Embed Size (px)
Citation preview

Westsächsische Hochschule ZwickauFachbereich Elektrotechnik
Studiengang Informationstechnik
Diplomarbeitvon
Lars Petzold
Aufbau eines Messplatzes zur Ermittlungder Schallfeldcharakteristik eines
Ultraschallwandlers
Arbeitsplatz: Forschungszentrum Karlsruhe,Institut für Prozessdatenverarbeitung und Elektronik (IPE)
Betreuer: Dipl.-Ing. (FH) Georg GöbelBetreuer: Dipl.-Ing. (FH) Klaus Schlote - HolubekReferent: Prof. Dr.-Ing. Jürgen KlötznerAbgabetermin: 03.01.2006
Bearbeitet in der Zeit vom 01.06.05 bis 30.11.05

II

Ich versichere, dass ich diese Diplomarbeit selbständig verfasst und keineanderen als die angegebenen Hilfsmittel verwendet habe.
(Lars Petzold)
Karlsruhe, den 30.11.05

Zusammenfassung
Ultraschall - Computertomographie (USCT) ist ein neues Bildaufnahmever-fahren, dass am Forschungszentrum Karlsruhe zur Brustkrebsdiagnose entwi-ckelt wird. Es zeichnet sich im Vergleich zu herkömmlichen Bildgebungsverfah-ren per Ultraschall durch eine höhere räumliche Bildauösung und signikantbessere Bildqualität aus, und ist in der Lage echte 3D Bilder zu erstellen. Umkostengünstige und reproduzierbare Ultraschallwandler für die USCT zur Ver-fügung zu stellen, entwickelte das Forschungszentrum Karlsruhe eigene Ultra-schallwandler, die ein Schallfeld genügend hoher Intensität mit einem breitemÖnungswinkel abstrahlen.Das Ziel der Arbeit war der Aufbau eines Versuchsplatzes zur Qualitätskon-
trolle der Ultraschallwandler. Die Charakterisierung der Ultraschallwandlererfolgt durch Analyse der Intensitätenverteilung des Schallfeldes im Übertra-gungsmedium Wasser. Der Messplatz sollte exibel für verschiedene Wandler-geometrien einsetzbar sein.Die mechanische Konstruktion des Versuchsaufbaus erfolgte unter Verwen-
dung von CAD und in Zusammenarbeit mit der Werkstatt im Institut. ZurSteuerung kamen Elektromotoren in Verbindung mit den am Institut für Pro-zessdatenverarbeitung und Elektronik (IPE) entwickelten Steuerkarten zumEinsatz. Die Benutzeroberäche wurde für einen handelsüblichen PC erstellt.Es wurde ein Versuchsplatz aufgebaut, mit dem ein Hydrophon frei im Raum
positioniert werden kann und der eine messtechnische Signalerfassung ermög-licht. Der Anwender hat die Möglichkeit, über eine Oberäche frei wählbarePunkte im Raum anzufahren und das Schallfeld auszumessen. Er kann vor-denierte Messabläufe nutzen oder automatische Messabläufe generieren. DieAuswertung der Daten in der Anwenderoberäche liefert Aussagen über die In-tensitätenverteilung des Schalls im Messvolumen, über die Winkelabhängigkeitund über das Frequenzspektrum der Ultraschallsignale. Der Messplatz kann aufeinfache Weise umgerüstet werden, so dass sowohl andere Ultraschallwandlerals auch andere Hydrophontypen eingesetzt werden können.

Inhaltsverzeichnis
1 Einleitung 41.1 USCT und Brustkrebsdiagnose . . . . . . . . . . . . . . . . . . 41.2 Ultraschallwandler . . . . . . . . . . . . . . . . . . . . . . . . . 51.3 Motivation und Ziele . . . . . . . . . . . . . . . . . . . . . . . . 61.4 Gliederung der Arbeit . . . . . . . . . . . . . . . . . . . . . . . 7
2 Konstruktion 82.1 Randbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . . 82.2 Spezikation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.3 Genauigkeit des Aufbaus . . . . . . . . . . . . . . . . . . . . . . 112.4 Physikalische Aspekte . . . . . . . . . . . . . . . . . . . . . . . 132.5 Wahl der Aufbauvariante . . . . . . . . . . . . . . . . . . . . . . 152.6 Antriebsberechnung . . . . . . . . . . . . . . . . . . . . . . . . . 172.7 Vorstellung der Steuerkarten . . . . . . . . . . . . . . . . . . . . 212.8 Erklärung der Hardwaresteuerung . . . . . . . . . . . . . . . . . 222.9 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3 Versuchsaufbau 273.1 Becken, Anbaurahmen und Montage . . . . . . . . . . . . . . . 273.2 Achsen und Montage . . . . . . . . . . . . . . . . . . . . . . . . 283.3 Motoren und Montage . . . . . . . . . . . . . . . . . . . . . . . 303.4 Positionsbestimmung . . . . . . . . . . . . . . . . . . . . . . . . 303.5 Energieversorgung und Elektronik . . . . . . . . . . . . . . . . 323.6 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . 33
1

4 Motorsteuerung mit Digitalen Signalprozessoren DSP 364.1 Spezikation der Programmierung . . . . . . . . . . . . . . . . . 364.2 Programmerklärung . . . . . . . . . . . . . . . . . . . . . . . . . 384.3 Ablauf . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.4 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5 PC - Steuerung 475.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475.2 Spezikation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 485.3 Aufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.3.1 Automatischer Testlauf . . . . . . . . . . . . . . . . . . . 515.3.2 Manuelle Positionierung . . . . . . . . . . . . . . . . . . 525.3.3 Referenzfahrt . . . . . . . . . . . . . . . . . . . . . . . . 555.3.4 grasche Positionsanzeige . . . . . . . . . . . . . . . . . 56
5.4 Bedienung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 565.5 Erklärung der benutzten Funktionen . . . . . . . . . . . . . . . 58
5.5.1 Kommunikation via RS232 . . . . . . . . . . . . . . . . . 585.5.2 Bedienächen und Buttons . . . . . . . . . . . . . . . . . 61
5.6 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . 63
6 Schallfeldmessung 656.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 656.2 Spezikation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 676.3 Erweiterung des Steuerrechners . . . . . . . . . . . . . . . . . . 686.4 Parametrisierung des GaGe - Scope . . . . . . . . . . . . . . . . 696.5 Ansteuerung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 716.6 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . 77
7 Auswertesoftware 797.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 797.2 Spezikation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 807.3 Aufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 817.4 Bedienung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 847.5 Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
7.5.1 Callbackfunktionen der Oberäche . . . . . . . . . . . . 85
2

7.5.2 Berechnungs- und Anzeigefunktionen . . . . . . . . . . . 877.6 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . 88
8 Diskussion und Ausblick 908.1 Zielsetzung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 908.2 Aktuelle Möglichkeiten . . . . . . . . . . . . . . . . . . . . . . . 92
8.2.1 Nachnutzbarkeit . . . . . . . . . . . . . . . . . . . . . . 938.2.2 Portierbarkeit . . . . . . . . . . . . . . . . . . . . . . . . 94
8.3 Zielüberschreitung . . . . . . . . . . . . . . . . . . . . . . . . . 958.4 Ausblick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
A Appendix 98A.1 Herstellerverzeichnis . . . . . . . . . . . . . . . . . . . . . . . . 98A.2 Benutzte Software . . . . . . . . . . . . . . . . . . . . . . . . . . 98A.3 Websites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99A.4 Verdrahtungsplan . . . . . . . . . . . . . . . . . . . . . . . . . . 100A.5 Struktogramme der Funktionen . . . . . . . . . . . . . . . . . . 101
Abbildungsverzeichnis 111
Literaturverzeichnis 114
3

Kapitel 1
Einleitung
1.1 USCT und Brustkrebsdiagnose
Bisherige Verfahren in der Brustkrebsdiagnose basieren auf der Verwendungvon Röntgenstrahlen oder bei bestimmten Befunden auf Ultraschallsignalen.Das derzeit meist angewandte Verfahren, die Röntgenmammographie, weistNachteile auf. Die Probleme sind die Strahlenbelastung der Patientin und dieErstellung von 2D Bildern. Dadurch sind Überlagerungen möglich. Durch dienotwendige Deformation der Brust bei der Röntgenmammographie und durchdie Erstellung von 2D Bildern wird die Lokalisierung von Läsionen erschwert.
Eine Alternative zur Röntgenmammographie bietet die Ultraschall - Compu-tertomographie USCT. Diese stellt dem Radiologen ein Werkzeug zur Verfü-gung mit dem in einer der Mammographie vergleichbaren Auösung ein 3DAbbild der Brust erstellt werden kann. Die gröÿten Vorteile der USCT - Tech-nik liegen dabei in der fehlenden Strahlenbelastung und in der realen 3D Abbil-dung der Brust, ohne diese zu deformieren. Dies könnte auf der medizinischenSeite zu besseren Aussagen über das untersuchte Gewebe und auf der Seiteder Patienten zu besserer Akzeptanz der Untersuchung führen, da diese nichtmehr mit den Schmerzen der Brustdeformation verbunden ist.
Derzeit existiert ein Versuchsaufbau mit dem Nylonfäden in einem Abstandvon 0,5 mm und mit einem Durchmesser von 0,1 mm erfolgreich rekonstruiertwerden konnten.
4

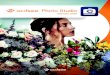
Abbildung 1.1: Darstellung des Ultraschallwandlersystems: Es ist dasfertige Wandlersystem von vorn zu erkennen. Die acht Sender mit jeweils vierumgebenden Empfängern ist dargestellt.
1.2 UltraschallwandlerFür den Einsatz in USCT wurden am Institut für Prozessdatenverarbeitungund Elektronik (IPE) spezielle Ultraschallwandler hergestellt. Diese Wandlersind für eine kostengünstige Herstellung mit reproduzierbarer Charakteristikkonzipiert und bieten gegenüber den Ultraschallwandlern von Fremdrmeneinen erheblichen Kostenvorteil. Zur Formung werden Piezoelemente zunächststrukturiert und kontaktiert. Im folgenden Schritt wird die zuvor bestückteSende- und Empfangselektronik seitlich angebracht und mit den Piezoelemen-ten verbunden. Zum Schluss wird das Sensorsystem zusammengeklappt undwasserdicht versiegelt. Ein Träger dient zur Montage an den Tomographen.Ein Wandlersystem bestehend aus 8 Sendern und 32 Empfängern. Innerhalbeines Tomographen werden insgesamt 48 dieser Wandlersysteme angebracht.Mittels sechs verschiedener Motorpositionen können 2304 verschiedene Sende-und 9216 Empfangspositionen emuliert werden.Dieses neue Wandlersystem Abb. 1.1 bietet weiter den Vorteil der möglichen
Verwendung von verschiedenen Pulsformen bis zu einer maximalen Signalam-plitude von 30 VPP . Die Anregungspulse für die Ultraschallwandler werdenüber "Coded Excitation" erzeugt, in dem Pulse mit unterschiedlichen Ampli-tuden und Frequenzen als Signalfolge auf den Ultraschallwandler gegeben wer-den. Diese Art der Anregung bietet ein sauberes Pulsspektrum, im Gegensatzzur Anregung mit einer harten Flanke, was die Rekonstruktion der gemesse-nen Signale verbessert. Die Eigenfrequenz der Piezoelemente wird verstärkt,
5

das Spektrum des Pulses wird klarer.
Die Empfänger und Sender können getrennt adressiert werden. Das Systembesitzt einen 32-kanaligen Vorverstärker zur Verbesserung des Signal / RauschAbstandes und benötigt einen 4-fach MUX, da die Anzahl der Kanäle begrenztist.
1.3 Motivation und Ziele
Die Vermessung der Ultraschallwandler ist insbesondere notwendig, um fest-zustellen, ob diese mit gleichen Aspekten reproduzierbar sind. Diese Aspek-te sind der Önungswinkel von 35, die Winkelabhängigkeit der Amplitudenund die Frequenzspektren des ausgesandten Schallfeldes. Die Verwendung vonUltraschallwandlern gleicher Eigenschaften bildet die Grundlage der Bildre-konstruktion. Hätten die Ultraschallwandler verschiedenartige Eigenschaften,so würde ein Objekt von verschiedenen Seiten unterschiedlich ausgeleuchtetwerden und die Bildrekonstruktion wäre fehlerhaft. Die Kenntnis der Wandle-reigenschaften ermöglichen zusätzlich eine Kalibrierung der Ultraschallwandlerzur gleichmäÿigen Bildausleuchtung.
Das Ziel dieser Arbeit ist der Aufbau eines Messplatzes, mit dem die Wandle-reigenschaften vermessen werden können. Es sind Aussagen über das Schallfeldan verschiedenen Punkten innerhalb eines Messvolumens zu treen, die Ampli-tude, belegte Frequenzen und den Önungswinkel wiedergeben. Der Messplatzsoll für verschiedene Ultraschallwandler exibel einsetzbar sein. Die Rand-bedingungen des Messplatzes sind die Positionierung eines Hydrophons zurSchallfeldmessung in einem Messvolumen mit einer Kantenlänge von 300 mmund mit einer Genauigkeit von 0,5 mm.
Die Aufgabe innerhalb des Projektes zur Charakterisierung der Ultraschall-wandler ist der Aufbau des Messplatzes und die motorisierte Positionierungeines Hydrophons. Diese Aufgabe kann in mehrere Teilaufgaben zerlegt wer-den. Diese sind die Konstruktion und der Aufbau, die Positionierung des Hy-drophons und die Ansteuerung der Positionierung.
6

1.4 Gliederung der Arbeit
Konstruktion und der AufbauDie Teilaufgabe der Konstruktion und des Aufbaus beinhaltet den mecha-nischen Aufbau des Messplatzes. Es sind mögliche Aufbauvarianten und dieVerwendung von möglichen Materialien zu prüfen. Das Ziel der Konstruktionist ein Messplatz, der den Ultraschallwandler und das Übertragungsmediumaufnehmen und an den die motorisierte Positionierung des Hydrophons ange-bracht werden kann.
HydrophonpositionierungDie Hydrophonpositionierung bestimmt Methoden zur Positionierung und Po-sitionsbestimmung. Es gilt verschiedene Methoden zur konzipieren und mitden verfügbaren Möglichkeiten abzuwägen. Das Ziel ist eine Steuerung derAntriebe zur Hydrophonpositionierung.
Ansteuerung der PositionierungDie Ansteuerung der Positionierung beinhaltet Mittel und Wege, um einemAnwender die Steuerung zu ermöglichen. Es sind Möglichkeiten bezüglich derPlattform und der Umsetzung zu nden. Das Ziel der Ansteuerung ist eine An-wenderoberäche, mit der die Messpunkte im Messvolumen bestimmt werdenkönnen.
Die nachfolgenden Abschnitte befassen sich mit der Umsetzung der gestelltenAufgaben. Dabei wird in den einzelnen Abschnitten auf die genaue Spezika-tion der Aufgaben eingegangen.
7

Kapitel 2
Konstruktion
2.1 Randbedingungen
Die Randbedingungen der Konstruktion beinhalten Vorgaben seitens der Auf-gabenstellung und der bereits vorhanden Bestandteile.
Die Aufgabenstellung gibt ein Messvolumen mit einer Kantenlänge von 300mm vor. Mit dieser Kantenlänge und einer mittigen Position des Ultraschall-wandlers kann bis zu einem Abstand von 150 mm die kugelförmige Wellenfrontder Schallwelle erfasst werden. Dies entspricht einem Messwinkel von 90 zujeder Seite des Ultraschallwandlers. Die Genauigkeit des Versuchsaufbaus wur-de auf 0,5 mm festgelegt. Die Genauigkeit liegt im Bereich einer Wellenlängeeines Ultraschallsignales bei einer Mittelfrequenz von 3 MHz in Wasser bei 20
Celsius. Die Mittelfrequenz ist für die Ultraschallwandler ebenfalls vorgegeben.Wellenlänge λ:
λ =cW
f(2.1)
cW : Ausbreitungsgeschwindigkeit in Wasser; 1486 msbei 20 Celsius
f : Mittelfrequenz mit 3 MHzAus der Formel (2.1) ergibt sich ein Wert von 0,495 mm.
Die maximale Abweichung in der Position von 0,5 mm darf nicht überschrittenwerden. Durch die maximal zulässige Positionsabweichung 4 s von 0,5 mmergibt sich eine Winkelungenauigkeit 4 α von 0,2 in einem Abstand von 150mm.
8

Winkelungenauigkeit 4 α:
4α = arcsin(4s
150mm) (2.2)
4 s =0,5 mmAus der Formel (2.2) ergibt sich ein Wert von 0,19.
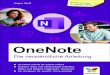
Zur Bewegung werden Linearschienen zur Verfügung gestellt. Als Linearschie-nen werden Baugruppen bezeichnet, die über eine Steigungsspindel eine rotato-rische in eine lineare Bewegung umwandeln. Ein Hersteller, von dem das Insti-tut IPE seit geraumer Zeit Linearschienen bezieht, ist das Unternehmen "THKLtd., Japan", das derartige Bewegungssysteme in hoher Qualität herstellt, ins-besondere was die Steigkeit der Gehäuse, Genauigkeit der Positionierung undHaltbarkeit betrit. Jeder Linearschiene wird eine Koordinate "X", "Y" oder"Z" zugeordnet Abb. 2.1, die im folgenden als Freiheitsgrad "X","Y" oder "Z"bezeichnet werden. Die Vorgaben bezüglich des Typs der Linearschienen sinddie Verwendung des Typs "KR3306", hochsteife Schienen mit 320 mm Gesamt-hub in den Freiheitsgraden "X" und "Y", und die Verwendung des Typs "VLA
Abbildung 2.1: Zuordnung des Koordinatensystems: In der Abbildung istdie Anordnung der Freiheitsgrade dargestellt. Die Abbildung zeigt die Ansichtdes Versuchsaufbaus, bei der sich der Ultraschallwandler (gelb) in der rech-ten Beckenseite bendet. Das rote Kreuz markiert den Nullpunkt 0,0,0 deskartesischen Koordinatensystems.
9

45", einer Schiene mit dem selben Hub allerdings in Leichtbauweise, beim Frei-heitsgrad "Z". Alle Linearschienen besitzen einen Spindelhub von 6 mm aufeine Wellenumdrehung und sind mit den entsprechenden Montagemöglichkei-ten zur Anbringung von End- und Referenzschaltern sowie für den Anschluÿvon Elektromotoren ausgestattet.
Die Steuerung der Elektromotoren soll über Steuerkarten erfolgen. Diese Kar-ten im Europakartenformat verfügen über einen DSP der Firma "Texas Instru-ments" ("TI"), der die Steuerung der Motorphasen über die Treiberbausteine"TD340I" und "LMD18200T" übernimmt und sowohl Endschalter und Refe-renzschalter, die als Öner geschalten werden müssen, auswerten kann. DerDSP ist darüber hinaus in der Lage, optische Linearencoder und Quadratu-rencoder auszuwerten und die Position relativ zu einem Referenzpunkt festzu-stellen. Die Programmierung erfolgt über das Tool des DSP -Herstellers "TI".Zum Schutz der Motoren und der Karten sind Temperatur-, Strom- und Span-nungsüberwachung integriert. Die Verwendung der Steuerkarten beschränktjedoch die maximal mögliche Versorgungsspannung der Motoren auf 24 V.
Die zu untersuchenden USCT - Ultraschallwandler sind zunächst die des For-schungszentrums mit den spezischen Abmessungen. Diese werden inklusiveeines vorgefertigten Trägers, wie er auch im Tomographen vorkommt, ausge-stattet. Zum Gesamtsystem gehört auch die Ansteuerelektronik, die in relati-ver Nähe zum Wandler angebracht werden muss. Ansteuerbar sind neben denSendern, von denen acht im USCT - Ultraschallwandler vorhanden sind, auchdie 32 Empfänger. Das Gesamtsystem aus Wandlern und Elektronik ist jedochder Beschränkung unterlegen, dass die Entfernung zwischen beiden nur einemaximal zulässige Leitungslänge von wenigen Zentimetern betragen darf.
Der Empfang der Wandlersignale soll zunächst über ein Hydrophon der Firma"NTR Systems, Seattle" umgesetzt werden. Dieses Hydrophon ist mit einerEmpfängeräche aus Piezofolie PVDF mit einem Durchmesser von 0,6 mm[6]ausgeführt. Zur Verstärkung der Signale ist ein Vorverstärker von 20 dB imLieferumfang enthalten. Die Kalibrierung des Hydrophons erfolgt nach denbeigefügten Listen des Herstellers.
10

