Embed Size (px)
Citation preview

Sichere MRK in industriellen AnwendungenEntwicklungsschritte bei ABB Corporate Research
Björn Matthias – 2011-01-26
44. Sitzung des FA 4.13 »Steuerung und Regelung von Robotern«
Praxisnahe Definition
Wirtschaftliche Relevanz
Normen und Gefährdungsbeurteilung
Entwicklungsbeispiele
Offene Fragen und Ausblick
Übersicht
Definition
Wirtschaftlichkeit
Normen
Beispiele
Offene Fragen
Sichere MRK in industriellen AnwendungenÜbersicht
2011-01-26 | Slide 2
© ABB Group
Übersicht
Definition
Wirtschaftlichkeit
Normen
Beispiele
Offene Fragen
Sichere MRK in industriellen AnwendungenPraxisnahe Definition
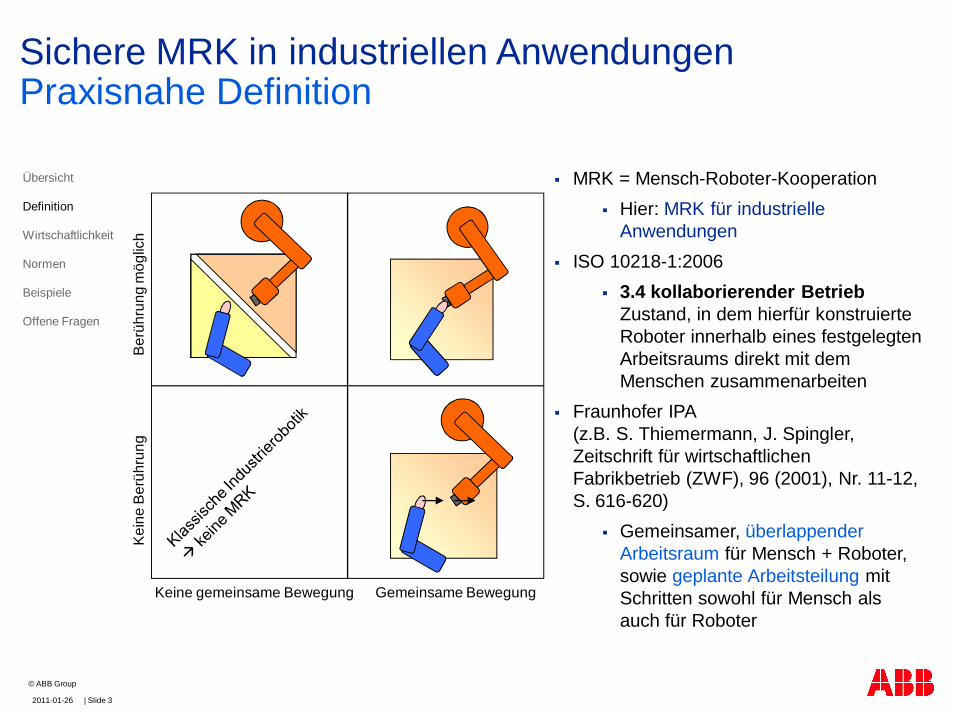
MRK = Mensch-Roboter-KooperationHier: MRK für industrielle Anwendungen
ISO 10218-1:20063.4 kollaborierender BetriebZustand, in dem hierfür konstruierte Roboter innerhalb eines festgelegten Arbeitsraums direkt mit dem Menschen zusammenarbeiten
Fraunhofer IPA(z.B. S. Thiemermann, J. Spingler, Zeitschrift für wirtschaftlichen Fabrikbetrieb (ZWF), 96 (2001), Nr. 11-12, S. 616-620)
Gemeinsamer, überlappender Arbeitsraum für Mensch + Roboter, sowie geplante Arbeitsteilung mit Schritten sowohl für Mensch als auch für Roboter
2011-01-26 | Slide 3
© ABB Group
Keine gemeinsame Bewegung
Kei
ne B
erüh
rung
Ber
ühru
ng m
öglic
h
Gemeinsame Bewegung

Sichere MRK in industriellen Anwendungen
Kooperationstyp1. Einmalig zum Einrichten
(z.B. Einlernhilfe)
2. Punktuell wiederkehrend(z.B. manuelles Einlegen, dritte Hand)
3. Regelmäßig bis dauerhaft(z.B. Handführung)
Übersicht
Definition
Wirtschaftlichkeit
Normen
Beispiele
Offene Fragen
Praxisnahe Definition
1
2
3
2011-01-26 | Slide 4
© ABB Group
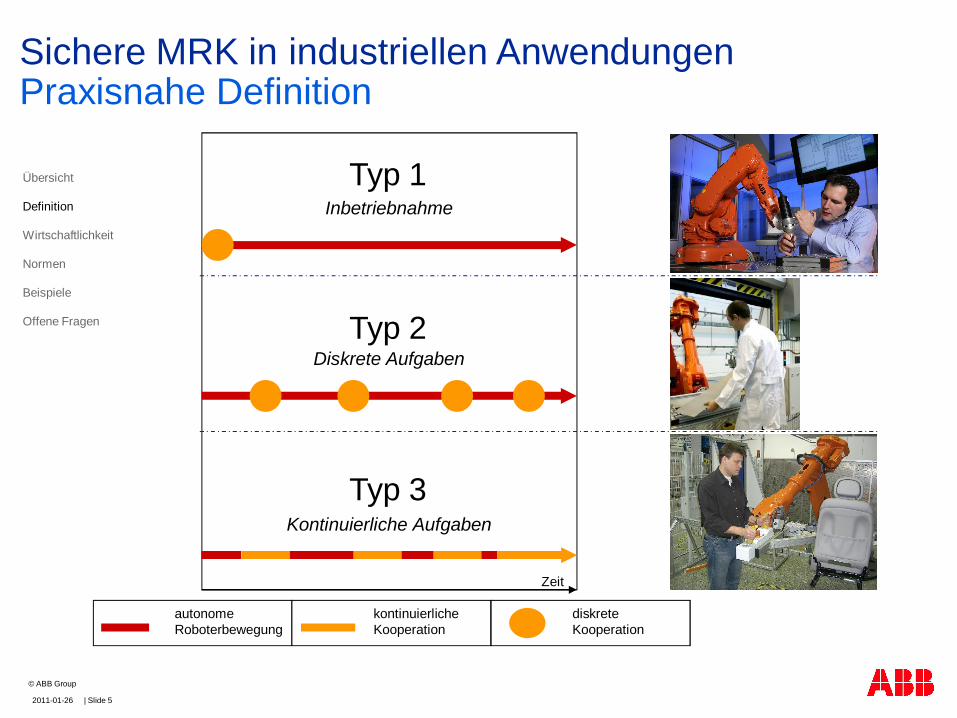
Zeit
Sichere MRK in industriellen Anwendungen
