Embed Size (px)
Citation preview

ANALYSE UND OPTIMIERUNG VON
ABBILDUNGSEIGENSCHAFTEN DER
ULTRASCHALL -ELASTOGRAPHIE
DISSERTATION
zur Erlangung des Grades eines
Doktor-Ingenieurs
der
Fakultät für Elektrotechnik und Informationstechnik
an der Ruhr-Universität Bochum
von
Karsten M. Hiltawsky
Lemgo
Bochum 2004

Dissertation eingereicht am: 17.11.2004
Tag der mündlichen Prüfung: 3.2.2005
Berichterstatter: Prof. Dr.-Ing. Helmut Ermert
Prof. Dr.-Ing. Johann Friedrich Böhme
Prof. Dr.-Ing. Georg Schmitz

Inhaltsverzeichnis
Liste der Formelzeichen und Abkürzungen III
1 Einleitung 11.1 Ultraschalltechnik in der Medizin . . . . . . . . . . . . . . . . . .. . . 11.2 Tumor-Diagnostik mit Ultraschall . . . . . . . . . . . . . . . . . .. . . 11.3 Elastische Eigenschaften von Tumoren . . . . . . . . . . . . . . .. . . . 21.4 Ziel der Arbeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Grundlagen 52.1 Ultraschall im Puls-Echo-Verfahren . . . . . . . . . . . . . . . .. . . . 5
2.1.1 Wechselwirkung Gewebe↔ Ultraschall . . . . . . . . . . . . . . 62.1.2 Feldverteilung einer Apertur / Beugung . . . . . . . . . . . . .. 72.1.3 Räumliche Impulsantwort . . . . . . . . . . . . . . . . . . . . . 102.1.4 Datenmodell des Ultraschall-Echosignals im Puls-Echo-Betrieb . 11
2.2 Grundlagen der Mechanik . . . . . . . . . . . . . . . . . . . . . . . . . 122.2.1 Lineare Elastizitätstheorie . . . . . . . . . . . . . . . . . . . .. 122.2.2 Isotroper Festkörper . . . . . . . . . . . . . . . . . . . . . . . . 142.2.3 Eindimensionale Spannung (Dehnung eines Stabes) . . .. . . . . 152.2.4 Ebener Spannungszustand, ebener Verzerrungszustand . . . . . . 16
3 Modellbildung 173.1 Datenmodell der Ultraschall-Elastographie . . . . . . . . .. . . . . . . . 173.2 Zeitverschiebungsschätzung . . . . . . . . . . . . . . . . . . . . . .. . 18
3.2.1 Methoden der Zeitverschiebungsschätzung . . . . . . . . .. . . 183.2.2 Varianz der Zeitverschiebungsschätzung . . . . . . . . . .. . . . 213.2.3 Kovarianz der Zeitverschiebungsschätzung . . . . . . . .. . . . 23
3.3 Dehnungsschätzung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.3.1 Konstruktion eines Dehnungs-Schätzers . . . . . . . . . . .. . . 253.3.2 Kovarianzmatrix des Schätzer . . . . . . . . . . . . . . . . . . . 263.3.3 Cramér-Rao Schranke der Dehnung . . . . . . . . . . . . . . . . 283.3.4 Vergleich der Dehnungsvarianz der Schätzer . . . . . . . .. . . 303.3.5 Dehnungsschätzer als FIR-Filter . . . . . . . . . . . . . . . . . .32
3.4 Eigenschaften von Elastogrammen . . . . . . . . . . . . . . . . . . .. . 333.4.1 SNR der Dehnung: SNRε . . . . . . . . . . . . . . . . . . . . . . 333.4.2 Ausgangs-SNRε: SNRε0
. . . . . . . . . . . . . . . . . . . . . . 343.4.3 SNRε-Gewinn: SNRεG
. . . . . . . . . . . . . . . . . . . . . . . 373.4.4 Gesamt-SNRε: SNRε0
· SNRεG. . . . . . . . . . . . . . . . . . . 40
3.4.5 Kontrast der Dehnung: CNRε . . . . . . . . . . . . . . . . . . . 443.4.6 Eigenschaften im Ortsfrequenzbereich . . . . . . . . . . . .. . . 453.4.7 Ortsauflösung der Dehnung . . . . . . . . . . . . . . . . . . . . 51
3.5 Harmonische Anregung: Vibrographie . . . . . . . . . . . . . . . .. . . 533.5.1 Cramér-Rao Schranke der Parameter einer Schwingung . . .. . . 553.5.2 Kalman-Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56

Inhaltsverzeichnis II
4 Simulation und Optimierung 614.1 FEM-Simulationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.1.1 FEM-Parameter: E-Modul-Verteilung, Randbedingungen . . . . . 624.1.2 Mechanischer Konversionsfaktor . . . . . . . . . . . . . . . . .. 644.1.3 Normierter Dehnungsunterschied (NDU) . . . . . . . . . . . .. 65
4.2 Ultraschall-Simulationen . . . . . . . . . . . . . . . . . . . . . . . .. . 684.2.1 Punktbildfunktion . . . . . . . . . . . . . . . . . . . . . . . . . 684.2.2 Simulation des Mediums . . . . . . . . . . . . . . . . . . . . . . 694.2.3 Medium unter axialer Kompression . . . . . . . . . . . . . . . . 704.2.4 Empirische Varianz der Zeitverschiebungen . . . . . . . .. . . . 714.2.5 Empirische Kovarianzfunktion der Zeitverschiebungen . . . . . . 724.2.6 Medium unter axialer und lateraler Kompression . . . . .. . . . 744.2.7 Medium unter axialer Kompression mit elevationaler Verschiebung 754.2.8 Elastographische Unschärfe, Modell für Verschiebungen . . . . . 764.2.9 Kompensation von lateralen Verschiebungen . . . . . . . .. . . 784.2.10 Medium unter axialer und lateraler Kompression mit Kompensation 824.2.11 Medium mit Einschluss . . . . . . . . . . . . . . . . . . . . . . 84
5 Realisiertes Abbildungssystem 905.1 Komponenten des Abbildungssystems . . . . . . . . . . . . . . . . .. . 90
5.1.1 PC mit A/D-Wandler Karte . . . . . . . . . . . . . . . . . . . . . 905.1.2 Ultraschallgerät . . . . . . . . . . . . . . . . . . . . . . . . . . . 915.1.3 Trigger-Schnittstelle . . . . . . . . . . . . . . . . . . . . . . . . 925.1.4 Echtzeit-Modus . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
6 Experimentelle Ergebnisse 966.1 Phantome . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
6.1.1 Phantom-Material . . . . . . . . . . . . . . . . . . . . . . . . . 966.1.2 Phantom-Eigenschaften . . . . . . . . . . . . . . . . . . . . . . 98
6.2 Messung der Autokovarianzfunktion bzw. Pulsbreiten . .. . . . . . . . . 1006.3 Statische bzw. Quasistatische Kompression . . . . . . . . . .. . . . . . 1026.4 Harmonische Kompression . . . . . . . . . . . . . . . . . . . . . . . . . 106
6.4.1 Frequenzabhängigkeit der Amplitude . . . . . . . . . . . . . .. 1076.4.2 Dehnungsbild (Elastogramm) . . . . . . . . . . . . . . . . . . . 1096.4.3 Dreidimensionale Betrachtung . . . . . . . . . . . . . . . . . . . 111
7 Zusammenfassung und Ausblick 115
Literaturverzeichnis 119
A Transformation einer normalverteilten Zufallsvariablen 127
B Separation des Korrelationskoeffizienten 129
C Impulsantwort des Dehnungs-KQ-Schätzers 132
D Gauß-Puls: Pulsbreite↔ Bandbreite 133

Liste der Formelzeichen und Abkürzungen
Nomenklatur
a = [a1 . . . aN ]T Unterstrich N × 1–Vektor
A =
A11 . . . A1N
.... . .
...AM1 . . . AMN
Fettdruck M × N–Matrix, Indexzugriffamn
I =
1 . . . 0...
. .....
0 . . . 1
Einheitsmatrix
AT Transponierte Matrix[A]−1 Inverse der Matrixa Dach geschätzte Größe
Operatoren
* Zeitbezogene Faltung◦−• Fouriertransformationspaar∂ Partielles Differentialddt
Erste Ableitung einer rein zeitabhängigen Größe
∇ Nabla–Operatorarg Argument einer komplexen GrößeCov KovarianzE Erwartungswert
Formelzeichen (lateinische Buchstaben)
A(zi) Schwingungsamplitude eines Gewebebereiches an der Position zi
für den Fall einer harmonischen mechanischen AnregungB Äquivalente Bandbreite des UltraschallsystemsB6dB 6−dB Bandbreite des Ultraschallsystemsc SchallgeschwindigkeitCNRε Elastographischer Kontraste1(t), e2(t) Hochfrequentes Empfangssignal vor bzw. nach Kompressionsschritte1(t), e2(t) Empfangssignal vor bzw. nach Kompressionsschritt im Basisbande(t)∗ Empfangssignal im Basisband, konjugiert komplexE Elastizitätsmodul

Formelzeichen und Abkürzungen IV
f(x, y, z) Dreidimensionale Streuerverteilung des Mediumsf0 Mittenfrequenz des Ultraschallwandlersh(x, y, z) Dreidimensionale Punktbildfunktion des UltraschallwandlersI(x, z, t) Intensität des Grauwertbildes bei(x, z) zur Zeittj Imaginäre EinheitN Anzahl der Filterkoeffizienten des FIR-FiltersNA Anzahl der summierten A-Linien bei lateraler Kompensationp(t) Punktbildfunktion des UltraschallsystemsP Pulsbreite eines gaußförmigen Pulses, s. Anhang Drab Kreuzkorrelationsfunktion der Signalea(t) undb(t)
r12 Kreuzkorrelationsfunktion der Signalee1(t) unde2(t)
r12 Kreuzkorrelationsfunktion der Signalee1(t) und e2(t) im BasisbandSi(xi, yi, zi) Amplitude eines Streuers, der sich an der Position(xi, yi, zi) befindetSNRel Elektronischer Signal-zu-StörabstandSNRε Elastographischer Signal-zu-Störabstandt Zeit bzgl. Schallwellenausbreitung∆t Abtastintervall bei der Abtastung hochfrequenter Echodatentvib Zeit bzgl. Vibration∆tvib Abtastintervall bei der Abtastung einer mechanischer SchwingungTC Korrelationsfensterlänge bei der ZeitverschiebungsschätzungTτ Abstand zwei aufeinander folgender Zeitverschiebungsschätzungenuz(z) Mechanische Verschiebung in axialer Richtungw Störung der Zeitverschiebungsschätzungx Koordinate für die laterale Richtungy Koordinate für die elevationale Richtungz Koordinate für die axiale Richtung, entspricht der Bildtiefe
Formelzeichen (griechische Buchstaben)
εlj in Kap. 2.2: Komponenten der mechanischen Dehnungεzz Mechanische Dehnung in z-Richtung (entspricht axialer Richtung)λ Wellenlängeν Poisson Zahlω Kreisfrequenzωvib Kreisfrequenz der mechanischen Schwingungρ Korrelationskoeffizientρax Korrelationskoeffizient aufgrund von axialen Verschiebungenρlat Korrelationskoeffizient aufgrund von lateralen Verschiebungenρelev Korrelationskoeffizient aufgrund von elevationalen Verschiebungenσ2
τ Varianz der Zeitverschiebungsschätzungenσ2
ε Varianz der Dehnungsschätzungenσax Parameter der gaussförmigen Punktbildfunktion in axialerRichtung

Formelzeichen und Abkürzungen V
σlat Parameter der gaussförmigen Punktbildfunktion in lateraler Richtungσelev Parameter der gaussförmigen Punktbildfunktion in elevationaler Richtungσik in Kap. 2.2: Komponenten der mechanischen Spannungτ(z) Zu uz(z) äquivalente Zeitverschiebung nachuz(z) = 1
2c τ(z)
Abkürzungen
A-Linie Synonym für ein Empfangssignal an einer Positionx = x0
CRLB Cramer-Rao Schranke (engl.:Cramer-Rao lower bound)DMA Dynamisch Mechanische AnalyseElastogramm Abbildung der mechanischen Dehnung in axialerRichtungFEM Methode der Finiten ElementeFWHM Pulsbreite (engl.:full width half maximum), s. Anhang DHF-Daten Hochfrequentes Empfangssignal einer A-LinieKQ Methode der kleinsten QuadrateNDU Normierter DehnungsunterschiedPBF Punktbildfunktion (tiefenabhängig)PC Rechner (engl.:personal computer)PIC Mikrocontroller (engl.:programmable interrupt controller)PRF Wiederholrate der Triggersignale (engl.:pulse repetition frequency)ROI Ausgewählter Bildausschnitt (engl.:region of interest)SGC Tiefenabhängige Kompensation des mechanischen Dehnungsabfalls
(engl.:strain gain compensation)SNR Signal-zu-Störabstand (engl.:signal to noise ratio)TDE Laufzeitschätzung (engl.:time delay estimation)TGC Tiefenabhängige Signalverstärkung (engl.:time gain compensation)

Kapitel 1
Einleitung
1.1 Ultraschalltechnik in der Medizin
Ultraschallwellen sind Schallwellen mit Frequenzen, die oberhalb der Hörschwelle von
20 kHz liegen. Ultraschallwellen breiten sich in Materie mit einer bestimmten Geschwin-
digkeit aus und können medizinisch sowohl diagnostisch alsauch therapeutisch genutzt
werden.
Vor der ersten diagnostischen Verwendung 1942 [26] wurde der Ultraschall bereits 1939
therapeutisch genutzt. Der einfallende und absorbierte Schall erzeugt im Gewebe Wärme,
die zur Krampflösung oder Schmerzstillung verwendet werden kann. Eine andere und
heute weit verbreitete therapeutische Anwendung ist mit Stoßwellen möglich [37], die
für die Zertrümmerung von Nieren- und Gallensteinen genutzt werden.
Mit der Einführung von aus Piezokeramik bestehenden Ultraschall-Arrays in der Ultra-
schall-Diagnostik wurde dieses Verfahren zur am häufigsten verwendeten medizinischen
Untersuchungsmodalität. Dieses Schnittbildverfahren ermöglicht die nicht-invasive und
gesundheitlich unbedenkliche Darstellung von Organen nicht nur im Hinblick auf de-
ren anatomische bzw. pathologische Gegebenheiten, sondern auch im Hinblick auf deren
Funktion aufgrund der Echtzeitfähigkeit des Verfahrens.
1.2 Tumor-Diagnostik mit Ultraschall
Eine spezielle diagnostische Anwendung der Ultraschalltechnik ist in der Tumor-Diagno-
stik zu sehen. Damit ist zum einen die möglichst frühzeitigeErkennung von verdächtigen
Läsionen, zum anderen die differenzialdiagnostische Abklärung einer solchen Läsion ge-
meint.
Bei der frühzeitigen Erkennung eines Tumors ist von Vorteil,dass moderne Ultra-
schallgeräte eine hohe axiale Auflösung besitzen. Die axiale Auflösung hängt von der
Bandbreite und indirekt von der Mittenfrequenz des verwendeten Ultraschallwandlers ab.
Bei Untersuchungen z.B. der weiblichen Brust werden inzwischen Mittenfrequenzen von
10−13 MHz benutzt, wodurch der Nachweis von Frühkarzinomen möglich wird [66, 89].
Die axiale Auflösung solcher Geräte liegt bei0.15 mm [68]. Generell ist eine weitere
Erhöhung der Mittenfrequenz dadurch limitiert, dass die akustische Dämpfung von biolo-
gischem Gewebe frequenzabhängig ist und bei hohen Frequenzen zunimmt, wodurch die

1.3 Elastische Eigenschaften von Tumoren 2
Eindringtiefe eingeschränkt wird. Erfordern die Untersuchungen große Eindringtiefen,
z.B. im Rahmen der Leberdiagnostik, so werden immer noch Mittenfrequenzen zwischen
3.5 − 5 MHz verwendet.
Bei der differenzialdiagnostischen Abklärung von Tumoren stehen verschiedene Unter-
suchungsmodalitäten zur Verfügung. Allen voran ist das konventionelle B-Bild-Verfahren
zu nennen, mit dessen Hilfe die Morphologie des untersuchten Gewebes dargestellt wird.
Allerdings zeigt dieses Verfahren eine grosse Untersucherabhängigkeit, die u.a. dadurch
zu erklären ist, dass es sich bei der Abbildung der Echogenität um keine quantitative Ab-
bildung eines Materialparameters handelt wie z.B. in der Röntgen-Computertomographie.
Daher werden im Falle einer suspekten Läsion zusätzlich Funktionsparameter wie Perfu-
sion oder Fluss bestimmt, um weitere differenzialdiagnostisch relevante Informationen
zu gewinnen. Insgesamt gesehen zeigt die Ultraschalluntersuchung von suspekten Be-
funden jedoch immer noch Schwächen bezüglich ihrer Spezifität, so dass sich die Frage
stellt, ob auch andere Parameter zur Gewebedifferenzierung beitragen können. Im Falle
der weiblichen Brust sind z.B. die Abbildung der akustischen Schallgeschwindigkeit und
akustischen Dämpfung von wissenschaftlichem Interesse [59, 81, 56, 73]. Zudem kam
in den letzten Jahren die Idee auf, dass mit Hilfe von Ultraschall auch elastische Para-
meter abgebildet werden können [7, 72]. Da generell nicht davon ausgegangen werden
kann, dass die Echogenität des Ultraschall-B-Bildes mit der Elastizität des untersuchten
Gewebes zusammenhängt, stellt die Abbildung eines elastischen Parameters eine neue
Information dar, die mit pathologischen Befunden korreliert werden kann.
1.3 Elastische Eigenschaften von Tumoren
In der Medizin ist seit langem bekannt, dass pathologische Veränderungen von Gewebe
mit einer Änderung der Gewebeelastizität einhergehen. Dies gilt insbesondere für bösar-
tige Tumore, die bei Erreichen einer gewissen Größe tastbarwerden. Die medizinische
Untersuchungsmethode der Palpation (Tasten) basiert auf der qualitativen Einschätzung
der Gewebeelastizität bei niedrigen mechanischen Frequenzen.
Die elastischen Eigenschaften von Gewebe hängen dabei von der mikroskopischen und
makroskopischen Zusammensetzung der Moleküle ab [32]. In der Literatur sind zahlrei-
che Werte über mechanische Materialparameter von biologischen Geweben zu finden, die
bereits aufgrund ihrer physiologischen Funktion mechanischen Beanspruchungen ausge-
setzt sind. Eine Zusammenfassung solcher Parameter für biologische Weichgewebe (glat-
te und quergestreifte Muskulatur, Gefäße, Sehnen, Haut, Lunge) und biologische Hart-
gewebe (Knochen, Zähne) findet sich z.B. in [1]. Es ist weitaus schwieriger, derartige
Daten für Organgewebe zu finden, dessen mechanische Eigenschaften sich erst durch
pathologische Prozesse verändern. Allerdings sind solcheZahlenwerte gerade dann von
Interesse, wenn Ergebnisse von Untersuchungsverfahren interpretiert werden sollen, mit

1.4 Ziel der Arbeit 3
denen elastische Parameter abgebildet werden. Für Brustgewebe fanden Krouskop et al.
Werte des Elastizitätsmoduln zwischen10 kPa und100 kPa bei leichter Kompression und
einer Poisson-Zahl vonν = 0.495 [58]. Obwohl generell nicht davon ausgegangen wer-
den kann, dass sich der Elastizitätsmodul von biologischemGewebe unabhängig von der
ausgeübten mechanischen Spannung verhält, fanden Erkamp et al., dass ein linearer Zu-
sammenhang zwischen mechanischer Dehnung und mechanischer Spannung für einen
großen Spannungsbereich besteht [27], der im Rahmen von manuell durchgeführten Un-
tersuchungen nicht verlassen wird. Für kleine Kompressionen (bis zu10 % Dehnung)
kann Gewebe der Brust und Gewebe der Prostata als linear-elastisches, isotropes und na-
hezu inkompressibles Medium angenommen werden [58]. Die gemessenen Phasenunter-
schiede zwischen mechanischer Dehnung und mechanischer Spannung im Falle einer har-
monischen mechanischen Anregung mit Vibrationsfrequenzen bis 10 Hz waren so klein
(< 10 ◦), dass die viskösen Eigenschaften des Mediums in diesem Frequenzbereich ver-
nachlässigt werden können.
In der Ultraschall-Elastographie geht es darum, interne Verschiebungen eines Körpers
aufgrund einer äußeren Kraftanwendung zu messen und aus diesen Größen mechanische
Parameter zu berechnen. Dies ist sowohl mit Hilfe der Daten des B-Bildes [7] als auch we-
sentlich genauer mit Hilfe von hochfrequenten Echodaten möglich [72]. Im letzteren Fall
kann aus den mechanischen Verschiebungen die mechanische Dehnung lokal berechnet
und angezeigt werden. Diese Methode wurde von Pesavento et al. zu einem Echtzeitver-
fahren weiterentwickelt [75].
1.4 Ziel der Arbeit
In dieser Arbeit wird auf die Analyse und Optimierung der Abbildungseigenschaften
der Ultraschall-Elastographie eingegangen. Bei der Analyse der Abbildungseigenschaften
wird der Kontrast von Dehnungsbildern (Elastogrammen) in Abhängigkeit von verschie-
denen Parametern theoretisch, mit Hilfe von Simulationen und experimentell untersucht.
Dabei zeigt sich, dass zusätzlich zu Parametern des Ultraschallgerätes und der Signalver-
arbeitung auch mechanische Randbedingungen eine Rolle spielen. Insgesamt erweist sich
eine Vibrationsanregung als vorteilhaft, die auch in der Signalverarbeitung berücksichtigt
werden muss.
Zunächst wird in Kap. 2 auf Grundlagen der Ultraschalltechnik und Grundlagen der Me-
chanik (Elastizitätstheorie) eingegangen. Bei der Ultraschalltechnik wird die in diagno-
stischen Ultraschallgeräten übliche Puls-Echo-Technik und das bei der Abbildung von
biologischem Weichgewebe resultierende Datenmodell erläutert. Bei der Betrachtung von
biologischem Gewebe als isotrop-elastisches, inkompressibles Medium ist es notwendig,
einige Begriffe und Zusammenhänge der Elastostatik zu erläutern. Dieses erfolgt in den
Grundlagen der Mechanik.

1.4 Ziel der Arbeit 4
In Kap. 3 wird mit Hilfe eines erweiterten Signalmodells gezeigt, dass die Abbildung von
elastischen Gewebeeigenschaften mit Ultraschall auf der Schätzung von Zeitverschiebun-
gen der Ultraschall-Echosignale basiert, aus denen lokal die mechanische Dehnung be-
rechnet wird. Lokale Unterschiede des Elastizitätsmodulsführen in Abhängigkeit von
der Geometrie der Einschlüsse und den mechanischen Randbedingungen zu Dehnungs-
differenzen, die mit Hilfe der Ultraschall-Elastographiedargestellt werden. Zur quantita-
tiven Erfassung der Abbildungsqualität werden das elastographische SNRε und der elasto-
graphische Kontrast CNRε eingeführt, wobei diese Größen von verschiedenen Parametern
abhängig sind. Es zeigt sich, dass der elastographische Kontrast in hohem Maße von Be-
wegungsartefakten in lateraler und elevationaler Richtungbeeinflusst wird, die zu einer
Dekorrelation der Ultraschall-Echosignale führen. Eine Möglichkeit, diese Bewegungs-
artefakte zu minimieren und trotzdem einen ausreichenden elastographischen Kontrast zu
erzielen, bietet sich durch eine harmonische mechanische Anregung des Gewebes. Die-
se harmonische Anregung muss auch in der Signalverarbeitung berücksichtigt werden.
Dazu wird in dieser Arbeit ein Kalman-Filter verwendet, aufdessen Grundlagen und Im-
plementierung zum Abschluss des Kap. 3 eingegangen wird. Der für die harmonische
mechanische Anregung notwendige Applikator wird in Kap. 6 vorgestellt.
In Kap. 4 wird mit Hilfe von Simulationen untersucht, in wie weit die theoretischen Ab-
schätzungen aus Kap. 3 zutreffen. Dabei wird die Methode derFiniten Elemente zur
Berechnung des normierten Dehnungsunterschiedes benutzt,der in die Berechnung des
elastographischen Kontrastes eingeht. Ein im Puls-Echo-Betrieb arbeitendes Ultraschall-
gerät wird ebenfalls simuliert. Unter Nutzung der Ergebnisse aus den FEM-Simulationen
werden Datensätze eines Objektes vor und nach Kompression simuliert, aus denen an-
schließend Elastogramme berechnet werden. Der Einfluss lateraler und elevationaler Ver-
schiebungen auf den elastographischen Kontrast wird in Abhängigkeit von Parametern
der ortsabhängigen Punktbildfunktion untersucht, wobei ein Verfahren vorgestellt wird,
mit dem laterale Verschiebungen kompensiert werden können.
Auf das im Rahmen dieser Arbeit realisierte Abbildungssystem wird in Kap. 5 eingegan-
gen. Es besteht aus einem Ultraschallgerät, einem Trigger-Interface und einem PC mit
A/D-Wandler Karte. Der Signalfluss des Abbildungssystemswurde dahingehend opti-
miert, dass eine Implementierung verschiedener Abbildungsmodalitäten in Echtzeit mög-
lich ist.
Die experimentellen Ergebnisse der Arbeit werden in Kap. 6 vorgestellt. Als Phantom-
Material diente ein Polyvinylalkohol, dessen elastische Eigenschaften den Anforderungen
entsprechend angepasst werden können. Mit Hilfe eines speziell angefertigten Phantoms,
das aus Gebieten mit unterschiedlicher Elastizität besteht, wurden Elastogramme sowohl
in Freihand-Technik als auch mit Hilfe eines mechanischen Applikators aufgenommen,
der eine harmonische Bewegung des Mediums bewirkt.
Die abschließende Zusammenfassung mit einem Ausblick findet sich in Kap. 7.

Kapitel 2
Grundlagen
Im folgenden Kapitel wird auf Grundlagen der Ultraschallphysik und auf Grundlagen
der Mechanik eingegangen. Mit Hilfe der Grundlagen der Ultraschallphysik kann ein
Signalmodell hergeleitet werden, mit dem verständlich wird, wie die im medizinischen
Ultraschall genutzten Signale entstehen. Bei den mechanischen Grundlagen wird auf die
Elastizitätstheorie isotroper Körper eingegangen, die für ein Verständnis der in Kap. 4.1
durchgeführten FEM-Simulationen notwendig sind.
2.1 Ultraschall im Puls-Echo-Verfahren
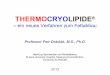
Die heutzutage in der medizinischen Diagnostik eingesetzten Ultraschallgeräte arbeiten
größtenteils in der Puls-Echo-Technik. Die Signalentstehung soll anhand von Abb. 2.1
erläutert werden. Ein kurzer Spannungspuls gelangt über eine Sende-/Empfangsweiche
z
Wandler (v, p)
Echo (U)
Z1 Z2
S/E
Z=Z0+∆Z
t
zi, tiA / D
Abb. 2.1: Ultraschall im Puls-Echo-Verfahren
zu einer Piezokeramik (Schallwandler), an der eine elektromechanische Energieumwand-
lung erfolgt, die zu einer Schnelleverteilungv auf der Wandlerfläche führt. Die Geome-
trie der Schallwandlerfläche (Apertur) bestimmt die örtliche Schalldruckverteilungp. Die
Wechselwirkung der tiefenabhängigen Schalldruckverteilung mit biologischem Gewebe
führt zu Schallechos, die vom Schallwandler empfangen, in elektrische Signale gewandelt
und dann digitalisiert werden. Die Einhüllende eines solchen hochfrequenten Echosignals
bildet eine A-Linie, d.h. eine Spalte eines Ultraschallbildes.
Für eine systemtheoretische Betrachtung kann man das Abbildungssystem in folgende
Komponenten mit entsprechenden Übertragungsfunktionen unterteilen:

2.1 Wechselwirkung Gewebe↔ Ultraschall 6
• Die elektromechanische Energieumwandlung eines Aktuators bzw. Sensors mit
dem Zweck, akustische Wellen in biologisches Gewebe ein- bzw. auszukoppeln
mit Übertragungsfunktion Hem(ω).
• Das gerichtete Senden und Empfangen von Schallwellen durchdie Verwendung
einer Apertur, deren Elemente relativ zueinander zeitverzögert angesteuert werden
können, wodurch akustische Beugung entsteht mit Übertragungsfunktion Hbe(ω),
in der der Sende- und Empfangsvorgang zusammengefasst wird.
• Die Wechselwirkung von akustischen Wellen mit biologischem Gewebe. Zum einen
entstehen durch lokale Unterschiede der Dichte∆ρ und Schallgeschwindigkeit∆c
akustische Rückstreuung (durch kleine akustische Impedanzänderungen∆Z, be-
rücksichtigt in Hst(ω)) und Reflexion an Grenzflächen (durch große akustische Im-
pedanzänderungenZ1/Z2, berücksichtigt in Hre(ω)). Zum anderen werden Schall-
wellen in biologischem Gewebe frequenzabhängig gedämpft (Hd(ω)).
Die Signalentstehung eines Ultraschallabbildungsverfahrens kann mit den genann-
ten Übertragungsfunktionen in einem Blockschaltbild nach Abb. 2.2 zusammengefaßt
werden. Je nach Aufgabenstellung müssen nun Vereinfachungen für die einzelnen
, c∆ρ ∆
v
BiologischesGewebe
ElektromechanischeImpulsantwort
RäumlicheImpulsantwort(Sendeweg)
RäumlicheImpulsantwort(Empfangsweg)
Schallwandler-anregung
Empfangs-signal
Hem Hst , Hre , Hd
Hbe
Hbe,s Hbe,e
Abb. 2.2: Blockschaltbild für Signalentstehung
Komponenten getroffen werden, um ein für die Anforderungenausreichend genaues
Signalmodell herzuleiten. Im hier vorliegenden Fall wird auf die elektromechanische
Impulsantwort mit ÜbertragungsfunktionHem(ω) nicht näher eingegangen. Bei den
Ultraschallwandlern handelt es sich um Piezokeramiken, die alsλ/2-Dickenschwinger
betrieben werden, wodurch sich eine Mittenfrequenzf0 ergibt. Durch mechanische
Dämpfung dieses Dickenschwingers wird dessen6-dB BandbreiteB – sowohl im Sende-
als auch Empfangsfall – erhöht, natürlich zu Lasten der Signalamplitude.
2.1.1 Wechselwirkung Gewebe↔ Ultraschall
Ultraschallbilder sind besonders durch ihre Speckle-Charakteristik geprägt. Unter Speck-
le versteht man jenes Muster, das sich bei der Rückstreuung von Ultraschallwellen ergibt,
wenn sich in einem im Vergleich zur Ortsauflösung kleinen Volumenelement viele Streu-
zentren befinden [28]. Ausgehend von der Wellengleichung für inhomogene Medien [21]

2.1 Feldverteilung 7
läßt sich ein in weiten Grenzen gültiges Modell für Ultraschall-Echosignale aus biologi-
schem Weichgewebe ableiten [103, 104, 108], mit dem sowohl die diffuse Rückstreuung
aufgrund von stochastisch verteilten akustischen Impedanzinhomogenitäten (Hst(ω)) als
auch Reflexionen an auflösbaren Inhomogenitäten (Hre(ω)) erklärt werden können. Bei
der Gewebedifferenzierung mit Ultraschall wird versucht,aus dem Leistungsdichtespek-
trum der Ultraschall-Echosignale lokal das Betragsspektrum |Hst(ω)| zu schätzen, um
verschiedene Gewebetypen aufgrund ihres Streuverhaltenszu klassifizieren [90, 91]. Sy-
stemtheoretisch kann diese Rückstreuung als dreidimensionale Faltung mit einem lokalen
Reflektivitätsprofilf(x, y, z) betrachtet werden [65], wobei Gewebetiefez und Signal-
laufzeitt überz = /1 2 c t verknüpft sind. In der Gewebedifferenzierung wird gewisserma-
ßen das Spektrum eines solchen Reflektivitätsprofils geschätzt.
Da die Gewebedämpfung vergleichsweise gering ist, kann ihre Wirkung in Form einer
nachträglichen Störungsrechnung beschrieben werden. Hierbei wird davon ausgegangen,
dass die Dämpfung die eigentliche Schallausbreitung nur durch ein exponentielles Ab-
klingen aller Feldgrößen in Schallausbreitungsrichtung verändert. Somit kann die Dämpf-
ungsübertragungsfunktion definiert werden, die die Dämpfung auf Hin-und Rückweg des
Schalls für die Tiefez wiedergibt,
|Hd(ω)| = e−2 α(ω) z . (2.1)
Die durch Dämpfung entstehende Minderung der Signalamplitude wird in Ultraschall-
systemen mit Hilfe eines TGC (engl.:time gain compensation) ausgeglichen, der das
Echosignal tiefenabhängig verstärkt. Zu beachten ist, dass die akustische Dämpfung in
biologischem Gewebe frequenzabhängig ist, was zu einer Verschiebung der Mittenfre-
quenzf0 des Spektrums und einer Reduktion der BandbreiteB über der Tiefe führt.
Zur vollständigen Beschreibung eines Signalmodels fehlt noch die Herleitung einer räum-
lichen Impulsantworth(x, y, z) (Punkbildfunktion, engl.:point spread function), die das
Übertragungsverhalten Hbe(ω) beschreibt, das durch die Verwendung von Aperturen bzw.
zeitverzögert angesteuerten Arrays zu Stande kommt.
2.1.2 Feldverteilung einer Apertur / Beugung
Bei der Schallabstrahlung von schwingenden festen Flächen ist im einfachsten Fall die
strahlende Fläche eben und Bestandteil einer unendlich ausgedehnten Ebene, die an
all denjenigen Stellen bewegungslos bleibt, von denen keine Schallabstrahlung erfolgt.
Schreibt man jedem FlächenelementdS einer AperturS nach Abb. 2.3 eine zur ihr
senkrechte Schnellekomponentevn(t) zu, so ist jedes dieser Flächenelemente Ausgangs-
punkt einer Kugelwelle mit der infinitesimalen Volumenschnelle vn(t) dS [60]. Der
Gesamtschalldruck in jedem PunktP des erzeugten Strahlungsfeldes ergibt sich dann
durch Addition der Beiträge aller Kugelwellen, d.h. durch ihre Integration über die ganze

2.1 Feldverteilung 8
z
xy
Apertur S 1r��
��
2r
Feldpunkt P
unendlich ausgedehnte,schallharte Umgebung
dS
= −�� ��
1 2R r r
Abb. 2.3: Position einer Apertur und eines Feldpunktes
Strahlerebene (Prinzip der Punktquellensynthese, Huygen’s Prinzip). Das so genannte
Rayleigh-Integral [77] lautet
p(r1, t) =ρ0
2π
∫∫
S
∂∂t
vn(r2, t − |r1−r2|c
)
|r1 − r2|dS . (2.2)
Unter der Annahme eines „Kolbenstrahlers“, d.h., dass die Schnellevn(r2, t) außerhalb
einer geschlossenen Randkurve zu Null wird, und dass für die Schnelle eine harmonische
Bewegung der Artvn(r2, t) = v0 ejωt mit Kreisfrequenzω und Wellenzahlk = 2π/λ
angenommen wird, ergibt sich der erzeugte Schalldruck zu
p(r1, t) =jωρ0
2πv0 ejωt
∫∫
S
e−jkR
RdS . (2.3)
Im folgenden soll für eine Aperturgeometrie nach Abb. 2.4 mit Maßen nach Tab. 2.1
Laterale AuflösungElevationale Auflösung
x
y
z
Apertur
Abb. 2.4: Geometrie einer aktiven Apertur (schwarz) als Teil einer größeren Apertur
die Schalldruckverteilung bei einer Frequenzf0 = 8.5 MHz berechnet werden. Die ver-
Tab. 2.1: Aperturdaten
Aperturlänge ∆x (lateral) 14,08 mm
Aperturbreite ∆y (elevational) 2,50 mm

2.1 Feldverteilung 9
wendeten Maße sind so gewählt, dass die Fläche der aktiven Apertur mit der Fläche aller
Arrayelemente übereinstimmt, die in dem hier verwendeten kommerziellen Ultraschall-
gerät bei der Schallstrahlformung angesteuert werden.
In Abb. 2.5 ist die Einhüllende der Schalldruckamplitude für die Ebeney = 0 und für
die Ebenex = 0 dargestellt. Zur Veranschaulichung der Richtcharakteristik der Aper-
Abb. 2.5: Einhüllende der Schalldruckamplitude eines Element-Arrays in dB in der Ebene
x = 0 bzw.y = 0 ohne Schallstrahlformung (engl.:Beamforming)
tur, insbesondere der elevationalen und lateralen Schallfeldausdehnung, sind die beiden
Hauptebenen in den Abbildungen 2.6 und 2.7 vergrößert dargestellt. In Abb. 2.6 findet
70
80
90
z in [mm]
y in
[mm
]
Einhüllende der Schalldruckamplitude in dB
0 10 20 30 40 50 60
-10
0
10
Abb. 2.6: Schallfeld eines Element-Arrays in der Ebenex = 0
sich die Einhüllende der Schalldruckamplitude für die Ebene x = 0. Dabei ist zu be-
achten, dass die elevationale Auflösung der Apertur auf derz-Achse (vgl. Abb. 2.4) vom
6 dB-Abfall des Schalldrucks in elevationaler Richtung abhängig ist. Diese liegt im Be-
reich von Millimetern und ändert sich auch bei einer zeitverzögerten Ansteuerung von
Array-Elementen in lateraler Richtung nur unwesentlich.
In Abb. 2.7 findet sich die Einhüllende der Schalldruckamplitude für die Ebeney = 0.
Man sieht eine relativ homogene Abstrahlung in lateraler Richtung, die zu keiner lateralen

2.1 Räumliche Impulsantwort 10
70
80
90
z in [mm]
x in
[mm
]
Einhüllende der Schalldruckamplitude in dB
00 10 20 30 40 50 60
-10
0
10
Abb. 2.7: Schallfeld eines Element-Arrays in der Ebeney = 0
Fokussierung im betrachteten Bereich0 mm < z < 60 mm führt. Mit dieser Apertur
wäre es nur bedingt möglich, Objekte in lateraler Richtung voneinander abzugrenzen.
Wie in Kap. 4.2 gezeigt wird, findet eine Fokussierung in lateraler Richtung erst durch
eine Schallstrahlformung (engl.:beamforming) statt.
2.1.3 Räumliche Impulsantwort
Vertauscht man die Reihenfolge von Integration und partieller Ableitung in Gl. (2.2)
p(r1, t) =ρ0
2π
∂
∂t
∫∫
S
vn(r2, t − |r1−r2|c
)
|r1 − r2|dS , (2.4)
so wird die Einführung eines SchnellepotentialsΦ(r, t) motiviert, das den Gleichungen
v(r, t) = −∇Φ(r, t)
p(r, t) = ρ0∂Φ(r, t)
∂t(2.5)
genügt [69]. Dann wird Gl. (2.4) zu einer Gleichung mit skalaren Größen,
Φ(r1, t) =
∫∫
S
vn(r2, t − |r1−r2|c
)
2π|r1 − r2|dS , (2.6)
wobei die Feldgrößen ausΦ(r, t) abgeleitet werden können. Eine zeitlich begrenzte An-
regung der AperturS konstanter Dauer kann von der Schallwandlergeometrie separiert
werden, indem die Ausblendeigenschaften der Deltafunktion genutzt wird [29],
Φ(r1, t) =
∫∫
S
∫
t′
vn(r2, t′)δ(r2, t − |r1−r2|
c− t′)
2π|r1 − r2|dt′ dS , (2.7)

2.1 Datenmodell des Ultraschall-Echosignals im Puls-Echo-Betrieb 11
Nimmt man nun die Schnellevn(r2, t) als gleichmäßig über der ganzen AperturS an, so
dassvn(r2, t) = vn(t) unabhängig vonr2 ist, dann folgt
Φ(r1, t) =
∫∫
S
vn(t) ∗ δ(r2, t − |r1−r2|c
)
2π|r1 − r2|dS , (2.8)
bzw.
Φ(r1, t) = vn(t)∗hr1r2(r1, t) mit hr1r2
(r1, t) =
∫∫
S
δ(r2, t − |r1−r2|c
)
2π|r1 − r2|dS .(2.9)
Das Integral in Gl. (2.9) ist die räumliche Impulsantwort, die die dreidimensionale Aus-
dehnung des Feldes in Abhängigkeit von einem Aufpunktr2 der AperturS und einem
Feldpunktr1 beschreibt. Mit Hilfe der räumlichen Impulsantworthr1r2(r1, t) kann der
Schalldruck nach Gl. 2.5 zu
p(r1, t) = ρ0∂vn(t)
∂t∗ hr1r2
(r1, t) (2.10)
berechnet werden, wenn die Schnelle der Apertur bekannt ist. Durch das Prinzip der
akustischen Reziprozität kann nicht nur der Fall der Transmission, sondern auch der
Fall des Empfangs von akustischen Wellen für ein streuendesMedium modelliert wer-
den [99, 46, 49], wobei die Aperturfläche beliebig gewählt werden kann. Für das Über-
tragungsverhalten gilt die Beziehung
hr1r2(r1, t) ∗
thr2r1
(r2, t) ◦−• |Hbe(ω)|2 . (2.11)
Zudem kann mit Hilfe des Superpositionsprinzips eine Zusammenschaltung von zeitlich
verzögert angesteuerten Aperturen berechnet werden, was von Jensen et al. im Rahmen
des Ultraschall-Simulators FIELD II umgesetzt wurde [48]. Dieser Ultraschall-Simulator
wurde auch in dieser Arbeit eingesetzt (s. Kap. 4.2).
2.1.4 Datenmodell des Ultraschall-Echosignals im
Puls-Echo-Betrieb
In einem kleinen Gewebebereich kann angenommen werden, dass örtliche Gewebein-
homogenitäten nur kleine Änderungen der akustischen Impedanz verursachen, dass die
tiefenabhängige Dämpfung kompensiert werden kann, und dass die dreidimensionale Sy-
stemantworth(x, y, z) (d.h. die dreidimensionale Abbildung eines Punktstreuers) sepa-
rierbar ist. In Abhängigkeit von der lateralen Schallwandlerpositionx und Bildtiefe z
ergibt sich das Empfangssignale(x, y, z) für kleine Verschiebungen bzw. Rotationen aus
einer dreidimensionalen Faltung [3, 95, 52, 67] zu
e(x, y, z) = h(x, y, z) ∗x∗y∗z
f(x, y, z) . (2.12)
Dabei isth(x, y, z) die räumliche Impulsantwort des Ultraschallsystems undf(x, y, z)
die Impulsantwort des Gewebes, die durch kleine örtliche Änderungen der akustischen

2.2 Grundlagen der Mechanik 12
Impedanz zu Stande kommt1. In biologischem Weichgewebe ist die Anzahl der Streu-
zentren pro Auflösungszelle so groß, dassf(x, y, z) als dreidimensionale normalverteilte
Zufallsvariable angenommen werden kann. Durch die Beziehung z = /1 2 c t zwischen Ge-
webetiefez, Schallgeschwindigkeitc und Laufzeitt kann Gl. (2.12) auch als
e(x, y, t) = h(x, y, t) ∗x∗y∗t
f(x, y, t) + n(t) (2.13)
geschrieben werden. Die Punktbildfunktion (PBF) wird als modulierter gaußförmiger
Puls mit Trägerfrequenzf0 angenommen [67],
h(x, y, t) = exp
[−
(x2
2 σ2lat
+y2
2 σ2elev
+t2
2 σ2ax
)]cos(2πf0 t) . (2.14)
Der Parameterσax der PBF in axialer Richtung ist im medizinischen Ultraschall abhängig
von der BandbreiteB des Ultraschallsystems und bestimmt das axiale Auflösungsvermö-
gen. Die Parameterσlat bzw. σelev der PBF in lateraler bzw. elevationaler Richtung sind
von der Geometrie der Schallwandlerelemente und der Schallstrahlformung (engl.:beam-
forming) abhängig und bestimmen das laterale bzw. elevationale Auflösungsvermögen.
Das grauwertkodierte B-Bild eines Ultraschallsystems ergibt sich aus der Einhüllenden
des Empfangssignalse(x, y, t) mit Hilfe seiner HilberttransformierteneH(x, y, t) zu
eE(x, y, t) =√
e(x, y, t)2 + eH(x, y, t)2 = | e(x, y, t) | (2.15)
und ist identisch mit dem Betrag des analytischen Signalse(x, y, t) = e(x, y, t) +
j·eH(x, y, t).
2.2 Grundlagen der Mechanik
Im folgenden wird kurz auf die Grundlagen der Elastizitätstheorie eingegangen, um die
wesentlichen Parameter zur Charakterisierung eines isotropen Materials herzuleiten. Da-
durch wird die Darstellung der mechanischen Dehnung (Feldgröße) motiviert.
2.2.1 Lineare Elastizitätstheorie
Allgemein formuliert zieht eine Deformation eines elastischen Körpers die Erscheinung
innerer Spannungen nach sich, d.h., es existiert zwischen Spannung und Deformation eine
bestimmte Abhängigkeit,
σik = σik(εlj) . (2.16)
Die einzelnen Komponenten der mechanischen Spannungσik bzw. der mechanischen
Dehnungεlj bilden jeweils einen Tensor zweiten Ranges, wobei die Koordinatenx, y
1Damit sind sowohl kleine Schwankungen der akustischen Impedanz als auch kleine Schwankungen der
Streuerdichte gemeint

2.2 Lineare Elastizitätstheorie 13
undz nach Abb. 2.8 durch die Indizes1, 2 und3 ersetzt werden, d.h.i, k, l, j ǫ {1, 2, 3}.
Das Experiment zeigt, dass bei geringen Deformationen die Spannung proportional der
z
x
y
ó33=ózz
ó31=ózx
ó32=ózy
ó23=óyz
ó22=óyy
ó21=óyx
ó =11 óxx
ó =12 óxy
ó13=óxz
Abb. 2.8: Größen des Spannungstensors
Deformation ist, im allgemeinen Fall also
σik =3∑
l=1
3∑
j=1
ciklj · εlj (2.17)
gilt (verallgemeinertes HOOK’sches Gesetz). Die Proportionalitätskoeffizientenciklj bil-
den einen Tensor vierten Ranges mit 81 Einträgen und werden als lineare Elastizitäts-
moduln oder Konstanten der Steifheit bezeichnet. Durch siewird jede Dehnungs- bzw.
Scherkomponente inεlj linear mit jeder Längs- bzw. Scherspannungskomponenteσik ver-
knüpft. Da der Verzerrungstensor symmetrisch ist (εlj = εjl), muss auchciklj = cikjl sein.
Dadurch reduziert sich die Anzahl der linear unabhängigen Einträge incikjl von 9·9 = 81
auf 9·6 = 54. Gleichermaßen folgt aus der Symmetrie des Spannungstensors (σik = σki),
dassciklj = ckilj sein muss (engl.:lack of rotation). Dadurch reduziert sich die Anzahl
der Einträge von 9· 6 = 54 auf 6· 6 = 36, so dass sich das verallgemeinerte HOOK’sche
Gesetz auf die Form
σ1
σ2
σ3
σ4
σ5
σ6
=
c11 c12 c13 c14 c15 c16
c21 c22 c23 c24 c25 c26
c31 c32 c33 c34 c35 c36
c41 c42 c43 c44 c45 c46
c51 c52 c53 c54 c55 c56
c61 c62 c63 c64 c65 c66
·
ε1
ε2
ε3
ε4
ε5
ε6
(2.18)
reduzieren lässt (vgl. S. 28 ff. in [100]). Dabei ist
σ1
σ2
σ3
σ4
σ5
σ6
Def:=
σ11
σ22
σ33
σ23
σ31
σ12
und
ε1
ε2
ε3
ε4
ε5
ε6
Def:=
ε11
ε22
ε33
2 ε23
2 ε31
2 ε12
. (2.19)

2.2 Isotroper Festkörper 14
Eine weitere Symmetrieüberlegung führt aufciklj = cljik bzw.cnm = cmn (Reziprozität),
was den Tensor der Elastizitätsmoduln im allgemeinen Fall auf 21 linear unabhängige
Einträge reduziert.
Im o.g. Fall charakterisiert der Tensorcnm die Elastizität eines Mediums, das keine Sym-
metrieelemente besitzt. Die Anwesenheit solcher Symmetrieelemente führt dazu, dass die
Anzahl der von Null verschiedenen Elastizitätsmoduln geringer wird sowie die Anzahl der
unabhängigen Moduln abnimmt (S. 140 ff. in [70] für alle Möglichkeiten2).
Die Symmetrieeigenschaften eines Materials können genutzt werden, um mit Hilfe di-
rekter Inspektion (S. 138 f. in [70]) die Einträge derciklj zu untersuchen. Im Falle eines
kubischen Materials ergeben sich 12 der 21 Einträge zu Null.Von den verbleibenden
9 Einträgen sind nur drei linear unabhängig, und es gilt
c11 = c22 = c33 (2.20)
c12 = c13 = c23 (2.21)
c44 = c55 = c66 . (2.22)
2.2.2 Isotroper Festkörper
Für den Fall eines isotropen Materials sind sogar nur 2 der 9 Einträge linear unabhängig.
Diese beiden Parameter heißen Lamé-Koeffizientenλ undµ und es gilt
c11 = c22 = c33 = 2 µ + λ (2.23)
c12 = c13 = c23 = λ (2.24)
c44 = c55 = c66 = µ . (2.25)
Wenn die Spannungs- und Deformationskomponenten mit zwei Indizes darzustellen sind,
dann lautet das HOOK’sche Gesetz für den isotropen Festkörper
σ11
σ22
σ33
σ23
σ31
σ12
=
λ + 2 µ λ λ 0 0 0
λ λ + 2 µ λ 0 0 0
λ λ λ + 2 µ 0 0 0
0 0 0 µ 0 0
0 0 0 0 µ 0
0 0 0 0 0 µ
ε11
ε22
ε33
2 ε23
2 ε31
2 ε12
(2.26)
bzw.
σik = λ Θ δik + 2 µ εik für i, k = 1, 2, 3 , (2.27)
wobeiΘ = ε11 + ε22 + ε33 die Volumenausdehnung ist.
2triklin, monoklin, rhombisch, tetragonal, trigonal, hexagonal, kubisch

2.2 Eindimensionale Spannung (Dehnung eines Stabes) 15
2.2.3 Eindimensionale Spannung (Dehnung eines Stabes)
Ist von allen Komponenten des Spannungstensors z.B. nur die Komponenteσ33 von Null
verschieden und die übrigenσik identisch Null, dann folgt aus Gl. (2.27) für diesen Fall
ε33 =(λ + µ) σ33
µ (3 λ + 2 µ)(2.28)
und
ε22 = ε11 = − λσ33
2 µ (3 λ + 2 µ). (2.29)
Somit ruft eine positive Normalspannung, die längs derz-Achse wirkt, eine Dehnung in
dieser Richtung und eine Kompression in Querrichtung hervor.
Der Koeffizient vor der Spannung in Gl. (2.28) stellt dem Sinn nach den Elastizitätsko-
effizienten des gedehnten Stabes dar. Seine reziproke Größe ist der effektive Elastizitäts-
modul, den man in diesem Fall den YOUNG’schen Modul nennt:
E =µ (3 λ + 2 µ)
λ + µ. (2.30)
Unter Berücksichtigung von Gl. (2.30) nimmt Gl. (2.28) die Form
ε33 E = σ33 (2.31)
an. Somit charakterisiert der YOUNG-Modul die Steifheit des Stabes im Vergleich zu sei-
ner Kompression. Wird die Spannungskomponenteσ33 lokal als konstant angenommen,
so verhalten sich Dehnungε33 und ElastizitätsmodulE antiproportional, so dass die Dar-
stellung der Dehnung eine semi-quantitative Abbildung desE-Moduls ergibt.
Das absolute Verhältnis von Quer- zu Längsdeformation des Stabes, d.h. der relativen
Kompression aus Gl. (2.29) zur relativen Verlängerung aus Gl. (2.28), die durch die
Längsspannung hervorgerufen wird, wird POISSON-Koeffizient genannt,
ν =
∣∣∣∣ε22
ε33
∣∣∣∣ =
∣∣∣∣ε11
ε33
∣∣∣∣ =λ
2 (λ + µ). (2.32)
Somit gilt ε22 = ε11 = −ν σ33/E. Das bedeutet, dass die Querschnittsverringerung des
Stabes bei seiner Längsdehnung durch die SteifheitE/ν charakterisiert wird.
Löst man die beiden Gleichungen (2.30) und (2.32) nach den Lamé-Koeffizienten auf, so
stehen sie mit den bekannten Größen ElastizitätsmodulE, SchubmodulG und Poisson
Zahlν in folgendem Zusammenhang (vgl. S. 16, [61]),
µ =E
2(1 + ν)= G (2.33)
λ =E ν
(1 + ν)(1 − 2 ν). (2.34)
Im Falle eines biologischen Gewebes, bei dem es sich um ein nahezu inkompressibles
Medium handelt(ν → 0.5), gilt demnachG = E/3.

