Embed Size (px)
Citation preview
Funktionsbeschreibung
robotron Elektronische
Schreibmaschine S 6006
1. Auflage
Karl-Marx-Stadt, 1987
© VEB Kombinat Robotron, 1987
Filf77TIVIZB7SCEMIIrrIG
Inhaltsverzeichnis
1. Elektronik
1.1. Stromversorgung
1.1.1. Kurzcharakteristik
1.1.2. Netzschalteinheit, Netztrenntrafo
1.1.3. Leiterplatte
1.1.3.1. Gleichrichter, Siebglieder
1.1.3.2. 5P-Regelschaltung
1.2. Zentrale Recheneinheit (ZRE) 1.2.1. Allgemeines 1.2.2. Zentrale Verarbeitungseinheit (CPU) 1.2.3. Paralleler Ein- und Ausgabebaustein (PIO) 1.2.4. Zähler-.und Zeitgeberbaustein (CTC) 1.2.5. Speicher 1.2.6. Tastatur 1.2.7. Einschaltlöschung / RESET-Bildung 1.2.8. Motorsteuerung 1.2.9. Druckmagnetsteuerung 1.2.10. Sonderfunktionen
1.2.10.1. Erkennung Anschlag links und Grundstellung Typenscheibe 1.2.10.2. LED-Anzeigen, Warnsignal
1.2.10.3. Schiebeschalter/Funktionsschalter 1.3. Moduleinschübe 1.3.1. Schnittstellen 1.3.1.1. Centronics 1.3.1.2. CommOdore 1.3.1.3. V24 (RS 232 0)
1.3.2. Speichererweiterung
1.3.3. Fakturiermodul 1.4. Verstärkereinheit (VE)
1.4.1. Schrittmotorenansteuerung
1.4.1,1. Wagenmotor (MW)
1.4.1.2. Farbbandmotor (MF) und Typenscheibenmotor (MT)
1.4.1.3. Papierträgermotor (MP)
1.4.2. Druckmagnetverstärker
2. Mechanik
2.1.. Schriftbaugruppe (SBG)
2.1.1. Transport mittels Linearschrittmotor (LSM)
2.1.2. Arretierung
2.1.3. Farbbandeinrichtung
2.1.3.1. Transportumschaltung
2.1.3.2. Farbbandhebung 2.1.3.3. Farbbandtransport
2.1.4. Korrekturbandeinrichtung
2.1.4.1. Korrekturbandhebung
2.1.4.2. Korrekturbandtransport
2.1.5. Typenscheibe - Druckmagnet - Schreibschritte
2.1.6. Fotosysteme
2.1.7. Leiterplatte mit Verbindungskabel der SBG
2.2. Papierträger
2.3. Tastatur
2.4. Verkleidung
1 L1 1 2 Anschlüsse 3 für Netztrafo
L2.1 Fl
Netz', L22
iSu-
tecker0 e
,192e7
1. Elektronik
1.1. Stromversorgung
1.1.1. Kurzcharakteristik
Die Baugruppe Stromversorgung, welche die stabilisierte 5P sowie 24P Rohspannung erzeugt,
wurde in konventioneller Technik gelöst. Bestandteile der Stromversorgungsbaugruppe sind die Netzschalteinheit, der Netztrenntrafo und die bestückte Leiterplatte. Der Spannungs—
regeltransistor ist über ein Kühlblech mit der Rückwand verbunden. Damit wird eine gute
Wärmeableitung der entstehenden Verlustleistung und Verteilung auf der Rückwand gasantiert. Die Ausgangsspannungen stehen an Kontaktstiften zur Verfügung. Der Netztrenntrafo ist als
separate Baugruppe an der Rückwand befestigt. Je nach Netznennspannung (110 V, 115 V, 220 V,
240 V) wird eine entsprechende Trafovariante eingesetzt.
1.1.2. Netzschalteinheit, Netztrenntrafo
Die Schreibmaschine enthält Abdeckungen, die ohne Werkzeug zu entfernen bzw. zu öffnen sind,
wodurch spannungsführende Teile erreicht werden können. Es macht sich damit erforderlich,
für alle Ausgangsspannungen den Status "Schutzkleinspannung" zu erreichen. Um die Bauelemen—
te auf der Netzseite ebenfalls sicher unterzubringen, wurde dafür eine allseitig geschlosse—
ne Baugruppe entwickelt. Diese Netzschalteinheit beinhaltet Netzstecker, Netzsicherung,
Drossel, Kondensator und deren Verdrahtung. Die Verbindung zum Netztrafo wird über doppelt
isolierte Drähte realisiert, welche an die Netzschalteinheit gesteckt werden. Netzschalter und Netzstecker sind bei angeschraubter Netzschalteinheit an der Rückwand von der Geräte—
rückseite aus bedienbar.
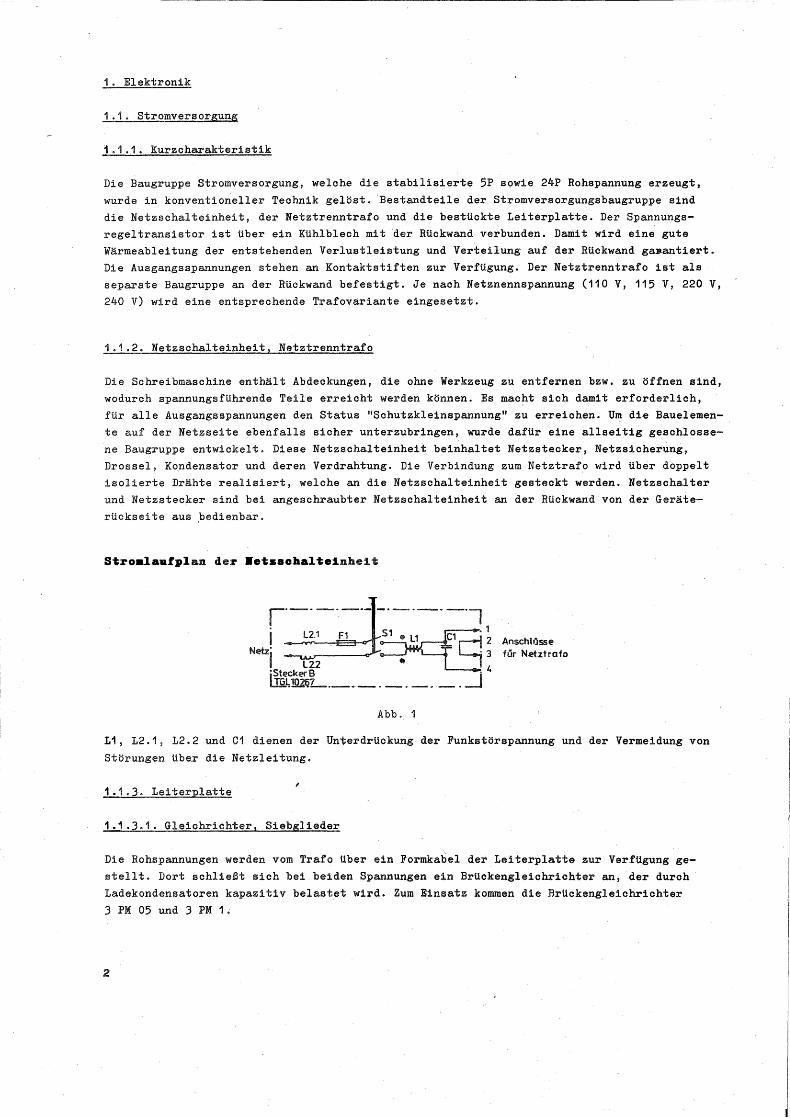
Stronlaufplan der Netssehalteinhelt
Abb. 1
Ll, L2.1, L2.2 und Cl dienen der Unterdrückung der Funkstörspannung und der Vermeidung von
Störungen über die Netzleitung.
1.1.3. Leiterplatte
1.1„3.1. Gleichrichter, Siebglieder
Die Rohspannungen werden vom Trafo über ein Formkabel der Leiterplatte zur Verfügung ge—
stellt. Dort schließt sich bei beiden Spannungen ein Brückengleichrichter an, der durch
Ladekondensatoren kapazitiv belastet wird. Zum Einsatz kommen die Brückengleichrichter 3 PM 05 und 3 PM 1.
2
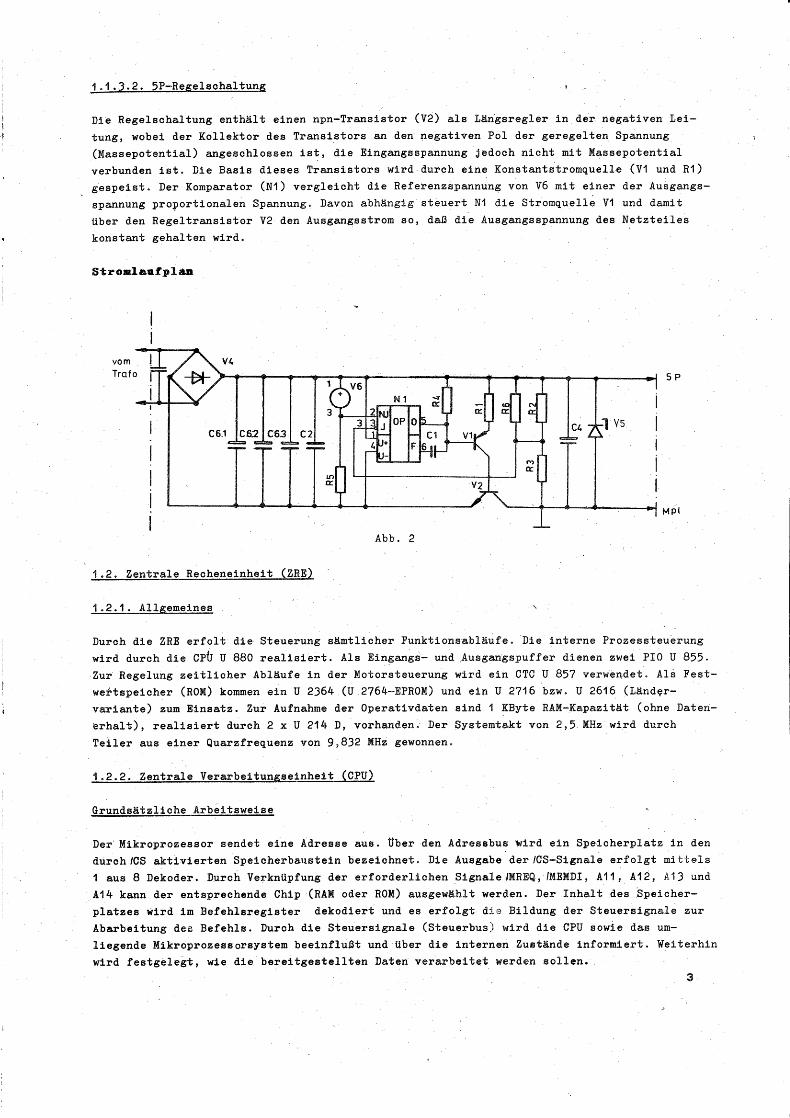
1 . 1 . 3 . 2 . 5P-Regelschaltung
Die Regelschaltung enthält einen npn-Transistor (V2) als Längsregler in der negativen Lei-tung, wobei der Kollektor des Transistors an den negativen Pol der geregelten Spannung
(Massepotential) angeschlossen ist, die Eingangsspannung jedoch nicht mit Massepotential
verbunden ist. Die Basis dieses Transistors wird durch eine Konstantstromquelle (V1 und R1) gespeist. Der Komparator (N1) vergleicht die Referenzspannung von V6 mit einer der Ausgangs-spannung proportionalen Spannung. Davon abhängig steuert N1 die Stromquelle V1 und damit
über den Regeltransistor V2 den Ausgangsstrom so, daß die Ausgangsspannung des Netzteiles
konstant gehalten wird.
Stromlaufpieta
Abb. 2
1.2. Zentrale Recheneinheit (ZRE)
1.2.1. Allgemeines
Durch die ZRE erfolt die Steuerung sämtlicher Funktionsabläufe. Die interne Prozessteuerung
wird durch die CA U 880 realisiert. Als Eingangs- und Ausgangspuffer dienen zwei PIO U 855.
Zur Regelung zeitlicher Abläufe in der Motorsteuerung wird ein CTC U 857 verwendet. Als Fest-wertspeicher (ROM) kommen ein U 2364 (U 2764-EPROM) und ein U 2716 bzw. U 2616 (Länder-
variante) zum Einsatz. Zur Aufnahme der Operativdaten sind 1 KByte RAM-Kapazität (ohne Daten-
erhalt), realisiert durch 2 x U 214 D, vorhanden. Der Systemtakt von 2,5 MHz wird durch
Teiler aus einer Quarzfrequenz von 9,832 MHz gewonnen.
1.2.2. Zentrale Verarbeitungseinheit (CPU)
Grundsätzliche Arbeitsweise
Der Mikroprozessor sendet eine Adresse aus. über den Adressbus wird ein Speicherplatz in den
durch/CS aktivierten Speicherbaustein bezeichnet. Die Ausgabe der/CS-Signale erfolgt mittels
1 aus 8 Dekoder. Durch Verknüpfung der erforderlichen Signale,MREQ, /MEMDI, All, Al2, A13 und
A14 kann der entsprechende Chip (RAM oder ROM) ausgewählt werden. Der Inhalt des Speicher-
platzes wird im Befehlsregister dekodiert und es erfolgt die Bildung der Steuersignale zur
Abarbeitung deß Befehls. Durch die Steuersignale (Steuerbus) wird die CPU sowie das um-
liegende Mikroprozessorsystem beeinflußt und über die internen Zustände informiert. Weiterhin wird festgelegt, wie die bereitgestellten Daten verarbeitet werden sollen.
3
1.2.3. Paralleler Ein- und Ausgabebaustein (PIO)
Das Interface zwischen Peripherie und CPU bilden zwei PIO (U 855). Durch die Programmierung werden folgende Arbeitsweisen festgelegt:
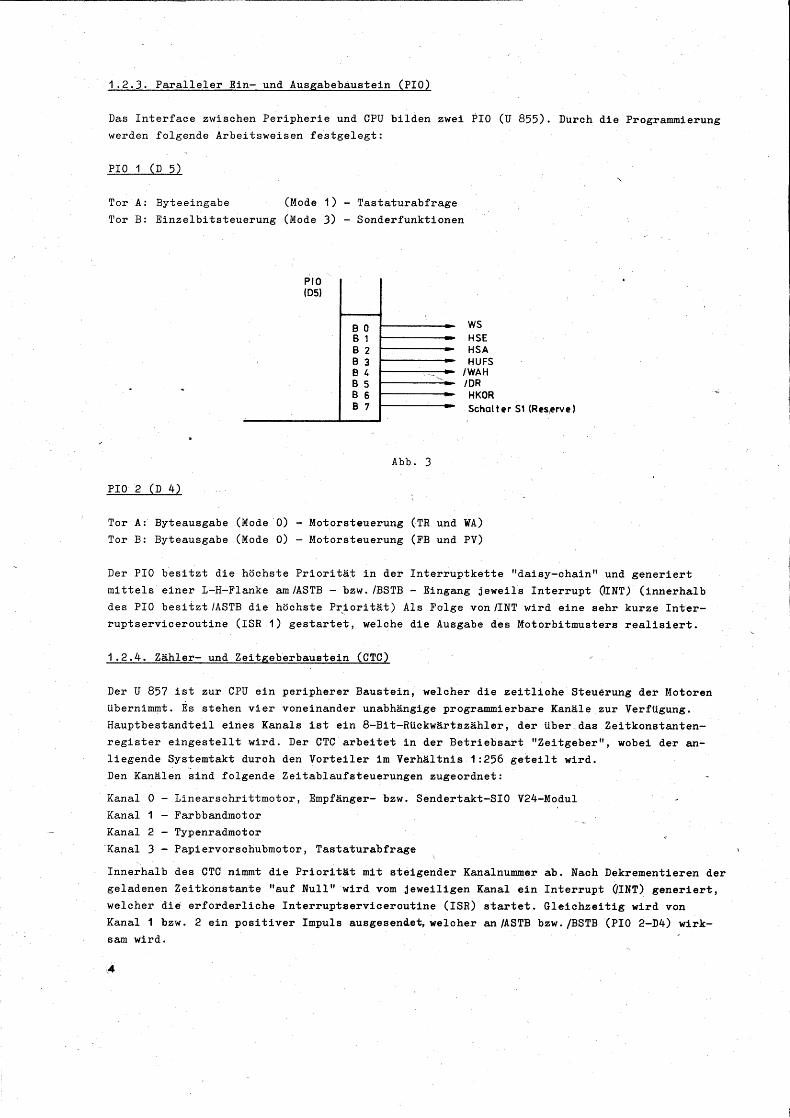
PIO 1 (D 5)
Tor A: Byteeingabe (Mode 1) - Tastaturabfrage Tor B: Einzelbitsteuerung (Mode 3) - Sonderfunktionen
P:10 (D5)
B 0
WS
B 1
HSE B 2
HSA B 3
HUFS B 4
/WAH B 5
/DR B 6
HKOR
B 7
Schalter St (Reserve)
Abb. 3
PIO 2 (D 4)
Tor A: Byteausgabe (Mode 0) - Motorsteuerung (TR und WA)
Tor B: Byteausgabe (Mode 0) - Motorsteuerung (FB und PV)
Der PIO besitzt die höchste Priorität in der Interruptkette "daisy-chain" und generiert
mittels einer L-H-Flanke am/ASTB - bzw./BSTB - Eingang jeweils Interrupt ((INT) (innerhalb
des PIO besitzt/ASTB die höchste Priorität) Als Folge von/INT wird eine sehr kurze Inter-ruptserviceroutine (ISR 1) gestartet, welche die Ausgabe des Motorbitmusters realisiert.
