Embed Size (px)
Citation preview

Hoch oszillierende Probleme
Richard Landskron
Inhaltsverzeichnis
1 Modellproblem 2
2 Anwendung klassischer Verfahren 4
3 Entwicklung alternativer Verfahren 63.1 Lange- und Multiple-Zeitschritt-Verfahren . . . . . . . . . . . . . . . . . . 63.2 Mollified-Impuls-Methode . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.3 Trigonometrische Verfahren . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.3.1 Mollified-Impuls-Verfahren als trigonometrisches Verfahren . . . . . 93.3.2 Gautschis und Deuflhards trigonometrische Verfahren . . . . . . . 9
4 Alternative Verfahren und das Testproblem 104.1 Eigenschaften der numerischen Methoden . . . . . . . . . . . . . . . . . . 114.2 Anwendung auf das Testproblem . . . . . . . . . . . . . . . . . . . . . . . 13
5 Modulierte Fourier-Entwicklung 145.1 Entwicklung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145.2 Invarianten der Entwicklung . . . . . . . . . . . . . . . . . . . . . . . . . . 175.3 Langzeit-Energieerhaltung . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
6 Verhalten der Störmer-Verlet Diskretisierung 21
1

In diesem Kapitel werden Hamilton-Systeme, deren Verhalten im Gegensatz zu bisheri-gen Betrachtungen auf verschiedenen Zeitskalen zu beobachten ist, behandelt. Insbeson-dere werden geeignete numerische Methoden für Differentialgleichungen zweiten Gradesmit oszillierenden Lösungen dargestellt. Diese Methoden sollen die schnellste Oszillationbezüglich der vorhandenen Zeitskalen berücksichtigen. Derartige Differentialgleichungentreten etwa in der Molekulardynamik, der Astrophysik und bei nichtlinearen Wellenglei-chungen auf. Man betrachtet allgemein ein Problem, bei dem die Newtonsche Bewegungs-gleichung für ein Teilchensystem die Form
Mq = −∇V (q) = −∇W (q)−∇U (q) (1)
besitzt, wobei W und U auf unterschiedlichen Zeitskalen agieren. Im Folgenden sei Mimmer die Identität. Des Weiteren gelte also∥∥∇2W (q)
∥∥2∥∥∇2U(q)
∥∥2, (2)
das heißt, −∇W (q) verändert sich gegenüber −∇U(q) deutlich schneller. Hier soll vorallem der Fall, dass W ein quadratisches Potential darstellt, größere Beachtung erfahren,das heißt
W = 12qTAq, (3)
wobei A eine positive semi-definite Matrix ist mit ω2 als größtem Eigenwert. Die dazu-gehörige Hamiltonfunktion ergibt sich, wie gewohnt, zu
H (p, q) = 12pTMp+ 1
2qTAq + U (q) . (4)
1 Modellproblem
1
Abbildung 1: Kette mit abwechselnd weichen nichtlinearen und harten linearen Federn
Zunächst soll ein Modellproblem entwickelt werden, anhand dessen die Verwendbarkeitder numerischen Methoden für derartige Problemstellungen getestet werden kann. Fürdieses bietet sich eine Modifikation des Fermi-Pasta-Ulam-Experiments an; dieses ist eineinfaches Modell für Simulationen in der statistischen Mechanik mit unerwartetem dyna-mischen Verhalten. Betrachtet wird eine Kette von 2m Massenpunkten, die abwechselndmit weichen nichtlinearen Federn und harten linearen Federn verbunden sind, und derenEndpunkte fixiert sind (siehe Abbildung 1). Wie üblich lässt sich für dieses Massen-system die Hamiltonfunktion für die Ortsvariablen q1, . . . , q2m (q0 = 0 = q2m+1), die
1wie alle anderen Bilder [HO] entnommen
2