2.2 Ebener Spannungszustand, ebener Verzerrungszustand 16
2.2.4 Ebener Spannungszustand, ebener Verzerrungszustand
Die Gleichungen für den ebenen Spannungszustand bzw. für den ebenen Verzerrungszu-
stand werden hier für diex-z-Ebene angegeben, weil diese Ebene mit einem Ultraschall-
Abbildungssystem dargestellt wird (vgl. dazu auch Kap. 4.1und Kap. 4.2).
Im ebenen Spannungszustand(engl.:plain stress) betrachtet man eine dünne Scheibe,
deren Dicke klein im Vergleich zu den übrigen Abmessungen ist. Wenn sie nur durch
Kräfte belastet wird, deren Wirkungslinien in der Ebene liegen, entsteht in der Platte
ein Spannungszustand, den man näherungsweise als ebenen Spannungszustand beschrei-
ben kann. Der ebene Spannungszustand wird dadurch charakterisiert, dass die Span-
nungskomponenten in der dritten Richtung (z.B. iny-Richtung) verschwinden [92], d.h.
σyy = σxy = σzy = 0 gilt.
Die Grundgleichungen des ebenen Spannungszustandes ergeben sich aus Gl. (2.27) zu
(vgl. S.17, [61])
σxx
σzz
σxz
=
E
(1 − ν2)
1 ν 0
ν 1 0
0 0 1−ν2
εxx
εzz
2 εxz
. (2.35)
Den ebenen Spannungszustand kann man so interpretieren, als wenn man ein sehr dünnes
Objektes betrachtet, z.B. eine Scheibe oder ein Lineal, das in der Ebene belastet wird [4].
Im ebenen Verzerrungszustand(engl.:plain strain) ist in senkrechter Richtung zur be-
trachteten Ebene (z.B. derx-z-Ebene) zwar eine Normalspannungσyy vorhanden, die
aber keinen Beitrag zur inneren Arbeit liefert, da nach Definition die Dehnung in dieser
Richtung Null ist, d.h.εyy = εxy = εzy = 0.
Die Grundgleichungen des ebenen Verzerrungszustandes ergeben sich aus Gl. (2.27) zu
(vgl. S.17, [61])
σxx
σzz
σxz
=
E
(1 + ν)(1 − 2 ν)
1 − ν ν 0
ν 1 − ν 0
0 0 1 − 2 ν
εxx
εzz
2 εxz
. (2.36)
Den ebenen Verzerrungszustand kann man so interpretieren,als wenn man den Quer-
schnitt eines Objektes betrachtet, das in senkrechter Richtung zu diesem Querschnitt weit
ausgedehnt ist [4].

Kapitel 3
Modellbildung
Wie in Kap. 2.2.3 dargestellt wurde, gilt für den Fall einer vorherrschenden Spannungs-
komponente ein linearer Zusammenhang zwischen Spannung und Dehnung in dieser
Richtung, z. B.σzz = E εzz nach Gl. (2.31). Nimmt man nun an, dass die mechanische
Spannung örtlich konstant ist, dann verhält sich die mechanische Dehnung antipropor-
tional zum Materialparameter Elastizitätsmodul. Die zweidimensionale Darstellung der
mechanischen Dehnung ist also eine semiquantitative Abbildung elastischer Eigenschaf-
ten.
Im folgenden Kapitel soll darauf eingegangen werden, wie aus Ultraschall-Echodaten
eines Objektes unter Kompression die mechanische Verschiebungτ(z) bzw.τ(t) ortsauf-
gelöst berechnet wird und welche statistischen Eigenschaften sich für die mechanische
Verschiebung bzw. die mechanische Dehnung ergeben.
3.1 Datenmodell der Ultraschall-Elastographie
Betrachtet man das Empfangssignal einer einzelnen A-Linie an einer lateralen Schall-
wandlerpositionx = x0 und nimmt die Impulsantwort als ortsinvariant an, so kann
Gl. (2.12) auf eine eindimensionale Faltung entlang der Achse z des Schallstrahls re-
duziert werden [10],
e(z) = h(z) ∗z
f(z) + n(z) , (3.1)
mit einer additiven Störungn(z), die ein mittelwertfreies und örtlich unkorreliertes Rau-
schen (z.B. elektronisches Rauschen) repräsentiert.
Wird das Gewebe mit lokaler Reflektivitätf(z) nun inz-Richtung komprimiert, so füh-
ren die resultierenden örtlichen Verschiebungenuz(z) zu Verschiebungen dieser lokalen
Reflektivität, d.h.f(z) → f(z + uz(z)). Seie1(z) das Empfangssignal vor Kompression
unde2(z) das Empfangssignal nach Kompression, dann gilt
e1(z) = h(z) ∗z
f(z) + n1(z)
e2(z) = h(z) ∗z
f(z + uz(z)) + n2(z) . (3.2)
Im störungsfreien Fall(ni(z) = 0) gilt dann in einer kleinen Umgebung umz = z0 die
Beziehung
e2(z) = e1(z + uz(z)) bzw.

3.2 Zeitverschiebungsschätzung 18
e2(t) = e1(t + τ(z)) , (3.3)
wobei die Verschiebunguz(z) mit einem Laufzeitunterschiedτ(z) überuz(z) = /1 2 c τ(z)
verknüpft ist. Die mechanische Dehnungεzz in z-Richtung ergibt sich zu
εzz =∂uz
∂z=
1
2
(dc(z)
dzτ(z) + c(z)
dτ(z)
dz
). (3.4)
Da die mikroskopischen Variationen der Schallgeschwindigkeit klein sind gegenüber den
durch eine Kompression hervorgerufenen makroskopischen Verschiebungenuz(z) bzw.
Laufzeitunterschiedenτ(z), folgt aus Gl. (3.4)
εzz = /1 2 cdτ(z)
dz=
dτ(t)
dt, (3.5)
wobei wieder die Äquivalenz von Zeitachset der Echos und Gewebetiefez benutzt wurde.
Die lokalen Laufzeitunterschiedeτ(t) können mit Hilfe von Methoden der Zeitverschie-
bungsschätzung (engl.:time delay estimation) in einer quasikontinuierlichen Auflösung
bestimmt werden, wenn die hochfrequenten Echosignale vor und nach geringen Kom-
pressionsschritten aufgenommen wurden.
3.2 Zeitverschiebungsschätzung
Die Schätzung von Zeitverschiebungen wird in der Ultraschallbildgebung für verschiede-
ne Anwendungen genutzt, so bei der Blutflußmessung [22, 23],bei der Bestimmung von
Laufzeitdifferenzen zur Korrektur von Phasenaberrationen und zur Messung von Gewe-
beverschiebungen bei der Abbildung elastischer Gewebeeigenschaften.
3.2.1 Methoden der Zeitverschiebungsschätzung
Methoden mit hochfrequenten Echodaten
Geht man davon aus, dass die Zeitverschiebung in einem kleinen Bereich umt = ti als
konstant angenommen werden kann und dass die statistischenEigenschaften der beiden
Empfangssignalee1(t) unde2(t) im betrachteten Bereich zeitunabhängig sind, dann sind
e1(t) und e2(t) gemeinsam stationäre Prozesse [14]. Die Zeitverschiebungkann unter
diesen Annahmen mit Hilfe der Kreuzkorrelationsfunktion
r12(τ) =1
TC
ti+TC/2∫
ti−TC/2
e1(t + τ) e2(t) dt für |τ | <π
2 π f0
≪ TC (3.6)
bestimmt werden [8, 57], wobei der Suchbereich im Hinblick auf eine spätere Verwen-
dung von Methoden im Basisband durch die Beziehungω0 · |τ | < π eingeschränkt wer-
den kann. Aus Abb. 3.1 wird ersichtlich, dass die bei der Berechnung der Korrelation

3.2 Methoden der Zeitverschiebungsschätzung 19
verwendete FensterlängeTC unabhängig vom AbstandTτ zweier aufeinander folgender
Verschiebungsschätzungen wählbar ist. Die Kreuzkorrelationsfunktionr12(τ) wird an der
TC
Tτ ti+1ti
A
te1(t)e2(t)
Abb. 3.1: Def inition der FensterlängeTC und SchrittweiteTτ an Positionenti, ti+1
Stelle des Laufzeitunterschiedes maximal, d.h.
∆τ(ti) = arg maxτ
(r12(τ)) für−π
ω0
< τ <π
ω0
(3.7)
ist ein Schätzer für die gesuchte Laufzeitdifferenz. Definiert man in Anlehnung an
Gl. (3.6) die Autokorrelationsfunktion über
rkk(τ) =1
TC
ti+TC/2∫
ti−TC/2
ek(t + τ) ek(t) dt mit |τ | ≪ TC für k = 1, 2 , (3.8)
dann ergibt sich die Funktion des Kreuzkorrelationskoeffizienten zu (vgl. S. 535 in [5])
ρ(τ) =r12(τ)√
r11(0)√
r22(0)(3.9)
und kann Werte zwischen−1 und1 annehmen. Die Suche nach dem Maximum der Kreuz-
korrelationsfunktion nach Gl. (3.7) erfordert hochfrequente Echodaten. Obwohl die Kor-
relationsfunktion mit Hilfe einer Faltungsoperation berechnet werden kann,
r12(τ) = e1(t) ∗t
e2(−t) , (3.10)
gestaltet sich die genaue Suche nach dem Maximum sehr rechenaufwendig, da sie auf-
wendige Interpolationen erfordert.
Methoden im Basisband
Führt man gestrichene Größenτ ′i im Sinne von Laufzeiten innerhalb von Signalen ein, so
kann ein gefenstertes hochfrequentes Echosignal
ei(t) = A(t − τ ′i) · cos (ω0(t − τ ′
i)) , (3.11)

3.2 Methoden der Zeitverschiebungsschätzung 20
mit EinhüllenderA(t − τ ′i) auch im Basisband dargestellt werden,
ei(t) = A(t − τ ′i) · e−jω0τ ′
i . (3.12)
Die Kreuzkorrelationsfunktion für Signale im Basisband lautet
r12(τ) =1
TC
ti+TC/2∫
ti−TC/2
e1(t + τ) e2(t)∗ dt . (3.13)
Die Korrelationsfunktion an der Stelleτ = 0 zwischen dem Signale1(t) unde2(t) errech-
net sich nach Einsetzen in (3.13) und Substitution zu
r12(0) ≈ rAA(∆τ) · ejω0∆τ (3.14)
mit ∆τ = τ2 − τ1 und rAA(∆τ) als Autokorrelationsfunktion der Einhüllenden an der
Stelle∆τ , die reellwertig und für kleine∆τ positiv ist. Der Laufzeitunterschied∆τ(ti)
kann daher allein aus der Phase der Kreuzkorrelationsfunktion r12(τ) an der Stelleτ = 0
geschätzt werden, d.h.,
∆τ(ti) =arg r12(0)
ω0
. (3.15)
In einer kleinen Umgebung umt = ti können die Phasenverläufeϕi(t) der beiden Basis-
bandsignale durch die Beziehung
ϕ2(t) ≈ ϕ1(t) + ω0∆τ = ϕ1(t) +2 π f0
c· 2∆z (3.16)
angenähert werden und hängen von der Verschiebung∆z ab. Diese Methode der Lauf-
zeitberechnung wurde in der Elastographie erstmals beim sogenannten „Phase Imaging“
genutzt [71] und ist aus der Darstellung von Blutfluss (engl.: color flow) ebenfalls be-
kannt, zu dessen Detektion schmalbandige Sendepulse verwendet werden [47]. Da der
Phasenunterschied im Intervall[−π, π] liegt, können jedoch nur Echolaufzeiten (Hin-
und Rückweg) in einem Bereich±λ/2 und Verschiebungen∆z in einem Bereich±λ/4
eindeutig berechnet werden. Pesavento et al. erweiterten dieses Prinzip um einen iterati-
ven Algorithmus [75, 76],
ϕ2(t) = ϕ1(t + ∆τtotal) + ω0 ∆τnew (3.17)
∆τtotal = ∆τtotal + ∆τnew ,
der die bis zum Zeitpunktti erreichte Gesamtverschiebung∆τtotal berücksichtigt und das
Signal e1(t) so lange neu interpoliert, bis der Phasenunterschiedω0 ∆τnew gleich Null
ist (Phasen-Nullstellen-Suche). Das Verfahren konvergiert für breitbandige Signale auch
dann, wenn die Mittenfrequenz der gefensterten Signale nicht mit f0 = ω0/(2 π) über-
einstimmt. Die aufsummierte Gesamtverschiebung∆τtotal entspricht der gesuchten qua-
sikontinuierlichen Verschiebungτ(ti) zwischen den beiden Signalene1(t) unde2(t).

3.2 Varianz der Zeitverschiebungsschätzung 21
3.2.2 Varianz der Zeitverschiebungsschätzung
Im folgenden wird auf die Varianz der aus gefensterten Signalen geschätzten Zeitver-
schiebung eingegangen. Dabei ist die minimal mögliche Varianz eines erwartungstreuen
Schätzers von Interesse, die durch die Cramér-Rao Schranke angegeben werden kann
(vgl. dazu auch [94, 113, 112]).
Definiert man das das Kreuzleistungsspektrum als Fouriertransformierte der Kreuzkorre-
lationsfunktion
Re1e2(f) =
∞∫
−∞
r12(t′)e−j 2πf t′dt′ (3.18)
und die Kohärenz (engl.:magnitude squared coherence) als
|γe1e2(f)|2 =
|Re1e2(f)|2
Re1e1(f)Re2e2
(f), (3.19)
so ergibt sich die minimale Varianz nach [57] zu
σ2τ, CRLB ≥
[TC
∫ ∞
−∞(2πf)2 |γe1e2
(f)|2
1 − |γe1e2(f)|2
df
]−1
. (3.20)
Walker und Trahey führten ein Signalmodell ein, in dem berücksichtigt wird, dass medi-
zinische Ultraschallsignale auch in Abwesenheit von elektronischem Rauschen dekorre-
liert sein können [111]. Betrachtet man zwei Empfangssignale e1(t) = s1(t) + n1(t) und
e2(t) = s2(t) + n2(t), so kann das elektronische Rauschen durchn1(t) bzw. n2(t) be-
schrieben werden und eine mögliche Dekorrelation durch denKorrelationskoeffizienten
ρ zwischens1(t) unds2(t). Unter Annahme von rechteckförmigen, bandpassbegrenzten
Leistungsspektren, d.h.Re1e2= ρ σ2
s undRe1e1= σ2
s +σ2n bzw.Re2e2
= σ2s +σ2
n in einem
Frequenzbereichf0 − B/2 ≤ |f | ≤ f0 + B/2 kann Gl. (3.20) zu
σ2τ, CRLB ≥ 3
2π2TC(B3 + 12Bf 20 )
[1
ρ2
(1 +
1
SNRel
)2
− 1
](3.21)
vereinfacht werden. Dabei istσs als Effektivwert der Amplitude des Signals undσn als
Effektivwert der Amplitude einer unkorrelierten Störung (Elektronisches Rauschen) zu
betrachten, so dass der Signal-zu-Störabstand durch SNRel = σ2s/σ
2n ausgedrückt wird1.
Dieses Ergebnis kann auf gaußförmige Leistungsspektren übertragen werden, wennB
durch die „äquivalente“ Bandbreite von gaußförmigen Spektren ersetzt wird [18]. Dazu
wird anstelle eines gaußförmigen Spektrums ein rechteckförmiges Spektrum gewählt, das
die gleiche Leistung und den gleichen Maximalwert besitzt.Für gaußförmige Spektren
ergibt sichB = 0.75 · B6dB (s. Anhang D, [5]). Im folgenden wird ein Ausdruck für den
Korrelationskoeffizientenρ angegeben, weil dieser nach Gl. (3.21) einen großen Einfluss
auf die Varianz der Zeitverschiebungsschätzungen hat, insbesondere wennρ < 1 wird.
1In der Originalarbeit benutzt Walker das Verhältnis von Effektivwerten.

3.2 Varianz der Zeitverschiebungsschätzung 22
Ausdruck für den Korrelationskoeffizienten ρ
In Anhang B wird gezeigt, dass der Korrelationskoeffizientals Produkt von drei einzelnen
Korrelationskoeffizienten ausgedrückt werden kann, d.h.
ρ = ρax · ρlat · ρelev , (3.22)
wenn für die Punktbildfunktion und die Impulsantwort des Gewebes aus Kap. 2.1.4 an-
genommen wird, dass die Punktbildfunktionh(x, y, t) separierbar ist und dass die Impul-
santwort des Gewebesf(x, y, t) durch weißes Rauschen beschrieben werden kann. Ein
anderer Beweis zu diesem Thema findet sich in [54].
In Gl. (3.22) werden drei Effekte berücksichtigt, die zu einer Dekorrelation der vor bzw.
nach einer Kompression des Mediums empfangenen Echosignale beitragen. Zunächst
führt die axiale Kompression des Gewebes zu einer Stauchungder empfangenen Signale
und damit zu einer Dekorrelation, die durchρax berücksichtigt wird. Weiterhin führen
Verschiebungen∆x in lateraler Richtung bzw.∆y in elevationaler Richtung zu einer De-
korrelation, die durchρlat bzw.ρelev berücksichtigt wird.
Axialer Korrelationskoeffizient ρax
Die durch rein axiale Kompression des Mediums hervorgerufene Dekorrelation der Si-
gnaleρax ergibt sich für das hier untersuchte Verfahren nach [110] zu
ρax =1
TC
TC/2∫
−TC/2
cos(2 π fs εzz t)sin(π Bs fs εzz t)
π Bs fs εzz tdt . (3.23)
Dabei ist
fs =−4f0 + 2 f0 εzz + εzz B
−4 + 4 εzz
und Bs = 22 f0 εzz − 2 B + εzz B
−4 f0 + 2 f0 εzz + εzz B. (3.24)
Es sei auf einen Zusammenhang mit einer Übersichtsarbeit von Quazi [80] verwiesen. Im
Falleρ = 1 kann Gl. (3.21) für einen niedrigen Signal-zu-Störabstand(SNRel ≪ 1) zu
σ2τ, CRLB ≥ 3
8π2 TC
1
SNR2el
1
f 32 − f 3
1
(3.25)
vereinfacht werden kann, wobeif2 = f0 + B/2 und f1 = f0 − B/2 und f 32 − f 3
1 =
B (12 f 20 + B2)/4 benutzt wurden. Für einen hohen Signal-zu-Störabstand (SNRel ≫ 1)
folgt aus Gl. (3.21) entsprechend
σ2τ, CRLB ≥ 3
8π2 TC
2
SNRel
1
f 32 − f 3
1
. (3.26)
Anhand der letzten beiden Gleichungen ist zu erkennen, dasssich die Cramér-Rao Schran-
ke von Zeitverschiebungsschätzungen proportional zu1/SNR2el für den Fall SNRel ≪ 1
und proportional zu1/SNRel für den Fall SNRel ≫ 1 verhält.

3.2 Kovarianz der Zeitverschiebungsschätzung 23
Lateraler Korrelationskoeffizient ρlat
Der Wert des lateralen Korrelationskoeffizientenρlat hängt von lateralen Verschiebungen
∆x ab. Wie in Anhang B gezeigt wird, ergibt sich unter Annahme einer separierbaren und
gaußförmigen PBF nach Gl. (2.14) der laterale Korrelationskoeffizientρlat zu
ρlat(∆x) = exp
(− ∆x2
4 σ2lat
)(3.27)
und hängt vom Parameterσlat der Punktbildfunktion ab [54]. Der Verlauf ist durch die
normierte Autokovarianzfunktion der Einhüllenden in lateraler Richtung gegeben [109].
Elevationaler Korrelationskoeffizient ρelev
Analog zur Überlegung bzgl. des lateralen Korrelationskoeffizienten hängt der Wert des
elevationalen Korrelationskoeffizientenρelev von elevationalen Verschiebungen∆y ab.
Der Verlauf ist durch die normierte Autokovarianzfunktionder Einhüllenden in elevatio-
naler Richtung gegeben und ergibt sich unter Annahme einer separierbaren und gaußför-
migen PBF nach Gl. (2.14) zu
ρelev(∆y) = exp
(− ∆y2
4 σ2elev
). (3.28)
Der Verlauf des elevationalen Korrelationskoeffizientenhängt vom Parameterσelev der
Punktbildfunktion ab.
Anhand von Gl. (3.27) bzw. Gl. (3.28) wird ersichtlich, dasslaterale bzw. elevationale
Verschiebungen in der Größenordnung vonσlat bzw. σelev bereits zu einer starken De-
korrelation der Signale führen. Solche Verschiebungen können z.B. durch ein unbeab-
sichtigtes Verkippen des Ultraschallwandlers während desKompressionsvorgangs oder
Bewegungen des Patienten verursacht werden.
3.2.3 Kovarianz der Zeitverschiebungsschätzung
Während in Kap. 3.2.2 eine untere Schranke für die Varianz dergeschätzten Zeitverschie-
bungen angegeben wurde, wird nun die Kovarianz zweier aufeinander folgender Zeit-
verschiebungsschätzungen betrachtet. Seienτi und τi+1 zwei an den Positionenti und
ti+1 geschätzte Zeitverschiebungen mit einem AbstandTτ = ti+1 − ti. Die Kovarianz ist
insbesondere dann von Interesse, wenn sich die mit einer KorrelationsfensterlängeTC ge-
fensterten Signale aufeinander folgender Zeitverschiebungsschätzungen überlappen, d.h.
wennTτ < TC ist. Céspedes et al. [19] nehmen an, dass die Kovarianz zu Nullwird, wenn
sich die gefensterten Signale nicht überlappen(Tτ > TC), und dass die Kovarianz linear
von Null auf den Wert der minimalen Varianz (Cramér-Rao Schranke) ansteigt, wenn die
Überlappung linear zunimmt(0 ≤ Tτ ≤ TC). Dieser Zusammenhang für die Kovarianz

3.3 Dehnungsschätzung 24
zweier aufeinander folgender Zeitverschiebungsschätzungenτ1 undτ2 lässt sich wie folgt
ausdrücken,
Cov {τ1, τ2} =
{σ2
τ
(1 − Tτ
TC
)für Tτ ≤ TC
0 für Tτ > TC .(3.29)
Dabei wird angenommen, dass die Echosignale in einer gewissen Umgebung stationär
und die Varianzen der Zeitverschiebungsschätzungen identisch sind, d.h.σ2τi
= σ2τ . In
einer Herleitung von Bilgen et al. zeigt sich, dass die Kovarianzfunktion eher durch
einen gaußförmigen Verlauf angenähert werden kann [13, 12]. In den Simulationen zeigt
sich, dass die empirische Kovarianzfunktion auch negativeWerte annimmt (vgl. dazu
Kap. 4.2.4 und Kap. 4.2.5), jedoch weiterhin fürTτ > TC zu Null wird.
3.3 Dehnungsschätzung
Auf Basis von Korrelationsverfahren gibt es Schätzer, mit deren Hilfe Zeitverschiebun-
gen aus hochfrequenten Echosignalen bzw. aus Signalen im Basisband geschätzt werden
können. Werden die geschätzten Zeitverschiebungenτ(t) als asymptotisch erwartungs-
treu und asymptotisch normalverteilt angenommen, dann können diese als Summe eines
deterministischen Anteilsτ(t) und einer Störungw(t) dargestellt werden,
τ(t) = τ(t) + w(t) (3.30)
bzw. im zeitdiskreten Fall mitt = nTτ und AbtastintervallTτ
τn = τn + wn . (3.31)
Die Ableitung der Zeitverschiebungen entspricht nach Gl. (3.5) der mechanischen Deh-
nung in axialer Richtung. Im folgenden soll diese Ableitung im zeitdiskreten Fall in einer
Umgebung fürn = n0+1 . . . n0+N bestimmt werden, indem eine Geradenanpassung an
die Verschiebungsschätzungen erfolgt (vgl. Abb. 3.2). Nimmt man die axiale Dehnung in
Abtastzeitpunkt n mit Abtastintervall Tτ
Zei
tver
schi
ebun
g τ[
n]
Zeitverschiebung τ[n]Geschätzte Zeitverschiebung τ[n]^
n=n0+1
Geradenanpassung durch KQ
n=n0+3 n=n0+5 n=n0+7 n=n0+9
Abb. 3.2: Beispiel für Zeitverschiebungsschätzung

3.3 Dehnungs-Schätzer 25
einer kleinen Umgebung konstant an, so folgt aus Gl. (3.31)
τn = τ(t1) + ε(t2) nTτ + wn für n = n0+1 . . . n0+N (3.32)
mit t1 = (n0+1) Tτ undt2 = (n0+N+1
2) Tτ . Dieses lässt sich auch in vektorieller Schreib-
weise ausdrücken,
τ = A · θ + w mit (3.33)
A =
1 (n0+1) Tτ
......
1 (n0+N) Tτ
und θ =
(τ(t1)
ε(t2)
).
Bei der Konstruktion eines Schätzers für den Parametervektor θ = [τ(t1) ε(t2)]T aus den
zeitlichen Verschiebungenτ ist dabei das Verhalten des zweiten Eintragsθ2 = ε(t2) von
Interesse, da es sich hierbei um die gesuchte lokale Dehnungεzz in z-Richtung an der
Positionz = /1 2 c t2 handelt.
Die Störungwn soll im weiteren als normalverteilte Zufallsvariable mit Kovarianzσ2τC
angenommen werden, d.h.
w ∼ N (0, σ2τC) . (3.34)
Der Spezialfall einer gaussverteilten unkorrelierten Störung, d.h.w ∼ N (0, σ2τ I) kann
dann aus dem allgemeinen Fall abgeleitet werden. Im folgenden wird daher die Indizie-
rungwc für farbiges, korreliertes Rauschen undwg für weißes, unkorreliertes Rauschen
verwendet. Wie im Anhang C gezeigt wird, ist das Ergebnisse der Schätzung des zweiten
Eintrags vonθ für den Fall einer unkorrelierten Störung nur von der AnzahlN der ver-
wendeten Stützstellen abhängig und nicht von der Positionn0. Dieses Ergebnis ist auch
graphisch nach Abb. 3.2 plausibel.
3.3.1 Konstruktion eines Dehnungs-Schätzers
Für ein Datenmodell nach Gl. (3.33) bietet sich die Methode der kleinsten Quadrate (KQ)
an [14], da mit Hilfe der MatrixA ein erwartungstreuer Schätzer für den Parametervektor
θ gebildet werden kann. Im allgemeinen Fall lautet der gewichtete KQ-Schätzer fürθ
unter Annahme vonw ∼ N (0,W)
θ =(AT[W]−1A
)−1AT[W]−1 τ . (3.35)
Die Berechnung der axialen Dehnung aus Zeitverschiebungsschätzungen mit dieser Me-
thode wurde in der Vergangenheit unter Annahme vonw = wg ∼ N (0, σ2τ I) durchge-
führt [53, 74], d.h.
θ =(ATA
)−1AT τ . (3.36)

3.3 Kovarianzmatrix des Schätzer 26
Der Vorteil eines solchen Schätzers ist, dass die zweite Zeile von(ATA
)−1AT mit N
Einträgen nicht mehr abhängig vonn0 ist2, wie aus Gl. (C.9) hervorgeht [38]. Anstelle
einer rechenintensiven KQ-Schätzung des Parametervektors θ aus den Verschiebungenτ
kann der Parameterθ2 also direkt durch FIR-Filterung der Verschiebungen berechnet wer-
den. Bisher wurde nicht berücksichtigt, dass ein auf o.g. Annahme basierender Schätzer
nicht zwangsläufig die minimale Varianz bei der Schätzung der Dehnung liefert, wenn es
sich bei der Störungw um korreliertes Rauschen handelt. Die Varianz der Dehnung kann
mit Hilfe der KovarianzmatrixCθ des geschätzten Parametervektorsθ angegeben werden,
Var(θ2) = σ2ε = [Cθ]22 (3.37)
Die Indizierung[Cθ]22 bezieht sich dabei auf den zweiten Diagonaleneintrag der 2x2
KovarianzmatrixCθ. Es werden nun Kovarianzmatrizen des Schätzers für verschiedene
Fälle berechnet.
3.3.2 Kovarianzmatrix des Schätzer
Im folgenden wird untersucht, welchen Einfluss die Berücksichtigung einer Wichtungs-
matrixW auf die Varianz der Dehnungsschätzung nach Gl. (3.35) hat – in Abhängigkeit
von der Anzahl der FilterkoeffizientenN (Filterlänge) und dem Intervall aufeinander fol-
gender ZeitverschiebungsschätzungenTτ . Gesucht ist also der zweite Eintrag der Diago-
nalen der Kovarianzmatrix des SchätzersCθ. Diese Kovarianzmatrix wird für drei Fälle
nach Tab. 3.1 berechnet. In den ersten beiden Fällen wird dieDehnung aus Zeitverschie-
Tab. 3.1: Verschiedene Dehnungsschätzer
Tτ Störungw KQ-GewichtungW Filterlänge
Fall 1 ∆t ∼ N (0, σ2τ C) σ2
τ C N
Fall 2 ∆t ∼ N (0, σ2τ C) σ2
τ I N
Fall 3 TC ∼ N (0, σ2τ I) σ2
τ I N = N
bungen berechnet, die im AbstandTτ = ∆t geschätzt wurden. Die Störung wird daher
als korreliert angenommen, d.h.wc ∼ N (0, σ2τC). Im dritten Fall wird die Dehnung
aus Zeitverschiebungen berechnet, die im AbstandTτ = TC geschätzt wurden und nach
Gl. (3.29) unkorreliert sind. In diesem Fall wird eine unkorrelierte Störung angenommen,
d.h. wg ∼ N (0, σ2τ I). Um die Ergebnisse vergleichbar zu machen, wird die normierte
FilterlängeN eingeführt,
N =(N − 1) Tτ
TC
+ 1 . (3.38)
2Die Schätzung des ersten Eintrags (τn1) ist hingegen abhängig von der Wahl vonn0.

3.3 Kovarianzmatrix des Schätzer 27
Dadurch findet gewissermaßen eine Normierung der FilterlängeN im FalleTτ = ∆t auf
eine vergleichbare Filterlänge für den Fall 3 (Tτ = TC) statt. Im letzteren Fall ist nämlich
geradeN = N . Für ganzzahligeN können die Ergebnisse aus Fall 1 und Fall 2 mit dem
Ergebnis aus Fall 3 direkt verglichen werden.
Fall 1 – Gewichteter KQ-Schätzer & korreliertes Rauschen
Mit der GewichtungW = σ2τ C ergibt sich der gewichtete KQ-Schätzer zu
θ =(AT[σ2
τC]−1A)−1
AT[σ2τC]−1 τ
=(ATC−1A
)−1ATC−1 τ . (3.39)
Der Schätzer ist erwartungstreu, d.h.E(θ) = θ. Unter Berücksichtigung vonwc ∼N (0, σ2
τ C) folgt für die Kovarianzmatrix des Schätzers
Cθ = E
[(θ − E(θ))(θ − E(θ))T
]
= E
[([ATC−1A]−1ATC−1(τ − Aθ)
) ([ATC−1A]−1ATC−1(τ − Aθ)
)T]
= E[[ATC−1A]−1ATC−1
(wcw
T
c
)C−1A[ATC−1A]−1
]
= σ2τ [ATC−1A]−1ATC−1A[ATC−1A]−1
=(AT[σ2
τC]−1A)−1
. (3.40)
Dabei wurde berücksichtigt, dass die transponierte Inverse einer quadratischen Matrix
gleich der inversen Transponierten ist.
Fall 2 – KQ-Schätzer & korreliertes Rauschen
Mit der GewichtungW = σ2τ I ergibt sich der gewichtete KQ-Schätzer zu
θ =(ATA
)−1AT τ . (3.41)
Auch dieser Schätzer ist erwartungstreu und die Kovarianzmatrix des SchätzersCθ ergibt
sich zu
Cθ = E
[(θ − E(θ))(θ − E(θ))T
]
= E
[([ATA]−1AT(τ − Aθ)
) ([ATA]−1AT(τ − Aθ)
)T]
= E[[ATA]−1AT
(wcw
T
c
)A[ATA]−1
]
= [ATA]−1AT σ2τCA[ATA]−1 . (3.42)
Offensichtlich unterscheidet sich die Kovarianzmatrix indiesem Fall von der aus
Gl. (3.40).

3.3 Cramér-Rao Schranke der Dehnung 28
Fall 3 – KQ-Schätzer & unkorreliertes Rauschen
Mit der GewichtungW = σ2τ I ergibt sich der gleiche KQ-Schätzer wie in Fall 2,
θ =(ATA
)−1AT τ . (3.43)
Weil die Störung in diesem Fall jedoch als unkorreliert angenommen wird, d.h.
wg∼N (0, σ2τ I), ergibt sich die Kovarianzmatrix des Schätzers zu
Cθ =(AT[σ2
τ I]−1A)−1
= σ2τ
(ATA
)−1. (3.44)
Bevor mit Hilfe der Kovarianzmatrizen die Varianzen der Dehnung für alle drei Fälle be-
rechnet werden, sollen diese mit der Cramér-Rao Schranke für das gewählte Datenmodell
nach Gl. 3.33 verglichen werden.
3.3.3 Cramér-Rao Schranke der Dehnung
Für das lineare Datenmodell aus Gl. (3.33) mit einer Störungnach Gl. (3.34) kann die
Cramér-Rao Schranke angegeben werden (S. 47, [55]). Dazu wirdzunächst die Fisher-In-
formationsmatrix bestimmt und anschließend invertiert. Die Einträge der Fisher-Informa-
tionsmatrix können mit Hilfe von
[I(θ)]ij =
[∂µ(θ)
∂θi
]T
[σ2τC(θ)]−1
[∂µ(θ)
∂θj
]
+ 1/2 tr[[C(θ)]−1∂C(θ)
∂θi
[C(θ)]−1∂C(θ)
∂θj
](3.45)
berechnet werden, wobei in unserem Fallµ(θ) = Aθ ist und die Indizesi für Zeilen und
j für Spalten stehen. Ausgeschrieben lauten die partiellen Ableitungen
[∂Aθ
∂θ1
]=
1...
1
und
[∂Aθ
∂θ2
]=
1...
N
Tτ . (3.46)
Nach Gl. (3.34) istC(θ) = σ2τ C nicht vonθ abhängig, so dass sich nach Einsetzen von
Gl. (3.46) in Gl. (3.45) die 2x2 Informationsmatrix zu
I(θ) =1
σ2τ
[1 . . . 1] [C]−1
1...
1
[1 . . . 1] [C]−1
1...
N
Tτ
[1 . . . N ] [C]−1
1...
1
Tτ [1 . . . N ] [C]−1
1...
N
T 2
τ
= AT[σ2τ C]−1A (3.47)

3.3 Cramér-Rao Schranke der Dehnung 29
ergibt. Die Kovarianzmatrix eines erwartungstreuen Schätzers (engl.:unbiased) für den
Parametervektorθ erfüllt die Ungleichung
Cθ ≥ [I(θ)]−1 . (3.48)
Die unteren Grenzen für die Varianzen der Komponentenθi des Parametervektorsθ
(Cramér-Rao Schranke) folgen aus den Diagonalenelementen der Inversen der Fisher-
Informationsmatrix,
Var(θi) = [Cθ]ii ≥ [I(θ)]−1ii , (3.49)
insbesondere gilt also für die Varianz der Dehnung die Beziehung
Var(εn2) = [Cθ]22 ≥ [I(θ)]−1
22 (3.50)
Vergleicht man die Kovarianzmatrizen der Schätzer aus Gl. (3.40) (Fall 1), Gl. (3.42)
(Fall 2) und Gl. (3.44) (Fall 3) mit der Fisher-Informationsmatrix aus Gl. (3.47), so kann
man feststellen, dass es sich in Fall 1 unter Annahme einer korrelierten Störung und in
Fall 3 unter Annahme einer unkorrelierten Störung gerade umderen Inverse handelt. In
diesen beiden Fällen gilt Gleichheit in Gl. (3.48), so dass die Schätzer nicht nur erwar-
tungstreu sind, sondern der geschätzte Parameter Dehnung auch die minimal mögliche
Varianz erreicht.
Betrachtet man Fall 3, so kann die Cramér-Rao Schranke für die Varianz der Dehnung
explizit in Abhängigkeit von der Varianz der Zeitverschiebungenσ2τ und der Filterlänge
N (mit N = N ) angegeben werden. Nach Invertierung der Fisher-Informationsmatrix
I(θ) =1
σ2τ
ATA (3.51)
ist der zweite Diagonaleneintrag von Interesse. Dieser ergibt sich mit Hilfe des Quotienten
vonaTa und der Determinante aus Gl. (C.2) nach Anhang C. Für die Varianz der Dehnung
gilt die Beziehung
σ2ε = σ2
τ
N112
N2(N2 − 1) T 2τ
=σ2
τ
T 2C
1112
N(N2 − 1), (3.52)
weil für Fall 3 nach Tab. 3.1 der Abstand aufeinander folgender Zeitverschiebungsschät-
zungen zuTτ = TC gewählt wird.
Es wird nun untersucht, wie groß die unterschiedlichen Varianzen für die einzelnen Fälle
sind. Obwohl die Varianz der Dehnungsschätzung für das jeweilige Datenmodell in Fall 1
bzw. Fall 3 minimal ist, kann grundsätzlich nicht davon ausgegangen werden, dass diese
Varianz identisch ist. Sie hängt wesentlich von der Kovarianzmatrix der Störung ab. Zu
erwarten ist jedoch, dass die Varianz in Fall 2 höher als in Fall 1 ist.

3.3 Vergleich der Dehnungsvarianz der Schätzer 30
3.3.4 Vergleich der Dehnungsvarianz der Schätzer
Weil bei der Ultraschall-Elastographie die mechanische Dehnung inz-Richtung darge-
stellt wird, ist die Varianz des zweiten Eintragsθ2 = ε(t2) des Parametervektorsθ wich-
tig zur Beschreibung der Qualität des Abbildungsverfahrens. Die Varianz der Dehnung
wird nun für die drei Fälle aus Kap. 3.3.2 berechnet, indem die KovarianzmatrizenCθ der
Schätzer nach Gl. (3.40), Gl. (3.42) und Gl. (3.44) numerisch ausgewertet werden.
Die KovarianzmatrixC der Störung besitzt eine Toeplitz-Form entsprechend der Kova-
rianzfunktion aus Gl. (3.29). Deren Verlauf ist von der KorrelationsfensterlängeTC und
vom Abstand aufeinander folgender VerschiebungsschätzungenTτ abhängig. Zur besse-
ren Vergleichbarkeit der Ergebnisse wird die Varianz der Dehnung nicht in Abhängigkeit
von der FilterlängeN , sondern in Abhängigkeit von der bzgl. der Korrelationsfensterlän-
geTC normierten FilterlängeN nach Gl. (3.38) dargestellt. Dadurch wird berücksichtigt,
dassTτ = ∆t für Fall 1 bzw. Fall 2 ist undTτ = TC für Fall 3 ist. Zusätzlich wird die
Varianz der Dehnungσ2ε aufσ2
τ/T2C normiert, da die Varianz der Zeitverschiebungsschät-
zungenσ2τ nach Gl. (3.21) von der KorrelationsfensterlängeTC abhängig ist.
In Abb. 3.3 ist die normierte Varianz der Dehnung für alle drei Fälle in dB dargestellt.
Zur besseren Übersichtlichkeit sind die Kurvenverläufe nur für TC = 50 ∆t abgebildet.
Allerdings zeigten die numerischen Berechnungen für andereKorrelationsfensterlängen
mit TC ∈ [10 ∆t, 150 ∆t] Abweichungen von weniger als1 dB, so dass die Schlussfol-
gerungen auf KorrelationsfensterlängenTC im genannten Bereich übertragbar sind.
1 2 3 4 5 6 7-24-18-12-606
121824
(σε)
2/ (στ
/ TC)2
in d
B Fall 2 (ungew. KQ-Schätzer)
Fall 1 (gew. KQ-Schätzer)
Fall 3 (unkorrelierte Störung)
Filterlänge N , ganzzahlig für Tτ = TC~
Filterlänge N , ganzzahlig für Tτ = TC~
Fall 3 mit N~
Fall 3 mit N~
Abb. 3.3: Normierte Varianz der Dehnung in dB für verschiedene Schätzer nach Fall 1–3
in Abhängigkeit von der normierten FilterlängeN , die fürTτ = TC ganzzahlig≥ 2 wird
Wie in Abb. 3.3 zu sehen ist, kann die normierte Filterlänge für Fall 1 und für Fall 2 auch
reelle Werte annehmen, während der Fall 3 nur für ganzzahlige Werte vonN definiert ist.
In Fall 3 ist der Abstand aufeinander folgender ZeitverschiebungsschätzungenTτ gerade
so groß wie die KorrelationsfensterlängeTC , damit die Annahme einer unkorrelierten
Störung gerechtfertigt ist. Der Verlauf der Kurve für Fall 3mit Tτ = TC könnte auch
direkt Gl. (3.52) entnommen werden, da dannN = N gilt.