Übersicht
Definition
Wirtschaftlichkeit
Normen
Beispiele
Offene Fragen
Praxisnahe Definition
Typ 1Inbetriebnahme
Typ 2Diskrete Aufgaben
Typ 3Kontinuierliche Aufgaben
autonomeRoboterbewegung
kontinuierlicheKooperation
diskreteKooperation
2011-01-26 | Slide 5
© ABB Group
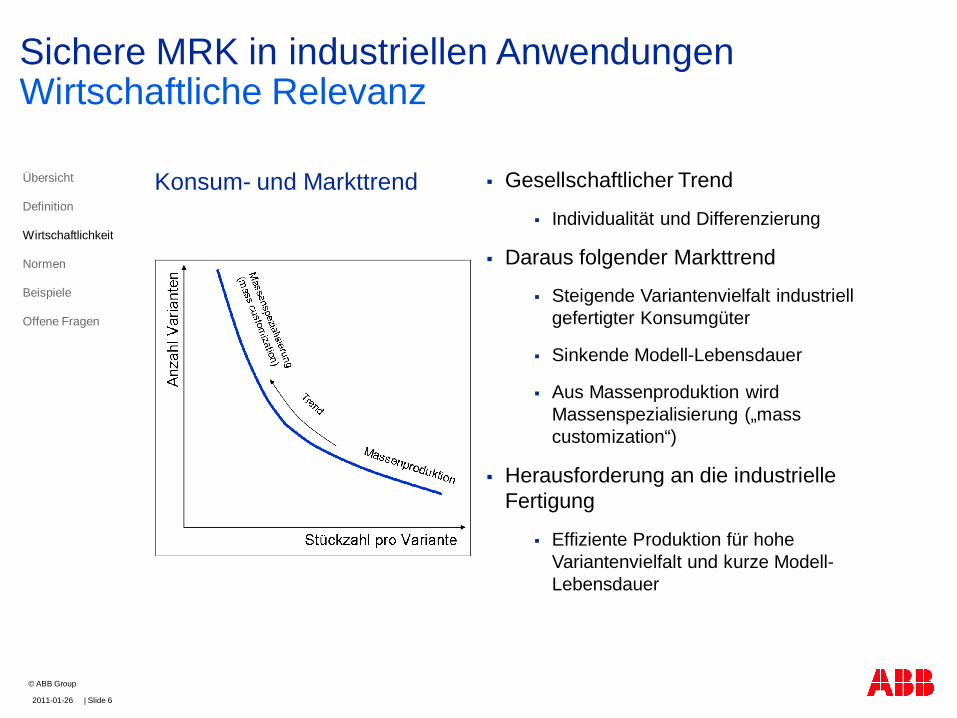
Gesellschaftlicher Trend
Individualität und Differenzierung
Daraus folgender Markttrend
Steigende Variantenvielfalt industriell gefertigter Konsumgüter
Sinkende Modell-Lebensdauer
Aus Massenproduktion wird Massenspezialisierung („masscustomization“)
Herausforderung an die industrielle Fertigung
Effiziente Produktion für hohe Variantenvielfalt und kurze Modell-Lebensdauer
Übersicht
Definition
Wirtschaftlichkeit
Normen
Beispiele
Offene Fragen
Sichere MRK in industriellen AnwendungenWirtschaftliche Relevanz
Konsum- und Markttrend
2011-01-26 | Slide 6
© ABB Group
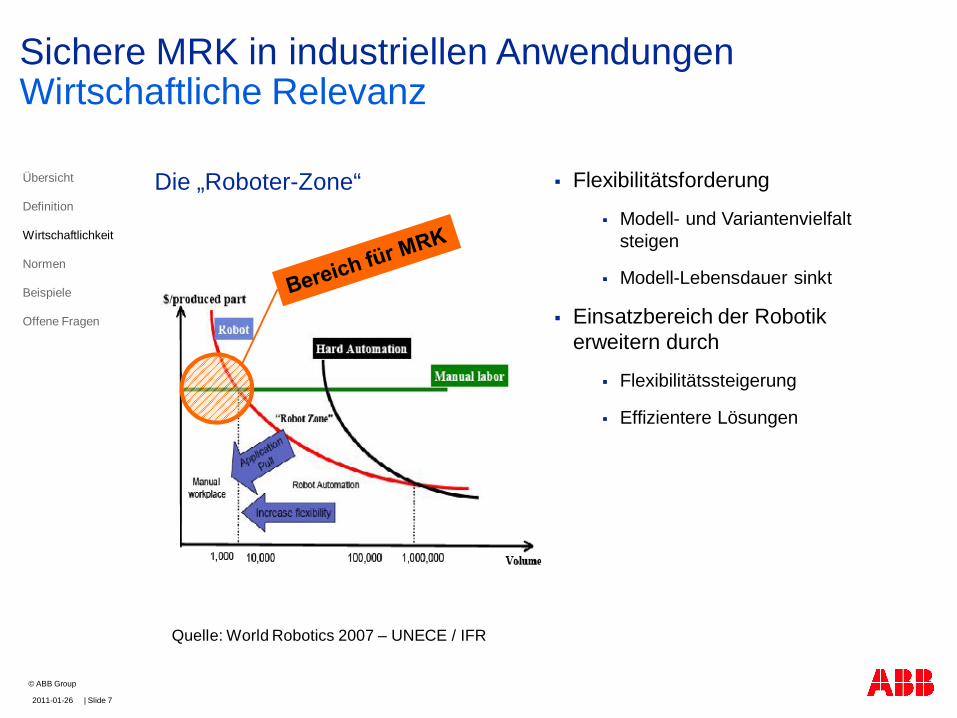
Flexibilitätsforderung
Modell- und Variantenvielfalt steigen
Modell-Lebensdauer sinkt
Einsatzbereich der Robotik erweitern durch
Flexibilitätssteigerung
Effizientere Lösungen
Übersicht
Definition
Wirtschaftlichkeit
Normen
Beispiele
Offene Fragen
Sichere MRK in industriellen AnwendungenWirtschaftliche Relevanz
Quelle: World Robotics 2007 – UNECE / IFR
Die „Roboter-Zone“
2011-01-26 | Slide 7
© ABB Group
Sichere MRK in industriellen Anwendungen
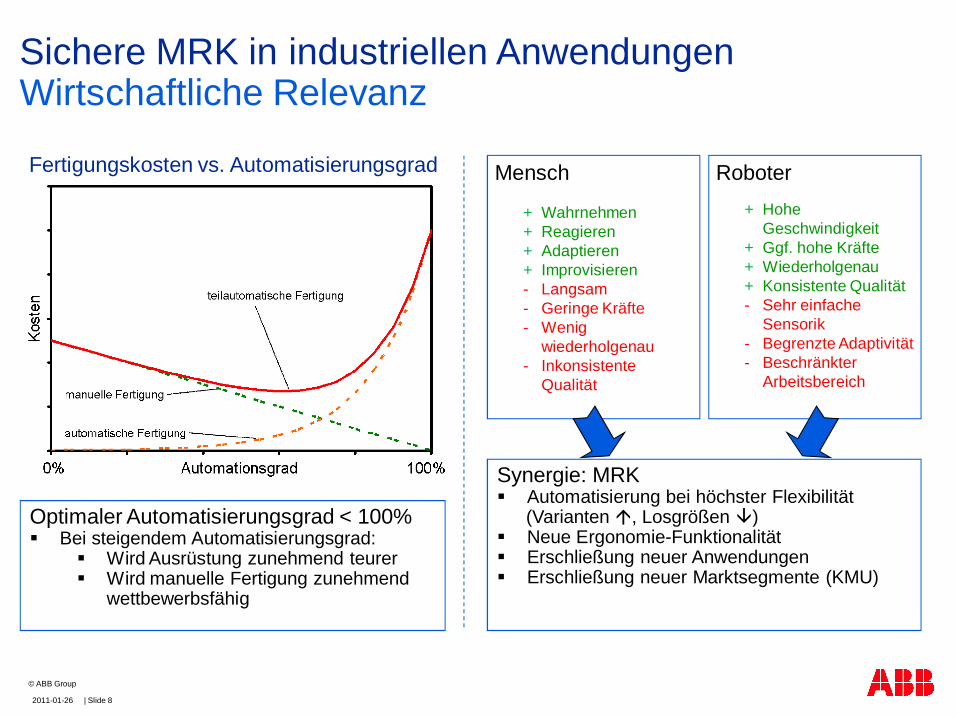
Mensch
+ Wahrnehmen+ Reagieren+ Adaptieren+ Improvisieren- Langsam- Geringe Kräfte - Wenig
wiederholgenau- Inkonsistente
Qualität
Roboter+ Hohe
Geschwindigkeit + Ggf. hohe Kräfte + Wiederholgenau+ Konsistente Qualität- Sehr einfache
Sensorik- Begrenzte Adaptivität- Beschränkter
Arbeitsbereich