1.2.4. Zähler- und Zeitgeberbaustein (CTC)
Der U 857 ist zur CPU ein peripherer Baustein, welcher die zeitliche Steuerung der Motoren
übernimmt. Es stehen vier voneinander unabhängige programmierbare Kanäle zur Verfügung.
Hauptbestandteil eines Kanals ist ein 8-Bit-Rückwärtszähler, der über_das Zeitkonstanten-
register eingestellt wird. Der CTC arbeitet in der Betriebsart "Zeitgeber", wobei der an-
liegende Systemtakt durch den Vorteiler im Verhältnis 1:256 geteilt wird. Den Kanälen sind folgende Zeitablaufsteuerungen zugeordnet:
Kanal 0 - Iinearschrittmotor, Empfänger- bzw. Sendertakt-SI0 V24-Modul Kanal 1 - Farbbandmotor
Kanal 2 - Typenradmotor
Kanal 3 - Papiervorschubmotor, Tastaturabfrage
Innerhalb des CTC nimmt die Priorität mit steigender Kanalnummer ab. Nach Dekrementieren der geladenen Zeitkonstante "auf Null" wird vom jeweiligen Kanal ein Interrupt (IINT) generiert,
welcher die erforderliche Interruptserviceroutine (ISR) startet. Gleichzeitig wird von
Kanal 1 bzw. 2 ein positiver Impuls ausgesendetwelcher an/ASTB bzw./BSTB (PIO 2-D4) wirk-sam wird.
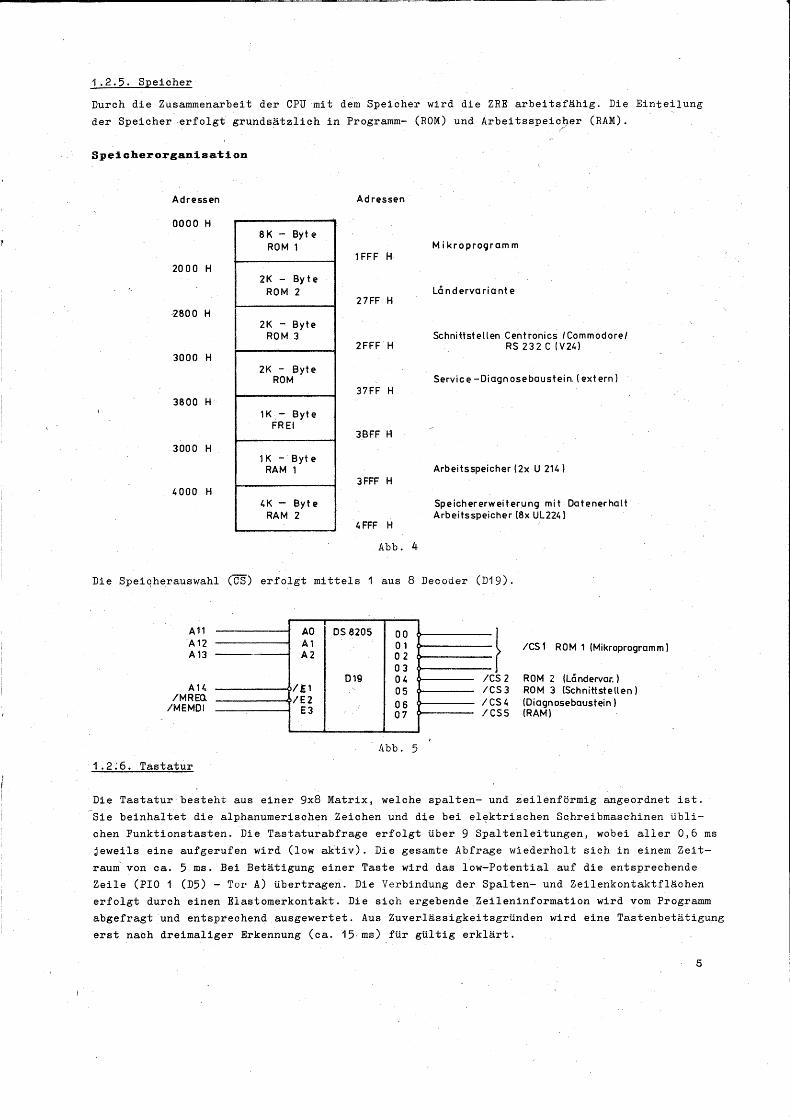
1FFF H
27FF H
Mikroprogramm
Ländervariante
8K — Byte ROM 1
2K — Byte ROM 2
2K — Byte ROM 3
2K — Byte ROM
1K . — Byte REI
1K — Byte RAM 1
[
4K — Byte RAM 2
0000 14
2000 H
2800 H
3000 14
3800 H
3000 H
4000 H
Schnittstellen Centronics /Commodore/ 2FFF H RS 232 C (V24)
Service —Diagnosebaustein. (extern) 37FF H
3BFF 14
Arbeitsspeicher (2x U 214 ) 3FFF H
Speichererweiterung mit Datenerhalt Arbeitsspeicher (8x U1.224)
4FFF 14
1.2.5. Speicher
Durch die Zusammenarbeit der CPU mit dem Speicher wird die ZRE arbeitsfähig. Die Einteilung
der Speicher erfolgt grundsätzlich in Programm- (ROM) und Arbeitsspeicher (RAM).
Speicherorganisation
Adressen
Adressen
Abb. 4
Die Speicherauswahl (CS) erfolgt mittels 1 aus 8 Decoder (D19).
00 01 0 /CS1 ROM 1 (Mikroprogramm) 02 03 0- 0 4 o /CS 2 ROM 2 (Ländervar. 05 o /CS 3 ROM 3 (Schnittstellen)
06 o / CS 4 (Diagnosebaustein 07 0 /C55 (RAM)
All Al2 Al3
A14 /MREO.
/MEMDI
AO Al A2
/El /E2
E3
DS 8205
019
Abb. 5
1.2.6. Tastatur
Die Tastatur besteht aus einer 9x8 Matrix, welche spalten- und zeilenförmig angeordnet ist.
Sie beinhaltet die alphanumerischen Zeichen und die bei elektrischen Schreibmaschinen übli-chen Funktionstasten. Die Tastaturabfrage erfolgt über 9 Spaltenleitungen, wobei aller 0,6 ms
jeweils eine aufgerufen wird (low aktiv). Die gesamte Abfrage wiederholt sich in einem Zeit-
raum von ca. 5 ms. Bei Betätigung einer Taste wird das low-Potential auf die entsprechende Zeile (PIO 1 (D5) - Tor A) übertragen. Die Verbindung der Spalten- und Zeilenkontaktflächen
erfolgt durch einen Elastomerkontakt. Die sieh ergebende Zeileninformation wird vom Programm abgefragt und entsprechend ausgewertet. Aus Zuverlässigkeitsgründen wird eine Tastenbetätigung
erst nach dreimaliger Erkennung (ca. 15 ms) für gültig erklärt.
5
ES ZO la
oa SM
9 •ctc1V
00
L S dS
jair_inuni ob.aräg Ls.
ZSM
dS
1 9V
Z:Z1d
LV
ris2
SO
0 Id
LO
90
so >0
CO
lo ZO
00
111111111111111M1111111111».111Mwal 1111111111111.11111111111111111111m111111Mffl 1111111111111MillillilMi_11111111111111mi 111111111111111111111111111 1 1111111111M1111111111111mfflium 11111111111111111111111111111111 1
11111111111
11111 3.
tZ/
dS
t dS/ 9 V
LV 9V
sV tiV
EV zV t V
0 V
11111111111 1111111111111.3.
11111mmaiw 111"......_1111111.1.011
111.1111131111011
es,
5_P R11,1
V2
/RESET >CPU (D11)
-->CTC ID6 D1
Abb'. 7
6
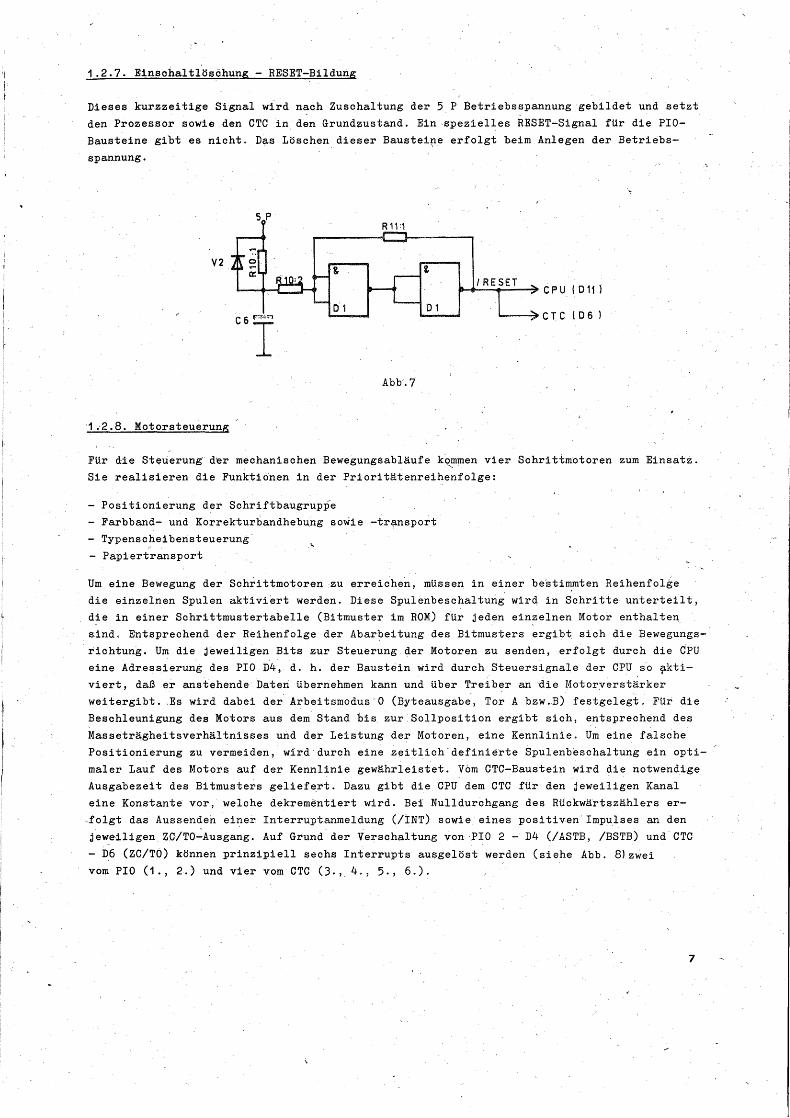
1.2.7. Einschaltlöschung - RESET-Bildung
Dieses kurzzeitige Signal wird nach Zuschaltung der 5 P Betriebsspannung gebildet und setzt
den Prozessor sowie den CTC in den Grundzustand. Ein spezielles RESET-Signal für die PIO-
Bausteine gibt es nicht. Das Löschen dieser Bausteine erfolgt beim Anlegen der Betriebs-
spannung.
1.2.8. Motorsteuerung
Für die Steuerung der mechanischen Bewegungsabläufe keinen vier Schrittmotoren zum Einsati.
Sie realisieren die Funktionen in der Prioritätenreihenfolge:
- Positionierung der SchriftbaugrupPe
- Farbband- und Korrekturbandhebung sowie -transport - Typenscheibensteuerung
- Papiertransport
Um eine Bewegung der Schrittmotoren zu erreichen, müssen in einer bestimmten Reihenfolge
die einzelnen Spulen aktiviert werden. Diese Spulenbeschaltung wird in Schritte unterteilt, die in einer Schrittmustertabelle (Bitmuster im ROM) für jeden einzelnen Motor enthalten,
sind. Entsprechend der Reihenfolge der Abarbeitung des Bitmusters ergibt sich die Bewegungs-
richtung. Um die jeweiligen Bits zur Steuerung der Motoren zu senden, erfolgt durch die CPU
eine Adressierung des PIO D4, d. h. der Baustein wird durch Steuersignale der CPU so ekti-viert, daß er anstehende Daten übernehmen kann und über Treiber an die Motorverstärker
weitergibt. Es wird dabei der Arbeitsmodus 0 (Byteausgabe, Tor A bzw.B) festgelegt. Für die
Beschleunigung des Motors aus dem Stand bis zur Sollposition ergibt sich, entsprechend des
Masseträgheitsverhältnisses und der Leistung der Motoren, eine Kennlinie. Um eine falsche Positionierung zu vermeiden, wird durch eine zeitlich definierte Spulenbeschaltung ein opti-
maler Lauf des Motors auf der Kennlinie gewährleistet. Vöm CTC-Baustein wird die notwendige
Ausgabezeit des Bitmusters geliefert. Dazu gibt die CPU dem CTC für den jeweiligen Kanal eine Konstante vor, welche dekrementiert wird. Bei Nulldurchgang des Rückwärtszählers er-
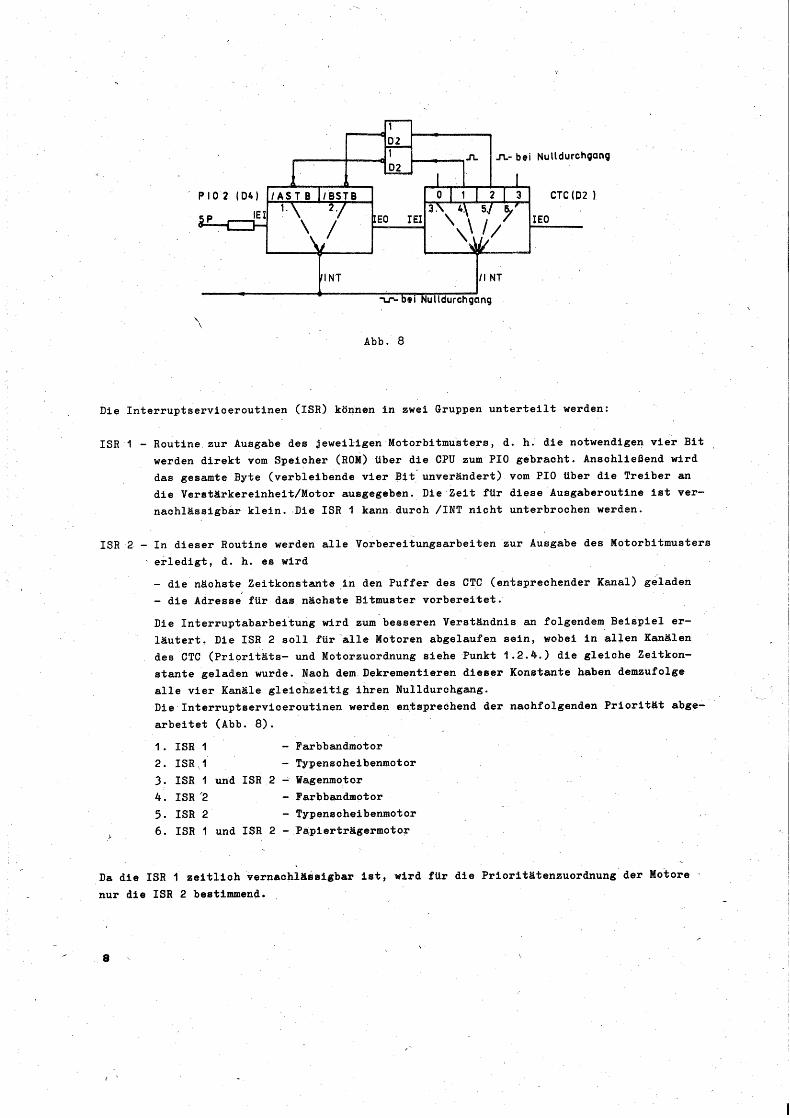
folgt das Aussenden einer Interruptanmeldung (/INT) sowie eines positiven Impulses an den jeweiligen ZC/TO-Ausgang. Auf Grund der Verschaltung von PIO 2 -'D4 (/ASTB, /BSTB) und'CTC
- D6 (ZC/T0) können prinzipiell sechs Interrupts ausgelöst werden (siehe Abb. 8)zwei
vom PIO (1., 2.) und vier vom CTC (3., 4., 5., 6.).
