Embed Size (px)
Citation preview
Jens Deussen
Fluid-Struktur-Simulation im
Hyperschall
Ausarbeitung zum CES-Seminarvortrag
Jens Deussen
Matrikelnummer 297842
29. April 2014
1. Einleitung
In dieser Ausarbeitung soll ein Einblick in die Problematik der Fluid-Struktur Simulationim Hyperschall gegeben werden. Dazu wird zunächst in Abschnitt 2 allgemein auf dasPhänomen der Fluid-Struktur Interaktion eingegangen und welche Lösungsansätze esfür die Simulation solcher Probleme gibt. Dabei wird auch das Diskretisierungsproblembeschrieben und ein möglicher Ansatz für die zeitliche Kopplung einer Fluid-StrukturBerechnung angegeben.
Im darauf folgenden Abschnitt werden die Bedingungen, die im Hyperschall herrschenbeschrieben und welche Folgen das für die Simulation im Bereich der Fluid-Struktur In-teraktion hat. Abschnitt 3.2 erläutert ein thermisches Modell und das mögliche Vorgehenbei einer aerothermoelastischen Simulation.
In Abschnitt 3 wird dieses Vorgehen auf ein Beispiel angewandt. Dabei wird exemplarischdie Herangehensweise bei einer Flutter-Berechnung entlang einer Flugbahn beschrieben.Auÿerdem wird dadurch ebenfalls deutlich wie wichtig die thermische Kopplung fürFluid-Struktur Simulationen im Hyperschall ist.
Der letzte Abschnitt stellt eine Zusammenfassung der Ergebnisse und Einsichten dar.
2. Fluid-Struktur Interaktion
Der Bereich der Fluid-Struktur Interaktion beschäftigt sich mit der gegenseitigen Be-ein�ussung von Strömung und Struktur. Dabei wird die Struktur von aerodynamischenLasten verformt. Durch diese Verformung werden wiederrum die Strömung und die ae-rodynamsichen Lasten verändert. Diese Kopplung ist schematisch in Abb. 1 dargestellt.
1

Jens Deussen
Abb. 1: Schematische Darstellung der Fluid-Struktur Interaktion
2.1. Lösungsansätze
Zur Lösung solch gekoppelter Probleme gibt es unterschiedliche Lösungsansätze. Diesesind die Feld-Elimination, der zeitgleiche und der aufgeteilte Ansatz.
Bei der Feld-Elimination werden die Modellgleichungen eines Feldes in die Gleichungendes anderen Feldes eingesetzt. Dies ist allerdings nur möglich, wenn die Modellgleichun-gen nach den Variablen, die im anderen Feld verwendet werden, aufgelöst werden kann.
Beim zeitgleichen Ansatz werden die Modelle zusammengefügt und als ein System gelöst.Vorteilhaft dabei ist, dass weniger Iterationen benötigt werden und die Stabilität erhöhtist.
Die dritte Lösungsstrategie ist der aufgeteilte Ansatz, bei dem die einzelnen Felder indi-viduell gelöst werden. Die Kopplung wird bei der Simulation mit Hilfe von Kopplungs-bedingungen umgesetzt. Diese werden anstelle der Randbedingungen an den jeweiligenFlächen zwischen Struktur und Fluid verwendet. Vorteil dieses Ansatzes ist, dass bisherentwickelte Lösungsverfahren für die einzelnen Felder weiter genutzt werden können undunabhängig voneinander sind. Im Gegensatz zum zeitgleichen Lösen benötigt dieser An-satz zusätzliche Iterationen. Auÿerdem wird bei dieser Lösungsstrategie zwischen einerschwachen und einer starken Kopplung unterschieden. Bei einer schwachen Kopplungsind nicht alle Kopplungsbedingungen zwingend erfüllt.