Synergie: MRKAutomatisierung bei höchster Flexibilität (Varianten , Losgrößen )Neue Ergonomie-FunktionalitätErschließung neuer AnwendungenErschließung neuer Marktsegmente (KMU)
Optimaler Automatisierungsgrad < 100%Bei steigendem Automatisierungsgrad:
Wird Ausrüstung zunehmend teurerWird manuelle Fertigung zunehmend wettbewerbsfähig
Fertigungskosten vs. Automatisierungsgrad
Wirtschaftliche Relevanz
2011-01-26 | Slide 8
© ABB Group
Sichere MRK in industriellen Anwendungen
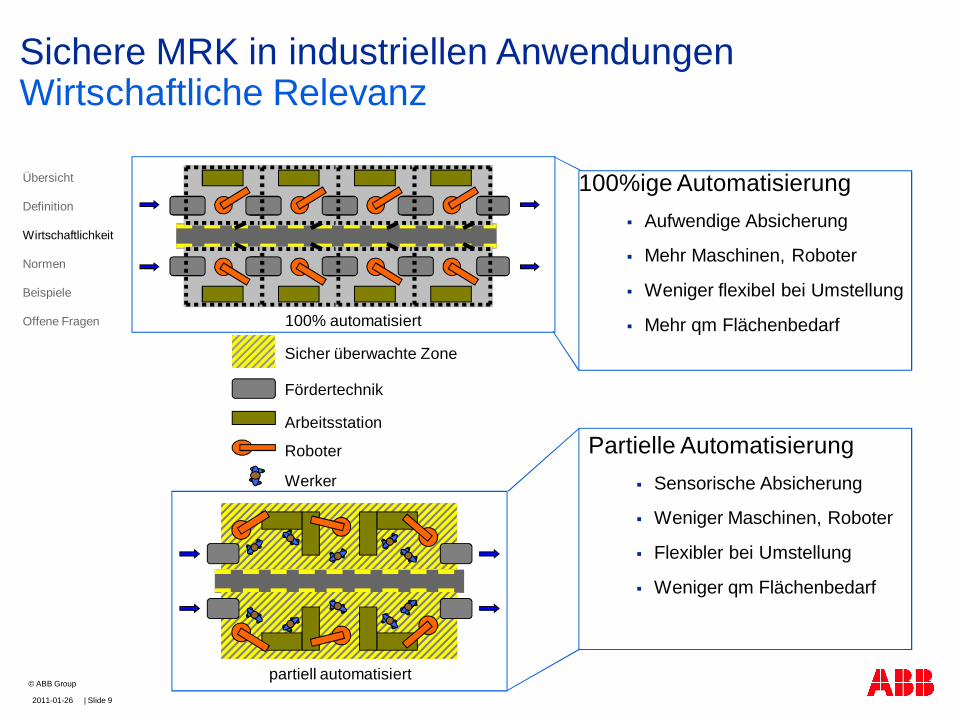
100%ige AutomatisierungAufwendige Absicherung
Mehr Maschinen, Roboter
Weniger flexibel bei Umstellung
Mehr qm Flächenbedarf100% automatisiert
partiell automatisiert
Sicher überwachte Zone
Fördertechnik
Arbeitsstation
Roboter
Werker
Partielle AutomatisierungSensorische Absicherung
Weniger Maschinen, Roboter
Flexibler bei Umstellung
Weniger qm Flächenbedarf
Wirtschaftliche Relevanz
Übersicht
Definition
Wirtschaftlichkeit
Normen
Beispiele
Offene Fragen
2011-01-26 | Slide 9
© ABB Group
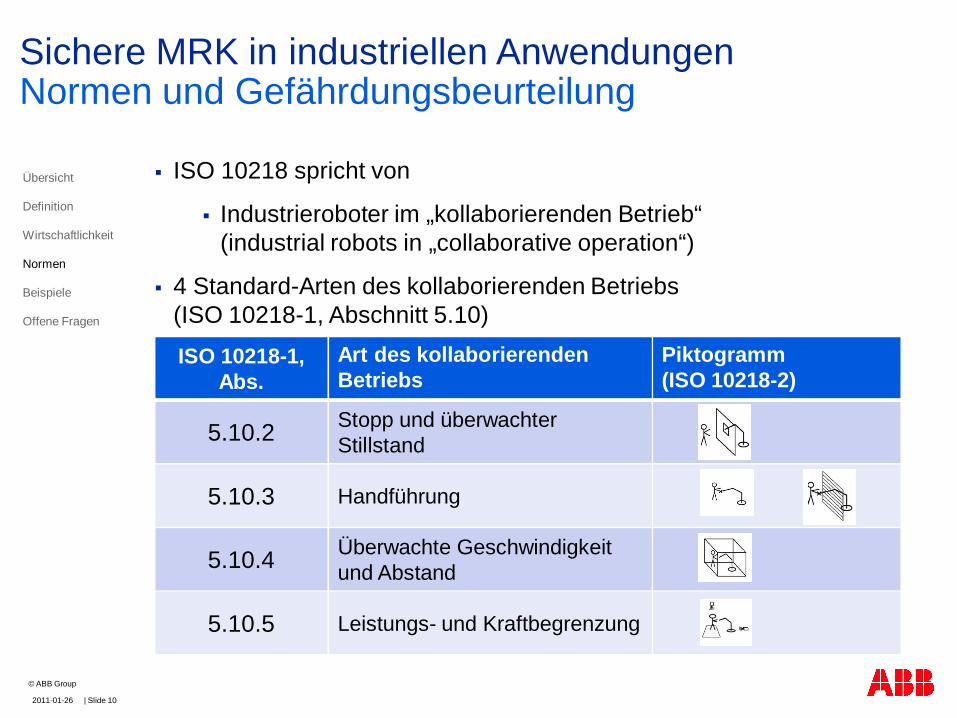
ISO 10218-1, Abs.
Art des kollaborierenden Betriebs
Piktogramm(ISO 10218-2)
5.10.2 Stopp und überwachter Stillstand
5.10.3 Handführung
5.10.4 Überwachte Geschwindigkeit und Abstand
5.10.5 Leistungs- und Kraftbegrenzung
ISO 10218 spricht von
Industrieroboter im „kollaborierenden Betrieb“(industrial robots in „collaborative operation“)
4 Standard-Arten des kollaborierenden Betriebs(ISO 10218-1, Abschnitt 5.10)
Übersicht
Definition
Wirtschaftlichkeit
Normen
Beispiele
Offene Fragen
Sichere MRK in industriellen AnwendungenNormen und Gefährdungsbeurteilung
2011-01-26 | Slide 10
© ABB Group
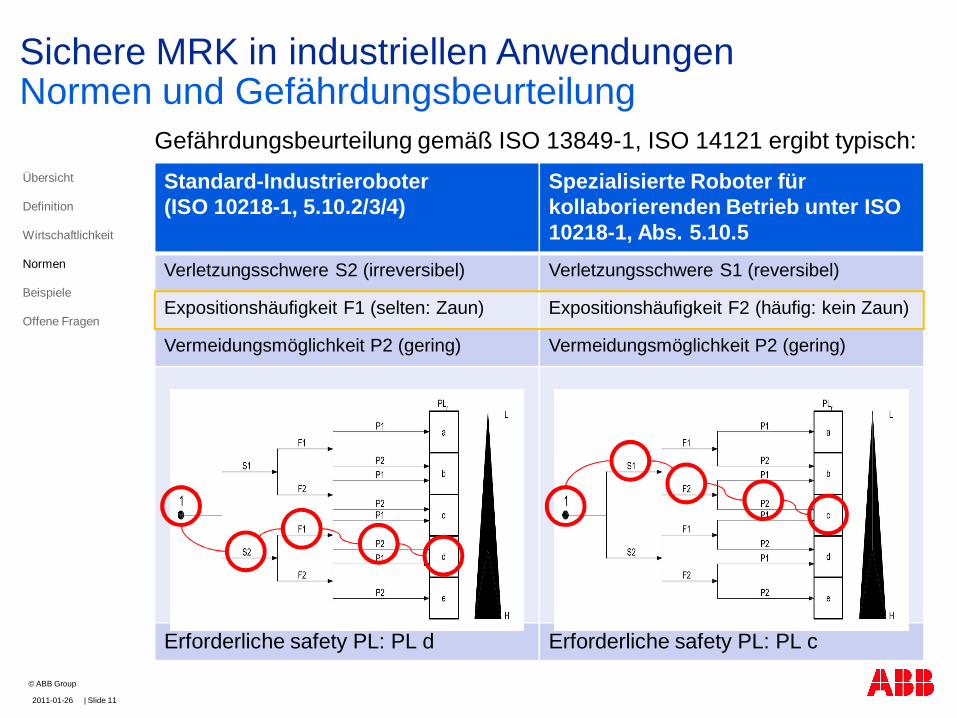
Gefährdungsbeurteilung gemäß ISO 13849-1, ISO 14121 ergibt typisch:
