Embed Size (px)
Citation preview

BeschreibungFHPP
Motorcontroller Typ– CMMP-AS-...– CMMS-ST-...– CMMS-AS-...– CMMD-AS-...
Festo ProfilHandhaben undPositionieren
Beschreibung555 695de 1011b[757 713]
Festo Handling andPositioning Profile

Inhalt und allgemeine Sicherheitshinweise
IFesto P.BE-CMM-FHPP-SW-DE de 1011b
Original de. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ausgabe de 1011b. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bezeichnung P.BE-CMM-FHPP-SW-DE. . . . . . . . . . . . . . . . .
Bestell-Nr. 555 695. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
© (Festo AG & Co. KG, D-73726 Esslingen, 2010)Internet: http://www.festo.comE-Mail: [email protected]
Weitergabe sowie Vervielfältigung dieses Dokuments,Verwertung und Mitteilung seines Inhalts verboten, soweitnicht ausdrücklich gestattet. Zuwiderhandlungen verpflich-ten zu Schadenersatz. Alle Rechte für den Fall der Patent-,Gebrauchsmuster- oder Geschmacksmustereintragungvorbehalten.

Inhalt und allgemeine Sicherheitshinweise
II Festo P.BE-CMM-FHPP-SW-DE de 1011b
CANopen®, DeviceNet®, EtherCAT®, PROFIBUS® sind eingetragene Marken der jeweiligenMarkeninhaber in bestimmten Ländern.
Inhalt und allgemeine Sicherheitshinweise
IIIFesto P.BE-CMM-FHPP-SW-DE de 1011b
Inhaltsverzeichnis
Bestimmungsgemäße Verwendung VII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Sicherheitshinweise VIII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Zielgruppe IX. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Service IX. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Wichtige Benutzerhinweise X. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Informationen zur Version XII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Begriffe und Abkürzungen XIII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1. E/A-Daten und Ablaufsteuerung 1-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Übersicht Festo Profil für Handhaben und Positionieren (FHPP) 1-3. . . . . . . . . .
1.2 Sollwertvorgabe (FHPP-Betriebsarten) 1-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.1 Umschalten der FHPP-Betriebsart 1-5. . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.2 Satzselektion 1-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.3 Direktauftrag 1-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Aufbau der E/A-Daten 1-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.1 Konzept 1-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.2 Zuordnung der EA-Daten beim CMMD 1-9. . . . . . . . . . . . . . . . . . . . . . .
1.3.3 E/A-Daten in den verschiedenen FHPP-Betriebsarten(Steuerungssicht) 1-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Belegung der Steuerbytes und Statusbytes (Übersicht) 1-11. . . . . . . . . . . . . . . .
1.5 Beschreibung der Steuerbytes 1-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.1 Steuerbyte 1 (CCON) 1-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.2 Steuerbyte 2 (CPOS) 1-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.3 Steuerbyte 3 (CDIR) – Direktauftrag 1-14. . . . . . . . . . . . . . . . . . . . . . . . .
1.5.4 Bytes 4 und 5 ... 8 – Direktauftrag 1-15. . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.5 Bytes 3 und 4 ... 8 – Satzselektion 1-15. . . . . . . . . . . . . . . . . . . . . . . . . .
1.6 Beschreibung der Statusbytes 1-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.6.1 Statusbyte 1 (SCON) 1-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.6.2 Statusbyte 2 (SPOS) 1-17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.6.3 Statusbyte 3 (SDIR) – Direktauftrag 1-18. . . . . . . . . . . . . . . . . . . . . . . . .
1.6.4 Bytes 4 und 5 ... 8 – Direktauftrag 1-19. . . . . . . . . . . . . . . . . . . . . . . . . .
1.6.5 Bytes 3, 4 und 5 ... 8 – Satzselektion 1-20. . . . . . . . . . . . . . . . . . . . . . . .
Inhalt und allgemeine Sicherheitshinweise
IV Festo P.BE-CMM-FHPP-SW-DE de 1011b
1.7 Zustandsmaschine FHPP 1-22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.7.1 Betriebsbereitschaft herstellen 1-24. . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.7.2 Positionieren 1-25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.7.3 FHPP-Betriebsart-abhängige Besonderheiten 1-27. . . . . . . . . . . . . . . . .
1.7.4 Beispiele zu den Steuer- und Statusbytes 1-27. . . . . . . . . . . . . . . . . . . .
2. Antriebsfunktionen 2-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 Maßbezugssystem für elektrische Antriebe 2-3. . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Rechenvorschriften Maßbezugssystem 2-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Referenzfahrt 2-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.1 Referenzfahrt elektrische Antriebe 2-7. . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.2 Referenzfahrtmethoden 2-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Tippbetrieb 2-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5 Teachen über Feldbus 2-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.6 Satz ausführen (Satzselektion) 2-17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.6.1 Ablaufdiagramme Satzselektion 2-18. . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.6.2 Satzaufbau 2-22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.6.3 Bedingte Satzweiterschaltung / Satzverkettung (PNU 402) 2-23. . . . . .
2.7 Direktauftrag 2-27. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.7.1 Ablauf diskreter Sollwert 2-29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.7.2 Ablauf Kraftbetrieb (Drehmoment-, Stromregelung) 2-30. . . . . . . . . . . .
2.7.3 Ablauf Drehzahlregelung 2-32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.8 Stillstandsüberwachung 2-34. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.9 Fliegendes Messen (Positions-Sampling) 2-36. . . . . . . . . . . . . . . . . . . . . . . . . . . .
3. Störverhalten und Diagnose 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Einteilung der Störungen 3-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.1 Warnungen 3-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.2 Störung Typ 1 3-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.3 Störung Typ 2 3-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Diagnosespeicher (Störungen) 3-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Warnungsspeicher (nur CMMP) 3-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Inhalt und allgemeine Sicherheitshinweise
VFesto P.BE-CMM-FHPP-SW-DE de 1011b
3.4 Störnummern 3-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.1 Störnummern CMMP 3-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.2 Störnummern CMMS/CMMD 3-46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5 Diagnose über FHPP-Statusbytes 3-52. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4. Parameter 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Allgemeine Parameterstruktur FHPP 4-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Zugriffsschutz 4-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.1 Zugriff über SPS und FCT 4-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Parameter-Übersicht nach FHPP 4-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4 Beschreibung der Parameter nach FHPP 4-14. . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.1 Darstellung der Parametereinträge 4-14. . . . . . . . . . . . . . . . . . . . . . . . .
4.4.2 PNUs für die Telegrammeinträge bei FHPP+ 4-15. . . . . . . . . . . . . . . . . .
4.4.3 Gerätedaten – Standard Parameter 4-17. . . . . . . . . . . . . . . . . . . . . . . . .
4.4.4 Gerätedaten – Erweiterte Parameter 4-18. . . . . . . . . . . . . . . . . . . . . . . .
4.4.5 Diagnose 4-21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.6 Prozessdaten 4-25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.7 Fliegendes Messen 4-30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.8 Satzliste 4-31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.9 Projektdaten – Allgemeine Projektdaten 4-44. . . . . . . . . . . . . . . . . . . . .
4.4.10 Projektdaten – Teachen 4-45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.11 Projektdaten – Tippbetrieb 4-46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.12 Projektdaten – Direktbetrieb Positionsregelung 4-47. . . . . . . . . . . . . . .
4.4.13 Projektdaten – Direktbetrieb Drehmomentregelung 4-48. . . . . . . . . . . .
4.4.14 Projektdaten – Direktbetrieb Drehzahlregelung 4-49. . . . . . . . . . . . . . .
4.4.15 Funktionsdaten – Kurvenscheibenfunktion 4-50. . . . . . . . . . . . . . . . . . .
4.4.16 Funktionsdaten – Positions- und Rotorlagetrigger 4-52. . . . . . . . . . . . .
4.4.17 Achsparameter Elektrische Antriebe 1 – Parameter Mechanik 4-55. . . .
4.4.18 Achsparameter Elektrische Antriebe 1 – Parameter Referenzfahrt 4-58
4.4.19 Achsparameter Elektrische Antriebe 1 – Reglerparameter 4-60. . . . . . .
4.4.20 Achsparameter Elektrische Antriebe 1– Elektronisches Typenschild 4-63. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.21 Achsparameter Elektrische Antriebe 1– Stillstandsüberwachung 4-64. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Inhalt und allgemeine Sicherheitshinweise
VI Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4.22 Achsparameter Elektrische Antriebe 1– Schleppfehlerüberwachung 4-65. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.23 Achsparameter Elektrische Antriebe 1 – Sonstige Parameter 4-65. . . .
4.4.24 Funktionsparameter digitale E/As 4-66. . . . . . . . . . . . . . . . . . . . . . . . . .
5. Parametrierung mit FPC 5-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Parametrierung mit FHPP 5-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1.1 Festo Parameterkanal (FPC) für zyklische Daten (E/A-Daten) 5-3. . . .
5.1.2 Auftragskennungen, Antwortkennungen und Fehlernummern 5-5. . .
5.1.3 Regeln für die Auftrags-Antwort-Bearbeitung 5-7. . . . . . . . . . . . . . . . .
A. Technischer Anhang A-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1 Umrechnungsfaktoren (Factor Group) A-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.1 Übersicht A-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.2 Objekte der Factor Group A-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.3 Berechnung der Positionseinheiten A-6. . . . . . . . . . . . . . . . . . . . . . . . .
A.1.4 Berechnung der Geschwindigkeitseinheiten A-9. . . . . . . . . . . . . . . . . .
A.1.5 Berechnung der Beschleunigungseinheiten A-13. . . . . . . . . . . . . . . . . .
B. Erweiterungen FHPP+ und Kurvenscheiben B-1. . . . . . . . . . . . . . . . . . . . . . . . .
B.1 Übersicht FHPP+ B-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.1 Aufbau des FHPP+-Telegramms B-4. . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.2 Beispiele B-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.3 Konfiguration der Feldbusse mit FHPP+ B-6. . . . . . . . . . . . . . . . . . . . . .
B.1.4 Telegrammeditor für FHPP+ B-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.5 Parameter-Übersicht FHPP+ B-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2 CMMP-AS - Betrieb von Kurvenscheiben B-7. . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2.1 Kurvenscheibenfunktion in Betriebsart Direktauftrag B-8. . . . . . . . . .
B.2.2 Kurvenscheibenfunktion in Betriebsart Satzselektion B-10. . . . . . . . . .
B.2.3 Parameter für die Kurvenscheibenfunktion B-10. . . . . . . . . . . . . . . . . . .
B.2.4 Erweiterte Zustandmaschine mit Kurvenscheibenfunktion B-11. . . . . .
C. Stichwortverzeichnis C-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Inhalt und allgemeine Sicherheitshinweise
VIIFesto P.BE-CMM-FHPP-SW-DE de 1011b
Bestimmungsgemäße Verwendung
Diese Beschreibung enthält das Festo Handling und PositionProfile (FHPP) für die CMMx Produkt-Familie entsprechendTab. 0/1 im Abschnitt “Informationen zur Version”.
Damit erhalten Sie ergänzende Informationen zur Steuerung,Diagnose und Parametrierung der Motorcontroller über denFeldbus.
Die vollständigen Informationen finden Sie in der Dokumenta-tion zum verwendeten Motorcontroller:
– Beschreibung P.BE-CMM...-HW-...:Mechanik - Elektrik - Überblick Funktionsumfang.
HinweisBeachten Sie unbedingt die im Produkthandbuch desverwendeten Motorcontrollers aufgeführten sicherheits-technischen Hinweise.
Je nach verwendetem Feldbus finden Sie weitere Informatio-nen in folgenden Handbüchern zur CMMx Produkt-Familie:
– Beschreibung P.BE-CMM...-CO-...:Beschreibung des implementierten CANopen Protokollsgemäß DSP 402.
– Beschreibung P.BE-CMM...-PB-...:Beschreibung des implementierten PROFIBUS-DP Proto-kolls.
– Beschreibung P.BE-CMM...-DN-...:Beschreibung des implementierten DeviceNet Protokolls.
– Beschreibung P.BE-CMM...-EC-...:Beschreibung des implementierten EtherCAT Protokolls.
Inhalt und allgemeine Sicherheitshinweise
VIII Festo P.BE-CMM-FHPP-SW-DE de 1011b
Sicherheitshinweise
Bei der Inbetriebnahme und Programmierung von Positionier-systemen sind unbedingt die in den Beschreibungen sowieden Bedienungsanleitungen zu den eingesetzten Komponen-ten gegebenen Sicherheitsvorschriften zu beachten.
Der Anwender hat dafür Sorge zu tragen, dass sich niemandim Einflussbereich der angeschlossenen Aktoren bzw. desAchssystems aufhält. Der mögliche Gefahrenbereich mussdurch geeignete Maßnahmen wie Absperrungen oder Warn-hinweise gesichert werden.
WarnungAchsen können mit großer Kraft und Geschwindigkeit ver-fahren. Kollisionen können zu schweren Verletzungen oderzur Zerstörung von Bauteilen führen.
Stellen Sie sicher, dass niemand in den Einflussbereich derAchsen sowie anderer angeschlossener Aktoren greifenkann und sich keine Gegenstände im Verfahrbereich befin-den, solange das System an Energiequellen angeschlossenist.
WarnungFehler bei der Parametrierung können Personen- und Sach-schäden verursachen.
Geben Sie den Regler nur dann frei, wenn das Achssystemfachgerecht installiert und parametriert ist.
Inhalt und allgemeine Sicherheitshinweise
IXFesto P.BE-CMM-FHPP-SW-DE de 1011b
Zielgruppe
Diese Beschreibung wendet sich ausschließlich an ausgebil-dete Fachleute der Steuerungs- und Automatisierungstech-nik, die Erfahrungen mit der Installation, Inbetriebnahme,Programmierung und Diagnose von Positioniersystemen be-sitzen.
Service
Bitte wenden Sie sich bei technischen Problemen an Ihrenlokalen Festo-Service oder an folgende E-Mail-Adresse:
Inhalt und allgemeine Sicherheitshinweise
X Festo P.BE-CMM-FHPP-SW-DE de 1011b
Wichtige Benutzerhinweise
Gefahrenkategorien
Diese Beschreibung enthält Hinweise auf mögliche Gefahren,die bei unsachgemäßem Einsatz des Produkts auftreten kön-nen. Diese Hinweise sind mit einem Signalwort (Warnung,Vorsicht, usw.) gekennzeichnet, schattiert gedruckt und zu-sätzlich durch ein Piktogramm gekennzeichnet. FolgendeGefahrenhinweise werden unterschieden:
Warnung... bedeutet, dass bei Missachten schwerer Personen- oderSachschaden entstehen kann.
Vorsicht... bedeutet, dass bei Missachten Personen- oder Sach-schaden entstehen kann.
Hinweis... bedeutet, dass bei Missachten Sachschaden entstehenkann.
Zusätzlich kennzeichnet das folgende Piktogramm Textstel-len, die Tätigkeiten mit elektrostatisch gefährdeten Bauele-menten beschreiben:
Elektrostatisch gefährdete Bauelemente: UnsachgemäßeHandhabung kann zu Beschädigungen von Bauelementenführen.
Inhalt und allgemeine Sicherheitshinweise
XIFesto P.BE-CMM-FHPP-SW-DE de 1011b
Kennzeichnung spezieller Informationen
Folgende Piktogramme kennzeichnen Textstellen, die spe-zielle Informationen enthalten.
Piktogramme
Information:Empfehlungen, Tipps und Verweise auf andere Informations-quellen.
Zubehör:Angaben über notwendiges oder sinnvolles Zubehör zumFesto Produkt.
Umwelt:Informationen zum umweltschonenden Einsatz von Festo Pro-dukten.
Textkennzeichnungen
• Der Auflistungspunkt kennzeichnet Tätigkeiten, die inbeliebiger Reihenfolge durchgeführt werden können.
1. Ziffern kennzeichnen Tätigkeiten, die in der angegebenenReihenfolge durchzuführen sind.
– Spiegelstriche kennzeichnen allgemeine Aufzählungen.
Inhalt und allgemeine Sicherheitshinweise
XII Festo P.BE-CMM-FHPP-SW-DE de 1011b
Informationen zur Version
Diese Beschreibung bezieht sich auf die Versionen entspre-chend Tab. 0/1.
Controller Firmware Bemerkung
CMMP-AS-... ab Version 3.5.1501.4.1 Motorcontroller Premium für Servomotoren.
Hinweis: Diese Beschreibung gilt nicht für die
Varianten CMMP-AS-...-M3. Benutzen Sie für diese
Varianten die spezielle FHPP-Beschreibung.
CMMS-ST-... ab Version 1.3.0.1.14 Motorcontroller Standard für Schrittmotoren.
CMMS-AS-... ab Version 1.3.0.1.15 Motorcontroller Standard für Servomotoren.
CMMD-AS-... ab Version 1.4.0.3.1 Doppel-Motorcontroller Standard für Servomotoren.
Tab. 0/1: Controller und Firmware-Versionen
Für ältere Versionen:Nutzen Sie ggf. die zugehörige ältere Version diese Doku-ments.
HinweisPrüfen Sie bei neueren Firmware-Ständen, ob hierfür eineneuere Version dieser Beschreibung vorliegt:www.festo.com
Inhalt und allgemeine Sicherheitshinweise
XIIIFesto P.BE-CMM-FHPP-SW-DE de 1011b
Begriffe und Abkürzungen
Folgende Begriffe und Abkürzungen werden in dieser Be-schreibung verwendet.
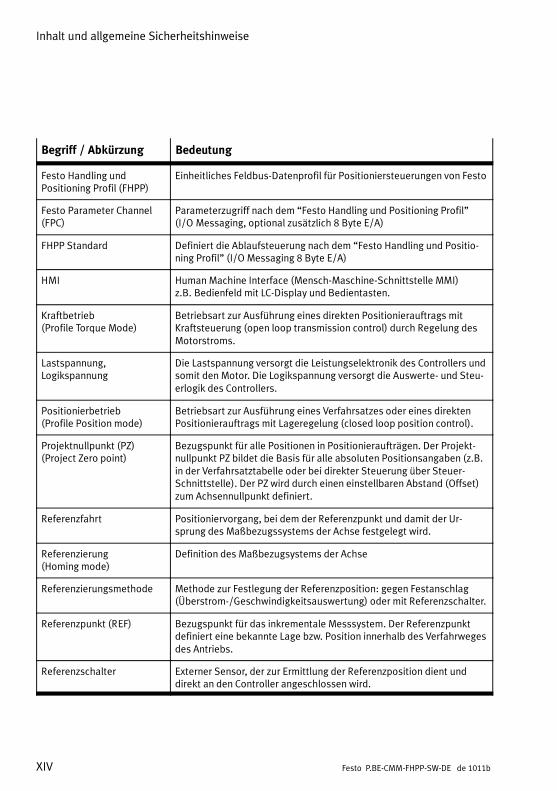
Begriff / Abkürzung Bedeutung
0-Signal Am Ein- oder Ausgang liegen 0 V an (positive Logik, entspricht LOW).
1-Signal Am Ein- oder Ausgang liegen 24 V an (positive Logik, entspricht HIGH).
Achse Mechanischer Bestandteil eines Antriebs, welche die Antriebskraft fürdie Bewegung überträgt. Eine Achse ermöglicht den Anbau und dieFührung der Nutzlast und den Anbau eines Referenzschalters.
Achsennullpunkt (AZ) Bezugspunkt der Software-Endlagen und des Projektnullpunkts PZ.Der Achsennullpunkt AZ wird durch einen voreingestellten Abstand(Offset) zum Referenzpunkt REF definiert.
Antrieb Kompletter Aktuator, bestehend Motor, Encoder und Achse, optionalmit Getriebe, ggf. mit Controller.
Betriebsart Art der Steuerung oder interner Betriebsmodus des Controllers.– Art der Steuerung: Satzselektion, Direktauftrag– Betriebsart des Reglers: Position Profile Mode,
Profile Torque Mode, Profile velocity mode– vordefinierte Abläufe: Homing Mode...
Controller Enthält Leistungselektronik + Regler + Positioniersteuerung, wertetSensorsignale aus, berechnet Bewegungen und Kräfte und stellt überdie Leistungselektronik die Spannungsversorgung für den Motorbereit.
Drehzahlregelung(Profile Velocity mode)
Betriebsart zur Ausführung eines Verfahrsatzes oder eines direktenPositionierauftrags mit Regelung der Geschwindigkeit bzw. Drehzahl.
EAEA
Eingang.Ausgang.Ein- und/oder Ausgang.
Encoder Elektrischer Impulsgeber (meist Rotorlagegeber). Der Controller wer-tet die erzeugten elektrischen Signale aus und berechnet daraus diePosition und Geschwindigkeit.
Festo Configuration Tool(FCT)
Software mit einheitlicher Projekt- und Datenverwaltung für unter-stützte Gerätetypen. Die speziellen Belange eines Gerätetyps werdendurch PlugIns mit den notwendigen Beschreibungen und Dialogenunterstützt.
Inhalt und allgemeine Sicherheitshinweise
XIV Festo P.BE-CMM-FHPP-SW-DE de 1011b
Begriff / Abkürzung Bedeutung
Festo Handling undPositioning Profil (FHPP)
Einheitliches Feldbus-Datenprofil für Positioniersteuerungen von Festo
Festo Parameter Channel(FPC)
Parameterzugriff nach dem “Festo Handling und Positioning Profil”(I/O Messaging, optional zusätzlich 8 Byte E/A)
FHPP Standard Definiert die Ablaufsteuerung nach dem “Festo Handling und Positio-ning Profil” (I/O Messaging 8 Byte E/A)
HMI HumanMachine Interface (Mensch-Maschine-Schnittstelle MMI)z.B. Bedienfeld mit LC-Display und Bedientasten.
Kraftbetrieb(Profile Torque Mode)
Betriebsart zur Ausführung eines direkten Positionierauftrags mitKraftsteuerung (open loop transmission control) durch Regelung desMotorstroms.
Lastspannung,Logikspannung
Die Lastspannung versorgt die Leistungselektronik des Controllers undsomit den Motor. Die Logikspannung versorgt die Auswerte- und Steu-erlogik des Controllers.
Positionierbetrieb(Profile Position mode)
Betriebsart zur Ausführung eines Verfahrsatzes oder eines direktenPositionierauftrags mit Lageregelung (closed loop position control).
Projektnullpunkt (PZ)(Project Zero point)
Bezugspunkt für alle Positionen in Positionieraufträgen. Der Projekt-nullpunkt PZ bildet die Basis für alle absoluten Positionsangaben (z.B.in der Verfahrsatztabelle oder bei direkter Steuerung über Steuer-Schnittstelle). Der PZ wird durch einen einstellbaren Abstand (Offset)zum Achsennullpunkt definiert.
Referenzfahrt Positioniervorgang, bei dem der Referenzpunkt und damit der Ur-sprung des Maßbezugssystems der Achse festgelegt wird.
Referenzierung(Homing mode)
Definition des Maßbezugsystems der Achse
Referenzierungsmethode Methode zur Festlegung der Referenzposition: gegen Festanschlag(Überstrom-/Geschwindigkeitsauswertung) oder mit Referenzschalter.
Referenzpunkt (REF) Bezugspunkt für das inkrementale Messsystem. Der Referenzpunktdefiniert eine bekannte Lage bzw. Position innerhalb des Verfahrwegesdes Antriebs.
Referenzschalter Externer Sensor, der zur Ermittlung der Referenzposition dient unddirekt an den Controller angeschlossen wird.
Inhalt und allgemeine Sicherheitshinweise
XVFesto P.BE-CMM-FHPP-SW-DE de 1011b
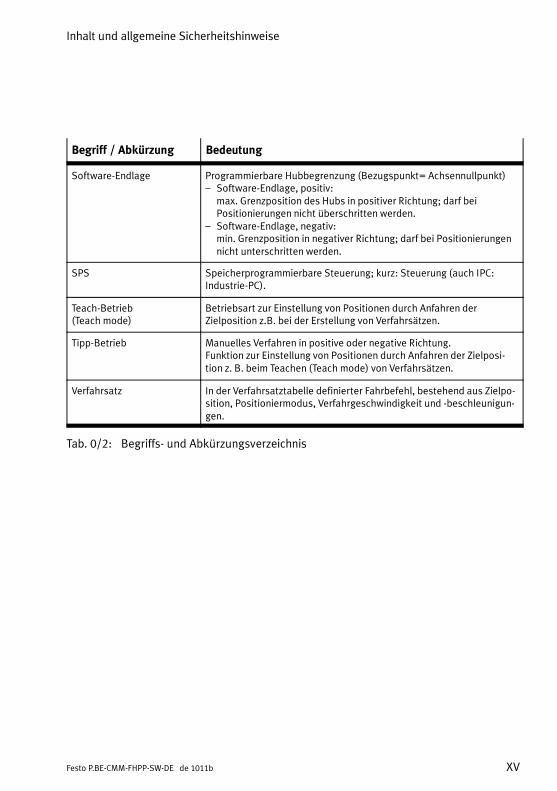
Begriff / Abkürzung Bedeutung
Software-Endlage Programmierbare Hubbegrenzung (Bezugspunkt= Achsennullpunkt)– Software-Endlage, positiv:
max. Grenzposition des Hubs in positiver Richtung; darf beiPositionierungen nicht überschritten werden.
– Software-Endlage, negativ:min. Grenzposition in negativer Richtung; darf bei Positionierungennicht unterschritten werden.
SPS Speicherprogrammierbare Steuerung; kurz: Steuerung (auch IPC:Industrie-PC).
Teach-Betrieb(Teach mode)
Betriebsart zur Einstellung von Positionen durch Anfahren derZielposition z.B. bei der Erstellung von Verfahrsätzen.
Tipp-Betrieb Manuelles Verfahren in positive oder negative Richtung.Funktion zur Einstellung von Positionen durch Anfahren der Zielposi-tion z. B. beim Teachen (Teach mode) von Verfahrsätzen.
Verfahrsatz In der Verfahrsatztabelle definierter Fahrbefehl, bestehend aus Zielpo-sition, Positioniermodus, Verfahrgeschwindigkeit und -beschleunigun-gen.
Tab. 0/2: Begriffs- und Abkürzungsverzeichnis

Inhalt und allgemeine Sicherheitshinweise
XVI Festo P.BE-CMM-FHPP-SW-DE de 1011b
E/A-Daten und Ablaufsteuerung
1-1Festo P.BE-CMM-FHPP-SW-DE de 1011b
Kapitel 1
E/A-Daten und Ablaufsteuerung
1. E/A-Daten und Ablaufsteuerung
1-2 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Inhaltsverzeichnis
1.1 Übersicht Festo Profil für Handhaben und Positionieren (FHPP) 1-3. . . . . . . . . .
1.2 Sollwertvorgabe (FHPP-Betriebsarten) 1-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.1 Umschalten der FHPP-Betriebsart 1-5. . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.2 Satzselektion 1-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.3 Direktauftrag 1-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Aufbau der E/A-Daten 1-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.1 Konzept 1-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.2 Zuordnung der EA-Daten beim CMMD 1-9. . . . . . . . . . . . . . . . . . . . . . .
1.3.3 E/A-Daten in den verschiedenen FHPP-Betriebsarten(Steuerungssicht) 1-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Belegung der Steuerbytes und Statusbytes (Übersicht) 1-11. . . . . . . . . . . . . . . .
1.5 Beschreibung der Steuerbytes 1-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.1 Steuerbyte 1 (CCON) 1-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.2 Steuerbyte 2 (CPOS) 1-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.3 Steuerbyte 3 (CDIR) – Direktauftrag 1-14. . . . . . . . . . . . . . . . . . . . . . . . .
1.5.4 Bytes 4 und 5 ... 8 – Direktauftrag 1-15. . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.5 Bytes 3 und 4 ... 8 – Satzselektion 1-15. . . . . . . . . . . . . . . . . . . . . . . . . .
1.6 Beschreibung der Statusbytes 1-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.6.1 Statusbyte 1 (SCON) 1-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.6.2 Statusbyte 2 (SPOS) 1-17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.6.3 Statusbyte 3 (SDIR) – Direktauftrag 1-18. . . . . . . . . . . . . . . . . . . . . . . . .
1.6.4 Bytes 4 und 5 ... 8 – Direktauftrag 1-19. . . . . . . . . . . . . . . . . . . . . . . . . .
1.6.5 Bytes 3, 4 und 5 ... 8 – Satzselektion 1-20. . . . . . . . . . . . . . . . . . . . . . . .
1.7 Zustandsmaschine FHPP 1-22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.7.1 Betriebsbereitschaft herstellen 1-24. . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.7.2 Positionieren 1-25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.7.3 FHPP-Betriebsart-abhängige Besonderheiten 1-27. . . . . . . . . . . . . . . . .
1.7.4 Beispiele zu den Steuer- und Statusbytes 1-27. . . . . . . . . . . . . . . . . . . .
1. E/A-Daten und Ablaufsteuerung
1-3Festo P.BE-CMM-FHPP-SW-DE de 1011b
1.1 Übersicht Festo Profil für Handhaben und Positionieren (FHPP)
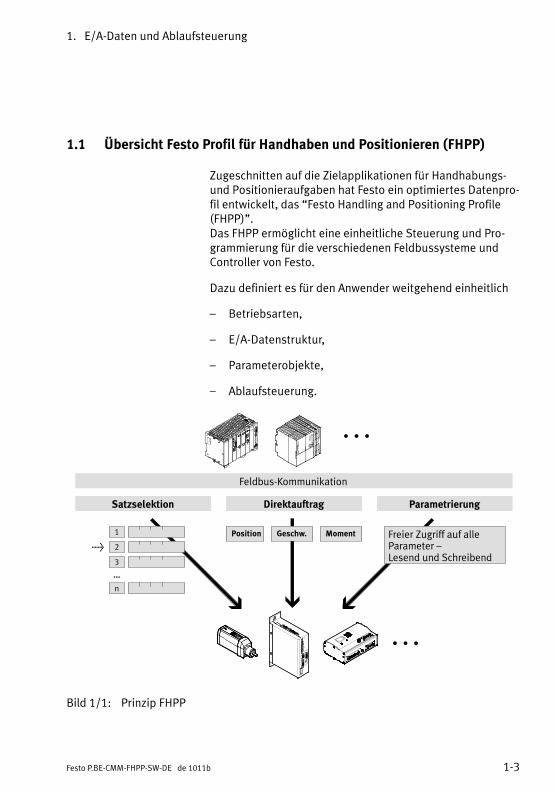
Zugeschnitten auf die Zielapplikationen für Handhabungs-und Positionieraufgaben hat Festo ein optimiertes Datenpro-fil entwickelt, das “Festo Handling and Positioning Profile(FHPP)”.Das FHPP ermöglicht eine einheitliche Steuerung und Pro-grammierung für die verschiedenen Feldbussysteme undController von Festo.
Dazu definiert es für den Anwender weitgehend einheitlich
– Betriebsarten,
– E/A-Datenstruktur,
– Parameterobjekte,
– Ablaufsteuerung.
Feldbus-Kommunikation
Satzselektion
Freier Zugriff auf alleParameter –Lesend und Schreibend
. . .
Direktauftrag Parametrierung
Position Geschw. Moment
. . .
1
2
3
...
n
>
Bild 1/1: Prinzip FHPP

1. E/A-Daten und Ablaufsteuerung
1-4 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Steuer- und Status-Daten (FHPP Standard)
Die Kommunikation über den Feldbus erfolgt über 8 ByteSteuer- und Status-Daten. Im Betrieb benötigte Funktionenund Statusmeldungen sind direkt schreib- und lesbar.
Parametrierung (FPC)
Über den Parameterkanal kann die Steuerung auf alle Para-meterwerte des Controllers über den Feldbus zugreifen.Hierfür werden weitere 8 Byte E/A-Daten verwendet.
Hinweis zu den Controllern
Jeder Controller hat spezifische Eigenschaften und Aufgaben.Er verfügt deshalb über eine individuelle Zustandsmaschineund eine individuelle Datenbasis.
Das Festo Handhabungs- und Positionierprofil FHPP stelltdem Anwender die individuellen Eigenschaften eines Control-lers einheitlich dar. Das Profil ist soweit möglich unabhängigvom jeweiligen Controller und Feldbus implementiert.
1. E/A-Daten und Ablaufsteuerung
1-5Festo P.BE-CMM-FHPP-SW-DE de 1011b
1.2 Sollwertvorgabe (FHPP-Betriebsarten)
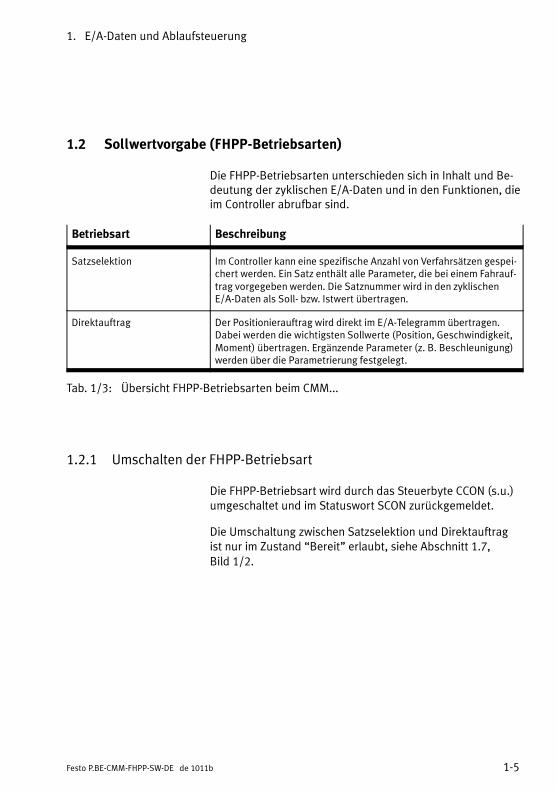
Die FHPP-Betriebsarten unterschieden sich in Inhalt und Be-deutung der zyklischen E/A-Daten und in den Funktionen, dieim Controller abrufbar sind.
Betriebsart Beschreibung
Satzselektion Im Controller kann eine spezifische Anzahl von Verfahrsätzen gespei-chert werden. Ein Satz enthält alle Parameter, die bei einem Fahrauf-trag vorgegeben werden. Die Satznummer wird in den zyklischenE/A-Daten als Soll- bzw. Istwert übertragen.
Direktauftrag Der Positionierauftrag wird direkt im E/A-Telegramm übertragen.Dabei werden die wichtigsten Sollwerte (Position, Geschwindigkeit,Moment) übertragen. Ergänzende Parameter (z. B. Beschleunigung)werden über die Parametrierung festgelegt.
Tab. 1/3: Übersicht FHPP-Betriebsarten beim CMM...
1.2.1 Umschalten der FHPP-Betriebsart
Die FHPP-Betriebsart wird durch das Steuerbyte CCON (s.u.)umgeschaltet und im Statuswort SCON zurückgemeldet.
Die Umschaltung zwischen Satzselektion und Direktauftragist nur im Zustand “Bereit” erlaubt, siehe Abschnitt 1.7,Bild 1/2.