7
at bei Nundurchgang
CTC CID2 1
•ei Nultdurchgang
Abb. 8
Die Interruptserviceroutinen (ISR) können in zwei Gruppen unterteilt werden:
ISR 1 - Routine zur Ausgabe des jeweiligen Motorbitmuiters, d. h. die notwendigen vier Bit
werden direkt vom Speicher (ROM) über die CPU zum PIO gebracht. Anschließend wird
das gesamte Byte (verbleibende vier Bit'unverändert) vom PIO über die Treiber an die Verstärkereinheit/Motor ausgegeben. Die Zeit für diese Ausgaberoutine ist ver-
nachlässigbar klein. Die ISR 1 kann durch /INT nicht unterbrochen werden.
ISR .2 - In dieser Routine werden alle Vorbereitungsarbeiten zur Ausgabe des Motorbitmusters
erledigt, d. h. es wird
- die nächste Zeitkonstante in den Puffer des CTC (entsprechender Kanal) geladen
- die Adresse' für das, nächste Bitmuster vorbereitet.
Die Interruptabarbeitung wird zum besseren Verständnis an folgendem Beispiel er-
läutert. Die ISR 2 soll, für alle Motoren abgelaufen sein, wobei in allen Kanälen
des CTC (Prioritäts- und Motorzuordnung siehe Punkt 1.2.4.) die gleiche Zeitkon-
stante geladen wurde. Nach dem Dekrementieren dieser Konstante haben demzufolge
alle vier Kanäle gleichzeitig ihren Nulldurchgang.
Die Interruptserviceroutinen werden entsprechend der nachfolgenden Priorität abge-arbeitet (Abb. 8).
1. ISR 1 - Farbbandmotor
2. ISR .1 - Typenscheibenmotor 3. ISR 1 und ISR 2 - Wagenmotor
4. ISR '2 - Farbbandmotor
5. ISR 2 - Typenscheibenmotor 6. ISR 1 und ISR 2 - Papierträgermotor
Da die ISR 1 zeitlich vernachlässigbar ist, wird für die Prioritätenzuordnung der Motore
nur die ISR 2 bestimmend.
8
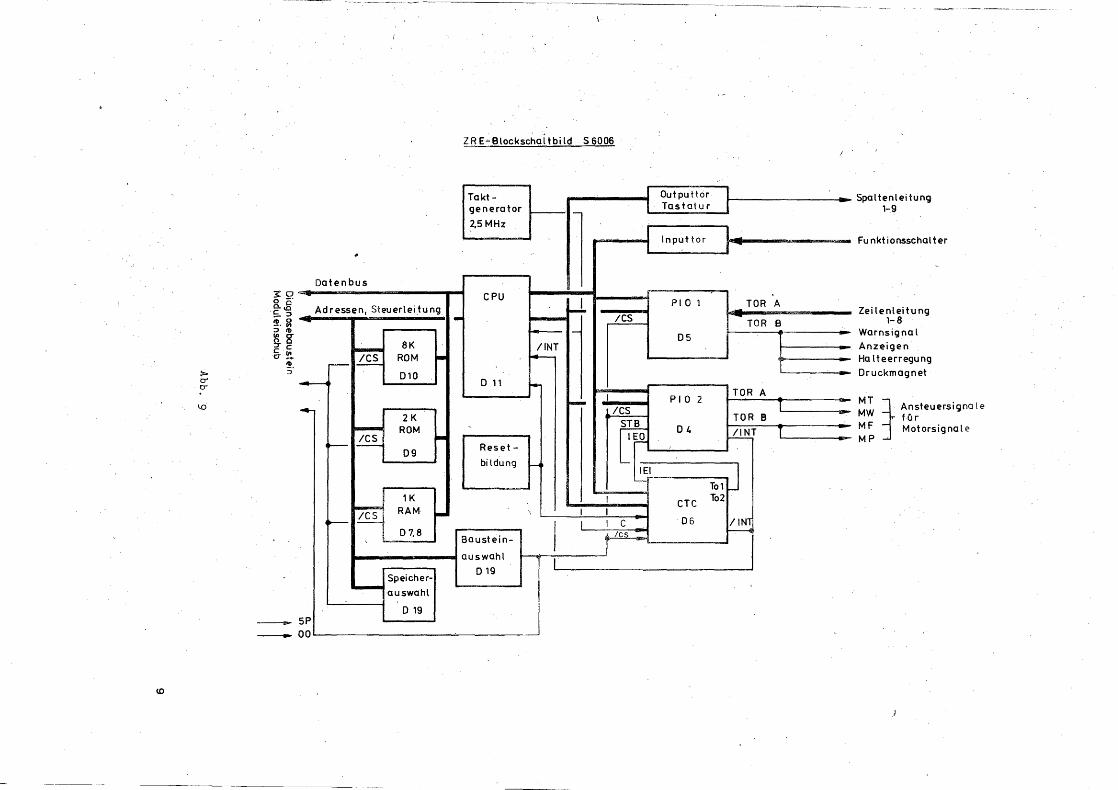
ZR E-Blockschaitbi ld S6006
Datenbus
Spaltenleitung 1-9
Funktionsschalter
Takt -generator
2.5 MHz
CPU PI 0 1
D5
/CS Adressen, Steuerleitung
/CS
TOR A
TOR B «NI
/INT 8K ROM
010
Zeilenleitung 1-8 •
Warnsignal
Anzeigen Hatteerregung
Druckmagnet D 11
TOR A
PI 0 2
v.) MT — Ansteuersignale
"'"' MW -- tOr MF — Motorsignale ® MP
Reset-
bildung
2K ROM
D9
/CS
MINMSZIal.
C S
1K RAM
07,8 Baustein-
auswahl
D 19
—0- 5P 00
co
Speicher-
auswahl
• 019
1.2.9. Druckmagnetsteuerung
Um einen gleichmäßigen Abdruck bei unterschiedlicher Fläche der Zeichen zu gewährleisten,
werden verschiedene Ansteuerzeiten des Druckmagneten benötigt. Jedem Drucksymbol ist eine spezifische Zeit (Tabelle im ROM) zugeordnet. Nach erfolgter Tastaturbetätigung dekodiert
die CPU das jeweilige Zeichen und ordnet ihm eine definierte, Zeit zu. Anschließend wird der Druckimpuls (DR) (Länge A Zeichen) über den PI01 - Tor B (D5) und der Verstärkereinheit
an den Druckmagneten ausgegeben.
1.2.10 Sonderfunktionen
1.2.10.1. Erkennung Anschlag links und Grundstellung Typenscheibe
Um nach dem Einschalten der Maschine eine definierte Grundstellung der Schrittmotoren zu
erreichen, wird ein Synchronisationslauf durchgeführt. Beim Einfahren der Zeiger in das jeweilige Fotosystem entsteht ein "H"-Signal, welches über die Gatter D1 und D15 auf den
Datenbus (D4, D5) gelegt wird.
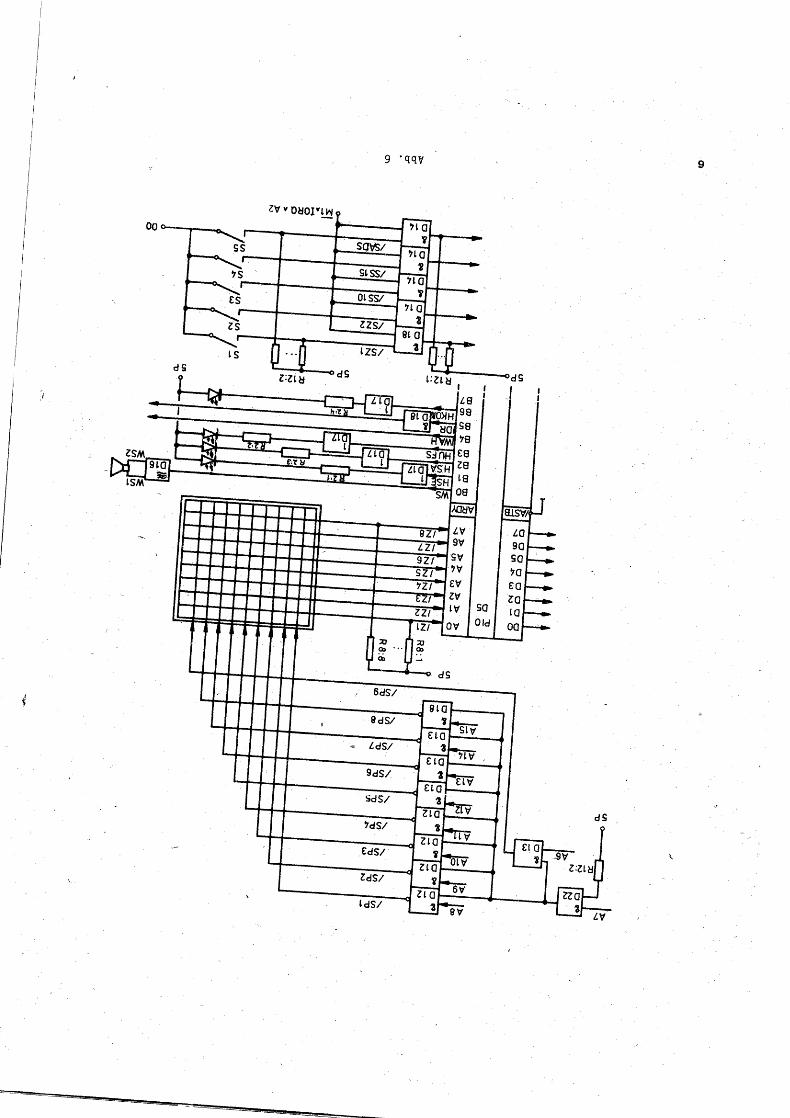
1.2.10.2. LED-Anzeigen, Warnsignal
Die Ansteuerung der LED-Anzeige sowie Freigabe Warnsignalgenerator erfolgen über den PIO
D6, Tor B, wobei der PIO im Arbeitsmodus Einzelbitsteuerung (MODE 3) arbeitet (Abb.6).
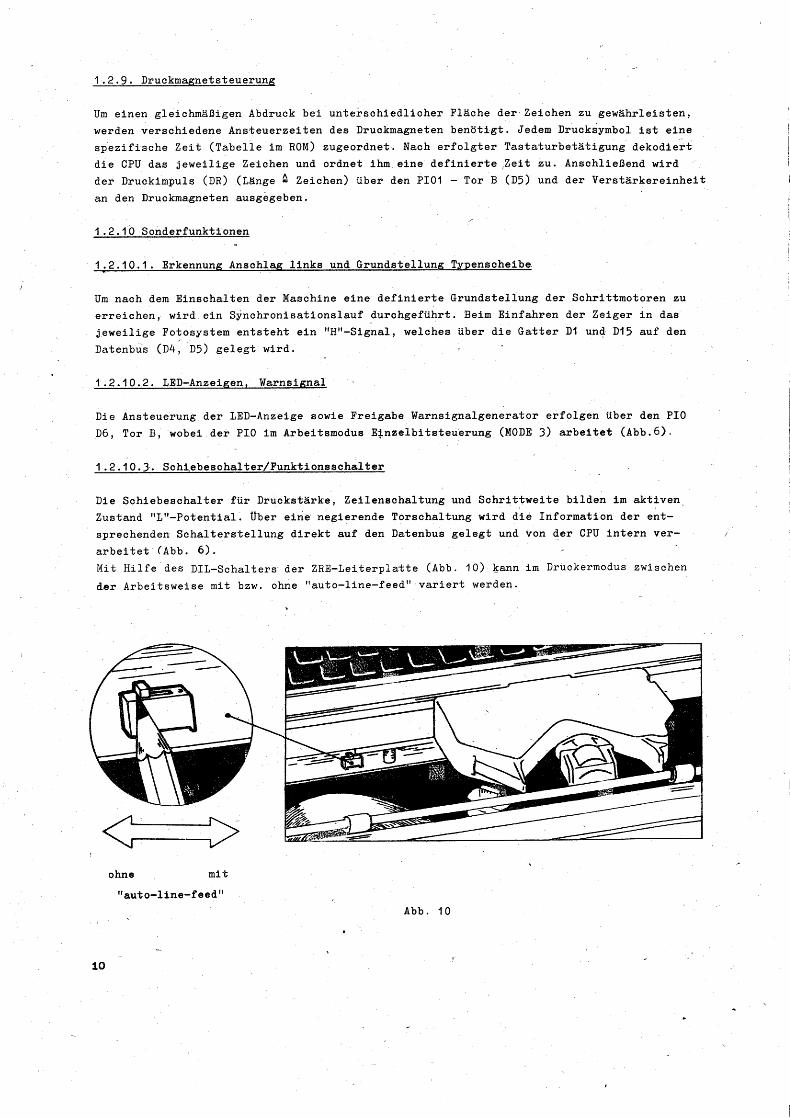
1 .2 .10.3. Schiebeschalter/Funktionsschalter
Die Schiebeschalter für Druckstärke, Zeilenschaltung und Schrittweite bilden im aktiven, Zustand "L"-Potential. über eine negierende Torschaltung wird die Information der ent-
sprechenden Schalterstellung direkt auf den Datenbus gelegt und von der CPU intern ver-
arbeitet (Abb. 6).
Mit Hilfe'des DIL-Schalters der ZRE-Leiterplatte (Abb. 10) kann im Druckermodus zwischen
der Arbeitsweise mit bzw. ohne "auto-line-feed" variert werden.
ohne mit
"auto-line-feed" Abb. 10
1.0
BUSY
/ACK
/RD
/I NT
1 1 Bin
T'
/ASTB ----1 1
DAT EN
• /AR DY
Abb. 12
1.3. Moduleinschübe
1.3.1. Schnittstellen
Die einzelnen Schnittstellen wurden als Einschubmoduln ausgelegt. Sie ermöglichen die
Nutzung der Schreibmaschine als Drucker für verschiedene Computer. Wird die Schreibmaschine
in den Druckerstatus gesetzt, erfolgt vom Mikroprogramm die Abfrage, ob ein Schnittstellen-
modul angeschlossen ist.