Abweichungen der Massenpunkte aus dem Ruhezustand, und deren Geschwindigkeitenpi = qi (q0 = 0 = q2m+1) aufstellen, bestehend aus kinetischer Energie und potentiel-ler Energie resultierend von den harten linearen Federn sowie den weichen nichtlinearenFedern,
H(p, q) =1
2
m∑i=1
(p2
2i−1 + p22i
)+ω2
4
m∑i=1
(q2i − q2i−1)2 +
m∑i=0
(q2i+1 − q2i)4,
wobei mi = 1 und ω 1 in Anlehnung an (2) als groß angenommen werden soll. Sinn-voller Weise führt man eine Koordinatentransformation auf Variablen durch, welche bisauf Skalierung den mittleren Ort der harten Federn beziehungsweise die Längenänderungdieser, nämlich
x0,i =1√2
(q2i + q2i−1) und x1,i =1√2
(q2i − q2i−1) ,
und die dazugehörigen zeitlichen Änderungen angeben, nicht zuletzt um auf die Formvon (4) zu gelangen,
H(x, x) =1
2
m∑i=1
(x2
0,i + x21,i
)+ω2
2
m∑i=1
x21,i+
+1
4
((x0,1 − x1,1)4 +
m−1∑i=1
(x0,i+1 − x1,i+1 − x0,i − x1,i)4 + (x0,m + x1,m)4
).
Bekanntlich ist H(x, x) = H(p, q) konstant. Um dieses Experiment zu analysieren ist esvon Vorteil daneben auch die harmonische Energie der harten Federn zu berechnen, dasheißt,
I = I1 + . . .+ Im, Ij =1
2
(x2
1,j + ω2x21,j
).
Teilt man die kinetische Energie in langsame und schnelle Bewegung auf, erhält man
T0 =1
2
m∑i=1
x20,i, T1 =
1
2
m∑i=1
x21,i.
Zur Veranschaulichung sei m = 3, ω = 50, x0,1(0) = 1, x0,1(0) = 1, x1,1(0) = ω−1,x1,1(0) = 1 und alle anderen Anfangswerte gleich Null. Das Experiment zeigt dyna-misches Verhalten auf verschiedenen Zeitskalen (siehe Abbildung 2). Auf der Zeitskalaω−1 zeigt die Änderung der kinetischen Energie T1, dass sich die harten Federn nahezuharmonisch verhalten. Die Bewegung der nichtlinearen Federn spielt sich jedoch in derZeitskala ω0 ab, veranschaulicht auf dem zweiten Teilbild. Der Energieaustausch, dasheißt die Übertragung der Schwingung zwischen den harten Feder, findet auf der Zeits-kala ω statt, was das Verhalten von I1, I2, I3 im dritten Bild zeigt. Diese Lösungen sindals exakt zu betrachten, da sie mit hoher Genauigkeit erzeugt worden sind. Betrachtetman das Geschehen für einen langen Zeitraum (ωN , N ≥ 2), so stellt man fest, dass sich
3
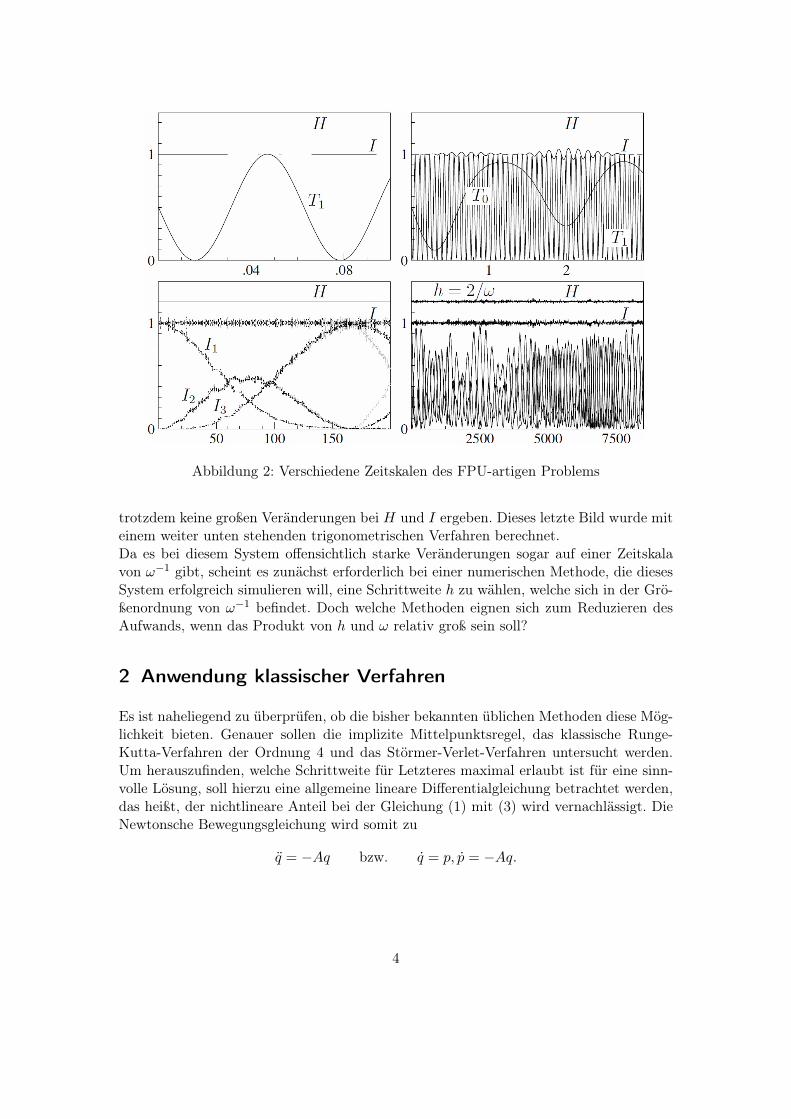
Abbildung 2: Verschiedene Zeitskalen des FPU-artigen Problems
trotzdem keine großen Veränderungen bei H und I ergeben. Dieses letzte Bild wurde miteinem weiter unten stehenden trigonometrischen Verfahren berechnet.Da es bei diesem System offensichtlich starke Veränderungen sogar auf einer Zeitskalavon ω−1 gibt, scheint es zunächst erforderlich bei einer numerischen Methode, die diesesSystem erfolgreich simulieren will, eine Schrittweite h zu wählen, welche sich in der Grö-ßenordnung von ω−1 befindet. Doch welche Methoden eignen sich zum Reduzieren desAufwands, wenn das Produkt von h und ω relativ groß sein soll?
2 Anwendung klassischer Verfahren
Es ist naheliegend zu überprüfen, ob die bisher bekannten üblichen Methoden diese Mög-lichkeit bieten. Genauer sollen die implizite Mittelpunktsregel, das klassische Runge-Kutta-Verfahren der Ordnung 4 und das Störmer-Verlet-Verfahren untersucht werden.Um herauszufinden, welche Schrittweite für Letzteres maximal erlaubt ist für eine sinn-volle Lösung, soll hierzu eine allgemeine lineare Differentialgleichung betrachtet werden,das heißt, der nichtlineare Anteil bei der Gleichung (1) mit (3) wird vernachlässigt. DieNewtonsche Bewegungsgleichung wird somit zu
q = −Aq bzw. q = p, p = −Aq.
4