3.3 Vergleich der Dehnungsvarianz der Schätzer 31
Erwartungsgemäß nimmt die Varianz der Dehnung mit zunehmender FilterlängeN bzw.
N ab. Außerdem bestätigt sich, dass die Varianz der Dehnung inFall 2 höher ist als in
Fall 1 (Schätzer mit minimaler Varianz). Allerdings ist derUnterschied gering(< 3 dB).
Betrachtet man jedoch den Aspekt der Echtzeit-Fähigkeit eines Verfahrens, so ist die
gewichtete KQ-Schätzung aufwendiger als ein FIR-Filter, das in Fall 2 und Fall 3 an-
gewendet werden könnte. Interessant ist auch der Verlauf der Varianz der Dehnung in
Fall 3 im Vergleich zu Fall 1, weil sich auch hier kein nennenswerter Unterschied zeigt.
Daraus folgt, dass ein Schätzen von Zeitverschiebungen im Abstand vonTτ = TC und
anschließende FIR-Filterung zu keinerlei Einbußen bzgl. der Varianz der Dehnung führt,
aber eine Reduktion der Filterkoeffizienten um den FaktorTC/Tτ bedeutet. Der Preis des
reduzierten Rechenaufwandes ist natürlich eine geringere Ortsauflösung, weil die Korre-
lationsfensterlängeTC im Bereich von mehreren Wellenlängen liegt.
Zusätzlich ist in Abb. 3.3 der Verlauf der normierten Varianz der Dehnung dargestellt,
wennN in Gl. (3.52) eingesetzt wird (Fall 3 mitN ). Wie man sieht, wird die normierte
Varianz der Dehnung im Vergleich zu Fall 1 bzw. Fall 2 fürN ≤ 2 leicht übertroffen. Für
N ≥ 2 wird die normierte Varianz der Dehnung im Vergleich zu Fall 2leicht unterschrit-
ten, während sie mit der aus Fall 1 gut übereinstimmt. Motiviert durch dieses Ergebnis
wird daher bei der Betrachtung der Varianz der Dehnung im Verlauf des Kapitels auf
Gl. (3.52) zurückgegriffen, wobeiN anstelle vonN verwendet wird, d.h.
σ2ε ≈ σ2
τ
T 2C
1112
N(N2 − 1). (3.53)
Für den Fall 3 mitTτ = TC ist geradeN = N und Gl. (3.53) stimmt mit Gl. (3.52)
überein. Die Varianz der Dehnung nimmt also bzgl. der normierten Filterlänge∼ 1
N3ab.
Zum Abschluss soll noch die normierte Varianz der Dehnung für Fall 2 (ungewichteter
KQ-Schätzer) untersucht werden, wenn sowohl die KorrelationsfensterlängeTC als auch
der Abstand aufeinander folgender ZeitverschiebungsschätzungenTτ beliebig gewählt
werden, d.h.Tτ ∈ [∆t, 150 ∆t], TC ∈ [10 ∆t, 150 ∆t] und Tτ ≤ TC . Die normierte
Varianz wurde für jede mögliche Kombination berechnet und in Abhängigkeit von der
sich ergebenden normierten FilterlängeN in Abb. 3.4 eingetragen.
Da in allen möglichen KombinationenTτ = ∆t enthalten ist, finden sich in Abb. 3.4
die Werte der Kurve von Fall 2 aus Abb. 3.3 wieder. Die normierte Varianz der Dehnung
unterscheidet sich aber auch fürTτ > ∆t nur geringfügig von den Werten fürTτ = ∆t
(< 3 dB) und kann daher ebenfalls durch Fall 3 mitN aus Abb. 3.3 abgeschätzt werden.
Zusammenfassend kann an dieser Stelle gesagt werden,
• dass eine Berechnung der Dehnung durch einen ungewichteten KQ-Schätzer nach
Fall 2 nur zu geringfügig höheren Varianzen führt als ein gewichteter KQ-Schätzer,
der zu minimaler Varianz führen würde, und
• dass die Varianz der Dehnung im Falle eines ungewichteten KQ-Schätzers für be-

3.3 Dehnungsschätzer als FIR-Filter 32
1 2 3 4 5 6 7
-12
-6
0
6
12
18
24
Filterlänge N , ganzzahlig für Tτ = TC~
Filterlänge N , ganzzahlig für Tτ = TC~
(σε)
2/ (στ
/ TC)2
in d
B
Fall 2 (ungew. KQ-Schätzer) für verschiedene TC bzw. Tτ
Fall 3 mit N~
Fall 3 mit N~
Abb. 3.4: Normierte Varianz der Dehnung in dB für Fall 2 für verschiedene Kombinatio-
nen vonTC undTτ in Abhängigkeit von der normierten FilterlängeN
liebige Kombinationen vonTτ undTC mit Tτ ≤ TC durch Gl. (3.53) abgeschätzt
werden kann, indem die normierte FilterlängeN nach Gl. (3.38) benutzt wird.
Der allgemeine Ausdruck für die Varianz der Dehnung wird in Kap. 3.4.1 verwendet, um
das elastographische SNRε zu betrachten. Zunächst aber motiviert dieses Teilergebnis,
die Dehnungsschätzung auch für den Fall überlappender Korrelationsfenster(Tτ < TC)
mit Hilfe eines ungewichteten KQ-Schätzers durchzuführen, was durch ein FIR-Filter
realisiert werden kann.
3.3.5 Dehnungsschätzer als FIR-Filter
Bei der Schätzung der axialen Dehnung durch einen ungewichteten KQ-Schätzer zeigt
sich, dass die zweite Zeile der Matrix(AT A
)−1AT aus Gl. (3.43) unabhängig von der
Positionn0 ist, an der der Parametervektorθ = [τ(t1) ε(t2)]T geschätzt wird. In Abhän-
gigkeit von der AnzahlN der berücksichtigten Zeitverschiebungsschätzungen ergeben
sich die Einträgeh′i der zweiten Zeile der o.g. Matrix als Quotient von Gl. (C.9) und der
in Gl. (C.8) berechneten Determinante aus Gl. (C.2) zu
h′i =
1
Tτ
2i − N − 116N(N2 − 1)
für i = 1 . . . N . (3.54)
Daher kann die Schätzung der axialen Dehnung durch einen ungewichteten KQ-Schätzer
auch mit Hilfe einer FIR-Filterung der axialen Verschiebungdurchgeführt werden, wobei
für die Filterkoeffizientenhi des FIR-Filters
hi = h′N+1−i = − 1
Tτ
2i − N − 116N(N2 − 1)
für i = 1 . . . N (3.55)
gelten muss. Wie erwartet ergeben sich fürN = 2 die Filterkoeffizientenh = [1 −1]/Tτ ,
was einer Differenzenbildung entspricht. Die Filterkoeffizienten sind in Abb. 3.5 für un-
gerade FilterlängenN dargestellt. Es handelt sich um punktsymmetrische Funktionen,
deren Steigung von der Filterlänge abhängig ist.

3.4 Eigenschaften von Elastogrammen 33
-5 -4 -3 -2 -1 0 1 2 3 4 5
-0.5-0.4-0.3-0.2-0.1
00.10.20.30.40.5
Filt
erko
effiz
ient
en h
iPosition i-(N+1)/2 in Abtastschritten ∆Tτ
Abb. 3.5: Koef f izientenhi des FIR-Filters für ungerade FilterlängenN , aus Symmetrie-
gründen an den Stelleni − (N + 1)/2 eingezeichnet
Aus den im AbstandTτ vorliegenden Zeitverschiebungsschätzungenτi wird die Dehnung
berechnet, indem eine Faltung mit einem FIR-Filter der LängeN und Filterkoeffizienten
hi nach Gl. (3.55) aus Kap. 3.3.5 erfolgt, d.h.
εi = hi ∗i τi =N∑
k=1
hk τi−k . (3.56)
Die Summationsgrenzen kommen dadurch zu Stande, dass die Filterkoeffizienten
hi nur für i = 1 . . . N ungleich Null sind. Der aus den Zeitverschiebungsschät-
zungen τi−N . . . τi−1 berechnete Dehnungswertεi muss dabei der absoluten Position
zi = /1 2 c (i − N+12
) Tτ zugeordnet werden.
3.4 Eigenschaften von Elastogrammen
Im folgenden Unterkapitel wird auf Abbildungseigenschaften der Ultraschall-Elasto-
graphie eingegangen. Dazu werden der elastographische Signal-zu-Störabstand SNRεund der elastographische Kontrast CNRε eingeführt und betrachtet. Anschließend wer-
den Eigenschaften im Ortsfrequenzbereich diskutiert und eine Abschätzung bzgl. der
Ortsauflösung gemacht.
3.4.1 SNR der Dehnung: SNRε
Zur Beurteilung der Abbildungsqualität von Elastogrammen kann im Falle eines homoge-
nen Mediums das Verhältnis von Mittelwert zu Standardabweichung der axialen Dehnung
verwendet werden [20]. In dieser Arbeit wird das elastographische SNRε als Quotient des
Quadrates der mittleren Dehnungε20 zur Varianz der Dehnung definiert, d.h.
SNRε =ε20
σ2ε
. (3.57)

3.4 Ausgangs-SNRε: SNRε034
Wie sich in Kap. 3.3.4 zeigte, kann die Varianz der Dehnung durch Gl. (3.53) gut genähert
werden. Dabei wird eine normierte FilterlängeN nach Gl. (3.38) verwendet, mit deren
Hilfe die Wahl einesTτ < TC über ein kleineresN berücksichtigt wird. Nach Einsetzen
von Gl. (3.53) in Gl. (3.57) ergibt sich das elastographische SNRε zu
SNRε =ε20(
σ2τ
T 2
C
) 11
1
12N(N2−1)
= SNRε0·
(1
12N(N2 − 1)
)(3.58)
mit
SNRε0=
ε20(
σ2τ
T 2
C
) . (3.59)
Zunächst soll der Ausdruck SNRε0untersucht werden, gewissermaßen ein Ausgangs-
SNRε, das durch Vergrößerung der normierten FilterlängeN erhöht werden kann.
3.4.2 Ausgangs-SNRε: SNRε0
Für die Varianz der Zeitverschiebungenσ2τ kann die Cramér-Rao Schranke aus Gl. (3.21)
als untere Grenze verwendet werden, was auf
SNRε0≤ ε2
0
T 2C
32π2TC(B3+12Bf2
0)
[1ρ2
(1 + 1
SNRel
)2
− 1
] (3.60)
führt. Dieser Ausdruck ist u.a. von den ParameternTC und wegenρ = ρax(TC , ε0) nach
Gl. (3.23) auch vonε0 abhängig. Der Integrand in Gl. (3.23) ist eine gerade Funktion, so
dass sich der axiale Korrelationskoeffizient zu
ρax(TC , ε0) =2
TC
TC/2∫
0
cos(a1 t)sin(a2 t)
a2 tdt (3.61)
ergibt, wobei die Konstantena1 = 2π fs ε0 unda2 = π Bs fs ε0 eingeführt wurden. Mit
Hilfe der trigonometrischen Umformungcos β · sin α = /1 2 (sin(α−β)+sin(α+β)) wird
dies zu
ρax =2
TC
1
a2
1
2
TC/2∫
0
sin((a2 − a1) t)
tdt +
TC/2∫
0
sin((a2 + a1) t)
tdt
(3.62)
bzw. unter Ausnutzung des IntegralsinusSi(x) =∫ x
0sin t
tdt zu
ρax =2
TC
1
a2
1
2
[Si
((a2 − a1)
TC
2
)+ Si
((a2 + a1)
TC
2
)], (3.63)
was eine numerische Auswertung erfordert. In Abb. 3.6 ist das Ergebnis der numeri-
schen Auswertung in Abhängigkeit von der KorrelationsfensterlängeTC für verschiedene
Werte der axialen Dehnungε0 dargestellt. Man erkennt zum einen, dass der Wert des Kor-
relationskoeffizienten durch eine Vergrößerung der Korrelationsfensterlänge abfällt. Zum

3.4 Ausgangs-SNRε: SNRε035
5 20 35 50 65 80 95 110 125 140
0.880.9
0.920.940.960.98
1
Korrelationsfensterlänge TC in ∆tK
orre
latio
nsko
effiz
ient
ρax
ε0=0.005
ε0=0.01
ε0=0.02
Abb. 3.6: Axialer Korrelationskoef f izientρax in Abhängigkeit von der FensterlängeTC
und axialer Dehnungε0
anderen führt eine Vergrößerung der Dehnung bei konstanterKorrelationsfensterlänge
ebenfalls zu einem Abfall des Korrelationskoeffizienten.Beides ist plausibel, da sowohl
eine Erhöhung der Korrelationsfensterlänge als auch der Dehnung zu einer vermehrten
Dekorrelation der gefensterten Signale führt.
Mit Hilfe dieser Werte fürρax(TC , ε0) kann das SNRε0nach Gl. (3.60) für typische Wer-
te vonTC und ε0 berechnet werden. Eine Übersicht über die Werte aller in Gl.(3.60)
vorkommenden Parameter findet sich in Tab. 3.2: das Abtastintervall ∆t, die Korrela-
Tab. 3.2: Werte der in den Simulationen verwendeten Parameter
Parameter Wert bzw. Wertebereich
∆t 1/50 MHz
TC [10 ∆t, 150 ∆t]
ε0 [0.1 % , 5.0 %]
SNRel 40 dB
f0 8.5 MHz
B6dB 60 % · f0
B 0, 75 · B6dB
tionsfensterlängeTC , die Dehnungε0, der elektronische Signal-zu-Störabstand SNRel,
die Mittenfrequenzf0, die 6-dB BandbreiteB6dB und die äquivalente BandbreiteB. In
Abb. 3.7 ist das elastographische Ausgangs-SNRε (SNRε0) in Abhängigkeit von der Kor-
relationsfensterlängeTC und der Dehnungε0 dargestellt. Zusätzlich ist der Verlauf des
maximalen SNRε0bei jeweils konstanter KorrelationsfensterlängeTC als schwarze Linie
eingezeichnet.
Es ist zu erkennen, dass die Maximalwerte des Ausgangs-SNRε0bei konstantemTC eher
bei kleinen als bei großen Dehnungen liegen. An dieser Tatsache würde sich auch nichts
ändern, wenn bei konstanter Korrelationsfensterlänge dieFilterlängeN erhöht oder der
AbstandTτ aufeinander folgender Verschiebungsschätzungen geändert wird (und damit
N verändert würde), weil dadurch alle Werte beiTC=const. (d.h., die jeweilige Spalte

3.4 Ausgangs-SNRε: SNRε036
0
5
10
15
20
25
30
20 40 60 80 100 120 140 160 180 200
0.51
1.52
2.53
3.54
4.55
TC in Abtastwerten ∆t
Deh
nung
ε0
in %
SNRε0in dB
Abb. 3.7: Ausgangs-SNRε0in dB in Abhängigkeit vonTC undε0 für ρ = ρax
in Abb. 3.7) mit einem konstanten Faktor multipliziert würden. Es kann also bereits hier
gesagt werden, dass eine gute Abbildungsqualität eherbei kleinen Dehnungenerreicht
wird. Für KorrelationsfensterlängenTC > 30 ∆t liegen diese Dehnungen bei ca.1 %.
Weiterhin ist zu sehen, dass die Maximalwerte mit größer werdendemTC zunehmen.
Um letzteres zu verdeutlichen, ist in Abb. 3.8 der Verlauf von SNRε0für einige kleine
Dehnungen in Abhängigkeit vonTC dargestellt. Während der Korrelationskoeffizient
10 20 40 60 80 100 120 140 160 180 200
-6-30369
1215182124
ε0=2.0
ε0=0.5ε0=1.0
ε0=0.2
ε0=0.1
10 20 40 60 80 100 120 140 160 180 200
-6-30369
1215182124
ε0=2.0
ε0=0.5ε0=1.0
ε0=0.2
ε0=0.1
TC in Abtastwerten ∆t
SN
Rε 0
in d
B
Abb. 3.8: SNRε0in dB in Abhängigkeit vonTC für verschiedeneε0 für ρ = 1.00 · ρax
nach Abb. 3.6 mit größer werdendemTC abnimmt und damit zu einer Reduktion von
SNRε0nach Gl. (3.60) führt, geht die KorrelationsfensterlängeTC mit dritter Potenz in den
Zähler ein, was insgesamt zu einer Erhöhung des SNRε0führt. Allerdings kann daraus an
dieser Stellenicht gefolgert werden, dass eine gute Abbildungsqualität durchmöglichst
große Korrelationsfensterlängen erreicht wird.
Der Grund ist darin zu sehen, dass sich das Gesamt-SNRε nach Gl. (3.57) aus einem
Ausgang-SNRε0nach Gl. (3.60) und einem vonN abhängigen Faktor zusammensetzt.
Dieses Teilergebnis würde sich nur übertragen lassen, wennman mit zunehmender Kor-
relationsfensterlängeTC in Kauf nimmt, dass auch die absolute Filterlänge(N − 1) Tτ
erhöht werden muss, damitN aus Gl. (3.38) konstant bleibt3. Auf den Einfluss vonN
auf das Gesamt-SNRε wird nun eingegangen.
3Für N = 2.43 = const. wäre immer10 · log10
( 1
12N(N2 − 1)) = 0 dB ⇒ (N − 1)Tτ = 1.43TC

3.4 SNRε-Gewinn: SNRεG37
3.4.3 SNRε-Gewinn: SNRεG
Bei der Wahl vonN wird in Abhängigkeit vonTC die absolute Filterlänge(N − 1) Tτ
verändert. Im folgenden wird untersucht, wie sich das SNRε in Abhängigkeit von der
FilterlängeN ändert. Dabei wird angenommen, dass das zu untersuchende Objekt eine
endliche Länge vonK·Tτ hat und einen Dehnungs-Rechteckpulsεi der LängeK hervor-
ruft,
εi =
{δi für i = 1 . . . K
0 für i > K, (3.64)
wobei mitδi ein „Dehnungsimpuls“ an der Stellei gemeint ist. Die dadurch hervorgeru-
fene zeitliche Verschiebungτi ergibt sich durch Aufsummation der Dehnung, so dass
τi−k = εi−k + τi−k−1 (3.65)
gilt. Die Verschiebung hat in diesem Fall den Verlauf einer Rampenfunktion
τi =
i∑k=1
εk für i = 1 . . . K
K∑k=1
εk = const. für i > K(3.66)
bzw. fürK = 1 den Verlauf einer Sprungfunktion. Die Faltung aus Gl. (3.56) wird nun zu
εi =N∑
k=1
hk τi−k =N∑
k=1
hk (εi−k + τi−k−1) =N∑
k=1
hk εi−k +N∑
k=1
hk τi−k−1 . (3.67)
Eine Substitution in der Indizierung der zweiten Summe(k′ = k + 1) und anschließende
Umbenennung führt auf
εi =N∑
k=1
hk εi−k +N+1∑
k=2
hk−1 τi−k =N∑
k=1
hk εi−k +N+1∑
k=2
hk−1 (εi−k + τi−k−1) .(3.68)
Nochmalige Substitution in der Indizierung der letzten Summe und anschließende Umbe-
nennung führt auf
εi =N∑
k=1
hk εi−k +N+1∑
k=2
hk−1 εi−k +N+2∑
k=3
hk−2 εi−k +N+2∑
k=3
hk−2 τi−k−1 (3.69)
bzw.
εi =N∑
k=1
hk εi−k +N+1∑
k=2
hk−1 εi−k +N+2∑
k=3
hk−2 εi−k +N+3∑
k=4
hk−3 εi−k + . . . . (3.70)
Wenn alle weiteren Filterkoeffizienten zu Null gesetzt werden, d.h.hk = 0 für k > N ,
dann kann Gl. (3.70) mit neuen oberen Summationsgrenzen als
εi =∞∑
k=1
hk εi−k +∞∑
k=2
hk−1 εi−k +∞∑
k=3
hk−2 εi−k +∞∑
k=4
hk−3 εi−k + . . .
=∞∑
k=1
(k∑
m=1
hm
)εi−k
(3.71)

3.4 SNRε-Gewinn: SNRεG38
geschrieben werden. Da für die in Kap. 3.3.5 angegebenen Filterkoeffizientenhi =
−hN−i+1 und für ungerade Filterlängenh(N+1)/2 = 0 gilt, beträgt die Summe über alle
Filterkoeffizienten Null und in Gl. (3.71) muss nur bisk = N summiert werden, d.h.
εi =N∑
k=1
(k∑
m=1
hm
)εi−k =
N∑
k=1
Hk εi−k = Hi ∗i εi . (3.72)
Die geschätzte Dehnung ergibt sich also durch Faltung des Dehnungsverlaufsεi mit der
integrierten ImpulsantwortHi des FIR-Filters,
Hi =i∑
m=1
hm . (3.73)
Voraussetzungen für die Herleitung dieses Zusammenhangs sind die Beziehung zwischen
Verschiebung und Dehnung aus Gl. (3.65) und die Bedingung, dass sich die Filterko-
effizientenhi zu Null summieren. Die Koeffizienten der integrierten ImpulsantwortHi
sind in Abb. 3.9 für verschiedene FilterlängenN dargestellt. Die integrierte Impulsant-
-5 -4 -3 -2 -1 0 1 2 3 4 5
0
0.2
0.4
0.6
0.8
1
Inte
grie
rte
Impu
lsan
twor
t Hi
Position i - N/2 in ∆Tτ
Abb. 3.9: Integrierte Impulsantwort des FIR-Filters für FilterlängenN = 2 . . . 10, aus
Symmetriegründen an den Stelleni − N/2 eingezeichnet
wort des FIR-Filters ist gewissermaßen die Systemantwort auf einen Dehnungs-Impuls
bzw. einen Verschiebungssprung. Nur fürN = 2 wird die integrierte Impulsantwort zur
Impulsfunktion. In allen anderen Fällen hat die Funktion Tiefpass-Charakter und führt zu
einer Glättung eines vorgegebenen Dehnungsverlaufes. Einvorgegebener Dehnungswert
eines Dehnungs-Rechteckpulses der LängeK wird nur dann erreicht, wenn die Filterlän-
geN die BeziehungN ≤ K+1 erfüllt. Für den FallN > K+1 ist die sich ergebende ma-
ximale AmplitudeAε(K,N) abhängig von der LängeK des Dehnungs-Rechteckpulses
und der LängeN des FIR-Filters. Es bietet sich an, den vonN abhängigen Term aus
Gl. (3.58) und die sich maximal ergebende AmplitudeAε(K,N) zu einem SNRε-Gewinn
SNRεGwie folgt zusammenzufassen:
SNRεG= Aε(K,N)2 ·
(1
12N(N2 − 1)
). (3.74)
Für einen Dehnungs-Impuls der LängeK = 1 kann der maximal erreichte Amplitu-
denwert in Abhängigkeit von der FilterlängeN direkt angegeben werden. Definiert man

3.4 SNRε-Gewinn: SNRεG39
∆h = 16N (N2 − 1), so ist für geradeN ,
Aε(1, N) =
N2∑
i=1
hi =1
Tτ
1
∆h
N/2∑
i=1
[(N + 1) − 2i] =1
Tτ
N23(N2 − 1)
(3.75)
und für ungeradeN ,
Aε(1, N) =
(N−1)/2∑
i=1
hi =1
Tτ
1
∆h
(N−1)/2∑
i=1
[(N + 1) − 2i] =1
Tτ
123N
. (3.76)
Ein Dehnungs-Impuls wird also weiterhin detektiert, aber seine Amplitude verringert sich
∼1/N , und es findet eine Aufweitung∼N statt.
Für beliebige Dehnungs-Rechteckpulseεi der LängeK und FIR-Filterhi der Länge
N kann die maximale AmplitudeAε(K,N) numerisch gefunden werden, indem die
Faltungsoperation nach Gl. (3.72) ausgeführt und der maximale Dehnungswert der
resultierendenεi bestimmt wird. Um den Einfluss der maximalen AmplitudeAε(K,N)
auf den elastographischen SNRε-Gewinn aus Gl. (3.74) graphisch zu veranschaulichen,
ist es zweckmäßig, eine bzgl. der Korrelationsfensterlänge TC normierte LängeK des
Dehnungs-Rechteckpulses einzuführen,
K = K · Tτ/TC . (3.77)
In Abb. 3.10 ist der elastographische SNRε-Gewinn für Dehnungs-Rechteckpulse mit ver-
schiedener normierter LängeK in Abhängigkeit von der normierten FilterlängeN aus
Gl. (3.38) zu finden. Zur besseren Übersichtlichkeit wurden in Abb. 3.10 die Kurvenver-
1 2 3 4 5 6 7 8 9-24-21-18-15-12-9-6-30369
121518
~ N3
~ N
SN
Rε G
-Gew
inn
in d
B
Normierte Länge des Dehnungs-Rechteckpulses
N = 2.43~N = 2.43~
~
~
Filterlänge N , ganzzahlig für Tτ = TC~
Filterlänge N , ganzzahlig für Tτ = TC~
K=5~K=5~
K=3~K=3~
K=2~K=2~
K=1~K=1~
K=0.5~K=0.5~
K=0.2~K=0.2~
K=0.1~K=0.1~
Abb. 3.10: SNRε-Gewinn SNRεGfür Dehnungs-Rechteckpulse mit normierter LängeK
in Abhängigkeit von der normierten FilterlängeN
läufe vonK = const. nur für TC = 40 ∆t undTτ = ∆t eingezeichnet, wobei sich die
Kurvenverläufe für andere Kombinationen vonTC undTτ nur um wenige dB unterschei-
den (vgl. dazu auch Kap. 3.3.4).
Anhand der Kurvenverläufe von Abb. 3.10 können zwei Feststellungen getroffen werden.

3.4 Gesamt-SNRε: SNRε0· SNRεG
40
1. Ist die absolute Filterlänge(N − 1) Tτ viel größer alsdie Länge eines Dehnungs-
RechteckpulsesK Tτ und damitN > 1 + K, so gilt
Aε(K,N) ∼ 1
N⇒ SNRεG
∼ N (3.78)
2. Ist die absolute Filterlänge(N − 1) Tτ viel kleiner als die Länge eines Dehnungs-
RechteckpulsesK Tτ , so erreichtAε(K,N) den vorgegebenen Dehnungswert, d.h.
Aε(K,N) = const. ⇒ SNRεG∼ N3 (3.79)
Da die Wahl einer großen FilterlängeN also zum einen zu einer vergrößerten Darstellung
von kleinen Objekten führt und zum anderen diese im Vergleich zu größeren Objekten
um den FaktorN2 weniger verstärkt werden, soll im folgenden das Gesamt-SNRε u.a. für
die minimal mögliche FilterlängeN = 2 beiTτ = ∆t betrachtet werden.
3.4.4 Gesamt-SNRε: SNRε0· SNRεG
Das Gesamt-SNRε ergibt sich mit Hilfe des Ausgangs-SNRε (SNRε0) aus Gl. (3.60) und
des SNRε-Gewinns(SNRεG) aus Gl. (3.74) zu
SNRε ≤ SNRε0· SNRεG
(3.80)
≤ ε20 T 3
C
32π2(B3+12Bf2
0)
[1ρ2
(1 + 1
SNRel
)2
− 1
] · Aε(K,N)2 · 1
12N(N2 − 1)
Im folgenden wird Gl. (3.80) in Abhängigkeit von der KorrelationsfensterlängeTC und
Dehnungε0 für bestimmte FIR-Filterlängen ausgewertet, d.h. für konstante Werte von
N bzw. Tτ , aus denen sichN ergibt. Es wird davon ausgegangen, dass die Länge des
Objektes größer als die Filterlänge ist. Durch diese Annahme kannAε(K,N) zu Eins
gesetzt werden.
Zunächst wird eine FilterlängeN = 2 mit Tτ = ∆t betrachtet. Das Ergebnis ist in
Abb. 3.11 für das Gesamt-SNRε in Abhängigkeit von der KorrelationsfensterlängeTC
-9
-8
-7
-6
-5
20 35 50 65 80 95 110 125 140
0.51
1.52
2.53
3.54
4.55
TC in Abtastwerten ∆t
Deh
nung
ε0
in %
SNRε in dB
Abb. 3.11: Gesamt-SNRε(TC , ε0) in dB für N = 2 in Abhängigkeit vonTC und ε0 für
ρ = ρax; maximaler Wert des Gesamt-SNRε für TC = const. (—)

3.4 Gesamt-SNRε: SNRε0· SNRεG
41
und Dehnungε0 dargestellt, wobei die anderen Parameter wie in Kap. 3.4.2 gewählt wur-
den. Zusätzlich wurde in Abb. 3.11 das bei einer bestimmten Korrelationsfensterlänge
TC maximale Gesamt-SNRε eingezeichnet (schwarze Linie), dessen Verlauf sich – wie
bereits in Kap. 3.4.2 erläutert – im Vergleich zu Abb. 3.7 nicht verändert. Im Gegensatz
zu Abb. 3.7 führt die Wahl der kürzest möglichen Filterlängeauf ein Gesamt-SNRε, das
sich fast unabhängig von der KorrelationsfensterlängeTC verhält. Zur Veranschaulichung
wurde in Abb. 3.12 das Gesamt-SNRε für bestimmte Korrelationsfensterlängen in Ab-
0.4 0.8 1.2 1.6 2 2.4 2.8 3.2 3.6 4 4.4 4.8
-12
-9
-6
Dehnung ε0 in %
SN
Rε
in d
B
TC=20 ∆t
TC=40 ∆t
TC=60 ∆tTC=50 ∆t
TC=30 ∆t
Abb. 3.12: Gesamt-SNRε(TC , ε0) in dB für N = 2 in Abhängigkeit vonTC für verschie-
deneε0 für ρ = ρax
hängigkeit von der Dehnungε0 aufgetragen. Es liegt in einem großen Dehnungsbereich
zwischen−6 dB und−5 dB. Das heißt auf der anderen Seite, dass bei beliebiger Wahlder
Parameter kein besserer Wert für das Gesamt-SNRε erzielt werden kann.
Eine Verbesserung des Gesamt-SNRε kann nur durch eine Vergrößerung der FilterlängeN
erfolgen. Dabei ist zu beachten, dass sich die Position des Maximums des Gesamt-SNRε
bei einer bestimmten KorrelationsfensterlängeTC nicht ändern wird. Weiterhin wird eine
Vergrößerung der absoluten Filterlänge dazu führen, dass sich das Gesamt-SNRε bei klei-
nen Korrelationsfensterlängen mehr verbessert als bei großen Korrelationsfensterlängen,
weil sichN nach Gl. (3.38) antiproportional zuTC verhält.
Wird Gl. (3.80) nun für eine konstante FIR-Filterlänge mitN = 100 undTτ = ∆t aus-
gewertet, so ergibt sich Abb. 3.13. Zusätzlich wurde – wie bereits in Abb. 3.11 – auch in
20
25
30
20 35 50 65 80 95 110 125 140
0.51
1.52
2.53
3.54
4.55
TC in Abtastwerten ∆t
Deh
nung
ε0
in %
SNRε in dB
Abb. 3.13: Gesamt-SNRε(TC , ε0) in dB für N = 100 in Abhängigkeit vonTC undε0 mit
ρ = ρax; maximaler Wert des Gesamt-SNRε für TC = const. (—)

3.4 Gesamt-SNRε: SNRε0· SNRεG
42
Abb. 3.13 das bei einer bestimmten KorrelationsfensterlängeTC maximale Gesamt-SNRεeingezeichnet (schwarze Linie), das den gleichen Verlauf zeigt. Damit der Einfluss der
Filterlänge auf das Gesamt-SNRε deutlich wird, wurde das Gesamt-SNRε in Abb. 3.14
für die gleichen KorrelationsfensterlängenTC wie in Abb. 3.12 aufgetragen. Es ist zu
0.4 0.8 1.2 1.6 2 2.4 2.8 3.2 3.6 4 4.4 4.8
21
24
27
Dehnung ε0 in %
SN
Rε
in d
B
TC=20 ∆t
TC=40 ∆t
TC=60 ∆t
TC=50 ∆t
TC=30 ∆t
Abb. 3.14: Gesamt-SNRε(TC , ε0) in dB für N = 100 in Abhängigkeit vonε0 für verschie-
deneTC mit ρ = ρax
sehen, dass die Kurven den gleichen Verlauf haben wie in Abb.3.12, jedoch bzgl. der
Ordinate verschoben sind. Zum Beispiel ist die Kurve fürTC = 20 ∆t um ca.33 dB nach
oben verschoben. Rechnerisch ändert sich durch eine Vergrößerung der Filterlänge von
N = 2 auf N = 100 bei einer Korrelationsfensterlänge vonTC = 20 ∆t der Wert von
N . In diesem Fall ändert sich der Wert vonN = 1.05 auf N = 5.95, so dass sich das
Gesamt-SNRε um 10 log10(5.95∗(5.952−1)1.05∗(1.052−1)
) = 32.8 dB erhöht. Im Falle einer Korrelations-
fensterlänge vonTC = 60∆t ergibt sich eine Erhöhung vonN = 1.017 auf N = 2.65,
was eine Erhöhung des Gesamt-SNRε um 10 log10(2.65∗(2.652−1)
1.017∗(1.0172−1)) = 26.6 dB zur Folge
hat. Der Einfluss vonN auf das Gesamt-SNRε kann auch graphisch Abb. 3.10 entnom-
men werden.
Während das maximal erreichbare Gesamt-SNRε im Falle der kürzest möglichen Fil-
terlängeN = 2 nahezu unabhängig von der Wahl der Korrelationsfensterlänge TC ist,
zeigt sich für FilterlängenN ≫ 2, dass das maximale Gesamt-SNRε bei kleinen Kor-
relationsfensterlängenTC zu erwarten ist. Der Grund ist in Gl. (3.38) zu sehen, weil die
FilterlängeN und die KorrelationsfensterlängeTC unterschiedlich in die Berechnung von
N eingehen. Allerdings ist plausibel, dass die KorrelationsfensterlängeTC nicht beliebig
klein gewählt werden kann, wenn eine Korrelationsfunktionaus gefensterten Signalen
berechnet wird. Wird das Maximum einer aus bandpaßbegrenzten Signalen berechneten
Kreuzkorrelationsfunktion gesucht, gibt Bendat
TC,min ≥ 32
2 B
[1 +
1
ρ2
](3.81)
als Kriterium für eine minimale KorrelationsfensterlängeTC,min an, um eine Zeitver-
schiebung in Abhängigkeit des zu erwartenden Korrelationskoeffizientenρ zuverlässig
zu schätzen [6] (S. 76, S. 134). Mit den hier gewählten Parametern (s. Tab. 3.2) führt dies

3.4 Gesamt-SNRε: SNRε0· SNRεG
43
auf einen Wert vonTC,min ≈ 120 ∆t für Korrelationskoeffizientenρ ≈ 1.0. In den in die-
ser Arbeit durchgeführten Simulationen (s. Kap. 4) zeigt sich empirisch, dass mit Hilfe
der Basisband-Methode schon fürTC,min ≈ 30 ∆t Zeitverschiebungen erwartungstreu ge-
schätzt werden können. Eine sinnvolle obere GrenzeTC,max für die Wahl der Korrelations-
fensterlänge ergibt sich dadurch, dass eine Zeitverschiebungτi mit Hilfe der Basisband-
Methode nur in einem Bereich von±π geschätzt werden kann, d.h.2πf0 τi < ±π sein
muß. Eine Stauchung umε0 führt zu einer zu schätzenden Zeitverschiebung innerhalb des
Korrelationsfensters vonτi = ε0 TC , d.h.
2 f0 ε0 TC < ±1 ⇒ TC,max =1
2 f0 ε0
. (3.82)
Bei einer mechanischen Dehnung vonε0 = 0.01 führt dies auf einen Wert vonTC,max ≈295 ∆t.
In den Abb. 3.12 und 3.14 zeigt sich außerdem, dass ein hohes Gesamt-SNRε unabhän-
gig von der Korrelationsfensterlänge bei einer mechanischen Dehnungε0 im Bereich von
einem Prozent erreicht wird und mit zunehmender Dehnung abfällt. Dies ist darauf zu-
rückzuführen, dass die Dekorrelation der Signale bei größerer Dehnung zunimmt, weil ein
kleinerer Wert des Korrelationskoeffizientenρax zu einer größeren Varianz der Zeitver-
schiebungsschätzungen bzw. der geschätzten Dehnungen führt. In Arbeiten von Varghese
[105, 106] wird davon ausgegangen, dass die durch Kompression hervorgerufene Dekor-
relation der gefensterten Echosignale vollständig durch eine vorangehende Streckung der
gefensterten Signale aufgehoben werden kann. Dies ist allerdings generell nur dann mög-
lich, wenn der Grad der Kompression a priori bekannt ist. Eine solche Annahme ist bei
der Freihand-Untersuchung von unbekannten Objekten jedoch nicht gerechtfertigt.
Mit Hilfe des hier dargestellten Konzept eines Ausgangs-SNRε (SNRε0) bzw. eines SNRε-
Gewinns(SNRεG) ist es möglich, dass zu erwartende elastographische Gesamt-SNRε
in Abhängigkeit von den genannten Parametern abzuschätzen. Wie sich herausgestellt
hat, ist die Wahl möglichst kleiner KorrelationsfensterlängenTC sinnvoll, um ein hohes
Gesamt-SNRε zu erzielen, z.B.TC = 30 ∆t. Man kann nun in Abb. 3.7 oder Abb. 3.8 in
Abhängigkeit von einer zu erwartenden Dehnungε0 ablesen, welches Ausgangs-SNRε0
sich ergibt. Anschließend kann man in Abb. 3.10 ablesen, welchesN benötigt wird, um
mit dem korrespondierenden SNRεG-Gewinn ein gewünschtes Gesamt-SNRε zu erzielen.
Die notwendige normierte FilterlängeN kann dann – je nach Wahl vonTτ – auf die
FilterlängeN umgerechnet werden.
Während das elastographische Gesamt-SNRε geeignet ist, die Abbildungsqualität von Ge-
bieten mit konstanter Dehnung zu beschreiben, ist es bei derDarstellung von harten und
weichen Einschlüssen notwendig, die Abbildungsqualität von resultierenden Dehnungs-
unterschieden zu untersuchen. Dazu wird im folgenden das elastographische Gesamt-
SNRε zu einer neuen Größe erweitert, dem elastographischen Kontrast CNRε.

3.4 Kontrast der Dehnung: CNRε 44
3.4.5 Kontrast der Dehnung: CNRε
Bei der zweidimensionalen Darstellung eines Parameters wieder mechanischen Dehnung
ist bei der Unterscheidung von Objekten deren Kontrast von Bedeutung. In der Bildverar-
beitung ist der KontrastC in einem Bildbereich mit minimaler IntensitätImin und maxi-
maler IntensitätImax definiert als [35, 25]
C =Imax − Imin
Imax + Imin
. (3.83)
Angelehnt an eine derartige Definition wurde das elastographische Kontrast-zu-Rausch
Verhältnis CNRε von Bilgen et al. eingeführt [11, 9]. Es ist
CNRε =(εk − ε0)
2
12(σ2
εk+ σ2
ε0)
(3.84)
mit εk und ε0 als den mittleren Werten der geschätzten Dehnung in einer Läsion bzw.
des Hintergrundes undσ2εk
bzw.σ2ε0
als den korrespondierenden Varianzen. Die Bildqua-
lität von Elastogrammen wird also durch das Verhältnis des Quadrates einer Dehnungs-
differenz zu einer mittleren Varianz der Dehnungen ausgedrückt.
Im folgenden soll der elastographische Kontrast für einen Dehnungsunterschied∆ε =
|ε0 − εk| betrachtet werden. Im Falle eines harten Einschlusses ist|εk| ≤ |ε0|, und für
die Varianzen der Dehnung giltσ2εk
≤ σ2ε0
. Dann kann der elastographische Kontrast aus
Gl. (3.84) durch die Beziehung
CNRε ≥∆ε2
σ2ε0
(3.85)
angenähert werden, wobei nach Erweitern mitε20
∆ε2
σ2ε0︸︷︷︸
=∆ε2
ε20︸ ︷︷ ︸
· ε20
σ2τ (ρ,TC ,ε)
T 2
C︸ ︷︷ ︸
· Aε(K,N)2 · 1
12N(N2 − 1)
︸ ︷︷ ︸
≈ CNRε NDU Ausgangs− SNRε0SNRεG
− Gewinn
(3.86)
ist. Offensichtlich wird der elastographische Kontrast für eine Dehnungsdifferenz∆ε =
|ε0| gerade zum elastographischen Gesamt-SNRε (SNRε0· SNRεG
) aus Gl. (3.80). Im
allgemeinen Fall muss zusätzlich der Ausdruck∆ε2/ε20 berücksichtigt werden, der hier
als normierter Dehnungsunterschied (NDU) eingeführt wird. Dessen Abhängigkeit von
der Geometrie des untersuchten Objektes, der Elastizitätsmodulverteilung des Objektes
und den Randbedingungen der Kompression wird ausführlich inKap. 4.1 mit Hilfe von
FEM-Simulationen untersucht.
Zur Veranschaulichung der Problematik eines ausreichenden Kontrastes ist in Abb. 3.15
ein Bildbeispiel gegeben. Es wird jeweils ein kleines Rechteck mit Mittelwert Eins auf
einem Hintergrund mit Mittelwert Null abgebildet. Während diese Situation oben links
ohne Rauschen dargestellt ist, wird in den anderen Bildern weißes Rauschen mit Varianz
σ2ε0
= σ2εk
∈ [2.0, 1.0, 0.5, 0.25, 0.125] hinzugefügt, so dass sich die angegebenen Kon-

3.4 Eigenschaften im Ortsfrequenzbereich 45
-0.5
0
0.5
1
1.5
-0.5
0
0.5
1
1.5CNRε = -3 dB
-0.5
0
0.5
1
1.5CNRε = 0 dB
-0.5
0
0.5
1
1.5CNRε = 3 dB
-0.5
0
0.5
1
1.5CNRε = 6 dB
-0.5
0
0.5
1
1.5CNRε = 9 dB
CNRε = ∞
Abb. 3.15: Bildbeispiel eines Dehnungsunterschiedes für verschiedene CNRε
traste CNRε ergeben. Erst für ein CNRε ≈ 6 dB kann das mittlere Rechteck abgegrenzt
werden.
Die in der Ultraschall-Elastographie typischerweise verwendeten Kompressionen führen
zu mittleren Dehnungen im Bereich von einem Prozent und zu Dehnungsdifferenzen
|εk−ε0| im Bereich von einigen Promille. Wie bereits angesprochen, wird der mecha-
nische Konversionsfaktor bei einem Dehnungsunterschied∆ε = |ε0| zu cPDE = 1 und
damit der elastographische Kontrast zum elastographischen Gesamt-SNRε. Würden nun
beispielsweise die Filterlänge zuN = 2 und Tτ = ∆t gewählt, so ist aus Abb. 3.12
bekannt, dass ein maximales Gesamt-SNRε von−5 dB erreicht werden kann. Mit einem
solchen Kontrast ließe sich ein Objekt aber nicht von seinemHintergrund abgrenzen.
Wählt man die KorrelationsfensterlängeTC = 40 ∆t, so ist nach Abb. 3.8 bei einer Deh-
nung vonε0 = 0.01 ein Ausgangs-SNRε0von ca.18 dB zu erwarten. Nach Abb. 3.10
könnteN von N = 2.43 auf N = 1.5 verkleinert werden (SNRε-Gewinn von ca.−9 dB),
weil der resultierende Kontrast immer noch bei ca.9 dB liegen würde. Die entsprechende
Filterlänge nach Gl. (3.38) wäreN = 21.
Erhöht sich die Varianz der Zeitverschiebungsschätzungenund damit die Varianz der Deh-
nung z.B. durch eine Verringerung des Korrelationskoeffizientenρ, worauf in Kap. 4.2
eingegangen wird, dann muss die FilterlängeN bzw. N so lange erhöht werden, bis ein
ausreichender elastographischer Kontrast erzielt wird.
3.4.6 Eigenschaften im Ortsfrequenzbereich
Die Analyse von Bildinformation kann nicht nur im Ortsraum (mit Koordinatenx bzw.
z) erfolgen, sondern auch im Ortsfrequenzraum (mit Ortsfrequenzenfx bzw. fz). Dabei
enthalten Informationen in Form von Bildern in der Regel Signale mit niedrigen Orts-
frequenzen (Tiefpaß-Verhalten, [50]), was dahingehend interpretiert werden kann, dass

3.4 Eigenschaften im Ortsfrequenzbereich 46
in einem Bild eher weiche Übergänge anstelle von schnellen Kantenwechseln zu finden
sind. Im folgenden wird darauf eingegangen, welche störenden spektralen Anteile in Ela-
stogrammen zu erwarten sind.
Wie in Kap. 3.3 erläutert, wird die mechanische Dehnung lokal mit Hilfe von Gl. (3.33)
aus geschätzten Zeitverschiebungen nach Gl. (3.31) berechnet. Es wurde in Kap. 3.3.4
gezeigt, dass die Varianz eines ungewichteten KQ-Schätzers nur geringfügig höher als
die Varianz eines gewichteten KQ-Schätzers ist. Trotzdem bietet es sich an, die Dehnung
mit Hilfe eines ungewichteten KQ-Schätzers aus den Zeitverschiebungsschätzungen zu
berechnen, weil diese Möglichkeit mit geringem Rechenaufwand mit Hilfe eines FIR-
Filters nach Gl. (3.55) implementiert werden kann (vgl. Kap. 3.3.5). Es ergibt sich ein
Übertragungssystem nach Abb. 3.16.
hi(FIR-Filter)
τn= τn + wn^ εn= εn + vn
^
Cw w Cv v
Abb. 3.16: Übertragungssystem: Berechnung der Dehnung aus Zeitverschiebungen
Betrachtet man die Störungwn der Zeitverschiebungsschätzungen lokal als diskreten sta-
tionären Prozess mitwc ∼ N (0, σ2τ C) bzw. wg ∼ N (0, σ2
τ I), so sind die Einträge der
Matrix σ2τ C durch die Kovarianzfunktion
cww(k) = Cov {wn+k, wn} = E {(wn+k − µw)(wn − µw)} (3.87)
gegeben. Die Fourier-Transformierte der Kovarianzfunktion eines diskreten stationären
Prozesses wird Spektraldichte oder kurz Spektrum genannt,
Cww(ω) =∞∑
k=−∞cww(k) exp−jωk . (3.88)
Durch lineares Filtern der Verschiebungsschätzungen nachGl. (3.56) mit Filterkoeffi-
zientenhi nach Gl. (3.55) wird aus dem stationären Prozesswn ein stationärer Prozessvn,
dessen Spektrum durch Multiplikation im Frequenzbereich gefunden werden kann [14]
(S. 113), [62],
Cvv(ω) = |H(ω)|2 Cww(ω) . (3.89)
Wird Tτ = TC gewählt, so kann die Störungwg als weißes Rauschen angenommen wer-
den, d.h.Cww(ω) = σ2τ . Der Verlauf des SpektrumsCvv(ω) wäre dann direkt proportio-
nal zum Spektrum des Filters|H(jω)|2. Bei einer Wahl vonTτ < TC überlappen sich
die Korrelationsfenster aufeinander folgender Zeitverschiebungsschätzungen, so dass das
SpektrumCww(ω) nicht mehr konstant ist. Im folgenden wird darauf eingegangen, wel-
chen Einfluss das resultierende Spektrum der Dehnung auf den bildlichen Eindruck eines
Elastogramms hat. Dabei ist immer das Spektrum der Störung gemeint.

3.4 Eigenschaften im Ortsfrequenzbereich 47
Spektrum des FIR-Filters
Für den FallTτ = TC ist das Spektrum der Dehnung direkt abhängig vom Spektrum des
FIR-Filters nach Gl. (3.55), das in Abb. 3.17 für verschiedenen FilterlängenN gezeigt
ist. Zur besseren Vergleichbarkeit der Ergebnisse wurde das Spektrum bzgl.T 2τ = T 2
C
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1
-42
-36
-30
-24
-18
-12
-6
0
6
Ortsfrequenz in 1/mm
Spe
ktru
m |H
|2·(
T τ)2
in d
B N=2
N=5
N=10
N=20
Abb. 3.17: Normiertes Spektrum des FIR-Filters fürN = 2, 5, 10 und20
normiert, da die Filterkoeffizienten aus Gl. (3.55) mit1Tτ
multipliziert werden. Das Spek-
trum des Filters zeigt fürN > 2 Bandpaßverhalten, wobei erwartungsgemäß die mittlere
Amplitude mit zunehmender FilterlängeN abnimmt.
Während der Verlauf des Spektrums unabhängig von der Wahl derFensterlängeTτ ist,
muss die Achse der Ortsfrequenz entsprechend angepasst werden. Dabei entspricht eine
Abtastung der Zeitverschiebungen im AbstandTτ einer örtlichen Abtastung von∆z =
/1 2 c Tτ . In Abb. 3.17 wurdeTτ = 30∆t gewählt, woraus sich eine Nyquistfrequenz von
0.833 MHz im Zeitbereich ergibt, die einer Nyquistfrequenz von1.082 mm−1 im Ortsfre-
quenzbereich entspricht. Eine solche quantitative Betrachtung der auftretenden Ortsfre-
quenzen ist wichtig, um den Einfluss eines Bandpaßverhaltens auf den bildlichen Ein-
druck von Elastogrammen nachzuvollziehen, z.B. in Abb. 3.18. Das Bild links entsteht,
wenn zweidimensionales weißes Rauschen spaltenweise mit einem FIR-Filter der Länge
N=10 gefiltert wird und wenn zusätzlich zeilenweise zwischen zwei benachbarten Spal-
ten gemittelt wird.4 Das normierte Spektrum des FIR-Filters ist oben rechts dargestellt
und hat ein Maximum bei einer Ortsfrequenz von0.145 mm−1, was einer Periode von
6.90 mm im Ortsbereich entspricht. Ein typischer Verlauf der resultierenden Dehnung
ist für die Spaltex=10 mm unten rechts aufgetragen. Durch das Bandpaßverhalten des
FIR-Filters werden bestimmte Ortsfrequenzen verstärkt, die im Bild den Eindruck einer
Struktur hinterlassen. Diez-Ausdehnung dieser Struktur – gewissermaßen der bildliche
Eindruck einer Schwingung – entspricht gerade der halben Periodendauer, in diesem Fall
4Dadurch wird die Korrelation zwischen Verschiebungsschätzungen benachbarter A-Linien berücksich-
tigt.

