Embed Size (px)
Citation preview
BachelorthesisHans David Burmeister
Untersuchung und Bewertung derÜbertragungseigenschaften eines Fahrzeug-zu-X
Kommunikationssystems
Fakultät Technik und InformatikDepartment Informations- undElektrotechnik
Faculty of Engineering and Computer ScienceDepartment of Information andElectrical Engineering

Hans David Burmeister
Untersuchung und Bewertung derÜbertragungseigenschaften eines Fahrzeug-zu-X
Kommunikationssystems
Bachelorthesis eingereicht im Rahmen der Bachelorprüfungim Studiengang Informations- und Elektrotechnikam Department Informations- und Elektrotechnikder Fakultät Technik und Informatikder Hochschule für Angewandte Wissenschaften Hamburg
Betreuender Prüfer : Prof. Dr.-Ing. Ralf WendelZweitgutachter : Dr.-Ing. Henning Hajo Mosebach
Abgegeben am 13. August 2013

Hans David Burmeister
Thema der BachelorthesisUntersuchung und Bewertung der Übertragungseigenschaften eines Fahrzeug-zu-XKommunikationssystems
StichworteFahrzeug-zu-X Kommunikation, IEEE 802.11p, DSRC, intelligentes Transportsystem,Übertragungseigenschaften, Latenz, RSSI, Paketverlustrate, PER, Car-to-Car Pro-tokoll
KurzzusammenfassungIn dieser Arbeit werden die Übertragungseigenschaften der Kommunikation nach demIEEE-Standard 802.11p zwischen intelligenten Transportsystemen (ITS) in realemUmfeld untersucht und bewertet. Als Versuchsfeld dient eine mit ITS RoadsideStations (IRSs) ausgestattete Referenzstrecke im Stadtgebiet. Die IRSs sendenNachrichten an eine ITS Vehicle Station anhand dieser die Messgrößen Latenz,Received Signal Strength Indicator (RSSI) sowie Paketverlustrate der Übertragungermittelt werden. Es werden Versuchsfahrten mit unterschiedlichen Datenraten,Nachrichtenlängen sowie Szenarien durchgeführt.
Hans David Burmeister
Title of the paperAnalysis and evaluation of the propagation characteristics of an vehicle-to-X commu-nication system
KeywordsVehicle-to-X communication, IEEE 802.11p, DSRC, intelligent transport system, prop-ergation characteristics, latency, RSSI, packet error ratio, PER, Car-to-Car protocol
AbstractThis paper analyzes and evaluates propagation characteristics of communicationsbetween intelligent transport systems (ITSs) using the IEEE standard 802.11p. Anurban environment equipped with ITS roadside stations (IRSs) is used as test field.The IRSs send packets to an ITS vehicle station. The packets are analyzed whilepost processing with focus on latency, received signal strength indicator (RSSI) andpacket error ratio. Different measurements are performed while varying the data rate,packet length and scenarios.

Danksagung
Ohne eine fachliche Betreuung sowie die Unterstützung meiner Familie und meiner Freundewäre die Anfertigung dieser Bachelorthesis nicht möglich gewesen. Ich möchte mich deshalb andieser Stelle bei den Menschen bedanken, die mich während der Arbeit an der Feldstudie undbeim Schreiben dieser Thesis unterstützt haben.
Ein besonderer Dank geht dabei an Herrn Dipl.-Ing. Tobias Frankiewicz und Frau Meike Möckel,M.Sc., die mich während meiner Arbeit im Deutschen Zentrum für Luft- und Raumfahrt betreutenund sich immer offen für Fragen meinerseits zeigten.
Ich bedanke mich herzlich bei Prof. Dr.-Ing. Ralf Wendel und Dr.-Ing. Henning Hajo Mosebachfür die Arbeit als Prüfer sowie die Unterstützung während des Anfertigens der Thesis.
Zuletzt geht mein Dank an meine Eltern, meine Schwestern und an meine Freunde, die michwährend der letzten Monate durch viele Gespräche immer wieder neu motiviert und mir durchUnterstützungen im Alltag die nötige Zeit zur Erstellung dieses Schriftstücks verschafft haben.
Inhaltsverzeichnis
Tabellenverzeichnis 7
Abbildungsverzeichnis 8
Abkürzungsverzeichnis 10
1. Einleitung 121.1. Anwendungsplattform Intelligente Mobilität . . . . . . . . . . . . . . . . . . . . 131.2. Verwandte Arbeiten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.3. Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.4. Kapitelübersicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2. Grundlagen 212.1. V2X-Standards . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.1.1. Der 802.11p-Standard . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.1.2. Das WAVE-Protokoll . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.1.3. Das Car2Car-Protokoll . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.2. V2X-Übertragungssysteme und ihre Eigenschaften . . . . . . . . . . . . . . . . 282.2.1. Die Antenne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.2.2. Die Kommunikationseinheit . . . . . . . . . . . . . . . . . . . . . . . . . 302.2.3. Der Übertragungskanal . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.3. Zeitsynchronisation in Netzwerksystemen . . . . . . . . . . . . . . . . . . . . . 34
3. Messumgebung 373.1. Systemarchitektur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373.2. ITS Roadside Station . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.2.1. Communication Control Unit . . . . . . . . . . . . . . . . . . . . . . . . 393.2.2. Zeitserver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.2.3. Application Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.2.4. Softwarestruktur und -schnittstellen . . . . . . . . . . . . . . . . . . . . 42
3.3. ITS Vehicle Station . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423.3.1. Communication Control Unit . . . . . . . . . . . . . . . . . . . . . . . . 453.3.2. Inertiales Navigationssystem . . . . . . . . . . . . . . . . . . . . . . . . 453.3.3. Application Unit und Zeitserver . . . . . . . . . . . . . . . . . . . . . . . 463.3.4. Softwarestruktur und -schnittstellen . . . . . . . . . . . . . . . . . . . . 46
4. Messgrößen und -methoden 494.1. Geografische Einteilung der Versuchsfelder . . . . . . . . . . . . . . . . . . . . 494.2. Paketverlustrate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52

Inhaltsverzeichnis 6
4.3. Received Signal Strength Indicator . . . . . . . . . . . . . . . . . . . . . . . . . 544.4. Latenz im Übertragungssystem . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5. Messdurchführung 595.1. Versuchsfeld K047 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 605.2. Versuchsfeld K071 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
6. Auswertung und Bewertung der Übertragungseigenschaften 666.1. Versuchsfeld K047 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
6.1.1. Received Signal Strength Indicator . . . . . . . . . . . . . . . . . . . . . 716.1.2. Paketverlustrate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 726.1.3. Latenz im Übertragungssystem . . . . . . . . . . . . . . . . . . . . . . 756.1.4. Abhängigkeiten der Messgrößen untereinander . . . . . . . . . . . . . . 76
6.2. Versuchsfeld K071 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 776.2.1. Received Signal Strength Indicator . . . . . . . . . . . . . . . . . . . . . 786.2.2. Paketverlustrate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 796.2.3. Latenz im Übertragungssystem . . . . . . . . . . . . . . . . . . . . . . 80
6.3. Vergleich der Versuchsfelder . . . . . . . . . . . . . . . . . . . . . . . . . . . . 806.4. Bewertung der Übertragungseigenschaften . . . . . . . . . . . . . . . . . . . . 82
7. Zusammenfassung und Ausblick 86
Literaturverzeichnis 89
A. Ergebnisdarstellung 91
B. Inhalt der beigelegten Daten-CD 94

Tabellenverzeichnis
2.1. Im IEEE 802.11p-Standard definierte Modulationen [in Anlehnung an ETSI, 2010] 232.2. In Europa freigegebene DSRC-Frequenzkanäle [ETSI, 2010, S. 13] . . . . . . . 27
3.1. Verifikation des Sendepegels des Linkbird-MX . . . . . . . . . . . . . . . . . . 40
5.1. Messszenarien im Versuchsfeld K047 . . . . . . . . . . . . . . . . . . . . . . . 625.2. Messszenarien im Versuchsfeld K071 . . . . . . . . . . . . . . . . . . . . . . . 65
6.1. Versuchsfeld K047: Ausschnitt der Messwerte von K047-0400-06 in östlicherRichtung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
6.2. Vergleich der Grundvoraussetzungen der Feldstudien . . . . . . . . . . . . . . . 82
Abbildungsverzeichnis
1.1. Übersichtskarte der Referenzstrecke der Anwendungsplattform Intelligente Mobi-lität (Braunschweig) [Kartenmaterial aus OpenStreetMap, 2013] . . . . . . . . . 14
1.2. Rahmenerfolgsrate in einem V2I-Szenario in Abhängigkeit zur Distanz zwischenIRS und IVS [Molisch u. a., 2011, S. 1206] . . . . . . . . . . . . . . . . . . . . . 16
1.3. Empfangene Datenpakete in einem V2I-Szenario [Hyncica u. a., 2012, S. 919] . . 18
2.1. Open Systems Interconnection Modell [in Anlehnung an Billings, 2013] . . . . . . 222.2. Architektur des WAVE-Protokolls [Hyncica u. a., 2012, S. 916] . . . . . . . . . . 232.3. Architektur des Car2Car-Protokolls [Hyncica u. a., 2012, S. 917] . . . . . . . . . 242.4. Aufbau eines Topologically-Scoped Broadcasts [in Anlehnung an NEC Laborato-
ries, 2012, S. 15, 20] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262.5. Antennendiagramme einer omnidirektionalen Antenne [Mobile Mark, 2013] . . . 292.6. Link Budget einer Funkübertragung [in Anlehnung an Garg, 2007, S. 291] . . . . 322.7. Verstärkung des Empfangspegels durch Reflexionen im „Urban Canyon“ [Sridhara
und Bohacek, 2007, S. 7] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.1. Schematischer Aufbau der Messumgebung . . . . . . . . . . . . . . . . . . . . 373.2. Hardwarestruktur einer IRS der AIM-Referenzstrecke . . . . . . . . . . . . . . . 383.3. Außenanlage und dazugehöriger Träger einer IRS der AIM-Referenzstrecke . . . 393.4. Softwarestruktur und -schnittstellen einer IRS . . . . . . . . . . . . . . . . . . . 423.5. Messaufbau der IVS im Versuchsfahrzeug „ViewCar“ . . . . . . . . . . . . . . . 433.6. Antennen der IVS auf dem Dach des Versuchsfahrzeugs „ViewCar“ . . . . . . . 443.7. Softwarestruktur und -schnittstellen der IVS . . . . . . . . . . . . . . . . . . . . 463.8. Graphical User Interface des „V2X-Mess- und Analysetools“ . . . . . . . . . . . 47
4.1. Methoden zur geografischen Einteilung des Versuchsfeldes [Kartenmaterial ausOpenStreetMap, 2013] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.2. Struktogramm zur Einteilung der Datensätze in geografische Bereiche . . . . . . 514.3. Messaufbau zur Validierung der RSSI-Messung . . . . . . . . . . . . . . . . . . 544.4. RSSI in Abhängigkeit des Empfangspegels . . . . . . . . . . . . . . . . . . . . 554.5. Prinzip der Latenzmessung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5.1. Kreuzung K047 im Versuchsfeld K047 [Satellitenbild aus GoogleEarth, 2013] . . 605.2. Übersicht über das Versuchsfeld K047 [Satellitenbild aus GoogleEarth, 2013] . . 615.3. Kreuzung K071 im Versuchsfeld K071 [Satellitenbild aus GoogleEarth, 2013] . . 635.4. Übersicht über das Versuchsfeld K071 [Satellitenbild aus GoogleEarth, 2013] . . 64
6.1. Aufteilung des Versuchsfelds nach Himmelsrichtungen [Kartenmaterial aus Open-StreetMap, 2013] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Abbildungsverzeichnis 9
6.2. Versuchsfeld K047: Übersicht des Datensatzes K047-0400-06 [Satellitenbild ausGoogleEarth, 2013] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
6.3. Versuchsfeld K047: RSSI aller Datensätze über die Distanz von West nach Ost . 716.4. Versuchsfeld K047: PER der Datensätze mit 400Byte Payload über die Distanz
von West nach Ost . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 726.5. Versuchsfeld K047: PER der Datensätze mit 1554Byte Payload über die Distanz
von West nach Ost . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 736.6. Versuchsfeld K047: Vergleich der PER der Datensätze K047-0400-06 und K047-
1554-06 über die Distanz von West nach Ost . . . . . . . . . . . . . . . . . . . 746.7. Versuchsfeld K047: Latenz aller Datensätze über die Distanz von West nach Ost 756.8. Versuchsfeld K071: Übersicht des Datensatzes K071-0400-06 [Satellitenbild aus
GoogleEarth, 2013] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 776.9. Versuchsfeld K071: RSSI aller Datensätze über die Distanz von Süd nach Nord . 786.10.Versuchsfeld K071: PER aller Datensätze über die Distanz von Süd nach Nord . 796.11.Versuchsfeld K071: Latenz aller Datensätze über die Distanz von Süd nach Nord 806.12.Vergleich von Datensätzen anhand der PER innerhalb der Gitternetzfelder . . . . 84
A.1. Versuchsfeld K047: Ausschnitt des Datensatzes K047-0400-06 [Satellitenbild ausGoogleEarth, 2013] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
A.2. Versuchsfeld K047: RSSI aller Datensätze über die Distanz von Süd nach Nord . 92A.3. Versuchsfeld K047: PER aller Datensätze über die Distanz von Süd nach Nord . 92A.4. Versuchsfeld K047: Latenz aller Datensätze über die Distanz von Süd nach Nord 93

Abkürzungsverzeichnis
AIM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Anwendungsplattform Intelligente MobilitätAU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Application UnitC2C-CC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Car 2 Car Communication ConsortiumCCH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Control ChannelCCU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Communication Control UnitDLR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Deutsches Zentrum für Luft- und Raumfahrt e.V.DSRC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Dedicated Short Range CommunicationEIRP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Equivalent Isotropically Radiated PowerETSI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . European Telecommunications Standards InstituteFSR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Frame-Success-RatioGPS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Global Positioning SystemIEEE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Institute of Electrical and Electronics EngineersINS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Inertiales NavigationssystemIRS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Intelligent Transport System Roadside StationITS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Intelligent Transport SystemIVS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Intelligent Transport System Vehicle StationIPv6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Internet Protocol Version 6KML . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Keyhole Markup LanguageLAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Local Area NetworkLOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Line-of-SightLSA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . LichtsignalanlageMAC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Media Access ControlMIMO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Multiple Input Multiple OutputNLOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Non-Line-of-SightNTP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Network Time ProtocolOFDM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Orthogonal Frequency-Devision MultiplexOSI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Open Systems InterconnectionPDR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Packet Delivery RatioPER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Packet Error RatioPKW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . PersonenkraftwagenQAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . QuadraturamplitudenmodulationQPSK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Quadrature Phase-Shift KeyingRSA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Realtime Spectrum AnalyzerRSSI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Received Signal Strength IndicatorSCH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Service ChannelSIMO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Single Input Multiple OutputSNR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Signal-to-Noise RatioTCP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Transmission Control Protocol

Abbildungsverzeichnis 11
TSB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Topologically-Scoped BroadcastUDP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Universal Datagram ProtocolUTC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Universal Time CoordinatedV2I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Vehicle-to-Infrastructure (Fahrzeug-zu-Infrastruktur)V2V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Vehicle-to-Vehicle (Fahrzeug-zu-Fahrzeug)V2X . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Vehicle-to-X (Fahrzeug-zu-X)WAVE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Wireless Access for Vehicular EnvironmentsWLAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Wireless Local Area Network

1. Einleitung
Fahrzeug-zu-X Kommunikationssysteme erhalten seit der Mitte des letzten Jahrzehnts großeAufmerksamkeit von Politik, Forschung und Wirtschaft. Die Motivationen zur Entwicklung dieserSysteme sind in erster Linie die Verbesserung der Fahrsicherheit und die effektivere Nutzungder Kapazitäten von Verkehrswegen. Dem Fahrer eines Fahrzeugs werden hierzu aktuelle Ver-kehrsinformationen der lokalen Umgebung in geeigneter Weise bereitgestellt, wodurch dieserbeispielsweise frühzeitig vor Staus oder Gefahrenstellen gewarnt werden kann. Auch die Berei-che Ökonomie, Umweltverträglichkeit, Komfort und Infotainment von Verkehrssystemen werdendurch diese Entwicklung nachhaltig verändert.Bei einer Fahrzeug-zu-X (engl. Vehicle-to-X oder V2X) Kommunikation erfolgt eine drahtlo-se Datenkommunikation zwischen Fahrzeugen (Fahrzeug-zu-Fahrzeug, engl. Vehicle-to-Vehicleoder V2V) oder zwischen einem Fahrzeug und der Infrastruktur (Fahrzeug-zu-Infrastruktur, engl.Vehicle-to-Infrastructure oder V2I). Infrastruktur ist hierbei ein Oberbegriff für Einrichtungen imStraßenverkehr, wie Lichtsignalanlagen (LSA), Wechselverkehrszeichen, Kontaktschleifen oderandere Anlagen im Umfeld der Verkehrswege, die mit V2X-Kommunikationseinheiten ausgestat-tet sind. [vgl. Busche, 2012, S. 4, 8 f] Ein V2X-Kommunikationssystem wird auch als IntelligentTransport System (ITS), ein entsprechend ausgestattetes Fahrzeug als ITS Vehicle Station (IVS)und ein Infrastrukturelement als ITS Roadside Station (IRS) bezeichnet.Der Mehrwert im Verkehr, der durch die V2X-Kommunikation erzielt wird, erfordert eine siche-re, robuste und möglichst latenzarme Datenübertragung. Um dies zu gewährleisten, werdenin der Forschung und Entwicklung große Anstrengungen unternommen. Die Schwierigkeit beider Erfüllung der Anforderungen liegt in der hohen Varianz des Funkkanals, die durch unter-schiedliche geografische Umfelder, Teilnehmerdichten sowie variierende Bewegungsrichtungenund Geschwindigkeiten der Teilnehmer gegeben ist (siehe Abschnitt 2.2). Für die meisten An-wendungen ist neben den schon beschriebenen Anforderungen auch eine große Kommunikati-onsreichweite von Vorteil. Das Gebiet, das durch eine ITS abgedeckt wird, ist entscheidend fürdie Anzahl erreichbarer Teilnehmer (Nachbarn), an die Nachrichten direkt übertragen bzw. vondenen Nachrichten empfangen werden können. Dies spielt für viele Anwendungen eine zentraleRolle.Das Institute of Electrical and Electronics Engineers (IEEE) hat mit den Standard 802.11p eineGrundlage für die V2X-Kommunikation definiert (siehe Abschnitt 2.1). Viele Forschungs- undEntwicklungsprojekte beschäftigen sich weiterhin mit der Optimierung der Übertragungseigen-schaften von V2X-Kommunikationen.In dieser Arbeit wird im Rahmen des Forschungsprojekts „Anwendungsplattform Intelligente Mo-bilität“ (AIM) (siehe Abschnitt 1.1) des Deutschen Zentrums für Luft- und Raumfahrt (DLR) eineFeldstudie zu den Übertragungseigenschaften einer V2X-Kommunikation (802.11p) durchge-führt. Der Fokus liegt hierbei auf den Messgrößen: Latenz, empfangener Signalpegel und Pa-ketverlustrate (engl. Packet Error Ratio (PER)). Es wird exemplarisch eine V2I-Kommunikation

1. Einleitung 13
zwischen einem sich bewegenden Fahrzeug (IVS) und unterschiedlichen IRSs in verschiede-nen Szenarien untersucht. Als Umfeld hierfür dient eine mit IRSs ausgestattete Referenzstreckedes AIM-Projekts, die mit dem Fahrzeug befahren wird. Die IVS ist mit einer entsprechendenVersuchsplattform ausgestattet.
1.1. Anwendungsplattform Intelligente Mobilität
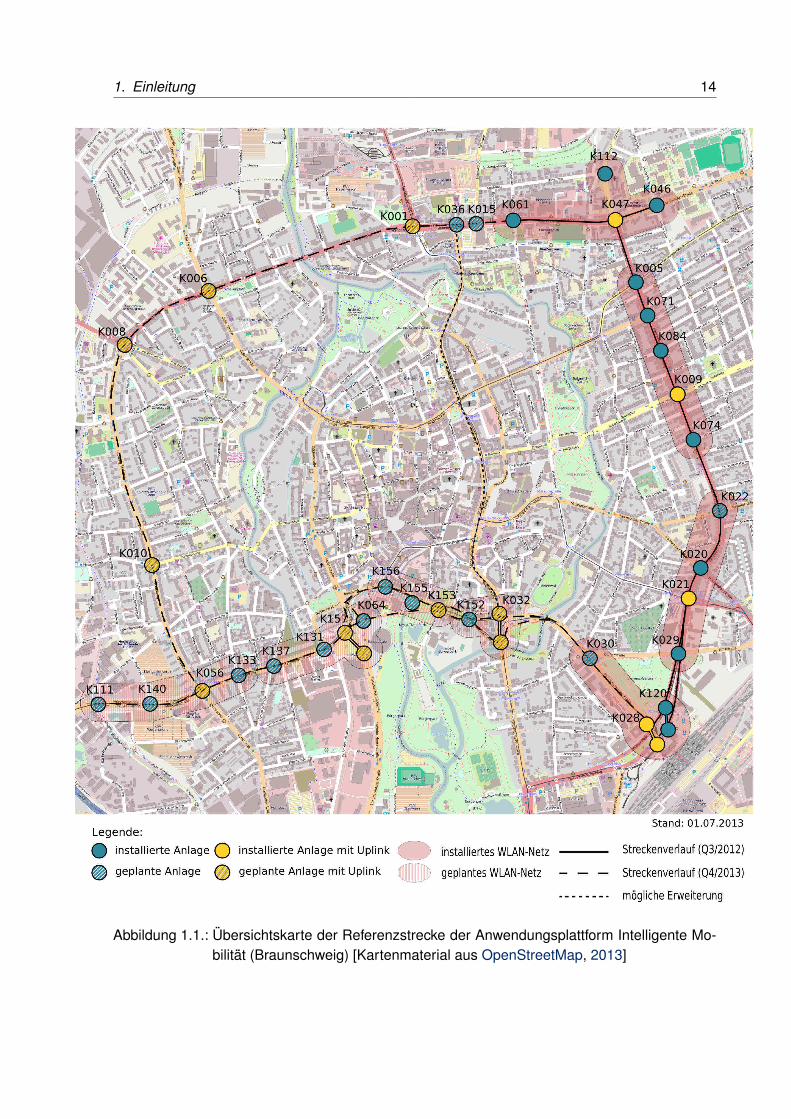
Die Anwendungsplattform Intelligente Mobilität (AIM) ist ein Projekt, in dem das DLR in Ko-operation mit der Stadt Braunschweig, dem Bundesland Niedersachsen und weiteren Partnernintelligente Transport- und Mobilitätssysteme erforscht, entwickelt sowie anwendet. Die Großfor-schungsanlage verwendet das DLR für eigene Projekte und stellt sie Partnern aus Wirtschaftund Forschung als Dienstleister zur Verfügung.AIM behandelt fünf Forschungsschwerpunkte: Verkehrsflussoptimierung, intermodale Mobili-tät, zukünftige Mobilitätskonzepte, Markteinführung sowie Migration und Mobilitätsbewusstsein.Hierdurch soll eine ganzheitlicher Überblick, aber auch zum Teil sehr spezifische Einblicke in dieaktuelle sowie zukünftige Entwicklung der Mobilität gegeben werden.Im AIM-Projekt wird einerseits die Region Braunschweig als reales Umfeld sowie andererseitsmehrere Instrumentarien zur Simulation für die Erforschung, Entwicklung sowie Anwendungneuer Fahrerassistenz- und Verkehrssysteme, der Wechselwirkungen des Verkehrs und einerVielzahl anderer Themen verwendet. Eine Besonderheit des Projekts stellt die Laufzeit der Ein-richtungen dar. Die im Rahmen von AIM gebauten Forschungseinrichtungen werden nicht nachwenigen Studien wieder demontiert, sondern über einen langen Zeitraum für Forschungszweckeerhalten bleiben. [vgl. DLR, 2010]Die Anwendungsplattform beinhaltet eine Referenzstrecke (siehe Abbildung 1.1), die einen Ringum die Braunschweiger Innenstadt beschreibt. Hier werden unter anderem neue Systeme zurV2X-Kommunikation und darauf aufbauende Fahrerassistenzsysteme erforscht und getestet.
1. Einleitung 14
Abbildung 1.1.: Übersichtskarte der Referenzstrecke der Anwendungsplattform Intelligente Mo-bilität (Braunschweig) [Kartenmaterial aus OpenStreetMap, 2013]

1. Einleitung 15
Die Abbildung 1.1 zeigt den bisherigen Ausbau der AIM-Referenzstrecke und die Planung fürzukünftige Erweiterungen. Dabei stellt jeder farbige Punkt eine IRS dar. Die Anlagen sind ne-ben der V2X-Kommunikationseinheit mit einer Schnittstelle ausgestattet, die das Auslesen desaktuellen Zustandes der LSA am entsprechenden Verkehrsknotenpunkt ermöglicht. Diese Infor-mationen können an Fahrzeuge (IVSs) weitergeleitet und dort dem Fahrer in geeigneter Weisezugänglich gemacht werden.Deutlich zu erkennen ist in Abbildung 1.1, dass der östliche sowie südliche Ring flächendeckendund der westliche sowie nördliche Ring nur vereinzelt ausgestattet sind bzw. werden. Hierbeizeigt der weniger gut ausgestattete Teil einen realistischen Ausbau für eine Markteinführung vonV2X-Kommunikationssystemen. Der andere Teil zeigt eine mögliche Ausbaudichte und Komple-xität eines V2X-Kommunikationsnetzes.Die Referenzstrecke ermöglicht Studien über die V2X-Kommunikation sowie die damit verbun-denen Anwendungen und außerdem Studien über die Verwaltung und Unterhaltung eines V2X-Kommunikationsnetzes mit umfangreicher Infrastruktur.
1.2. Verwandte Arbeiten
Es wird seit Anfang des 21. Jahrhunderts intensiv an der V2X-Kommunikation geforscht. ImJahre 2007 wurde ein erster Entwurf des WLAN-Standards 802.11p vom IEEE vorgestellt undsomit eine erste Standardisierung für die drahtlose Kommunikation zwischen Fahrzeugen so-wie Fahrzeugen und der Infrastruktur geschaffen. Es gibt eine große Anzahl an Studien, die dieÜbertragungseigenschaften von V2X-Kommunikationen untersuchen und evaluieren. Diese kön-nen grundsätzlich in zwei Bereiche aufgeteilt werden: Studien, die mit aufwendigen Simulationenein reales Kommunikationsumfeld nachstellen und Feldstudien, bei denen eine reale Umgebungfür Versuche verwendet wird. Simulationsstudien sind wiederholbar, die Umgebungsparametersind leicht anpassbar und es können Technologien getestet werden, die noch nicht technischrealisiert sind. Eine Simulation gibt jedoch nicht die Realität wieder, da einzelne Einflüsse nichtmit berücksichtigt werden können bzw. eine Berücksichtigung zu aufwendig wäre. Feldstudi-en hingegen zeigen für den Anwendungsfall in der entsprechenden Versuchsumgebung realeErgebnisse, die jedoch häufig einen aufwendigen sowie kostspieligen Versuchsaufbau voraus-setzen. [vgl. Hyncica u. a., 2012, S. 915]Es wird nachfolgend auf einige für diese Arbeit relevante Feldstudien eingegangen.
Die Veröffentlichung [Molisch u. a., 2011] beinhaltet die Untersuchung wichtiger Charakteristikenvon V2X-Übertragungskanälen, einen Überblick über die wichtigsten Kanalmodelle für unter-schiedliche Szenarien in verschiedenen Umfeldern und beleuchtet das Design von Funksys-temen mit Fokus auf den IEEE-Standard 802.11p. In dieser Arbeit wird in Kapitel 2.2 auf dasDesign von Kommunikationssystemen eingegangen und auf [Molisch u. a., 2011] Bezug genom-men. In der Veröffentlichung wurden zur Modellbildung für spätere Simulationen Experimentedurchgeführt, bei denen die durchschnittliche Übertragungsqualität zwischen einem Fahrzeug(IVS) und zweier IRSs gemessen und bewertet wurde. Als Gütemaß der Übertragung wurde
1. Einleitung 16
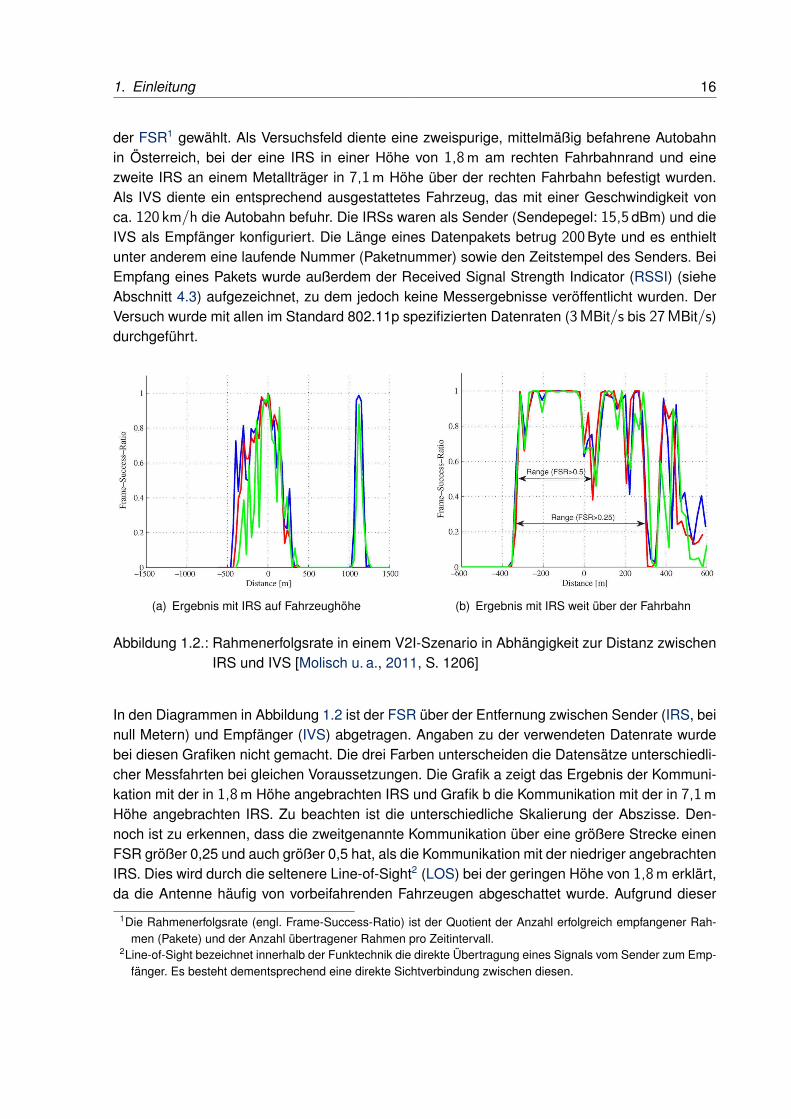
der FSR1 gewählt. Als Versuchsfeld diente eine zweispurige, mittelmäßig befahrene Autobahnin Österreich, bei der eine IRS in einer Höhe von 1,8m am rechten Fahrbahnrand und einezweite IRS an einem Metallträger in 7,1m Höhe über der rechten Fahrbahn befestigt wurden.Als IVS diente ein entsprechend ausgestattetes Fahrzeug, das mit einer Geschwindigkeit vonca. 120 km/h die Autobahn befuhr. Die IRSs waren als Sender (Sendepegel: 15,5dBm) und dieIVS als Empfänger konfiguriert. Die Länge eines Datenpakets betrug 200Byte und es enthieltunter anderem eine laufende Nummer (Paketnummer) sowie den Zeitstempel des Senders. BeiEmpfang eines Pakets wurde außerdem der Received Signal Strength Indicator (RSSI) (sieheAbschnitt 4.3) aufgezeichnet, zu dem jedoch keine Messergebnisse veröffentlicht wurden. DerVersuch wurde mit allen im Standard 802.11p spezifizierten Datenraten (3MBit/s bis 27MBit/s)durchgeführt.
(a) Ergebnis mit IRS auf Fahrzeughöhe (b) Ergebnis mit IRS weit über der Fahrbahn
Abbildung 1.2.: Rahmenerfolgsrate in einem V2I-Szenario in Abhängigkeit zur Distanz zwischenIRS und IVS [Molisch u. a., 2011, S. 1206]
In den Diagrammen in Abbildung 1.2 ist der FSR über der Entfernung zwischen Sender (IRS, beinull Metern) und Empfänger (IVS) abgetragen. Angaben zu der verwendeten Datenrate wurdebei diesen Grafiken nicht gemacht. Die drei Farben unterscheiden die Datensätze unterschiedli-cher Messfahrten bei gleichen Voraussetzungen. Die Grafik a zeigt das Ergebnis der Kommuni-kation mit der in 1,8m Höhe angebrachten IRS und Grafik b die Kommunikation mit der in 7,1mHöhe angebrachten IRS. Zu beachten ist die unterschiedliche Skalierung der Abszisse. Den-noch ist zu erkennen, dass die zweitgenannte Kommunikation über eine größere Strecke einenFSR größer 0,25 und auch größer 0,5 hat, als die Kommunikation mit der niedriger angebrachtenIRS. Dies wird durch die seltenere Line-of-Sight2 (LOS) bei der geringen Höhe von 1,8m erklärt,da die Antenne häufig von vorbeifahrenden Fahrzeugen abgeschattet wurde. Aufgrund dieser
1Die Rahmenerfolgsrate (engl. Frame-Success-Ratio) ist der Quotient der Anzahl erfolgreich empfangener Rah-men (Pakete) und der Anzahl übertragener Rahmen pro Zeitintervall.
2Line-of-Sight bezeichnet innerhalb der Funktechnik die direkte Übertragung eines Signals vom Sender zum Emp-fänger. Es besteht dementsprechend eine direkte Sichtverbindung zwischen diesen.