2.2 SpezikationDer Messstand soll ein Hydrophon ausgehend von Koordinatenvorgaben posi-tionieren. Dabei soll der Sensor im Übertragungsmedium Wasser bewegt wer-den. Das Wasserbecken muss hinreichend gross sein, um den geforderten Be-wegungsraum von 300 mm x 300 mm x 300 mm und die Aufnahme des USCT- Ultraschallwandlers mit der erforderlichen Ansteuerelektronik zu realisieren.
Wegen der Notwendigkeit einer kurzen Verbindungsleitung zwischen dem Ul-traschallwandler und der Ansteuerelektronik wird die Ansteuerelektronik ineinem extra Behälter versenkt. Über die Verbindungsleitung wird der MixedSignal Prozessor (MSP) des Ultraschallwandlers programmiert. Eine längereLeitung als 10 cm kann nicht benutzt werden, da sonst die Signale zur Pro-grammierung nicht mehr richtig am MSP ankommen.
Die Bewegung wird durch Linearschienen ermöglicht an deren Schlitten dienächste Linearschiene oder das Hydrophon montiert sind. Die Linearschienenmüssen in geeigneter Weise am Wasserbehälter und untereinander befestigtwerden, um die auftretenden Beschleunigungen beim Starten und Stoppen derAchsen zu kompensieren. Der Antrieb erfolgt mittels Elektromotoren, welchedie Spindeln der Linearschienen in Rotation versetzen und über die Spindelstei-gung den Vortrieb gewährleisten. Um die Position festzustellen und die Linear-schienen zu schützen, müssen End- und Referenzschalter angebracht werden.
Ein weiterer wesentlicher Bestandteil des Versuchsaufbaus bildet die notwen-dige Energieversorgung der vorhanden Motoren. Deshalb el die Wahl auf ein19" Gehäuse in das die benötigten Elektronik integriert wird. Es werden Netz-teile und Steuerkarten benötigt. Ein entsprechender Schutz gegen Spritzwasserder Elektronik und der Verbindung der Elektronik zu Spannungs- und Strom-führenden Anbauteilen muss gegeben sein.
2.3 Genauigkeit des AufbausDie erforderliche Genauigkeit des Versuchsaufbaus folgt aus der Aufgabenstel-lung.
Am Versuchsaufbau wirken Abweichungen die durch die Linearschienen be-
11

dingt sind. Dazu gehören das Radialspiel, das Umkehrspiel und die Wieder-holgenauigkeiten und sind im Handbuch des Achsenherstellers "THK Ltd,Japan"[11][12] angegeben und liegen alle im Bereich von 0,01 mm. Die Ab-weichungen des gerollten Kugelgewinde können wegen ihrer geringen Gröÿevernachlässigt werden.
Radialspiel: Das Radialspiel gibt die Abweichungen der Antriebsspindel beirotatorischer Bewegung wieder. Es wird in mm angegeben. Die Aussagedes Radialspiels ist der minimale Drehwinkel, mit dem die Spindel inRotation versetzt werden muss, bevor eine transversale Bewegung desSchlittens entsteht. Die Umrechnung des Drehwinkels in die transversaleAbweichung ergibt sich aus der Steigung.
Umkehrspiel: Das Umkehrspiel hängt von dem Radialspiel ab und gibt dietransversale Abweichung des Schlittens bei Umkehr der Drehrichtung derAntriebsspindel in mm an.
Wiederholgenauigkeit: Die Wiederholgenauigkeit gibt die Abweichung derPosition in mm bei mehrmaliger Durchführung einer transversalen Be-wegung in jeweils die selbe Richtung an und wirkt in beide Richtungeneines Freiheitsgrads gleich.
Die Wirkungen der Abweichungen wurden in einer "worst case" Analyse un-tersucht, indem eine Grundabweichung durch Addition der Eingangsparameterberechnet wurde, und diese betragsmässig bei verschiedenen n - Durchläufenaufaddiert wird. Die angegebenen Werte wurden dem Handbuch der Linear-schienen vom Herstellers "THK Ltd., Japan"[11][12] entnommen. Ein Durch-lauf entspricht dem Durchfahren der gesamt möglichen Verfahrstrecke einerAchse in beide Richtungen.Aus der Tabelle 2.1 wird sichtbar, nach welcher Anzahl von Durchläufen eine
Referenzierung auf den Nullpunkt notwendig ist. Es wurde festgelegt, dassnach jeweils 20 Messdurchläufen referenziert werden muss. Die Basis bildet dieAbweichung der Linearschiene des Freiheitsgrads "Z".
12

Tabelle 2.1: Gesamte Positionsabweichung nach n - Durchläufen in [mm]
Anzahl der Durchläufe "X" "Y" "Z"1 0,0004 0,0004 0,02010 0,004 0,004 0,20100 0,04 0,04 2,01000 0,4 0,4 20,0
2.4 Physikalische AspekteBevor mit dem Aufbau begonnen werden kann, müssen die Vor- und Nach-teile von den möglichen Aufbauvarianten abgewogen werden. Im Allgemeinenwirken innerhalb des Versuchsaufbaus:
• Gewichtskräfte, resultierend aus den Linearschienen und den Aufbauten.
• Druckkräfte, die das Wasser auf den Wasserbehälter ausübt.
• Beschleunigungskräfte durch beschleunigte Massen seitens der Elektro-antriebe.
Die Druckkräfte auf die Seiten des Wasserbeckens wirken bei kompletter Fül-lung. Insgesamt muss mindestens ein Volumen von 0,027 m3 mit einem Gewichtvon ca. 30 kg gefüllt werden. Die minimale Füllhöhe muss den Gesamtweg desFreiheitsgrads "Z" beinhalten und somit mindestens 300 mm betragen. Für dieLängen- und Breitenausdehnung ist die Unterbringung der Elektronik und desWandlers zu berücksichtigen. Das Material für das Wasserbecken muss hinrei-chend stabil und in geeigneter Weise zu montieren sein, um die Dichtheit beivoller Füllhöhe zu gewährleisten.
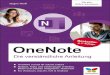
Von Interesse sind möglichen Aufbauvarianten der Linearschienen. Das Zielbesteht darin, einen Sensor innerhalb von drei Freiheitsgraden zu positionieren,wobei jeder Freiheitsgrad durch eine Linearachse repräsentiert wird. Es ergebensich daraus drei Aufbauvarianten, die als "H - Form", "X - Form" und als "L- Form" bezeichnet werden. Die Grak Abb. 2.2 stellt die alle drei Variantenin der Draufsicht dar.
13

L - Form: Die "L - Form" entsteht, wenn der Freiheitsgrad "Y" so auf "X"montiert ist, dass im Winkel von 90 die äuÿersten Kanten eine Fluchtbilden. Dabei entsteht allerdings der maximal mögliche Überhang derLinearschiene von "Y" mit allen Nachteilen bezüglich der Wirkung derGewichtskraft auf Schienenkörper und Steigungsspindel, welche maximalwird, wenn der Freiheitsgrad "Z" auf das Ende der Schiene positioniertwird.
X - Form: Die "X - Form" stellt eine Montagevariante dar, bei der der zwei-te Freiheitsgrad "Y" mittig auf dem ersten Freiheitsgrad "X" montiertwird, so dass auf beiden Seiten gleiche Überhänge von "Y" entstehen."Z" wird nach wie vor stehend auf "Y" angebracht. Als Vorteil kannhierbei die gleichmäÿige Belastung von "X" in Richtung von "Y" be-trachtet werden. Nachteilig ist die Entstehung von "messtoten" Gebie-ten, denn selbst wenn es gelingt den Sensor durch Bewegung in Richtungdes Freiheitsgrads "Z" über den Freiheitsgrad "X" hinweg zu bewegen,so können Positionen im Wasser, die unter der Linearschiene liegen, nichteingenommen werden. Damit ist diese Variante unbrauchbar.
H - Form: Die "H - Form" stellt einen Aufbau dar, bei dem die Linearach-se für den zweiten Freiheitsgrad "Y" über eine eigene Laufschiene amEnde des Achsenkörpers unterstützt wird, so dass kein Überhang zu-stande kommt. Dies hat den Vorteil, dass die Gewichtskraft nicht aufdas Gehäuse des zweiten Freiheitsgrads "Y" und auf den Schlitten desersten Freiheitsgrads "X" wirken kann. Insbesondere werden dabei dieSteigungsspindeln der Linearschienen "X" und "Y" geschützt. Der Nach-
Abbildung 2.2: Ansicht der Aufbauvarianten: In der Abbildung sind diemöglichen Aufbauvarianten von drei Linearschienen angegeben. Von links nachrechts sind dies die "L - Form", "X - Form" und die "H - Form".
14

teil dieser Variante ist die erforderliche Genauigkeit bei der Anbringungder Laufschiene. Jede axiale Abweichung in vertikaler oder horizonta-ler Richtung äuÿert sich direkt als Zusatzbelastung auf die Schiene desersten Freiheitsgrads "X". Dieser Eekt ist nur bei Montage auf einergemeinsamen Grundplatte auszuschlieÿen.
Die Montage der Freiheitsgrade untereinander muss sowohl die auftretendenKräfte der Quer- und Längsbeschleunigungen der Motoren als auch die ent-stehende Verteilung der Gewichtskraft aushalten können. Einfache Träger ausMetall sind dabei nicht geeignet, da durch die ache Konstruktion Biegebalkenentstehen, die zu einer Verschiebung des Sensors in vertikaler Richtung durchdie Biegung führen. Die Verwendung von sogenannten "U - Prolen" kann dementgegenwirken. Im Fall der stehenden Z - Achse wird die Auageäche rela-tiv zu Gesamtlänge der Schiene sehr klein sein, so dass die Anbringung einesStützwinkels erforderlich wird.
2.5 Wahl der AufbauvarianteDie Wahl der Anordnung der Freiheitsgrade fand nach Ausscheiden der "X- Form" durch die Entstehung von "messtoten" Gebieten zwischen der "H- Form" und der "L - Form" statt und el trotz der oensichtliche Vorteileder "H - Form" auf die "L - Form". Die Anbringung der Stützschiene ohneaxiale Abweichung konnte nicht garantiert werden, da durch die Anbringungüber der Wasseräche an den Rändern des Wasserbeckens keine gemeinsameGrundplatte montiert werden konnte.Die Kräfteverteilung der "L - Form" stellt sich schematisch in der Seitenan-
sicht der Aufbauvariante Abb.2.3 dar.Die Auswirkungen wirken sich beide entweder auf die Verbindungen zur
Grundplatte bzw. der Linearschienen der Freiheitsgrade "X" und "Y" aus,oder können an den Gehäusen der Schienen zu Verwindungen führen. Der Her-steller garantiert eine hohe Steigkeit der Gehäuse, so dass davon ausgegangenwerden kann, dass sich die Druckkraft auf die Gehäuse der Schienen "X" und"Y" nicht negativ auf die Versuchsanordnung auswirkt. Die Steigkeit wird alsaxiale Flächenmomente 2. Grades in mm4 mit lx = 6,2·104 und ly = 3,8·105 im
15

Handbuch des Herstellers[11] angegeben. Daraus resultiert einen Einfederungvon 5 µm bei einer Belastung von 1000 N. Die Aussage ist, dass das wirkendeGewicht des Aufbaus keinen nennenswerten Einuss auf die Gehäuse der Li-nearschienen hat. Auf die Verbindungen der Linearschienen der Freiheitsgrade"X" und "Y" untereinander bzw. der Schiene "X" zum Wasserbecken wirktdie Gewichtskraft aus dem Überhang der Schiene "Y" und dem Aufbau ausSchiene "Z" mit Ultraschallwandler. Die Verbindungen aus Schrauben werdendabei beansprucht.
Für den Aufbau des Wasserbeckens standen im Haus verschiedene Materialienzur Verfügung. Bei genauerer Betrachtung erweist sich eine Konstruktion ausMetall trotz der oensichtlichen Stabilität als ungeeignet, da nicht veredelteMetalle durch Oxidation das Wasser verschmutzen und eine Schallfeldmessungverfälschen können. Die Nutzung von Edelstahl beseitigt zwar das Problem derOxidation, führt aber zu einem hohen Gewicht. Der Aufbau aus Kunststoenerschien daher sinnvoll. Als hochstabile Kunststoe standen PVC und Ple-xiglas zur Verfügung. Da insbesondere Plexiglas den Vorteil einer seitlichenSichtkontrolle bietet, wurde dieses Material benutzt. Plexiglas kann auf einfa-che Weise geklebt werden und ist so stabil, dass die auftretenden Wasserdrückeden Aufbau nicht beschädigen können. Ein Abdichten der Fugen erfolgt mit
Abbildung 2.3: Kräfte an der L - Form: In dieser Abbildung sind schema-tisch die wirkenden Kräfte dargestellt.
16

Silikonkautschuk.Die Montage der Freiheitsgrade mit dem Wasserbecken erfolgt über eine Alu-
miniumprol. Es wurde ein Rahmen gefertigt, der den Maÿen des Wasserbe-ckens entspricht und aufgesetzt wird. Damit sich der Rahmen nicht lösen kann,wurde er mit dem Plexiglas verschraubt. Die Linearachse des ersten Freiheits-grads wurde auf die kurze Seite des Rahmens angeschraubt, so dass der zweiteFreiheitsgrad "Y" über das Volumen ragt.
2.6 AntriebsberechnungDie erforderlichen Antriebsgröÿen sind von der gewählten Aufbauvariante un-abhängig, und ergeben sich aus Eigenschaften der Linearschienen und den zubewegenden Massen. Die Eigenschaften der Linearschienen sind die Spindel-steigung, die Kugelmittendurchmesser und die Reibungskoezienten. Die Mas-sen ergeben sich aus den Aufbauten für jede Linearschiene. Die gröÿte Massemuÿ von der Linearschienen des Freiheitsgrads "X" bewegt werden. Die Ein-gangsparameter sind in jeder Aufbauvariante als konstant anzusehen, da sichweder die Eigenschaften der Linearschienen noch die zu bewegenden Massenverändern. Zur Auswahl der Antriebe sind Dreh- und Trägheitsmomente, Rei-bungskräfte, Drehzahlen sowie die Zeiten zur Positionierung, welche Beschleu-nigung, konstante Geschwindigkeiten und Abbremsen beinhalten, zu ermitteln.Zum Schutz der Linearachsen muss eine Überprüfung der berechneten Gröÿenmit den vorgegeben Grenzbereichen des Herstellers durchgeführt werden. Anden Antrieb des Freiheitsgrads "Z" sind zusätzliche Anforderungen bezüglichdes Haltemoments zu stellen, da die spätere Anbringung eines Antriebs zurDrehung des Hydrophons mit vorgesehen wird.Relevante physikalische Gröÿen und ihre Einheiten:
• Trägheitsmomente Jx in [kgm2]Der Index x bezeichnet das Bauteil, für welches das Trägheitsmomentaufgestellt wurde.
• Drehmomente Tn in [kgm2s−2]Der Index n bezeichnet eine ganze Zahl zur Numerierung der Drehmo-mente.
17

• Winkelbeschleunigung α in [rads−1]
• Beschleunigung a in [ms−2]
• Kräfte Fh und Fv in [kgms−2]Der Index h bzw. v bezieht sich auf die Lage, in der die Kräfte wirken.Eine horizontale Lage wird mit h, eine vertikale Lage mit v bezeichnet.
• Massen m in [kg]
Folgende Konstanten werden benutzt:
• Erdbeschleunigung g mit 9,8066 [ms−2]
• Zahl Π mit 3,1415
Vorab werden die Zeiten zum Beschleunigen und Abbremsen relativ zur ge-samten Positionierzeit festgelegt. In den folgenden Berechnungen wird von je16der gesamten Positionierzeit ausgegangen.Alle erforderlichen Gröÿen zur Auswahl der Antriebe wurden mit folgenden
Formeln errechnet:
Steigungswinkel β:tan(β) =
l
Π · dp(2.3)
l: Spindelsteigung [11][12]dp: Kugelmittendurchmesser [11][12]
Wirkende Gewichtskraft Fh horizontal:
Fh = µ ·m · g (2.4)
µ: Reibungskoezient [11][12]
Wirkende Gewichtskraft Fv vertikal:
Fv = m · g (2.5)
Erforderliche Drehzahl n:
n =VMAX · 60
l· 1
i(2.6)
i : ÜbersetzungsverhältnisVMAX : Verfahrgeschwindigkeit
18

Winkelbeschleunigung α:α =
2 · Π · n60 · tB (2.7)
tB : Beschleunigungszeit
Gesamtträgheitsmoment J:
J = m · ( l
2 · Π)2 · i2 · 10−6 + JS · i2 + JB (2.8)
JS : Spindelträgheitsmoment 2,5·10−5 [kgm2] [11][12]JB : andere Trägheitsmomente, werden vernachlässigt.
Drehmomente Tn:T1 =
Fa · l2 · Π · η1
(2.9)
η1 gibt den Wirkungsgrad an [11][12].T1 gibt das erforderliche Drehmoment zur Bewegung der Masse an.
T2 = Td · i (2.10)
T2 gibt das Losbrechmoment des Kugelgewindetriebs an.
T3 = J · α · 103 (2.11)
T3 gibt das erforderliche Drehmoment an, welches benötigt wird um dieSpindel der Linearschienen in Rotation zu versetzen.T4 ist das Trägheitsmoment der Encoderwelle mit 0,1·10−3[kgm2][5].Td ist Vorspannmoment des Kugelgewindes.
Bis auf die Parameter Wirkungsgrad und Reibungskoezient, die jeweils ausden Handbüchern der Linearschienen[11][12] abgelesen wurden, ergaben sichfür die Freiheitsgrade die Werte der Tabelle 2.2 zur Antriebsberechnung.Die Drehzahlen sind für die Fahrt in einer Mäanderform angegeben. Bei dieser
Art der kontinuierlichen Bewegung in der "XY" Ebene gibt es eine schnelle undeine langsam Achse. In der Tabelle 2.2 sind die berechneten Werte für beideMöglichkeiten angegeben. Die Werte ohne Klammern bezeichnen die schnelleVerfahrgeschwindigkeit von "Y" und die langsame Verfahrgeschwindigkeit von"X". Die Werte in Klammern bezeichnen den umgekehrten Fall. Zusammen-fassend gelten allerdings für beide Linearachsen gleiche Drehzahlbedingungen.
19

Tabelle 2.2: Antriebsberechnung der Freiheitsgrade: In der Tabelle sinddie Ergebnisse der Antriebsberechnungen für jeden Freiheitsgrad getrennt dar-gestellt.
Gröÿe mit SI - Einheit "X" "Y" "Z"Steigungswinkel β in [] 10,3 10,3 13,4
Wirkungsgrad η 0,96 0,96 0,96Reibungskoezient µ 0,005 0,005 0,005
Antriebsmoment T1 in [Nmm] 0,39 0,16 16,69Drehzahl n in [min−1] 70 (700) 700 (70) 100
Winkelbeschleunigung α in [rads−1] 1,02 (103,24) 103,24 (1,02) 62,83Gesamtträgheitsmoment J in [kgm2] 3,14·10−5 2,85·10−5 2,65·10−5
Drehmoment Beschleunigen in [Nmm] 0,4 4,16 18,99 (14,19)Drehmoment bei VMAX in [Nmm] 0,34 0,16 16,59Drehmoment Bremsen in [Nmm] 0,3 3,84 14,19 (18,99)
Die Angaben zu den Momenten während der Beschleunigung, mit konstanterGeschwindigkeit oder beim Bremsen beziehen sich im Falle der Freiheitsgra-de "X" und "Y" auf eine Bewegung in einer horizontalen Ebenen. Die Wertebeim Freiheitsgrad "Z" beziehen sich auf eine vertikale Ebene. Die angegebenWerte vor den Klammern gelten für die Aufwärtsbewegung und die Werte inKlammern für die Abwärtsbewegung.
Aus den Handbüchern des Achsenherstellers "THK Ltd, Japan"[11][12] wur-den die kritischen Drehzahlen mit den ermittelten Werten verglichen. Der Her-steller gab eine kritische Drehzahl von 16700 min−1 der Achsen vom Typ "KR3306" bzw. von 13400 min−1 beim Typ "VLA 45" an, welche nicht erreichtwerden. Über die Gewichtsbelastung und die Drehzahlen konnte die Mindest-lebensdauer der Achsen zu 9,7·109 Umdrehungen beim Typ "KR 3306" undvon 8,3·108 beim Typ "VLA 45" bestimmt werden. Umgerechnet in eine Ent-fernung über die Spindelsteigung entspricht dies einer möglichen Entfernungvon 58200 Km beim Typ "KR 3306" und einer Entfernung von 4980 Km beimTyp "VLA 45" bevor Verschleiÿerscheinungen zu erwarten sind.
20

Für die Auswahl der Motoren wurde jeweils das grösste Drehmoment als An-haltspunkt genutzt. Als Sicherheitszugabe wurde dieser Wert zusätzlich ver-doppelt. Bei Motorherstellern arbeitet das Institut seit langem mit dem Schwei-zer Unternehmen "Maxon Motors" zusammen, deren Motoren unter anderemauch in der Marslandefähre der NASA eingesetzt werden. Aus der Produktpa-lette war jedoch kein Motor zu nden, dessen Eigenschaften so kleine Werteaufweisen, wie berechnet. Deshalb wurde der Einkauf von Motoren des Her-stellers "Maxon Motors" entschieden, deren Drehmomente am nächsten an denberechneten Werten liegen.
2.7 Vorstellung der SteuerkartenDie Positionierung innerhalb von zwei Freiheitsgraden ist eine oft geforderteSpezikation an Projekte innerhalb des Instituts für Prozessdatenverarbeitungund Elektronik. Deshalb wurde intern eine Steuerkarte entwickelt, die auch imAufbau des Messplatzes eingesetzt werden soll. Da jede Steuerkarte nur zweiFreiheitsgrade ansteuern kann, werden für die Steuerung von drei Freiheitsgra-den zwei Steuerkarten eingesetzt.Die wichtigsten Eigenschaften für den Einsatz im Messplatz sollen hier ge-
nannt werden.
• Steuerung mit Pulsweitenmodulierten - Signalen (PWM).
• Ansteuerung von zwei Motoren pro Karte; DC-, AC- und Schrittmotorenbis zu einer Versorgungsspannung von 24 V können eingesetzt werden.
• Parametrisierbare Drehrichtung und Geschwindigkeit.
• Auswertung von End- und Referenzfahrtschalter.
• Auswertung von Encodersignalen unter dem Format der SchnittstelleRS422.
• Überwachung der Treiberbausteine, Ströme, Spannungen und Tempera-tur.
• Vorhandene Hardwareschnittstellen CAN, USB, RS232.
21

Als informationsverarbeitende Einheit wurde ein DSP der Firma "TI" mitder Bezeichnung "TMS320LF2812" benutzt. Der DSP steuert dabei über diePWM - Ausgänge die Motoren an. Er setzt die erhaltenen Daten aus der Kom-munikation mit dem Steuerrechner in PWM - Signale um und übernimmt auchdie Kommunikation über die Kommunikationsschnittstellen. Zur Ansteuerungder Motorphasen werden PWM - Signale benutzt, da es über diese möglich ist,über das Tastverhältnis verschiedene Spannungen zu erzeugen. Bei DC - Mo-toren kann auf diese Art und Weise die Drehgeschwindigkeit gesteuert werden.AC - Motoren können über Variation des Tastverhältnisses beschaltet werden.Beim Einsatz von Schrittmotoren können die Ansteuerpulse erzeugt werden.Die erforderlichen Ströme und Spannungen werden von verschiedenen Netztei-
len und Treiberbausteinen zur Verfügung gestellt. Zur Energieversorgung derMotoren und der Signalprozessoren stehen Spannungseingänge zur Verfügung,die mit je einem Netzteil verbunden sind, welche 24 V mit einer Ausgangsleis-tung von 120 W bzw. 7 V und 7 W liefern. Beide Spannungsversorgungen sindals 19" Einschubnetzteile ausgeführt.
2.8 Erklärung der HardwaresteuerungDie Hardware kann in verschiedene Teile untergliedert werden:
• DSP mit Speicherchips, Spannungsversorgung und Pegelumsetzer zur Si-gnalanpassung an die Peripherie.
• Kommunikationsbausteine mit den Pegelumsetzer zum Anschluss an denDSP.
• Die H - Brücke mit Treiberchips.
• Die Schalterelektronik mit den Anschlüssen für End- und Referenzschal-ter.
Der DSP ist mit der umliegenden Peripherie verbunden. Dabei sind als An-schlusspins neben den General Purpose Input Output (GPIO) - Pins auchEingänge mit Interrupt - Pins beschaltet. Die Pegelspannung der Pins beträgtjeweils 0 V für logisch 0 und 3,3 V für logisch 1. Diese Spannung unterscheidet
22