1. E/A-Daten und Ablaufsteuerung
1-6 Festo P.BE-CMM-FHPP-SW-DE de 1011b
1.2.2 Satzselektion
Jeder Controller verfügt über eine bestimmte Anzahl von Sät-zen, die alle für einen Fahrauftrag notwendigen Informationenenthalten. Die maximale Anzahl der Sätze ist pro Controllerfestgelegt.
In den Ausgangsdaten der SPS wird die Satznummer übertra-gen, die der Controller mit dem nächsten Start ausführen soll.Seine Eingangsdaten enthalten die zuletzt ausgeführte Satz-nummer. Der Fahrauftrag selbst muss dabei nicht mehr aktivsein.
Der Controller unterstützt keinen Automatikbetrieb, d.h. keinAnwenderprogramm. Sätze können nicht mit einer program-mierbaren Logik automatisch abgearbeitet werden. Der Con-troller kann damit Stand-Alone keine sinnvollen Aufgabenbewältigen – eine enge Kopplung mit der SPS ist auf jedenFall notwendig.
Allerdings ist es abhängig vom Controller möglich, mehrereSätze zu verketten und mit einem Startkommando hinterein-ander ausführen zu lassen. Ebenso ist es – abhängig vomController – möglich, eine Satzweiterschaltung vor Erreichender Zielposition zu definieren.
Die vollständige Parametrierung der Satzverkettung (”Weg-programm”), z. B. des Folgesatzes, ist nur über das FCT mög-lich.
Damit können Verfahrprofile erstellt werden, ohne dass dieTotzeiten zum Wirken kommen, die bei der Übertragung aufdem Feldbus und der Zykluszeit der SPS entstehen.
1. E/A-Daten und Ablaufsteuerung
1-7Festo P.BE-CMM-FHPP-SW-DE de 1011b
1.2.3 Direktauftrag
Im Direktauftrag werden Fahraufträge direkt in den Aus-gangsdaten der SPS formuliert.
Die typische Anwendung berechnet dynamisch bei jedemAuftrag oder auch nur einigen Aufträgen die Zielsollwerte.Damit kann z. B. eine Anpassung an unterschiedliche Werk-stückgrößen erreicht werden, ohne die Satzliste neu zu para-metrieren. Die Fahrdaten werden komplett in der SPS verwal-tet und direkt an den Controller gesendet.
1. E/A-Daten und Ablaufsteuerung
1-8 Festo P.BE-CMM-FHPP-SW-DE de 1011b
1.3 Aufbau der E/A-Daten
1.3.1 Konzept
Das FHPP-Protokoll sieht grundsätzlich 8 Byte E- und 8 ByteA-Daten vor. Davon ist das erste Byte fix (bei den FHPP-Betriebsarten Satzselektion und Direktauftrag die ersten2 Bytes). Es bleibt in jedem Betriebsmodus erhalten undsteuert die Freigabe des Controllers und die FHPP-Betriebs-arten. Die weiteren Bytes sind abhängig von der gewähltenFHPP-Betriebsart. Hier können weitere Steuer- bzw. Status-bytes und Soll- und Istwerte übertragen werden.
In den zyklischen Daten sind weitere Daten zulässig, zurÜbertragung von Parametern nach dem FPC-Protokoll oderFHPP+.
Eine SPS tauscht damit mit dem FHPP folgende Daten aus:
– 8 Byte Steuer- und Status-Daten:
– Steuer- und Statusbytes,
– Satznummer bzw. Sollposition in den A-Daten,
– Rückmeldung von Istposition und Satznummer in denE-Daten,
– weitere betriebsartenabhängige Soll- und Istwerte,
– Bei Bedarf weitere 8 Byte E und 8 Byte A-Daten für dieParametrierung nach FPC, siehe Abschnitt 5.1.
– Sofern unterstützt bei Bedarf bis zu 24 (ohne FPC) oder16 (mit FPC) zusätzliche Byte EA-Daten für die Parameter-übertragung über FHPP+, siehe Anhang B.1.
Beachten Sie ggf. die Spezifikation im Busmaster bei der Dar-stellung von Worten und Doppelworten (Intel/Motorola).
Z. B. beim Senden über CAN erfolgt die Darstellung in der“little endian”-Darstellung (niederwertigstes Byte zuerst).
1. E/A-Daten und Ablaufsteuerung
1-9Festo P.BE-CMM-FHPP-SW-DE de 1011b
1.3.2 Zuordnung der EA-Daten beim CMMD
Die Steuerung über FHPP für die Achse 1 und Achse 2 erfolgtbeim CMMD immer über eine gemeinsame Feldbusschnitt-stelle. Wird eine Schnittstelle aktiviert, gilt diese Schnittstelleimmer für beide Achsen.
Jede Achse besitzt dann jeweils eigene EA-Daten entspre-chend Abschnitt 1.3.1 bzw. 1.3.3.
Die Zuordnung der EA-Daten über den Feldbus ist abhängigvon der verwendeten Steuerschnittstelle:
– CANopen:Die beiden Achsen besitzen eine separate CAN-Adresse,jeweils mit 8 (ohne FPC) bzw. 16 EA-Byte Daten (mit FPC).Die Adresse von Achse 1 wird an den DIP-Schaltern einge-stellt. Achse 2 wird immer die darauffolgende Adressezugewiesen:
CAN-Adresse Achse 2 = CAN-Adresse Achse 1 + 1
– PROFIBUS und DeviceNet:Die beiden Achsen besitzen eine gemeinsame Bus-adresse, die über die DIP-Schalter eingestellt wird.Die EA-Daten für die zwei Achsen werden in einem ge-meinsamen Telegramm mit doppelter Länge übertragen.Beispiel (mit FPC):Byte 1 ... 8: Steuer-/Statusbytes Achse 1Byte 9 ... 16: FPC Achse 1Byte 17 ... 24: Steuer-/Statusbytes Achse 2Byte 25 ... 32: FPC Achse 2
Hinweis:Bei PROFIBUS und DeviceNet werden die EA-Daten für dieAchse 2 von Achse 1 gelesen, an Achse 2 weitergeleitet unddort ausgewertet. Die Antwort wird frühestens mit dem näch-sten internen Kommunikationstask (alle 1,6 ms) an Achse 1zurückgegeben. Erst dann kann die Antwort über den Feldbuszurückgegeben werden.Dies bedeutet, dass die Verarbeitungszeit der Feldbusproto-kolle doppelt so lang ist wie beim CMMS-AS.
1. E/A-Daten und Ablaufsteuerung
1-10 Festo P.BE-CMM-FHPP-SW-DE de 1011b
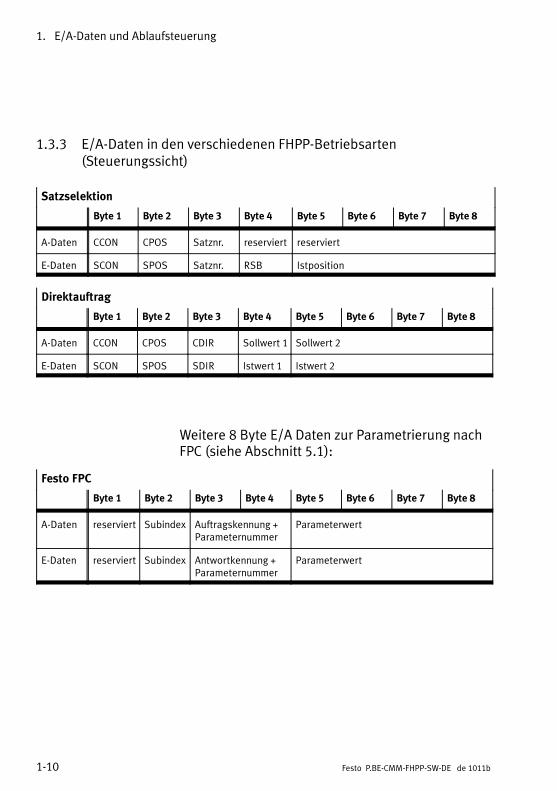
1.3.3 E/A-Daten in den verschiedenen FHPP-Betriebsarten(Steuerungssicht)
Satzselektion
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
A-Daten CCON CPOS Satznr. reserviert reserviert
E-Daten SCON SPOS Satznr. RSB Istposition
Direktauftrag
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
A-Daten CCON CPOS CDIR Sollwert 1 Sollwert 2
E-Daten SCON SPOS SDIR Istwert 1 Istwert 2
Weitere 8 Byte E/A Daten zur Parametrierung nachFPC (siehe Abschnitt 5.1):
Festo FPC
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
A-Daten reserviert Subindex Auftragskennung +Parameternummer
Parameterwert
E-Daten reserviert Subindex Antwortkennung +Parameternummer
Parameterwert
1. E/A-Daten und Ablaufsteuerung
1-11Festo P.BE-CMM-FHPP-SW-DE de 1011b
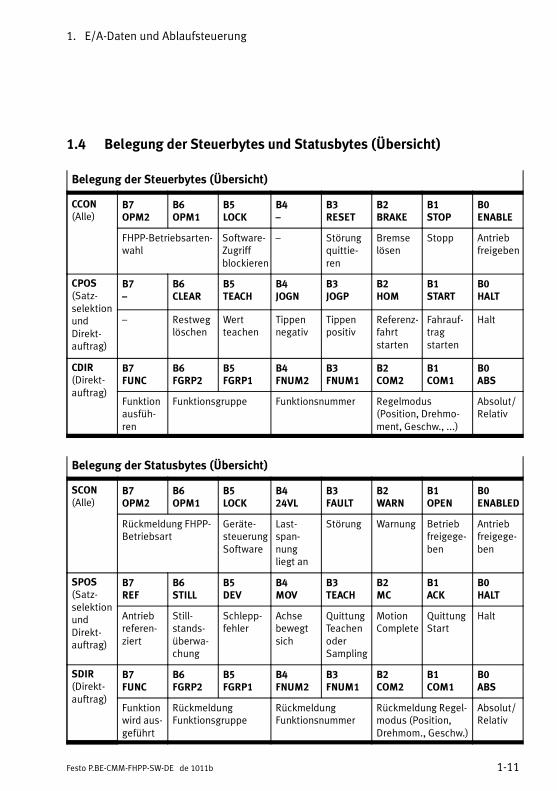
1.4 Belegung der Steuerbytes und Statusbytes (Übersicht)
Belegung der Steuerbytes (Übersicht)
CCON(Alle)
B7OPM2
B6OPM1
B5LOCK
B4–
B3RESET
B2BRAKE
B1STOP
B0ENABLE
FHPP-Betriebsarten-wahl
Software-Zugriffblockieren
– Störungquittie-ren
Bremselösen
Stopp Antriebfreigeben
CPOS(Satz-selektionundDirekt-auftrag)
B7–
B6CLEAR
B5TEACH
B4JOGN
B3JOGP
B2HOM
B1START
B0HALT
– Restweglöschen
Wertteachen
Tippennegativ
Tippenpositiv
Referenz-fahrtstarten
Fahrauf-tragstarten
Halt
CDIR(Direkt-auftrag)
B7FUNC
B6FGRP2
B5FGRP1
B4FNUM2
B3FNUM1
B2COM2
B1COM1
B0ABS
Funktionausfüh-ren
Funktionsgruppe Funktionsnummer Regelmodus(Position, Drehmo-ment, Geschw., ...)
Absolut/Relativ
Belegung der Statusbytes (Übersicht)
SCON(Alle)
B7OPM2
B6OPM1
B5LOCK
B424VL
B3FAULT
B2WARN
B1OPEN
B0ENABLED
Rückmeldung FHPP-Betriebsart
Geräte-steuerungSoftware
Last-span-nungliegt an
Störung Warnung Betriebfreigege-ben
Antriebfreigege-ben
SPOS(Satz-selektionundDirekt-auftrag)
B7REF
B6STILL
B5DEV
B4MOV
B3TEACH
B2MC
B1ACK
B0HALT
Antriebreferen-ziert
Still-stands-überwa-chung
Schlepp-fehler
Achsebewegtsich
QuittungTeachenoderSampling
MotionComplete
QuittungStart
Halt
SDIR(Direkt-auftrag)
B7FUNC
B6FGRP2
B5FGRP1
B4FNUM2
B3FNUM1
B2COM2
B1COM1
B0ABS
Funktionwird aus-geführt
RückmeldungFunktionsgruppe
RückmeldungFunktionsnummer
Rückmeldung Regel-modus (Position,Drehmom., Geschw.)
Absolut/Relativ
1. E/A-Daten und Ablaufsteuerung
1-12 Festo P.BE-CMM-FHPP-SW-DE de 1011b
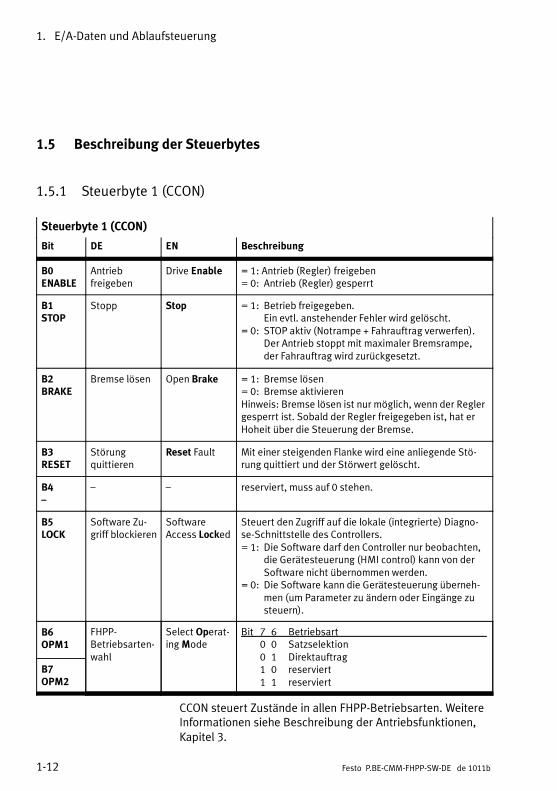
1.5 Beschreibung der Steuerbytes
1.5.1 Steuerbyte 1 (CCON)
Steuerbyte 1 (CCON)
Bit DE EN Beschreibung
B0ENABLE
Antriebfreigeben
Drive Enable = 1: Antrieb (Regler) freigeben= 0: Antrieb (Regler) gesperrt
B1STOP
Stopp Stop = 1: Betrieb freigegeben.Ein evtl. anstehender Fehler wird gelöscht.
= 0: STOP aktiv (Notrampe + Fahrauftrag verwerfen).Der Antrieb stoppt mit maximaler Bremsrampe,der Fahrauftrag wird zurückgesetzt.
B2BRAKE
Bremse lösen Open Brake = 1: Bremse lösen= 0: Bremse aktivierenHinweis: Bremse lösen ist nur möglich, wenn der Reglergesperrt ist. Sobald der Regler freigegeben ist, hat erHoheit über die Steuerung der Bremse.
B3RESET
Störungquittieren
Reset Fault Mit einer steigenden Flanke wird eine anliegende Stö-rung quittiert und der Störwert gelöscht.
B4–
– – reserviert, muss auf 0 stehen.
B5LOCK
Software Zu-griff blockieren
SoftwareAccess Locked
Steuert den Zugriff auf die lokale (integrierte) Diagno-se-Schnittstelle des Controllers.= 1: Die Software darf den Controller nur beobachten,
die Gerätesteuerung (HMI control) kann von derSoftware nicht übernommen werden.
= 0: Die Software kann die Gerätesteuerung überneh-men (um Parameter zu ändern oder Eingänge zusteuern).
B6OPM1
FHPP-Betriebsarten-wahl
Select Operat-ingMode
Bit 7 6 Betriebsart0 0 Satzselektion0 1 Direktauftrag1 0 reserviert1 1 reserviert
B7OPM2
CCON steuert Zustände in allen FHPP-Betriebsarten. WeitereInformationen siehe Beschreibung der Antriebsfunktionen,Kapitel 3.
1. E/A-Daten und Ablaufsteuerung
1-13Festo P.BE-CMM-FHPP-SW-DE de 1011b
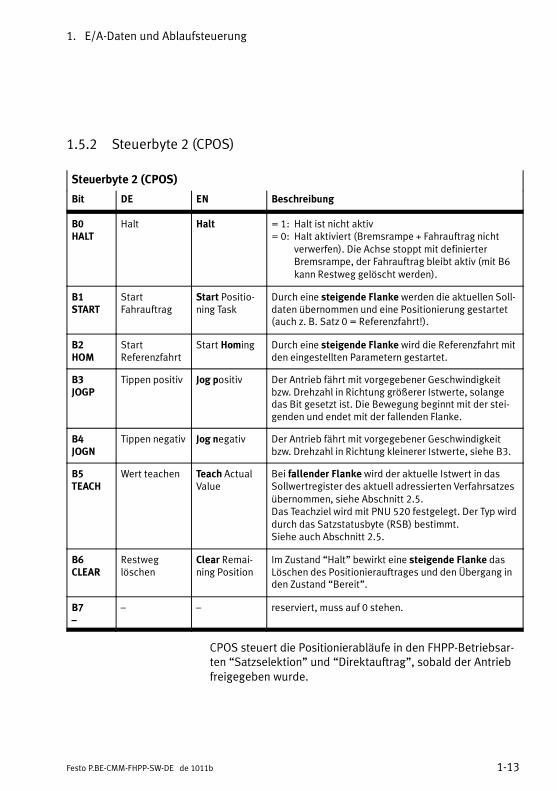
1.5.2 Steuerbyte 2 (CPOS)
Steuerbyte 2 (CPOS)
Bit DE EN Beschreibung
B0HALT
Halt Halt = 1: Halt ist nicht aktiv= 0: Halt aktiviert (Bremsrampe + Fahrauftrag nicht
verwerfen). Die Achse stoppt mit definierterBremsrampe, der Fahrauftrag bleibt aktiv (mit B6kann Restweg gelöscht werden).
B1START
StartFahrauftrag
Start Positio-ning Task
Durch eine steigende Flanke werden die aktuellen Soll-daten übernommen und eine Positionierung gestartet(auch z. B. Satz 0 = Referenzfahrt!).
B2HOM
StartReferenzfahrt
Start Homing Durch eine steigende Flanke wird die Referenzfahrt mitden eingestellten Parametern gestartet.
B3JOGP
Tippen positiv Jog positiv Der Antrieb fährt mit vorgegebener Geschwindigkeitbzw. Drehzahl in Richtung größerer Istwerte, solangedas Bit gesetzt ist. Die Bewegung beginnt mit der stei-genden und endet mit der fallenden Flanke.
B4JOGN
Tippen negativ Jog negativ Der Antrieb fährt mit vorgegebener Geschwindigkeitbzw. Drehzahl in Richtung kleinerer Istwerte, siehe B3.
B5TEACH
Wert teachen Teach ActualValue
Bei fallender Flanke wird der aktuelle Istwert in dasSollwertregister des aktuell adressierten Verfahrsatzesübernommen, siehe Abschnitt 2.5.Das Teachziel wird mit PNU 520 festgelegt. Der Typ wirddurch das Satzstatusbyte (RSB) bestimmt.Siehe auch Abschnitt 2.5.
B6CLEAR
Restweglöschen
Clear Remai-ning Position
Im Zustand “Halt” bewirkt eine steigende Flanke dasLöschen des Positionierauftrages und den Übergang inden Zustand “Bereit”.
B7–
– – reserviert, muss auf 0 stehen.
CPOS steuert die Positionierabläufe in den FHPP-Betriebsar-ten “Satzselektion” und “Direktauftrag”, sobald der Antriebfreigegeben wurde.
1. E/A-Daten und Ablaufsteuerung
1-14 Festo P.BE-CMM-FHPP-SW-DE de 1011b
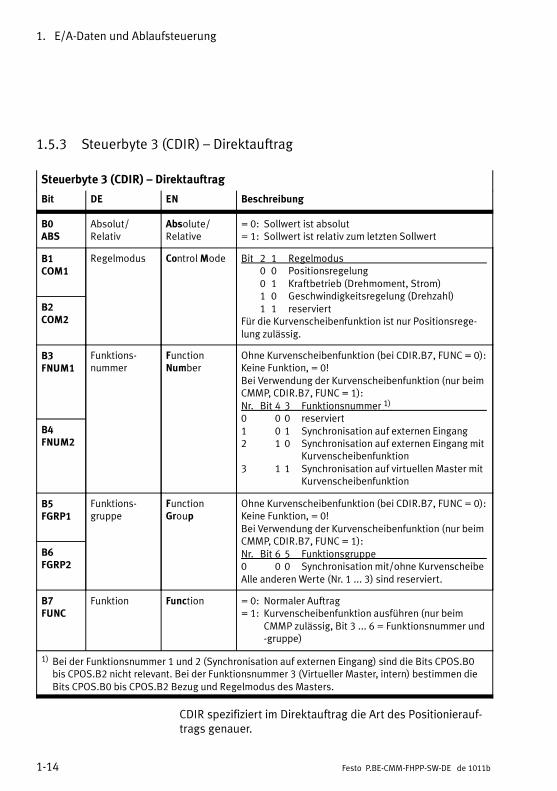
1.5.3 Steuerbyte 3 (CDIR) – Direktauftrag
Steuerbyte 3 (CDIR) – Direktauftrag
Bit DE EN Beschreibung
B0ABS
Absolut/Relativ
Absolute/Relative
= 0: Sollwert ist absolut= 1: Sollwert ist relativ zum letzten Sollwert
B1COM1
Regelmodus ControlMode Bit 2 1 Regelmodus0 0 Positionsregelung0 1 Kraftbetrieb (Drehmoment, Strom)1 0 Geschwindigkeitsregelung (Drehzahl)1 1 reserviert
Für die Kurvenscheibenfunktion ist nur Positionsrege-lung zulässig.
B2COM2
B3FNUM1
Funktions-nummer
FunctionNumber
Ohne Kurvenscheibenfunktion (bei CDIR.B7, FUNC = 0):Keine Funktion, = 0!Bei Verwendung der Kurvenscheibenfunktion (nur beimCMMP, CDIR.B7, FUNC = 1):Nr. Bit 4 3 Funktionsnummer 1)
0 0 0 reserviert1 0 1 Synchronisation auf externen Eingang2 1 0 Synchronisation auf externen Eingang mit
Kurvenscheibenfunktion3 1 1 Synchronisation auf virtuellen Master mit
Kurvenscheibenfunktion
B4FNUM2
B5FGRP1
Funktions-gruppe
FunctionGroup
Ohne Kurvenscheibenfunktion (bei CDIR.B7, FUNC = 0):Keine Funktion, = 0!Bei Verwendung der Kurvenscheibenfunktion (nur beimCMMP, CDIR.B7, FUNC = 1):Nr. Bit 6 5 Funktionsgruppe0 0 0 Synchronisation mit/ohne KurvenscheibeAlle anderenWerte (Nr. 1 ... 3) sind reserviert.
B6FGRP2
B7FUNC
Funktion Function = 0: Normaler Auftrag= 1: Kurvenscheibenfunktion ausführen (nur beim
CMMP zulässig, Bit 3 ... 6 = Funktionsnummer und-gruppe)
1) Bei der Funktionsnummer 1 und 2 (Synchronisation auf externen Eingang) sind die Bits CPOS.B0bis CPOS.B2 nicht relevant. Bei der Funktionsnummer 3 (Virtueller Master, intern) bestimmen dieBits CPOS.B0 bis CPOS.B2 Bezug und Regelmodus des Masters.
CDIR spezifiziert im Direktauftrag die Art des Positionierauf-trags genauer.
1. E/A-Daten und Ablaufsteuerung
1-15Festo P.BE-CMM-FHPP-SW-DE de 1011b
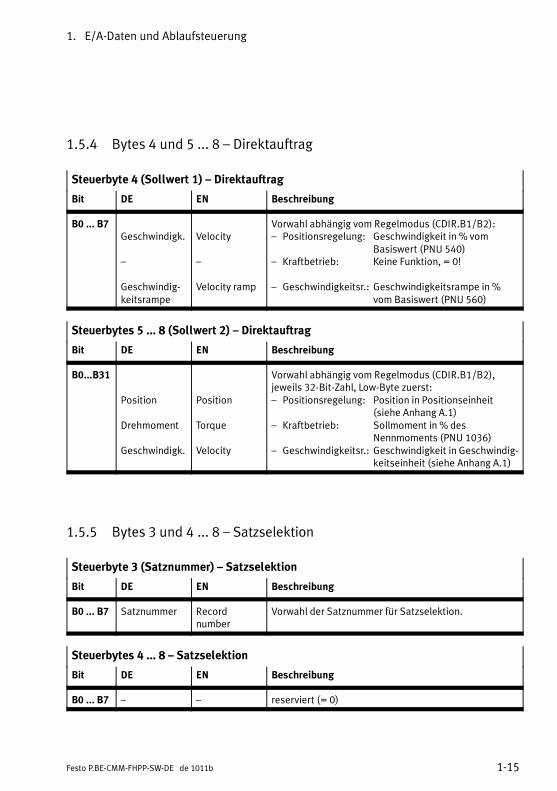
1.5.4 Bytes 4 und 5 ... 8 – Direktauftrag
Steuerbyte 4 (Sollwert 1) – Direktauftrag
Bit DE EN Beschreibung
B0 ... B7Geschwindigk.
–
Geschwindig-keitsrampe
Velocity
–
Velocity ramp
Vorwahl abhängig vom Regelmodus (CDIR.B1/B2):– Positionsregelung: Geschwindigkeit in % vom
Basiswert (PNU 540)– Kraftbetrieb: Keine Funktion, = 0!
– Geschwindigkeitsr.: Geschwindigkeitsrampe in %vom Basiswert (PNU 560)
Steuerbytes 5 ... 8 (Sollwert 2) – Direktauftrag
Bit DE EN Beschreibung
B0...B31
Position
Drehmoment
Geschwindigk.
Position
Torque
Velocity
Vorwahl abhängig vom Regelmodus (CDIR.B1/B2),jeweils 32-Bit-Zahl, Low-Byte zuerst:– Positionsregelung: Position in Positionseinheit
(siehe Anhang A.1)– Kraftbetrieb: Sollmoment in % des
Nennmoments (PNU 1036)– Geschwindigkeitsr.: Geschwindigkeit in Geschwindig-
keitseinheit (siehe Anhang A.1)
1.5.5 Bytes 3 und 4 ... 8 – Satzselektion
Steuerbyte 3 (Satznummer) – Satzselektion
Bit DE EN Beschreibung
B0 ... B7 Satznummer Recordnumber
Vorwahl der Satznummer für Satzselektion.
Steuerbytes 4 ... 8 – Satzselektion
Bit DE EN Beschreibung
B0 ... B7 – – reserviert (= 0)
1. E/A-Daten und Ablaufsteuerung
1-16 Festo P.BE-CMM-FHPP-SW-DE de 1011b
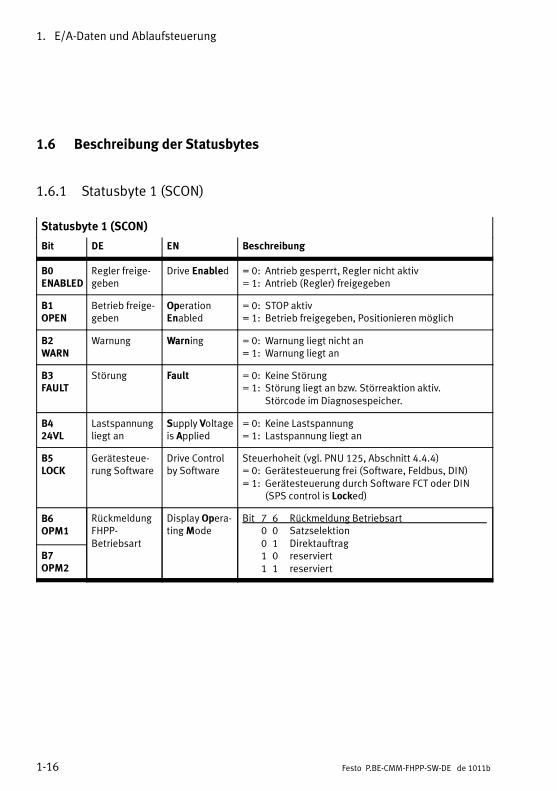
1.6 Beschreibung der Statusbytes
1.6.1 Statusbyte 1 (SCON)
Statusbyte 1 (SCON)
Bit DE EN Beschreibung
B0ENABLED
Regler freige-geben
Drive Enabled = 0: Antrieb gesperrt, Regler nicht aktiv= 1: Antrieb (Regler) freigegeben
B1OPEN
Betrieb freige-geben
OperationEnabled
= 0: STOP aktiv= 1: Betrieb freigegeben, Positionieren möglich
B2WARN
Warnung Warning = 0: Warnung liegt nicht an= 1: Warnung liegt an
B3FAULT
Störung Fault = 0: Keine Störung= 1: Störung liegt an bzw. Störreaktion aktiv.
Störcode im Diagnosespeicher.
B424VL
Lastspannungliegt an
Supply Voltageis Applied
= 0: Keine Lastspannung= 1: Lastspannung liegt an
B5LOCK
Gerätesteue-rung Software
Drive Controlby Software
Steuerhoheit (vgl. PNU 125, Abschnitt 4.4.4)= 0: Gerätesteuerung frei (Software, Feldbus, DIN)= 1: Gerätesteuerung durch Software FCT oder DIN
(SPS control is Locked)
B6OPM1
RückmeldungFHPP-Betriebsart
DisplayOpera-tingMode
Bit 7 6 Rückmeldung Betriebsart0 0 Satzselektion0 1 Direktauftrag1 0 reserviert1 1 reserviert
B7OPM2
1. E/A-Daten und Ablaufsteuerung
1-17Festo P.BE-CMM-FHPP-SW-DE de 1011b
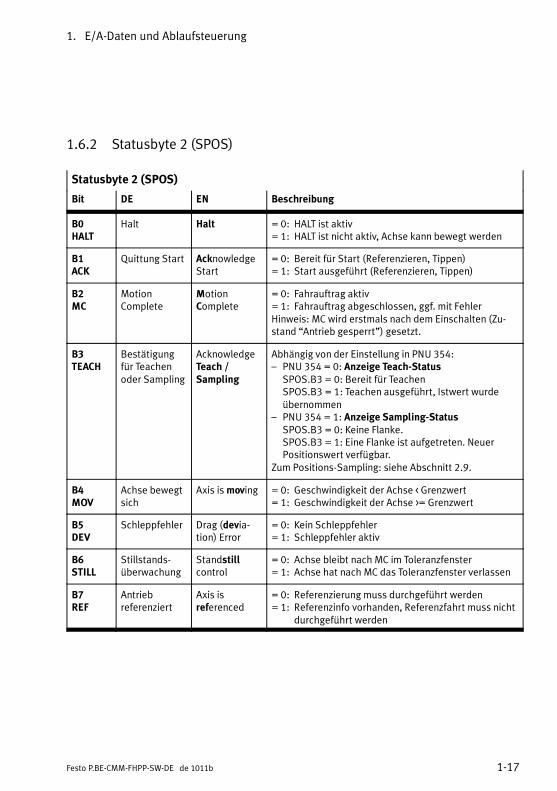
1.6.2 Statusbyte 2 (SPOS)
Statusbyte 2 (SPOS)
Bit DE EN Beschreibung
B0HALT
Halt Halt = 0: HALT ist aktiv= 1: HALT ist nicht aktiv, Achse kann bewegt werden
B1ACK
Quittung Start AcknowledgeStart
= 0: Bereit für Start (Referenzieren, Tippen)= 1: Start ausgeführt (Referenzieren, Tippen)
B2MC
MotionComplete
MotionComplete
= 0: Fahrauftrag aktiv= 1: Fahrauftrag abgeschlossen, ggf. mit FehlerHinweis: MC wird erstmals nach dem Einschalten (Zu-stand “Antrieb gesperrt”) gesetzt.
B3TEACH
Bestätigungfür Teachenoder Sampling
AcknowledgeTeach /Sampling
Abhängig von der Einstellung in PNU 354:– PNU 354 = 0: Anzeige Teach-Status
SPOS.B3 = 0: Bereit für TeachenSPOS.B3 = 1: Teachen ausgeführt, Istwert wurdeübernommen
– PNU 354 = 1: Anzeige Sampling-StatusSPOS.B3 = 0: Keine Flanke.SPOS.B3 = 1: Eine Flanke ist aufgetreten. NeuerPositionswert verfügbar.
Zum Positions-Sampling: siehe Abschnitt 2.9.
B4MOV
Achse bewegtsich
Axis ismoving = 0: Geschwindigkeit der Achse < Grenzwert= 1: Geschwindigkeit der Achse >= Grenzwert
B5DEV
Schleppfehler Drag (devia-tion) Error
= 0: Kein Schleppfehler= 1: Schleppfehler aktiv
B6STILL
Stillstands-überwachung
Standstillcontrol
= 0: Achse bleibt nach MC im Toleranzfenster= 1: Achse hat nach MC das Toleranzfenster verlassen
B7REF
Antriebreferenziert
Axis isreferenced
= 0: Referenzierung muss durchgeführt werden= 1: Referenzinfo vorhanden, Referenzfahrt muss nicht
durchgeführt werden
1. E/A-Daten und Ablaufsteuerung
1-18 Festo P.BE-CMM-FHPP-SW-DE de 1011b
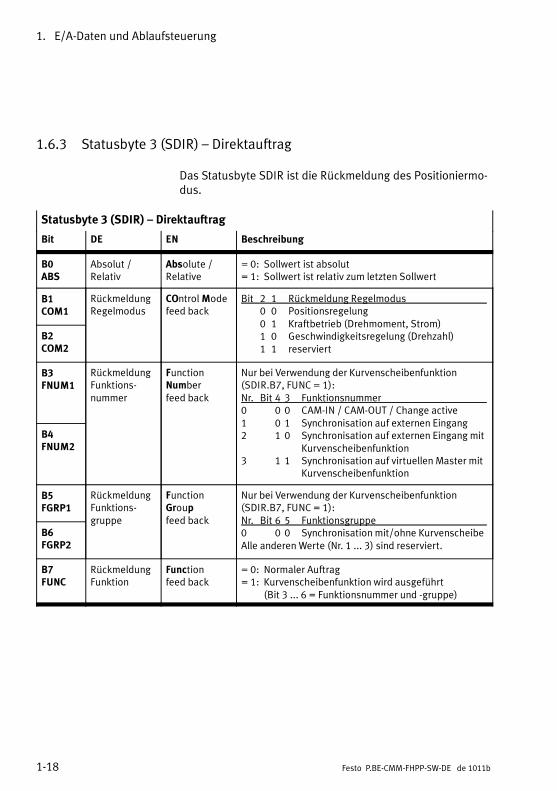
1.6.3 Statusbyte 3 (SDIR) – Direktauftrag
Das Statusbyte SDIR ist die Rückmeldung des Positioniermo-dus.
Statusbyte 3 (SDIR) – Direktauftrag
Bit DE EN Beschreibung
B0ABS
Absolut /Relativ
Absolute /Relative
= 0: Sollwert ist absolut= 1: Sollwert ist relativ zum letzten Sollwert
B1COM1
RückmeldungRegelmodus
COntrolModefeed back
Bit 2 1 Rückmeldung Regelmodus0 0 Positionsregelung0 1 Kraftbetrieb (Drehmoment, Strom)1 0 Geschwindigkeitsregelung (Drehzahl)1 1 reserviert
B2COM2
B3FNUM1
RückmeldungFunktions-nummer
FunctionNumberfeed back
Nur bei Verwendung der Kurvenscheibenfunktion(SDIR.B7, FUNC = 1):Nr. Bit 4 3 Funktionsnummer0 0 0 CAM-IN / CAM-OUT / Change active1 0 1 Synchronisation auf externen Eingang2 1 0 Synchronisation auf externen Eingang mit
Kurvenscheibenfunktion3 1 1 Synchronisation auf virtuellen Master mit
Kurvenscheibenfunktion
B4FNUM2
B5FGRP1
RückmeldungFunktions-gruppe
FunctionGroupfeed back
Nur bei Verwendung der Kurvenscheibenfunktion(SDIR.B7, FUNC = 1):Nr. Bit 6 5 Funktionsgruppe0 0 0 Synchronisation mit/ohne KurvenscheibeAlle anderenWerte (Nr. 1 ... 3) sind reserviert.
B6FGRP2
B7FUNC
RückmeldungFunktion
Functionfeed back
= 0: Normaler Auftrag= 1: Kurvenscheibenfunktion wird ausgeführt
(Bit 3 ... 6 = Funktionsnummer und -gruppe)
1. E/A-Daten und Ablaufsteuerung
1-19Festo P.BE-CMM-FHPP-SW-DE de 1011b
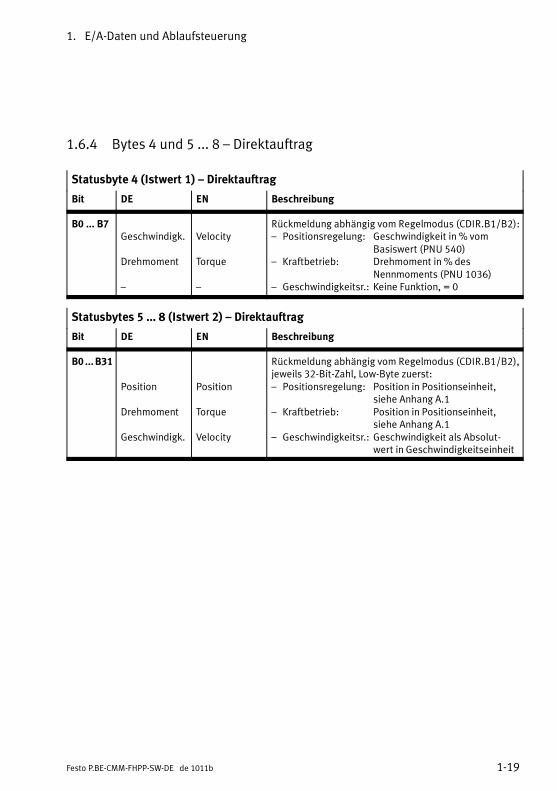
1.6.4 Bytes 4 und 5 ... 8 – Direktauftrag
Statusbyte 4 (Istwert 1) – Direktauftrag
Bit DE EN Beschreibung
B0 ... B7Geschwindigk.
Drehmoment
–
Velocity
Torque
–
Rückmeldung abhängig vom Regelmodus (CDIR.B1/B2):– Positionsregelung: Geschwindigkeit in % vom
Basiswert (PNU 540)– Kraftbetrieb: Drehmoment in % des
Nennmoments (PNU 1036)– Geschwindigkeitsr.: Keine Funktion, = 0
Statusbytes 5 ... 8 (Istwert 2) – Direktauftrag
Bit DE EN Beschreibung
B0 ...B31
Position
Drehmoment
Geschwindigk.
Position
Torque
Velocity
Rückmeldung abhängig vom Regelmodus (CDIR.B1/B2),jeweils 32-Bit-Zahl, Low-Byte zuerst:– Positionsregelung: Position in Positionseinheit,
siehe Anhang A.1– Kraftbetrieb: Position in Positionseinheit,
siehe Anhang A.1– Geschwindigkeitsr.: Geschwindigkeit als Absolut-
wert in Geschwindigkeitseinheit
1. E/A-Daten und Ablaufsteuerung
1-20 Festo P.BE-CMM-FHPP-SW-DE de 1011b
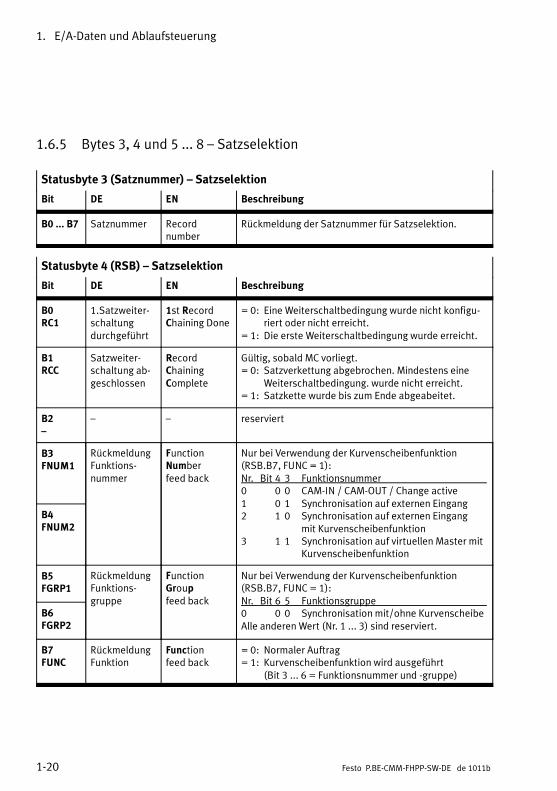
1.6.5 Bytes 3, 4 und 5 ... 8 – Satzselektion
Statusbyte 3 (Satznummer) – Satzselektion
Bit DE EN Beschreibung
B0 ... B7 Satznummer Recordnumber
Rückmeldung der Satznummer für Satzselektion.
Statusbyte 4 (RSB) – Satzselektion
Bit DE EN Beschreibung
B0RC1
1.Satzweiter-schaltungdurchgeführt
1st RecordChaining Done
= 0: Eine Weiterschaltbedingung wurde nicht konfigu-riert oder nicht erreicht.
= 1: Die erste Weiterschaltbedingung wurde erreicht.
B1RCC
Satzweiter-schaltung ab-geschlossen
RecordChainingComplete
Gültig, sobald MC vorliegt.= 0: Satzverkettung abgebrochen. Mindestens eine
Weiterschaltbedingung. wurde nicht erreicht.= 1: Satzkette wurde bis zum Ende abgeabeitet.
B2–
– – reserviert
B3FNUM1
RückmeldungFunktions-nummer
FunctionNumberfeed back
Nur bei Verwendung der Kurvenscheibenfunktion(RSB.B7, FUNC = 1):Nr. Bit 4 3 Funktionsnummer0 0 0 CAM-IN / CAM-OUT / Change active1 0 1 Synchronisation auf externen Eingang2 1 0 Synchronisation auf externen Eingang
mit Kurvenscheibenfunktion3 1 1 Synchronisation auf virtuellen Master mit
Kurvenscheibenfunktion
B4FNUM2
B5FGRP1
RückmeldungFunktions-gruppe
FunctionGroupfeed back
Nur bei Verwendung der Kurvenscheibenfunktion(RSB.B7, FUNC = 1):Nr. Bit 6 5 Funktionsgruppe0 0 0 Synchronisation mit/ohne KurvenscheibeAlle anderenWert (Nr. 1 ... 3) sind reserviert.
B6FGRP2
B7FUNC
RückmeldungFunktion
Functionfeed back
= 0: Normaler Auftrag= 1: Kurvenscheibenfunktion wird ausgeführt
(Bit 3 ... 6 = Funktionsnummer und -gruppe)
1. E/A-Daten und Ablaufsteuerung
1-21Festo P.BE-CMM-FHPP-SW-DE de 1011b
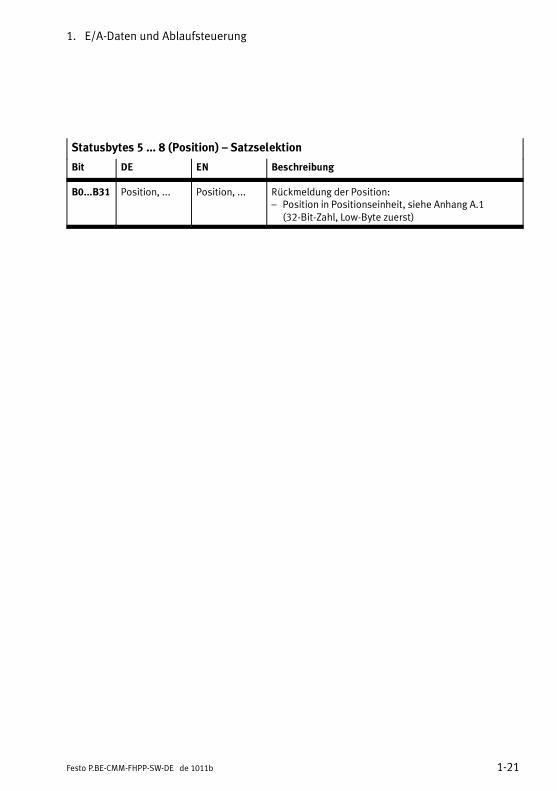
Statusbytes 5 ... 8 (Position) – Satzselektion
Bit DE EN Beschreibung
B0...B31 Position, ... Position, ... Rückmeldung der Position:– Position in Positionseinheit, siehe Anhang A.1
(32-Bit-Zahl, Low-Byte zuerst)
1. E/A-Daten und Ablaufsteuerung
1-22 Festo P.BE-CMM-FHPP-SW-DE de 1011b
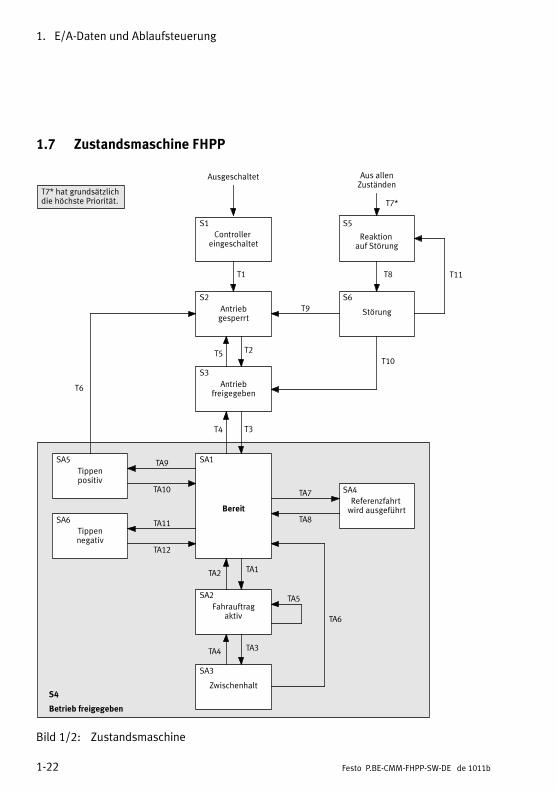
1.7 Zustandsmaschine FHPP
T7* hat grundsätzlichdie höchste Priorität.
Ausgeschaltet
S1
Controllereingeschaltet
S3
Antriebfreigegeben
S2
Antriebgesperrt
SA1
Bereit
SA5
Tippenpositiv
SA6
Tippennegativ
SA4
Referenzfahrtwird ausgeführt
SA2
Fahrauftragaktiv
SA3
Zwischenhalt
S5
Reaktionauf Störung
S6
Störung
Aus allenZuständen
S4
Betrieb freigegeben
T6
TA11
TA12
TA9
TA10
TA3
TA6
TA4
TA5
TA7
TA8
TA1TA2
T2T5
T3T4
T1
T7*
T8
T10
T9
S5
T11
Bild 1/2: Zustandsmaschine
1. E/A-Daten und Ablaufsteuerung
1-23Festo P.BE-CMM-FHPP-SW-DE de 1011b
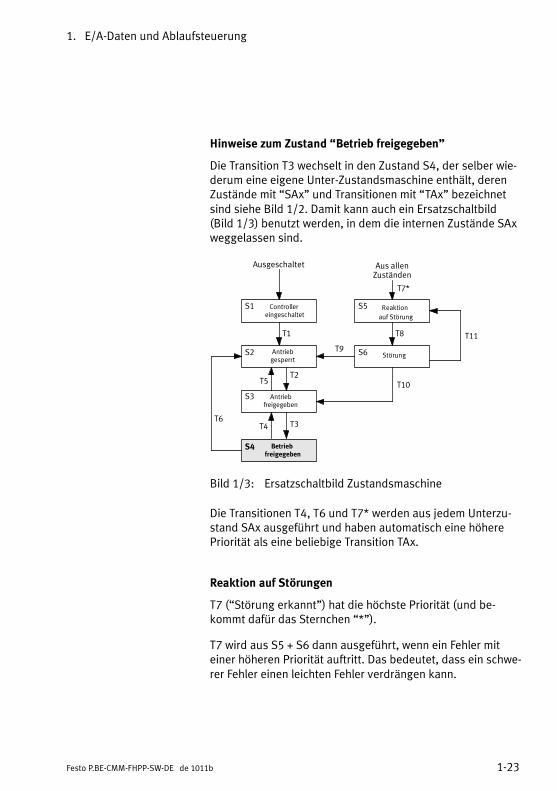
Hinweise zum Zustand “Betrieb freigegeben”
Die Transition T3 wechselt in den Zustand S4, der selber wie-derum eine eigene Unter-Zustandsmaschine enthält, derenZustände mit “SAx” und Transitionen mit “TAx” bezeichnetsind siehe Bild 1/2. Damit kann auch ein Ersatzschaltbild(Bild 1/3) benutzt werden, in dem die internen Zustände SAxweggelassen sind.
Ausgeschaltet
S1 Controllereingeschaltet
S3 Antriebfreigegeben
S2 Antriebgesperrt
S5 Reaktion
auf Störung
S6 Störung
Aus allenZuständen
Betriebfreigegeben
T6
T2T5
T3T4
T1
T7*
T8
T10
T9
S5
T11
S4
Bild 1/3: Ersatzschaltbild Zustandsmaschine
Die Transitionen T4, T6 und T7* werden aus jedem Unterzu-stand SAx ausgeführt und haben automatisch eine höherePriorität als eine beliebige Transition TAx.
Reaktion auf Störungen
T7 (“Störung erkannt”) hat die höchste Priorität (und be-kommt dafür das Sternchen “*”).
T7 wird aus S5 + S6 dann ausgeführt, wenn ein Fehler miteiner höheren Priorität auftritt. Das bedeutet, dass ein schwe-rer Fehler einen leichten Fehler verdrängen kann.
1. E/A-Daten und Ablaufsteuerung
1-24 Festo P.BE-CMM-FHPP-SW-DE de 1011b
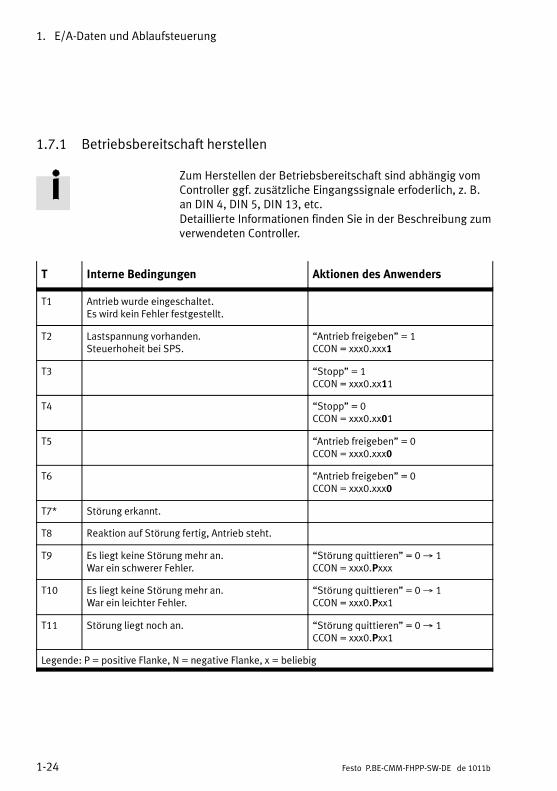
1.7.1 Betriebsbereitschaft herstellen
Zum Herstellen der Betriebsbereitschaft sind abhängig vomController ggf. zusätzliche Eingangssignale erfoderlich, z. B.an DIN 4, DIN 5, DIN 13, etc.Detaillierte Informationen finden Sie in der Beschreibung zumverwendeten Controller.
T Interne Bedingungen Aktionen des Anwenders
T1 Antrieb wurde eingeschaltet.Es wird kein Fehler festgestellt.
T2 Lastspannung vorhanden.Steuerhoheit bei SPS.
“Antrieb freigeben” = 1CCON = xxx0.xxx1
T3 “Stopp” = 1CCON = xxx0.xx11
T4 “Stopp” = 0CCON = xxx0.xx01
T5 “Antrieb freigeben” = 0CCON = xxx0.xxx0
T6 “Antrieb freigeben” = 0CCON = xxx0.xxx0
T7* Störung erkannt.
T8 Reaktion auf Störung fertig, Antrieb steht.
T9 Es liegt keine Störung mehr an.War ein schwerer Fehler.
“Störung quittieren” = 0→ 1CCON = xxx0.Pxxx
T10 Es liegt keine Störung mehr an.War ein leichter Fehler.
“Störung quittieren” = 0→ 1CCON = xxx0.Pxx1
T11 Störung liegt noch an. “Störung quittieren” = 0→ 1CCON = xxx0.Pxx1
Legende: P = positive Flanke, N = negative Flanke, x = beliebig
1. E/A-Daten und Ablaufsteuerung
1-25Festo P.BE-CMM-FHPP-SW-DE de 1011b
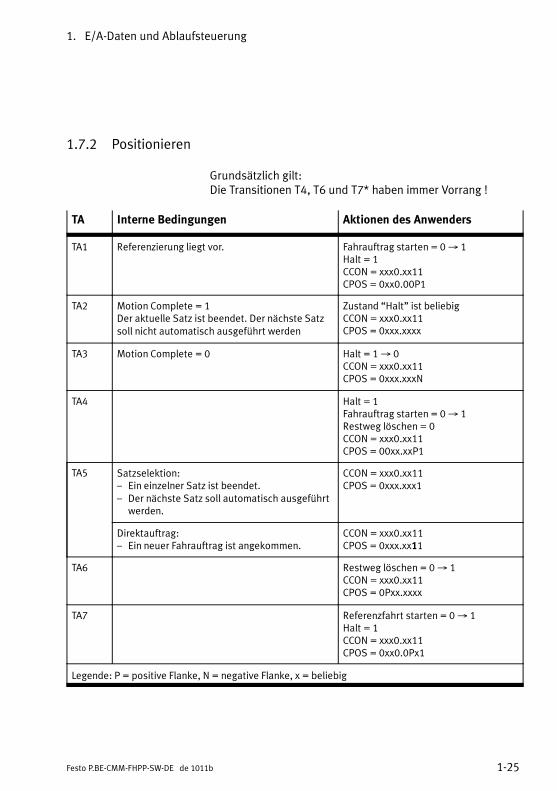
1.7.2 Positionieren
Grundsätzlich gilt:Die Transitionen T4, T6 und T7* haben immer Vorrang !
TA Interne Bedingungen Aktionen des Anwenders
TA1 Referenzierung liegt vor. Fahrauftrag starten = 0→ 1Halt = 1CCON = xxx0.xx11CPOS = 0xx0.00P1
TA2 Motion Complete = 1Der aktuelle Satz ist beendet. Der nächste Satzsoll nicht automatisch ausgeführt werden
Zustand “Halt” ist beliebigCCON = xxx0.xx11CPOS = 0xxx.xxxx
TA3 Motion Complete = 0 Halt = 1→ 0CCON = xxx0.xx11CPOS = 0xxx.xxxN
TA4 Halt = 1Fahrauftrag starten = 0→ 1Restweg löschen = 0CCON = xxx0.xx11CPOS = 00xx.xxP1
TA5 Satzselektion:– Ein einzelner Satz ist beendet.– Der nächste Satz soll automatisch ausgeführt
werden.
CCON = xxx0.xx11CPOS = 0xxx.xxx1
Direktauftrag:– Ein neuer Fahrauftrag ist angekommen.
CCON = xxx0.xx11CPOS = 0xxx.xx11
TA6 Restweg löschen = 0→ 1CCON = xxx0.xx11CPOS = 0Pxx.xxxx
TA7 Referenzfahrt starten = 0→ 1Halt = 1CCON = xxx0.xx11CPOS = 0xx0.0Px1
Legende: P = positive Flanke, N = negative Flanke, x = beliebig
1. E/A-Daten und Ablaufsteuerung
1-26 Festo P.BE-CMM-FHPP-SW-DE de 1011b
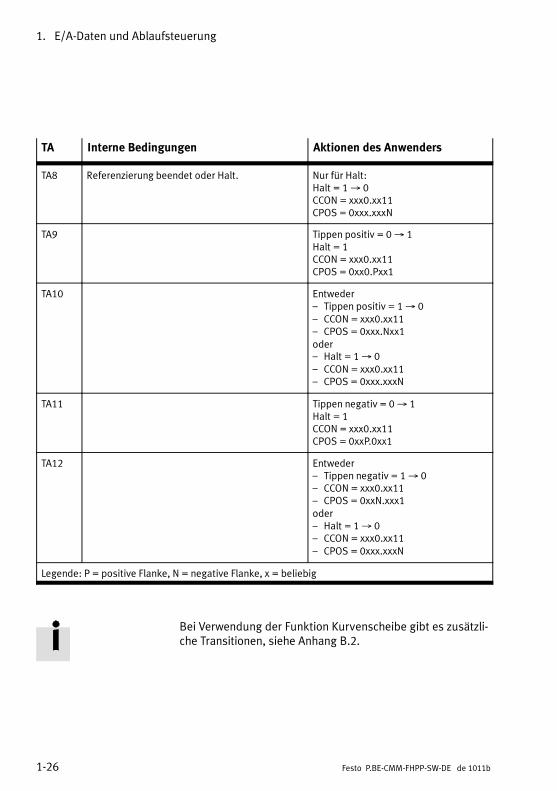
TA Aktionen des AnwendersInterne Bedingungen
TA8 Referenzierung beendet oder Halt. Nur für Halt:Halt = 1→ 0CCON = xxx0.xx11CPOS = 0xxx.xxxN
TA9 Tippen positiv = 0→ 1Halt = 1CCON = xxx0.xx11CPOS = 0xx0.Pxx1
TA10 Entweder– Tippen positiv = 1→ 0– CCON = xxx0.xx11– CPOS = 0xxx.Nxx1oder– Halt = 1→ 0– CCON = xxx0.xx11– CPOS = 0xxx.xxxN
TA11 Tippen negativ = 0→ 1Halt = 1CCON = xxx0.xx11CPOS = 0xxP.0xx1
TA12 Entweder– Tippen negativ = 1→ 0– CCON = xxx0.xx11– CPOS = 0xxN.xxx1oder– Halt = 1→ 0– CCON = xxx0.xx11– CPOS = 0xxx.xxxN
Legende: P = positive Flanke, N = negative Flanke, x = beliebig
Bei Verwendung der Funktion Kurvenscheibe gibt es zusätzli-che Transitionen, siehe Anhang B.2.
1. E/A-Daten und Ablaufsteuerung
1-27Festo P.BE-CMM-FHPP-SW-DE de 1011b
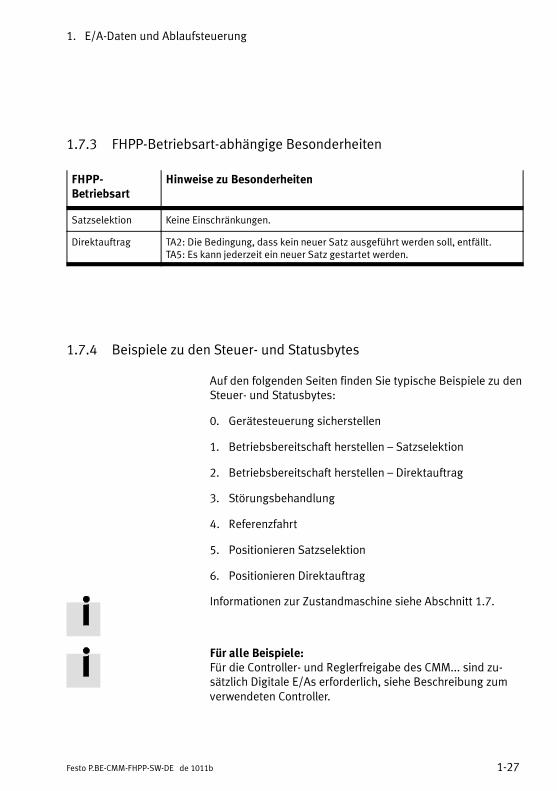
1.7.3 FHPP-Betriebsart-abhängige Besonderheiten
FHPP-Betriebsart
Hinweise zu Besonderheiten
Satzselektion Keine Einschränkungen.
Direktauftrag TA2: Die Bedingung, dass kein neuer Satz ausgeführt werden soll, entfällt.TA5: Es kann jederzeit ein neuer Satz gestartet werden.
1.7.4 Beispiele zu den Steuer- und Statusbytes
Auf den folgenden Seiten finden Sie typische Beispiele zu denSteuer- und Statusbytes:
0. Gerätesteuerung sicherstellen
1. Betriebsbereitschaft herstellen – Satzselektion
2. Betriebsbereitschaft herstellen – Direktauftrag
3. Störungsbehandlung
4. Referenzfahrt
5. Positionieren Satzselektion
6. Positionieren Direktauftrag
Informationen zur Zustandmaschine siehe Abschnitt 1.7.
Für alle Beispiele:Für die Controller- und Reglerfreigabe des CMM... sind zu-sätzlich Digitale E/As erforderlich, siehe Beschreibung zumverwendeten Controller.
1. E/A-Daten und Ablaufsteuerung
1-28 Festo P.BE-CMM-FHPP-SW-DE de 1011b
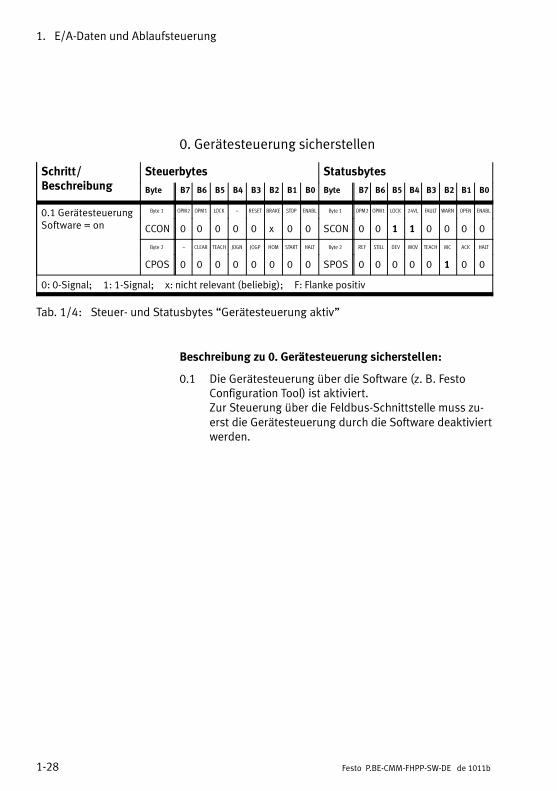
0. Gerätesteuerung sicherstellen
Schritt/Beschreibung
Steuerbytes Statusbytes
Byte B7 B6 B5 B4 B3 B2 B1 B0 Byte B7 B6 B5 B4 B3 B2 B1 B0
0.1 GerätesteuerungSoftware = on
Byte 1 OPM2 OPM1 LOCK – RESET BRAKE STOP ENABL Byte 1 OPM2 OPM1 LOCK 24VL FAULT WARN OPEN ENABL
CCON 0 0 0 0 0 x 0 0 SCON 0 0 1 1 0 0 0 0
Byte 2 – CLEAR TEACH JOGN JOGP HOM START HALT Byte 2 REF STILL DEV MOV TEACH MC ACK HALT
CPOS 0 0 0 0 0 0 0 0 SPOS 0 0 0 0 0 1 0 0
0: 0-Signal; 1: 1-Signal; x: nicht relevant (beliebig); F: Flanke positiv
Tab. 1/4: Steuer- und Statusbytes “Gerätesteuerung aktiv”
Beschreibung zu 0. Gerätesteuerung sicherstellen:
0.1 Die Gerätesteuerung über die Software (z. B. FestoConfiguration Tool) ist aktiviert.Zur Steuerung über die Feldbus-Schnittstelle muss zu-erst die Gerätesteuerung durch die Software deaktiviertwerden.
1. E/A-Daten und Ablaufsteuerung
1-29Festo P.BE-CMM-FHPP-SW-DE de 1011b
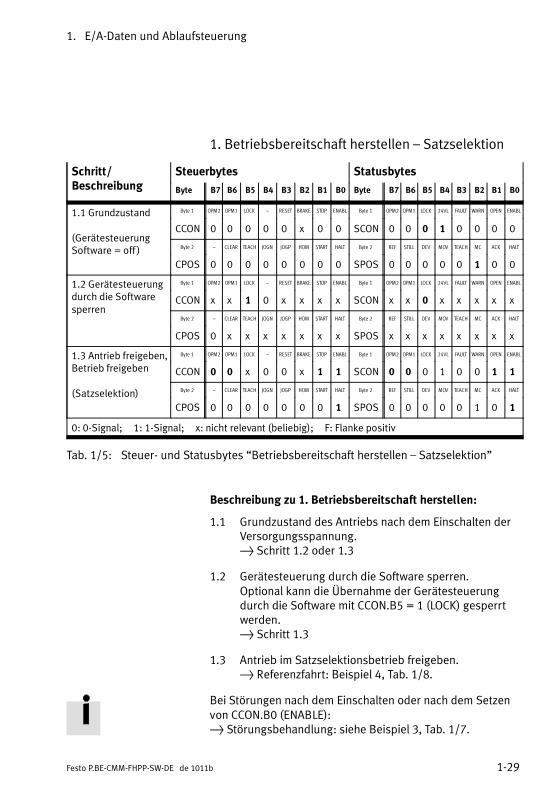
1. Betriebsbereitschaft herstellen – Satzselektion
Schritt/Beschreibung
Steuerbytes Statusbytes
Byte B7 B6 B5 B4 B3 B2 B1 B0 Byte B7 B6 B5 B4 B3 B2 B1 B0
1.1 Grundzustand
(GerätesteuerungSoftware = off )
Byte 1 OPM2 OPM1 LOCK – RESET BRAKE STOP ENABL Byte 1 OPM2 OPM1 LOCK 24VL FAULT WARN OPEN ENABL
CCON 0 0 0 0 0 x 0 0 SCON 0 0 0 1 0 0 0 0
Byte 2 – CLEAR TEACH JOGN JOGP HOM START HALT Byte 2 REF STILL DEV MOV TEACH MC ACK HALT
CPOS 0 0 0 0 0 0 0 0 SPOS 0 0 0 0 0 1 0 0
1.2 Gerätesteuerungdurch die Softwaresperren
Byte 1 OPM2 OPM1 LOCK – RESET BRAKE STOP ENABL Byte 1 OPM2 OPM1 LOCK 24VL FAULT WARN OPEN ENABL
CCON x x 1 0 x x x x SCON x x 0 x x x x x
Byte 2 – CLEAR TEACH JOGN JOGP HOM START HALT Byte 2 REF STILL DEV MOV TEACH MC ACK HALT
CPOS 0 x x x x x x x SPOS x x x x x x x x
1.3 Antrieb freigeben,Betrieb freigeben
(Satzselektion)
Byte 1 OPM2 OPM1 LOCK – RESET BRAKE STOP ENABL Byte 1 OPM2 OPM1 LOCK 24VL FAULT WARN OPEN ENABL
CCON 0 0 x 0 0 x 1 1 SCON 0 0 0 1 0 0 1 1
Byte 2 – CLEAR TEACH JOGN JOGP HOM START HALT Byte 2 REF STILL DEV MOV TEACH MC ACK HALT
CPOS 0 0 0 0 0 0 0 1 SPOS 0 0 0 0 0 1 0 1
0: 0-Signal; 1: 1-Signal; x: nicht relevant (beliebig); F: Flanke positiv
Tab. 1/5: Steuer- und Statusbytes “Betriebsbereitschaft herstellen – Satzselektion”
Beschreibung zu 1. Betriebsbereitschaft herstellen:
1.1 Grundzustand des Antriebs nach dem Einschalten derVersorgungsspannung.} Schritt 1.2 oder 1.3
1.2 Gerätesteuerung durch die Software sperren.Optional kann die Übernahme der Gerätesteuerungdurch die Software mit CCON.B5 = 1 (LOCK) gesperrtwerden.} Schritt 1.3
1.3 Antrieb im Satzselektionsbetrieb freigeben.} Referenzfahrt: Beispiel 4, Tab. 1/8.
Bei Störungen nach dem Einschalten oder nach dem Setzenvon CCON.B0 (ENABLE):} Störungsbehandlung: siehe Beispiel 3, Tab. 1/7.
1. E/A-Daten und Ablaufsteuerung
1-30 Festo P.BE-CMM-FHPP-SW-DE de 1011b
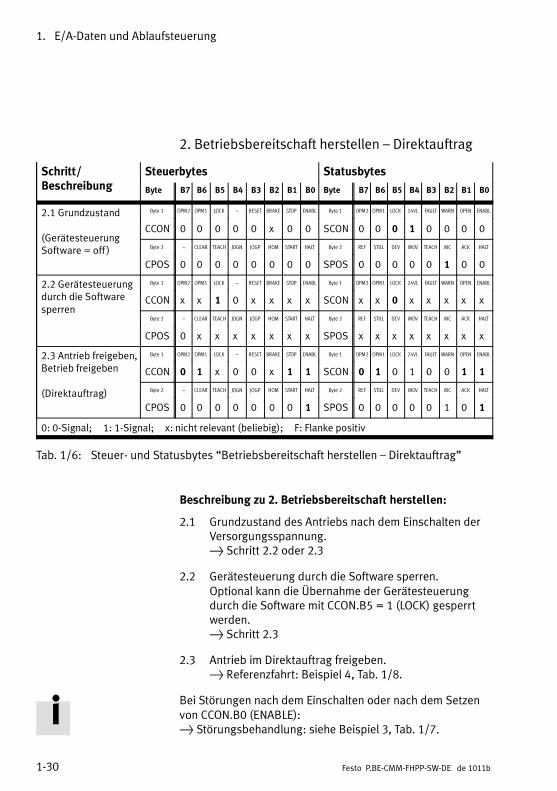
2. Betriebsbereitschaft herstellen – Direktauftrag
Schritt/Beschreibung
Steuerbytes Statusbytes
Byte B7 B6 B5 B4 B3 B2 B1 B0 Byte B7 B6 B5 B4 B3 B2 B1 B0
2.1 Grundzustand
(GerätesteuerungSoftware = off )
Byte 1 OPM2 OPM1 LOCK – RESET BRAKE STOP ENABL Byte 1 OPM2 OPM1 LOCK 24VL FAULT WARN OPEN ENABL
CCON 0 0 0 0 0 x 0 0 SCON 0 0 0 1 0 0 0 0
Byte 2 – CLEAR TEACH JOGN JOGP HOM START HALT Byte 2 REF STILL DEV MOV TEACH MC ACK HALT
CPOS 0 0 0 0 0 0 0 0 SPOS 0 0 0 0 0 1 0 0
2.2 Gerätesteuerungdurch die Softwaresperren
Byte 1 OPM2 OPM1 LOCK – RESET BRAKE STOP ENABL Byte 1 OPM2 OPM1 LOCK 24VL FAULT WARN OPEN ENABL
CCON x x 1 0 x x x x SCON x x 0 x x x x x
Byte 2 – CLEAR TEACH JOGN JOGP HOM START HALT Byte 2 REF STILL DEV MOV TEACH MC ACK HALT
CPOS 0 x x x x x x x SPOS x x x x x x x x
2.3 Antrieb freigeben,Betrieb freigeben
(Direktauftrag)
Byte 1 OPM2 OPM1 LOCK – RESET BRAKE STOP ENABL Byte 1 OPM2 OPM1 LOCK 24VL FAULT WARN OPEN ENABL
CCON 0 1 x 0 0 x 1 1 SCON 0 1 0 1 0 0 1 1
Byte 2 – CLEAR TEACH JOGN JOGP HOM START HALT Byte 2 REF STILL DEV MOV TEACH MC ACK HALT
CPOS 0 0 0 0 0 0 0 1 SPOS 0 0 0 0 0 1 0 1
0: 0-Signal; 1: 1-Signal; x: nicht relevant (beliebig); F: Flanke positiv
Tab. 1/6: Steuer- und Statusbytes “Betriebsbereitschaft herstellen – Direktauftrag”
Beschreibung zu 2. Betriebsbereitschaft herstellen:
2.1 Grundzustand des Antriebs nach dem Einschalten derVersorgungsspannung.} Schritt 2.2 oder 2.3
2.2 Gerätesteuerung durch die Software sperren.Optional kann die Übernahme der Gerätesteuerungdurch die Software mit CCON.B5 = 1 (LOCK) gesperrtwerden.} Schritt 2.3
2.3 Antrieb im Direktauftrag freigeben.} Referenzfahrt: Beispiel 4, Tab. 1/8.
Bei Störungen nach dem Einschalten oder nach dem Setzenvon CCON.B0 (ENABLE):} Störungsbehandlung: siehe Beispiel 3, Tab. 1/7.
1. E/A-Daten und Ablaufsteuerung
1-31Festo P.BE-CMM-FHPP-SW-DE de 1011b
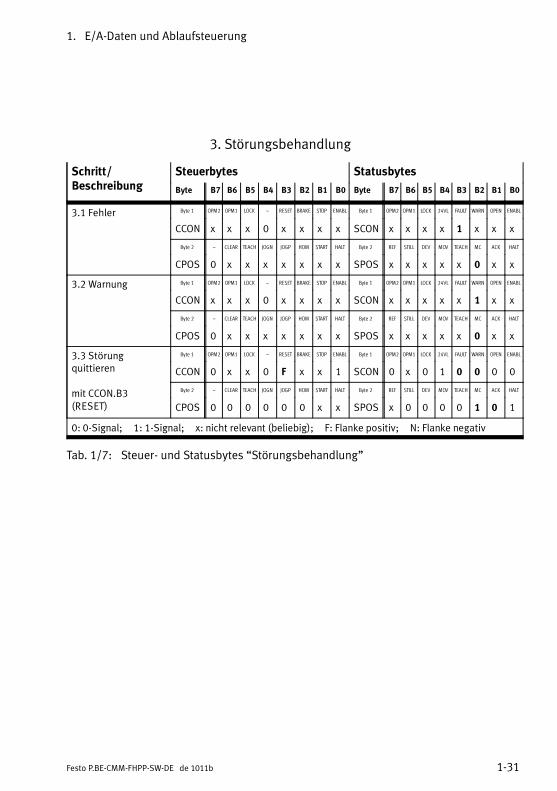
3. Störungsbehandlung
Schritt/Beschreibung
Steuerbytes Statusbytes
Byte B7 B6 B5 B4 B3 B2 B1 B0 Byte B7 B6 B5 B4 B3 B2 B1 B0
3.1 Fehler Byte 1 OPM2 OPM1 LOCK – RESET BRAKE STOP ENABL Byte 1 OPM2 OPM1 LOCK 24VL FAULT WARN OPEN ENABL
CCON x x x 0 x x x x SCON x x x x 1 x x x
Byte 2 – CLEAR TEACH JOGN JOGP HOM START HALT Byte 2 REF STILL DEV MOV TEACH MC ACK HALT
CPOS 0 x x x x x x x SPOS x x x x x 0 x x
3.2 Warnung Byte 1 OPM2 OPM1 LOCK – RESET BRAKE STOP ENABL Byte 1 OPM2 OPM1 LOCK 24VL FAULT WARN OPEN ENABL
CCON x x x 0 x x x x SCON x x x x x 1 x x
Byte 2 – CLEAR TEACH JOGN JOGP HOM START HALT Byte 2 REF STILL DEV MOV TEACH MC ACK HALT
CPOS 0 x x x x x x x SPOS x x x x x 0 x x
3.3 Störungquittieren
mit CCON.B3(RESET)
Byte 1 OPM2 OPM1 LOCK – RESET BRAKE STOP ENABL Byte 1 OPM2 OPM1 LOCK 24VL FAULT WARN OPEN ENABL
CCON 0 x x 0 F x x 1 SCON 0 x 0 1 0 0 0 0
Byte 2 – CLEAR TEACH JOGN JOGP HOM START HALT Byte 2 REF STILL DEV MOV TEACH MC ACK HALT
CPOS 0 0 0 0 0 0 x x SPOS x 0 0 0 0 1 0 1
0: 0-Signal; 1: 1-Signal; x: nicht relevant (beliebig); F: Flanke positiv; N: Flanke negativ
Tab. 1/7: Steuer- und Statusbytes “Störungsbehandlung”
1. E/A-Daten und Ablaufsteuerung
1-32 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Beschreibung zu 3. Störungsbehandlung
3.1 Fehler wird durch SCON.B3 (FAULT) angezeigt.} Verfahren nicht mehr möglich.
3.2 Warnung wird durch SCON.B2 (WARN) angezeigt.} Verfahren weiterhin möglich.
3.3 Störung quittieren mit positiver Flanke an CCON.B3(RESET).} Störungsbit SCON.B3 (FAULT) oder
SCON.B2 (WARN) wird zurückgesetzt} SPOS.B2 (MC) wird gesetzt} Antrieb ist betriebsbereit
Fehler und Warnungen können auch mit DIN5 (Reglerfrei-gabe) quittiert werden, siehe Beschreibung zum verwendetenController.
1. E/A-Daten und Ablaufsteuerung
1-33Festo P.BE-CMM-FHPP-SW-DE de 1011b
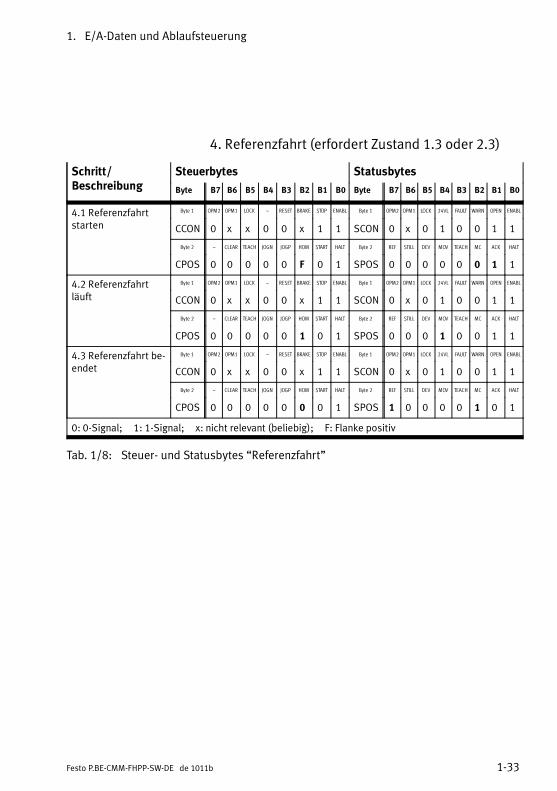
4. Referenzfahrt (erfordert Zustand 1.3 oder 2.3)
Schritt/Beschreibung
Steuerbytes Statusbytes
Byte B7 B6 B5 B4 B3 B2 B1 B0 Byte B7 B6 B5 B4 B3 B2 B1 B0
4.1 Referenzfahrtstarten
Byte 1 OPM2 OPM1 LOCK – RESET BRAKE STOP ENABL Byte 1 OPM2 OPM1 LOCK 24VL FAULT WARN OPEN ENABL
CCON 0 x x 0 0 x 1 1 SCON 0 x 0 1 0 0 1 1
Byte 2 – CLEAR TEACH JOGN JOGP HOM START HALT Byte 2 REF STILL DEV MOV TEACH MC ACK HALT
CPOS 0 0 0 0 0 F 0 1 SPOS 0 0 0 0 0 0 1 1
4.2 Referenzfahrtläuft
Byte 1 OPM2 OPM1 LOCK – RESET BRAKE STOP ENABL Byte 1 OPM2 OPM1 LOCK 24VL FAULT WARN OPEN ENABL
CCON 0 x x 0 0 x 1 1 SCON 0 x 0 1 0 0 1 1
Byte 2 – CLEAR TEACH JOGN JOGP HOM START HALT Byte 2 REF STILL DEV MOV TEACH MC ACK HALT
CPOS 0 0 0 0 0 1 0 1 SPOS 0 0 0 1 0 0 1 1
4.3 Referenzfahrt be-endet
Byte 1 OPM2 OPM1 LOCK – RESET BRAKE STOP ENABL Byte 1 OPM2 OPM1 LOCK 24VL FAULT WARN OPEN ENABL
CCON 0 x x 0 0 x 1 1 SCON 0 x 0 1 0 0 1 1
Byte 2 – CLEAR TEACH JOGN JOGP HOM START HALT Byte 2 REF STILL DEV MOV TEACH MC ACK HALT
CPOS 0 0 0 0 0 0 0 1 SPOS 1 0 0 0 0 1 0 1
0: 0-Signal; 1: 1-Signal; x: nicht relevant (beliebig); F: Flanke positiv
Tab. 1/8: Steuer- und Statusbytes “Referenzfahrt”
1. E/A-Daten und Ablaufsteuerung
1-34 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Beschreibung zu 4. Referenzfahrt:
4.1 Eine positive Flanke an CPOS.B2 (HOM, Referenzfahrtstarten) startet die Referenzfahrt. Der Start wird so-lange mit SPOS.B1 (Quittung Start) bestätigt wieCPOS.B2 (HOM) gesetzt ist.
4.2 Das Bewegen der Achse wird mit SPOS.B4 (MOV, Achsebewegt sich) angezeigt.
4.3 Nach erfolgreicher Referenzfahrt wird SPOS.B2 (MC,Motion Complete) und SPOS.B7 (REF) gesetzt.
Bei Störungen bei der Referenzfahrt:} Störungsbehandlung: siehe Beispiel 3, Tab. 1/7.
1. E/A-Daten und Ablaufsteuerung
1-35Festo P.BE-CMM-FHPP-SW-DE de 1011b
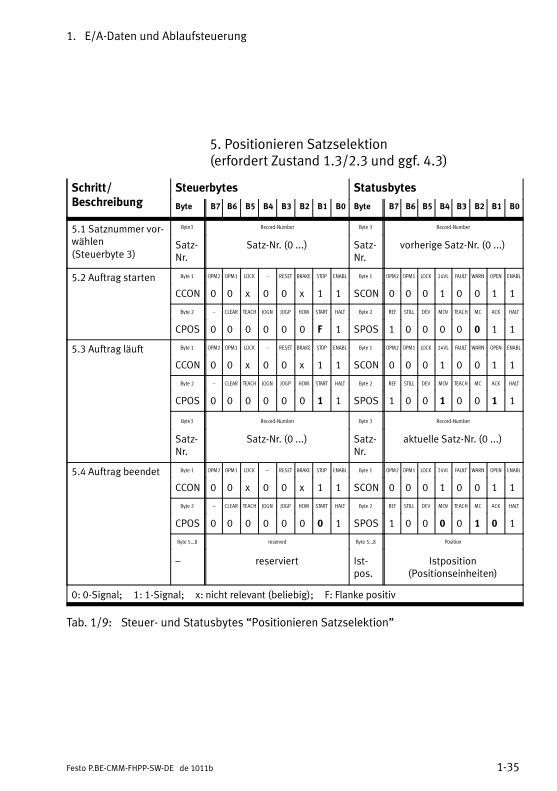
5. Positionieren Satzselektion(erfordert Zustand 1.3/2.3 und ggf. 4.3)
Schritt/Beschreibung
Steuerbytes Statusbytes
Byte B7 B6 B5 B4 B3 B2 B1 B0 Byte B7 B6 B5 B4 B3 B2 B1 B0
5.1 Satznummer vor-wählen(Steuerbyte 3)
Byte3 Record-Number Byte 3 Record-Number
Satz-Nr.
Satz-Nr. (0 ...) Satz-Nr.
vorherige Satz-Nr. (0 ...)
5.2 Auftrag starten Byte 1 OPM2 OPM1 LOCK – RESET BRAKE STOP ENABL Byte 1 OPM2 OPM1 LOCK 24VL FAULT WARN OPEN ENABL
CCON 0 0 x 0 0 x 1 1 SCON 0 0 0 1 0 0 1 1
Byte 2 – CLEAR TEACH JOGN JOGP HOM START HALT Byte 2 REF STILL DEV MOV TEACH MC ACK HALT
CPOS 0 0 0 0 0 0 F 1 SPOS 1 0 0 0 0 0 1 1
5.3 Auftrag läuft Byte 1 OPM2 OPM1 LOCK – RESET BRAKE STOP ENABL Byte 1 OPM2 OPM1 LOCK 24VL FAULT WARN OPEN ENABL
CCON 0 0 x 0 0 x 1 1 SCON 0 0 0 1 0 0 1 1
Byte 2 – CLEAR TEACH JOGN JOGP HOM START HALT Byte 2 REF STILL DEV MOV TEACH MC ACK HALT
CPOS 0 0 0 0 0 0 1 1 SPOS 1 0 0 1 0 0 1 1
Byte3 Record-Number Byte 3 Record-Number
Satz-Nr.
Satz-Nr. (0 ...) Satz-Nr.
aktuelle Satz-Nr. (0 ...)
5.4 Auftrag beendet Byte 1 OPM2 OPM1 LOCK – RESET BRAKE STOP ENABL Byte 1 OPM2 OPM1 LOCK 24VL FAULT WARN OPEN ENABL
CCON 0 0 x 0 0 x 1 1 SCON 0 0 0 1 0 0 1 1
Byte 2 – CLEAR TEACH JOGN JOGP HOM START HALT Byte 2 REF STILL DEV MOV TEACH MC ACK HALT
CPOS 0 0 0 0 0 0 0 1 SPOS 1 0 0 0 0 1 0 1
Byte 5...8 reserved Byte 5...8 Position
– reserviert Ist-pos.
Istposition(Positionseinheiten)
0: 0-Signal; 1: 1-Signal; x: nicht relevant (beliebig); F: Flanke positiv
Tab. 1/9: Steuer- und Statusbytes “Positionieren Satzselektion”
1. E/A-Daten und Ablaufsteuerung
1-36 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Beschreibung zu 5. Positionieren Satzselektion:
(Schritte 5.1 .... 5.4 bedingte Reihenfolge)
Nachdem die Betriebsbereitschaft hergestellt und eine Refe-renzfahrt ausgeführt wurde, kann ein Positionierauftrag ge-startet werden.
5.1 Satznummer vorwählen: Byte 3 der Ausgangsdaten0 = Referenzfahrt1 ... = Programmierbare Verfahrsätze
5.2 Mit CPOS.B1 (START, Starte Task) wird der vorgewähltePositionierauftrag gestartet. Der Start wird solange mitSPOS.B1 (Quittung Start) bestätigt wie CPOS.B1(START) gesetzt ist.
5.3 Das Bewegen der Achse wird mit SPOS.B4 (MOV, Achsebewegt sich) angezeigt.
5.4 Nach Beendigung des Positionierauftrages, wirdSPOS.B2 (MC, Motion Complete) gesetzt.
Bei Störungen beim Positionieren:} Störungsbehandlung: siehe Beispiel 3, Tab. 1/7.
1. E/A-Daten und Ablaufsteuerung
1-37Festo P.BE-CMM-FHPP-SW-DE de 1011b
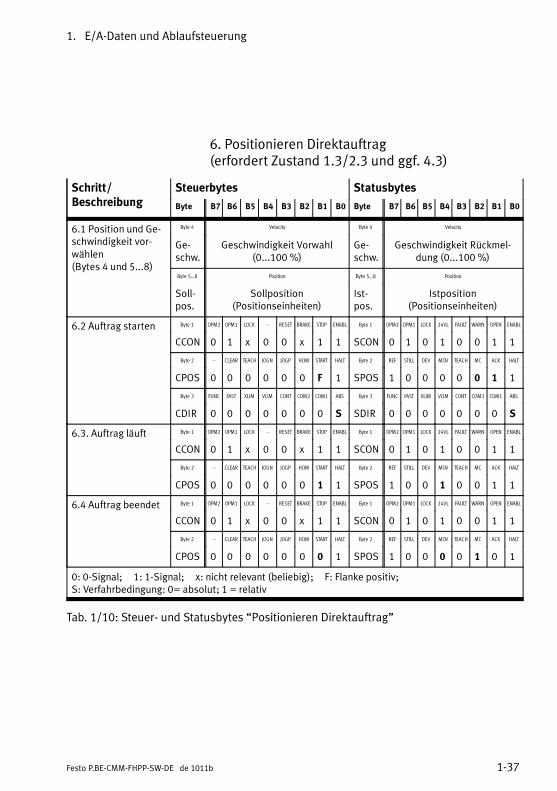
6. Positionieren Direktauftrag(erfordert Zustand 1.3/2.3 und ggf. 4.3)
Schritt/Beschreibung
Steuerbytes Statusbytes
Byte B7 B6 B5 B4 B3 B2 B1 B0 Byte B7 B6 B5 B4 B3 B2 B1 B0
6.1 Position und Ge-schwindigkeit vor-wählen(Bytes 4 und 5...8)
Byte 4 Velocity Byte 4 Velocity
Ge-schw.
Geschwindigkeit Vorwahl(0...100 %)
Ge-schw.
Geschwindigkeit Rückmel-dung (0...100 %)
Byte 5...8 Position Byte 5...8 Position
Soll-pos.
Sollposition(Positionseinheiten)
Ist-pos.
Istposition(Positionseinheiten)
6.2 Auftrag starten Byte 1 OPM2 OPM1 LOCK – RESET BRAKE STOP ENABL Byte 1 OPM2 OPM1 LOCK 24VL FAULT WARN OPEN ENABL
CCON 0 1 x 0 0 x 1 1 SCON 0 1 0 1 0 0 1 1
Byte 2 – CLEAR TEACH JOGN JOGP HOM START HALT Byte 2 REF STILL DEV MOV TEACH MC ACK HALT
CPOS 0 0 0 0 0 0 F 1 SPOS 1 0 0 0 0 0 1 1
Byte 3 FUNC FAST XLIM VLIM CONT COM2 COM1 ABS Byte 3 FUNC FAST XLIM VLIM CONT COM2 COM1 ABS
CDIR 0 0 0 0 0 0 0 S SDIR 0 0 0 0 0 0 0 S
6.3. Auftrag läuft Byte 1 OPM2 OPM1 LOCK – RESET BRAKE STOP ENABL Byte 1 OPM2 OPM1 LOCK 24VL FAULT WARN OPEN ENABL
CCON 0 1 x 0 0 x 1 1 SCON 0 1 0 1 0 0 1 1
Byte 2 – CLEAR TEACH JOGN JOGP HOM START HALT Byte 2 REF STILL DEV MOV TEACH MC ACK HALT
CPOS 0 0 0 0 0 0 1 1 SPOS 1 0 0 1 0 0 1 1
6.4 Auftrag beendet Byte 1 OPM2 OPM1 LOCK – RESET BRAKE STOP ENABL Byte 1 OPM2 OPM1 LOCK 24VL FAULT WARN OPEN ENABL
CCON 0 1 x 0 0 x 1 1 SCON 0 1 0 1 0 0 1 1
Byte 2 – CLEAR TEACH JOGN JOGP HOM START HALT Byte 2 REF STILL DEV MOV TEACH MC ACK HALT
CPOS 0 0 0 0 0 0 0 1 SPOS 1 0 0 0 0 1 0 1
0: 0-Signal; 1: 1-Signal; x: nicht relevant (beliebig); F: Flanke positiv;S: Verfahrbedingung: 0= absolut; 1 = relativ
Tab. 1/10: Steuer- und Statusbytes “Positionieren Direktauftrag”
1. E/A-Daten und Ablaufsteuerung
1-38 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Beschreibung zu Positionieren Direktauftrag:
(Schritt 6.1 ... 6.4 bedingte Reihenfolge)
Nachdem die Betriebsbereitschaft hergestellt und eine Refe-renzfahrt ausgeführt wurde, muss eine Sollposition vorge-wählt werden.
6.1 Die Sollposition wird in Positionseinheiten in den Bytes5...8 des Ausgangswortes übergeben.Die Sollgeschwindigkeit wird in % im Byte 4 übergeben(0 = keine Geschw.; 100 = max. Geschw.).
6.2 Mit CPOS.B1 (START, Start Fahrauftrag) wird der vorge-wählte Positionierauftrag gestartet. Der Start wird so-lange mit SPOS.B1 (Quittung Start) bestätigt wieCPOS.B1 (START) gesetzt ist.
6.3 Das Bewegen der Achse wird mit SPOS.B4 (MOV, Achsebewegt sich) angezeigt.
6.4 Nach Beendigung des Positionierauftrages wirdSPOS.B2 (MC, Motion Complete) gesetzt.
Bei Störungen beim Positionieren:} Störungsbehandlung: siehe Beispiel 3, Tab. 1/7.
Antriebsfunktionen
2-1Festo P.BE-CMM-FHPP-SW-DE de 1011b
Kapitel 2
Antriebsfunktionen
2. Antriebsfunktionen
2-2 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Inhaltsverzeichnis
2.1 Maßbezugssystem für elektrische Antriebe 2-3. . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Rechenvorschriften Maßbezugssystem 2-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Referenzfahrt 2-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.1 Referenzfahrt elektrische Antriebe 2-7. . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.2 Referenzfahrtmethoden 2-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Tippbetrieb 2-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5 Teachen über Feldbus 2-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.6 Satz ausführen (Satzselektion) 2-17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.6.1 Ablaufdiagramme Satzselektion 2-18. . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.6.2 Satzaufbau 2-22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.6.3 Bedingte Satzweiterschaltung / Satzverkettung (PNU 402) 2-23. . . . . .
2.7 Direktauftrag 2-27. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.7.1 Ablauf diskreter Sollwert 2-29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.7.2 Ablauf Kraftbetrieb (Drehmoment-, Stromregelung) 2-30. . . . . . . . . . . .
2.7.3 Ablauf Drehzahlregelung 2-32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.8 Stillstandsüberwachung 2-34. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.9 Fliegendes Messen (Positions-Sampling) 2-36. . . . . . . . . . . . . . . . . . . . . . . . . . . .
2. Antriebsfunktionen
2-3Festo P.BE-CMM-FHPP-SW-DE de 1011b
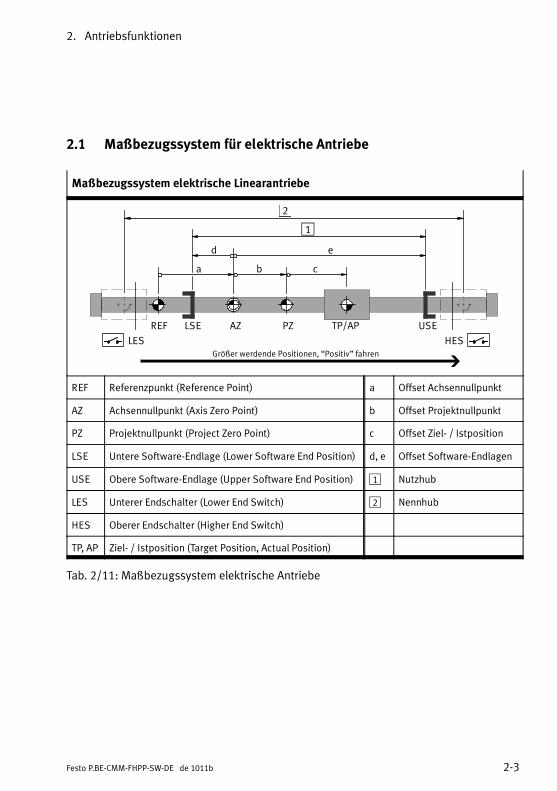
2.1 Maßbezugssystem für elektrische Antriebe
Maßbezugssystem elektrische Linearantriebe
1
REF AZ
a b c
PZ
d e
TP/AP USELSE
2
Größer werdende Positionen, “Positiv” fahren
LES HES
REF Referenzpunkt (Reference Point) a Offset Achsennullpunkt
AZ Achsennullpunkt (Axis Zero Point) b Offset Projektnullpunkt
PZ Projektnullpunkt (Project Zero Point) c Offset Ziel- / Istposition
LSE Untere Software-Endlage (Lower Software End Position) d, e Offset Software-Endlagen
USE Obere Software-Endlage (Upper Software End Position) 1 Nutzhub
LES Unterer Endschalter (Lower End Switch) 2 Nennhub
HES Oberer Endschalter (Higher End Switch)
TP, AP Ziel- / Istposition (Target Position, Actual Position)
Tab. 2/11: Maßbezugssystem elektrische Antriebe
2. Antriebsfunktionen
2-4 Festo P.BE-CMM-FHPP-SW-DE de 1011b
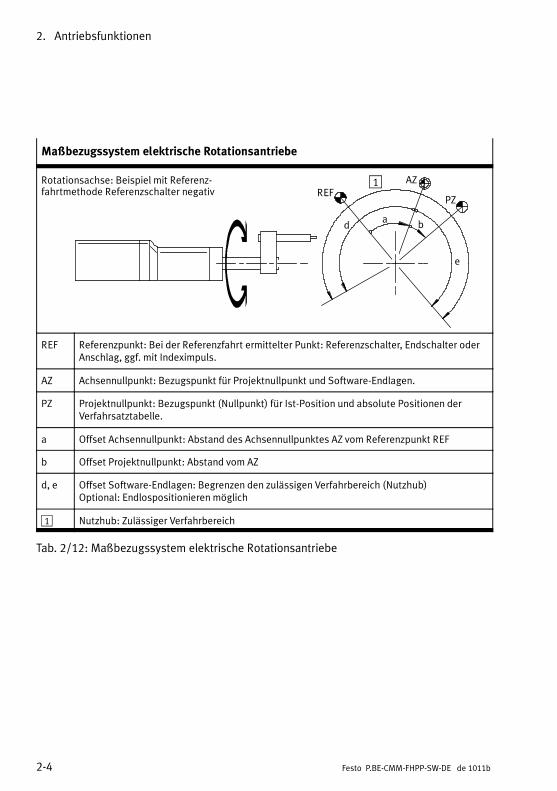
Maßbezugssystem elektrische Rotationsantriebe
Rotationsachse: Beispiel mit Referenz-fahrtmethode Referenzschalter negativ REF
AZ
a b
e
PZ
d
1
REF Referenzpunkt: Bei der Referenzfahrt ermittelter Punkt: Referenzschalter, Endschalter oderAnschlag, ggf. mit Indeximpuls.
AZ Achsennullpunkt: Bezugspunkt für Projektnullpunkt und Software-Endlagen.
PZ Projektnullpunkt: Bezugspunkt (Nullpunkt) für Ist-Position und absolute Positionen derVerfahrsatztabelle.
a Offset Achsennullpunkt: Abstand des Achsennullpunktes AZ vom Referenzpunkt REF
b Offset Projektnullpunkt: Abstand vom AZ
d, e Offset Software-Endlagen: Begrenzen den zulässigen Verfahrbereich (Nutzhub)Optional: Endlospositionieren möglich
1 Nutzhub: Zulässiger Verfahrbereich
Tab. 2/12: Maßbezugssystem elektrische Rotationsantriebe
2. Antriebsfunktionen
2-5Festo P.BE-CMM-FHPP-SW-DE de 1011b
2.2 Rechenvorschriften Maßbezugssystem
Bezugspunkt Rechenvorschrift
Achsennullpunkt AZ = REF + a
Projektnullpunkt PZ = AZ + b = REF + a + b
Untere Software-Endlage LSE = AZ + d = REF + a + d
Obere Software-Endlage USE = AZ + e = REF + a + e
Zielposition / Istposition TP, AP = PZ + c = AZ + b + c = REF + a + b + c
Tab. 2/13: Rechenvorschriften Maßbezugssystem mit inkrementalen Messsystemen
2.3 Referenzfahrt
Bei Antrieben mit inkrementalem Messsystem muss nachdem Einschalten immer eine Referenzfahrt durchgeführt wer-den.Dies wird mit dem Parameter “Referenzfahrt erforderlich”(PNU 1014) antriebsspezifisch festgelegt.
Abhängig vom Controller bzw. Antrieb sind verschiedene Re-ferenzfahrtmodi zulässig.Eine Übersicht enthält Tab. 2/14.
Beschreibung der Referenzfahrtmodi siehe Abschnitt 2.3.2.
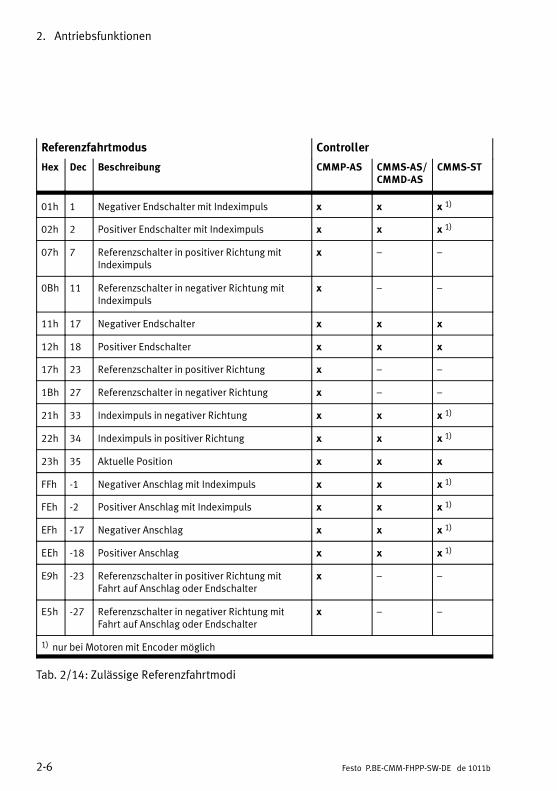
2. Antriebsfunktionen
2-6 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Referenzfahrtmodus Controller
Hex Dec Beschreibung CMMP-AS CMMS-AS/CMMD-AS
CMMS-ST
01h 1 Negativer Endschalter mit Indeximpuls x x x 1)
02h 2 Positiver Endschalter mit Indeximpuls x x x 1)
07h 7 Referenzschalter in positiver Richtung mitIndeximpuls
x – –
0Bh 11 Referenzschalter in negativer Richtung mitIndeximpuls
x – –
11h 17 Negativer Endschalter x x x
12h 18 Positiver Endschalter x x x
17h 23 Referenzschalter in positiver Richtung x – –
1Bh 27 Referenzschalter in negativer Richtung x – –
21h 33 Indeximpuls in negativer Richtung x x x 1)
22h 34 Indeximpuls in positiver Richtung x x x 1)
23h 35 Aktuelle Position x x x
FFh -1 Negativer Anschlag mit Indeximpuls x x x 1)
FEh -2 Positiver Anschlag mit Indeximpuls x x x 1)
EFh -17 Negativer Anschlag x x x 1)
EEh -18 Positiver Anschlag x x x 1)
E9h -23 Referenzschalter in positiver Richtung mitFahrt auf Anschlag oder Endschalter
x – –
E5h -27 Referenzschalter in negativer Richtung mitFahrt auf Anschlag oder Endschalter
x – –
1) nur bei Motoren mit Encoder möglich
Tab. 2/14: Zulässige Referenzfahrtmodi
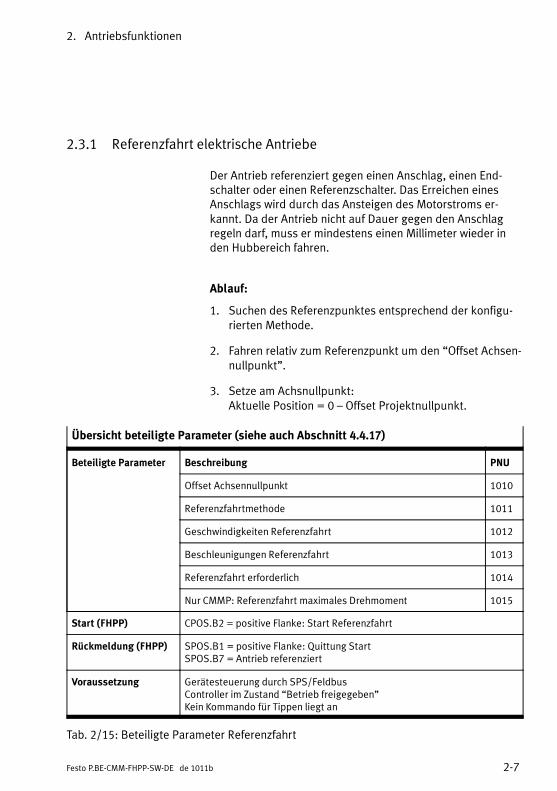
2. Antriebsfunktionen
2-7Festo P.BE-CMM-FHPP-SW-DE de 1011b
2.3.1 Referenzfahrt elektrische Antriebe
Der Antrieb referenziert gegen einen Anschlag, einen End-schalter oder einen Referenzschalter. Das Erreichen einesAnschlags wird durch das Ansteigen des Motorstroms er-kannt. Da der Antrieb nicht auf Dauer gegen den Anschlagregeln darf, muss er mindestens einen Millimeter wieder inden Hubbereich fahren.
Ablauf:
1. Suchen des Referenzpunktes entsprechend der konfigu-rierten Methode.
2. Fahren relativ zum Referenzpunkt um den “Offset Achsen-nullpunkt”.
3. Setze am Achsnullpunkt:Aktuelle Position = 0 – Offset Projektnullpunkt.
Übersicht beteiligte Parameter (siehe auch Abschnitt 4.4.17)
Beteiligte Parameter Beschreibung PNU
Offset Achsennullpunkt 1010
Referenzfahrtmethode 1011
Geschwindigkeiten Referenzfahrt 1012
Beschleunigungen Referenzfahrt 1013
Referenzfahrt erforderlich 1014
Nur CMMP: Referenzfahrt maximales Drehmoment 1015
Start (FHPP) CPOS.B2 = positive Flanke: Start Referenzfahrt
Rückmeldung (FHPP) SPOS.B1 = positive Flanke: Quittung StartSPOS.B7 = Antrieb referenziert
Voraussetzung Gerätesteuerung durch SPS/FeldbusController im Zustand “Betrieb freigegeben”Kein Kommando für Tippen liegt an
Tab. 2/15: Beteiligte Parameter Referenzfahrt
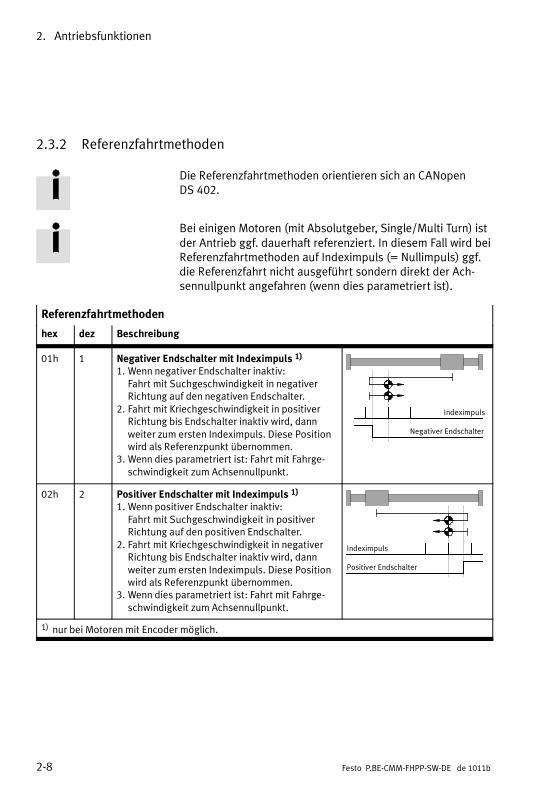
2. Antriebsfunktionen
2-8 Festo P.BE-CMM-FHPP-SW-DE de 1011b
2.3.2 Referenzfahrtmethoden
Die Referenzfahrtmethoden orientieren sich an CANopenDS 402.
Bei einigen Motoren (mit Absolutgeber, Single/Multi Turn) istder Antrieb ggf. dauerhaft referenziert. In diesem Fall wird beiReferenzfahrtmethoden auf Indeximpuls (= Nullimpuls) ggf.die Referenzfahrt nicht ausgeführt sondern direkt der Ach-sennullpunkt angefahren (wenn dies parametriert ist).
Referenzfahrtmethoden
hex dez Beschreibung
01h 1 Negativer Endschalter mit Indeximpuls 1)
1. Wenn negativer Endschalter inaktiv:Fahrt mit Suchgeschwindigkeit in negativerRichtung auf den negativen Endschalter.
2. Fahrt mit Kriechgeschwindigkeit in positiverRichtung bis Endschalter inaktiv wird, dannweiter zum ersten Indeximpuls. Diese Positionwird als Referenzpunkt übernommen.
3. Wenn dies parametriert ist: Fahrt mit Fahrge-schwindigkeit zum Achsennullpunkt.
Indeximpuls
Negativer Endschalter
02h 2 Positiver Endschalter mit Indeximpuls 1)
1. Wenn positiver Endschalter inaktiv:Fahrt mit Suchgeschwindigkeit in positiverRichtung auf den positiven Endschalter.
2. Fahrt mit Kriechgeschwindigkeit in negativerRichtung bis Endschalter inaktiv wird, dannweiter zum ersten Indeximpuls. Diese Positionwird als Referenzpunkt übernommen.
3. Wenn dies parametriert ist: Fahrt mit Fahrge-schwindigkeit zum Achsennullpunkt.
Indeximpuls
Positiver Endschalter
1) nur bei Motoren mit Encoder möglich.
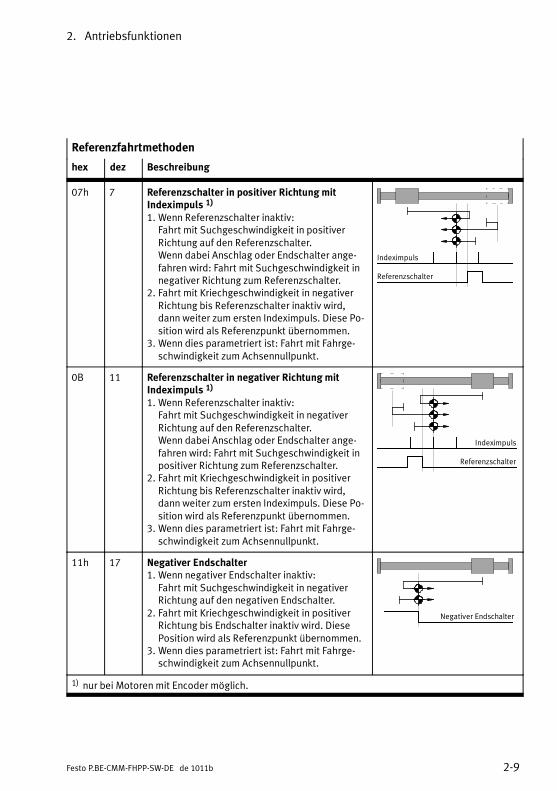
2. Antriebsfunktionen
2-9Festo P.BE-CMM-FHPP-SW-DE de 1011b
Referenzfahrtmethoden
hex Beschreibungdez
07h 7 Referenzschalter in positiver Richtung mitIndeximpuls 1)
1. Wenn Referenzschalter inaktiv:Fahrt mit Suchgeschwindigkeit in positiverRichtung auf den Referenzschalter.Wenn dabei Anschlag oder Endschalter ange-fahren wird: Fahrt mit Suchgeschwindigkeit innegativer Richtung zum Referenzschalter.
2. Fahrt mit Kriechgeschwindigkeit in negativerRichtung bis Referenzschalter inaktiv wird,dann weiter zum ersten Indeximpuls. Diese Po-sition wird als Referenzpunkt übernommen.
3. Wenn dies parametriert ist: Fahrt mit Fahrge-schwindigkeit zum Achsennullpunkt.
Indeximpuls
Referenzschalter
0B 11 Referenzschalter in negativer Richtung mitIndeximpuls 1)
1. Wenn Referenzschalter inaktiv:Fahrt mit Suchgeschwindigkeit in negativerRichtung auf den Referenzschalter.Wenn dabei Anschlag oder Endschalter ange-fahren wird: Fahrt mit Suchgeschwindigkeit inpositiver Richtung zum Referenzschalter.
2. Fahrt mit Kriechgeschwindigkeit in positiverRichtung bis Referenzschalter inaktiv wird,dann weiter zum ersten Indeximpuls. Diese Po-sition wird als Referenzpunkt übernommen.
3. Wenn dies parametriert ist: Fahrt mit Fahrge-schwindigkeit zum Achsennullpunkt.
Indeximpuls
Referenzschalter
11h 17 Negativer Endschalter1. Wenn negativer Endschalter inaktiv:
Fahrt mit Suchgeschwindigkeit in negativerRichtung auf den negativen Endschalter.
2. Fahrt mit Kriechgeschwindigkeit in positiverRichtung bis Endschalter inaktiv wird. DiesePosition wird als Referenzpunkt übernommen.
3. Wenn dies parametriert ist: Fahrt mit Fahrge-schwindigkeit zum Achsennullpunkt.
Negativer Endschalter
1) nur bei Motoren mit Encoder möglich.
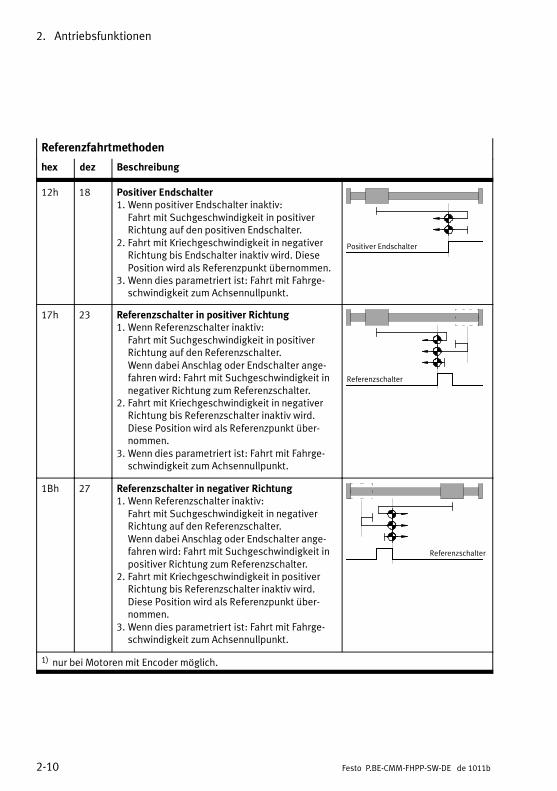
2. Antriebsfunktionen
2-10 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Referenzfahrtmethoden
hex Beschreibungdez
12h 18 Positiver Endschalter1. Wenn positiver Endschalter inaktiv:
Fahrt mit Suchgeschwindigkeit in positiverRichtung auf den positiven Endschalter.
2. Fahrt mit Kriechgeschwindigkeit in negativerRichtung bis Endschalter inaktiv wird. DiesePosition wird als Referenzpunkt übernommen.
3. Wenn dies parametriert ist: Fahrt mit Fahrge-schwindigkeit zum Achsennullpunkt.
Positiver Endschalter
17h 23 Referenzschalter in positiver Richtung1. Wenn Referenzschalter inaktiv:
Fahrt mit Suchgeschwindigkeit in positiverRichtung auf den Referenzschalter.Wenn dabei Anschlag oder Endschalter ange-fahren wird: Fahrt mit Suchgeschwindigkeit innegativer Richtung zum Referenzschalter.
2. Fahrt mit Kriechgeschwindigkeit in negativerRichtung bis Referenzschalter inaktiv wird.Diese Position wird als Referenzpunkt über-nommen.
3. Wenn dies parametriert ist: Fahrt mit Fahrge-schwindigkeit zum Achsennullpunkt.
Referenzschalter
1Bh 27 Referenzschalter in negativer Richtung1. Wenn Referenzschalter inaktiv:
Fahrt mit Suchgeschwindigkeit in negativerRichtung auf den Referenzschalter.Wenn dabei Anschlag oder Endschalter ange-fahren wird: Fahrt mit Suchgeschwindigkeit inpositiver Richtung zum Referenzschalter.
2. Fahrt mit Kriechgeschwindigkeit in positiverRichtung bis Referenzschalter inaktiv wird.Diese Position wird als Referenzpunkt über-nommen.
3. Wenn dies parametriert ist: Fahrt mit Fahrge-schwindigkeit zum Achsennullpunkt.
Referenzschalter
1) nur bei Motoren mit Encoder möglich.
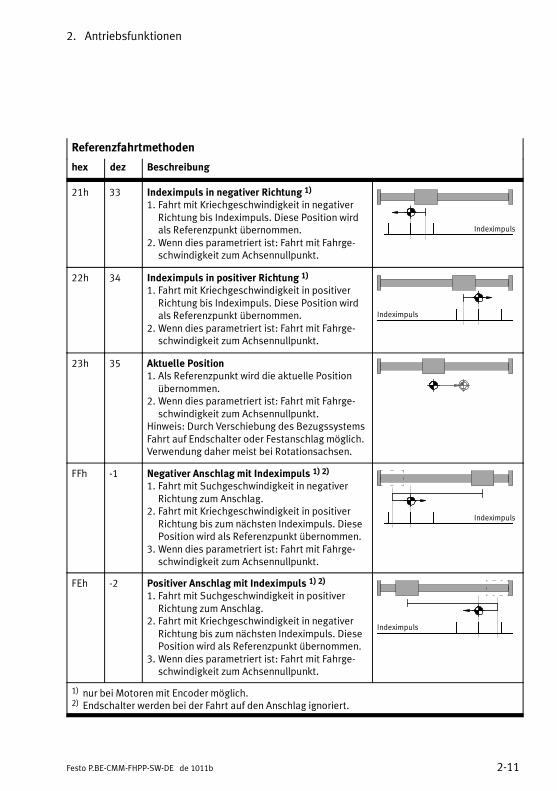
2. Antriebsfunktionen
2-11Festo P.BE-CMM-FHPP-SW-DE de 1011b
Referenzfahrtmethoden
hex Beschreibungdez
21h 33 Indeximpuls in negativer Richtung 1)
1. Fahrt mit Kriechgeschwindigkeit in negativerRichtung bis Indeximpuls. Diese Position wirdals Referenzpunkt übernommen.
2. Wenn dies parametriert ist: Fahrt mit Fahrge-schwindigkeit zum Achsennullpunkt.
Indeximpuls
22h 34 Indeximpuls in positiver Richtung 1)
1. Fahrt mit Kriechgeschwindigkeit in positiverRichtung bis Indeximpuls. Diese Position wirdals Referenzpunkt übernommen.
2. Wenn dies parametriert ist: Fahrt mit Fahrge-schwindigkeit zum Achsennullpunkt.
Indeximpuls
23h 35 Aktuelle Position1. Als Referenzpunkt wird die aktuelle Position
übernommen.2. Wenn dies parametriert ist: Fahrt mit Fahrge-
schwindigkeit zum Achsennullpunkt.Hinweis: Durch Verschiebung des BezugssystemsFahrt auf Endschalter oder Festanschlag möglich.Verwendung daher meist bei Rotationsachsen.
FFh -1 Negativer Anschlag mit Indeximpuls 1) 2)
1. Fahrt mit Suchgeschwindigkeit in negativerRichtung zum Anschlag.
2. Fahrt mit Kriechgeschwindigkeit in positiverRichtung bis zum nächsten Indeximpuls. DiesePosition wird als Referenzpunkt übernommen.
3. Wenn dies parametriert ist: Fahrt mit Fahrge-schwindigkeit zum Achsennullpunkt.
Indeximpuls
FEh -2 Positiver Anschlag mit Indeximpuls 1) 2)
1. Fahrt mit Suchgeschwindigkeit in positiverRichtung zum Anschlag.
2. Fahrt mit Kriechgeschwindigkeit in negativerRichtung bis zum nächsten Indeximpuls. DiesePosition wird als Referenzpunkt übernommen.
3. Wenn dies parametriert ist: Fahrt mit Fahrge-schwindigkeit zum Achsennullpunkt.
Indeximpuls
1) nur bei Motoren mit Encoder möglich.2) Endschalter werden bei der Fahrt auf den Anschlag ignoriert.
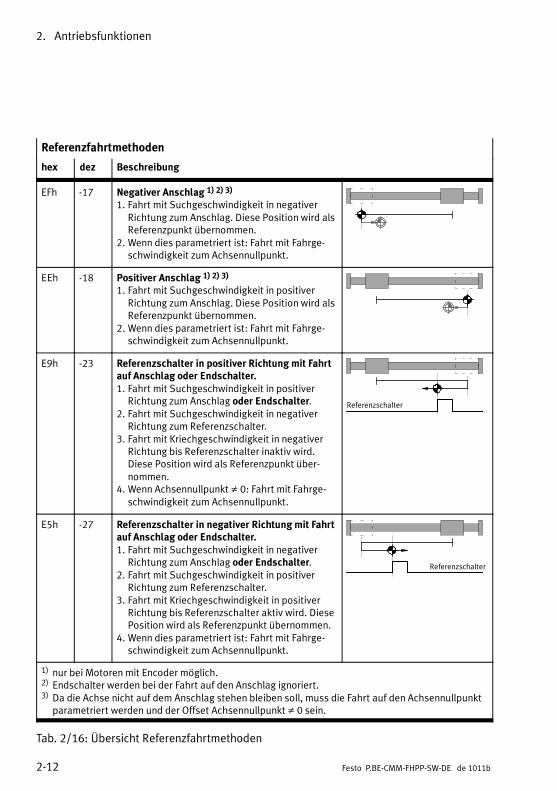
2. Antriebsfunktionen
2-12 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Referenzfahrtmethoden
hex Beschreibungdez
EFh -17 Negativer Anschlag 1) 2) 3)
1. Fahrt mit Suchgeschwindigkeit in negativerRichtung zum Anschlag. Diese Position wird alsReferenzpunkt übernommen.
2. Wenn dies parametriert ist: Fahrt mit Fahrge-schwindigkeit zum Achsennullpunkt.
EEh -18 Positiver Anschlag 1) 2) 3)
1. Fahrt mit Suchgeschwindigkeit in positiverRichtung zum Anschlag. Diese Position wird alsReferenzpunkt übernommen.
2. Wenn dies parametriert ist: Fahrt mit Fahrge-schwindigkeit zum Achsennullpunkt.
E9h -23 Referenzschalter in positiver Richtung mit Fahrtauf Anschlag oder Endschalter.1. Fahrt mit Suchgeschwindigkeit in positiver
Richtung zum Anschlag oder Endschalter.2. Fahrt mit Suchgeschwindigkeit in negativer
Richtung zum Referenzschalter.3. Fahrt mit Kriechgeschwindigkeit in negativer
Richtung bis Referenzschalter inaktiv wird.Diese Position wird als Referenzpunkt über-nommen.
4. Wenn Achsennullpunkt ≠ 0: Fahrt mit Fahrge-schwindigkeit zum Achsennullpunkt.
Referenzschalter
E5h -27 Referenzschalter in negativer Richtung mit Fahrtauf Anschlag oder Endschalter.1. Fahrt mit Suchgeschwindigkeit in negativer
Richtung zum Anschlag oder Endschalter.2. Fahrt mit Suchgeschwindigkeit in positiver
Richtung zum Referenzschalter.3. Fahrt mit Kriechgeschwindigkeit in positiver
Richtung bis Referenzschalter aktiv wird. DiesePosition wird als Referenzpunkt übernommen.
4. Wenn dies parametriert ist: Fahrt mit Fahrge-schwindigkeit zum Achsennullpunkt.
Referenzschalter
1) nur bei Motoren mit Encoder möglich.2) Endschalter werden bei der Fahrt auf den Anschlag ignoriert.3) Da die Achse nicht auf dem Anschlag stehen bleiben soll, muss die Fahrt auf den Achsennullpunkt
parametriert werden und der Offset Achsennullpunkt ≠ 0 sein.
Tab. 2/16: Übersicht Referenzfahrtmethoden
2. Antriebsfunktionen
2-13Festo P.BE-CMM-FHPP-SW-DE de 1011b
2.4 Tippbetrieb
Im Zustand “Betrieb freigegeben” kann der Antrieb durchTippen positiv/negativ verfahren werden. Diese Funktion wirdüblicherweise verwendet für:
– Anfahren von Teachpositionen,
– Antrieb aus dem Weg fahren (z. B. nach einer Anlagen-Störung),
– Manuelles Verfahren als normale Betriebsart (handbetä-tigter Vorschub).
Ablauf
1. Mit dem Setzen eines der Signale Tippen positiv / Tippennegativ setzt sich der Antrieb langsam in Bewegung.Durch die langsame Geschwindigkeit kann eine Positionsehr genau bestimmt werden.
2. Bleibt das Signal länger als die parametrierte “ZeitdauerPhase 1” gesetzt, wird die Geschwindigkeit solange er-höht, bis die konfigurierte Maximalgeschwindigkeit er-reicht wird. Damit können große Hübe schnell durchfah-ren werden.
3. Wechselt das Signal auf 0, wird der Antrieb mit der einge-stellten maximalen Verzögerung abgebremst.
4. Nur wenn der Antrieb referenziert ist:Erreicht der Antrieb eine Software-Endlage, hält er auto-matisch an. Die Software-Endlage wird nicht überfahren,der Weg zum Anhalten wird dabei entsprechend der ein-gestellten Rampe berücksichtigt. Der Tippbetrieb wirdauch hier erst wieder nach Tippen = 0 verlassen.
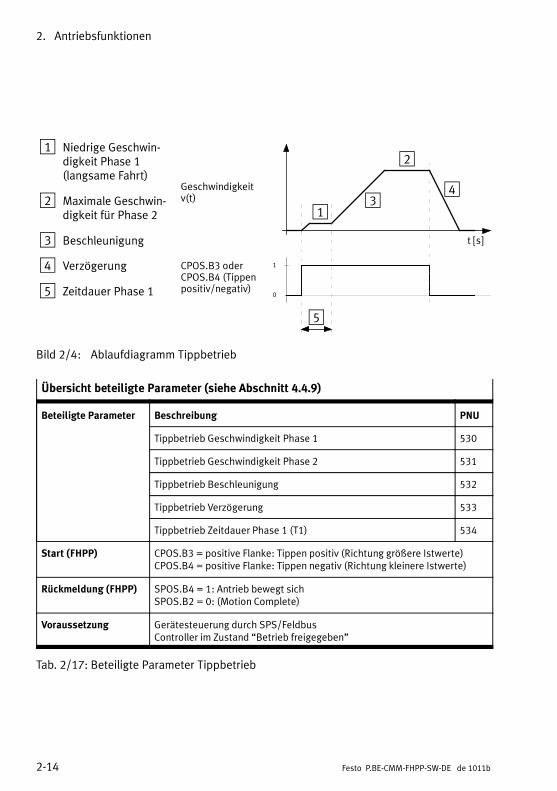
2. Antriebsfunktionen
2-14 Festo P.BE-CMM-FHPP-SW-DE de 1011b
1 Niedrige Geschwin-digkeit Phase 1(langsame Fahrt)
2 Maximale Geschwin-digkeit für Phase 2
3 Beschleunigung
4 Verzögerung
5 Zeitdauer Phase 1
CPOS.B3 oderCPOS.B4 (Tippenpositiv/negativ)
Geschwindigkeitv(t)
t [s]
1
0
1
2
34
5
Bild 2/4: Ablaufdiagramm Tippbetrieb
Übersicht beteiligte Parameter (siehe Abschnitt 4.4.9)
Beteiligte Parameter Beschreibung PNU
Tippbetrieb Geschwindigkeit Phase 1 530
Tippbetrieb Geschwindigkeit Phase 2 531
Tippbetrieb Beschleunigung 532
Tippbetrieb Verzögerung 533
Tippbetrieb Zeitdauer Phase 1 (T1) 534
Start (FHPP) CPOS.B3 = positive Flanke: Tippen positiv (Richtung größere Istwerte)CPOS.B4 = positive Flanke: Tippen negativ (Richtung kleinere Istwerte)
Rückmeldung (FHPP) SPOS.B4 = 1: Antrieb bewegt sichSPOS.B2 = 0: (Motion Complete)
Voraussetzung Gerätesteuerung durch SPS/FeldbusController im Zustand “Betrieb freigegeben”
Tab. 2/17: Beteiligte Parameter Tippbetrieb
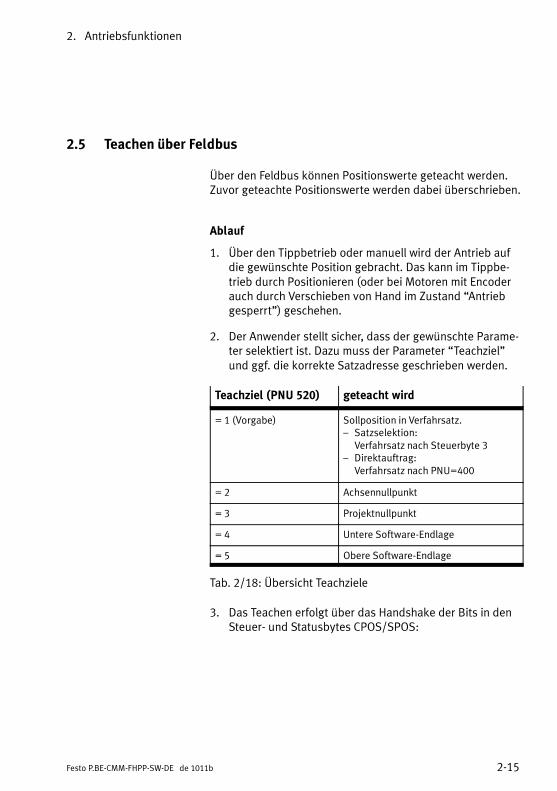
2. Antriebsfunktionen
2-15Festo P.BE-CMM-FHPP-SW-DE de 1011b
2.5 Teachen über Feldbus
Über den Feldbus können Positionswerte geteacht werden.Zuvor geteachte Positionswerte werden dabei überschrieben.
Ablauf
1. Über den Tippbetrieb oder manuell wird der Antrieb aufdie gewünschte Position gebracht. Das kann im Tippbe-trieb durch Positionieren (oder bei Motoren mit Encoderauch durch Verschieben von Hand im Zustand “Antriebgesperrt”) geschehen.
2. Der Anwender stellt sicher, dass der gewünschte Parame-ter selektiert ist. Dazu muss der Parameter “Teachziel”und ggf. die korrekte Satzadresse geschrieben werden.
Teachziel (PNU 520) geteacht wird
= 1 (Vorgabe) Sollposition in Verfahrsatz.– Satzselektion:
Verfahrsatz nach Steuerbyte 3– Direktauftrag:
Verfahrsatz nach PNU=400
= 2 Achsennullpunkt
= 3 Projektnullpunkt
= 4 Untere Software-Endlage
= 5 Obere Software-Endlage
Tab. 2/18: Übersicht Teachziele
3. Das Teachen erfolgt über das Handshake der Bits in denSteuer- und Statusbytes CPOS/SPOS:
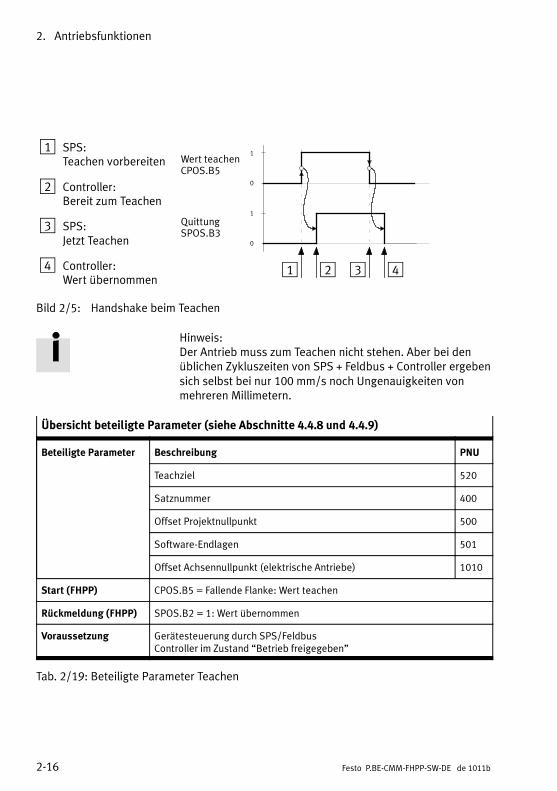
2. Antriebsfunktionen
2-16 Festo P.BE-CMM-FHPP-SW-DE de 1011b
1 SPS:Teachen vorbereiten
2 Controller:Bereit zum Teachen
3 SPS:Jetzt Teachen
4 Controller:Wert übernommen
1
0
QuittungSPOS.B3
Wert teachenCPOS.B5
1 2
1
0
3 4
Bild 2/5: Handshake beim Teachen
Hinweis:Der Antrieb muss zum Teachen nicht stehen. Aber bei denüblichen Zykluszeiten von SPS + Feldbus + Controller ergebensich selbst bei nur 100 mm/s noch Ungenauigkeiten vonmehreren Millimetern.
Übersicht beteiligte Parameter (siehe Abschnitte 4.4.8 und 4.4.9)
Beteiligte Parameter Beschreibung PNU
Teachziel 520
Satznummer 400
Offset Projektnullpunkt 500
Software-Endlagen 501
Offset Achsennullpunkt (elektrische Antriebe) 1010
Start (FHPP) CPOS.B5 = Fallende Flanke: Wert teachen
Rückmeldung (FHPP) SPOS.B2 = 1: Wert übernommen
Voraussetzung Gerätesteuerung durch SPS/FeldbusController im Zustand “Betrieb freigegeben”
Tab. 2/19: Beteiligte Parameter Teachen
2. Antriebsfunktionen
2-17Festo P.BE-CMM-FHPP-SW-DE de 1011b
2.6 Satz ausführen (Satzselektion)
Im Zustand “Betrieb freigegeben” kann ein Satz gestartetwerden. Diese Funktion wird üblicherweise verwendet für:
– wahlfreies Anfahren von Positionen der Satzliste durchdie SPS,
– Abarbeiten eines Verfahrprofils durch Verkettung vonSätzen,
– bekannte Zielpositionen, die sich nur selten ändern (Re-zepturwechsel).
Ablauf
1. Gewünschte Satznummer in Ausgangsdaten der SPS ein-stellen. Bis zum Start antwortet der Controller weiterhinmit der Nummer des zuletzt ausgeführten Satzes.
2. Mit steigender Flanke an CPOS.B1 (START) übernimmt derController die Satznummer und startet den Fahrauftrag.
3. Der Controller signalisiert mit der steigenden Flanke anQuittung Start, dass die SPS-Ausgangs-Daten übernom-men wurden und der Positionierauftrag jetzt aktiv ist. DerPositionierbefehl wird weiter ausgeführt, auch wennCPOS.B1 (START) wieder auf Null zurückgesetzt wird.
4. Wenn der Satz beendet wurde, wird SPOS.B2 (MC) ge-setzt.
Fehlerursachen in Anwendung:
– Es wurde keine Referenzierung ausgeführt (sofern erfor-derlich, siehe PNU 1014).
– Die Zielposition und/oder die Vorwahlposition sind nichterreichbar.
– Ungültige Satznummer.
– Nicht initialisierter Satz.
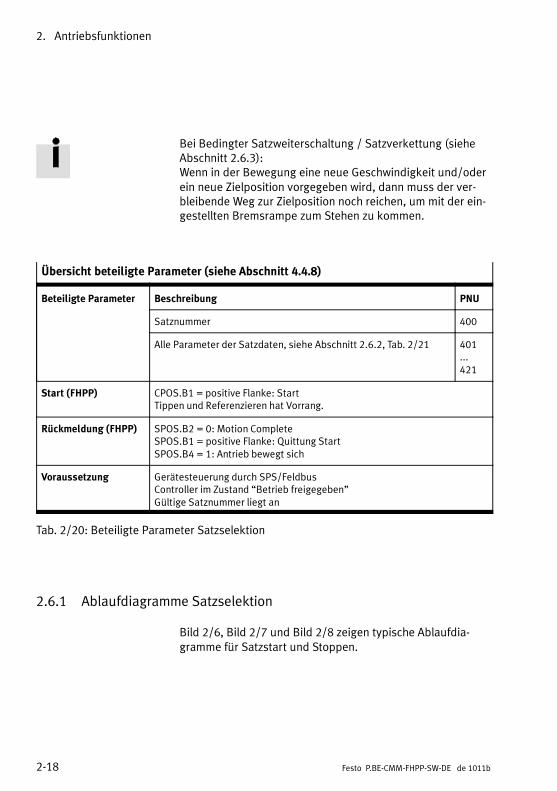
2. Antriebsfunktionen
2-18 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Bei Bedingter Satzweiterschaltung / Satzverkettung (sieheAbschnitt 2.6.3):Wenn in der Bewegung eine neue Geschwindigkeit und/oderein neue Zielposition vorgegeben wird, dann muss der ver-bleibende Weg zur Zielposition noch reichen, um mit der ein-gestellten Bremsrampe zum Stehen zu kommen.
Übersicht beteiligte Parameter (siehe Abschnitt 4.4.8)
Beteiligte Parameter Beschreibung PNU
Satznummer 400
Alle Parameter der Satzdaten, siehe Abschnitt 2.6.2, Tab. 2/21 401...421
Start (FHPP) CPOS.B1 = positive Flanke: StartTippen und Referenzieren hat Vorrang.
Rückmeldung (FHPP) SPOS.B2 = 0: Motion CompleteSPOS.B1 = positive Flanke: Quittung StartSPOS.B4 = 1: Antrieb bewegt sich
Voraussetzung Gerätesteuerung durch SPS/FeldbusController im Zustand “Betrieb freigegeben”Gültige Satznummer liegt an
Tab. 2/20: Beteiligte Parameter Satzselektion
2.6.1 Ablaufdiagramme Satzselektion
Bild 2/6, Bild 2/7 und Bild 2/8 zeigen typische Ablaufdia-gramme für Satzstart und Stoppen.
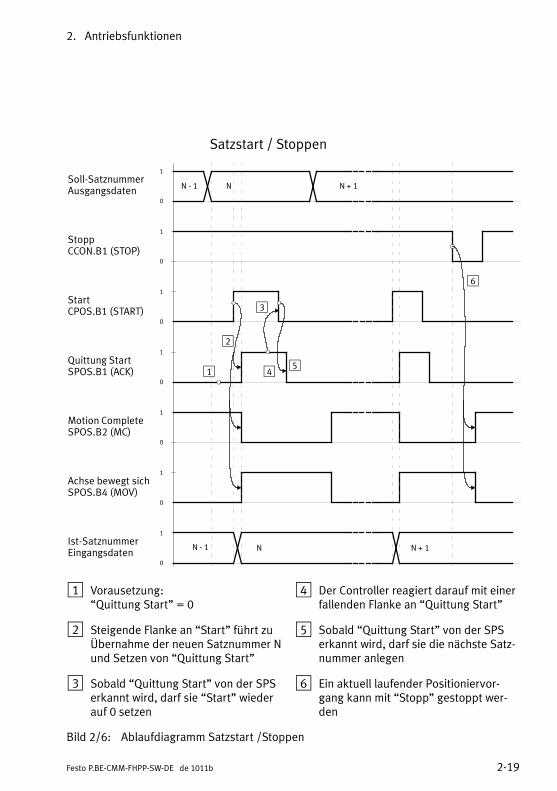
2. Antriebsfunktionen
2-19Festo P.BE-CMM-FHPP-SW-DE de 1011b
Satzstart / Stoppen
Soll-SatznummerAusgangsdaten
StoppCCON.B1 (STOP)
Quittung StartSPOS.B1 (ACK)
Motion CompleteSPOS.B2 (MC)
Ist-SatznummerEingangsdaten
N - 1 N N + 1
N - 1 N
1
0
1
0
1
0
1
0
1
0
1
2
3
4
6
1
0
1
0
Achse bewegt sichSPOS.B4 (MOV)
StartCPOS.B1 (START)
N + 1
5
1 Vorausetzung:“Quittung Start” = 0
2 Steigende Flanke an “Start” führt zuÜbernahme der neuen Satznummer Nund Setzen von “Quittung Start”
3 Sobald “Quittung Start” von der SPSerkannt wird, darf sie “Start” wiederauf 0 setzen
4 Der Controller reagiert darauf mit einerfallenden Flanke an “Quittung Start”
5 Sobald “Quittung Start” von der SPSerkannt wird, darf sie die nächste Satz-nummer anlegen
6 Ein aktuell laufender Positioniervor-gang kann mit “Stopp” gestoppt wer-den
Bild 2/6: Ablaufdiagramm Satzstart /Stoppen
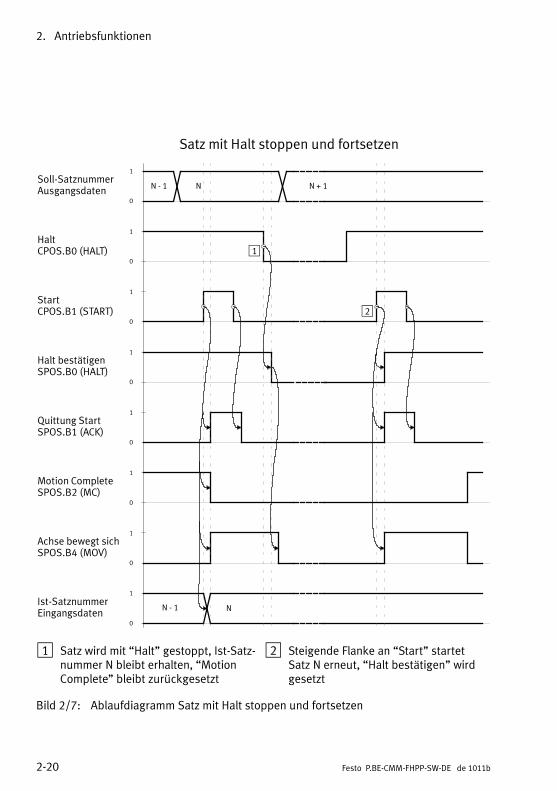
2. Antriebsfunktionen
2-20 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Satz mit Halt stoppen und fortsetzen
Soll-SatznummerAusgangsdaten
Quittung StartSPOS.B1 (ACK)
Motion CompleteSPOS.B2 (MC)
Ist-SatznummerEingangsdaten
N - 1 N N + 1
N - 1 N
1
0
1
0
1
0
1
0
1
0
1
0
Achse bewegt sichSPOS.B4 (MOV)
HaltCPOS.B0 (HALT)
1
0
StartCPOS.B1 (START)
1
0
Halt bestätigenSPOS.B0 (HALT)
1
2
1 Satz wird mit “Halt” gestoppt, Ist-Satz-nummer N bleibt erhalten, “MotionComplete” bleibt zurückgesetzt
2 Steigende Flanke an “Start” startetSatz N erneut, “Halt bestätigen” wirdgesetzt
Bild 2/7: Ablaufdiagramm Satz mit Halt stoppen und fortsetzen
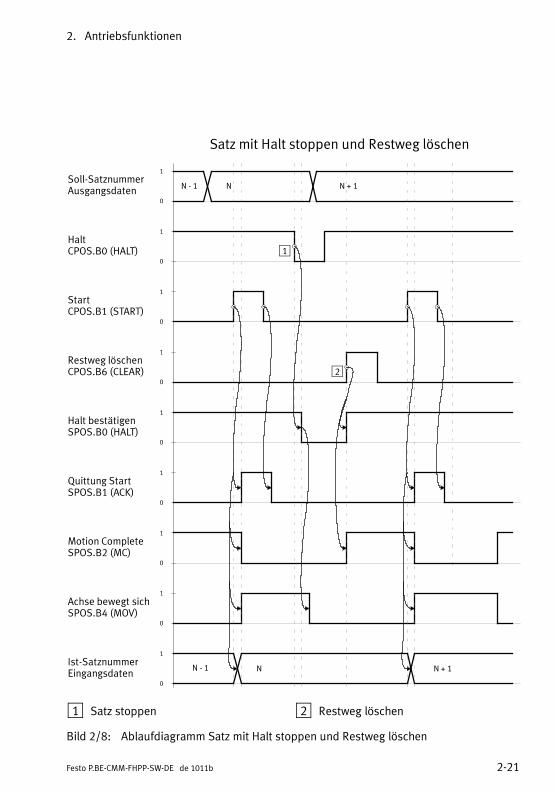
2. Antriebsfunktionen
2-21Festo P.BE-CMM-FHPP-SW-DE de 1011b
Satz mit Halt stoppen und Restweg löschen
Soll-SatznummerAusgangsdaten
Quittung StartSPOS.B1 (ACK)
Motion CompleteSPOS.B2 (MC)
Ist-SatznummerEingangsdaten
N - 1 N N + 1
N - 1 N
1
0
1
0
1
0
1
0
1
0
1
0
Achse bewegt sichSPOS.B4 (MOV)
HaltCPOS.B0 (HALT)
N + 1
1
0
StartCPOS.B1 (START)
Restweg löschenCPOS.B6 (CLEAR)
1
0
1
0
Halt bestätigenSPOS.B0 (HALT)
1
2
1 Satz stoppen 2 Restweg löschen
Bild 2/8: Ablaufdiagramm Satz mit Halt stoppen und Restweg löschen
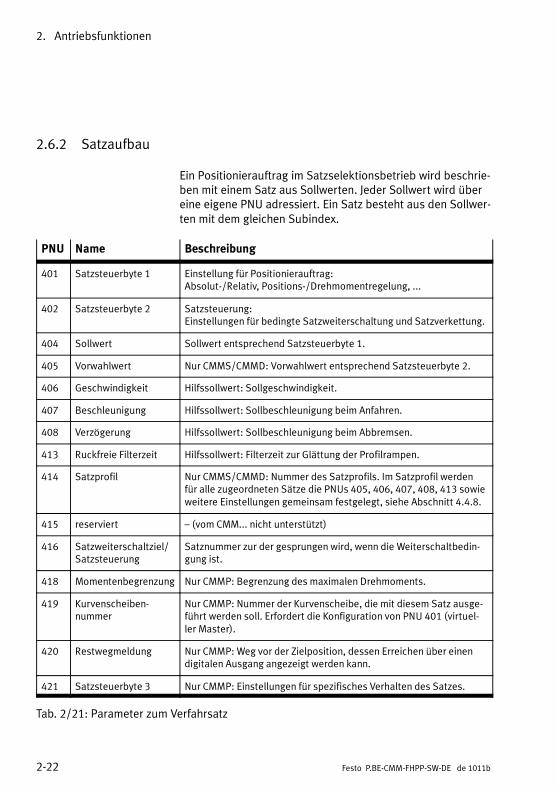
2. Antriebsfunktionen
2-22 Festo P.BE-CMM-FHPP-SW-DE de 1011b
2.6.2 Satzaufbau
Ein Positionierauftrag im Satzselektionsbetrieb wird beschrie-ben mit einem Satz aus Sollwerten. Jeder Sollwert wird übereine eigene PNU adressiert. Ein Satz besteht aus den Sollwer-ten mit dem gleichen Subindex.
PNU Name Beschreibung
401 Satzsteuerbyte 1 Einstellung für Positionierauftrag:Absolut-/Relativ, Positions-/Drehmomentregelung, ...
402 Satzsteuerbyte 2 Satzsteuerung:Einstellungen für bedingte Satzweiterschaltung und Satzverkettung.
404 Sollwert Sollwert entsprechend Satzsteuerbyte 1.
405 Vorwahlwert Nur CMMS/CMMD: Vorwahlwert entsprechend Satzsteuerbyte 2.
406 Geschwindigkeit Hilfssollwert: Sollgeschwindigkeit.
407 Beschleunigung Hilfssollwert: Sollbeschleunigung beim Anfahren.
408 Verzögerung Hilfssollwert: Sollbeschleunigung beim Abbremsen.
413 Ruckfreie Filterzeit Hilfssollwert: Filterzeit zur Glättung der Profilrampen.
414 Satzprofil Nur CMMS/CMMD: Nummer des Satzprofils. Im Satzprofil werdenfür alle zugeordneten Sätze die PNUs 405, 406, 407, 408, 413 sowieweitere Einstellungen gemeinsam festgelegt, siehe Abschnitt 4.4.8.
415 reserviert – (vom CMM... nicht unterstützt)
416 Satzweiterschaltziel/Satzsteuerung
Satznummer zur der gesprungen wird, wenn die Weiterschaltbedin-gung ist.
418 Momentenbegrenzung Nur CMMP: Begrenzung des maximalen Drehmoments.
419 Kurvenscheiben-nummer
Nur CMMP: Nummer der Kurvenscheibe, die mit diesem Satz ausge-führt werden soll. Erfordert die Konfiguration von PNU 401 (virtuel-ler Master).
420 Restwegmeldung Nur CMMP: Weg vor der Zielposition, dessen Erreichen über einendigitalen Ausgang angezeigt werden kann.
421 Satzsteuerbyte 3 Nur CMMP: Einstellungen für spezifisches Verhalten des Satzes.
Tab. 2/21: Parameter zum Verfahrsatz
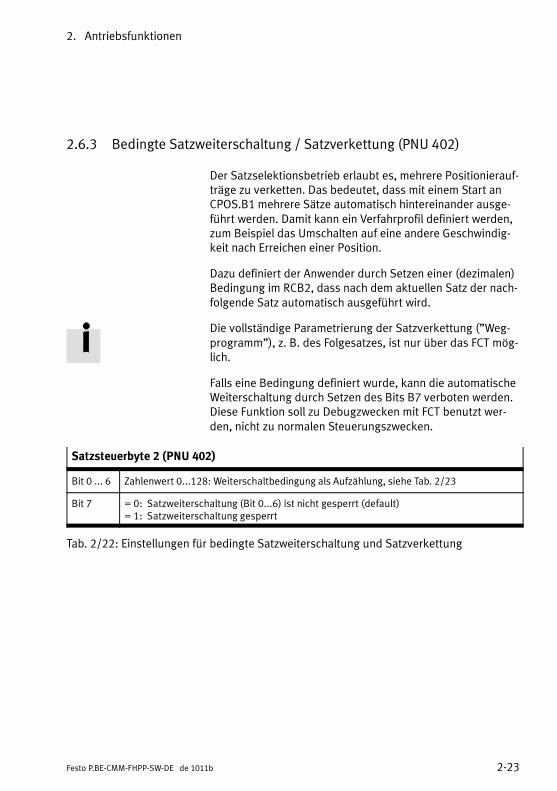
2. Antriebsfunktionen
2-23Festo P.BE-CMM-FHPP-SW-DE de 1011b
2.6.3 Bedingte Satzweiterschaltung / Satzverkettung (PNU 402)
Der Satzselektionsbetrieb erlaubt es, mehrere Positionierauf-träge zu verketten. Das bedeutet, dass mit einem Start anCPOS.B1 mehrere Sätze automatisch hintereinander ausge-führt werden. Damit kann ein Verfahrprofil definiert werden,zum Beispiel das Umschalten auf eine andere Geschwindig-keit nach Erreichen einer Position.
Dazu definiert der Anwender durch Setzen einer (dezimalen)Bedingung im RCB2, dass nach dem aktuellen Satz der nach-folgende Satz automatisch ausgeführt wird.
Die vollständige Parametrierung der Satzverkettung (”Weg-programm”), z. B. des Folgesatzes, ist nur über das FCT mög-lich.
Falls eine Bedingung definiert wurde, kann die automatischeWeiterschaltung durch Setzen des Bits B7 verboten werden.Diese Funktion soll zu Debugzwecken mit FCT benutzt wer-den, nicht zu normalen Steuerungszwecken.
Satzsteuerbyte 2 (PNU 402)
Bit 0 ... 6 Zahlenwert 0...128: Weiterschaltbedingung als Aufzählung, siehe Tab. 2/23
Bit 7 = 0: Satzweiterschaltung (Bit 0...6) ist nicht gesperrt (default)= 1: Satzweiterschaltung gesperrt
Tab. 2/22: Einstellungen für bedingte Satzweiterschaltung und Satzverkettung
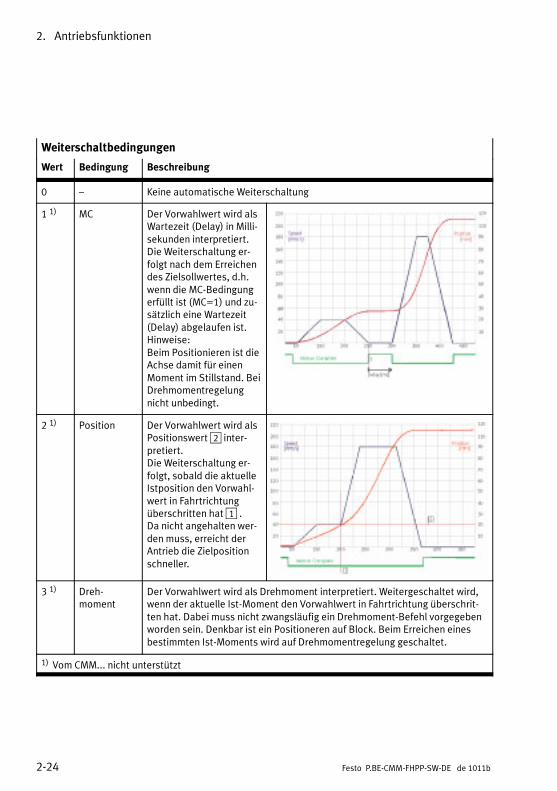
2. Antriebsfunktionen
2-24 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Weiterschaltbedingungen
Wert Bedingung Beschreibung
0 – Keine automatische Weiterschaltung
1 1) MC Der Vorwahlwert wird alsWartezeit (Delay) in Milli-sekunden interpretiert.Die Weiterschaltung er-folgt nach dem Erreichendes Zielsollwertes, d.h.wenn die MC-Bedingungerfüllt ist (MC=1) und zu-sätzlich eine Wartezeit(Delay) abgelaufen ist.Hinweise:Beim Positionieren ist dieAchse damit für einenMoment im Stillstand. BeiDrehmomentregelungnicht unbedingt.
2 1) Position Der Vorwahlwert wird alsPositionswert2 inter-pretiert.Die Weiterschaltung er-folgt, sobald die aktuelleIstposition den Vorwahl-wert in Fahrtrichtungüberschritten hat1 .Da nicht angehalten wer-den muss, erreicht derAntrieb die Zielpositionschneller.
3 1) Dreh-moment
Der Vorwahlwert wird als Drehmoment interpretiert. Weitergeschaltet wird,wenn der aktuelle Ist-Moment den Vorwahlwert in Fahrtrichtung überschrit-ten hat. Dabei muss nicht zwangsläufig ein Drehmoment-Befehl vorgegebenworden sein. Denkbar ist ein Positioneren auf Block. Beim Erreichen einesbestimmten Ist-Moments wird auf Drehmomentregelung geschaltet.
1) Vom CMM... nicht unterstützt
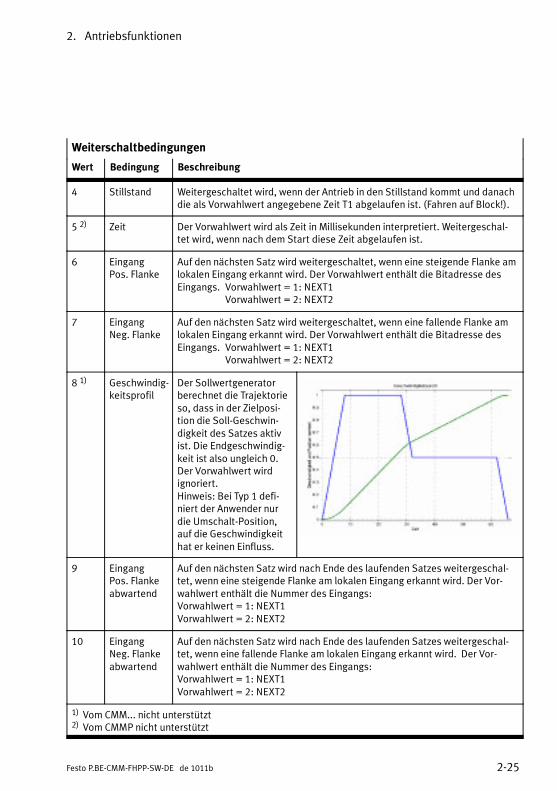
2. Antriebsfunktionen
2-25Festo P.BE-CMM-FHPP-SW-DE de 1011b
Weiterschaltbedingungen
Wert BeschreibungBedingung
4 Stillstand Weitergeschaltet wird, wenn der Antrieb in den Stillstand kommt und danachdie als Vorwahlwert angegebene Zeit T1 abgelaufen ist. (Fahren auf Block!).
5 2) Zeit Der Vorwahlwert wird als Zeit in Millisekunden interpretiert. Weitergeschal-tet wird, wenn nach dem Start diese Zeit abgelaufen ist.
6 EingangPos. Flanke
Auf den nächsten Satz wird weitergeschaltet, wenn eine steigende Flanke amlokalen Eingang erkannt wird. Der Vorwahlwert enthält die Bitadresse desEingangs. Vorwahlwert = 1: NEXT1
Vorwahlwert = 2: NEXT2
7 EingangNeg. Flanke
Auf den nächsten Satz wird weitergeschaltet, wenn eine fallende Flanke amlokalen Eingang erkannt wird. Der Vorwahlwert enthält die Bitadresse desEingangs. Vorwahlwert = 1: NEXT1
Vorwahlwert = 2: NEXT2
8 1) Geschwindig-keitsprofil
Der Sollwertgeneratorberechnet die Trajektorieso, dass in der Zielposi-tion die Soll-Geschwin-digkeit des Satzes aktivist. Die Endgeschwindig-keit ist also ungleich 0.Der Vorwahlwert wirdignoriert.Hinweis: Bei Typ 1 defi-niert der Anwender nurdie Umschalt-Position,auf die Geschwindigkeithat er keinen Einfluss.
9 EingangPos. Flankeabwartend
Auf den nächsten Satz wird nach Ende des laufenden Satzes weitergeschal-tet, wenn eine steigende Flanke am lokalen Eingang erkannt wird. Der Vor-wahlwert enthält die Nummer des Eingangs:Vorwahlwert = 1: NEXT1Vorwahlwert = 2: NEXT2
10 EingangNeg. Flankeabwartend
Auf den nächsten Satz wird nach Ende des laufenden Satzes weitergeschal-tet, wenn eine fallende Flanke am lokalen Eingang erkannt wird. Der Vor-wahlwert enthält die Nummer des Eingangs:Vorwahlwert = 1: NEXT1Vorwahlwert = 2: NEXT2
1) Vom CMM... nicht unterstützt2) Vom CMMP nicht unterstützt
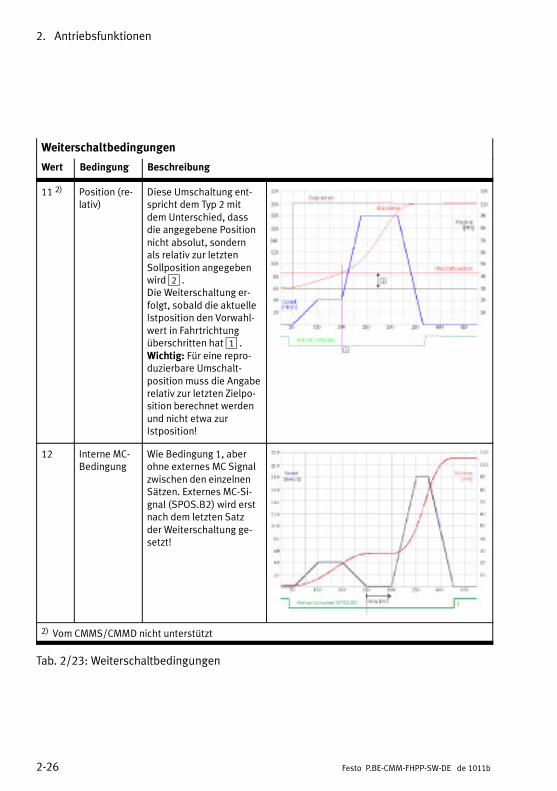
2. Antriebsfunktionen
2-26 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Weiterschaltbedingungen
Wert BeschreibungBedingung
11 2) Position (re-lativ)
Diese Umschaltung ent-spricht dem Typ 2 mitdem Unterschied, dassdie angegebene Positionnicht absolut, sondernals relativ zur letztenSollposition angegebenwird2 .Die Weiterschaltung er-folgt, sobald die aktuelleIstposition den Vorwahl-wert in Fahrtrichtungüberschritten hat1 .Wichtig: Für eine repro-duzierbare Umschalt-position muss die Angaberelativ zur letzten Zielpo-sition berechnet werdenund nicht etwa zurIstposition!
12 Interne MC-Bedingung
Wie Bedingung 1, aberohne externes MC Signalzwischen den einzelnenSätzen. Externes MC-Si-gnal (SPOS.B2) wird erstnach dem letzten Satzder Weiterschaltung ge-setzt!
2) Vom CMMS/CMMD nicht unterstützt
Tab. 2/23: Weiterschaltbedingungen
2. Antriebsfunktionen
2-27Festo P.BE-CMM-FHPP-SW-DE de 1011b
2.7 Direktauftrag
Im Zustand “Betrieb freigegeben” (Direktauftrag) wird einAuftrag direkt in den E/A-Daten formuliert, die über Feldbusübertragen werden. Die Sollwerte werden dabei teilweise inder SPS vorgehalten.
Die Funktion wird in folgenden Situationen angewendet:
– Wahlfreies Anfahren von Positionen innerhalb des Nutz-hubs.
– Die Zielpositionen sind bei der Projektierung unbekanntoder ändern sich häufig (z. B. viele unterschiedliche Werk-stückpositionen).
– Ein Verfahrprofil durch Verkettung von Sätzen (G25-Funk-tion) ist nicht notwendig.
– Der Antrieb soll einem Sollwert kontinuierlich folgen.
Wenn kurze Wartezeiten unkritisch sind, kann ein Verfahrpro-fil durch Verkettung von Sätzen extern durch die SPS gesteu-ert realisiert werden.
Fehlerursachen in Anwendung
– Keine Referenzierung ausgeführt (sofern erforderlich,siehe PNU 1014).
– Zielposition nicht erreichbar bzw. außerhalb Software-Endlagen.
– Lastmoment zu groß.
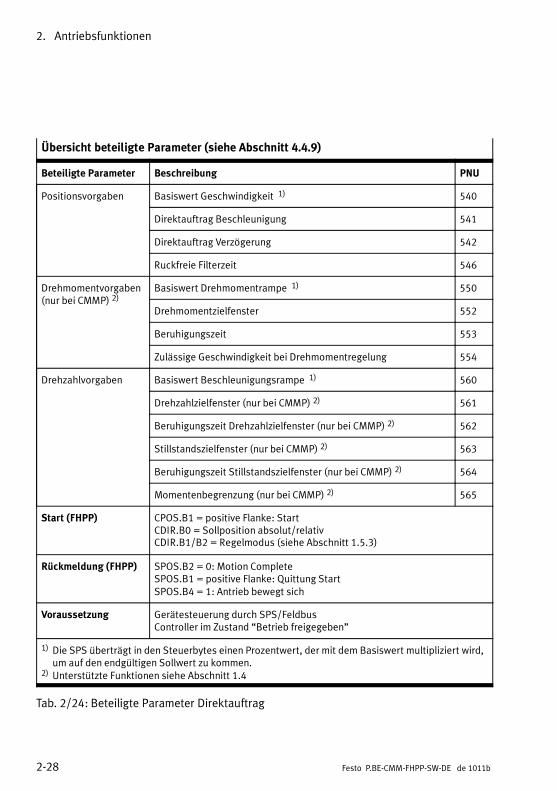
2. Antriebsfunktionen
2-28 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Übersicht beteiligte Parameter (siehe Abschnitt 4.4.9)
Beteiligte Parameter Beschreibung PNU
Positionsvorgaben Basiswert Geschwindigkeit 1) 540
Direktauftrag Beschleunigung 541
Direktauftrag Verzögerung 542
Ruckfreie Filterzeit 546
Drehmomentvorgaben(nur bei CMMP) 2)
Basiswert Drehmomentrampe 1) 550
Drehmomentzielfenster 552
Beruhigungszeit 553
Zulässige Geschwindigkeit bei Drehmomentregelung 554
Drehzahlvorgaben Basiswert Beschleunigungsrampe 1) 560
Drehzahlzielfenster (nur bei CMMP) 2) 561
Beruhigungszeit Drehzahlzielfenster (nur bei CMMP) 2) 562
Stillstandszielfenster (nur bei CMMP) 2) 563
Beruhigungszeit Stillstandszielfenster (nur bei CMMP) 2) 564
Momentenbegrenzung (nur bei CMMP) 2) 565
Start (FHPP) CPOS.B1 = positive Flanke: StartCDIR.B0 = Sollposition absolut/relativCDIR.B1/B2 = Regelmodus (siehe Abschnitt 1.5.3)
Rückmeldung (FHPP) SPOS.B2 = 0: Motion CompleteSPOS.B1 = positive Flanke: Quittung StartSPOS.B4 = 1: Antrieb bewegt sich
Voraussetzung Gerätesteuerung durch SPS/FeldbusController im Zustand “Betrieb freigegeben”
1) Die SPS überträgt in den Steuerbytes einen Prozentwert, der mit dem Basiswert multipliziert wird,um auf den endgültigen Sollwert zu kommen.
2) Unterstützte Funktionen siehe Abschnitt 1.4
Tab. 2/24: Beteiligte Parameter Direktauftrag
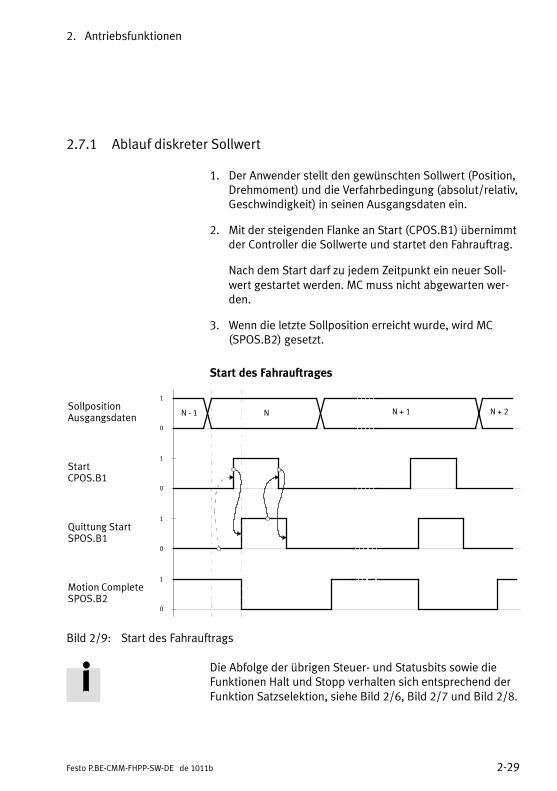
2. Antriebsfunktionen
2-29Festo P.BE-CMM-FHPP-SW-DE de 1011b
2.7.1 Ablauf diskreter Sollwert
1. Der Anwender stellt den gewünschten Sollwert (Position,Drehmoment) und die Verfahrbedingung (absolut/relativ,Geschwindigkeit) in seinen Ausgangsdaten ein.
2. Mit der steigenden Flanke an Start (CPOS.B1) übernimmtder Controller die Sollwerte und startet den Fahrauftrag.
Nach dem Start darf zu jedem Zeitpunkt ein neuer Soll-wert gestartet werden. MC muss nicht abgewarten wer-den.
3. Wenn die letzte Sollposition erreicht wurde, wird MC(SPOS.B2) gesetzt.
Start des Fahrauftrages
SollpositionAusgangsdaten
StartCPOS.B1
Quittung StartSPOS.B1
Motion CompleteSPOS.B2
N - 1 N N + 1
1
0
1
0
1
0
1
0
N + 2
Bild 2/9: Start des Fahrauftrags
Die Abfolge der übrigen Steuer- und Statusbits sowie dieFunktionen Halt und Stopp verhalten sich entsprechend derFunktion Satzselektion, siehe Bild 2/6, Bild 2/7 und Bild 2/8.
2. Antriebsfunktionen
2-30 Festo P.BE-CMM-FHPP-SW-DE de 1011b
2.7.2 Ablauf Kraftbetrieb (Drehmoment-, Stromregelung)
Der Kraftbetrieb wird durch das Umschalten des Regelmodusmit den Bits CDIR - COM1/2 vorbereitet. Der Antrieb bleibtdabei positionsgeregelt stehen. Das Signal “MC” (MotionComplete) wird in diesem Regelmodus im Sinne von “Dreh-momentsollwert erreicht” benutzt.
Nach der Sollwertvorgabe wird mit dem Startsignal (Start-Bit)das Drehmoment / das Moment mit der Drehmomentrampe(nur CMMP-AS) in der Richtung des Vorzeichens des Soll-werts aufgebaut und der aktive Drehmomentregelmodusüber die Bits SDIR - COM1/2 angezeigt.
Beim CMMP:Die Geschwindigkeit wird dabei auf den Wert im Parameter“Zulässige Geschwindigkeit” begrenzt. Bei Erreichen dieserGeschwindigkeit wird das Bit “Geschwindigkeitsgrenze er-reicht” im Statusbyte SDIR gesetzt.
Bei Erreichen des Sollwerts unter Berücksichtigung des Ziel-fensters und des Zeitfensters wird das “MC” Signal gesetzt.Drehmoment / Moment werden weiter geregelt.
Fehlerursachen in Anwendung
– Keine Referenzierung ausgeführt (sofern erforderlich,siehe PNU 1014).
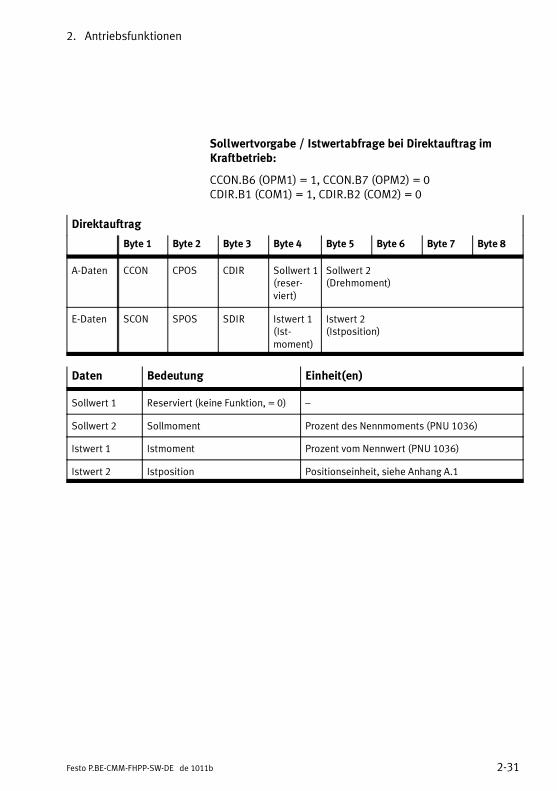
2. Antriebsfunktionen
2-31Festo P.BE-CMM-FHPP-SW-DE de 1011b
Sollwertvorgabe / Istwertabfrage bei Direktauftrag imKraftbetrieb:
CCON.B6 (OPM1) = 1, CCON.B7 (OPM2) = 0CDIR.B1 (COM1) = 1, CDIR.B2 (COM2) = 0
Direktauftrag
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
A-Daten CCON CPOS CDIR Sollwert 1(reser-viert)
Sollwert 2(Drehmoment)
E-Daten SCON SPOS SDIR Istwert 1(Ist-moment)
Istwert 2(Istposition)
Daten Bedeutung Einheit(en)
Sollwert 1 Reserviert (keine Funktion, = 0) –
Sollwert 2 Sollmoment Prozent des Nennmoments (PNU 1036)
Istwert 1 Istmoment Prozent vom Nennwert (PNU 1036)
Istwert 2 Istposition Positionseinheit, siehe Anhang A.1
2. Antriebsfunktionen
2-32 Festo P.BE-CMM-FHPP-SW-DE de 1011b
2.7.3 Ablauf Drehzahlregelung
Die Drehzahlregelung wird nur in der Betriebsart “Direktauf-trag” unterstützt. Es wird nur die “diskrete Sollwertnachfüh-rung” (vgl. Abschnitt 2.7.1) unterstützt.
Die Drehzahlregelung wird durch das Umschalten des Regel-modus angefordert. Der Antrieb bleibt dabei in der vorhereingestellten Betriebsart. Nach der Sollwertvorgabe wird mitdem Startsignal (Start-Bit) in die Betriebsart Drehzahlrege-lung gewechselt und der Drehzahlsollwert wirksam.Das Moment wird dabei auf den Wert im Parameter “Momen-tenbegrenzung” (PNU 565) begrenzt.
Das Signal “MC” (Motion Complete) wird in diesem Regelmo-dus im Sinne von “Drehzahlzielwert erreicht” benutzt:
Motion Complete / Stillstandsmeldung
Für die Ermittlung von “Drehzahl erreicht” und “Drehzahl 0”wird der gleiche Komparatortyp verwendet, der sich entspre-chend Bild 2/10 verhält, siehe Tab. 2/25.
Sollwert Vorgaben zum Erreichen von MC (Motion Complete)
≠ 0 Zieldrehzahl: Sollwert gemäß E- DatenToleranz: Drehzahlzielfenster (PNU 561)Einschwingzeit: Beruhigungszeit Drehzahlzielfenster (PNU 562)
= 0 Zieldrehzahl: Sollwert gemäß E- DatenToleranz: Stillstandszielfenster (PNU 563)Einschwingzeit: Beruhigungszeit Stillstandszielfenster (PNU 564)
Tab. 2/25: Vorgaben Motion Complete / Stillstandsmeldung
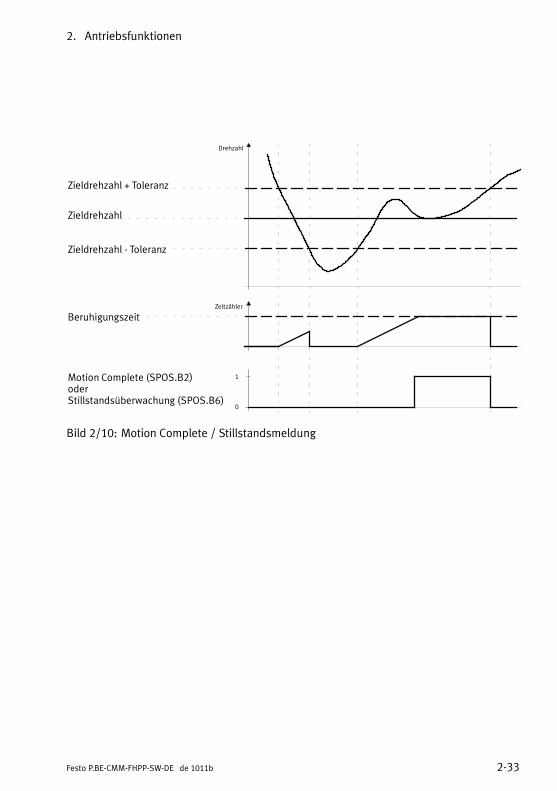
2. Antriebsfunktionen
2-33Festo P.BE-CMM-FHPP-SW-DE de 1011b
Zieldrehzahl + Toleranz
Beruhigungszeit
Motion Complete (SPOS.B2)oderStillstandsüberwachung (SPOS.B6)
Zeitzähler
1
0
Drehzahl
Zieldrehzahl
Zieldrehzahl - Toleranz
Bild 2/10: Motion Complete / Stillstandsmeldung
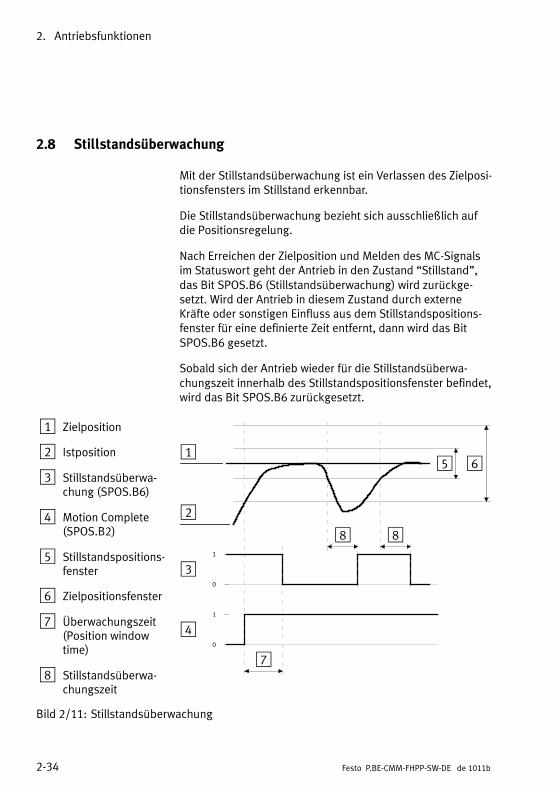
2. Antriebsfunktionen
2-34 Festo P.BE-CMM-FHPP-SW-DE de 1011b
2.8 Stillstandsüberwachung
Mit der Stillstandsüberwachung ist ein Verlassen des Zielposi-tionsfensters im Stillstand erkennbar.
Die Stillstandsüberwachung bezieht sich ausschließlich aufdie Positionsregelung.
Nach Erreichen der Zielposition und Melden des MC-Signalsim Statuswort geht der Antrieb in den Zustand “Stillstand”,das Bit SPOS.B6 (Stillstandsüberwachung) wird zurückge-setzt. Wird der Antrieb in diesem Zustand durch externeKräfte oder sonstigen Einfluss aus dem Stillstandspositions-fenster für eine definierte Zeit entfernt, dann wird das BitSPOS.B6 gesetzt.
Sobald sich der Antrieb wieder für die Stillstandsüberwa-chungszeit innerhalb des Stillstandspositionsfenster befindet,wird das Bit SPOS.B6 zurückgesetzt.
1 Zielposition
2 Istposition
3 Stillstandsüberwa-chung (SPOS.B6)
4 Motion Complete(SPOS.B2)
5 Stillstandspositions-fenster
6 Zielpositionsfenster
7 Überwachungszeit(Position windowtime)
8 Stillstandsüberwa-chungszeit
1
0
1
0
1
2
3
4
5 6
7
88
Bild 2/11: Stillstandsüberwachung
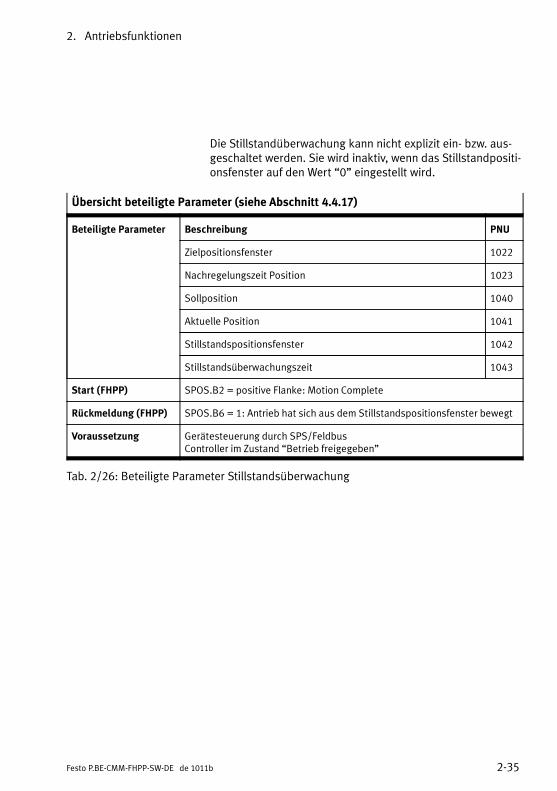
2. Antriebsfunktionen
2-35Festo P.BE-CMM-FHPP-SW-DE de 1011b
Die Stillstandüberwachung kann nicht explizit ein- bzw. aus-geschaltet werden. Sie wird inaktiv, wenn das Stillstandpositi-onsfenster auf den Wert “0” eingestellt wird.
Übersicht beteiligte Parameter (siehe Abschnitt 4.4.17)
Beteiligte Parameter Beschreibung PNU
Zielpositionsfenster 1022
Nachregelungszeit Position 1023
Sollposition 1040
Aktuelle Position 1041
Stillstandspositionsfenster 1042
Stillstandsüberwachungszeit 1043
Start (FHPP) SPOS.B2 = positive Flanke: Motion Complete
Rückmeldung (FHPP) SPOS.B6 = 1: Antrieb hat sich aus dem Stillstandspositionsfenster bewegt
Voraussetzung Gerätesteuerung durch SPS/FeldbusController im Zustand “Betrieb freigegeben”
Tab. 2/26: Beteiligte Parameter Stillstandsüberwachung
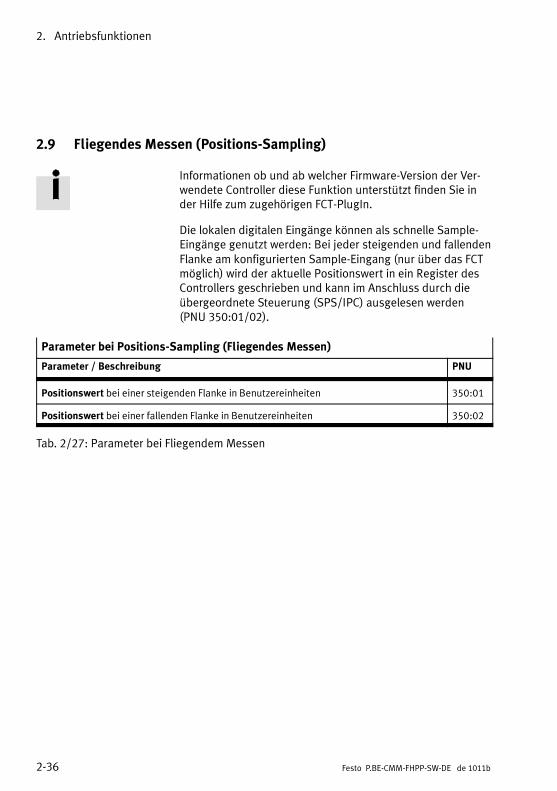
2. Antriebsfunktionen
2-36 Festo P.BE-CMM-FHPP-SW-DE de 1011b
2.9 Fliegendes Messen (Positions-Sampling)
Informationen ob und ab welcher Firmware-Version der Ver-wendete Controller diese Funktion unterstützt finden Sie inder Hilfe zum zugehörigen FCT-PlugIn.
Die lokalen digitalen Eingänge können als schnelle Sample-Eingänge genutzt werden: Bei jeder steigenden und fallendenFlanke am konfigurierten Sample-Eingang (nur über das FCTmöglich) wird der aktuelle Positionswert in ein Register desControllers geschrieben und kann im Anschluss durch dieübergeordnete Steuerung (SPS/IPC) ausgelesen werden(PNU 350:01/02).
Parameter bei Positions-Sampling (Fliegendes Messen)
Parameter / Beschreibung PNU
Positionswert bei einer steigenden Flanke in Benutzereinheiten 350:01
Positionswert bei einer fallenden Flanke in Benutzereinheiten 350:02
Tab. 2/27: Parameter bei Fliegendem Messen