1. Einleitung 17
Erkenntnis wird empfohlen die Antennen einer IRS möglichst über der Fahrbahn anzubringen,um eine häufige LOS zu gewährleisten.Die Grafik 1.2 a zeigt eine Besonderheit: ab einer Distanz von ca. 400m wurden vorerst keinePakete mehr empfangen und bei einer Distanz zwischen ca. 1 und 1,2 km unerwartet mit einemFSR von annähernd eins gemessen. Die Autoren führen dies auf eine die Autobahn queren-de Brücke mit vertikalen Metallstreben am Geländer zurück. Diese schattete die Fahrbahn erstab und lenkte das Signal auf den weiter entfernten Fahrbahnabschnitt um. Um eine derartigeUmlenkung des Signals zu verhindern, wird empfohlen Wellenabsorbierer an Brückengeländernanzubringen und den Einfluss von Gebäuden und Gegenständen im Umfeld einer IRS genau zuprüfen. Das Phenomen war bei der höher angebrachten IRS nicht zu erkennen.
In der Publikation [Hyncica u. a., 2012] wird eine Feldstudie vorgestellt, bei der Reichweite, La-tenz und Packet Delivery Ratio (PDR) (andere Bezeichnung für FSR) einer V2I-Kommunikationin einem Stadtgebiet untersucht wurden. Für die Studie wurden zwei Fahrzeuge als ITSs verwen-det, die jeweils mit einer Application Unit (AU) zur Datenverarbeitung, einem Global PositioningSystem (GPS)-Empfänger zur Positionserfassung sowie drei unterschiedlichen Kommunikati-onseinheiten (Communication Control Unit (CCU)) ausgestattet waren. Die drei CCUs unter-stützten jeweils einen der drei IEEE-Kommunikationsstandards 802.15.4 (868MHz für drahtloseSensornetze), 802.11b (2,4GHz, Standard-WLAN bis 12MBit/s) sowie 802.11a (5GHz, WLANmit hoher Sendeleistung). Die beiden erstgenannten Standards unterscheiden sich erheblichvom Standard 802.11p. Der Standard 802.11a hingegen hat viele Ähnlichkeiten mit diesem,weshalb im weiteren Verlauf des Abschnitts nur auf diesen Bezug genommen wird (soweit nichtanders angegeben). Eines der beiden Fahrzeuge wurde als IRS verwendet und am rechtenFahrbahnrand positioniert. Das andere Fahrzeug fuhr im Straßenverkehr Szenarien mit LOSund Non-Line-of-Sight3 (NLOS) im Bereich um die IRS. Die IVS sendete mit einer Datenrate von6MBit/s Datenpakete mit jeweils einer Größe von 156Byte an die IRS. Zur Positionszuordnungeines Wertes der PDR wurde das befahrene Gebiet in ein Gitternetz aufgeteilt. Die IRS prüftebei jedem empfangenen Datenpaket anhand der mitgesendeten GPS-Position der IVS die Zu-gehörigkeit zu einem Feld des Gitternetzes. Nach dem Wechsel in ein anderes Feld oder nachAblauf einer definierten Zeit, wurde der PDR für das entsprechende Feld berechnet. Außerdemwurde jedes empfangene Paket an die IVS zurückgesendet, um ggf. die Untersuchung einerRound-Trip-Kommunikation zu ermöglichen. In beiden Systemen wurde eine Antenne mit einemAntennengewinn (Definition siehe Abschnitt 2.2.1) von 10dBi mit einem Pegel von 23dBm ge-speist.
3Non-Line-of-Sight ist das Gegenteil der Line-of-Sight. Es besteht keine Sichtverbindung zwischen Sender undEmpfänger.

1. Einleitung 18
Abbildung 1.3.: Empfangene Datenpakete in einem V2I-Szenario [Hyncica u. a., 2012, S. 919]
In Abbildung 1.3 sind die erfolgreich empfangenen Datenpakete während des V2I-Szenarienim Stadtgebiet unter Verwendung der drei vorher beschriebenen Übertragungsstandards dar-gestellt. Für die 802.11a-Übertragung (rot) gibt der Autor eine Reichweite bei LOS von bis zu450m und bei NLOS von bis zu 110m an. Auffallend bei der Betrachtung der Ergebnisse ist,dass die 802.11b-Übertragung (blau) einen sehr viel größeren Bereich abdeckt als die 802.11a-Übertragung. Hier kommt es zu einer Reichweite von bis zu 850m bei LOS und von bis zu 140mbei NLOS. Dies ist auf die andere Parameter des 802.11b-Systems zurückzuführen (Antennen-gewinn von 8,5 dB und Sendepegel von 27dBm).Zur weiteren Auswertung wurden die Gitternetzfelder aufsummiert, in denen die PDR größer als95% war. Dies trat bei Verwendung vom 802.11a-Standard bei 137 von 276 Feldern ein. Somitgehen bei 49,6% der Felder maximal 5% der gesendeten Nachrichten verloren.
In [Maier u. a., 2011] wird im Rahmen des Projekts ROADSAFE die Zeit- und Frequenzsynchro-nisation von Systemen behandelt, die das orthogonale Frequenzmultiplexverfahren (OFDM) ver-wenden. Es wird eine sich in der Entwicklung befindlichen Testplattform zur V2X-Kommunikationmit Multiple Input Multiple Output (MIMO)-Transceivern vorgestellt, bei der die Synchroni-sation mit unterschiedlichen Algorithmen implementiert und getestet wurde. Zur Validierungder Implementierungen wurde die Anzahl der übertragenen Pakete während V2I- und V2V-Kommunikationen in unterschiedlichen Szenarien aufgezeichnet. Als Sender wurden hierbeiein Fahrzeug (IVS) sowie eine IRS mit einkanaligen Kommunikationseinheiten ausgestattet. Ein

1. Einleitung 19
zweites Fahrzeug wurde mit der zu testenden MIMO-Plattform versehen und als Empfänger ein-gesetzt.Die V2I-Kommunikation wurde auf einer Autobahn mit zwei Spuren in der einen und drei Spurenin der anderen Fahrtrichtung durchgeführt. Die Antenne der IRS wurde in ca. 8m Höhe zwi-schen der ersten und zweiten Spur der dreispurigen Fahrbahn angebracht. Es wurden für dieDatenpaketgrößen von 200Byte und 1554Byte jeweils drei Versuchsfahrten in beide Fahrtrich-tungen für die Modulationen Quadrature Phase-Shift Keying (QPSK) (Datenrate: 6MBit/s) und16-Quadraturamplitudenmodulation (16-QAM) (Datenrate: 12MBit/s) durchgeführt. Der Emp-fänger bewegte sich mit 70 bis 100 km/h. Wie erwartet ergab die Auswertung, dass sich beieiner höheren Datenrate und somit höherwertigen Modulation die Anzahl der empfangenen Pa-kete proportional verhält. Es wurden in der Publikation weitere Implementierungen von Synchro-nisationsverfahren im V2I-Szenario getestet und ausgewertet.Bei der V2V-Kommunikation wurden Messfahrten durch den Kaisermühlentunnel in Österreichdurchgeführt. Es gab drei unterschiedliche Szenarien: LOS mit einigen Personenkraftwagen(PKW) zwischen den kommunizierenden ITSs, NLOS mit PKW sowie einem Lastkraftwagenzwischen den ITSs und ein Szenario, bei dem sich die kommunizierenden Fahrzeuge jeweilsüberholten. Die Auswertung zeigt, dass sich die Anzahl der empfangenen Pakete bei NLOS vonder bei LOS bei ungefähr gleicher Distanz stark unterscheidet. NLOS ermöglicht den Empfangvon ca. einem Drittel der Pakete, die bei LOS dokumentiert wurden. Auch diese Auswertungzeigt noch weitere Details über die unterschiedlich implementierten Synchronisationsalgorith-men. Abschließend wird festgehalten, dass ein Kommunikationssystem mit MIMO bis zu 13,6%
mehr Pakete empfangen kann, als ein System mit Single Input Multiple Output (SIMO).
1.3. Motivation
Ziel der im Rahmen dieser Arbeit durchgeführten Feldstudie und der daraus resultierendenErgebnisse ist die Übertragungseigenschaften einer V2X-Kommunikation in einem realistischenUmfeld zu untersuchen und zu bewerten. Hierdurch können Optimierungspotentiale der Da-tenübertragung mit diesem Kommunikationssystem erkannt werden. Die hier untersuchtenMessgrößen Latenz, Empfangspegel und Paketverlustrate ermöglichen die Bewertung derV2X-Übertragung über den Funkkanal. In Publikationen, wie [Sridhara und Bohacek, 2007],wird beschrieben, dass z.B. aus einem hohen Empfangspegel und einer geringen Latenz nichtzwangsläufig eine erfolgreiche Übertragung von Datenpaketen resultiert. Um dies weiter zuuntersuchen, wird auch die Abhängigkeit der Parameter voneinander betrachtet. Da im 802.11p-Standard unter anderem auf einen Handshake und Ackknowledges verzichtet wurde, wird einDatenpaket nur einmal übertragen und somit ist die erfolgreiche Übertragung jedes einzelnenPakets elementar. Geht ein Paket verloren, erreicht die enthaltene Information den Empfängerentweder verspätet, falls der Sender den gleichen Inhalt ein zweites Mal versendet, oder nie.„Der Nutzen eines Verkehrsinformationssystems steigt mit wachsender zeitlicher Aktualität derNachricht.“ [Busche, 2012, S. 8] Dies unterstreicht die Wichtigkeit der erfolgreichen Übertragungjeder Information.

1. Einleitung 20
Die Referenzstrecke des AIM-Projekts bietet neben der Untersuchung von V2X-Kommunikationen auch die Möglichkeit Erkenntnisse über den Aufbau und die Verwaltung vonflächendeckenden IRS-Netzen zu gewinnen. Diese Erkenntnisse können bei einer Markteinfüh-rung von V2X-Systemen wertvoll sein. Die für die Feldstudie verwendete Messplattform sowiedie entwickelte Software sollen eine Wiederholung der Messungen mit wenig Aufwand ermögli-chen. Somit können Veränderung im IRS-Netz, wie ein weiterer Ausbau oder die Verwendunganderer Hardware, eines anderen Standards oder die Veränderung von Parametern, überwachtwerden.
1.4. Kapitelübersicht
In Kapitel 2 wird ein Technologieüberblick gegeben. Es wird zuerst auf die gängigsten Standardsund Protokolle im Bereich der V2X-Kommunikation eingegangen. Außerdem wird das Kommuni-kationssystem sowie der Funkkanal einer V2X-Kommunikation beschrieben, da die Kenntnissehierüber grundlegend für die Feldstudie sind. In dieser Feldstudie wird die Latenz im Übertra-gungsssystem gemessen. Hierzu ist eine genaue Zeitsynchronisation innerhalb des Systemsnotwendig. Auf Methoden zur Synchronisation wird im letzten Abschnitt des Kapitels eingegan-gen.
Das verwendete Übertragungssystem wird in Kapitel 3 betrachtet. Hierbei werden alle Kompo-nenten der für die Messung verwendeten IRSs und der Messplattform (IVS) detailliert beschrie-ben. Außerdem wird auf die Software und deren Schnittstellen eingegangen.
In Kapitel 4 werden die drei Messgrößen Latenz, Received Signal Strength Indicator (RSSI) undPaketverlustrate definiert. Außerdem werden die Methoden ihrer Messung bzw. Bestimmungbeschrieben.
Das Kapitel 5 umfasst die Darstellung der Versuchsfelder sowie die Definition der verschiedenenVersuchsfahrten. Hierbei werden auch die unterschiedlichen Szenarien sowie die ParameterDatenrate und Nachrichtenlänge beschrieben.
In Kapitel 6 werden markante Messergebnisse dargestellt und ausgewertet. Dabei werden diedrei Messgrößen unterschiedlicher Versuchsfahrten verglichen. Außerdem wird abschließendeine Bewertung des Übertragungssystems durchgeführt.
Kapitel 7 schließt diese Arbeit mit einer Darstellung der aus dieser Studie gewonnenen Erkennt-nisse sowie einem Ausblick für zukünftige Forschungsarbeit ab.
2. Grundlagen
Dieses Kapitel gibt zuerst einen Überblick über die wichtigsten Standards für V2X-Kommunikationssysteme und die darin enthaltenen technischen Spezifikationen. In Abschnitt2.2 wird auf die Eigenschaften des V2X-Übertragungskanals in unterschiedlichen Szenariensowie die zur Übertragung verwendeten Komponenten eingegangen. Die Möglichkeiten derZeitsynchronisation in Netzwerken werden im Abschnitt 2.3 aufgezeigt.
2.1. V2X-Standards
Seit Anfang des 21. Jahrhunderts wird an Standards zur V2X-Kommunikation, auch DedicatedShort Range Communication (DSRC) genannt, gearbeitet. Im Jahre 2006 wurde die InitiativeWireless Access for Vehicular Environments (WAVE) ins Leben gerufen. Innerhalb des Stan-dards 802.11 für Wireless Local Area Network (WLAN) des IEEE wurde mithilfe der Initiativeder Standard 802.11p entwickelt. Dieser ist seitdem die Schlüsseltechnologie für DSRCs [vgl.Molisch u. a., 2011, S. 1190].Es gibt weltweit diverse standardisierte Protokolle zur V2X-Kommunikation, jedoch haben sichzwei davon durchgesetzt. In Nordamerika ist das gleichnamige Protokoll der WAVE-Initiativeweit verbreitet. In Europa hingegen wird meist das vom Car 2 Car Communication Consorti-um (C2C-CC) entwickelte Protokoll Car2Car bevorzugt. [vgl. Hyncica u. a., 2012, S. 2] BeideProtokolle haben ähnliche Architekturen, basieren auf IEEE 802.11p und verwenden bevorzugtdas 5,9-GHz-Frequenzband. Die Entwicklung und Standardisierung beider Protokolle ist nochnicht abgeschlossen und da sie bisher nicht kompatibel sind, arbeiten gemeinsame Arbeitsgrup-pen daran dies zu ändern.
In Abschnitt 2.1.1 wird auf den für DSRCs grundlegenden IEEE-Standard 802.11p eingegangen.In den darauffolgenden Abschnitten werden kurz die Eigenschaften des Protokolls WAVE unddetailliert die des Protokolls Car2Car beschrieben. Grundlage der Protokollarchitekturen ist dasOpen Systems Interconnection Modell (OSI-Modell).
Bei der Beschreibung von Netzwerkarchitekturen ist es üblich diese mithilfe des OSI-Modells inunterschiedliche Schichten aufzuteilen. Der Zweck des Modells ist die Ermöglichung der Kom-munikation zwischen unterschiedlichen Systemen und die Vereinfachung deren Entwicklung.

2. Grundlagen 22
7 Anwendung(Application)
Ermöglicht Anwendungen den Zugriff auf das Netzwerk, enthält die eigentliche Anwendung jedoch nicht
6 Darstellung(Presentation)
Ermöglicht den Datenaustausch zwischen Systemen unterschiedlicher Architektur; ist somit „Übersetzer“ zwischen nicht kompatiblen Systemen; verwaltet Datenkompression und Sicherheit
5 Session(Sitzung)
Verwaltet die temporäre oder dauerhafte Verbindung zwischen zwei Systemen; stellt Wiederaufbau der Verbindung nach Zusammenbruch sicher
4 Transport(Transport)
Ist das Bindeglied zwischen den transportorientierten und anwendungs- orientierten Schichten (z.B. Datenpakete einer Anwendung zuweisen); Prüft die korrekte Übertragung zwischen Sender und Empfänger
3 Vermittlung(Network)
Kontrolliert Datenfluss und Routing; stellt Unabhängigkeit der Datenüber- tragungstechnologie sicher
2 Sicherung(Data Link)
Die Logical Link Control (LLC) steuert die Datenübertragung, deren Fehlerprüfung sowie sie Vermeidung von Überlastsituationen
Die Media Access Control (MAC) umfasst Netzwerkprotokolle und -baugruppen sowie die Regeln, wie sich mehrere Rechner das gemeinsam genutzte physikalische Übertragungsmedium teilen.
1 Bitübertragung(Physical)
(PHY)
Beschreibt die grundlegende, physikalische Technologie eines Netzwerks und verwaltet den Auf- und Abbau sowie die Aufrechterhaltung einer Verbindung; beinhaltet u.a. Methoden zur Bitübertragung und Spezifikationen des Übertragungsmediums
tra
nsp
ort
ori
en
tiert
an
we
nd
un
gso
rie
ntie
rt
Abbildung 2.1.: Open Systems Interconnection Modell [in Anlehnung an Billings, 2013]
Wie aus Abbildung 2.1 ersichtlich, teilt das OSI-Modell die Netzwerkarchitektur eines Protokollsin sieben Schichten auf. Das Modell bietet lediglich eine Möglichkeit für eine Einteilung an, dienicht immer vollständig in einem Protokoll abgebildet wird. Innerhalb eines Protokolls werden dieSchichten durch unterschiedliche Standards abgedeckt, wodurch die Verwendung eines Stan-dards in unterschiedlichen Protokollen erleichtert wird.
2.1.1. Der 802.11p-Standard
Der IEEE-Standard 802.11p verwendet das 5,9-GHz-Frequenzband (5,875−5,905GHz) undbaut auf den Standard 802.11a im 5-GHz-Frequenzband auf. In Bezug auf das OSI-Modell be-schreibt der Standard die Bitübertragungsschicht sowie die MAC-Subschicht. Um eine robustereÜbertragung zu gewährleisten, wird die Kanalbandbreite beim Standard 802.11p von 20MHz in802.11a auf 10MHz gesenkt. Dadurch wird die Datenrate halbiert und auf maximal 27MBit/sbegrenzt. [vgl. Schmidt u. a., 2009, S. 10f]

2. Grundlagen 23
Datenrate [MBit/s] 3 4,5 6 9 12 18 24 27
Modulation BPSK BPSK QPSK QPSK 16-QAM 16-QAM 64-QAM 64-QAM
Coderate 1/2 3/4 1/2 3/4 1/2 3/4 2/3 3/4
Tabelle 2.1.: Im IEEE 802.11p-Standard definierte Modulationen [in Anlehnung an ETSI, 2010]
Der Standard verwendet, wie auch 802.11a, das orthogonale Frequenzmultiplexverfahren(OFDM), wodurch der Datenstrom auf unterschiedliche Trägersignale aufgeteilt wird. Die Da-tenübertragung ist somit wenig störanfällig und die Modulationen der Träger können den Anfor-derungen entsprechend angepasst werden. In der Tabelle 2.1 sind alle in 802.11p definiertenModulationen mit den dazugehörigen Datenraten sowie Coderaten aufgeführt. Mit der Code-rate und der Wertigkeit der Modulation steigt die Datenrate. Hierdurch verringert sich jedochgleichzeitig der Signal-Rauschabstand (engl. Signal-to-Noise Ratio (SNR)), wodurch wiederumdie Anzahl fehlerhaft übertragener Bits steigt. [vgl. Molisch u. a., 2011, S. 1207] Aufgrund des-sen sollte dies bei der Wahl der Datenrate für sicherheitsrelevante Anwendungen berücksichtigtwerden.
2.1.2. Das WAVE-Protokoll
Abbildung 2.2.: Architektur des WAVE-Protokolls [Hyncica u. a., 2012, S. 916]
In Abbildung 2.2 wird die Architektur des WAVE-Protokolls dargestellt. Es sind am linken Randdie Schichten des OSI-Modells aufgeführt, die von den weiter rechts gezeigten Standards ab-gedeckt werden. Für die PHY-Schicht sowie die MAC-Subschicht wird IEEE 802.11p verwendet,wobei die Sicherungsschicht durch den IEEE 1609.4-Standard vervollständigt wird. Dieser be-schreibt die Mehrkanalnutzung der drahtlosen Übertragung. Die Netzwerk- und die Transport-schicht sind in zwei anwendungsbezogene Bereiche aufgeteilt. Dies sind Transmission Control
2. Grundlagen 24
Protocol (TCP)/Universal Datagram Protocol (UDP) in Verbindung mit Internet Protocol Versi-on 6 (IPv6) für nicht-kritische Nachrichten und das WAVE Simple Message Protocol (WSMP)für sicherheitskritische Nachrichten. Die Ressourcen werden nach dem IEEE-Standard 1609.1verwaltet. Außerdem werden schichtübergreifend der Standard IEEE 1609.3 und 1609.2 für dieVerwaltung und Sicherheit verwendet.
2.1.3. Das Car2Car-Protokoll
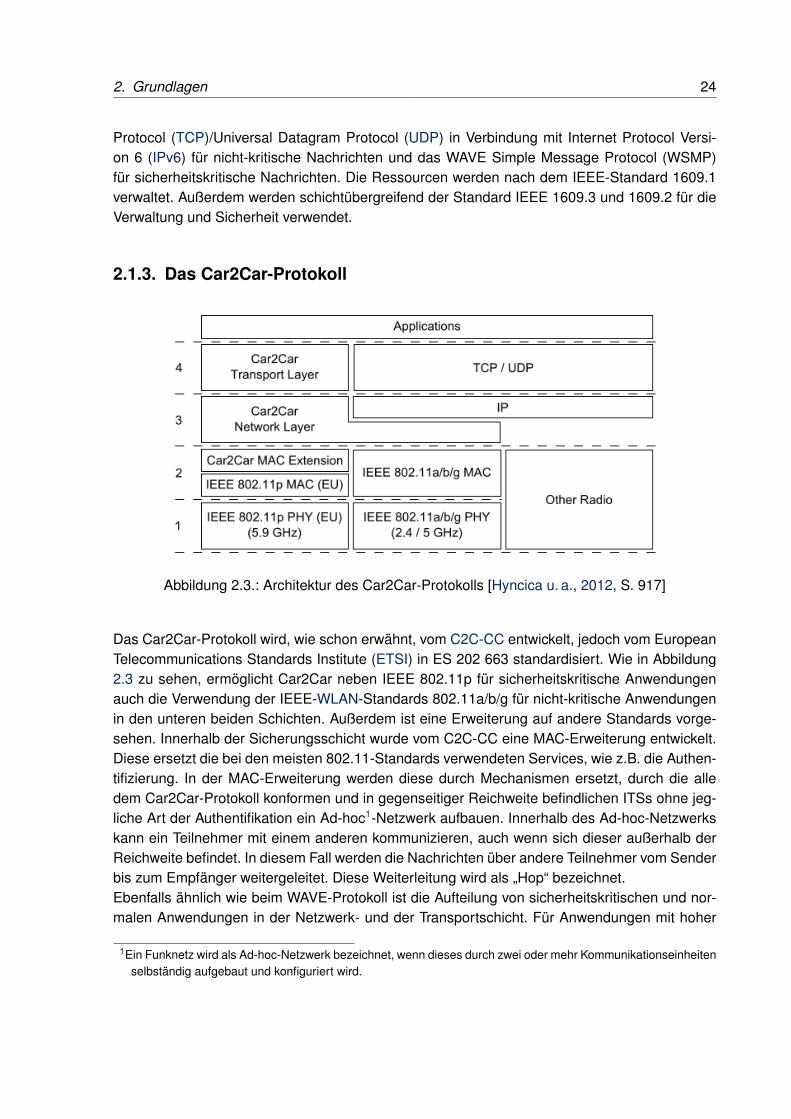
Abbildung 2.3.: Architektur des Car2Car-Protokolls [Hyncica u. a., 2012, S. 917]
Das Car2Car-Protokoll wird, wie schon erwähnt, vom C2C-CC entwickelt, jedoch vom EuropeanTelecommunications Standards Institute (ETSI) in ES 202 663 standardisiert. Wie in Abbildung2.3 zu sehen, ermöglicht Car2Car neben IEEE 802.11p für sicherheitskritische Anwendungenauch die Verwendung der IEEE-WLAN-Standards 802.11a/b/g für nicht-kritische Anwendungenin den unteren beiden Schichten. Außerdem ist eine Erweiterung auf andere Standards vorge-sehen. Innerhalb der Sicherungsschicht wurde vom C2C-CC eine MAC-Erweiterung entwickelt.Diese ersetzt die bei den meisten 802.11-Standards verwendeten Services, wie z.B. die Authen-tifizierung. In der MAC-Erweiterung werden diese durch Mechanismen ersetzt, durch die alledem Car2Car-Protokoll konformen und in gegenseitiger Reichweite befindlichen ITSs ohne jeg-liche Art der Authentifikation ein Ad-hoc1-Netzwerk aufbauen. Innerhalb des Ad-hoc-Netzwerkskann ein Teilnehmer mit einem anderen kommunizieren, auch wenn sich dieser außerhalb derReichweite befindet. In diesem Fall werden die Nachrichten über andere Teilnehmer vom Senderbis zum Empfänger weitergeleitet. Diese Weiterleitung wird als „Hop“ bezeichnet.Ebenfalls ähnlich wie beim WAVE-Protokoll ist die Aufteilung von sicherheitskritischen und nor-malen Anwendungen in der Netzwerk- und der Transportschicht. Für Anwendungen mit hoher
1Ein Funknetz wird als Ad-hoc-Netzwerk bezeichnet, wenn dieses durch zwei oder mehr Kommunikationseinheitenselbständig aufgebaut und konfiguriert wird.

2. Grundlagen 25
Priorität wurde jeweils eine Protokollschicht entwickelt, für nicht-kritische Anwendungen wirdwieder auf TCP/UDP mit IPv6 zurückgegriffen. [Hyncica u. a., 2012]
Das Car2Car-Protokoll soll für unterschiedlichste Anwendungen verwendet werden, die z.B. In-formationen mit nur einem Teilnehmer oder einer Gruppe von Teilnehmern austauschen. Fürdie Vielzahl an Einsatzgebieten werden im Car2Car-Protokoll mehrere Pakettypen (engl. PacketTypes) definiert:
• GeoUnicast: Es werden Daten in einer Nachricht von einem Sender zu einem Empfän-ger übertragen. Hierbei wird die Nachricht ggf. von anderen Teilnehmern des Ad-hoc-Netzwerks weitergeleitet.
• Topologically-Scoped Broadcast (TSB): Hierbei sendet eine ITS Daten an alle Teilneh-mer des Ad-hoc-Netzwerks. Die Anzahl der Hops ist jedoch begrenzt. TSBs sollten mitBedacht verwendet werden, da sie den Übertragungskanal schnell auslasten können.
• Single-Hop Broadcast: Dies ist ein spezieller Fall des TSBs, wobei die Nachricht hier nuran direkte Nachbarn im Netzwerk gesendet wird.
• Geographically-Scoped Broadcast: Es wird eine Nachricht von einem Sender an allesich in einem definierten geografischen Gebiet befindlichen Teilnehmer gesendet. Hierbeimuss der Sender sich nicht selbst in dem Zielgebiet befinden. Die Nachricht wird ggf. überviele Teilnehmer bis zu den Empfängern weitergeleitet (Multihopping).
• Geographically-Scoped Anycast: Bei diesem wird, wie bei dem Geographically-ScopedBroadcast, eine Nachricht von einem Sender in ein definiertes geografisches Gebiet ge-sendet. Hierbei wird jedoch nur an einen beliebigen Teilnehmer und nicht an alle Teilneh-mer in dem Gebiet gesendet.
• Beacon: Hierbei wird eine Nachricht ohne Nutzdaten an alle in Reichweite befindlichenTeilnehmer gesendet (meist in einem definierten Intervall). Die Nachricht wird von diesennicht weitergeleitet. Durch den Empfang von Beacons kann jeder Teilnehmer eines Ad-hoc-Netzwerks feststellen, welche und wie viele Teilnehmer sich in Reichweite befinden.
[vgl. C2C-CC, 2007, S. 67f]

2. Grundlagen 26
Abbildung 2.4.: Aufbau eines Topologically-Scoped Broadcasts [in Anlehnung an NEC Labora-tories, 2012, S. 15, 20]
In Abbildung 2.4 ist der Aufbau eines TSBs dargestellt. Dieser wird grundsätzlich in einen Nach-richtenkopf (Header) fester Länge von 36Byte und einen Datenbereich (Payload) variabler Längeaufgeteilt. Der Payload wird von der sendenden Applikation mit Informationen gefüllt und kannsehr unterschiedliche Längen haben.Der Nachrichtenkopf enthält die folgenden Informationen:
• Der Packet Subtype spezifiziert z.B. die geometrische Form des geografischen Empfangs-gebiets.
• Das Hop Limit ist ein Zähler, durch den der Sender die maximale Anzahl an Hops vorgibt.Jeder Empfänger dekrementiert den Zählwert und leitet die Nachricht bei einem Wertgrößer null weiter.
• Die Flags sind für sicherheitsrelevante Anwendungen reserviert.
• Die Datenbereichslänge (Payload Length) ist in Byte angegeben.
• Die Traffic Class gibt die Priorität der Nachricht in acht Stufen (null ist höchste Priorität)an.
• Die Geo-Networking-Adresse ist eine acht Byte lange Adresse einer DSRC-Schnittstelle.Diese wird in der Regel von der Schnittstelle selbst aus unterschiedlichen Informationenzusammengesetzt und ist einmalig, wodurch jedes Paket eindeutig dieser zugeordnet wer-den kann.
2. Grundlagen 27
• Durch den Zeitstempel (Timestamp) wird die Sendezeit der Nachricht übertragen.
• Der Header enthält Informationen über die geografische Position und die Bewegung desSenders: Breitengrad (Latitude), Längengrad (Longitude), Geschwindigkeit (Speed), Aus-richtung (Heading) sowie die Höhe über dem Meeresspiegel (Altitude).
• Es werden die Genauigkeiten des Zeitstempels (TAcc), der Position (PosAcc), der Ge-schwindigkeit (SAcc) und der Ausrichtung (HAcc) in einer TSB übertragen.
• Der Zielport (Destination Port) definiert, für welche Applikationsgruppe die in der Nachrichtenthaltenen Informationen bestimmt sind.
[vgl. NEC Laboratories, 2012, S. 17f]Die Nachrichtenköpfe der anderen Pakettypen enthalten teils weniger und teils mehr Informatio-nen. Zusätzliche Informationen definieren z.B. den Empfangsbereich oder die Lebenszeit einerNachricht.
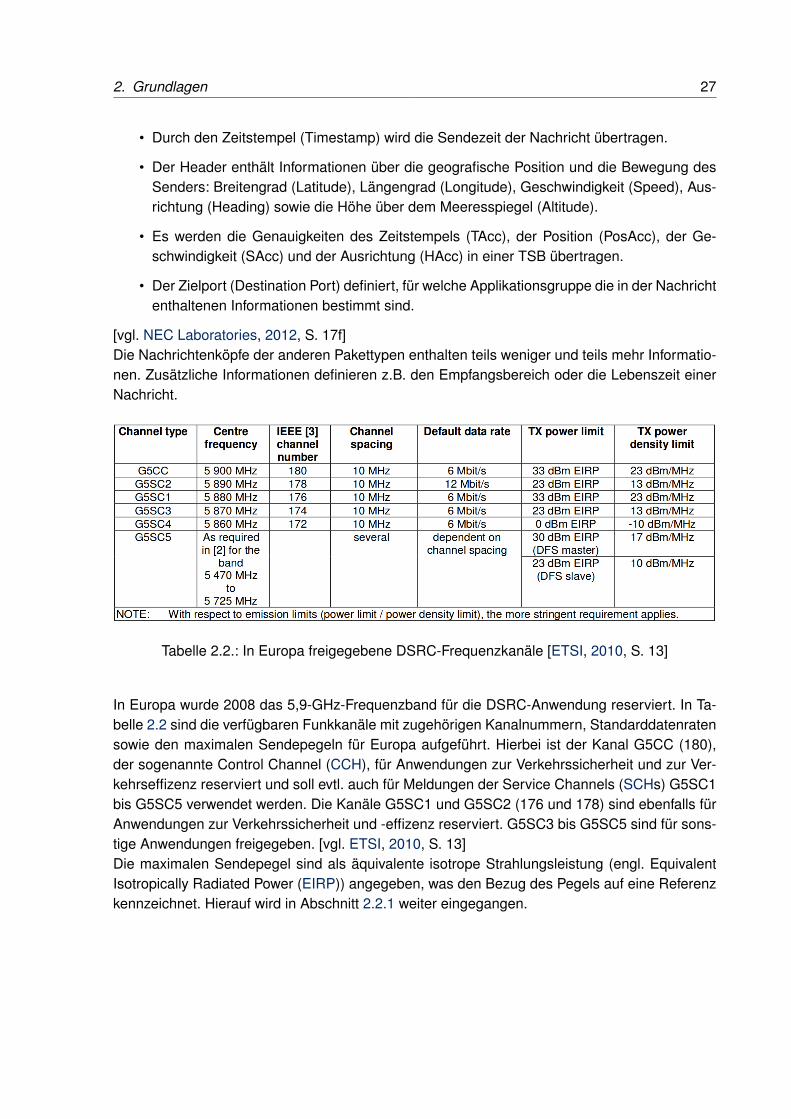
Tabelle 2.2.: In Europa freigegebene DSRC-Frequenzkanäle [ETSI, 2010, S. 13]
In Europa wurde 2008 das 5,9-GHz-Frequenzband für die DSRC-Anwendung reserviert. In Ta-belle 2.2 sind die verfügbaren Funkkanäle mit zugehörigen Kanalnummern, Standarddatenratensowie den maximalen Sendepegeln für Europa aufgeführt. Hierbei ist der Kanal G5CC (180),der sogenannte Control Channel (CCH), für Anwendungen zur Verkehrssicherheit und zur Ver-kehrseffizenz reserviert und soll evtl. auch für Meldungen der Service Channels (SCHs) G5SC1bis G5SC5 verwendet werden. Die Kanäle G5SC1 und G5SC2 (176 und 178) sind ebenfalls fürAnwendungen zur Verkehrssicherheit und -effizenz reserviert. G5SC3 bis G5SC5 sind für sons-tige Anwendungen freigegeben. [vgl. ETSI, 2010, S. 13]Die maximalen Sendepegel sind als äquivalente isotrope Strahlungsleistung (engl. EquivalentIsotropically Radiated Power (EIRP)) angegeben, was den Bezug des Pegels auf eine Referenzkennzeichnet. Hierauf wird in Abschnitt 2.2.1 weiter eingegangen.

