Embed Size (px)
Citation preview
Copyright by A-Car-Engineering GmbH, Calcagni Carlo
ELEXBO Elektro-Experimentier-Box
Can-Bus-Schulungslehrgang
1
ELEXBO
A-Car-Engineering
CAN BUS
Inhalt
Sie können ……………
das Prinzip der Fahrzeug-Bussysteme anhand eines Schemas erklären
Signalspiegelung eines Zweileiter-CAN Bus beschreiben
Den USB-Serial-Bus mit dem Oszilloskop diagnostizieren
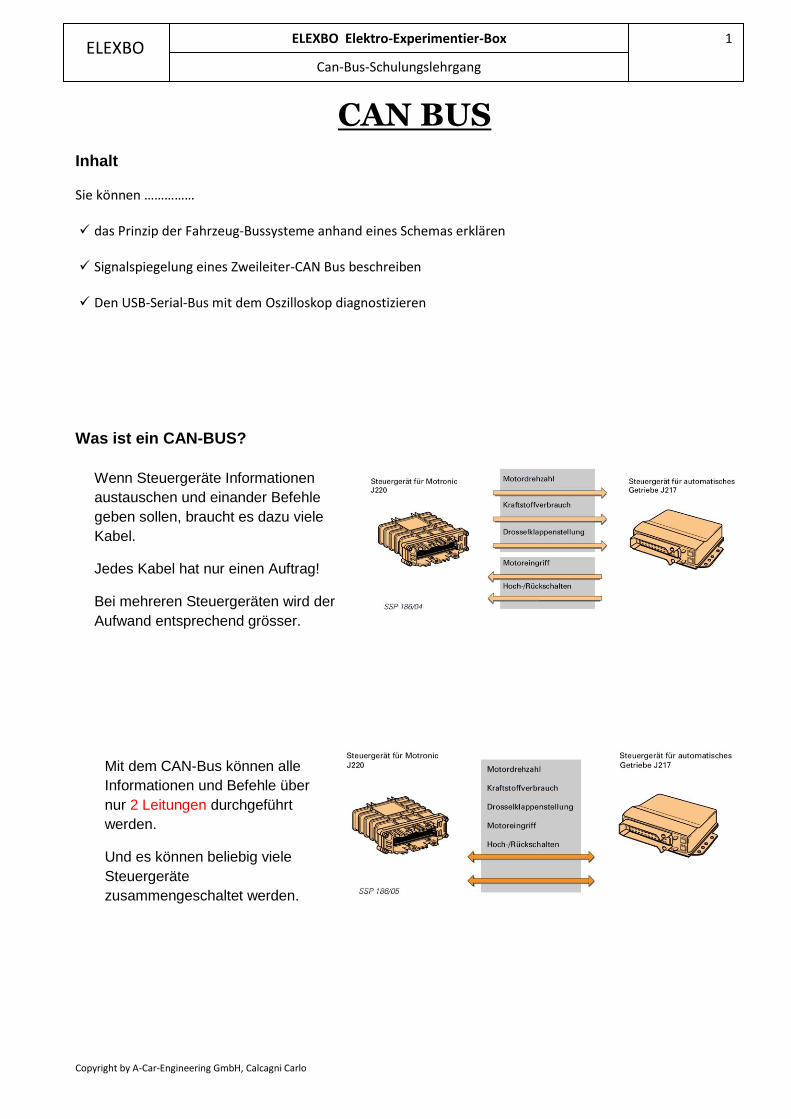
Was ist ein CAN-BUS?
Wenn Steuergeräte Informationen
austauschen und einander Befehle
geben sollen, braucht es dazu viele
Kabel.
Jedes Kabel hat nur einen Auftrag!
Bei mehreren Steuergeräten wird der
Aufwand entsprechend grösser.
Mit dem CAN-Bus können alle
Informationen und Befehle über
nur 2 Leitungen durchgeführt
werden.
Und es können beliebig viele
Steuergeräte
zusammengeschaltet werden.