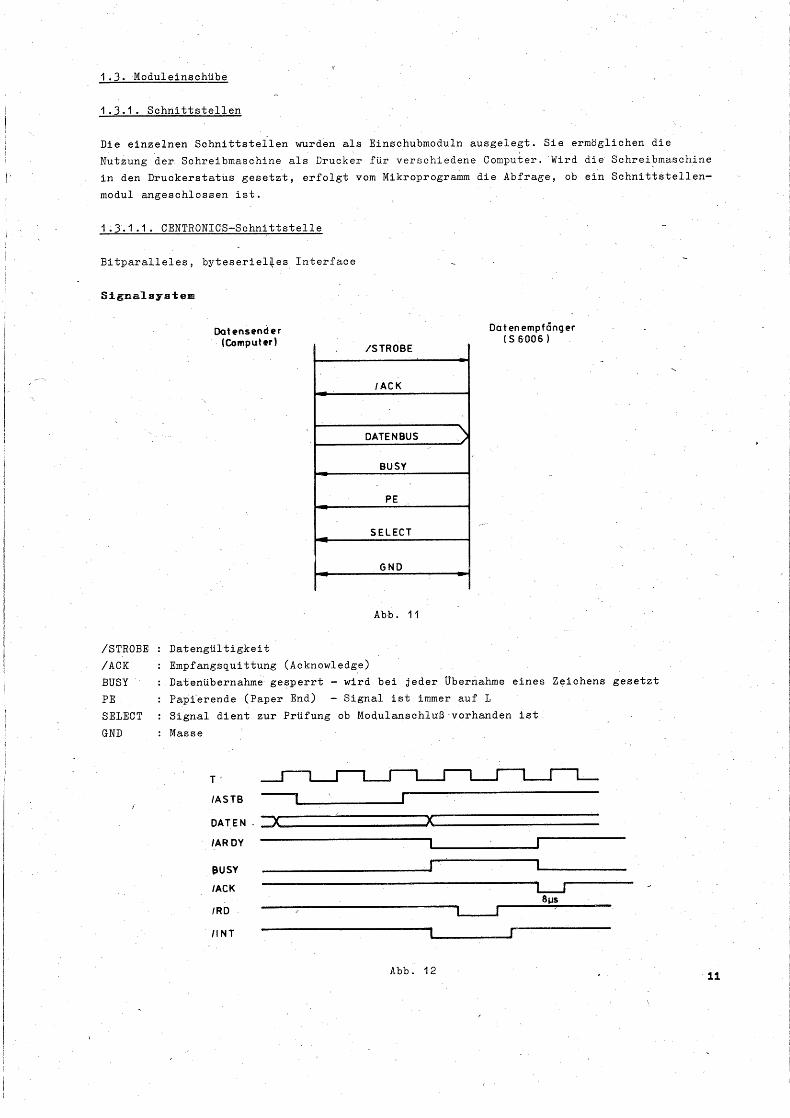
1.3.1.1. CENTRONICS-Schnittstelle
Bitparalleles, byteserielles Interface
Signalsystem
Datensender (Computer)
Datenempfänger (S6006)
Abb. 11
/STROBE : Datengültigkeit
/ACK : Empfangsquittung (Acknowledge)
BUSY : Datenübernahme gesperrt - wird bei jeder Übernahme eines Zeichens gesetzt
PE : Papierende (Paper End) - Signal ist immer auf L
SELECT : Signal dient zur Prüfung ob Modulanschluß vorhanden ist
GND : Masse
11
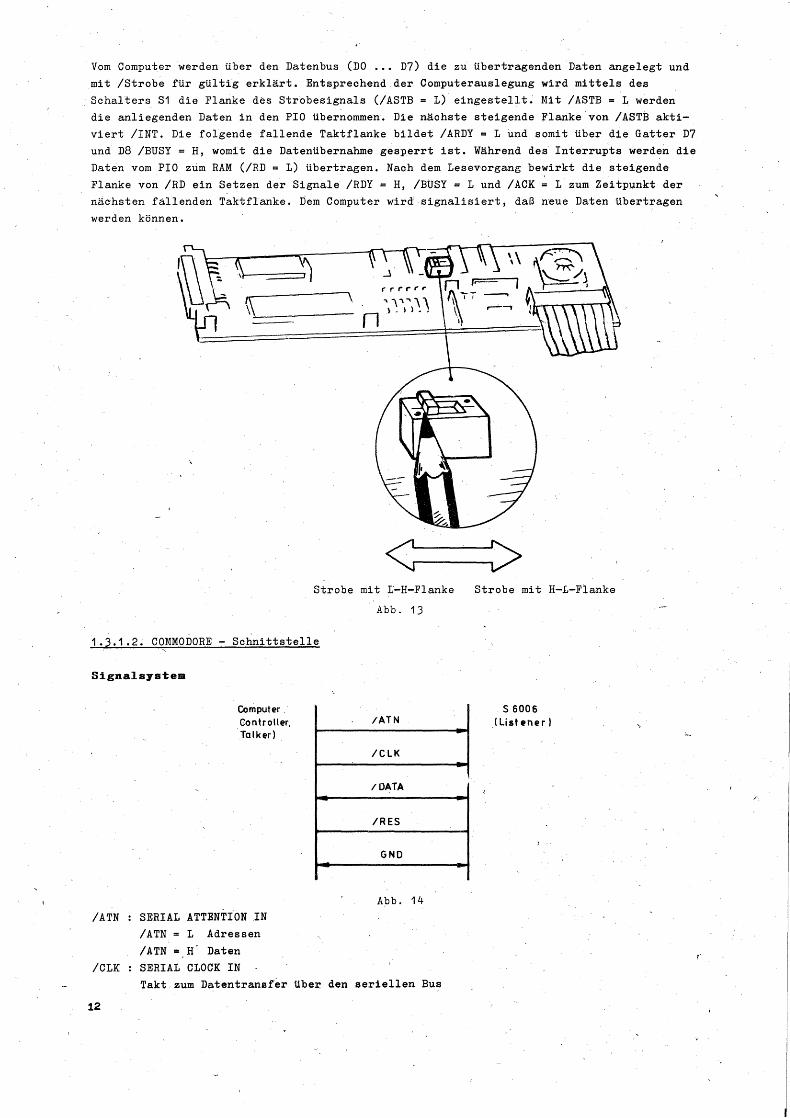
Vom Computer werden über den Datenbus (DO ... D7) die zu übertragenden Daten angelegt und mit /Strobe für gültig erklärt. Entsprechend der Computerauslegung wird mittels des Schalters S1 die Flanke des Strobesignals (/ASTB = L) eingestellt. Mit /ASTB = L werden die anliegenden Daten in den PIO übernommen. Die nächste steigende Flanke von /ASTB akti—viert /INT. Die folgende fallende Taktflanke bildet /ARDY = L und somit über die Gatter D7 und D8 /BUSY = H, womit die Datenübernahme gesperrt ist. Während des Interrupts werden die Daten vom PIO zum RAM (/RD = L) übertragen. Nach dem Lesevorgang bewirkt die steigende Flanke von /RD ein Setzen der Signale /RDY = H, /BUSY = L und /ACK = L zum Zeitpunkt der nächsten fallenden Taktflanke. Dem Computer wird signalisiert, daß neue Daten übertragen werden können.
Strobe mit L—H—Flanke Strobe mit H—L—Flanke
Abb. 13
1.3.1.2. COMMODORE — Schnittstelle
Signalsystem
Computer Controller, Talk er)
S 6006 (Listener)
Abb. 14 /ATN : SERIAL ATTENTION IN
/ATN = L Adressen /ATN =11 Daten
/CLK : SERIAL GLOCK IN - Takt zum Datentransfer über, den seriellen Bus
12
/DATA : SERIAL DATA IN/OUT
Die Datenübertragung über diese Leitung des seriellen Busses erfolgt bidirektional bitseriell
/RES : RESET
/GND : GROUND (Masse)
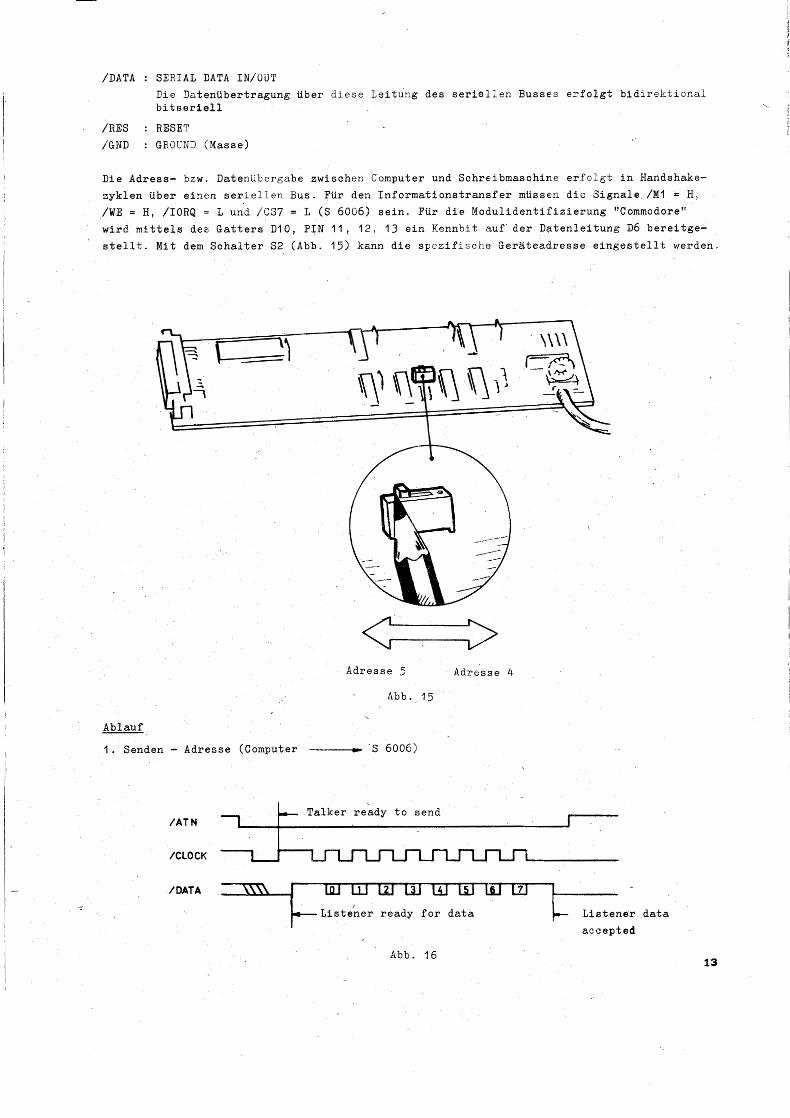
Die Adress- bzw. Datenübergabe zwischen Computer und Schreibmaschine erfolgt in Handshake-
zyklen über einen seriellen Bus. Für den Informationstransfer müssen die Signale /M1 = H,
/WE = H, /IORQ = L und /CS7 = L (S 6006) sein. Für die Modulidentifizierung "Commodore"
wird mittels des Gatters D10, PIN 11, 12, 13 ein Kennbit auf der Datenleitung D6 bereitge-
stellt. Mit dem Schalter S2 (Abb. 15) kann die spezifische Geräteadresse eingestellt werden.
Adresse 5
Adresse 4
Abb. 15
Ablauf
1. Senden - Adresse (Computer
S 6006)
/ATN --1
/MACK
/DATA NM\
Talker ready to send
LQJ LIJ 121 L J lsl U J 11.1 Lzi .0.---Listener ready for data Listener data
accepted
Abb. 16 13
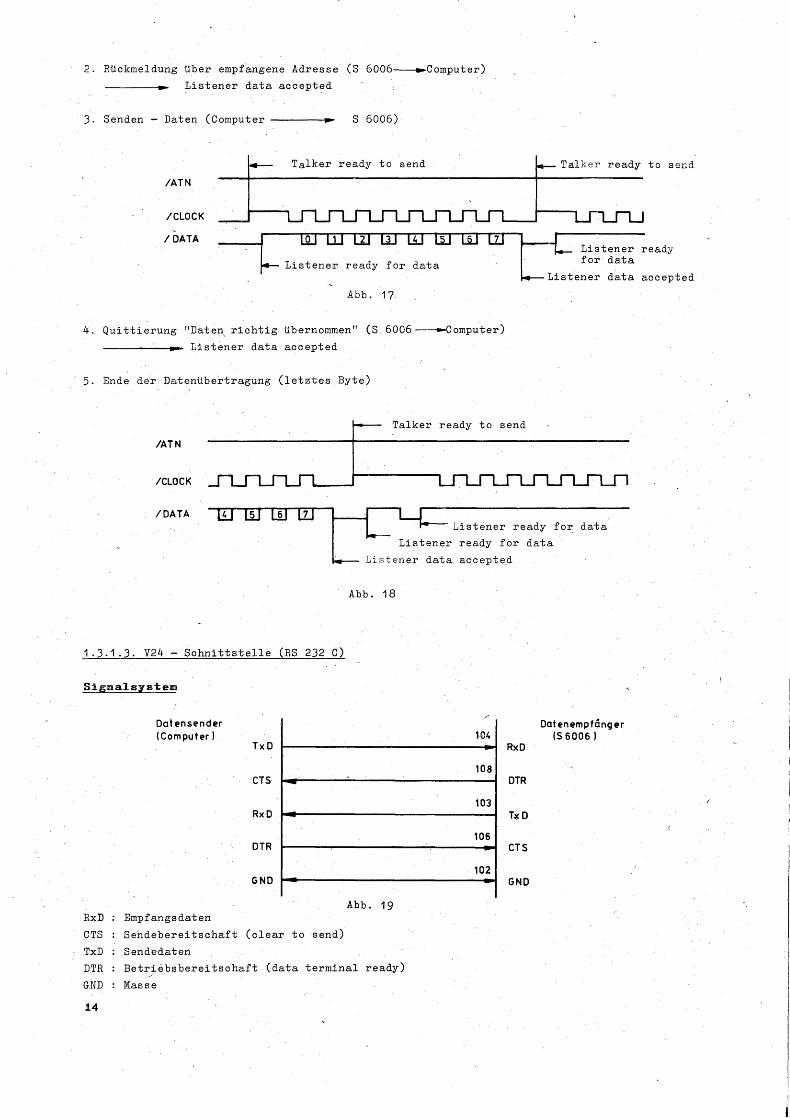
2. Rückmeldung über empfangene Adresse (S 6006---A.Computer)
Listener data accepted
3. genden — Daten (Computer S 6006)
/AT N
/GLOCK
/DATA
4-^ Listener ready för data
Abb. 17
4. Quittierung "Daten richtig übernommen" (S 6006---m-Computer)
Listener data accepted
5. Ende der Datenübertragung (letztes Byte)
LLI L2J 1.2J 1.5_1 LLI 1.2J Listener ready for data
f--Listener data accepted
es-- Talker ready to send ....__Talker ready to send
Talker ready to send
L__ Listener ready for data
Listener ready for data
mr-- Listener data accepted
/AT N
/GLOCK
/DATA w
Abb. 18
1.3.1.3. V24 — Schnittstelle (RS 232 0)
104 Datenempfang er
IS 6006 )
Signal syst emm
Datensender (Computer 1
Tx0 RxD
108 CTS DTR 41
103 RxD Tx D
106 DTR CTS
• 102 GND GND
Abb. 19 RxD : Empfangsdaten
CTS : Sendebereitschaft (clear to send)
TxD : Sendedaten
DTR : Betriebsbereitschaft (data terminal ready)
GND : Masse
14
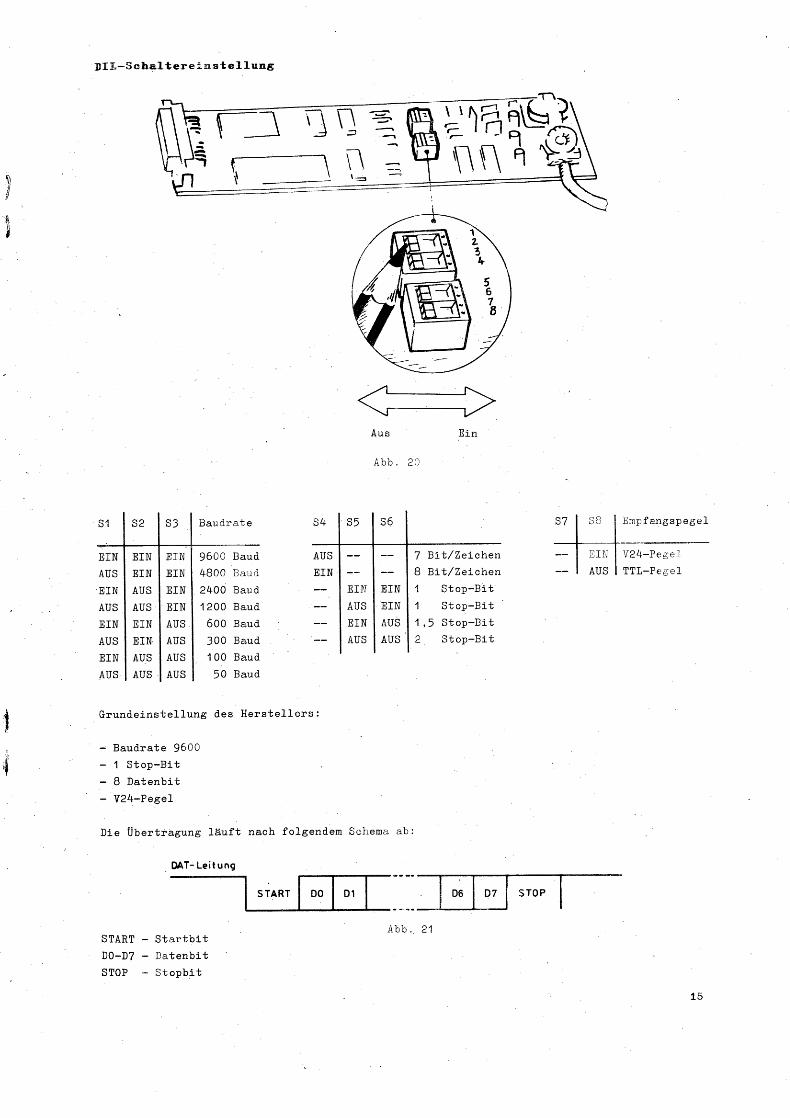
S1 S2 S3 Baudrate S4 S5
EIN EIN EIN 9600 Baud AUS
AUS EIN EIN 4800 Baud EIN
EIN AUS EIN 2400 Baud EIN
AUS AUS EIN 1200 Baud AUS
EIN EIN AUS. 600 Baud EIN
AUS EIN AUS 300 Baud AUS
EIN AUS AUS 100 Baud
AUS AUS AUS 50 Baud
EIN V24—Pegel
AUS TTL—Pegel
S7 SO tkTfangspegel se
7 Bit/Zeichen
8 Bit/Zeichen
1 Stop—Bit
1 Stop—Bit
1,5 Stop—Bit
2 Stop—Bit
EIN
EIN
AUS
AUS
➢DIL—Schaltereinstellung
Aus
Ein
Abb. 20
Grundeinstellung des Herstellers:
— Baudrate 9600
— 1 Stop—Bit
— 8 Datenbit
— V24—Pegel
Die Übertragung läuft nach folgendem Schema ab:
DAT-Leitung
START D7 STOP I
Abb.. 21
DO D1 D6
START — Startbit
D0—D7 — Datenbit
STOP — Stopbit
15
Auf der Leiterplatte befinden sich ein SI0 U8563, welcher im Asynchronbetrieb arbeitet, ein
ROM U2716 D als Festwertspeicher für den Zeichenvorrat und das Mikroprogramm der Schnitt-
stelle, Leitungstreiber und -empfänger K 170 AP2, K170 UP2 zur ausgangsseitigen Pegelwand-
lung und ein Timer B 555 als Bestandteil des Transverters. Die Kupplung des Moduls mit dem
entsprechenden Computer wird über die Buchse X 43, wahlweise ausgelegt als EFS 26-polig oder
als Canon-Buchse, erreicht. Der U8563 übernimmt als peripherer Baustein die Wandlung der
seriell eintreffenden Daten sowie deren Pufferung beim Empfang (bis 3 Byte). Für die Über-
tragung (Computer-43.-S 6006) sind insgesamt nur 3 Leitungen erforderlich (GED, RxD, DTR).