2. Grundlagen 28
2.2. V2X-Übertragungssysteme und ihre Eigenschaften
In V2X-Kommunikationen findet eine hochfrequente, digitale Funkübertragung bei moderaterDatenrate statt. Es werden dabei hohe Anforderungen an die Zuverlässigkeit gestellt, da derNutzen der Anwendungen, die auf die Kommunikation aufbauen, von jeder einzelnen Daten-übertragung abhängt. Um die Robustheit des Übertragungssystems zu steigern, ist die genaueKenntnis über den Übertragungskanal unabdingbar.In diesem Abschnitt wird zuerst auf die Komponenten eines Übertragungssystems und nachfol-gend auf den Übertragungskanal und seine Eigenschaften eingegangen.
2.2.1. Die Antenne
Es gibt viele verschiedene Antennen, die sich durch Eigenschaften, wie Richtwirkung, Frequenz-bereich, maximale Sendeleistung und Bauform unterscheiden. Antennen können nach ihren Ei-genschaften unterschiedlichen Kategorien zugeordnet werden. Eine Kategorisierung wird nachder Richtwirkung gemacht. Es gibt omnidirektionale-, bidirektionale- und direktionale Antennen,wobei diese Gruppen weiter unterteilt werden können. Für die V2X-Kommunikation werden meistomnidirektionale Antennen verwendet, zu denen Rundstrahler, Discone- und Stabantenne ge-hören. Diese senden kreisförmig (360◦) in horizontaler Richtung. Somit ist die Kommunikationmit einer auf gleicher Höhe befindlichen Antenne am besten und mit einer unterhalb befindlichenam schlechtesten. Bei einer V2I-Kommunikation kommt es daher vor, dass die Übertragung we-nig zuverlässig ist, wenn sich die IVS unterhalb der IRS befindet. Dieses Phänomen wurde in[Molisch u. a., 2011] beschrieben und ist Abbildung 1.2 (b) zu entnehmen.
Der Antennengewinn gibt die Richtwirkung einer Antenne in einem Verhältnis an. Es wird diein Hauptrichtung2 abgegebenen Strahlung der Antenne mit der Strahlung einer verlustlosen Be-zugsantenne ins Verhältnis gesetzt. Als Bezug wird entweder ein isotroper Kugelstrahler odereine Dipolantenne verwendet. Geläufig ist die Verwendung des isotropen Kugelstrahlers, derkeine Richtwirkung, somit eine kugelförmige Abstrahlung und per Definition einen Antennen-gewinn von 0 dB hat. Zur Kennzeichnung des Bezugs wird der Antennengewinn hierbei in dBiangegeben, wohingegen die Verwendung der Dipolantenne als Bezug mit der Einheit dBd ge-kennzeichnet wird.Mit dem Sendepegel PT der Kommunikationseinheit und dem Antennengewinn Gi in Bezug zueinem Kugelstrahler kann die äquivalente isotrope Sendeleistung EIRP (Equivalent Isotropical-ly Radiated Power) berechnet werden. Für den Antennengewinn in Bezug auf die DipolantenneGd ist das Ergebnis die Effektive Strahlungsleistung ERP (Effective Radiated Power).
2Die Hauptstrahlungsrichtung ist die Richtung, in der die meiste Strahlungsenergie einer Antenne abgegeben wird.Bei einer omnidirektionalen Antenne ist dies der Kreis um die vertikale Achse.

2. Grundlagen 29
Diese lassen sich wie folgt berechnen:
EIRP = PT + Gi
ERP = PT + Gd = EIRP − 2.14dB
[vgl. Garg, 2007, S. 291]Hierbei ist zu beachten, dass die Leitung zwischen der Kommunikationseinheit und der Antenneals verlustlos angenommen wird. Soll die Leitungsdämpfung Ll mit berücksichtigt werden, soergibt sich durch Subtraktion dieser vom Sendepegel PT :
EIRP = PT − Ll + Gi (2.1)
ERP = PT − Ll + Gd = EIRP − 2.14dB
(a) horizontal (b) vertikal
Abbildung 2.5.: Antennendiagramme einer omnidirektionalen Antenne [Mobile Mark, 2013]
In Abbildung 2.5 sind die Diagramme der in dieser Feldstudie für die IVS verwendeten omnidi-rektionalen Antenne (Mobile Mark, SMW-404) bei 5,5GHz dargestellt. Hierbei wird der Anten-nengewinn in dBi auf den im Mittelpunkt entspringenden Linien und der Winkel in Grad auf denKreisen um den Mittelpunkt herum abgetragen. Wie für eine omnidirektionale Antenne üblich, hatdie Antenne in horizontaler Richtung (Abbildung 2.5a) eine gleichmäßige Richtwirkung. Der Her-steller gibt einen Antennengewinn von 5dBi an, der aus dem Diagramm a entnommen werdenkann. In vertikaler Richtung (Abbildung 2.5b ist hingegen zu erkennen, dass die Antenne denangegebenen Antennengewinn nur bei bestimmten Winkeln erreicht. Dies ist bei der Installationund Verwendung zu beachten.
Die Antenne einer IRS kann durch ihre statische Position und das zum Teil ebenfalls statischeUmfeld dem Einsatzgebiet gut angepasst werden. In der Regel werden diese an einem Mast

2. Grundlagen 30
oder einem Träger neben oder über der Fahrbahn angebracht und somit aus vielen Montagepo-sitionen die optimale gewählt werden kann. Die Bauform und -größe sind nicht problematisch,da an den Montagepositionen in der Regel genügend Platz vorhanden ist. Auch aus ästhetischerSicht ist gegen eine Antenne für den V2X-Frequenzbereich (ca. 5,9GHz) in Relation zum Mastoder Träger in einer Höhe von mehreren Metern wenig einzuwenden, da sie optisch nicht auffäl-lig ist. Es kann somit eine beliebige Antenne gewählt werden.Bei einem Fahrzeug (IVS) hat die Auswahl der Bauform der Antenne und ihre Positionierunggroßen Einfluss auf die Übertragungseigenschaften. Bei der konventionellen Positionierung derAntenne auf dem hinteren Fahrzeugdach können viele bauliche Eigenschaften des Fahrzeugsdie Übertragungseigenschaften beeinträchtigen. Beispielsweise schattet eine Dachreling die An-tenne so ab, dass die Signalqualität zu den Seiten des Fahrzeugs beeinträchtigt wird. Auchein nach hinten abfallendes Dach kann die Funkeigenschaften in Fahrtrichtung verschlechtern,wenn die Antenne nicht hieran angepasst ist. Die Sende- und Empfangseigenschaften könnendurch andere Positionen und/oder mehrere Antennen verbessert werden. Wird z.B. jeweils eineAntenne im Front- und Heckbereich des Fahrzeugs positioniert, kann dies zu einer Verbesserungder Eigenschaften führen. In [Reichardt u. a., 2009] wurden aus diesem Grund mehrere Positio-nen der Antenne simuliert. Die Auswertung bestätigt, dass die Positionierung einen großen Ein-fluss haben kann. Es wird empfohlen, IVSs mit MIMO-Antennensystemen auszustatten, wobeidie Antennen möglichst weit voneinander positioniert werden sollten.Bei Fahrzeugen und besonders bei PKW hat die technisch optimale Funktion der V2X-Kommunikation nicht die oberste Priorität der Automobilhersteller. Hier schränken Faktoren wieÖkonomie, Strömungsverhalten und vor allem die Ästhetik des Fahrzeugs die Auswahl der Bau-form und der Positionierung der Antenne stark ein. Es werden große Anstrengungen gemachtdie Eigenschaften von Antennen zu verbessern und gleichzeitig die von der Automobilindustriegestellten Anforderungen einzuhalten. [vgl. Molisch u. a., 2011, S. 1193f]
2.2.2. Die Kommunikationseinheit
Die Kommunikationseinheit einer Drahtlosübertragung, auch Communication Control Unit (CCU)genannt, bereitet die von einer lokalen Datenquelle eingebenden Daten für die Versendung überden Funkkanal vor. Hierbei wird in der Regel ein standardisiertes Protokoll umgesetzt, das dielogische Übertragung der Informationen und die physikalische Übertragung der Signale spezifi-ziert. Dies kann im Fall der DSRC also beispielsweise das Car2Car-Protokoll sein. Das aufbe-reitete Signal wird über eine Leitung zur Antenne gesendet und von dieser über den Funkkanalan den/die Empfänger übertragen. Wird von der Antenne ein Signal empfangen, so wird es aufumgekehrtem Weg zur CCU übertragen. Diese setzt das Signal um und stellt die enthaltenenInformationen einer lokalen Datensenke zur Verfügung. Somit wird eine bidirektionale Kommu-nikation über die Antenne ermöglicht.
Ein Parameter einer Kommunikationseinheit ist der Sendepegel PT am Ausgang der CCU. Die-ser ist ausschlaggebend für den Bereich, in dem das Kommunikationssystem senden kann. Für

2. Grundlagen 31
viele V2X-Anwendungen ist eine möglichst große Reichweite von Vorteil. Zu bedenken ist hier-bei jedoch, dass eine größere Reichweite im Rückkehrschluss die Kanalauslastung durch einegrößere Anzahl an Teilnehmern erhöht, was wiederum die Robustheit und die Latenzen einerÜbertragung negativ beeinflusst. In der Regel gibt eine höhere Instanz außerdem einen Maxi-malwert für den Sendepegel einer Antenne vor. Aus der Tabelle 2.2 ist beispielsweise zu entneh-men, dass für den DSRC-Kanal 180 (5,9GHz) in Europa eine maximale Sendeleistung EIRP von33dBm zugelassen ist. Dies muss bei der Parametrisierung einer CCU bedacht werden. Hieraufwird in Abschnitt 2.2.3 weiter eingegangen.
Ein weiterer wichtiger Parameter einer CCU ist die Empfangsempfindlichkeit (engl. Receive Sen-sitivity). Diese stellt den geringsten Empfangspegel (in dBm) dar, bei dem die CCU bei einemvorgegebenen SNR und einer definierten Datenrate einer empfangenen Nachricht Informatio-nen entnehmen kann. Die Empfindlichkeit ist bei jedem Produkt unterschiedlich und beeinflusstmaßgeblich die Reichweite, in der Nachrichten empfangen und ihnen Informationen entnommenwerden können. [GIG, 2013] Dieser Parameter ist für viele Produkte (besonders im niedrigenPreissegment) nicht öffentlich zugänglich.
2.2.3. Der Übertragungskanal
Bei einer drahtlosen Kommunikation werden Signale vom Sender zum Empfänger über eine end-liche Anzahl an Pfaden übertragen. Diese Art der Ausbreitung wird Mehrwegeausbreitung oderMultipath-Fading genannt. Die Pfade entstehen durch Reflexionen, Streuungen und Brechnun-gen an Objekten im Übertragungsbereich, deren Anzahl stark variieren kann. Jeder dieser Pfadehat Einfluss auf das vom Sender empfangene Signal, da hier die einzelnen Signale nach demSuperpositionsprinzip aufsummiert werden. Es wird durch unterschiedlich lange Pfade durchden Funkkanal dasselbe Signal zeitlich versetzt empfangen, was Interferenzen am Empfängererzeugt. Durch die Bewegung des Senders, des Empfängers und/oder der Streukörper wird derÜbertragungskanal zeitvariant. Das Ergebnis ist ein variierender Empfangspegel zu unterschied-lichen Zeiten (Fading) sowie weitere Interferenzen. Die Einflüsse der Mehrwegeausbreitung aufdie Amplitude, die Phase und die Verzögerung definieren die Impulsantwort des Übertragungs-kanals.Grundsätzlich charakterisieren fünf Eigenschaften einen Funkkanal:
• Pfadverlust: proportionale Abnahme des durchschnittlichen Empfangspegels mit der Ent-fernung zum Sender
• Fading: Schwankung des Empfangspegels mit Zeit, Frequenz und Raum
• Reflexionsverschiebung: Verschiebung des Signals durch Reflexionen, Streuungenund/oder Brechnungen
• Dopplerverschiebung: Verschiebung und Überlagerung des Signals durch Bewegung derStreukörper im Umfeld, des Senders und/oder des Empfängers
2. Grundlagen 32
• Winkelverschiebung: Verschiebung des Signals durch Streukörper und Antennen
Um eine fehlerfreie Übertragung von Informationen zu ermöglichen, muss das Kommunikations-system möglichst gut an den Funkkanal angepasst werden. Besonders wichtig ist hierbei dieAnpassung der Antennen.Bei einer Kommunikation zwischen einem Sender und einem Empfänger auf freiem Feld, alsoohne jegliche Streukörper, kann der Pfadverlust LFSPL (Free-Space Pathloss) mit der folgendenGleichung berechnet werden:
LFSPL = 20log
(4πd
λ
)[dB] (2.2)
λ: Länge Grundschwingung [m]d : Entfernung zwischen Sender und Empfänger [m][vgl. Garg, 2007, S. 290]
Mithilfe des Pfadverlustes LFSPL kann der Pegel an der CCU des Empfängers PRx eines be-kannten Übertragungssystems berechnet werden. Der SNR ist direkt vom Empfangspegel ab-hängig. Hierdurch ist dieser ausschlaggebend für die Rückgewinnung der Informationen ausdem Signal.
Sender Empfänger
Sendeantenne
Kanal
Empfangsantenne
Leitung Leitung
PTx
LTx
GTx
LFSPL
LDiv
GRx
LRx
PRx
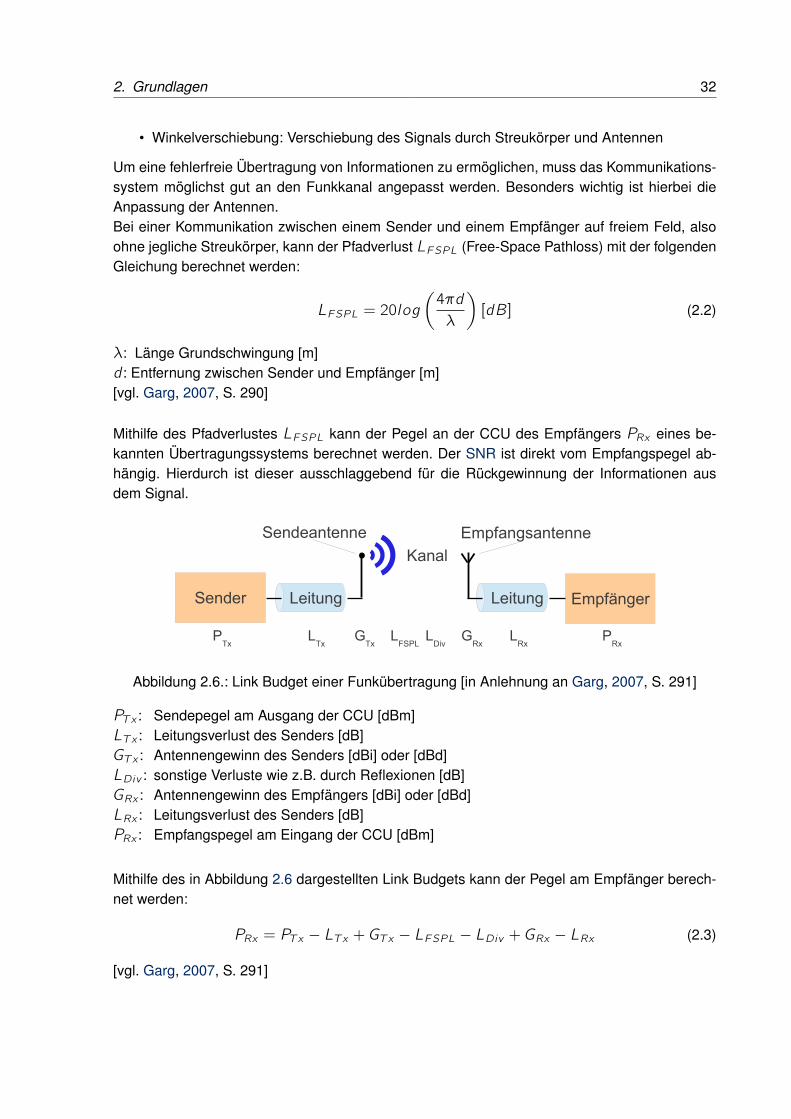
Abbildung 2.6.: Link Budget einer Funkübertragung [in Anlehnung an Garg, 2007, S. 291]
PTx : Sendepegel am Ausgang der CCU [dBm]LTx : Leitungsverlust des Senders [dB]GTx : Antennengewinn des Senders [dBi] oder [dBd]LDiv : sonstige Verluste wie z.B. durch Reflexionen [dB]GRx : Antennengewinn des Empfängers [dBi] oder [dBd]LRx : Leitungsverlust des Senders [dB]PRx : Empfangspegel am Eingang der CCU [dBm]
Mithilfe des in Abbildung 2.6 dargestellten Link Budgets kann der Pegel am Empfänger berech-net werden:
PRx = PTx − LTx + GTx − LFSPL − LDiv + GRx − LRx (2.3)
[vgl. Garg, 2007, S. 291]

2. Grundlagen 33
Findet die Funkübertragung nicht auf freiem Feld statt, so gehen die zusätzlichen Pfadverlustein LDiv ein. Trifft ein Signal auf einen Streukörper, so wird ein Teil der Energie von diesem absor-biert, und ein Teil wird reflektiert. Um die Auswirkungen reflektierter Signale auf die empfangeneNachricht zu verdeutlichen, wird das folgende Beispiel verwendet.In Abbildung 2.7 ist ein links und rechts mit Häusern be-bauter Straßenabschnitt, auch „Urban Canyon“ genannt,vereinfacht in der Draufsicht dargestellt. In diesem Um-feld wird eine Nachricht von einem Sender an einen Emp-fänger gesendet. Die Häuserwände (als glatt angenom-men) reflektieren das gesendete Signal so, dass sich vie-le Wellen an der Antenne des Empfängers bündeln. So-mit kann in diesem Umfeld unter Umständen ein größererEmpfangspegel erreicht werden, als es im freien Feld derFall wäre. Dies ist darauf zurückzuführen, dass Wellen ander Empfangsantenne gebündelt werden, die vom Sen-der in eine andere Richtung abgegeben wurden als sichder Empfänger befindet, sie aber durch Reflexionen um-gelenkt wurden. Gleichzeitig ist aber auch zu bedenken,dass ein größerer Signalpegel keinen Aufschluss darübergibt, ob die Informationen richtig übertragen werden. DieInterferenzen in einem „Urban Canyon“ haben große Aus-wirkungen auf die Anzahl erfolgreich übertragener Infor-mationen, da die Länge der Pfade durch unterschiedlichviele Reflexionen stark variiert.
Abbildung 2.7.: Verstärkung desEmpfangspegels durch Reflexio-nen im „Urban Canyon“ [Sridharaund Bohacek, 2007, S. 7]
Nicht nur Streukörper haben einen Einfluss auf die erfolgreiche Übertragung über den Funkka-nal und die Sendereichweite, auch das Wetter kann diese stark beeinträchtigen. Regen oderSchnee können die Qualität genauso mindern wie hohe Luftfeuchtigkeit. Durch diese Umwelt-einflüsse wird das Rauschen auf dem Kanal vergrößert, wodurch sich der SNR verringert undeine Rückgewinnung des gesendeten Signals im Empfänger erschwert wird.Um ein Übertragungssystem möglichst gut an den Funkkanal anzupassen, werden akkurateModelle der Übertragungskanäle anhand von Feldstudien erstellt, die die Umfelder und ver-schiedene Szenarien einer V2X-Kommunikation darstellen. Bei der Untersuchung des V2X-Kommunikationskanals müssen V2I- und V2V-Kommunikationen unterschiedlich behandelt wer-den. [vgl. Molisch u. a., 2011, S. 1196ff]
Der V2I-Übertragungskanal
Eine V2I-Kommunikation ähnelt einer typischen Drahtloskommunikation, wie dem Mobilfunk (zel-lulare Kommunikation). Es gibt eine Basisstation, hier die IRS, die fest an einem Mast oder ähn-lichem montiert ist. Bei V2I-Kommunikationen befindet sich die Basisstation nur einige Meter(typisch zwischen 5 und 10m) über der Fahrbahn, nicht auf einer Höhe zwischen 30 und 50m,wie es im Mobilfunk der Fall ist. Somit ist die IRS höher angebracht als die nicht-statischen Kom-munikationsstationen, den IVS, jedoch gegebenenfalls nicht höher als z.B. Gebäude, Bäume

2. Grundlagen 34
oder Schallschutzwände im Umfeld. Es kommt durch die Freifläche, die eine Fahrbahn in derRegel schafft, trotzdem in vielen Fällen (besonders bei geringem Verkehrsaufkommen) zu einerLOS zwischen Sender und Empfänger. Eine LOS ermöglicht eine verzögerungsarme Übertra-gung der Informationen bei geringer Kanaldämpfung und Interferenz.Des Weiteren ist bei einer V2I-Kommunikation die maximale relative Geschwindigkeit zwischenSender und Empfänger gleich der absoluten Geschwindigkeit der IVS. [vgl. Molisch u. a., 2011,S. 1201ff]Zu beachten ist ebenfalls, dass die IRS meist bessere Übertragungseigenschaften aufweist alsdie IVS. Dies hat verschiedene Gründe. Einerseits sind die Antennen in ihrer Richtwirkung andie Umgebung angepasst, es kann eine optimale Bauform verwendet werden und daraus resul-tierend ist der Antennengewinn (siehe 2.2.1) größer. Andererseits gibt es bei einer IVS im nahenUmfeld mehr Störungen durch z.B. die Zündung von Verbrennungsmotoren, die das Rauschenauf dem Kanal erhöhen und somit den SNR verringern. [vgl. Garg, 2007, S. 288]
Der V2V-Übertragungskanal
Bei einer V2V-Kommunikation bewegen sich der Sender und der Empfänger ggf. mit hoher Ge-schwindigkeit, woraus eine hohe relative Geschwindigkeit zwischen den beiden ITSs resultiert.Dabei sind die Antennen der IVSs meist auf einer Höhe von 1−2m angebracht. Die Wahrschein-lichkeit, dass Streukörper den Empfänger abschatten, ist somit groß, wodurch es nur selten zueiner LOS kommt. Statische Streukörper sind im Straßenverkehr beispielsweise Straßenschilder,parkende Autos oder Bäume. Nicht-statische Streukörper sind Fahrzeuge im nahen Umfeld. Ab-hängig vom Szenario (z.B. Autobahnfahrt oder Fahrt bei dichtem Verkehr im Stadtgebiet) variiertdie Anzahl und Relevanz der Streukörper. Zu berücksichtigen ist bei einer V2V-Kommunikationaußerdem, dass die verwendeten Antennen meist sehr kompakte Bauformen haben und somitkeine optimalen Funkeigenschaften besitzen. [vgl. Molisch u. a., 2011, S. 1189ff]
2.3. Zeitsynchronisation in Netzwerksystemen
In Computersystemen und besonders in Netzwerksystemen ist häufig eine genaue Zeitsynchro-nisation wichtig, um auftretenden Ereignissen einem möglichst exakten Zeitpunkt zuordnen zukönnen. Dies wiederum ist essentiell zur Festlegung der Reihenfolge des Auftretens der Er-eignisse. Es ist somit ein grundlegender Aspekt von Aufzeichnungen (Logging), Steuerungen,Regelungen und Transaktionen. Um die genaue Zeit in einem Netzwerksystem zu gewährleis-ten, werden die einzelnen Systemkomponenten, die Clients, mit einer gemeinsamen, möglichstgenauen Zeitquelle, synchronisiert. Die Zeit der Quelle wird den Clients durch einen Zeitserverzur Verfügung gestellt. Es wird zwischen der Synchronisation der Clients eines Servers unter-einander, d. h. die Zeitstempel der Clients sind möglichst gleich, und der Synchronisation derClients auf die Standardzeit UTC3 unterschieden. [vgl. Elson und Estrin, 2003, S. 4, 12f]
3Die Universal Time Coordinated (UTC) wurde 1972 eingeführt und ist die weltweite Referenzzeit, von der alleLokalzeiten (z.B. die Mitteleuropäische Zeit) abgeleitet werden. Durch die Erdrotation hervorgerufene Schwan-kungen werden durch Schaltsekunden berücksichtigt.
2. Grundlagen 35
Zur Zeitsynchronisation hat sich das Network Time Protocol (NTP) durchgesetzt , das auf demInternet Protocol (IP) und User Datagram Protocol (UDP) aufbaut [EndRun, 2013]. NTP ermög-licht Clients sich mit einem Zeitserver zu synchronisieren, auch wenn dieser über viele Gatewaysund unzuverlässige, ständig wechselnde Pfade verbunden ist, wie es beispielsweise beim Inter-net der Fall ist. Das NTP bewirkt eine möglichst genaue Synchronisation der Clients mit demServer durch den Austausch von Paketen, die unterschiedliche Zeitstempel enthalten. Hierzuläuft eine Hintergrundanwendung auf dem Client-System, die periodisch Pakete an den Serversendet, die dann von diesem zurückgesendet werden. Nachdem der Client das Paket emp-fangen hat, sind die Sende- und Empfangszeitpunkte (Zeitstempel) des Pakets von Client undServer bekannt. Mithilfe dieser vier Zeitstempel berechnet die Anwendung auf dem Client dieAbweichung der Systemzeit von der Zeit des Servers und passt diese ggf. an. Hierbei wird ei-nerseits die Verzögerung (Delay), die durch die zurückgelegte Strecke zum Server und zurückentsteht, und andererseits die Abweichung (Offset) berechnet. Der Offset entsteht durch dieverzögerte Antwort im Server sowie durch einen unterschiedlich langen Hin- und Rückweg desSynchronisationspakets. [vgl. l. Mills, 1991, S. 1486ff]
Um die Teilnehmer eines Netzwerks zu synchronisieren, muss eine Auswahl des Zeitserversgetroffen werden. Es gibt grundsätzlich vier verschiedene Typen:
1. Zeitserver, die ihre Zeit direkt von einer lokale Atomuhr beziehen. Diese sind aufgrundihres Hardwareaufbaus kostenintensiv und somit nur für wenige Anwendungen vertretbar,bieten dafür jedoch eine höchst genaue, verlässliche und sichere Synchronisation.
2. Zeitserver, die über einen GPS-Empfänger verfügen und die Zeit aus den empfangenenDaten mehrerer GPS-Satelliten (haben integrierte Atomuhren) berechnen. Diese bietet ei-ne kostengünstige und sehr genaue Möglichkeit der Zeitsynchronisation. Außerdem kön-nen somit auch mobile, abgeschlossene Netzwerke synchronisiert werden.
3. Zeitserver, die die Zeit einer Hardware-Uhr (Real Time Clock) dem Netz zur Verfügungstellen. Da eine herkömmliche Hardware-Uhr aus einem Schwingkreis besteht und dieservon Umgebungsparametern, wie der Temperatur beeinflusst wird, liefert sie nie eine ver-lässliche Zeit. Somit bietet dieser Typ eine Möglichkeit für abgeschlossene Systeme, beidenen es nicht auf die Exaktheit der UTC-Zeit ankommt, sondern auf die reine Synchroni-sation der Clients untereinander.
4. Zeitserver, die ihre Zeit von einem der vorher genannten Server beziehen. Diese werdenin Netzwerken verwendet, um eine möglichst genaue Synchronisation der Clients unter-einander zu bewirken. Hierbei kann jedoch keine genaue Synchronisation zur UTC-Zeitgewährleistet werden.
[EndRun, 2013]
Es werden im Internet verschiedene Zeitserver zur Verfügung gestellt, von denen viele dieZeit direkt über eine lokalen Atomuhr beziehen (Typ 1). Einer davon ist beispielsweise derServer der Physikalisch-Technischen Bundesanstalt (PTB) in Braunschweig. Die Synchronisa-tion mit diesen Servern erfordert keine zusätzliche Hardware, sondern lediglich eine laufende

2. Grundlagen 36
NTP-Applikation auf dem Clientsystem. Da die Länge der Hin- und Rückpfade durch das nicht-statische Routing zum Server stark variieren kann, ist eine genaue Synchronisation nicht mög-lich.Für eine zeitkritische Messung sollte deshalb ein lokaler Zeitserver des Typs 1 oder 2 zur Syn-chronisation des Messsystems verwendet werden, wobei Typ 2 mit weniger Aufwand und Kostenverbunden ist. Hierbei ist eine Synchronisation mit einer maximalen Abweichung von der Ser-verzeit zwischen 0,5 und 2ms mit handelsüblicher Hardware erreichbar [EndRun, 2013].