Standard-Industrieroboter(ISO 10218-1, 5.10.2/3/4)
Spezialisierte Roboter für kollaborierenden Betrieb unter ISO 10218-1, Abs. 5.10.5
Verletzungsschwere S2 (irreversibel) Verletzungsschwere S1 (reversibel)
Expositionshäufigkeit F1 (selten: Zaun) Expositionshäufigkeit F2 (häufig: kein Zaun)
Vermeidungsmöglichkeit P2 (gering) Vermeidungsmöglichkeit P2 (gering)
Erforderliche safety PL: PL d Erforderliche safety PL: PL c
Übersicht
Definition
Wirtschaftlichkeit
Normen
Beispiele
Offene Fragen
Sichere MRK in industriellen AnwendungenNormen und Gefährdungsbeurteilung
2011-01-26 | Slide 11
© ABB Group

Basistechnologie Safety Controller„EPS“ (Electronic Position Switches) – seit 2007Achsbereichsüberwachung„SafeMove“ – seit 2008EPS + kartesisch + Orientierung
ApplikationsartenEinlegen bei sicherem Stillstand + automatischer Wiederanlauf (entspricht ISO 10218-1 Abs. 5.10.2)Handführen des Roboters durch sicheres Bedienpult am Werkzeug –„Produktionsassistent“ (entspricht ISO 10218-1 Abs. 5.10.3)Sichere Überwachung von Geschwindigkeit und Abstand (entspricht ISO 10218-1 Abs. 5.10.4)(Leistungs- und Kraftbegrenzung (nach ISO 10218-1:2006 Abs. 5.10.5, 5.10.6))
Übersicht
Definition
Wirtschaftlichkeit
Normen
Beispiele
Offene Fragen
Sichere MRK in industriellen AnwendungenEntwicklungsbeispiele – Übersicht
2011-01-26 | Slide 12
© ABB Group
IRC 5
EPS SafeMove

AufbauStandard Industrieroboter + Steuerung:IRB6600 + IRC5 incl. Option SafeMove
Roll-Tor, Bereichsüberwachung davor (Hintertretschutz in Demo weggelassen)
FunktionenSicherer Stillstand zum Einlegen
Bei Verlassen des Einlegebereichs, Roll-Tor Schließung + automatischer Wiederanlauf
• Gefährdungsbeurteilung• Stoß durch Roboter
SafeMove: sicherer Stillstand
• Klemmung Hand/Finger an EinlegefensterRoll-Tor