3.4 Eigenschaften im Ortsfrequenzbereich 48
Spe
ktru
m in
dB
Deh
nung
bei
x=
10 m
m
Bildbreite x in mm
Bild
tiefe
z in
mm
10 20 30
10
20
30
40
50
60
Bildtiefe z in mm
-1
-0.5
0
0.5
1
-1
-0.5
0
0.5
1
0 0.2 0.4 0.6 0.8 1-40
-30
-20
-10
Ortsfrequenz in 1/mm
10 16 22 28 34 40 46
-1
0
1
0 0.2 0.4 0.6 0.8 1-40
-30
-20
-10
Ortsfrequenz in 1/mm
10 16 22 28 34 40 46
-1
0
1
Abb. 3.18: Bild des gef ilterten Verschiebungsrauschens (links), normiertes Spektrum des
FIR-Filters (rechts oben), Beispiel eines Dehnungsverlaufes (rechts unten)
also3.45 mm. Ist zudem das Rauschen benachbarter Spalten korreliert,worauf nochmal
in Kap. 4 eingegangen wird, dann entsteht ein körniges Bild bzw. ein Zebramuster. Da-
bei handelt es sich aber nicht um Änderungen der mechanischen Dehnung aufgrund von
Elastizitätsunterschieden, sondern um Bildartefakte.
Spektrum der Dehnung für beliebigeTC und Tτ
Wählt man Fensterlängen mitTτ < TC , z.B. TC = 30 ∆t und Tτ = 10 ∆t, dann han-
delt es sich bei der Störung der Zeitverschiebungsschätzungenwc um farbiges Rauschen.
Damit ist das Spektrum der StörungCww(ω) nicht mehr konstant, sondern vom Verlauf
der Kovarianzfunktioncww(k) abhängig. Mit den genannten Werten und unter der Annah-
me, dass die Kovarianzfunktion linear von1 auf0 im Intervall [0, TC ] abfällt, würde sich
eine Kovarianzfunktion nach Abb. 3.19 (oben) ergeben, die bzgl. der Varianz der Zeit-
verschiebungsschätzungenσ2τ normiert wurde. Das resultierende Spektrum der Störung
der ZeitverschiebungenCww(ω), ebenfalls normiert aufσ2τ , ist in der gleichen Abbildung
unten dargestellt (gestrichelt). Das Spektrum des FIR-Filters|H(ω)|2 wurde für eine Fil-
terlängeN = 10 berechnet und mitT 2C (Korrelationsfensterlänge) multipliziert. Dadurch
wird das Spektrum der DehnungCvv(ω), das durch Multiplikation des Spektrums der
Zeitverschiebungen mit dem Spektrum des FIR-Filters resultiert, bzgl.σ2τ/T
2C normiert.
Diese Normierung wurde bereits in Kap. 3.3.4 eingeführt, wodie Varianz der Dehnung in
Abhängigkeit von der normierten FilterlängeN berechnet wurde (siehe auch Abb. 3.3 und
Abb. 3.4). Mit Hilfe dieser Normierung war es dann in Kap. 3.4.1 möglich, den Signal-
zu-Störabstand der Dehnung SNRε als Produkt von einem Ausgangs-SNRε0und einem
SNRεG-Gewinn zu betrachten. Bei der Betrachtung des SNRεG
-Gewinns stellte sich her-
aus, dass dieser für Objekte, die größer als die absolute Filterlänge sind, gerade dem

3.4 Eigenschaften im Ortsfrequenzbereich 49
-0.9 -0.7 -0.5 -0.3 -0.1 0.1 0.3 0.5 0.7 0.90
0.5
1
Position in mm
0.5 1 1.5 2 2.5 3-60-40-20
020
Cvv/(στ / TC)2
Cww/(στ)2
c ww
/ (στ)
2
Ortsfrequenz in 1/mm
Cw
w/(στ)
2, |
H|2 ·
(TC)2
und
Cv
v/(στ
/ TC)2
in d
B
|H|2·(TC)2
-6,18 dB
2,25 dB
Abb. 3.19: Oben: Normierte Kovarianzfunktion der Zeitverschiebungsschätzungen; un-
ten: Normiertes Spektrum der Zeitverschiebungsschätzungen, der Übertragungsfunktion
und der Dehnung
Kehrwert der normierten Varianz der Dehnung entspricht. Der Zusammenhang zwischen
dieser normierten Varianz der Dehnung aus Kap. 3.3.4 und demhier betrachteten Spek-
trum der Störung der Dehnung liegt auf der Hand, wenn man sichin Erinnerung ruft, dass
die Störungen jeweils als mittelwertfreie stationäre Prozesse angenommen werden. Die
normierte Varianz der Dehnung ist nämlich gerade die mittlere Leistung der normierten
Störung der Dehnung, d.h. im hier betrachteten Fall in Abb. 3.19 ca.−6.18 dB. Dieser
Wert findet sich auch in Abb. 3.4, wenn man für die hier gewählten Parameter den Abs-
zissenwertN = (10−1)·1030
+ 1 = 4 betrachtet. Da in Abb. 3.4 die normierte Varianz der
Dehnung für alle möglichen Kombinationen vonTC undTτ berechnet wurde, entspricht
dieser Wert einer der Einträge (x) an der StelleN = 4. Zum Vergleich würde die Nä-
herungsformel aus Gl. (3.53) einen Wert von−10 · log10
(112
· 4 · (16 − 1))
= −6.99 dB
liefern, der sich wie bereits graphisch ersichtlich nur geringfügig von der exakten Rech-
nung unterscheidet.
Der Verlauf des Spektrums der Störung der DehnungCvv(ω) zeigt ein Bandpaßverhalten
wie bereits das Spektrum des FIR-Filters in Abb. 3.17. Dies war zu erwarten, da das
Spektrum der Störung der Zeitverschiebungsschätzungen für Tτ < TC Tiefpaßverhalten
zeigt. Im hier betrachteten Fall ergibt sich ein maximaler Wert des normierten Spektrums
der Störung der Dehnung von2.25 dB bei einer Ortsfrequenz von0.41 mm−1. Ähnlich
wie in Abb. 3.18 würde sich also ein körniges Muster des Elastogramms ergeben. Es
wäre müßig, nach einem geschlossenen Ausdruck für die Ortsfrequenzen zu suchen, an
denen das normierte Spektrum sein Maximum erreicht. Die fürsinnvolle Kombinationen
von TC und Tτ durchgeführten Rechnungen zeigen aber, dass diese Ortsfrequenzen zu
Strukturen führen, deren Größe im Bereich von Millimetern liegt.
Um den Mittelwert des normierten Spektrums mit dessen Maximalwert zu vergleichen,

3.4 Eigenschaften im Ortsfrequenzbereich 50
wurden beide Größen für verschiedene Kombinationen vonTC undTτ numerisch berech-
net(TC ∈ [10 ∆t, 100 ∆t] undTτ ∈ [∆t, 100 ∆t]). In Abb. 3.20 sind die Kehrwerte des
Mittelwertes bzw. des Maximalwertes in Abhängigkeit von der normierten FilterlängeN
aufgetragen, weil diese Kehrwerte gerade dem elastographischen SNRε-Gewinn SNRεG
aus Kap. 3.4.3 entsprechen. Dabei wurde vorausgesetzt, dass die absolute Filterlänge
1 2 3 4 5 6 7-12-9-6-30369
1215
Tτ = TC
Tτ = 1/2 TC
Tτ = 1/3 TC
Tτ = 1/4 TC
SN
Rε G
-Gew
inn
in d
B
Filterlänge N , ganzzahlig für Tτ = TC~
Filterlänge N , ganzzahlig für Tτ = TC~
Verlauf für Mittelwert desnormierten Spektrums
Verläufe für maximalen Wertdes normierten Spektrums
Abb. 3.20: SNRε-Gewinn SNRεGfür maximale Werte des normierten Spektrums der Deh-
nung in Abhängigkeit von der normierten FilterlängeN
(N−1)·Tτ kleiner als die Größe des Objektes ist. Zur besseren Übersichtlichkeit sind die
Kurven nur für bestimmte Verhältnisse vonTτ undTC eingezeichnet. Diese Verhältnis-
se entsprechen dem Grad der Überlappung der Korrelationsfenster aufeinander folgender
Zeitverschiebungsschätzungen(hier:0 %, 50 %, 67 %, 75 %).
Im Fall des Mittelwertes des Spektrums unterscheiden sich die Kurven erwartungsgemäß
nur geringfügig voneinander. Die Verläufe ergeben sich gerade aus dem Kehrwert der
normierten Varianz der Dehnung aus Abb. 3.4 und stimmen mit dem elastographischen
SNRε-Gewinn SNRεGaus Abb. 3.10 überein, wenn der maximal mögliche Gewinn be-
trachtet wird, d.h. die absolute Filterlänge kleiner als die Objektgröße ist.
Da die Maximalwerte der normierten Spektren immer größer sind als deren Mittelwer-
te, verlaufen die Kurven des SNRε-Gewinns SNRεGfür die Maximalwerte unterhalb der
Kurven für die Mittelwerte. Bei einer50 %-igen Überlappung ist der Abstand der beiden
Kurven ca.3 dB für N = 2 und bereits ca.9 dB für N = 4. Im vorangegangen Beispiel
ergaben sich im normierten Spektrum der Dehnung Werte von−6.18 dB für den Mittel-
wert und2.25 dB für das Maximum. Entsprechend ist in Abb. 3.20 durch die Bildung des
Kehrwertes an der StelleN = 4 ein Eintrag von+6.18 dB in der Kurve der Mittelwerte
und ein Eintrag von−2.25 dB in der Kurve der Maximalwerte fürTτ = 1/3 TC zu finden,
da im BeispielTC = 30 ∆t undTτ = 10 ∆t gewählt wurde.
Bei einer festen KorrelationsfensterlängeTC und einer beliebigen normierten Filterlänge
N ist die absolute Filterlänge nach(N−1)·Tτ = (N−1)·TC ebenfalls konstant. Aus
Abb. 3.20 lässt sich daher folgern, dass die beschriebenen Bildartefakte bei konstanter
absoluter Filterlänge am geringsten ausfallen, wennTτ = TC gewählt wird.
Während es bei der Beobachtung von großen Strukturen zur Beurteilung des elastogra-

3.4 Ortsauf lösung der Dehnung 51
phischen SNRε nach Gl. (3.57) ausreichend ist, die Varianz der Dehnung bzw. äquivalent
den Mittelwert des Spektrums der Dehnung heranzuziehen, ist es für eine Abschätzung
der Ortsauflösung des Verfahrens sinnvoller, den maximal erreichten Wert des Spektrums
der Dehnung zu verwenden.
3.4.7 Ortsauflösung der Dehnung
Wie im vorangegangenen Kapitel beschrieben, ist es bei der Abgrenzung von kleinen
Strukturen sinnvoll, den maximalen Wert des normierten Spektrums der Störung der Deh-
nung bzw. den sich daraus ergebenden elastographischen SNRε-Gewinn SNRεGzu ver-
wenden.
Eine Abschätzung der Ortsauflösung des Verfahrens soll hier mit Hilfe von Dehnungs-
Rechteckpulsen (vgl. Kap. 3.4.3) erfolgen, die Dehnungsdifferenzen im eindimensionalen
Federmodell entsprechen würden. Wie bereits in Kap. 3.4.3 erläutert, wird die Ampli-
tude einer Dehnungsdifferenz eines Dehnungs-Rechteckpulses der LängeK bei einer
FIR-Filterung nur dann korrekt wiedergegeben, wenn die FilterlängeN die Beziehung
N ≤ K + 1 erfüllt. In Abb. 3.10 zeigte sich dies dadurch, dass kleinere Dehnungs-
Rechteckpulse einen niedrigeren SNRε-Gewinn aufweisen. Durch diese Forderung wird
zudem nicht nur eine Abbildungstreue bzgl. der Amplitude eines Dehnungs-Rechteck-
pulses, sondern auch bzgl. dessen Größe erreicht, weil es sich bei dem FIR-Filter
um punktsymmetrische Rampen handelt. Aufgrund der Punktsymmetrie entspricht die
−6 dB-Pulsbreite (engl.:FWHW: full width half maximum) eines gefilterten Dehnungs-
Rechteckpulses gerade der vorgegebenen Größe des Rechteckpulses. Dies ist beispielhaft
in Abb. 3.21 für eine FilterlängeN = 10 und eine Objektgröße von(N − 1) Tτ bei
20 25 30 35 40 45 50
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
Abtastwerte in Tτ
Nor
mie
rte
Deh
nung
sdiff
eren
z
FWHM
Rechteck-Puls gefilterterRechteck-Puls
Abb. 3.21: FWHM eines gef ilterten Dehnungs-Rechteckpulses für N = 10
einer (normierten) Änderung der Dehnung von−1 auf 0 gezeigt. Eine solche Änderung
von negativen Werten auf Werte nahe Null würde bei der Kompression eines kleinen
(unendlich) harten Einschlusses auftreten.
Die kleinste darzustellende Objektgröße ist also durch dieFilterlängeN bzw. die absolute
Filterlänge(N−1) Tτ limitiert, die notwendig ist, um bei einer bestimmten Dehnungs-
differenz einen ausreichenden elastographischen Kontrast zu erzielen. Nimmt man als

3.4 Ortsauf lösung der Dehnung 52
Dehnungsdifferenz die mittlere Dehnungε0 an, so entspricht der elastographische Kon-
trast gerade dem elastographischen Gesamt-SNRε, das sich aus dem elastographischen
Ausgangs-SNRε0nach Gl. (3.60) (vgl. Abb. 3.8) und dem elastographischen SNRεG
-
Gewinn nach Abb. 3.20 ergibt. Für eine Abschätzung der Größenordnung ist es erfor-
derlich, das Ergebnis in Abhängigkeit von der absoluten Filterlänge darzustellen, die über
(N − 1) Tτ = (N − 1) TC von der normierten FilterlängeN und der Korrelationsfen-
sterlängeTC abhängt. In Abb. 3.22 ist das resultierende Gesamt-SNRε bzw. der elasto-
graphische Kontrast für eine KorrelationsfensterlängeTC = 30 ∆t und eine Dehnung
30 60 90 120 150 180 210 240 2700
6
12
18
24
30
36Verlauf für Mittelwert desnormierten Spektrums
Verläufe für maximalen Wertdes normierten Spektrums
SN
Rε
in d
B
Absolute Filterlänge in Vielfachen ∆t
Tτ = ∆t
Tτ = 5∆tTτ = 10∆t
Tτ = 20∆tTτ = 30∆t
Abb. 3.22: Gesamt-SNRε in dB für TC = 30 ∆t und ε0 = 1 % in Abhängigkeit vonTτ
und der absoluten Filterlänge
von ε0 = 0.01 abgebildet. Diese Korrelationsfensterlänge wurde gewählt, da sie nach
den Überlegungen aus Kap. 3.4.4 auch in der Praxis eine untere Grenze für die Wahl von
TC darstellt. Außerdem ist es sinnvoll, absolute Filterlängen mit (N−1)·Tτ ≥ TC zu be-
trachten, damit mindestens zwei der Zeitverschiebungsschätzungen unkorreliert sind. Wie
man anhand von Abb. 3.22 erkennen kann, ist es dann bereits für absolute Filterlängen
in der Größenordnung der Korrelationsfensterlänge(hier:TC = 30 ∆t) möglich, einen
ausreichenden elastographischen Kontrast zu erzielen, sogar für überlappende Korrelati-
onsfenster mitTτ ≤ TC . Für andere Dehnungen zeigen sich ähnliche Ergebnisse, weil
sich das elastographische Ausgangs-SNRε0nach Abb. 3.8 für Dehnungen zwischen0.1 %
und 2.0 % für Korrelationsfensterlängen in einem Bereich von30 ∆t ≤ TC ≤ 140 ∆t
nur geringfügig unterscheidet. Auch für größere KorrelationsfensterlängenTC zeigt sich,
dass die Ortsauflösung im Bereich der Korrelationsfensterlänge liegt. Auf eine vollstän-
dige Darstellung wird hier verzichtet, weil es bei der Ortsauflösung um die Diskussion
einer unteren Grenze geht. Für die theoretisch mögliche Auflösung kann mit dieser Be-
trachtung fürTC = 30 ∆t ein Wert von∆z = /1 2 c TC = 0.46 mm als untere Grenze
angegeben werden. Die Größenordnung der so ermittelten Auflösung stimmt mit der von
Righetti et al. überein. Diese haben zur Bestimmung der Ortsauflösung in Simulationen
untersucht, wie groß der Abstand zweier Objekte sein muss, um sie noch getrennt vonein-
ander abbilden zu können [83, 84]. Die hier durchgeführte Betrachtung wurde im Sinne
der Detektierbarkeit eines einzelnen Objektes durchgeführt, wie es bei der Detektion von
harten Tumoren der Fall ist.

3.5 Harmonische Anregung: Vibrographie 53
3.5 Harmonische Anregung: Vibrographie
Wesentlich für die Abbildungsqualität eines Elastogrammsist die Varianz, die bei der
Schätzung der Zeitverschiebungen erreicht wird. Diese hängt zum einen von System-
parametern ab, zum anderen aber von lateralen und elevationalen Verschiebungen des
Mediums, die zu einer Dekorrelation der Signale führen. Eine Verbesserung der Abbil-
dungsqualität kann also insbesondere dann erreicht werden, wenn die mechanischen Ver-
schiebungen gleichmäßig (z.B. periodisch) in axialer Richtung durchgeführt werden und
anschließend eine Auswertung erfolgt. Anhand von Abb. 3.23wird darauf eingegangen,
z0 t
z t0 t1=t0+∆tvib
zi(t)
Abb. 3.23: Prinzip der Vibration: Zeitabhängige Bewegung des Gewebes innerhalb eines
Schallstrahls (A-Linie)
welche Verschiebungen bei einer harmonischen Anregung eines Gewebebereiches mit ei-
ner Frequenzωvib lokal gemessen werden. Seizi(tvib) die zeitabhängige Position eines
kleinen Gewebebereiches (Streuers) undzi die Position zum Zeitpunkttvib = 0, d.h.
zi = zi(0). Der Verlauf vonzi(tvib) kann durch
zi(tvib) = zi + A(zi) cos(ωvib tvib) (3.90)
angegeben werden, wobei die SchwingungsamplitudeA(zi) des Gewebebereiches ortsab-
hängig ist. Gewebebereiche nahe am Ultraschallwandler haben eine sehr geringe Schwin-
gungsamplitude, Gewebebereiche weiter entfernt vom Ultraschallwandler haben eine hö-
here Schwingungsamplitude. Im folgenden soll eine Verschiebungsschätzungτ(z0, t0) an
der Stellez = z0 zum Zeitpunkttvib = t0 betrachtet werden. Zunächst gilt für die Position
des Gewebebereicheszi(t) zum Zeitpunkttvib = t0
zi(t0) = zi + A(zi) cos(ωvib t0)!= z0 , (3.91)
bzw. nach Umstellen
zi = z0 − ∆z mit ∆z = A(zi) cos(ωvib t0) . (3.92)

3.5 Harmonische Anregung: Vibrographie 54
Zu einem Zeitpunktt1 = t0 + ∆tvib hat dieser Gewebebereich die Position
zi(t1) = zi + A(zi) cos(ωvib(t0 + ∆tvib))
= zi + A(zi) (cos(ωvibt0) cos(ωvib∆tvib) − sin(ωvibt0) sin(ωvib∆tvib)) . (3.93)
Die Differenzzi(t0) − zi(t1) ist der zu erwartende Wert der Verschiebungsschätzung an
der Stellez = z0 zum Zeitpunktt = t0, d.h.
τ(z0, t0) = A(zi) [(1 − cos(ωvib ∆tvib)) cos(ωvib t0)
+ sin(ωvib ∆tvib) cos(ωvib t0)] . (3.94)
Dieser Ausdruck kann zu
τ(z0, t0) = Avib(zi) cos(ωvib t0 + Φvib) (3.95)
zusammengefasst werden. Die AmplitudeAvib(zi) setzt sich aus der Schwingungsampli-
tude des GewebebereichesA(zi) und einem NormierungsfaktorAnorm(ωvib) zusammen,
Avib(zi) = A(zi)√
sin2(ωvib ∆tvib) + cos2(ωvib ∆tvib) + 1 − 2 cos(ωvib ∆tvib)
= A(zi)√
2(1 − cos(ωvib ∆tvib))
= A(zi) Anorm(ωvib) . (3.96)
Der NormierungsfaktorAnorm(ωvib) =√
2(1 − cos(ωvib ∆tvib)) hängt von der Frequenz
der mechanischen Anregung und dessen Abtastung bzw. dem Produkt ωvib ∆tvib ab. Für
die PhaseΦvib gilt
Φvib = arctan
( − sin(ωvib ∆tvib)
1 − cos(ωvib ∆tvib)
)(3.97)
Wird weiterhin die SchwingungsamplitudeA(zi) durch
A(zi) = A(z0 − ∆z) = A(z0) −dA
dz∆z = A(z0) − εzz(z0)A(zi) cos(ωvib t0)(3.98)
angenähert, dann folgt für die Verschiebungτ(z0, t0)
τ(z0, t0) = [A(z0) − εzz(z0)A(zi) cos(ωvib t0)] ·√2(1 − cos(ωvib ∆tvib)) cos(ωvib t0 + Φvib) . (3.99)
Weil die auftretenden Dehnungen bei den angewendeten mechanischen Auslenkungen
sehr klein sind(εzz ≪ 1), wird im folgenden mit der Näherungslösung
τ(z0, t0) ∼= A(z0) Anorm(ωvib) cos(ωvib t0 + Φvib) (3.100)
gearbeitet. Aus der Schwingungsamplitude der Zeitverschiebungsschätzungen an der Po-
sitionz = z0 kann also direkt auf die SchwingungsamplitudeA(z0) des Gewebebereiches
an der Positionz = z0 geschlossen werden, wenn der frequenzabhängige Normierungs-
faktorAnorm(ωvib) berücksichtigt wird. Die axiale mechanische Dehnung (Elastogramm)
ergibt sich aus der Ableitung vonA(z0).

3.5 Cramér-Rao Schranke der Parameter einer Schwingung 55
3.5.1 Cramér-Rao Schranke der Parameter einer Schwingung
Seis[n; θ] ein diskretisiertes zeitharmonisches Signal mit bekannter Kreisfrequenzωvib in
Abhängigkeit des Parametervektorsθ = [a b]T,
s[n; θ] = a cos(ωvib ∆tvib n) + b sin(ωvib ∆tvib n) für n = 0 . . . N−1 . (3.101)
Ist diesem Signal weißes Gauß’sches Rauschenw[n] überlagert mitw[n] ∼ N (0, σ2),
dann können die Parameter aus dem resultierenden Signal
z[n] = s[n; θ] + w[n] für n = 0 . . . N−1 (3.102)
durch
a =2
N
N−1∑
n=0
z[n] cos(ωvib ∆tvib n) und (3.103)
b =2
N
N−1∑
n=0
z[n] sin(ωvib ∆tvib n) (3.104)
geschätzt werden. Diese Schätzer sind nach [14] erwartungstreu und wirksam, d.h. errei-
chen die Cramér-Rao Schranke (CRLB), wenn die Varianzσ2 der Störung bekannt ist.
Für die Vibrographie sind jedoch nach Gl. (3.100) insbesondere die AmplitudeA und die
PhaseΦ der zeitharmonischen Schwingung von Interesse. Wird ein Parametervektorϑ als
Funktion des Parametervektorsθ definiert,
ϑ =
[A
Φ
](θ) =
[ √a2 + b2
arctan(−b
a
)]
, (3.105)
so erhält das zeitharmonische Signal nach Gl. (3.101) die Form
s[n; ϑ] = A cos(ωvib ∆tvib n + Φ) (3.106)
mit AmplitudeA und PhaseΦ. Bei der Berechnung der CRLB für die AmplitudeA kann
folgende Beziehung für die KovarianzmatrixCϑ genutzt werden [55] (S. 45),
Cϑ −∂g(θ)
∂θI−1(θ)
∂g(θ)
∂θ
T
≥ 0 . (3.107)
Dabei ist∂g(θ)
∂θdie Jacobi Matrix, die sich in unserem Fall zu
∂g(θ)
∂θ=
(a√
a2+b2b√
a2+b2
−ba2+b2
aa2+b2
)(3.108)
ergibt. Für die Berechnung der inversen Fisher-Informationsmatrix I−1(θ) müssen zu-
nächst die einzelnen Elemente der Fisher-Informationsmatrix nach
[I(θ)]ij =1
σ2
N−1∑
n=0
∂s[n; θ]
∂θi
∂s[n; θ]
∂θj
(3.109)

3.5 Kalman-Filter 56
berechnet werden [55] (S.49). Durch Einführung vonφ = ωvib ∆tvib n erhält man
[I(θ)]11 =1
σ2
N−1∑
n=0
cos2(φ) =1
σ2
N−1∑
n=0
(1
2+
1
2cos(φ)
)≈ N
2 σ2, (3.110)
[I(θ)]12 = − 1
σ2
N−1∑
n=0
cos(φ) sin(φ) =1
2 σ2
N−1∑
n=0
sin(2 φ) ≈ 0 und (3.111)
[I(θ)]22 =1
σ2
N−1∑
n=0
sin2(φ) ≈ N
2 σ2. (3.112)
Die resultierende Fisher-Informationsmatrix lautet
I(θ) =1
σ2
[N2
0
0 N2
], (3.113)
und ein Einsetzen dieser Ergebnisse in Gl. (3.107) führt auf
Cϑ ≥(
a√a2+b2
b√a2+b2
−ba2+b2
aa2+b2
)σ2
(2N
0
0 2N
) (a√
a2+b2−b
a2+b2
b√a2+b2
aa2+b2
)(3.114)
bzw. nach Ausmultiplizieren auf
Cϑ ≥ σ2
(2N
0
0 2A2N
). (3.115)
Demnach gilt für die Varianzen der Elemente vonϑ
Var(A) ≥ 2σ2
Nund Var(Φ) ≥ 2σ2
A2N. (3.116)
Zunächst muss festgestellt werden, dass die CRLB der AmplitudeA mit 1N
abfällt und die
CRLB der PhaseΦ vom Wert der Amplitude abhängig ist. Da es sich bei der Transfor-
mation aus Gl. (3.105) jedoch um keine lineare Transformation handelt, wird die CRLB
nicht erreicht. Zudem ist der Schätzer für die Amplitude Riceverteilt und geht nur für
A2 ≫ 2 σ2
Nin eine Gauß-Verteilung über.
Im hier vorliegenden Fall der lokalen Beobachtung einer Schwingung eines Gewebeaus-
schnittes ist damit zu rechnen, dass sich der Wert der Schwingungsamplitude ständig än-
dert – zufällig durch kleinste Bewegungen des Untersuchers bzw. des untersuchten Ob-
jektes oder absichtlich durch einen Wechsel des untersuchten Gewebeausschnittes. Au-
ßerdem ist davon auszugehen, dass sich die Varianz der Störung nicht stationär verhält.
Die Lösung eines solchen Problems kann mit Hilfe eines rekursiven Verfahrens, dem
Kalman-Filter, erfolgen.
3.5.2 Kalman-Filter
Sind die Amplitude bzw. Phase einer Schwingung bekannter Frequenz einer zufälligen
Änderung ausgesetzt, dann können Amplitude und Phase dieser Schwingung mit Hilfe

3.5 Kalman-Filter 57
eines Kalman-Filters aus den Messwerten berechnet werden.Das Kalman-Filter arbei-
tet rekursiv im Zustandsraum und liefert aus (vektoriellen) Messwerten einen optimalen
Zustandsvektor [17, 16], schematisch dargestellt in Abb. 3.24. Es verwendet dabei die
Prozess-Rauschen
Zustand(unbekannt)
Modell:Zustand ↔ Messung Messungen
Kalman-
Filter
Optimale Schätzungdes Zustandes
Mess-Rauschen
11 −− += nnn vxx
nnnn wxz += H
( )Q0,N~mit nn vv
( )nnn Rww 0 ,N~mit
Abb. 3.24: Kalman-Filter: Schätzung von Zuständen aus Messungen
gesamte in den Messwerten enthaltene Information und führtimplizit eine Datenfusion
durch.
Unter Ausnutzung der trigonometrischen Umformung
A cos(ωvib ∆tvib n + Φ) = A cos(Φ) cos(ωvib ∆tvib n)
−A sin(Φ) sin(ωvib ∆tvib n) (3.117)
bietet es sich an, die zeitdiskreten Messwertezn einer Schwingung (AmplitudeA, Pha-
seΦ) mit überlagerter Störungwn ∼ N (0, Rn) als
zn =[
cos(ωvib ∆tvib n) − sin(ωvib ∆tvib n)] [
A cos(Φ)
A sin(Φ)
]+ wn
= Hn xn + wn
(3.118)
darzustellen. Die BeobachtungsmatrixHn ändert sich in Abhängigkeit vom Zeitpunkt
∆tvib n. Ziel ist es nun, den unbekannten Zustandsvektorxn aus den Meßwertenzn zu
berechnen. Dabei werden die Zustände als stochastischer Prozeß aufgefaßt, für die die
lineare stochastische Differenzengleichung
xn+1 =
[1 0
0 1
]xn + νn mit νn ∼ N (0,Q) (3.119)
gilt. Aus den Komponenten des Zustandsvektorsxn(1) = A cos(Φ) und xn(2) =
A sin(Φ) können die Amplitude und Phase der Schwingung mit Hilfe von
A =√
xn(1)2 + xn(2)2 und
Φ = arctan(
xn(2)xn(1)
) (3.120)
berechnet werden. Das Kalman-Filter selbst arbeitet rekursiv, d.h., dass der aktuelle Zu-
standsvektor durch neue Messwerte laufend aktualisiert wird. Die Rekursionsschritte lau-

3.5 Kalman-Filter 58
ten im Detail (vgl. dazu S. 137 f. in [17] oder S. 219 in [16]):
1. Initialisierung
x−0 = E {x}
P−0 = Q
(3.121)
2. Berechnung des Kalman-Faktors
Kn = P−n HT
n
(Hn P−
n HT
n + Rn
)−1(3.122)
3. Erneuerung des Zustandsvektors
xn = x−n + Kn
(zn − Hn x−
n
)(3.123)
4. Erneuerung der Fehler-Kovarianzmatrix
Pn = (I − KnHn)P−n (3.124)
5. Prädiktion des Zustandsvektors und der Fehler-Kovarianzmatrix
n = n + 1
x−n = xn−1
P−n = Pn−1 + Q
(3.125)
und mit Schritt 2 fortfahren.
Eine graphische Darstellung dieser Rekursionsvorschrift findet sich in Abb. 3.25.
Berechnung des Kalman-Faktors
Prädiktion derFehler-Kovarianz
Erneuerung des Zustandsvektors
Erneuerung der Fehler-Kovarianz
Prädiktion des Zustandsvektors
( ) 1−−− += nnnnnn RTT HPHHPK
1−− = nn xx
( )−− −+= nnnnn xzxx HK
QPP += −−
1nn ( ) −−= nnn PHKIP
−−00 , Px
1+= nn
Abb. 3.25: Schema der Rekursionsvorschrift eines Kalman-Filters
Bei der Verwendung eines Kalman-Filters ist gegenüber einemklassischen Schätzer vor-
teilhaft, dass ein Prozess-Rauschen des zu schätzenden Zustandes berücksichtigt werden
kann. Es ist zudem nicht erforderlich, dass die VarianzRn des Mess-Rauschens stationär
ist. Bei der Berechnung des Kalman-Faktors (2. Iterationsschritt in Abb. 3.25) führt eine
hohe Varianz dazu, dass die Messung sehr gering gewichtet wird und kaum Einfluss auf

3.5 Kalman-Filter 59
die nächste Zustandsschätzung hat. Ein weiterer Vorteil ist in dem rekursiven Ansatz zu
sehen, weil dadurch die Abtastung der Schwingung nicht äquidistant erfolgen muss. Die
ÜbertragungsmatrixHn in Gl. (3.118) wird für jeden Iterationsschritt in Abhängigkeit
vom Abtastzeitpunkt neu berechnet. Im Gegensatz zu einem klassischen Schätzer wie in
Gl. (3.105) ist aber zu beachten, dass die Varianz der geschätzten Parameter nicht be-
liebig klein wird, wenn die Anzahl der eingehenden Messwerte steigt. Zur Abschätzung
der Genauigkeit, die mit einem Kalman-Filter erreicht wird, müssen im Falle einer nicht
stationären Varianz Simulationen durchgeführt werden.
Abschätzung der Genauigkeit
In den hier durchgeführten Simulationen wurde untersucht,welchen quadratischen Feh-
ler das Kalman-Filter bei der rekursiven Berechnung der Schwingungsamplitude liefert.
Dafür muss zunächst die KovarianzmatrixQ des Prozess-Rauschens gewählt werden. Die
Simulationen wurden für WerteQ = I · 10−5 rad2, Q = I · 10−4 rad2, Q = I · 5 · 10−4 rad2
undQ = I · 10−3 rad2 durchgeführt. Die minimale Varianz der MesswerteRn kann mit
Hilfe von Gl. (3.21) abgeschätzt werden,
Rn =3
2π2TC(B3 + 12Bf 20 )
[1
ρ2n
(1 +
1
SNRel
)2
− 1
]. (3.126)
Die ParameterB, f0 und SNRel können aus Tab. 3.2 in Kap. 3.4.2 übernommen wer-
den, die Korrelationsfensterlänge wurde zuTC = 30 ∆t mit ∆t = 1/50 MHz gewählt.
Der Korrelationskoeffizientρn ändert sich abhängig vom Abtastzeitpunkt und der Vibra-
tionsfrequenz, weil der Korrelationskoeffizientρax nach Gl. (3.23) von der Dehnungε
abhängig ist und sich letztere bei einer Vibrationsanregung lokal ändert. Nach Gl. (3.100)
führt eine Vibrationsanregung zu Verschiebungenτn(z0) gemäß
τn(z0) = A(z0) Anorm(ωvib) cos(ωvib ∆tvib n + Φ) , (3.127)
wobei der FaktorAnorm(ωvib) =√
2(1 − cos(ωvib ∆tvib) von der Schwingungsfrequenz
abhängig ist undt0 = ∆tvib n gewählt wurde. Wenn der Hub eines Vibrations-Applikators
[42] zu einer lokalen Dehnungε0 führt, dann ist die lokale Dehnungεn zum Zeitpunktt0durch
εn =τn(z0)
2 A(z0)ε0 (3.128)
gegeben. Man sieht, dassεn ∈ [−ε0, +ε0] ist und der Korrelationskoeffizientρax nach
Gl. (3.23) zu einem Korrelationskoeffizientenρn wird.
Sei nunR0 die Varianz nach Gl. (3.126) im Falle eines einzelnen Kompressionsschrit-
tes, bei dem die Dehnungε0 auftritt. Es bietet sich an, diesen Wert mit der Varianz
der geschätzten Amplitude des Kalman-Filters im eingeschwungenen Zustand zu ver-
gleichen. Wenn die Varianz der geschätzten Amplitude des Kalman-Filters im Falle ei-

3.5 Kalman-Filter 60
ner Vibrationsanregung kleiner ist als die Varianz im Falleeiner einzelnen Kompression,
dann könnte durch die Vibrationsanregung die Abbildungsqualität der Ultraschall-Ela-
stographie verbessert werden. Da man von einem frequenzabhängigen Verhalten ausge-
hen muss, wurde die normierte Schwingungsfrequenz in einemBereich vonfvib ∆tvib ∈[0, 0.5] variiert. Die Ergebnisse der Simulationen sind in Abb. 3.26für eine Dehnung von
ε0 = 0.01 dargestellt. Es zeigte sich, dass die Wahl der Amplitude in einem Bereich von
0.1 0.2 0.3 0.4
-6
0
6
12
18
Normierte Frequenz vibvib tf ∆
Q=10-5 · I
Q=10-4 · I
Q=10-3 · IQ=5·10-4 · I
R0
/ Var
{A}
in d
B^
R0
/ Var
{A}
in d
B^
Abb. 3.26: Verhältnis vonR0 zur Varianz der geschätzten Amplitude in dB für verschie-
deneQ bei einer Dehnung vonε0 = 0.01
A(z0) ∈ [1, 30] rad keinen Einfluss auf das Ergebnis hat.5 Anhand von Abb. 3.26 lässt
sich sagen, dass eine Verbesserung der Abbildungsqualitätnicht bei beliebiger Wahl von
Q erfolgt. Zum Beispiel ist das Verhältnis fürQ = I · 10−3 rad2 und fvib ∆tvib < 0.1
negativ, was zu einer Verschlechterung der Abbildungsqualität führen würde. Obwohl
generell eine Verkleinerung der Einträge vonQ zu einer Verbesserung der Abbildungs-
qualität führt, ist dies nicht unbedingt sinnvoll, weil dadurch das Einschwingverhalten
des Kalman-Filters ungünstig beeinflusst wird. Werden dieEinträge vonQ nämlich zu
klein gewählt, dann dauert es im Rahmen eines Echtzeitverfahrens zu lange, bis der wah-
re Wert der Amplitude erreicht wird. Bei den experimentellenArbeiten erwies sich eine
Wahl vonQ = I · 5 · 10−4 rad2 als sinnvoll. Dabei ist zu beachten, dass der Vorteil einer
Vibrationsanregung nicht nur in der Verbesserung der Abbildungsqualität durch Filtern
der Messwerte liegt, sondern insbesondere in der gleichmäßigeren, untersucherunabhän-
gigen mechanischen Kompression. Durch diese werden weniger Bewegungsartefakte in
lateraler bzw. elevationaler Richtung hervorgerufen, so dass sich die Varianz der Zeitver-
schiebungsschätzungen verbessert.
5Die zu erwartenden Amplituden liegen typischerweise in diesem Bereich.

Kapitel 4
Simulation und Optimierung
In Abb. 4.1 ist das prinzipielle Vorgehen dargestellt, das hier zur Überprüfung der zu erzie-
lenden Abbildungsqualität der Ultraschall-Elastographie verwendet wird. Zunächst wird
das mechanische Vorwärtsproblem mit Hilfe der Methode der Finiten-Elemente (FEM)
unter Annahme des ebenen Verzerrungszustandes gelöst – in Abhängigkeit von einer
Elastizitätsmodul-Verteilung und bestimmten Randbedingungen. Die sich ergebenden
E-Modul: E0, Ek Dehnung ∆εFEM
Ultraschallsystem
Zeitverschiebungs-Schätzung: στ,CRLB
Dehnungsbild: CNRε
FIR-Filter
Rauschen2
Abb. 4.1: Analyse des elastographischen Kontrast-zu-Rausch Verhältnisses CNRε
axialen und lateralen Objektverschiebungen werden in den anschließenden Ultraschall-
Simulationen berücksichtigt und beeinflussen die Varianzder Zeitverschiebungsschätzun-
genσ2τ . Da das menschliche Auge aber nicht in der Lage ist, Informationen aus Verschie-
bungsbildern sinnvoll zu interpretieren (vgl. Abb. 4.2 mitte), müssen aus diesen z.B. Deh-
nungsbilder berechnet werden (s. Abb. 4.2 rechts). Der elastographische Kontrast CNRεbesteht nach Gl. (3.86) aus drei Komponenten,
∆ε2
σ2ε0︸︷︷︸
=∆ε2
ε20︸ ︷︷ ︸
· ε20
σ2τ (ρ,TC ,ε)
T 2
C︸ ︷︷ ︸
· Aε(K,N)2 · 1
12N(N2 − 1)
︸ ︷︷ ︸
≈ CNRε NDU Ausgangs− SNRε0SNRεG
− Gewinn
. (4.1)
Der normierte Dehnungsunterschied (NDU) hängt von der Geometrie des Objektes, den
Randbedingungen bei der Kompression und der Verteilung der Elastizitätsmoduln ab.
Darauf wird in Kap. 4.1 eingegangen, wobei die Geometrie desObjektes und die Rand-
bedingungen in einem mechanischen KonversionsfaktorcPDE (Ek, E0) zusammengefasst
werden können. Mit Hilfe von Ultraschall-Simulationen werden in Kap. 4.2 die Ergeb-
nisse aus Kap. 3 überprüft. Dabei sind insbesondere die Varianz der Zeitverschiebungs-
schätzungenσ2τ bzw. deren Cramér-Rao Schranke nach Gl. (3.21) von Bedeutung, weil
aus diesen Zeitverschiebungen nach FIR-Filterung ein Dehnungsbild entsteht.