Abbildung 2.4: Prinzip der H - Brücke: In der Abbildung ist das Prinzipder H - Brücke dargestellt.
sich von der Pegelspannung der umliegenden Peripherie und wird auf TTL-Pegel von den Pegelumsetzern erhöht. Die Kommunikationsbausteine zumNutzung von USB- und CAN- Schnittstellen sind eingangsseitig mit den In-terrupteingängen verbunden und steuern so die Kommunikation.
Zur Positionierung werden die Treiberbausteine mit einem PWM - Signal be-schaltet, welches über eine "H - Brücke" die Motorphasen steuert. Eine "H -Brücke" Abb. 2.4 ist eine Anordnung von vier Transistorschaltern. Die Tran-sistoren erlauben es, die Stromussrichtung durch den Motor zu ändern. DieÄnderung wird durch Wahl der Transistoren erzielt. Die Treiberchips regeln diegeschalteten Transistoren der "H - Brücke". Über die geschalteten Transistorenist die Polarität und damit die Drehrichtung der Motoren beeinussbar.T1 und T2 werden als Highside-Transistoren bezeichnet. Sie verbinden jeweils
einen Pol mit der Versorgungsspannung. T3 und T4, die Lowside-Transistoren,schlieÿen jeweils einen Pol an das Masse-Potenzial an. Durch Schalten derTransistoren T1 und T4 ieÿt der Strom von links nach rechts durch denMotor. Sind T2 und T3 aufgesteuert, ieÿt der Strom von rechts nach linksdurch den Motor.Der Treiberbaustein "TD 340 I" Abb. 2.5 steuert über den Eingang "DIR" die
durchgeschalteten Transistoren. Der Eingang "Brake" setzt die elektronischeBremse und der Eingang "PWM" steuert die Transistoren auf.Um den Versuchsaufbau bei Fehlfunktionen der Positionierung zu schützen,
müssen Endschalter Abb. 2.6 angebracht werden. Die Endschalter verursachen
23

Abbildung 2.5: H - Brückenschaltung: In der Abbildung ist die H - Brückeund der Treiberbaustein "TD 340 I" dargestellt[1][2].
bei Betätigung über eine Schaltung als Öner an den MOSFET "IRF 9724N"eine Unterbrechung der Spannungsversorgung der "H - Brücke". Die Motor-spannung von 24 V wird hart abschalten.
Abbildung 2.6: Beschaltung der Endschalter: In der Abbildung ist dieBeschaltung der Endschalter dargestellt[1][2].
24

2.9 ZusammenfassungDer Abschnitt "Konstruktion" beinhaltet alle erforderlichen Spezikationender Konstruktion des Versuchsaufbaus. Dazu gehören die Montage der Linear-schienen, die Auswahl des Materials und Form des Wasserbeckens. Die beste-henden Möglichkeiten der Anbringung der Linearschienen an das Wasserbeckenwurden erläutert. Zusätzlich erfolgte die Berechnung der erforderlichen An-triebsgröÿen und es wurden Aussagen über die zu erwartende Genauigkeit derVersuchsanordnung in Bezug zur geforderten Positioniergenauigkeit getroen.
Die Linearschienen werden in der sogenannten "L - Form" angebracht. DieMontage der Achsen untereinander wird mit Prolen und mit Stützwinkelrealisiert. Die Wahl el auf diese Verbindungsvariante, da die "X - Form"wegen der Entstehung von "messtoten" Gebieten entfällt und die "H - Form"wegen der fehlenden gemeinsamen Grundplatte und der zu erwartenden axialenAbweichung nicht umgesetzt werden kann.
Das Wasserbecken wird aus Plexiglas geklebt und mit der entsprechendenGröÿe zur Unterbringung des Ultraschallwandlers samt Elektronik und desVerfahrwegs von 300 mm in Richtung jedes Freiheitsgrads versehen.
Das Anbringen der montierten Linearschienen an das Wasserbecken erfolgtüber einen Rahmen aus Aluminium - Prol.
Als Antriebe werden Motoren des Herstellers " Maxon Motors" benutzt, diefür die Freiheitsgrade "X" und "Y" ein Mindestdrehmoment von 4 Nmm undfür den Freiheitsgrad "Z" von 19 Nmm bringen müssen Tab. 2.2. Für alle Mo-toren werden 24 V als maximale Versorgungsspannung bestimmt. Die Ansteue-rung der Motoren erfolgt über die vorgegebenen Steuerkarten. Dabei schaltetein DSP ein PWM - Signal auf einen Treiberbaustein, der die Motorphasenüber eine "H - Brücke" beschaltet. Zur Spannungsversorgung beider Steuer-karten wird ein 7 V Netzteil mit einer Ausgangsleistung von 7 W eingesetzt.Die Spannungsversorgung der Motoren wird über 24 V jeweils 1 Netzteil miteiner Ausgangsleistung von 120 W eingesetzt.
Die geforderte Positioniergenauigkeit aus der Aufgabenstellung wurde auf ei-ne Wellenlänge eines Ultraschallsignals mit einer Mittelfrequenz von 3 MHzin Wasser zu 0,5 mm bestimmt. Damit wurde gewährleitet, dass einem Mess-
25

punkt der richtige Messwert zugeordnet werden kann. Diese Genauigkeit kanninnerhalb von 20 kompletten Messdurchläufen eingehalten werden, bevor ei-ne Referenzierung auf den Nullpunkt notwendig ist. Basis für diese Aussagenbilden die Positioniergenauigkeiten der Linearschienen. Entscheiden für die An-gabe von 20 Durchläufen war die Abweichung der Linearschiene "VLA 45", diein einer "worst case" Analyse untersucht wurde Tab. 2.1.
26

Kapitel 3
Versuchsaufbau
3.1 Becken, Anbaurahmen und MontageDer Wasserbehälter besteht aus Plexiglas. Das Wände aus Plexiglas werdengeklebt und mit Silikon abgedichtet. In einer Stirnwand Abb. 3.1 wurde einAblauf in 0,25 Zoll vorgesehen. Die Einzelteile des Wasserbeckens wurden mitdem Plexiglaskleber "Agrix" zusammengefügt. Die endgültige Gröÿe des Was-serbeckens beträgt 515 mm x 355 mm x 380 mm bei einer Wandstärke von 8mm.Auf dem oberen Rand des Wasserbeckens ist zur Montage der Linearschienen
Abbildung 3.1: Ansicht des Wasserbeckens: Zu erkennen ist das Wasser-becken mit dem Rahmen aus Aluminiumprol.
27

Abbildung 3.2: Befestigung X - Achse: Es ist ein Einblick in die Linearschie-ne zu sehen. Erkennbar ist die Steigungsspindel und links neben der Spindeldie Schrauben zur Befestigung am Prolrahmen.
ein Rahmen aus 30 mm Aluminiumprol aufgesetzt und mit demWasserbeckenverschraubt.
3.2 Achsen und MontageDie Achsen werden in "L -Form" untereinander montiert. Die Achse des Frei-heitsgrads "X" wird direkt auf den Rahmen aus Aluminium geschraubt.Das Bild Abb. 3.2 gewährt einen Einblick in die Linearachse und verdeutlicht
die Befestigung am Prol mittels der Schlitzschrauben. Dabei ist zu erkennen,dass die Unterseite zweiseitig gebohrt wurde und es auf diese Art und Weisemöglich ist, die Achse nach links oder rechts zu verschieben. Darüber hinausist eine Verschiebung nach oben und unten durch eine durchgehende Nut desProls möglich.Im Bild Abb. 3.3 ist die Montage der Linearschiene für den Freiheitsgrad
"Y" mittels eines Trägers in Form von einem U - Prol am Schlitten derLinearschiene des Freiheitsgrads "X" dargestellt. Der Träger ist aus Aluminiumgearbeitet. Die Schrauben zur Befestigung sind an der Unterseite des Trägers
28

Abbildung 3.3: Befestigung Y - Achse: Es ist das U -Prol zur Befestigungder Linearschiene zu erkennen. Die Schiene wurde eingelegt und mit Schraubenam U -Prol angebracht.
noch zu erkennen.Der letzte Freiheitsgrad "Z" Abb. 3.4 wird mit einem Winkelträger, der
die korrekte rechtwinklige Position garantiert und die Schwingneigung unter-drückt, befestigt. Dazu wurde auf dem Schlitten des Freiheitsgrads "Y" eineGrundplatte angebracht. Auf diese Grundplatte wurde hochkant eine weiterePlatte gestellt, mit der das Gehäuse der Linearschiene des Freiheitsgrads "Z"verschraubt wurde. Um dem System Stabilität zu geben, wurde zusätzlich einStützwinkel aus Aluminium befestigt.
Abbildung 3.4: Befestigung Z - Achse: Im Bild ist die Rückansicht derBefestigung aus Grundplatte und Stützwinkel der Linearschiene "VLA 45" zuerkennen.
29

Abbildung 3.5: Motor mit Adapter: Dargestellt ist die Stirnseite des Motorsmit angeschraubtem Adapter. Auf der Motorwelle bendet sich die Lamellen-kupplung.
3.3 Motoren und MontageDie erworbenen Motoren von "Maxon Motors" besitzen an der Stirnseite derGehäuse Bohrungen, die zum Anbringen an verschiedene Adapter dienen. Die-se Adapter wurden an die Motoren und den Motoransch der Linearachsenangepasst und von der Institutseigenen Werkstatt gefertigt.Im Bild Abb. 3.5 ist ein Motor mit dem Adapter vor dem Anbau an die Linea-
rachse zu sehen. Der Adapter aus Aluminium wurde stirnseitig an das Motor-gehäuse mit Senkkopfschrauben befestigt. Die Verbindung zwischen der Mo-torwelle und der Antriebswelle der Linearschiene wurde über die angebrachteLamellenkupplung hergestellt. Die Ausführung der Kupplung in Lamellenformlässt Anpassungen an verschiedene Abstände zwischen den zu verbindendenWellen zu.
3.4 PositionsbestimmungFür die Positionsbestimmung und für den Schutz der Linearschienen müssenpositionsbestimmende Bauteile angebracht werden. Diese stellen entweder sta-tische Signale oder eine Reihe von Zählpulsen zur Verfügung.Zum Schutz der Achsen wurden Endschalter angebracht. Diese sollen ein Ab-
schalten der Motoren bewirken, wenn sich der Schlitten der Linearachse kurzvor dem Endanschlag bendet. Der Nullpunkt soll ebenfalls durch einen Schal-
30

Abbildung 3.6: Ansicht des Schalterträgers: Im Bild ist die rechte undlinke Seite des Schalterträgers dargestellt. Die äusseren Schalter dienen alsEndschalter, der innere Schalter dient als Referenzschalter.
ter erkannt werden. Für beide Arten von Schaltern wurden Rollenwippschalterverwendet, die als Öner geschaltet sind. Alle drei Schalter pro Achse wurdenauf einem Träger Abb. 3.6 installiert und an das Gehäuse der Linearschieneangebracht.Das Auslösen der Rollenwippschalter durch die Schlittenkante beeinträchtigt
die mechanische Lebensdauer der Schalter. Zur Lösung des Problems wurdenAuslöseklötzer Ab. 3.7 mit einer Fase an den Achsen angebracht, welche dieSchalter betätigen. Mit denWippschaltern wurde der Nullpunkt wie im Kapitel"2. Konstruktion" angegeben, gelegt.Zur Codierung der Position werden für die Motoren Encoder verwendet, die
fertig montiert mit den Motoren geliefert wurden. Diese Encoder sind Quadra-turencoder und versorgen die angeschlossene Elektronik mit Zählimpulsen dierelativ zur gefahrenen Strecke sind. Über die Drehung der Motorwelle werdeninnerhalb des Encoders die Signale erzeugt. Die verwendeten Encoder vom Typ"HEDL 5440" des Motorherstellers "Maxon Motors" liefern pro Umdrehung
Abbildung 3.7: Schalter mit Betätigungsklotz: Es ist ein silberner Betäti-gungsklotz zu erkennen, der die Rollenwippschalter betätigt.
31

Abbildung 3.8: Frontansicht des 19" Gehäuses: Es ist die Frontseite des 19"Gehäuses zu sehen. Am linken Bildrand sind die Frontseiten der Netzteile zusehen. Rechts daneben benden sich die Programmiereingänge der eingebautenSteuerkarten.
500 Zählpulse. Die Phasenlage der Zählpulse bestimmt dabei die Drehrichtung.
3.5 Energieversorgung und ElektronikDa die Messanlage zur Charakterisierung von Schallfeldern als eigenständi-ger Versuchsaufbau konzipiert werden soll, ist es nicht möglich zur Energie-versorgung Labornetzgeräte zu benutzen. Die Spannungsversorgung und dieSteuerkarten wurden in einem 19" Gehäuse untergebracht.Im Bild Abb. 3.8 ist die Frontseite des 19" Einschubgehäuses zu erkennen.
Am linken Gehäuserand benden sich 3 Netzteile, von denen jeweils eineszur Bereitstellung der Motorspannung dient und eines die beiden DSP derSteuerkarten versorgt. Am rechten Rand sind die Programmiereingänge fürdie Steuerkarten der beschrifteten Freiheitsgrade zu erkennen. An diese kannüber eine JTAG - Schnittstelle die Steuerkarten debugged oder programmiertwerden.Die Anschlüsse der Netzspannung und der Motoren, Schalter und Encoder
benden sich auf der Rückseite des Gehäuses Abb. 3.9. Die einzelnen An-schlüsse sind nach Freiheitsgraden getrennt. An der Rückwand wurden dieEingänge der Kommunikationsschnittstellen mit der Bezeichnung "COM1"und "COM2", die Eingänge der Encoder auf Höhe der Beschriftung "Enco-der" und die Eingänge der Rollenwippschalter angebracht. Als Ausgänge ste-
32

Abbildung 3.9: Rückseite des 19" Gehäuses: In der Darstellung ist dieRückseite des Gehäuses zu erkennen. Am rechten Bildrand bendet sich derNetzlter zum Anschluss von 220 V Netzspannung. Der restliche Platz derRückwand wurde zur Anbringung der Ein- und Ausgänge der Motorsteuerunggenutzt.
hen mit der Bezeichnung "Motor" die Motorphasen zur Verfügung. Bei derAusführung der Motorphasen wurden auf die Ausführung als Buchse geachtet,so dass seitens des Anwenders kein Kurzschluss der stromführenden Leitungenverursacht werden. Die Aus- und Eingänge mit der Bezeichnung "T" sind fürdie spätere Anbringung des Freiheitsgrads "Teta" vorgesehen, der zur Rotationdes Hydrophons genutzt werden kann.Intern Abb. 3.10 sind alle Ports mit den Netzteilen und Steuerkarten verbun-
den. Der Verdrahtungsplan ist im Anhang zu nden. Die Netzteile sind übereinen Netzlter mit dem Netzanschluss verbunden. Die Ausgangsleitungen derNetzteile werden zur Spannungsversorgung mit den Steuerkarten verbunden.Die Fühlerleitungen der Netzteile werden nicht benutzt. Die Aus- und Eingän-ge der Steuerkarten sind mit der Rückwand des 19" Gehäuses verbunden. AlsEingänge stehen die Leitungen der Rollenwippschalter und die Eingänge derMotorencoder zur Verfügung, die Ausgänge sind die Anschlüsse der Motorpha-sen.
3.6 Zusammenfassung
Das Kapitel 3. Versuchsaufbau beschreibt die Umsetzung der Spezikationen,wie sie im Kapitel 2. Konstruktion getroen wurden.
33

Das Wasserbecken wurde in einer Gröÿe aufgebaut, die sowohl den gefor-derten Verfahrweg von 300 mm als auch den Ultraschallwandler inklusive derAnsteuerelektronik umfasst.Die Linearschienen der Freiheitsgrade "X", "Y" und "Z" wurden in der "L
- Form" angebracht. Die Montage wurde mit gefertigte Trägern und Stüt-zwinkeln realisiert. Die Verbindung erfolgte über Schraubverbindungen. Andie Linearschienen wurden mit Schalterträgern End- und Referenzschalter an-gebracht. Zum Schutz der Schalter und zur besseren Betätigung wurden dieSchlitten der Linearschienen um Betätigungsklötzer erweitert.Die Steuerkarten und die erforderlichen Spannungsversorgungen wurden in
ein 19" Gehäuse integriert. Die Verkabelung zwischen den Spannungsversor-gungen und den Steuerkarten, sowie der Steuerkarten zu den Anschlüssen aufder Rückseite des 19" Gehäuses wurde aufgebaut.Zusammenfassend wird ein Bild des kompletten Versuchsaufbaus Abb. 3.11
in Frontansicht gegeben.
Abbildung 3.10: Draufsicht des 19" Gehäuses: Im Bild ist die interne Ver-kabelung zu erkennen. Auf der rechten Seite benden sich die Verbindungender Netzteile und der Netzlter. Auf der linken Seite benden sich die Steuer-karten und deren Verkabelung der Ein- und Ausgänge zur Rückwand.
34

Abbildung 3.11: Vorderansicht des Messplatzes: Es ist der gesamte Mess-platz dargestellt. Zu sehen ist das Wasserbecken mit den Aufbauten. Darunterbendet sich das 19" Gehäuse mit der Elektronik.
35

Kapitel 4
Motorsteuerung mit DigitalenSignalprozessoren DSP
4.1 Spezikation der Programmierung
Die Spezikation der Programmierung ist durch die Beschaltung vorgegeben.Es können nur GPIO - Pins benutzt werden, die auch tatsächlich hardwa-remäÿig verbunden sind. Die Aufgabenstellung fordert Methoden zur Posi-tionierung und Positionsbestimmung und gibt die Kommunikation mit einerAnwenderoberäche vor. Die Kommunikationsart wird hier auf die Benutzungder seriellen Schnittstelle RS232 festgelegt, da diese Kommunikationsschnitt-stelle weit verbreitet ist und von den meisten Systemen zur Verfügung gestelltwird. Es ist davon auszugehen, dass seitens des Anwenders verschiedene Be-fehle ausgeführt werden sollen. Es wird bestimmt, dass jedem Anwenderbefehlein Zustand innerhalb eines Zustandsautomaten zugeordnet wird. Dies soll eineklare Trennung der Funktionen der Motorsteuerung ermöglichen. Alle Anwen-derbefehle werden innerhalb eines Übertragungsbuers neben den notwendigenInformationen wie Zielposition und ID codiert. Die Einführung einer Identika-tion ID ist notwendig, um Verbindungsfehler seitens des Anwenders bezüglichder Kommunikationskanäle abzufangen. Das Ziel ist, dass die Steuerkarte zurSteuerung der Freiheitsgrade "X" und "Y" nur auf Befehle mit der richtigen IDreagiert und die richtige Zuordnung der Rückmeldungen seitens der Steuerungan den Anwender gewährleistet wird.
36

Die Programmierung kann in mehrere Module zerlegt werden:
Initialisierung: Das Programm muss den DSP für die Anwendung initialisie-ren und voreinstellen. Die Initialisierung ist teilweise durch die Beschal-tung vorgegeben. Die GPIO - Pins müssen entsprechend der Beschaltungin Funktion und Richtung eingestellt werden. Die PWM - Erzeugungwird über Timer realisiert. Diese müssen initialisiert werden. Die Analog/ Digital - Wandlung (ADC)[10][7] zur Überwachung der H-Brücke isteinzustellen. Und die Positionserfassung über Quadratur Encoder PulseQEP - Eingänge muss angeschaltet werden. Die Zählung der Zählsignalewird dabei ebenfalls über Timer realisiert, bei denen die Zählpulse denEingangstakt repräsentieren. Die Kommunikation ist entsprechend derÜbertragungsrate, der Anzahl der Übertragungsbytes und der Abbarbei-tung eines Empfangs- oder Sendeereignis einzustellen. Die Freischaltungder benutzten Interrupts zur Steuerung der PMW - Timer und Kommu-nikation schlieÿt sich an. Alle aktuellen Positionsdaten und Parameterwerden in Datenstrukturen gehalten. Diese müssen ebenfalls vorinitia-lisiert werden. Als Datenstrukturen stehen Strukturen zur Verfügung,die alle relevanten Daten wie Zustand der Bremse, Bewegungsrichtung,aktuelle Geschwindigkeit, aktuelle Position und Zielposition beinhalten.Alle Strukturen werden mit dem Namen des zugeordneten Freiheitsgradsangesprochen.
PWM - Erzeugung: Das PWM - Signal wird durch Timer der Eventmana-ger EV [9] des DSP erzeugt. Jeder Eventmanager steuert die korrespon-dierende H - Brücke eines Freiheitsgrads an. Die Geschwindigkeit ergibtsich aus dem Tastverhältnis der PWM - Signale. Es sind verschiedeneGeschwindigkeiten vorzusehen, die über den Compare - Wert des EV -Timers bestimmt werden und dass Tastverhältnis verändern. Die Rich-tung der Motordrehung und die Bremse müssen über die GPIO - Pinsgesetzt werden.
Kommunikation: Die Kommunikation zwischen dem Steuerrechner und demDSP erfolgt über die Schnittstelle RS 232. Die Programmierung musssich mit dem Steuerrechner synchronisieren, was über die Nutzung der
37