Mit der Steuerleitung DTR wird die Übertragung unterbrochen (DTR low). Diese Unterbrechung
erfolgt während des Ausdruckes bis_ die CPU im Übertragungszyklus den SIO-Puffer vollständig
ausgelesen hat. Durch zyklische Abfrage (Polling) des Bit's DO (Zeichen verfügbar)im Lese-
register RRO wird von der CPU festgestellt, oh noch Zeichen im Empfängerpuffer vorhanden
sind. DTR wird softwaremäßig über das DTR-Bit D7 im Schreibregister WR5 gesteuert. Die zur
- Versorgung des Leitungstreibers K 170 AP2 notwendigen. Spannungen (12P, 12N) werden mit einem Transverter erzeugt. Dabei dient der Timer B 555 zur Erzeugung der Transverterimpulse und
zur Ansteuerung des Schalttransistors Vl. Wenn die Spannung 12N ihren Sollwert erreicht hat,
wird über R6 und V2 am PIN 5 des B 555 die Impulsbreite der Transverterimpulse verringert
und somit die Ausgangsspannungen stabilisiert.
1.3.2. Speichererweiterung
Mittels des Speichermoduls wird die RAM-Kapazität der Maschine um 4 KByte (8xUL 224) mit
Datenerhalt erhöht. Im angesteckten Zustand des Moduls liegen die Daten- und Adreßleitungen
parallel zu denen auf der ZRE. Die /CS-Auswahl erfolgt mittels D1 (1 aus 8 Dekoder) und den
Gattern D2 / D3 / D4, welche bei Unterspannung die Speichersperrung übernehmen. Der Kompa-
rator N1 dient in Verbindung mit dem Referenzelement V3 zur Überwachung der Betriebsspannung
5P. Wenn durch Spannungseinbrüche oder Ausschalten der Maschine diese Spannung unter 4,75 V
absinkt, wird-der Speicher gegen fehlerhaftes Überschreiben gesperrt. Mit N2 wird der Lade
strom für die Akkus gesteuert. Bei einer Batteriespannung <2,8 V erfolgt eine Schnelladung
über die Stromquelle V5, so daß auch bei stark entladenen Batterien innerhalb kurzer Aus-
schaltzeit der Maschine der Datenerhalt gewährleistet wird. Die Widerstandsnetzwerke R 1:1
und R 1:2 bewirken im nicht angesteckten Zustand des Moduls einen definierten Pegel an den
Daten- und Adreßleitungen. Bei voll geladenen Batterien ist ein Datenerhalt von 500 h ge-
sichert.
1.3.3. Fakturiermodul
Mit Hilfe des Fakturiermoduls wird eine flexible und kundenspezifische Rechnungsführung er-möglicht, Die dazu notwendige Mikroprogrammerweiterung wurde mit einem 4K-EPROM (U 2732)
realisiert, welcher im Modul untergebracht ist. Das Abspeichern der Daten (z. B. Adressen,
Datum, Artikel, Preis, Zwischensumme usw.) erfolgt in einem 4K statisch RAM (8x UL 224) mit
Datenerhalt. Im angestecktem Zustand des Moduls liegen die Daten- und Adressleitungen para-llel zu denen auf der ZRE. Die /CS-Auswahl des EPROMs wird mittels des Signals /MRQ und der
Adressen Al2, A13 und A14 gesteuert. Die.RAM-Hardware mit Datenerhalt, Akkuladung und /CS-Bildung ist analog der des Speichermoduls (siehe Punkt 1.3.2.).
1.4. Verstärkereinheit (VE)
1.4.1. Schrittmotorenansteuerung
Die Ansteuerung der einzelnen Motore ist in Schrittmustertabellen im jeweiligen Abschnitt
dargestellt. Die Funktionsweise der Spulenansteuerung ist für alle Motore identisch. Die
grundsätzlichen Erläuterungen konzentrieren sich deshalb auf den Wagenmotor.
16
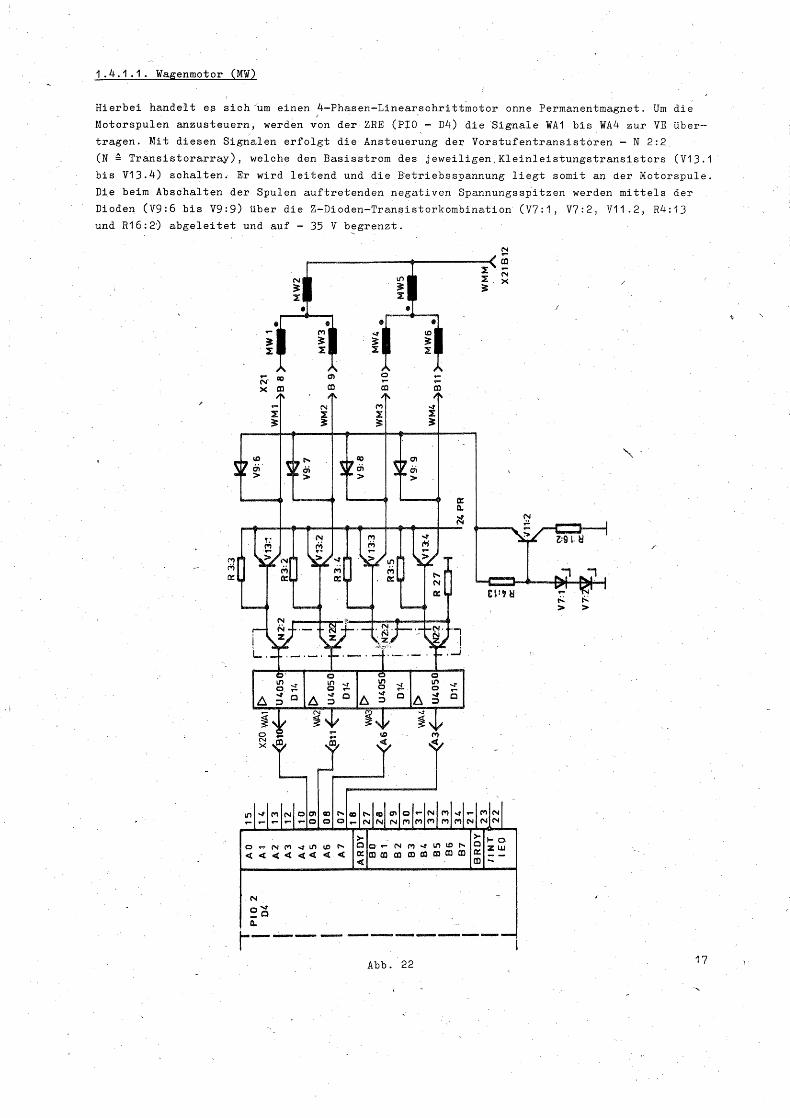
1.4.1.1. Wagenmotor (MW)
Hierbei handelt es sich 'um einen 4-Phasen-LinearschrittMotor onne Permanentmagnet. Um die
Motorspulen anzusteuern, werden von der ZRE (PIO - D4) die Signale WA1 bis WA4 zur VE über-
tragen. Mit diesen Signalen erfolgt die Ansteuerung der Vorstufentransistoren - N 2:2
(N 4 Transistorarray), welche den Basisstrom des jeweiligen Kleinleistungstransistors (V13.1
bis V13.4) schalten. Er wird leitend und die Betriebsspannung liegt somit an der Motorspule.
Die beim Abschalten der Spulen auftretenden negativen Spannungsspitzen werden mittels der
Dioden (V9:6 bis V9:9) über die Z-Dioden-Transistorkombination (V7:1, V7:2, V11.2, R4:13
und R16:2) abgeleitet und auf - 35 V begrenzt.
0 o
4̀ .., • .4 0 • .4. M 4 m
O OI
O X V
v11-4141 Nm.
NI 21M1;Igl O 0 CD
0 .,,NM ,STION < < < < < < < <
> MO.-MM40Mt, MMMMMOMMM
O re
t- Z W
Ov Ct.
111«.3«. 1 410»••••• amamme •Omme•••• e.1110i <1./m11•1031 loollipMele IM*
Abb. 22 17
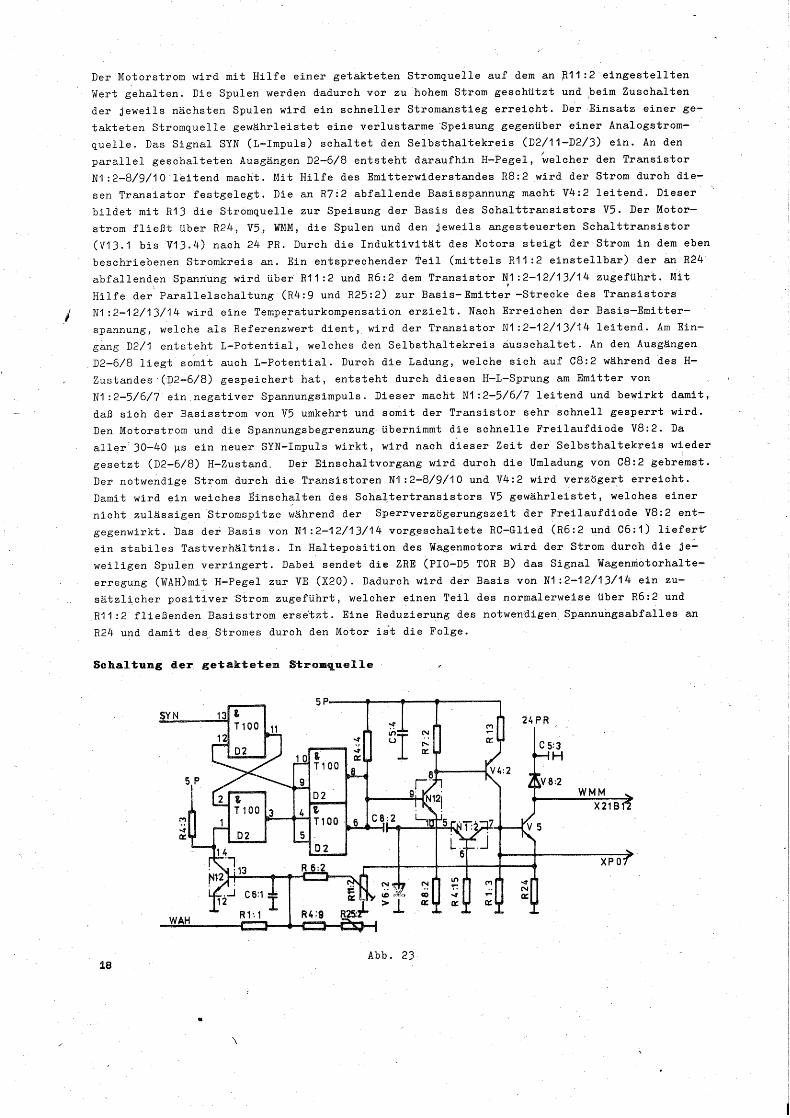
Der Motorstrom wird mit Hilfe einer getakteten Stromquelle auf dem an R11:2 eingestellten
Wert gehalten. Die Spulen werden dadurch vor zu hohem Strom geschützt und beim Zuschalten der jeweils nächsten Spulen wird ein schneller Stromanstieg erreicht. Der Einsatz einer ge-
takteten Stromquelle gewährleistet eine verlustarme Speisung gegenüber einer Analogstrom-
quelle. Das Signal SYN (L-Impuls) schaltet den Selbsthaltekreis (D2/11-D2/3) ein. An den
parallel geschalteten Ausgängen D2-6/8 entsteht daraufhin H-Pegel, Welcher den Transistor
N1:2-8/9/10 leitend macht. Mit Hilfe des Emitterwiderstandes R8:2 wird der Strom durch die-sen Transistor festgelegt. Die an R7:2 abfallende Basisspannung macht V4:2 leitend. Dieser
bildet mit R13 die Stromquelle zur Speisung der Basis des Schalttransistors V5. Der Motor-
strom fließt über R24, V5, WMM, die Spulen und den jeweils angesteuerten Schalttransistor (V13.1 bis V13.4) nach 24 PR. Durch die Induktivität des Motors steigt der Strom in dem eben
beschriebenen Stromkreis an. Ein entsprechender Teil (mittels R11:2 einstellbar) der an R24
abfallenden Spannung wird über R11:2 und R6:2 dem Transistor N1:2-12/13/14 zugeführt. Mit
Hilfe der Parallelschaltung (R4:9 und R25:2) zur Basis-Emitter -Strecke des Transistors N1:2-12/13/14 wird eine Temperaturkompensation erzielt. Nach Erreichen der Basis-Emitter-
spannung, welche als Referenzwert dient, wird der Transistor N1:2-12/13/14 leitend. Am Ein-
gang D2/1 entsteht L-Potential, welches den Selbsthaltekreis ausschaltet. An den Ausgängen D2-6/8 liegt somit auch L-Potential. Durch die Ladung, welche sich auf C8:2 während des H-
Zustandes (D2-6/8) gespeichert hat, entsteht durch diesen H-L-Sprung am Emitter von
N1:2-5/6/7 ein negativer Spannungsimpuls. Dieser macht N1:2-5/6/7 leitend und bewirkt damit,
daß sich der Basisstrom von V5 umkehrt und somit der Transistor sehr schnell gesperrt wird. Den Motorstrom und die Spannungsbegrenzung übernimmt die schnelle Freilaufdiode V8:2. Da aller'30-40 us ein neuer SYN-Impuls wirkt, wird nach dieser Zeit der Selbsthaltekreis wieder
gesetzt (D2-6/8) H-Zustand, Der Einschaltvorgang wird durch die Umladung von C8:2 gebremst. Der notwendige Strom durch die Transistoren N1:2-8/9/10 und V4:2 wird verzögert erreicht.
Damit wird ein weiches 2inschalten des Schaltertransistors V5 gewährleistet, welches einer
nicht zulässigen Stromspitze während der Sperrverzögerungszeit der Freilaufdiode V8:2 ent-
gegenwirkt. Das der Basis von N1:2-12/13/14 vorgeschaltete RC-Glied (R6:2 und C6:1) liefert' ein stabiles Tastverhältnis. In Halteposition des Wagenmotors wird der Strom durch die je:
weiligen Spulen verringert. Dabei sendet die ZRE (PI0-D5 TOR B) das Signal Wagenmotorhalte-
erregung (WAH)mit H-Pegel zur VE (X20). Dadurch wird der Basis von N1:2-12/13/14 ein zu-sätzlicher positiver Strom zugeführt, welcher einen Teil des normalerweise über R6:2 und
R11:2 fließenden Basisstrom ersetzt. Eine Reduzierung des notwendigen Spannungsabfalles an
R24 und damit des Stromes durch den Motor ist die Folge.