2.2. Kopplungsbedingungen
Zu den Kopplungsbedingungen einer Fluid-Struktur Simulation gehören die kinemati-sche und die dynamische Stetigkeit. Dabei fordern die kinematischen Bedingungen, dassdie Verschiebung, die Geschwindigkeit und die Beschleunigung der Grenz�äche auf Fluid-und Struktur-Seite identisch sind. Diese Bedingungen sind in den Gleichungen (1)-(3)beschrieben.
dF (t,x) = dS(t,x) (1)
dF (t,x) = dS(t,x) (2)
dF (t,x) = dS(t,x) (3)
Dabei ist d die Verschiebung der Grenz�äche und die Subskripte F und S stehen fürFluid- und Struktur-Seite dieser Fläche.
Die dynamische Stetigkeit bezieht sich dagegen auf gleiche Spannungen und Kräfte aufbeiden Seiten der Grenz�äche. Die dazugehörigen Gleichungen lauten
σF (t,x) = −σS(t,x) und (4)
FF (t,x) = −FS(t,x), (5)
2

Jens Deussen
in denen die Spannung σ und die Kraft F verwendet wird.
2.3. Diskretisierungs-Problem
Durch das numerische Lösen und der damit verbundenen Diskretisierung, kommt nebender Fluid- und Strukturberechnung ein zusätzliches rechenintensives Feld hinzu. AufGrund der Strukturbewegung und der daraus resultierenden Bewegung der Grenz�ächezwischen Struktur und Fluid, muss die Vernetzung des Fluidbereichs bei jeder Verän-derung aktualisiert werden. Abb. 2 zeigt schematisch die gegenseitige Beein�ussung dereinzelnen Teilbereiche.
Abb. 2: Schematische Darstellung der Fluid-Struktur Interaktion mit Aktualisierung derVernetzung
2.4. Zeitliche Kopplung
Ein mögliches Lösungsschema für eine Fluid-Struktur Berechnung mit Hilfe eines aufge-teilten Ansatzes ist der konventionelle Ansatz, welcher in Abb. 3 dargestellt ist. Dieseskann grob in vier Schritte unterteilt werden. Zuerst wird die Vernetzung des Fluid-Bereichs mit der Verformung aus dem letzten Zeitschritt aktualisiert und an den Strö-mungslöser übergeben. Im nächsten Schritt wird dann die Strömung für den neuen Fluid-Bereich simuliert. Dabei dient die Lösung des vorherigen Zeitschrittes als Anfangsbedin-gung. Anschlieÿend werden die aerodynamischen Lasten am Fluid-Struktur-Interface be-stimmt und an den Struktur-Löser übermittelt. Mit Hilfe der neuen Lasten kann danachdie neue Verformung der Struktur berechnet werden.
Es ist zu beachten, dass es sich bei diesem Schema um eine schwache Kopplung handelt,da die Kopplungsbedingungen nicht zwingend erfüllt sind. Das hängt damit zusammen,dass für die Aktualisierung des Fluid-Bereichs und dessen Vernetzung die Verformungder Struktur aus dem vorherigen Zeitschritt verwendet wird.
Um eine starke Kopplung zu erhalten kann solange über die Lösungen des neuen Zeit-schrittes iteriert werden, bis alle Kopplungsbedingungen erfüllt sind. Eine andere Mög-lichkeit, um die Kopplung zu verbessern ist ein Prädiktor mit Hilfe der Verformung aus
3

Jens Deussen
Abb. 3: Konventioneller Ansatz für die zeitliche Kopplung einer Fluid-Struktur Berech-nung
dem vorheigen Zeitschritt. Dieses Vorgehen erfolgt dann zum Beispiel mit einer Taylor-entwicklung. Eine Vorhersage erster Ordnung für den ersten Schritt ist in Gleichung (6)gegeben.
dn+1 = dn + ∆tdn (6)
3. Hyperschall
Als Hyperschall bezeichnet man den Bereich von Geschwindigkeiten, die deutlich grö-ÿer als die örtliche Schallgeschwindigkeit sind. Die De�nition der Machzahl ist in Glei-chung (7) angegeben.