Copyright by A-Car-Engineering GmbH, Calcagni Carlo
ELEXBO Elektro-Experimentier-Box
Can-Bus-Schulungslehrgang
2
ELEXBO
A-Car-Engineering
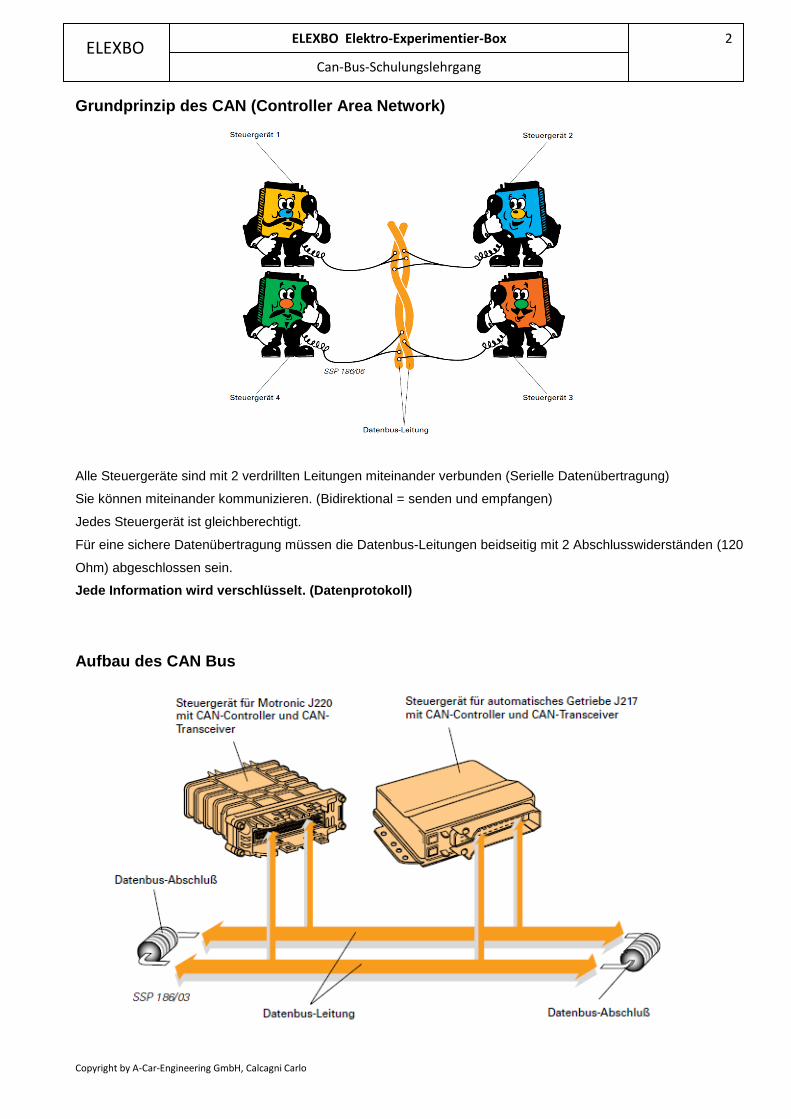
Grundprinzip des CAN (Controller Area Network)
Alle Steuergeräte sind mit 2 verdrillten Leitungen miteinander verbunden (Serielle Datenübertragung)
Sie können miteinander kommunizieren. (Bidirektional = senden und empfangen)
Jedes Steuergerät ist gleichberechtigt.
Für eine sichere Datenübertragung müssen die Datenbus-Leitungen beidseitig mit 2 Abschlusswiderständen (120
Ohm) abgeschlossen sein.
Jede Information wird verschlüsselt. (Datenprotokoll)
Aufbau des CAN Bus
Copyright by A-Car-Engineering GmbH, Calcagni Carlo
ELEXBO Elektro-Experimentier-Box