3. Messumgebung
Dieses Kapitel beschreibt alle für die Messung verwendeten Hardwarekomponenten und de-ren Integration zu einem System. Außerdem wird die zur Messung verwendete Softwarestrukturvorgestellt. Dabei wird auf die Subsysteme IRS und die Messplattform der IVS getrennt einge-gangen.
3.1. Systemarchitektur
CCU CCU AUAU Ethernet
ITS Roadside Station 1 ITS Vehicle Station
Zeitserver INS
Zitsync.-Karte
EthernetEthernet
Ethernet
Ethernet
802.11p
GPS GPS GPS
ITS Roadside Station ...ITS Roadside Station n
Abbildung 3.1.: Schematischer Aufbau der Messumgebung
Die Messumgebung besteht grundsätzlich aus einer oder mehreren IRSs, die per Funk Nach-richten an eine IVS versenden. Die schon vorhandenen IRSs sind Teil des AIM-Projekts, dasin Abschnitt 1.1 beschrieben wurde. Die V2I-Kommunikation basiert auf dem Car2Car-Protokollund verwendet somit für die Datenübertragung den IEEE-Standard 802.11p. Der Hardwareauf-bau der Messumgebung ist in Abbildung 3.1 dargestellt. Auf die verwendeten Hardwarekompo-nenten und Subsysteme wird in den folgenden Abschnitten eingegangen.
3. Messumgebung 38
3.2. ITS Roadside Station
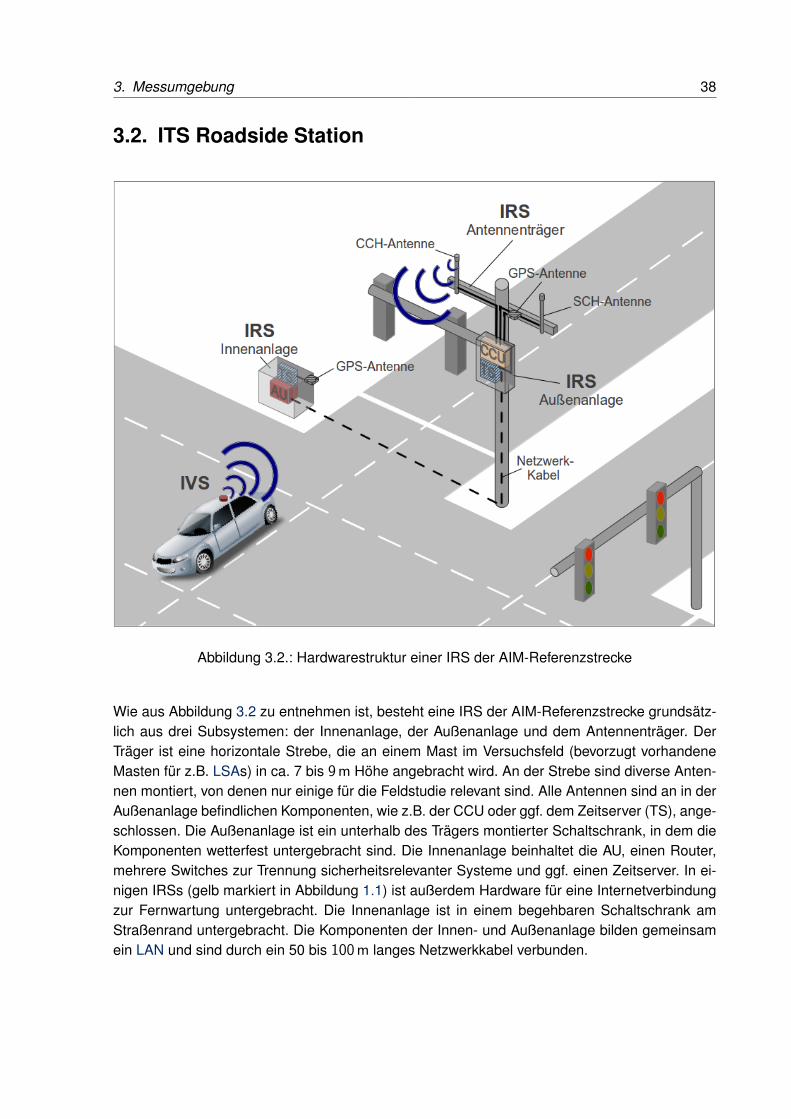
Abbildung 3.2.: Hardwarestruktur einer IRS der AIM-Referenzstrecke
Wie aus Abbildung 3.2 zu entnehmen ist, besteht eine IRS der AIM-Referenzstrecke grundsätz-lich aus drei Subsystemen: der Innenanlage, der Außenanlage und dem Antennenträger. DerTräger ist eine horizontale Strebe, die an einem Mast im Versuchsfeld (bevorzugt vorhandeneMasten für z.B. LSAs) in ca. 7 bis 9m Höhe angebracht wird. An der Strebe sind diverse Anten-nen montiert, von denen nur einige für die Feldstudie relevant sind. Alle Antennen sind an in derAußenanlage befindlichen Komponenten, wie z.B. der CCU oder ggf. dem Zeitserver (TS), ange-schlossen. Die Außenanlage ist ein unterhalb des Trägers montierter Schaltschrank, in dem dieKomponenten wetterfest untergebracht sind. Die Innenanlage beinhaltet die AU, einen Router,mehrere Switches zur Trennung sicherheitsrelevanter Systeme und ggf. einen Zeitserver. In ei-nigen IRSs (gelb markiert in Abbildung 1.1) ist außerdem Hardware für eine Internetverbindungzur Fernwartung untergebracht. Die Innenanlage ist in einem begehbaren Schaltschrank amStraßenrand untergebracht. Die Komponenten der Innen- und Außenanlage bilden gemeinsamein LAN und sind durch ein 50 bis 100m langes Netzwerkkabel verbunden.
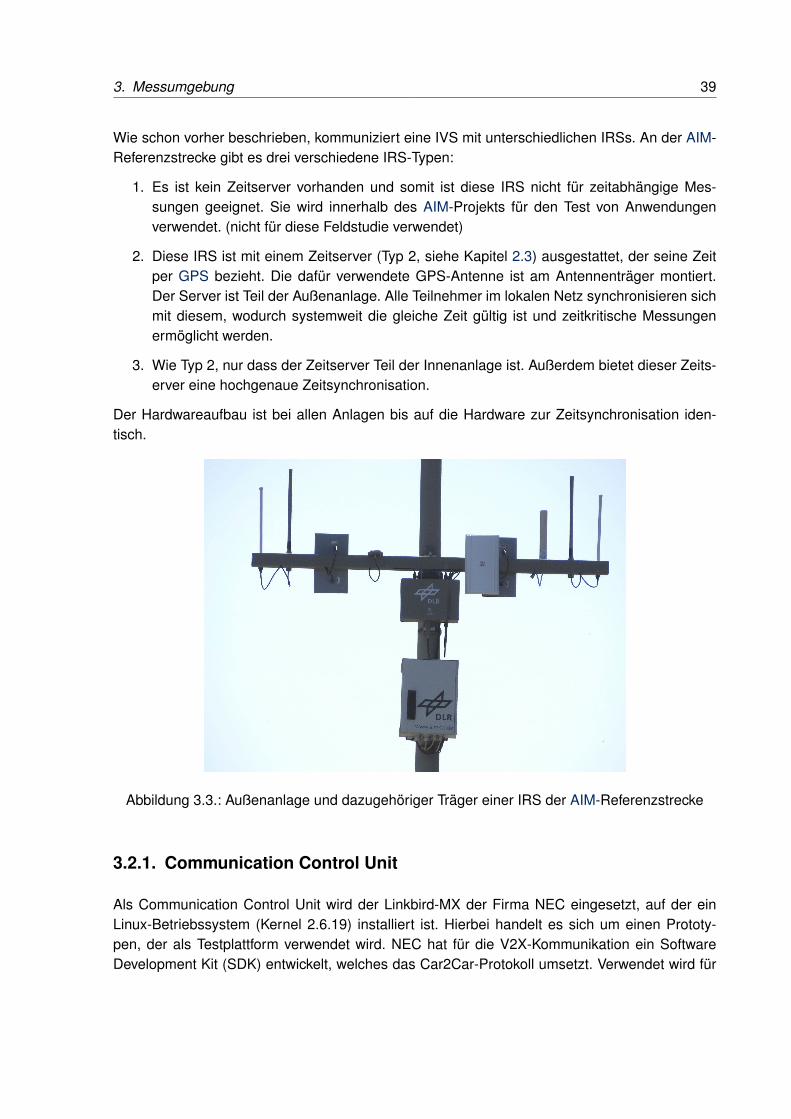
3. Messumgebung 39
Wie schon vorher beschrieben, kommuniziert eine IVS mit unterschiedlichen IRSs. An der AIM-Referenzstrecke gibt es drei verschiedene IRS-Typen:
1. Es ist kein Zeitserver vorhanden und somit ist diese IRS nicht für zeitabhängige Mes-sungen geeignet. Sie wird innerhalb des AIM-Projekts für den Test von Anwendungenverwendet. (nicht für diese Feldstudie verwendet)
2. Diese IRS ist mit einem Zeitserver (Typ 2, siehe Kapitel 2.3) ausgestattet, der seine Zeitper GPS bezieht. Die dafür verwendete GPS-Antenne ist am Antennenträger montiert.Der Server ist Teil der Außenanlage. Alle Teilnehmer im lokalen Netz synchronisieren sichmit diesem, wodurch systemweit die gleiche Zeit gültig ist und zeitkritische Messungenermöglicht werden.
3. Wie Typ 2, nur dass der Zeitserver Teil der Innenanlage ist. Außerdem bietet dieser Zeits-erver eine hochgenaue Zeitsynchronisation.
Der Hardwareaufbau ist bei allen Anlagen bis auf die Hardware zur Zeitsynchronisation iden-tisch.
Abbildung 3.3.: Außenanlage und dazugehöriger Träger einer IRS der AIM-Referenzstrecke
3.2.1. Communication Control Unit
Als Communication Control Unit wird der Linkbird-MX der Firma NEC eingesetzt, auf der einLinux-Betriebssystem (Kernel 2.6.19) installiert ist. Hierbei handelt es sich um einen Prototy-pen, der als Testplattform verwendet wird. NEC hat für die V2X-Kommunikation ein SoftwareDevelopment Kit (SDK) entwickelt, welches das Car2Car-Protokoll umsetzt. Verwendet wird für

3. Messumgebung 40
die Messungen die SDK-Version 2.3.3. Wird ein UDP-Paket über Ethernet an einem definiertenPort der CCU empfangen, so werden die Informationen zu einer Car2Car-Nachricht verpacktund über die Luftschnittstelle versendet. Wird ein Datenpaket über die Luftschnittstelle empfan-gen, so wird dieses als UDP-Paket an einen definierten Port der AU gesendet. Der Linkbird-MXhat zwei integrierte Drahtlos-Netzwerkkarten vom Typ DCMA-82, die von der Firma QualcommAtheros entwickelt wurden. Somit bietet diese CCU zwei getrennte Kanäle, einen Control Chan-nel (CCH) und einen Service Channel (SCH). Nur der CCH wird für die Messung verwendet undauf Kanal 180 (5,895-5,905GHz) betrieben.Für die DSRC werden zwei omnidirektionale Stabantennen der Firma Mobile Mark vom TypECO12-5800 verwendet, die im Frequenzbereich zwischen 5,7 und 6,0GHz einen Antennenge-winn Gi von 12dBi besitzen. Diese werden über 3m lange Leitungen mit einer Dämpfung von0,71 dB/m (+ Dämpfung der Verbinder) an die CCH- und an die SCH-Schnittstelle des Linkbirdsangeschlossen. Die Antennen sind ca. 1,8m voneinander entfernt an dem Antennenträger mon-tiert (siehe Abbildung 3.2 und 3.3).Der Linkbird-MX ermöglicht einen Sendepegel PT zwischen 0 und 30dBm, der in ganzzahligenSchritten konfigurierbar ist [vgl. NEC Laboratories, 2013, S. 15]. Da die Sendeleistung der An-tenne EIRP in den Kanälen 176 und 180 in Europa auf maximal 33dBm begrenzt ist (sieheTabelle 2.2), muss dies bei der Konfiguration der CCU beachtet werden.Um den Sendepegel der CCU zu verifizieren, wurden Messungen mit einem Echtzeit-Spektrumanalysator (engl. Realtime Spectrum Analyzer (RSA)) (SPECMON6 von Tektronix)durchgeführt. Hierbei wurde der Linkbird-MX (CCH) über die 3m lange Leitung, die auch anden IRSs verwendet wird, an den Eingang des RSAs angeschlossen. Am RSA wurde der Pegelim Kanalband (Kanal 180, Bandbreite 10MHz) gemessen. Der über zehn Werte gemittelte PegelPSpec kann mit dem Sendepegel PT der CCU verglichen werden. Um den Sendepegel über deneinstellbaren Bereich zu verifizieren, wurden mehrere Messungen mit unterschiedlichen Pegelndurchgeführt.
PT [dBm] 6 9 12 15 18 20 21 22 23 24 25 30
PSpec [dBm] 0,4 3,5 5,8 8,9 12,3 15,2 16,3 17,1 18,4 18,4 18,4 18,4
∆P [dBm] 5,6 5,5 6,2 6,1 5,7 4,8 4,7 4,9 4,6 5,6 6,6 11,6
Tabelle 3.1.: Verifikation des Sendepegels des Linkbird-MX
In Tabelle 3.1 sind alle gemessenen Pegel mit dazugehörigen Sendepegeln der CCU dargestellt.Es fällt auf, dass sich PSpec ab einem Sendepegel PT von 23dBm nicht ändert. Dies lässt dar-auf schließen, dass der im Handbuch des Linkbird-MX definierte Bereich des Sendepegels bismaximal 30dBm zwar konfigurierbar ist, von der Drahtlos-Netzwerkkarte jedoch nicht umgesetztwird. In der Spezifikation der Netzwerkkarte ist ein maximaler Sendepegel von 22,5dBm bei ei-ner Datenrate von 6MBit/s unter Verwendung des Standards 802.11a angegeben [vgl. Wistron,2006]. Da die Karte nicht für den Standard 802.11p spezifiziert ist, liegt es nahe, dass die Kenn-werte für den sehr ähnlichen Standard 802.11a für beide gültig sind.Die Abweichung ∆P zwischen dem gemessenen und dem konfigurierten Sendepegel sind

3. Messumgebung 41
grundsätzlich durch Leitungsverluste und Verluste der Leitungsverbinder zu erklären. Es wirdhier allerdings ein konstanter Wert erwartet, da die Verbindung zwischen der CCU und demSpektrumanalysator während der Messungen nicht verändert wurde. Es ist deshalb darauf zuschließen, dass der Pegel am Ausgang der CCU mit großen Toleranzen umgesetzt wird undüber den einstellbaren Bereich schwankt.Die Differenz zwischen dem konfigurierten und dem gemessenen Pegel beträgt minimal4,6dBm. Folglich kann die Leitungsdämpfung maximal Ll ,max = 4,6dBm betragen. Anhand die-ser Kenntnis und mithilfe des Antennengewinns Gi kann durch Umstellen der Gleichung 2.1 dervon der CCU maximal auszugebende Signalpegel PT,max berechnet werden.
PT,max = EIRPmax + Ll ,max − Gi = 33dBm + 4, 6dB − 12dBi = 25, 6dBm
In der Feldstudie wird die maximal mögliche Reichweite der V2X-Kommunikation im AIM-Versuchsfeld getestet. Aus diesem Grund werden alle verwendeten CCUs mit dem maximalzugelassenen bzw. möglichen Sendepegel konfiguriert. Wie beschrieben, ist der Sendepegeldes Linkbird-MX auf 23dBm begrenzt, weshalb der maximale Sendepegel von 25,6dBm nichterreicht werden kann und die Einhaltung des maximal zulässigen Pegels gewährleistet ist. DurchVerwendung der Gleichung 2.1 kann ein Sendepegel EIRP der IRS von 30,4dBm berechnetwerden.
3.2.2. Zeitserver
Wie am Anfang dieses Kapitels beschrieben, gibt es zwei unterschiedliche IRS-Typen mit inte-griertem Zeitserver. Diese unterscheiden sich neben der Unterbringung des Servers auch in derHardware.Bei IRSs mit Zeitserver in der Außenanlage ist der Antennenträger sowie ein dazugehörigerRechner von der Firma Airberry für das DLR entwickelt worden. Der Träger ist mit einer GPS-Antenne ausgestattet. Der Rechner wertet die GPS-Daten aus und dient als NTP-Zeitserver fürdas lokale Netzwerk. Hiermit kann die übliche Genauigkeit zwischen 0,5 und 2ms erreicht wer-den.Bei IRSs mit einem Zeitserver in der Innenanlage ist eine GPS-Antenne an dem begehbarenSchaltschrank montiert. Diese ist an dem Zeitserver Lantime M400 GPS der Firma Meinbergangeschlossen. Dieser ermöglicht durch hochgenaue Hardware und daran angepasste Softwa-re eine genauere Synchronisation, als der Server in der Außenanlage.
3.2.3. Application Unit
Als AU wird bei den IRSs ein lüfterloser Industrie-PC verwendet, auf dem ein Ubuntu Serverinstalliert ist. Auf der AU wird die Applikation „DominionServer“ ausgeführt.Dominion ist ein Softwareframework, das für die Entwicklung und Verwaltung von Applikationensowie Systemvariablen vom DLR entwickelt wurde. Die Applikation „DominionServer“stellt den
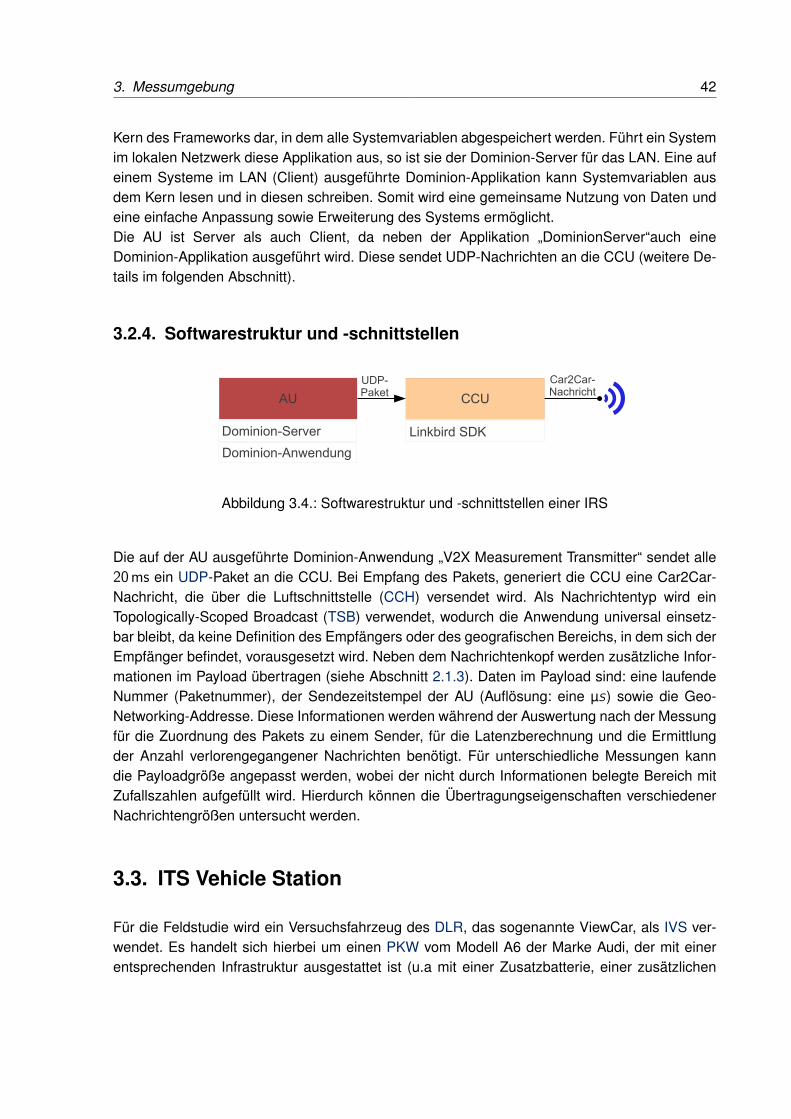
3. Messumgebung 42
Kern des Frameworks dar, in dem alle Systemvariablen abgespeichert werden. Führt ein Systemim lokalen Netzwerk diese Applikation aus, so ist sie der Dominion-Server für das LAN. Eine aufeinem Systeme im LAN (Client) ausgeführte Dominion-Applikation kann Systemvariablen ausdem Kern lesen und in diesen schreiben. Somit wird eine gemeinsame Nutzung von Daten undeine einfache Anpassung sowie Erweiterung des Systems ermöglicht.Die AU ist Server als auch Client, da neben der Applikation „DominionServer“auch eineDominion-Applikation ausgeführt wird. Diese sendet UDP-Nachrichten an die CCU (weitere De-tails im folgenden Abschnitt).
3.2.4. Softwarestruktur und -schnittstellen
Car2Car-Nachricht
CCU
Linkbird SDK
AU
UDP-Paket
Dominion-Server
Dominion-Anwendung
Abbildung 3.4.: Softwarestruktur und -schnittstellen einer IRS
Die auf der AU ausgeführte Dominion-Anwendung „V2X Measurement Transmitter“ sendet alle20ms ein UDP-Paket an die CCU. Bei Empfang des Pakets, generiert die CCU eine Car2Car-Nachricht, die über die Luftschnittstelle (CCH) versendet wird. Als Nachrichtentyp wird einTopologically-Scoped Broadcast (TSB) verwendet, wodurch die Anwendung universal einsetz-bar bleibt, da keine Definition des Empfängers oder des geografischen Bereichs, in dem sich derEmpfänger befindet, vorausgesetzt wird. Neben dem Nachrichtenkopf werden zusätzliche Infor-mationen im Payload übertragen (siehe Abschnitt 2.1.3). Daten im Payload sind: eine laufendeNummer (Paketnummer), der Sendezeitstempel der AU (Auflösung: eine µs) sowie die Geo-Networking-Addresse. Diese Informationen werden während der Auswertung nach der Messungfür die Zuordnung des Pakets zu einem Sender, für die Latenzberechnung und die Ermittlungder Anzahl verlorengegangener Nachrichten benötigt. Für unterschiedliche Messungen kanndie Payloadgröße angepasst werden, wobei der nicht durch Informationen belegte Bereich mitZufallszahlen aufgefüllt wird. Hierdurch können die Übertragungseigenschaften verschiedenerNachrichtengrößen untersucht werden.
3.3. ITS Vehicle Station
Für die Feldstudie wird ein Versuchsfahrzeug des DLR, das sogenannte ViewCar, als IVS ver-wendet. Es handelt sich hierbei um einen PKW vom Modell A6 der Marke Audi, der mit einerentsprechenden Infrastruktur ausgestattet ist (u.a mit einer Zusatzbatterie, einer zusätzlichen
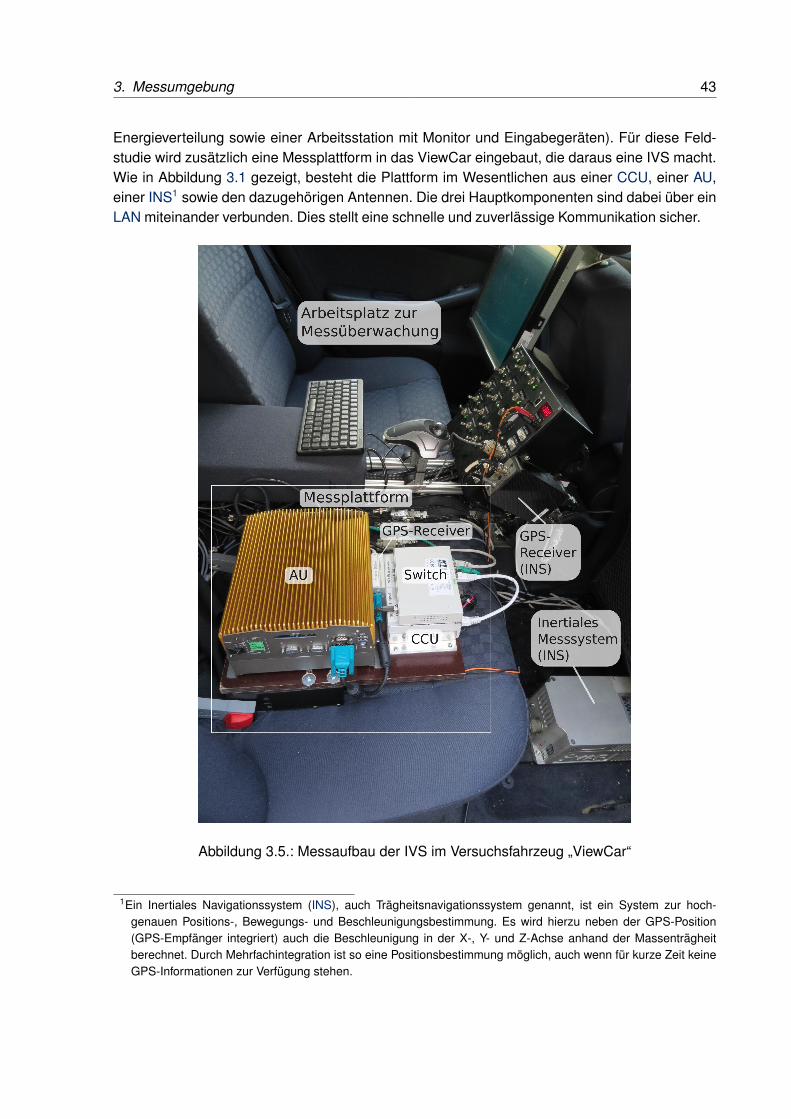
3. Messumgebung 43
Energieverteilung sowie einer Arbeitsstation mit Monitor und Eingabegeräten). Für diese Feld-studie wird zusätzlich eine Messplattform in das ViewCar eingebaut, die daraus eine IVS macht.Wie in Abbildung 3.1 gezeigt, besteht die Plattform im Wesentlichen aus einer CCU, einer AU,einer INS1 sowie den dazugehörigen Antennen. Die drei Hauptkomponenten sind dabei über einLAN miteinander verbunden. Dies stellt eine schnelle und zuverlässige Kommunikation sicher.
Abbildung 3.5.: Messaufbau der IVS im Versuchsfahrzeug „ViewCar“
1Ein Inertiales Navigationssystem (INS), auch Trägheitsnavigationssystem genannt, ist ein System zur hoch-genauen Positions-, Bewegungs- und Beschleunigungsbestimmung. Es wird hierzu neben der GPS-Position(GPS-Empfänger integriert) auch die Beschleunigung in der X-, Y- und Z-Achse anhand der Massenträgheitberechnet. Durch Mehrfachintegration ist so eine Positionsbestimmung möglich, auch wenn für kurze Zeit keineGPS-Informationen zur Verfügung stehen.

3. Messumgebung 44
Die Messplattform (Abbildung 3.5) ist dafür konzipiert in unterschiedlichen Fahrzeugen mit we-nig Aufwand in Betrieb genommen zu werden. Aus diesem Grund sind die AU, die CCU, einSwitch sowie ein für diese Messungen nicht verwendeter GPS-Empfänger auf einer Holzplattemontiert. Die Plattform kann wiederum mithilfe eines Isofix2-Verschlusses an einem entspre-chend ausgestatteten Fahrzeugsitz befestigt werden. Dies ermöglicht eine sichere Befestigungder Messplattform in unterschiedliche Fahrzeuge mit geringem Aufwand. Die INS ist nicht in derPlattform enthalten, da sie eine feste Verbindung mit der Fahrzeugkarosserie voraussetzt. Auf-grund dessen muss diese in jedem Testfahrzeug separat eingebaut werden. Das Viewcar wurdebereits für vorherige Tests mit einer INS ausgestattet.
Abbildung 3.6.: Antennen der IVS auf dem Dach des Versuchsfahrzeugs „ViewCar“
Wie in Abbildung 3.6 zu erkennen, sind neben der werkseitig montierten Reling und der Rund-funkantenne sechs weitere Antennen auf dem Dach des ViewCars montiert. Die drei schwarzenRundstrahler sind für die Messungen nicht relevant.
2Isofix ist ein Befestigungssystem, das eine sichere und komfortable Befestigung eines Kindersitzes auf einemFahrzeugsitz gewährleistet. Einige Fahrzeugmodelle werden schon werkseitig mit der entsprechenden Aufnah-me am Sitz ausgestattet.

3. Messumgebung 45
Die drei weiteren Antennen sind:
• eine Fahrzeugantenne (vier Antennen in einem Gehäuse), die durch einen Magnetfuß amDach befestigt ist und für DSRC verwendet wird,
• eine „Bullet“-Antenne für den GPS-Empfänger des Zeitservers, die an einem Dachträgermontiert ist und
• eine „Ufo“-Antenne für die INS, die zur Forschungsausstattung des ViewCars gehört undfest mit dem Fahrzeugdach verschraubt ist.
In Abschnitt 2.2.1 wird beschrieben, dass sich am Dach montierte Gegenstände negativ aufdie Übertragungseigenschaften der Antenne auswirken. Um einen praxisnahen Anwendungsfalldarzustellen, müsste also das Dach bis auf die Reling und die Fahrzeugantenne frei von Gegen-ständen sein. Während dieser Messungen ist es nicht möglich diesen Fall darzustellen, da dieGPS-Antenne der INS fest an dem Dach befestigt ist. Außerdem wird für die genaue Zeitsyn-chronisation die „Bullet “-Antenne benötigt, für die es kein Montagezubehör für Fahrzeugdächergibt und eine sichere Befestigung nur durch einen Dachträger gegeben ist. Dies ist bei der Aus-wertung der Messergebnisse zu berücksichtigen.
3.3.1. Communication Control Unit
Wie bei den IRSs wird auch hier als CCU der Linkbird-MX verwendet. Zur drahtlosen Kommu-nikation wird die Fahrzeugantenne SMW-404 der Firma Mobile Mark verwendet. Diese ist fürdie Montage auf einem Fahrzeugdach vorgesehen und hat ein für Fahrzeugantennen typisches,aerodynamisches Gehäuse. Für den CCH wird eine der internen Antennen mit einem Gewinnvon 5dBi (4,9 bis 6,0GHz) und für den SCH eine Antenne mit einem Gewinn von 5dBi (4,4 bis6,0GHz) verwendet. In Abbildung 2.5 sind die entsprechenden Antennendiagramme gezeigt (fürbeide Antennen gültig). Außerdem sind noch je eine Antenne für GPS und für einen Frequenz-bereich zwischen 0,8 bis 2,7GHz für z.B. WLAN integriert.Um eine möglichst praxisnahe Messumgebung zu schaffen, wurde diese Multifunktionsantennegewählt, da sie den von den Automobilherstellern eingesetzten Antennen von den Abmaßen undvom Funktionsumfang her ähnelt.
3.3.2. Inertiales Navigationssystem
Für die Messungen wird das im Viewcar verbaute INS verwendet. Dieses ist nicht in ein Ge-rät integriert, sondern besteht aus einem GPS-Empfänger (Forsberg Services), dem inertialenMesssystem iDIS-FMS der Firma iMAR und einer AU. Das Messsystem kombiniert seine Datenmit den Daten des GPS-Empfängers und berechnet daraus resultierende Werte, wie u.a. Posi-tion, Geschwindigkeit und Beschleunigung. Diese werden an die AU gesendet, wo sie mithilfeeiner Dominion-Anwendung in den Kern des Dominion-Servers geschrieben werden.