Ma =v
c(7)
Diese Gleichung beschreibt das Verhältnis von Geschwindigkeit v zur lokalen Schall-geschwindigkeit c, die mit dem Isentropenexponenten κ, der Gaskonstante R und derTemperatur T als
c =√κRT (8)
de�niert ist.
Um solche Machzahlen zu erreichen, �iegen Hyperschallfahrzeuge in groÿen Flughöhen.In Abb. 4 sind diese Flughöhen mit den dazugehörigen Machzahlen für unterschiedlicheHyperschallfahrzeuge dargestellt.
Für diesen Flugbereich müssen zusätzliche E�ekte durch extreme Temperaturen in derGrenzschicht beachtet werden. Auÿerdem sind Versuche im Windkanal unter diesen Um-ständen nicht möglich.
3.1. Einfluss der Thermik
Zusätzlich zur Fluid-Sturktur Interaktion müssen im Hyperschall auch thermische Ef-fekte beachtet werden. Eine Simulation in diesem Bereich muss die Aerothermik, dieThermoelastik und zusätzliche Probleme für die Aeroelastik berücksichtigen.
4

Jens Deussen
Abb. 4: Einsatzbereiche für diverse hypersonische Fahrzeuge [1]
Für die Aerothermik, muss beachtet werden, dass die Strömung eine Temperatur-Grenz-schicht besitzt, die von der Wandtemperatur abhängig ist. Darüber hinaus sind dieFluid-Parameter, wie zum Beispiel die Viskosität temperaturabhängig, sodass sich dasVerhalten des Fluids bei unterschiedlichen Temperaturen ändert.
Neben der Aerothermik müssen auch E�ekte auf das thermoelastische Problem mit indie Simulation einbezogen werden. Durch eine Erhöhung der Temperatur dehnt sichdie Struktur aus, während sie sich bei einer Senkung der Temperatur zusammenzieht.Wird diese Veränderung unterdrückt, entstehen thermische Spannungen, die ebenfallszu betrachtet sind.
Des Weiteren beein�usst die Temperatur die Struktur-Parameter, wie das E-Modul oderden thermischen Ausdehnungskoe�zienten. Diese Parameter werden bei einer Tempera-turerhöhung verringert. Der Ein�uss der Thermik ist schematisch in Abb. 5 visualisiert.
Abb. 5: Schematische Darstellung der Interaktion zwischen Fluid, Struktur und Thermik
Eine Kopplung der Thermik für eine Fluid-Struktur Simulation im Hyperschall ist somitnotwendig.
5

Jens Deussen
3.2. Aerothermoelastische Berechnung
Eine schematische Darstellung des Modells für die Wärmeübertragung ist in Abb. 6gezeigt. Eine Energiebilanz an der Wand der Struktur liefert:
qaero = qrad + qcond + qstrd, (9)
wobei die Subskripte der Wärmeströme das aerodynamische Erhitzen, die Abstrahlung,das Weiterleiten in die Struktur und die in der Wand gespeicherte Energie beschreiben.Auÿerdem können folgende De�nitionen für die Wärmeströme vorgenommen werden:
qaero = hht (TAW − TW ) , (10)
qrad = σεT 4W . (11)
Dabei kommen der Wärmeübertragungskoe�zient hht, die adiabate WandtemperaturTAW aus der Fluidberechnung, die Wandtemperatur TW , die Stefan-Boltzmann-Kon-stante σ, sowie der Emissionsgrad ε vor.
Abb. 6: Schematische Darstellung des Wärmeübertragungsmodells [1]
Für einen stationären Zustand gilt, dass
qaero = qrad, (12)
und somit
0 = σεT 4W − hhtTW − hhtTAW . (13)
Mit Gleichung (13) kann dann bei gegebenem hht, TAW , σ und ε die WandtemperaturTW berechnet werden.