Can-Bus-Schulungslehrgang
3
ELEXBO
A-Car-Engineering
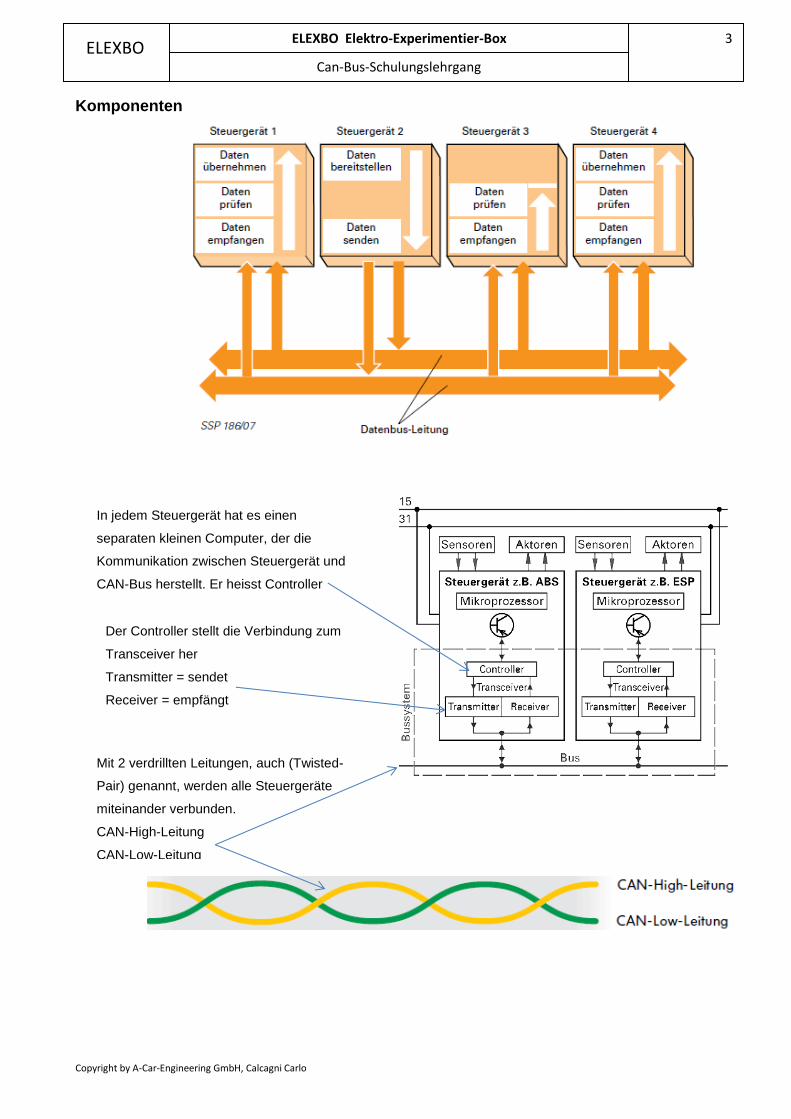
Komponenten
In jedem Steuergerät hat es einen
separaten kleinen Computer, der die
Kommunikation zwischen Steuergerät und
CAN-Bus herstellt. Er heisst Controller
Der Controller stellt die Verbindung zum
Transceiver her
Transmitter = sendet
Receiver = empfängt
Mit 2 verdrillten Leitungen, auch (Twisted-
Pair) genannt, werden alle Steuergeräte
miteinander verbunden.
CAN-High-Leitung
CAN-Low-Leitung
Copyright by A-Car-Engineering GmbH, Calcagni Carlo
ELEXBO Elektro-Experimentier-Box
Can-Bus-Schulungslehrgang
4
ELEXBO
A-Car-Engineering
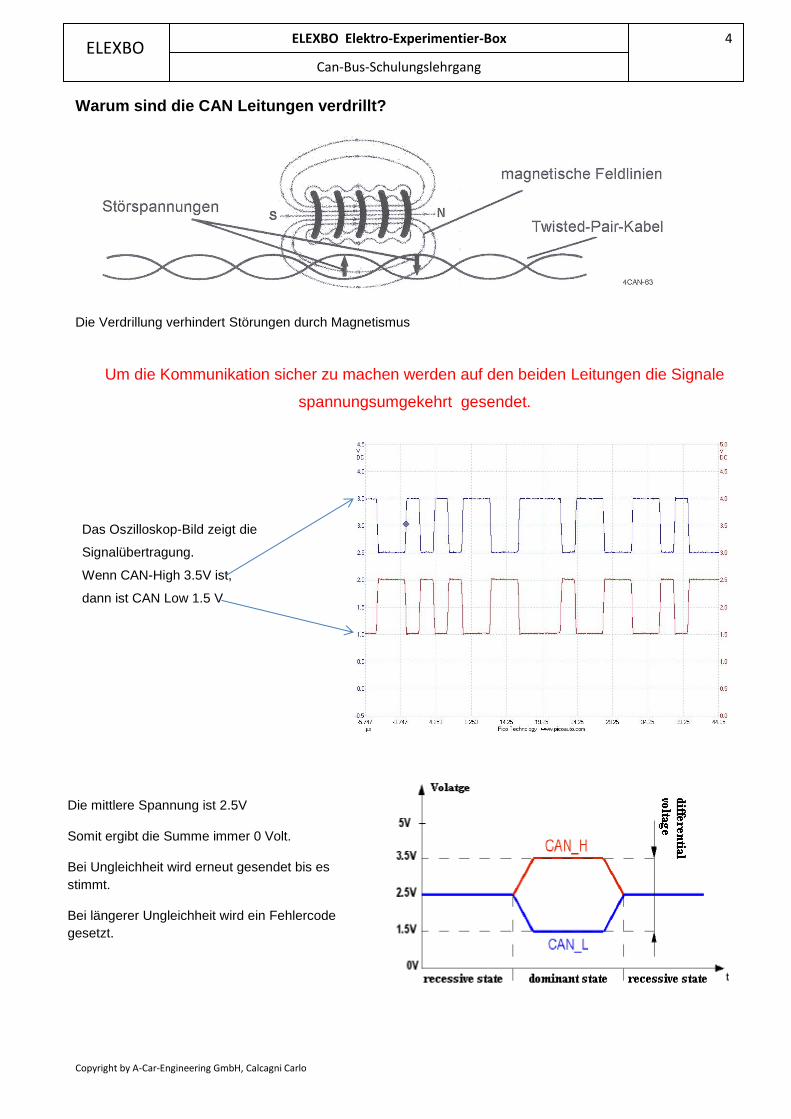
Warum sind die CAN Leitungen verdrillt?