Schaltung der getakteten Stromquelle
18 Abb. 23
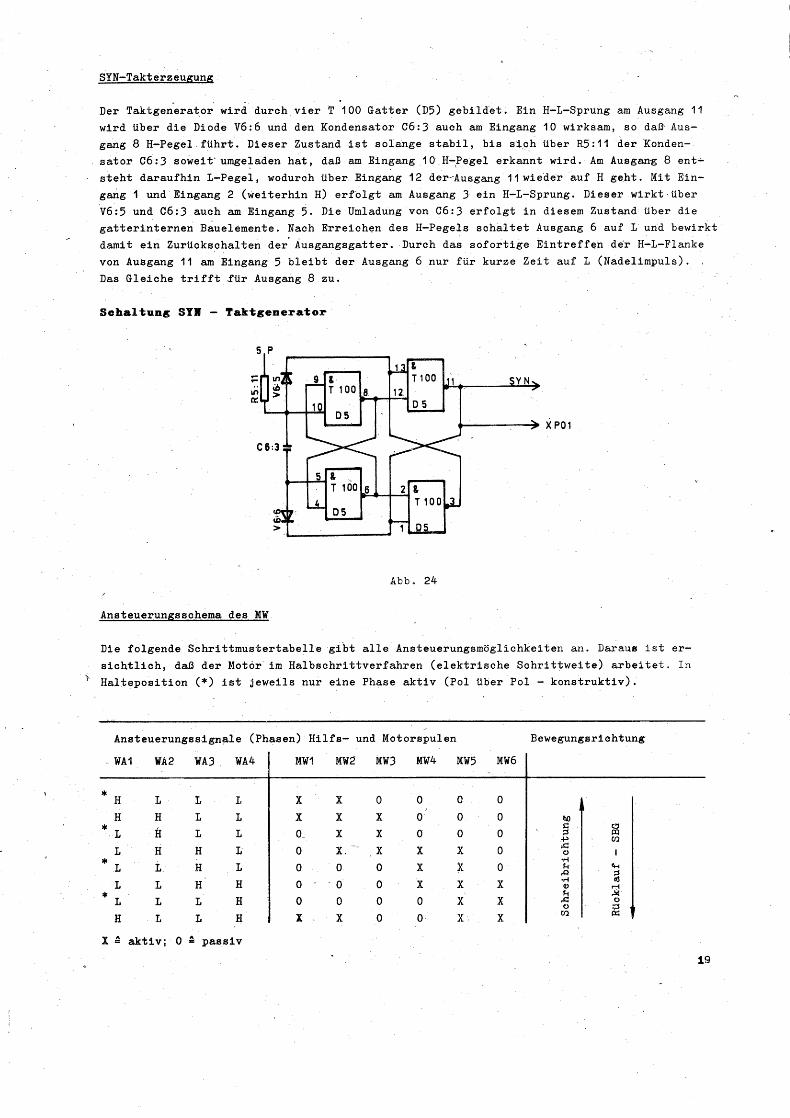
Schaltung SYN - Taktgenerator
5 P
vi
XPO1
Abb. 24
SYN-Takterzeugung
Der Taktgenerator wird durch vier T 100 Gatter (D5) gebildet. Ein H-L-Sprung am Ausgang 11
wird über die Diode V6:6 und den Kondensator C6:3 auch am Eingang 10 wirksam, so dae Aus-
gang 8 H-Pegel führt. Dieser Zustand ist solange stabil, bis sich über R5:11 der Konden-sator C6:3 soweit umgeladenhat, daß am Eingang 10 H-Pegel erkannt wird. Am Ausgang 8 ent-
steht daraufhin L-Pegel, wodurch über Eingang 12 der-Ausgang 11 wieder auf H geht. Mit Ein-
gang 1 und Eingang 2 (weiterhin H) erfolgt am Ausgang 3 ein H-L-Sprung. Dieser wirkt-über V6:5 und C6:3 auch am Eingang 5. Die Umladung von C6:3 erfolgt in diesem Zustand über die gatterinternen Bauelemente. Nach Erreichen des H-Pegels schaltet Ausgang 6 auf L und bewirkt
damit ein Zurückschalten der Ausgangsgatter. Durch das sofortige Eintreffen der H-L-Flanke
von Ausgang 11 am Eingang 5 bleibt der Ausgang 6 nur für kurze Zeit auf L (Nadelimpuls).
Das Gleiche trifft -für Ausgang 8 zu.
Ansteuerungsschema des MW
Die folgende Schrittmustertabelle gibt alle Ansteuerungsmöglichkeiten an. Daraus ist er-
sichtlich, daß der Motör im Halbschrittverfahren (elektrische Schrittweite) arbeitet. In
Halteposition (*) ist jeweils nur eine Phase aktiv (Pol über Pol - konstruktiv).
Ansteuerungssignale (Phasen) Hilfs- und Motorspulen Bewegungsrichtung
WA1 WA2 WA3 WA4 MW1 MW2 MW3 MW4 MW5 MW6
* H L L L X X 0 0 0
H H L L x x x 0 0 0 bc * L ii L L o, X X 0 0 0
00
L H H I.' o X. X X X 0 0
*,L L H L 0 0 0 X X 0 A L L H H 0 -0 0 X X X
L L H 0 0 0 0 X X 0
H L L H X X 0 0- X.
X g aktiv; 0 A passiv
Rüc
kla
uf -
S
EG
19
Rechtslauf
Linkslauf
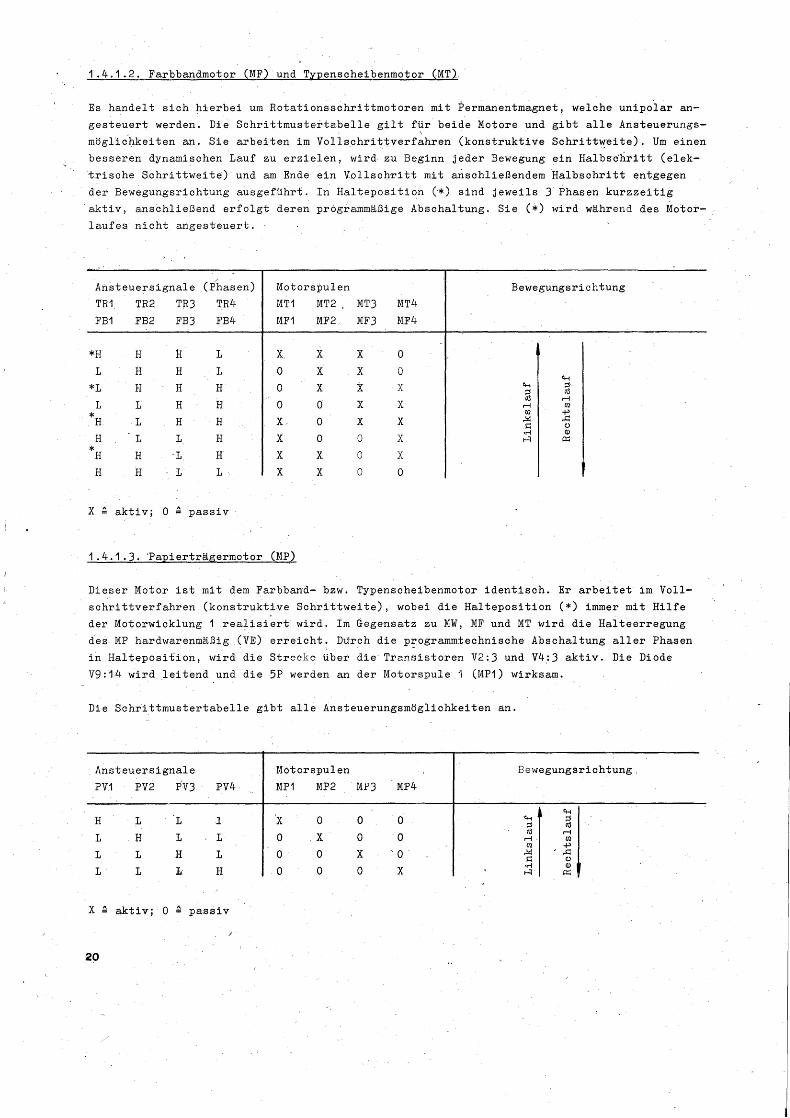
1.4.1.2. Farbbandmotor (MF) und Typenscheibenmotor (MT)
Es handelt sich hierbei um Rotationsschrittmotoren mit Permanentmagnet, welche unipolar an—
gesteuert werden. Die Schrittmustertabelle gilt für beide Motore und gibt alle Ansteuerungs—
möglichkeiten an. Sie arbeiten im Vollschrittverfahren (konstruktive Schrittweite). Um einen
besseren dynamischen Lauf zu erzielen, wird zu Beginn jeder Bewegung ein HalbsChritt (elek—
trische Schrittweite) und am Ende ein Vollschritt mit anschließendem Halbschritt entgegen
der Bewegungsrichtung ausgeführt. In Halteposition (*) sind jeweils 3 Phasen kurzzeitig aktiv, anschließend erfolgt deren prögrammäßige Abschaltung. Sie (*) wird während des Motor—
laufes nicht angesteuert.
Ansteuersignale (Phasen)
TR1 TR2 TR3 TR4
FB1 FB2 FB3 FB4
Motorspulen
MT1 MT2 , MT3 MT4
MF1 MF2 MF3 MF4
Bewegungsrichtung
*H H H L
L H H L
*L H H H
L L H H * H L H H
H L L H * H H .L H
H L L
x 0
o x x 0
o x x x o o x x x_ 0 X X X 0 0 X
X X 0 X
X 0 0
X 4 aktiv; 0 4 passiv
1.4.1.3. Tapierträgermotor (MP)
Dieser Motor ist mit dem Farbband— bzw. Typenscheibenmotor identisch. Er arbeitet im Voll—
schrittverfahren (konstruktive Schrittweite), wobei die Halteposition (*) immer mit Hilfe
der Motorwicklung 1 realisiert wird. Im Gegensatz zu MW, MF und MT wird die Halteerregung
des MP hardwarenmäßig (VE) erreicht. Durch die programmtechnische Abschaltung aller Phasen
in Halteposition, wird die Strecke über die Transistoren V2:3 und V4:3 aktiv. Die Diode
V9:14 wird leitend und die 5P werden an der Motorspule 1 (MP1) wirksam.
Die Schrittmustertabelle gibt alle Ansteuerungsmöglichkeiten an.
Jinsteuersignale
PV.1 PV2 151/3 PV4•
Motorspulen
MP1 MP2 1iP3 MP4
Bewegungsrichtung
H L 1 1
L H L L
L L II L
L L L H
0 X
0 0
0
0
0
0
x Linkslauf
X 4 aktiv; 0 4 pasSiv
20
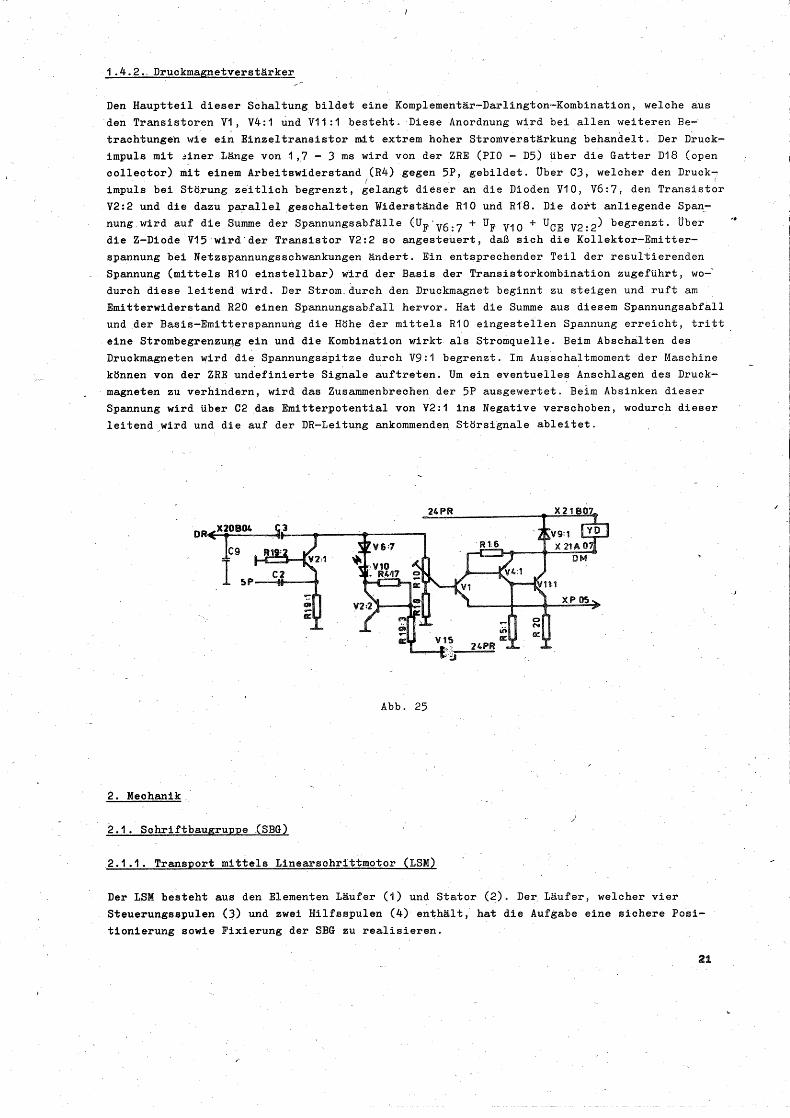
1.4.2- Druckmagnetverstärker
Den Hauptteil dieser Schaltung bildet eine Komplementär-Darlington-Kombination, welche aus den Transistoren V1, V4:1 und V11:1 besteht. Diese Anordnung wird bei allen weiteren Be-
trachtungen wie ein Einzeltransistor mit extrem hoher Stromverstärkung behandelt. Der Druck-
impuls mit Aner Länge von 1,7 - 3 ms wird von der ZRE (PIO - D5) über die Gatter D18 (open collector) mit einem Arbeitswiderstand (R4) gegen 5P, gebildet. über C3, welcher den Druck-
impuls bei Störung zeitlich begrenzt, gelangt dieser an die Dioden V10, V6:7, den Transistor
V2:2 und die dazu parallel, geschalteten Widerstände R10 und R18. Die dort anliegende Span-
nung wird auf die Summe der Spannungsabfälle (Up 'v6:7 + Up V10 ) UCE V2:2) begrenzt. über
die Z-Diode V15 wird der Transistor V2:2 so angesteuert, daß sich die Kollektor-Emitter-
spannung bei Netzspannungsschwankungen ändert. Ein entsprechender Teil der resultierenden
Spannung (mittels R10 einstellbar) wird der Basis der Transistorkombination zugeführt, wo durch diese leitend wird. Der Strom.durch den Druckmagnet beginnt zu steigen und ruft am
Emitterwiderstand R20 einen Spannungsabfall hervor. Hat die Summe aus diesem Spannungsabfall und der Basis-Emitterspannung die Höhe der mittels R10 eingestellen Spannung erreicht, tritt
eine Strombegrenzung ein und die Kombination wirkt als Stromquelle. Beim Abschälten des
Druckmagneten wird die Spannungsspitze durch V9:1 begrenzt. Im Ausschaltmoment der Maschine
können von der ZRE undefinierte Signale auftreten. Um ein eventuelles Anschlagen des Druck-magneten zu verhindern, wird das Zusammenbrechen der 5P ausgewertet. Beim Absinken dieser
Spannung wird über C2 das Emitterpotential von V2:1 ins Negative verschoben, wodurch dieser
leitend wird und die auf der DR-Leitung ankommenden Störsignale ableitet.
Abb. 25
2. Mechanik,
2.1. Schriftbaugruppe ZSBG)
2.1.1. Transport mittels Linearschrittmotor (LSM)
Der LSM besteht aus den Elementen Läufer (1) und Stator (2). Der Läufer, welcher vier
Steuerungsspulen (3) und zwei Hilfsspulen (4) enthält, hat die Aufgabe eine sichere Posi-
tionierung sowie Fixierung der SBG zu realisieren.