Serial Communication Interface SCI - Schnittstelle [8]und Interrupts derSchnittstelle geschehen soll. In der Interrupt Service Routine ISR wirddie Übertragung auf Fehlerfreiheit mit einer Checksumme geprüft und imFehlerfall eine Neuübertragung ausgelöst. Innerhalb des Übertragungs-buers sind ID - Codes, Zustände des Systems, Befehle, Positionen unddie Checksumme zu codieren. Mit diesen Informationen soll eine fehler-sichere Kommunikation aufgebaut werden.
Anwenderbefehle: Zur Positionierung sollen verschiedene Modi zur Verfü-gung stehen. Die Anwenderbefehle sollen in einer state machine abge-arbeitet werden. Es ist die state machine aufzubauen, die verschiedeneZustände zu denieren und die auszuführenden Funktionen jedes Zustandfestzulegen.
4.2 ProgrammerklärungMit Einsprung in die Hauptfunktion beginnt die Initialisierung des DSP. Mitdem Aufruf der Funktion InitSysCtrl erfolgt die Abschaltung des Watch-dogsmoduls, welches nicht benötigt wird. Der Systemtakt wird über einen 4-Bit-Wert eingestellt. Der von einem externen Oszillator in den Chip geführte30MHz-Takt kann so mit Faktoren von 0,5 bis 5 multipliziert werden. In dervorliegenden Anwendung ist der Systemtakt auf den maximalen Wert von 150MHz eingestellt. Des weiteren werden an dieser Stelle alle benötigten Taktsi-gnale der anderen Module aktiviert.
InitialisierungInitGpioPorts: Die Einstellung der 56 kongurierbaren I/O - Ports erfolgt
über diese Funktion. Die Pins können zur freien Benutzung oder in einervordenierten Funktion über die MUX - Register der Ports eingestelltwerden. Als nächstes wird die Richtung der Pins über die DIR - Registergesetzt.
InitPieCtrl: Mit dieser Routine erfolgt im Anschluss an die Einstellung derGPIO - Ports das Ausschalten aller Interrupts und das Löschen der In-
38

terruptags in der Funktion. Die benötigten Interrupts werden von denfolgenden Modulen wieder eingeschaltet.
InitEVA, InitEVB: Die Einstellung der Timer zur PWM - Erzeugung undzur Positionsermittlung werden mit diesen Funktionen durchgeführt. DerEvent Manager EVA steuert den Freiheitsgrad "X", der Event ManagerEVB den Freiheitsgrad "Y". Es wird in beiden Eventmanagern je einTimer für die Erzeugung des PWM-Signals konguriert. Die Zähler wer-den aktiviert, als kontinuierliche Auf- /Abwärtszähler eingestellt, und derVergleichsmodus eingeschaltet. Der Wert des Vergleichsregisters, welcherspäter die Pulsbreite des PWM - Signals bestimmt, wird mit Null initia-lisiert. Die Perioden werden auf 4000 Systemtakte eingestellt, um eineFrequenz der PWM - Signale von 37,5 kHz zu erhalten. Die gewählteFrequenz ist zum einen klein genug, so dass die generierten Interruptsdas System nicht übermässig belasten und groÿ genug, um eine sauberePWM zu generieren. Die Polarität der Signale wird festgesetzt, und kannbei Bedarf invertiert werden.
Die Erfassung der Encodersignale erfolgt über die beiden anderen der jezwei Timer eines Moduls. Die Perioden werden hier auf das Maximumvon 65535 gesetzt, um möglichst viele der zu empfangenden Signale, wel-che die sehr kleinen Teilschritte einer Bewegung repräsentieren, zählen zukönnen. Die Zähler werden aktiviert und der benötigte Modus eingestellt.Die Taktquelle ist für diese Zähler jedoch nicht der interne Systemtakt,sondern der Takt der Encodersignal- Empfangseinheiten, der sogenann-ten QEP-Schaltkreise. Diese generieren ihren Takt nach Events, welchein diesem Fall durch die Flanken der eingehenden Sensorsignale ausgelöstwerden. In den Kontrollregistern für das QEP-Module werden die ver-wendeten Teileinheiten "CAP1" bis "CAP6" aktiviert. CAP bezeichnetdabei einen sogenannten Capture - Eingang. Es wird eingestellt, dass vonjedem Eingangssignal jeweils die steigende und die fallende Flanke de-tektiert und gezählt wird. Dies erhöht die Auösung der Positionierungum den Faktor 4. Die von den Empfangseinheiten erzeugten Interruptsvon "CAP3" und "CAP6" werden am Ende dieser Funktionen freigege-ben, sowie auch die, welche von den Unter- und Überläufen der Timer
39

T2 und T4 generiert werden. Die Interrupts der Unter- und Überläufewerden genutzt, um die Positionierung über Entfernungen zu betreiben,die gröÿer als über die Timerperiode messbare Enfernung ist. Dazu wirdintern über eine Variable ein Additionswert um die Timerperiode erhöhtoder verkleinert.
InitInterrupts: Die Funktion beinhaltet die Aktivierung der benötigten In-terrupts. Der DSP verfügt über 96 Interrupts, von denen die Mehrzahl fürden Prozessor selbst reserviert ist. Das Multiplexen der Interruptsignalegeschieht mit Hilfe des PIE - Blocks, welcher wie eine Tabelle aufge-baut ist. Die Interrupts sind dort in zwölf Gruppen zu je acht Signalenzusammengefasst. Der Peripheral Interrupt Enable PIE - Block ermög-licht es, jeden Interrupt einzeln zu aktivieren. Dazu wird das betroeneSignal über die PIE Interrupt Enable Register PIEIER freigeschaltet,und die Gruppe, in der sich der zu verwendende Interrupt bendet, überdie Interrupt Enable Register IER aktiviert. Es kann so wie in einer Ma-trix angegeben werden, welche Interrupts während des Programmablaufszugelassen sind.
InitSCI: Als letztes wird die serielle Schnittstelle eingestellt. Dazu erfolgtder Aufruf dieser Funktion. In ihr wird die Baudrate und das Übertra-gungsprotokoll gesetzt. Die Einstellung bezüglich der Baudrate erfolgt zu19200 und das Datenformat wird auf 8 Datenbits, 1 Stopbit und keineParität initialisiert. Ein Hardware-oder Softwarehandshake wird wegender Prüfung über eine Checksumme nicht benötigt.
Nach der Initialisierung des DSP erfolgt die Referenzierung der drei Freiheits-grade auf den Nullpunkt, so dass mit einer denierten Startposition in dieSchleife des Zustandsautomaten eingesprungen werden kann.Alle Befehle, die vom DSP ausgeführt werden sollen, können in eigenständige
Funktionen umgesetzt werden. Dazu gehören zum einen Funktionen, die GPIO- Pins setzen oder löschen, Funktionen die Register auswerten und die InterruptService Routinen[4].
Setzen der Bremse: Die Bremse wird mit den Funktionen brko und br-kon bedient. Jeder Funktion wird als Übergabe der char - Wert der Achse
40

als 'x' oder 'y' übergeben und entsprechend das GPIO - Pin, welches mitdem 'Brake' - Eingang des "LMD 18200 T" verbunden ist gesetzt oderrückgesetzt.
Setzen der Richtung: Die Wahl der Richtung geschieht mit den Funktionendirfwd und dirbckwrd. Analog den Funktionen zum setzen der Brem-se wird ein char - Wert übergeben und das GPIO - Pin gesetzt bzw.rückgesetzt.
Setzen der Geschwindigkeit: Die Geschwindigkeit wird als Funktionsüber-gabe in Form von Prozent der Gesamtgeschwindigkeit der Funktion Sets-peed übergeben. Um die Geschwindigkeit für die Achse setzen zu kön-nen, wird die Achsenbezeichnung ebenfalls als char mit übergeben. DieBerechnung erfolgt nach der Formel:
CMPR = V · (Timerperiode/100) (4.1)
V bezeichnet dabei eine Prozentuale Übergabe der Maximalgeschwindig-keit.Das Ergebnis ist der CMPR - Wert des Timers, bei dem die Ausgangspo-larität geändert wird. Über den CMPR - Wert können auch Motoren mitVersorgungsspannungen unter 24 V angeschlossen werden. Der CMPR -Wert ist dementsprechend zu vergröÿern bzw. zu verkleinern. Innerhalbder Funktion wird das Compare - Register des Timers der Achse mit demerrechneten Wert beschrieben.
Positionsbestimmung: Die Positionsbestimmung erfolgt mittels der Funk-tion detpos, welche den Zählerstand des Positionszählers jeder Achseausliest und in Verbindung mit einem Zähler, der die aktuelle Positionin Zählerschritten hält, verrechnet. Das Ändern der Bewegungsrichtungkann bei der Positionsbestimmung nach dieser Art zu Fehlern führen,wenn sich der aktuelle Zählwert in der Nähe von 0 oder von 65535 be-ndet. Der Schlitten bewegt sich bei einer Änderung der Fahrtrichtungunbestimmt in beide Richtungen hin und her. Dabei treten Zählimpulseseitens der Encoder auf, welche wiederum zu Zählerüberläufen führenkönnen. Deshalb arbeitet die Funktion mit der Routine checkdistanz
41

zusammen, welche die Fahrdistanz mit dem Zählerstand vor einen mög-lichen Überlauf vergleicht, den Zählerstand auf 30000 setzt und die Po-sition dementsprechend anpasst.
Positionierung: Die eigentliche Positionierung wird als Aufruf der Funkti-on tocoordinates, die als Übergaben die Sollpositionen erhält, durch-geführt. In dieser Routine sind die Aufrufe der Funktionen InitDrive,InitAchse, drive und CheckMovement enthalten. Die übergebenenPositionen werden mit der Istposition verglichen. Bei einer Dierenz bei-der Positionen die über der Toleranz liegt, wird die Positionierung mitdem Funktionsaufruf von InitDrive initialisiert, indem für jede Achseder PMW - Timer und dessen Interrupts freigeschaltet werden. Im An-schluss erfolgt die Initialisierung der Achse durch lösen der Bremse undsetzen der Startgeschwindigkeit über den Compare Wert des Timerregis-ters. Mit der Funktion drive erfolgt ständiger Vergleich der Position inder Bewegung mit der Zielposition. Wird diese erreicht, wird die PWM -Erzeugung gestoppt indem der Compare Wert auf 0 gesetzt wird. Da dieAchse nicht sofort steht, sondern sich noch wenige Zählimpulse weiter-bewegt, prüft die Funktion CheckMovement die Zählerstände solange,bis diese sich nicht mehr ändern. Die Bremse wird gesetzt und der Be-wegungsvorgang ist abgeschlossen. Eine Anpassung der Geschwindigkeiterfolgt zu jedem Perioden Interrupt des PWM - Zählers. Dabei wirdje nach Entfernung die Geschwindigkeit auf einen von den möglichenWerten 5 Prozent, 30 Prozent, 60 Prozent oder 99 Prozent gesetzt. DieEntfernung als Dierenz zwischen Soll- und Istposition in Millimeter be-trägt dabei Werte kleiner als 10 mm, bis 30 mm, bis 100 mm und mehrals 100 mm. Der Bewegung wurde ein Toleranzwert auferlegt, der 200Zählimpulse beträgt. Die entstehende Toleranzentfernung beträgt:
Dist =Steigung
500· 200 (4.2)
Die Steigung beträgt 1,25 bei 500 Zählimpulsen und es ergibt sich aus derFormel 4.2 eine Toleranzentfernung von 0,50 mm. Die geforderte Toleranzinnerhalb der Position aus der Aufgabenstellung wird somit erreicht. DerToleranzwert kann nach unten korrigert werden. Dies erhöht die Flexi-
42

bilität der Motorsteuerung in Bezug auf den Einsatz unter geändertenBedingungen.
Befehle, wie die Geschwindigkeitüberprüfung, die zu nicht denierten Zeitenauftreten, werden in den Interrupt Service Routinen verarbeitet.
Die Kommunikation erfolgt interruptgesteuert. Der Empfangs - Interrupt wirddurch den vollständigen Empfang von 15 Bytes ausgelöst und liest den Spei-cher in einen Puer in Form einer Struktur. Der wert von 15 Bytes ergibt sichaus der Gröÿe des Übertragungspuers, der 15 char - Werte zu je einem Byteenthält. Innerhalb der Service Routine erfolgt die Prüfung der Checksummeund in Falle einer fehlerhaften Übertragung wird ein erneutes Senden seitensdes Steuerrechners ausgelöst. Ebenfalls integriert ist die Auswertung des Com-mand CMD - char, in dem alle Befehle codiert sind. Je nach Inhalt wird einZustandshandle der State Machine gesetzt. Durch die integrierte switch - An-weisung, welche eine Variable abfragt, die den aktuellen Zustand identiziert,entsteht eine State Machine (Zustandautomat). Diese ruft dann die entspre-chenden Funktionen auf. Die Service -Routine benutzt die denierten Hand-les zur Auswertung Übertragungspuers. Zum Setzen des Puers werden dieFunktionen SetBuer und LoescheBuer benutzt. Die Funktion SetBuf-fer setzt nach mit den Übergaben ID, CMD und Notaus die Informationen inden Puer an. Das Senden über die Schnittstelle wird durch einen Interruptrealisiert, der analog dem Empfangsinterrupt auslöst wenn eine vorgegebeneAnzahl von Zeichen im Puer des DSP steht. Das Schreiben der Zeichen in denPuer des DSP erfolgt mit der Funktion TxBuer, in der die Registerzugrieenthalten sind.
4.3 Ablauf
Die Steuerung erfolgt einem festen Ablauf, der aus der Durchführung der In-itialisierung und dem Rotieren in der Steuerschleife besteht. Die Steuerschleifebesteht aus einer for - Schleife, die endlos ausgeführt und nur durch die Inter-rupts unterbrochen wird. Die möglichen Zustände entsprechen den Befehlenund kapseln die erforderlichen Funktionsaufrufe.
43

NOP: Dieser Zustand trägt die Bezeichnung "No Operation". In diesem er-folgt keine Aktion. Der Zustand wird nach den anderen erfolgreich abge-arbeiteten Zuständen bis auf den Zustand "NOTAUS" eingenommen.
NOTAUS: Der "Notaus Zustand" ist ein Ausnahmezustand und wird sei-tens des Anwenders durch Betätigen der Taste, durch den DSP durchBetätigen eines Endschalters oder durch die Überwachungsfunktionender Motorsteuerkarte ausgelöst. Es erfolgt das Setzen der Bremse, Ab-schalten der PWM und Absetzen einer Nachricht an den Steuerrechner.Es gibt keinen Folgezustand. Der Zutand kann nur durch den Anwenderüber einen übertragenen Befehl verlassen werden.
Referenzierung: Der Zustand "Referenzierung" fährt den übergebenen Ziel-punkt an. Um die Anwendung exibel zu gestalten und die Wahl ei-nes neuen Nullpunktes zu ermöglichen, wurde darauf verzichtet, denNullpunkt zu hinterlegen. Dieser wird übergeben und angefahren. ImAnschluss erfolgt das Absetzen einer Nachricht und der Folgezustand"NOP".
Manuelle Positionierung: Innerhalb diese Zustandes wird die empfangenenZielposition angefahren. Es erfolgt der Aufruf der Funktion tocoordi-nates. Nach Erreichen der Zielposition wird eine Meldung abgesetzt undder Folgezustand "NOP" eingenommen.
Automatische Positionierung Dieser Zustand prüft die Anwendervorga-ben über die Art und Form der automatischen Positionierung und ruftseinerseits die Funktionen auf. Die Zielpositionen werden verwaltet unddas erreichen dieser ohne anzuhalten geprüft, bis alle Positionen ange-fahren wurden. Bei jeder Positionsbestätigung erfolgt das Absetzen einerNachricht an den Steuerrechner. Der Folgezustand ist "NOP".
Das Struktogramm Abb. 4.1 verdeutlicht den Sachverhalt nochmals.
4.4 ZusammenfassungDieser Abschnitt befasste sich mit dem Aufbau der Motorsteuerung. Um dieProgrammierung mit den geforderten Funktionalitäten aufzubauen, wurde der
44

Abbildung 4.1: Struktogramm der state machine: In der Abbildung istdie state machine dargestellt. Es sind alle Zustände, die Folgezustände und dieausgeführten Funktionen dargestellt.
DSP entsprechend den Anforderungen vorinitialisiert. Alle Anforderungen ausder Spezikation wurden erreicht.Zuerst wurden nicht benötigte Module des DSP abgeschaltet. Im Anschluss
erfolgt die Einstellung der GPIO - Pins, mit Ihrer geforderten Funktion undRichtung. Über die Einstellung der Event Manager wurden je einer von zweiTimern pro Event Manager auf eine Frequenz von 37,5 KHz eingestellt. DiePolarität der Pins wurde hinterlegt, so dass die H -Brücke geschaltet werdenkann. Die erforderlichen Interrupts wurden jedoch vorerst gesperrt und wer-den von den folgenden Funktionen wieder freigegeben oder erneut gesperrt.Die übrigen Timer werden zur Positionserfassung durch das Zählen von En-coderzählimpulsen genutzt und entsprechen initialisiert. Die Einstellung derSchnittstelle und Interrupts beendet die Initialisierung.Alle Funktionalitäten wurden gemäÿ der DSP - Beschaltung in eigenen Rou-
tinen zusammengefasst, so dass die Befehle leicht abgearbeitet werden können.
45

Die Positionierung erfolgt dabei innerhalb der vorgegeben Toleranz und ver-waltet auch die Positionsabweichung der Achse. Die Interrupt Service Routinenunterstützen die Positionierung durch Parameteranpassung und realisieren dieKommunikation nach auÿen.Mit Einsprung in die Endlos - Schleife beginnt der Zustandsautomat. Dieser
prüft einen Zustandshandle und ruft nacheinander die benötigten Routinenauf. Ist der Befehl abgearbeitet, erfolgt die Übermittlung einer entsprechen-den Meldung und der Folgezustand wird eingenommen. Eine Ausnahme bildetder Zustand "NOTAUS", in dem solange verharrt wird, bis die Ursache desZustandes beseitigt wurde. Dies wird durch einen neuen Befehl seitens desAnwenders angezeigt. In die einzelnen Zustände kann nur über die InterruptService Routine nach einen fehlerfreien Datenempfang oder nach der Abarbei-tung des Zustandes gelangt werden.
46

Kapitel 5
PC - Steuerung
5.1 Einleitung
Um die Steuerung der Motoren für den Anwender übersichtlich zu gestalten,wurde eine Oberäche aufgebaut, die dem Nutzer die Möglichkeit gibt, Po-sitionen anzufahren. Dieses Anwenderfrontend ist für den Betrieb auf einenhandelsüblichen PC mit dem Betriebssystem "Windows" vorgesehen. In Anleh-nung an die Aufgabe der Charakterisierung von UltraSchallWAndlern wurdedas Programm CUSWA genannt.
Dem Programm wurde eine grasche Oberäche hinzugefügt, die benutzer-freundlich und intuitiv zu bedienen ist. Zum Aufbau des Programms und dergraschen Oberäche stehen verschiedene Programmiertools zur Verfügung.Zur Wahl standen die Programmiersprache "C" unter dem Werkzeug "Lab-Windows" oder die grasche Programmierung mittels "LabView". Da "Lab-View" für messtechnische Anwendung konzipiert ist und zunehmend in derAutomatisierungs- und Steuerungstechnik eingesetzt wird, el die Wahl zu-nächst auf dieses Werkzeug. Wie sich jedoch herausstellte, ist die grascheProgrammierung ungeeignet, und oenbarte beträchtliche Nachteile gegenübereiner Programmierung in einer höheren Programmiersprache. Als gravierends-te Nachteile stellten sich der zeitliche Aufwand, die Unübersichtlichkeit und dieschlechte Nachvollziehbarkeit des Codes dar. Deshalb wurde sich einer kurzenVersuchsphase entschieden, das Programm mit "LabWindows" in der Pro-grammiersprache "C" aufzubauen.
47

5.2 SpezikationDie Anwendung muss eine Reihe von grundlegenden Aufgaben erfüllen. DerenSpezikation lautet:
Positionierung: Die Positionierung ermöglicht die Angabe von Messpositio-nen durch den Benutzer und die erzeugt der jeweiligen Einträge in dieÜbertragungspuer. Die Anwendereingaben werden in die erforderlichenBefehle umcodiert und in den Übertragungspuer neben den Zielpositio-nen eingesetzt. Bei der Angabe der Zielpositionen sollen neben den festvordenierten Bewegungsabläufen der "Mäanderfahrt" auch die Anga-be von Koordinaten aus einem File, der Angabe in Einzelpositionen inkartesischen Koordinaten sowie in Polarkoordinaten möglich sein. Diesbeinhaltet eine Codierung verschiedener Betriebszustände und der Start-und Stopbefehle. Zur Feinpositionierung in mm - Schritten waren die ent-sprechenden Tasten vorzusehen.
Kommunikation via RS232: Die Kommunikationsfunktionen beinhaltendas Vervollständigen der entsprechenden Übertragungspuer mit den IDsder angesprochenen Freiheitsgrade, das Önen und Schlieÿen der Kom-munikationskanäle und das Einlesen der empfangenen Daten. Die Kom-munikation wird dabei über erzeugte Threads zum Senden und Emp-fangen in die Zuteilung von Rechenzeit des Prozessors integriert. Daskorrekte Übertragen wird mit einer Prüfsumme überprüft. Diese Prüf-summe entsteht aus den eingetragenen Positionen.
Auswertung der Daten: Die Daten des DSP müssen ausgewertet und in ei-ne grasche Anzeige umgewandelt werden. Für diese Anzeige wurde ein2D - Plot zur Anzeige einer "XY" - Ebene und ein 2D-Plot zur Anzei-ge der aktuellen Z - Ebene realisiert. Die Daten werden durch den DSPautomatisch aktualisiert und die Anzeige angepasst. Die gegenwärtigePosition soll abhängig vom aktuellen Betriebsmodus der Positionierungin den Diagrammen angezeigt werden. Ebenfalls müssen die verschiede-nen Zustände der durchgeführten Referenzfahrt und der Notaussituationzur Anzeige gebracht werden. Um den Nutzer im Falle von Fehlern zu
48

unterstützen, müssen Textausgaben vorgesehen werden, welche die Feh-lerquelle nachvollziehbar machen.
Benutzerführung: Die Benutzerführung beinhaltet die Auswahl zwischenden verschiedenen Positioniermodi "Automatischer Messdurchlauf", der"manuellen Positionierung" innerhalb der maximalen Verfahrstrecke von300 mm, der Durchführung einer Referenzfahrt und der Notabschaltungder laufenden Motoren. Wird durch den Anwender ein "Notaus" aus-gelöst, so besteht im Anschluss nur die Möglichkeit, eine Referenzfahrtdurchführen zu können.
Für die Portierbarkeit des Codes und die Wiederverwendbarkeit der Pro-grammteile in einem anderen Kontext musste eine Modularisierung erfolgen.Bei dieser wurde das Programm in Funktionsmodule zerlegt, die eigenständigfunktionstüchtig sind. Das Ziel der Modularisierung ist zusätzlich eine einfacheArt ein Update durchzuführen. Nur die Funktionsdenitionen müssen geändertwerden, die Aufrufe und Deklarationen bleiben soweit wie möglich bestehen.Nachfolgendes Struktogramm soll die Modularisierung verdeutlichen.Die Grak Abb. 5.1 zeigt die Zerlegung des Programms in seine Module.
Jedem Modul wird im Programm ein Code - File und eine Header- Dateizugeordnet. Das Modul "Positionierung und Steuerung der drei Freiheitsgra-de" beinhaltet die Callbackfunktionen der Bedienelemente. Das Modul "Kom-munikation via RS 232" beinhaltet die notwendigen Funktionen zum Setzender Übertragungspuer, zur Übertragung und zum Empfang über die serielle
Abbildung 5.1: Modularisierung des CUSWA - Programms: In der Dar-stellung ist die Modularisierung der Oberäche angegeben. Insgesamt sind dreiModule vorhanden, die über die Main - Funktion angesprochen werden.
49