3. Messumgebung 46
Das System liefert durch differentielles GPS die aktuelle Position mit einer Genauigkeit von un-ter einem Meter. Außerdem stellt sie die Geschwindigkeit und die Ausrichtung des Fahrzeugs inEchtzeit zur Verfügung, die mit jedem Messdatensatz abgespeichert werden.
3.3.3. Application Unit und Zeitserver
Als AU wird ein lüfterloser Fahrzeug-PC mit Ubuntu als Betriebssystem verwendet. Dieser istder Dominion-Server des IVS-Netzwerks. Neben der Speicherung der Variablen überwacht derServer auch die eingehenden UDP-Pakete und stellt sie den Dominion-Applikationen zur Ver-fügung. Hierdurch werden die von der CCU eingehenden Nachrichten in den Kern geschriebenund können von einer Dominion-Applikation von dort abgerufen werden.Die AU ist außerdem der Zeitserver für das LAN des Messsystems. Zur Synchronisation mitder UTC-Zeit ist die Satelliten-Funkuhr GPS170PCI der Firma Meinberg in einen PCI-Steckplatzeingebaut, die die Zeit anhand der Daten mehrerer GPS-Satelliten ermittelt. Da die zeitgebendeHardware direkt im Server integriert ist, werden Abweichungen durch Verzögerungen auf Lei-tungswegen umgangen. Die Synchronisation der Systemzeit der AU mit der UTC-Zeit hat nacheiner Einschwingzeit von 90 Minuten eine maximale Abweichung von der UTC-Zeit von 15µs.Dies wurde bei einem Langzeittest mit diesem System bei einer vorigen Studie im DLR ermittelt.Die Funkuhr erfordert eine auf dem Fahrzeugdach montierte GPS-Antenne, auf die bereits vor-her eingegangen wurde. Die CCU ist NTP-Client und synchronisiert sich mit der Systemzeit derAU. Dies ermöglicht eine genaue Messung zeitlich dicht beieinander liegender Ereignisse.
3.3.4. Softwarestruktur und -schnittstellen
UDP-Paket
AU INS
Dominion-Server Dominion-Anwendung
CCU
Linkbird SDK
Car2Car-Nachricht
Dominion-Variablen
c2xnet.trace
gps.logmeasurement.log
Dominion-Anwendung
Abbildung 3.7.: Softwarestruktur und -schnittstellen der IVS
Die Abbildung 3.7 zeigt die Struktur unterschiedlicher Software auf den Komponenten des Mess-systems und deren Informationsaustausch über verschiedene Schnittstellen.Die INS schreibt alle zehn Millisekunden einen Datensatz (enthält u.a. geografische Position,Geschwindigkeit und Fahrzeugausrichtung) in den Kern des Dominion-Servers. Somit ist immerdie aktuelle Position des Fahrzeugs (mit geringer Abweichung) für die Dominion-Anwendungen
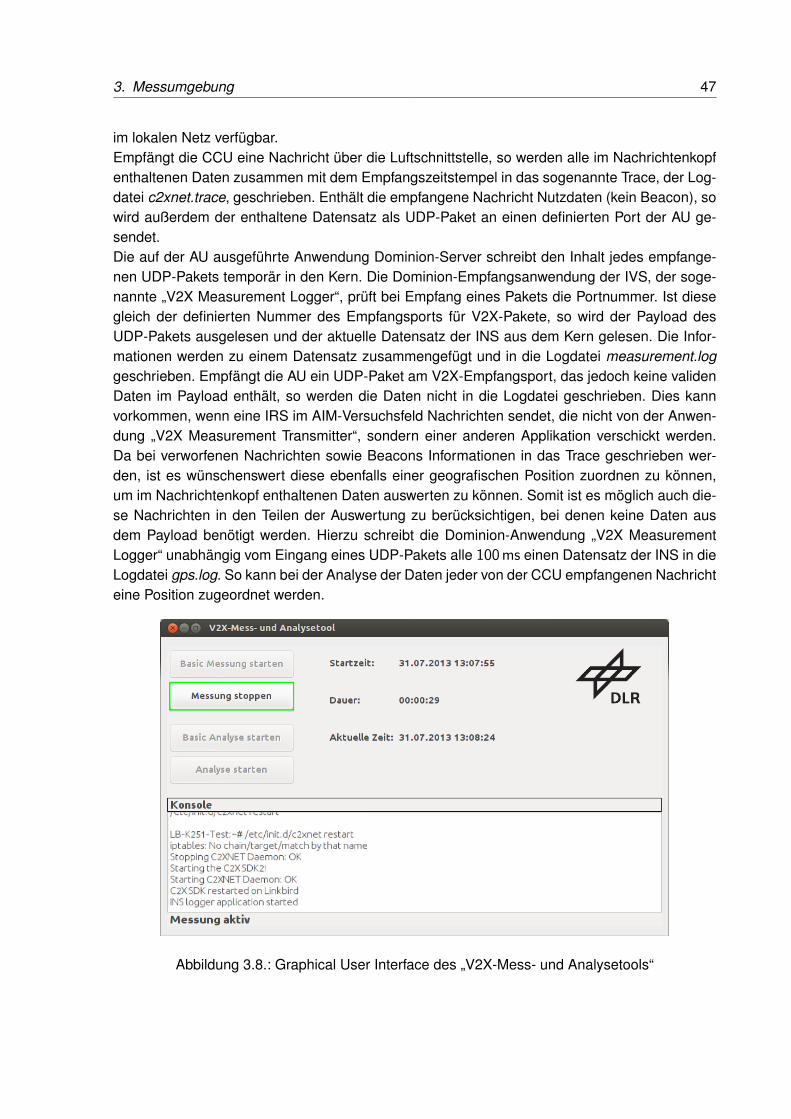
3. Messumgebung 47
im lokalen Netz verfügbar.Empfängt die CCU eine Nachricht über die Luftschnittstelle, so werden alle im Nachrichtenkopfenthaltenen Daten zusammen mit dem Empfangszeitstempel in das sogenannte Trace, der Log-datei c2xnet.trace, geschrieben. Enthält die empfangene Nachricht Nutzdaten (kein Beacon), sowird außerdem der enthaltene Datensatz als UDP-Paket an einen definierten Port der AU ge-sendet.Die auf der AU ausgeführte Anwendung Dominion-Server schreibt den Inhalt jedes empfange-nen UDP-Pakets temporär in den Kern. Die Dominion-Empfangsanwendung der IVS, der soge-nannte „V2X Measurement Logger“, prüft bei Empfang eines Pakets die Portnummer. Ist diesegleich der definierten Nummer des Empfangsports für V2X-Pakete, so wird der Payload desUDP-Pakets ausgelesen und der aktuelle Datensatz der INS aus dem Kern gelesen. Die Infor-mationen werden zu einem Datensatz zusammengefügt und in die Logdatei measurement.loggeschrieben. Empfängt die AU ein UDP-Paket am V2X-Empfangsport, das jedoch keine validenDaten im Payload enthält, so werden die Daten nicht in die Logdatei geschrieben. Dies kannvorkommen, wenn eine IRS im AIM-Versuchsfeld Nachrichten sendet, die nicht von der Anwen-dung „V2X Measurement Transmitter“, sondern einer anderen Applikation verschickt werden.Da bei verworfenen Nachrichten sowie Beacons Informationen in das Trace geschrieben wer-den, ist es wünschenswert diese ebenfalls einer geografischen Position zuordnen zu können,um im Nachrichtenkopf enthaltenen Daten auswerten zu können. Somit ist es möglich auch die-se Nachrichten in den Teilen der Auswertung zu berücksichtigen, bei denen keine Daten ausdem Payload benötigt werden. Hierzu schreibt die Dominion-Anwendung „V2X MeasurementLogger“ unabhängig vom Eingang eines UDP-Pakets alle 100ms einen Datensatz der INS in dieLogdatei gps.log. So kann bei der Analyse der Daten jeder von der CCU empfangenen Nachrichteine Position zugeordnet werden.
Abbildung 3.8.: Graphical User Interface des „V2X-Mess- und Analysetools“
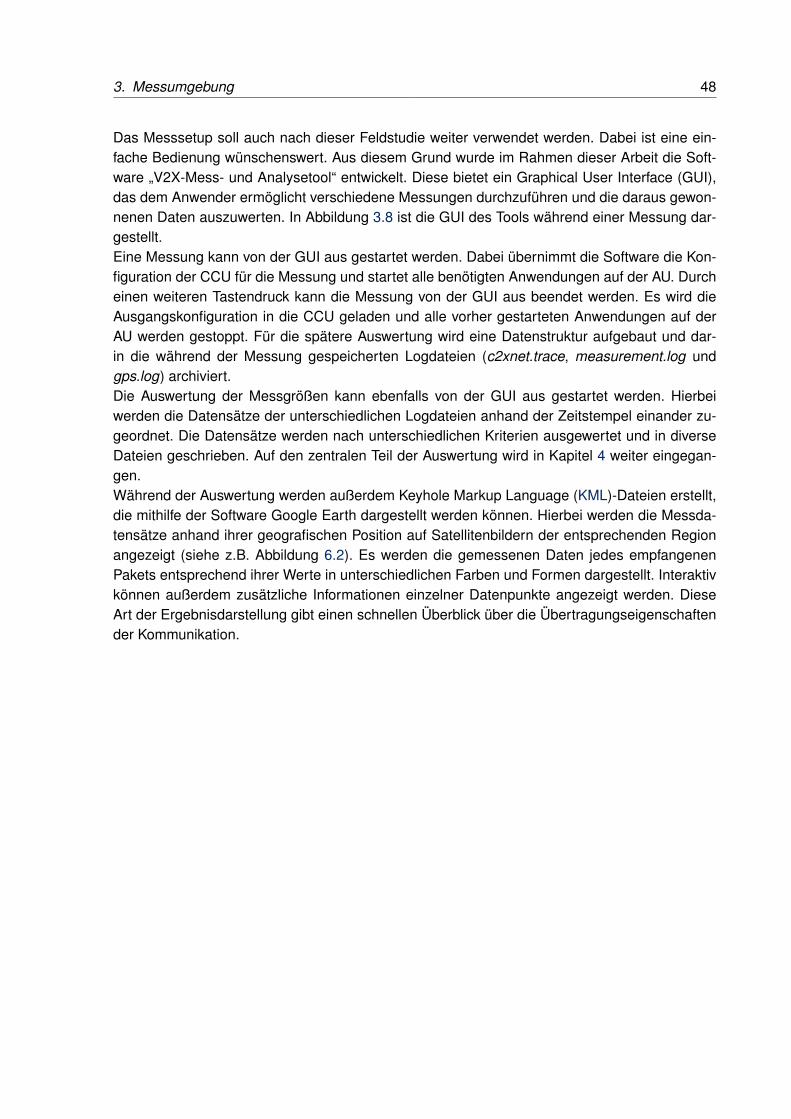
3. Messumgebung 48
Das Messsetup soll auch nach dieser Feldstudie weiter verwendet werden. Dabei ist eine ein-fache Bedienung wünschenswert. Aus diesem Grund wurde im Rahmen dieser Arbeit die Soft-ware „V2X-Mess- und Analysetool“ entwickelt. Diese bietet ein Graphical User Interface (GUI),das dem Anwender ermöglicht verschiedene Messungen durchzuführen und die daraus gewon-nenen Daten auszuwerten. In Abbildung 3.8 ist die GUI des Tools während einer Messung dar-gestellt.Eine Messung kann von der GUI aus gestartet werden. Dabei übernimmt die Software die Kon-figuration der CCU für die Messung und startet alle benötigten Anwendungen auf der AU. Durcheinen weiteren Tastendruck kann die Messung von der GUI aus beendet werden. Es wird dieAusgangskonfiguration in die CCU geladen und alle vorher gestarteten Anwendungen auf derAU werden gestoppt. Für die spätere Auswertung wird eine Datenstruktur aufgebaut und dar-in die während der Messung gespeicherten Logdateien (c2xnet.trace, measurement.log undgps.log) archiviert.Die Auswertung der Messgrößen kann ebenfalls von der GUI aus gestartet werden. Hierbeiwerden die Datensätze der unterschiedlichen Logdateien anhand der Zeitstempel einander zu-geordnet. Die Datensätze werden nach unterschiedlichen Kriterien ausgewertet und in diverseDateien geschrieben. Auf den zentralen Teil der Auswertung wird in Kapitel 4 weiter eingegan-gen.Während der Auswertung werden außerdem Keyhole Markup Language (KML)-Dateien erstellt,die mithilfe der Software Google Earth dargestellt werden können. Hierbei werden die Messda-tensätze anhand ihrer geografischen Position auf Satellitenbildern der entsprechenden Regionangezeigt (siehe z.B. Abbildung 6.2). Es werden die gemessenen Daten jedes empfangenenPakets entsprechend ihrer Werte in unterschiedlichen Farben und Formen dargestellt. Interaktivkönnen außerdem zusätzliche Informationen einzelner Datenpunkte angezeigt werden. DieseArt der Ergebnisdarstellung gibt einen schnellen Überblick über die Übertragungseigenschaftender Kommunikation.

4. Messgrößen und -methoden
Bei dieser Feldstudie werden Messungen der drei Größen Latenz im Übertragungssystem, Pa-ketverlustrate und Empfangspegel durchgeführt.Im nächsten Abschnitt werden Methoden zur geografischen Einteilung des Versuchsfeld vorge-stellt, anhand der die Messgrößen unterschiedlicher Versuchsfahrten verglichen werden können.In den darauf folgenden Abschnitten werden die drei Messgrößen definiert und die Methoden ih-rer Ermittlung vorgestellt.
4.1. Geografische Einteilung der Versuchsfelder
Ein Ziel der Feldstudie ist es V2I-Messungen mit unterschiedlichen Parametern in demselbenVersuchsfeld durchzuführen und nach einer Auswertung unterschiedliche, die Übertragungsei-genschaften bewertende Daten miteinander zu vergleichen. Somit ist es notwendig die Daten soauszuwerten, dass sie vergleichbar sind.Während der Messung werden grundsätzlich alle von der IVS empfangenen Nachrichten gespei-chert. Nach dem Empfang einer Nachricht stehen unterschiedliche Informationen zur Verfügung,die Aufschluss über die Übertragungseigenschaften geben. Außerdem wird die geografischePosition der IVS aufgezeichnet und bei einer nachträglichen Auswertung jeder Nachricht einePosition zugeordnet. Dies ist für eine Bewertung erforderlich, da die Übertragungseigenschaf-ten stark von der Entfernung zwischen Sender und Empfänger sowie der dazwischenliegendenUmgebung abhängt.Während einer Messung (Dauer: ca. 40 Minuten; Paketrate: 20 Pakete/s) werden zwischen10000 und 30000 Nachrichten von der IVS empfangen. Es ist nicht möglich alle Datensätzeunterschiedlicher Versuchsfahrten anhand ihrer geografischen Position einander zuzuordnen,sie miteinander zu vergleichen und dadurch die Übertragungseigenschaften zu bewerten. Einer-seits ist die Darstellung und der Vergleich einer Anzahl an Datensätzen dieser Größenordnungin Form einer Tabelle oder eines Diagramms nicht möglich. Andererseits wird nicht bei jeder Ver-suchsfahrt exakt dieselbe Strecke abgefahren, wodurch Datensätze nicht einander zugeordnetwerden könnten. Aus diesem Grund ist es notwendig das Versuchsfeld in geografische Bereicheaufzuteilen. Für jeden dieser Bereiche werden die Messgrößen ermittelt bzw. innerhalb diesemBereich gemittelt. Somit können die gleichen geografischen Bereiche unterschiedlicher Messun-gen miteinander verglichen und die verschiedenen Übertragungseigenschaften bewertet wer-den.Grundsätzlich kann die geografische Einteilung beliebig vorgenommen werden. Die zwei nach-folgend vorgestellten Methoden sind mit moderatem Aufwand umsetzbar.

4. Messgrößen und -methoden 50
(a) Einteilung in ein Gitternetz (b) Einteilung in Ringe
Abbildung 4.1.: Methoden zur geografischen Einteilung des Versuchsfeldes [Kartenmaterial ausOpenStreetMap, 2013]
Die Abbildung 4.1a zeigt die geografische Einteilung eines beispielhaften Versuchsfeldes mit-hilfe eines Gitternetzes und Abbildung 4.1b die Einteilung durch äquidistante Kreise. Die IRSist statisch (roter Punkt) und die IVS bewegt sich auf den Verkehrswegen im Umfeld. Die Ver-kehrswege, auf denen sich eine LOS zwischen IVS und IRS ergeben kann, sind grün und dieVerkehrswege, auf denen eine NLOS vorliegt, sind rot gekennzeichnet. Im Allgemeinen ist inLOS eine stabilere und leistungsfähigere Übertragung möglich als in NLOS (siehe 2.2). Um die-se unterschiedlichen Voraussetzungen für die Übertragung getrennt betrachten und bewertenzu können, ist eine Trennung von Datensätzen einer Kommunikation in LOS und denen in NLOSwünschenswert. Diese genaue Zuordnung der Datensätze ist bei einer manuellen Wahl derBereiche möglich. Wird die Einteilung in Bereiche und die Zuordnung der Datensätze mithilfeeiner Software durchgeführt, ist es nicht ohne großen Aufwand möglich die genaue Trennung zuimplementieren. Aus diesem Grund werden die beiden Methoden aus Abbildung 4.1 in Betrachtgezogen. In den Grafiken sind beispielhaft Bereiche, in denen keine separate Berechnungmöglich ist, hervorgehoben. Im Vergleich der beiden Methoden wird deutlich, dass ein Gitternetzeine genauere Trennung und somit qualitativ hochwertigere Ergebnisse ermöglicht. Ein feineresGitternetz begünstigt die Separation, wohingegen schmalere Abstände zwischen den Kreisenkeinen Mehrwert bringen. Nach Auswahl der Gitternetzeinteilung, ist die Größe zu bestimmen.Diese wird durch die Berechnung der PER vorgegeben, worauf in Abschnitt 4.2 eingegangenwird. Aufgrund des beschriebenen Vorteils wird das Gitternetzes als Methode zur geografischenEinteilung gewählt. Eine ähnliche Methode wurde auch in [Hyncica u. a., 2012] verwendet, umdie Packet Delivery Ratio zu ermitteln.
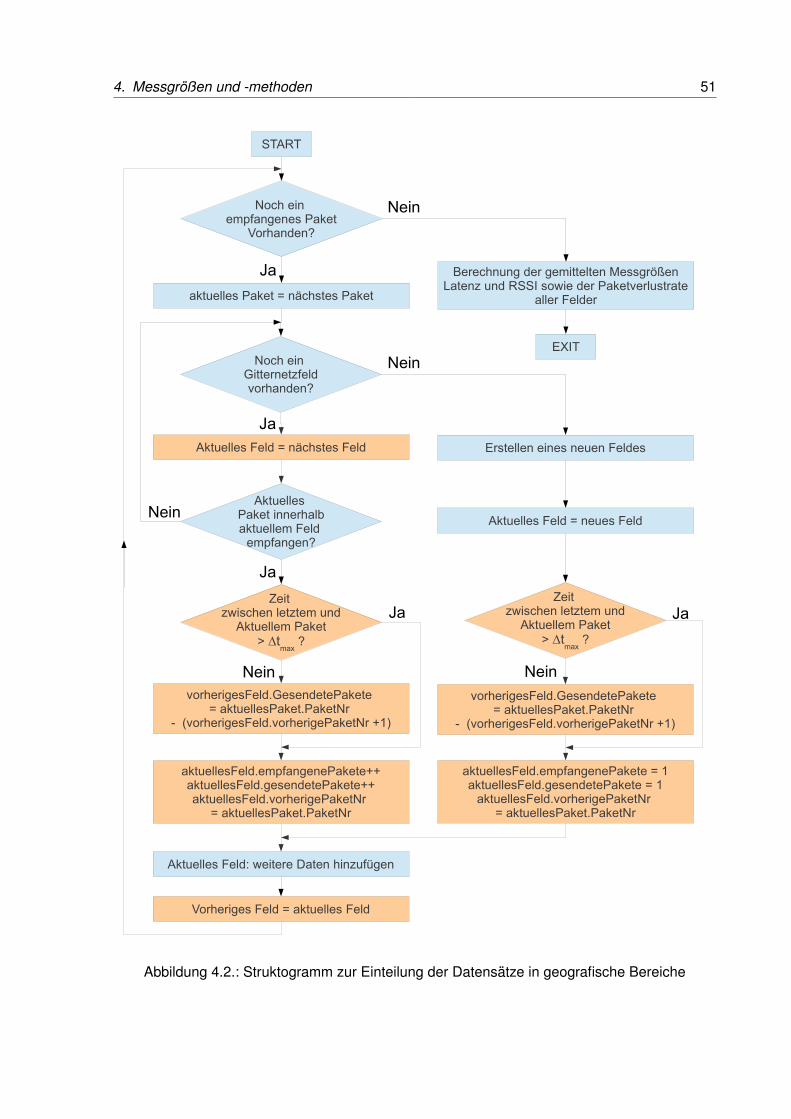
4. Messgrößen und -methoden 51
Aktuelles Feld = nächstes Feld
Aktuelles Paket innerhalbaktuellem Feld
empfangen?
Zeit zwischen letztem und
Aktuellem Paket > ∆t
max ?
vorherigesFeld.GesendetePakete = aktuellesPaket.PaketNr
- (vorherigesFeld.vorherigePaketNr +1)
aktuellesFeld.empfangenePakete++aktuellesFeld.gesendetePakete++aktuellesFeld.vorherigePaketNr
= aktuellesPaket.PaketNr
Ja
Ja
Nein
Zeit zwischen letztem und
Aktuellem Paket > ∆t
max ?
aktuellesFeld.empfangenePakete = 1aktuellesFeld.gesendetePakete = 1
aktuellesFeld.vorherigePaketNr = aktuellesPaket.PaketNr
Vorheriges Feld = aktuelles Feld
Nein
Noch ein Gitternetzfeldvorhanden?
aktuelles Paket = nächstes Paket
Ja
Noch ein empfangenes Paket
Vorhanden?
EXIT
Ja Ja
Nein
Nein
Erstellen eines neuen Feldes
Aktuelles Feld = neues Feld
Aktuelles Feld: weitere Daten hinzufügen
Berechnung der gemittelten MessgrößenLatenz und RSSI sowie der Paketverlustrate
aller Felder
Nein
START
vorherigesFeld.GesendetePakete = aktuellesPaket.PaketNr
- (vorherigesFeld.vorherigePaketNr +1)
Abbildung 4.2.: Struktogramm zur Einteilung der Datensätze in geografische Bereiche

4. Messgrößen und -methoden 52
In Abbildung 4.2 wird die Einteilung der empfangenen Datensätze in die Gitternetzfelder alsStruktogramm dargestellt. Die Auswertung ist in dem im Rahmen dieser Arbeit entwickelten„V2X-Mess- und Analysetool“ implementiert. In einer Schleife wird jedes empfangene Paket ei-nem Feld zugeordnet. Bei Nichtvorhandensein eines Feldes wird dieses erstellt. Die blau mar-kierten Operationen sind für die Einteilung in die Gitternetzfelder und die Speicherung zuge-höriger Werte notwendig. Nachdem alle Pakete zugeordnet wurden, können die arithmetischenMittelwerte der Messgrößen Latenz und RSSI sowie die Paketverlustrate jedes Feldes berechnetwerden. Die orange markierten Operationen werden speziell für die Berechnung der Paketver-lustrate benötigt. Eine Erklärung hierzu erfolgt im nächsten Abschnitt.
4.2. Paketverlustrate
Die Paketverlustrate, englisch Packet Error Ratio (PER), ist ein Gütemaß einer digitalen Kom-munikation. Die PER ist der Quotient aus der Anzahl der falsch oder nicht empfangenen PaketenE und der Anzahl der gesendeten Pakete nT bezogen auf eine Zeit. Sie wird meist in Prozentangegeben. Häufig ist die Anzahl der empfangenen Pakete nR und nicht die der fehlerhaftenPakete verfügbar.
PER =nEnT
= 1−nRnT
(4.1)
Zur Ermittlung der Paketverlustrate können in der Praxis die in einem Zeitintervall gesendetensowie empfangenen Pakete gezählt und mit der Formel 4.1 berechnet werden. Im Normalfall istnur dem Sender die Anzahl der gesendeten Pakete und dem Empfänger die Anzahl der emp-fangenen Pakete bekannt. Um bei der Auswertung der Messergebnisse nicht die Daten aus derIVS und der IRS zusammenfügen zu müssen, wird jedem Paket eine laufende Paketnummerzugeordnet und darin mitgesendet. Somit kann der Empfänger die zusammengehörigen Daten(empfangenes Paket und Anzahl gesendeter Pakete) speichern. Infolge dessen kann die Paket-verlustrate durch einfache Subtraktion berechnet werden.Zur Festlegung eines geeigneten Zeitintervalls gibt es unterschiedliche Methoden. Bei einer sta-tischen Messung (Sender und Empfänger statisch) kann das Intervall beliebig gewählt werden.Bei einer nicht-statischen Messung hingegen hängt die geografische Position von der Zeit ab.Folglich verändert sich die Position der Kommunikationsteilnehmer während der Aufnahme ei-nes PER-Datensatzes.Da das Versuchsfeld, wie in Abschnitt 4.1 beschrieben, in Gitternetzfelder aufgeteilt wird, kannfür jedes Feld je eine Paketverlustrate ermittelt werden.Während des Übergangs von einem Feld in das nächste kommt es jedoch zu einem Problem,wenn währenddessen Pakete verloren gehen. Die geografische Position wird lediglich einemempfangenen Paket zugeordnet, da die Zuordnung im Empfänger stattfindet. Hierdurch ist diePosition nicht bekannt, an der sich die IVS zum Sendezeitpunkt der verlorengegangenen Nach-richt befand. Eine Zuordnung könnte durch die Interpolation der Position zum Sendezeitpunktdieser Pakete anhand der Geschwindigkeit und der Bewegungsrichtung der IVS erfolgen. Da
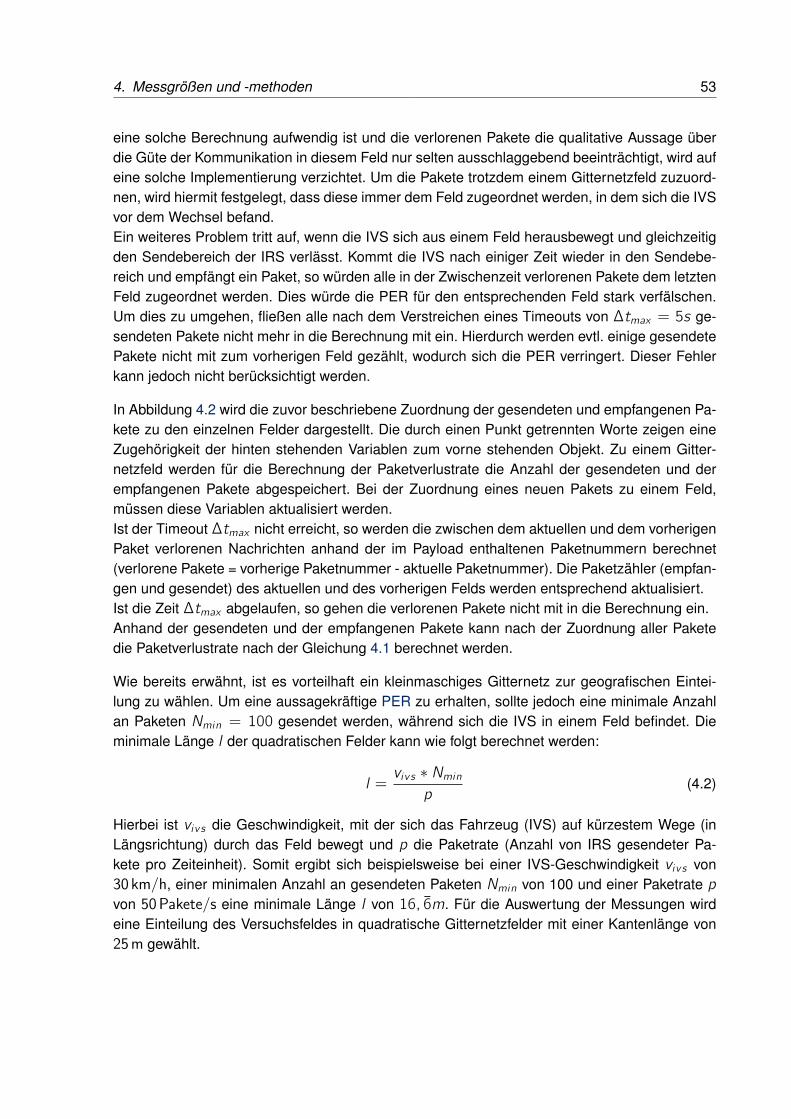
4. Messgrößen und -methoden 53
eine solche Berechnung aufwendig ist und die verlorenen Pakete die qualitative Aussage überdie Güte der Kommunikation in diesem Feld nur selten ausschlaggebend beeinträchtigt, wird aufeine solche Implementierung verzichtet. Um die Pakete trotzdem einem Gitternetzfeld zuzuord-nen, wird hiermit festgelegt, dass diese immer dem Feld zugeordnet werden, in dem sich die IVSvor dem Wechsel befand.Ein weiteres Problem tritt auf, wenn die IVS sich aus einem Feld herausbewegt und gleichzeitigden Sendebereich der IRS verlässt. Kommt die IVS nach einiger Zeit wieder in den Sendebe-reich und empfängt ein Paket, so würden alle in der Zwischenzeit verlorenen Pakete dem letztenFeld zugeordnet werden. Dies würde die PER für den entsprechenden Feld stark verfälschen.Um dies zu umgehen, fließen alle nach dem Verstreichen eines Timeouts von ∆tmax = 5s ge-sendeten Pakete nicht mehr in die Berechnung mit ein. Hierdurch werden evtl. einige gesendetePakete nicht mit zum vorherigen Feld gezählt, wodurch sich die PER verringert. Dieser Fehlerkann jedoch nicht berücksichtigt werden.
In Abbildung 4.2 wird die zuvor beschriebene Zuordnung der gesendeten und empfangenen Pa-kete zu den einzelnen Felder dargestellt. Die durch einen Punkt getrennten Worte zeigen eineZugehörigkeit der hinten stehenden Variablen zum vorne stehenden Objekt. Zu einem Gitter-netzfeld werden für die Berechnung der Paketverlustrate die Anzahl der gesendeten und derempfangenen Pakete abgespeichert. Bei der Zuordnung eines neuen Pakets zu einem Feld,müssen diese Variablen aktualisiert werden.Ist der Timeout ∆tmax nicht erreicht, so werden die zwischen dem aktuellen und dem vorherigenPaket verlorenen Nachrichten anhand der im Payload enthaltenen Paketnummern berechnet(verlorene Pakete = vorherige Paketnummer - aktuelle Paketnummer). Die Paketzähler (empfan-gen und gesendet) des aktuellen und des vorherigen Felds werden entsprechend aktualisiert.Ist die Zeit ∆tmax abgelaufen, so gehen die verlorenen Pakete nicht mit in die Berechnung ein.Anhand der gesendeten und der empfangenen Pakete kann nach der Zuordnung aller Paketedie Paketverlustrate nach der Gleichung 4.1 berechnet werden.
Wie bereits erwähnt, ist es vorteilhaft ein kleinmaschiges Gitternetz zur geografischen Eintei-lung zu wählen. Um eine aussagekräftige PER zu erhalten, sollte jedoch eine minimale Anzahlan Paketen Nmin = 100 gesendet werden, während sich die IVS in einem Feld befindet. Dieminimale Länge l der quadratischen Felder kann wie folgt berechnet werden:
l =vivs ∗ Nmin
p(4.2)
Hierbei ist vivs die Geschwindigkeit, mit der sich das Fahrzeug (IVS) auf kürzestem Wege (inLängsrichtung) durch das Feld bewegt und p die Paketrate (Anzahl von IRS gesendeter Pa-kete pro Zeiteinheit). Somit ergibt sich beispielsweise bei einer IVS-Geschwindigkeit vivs von30 km/h, einer minimalen Anzahl an gesendeten Paketen Nmin von 100 und einer Paketrate pvon 50Pakete/s eine minimale Länge l von 16, 6̄m. Für die Auswertung der Messungen wirdeine Einteilung des Versuchsfeldes in quadratische Gitternetzfelder mit einer Kantenlänge von25m gewählt.
4. Messgrößen und -methoden 54
4.3. Received Signal Strength Indicator
Der Pegel bei Empfang eines Signals an einer CCU ist zur Bewertung der Übertragungseigen-schaften grundlegend.Die meisten Drahtlos-Netzwerkkarten messen den Empfangspegel und stellen diesen als Re-ceived Signal Strength Indicator (RSSI) dar. Dieser wurde im IEEE Standard 802.11 definiertund ist eine Kennzahl für die Leistung am Empfänger einer WLAN Kommunikation. Hierbei wirddie Leistung im Frequenzband des Empfängers über die elektrische Eingangsspannung an derDrahtlos-Netzwerkkarte gemessen und als RSSI durch einen Integer-Wert (0-255, ein Byte)abgebildet. Der RSSI wird intern von der Netzwerkkarte sowie vom Gerätetreiber verwendet,um die Verfügbarkeit des Funkkanals festzustellen. Es wird der Bereich zwischen null (keineEmpfangsleistung) und einem Maximalwert verwendet. Da der Maximalwert des Indikators nichtstandardisiert ist, wird dieser vom Hersteller der Netzwerkkarte festgelegt. Auch die Abhängig-keit zwischen dem RSSI und der physikalischen Signalstärke in mW bzw. dem Leistungspegelin dBm, ist nicht standardisiert und somit ebenfalls vom Hersteller abhängig. Um aus einemvorhandenen RSSI die Empfangsleistung oder den Empfangspegel zu erhalten, werden herstel-lerabhängige Übertragungstabellen oder Formeln zur Umrechnung verwendet. Die Umrechnungist abhängig von der Empfindlichkeit des Empfängermoduls. Zu beachten ist, dass der RSSI beieinigen Netzwerkkarten nur rudimentär ermittelt wird und somit nur einen Richtwert darstellt.[vgl. Bardwell, 2002, S. 4f]Durch persönlichen Kontakt mit Entwicklern der Firma NEC wurden Informationen zum Treiberder im Linkbird-Mx integrierten Atheros-Netzwerkkarten eingeholt. Als Grundlage wurde hier-nach ein Treiber des „MadWifi-Projekts1“ verwendet. Dieser implementiert den RSSI so, dass erdem SNR während des Empfangs der Nachricht entspricht [MadWifi-Projekt, 2013]. Die Netz-werkkarten vom Typ DCMA-82 sind für die Verwendung bis 5,85GHz vorgesehen [vgl. Wistron,2006]. Für die Verwendung des 802.11p-Standards (5,875GHz-5,905GHz) für die Drahtlosüber-tragung wurde der MadWifi-Treiber nach eigenen Angaben von der Firma NEC angepasst.
SpektrumanalysatorCCU1
PT
CCU2
PR,Spec
RSSI
Ant. 2
Ant. 3Ant. 1
Abbildung 4.3.: Messaufbau zur Validierung der RSSI-Messung
1Innerhalb des MadWifi-Projekts werden frei zugänglicher Treiber für WLAN-Geräte der Firma Atheros entwickelt.[vgl. MadWifi-Projekt, 2013]
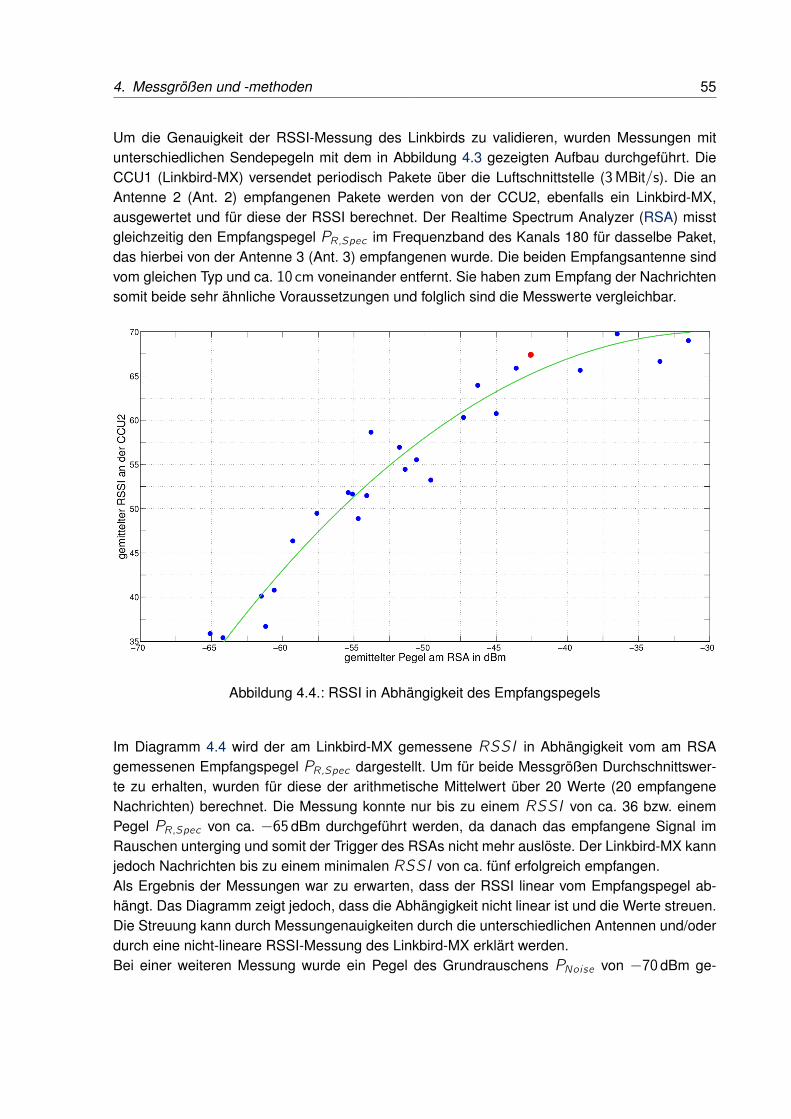
4. Messgrößen und -methoden 55
Um die Genauigkeit der RSSI-Messung des Linkbirds zu validieren, wurden Messungen mitunterschiedlichen Sendepegeln mit dem in Abbildung 4.3 gezeigten Aufbau durchgeführt. DieCCU1 (Linkbird-MX) versendet periodisch Pakete über die Luftschnittstelle (3MBit/s). Die anAntenne 2 (Ant. 2) empfangenen Pakete werden von der CCU2, ebenfalls ein Linkbird-MX,ausgewertet und für diese der RSSI berechnet. Der Realtime Spectrum Analyzer (RSA) misstgleichzeitig den Empfangspegel PR,Spec im Frequenzband des Kanals 180 für dasselbe Paket,das hierbei von der Antenne 3 (Ant. 3) empfangenen wurde. Die beiden Empfangsantenne sindvom gleichen Typ und ca. 10 cm voneinander entfernt. Sie haben zum Empfang der Nachrichtensomit beide sehr ähnliche Voraussetzungen und folglich sind die Messwerte vergleichbar.
Abbildung 4.4.: RSSI in Abhängigkeit des Empfangspegels
Im Diagramm 4.4 wird der am Linkbird-MX gemessene RSSI in Abhängigkeit vom am RSAgemessenen Empfangspegel PR,Spec dargestellt. Um für beide Messgrößen Durchschnittswer-te zu erhalten, wurden für diese der arithmetische Mittelwert über 20 Werte (20 empfangeneNachrichten) berechnet. Die Messung konnte nur bis zu einem RSSI von ca. 36 bzw. einemPegel PR,Spec von ca. −65dBm durchgeführt werden, da danach das empfangene Signal imRauschen unterging und somit der Trigger des RSAs nicht mehr auslöste. Der Linkbird-MX kannjedoch Nachrichten bis zu einem minimalen RSSI von ca. fünf erfolgreich empfangen.Als Ergebnis der Messungen war zu erwarten, dass der RSSI linear vom Empfangspegel ab-hängt. Das Diagramm zeigt jedoch, dass die Abhängigkeit nicht linear ist und die Werte streuen.Die Streuung kann durch Messungenauigkeiten durch die unterschiedlichen Antennen und/oderdurch eine nicht-lineare RSSI-Messung des Linkbird-MX erklärt werden.Bei einer weiteren Messung wurde ein Pegel des Grundrauschens PNoise von −70dBm ge-