• Hintertretenz.B. Scanner
• Vorzeitiger WiederanlaufBereichsüberwachung durch Scanner
Übersicht
Definition
Wirtschaftlichkeit
Normen
Beispiele
Offene Fragen
Sichere MRK in industriellen AnwendungenEntwicklungsbeispiele – Einlegen bei sicherem Stopp
2011-01-26 | Slide 13
© ABB Group

Übersicht
Definition
Wirtschaftlichkeit
Normen
Beispiele
Offene Fragen
AufbauStandard Industrieroboter + Steuerung: IRB6640 + IRC5 incl. Option SafeMove
MRK Steuerpult, sichere 2-Hand-Bedienung (Zustimmtaster), Not-Aus
Funktionen per Joystick
Virtuelle Schiene
Freies Verfahren
Übersicht
Definition
Wirtschaftlichkeit
Normen
Beispiele
Offene Fragen
Sichere MRK in industriellen AnwendungenEntwicklungsbeispiele – Handführung
2011-01-26 | Slide 14
© ABB Group
• Gefährdungsbeurteilung
• Stoß durch Roboter bei > 250 mm/sSafeMove: v 250 mm/s
• Klemmung Hand/Finger durch Roboter an Zellenperipherie
Zwei-Hand-Bedienung
• Standardgefährdung unter OberarmArbeitsanweisung

AufbauZusammenarbeit mit Uni Bayreuth, Prof. Dominik HenrichStandard Industrieroboter + Steuerung: IRB6640 + IRC54 Grauwertkameras in Zelle verteiltFunktionen
Automatische GeschwindigkeitsanpassungIn der Demo nicht durchgehend sicherheitsgerichtet
Aktuelle ThemenSichere Implementierung von
dynamischen Zonenadaptiver Geschwindigkeitsanpassung
Sicherheitsgerichtete Schnittstellen zu entsprechender SensorikSichere Berücksichtigung von Bremswegen
Übersicht
Definition
Wirtschaftlichkeit
Normen
Beispiele
Offene Fragen
Sichere MRK in industriellen AnwendungenEntwicklungsbeispiele – dynamische Zonen
2011-01-26 | Slide 15
© ABB Group

Sichere MRK in industriellen Anwendungen
Spezialisierte Roboterentwicklungen für kollaborierenden Betrieb gemäß ISO 10218-1, 5.10.5, z.B.