Abbildung 5.2: CUSWA Bedienoberäche: Das Bild zeigt die kompletteOberäche zur Positionierung des Hydrophons.
Schnittstelle RS 232.
5.3 AufbauDas Anwenderfrontend kapselt die angebotenen Funktionalitäten. Jede Bedi-enäche erhält einen eigenen Handle, so dass sie sukzessive aus- und einge-schaltet werden kann. Eine Ausnahme bildet der Button "NOTAUS" sowiedie Anzeigen der Notaussituation des DSP die aus Sicherheitsgründen immeraktiv sind und die Anzeigediagramme der Freiheitsgrade "X", "Y" und "Z".Die endgültige Programmoberäche ist in der nachstehenden Grak Abb. 5.2dargestellt.Am oberen linken Bildrand der Oberäche sieht man die Reiter zur Auswahl
der Positionierung. Im Bedienfeld "Betriebsmodus" können über eine Auswahl-liste die verschiedenen Modi "automatischer Testlauf", "manuelle Positionie-rung" und "Referenzfahrt" ausgewählt werden. Bei Auswahl werden die dar-unterliegenden Bedienächen freigeschaltet. Rechts ist das Anzeigediagramm
50

der "XY" - Ebene erkennbar und rechts daneben die Anzeige der aktuellen "Z"- Ebene. Unten in der Grak Abb. 5.2 ist rot der Notausbutton zur Stoppender Positionierung und darunter die Anzeige der Ursache für einen Notstopangebracht. Rechts daneben bendet sich ein Ausgabefeld für Textmeldun-gen und darunter ein Button zum Beenden des Programms. Die verschiedenenBetriebsmodi entsprechen je einer Bedienäche, und können nur über dieseparametriert werden. Um Fehleinstellungen vorzubeugen, werden die nicht be-nötigten Bedienächen ausgeschaltet.
5.3.1 Automatischer Testlauf
Die erste Bedienäche Abb. 5.3, die einem Element des Auswahlmenüs "Be-triebsmodus" zugeordnet ist, ist der automatische Testlauf. Die Positionierungwird kontinuierlich in einer festgelegten Bewegungsform Punkte im Raum an-fahren, ohne die Bewegung zu stoppen und die Messung an jedem Punkt durch-zuführen. Das Bewegungsmuster das hinterlegt ist, hat die Form eines in der"XY" - Ebene liegenden Mäanders. Bei der Auswahl dieser Art der Positio-nierung erfolgt eine Vorschau in einer kleinen Grak unterhalb des Auswahl-menüs. Dieser Bewegungsablauf fährt die Punkte auf dem Mäander innerhalbeiner durch "X" und "Y" aufgespannten Ebene an, wechselt nach Komplet-tierung die "Z" - Ebene und fährt den Mäander wieder zurück, bis alle "Z" -Ebenen im angegeben Abstand durchfahren sind. Alle weiteren Bewegungsfor-men, die beliebig sein können, werden über ein extra Programm erzeugt unddie Koordinaten in einer Datei abgelegt. Somit ist es als Beispiel möglich, Ku-geloberächen abzufahren. Die Messpunkte werden über den Abstand (4 mmbis 30 mm) ausgehend vom Nullpunkt, angegeben. Diese Art von Positionie-rung wird mit der Auswahl des Elements "Koordinaten" angewählt. Eine letzteEinstellung setzt die Anzahl der Messungen, die an einem Punkt durchgeführtwerden und über die gemittelt wird. Es sind 2 bis 90 einstellbar. Die Art desautomatischen Testlaufs wird mit dem Button "Einstellen" dem DSP überge-ben und mit dem Button "Start" beginnt der automatische Testlauf. Internwerden mit der Betätigung "Einstellen" über die Callbackfunktion ein Puermit den Anwendereinstellungen gesetzt und an die Steuerkarten übertragen.Diese setzen intern ihre Startparameter und warten auf das Startsignal. Mit
51

Abbildung 5.3: Bedienäche "automatischer Testlauf": Diese Abbildungzeigt die Bedienäche zum Einstellen eines automatischen Testlaufs. Es sindalle Eingabefelder und beide Bedienbuttons zu sehen.
Betätigung des Buttons "Start" wird der Befehl wieder in einen Puer einge-setzt und übertragen. Sofort danach erfolgt der Einsprung in eine Funktion, wodie zu meldenden Positionen erstellt, abgelegt und mit den DSP - Meldungenverglichen werden und zwar solange, bis alle Positionen abgefahren wurden.Diese Funktion wird durch einen Wechsel des Betriebsmodus und die Notaus-situation verlassen. Der Fortschritt der Messung,die bereits erreichten bzw. dienoch zu erreichenden Messpunkte werden dann verworfen. Alle Positionen dieinnerhalb einer "XY" - Ebene erreicht wurden, werden im Anzeigediagrammmit aneinander gereihten Punkten in blauer Farbe angezeigt. Beim Wechselder "Z" - Ebene wird die Anzeige zurückgesetzt.
5.3.2 Manuelle Positionierung
Die zweite Bedienäche Abb. 5.4 wird zum Anfahren einer denierten Posi-tion genutzt. Dieser Punkt innerhalb des Raumes wird mit den Koordinaten"X", "Y" und "Z" charakterisiert. Zu erkennen ist ein Auswahlmenü mit der
52

Abbildung 5.4: Bedienäche "manuelle Positionierung": Dargestellt sindalle Eingabemöglichkeiten zur manuellen Positionierung des Hydrophons aufeinen Punkt. Dieser kann in kartesischen Koordinaten, in einer Abstands/ Win-kel Kombination oder über Buttons in Millimeterschritten angegeben werden.
Überschrift "Eingangsdaten". Mit diesem kann die Art der Koordinatenanga-be ausgewählt werde. Es ist die Wahl zwischen der Angabe in kartesischenKoordinaten und in Polarkoordinaten möglich. Je nach Entscheidung des An-wenders werden die entsprechenden Eingabefelder freigeschaltet. Die Angabeder kartesischen Koordinaten bezieht sich auf den Nullpunkt, die Polarkoordi-naten beziehen sich auf die Position des Ultraschallwandlers. Mit Betätigungdes Buttons "Einstellen" werden die Koordinaten in den Übertragungspuergestellt und übertragen. Im alle der Polarkoordinaten müssen diese in kartesi-sche Koordinaten umgerechnet werden.
Die Grak Abb. 5.5 soll darstellen, dass sich die Angabe des Sensorabstandsauf den Ultraschallwandler bezieht. Die Position liegt von diesem entfernt aufdem Bogen eines Kreises, dessen Radius sich aus dem Abstand zum Sensor unddem Önungswinkel ergibt. Die Stellung auf dem Kreisbogen wird durch denRotationswinkel angegeben. Der Ursprung des Rotationswinkels bendet sichauf der rechten Seite in 3 Uhr Position. Der Rotationssinn ist gegen den Uhr-zeigersinn gerichtet. Die Berechnung beruht auf den trigonometrischen Funk-
53

Abbildung 5.5: Umrechnung kartesische in Polarkordinaten: In dieserAbbildung ist dargestellt, wie die Angabe von Abstand und Winkeln zu ver-stehen ist. α bezeichnet den Önungswinkel, der über den Abstand den Radiusdes aufgespannten Kreises ergibt. β bezeichnet den Rotationswinkel über denausgehend vom Nullpunkt gegen den Uhrzeigersinn die Koordinaten berechnetwerden.
tionen:Kreisradius =
d
tan(180 − 90 − α)(5.1)
d gibt den Abstand des Hydrophons zum Ultraschallwandler an und bezeichnetgleichzeitig die Y -Koordinate.α bezeichnet den Önungswinkel.
X −Koordinate = cos(β) ·Radius (5.2)
Z −Koordinate = sin(β) ·Radius (5.3)
Wird über einen der Parameter die Grenze der Verfahrstrecke überschritten,erfolgt eine Begrenzung auf den Minimal- bzw. Maximalwert der Verfahrstre-cke.
Die Anzahl der Messungen, die an einem Messpunkt durchgeführt werdensollen, können zwischen 2 und 90 eingestellt werden. Über diese Anzahl wirdspäter gemittelt.
Die Tasten mit der Bezeichnung "X+", "X-", "Y+", "Y-", "Z+" und "Z-" die-nen der Feinpositionierung. Mit der Richtung des Vorzeichens wird innerhalbdes Freiheitsgrads die aktuelle Position inkrementiert oder dekrementiert. Die
54

neue Zielposition wird an den DSP übertragen und sofort angefahren. Es kannhilfreich sein, zur Untersuchung eines begrenzten lokalen Gebiets einen neuenNullpunkt zu setzen. Dies erfolgt mit dem Button "Nullpunkt setzen". Dieserneue Nullpunkt wird ab diesem Augenblick mit jeder neuen Referenzfahrt an-gefahren und kann nur überschrieben werden. Das Setzen des voreingestelltenNullpunktes ist nur durch einen neuen Programmstart möglich. Der neu ge-setzte Nullpunkt wird als relative Koordinaten bezüglich des fest deniertenNullpunktes ins kartesischen Koordinatensystem übergeben und als Variablegehalten. Die Initialisierung der Strukturelemente zu Halten des Nullpunkteserfolgt zu 0,0,0. Mit dem Button "Messung" wird die eingestellte Anzahlvon Messungen durchgeführt.
5.3.3 Referenzfahrt
Die Bedienäche "Referenzfahrt" Abb. 5.6 beinhaltet einen Button und eineAnzeige. Der Button dient zum Starten der Referenzfahrt. Bei dessen Be-tätigung wird der Übertragungspuer mit den Koordinaten des Nullpunktsgeladen und der Befehl mit den Ziel - IDs eingesetzt. Im Anschluss erfolgtdie Übertragung an die Steuerkarten, die auch sofort mit der Bearbeitung derReferenzfahrt beginnen. Dieser Betriebsmodus kann durch andere Modi unter-brochen werden, d.h. bei einer Referenzierung von einem weit entfernten Punktim Raum bezüglich des Nullpunkts kann die Abarbeitung unterbrochen wer-den. Die Anzeige wird durch die Bestätigung von beiden Steuerkarten gesetzt.Erreicht ein Freiheitsgrad den Nullpunkt nicht, etwa bei Unterbrechung durcheinen anderen Modi, werden die Daten verworfen und einen neue Referenzfahrtwird notwendig.
Abbildung 5.6: Bedienäche "Referenzfahrt": In der Grak ist der Buttonund die Anzeige zu erkennen.
55

5.3.4 grasche Positionsanzeige
Abbildung 5.7: Anzeige "XY" - Ebene und "Z" - Ebene: Im Bild sind diegraschen Anzeigen der "XY" - Ebene als kartesisches Koordinatendiagrammund die Darstellung der "Z" - Ebene als Balkendiagramm dargestellt.
Die Oberäche des CUSWA - Programms beinhaltet auch grasche Positi-onsanzeigen Abb. 5.7. Diese stellen die "XY" - Ebene und die aktuelle "Z" -Ebene dar und dienen nur zur Ausgabe. Die Anzeige stellt die Positionen inunterschiedlicher Art je nach aktuellen Betriebsmodus dar. Dies schlieÿt dieDarstellungsfarbe und die Anzahl der dargestellten Positionen ein. Im Modus"automatischer Testlauf" werden alle Punkte innerhalb einer "XY" - Ebenepro "Z" - Ebene dargestellt. Im Modus "manuelle Positionierung" und "Re-ferenzfahrt" erfolgt dagegen nur die Darstellung der aktuellen Position in derjeweiligen Farbe. Der Nullpunkt wird grün, die manuelle angefahrenen Positio-nen blau und die automatisch angefahrenen Positionen werden rot dargestellt.
5.4 BedienungDie Bedienung der Positionierung ist im Allgemeinen für drei Schritte konzi-piert:
56

1. Parameter setzen.
2. Einstellungen übertragen.
3. Befehl ausführen.
Ausnahmen von diesem Prinzip stellen die Funktionen "Referenzfahrt" und"Notaus" dar, bei denen die Schritte in einen Befehl zusammengefasst wurden.
Zur Umsetzung der Schrittfolge sind in jeder Bedienäche die entsprechen-den Buttons und Eingabefelder vorgegeben. Um Fehleinstellungen zu vermei-den wurden die nicht benutzten Eingabefelder "ausgegraut", dh. sie sind imHintergrund vorhanden und die Funktionalitäten werden seitens des Steuer-programms geladen, es können jedoch durch "Ausgrauen" keine Parameter undBefehle gesetzt werden. Die Buttons "Notaus", die zugehörigen Anzeigen undder Button "Beenden" sind immer aktiv.
Den Einstiegspunkt bildet die Ansicht des Programms nach dem Önen. DerAblauf kann wie folgt genannt werden:
1. Das Programm wird gestartet und die Oberäche Positionierung er-scheint. Standardmäÿig ist die Bedienäche "automatischer Testlauf",die Diagramme zur Anzeige der Position, der Button "Notaus" und "Be-enden" aktiv. Wenn das Programm vor den Steuerkarten in Betrieb ge-nommen wird, so erfolgt durch die Steuerkarten die Eingangsreferen-zierung und die entsprechende Meldung. Die Anzeige des Nullpunktesleuchtet dann auf.
2. Vom Anwender wird im zweiten Schritt der Betriebsmodus ausgewählt.Dazu wird aus den vorhanden Modi "automatischer Testlauf", "manu-elle Positionierung" und "Referenzfahrt" gewählt. Je nach Reihenfolgeder Inbetriebnahme vom Programm CUSWA und den Steuerkarten mussnun eine Referenzfahrt erfolgen oder ein anderer Betriebsmodus ausge-wählt werden. Dies geschieht über den Auswahlmenü und es werden dieEingabefelder und Buttons des Modus freigeschaltet.
3. Nun erfolgt die Parametrierung des gewählten Modus über die Eingabe-felder.
57

4. Die Übergabe der Parameter und Einstellung der Steuerkarten erfolgt mitden Button "Einstellen". Der Betriebsmodus wird im Puer neben denParametern eingetragen und die Übertragung an die Steuerkarten via RS232 gestartet. Nach der Übertragung ist eine Korrektur der Parameteroder ein Wechsel des Modus jederzeit möglich.
5. Mit den Buttons "Positionieren" oder "Start" wird ein Startbefehl über-tragen. Der übergebene Befehl wird abgearbeitet.
6. Als letztes erfolgt die Messung. Im Falle des "automatischen Testlaufs"wird die Messung automatisch ausgelöst. Im Falle der "manuellen Posi-tionierung" kann die Messung am angefahrenen Punkt ausgelöst werden.
5.5 Erklärung der benutzten FunktionenDem CUSWA - Programm liegen eigenständige Funktionen inklusive der zuge-hörigen Headerdateien zu Grunde. Die Code- und Headerdateien wurden derAufgabe und dem Namen nach in Module zusammengefasst und können übereine Hauptfunktion auch eigenständig in einem anderen Zusammenhang geru-fen werde. Abhängigkeiten durch die Hardware des Steuerrechners sind dabeiallerdings zu beachten.
5.5.1 Kommunikation via RS232
Die Vorgaben an die Kommunikation beinhalteten die Schnittstelle RS232 miteiner Übertragungsrate von 19200 Baud und ein speziziertes Datenformat.Das Datenformat besteht aus 8 Datenbits, einem Stopbit und keiner Parität.Zur Umsetzung der Kommunikation mit der RS232- Schnittstelle wurden eineReihe von Funktionen und Konstanten deniert. Die Funktionen sind im Co-de - File "RS232.c" und die benutzten Konstanten und Deklarationen in derHeaderdatei "Serial.h" enthalten. Zur Übertragung Abb. 5.8 wird ein eigenesFormat genutzt:
Grundsätzlich stellt die Entwicklungsumgebung "LabWindows" eine Reihevon vordenierten Funktionen zur Verfügung. Diese beinhalten die Einstellun-
58

Abbildung 5.8: Übertragungsformat: Es ist der Aufbau des Übertragungs-puers zu erkennen.
gen des COM - Ports, das Önen und Schlieÿen eines Kommunikationskanalssowie die Verwaltung von Threads.Threads sind eigenständige Prozesse, die eigene Prozessorzeit zugeteilt be-
kommen. Die Verwendung von Threads ist notwendig, da die Kommunikationunter Umständen eine gewisse Zeit dauern kann. Dies führt, wenn keine unter-schiedlichen Threads verwendet werden, bei Aufrufen aus der Hauptfunktionheraus zu einer Blockade des ganzen Programms. Es können dann keine wei-teren Funktionen während der Zeit, welche die Kommunikation beansprucht,ausgeführt werden. Die Verwendung von Threads beseitigt dieses Problem,da sie die Kommunikation herauslösen und so das Programm weiter arbei-ten kann. Nach Abschluss des Threads wird der Hauptfunktion ein Handleübergeben, der den Abschluss anzeigt. Die vorgegeben Funktionen der Ent-wicklungsumgebung wurden um eigenen Funktionsdenitionen zum Setzen derÜbertragungspuer erweitert.
void CongCOM(. . . ); Önet und konguriert den COM - Port mit denVorgaben. Diese sind als denierte Werte hinterlegt und können inner-halb der Headerdatei einfach angepasst und verändert werden.
void CloseCOM(. . . ); Schlieÿt den COM - Port bei Programmende, so dass
59

dieser anderen Anwendungen als Ressource zur Verfügung steht. DieÜbergabe identiziert den Port als COM1 oder COM2.
void SetTxBuerAT(. . . ); Setzt den Übertragungspuer mit den Befehlenund Parametern des automatischen Testlaufs. Die Übergabe denierenden Modus des automatischen Testlaufs.
void SetTxBuerMP(. . . ); Setzt den Übertragungspuer mit den Befehlenund der Zielposition der manuellen Positionierung. Die Codierung erfolgtin mm und in kartesischen Koordinaten. Die Übergabe gibt die Art derEingangsdaten, also kartesische oder Polarkoordinaten an.
void SetTxBuerFMP(. . . ); Inkrementiert oder dekrementiert die aktuellePosition und setzt den Befehl der manuellen Positionierung ein.
void SetTxBuerREF(void); Setzt den Befehl und den eingestellten Null-punkt ein.
void SetTxBuerSRQ(. . . ); Fügt in den Buer die Anforderungen einererneuten Übertragung seitens des DSP ein.
void SetTxBuerGO(. . . ); Die Funktion setzt den Start oder den Stopbe-fehl in den Buer ein. Die Übergabe gibt den Befehl an.
void SetTxBuerHWNH(void); Setzt den Befehl zum Notstop in den Buf-fer ein.
void LoescheBuer(. . . ); Löscht die Buer. Dabei wird mit der Übergabezwischen Sende- und Empfangspuer unterschieden.
void CleanUpRecThreads(. . . ); Die Funktion wartet auf die Bestätigung,dass der Thread beendet wurde und entfernt die entsprechenden Varia-blen aus der Taskliste des Betriebssystems.
void GetRxBuerData(. . . ); Die Funktion wertet den Inhalt des Messa-gepuers nach dem Empfang aus. Dabei werden die Positionen und deraktuelle Betriebszustand ermittelt.
60

int Controlchecksum(. . . ); Es erfolgt die Prüfung der Checksumme unddas Anzeigen eines Übertragungsfehlers.
int CVICALLBACK SendBytesXYThreadfunktion(. . . ); DieseFunktion übernimmt das Senden über die Schnittstelle. Innerhalbder Funktion erfolgt die Anmeldung der Threads an das Betriebssys-tems.Diese Funktion ist für die Kommunikation mit der Steuerkarte derFreiheitsgrade "X" und "Y" zuständig.
int CVICALLBACK SendBytesZTThreadfunktion(. . . ); Diese Funk-tion übernimmt dieselbe Aufgabe wie "int CVICALLBACK SendBy-tesXYThreadfunktion(. . . );" und ist für die Kommunikation mit derSteuerkarte der Achse "Z" zuständig.
void Com1(Com2)Callback(. . . ); Diese Funktion wird beim Empfangüber die serielle Schnittstelle gerufen. Da der Empfang ebenfalls übereinen Thread geregelt ist, löst die Funktion den Thread mit dem voll-ständigen Empfang von 15 Bytes, also eines kompletten Übertragungs-puer aus, wenn dieser an der Empfangselektronik des Motherboards desSteuerrechners anliegen.
int CVICALLBACK RecBytesXYThreadfunktion(. . . ); Diese Funk-tion ist die ausgeführte Funktion, wenn eine Empfangsthread durch dieFunktion "void Com1Callback(. . . );" angemeldet wurde und liest die By-tes von der Empfangselektronik.
int CVICALLBACK RecBytesZTThreadfunktion(. . . ); Diese Funkti-on erfüllt dieselbe Aufgabe wie die Funktion mit der Bezeichnung "intCVICALLBACK RecBytesXYThreadfunktion(. . . )" und wird von demangemeldeten Thread durch "void Com2Callback(. . . );" ausgeführt.
5.5.2 Bedienächen und ButtonsDie benutzten Funktionen der Bedienächen bzw. Buttons, die im Programmzu nden sind, entstehen durch den graschen Aufbau der Oberäche. Dabeierstellt die Entwicklungsumgebung für jeden Bestandteil einen leeren Funk-tionsrumpf, soweit dies gewünscht wird. Diese Funktionen werden als Call-
61

backs bezeichnet und tragen den Spezizierer CVICALLBACK im Namen.Zur Oberäche wird eine Headerdatei erstellt und die Funktionsdeklarationender Callbacks in diese eingetragen.
int CVICALLBACK QuitCuswa(. . . ); Diese Funktion beendet das Pro-gramm, indem das User Interface beendet, die Variablen vom Speicher,die Threads gelöscht und die Ressourcen freigegeben werden.
int CVICALLBACK ShowParamInput(. . . ); Zeigt je nach Wahl ausdem Auswahlfeld "Betriebsmodus" die entsprechenden Eingabefelder anoder verbirgt diese.
int CVICALLBACK ShowMovePattern(. . . ); Diese Funktion zeigt eineVorschau des Bewegungsmusters im Bereich "automatischer Testlauf"an.
int CVICALLBACK DSPATSettings(. . . ); Die Routine ruft intern dieFunktionen zum Füllen des Übertragungspuers und zum Senden an denDSP auf. Die eingestellten Werte werden von den gerufenen Funktionenselbst eingesetzt.
int CVICALLBACK DoAutoMeasurement(. . . ); Diese Funktion ruftebenfalls Füll- und Sendefunktionen des Übertragungspuers an denDSP auf. Setzt das Startsignal ein. Ist die Callbackfunktion des But-tons "Start" im Feld "automatischer Testlauf".
int CVICALLBACK ShowDatenInput(. . . ); Diese Routine zeigt jenach Wahl der Eingabeparameter im Bedienfeld "manuelle Positionie-rung" die entsprechenden Eingabefelder an oder verbirgt diese.
int CVICALLBACK DSPMPSettings(. . . ); Die Funktion setzt die ent-sprechenden Werte, die in die Eingabefelder eingegeben wurden, in denÜbertragungspuer durch Aufruf der Setzfunktion und überträgt diesean den DSP.
int CVICALLBACK MoveToPosition(. . . ); Diese Funktion ist die Call-backfunktion des Buttons "Positionieren" und startet die Positionierung
62

durch Ausgabe des Startbefehls. Es erfolgen erst Eintragungen in denSendepuer und danach die Übertragung.
int CVICALLBACK DoFeinPosXplus(. . . ); ,
int CVICALLBACK DoFeinPosXminus(. . . ); ,
int CVICALLBACK DoFeinPosYplus(. . . ); ,
int CVICALLBACK DoFeinPosYminus(. . . ); ,
int CVICALLBACK DoFeinPosZplus(. . . ); und
int CVICALLBACK DoFeinPosZminus(. . . ); Alle Funktionen zur Fein-positionierung inkrementieren oder dekrementieren die aktuelle Positiondes angegeben Freiheitsgrads in Millimeter - Schritten, setzen den Über-tragungspuer und lösen die sofortige Positionierung aus.
int CVICALLBACK SetNullpunkt(. . . ); Diese Funktion trägt den aktu-ellen Wert aus der Struktur "Ist - Position" in die Struktur "Nullpunkt"ein.
int CVICALLBACK DoMeasurement(. . . ); Diese Routine löst die Mes-sung aus.
int CVICALLBACK DoReferenz(. . . ); Durch diese Callbackfunktionwird an den DSP das Startsignal zur Referenzfahrt übergeben. Die Aus-gabe erfolgt nacheinander an beide Motorkarten.
int CVICALLBACK DoNotaus(. . . ); Innerhalb dieser Funktion erfolgtdie Übertragung des Stopsignals an beide DSPs.
5.6 ZusammenfassungDas Programm mit der graschen Oberäche zur Positionierung des Hydro-phons wurde in diesem Abschnitt vorgestellt. Es ist ein Programm entstanden,welches das Hydrophon in verschiedenen Betriebsmodi und unter Angabe un-terschiedlicher Parameter positionieren kann. Das Programm kann dabei infolgende Bestandteile zerlegt werden:
63