Die Verdrillung verhindert Störungen durch Magnetismus
Um die Kommunikation sicher zu machen werden auf den beiden Leitungen die Signale
spannungsumgekehrt gesendet.
Das Oszilloskop-Bild zeigt die
Signalübertragung.
Wenn CAN-High 3.5V ist,
dann ist CAN Low 1.5 V
Die mittlere Spannung ist 2.5V
Die mittlere Spannung ist 2.5V
Somit ergibt die Summe immer 0 Volt.
Bei Ungleichheit wird erneut gesendet bis es
stimmt.
Bei längerer Ungleichheit wird ein Fehlercode
gesetzt.
Copyright by A-Car-Engineering GmbH, Calcagni Carlo
ELEXBO Elektro-Experimentier-Box
Can-Bus-Schulungslehrgang
5
ELEXBO
A-Car-Engineering
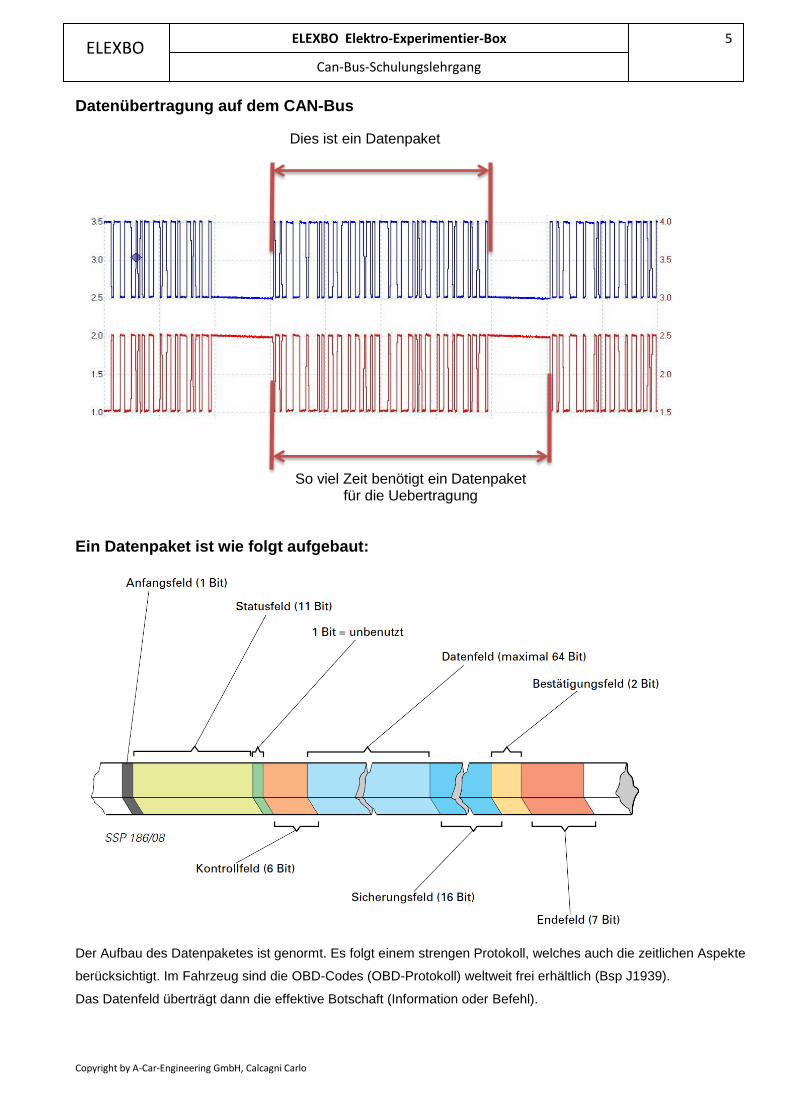
Datenübertragung auf dem CAN-Bus
Ein Datenpaket ist wie folgt aufgebaut:
Der Aufbau des Datenpaketes ist genormt. Es folgt einem strengen Protokoll, welches auch die zeitlichen Aspekte
berücksichtigt. Im Fahrzeug sind die OBD-Codes (OBD-Protokoll) weltweit frei erhältlich (Bsp J1939).