4.1 FEM-Simulationen 62
4.1 FEM-Simulationen
Die Methode der Finiten Elemente (engl.:FEM = f inite element method) ist elementarer
Bestandteil der modernen Numerik und eignet sich zur Behandlung einer Vielzahl von
Problemen physikalischer und ingenieurwissenschaftlicher Herkunft. Allgemein betrach-
tet ist die Methode der Finiten Elemente ein Diskretisierungsverfahren für Kontinuums-
probleme [114]. Die internen Verfahrensschritte für den vollständigen Lösungsprozess
sind im Wesentlichen:
• Diskretisierung der Geometrie in Finite Elemente
• Formulierung der Matrizen des Finiten Elementes
• Numerische Integration zur Berechnung der Matrizen
• Zusammenfassung der Elementmatrizen zu Gesamtmatrizen
• Graphische Darstellung der numerischen Lösung
Für die Ausführung dieser Schritte steht kommerzielle Software zur Verfügung. Im Rah-
men dieser Arbeit wurde die Programme MATLABR© und ANSYSR© benutzt.
4.1.1 FEM-Parameter: E-Modul-Verteilung, Randbedingungen
Für den Fall eines runden, zylinderförmigen Einschlusses von 10 mm Durchmesser
mit ElastizitätsmodulEk in einem homogenen Medium mit ElastizitätsmodulE0 (vgl.
Abb. 4.2 links) wurden verschiedene Simulationen durchgeführt. Unter Annahme des
Ek
E0
Objektbreite x in mm
Obj
ektti
efe
z in
mm
0 20 40
0
10
20
30
40
50
60 -0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0 20 40-1.3
-1.2
-1.1
-1
-0.9
-0.8
-0.7
0 20 40
E-Modul-Verteilung Verschiebung uz in mm Axiale Dehnung εzz in %
Abb. 4.2: E-Modul Verteilung (links) mitE0 = 30 kPa undEk = 50 kPa, axiale Verschie-
bung in mm (mitte) und axiale Dehnung in Prozent (rechts)
ebenen Verzerrungszustandes (engl.:plain strain) wurde ein Medium mit einem Quer-

4.1 FEM-Parameter 63
schnitt von60 x 40 mm um ein Prozent komprimiert. Dies ist ein Wert, der typischerweise
bei der Ultraschall-Elastographie auftritt. In Kap. 4.1.3wird darauf eingegangen, dass die
erzielten Ergebnisse auch auf Kompressionen in einem Bereich um ein Prozent Dehnung
übertragbar sind. Für den oberen bzw. unteren Rand wurden demnach Dirichtlet’sche
Randbedingungen mit Werten der vertikalen Verschiebung von−0.6 mm bzw.0.0 mm
angenommen (Plattenkompression). Für die seitlichen Ränder wurden Neumann’sche
Randbedingungen angenommen. Ein typisches Ergebnis einer solchen Simulation ist in
Abb. 4.2 zu sehen. Das Vorzeichen der Dehnungswerte ist negativ, weil das Medium
komprimiert wurde.
Die Werte des Elastizitätsmoduls für biologisches Weichgewebe variieren je nach Ge-
webetyp [32]. Für Brustgewebe fanden Krouskop et al. Werte zwischen10 kPa und
100 kPa bei leichter Kompression und einer Poisson-Zahl vonν = 0.495 [58]. Die
FEM-Simulation eines Einschlusses mit ElastizitätsmodulEk in einem homogenen
Material mit ElastizitätsmodulE0 wurde für verschiedene Werte in dem genannten Wer-
tebereich durchgeführt. In Abb. 4.3 ist der Verlauf der axialen Dehnung an der Position
0 15 30 45 60
-1.4
-1.2
-1
-0.8
-0.6
-0.4
0 15 30 45 60
-2
-1.8
-1.6
-1.4
-1.2
-1
-0.8
Tiefe z in mm
E0=20kPa
Ek=30 kPa
Ek=50 kPa
Ek=70 kPa
Ek=90 kPa
Ek=10 kPa
E0=60kPa
Axi
ale
Deh
nung
εzz
in %
Ek=10 kPa
Ek=30 kPa
Ek=50 kPa
Ek=90 kPa
Tiefe z in mm
Abb. 4.3: Dehnungsverlauf an der Positionx = 20 mm für Einschlüsse mit10 mm Durch-
messer für verschiedene E-Modul-VerteilungenE0 bzw.Ek
x = 20 mm für ein variierendesEk bei konstantemE0 abgebildet. Auf der linken Seite
wurdeE0 = 20 kPa, auf der rechten SeiteE0 = 60 kPa gewählt. Für harte Einschlüsse ist
der Elastizitätsmodul des EinschlussesEk größer als der des umgebenden BereichesE0,
für weiche Einschlüsse giltEk < E0. Anhand der Kurvenverläufe kann man erkennen,
dass die axiale Dehnung im Mittel bei−1 % liegt. Außerdem ist der absolute Wert der
Dehnung an der Position eines harten Einschlusses immer kleiner als der absolute Wert
der Dehnung außerhalb des Einschlusses.
Dieser Sachverhalt zeigt sich auch in Abb. 4.4. Mittelt man die axiale Dehnungεzz über

4.1 Mechanischer Konversionsfaktor 64
die Fläche des Einschlusses (siehe eingezeichneter Kreis in Abb. 4.2 rechts) zu einem
Wertεk für verschiedeneEk bei festemE0, so ergibt sich ein hyperbelartiger Verlauf der
10 20 30 40 50 60 70 80 90 100
-1.8
-1.6
-1.4-1.2
-1
-0.8
-0.6
-0.4
-0.2 E0 < Ek => εk > ε0
Ek in kPa
Gem
ittel
te a
xial
e D
ehnu
ngε k
in %
E0=10 kPa
E0=30 kPa
E0=50 kPaE0=70 kPa
E0 > Ek => εk < ε0
Abb. 4.4: Gemittelte axiale Dehnungεk in % für zunehmendeEk bei konstantemE0 im
Wertebereich von10 kPa bis100 kPa.
Art εk ∼ −1/Ek. Diese Hyperbeln sind für zunehmende Werte vonE0 (Pfeilrichtung)
in 10 kPa-Schritten eingezeichnet. WennEk den Wert vonE0 überschreitet – und es sich
somit um harte Einschlüsse handelt – überschreitetεk den Werte der mittleren Dehnung
von−1 % bzw. gilt |εk| < 1 %. Zur Veranschaulichung wurde die Geradeεk = −1 % ge-
strichelt eingezeichnet. Dadurch motiviert wird nun das Verhältnisε0/εk in Abhängigkeit
vonEk bei festemE0 untersucht.
4.1.2 Mechanischer Konversionsfaktor
Zu diesem Zweck wurden für die Konstellation aus Abb. 4.2 Simulationen für verschie-
dene Werte vonEk und E0 in einem Bereich von10 kPa bis100 kPa durchgeführt und
anschließend die QuotientenEk/E0 und ε0/εk berechnet. Der QuotientEk/E0 hängt
linear vom ElastizitätsmodulEk des Einschlusses ab und ist in Abb. 4.5 für die Fälle
E0 = 10, 20, 30 kPa dargestellt (—). Dabei ist zu beachten, dass in Abb. 4.5 nur harte
Einschlüsse betrachtet werden (Ek > E0), so dass der Quotient größer Eins ist. Der Quo-
tient ε0/εk ist ebenfalls in Abhängigkeit vonEk für den Fallε0 = −1 % dargestellt (· · ·).Es ist plausibel, dass das Verhältnisε0/εk für Ek = E0 gleich Eins ist, weil dieser Fall der
Simulation eines homogenen elastischen Mediums ohne Einschlüsse entspricht. Es bietet
sich an, das Verhältnis vonε0/εk in Abhängigkeit vonEk durch
ε0
εk
= cPDE
(Ek − E0
E0
)+ 1 (4.2)
anzunähern. Der FaktorcPDE kann als „mechanischer Konversionsfaktor“ interpretiert
werden, der von der Geometrie des Einschlusses, der Verteilung der Elastizitätsmoduln
und von den mechanischen Randbedingungen abhängig ist. Es sei angemerkt, dass der

4.1 Normierter Dehnungsunterschied 65
10 30 50 70 901
1.5
2
2.5
3
3.5
4
4.5
5
Ek in kPa
Ek
/ E0
ε 0/ ε
k
E0=10 kPa
E0=20 kPa
E0=30 kPa
Für harte Einschlüsse ist das Verhältnis > 1
Abb. 4.5: Elastizitätsmodul-VerhältnisEk/E0 (—) und Dehnungsverhältnis−1 %/εk
(· · ·) für E0 = 10, 20, 30 kPa
mechanische Konversionsfaktor den Wert Eins annimmt, wenndas Dehnungsverhältnis
ε0/εk dem TeilerverhältnisEk/E0 entspricht, d.h.,
ε0
εk
= 1 ·(
Ek − E0
E0
)+ 1 =
Ek
E0
. (4.3)
Dies würde dem eindimensionalen Fall zweier mechanischer Federn entsprechen. In den
hier durchgeführten zweidimensionalen Simulationen wurde dieser Wert immer unter-
schritten, was daran zu sehen ist, dass die Geraden des Quotientenε0/εk in Abb. 4.5 eine
geringere Steigung haben als die des QuotientenEk/E0. Für harte Einschlüsse mit ei-
nem Durchmesser von4 mm liegt der mechanische Konversionsfaktor in einem Bereich
0.37 ≤ cPDE ≤ 0.47. Für harte Einschlüsse mit einem Durchmesser von10 mm liegt der
mechanische Konversionsfaktor in einem Bereich von0.38 ≤ cPDE ≤ 0.48.
4.1.3 Normierter Dehnungsunterschied (NDU)
Bei der Näherung des elastographischen Kontrastes CNRε durch Gl. (3.86) wurde der
normierte Dehnungsunterschied∆ε2/σ2ε0
eingeführt (NDU). Dieser soll nun mit Hilfe
der Ergebnisse aus dem vorherigen Kap. 4.1.2 quantifiziertwerden.
Die Dehnungsdifferenz∆ε zwischen einem Einschluss mit Dehnungεk und einem Hin-
tergrund mit mittlerer Dehnungε0 lässt sich unter Verwendung von Gl. (4.2) durch
∆ε = εk − ε0 = − εk · cPDE ·(
Ek − E0
E0
)(4.4)
ausdrücken. Dieses Ergebnis kann auch in Abhängigkeit vonε0 und ∆E = Ek − E0

4.1 Normierter Dehnungsunterschied 66
ausgedrückt werden,
∆ε = − ε0
cPDE · ∆EE0
1 + cPDE · ∆EE0
. (4.5)
Führt man die FEM-Simulationen für verschiedene Dehnungenε0 durch, so zeigt sich,
dass der mechanische KonversionsfaktorcPDE in einem großen Dehnungsbereich nicht
vonε0 und damit nicht von der Gesamtkompression abhängig ist. Dieses ist exemplarisch
in Abb. 4.6 gezeigt. In allen Fällen ergab sich ein mechanischer Konversionsfaktor von
0 15 30 45 60
-3
-2
-1
-0.5
-0.1
Axi
ale
Deh
nung
εzz
in %
Tiefe z in mm
E0=20kPa
Ek=50kPa
ε0=-0.1%
ε0=-0.5%
ε0=-1%
ε0=-2%
ε0=-3%
Abb. 4.6: Dehnungsverlauf an der Positionx = 20 mm für verschiedeneε0 für einen
Einschluss von10 mm Durchmesser mitEk = 50 kPa beiE0 = 20 kPa
cPDE = 0.479. Für den Fall eines linear elastischen Mediums ergibt sich der normierte
Dehnungsunterschied direkt aus Gl. (4.5) als Funktion von∆E, E0 undcPDE zu
∆ε2
ε20
=
(cPDE · ∆E
E0
1 + cPDE · ∆EE0
)2
. (4.6)
In Abb. 4.7 ist der normierte Dehnungsunterschied für harteEinschlüsse dargestellt,
wobei die rote Kurve fürcPDE = 1, die grüne Kurve für einen Einschluss mit10 mm
Durchmesser und die blaue Kurve für einen Einschluss mit5 mm Durchmesser verwen-
det wurde. Es zeigt sich, dass der normierte Dehnungsunterschied im Falle von harten
Einschlüssen zu einem Verlust des elastographischen Kontrastes führt, weil der NDU nur
für ∆E/E0 → ∞ den Wert0 dB erreicht.
In Abb. 4.8 ist der normierte Dehnungsunterschied für weiche Einschlüsse dargestellt, wo-
bei wieder die rote Kurve fürcPDE = 1, die grüne Kurve für einen Einschluss mit10 mm
Durchmesser und die blaue Kurve für einen Einschluss mit5 mm Durchmesser gewählt
wurde. Im eindimensionalen Fall zweier mechanischer Federn (cPDE = 1) würde der
normierte Dehnungsunterschied für∆E/E0 = −0.5 zu0 dB werden, weil fürE0 = 2 Ek
geradeεk = 2 ε0 und damit∆ε = ε0 ist. Aus den Ergebnissen der FEM-Simulationen

4.1 Normierter Dehnungsunterschied 67
∆E / E0 mit ∆E= Ek-E0
(∆ε/
ε 0)2
in d
B m
it ∆ε
=ε k
-ε0
0 1 2 3 4 5 6 7 8 9
-24-21-18-15-12-9-6-30
Abb. 4.7: Normierter Dehnungsunterschied(∆ε/ε0)2 in dB in Abhängigkeit von∆E/E0
für harte Einschlüsse
-0.9 -0.8 -0.7 -0.6 -0.5 -0.4 -0.3 -0.2 -0.1-30
-24
-18
-12
-6
0
6
1218
(∆ε/
ε 0)2
in d
B m
it ∆ε
=ε k
-ε0
∆E / E0 mit ∆E= Ek-E0
Abb. 4.8: Normierter Dehnungsunterschied(∆ε/ε0)2 in dB in Abhängigkeit von∆E/E0
für weiche Einschlüsse
folgt, dass der normierte Dehnungsunterschied auch bei weichen Einschlüssen zu einer
Verminderung des elastographischen Kontrastes führt und für E0 ≫ Ek den Wert0 dB
erreicht.
Mit der hier vorgestellten Methode wurde ein geschlossenerAusdruck für den normierten
Dehnungsunterschied (NDU) in Gl. (4.6) hergeleitet, der für die hier untersuchte Objekt-
geometrie bei den angenommenen Randbedingungen für einen großen Wertebereich der
Elastizitätsmoduln gültig ist. Die Einschränkung des Wertebereichs der Elastizitätsmo-
duln ist dadurch gerechtfertigt, dass biologisches Weichgewebe modelliert wird. Obwohl
die angenommenen Randbedingungen und die Annahme des ebenenVerzerrungszustan-
des eine Einschränkung der Übertragbarkeit der Ergebnisseauf reale Untersuchungsbe-
dingungen darstellen, kann das hier erarbeitete Konzept zur Quantifizierung des elastogra-
phischen Kontrastes CNRε weiterhin angewendet werden. Eine Anpassung der Parame-
ter der FEM-Simulationen führt zu einem modifizierten mechanischen Konversionsfaktor
cPDE bzw. zu einem anderen Verlauf des normierten Dehnungsunterschiedes in Abb. 4.7
und Abb. 4.8.

4.2 Ultraschall-Simulationen 68
4.2 Ultraschall-Simulationen
Im folgenden wird eine Apertur simuliert, deren Abmessungen so gewählt wurden, dass
sie mit den Spezifikationen des verwendeten Ultraschallwandlers VF 13-5 des Ultra-
schallgerätes Siemens Omnia übereinstimmen. Eine Zusammenfassung der gewählten
Einstellungen ist in Tab. 4.1 zu finden. Die Apertur bestehtaus 64 Elementen, wobei im
Tab. 4.1: Parameter des Ultraschall-Simulators
Elementgröße lateral xelem 0.21 mm
Elementgröße elevationalyelem 2.5 mm
Elementanzahl gesamt nges 227
A-Linien nA 163
Elementanzahl Apertur naktiv 64
Apertur lateral xap 14.08 mm
Apertur elevational yap 2.5 mm
Fokussierung Senden 40 mm
Fokussierung Empfang dynamisch
Sendefall eine Hanning-Apodisierung benutzt wird. Als Sendefokus wurde eine Tiefe
von40 mm gewählt. Die Empfangsfokussierung erfolgt dynamisch, wie es auch in einem
handelsüblichen Ultraschallgerät der Fall ist.
4.2.1 Punktbildfunktion
Die Eigenschaften der Ultraschall-Elastographie werden wesentlich durch Parameter der
Punktbildfunktion bestimmt, die verantwortlich für Korrelationslängen der Ultraschallsi-
gnale in lateraler bzw. elevationaler Richtung sind. Die Punktbildfunktion kann im Fokus
als separierbare Funktion angenommen werden [109], wobei die Parameter der Punkt-
bildfunktion von der verwendeten Apertur und der Schallformung abhängig sind.
Zur Verdeutlichung der tiefenabhängigen Eigenschaften eines Ultraschallabbildungssy-
stems wurde ein Datensatz für eine Anordnung von Punktstreuern berechnet, die in der
Bildmitte im Abstand von1 mm über die Tiefe verteilt sind. Schon anhand des B-Bildes
(Abb. 4.9 links) kann man erkennen, dass die laterale Breite der Punktbildfunktion tie-
fenabhängig ist. Der Verlauf der Punktbildfunktion ist ebenfalls in Abb. 4.9 (rechts) zu
sehen. In dieser Abbildung wurde zusätzlich die laterale PulsbreitePlat eingezeichnet,
für die Plat = 2.3548 · σlat gilt. Typisch ist die tiefenabhängige Zunahme der lateralen
Pulsbreite.

4.2 Simulation des Mediums 69
10
20
30
40
50
60
Laterale Position x in mm
Bild
tiefe
z in
mm
-5 0 5
10
20
30
40
50
60
Bild
tiefe
z in
mm
σlat, σelev, Plat, Pelev [mm] σlat in Vielfachen von xelem
0.5 1 1.5 2 2.5
10
15
20
25
30
35
40
45
50
0.5 1 1.5 2 2.5
10
15
20
25
30
35
40
45
50
0.5 1 1.5 2 2.5
10
15
20
25
30
35
40
45
50
0.5 1 1.5 2 2.5
10
15
20
25
30
35
40
45
50
0.5 1 1.5 2
10
15
20
25
30
35
40
45
50
0.5 1 1.5 2
10
15
20
25
30
35
40
45
50
Abb. 4.9: Tiefenabhängige Punktbildfunktion des Ultraschallsystems: B-Bild (links), la-
terale und elevationale PulsbreitePlat, Pelev bzw.σlat, σelev (rechts)
4.2.2 Simulation des Mediums
Die Modellierung des Mediums erfolgt durch eine Ansammlungvon StreuernSi(xi, yi, zi),
die in einem definierten Volumen gleichverteilt werden, dessen Grenzen wie folgt
gewählt sind: in lateraler Richtungxi ∈ [−20 mm, 20 mm], in axialer Richtung
zi ∈ [5 mm, 50 mm] und in elevationaler Richtungyi ∈ [−5 mm, 5 mm]. Die Streuer
wurden in lateraler Richtung über insgesamt40 mm verteilt, damit der zu erwartende
Bildbereich von34.23 mm (bei163 A-Linien) auch im Falle von lateralen Verschiebungen
der Streuer vollständig von Streuern durchsetzt wird. Abb.4.10 zeigt die Positionierung
der Streuer. Die symmetrische Anordnung um den Koordinatenursprung bzgl. derx-
bzw. y-Achse hat numerische Gründe, um die mittlere A-Linie des Ultraschallarrays
eindeutig definieren zu können. Die Amplitude der StreuerSi(xi, yi, zi) entspricht der
Reflektivität und wird als normalverteilt angenommen. Eineortsabhängige Dämpfung
des Mediums wird nicht berücksichtigt.
Wenn sich in dem zu simulierenden B-Bild eine vollständige Speckles-Charakteristik aus-
bilden soll, dann müssen ca.40 Streuer pro Wellenlänge gleichmäßig auf das Gebiet
verteilt werden [109]. Bei einer Schallgeschwindigkeit von1540 m/s und einer Mitten-
frequenz von8.5 MHz resultiert eine Wellenlänge von181.2 µm. Bei einer von Streuern
durchsetzten Bildtiefe von50 mm (entspricht ca.276 Wellenlängen) und163 A-Linien er-
gibt sich eine Anzahl von ca.2 Mio. Streuern. Bedingt durch die hohe Zahl von Streuern
beträgt der Rechenaufwand für eine Simulation auf einem1.8 GHz PC-System mehrere
Tage.

4.2 Medium unter axialer Kompression 70
Bildbreite x [mm]
Bild
tiefe
z [m
m]
10
20
30
40
50
10 20 30Bildbreite x [mm]
10
20
30
40
50
10 20 3010 20 30
1%
Bildbreitexi
yi
zi
0
034mm
40mm
Si(xi , yi , zi)
Abb. 4.10: Objektgeometrie (links) und Simulationsergebnis: B-Bild vor (mitte) und nach
Kompression (rechts)
4.2.3 Medium unter axialer Kompression
Zunächst wurde das aus einer Ansammlung von Streuern bestehende Medium um ein
Prozent in axialer Richtung komprimiert. Die neuen axialen Streuerpositionenzi,1 erge-
ben sich wegen 11−(−0.01)
≈ 0.99 aus den Streuerpositionenzi,0 zu
zi,1 = 0.99 · zi,0 . (4.7)
Abb. 4.10 zeigt das simulierte B-Bild vor (links) und nach Kompression (rechts). Die
axiale Kompression von einem Prozent ist im B-Bild allein nur schwer zu erkennen.
Berechnet man aus den hochfrequenten Echosignalen mit Hilfedes in Kap. 3.2.1 beschrie-
benen rekursiven Algorithmus die Verschiebungsbilder (hier: TC = 40 ∆t, Tτ = 20 ∆t),
so zeigt sich das in Abb. 4.11 links dargestellte Ergebnis. Zusätzlich kann mit Hilfe der
Verschiebungsdaten der Korrelationskoeffizientρ und ein Dehnungsbild (hier: normierte
FilterlängeN = 2.25) berechnet werden. Das Verschiebungsbild zeigt das erwartete Er-
gebnis einer kontinuierlich zunehmenden zeitlichen Verschiebung über der Tiefe bis zu
einem Wert von ca.34 rad, was bei einer Mittenfrequenz vonf0 = 8.5 MHz einer Ver-
schiebung von0.50 mm entspricht. Dieses Ergebnis stimmt mit der vorgegebeneneinpro-
zentigen Kompression eines effektiven Streuerbereiches von 50 mm überein. Die Werte
des Korrelationskoeffizienten liegen nahe1.0. Auch dieses Ergebnis stimmt mit dem zu
erwartenden aus Gl. (3.23) bzw. aus Abb. 3.6 überein. Im Dehnungsbild sieht man die in
Kap. 3.4.6 erläuterte körnige Struktur aufgrund der Varianz der Zeitverschiebungsschät-
zungen und anschließender FIR-Filterung. Der Mittelwert der Dehnung von−1 % stimmt
mit der Vorgabe überein.

4.2 Empirische Varianz 71
-30
-25
-20
-15
-10
-5
0
Bild
tiefe
z in
mm
Verschiebung in rad
10 20 30
10
20
30
40
500.98
0.985
0.99
0.995
1
Bildbreite x in mm
Korrelationskoeffizient ρ
10 20 30-1.1
-1.05
-1
-0.95
-0.9Dehnung εzz in %
10 20 30
Abb. 4.11: Axiale Kompression: Verschiebung (links), Korrelationskoef f izient (mitte)
und Dehnung (rechts)
4.2.4 Empirische Varianz der Zeitverschiebungen
Um die Ergebnisse zu quantifizieren und mit den theoretischen Herleitungen zu ver-
gleichen, wurden Bilder der Zeitverschiebung und des Korrelationskoeffizienten für
verschiedene KorrelationsfensterlängenTC berechnet. Anschließend wurde die Varianz
Var
ianz
in ∆
t2
TC in Abtastwerten ∆t
5 20 40 60 80 100 120 1400
0.002
0.004
0.006
0.008
0.01
0.012
5 20 40 60 80 100 120 1400
0.002
0.004
0.006
0.008
0.01
0.012Varianz der Zeitverschiebungsschätzungen
Varianz mit theoretischem ρ
Varianz mit geschätztem ρ
Abb. 4.12: Empirische Varianz der Zeitverschiebungsschätzungen in Abhängigkeit der
FensterlängeTC in Vielfachen∆t
der Zeitverschiebungsschätzungen und der mittlere Wert des geschätzten Korrelations-
koeffizienten in der Fokustiefe (40 mm) bestimmt. Um die Gültigkeit der Gleichungen
(3.23) und (3.21) abzuschätzen, wurde sowohl für den geschätzten Korrelationsko-
effizienten als auch den Korrelationskoeffizienten aus Gl. (3.21) für ε0 = −1 % die
Varianz nach Gl. (3.21) in Abhängigkeit vonTC berechnet (s. Abb. 4.12). Zunächst
muss festgestellt werden, dass die Varianz der Zeitverschiebungsschätzungen erwar-
tungsgemäß mit größer werdender Korrelationsfensterlänge TC zunimmt, weil dadurch
die Annahme einer reinen Zeitverschiebung zwischen den gefensterten Echosignalen
verletzt wird. Anhand von Abb. 4.12 können zwei weitere Aussagen gemacht werden.
Zum einen trifft die Abschätzung für den Korrelationskoeffizienten nach Gl. (3.23) erst

4.2 Empirische Kovarianzfunktion 72
für KorrelationsfensterlängenTC ≥ 40∆t zu. Für kleinere Fensterlängen wird der Wert
des Korrelationskoeffizienten in Gl. (3.23) zu hoch bestimmt, was sich in einer kleineren
Varianz der Zeitverschiebungsschätzungen nach Gl. (3.21)zeigt. Dies lässt sich damit
erklären, dass die KorrelationsfensterlängeTC bei der Berechnung der Korrelationsfunk-
tion nicht beliebig klein gewählt werden kann. Zum anderen lässt sich sagen, dass die
Varianz der Zeitverschiebungsschätzungen die Cramér-Rao Schranke nach Gl. (3.21) nur
unwesentlich übertrifft.
4.2.5 Empirische Kovarianzfunktion der Zeitverschiebungen
Um die Kovarianzfunktioncττ (k) zu schätzen, wurden die Zeitverschiebungsschätzungen
τn zunächst von ihrem bekannten tiefenabhängigen Trendτn befreit, der durch die axiale
Kompression von1 % zu Stande kommt. Anschließend wurde die empirische Kovarianz-
funktion für den Bildbereich35 mm bis45 mm nach
cττ (k) =1
N
N−1−|k|∑
n=0
(τn+|k| − τn+|k|)(τn − τn) (4.8)
für jede A-Linie gebildet und gemittelt. Da zu erwarten ist,dass die Kovarianzfunktion der
Zeitverschiebungsschätzungen abhängig von der KorrelationsfensterlängeTC ist, wurde
diese für verschiedene FensterlängenTC berechnet. In Abb. 4.13 ist das Ergebnis darge-
-130 -100 -70 -40 -10 010 40 70 100 130-0.6-0.4-0.2
00.20.40.60.8
1
Abtastwerte ∆t
Nor
mie
rte
Kov
aria
nzfu
nktio
n
TC=10, 40, 70, 100, 130 ∆t
Abb. 4.13: Normierte empirische Kovarianzfunktion der Zeitverschiebungsschätzungen
für FensterlängenTC = 10, 40, 70, 100, 130 ∆t
stellt, wobei die Kovarianzfunktionen zur besseren Vergleichbarkeit jeweils bzgl.cττ (0)
(entspricht der Varianz) normiert wurden. Um den Einfluss der Korrelationsfensterlänge
TC auf den Verlauf der normierten Kovarianzfunktioncττ (k) zu berücksichtigen, wur-
den alle Kovarianzfunktionen bzgl. der normierten Zeitachse(Tτ1 −Tτ2)/TC gemittelt. In
Abb. 4.14 ist der Mittelwert (dicke Linie) und± eine Standardabweichung (dünne Lini-
en) eingezeichnet. Die Kovarianzfunktion fällt in einem BereichTτ ≤ TC ab und nimmt
auch negative Werte an. Obwohl sich der Verlauf der Kovarianzfunktion von dem linear
angenommenen aus Gl. (3.29) unterscheidet, wird die Kovarianz fürTτ > TC zu Null.

4.2 Empirische Kovarianzfunktion 73
0 0.5 1 1.5 2 2.5 3-0.5
0
0.5
1
| Tτ1- Tτ2
| / TC
Nor
mie
rte
Kov
aria
nzfu
nktio
n
Abb. 4.14: Normierte empirische Kovarianzfunktion der Zeitverschiebungsschätzungen
für relative Abstände(Tτ1 − Tτ2)/TC : Mittelwert und± eine Standardabweichung
Es stellt sich die Frage, welche Auswirkungen sich dadurch für die Varianz der Dehnung
bzw. das elastographische SNRε ergeben. In Abb. 4.15 ist der Verlauf der Varianz der Deh-
nungσ2ε für die drei Dehnungsschätzer aus Kap. 3.3.1 dargestellt, wobei die Einträge der
Filterlänge N , ganzzahlig für Tτ = TC~
Filterlänge N , ganzzahlig für Tτ = TC~
1 2 3 4 5 6 7-24-18-12-606
121824
Fall 2 mit lin. abfall. Kov.
Fall 1 mit lin. abfall. Kov.
Fall 1 mit emp. Kov.
Fall 2 mit emp. Kov.
Fall 3 (unkorrelierte Störung)
(σε)
2/ (στ
/ TC)2
in d
B
Abb. 4.15: Standardabweichung der Dehnung in dB für verschiedene Schätzer nach
Fall 1–3 in Abhängigkeit von der normierten FilterlängeN , die für Tτ = TC ganzzah-
lig ≥ 2 wird
Kovarianzmatrixσ2τ C entsprechend der empirischen Kovarianzfunktion gewählt wurden.
Zur besseren Vergleichbarkeit wurde das Ergebnis bzgl.σ2τ/T
2C normiert und in Abhän-
gigkeit von der normierten FilterlängeN dargestellt. Es zeigt sich, dass die Annahme
einer unkorrelierten Störung (Fall2) nur unwesentlich höhere Varianzen der Dehnung lie-
fert als die Implementierung eines gewichteten KQ-Schätzers (Fall1). Auch die Wahl von
Filterlängen, die einem Vielfachen der KorrelationsfensterlängeTC entsprechen (Fall3),
führt bei größeren Filterlängen nur zu einer Abweichung von6 dB.

4.2 Medium unter axialer und lateraler Kompression 74
4.2.6 Medium unter axialer und lateraler Kompression
Zusätzlich zu einer axialen Kompression wurde nun eine laterale Kompression um ein
Prozent von rechts durchgeführt und das Medium am linken Randfixiert angenommen.
Während die axialen Streuerpositionenzi,1 weiterhin mit denen aus Kap. 4.2.3 überein-
stimmen, ergeben sich die neuen lateralen Streuerpositionen nun zu
xi,1 = 0.99 · xi,0 . (4.9)
Die lateralen Verschiebungen des Mediums nehmen also von links nach rechts kontinu-
ierlich zu.
Berechnet man aus den hochfrequenten Echosignalen mit Hilfedes in Kap. 3.2.1 beschrie-
benen rekursiven Algorithmus die Verschiebungsbilder (hier: TC = 40 ∆t, Tτ = 5 ∆t),
so zeigt sich das in Abb. 4.16 links dargestellte Ergebnis. Zusätzlich kann aus den Ver-
-30
-20
-10
0
10 20 30
10
20
30
40
50-1.5
-1
-0.5
10 20 30 10 20 300.7
0.8
0.9
1
10 20 30
Bild
tiefe
z in
mm
Bildbreite x in mm
Dehnung εzz in % ρ theoretischρ empirischVerschiebung in rad
Abb. 4.16: Axiale und laterale Kompression (v.l.n.r): Verschiebung, Dehnung, empirisch
ermittelter und theoretisch vorhergesagter Korrelationskoef f izient
schiebungsdaten ein Dehnungsbild (hier: FilterlängeN = 30 · Tτ , N = 4.625) und der
Korrelationskoeffizientρ berechnet werden. Zum Vergleich wurde der theoretisch zu er-
wartende Korrelationskoeffizient mit Hilfe der tiefenabhängigen lateralen Pulsbreite aus
Abb. 4.9 berechnet und ebenfalls in Abb. 4.16 (rechts) dargestellt.
Man sieht im Verschiebungsbild und im Dehnungsbild, dass die lateralen Verschiebun-
gen des Objektes – hervorgerufen durch die zusätzliche laterale Kompression – zu einer
höheren Varianz der Messwerte führen. Die Begründung für diehöhere Varianz ist darin
zu sehen, dass die lateralen Verschiebungen des Objektes zueiner Dekorrelation der Si-
gnale führen. Die empirischen Werte des Korrelationskoeffizienten bestätigen dabei die
theoretisch vorausgesagten Werte.
In Kap. 4.2.9 und Kap. 4.2.10 wird darauf eingegangen, wie dieser Fehler kompensiert
werden kann – zumindest für den Fall von lateralen Verschiebungen.

4.2 Medium unter axialer Kompression und elevationaler Verschiebung 75
4.2.7 Medium unter axialer Kompression mit elevationaler
Verschiebung
Zusätzlich zu einer axialen Kompression erfolgt nun eine elevationale Verschiebung
in y−Richtung. Während die axialen Streuerpositionenzi,1 weiterhin mit denen aus
Kap. 4.2.3 übereinstimmen, werden die elevationalen Streuerpositionen zu
yi,1 = yi,0 + [xi,0 − xi,1] (4.10)
gewählt. Die elevationale Verschiebung entspricht also der von links nach rechts zuneh-
menden lateralen Verschiebung aus Kap. 4.2.6.
Berechnet man aus den hochfrequenten Echosignalen mit Hilfedes in Kap. 3.2.1 beschrie-
benen rekursiven Algorithmus die Verschiebungsbilder (hier: TC = 40 ∆t, Tτ = 5 ∆t),
so zeigt sich das in Abb. 4.17 links dargestellte Ergebnis. Zusätzlich wurde der Korre-
-30
-20
-10
0
10 20 30
10
20
30
40
50-1.5
-1
-0.5
10 20 30 10 20 300.7
0.8
0.9
1
10 20 30
Bild
tiefe
z in
mm
Bildbreite x in mm
Dehnung εzz in % ρ theoretischρ empirischVerschiebung in rad
Abb. 4.17: Axiale Kompression und elevationale Verschiebung (v.l.n.r): Verschiebung,
Dehnung, Korrelationskoef f izient empirisch und theoretisch
lationskoeffizientρ und aus den Verschiebungsdaten ein Dehnungsbild (hier: Filterlänge
N = 30 · Tτ , N = 4.625) berechnet. Zum Vergleich wurde der theoretisch zu erwar-
tende Korrelationskoeffizient mit Hilfe der tiefenabhängigen elevationalen Pulsbreite aus
Abb. 4.9 berechnet und ebenfalls in Abb. 4.16 (rechts) dargestellt.
Man sieht im Verschiebungsbild und im Dehnungsbild, dass die von links nach rechts
zunehmenden elevationalen Verschiebungen des Objektes zueiner tiefenabhängig zuneh-
menden Varianz der Messwerte führen. Die Begründung für die Zunahme der Varianz
ist darin zu sehen, dass die elevationalen Verschiebungen des Objektes zu einer Dekor-
relation der Signale führen. Die empirischen Werte des Korrelationskoeffizienten bestä-
tigen dabei die theoretisch vorausgesagten Werte. Bei einemVergleich von Abb. 4.17
und Abb. 4.16 zeigt sich weiterhin, dass sich die Abbildungsqualität der Ultraschall-
Elastographie bei elevationalen Verschiebungen weniger verschlechtert als bei lateralen

4.2 Elastographische Unschärfe, Modell für Verschiebungen 76
Verschiebungen. Der Grund ist darin zu sehen, dass die elevationale Pulsbreite der Punkt-
bildfunktion bei gleicher Bildtiefe größer als die lateralePulsbreite ist, wie in Abb. 4.9
zu sehen. Im Gegensatz zu lateralen Verschiebungen können Verschiebungen in elevatio-
naler Richtung bei einem Ultraschallgerät mit linearem Array nicht kompensiert werden.
Im folgenden wird darauf eingegangen, welchen Einfluss solche Verschiebungen auf das
elastographische SNRε haben.
4.2.8 Elastographische Unschärfe, Modell für Verschiebungen
In experimentellen und klinischen Arbeiten hat sich gezeigt, dass es zu einer Dekorrela-
tion von hochfrequenten Echosignalen kommt, die durch die Kompression des Gewebes
allein bzw. die resultierende Stauchung der Echosignale nicht erklärt werden kann. In [67]
führt Meunier die Dekorrelation auf Verschiebungen zurück, die senkrecht zur Kompres-
sionsrichtung aufgrund der Inkompressibilität des Mediums entstehen. In Experimenten
zeigte sich jedoch, dass die durch unabsichtliche Bewegungen des Ultraschallwandlers
hervorgerufenen Verschiebungen weitaus größer sein können und als Hauptursache für
eine Dekorrelation der Signale bzw. eine Erhöhung der Varianz der Zeitverschiebungs-
schätzungen unter realen Untersuchungsbedingungen anzusehen sind [40]. In der folgen-
den Herleitung wird untersucht, welchen quantitativen Einfluss laterale Verschiebungen
auf das elastographische SNRε haben. Dazu ist es notwendig, den lateralen Korrelations-
koeffizientenρlat in Abhängigkeit von lateralen Verschiebungen∆x und dem Parameter
σlat der Punktbildfunktion auszudrücken. Die Herleitung ist für elevationale Verschiebun-
gen identisch, wennρlat durchρelev, ∆x durch∆y undσlat durchσelev ersetzt wird.
Mit Hilfe von Gl. (3.27) als Ausdruck für den lateralen Korrelationskoeffizienten gilt
1
ρlat(∆x)2=
1
exp(− ∆x2
4σ2
lat
)2 = exp
(∆x2
2 σ2lat
). (4.11)
Diese Funktion ist stetig differenzierbar und kann mit Hilfe einer Taylor-Reihe um∆x=0
angenähert werden [15],
1
ρlat(∆x)2= 1 + 1/2
∆x2
σ2lat
+ 1/8∆x4
σ4lat
+ 1/48∆x6
σ6lat
+ . . . . (4.12)
Im Hinblick auf das elastographische SNRε geht die Varianz der Zeitverschiebungs-
schätzung nach Gl. (3.60) mit1/σ2τ in das elastographische Ausgangs-SNRε0
ein. Nach
Gl. (3.21) gilt zudem die Proportionalitätsbeziehung
σ2τ ∼
[1
ρ2ax
1
ρ2lat
(1 +
1
SNRel
)2
− 1
]. (4.13)
Berücksichtigt man die Glieder der Taylor-Reihe aus Gl. (4.12) bis zur zweiten Ordnung

4.2 Elastographische Unschärfe, Modell für Verschiebungen 77
und nimmt weiter an, dass1/SNRel ≪ 1 undρax ≈ 1.0 sind, so ergibt sich
σ2τ ∼
[2 (1 − ρax) +
2
SNRel
+ 1/2∆x2
σ2lat
+ 1/8∆x4
σ4lat
]. (4.14)
Von Interesse ist nun, wie gross der Einfluss von lateralen Verschiebungen auf das ela-
stographische SNRε ist. Es bietet sich an, die Änderung der Varianz nach Gl. (4.14) für
Verschiebungen∆x > 0 zu betrachten und die Größe
SNRεV=
2 (1 − ρax) + 2/SNRel
2 (1 − ρax) + 2/SNRel + 1/2 ∆x2
σ2
lat
+ 1/8 ∆x4
σ4
lat
(4.15)
als SNRε-Verlust der Dehnung(SNRεV) einzuführen. In Abb. 4.18 ist der SNRε-Verlust
(SNRεV) in Abhängigkeit von lateralen Verschiebungen zu sehen. DieVerschiebungen
0.840.860.880.90.920.940.960.98
-12
-9
-6
-3
0
Korrelationskoeffizient ρ=ρax·ρlat
0.9720.959
0.9420.921
0.8950.866
0.834
0.980
SN
Rε-
Ver
lust
in d
B
∆x in Vielfachen von σlat
0.1 0.3 0.4 0.5 0.6 0.7 0.80.1 0.3 0.4 0.5 0.6 0.7 0.8
Abb. 4.18: Mechanische Unschärfe: SNRε-Verlust in dB durch laterale bzw. elevationale
Verschiebungen fürρax = 0.9826 bei ε0 = 1 %
sind in Vielfachen vonσlat gewählt, damit das Ergebnis auf elevationale Verschiebungen
übertragbar ist. Aus Abb. 4.18 geht hervor, dass Verschiebungen zu einer Erniedrigung des
elastographischen SNRε und damit auch des elastographischen Kontrastes CNRε führen.
Es handelt sich in gewisser Weise um eine „mechanische Unschärfe“, weil eine mecha-
nische Verschiebung in lateraler oder elevationaler Richtung zu einem Verlust der elasto-
graphischen Abbildungsqualität führt. Wenn der elastographische Verlust eine bestimmte
Schranke Sε nicht unterschreiten soll, d.h. SNRεV≥ Sε mit Sε ≤ 1, dann darf das Quadrat
der Verschiebung einen bestimmten Wert nicht überschreiten,
∆x2 ≤ −2 σ2lat + 2 σ2
lat
√1 − 4
(1 − ρax +
1
SNRel
)(1 − 1
Sε
).
Wie zu erwarten, dürfen für Sε = 1 keine Verschiebungen in lateraler Richtung auftreten,
d.h.∆x = 0.
Mit Hilfe dieser Überlegungen ist es möglich zu erklären, warum Dehnungsbilder in rea-
len Untersuchungen auch bei der Anwendung von geringen Kompressionen häufig ei-
ne schlechte Abbildungsqualität aufweisen. Die mechanische Fehlerquelle einer lateralen

4.2 Kompensation von lateralen Verschiebungen 78
oder elevationalen Verschiebung wird in einem Modell, das von rein axialen Verschie-
bungen ausgeht, nicht berücksichtigt. Der Abfall des Korrelationskoeffizienten auf Werte
ρ < 0.95 kann durch Verschiebungen im Submillimeterbereich senkrecht zur axialen
Richtung erklärt werden. Der Einfluss solcher Verschiebungen auf das elastographische
SNRε wurde in Abb. 4.18 demonstriert. Dabei ist zu beachten, dasslaterale Verschiebun-
gen – absolut gesehen – das elastographische SNRε mehr beeinflussen als elevationale
Verschiebungen, weil die laterale Pulsbreite nach Abb. 4.9(rechts) in der Regel kleiner
als die elevationale Pulsbreite ist. Aus Abb. 4.9 (rechts) ist ebenfalls ersichtlich, dass die
Pulsbreiten tiefenabhängig zunehmen und damit der Einfluss von Verschiebungen auf das
elastographische SNRε mit zunehmender Bildtiefe abnimmt.
Im folgenden wird darauf eingegangen, wie der Einfluss lateraler Verschiebungen auf das
elastographische SNRε teilweise kompensiert werden kann.
4.2.9 Kompensation von lateralen Verschiebungen
Wie in Kap. 4.2.8 erläutert, ist der Einfluss von lateralen Verschiebungen auf das elasto-
graphische SNRε größer als der von elevationalen Verschiebungen. Im folgenden wird
darauf eingegangen, wie Verschiebungen in lateraler Richtung kompensiert werden kön-
nen. Dabei steht eine Erhöhung des elastographischen Kontrastes im Vordergrund und
nicht eine rechenintensive Berechnung der lateralen Verschiebung, wie z.B. aus [64] be-
kannt.
Seie1,i(t) das Empfangssignal mit überlagerter Störung deri-ten A-Linie vor Kompres-
sion unde2,i(t) das Empfangssignal mit überlagerter Störung deri-ten A-Linie nach Kom-
pression,
e1,i(t) = s1,i(t) + n1,i(t) (4.16)
e2,i(t) = s2,i(t) + n2,i(t) . (4.17)
Die für den Empfang der Signale verantwortliche Apertur besteht aus vielen Einzelele-
menten und „wandert“ zur Bilderzeugung elementweise in lateraler Richtung. Dadurch
korrespondieren die Empfangssignalee1,i(t) unde1,i+1(t) benachbarter A-Linien zu Ge-
webebereichen, die umxelem in lateraler Richtung verschoben sind – schematisch dar-
gestellt in Abb. 4.19. Zusätzlich ist eine durch die Kompression hervorgerufene laterale
Verschiebung∆x des Mediums angedeutet. Liegt diese in einem Bereich von0.5·xelem <
|∆x| < xelem , dann wird die Korrelation zwischen den Signalene1,i(t) unde2,i+1(t) höher
sein als zwischen den Signalene1,i(t) unde2,i(t), weil die laterale Verschiebung bzgl. der
benachbarten A-Linie geringer ist.
Eine Verbesserung der Zeitverschiebungsschätzung wird also dadurch erreicht, dass die
Korrelation der Empfangssignale vor und nach Kompression nicht nur zwischen Signalen
gleicher A-Linien, sondern auch zwischen Signalen benachbarter A-Linien durchgeführt

4.2 Kompensation von lateralen Verschiebungen 79
0
0.2
0.4
0.6
0.8
1
Plat
e2,i+1e1,i+1 e1,N e2,Ne2,ie1,i
∆xxelem
Nor
mie
rte
PB
F in
la
tera
ler
Ric
htun
g
σlat
...
(N-i-1)·xelem
Abb. 4.19: Schematische Darstellung der Lagebeziehung benachbarter A-Linien und der
lateralen PulsbreitePlat der Punktbildfunktion
wird. Von den geschätzten Zeitverschiebungen wird diejenige gewählt, bei deren Berech-
nung der Korrelationskoeffizient aus Gl. (3.9) den höchsten Wert annimmt1. Der Einfluss
einer solchen Methodik auf das elastographische SNRε wird anhand von Abb. 4.18 deut-
lich, wenn man den Parameterσlat der gaußförmigen Punktbildfunktion in Vielfachen
der Elementbreitexelem ausdrückt. Beispielsweise gilt im Fokus bei einer Bildtiefe von
z = 40 mm nach Abb. 4.9 (rechts) die Näherungσlat ≈ xelem . Wird die Korrelation auch
für benachbarte A-Linien gebildet, dann ist für eine der beiden A-Linien∆x ≤ 0.5 ·xelem
bzw.∆x ≤ 0.5 · σlat. Es würde daher ausreichen, den elastographischen SNRε-Verlust in
Abb. 4.18 für Werte∆ x ≤ 0.5 · σlat zu betrachten, so dass der maximale SNRε-Verlust
ca.−6 dB beträgt.
Eine weitere Verbesserung der Kompensation von lateralen Verschiebungen kann erreicht
werden, indem die Empfangssignale benachbarter A-Linien vor der Schätzung von Zeit-
verschiebungen aufsummiert werden. Es wird nun ein geschlossener Ausdruck für den
Wert eines sich ergebenden mittleren lateralen Korrelationskoeffizientenρlat entwickelt,
mit dessen Hilfe der Effekt auf das elastographische SNRε erklärt werden kann .
Für die Leistungsspektren bzw. Kreuzleistungsspektren der Signale wird
Rs1,is1,j= ρax · ρlat((i−j)xelem) · Rss (4.18)
Rs2,is2,j= ρax · ρlat((i−j)xelem) · Rss (4.19)
Rs1,is2,j=
{ρax · ρlat((j−i)xelem+∆x) · Rss für j ≥ i
ρax · ρlat((j−i)xelem−∆x) · Rss für i ≥ j(4.20)
angenommen, wobei der Korrelationskoeffizientρlat nach Gl. (3.27) abhängig von der
lateralen Verschiebung ist,
ρlat(∆x) = exp
(−∆x2
4σ2lat
). (4.21)
Die Leistungsspektren bzw. Kreuzleistungsspektren der Störungen seien untereinander
1Typischerweise reicht es aus, die Berechnung für je zwei lateral benachbarte A-Linien durchzuführen.

4.2 Kompensation von lateralen Verschiebungen 80
unkorreliert, d.h.
Rn1,in1,j= δij · Rnn (4.22)
Rn2,in2,j= δij · Rnn (4.23)
Rn1,in2,j= 0 . (4.24)
Betrachtet man die Summe der Empfangssignale benachbarter A-Linien, d.h.,
e1(t) =
NA∑
i=1
e1,i(t) bzw. e2(t) =
NA∑
i=1
e2,i(t) , (4.25)
dann folgt für die Kreuzleistungsspektren vone1(t) unde2(t)
Re1e2=
∑
i
∑
j
Rs1,is2,j+
∑
i
∑
j
Rn1,in2,j(4.26)
= ρax ·(NA ρlat(∆x) +
NA−1∑
i=1
(NA − i) · [ρlat(∆x + i xelem) + ρlat(∆x − i xelem)])· Rss + 0
und für die Autospektren vone1(t) bzw.e2(t)
Re1e1=
∑
i
∑
j
Rs1,is1,j+
∑
i
Rn1,in1,j(4.27)
=(NA +
NA−1∑
i=1
2 (NA − i) ρlat(i xelem))· Rss + NA · Rnn bzw.
Re2e2=
∑
i
∑
j
Rs2,is2,j+
∑
i
Rn2,in2,j(4.28)
=(NA +
NA−1∑
i=1
2 (NA − i) ρlat(i xelem))· Rss + NA · Rnn .
Anstelle der Kohärenz aus Gl. (3.19) soll hier unter Berücksichtigung vonRe1e1= Re2e2
der Ausdruck1/|γ12| ausgewertet werden, der unter Annahme flacher, bandpaßbegrenzter
SpektrenRss bzw.Rnn wie folgt in die Cramér-Rao Schranke eingeht,
Re2e2
Re1e2
=(NA+
NA−1∑i=1
2(NA−i) ρlat(i xelem) )·Rss+NA·Rnn
ρax·(NAρlat(∆x)+NA−1∑
i=1
(NA−i)[ρlat(∆x+i xelem)+ρlat(∆x−i xelem)])·Rss
=1
ρax
·1 +
NA−1∑i=1
2NA−iNA
ρlat(i xelem) + Rnn
Rss
ρlat(∆x) +NA−1∑i=1
NA−iNA
[ρlat(∆x + i xelem) + ρlat(∆x − i xelem)]
=1
ρax
·1 +
NA−1∑i=1
2NA−iNA
ρlat(i xelem) + 1SNRel
ρlat(∆x) +NA−1∑i=1
NA−iNA
[ρlat(∆x + i xelem) + ρlat(∆x − i xelem)]
. (4.29)

4.2 Kompensation von lateralen Verschiebungen 81
Für den Fall∆x = 0 undNA = 1 geht Gl. (4.29) in 1ρax
(1 + 1
SNRel
)über. Dieses Ergebnis
ist bereits aus Gl. (3.21) in Kap. 3.2.2 bekannt. Der zweite Term in Gl. (4.29) kann – bis
auf die Störung durch elektronisches Rauschen – als Kehrwerteines mittleren lateralen
Korrelationskoeffizientenρlat interpretiert werden, d.h.,
ρlat =
ρlat(∆x) +NA−1∑i=1
NA−iNA
[ρlat(∆x + i xelem) + ρlat(∆x − i xelem)]
1 +NA−1∑i=1
2NA−iNA
ρlat(i xelem) + 1SNRel
(1 +
1
SNRel
).
Für den Fallxelem ≫ σlat werden die Summen zu Null undρlat = ρlat(∆x). Eine Sum-
mation über mehrere A-Linien führt also nur dann zu einer Verbesserung der Korrelation,
wenn die Elementbreite in der Größenordnung des Parametersσlat der lateralen Punkt-
bildfunktion liegt.
Eine numerische Auswertung des mittleren lateralen Korrelationskoeffizientenρlat für
σlat = xelem führt auf Abb. 4.20. Es ist deutlich zu sehen, dass der Wert des mittleren
0 0.1 0.2 0.3 0.4 0.5 0.6
0.94
0.96
0.98
1
NA=1NA=2
NA=7NA=4
∆x in Vielfachen von σlat für σlat=xelem
Kor
rela
tions
koef
fizie
nt ρ
lat
_K
orre
latio
nsko
effiz
ient
ρla
t
_
Abb. 4.20: Verlauf des mittleren lateralen Korrelationskoef f izientenρlat in Abhängigkeit
von lateralen Verschiebungen∆x und AnzahlNA der summierten A-Linien fürρax =
0.9826 beiε0 = 1 %
lateralen Korrelationskoeffizienten bei lateralen Verschiebungen weniger absinkt, wenn
über mehrere A-Linien summiert wird. Der Einfluss einer solchen Summation auf das
elastographische SNRε bzw. den elastographischen Kontrast CNRε ist in der nächsten
Abb. 4.21 zu finden. Dabei wurde von einer mittleren Dehnungvon ε0 = −1 % ausge-
gangen, was auf einen axialen Korrelationskoeffizienten von ρax = 0.9826 führt. Man
erkennt auch hier, dass eine Summation in lateraler Richtungzu einer Verbesserung der
elastographischen Abbildungsqualität führt. Zudem ist anzumerken, dass eine Verbesse-
rung der Korrelation dazu führt, dass Zeitverschiebungen auch bei kleinen Korrelations-
fensterlängenTC erwartungstreu geschätzt werden können.