In Abbildung 7 ist der Lösungsverlauf einer aerothermoelastischen Simulation als Fluss-diagramm dargestellt. Zuerst wird die Geometrie mit Hilfe einer CAD-Software erstellt.
6

Jens Deussen
Für den Fluid-Bereich werden anschlieÿend eine strukturierte Volumenvernetzung undfür den Struktur-Bereich eine unstrukturierte Ober�ächenvernetzung vorgenommen. DasStrukturmodell wird durch Versteifungs- und Massenelemente verfeinert. Mit Hilfe einesFluidlösers wird sowohl die Strömung um die Geometrie, als auch der Wärmeübertra-gungskoe�zient berechnet. Zusätzlich wird die Wandtemperatur mittels einer adiabatenWand als Randbedingung bestimmt. Die Wandtemperatur und der Wärmeübertragungs-koe�zient werden an den Strukturlöser übermittelt. Dieser bestimmt im Anschluss dieWärmeübertragung für die Struktur mit dem zuvor vorgestellen thermischen Modell.Die Schwingungensarten werden mit der Finite-Elemente Analyse bestimmt. Im Ae-roelastischen Löser wird dann mit dem Ergebnis aus dem Fluid-Löser und der durchdie Schwingungsarten induzierten Verformung der Struktur ein aeroelastisches Gleich-gewicht bestimmt. Anschlieÿend werden die Schwingungsarten gestört und die Mach-zahl variiert um die Frequenzen und die Dämpfung des Systems zu bestimmen. Umdie Flutter-Machzahl zu erhalten, wird der Zustand gesucht, bei dem keine Dämpfungvorhanden ist.
Abb. 7: Flussdiagramm des aerothermoelastischen Lösungsschemas [2]
7

Jens Deussen
4. Beispiel: FALCON
Das Missionsziel des FALCON-Projekts (Force Application and Launch from the con-tinental United States), welches von der DARPA (Defense Advanced Research ProjectsAgency) und der U.S. Airforce durchgeführt wird, ist die Entwicklung eines autonomenhypersonischen Fahrzeugs, welches eine Nutzlast von 12000 [lb] bis zu 17000 [km] inweniger als zwei Stunden transportieren kann. Das zu entwickelnde Fahrzeug soll wieein gewöhnliches Luftfahrzeug starten.
4.1. Flugbahn
Eine repräsentative Flugbahn eines solchen Fahrzeugs kann in drei Phasen unterteiltwerden. In der ersten Phase startet das Hyperschallfahrzeug von einer gewöhnlichenStartbahn und steigt bis zu einer Flughöhe von 40 [km]. Auf dieser Höhe wird in derzweiten Phase der Antrieb abgeschaltet. Dennoch steigt das Fahrzeug weiter bis zu einermaximalen Flughöhe von 60 [km]. Anschlieÿend beginnt ein Gleit�ug bis zu einer Höhevon 35 [km]. Auf dieser Höhe beginnt die dritte Phase, in der der Antrieb wieder gest-artet wird und das Fahrzeug erneut auf eine Flughöhe von 40 [km] steigt. Anschlieÿendwiederholen sich die zweite und dritte Phase. Diese Flugbahn mit den dazugehörigenMachzahlen und Flughöhen kann in Abb. 8 betrachtet werden.