Das Datenfeld überträgt dann die effektive Botschaft (Information oder Befehl).
Dies ist ein Datenpaket
So viel Zeit benötigt ein Datenpaket für die Uebertragung
Copyright by A-Car-Engineering GmbH, Calcagni Carlo
ELEXBO Elektro-Experimentier-Box
Can-Bus-Schulungslehrgang
6
ELEXBO
A-Car-Engineering
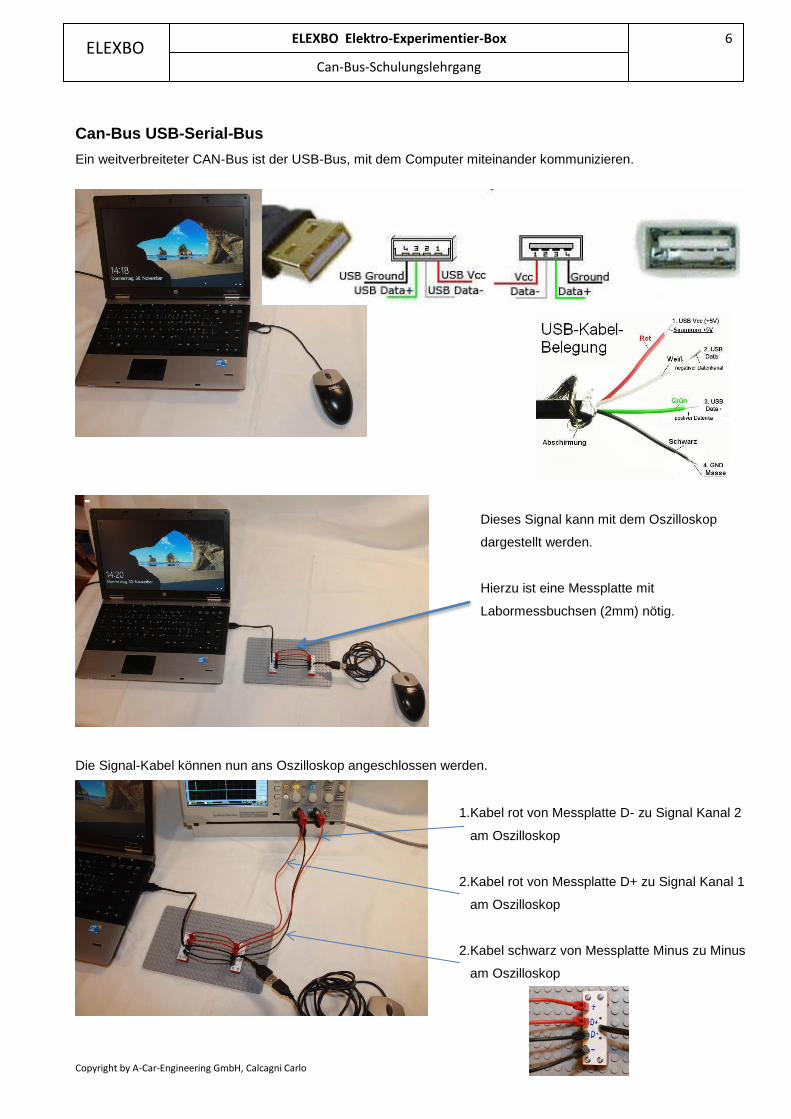
Can-Bus USB-Serial-Bus
Ein weitverbreiteter CAN-Bus ist der USB-Bus, mit dem Computer miteinander kommunizieren.
Die Signal-Kabel können nun ans Oszilloskop angeschlossen werden.
Dieses Signal kann mit dem Oszilloskop
dargestellt werden.