DLR / Kuka LWR (safety PL?)Universal Robots (Konzeptprüfung, F < 150 N)Neuronics Katana, TIM 101 (v < 250 mm/s)
Beschreibung der Applikationsanforderungen (und ggf. Praxis) in ISO/TS 15066 „Robots and robotic devices – Collaborative robots”Gefährdungsbeurteilung ist anders als für Standard-Roboter:
Detaillierte Kenntnis der Biomechanik von geringfügigen Verletzungen ist notwendigGesamtapplikation inkl. Werkstück etc. spielt eine besonders wichtige Rolle
Übersicht
Definition
Wirtschaftlichkeit
Normen
Beispiele
Offene Fragen
Entwicklungsbeispiele – Leistungs- u. Kraftbegrenzung
2011-01-26 | Slide 16
© ABB Group
FP7 ICT 230902 ROSETTA - Seite 17
ROSETTA
RObot control for Skilled ExecuTion of Tasks in natural interaction with humans; based on Autonomy, cumulative
knowledge and learning
ROSETTA entwickelt ergonomische Technologien für Industrieroboter, die durch menschenähnliche und sichere Bewegungen die Kooperation mit Werkern auf natürlich anmutende Weise ermöglichen. Diese Roboter werden intuitiv und effizient programmierbar sein, damit sie nach Produktionsumstellungen leichter an neue Aufgaben angepasst werden können.
FP7 ICT 230902 ROSETTA - Seite 18
Zielsetzung des Projekts
Übergeordnetes Ziel:Einen Industrieroboter dazu ertüchtigen, Aufgaben in
einer ansonsten manuellen Fertigungslinie zu übernehmen
Einfache Bedienbarkeit• Häufige Umstellungen einfach• Nur minimales Basiswissen nötig• Komplexe Aufgaben einfach
anweisen
Personensicherheit• Arbeitsplätze in beengter
Umgebung• Kooperation zwischen Mensch
und Roboter
FP7 ICT 230902 ROSETTA - Seite 19
Projekt-Steckbrief
EckdatenEU Siebentes Rahmenprogramm
Challenge 2 – Cognitive Systems, Interaction, Robotics
Projekt-Typ: Large-ScaleIntegrating Project (IP)Laufzeit: Mar. 2009 – Feb. 2013Gesamtvolumen: ca. 10 MEUR
KonsortiumABB AB (Schweden, Koordinator)ABB AG (Deutschland)DYNAmore GmbH (Deutschland)Fraunhofer IPA (Deutschland)K.U. Leuven (Belgien)Ludwig-Maximilians-Universität Munich (Deutschland)Lund University (Schweden)Politecnico di Milano (Italien)
FP7 ICT 230902 ROSETTA - Seite 20
Zielstellungen und Forschungsschwerpunkte
Zielstellungen Ertüchtigung von Robotern für komplexe Aufgaben mit hoher Flexibilität und RobustheitVerringerung des Einrichtaufwands für eine schnelle Produktionsumstellung von Produkt A auf Produkt BErstellung eines leicht bedienbarenProgrammiersystems, um ROSETTA-Roboter Funktionalität auch ohne qualifizierte Programmierer einzusetzenEntwicklung von neuer Sensorik, Regelungs-und Entscheidungs-Algorithmik für personensichere, direkte Mensch-Roboter-Interaktion in einem realistischen Produktionsszenario