Mit dem Button "Beenden" kann das Programm jederzeit beendet werden.Die Bedienäche "automatischer Testlauf" lässt das Parametrisieren und
Starten der automatischen Durchfahrt des Testvolumens auf verschiedene Artzu. Vorgegeben ist die Fahrt im Muster einer Mäanderkurve. Beliebige Posi-tionen können mit einer Datei, welches die Zielkoordinaten enthält, angegebenwerden.In der Bedienäche "manuelle Positionierung" ist es möglich, einen denierten
Zielpunkt im Raum anzufahren. Die Angabe kann dabei in kartesischen undin Polarkoordinaten erfolgen. Mit den Tasten zur Feinpositionierung kann diePosition in Millimeterschritten verändert werden. Um Messungen innerhalbeines bestimmten Gebietes im Raum zu erleichtern, kann ein neuer Nullpunktgesetzt werden.Über die Bedienäche "Referenzfahrt" kann der abgelegte Nullpunkt jederzeit
neu angefahren werden. Wird der Nullpunkt verändert, so gilt der vordenierteNullpunkt erst wieder mit erneutem Programmstart. Wird der Nullpunkt vonallen Freiheitsgraden erreicht, erfolgt eine grasche Anzeige.Mit dem Button "NOTAUS" kann die Positionierung jederzeit unterbrochen
werden. Es wird eine Anzeige gesetzt, welche diesen Zustand signalisiert. Wirdseitens der Steuerkarten eine Notaus durch Endschalter oder die Überwa-chungselektronik ausgelöst, erfolgt ebenfalls die entsprechende Anzeige.Die aktuelle Position wird mit zwei Diagrammen angezeigt, wobei eines die
"XY" - Ebene und eines die Z - Ebene darstellt. Die Anzeigeart und die Anzei-gefarbe ändern sich mit eingestelltem Betriebsmodus. Jedem Betriebsmodusist eine eigenen Farbe zugeordnet. Im Betriebsmodus "automatischer Testlauf"werden die erreichten Koordinaten in blauer Farbe und fortlaufend dargestellt,so dass die Kurve nachvollziehbar bleibt. Im Betriebsmodus "manuelle Positio-nierung" wird nur die aktuelle Position in roter Farbe und im Betriebsmodus"Referenzfahrt" wird die aktuelle Position in grüner Farbe dargestellt.
64

Kapitel 6
Schallfeldmessung
6.1 Einleitung
Der Versuchsaufbau wurde zur Messung von Schallfeldern von Ultraschall-wandlern konzipiert.
Das Schallfeld wird von den Wandlern erzeugen, die Messung wird mit demHydrophon durchgeführt. Die hauseigenen Ultraschallwandler verfügen übereinen Ansteuerelektronik, welche die Schallgenerierung durchführt. Das Hy-drophon auf der Gegenseite liefert der Druckamplitude proportionale Span-nungswerte, die zur Auswertung genutzt werden. Der Steuerrechner ist wederin der Lage, die Ansteuerelektronik zu bedienen, noch die Spannungswertedes Hydrophons aufzunehmen. Dazu müssen weitere Hardwarekomponenteninstalliert werden, die in der Lage sind, die geforderten Funktionalitäten zurealisieren. Im vorliegenden Fall ist dies eine Karte zur digitalen I/O, um dieSchallfelderzeugung zu triggern und ein so genanntes GaGe - Scope in PCI -Ausführung als Einsteckkarte.
Die internen Beschaltung des Ultraschallwandlers ist in der Abbildung Abb.6.1 dargestellt.Betrachtet man nur die Schallfeldgenerierung, kann man vereinfacht sagen,
dass die angelegten Adressen der Sender an A01 über den MSP den Senderfreischaltet der mit dem anliegenden Analogsignal von S0 beschaltet wird.Dieses Analogsignal ist einen Abfolge von Schwingungen und bewirkt über diePiezokristalle im Wandler die Schallfelderzeugung.
65

Abbildung 6.1: Interne Beschaltung des Ultraschallwandlers: In der Gra-k ist das Blockschaltbild der internen Wandlerbeschaltung dargestellt.
Die Beschaltung der externen Elektronik Abb. 6.2 sieht wie folgt aus:Die Adresse des gewählten Senders wird eingestellt und an den Wandler wei-
tergegeben, dieser schaltet den Sender frei und die Signalform zum Erzeugendes Pulses wird durchgeschleift. Die Spannungsversorgung des Wandlers wirdebenfalls von der Ansteuerelektronik übernommen.Zusammenfassend kann also gesagt werden, dass um einen Ultraschallpuls
zu erzeugen, die Adresse eingestellt und zu gegebener Zeit die Signalform zurPulserzeugung angelegt werden muss.
Die Signalform zur Schallfelderzeugung wird von dem programmierbarenFunktionsgenerator "AWG 2021" der Firma "Sony Tektronix" zur Verfügunggestellt, und ist aus einer Reihe von Pulsen zusammengesetzt Abb. 6.3. DasSignal ist aus 3 Pulsen zusammengesetzt, welche alle eine Mittelfrequenz von 9MHz haben. Die Amplituden betragen 2 VPP beim ersten und dritten Puls und4 VPP beim zweite Puls. Die Gesamtfrequenz aller drei Pulse ergibt die Mit-telfrequenz von 3 MHz. Mit dem Eintreen des Triggersignals, wird das Signalan den Ausgang gelegt. Der Trigger besteht dabei aus einer 5 V - Flanke.
66

Abbildung 6.2: Beschaltung des externen Elektronik: In der Grak istein Blockschaltbild der Ansteuerelektronik zu sehen.
6.2 SpezikationDie Spezikation der Schallfeldmessung umfasst die Erzeugung des Schallfel-des, die Messung der Spannungssignale des Hydrophons und die Ablage derMessdaten. Diese Anforderung kann in folgende Einzelaufgaben zerlegt werden:
Erweiterung des Steuerrechners: Die Erweiterung des Steuerrechners be-
Abbildung 6.3: Abbild der Signalform zur Schallfelderzeugung: In derGrak sind die drei Pulse des Anregungssignal zu sehen.
67

zieht sich auf die zusätzlich benötigte Hardware, eine Hardware mit derdie Triggerung durchgeführt werden kann und der Einsatz einer Oszillo-skop - Karte zur Erfassung der Messspannungen.
Schallfelderzeugung: Die Schallfelderzeugung beinhaltet das Ansprechendes programmierbaren Funktionsgenerators. Diese Triggerung soll überdie Einschubkarte zur digitalen I/O erfolgen.
Erfassung der Hydrophonspannungen: Die Messung des Schallfeldes er-folgt über ein Hydrophon, welches als Ausgangswerte Spannungen liefert.Diese Spannungen werden über der Zeit von einer GaGe - Scope Karteerfasst. Die Scope - Karte ist zu parametrieren und über die Anwende-roberäche anzusteuern.
Ansteuerung: Die zusätzlichen Hardwarekomponenten müssen in geeigneterWeise von der Anwenderoberäche angesteuert werden. Dies schlieÿt dieErstellung und Nutzung von Treibern mit ein. Zwischen den Teilaufga-ben der Schallfelderzeugung und der Messung ist eine Synchronisationdurchzuführen.
6.3 Erweiterung des SteuerrechnersUm die Schallfeldmessung durchzuführen muss der Steuerrechner um die erfor-derliche Hardware erweitert werden. Der Steuerrechner ist ein handelsüblicherPC, dessen Motherboard mit Slots in PCI - Ausführung bestückt ist. Die Hard-ware wird deshalb in Form von Einsteckkarten mit PCI - Verbindung in denRechner eingebaut. Über den PCI - Bus erfolgt die Spannungsversorgung derKarten und der Datenaustausch.
Die Einsteckkarte zur Triggerung des programmierbaren Signalgenerators istein Produkt des Herstellers "National Instruments" mit der Bezeichnung "PCI6503". Mit dieser Karte können bis zu 24 digitale Kanäle im Modus Input oderOutput betrieben werden. Der Spannungspegel ist in TTL ausgeführt undbringt die geforderte Triggeranke von 5 V. Die Flankensteilheit beträgt dabei5 V in 2 ns. Im Lieferumfang war ein Anschlusskabel in Flachbandausführung
68

und ein Anschlussblock enthalten. Über den Anschlussblock wird das Signalan den BNC - Eingang des Generators weitergeleitet.
Die Scope - Karte "CS 1250" ist von dem Hersteller "GaGe Applied, Inc.". Sieverfügt über zwei Eingänge für die Messkanäle, einen Eingang für eine externeAbtastfrequenz und einen Eingang für einen externen Trigger. Die maximaleAbtastfrequenz beträgt einkanalig 50 Megasamples pro Sekunde bei einer Auf-lösung von 12 Bit. Bei der Nutzung von zwei Eingangskanälen halbiert sich dieAbtastfrequenz. Auf der Karte ist ein Speicher von 8 MB zur kurzzeitigen Da-tenablage verfügbar. Die Karte ist hinsichtlich der Eingangskanäle, Triggerung,Abtastrate, Speichertiefe und Datenablage parametrisierbar.
6.4 Parametrisierung des GaGe - ScopeDie Parametrierung der Scope - Karte hängt von der zu erwartenden abzutas-tenden Signalfrequenz, von der Entfernung des Hydrophons zum Ultraschall-wandler,der Amplitude, dem Trigger und dem Eingangswiderstand ab. DieAmplitude ist unkritisch und wird einfach auf die maximal mögliche Eingang-samplitude von 10 VPP eingestellt. Dieser Parameter hat keinen relevantenEinuss auf die Messdurchführung. Die Triggerung der Karte wird auf einenSoftwaretrigger eingestellt, der Eingangswiderstand beträgt 50 Ω.
Die zu erwartende maximale Signalfrequenz bedingt die Abtastfrequenz. Indiesem Zusammenhang ist das Abtasttheorem zu beachten, welches vorgibt,dass die Abtastfrequenz mindestens das doppelte der abzutastenden Signalfre-quenz betragen muss. Andernfalls treten Aliasing Eekte ein. Die maximaleMittelfrequenz beträgt 3 MHz und ist vorgegeben, während die Abtastfrequenzbei der Nutzung von einem Kanal 50 MHz beträgt. Das Abtasttheorem ist ein-gehalten.
Die Entfernung zwischen Hydrophon und Ultraschallwandler bedingt über dieLaufzeit des Schalls im Übertragungsmedium Wasser die Anzahl der Sample-punkte, welche nach der Messtriggerung im Speicher abgelegt und später ineine Datei geschrieben werden müssen. Diese Entfernung ist zunächst unbe-kannt. Möglich wäre das Ermitteln der Entfernung über die Anwenderoberä-che und die entsprechende Einstellung der Scope - Karte. Da jede Einstellung
69

mit einer gewissen Zeit verbunden ist, erschient diese Vorgehen nicht sinnvoll.Statt dessen wird von der gröÿten möglichen Entfernung zwischen Wandler undSensor ausgegangen und daraus die Anzahl der nötigen Samples ermittelt. VonNachteil ist jedoch die resultierende Ablage von nicht relevanten Messdaten.Diese müssen im Anschluss geltert werden. Aus den Ausführungen werdendie Einstellparameter der Karte wie folgt ermittelt:
Sampleperiode, Zeit zwischen den Samples
TSAMPLE =1
50 · 106Hz= 2 · 10−8s (6.1)
TSample gibt die Sampleperiode in Sekunden an.
Periode des Ultraschallsignals
TUSSIGNAL =1
3 · 106Hz= 3.33 · 10−7s (6.2)
TUSSIGNAL gibt die Periode eines 3 MHz Signals in Sekunden an.
Dauer von 6 Perioden des Ultraschallsignals
t6Perioden = 6 ∗ TUSSIGNAL = 2 · 10−6s (6.3)
t6Perioden gibt die Zeitdauer von 6 Perioden bei 3 MHz an.
Maximale Signallaufzeit
t =300mm
1, 486 · 106 mms
≈ 2 · 10−4s (6.4)
t gibt die Signallaufzeit bei einer Entfernung von 300 mm in Sekundenan.1,486·106 mm
sist die Ausbreitungsgeschwindigkeit von Schall in Wasser
bei einer Temperatur von 20 Celsius.
Anzahl der Samples zur Laufzeit
NLZ−SAMPLES =t
TSAMPLE
= 104 (6.5)
NLZ−SAMPLES gibt die Anzahl der Samples innerhalb der Laufzeit an.
70

Anzahl der Samples innerhalb des Signals
NUS−SAMPLES =t6Perioden
TSAMPLE
= 102 (6.6)
NUS−SAMPLES gibt die Anzahl der Samples innerhalb von 6 Perioden esEingangssignals bei 3 MHz an.
Gesamtanzahl der Samples
NALL−SAMPLES = NUS−SAMPLES + NLZ−SAMPLES = 10100 (6.7)
Aus dieser Berechnung geht eine Gesamtanzahl von 10100 Samples hervor.Die GaGe - Karte ist mit diesem Wert nicht einstellbar, sondern stützt sichauf dafür vordenierte Werte. Es wurde der nächst gröÿere Wert von 16000Samples gewählt.
6.5 AnsteuerungDie Ansteuerung betrit zum einen die Karte von "National Instruments" unddie Karte von "GaGe Applied, Inc."
Da die Entwicklungsumgebung "LabWindows" und die Karte für die digitaleI/O vom selben Hersteller "National Instruments" sind, gibt es innerhalb derEntwicklungsumgebung bereits Treiber und Funktionen zur Ansteuerung. In-nerhalb von LabWindows können diese Funktionen unter dem Begri "DAQ"per Drag and Drop in die Programmieroberäche eingefügt werden. Darininbegrien ist die Initialisierung der Ports, das Önen und Schlieÿen und dasSetzen bzw. Rücksetzen der Signale. Diese Funktionen wurden in der Anwende-roberäche CUSWA in drei Funktionen eingefügt. Die Funktion InitDigIO()konguriert die Karte auf die Nutzung des Ports A. Dies ist einer von 3 mögli-chen Ports mit einer Breite von 8 Bit. Die Richtung des Ports wird auf Outputgesetzt. Die Funktion OpenCloseDigIO() önet und schlieÿt den Port. So-bald ein Kanal oder ein Port von der Anwenderoberäche geönet wird, stehtdiese anderen Anwendungen unter dem Betriebssystem Windows nicht mehrzur Verfügung. Diese Blockade gegenüber anderen Anwendungen wird mit ei-nem Handle realisiert, der mit dem Schlieÿen des Ports gelöscht wird. Wird die
71

Abbildung 6.4: Flussdiagramm GaGe - Programmierung: Dargestellt istdie Reihenfolge der durchzuführenden Funktionen, um die GaGe - Karte richtigeinzustellen
Funktion zum Schlieÿen nicht ausgeführt, so bleibt der Handle auch nach demBeenden des Programms CUSWA bestehen und die Karte steht nicht mehrzur Verfügung. Die Routine SetPort setzt das Signal auf logisch Eins oderlogisch Null. Der Pegel von logisch Eins oder logisch Null wird der Funktionübergeben.
Die Programmierung der GaGe - Karte muss nach folgender Reihenfolge er-folgen:Zuerst wird die Karte initialisiert, siehe Abb. 6.4. Dabei ist das Einlesen einer
Kongurationsdatei vorgesehen. Diese Möglichkeit wird jedoch nicht benutzt.
72

Im Anschluss erfolgt das Anwählen der Karte und die Parametrierung derMessung, indem Abtastrate, Eingangswiderstand, Amplitude, Art des Trig-gers und Anzahl der Samples eingestellt werden. Danach kann die Messunggestartet werden, die Berechnung der benötigten RAM - Adressen und dieDatenablage. Für diesen Ablauf stellt der Hersteller eine Reihe von Funk-tionen zur Verfügung. Diese Routinen benutzen Datentypen und -strukturen,die gleichfalls mitgeliefert werden. Problematisch ist die teilweise Veränderungdes Microsoft - Standards bezüglich der einbezogenen Routinen durch die Ent-wicklungsumgebung. Teilweise werden inkompatible Denitionen eingesetzt,die nicht benutzt werden können. Zur Umsetzung wurden folgenden Dateiendes Herstellers in den Programmcode einbezogen:
GAGEDRV.h Diese Headerdatei enthält Konstanten zur Parametrie-rung der Karte wie Impedanzen, Samplefrequenzen und Oset -Einstellungen[3].
WHICHDRV.h Enthalten sind Konstanten und Makros zur Arbeit unterverschiedenen Umgebungen, Betriebssystemen und Speichermodellen[3].
EEPROM.H Die Headerdatei enthält Denitionen des Onboard - Speicherszur Zwischenablage der Messdaten[3].
STRUCTS.h Innerhalb der Headerdatei wurden Datenstrukturen deniert,welche die Registerbelegung widerspiegeln[3].
APPSUPP.h Enthält Funktionsprototypen zur Datenübergabe der Parame-ter an die Karte via PCI[3].
APPSUPP.c Die deklarierten Routinen aus der gleichnamigen Headerdateisind in diesem Codele deniert[3].
STRUCTS.c Dieses Codele enthält alle Funktionen zur Initialisierungder in der gleichnamigen Headerdatei erstellten Datentypen undRegisterstrukturen[3].
GAGEDRV.lib Diese Bibliothek beinhaltet vordenierte Routinen des Her-stellers "GaGe Applied, Inc." und bietet eine breites Spektrum an Mög-
73

Abbildung 6.5: Flussdiagramm GaGe - Initialisierung In der Grak istdie richtige Reihenfolge der abzuarbeitenden Funktionen bei der Initialisierungzu erkennen.
lichkeiten seitens der Messung, Datenablage, Vorverarbeitung der Daten,Osetregulierung und vieles mehr[3].
Zum Kapseln der Routinen, die nur das Ansprechen der GaGe - Karte bein-halten, wurde in die Anwenderoberäche ein eigenes Modul einbezogen. DieseModul trägt die Bezeichnung "GaGeFunktionen.c".Die Initialisierung kann mit folgender Ablaufstruktur verdeutlicht werden
Abb. 6.5:Es werden in der Initialisierung benutzt:
InitGage(); Dies ist eine übergeordnete Funktion, welche die nachstehendenFunktionen aufruft und besitzt weder einen Übergabewert noch einenRückgabewert. Nach den Aufrufen der oben dargestellten Funktionenerfolgt innerhalb von InitGage() die Speicherallokierung und Vorinitia-lisierung der Felder zur Zwischenablage der Messergebnisse.
74