Abbildung 3: Numerische Lösung des FPU-artigen Problems mit gleichen Anfangsdaten
Sei ω2 der größte Eigenwert von A, einer positiven semi-definiten Matrix. Die Berechnungeines Schrittes der Störmer-Verlet-Methode ergibt in diesem Fall(
pn+1
qn+1
)=
(pn + 1
2h (−Aqn −Aqn+1)qn + hpn + 1
2h2 (−Aqn)
)=
=
(I −1
2hAhI I − 1
2h2A
)(pnqn
)+
(0 −1
2hA0 0
)(pn+1
qn+1
)und somit(
pn+1
qn+1
)=
(I −1
2hA0 I
)(I −1
2hAhI I − 1
2h2A
)(pnqn
)=
=
(I − 1
2h2A −hA+ 1
4h3A2
hI I − 12h
2A
)(pnqn
).
Damit die lineare Stabilität gewährleistet ist, das heißt die Beschränktheit der Lösung,müssen die Eigenwerte der obigen Matrix betragsmäßig kleiner als 1 sein. Also betrachtetman das dazugehörige charakteristische Polynom
det
(−I + 1
2h2A+ λI hA− 1
4h3A2
−hI −I + 12h
2A+ λI
)=
= det((
(λ− 1)I + 12h
2A)2
+ h(hA− 1
4h3A2
))=
= det((λ− 1)2I + λh2A
),
freilich nur da −hI invertierbar ist und die auftretenden Matrizen als Potenzen von Apaarweise kommutieren. Dies entspricht dem charakteristischem Polynom von −λh2Abezüglich (λ− 1)2. Es ergibt sich für ωi als Eigenwert von A
0 = (λ− 1)2 + λh2ω2i = λ2 − 2λ(1− ω2
i h2) + 1.
5

Daraus folgt |λ| ≤ 1 genau dann, wenn hωi ≤ hω ≤ 2.Die Anwendung obiger Methoden auf das Testproblem ergibt beistehende Ausgabe (Ab-bildung 3). Es ist zu erkennen, dass für die sehr geringe Schrittweite h = 0, 001 dieLösungen zufriedenstellend sind. Bei einer Vergrößerung der Schrittweite sind die ge-lieferten Lösungen inakzeptabel. Beim klassischen Runge-Kutta-Verfahren ergeben sichkomplett falsche Lösungen und bei dem Störmer-Verlet-Verfahren sind zwar die richtigenTendenzen zu erkennen, jedoch ist dort der relative Fehler zu groß.Diese Ergebnisse erzwingen die Ursachen dafür zu suchen und natürlich auch neue bessereMethoden zu entwickeln.
3 Entwicklung alternativer Verfahren
In diesem Abschnitt sollen Verfahren vorgestellt werden, die speziell auf hoch oszillierendeProbleme zugeschnitten sind. Es sollen also Hamilton-Systeme in Augenschein genommenwerden, bei denen das Potential, wie aus (1) mit (2) ersichtlich, aufgeteilt werden kann.Der Aufwand −∇W (q) auszuwerten möge geringer sein als bei −∇U(q). Dann ist essinnvoll, nicht bei jedem Zeitschritt, dessen Länge durch −∇W (q) - verantwortlich fürdas hoch oszillierende Verhalten - vorgegeben wird, auch auf die Veränderung des zweitenAnteils des Potentials Rücksicht zu nehmen. Deshalb ist die Störmer-Verlet-Methode fürderartige Systeme ungeeignet.
3.1 Lange- und Multiple-Zeitschritt-Verfahren
Einhergehend mit der Aufteilung des Potentials ist die Trennung der Hamilton-FunktionH = H [s] + H [l] in einen schnellen und langsamen Anteil, wobei die kinetische Ener-gie gegebenenfalls ebenso wie das Potential zu trennen ist. Wenn man vom idealen Fallausgeht, dass die exakten Flüsse ϕ[s]
t , ϕ[l]t der dazugehörigen Hamilton-Funktionen expli-
zit berechenbar sind, so lässt sich der Gedanke der Splitting-Methoden folgendermaßenanwenden
Ψh = ϕ[l]h/2 ϕ
[s]h ϕ
[l]h/2.
Diese Methode nennt man Langes-Zeitschritt-Verfahren, da der Zeitschritt h groß seindarf im Vergleich zur Zeitskala der Oszillation.In der Regel werden sich die Flüsse zu den beiden Hamiltonfunktionen H [s] und H [l]
jedoch nicht exakt bestimmen lassen. Um trotzdem eine ähnliche Konstruktion zu erhal-ten, wählt man zunächst δh so, dass diese Schrittweite für ein Verfahren φ[s]
t angewandtauf H [s] Erfolg verspricht. Anschließend ist die maximale Zahl N festzustellen, sodassH [l] ebenfalls mit einem möglicherweise anderen Verfahren φ
[l]t simuliert werden kann,
allerdings mit der Schrittweite h := Nδh. Dies definiert nun das sogenannte Multiple-Zeitschritt-Verfahren
Ψh =(φ
[l]h/2
)∗[φ
[s]h/N
]N φ[l]
h/2.
6