Abb. 8: Flugbahn für das FALCON-Project mit Distanz, Flughöhe und Machzahl [2]
8
Jens Deussen
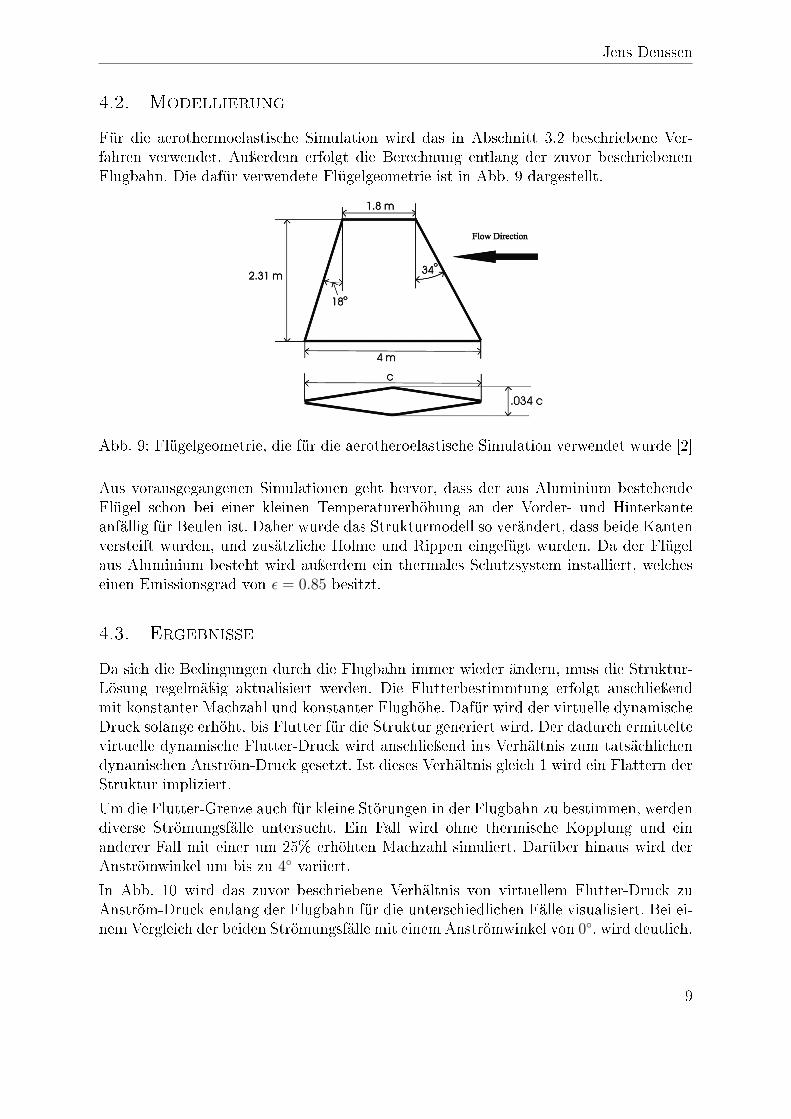
4.2. Modellierung
Für die aerothermoelastische Simulation wird das in Abschnitt 3.2 beschriebene Ver-fahren verwendet. Auÿerdem erfolgt die Berechnung entlang der zuvor beschriebenenFlugbahn. Die dafür verwendete Flügelgeometrie ist in Abb. 9 dargestellt.
Abb. 9: Flügelgeometrie, die für die aerotheroelastische Simulation verwendet wurde [2]
Aus vorausgegangenen Simulationen geht hervor, dass der aus Aluminium bestehendeFlügel schon bei einer kleinen Temperaturerhöhung an der Vorder- und Hinterkanteanfällig für Beulen ist. Daher wurde das Strukturmodell so verändert, dass beide Kantenversteift wurden, und zusätzliche Holme und Rippen eingefügt wurden. Da der Flügelaus Aluminium besteht wird auÿerdem ein thermales Schutzsystem installiert, welcheseinen Emissionsgrad von ε = 0.85 besitzt.
4.3. Ergebnisse
Da sich die Bedingungen durch die Flugbahn immer wieder ändern, muss die Struktur-Lösung regelmäÿig aktualisiert werden. Die Flutterbestimmtung erfolgt anschlieÿendmit konstanter Machzahl und konstanter Flughöhe. Dafür wird der virtuelle dynamischeDruck solange erhöht, bis Flutter für die Struktur generiert wird. Der dadurch ermitteltevirtuelle dynamische Flutter-Druck wird anschlieÿend ins Verhältnis zum tatsächlichendynamischen Anström-Druck gesetzt. Ist dieses Verhältnis gleich 1 wird ein Flattern derStruktur impliziert.