Hierzu ist eine Messplatte mit
Labormessbuchsen (2mm) nötig.
1.Kabel rot von Messplatte D- zu Signal Kanal 2
am Oszilloskop
2.Kabel rot von Messplatte D+ zu Signal Kanal 1
am Oszilloskop
2.Kabel schwarz von Messplatte Minus zu Minus
am Oszilloskop
Copyright by A-Car-Engineering GmbH, Calcagni Carlo
ELEXBO Elektro-Experimentier-Box
Can-Bus-Schulungslehrgang
7
ELEXBO
A-Car-Engineering
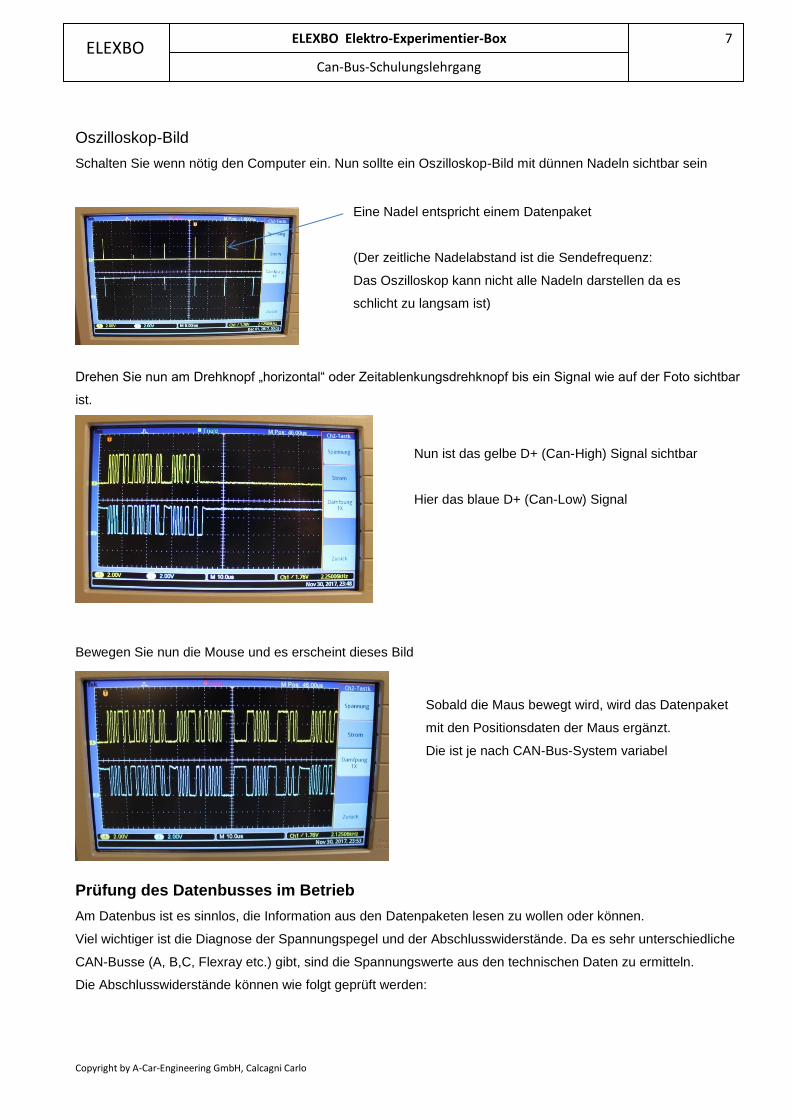
Oszilloskop-Bild
Schalten Sie wenn nötig den Computer ein. Nun sollte ein Oszilloskop-Bild mit dünnen Nadeln sichtbar sein
Drehen Sie nun am Drehknopf „horizontal“ oder Zeitablenkungsdrehknopf bis ein Signal wie auf der Foto sichtbar
ist.
Bewegen Sie nun die Mouse und es erscheint dieses Bild
Prüfung des Datenbusses im Betrieb
Am Datenbus ist es sinnlos, die Information aus den Datenpaketen lesen zu wollen oder können.
Viel wichtiger ist die Diagnose der Spannungspegel und der Abschlusswiderstände. Da es sehr unterschiedliche
CAN-Busse (A, B,C, Flexray etc.) gibt, sind die Spannungswerte aus den technischen Daten zu ermitteln.