21
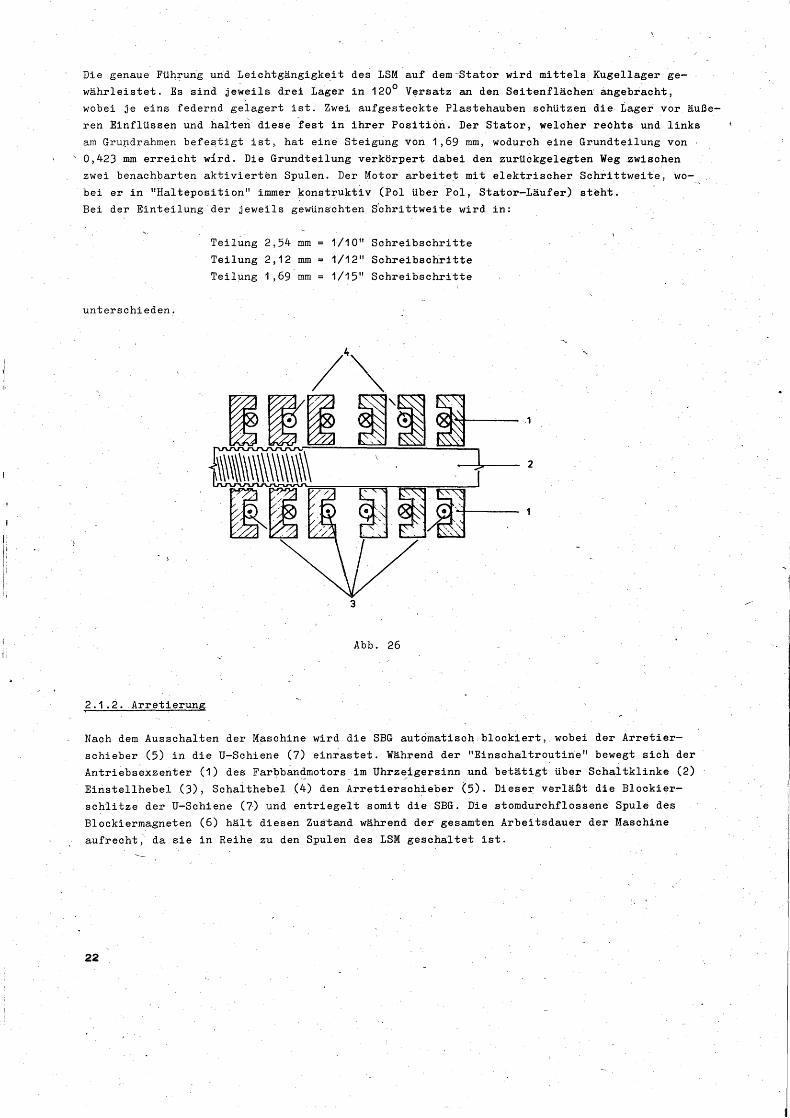
Die genaue Führung und Leichtgängigkeit des LSM auf dem-Stator wird mittels Kugellager ge— währleistet. Es sind jeweils drei Lager in 120° Versatz an den Seitenflächen angebracht,
wobei je eins federnd gelagert ist. Zwei aufgesteckte Plastehauben schützen die Lager vor äuße— ren Einflüssen und halten diese fest in ihrer Position. Der Stator, welcher rechts und links
am Grupdrahmen befestigt ist, hat eine Steigung von 1,69 mm, wodurch eine Grundteilung von
0,423 mm erreicht wird. Die Grundteilung verkörpert dabei den zurückgelegten Weg zwischen zwei benachbarten aktivierten Spulen. Der Motor arbeitet mit elektrischer Schrittweite, wo—
bei er in "Halteposition" immer konstruktiv (Pol über Pol, Stator—Läufer) steht. Bei der Einteilung der jeweils gewünschten Schrittweite wird in:
Teilung 2,54 mm '= 1/10" Schreibschritte Teilung 2,12 mm = 1/12" Schreibschritte Teilung 1,69 mm = 1/15" Schreibschritte
unterschieden.
Abb. 26
2.1.2. Arretierung
Nach dem Ausschalten der Maschine wird die SBG automatisch blockiert, wobei der Arretier—
schieber (5) in die U—Schiene (7) einrastet. Während der "Einschaltroutine" bewegt sich der
Antriebsexzenter (1) des Farbbandmotors im Uhrzeigersinn und betätigt über Schaltklinke (2)
Einstellhebel (3), Schalthebel (4) den Arretierschieber (5). Dieser verläßt die Blockier—
schlitze der U—Schiene (7) und entriegelt somit die SBG. Die stomdurchflossene Spule des Blockiermagneten (6) hält diesen Zustand während der gesamten Arbeitsdauer der Maschine
aufrecht, da sie in Reihe zu den Spulen des LSM geschaltet ist.
22
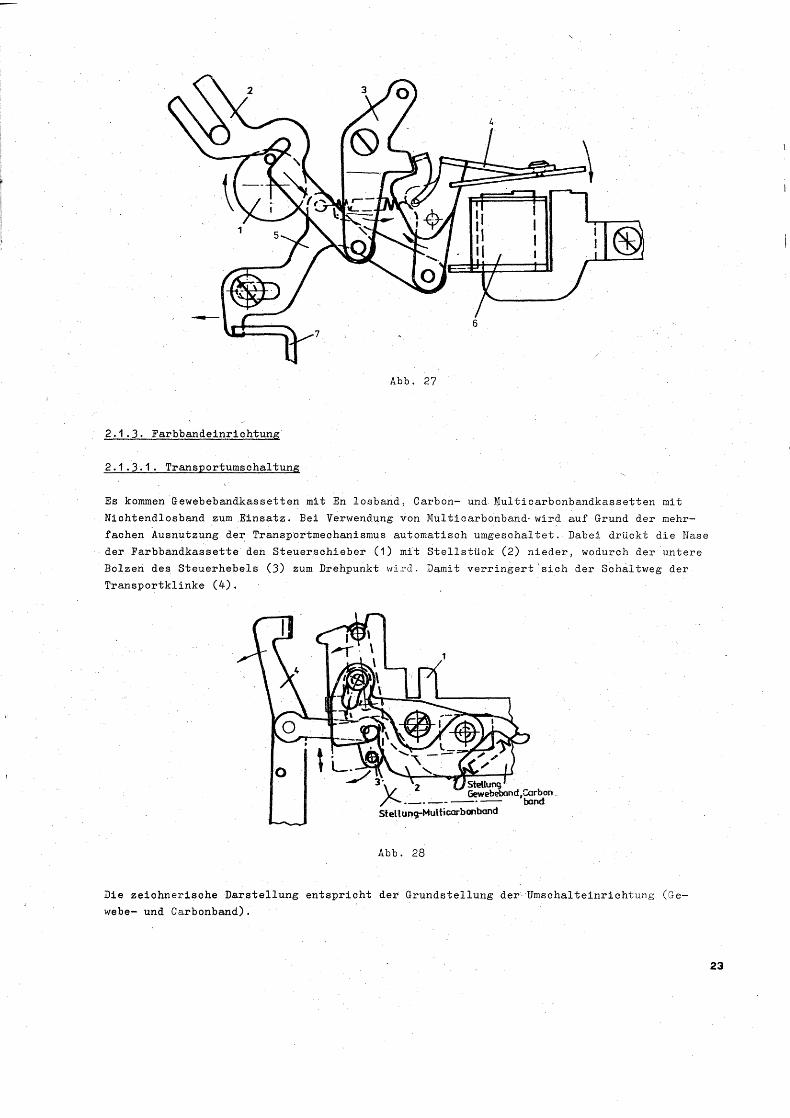
Abb. 28
Stenu Gewebeband, b
don
ban Stet lung-Multicarbonband
Abb. 27
2.1.3. Farbbandeinrichtung
2.1.3.1. Transportumschaltung
Es kommen Gewebebandkassetten mit En losband, Carbon- und Multicarbonbandkassetten mit
Nichtendlosband zum Einsatz. Bei Verwendung von Multicarbonband-wird auf Grund der mehr-
fachen Ausnutzung der Transportmechanismus automatisch umgeschaltet. Dabei drückt die Nase
der Farbbandkassette den Steuerschieber (1) mit Stellstück (2) nieder, wodurch der untere
Bolzen des Steuerhebels (3) zum Drehpunkt wird. Damit verringert'sich der Schaltweg der
Transportklinke (4).
Die zeichnerische Darstellung entspricht der Grundstellung der Umschalteinrichtung (Ge-
webe- und Carbonband).
23
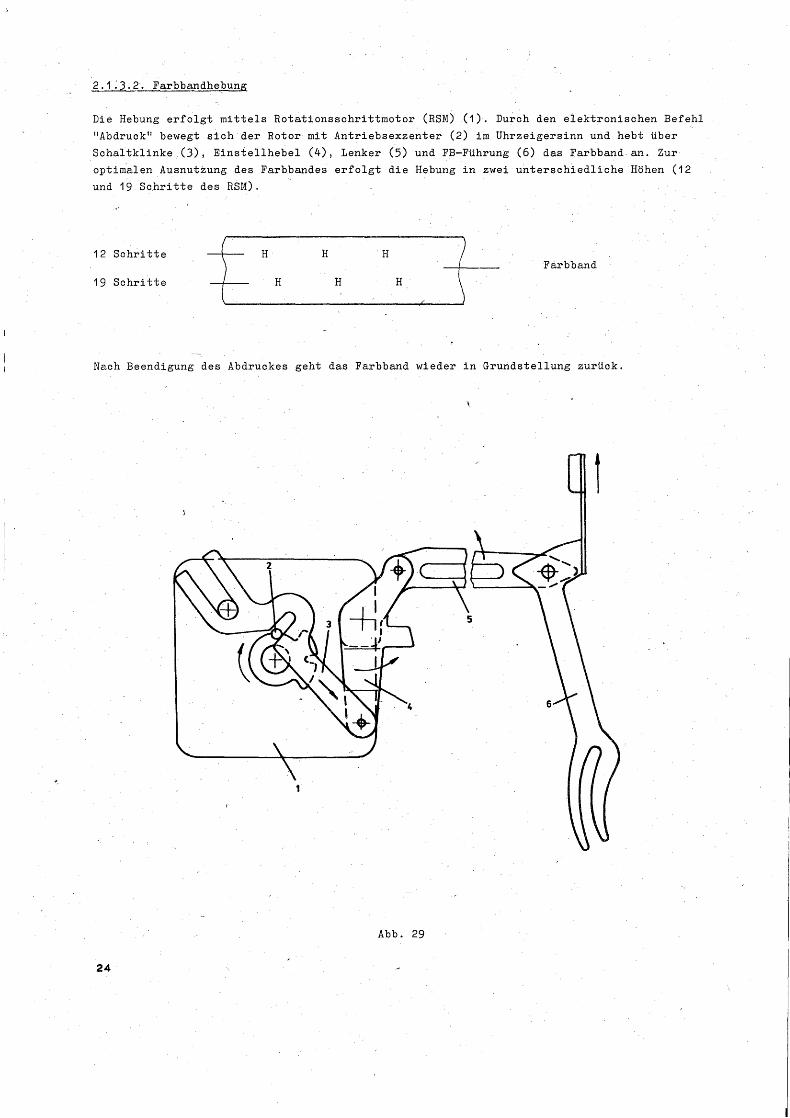
2.1.3.2'. Farbbandhebung
Die Hebung erfolgt mittels Rotationsschrittmotor (RSM) (1). Durch den elektronischen Befehl
"Abdruck" bewegt sich der Rotor mit Antriebsexzenter (2) im Uhrzeigersinn und hebt über
Schaltklinke (3), Einstellhebel (4), Lenker (5) und FB—Führung (6) das Farbband an. Zur
optimalen Ausnutzung des Farbbandes erfolgt die Hebung in zwei unterschiedliche Höhen (12
und 19 Schritte des RSM).
12 Schritte
H
19 Schritte
H H
Farbband
Nach Beendigung des Abdruckes geht das Farbband wieder in Grundstellung zurück.
Abb. 29
24
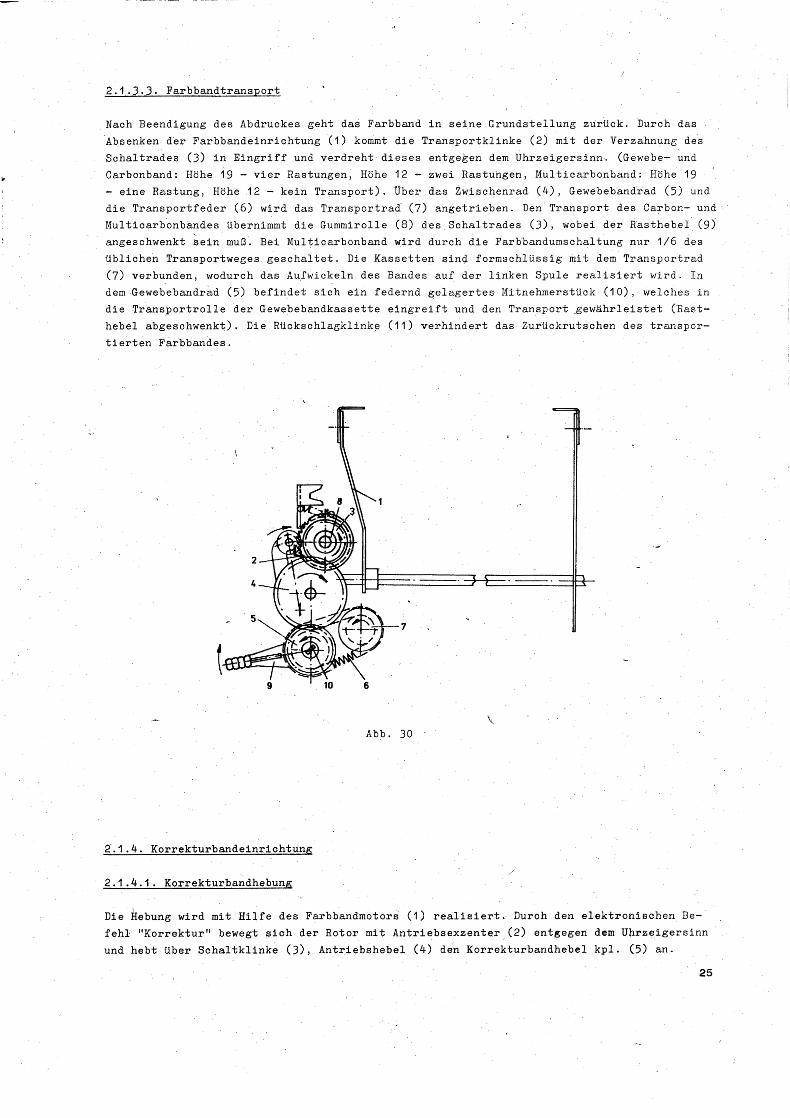
2.1.3.3. Farbbandtransport
Nach Beendigung des Abdruckes geht das Farbband in seine Grundstellung zurück. Durch das
Absenken der Farbbandeinrichtung (1) kommt die Transportklinke (2) mit der Verzahnung des
Schaltrades (3) in Eingriff und verdreht dieses entgegen dem Uhrzeigersinn. (Gewebe- und
Carbonband: Höhe 19 - vier Rastungen, Höhe 12 - zwei Rastungen, Multicarbonband: Höhe 19
- eine Rastung, Höhe 12 - kein Transport). über das Zwischenrad (4), Gewebebandrad (5) und
die Transportfeder (6) wird das Transportrad (7) angetrieben. Den Transport des Carbon- und
Multicarbonbandes übernimmt die Gummirolle (8) des Schaltrades (3), wobei der Rasthebel (9)
angeschwenkt sein muß. Bei Multicarbonband wird durch die Farbbandumschaltung nur 1/6 des
üblichen Transportweges geschaltet. Die Kassetten sind formschlüssig mit dem Transportrad
(7) verbunden, wodurch das Aufwickeln des Bandes auf der linken Spule realisiert wird. In
dem Gewebebandrad (5) befindet sich ein federnd gelagertes Mitnehmerstück (10), welches in
die Transportrolle der Gewebebandkassette eingreift und den Transport _gewährleistet (Rast-
hebel abgeschwenkt). Die Rückschlagklinke (11) verhindert das Zurückrutschen des transpor-
tierten Farbbandes.
Abb. 30
2 .1 .4 . KorrekturbandeinrichtunK
2.1.4.1. Korrekturbandhebung
Die Hebung wird mit Hilfe des Farbbandmotors (1) realisiert. Durch den elektronischen Be-
fehl "Korrektur" bewegt sich der Rotor mit Antriebsexzenter (2) entgegen dem Uhrzeigersinn
und hebt über Schaltklinke (3), Antriebshebel (4) den Korrekturbandhebel kpl. (5) an.