Störverhalten und Diagnose
3-1Festo P.BE-CMM-FHPP-SW-DE de 1011b
Kapitel 3
Störverhalten und Diagnose
3. Störverhalten und Diagnose
3-2 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Inhaltsverzeichnis
3.1 Einteilung der Störungen 3-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.1 Warnungen 3-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.2 Störung Typ 1 3-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.3 Störung Typ 2 3-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Diagnosespeicher (Störungen) 3-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Warnungsspeicher (nur CMMP) 3-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Störnummern 3-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.1 Störnummern CMMP 3-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.2 Störnummern CMMS/CMMD 3-46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5 Diagnose über FHPP-Statusbytes 3-52. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3. Störverhalten und Diagnose
3-3Festo P.BE-CMM-FHPP-SW-DE de 1011b
3.1 Einteilung der Störungen
Es werden folgende Störungsarten unterschieden:
– Warnungen,
– Störung Typ 1 (Endstufe wird nicht abgeschaltet),
– Störung Typ 2 (Endstufe wird abgeschaltet).
Die Einordnung der möglichen Störungen sind controllerspe-zifisch festgelegt. Grundlage ist hier jeweils das notwendigeVerhalten des Reglers bei der jeweiligen Störung.
Die Controller signalisieren Fehler oder Störungen durch ent-sprechende Fehlermeldungen oder Warnungen. Diese könnenüber folgende Möglichkeiten ausgewertet werden:
– Displayanzeige,
– Statusbytes (siehe Abschnitt 1.4),
– Busspezifische Diagnose (siehe Beschreibung zum Feld-bus des verwendeten Controllers),
– Diagnosespeicher (siehe Abschnitt 3.2),
– FCT (siehe Hilfe zum FCT).
3. Störverhalten und Diagnose
3-4 Festo P.BE-CMM-FHPP-SW-DE de 1011b
3.1.1 Warnungen
Eine Warnung ist eine Information für den Anwender, die kei-nen Einfluss auf das Verhalten des Antriebs hat.
Verhalten bei Warnungen
– Regler und Endstufe bleiben aktiv.
– Die aktuelle Positionierung wird nicht abgebrochen.
– Abhängig von der Störnummer ist eine neue Posi-tionierung unter Umständen möglich.
– Das Bit SCON.B2 (WARN) wird gesetzt.
– Wenn die Warnungsursache verschwindet, wird das BitSCON.B2 automatisch wieder gelöscht.
– nur CMMP:Die Warnungsnummern werden im Warnungsregister pro-tokolliert (PNU 211).
Ursachen von Warnungen
– Parameter kann nicht geschrieben oder gelesen werden(Im Betriebszustand nicht zulässig, ungültige PNU, ...).
– Schleppfehler, Antrieb hat nach Motion Complete die Tole-ranz verlassen u.ä. leichte Regelfehler.
3. Störverhalten und Diagnose
3-5Festo P.BE-CMM-FHPP-SW-DE de 1011b
3.1.2 Störung Typ 1
Bei einem Fehler kann die geforderte Leistung nicht erbrachtwerden. Die Antrieb wechselt aus seinem aktuellen Zustandin den Zustand “Fault”.
Verhalten bei Störungen Typ 1
– Die Endstufe wird nicht abgeschaltet.
– Die aktuelle Positionierung wird abgebrochen.
– Die Geschwindigkeit wird an der Not-Rampe runtergefah-ren.
– Die Ablaufsteuerung wechselt in den Zustand Fault. Eineneue Positionierung ist nicht möglich.
– Das Bit SCON.B3 (FAULT) wird gesetzt.
– Der Zustand “Fault” kann durch Ausschalten, durch einepositive Flanke am Eingang CCON.B3 (RESET) oder durchRücksetzen/Setzen von DIN5 (Reglerfreigabe) verlassenwerden.
– Haltebremse wird aktiviert, wenn Antrieb gestoppt ist.
Ursachen von Störungen Typ 1
– Software-Endlagen verletzt.
– Motion Complete-Timeout.
– Schleppfehlerüberwachung.
3. Störverhalten und Diagnose
3-6 Festo P.BE-CMM-FHPP-SW-DE de 1011b
3.1.3 Störung Typ 2
Bei einem Fehler kann die geforderte Leistung nicht erbrachtwerden. Die Antrieb wechselt aus seinem aktuellen Zustandin den Zustand ”Fault”.
Verhalten bei Störungen Typ 2
– Die Endstufe wird abgeschaltet.
– Die aktuelle Positionierung wird abgebrochen.
– Der Antrieb trudelt aus.
– Die Ablaufsteuerung wechselt in den Zustand Fault. Eineneue Positionierung ist nicht möglich.
– Das Bit SCON.B3 (FAULT) wird gesetzt.
– Der Zustand “Fault” kann durch Ausschalten, durch einepositive Flanke am Eingang CCON.B3 (RESET) oder durchRücksetzen/Setzen von DIN5 (Reglerfreigabe) verlassenwerden.
– Haltebremse wird aktiviert, wenn Antrieb gestoppt ist.
Ursachen von Störungen Typ 2
– Lastspannung fehlt (z. B. bei einer implementiertenNotabschaltung).
– Hardware-Fehler:
– Messsystemfehler.
– Busfehler.
– SD-Kartenfehler.
– Unzulässiger Betriebsartenwechsel.
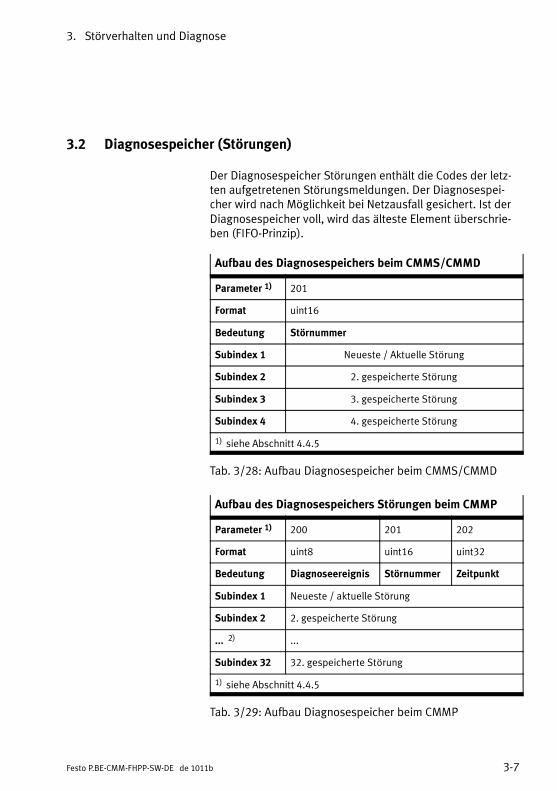
3. Störverhalten und Diagnose
3-7Festo P.BE-CMM-FHPP-SW-DE de 1011b
3.2 Diagnosespeicher (Störungen)
Der Diagnosespeicher Störungen enthält die Codes der letz-ten aufgetretenen Störungsmeldungen. Der Diagnosespei-cher wird nach Möglichkeit bei Netzausfall gesichert. Ist derDiagnosespeicher voll, wird das älteste Element überschrie-ben (FIFO-Prinzip).
Aufbau des Diagnosespeichers beim CMMS/CMMD
Parameter 1) 201
Format uint16
Bedeutung Störnummer
Subindex 1 Neueste / Aktuelle Störung
Subindex 2 2. gespeicherte Störung
Subindex 3 3. gespeicherte Störung
Subindex 4 4. gespeicherte Störung
1) siehe Abschnitt 4.4.5
Tab. 3/28: Aufbau Diagnosespeicher beim CMMS/CMMD
Aufbau des Diagnosespeichers Störungen beim CMMP
Parameter 1) 200 201 202
Format uint8 uint16 uint32
Bedeutung Diagnoseereignis Störnummer Zeitpunkt
Subindex 1 Neueste / aktuelle Störung
Subindex 2 2. gespeicherte Störung
... 2) ...
Subindex 32 32. gespeicherte Störung
1) siehe Abschnitt 4.4.5
Tab. 3/29: Aufbau Diagnosespeicher beim CMMP
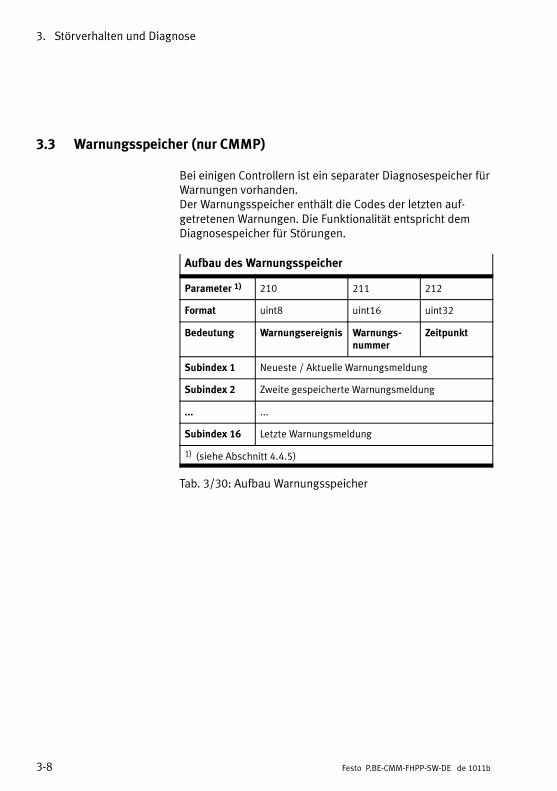
3. Störverhalten und Diagnose
3-8 Festo P.BE-CMM-FHPP-SW-DE de 1011b
3.3 Warnungsspeicher (nur CMMP)
Bei einigen Controllern ist ein separater Diagnosespeicher fürWarnungen vorhanden.Der Warnungsspeicher enthält die Codes der letzten auf-getretenen Warnungen. Die Funktionalität entspricht demDiagnosespeicher für Störungen.
Aufbau des Warnungsspeicher
Parameter 1) 210 211 212
Format uint8 uint16 uint32
Bedeutung Warnungsereignis Warnungs-nummer
Zeitpunkt
Subindex 1 Neueste / Aktuelle Warnungsmeldung
Subindex 2 Zweite gespeicherte Warnungsmeldung
... ...
Subindex 16 Letzte Warnungsmeldung
1) (siehe Abschnitt 4.4.5)
Tab. 3/30: Aufbau Warnungsspeicher
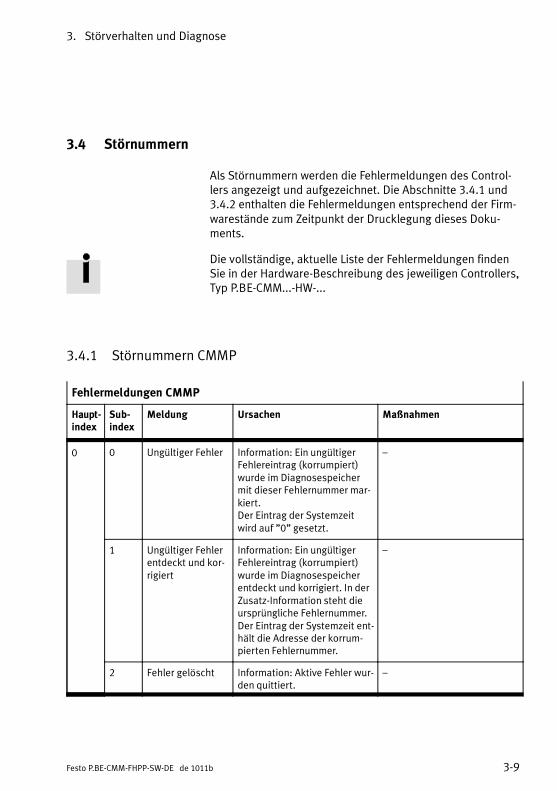
3. Störverhalten und Diagnose
3-9Festo P.BE-CMM-FHPP-SW-DE de 1011b
3.4 Störnummern
Als Störnummern werden die Fehlermeldungen des Control-lers angezeigt und aufgezeichnet. Die Abschnitte 3.4.1 und3.4.2 enthalten die Fehlermeldungen entsprechend der Firm-warestände zum Zeitpunkt der Drucklegung dieses Doku-ments.
Die vollständige, aktuelle Liste der Fehlermeldungen findenSie in der Hardware-Beschreibung des jeweiligen Controllers,Typ P.BE-CMM...-HW-...
3.4.1 Störnummern CMMP
Fehlermeldungen CMMP
Haupt-index
Sub-index
Meldung Ursachen Maßnahmen
0 0 Ungültiger Fehler Information: Ein ungültigerFehlereintrag (korrumpiert)wurde im Diagnosespeichermit dieser Fehlernummer mar-kiert.Der Eintrag der Systemzeitwird auf ”0” gesetzt.
–
1 Ungültiger Fehlerentdeckt und kor-rigiert
Information: Ein ungültigerFehlereintrag (korrumpiert)wurde im Diagnosespeicherentdeckt und korrigiert. In derZusatz-Information steht dieursprüngliche Fehlernummer.Der Eintrag der Systemzeit ent-hält die Adresse der korrum-pierten Fehlernummer.
–
2 Fehler gelöscht Information: Aktive Fehler wur-den quittiert.
–
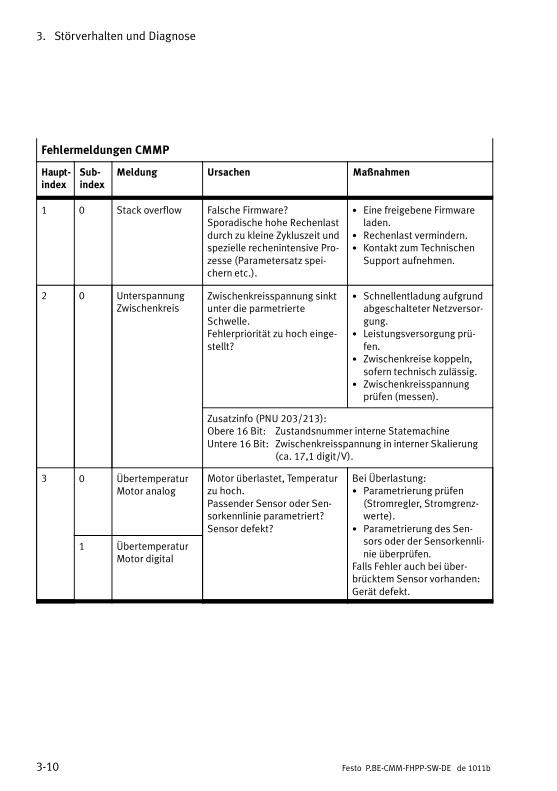
3. Störverhalten und Diagnose
3-10 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
1 0 Stack overflow Falsche Firmware?Sporadische hohe Rechenlastdurch zu kleine Zykluszeit undspezielle rechenintensive Pro-zesse (Parametersatz spei-chern etc.).
• Eine freigebene Firmwareladen.
• Rechenlast vermindern.• Kontakt zum Technischen
Support aufnehmen.
2 0 UnterspannungZwischenkreis
Zwischenkreisspannung sinktunter die parmetrierteSchwelle.Fehlerpriorität zu hoch einge-stellt?
• Schnellentladung aufgrundabgeschalteter Netzversor-gung.
• Leistungsversorgung prü-fen.
• Zwischenkreise koppeln,sofern technisch zulässig.
• Zwischenkreisspannungprüfen (messen).
Zusatzinfo (PNU 203/213):Obere 16 Bit: Zustandsnummer interne StatemachineUntere 16 Bit: Zwischenkreisspannung in interner Skalierung
(ca. 17,1 digit/V).
3 0 ÜbertemperaturMotor analog
Motor überlastet, Temperaturzu hoch.Passender Sensor oder Sen-sorkennlinie parametriert?Sensor defekt?
Bei Überlastung:• Parametrierung prüfen
(Stromregler, Stromgrenz-werte).
• Parametrierung des Sen-sors oder der Sensorkennli-nie überprüfen.
Falls Fehler auch bei über-brücktem Sensor vorhanden:Gerät defekt.
1 ÜbertemperaturMotor digital
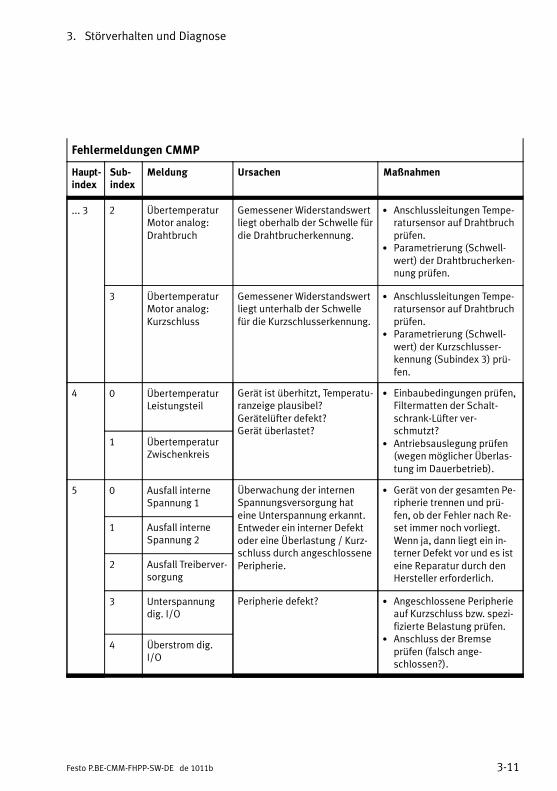
3. Störverhalten und Diagnose
3-11Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
... 3 2 ÜbertemperaturMotor analog:Drahtbruch
Gemessener Widerstandswertliegt oberhalb der Schwelle fürdie Drahtbrucherkennung.
• Anschlussleitungen Tempe-ratursensor auf Drahtbruchprüfen.
• Parametrierung (Schwell-wert) der Drahtbrucherken-nung prüfen.
3 ÜbertemperaturMotor analog:Kurzschluss
Gemessener Widerstandswertliegt unterhalb der Schwellefür die Kurzschlusserkennung.
• Anschlussleitungen Tempe-ratursensor auf Drahtbruchprüfen.
• Parametrierung (Schwell-wert) der Kurzschlusser-kennung (Subindex 3) prü-fen.
4 0 ÜbertemperaturLeistungsteil
Gerät ist überhitzt, Temperatu-ranzeige plausibel?Gerätelüfter defekt?Gerät überlastet?
• Einbaubedingungen prüfen,Filtermatten der Schalt-schrank-Lüfter ver-schmutzt?
• Antriebsauslegung prüfen(wegen möglicher Überlas-tung im Dauerbetrieb).
1 ÜbertemperaturZwischenkreis
5 0 Ausfall interneSpannung 1
Überwachung der internenSpannungsversorgung hateine Unterspannung erkannt.Entweder ein interner Defektoder eine Überlastung / Kurz-schluss durch angeschlossenePeripherie.
• Gerät von der gesamten Pe-ripherie trennen und prü-fen, ob der Fehler nach Re-set immer noch vorliegt.Wenn ja, dann liegt ein in-terner Defekt vor und es isteine Reparatur durch denHersteller erforderlich.
1 Ausfall interneSpannung 2
2 Ausfall Treiberver-sorgung
3 Unterspannungdig. I/O
Peripherie defekt? • Angeschlossene Peripherieauf Kurzschluss bzw. spezi-fizierte Belastung prüfen.
• Anschluss der Bremseprüfen (falsch ange-schlossen?).
4 Überstrom dig.I/O
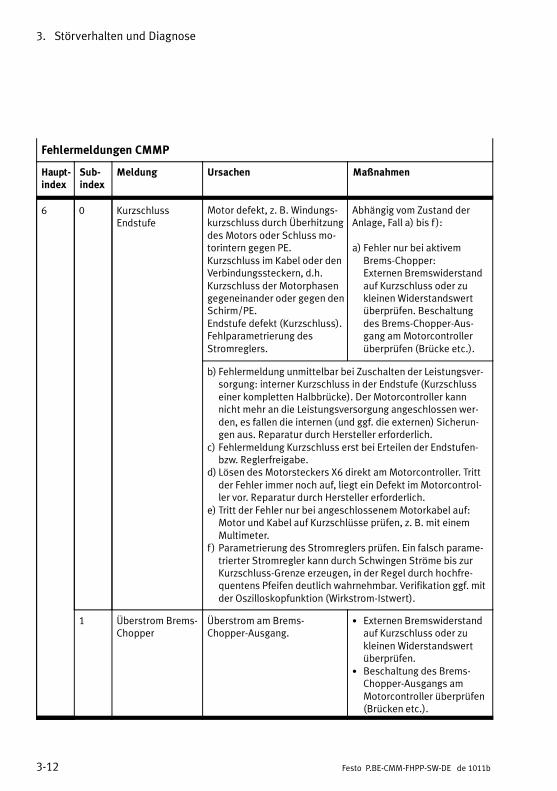
3. Störverhalten und Diagnose
3-12 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
6 0 KurzschlussEndstufe
Motor defekt, z. B. Windungs-kurzschluss durch Überhitzungdes Motors oder Schluss mo-torintern gegen PE.Kurzschluss im Kabel oder denVerbindungssteckern, d.h.Kurzschluss der Motorphasengegeneinander oder gegen denSchirm/PE.Endstufe defekt (Kurzschluss).Fehlparametrierung desStromreglers.
Abhängig vom Zustand derAnlage, Fall a) bis f ):
a) Fehler nur bei aktivemBrems-Chopper:Externen Bremswiderstandauf Kurzschluss oder zukleinenWiderstandswertüberprüfen. Beschaltungdes Brems-Chopper-Aus-gang amMotorcontrollerüberprüfen (Brücke etc.).
b) Fehlermeldung unmittelbar bei Zuschalten der Leistungsver-sorgung: interner Kurzschluss in der Endstufe (Kurzschlusseiner kompletten Halbbrücke). Der Motorcontroller kannnicht mehr an die Leistungsversorgung angeschlossen wer-den, es fallen die internen (und ggf. die externen) Sicherun-gen aus. Reparatur durch Hersteller erforderlich.
c) Fehlermeldung Kurzschluss erst bei Erteilen der Endstufen-bzw. Reglerfreigabe.
d) Lösen des Motorsteckers X6 direkt amMotorcontroller. Trittder Fehler immer noch auf, liegt ein Defekt im Motorcontrol-ler vor. Reparatur durch Hersteller erforderlich.
e) Tritt der Fehler nur bei angeschlossenemMotorkabel auf:Motor und Kabel auf Kurzschlüsse prüfen, z. B. mit einemMultimeter.
f ) Parametrierung des Stromreglers prüfen. Ein falsch parame-trierter Stromregler kann durch Schwingen Ströme bis zurKurzschluss-Grenze erzeugen, in der Regel durch hochfre-quentens Pfeifen deutlich wahrnehmbar. Verifikation ggf. mitder Oszilloskopfunktion (Wirkstrom-Istwert).
1 Überstrom Brems-Chopper
Überstrom am Brems-Chopper-Ausgang.
• Externen Bremswiderstandauf Kurzschluss oder zukleinenWiderstandswertüberprüfen.
• Beschaltung des Brems-Chopper-Ausgangs amMotorcontroller überprüfen(Brücken etc.).
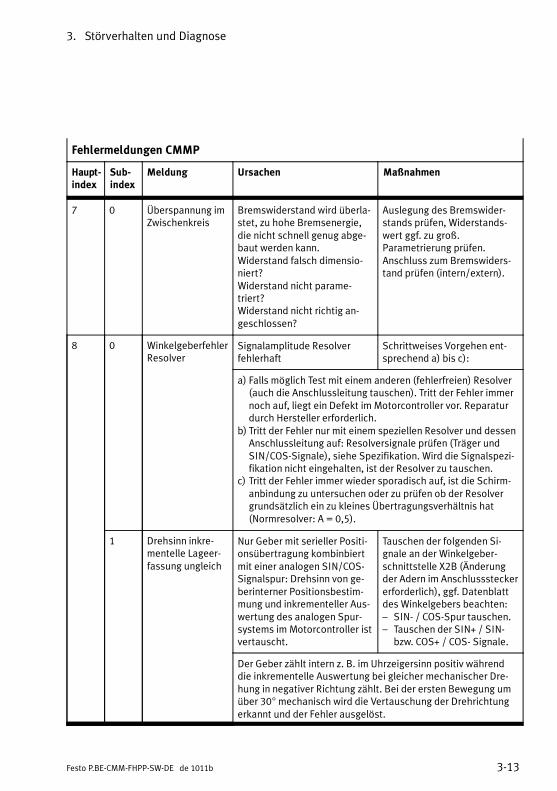
3. Störverhalten und Diagnose
3-13Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
7 0 Überspannung imZwischenkreis
Bremswiderstand wird überla-stet, zu hohe Bremsenergie,die nicht schnell genug abge-baut werden kann.Widerstand falsch dimensio-niert?Widerstand nicht parame-triert?Widerstand nicht richtig an-geschlossen?
Auslegung des Bremswider-stands prüfen, Widerstands-wert ggf. zu groß.Parametrierung prüfen.Anschluss zum Bremswiders-tand prüfen (intern/extern).
8 0 WinkelgeberfehlerResolver
Signalamplitude Resolverfehlerhaft
Schrittweises Vorgehen ent-sprechend a) bis c):
a) Falls möglich Test mit einem anderen (fehlerfreien) Resolver(auch die Anschlussleitung tauschen). Tritt der Fehler immernoch auf, liegt ein Defekt im Motorcontroller vor. Reparaturdurch Hersteller erforderlich.
b) Tritt der Fehler nur mit einem speziellen Resolver und dessenAnschlussleitung auf: Resolversignale prüfen (Träger undSIN/COS-Signale), siehe Spezifikation. Wird die Signalspezi-fikation nicht eingehalten, ist der Resolver zu tauschen.
c) Tritt der Fehler immer wieder sporadisch auf, ist die Schirm-anbindung zu untersuchen oder zu prüfen ob der Resolvergrundsätzlich ein zu kleines Übertragungsverhältnis hat(Normresolver: A = 0,5).
1 Drehsinn inkre-mentelle Lageer-fassung ungleich
Nur Geber mit serieller Positi-onsübertragung kombinbiertmit einer analogen SIN/COS-Signalspur: Drehsinn von ge-berinterner Positionsbestim-mung und inkrementeller Aus-wertung des analogen Spur-systems im Motorcontroller istvertauscht.
Tauschen der folgenden Si-gnale an der Winkelgeber-schnittstelle X2B (Änderungder Adern im Anschlusssteckererforderlich), ggf. Datenblattdes Winkelgebers beachten:– SIN- / COS-Spur tauschen.– Tauschen der SIN+ / SIN-
bzw. COS+ / COS- Signale.
Der Geber zählt intern z. B. im Uhrzeigersinn positiv währenddie inkrementelle Auswertung bei gleicher mechanischer Dre-hung in negativer Richtung zählt. Bei der ersten Bewegung umüber 30°mechanisch wird die Vertauschung der Drehrichtungerkannt und der Fehler ausgelöst.
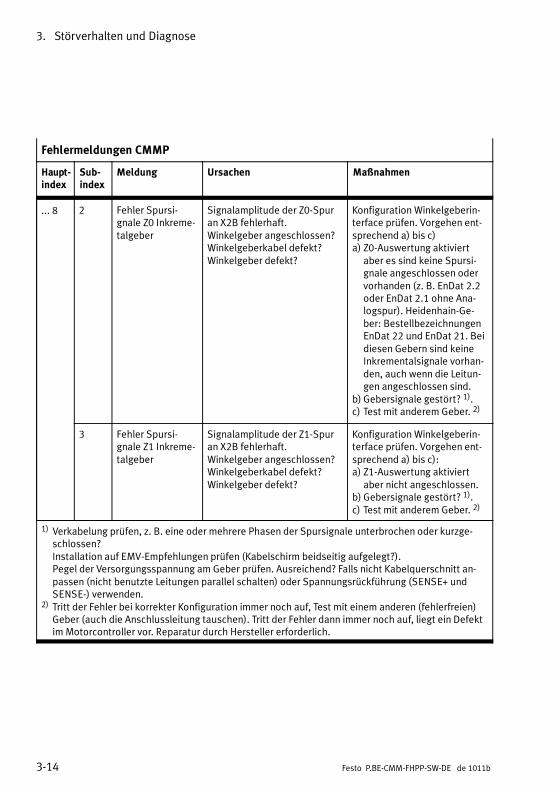
3. Störverhalten und Diagnose
3-14 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
... 8 2 Fehler Spursi-gnale Z0 Inkreme-talgeber
Signalamplitude der Z0-Spuran X2B fehlerhaft.Winkelgeber angeschlossen?Winkelgeberkabel defekt?Winkelgeber defekt?
Konfiguration Winkelgeberin-terface prüfen. Vorgehen ent-sprechend a) bis c)a) Z0-Auswertung aktiviert
aber es sind keine Spursi-gnale angeschlossen odervorhanden (z. B. EnDat 2.2oder EnDat 2.1 ohne Ana-logspur). Heidenhain-Ge-ber: BestellbezeichnungenEnDat 22 und EnDat 21. Beidiesen Gebern sind keineInkrementalsignale vorhan-den, auch wenn die Leitun-gen angeschlossen sind.
b) Gebersignale gestört? 1).c) Test mit anderem Geber. 2)
3 Fehler Spursi-gnale Z1 Inkreme-talgeber
Signalamplitude der Z1-Spuran X2B fehlerhaft.Winkelgeber angeschlossen?Winkelgeberkabel defekt?Winkelgeber defekt?
Konfiguration Winkelgeberin-terface prüfen. Vorgehen ent-sprechend a) bis c):a) Z1-Auswertung aktiviert
aber nicht angeschlossen.b) Gebersignale gestört? 1).c) Test mit anderem Geber. 2)
1) Verkabelung prüfen, z. B. eine oder mehrere Phasen der Spursignale unterbrochen oder kurzge-schlossen?Installation auf EMV-Empfehlungen prüfen (Kabelschirm beidseitig aufgelegt?).Pegel der Versorgungsspannung am Geber prüfen. Ausreichend? Falls nicht Kabelquerschnitt an-passen (nicht benutzte Leitungen parallel schalten) oder Spannungsrückführung (SENSE+ undSENSE-) verwenden.
2) Tritt der Fehler bei korrekter Konfiguration immer noch auf, Test mit einem anderen (fehlerfreien)Geber (auch die Anschlussleitung tauschen). Tritt der Fehler dann immer noch auf, liegt ein Defektim Motorcontroller vor. Reparatur durch Hersteller erforderlich.
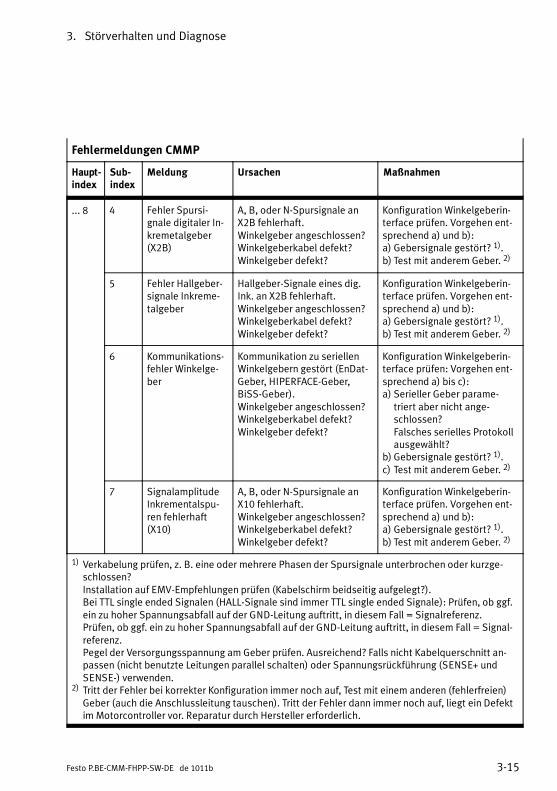
3. Störverhalten und Diagnose
3-15Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
... 8 4 Fehler Spursi-gnale digitaler In-kremetalgeber(X2B)
A, B, oder N-Spursignale anX2B fehlerhaft.Winkelgeber angeschlossen?Winkelgeberkabel defekt?Winkelgeber defekt?
Konfiguration Winkelgeberin-terface prüfen. Vorgehen ent-sprechend a) und b):a) Gebersignale gestört? 1).b) Test mit anderem Geber. 2)
5 Fehler Hallgeber-signale Inkreme-talgeber
Hallgeber-Signale eines dig.Ink. an X2B fehlerhaft.Winkelgeber angeschlossen?Winkelgeberkabel defekt?Winkelgeber defekt?
Konfiguration Winkelgeberin-terface prüfen. Vorgehen ent-sprechend a) und b):a) Gebersignale gestört? 1).b) Test mit anderem Geber. 2)
6 Kommunikations-fehler Winkelge-ber
Kommunikation zu seriellenWinkelgebern gestört (EnDat-Geber, HIPERFACE-Geber,BiSS-Geber).Winkelgeber angeschlossen?Winkelgeberkabel defekt?Winkelgeber defekt?
Konfiguration Winkelgeberin-terface prüfen: Vorgehen ent-sprechend a) bis c):a) Serieller Geber parame-
triert aber nicht ange-schlossen?Falsches serielles Protokollausgewählt?
b) Gebersignale gestört? 1).c) Test mit anderem Geber. 2)
7 SignalamplitudeInkrementalspu-ren fehlerhaft(X10)
A, B, oder N-Spursignale anX10 fehlerhaft.Winkelgeber angeschlossen?Winkelgeberkabel defekt?Winkelgeber defekt?
Konfiguration Winkelgeberin-terface prüfen. Vorgehen ent-sprechend a) und b):a) Gebersignale gestört? 1).b) Test mit anderem Geber. 2)
1) Verkabelung prüfen, z. B. eine oder mehrere Phasen der Spursignale unterbrochen oder kurzge-schlossen?Installation auf EMV-Empfehlungen prüfen (Kabelschirm beidseitig aufgelegt?).Bei TTL single ended Signalen (HALL-Signale sind immer TTL single ended Signale): Prüfen, ob ggf.ein zu hoher Spannungsabfall auf der GND-Leitung auftritt, in diesem Fall = Signalreferenz.Prüfen, ob ggf. ein zu hoher Spannungsabfall auf der GND-Leitung auftritt, in diesem Fall = Signal-referenz.Pegel der Versorgungsspannung am Geber prüfen. Ausreichend? Falls nicht Kabelquerschnitt an-passen (nicht benutzte Leitungen parallel schalten) oder Spannungsrückführung (SENSE+ undSENSE-) verwenden.
2) Tritt der Fehler bei korrekter Konfiguration immer noch auf, Test mit einem anderen (fehlerfreien)Geber (auch die Anschlussleitung tauschen). Tritt der Fehler dann immer noch auf, liegt ein Defektim Motorcontroller vor. Reparatur durch Hersteller erforderlich.
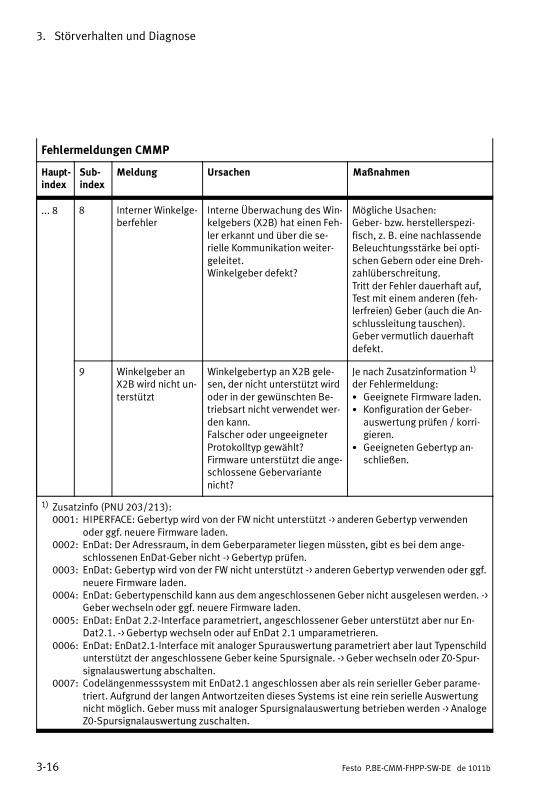
3. Störverhalten und Diagnose
3-16 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
... 8 8 Interner Winkelge-berfehler
Interne Überwachung des Win-kelgebers (X2B) hat einen Feh-ler erkannt und über die se-rielle Kommunikation weiter-geleitet.Winkelgeber defekt?
Mögliche Usachen:Geber- bzw. herstellerspezi-fisch, z. B. eine nachlassendeBeleuchtungsstärke bei opti-schen Gebern oder eine Dreh-zahlüberschreitung.Tritt der Fehler dauerhaft auf,Test mit einem anderen (feh-lerfreien) Geber (auch die An-schlussleitung tauschen).Geber vermutlich dauerhaftdefekt.
9 Winkelgeber anX2B wird nicht un-terstützt
Winkelgebertyp an X2B gele-sen, der nicht unterstützt wirdoder in der gewünschten Be-triebsart nicht verwendet wer-den kann.Falscher oder ungeeigneterProtokolltyp gewählt?Firmware unterstützt die ange-schlossene Gebervariantenicht?
Je nach Zusatzinformation 1)
der Fehlermeldung:• Geeignete Firmware laden.• Konfiguration der Geber-
auswertung prüfen / korri-gieren.
• Geeigneten Gebertyp an-schließen.
1) Zusatzinfo (PNU 203/213):0001: HIPERFACE: Gebertyp wird von der FW nicht unterstützt -> anderen Gebertyp verwenden
oder ggf. neuere Firmware laden.0002: EnDat: Der Adressraum, in dem Geberparameter liegen müssten, gibt es bei dem ange-
schlossenen EnDat-Geber nicht -> Gebertyp prüfen.0003: EnDat: Gebertyp wird von der FW nicht unterstützt -> anderen Gebertyp verwenden oder ggf.
neuere Firmware laden.0004: EnDat: Gebertypenschild kann aus dem angeschlossenen Geber nicht ausgelesen werden. ->
Geber wechseln oder ggf. neuere Firmware laden.0005: EnDat: EnDat 2.2-Interface parametriert, angeschlossener Geber unterstützt aber nur En-
Dat2.1. -> Gebertyp wechseln oder auf EnDat 2.1 umparametrieren.0006: EnDat: EnDat2.1-Interface mit analoger Spurauswertung parametriert aber laut Typenschild
unterstützt der angeschlossene Geber keine Spursignale. -> Geber wechseln oder Z0-Spur-signalauswertung abschalten.
0007: Codelängenmesssystem mit EnDat2.1 angeschlossen aber als rein serieller Geber parame-triert. Aufgrund der langen Antwortzeiten dieses Systems ist eine rein serielle Auswertungnicht möglich. Geber muss mit analoger Spursignalauswertung betrieben werden -> AnalogeZ0-Spursignalauswertung zuschalten.
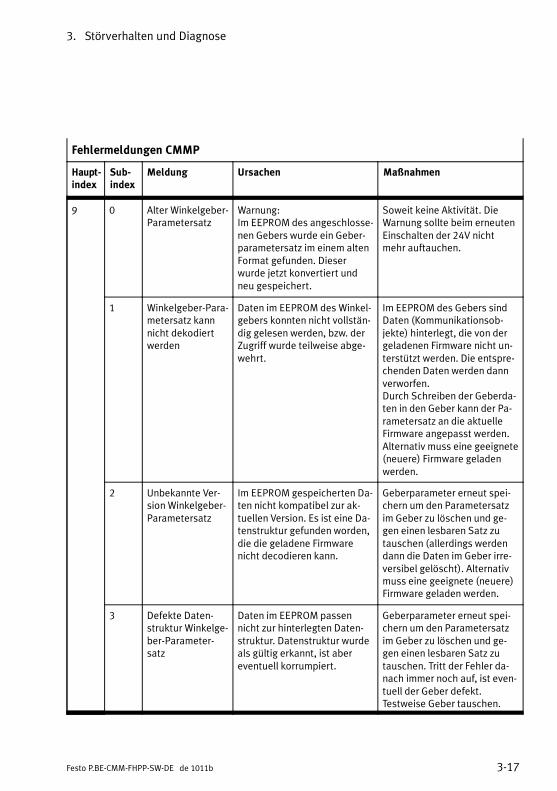
3. Störverhalten und Diagnose
3-17Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
9 0 Alter Winkelgeber-Parametersatz
Warnung:Im EEPROM des angeschlosse-nen Gebers wurde ein Geber-parametersatz im einem altenFormat gefunden. Dieserwurde jetzt konvertiert undneu gespeichert.
Soweit keine Aktivität. DieWarnung sollte beim erneutenEinschalten der 24V nichtmehr auftauchen.
1 Winkelgeber-Para-metersatz kannnicht dekodiertwerden
Daten im EEPROM des Winkel-gebers konnten nicht vollstän-dig gelesen werden, bzw. derZugriff wurde teilweise abge-wehrt.
Im EEPROM des Gebers sindDaten (Kommunikationsob-jekte) hinterlegt, die von dergeladenen Firmware nicht un-terstützt werden. Die entspre-chenden Daten werden dannverworfen.Durch Schreiben der Geberda-ten in den Geber kann der Pa-rametersatz an die aktuelleFirmware angepasst werden.Alternativ muss eine geeignete(neuere) Firmware geladenwerden.
2 Unbekannte Ver-sion Winkelgeber-Parametersatz
Im EEPROM gespeicherten Da-ten nicht kompatibel zur ak-tuellen Version. Es ist eine Da-tenstruktur gefunden worden,die die geladene Firmwarenicht decodieren kann.
Geberparameter erneut spei-chern um den Parametersatzim Geber zu löschen und ge-gen einen lesbaren Satz zutauschen (allerdings werdendann die Daten im Geber irre-versibel gelöscht). Alternativmuss eine geeignete (neuere)Firmware geladen werden.
3 Defekte Daten-struktur Winkelge-ber-Parameter-satz
Daten im EEPROM passennicht zur hinterlegten Daten-struktur. Datenstruktur wurdeals gültig erkannt, ist abereventuell korrumpiert.
Geberparameter erneut spei-chern um den Parametersatzim Geber zu löschen und ge-gen einen lesbaren Satz zutauschen. Tritt der Fehler da-nach immer noch auf, ist even-tuell der Geber defekt.Testweise Geber tauschen.
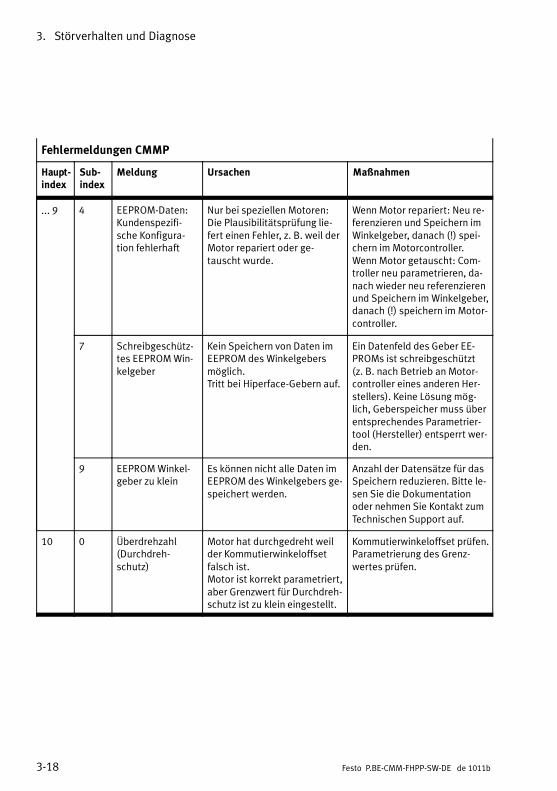
3. Störverhalten und Diagnose
3-18 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
... 9 4 EEPROM-Daten:Kundenspezifi-sche Konfigura-tion fehlerhaft
Nur bei speziellen Motoren:Die Plausibilitätsprüfung lie-fert einen Fehler, z. B. weil derMotor repariert oder ge-tauscht wurde.
WennMotor repariert: Neu re-ferenzieren und Speichern imWinkelgeber, danach (!) spei-chern im Motorcontroller.WennMotor getauscht: Com-troller neu parametrieren, da-nach wieder neu referenzierenund Speichern im Winkelgeber,danach (!) speichern im Motor-controller.
7 Schreibgeschütz-tes EEPROMWin-kelgeber
Kein Speichern von Daten imEEPROM des Winkelgebersmöglich.Tritt bei Hiperface-Gebern auf.
Ein Datenfeld des Geber EE-PROMs ist schreibgeschützt(z. B. nach Betrieb an Motor-controller eines anderen Her-stellers). Keine Lösung mög-lich, Geberspeicher muss überentsprechendes Parametrier-tool (Hersteller) entsperrt wer-den.
9 EEPROMWinkel-geber zu klein
Es können nicht alle Daten imEEPROM des Winkelgebers ge-speichert werden.
Anzahl der Datensätze für dasSpeichern reduzieren. Bitte le-sen Sie die Dokumentationoder nehmen Sie Kontakt zumTechnischen Support auf.
10 0 Überdrehzahl(Durchdreh-schutz)
Motor hat durchgedreht weilder Kommutierwinkeloffsetfalsch ist.Motor ist korrekt parametriert,aber Grenzwert für Durchdreh-schutz ist zu klein eingestellt.
Kommutierwinkeloffset prüfen.Parametrierung des Grenz-wertes prüfen.
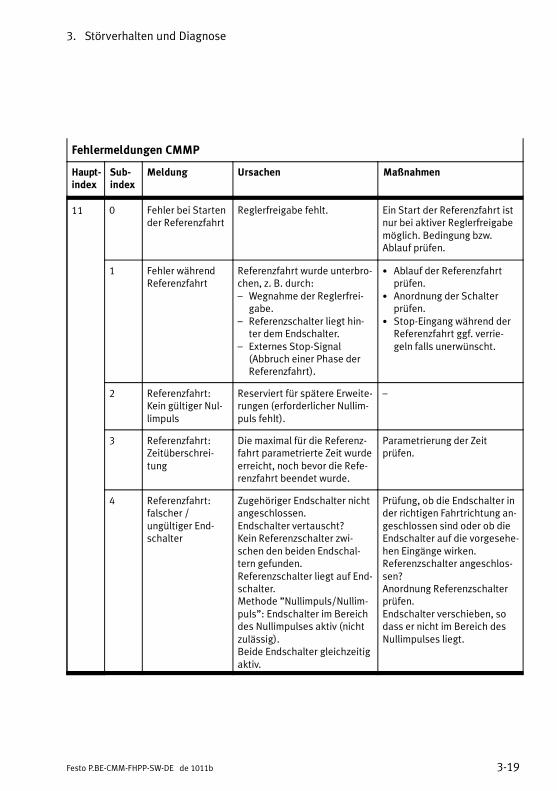
3. Störverhalten und Diagnose
3-19Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
11 0 Fehler bei Startender Referenzfahrt
Reglerfreigabe fehlt. Ein Start der Referenzfahrt istnur bei aktiver Reglerfreigabemöglich. Bedingung bzw.Ablauf prüfen.
1 Fehler währendReferenzfahrt
Referenzfahrt wurde unterbro-chen, z. B. durch:– Wegnahme der Reglerfrei-
gabe.– Referenzschalter liegt hin-
ter dem Endschalter.– Externes Stop-Signal
(Abbruch einer Phase derReferenzfahrt).
• Ablauf der Referenzfahrtprüfen.
• Anordnung der Schalterprüfen.
• Stop-Eingang während derReferenzfahrt ggf. verrie-geln falls unerwünscht.
2 Referenzfahrt:Kein gültiger Nul-limpuls
Reserviert für spätere Erweite-rungen (erforderlicher Nullim-puls fehlt).
–
3 Referenzfahrt:Zeitüberschrei-tung
Die maximal für die Referenz-fahrt parametrierte Zeit wurdeerreicht, noch bevor die Refe-renzfahrt beendet wurde.
Parametrierung der Zeitprüfen.
4 Referenzfahrt:falscher /ungültiger End-schalter
Zugehöriger Endschalter nichtangeschlossen.Endschalter vertauscht?Kein Referenzschalter zwi-schen den beiden Endschal-tern gefunden.Referenzschalter liegt auf End-schalter.Methode ”Nullimpuls/Nullim-puls”: Endschalter im Bereichdes Nullimpulses aktiv (nichtzulässig).Beide Endschalter gleichzeitigaktiv.
Prüfung, ob die Endschalter inder richtigen Fahrtrichtung an-geschlossen sind oder ob dieEndschalter auf die vorgesehe-hen Eingänge wirken.Referenzschalter angeschlos-sen?Anordnung Referenzschalterprüfen.Endschalter verschieben, sodass er nicht im Bereich desNullimpulses liegt.
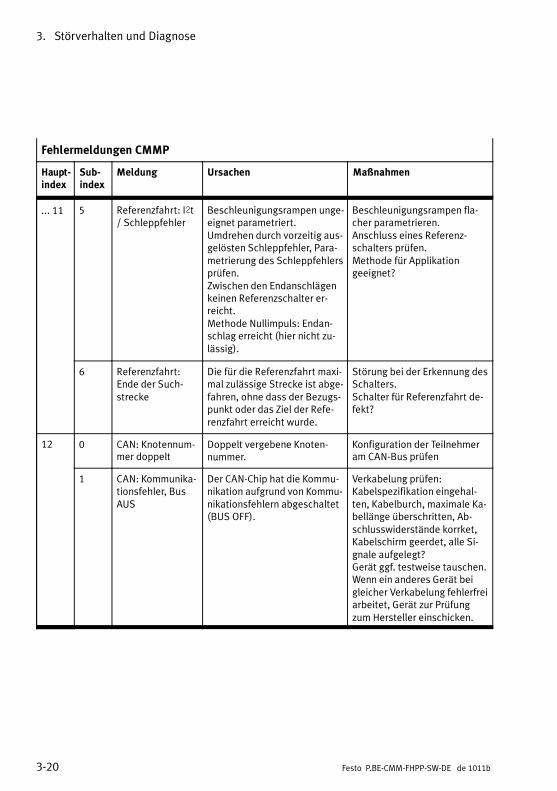
3. Störverhalten und Diagnose
3-20 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
... 11 5 Referenzfahrt: I�t/ Schleppfehler
Beschleunigungsrampen unge-eignet parametriert.Umdrehen durch vorzeitig aus-gelösten Schleppfehler, Para-metrierung des Schleppfehlersprüfen.Zwischen den Endanschlägenkeinen Referenzschalter er-reicht.Methode Nullimpuls: Endan-schlag erreicht (hier nicht zu-lässig).
Beschleunigungsrampen fla-cher parametrieren.Anschluss eines Referenz-schalters prüfen.Methode für Applikationgeeignet?
6 Referenzfahrt:Ende der Such-strecke
Die für die Referenzfahrt maxi-mal zulässige Strecke ist abge-fahren, ohne dass der Bezugs-punkt oder das Ziel der Refe-renzfahrt erreicht wurde.
Störung bei der Erkennung desSchalters.Schalter für Referenzfahrt de-fekt?
12 0 CAN: Knotennum-mer doppelt
Doppelt vergebene Knoten-nummer.
Konfiguration der Teilnehmeram CAN-Bus prüfen
1 CAN: Kommunika-tionsfehler, BusAUS
Der CAN-Chip hat die Kommu-nikation aufgrund von Kommu-nikationsfehlern abgeschaltet(BUS OFF).
Verkabelung prüfen:Kabelspezifikation eingehal-ten, Kabelburch, maximale Ka-bellänge überschritten, Ab-schlusswiderstände korrket,Kabelschirm geerdet, alle Si-gnale aufgelegt?Gerät ggf. testweise tauschen.Wenn ein anderes Gerät beigleicher Verkabelung fehlerfreiarbeitet, Gerät zur Prüfungzum Hersteller einschicken.
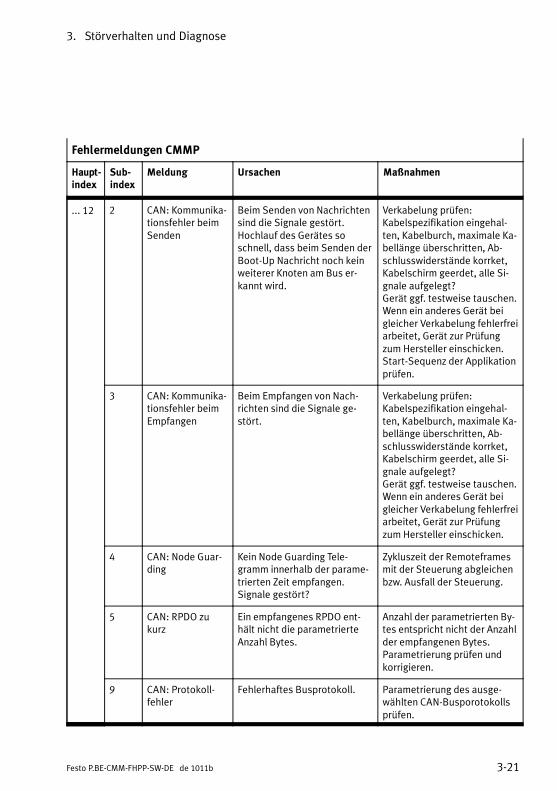
3. Störverhalten und Diagnose
3-21Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
... 12 2 CAN: Kommunika-tionsfehler beimSenden
Beim Senden von Nachrichtensind die Signale gestört.Hochlauf des Gerätes soschnell, dass beim Senden derBoot-Up Nachricht noch keinweiterer Knoten am Bus er-kannt wird.
Verkabelung prüfen:Kabelspezifikation eingehal-ten, Kabelburch, maximale Ka-bellänge überschritten, Ab-schlusswiderstände korrket,Kabelschirm geerdet, alle Si-gnale aufgelegt?Gerät ggf. testweise tauschen.Wenn ein anderes Gerät beigleicher Verkabelung fehlerfreiarbeitet, Gerät zur Prüfungzum Hersteller einschicken.Start-Sequenz der Applikationprüfen.
3 CAN: Kommunika-tionsfehler beimEmpfangen
Beim Empfangen von Nach-richten sind die Signale ge-stört.
Verkabelung prüfen:Kabelspezifikation eingehal-ten, Kabelburch, maximale Ka-bellänge überschritten, Ab-schlusswiderstände korrket,Kabelschirm geerdet, alle Si-gnale aufgelegt?Gerät ggf. testweise tauschen.Wenn ein anderes Gerät beigleicher Verkabelung fehlerfreiarbeitet, Gerät zur Prüfungzum Hersteller einschicken.
4 CAN: Node Guar-ding
Kein Node Guarding Tele-gramm innerhalb der parame-trierten Zeit empfangen.Signale gestört?
Zykluszeit der Remoteframesmit der Steuerung abgleichenbzw. Ausfall der Steuerung.
5 CAN: RPDO zukurz
Ein empfangenes RPDO ent-hält nicht die parametrierteAnzahl Bytes.
Anzahl der parametrierten By-tes entspricht nicht der Anzahlder empfangenen Bytes.Parametrierung prüfen undkorrigieren.
9 CAN: Protokoll-fehler
Fehlerhaftes Busprotokoll. Parametrierung des ausge-wählten CAN-Busporotokollsprüfen.
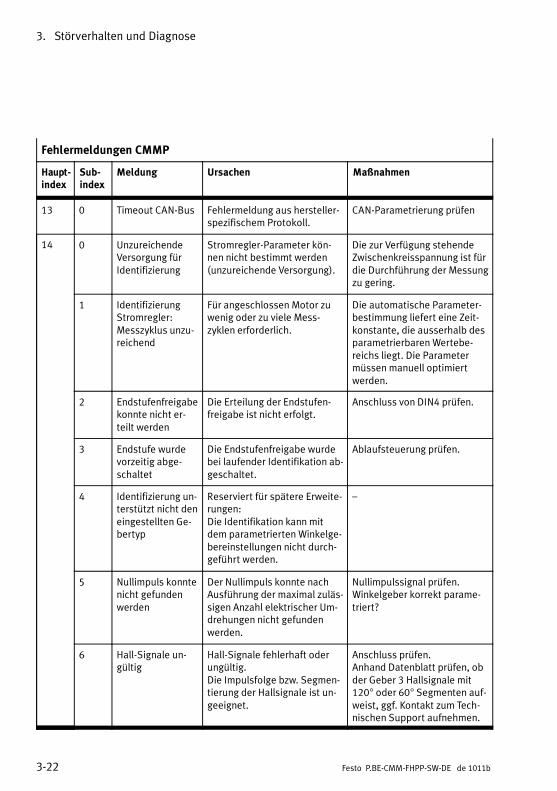
3. Störverhalten und Diagnose
3-22 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
13 0 Timeout CAN-Bus Fehlermeldung aus hersteller-spezifischem Protokoll.
CAN-Parametrierung prüfen
14 0 UnzureichendeVersorgung fürIdentifizierung
Stromregler-Parameter kön-nen nicht bestimmt werden(unzureichende Versorgung).
Die zur Verfügung stehendeZwischenkreisspannung ist fürdie Durchführung der Messungzu gering.
1 IdentifizierungStromregler:Messzyklus unzu-reichend
Für angeschlossen Motor zuwenig oder zu viele Mess-zyklen erforderlich.
Die automatische Parameter-bestimmung liefert eine Zeit-konstante, die ausserhalb desparametrierbarenWertebe-reichs liegt. Die Parametermüssen manuell optimiertwerden.
2 Endstufenfreigabekonnte nicht er-teilt werden
Die Erteilung der Endstufen-freigabe ist nicht erfolgt.
Anschluss von DIN4 prüfen.
3 Endstufe wurdevorzeitig abge-schaltet
Die Endstufenfreigabe wurdebei laufender Identifikation ab-geschaltet.
Ablaufsteuerung prüfen.
4 Identifizierung un-terstützt nicht deneingestellten Ge-bertyp
Reserviert für spätere Erweite-rungen:Die Identifikation kann mitdem parametrierten Winkelge-bereinstellungen nicht durch-geführt werden.
–
5 Nullimpuls konntenicht gefundenwerden
Der Nullimpuls konnte nachAusführung der maximal zuläs-sigen Anzahl elektrischer Um-drehungen nicht gefundenwerden.
Nullimpulssignal prüfen.Winkelgeber korrekt parame-triert?
6 Hall-Signale un-gültig
Hall-Signale fehlerhaft oderungültig.Die Impulsfolge bzw. Segmen-tierung der Hallsignale ist un-geeignet.
Anschluss prüfen.Anhand Datenblatt prüfen, obder Geber 3 Hallsignale mit120° oder 60° Segmenten auf-weist, ggf. Kontakt zum Tech-nischen Support aufnehmen.
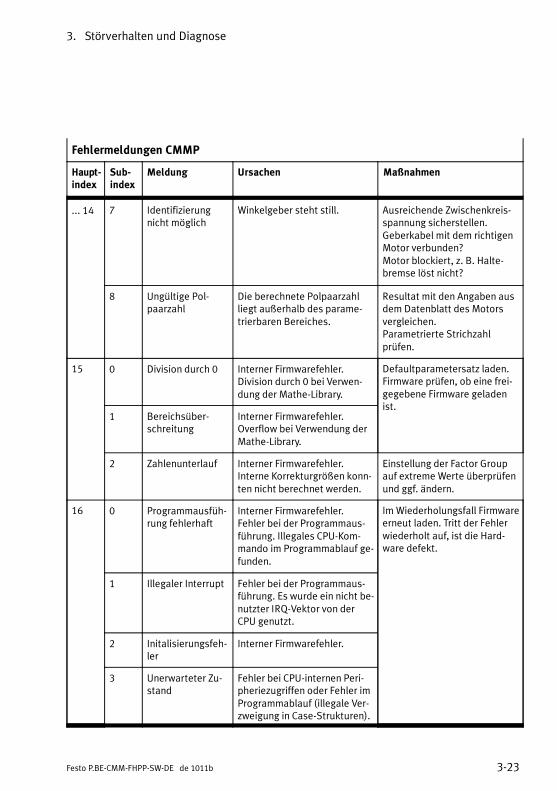
3. Störverhalten und Diagnose
3-23Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
... 14 7 Identifizierungnicht möglich
Winkelgeber steht still. Ausreichende Zwischenkreis-spannung sicherstellen.Geberkabel mit dem richtigenMotor verbunden?Motor blockiert, z. B. Halte-bremse löst nicht?
8 Ungültige Pol-paarzahl
Die berechnete Polpaarzahlliegt außerhalb des parame-trierbaren Bereiches.
Resultat mit den Angaben ausdem Datenblatt des Motorsvergleichen.Parametrierte Strichzahlprüfen.
15 0 Division durch 0 Interner Firmwarefehler.Division durch 0 bei Verwen-dung der Mathe-Library.
Defaultparametersatz laden.Firmware prüfen, ob eine frei-gegebene Firmware geladenist.
1 Bereichsüber-schreitung
Interner Firmwarefehler.Overflow bei Verwendung derMathe-Library.
2 Zahlenunterlauf Interner Firmwarefehler.Interne Korrekturgrößen konn-ten nicht berechnet werden.
Einstellung der Factor Groupauf extreme Werte überprüfenund ggf. ändern.
16 0 Programmausfüh-rung fehlerhaft
Interner Firmwarefehler.Fehler bei der Programmaus-führung. Illegales CPU-Kom-mando im Programmablauf ge-funden.
Im Wiederholungsfall Firmwareerneut laden. Tritt der Fehlerwiederholt auf, ist die Hard-ware defekt.
1 Illegaler Interrupt Fehler bei der Programmaus-führung. Es wurde ein nicht be-nutzter IRQ-Vektor von derCPU genutzt.
2 Initalisierungsfeh-ler
Interner Firmwarefehler.
3 Unerwarteter Zu-stand
Fehler bei CPU-internen Peri-pheriezugriffen oder Fehler imProgrammablauf (illegale Ver-zweigung in Case-Strukturen).
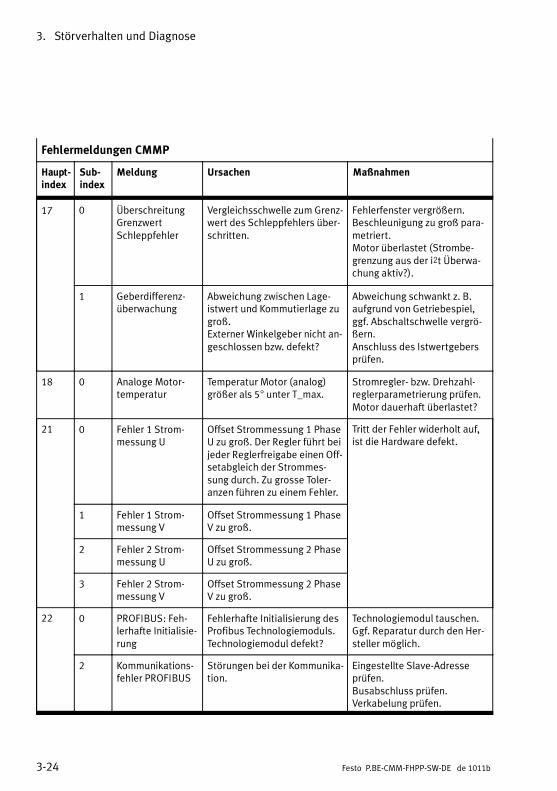
3. Störverhalten und Diagnose
3-24 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
17 0 ÜberschreitungGrenzwertSchleppfehler
Vergleichsschwelle zum Grenz-wert des Schleppfehlers über-schritten.
Fehlerfenster vergrößern.Beschleunigung zu groß para-metriert.Motor überlastet (Strombe-grenzung aus der i�t Überwa-chung aktiv?).
1 Geberdifferenz-überwachung
Abweichung zwischen Lage-istwert und Kommutierlage zugroß.Externer Winkelgeber nicht an-geschlossen bzw. defekt?
Abweichung schwankt z. B.aufgrund von Getriebespiel,ggf. Abschaltschwelle vergrö-ßern.Anschluss des Istwertgebersprüfen.
18 0 Analoge Motor-temperatur
Temperatur Motor (analog)größer als 5° unter T_max.
Stromregler- bzw. Drehzahl-reglerparametrierung prüfen.Motor dauerhaft überlastet?
21 0 Fehler 1 Strom-messung U
Offset Strommessung 1 PhaseU zu groß. Der Regler führt beijeder Reglerfreigabe einen Off-setabgleich der Strommes-sung durch. Zu grosse Toler-anzen führen zu einem Fehler.
Tritt der Fehler widerholt auf,ist die Hardware defekt.
1 Fehler 1 Strom-messung V
Offset Strommessung 1 PhaseV zu groß.
2 Fehler 2 Strom-messung U
Offset Strommessung 2 PhaseU zu groß.
3 Fehler 2 Strom-messung V
Offset Strommessung 2 PhaseV zu groß.
22 0 PROFIBUS: Feh-lerhafte Initialisie-rung
Fehlerhafte Initialisierung desProfibus Technologiemoduls.Technologiemodul defekt?
Technologiemodul tauschen.Ggf. Reparatur durch den Her-steller möglich.
2 Kommunikations-fehler PROFIBUS
Störungen bei der Kommunika-tion.
Eingestellte Slave-Adresseprüfen.Busabschluss prüfen.Verkabelung prüfen.
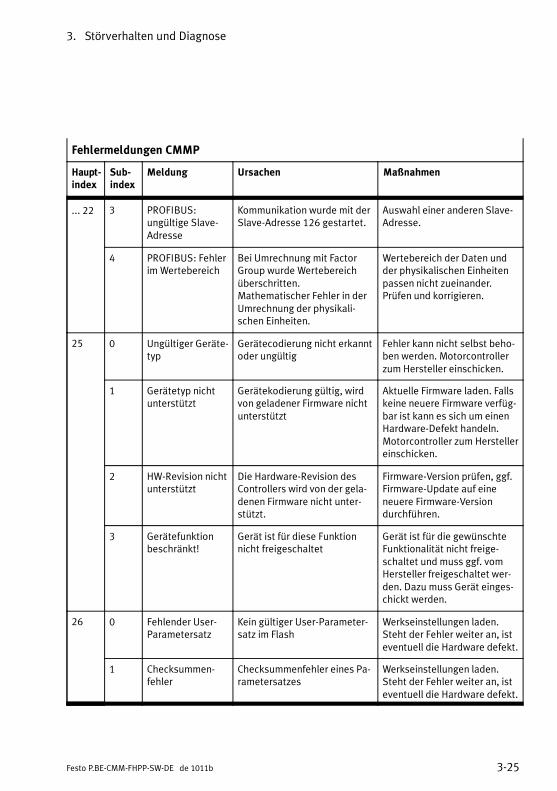
3. Störverhalten und Diagnose
3-25Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
... 22 3 PROFIBUS:ungültige Slave-Adresse
Kommunikation wurde mit derSlave-Adresse 126 gestartet.
Auswahl einer anderen Slave-Adresse.
4 PROFIBUS: Fehlerim Wertebereich
Bei Umrechnung mit FactorGroup wurde Wertebereichüberschritten.Mathematischer Fehler in derUmrechnung der physikali-schen Einheiten.
Wertebereich der Daten undder physikalischen Einheitenpassen nicht zueinander.Prüfen und korrigieren.
25 0 Ungültiger Geräte-typ
Gerätecodierung nicht erkanntoder ungültig
Fehler kann nicht selbst beho-ben werden. Motorcontrollerzum Hersteller einschicken.
1 Gerätetyp nichtunterstützt
Gerätekodierung gültig, wirdvon geladener Firmware nichtunterstützt
Aktuelle Firmware laden. Fallskeine neuere Firmware verfüg-bar ist kann es sich um einenHardware-Defekt handeln.Motorcontroller zum Herstellereinschicken.
2 HW-Revision nichtunterstützt
Die Hardware-Revision desControllers wird von der gela-denen Firmware nicht unter-stützt.
Firmware-Version prüfen, ggf.Firmware-Update auf eineneuere Firmware-Versiondurchführen.
3 Gerätefunktionbeschränkt!
Gerät ist für diese Funktionnicht freigeschaltet
Gerät ist für die gewünschteFunktionalität nicht freige-schaltet und muss ggf. vomHersteller freigeschaltet wer-den. Dazu muss Gerät einges-chickt werden.
26 0 Fehlender User-Parametersatz
Kein gültiger User-Parameter-satz im Flash
Werkseinstellungen laden.Steht der Fehler weiter an, isteventuell die Hardware defekt.
1 Checksummen-fehler
Checksummenfehler eines Pa-rametersatzes
Werkseinstellungen laden.Steht der Fehler weiter an, isteventuell die Hardware defekt.
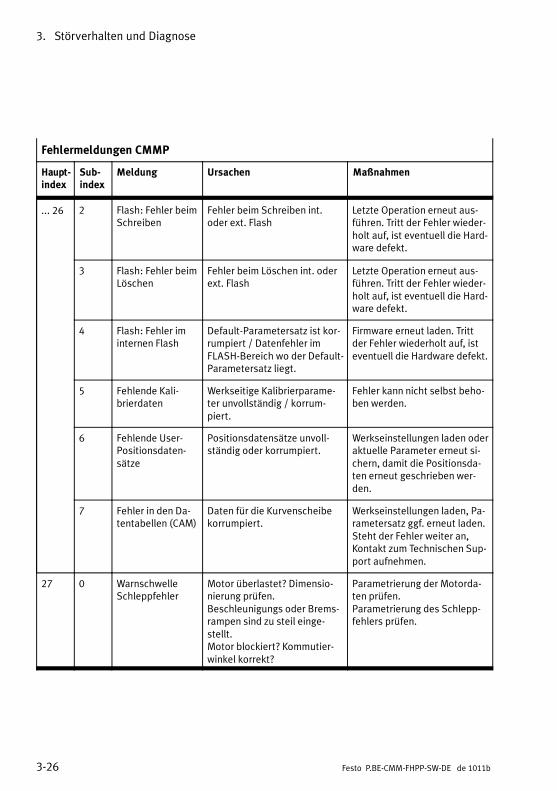
3. Störverhalten und Diagnose
3-26 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
... 26 2 Flash: Fehler beimSchreiben
Fehler beim Schreiben int.oder ext. Flash
Letzte Operation erneut aus-führen. Tritt der Fehler wieder-holt auf, ist eventuell die Hard-ware defekt.
3 Flash: Fehler beimLöschen
Fehler beim Löschen int. oderext. Flash
Letzte Operation erneut aus-führen. Tritt der Fehler wieder-holt auf, ist eventuell die Hard-ware defekt.
4 Flash: Fehler iminternen Flash
Default-Parametersatz ist kor-rumpiert / Datenfehler imFLASH-Bereich wo der Default-Parametersatz liegt.
Firmware erneut laden. Trittder Fehler wiederholt auf, isteventuell die Hardware defekt.
5 Fehlende Kali-brierdaten
Werkseitige Kalibrierparame-ter unvollständig / korrum-piert.
Fehler kann nicht selbst beho-ben werden.
6 Fehlende User-Positionsdaten-sätze
Positionsdatensätze unvoll-ständig oder korrumpiert.
Werkseinstellungen laden oderaktuelle Parameter erneut si-chern, damit die Positionsda-ten erneut geschrieben wer-den.
7 Fehler in den Da-tentabellen (CAM)
Daten für die Kurvenscheibekorrumpiert.
Werkseinstellungen laden, Pa-rametersatz ggf. erneut laden.Steht der Fehler weiter an,Kontakt zum Technischen Sup-port aufnehmen.
27 0 WarnschwelleSchleppfehler
Motor überlastet? Dimensio-nierung prüfen.Beschleunigungs oder Brems-rampen sind zu steil einge-stellt.Motor blockiert? Kommutier-winkel korrekt?
Parametrierung der Motorda-ten prüfen.Parametrierung des Schlepp-fehlers prüfen.
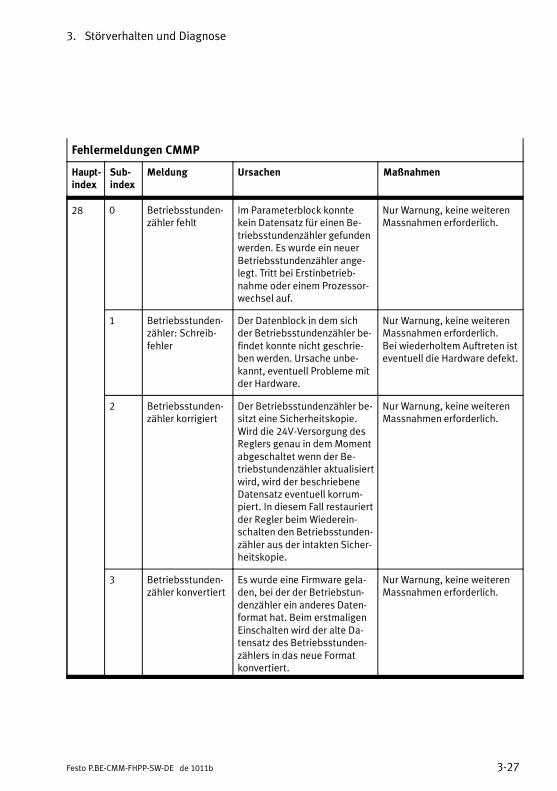
3. Störverhalten und Diagnose
3-27Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
28 0 Betriebsstunden-zähler fehlt
Im Parameterblock konntekein Datensatz für einen Be-triebsstundenzähler gefundenwerden. Es wurde ein neuerBetriebsstundenzähler ange-legt. Tritt bei Erstinbetrieb-nahme oder einem Prozessor-wechsel auf.
Nur Warnung, keine weiterenMassnahmen erforderlich.
1 Betriebsstunden-zähler: Schreib-fehler
Der Datenblock in dem sichder Betriebsstundenzähler be-findet konnte nicht geschrie-ben werden. Ursache unbe-kannt, eventuell Probleme mitder Hardware.
Nur Warnung, keine weiterenMassnahmen erforderlich.Bei wiederholtem Auftreten isteventuell die Hardware defekt.
2 Betriebsstunden-zähler korrigiert
Der Betriebsstundenzähler be-sitzt eine Sicherheitskopie.Wird die 24V-Versorgung desReglers genau in demMomentabgeschaltet wenn der Be-triebstundenzähler aktualisiertwird, wird der beschriebeneDatensatz eventuell korrum-piert. In diesem Fall restauriertder Regler beim Wiederein-schalten den Betriebsstunden-zähler aus der intakten Sicher-heitskopie.
Nur Warnung, keine weiterenMassnahmen erforderlich.
3 Betriebsstunden-zähler konvertiert
Es wurde eine Firmware gela-den, bei der der Betriebstun-denzähler ein anderes Daten-format hat. Beim erstmaligenEinschalten wird der alte Da-tensatz des Betriebsstunden-zählers in das neue Formatkonvertiert.
Nur Warnung, keine weiterenMassnahmen erforderlich.
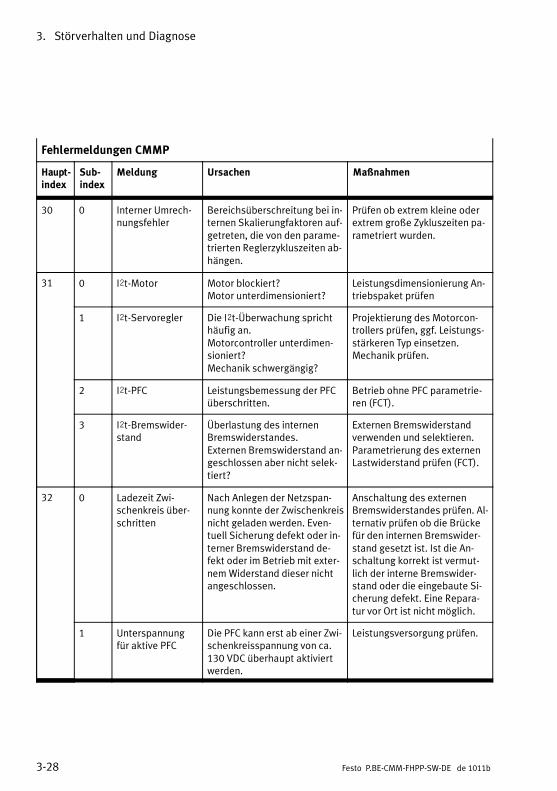
3. Störverhalten und Diagnose
3-28 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
30 0 Interner Umrech-nungsfehler
Bereichsüberschreitung bei in-ternen Skalierungfaktoren auf-getreten, die von den parame-trierten Reglerzykluszeiten ab-hängen.
Prüfen ob extrem kleine oderextrem große Zykluszeiten pa-rametriert wurden.
31 0 I�t-Motor Motor blockiert?Motor unterdimensioniert?
Leistungsdimensionierung An-triebspaket prüfen
1 I�t-Servoregler Die I�t-Überwachung sprichthäufig an.Motorcontroller unterdimen-sioniert?Mechanik schwergängig?
Projektierung des Motorcon-trollers prüfen, ggf. Leistungs-stärkeren Typ einsetzen.Mechanik prüfen.
2 I�t-PFC Leistungsbemessung der PFCüberschritten.
Betrieb ohne PFC parametrie-ren (FCT).
3 I�t-Bremswider-stand
Überlastung des internenBremswiderstandes.Externen Bremswiderstand an-geschlossen aber nicht selek-tiert?
Externen Bremswiderstandverwenden und selektieren.Parametrierung des externenLastwiderstand prüfen (FCT).
32 0 Ladezeit Zwi-schenkreis über-schritten
Nach Anlegen der Netzspan-nung konnte der Zwischenkreisnicht geladen werden. Even-tuell Sicherung defekt oder in-terner Bremswiderstand de-fekt oder im Betrieb mit exter-nemWiderstand dieser nichtangeschlossen.
Anschaltung des externenBremswiderstandes prüfen. Al-ternativ prüfen ob die Brückefür den internen Bremswider-stand gesetzt ist. Ist die An-schaltung korrekt ist vermut-lich der interne Bremswider-stand oder die eingebaute Si-cherung defekt. Eine Repara-tur vor Ort ist nicht möglich.
1 Unterspannungfür aktive PFC
Die PFC kann erst ab einer Zwi-schenkreisspannung von ca.130 VDC überhaupt aktiviertwerden.
Leistungsversorgung prüfen.
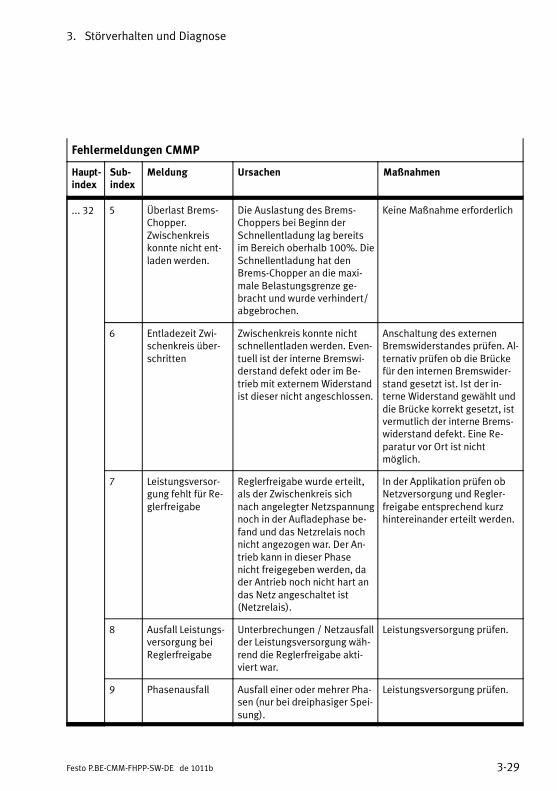
3. Störverhalten und Diagnose
3-29Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
... 32 5 Überlast Brems-Chopper.Zwischenkreiskonnte nicht ent-laden werden.
Die Auslastung des Brems-Choppers bei Beginn derSchnellentladung lag bereitsim Bereich oberhalb 100%. DieSchnellentladung hat denBrems-Chopper an die maxi-male Belastungsgrenze ge-bracht und wurde verhindert/abgebrochen.
Keine Maßnahme erforderlich
6 Entladezeit Zwi-schenkreis über-schritten
Zwischenkreis konnte nichtschnellentladen werden. Even-tuell ist der interne Bremswi-derstand defekt oder im Be-trieb mit externemWiderstandist dieser nicht angeschlossen.
Anschaltung des externenBremswiderstandes prüfen. Al-ternativ prüfen ob die Brückefür den internen Bremswider-stand gesetzt ist. Ist der in-terne Widerstand gewählt unddie Brücke korrekt gesetzt, istvermutlich der interne Brems-widerstand defekt. Eine Re-paratur vor Ort ist nichtmöglich.
7 Leistungsversor-gung fehlt für Re-glerfreigabe
Reglerfreigabe wurde erteilt,als der Zwischenkreis sichnach angelegter Netzspannungnoch in der Aufladephase be-fand und das Netzrelais nochnicht angezogen war. Der An-trieb kann in dieser Phasenicht freigegeben werden, dader Antrieb noch nicht hart andas Netz angeschaltet ist(Netzrelais).
In der Applikation prüfen obNetzversorgung und Regler-freigabe entsprechend kurzhintereinander erteilt werden.
8 Ausfall Leistungs-versorgung beiReglerfreigabe
Unterbrechungen / Netzausfallder Leistungsversorgung wäh-rend die Reglerfreigabe akti-viert war.
Leistungsversorgung prüfen.
9 Phasenausfall Ausfall einer oder mehrer Pha-sen (nur bei dreiphasiger Spei-sung).
Leistungsversorgung prüfen.
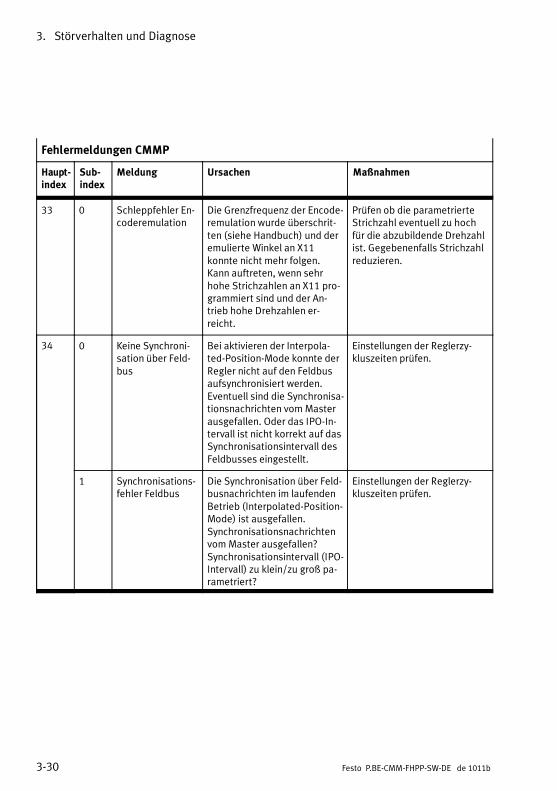
3. Störverhalten und Diagnose
3-30 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
33 0 Schleppfehler En-coderemulation
Die Grenzfrequenz der Encode-remulation wurde überschrit-ten (siehe Handbuch) und deremulierte Winkel an X11konnte nicht mehr folgen.Kann auftreten, wenn sehrhohe Strichzahlen an X11 pro-grammiert sind und der An-trieb hohe Drehzahlen er-reicht.
Prüfen ob die parametrierteStrichzahl eventuell zu hochfür die abzubildende Drehzahlist. Gegebenenfalls Strichzahlreduzieren.
34 0 Keine Synchroni-sation über Feld-bus
Bei aktivieren der Interpola-ted-Position-Mode konnte derRegler nicht auf den Feldbusaufsynchronisiert werden.Eventuell sind die Synchronisa-tionsnachrichten vomMasterausgefallen. Oder das IPO-In-tervall ist nicht korrekt auf dasSynchronisationsintervall desFeldbusses eingestellt.
Einstellungen der Reglerzy-kluszeiten prüfen.
1 Synchronisations-fehler Feldbus
Die Synchronisation über Feld-busnachrichten im laufendenBetrieb (Interpolated-Position-Mode) ist ausgefallen.SynchronisationsnachrichtenvomMaster ausgefallen?Synchronisationsintervall (IPO-Intervall) zu klein/zu groß pa-rametriert?
Einstellungen der Reglerzy-kluszeiten prüfen.
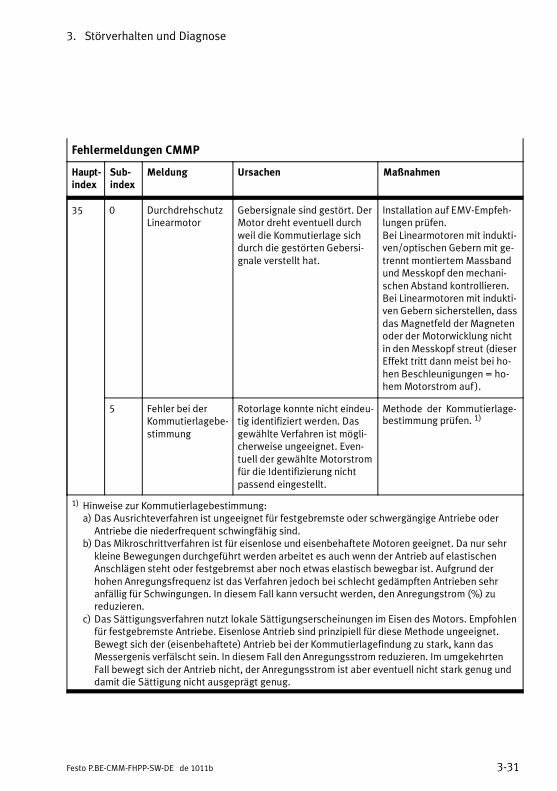
3. Störverhalten und Diagnose
3-31Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
35 0 DurchdrehschutzLinearmotor
Gebersignale sind gestört. DerMotor dreht eventuell durchweil die Kommutierlage sichdurch die gestörten Gebersi-gnale verstellt hat.
Installation auf EMV-Empfeh-lungen prüfen.Bei Linearmotoren mit indukti-ven/optischen Gebern mit ge-trennt montiertem Massbandund Messkopf den mechani-schen Abstand kontrollieren.Bei Linearmotoren mit indukti-ven Gebern sicherstellen, dassdas Magnetfeld der Magnetenoder der Motorwicklung nichtin den Messkopf streut (dieserEffekt tritt dann meist bei ho-hen Beschleunigungen = ho-hemMotorstrom auf ).
5 Fehler bei derKommutierlagebe-stimmung
Rotorlage konnte nicht eindeu-tig identifiziert werden. Dasgewählte Verfahren ist mögli-cherweise ungeeignet. Even-tuell der gewählte Motorstromfür die Identifizierung nichtpassend eingestellt.
Methode der Kommutierlage-bestimmung prüfen. 1)
1) Hinweise zur Kommutierlagebestimmung:a) Das Ausrichteverfahren ist ungeeignet für festgebremste oder schwergängige Antriebe oder
Antriebe die niederfrequent schwingfähig sind.b) Das Mikroschrittverfahren ist für eisenlose und eisenbehaftete Motoren geeignet. Da nur sehr
kleine Bewegungen durchgeführt werden arbeitet es auch wenn der Antrieb auf elastischenAnschlägen steht oder festgebremst aber noch etwas elastisch bewegbar ist. Aufgrund derhohen Anregungsfrequenz ist das Verfahren jedoch bei schlecht gedämpften Antrieben sehranfällig für Schwingungen. In diesem Fall kann versucht werden, den Anregungstrom (%) zureduzieren.
c) Das Sättigungsverfahren nutzt lokale Sättigungserscheinungen im Eisen des Motors. Empfohlenfür festgebremste Antriebe. Eisenlose Antrieb sind prinzipiell für diese Methode ungeeignet.Bewegt sich der (eisenbehaftete) Antrieb bei der Kommutierlagefindung zu stark, kann dasMessergenis verfälscht sein. In diesem Fall den Anregungsstrom reduzieren. Im umgekehrtenFall bewegt sich der Antrieb nicht, der Anregungsstrom ist aber eventuell nicht stark genug unddamit die Sättigung nicht ausgeprägt genug.
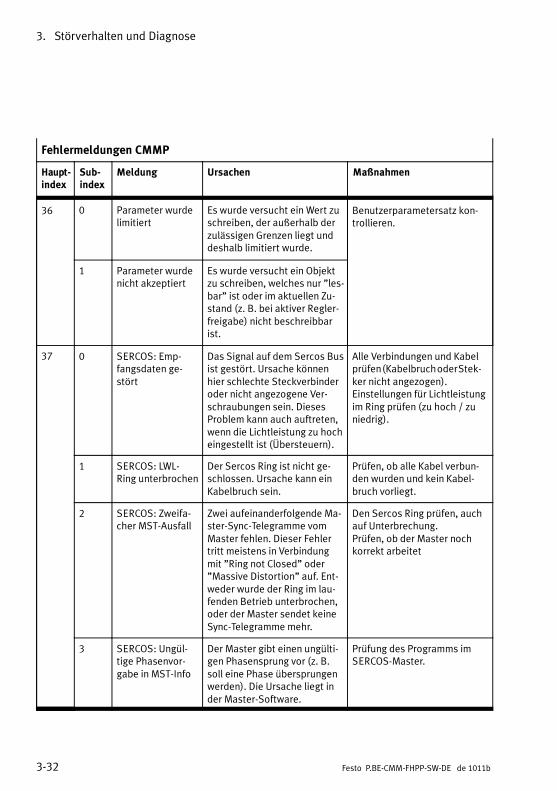
3. Störverhalten und Diagnose
3-32 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
36 0 Parameter wurdelimitiert
Es wurde versucht ein Wert zuschreiben, der außerhalb derzulässigen Grenzen liegt unddeshalb limitiert wurde.
Benutzerparametersatz kon-trollieren.
1 Parameter wurdenicht akzeptiert
Es wurde versucht ein Objektzu schreiben, welches nur ”les-bar” ist oder im aktuellen Zu-stand (z. B. bei aktiver Regler-freigabe) nicht beschreibbarist.
37 0 SERCOS: Emp-fangsdaten ge-stört
Das Signal auf dem Sercos Busist gestört. Ursache könnenhier schlechte Steckverbinderoder nicht angezogene Ver-schraubungen sein. DiesesProblem kann auch auftreten,wenn die Lichtleistung zu hocheingestellt ist (Übersteuern).
Alle Verbindungen und Kabelprüfen(KabelbruchoderStek-ker nicht angezogen).Einstellungen für Lichtleistungim Ring prüfen (zu hoch / zuniedrig).
1 SERCOS: LWL-Ring unterbrochen
Der Sercos Ring ist nicht ge-schlossen. Ursache kann einKabelbruch sein.
Prüfen, ob alle Kabel verbun-den wurden und kein Kabel-bruch vorliegt.
2 SERCOS: Zweifa-cher MST-Ausfall
Zwei aufeinanderfolgende Ma-ster-Sync-Telegramme vomMaster fehlen. Dieser Fehlertritt meistens in Verbindungmit ”Ring not Closed” oder”Massive Distortion” auf. Ent-weder wurde der Ring im lau-fenden Betrieb unterbrochen,oder der Master sendet keineSync-Telegramme mehr.
Den Sercos Ring prüfen, auchauf Unterbrechung.Prüfen, ob der Master nochkorrekt arbeitet
3 SERCOS: Ungül-tige Phasenvor-gabe in MST-Info
Der Master gibt einen ungülti-gen Phasensprung vor (z. B.soll eine Phase übersprungenwerden). Die Ursache liegt inder Master-Software.
Prüfung des Programms imSERCOS-Master.
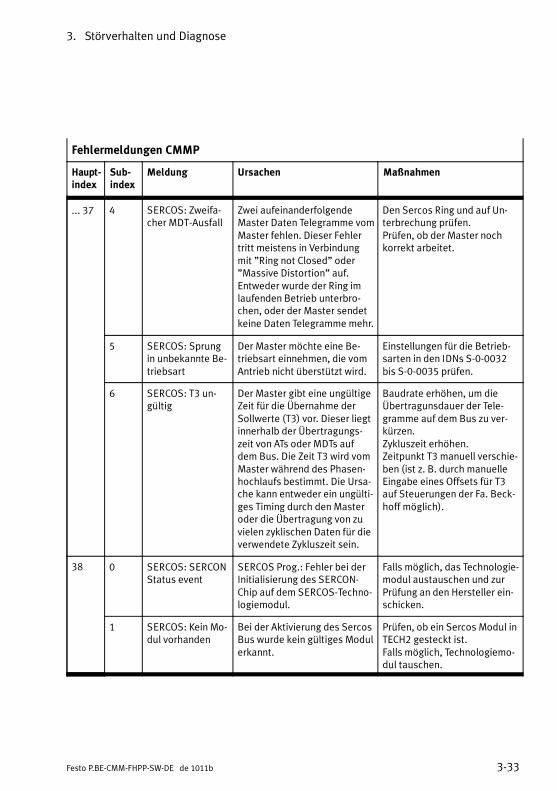
3. Störverhalten und Diagnose
3-33Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
... 37 4 SERCOS: Zweifa-cher MDT-Ausfall
Zwei aufeinanderfolgendeMaster Daten Telegramme vomMaster fehlen. Dieser Fehlertritt meistens in Verbindungmit ”Ring not Closed” oder”Massive Distortion” auf.Entweder wurde der Ring imlaufenden Betrieb unterbro-chen, oder der Master sendetkeine Daten Telegramme mehr.
Den Sercos Ring und auf Un-terbrechung prüfen.Prüfen, ob der Master nochkorrekt arbeitet.
5 SERCOS: Sprungin unbekannte Be-triebsart
Der Master möchte eine Be-triebsart einnehmen, die vomAntrieb nicht überstützt wird.
Einstellungen für die Betrieb-sarten in den IDNs S-0-0032bis S-0-0035 prüfen.
6 SERCOS: T3 un-gültig
Der Master gibt eine ungültigeZeit für die Übernahme derSollwerte (T3) vor. Dieser liegtinnerhalb der Übertragungs-zeit von ATs oder MDTs aufdem Bus. Die Zeit T3 wird vomMaster während des Phasen-hochlaufs bestimmt. Die Ursa-che kann entweder ein ungülti-ges Timing durch denMasteroder die Übertragung von zuvielen zyklischen Daten für dieverwendete Zykluszeit sein.
Baudrate erhöhen, um dieÜbertragunsdauer der Tele-gramme auf dem Bus zu ver-kürzen.Zykluszeit erhöhen.Zeitpunkt T3 manuell verschie-ben (ist z. B. durch manuelleEingabe eines Offsets für T3auf Steuerungen der Fa. Beck-hoff möglich).
38 0 SERCOS: SERCONStatus event
SERCOS Prog.: Fehler bei derInitialisierung des SERCON-Chip auf dem SERCOS-Techno-logiemodul.
Falls möglich, das Technologie-modul austauschen und zurPrüfung an den Hersteller ein-schicken.
1 SERCOS: Kein Mo-dul vorhanden
Bei der Aktivierung des SercosBus wurde kein gültiges Modulerkannt.
Prüfen, ob ein Sercos Modul inTECH2 gesteckt ist.Falls möglich, Technologiemo-dul tauschen.
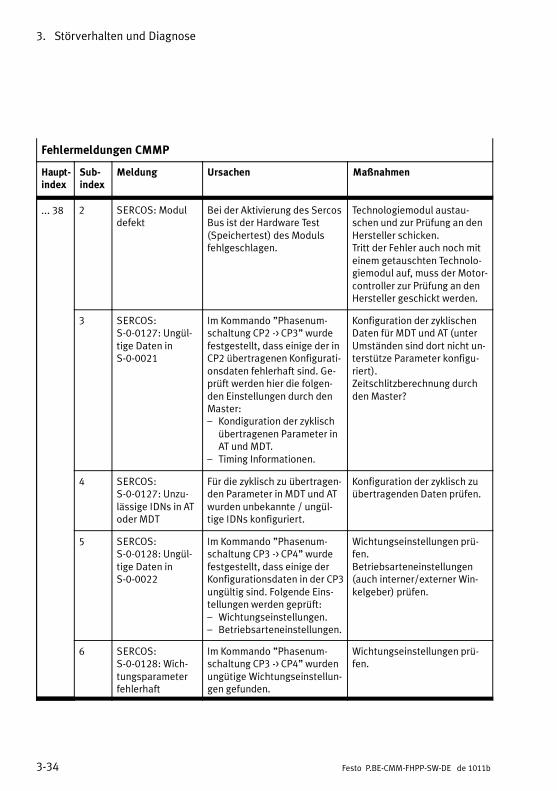
3. Störverhalten und Diagnose
3-34 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
... 38 2 SERCOS: Moduldefekt
Bei der Aktivierung des SercosBus ist der Hardware Test(Speichertest) des Modulsfehlgeschlagen.
Technologiemodul austau-schen und zur Prüfung an denHersteller schicken.Tritt der Fehler auch noch miteinem getauschten Technolo-giemodul auf, muss der Motor-controller zur Prüfung an denHersteller geschickt werden.
3 SERCOS:S-0-0127: Ungül-tige Daten inS-0-0021
Im Kommando ”Phasenum-schaltung CP2 -> CP3” wurdefestgestellt, dass einige der inCP2 übertragenen Konfigurati-onsdaten fehlerhaft sind. Ge-prüft werden hier die folgen-den Einstellungen durch denMaster:– Kondiguration der zyklisch
übertragenen Parameter inAT und MDT.
– Timing Informationen.
Konfiguration der zyklischenDaten für MDT und AT (unterUmständen sind dort nicht un-terstütze Parameter konfigu-riert).Zeitschlitzberechnung durchdenMaster?
4 SERCOS:S-0-0127: Unzu-lässige IDNs in AToder MDT
Für die zyklisch zu übertragen-den Parameter in MDT und ATwurden unbekannte / ungül-tige IDNs konfiguriert.
Konfiguration der zyklisch zuübertragenden Daten prüfen.
5 SERCOS:S-0-0128: Ungül-tige Daten inS-0-0022
Im Kommando ”Phasenum-schaltung CP3 -> CP4” wurdefestgestellt, dass einige derKonfigurationsdaten in der CP3ungültig sind. Folgende Eins-tellungen werden geprüft:– Wichtungseinstellungen.– Betriebsarteneinstellungen.
Wichtungseinstellungen prü-fen.Betriebsarteneinstellungen(auch interner/externer Win-kelgeber) prüfen.
6 SERCOS:S-0-0128: Wich-tungsparameterfehlerhaft
Im Kommando ”Phasenum-schaltung CP3 -> CP4” wurdenungütige Wichtungseinstellun-gen gefunden.
Wichtungseinstellungen prü-fen.
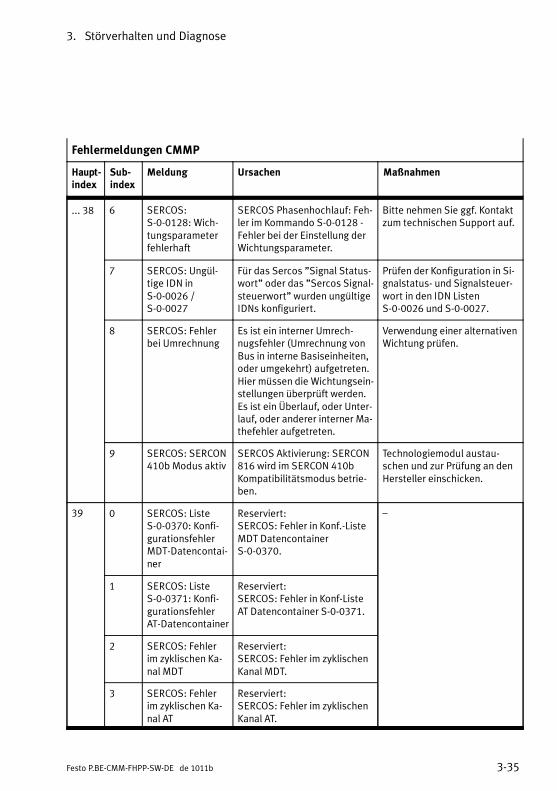
3. Störverhalten und Diagnose
3-35Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
... 38 6 SERCOS:S-0-0128: Wich-tungsparameterfehlerhaft
SERCOS Phasenhochlauf: Feh-ler im Kommando S-0-0128 -Fehler bei der Einstellung derWichtungsparameter.
Bitte nehmen Sie ggf. Kontaktzum technischen Support auf.
7 SERCOS: Ungül-tige IDN inS-0-0026 /S-0-0027
Für das Sercos ”Signal Status-wort” oder das ”Sercos Signal-steuerwort” wurden ungültigeIDNs konfiguriert.
Prüfen der Konfiguration in Si-gnalstatus- und Signalsteuer-wort in den IDN ListenS-0-0026 und S-0-0027.
8 SERCOS: Fehlerbei Umrechnung
Es ist ein interner Umrech-nugsfehler (Umrechnung vonBus in interne Basiseinheiten,oder umgekehrt) aufgetreten.Hier müssen die Wichtungsein-stellungen überprüft werden.Es ist ein Überlauf, oder Unter-lauf, oder anderer interner Ma-thefehler aufgetreten.
Verwendung einer alternativenWichtung prüfen.
9 SERCOS: SERCON410b Modus aktiv
SERCOS Aktivierung: SERCON816 wird im SERCON 410bKompatibilitätsmodus betrie-ben.
Technologiemodul austau-schen und zur Prüfung an denHersteller einschicken.
39 0 SERCOS: ListeS-0-0370: Konfi-gurationsfehlerMDT-Datencontai-ner
Reserviert:SERCOS: Fehler in Konf.-ListeMDT DatencontainerS-0-0370.
–
1 SERCOS: ListeS-0-0371: Konfi-gurationsfehlerAT-Datencontainer
Reserviert:SERCOS: Fehler in Konf-ListeAT Datencontainer S-0-0371.
2 SERCOS: Fehlerim zyklischen Ka-nal MDT
Reserviert:SERCOS: Fehler im zyklischenKanal MDT.
3 SERCOS: Fehlerim zyklischen Ka-nal AT
Reserviert:SERCOS: Fehler im zyklischenKanal AT.
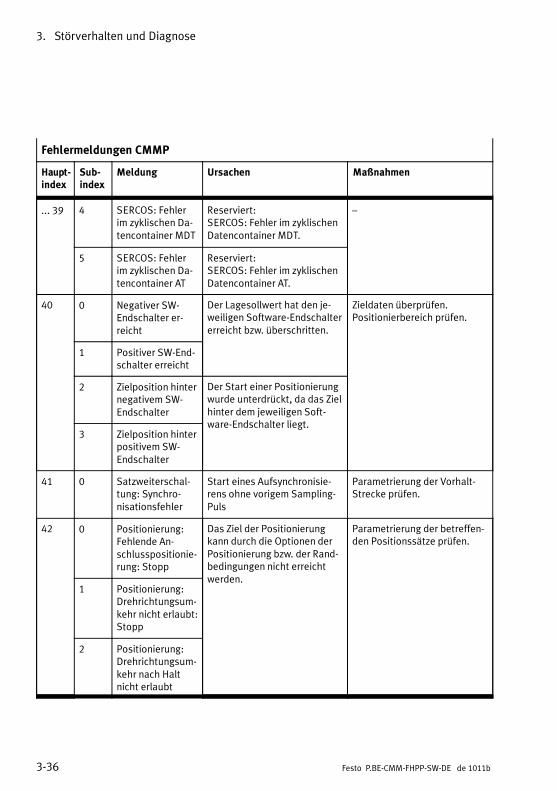
3. Störverhalten und Diagnose
3-36 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
... 39 4 SERCOS: Fehlerim zyklischen Da-tencontainer MDT
Reserviert:SERCOS: Fehler im zyklischenDatencontainer MDT.
–
5 SERCOS: Fehlerim zyklischen Da-tencontainer AT
Reserviert:SERCOS: Fehler im zyklischenDatencontainer AT.
40 0 Negativer SW-Endschalter er-reicht
Der Lagesollwert hat den je-weiligen Software-Endschaltererreicht bzw. überschritten.
Zieldaten überprüfen.Positionierbereich prüfen.
1 Positiver SW-End-schalter erreicht
2 Zielposition hinternegativem SW-Endschalter
Der Start einer Positionierungwurde unterdrückt, da das Zielhinter dem jeweiligen Soft-ware-Endschalter liegt.
3 Zielposition hinterpositivem SW-Endschalter
41 0 Satzweiterschal-tung: Synchro-nisationsfehler
Start eines Aufsynchronisie-rens ohne vorigem Sampling-Puls
Parametrierung der Vorhalt-Strecke prüfen.
42 0 Positionierung:Fehlende An-schlusspositionie-rung: Stopp
Das Ziel der Positionierungkann durch die Optionen derPositionierung bzw. der Rand-bedingungen nicht erreichtwerden.
Parametrierung der betreffen-den Positionssätze prüfen.
1 Positionierung:Drehrichtungsum-kehr nicht erlaubt:Stopp
2 Positionierung:Drehrichtungsum-kehr nach Haltnicht erlaubt
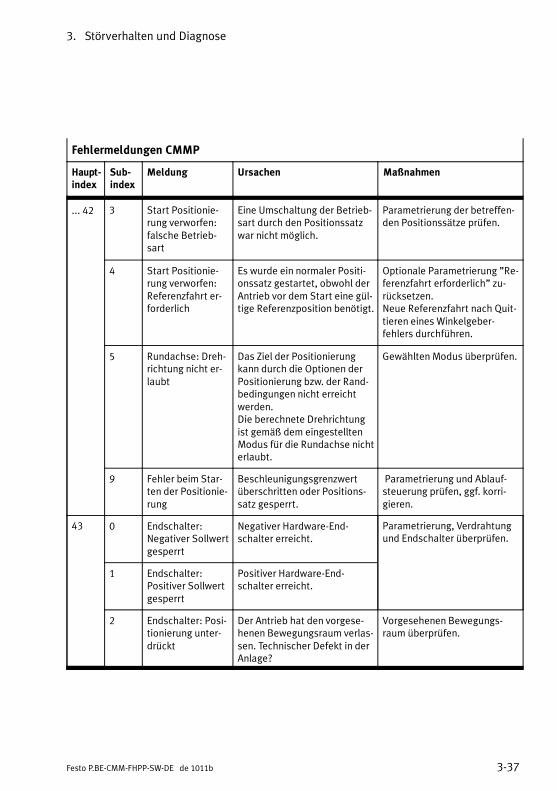
3. Störverhalten und Diagnose
3-37Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
... 42 3 Start Positionie-rung verworfen:falsche Betrieb-sart
Eine Umschaltung der Betrieb-sart durch den Positionssatzwar nicht möglich.