Lemma 1. Es seien φ[l]t eine beliebige Methode der Ordnung 1 und φ[s]
t eine symmetri-sche Methode der Ordnung 2. Dann ist das Multiple-Zeitschritt-Verfahren symmetrischund besitzt Ordnung 2.Wenn sowohl φ[l]
t als auch φ[s]t symplektisch ist, dann ist das Multiple-Zeitschritt-Verfahren
ebenso symplektisch.
Beweis. Die vorgestellte Methode ist eine Kompositionsmethode. Die Behauptung istsomit offensichtlich.
Diese Methoden bieten zwar die Möglichkeit, dass längere Zeitschritte erlaubt werdenals bei der Störmer-Verlet-Methode, allerdings ergeben sich numerische Resonanzphä-nomene, wenn das Produkt von Schrittweite h und einer Eigenfrequenz von ∇2W einVielfaches von π ergibt.
3.2 Mollified-Impuls-Methode
Beschränkt man die zu betrachtenden Systeme auf derartige, deren Hamiltonfunktiondie Form H(p, q) = (T (q) +W (q)) + U(q) besitzt, T (q) = 1
2pT p, kann der exakte Fluss
ϕHh des Systems angenähert werden mit
ϕUh/2 ϕT+Wh ϕUh/2.
Dies führt zur gleichen Struktur wie zuvor, wenngleich die Hamiltonfunktion anders auf-geteilt wurde, und zwar zur folgenden Methode
Ψh =(φUh/2
)∗((φWh/2N
)∗ φTh/N φ
Wh/2N
) φUh/2.
Natürlich gilt für diese obiges Lemma, das heißt, bei geeigneter Wahl der Grundmethodenist sie symplektisch und symmetrisch. Diese lässt sich realisieren zum Beispiel als
• Setze p+n = pn − 1
2h∇U(qn).
• Löse q = −∇W (q) mit Anfangswerten (qn, p+n ) mit einem Zeitschritt h um daraus
(qn+1, p−n+1) zu erhalten.
• Setze pn+1 = p−n+1 − 12h∇U(qn+1).
Dieses Vorgehen sei als Impuls-Methode bezeichnet. Die beiden Randterme werden amEnde und am Anfang eines jeden Schrittes Impuls-artig verwendet, wohingegen dazwi-schen viele kleine Schritte stattfinden. Dadurch entsteht aber sofort ein Problem: DieKraft −∇U wirkt nicht direkt auf die Oszillation ein und wird nur an isolierten Punktender oszillierenden Lösung ausgewertet.Ein Ausweg besteht darin, die sich langsam ändernde Kraft an einem Durchschnitts-wert, bezeichnet mit qn = a(qn), auszuwerten. Dazu ersetzt man das Potential U(q)durch U(q) = U(a(q)) und somit auch die Kraft −∇U in der Impuls-Methode durch einegemilderte Kraft
−∇U(q) = −a′(q)T∇U(a(q)).
7

Dies heißt man dann Mollified-Impuls-Methode; eine Impuls-Methode mit speziellemPotential. Der allgemeine Algorithmus der Mollified-Impuls-Methode liest sich somit fol-gendermaßen:
• Setze p+n = pn − 1
2h∇U(qn).
• Löse q = −∇W (q) mit Anfangswerten (qn, p+n ) mit einem Zeitschritt h um daraus
(qn+1, p−n+1) zu erhalten.
• Berechne die Durchschnittswerte a (qn+1) und a′ (qn+1) mit einer geeigneten Me-thode.
• Setze pn+1 = p−n+1 − 12h∇U(qn+1).
Es bleibt noch ein geeignete Art der Mittelung für a(qn) zu bestimmen. Zu beachtenist dabei, dass es ein Operator ist, der nur von den Ortsvariablen qn abhängt und imGegensatz hierzu unabhängig von den Impulsvariablen pn ist, damit Symplektizität undSymmetrie garantiert werden können. Dies schließt das Mitteln der Lösungen, die inobigem zweiten Schritt generiert werden, aus. Eine Möglichkeit stellt die anschließendeVorgehensweise dar. Man löst zuerst die folgenden Hilfsanfangswertprobleme mit dersel-ben Methode mit der gleichen Schrittweite
x = −∇W (x) mit x(0) = qn, x(0) = 0,
X = −∇2W (x(t))X mit X(0) = I, X(0) = 0,
und berechnet daraus als Durchschnittswerte
a(qn+1) = 1h
∫ h
0x(t)dt und a′(qn+1) = 1
h
∫ h
0X(t)dt.
3.3 Trigonometrische Verfahren
Wendet man nun die Mollified-Impuls-Methode mit dieser Mittelung auf das Problem(1) mit (2) und (3) an, so kann man die analytische Lösung bestimmen. Als Lösungender Hilfsdifferentialgleichungen ergeben sich
x (t) = cos (Ωt) qn und X (t) = cos (Ωt)
mit Ω = A1/2. Also berechnen sich die Mittelwerte zu
a (qn+1) = sinc (hΩ) qn und a (qn+1) = sinc (hΩ) .
Dabei ist sinc die Erweiterung der Funktion
sinc : R→ R, x 7→
sin(x)x für x 6= 0,
1 für x = 0,
auf Matrizen. Durch Lösen der dritten Differentialgleichung, q = −∇W (q) mit den An-fangswerten (qn, p
+n ), vereinfacht sich die Mollified-Impuls-Methode mit g (x) := −∇U (x)
8