4.2 Medium unter axialer und lateraler Kompression 82
0 0.1 0.2 0.3 0.4 0.5 0.6
-6
-3
0
NA=1
NA=3NA=5
SN
Rε-
Ver
lust
in d
B
∆x in Vielfachen von σlat für σlat=xelem
NA=7
Abb. 4.21: SNRε-Verlust bei zusätzlicher Summation überNA A-Linien für ρax = 0.9826
beiε0 = −1 %
4.2.10 Medium unter axialer und lateraler Kompression mit
Kompensation
In den nun folgenden Beispielen wurden die Zeitverschiebungen mit Hilfe der in
Kap. 4.2.9 vorgestellten lateralen Kompensation geschätzt. Die weiteren Parameter wur-
den zuTC = 60 ∆t, Tτ = 25 ∆t und N = 11 gewählt. In Abb. 4.22 ist das Ergebnis
ohne Summation über mehrere A-Linien dargestellt, d.h.NA = 1. Im Dehnungsbild
-30
-20
-10
0
10 20 30
10
20
30
40
50
-1.1
-1
-0.9
-0.8
10 20 30 10 20 300.92
0.94
0.96
0.98
1
10 20 30Bildbreite x in mm
ρ theoretischρ empirischVerschiebung in rad
Bild
tiefe
z in
mm
Dehnung εzz in %
Abb. 4.22: Axiale und laterale Kompression mit Kompensation undNA = 1 (v.l.n.r):
Verschiebung, Dehnung, empirisch ermittelter und theoretisch vorhergesagter Korrelati-
onskoef f izient
fällt auf, dass die Varianz an den Bildrändern größer als in der Bildmitte ist. Die Ursache
liegt darin, dass dort Verschiebungen in der Größenordnungeiner halben Elementbreite
auftreten, während in der Bildmitte – relativ zu einer benachbarten A-Linie – die la-
terale Verschiebung zu Null wird. Es ist aber bereits eine deutliche Verbesserung des
Dehnungsbildes im Vergleich zu Abb. 4.16 zu sehen.
In Abb. 4.23 wurde die laterale Kompensation für eine Summation über drei A-Linien

4.2 Medium unter axialer und lateraler Kompression 83
durchgeführt, d.h.NA = 3. Man sieht, dass sich die Qualität des Elastogramms weiter
-30
-20
-10
0
10 20 30
10
20
30
40
50
-1.1
-1
-0.9
-0.8
10 20 30 10 20 300.92
0.94
0.96
0.98
1
10 20 30
Bild
tiefe
z in
mm
Bildbreite x in mm
Dehnung εzz in % ρ theoretischρ empirischVerschiebung in rad
z1
z2
z3
Abb. 4.23: Axiale und laterale Kompression mit Kompensation undNA = 3 (v.l.n.r):
Verschiebung, Dehnung, empirisch ermittelter und theoretisch vorhergesagter Korrelati-
onskoef f izient
verbessert und der Wert des Korrelationskoeffizienten zunimmt. Um den Einfluss der late-
ralen Verschiebungen auf den Wert des Korrelationskoeffizienten zu verdeutlichen, ist er
für bestimmte Bildtiefenz nochmals in Abb. 4.24 dargestellt. Dazu wurde der Korrelati-
5 10 15 20 25 30
0.94
0.96
0.98
5 10 15 20 25 30
0.960.970.98
Kor
rela
tions
koef
fizie
nt ρ
5 10 15 20 25 30
0.960.970.98
Bildbreite x in mm
z1=10 mm
z2=25 mm
z3=40 mm
Abb. 4.24: Tiefenabhängiger Verlauf vonρ für NA = 3 beiz1 = 10 mm,z2 = 25 mm und
z3 = 40 mm: Empirischer Wert (—) und theoretischer Verlauf (· · ·)
onskoeffizient an den drei in Abb. 4.23 (rechts) eingezeichneten Bildtiefenz1 = 10.0 mm,
z2 = 25.0 mm undz3 = 40.0 mm jeweils über eine Bildtiefe von∆z = 1.0 mm gemittelt.
Bei der Berechnung des theoretischen Wertes für den Korrelationskoeffizienten wurde
berücksichtigt, dassρax = 0.9826 für Tτ = 60 ∆t ist, wobeif0 = 8.5 MHz undB wie in
vorherigen Kapiteln gewählt wurden. Die Verbesserung der Korrelation ist insbesondere

4.2 Medium mit Einschluss 84
in den Bildbereichen zu sehen, in denen eine schmale lateralePunktbildfunktion vorliegt,
d.h. im oberen Bildbereich.
4.2.11 Medium mit Einschluss
Um die Ergebnisse aus Kap. 3.4.5 zu verifizieren, müssen zunächst die axialen und
lateralen Verschiebungen des Mediums aufgrund einer äußeren Kompression mit Hilfe
der FEM (ebener Verzerrungszustand) berechnet werden. Fürdie Durchführung der
Ultraschall-Simulationen ist es anschließend notwendig,die Positionen der Streuer ent-
sprechend der lokal auftretenden axialen und lateralen Verschiebungen zu verändern.
Dadurch erhält man einen Ultraschalldatensatz vor Kompression und einen Ultraschall-
datensatz nach Kompression.
Als Medium wurde ein quaderförmiges Objekt mit einem hartenzylinderförmigen Ein-
schluss gewählt, dessen Querschnitt in Abb. 4.25 (links) dargestellt ist. Der Einschluss
-0.1
0
0.1
Objektbreite x in mm0 20 40
-1.2
-1
-0.8
-0.6
0 20 40-0.6
-0.4
-0.2
0
0 20 40
Obj
ektti
efe
z in
mm
0 20 40
0
20
40
60
Abb. 4.25: E-Modul Verteilung (links) mitE0 = 20 kPa undEk = 50 kPa, axiale und
laterale Verschiebungen in mm (mitte) und axiale Dehnung inProzent (rechts)
mit einem Durchmesser von5 mm wurde an der lateralen Positionx = 20 mm bzw. axia-
len Positionz = 30 mm platziert. Der Elastizitätsmodul des Einschlusses wurde zuEk =
50 kPa gewählt, der Elastizitätsmodul des homogenen Hintergrundes zuE0 = 20 kPa. Die
axiale Kompression betrug1 %, und die seitlichen Ränder wurden frei gelassen. Die re-
sultierenden axialen und lateralen Verschiebungen sind inAbb. 4.25 (mitte) gezeigt, das
Bild der axialen Dehnung findet sich in Abb. 4.25 (rechts).
Elastographischer Kontrast CNRε
Der elastographische Kontrast CNRε besteht nach Gl. (3.86) aus drei Komponenten:
dem normierten Dehnungsunterschied (NDU), dem elastographischen Ausgangs-SNRε(SNRε0
) und dem elastographischen SNRε-Gewinn(SNRεG). Der normierte Dehnungs-
unterschied kann graphisch aus Abb. 4.7 ermittelt werden. Für ∆E/E0 = 1.5 findet sich

4.2 Medium mit Einschluss 85
ein Wert von ca.−8 dB. Unter Verwendung des mechanischen KonversionsfaktorscPDE ,
der für die genannte Konstellation in Kap. 4.1.2 zucPDE = 0.479 berechnet wurde, er-
gibt sich nach Einsetzen in Gl. (4.6) ein normierter Dehnungsunterschied von∆ε2/ε20
von −7.6 dB. Das elastographische Ausgangs-SNRε0(vgl. dazu Abb. 3.8) liegt für eine
Dehnung vonε = 1 % bei einem Wert von18 dB. Der SNRεG-Gewinn kann mit Hilfe
von Gl. (3.74) berechnet werden oder aus Abb. 3.10 abgelesenwerden. FürN = 3 ist
SNRεG= 3 dB, für N = 5 ist SNRεG
= 10 dB und fürN = 7 ist SNRεG= 14.5 dB.
Werden diese Werte entsprechend Gl. (3.86) zusammengefasst, dann ergibt sich das Ver-
hältnis∆ε2/σ2ε0
. Eine Zusammenfassung der genannten Parameter findet sichin Tab. 4.2.
Tab. 4.2: Kontrast der Dehnung CNRε: Theoretische Werte
N = 3 N = 5 N = 7
∆ε2/ε20 −7.6 dB −7.6 dB −7.6 dB
SNRε018 dB 18 dB 18 dB
SNRεG3 dB 10 dB 14.5 dB
∆ε2/σ2ε0
13 dB 20 dB 24.9 dB
Berücksichtigung von axialen Verschiebungen
Es wurden Ultraschall-Simulationen für die Streuerverteilung vor bzw. nach Kom-
pression durchgeführt, wobei zunächst nur die axialen Verschiebungen aus den FEM-
Berechnungen berücksichtigt wurden. Dadurch wird erreicht, dass keine Artefakte durch
laterale Verschiebungen entstehen können. Die Berechnung der Dehnungsbilder erfolgte
mit dem in Kap. 3.2.1 beschriebenen rekursiven Algorithmusmit TC = 40 ∆t und
Tτ = 20 ∆t. Die Dehnungsbilder sind in Abb. 4.26 für verschiedene FilterlängenN
Bild
tiefe
z in
mm
10 20 30
10
20
30
40
50
Bildbreite x in mm10 20 30
-1.2
-1
-0.8
-0.6
10 20 30
3~
5 == NN 5~
9 == NN 7~
13 == NN
Abb. 4.26: Medium mit Einschluss: Axiale Dehnung für verschiedene FilterlängenN

4.2 Medium mit Einschluss 86
zu sehen. Offensichtlich erhöht sich bei einer Zunahme der Filterlänge auch der ela-
stographische Kontrast CNRε. Zur Abschätzung des Kontrastes wurden nun Regionen
innerhalb und außerhalb des Einschlusses ausgewählt (ROI), wie in Abb. 4.26 (rechts)
angedeutet. Für diese Regionen wurden die in Tab. 4.3 aufgelisteten Parameter berechnet.
Dabei bezieht sichεk bzw. σ2εk
auf die mittlere Dehnung bzw. Varianz der Dehnung
Tab. 4.3: Kontrast der Dehnung CNRε: Gemessene Werte zu Abb. 4.26
N = 3 N = 5 N = 7
εk in % −0.553 −0.559 −0.568
σ2εk
2.279 · 10−7 3.635 · 10−8 2.601 · 10−8
ε0 in % −1.033 −1.030 −1.027
σ2ε0
9.489 · 10−7 1.008 · 10−7 4.563 · 10−8
2 ∆ε2/(σ2ε0
+ σ2εk
) 15.92 dB 25.09 dB 27.71 dB
∆ε2/σ2ε0
13.85 dB 23.42 dB 26.66 dB
innerhalb des Einschlusses undε0 bzw. σ2ε0
auf die mittlere Dehnung bzw. Varianz der
Dehnung des Hintergrundes. Vergleicht man die Werte der Simulationen (Tab. 4.3) mit
denen der theoretischen Abschätzung (Tab. 4.2), so stellt man eine gute Übereinstim-
mung fest. Außerdem zeigt sich, dass der elastographische Kontrast nach Gl. (3.84), d.h.
CNRε = 2 ∆ε2/(σ2ε0
+ σ2εk
), geringfügig größer als das Verhältnis∆ε2/σ2ε0
aus Gl. (3.86)
für den Fall eines harten Einschlusses ist. Dies bestätigt das Ergebnis aus Gl. (3.85), d.h.
CNRε ≥ ∆ε2/σ2ε0
.
Berücksichtigung von axialen und lateralen Verschiebungen
Die Ultraschall-Simulationen für die Streuerverteilung vor bzw. nach Kompression wur-
den auch für den Fall durchgeführt, dass axiale und lateraleVerschiebungen aus den FEM-
Berechnungen berücksichtigt werden. Zusätzlich zu den lateralen Verschiebungen aus den
FEM-Berechnungen wurde das Medium um50 µm in lateraler Richtung nach rechts ver-
schoben, um eine Asymmetrie der lateralen Verschiebungen zu erreichen. Die laterale
Verschiebung des Mediums fällt dadurch im rechten Bildbereich stärker aus als im linken
Bildbereich.
Das Ergebnis der Dehnungsberechnung mit Hilfe des rekursiven Algorithmus ist fürTC =
40 ∆t undTτ = 20 ∆t in Abb. 4.27 zu sehen, wobei verschiedene Filterlängen gewählt
wurden. Zusätzlich ist im unteren Bereich von Abb. 4.27 die mittlere laterale Verschie-
bung∆x in Vielfachen vonxelem aufgetragen, die im rechten Bildbereich größer als im
linken ist. In den Dehnungsbildern zeigt sich insbesonderein der rechten Bildhälfte ein
deutlicher Abfall der Bildqualität. Diese kann auch durch die Wahl einer größeren Filter-
längeN nicht verbessert werden. Die Dekorrelation aufgrund der lateralen Verschiebun-
gen ist an manchen Stellen so groß, dass die Zeitverschiebungen bzw. Dehnungen nicht

4.2 Medium mit Einschluss 87
10
20
30
40
50
10 20 30
-1.2
-1
-0.8
-0.6
Bild
tiefe
z in
mm
Bildbreite x in mm
3~
5 == NN 5~
9 == NN 7~
13 == NN
10 20 30-0.5
00.5
1
10 20 30-0.5
00.5
1
∆x/x
elem
10 20 30-0.5
00.5
1
10 20 30-0.5
00.5
10
Abb. 4.27: Medium mit Einschluss: Axiale Dehnung für verschiedene FilterlängenohneKompensation der lateralen Verschiebungen
mehr erwartungstreu geschätzt werden.
Die Methode der lateralen Kompensation, bei der auch benachbarte A-Linien miteinan-
der korreliert werden, wurde mit einer Summation überNA = 3 A-Linien durchgeführt.
Das Ergebnis ist in Abb. 4.28 dargestellt. Vergleicht man Abb. 4.27 mit Abb. 4.28, so
10
20
30
40
50
10 20 30
-1.2
-1
-0.8
-0.6
Bild
tiefe
z in
mm
Bildbreite x in mm
3~
5 == NN 5~
9 == NN 7~
13 == NN
0 10 20 30-0.5
00.5
1
∆x/x
elem
0 10 20 30-0.5
00.5
1
∆x/x
elem
0 10 20 30-0.5
00.5
1
0 10 20 30-0.5
00.5
10
Abb. 4.28: Medium mit Einschluss: Axiale Dehnung für verschiedene FilterlängenmitKompensation der lateralen Verschiebungen und Summation überNA = 3 A-Linien
führt die Kompensation der lateralen Verschiebungen zu einer deutlichen Verbesserung
der Abbildungsqualität. Die Artefakte in der rechten Bildhälfte werden kompensiert, weil
die lateralen Verschiebungen nun in einem Bereich von−0.5 xelem ≤ ∆x ≤ 0.5 xelem
liegen. Zur Verdeutlichung dieser Verbesserung ist die mittlere laterale Verschiebung in
Vielfachen vonxelem im unteren Bereich von Abb. 4.28 dargestellt. Zu beachten bleibt,

4.2 Medium mit Einschluss 88
dass laterale Verschiebungen nahe an der Schallwandleroberfläche größeren Einfluss auf
die Varianz der Dehnung haben als weiter entfernt von der Schallwandleroberfläche. Dies
kann durch den Verlauf der Pulsbreiten der Punktbildfunktion aus Abb. 4.9 erklärt wer-
den, weil der Parameterσlat tiefenabhängig zunimmt.
Wählt man Regionen innerhalb und außerhalb des Einschlusses entsprechend Abb. 4.28
(rechts) aus und bestimmt erneut die aus Tab. 4.3 bekannten Parameter, dann ergeben sich
die in Tab. 4.4 aufgelisteten Werte. Vergleicht man die Ergebnisse aus Tab. 4.4 mit de-
Tab. 4.4: Kontrast der Dehnung CNRε: Gemessene Werte zu Abb. 4.28
N = 3 N = 5 N = 7
εk in % −0.568 −0.575 −0.579
σ2εk
5.249 · 10−7 9.338 · 10−8 1.924 · 10−8
ε0 in % −1.031 −1.027 −1.024
σ2ε0
1.454 · 10−6 2.666 · 10−7 1.018 · 10−8
2 ∆ε2/(σ2ε0
+ σ2εk
) 13.37 dB 20.56 dB 25.15 dB
∆ε2/σ2ε0
11.69 dB 18.85 dB 22.89 dB
nen aus Tab. 4.3, so zeigen sich geringfügig niedrigere Werte für den elastographischen
Kontrast bzw. das Verhältnis∆ε2/σ2ε0
. Dieses Ergebnis kann durch den SNRε-Verlust
(SNRεV) erklärt werden, der durch die lateralen Verschiebungen zu Stande kommt. Im
Gegensatz zu den Dehnungsbildern, die ohne Kompensation von lateralen Verschiebun-
gen berechnet wurden, fällt der SNRε-Verlust aber deutlich geringer aus. Dieses Ergebnis
ist in Übereinstimmung mit der theoretischen Abschätzung aus Gl. (4.15) bzw. Abb. 4.18
für den Fall ohne Kompensation von lateralen Verschiebungen und aus Abb. 4.21 für den
Fall mit Kompensation von lateralen Verschiebungen.
Insgesamt kann man zusammenfassen, dass sich die Ergebnisse der Simulationen mit den
theoretisch vorhergesagten Werten in Einklang befinden. Dies gilt insbesondere für die
Abschätzung des elastographischen Kontrastes (CNRε), der maßgeblich zur Abbildungs-
qualität von Elastogrammen beiträgt. Es konnte ebenfalls gezeigt werden, dass durch die
Kompensation von lateralen Verschiebungen bei der Verschiebungsschätzung eine rele-
vante Fehlerquelle reduziert werden kann.
Ortsfrequenzbereich
Wenn man die Dehnungsbilder aus den Abb. 4.26 und Abb. 4.28 für kleine FilterlängenN
betrachtet, dann fällt eine körnige Struktur auf, wie sie bereits in Kap. 3.4.6 beschrieben
wurde. Zur weiteren Betrachtung dieses Phänomens ist der Verlauf der axialen Dehnung
in der Bildmitte(x = 17 mm) in Abb. 4.29 für verschiedene Filterlängen dargestellt. Die
aus den Simulationen resultierenden Dehnungsverläufe (—)wurden dabei zusätzlich um

4.2 Medium mit Einschluss 89
10 20 30 40 50
-1
-0.5
0
Bildtiefe z in mm
Deh
nung
εzz
in %
N=5 Tτ
N=13 Tτ
N=9 Tτ
Abb. 4.29: Axiale Dehnung an der Stellex = 17 mm für verschiedene FilterlängenN
jeweils0.25 % verschoben, um eine bessere Übersichtlichkeit zu erreichen. Die aus den
FEM-Berechnungen zu erwartenden Dehnungsverläufe sind ebenfalls eingezeichnet (· · ·).
Zunächst fällt auf, dass die Störung des Dehnungsverlaufesmit zunehmender Filterlänge
geringer wird und der Dehnungsverlauf in allen Fällen den Wert des Plateaus erreicht.
Gleichzeitig nimmt jedoch die Steigung des Dehnungsverlaufes an der Stelle des Ein-
schlusses ab. Wie in Kap. 3.4.3 beschrieben, hängt dies mit der absoluten Filterlänge zu-
sammen, die in jedem Fall kleiner als die Objektgröße sein sollte. FürN = 13 Tτ beträgt
die absolute Filterlänge0.5 · 1540 ms · 12 · 20/50 MHz = 3.70 mm und liegt damit noch
unterhalb der Objektgröße von5 mm. Bei der Betrachtung der Störung fällt auf, dass es
sich nicht um weißes Rauschen handelt, sondern um eine Störung mit bevorzugten Fre-
quenzanteilen.
In Abb. 4.30 sind gemittelte Spektren der Dehnung (—) gezeigt, wobei der Mittelwert der
Dehnung vor Berechnung der Spektren abgezogen wurde. Zur besseren Übersichtlichkeit
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6-40
-20
0
20
40
Ortsfrequenz in 1/mm
Spe
ktru
min
dB
N=5 Tτ
N=13 Tτ
N=9 Tτ
Abb. 4.30: Spektrum der mittelwertbefreiten axialen Dehnung in dB an der Stellex =
17 mm für verschiedene FilterlängenN
wurden die Spektren um jeweils25 dB verschoben. Die Spektren der FIR-Filter, die be-
reits in Abb. 3.17 beschrieben wurden, sind ebenfalls für die entsprechenden Filterlängen
eingezeichnet (· · ·). Es bestätigt sich, dass die körnige Struktur im Elastogramm durch die
Methode der Dehnungsschätzung (KQ) zu erklären ist.

Kapitel 5
Realisiertes Abbildungssystem
Die Überprüfung der theoretisch hergeleiteten Resultate anhand von Phantommessungen
(s. Kap. 6) erfolgte mit Hilfe eines speziell entwickelten Abbildungssystems, auf das im
folgenden Kapitel eingegangen wird.
5.1 Komponenten des Abbildungssystems
Es wurde ein Abbildungssystem nach Abb. 5.1 entwickelt, mitdem die Datenerfassung
und Datenverarbeitung für jedes Ultraschallgerät möglichist, das einen analogen Beam-
former verwendet und Zugang sowohl zu den analogen hochfrequenten Echodaten als
auch den internen Triggersignalen gewährt (shot-trigger1).
PCA/DTrigger-
Trigger-Schnittstelle
Ultraschall-wandler
Ultraschall hf-Daten
shot-trigger
Siemens OmniaLPT-Port
signal
Abb. 5.1: Blockschaltbild der Systemkomponenten zur Datenerfassung
Die Datenaufnahme erfolgt mit Hilfe eines PC’s mit einer A/D-Wandler Karte und einer
speziellen Trigger-Schnittstelle, mit deren Hilfe die Datenaufnahme synchronisiert wird.
Für Ultraschallgeräte mit digitalem Beamformer wurde eine Lösung von Scabia et al.
vorgeschlagen [88].
5.1.1 PC mit A/D-Wandler Karte
Zur Datenerfassung stand eine 12-bit A/D-Wandler Karte desTyps Gage 1250 zur Verfü-
gung, mit der die analogen Echodaten mit einer Abtastrate von 50 MHz abgetastet wer-
den können. Diese A/D-Wandler Karte besitzt einen externenTriggereingang, so dass
1Jeder Sende-/Empfangsvorgang eines in Puls-Echo-Technikarbeitenden Ultraschallgerätes wird durch
ein internes Triggersignal (TTL-Pegel) ausgelöst.

5.1 Ultraschallgerät 91
nach Auftreten eines Triggersignals eine frei wählbare Anzahl von Abtastwerten aufge-
nommen werden kann. Zusätzlich besteht die Möglichkeit des„multiple recording“. In
diesem Modus erfolgt die Datenaufnahme nach Aktivierung der Karte für eine frei wähl-
bare Anzahl von Triggersignalen. Entscheidend für eine kontinuierliche Datenerfassung
und Datenverarbeitung ist die Synchronisierung der kontinuierlich auftretenden Trigger-
signale des Ultraschallgerätes mit der Aktivierung der A/D-Wandler Karte, damit die auf-
genommenen Echodaten der A-Linien in der richtigen Reihenfolge zu einem Datensatz
eines B-Bildes zusammengesetzt werden können.
Konzeptuell entscheidend ist, dass diese Synchronisierung durch eine unabhängig arbei-
tende Trigger-Schnittstelle realisiert wurde, die über den LPT-Port des PC’s angesteuert
wird. Dadurch wird dem Prozessor des PC’s mehr Rechenleistungzur Verfügung gestellt,
was für eine Echtzeitfähigkeit des Systems von Bedeutung ist(s. Kap. 5.1.3).
5.1.2 Ultraschallgerät
In der medizinischen Diagnostik werden Ultraschallgerätemit einer Mittenfrequenz des
Sendepulses zwischen3 MHz und 100 MHz eingesetzt. Die empfangenen hochfrequen-
ten Echosignale haben typischerweise eine6-dB Bandbreite von50 − 80 % der Mitten-
frequenz. Für die hier durchgeführten Messungen stand ein handelsübliches Ultraschall-
4 6 8 10 12 14
-30
-25
-20
-15
-10
-5
0
f in MHz
Am
plitu
de in
dB
Abb. 5.2: Spektrum der Ultraschallsignale
gerät des Typs Siemens Omnia mit einem hochfrequenten Ultraschallwandler des Typs
VF 13-5 zur Verfügung.2 Die Mittenfrequenz des Sendepulses wurde zu10 MHz gewählt.
Ein typisches Beispiel für den Verlauf des Spektrums der Empfangssignale ist in Abb. 5.2
zu sehen. Die Mittenfrequenzf0 beträgt ca.8.5 MHz, und die6-dB Bandbreite beträgt
ca.4.5 MHz, was ca.50 % der Mittenfrequenz entspricht.
2192 Elemente mit Elementbreite0.2 mm und Pitch0.21 mm. Breite des B-Bildes32 mm, internes
Beamforming mit64 Elementen

5.1 Trigger-Schnittstelle 92
Es bestand ein analoger Zugang zu den hochfrequenten Ultraschall-Echodaten hinter dem
Beamformer. Aus diesen Signalen werden intern im Ultraschallgerät einzelne A-Linien
berechnet und zu einem grauwertkodierten B-Bild weiterverarbeitet. Dabei wird jeder
Sende- und Empfangsvorgang des in Puls-Echo-Technik arbeitenden Gerätes intern durch
ein Triggersignal ausgelöst (TTL-Pegel, „shot-trigger“). Auf dieses Signal konnte eben-
falls zugegriffen werden. Der Verlauf der Triggersignale ist in Abb. 5.3 dargestellt. Die
60 µs
225 µs = 1 / 4.44 kHz
527 µs
37 ms = 1 / 27 Hz
offset Aufnahmebereich
(Bild n: 163 Trigger-Pulse pro Bild)(Bild n-1) (Bild n+1)
Abb. 5.3: Triggersignal-Folge des Siemens Omnia
Wiederholrate der Trigger-Pulse beträgt4.44 kHz, d.h., dass zwei A-Linien eines B-Bil-
des in einem zeitlichen Abstand von225 µs aufgenommen werden (shot-trigger). Für je-
des B-Bild werden163 A-Linien aufgenommen, wobei die Bildwiederholrate27 Hz be-
trägt. Dadurch kommt es zu einem zeitlichen Abstand von527 µs zwischen dem letzten
Triggerpuls eines Bildes und dem ersten Triggerpuls des folgenden Bildes. Dieser grö-
ßere zeitliche Abstand zwischen zwei Bildern wurde genutzt,um einen internen Zähler
des Mikrocontrollers zu aktivieren und die Datenaufnahme einzelner A-Linien mit dem
Beginn eines B-Bildes zu synchronisieren.
Da es sich bei Ultraschallsignalen um hochfrequente und breitbandige Signale handelt,
muss zur Einhaltung der Nyquist-Bedingung ein Vielfaches der Mittenfrequenz als Abta-
strate gewählt werden (hier:50 MHz). Zur Reduktion der Datenmengen ist es erforderlich,
den Zeitpunkt und die Dauer der A/D-Wandlung mit dem Zeitpunkt des Empfangs des
Ultraschall-Echos zu synchronisieren. Beispielsweise beträgt die Schall-Laufzeit77.9 µs
bei einer Gewebetiefe von60 mm, so dass nicht über einen Zeitraum von225 µs abgetastet
werden muss.
5.1.3 Trigger-Schnittstelle
Es wurde eine universelle Trigger-Schnittstelle entwickelt, um auf einem PC verschie-
dene Echtzeit-Anwendungen für Ultraschallgeräte implementieren zu können, die einen
analogen Beamformer verwenden. Mit Hilfe dieser Trigger-Schnittstelle ist es möglich,

5.1 Trigger-Schnittstelle 93
• die Ultraschall-Echosignale der einzelnen A-Linien bildweise geordnet aufzuneh-
men und
• den Zeitpunkt und die Dauer der A/D-Wandlung im PC mit dem Zeitpunkt des
Empfangs des Ultraschall-Echos zu synchronisieren.
Wie in Abb. 5.4 dargestellt, besteht die Trigger-Schnittstelle im wesentlichen aus einem
programmierbaren Mikrocontroller (engl.:PIC = Programmable Interrupt Controller)
und einem UND-Gatter. Hauptaufgabe des PIC’s ist es (hier: Modell 16F84 der Firma
PIC UNDGatter
Shot-Trigger(Ultraschallgerät) PIC-Trigger
Trigger-Signal(A/D-Wandler)
PC-Init-FlagPC-Start-Flag8 bit Datenleitung(PC via LPT-Port)
2+8 Leitungen
Abb. 5.4: Blockschaltbild der Trigger-Schnittstelle
Microchip mit 20 MHz-Quarz), die positiven Flanken des Triggersignals zu detektieren
und intern die Zahl der Triggersignale zu zählen. Die Anzahlder Triggersignale pro Bild
ist abhängig vom Gerät bzw. Untersuchungsmodus und kann demPIC per LPT-Port über-
mittelt werden (Aktivierung des PC-Init-Flags und Übermittlung der Werte über das Da-
tenregister).
Das erste Triggersignal eines Bildes wird dadurch erkannt, dass die Pause zwischen dem
letzten Triggersignal des vorhergehenden Bildes und dem ersten Triggersignal des aktuel-
len Bildes größer ist (hier:527 µs) als die Pause zwischen zwei Triggersignalen innerhalb
eines Bildes (hier:225 µs). Der interne Zähler des PIC’s wird nach jeder längeren Pause
zwischen zwei Bildern auf Null zurückgesetzt. Wenn der PC perLPT-Port (PC-Start-
Flag) dem Interrupt-Eingang des PIC’s mitteilt, dass Triggersignale durchgelassen wer-
den sollen, dann stellt der PIC sicher, dass nur Triggersignale des gewünschten Aufnah-
mebereiches durchgelassen werden, nicht aber Triggersignale davor (offset) oder danach
(vgl. Abb. 5.3). Mit Hilfe des PIC’s wird also sichergestellt, dass die Triggersignale bild-
weise verarbeitet werden können. Wird z.B. das PIC-Start-Flag aktiviert, während gerade
Triggersignale aus dem Aufnahmebereich gezählt werden, dann darf der PIC-Trigger erst
für das nächste Bild aktiviert werden. Dadurch kann es zu einem Verlust der Daten eines
einzelnen Bildes kommen, die Synchronisierung der Datenaufnahme ist jedoch weiterhin
gewährleistet.
An dieser Stelle muss betont werden, dass das Triggersignaldes Ultraschallgerätes (shot-
trigger) möglichst ohne Zeitverlust an den externen Triggereingang der A/D-Wandler wei-
tergeleitet werden muss. Diese Aufgabe könnte durch einen Mikrocontroller allein (mit
PIC-Trigger Ausgang) auch bei sehr hohen Taktraten (z.B.100 MHz) nicht gelöst werden,

5.1 Echtzeit-Modus 94
weil die interne Bearbeitung eines einzelnen Befehls im Bereich von50−200 ns liegt. Bei
Abtastraten der A/D-Wandler Karte von z.B.50 MHz wird der Empfangskanal im Ab-
stand von20 ns abgetastet, so dass eine Unsicherheit bzgl. des Beginns der Abtastung
im Bereich mehrerer Abtastwerte (Samples) resultieren würde. Eine solche Ungenauig-
keit im Bereich von mehreren Abtastwerten würde zu einer unerwünschten Verzerrung
des aus mehreren abgetasteten A-Linien bestehenden Bildes führen. Zur Lösung dieses
Problems kann ein UND-Gatter verwendet werden (hier: Typ 74HC11).
Indem das Triggersignal direkt an ein UND-Gatter geleitet wird, entsteht bei kurzen
Gatter-Laufzeiten (ca.2 ns) eine Verzögerung in der Größenordnung des Jitters der A/D-
Wandler Karte. Durch das hier verwendete UND-Gatter wird ein einzelner Trigger-Puls
in Abhängigkeit des Status des PIC-Triggers innerhalb von weniger als10 ns weitergelei-
tet und gewissermaßen erst anschließend vom PIC gezählt. Dieser benötigt nämlich für
die Flankendetektion einige Mikrosekunden. Die Dauer der Trigger-Pulse(60 µs) ist da-
für ausreichend. Ebenfalls zu beachten ist, dass die Flankendetektion des PIC’s schnell
im Vergleich zur shot-trigger-Folge (hier:4.4 kHz) ist. Nur dann kann der Status des vom
Mikrocontroller generierten Signals (PIC-Trigger) gesetzt werden (low oder high), bevor
das nächste Triggersignal am UND-Gatter anliegt. Auf dieseWeise kann eine beliebige
shot-Folge innerhalb eines Bildes eingestellt und damit derAufnahmebereich festgelegt
werden.
Damit jederzeit vom PC gesteuert werden kann, ob das von der Trigger-Schnittstelle ge-
nerierte Triggersignal weitergeleitet wird oder nicht, wird eine Datenleitung der Drucker-
schnittstelle als PC-Start-Flag benutzt. Dieses Flag führtauf den Interrupt-Eingang des
PIC’s, über den der Status des PIC-Trigger Ausgangs (low oder high) festgelegt wird, der
wiederum direkt am UND-Gatter anliegt.
5.1.4 Echtzeit-Modus
Anhand des Ablaufdiagramms in Abb. 5.5 wird kurz erläutert,wie die Komponenten zu-
sammenarbeiten müssen, um einen Echtzeit-Modus zu realisieren. Zunächst aktiviert der
PC die A/D-Wandler Karte, die daraufhin mit der Datenaufnahme beginnt, sobald Trig-
gersignale am Triggereingang anliegen. Bruchteile von Millisekunden darauf aktiviert der
PC den Mikrocontroller (PIC) über dessen Interrupt-Eingang. Intern wird im PIC dadurch
ein Flag gesetzt, das immervor Beginn eines vollständigen Frames abgefragt wird. Er-
reicht der interne Zähler des PIC’s den Beginn eines Frames undist das interne Flag
gesetzt (d.h. eine Anforderung liegt vor), dann werden die Triggersignale des Ultraschall-
gerätes an die A/D-Wandler Karte weitergeleitet. Nach der Aktivierung des PIC’s bleibt
PC-seitig Zeit für die Datenverarbeitung. Ist die Datenverarbeitung abgeschlossen, wartet
der PC auf ein Signal der A/D-Wandler Karte, dass die Datenaufnahme abgeschlossen
ist, damit die abgetasteten Daten vom PC eingelesen werden können. Danach beginnt

5.1 Echtzeit-Modus 95
PC aktiviert A/D-Karte
PC aktiviert Interrupt des PIC
Datenverarbeitung
PC liest Daten aus
Aufnahmebeendet ?
Trigger vorhanden ?
Alle shots aufnehmen
Auf Anfang einesframes warten
Soll frame aufge-nommen werden ?
Shot-Signale eines frames weiterleiten
Aufnahme beenden
Aufnahme starten ?
PC(Datenverarbeitung)
PIC(Trigger-Verarbeitung)
A/D-Karte(Datenaufnahme)
Abb. 5.5: Ablaufdiagramm: Synchronisierung von PC, PIC und A/D-Wandler Karte zur
Realisierung einer Echtzeit-Datenverarbeitung
der Vorgang von vorne. Zum einen wird dadurch erreicht, dassdie A/D-Wandler Karte
nicht kontinuierlich abtastet, zum anderen wird erreicht,dass programmiertechnisch der
Daten-Abtast-Prozess vom Daten-Verarbeitungsprozess getrennt werden kann.
Nach diesem Prinzip können hochfrequente Echodaten in Echtzeit für verschiedene An-
wendungen verarbeitet werden, so. z.B. auch für Verfahren inder Gefäßdiagnostik bei
der Detektion und Verfolgung von arteriellen Gefäßwänden [45]. Eine andere Einsatz-
möglichkeit bietet sich mit Hilfe des Application Program Interface (API) innerhalb der
Programmierumgebung MATLABR©, mit dessen Hilfe eine Art PC-Oszilloskop für die
Ultraschalldatenverarbeitung realisiert werden konnte.Die Komponenten des realisierten
Abbildungssystems sind in Abb. 5.6 dargestellt.
Abb. 5.6: Systemkomponenten: Ultraschallgerät (links), PC mit A/D-Wandler (mitte),
Trigger-Interface (rechts)

Kapitel 6
Experimentelle Ergebnisse
In diesem Kapitel wird auf experimentelle Ergebnisse des Verfahrens eingegangen. Es
werden Unterschiede in den Abbildungseigenschaften der Ultraschall-Elastographie zwi-
schen einer Freihand-Methode und einer apparativen Methode gezeigt.
6.1 Phantome
Es wurden Messungen an Phantomen vorgenommen. Diese wurdenaus einem speziellen
Material hergestellt (Elvanolr71-30), mit dem die Elastizität den Anforderungen ent-
sprechend variiert werden kann.
6.1.1 Phantom-Material
Bei der Entwicklung neuer Abbildungsverfahren in der medizinischen Diagnostik ist es
notwendig, deren Möglichkeiten mit Hilfe von Experimentenan Phantomen abzuschät-
zen. Für die Herstellung von Phantomen im Rahmen der Ultraschall-Elastographie müs-
sen sowohl mechanische als auch akustische Eigenschaften bei der Materialauswahl be-
rücksichtigt werden:
1. Die Ultraschallwellen müssen im gewünschten Frequenzbereich in dem Medium
ausbreitungsfähig sein.
2. Das Medium muss (ortsabhängige) elastische Eigenschaften aufweisen, die mit de-
nen von menschlichem Gewebe vergleichbar sind, damit eine geringe äußere Kom-
pression zu inneren Deformationen führt.
3. Das Medium muss kleine und ausreichend viele Variationenin der Schallgeschwin-
digkeit bzw. Dichte aufweisen, damit genügend Streuzentren entstehen, um die für
Ultraschallbilder typischen Specklemuster hervorzurufen.
Prinzipiell besitzen wassergefüllte und vakuierte Mikroschwämme die aufgezählten Ei-
genschaften. Allerdings ist es mit diesem Material nur schwer möglich, einen Körper mit
klar definierten Elastizitätsverteilungen zu erzeugen.
Daher ist man in der Praxis dazu übergegangen, eine Suspension aus einem Trägermaterial
und kleinen Partikeln in heißem Wasser in Lösung zu bringen und anschließend aushärten

6.1 Phantom-Material 97
zu lassen. Durch das Trägermaterial werden die Bedingungen (1) und (2) sichergestellt.
Durch den Zusatz von kleinsten Partikeln als Streuzentren wird Bedingung (3) erfüllt.
Agar-Agar
In der Vergangenheit wurden als Trägermaterial häufig Gelatine oder Agar-Agar (Gelier-
mittel aus Meeresalgen) verwendet. Während die mechanischeStabilität dieser Phantome
akzeptabel ist, bestehen grosse Einschränkungen bzgl. derHaltbarkeit, weil Kohlenhydra-
te in einem Zeitraum von wenigen Wochen durch Mikroorganismen biologisch abgebaut
werden.
Elvanolr71-30
Die in den experimentellen Arbeiten eingesetzten Phantomewurden aus dem Material
Elvanolr71-30 der Firma DuPont hergestellt. Elvanolr71-30 gehört zur Klasse der hy-
drolysierten Polyvinylalkohole und besitzt eine niedrigeViskosität. Es handelt sich um ein
weißes Granulat, das sich im warmen Wasser löst. Bei der Arbeit mit diesem Phantom-
material ist zu beachten, dass das mechanische Verhalten von Kunststoff-Erzeugnissen
infolge des visko-elastischen Verhaltens von Polymeren auch von der Beanspruchungs-
dauer und Beanspruchungstemperatur abhängig ist [86]. Darüber hinaus wird es von der
Formteilgestalt und den Herstellungsbedingungen der Formteile beeinflusst.
Die Herstellung von Elvanol-Phantomen erfolgt üblicherweise indrei Schritten:
1. Schritt (Herstellung der Grundsubstanz):Entsprechend dem erforderlichen Gesamt-
volumen wird eine 10 %-ige wässrige Suspension aus Elvanol erstellt, wobei das Gra-
nulat unter kontinuierlichem Rühren hinzugefügt wird. Diese milchige Suspension wird
anschließend unter weiterem Rühren auf ca. 75◦C erhitzt, wobei diese Temperatur für
ca. 20 Minuten gehalten werden muß. Nach Auskühlung des Gemisches auf Raumtempe-
ratur entsteht ein farbloses lagerfähiges Gel, aus dem verschiedene Phantome hergestellt
werden können.
2. Schritt (Herstellung der Phantom-Suspension):Je nach Bedarf wird eine bestimmte
Menge der o.g. Grundsubstanz wieder auf 75◦C erhitzt. Nun wird unter kontinuierlichem
Rühren in Abhängigkeit von der gewünschten Konzentration anStreuzentren 1-5 % Kie-
selgel (hier: TLC–Kieselgel 60 HMerckmit einer mittleren Korngröße von15 µm) hinzu-
gefügt. Diese Suspension wird langsam (ca. 15 Minuten) auf 40-45◦C abgekühlt, wobei
keine Luftbläschen in dem Gemisch verbleiben dürfen. Anschließend wird das Gemisch
in eine Form gegossen (z.B. Zylinder bzw. Quader), wobei in dieser Form auch bereits
vorher angefertigte Elvanol-Phantome platziert sein können.
3. Schritt (Variation der Phantom-Elastizität): Die gefüllte Form wird nun tiefgefro-
ren und anschließend bei Raumtemperatur bzw. im warmen Wasserbad aufgetaut. Bedingt

6.1 Phantom-Eigenschaften 98
durch eine Mischungslücke bei tiefen Temperaturen verdunstet aus dem Phantom Was-
ser beim Auftauvorgang (Evaporation), wodurch die Elastizität des Materials zunimmt.
Durch Variation der Anzahl von Gefrier- und Auftauzyklen wird dem Material weiteres
Wasser entzogen, was zu einer weiteren Zunahme der Elastizität führt. Typischerweise
reichen drei Zyklen aus, um eine Elastizität zu erreichen, die mit derjenigen von biologi-
schem Gewebe vergleichbar ist, also in einem Bereich von 10 kPa bis 100 kPa liegt.
Nach dem gleichen Prinzip können mit Hilfe von zylinderförmigen Formteilen auch Phan-
tome zur Modellierung von Gefäßwänden hergestellt werden [41]. Bei der anschließen-
den Lagerung der Phantome bei Raumtemperatur ist darauf zu achten, dass sie luftdicht
abgeschlossen sind.
6.1.2 Phantom-Eigenschaften
Es wurde ein quaderförmiges (weiches) Phantom mit einem zylindrischen (härteren) Ein-
schluss – jeweils aus Elvanolr71-30 – angefertigt. Im folgenden wird auf die geometri-
schen Abmessungen und erzielten Werte des Elastizitätsmoduls eingegangen.
Abmessungen
Die Größe des quaderförmigen Phantoms betrug nach der Herstellung 60 x 94 x 48 mm3.
Vor der Herstellung des quaderförmigen Phantoms wurde ein zylindrisches Phantom mit
einem Durchmesser von 4.7 mm und einer Länge von 60 mm hergestellt und in den Qua-
der eingebracht. Die Lage innerhalb des Quaders kann Abb. 6.1 entnommen werden. Der
Abb. 6.1: Geometrische Abmessungen des quaderförmigen Phantoms mit einem zylindri-
schen Einschluss
Mittelpunkt des zylinderförmigen Einschluss befand sich ca.12.5 mm von der Oberfläche
des Phantoms.

6.1 Phantom-Eigenschaften 99
Elastizitätsmodul / Dynamisch Mechanische Analyse (DMA)
Für Agar-Agar-Phantome ist bekannt, dass der Elastizitätsmodul (in kPa) proportional
mit dem Quadrat der verwendeten Agar-Konzentration (in g/l) zunimmt [36]. Der Ela-
stizitätsmodul von Phantomen aus Polyvinylalkoholen hängt jedoch nicht nur von der
Konzentration, sondern auch von der Anzahl von Gefrier- undAuftauvorgängen ab und
muss experimentell festgestellt werden. Es ist aber bekannt, dass Werte für den Elastizi-
tätsmodul im Bereich von 10 kPa bis 100 kPa erreicht werden können [31].
Nach Abschluss der Datenaufnahme (s. Kap. 6.3 und Kap. 6.4) wurden Schnitte des Phan-
toms angefertigt und kleine Zylinder ausgestanzt – sowohl aus dem weichen Material des
Quaders als auch aus dem härteren Material des zylindrischen Einschlusses. Der Elastizi-
tätsmodul dieser Proben wurde mit Hilfe der Dynamisch Mechanischen Analyse (DMA)
bestimmt. DieDynamisch-Mechanische Analyse (DMA)ist eine Untersuchungsmetho-
de zur Bestimmung des elastischen bzw. viskoelastischen Verhaltens (z.B. Elastizitäts-
modul) von Materialien in Abhängigkeit von anderen Einflussgrößen wie z.B. Tempe-
ratur und Frequenz. Mit den Geräten der heutigen Generationlassen sich verschiedene
Werkstoffe vom „weichen“ Polymer bis zur „spröden“ Keramikuntersuchen.
Das Funktionsprinzip eines Dynamisch-Mechanischen Analysators (hier: TA Instruments
DMA 2980) kann wie folgt zusammengefasst werden: Die zu untersuchende Probe wird
in eine Klammer (Sonde) eingespannt, wobei jede Klammer auseinem feststehenden
und einem beweglichen Teil besteht. Abhängig vom Material und den zu erwartenden
Kennwerten stehen verschiedene Sondensysteme zur Verfügung. Bei den hier beschrie-
benen Messungen wurde eine Kompressionsklammer verwendet. Der bewegliche Teil der
Klammer ist mit einem beweglichen Stempel verbunden, über den die Probe mit einer
sinusförmig oszillierenden Kraft angeregt wird. Gemessenwerden sowohl die Amplitude
der Kraft bzw. die Amplitude der Deformation als auch deren Phasenverschiebung. Für
Messungen bei höheren Temperaturen kann über die Probe ein Widerstandsofen gefah-
ren werden. Aus den Messwerten können die viskoelastischenEigenschaften einer Probe
als Funktion von Zeit und Temperatur bestimmt werden. Nebendem Elastizitätsmodul
(Speichermodul)E wird auch der VerlustmodulE ′ und der mechanische Verlustfaktor
tan δ = E ′/E des Werkstoffs bestimmt.
Der Elastizitätsmodul der Proben wurde bei Raumtemperatur für verschiedene An-
regungsfrequenzen bestimmt. Die Anregungsfrequenzen wurden so gewählt, dass sie
einen Bereich abdecken, in dem typischerweise der Vibrations-Applikator arbeitet
(0.1 Hz, 0.2 Hz, 0.5 Hz, 1.0 Hz, 2.0 Hz, 5.0 Hz und10.0 Hz). Für den (weicheren) Au-
ßenbereich der Probe ergab sich ein Mittelwert des Speichermoduls von44.97 kPa±3.52 kPa. Für das Verhältnis von Verlustmodul zu Speichermodul ergab sich ein Mittel-
wert von tan δ = 0.0977 ± 0.00587. Für den (härteren) Innenbereich der Probe ergab
sich ein Mittelwert von79.56 kPa± 4.25 kPa. Für das Verhältnis von Verlustmodul zu
Speichermodul ergab sich ein Mittelwert vontan δ = 0.0651 ± 0.00367.