Die Abschlusswiderstände können wie folgt geprüft werden:
Eine Nadel entspricht einem Datenpaket
(Der zeitliche Nadelabstand ist die Sendefrequenz:
Das Oszilloskop kann nicht alle Nadeln darstellen da es
schlicht zu langsam ist)
Nun ist das gelbe D+ (Can-High) Signal sichtbar
Hier das blaue D+ (Can-Low) Signal
Sobald die Maus bewegt wird, wird das Datenpaket
mit den Positionsdaten der Maus ergänzt.
Die ist je nach CAN-Bus-System variabel
Copyright by A-Car-Engineering GmbH, Calcagni Carlo
ELEXBO Elektro-Experimentier-Box
Can-Bus-Schulungslehrgang
8
ELEXBO
A-Car-Engineering
CAN-Bus Prüfung mit dem Multimeter
Widerstandsprüfungen
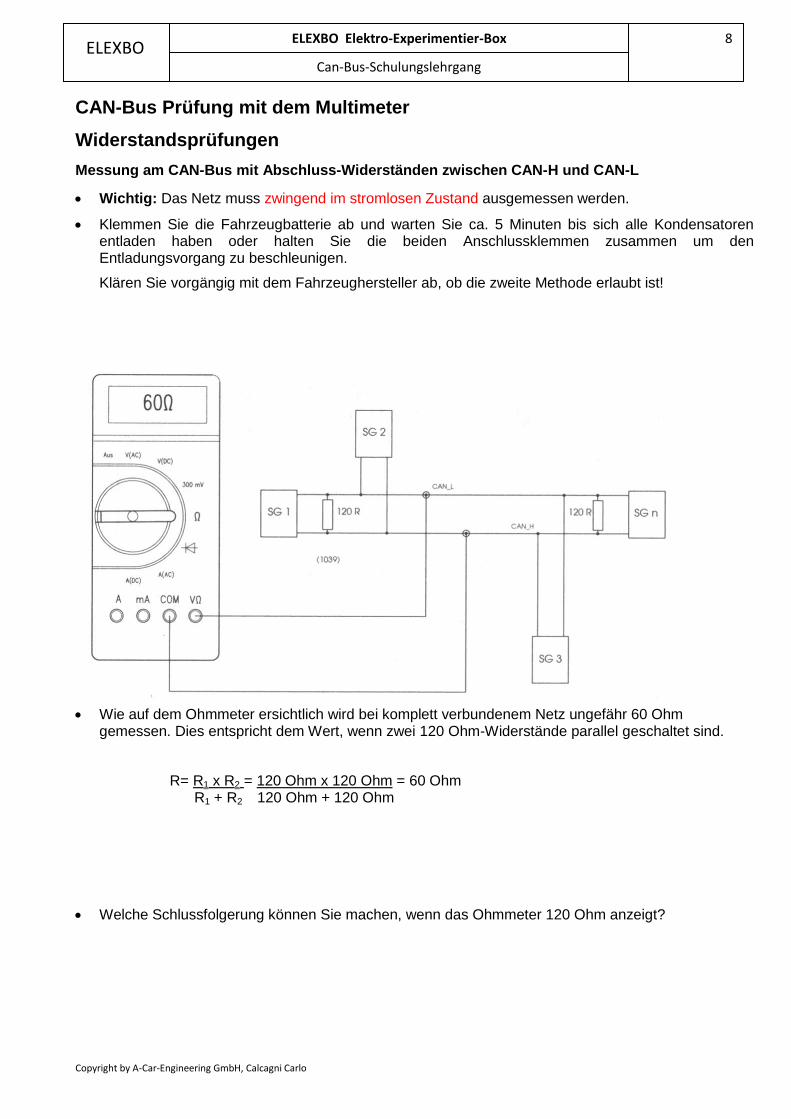
Messung am CAN-Bus mit Abschluss-Widerständen zwischen CAN-H und CAN-L
Wichtig: Das Netz muss zwingend im stromlosen Zustand ausgemessen werden.
Klemmen Sie die Fahrzeugbatterie ab und warten Sie ca. 5 Minuten bis sich alle Kondensatoren entladen haben oder halten Sie die beiden Anschlussklemmen zusammen um den Entladungsvorgang zu beschleunigen.
Klären Sie vorgängig mit dem Fahrzeughersteller ab, ob die zweite Methode erlaubt ist!
Wie auf dem Ohmmeter ersichtlich wird bei komplett verbundenem Netz ungefähr 60 Ohm gemessen. Dies entspricht dem Wert, wenn zwei 120 Ohm-Widerstände parallel geschaltet sind.