zu
p+n = pn + 1
2hsinc (hΩ) g (sinc (hΩ) qn)(qn+1
p−n+1
)=
(cos (hΩ) hsinc (hΩ)−Ω sin (hΩ) cos (hΩ)
)(qnp+n
)pn+1 = p−n+1 + 1
2hsinc (hΩ) g (sinc (hΩ) qn+1) .
3.3.1 Mollified-Impuls-Verfahren als trigonometrisches Verfahren
Durch Eliminierung der Impulse aus diesen Gleichungen erhält man daraus die Zwei-Schritt-Formulierung nach García-Archilla et al. (1999)
qn+1 − 2 cos (hΩ) qn + qn−1 = h2sinc2 (hΩ) g (sinc (hΩ) qn) .
Der Impuls kann dann durch
2hsinc (hΩ) pn = qn+1 + qn−1
ermittelt werden. Die Plausibilität dieser Wahl erklärt sich im nächsten Abschnitt.
3.3.2 Gautschis und Deuflhards trigonometrische Verfahren
Im Gegensatz zu vorher soll dieses Mal eine direkte Auseinandersetzung mit dem Pro-blem (1) mit (2) und (3) stattfinden, wobei wieder gelte g (x) = −∇U (x). Als linearegewöhnliche Differentialgleichung ergibt sich(
qp
)=
(0 I−Ω2 0
)︸ ︷︷ ︸
:=B
(qp
)+
(0−1
)g(q)
mit den Anfangswerten q(0) = q0 und p(0) = p0. Die Methode der Variation der Kon-stanten liefert(
q(t)p(t)
)=
(cos (Ωt) Ω−1 sin (Ωt)−Ω sin (Ωt) cos (Ωt)
)︸ ︷︷ ︸
=eBt
(q0
p0
)+
+
∫ t
0
(−Ω−1 sin (Ω (t− s))
cos (Ω (t− s))
)g (q (s)) ds. (5)
Falls g = C = konst. ist, dann sind die folgenden Approximationen an q,
qn+1 − 2 cos (hΩ) qn + qn−1 = h2sinc2(
12hΩ
)gn,
eine von Gautschi (1961) vorgeschlagene Diskretisierung, und p, die bereits verwendeteGeschwindigkeitsbestimmung
2hsinc (hΩ) pn = qn+1 + qn−1,
9

exakt. Aus der Differentialgleichung folgt nämlich
q (t) = −Ω sin (Ωt) q0 + cos (Ωt) p0 + Ω−1 sin (Ωt)C
undq (t) = −Ω2 cos (Ωt) q0 − Ω sin (Ωt) p0 + cos (Ωt)C.
Mit Hilfe der Additionstheoreme vollzieht man nach, dass
qn+1 − qn−1 =
= (sin (nhΩ) cos (hΩ) + sin (hΩ) cos (nhΩ))(−Ωq0 + Ω−1C
)+
+ (cos (nhΩ) cos (hΩ)− sin (nhΩ) sin (hΩ)) p0−− (sin (nhΩ) cos (hΩ)− sin (hΩ) cos (nhΩ))
(−Ωq0 + Ω−1C
)−
− (cos (nhΩ) cos (hΩ) + sin (nhΩ) sin (hΩ)) p0 =
= 2 sin (hΩ)(cos (nhΩ)
(−Ωq0 + Ω−1C
)− sin (nhΩ) p0
)=
= 2hsinc (hΩ) qn.
Dass auch die Ortsdiskretisierung für g = C = konst. exakt ist, zeigt man ähnlich zudieser Herleitung. Durch Betrachtung der Lösungsformel ergibt sich eine weitere trigo-nometrische Methode. So näherte Deuflhard (1979) das Integral durch die Trapezregel,(
qn+1
pn+1
)=
(cos (hΩ) Ω−1 sin (hΩ)−Ω sin (hΩ) cos (hΩ)
)(qnpn
)+h
2
(Ω−1 sin (hΩ) gn
cos (hΩ) gn + gn+1
),
dieses Mal mit den Anfangswerten q(nh) = qn und p(nh) = pn, und schlug folgendeMethode vor, entstehend aus Eliminierung der Impulse,
qn+1 − 2 cos (hΩ) qn + qn−1 = h2sinc (hΩ) gn,
da sich in analoger Weise zu qn+1
qn−1 = cos (−hΩ) qn + Ω−1 sin (−hΩ) pn −h
2Ω−1 sin (−hΩ) gn
ergibt. Als Geschwindigkeitsberechnung eignet sich wieder die übliche Diskretisierung.
4 Alternative Verfahren und das Testproblem
Die Fähigkeiten der neu hinzugewonnenen Methoden gilt es nun zu prüfen. Deshalb solldie Methode angewandt werden auf nichtlineare Systeme der bekannten Form
x+ Ω2x = g(x) (6)
mit einem glatten nichtlinearen Gradientenfeld g (x) = −∇U (x) und der quadratischenMatrix
Ω =
(0 00 ωI
), ω 1, (7)
10