Parametrierung der betreffen-den Positionssätze prüfen.
4 Start Positionie-rung verworfen:Referenzfahrt er-forderlich
Es wurde ein normaler Positi-onssatz gestartet, obwohl derAntrieb vor dem Start eine gül-tige Referenzposition benötigt.
Optionale Parametrierung ”Re-ferenzfahrt erforderlich” zu-rücksetzen.Neue Referenzfahrt nach Quit-tieren eines Winkelgeber-fehlers durchführen.
5 Rundachse: Dreh-richtung nicht er-laubt
Das Ziel der Positionierungkann durch die Optionen derPositionierung bzw. der Rand-bedingungen nicht erreichtwerden.Die berechnete Drehrichtungist gemäß dem eingestelltenModus für die Rundachse nichterlaubt.
Gewählten Modus überprüfen.
9 Fehler beim Star-ten der Positionie-rung
Beschleunigungsgrenzwertüberschritten oder Positions-satz gesperrt.
Parametrierung und Ablauf-steuerung prüfen, ggf. korri-gieren.
43 0 Endschalter:Negativer Sollwertgesperrt
Negativer Hardware-End-schalter erreicht.
Parametrierung, Verdrahtungund Endschalter überprüfen.
1 Endschalter:Positiver Sollwertgesperrt
Positiver Hardware-End-schalter erreicht.
2 Endschalter: Posi-tionierung unter-drückt
Der Antrieb hat den vorgese-henen Bewegungsraum verlas-sen. Technischer Defekt in derAnlage?
Vorgesehenen Bewegungs-raum überprüfen.
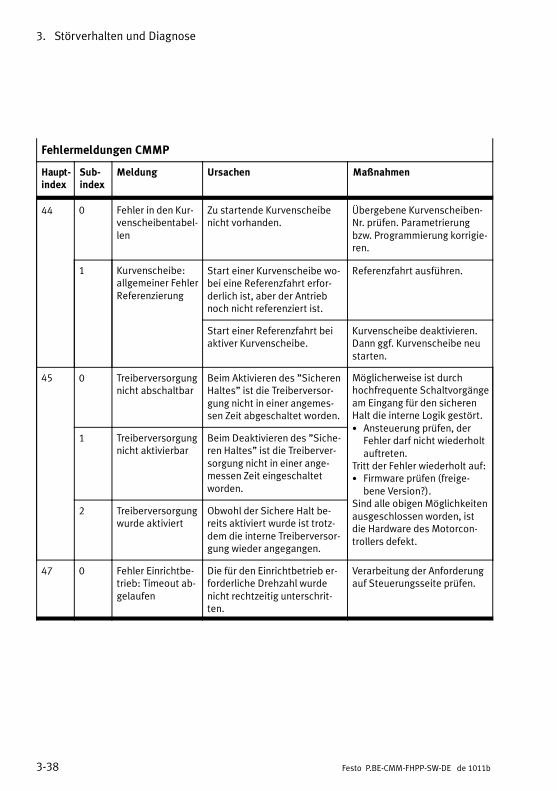
3. Störverhalten und Diagnose
3-38 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
44 0 Fehler in den Kur-venscheibentabel-len
Zu startende Kurvenscheibenicht vorhanden.
Übergebene Kurvenscheiben-Nr. prüfen. Parametrierungbzw. Programmierung korrigie-ren.
1 Kurvenscheibe:allgemeiner FehlerReferenzierung
Start einer Kurvenscheibe wo-bei eine Referenzfahrt erfor-derlich ist, aber der Antriebnoch nicht referenziert ist.
Referenzfahrt ausführen.
Start einer Referenzfahrt beiaktiver Kurvenscheibe.
Kurvenscheibe deaktivieren.Dann ggf. Kurvenscheibe neustarten.
45 0 Treiberversorgungnicht abschaltbar
Beim Aktivieren des ”SicherenHaltes” ist die Treiberversor-gung nicht in einer angemes-sen Zeit abgeschaltet worden.
Möglicherweise ist durchhochfrequente Schaltvorgängeam Eingang für den sicherenHalt die interne Logik gestört.• Ansteuerung prüfen, der
Fehler darf nicht wiederholtauftreten.
Tritt der Fehler wiederholt auf:• Firmware prüfen (freige-
bene Version?).Sind alle obigen Möglichkeitenausgeschlossen worden, istdie Hardware des Motorcon-trollers defekt.
1 Treiberversorgungnicht aktivierbar
Beim Deaktivieren des ”Siche-ren Haltes” ist die Treiberver-sorgung nicht in einer ange-messen Zeit eingeschaltetworden.
2 Treiberversorgungwurde aktiviert
Obwohl der Sichere Halt be-reits aktiviert wurde ist trotz-dem die interne Treiberversor-gung wieder angegangen.
47 0 Fehler Einrichtbe-trieb: Timeout ab-gelaufen
Die für den Einrichtbetrieb er-forderliche Drehzahl wurdenicht rechtzeitig unterschrit-ten.
Verarbeitung der Anforderungauf Steuerungsseite prüfen.
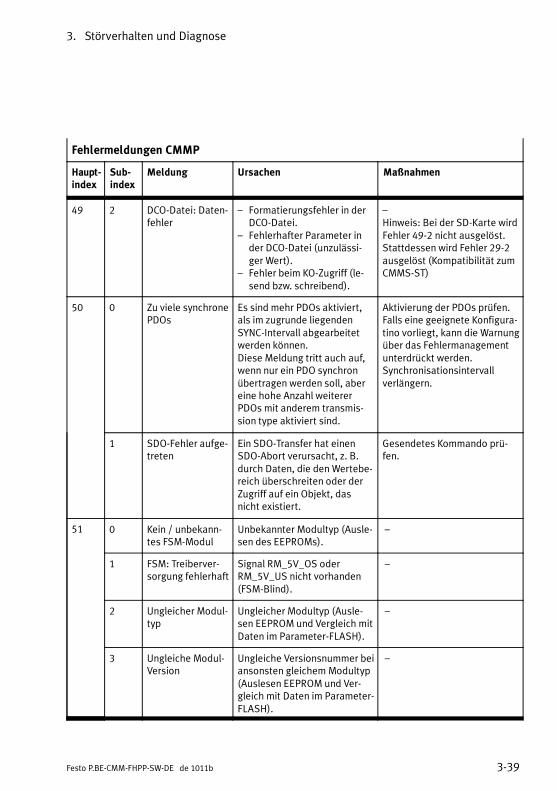
3. Störverhalten und Diagnose
3-39Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
49 2 DCO-Datei: Daten-fehler
– Formatierungsfehler in derDCO-Datei.
– Fehlerhafter Parameter inder DCO-Datei (unzulässi-ger Wert).
– Fehler beim KO-Zugriff (le-send bzw. schreibend).
–Hinweis: Bei der SD-Karte wirdFehler 49-2 nicht ausgelöst.Stattdessen wird Fehler 29-2ausgelöst (Kompatibilität zumCMMS-ST)
50 0 Zu viele synchronePDOs
Es sind mehr PDOs aktiviert,als im zugrunde liegendenSYNC-Intervall abgearbeitetwerden können.Diese Meldung tritt auch auf,wenn nur ein PDO synchronübertragen werden soll, abereine hohe Anzahl weitererPDOs mit anderem transmis-sion type aktiviert sind.
Aktivierung der PDOs prüfen.Falls eine geeignete Konfigura-tino vorliegt, kann die Warnungüber das Fehlermanagementunterdrückt werden.Synchronisationsintervallverlängern.
1 SDO-Fehler aufge-treten
Ein SDO-Transfer hat einenSDO-Abort verursacht, z. B.durch Daten, die denWertebe-reich überschreiten oder derZugriff auf ein Objekt, dasnicht existiert.
Gesendetes Kommando prü-fen.
51 0 Kein / unbekann-tes FSM-Modul
Unbekannter Modultyp (Ausle-sen des EEPROMs).
–
1 FSM: Treiberver-sorgung fehlerhaft
Signal RM_5V_OS oderRM_5V_US nicht vorhanden(FSM-Blind).
–
2 Ungleicher Modul-typ
Ungleicher Modultyp (Ausle-sen EEPROM und Vergleich mitDaten im Parameter-FLASH).
–
3 Ungleiche Modul-Version
Ungleiche Versionsnummer beiansonsten gleichemModultyp(Auslesen EEPROM und Ver-gleich mit Daten im Parameter-FLASH).
–
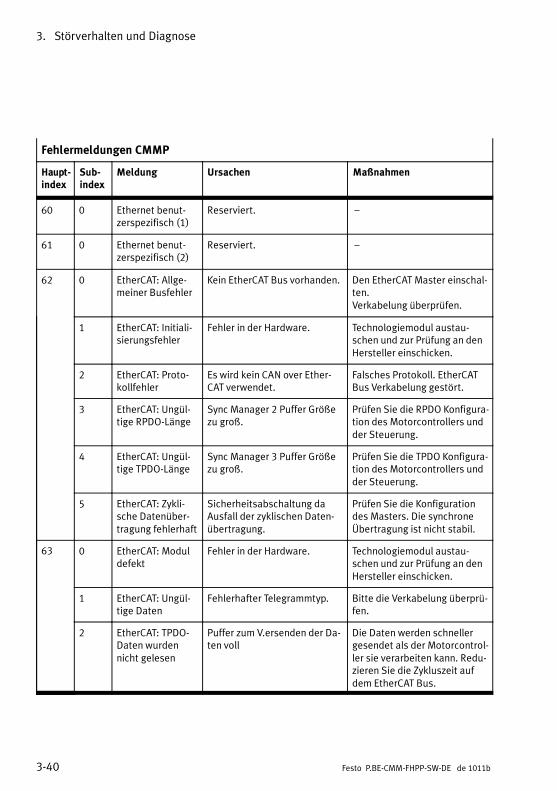
3. Störverhalten und Diagnose
3-40 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
60 0 Ethernet benut-zerspezifisch (1)
Reserviert. –
61 0 Ethernet benut-zerspezifisch (2)
Reserviert. –
62 0 EtherCAT: Allge-meiner Busfehler
Kein EtherCAT Bus vorhanden. Den EtherCAT Master einschal-ten.Verkabelung überprüfen.
1 EtherCAT: Initiali-sierungsfehler
Fehler in der Hardware. Technologiemodul austau-schen und zur Prüfung an denHersteller einschicken.
2 EtherCAT: Proto-kollfehler
Es wird kein CAN over Ether-CAT verwendet.
Falsches Protokoll. EtherCATBus Verkabelung gestört.
3 EtherCAT: Ungül-tige RPDO-Länge
Sync Manager 2 Puffer Größezu groß.
Prüfen Sie die RPDO Konfigura-tion des Motorcontrollers undder Steuerung.
4 EtherCAT: Ungül-tige TPDO-Länge
Sync Manager 3 Puffer Größezu groß.
Prüfen Sie die TPDO Konfigura-tion des Motorcontrollers undder Steuerung.
5 EtherCAT: Zykli-sche Datenüber-tragung fehlerhaft
Sicherheitsabschaltung daAusfall der zyklischen Daten-übertragung.
Prüfen Sie die Konfigurationdes Masters. Die synchroneÜbertragung ist nicht stabil.
63 0 EtherCAT: Moduldefekt
Fehler in der Hardware. Technologiemodul austau-schen und zur Prüfung an denHersteller einschicken.
1 EtherCAT: Ungül-tige Daten
Fehlerhafter Telegrammtyp. Bitte die Verkabelung überprü-fen.
2 EtherCAT: TPDO-Daten wurdennicht gelesen
Puffer zum V.ersenden der Da-ten voll
Die Daten werden schnellergesendet als der Motorcontrol-ler sie verarbeiten kann. Redu-zieren Sie die Zykluszeit aufdem EtherCAT Bus.
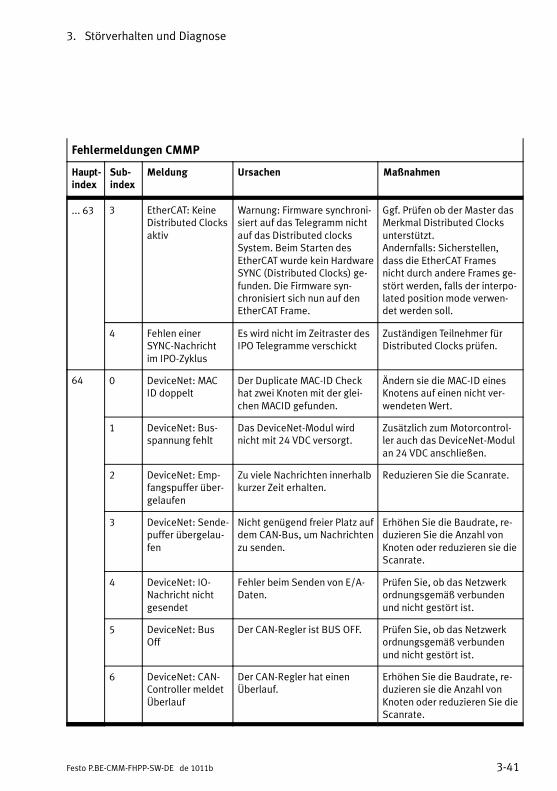
3. Störverhalten und Diagnose
3-41Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
... 63 3 EtherCAT: KeineDistributed Clocksaktiv
Warnung: Firmware synchroni-siert auf das Telegramm nichtauf das Distributed clocksSystem. Beim Starten desEtherCAT wurde kein HardwareSYNC (Distributed Clocks) ge-funden. Die Firmware syn-chronisiert sich nun auf denEtherCAT Frame.
Ggf. Prüfen ob der Master dasMerkmal Distributed Clocksunterstützt.Andernfalls: Sicherstellen,dass die EtherCAT Framesnicht durch andere Frames ge-stört werden, falls der interpo-lated position mode verwen-det werden soll.
4 Fehlen einerSYNC-Nachrichtim IPO-Zyklus
Es wird nicht im Zeitraster desIPO Telegramme verschickt
Zuständigen Teilnehmer fürDistributed Clocks prüfen.
64 0 DeviceNet: MACID doppelt
Der Duplicate MAC-ID Checkhat zwei Knoten mit der glei-chen MACID gefunden.
Ändern sie die MAC-ID einesKnotens auf einen nicht ver-wendetenWert.
1 DeviceNet: Bus-spannung fehlt
Das DeviceNet-Modul wirdnicht mit 24 VDC versorgt.
Zusätzlich zumMotorcontrol-ler auch das DeviceNet-Modulan 24 VDC anschließen.
2 DeviceNet: Emp-fangspuffer über-gelaufen
Zu viele Nachrichten innerhalbkurzer Zeit erhalten.
Reduzieren Sie die Scanrate.
3 DeviceNet: Sende-puffer übergelau-fen
Nicht genügend freier Platz aufdem CAN-Bus, um Nachrichtenzu senden.
Erhöhen Sie die Baudrate, re-duzieren Sie die Anzahl vonKnoten oder reduzieren sie dieScanrate.
4 DeviceNet: IO-Nachricht nichtgesendet
Fehler beim Senden von E/A-Daten.
Prüfen Sie, ob das Netzwerkordnungsgemäß verbundenund nicht gestört ist.
5 DeviceNet: BusOff
Der CAN-Regler ist BUS OFF. Prüfen Sie, ob das Netzwerkordnungsgemäß verbundenund nicht gestört ist.
6 DeviceNet: CAN-Controller meldetÜberlauf
Der CAN-Regler hat einenÜberlauf.
Erhöhen Sie die Baudrate, re-duzieren sie die Anzahl vonKnoten oder reduzieren Sie dieScanrate.
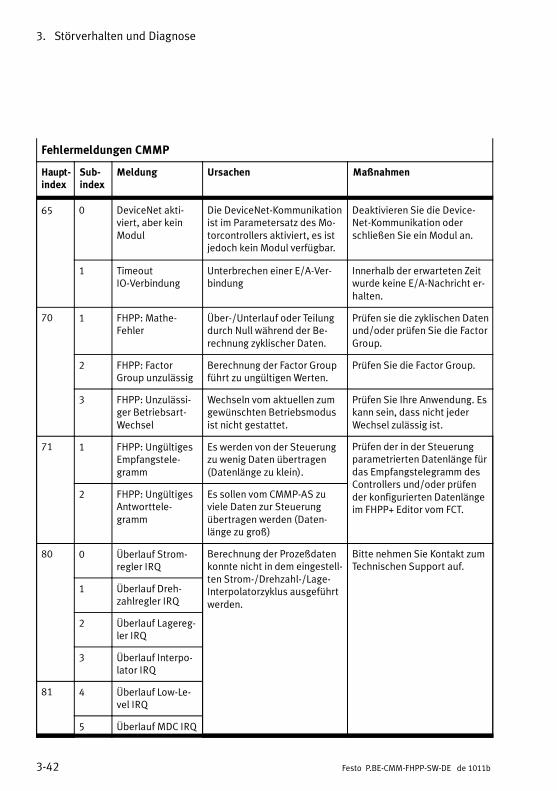
3. Störverhalten und Diagnose
3-42 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
65 0 DeviceNet akti-viert, aber keinModul
Die DeviceNet-Kommunikationist im Parametersatz des Mo-torcontrollers aktiviert, es istjedoch kein Modul verfügbar.
Deaktivieren Sie die Device-Net-Kommunikation oderschließen Sie ein Modul an.
1 TimeoutIO-Verbindung
Unterbrechen einer E/A-Ver-bindung
Innerhalb der erwarteten Zeitwurde keine E/A-Nachricht er-halten.
70 1 FHPP: Mathe-Fehler
Über-/Unterlauf oder Teilungdurch Null während der Be-rechnung zyklischer Daten.
Prüfen sie die zyklischen Datenund/oder prüfen Sie die FactorGroup.
2 FHPP: FactorGroup unzulässig
Berechnung der Factor Groupführt zu ungültigenWerten.
Prüfen Sie die Factor Group.
3 FHPP: Unzulässi-ger Betriebsart-Wechsel
Wechseln vom aktuellen zumgewünschten Betriebsmodusist nicht gestattet.
Prüfen Sie Ihre Anwendung. Eskann sein, dass nicht jederWechsel zulässig ist.
71 1 FHPP: UngültigesEmpfangstele-gramm
Es werden von der Steuerungzu wenig Daten übertragen(Datenlänge zu klein).
Prüfen der in der Steuerungparametrierten Datenlänge fürdas Empfangstelegramm desControllers und/oder prüfender konfigurierten Datenlängeim FHPP+ Editor vom FCT.
2 FHPP: UngültigesAntworttele-gramm
Es sollen vom CMMP-AS zuviele Daten zur Steuerungübertragen werden (Daten-länge zu groß)
80 0 Überlauf Strom-regler IRQ
Berechnung der Prozeßdatenkonnte nicht in dem eingestell-ten Strom-/Drehzahl-/Lage-Interpolatorzyklus ausgeführtwerden.
Bitte nehmen Sie Kontakt zumTechnischen Support auf.
1 Überlauf Dreh-zahlregler IRQ
2 Überlauf Lagereg-ler IRQ
3 Überlauf Interpo-lator IRQ
81 4 Überlauf Low-Le-vel IRQ
5 Überlauf MDC IRQ
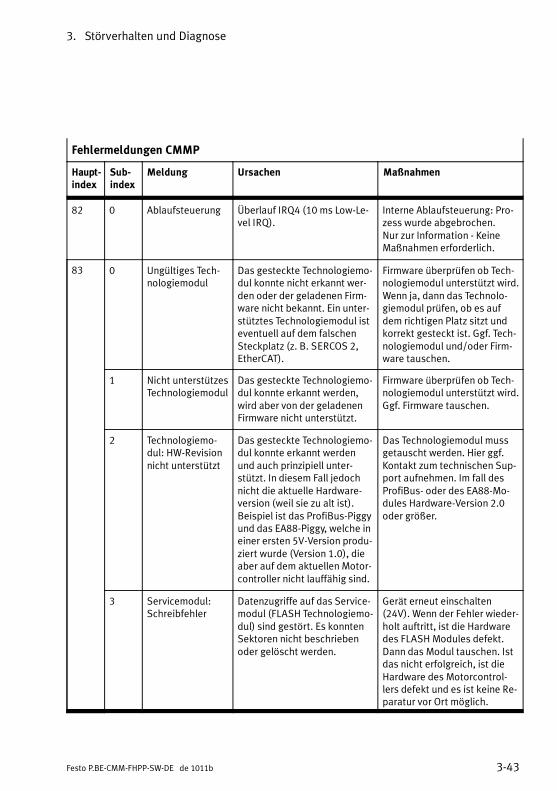
3. Störverhalten und Diagnose
3-43Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
82 0 Ablaufsteuerung Überlauf IRQ4 (10 ms Low-Le-vel IRQ).
Interne Ablaufsteuerung: Pro-zess wurde abgebrochen.Nur zur Information - KeineMaßnahmen erforderlich.
83 0 Ungültiges Tech-nologiemodul
Das gesteckte Technologiemo-dul konnte nicht erkannt wer-den oder der geladenen Firm-ware nicht bekannt. Ein unter-stütztes Technologiemodul isteventuell auf dem falschenSteckplatz (z. B. SERCOS 2,EtherCAT).
Firmware überprüfen ob Tech-nologiemodul unterstützt wird.Wenn ja, dann das Technolo-giemodul prüfen, ob es aufdem richtigen Platz sitzt undkorrekt gesteckt ist. Ggf. Tech-nologiemodul und/oder Firm-ware tauschen.
1 Nicht unterstützesTechnologiemodul
Das gesteckte Technologiemo-dul konnte erkannt werden,wird aber von der geladenenFirmware nicht unterstützt.
Firmware überprüfen ob Tech-nologiemodul unterstützt wird.Ggf. Firmware tauschen.
2 Technologiemo-dul: HW-Revisionnicht unterstützt
Das gesteckte Technologiemo-dul konnte erkannt werdenund auch prinzipiell unter-stützt. In diesem Fall jedochnicht die aktuelle Hardware-version (weil sie zu alt ist).Beispiel ist das ProfiBus-Piggyund das EA88-Piggy, welche ineiner ersten 5V-Version produ-ziert wurde (Version 1.0), dieaber auf dem aktuellen Motor-controller nicht lauffähig sind.
Das Technologiemodul mussgetauscht werden. Hier ggf.Kontakt zum technischen Sup-port aufnehmen. Im fall desProfiBus- oder des EA88-Mo-dules Hardware-Version 2.0oder größer.
3 Servicemodul:Schreibfehler
Datenzugriffe auf das Service-modul (FLASH Technologiemo-dul) sind gestört. Es konntenSektoren nicht beschriebenoder gelöscht werden.
Gerät erneut einschalten(24V). Wenn der Fehler wieder-holt auftritt, ist die Hardwaredes FLASH Modules defekt.Dann das Modul tauschen. Istdas nicht erfolgreich, ist dieHardware des Motorcontrol-lers defekt und es ist keine Re-paratur vor Ort möglich.
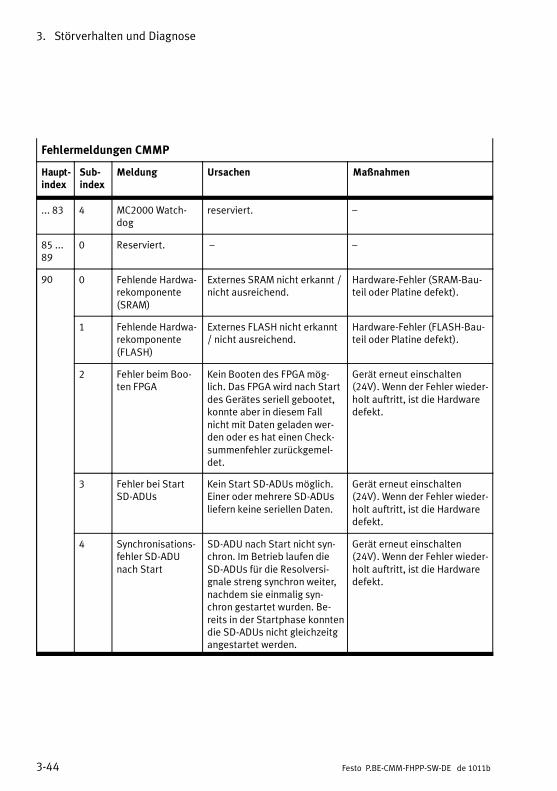
3. Störverhalten und Diagnose
3-44 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
... 83 4 MC2000 Watch-dog
reserviert. –
85 ...89
0 Reserviert. – –
90 0 Fehlende Hardwa-rekomponente(SRAM)
Externes SRAM nicht erkannt /nicht ausreichend.
Hardware-Fehler (SRAM-Bau-teil oder Platine defekt).
1 Fehlende Hardwa-rekomponente(FLASH)
Externes FLASH nicht erkannt/ nicht ausreichend.
Hardware-Fehler (FLASH-Bau-teil oder Platine defekt).
2 Fehler beim Boo-ten FPGA
Kein Booten des FPGA mög-lich. Das FPGA wird nach Startdes Gerätes seriell gebootet,konnte aber in diesem Fallnicht mit Daten geladen wer-den oder es hat einen Check-summenfehler zurückgemel-det.
Gerät erneut einschalten(24V). Wenn der Fehler wieder-holt auftritt, ist die Hardwaredefekt.
3 Fehler bei StartSD-ADUs
Kein Start SD-ADUs möglich.Einer oder mehrere SD-ADUsliefern keine seriellen Daten.
Gerät erneut einschalten(24V). Wenn der Fehler wieder-holt auftritt, ist die Hardwaredefekt.
4 Synchronisations-fehler SD-ADUnach Start
SD-ADU nach Start nicht syn-chron. Im Betrieb laufen dieSD-ADUs für die Resolversi-gnale streng synchron weiter,nachdem sie einmalig syn-chron gestartet wurden. Be-reits in der Startphase konntendie SD-ADUs nicht gleichzeitgangestartet werden.
Gerät erneut einschalten(24V). Wenn der Fehler wieder-holt auftritt, ist die Hardwaredefekt.
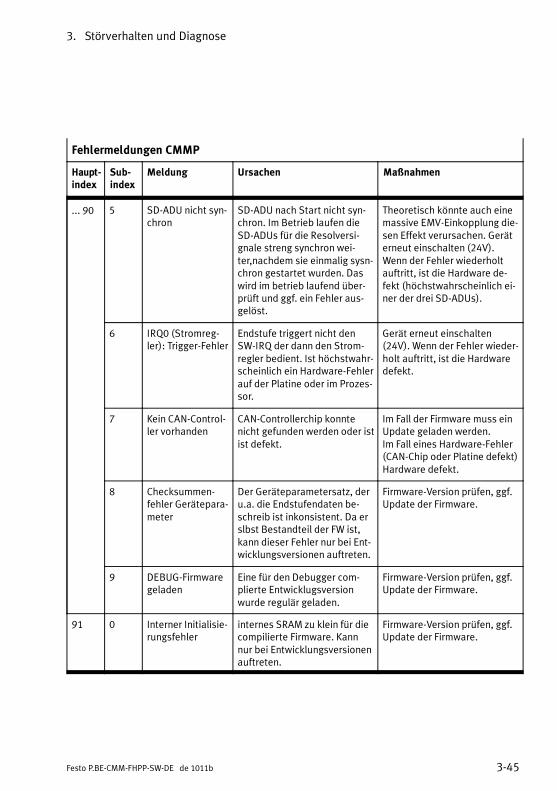
3. Störverhalten und Diagnose
3-45Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMP
Haupt-index
MaßnahmenUrsachenMeldungSub-index
... 90 5 SD-ADU nicht syn-chron
SD-ADU nach Start nicht syn-chron. Im Betrieb laufen dieSD-ADUs für die Resolversi-gnale streng synchron wei-ter,nachdem sie einmalig sysn-chron gestartet wurden. Daswird im betrieb laufend über-prüft und ggf. ein Fehler aus-gelöst.
Theoretisch könnte auch einemassive EMV-Einkopplung die-sen Effekt verursachen. Geräterneut einschalten (24V).Wenn der Fehler wiederholtauftritt, ist die Hardware de-fekt (höchstwahrscheinlich ei-ner der drei SD-ADUs).
6 IRQ0 (Stromreg-ler): Trigger-Fehler
Endstufe triggert nicht denSW-IRQ der dann den Strom-regler bedient. Ist höchstwahr-scheinlich ein Hardware-Fehlerauf der Platine oder im Prozes-sor.
Gerät erneut einschalten(24V). Wenn der Fehler wieder-holt auftritt, ist die Hardwaredefekt.
7 Kein CAN-Control-ler vorhanden
CAN-Controllerchip konntenicht gefunden werden oder istist defekt.
Im Fall der Firmware muss einUpdate geladen werden.Im Fall eines Hardware-Fehler(CAN-Chip oder Platine defekt)Hardware defekt.
8 Checksummen-fehler Gerätepara-meter
Der Geräteparametersatz, deru.a. die Endstufendaten be-schreib ist inkonsistent. Da erslbst Bestandteil der FW ist,kann dieser Fehler nur bei Ent-wicklungsversionen auftreten.
Firmware-Version prüfen, ggf.Update der Firmware.
9 DEBUG-Firmwaregeladen
Eine für den Debugger com-plierte Entwicklugsversionwurde regulär geladen.
Firmware-Version prüfen, ggf.Update der Firmware.
91 0 Interner Initialisie-rungsfehler
internes SRAM zu klein für diecompilierte Firmware. Kannnur bei Entwicklungsversionenauftreten.
Firmware-Version prüfen, ggf.Update der Firmware.
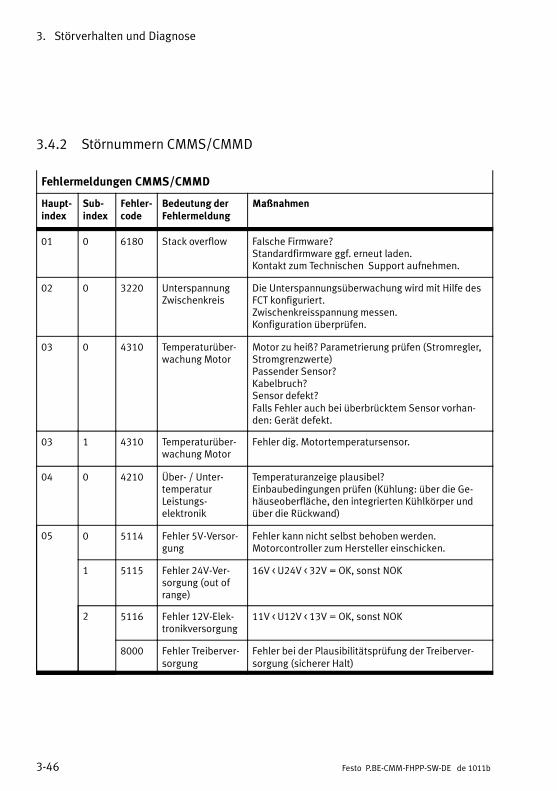
3. Störverhalten und Diagnose
3-46 Festo P.BE-CMM-FHPP-SW-DE de 1011b
3.4.2 Störnummern CMMS/CMMD
Fehlermeldungen CMMS/CMMD
Haupt-index
Sub-index
Fehler-code
Bedeutung derFehlermeldung
Maßnahmen
01 0 6180 Stack overflow Falsche Firmware?Standardfirmware ggf. erneut laden.Kontakt zum Technischen Support aufnehmen.
02 0 3220 UnterspannungZwischenkreis
Die Unterspannungsüberwachung wird mit Hilfe desFCT konfiguriert.Zwischenkreisspannung messen.Konfiguration überprüfen.
03 0 4310 Temperaturüber-wachung Motor
Motor zu heiß? Parametrierung prüfen (Stromregler,Stromgrenzwerte)Passender Sensor?Kabelbruch?Sensor defekt?Falls Fehler auch bei überbrücktem Sensor vorhan-den: Gerät defekt.
03 1 4310 Temperaturüber-wachung Motor
Fehler dig. Motortemperatursensor.
04 0 4210 Über- / Unter-temperaturLeistungs-elektronik
Temperaturanzeige plausibel?Einbaubedingungen prüfen (Kühlung: über die Ge-häuseoberfläche, den integrierten Kühlkörper undüber die Rückwand)
05 0 5114 Fehler 5V-Versor-gung
Fehler kann nicht selbst behoben werden.Motorcontroller zum Hersteller einschicken.
1 5115 Fehler 24V-Ver-sorgung (out ofrange)
16V < U24V < 32V = OK, sonst NOK
2 5116 Fehler 12V-Elek-tronikversorgung
11V < U12V < 13V = OK, sonst NOK
8000 Fehler Treiberver-sorgung
Fehler bei der Plausibilitätsprüfung der Treiberver-sorgung (sicherer Halt)
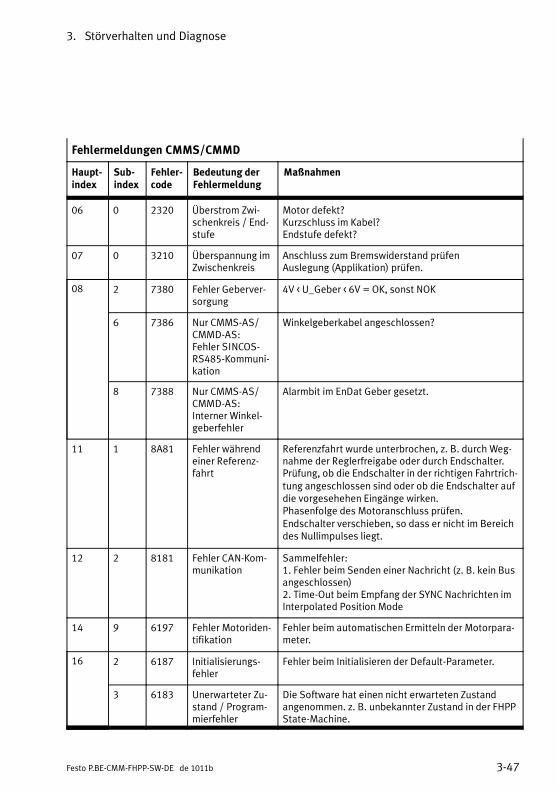
3. Störverhalten und Diagnose
3-47Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMS/CMMD
Haupt-index
MaßnahmenBedeutung derFehlermeldung
Fehler-code
Sub-index
06 0 2320 Überstrom Zwi-schenkreis / End-stufe
Motor defekt?Kurzschluss im Kabel?Endstufe defekt?
07 0 3210 Überspannung imZwischenkreis
Anschluss zum Bremswiderstand prüfenAuslegung (Applikation) prüfen.
08 2 7380 Fehler Geberver-sorgung
4V < U_Geber < 6V = OK, sonst NOK
6 7386 Nur CMMS-AS/CMMD-AS:Fehler SINCOS-RS485-Kommuni-kation
Winkelgeberkabel angeschlossen?
8 7388 Nur CMMS-AS/CMMD-AS:Interner Winkel-geberfehler
Alarmbit im EnDat Geber gesetzt.
11 1 8A81 Fehler währendeiner Referenz-fahrt
Referenzfahrt wurde unterbrochen, z. B. durch Weg-nahme der Reglerfreigabe oder durch Endschalter.Prüfung, ob die Endschalter in der richtigen Fahrtrich-tung angeschlossen sind oder ob die Endschalter aufdie vorgesehehen Eingänge wirken.Phasenfolge des Motoranschluss prüfen.Endschalter verschieben, so dass er nicht im Bereichdes Nullimpulses liegt.
12 2 8181 Fehler CAN-Kom-munikation
Sammelfehler:1. Fehler beim Senden einer Nachricht (z. B. kein Busangeschlossen)2. Time-Out beim Empfang der SYNC Nachrichten imInterpolated Position Mode
14 9 6197 Fehler Motoriden-tifikation
Fehler beim automatischen Ermitteln der Motorpara-meter.
16 2 6187 Initialisierungs-fehler
Fehler beim Initialisieren der Default-Parameter.
3 6183 Unerwarteter Zu-stand / Program-mierfehler
Die Software hat einen nicht erwarteten Zustandangenommen. z. B. unbekannter Zustand in der FHPPState-Machine.
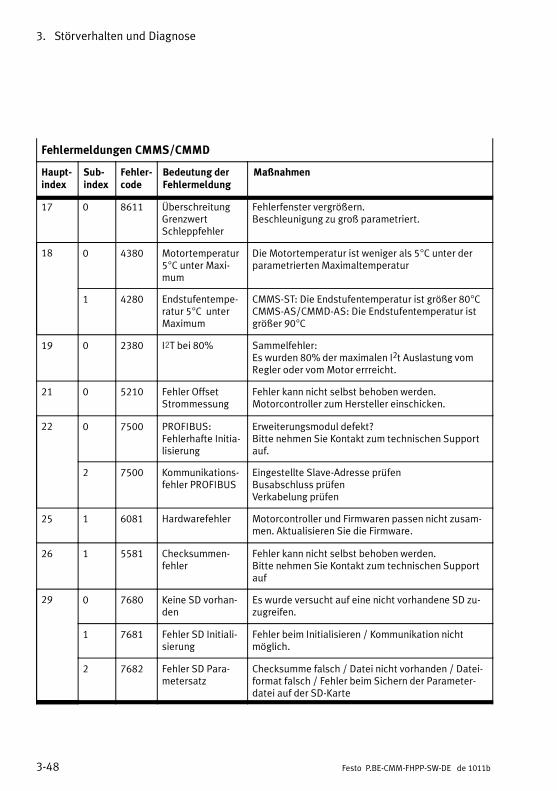
3. Störverhalten und Diagnose
3-48 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMS/CMMD
Haupt-index
MaßnahmenBedeutung derFehlermeldung
Fehler-code
Sub-index
17 0 8611 ÜberschreitungGrenzwertSchleppfehler
Fehlerfenster vergrößern.Beschleunigung zu groß parametriert.
18 0 4380 Motortemperatur5°C unter Maxi-mum
Die Motortemperatur ist weniger als 5°C unter derparametrierten Maximaltemperatur
1 4280 Endstufentempe-ratur 5°C unterMaximum
CMMS-ST: Die Endstufentemperatur ist größer 80°CCMMS-AS/CMMD-AS: Die Endstufentemperatur istgrößer 90°C
19 0 2380 I�T bei 80% Sammelfehler:Es wurden 80% der maximalen I2t Auslastung vomRegler oder vomMotor errreicht.
21 0 5210 Fehler OffsetStrommessung
Fehler kann nicht selbst behoben werden.Motorcontroller zum Hersteller einschicken.
22 0 7500 PROFIBUS:Fehlerhafte Initia-lisierung
Erweiterungsmodul defekt?Bitte nehmen Sie Kontakt zum technischen Supportauf.
2 7500 Kommunikations-fehler PROFIBUS
Eingestellte Slave-Adresse prüfenBusabschluss prüfenVerkabelung prüfen
25 1 6081 Hardwarefehler Motorcontroller und Firmwaren passen nicht zusam-men. Aktualisieren Sie die Firmware.
26 1 5581 Checksummen-fehler
Fehler kann nicht selbst behoben werden.Bitte nehmen Sie Kontakt zum technischen Supportauf
29 0 7680 Keine SD vorhan-den
Es wurde versucht auf eine nicht vorhandene SD zu-zugreifen.
1 7681 Fehler SD Initiali-sierung
Fehler beim Initialisieren / Kommunikation nichtmöglich.
2 7682 Fehler SD Para-metersatz
Checksumme falsch / Datei nicht vorhanden / Datei-format falsch / Fehler beim Sichern der Parameter-datei auf der SD-Karte
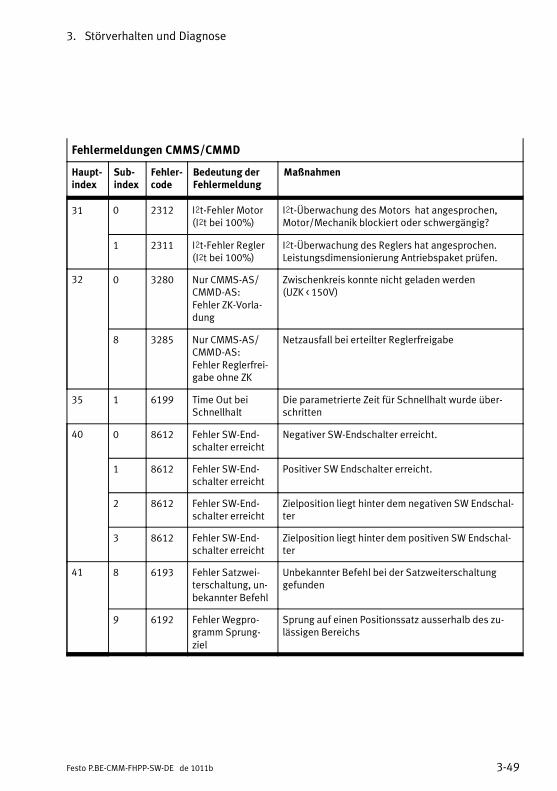
3. Störverhalten und Diagnose
3-49Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMS/CMMD
Haupt-index
MaßnahmenBedeutung derFehlermeldung
Fehler-code
Sub-index
31 0 2312 I�t-Fehler Motor(I�t bei 100%)
I�t-Überwachung des Motors hat angesprochen,Motor/Mechanik blockiert oder schwergängig?
1 2311 I�t-Fehler Regler(I�t bei 100%)
I�t-Überwachung des Reglers hat angesprochen.Leistungsdimensionierung Antriebspaket prüfen.
32 0 3280 Nur CMMS-AS/CMMD-AS:Fehler ZK-Vorla-dung
Zwischenkreis konnte nicht geladen werden(UZK < 150V)
8 3285 Nur CMMS-AS/CMMD-AS:Fehler Reglerfrei-gabe ohne ZK
Netzausfall bei erteilter Reglerfreigabe
35 1 6199 Time Out beiSchnellhalt
Die parametrierte Zeit für Schnellhalt wurde über-schritten
40 0 8612 Fehler SW-End-schalter erreicht
Negativer SW-Endschalter erreicht.
1 8612 Fehler SW-End-schalter erreicht
Positiver SW Endschalter erreicht.
2 8612 Fehler SW-End-schalter erreicht
Zielposition liegt hinter dem negativen SW Endschal-ter
3 8612 Fehler SW-End-schalter erreicht
Zielposition liegt hinter dem positiven SW Endschal-ter
41 8 6193 Fehler Satzwei-terschaltung, un-bekannter Befehl
Unbekannter Befehl bei der Satzweiterschaltunggefunden
9 6192 Fehler Wegpro-gramm Sprung-ziel
Sprung auf einen Positionssatz ausserhalb des zu-lässigen Bereichs
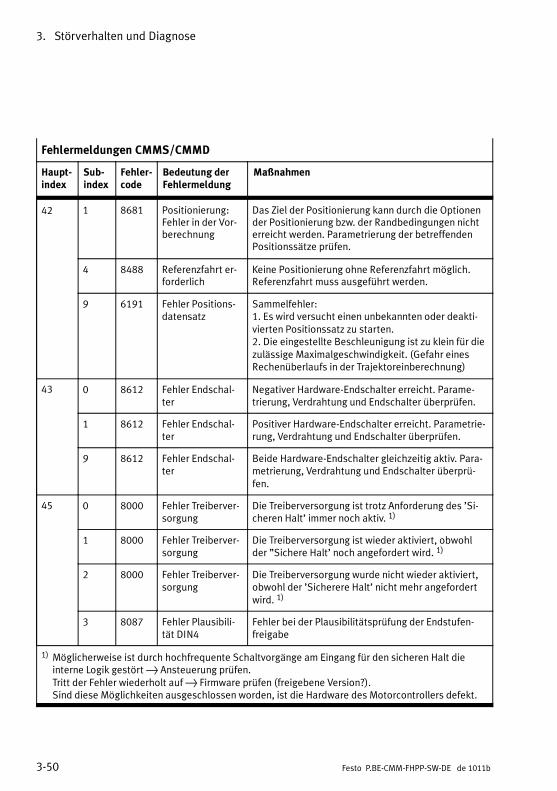
3. Störverhalten und Diagnose
3-50 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMS/CMMD
Haupt-index
MaßnahmenBedeutung derFehlermeldung
Fehler-code
Sub-index
42 1 8681 Positionierung:Fehler in der Vor-berechnung
Das Ziel der Positionierung kann durch die Optionender Positionierung bzw. der Randbedingungen nichterreicht werden. Parametrierung der betreffendenPositionssätze prüfen.
4 8488 Referenzfahrt er-forderlich
Keine Positionierung ohne Referenzfahrt möglich.Referenzfahrt muss ausgeführt werden.
9 6191 Fehler Positions-datensatz
Sammelfehler:1. Es wird versucht einen unbekannten oder deakti-vierten Positionssatz zu starten.2. Die eingestellte Beschleunigung ist zu klein für diezulässige Maximalgeschwindigkeit. (Gefahr einesRechenüberlaufs in der Trajektoreinberechnung)
43 0 8612 Fehler Endschal-ter
Negativer Hardware-Endschalter erreicht. Parame-trierung, Verdrahtung und Endschalter überprüfen.
1 8612 Fehler Endschal-ter
Positiver Hardware-Endschalter erreicht. Parametrie-rung, Verdrahtung und Endschalter überprüfen.
9 8612 Fehler Endschal-ter
Beide Hardware-Endschalter gleichzeitig aktiv. Para-metrierung, Verdrahtung und Endschalter überprü-fen.
45 0 8000 Fehler Treiberver-sorgung
Die Treiberversorgung ist trotz Anforderung des ’Si-cheren Halt’ immer noch aktiv. 1)
1 8000 Fehler Treiberver-sorgung
Die Treiberversorgung ist wieder aktiviert, obwohlder ”Sichere Halt’ noch angefordert wird. 1)
2 8000 Fehler Treiberver-sorgung
Die Treiberversorgung wurde nicht wieder aktiviert,obwohl der ’Sicherere Halt’ nicht mehr angefordertwird. 1)
3 8087 Fehler Plausibili-tät DIN4
Fehler bei der Plausibilitätsprüfung der Endstufen-freigabe
1) Möglicherweise ist durch hochfrequente Schaltvorgänge am Eingang für den sicheren Halt dieinterne Logik gestört} Ansteuerung prüfen.Tritt der Fehler wiederholt auf} Firmware prüfen (freigebene Version?).Sind diese Möglichkeiten ausgeschlossen worden, ist die Hardware des Motorcontrollers defekt.
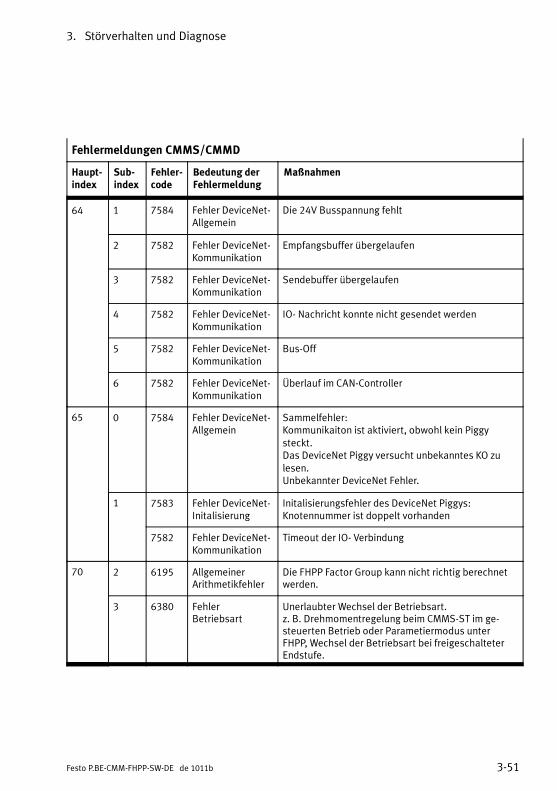
3. Störverhalten und Diagnose
3-51Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMS/CMMD
Haupt-index
MaßnahmenBedeutung derFehlermeldung
Fehler-code
Sub-index
64 1 7584 Fehler DeviceNet-Allgemein
Die 24V Busspannung fehlt
2 7582 Fehler DeviceNet-Kommunikation
Empfangsbuffer übergelaufen
3 7582 Fehler DeviceNet-Kommunikation
Sendebuffer übergelaufen
4 7582 Fehler DeviceNet-Kommunikation
IO- Nachricht konnte nicht gesendet werden
5 7582 Fehler DeviceNet-Kommunikation
Bus-Off
6 7582 Fehler DeviceNet-Kommunikation
Überlauf im CAN-Controller
65 0 7584 Fehler DeviceNet-Allgemein
Sammelfehler:Kommunikaiton ist aktiviert, obwohl kein Piggysteckt.Das DeviceNet Piggy versucht unbekanntes KO zulesen.Unbekannter DeviceNet Fehler.
1 7583 Fehler DeviceNet-Initalisierung
Initalisierungsfehler des DeviceNet Piggys:Knotennummer ist doppelt vorhanden
7582 Fehler DeviceNet-Kommunikation
Timeout der IO- Verbindung
70 2 6195 AllgemeinerArithmetikfehler
Die FHPP Factor Group kann nicht richtig berechnetwerden.
3 6380 FehlerBetriebsart
Unerlaubter Wechsel der Betriebsart.z. B. Drehmomentregelung beim CMMS-ST im ge-steuerten Betrieb oder Parametiermodus unterFHPP, Wechsel der Betriebsart bei freigeschalteterEndstufe.
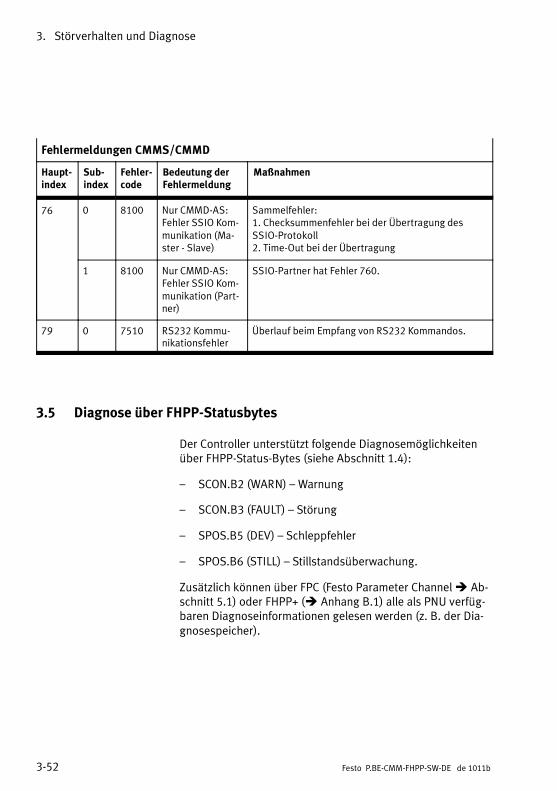
3. Störverhalten und Diagnose
3-52 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fehlermeldungen CMMS/CMMD
Haupt-index
MaßnahmenBedeutung derFehlermeldung
Fehler-code
Sub-index
76 0 8100 Nur CMMD-AS:Fehler SSIO Kom-munikation (Ma-ster - Slave)
Sammelfehler:1. Checksummenfehler bei der Übertragung desSSIO-Protokoll2. Time-Out bei der Übertragung
1 8100 Nur CMMD-AS:Fehler SSIO Kom-munikation (Part-ner)
SSIO-Partner hat Fehler 760.
79 0 7510 RS232 Kommu-nikationsfehler
Überlauf beim Empfang von RS232 Kommandos.
3.5 Diagnose über FHPP-Statusbytes
Der Controller unterstützt folgende Diagnosemöglichkeitenüber FHPP-Status-Bytes (siehe Abschnitt 1.4):
– SCON.B2 (WARN) – Warnung
– SCON.B3 (FAULT) – Störung
– SPOS.B5 (DEV) – Schleppfehler
– SPOS.B6 (STILL) – Stillstandsüberwachung.
Zusätzlich können über FPC (Festo Parameter Channel� Ab-schnitt 5.1) oder FHPP+ (� Anhang B.1) alle als PNU verfüg-baren Diagnoseinformationen gelesen werden (z. B. der Dia-gnosespeicher).
Parameter
4-1Festo P.BE-CMM-FHPP-SW-DE de 1011b
Kapitel 4
Parameter
4. Parameter
4-2 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Inhaltsverzeichnis
4.1 Allgemeine Parameterstruktur FHPP 4-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Zugriffsschutz 4-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.1 Zugriff über SPS und FCT 4-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Parameter-Übersicht nach FHPP 4-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4 Beschreibung der Parameter nach FHPP 4-14. . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.1 Darstellung der Parametereinträge 4-14. . . . . . . . . . . . . . . . . . . . . . . . .
4.4.2 PNUs für die Telegrammeinträge bei FHPP+ 4-15. . . . . . . . . . . . . . . . . .
4.4.3 Gerätedaten – Standard Parameter 4-17. . . . . . . . . . . . . . . . . . . . . . . . .
4.4.4 Gerätedaten – Erweiterte Parameter 4-18. . . . . . . . . . . . . . . . . . . . . . . .
4.4.5 Diagnose 4-21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.6 Prozessdaten 4-25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.7 Fliegendes Messen 4-30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.8 Satzliste 4-31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.9 Projektdaten – Allgemeine Projektdaten 4-44. . . . . . . . . . . . . . . . . . . . .
4.4.10 Projektdaten – Teachen 4-45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.11 Projektdaten – Tippbetrieb 4-46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.12 Projektdaten – Direktbetrieb Positionsregelung 4-47. . . . . . . . . . . . . . .
4.4.13 Projektdaten – Direktbetrieb Drehmomentregelung 4-48. . . . . . . . . . . .
4.4.14 Projektdaten – Direktbetrieb Drehzahlregelung 4-49. . . . . . . . . . . . . . .
4.4.15 Funktionsdaten – Kurvenscheibenfunktion 4-50. . . . . . . . . . . . . . . . . . .
4.4.16 Funktionsdaten – Positions- und Rotorlagetrigger 4-52. . . . . . . . . . . . .
4.4.17 Achsparameter Elektrische Antriebe 1 – Parameter Mechanik 4-55. . . .
4.4.18 Achsparameter Elektrische Antriebe 1 – Parameter Referenzfahrt 4-58
4.4.19 Achsparameter Elektrische Antriebe 1 – Reglerparameter 4-60. . . . . . .
4.4.20 Achsparameter Elektrische Antriebe 1– Elektronisches Typenschild 4-63. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.21 Achsparameter Elektrische Antriebe 1– Stillstandsüberwachung 4-64. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.22 Achsparameter Elektrische Antriebe 1– Schleppfehlerüberwachung 4-65. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.23 Achsparameter Elektrische Antriebe 1 – Sonstige Parameter 4-65. . . .
4.4.24 Funktionsparameter digitale E/As 4-66. . . . . . . . . . . . . . . . . . . . . . . . . .
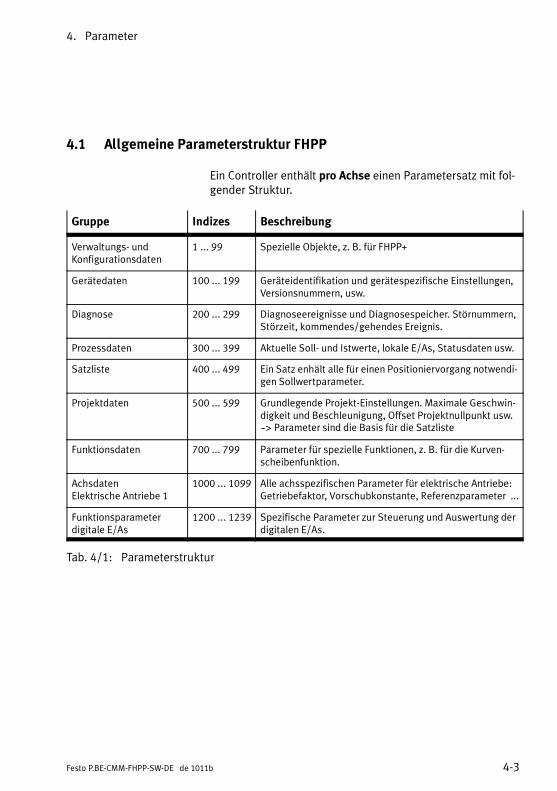
4. Parameter
4-3Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.1 Allgemeine Parameterstruktur FHPP
Ein Controller enthält pro Achse einen Parametersatz mit fol-gender Struktur.
Gruppe Indizes Beschreibung
Verwaltungs- undKonfigurationsdaten
1 ... 99 Spezielle Objekte, z. B. für FHPP+
Gerätedaten 100 ... 199 Geräteidentifikation und gerätespezifische Einstellungen,Versionsnummern, usw.
Diagnose 200 ... 299 Diagnoseereignisse und Diagnosespeicher. Störnummern,Störzeit, kommendes/gehendes Ereignis.
Prozessdaten 300 ... 399 Aktuelle Soll- und Istwerte, lokale E/As, Statusdaten usw.
Satzliste 400 ... 499 Ein Satz enhält alle für einen Positioniervorgang notwendi-gen Sollwertparameter.
Projektdaten 500 ... 599 Grundlegende Projekt-Einstellungen. Maximale Geschwin-digkeit und Beschleunigung, Offset Projektnullpunkt usw.--> Parameter sind die Basis für die Satzliste
Funktionsdaten 700 ... 799 Parameter für spezielle Funktionen, z. B. für die Kurven-scheibenfunktion.
AchsdatenElektrische Antriebe 1
1000 ... 1099 Alle achsspezifischen Parameter für elektrische Antriebe:Getriebefaktor, Vorschubkonstante, Referenzparameter ...
Funktionsparameterdigitale E/As
1200 ... 1239 Spezifische Parameter zur Steuerung und Auswertung derdigitalen E/As.
Tab. 4/1: Parameterstruktur
4. Parameter
4-4 Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.2 Zugriffsschutz
4.2.1 Zugriff über SPS und FCT
Der Anwender kann die gleichzeitige Bedienung des Antriebsdurch SPS und FCT verriegeln. Dazu dienen die Bits CCON.B5(FCT Zugriff blockiert) und SCON.B5 (Steuerhoheit FCT).
Bedienung FCT verhindern: CCON.B5 (LOCK)
Durch Setzen des Steuer-Bits CCON.B5 verhindert die SPS,dass das FCT die Steuerhoheit übernimmt. FCT kann bei ge-setztem LOCK also weder Parameter schreiben noch den An-trieb steuern, Referenzfahrt ausführen usw.
Die SPS wird so programmiert, dass sie diese Freigabe erstdurch eine entsprechende Benutzeraktion erteilt. Dabei wirdin der Regel der Automatik-Betrieb verlassen. Damit kann derSPS-Programmierer gewährleisten, dass die SPS immer weiß,wann sie die Kontrolle über den Antrieb hat.
Wichtig: Die Sperre ist aktiv, wenn das Bit CCON.B5 1-Signalführt. Es muss also nicht zwangsweise gesetzt werden. DerAnwender, der eine solche Verriegelung nicht benötigt, kannes immer auf 0 stehen lassen.
Rückmeldung Steuerhoheit bei FCT: SCON.B5 (LOCK)
Dieses Bit informiert die SPS darüber, dass der Antrieb durchdas FCT geführt wird und sie keine Kontrolle mehr über denAntrieb hat. Dieses Bit muss nicht ausgewertet werden. Einemögliche Reaktion der SPS ist der Übergang in den Stopp-oder Hand-Betrieb.
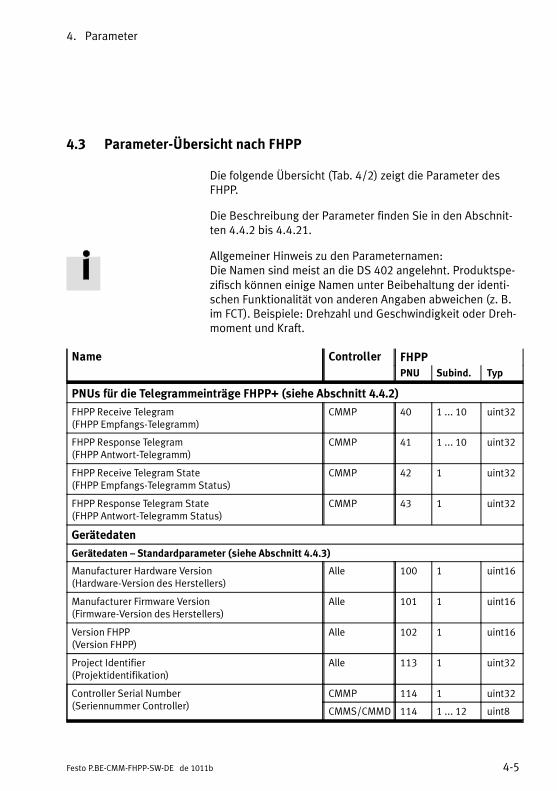
4. Parameter
4-5Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.3 Parameter-Übersicht nach FHPP
Die folgende Übersicht (Tab. 4/2) zeigt die Parameter desFHPP.
Die Beschreibung der Parameter finden Sie in den Abschnit-ten 4.4.2 bis 4.4.21.
Allgemeiner Hinweis zu den Parameternamen:Die Namen sind meist an die DS 402 angelehnt. Produktspe-zifisch können einige Namen unter Beibehaltung der identi-schen Funktionalität von anderen Angaben abweichen (z. B.im FCT). Beispiele: Drehzahl und Geschwindigkeit oder Dreh-moment und Kraft.
Name Controller FHPPPNU Subind. Typ
PNUs für die Telegrammeinträge FHPP+ (siehe Abschnitt 4.4.2)
FHPP Receive Telegram(FHPP Empfangs-Telegramm)
CMMP 40 1 ... 10 uint32
FHPP Response Telegram(FHPP Antwort-Telegramm)
CMMP 41 1 ... 10 uint32
FHPP Receive Telegram State(FHPP Empfangs-Telegramm Status)
CMMP 42 1 uint32
FHPP Response Telegram State(FHPP Antwort-Telegramm Status)
CMMP 43 1 uint32
Gerätedaten
Gerätedaten – Standardparameter (siehe Abschnitt 4.4.3)
Manufacturer Hardware Version(Hardware-Version des Herstellers)
Alle 100 1 uint16
Manufacturer Firmware Version(Firmware-Version des Herstellers)
Alle 101 1 uint16
Version FHPP(Version FHPP)
Alle 102 1 uint16
Project Identifier(Projektidentifikation)
Alle 113 1 uint32
Controller Serial Number(Seriennummer Controller)
CMMP 114 1 uint32
CMMS/CMMD 114 1 ... 12 uint8
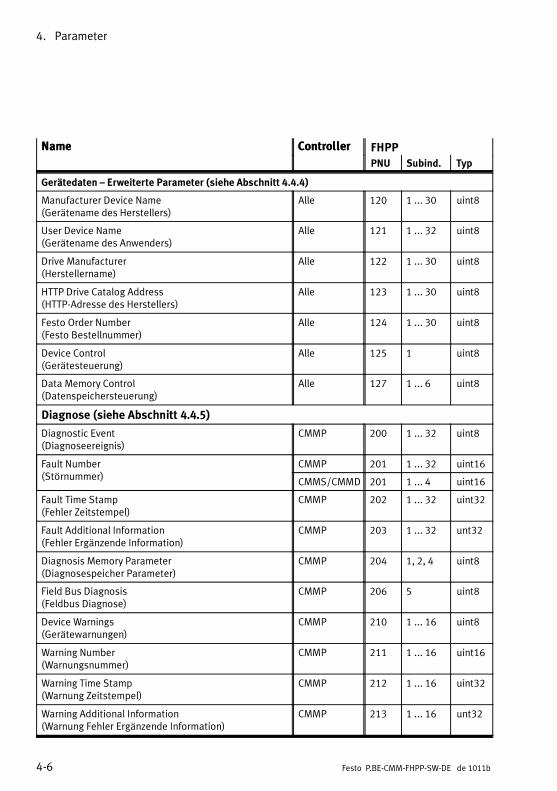
4. Parameter
4-6 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Name FHPPControllerNameTypSubind.PNU
Controller
Gerätedaten – Erweiterte Parameter (siehe Abschnitt 4.4.4)
Manufacturer Device Name(Gerätename des Herstellers)
Alle 120 1 ... 30 uint8
User Device Name(Gerätename des Anwenders)
Alle 121 1 ... 32 uint8
Drive Manufacturer(Herstellername)
Alle 122 1 ... 30 uint8
HTTP Drive Catalog Address(HTTP-Adresse des Herstellers)
Alle 123 1 ... 30 uint8
Festo Order Number(Festo Bestellnummer)
Alle 124 1 ... 30 uint8
Device Control(Gerätesteuerung)
Alle 125 1 uint8
Data Memory Control(Datenspeichersteuerung)
Alle 127 1 ... 6 uint8
Diagnose (siehe Abschnitt 4.4.5)
Diagnostic Event(Diagnoseereignis)
CMMP 200 1 ... 32 uint8
Fault Number(Störnummer)
CMMP 201 1 ... 32 uint16
CMMS/CMMD 201 1 ... 4 uint16
Fault Time Stamp(Fehler Zeitstempel)
CMMP 202 1 ... 32 uint32
Fault Additional Information(Fehler Ergänzende Information)
CMMP 203 1 ... 32 unt32
Diagnosis Memory Parameter(Diagnosespeicher Parameter)
CMMP 204 1, 2, 4 uint8
Field Bus Diagnosis(Feldbus Diagnose)
CMMP 206 5 uint8
Device Warnings(Gerätewarnungen)
CMMP 210 1 ... 16 uint8
Warning Number(Warnungsnummer)
CMMP 211 1 ... 16 uint16
Warning Time Stamp(Warnung Zeitstempel)
CMMP 212 1 ... 16 uint32
Warning Additional Information(Warnung Fehler Ergänzende Information)
CMMP 213 1 ... 16 unt32
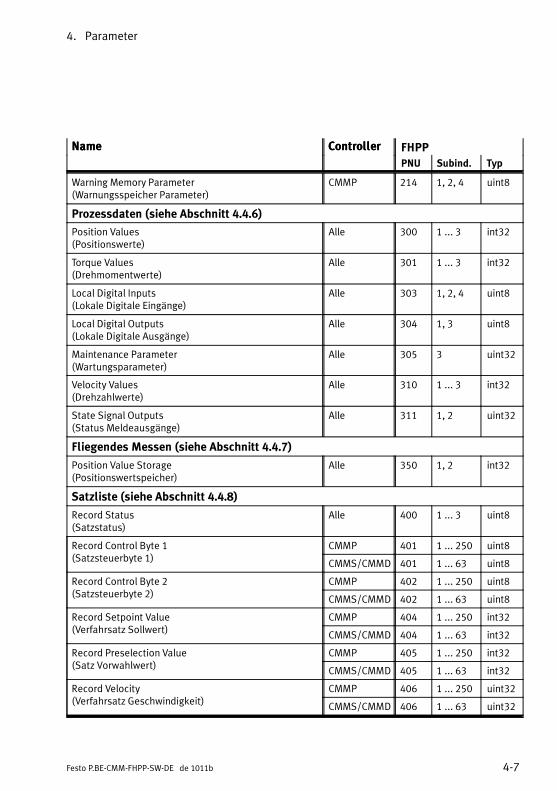
4. Parameter
4-7Festo P.BE-CMM-FHPP-SW-DE de 1011b
Name FHPPControllerNameTypSubind.PNU
Controller
Warning Memory Parameter(Warnungsspeicher Parameter)
CMMP 214 1, 2, 4 uint8
Prozessdaten (siehe Abschnitt 4.4.6)
Position Values(Positionswerte)
Alle 300 1 ... 3 int32
Torque Values(Drehmomentwerte)
Alle 301 1 ... 3 int32
Local Digital Inputs(Lokale Digitale Eingänge)
Alle 303 1, 2, 4 uint8
Local Digital Outputs(Lokale Digitale Ausgänge)
Alle 304 1, 3 uint8
Maintenance Parameter(Wartungsparameter)
Alle 305 3 uint32
Velocity Values(Drehzahlwerte)
Alle 310 1 ... 3 int32
State Signal Outputs(Status Meldeausgänge)
Alle 311 1, 2 uint32
Fliegendes Messen (siehe Abschnitt 4.4.7)
Position Value Storage(Positionswertspeicher)
Alle 350 1, 2 int32
Satzliste (siehe Abschnitt 4.4.8)
Record Status(Satzstatus)
Alle 400 1 ... 3 uint8
Record Control Byte 1(Satzsteuerbyte 1)
CMMP 401 1 ... 250 uint8
CMMS/CMMD 401 1 ... 63 uint8
Record Control Byte 2(Satzsteuerbyte 2)
CMMP 402 1 ... 250 uint8
CMMS/CMMD 402 1 ... 63 uint8
Record Setpoint Value(Verfahrsatz Sollwert)
CMMP 404 1 ... 250 int32
CMMS/CMMD 404 1 ... 63 int32
Record Preselection Value(Satz Vorwahlwert)
CMMP 405 1 ... 250 int32
CMMS/CMMD 405 1 ... 63 int32
Record Velocity(Verfahrsatz Geschwindigkeit)
CMMP 406 1 ... 250 uint32
CMMS/CMMD 406 1 ... 63 uint32
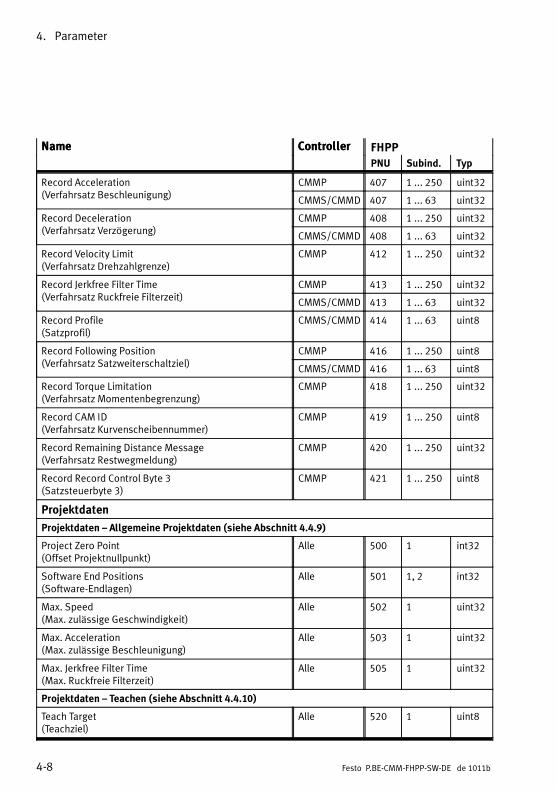
4. Parameter
4-8 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Name FHPPControllerNameTypSubind.PNU
Controller
Record Acceleration(Verfahrsatz Beschleunigung)
CMMP 407 1 ... 250 uint32
CMMS/CMMD 407 1 ... 63 uint32
Record Deceleration(Verfahrsatz Verzögerung)
CMMP 408 1 ... 250 uint32
CMMS/CMMD 408 1 ... 63 uint32
Record Velocity Limit(Verfahrsatz Drehzahlgrenze)
CMMP 412 1 ... 250 uint32
Record Jerkfree Filter Time(Verfahrsatz Ruckfreie Filterzeit)
CMMP 413 1 ... 250 uint32
CMMS/CMMD 413 1 ... 63 uint32
Record Profile(Satzprofil)
CMMS/CMMD 414 1 ... 63 uint8
Record Following Position(Verfahrsatz Satzweiterschaltziel)
CMMP 416 1 ... 250 uint8
CMMS/CMMD 416 1 ... 63 uint8
Record Torque Limitation(Verfahrsatz Momentenbegrenzung)
CMMP 418 1 ... 250 uint32
Record CAM ID(Verfahrsatz Kurvenscheibennummer)
CMMP 419 1 ... 250 uint8
Record Remaining Distance Message(Verfahrsatz Restwegmeldung)
CMMP 420 1 ... 250 uint32
Record Record Control Byte 3(Satzsteuerbyte 3)
CMMP 421 1 ... 250 uint8
Projektdaten
Projektdaten – Allgemeine Projektdaten (siehe Abschnitt 4.4.9)
Project Zero Point(Offset Projektnullpunkt)
Alle 500 1 int32
Software End Positions(Software-Endlagen)
Alle 501 1, 2 int32
Max. Speed(Max. zulässige Geschwindigkeit)
Alle 502 1 uint32
Max. Acceleration(Max. zulässige Beschleunigung)
Alle 503 1 uint32
Max. Jerkfree Filter Time(Max. Ruckfreie Filterzeit)
Alle 505 1 uint32
Projektdaten – Teachen (siehe Abschnitt 4.4.10)
Teach Target(Teachziel)
Alle 520 1 uint8
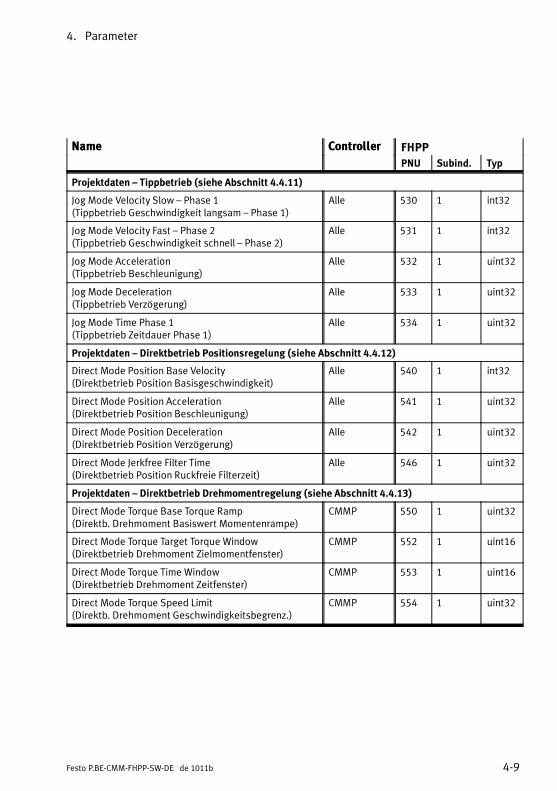
4. Parameter
4-9Festo P.BE-CMM-FHPP-SW-DE de 1011b
Name FHPPControllerNameTypSubind.PNU
Controller
Projektdaten – Tippbetrieb (siehe Abschnitt 4.4.11)
Jog Mode Velocity Slow – Phase 1(Tippbetrieb Geschwindigkeit langsam – Phase 1)
Alle 530 1 int32
Jog Mode Velocity Fast – Phase 2(Tippbetrieb Geschwindigkeit schnell – Phase 2)
Alle 531 1 int32
Jog Mode Acceleration(Tippbetrieb Beschleunigung)
Alle 532 1 uint32
Jog Mode Deceleration(Tippbetrieb Verzögerung)
Alle 533 1 uint32
Jog Mode Time Phase 1(Tippbetrieb Zeitdauer Phase 1)
Alle 534 1 uint32
Projektdaten – Direktbetrieb Positionsregelung (siehe Abschnitt 4.4.12)
Direct Mode Position Base Velocity(Direktbetrieb Position Basisgeschwindigkeit)
Alle 540 1 int32
Direct Mode Position Acceleration(Direktbetrieb Position Beschleunigung)
Alle 541 1 uint32
Direct Mode Position Deceleration(Direktbetrieb Position Verzögerung)
Alle 542 1 uint32
Direct Mode Jerkfree Filter Time(Direktbetrieb Position Ruckfreie Filterzeit)
Alle 546 1 uint32
Projektdaten – Direktbetrieb Drehmomentregelung (siehe Abschnitt 4.4.13)
Direct Mode Torque Base Torque Ramp(Direktb. Drehmoment Basiswert Momentenrampe)
CMMP 550 1 uint32
Direct Mode Torque Target Torque Window(Direktbetrieb Drehmoment Zielmomentfenster)
CMMP 552 1 uint16
Direct Mode Torque Time Window(Direktbetrieb Drehmoment Zeitfenster)
CMMP 553 1 uint16
Direct Mode Torque Speed Limit(Direktb. Drehmoment Geschwindigkeitsbegrenz.)
CMMP 554 1 uint32
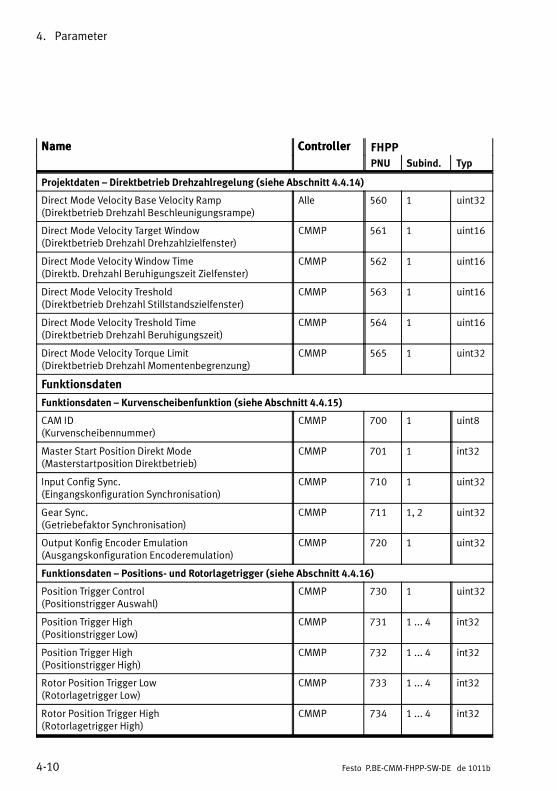
4. Parameter
4-10 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Name FHPPControllerNameTypSubind.PNU
Controller
Projektdaten – Direktbetrieb Drehzahlregelung (siehe Abschnitt 4.4.14)
Direct Mode Velocity Base Velocity Ramp(Direktbetrieb Drehzahl Beschleunigungsrampe)
Alle 560 1 uint32
Direct Mode Velocity Target Window(Direktbetrieb Drehzahl Drehzahlzielfenster)
CMMP 561 1 uint16
Direct Mode Velocity Window Time(Direktb. Drehzahl Beruhigungszeit Zielfenster)
CMMP 562 1 uint16
Direct Mode Velocity Treshold(Direktbetrieb Drehzahl Stillstandszielfenster)
CMMP 563 1 uint16
Direct Mode Velocity Treshold Time(Direktbetrieb Drehzahl Beruhigungszeit)
CMMP 564 1 uint16
Direct Mode Velocity Torque Limit(Direktbetrieb Drehzahl Momentenbegrenzung)
CMMP 565 1 uint32
Funktionsdaten
Funktionsdaten – Kurvenscheibenfunktion (siehe Abschnitt 4.4.15)
CAM ID(Kurvenscheibennummer)
CMMP 700 1 uint8
Master Start Position Direkt Mode(Masterstartposition Direktbetrieb)
CMMP 701 1 int32
Input Config Sync.(Eingangskonfiguration Synchronisation)
CMMP 710 1 uint32
Gear Sync.(Getriebefaktor Synchronisation)
CMMP 711 1, 2 uint32
Output Konfig Encoder Emulation(Ausgangskonfiguration Encoderemulation)
CMMP 720 1 uint32
Funktionsdaten – Positions- und Rotorlagetrigger (siehe Abschnitt 4.4.16)
Position Trigger Control(Positionstrigger Auswahl)
CMMP 730 1 uint32
Position Trigger High(Positionstrigger Low)
CMMP 731 1 ... 4 int32
Position Trigger High(Positionstrigger High)
CMMP 732 1 ... 4 int32
Rotor Position Trigger Low(Rotorlagetrigger Low)
CMMP 733 1 ... 4 int32
Rotor Position Trigger High(Rotorlagetrigger High)
CMMP 734 1 ... 4 int32
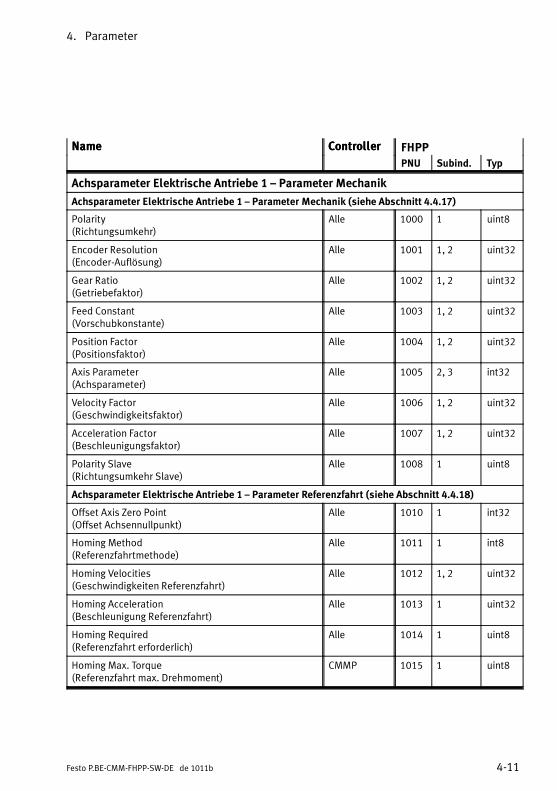
4. Parameter
4-11Festo P.BE-CMM-FHPP-SW-DE de 1011b
Name FHPPControllerNameTypSubind.PNU
Controller
Achsparameter Elektrische Antriebe 1 – Parameter Mechanik
Achsparameter Elektrische Antriebe 1 – Parameter Mechanik (siehe Abschnitt 4.4.17)
Polarity(Richtungsumkehr)
Alle 1000 1 uint8
Encoder Resolution(Encoder-Auflösung)
Alle 1001 1, 2 uint32
Gear Ratio(Getriebefaktor)
Alle 1002 1, 2 uint32
Feed Constant(Vorschubkonstante)
Alle 1003 1, 2 uint32
Position Factor(Positionsfaktor)
Alle 1004 1, 2 uint32
Axis Parameter(Achsparameter)
Alle 1005 2, 3 int32
Velocity Factor(Geschwindigkeitsfaktor)
Alle 1006 1, 2 uint32
Acceleration Factor(Beschleunigungsfaktor)
Alle 1007 1, 2 uint32
Polarity Slave(Richtungsumkehr Slave)
Alle 1008 1 uint8
Achsparameter Elektrische Antriebe 1 – Parameter Referenzfahrt (siehe Abschnitt 4.4.18)
Offset Axis Zero Point(Offset Achsennullpunkt)
Alle 1010 1 int32
Homing Method(Referenzfahrtmethode)
Alle 1011 1 int8
Homing Velocities(Geschwindigkeiten Referenzfahrt)
Alle 1012 1, 2 uint32
Homing Acceleration(Beschleunigung Referenzfahrt)
Alle 1013 1 uint32
Homing Required(Referenzfahrt erforderlich)
Alle 1014 1 uint8
Homing Max. Torque(Referenzfahrt max. Drehmoment)
CMMP 1015 1 uint8
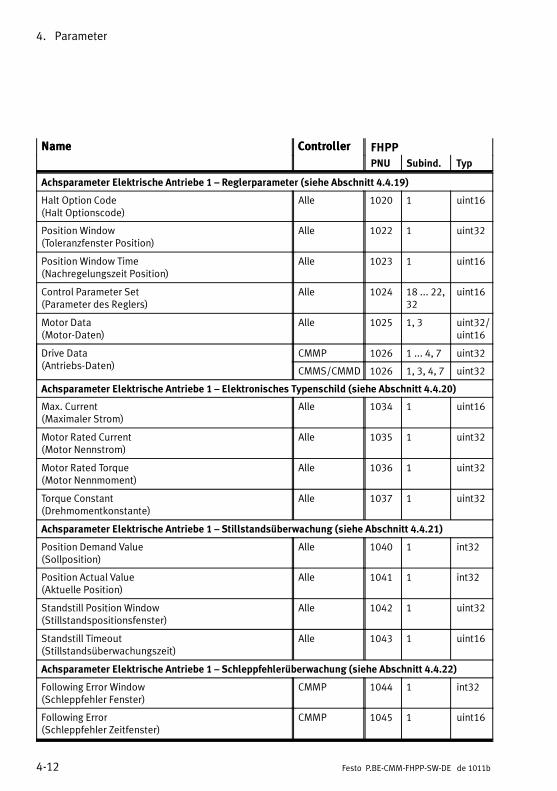
4. Parameter
4-12 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Name FHPPControllerNameTypSubind.PNU
Controller
Achsparameter Elektrische Antriebe 1 – Reglerparameter (siehe Abschnitt 4.4.19)
Halt Option Code(Halt Optionscode)
Alle 1020 1 uint16
Position Window(Toleranzfenster Position)
Alle 1022 1 uint32
Position Window Time(Nachregelungszeit Position)
Alle 1023 1 uint16
Control Parameter Set(Parameter des Reglers)
Alle 1024 18 ... 22,32
uint16
Motor Data(Motor-Daten)
Alle 1025 1, 3 uint32/uint16
Drive Data(Antriebs-Daten)
CMMP 1026 1 ... 4, 7 uint32
CMMS/CMMD 1026 1, 3, 4, 7 uint32
Achsparameter Elektrische Antriebe 1 – Elektronisches Typenschild (siehe Abschnitt 4.4.20)
Max. Current(Maximaler Strom)
Alle 1034 1 uint16
Motor Rated Current(Motor Nennstrom)
Alle 1035 1 uint32
Motor Rated Torque(Motor Nennmoment)
Alle 1036 1 uint32
Torque Constant(Drehmomentkonstante)
Alle 1037 1 uint32
Achsparameter Elektrische Antriebe 1 – Stillstandsüberwachung (siehe Abschnitt 4.4.21)
Position Demand Value(Sollposition)
Alle 1040 1 int32
Position Actual Value(Aktuelle Position)
Alle 1041 1 int32
Standstill Position Window(Stillstandspositionsfenster)
Alle 1042 1 uint32
Standstill Timeout(Stillstandsüberwachungszeit)
Alle 1043 1 uint16
Achsparameter Elektrische Antriebe 1 – Schleppfehlerüberwachung (siehe Abschnitt 4.4.22)
Following Error Window(Schleppfehler Fenster)
CMMP 1044 1 int32
Following Error(Schleppfehler Zeitfenster)
CMMP 1045 1 uint16
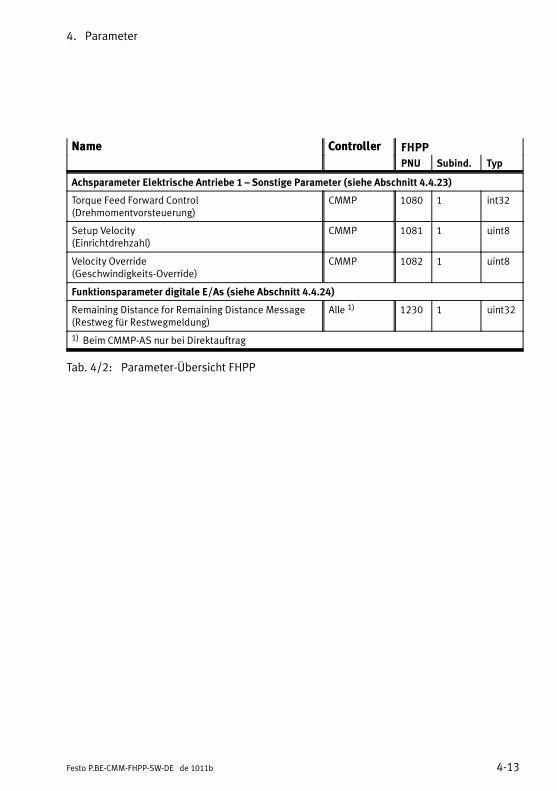
4. Parameter
4-13Festo P.BE-CMM-FHPP-SW-DE de 1011b
Name FHPPControllerNameTypSubind.PNU
Controller
Achsparameter Elektrische Antriebe 1 – Sonstige Parameter (siehe Abschnitt 4.4.23)
Torque Feed Forward Control(Drehmomentvorsteuerung)
CMMP 1080 1 int32
Setup Velocity(Einrichtdrehzahl)
CMMP 1081 1 uint8
Velocity Override(Geschwindigkeits-Override)
CMMP 1082 1 uint8
Funktionsparameter digitale E/As (siehe Abschnitt 4.4.24)
Remaining Distance for Remaining Distance Message(Restweg für Restwegmeldung)
Alle 1) 1230 1 uint32
1) Beim CMMP-AS nur bei Direktauftrag
Tab. 4/2: Parameter-Übersicht FHPP
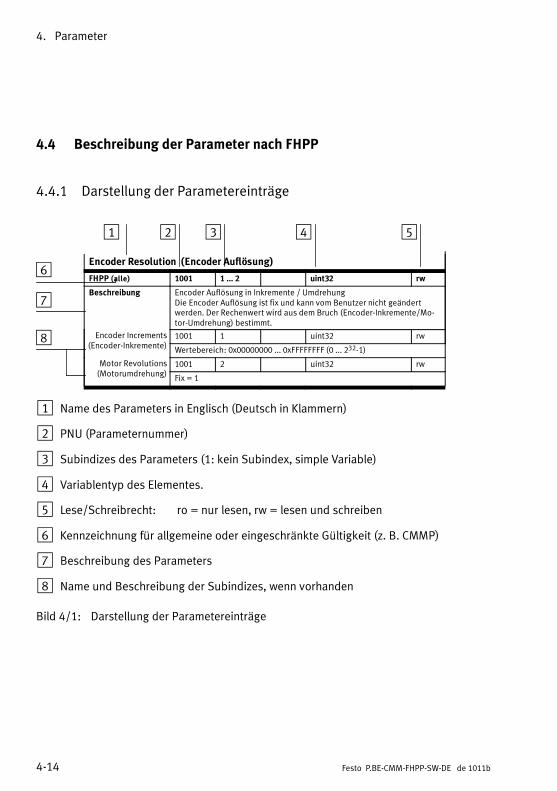
4. Parameter
4-14 Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4 Beschreibung der Parameter nach FHPP
4.4.1 Darstellung der Parametereinträge
Encoder Resolution (Encoder Auflösung)
FHPP (alle) 1001 1 ... 2 uint32 rw
Beschreibung Encoder Auflösung in Inkremente / UmdrehungDie Encoder Auflösung ist fix und kann vom Benutzer nicht geändertwerden. Der Rechenwert wird aus dem Bruch (Encoder-Inkremente/Mo-tor-Umdrehung) bestimmt.
Encoder Increments(Encoder-Inkremente)
1001 1 uint32 rw
Wertebereich: 0x00000000 ... 0xFFFFFFFF (0 ... 232-1)
Motor Revolutions(Motorumdrehung)
1001 2 uint32 rw
Fix = 1
1 Name des Parameters in Englisch (Deutsch in Klammern)
2 PNU (Parameternummer)
3 Subindizes des Parameters (1: kein Subindex, simple Variable)
4 Variablentyp des Elementes.
5 Lese/Schreibrecht: ro = nur lesen, rw = lesen und schreiben
6 Kennzeichnung für allgemeine oder eingeschränkte Gültigkeit (z. B. CMMP)
7 Beschreibung des Parameters
8 Name und Beschreibung der Subindizes, wenn vorhanden
Bild 4/1: Darstellung der Parametereinträge
1 2 3 4 5
6
7
8
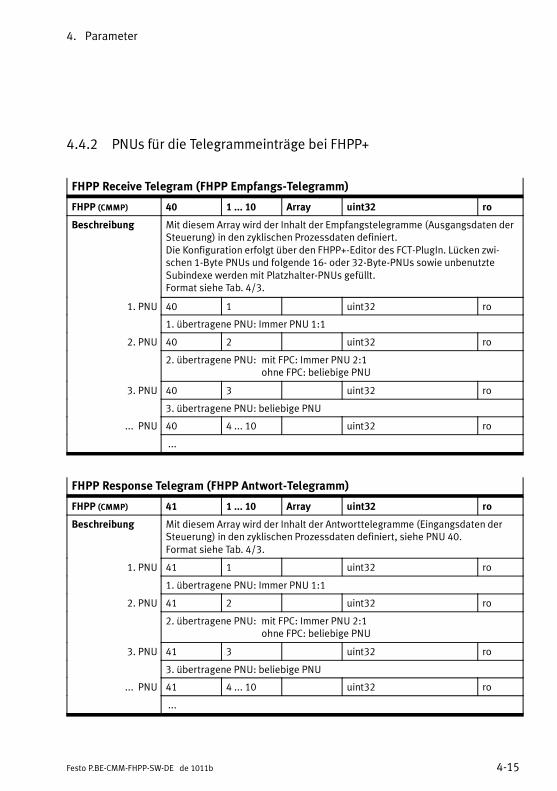
4. Parameter
4-15Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4.2 PNUs für die Telegrammeinträge bei FHPP+
FHPP Receive Telegram (FHPP Empfangs-Telegramm)
FHPP (CMMP) 40 1 ... 10 Array uint32 ro
Beschreibung Mit diesem Array wird der Inhalt der Empfangstelegramme (Ausgangsdaten derSteuerung) in den zyklischen Prozessdaten definiert.Die Konfiguration erfolgt über den FHPP+-Editor des FCT-PlugIn. Lücken zwi-schen 1-Byte PNUs und folgende 16- oder 32-Byte-PNUs sowie unbenutzteSubindexe werden mit Platzhalter-PNUs gefüllt.Format siehe Tab. 4/3.
1. PNU 40 1 uint32 ro
1. übertragene PNU: Immer PNU 1:1
2. PNU 40 2 uint32 ro
2. übertragene PNU: mit FPC: Immer PNU 2:1ohne FPC: beliebige PNU
3. PNU 40 3 uint32 ro
3. übertragene PNU: beliebige PNU
... PNU 40 4 ... 10 uint32 ro
...
FHPP Response Telegram (FHPP Antwort-Telegramm)
FHPP (CMMP) 41 1 ... 10 Array uint32 ro
Beschreibung Mit diesem Array wird der Inhalt der Antworttelegramme (Eingangsdaten derSteuerung) in den zyklischen Prozessdaten definiert, siehe PNU 40.Format siehe Tab. 4/3.
1. PNU 41 1 uint32 ro
1. übertragene PNU: Immer PNU 1:1
2. PNU 41 2 uint32 ro
2. übertragene PNU: mit FPC: Immer PNU 2:1ohne FPC: beliebige PNU
3. PNU 41 3 uint32 ro
3. übertragene PNU: beliebige PNU
... PNU 41 4 ... 10 uint32 ro
...
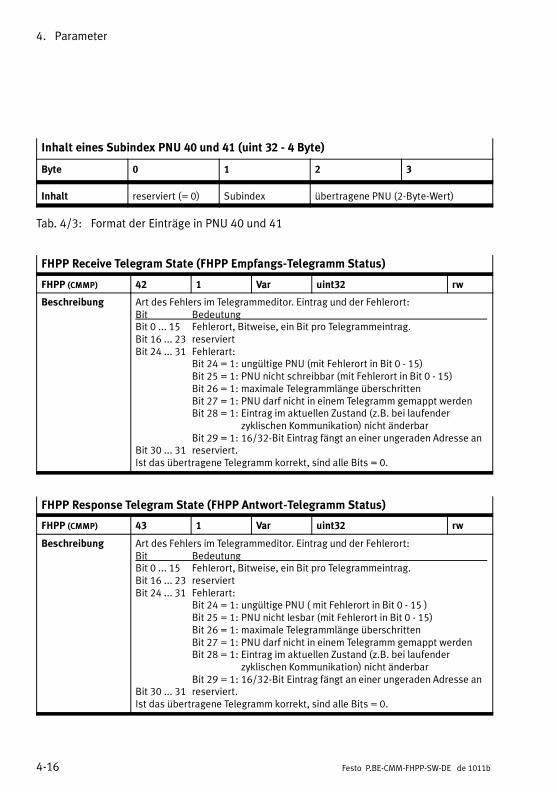
4. Parameter
4-16 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Inhalt eines Subindex PNU 40 und 41 (uint 32 - 4 Byte)
Byte 0 1 2 3
Inhalt reserviert (= 0) Subindex übertragene PNU (2-Byte-Wert)
Tab. 4/3: Format der Einträge in PNU 40 und 41
FHPP Receive Telegram State (FHPP Empfangs-Telegramm Status)
FHPP (CMMP) 42 1 Var uint32 rw
Beschreibung Art des Fehlers im Telegrammeditor. Eintrag und der Fehlerort:Bit BedeutungBit 0 ... 15 Fehlerort, Bitweise, ein Bit pro Telegrammeintrag.Bit 16 ... 23 reserviertBit 24 ... 31 Fehlerart:
Bit 24 = 1: ungültige PNU (mit Fehlerort in Bit 0 - 15)Bit 25 = 1: PNU nicht schreibbar (mit Fehlerort in Bit 0 - 15)Bit 26 = 1: maximale Telegrammlänge überschrittenBit 27 = 1: PNU darf nicht in einem Telegramm gemappt werdenBit 28 = 1: Eintrag im aktuellen Zustand (z.B. bei laufender
zyklischen Kommunikation) nicht änderbarBit 29 = 1: 16/32-Bit Eintrag fängt an einer ungeraden Adresse an
Bit 30 ... 31 reserviert.Ist das übertragene Telegramm korrekt, sind alle Bits = 0.
FHPP Response Telegram State (FHPP Antwort-Telegramm Status)
FHPP (CMMP) 43 1 Var uint32 rw
Beschreibung Art des Fehlers im Telegrammeditor. Eintrag und der Fehlerort:Bit BedeutungBit 0 ... 15 Fehlerort, Bitweise, ein Bit pro Telegrammeintrag.Bit 16 ... 23 reserviertBit 24 ... 31 Fehlerart:
Bit 24 = 1: ungültige PNU ( mit Fehlerort in Bit 0 - 15 )Bit 25 = 1: PNU nicht lesbar (mit Fehlerort in Bit 0 - 15)Bit 26 = 1: maximale Telegrammlänge überschrittenBit 27 = 1: PNU darf nicht in einem Telegramm gemappt werdenBit 28 = 1: Eintrag im aktuellen Zustand (z.B. bei laufender
zyklischen Kommunikation) nicht änderbarBit 29 = 1: 16/32-Bit Eintrag fängt an einer ungeraden Adresse an
Bit 30 ... 31 reserviert.Ist das übertragene Telegramm korrekt, sind alle Bits = 0.
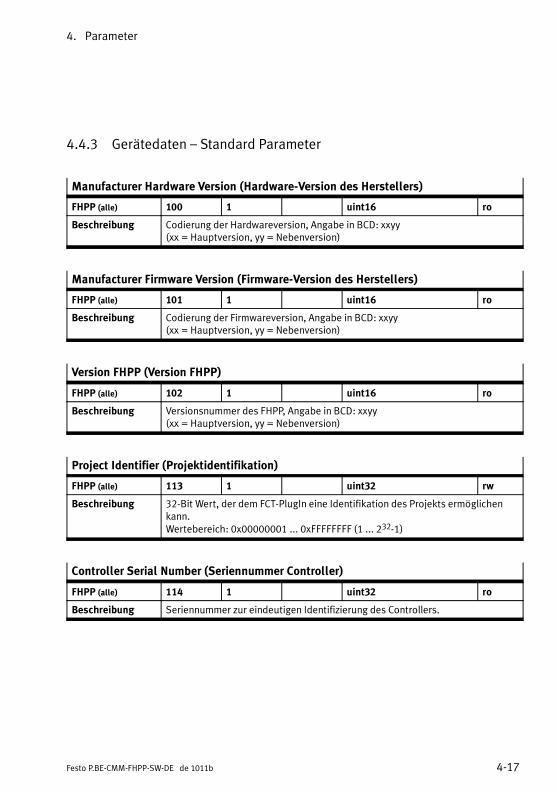
4. Parameter
4-17Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4.3 Gerätedaten – Standard Parameter
Manufacturer Hardware Version (Hardware-Version des Herstellers)
FHPP (alle) 100 1 uint16 ro
Beschreibung Codierung der Hardwareversion, Angabe in BCD: xxyy(xx = Hauptversion, yy = Nebenversion)
Manufacturer Firmware Version (Firmware-Version des Herstellers)
FHPP (alle) 101 1 uint16 ro
Beschreibung Codierung der Firmwareversion, Angabe in BCD: xxyy(xx = Hauptversion, yy = Nebenversion)
Version FHPP (Version FHPP)
FHPP (alle) 102 1 uint16 ro
Beschreibung Versionsnummer des FHPP, Angabe in BCD: xxyy(xx = Hauptversion, yy = Nebenversion)
Project Identifier (Projektidentifikation)
FHPP (alle) 113 1 uint32 rw
Beschreibung 32-Bit Wert, der dem FCT-PlugIn eine Identifikation des Projekts ermöglichenkann.Wertebereich: 0x00000001 ... 0xFFFFFFFF (1 ... 232-1)
Controller Serial Number (Seriennummer Controller)
FHPP (alle) 114 1 uint32 ro
Beschreibung Seriennummer zur eindeutigen Identifizierung des Controllers.
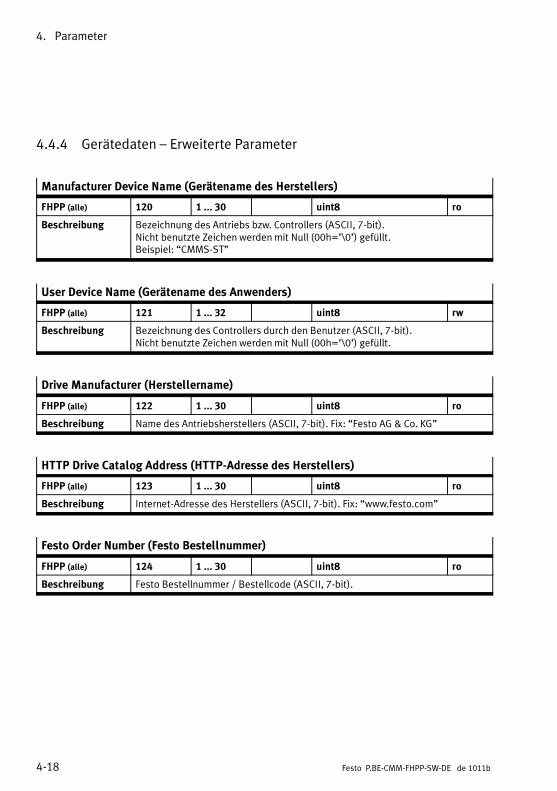
4. Parameter
4-18 Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4.4 Gerätedaten – Erweiterte Parameter
Manufacturer Device Name (Gerätename des Herstellers)
FHPP (alle) 120 1 ... 30 uint8 ro
Beschreibung Bezeichnung des Antriebs bzw. Controllers (ASCII, 7-bit).Nicht benutzte Zeichen werden mit Null (00h=’\0’) gefüllt.Beispiel: “CMMS-ST”
User Device Name (Gerätename des Anwenders)
FHPP (alle) 121 1 ... 32 uint8 rw
Beschreibung Bezeichnung des Controllers durch den Benutzer (ASCII, 7-bit).Nicht benutzte Zeichen werden mit Null (00h=’\0’) gefüllt.
Drive Manufacturer (Herstellername)
FHPP (alle) 122 1 ... 30 uint8 ro
Beschreibung Name des Antriebsherstellers (ASCII, 7-bit). Fix: “Festo AG & Co. KG”
HTTP Drive Catalog Address (HTTP-Adresse des Herstellers)
FHPP (alle) 123 1 ... 30 uint8 ro
Beschreibung Internet-Adresse des Herstellers (ASCII, 7-bit). Fix: “www.festo.com”
Festo Order Number (Festo Bestellnummer)
FHPP (alle) 124 1 ... 30 uint8 ro
Beschreibung Festo Bestellnummer / Bestellcode (ASCII, 7-bit).
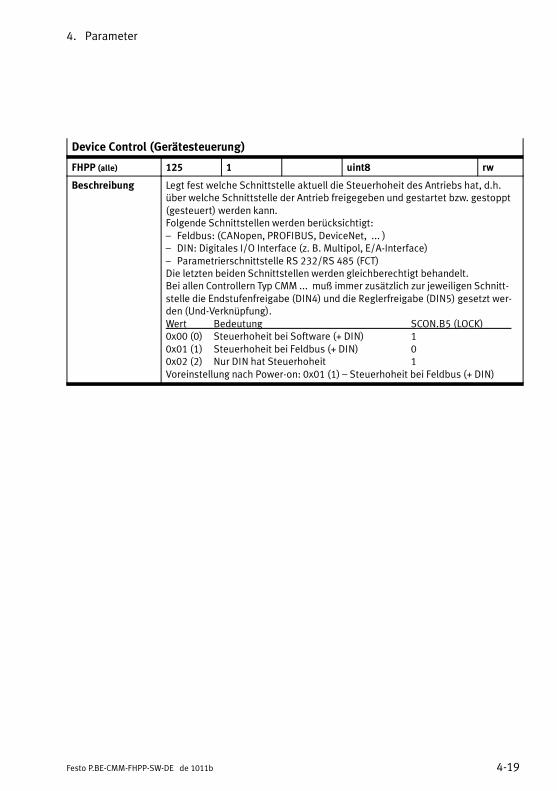
4. Parameter
4-19Festo P.BE-CMM-FHPP-SW-DE de 1011b
Device Control (Gerätesteuerung)
FHPP (alle) 125 1 uint8 rw
Beschreibung Legt fest welche Schnittstelle aktuell die Steuerhoheit des Antriebs hat, d.h.über welche Schnittstelle der Antrieb freigegeben und gestartet bzw. gestoppt(gesteuert) werden kann.Folgende Schnittstellen werden berücksichtigt:– Feldbus: (CANopen, PROFIBUS, DeviceNet, ... )– DIN: Digitales I/O Interface (z. B. Multipol, E/A-Interface)– Parametrierschnittstelle RS 232/RS 485 (FCT)Die letzten beiden Schnittstellen werden gleichberechtigt behandelt.Bei allen Controllern Typ CMM ... muß immer zusätzlich zur jeweiligen Schnitt-stelle die Endstufenfreigabe (DIN4) und die Reglerfreigabe (DIN5) gesetzt wer-den (Und-Verknüpfung).Wert Bedeutung SCON.B5 (LOCK)0x00 (0) Steuerhoheit bei Software (+ DIN) 10x01 (1) Steuerhoheit bei Feldbus (+ DIN) 00x02 (2) Nur DIN hat Steuerhoheit 1Voreinstellung nach Power-on: 0x01 (1) – Steuerhoheit bei Feldbus (+ DIN)
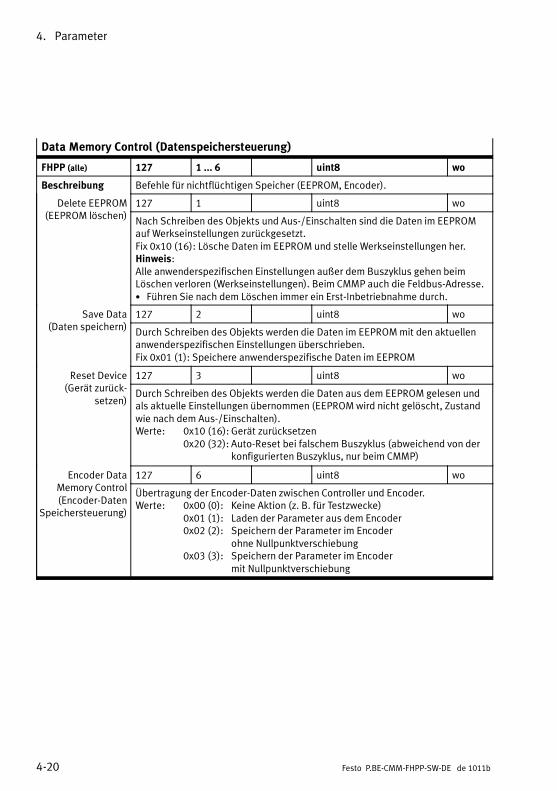
4. Parameter
4-20 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Data Memory Control (Datenspeichersteuerung)
FHPP (alle) 127 1 ... 6 uint8 wo
Beschreibung Befehle für nichtflüchtigen Speicher (EEPROM, Encoder).
Delete EEPROM(EEPROM löschen)
127 1 uint8 wo
Nach Schreiben des Objekts und Aus-/Einschalten sind die Daten im EEPROMauf Werkseinstellungen zurückgesetzt.Fix 0x10 (16): Lösche Daten im EEPROM und stelle Werkseinstellungen her.Hinweis:Alle anwenderspezifischen Einstellungen außer dem Buszyklus gehen beimLöschen verloren (Werkseinstellungen). Beim CMMP auch die Feldbus-Adresse.• Führen Sie nach dem Löschen immer ein Erst-Inbetriebnahme durch.
Save Data(Daten speichern)
127 2 uint8 wo
Durch Schreiben des Objekts werden die Daten im EEPROMmit den aktuellenanwenderspezifischen Einstellungen überschrieben.Fix 0x01 (1): Speichere anwenderspezifische Daten im EEPROM
Reset Device(Gerät zurück-
setzen)
127 3 uint8 wo
Durch Schreiben des Objekts werden die Daten aus dem EEPROM gelesen undals aktuelle Einstellungen übernommen (EEPROMwird nicht gelöscht, Zustandwie nach dem Aus-/Einschalten).Werte: 0x10 (16): Gerät zurücksetzen
0x20 (32): Auto-Reset bei falschem Buszyklus (abweichend von derkonfigurierten Buszyklus, nur beim CMMP)
Encoder DataMemory Control(Encoder-Daten
Speichersteuerung)
127 6 uint8 wo
Übertragung der Encoder-Daten zwischen Controller und Encoder.Werte: 0x00 (0): Keine Aktion (z. B. für Testzwecke)
0x01 (1): Laden der Parameter aus dem Encoder0x02 (2): Speichern der Parameter im Encoder
ohne Nullpunktverschiebung0x03 (3): Speichern der Parameter im Encoder
mit Nullpunktverschiebung
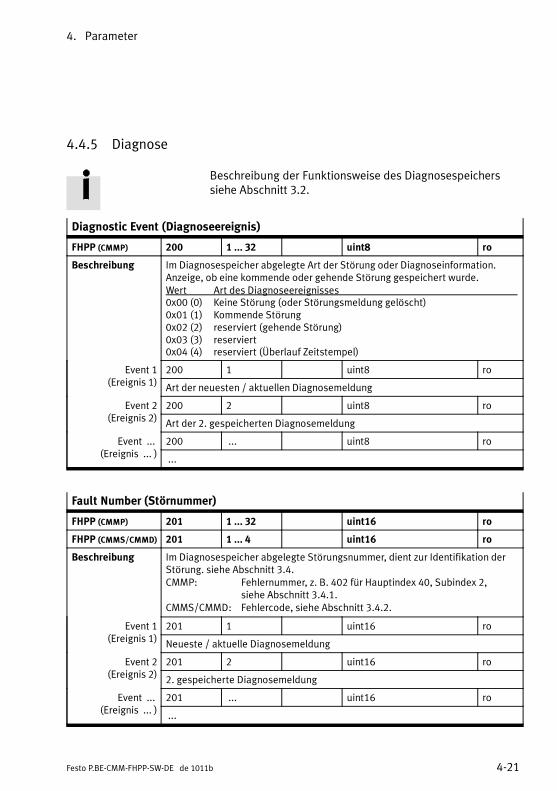
4. Parameter
4-21Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4.5 Diagnose
Beschreibung der Funktionsweise des Diagnosespeicherssiehe Abschnitt 3.2.
Diagnostic Event (Diagnoseereignis)
FHPP (CMMP) 200 1 ... 32 uint8 ro
Beschreibung Im Diagnosespeicher abgelegte Art der Störung oder Diagnoseinformation.Anzeige, ob eine kommende oder gehende Störung gespeichert wurde.Wert Art des Diagnoseereignisses0x00 (0) Keine Störung (oder Störungsmeldung gelöscht)0x01 (1) Kommende Störung0x02 (2) reserviert (gehende Störung)0x03 (3) reserviert0x04 (4) reserviert (Überlauf Zeitstempel)
Event 1(Ereignis 1)
200 1 uint8 ro
Art der neuesten / aktuellen Diagnosemeldung
Event 2(Ereignis 2)
200 2 uint8 ro
Art der 2. gespeicherten Diagnosemeldung
Event ...(Ereignis ... )
200 ... uint8 ro
...
Fault Number (Störnummer)
FHPP (CMMP) 201 1 ... 32 uint16 ro
FHPP (CMMS/CMMD) 201 1 ... 4 uint16 ro
Beschreibung Im Diagnosespeicher abgelegte Störungsnummer, dient zur Identifikation derStörung. siehe Abschnitt 3.4.CMMP: Fehlernummer, z. B. 402 für Hauptindex 40, Subindex 2,
siehe Abschnitt 3.4.1.CMMS/CMMD: Fehlercode, siehe Abschnitt 3.4.2.
Event 1(Ereignis 1)
201 1 uint16 ro
Neueste / aktuelle Diagnosemeldung
Event 2(Ereignis 2)
201 2 uint16 ro
2. gespeicherte Diagnosemeldung
Event ...(Ereignis ... )
201 ... uint16 ro
...
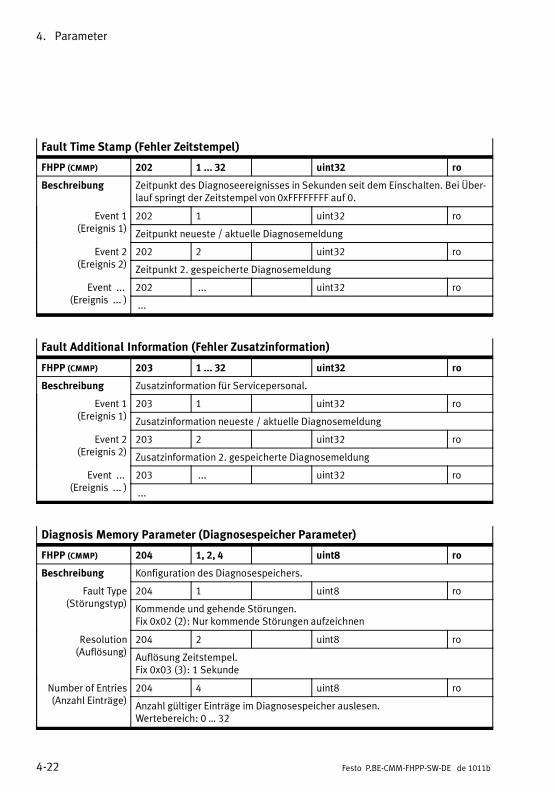
4. Parameter