InitBoard(); Diese Funktion initialisiert die GaGe - Karte und setzt die An-fangsparameter des Speicherzugris und die I/O - Adresse des PCI - Busfür das Betriebssystem. Der Treiber wird initialisiert und der benötig-te Speicher belegt. Im Anschluss erfolgt die Feststellung des Kartentypsund der spezischen Funktionsparameter.
BoardSetting(); Die Funktion setzt die Anwenderparameter der Messung ineine Struktur ein.
SetBoard(); Diese Routine übermittelt die Anwenderparameter via der er-mittelten I/O - Adresse an die Karte und bereitet die Messung vor. Umden Onboard - Relais die notwendige Zeit zum Einstellen zu geben, bein-haltet die Funktion eine Warteschleife.
Die Messung über die GaGe - Karte folgt immer einem bestimmten Ablauf.Dieser Ablauf ist in den Struktogrammen im Anhang "Appendix B: Strukto-gramme" dargestellt. Mit dem Einsprung in die Messfunktion erfolgt sofortder Start der Messung, in dem die Signalabgabe und die GaGe - Karte get-riggert werden. Im Anschluss wird geprüft, ob eine Triggerung erfolgt und obdie Karte die maximal zulässige Messzeit überschreitet. Bei fehlender Trig-gerung wird die Messung per Funktionsaufruf erzwungen, bei einer Zeitüber-schreitung wird die Messung abgebrochen. Die maximal zulässige Zeitdauer fürbeide Fälle beträgt eine Sekunde. Nach dieser Zeit kann mit Sicherheit davonausgegangen werden, dass keine Triggerung mehr erfolgt. Mögliche Ursachenliegen beim Betriebssystem. Im Anschluss werden die Adressen im RAM überdie Anzahl der Messpunkte errechnet. Dabei wird der Buer auf der Karteals Ringpuer aufgebaut und ausgelesen. Die ermittelten Werte werden imRAM des Messrechners abgelegt. Gleichzeitig wird ein Mittelwert über alleWerte gebildet, aus dem im Anschluss eine Detektionsgrenze für das Signalgeneriert wird, die 5 Prozent um den Mittelwert liegt. Diese Grenze berück-sichtigt den Gleichspannungsanteil der Eingangssignale. Sie wird bei einemnegativen Gleichspannungsanteil auf 5 Prozent unterhalb und bei einem posi-tiven Gleichspannungsanteil auf 5 Prozent über den Mittelwert gelegt. Danacherfolgt die Auswertung der Daten in einer Filterschleife, durch Vergleichen derWerte mit der Detektionsgrenze. Wird die Grenze von fünf Samples in Folge
75

Abbildung 6.6: Wirkung des Softwarelters: In dieser Grak die Wirkungdes Softwarelters dargestellt. Bei dem entsprechenden Oset werden 5 Ab-tastpunkte (rot) vor der Datenablage geprüft.
über- oder unterschritten, wird dies als beginnendes Signal interpretiert. DieDauer von fünf Samples bei einer Abtastrate von 50 Megasamples entsprichteiner Zeitdauer von 100 ns. Mit dieser Zeitdauer ist die positive Halbwelle ei-nes Signals mit einer Frequenz kleiner als 5 MHz detektierbar. Um die positiveHalbwelle bei einem negativen Oset nicht zu verpassen, wird innerhalb derSamples zurückgegangen und danach die Daten abgelegt. Die Abbildung Abb.6.6 verdeutlicht die Wirkung des Filters:
Über den Index des Feldes wird die weitere Datenablage gesteuert. Es wirdein Bereich festgelegt der 5 Samples vom aktuellen Index zurück beginnt und250 Samples lang ist. Da die Signalform bekannt ist, kann über diese Einteilungeine Signaldauer von 12 Perioden bzw. eine Zeit von 5µs mit einem Vorlaufvon 5 Samples eingelesen werden. Damit reduziert sich das Datenvolumen proMessung an einem Punkt von 320 KB auf 8 KB. Am Ende erfolgt die Daten-ablage. Es wird ein Dateiname erstellt, der abhängig vom jeweiligen Modus die
76

Bezeichnung "AUTO" oder "MANU" enthält und mit der Erweiterung ".dat"endet. Der Dateiname hat dabei die Form: GAGExMS.dat, wobei x die Stelleder Modusbezeichnung angibt. Die Datei erhält ein Header mit der Form:
xxx-yyy-zzz-time1-time2-nn-nnnn
dabei geben xxx, yyy und zzz die Koordinaten des Messpunktes an, time1 dieZeit des ersten Signalwerts ab dem Trigger, time2 der Sampleperiode, nn derAnzahl der Messdurchläufe und nnnn die gesamten Samples nach dem Trigger.Im Anschluss werden sowohl die Messdaten als die Zeitinformationen im oat- Format gespeichert. Die nachfolgenden Messwerte der anderen Messpunktewerden mit neuem Header an die Datei angehängt.
6.6 ZusammenfassungDer Abschnitt der Schallfeldmessung befasste sich mit dem Aufbau der Elek-tronik seitens des Wandlers, der Erzeugung des Schallfeldes durch Anlegeneines Triggers und dessen Erzeugung sowie der messtechnischen Erfassung derSpannungssignale des Hydrophons und die Ablage der Daten.
Der Steuerrechner wurde um die benötigte Hardware erweitert. Dabei ist dieVerwendung der Hardware exibel gestaltbar. Bei der Karte zur digitalen I/Osind 23 der 24 Kanäle unbelegt und können für weitere Aufgaben genutztwerden. Auch bei der Scope - Karte ist noch ein Eingangskanal zur Belegungmit weiteren Messaufgaben freigeblieben.
Die Programmierung der Hardware von "National Instruments" kann einfachüber die Entwicklungsumgebung "LabWindows" angesteuert werden. Der Trei-ber zur Karte und die notwendigen Routinen sind inbegrien.
Die Messwerterfassung wurde über die GaGe - Scope Karte umgesetzt. DieAbtastfrequenz von 50 MHz lässt eine Erhöhung der Eingangsfrequenz biszu 25 MHz anstatt 3 MHz zu. Der Umfang der Datenablage von bisher 16000Samples kann genauso erhöht werden. Das Anwendungsspektrum wird dadurcherweitert, da nicht nur höhere Eingangsfrequenzen sondern auch gröÿere Ent-fernungen zwischen Sensor und Ultraschallwandler zulässig sind. Die benutztenRoutinen des Herstellers sind sowohl für den Betrieb mit einem Board oder in
77

Master - Slave Systemen anwendbar. Alle Konstanten zur Parametrierung wer-den seitens des Herstellers mitgeliefert so dass die Einstellung der Karte gemäÿder Messaufgabe schnell und einfach geändert werden kann.
78

Kapitel 7
Auswertesoftware
7.1 Einleitung
Zur Vervollständigung der Funktionalität des Messplatzes gehört neben derPositionierung, der Schallgenerierung und der Messung der Schallsignale auchdie anschlieÿende Auswertung der Messdaten. Um die Kompaktheit des Mess-programms zu gewährleisten, wurde die Auswertung der Messergebnisse in denbisherigen Aufbau der Anwenderoberäche CUSWA zu integriert.
Dem Programm CUSWA wurde deshalb eine zweite Oberäche hinzuge-fügt. Die Navigation zwischen den Oberächen erfolgt über Programmreiter.Der Grundgedanke beim Zusammenfassen beider Funktionalitäten des Steuer-programms war ein denierter Ablauf der Messung. Zuerst sollte die Positio-nierung und die Messungen an einem oder mehreren Punkten erfolgen und dieDaten abgelegt werden um dann wieder eingelesen und ausgewertet zu wer-den. Das Datenformat der abgelegten Messungen schreibt dabei jedoch nichtzwingend die Umsetzung einer eigenen Programmierung vor. Ebenso sind dieProgramme "Excel" und "Matlab" geeignet, die Daten einzusetzen. In beidenProgrammen besteht jedoch vorab nicht die Möglichkeit, die gewünschten Aus-sagen über die Verteilung der Intensitäten, über die Winkelabhängigkeit oderüber das Frequenzspektrum treen zu können. Innerhalb von "Matlab" mussdazu erste ein "M - File" erzeugt werden, unter "Excel" sind manche Aussagenwie ein Frequenzspektrum nicht möglich.
79

7.2 SpezikationBei der Auswertung ist nicht nur die reine Kurvenform von Interesse. Zusätzlichsollen Aussagen über die Verteilung der Intensitäten des Schallfeldes im Raum,die Winkelabhängigkeit des Sensors und das Frequenzspektrum getroen wer-den. Die Ergebnisse sind dementsprechend auszugeben. Die Anforderungen andie Messdatenauswertung kann in folgende Einzelaufgaben aufgeteilt werden.
Verteilung der Intensitäten im Raum: Die Verteilung der Intensitätengibt Aussagen über die Nutzbarkeit des Wandlers. Es kann festgestelltwerden, ob die Amplitude in einer diskreten Entfernung zum Ultraschall-wandler den Erwartungen entspricht. Aus den abgelegten Punkten in denDateien der Messdaten sind dazu die Maximalwerte zu nden. Diese sol-len innerhalb einer Einstufungen von 10 Intensitätsgraden einer Farbezugeordnet werden. In einem Diagramm, welches die "XY" - Ebene dar-stellt, sollen die Maximalwerte an den Messpunkten mit der entsprechen-den Farbe dargestellt werden. Die verschiedenen "Z" - Ebenen müssendurchgeschaltet werden können, so dass für jede Ebene eine spezischeIntensitätenverteilung ausgegeben wird. Es soll eine Unterscheidung zwi-schen den Messdaten des automatischen Testlaufs und der Messung anwahllos angesteuerten Positionen der manuellen Positionierung möglichsein.
Schalldruck in Abhängigkeit des Winkels: Jeder Sensor besitzt eineWinkelabhängigkeit bei der Signalerfassung. Die Aussage, die getrof-fen werden soll, sind Veränderungen der Schalldruckverteilung über denWinkel. Dazu sind in einem Diagramm innerhalb eines gewünschten Ab-standes die Schalldrücke anzugeben. Die Schalldruckermittlung soll dabeiverschiedene Sensortypen mit deren spezischen Eigenschaften bezüglichEmpndlichkeit und Verstärkung berücksichtigen. Die Angabe verschie-dener "Z" - Ebenen ist ebenfalls vorzusehen.
Frequenzspektrum: Die genauere Untersuchung von Messwerten, die vonden erwartenden Ergebnissen bezüglich der Intensität und der Winkel-abhängigkeit abweichen, sollen in einer Frequenzanalyse näher untersucht
80

werden. Dazu ist von den Messwerten ein Frequenzspektrum zu erstel-len. Alle Punkte aus der gewählten Datei sind in einer Liste mit ihrenKoordinaten zur Auswahl darzustellen. Eine Unterscheidung bezüglichverschiedener "Z" - Ebenen ist nicht vorzusehen, da diese innerhalb derPunktkoordinaten bereits mit angegeben sind.
Datenimport und -export: Der Datenimport beinhaltet die Auswahl ver-schiedener Datenquellen. Als solche stehen die Messergebnisse der manu-ell angefahrenen Punkte und die des automatischen Testlaufs zur Verfü-gung. Beide sind entsprechend im Dateinamen codiert und auswählbar.Für alle Diagramme soll die Möglichkeit bestehen, dass diese ausgedrucktwerden können. Zur Vervollständigung sind die Minimal- und Maximal-werte sowie die Kurvenform mit auszugeben.
7.3 AufbauDas Frontend zur Auswertung der Messergebnisse beinhaltet alle Funktionen.Der Aufbau der Oberäche berücksichtigt die Möglichkeit, die Diagramme zuwechseln, so dass die Auswertung der Messdaten des automatischen Messlaufsund die der manuellen Positionierung nacheinander ausgewählt werden können.Dabei wurde intern auf eine strenge Trennung der Eingangsdaten geachtet.Jedem der beiden möglichen Datenimporte wird ein eigener Speicherbereichzugeordnet, der auch bei einem Wechsel des Datenmodus zwischen "Auto" undManu" erhalten bleibt und nur bei einem Programmende oder einer erneutenMessung freigegeben wird.In der Abbildung Abb. 7.1 ist die Ansicht der Oberäche zur Auswertung zu
sehen. Beginnend am linken oberen Bildrand sind die Buttons zur Auswahl derEingangsdaten zu sehen. Die Bezeichnungen "Auto" und "Manu" bezeichnendabei die Erweiterung im Dateinamen und identizieren damit den Betriebs-modus mit dem die Messdaten erstellt wurden. Die Dateien benden sich ineinem Verzeichnis, dessen Pfad über eine "Dene" - Anweisung hinterlegt ist.Die Angabe eines anderen Verzeichnisses ist nicht möglich. Darunter bendetsich das Auswahlmenü Abb. 7.2 mit dem aus den Diagrammen zur Anzeige derIntensitäten im Raum oder Winkelabhängigkeit gewählt werden kann. Unter
81

Abbildung 7.1: CUSWA Datenauswertung: Dargestellt ist die Oberächezur Datenauswertung. Es sind die Eingabefelder und die Diagramme zu sehen.
diesen benden sich die Buttons zur Auswahl der ermittelten Z - Ebenen. Wirdinnerhalb der Z - Ebenen die kleinste oder die gröÿte Ebene erreicht, wird derjeweilige Button abgeschaltet, so dass nur in die entgegengesetzte Richtung
Abbildung 7.2: Diagramme und Eingaben: In der Grak sind die Auswahl-menüs und die Diagramme zur Anzeige der Intensitäten und der Winkelab-hängigkeit zu sehen.
82

navigiert werden kann. Die Buttons gelten für jedes Diagramm, sofern diesfreigeschaltet wurde. Den letzten Teil zur Parametrierung der Anzeige bildendie Eingabefelder der Schalldruck - Winkelanzeige. In diesen können die Wertevon verschiedenen Sensortypen bezüglich der Empndlichkeit Empf [µV
Pa] und
der Verstärkung V eingegeben werden. Die Verstärkung als Faktor angegeben.Die Umrechnung in den Schalldruck P [Pa] erfolgt nach der Berechnungsvor-schrift:
DruckP =UMESS
V ∗ Empf(7.1)
Der letzte Eingangsparameter ist der Abstand des Sensors zum Ultraschall-wandler. Der darunter liegende Button "WS Anzeigen" initialisiert das Dia-gramm und wird nur zur Erstanzeige bedient. Danach kann mit den Buttonszum Wechseln der Z - Ebene manövriert werden. Rechts neben den beschrie-benen Teilen der Oberäche benden sich die beiden wählbaren Diagramme,die entsprechend der Auswahl freigeschaltet werden. Innerhalb des Diagrammszur Anzeige der Winkelabhängigkeit wird die Skalierung der Y - Achse entspre-chend der berechneten Schalldrücke angepasst. Die Einteilung der Intensitätenerfolgt in 10 Stufen, wobei jeder Stufe eine Farbe zugeordnet wird. Punkteohne Messwerte dazwischen bleiben weiÿ.Am unteren linken Bildrand Abb. 7.3 bendet sich das Auswahlfeld der
Punkte, mit deren zugeordneten Messwerten eine Frequenzanalyse durchge-führt werden soll. Mit Betätigung des Buttons "Punkt" und der Auswahl einesPunktes aus dem darunterliegenden Auswahlring der Punkte wird die rechts
Abbildung 7.3: Anzeige des Frequenzspektrums: Die Anzeige des Fre-quenzspektrums ist dargestellt. Die Skalierung der "X" - Achse wird bei derAuswahl eines Punktes zur Anzeige angepasst.
83

bendliche Anzeige des Frequenzspektrums initialisiert. Dazu wird über dieMesswerte eine Fast Fourier Transformation FFT berechnet, aus deren Ergeb-nis die Beträge gebildet, die Achsenskalierung überprüft, neu gesetzt und imAnschluss die Ergebnisse ausgegeben werden. Bei der Auswahl der Frequenz-analyse werden in einzelnen Popup - Fenstern die Minimal und Maximalwerteaus allen eingelesenen Messwerten und die detektierte Kurvenform ausgege-ben. Zuletzt sind die Buttons zum Datenexport zu nennen, mit denen z.B. einAusdruck der freigeschalteten Diagramme vorgenommen werden kann.
7.4 BedienungDas bedienen der Positionierung ist in vier Schritten konzipiert:
1. Datenquelle wählen.
2. Anzeige wählen.
3. Anzeige parametrieren.
4. Datenexport starten.
Um die Konzipierung umzusetzen, wurden die jeweils nicht gewählten Dia-gramme abgeschaltet. Der Anwender soll jeweils die Auswertung mit dem Zieleine bestimmte Aussage zu treen, durchzuführen. Danach soll der Datenex-port gestartet werden um im Anschluss daran unter einer anderen Zielsetzungdurch Wechsel des Diagramms die Auswertung zu wiederholen.
Die Nutzung des Programms zur Datenauswertung wird durch die Anwen-derführung bestimmt. Den Einstiegspunkt bildet die Ansicht des Programmsnach der Auswahl über den Programmreiter.
1. Der Programmteil "Auswertung" wurde über den Reiter ausgewählt unddie Oberäche erscheint. Standardmäÿig sind die Anzeigediagramme unddas Auswahlmemü der Punkte für die Frequenzanalyse ausgeschaltet.
2. Es erfolgt die Auswahl der Datenquelle und das Auswahlmenü der Dia-gramme wird freigeschaltet.
84

3. Mit der folgenden Auswahl des Anzeigediagramms wird dieses angezeigt.Mit der Wahl der Intensitätenanzeige wird diese sofort mit den Mess-werten der ersten ermittelten Z - Ebene initialisiert. Sind mehrere Z -Ebenen vorhanden, erfolgt die Freischaltung der Buttons zum Wechselnder Ebenen. Wird das Diagramm zur Anzeige der Winkelabhängigkeitgewählt, erfolgt die Freischaltung der Eingabefelder für die Parameter.Das Diagramm wird erst mit der Betätigung des Buttons "WS Anzei-gen" initialisiert, da erst zu diesem Zeitpunkt der gewünschte Abstandzwischen Sensor und Wandler feststeht. Im Anschluss kann über die But-tons der Z - Ebenen die Anzeige gewechselt werden. ein Wechsel sowohlder Datenquelle oder Anzeigediagramme ist jederzeit möglich.
4. Werden Aussagen über einen Punkt bezüglich des Frequenzspektrums ge-wünscht, so kann dies durch die Betätigung durch den Button "Punkt"erfolgen. Damit wird das Auswahlmenü der Punkte freigeschaltet undmit der Wahl eines Punktes erfolgt die Anzeige des Spektrums im Dia-gramm. Für ergänzende Informationen werden die absoluten Minimal-und Maximalwerte sowie die Kurvenform ausgegeben.
5. Es ist jederzeit möglich, die aktuelle Anzeige auszudrucken.
7.5 FunktionenDie Datenauswertung wird über Callbackfunktionen der Buttons und überAuswahlringe mit eigenständigen Funktionen umgesetzt. Der Anspruch derModularisierung bleibt weiterhin bestehen, die Funktionsdenitionen und ihreDeklarationen können jedoch in die bestehenden Code- und Headerles einbe-zogen werden. Lediglich die Callbackfunktionen erhalten ein eigenes Codele,werden jedoch in der automatisch erstellten Headerdatei der Entwicklungsum-gebung deklariert.
7.5.1 Callbackfunktionen der Oberächeint CVICALLBACK SetAutoSource (. . . ); Diese Funktion wird durch
die Betätigung des Buttons "AUTO" gestartet und setzt den Button
85

"MANU" zurück, löscht alle Punkte aus dem Punktauswahlfeld, schaltetdie Auswahl der Anzeigediagramme frei und liest das File mit den Mess-werten mit der Erweiterung "Auto" unter dem vordenierten Dateipfadein.
int CVICALLBACK SetManuSource (. . . ); Mit der Betätigung desButtons "MANU" erfolgt der Einsprung in diese Routine. Die Funktionsetzt den Button "AUTO" zurück, löscht alle Punkte aus dem Punkt-auswahlfeld, schaltet die Auswahl der Anzeigediagramme frei und liestdas File mit den Messwerten, indessen Name "Manu" zu nden ist, ein.
int CVICALLBACK ShowDiagramm (. . . ); Dieser Callback schaltet jenach Auswahl das Anzeigediagramm frei, löscht alle vorherigen Punkteund Kurven, ruft nacheinander die Funktionen zur Absolutwertberech-nung, Minimum / Maximum - Ermittlung und Anzeige der Messpunkteim Punktauswahlfeld auf. Wird die Intensitätenanzeige gewählt, erfolgtbereits die Ausgabe der ersten Z - Ebene.
int CVICALLBACK ChangeZUp (. . . ); Dieser Callback verwaltet denZähler für die Z - Ebene und aktualisiert mit den neuen Daten die ge-wählte Anzeige. Wird die gröÿte Ebene erreicht, schaltet sich der Buttonselbst ab.
int CVICALLBACK ChangeZDown (. . . ); Dieser Callback verwaltetden Zähler für die Z - Ebene und aktualisiert mit den neuen Daten diegewählte Anzeige. Wird die kleinste Ebene erreicht, schaltet sich derButton selbst ab.
int CVICALLBACK ShowWSFirstTime (. . . ); Dieser Callback reali-siert die Erstanzeige des Schalldruck/Winkel Diagramms und liest dazudie Parameter ein. Im Anschluss werden die Berechnungsfunktionen ge-rufen. Nach der Anzeige wird der Button ausgeschaltet. Weitere Anzeigenerfolgen über die Z - Buttons.
int CVICALLBACK ShowPunkte (. . . ); Dieser Callback schaltet dasAuswahlfeld der Punkte für die Frequenzanalyse frei
86

int CVICALLBACK ShowPunktFS (. . . ); Diese Callbackfunktion wirdbei Auswahl eines Punktes zur Frequenzanalyse gestartet und übergibtden Punktindex des Feldes der Berechnungs- und Anzeigefunktion.
int CVICALLBACK PrintPanel (. . . ); Diese Callbackroutine drucktdas Panel mit den Diagrammen aus.
7.5.2 Berechnungs- und Anzeigefunktionenvoid CalcAbs(void); Diese Routine ermittelt aus allen eingelesenen Mess-
werten die Beträge der Spannungen und dient zur Vorbereitung der An-zeige der Winkelabhängigkeit und der Intensitätenverteilung.
void GetSchalldruck(void) Diese Routine errechnet aus den Messspannun-gen und den Angaben zu den Eigenschaften des Sensors die gemessenenSchalldrücke.
void ReadMessVal(. . . ); Liest die Messdaten und die Datenheader ein. DieÜbergabe identiziert dabei die einzulesende Datei. Den Messergebnissenund den Headern wird jeweils ein Speicherbereich zur Verfügung gestellt,auf den im Anschluss zur Auswertung mehrfach zugegrien wird.
void GetZEbenen(void) Mit dieser Funktion wird durch die Auswertungder eingelesenen Datenheader die Anzahl der Z - Ebenen ermittelt undalle abgelegten Punkttripel, also Vektoren der Punkte, in denen alle Ko-ordinaten enthalten sind in einem Feld abgelegt.
void GetGlobMinMax(void) Mit dieser Routine werden die absoluten Ex-tremwerte aus allen Abgelegten Messdaten ermittelt.
void ShowMessPoints(void); Diese Routine zeigt alle Messpunkte imPunktauswahlfeld der Frequenzanalyse an, die durch die Header ermit-telt werden konnten.
void ShowIntensity(. . . ); Die Funktion weist den Messwerten aller Punkteeiner Z - Ebene Farben zu und zeigt diese im Diagramm der Intensitätenals Punkte an.
87

void ShowSchallWinkel(. . . ); Analog der Funktion zum Anzeigen der In-tensitäten, werden hier die Messergebnisse als Schalldrücke angezeigt.Innerhalb der Funktion erfolgt eine Abfrage, welche Punkte im ange-gebenen Anstand vorhanden sind und selektiert deren Messwerte. DieAnzeige erfolgt als vertikale Balken im Diagramm.
void ShowPunktSpektrum(. . . ); Führt mit den Messdaten des gewähltenPunktes eine FFT durch und zeigt das Ergebnis im Spektrendiagramman. Die Anzeige erfolgt dabei ebenfalls als vertikale Balken. Vor der ei-gentlichen Anzeige wird die Achsenskalierung überprüft. Um Spiegelfre-quenzen zu unterdrücken, wird der Maximalwert der Frequenzachse aufdie Nyquistfrequenz begrenzt. Dadurch wird auch einen bessere Anzeigeumgesetzt, da die relevanten Daten, deren Mittelfrequenz mit 3 MHz be-kannt ist, nicht am Anfang des Diagramms erscheinen und die restlicheAnzeigeäche leer bleibt.
7.6 ZusammenfassungDie Erweiterung der Steuersoftware "CUSWA" um den Programmteil zur Da-tenauswertung stellt dem Anwender eine Reihe von Auswertungen zur Verfü-gung, mit denen das gemessenen Schallfeld charakterisiert werden kann.Der Anwender hat die Möglichkeit, zwischen den Messdaten der verschiede-
nen Betriebsmodi zu unterscheiden und diese getrennt einzulesen. Dabei kannjederzeit die Datenquelle gewechselt werden.Es stehen zwei Diagramme zur Verfügung, die verschiedene Aussagen über
das Schallfeld in Bezug auf den benutzten Wandler bieten. Mit der Intensi-tätenverteilung können die maximal ermittelten Schalldrücke relativ zu denExtremwerten aller eingelesenen Messwerte angezeigt werden. Daraus sind In-formationen über die Stärke des Schallfeldes entnehmbar. Die Anzeige derWinkelabhängigkeit zeigt das Schallfeld relativ zur Position des Sensors. Die-se Anzeige ist für verschiedene Sensortypen parametrisierbar. Zwischen denbeiden Diagrammen kann ebenfalls jederzeit gewechselt werden.Wenn Informationen über das Frequenzspektrum an bestimmten Punkten ge-
wünscht werden, so ist die Durchführung von einer Frequenzanalyse möglich.
88