mit Blöcken beliebiger Aufteilung. Es sollen nur Lösungen betrachtet werden, die unab-hängig von ω beschränkt sind, so dass die Anfangswerte
12 ‖x(0)‖2 + 1
2 ‖Ωx(0)‖2 ≤ E (8)
erfüllen, wobei E unabhängig von ω ist. Diese Bedingung besagt, dass die Gesamtenergiedes betrachteten Teilchensystems endlich ist.Wie leicht zu erkennen ist, stellt das vorgestellte Modellproblem ein Beispiel aus dieserKlasse dar. Nur die Methoden, die zufriedenstellende Lösungen für dieses Problem ab-liefern, sind es auch wert bei allgemeineren hoch oszillierenden Problemen betrachtet zuwerden wie das Auftreten der hohen Frequenz beim nichtlinearen Anteil, mehrere kon-stante hohe Frequenzen bis hin zu einer ortsabhängigen kinetischen Energie oder mitzeit- und lösungsabhängigen hohen Frequenzen.2
4.1 Eigenschaften der numerischen Methoden
Verallgemeinert man die Methoden aus dem vorherigen Abschnitt, so erhält man dieZwei-Schritt-Formulierung einer numerischen Methode, die zum Lösen des Problems (6)herangezogen werden kann,
xn+1 − 2 cos (hΩ)xn + xn−1 = h2Ψg (Φxn) (9)2hsinc (hΩ) xn = xn+1 − xn−1, (10)
wobei Ψ = ψ (hΩ) und Φ = φ (hΩ) mit geraden, reellwertigen sogenannten Filterfuntio-nen ψ und φ mit ψ (0) = 1 = φ (0) gilt. Neben den bereits eingeführten Möglichkeitenbieten sich noch andere an, so dass sich unten stehende Übersicht ergibt:
(A) ψ(ξ) = sinc2(12ξ) φ(ξ) = 1 Gautschi (1961)
(B) ψ(ξ) = sinc(ξ) φ(ξ) = 1 Deuflhard (1979)(C) ψ(ξ) = sinc(ξ)φ(ξ) φ(ξ) = sinc(ξ) Garcia-Archilla et al. (1999)(D) ψ(ξ) = sinc2(1
2ξ) φ(ξ) = (∗) Hochbruck und Lubich (1999)(E) ψ(ξ) = sinc2(ξ) φ(ξ) = 1 Hairer und Lubich (2000)
(∗) steht für sinc(ξ(1 + 13 sin2(1
2ξ))). Ebenso kann die Methode als Ein-Schritt-Verfahren,in einer durch die Formel (5) motivierten Form, dargestellt werden:
xn+1 = cos(hΩ)xn + Ω−1 sin(hΩ)xn +1
2h2Ψgn (11)
xn+1 = −Ω sin(hΩ)xn + cos(hΩ)xn +1
2h2(Ψ0gn + Ψ1gn+1). (12)
Die verwendeten Funktionen sind dabei definiert als gn = g (Φxn) und Ψ0 = ψ0 (hΩ)sowie Ψ1 = ψ1 (hΩ) mit geraden, reellwertigen Funktionen ψ0 und ψ1, die ψ0 (0) = 1 =ψ1 (0) erfüllen.
2[GNI] Seiten 516-565
11

Lemma 2. Das Verfahren bestehend aus (11) und (12) ist von der Ordnung 2 für h→ 0.Es ist genau dann symmetrisch, wenn
ψ (ξ) = sinc (ξ)ψ1 (ξ) , ψ0 (ξ) = cos (ξ)ψ1 (ξ) (13)
erfüllt ist. Unter diesen Voraussetzungen ist das Verfahren genau dann symplektisch,wenn zusätzlich noch gilt
ψ (ξ) = sinc (ξ)φ (ξ) .
Beweis. Die Ordnungsaussage ergibt sich durch den Vergleich der Taylorentwicklungender exakten Lösung,
x (t+ h) = x(t) + hx(t) + 12h
2(g (x(t))− Ω2x(t)
)+O
(h3),
x (t+ h) = x(t) + h(g (x(t))− Ω2x(t)
)+ 1
2h2(g′ (x(t)) x(t)− Ω2x(t)
)+O
(h3),
mit denjenigen der numerischen Approximation,
xn+1 = xn − 12h
2Ω2xn + hxn + 12h
2g (xn) +O(h3),
xn+1 = −hΩ2xn + xn − 12h
2Ω2xn + 12h(g (xn) + g (xn) + hg′ (xn) xn
)+O
(h3),
wobei zu beachten ist, dass Ψ = I + O(h2) = Φ und ebenso Ψ0 = I + O(h2) = Ψ1
aufgrund der Forderungen an diese Funktionen.Durch Austauschen n↔ n+ 1 und h↔ −h erhält man
xn = cos(hΩ)xn+1 − Ω−1 sin(hΩ)xn+1 +1
2h2Ψgn+1
xn = Ω sin(hΩ)xn + cos(hΩ)xn+1 −1
2h2(Ψ0gn+1 + Ψ1gn).
Durch geschicktes Multiplizieren der beiden Gleichungen mit sin (hΩ) und cos (hΩ) mitanschließendem Addieren erfährt man, dass die adjungierte Methode genau dann mitder ursprünglichen Methode übereinstimmt, das bedeutet, symmetrisch ist, wenn obigeGleichungen erfüllt sind.Für den dritten Teil der Aussage interpretiert man das Verfahren als Splitting-Methode.Zuerst führt man einen halben Zeitschritt der Form
x+n = xn +
1
2hΨ1g (Φxn)
durch, der einem halben Zeitschritt des symplektischen Euler-Verfahrens angewandt aufx = Ψ1g (Φx) entspricht. Anschließend löst man die Differentialgleichung x + Ω2x = 0mit den Anfangswerten xn und x+
n exakt, so dass man
xn+1 = cos (hΩ)xn + Ω−1 sin (hΩ) xn + 12h
2 sinc (hΩ) Ψ1︸ ︷︷ ︸=Ψ
g (Φxn)
x−n+1 = −Ω sin (hΩ)xn + cos (hΩ) xn + 12h cos (hΩ) Ψ1︸ ︷︷ ︸
=Ψ0
g (Φxn)
12