4-22 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fault Time Stamp (Fehler Zeitstempel)
FHPP (CMMP) 202 1 ... 32 uint32 ro
Beschreibung Zeitpunkt des Diagnoseereignisses in Sekunden seit dem Einschalten. Bei Über-lauf springt der Zeitstempel von 0xFFFFFFFF auf 0.
Event 1(Ereignis 1)
202 1 uint32 ro
Zeitpunkt neueste / aktuelle Diagnosemeldung
Event 2(Ereignis 2)
202 2 uint32 ro
Zeitpunkt 2. gespeicherte Diagnosemeldung
Event ...(Ereignis ... )
202 ... uint32 ro
...
Fault Additional Information (Fehler Zusatzinformation)
FHPP (CMMP) 203 1 ... 32 uint32 ro
Beschreibung Zusatzinformation für Servicepersonal.
Event 1(Ereignis 1)
203 1 uint32 ro
Zusatzinformation neueste / aktuelle Diagnosemeldung
Event 2(Ereignis 2)
203 2 uint32 ro
Zusatzinformation 2. gespeicherte Diagnosemeldung
Event ...(Ereignis ... )
203 ... uint32 ro
...
Diagnosis Memory Parameter (Diagnosespeicher Parameter)
FHPP (CMMP) 204 1, 2, 4 uint8 ro
Beschreibung Konfiguration des Diagnosespeichers.
Fault Type(Störungstyp)
204 1 uint8 ro
Kommende und gehende Störungen.Fix 0x02 (2): Nur kommende Störungen aufzeichnen
Resolution(Auflösung)
204 2 uint8 ro
Auflösung Zeitstempel.Fix 0x03 (3): 1 Sekunde
Number of Entries(Anzahl Einträge)
204 4 uint8 ro
Anzahl gültiger Einträge im Diagnosespeicher auslesen.Wertebereich: 0 … 32
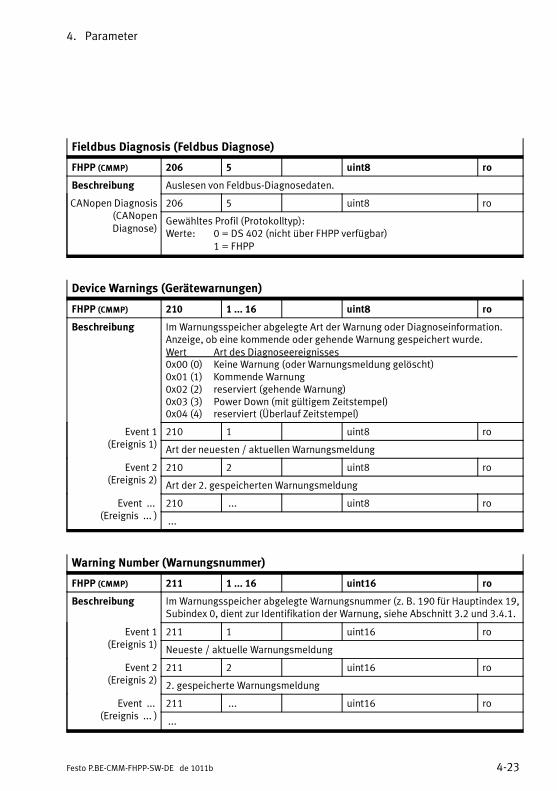
4. Parameter
4-23Festo P.BE-CMM-FHPP-SW-DE de 1011b
Fieldbus Diagnosis (Feldbus Diagnose)
FHPP (CMMP) 206 5 uint8 ro
Beschreibung Auslesen von Feldbus-Diagnosedaten.
CANopen Diagnosis(CANopenDiagnose)
206 5 uint8 ro
Gewähltes Profil (Protokolltyp):Werte: 0 = DS 402 (nicht über FHPP verfügbar)
1 = FHPP
Device Warnings (Gerätewarnungen)
FHPP (CMMP) 210 1 ... 16 uint8 ro
Beschreibung Im Warnungsspeicher abgelegte Art der Warnung oder Diagnoseinformation.Anzeige, ob eine kommende oder gehende Warnung gespeichert wurde.Wert Art des Diagnoseereignisses0x00 (0) Keine Warnung (oder Warnungsmeldung gelöscht)0x01 (1) Kommende Warnung0x02 (2) reserviert (gehende Warnung)0x03 (3) Power Down (mit gültigem Zeitstempel)0x04 (4) reserviert (Überlauf Zeitstempel)
Event 1(Ereignis 1)
210 1 uint8 ro
Art der neuesten / aktuellen Warnungsmeldung
Event 2(Ereignis 2)
210 2 uint8 ro
Art der 2. gespeicherten Warnungsmeldung
Event ...(Ereignis ... )
210 ... uint8 ro
...
Warning Number (Warnungsnummer)
FHPP (CMMP) 211 1 ... 16 uint16 ro
Beschreibung Im Warnungsspeicher abgelegte Warnungsnummer (z. B. 190 für Hauptindex 19,Subindex 0, dient zur Identifikation der Warnung, siehe Abschnitt 3.2 und 3.4.1.
Event 1(Ereignis 1)
211 1 uint16 ro
Neueste / aktuelle Warnungsmeldung
Event 2(Ereignis 2)
211 2 uint16 ro
2. gespeicherte Warnungsmeldung
Event ...(Ereignis ... )
211 ... uint16 ro
...
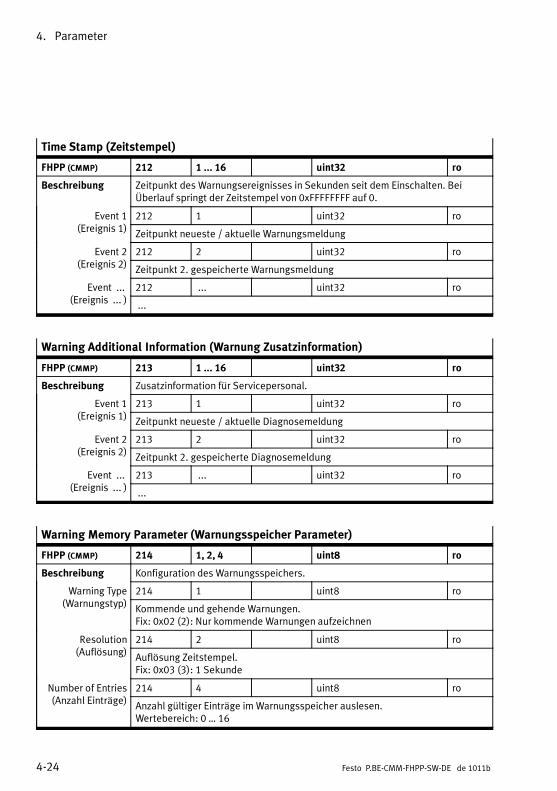
4. Parameter
4-24 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Time Stamp (Zeitstempel)
FHPP (CMMP) 212 1 ... 16 uint32 ro
Beschreibung Zeitpunkt des Warnungsereignisses in Sekunden seit dem Einschalten. BeiÜberlauf springt der Zeitstempel von 0xFFFFFFFF auf 0.
Event 1(Ereignis 1)
212 1 uint32 ro
Zeitpunkt neueste / aktuelle Warnungsmeldung
Event 2(Ereignis 2)
212 2 uint32 ro
Zeitpunkt 2. gespeicherte Warnungsmeldung
Event ...(Ereignis ... )
212 ... uint32 ro
...
Warning Additional Information (Warnung Zusatzinformation)
FHPP (CMMP) 213 1 ... 16 uint32 ro
Beschreibung Zusatzinformation für Servicepersonal.
Event 1(Ereignis 1)
213 1 uint32 ro
Zeitpunkt neueste / aktuelle Diagnosemeldung
Event 2(Ereignis 2)
213 2 uint32 ro
Zeitpunkt 2. gespeicherte Diagnosemeldung
Event ...(Ereignis ... )
213 ... uint32 ro
...
Warning Memory Parameter (Warnungsspeicher Parameter)
FHPP (CMMP) 214 1, 2, 4 uint8 ro
Beschreibung Konfiguration des Warnungsspeichers.
Warning Type(Warnungstyp)
214 1 uint8 ro
Kommende und gehende Warnungen.Fix: 0x02 (2): Nur kommende Warnungen aufzeichnen
Resolution(Auflösung)
214 2 uint8 ro
Auflösung Zeitstempel.Fix: 0x03 (3): 1 Sekunde
Number of Entries(Anzahl Einträge)
214 4 uint8 ro
Anzahl gültiger Einträge im Warnungsspeicher auslesen.Wertebereich: 0 … 16
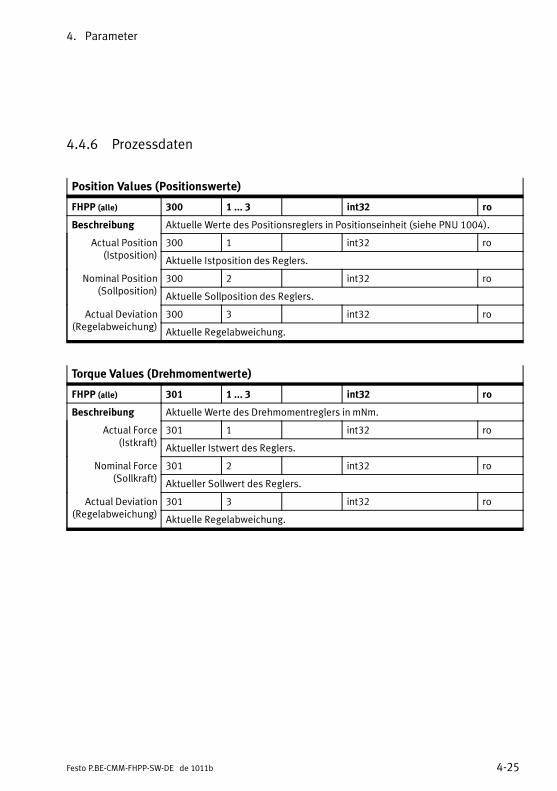
4. Parameter
4-25Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4.6 Prozessdaten
Position Values (Positionswerte)
FHPP (alle) 300 1 ... 3 int32 ro
Beschreibung Aktuelle Werte des Positionsreglers in Positionseinheit (siehe PNU 1004).
Actual Position(Istposition)
300 1 int32 ro
Aktuelle Istposition des Reglers.
Nominal Position(Sollposition)
300 2 int32 ro
Aktuelle Sollposition des Reglers.
Actual Deviation(Regelabweichung)
300 3 int32 ro
Aktuelle Regelabweichung.
Torque Values (Drehmomentwerte)
FHPP (alle) 301 1 ... 3 int32 ro
Beschreibung Aktuelle Werte des Drehmomentreglers in mNm.
Actual Force(Istkraft)
301 1 int32 ro
Aktueller Istwert des Reglers.
Nominal Force(Sollkraft)
301 2 int32 ro
Aktueller Sollwert des Reglers.
Actual Deviation(Regelabweichung)
301 3 int32 ro
Aktuelle Regelabweichung.
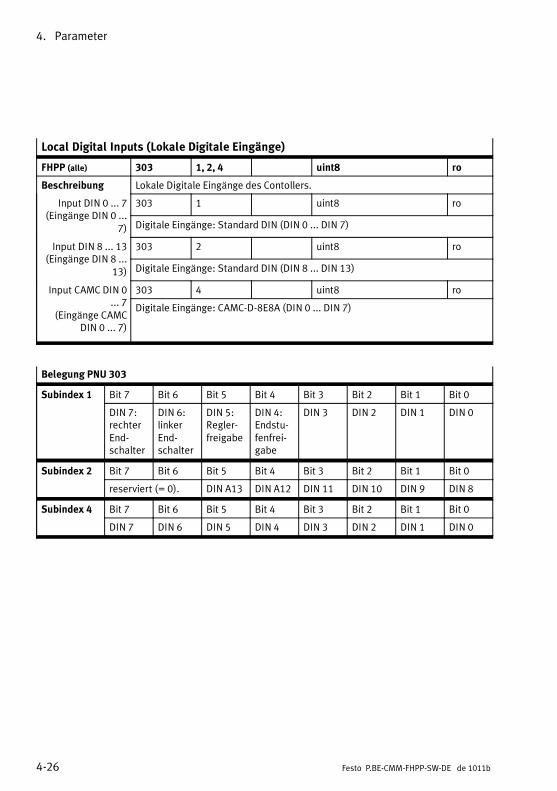
4. Parameter
4-26 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Local Digital Inputs (Lokale Digitale Eingänge)
FHPP (alle) 303 1, 2, 4 uint8 ro
Beschreibung Lokale Digitale Eingänge des Contollers.
Input DIN 0 ... 7(Eingänge DIN 0 ...
7)
303 1 uint8 ro
Digitale Eingänge: Standard DIN (DIN 0 ... DIN 7)
Input DIN 8 ... 13(Eingänge DIN 8 ...
13)
303 2 uint8 ro
Digitale Eingänge: Standard DIN (DIN 8 ... DIN 13)
Input CAMC DIN 0... 7
(Eingänge CAMCDIN 0 ... 7)
303 4 uint8 ro
Digitale Eingänge: CAMC-D-8E8A (DIN 0 ... DIN 7)
Belegung PNU 303
Subindex 1 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
DIN 7:rechterEnd-schalter
DIN 6:linkerEnd-schalter
DIN 5:Regler-freigabe
DIN 4:Endstu-fenfrei-gabe
DIN 3 DIN 2 DIN 1 DIN 0
Subindex 2 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
reserviert (= 0). DIN A13 DIN A12 DIN 11 DIN 10 DIN 9 DIN 8
Subindex 4 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
DIN 7 DIN 6 DIN 5 DIN 4 DIN 3 DIN 2 DIN 1 DIN 0
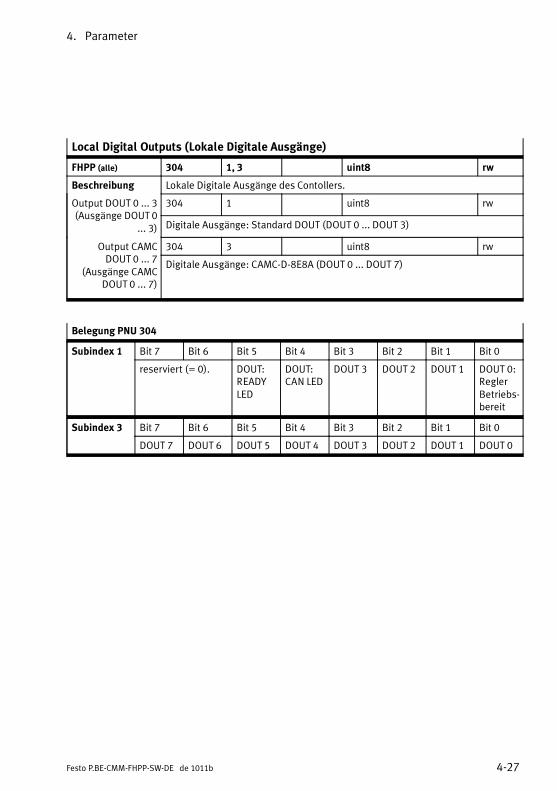
4. Parameter
4-27Festo P.BE-CMM-FHPP-SW-DE de 1011b
Local Digital Outputs (Lokale Digitale Ausgänge)
FHPP (alle) 304 1, 3 uint8 rw
Beschreibung Lokale Digitale Ausgänge des Contollers.
Output DOUT 0 ... 3(Ausgänge DOUT 0
... 3)
304 1 uint8 rw
Digitale Ausgänge: Standard DOUT (DOUT 0 ... DOUT 3)
Output CAMCDOUT 0 ... 7
(Ausgänge CAMCDOUT 0 ... 7)
304 3 uint8 rw
Digitale Ausgänge: CAMC-D-8E8A (DOUT 0 ... DOUT 7)
Belegung PNU 304
Subindex 1 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
reserviert (= 0). DOUT:READYLED
DOUT:CAN LED
DOUT 3 DOUT 2 DOUT 1 DOUT 0:ReglerBetriebs-bereit
Subindex 3 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
DOUT 7 DOUT 6 DOUT 5 DOUT 4 DOUT 3 DOUT 2 DOUT 1 DOUT 0
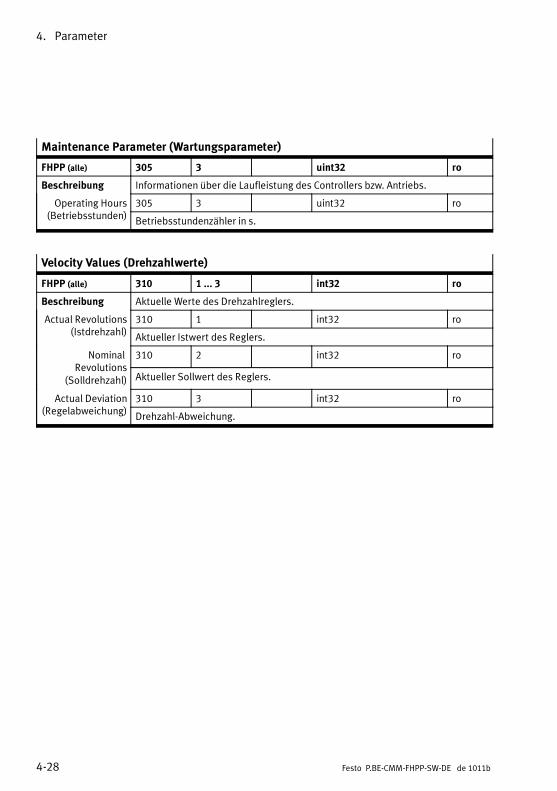
4. Parameter
4-28 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Maintenance Parameter (Wartungsparameter)
FHPP (alle) 305 3 uint32 ro
Beschreibung Informationen über die Laufleistung des Controllers bzw. Antriebs.
Operating Hours(Betriebsstunden)
305 3 uint32 ro
Betriebsstundenzähler in s.
Velocity Values (Drehzahlwerte)
FHPP (alle) 310 1 ... 3 int32 ro
Beschreibung Aktuelle Werte des Drehzahlreglers.
Actual Revolutions(Istdrehzahl)
310 1 int32 ro
Aktueller Istwert des Reglers.
NominalRevolutions
(Solldrehzahl)
310 2 int32 ro
Aktueller Sollwert des Reglers.
Actual Deviation(Regelabweichung)
310 3 int32 ro
Drehzahl-Abweichung.
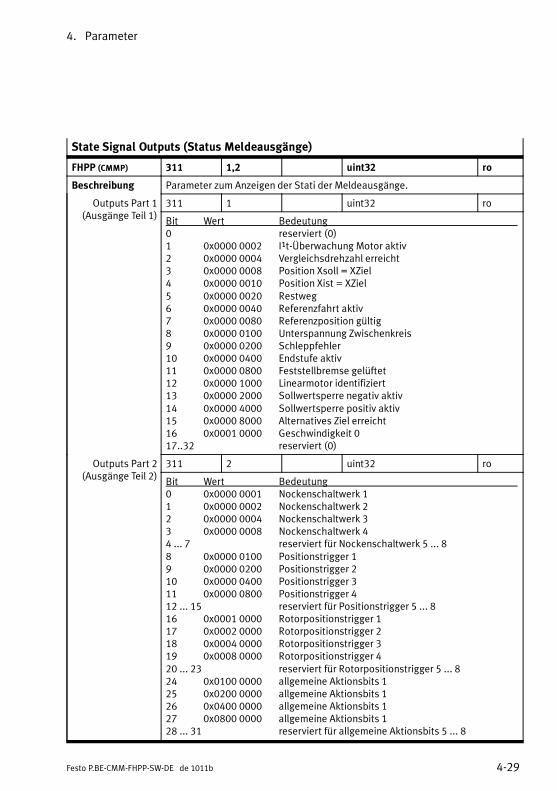
4. Parameter
4-29Festo P.BE-CMM-FHPP-SW-DE de 1011b
State Signal Outputs (Status Meldeausgänge)
FHPP (CMMP) 311 1,2 uint32 ro
Beschreibung Parameter zum Anzeigen der Stati der Meldeausgänge.
Outputs Part 1(Ausgänge Teil 1)
311 1 uint32 ro
Bit Wert Bedeutung0 reserviert (0)1 0x0000 0002 I¹t-Überwachung Motor aktiv2 0x0000 0004 Vergleichsdrehzahl erreicht3 0x0000 0008 Position Xsoll = XZiel4 0x0000 0010 Position Xist = XZiel5 0x0000 0020 Restweg6 0x0000 0040 Referenzfahrt aktiv7 0x0000 0080 Referenzposition gültig8 0x0000 0100 Unterspannung Zwischenkreis9 0x0000 0200 Schleppfehler10 0x0000 0400 Endstufe aktiv11 0x0000 0800 Feststellbremse gelüftet12 0x0000 1000 Linearmotor identifiziert13 0x0000 2000 Sollwertsperre negativ aktiv14 0x0000 4000 Sollwertsperre positiv aktiv15 0x0000 8000 Alternatives Ziel erreicht16 0x0001 0000 Geschwindigkeit 017..32 reserviert (0)
Outputs Part 2(Ausgänge Teil 2)
311 2 uint32 ro
Bit Wert Bedeutung0 0x0000 0001 Nockenschaltwerk 11 0x0000 0002 Nockenschaltwerk 22 0x0000 0004 Nockenschaltwerk 33 0x0000 0008 Nockenschaltwerk 44 ... 7 reserviert für Nockenschaltwerk 5 ... 88 0x0000 0100 Positionstrigger 19 0x0000 0200 Positionstrigger 210 0x0000 0400 Positionstrigger 311 0x0000 0800 Positionstrigger 412 ... 15 reserviert für Positionstrigger 5 ... 816 0x0001 0000 Rotorpositionstrigger 117 0x0002 0000 Rotorpositionstrigger 218 0x0004 0000 Rotorpositionstrigger 319 0x0008 0000 Rotorpositionstrigger 420 ... 23 reserviert für Rotorpositionstrigger 5 ... 824 0x0100 0000 allgemeine Aktionsbits 125 0x0200 0000 allgemeine Aktionsbits 126 0x0400 0000 allgemeine Aktionsbits 127 0x0800 0000 allgemeine Aktionsbits 128 ... 31 reserviert für allgemeine Aktionsbits 5 ... 8
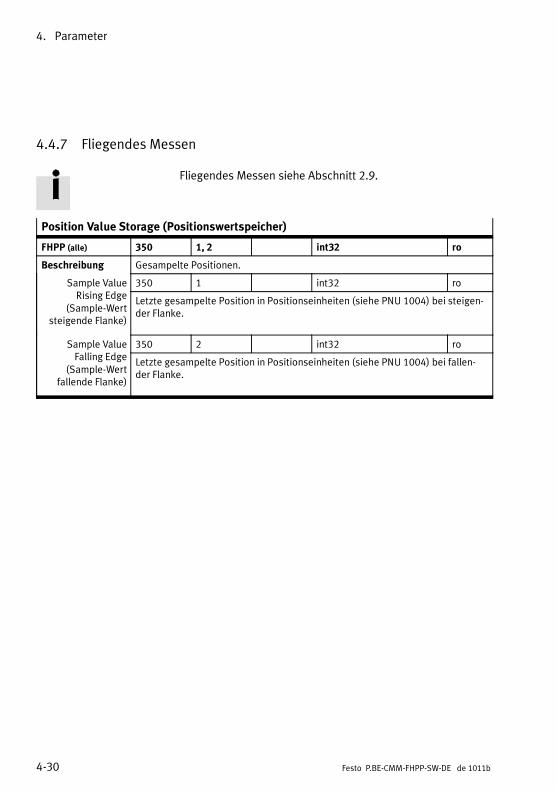
4. Parameter
4-30 Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4.7 Fliegendes Messen
Fliegendes Messen siehe Abschnitt 2.9.
Position Value Storage (Positionswertspeicher)
FHPP (alle) 350 1, 2 int32 ro
Beschreibung Gesampelte Positionen.
Sample ValueRising Edge
(Sample-Wertsteigende Flanke)
350 1 int32 ro
Letzte gesampelte Position in Positionseinheiten (siehe PNU 1004) bei steigen-der Flanke.
Sample ValueFalling Edge
(Sample-Wertfallende Flanke)
350 2 int32 ro
Letzte gesampelte Position in Positionseinheiten (siehe PNU 1004) bei fallen-der Flanke.
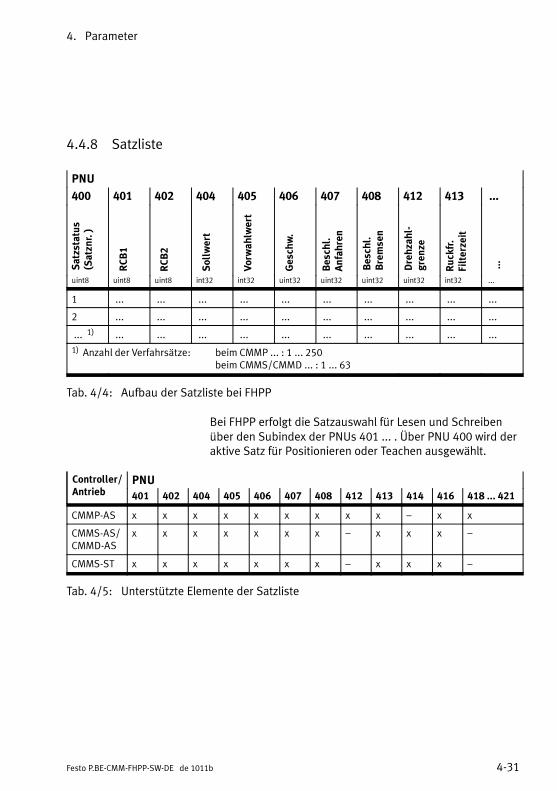
4. Parameter
4-31Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4.8 Satzliste
PNU
400 401 402 404 405 406 407 408 412 413 ...
Satzstatus
(Satznr.)
RCB1
RCB2
Sollwert
Vorw
ahlw
ert
Geschw.
Beschl.
Anfahren
Beschl.
Bremse
n
Drehzahl-
grenze
Ruckfr.
Filterzeit
...
uint8 uint8 uint8 int32 int32 uint32 uint32 uint32 uint32 int32 ...
1 ... ... ... ... ... ... ... ... ... ...
2 ... ... ... ... ... ... ... ... ... ...
... 1) ... ... ... ... ... ... ... ... ... ...
1) Anzahl der Verfahrsätze: beim CMMP ... : 1 ... 250beim CMMS/CMMD ... : 1 ... 63
Tab. 4/4: Aufbau der Satzliste bei FHPP
Bei FHPP erfolgt die Satzauswahl für Lesen und Schreibenüber den Subindex der PNUs 401 ... . Über PNU 400 wird deraktive Satz für Positionieren oder Teachen ausgewählt.
Controller/Antrieb
PNU401 402 404 405 406 407 408 412 413 414 416 418 ... 421
CMMP-AS x x x x x x x x x – x x
CMMS-AS/CMMD-AS
x x x x x x x – x x x –
CMMS-ST x x x x x x x – x x x –
Tab. 4/5: Unterstützte Elemente der Satzliste
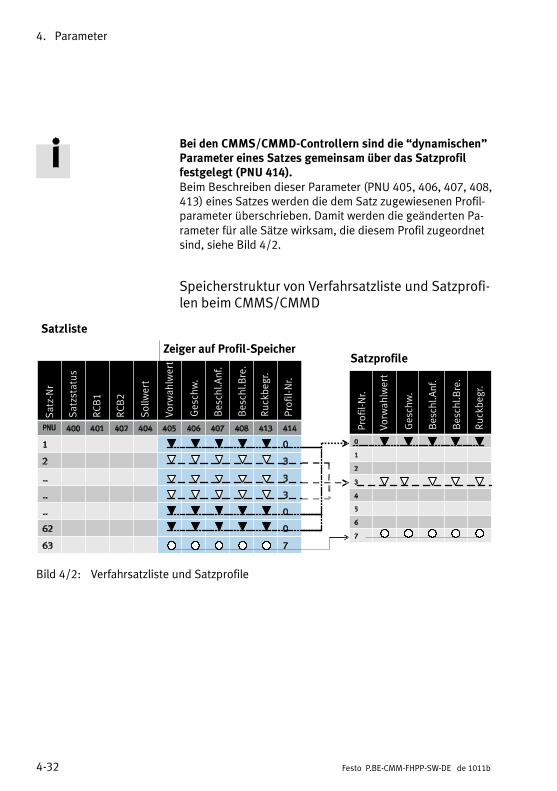
4. Parameter
4-32 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Bei den CMMS/CMMD-Controllern sind die “dynamischen”Parameter eines Satzes gemeinsam über das Satzprofilfestgelegt (PNU 414).Beim Beschreiben dieser Parameter (PNU 405, 406, 407, 408,413) eines Satzes werden die dem Satz zugewiesenen Profil-parameter überschrieben. Damit werden die geänderten Pa-rameter für alle Sätze wirksam, die diesem Profil zugeordnetsind, siehe Bild 4/2.
Speicherstruktur von Verfahrsatzliste und Satzprofi-len beim CMMS/CMMD
Satzliste
Zeiger auf Profil-SpeicherSatzprofile
Satz-Nr
Satzstatus
RCB1
RCB2
Vorw
ahlwert
Geschw.
Beschl.Anf.
Beschl.Bre.
Ruckbegr.
Profil-Nr.
Sollwert
Vorw
ahlwert
Geschw.
Beschl.Anf.
Beschl.Bre.
Ruckbegr.
Profil-Nr.
Bild 4/2: Verfahrsatzliste und Satzprofile
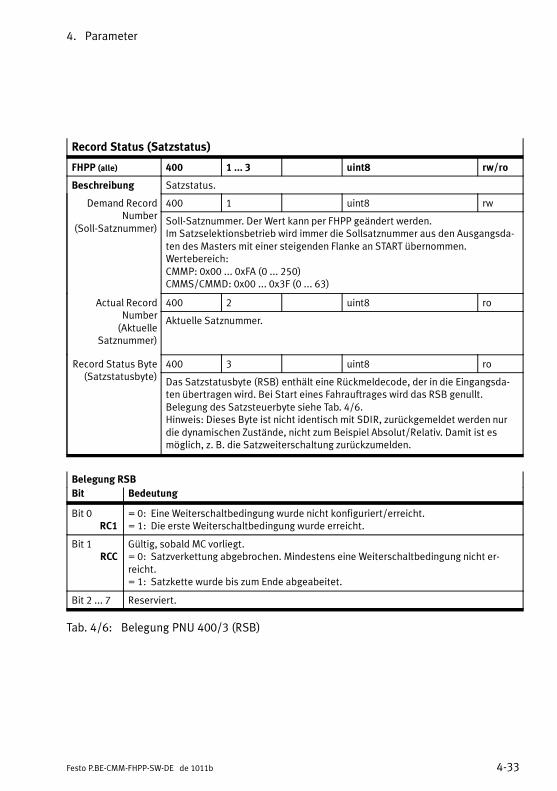
4. Parameter
4-33Festo P.BE-CMM-FHPP-SW-DE de 1011b
Record Status (Satzstatus)
FHPP (alle) 400 1 ... 3 uint8 rw/ro
Beschreibung Satzstatus.
Demand RecordNumber
(Soll-Satznummer)
400 1 uint8 rw
Soll-Satznummer. Der Wert kann per FHPP geändert werden.Im Satzselektionsbetrieb wird immer die Sollsatznummer aus den Ausgangsda-ten des Masters mit einer steigenden Flanke an START übernommen.Wertebereich:CMMP: 0x00 ... 0xFA (0 ... 250)CMMS/CMMD: 0x00 ... 0x3F (0 ... 63)
Actual RecordNumber(Aktuelle
Satznummer)
400 2 uint8 ro
Aktuelle Satznummer.
Record Status Byte(Satzstatusbyte)
400 3 uint8 ro
Das Satzstatusbyte (RSB) enthält eine Rückmeldecode, der in die Eingangsda-ten übertragen wird. Bei Start eines Fahrauftrages wird das RSB genullt.Belegung des Satzsteuerbyte siehe Tab. 4/6.Hinweis: Dieses Byte ist nicht identisch mit SDIR, zurückgemeldet werden nurdie dynamischen Zustände, nicht zum Beispiel Absolut/Relativ. Damit ist esmöglich, z. B. die Satzweiterschaltung zurückzumelden.
Belegung RSB
Bit Bedeutung
Bit 0RC1
= 0: Eine Weiterschaltbedingung wurde nicht konfiguriert/erreicht.= 1: Die erste Weiterschaltbedingung wurde erreicht.
Bit 1RCC
Gültig, sobald MC vorliegt.= 0: Satzverkettung abgebrochen. Mindestens eine Weiterschaltbedingung nicht er-reicht.= 1: Satzkette wurde bis zum Ende abgeabeitet.
Bit 2 ... 7 Reserviert.
Tab. 4/6: Belegung PNU 400/3 (RSB)
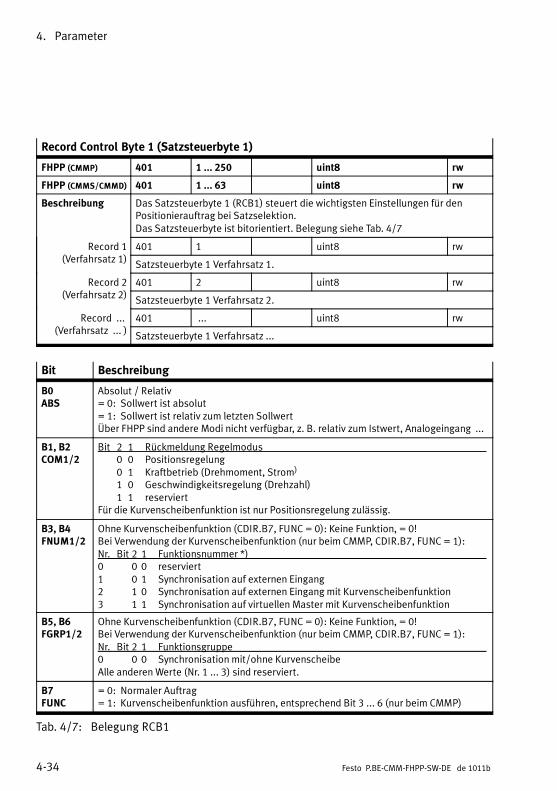
4. Parameter
4-34 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Record Control Byte 1 (Satzsteuerbyte 1)
FHPP (CMMP) 401 1 ... 250 uint8 rw
FHPP (CMMS/CMMD) 401 1 ... 63 uint8 rw
Beschreibung Das Satzsteuerbyte 1 (RCB1) steuert die wichtigsten Einstellungen für denPositionierauftrag bei Satzselektion.Das Satzsteuerbyte ist bitorientiert. Belegung siehe Tab. 4/7
Record 1(Verfahrsatz 1)
401 1 uint8 rw
Satzsteuerbyte 1 Verfahrsatz 1.
Record 2(Verfahrsatz 2)
401 2 uint8 rw
Satzsteuerbyte 1 Verfahrsatz 2.
Record ...(Verfahrsatz ... )
401 ... uint8 rw
Satzsteuerbyte 1 Verfahrsatz ...
Bit Beschreibung
B0ABS
Absolut / Relativ= 0: Sollwert ist absolut= 1: Sollwert ist relativ zum letzten SollwertÜber FHPP sind andere Modi nicht verfügbar, z. B. relativ zum Istwert, Analogeingang ...
B1, B2COM1/2
Bit 2 1 Rückmeldung Regelmodus0 0 Positionsregelung0 1 Kraftbetrieb (Drehmoment, Strom)
1 0 Geschwindigkeitsregelung (Drehzahl)1 1 reserviert
Für die Kurvenscheibenfunktion ist nur Positionsregelung zulässig.
B3, B4FNUM1/2
Ohne Kurvenscheibenfunktion (CDIR.B7, FUNC = 0): Keine Funktion, = 0!Bei Verwendung der Kurvenscheibenfunktion (nur beim CMMP, CDIR.B7, FUNC = 1):Nr. Bit 2 1 Funktionsnummer *)0 0 0 reserviert1 0 1 Synchronisation auf externen Eingang2 1 0 Synchronisation auf externen Eingang mit Kurvenscheibenfunktion3 1 1 Synchronisation auf virtuellen Master mit Kurvenscheibenfunktion
B5, B6FGRP1/2
Ohne Kurvenscheibenfunktion (CDIR.B7, FUNC = 0): Keine Funktion, = 0!Bei Verwendung der Kurvenscheibenfunktion (nur beim CMMP, CDIR.B7, FUNC = 1):Nr. Bit 2 1 Funktionsgruppe0 0 0 Synchronisation mit/ohne KurvenscheibeAlle anderenWerte (Nr. 1 ... 3) sind reserviert.
B7FUNC
= 0: Normaler Auftrag= 1: Kurvenscheibenfunktion ausführen, entsprechend Bit 3 ... 6 (nur beim CMMP)
Tab. 4/7: Belegung RCB1
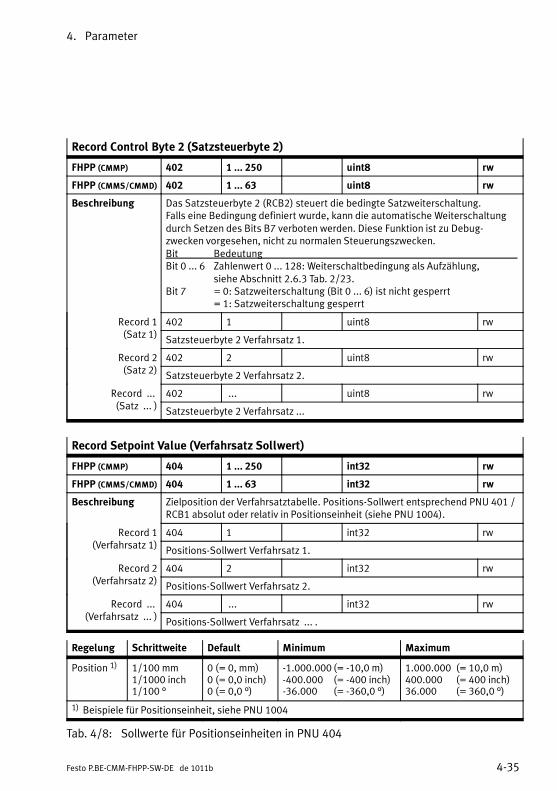
4. Parameter
4-35Festo P.BE-CMM-FHPP-SW-DE de 1011b
Record Control Byte 2 (Satzsteuerbyte 2)
FHPP (CMMP) 402 1 ... 250 uint8 rw
FHPP (CMMS/CMMD) 402 1 ... 63 uint8 rw
Beschreibung Das Satzsteuerbyte 2 (RCB2) steuert die bedingte Satzweiterschaltung.Falls eine Bedingung definiert wurde, kann die automatische Weiterschaltungdurch Setzen des Bits B7 verboten werden. Diese Funktion ist zu Debug-zwecken vorgesehen, nicht zu normalen Steuerungszwecken.Bit BedeutungBit 0 ... 6 Zahlenwert 0 ... 128: Weiterschaltbedingung als Aufzählung,
siehe Abschnitt 2.6.3 Tab. 2/23.Bit 7 = 0: Satzweiterschaltung (Bit 0 ... 6) ist nicht gesperrt
= 1: Satzweiterschaltung gesperrt
Record 1(Satz 1)
402 1 uint8 rw
Satzsteuerbyte 2 Verfahrsatz 1.
Record 2(Satz 2)
402 2 uint8 rw
Satzsteuerbyte 2 Verfahrsatz 2.
Record ...(Satz ... )
402 ... uint8 rw
Satzsteuerbyte 2 Verfahrsatz ...
Record Setpoint Value (Verfahrsatz Sollwert)
FHPP (CMMP) 404 1 ... 250 int32 rw
FHPP (CMMS/CMMD) 404 1 ... 63 int32 rw
Beschreibung Zielposition der Verfahrsatztabelle. Positions-Sollwert entsprechend PNU 401 /RCB1 absolut oder relativ in Positionseinheit (siehe PNU 1004).
Record 1(Verfahrsatz 1)
404 1 int32 rw
Positions-Sollwert Verfahrsatz 1.
Record 2(Verfahrsatz 2)
404 2 int32 rw
Positions-Sollwert Verfahrsatz 2.
Record ...(Verfahrsatz ... )
404 ... int32 rw
Positions-Sollwert Verfahrsatz ... .
Regelung Schrittweite Default Minimum Maximum
Position 1) 1/100 mm1/1000 inch1/100 °
0 (= 0, mm)0 (= 0,0 inch)0 (= 0,0 °)
-1.000.000 (= -10,0 m)-400.000 (= -400 inch)-36.000 (= -360,0 °)
1.000.000 (= 10,0 m)400.000 (= 400 inch)36.000 (= 360,0 °)
1) Beispiele für Positionseinheit, siehe PNU 1004
Tab. 4/8: Sollwerte für Positionseinheiten in PNU 404
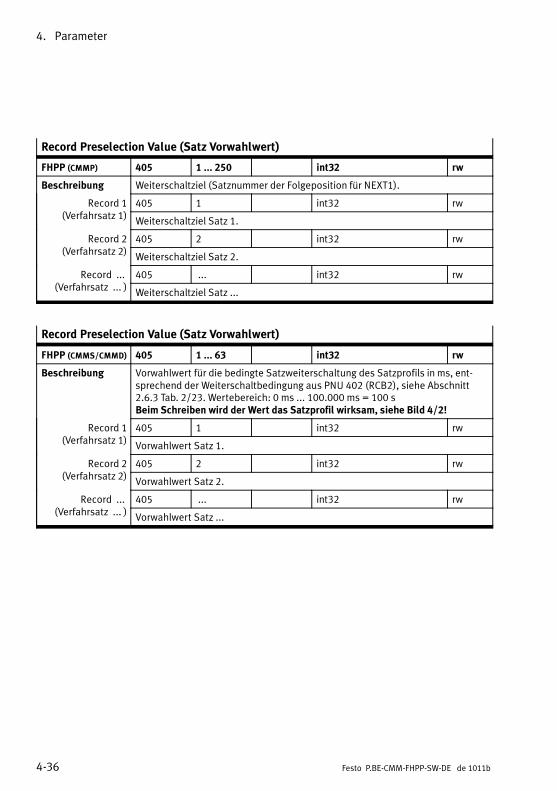
4. Parameter
4-36 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Record Preselection Value (Satz Vorwahlwert)
FHPP (CMMP) 405 1 ... 250 int32 rw
Beschreibung Weiterschaltziel (Satznummer der Folgeposition für NEXT1).
Record 1(Verfahrsatz 1)
405 1 int32 rw
Weiterschaltziel Satz 1.
Record 2(Verfahrsatz 2)
405 2 int32 rw
Weiterschaltziel Satz 2.
Record ...(Verfahrsatz ... )
405 ... int32 rw
Weiterschaltziel Satz ...
Record Preselection Value (Satz Vorwahlwert)
FHPP (CMMS/CMMD) 405 1 ... 63 int32 rw
Beschreibung Vorwahlwert für die bedingte Satzweiterschaltung des Satzprofils in ms, ent-sprechend der Weiterschaltbedingung aus PNU 402 (RCB2), siehe Abschnitt2.6.3 Tab. 2/23. Wertebereich: 0 ms ... 100.000 ms = 100 sBeim Schreiben wird der Wert das Satzprofil wirksam, siehe Bild 4/2!
Record 1(Verfahrsatz 1)
405 1 int32 rw
Vorwahlwert Satz 1.
Record 2(Verfahrsatz 2)
405 2 int32 rw
Vorwahlwert Satz 2.
Record ...(Verfahrsatz ... )
405 ... int32 rw
Vorwahlwert Satz ...
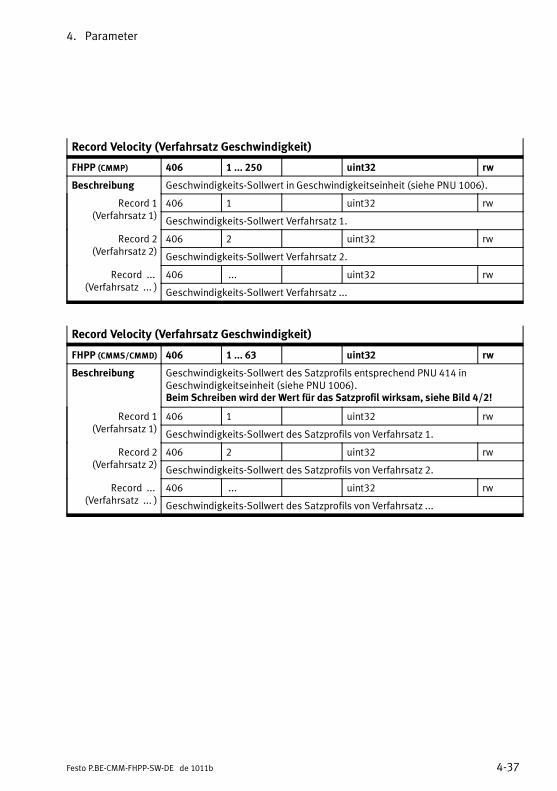
4. Parameter
4-37Festo P.BE-CMM-FHPP-SW-DE de 1011b
Record Velocity (Verfahrsatz Geschwindigkeit)
FHPP (CMMP) 406 1 ... 250 uint32 rw
Beschreibung Geschwindigkeits-Sollwert in Geschwindigkeitseinheit (siehe PNU 1006).
Record 1(Verfahrsatz 1)
406 1 uint32 rw
Geschwindigkeits-Sollwert Verfahrsatz 1.
Record 2(Verfahrsatz 2)
406 2 uint32 rw
Geschwindigkeits-Sollwert Verfahrsatz 2.
Record ...(Verfahrsatz ... )
406 ... uint32 rw
Geschwindigkeits-Sollwert Verfahrsatz ...
Record Velocity (Verfahrsatz Geschwindigkeit)
FHPP (CMMS/CMMD) 406 1 ... 63 uint32 rw
Beschreibung Geschwindigkeits-Sollwert des Satzprofils entsprechend PNU 414 inGeschwindigkeitseinheit (siehe PNU 1006).Beim Schreiben wird der Wert für das Satzprofil wirksam, siehe Bild 4/2!
Record 1(Verfahrsatz 1)
406 1 uint32 rw
Geschwindigkeits-Sollwert des Satzprofils von Verfahrsatz 1.
Record 2(Verfahrsatz 2)
406 2 uint32 rw
Geschwindigkeits-Sollwert des Satzprofils von Verfahrsatz 2.
Record ...(Verfahrsatz ... )
406 ... uint32 rw
Geschwindigkeits-Sollwert des Satzprofils von Verfahrsatz ...
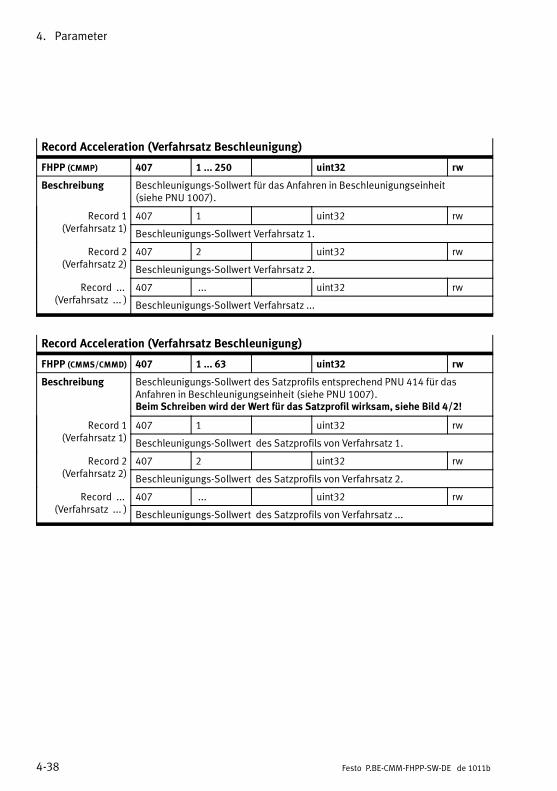
4. Parameter
4-38 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Record Acceleration (Verfahrsatz Beschleunigung)
FHPP (CMMP) 407 1 ... 250 uint32 rw
Beschreibung Beschleunigungs-Sollwert für das Anfahren in Beschleunigungseinheit(siehe PNU 1007).
Record 1(Verfahrsatz 1)
407 1 uint32 rw
Beschleunigungs-Sollwert Verfahrsatz 1.
Record 2(Verfahrsatz 2)
407 2 uint32 rw
Beschleunigungs-Sollwert Verfahrsatz 2.
Record ...(Verfahrsatz ... )
407 ... uint32 rw
Beschleunigungs-Sollwert Verfahrsatz ...
Record Acceleration (Verfahrsatz Beschleunigung)
FHPP (CMMS/CMMD) 407 1 ... 63 uint32 rw
Beschreibung Beschleunigungs-Sollwert des Satzprofils entsprechend PNU 414 für dasAnfahren in Beschleunigungseinheit (siehe PNU 1007).Beim Schreiben wird der Wert für das Satzprofil wirksam, siehe Bild 4/2!
Record 1(Verfahrsatz 1)
407 1 uint32 rw
Beschleunigungs-Sollwert des Satzprofils von Verfahrsatz 1.
Record 2(Verfahrsatz 2)
407 2 uint32 rw
Beschleunigungs-Sollwert des Satzprofils von Verfahrsatz 2.
Record ...(Verfahrsatz ... )
407 ... uint32 rw
Beschleunigungs-Sollwert des Satzprofils von Verfahrsatz ...
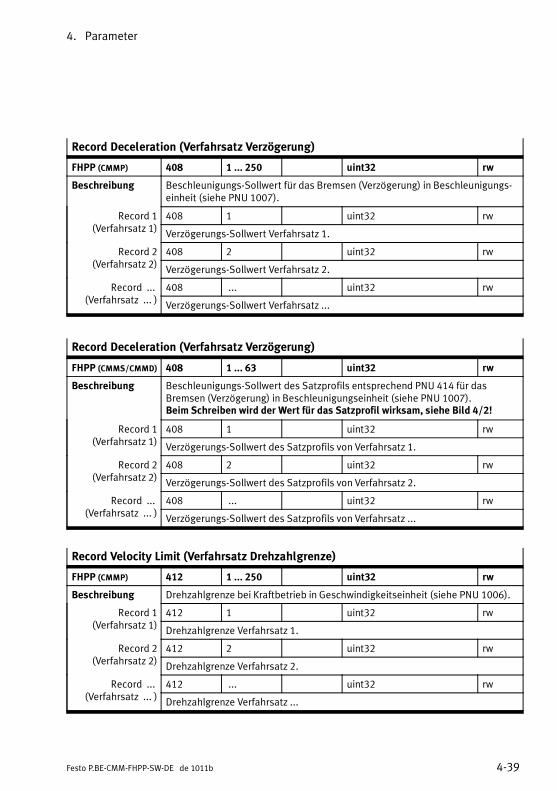
4. Parameter
4-39Festo P.BE-CMM-FHPP-SW-DE de 1011b
Record Deceleration (Verfahrsatz Verzögerung)
FHPP (CMMP) 408 1 ... 250 uint32 rw
Beschreibung Beschleunigungs-Sollwert für das Bremsen (Verzögerung) in Beschleunigungs-einheit (siehe PNU 1007).
Record 1(Verfahrsatz 1)
408 1 uint32 rw
Verzögerungs-Sollwert Verfahrsatz 1.
Record 2(Verfahrsatz 2)
408 2 uint32 rw
Verzögerungs-Sollwert Verfahrsatz 2.
Record ...(Verfahrsatz ... )
408 ... uint32 rw
Verzögerungs-Sollwert Verfahrsatz ...
Record Deceleration (Verfahrsatz Verzögerung)
FHPP (CMMS/CMMD) 408 1 ... 63 uint32 rw
Beschreibung Beschleunigungs-Sollwert des Satzprofils entsprechend PNU 414 für dasBremsen (Verzögerung) in Beschleunigungseinheit (siehe PNU 1007).Beim Schreiben wird der Wert für das Satzprofil wirksam, siehe Bild 4/2!
Record 1(Verfahrsatz 1)
408 1 uint32 rw
Verzögerungs-Sollwert des Satzprofils von Verfahrsatz 1.
Record 2(Verfahrsatz 2)
408 2 uint32 rw
Verzögerungs-Sollwert des Satzprofils von Verfahrsatz 2.
Record ...(Verfahrsatz ... )
408 ... uint32 rw
Verzögerungs-Sollwert des Satzprofils von Verfahrsatz ...
Record Velocity Limit (Verfahrsatz Drehzahlgrenze)
FHPP (CMMP) 412 1 ... 250 uint32 rw
Beschreibung Drehzahlgrenze bei Kraftbetrieb in Geschwindigkeitseinheit (siehe PNU 1006).
Record 1(Verfahrsatz 1)
412 1 uint32 rw
Drehzahlgrenze Verfahrsatz 1.
Record 2(Verfahrsatz 2)
412 2 uint32 rw
Drehzahlgrenze Verfahrsatz 2.
Record ...(Verfahrsatz ... )
412 ... uint32 rw
Drehzahlgrenze Verfahrsatz ...
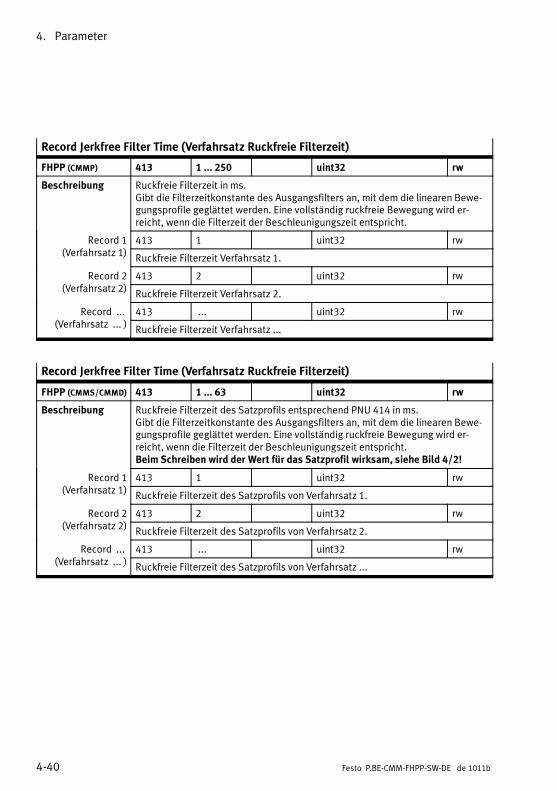
4. Parameter
4-40 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Record Jerkfree Filter Time (Verfahrsatz Ruckfreie Filterzeit)
FHPP (CMMP) 413 1 ... 250 uint32 rw
Beschreibung Ruckfreie Filterzeit in ms.Gibt die Filterzeitkonstante des Ausgangsfilters an, mit dem die linearen Bewe-gungsprofile geglättet werden. Eine vollständig ruckfreie Bewegung wird er-reicht, wenn die Filterzeit der Beschleunigungszeit entspricht.
Record 1(Verfahrsatz 1)
413 1 uint32 rw
Ruckfreie Filterzeit Verfahrsatz 1.
Record 2(Verfahrsatz 2)
413 2 uint32 rw
Ruckfreie Filterzeit Verfahrsatz 2.
Record ...(Verfahrsatz ... )
413 ... uint32 rw
Ruckfreie Filterzeit Verfahrsatz ...
Record Jerkfree Filter Time (Verfahrsatz Ruckfreie Filterzeit)
FHPP (CMMS/CMMD) 413 1 ... 63 uint32 rw
Beschreibung Ruckfreie Filterzeit des Satzprofils entsprechend PNU 414 in ms.Gibt die Filterzeitkonstante des Ausgangsfilters an, mit dem die linearen Bewe-gungsprofile geglättet werden. Eine vollständig ruckfreie Bewegung wird er-reicht, wenn die Filterzeit der Beschleunigungszeit entspricht.Beim Schreiben wird der Wert für das Satzprofil wirksam, siehe Bild 4/2!
Record 1(Verfahrsatz 1)
413 1 uint32 rw
Ruckfreie Filterzeit des Satzprofils von Verfahrsatz 1.
Record 2(Verfahrsatz 2)
413 2 uint32 rw
Ruckfreie Filterzeit des Satzprofils von Verfahrsatz 2.
Record ...(Verfahrsatz ... )
413 ... uint32 rw
Ruckfreie Filterzeit des Satzprofils von Verfahrsatz ...
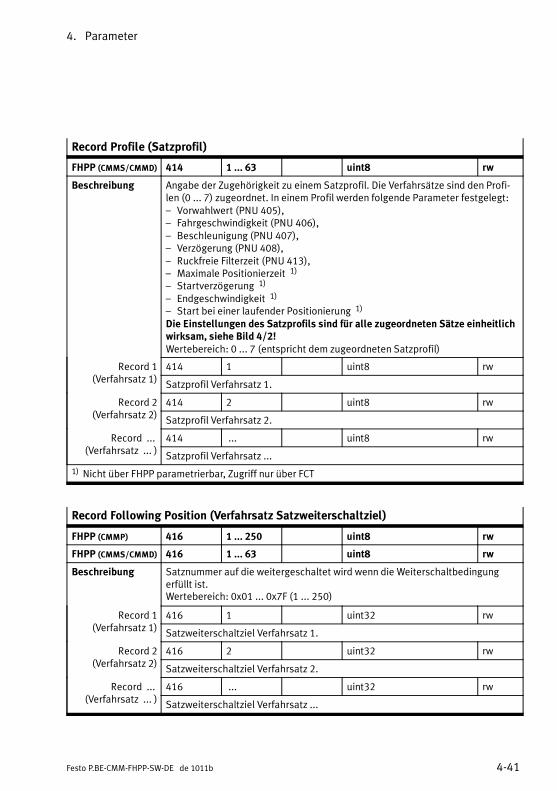
4. Parameter
4-41Festo P.BE-CMM-FHPP-SW-DE de 1011b
Record Profile (Satzprofil)
FHPP (CMMS/CMMD) 414 1 ... 63 uint8 rw
Beschreibung Angabe der Zugehörigkeit zu einem Satzprofil. Die Verfahrsätze sind den Profi-len (0 ... 7) zugeordnet. In einem Profil werden folgende Parameter festgelegt:– Vorwahlwert (PNU 405),– Fahrgeschwindigkeit (PNU 406),– Beschleunigung (PNU 407),– Verzögerung (PNU 408),– Ruckfreie Filterzeit (PNU 413),– Maximale Positionierzeit 1)
– Startverzögerung 1)
– Endgeschwindigkeit 1)
– Start bei einer laufender Positionierung 1)
Die Einstellungen des Satzprofils sind für alle zugeordneten Sätze einheitlichwirksam, siehe Bild 4/2!Wertebereich: 0 ... 7 (entspricht dem zugeordneten Satzprofil)
Record 1(Verfahrsatz 1)
414 1 uint8 rw
Satzprofil Verfahrsatz 1.
Record 2(Verfahrsatz 2)
414 2 uint8 rw
Satzprofil Verfahrsatz 2.
Record ...(Verfahrsatz ... )
414 ... uint8 rw
Satzprofil Verfahrsatz ...
1) Nicht über FHPP parametrierbar, Zugriff nur über FCT
Record Following Position (Verfahrsatz Satzweiterschaltziel)
FHPP (CMMP) 416 1 ... 250 uint8 rw
FHPP (CMMS/CMMD) 416 1 ... 63 uint8 rw
Beschreibung Satznummer auf die weitergeschaltet wird wenn die Weiterschaltbedingungerfüllt ist.Wertebereich: 0x01 ... 0x7F (1 ... 250)
Record 1(Verfahrsatz 1)
416 1 uint32 rw
Satzweiterschaltziel Verfahrsatz 1.
Record 2(Verfahrsatz 2)
416 2 uint32 rw
Satzweiterschaltziel Verfahrsatz 2.
Record ...(Verfahrsatz ... )
416 ... uint32 rw
Satzweiterschaltziel Verfahrsatz ...
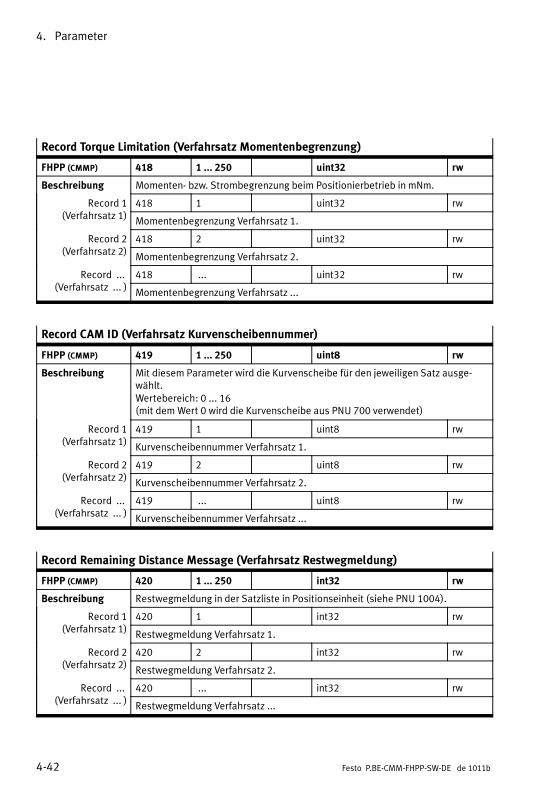
4. Parameter
4-42 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Record Torque Limitation (Verfahrsatz Momentenbegrenzung)
FHPP (CMMP) 418 1 ... 250 uint32 rw
Beschreibung Momenten- bzw. Strombegrenzung beim Positionierbetrieb in mNm.
Record 1(Verfahrsatz 1)
418 1 uint32 rw
Momentenbegrenzung Verfahrsatz 1.
Record 2(Verfahrsatz 2)
418 2 uint32 rw
Momentenbegrenzung Verfahrsatz 2.
Record ...(Verfahrsatz ... )
418 ... uint32 rw
Momentenbegrenzung Verfahrsatz ...
Record CAM ID (Verfahrsatz Kurvenscheibennummer)
FHPP (CMMP) 419 1 ... 250 uint8 rw
Beschreibung Mit diesem Parameter wird die Kurvenscheibe für den jeweiligen Satz ausge-wählt.Wertebereich: 0 ... 16(mit demWert 0 wird die Kurvenscheibe aus PNU 700 verwendet)
Record 1(Verfahrsatz 1)
419 1 uint8 rw
Kurvenscheibennummer Verfahrsatz 1.
Record 2(Verfahrsatz 2)
419 2 uint8 rw
Kurvenscheibennummer Verfahrsatz 2.
Record ...(Verfahrsatz ... )
419 ... uint8 rw
Kurvenscheibennummer Verfahrsatz ...
Record Remaining Distance Message (Verfahrsatz Restwegmeldung)
FHPP (CMMP) 420 1 ... 250 int32 rw
Beschreibung Restwegmeldung in der Satzliste in Positionseinheit (siehe PNU 1004).
Record 1(Verfahrsatz 1)
420 1 int32 rw
Restwegmeldung Verfahrsatz 1.
Record 2(Verfahrsatz 2)
420 2 int32 rw
Restwegmeldung Verfahrsatz 2.
Record ...(Verfahrsatz ... )
420 ... int32 rw
Restwegmeldung Verfahrsatz ...
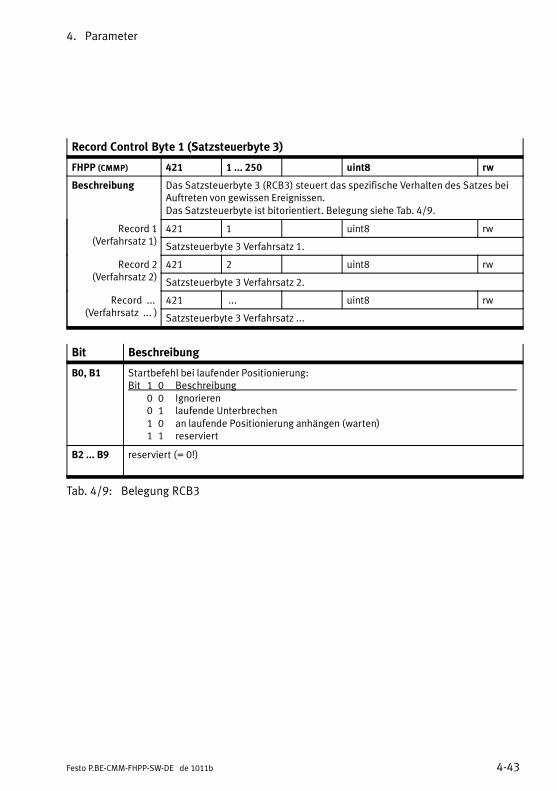
4. Parameter
4-43Festo P.BE-CMM-FHPP-SW-DE de 1011b
Record Control Byte 1 (Satzsteuerbyte 3)
FHPP (CMMP) 421 1 ... 250 uint8 rw
Beschreibung Das Satzsteuerbyte 3 (RCB3) steuert das spezifische Verhalten des Satzes beiAuftreten von gewissen Ereignissen.Das Satzsteuerbyte ist bitorientiert. Belegung siehe Tab. 4/9.
Record 1(Verfahrsatz 1)
421 1 uint8 rw
Satzsteuerbyte 3 Verfahrsatz 1.
Record 2(Verfahrsatz 2)
421 2 uint8 rw
Satzsteuerbyte 3 Verfahrsatz 2.
Record ...(Verfahrsatz ... )
421 ... uint8 rw
Satzsteuerbyte 3 Verfahrsatz ...
Bit Beschreibung
B0, B1 Startbefehl bei laufender Positionierung:Bit 1 0 Beschreibung
0 0 Ignorieren0 1 laufende Unterbrechen1 0 an laufende Positionierung anhängen (warten)1 1 reserviert
B2 ... B9 reserviert (= 0!)
Tab. 4/9: Belegung RCB3
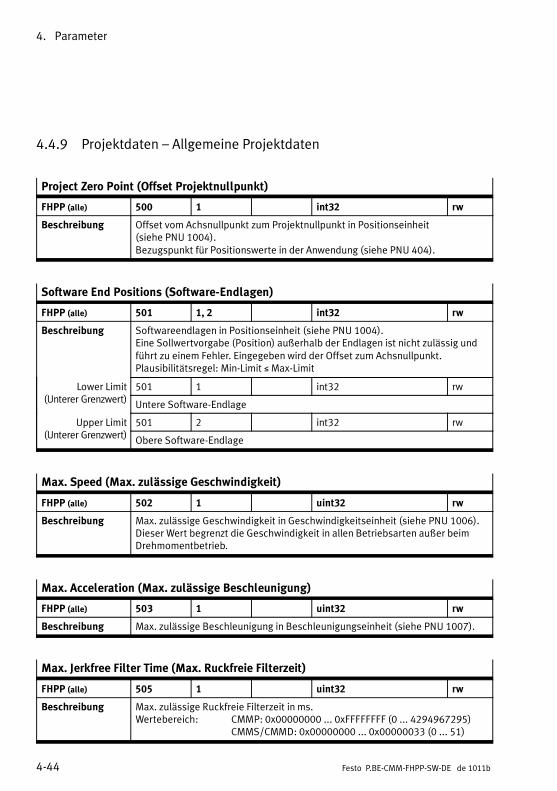
4. Parameter
4-44 Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4.9 Projektdaten – Allgemeine Projektdaten
Project Zero Point (Offset Projektnullpunkt)
FHPP (alle) 500 1 int32 rw
Beschreibung Offset vom Achsnullpunkt zum Projektnullpunkt in Positionseinheit(siehe PNU 1004).Bezugspunkt für Positionswerte in der Anwendung (siehe PNU 404).
Software End Positions (Software-Endlagen)
FHPP (alle) 501 1, 2 int32 rw
Beschreibung Softwareendlagen in Positionseinheit (siehe PNU 1004).Eine Sollwertvorgabe (Position) außerhalb der Endlagen ist nicht zulässig undführt zu einem Fehler. Eingegeben wird der Offset zum Achsnullpunkt.Plausibilitätsregel: Min-Limit ≤ Max-Limit
Lower Limit(Unterer Grenzwert)
501 1 int32 rw
Untere Software-Endlage
Upper Limit(Unterer Grenzwert)
501 2 int32 rw
Obere Software-Endlage
Max. Speed (Max. zulässige Geschwindigkeit)
FHPP (alle) 502 1 uint32 rw
Beschreibung Max. zulässige Geschwindigkeit in Geschwindigkeitseinheit (siehe PNU 1006).Dieser Wert begrenzt die Geschwindigkeit in allen Betriebsarten außer beimDrehmomentbetrieb.
Max. Acceleration (Max. zulässige Beschleunigung)
FHPP (alle) 503 1 uint32 rw
Beschreibung Max. zulässige Beschleunigung in Beschleunigungseinheit (siehe PNU 1007).
Max. Jerkfree Filter Time (Max. Ruckfreie Filterzeit)
FHPP (alle) 505 1 uint32 rw
Beschreibung Max. zulässige Ruckfreie Filterzeit in ms.Wertebereich: CMMP: 0x00000000 ... 0xFFFFFFFF (0 ... 4294967295)
CMMS/CMMD: 0x00000000 ... 0x00000033 (0 ... 51)
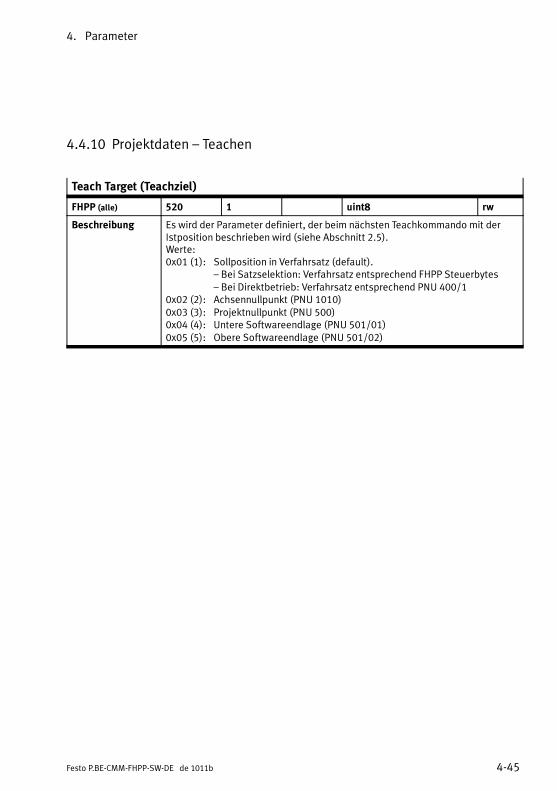
4. Parameter
4-45Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4.10 Projektdaten – Teachen
Teach Target (Teachziel)
FHPP (alle) 520 1 uint8 rw
Beschreibung Es wird der Parameter definiert, der beim nächsten Teachkommando mit derIstposition beschrieben wird (siehe Abschnitt 2.5).Werte:0x01 (1): Sollposition in Verfahrsatz (default).
– Bei Satzselektion: Verfahrsatz entsprechend FHPP Steuerbytes– Bei Direktbetrieb: Verfahrsatz entsprechend PNU 400/1
0x02 (2): Achsennullpunkt (PNU 1010)0x03 (3): Projektnullpunkt (PNU 500)0x04 (4): Untere Softwareendlage (PNU 501/01)0x05 (5): Obere Softwareendlage (PNU 501/02)
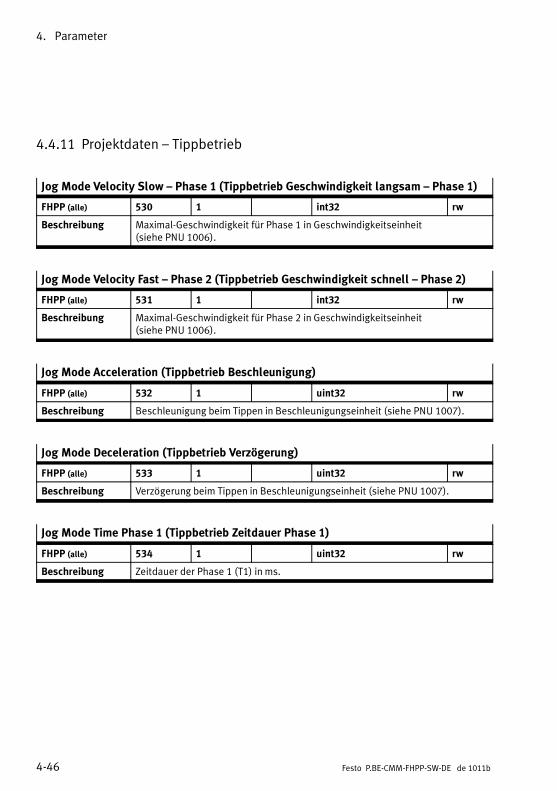
4. Parameter
4-46 Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4.11 Projektdaten – Tippbetrieb
Jog Mode Velocity Slow – Phase 1 (Tippbetrieb Geschwindigkeit langsam – Phase 1)
FHPP (alle) 530 1 int32 rw
Beschreibung Maximal-Geschwindigkeit für Phase 1 in Geschwindigkeitseinheit(siehe PNU 1006).
Jog Mode Velocity Fast – Phase 2 (Tippbetrieb Geschwindigkeit schnell – Phase 2)
FHPP (alle) 531 1 int32 rw
Beschreibung Maximal-Geschwindigkeit für Phase 2 in Geschwindigkeitseinheit(siehe PNU 1006).
Jog Mode Acceleration (Tippbetrieb Beschleunigung)
FHPP (alle) 532 1 uint32 rw
Beschreibung Beschleunigung beim Tippen in Beschleunigungseinheit (siehe PNU 1007).
Jog Mode Deceleration (Tippbetrieb Verzögerung)
FHPP (alle) 533 1 uint32 rw
Beschreibung Verzögerung beim Tippen in Beschleunigungseinheit (siehe PNU 1007).
Jog Mode Time Phase 1 (Tippbetrieb Zeitdauer Phase 1)
FHPP (alle) 534 1 uint32 rw
Beschreibung Zeitdauer der Phase 1 (T1) in ms.
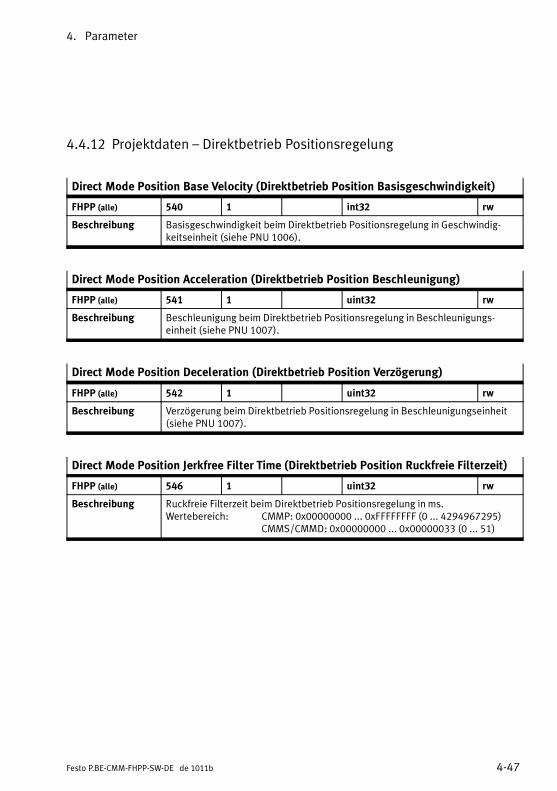
4. Parameter
4-47Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4.12 Projektdaten – Direktbetrieb Positionsregelung
Direct Mode Position Base Velocity (Direktbetrieb Position Basisgeschwindigkeit)
FHPP (alle) 540 1 int32 rw
Beschreibung Basisgeschwindigkeit beim Direktbetrieb Positionsregelung in Geschwindig-keitseinheit (siehe PNU 1006).
Direct Mode Position Acceleration (Direktbetrieb Position Beschleunigung)
FHPP (alle) 541 1 uint32 rw
Beschreibung Beschleunigung beim Direktbetrieb Positionsregelung in Beschleunigungs-einheit (siehe PNU 1007).
Direct Mode Position Deceleration (Direktbetrieb Position Verzögerung)
FHPP (alle) 542 1 uint32 rw
Beschreibung Verzögerung beim Direktbetrieb Positionsregelung in Beschleunigungseinheit(siehe PNU 1007).
Direct Mode Position Jerkfree Filter Time (Direktbetrieb Position Ruckfreie Filterzeit)
FHPP (alle) 546 1 uint32 rw
Beschreibung Ruckfreie Filterzeit beim Direktbetrieb Positionsregelung in ms.Wertebereich: CMMP: 0x00000000 ... 0xFFFFFFFF (0 ... 4294967295)
CMMS/CMMD: 0x00000000 ... 0x00000033 (0 ... 51)
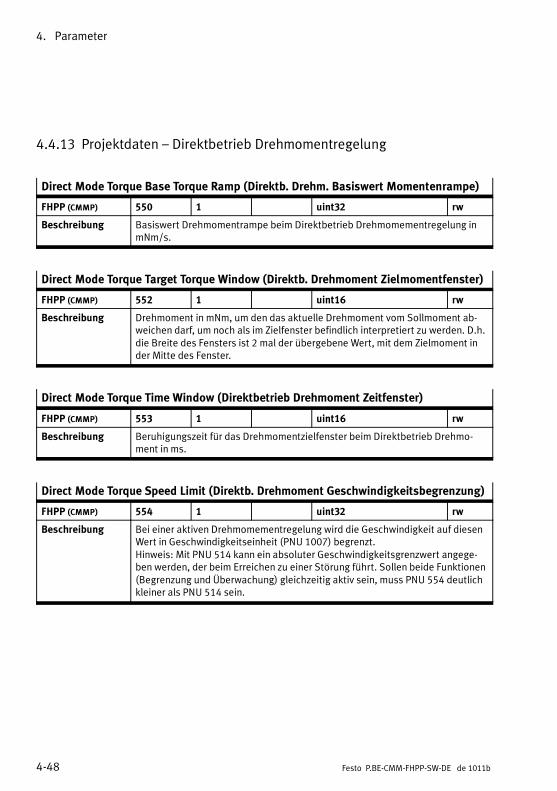
4. Parameter
4-48 Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4.13 Projektdaten – Direktbetrieb Drehmomentregelung
Direct Mode Torque Base Torque Ramp (Direktb. Drehm. Basiswert Momentenrampe)
FHPP (CMMP) 550 1 uint32 rw
Beschreibung Basiswert Drehmomentrampe beim Direktbetrieb Drehmomementregelung inmNm/s.
Direct Mode Torque Target Torque Window (Direktb. Drehmoment Zielmomentfenster)
FHPP (CMMP) 552 1 uint16 rw
Beschreibung Drehmoment in mNm, um den das aktuelle Drehmoment vom Sollmoment ab-weichen darf, um noch als im Zielfenster befindlich interpretiert zu werden. D.h.die Breite des Fensters ist 2 mal der übergebene Wert, mit dem Zielmoment inder Mitte des Fenster.
Direct Mode Torque Time Window (Direktbetrieb Drehmoment Zeitfenster)
FHPP (CMMP) 553 1 uint16 rw
Beschreibung Beruhigungszeit für das Drehmomentzielfenster beim Direktbetrieb Drehmo-ment in ms.
Direct Mode Torque Speed Limit (Direktb. Drehmoment Geschwindigkeitsbegrenzung)
FHPP (CMMP) 554 1 uint32 rw
Beschreibung Bei einer aktiven Drehmomementregelung wird die Geschwindigkeit auf diesenWert in Geschwindigkeitseinheit (PNU 1007) begrenzt.Hinweis: Mit PNU 514 kann ein absoluter Geschwindigkeitsgrenzwert angege-ben werden, der beim Erreichen zu einer Störung führt. Sollen beide Funktionen(Begrenzung und Überwachung) gleichzeitig aktiv sein, muss PNU 554 deutlichkleiner als PNU 514 sein.
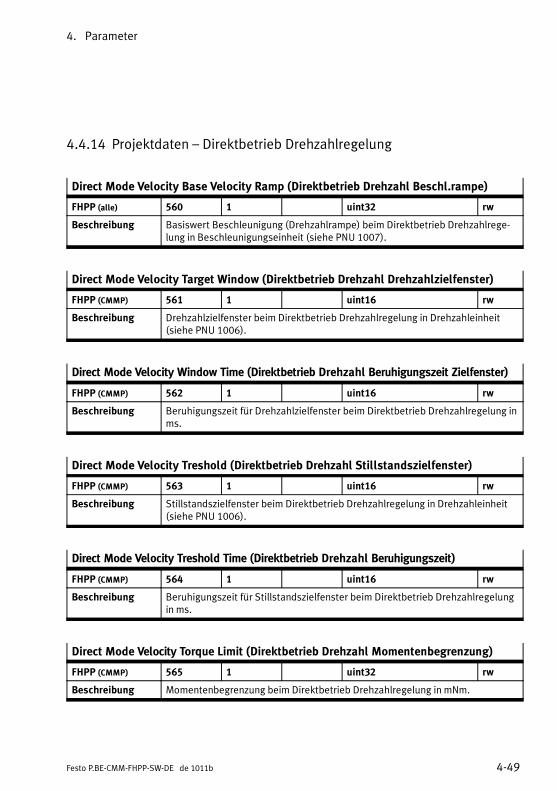
4. Parameter
4-49Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4.14 Projektdaten – Direktbetrieb Drehzahlregelung
Direct Mode Velocity Base Velocity Ramp (Direktbetrieb Drehzahl Beschl.rampe)
FHPP (alle) 560 1 uint32 rw
Beschreibung Basiswert Beschleunigung (Drehzahlrampe) beim Direktbetrieb Drehzahlrege-lung in Beschleunigungseinheit (siehe PNU 1007).
Direct Mode Velocity Target Window (Direktbetrieb Drehzahl Drehzahlzielfenster)
FHPP (CMMP) 561 1 uint16 rw
Beschreibung Drehzahlzielfenster beim Direktbetrieb Drehzahlregelung in Drehzahleinheit(siehe PNU 1006).
Direct Mode Velocity Window Time (Direktbetrieb Drehzahl Beruhigungszeit Zielfenster)
FHPP (CMMP) 562 1 uint16 rw
Beschreibung Beruhigungszeit für Drehzahlzielfenster beim Direktbetrieb Drehzahlregelung inms.
Direct Mode Velocity Treshold (Direktbetrieb Drehzahl Stillstandszielfenster)
FHPP (CMMP) 563 1 uint16 rw
Beschreibung Stillstandszielfenster beim Direktbetrieb Drehzahlregelung in Drehzahleinheit(siehe PNU 1006).
Direct Mode Velocity Treshold Time (Direktbetrieb Drehzahl Beruhigungszeit)
FHPP (CMMP) 564 1 uint16 rw
Beschreibung Beruhigungszeit für Stillstandszielfenster beim Direktbetrieb Drehzahlregelungin ms.
Direct Mode Velocity Torque Limit (Direktbetrieb Drehzahl Momentenbegrenzung)
FHPP (CMMP) 565 1 uint32 rw
Beschreibung Momentenbegrenzung beim Direktbetrieb Drehzahlregelung in mNm.
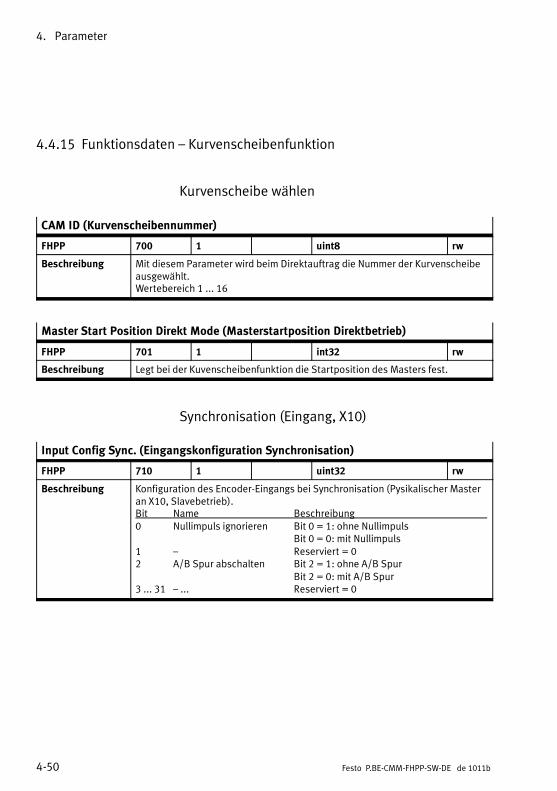
4. Parameter
4-50 Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4.15 Funktionsdaten – Kurvenscheibenfunktion
Kurvenscheibe wählen
CAM ID (Kurvenscheibennummer)
FHPP 700 1 uint8 rw
Beschreibung Mit diesem Parameter wird beim Direktauftrag die Nummer der Kurvenscheibeausgewählt.Wertebereich 1 ... 16
Master Start Position Direkt Mode (Masterstartposition Direktbetrieb)
FHPP 701 1 int32 rw
Beschreibung Legt bei der Kuvenscheibenfunktion die Startposition des Masters fest.
Synchronisation (Eingang, X10)
Input Config Sync. (Eingangskonfiguration Synchronisation)
FHPP 710 1 uint32 rw
Beschreibung Konfiguration des Encoder-Eingangs bei Synchronisation (Pysikalischer Masteran X10, Slavebetrieb).Bit Name Beschreibung0 Nullimpuls ignorieren Bit 0 = 1: ohne Nullimpuls
Bit 0 = 0: mit Nullimpuls1 – Reserviert = 02 A/B Spur abschalten Bit 2 = 1: ohne A/B Spur
Bit 2 = 0: mit A/B Spur3 ... 31 – ... Reserviert = 0
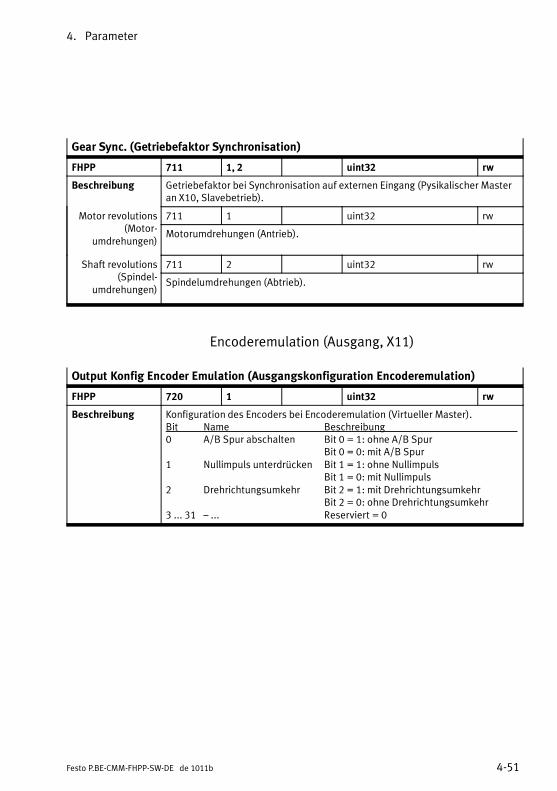
4. Parameter
4-51Festo P.BE-CMM-FHPP-SW-DE de 1011b
Gear Sync. (Getriebefaktor Synchronisation)
FHPP 711 1, 2 uint32 rw
Beschreibung Getriebefaktor bei Synchronisation auf externen Eingang (Pysikalischer Masteran X10, Slavebetrieb).
Motor revolutions(Motor-
umdrehungen)
711 1 uint32 rw
Motorumdrehungen (Antrieb).
Shaft revolutions(Spindel-
umdrehungen)
711 2 uint32 rw
Spindelumdrehungen (Abtrieb).
Encoderemulation (Ausgang, X11)
Output Konfig Encoder Emulation (Ausgangskonfiguration Encoderemulation)
FHPP 720 1 uint32 rw
Beschreibung Konfiguration des Encoders bei Encoderemulation (Virtueller Master).Bit Name Beschreibung0 A/B Spur abschalten Bit 0 = 1: ohne A/B Spur
Bit 0 = 0: mit A/B Spur1 Nullimpuls unterdrücken Bit 1 = 1: ohne Nullimpuls
Bit 1 = 0: mit Nullimpuls2 Drehrichtungsumkehr Bit 2 = 1: mit Drehrichtungsumkehr
Bit 2 = 0: ohne Drehrichtungsumkehr3 ... 31 – ... Reserviert = 0
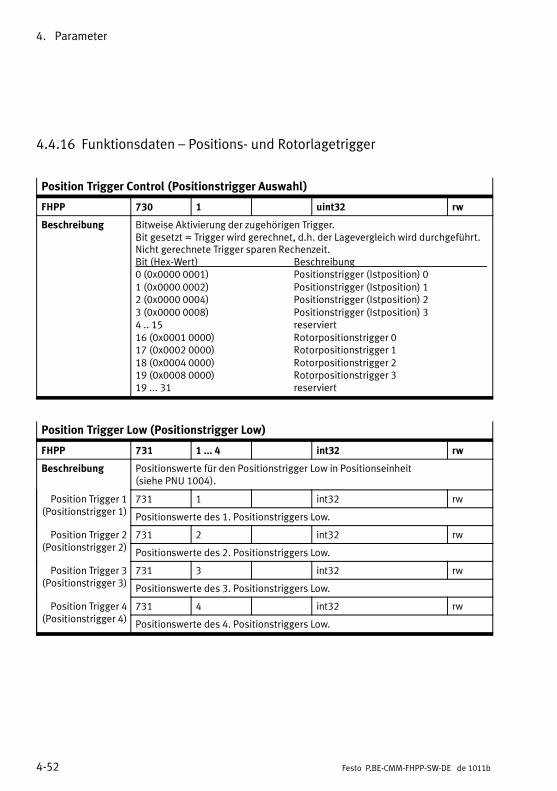
4. Parameter
4-52 Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4.16 Funktionsdaten – Positions- und Rotorlagetrigger
Position Trigger Control (Positionstrigger Auswahl)
FHPP 730 1 uint32 rw
Beschreibung Bitweise Aktivierung der zugehörigen Trigger.Bit gesetzt = Trigger wird gerechnet, d.h. der Lagevergleich wird durchgeführt.Nicht gerechnete Trigger sparen Rechenzeit.Bit (Hex-Wert) Beschreibung0 (0x0000 0001) Positionstrigger (Istposition) 01 (0x0000 0002) Positionstrigger (Istposition) 12 (0x0000 0004) Positionstrigger (Istposition) 23 (0x0000 0008) Positionstrigger (Istposition) 34 .. 15 reserviert16 (0x0001 0000) Rotorpositionstrigger 017 (0x0002 0000) Rotorpositionstrigger 118 (0x0004 0000) Rotorpositionstrigger 219 (0x0008 0000) Rotorpositionstrigger 319 ... 31 reserviert
Position Trigger Low (Positionstrigger Low)
FHPP 731 1 ... 4 int32 rw
Beschreibung Positionswerte für den Positionstrigger Low in Positionseinheit(siehe PNU 1004).
Position Trigger 1(Positionstrigger 1)
731 1 int32 rw
Positionswerte des 1. Positionstriggers Low.
Position Trigger 2(Positionstrigger 2)
731 2 int32 rw
Positionswerte des 2. Positionstriggers Low.
Position Trigger 3(Positionstrigger 3)
731 3 int32 rw
Positionswerte des 3. Positionstriggers Low.
Position Trigger 4(Positionstrigger 4)
731 4 int32 rw
Positionswerte des 4. Positionstriggers Low.
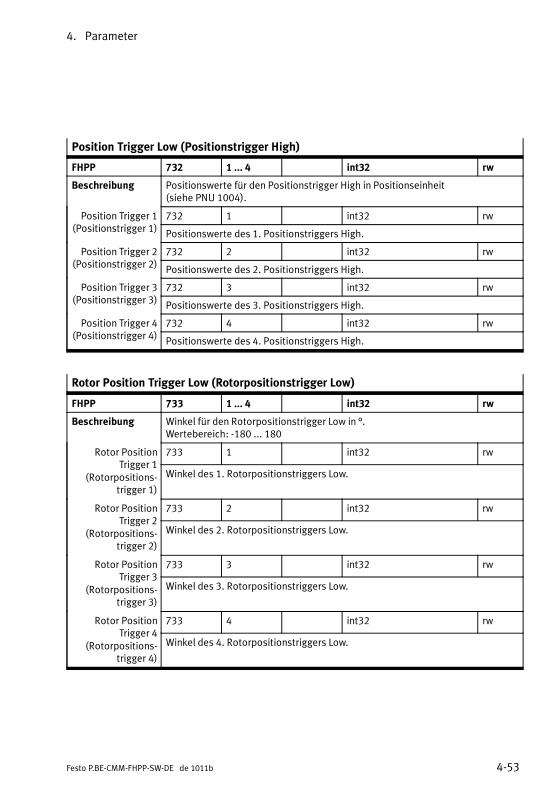
4. Parameter
4-53Festo P.BE-CMM-FHPP-SW-DE de 1011b
Position Trigger Low (Positionstrigger High)
FHPP 732 1 ... 4 int32 rw
Beschreibung Positionswerte für den Positionstrigger High in Positionseinheit(siehe PNU 1004).
Position Trigger 1(Positionstrigger 1)
732 1 int32 rw
Positionswerte des 1. Positionstriggers High.
Position Trigger 2(Positionstrigger 2)
732 2 int32 rw
Positionswerte des 2. Positionstriggers High.
Position Trigger 3(Positionstrigger 3)
732 3 int32 rw
Positionswerte des 3. Positionstriggers High.
Position Trigger 4(Positionstrigger 4)
732 4 int32 rw
Positionswerte des 4. Positionstriggers High.
Rotor Position Trigger Low (Rotorpositionstrigger Low)
FHPP 733 1 ... 4 int32 rw
Beschreibung Winkel für den Rotorpositionstrigger Low in °.Wertebereich: -180 ... 180
Rotor PositionTrigger 1
(Rotorpositions-trigger 1)
733 1 int32 rw
Winkel des 1. Rotorpositionstriggers Low.
Rotor PositionTrigger 2
(Rotorpositions-trigger 2)
733 2 int32 rw
Winkel des 2. Rotorpositionstriggers Low.
Rotor PositionTrigger 3
(Rotorpositions-trigger 3)
733 3 int32 rw
Winkel des 3. Rotorpositionstriggers Low.
Rotor PositionTrigger 4
(Rotorpositions-trigger 4)
733 4 int32 rw
Winkel des 4. Rotorpositionstriggers Low.
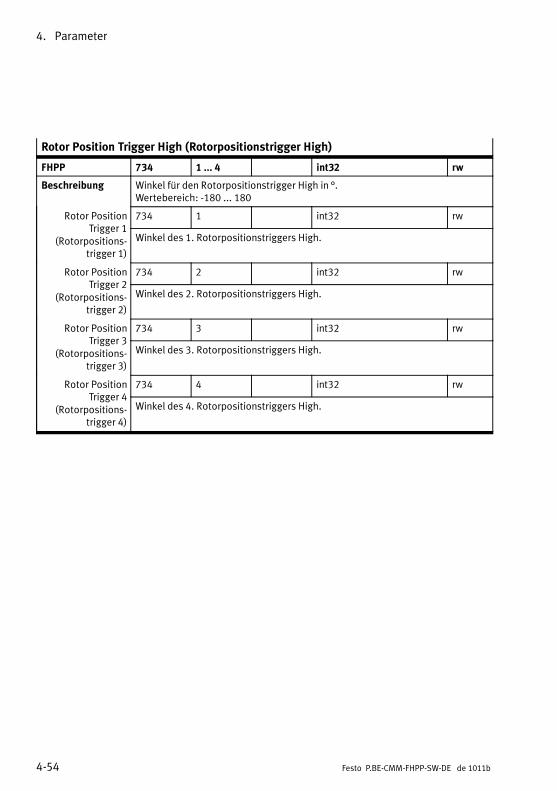
4. Parameter
4-54 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Rotor Position Trigger High (Rotorpositionstrigger High)
FHPP 734 1 ... 4 int32 rw
Beschreibung Winkel für den Rotorpositionstrigger High in °.Wertebereich: -180 ... 180
Rotor PositionTrigger 1
(Rotorpositions-trigger 1)
734 1 int32 rw
Winkel des 1. Rotorpositionstriggers High.
Rotor PositionTrigger 2
(Rotorpositions-trigger 2)
734 2 int32 rw
Winkel des 2. Rotorpositionstriggers High.
Rotor PositionTrigger 3
(Rotorpositions-trigger 3)
734 3 int32 rw
Winkel des 3. Rotorpositionstriggers High.
Rotor PositionTrigger 4
(Rotorpositions-trigger 4)
734 4 int32 rw
Winkel des 4. Rotorpositionstriggers High.
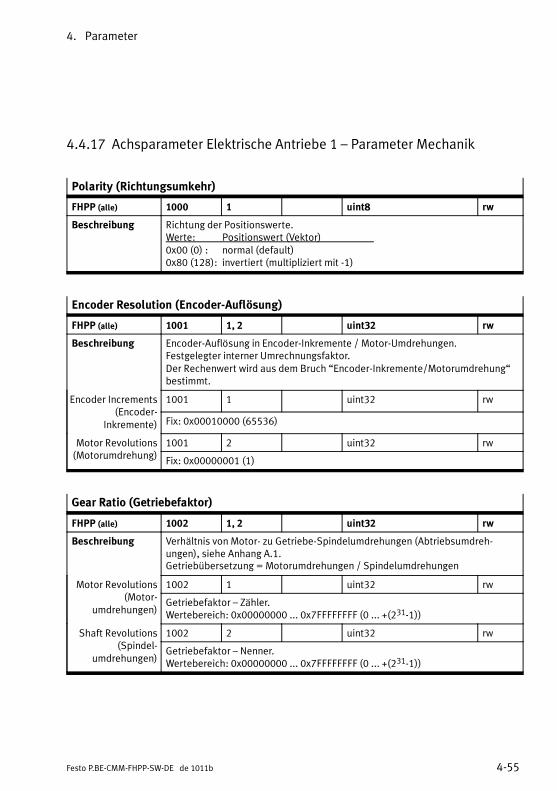
4. Parameter
4-55Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4.17 Achsparameter Elektrische Antriebe 1 – Parameter Mechanik
Polarity (Richtungsumkehr)
FHPP (alle) 1000 1 uint8 rw
Beschreibung Richtung der Positionswerte.Werte: Positionswert (Vektor)0x00 (0) : normal (default)0x80 (128): invertiert (multipliziert mit -1)
Encoder Resolution (Encoder-Auflösung)
FHPP (alle) 1001 1, 2 uint32 rw
Beschreibung Encoder-Auflösung in Encoder-Inkremente / Motor-Umdrehungen.Festgelegter interner Umrechnungsfaktor.Der Rechenwert wird aus dem Bruch “Encoder-Inkremente/Motorumdrehung“bestimmt.
Encoder Increments(Encoder-
Inkremente)
1001 1 uint32 rw
Fix: 0x00010000 (65536)
Motor Revolutions(Motorumdrehung)
1001 2 uint32 rw
Fix: 0x00000001 (1)
Gear Ratio (Getriebefaktor)
FHPP (alle) 1002 1, 2 uint32 rw
Beschreibung Verhältnis von Motor- zu Getriebe-Spindelumdrehungen (Abtriebsumdreh-ungen), siehe Anhang A.1.Getriebübersetzung = Motorumdrehungen / Spindelumdrehungen
Motor Revolutions(Motor-
umdrehungen)
1002 1 uint32 rw
Getriebefaktor – Zähler.Wertebereich: 0x00000000 ... 0x7FFFFFFFF (0 ... +(231-1))
Shaft Revolutions(Spindel-
umdrehungen)
1002 2 uint32 rw
Getriebefaktor – Nenner.Wertebereich: 0x00000000 ... 0x7FFFFFFFF (0 ... +(231-1))
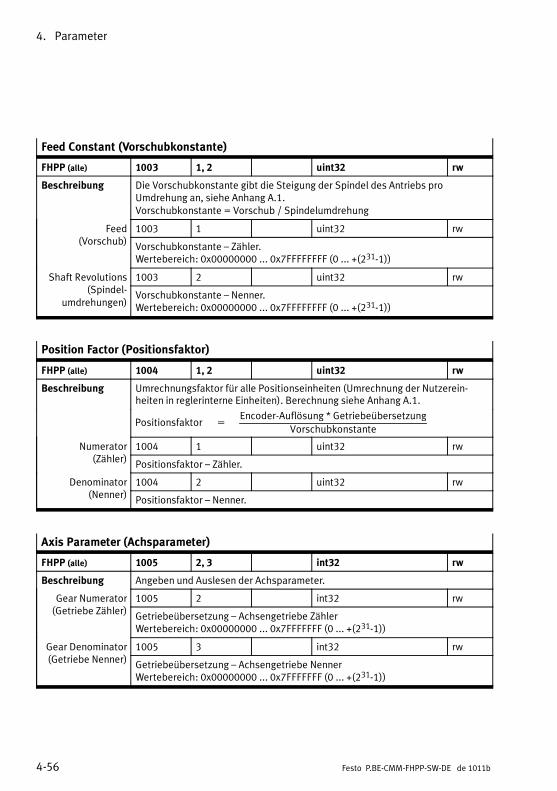
4. Parameter
4-56 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Feed Constant (Vorschubkonstante)
FHPP (alle) 1003 1, 2 uint32 rw
Beschreibung Die Vorschubkonstante gibt die Steigung der Spindel des Antriebs proUmdrehung an, siehe Anhang A.1.Vorschubkonstante = Vorschub / Spindelumdrehung
Feed(Vorschub)
1003 1 uint32 rw
Vorschubkonstante – Zähler.Wertebereich: 0x00000000 ... 0x7FFFFFFFF (0 ... +(231-1))
Shaft Revolutions(Spindel-
umdrehungen)
1003 2 uint32 rw
Vorschubkonstante – Nenner.Wertebereich: 0x00000000 ... 0x7FFFFFFFF (0 ... +(231-1))
Position Factor (Positionsfaktor)
FHPP (alle) 1004 1, 2 uint32 rw
Beschreibung Umrechnungsfaktor für alle Positionseinheiten (Umrechnung der Nutzerein-heiten in reglerinterne Einheiten). Berechnung siehe Anhang A.1.
Positionsfaktor =
Encoder-Auflösung * GetriebeübersetzungVorschubkonstante
Numerator(Zähler)
1004 1 uint32 rw
Positionsfaktor – Zähler.
Denominator(Nenner)
1004 2 uint32 rw
Positionsfaktor – Nenner.
Axis Parameter (Achsparameter)
FHPP (alle) 1005 2, 3 int32 rw
Beschreibung Angeben und Auslesen der Achsparameter.
Gear Numerator(Getriebe Zähler)
1005 2 int32 rw
Getriebeübersetzung – Achsengetriebe ZählerWertebereich: 0x00000000 ... 0x7FFFFFFF (0 ... +(231-1))
Gear Denominator(Getriebe Nenner)
1005 3 int32 rw
Getriebeübersetzung – Achsengetriebe NennerWertebereich: 0x00000000 ... 0x7FFFFFFF (0 ... +(231-1))
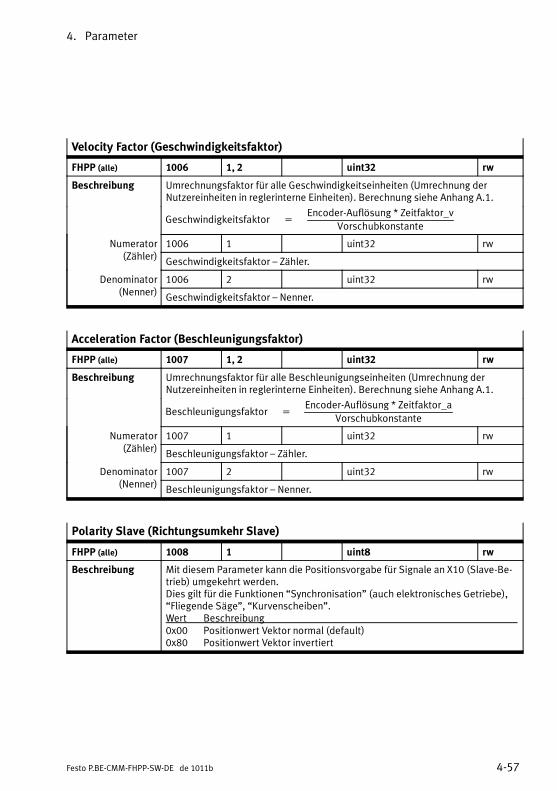
4. Parameter
4-57Festo P.BE-CMM-FHPP-SW-DE de 1011b
Velocity Factor (Geschwindigkeitsfaktor)
FHPP (alle) 1006 1, 2 uint32 rw
Beschreibung Umrechnungsfaktor für alle Geschwindigkeitseinheiten (Umrechnung derNutzereinheiten in reglerinterne Einheiten). Berechnung siehe Anhang A.1.
Geschwindigkeitsfaktor =
Encoder-Auflösung * Zeitfaktor_vVorschubkonstante
Numerator(Zähler)
1006 1 uint32 rw
Geschwindigkeitsfaktor – Zähler.
Denominator(Nenner)
1006 2 uint32 rw
Geschwindigkeitsfaktor – Nenner.
Acceleration Factor (Beschleunigungsfaktor)
FHPP (alle) 1007 1, 2 uint32 rw
Beschreibung Umrechnungsfaktor für alle Beschleunigungseinheiten (Umrechnung derNutzereinheiten in reglerinterne Einheiten). Berechnung siehe Anhang A.1.
Beschleunigungsfaktor =
Encoder-Auflösung * Zeitfaktor_aVorschubkonstante
Numerator(Zähler)
1007 1 uint32 rw
Beschleunigungsfaktor – Zähler.
Denominator(Nenner)
1007 2 uint32 rw
Beschleunigungsfaktor – Nenner.
Polarity Slave (Richtungsumkehr Slave)
FHPP (alle) 1008 1 uint8 rw
Beschreibung Mit diesem Parameter kann die Positionsvorgabe für Signale an X10 (Slave-Be-trieb) umgekehrt werden.Dies gilt für die Funktionen “Synchronisation” (auch elektronisches Getriebe),“Fliegende Säge”, “Kurvenscheiben”.Wert Beschreibung0x00 Positionwert Vektor normal (default)0x80 Positionwert Vektor invertiert
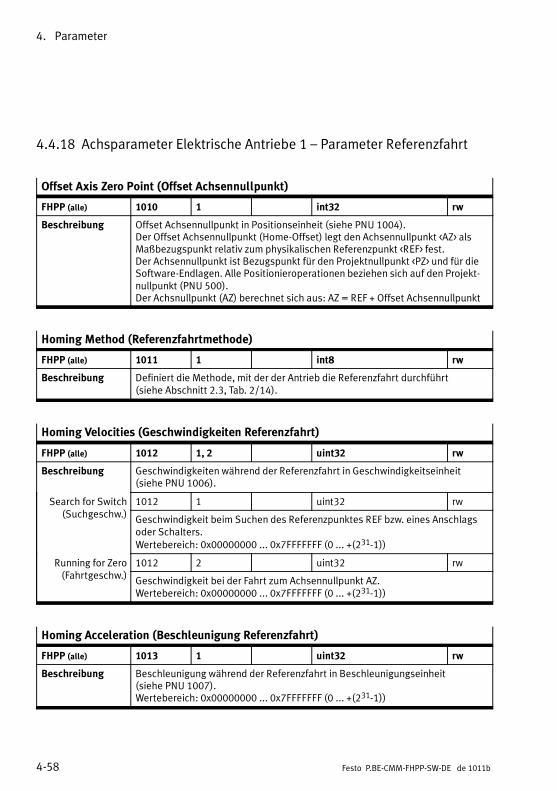
4. Parameter
4-58 Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4.18 Achsparameter Elektrische Antriebe 1 – Parameter Referenzfahrt
Offset Axis Zero Point (Offset Achsennullpunkt)
FHPP (alle) 1010 1 int32 rw
Beschreibung Offset Achsennullpunkt in Positionseinheit (siehe PNU 1004).Der Offset Achsennullpunkt (Home-Offset) legt den Achsennullpunkt <AZ> alsMaßbezugspunkt relativ zum physikalischen Referenzpunkt <REF> fest.Der Achsennullpunkt ist Bezugspunkt für den Projektnullpunkt <PZ> und für dieSoftware-Endlagen. Alle Positionieroperationen beziehen sich auf den Projekt-nullpunkt (PNU 500).Der Achsnullpunkt (AZ) berechnet sich aus: AZ = REF + Offset Achsennullpunkt
Homing Method (Referenzfahrtmethode)
FHPP (alle) 1011 1 int8 rw
Beschreibung Definiert die Methode, mit der der Antrieb die Referenzfahrt durchführt(siehe Abschnitt 2.3, Tab. 2/14).
Homing Velocities (Geschwindigkeiten Referenzfahrt)
FHPP (alle) 1012 1, 2 uint32 rw
Beschreibung Geschwindigkeiten während der Referenzfahrt in Geschwindigkeitseinheit(siehe PNU 1006).
Search for Switch(Suchgeschw.)
1012 1 uint32 rw
Geschwindigkeit beim Suchen des Referenzpunktes REF bzw. eines Anschlagsoder Schalters.Wertebereich: 0x00000000 ... 0x7FFFFFFF (0 ... +(231-1))
Running for Zero(Fahrtgeschw.)
1012 2 uint32 rw
Geschwindigkeit bei der Fahrt zum Achsennullpunkt AZ.Wertebereich: 0x00000000 ... 0x7FFFFFFF (0 ... +(231-1))
Homing Acceleration (Beschleunigung Referenzfahrt)
FHPP (alle) 1013 1 uint32 rw
Beschreibung Beschleunigung während der Referenzfahrt in Beschleunigungseinheit(siehe PNU 1007).Wertebereich: 0x00000000 ... 0x7FFFFFFF (0 ... +(231-1))
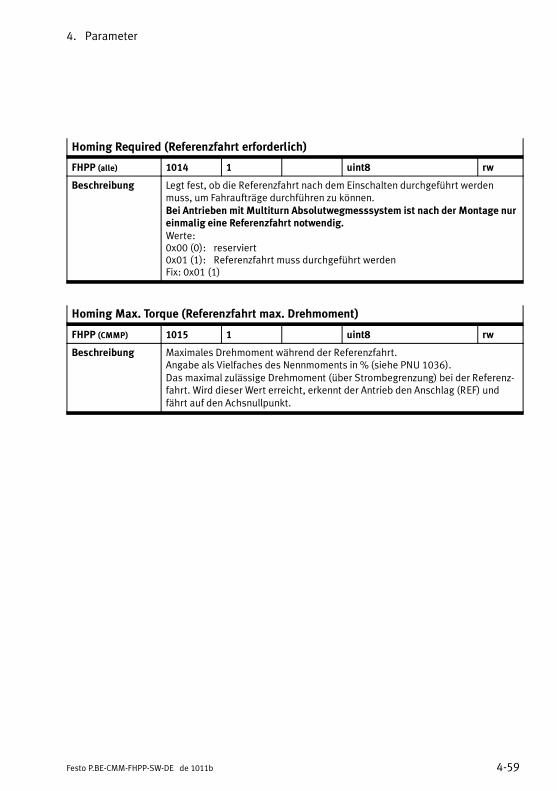
4. Parameter
4-59Festo P.BE-CMM-FHPP-SW-DE de 1011b
Homing Required (Referenzfahrt erforderlich)
FHPP (alle) 1014 1 uint8 rw
Beschreibung Legt fest, ob die Referenzfahrt nach dem Einschalten durchgeführt werdenmuss, um Fahraufträge durchführen zu können.Bei Antrieben mit Multiturn Absolutwegmesssystem ist nach der Montage nureinmalig eine Referenzfahrt notwendig.Werte:0x00 (0): reserviert0x01 (1): Referenzfahrt muss durchgeführt werdenFix: 0x01 (1)
Homing Max. Torque (Referenzfahrt max. Drehmoment)
FHPP (CMMP) 1015 1 uint8 rw
Beschreibung Maximales Drehmoment während der Referenzfahrt.Angabe als Vielfaches des Nennmoments in % (siehe PNU 1036).Das maximal zulässige Drehmoment (über Strombegrenzung) bei der Referenz-fahrt. Wird dieser Wert erreicht, erkennt der Antrieb den Anschlag (REF) undfährt auf den Achsnullpunkt.
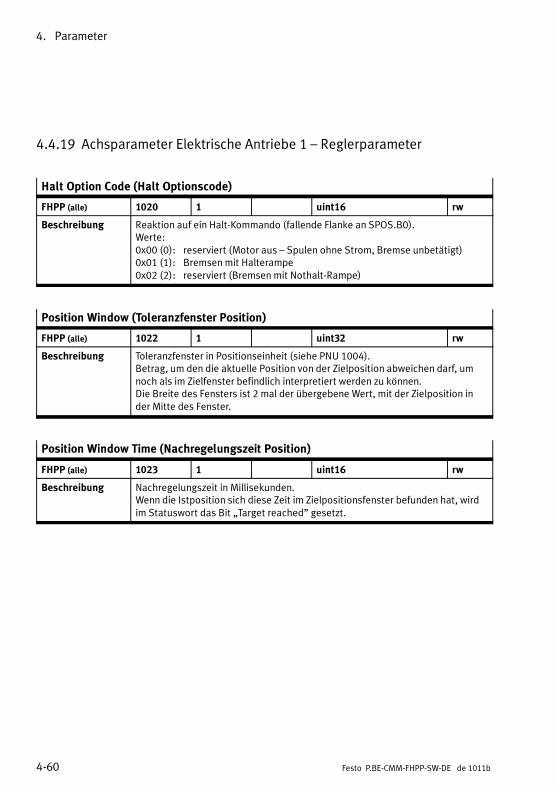
4. Parameter
4-60 Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4.19 Achsparameter Elektrische Antriebe 1 – Reglerparameter
Halt Option Code (Halt Optionscode)
FHPP (alle) 1020 1 uint16 rw
Beschreibung Reaktion auf ein Halt-Kommando (fallende Flanke an SPOS.B0).Werte:0x00 (0): reserviert (Motor aus – Spulen ohne Strom, Bremse unbetätigt)0x01 (1): Bremsen mit Halterampe0x02 (2): reserviert (Bremsen mit Nothalt-Rampe)
Position Window (Toleranzfenster Position)
FHPP (alle) 1022 1 uint32 rw
Beschreibung Toleranzfenster in Positionseinheit (siehe PNU 1004).Betrag, um den die aktuelle Position von der Zielposition abweichen darf, umnoch als im Zielfenster befindlich interpretiert werden zu können.Die Breite des Fensters ist 2 mal der übergebene Wert, mit der Zielposition inder Mitte des Fenster.
Position Window Time (Nachregelungszeit Position)
FHPP (alle) 1023 1 uint16 rw
Beschreibung Nachregelungszeit in Millisekunden.Wenn die Istposition sich diese Zeit im Zielpositionsfenster befunden hat, wirdim Statuswort das Bit „Target reached” gesetzt.
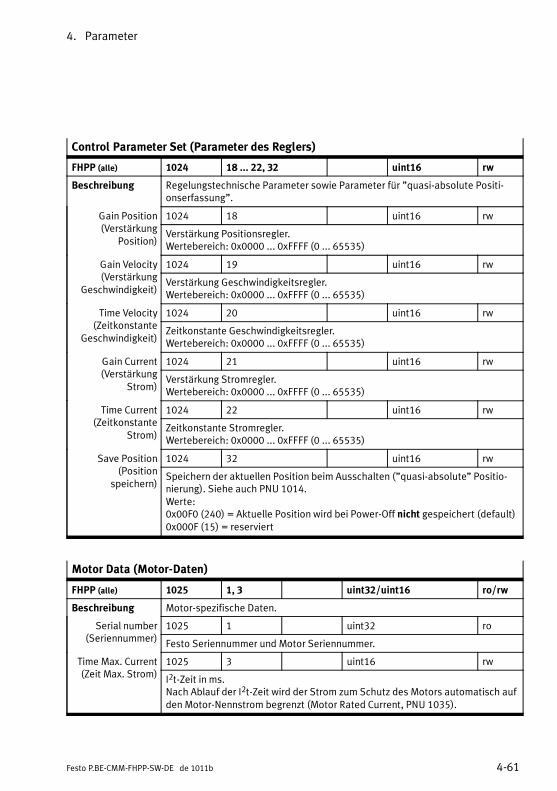
4. Parameter
4-61Festo P.BE-CMM-FHPP-SW-DE de 1011b
Control Parameter Set (Parameter des Reglers)
FHPP (alle) 1024 18 ... 22, 32 uint16 rw
Beschreibung Regelungstechnische Parameter sowie Parameter für ”quasi-absolute Positi-onserfassung”.
Gain Position(Verstärkung
Position)
1024 18 uint16 rw
Verstärkung Positionsregler.Wertebereich: 0x0000 ... 0xFFFF (0 ... 65535)
Gain Velocity(Verstärkung
Geschwindigkeit)
1024 19 uint16 rw
Verstärkung Geschwindigkeitsregler.Wertebereich: 0x0000 ... 0xFFFF (0 ... 65535)
Time Velocity(Zeitkonstante
Geschwindigkeit)
1024 20 uint16 rw
Zeitkonstante Geschwindigkeitsregler.Wertebereich: 0x0000 ... 0xFFFF (0 ... 65535)
Gain Current(Verstärkung
Strom)
1024 21 uint16 rw
Verstärkung Stromregler.Wertebereich: 0x0000 ... 0xFFFF (0 ... 65535)
Time Current(Zeitkonstante
Strom)
1024 22 uint16 rw
Zeitkonstante Stromregler.Wertebereich: 0x0000 ... 0xFFFF (0 ... 65535)
Save Position(Position
speichern)
1024 32 uint16 rw
Speichern der aktuellen Position beim Ausschalten (”quasi-absolute” Positio-nierung). Siehe auch PNU 1014.Werte:0x00F0 (240) = Aktuelle Position wird bei Power-Off nicht gespeichert (default)0x000F (15) = reserviert
Motor Data (Motor-Daten)
FHPP (alle) 1025 1, 3 uint32/uint16 ro/rw
Beschreibung Motor-spezifische Daten.
Serial number(Seriennummer)
1025 1 uint32 ro
Festo Seriennummer und Motor Seriennummer.
Time Max. Current(Zeit Max. Strom)
1025 3 uint16 rw
I2t-Zeit in ms.Nach Ablauf der I2t-Zeit wird der Strom zum Schutz des Motors automatisch aufden Motor-Nennstrom begrenzt (Motor Rated Current, PNU 1035).
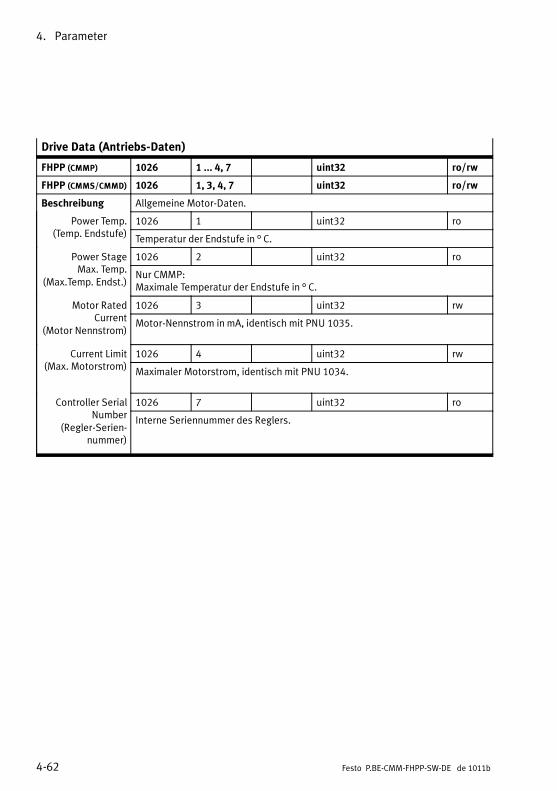
4. Parameter
4-62 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Drive Data (Antriebs-Daten)
FHPP (CMMP) 1026 1 ... 4, 7 uint32 ro/rw
FHPP (CMMS/CMMD) 1026 1, 3, 4, 7 uint32 ro/rw
Beschreibung Allgemeine Motor-Daten.
Power Temp.(Temp. Endstufe)
1026 1 uint32 ro
Temperatur der Endstufe in ° C.
Power StageMax. Temp.
(Max.Temp. Endst.)
1026 2 uint32 ro
Nur CMMP:Maximale Temperatur der Endstufe in ° C.
Motor RatedCurrent
(Motor Nennstrom)
1026 3 uint32 rw
Motor-Nennstrom in mA, identisch mit PNU 1035.
Current Limit(Max. Motorstrom)
1026 4 uint32 rw
Maximaler Motorstrom, identisch mit PNU 1034.
Controller SerialNumber
(Regler-Serien-nummer)
1026 7 uint32 ro
Interne Seriennummer des Reglers.
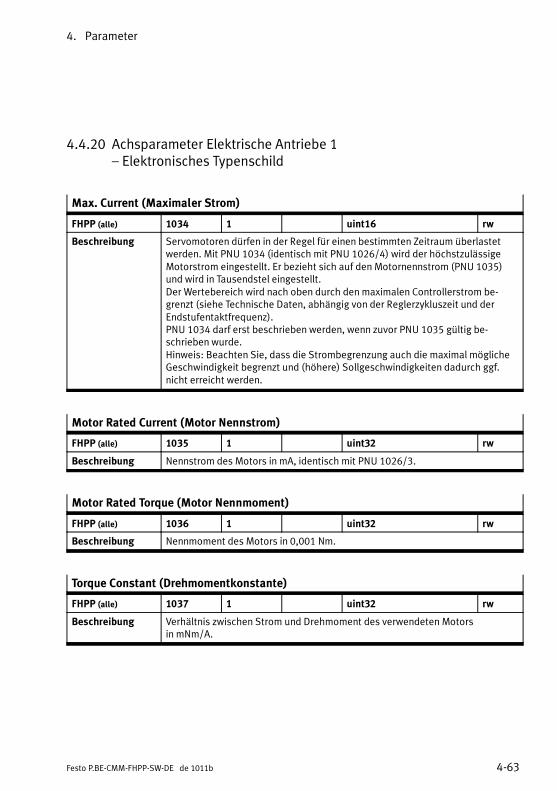
4. Parameter
4-63Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4.20 Achsparameter Elektrische Antriebe 1– Elektronisches Typenschild
Max. Current (Maximaler Strom)
FHPP (alle) 1034 1 uint16 rw
Beschreibung Servomotoren dürfen in der Regel für einen bestimmten Zeitraum überlastetwerden. Mit PNU 1034 (identisch mit PNU 1026/4) wird der höchstzulässigeMotorstrom eingestellt. Er bezieht sich auf den Motornennstrom (PNU 1035)und wird in Tausendstel eingestellt.Der Wertebereich wird nach oben durch den maximalen Controllerstrom be-grenzt (siehe Technische Daten, abhängig von der Reglerzykluszeit und derEndstufentaktfrequenz).PNU 1034 darf erst beschrieben werden, wenn zuvor PNU 1035 gültig be-schrieben wurde.Hinweis: Beachten Sie, dass die Strombegrenzung auch die maximal möglicheGeschwindigkeit begrenzt und (höhere) Sollgeschwindigkeiten dadurch ggf.nicht erreicht werden.
Motor Rated Current (Motor Nennstrom)
FHPP (alle) 1035 1 uint32 rw
Beschreibung Nennstrom des Motors in mA, identisch mit PNU 1026/3.
Motor Rated Torque (Motor Nennmoment)
FHPP (alle) 1036 1 uint32 rw
Beschreibung Nennmoment des Motors in 0,001 Nm.
Torque Constant (Drehmomentkonstante)
FHPP (alle) 1037 1 uint32 rw
Beschreibung Verhältnis zwischen Strom und Drehmoment des verwendeten Motorsin mNm/A.
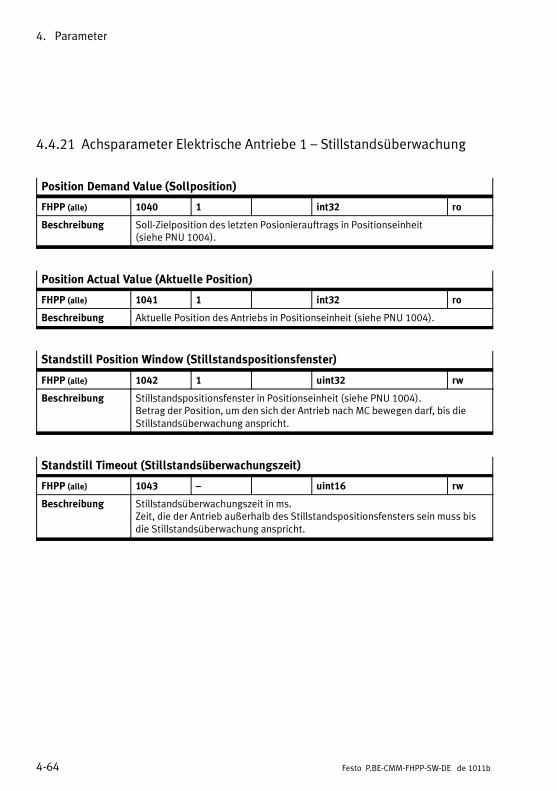
4. Parameter
4-64 Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4.21 Achsparameter Elektrische Antriebe 1 – Stillstandsüberwachung
Position Demand Value (Sollposition)
FHPP (alle) 1040 1 int32 ro
Beschreibung Soll-Zielposition des letzten Posionierauftrags in Positionseinheit(siehe PNU 1004).
Position Actual Value (Aktuelle Position)
FHPP (alle) 1041 1 int32 ro
Beschreibung Aktuelle Position des Antriebs in Positionseinheit (siehe PNU 1004).
Standstill Position Window (Stillstandspositionsfenster)
FHPP (alle) 1042 1 uint32 rw
Beschreibung Stillstandspositionsfenster in Positionseinheit (siehe PNU 1004).Betrag der Position, um den sich der Antrieb nach MC bewegen darf, bis dieStillstandsüberwachung anspricht.
Standstill Timeout (Stillstandsüberwachungszeit)
FHPP (alle) 1043 – uint16 rw
Beschreibung Stillstandsüberwachungszeit in ms.Zeit, die der Antrieb außerhalb des Stillstandspositionsfensters sein muss bisdie Stillstandsüberwachung anspricht.
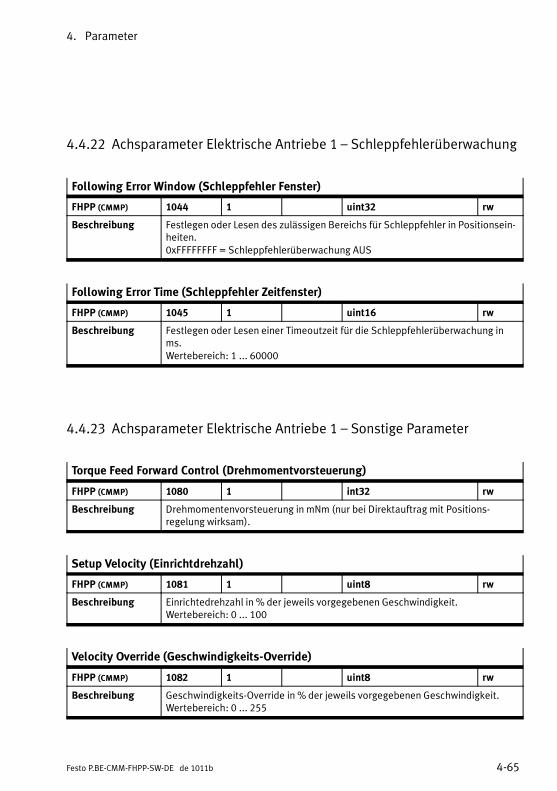
4. Parameter
4-65Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4.22 Achsparameter Elektrische Antriebe 1 – Schleppfehlerüberwachung
Following Error Window (Schleppfehler Fenster)
FHPP (CMMP) 1044 1 uint32 rw
Beschreibung Festlegen oder Lesen des zulässigen Bereichs für Schleppfehler in Positionsein-heiten.0xFFFFFFFF = Schleppfehlerüberwachung AUS
Following Error Time (Schleppfehler Zeitfenster)
FHPP (CMMP) 1045 1 uint16 rw
Beschreibung Festlegen oder Lesen einer Timeoutzeit für die Schleppfehlerüberwachung inms.Wertebereich: 1 ... 60000
4.4.23 Achsparameter Elektrische Antriebe 1 – Sonstige Parameter
Torque Feed Forward Control (Drehmomentvorsteuerung)
FHPP (CMMP) 1080 1 int32 rw
Beschreibung Drehmomentenvorsteuerung in mNm (nur bei Direktauftrag mit Positions-regelung wirksam).
Setup Velocity (Einrichtdrehzahl)
FHPP (CMMP) 1081 1 uint8 rw
Beschreibung Einrichtedrehzahl in % der jeweils vorgegebenen Geschwindigkeit.Wertebereich: 0 ... 100
Velocity Override (Geschwindigkeits-Override)
FHPP (CMMP) 1082 1 uint8 rw
Beschreibung Geschwindigkeits-Override in % der jeweils vorgegebenen Geschwindigkeit.Wertebereich: 0 ... 255
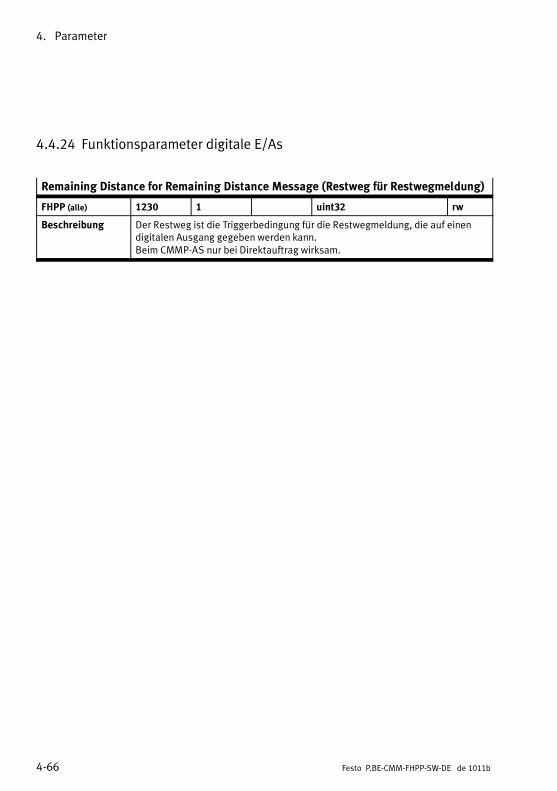
4. Parameter
4-66 Festo P.BE-CMM-FHPP-SW-DE de 1011b
4.4.24 Funktionsparameter digitale E/As
Remaining Distance for Remaining Distance Message (Restweg für Restwegmeldung)
FHPP (alle) 1230 1 uint32 rw
Beschreibung Der Restweg ist die Triggerbedingung für die Restwegmeldung, die auf einendigitalen Ausgang gegeben werden kann.Beim CMMP-AS nur bei Direktauftrag wirksam.