4. Messgrößen und -methoden 56
messen. Wird davon ausgegangen, dass der RSSI mit Einheit dBm gleich dem Signal-zu-Rauschabstand SNR ist, so kann der Empfangspegel der CCU PR,CCU nach folgender Glei-chung berechnet werden:
PR,CCU = PNoise + SNR = PNoise + RSSI dBm
Mithilfe dieser Gleichung wird exemplarisch der Empfangspegel der CCU für den im Diagramm4.4 rot markierten Messpunkt (RSSI dBm ' 67,5dBm) berechnet. Hierbei ergibt sich ein PegelPR,CCU von −2,5dBm. Dieser Pegel weicht zu stark vom gemessenen Empfangspegel PR,Specvon ca. −42,5dBm ab, als dass eine Messungenauigkeit der Grund hierfür sein könnte. Es wirddaher vermutet, dass durch die Anpassung des Treibers auch die Berechnung und/oder Darstel-lung des RSSIs geändert wurde. Die Entwickler von NEC konnten hierzu keine Auskunft gebenund auch die Dokumentation enthält zur Umrechnung desRSSIs in den Empfangspegel PR,CCUkeine weiteren Informationen. Aus diesem Grund dient das Diagramm 4.4 als Referenz.
Wie in Abschnitt 4.1 erläutert, ist es notwendig einen Wert jeder Messgröße für jedes Gitternetz-feld zu berechnen, um unterschiedliche Datensätze vergleichbar zu machen. Deshalb wird derarithmetische Mittelwert der RSSI-Werte aller innerhalb eines Feldes empfangenen Nachrichtenberechnet.
4.4. Latenz im Übertragungssystem
Zur Betrachtung der Latenz in der Informationsübertragung sowie des Einflusses der Mehrwe-geausbreitung werden verschiedene Zeitmessungen durchgeführt.
CCU CCU AUAUUDP-Paket UDP-Paket
ITS Roadside Station ITS Vehicle Station
T1
T2
T3
T4
t1,2
t2,3
t3,4
t1,4
V2X-Nachricht
Abbildung 4.5.: Prinzip der Latenzmessung
Die Abbildung 4.5 zeigt den grundsätzlichen Aufbau des zur Messung verwendete Kommunikati-onssystems. Dabei bilden Application Units (AUs) und Communication Control Units (CCUs) derbeiden Systeme jeweils ein Local Area Network (LAN). T1 bis T4 markieren Zeitpunkte, an de-nen eine Anwendung einen Zeitstempel speichern oder als Information weiterleiten kann. DesWeiteren werden die somit ermittelbaren Latenzen t1,2, t2,3, t3,4 und t1,4 dargestellt. Folgend
4. Messgrößen und -methoden 57
wird die Ermittlung der vier Zeitstempel eines Datenpakets beschrieben.Auf der AU der IRS ist die Messanwendung „V2X Measurement Transmitter “ aktiv, die alle20ms eine Nachricht als UDP-Pakete über das LAN an die CCU sendet. Jedes Paket enthältim Payload die Sendezeit T1 in Mikrosekunden. Das UDP-Paket wird in der CCU der IRS ineine V2X-Nachricht nach dem Car2Car-Protokoll umgewandelt und über die Luftschnittstelle andie CCU der IVS gesendet. Dabei fügt die CCU dem Nachrichtenkopf den Sendezeitstempel T2hinzu (siehe Abbildung 2.4). Dieser Zeitstempel hat eine Auflösung von einer Millisekunde. BeiEmpfang der Nachricht an der zweiten CCU wird dieser der Zeitstempel T3 (in Mikrosekunden)hinzugefügt und die Informationen werden als UDP-Paket über das LAN an die AU gesendet.Hier fügt die Empfangsanwendung „V2X Measurement Logger “ den Zeitstempel T4 mit einerAuflösung von eine Mikrosekunden hinzu und speichert alle relevanten Informationen der Nach-richt in einer Log-Datei ab. Somit stehen die vier Zeitstempel T1−4 jeder Nachricht nach derMessung zur Verfügung, aus denen die Latenzen tx berechnet werden können.Die Latenzen beinhalten die durch die folgenden Operationen/Übertragungen erzeugten Verzö-gerungen:
t1,2 : Erstellen des UDP-Pakets durch die Sendeapplikation,Übertragen des Pakets über das LAN zur CCU der IRS undUmwandeln des UDP-Pakets in eine Car2Car-Nachricht
t2,3 : Laufzeit durch den Funkkanal undEmpfang der gesamten Nachricht an der CCU der IVS
t3,4 : Umwandeln der Car2Car-Nachricht in ein UDP-Paket,Übertragen des Pakets über das LAN zur AU der IVS undLesen von Informationen aus dem UDP-Paket
t1,4 : die Summe aus t1,2, t2,3 und t3,4
Um aussagekräftige Ergebnisse zu erhalten, müssen die IRS und die IVS sowie die darin enthal-tenen Komponenten möglichst genau miteinander zeitlich synchronisiert werden. Hierzu werdenbeide Systeme jeweils mit einem NTP-Zeitserver ausgestattet, der eine Synchronisation mithilfevon GPS-Empfängern (Zeitserver Typ 2) durchführt. Auf die Methoden wurde in Kapitel 3 weitereingegangen.Die Messung der Latenz t2,3 ist durch die geringe Distanz zwischen Sender und Empfängervon unter einem Kilometer kritisch. Die Latenz TFSP der Übertragung eines Signals über eineDistanz s ohne jegliche Reflexion, also auf freiem Feld, kann wie folgt berechnet werden:
TFSP =s
c(4.3)
c ∼= 3 ∗ 108m/s : Lichtgeschwindigkeit
Wird davon ausgegangen, dass ein Signal von der IRS zu einer s = 700m entfernten IVSübertragen wird, so kann die Latenz bei direkter Übertragung mit der Gleichung 4.3 berechnetwerden. Hierbei ergibt sich TFSP = 2,33 µs. Da die Toleranzen der Zeitsynchronisation bei 0,5bis 2ms liegen können, ist diese sehr viel größer als die zu messende Latenz. Eine Messung in
4. Messgrößen und -methoden 58
dieser Größenordnung ist somit nicht sinnvoll durchführbar. Auch bei mehrfacher Reflexion er-geben sich keine Latenzen in einer messbaren Größenordnung. Des Weiteren ist die Zeit T2 nurin einer Auflösung von einer Millisekunde verfügbar. Aus diesen Gründen kann diese Messungnicht durchgeführt werden.Die Latenzen t1,2 und t3,4 enthalten die Verzögerung durch die Umwandlung der Nachricht inein anderes Format. Diese sind von der Größe der Nachricht abhängig, die deshalb so gewähltwerden sollte, dass die Latenzen messbar sind.Für Anwendungen ist die Latenz t1,4 relevant. Diese stellt die Zeit dar, die benötigt wird, um ei-ne Nachricht bestimmter Größe mit einer bestimmten Datenrate von einer Anwendung auf demSender zu einer Anwendung auf einem Empfänger zu übertragen. Diese Latenz kann mithilfeder vorhandenen Hardware in ausreichender Genauigkeit gemessen werden. Zu beachten hier-bei ist, dass die Latenz t1,4 von der verwendeten Hardware (CCU, Netzwerkleitung, AU) undSoftware (Sendeapplikation, SDK der CCU, Empfangsapplikation) abhängt. Die Ergebnisse sindsomit nur für dieses Messsystem gültig.

5. Messdurchführung
Durch die Feldstudie werden verschiedene Szenarien untersucht, die einen Überblick überden Einfluss unterschiedlicher Parameter und Umgebungen geben sollen. Um dies zu ermög-lichen, werden die Messungen an zwei unterschiedlichen Verkehrsknotenpunkten der AIM-Referenzstrecke mit den dort vorhandenen IRSs durchgeführt: an der Kreuzung K047, die inBraunschweig einer der größten Verkehrsknotenpunkte ist, und an der K071, bei der es sich umeine gängige, innerstädtische Kreuzung handelt (siehe Abbildung 1.1). Bei beiden Kreuzungenwerden die Übertragungseigenschaften der V2I-Kommunikation mit unterschiedlichen Datenra-ten und Nachrichtenlängen untersucht.Es werden Versuche mit einer Datenrate von 6MBit/s durchgeführt, da diese im Car2Car-Protokoll als Standard definiert ist. Um zu untersuchen, ob die niedrigste Datenrate Vorteilegegenüber der Standarddatenrate bringt, wird die Übertragung mit 3MBit/s untersucht. Außer-dem wird die maximale Datenrate von 27MBit/s verwendet, um die Übertragung bei hoher An-forderung zu testen.Die Nachrichtenlänge wird ebenfalls variiert. Es wird eine Länge des Payloads von 400Byte füreine gängige Nachricht sowie eine Länge von 1554Byte für eine Nachricht mit großem Infor-mationsinhalt verwendet. Um eine Vergleichbarkeit mit den Ergebnisse aus [Maier u. a., 2011]herzustellen, werden ebenfalls eine Payloadlänge von 1554Byte gewählt.Alle Versuche werden mit einer maximalen Geschwindigkeit von 30 km/h durchgeführt. Da dieIVS im öffentlichen Verkehr bewegt wird, ist keine gleichmäßige Geschwindigkeit möglich.Die für die Versuche verwendeten IRSs senden mit dem maximal konfigurierbaren Pegel (sieheAbschnitt 3.2.1).
In diesem Kapitel werden alle durchgeführten Messungen im Detail beschrieben. Hierbei wirdjeweils auf das Versuchsfeld und die Parameter der übertragenen Nachrichten eingegangen.

5. Messdurchführung 60
5.1. Versuchsfeld K047
Abbildung 5.1.: Kreuzung K047 im Versuchsfeld K047 [Satellitenbild aus GoogleEarth, 2013]
Wie in Abbildung 5.1 zu erkennen, kreuzen sich zwei Straßen mit jeweils zwei Hauptspuren injeder Richtung. An der Kreuzung kommen in ankommender Richtung noch jeweils ein bis dreiAbbiegespuren hinzu. Hierdurch wird eine große Freifläche um die IRS (roter Punkt) geschaffen,die durch teils von der Straße zurückgesetzte Gebäude weiter vergrößert wird. Ein Großteilder angrenzenden Gebäude sind drei- oder vierstöckig. Die Brucknerstraße, der Rebenring undvereinzelt auch die Hans-Sommer-Straße sind am Straßenrand mit Bäumen bepflanzt. Die IRSist an einem Mast einer Lichtsignalanlage (LSA) auf dem Mittelstreifen der Hans-Sommer-Straßemontiert. Der für diese Versuchsfahrten eingesetzte Zeitserver ist Teil der Innenanlage. Wie inAbschnitt 3.2 beschrieben, ermöglicht dieser eine hochgenaue Zeitsynchronisation.

5.M
essdurchführung61
400m
600m
200
m
Zoom: siehe Abbildung 5.1
N
S
OW
Ost-West
Nord-Süd
IRS K047
Ost-W
est
Nord-S
üd
Nord-Süd
Ost-West
Nord-S
üd
Ost-W
est
Abbildung 5.2.: Übersicht über das Versuchsfeld K047 [Satellitenbild aus GoogleEarth, 2013]

5. Messdurchführung 62
Die Abbildung 5.2 gibt einen Überblick über das Versuchsfeld um die IRS der Kreuzung K047herum. Dieses ist in grüne Bereiche mit LOS und rote Bereiche mit NLOS aufgeteilt. Für diespätere Auswertung wurde das Versuchsfeld des Weiteren durch die roten, sich bei der IRSkreuzenden Linien in zwei Bereiche aufgeteilt: Nord-Süd und Ost-West, worauf in Abschnitt 6weiter eingegangen wird.Während jeder Versuchsfahrt wurden alle Verkehrswege um die Kreuzung K047 befahren. DieRoute ist in Abbildung 5.2 blau eingezeichnet.
Bezeichner Payloadlänge Datenrate VerkehrsaufkommenK047-0400-03 400Byte 3MBit/s geringK047-0400-06 400Byte 6MBit/s mittelmäßigK047-0400-27 400Byte 27MBit/s mittelmäßigK047-1554-06 1554Byte 6MBit/s geringK047-1554-27 1554Byte 27MBit/s gering
Tabelle 5.1.: Messszenarien im Versuchsfeld K047
In Tabelle 5.1 sind alle in diesem Versuchsfeld durchgeführten Messungen aufgeführt. Hier-in sind die vorher beschriebenen Payloadlängen und Datenraten zu finden. Da eine Datenratevon 3MBit/s geringer als die Standarddatenrate und deshalb unüblich ist, wurde nur eine Ver-suchsfahrt mit dieser Parametrierung durchgeführt. Das Verkehrsaufkommen war nicht währendaller Versuchsfahrten gleich, weshalb dieses bewertet und mit aufgeführt wird. Die Bezeichnerkennzeichnen die Messung eindeutig. Er ist nach der folgenden Struktur aufgebaut: <Kreuzungs-Nr.>-<Payloadlänge>-<Datenrate>. Werden diese Bezeichner im weiteren Verlauf verwendet, sowird Bezug auf die entsprechende Messung genommen.

5. Messdurchführung 63
5.2. Versuchsfeld K071
Abbildung 5.3.: Kreuzung K071 im Versuchsfeld K071 [Satellitenbild aus GoogleEarth, 2013]
Bei dem Verkehrsknoten K071 (siehe Abbildung 5.3) trifft eine einspurige Nebenstraße (Hum-boldtstraße) auf eine zweispurige Hauptstraße (Hagenring). Die Humboldtstraße wird im Kreu-zungsabschnitt um zwei Abbiegespuren erweitert. Beide Straßen verlaufen fast gradlinig undtreffen sich annähernd im rechten Winkel. Südlich der Kreuzung zweigt die Wabestraße (Ein-bahnstraße) vom Hagenring ab. Alle Verkehrswege sind fast durchgängig zu beiden Seiten vondrei- bis vierstöckigen Gebäuden umgeben, die nur wenig Abstand zur Fahrbahn haben. Eshandelt sich hierbei um ein typisches innerstädtisches Kreuzungsszenario. Die IRS ist auf demMittelstreifen des Hagenrings an einem Mast montiert. Bei dieser ist der Zeitserver Teil der Au-ßenanlage. Wie in Abschnitt 3.2 beschrieben, kann dieser Zeitserver nur die übliche Synchroni-sationsgenauigkeit zwischen 0,5 und 2ms gewährleisten.

5. Messdurchführung 64
150m
N
S
OW
Ost-West
Nord-Süd
IRS K071
Ost-W
est
Nord-S
üd
Nord-Süd
Ost-West
Nord-S
üd
Ost-W
est
Abbildung 5.4.: Übersicht über das Versuchsfeld K071 [Satellitenbild aus GoogleEarth, 2013]
Die Abbildung 5.4 zeigt eine Übersicht über das Versuchsfeld K071. Hierbei sind wieder Bereichemit LOS zwischen IRS und IVS in grün und Bereiche mit NLOS in rot gekennzeichnet. Die beiallen Versuchsfahrten gefahrene Route ist blau eingezeichnet. Dieses Versuchsfeld ist ebenfallsin die Bereiche Nord-Süd und Ost-West eingeteilt.

5. Messdurchführung 65
Bezeichner Datenrate Payloadlänge VerkehrsaufkommenK071-0400-06 400Byte 6MBit/s geringK071-0400-27 400Byte 27MBit/s hochK071-1554-06 1554Byte 6MBit/s hochK071-1554-27 1554Byte 27MBit/s mittelmäßig
Tabelle 5.2.: Messszenarien im Versuchsfeld K071
Auch in diesem Versuchsfeld wurden unterschiedliche Nachrichtengrößen und Datenraten un-tersucht. Es wurde jedoch keine Messung mit der Datenrate von 3MBit/s durchgeführt, da dieseDatenrate kleiner ist, als die Standarddatenrate und in der Praxis daher selten eingesetzt wird.Die Struktur des Bezeichners ist gleich der im Versuchsfeld K047.
6. Auswertung und Bewertung derÜbertragungseigenschaften
Dieses Kapitel umfasst die Darstellung und Auswertung der während der Versuchsfahrten auf-genommenen Datensätze. Dabei werden die Messgrößen Received Signal Strength Indica-tor (RSSI), Paketverlustrate (PER) und Latenz im Übertragungssystem erst einzeln und nachfol-gend die Abhängigkeit zueinander betrachtet. Bei allen Messergebnissen ist zu beachten, dassdiese nur für dieses Messsystem in den durchgeführten Szenarien gültig sind. Unter Berück-sichtigung dieser Einschränkung können die Ergebnisse herangezogen werden, um die Über-tragungseigenschaften anderer Messsysteme zu vergleichen.Vor der Auswertung der Messgrößen wird eine weitere geografische Einteilung der Versuchsfel-der eingeführt.
In Abschnitt 4.1 wird die Einteilung des Versuchsfeldes mithilfe eines Gitternetzes in verschie-dene Felder definiert. Die gleichen Felder unterschiedlicher Versuchsfahrten können dadurch intabellarischer Form verglichen werden. Es gibt durch die äquidistante Einteilung zum Teil meh-rere Felder, deren Mittelpunkte die gleiche Distanz zur IRS aufweisen. Es ist gewünscht dieErgebnisse in Diagrammen darzustellen, da dies einen schnellen Überblick über den Wertever-lauf ermöglicht. In einem Diagramm, auf dem die Distanz zwischen IRS und IVS (Mittelpunkt desFeldes) auf der Abszisse dargestellt wird, würden Punkte mit gleicher Distanz demselben Wertzugeordnet werden. Hierdurch ließen sich die Gitternetzfelder der unterschiedlichen Datensät-ze nicht eindeutig vergleichen. Um dies zu umgehen, wird das Versuchsfeld nochmals in zweiBereiche aufgeteilt.
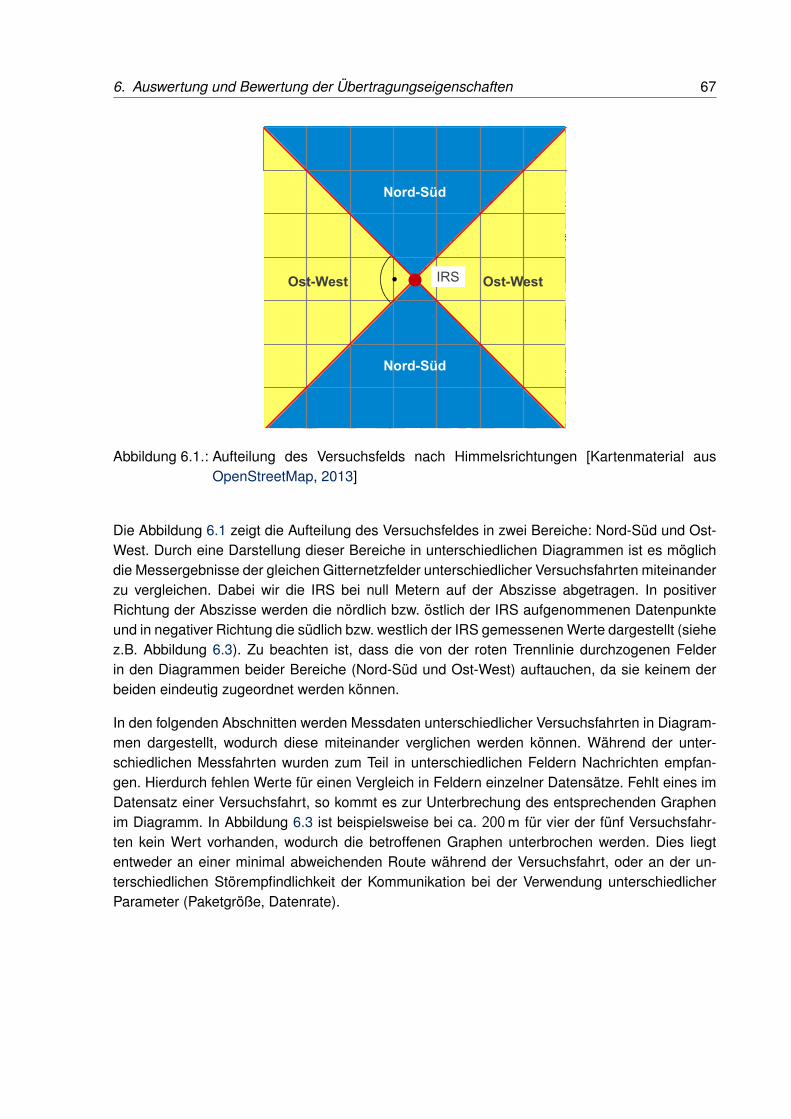
6. Auswertung und Bewertung der Übertragungseigenschaften 67
IRS Ost-WestOst-West
Nord-Süd
Nord-Süd
Abbildung 6.1.: Aufteilung des Versuchsfelds nach Himmelsrichtungen [Kartenmaterial ausOpenStreetMap, 2013]
Die Abbildung 6.1 zeigt die Aufteilung des Versuchsfeldes in zwei Bereiche: Nord-Süd und Ost-West. Durch eine Darstellung dieser Bereiche in unterschiedlichen Diagrammen ist es möglichdie Messergebnisse der gleichen Gitternetzfelder unterschiedlicher Versuchsfahrten miteinanderzu vergleichen. Dabei wir die IRS bei null Metern auf der Abszisse abgetragen. In positiverRichtung der Abszisse werden die nördlich bzw. östlich der IRS aufgenommenen Datenpunkteund in negativer Richtung die südlich bzw. westlich der IRS gemessenen Werte dargestellt (siehez.B. Abbildung 6.3). Zu beachten ist, dass die von der roten Trennlinie durchzogenen Felderin den Diagrammen beider Bereiche (Nord-Süd und Ost-West) auftauchen, da sie keinem derbeiden eindeutig zugeordnet werden können.
In den folgenden Abschnitten werden Messdaten unterschiedlicher Versuchsfahrten in Diagram-men dargestellt, wodurch diese miteinander verglichen werden können. Während der unter-schiedlichen Messfahrten wurden zum Teil in unterschiedlichen Feldern Nachrichten empfan-gen. Hierdurch fehlen Werte für einen Vergleich in Feldern einzelner Datensätze. Fehlt eines imDatensatz einer Versuchsfahrt, so kommt es zur Unterbrechung des entsprechenden Graphenim Diagramm. In Abbildung 6.3 ist beispielsweise bei ca. 200m für vier der fünf Versuchsfahr-ten kein Wert vorhanden, wodurch die betroffenen Graphen unterbrochen werden. Dies liegtentweder an einer minimal abweichenden Route während der Versuchsfahrt, oder an der un-terschiedlichen Störempfindlichkeit der Kommunikation bei der Verwendung unterschiedlicherParameter (Paketgröße, Datenrate).

6.A
uswertung
undB
ewertung
derÜbertragungseigenschaften
68
6.1. Versuchsfeld K047
Abbildung 6.2.: Versuchsfeld K047: Übersicht des Datensatzes K047-0400-06 [Satellitenbild aus GoogleEarth, 2013]
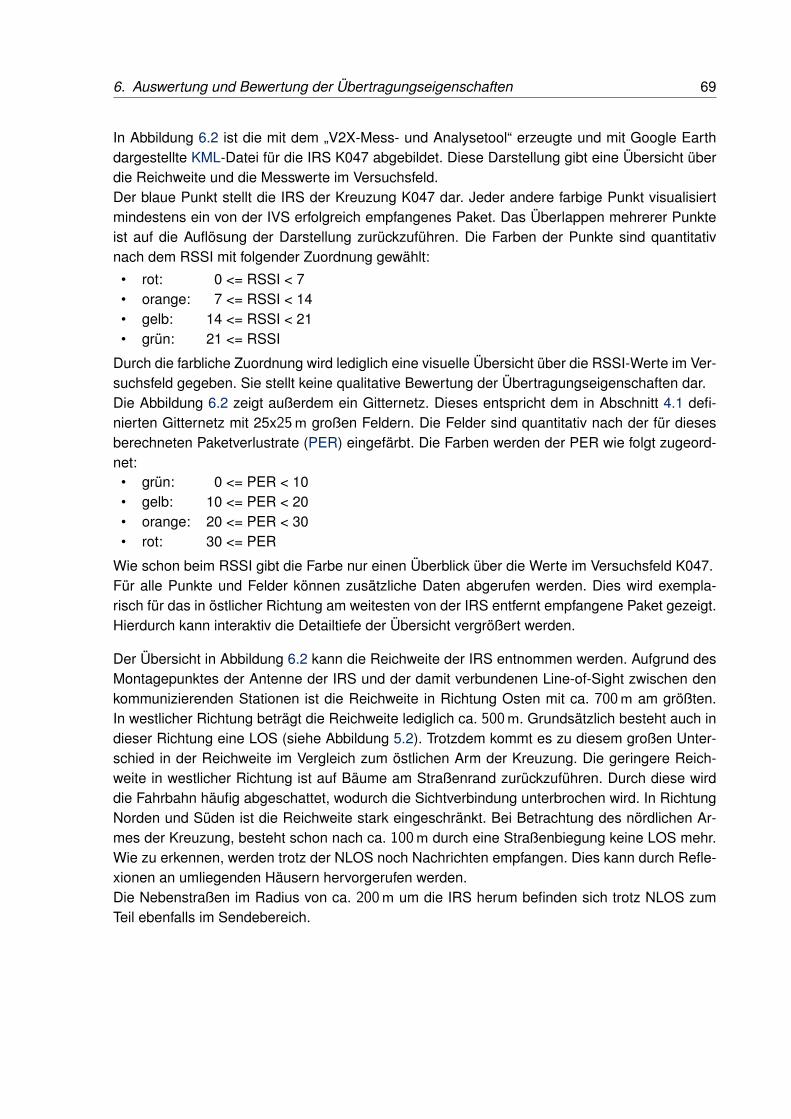
6. Auswertung und Bewertung der Übertragungseigenschaften 69
In Abbildung 6.2 ist die mit dem „V2X-Mess- und Analysetool“ erzeugte und mit Google Earthdargestellte KML-Datei für die IRS K047 abgebildet. Diese Darstellung gibt eine Übersicht überdie Reichweite und die Messwerte im Versuchsfeld.Der blaue Punkt stellt die IRS der Kreuzung K047 dar. Jeder andere farbige Punkt visualisiertmindestens ein von der IVS erfolgreich empfangenes Paket. Das Überlappen mehrerer Punkteist auf die Auflösung der Darstellung zurückzuführen. Die Farben der Punkte sind quantitativnach dem RSSI mit folgender Zuordnung gewählt:
• rot: 0 <= RSSI < 7• orange: 7 <= RSSI < 14• gelb: 14 <= RSSI < 21• grün: 21 <= RSSI
Durch die farbliche Zuordnung wird lediglich eine visuelle Übersicht über die RSSI-Werte im Ver-suchsfeld gegeben. Sie stellt keine qualitative Bewertung der Übertragungseigenschaften dar.Die Abbildung 6.2 zeigt außerdem ein Gitternetz. Dieses entspricht dem in Abschnitt 4.1 defi-nierten Gitternetz mit 25x25m großen Feldern. Die Felder sind quantitativ nach der für diesesberechneten Paketverlustrate (PER) eingefärbt. Die Farben werden der PER wie folgt zugeord-net:• grün: 0 <= PER < 10• gelb: 10 <= PER < 20• orange: 20 <= PER < 30• rot: 30 <= PER
Wie schon beim RSSI gibt die Farbe nur einen Überblick über die Werte im Versuchsfeld K047.Für alle Punkte und Felder können zusätzliche Daten abgerufen werden. Dies wird exempla-risch für das in östlicher Richtung am weitesten von der IRS entfernt empfangene Paket gezeigt.Hierdurch kann interaktiv die Detailtiefe der Übersicht vergrößert werden.
Der Übersicht in Abbildung 6.2 kann die Reichweite der IRS entnommen werden. Aufgrund desMontagepunktes der Antenne der IRS und der damit verbundenen Line-of-Sight zwischen denkommunizierenden Stationen ist die Reichweite in Richtung Osten mit ca. 700m am größten.In westlicher Richtung beträgt die Reichweite lediglich ca. 500m. Grundsätzlich besteht auch indieser Richtung eine LOS (siehe Abbildung 5.2). Trotzdem kommt es zu diesem großen Unter-schied in der Reichweite im Vergleich zum östlichen Arm der Kreuzung. Die geringere Reich-weite in westlicher Richtung ist auf Bäume am Straßenrand zurückzuführen. Durch diese wirddie Fahrbahn häufig abgeschattet, wodurch die Sichtverbindung unterbrochen wird. In RichtungNorden und Süden ist die Reichweite stark eingeschränkt. Bei Betrachtung des nördlichen Ar-mes der Kreuzung, besteht schon nach ca. 100m durch eine Straßenbiegung keine LOS mehr.Wie zu erkennen, werden trotz der NLOS noch Nachrichten empfangen. Dies kann durch Refle-xionen an umliegenden Häusern hervorgerufen werden.Die Nebenstraßen im Radius von ca. 200m um die IRS herum befinden sich trotz NLOS zumTeil ebenfalls im Sendebereich.
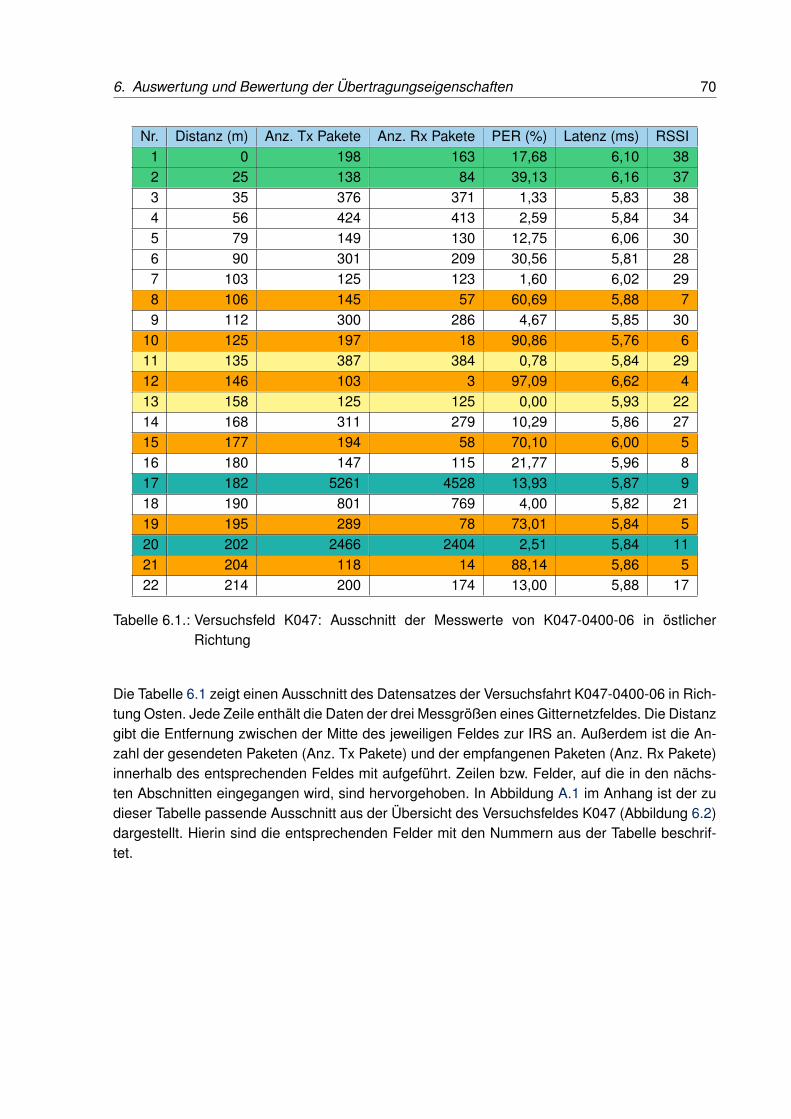
6. Auswertung und Bewertung der Übertragungseigenschaften 70
Nr. Distanz (m) Anz. Tx Pakete Anz. Rx Pakete PER (%) Latenz (ms) RSSI1 0 198 163 17,68 6,10 382 25 138 84 39,13 6,16 373 35 376 371 1,33 5,83 384 56 424 413 2,59 5,84 345 79 149 130 12,75 6,06 306 90 301 209 30,56 5,81 287 103 125 123 1,60 6,02 298 106 145 57 60,69 5,88 79 112 300 286 4,67 5,85 30
10 125 197 18 90,86 5,76 611 135 387 384 0,78 5,84 2912 146 103 3 97,09 6,62 413 158 125 125 0,00 5,93 2214 168 311 279 10,29 5,86 2715 177 194 58 70,10 6,00 516 180 147 115 21,77 5,96 817 182 5261 4528 13,93 5,87 918 190 801 769 4,00 5,82 2119 195 289 78 73,01 5,84 520 202 2466 2404 2,51 5,84 1121 204 118 14 88,14 5,86 522 214 200 174 13,00 5,88 17
Tabelle 6.1.: Versuchsfeld K047: Ausschnitt der Messwerte von K047-0400-06 in östlicherRichtung
Die Tabelle 6.1 zeigt einen Ausschnitt des Datensatzes der Versuchsfahrt K047-0400-06 in Rich-tung Osten. Jede Zeile enthält die Daten der drei Messgrößen eines Gitternetzfeldes. Die Distanzgibt die Entfernung zwischen der Mitte des jeweiligen Feldes zur IRS an. Außerdem ist die An-zahl der gesendeten Paketen (Anz. Tx Pakete) und der empfangenen Paketen (Anz. Rx Pakete)innerhalb des entsprechenden Feldes mit aufgeführt. Zeilen bzw. Felder, auf die in den nächs-ten Abschnitten eingegangen wird, sind hervorgehoben. In Abbildung A.1 im Anhang ist der zudieser Tabelle passende Ausschnitt aus der Übersicht des Versuchsfeldes K047 (Abbildung 6.2)dargestellt. Hierin sind die entsprechenden Felder mit den Nummern aus der Tabelle beschrif-tet.
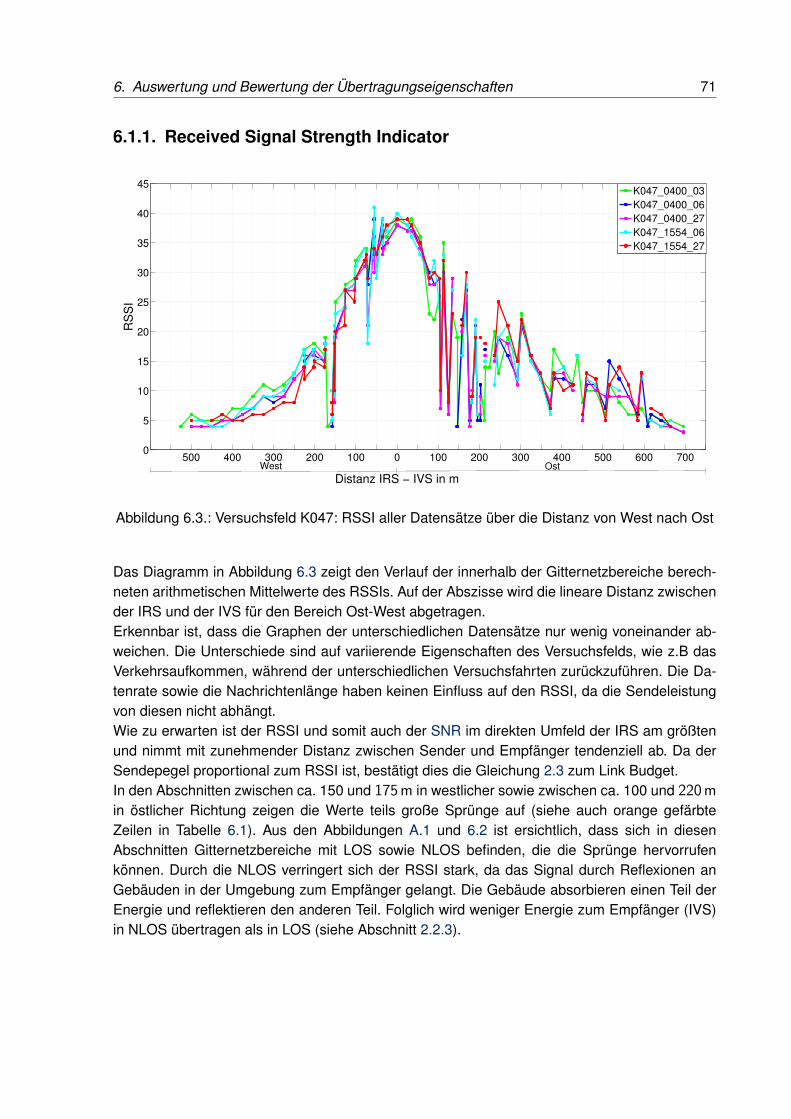
6. Auswertung und Bewertung der Übertragungseigenschaften 71
6.1.1. Received Signal Strength Indicator
500 400 300 200 100 0 100 200 300 400 500 600 7000
5
10
15
20
25
30
35
40
45
Distanz IRS − IVS in m
RS
SI
K047_0400_03
K047_0400_06
K047_0400_27
K047_1554_06
K047_1554_27
OstWest
Abbildung 6.3.: Versuchsfeld K047: RSSI aller Datensätze über die Distanz von West nach Ost
Das Diagramm in Abbildung 6.3 zeigt den Verlauf der innerhalb der Gitternetzbereiche berech-neten arithmetischen Mittelwerte des RSSIs. Auf der Abszisse wird die lineare Distanz zwischender IRS und der IVS für den Bereich Ost-West abgetragen.Erkennbar ist, dass die Graphen der unterschiedlichen Datensätze nur wenig voneinander ab-weichen. Die Unterschiede sind auf variierende Eigenschaften des Versuchsfelds, wie z.B dasVerkehrsaufkommen, während der unterschiedlichen Versuchsfahrten zurückzuführen. Die Da-tenrate sowie die Nachrichtenlänge haben keinen Einfluss auf den RSSI, da die Sendeleistungvon diesen nicht abhängt.Wie zu erwarten ist der RSSI und somit auch der SNR im direkten Umfeld der IRS am größtenund nimmt mit zunehmender Distanz zwischen Sender und Empfänger tendenziell ab. Da derSendepegel proportional zum RSSI ist, bestätigt dies die Gleichung 2.3 zum Link Budget.In den Abschnitten zwischen ca. 150 und 175m in westlicher sowie zwischen ca. 100 und 220min östlicher Richtung zeigen die Werte teils große Sprünge auf (siehe auch orange gefärbteZeilen in Tabelle 6.1). Aus den Abbildungen A.1 und 6.2 ist ersichtlich, dass sich in diesenAbschnitten Gitternetzbereiche mit LOS sowie NLOS befinden, die die Sprünge hervorrufenkönnen. Durch die NLOS verringert sich der RSSI stark, da das Signal durch Reflexionen anGebäuden in der Umgebung zum Empfänger gelangt. Die Gebäude absorbieren einen Teil derEnergie und reflektieren den anderen Teil. Folglich wird weniger Energie zum Empfänger (IVS)in NLOS übertragen als in LOS (siehe Abschnitt 2.2.3).