6.2 Messung der Autokovarianzfunktion bzw. Pulsbreiten 100
6.2 Messung der Autokovarianzfunktion bzw.
Pulsbreiten
Für die Messung der Pulsbreiten wurde das in Kap. 5.1.2 beschriebene Ultraschallgerät
des Typs Siemens Omnia mit einem Ultraschallwandler des Typs VF 13-5 verwendet.
Die Mittenfrequenz der Sendepulse wurde zu10 MHz gewählt. Bei einer dargestellten
Bildtiefe von50 mm wurde die Position des Sendefokus aufz = 35 mm eingestellt.
Für die Messung der Autokovarianzfunktion in lateraler bzw. elevationaler Richtung ist
ein Phantom notwendig, das Streuer enthält, deren Größe unterhalb des Auflösungsver-
mögens des Abbildungssystems liegt. Dadurch entsteht in der Ultraschallabbildung ein
Speckle-Muster, das nicht mehr von der Größe der Streuer, sondern nur noch von System-
parametern abhängt [34, 109]. Es wurde ein homogenes Phantom aus dem in Kap. 6.1.1
beschriebenen Material Elvanolr71-30 hergestellt und TLC–Kieselgel 60 HMerckmit
einer mittleren Korngröße von15 µm hinzugefügt.
Zur Bestimmung der Kovarianzfunktion in lateraler Richtung muss die Einhüllende des
Empfangssignals als Funktion von lateralen Verschiebungen k·∆x vorliegen. Für die Da-
tenaufnahme ist es daher notwendig, den Ultraschallwandler in kleinen Schritten∆x zu
verfahren [98] bzw. das Objekt gegenüber dem Ultraschallwandler zu verschieben. Bei ei-
ner erforderlichen Schrittweite von∆x = 20 µm wurde hier der zuletzt genannte Ansatz
mit Hilfe eines Mikrometertisches verfolgt, wie in Abb. 6.2(links) dargestellt. Im fol-
Ultraschallwandler(fixiert)
Mikrometer-tisch
Phantom
Tiefe z in mm
Late
rale
r A
bsta
nd ∆
x in
µm
Normierte Autokovarianzfunktion
0
0.2
0.4
0.6
0.8
1
10 20 30 40 50
-600
-450
-300
-150
0
150
300
450
600
Abb. 6.2: Setup zur Messung der Autokovarianzfunktion in lateraler Richtung (links) und
normiertes Ergebnis der Messung (rechts)
genden seieEx(k) der Wert der Einhüllenden zur Zeitt an der lateralen Positionx+k·∆x
bzw. der elevationalen Positiony, d.h.eEx(k) = eE(x + k·∆x, y, t). Werden der Mittel-
wert und der lineare Trend voneEx(k) entfernt, dann ergibt sich die empirische Autoko-

6.2 Messung der Autokovarianzfunktion bzw. Pulsbreiten 101
varianzfunktioncExEx(k) in lateraler Richtung zu
cExEx(k) =
1
N − |k|
N−1−|k|∑
n=0
eEx(n + |k|) · eEx
(n) . (6.1)
Zur Verbesserung der Genauigkeit wurde die Autokovarianzfunktion über mehrere A-
Linien und in axialer Richtung über einen Bereich von∆z = 1 mm gemittelt. Als Er-
gebnis dieser Rechnung ist die normierte Autokovarianzfunktion cExEx(k)/cExEx
(0) auf
der rechten Seite von Abb. 6.2 zu finden. Es zeigt sich ein tiefenabhängiger Verlauf der
normierten Autokovarianzfunktion, auf den bei der Betrachtung der lateralen Pulsbreite
nochmal eingegangen wird.
Für die Berechnung der Autokovarianzfunktion in elevationaler Richtung muss die Ein-
hüllende des Empfangssignals als Funktion von elevationalen Verschiebungenk·∆y vor-
liegen. Die dafür erforderlichen Messungen wurden mit Hilfe eines Mikrometertisches
entsprechend Abb. 6.3 (links) mit einer Schrittweite von∆y = 20 µm durchgeführt. Sei
eEy(k) der Wert der Einhüllenden zur Zeitt an der lateralen Positionx bzw. der elevatio-
nalen Positiony+k·∆y, d.h.eEy(k) = eE(x, y+k·∆y, t). Dann ergibt sich die empirische
Autokovarianzfunktion in elevationaler Richtung nach Abzug des linearen Trends und des
Mittelwertes zu
cEyEy(k) =
1
N − |k|
N−1−|k|∑
n=0
eEy(n + |k|) · eEy
(n) . (6.2)
Zur Verbesserung der Genauigkeit wurde die Autokovarianzfunktion über mehrere A-
Linien und axialer Richtung über einen Bereich von∆z = 1 mm gemittelt. Als Ergeb-
nis dieser Rechnung ist die normierte Autokovarianzfunktion cEyEy(k)/cEyEy
(0) auf der
rechten Seite von Abb. 6.3 zu finden. Wie bereits in Abb. 6.2 zeigt sich auch hier ein
Ultraschallwandler (fixiert)
Mikrometer-tisch
Tiefe z in mm
Ele
vatio
nale
r A
bsta
nd ∆
y in
µm
Normierte Autokovarianzfunktion
0
0.2
0.4
0.6
0.8
1
10 20 30 40 50
-1000-800-600-400-200
0200400600800
1000
Abb. 6.3: Setup zur Messung der Autokovarianzfunktion in elevationaler Richtung (links)
und normiertes Ergebnis der Messung (rechts)
tiefenabhängiger Verlauf, der nun in Zusammenhang mit der Pulsbreite gebracht wird.
Unter Annahme einer gaußförmigen, separierbaren Punktbildfunktion nach Gl. (2.14) ist

6.3 Statische bzw. Quasistatische Kompression 102
der Verlauf der normierten Autokovarianzfunktion in lateraler bzw. elevationaler Rich-
tung nach Gl. (3.27) bzw. Gl. (3.28) ebenfalls gaußförmig, unterscheidet sich jedoch im
Exponenten um den Faktor1/2. Die PulsbreiteP der Punktbildfunktion (FHWM) kann
z.B. aus dem Verlauf der normierten Autokovarianzfunktion ermittelt werden, wenn die
laterale bzw. elevationale Position bestimmt wird, an der die normierte Autokovarianz-
funktion den Wertexp(− log(2)/2) =√
1/2 annimmt (vgl. dazu Anhang D). Die auf
diese Weise aus den Abb. 6.2 und Abb. 6.3 bestimmten Pulsbreiten in lateraler bzw. ele-
vationaler Richtung sind nochmals in Abb. 6.4 zusammengefasst. Man erkennt, dass die
10 15 20 25 30 35 40 45 50
200
400
600
800
1000
1200
Bildtiefe z in mm
Pul
sbre
itein
µm
lateral
elevational
Abb. 6.4: Setup zur Messung der elevationalen Pulsbreite (links) und Autokovarianzfunk-
tion in elevationaler Richtung (rechts)
tiefenabhängige Zunahme der Pulsbreite in lateraler Richtung geringer als in elevationaler
Richtung ist. Zusätzlich ist bei der Pulsbreite in lateralerRichtung eine Einschnürung im
Bereich der Fokuszone zu erkennen. Obwohl die Annahme einer gaußförmigen PBF nur
eine Näherungslösung darstellt, stimmen die Ergebnisse der Messungen qualitativ mit den
Ergebnissen der Simulationen aus Kap. 4.2.1 überein. Zudemkonnte in den Messungen
eine geringere elevationale Pulsbreite als in den Simulationen erwartet werden, weil auf
einem handelsüblichen Ultraschallwandler zusätzlich eine akustische Linse aus Gummi
angebracht wird, um die Fokussierung in elevationaler Richtung zu verbessern.
6.3 Statische bzw. Quasistatische Kompression
Bei den hier durchgeführten Experimenten wird angenommen, dass die Kompression der
Objekte statisch bzw. quasistatisch erfolgt. Unter einer statischen Kompression versteht
man, dass vor bzw. nach der Kompression ein langer Zeitraum verstrichen ist und sich
das Objekt in Ruhe befindet. Bei einer quasistatischen Kompression wird angenommen,
dass im Falle von mehreren aufeinander folgenden Kompressionsschritten jeder einzelne
als statisch betrachtet werden kann.

6.3 Apparative Methode 103
Apparative Methode
Der Einsatz von apparativen Verfahren ist auch in der Ultraschalldiagnostik bekannt [81,
82]. Die Möglichkeit einer definierten statischen Kompression bietet sich z.B. durch den
Einsatz von Kompressionsplatten, deren Lage zueinander durch steuerbare Motoren ver-
ändert werden kann. Dabei kann die Qualität der Elastogramme durch die Anwendung
mehrerer Kompressionsschritte verbessert werden [107].
Ein solcher Ansatz wurde auch bei der Untersuchung der weiblichen Brust verfolgt [59,
38, 43]. Wesentlicher Vorteil eines apparativen Verfahrens ist, dass der Grad der Kom-
pression wohl definiert werden kann und Annahmen über die Randbedingungen getroffen
werden können. Weiterhin führt der Einsatz von Kompressionsplatten zu einer Fixierung
des Objektes, so dass bei einer Ausführung von definierten Kompressionsschritten die
Bewegungsartefakte minimiert werden – insbesondere die Bewegungsartefakte, die durch
ein Verkippen des Ultraschallwandlers bzw. des Objektes inlateraler oder elevationaler
Ebene entstehen. Allerdings zeigte sich in der klinischen Anwendung, dass die Handha-
bung eines solchen Gerätes zu aufwendig ist, um im Routinebetrieb eingesetzt werden zu
können. Außerdem ist aus der konventionellen Mammographiebekannt, dass mit einem
solchen Ansatz brustwandnahe Läsionen häufig nicht erfasst werden [96]. Für die Unter-
suchung einer größeren Zahl von Patienten ist daher die Entwicklung bzw. Verbesserung
von Freihand-Verfahren notwendig, um letztendlich auch den klinischen Stellenwert des
Elastographie-Verfahrens abschätzen zu können.
Freihand-Methode
Werden elastische Gewebeeigenschaften mit Hilfe der Elastographie im Rahmen einer
Freihand-Untersuchung abgebildet, so bietet es sich an, die Kompression mit dem Ul-
traschallwandler selbst durchzuführen. Generell führt diese manuell durchgeführte Kom-
pression zu unterschiedlichen Kompressionsschritten innerhalb einer Aufnahmeserie. Es
ist ebenfalls davon auszugehen, dass im Vergleich zu einer apparativ durchgeführten
Kompression größere Bewegungsartefakte entstehen. Diese würden eine Dekorrelation
der Datensätze und damit eine geringe Qualität der einzelnen Elastogramme zur Folge
haben, weil sich die Varianz der Zeitverschiebungsschätzungen erhöht (vgl. Kap. 3.2).
Der Wert des Korrelationskoeffizienten kann als Kriteriumverwendet werden, um Ela-
stogramme von weiteren Berechnungsschritten auszuschließen. Céspedes et al. fanden
empirisch heraus, dass Elastogramme für weitere Berechnungen verwendet werden kön-
nen, wenn für den Korrelationskoeffizientenρ > 0.9 gilt [19]. Die Begründung für ein
solches Ausschlußkriterium ist nach Umstellen von Gl. (3.81) aus Kap. 3.4.4 ersichtlich.
Wenn der Wert des Korrelationskoeffizienten einen bestimmten Wert unterschreitet, dann
ist die vorab gewählte Korrelationsfensterlänge evtl. zu gering, um die Zeitverschiebung
erwartungstreu zu schätzen. Bedingt durch die zeilenweise durchgeführten Iterationen des

6.3 Freihand-Methode: Phantom-Messung 104
Verfahrens der Phasen-Nullstellen-Suche entstehen Bildartefakte wie z.B. in Abb. 4.27,
in der ganze Bildspalten keine sinnvolle Information mehr enthalten.
Bei einer Serie von Datensätzen und entsprechend einer Serievon Elastogrammen stellt
sich außerdem die Frage, wie die Auswertung zu einem einzigen Elastogramm erfolgen
soll. Dabei muss berücksichtigt werden, dass sowohl die Qualität der einzelnen Elasto-
gramme bzw. das elastographische CNRε als auch deren mittlere Dehnung unterschied-
lich sind. In [39, 44] wurde ein Verfahren vorgestellt, bei dem die Elastogramme vor
einer Mittelwertbildung normiert werden. Bei der Normierung der Elastogramme wird
vorausgesetzt, dass das untersuchte Objekt im angewendeten Kompressionsbereich ein
linear-elastisches Verhalten aufweist. Geht man weiterhin davon aus, dass bei der Un-
tersuchung verschiedener Objekte jeweils eine ähnliche Kompression angewendet wird,
dann können die Ergebnisse dieser Untersuchungen miteinander verglichen werden, wie
in [39] für Tumore der weiblichen Brust gezeigt wurde.
Freihand-Methode: Phantom-Messung
Die qualitative und quantitative Auswertung von Elastogrammen soll hier anhand einer
Phantom-Messung demonstriert werden. Dazu wurde das Phantom aus Kap. 6.1.2 im
Querschnitt untersucht und mit dem Ultraschallwandler komprimiert. Zur Optimierung
der mechanischen Kompression wurde auf den Ultraschallwandler eine Kompressions-
platte bündig angebracht, die in Abb. 6.5 (links) dargestellt ist. Mit Hilfe einer solchen
Kompressionsplatte wird zum einen erreicht, dass die Kompression des Objektes vorwie-
gend in axialer Richtung stattfindet, zum anderen werden Bewegungsartefakte durch ein
Verkippen des Ultraschallwandlers minimiert. In Abb. 6.5 ist das resultierende B-Bild in
der Mitte und das Elastogramm rechts dargestellt. Für die Berechnung der Elastogramme
Bildbreite x in mm
Bild
tiefe
z in
mm
1 5 10 15
5
10
15
20
25
30 -1.1
-1
-0.9
-0.8
-0.7
Bildbreite x in mm1 5 10 15
Schallwandleroberfläche(47 mm x 10 mm)
Kompressionsplatte(105 mm x 105 mm)
Axiale D
ehnung εzz
in %
Abb. 6.5: Ultraschallwandler mit Kompressionsplatte (links) und Ergebnisse der
Freihand-Methode: B-Bild (mitte) und Elastogramm (rechts)

6.3 Freihand-Methode: Phantom-Messung 105
wurde eine Korrelationsfensterlänge vonTC = 40 ∆t, ein Abstand aufeinander folgender
Verschiebungsschätzungen vonTτ = 20 ∆t und eine Filterlänge vonN = 13 gewählt,
wodurch sich eine normierte Filterlänge vonN = 7 ergibt.
Man kann bereits im B-Bild erkennen, dass sich in dem Phantom eine Inhomogenität mit
rundem Querschnitt befindet, die sich als echoreiches Gebiet von dem übrigen Bildbe-
reich abhebt. Bei dem für Ultraschallbilder typischen Speckle-Muster fällt auf, dass die
mittlere Größe der Speckle in Abhängigkeit von der Bildtiefezunimmt. Diese visuelle
Beobachtung resultiert aus der tiefenabhängigen Zunahme der lateralen Pulsbreite nach
Abb. 6.2. Im Elastogramm sind, bezogen auf ihren absoluten Wert, Bereiche geringer
Dehnung rot und Bereiche größerer Dehnung blau dargestellt.Bei einer qualitativen Be-
trachtung des Elastogramms hebt sich die Inhomogenität alsroter Bereich hervor, so dass
sie als härterer Einschluss identifiziert werden kann. Dies war aufgrund der Ergebnisse
der DMA aus Kap. 6.1.2 zu erwarten.
Im Gegensatz zur theoretischen Dehnungsverteilung aus Abb. 4.25 zeigt sich in der ex-
perimentellen Messung nahe an der Kompressionsplatte ein Bereich geringer Dehnung.
Während die Annahme des ebenen Verzerrungszustandes gerechtfertigt erscheint, weil die
Abmessung der Kompressionsplatte in elevationaler Richtung mit 105 mm gross ist (vgl.
dazu Abb. 6.5), müssen die Randbedingungen nochmals genauerbetrachtet werden. Für
die FEM-Rechnung in Abb. 4.25 wurden Dirichlet’sche Randbedingungen für den oberen
Rand (die Kompressionsplatte) mit∆z = const. und∆x 6= 0 angenommen. Aufgrund
der experimentellen Erfahrungen muss die zweite Annahme modifiziert werden, weil sich
das Objekt direkt an der Kompressionsplatte nicht in lateraler Richtung verschiebt, d.h.
∆x = 0. Die theoretische Dehnungsverteilung wurde für beide Fälle für das hier verwen-
dete Phantom mit den Abmessungen nach Abb. 6.1 berechnet, wobei eine Kompression
von einem Prozent der Phantomhöhe angenommen wurde. Die resultierende Dehnungs-
verteilung ist jeweils für eine Schnittebene in Abb. 6.6 dargestellt. Auf der linken Seite
ist die axiale Dehnungsverteilung für den Fall dargestellt, dass das Objekt direkt an der
Kompressionsplatte laterale Verschiebungen ausführen kann. Auf der rechten Seite ist die
axiale Dehnungsverteilung für den Fall dargestellt, dass das Objekt direkt an der Kom-
pressionsplattekeine lateralen Verschiebungen ausführen kann. Es zeigt sich, dass das
Ergebnis aus Abb. 6.5 mit geringen Dehnungen nahe der Kompressionsplatte durch die
Modifizierung der Randbedingungen erklärt werden kann.
Für eine quantitative Betrachtung wurden Regionen innerhalbund außerhalb der Läsi-
on ausgewählt, in denen die Dehnung einen konstanten Wert annimmt (vgl. Abb. 6.5).
Es wurden die in Tab. 6.1 aufgeführten Parameter für die Region innerhalb und außer-
halb der Läsion empirisch bestimmt, d.h. die mittlere Dehnung, die Varianz der Dehnung
und der sich ergebende elastographische Kontrast. Im Rahmender Freihand-Ultraschall-
Elastographie konnte gezeigt werden, dass eine Darstellung der mechanischen Dehnung
in axialer Richtung auch für eine manuell durchgeführte Kompression möglich ist. Al-

6.4 Harmonische Kompression 106
Abb. 6.6: Ultraschallwandler mit Kompressionsplatte: Simulierte Dehnungsverteilung im
ebenen Verzerrungszustand für unterschiedliche Randbedingungen
Tab. 6.1: Kontrast der Dehnung CNRε: Gemessene Werte zu Abb. 6.5
N = 7
εk in % −0.737
σ2εk
3.862 · 10−8
ε0 in % −1.096
σ2ε0
9.449 · 10−8
2 ∆ε2/(σ2ε0
+ σ2εk
) 22.86 dB
∆ε2/σ2ε0
21.34 dB
lerdings ist eine Freihand-Methode sehr stark von der Geschicklichkeit des Untersuchers
abhängig. Die Reproduzierbarkeit der Ergebnisse wird sowohl durch die Ausführung der
Kompression als auch durch eine laterale oder elevationaleVerkippung des Ultraschall-
wandlers während der Kompression beeinträchtigt, so dass weitere Verbesserungen not-
wendig sind, um das Verfahren im Routinebetrieb einsetzen zukönnen.
6.4 Harmonische Kompression
Wie bereits in Kap. 6.3 beschrieben, ist ein Nachteil einer Freihand-Methodik darin zu
sehen, dass die Abbildungsqualität und die Reproduzierbarkeit der Ergebnisse sehr stark
von der Geschicklichkeit des Untersuchers abhängt, weil die Kompression mit dem Ul-
traschallwandler durchgeführt wird. Auf der anderen Seiteist eine apparative Methode
mittels Kompressionsplatten zu aufwendig, um in der PraxisAnwendung zu finden. Es
bietet sich daher an, die Vorteile einer Freihand-Methodikund einer apparativen Metho-
de in einem Freihand-Applikator zu vereinen. Es wurde ein Applikator entwickelt und

6.4 Frequenzabhängigkeit der Amplitude 107
patentiert [42], der die erforderlichen Kriterien erfüllt, d.h.
• eine einfache Bedienung als Hand-Applikator und
• eine untersucherunabhängige Ausführung einer axialen Kompression.
Das angefertigte Modell mit einer Gesamthöhe von ca.20 cm ist in Abb. 6.7 zu sehen. Das
Abb. 6.7: Entwickelter Freihand-Applikator zur Unterstützung der Freihand-Elastogra-
phie mit befestigtem Ultraschallwandler
Prinzip der Anordnung besteht darin, dass eine exzentrischgebohrte und auf einer Welle
montierte Kreisscheibe eine geführte Befestigungsplatte bewegt, indem die Kreisschei-
be in einem Langloch der Befestigungsplatte rotiert. Die Rotationsbewegung der Welle
wird dadurch in eine sinusförmige Hubbewegung der Befestigungsplatte umgesetzt, auf
der ein Ultraschallwandler angebracht werden kann. In Abhängigkeit von der Größe der
Kreisscheibe und der Position der exzentrischen Bohrung wird so eine harmonische me-
chanische Anregung eines Objektes mit einem definierten Hub erzeugt (Vibration). Die
durch die Vibration hervorgerufene lokale Schwingung hängt von der Frequenz ab, wie in
Kap. 3.5 beschrieben. Mit dem hier realisierten Applikatorkönnen Schwingungsfrequen-
zen in einem Bereich von2.5 Hz bis5 Hz mit einem Hub von ca.0.5 mm realisiert wer-
den. Der zusätzlich angebrachte Aufsatzring schließt bündig mit dem Ultraschallwandler
ab und vermindert Bewegungsartefakte durch z.B. ein Verkippen, wenn der Applikator
auf eine beliebige Stelle aufgesetzt wird. Im folgenden wird auf die Ergebnisse eingegan-
gen, die mit Hilfe einer Vibrationsanregung durch den vorgestellten Applikator für das in
Kap. 6.1.2 beschriebene Phantom erzielt wurden.
6.4.1 Frequenzabhängigkeit der Amplitude
Das in Abb. 6.1 gezeigte Phantom wurde mit Hilfe des Applikators untersucht. Während
der Untersuchung wurde die Abbildungsebene so eingestellt, dass der zylinderförmige

6.4 Frequenzabhängigkeit der Amplitude 108
Einschluss im Querschnitt getroffen ist. Die harmonische Kompression des Objektes wur-
de in einem Frequenzbereich von2.6 Hz . . . 4.7 Hz durchgeführt. Aus den hochfrequenten
Echodaten wurden für jede A-Linie Zeitverschiebungenτ(z0, t0) an Gewebetiefenz0 zu
Zeitpunktent0 berechnet. Diese beschreiben beschreiben nach Gl. (3.100)eine Schwin-
gung der Art
τ(z0, t0) = A(z0)√
2(1 − cos(ωvib ∆tvib)) cos(ωvib t0 + Φvib) . (6.3)
Die Amplitude Avib(z0) der Schwingung ist abhängig von der lokalen Amplitude des
GewebesA(z0), der Frequenz der mechanischen Vibrationωvib = 2 π fvib und dem Abta-
stintervall∆tvib,
Avib(z0) = A(z0)√
2(1 − cos(ωvib ∆tvib)) . (6.4)
Als Resultat des Kalman-Filters erhält man in jedem Iterationsschritt für jede A-Linie
die tiefenabhängige AmplitudeAvib(z0). Diese aus den Messungen geschätzte Amplitude
Avib(z0) muss durch den Normierungsfaktor√
2(1 − cos(ωvib ∆tvib)) geteilt werden, da-
mit anschließend aus der AmplitudeA(z0) die Dehnung berechnet werden kann. Der Wert
des Normierungsfaktors kann generell in einem Bereich von[0, 2] liegen. Das Ergebnis
der tiefenabhängigen AmplitudeAvib(z0) ist exemplarisch für eine A-Linie in Abb. 6.8
gezeigt, um das frequenzabhängige Verhalten zu verdeutlichen. Die Amplitude wurde
0 5 10 15 20 25 30 35
-15
-10
-5
0
Bildtiefe z in mm
Neg
ativ
e A
mpl
itude
[rad
]
fvib=2.87 Hz
fvib=4.69 Hz
fvib=3.61 Hz
Nach Normierung
Abb. 6.8: Vibrationsanregung: Tiefenabhängige Amplitudeeiner A-Linie für verschiede-
ne Frequenzen des Applikators
negativ aufgetragen, damit die nach einer Normierung berechneten Elastogramme nega-
tive Werte erhalten und einem Elastogramm für den Fall einerKompression entsprechen.
Anhand von Abb. 6.8 bestätigt sich, dass der Verlauf der Amplituden nach einer frequenz-
abhängigen Normierung nahezu identisch ist. Man erkennt zudem, dass der Normierungs-
faktor für die Vibrationsfrequenzfvib = 4.69 Hz größer als eins ist. Dies ist dadurch zu
erklären, dass der Normierungsfaktor einen Wert von eins für cos(ωvib ∆tvib) = 0.5 bzw.
ωvib ∆tvib = π/3 erreicht. Mit dem hier verwendeten Mess-System mit∆tvib = 1/27 s ist
dies gerade bei einer Vibrationsfrequenz vonfvib = 4.5 Hz der Fall.

6.4 Dehnungsbild (Elastogramm) 109
Anhand von Abb. 6.8 kann auch eine Aussage über den Hub des Applikators getroffen
werden. Eine maximale Amplitude der Schwingung von ca.17 rad korrespondiert zu ei-
nem Hub des Applikators von ca.34 rad. Dieses Phasenmaß kann mit Hilfe der Mitten-
frequenzf0 = 8.5 MHz in Meter umgerechnet werden, so dass sich für den Hub des
Applikators /1 2 c · 34 rad/(2 π f0) ≈ 490 µm ergibt. Wie sich in den folgenden Bildern
zeigen wird, reichen bereits solche geringen Verschiebungen aus, um den härteren Ein-
schluss aufgrund von Dehnungsunterschieden von seiner Umgebung abzugrenzen.
6.4.2 Dehnungsbild (Elastogramm)
Aus der normierten AmplitudeA(z0) kann mit Hilfe der in Kap. 3.3 dargestellten Me-
thode (FIR-Filter) ein Dehnungsbild (Elastogramm) berechnet werden. Da der Hub des
Applikators der doppelten Amplitude entspricht, wurden die Elastogramme zusätzlich mit
zwei multipliziert.
In Abb. 6.9 ist das Ergebnis aus einer mit dem Mess-System unddem Hand-Applikator
durchgeführten Untersuchung bei einer Vibrationsfrequenz von fvib = 2.87 Hz darge-
stellt. Neben dem B-Bild (links) und dem Elastogramm (mitte) findet sich in dieser Ab-
Bildbreite x in mm
Bild
tiefe
z in
mm
5 10 15
5
10
15
20
25
30
35
Bildbreite x in mm5 10 15
Bildbreite x in mm5 10 15
B-Bild Phase in radDehnung εzz in %
-2.2
-2
-1.8
-1.6
-1.4
-1.2
-1
-0.8
-2.2
-2
-1.8
-1.6
-1.4
-1.2
-1
-0.8
-2.9
-2.85
-2.8
-2.75
-2.7
-2.9
-2.85
-2.8
-2.75
-2.7
Abb. 6.9: Vibrationsanregung: B-Bild (links), Elastogramm (mitte) und Phase (rechts)
bildung auch ein Bild der ortsabhängigen Phase (rechts). Letztere ergibt sich aus dem
Zustandsvektor des Kalman-Filters entsprechend Gl. (3.120) aus Kap. 3.5.2.
Während sich das B-Bild nur geringfügig von dem aus der Freihand-Untersuchung unter-
scheidet (vgl. Abb. 6.5), fällt im Elastogramm des Phantomsauf, dass die Dehnungswerte
– absolut betrachtet – mit zunehmender Bildtiefe abnehmen. Diese Beobachtung bestätigt
sich auch dann, wenn die Untersuchungsstelle geändert oderder Applikator zusätzlich zur
Vibration leicht angedrückt wird. Wie bereits in Kap. 6.3 für die Kompression mit Hil-
fe einer Kompressionsplatte gezeigt, hängt die Verteilungder Dehnung maßgeblich von

6.4 Dehnungsbild (Elastogramm) 110
den vorliegenden Randbedingungen ab. Bei der Verwendung des Hand-Applikators stellt
sich zudem die Frage, ob die Annahme des ebenen Verzerrungszustandes aus Kap. 2.2.4
weiterhin gerechtfertigt ist. Bei der Verwendung des Hand-Applikators erfolgt die Kom-
pression durch den Ultraschallwandler, so dass die Ausdehnung der komprimierenden
Fläche in elevationaler Richtung klein im Vergleich zur Abmessung des Objektes ist. Es
kann daher gerade im Bereich unterhalb des Ultraschallwandlers nicht davon ausgegangen
werden, dass keine Verzerrungen senkrecht zur Bildebene auftreten. Da die hier vorlie-
gende Situation ebenfalls nicht durch den ebenen Spannungszustand beschrieben werden
kann, muss eine dreidimensionale Betrachtung des mechanischen Problems erfolgen. Vor-
ab kann jedoch festgestellt werden, dass der härtere Einschluss im Elastogramm von der
Umgebung abgrenzbar ist und sowohl bzgl. seiner Position als auch seiner Abmessung
mit dem Echogenitätsunterschied im B-Bild übereinstimmt.
Zum Abschluss dieses Unterkapitels soll noch das Bild der Phase aus Abb. 6.9 (rechts)
erläutert werden. Dort fällt auf, dass die Phase spaltenweise von links nach rechts linear
zunimmt. Die lineare Zunahme der Phase von links nach rechtsfindet sich auch für andere
Vibrations-Frequenzen. Um dies zu verdeutlichen, ist der Verlauf der Phase in Abb. 6.10
bei einer Bildtiefe vonz = 20 mm für verschiedene Frequenzen aufgetragen. Zur bes-
0 5 10 150
0.1
0.2
0.3
0.4
0.5
Bildbreite in mm
Pha
se in
rad
fvib=2.87 Hz
fvib=4.69 Hz
fvib=3.61 Hz
Abb. 6.10: Frequenzabhängiger Verlauf der Phase bei einer Bildtiefe vonz = 20 mm
seren Vergleichbarkeit wurde der Phasenwert der ersten A-Linie (Bildspalte) abgezogen,
weil er letztlich nur von der (willkürlichen) Startposition des Hand-Applikators abhängt.
Es zeigt sich, dass die spaltenweise lineare Zunahme der Phase von der Frequenz ab-
hängig ist. Dieses Ergebnis ist dadurch zu erklären, dass die Echosignale der einzelnen
A-Linien nacheinander aufgenommen werden, weil die Apertur spaltenweise „wandert“.
Während die zeitliche Verzögerung des Aufnahmezeitpunktesinnerhalb einer A-Linie
durch die Laufzeit des Schalls vernachlässigt werden kann,ist die zeitliche Verzögerung
zwischen zwei A-Linien durch die PRF festgelegt und beträgt bei dem hier realisierten
Mess-System ca.225 µs (vgl. Kap. 5.1.2). Exemplarisch soll dieser Zusammenhangfür
die Vibrationsfrequenzfvib = 4.69 Hz gezeigt werden. Berücksichtigt man, dass der late-
rale Bildbereich80 A-Linien entspricht, so ergibt sich eine Phasenverschiebung zwischen
der ersten und letzten A-Linie von2 π fvib · 79 · 225 µs = 0.52 rad. Dieser Wert entspricht
ungefähr dem Wert aus Abb. 6.10.

6.4 Dreidimensionale Betrachtung 111
6.4.3 Dreidimensionale Betrachtung
Wie bereits im vorigen Unterkapitel angesprochen, kann dasexperimentelle Ergebnis des
Elastogramms bei Verwendung des Hand-Applikators auch beieiner Änderung der Rand-
bedingungen nicht erklärt werden, weil die Annahme des ebenen Verzerrungszustandes
nicht länger zutrifft, wenn die zur Kompression des Objektes verwendete Kompressi-
onsfäche klein ist. Für ein solches mechanisches Problem ist daher der Übergang zu einer
dreidimensionalen Betrachtung notwendig. Für den Fall einer runden Kompressionsfläche
und eines in der Halbebene unendlich ausgedehnten Objekt wurde eine analytische Lö-
sung in [78, 79] hergeleitet. Für den hier vorliegenden Fall, dargestellt in Abb. 6.11 (links),
wurde eine numerische Lösung mit Hilfe der Software ANSYSR© berechnet. Während die
Ø 4.7 mm
94 mm
60 mm
12.5 mm
35.5 mm
10 mm
47 mm
47 mm
Dz= -0.5 mm
Dx= 0.0 mmD Dy= z=
Dx= 0.0 mmDy=
E =45 kPa
E =80 kPa
=0.495
0
k
n
xz
y
Abb. 6.11: Geometrie und Randbedingungen für 3D-Berechnungen (links) und Diskreti-
sierung mittels ANSYS (rechts)
Geometrie des Objektes mit der aus Abb. 6.6 übereinstimmt, sind die Randbedingungen
nun unterschiedlich. Zum einen entspricht die Kompressionsfläche nicht mehr der Größe
der Kompressionsplatte, sondern nur noch der Oberfläche des Ultraschallwandlers, zum
anderen müssen auch Randbedingungen iny-Richtung festgelegt werden. Die dreidimen-
sionale Diskretisierung des Objektes ist in Abb. 6.11 (rechts) dargestellt. Der Elastizi-
tätsmodul des Objektes bzw. des Einschlusses wurde isotropangenommen und anhand
der Messungen aus Kap. 6.1.2 gewählt, d.h., für den Elastizitätsmodul des zylinderför-
migen EinschlussesEk = 80 kPa, für den Elastizitätsmodul des homogenen Materials
E0 = 45 kPa und für die Poisson-Zahlν = 0.495. Generell ist zu erwarten, dass bei einer
kleineren Kompressionsfläche die mechanische Spannung inz-Richtung über der Tiefe
abfällt und es dadurch auch zu einem Abfall der mechanischenDehnung kommt.
Das Ergebnis der Berechnung mit ANSYSR© ist für die mechanische Dehnung in
z-Richtung in Abb. 6.12 (links) gezeigt. Bei der Darstellung der Objektgeometrie
wurden die auftretenden Objektverschiebungen10-fach vergrößert, damit der Einfluss
der endlichen Kompressionsfläche besser zu erkennen ist. Auf der rechten Seite von

6.4 Dreidimensionale Betrachtung 112
MNMX
-.025933-.022171
-.018409-.014646
-.010884-.007122
-.00336.402E-03
.004165.007927
NODAL SOLUTION
STEP=1SUB =1TIME=1EPTOY (AVG)RSYS=0DMX =.436906SMN =-.025933SMX =.007927
-1.8
-1.6
-1.4
-1.2
-1
-0.8
Bildbreite x in mm
Bild
tiefe
z in
mm
0 5 10 15
0
5
10
15
20
25
30
35
Axiale D
ehnung εzz
in %
Abb. 6.12: Dreidimensionale Darstellung der Dehnung (links) und Vergrößerung des dar-
gestellten Bildbereiches (rechts)
Abb. 6.12 ist der Objektbereich vergrößert dargestellt, der mit dem Abbildungsbereich
des Mess-Systems übereinstimmt. Außerdem wurde der angezeigte Dehnungsbereich
so gewählt, dass das Dehnungsbild mit dem experimentellen Ergebnis aus Abb. 6.9
verglichen werden kann. Es zeigt sich nun eine gute Übereinstimmung zwischen der
theoretisch zu erwartenden Dehnungsverteilung und dem gemessenen Ergebnis. Der
in der abgebildeten Ebene beobachtete Abfall der Dehnung über der Tiefe kann also
erklärt werden, wenn das mechanische Problem dreidimensional betrachtet wird. Die
Übereinstimmung zwischen dem Simulationsergebnis und demexperimentellen Er-
gebnis rechtfertigt zudem die Annahme einer quasistatischen Kompression bei kleinen
Vibrationsfrequenzen.
Bei einer Betrachtung des Elastogramms aus Abb. 6.9 stellt sich die Frage, wie der aus
dem tiefenabhängigen Abfall der mechanischen Spannung resultierende Abfall der me-
chanischen Dehnung kompensiert werden kann, um einen homogeneren Bildeindruck zu
erreichen. Ein ähnliches Problem ist bei der Ultraschallabbildung von Gewebe im konven-
tionellen B-Bild-Verfahren bzgl. der Amplitude des Empfangssignals bekannt. Dort muss
das Empfangssignal aufgrund der akustischen Gewebedämpfung tiefenabhängig verstärkt
werden, um eine homogene Intensität des B-Bildes zu erreichen(engl.:time gain compen-
sation, TGC). An dieser Stelle werden zwei Möglichkeiten zur „strain gain compensati-
on“ (SGC) gezeigt, um den Einfluss der tiefenabhängigen mechanischen Spannung auf
das Elastogramm zu kompensieren.
Eine Möglichkeit zur SGC besteht darin, die Dehnungswerte tiefenabhängig mit dem
Kehrwert der mechanischen Spannung zu multiplizieren. In Abb. 6.13 ist auf der linken
Seite der lateral gemittelte Verlauf der mechanischen Spannung (· · ·) und dessen Kehr-
wert (—) dargestellt. Der Verlauf der mechanischen Spannung wurde so normiert, dass
der maximale Wert Eins beträgt. Wird das Elastogramm aus Abb. 6.9 spaltenweise mit
dem Kehrwert der lateral gemittelten mechanischen Spannung (SGC) multipliziert, dann

6.4 Dreidimensionale Betrachtung 113
-4.5
-4
-3.5
-3
-2.5
-2
-1.5
-1
Bildbreite x in mm5 10 15
0
5
10
15
20
25
30
351 2 3 4
0
5
10
15
20
25
30
35
SGC
Bild
tiefe
z in
mm
Abb. 6.13: Strain Gain Compensation: Tiefenabhängige Kompensation der mechanischen
Spannung (· · ·) durch den Kehrwert der mechanischen Spannung (—)
ergibt sich das in Abb. 6.13 (rechts) dargestellte Elastogramm. Das Elastogramm hat
nun ein ähnliches Erscheinungsbild wie die Elastogramme aus Abb. 6.5 bzw. Abb. 6.6
(rechts). Allerdings ist der Verlauf der mechanischen Spannung und damit auch deren
Kehrwert im allgemeinen nicht bekannt, weil die mechanische Spannung nicht gemessen
wird und auch nicht numerisch bestimmt werden kann, wenn dieElastizitätsmodulvertei-
lung des Objektes und die Randbedingungen nicht bekannt sind. Interessant ist daher ein
Vergleich des Verlaufs der mechanischen Spannung aus Abb. 6.13 (links) mit folgendem
analytischen Ergebnis aus der Mechanik, das als Erweiterung des BOUSSINESQ-Problems
(z.B. [85] oder S. 194 ff. in [2]) zu verstehen ist: Liegt eine runde Kompressionsplatte mit
Radiusr0 einem Halbraum mit homogenem Elastizitätsmodul auf und wirkt auf die Kom-
pressionsplatte eine Kraft (inz-Richtung), dann ergibt sich für die mechanische Spannung
σzz(z) in z-Richtung die analytische Lösung (S. 405 in [102])
σzz(z) = σzz(0)
[1 − z3
(r20 + z2)
3
2
]. (6.5)
Der Verlauf der mechanischen Spannung aus Abb. 6.13 (links)kann durch die analy-
tische Lösung aus Gl. (6.5) angenähert werden. Im hier vorliegenden Fall muss dazu
r0 = 14.38 mm gewählt werden, wodurch sich eine Fläche der runden Kompressionsplat-
te vonA = π · (14.38 mm)2 ≈ 650 mm2 ergibt. Diese ist etwas größer als die rechteckige
Oberfläche des Ultraschallwandlers aus Abb. 6.11, die47 mm·10 mm = 470 mm2 beträgt.
Als weitere Möglichkeit zur SGC bietet es sich an, die Dehnungswerte eines Elasto-
gramms lateral zu mitteln, um einen mittleren tiefenabhängigen Dehnungsverlauf zu er-
halten, und anschließend das Elastogramm spaltenweise mitdem Kehrwert dieses Deh-
nungsverlaufes zu multiplizieren. Der mittlere Dehnungsverlauf (· · ·) und dessen Kehr-
wert (—) ist für das Elastogramm aus Abb. 6.9 in Abb. 6.14 (links) dargestellt. Der
Verlauf der mechanischen Dehnung wurde normiert, damit dermaximale Wert Eins be-

6.4 Dreidimensionale Betrachtung 114
-1.3
-1.2
-1.1
-1
-0.9
-0.8
-0.7
Bildbreite x in mm5 10 15
0
5
10
15
20
25
30
351 2 3 4
0
5
10
15
20
25
30
35
SGC
Bild
tiefe
z in
mm
Abb. 6.14: Strain Gain Compensation: Tiefenabhängige Kompensation der mechanischen
Spannung (· · ·) durch den Kehrwert der mechanischen Dehnung (—)
trägt. Nach Multiplikation des Elastogramms aus Abb. 6.9 mit dem Kehrwert der lateral
gemittelten mechanischen Dehnung ergibt sich das in Abb. 6.14 (rechts) dargestellte Ela-
stogramm. Für eine quantitative Betrachtung wurden Regioneninnerhalb und außerhalb
der Läsion entsprechend der Kreise in Abb. 6.14 (rechts) ausgewählt. Es wurden die in
Tab. 6.2 aufgeführten Parameter für die Region innerhalb undaußerhalb der Läsion empi-
Tab. 6.2: Kontrast der Dehnung CNRε: Gemessene Werte zu Abb. 6.14
N = 7
εk in % −0.875
σ2εk
1.133 · 10−7
ε0 in % −1.112
σ2ε0
1.931 · 10−7
2 ∆ε2/(σ2ε0
+ σ2εk
) 15.64 dB
∆ε2/σ2ε0
14.64 dB
risch bestimmt, d.h. die mittlere Dehnung, die Varianz der Dehnung und der sich ergeben-
de elastographische Kontrast. Die erreichte Abbildungsqualität ist ausreichend, um den
härteren Einschluss von der Umgebung abzugrenzen. Zudem ist das Elastogramm nach
SGC einfacher zu interpretieren als das Elastogramm ohne SGC (vgl. Abb. 6.9), weil die
Dehnungswerte mit der hier verwendeten SGC keinen tiefenabhängigen Verlauf besitzen.
Zusätzlich ist anzumerken, dass die Implementierung einerSGC einen verhältnismäßig
geringen Rechenaufwand bedeutet.