Parametrierung mit FPC
5-1Festo P.BE-CMM-FHPP-SW-DE de 1011b
Kapitel 5
Parametrierung mit FPC

5. Parametrierung mit FPC
5-2 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Inhaltsverzeichnis
5.1 Parametrierung mit FHPP 5-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1.1 Festo Parameterkanal (FPC) für zyklische Daten (E/A-Daten) 5-3. . . .
5.1.2 Auftragskennungen, Antwortkennungen und Fehlernummern 5-5. . .
5.1.3 Regeln für die Auftrags-Antwort-Bearbeitung 5-7. . . . . . . . . . . . . . . . .
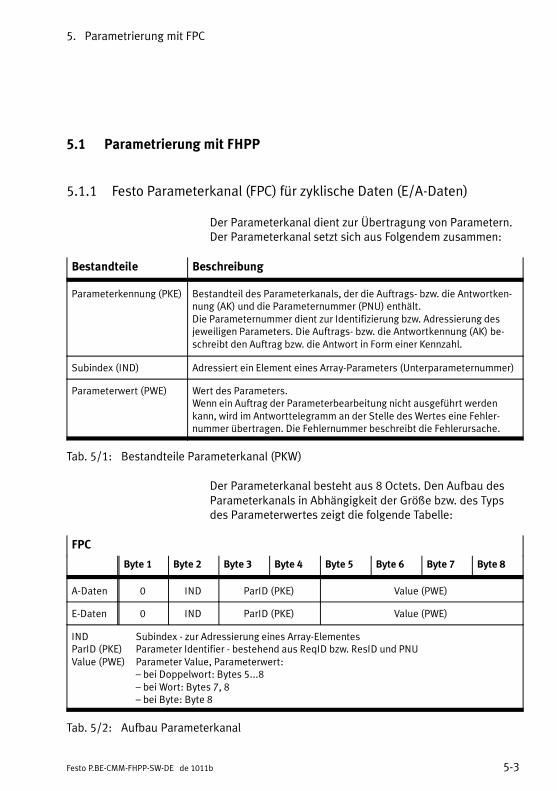
5. Parametrierung mit FPC
5-3Festo P.BE-CMM-FHPP-SW-DE de 1011b
5.1 Parametrierung mit FHPP
5.1.1 Festo Parameterkanal (FPC) für zyklische Daten (E/A-Daten)
Der Parameterkanal dient zur Übertragung von Parametern.Der Parameterkanal setzt sich aus Folgendem zusammen:
Bestandteile Beschreibung
Parameterkennung (PKE) Bestandteil des Parameterkanals, der die Auftrags- bzw. die Antwortken-nung (AK) und die Parameternummer (PNU) enthält.Die Parameternummer dient zur Identifizierung bzw. Adressierung desjeweiligen Parameters. Die Auftrags- bzw. die Antwortkennung (AK) be-schreibt den Auftrag bzw. die Antwort in Form einer Kennzahl.
Subindex (IND) Adressiert ein Element eines Array-Parameters (Unterparameternummer)
Parameterwert (PWE) Wert des Parameters.Wenn ein Auftrag der Parameterbearbeitung nicht ausgeführt werdenkann, wird im Antworttelegramm an der Stelle des Wertes eine Fehler-nummer übertragen. Die Fehlernummer beschreibt die Fehlerursache.
Tab. 5/1: Bestandteile Parameterkanal (PKW)
Der Parameterkanal besteht aus 8 Octets. Den Aufbau desParameterkanals in Abhängigkeit der Größe bzw. des Typsdes Parameterwertes zeigt die folgende Tabelle:
FPC
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
A-Daten 0 IND ParID (PKE) Value (PWE)
E-Daten 0 IND ParID (PKE) Value (PWE)
IND Subindex - zur Adressierung eines Array-ElementesParID (PKE) Parameter Identifier - bestehend aus ReqID bzw. ResID und PNUValue (PWE) Parameter Value, Parameterwert:
– bei Doppelwort: Bytes 5...8– bei Wort: Bytes 7, 8– bei Byte: Byte 8
Tab. 5/2: Aufbau Parameterkanal
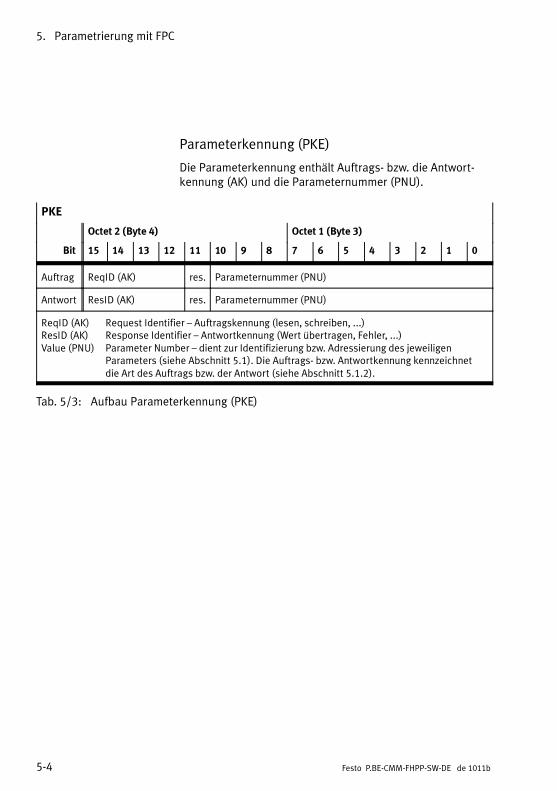
5. Parametrierung mit FPC
5-4 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Parameterkennung (PKE)
Die Parameterkennung enthält Auftrags- bzw. die Antwort-kennung (AK) und die Parameternummer (PNU).
PKE
Octet 2 (Byte 4) Octet 1 (Byte 3)
Bit 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Auftrag ReqID (AK) res. Parameternummer (PNU)
Antwort ResID (AK) res. Parameternummer (PNU)
ReqID (AK) Request Identifier – Auftragskennung (lesen, schreiben, ...)ResID (AK) Response Identifier – Antwortkennung (Wert übertragen, Fehler, ...)Value (PNU) Parameter Number – dient zur Identifizierung bzw. Adressierung des jeweiligen
Parameters (siehe Abschnitt 5.1). Die Auftrags- bzw. Antwortkennung kennzeichnetdie Art des Auftrags bzw. der Antwort (siehe Abschnitt 5.1.2).
Tab. 5/3: Aufbau Parameterkennung (PKE)
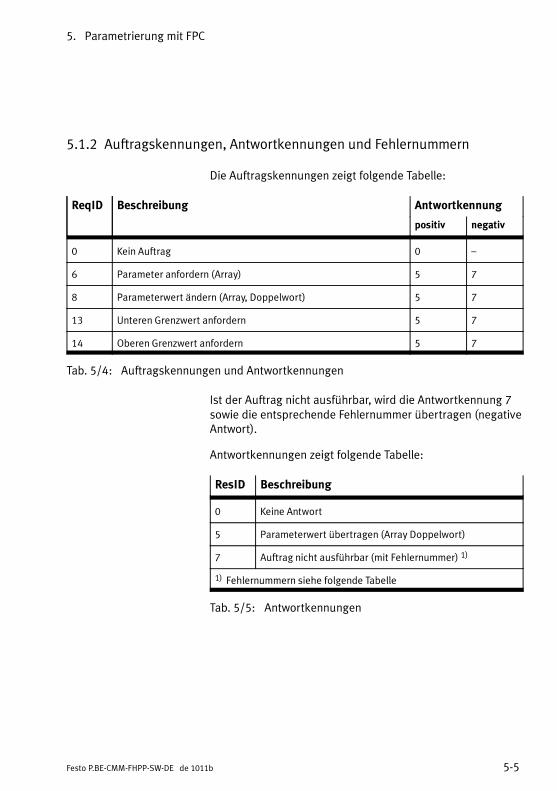
5. Parametrierung mit FPC
5-5Festo P.BE-CMM-FHPP-SW-DE de 1011b
5.1.2 Auftragskennungen, Antwortkennungen und Fehlernummern
Die Auftragskennungen zeigt folgende Tabelle:
ReqID Beschreibung Antwortkennung
positiv negativ
0 Kein Auftrag 0 –
6 Parameter anfordern (Array) 5 7
8 Parameterwert ändern (Array, Doppelwort) 5 7
13 Unteren Grenzwert anfordern 5 7
14 Oberen Grenzwert anfordern 5 7
Tab. 5/4: Auftragskennungen und Antwortkennungen
Ist der Auftrag nicht ausführbar, wird die Antwortkennung 7sowie die entsprechende Fehlernummer übertragen (negativeAntwort).
Antwortkennungen zeigt folgende Tabelle:
ResID Beschreibung
0 Keine Antwort
5 Parameterwert übertragen (Array Doppelwort)
7 Auftrag nicht ausführbar (mit Fehlernummer) 1)
1) Fehlernummern siehe folgende Tabelle
Tab. 5/5: Antwortkennungen
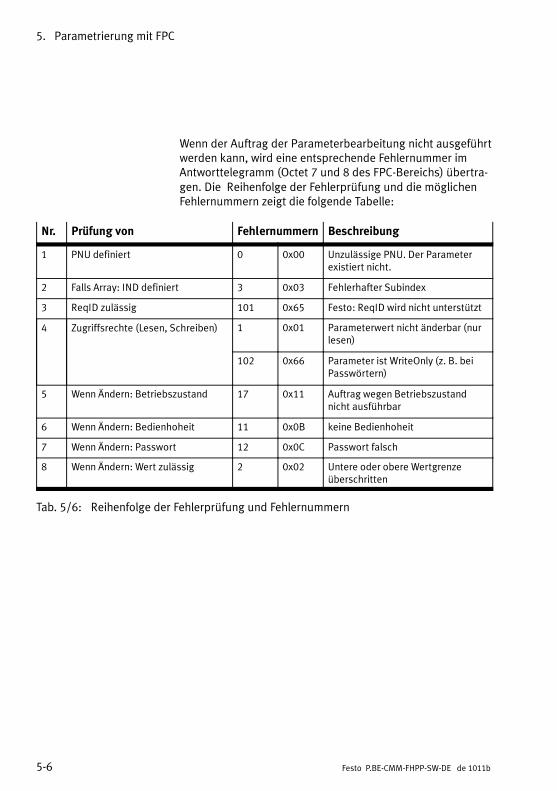
5. Parametrierung mit FPC
5-6 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Wenn der Auftrag der Parameterbearbeitung nicht ausgeführtwerden kann, wird eine entsprechende Fehlernummer imAntworttelegramm (Octet 7 und 8 des FPC-Bereichs) übertra-gen. Die Reihenfolge der Fehlerprüfung und die möglichenFehlernummern zeigt die folgende Tabelle:
Nr. Prüfung von Fehlernummern Beschreibung
1 PNU definiert 0 0x00 Unzulässige PNU. Der Parameterexistiert nicht.
2 Falls Array: IND definiert 3 0x03 Fehlerhafter Subindex
3 ReqID zulässig 101 0x65 Festo: ReqID wird nicht unterstützt
4 Zugriffsrechte (Lesen, Schreiben) 1 0x01 Parameterwert nicht änderbar (nurlesen)
102 0x66 Parameter ist WriteOnly (z. B. beiPasswörtern)
5 Wenn Ändern: Betriebszustand 17 0x11 Auftrag wegen Betriebszustandnicht ausführbar
6 Wenn Ändern: Bedienhoheit 11 0x0B keine Bedienhoheit
7 Wenn Ändern: Passwort 12 0x0C Passwort falsch
8 Wenn Ändern: Wert zulässig 2 0x02 Untere oder obere Wertgrenzeüberschritten
Tab. 5/6: Reihenfolge der Fehlerprüfung und Fehlernummern
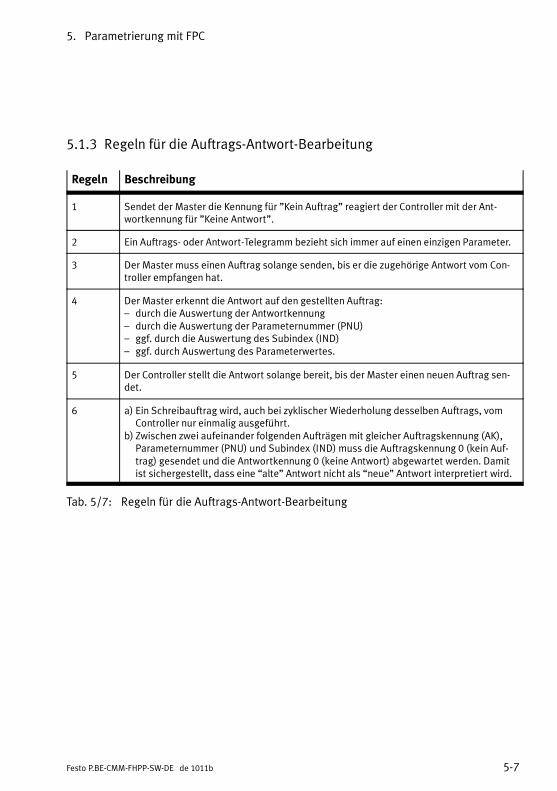
5. Parametrierung mit FPC
5-7Festo P.BE-CMM-FHPP-SW-DE de 1011b
5.1.3 Regeln für die Auftrags-Antwort-Bearbeitung
Regeln Beschreibung
1 Sendet der Master die Kennung für ”Kein Auftrag” reagiert der Controller mit der Ant-wortkennung für ”Keine Antwort”.
2 Ein Auftrags- oder Antwort-Telegramm bezieht sich immer auf einen einzigen Parameter.
3 Der Master muss einen Auftrag solange senden, bis er die zugehörige Antwort vom Con-troller empfangen hat.
4 Der Master erkennt die Antwort auf den gestellten Auftrag:– durch die Auswertung der Antwortkennung– durch die Auswertung der Parameternummer (PNU)– ggf. durch die Auswertung des Subindex (IND)– ggf. durch Auswertung des Parameterwertes.
5 Der Controller stellt die Antwort solange bereit, bis der Master einen neuen Auftrag sen-det.
6 a) Ein Schreibauftrag wird, auch bei zyklischer Wiederholung desselben Auftrags, vomController nur einmalig ausgeführt.
b) Zwischen zwei aufeinander folgenden Aufträgen mit gleicher Auftragskennung (AK),Parameternummer (PNU) und Subindex (IND) muss die Auftragskennung 0 (kein Auf-trag) gesendet und die Antwortkennung 0 (keine Antwort) abgewartet werden. Damitist sichergestellt, dass eine “alte” Antwort nicht als “neue” Antwort interpretiert wird.
Tab. 5/7: Regeln für die Auftrags-Antwort-Bearbeitung
5. Parametrierung mit FPC
5-8 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Ablauf der Parameter-Bearbeitung
VorsichtBeachten Sie beim Ändern von Parametern:Ein FHPP-Steuersignal, das sich auf einen geänderten Pa-rameter beziehen soll, darf erst dann erfolgen, wenn zumentsprechenden Parameter und ggf. Index die Antwortken-nung “Parameterwert übertragen“ eingetroffen ist.
Soll z. B. ein Positionswert in einem Positionsregister geän-dert und anschließend auf diese Position verfahren werden,darf der Fahrbefehl erst dann erfolgen, wenn der Controllerdie Änderung des Positionsregisters abgeschlossen und be-stätigt hat.
VorsichtUm sicherzustellen, dass eine “alte” Antwort nicht als“neue” Antwort interpretiert werden kann, muss zwischenzwei aufeinander folgenden Aufträgen mit gleicher Auf-tragskennung (AK), Parameternummer (PNU) und Subin-dex (IND) die Auftragskennung 0 (kein Auftrag) gesendetund die Antwortkennung 0 (keine Antwort) abgewartetwerden.
Fehlerauswertung
Bei nicht ausführbaren Aufträgen antwortet der Slave wiefolgt:
– Ausgabe von Antwortkennung = 7
– Ausgabe einer Fehlernummer in Byte 7 und 8 des Parame-terkanals (FPC).
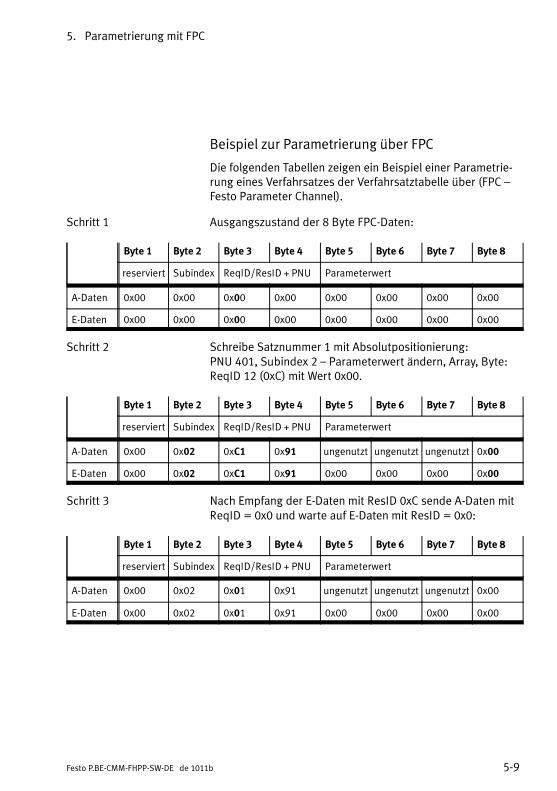
5. Parametrierung mit FPC
5-9Festo P.BE-CMM-FHPP-SW-DE de 1011b
Beispiel zur Parametrierung über FPC
Die folgenden Tabellen zeigen ein Beispiel einer Parametrie-rung eines Verfahrsatzes der Verfahrsatztabelle über (FPC –Festo Parameter Channel).
Schritt 1 Ausgangszustand der 8 Byte FPC-Daten:
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
reserviert Subindex ReqID/ResID + PNU Parameterwert
A-Daten 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
E-Daten 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
Schritt 2 Schreibe Satznummer 1 mit Absolutpositionierung:PNU 401, Subindex 2 – Parameterwert ändern, Array, Byte:ReqID 12 (0xC) mit Wert 0x00.
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
reserviert Subindex ReqID/ResID + PNU Parameterwert
A-Daten 0x00 0x02 0xC1 0x91 ungenutzt ungenutzt ungenutzt 0x00
E-Daten 0x00 0x02 0xC1 0x91 0x00 0x00 0x00 0x00
Schritt 3 Nach Empfang der E-Daten mit ResID 0xC sende A-Daten mitReqID = 0x0 und warte auf E-Daten mit ResID = 0x0:
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
reserviert Subindex ReqID/ResID + PNU Parameterwert
A-Daten 0x00 0x02 0x01 0x91 ungenutzt ungenutzt ungenutzt 0x00
E-Daten 0x00 0x02 0x01 0x91 0x00 0x00 0x00 0x00
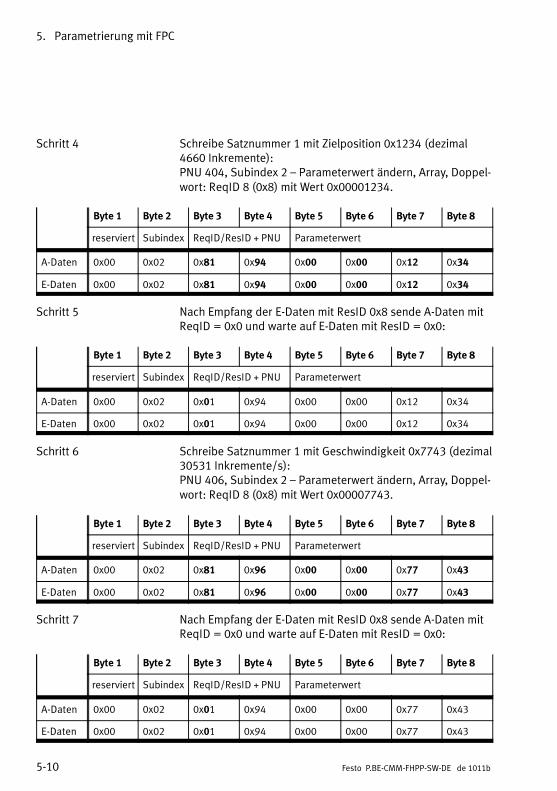
5. Parametrierung mit FPC
5-10 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Schritt 4 Schreibe Satznummer 1 mit Zielposition 0x1234 (dezimal4660 Inkremente):PNU 404, Subindex 2 – Parameterwert ändern, Array, Doppel-wort: ReqID 8 (0x8) mit Wert 0x00001234.
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
reserviert Subindex ReqID/ResID + PNU Parameterwert
A-Daten 0x00 0x02 0x81 0x94 0x00 0x00 0x12 0x34
E-Daten 0x00 0x02 0x81 0x94 0x00 0x00 0x12 0x34
Schritt 5 Nach Empfang der E-Daten mit ResID 0x8 sende A-Daten mitReqID = 0x0 und warte auf E-Daten mit ResID = 0x0:
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
reserviert Subindex ReqID/ResID + PNU Parameterwert
A-Daten 0x00 0x02 0x01 0x94 0x00 0x00 0x12 0x34
E-Daten 0x00 0x02 0x01 0x94 0x00 0x00 0x12 0x34
Schritt 6 Schreibe Satznummer 1 mit Geschwindigkeit 0x7743 (dezimal30531 Inkremente/s):PNU 406, Subindex 2 – Parameterwert ändern, Array, Doppel-wort: ReqID 8 (0x8) mit Wert 0x00007743.
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
reserviert Subindex ReqID/ResID + PNU Parameterwert
A-Daten 0x00 0x02 0x81 0x96 0x00 0x00 0x77 0x43
E-Daten 0x00 0x02 0x81 0x96 0x00 0x00 0x77 0x43
Schritt 7 Nach Empfang der E-Daten mit ResID 0x8 sende A-Daten mitReqID = 0x0 und warte auf E-Daten mit ResID = 0x0:
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
reserviert Subindex ReqID/ResID + PNU Parameterwert
A-Daten 0x00 0x02 0x01 0x94 0x00 0x00 0x77 0x43
E-Daten 0x00 0x02 0x01 0x94 0x00 0x00 0x77 0x43