6. Auswertung und Bewertung der Übertragungseigenschaften 72
In Abbildung A.2 wird das Diagramm für die Bereiche des Gitternetzes in nördlicher und südli-cher Richtung dargestellt. Hierbei ist eine deutlich schnellere Abnahme des RSSIs sowie einegeringere Reichweite als in östlicher und westlicher Richtung zu erkennen. Dies ist darauf zu-rückzuführen, dass Richtung Norden und Süden wenige Bereiche mit LOS vorhanden sind undder RSSI in NLOS aus dem vorher beschriebenen Grund geringer ist.
6.1.2. Paketverlustrate
500 400 300 200 100 0 100 200 300 400 500 600 7000
10
20
30
40
50
60
70
80
90
100
Distanz IRS − IVS in m
PE
R in
%
K047−0400−03
K047−0400−06
K047−0400−27
OstWest
Abbildung 6.4.: Versuchsfeld K047: PER der Datensätze mit 400Byte Payload über die Distanzvon West nach Ost
Im Diagramm in Abbildung 6.4 wird die Paketverlustrate aller im Versuchsfeld K047 mit 400Bytegroßen Paketen durchgeführten Versuchsfahrten über die Distanz im Bereich Ost-West abge-tragen.Auffällig ist bei allen Datensätzen dieses Versuchsfeldes, dass die Paketverlustrate in direkterUmgebung der IRS (Distanz < 25m) relativ groß ist (PER > 15%). Die Kommunikation zwischenIRS und IVS ist somit bei geringer Distanz nicht zuverlässig. Wie in Abschnitt 2.2.1 beschrieben,sendet eine omnidirektionale Antenne die Signale in horizontaler Richtung. Ist die Antenne er-höht, so ist der Empfang direkt unter dieser weniger gut als in einiger Entfernung. Dies ist auchhier festzustellen, da die PER bei einer Distanz zwischen 25 und 100m geringer ist als in direk-ter Umgebung der IRS.Wie schon beim RSSI in Abbildung 6.3 kommt es zu Sprüngen bei Bereichen, in denen eineNLOS vorliegt. Hierbei steigt die PER sprungartig auf Werte größer 60% an. Die Übertragung

6. Auswertung und Bewertung der Übertragungseigenschaften 73
in NLOS ist also deutlich weniger zuverlässig als in LOS.Der Datensatz K047-0400-03 zeigt besonders in Richtung Westen eine verlässlichere Übertra-gung als die beiden anderen Datensätze. Dies ist auf den größeren Signal-Rauschabstand durchdie niederwertigere Modulation (BPSK, siehe Abschnitt 2.1.1) bei einer Datenrate von 3MBit/szurückzuführen. Hierdurch ist die Kommunikation weniger störanfällig und die Wahrscheinlich-keit der erfolgreichen Übertragung einer Nachricht steigt.Wie bereits am Anfang des Kapitels beschrieben, sind in den Datensätzen zum Teil unterschied-liche Gitternetzfelder vorhanden. Dadurch weisen die Graphen Unterbrechungen auf. Es ist auf-fällig, dass im Datensatz K047-0400-03 mehrmals Datenpunkte vorhanden sind, bei denen dieanderen abgebildeten Graphen unterbrochen sind. Dies ist ebenfalls auf die geringere Störan-fälligkeit bei einer Datenrate von 3MBit/s zurückzuführen, da hieraus eine größere Reichweiteder IRS resultiert und somit in mehr Feldern Nachrichten empfangen werden.
500 400 300 200 100 0 100 200 300 400 500 600 7000
10
20
30
40
50
60
70
80
90
100
Distanz IRS − IVS in m
PE
R in
%
K047−1554−06
K047−1554−27
West Ost
Abbildung 6.5.: Versuchsfeld K047: PER der Datensätze mit 1554Byte Payload über die Distanzvon West nach Ost
Im Vergleich der unterschiedlichen Datenraten bei einer Payloadgröße von 1554Byte in Abbil-dung 6.5 fällt auf, dass die Paketverlustrate des Datensatzes K047-1554-06 mit der geringerenDatenrate und somit der niederwertigeren Modulation in vielen Bereichen deutlich größer ist.Dies war nicht zu erwarten, da hier theoretisch ein größerer Signal-Rauschabstand vorliegenmüsste (siehe Abschnitt 2.1), wodurch die Übertragung zuverlässiger wäre. Der Grund für dieAbweichung von der Theorie ist nicht ersichtlich. Da es sich bei diesem Datensatz um eineStichprobe handelt, könnte durch weitere Versuchsfahrten mit denselben Parametern festge-stellt werden, ob es sich bei dem vorliegenden Ergebnis um eine Ausnahme oder die Regelhandelt.
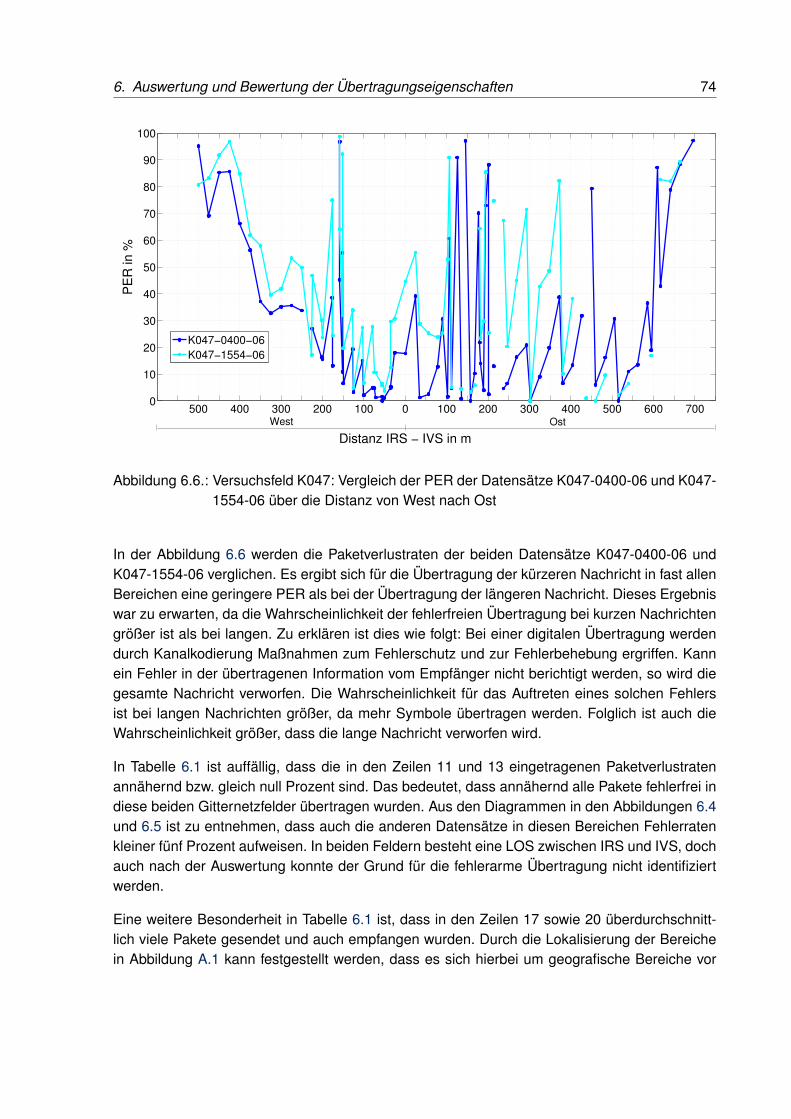
6. Auswertung und Bewertung der Übertragungseigenschaften 74
500 400 300 200 100 0 100 200 300 400 500 600 7000
10
20
30
40
50
60
70
80
90
100
Distanz IRS − IVS in m
PE
R in
%
K047−0400−06
K047−1554−06
West Ost
Abbildung 6.6.: Versuchsfeld K047: Vergleich der PER der Datensätze K047-0400-06 und K047-1554-06 über die Distanz von West nach Ost
In der Abbildung 6.6 werden die Paketverlustraten der beiden Datensätze K047-0400-06 undK047-1554-06 verglichen. Es ergibt sich für die Übertragung der kürzeren Nachricht in fast allenBereichen eine geringere PER als bei der Übertragung der längeren Nachricht. Dieses Ergebniswar zu erwarten, da die Wahrscheinlichkeit der fehlerfreien Übertragung bei kurzen Nachrichtengrößer ist als bei langen. Zu erklären ist dies wie folgt: Bei einer digitalen Übertragung werdendurch Kanalkodierung Maßnahmen zum Fehlerschutz und zur Fehlerbehebung ergriffen. Kannein Fehler in der übertragenen Information vom Empfänger nicht berichtigt werden, so wird diegesamte Nachricht verworfen. Die Wahrscheinlichkeit für das Auftreten eines solchen Fehlersist bei langen Nachrichten größer, da mehr Symbole übertragen werden. Folglich ist auch dieWahrscheinlichkeit größer, dass die lange Nachricht verworfen wird.
In Tabelle 6.1 ist auffällig, dass die in den Zeilen 11 und 13 eingetragenen Paketverlustratenannähernd bzw. gleich null Prozent sind. Das bedeutet, dass annähernd alle Pakete fehlerfrei indiese beiden Gitternetzfelder übertragen wurden. Aus den Diagrammen in den Abbildungen 6.4und 6.5 ist zu entnehmen, dass auch die anderen Datensätze in diesen Bereichen Fehlerratenkleiner fünf Prozent aufweisen. In beiden Feldern besteht eine LOS zwischen IRS und IVS, dochauch nach der Auswertung konnte der Grund für die fehlerarme Übertragung nicht identifiziertwerden.
Eine weitere Besonderheit in Tabelle 6.1 ist, dass in den Zeilen 17 sowie 20 überdurchschnitt-lich viele Pakete gesendet und auch empfangen wurden. Durch die Lokalisierung der Bereichein Abbildung A.1 kann festgestellt werden, dass es sich hierbei um geografische Bereiche vor

6. Auswertung und Bewertung der Übertragungseigenschaften 75
Lichtsignalanlagen handelt. Hier musste das Fahrzeug, bzw. die IVS, die Dauer der Rotphasean einer Position stehen bleiben, wodurch sehr viele Pakete in den entsprechenden Feldernempfangen wurden.
6.1.3. Latenz im Übertragungssystem
500 400 300 200 100 0 100 200 300 400 500 600 7005
6
7
8
9
10
11
Distanz IRS − IVS in m
La
ten
z in
ms
K047−0400−03
K047−0400−06
K047−0400−27
K047−1554−06
K047−1554−27
OstWest
Abbildung 6.7.: Versuchsfeld K047: Latenz aller Datensätze über die Distanz von West nach Ost
Das Diagramm in Abbildung 6.7 zeigt die innerhalb der einzelnen Gitternetzfelder arithmetischgemittelte Latenz t1,4 (siehe Abschnitt 4.4) im Übertragungssystem zwischen der auf der Appli-cation Unit (AU) der IRS ausgeführten Sendeapplikation und der auf der AU der IVS ausgeführ-ten Empfangsapplikation. Die Datensätze mit einer Payloadlänge von 400Byte haben fast durch-gehend eine Latenz von ca. 5,9ms und die Datensätze mit einer Payloadlänge von 1554Byteeine Latenz von ca. 9,6ms. Das Delta zwischen den beiden Datensatzgruppen von ca. 3,7msist somit eindeutig von der Länge der Nachricht abhängig.Die Länge einer übertragenen Nachricht setzt sich aus der Payloadlänge lP und der Länge desNachrichtenkopfes lH (beim TSB 36Byte, siehe 2.1.3) zusammen. Wird davon ausgegangen,dass die Latenz linear von der Nachrichtenlänge abhängt, so können die Latenzen t400 für diekurze Nachricht und t1554 für die lange Nachricht durch folgende Gleichung ins Verhältnis gesetztwerden:
t1554t400
=lP,1554 + lHlP,400 + lH
=1554Byte + 36Byte
400Byte + 36Byte' 3, 6 (6.1)

6. Auswertung und Bewertung der Übertragungseigenschaften 76
Die gemessenen Latenzen haben jedoch ein Verhältnis von ca. 1,6, wodurch bewiesen ist, dassdie Latenz t1,4 nicht linear von der Nachrichtenlänge abhängt. Dies lässt darauf schließen, dasses nicht linear von der Länge abhängige oder konstante Latenzen innerhalb des Übertragungs-systems gibt. Diese sind mit den durchgeführten Versuchen jedoch nicht identifizierbar.
Bei einer Distanz von jeweils ca. 150m westlich und östlich kommt es bei den DatensätzenK047-0400-06 und K047-1554-27 zu Sprüngen um jeweils ca. 0,7ms. Wie auch schon in denvorherigen Auswertungen erwähnt, gibt es hier Bereiche mit NLOS zwischen IRS und IVS. InTabelle 6.1 ist in Zeile 12 der Sprung im Datensatz K047-0400-06 bei einer Distanz von 146min östlicher Richtung zu finden. Hierbei fällt auf, dass von 103 gesendeten Nachrichten nur dreiinnerhalb des Bereichs erfolgreich empfangen wurden, wodurch das arithmetische Mittel derLatenz über diese drei Werte berechnet wurde. Die empfangenen Pakete müssen eher zufälligdurch die Mehrwegeausbreitung und folglich mit hoher Latenz t2,3 vom Sender zum Empfängerübertragen worden sein. Hieraus resultiert eine überdurchschnittlich hohe Latenz t1,4 in diesemBereich.
6.1.4. Abhängigkeiten der Messgrößen untereinander
In diesem Abschnitt wird die Abhängigkeit der Messgrößen untereinander geprüft. Hierbei wirdein besonderer Fokus auf die Messung K047-0400-06 gelegt, da diese für spätere Vergleichemit verwandten Studien am besten geeignet ist.Die bisherige Auswertung zeigt, dass der RSSI und die Paketverlustrate stark von der Line-of-Sight zwischen IRS und IVS abhängen. In Tabelle 6.1 sind die Zeilen der Gitternetzfelder orangeeingefärbt, in denen eine NLOS besteht. Hier ist ein starker Anstieg der Paketverlustrate undgleichzeitig ein starker Abfall des RSSIs im Gegensatz zu den Bereichen in LOS zu erkennen.Der RSSI und die PER verhalten sich somit grundsätzlich antiproportional. In den grün eingefärb-ten Zeilen eins und zwei im Vergleich zur Zeile drei ist dies jedoch nicht zu beobachten. Für dieersten beiden Felder wurde für die geringe Distanz von kleiner 25m eine relativ hohe Paketver-lustrate von 17,68% bzw. 39,13% ermittelt. Innerhalb des dritten Gitternetzfeldes hingegen istdie Übertragung sehr fehlerarm. Der RSSI der drei Bereiche ist annähernd konstant bei 37 bzw.38. Dieses Phenomen tritt, wie bereits in Abschnitt 6.1.2 im Bezug auf die PER beschrieben,durch die Richteigenschaften der omnidirektionalen Antenne der IRS auf. Bei Nachrichten, dieim direkten Umfeld der IRS empfangen werden, findet die Übertragung daher fast ausschließlichdurch Reflexionen vom Sender zum Empfänger statt. Es besteht folglich genau betrachtet keineLOS zwischen diesen.Die gemessene Latenz zwischen der Sende- und der Empfangsapplikation zeigt teilweise etwaserhöhte Werte im Bereich um die IRS (siehe Diagramm in 6.7). Da Reflexionen durch eine NLOSdie Latenz der Übertragung vergrößern, bestätigen diese Ergebnisse die vorher gemachte Aus-sage.Bei einigen Datenpunkten, bei denen der RSSI und die PER Sprünge aufweisen, zeigt auch dieLatenz zum Teil markante Werte. Da in NLOS keine direkte Übertragung der Signale möglich ist,ist eine größere Latenz als in LOS unumgänglich. Folglich muss in den Bereichen mit NLOS eine
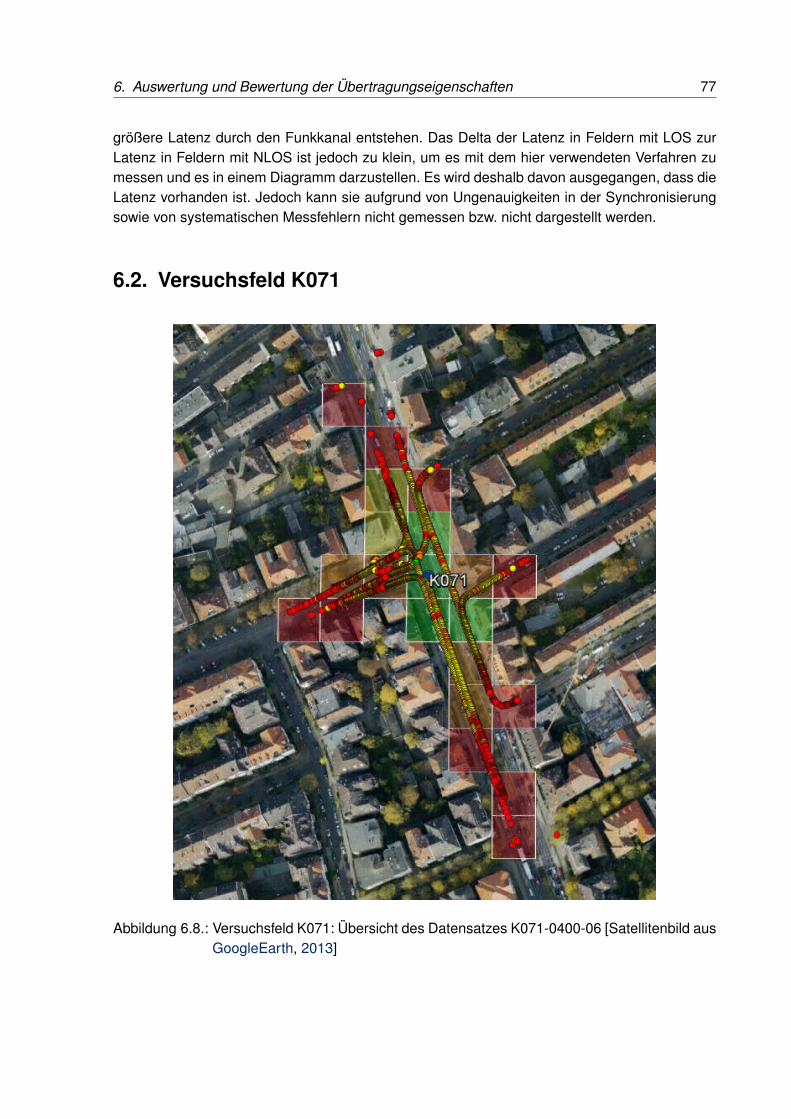
6. Auswertung und Bewertung der Übertragungseigenschaften 77
größere Latenz durch den Funkkanal entstehen. Das Delta der Latenz in Feldern mit LOS zurLatenz in Feldern mit NLOS ist jedoch zu klein, um es mit dem hier verwendeten Verfahren zumessen und es in einem Diagramm darzustellen. Es wird deshalb davon ausgegangen, dass dieLatenz vorhanden ist. Jedoch kann sie aufgrund von Ungenauigkeiten in der Synchronisierungsowie von systematischen Messfehlern nicht gemessen bzw. nicht dargestellt werden.
6.2. Versuchsfeld K071
Abbildung 6.8.: Versuchsfeld K071: Übersicht des Datensatzes K071-0400-06 [Satellitenbild ausGoogleEarth, 2013]

6. Auswertung und Bewertung der Übertragungseigenschaften 78
Die Abbildung 6.8 zeigt eine Übersicht der Versuchsfahrt K071-0400-06 im Versuchsfeldes K071um die IRS K071 herum. Bei der Darstellung handelt es sich, wie schon in Abbildung 6.2, umdie vom „V2X-Mess- und Analysetool“ erzeugte und mit Google Earth dargestellte Datei. Esgelten alle für die Abbildung 6.2 beschriebenen Eigenschaften. Die Länge der quadratischenGitternetzfelder beträgt auch hier 25m.
Bei einer Betrachtung Abbildung 6.8 fällt auf, dass wenig Nachrichten mit einem RSSI größeroder gleich 21 (wenig grün gefärbte Punkte) übertragen wurden. Es gibt außerdem nur vier grüneingefärbte Gitternetzfelder und somit Felder mit einer Paketverlustrate kleiner 10%. Die Reich-weite der Kommunikation beträgt maximal 182m. Diese Ergebnisse lassen darauf schließen,dass die Kommunikation mit dieser IRS wenig robust und leistungsfähig ist.
Wie aus der Einteilung des Versuchsfeldes in Abbildung 5.4 ersichtlich, befindet sich ein Großteilder Gitternetzfelder im Bereich Nord-Süd. Aus diesem Grund wird der Fokus der nachfolgendenAuswertung der Messgrößen auf diesen Bereich gelegt.
6.2.1. Received Signal Strength Indicator
Abbildung 6.9.: Versuchsfeld K071: RSSI aller Datensätze über die Distanz von Süd nach Nord
Auch in diesem Versuchsfeld ist eine tendenzielle Abnahme des RSSIs mit der Distanz zwi-schen Sender und Empfänger zu erkennen. Der Datensatz K071-0400-06 zeigt im Vergleich zuden anderen Datensätzen an einigen Messpunkten etwas erhöhte Werte. Dies könnte auf dasgeringe Verkehrsaufkommen während dieser Messfahrt zurückzuführen sein. Bei wenig Verkehrgibt es weniger Streukörper in der Umgebung und die Wahrscheinlichkeit einer Abschattung
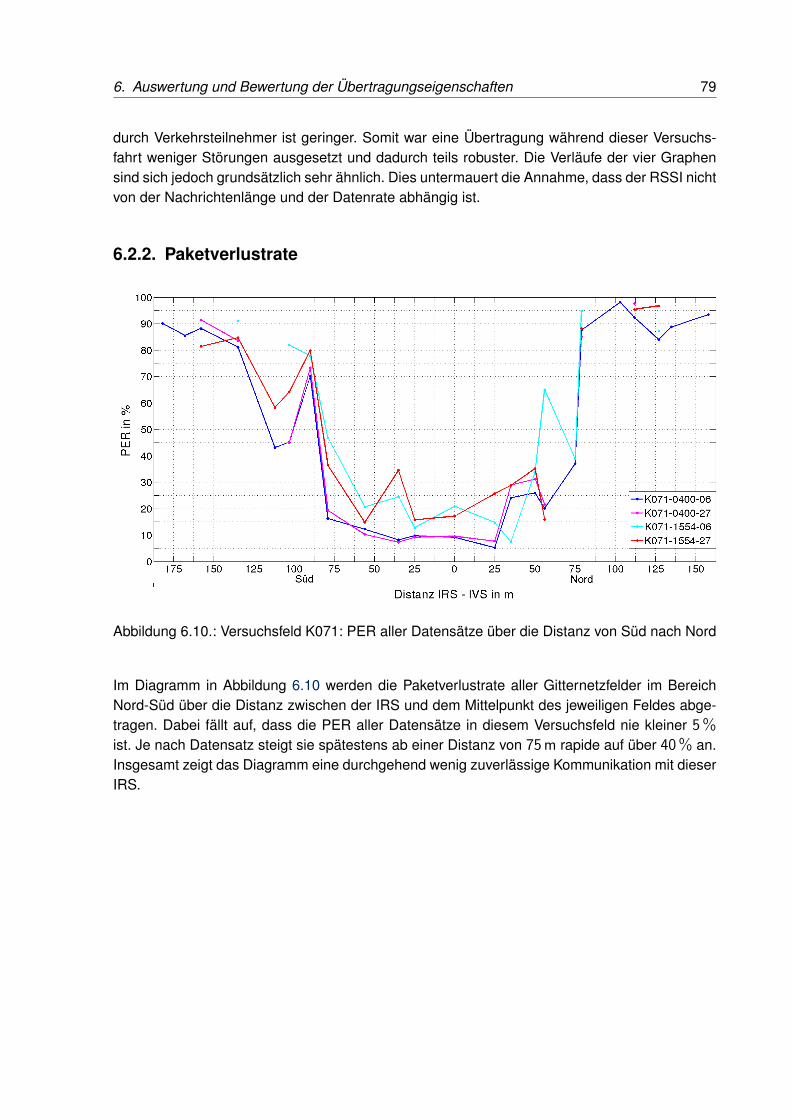
6. Auswertung und Bewertung der Übertragungseigenschaften 79
durch Verkehrsteilnehmer ist geringer. Somit war eine Übertragung während dieser Versuchs-fahrt weniger Störungen ausgesetzt und dadurch teils robuster. Die Verläufe der vier Graphensind sich jedoch grundsätzlich sehr ähnlich. Dies untermauert die Annahme, dass der RSSI nichtvon der Nachrichtenlänge und der Datenrate abhängig ist.
6.2.2. Paketverlustrate
Abbildung 6.10.: Versuchsfeld K071: PER aller Datensätze über die Distanz von Süd nach Nord
Im Diagramm in Abbildung 6.10 werden die Paketverlustrate aller Gitternetzfelder im BereichNord-Süd über die Distanz zwischen der IRS und dem Mittelpunkt des jeweiligen Feldes abge-tragen. Dabei fällt auf, dass die PER aller Datensätze in diesem Versuchsfeld nie kleiner 5%
ist. Je nach Datensatz steigt sie spätestens ab einer Distanz von 75m rapide auf über 40% an.Insgesamt zeigt das Diagramm eine durchgehend wenig zuverlässige Kommunikation mit dieserIRS.