Dies ist insbesondere bei Messergebnisse an Punkten vorgesehen, die nicht denErwartungen entsprechen. Zur Auswahl werden alle Punkte in einem Auswahl-feld dargestellt und können per Mausklick angewählt werden. Die Frequenz-analyse wird automatisch durchgeführt. Ergänzend werden Informationen überdie Extremwerte und die gemessene Kurvenform an diesem Punkt gegeben.Die Diagramme und deren Parameter können jederzeit ausgedruckt werden.
89

Kapitel 8
Diskussion und Ausblick
8.1 ZielsetzungDie Zielsetzung der Diplomarbeit war der Aufbau eines Messplatzes, mit demdie ausgesandten Schallfelder von Ultraschallwandlern untersucht werden kön-nen. Der Hintergrund der Aufgabenstellung war die Überprüfung der Reprodu-zierbarkeit der Ultraschallwandler anhand von Aussagen über die Eigenschaf-ten der Amplitude des erzeugten Schallfeldes, dem Önungswinkel und demFrequenzspektrum der Ultraschallsignale. Die Aufgabenstellung konnte in dreiTeilaufgaben gegliedert werden, die alle erfüllt wurden.
Konstruktion und der Aufbau des Messplatzes: Die Konstruktionbeinhaltete den Aufbau eines Wasserbeckens, in dem das Hydrophonpositioniert werden sollt. Dem Hydrophon wurde eine Verfahrweg von300 mm in Richtung von insgesamt drei Freiheitsgraden zugewiesen.Die Positioniergenauigkeit wurde auf 0,5 mm festgelegt. Es ist einWasserbecken aus Plexiglas entstanden, welches nicht nur die geforder-ten Verfahrwege, sondern auch genügend Raum zur Anbringung derUltraschallwandler mit deren Ansteuerelektronik beinhaltet. Zur Posi-tionierung wurden Linearschienen mit positionsbestimmenden Bauteilenversehen, angebracht. Die Linearschienen wurden mit Elektromotorenversehen. Der gesamte Aufbau wurde verkabelt. Zur Ansteuerung derElektromotoren wurden Steuerkarten eingesetzt, welche die Steuerungüber einen DSP realisieren. Zur Spannungsversorgung der Steuerkar-
90

ten und Motoren wurden Netzteile erworben. Die Steuerkarten undSpannungsversorgungen wurden in einem 19" Gehäuse vor Spritzwassergeschützt und am Messplatz angebracht.
Positionierung eines Hydrophons: Die Positionierung des Hydrophons er-folgte in Verbindung mit den Steuerkarten über die Programmierung desDSP. Über das Programm wurde eine PWM - Signal erzeugt, welches dieDrehrichtung und die Geschwindigkeit der Motoren regelt. Die Drehen-coder an den Motoren wurden ausgewertet und so die Position bestimmt.Der Motorsteuerung kann über die serielle Schnittstelle RS 232 Befehleübergeben werden, welche in einer state machine abgearbeitet werden.Die Steuerung kann die erforderliche Genauigkeit von 0,5 mm einhalten.
Programmerstellung zur Steuerung der Hydrophonpositionierung:Zur Ansteuerung der Positionen für das Hydrophon wurde ein Programmerstellt, welches dem Anwender die Möglichkeit gibt, die Positionenautomatisch und manuell anzufahren. Es kann über das Programm eineReferenzfahrt durchgeführt werden und die Bewegung des Hydrophonskann mit einem Button softwaremäÿig gestoppt werden. Die aktuelle Po-sition des Hydrophons wird für die "XY" - Ebene in einem kartesischenKoordinatendiagramm und für die "Z" - Ebene in einem Balkendiagammangezeigt. Die Kommunikation zu den Steuerkarten wird über die serielleSchnittstelle RS 232 realisiert. Über die Software kann die Generierungund die Detektion der Schallfeldsignale durchgeführt werden.
In der Aufgabenstellung nicht verlangt aber zusätzlich umgesetzt wurdedie integrierte Auswertung der gemessenen Signale in einer extra dafürprogrammierten Programmoberäche innerhalb des Programms. Dieseermöglicht es, die aufgenommenen Daten mit dem gleichen Werkzeugauszuwerten. Die direkte Kontrolle der Datenaufnahme ist für systema-tische Messungen und vor allem bei der Fehlersuche auf einem Ultra-schallwandler von groÿem Vorteil.
91

8.2 Aktuelle MöglichkeitenDer Versuchsaufbau zur Charakterisierung eines Schallfeldes bietet verschiede-ne Aufbaumöglichkeiten um eine Schallfeldmessung durchzuführen. Über dieentkoppelte Anbringung des Hydrophons, kann der Sensorträger abgenommenwerden, ohne sonstige Veränderungen an der Linearschiene des Freiheitsgrads"Z" vorzunehmen. Sollte der Wunsch bestehen, andere Hydrophone nutzenzu wollen, so kann einfach ein neuer Träger erstellt und das Hydrophon an-gebracht werden. Analog besteht die Möglichkeit, Wandler von industriellenHerstellern oder allgemein in anderer Geometrie, anzubringen. Die Konstruk-tion aus einem Prolrahmen lässt die Montage von anderen Anbauteilen zu,so dass der Aufbau erweitert und verändert werden kann.Der Messplatz versetzt einen Anwender nicht nur in die Lage, denierte Punk-
te im Raum anzusteuern, sondern ermöglicht auch einen kontinuierlichen Ver-fahrweg. Es stehen dabei eine vordenierte Fahrt in Form eines Mäanders oderdie Fahrt nach vorher erstellten Koordinaten zur Verfügung. Die Koordinatendieses Verfahrwegs können in einer Datei abgelegt und eingelesen werden, sodass dem Muster innerhalb der 3 Freiheitsgrade keine Beschränkungen auf-erlegt sind. Die Durchführung der Schallfeldmessung ist automatisch oder inEinzelschritten durchführbar. Die Daten werden in einem Verzeichnis abgelegtund können sowohl von dem Steuerprogramm, als auch von anderer mathema-tischer Software eingelesen und verarbeitet werden. Dem erzeugbaren Daten-volumen ist innerhalb der automatischen Testläufe nur in der Fahrt in einervordenierten Form über die Rasterung der Messpunkte eine Grenze gesetzt.Bei der Fahrt mittels vorher festgelegter Koordinaten gibt es keinen Beschrän-kung denn alle Messpunkte können mehrfach vermessen werden.Die Benutzeroberäche in ihrer derzeitigen Form kann auf jedem handelsüb-
lichen Rechner mit dem Betriebssystem Windows eingesetzt werden. EinzigeBeschränkung ist das Vorhandensein von zwei RS232 - Schnittstellen, die ei-ne Baudrate von 19200 Baud realisieren müssen, um mit den Steuerkarten zukommunizieren.Die Steuerkarten mitsamt der Elektronik sind mit einem 19" - Gehäuse ver-
sehen und eigenständig zu jeder Ansteuerung von Elektromotoren einsetzbar.Über die Nutzung von PWM - Signalen sind AC-, DC- und Schrittmotoren
92

ansteuerbar. Die Positionsermittlung kann über Quadraturdrehencoder oderLinearencoder erfolgen. Zur Kommunikation ist nicht nur die Schnittstelle RS232 sondern auch USB und Parallele Schnittstellen nutzbar.
8.2.1 NachnutzbarkeitInsbesondere die Nachnutzbarkeit des Versuchsaufbaus ist von besonderemInteresse. Wie bereits in der Beschreibung der aktuellen Möglichkeiten darge-stellt, ist der Messplatz inklusive Steuerrechner und Elektronik exibel ein-setzbar. Erweiterungen können gemäÿ der aktuellen Konstruktion erstellt undangebracht werden.Die einzelnen Bestandteile sind auch getrennt von dem Anspruch der Schall-
feldmessung einsetzbar. Die Konstruktion des Beckens lässt eine andere Ver-wendung zu, ebenfalls die Verbindung der Steuerkarten mit den Netzteileninnerhalb des 19" Gehäuses. Beim Aufbau der Oberäche wurde auf strengeModularisierung geachtet, so dass die Nachnutzung einzelner Programmteilemöglich ist.Der Versuchsaufbau kann für eine Reihe von Messaufgaben verwendet wer-
den. Die Messung der Ultraschallwandler welche zur Materialprüfung von Pi-pelinerohren in einem sogenannten Molch eingesetzt werden, ist ohne weiteresmöglich. So können verschiedene Projekte des IPE vom Messplatz protieren.Die Bedingungen zum Einsatz sind die Verwendung der Steuerkarten, welchedie Motoren ansprechen und die Kommunikation über die RS 232 Schnittstelle.Das Anwenderprogramm CUSWA muss nicht zwangsläug zum Einsatz kom-
men, wenn die erforderlichen Eingangsdaten der Motorsteuerung über dieSchnittstelle gesendet werden können. Das Terminal - Programm, welches injeder Standardinstallation unter Windows enthalten ist, ist in der Lage dieseKommunikation zu übernehmen. Die Schallfeldgenerierung kann manuell erfol-gen und die Aufnahme der Messdaten kann ebenso manuell realisiert werden.dazu sind die entsprechenden Veränderungen am Versuchsaufbau vorzuneh-men.Das Programm kann eigenständig Messung andere Signale mit der GaGe -
Scope Karte durchführen. Die Parametrisierung der Karte ist über vordenier-te Wert einfach zu ändern. In gewissen Umfang können die Messdaten auch
93

ausgewertet werden, wenn die gewünschten Aussagen mit den vorhandenenAuswertmöglichkeiten hinsichtlich Intensität oder Frequenzspektrum getroenwerden können.
8.2.2 Portierbarkeit
Der Messplatz kann weitestgehend in seine Einzelbestandteile zerlegt werden.Die Zerlegung resultiert in den eigenständigen Elementen:
• Wasserbecken, Becken zum Versenken der Elektronik, Wandlerhalterung
• Rahmen aus Aluminiumprol
• Linearschienen, Träger, Sensorhalterung
• Motoren und Motoradapter
• Kabelbäume der Linearschienen mit Schaltern und Steckern
• 19" Einschubgehäuse, Netzteile, Steuerkarten und Backplanes
• Programmierbarer Funktionsgenerator, Anschlussblock
• Steuerrechner mit dem Programm CUSWA, PCI - Einsteckkarte zur di-gitalen I/O, PCI - GaGe - Scope Karte
Der Messplatz kann somit an jeden beliebigen Ort verbracht und dort neuaufgebaut werden. Der Messplatz ist nicht an einen festen Standort gebunden.
Die Portierbarkeit der Steuersoftware in Einzelfunktionen ist über die Mo-dularisierung möglich. Die Portierbarkeit des gesamten Programms unterliegtjedoch der Einschränkung, dass auf dem Rechner die GaGe - Scope Karte undderen Treiber vorhanden sein muss, da die Initialisierungsfunktionen auf diesezugreifen. Ein bestimmter Kartentyp des Herstellers "GaGe Applied, Inc." istjedoch nicht vorgeschrieben. Es müssen lediglich die Kartenparameter ange-passt werden.
94

8.3 ZielüberschreitungZur Komplettierung des Versuchsaufbaus wurde dem Anwenderprogramm dieMessauswertung hinzugefügt, obwohl dies so nicht in der Aufgabenstellungverlangt war. Dies erschien unter Berücksichtigung der Tatsache, das somitalle Bestandteile aus "einer Hand" kommen, sinnvoll.
8.4 AusblickFür die Einschätzung der Eigenschaften der Ultraschallwandler stellt dieserVersuchsaufbau ein geeignetes Werkzeug dar. Die Durchführung der Messungist weitestgehend automatisiert und lässt die Generierung von einer Vielzahlvon Messdaten zu. Die Möglichkeit einfachen Veränderung des Aufbaus vorzu-nehmen, lässt Anpassungen an veränderte Ultraschallwandler oder eingesetzteHydrophone zu. Der Versuchsaufbau ist leicht zu demontieren und zu trans-portieren.
95

96

Abkürzungen und Bezeichnungen
” ZollAC Wechselstrom, -signalADC Analog - Digital WandlungCAD computer aided designCAN controller area networkCAP captureCMPR Vergleichswertcoded excitation aus Pulsen bestehendes AnregungssignalDAQ data acquisitionDC Gleichstrom, -signalDIR RichtungDSP Digitaler Signal ProzessorEV event managerFFT Fast Fourier TransformationFZK Forschungszentrum KarlsruheGPIO general purpose input outputMSP Mixed Signal ProzessorNI National InstrumentsPWM Pulsweiten moduliertes SignalPV C PolyvinylchloridQEP quadratur encoder pulsRS422, RS232 serielle SchnittstellenSCI serial communication interfaceTI Texas InstrumentsUSB universal serial busUSCT Ultraschall Computer Tomographieworst case schlimmster Fall
97

Anhang A
Appendix
A.1 Herstellerverzeichnis
GaGe - Scope: Hersteller der MesskarteKniehl: Hersteller der NetzteileMaxon Motors: Hersteller der DC - MotorenNational Instruments: Hersteller der IO - KarteNTR Systems Inc.: Hersteller des HydrophonsSchro: Hersteller des 19" EinschubgehäusesTexas Instruments: Hersteller des DSPTHK Ltd.: Hersteller der Linearschienen
A.2 Benutzte Software
Adobe: Adobe ReaderAdobe: Adobe DestillerAleksander Simonic: WinEdtartofcode LLC: GhostscriptAutodesk: Inventor Professional 8GaGe Applied: GaGescopeJasc: Paint Shop ProLatex: LaTex
98

Microsoft: ExcelMicrosoft: PaintMicrosoft: Visual CMicrosoft: WordNational Instruments: LabWindowsNational Instruments: Measurement and AutomationTexas Instruments: Code Composer
A.3 WebsitesELKO.de: Elektronik Kompendiummaxon.com: Homepage des Motorherstellersni.com: Homepage von National Instrumentsthk.com: Homepage von THK Ltd.ti.com: Homepage von Texas Instrumentswikipedia.de: Online Lexikon
99

A.4 Verdrahtungsplan
Abbildung A.1: Verbindungsübersicht des Messstands: Dargestellt sindalle Verbindungen innerhalb des Messtands.
100

A.5 Struktogramme der Funktionen
Abbildung A.2: Struktogramm des Buttons "Einstellen" des automa-tischen Testlaufes: Dargestellt ist der Funktionsablauf bei der Betätigungdes Buttons zum Einstellen des automatischen Testlaufes.
101

Abbildung A.3: Struktogramm des Buttons "Start" des automatischenTestlaufes: Dargestellt ist der Funktionsablauf bei der Betätigung des Buttonszum Starten des automatischen Testlaufes.
102

Abbildung A.4: Struktogramm des Buttons "Einstellen" der manuellenPositionierung: Dargestellt ist der Funktionsablauf bei der Betätigung desButtons zum Einstelen der manuellen Positionierung.
103

Abbildung A.5: Struktogramm des Buttons "Positionieren": Dargestelltist der Funktionsablauf bei der Betätigung des Buttons zur manuellen Positio-nierung.
104

Abbildung A.6: Struktogramm der FMP - Buttons: Dargestellt ist derFunktionsablauf bei der Betätigung der Buttons zur Feinpositionierung.
105

Abbildung A.7: Struktogramm des Buttons "Referenzfahrt": Dargestelltist der Funktionsablauf bei der Betätigung des Buttons zur Durchführung derReferenzfahrt.
106

Abbildung A.8: Struktogramm der Anzeige des Referenzpunktes: Dar-gestellt ist der Funktionsablauf zur Anzige des Nullpunktes bei 0,0,0
Abbildung A.9: Struktogramm der Auswahl der Diagramme: Dargestelltist der Funktionsablauf bei der Auswahl eines Diagramms aus dem Auswahl-menü
107

Abbildung A.10: Struktogramm des Buttons "Notaus": Dargestellt istder Funktionsablauf bei der Betätigung des Buttons zur Notabschaltung.
Abbildung A.11: Struktogramm der Auswahl der Datenquelle: Darge-stellt ist der Funktionsablauf bei der Betätigung des Buttons zur Auswahl derEingangsdaten zur Auswertung
108

Abbildung A.12: Struktogramm der Anzeige der Diagramme: Darge-stellt ist der Funktionsablauf zur Anzeige eines Diagramms aus dem Auswahl-menü.
109

Abbildung A.13: Struktogramm des Buttons "WS Anzeigen": Darge-stellt ist der Funktionsablauf bei der Betätigung der Buttons zur Erstanzeigedes Diagramms zur Anzeige der Winkelabhängigkeit.
Abbildung A.14: Struktogramm der Punktauswahl zur Anzeige desFrequenzspektrums: Dargestellt ist der Funktionsablauf bei der Betätigungder Buttons zur Anzeige des Frequenzspektrums.
110

111

Abbildungsverzeichnis
Abb. 1.1 "Ultraschallwandler" Seite 5Abb. 2.1 "Einteilung des Koordinatensystems" Seite 9Abb. 2.2 "Aufbauvarianten" Seite 14Abb. 2.3 "Kräfte an der L - Form" Seite 16Abb. 2.4 "Prinzip der H - Brücke" Seite 23Abb. 2.5 "H - Brückenschaltung" Seite 24Abb. 2.6 "Endschalter" Seite 24Abb. 3.1 "Ansicht des Wasserbeckens" Seite 27Abb. 3.2 "Befestigung X - Achse" Seite 28Abb. 3.3 "Befestigung Y - Achse" Seite 29Abb. 3.4 "Befestigung Z - Achse" Seite 29Abb. 3.5 "Motor mit Adapter" Seite 30Abb. 3.6 "Ansicht des Schalterträgers" Seite 31Abb. 3.7 "Schalter mit Betätigungsklotz" Seite 31Abb. 3.8 "Frontansicht des 19" Gehäuse" Seite 32Abb. 3.9 "Rückseite des 19" Gehäuse" Seite 33Abb. 3.10 "Draufsicht 19" Gehäuse" Seite 33Abb. 3.11 "Vorderansicht des Messplatzes" Seite 35Abb. 4.1 "Struktogramm state machine" Seite 45Abb. 5.1 "Modularisierung des CUSWA - Programms" Seite 49Abb. 5.2 "CUSWA Bedienoberäche" Seite 50Abb. 5.3 "Bedienäche "automatischer Testlauf" Seite 52Abb. 5.4 "Bedienäche "manuelle Positionierung" Seite 53Abb. 5.5 "Umrechnung Polar- in kartesische Koordinaten" Seite 54Abb. 5.6 "Bedienäche "Referenzfahrt" Seite 55Abb. 5.7 "Anzeige "XY - Ebene und Z - Ebene" Seite 56Abb. 5.8 "Übertragungsformat" Seite 59
112

Abb. 6.1 "interne Beschaltung des Ultraschallwandlers" Seite 66Abb. 6.2 "Beschaltung des externen Elektronik" Seite 67Abb. 6.3 "Abbild der Signalform zur Schallfelderzeugung" Seite 67Abb. 6.4 "Flussdiagramm GaGe - Programmierung" Seite 72Abb. 6.5 "Flussdiagramm GaGe - Initialisierung" Seite 74Abb. 6.6 "Wirkung des Softwarelters" Seite 76Abb. 7.1 "CUSWA Datenauswertung" Seite 82Abb. 7.2 "Diagramme und Eingaben" Seite 82Abb. 7.3 "Anzeige des Frequenzspektrums" Seite 83
113

Literaturverzeichnis
[1] Th. Blank. Dokumentation der Steuerkarten. IPE, 2004.
[2] Th. Blank. Schaltplan der Steuerkarten. IPE, 2004.
[3] GaGe Applied Inc., US. PCI GaGe Scope CS 1250.
[4] M. Konecny. XY - Steuerungen. FH Karlsruhe, 2003.
[5] Maxon Motors, Schweiz. Encoder HEDL 5440.
[6] NTR Systems, US. TNU 001A.
[7] Texas Instruments, Europa. SPRA 989a.
[8] Texas Instruments, Europa. SPRU 051b.
[9] Texas Instruments, Europa. SPRU 065c.
[10] Texas Instruments, Europa. TMS 320 F2812.
[11] THK Ltd, Japan. Kompakt Linearachse KR 3306.
[12] THK Ltd, Japan. Low Cost Linearachse VLA 45.
114