ForschungsthemenIntuitive Programmierung des Roboters
Aufgabenorientierte ProgrammierungDarstellung von Wissen und FähigkeitenEngineering-Werkzeug
RobotersteuerungSensorintegrationMontage-Arbeitsschritte
LernenAnwendungsorientierte ArchitekturSemantische Wahrnehmung und Interpretation
PersonensicherheitDirekte Mensch-Roboter-InteraktionVerletzungskriterienÜberwachung des Arbeitsraums
FP7 ICT 230902 ROSETTA - Seite 21
Schwerpunkte und voraussichtliche Ergebnisse
SchwerpunkteFramework für Wissens-IntegrationAspekte des ErgonomieKriterien für PersonensicherheitRobot Kinematics
ErgebnisseNeue Anwendungen für Automatisierung mit RoboternErhöhte Flexibilität in Automatisierungs-LösungenSenkung der ProduktionskostenSteigerung der ProduktqualitätBeschreibung und Modellierung des physikalischen Kontakts Mensch-RoboterKlassifizierungsschema für Verletzungsrisiken ermöglicht Normung von „kollaborierenden Robotern“ (Mitwirkung bei ISO/TS 15066)
FP7 ICT 230902 ROSETTA - Seite 22
PY1 Highlight: Framework für Wissensbasis
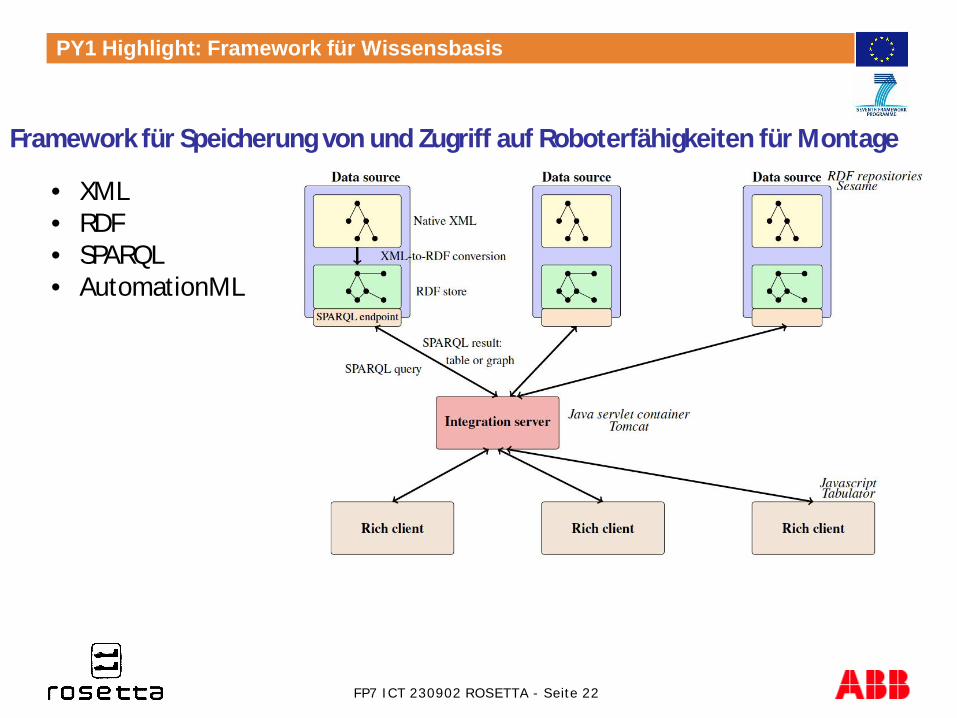
Framework für Speicherung von und Zugriff auf Roboterfähigkeiten für Montage
• XML• RDF• SPARQL• AutomationML
FP7 ICT 230902 ROSETTA - Seite 23
PY1 Highlight: Untersuchung menschenähnlicher Bewegung
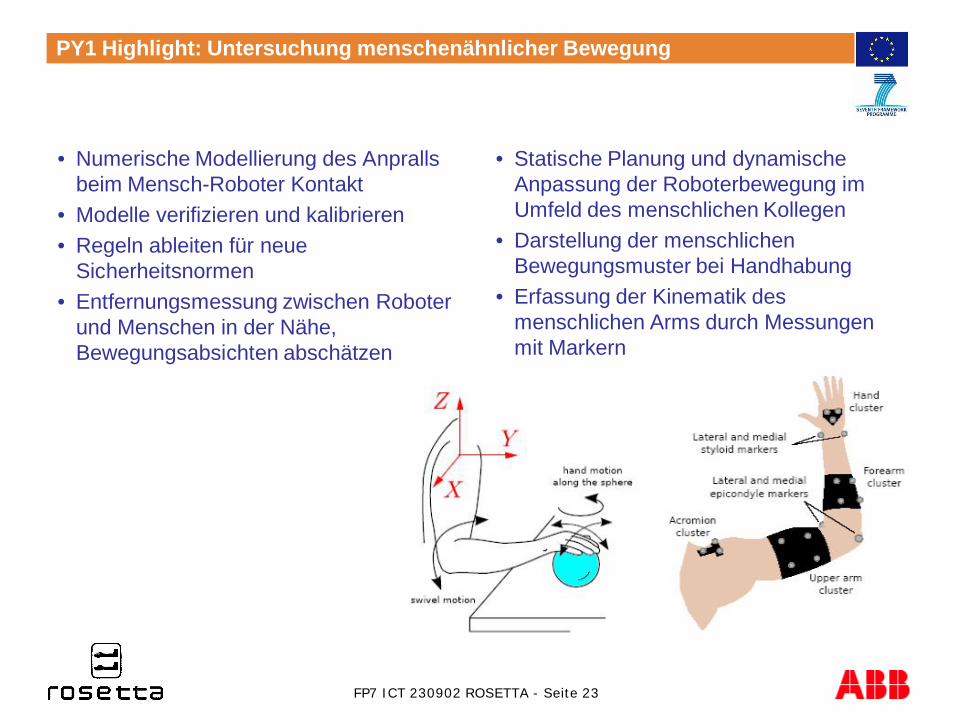
• Numerische Modellierung des Anpralls beim Mensch-Roboter Kontakt
• Modelle verifizieren und kalibrieren• Regeln ableiten für neue
Sicherheitsnormen• Entfernungsmessung zwischen Roboter
und Menschen in der Nähe, Bewegungsabsichten abschätzen
• Statische Planung und dynamische Anpassung der Roboterbewegung im Umfeld des menschlichen Kollegen
• Darstellung der menschlichen Bewegungsmuster bei Handhabung
• Erfassung der Kinematik des menschlichen Arms durch Messungen mit Markern
FP7 ICT 230902 ROSETTA - Seite 24
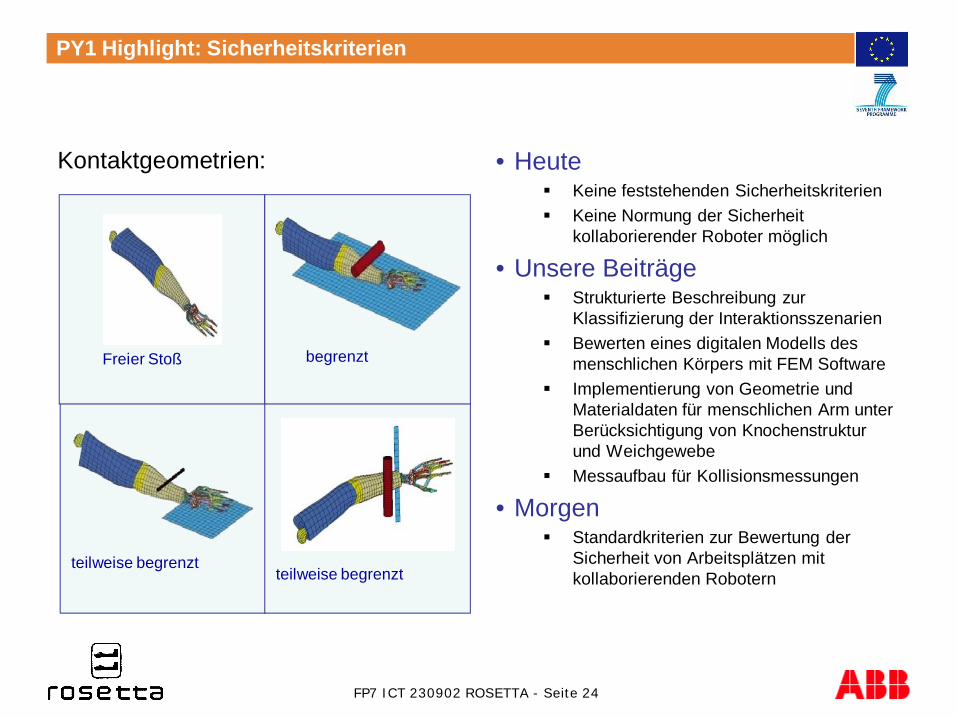
PY1 Highlight: Sicherheitskriterien
• HeuteKeine feststehenden SicherheitskriterienKeine Normung der Sicherheit kollaborierender Roboter möglich
• Unsere BeiträgeStrukturierte Beschreibung zur Klassifizierung der InteraktionsszenarienBewerten eines digitalen Modells des menschlichen Körpers mit FEM SoftwareImplementierung von Geometrie und Materialdaten für menschlichen Arm unter Berücksichtigung von Knochenstruktur und WeichgewebeMessaufbau für Kollisionsmessungen
• MorgenStandardkriterien zur Bewertung der Sicherheit von Arbeitsplätzen mit kollaborierenden Robotern
Freier Stoß begrenzt
teilweise begrenztteilweise begrenzt
Kontaktgeometrien:
FP7 ICT 230902 ROSETTA - Seite 25
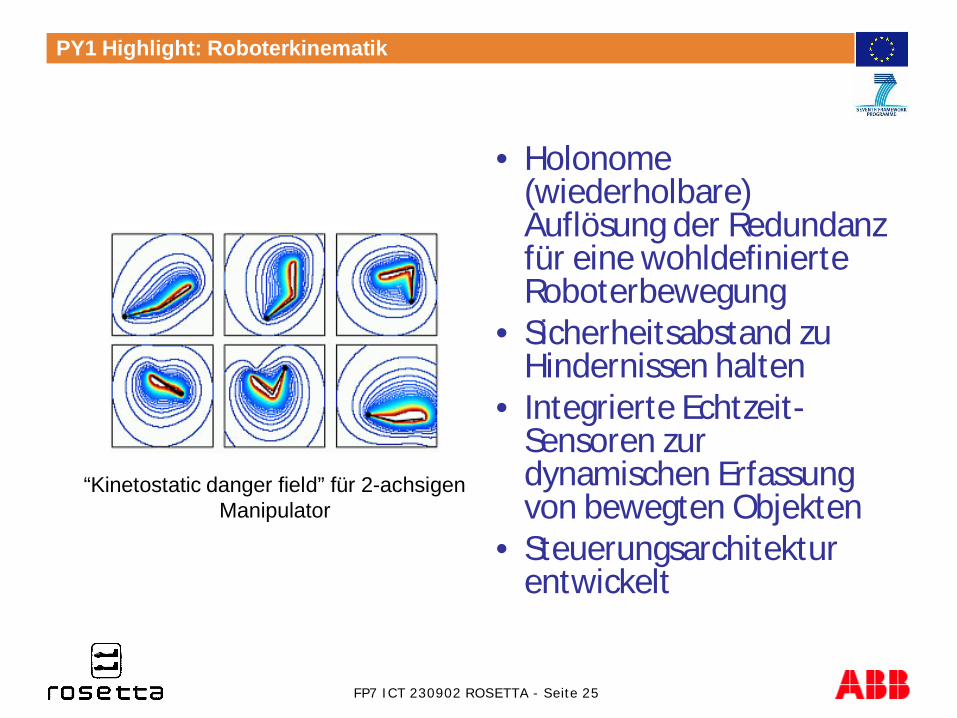