Kapitel 7
Zusammenfassung und Ausblick
Die medizinische Untersuchungsmethode der Palpation wirdseit den Anfängen der Medi-
zin verwendet, um pathologische Veränderungen von Gewebe qualitativ zu erfassen, weil
diese häufig mit einer Änderung der Gewebeelastizität einhergehen. Allerdings ist ein
derartiger Palpationsbefund immer vom Untersucher abhängig und damit subjektiv. Das
gilt sowohl für das Auffinden einer pathologischen Veränderung als auch für den qua-
litativen Tasteindruck einer solchen Veränderung. Die Ultraschall-Elastographie ist ein
neues Abbildungsverfahren [72], das die quantitative Abbildung von elastischen Gewe-
beeigenschaften zum Ziel hat. Mittlerweile gibt es Verfahren, mit denen die Ultraschall-
Elastographie in Echtzeit-Systemen implementiert werdenkann [75].
In dieser Arbeit wurde untersucht, welche Abbildungseigenschaften die Ultraschall-
Elastographie besitzt, und es wurden Möglichkeiten zur Verbesserung vorgestellt und
implementiert. Dazu war es zunächst notwendig, Grundlagender Ultraschalltechnik
und Grundlagen der Mechanik zu erläutern, um ein geeignetesDatenmodell für die
empfangenen Ultraschall-Echosignale aufzustellen sowiedas mechanische Verhalten von
biologischem Gewebe untersuchen zu können, das als linear-elastisches und isotropes
Medium angenommen wird.
Bei der Darstellung von Dehnungsdifferenzen kommt es daraufan, einen möglichst
hohen Kontrast zu erzielen. Für die Abschätzung der Abbildungsqualität der Ultraschall-
Elastographie wurde daher ein theoretischer Ausdruck für den elastographischen Kontrast
(CNRε) hergeleitet, der in Gl. (3.86) zu finden ist. Dieser Ausdruck beinhaltet den nor-
mierten Dehnungsunterschied (NDU), das elastographischeAusgangs-SNRε (SNRε0)
und den elastographischen SNRε-Gewinn (SNRεG).
Es zeigte sich, dass der normierte Dehnungsunterschied vonder Geometrie der Ein-
schlüsse, deren Elastizitätsmoduln und von den vorliegenden Randbedingungen abhängt,
wobei die Geometrie der Einschlüsse und die vorliegenden Randbedingungen in einem
mechanischen KonversionsfaktorcPDE zusammengefasst werden können. Dieser nimmt
im einfachsten (eindimensionalen) Fall zweier mechanischer Federn den WertcPDE = 1
an, muss jedoch bei komplexeren Geometrieen bzw. Randbedingungen mit Hilfe von
FEM-Simulationen berechnet werden. Derartige FEM-Simulationen wurden in dieser
Arbeit für eine bestimmte Objektgeometrie in einem Wertebereich der Elastizitätsmoduln
durchgeführt, der für biologisches Weichgewebe relevant ist. Das vorgestellte Konzept
muss bei Bedarf auf andere Objektgeometrieen übertragen werden, weil eine allgemein-
gültige analytische Lösung nicht angeben werden kann.
Das elastographische Ausgangs-SNRε ist zum einen von der mittleren Dehnungε0, zum

Kapitel 7: Zusammenfassung und Ausblick 116
anderen über die Varianz der Zeitverschiebungsschätzungen von der Korrelationsfen-
sterlängeTC , sowie von den Systemparametern BandbreiteB, Mittenfrequenzf0 und
elektronischem Signal-zu-Störabstand SNRel abhängig. Zusätzlich hat der Wert des Kor-
relationskoeffizientenρ, der sich bei der Schätzung der Zeitverschiebung ergibt, einen
entscheidenden Einfluss auf das elastographische Ausgangs-SNRε. Bei der Analyse
zeigte sich, dass die KorrelationsfensterlängeTC möglichst klein gewählt werden muss,
um ein optimales elastographisches Ausgangs-SNRε zu erhalten.
Bei der Betrachtung des elastographischen SNRε-Gewinns musste berücksichtigt wer-
den, dass die mechanische Dehnung aus Zeitverschiebungsschätzungen mit Hilfe der
Methode der kleinsten Quadrate berechnet wird, wobei dieseBerechnung auch durch
ein FIR-Filter implementiert werden kann. Es stellte sich heraus, dass der elastographi-
sche SNRε-Gewinn als Funktion einer normierten FilterlängeN ausgedrückt werden
kann. Diese normierte Filterlänge hängt von der bei der Zeitverschiebungsschätzung
verwendeten KorrelationsfensterlängeTC , dem Abstand aufeinander folgender Zeit-
verschiebungsschätzungenTτ und der FilterlängeN des bei der Dehnungsberechnung
verwendeten FIR-Filters ab.
Mit Hilfe von Ultraschall-Simulationen wurde zunächst aufdie ortsabhängigen Eigen-
schaften der Punktbildfunktion eingegangen, weil die bei einer axialen Kompression des
Mediums hervorgerufenen lateralen und elevationalen Verschiebungen in Abhängigkeit
von Parametern der Punktbildfunktion zu einer Dekorrelation der Ultraschall-Echosignale
führen. Der Korrelationskoeffizient kann unter Annahme einer separierbaren Punktbild-
funktion als Produkt von drei Anteilen ausgedrückt werden,nämlichρ = ρax · ρlat · ρelev.
Der axiale Korrelationskoeffizientρax ergibt sich dadurch, dass die zeitverschobenen
Echosignale zusätzlich gestaucht bzw. gestreckt sind, wasdurch das in dieser Arbeit ver-
wendete Verfahren zur Zeitverschiebungsschätzung nicht kompensiert wird. Die Haupt-
ursache für eine Dekorrelation der Signale und damit ein niedriges elastographisches
Ausgangs-SNRε ist jedoch im lateralen bzw. elevationalen Korrelationskoeffizientenρlat
bzw.ρelev zu sehen. Geringe laterale bzw. elevationale Verschiebungen in der Größenord-
nung der Pulsbreiten des Ultraschall-Systems führen bereits zu einer deutlichen Dekorre-
lation der Signale. Derartige Verschiebungen entstehen zum einen durch eine äußere axia-
le Kompression des Gewebes, zum anderen aber insbesondere durch Bewegungsartefakte.
Zur Reduzierung derartiger Bewegungsartefakte bietet es sich an, die mechanische Kom-
pression harmonisch durchzuführen. Dazu wurde ein spezieller Applikator entwickelt,
der im Rahmen von Freihand-Untersuchungen genutzt werden kann. Eine äußere mecha-
nische Anregung des Gewebes führt lokal zu Schwingungen desGewebes, deren Ampli-
tude und Phase aus den Zeitverschiebungsschätzungen berechnet werden können. Dazu
wurde in dieser Arbeit ein Kalman-Filter implementiert. Mit diesem kann berücksichtigt
werden, dass die Varianz der Zeitverschiebungsschätzungen zeitinvariant ist. Bezüglich
einer rechnerischen Kompensation von Bewegungsartefaktenwurde gezeigt, dass laterale
Verschiebungen teilweise kompensiert werden können, indem die Berechnung der Korre-

Kapitel 7: Zusammenfassung und Ausblick 117
lationsfunktion bei der Zeitverschiebungsschätzung auf benachbarte A-Linien ausgedehnt
wird und vor Berechnung der Korrelationsfunktion eine Summation der Echosignale be-
nachbarter A-Linien erfolgt.
Mit Hilfe der Ultraschall-Simulationen wurde weiterhin das zur Abschätzung des ela-
stographischen Kontrastes entwickelte Modell überprüft.Dazu wurde eine Ultraschall-
Apertur inklusive Schallstrahlformung simuliert, deren Parameter mit der Apertur des in
den Experimenten verwendeten Ultraschallwandlers übereinstimmen. Als Medium wurde
ein homogenes Objekt mit einem zylindrischen Einschluss simuliert. Die zufällig platzier-
ten Streuer wurden entsprechend der Ergebnisse aus den FEM-Simulationen verschoben,
so dass hochfrequente Echosignale des Objektes vor und nachKompression verwendet
werden konnten, um Elastogramme zu berechnen. Der elastographische Kontrast wurde
empirisch für Bildausschnitte innerhalb und außerhalb des Einschlusses bestimmt, wobei
sich eine gute Übereinstimmung mit den theoretisch vorhergesagten Werten zeigte.
Zur Durchführung von experimentellen Arbeiten wurde ein Abbildungssystem ent-
wickelt, das aus einem Ultraschallgerät, einer speziellenTrigger-Schnittstelle und einem
PC mit einer A/D-Wandler Karte besteht. Bei dem Ultraschallgerät handelte es sich um
ein handelsübliches Gerät des Typs Siemens Omnia mit einem Ultraschallwandler des
Typs VF 13-5, bei dem sowohl auf die analogen Ultraschall-Echosignale als auch auf die
Triggersignale zugegriffen werden konnte. Der Entwurf einer Trigger-Schnittstelle war
notwendig, um eine Synchronisierung der Datenaufnahme undder Datenverarbeitung zu
gewährleisten, wobei die hochfrequenten Ultraschall-Echosignale mit einer Abtastrate
von 50 MHz abgetastet wurden. Durch die Steuerung der Datenaufnahme über den LPT-
Port ist es möglich, verschiedene Abbildungsverfahren echtzeitfähig zu implementieren.
In dieser Arbeit wurde mit diesem Abbildungssystem das bereits genannte Kalman-Filter
implementiert, um aus Zeitverschiebungsschätzungen eines harmonisch angeregten Ob-
jektes ein Elastogramm zu berechnen und anzuzeigen.
Zur Durchführung von Experimenten war neben dem Abbildungssystem auch die Her-
stellung eines geeigneten Phantoms notwendig. Als Material für das Phantom diente
ein spezieller Polyvinylalkohol (Elvanolr71-30), dessen elastische Eigenschaften beim
Herstellungsprozess variiert werden können. Es wurde ein homogenes Phantom mit
einem harten zylindrischen Einschluss hergestellt, dessen elastische Eigenschaften
(Elastizitätsmoduln) nach Abschluss der Experimente mit Hilfe einer dynamisch-mecha-
nischen Analyse bestimmt wurden. In den Experimenten wurden zunächst Elastogramme
mit einer Freihand-Methode aufgenommen. Anschließend wurden Elastogramme für
mechanische Anregungen unterschiedlicher Frequenz mit Hilfe des Hand-Applikators
aufgenommen. Während das mit der Freihand-Methode aufgenommene Elastogramm mit
den Ergebnissen der zweidimensionalen FEM-Simulation (ebener Verzerrungszustand)
vergleichbar war, konnte das mit dem Hand-Applikator aufgenommene Elastogramm
nur mit Hilfe einer dreidimensionalen FEM-Simulation erklärt werden. Es zeigte sich,
dass der durch die geringere Auflagefläche des Ultraschallwandlers bedingte tiefenab-

Kapitel 7: Zusammenfassung und Ausblick 118
hängige Abfall der mechanischen Spannung zu einem Abfall der mechanischen Dehnung
führt. Dieser Abfall der mechanischen Dehnung konnte jedoch rechnerisch kompensiert
werden (strain gain compensation), so dass das resultierende Elastogramm homogener
aussieht und einfacher zu interpretieren ist. Insgesamt gesehen ist daher die Methode mit
dem Hand-Applikator einer Freihand-Untersuchung vorzuziehen, da das resultierende
Elastogramm unabhängig von der Geschicklichkeit des Untersuchers reproduzierbar ist.
Bisher deuten einige klinische Ergebnisse auf einen Nutzen der Ultraschall-Elastographie
[33, 63, 44]. Im Hinblick auf eine Verbesserung von diagnostischer Sensitivität und Spe-
zifität von krebsverdächtigen Läsionen konnte das Potenzial des Verfahrens bisher je-
doch nicht ausreichend untersucht werden. Eine Ursache istmit Sicherheit in der fehlen-
den Reproduzierbarkeit der Elastogramme zu sehen, die durcheine untersucherabhängige
Kompression zu Stande kommt. Dieses Problem kann in Zukunftdurch den vorgestellten
Hand-Applikator und eine harmonische Kompression des Objektes gelöst werden, wobei
der durch die begrenzte Auflagefläche des Ultraschallwandlers resultierende mechanische
Dehnungsabfall in den Elastogrammen kompensiert werden muss.
Natürlich bleibt als übergeordnetes Ziel der elastischen Abbildung von Gewebe die Dar-
stellung von Materialparametern wie Elastizitätsmodul oder Schermodul. Allerdings sind
bisher vorgestellte Verfahren, mit denen die Rekonstruktion solcher Materialparameter
verfolgt wird, zeitaufwendig [51, 24]. Dabei ist zu beachten, dass die Untersuchungszeit
von Verfahren kritisch im Hinblick auf einen klinischen Einsatz ist und zu einer Ver-
nachlässigung einer neuen Methodik führen kann [93]. Zudemist eine genaue Erfassung
der Randbedingungen und Objektgeometrie häufig schwierig.Ein interessanter Ansatz
ist daher in der transienten Elastographie zu sehen, mit deren Hilfe der Schermodul von
Gewebe gemessen wird [87, 30, 101]. Sieht man von der Möglichkeit ab, elastische Ge-
webeeigenschaften mit Ultraschall abzubilden, so bietet sich mit der Magnet-Resonanz-
Tomographie ein anderes Abbildungsverfahren an, den Materialparameter Elastizitätsmo-
dul zu rekonstruieren [97]. Gerade hier muss aber die lange Untersuchungszeit von über
30 Minuten hinterfragt werden, weil nur eine diagnostisch sehr relevante Information
einen solchen Aufwand rechtfertigen würde. Zum heutigen Zeitpunkt muss festgestellt
werden, dass die Ultraschall-Elastographie noch nicht denSprung zu einem Standard-
verfahren geschafft hat, das im klinischen Alltag verwendet wird. In der Verwendung
einer mechanischen Vibrationsquelle mit geeigneter Signalverarbeitung ist mit Sicher-
heit eine Verbesserung des Verfahrens zu sehen. Ob sich das Verfahren der Ultraschall-
Elastographie in der klinischen Routinediagnostik durchsetzt, muss in weiteren klinischen
Arbeiten untersucht werden. Eventuell muss auch nochmal grundlegend an größeren Kol-
lektiven als bisher erforscht werden, in welchem Stadium von Tumoren signifikante Än-
derungen des elastischen Parameters Elastizitätsmodul zuerwarten sind.

Literaturverzeichnis
[1] H. Abé, K. Hayashi, M. Sato.Data Book on Mechanical Properties of Living Cells,
Tissues, and Organs. Springer Verlag, Tokyo, 1996.
[2] T. M. Atanackovic, A. Guran.Theory of Elasticity for Scientists and Engineers.
Birkhäuser, Boston, 2000.
[3] J. C. Bamber, R. J. Dickinson. Ultrasonic b-scanning: a computer simulation.Phys.
Med. Biol., 25(3):463–479, 1980.
[4] K.-J. Bathe.Finite-Elemente-Methoden. Springer Verlag, Berlin Heidelberg New
York, 1990.
[5] J. S. Bendat, A. C. Piersol.Random Data: Analysis and Measurement Procedures.
John Wiley and Sons, New York, 2nd Ed. , 1986.
[6] J. S. Bendat, A. G. Piersol.Engineering applications of correlation and spectral
analysis. John Wiley & Sons, New York, 1980.
[7] M. Bertrand, J. Meunier, M. Doucet, G. Ferland. Ultrasonic biomedical strain gau-
ge based on speckle tracking. InIEEE 1989 Ultrasonics Symposium Proceedings,
S. 859– 863, 1989.
[8] J. W. Betz. Effects of uncopensated relative time companding on a broad-band
cross correlator.IEEE Trans. Acoust. Speech & Signal Proc., 33(3):505–510, 1985.
[9] M. Bilgen. Target detectability in acoustic elastography. IEEE Trans. Ultrason.
Ferroel. Freq. Control, 46(5):1128–1133, 1999.
[10] M. Bilgen, M. F. Insana. Deformation models and correlation analysis in elasto-
graphy.J. Acoust. Soc. Am., 99(5):3212–3224, 1996.
[11] M. Bilgen, M. F. Insana. Predict target detectability inacoustic elastography.IEEE
1997 Ultrasonics Symposium Proceedings, 2:1427–1430, 1997.
[12] M. Bilgen, M. F. Insana. Covariance Analysis of Time DelayEstimates for Strained
Signals.IEEE Trans. Signal Proc., 46(10):2589–2600, 1998.
[13] M. Bilgen, M. F. Insana, T. J. Hall, P. Chaturvedi. Statistical Analysis of Strain
Images Estimated from Overlapped and Filtered Echo Signals. Ultrasonic Imaging,
19:209–220, 1997.
[14] J. Böhme.Stochastische Signale. Teubner Verlag, 1 Ed. , 1993.
[15] I. N. Bronstein, K. A. Semendjajew.Taschenbuch der Mathematik. Verlag Harri
Deutsch, Frankfurt a. M.

Literaturverzeichnis 120
[16] R. G. Brown, P. Y. C. Hwang.Introduction to random signals and applied Kalman
f iltering. John Wiley & Sons, New York, 3rd Ed. , 1997.
[17] D. E. Catlin.Estimation, Control, and the Discrete Kalman Filter, Bd. 71 v.App-
lied Mathematical Sciences. Springer-Verlag, New York, 1989.
[18] I. Céspedes, Y. Huang, J. Ophir, S. Spratt. Methods for estimation of subsample
time delays of digitized echo signals.Ultrasonic Imaging, 17:142–171, 1995.
[19] I. Céspedes, M. Insana, J. Ophir. Theoretical bounds on strain estimation in elasto-
graphy.IEEE Trans. Ultrason. Ferroel. Freq. Control, 42:969– 972, 1995.
[20] I. Céspedes, J. Ophir. Reduction of image noise in elastography. Ultrasonic Ima-
ging, 15:89–102, 1993.
[21] L. A. Chernov.Wave Propagation in a Random Medium. Dover Publications, New
York, 1960.
[22] P. de Jong, T. Arts, A. Hoeks, R. Reneman. Determination oftissue motion velocity
by correlation interpolation of pulsed ultrasonic echo signals.Ultrasonic Imaging,
12:84– 98, 1990.
[23] C. de Korte, A. van der Steen, B. Dijkman, C. Lancée. Performance of time delay
estimation methods for small time shifts in ultrasonic signals.Ultrasonics, 35:263–
274, 1997.
[24] M. M. Doyley, P. M. Meaney, J. C. Bamber. Evaluation of an iterative reconstruc-
tion method for quantitative elastography.Phys. Med. Biol., 45:1521–1540, 2000.
[25] O. Dössel.Bildgebende Verfahren in der Medizin. Springer, Berlin, Heidelberg,
New York, 2000.
[26] K. T. Dussik. Über die Möglichkeit hochfrequente mechanische Schwingungen als
diagnostische Hilfsmittel zu verwenden.Z. f. d. ges. Neurol. u. Psychiat., 174:143,
1942.
[27] R. Q. Erkamp, P. Wiggins, A. R. Skovoroda, S. Y. Emelianov,M. O’Donnell. Mea-
suring the elastic modulus of small tissue samples.Ultrasonic Imaging, 20:17–28,
1998.
[28] H. Ermert. Skriptum zur Vorlesung „Diagnostische Abbildungsverfahren I“ an der
Ruhr-Universität Bochum. 1995.
[29] A. Fettweis.Elemente nachrichtentechnischer Systeme. Teubner, Stuttgart, 1992.
[30] M. Fink, L. Sandrin, M. Tanter, S. Catheline, S. Chaffai, J. Bercoff, J. L. Gennis-
son. Ultra high speed imaging of elasticity.IEEE 2002 Ultrasonics Symposium
Proceedings, 2:1811–1820, 2002.

Literaturverzeichnis 121
[31] J. Fromageau, E. Brusseau, D. Vray, G. Gimenez, P. Delachartre. Characterization
of PVA Cryogel for Intravascular Ultrasound Elasticity Imaging. IEEE Trans.
Ultrason. Ferroel. Freq. Control, 50(10):1318–1324, 2003.
[32] Y. C. Fung. Biomechanics: Mechanical Properties of Living Tissues. Springer-
Verlag, 1993.
[33] B. S. Garra, E. I. Céspedes, J. Ophir, S. R. Spratt, R. A. Zurrubier, C. M. Magnant,
M. F. Pennanen. Elastography of breast lesions: Initial clinical results.Radiology,
202:79–86, 1997.
[34] J. W. Goodman.Laser Speckle and Related Phenomena, Kap. Statistical properties
of laser speckle patterns, S. 9–75. Springer-Verlag, Berlin, 1975.
[35] P. Haberäcker.Digitale Bildverarbeitung: Grundlagen und Anwendungen. Carl
Hanser Verlag München Wien, 1991.
[36] T. J. Hall, M. Bilgen, M. F. Insana, T. A. Krouskop. Phantom materials for elasto-
graphy.IEEE Trans. Ultrason. Ferroel. Freq. Control, 44:1355– 1365, 1997.
[37] E. Häusler, W. Kiefer. Anregung von Stoßwellen in Flüssigkeiten durch Hochge-
schwindigkeitswassertropfen.Verh. DPG, 6:786, 1970.
[38] K. M. Hiltawsky. Entwurf und Realisierung eines Verfahrens zur dreidimensio-
nalen Gewebedifferenzierung der weiblichen Brust mit Ultraschall. Diplomarb.,
Lehrstuhl für Hochfrequenztechnik, Ruhr–Universität Bochum, 1998.
[39] K. M. Hiltawsky. Freihand-Ultraschall-Elastographie der weiblichen Brust. Me-
dizinische Dissertation, Ruhr–Universität Bochum, 2000.
[40] K. M. Hiltawsky, H. Ermert. Uncertainty relation in elastography: New approach
to explain for errors of in vivo elastography.IEEE 2001 Ultrasonics Symposium
Proceedings, 2:1597–1600, 2001.
[41] K. M. Hiltawsky, H. Ermert. Measurement of Flow-Mediated Vasodilatation using
Kalman Filtering.IEEE 2002 Ultrasonics Symposium Proceedings, 2:1791–1794,
2002.
[42] K. M. Hiltawsky, H. Ermert. Vorrichtung zur Unterstützung der Elastographie.
Patentschrift DE 199 36 554 C 2, 2003.
[43] K. M. Hiltawsky, M. Krüger, H. Ermert, L. Heuser. Threedimensional ultrasound
elastography of the female breast: in vitro and in vivo results. Biomed Tech (Berl),
43:520–521, 1998.
[44] K. M. Hiltawsky, M. Krüger, C. Starke, L. Heuser, H. Ermert, A. Jensen. Freehand
Ultrasound Elastography of Breast Lesions: Clinical Results.Ultrasound in Med.
& Biol., 27(11):1461–1469, 2001.

Literaturverzeichnis 122
[45] K. M. Hiltawsky, A. Wiegratz, M. Enderle, H. Ermert. Real-time detection of
vessel diameters with ultrasound.Biomed. Tech., 48(5):141–146, 2003.
[46] J. A. Jensen. A model for the propagation and scatteringof ultrasound in tissue.J.
Acoust. Soc. Am., 89:182–191, 1991.
[47] J. A. Jensen.Estimation of Blood Velocities Using Ultrasound. Cambridge Uni-
versity Press, 1996.
[48] J. A. Jensen. Field: A program for simulating ultrasound systems. In10th Nordic-
Baltic Conference on Biomedical Imaging, Bd. 34 v.1, S. 351–353. Medical &
Biological Engineering & Computing, 1996.
[49] J. A. Jensen, N. B. Svendsen. Calculation of pressure fields from arbitrarily shaped,
apodized, and excited ultrasound transducers.IEEE Trans. Ultrason. Ferroel. Freq.
Control, 39:262–267, 1992.
[50] B. Jähne.Digitale Bildverarbeitung. Springer-Verlag, Berlin Heidelberg, 1989.
[51] F. Kallel, M. Bertrand. Tissue Elasticity Reconstruction Using Linear Perturbation
Method. IEEE Trans. Medical Imaging, 15(3):299–313, 1996.
[52] F. Kallel, M. Bertrand, J. Meunier. Speckle Motion Artifact Under Tissue Rotation.
IEEE Trans. Ultrason. Ferroel. Freq. Control, 41(1):105–122, 1994.
[53] F. Kallel, J. Ophir. A least-square estimator for elastography.Ultrasonic Imaging,
19:195–208, 1997.
[54] F. Kallel, J. Ophir. Three-dimensional tissue motion and its effect on image noise
in elastography.IEEE Trans. Ultrason. Ferroel. Freq. Control, 44(6):1286–1296,
1997.
[55] S. M. Kay. Fundamentals of Statistical Signal Processing: Estimation Theory.
Prentice Hall International, Inc., 1993.
[56] C. Kimme-Smith. Can quantitative ultrasound measurements help avoid breast
biopsy ?American Journal of Radiology, 165:832– 833, 1995.
[57] C. H. Knapp, G. C. Carter. The generalized correlation method for estimation of
time delay.IEEE Trans. Acoust. Speech & Signal Proc., 24(4):320–327, 1976.
[58] T. A. Krouskop, T. M. Wheeler, F. Kallel, B. S. Garra, T. Hall. Elastic moduli of
breast and prostate tissues under compression.Ultrasonic Imaging, 20:260–274,
1998.
[59] M. Krüger. Ein Modell für die morphologische und quantitative Abbildung aku-
stisch inhomogener Medien mit Ultraschall. Dissert., Ruhr–Universität Bochum,
1997.

Literaturverzeichnis 123
[60] H. Kuttruff. Physik und Technik des Ultraschalls. S. Hirzel Verlag Stuttgart, 1988.
[61] L. D. Landau, E. M. Lifschitz. Lehrbuch der theoretischen Physik: Elastizitäts-
theorie, Bd. VII. Akademie-Verlag, Berlin, 1989.
[62] A. Leon-Garcia. Probability and Random Processes for Electrical Engineering.
Addison-Wesley Publishing Company, 2nd Ed. , 1994.
[63] A. Lorenz, H. J. Sommerfeld, M. Garcia-Schürmann, S. Philippou, T. Senge, H. Er-
mert. A New System for the Acquisition of Ultrasonic Multicompression Strain
Images of the Human Prostate In Vivo.IEEE Trans. Ultrason. Ferroel. Freq. Con-
trol, 46(5):1147–1155, 1999.
[64] M. A. Lubinski, S. Y. Emelianov, K. R. Raghavan, A. E. Yagle, A. R. Skovoroda,
M. O’Donnell. Lateral Displacement Estimation Using Tissue Incompressibility.
IEEE Trans. Ultrason. Ferroel. Freq. Control, 43 (2):247–255, 1996.
[65] A. Macovski. Medical Imaging Systems. Prentice Hall, Englewood Cliffs, NJ,
1983.
[66] H. Madjar, W. Sauerbrei, A. Rachowska, A. Pfleiderer. Vergleich von hochauflö-
sender Sonographie und Mammographie.Ultraschall Klin Prax, 6:290–297, 1991.
[67] J. Meunier, M. Bertrand. Ultrasonic texture motion analysis: Theory and simulati-
on. IEEE Trans. Ultrason. Ferroel. Freq. Control, 14(2):293–300, 1995.
[68] H. Morneburg. Bildgebende Systeme für die medizinische Diagnostik. Publicis
MCD Verlag, München, 1995.
[69] P. M. Morse, K. U. Ingard.Theoretical Acoustics. McGraw-Hill, New York, 1968.
[70] J. F. Nye.Physical Poperties of Crystals. Oxford University Press, Oxford, 1985.
[71] M. O’Donnell, A. Skovoroda, B. Shapo, S. Emelianov. Internal displacement and
strain imaging using ultrasonic speckle tracking.IEEE Trans. Ultrason. Ferroel.
Freq. Control, 41:314– 325, 1994.
[72] J. Ophir, I. Céspedes, et al. Elastography: A quantitative method for imaging the
elasticity of biological tissues.Ultrasonic Imaging, 13:111–134, 1991.
[73] J. Pedersen. A simple method for relative assessment ofthe sound propagation
velocity in breast tumors: Technique and diagnostic efficacy. American Journal of
Radiology, 168:1591–1594, 1997.
[74] A. Pesavento.Quantitative Ultraschallabbildungsverfahren für die Muskeldiagno-
stik. Dissert., Ruhr–Universität Bochum, 1999.
[75] A. Pesavento, A. Lorenz, H. Ermert. System for Real-TimeElastography.Electro-
nics Letters, 35 (11):941–942, 1999.

Literaturverzeichnis 124
[76] A. Pesavento, C. Perrey, M. Krueger, H. Ermert. A time efficient and accurate strain
estimation concept for ultrasonic elastography using iterative phase zero estimati-
on. IEEE Trans. Ultrason. Ferroel. Freq. Control, 46(5):1057–1067, 1999.
[77] A. D. Pierce.Acoustics: An Introduction to Its Physical Principles and Applicati-
ons. Acoustical Society of America, New York, 1989.
[78] H. Ponnekanti, J. Ophir, I. Céspedes. Axial stress distribution between coaxial
compressors in elastography: an analytical model.Ultrasound in Med. & Biol.,
18(8):667–673, 1992.
[79] H. Ponnekanti, J. Ophir, I. Céspedes. Ultrasonic imaging of the stress distributi-
on in elastic media due to an external compressor.Ultrasound in Med. & Biol.,
20(1):27–33, 1994.
[80] A. H. Quazi. An overview of the time delay estimate in active and passive systems
for target localization.IEEE Trans. Acoust. Speech & Signal Proc., 29:527–533,
1981.
[81] K. Richter. Clinical amplitude/velocity reconstructive imaging (CARI) — a new
sonographic method for detecting breast lesions.Brit. J. Radiol., 68:375–384,
1995.
[82] K. Richter, B. Hamm, S. H. Heywang-Köbrunner. Automatisierte Mammasono-
graphie und Mammographie: Differenzierung Benigner und Maligner Mammalä-
sionen.Fortschr. Röntgenstr., 169,3:245–252, 1998.
[83] R. Righetti, J. Ophir, P. Ktonas. Axial resolution in elastography. Ultrasound in
Med. & Biol., 28(1):101–113, 2002.
[84] R. Righetti, S. Srinivasan, J. Ophir. Lateral resolutionin elastography.Ultrasound
in Med. & Biol., 29(5):695–704, 2003.
[85] A. Saada. Elasticity, theory and applications.Pergamon Press NY, 14, 1974.
[86] H. Saechling.Kunststoff-Taschenbuch. Carl Hanser Verlag München Wien, 1992.
[87] L. Sandrin, M. Tanter, S. Catheline, M. Fink. Time-resolved 2D pulsed elastogra-
phy. Experiments on tissue-equivalent phantoms and breastin-vivo. Proceedings
of SPIE - The International Society for Optical Engineering, 4325:120–126, 2001.
[88] M. Scabia, E. Biagi, L. Masotti. Hardware and software platform for real-time
processing and visualization of echographic radiofrequency signals. IEEE Trans.
Ultrason. Ferroel. Freq. Control, 49(10):1444–52, 2002.
[89] I. Schlecht, J. Hadijuana, N. Hosten, H. Oellinger, C. Minguillon, T. Bombard,
W. Lichtenegger, R. Felix. Sonographischer Nachweis des Mammakarzinoms bei
unauffälliger Mammographie.Akt Radiol, 5:297–300, 1995.

Literaturverzeichnis 125
[90] G. Schmitz.Ein Verfahren zur Ultraschall-Gewebecharakterisierung der Prostata.
Fortschr.-Ber. VDI Reihe 17: Biotechnik Nr. 141. VDI Verlag, Düsseldorf, 1996.
[91] G. Schmitz, H. Ermert, T. Senge. Tissue-characterization of the prostate using
radio frequency ultrasonic signals.IEEE Trans. Ultrason. Ferroel. Freq. Control,
46(1):126–138, 1996.
[92] W. Schnell, D. Gross, W. Hauger.Technische Mechanik: Elastostatik, Bd. II.
Springer-Verlag, Berlin Heidelberg New York, 1992.
[93] J. S. Schreiman, R. R. Gisvold, J. F. Greenleaf, R. C. Bahn. Ultrasound transmis-
sion computed tomography of the breast.Radiology, 150:523–530, 1984.
[94] P. M. Schultheiss, E. Weinstein. Estimation of differential Doppler shifts.J. Acoust.
Soc. Am., 66(5):1412–1419, 1979.
[95] D. A. Seggie, S. Leeman, R. E. Burge. Realistic simulation of B-scan images.
IEEE 1983 Ultrasonics Symposium Proceedings, S. 714–717, 1983.
[96] E. A. Sickles. Practical Solutions to Common Mammographic Problems: Tailoring
the Examination.American Journal of Radiology, 151:31–39, 1988.
[97] R. Sinkus, J. Lorenzen, D. Schrader, M. Lorenzen, M. Dargatz, D. Holz. High-
resolution tensor MR elastography for breast tumour detection. Physics in Medici-
ne and Biology, 45(6):1649–1664, 2000.
[98] W. L. Smith, A. Fenster. Optimum scan spacing for three-dimensional ultrasound
by speckle statistics.Ultrasound in Med. & Biol., 26(4):551–562, 2000.
[99] P. R. Stepanishen. Pulsed transmit/receive response ofultrasonic piezoelectric
transducers.J. Acoust. Soc. Am., 69:1815–1827, 1981.
[100] V. A. Sutilov. Physik des Ultraschalls: Grundlagen. Springer-Verlag, Wien - New
York, 1984.
[101] M. Tanter, J. Bercoff, S. Chaffai, L. Sandrin, S. Catheline, M. Fink, J. L. Gen-
nisson, M. Meunier. In vivo breast tumor detection using transient elastography.
Ultrasound in Med. & Biol., 29(10):1387–1396, 2003.
[102] S. Timoshenko, J. N. Goodier.Theory of Elasticity Theory of Elasticity. McGraw-
Hill Book Company, New York, 1970.
[103] M. Ueda, H. Ichikawa. Analysis of an echo signal reflected from a weakly scatte-
ring volume by a discrete model of the medium.J. Acoust. Soc. Am., 70(6):1768–
1775, 1981.
[104] M. Ueda, Y. Ozawa. Spectral analysis of echoes for backscattering coefficient
measurement.J. Acoust. Soc. Am., 77(1):38–47, 1985.

Literaturverzeichnis 126
[105] T. Varghese, J. Ophir. Enhancement of echo-signal correlation in elastography
using temporal stretching.IEEE Trans. Ultrason. Ferroel. Freq. Control, 44:173–
180, 1997.
[106] T. Varghese, J. Ophir. A theoretical framework for performance characterization
of elastography: The strain filter.IEEE Trans. Ultrason. Ferroel. Freq. Control,
44:164–172, 1997.
[107] T. Varghese, J. Ophir, I. Céspedes. Noise reduction in elastograms using temporal
stretching with multicompression averaging.Ultrasound in Med. & Biol., 22:1043–
1052, 1996.
[108] R. F. Wagner, M. F. Insana, D. G. Brown. Statistical properties of radio-frequency
and envelope-detected signals with applications to medical ultrasound.J. Opt. Soc.
Am., 4(5):910–922, 1987.
[109] R. F. Wagner, S. W. Smith, J. M. Sandrik, H. Lopez. Statistics of Speckle in Ul-
trasound B-scans.IEEE Transactions on Sonics and Ultrasonics, 30(3):156–163,
1983.
[110] W. F. Walker, G. E. Trahey. A fundamental limit on the accuracy of speckle signal
alignment.IEEE 1994 Ultrasonics Symposium Proceedings, S. 1787–1791, 1994.
[111] W. F. Walker, G. E. Trahey. A fundamental limit on delayestimation using par-
tially correlated speckle signals.IEEE Trans. Ultrason. Ferroel. Freq. Control,
42(2):301–308, 1995.
[112] E. Weinstein, A. J. Weiss. Fundamental Limitations inPassive Time-Delay Esti-
mation – Part II: Wide-Band Systems.IEEE Trans. Acoust. Speech & Signal Proc.,
32(5):1064–1078, 1984.
[113] A. J. Weiss, E. Weinstein. Fundamental Limitations inPassive Time Delay Estima-
tion – Part I: Narrow-Band Systems.IEEE Trans. Acoust. Speech & Signal Proc.,
31(2):472–485, 1983.
[114] O. C. Zienkiewicz.Methode der finiten Elemente. Carl Hanser Verlag, München
Wien, 1984.

Anhang A
Transformation einer normalverteiltenZufallsvariablen
Transformation „weiß nach farbig“
Ist eine Störungwg gegeben mit statistischen Eigenschaftenwg ∼ N (0, σ2I), dann kanndiese mit Hilfe einer linearen Transformationwc = A · wg in eine Störungwc überführtwerden mit statistischen Eigenschaftenwc ∼ N (0, σ2C).
Mit Hilfe von
Cov {wc} = E{wc wc
T}
= E{Awg (Awg)
T}
= AE{wgw
Tg
}AT (A.1)
folgt
Aσ2 IAT =! σ2 C (A.2)
und damit
C = AAT . (A.3)
Eine Eigenwertzerlegung vonC, z.B. in MATLAB realisiert durch den Befehl „[V,D] =eig(C)“ liefert
CV = VD , (A.4)
woraus sich
C = VDVT =(V√
D) (
V√
D)T
(A.5)
ergibt.
Die Transformationsvorschrift zur Überführung vonwg mit statistischen Eigenschaftenwg ∼ N (0, σ2I) nachwc mit statistischen Eigenschaftenwc ∼ N (0, σ2C) lautet dem-nach
wc = V√
Dwg . (A.6)
Transformation „farbig nach weiß“
Ist eine Störungwc gegeben mit statistischen Eigenschaftenwc ∼ N (0, σ2C), dann kanndiese mit Hilfe einer linearen Transformationwg = A · wc in eine Störungwg überführtwerden mit statistischen Eigenschaftenwg ∼ N (0, σ2I).
Mit Hilfe von
Cov {wg} = E{wg wg
T}
= E{Awc (Awc)
T}
= AE{wcw
Tc
}AT (A.7)
folgt
Aσ2CAT =! σ2 I (A.8)

Anhang A: Transformation einer normalverteilten Zufallsvariablen 128
bzw.
ATACATA = ATA . (A.9)
Daraus folgt die BeziehungATAC = I und schließlich
[C]−1 = AT A . (A.10)
Eine Eigenwertzerlegung von[C]−1, z.B. in MATLAB realisiert durch den Befehl„ [V,D] = eig([C]−1)“ liefert
[C]−1 V = VD , (A.11)
woraus sich
[C]−1 = VDVT =(√
DVT)T (√
DVT)
(A.12)
ergibt.
Die Transformationsvorschrift zur Überführung vonwc mit statistischen Eigenschaftenwc ∼ N (0, σ2C) nachwg mit statistischen Eigenschaftenwg ∼ N (0, σ2I) lautet dem-nach
wg =√
DVT wc . (A.13)

Anhang B
Separation desKorrelationskoeffizienten
Im folgenden wird hergeleitet, dass der Korrelationskoeffizient ρ(τ) aus Gl. (3.9) sepa-rierbar ist, wenn für die Punktbildfunktionh(x, y, t) und die Impulsantwort des Gewebesf(x, y, t) aus Kap. 2.1.4 angenommen wird, dass
• die Punktbildfunktionh(x, y, t) separierbar ist und
• die Impulsantwort des Gewebesf(x, y, t) durch weißes Rauschen beschrieben wer-den kann.
Betrachtet man das Empfangssignale(x, y, t) aus Gl. (2.13) an einer beliebigen lateralenbzw. elevationalen Positionx1 bzw.y1 zu einem Zeitpunktt1 für eine lokal hervorgerufeneKompressionα1 = 1/(1 − εzz) und vernachlässigt das elektronische Rauschen, so ist
e1(∆x1, ∆y1, t1) =
+∞∫
−∞
+∞∫
−∞
+∞∫
−∞
f(x1, y1, α1τ1)
·h(∆x1 − x1, ∆y1 − y1, t1 − τ1) dx1 dy1 dτ1 . (B.1)
Ebenso gilt für das Empfangssignal an Positionenx2 bzw. y2 zu einem Zeitpunktt2 füreine lokale Kompressionα2
e2(∆x2, ∆y2, t2) =
+∞∫
−∞
+∞∫
−∞
+∞∫
−∞
f(x2, y2, α2τ2)
·h(∆x2 − x2, ∆y2 − y2, t2 − τ2) dx2 dy2 dτ2 . (B.2)
Es wird nun im Hinblick auf eine spätere Berechnung der Auto- bzw. Kreuzkorrelations-funktion der Erwartungswert des Produkts der beiden Empfangssignale gebildet, wobeizur besseren Übersichtlichkeit die Integrationsgrenzen von −∞ bis +∞ weggelassenwerden,
E {e1(∆x1, ∆y1, t1) e2(∆x2, ∆y2, t2)}
= E
{∫∫∫f(x1, y1, α1τ1) h(∆x1 − x1, ∆y1 − y1, t1 − τ1) dx1 dy1 dτ1
·∫∫∫
f(x2, y2, α2τ2) h(∆x2 − x2, ∆y2 − y2, t2 − τ2) dx2 dy2 dτ2
}. (B.3)
Eine Vertauschung der Integrationsreihenfolge und die Substitutionenτ ′1 = α1τ1 bzw.
τ ′2 = α2τ2 mit anschließender Umbenennung führen auf
∫∫∫∫∫∫E {f(x1, y1, τ1) f(x2, y2, τ2)}
·hx(∆x1 − x1) hy(∆y1 − y1) ht(t1 − τ1α1
) 1α1

Anhang B: Separation des Korrelationskoef f izienten 130
·hx(∆x2 − x2) hy(∆y2 − y2) ht(t2 − τ2α2
) 1α2
dx1 dy1 dτ1 dx2 dy2 dτ2 . (B.4)
Wird nun angenommen, dass die Impulsantwort des Gewebes durch weißes Rauschenbeschrieben werden kann, d.h. durch einen stationären Prozess mit der Eigenschaft
E {f(x1, y1, τ1) f(x2, y2, τ2)} = S2 δ(x1 − x2) δ(y1 − y2) δ(τ1 − τ2) , (B.5)
dann ergibt sich für den Erwartungswert des Produkts der Empfangssignale
E {e1(∆x1, ∆y1, t1) e2(∆x2, ∆y2, t2)}
=
∫∫∫∫∫∫S2 δ(x1 − x2) hx(∆x1 − x1) hx(∆x2 − x2)
· δ(y1 − y2) hy(∆y1 − y1) hy(∆y2 − y2)
· δ(τ1 − τ2) ht(t1 − τ1α1
) 1α1
ht(t2 − τ2α2
) 1α2
dx1 dy1 dτ1 dx2 dy2 dτ2 . (B.6)
Die Punktbildfunktion aus Gl. (2.14) wird als separierbareFunktion h(x, y, t) =hx(x) hy(y) ht(t) angenommen, so dass sich aus Gl. (B.6)
E {e1(∆x1, ∆y1, t1) e2(∆x2, ∆y2, t2)}
= S2
∫∫∫hx(∆x1 − x2) hx(∆x2 − x2)hy(∆y1 − y2) hy(∆y2 − y2)
·ht(t1 − τ2α1
) 1α1
ht(t2 − τ2α2
) 1α2
dx2 dy2 dτ2
= S2
∫hx(∆x1 − x2) hx(∆x2 − x2) dx2
∫hy(∆y1 − y2) hy(∆y2 − y2) dy2
·∫
ht(t1 − τ2α1
) 1α1
ht(t2 − τ2α2
) 1α2
dτ2 (B.7)
ergibt. Im folgenden wird gezeigt, dass das erste Integral in der obigen Gl. (B.7) nurvon der Differenz∆x = ∆x1 − ∆x2 abhängig ist, wobei die Symmetrie-Eigenschafthx(x) = hx(−x) der Punktbildfunktion aus Gl. (2.14) genutzt wird,
∫hx(∆x1 − x2) hx(∆x2 − x2) dx2
=
∫hx(x) hx(∆x − x) dx = hx ∗
xhx
∣∣x=∆x
. (B.8)
Nach Gl. (2.14) hathx(x) einen gaussförmigen Verlauf, so dass die Fourierbeziehung
hx(x) = exp
[− x2
2 σ2lat
]◦−• Hx(fx) =
√2πσ2
lat exp[−2π2σ2
lat f2x
](B.9)
gilt. Die Faltung in Gl. (B.8) kann durch Multiplikation der Fouriertransformierten imFrequenzbereich und anschließende Rücktransformation ausgeführt werden,
Hx(fx) · Hx(fx) •−◦√
πσ2lat exp
[− x2
4 σ2lat
], (B.10)
so dass sich wieder eine Funktion mit gaußförmigem Verlauf ergibt, allerdings mit einemum den Faktor
√2 größeren Parameterσlat. Das erste Integral in Gl. (B.7) kann demnach
zu
hx(∆x) =
∫hx(∆x1 − x2) hx(∆x2 − x2) dx2 =
√πσ2
lat exp
[− ∆x2
4 σ2lat
](B.11)

Anhang B: Separation des Korrelationskoef f izienten 131
vereinfacht werden. Auf die gleiche Weise kann das zweite Integral in Gl. (B.7) zu
hy(∆y) =
∫hy(∆y1 − y2) hy(∆y2 − y2) dy2 =
√πσ2
elev exp
[− ∆y2
4 σ2elev
](B.12)
mit ∆y = y1 − y2 vereinfacht werden. Das dritte Integral in Gl. (B.7) soll hier nicht näherbesprochen werden,
ht(t1, t2, α1, α2) =
∫ht(t1 − τ2
α1) 1
α1
ht(t2 − τ2α2
) 1α2
dτ2 . (B.13)
Es folgt als Zwischenergebnis für den Erwartungswert des Produkts der Empfangssignale
E {e1(∆x1, ∆y1, t1) e2(∆x2, ∆y2, t2)}= S2 hx(∆x) hy(∆y) ht(t1, t2, α1, α2) . (B.14)
Sei nun e1(∆x1, ∆y1, t) das Empfangssignal vor Kompression mitα1 = 1 unde2(∆x2, ∆y2, t) das Empfangssignal nach Kompression mitα2 = α = 1/(1 − εzz).Der Korrelationskoeffizientρ(τ) aus Gl. (3.9) ergibt sich dann unter Berücksichtigungder Erwartungswertbildung zu
ρ(τ) =
TC/2∫−TC/2
E{e1(∆x1,∆y1,t+τ) e2(∆x2,∆y2,t)}dt
√√√√TC/2∫
−TC/2
E{e1(∆x1,∆y1,t) e1(∆x1,∆y1,t)}dt
√√√√TC/2∫
−TC/2
E{e2(∆x2,∆y2,t) e2(∆x2,∆y2,t)}dt
=
hx(∆x) hy(∆y)TC/2∫
−TC/2
ht(t+τ,t,1,α)dt
hx(0) hy(0)
√√√√TC/2∫
−TC/2
ht(t,t,1,1)dt
√√√√TC/2∫
−TC/2
ht(t,t,α,α)dt
=hx(∆x)
hx(0)· hy(∆y)
hy(0)·
TC/2∫−TC/2
ht(t+τ,t,1,α)dt
√√√√TC/2∫
−TC/2
ht(t,t,1,1)dt
√√√√TC/2∫
−TC/2
ht(t,t,α,α)dt
= ρlat(∆x) · ρelev(∆y) · ρax(τ, εzz) , (B.15)
d.h., dass er separierbar und als Produkt von drei einzelnenKorrelationskoeffizientendarstellbar ist.

Anhang C
Impulsantwort desDehnungs-KQ-Schätzers
Die Matrix A ist gegeben durch
A = [a b] mit a =
1...1
und b =
n0 + 1...
n0 + N
Tτ
Def:= (n0 a+n)Tτ .(C.1)
Es gilt dann
(A
TA
)−1A
T =
[aTa aTbbTa bTb
]−1 [aT
bT
]=
1
aTa bTb − bTa aTb
[bTb −aTb
−bTa aTa
] [aT
bT
].(C.2)
Das Ergebnis ist eine Matrix mitN Spalten und 2 Zeilen, wobei für die Schätzung vonε nur diezweite Zeile von Bedeutung ist. Es soll daher gezeigt werden, dass die zweite Zeile der Matrix ausGl. (C.2) unabhängig vonn0 und damitn0a ist, wobei folgende Beziehungen genutzt werden
aTa = N (C.3)
nTa = naT = 1/2 N (N + 1) (C.4)
aTb = bTa = (N n0 + 1/2 N (N + 1)) Tτ (C.5)
bTb = (n0 aT + nT)(n0 a + n)T 2τ
=(n2
0 N + n0 N (N + 1) + nTn)
T 2τ (C.6)
nTn =1
6N (N + 1) (2N + 1) . (C.7)
Die Determinante in (C.2) ergibt sich zu
aTa bTb − bTa aTb = (n20 N2 + N2 n0 (N + 1) + nTn N − [N n0 + 1/2 N (N + 1)]2)T 2
τ
=
(1
6N2 (N + 1) (2N + 1) − 1/4 N2 (N + 1)2
)T 2
τ
=1
12N2(N2 − 1)T 2
τ , (C.8)
und für die zweite Zeile in (C.2) erhält man
−bTa aT + aTa bT = (−N n0 aT − 1/2 N (N + 1) aT + N (n0 aT + nT))Tτ
= (N (nT − N + 1
2aT))Tτ
=N
2(2nT − N − 1)Tτ . (C.9)
Zum einen ist dadurch gezeigt, dass die Schätzung vonε durch die Methode der Kleinsten Qua-drate nicht abhängig ist vonn0 bzw. der Position, an der geschätzt wird. Zum anderen kann dieKQ-Schätzung als FIR-Filter implementiert werden, dessen Impulsantwort nach Gl. (C.9) einepunktsymmetrische Rampe ist.

Anhang D
Gauß-Puls: Pulsbreite↔ Bandbreite
Es gilt die Fourierbeziehung
exp(−α t2
)◦−•
√π
αexp
(− ω2
4 α
)(D.1)
und damit
exp
(−t2
2 σ2
)◦−•
√2 πσ2 exp
(−2 π2σ2f2
)(D.2)
mit ω = 2π f .
Die PulsbreiteP (engl.:FWHM) ist im Zeit- bzw. Ortsbereich definiert. Es ist der Bereich, in demein gaußförmiger Puls größer als die Hälfte des Maximums ist, d.h.P = 2 t1/2 mit
exp
(−t21/2
2 σ2
)!= 0,5 ⇔ t1/2 =
√2 ln 2σ (D.3)
⇒ P = FWHM = 2 ·√
2 ln 2σ ≈ 2,3548 σ . (D.4)
Die BandbreiteB ist im Frequenzbereich definiert. Es ist der Bereich, in dem das Spektrum größerals die Hälfte des Maximums(B6dB) oder als einem Zehntel des Maximums(B20dB) ist, d.h.
exp(−2 π2σ2f2
) != 0,5 für f =
B6dB
2(D.5)
bzw.
exp(−2 π2σ2f2
) != 0,1 für f =
B20dB
2(D.6)
Damit ergibt sich folgender Zusammenhang zwischenσ und der Bandbreite,
σ =
√2 ln 2
π B6dB=
√2 ln 10
π B20dB. (D.7)
Betrachtet man die Leistung eines Signales mit gaußförmigem Spektrum, so ist∞∫
−∞
(exp
(−2 π2σ2f2
))2df =
1
2√
πσ=
√π B6dB
2√
2 ln 2≈ 0,75 B6dB (D.8)
die äquivalente Bandbreite eines Signals mit einem rechteckförmigen Spektrum.

Danksagung
Diese Arbeit ist im Rahmen meiner Tätigkeit als wissenschaftlicher Mitarbeiter am Lehr-
stuhl für Hochfrequenztechnik der Ruhr-Universität Bochum bzw. als Mitarbeiter des
Kompetenzzentrums Medizintechnik Ruhr (KMR Bochum) entstanden.
Ich möchte mich bei allen Kollegen, Mitarbeitern und Studenten des Instituts bedanken,
die zum Gelingen dieser Arbeit beigetragen haben. Den Mitarbeitern der mechanischen
und elektrischen Werkstätten danke ich für die vielfältigepraktische Unterstützung mei-
nes Vorhabens. Mein besonderer Dank gilt Herrn Prof. Dr.-Ing. H. Ermert für die Über-
lassung des Themas und die Betreuung der Arbeit. Herrn Prof. Dr.-Ing. J. F. Böhme danke
ich für die vielfältigen Anregungen während meines Studiums sowie die Übernahme des
Korreferats und Herrn Prof. Dr.-Ing. G. Schmitz ebenfalls für die Übernahme des Korre-
ferats.

Lebenslauf
Name: Karsten Mark HiltawskyGeburtsdatum und -ort: 12. August 1974 in LemgoStaatsangehörigkeit: deutschFamilienstand: ledigKonfession: römisch-katholisch
Schulbesuch:08/1980–07/1984 Heide-Grundschule/ Schwerte08/1984–06/1993 Ruhrtal-Gymnasium/ Schwerte mit Abschluss Abitur
Studium:Elektrotechnik:Wintersemester 1993 Studienbeginn an der Ruhr-UniversitätBochum10/1995 Vordiplom Elektrotechnik08/1996–05/1997 Studienaufenthalt an der Purdue-University/ USA
durch Stipendium des DAAD04/1998 Abschluß Diplom-Ingenieur ElektrotechnikMedizin:Wintersemester 1993 Studienbeginn an der Ruhr-UniversitätBochum09/1995 Ärztliche Vorprüfung09/1996 1. Staatsexamen Medizin09/1999 2. Staatsexamen Medizin10/1999-10/2000 Praktisches Jahr in Bochum und Zürich10/2000 3. Staatsexamen Medizin12/2001 Medizinische Promotion12/2002 Erteilung der ärztlichen Voll-Approbation
Stipendien und Preise:seit 11/1995 Stipendiat der Studienstiftung des deutschenVolkes03/1997 Förderpreis der Stiftung Familie Klee10/1998 Stipendium der Esser-Stiftung
Berufliche Tätigkeit:10/2000-04/2004 Wissenschaftlicher Mitarbeiter am Institut für Hochfrequenztechnik
der Ruhr-Universität Bochumseit 04/2004 Angestellter am GE Forschungszentrum Garching