R= R1 x R2 = 120 Ohm x 120 Ohm = 60 Ohm R1 + R2 120 Ohm + 120 Ohm
Welche Schlussfolgerung können Sie machen, wenn das Ohmmeter 120 Ohm anzeigt?
Copyright by A-Car-Engineering GmbH, Calcagni Carlo
ELEXBO Elektro-Experimentier-Box
Can-Bus-Schulungslehrgang
9
ELEXBO
A-Car-Engineering
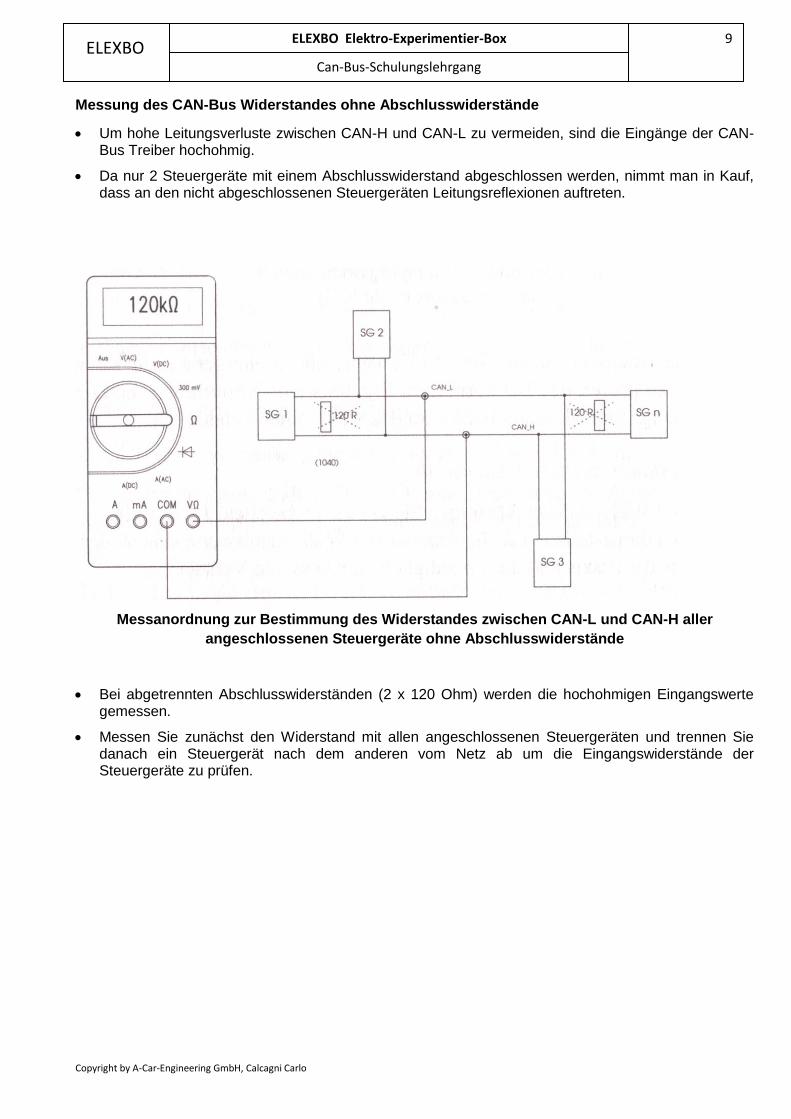
Messung des CAN-Bus Widerstandes ohne Abschlusswiderstände
Um hohe Leitungsverluste zwischen CAN-H und CAN-L zu vermeiden, sind die Eingänge der CAN-Bus Treiber hochohmig.
Da nur 2 Steuergeräte mit einem Abschlusswiderstand abgeschlossen werden, nimmt man in Kauf, dass an den nicht abgeschlossenen Steuergeräten Leitungsreflexionen auftreten.
Messanordnung zur Bestimmung des Widerstandes zwischen CAN-L und CAN-H aller
angeschlossenen Steuergeräte ohne Abschlusswiderstände
Bei abgetrennten Abschlusswiderständen (2 x 120 Ohm) werden die hochohmigen Eingangswerte gemessen.
Messen Sie zunächst den Widerstand mit allen angeschlossenen Steuergeräten und trennen Sie danach ein Steuergerät nach dem anderen vom Netz ab um die Eingangswiderstände der Steuergeräte zu prüfen.





