PY1 Highlight: Roboterkinematik
• Holonome(wiederholbare) Auflösung der Redundanz für eine wohldefinierte Roboterbewegung
• Sicherheitsabstand zu Hindernissen halten
• Integrierte Echtzeit-Sensoren zur dynamischen Erfassung von bewegten Objekten
• Steuerungsarchitektur entwickelt
“Kinetostatic danger field” für 2-achsigen Manipulator
FP7 ICT 230902 ROSETTA - Seite 26
Aktuelle Fragen und Ausblick
Leichte BedienbarkeitAnpassung an Benutzergruppen ist ein DauerthemaRoboter-Spezifika in den Hintergrund / Applikations-Spezifika in den Vordergrund„low-cost“: Bedienung einfach wie ein elektrisches (Hand-) Werkzeug, wenige „Knöpfe“ führen zum Ziel„high-end“: Durch „maschinelles Lernen“ wird der Roboter zum kompetenten „Kollegen“, kann auf „Erfahrung“ zurückgreifen, versteht komplexe Kommandos
Sicherheit in der Mensch-Roboter KooperationNormung (ISO / TS 15066 Robots and robotic devices - Safety requirements -Industrial collaborative workspace)Entwurfsrichtlinien und Testverfahren für personensichere RoboterRegelungstechnische Beeinflussung des Roboters zur gleichzeitigen Minimierung des Verletzungsrisikos und der TaktzeitLangfristig: Sicherheit nicht mehr im Arbeitsablauf, sondern im Hintergrund (Erfassung der Situation Bewertung der Personensicherheit Anpassung der Bewegung)
Sichere MRK in industriellen Anwendungen
MRK mit Standard-IndustrieroboternSichere Kommunikation zwischen sicherheitsgerichteten Sensoren und sicherheitsgerichteter Robotersteuerung
Zur Konfiguration vorab + zur Laufzeit
Methodologie für die Gefährdungsbeurteilung und Erstellung von sicherer Applikationsstrategie
MRK mit spezialisierten Robotern ISO 10218-1, 5.10.5Schwellwerte für Schmerz und für geringfügige Verletzungen damit bewusste Gefährdungsbeurteilung durchgeführt werden können(experimentell: DGUV/IFA, Uni Ljubljanain Simulation: ROSETTA FP7-Projekt)Berücksichtigung des Werkzeugs, Werkstücks, Vorrichtungen, übrige Zelleneinrichtung in der GefährdungsbeurteilungMethodologie für den Entwurf einer sicheren GesamtapplikationISO/TS 15066 „Collaborative Robots“ – erster Entwurf ca. Ende 2011
Übersicht
Definition
Wirtschaftlichkeit
Normen
Beispiele
Offene Fragen
Offene Fragen und Ausblick
2011-01-26 | Slide 27
© ABB Group
























![He378 FES KrimStat 02.ppt [Schreibgeschützt] · PDF fileQuelle: Baier, Dirk; Kemme, Stefanie; Hanslmaier, Michael; Doering, Bettina; Rehbein, Florian; Pfeiffer, Christian: Kriminalitätsfurcht,](https://img.pdfslide.org/doc/110x75/5a7a708b7f8b9a04618c76df/he378-fes-krimstat-02ppt-schreibgeschtzt-baier-dirk-kemme-stefanie-hanslmaier.jpg)