durch Berechnung aus der Lösung x(t) = cos (Ωt)xn+Ω−1 sin (Ωt) x+n erhält. Zum Schluss
führt man dann das Adjungierte zum ersten Halbschritt durch, das heißt, man setzt
xn+1 = x−n+1 +1
2hΨ1g (Φxn+1) =
= −Ω sin (hΩ)xn + cos (hΩ) xn + 12h (Ψ0g (Φxn) + Ψ1g (Φxn+1)) .
Da im zweiten Teil die Integration exakt ist, reicht es zu zeigen, dass Ψ1g (Φx) genaudann ein Gradientenfeld ist, wenn die Zusatzbedingung erfüllt ist, und somit von einemPotential herrührt, wodurch der symplektische Euler seine Symplektizität auch entfaltenkann.
4.2 Anwendung auf das Testproblem
Abbildung 4: Energieaustausch der harten Federn für die Verfahren (A)-(F) für h =0, 035, ω = 50
Wie sich diese Methoden bei Anwendung auf ein konkretes Problem verhalten, soll dieEinsetzung dieser bei dem Modellproblem aufzeigen. So zeigt Abbildung 4 den Energie-austausch bei den sechs Verfahren (A)-(F)3 angewandt auf das Fermi-Pasta-Ulam-artigeExperiment mit denselben Eingangsdaten wie in Abbildung 2. Wiederum werden die glei-chen physikalischen Größen betrachtet, so dass sich anhand der Bilder feststellen lässt,dass nur die Methoden (B), (D) und (F) zufriedenstellende Ergebnisse liefern. Für einvernünftiges Verhalten der Methoden kann gezeigt werden, wie später zu sehen sein wird,dass ψ (hω)φ (hω) = sinc (hω) sein muss. Dieser Bedingung genügt das Verfahren (B);bei (D) erklärt sich das gute Verhalten durch die Annäherung an diese Beziehung, indiesem Fall mittels ψ (hω)φ (hω) ≈ 0, 95sinc (hω) für hω = 1, 5.Betrachtet man die Energieerhaltung vonH der Methoden für einen langen Zeitraum und3[GNI] Seite 478 für die Methode (F)
13

Abbildung 5: Maximaler Fehler der totalen Energie auf dem Intervall [0, 1000] für dieVerfahren (A)-(F) in Abhängigkeit von hω (h = 0, 02)
verschiedene Werte von ω für ein festes h, so stellt sich heraus, dass sich bei Vielfachenvon π erhebliche numerische Instabilitäten ergeben (siehe Abbildung 5). Nur Methode(E) kommt diesen unerwünschten Ungenauigkeiten aus. Doch nimmt man auch die os-zillatorische Energie I in Augenschein, so ergeben sich für diese vergleichbare Bilder, beidenen sogar das Verfahren (E) nicht mehr für alle hω die Energie erhält.Nichtsdestoweniger zeigt sich, dass diese Methoden für Schrittweiten, die größer sind alsdiejenigen der bisher bekannten Verfahren bei der Anwendung auf das Testproblem undbei denen diese versagten, tauglich sind und brauchbare Ergebnisse anzeigen können.
5 Modulierte Fourier-Entwicklung
Zur Erklärung der numerischen Phänomene stellt die modulierte Fourier-Entwicklung,die sowohl die exakte als auch die numerische Lösung in einen sich langsam änderndenAnteil und oszillierende Anteile zerlegt, wobei letztere aus trigonometrischen Funktionenmit sich langsam ändernden Koeffizientenfunktionen bestehen, das analytische Werkzeugbereit. Dieses ist notwendig, da die Rückwärtsfehler-Analyse nur Ergebnisse für hω → 0liefert, wohingegen hier der Fall hω ≥ c > 0 von Interesse ist.
5.1 Entwicklung
Betrachte (6) mit (7). Für die Spezialfälle (Ω = ω ∈ R) g(x) = 0 oder g(x) = x ergibt sichx(t) = c1e
iωt + c−1e−iωt, c1, c−1 ∈ C, bzw. x(t) = c1e
iαteiωt + c−1e−iαte−iωt, c1, c−1 ∈ C
14