Um die Flutter-Grenze auch für kleine Störungen in der Flugbahn zu bestimmen, werdendiverse Strömungsfälle untersucht. Ein Fall wird ohne thermische Kopplung und einanderer Fall mit einer um 25% erhöhten Machzahl simuliert. Darüber hinaus wird derAnströmwinkel um bis zu 4◦ variiert.
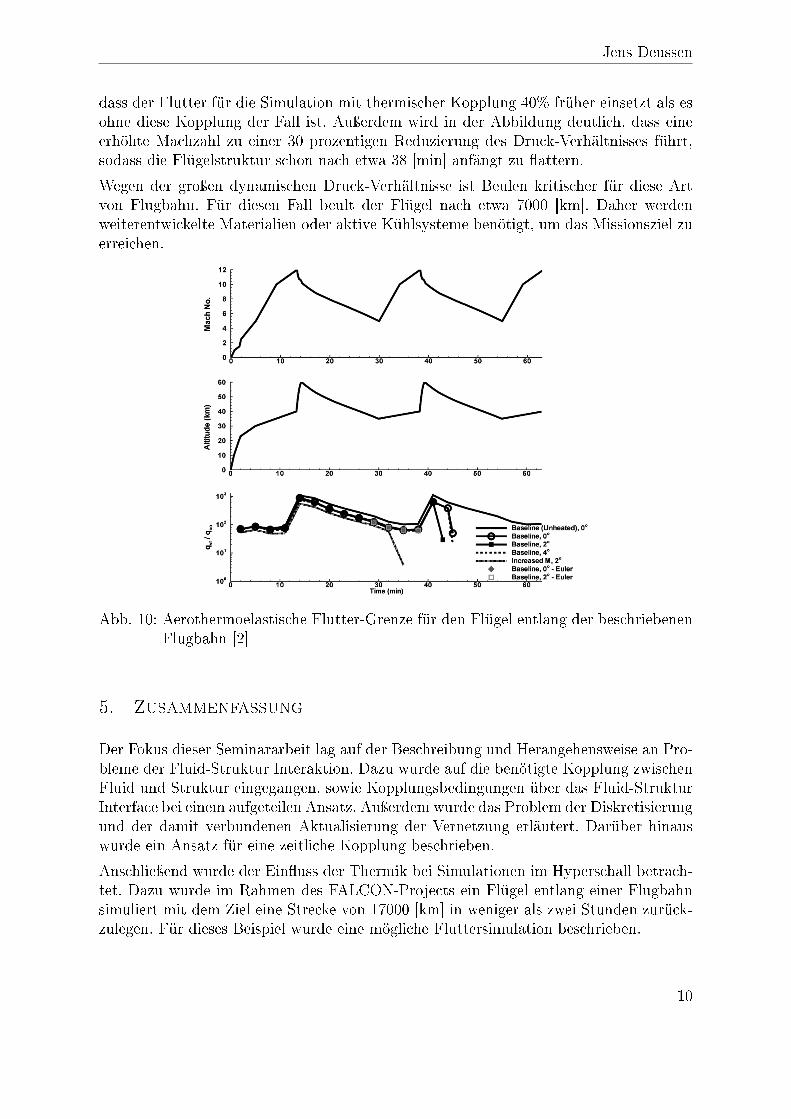
In Abb. 10 wird das zuvor beschriebene Verhältnis von virtuellem Flutter-Druck zuAnström-Druck entlang der Flugbahn für die unterschiedlichen Fälle visualisiert. Bei ei-nem Vergleich der beiden Strömungsfälle mit einem Anströmwinkel von 0◦, wird deutlich,
9
Jens Deussen
dass der Flutter für die Simulation mit thermischer Kopplung 40% früher einsetzt als esohne diese Kopplung der Fall ist. Auÿerdem wird in der Abbildung deutlich, dass eineerhöhte Machzahl zu einer 30 prozentigen Reduzierung des Druck-Verhältnisses führt,sodass die Flügelstruktur schon nach etwa 38 [min] anfängt zu �attern.