Technischer Anhang
A-1Festo P.BE-CMM-FHPP-SW-DE de 1011b
Anhang A
Technischer Anhang

A. Technischer Anhang
A-2 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Inhaltsverzeichnis
A.1 Umrechnungsfaktoren (Factor Group) A-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.1 Übersicht A-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.2 Objekte der Factor Group A-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.3 Berechnung der Positionseinheiten A-6. . . . . . . . . . . . . . . . . . . . . . . . .
A.1.4 Berechnung der Geschwindigkeitseinheiten A-9. . . . . . . . . . . . . . . . . .
A.1.5 Berechnung der Beschleunigungseinheiten A-13. . . . . . . . . . . . . . . . . .
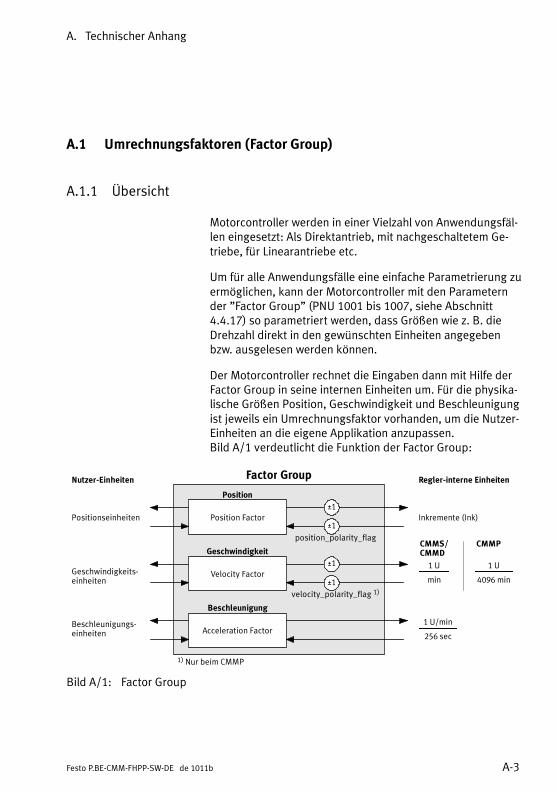
A. Technischer Anhang
A-3Festo P.BE-CMM-FHPP-SW-DE de 1011b
A.1 Umrechnungsfaktoren (Factor Group)
A.1.1 Übersicht
Motorcontroller werden in einer Vielzahl von Anwendungsfäl-len eingesetzt: Als Direktantrieb, mit nachgeschaltetem Ge-triebe, für Linearantriebe etc.
Um für alle Anwendungsfälle eine einfache Parametrierung zuermöglichen, kann der Motorcontroller mit den Parameternder ”Factor Group” (PNU 1001 bis 1007, siehe Abschnitt4.4.17) so parametriert werden, dass Größen wie z. B. dieDrehzahl direkt in den gewünschten Einheiten angegebenbzw. ausgelesen werden können.
Der Motorcontroller rechnet die Eingaben dann mit Hilfe derFactor Group in seine internen Einheiten um. Für die physika-lische Größen Position, Geschwindigkeit und Beschleunigungist jeweils ein Umrechnungsfaktor vorhanden, um die Nutzer-Einheiten an die eigene Applikation anzupassen.Bild A/1 verdeutlicht die Funktion der Factor Group:
Position Factor
Position
Factor GroupNutzer-Einheiten Regler-interne Einheiten
Positionseinheiten
Geschwindigkeits-einheiten
±1
position_polarity_flag
Beschleunigungs-einheiten
±1
Velocity Factor
Geschwindigkeit
±1
velocity_polarity_flag 1)
±1
Acceleration Factor
Beschleunigung
Inkremente (Ink)
1 U
min
1 U/min
256 sec
1 U
4096 min
CMMS/CMMD
CMMP
1) Nur beim CMMP
Bild A/1: Factor Group
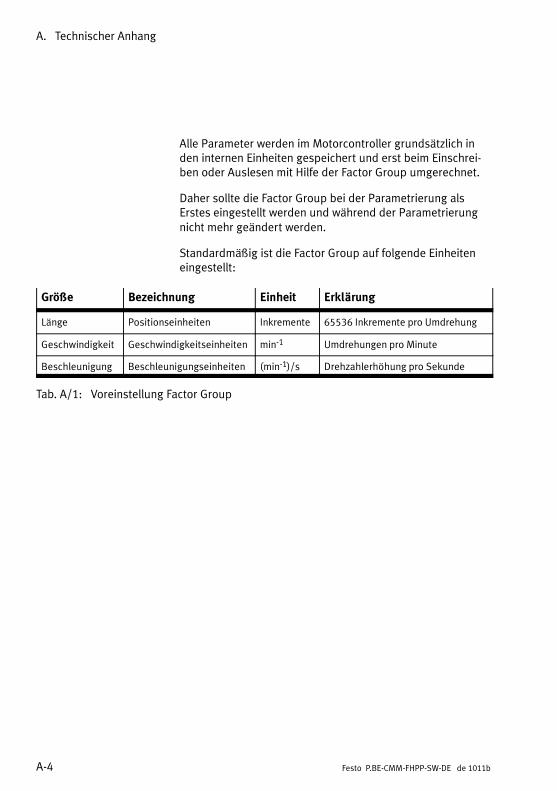
A. Technischer Anhang
A-4 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Alle Parameter werden im Motorcontroller grundsätzlich inden internen Einheiten gespeichert und erst beim Einschrei-ben oder Auslesen mit Hilfe der Factor Group umgerechnet.
Daher sollte die Factor Group bei der Parametrierung alsErstes eingestellt werden und während der Parametrierungnicht mehr geändert werden.
Standardmäßig ist die Factor Group auf folgende Einheiteneingestellt:
Größe Bezeichnung Einheit Erklärung
Länge Positionseinheiten Inkremente 65536 Inkremente pro Umdrehung
Geschwindigkeit Geschwindigkeitseinheiten min-1 Umdrehungen pro Minute
Beschleunigung Beschleunigungseinheiten (min-1)/s Drehzahlerhöhung pro Sekunde
Tab. A/1: Voreinstellung Factor Group
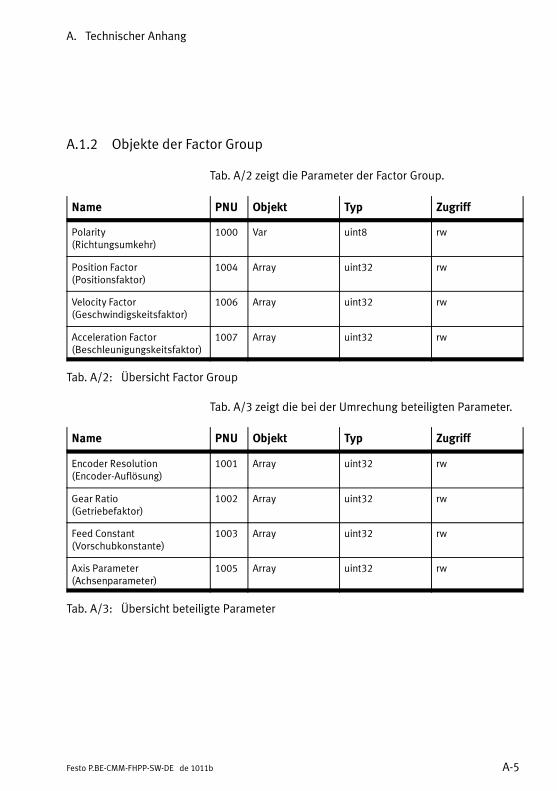
A. Technischer Anhang
A-5Festo P.BE-CMM-FHPP-SW-DE de 1011b
A.1.2 Objekte der Factor Group
Tab. A/2 zeigt die Parameter der Factor Group.
Name PNU Objekt Typ Zugriff
Polarity(Richtungsumkehr)
1000 Var uint8 rw
Position Factor(Positionsfaktor)
1004 Array uint32 rw
Velocity Factor(Geschwindigskeitsfaktor)
1006 Array uint32 rw
Acceleration Factor(Beschleunigungskeitsfaktor)
1007 Array uint32 rw
Tab. A/2: Übersicht Factor Group
Tab. A/3 zeigt die bei der Umrechung beteiligten Parameter.
Name PNU Objekt Typ Zugriff
Encoder Resolution(Encoder-Auflösung)
1001 Array uint32 rw
Gear Ratio(Getriebefaktor)
1002 Array uint32 rw
Feed Constant(Vorschubkonstante)
1003 Array uint32 rw
Axis Parameter(Achsenparameter)
1005 Array uint32 rw
Tab. A/3: Übersicht beteiligte Parameter
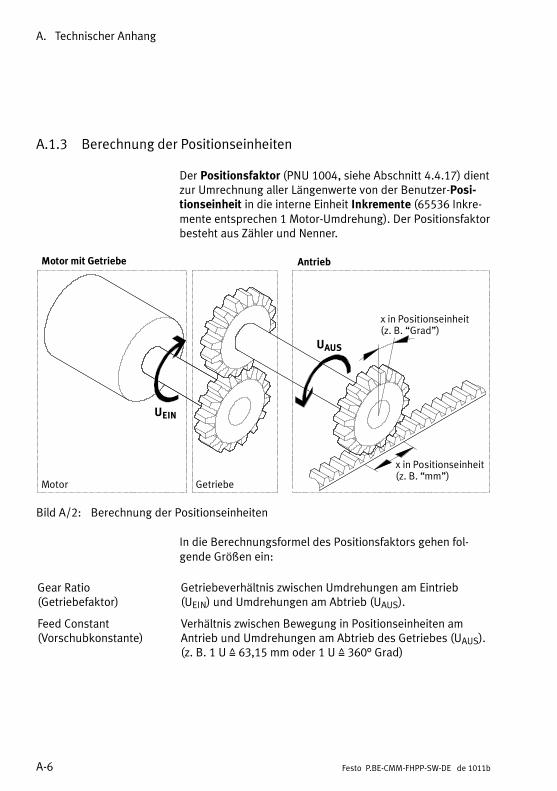
A. Technischer Anhang
A-6 Festo P.BE-CMM-FHPP-SW-DE de 1011b
A.1.3 Berechnung der Positionseinheiten
Der Positionsfaktor (PNU 1004, siehe Abschnitt 4.4.17) dientzur Umrechnung aller Längenwerte von der Benutzer-Posi-tionseinheit in die interne Einheit Inkremente (65536 Inkre-mente entsprechen 1 Motor-Umdrehung). Der Positionsfaktorbesteht aus Zähler und Nenner.
Motor Getriebe
AntriebMotor mit Getriebe
UEIN
UAUS
x in Positionseinheit(z. B. “mm”)
x in Positionseinheit(z. B. “Grad”)
Bild A/2: Berechnung der Positionseinheiten
In die Berechnungsformel des Positionsfaktors gehen fol-gende Größen ein:
Gear Ratio(Getriebefaktor)
Getriebeverhältnis zwischen Umdrehungen am Eintrieb(UEIN) und Umdrehungen am Abtrieb (UAUS).
Feed Constant(Vorschubkonstante)
Verhältnis zwischen Bewegung in Positionseinheiten amAntrieb und Umdrehungen am Abtrieb des Getriebes (UAUS).(z. B. 1 U Z 63,15 mm oder 1 U Z 360° Grad)
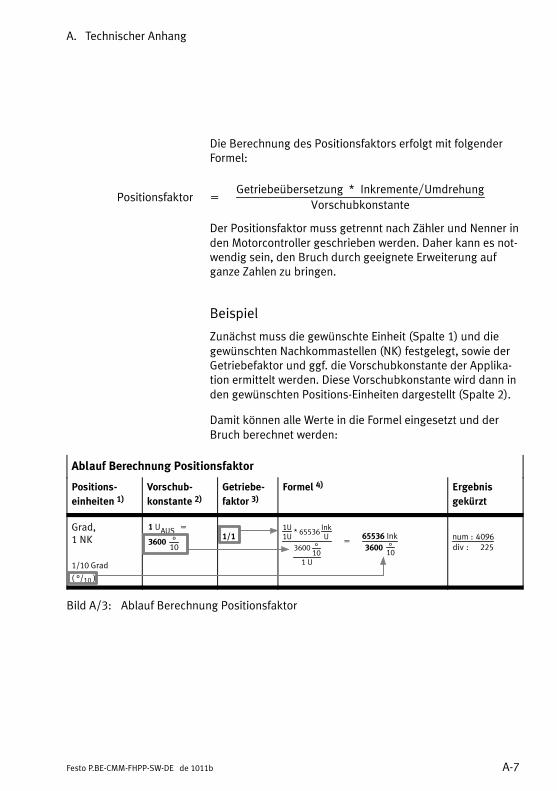
A. Technischer Anhang
A-7Festo P.BE-CMM-FHPP-SW-DE de 1011b
Die Berechnung des Positionsfaktors erfolgt mit folgenderFormel:
Positionsfaktor =
Getriebeübersetzung * Inkremente�UmdrehungVorschubkonstante
Der Positionsfaktor muss getrennt nach Zähler und Nenner inden Motorcontroller geschrieben werden. Daher kann es not-wendig sein, den Bruch durch geeignete Erweiterung aufganze Zahlen zu bringen.
Beispiel
Zunächst muss die gewünschte Einheit (Spalte 1) und diegewünschten Nachkommastellen (NK) festgelegt, sowie derGetriebefaktor und ggf. die Vorschubkonstante der Applika-tion ermittelt werden. Diese Vorschubkonstante wird dann inden gewünschten Positions-Einheiten dargestellt (Spalte 2).
Damit können alle Werte in die Formel eingesetzt und derBruch berechnet werden:
Ablauf Berechnung Positionsfaktor
Positions-
einheiten 1)
Vorschub-
konstante 2)
Getriebe-
faktor 3)Formel 4) Ergebnis
gekürzt
Grad,1 NK
1/10 Grad
( °/10 )
1 UAUS
=
3600 °10
1/11U1U
* 65536InkU
3600 °10
1 U
=
65536 Ink
3600 °10
num : 4096div : 225
Bild A/3: Ablauf Berechnung Positionsfaktor
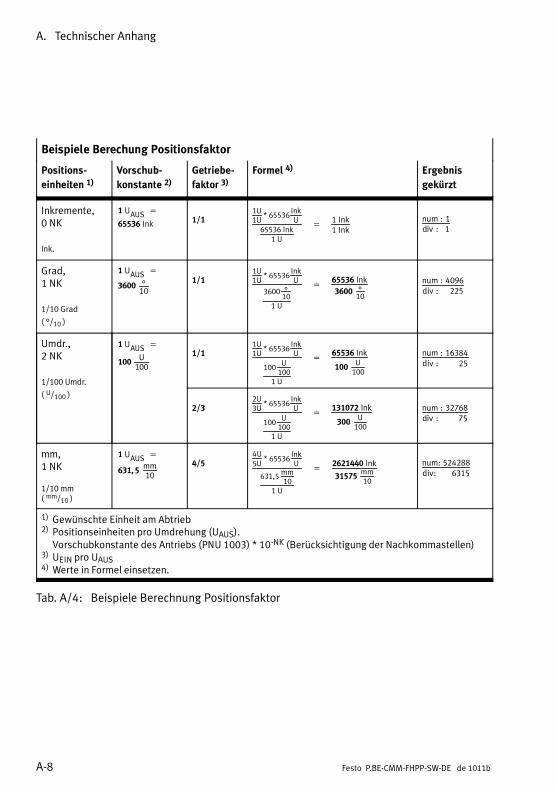
A. Technischer Anhang
A-8 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Beispiele Berechung Positionsfaktor
Positions-
einheiten 1)
Vorschub-
konstante 2)
Getriebe-
faktor 3)Formel 4) Ergebnis
gekürzt
Inkremente,0 NK
Ink.
1 UAUS
=
65536 Ink 1/11U1U
* 65536InkU
65536 Ink
1 U
=1 Ink1 Ink
num : 1div : 1
Grad,1 NK
1/10 Grad
( °/10 )
1 UAUS
=
3600 °10
1/11U1U
* 65536InkU
3600 °10
1 U
=
65536 Ink
3600 °10
num : 4096div : 225
Umdr.,2 NK
1/100 Umdr.
( U/100 )
1 UAUS
=
100U100
1/11U1U
* 65536InkU
100U100
1 U
=
65536 Ink
100U100
num : 16384div : 25
2/32U3U
* 65536InkU
100U100
1 U
=
131072 Ink
300U100
num : 32768div : 75
mm,1 NK
1/10 mm( mm/10 )
1 UAUS
=
631,5mm10
4/54U
5U* 65536
InkU
631,5mm10
1 U
=
2621440 Ink
31575mm10
num: 524288div: 6315
1) Gewünschte Einheit am Abtrieb2) Positionseinheiten pro Umdrehung (UAUS).
Vorschubkonstante des Antriebs (PNU 1003) * 10-NK (Berücksichtigung der Nachkommastellen)3) UEIN pro UAUS4) Werte in Formel einsetzen.
Tab. A/4: Beispiele Berechnung Positionsfaktor