25
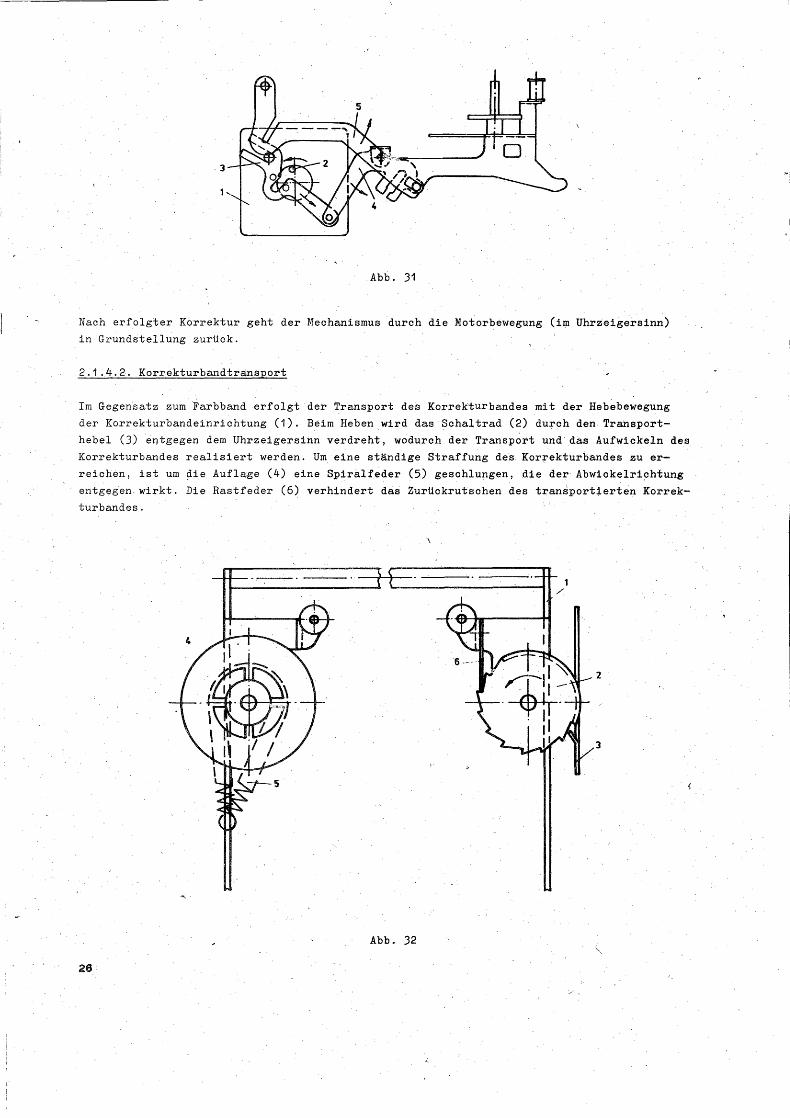
Abb. 31
Nach erfolgter Korrektur geht der Mechanismus durch die Motorbewegung (im Uhrzeigersinn)
in Grundstellung zurück.
2.1.4.2. Korrekturbandtransport
Im Gegensatz zum Farbband erfolgt der Transport des Korrekturbandes mit der Hebebewegung
der Korrekturbandeinrichtung (1). Beim Heben wird das Schaltrad (2) durch den Transport—
hebel (3) entgegen dem Uhrzeigersinn verdreht, wodurch der Transport und- das Aufwickeln des
Korrekturbandes realisiert werden. Um eine ständige Straffung des. Korrekturbandes zu er—
reichen, ist um die Auflage (4) eine Spiralfeder (5) geschlungen, die der Abwickelrichtung
entgegen.wirkt. Die Rastfeder (6) verhindert das Zurückrutschen des transportierten Korrek—
turbandes.
Abb. 32
26
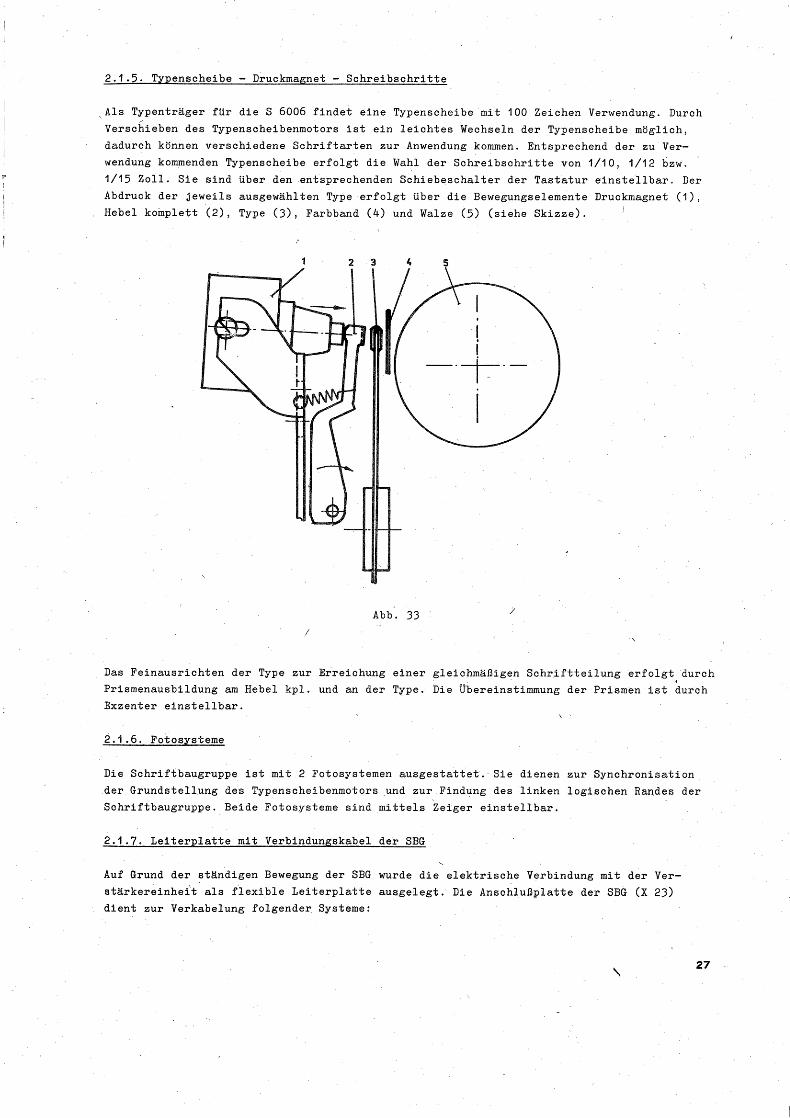
2.1.5. Typenscheibe — Druckmagnet — Schreibschritte
Als Typenträger für die S 6006 findet eine Typenscheibe mit 100 Zeichen Verwendung. Durch
Verschieben des Typenscheibenmotors ist ein leichtes Wechseln der Typenscheibe möglich,
dadurch können verschiedene Schriftarten zur Anwendung kommen. Entsprechend der zu Ver—
wendung kommenden Typenscheibe erfolgt die Wahl der Schreibschritte von 1/10, 1/12 bzw.
1/15 Zoll. Sie sind über den entsprechenden Schiebeschalter der Tastatur einstellbar. Der
Abdruck der jeweils ausgewählten Type erfolgt über die Bewegungselemente Druckmagnet (1),
Hebel komplett (2), Type (3), Farbband (4) und Walze (5) (siehe Skizze).
Abb. 33
Das Feinausrichten der Type zur Erreichung einer gleichmäßigen Schriftteilung erfolgt durch
Prismenausbildung am Hebel kpl. und an der Type. Die Übereinstimmung der Prismen ist durch
Exzenter einstellbar.
2.1.6. Fotosysteme
Die Schriftbaugruppe ist mit 2 Fotosystemen ausgestattet. Sie dienen zur Synchronisation
der Grundstellung des Typenscheibenmotors und zur Findung des linken logischen Randes der
Schriftbaugruppe. Beide Fotosysteme sind mittels Zeiger einstellbar.
2.1.7. Leiterplatte mit Verbindungskabel der SBG
Auf Grund der ständigen Bewegung der SBG wurde die elektrische Verbindung mit der Ver—
stärkereinheit als flexible Leiterplatte ausgelegt. Die Anschlußplatte der SBG (X 23)
dient zur Verkabelung folgender Systeme:
27
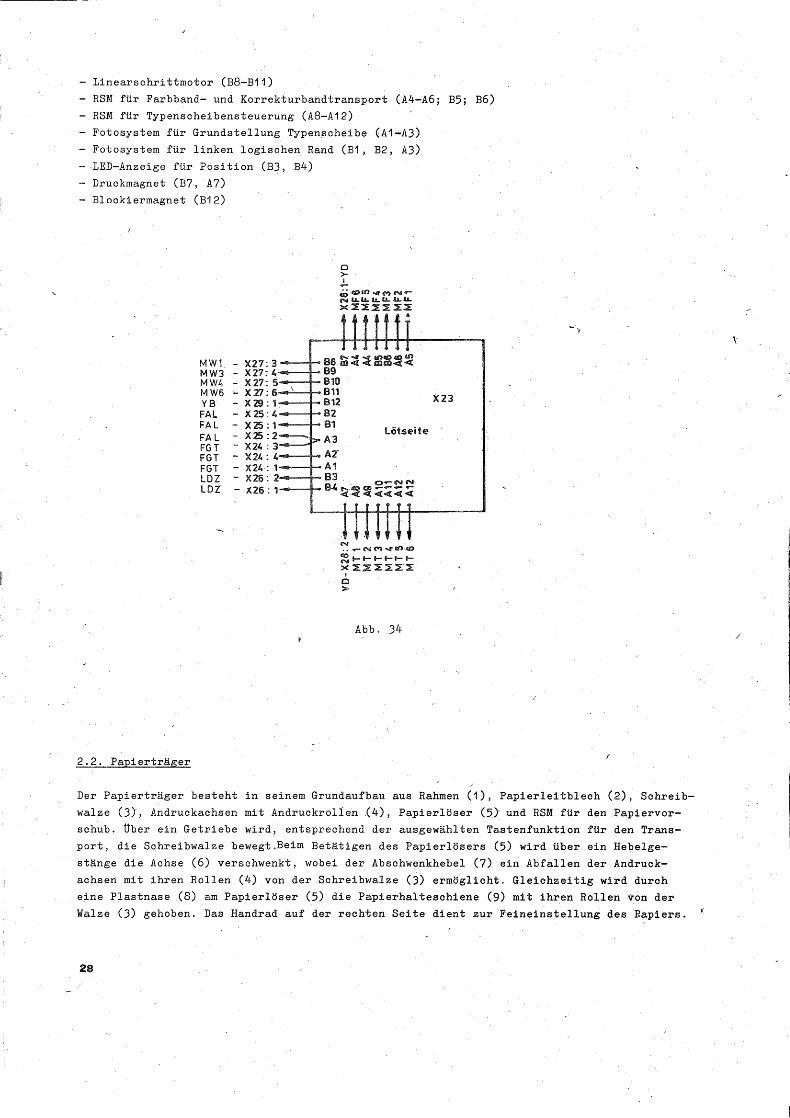
- Linearschrittmotor (B8-E11) - RSM für Farbband- und Korrekturbandtransport (A4-A6; B5; B6) - RSM für Typenscheibensteuerung (A8-Al2)
Fotosystem für Grundstellung Typenscheibe (A1-A3) - Fotosystem für linken logischen Rand (B1, B2, A3)
- LED-Anzeige für Position (B3, B4) - Druckmagnet (B7, A7) - Blockiermagnet (B12)
0 >-
1.11- 11. lt. SC >Z.ZZ
138 mm«
Lötseite
r <44
-1
ft1.5%.11112 4.1i
X23
MW1 - X27:3 89 MW3 - X27:4
MW4 - X27:5 810 MW6 - X27:6 811
812 - YB - X29 :1 .2 -1 82 FAL - X25: 4
81 FAL - X25:1 FAL - X25 A3
A2 FG T X24 :3'2 FGT X24 . 4-
Al FGT - X24:1-2- - 83 LDZ X26:2-2-
1344 LDZ - X26:1
e- f.<8 tre 114> ISO Q3.• ff-- 8-- 1- C-- XXXXZZM
Abb. 34
2.2. Papierträger
Der Papierträger besteht in seinem Grundaufbau aus Rahmen (1), Papierleitblech (2), Schreib-
walze (3), Andruckachsen mit Andruckrollen (4), Papierlöser (5) und RSM für den Papiervor-schub. über ein Getriebe wird, entsprechend der ausgewählten Tastenfunktion für den Trans-
port, die Schreibwalze bewegt.Beim Betätigen des Papierlösers (5) wird über ein Hebelge-
stänge die Achse (6) verschwenkt, wobei der Abschwenkhebel (7) ein Abfallen der Andruck-
achsen mit ihren Rollen (4) von der Schreibwalze (3) ermöglicht. Gleichzeitig wird durch
eine Plastnase (8) am Papierlöser (5) die Papierhalteschiene (9) mit ihren Rollen von der
Walze (3) gehoben.. Das Handrad auf der rechten Seite dient zur Feineinstellung des Papiers.
28
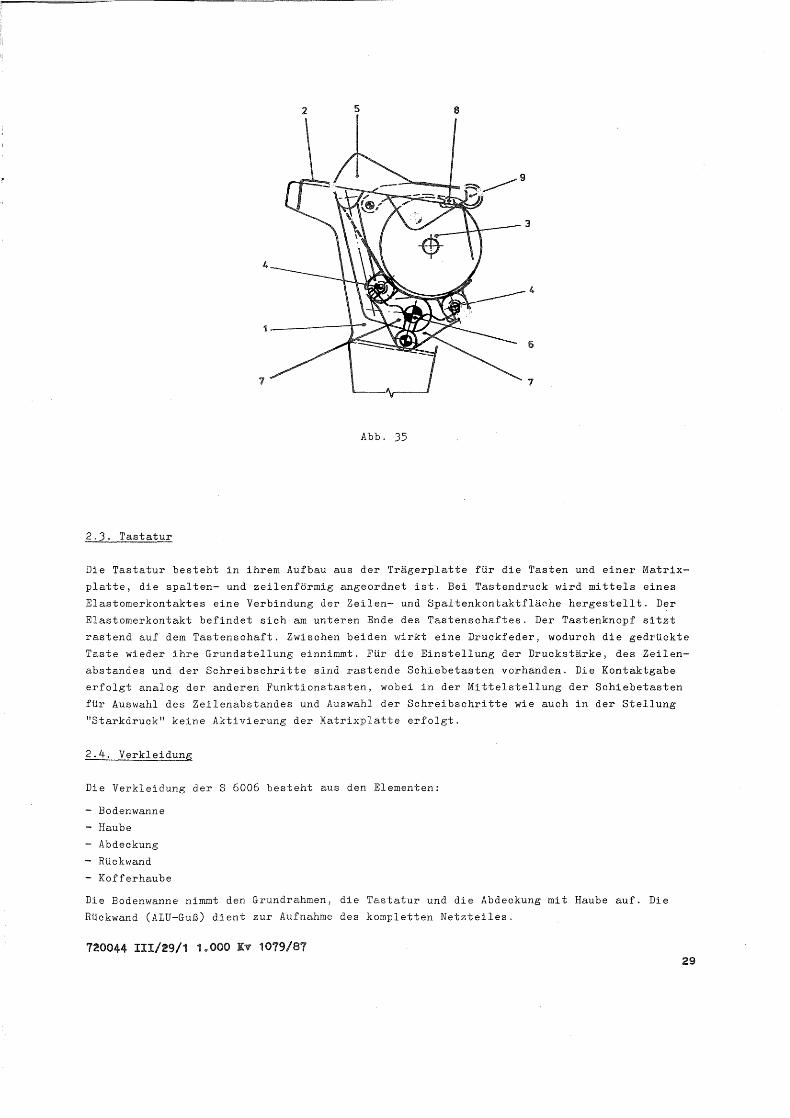
Abb. 35
2.3. Tastatur
Die Tastatur besteht in ihrem Aufbau aus der Trägerplatte für die Tasten und einer Matrix—
platte, die spalten— und zeilenförmig angeordnet ist. Bei Tastendruck wird mittels eines
Elastomerkontaktes eine Verbindung der Zeilen— und Spaltenkontaktfläche hergestellt. Der
Elastomerkontakt befindet sich am unteren Ende des Tastenschaftes. Der Tastenknopf sitzt
rastend auf dem Tastenschaft. Zwischen beiden wirkt eine Druckfeder, wodurch die gedrückte
Taste wieder ihre Grundstellung einnimmt. Für die Einstellung der Druckstärke, des Zeilen—
abstandes und der Schreibschritte sind rastende Schiebetasten vorhanden. Die Kontaktgabe
erfolgt analog der anderen Funktionstasten, wobei in der Mittelstellung der Schiebetasten
für Auswahl des Zeilenabstandes und Auswahl der Schreibschritte wie auch in der Stellung
"Starkdruck" keine Aktivierung der Matrixplatte erfolgt.
2.4. Verkleidung
Die Verkleidung der S 6006 besteht aus den Elementen:
— Bodenwanne
— Haube
— Abdeckung
— Rückwand
— Kofferhaube
Die Bodenwanne nimmt den Grundrahmen, die Tastatur und die Abdeckung mit Haube auf. Die
Rückwand (ALU—Guß) dient zur Aufnahme des kompletten Netzteiles.
720044 111/29/1 1.000 KIT 1079/87 29
robotron
VEB Robotron Buchungsmaschinenwerk Karl-Marx-Stadt DDR • 9010 Karl-Marx-Stadt Annaberger Straße 93 PSF 129
Exporteur: Robotron — Export/Import Volkseigener Außenhandelsbetrieb der Deutschen Demokratischen Republik DDR • 1140 Berlin Allee der Kosmonauten 24 PSF 11
260.59.01.001 (GER)
1



