6. Auswertung und Bewertung der Übertragungseigenschaften 80
6.2.3. Latenz im Übertragungssystem
Abbildung 6.11.: Versuchsfeld K071: Latenz aller Datensätze über die Distanz von Süd nachNord
In Abbildung 6.11 wird die Latenz t1,4 des Übertragungssystems dargestellt. Hierbei ist zu er-kennen, dass diese stark schwankt. Bei der Messreihe K071-1554-27 kommt es zu einem Deltazwischen der minimalen und der maximalen Latenz von 2,5ms. Der Zeitserver der IRS ermög-licht, wie in Abschnitt 3.2 beschrieben, eine Synchronisation mit einer Genauigkeit zwischen 0,5und 2ms. Schwankungen dieser Größenordnung können also auf die ungenaue Synchronisati-on des Messsystems zurückgeführt werden. Aufgrund dieser Tatsache kann die Latenz dieserDatensätze nicht sinnvoll ausgewertet werden.
6.3. Vergleich der Versuchsfelder
In diesem Abschnitt werden die Ergebnisse der beiden Versuchsfelder miteinander verglichen.Bei beiden waren grundsätzlich die gleichen Voraussetzungen gegeben: Die Hardware der ver-wendeten IRSs ist bis auf den Zeitserver identisch. Beide CCUs waren auf den maximalen Sen-depegel eingestellt.
Bei einem Vergleich der Reichweiten der Versuchsfahrten K047-0400-06 (Abbildung 6.2) undK071-0400-06 (Abbildung 6.8) ist erkennbar, dass diese sich deutlich unterscheiden. Die ma-ximale Reichweite während der erstgenannten Versuchsfahrt betrug 702m und die der zweit-genannten bei gleicher Datenrate und Payloadlänge betrug 161m. Dieser extreme Unterschied
6. Auswertung und Bewertung der Übertragungseigenschaften 81
kann nur durch eine fehlerhafte Funktion einer der Stationen erklärt werden. Durch vorherigeMessungen der Reichweite anderer IRSs im AIM-Testfeld außerhalb dieser Studie wurde fest-gestellt, dass eine Kommunikation zwischen IRS und IVS bei LOS über mehrere Hundert Me-ter möglich ist. Da die Ergebnisse im Versuchsfeld K071 diesen Erfahrungswert deutlich unter-schreiten, kann davon ausgegangen werden, dass in der entsprechenden IRS ein Fehler vorliegt.Vermutlich handelt es sich hierbei um fehlerhafte Hardware, wie z.B. die CCU oder die Anten-nenleitung. Hierdurch kam es zu einem sehr viel geringen Sendepegel als bei der fehlerfreienIRS.
Der in Abbildung 6.3 dargestellte RSSI im Versuchsfeld K047 zeigt in den Gitternetzfeldern imdirekten Umfeld der IRS Werte größer 35. Im Versuchsfeld K071 hingegen beträgt der RSSIin den vergleichbaren Feldern zwischen 11 und 13. Dies ist auf den fehlerhaften Sendepegelzurückzuführen. Zudem ist bei einem Vergleich der Diagramme auffällig, dass die Datensätze imVersuchsfeld K047 große Sprünge aufweisen. Im Versuchsfeld K071 hingegen ist ein annäherndkonstanter Abfall des RSSIs bei größer werdender Distanz zu erkennen. Der Grund für diesenUnterschied ist, dass im Bereich Ost-West des Versuchsfeldes K047 Felder mit NLOS und LOSvorhanden sind, wohingegen im Versuchsfeld K071 lediglich in Feldern mit LOS Nachrichtenempfangen wurden.
Die Beeinträchtigung der Sendeeigenschaften der IRS K071 sind auch im Vergleich der PER inden Diagrammen 6.4, 6.6 und 6.5 mit dem Diagramm 6.10 zu erkennen. Die Paketverlustrateist im Versuchsfeld K071 durchgehend höher und steigt schneller an als im Versuchsfeld K047.Bemerkenswert ist jedoch, dass die PER im direkten Umfeld der IRS in Versuchsfeld K047 höherist, als in Versuchsfeld K071. Durch einen geringeren Sendepegel der IRS K071 bei ähnlich hochangebrachter Antenne war eine höhere PER im Versuchsfeld K071 zu erwarten. Eine möglicheErklärung hierfür ist der Urban Canyon. Die im Versuchsfeld K071 dicht am Straßenrand stehen-den Gebäude begünstigen die Kommunikation mit einer unterhalb der Antenne befindlichen IVSdurch Reflexionen. Um die IRS der Kreuzung K047 ist eine Freifläche, wodurch der Effekt desUrban Canyons keine bzw. eine deutlich geringere Auswirkung hat.
Die Latenz t1,4 im Übertragungssytem kann durch die ungenauere Zeitsynchronisation der IRSK071 nur bedingt verglichen werden. Bei allen Datensätzen (siehe Abbildungen 6.7 und 6.11)ist eine Abhängigkeit der Latenz von der Nachrichtengröße zu erkennen. Die mittlere Latenz derDatensätze mit einer Payloadgröße von 400Byte liegt im Versuchsfeld K047 bei ca. 5,9ms undim Versuchsfeld K071 bei ca. 4,7ms. Bei einer Payloadgröße von 1554Byte liegt diese im Ver-suchsfeld K047 bei ca. 9,6ms und im Versuchsfeld K071 bei ca. 10ms. Wird die unterschiedlichgenaue Synchronisation berücksichtigt, können diese Ergebnisse als tendenziell ähnlich bewer-tet werden.

6. Auswertung und Bewertung der Übertragungseigenschaften 82
6.4. Bewertung der Übertragungseigenschaften
In diesem Abschnitt werden die Übertragungseigenschaften der V2X-Kommunikation innerhalbdes AIM-Versuchsfeldes anhand der Ergebnisse der Feldstudie bewertet. Hierzu werden auchdie im Abschnitt 1.2 vorgestellten Studien [Molisch u. a., 2011] und [Hyncica u. a., 2012] zumVergleich hinzugezogen.
Bei einer Kommunikation steht grundsätzlich die erfolgreiche Informationsübertragung im Vor-dergrund. Hierbei ist es für die Nutzung der Informationen nicht relevant, mit welchen Mittelndie erfolgreiche Übertragung sichergestellt wird. Die Paketverlustrate ist aus diesem Grund daszentrale Bewertungskriterium der Übertragung zwischen IRS und IVS. Die PER ist abhängig vonder Distanz zwischen Sender und Empfänger und somit ist die Entfernung bei der Bewertungder PER mit zu betrachten.Ein Empfangspegel an der CCU des Empfängers (RSSI) ist zwar Voraussetzung für die Über-tragung, ist jedoch, wie in den vorherigen Abschnitten beschrieben, kein Maß für ihren Erfolg.Die Latenz wiederum ist erst relevant, wenn es zu einer erfolgreichen Informationsübertragunggekommen ist. Sie spielt somit eine sekundäre Rolle.
diese Studie [Molisch u. a., 2011] [Hyncica u. a., 2012] [Maier u. a., 2011]Szenario Innenstadt Autobahn Innenstadt AutobahnStandard IEEE 802.11p IEEE 802.11p IEEE 802.11a IEEE 802.11p
Geschwindigkeit max. 30 km/h ca. 120 km/h Stadtverkehr 70 bis 100 km/h
EIRP ca. 30,4dBm 15,5dBm ca. 33dBm -Höhe IRS ca. 8m 7,1m - ca. 8m
Payloadlänge 400Byte 200Byte 156Byte 200Byte1554Byte 1554Byte
Messgrößen PER PDR PDR PDRRSSI (RSSI)
LatenzDatenrate 3, 6, 27MBit/s alle verfügbaren 6MBit/s 6MBit/s
Tabelle 6.2.: Vergleich der Grundvoraussetzungen der Feldstudien
Um die Ergebnisse der verwandten Feldstudien mit denen dieser Studie vergleichen zu können,muss festgestellt werden, inwieweit sich die Rahmenbedingungen decken. Die Tabelle 6.2 zeigt,dass die Studien bedingt vergleichbar sind. Speziell die Ergebnisse aus [Maier u. a., 2011] sindtrotz ähnlicher Rahmenbedingungen nicht für einen Vergleich geeignet, da für die Packet Delive-ry Ratio (PDR) keine Distanz zwischen Sender und Empfänger sowie kein Zeitintervall als Bezugangegeben wurde. Trotz der abweichenden Rahmenbedingungen werden nachfolgend einzelneErgebnisse der verbleibenden zwei Studien mit den Ergebnissen dieser Studie verglichen.
Die Einteilung in Gitternetzfelder wurde aus der Feldstudie [Hyncica u. a., 2012] übernommen.Hier wurde die Kommunikation innerhalb eines Feldes als ausreichend zuverlässig bewertet,

6. Auswertung und Bewertung der Übertragungseigenschaften 83
wenn die Packet Delivery Ratio (PDR) mehr als 95% betrug. Eine Umrechnung der PDR in einePacket Error Ratio (PER) erfolgt nach der folgenden Gleichung:
PER[%] = 100− PDR[%]
Hiernach wurde in [Hyncica u. a., 2012] die Kommunikation als gut bewertet, wenn die PER 5%
nicht überschritt. Diese Schwelle ist für eine drahtlose Übertragung über mittelgroße Distanzensehr niedrig. Realistischer ist eher eine Übertragung mit einer PER von 25%.
Im Versuchsfeld K071 wird bei keinem Gitternetzfeld die PER von 5% unterschritten. Bei einemDrittel der Felder der Versuchsfahrt K017-0400-06 bleibt die PER unter 25%. Bei den verblei-benden Datensätzen dieses Versuchsfeldes ist die Kommunikation noch weniger robust. Wiebereits vorher festgestellt, zeigt die IRS der Kreuzung K071 aufgrund eines Fehlers (vermutlichein Hardwaredefekt) einen sehr geringen Sendepegel. Aus diesem Grund ist die Kommunikationstark beeinträchtigt und die Reichweite somit eingeschränkt. Versuche, die außerhalb des Rah-mens dieser Arbeit mit Stationen der AIM-Referenzstrecke durchgeführt wurden, zeigen, dassdie Ergebnisse der Reichweite im Versuchsfeld K071 nicht annähernd der Leistungsfähigkeit deranderen Stationen entspricht. Aufgrund dessen können die Ergebnisse aus diesem Versuchsfeldnicht als Maß für die Bewertung des Kommunikationssystems verwendet werden. Somit wird dienachfolgende Bewertung auf das Versuchsfeld K047 eingeschränkt und lediglich auf die darausgewonnenen Ergebnisse Bezug genommen.
Der Tabelle 6.2 ist zu entnehmen, dass die in [Hyncica u. a., 2012] veröffentlichte Feldstudiemit dem Standard 802.11a durchgeführt wurde, auf den der Standard 802.11p aufbaut. DieErgebnisse sind somit grundsätzlich mit den Ergebnissen der im Rahmen dieser Arbeit durch-geführten Studie vergleichbar.Die maximale Reichweite mit 802.11a beträgt in LOS 450m und in NLOS 110m. Die Ergebnisseunter Verwendung des Standards 802.11p in dieser Feldstudie ergaben eine Reichweite in LOSvon ca. 700m und in NLOS von ca. 300m. Somit wird durch die Verwendung des auf dieV2X-Kommunikation angepassten Standards ein großer Gewinn in der Reichweite erzielt.

6. Auswertung und Bewertung der Übertragungseigenschaften 84
K047−0400−03 K047−0400−06 K047−0400−27 K047−1554−06 K047−1554−270
20
40
60
80
100
120
140
An
za
hl F
eld
er
Felder gesamt
Felder mit PER < 50%
Felder mit PER < 25%
Felder mit PER < 5%112 110
104 104
123
91
76
32
22
61
25
61
80 81
60
30
8
63
40
17
Abbildung 6.12.: Vergleich von Datensätzen anhand der PER innerhalb der Gitternetzfelder
In [Hyncica u. a., 2012] wurde bei knapp 50% der Gitternetzfelder eine PDR größer 95% (PER< 5%) ermittelt. Das Balkendiagramm in Abbildung 6.12 zeigt, dass bei der vergleichbaren Ver-suchsfahrt K047-0400-06 bei ca. 20% der Felder eine PER von 5% unterschritten wurde. Imersten Vergleich der beiden Studien scheint die Kommunikation der in dieser Arbeit vorgestell-ten Feldstudie weniger zuverlässig. Durch einen Vergleich der Abbildungen 1.3 und 6.2 fälltauf, dass in [Hyncica u. a., 2012] deutlich weniger Felder mit NLOS in die Berechnung einflie-ßen. Außerdem wird in den beiden Studien nicht dieselbe Nachrichtengröße verwendet, was diePER beeinflusst. Werden diese Voraussetzungen bedacht, so relativiert sich der Unterschiedzwischen den Ergebnissen der Studien.
Eine weitere Referenz sind die Ergebnisse aus [Molisch u. a., 2011]. Im Vergleich des Dia-gramms in Abbildung 1.2b und des Datensatzes K047-0400-06 in Abbildung 6.4 sind Unter-schiede zu erkennen. Der Graph der PER dieser Studie in Abbildung 6.4 weist durch die ge-mischten Felder in NLOS und LOS große Sprünge auf. Die Ergebnisse von [Molisch u. a., 2011]hingegen wurden durchgehend in LOS auf einer geraden Autobahn durchgeführt, weshalb keineSprünge im entsprechenden Diagramm vorhanden sind. Die Diagramme sind somit nicht direktvergleichbar. Werden die Bereiche mit NLOS sowie die erhöhte Fehlerrate im Bereich direkt umdie IRS bei den Ergebnissen der Messfahrt K047-0400-06 vernachlässigt, so wird die Schwelledes PERs von 25% nach ca. 175m westlich und ca. 350m östlich der IRS überschritten. Bei[Molisch u. a., 2011] war dies in Richtung Westen bei ca. 350m und in Richtung Osten bei ca.320m der Fall. Im Vergleich zeigt die Kommunikation in [Molisch u. a., 2011] sich robuster alsin dieser Studie. Dies kann durch die Nutzung unterschiedlicher Kommunikationssysteme oderdas andere Umfeld erklärt werden.
Eine Latenz in der Übertragung einer Information im lokalen Bereich von unter 10ms ist für diemeisten Anwendungen nicht relevant. Lediglich bei Anwendungen, die die Sicherheit verbessern

6. Auswertung und Bewertung der Übertragungseigenschaften 85
sollen und eine schnelle Reaktionszeit voraussetzen, könnte diese „verlorene“ Zeit von Bedeu-tung sein. Hier sollten die Nachrichtenlänge möglichst kurz gehalten werden, da die Latenz vondieser abhängt.
Grundsätzlich können die Übertragungseigenschaften des verwendeten Kommunikationssys-tems in LOS bis zu einer Distanz zwischen den kommunizierenden Stationen von ca. 300m alsleistungsfähig und robust bewertet werden. In einem Radius von ca. 50m kommt es jedoch zuEinschränkungen durch die Richtcharakteristik der Antenne. Bewegt sich ein Fahrzeug, das miteinem intelligenten Transportsystem ausgestattet ist, auf einer Nebenstraße, so kommt es schonnach wenigen Metern in NLOS zu einer starken Beeinträchtigung der Kommunikation.Eine IRS der AIM-Referenzstrecke hat mit bis zu 700m eine große Reichweite für ein Innen-stadtszenario. Über die ITS an einem Verkehrsknoten können somit lokale Informationen anankommende IVSs gesendet werden und stehen den Fahrerassistenzsystemen an Bord desFahrzeugs zur Verfügung. Bei der Versendung sicherheitsrelevanter Informationen muss jedochdie relativ hohe Fehlerrate bei größerer Distanz beachtet werden.

7. Zusammenfassung und Ausblick
In diesem Kapitel wird eine Zusammenfassung sowie ein Überblick über die wichtigsten Er-gebnisse und Erkenntnisse der durchgeführten Feldstudie gegeben. Nachfolgend wird dieseBachelorarbeit durch einen Ausblick auf hierauf aufbauende Forschungsarbeit im Bereich derFahrzeug-zu-X Kommunikation abgeschlossen.
In dieser Arbeit wurde der Aufbau eines Kommunikationssystems für die Messung der Über-tragungseigenschaften von V2X-Kommunikationen beschrieben. Dabei wurde auf alle verwen-deten Komponenten und deren Integration zu einem System eingegangen. Es wurden die vor-handenen ITS Roadside Stations der AIM-Referenzstrecke verwendet, die mit einer ITS VehicleStation kommunizierten. Hierfür wurde ein Fahrzeug mit einer für diese Messungen entwickelteMessplattform ausgestattet. Im weiteren Verlauf der Arbeit wurden die Methoden zur Ermittlungder drei Messgrößen Paketverlustrate, Latenz im Übertragungssystem sowie Received SignalStrength Indicator beschrieben. Dies schaffte eine Grundlage für die Durchführung von Mes-sungen der Übertragungseigenschaften im Versuchsfeld. Es wurden insgesamt neun Versuchs-fahrten durchgeführt, um den Einfluss unterschiedlicher Datenraten, Nachrichtenlängen sowieUmgebungen zu untersuchen. Als Umgebung diente einerseits einer der größten Verkehrskno-tenpunkte Braunschweigs und andererseits eine typische innerstädtische Kreuzung. Die Da-tenraten 3, 6 und 27MBit/s sowie die Payloadgrößen 400Byte und 1554Byte wurden in fastallen möglichen Kombinationen verwendet, um den Einfluss unterschiedlicher Parameter auf dieÜbertragungseigenschaften zu untersuchen. Die während der Versuchsfahrten aufgenommenenDatensätze wurden aufgewertet und die markanten Ergebnisse dargestellt.
Die im Rahmen dieser Bachelorthesis durchgeführte Feldstudie zeigt die Leistungsfähigkeit,aber auch die Grenzen des verwendeten V2X-Kommunikationssystems auf. Die wichtigste Vor-aussetzung für eine V2X-Kommunikation ist die Line-of-Sight. Ist diese gegeben, ist eine Kom-munikation über ein Vielfaches der Distanz in Non-Line-of-Sight möglich. Somit spielen die Um-gebung, die Platzierung der Antenne einer IRS sowie ihre Richteigenschaften eine zentrale Rollefür die Zuverlässigkeit und Reichweite der Kommunikation.Nachfolgend werden weitere gewonnene Erkenntnisse dargestellt:
• In der Arbeit wurde eine tendenzielle Abnahme des RSSIs mit größer werdender Distanzzwischen Sender und Empfänger festgestellt. Da der RSSI ein Indikator für den Pegel ander CCU des Empfängers ist, konnte somit der Einfluss der Pfadverluste im Funkkanal aufden Empfangspegel bewiesen werden.
• Durch Versuche mit unterschiedlichen Nachrichtenlängen konnte festgestellt werden, dasssich eine längere Nachricht negativ auf die Zuverlässigkeit der Kommunikation auswirkt.Ist eine sichere Übertragung notwendig, sollten deshalb möglichst kurze Nachrichten ver-wendet werden.
7. Zusammenfassung und Ausblick 87
• Es konnte eine Abhängigkeit der Paketverlustrate vom RSSI festgestellt werden. Dieseverhalten sich grundsätzlich antiproportional. Fällt der RSSI, so steigt die PER und umge-kehrt. Ausgenommen ist hiervon die direkte Umgebung der IRS, in der der RSSI erwartethoch war. Die PER zeigte in diesem Bereich einen ungewöhnlich hohen Wert für die ge-ringe Distanz von unter 50m. Dies ist auf die Richtcharakteristik der an einem Mast erhöhtangebrachten omnidirektionalen Antenne zurückzuführen. Es ist somit zu empfehlen diesebei der Auswahl sowie der Montage der Antenne einer IRS zu berücksichtigen.
• Durch die Untersuchung der Latenz wurde eine nicht-lineare Abhängigkeit von der Nach-richtenlänge ermittelt. Lange Nachrichten bewirken eine größere Latenz zwischen derSendeanwendung und der Empfangsanwendung als kurze Nachrichten. Bei der Übertra-gung von Nachrichten einer Länge von 400Byte wurde eine Latenz von ca. 6ms und beider Übertragung von 1554Byte langen Nachrichten eine Latenz von ca. 10ms gemessen.Ist eine geringe Latenz gefordert, sind folglich kurze Nachrichten zu verwenden.
• Der Einfluss der Mehrwegeausbreitung auf die Latenz konnte aufgrund eines unzurei-chend genauen Messverfahrens nicht festgestellt werden.
Die Untersuchung der Latenz im Übertragungssystem konnte nicht in der gewünschten Detailtie-fe durchgeführt werden. Der Gründe hierfür waren die unzureichende Genauigkeit der Zeitsyn-chronisation der Systemkomponenten sowie die zu geringe Auflösung des Sendezeitstempelsder Communication Control Unit. Es konnte trotz dessen die Latenz zwischen der Sendeanwen-dung und der Empfangsanwendung mit aufschlussreichen Ergebnissen gemessen werden.
Neben der Analyse der Übertragungseigenschaften konnte durch diese Studie eine fehlerhaf-te ITS Roadside Unit der AIM-Referenzstrecke identifiziert werden. Dies zeigt den Nutzen derentwickelten Messplattform zur Überwachung von Qualitätsparametern eines Netzwerks von in-telligenten Transportsystemen. Die portable Plattform soll in Zukunft neben der Verwendung fürweitere Studien auch für die Überwachung der Stationen der AIM-Referenzstrecke eingesetztwerden. Denkbar ist beispielsweise eine zyklische Messfahrt über die Strecke, bei der Nach-richten von sämtlichen IRSs empfangen und gespeichert werden. Im Nachhinein können diesemithilfe des „V2X-Mess- und Analysetool“ ausgewertet werden. Die mithilfe von Google Earthdargestellte Übersicht zeigt dann den aktuellen Status der im Feld befindlichen IRSs. Somitkönnten Fehler lokalisiert, analysiert und daraufhin behoben werden.
Während der Analyse der Übertragungseigenschaften der V2I-Kommunikation gab es einigeErgebnisse, die einer weiteren Untersuchungen bedürfen. Außerdem konnten einige Messungenwegen ihres Umfangs, der benötigten Hilfsmittel oder des damit verbundenen Zeitaufwands nichtin diesem Rahmen durchgeführt werden. Nachfolgend werden diese Themen als Grundlage fürweitere wissenschaftliche Untersuchungen zusammengefasst:
• Einige Datensätze zeigen zum jetzigen Zeitpunkt nicht erklärbare Verläufe. Es kann sichhierbei um zufällige Extrema handeln, da in dieser Feldstudie nur je eine Versuchsfahrt fürjedes Szenario und Parameterpaar (Datenrate und Nachrichtenlänge) durchgeführt wur-de. Eine Durchführung mehrerer Versuchsfahrten mit denselben Parametern im selben

7. Zusammenfassung und Ausblick 88
Umfeld würde eine Mittelwertbildung ermöglichen. Durch eine Auswertung dieser Mittel-werte könnte festgestellt werden, ob es sich tatsächlich um Extrema oder um typischeMesswerte handelt.
• Durch eine zyklische Untersuchung der Übertragungseigenschaften mit demselben Mess-system sowie im selben Umfeld, könnte die Abhängigkeit dieser von unterschiedlichenUmwelteinflüssen, wie z.B. der Belaubung von Bäumen oder der Wetterbedingungen, er-mittelt werden.
• Es könnten Versuchsfahrten bei unterschiedlichem Verkehrsaufkommen im selben Ver-suchsfeld durchgeführt werden. Dies würde bei der Ermittlung des Einflusses von nicht-statischen Störkörpern (Fahrzeugen) im Umfeld der Kommunikationsteilnehmer auf dieÜbertragungseigenschaften hilfreich sein. Dabei könnte beispielsweise eine Versuchsfahrtmit einer Abschattung der IVS durch einen Lastkraftwagen erzeugt werden.
• Bei der Analyse eines Datensatzes mithilfe des „V2X-Mess- und Analysetools“ wird dieÜbersicht des Versuchsfahrt erzeugt, die mit Google Earth gesichtet werden kann. Derzeitgeschieht die farbliche Darstellung der Messgrößen nach einem beliebig gewählten Ver-fahren (siehe 6.1). Dieses Verfahren könnte den Erkenntnissen dieser Studie abgepasstwerden. Hierdurch könnte die Bewertung der Kommunikation von dem Tool durchgeführtund dem Anwender in der Übersicht dargestellt werden.
• Im Rahmen dieser Arbeit konnte der Grund für die nicht-lineare Abhängigkeit der Latenzvon der Nachrichtenlänge nicht ermittelt werden. Hierzu sind weitere Messungen nötig,bei denen eine genauere Zeitsynchronisation im Messsystem gewährleistet werden kann.
• Eine hochgenaue Messung der Latenz einer Nachricht bei NLOS hätte ebenfalls eine wis-senschaftlichen Wert. Hierdurch könnte festgestellt werden welche Strecke eine Nachrichtzurückgelegt hat, bis sie empfangen wird.
Diese Arbeit bringt neue Erkenntnisse über die Übertragungseigenschaften des an der AIM-Referenzstrecke des Deutschen Zentrums für Luft- und Raumfahrt eingesetzten Kommunikati-onssystems. Es ist wünschenswert, dass die Ergebnisse als Grundlage für weitere Forschungs-arbeit im Bereich der Fahrzeug-zu-X Kommunikation dienen.

Literaturverzeichnis
[Bardwell 2002] BARDWELL, Joe: Converting Signal Strength Percentage to dBm Values /Professional Services. 2002. – Forschungsbericht
[Billings 2013] BILLINGS, David: OSI Model. Webseite. 2013. – URL http://gtcc-it.net/billings/osi1.htm. – Guilford Technical Community College, abgerufen am06.08.2013
[Busche 2012] BUSCHE, Holger: Selbstorganisierende Fahrzeug-zu-Fahrzeug Kommunikati-on. Cuvillier Verlag Göttingen, 2012. – ISBN 978-3-95404-1701
[C2C-CC 2007] C2C-CC: Car 2 Car Communication Consortium Manifesto. 2007. – Version1.1
[DLR 2010] DLR, TS-AIM: Anwendungsplattform Intelligente Mobilität. Broschüre. 4 2010.– URL http://www.dlr.de/fs/Portaldata/16/Resources/dokumente/service/DLR-TS_AnwendungsplattformIntelligenteMobilitaet.pdf
[Elson und Estrin 2003] ELSON, Jeremy E. ; ESTRIN, Deborah: Time synchronization in wire-less sensor networks, University of California, Los Angeles, Dissertation, 2003
[EndRun 2013] ENDRUN: Introduction to NTP / EndRun Technologies. URL http://www.endruntechnologies.com/pdf/NTP-Intro.pdf, 2013. – Forschungsbericht
[ETSI 2010] ETSI: ETSI ES 202 663 v1.1.0 / European Telecommunications StandardsInstitute. 2010. – Standard
[Garg 2007] GARG, Vijay K.: Wireless Communication and Networking. Morgan KaufmannPublishers, 2007. – ISBN 978-0-12-373580-5
[GIG 2013] GIG: Receiver Sensitivity/Noise / Granite Island Group. URL http://www.tscm.com/rcvr_sen.pdf, 2013. – Forschungsbericht
[GoogleEarth 2013] GOOGLEEARTH: Google Earth. Software. 2013. – Kartenmaterial abge-rufen im Zeitraum 25.06.-11.08.2013
[Hyncica u. a. 2012] HYNCICA, Ondrej ; HONZIK, Petr ; KUCERA, Pavel ; PAVLATA, Karel: UrbanVehicle-to-Infrastructure Wireless Communications Range Evaluation. In: International IEEEConference on Intelligent Transportation Systems (2012), Nr. 15, S. 915–920
[MadWifi-Projekt 2013] MADWIFI-PROJEKT: MadWifi-Projekt. Webseite. 2013. – URL http://www.madwifi-project.org/. – abgerufen am 20.07.2013

Literaturverzeichnis 90
[Maier u. a. 2011] MAIER, Georg ; PAIER, Alexander ; MECKLENBRÄUKER, Christoph F.: PacketDetection and Frequency Synchronization with Antenna Diversity for IEEE 802.11p Based onReal-World Measurements / Vienna University of Technology, Institute of Telecommunicati-ons. 2011. – Forschungsbericht
[l. Mills 1991] MILLS, David l.: Internet time synchronization: the network time protocol. In:IEEE Transactions on Communications 39 (1991), Nr. 10, S. 1482–1493
[Mobile Mark 2013] Mobile Mark (Veranst.): SMW-404 Series Antennas. 2013
[Molisch u. a. 2011] MOLISCH, Andreas F. ; MECKLENBRÄUKER, Christoph F. ; KAREDAL,Johan ; TUFVESSON, Fredrik ; PAIER, Alexander ; BERNADO, Laura ; ZEMEN, Thomas ;KLEMP, Oliver ; CZINK, Nicolai: Vehicular channel characterization and its implications forwireless system design and performance. In: Proceedings of the IEEE 99 (2011), Nr. 7,S. 1189–1212
[NEC Laboratories 2012] NEC Laboratories (Veranst.): Car2X Communication SDK - ProtocolStack. 2.3. 8 2012
[NEC Laboratories 2013] NEC Laboratories (Veranst.): Car2X Communication SDK - UserGuide. 2.3.3. 1 2013
[OpenStreetMap 2013] OPENSTREETMAP: OpenStreetMap. Webseite. 2013. – URL http://www.openstreetmap.org/. – abergerufen im Zeitraum 29.06.-11.08.2013
[Reichardt u. a. 2009] REICHARDT, Lars ; STURM, Christian ; ZWICK, Thomas: Performanceevaluation of SISO, SIMO and MIMO antenna systems for car-to-car communications in urbanenvironments, IEEE, 2009, S. 51–56
[Schmidt u. a. 2009] SCHMIDT, Robert K. ; LEINMÜLLER, Tim ; BÖDDEKER, Bert: V2X Kom-munikation. 2009
[Sridhara und Bohacek 2007] SRIDHARA, Vinay ; BOHACEK, Stephan: Realistic propagationsimulation of urban mesh networks. In: Computer Networks 51 (2007), Nr. 12, S. 3392–3412
[Wistron 2006] Wistron (Veranst.): DCMA-82 Market Product Specification. 2006. – Version0.1

A. Ergebnisdarstellung
12
3 4 5
6 9
7
11 13
108 12
14
17
15
16 20
18
19
21
22
Abbildung A.1.: Versuchsfeld K047: Ausschnitt des Datensatzes K047-0400-06 [Satellitenbildaus GoogleEarth, 2013]

A. Ergebnisdarstellung 92
Abbildung A.2.: Versuchsfeld K047: RSSI aller Datensätze über die Distanz von Süd nach Nord
Abbildung A.3.: Versuchsfeld K047: PER aller Datensätze über die Distanz von Süd nach Nord

A. Ergebnisdarstellung 93
Abbildung A.4.: Versuchsfeld K047: Latenz aller Datensätze über die Distanz von Süd nach Nord

B. Inhalt der beigelegten Daten-CD
• Bachelorthesis (Thesis als PDF-Datei)
• Quellen (verwendete Quellen)
– [Bardwell-2002] Converting Signal Strength
– [C2C-2007] C2C-CC Manifesto
– [DLR-2010] Anwendungsplattform Intelligente Mobilität
– [Elson-2003] Time Synchronization in Wireless Sensor Networks
– [EndRun-2013] Introduction to NTP
– [ETSI-2010] ES 202 663 v1-1-0
– [GIG-2013] Receiver Sensitivity - Noise
– [Hynicica-2012] Urban Vehicle-to-Infrastructure Wireless Communications RangeEvaluation
– [Maier-2011] Packet Detection and Frequency Synchronization
– [Meinberg-2012] Handbuch GPS170PCI
– [Millis-1991] Internet Time Synchronization: The Network Time Protocol
– [Molisch-2011] Vehicular Channel Characterization and its Implications for WirelessSystem Design and Performance
– [NEC-2012] C2X-SDK2 Protocol Stack v2-3
– [NEC-2013] C2X-SDK2 User Guide v2-2-3
– [Rechardt-2009] Performance Evaluation of SISO, SIMO and MIMO Antenna Sys-tems for Car-to-Car Communications in Urban Environments
– [Schmidt-2009] V2X Kommunikation
– [Sidhara-2007] Realistic Propagation Simulation of Urban Mesh Networks
– [Wistron:2006] DCMA-82 Market Product Specification
• V2X-Mess- und Analysetool (entwickelte Messsoftware)
– Readme - V2X-Mess- und Analysetool (Kurzanleitung als PDF-Datei)
– V2X-Mess- und Analysetool (Messsoftware)
– Starte Tool (Linux) (Skript zum Starten des Tools unter Linux)
– V2xMeasurement (Konfigurationsdatei des Tools)
– rawData (Rohdaten der Versuchsfahrten)
– sources (Daten des Tools)

B. Inhalt der beigelegten Daten-CD 95
• KML-Dateien der Datensätze (Übersichten der Versuchsfahrten)
– K047-0400-03
– K047-0400-06
– K047-0400-27
– K047-1554-06
– K047-1554-27
– K071-0400-06
– K071-0400-27
– K071-1554-06
– K071-1554-27

Versicherung über die Selbstständigkeit
Hiermit versichere ich, dass ich die vorliegende Arbeit im Sinne der Prüfungsordnung nach§16(5) APSO-TI-BM ohne fremde Hilfe selbstständig verfasst und nur die angegebenen Hilfs-mittel benutzt habe. Wörtlich oder dem Sinn nach aus anderen Werken entnommene Stellenhabe ich unter Angabe der Quellen kenntlich gemacht.
Hamburg, 13. August 2013Ort, Datum Unterschrift





