A. Technischer Anhang
A-9Festo P.BE-CMM-FHPP-SW-DE de 1011b
A.1.4 Berechnung der Geschwindigkeitseinheiten
Der Geschwindigkeitsfaktor (PNU 1006, siehe Abschnitt4.4.17) dient zur Umrechnung aller Geschwindigkeitswertevon der Benutzer-Geschwindigkeitseinheit in die interneEinheit:
– beim CMMS/CMMD: Umdrehungen pro Minute,
– beim CMMP-AS: Umdrehungen pro 4096 Minuten.
Der Geschwindigkeitsfaktor besteht aus Zähler und Nenner.
Die Berechnung des Geschwindigkeitsfaktors setzt sich auszwei Teilen zusammen: Einem Umrechnungsfaktor von inter-nen Längeneinheiten in Benutzer-Positionseinheiten und ei-nem Umrechnungsfaktor von internen Zeiteinheiten in benut-zerdefinierte Zeiteinheiten (z. B. von Sekunden in Minuten).Der erste Teil entspricht der Berechnung des Positionsfaktors,für den zweiten Teil kommt ein zusätzlicher Faktor hinzu:
Zeitfaktor_v Verhältnis zwischen interner Zeiteinheit und benutzerdefi-nierter Zeiteinheit:(z. B. beim CMMS 1 min = 1/4096 4096 min)
Gear Ratio(Getriebefaktor)
Getriebeverhältnis zwischen Umdrehungen am Eintrieb(UEIN) und Umdrehungen am Abtrieb (UAUS).
Feed Constant(Vorschubkonstante)
Verhältnis zwischen Bewegung in Positionseinheiten amAntrieb und Umdrehungen am Abtrieb des Getriebes (UAUS).(z. B. 1 U Z 63,15 mm oder 1 U Z 360° Grad)
Die Berechnung des Geschwindigkeitsfaktors erfolgt mit fol-gender Formel:
Geschwindigkeitsfaktor =
Getriebeübersetzung * Zeitfaktor_vVorschubkonstante
Wie der Positionsfaktor muss auch der Geschwindigkeitsfak-tor getrennt nach Zähler und Nenner in den Motorcontrollergeschrieben werden. Daher kann es notwendig sein, denBruch durch geeignete Erweiterung auf ganze Zahlen zu brin-gen.
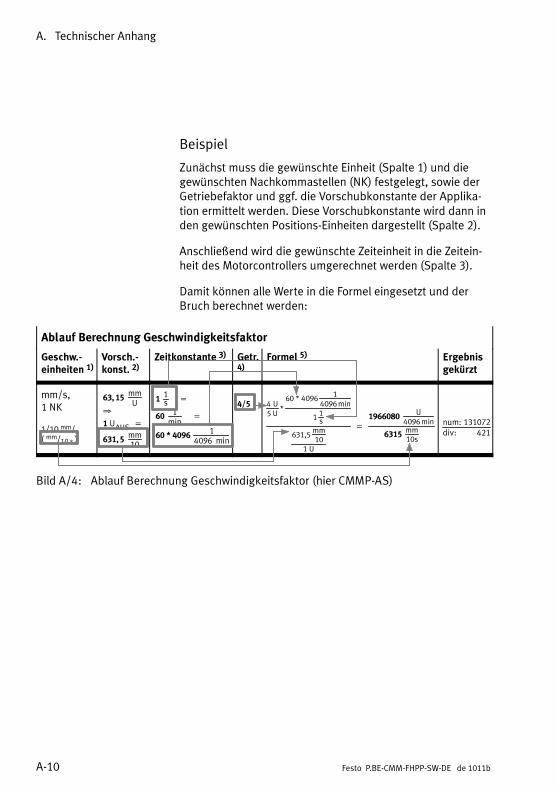
A. Technischer Anhang
A-10 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Beispiel
Zunächst muss die gewünschte Einheit (Spalte 1) und diegewünschten Nachkommastellen (NK) festgelegt, sowie derGetriebefaktor und ggf. die Vorschubkonstante der Applika-tion ermittelt werden. Diese Vorschubkonstante wird dann inden gewünschten Positions-Einheiten dargestellt (Spalte 2).
Anschließend wird die gewünschte Zeiteinheit in die Zeitein-heit des Motorcontrollers umgerechnet werden (Spalte 3).
Damit können alle Werte in die Formel eingesetzt und derBruch berechnet werden:
Ablauf Berechnung Geschwindigkeitsfaktor
Geschw.-einheiten 1)
Vorsch.-konst. 2)
Zeitkonstante 3) Getr.4)
Formel 5) Ergebnisgekürzt
mm/s,1 NK
1/10 mm/s( mm/10 s )
63,15mmU
⇒
1 UAUS
=
631,5mm10
11s =
60 1min
=
60 * 40961
4096 min
4/5 4 U
5 U*
60 * 40961
4096min
11s
631,5mm10
1 U
=
1966080U
4096min
6315mm10s
num: 131072div: 421
Bild A/4: Ablauf Berechnung Geschwindigkeitsfaktor (hier CMMP-AS)
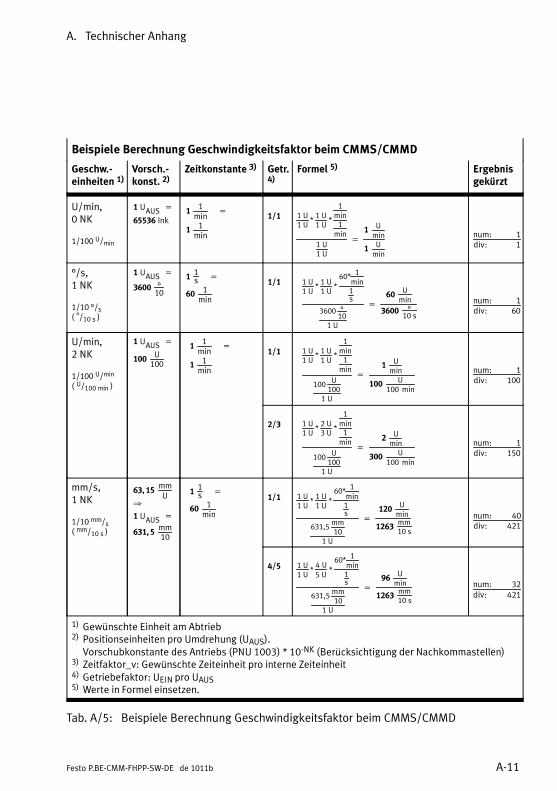
A. Technischer Anhang
A-11Festo P.BE-CMM-FHPP-SW-DE de 1011b
Beispiele Berechnung Geschwindigkeitsfaktor beim CMMS/CMMD
Geschw.-einheiten 1)
Vorsch.-konst. 2)
Zeitkonstante 3) Getr.4)
Formel 5) Ergebnisgekürzt
U/min,0 NK
1/100 U/min
1 UAUS
=
65536 Ink1
1min
=
1 1min
1/1 1 U1 U
*1 U1 U
*
1
min1
min
1 U1 U
=
1 U
min
1 U
min
num: 1div: 1
°/s,1 NK
1/10 °/s( °/10 s )
1 UAUS
=
3600 °10
11s =
60 1min
1/1 1 U1 U
*1 U1 U
*
60*1
min1s
3600 °10
1 U
=
60U
min
3600 °10 s
num: 1div: 60
U/min,2 NK
1/100 U/min
( U/100 min )
1 UAUS
=
100U100
11
min=
1 1min
1/1 1 U1 U
*1 U1 U
*
1
min1
min
100U100
1 U
=
1 U
min
100 U
100 min
num: 1div: 100
2/3 1 U1 U
*2 U3 U
*
1
min1
min
100U100
1 U
=
2 U
min
300 U
100 min
num: 1div: 150
mm/s,1 NK
1/10 mm/s( mm/10 s )
63,15mmU
⇒
1 UAUS
=
631,5mm10
11s =
60 1min
1/1 1 U1 U
*1 U1 U
*
60*1
min1s
631,5mm10
1 U
=
120U
min
1263mm10 s
num: 40div: 421
4/5 1 U1 U
*4 U
5 U*
60*1
min1s
631,5mm10
1 U
=
96U
min
1263mm10 s
num: 32div: 421
1) Gewünschte Einheit am Abtrieb2) Positionseinheiten pro Umdrehung (UAUS).
Vorschubkonstante des Antriebs (PNU 1003) * 10-NK (Berücksichtigung der Nachkommastellen)3) Zeitfaktor_v: Gewünschte Zeiteinheit pro interne Zeiteinheit4) Getriebefaktor: UEIN pro UAUS5) Werte in Formel einsetzen.
Tab. A/5: Beispiele Berechnung Geschwindigkeitsfaktor beim CMMS/CMMD
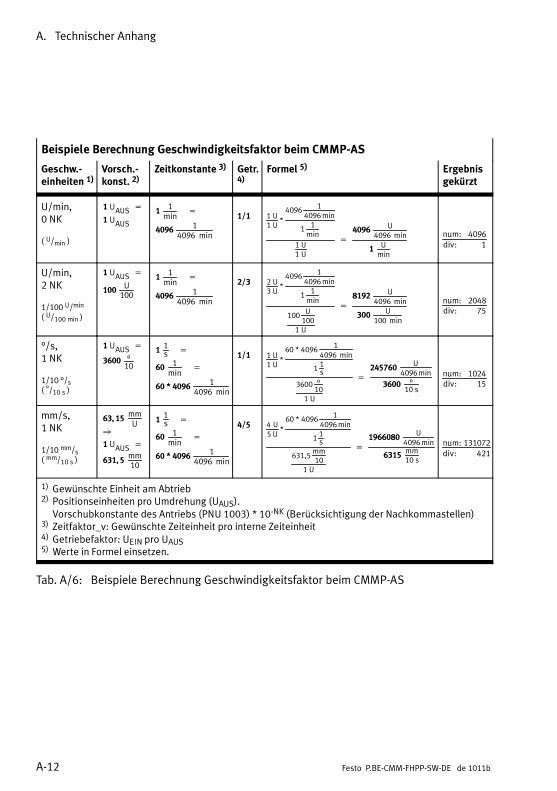
A. Technischer Anhang
A-12 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Beispiele Berechnung Geschwindigkeitsfaktor beim CMMP-AS
Geschw.-einheiten 1)
Vorsch.-konst. 2)
Zeitkonstante 3) Getr.4)
Formel 5) Ergebnisgekürzt
U/min,0 NK
( U/min )
1 UAUS
=
1 UAUS
11
min=
4096 14096 min
1/1 1 U1 U
*
40961
4096min
11
min
1 U1 U
=
4096 U
4096 min
1 U
min
num: 4096div: 1
U/min,2 NK
1/100 U/min
( U/100 min )
1 UAUS
=
100U100
11
min=
4096 14096 min
2/3 2 U3 U
*
40961
4096min
11
min
100U100
1 U
=
8192 U
4096 min
300 U
100 min
num: 2048div: 75
°/s,1 NK
1/10 °/s( °/10 s )
1 UAUS
=
3600 °10
11s =
60 1min
=
60 * 40961
4096 min
1/1 1 U1 U
*
60 * 40961
4096 min
11s
3600 °10
1 U
=
245760U
4096min
3600 °10 s
num: 1024div: 15
mm/s,1 NK
1/10 mm/s( mm/10 s )
63,15mmU
⇒
1 UAUS
=
631,5mm10
11s =
60 1min
=
60 * 40961
4096 min
4/5 4 U
5 U*
60 * 40961
4096min
11s
631,5mm10
1 U
=
1966080U
4096min
6315mm10 s
num: 131072div: 421
1) Gewünschte Einheit am Abtrieb2) Positionseinheiten pro Umdrehung (UAUS).
Vorschubkonstante des Antriebs (PNU 1003) * 10-NK (Berücksichtigung der Nachkommastellen)3) Zeitfaktor_v: Gewünschte Zeiteinheit pro interne Zeiteinheit4) Getriebefaktor: UEIN pro UAUS5) Werte in Formel einsetzen.
Tab. A/6: Beispiele Berechnung Geschwindigkeitsfaktor beim CMMP-AS
A. Technischer Anhang
A-13Festo P.BE-CMM-FHPP-SW-DE de 1011b
A.1.5 Berechnung der Beschleunigungseinheiten
Der Beschleunigungsfaktor (PNU 1007, siehe Abschnitt4.4.17) dient zur Umrechnung aller Beschleunigungswertevon der Benutzer-Beschleunigungseinheit in die interne Ein-heit Umdrehungen pro Minuten pro 256 Sekunden.Der Geschwindigkeitsfaktor besteht aus Zähler und Nenner.
Die Berechnung des Beschleunigungsfaktors setzt sich eben-falls aus zwei Teilen zusammen: Einem Umrechnungsfaktorvon internen Längeneinheiten in Benutzer-Positionseinheitenund einem Umrechnungsfaktor von internen Zeiteinheitenzum Quadrat in benutzerdefinierte Zeiteinheiten zum Quadrat(z. B. von Sekunden2 in Minuten2). Der erste Teil entsprichtder Berechnung des Positionsfaktors, für den zweiten Teilkommt ein zusätzlicher Faktor hinzu:
Zeitfaktor_a Verhältnis zwischen interner Zeiteinheit zum Quadrat undbenutzerdefinierter Zeiteinheit zum Quadrat(z. B. 1 min2 = 1 min * 1 min = 60 s * 1 min = 60/256 min * s).
Gear Ratio(Getriebefaktor)
Getriebeverhältnis zwischen Umdrehungen am Eintrieb(UEIN) und Umdrehungen am Abtrieb (UAUS).
Feed Constant(Vorschubkonstante)
Verhältnis zwischen Bewegung in Positionseinheiten amAntrieb und Umdrehungen am Abtrieb des Getriebes (UAUS).(z. B. 1 U Z 63,15 mm oder 1 U Z 360° Grad)
Die Berechnung des Beschleunigungsfaktors erfolgt mit fol-gender Formel:
Beschleunigungsfaktor =
Getriebeübersetzung * Zeitfaktor_aVorschubkonstante
Wie der Positions- und der Geschwindigkeitsfaktor muss auchder Beschleunigungsfaktor getrennt nach Zähler und Nennerin den Motorcontroller geschrieben werden. Daher kann esnotwendig sein, den Bruch durch geeignete Erweiterung aufganze Zahlen zu bringen.
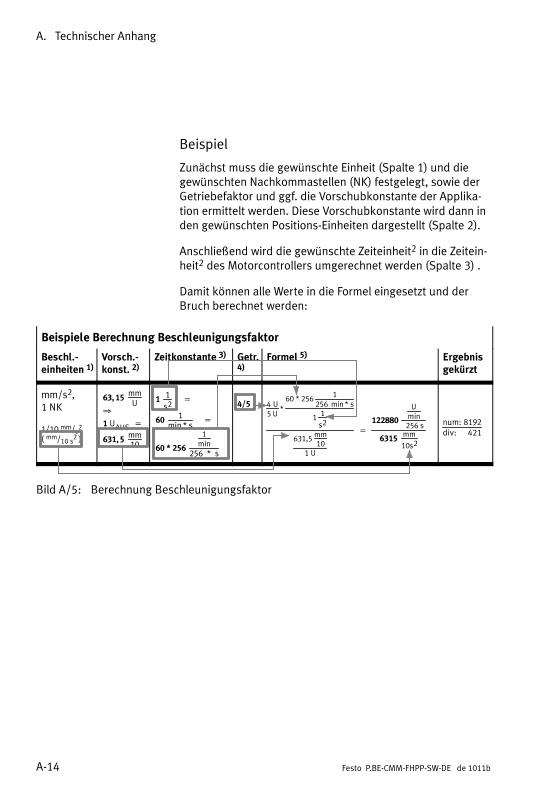
A. Technischer Anhang
A-14 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Beispiel
Zunächst muss die gewünschte Einheit (Spalte 1) und diegewünschten Nachkommastellen (NK) festgelegt, sowie derGetriebefaktor und ggf. die Vorschubkonstante der Applika-tion ermittelt werden. Diese Vorschubkonstante wird dann inden gewünschten Positions-Einheiten dargestellt (Spalte 2).
Anschließend wird die gewünschte Zeiteinheit2 in die Zeitein-heit2 des Motorcontrollers umgerechnet werden (Spalte 3) .
Damit können alle Werte in die Formel eingesetzt und derBruch berechnet werden:
Beispiele Berechnung Beschleunigungsfaktor
Beschl.-einheiten 1)
Vorsch.-konst. 2)
Zeitkonstante 3) Getr.4)
Formel 5) Ergebnisgekürzt
mm/s2,1 NK
1/10 mm/s2
( mm/10 s2 )
63,15mmU
⇒
1 UAUS
=
631,5mm10
11
s2=
601
min * s=
60 * 256
1
min
256 * s
4/5 4 U
5 U*
60 * 2561
256 min * s
11
s2
631,5mm10
1 U
=
122880
U
min256 s
6315mm
10s2
num: 8192div: 421
Bild A/5: Berechnung Beschleunigungsfaktor
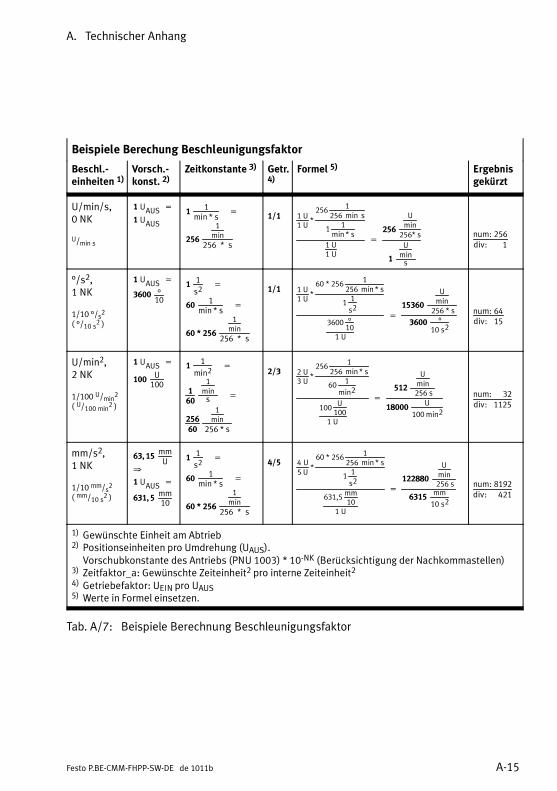
A. Technischer Anhang
A-15Festo P.BE-CMM-FHPP-SW-DE de 1011b
Beispiele Berechung Beschleunigungsfaktor
Beschl.-einheiten 1)
Vorsch.-konst. 2)
Zeitkonstante 3) Getr.4)
Formel 5) Ergebnisgekürzt
U/min/s,0 NK
U/min s
1 UAUS
=
1 UAUS
11
min * s=
256
1
min
256 * s
1/1 1 U1 U
*
2561
256 min s
11
min * s
1 U1 U
=
256
U
min
256* s
1
U
mins
num: 256div: 1
°/s2,1 NK
1/10 °/s2
( °/10 s2 )
1 UAUS
=
3600 °10
11
s2=
601
min * s=
60 * 256
1
min
256 * s
1/1 1 U1 U
*
60 * 2561
256 min * s
11
s2
3600 °10
1 U
=
15360
U
min
256 * s
3600 °10 s2
num: 64div: 15
U/min2,2 NK
1/100 U/min2
( U/100 min2 )
1 UAUS
=
100U100
11
min2=
160
1
mins =
25660
1
min
256 * s
2/3 2 U3 U
*
2561
256 min * s
601
min2
100U100
1 U
=
512
U
min256 s
18000U
100min2
num: 32div: 1125
mm/s2,1 NK
1/10 mm/s2
( mm/10 s2 )
63,15mmU
⇒
1 UAUS
=
631,5mm10
11
s2=
601
min * s=
60 * 256
1
min
256 * s
4/5 4 U
5 U*
60 * 2561
256 min * s
11
s2
631,5mm10
1 U
=
122880
U
min256 s
6315mm
10 s2
num: 8192div: 421
1) Gewünschte Einheit am Abtrieb2) Positionseinheiten pro Umdrehung (UAUS).
Vorschubkonstante des Antriebs (PNU 1003) * 10-NK (Berücksichtigung der Nachkommastellen)3) Zeitfaktor_a: Gewünschte Zeiteinheit2 pro interne Zeiteinheit24) Getriebefaktor: UEIN pro UAUS5) Werte in Formel einsetzen.
Tab. A/7: Beispiele Berechnung Beschleunigungsfaktor

A. Technischer Anhang
A-16 Festo P.BE-CMM-FHPP-SW-DE de 1011b

Erweiterungen FHPP+ und Kurvenscheiben
B-1Festo P.BE-CMM-FHPP-SW-DE de 1011b
Anhang B
Erweiterungen FHPP+ und Kurvenscheiben
B. Erweiterungen FHPP+ und Kurvenscheiben
B-2 Festo P.BE-CMM-FHPP-SW-DE de 1011b
Inhaltsverzeichnis
B.1 Übersicht FHPP+ B-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.1 Aufbau des FHPP+-Telegramms B-4. . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.2 Beispiele B-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.3 Konfiguration der Feldbusse mit FHPP+ B-6. . . . . . . . . . . . . . . . . . . . . .
B.1.4 Telegrammeditor für FHPP+ B-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.5 Parameter-Übersicht FHPP+ B-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2 CMMP-AS - Betrieb von Kurvenscheiben B-7. . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2.1 Kurvenscheibenfunktion in Betriebsart Direktauftrag B-8. . . . . . . . . .
B.2.2 Kurvenscheibenfunktion in Betriebsart Satzselektion B-10. . . . . . . . . .
B.2.3 Parameter für die Kurvenscheibenfunktion B-10. . . . . . . . . . . . . . . . . . .
B.2.4 Erweiterte Zustandmaschine mit Kurvenscheibenfunktion B-11. . . . . .
B. Erweiterungen FHPP+ und Kurvenscheiben
B-3Festo P.BE-CMM-FHPP-SW-DE de 1011b
B.1 Übersicht FHPP+
FHPP+ ist eine Erweiterung des KommunikationsprotokollsFHPP.
Informationen ob und ab welcher Firmware-Version der Ver-wendete Controller diese Funktion unterstützt finden Sie inder Hilfe zum zugehörigen FCT-PlugIn.
Mit der Erweiterung FHPP+ können neben den Steuer- undStatusbytes und dem optionalen Parameterkanal (FPC) vomAnwender konfigurierbare weitere PNUs über das zyklischeTelegramm übertragen werden.
Die minimale Telegrammkonfiguration enthält jeweils dieSteuer- und Statusbytes, d.h. es werden 8 Byte gesendet undempfangen. Wird der Parameterkanal mit übertragen, so folgter stets direkt dem I/O-Kanal.
Mit FHPP+ können im Empfangstelegramm weitere Sollwerteangehängt werden, die in den Steuer- und Statusbytes bzw.im FPC nicht abgebildet sind. In dem Antworttelegramm kön-nen zusätzliche Istwerte übermittelt werden, wie z. B. aktuelleZwischenkreisspannung oder Temperatur der Endstufe.
Für die zusätzlichen Daten (FHPP+) gilt, dass bis zu einer Ge-samtlänge von 32 Byte immer Vielfache von 8 Byte übertra-gen werden.
Die Konfiguration der über FHPP+ übertragenen Daten erfolgtüber den FHPP+-Telegrammeditor im FCT-PlugIn des Control-lers.
HinweisNicht alle PNUs sind für das FHPP+-Telegramm konfigurier-bar. Z. B. können die PNUs 40 bis 43 gar nicht übertragenwerden, PNUs ohne Schreibzugriff können nicht in denAusgangsdaten konfiguriert werden, usw.
B. Erweiterungen FHPP+ und Kurvenscheiben
B-4 Festo P.BE-CMM-FHPP-SW-DE de 1011b
B.1.1 Aufbau des FHPP+-Telegramms
Der erste Eintrag im Telegramm (Adresse 0) ist für den I/O-Kanal reserviert.
Optional muss als zweiter Eintrag (Adresse 8) der Parameter-kanal FPC ausgewählt werden, falls dieser in der Applikationbenötigt wird und über die Buskonfiguration festgelegt ist.Der Parameterkanal darf ausschließlich an dieser Stelle konfi-guriert werden.
Ab dem dritten Eintrag im Telegramm (Adresse 16) bzw. zwei-ten Eintrag ohne FPC (Adresse 8) können frei wählbar alleübrigen PNUs gemappt werden, die in der Applikation not-wendig sind.
Bei bestimmten Steuerungen (z.B. SIEMENS S7) ist darauf zuachten, dass sich PNUs mit Längen von 2 bzw. 4 Byte passen-den Adressen befinden. Diese PNUs sollten nur an geradenAdressen vorgesehenwerden. Ummögliche auftretende Lük-ken füllen zu können, werden sogenannte Platzhalter dekla-riert. Mit deren Hilfe kann dafür gesorgt werden, dass PNUsan gewünschte Adressen gemappt werden können.
Alle nicht verwendeten Teile eines Telegramms und insbeson-dere alle nicht verwendeten Einträge im Telegrammeditorwerden mit den Platzhaltern aufgefüllt.
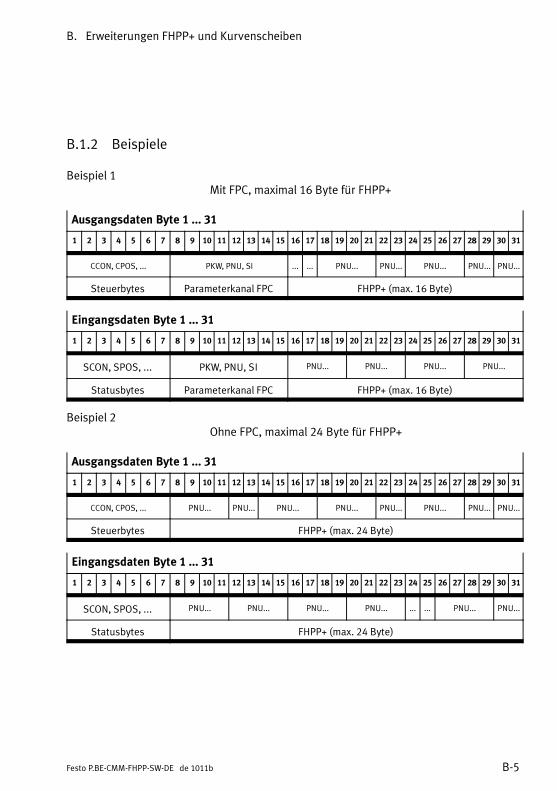
B. Erweiterungen FHPP+ und Kurvenscheiben
B-5Festo P.BE-CMM-FHPP-SW-DE de 1011b
B.1.2 Beispiele
Beispiel 1Mit FPC, maximal 16 Byte für FHPP+
Ausgangsdaten Byte 1 ... 31
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
CCON, CPOS, ... PKW, PNU, SI ... ... PNU... PNU... PNU... PNU... PNU...
Steuerbytes Parameterkanal FPC FHPP+ (max. 16 Byte)
Eingangsdaten Byte 1 ... 31
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
SCON, SPOS, ... PKW, PNU, SI PNU... PNU... PNU... PNU...
Statusbytes Parameterkanal FPC FHPP+ (max. 16 Byte)
Beispiel 2Ohne FPC, maximal 24 Byte für FHPP+
Ausgangsdaten Byte 1 ... 31
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
CCON, CPOS, ... PNU... PNU... PNU... PNU... PNU... PNU... PNU... PNU...
Steuerbytes FHPP+ (max. 24 Byte)
Eingangsdaten Byte 1 ... 31
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
SCON, SPOS, ... PNU... PNU... PNU... PNU... ... ... PNU... PNU...
Statusbytes FHPP+ (max. 24 Byte)
B. Erweiterungen FHPP+ und Kurvenscheiben
B-6 Festo P.BE-CMM-FHPP-SW-DE de 1011b
B.1.3 Konfiguration der Feldbusse mit FHPP+
Länge und Inhalt der übertragenen Daten werden über denTelegrammeditor definiert.
Die damit festgelegten Daten müssen jeweils feldbusspezi-fisch am Master/Scanner konfiguriert werden, je nach Feld-bus z. B. über die entsprechenden GSD- oder EDS-Dateien.
Informationen über die Konfiguration finden Sie in der zuge-hörigen Feldbusbeschreibung.
B.1.4 Telegrammeditor für FHPP+
Die Konfiguration der übertragenen Daten erfolgt ausschließ-lich über den FHPP+-Editor des FCT-PlugIns.Die entsprechenden PNUs 40 und 41 können nur gelesenwerden, siehe Abschnitt B.1.5.
Der FHPP+ Telegrammeditor ordnet die Dateninhalte des zy-klischen FHPP-Telegramms den PNUs eindeutig zu. Die Spezi-fikation sieht allgemein 16 Einträge pro Empfang- und Sende-telegramm vor. In der aktuellen Ausbaustufe sind maximal 10Einträge für die Controller CMMP-AS zulässig. Die maximaleLänge eines Telegramms ist auf 32 Byte begrenzt.
Die PNUs zum Einstellen des Telegrammmappings dürfen imFHPP+ Telegramm nicht gemappt werden.
B.1.5 Parameter-Übersicht FHPP+
Die Beschreibung der speziellen Parameter für das FHPP+finden Sie im Abschnitt 4.4.2.
B. Erweiterungen FHPP+ und Kurvenscheiben
B-7Festo P.BE-CMM-FHPP-SW-DE de 1011b
B.2 CMMP-AS - Betrieb von Kurvenscheiben
Der CMMP-AS hat die Möglichkeit, 16 Kurvenscheiben mitjeweils 4 zugeordneten Nockenbahnen zu bearbeiten.
Diese Funktion steht ab Firmware-Version 3.5.1501.4.1 desCMMP-AS zur Verfügung.
Der CMMP-AS stellt hierfür über FHPP folgende Funktionalitätzur Verfügung:
– Synchronisationsbetrieb auf externen Eingang, Slavebe-trieb.
– Synchronisationsbetrieb auf externen Eingang mit Kur-venscheibe, Slavebetrieb.
– Virtueller Master (intern) mit Kurvenscheibe.
Die Steuerung ist in folgenden Betriebsarten möglich:
– Satzselektion.
– Direktbetrieb Positionieren.
Die Parametrierung der Kurvenscheiben erfolgt über das FCT-PlugIn. Informationen zur Parametrierung finden Sie in derHilfe zum PlugIn CMMP-AS.
Vollständige Informationen zur Kurvenscheibenfunktion fin-den Sie im speziellen Handbuch zur Kurvenscheibe.
B. Erweiterungen FHPP+ und Kurvenscheiben
B-8 Festo P.BE-CMM-FHPP-SW-DE de 1011b
B.2.1 Kurvenscheibenfunktion in Betriebsart Direktauftrag
Synchronisation auf externen Mastercontroller mitKurvenscheibe (Slavebetrieb)
Der Synchronisationsbetrieb ermöglicht es einem Slavecon-troller einem Mastercontroller über einen zusätzlichen exter-nen Eingang nach parametrierten Regeln zu folgen.
Dies kann rein Lagesynchron oder über eine zusätzliche Kur-venscheibenfunktion, CAM Funktion, erfolgen.
Aktivierung des Synchronisationsbetriebs im Direktmodus:
Die Auswahl des Synchronbetriebs erfolgt über das Control-byte 3, CDIR mit einem gesetzten CDIR.B7 (FUNC) und dergewünschten Funktionalität in der Funktionsgruppe und derFunktionsnummer, CDIR.B6 ... B3 (FGRP, FNUM).
Aktiviert wird der Synchronbetrieb dann mit einer positivenFlanke an Bit CPOS.B1 (START). Das Bit CCON.B1 (STOP)stoppt den Synchonisationsbetrieb. Das Bit CPOS.B0 (HALT)hat keine Zwischenhaltfunktion (Wechsel nach Bereit mit Hal-trampe). Mit der negativen Flanke von CPOS.B1 (START) wirdder Synchronisationsbetrieb ebenfalls beendet.
B. Erweiterungen FHPP+ und Kurvenscheiben
B-9Festo P.BE-CMM-FHPP-SW-DE de 1011b
Soll- und Istwerte abhängig von den Funktionsnummern
Funktionsnummer Belegung der Soll-/Istwerte
FNUM= 0: reserviert –
FNUM= 1, FNUM= 2:Synchronisationsbetriebohne/mit Kurvenscheibe
Sollwert 1 keine Bedeutung da der Lagesollwert über den externenEingang kommt.
Sollwert 2 keine Bedeutung da der Lagesollwert über den externenEingang kommt.
Istwert 1 wie bei Positionierbetrieb Istgeschwindigkeit des Slaves(nach der Kurvenscheibe)
Istwert 2 wie bei Positionierbetrieb Istposition des Slaves (nachder Kurvenscheibe)
FNUM= 3: Virtueller Master(intern) mit Kurvenscheibe
Sollwert 1 Je nach Betriebsart des Masters, Sollgeschwindigkeitdes Masters
Sollwert 2 Je nach Betriebsart des Masters, Sollposition des Ma-sters
Istwert 1 Istgeschwindigkeit des Slaves (nach der Kurvenscheibe)Istwert 2 Istposition des Slaves (nach der Kurvenscheibe)
Tab. B/1: Belegung Soll-/Istwerte
Die Kurvenscheibe wird über die PNU 700 ausgewählt.Über FHPP+ kann diese Auswahl in die Prozessdaten ge-mappt werden.
B. Erweiterungen FHPP+ und Kurvenscheiben
B-10 Festo P.BE-CMM-FHPP-SW-DE de 1011b
B.2.2 Kurvenscheibenfunktion in Betriebsart Satzselektion
Bei Satzselektion wird die Art des Satzes mit dem Satzsteuer-byte in der Satzliste definiert. Die Erweiterung auf den Kur-venscheibenbetrieb kann wie im Direktbetrieb mit dem fürallgemeine Funktionserweiterungen vorgesehenen Bit 7(FUNC) im Satzsteuerbyte 1 aktiviert werden.
Die Kurvenscheibennummer wird über die PNU 419 ausge-wählt. Ist PNU 419 = 0 wird der Inhalt von PNU 700 verwen-det.
B.2.3 Parameter für die Kurvenscheibenfunktion
Die Parameter für die Kurvenscheibenfunktion finden Sie inAbschnitt 4.4.15.
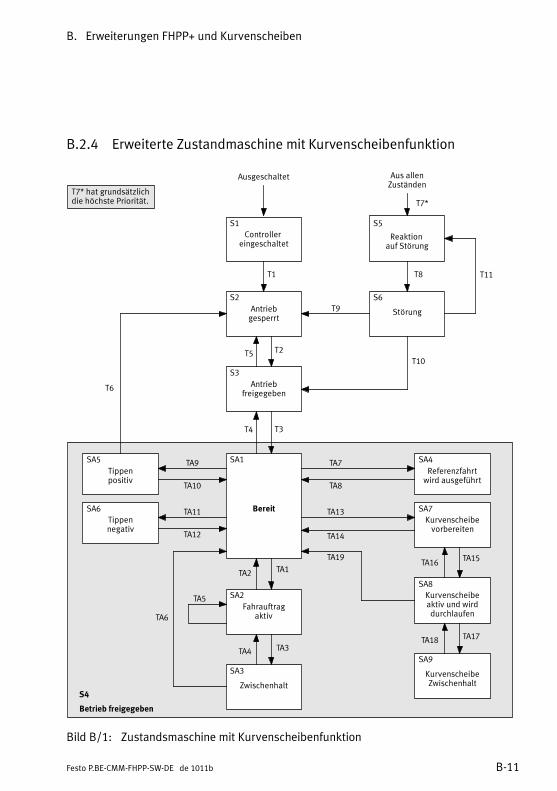
B. Erweiterungen FHPP+ und Kurvenscheiben
B-11Festo P.BE-CMM-FHPP-SW-DE de 1011b
B.2.4 Erweiterte Zustandmaschine mit Kurvenscheibenfunktion
T7* hat grundsätzlichdie höchste Priorität.
Ausgeschaltet
S1
Controllereingeschaltet
S3
Antriebfreigegeben
S2
Antriebgesperrt
SA1
Bereit
SA5
Tippenpositiv
SA6
Tippennegativ
SA4
Referenzfahrtwird ausgeführt
SA2
Fahrauftragaktiv
SA3
Zwischenhalt
S5
Reaktionauf Störung
S6
Störung
Aus allenZuständen
S4
Betrieb freigegeben
T6
TA11
TA12
TA9
TA10
TA3
TA6
TA4
TA5
TA7
TA8
TA1TA2
T2T5
T3T4
T1
T7*
T8
T10
T9
S5
T11
SA7
Kurvenscheibevorbereiten
TA13
TA14
TA19
SA8
Kurvenscheibeaktiv und wirddurchlaufen
SA9
KurvenscheibeZwischenhalt
TA17TA18
TA15TA16
Bild B/1: Zustandsmaschine mit Kurvenscheibenfunktion
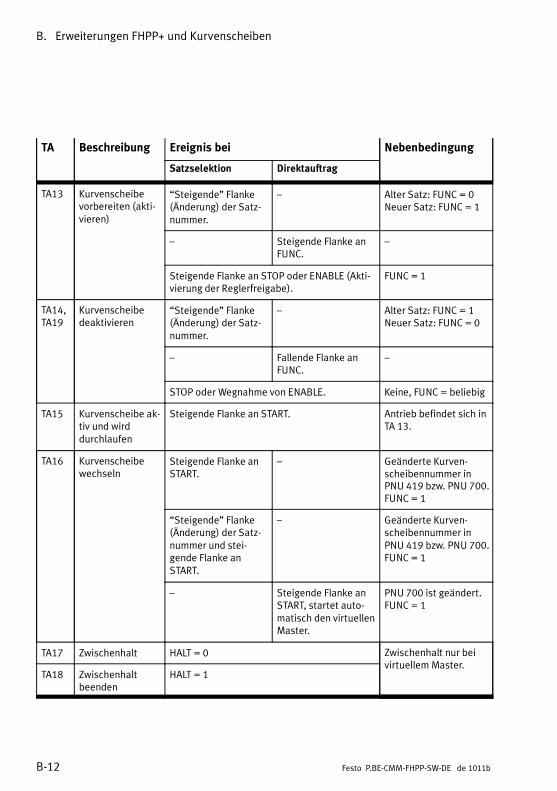
B. Erweiterungen FHPP+ und Kurvenscheiben
B-12 Festo P.BE-CMM-FHPP-SW-DE de 1011b
TA Beschreibung Ereignis bei Nebenbedingung
Satzselektion Direktauftrag
TA13 Kurvenscheibevorbereiten (akti-vieren)
“Steigende” Flanke(Änderung) der Satz-nummer.
– Alter Satz: FUNC = 0Neuer Satz: FUNC = 1
– Steigende Flanke anFUNC.
–
Steigende Flanke an STOP oder ENABLE (Akti-vierung der Reglerfreigabe).
FUNC = 1
TA14,TA19
Kurvenscheibedeaktivieren
“Steigende” Flanke(Änderung) der Satz-nummer.
– Alter Satz: FUNC = 1Neuer Satz: FUNC = 0
– Fallende Flanke anFUNC.
–
STOP oder Wegnahme von ENABLE. Keine, FUNC = beliebig
TA15 Kurvenscheibe ak-tiv und wirddurchlaufen
Steigende Flanke an START. Antrieb befindet sich inTA 13.
TA16 Kurvenscheibewechseln
Steigende Flanke anSTART.
– Geänderte Kurven-scheibennummer inPNU 419 bzw. PNU 700.FUNC = 1
“Steigende” Flanke(Änderung) der Satz-nummer und stei-gende Flanke anSTART.
– Geänderte Kurven-scheibennummer inPNU 419 bzw. PNU 700.FUNC = 1
– Steigende Flanke anSTART, startet auto-matisch den virtuellenMaster.
PNU 700 ist geändert.FUNC = 1
TA17 Zwischenhalt HALT = 0 Zwischenhalt nur beivirtuellem Master.
TA18 Zwischenhaltbeenden
HALT = 1

Stichwortverzeichnis
C-1Festo P.BE-CMM-FHPP-SW-DE de 1011b
Anhang C
Stichwortverzeichnis

C. Stichwortverzeichnis
C-2 Festo P.BE-CMM-FHPP-SW-DE de 1011b
C. Stichwortverzeichnis
C-3Festo P.BE-CMM-FHPP-SW-DE de 1011b
A
absolut 1-18, 4-34. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Achsennullpunkt XIII, 4-58. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Antrieb XIII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Antwortkennung (AK) 5-4, 5-5. . . . . . . . . . . . . . . . . . . . . . . . .
Auftragskennung (AK) 5-4, 5-5. . . . . . . . . . . . . . . . . . . . . . . . .
B
Benutzerhinweise X. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Betriebsart XIII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Drehzahlregelung XIII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Positionierbetrieb XIV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Profile Torque Mode (s. Kraftbetrieb) XIV. . . . . . . . . . . . . .Referenzierung XIV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Teach-Betrieb XV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Betriebsart (FHPP-Betriebsart)Direktauftrag 1-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Satzselektion 1-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C
Controller XIII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
D
Diagnose, FHPP-Status-Bytes 3-52. . . . . . . . . . . . . . . . . . . . .
Diagnosespeicher (Störungen) 3-7. . . . . . . . . . . . . . . . . . . . . .
Direktauftrag 1-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Drehzahlregelung XIII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C. Stichwortverzeichnis
C-4 Festo P.BE-CMM-FHPP-SW-DE de 1011b
E
Elektrische Achse XIII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Encoder XIII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
F
Fehlernummern 5-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Festo Configuration Tool (FCT) XIII. . . . . . . . . . . . . . . . . . . . . .
Festo Parameter Channel (FPC) XIV, 5-3. . . . . . . . . . . . . . . . . .
FHPP 1-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
FHPP-BetriebsartDirektauftrag 1-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Satzselektion 1-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
FHPP+ B-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
H
HMI (siehe Gerätesteuerung) XIV. . . . . . . . . . . . . . . . . . . . . .
K
Kurvenscheiben B-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
M
Maßbezugssystem 2-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
N
Nutzhub 2-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C. Stichwortverzeichnis
C-5Festo P.BE-CMM-FHPP-SW-DE de 1011b
P
Parameter Number (PNU) 5-4. . . . . . . . . . . . . . . . . . . . . . . . .
Parameterkanal (PKW) 5-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Parameterkennung (PKE) 5-3, 5-4. . . . . . . . . . . . . . . . . . . . . .
Parameterwert (PWE) 5-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Parametrierung mit FHPP 5-3. . . . . . . . . . . . . . . . . . . . . . . . . .
Piktogramme XI. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Positionierbetrieb XIV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Profile Position Mode XIV. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Profile Torque Mode (s. Kraftbetrieb) XIV. . . . . . . . . . . . . . . .
Profile Velocity Mode XIII. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Projektnullpunkt XIV, 4-44. . . . . . . . . . . . . . . . . . . . . . . . . . . .
R
Referenzfahrt XIV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Referenzierung XIV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Referenzierungsmethode XIV. . . . . . . . . . . . . . . . . . . . . . . .Referenzpunkt XIV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Referenzschalter XIV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
relativ 1-18, 4-34. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
S
Satzselektion 1-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Sicherheitshinweise VIII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Service IX. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Software-Endlage XV, 4-44. . . . . . . . . . . . . . . . . . . . . . . . . . . .Negativ (untere) XV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Positiv (obere) XV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SPS XV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Subindex (IND) 5-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C. Stichwortverzeichnis
C-6 Festo P.BE-CMM-FHPP-SW-DE de 1011b
T
Teach-Betrieb XV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Textkennzeichnungen XI. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tipp-Betrieb XV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
V
Verfahrsatz XV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Version XII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
W
Warnungsspeicher 3-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Z
Zielgruppe IX. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .





