Wegen der groÿen dynamischen Druck-Verhältnisse ist Beulen kritischer für diese Artvon Flugbahn. Für diesen Fall beult der Flügel nach etwa 7000 [km]. Daher werdenweiterentwickelte Materialien oder aktive Kühlsysteme benötigt, um das Missionsziel zuerreichen.
Abb. 10: Aerothermoelastische Flutter-Grenze für den Flügel entlang der beschriebenenFlugbahn [2]
5. Zusammenfassung
Der Fokus dieser Seminararbeit lag auf der Beschreibung und Herangehensweise an Pro-bleme der Fluid-Struktur Interaktion. Dazu wurde auf die benötigte Kopplung zwischenFluid und Struktur eingegangen, sowie Kopplungsbedingungen über das Fluid-StrukturInterface bei einem aufgeteilen Ansatz. Auÿerdem wurde das Problem der Diskretisierungund der damit verbundenen Aktualisierung der Vernetzung erläutert. Darüber hinauswurde ein Ansatz für eine zeitliche Kopplung beschrieben.
Anschlieÿend wurde der Ein�uss der Thermik bei Simulationen im Hyperschall betrach-tet. Dazu wurde im Rahmen des FALCON-Projects ein Flügel entlang einer Flugbahnsimuliert mit dem Ziel eine Strecke von 17000 [km] in weniger als zwei Stunden zurück-zulegen. Für dieses Beispiel wurde eine mögliche Fluttersimulation beschrieben.
10

Jens Deussen
Die wichtigsten Erkenntnisse dabei sind, dass der Flügel 40% früher anfängt zu �attern,wenn eine thermische Kopplung betrachtet wird. Auÿerdem gibt es eine zusätzliche Re-duzierung von bis zu 30%, falls die Machzahl um 25% erhöht wird. Während eine kleineÄnderung des Anstellwinkels vom Flügel kaum einen Ein�uss auf die Flutter-Grenzehat. Für das in dieser Arbeit angegebene Beispiel ist Beulen kritischer als Flutter unddaher werden weiterentwickelte Materialien oder ein aktives Kühlsystem für das Hyper-schallfahrzeug benötigt, um das angegebene Missionsziel zu erreichen.
Literatur
[1] Friedmann, P. P. and Powell, K. G. (2004), Aeroelasticity, aerothermoelasticity andaeroelastic scaling of hypersonic vehicles. AFOSR GRANT No. F49620-01-1-0158
[2] McNamara, J. J., Friedmann, P. P., Powell, K. G., Thururhimattam, B.J., andBartels, R. E. (2008), Aeroelastic and aerothemoelastic behavior in hypersonic�ow. AIAA journal, 46(10), 2591-2610.
[3] Culler, A. J., and McNamara, J. J. (2010), Studies of �uid-thermal-structuralcoupling for aerothermoelasticity in hypersonic �ow. AIAA journal, 48(8), 1721-1738
11





















![3 Das Messen von Hyperschall [Schreibgeschützt] · PDF fileDas Messen von Hyperschall mit der Winkelrute Dipl.-Ing. Reiner Gebbensleben, Dresden Seminar „Medizinische Hyperschalldiagnostik“Oktober](https://img.pdfslide.org/doc/110x75/5a7968767f8b9a260e8c69dc/3-das-messen-von-hyperschall-schreibgeschtzt-messen-von-hyperschall-mit-der-winkelrute.jpg)