mit α = O(ω−1
). Wenn g(x) quadratische Terme enthält, dann sind ebenso Produkte
der gleichen Form beteiligt.Der allgemeine Ansatz für die exakte Lösung lautet somit
x(t) =∑k∈Z
eikωtzk(t), zk(t) =
(zk0 (t)zk1 (t)
),
wobei zk(t) entsprechend Ω aufgeteilt ist. Das dieser Ansatz gerechtfertigt ist zeigt nach-stehender Satz.
Satz 1. Betrachte eine Lösung x (t) des Problems (6), welche die Energiebedingung (8)erfüllt, und in einer kompakten Menge K für 0 ≤ t ≤ T bleibt. Dann erlaubt die Lösungeine Entwicklung der Form
x(t) =∑|k|<N
eikωtzk (t) +RN (t)
für beliebiges N ≥ 2, wobei der Restterm und seine Ableitung beschränkt sind gemäß
RN (t) = O(ω−N−2
)und RN (t) = O
(ω−N−1
)für 0 ≤ t ≤ T.
Die Funktionen zk =(zk0 , z
k1
)zusammen mit all ihren Ableitungen (bis zu einer beliebigen
Ordnung M) sind beschränkt durch
z00 = O(1), z1
0 = O(ω−3), zk0 = O(ω−k−2),z0
1 = O(ω−2), z11 = O(ω−1), zk1 = O(ω−k−2)
für k = 2, . . . , N − 1. Darüber hinaus gilt z−k = zk für alle k. Diese Funktionen sindeindeutig bis auf Terme der Ordnung O
(ω−N−2
). Die Konstanten symbolisiert durch die
O-Notation sind unabhängig von ω und t mit 0 ≤ t ≤ T (aber abhängig von N,T,E, denSchranken der Ableitungen der Nichtlinearität g (x) auf K und der maximalen OrdnungM der betrachteten Ableitungen).
Beweisskizze. 4 DefinierexN (t) =
∑|k|<N
eikωtzk (t).
4[GNI] Seiten 497-498 für den vollständigen Beweis
15

Die Taylorentwicklung von g (x) um z0 an der Stelle xN (t) liefert
g (xN (t)) = g(z0)
+ g′(z0) ∑
0<|k|<N
eikωtzk+
+ 12
( ∑0<|k|<N
eikωtzk)T
g′′(z0) ∑
0<|k|<N
eikωtzk + . . . =
=∑m≥0
∑0<|α1|,...,|αm|<N
1m!g
(m)(z0) (eiα1ωtzα1 , . . . , eiαmωtzαm
)=
=∑k≥0
(∑m≥0
∑0<|α1|,...,|αm|<N
s(α)=k
1m!g
(m)(z0)
(zα1 , . . . , zαm)
)eikωt.
Hier sei s(α) =∑m
j=1 αj zum Multiindex α = (α1, ..., αm). Setzt man die N -te Partial-summe xN und die Taylorentwicklung von g (xN (t)) in die Differentialgleichung (6) mit(7) ein, so erhält man mit Koeffizientenvergleich (ω0 = 0, ω1 = ω)
zkj + 2ikωzkj +(ω2j − (kω)2
)zkj =
∑m≥0
∑0<|α1|,...,|αm|<N
s(α)=k
1m!g
(m)(z0)
(zα1 , . . . , zαm),
k = 1, . . . , N − 1, j = 1, 2. (14)
Für große ω ist der Term mit der höchsten auftretenden Potenz von ω dominierend.Da man an Lösungen mit beschränkten Koeffizientenfunktionen interessiert ist, versuchtman die höheren Ableitungen zu eliminieren, da sonst singulär gestörte Probleme drohenwürden. Im Geiste der Euler-Ableitung der Euler-Maclaurinschen-Summenformel kannman dies durchführen und erhält
• eine Differentialgleichung zweiter Ordnung für z00(t),
• eine Differentialgleichung erster Ordnung für z±11 (t) und
• algebraische Gleichungen für alle andern zkj (t).
Die Anfangsbedingungen ergeben sich durch das Einsetzen von xN in die Anfangsbedin-gung x(0) = x0, x(0) = x0. Anschließend schätzt man den Fehler RN = x(t)−xN (t).
Ebenso wie die analytische Lösung besitzt auch die numerische Lösung eine modulierteFourier-Entwicklung. Wie man aber schon an der numerischen Resonanz, wenn hω sich imBereich von Vielfachen von π bewegt, erkennt, ist es notwendig diesen Fall auszuschließen.Dies gelingt mit der Bedingung, dass h und ω−1 in einem Gebiet des R2 liegen, für dieeine positive Konstante c existiert, so dass
| sin(12khω)| ≥ c
√h für k = 1, . . . , N, mit N ≥ 2. (15)
Aus dieser Bedingung ergibt sich, dass hω sich außerhalb einer O(√h)-Umgebung von
Vielfachen von π befindet, da∣∣k2 (hω + lπ)
∣∣+O(h3) = | sin(12khω)| ≥ c
√h
16

für entsprechendes l ∈ Z. Für gegebenes h und ω muss eine Einschränkung an N einge-führt werden. Es wird nämlich ein festes N so gewählt, dass (15) erfüllt ist.Außerdem müssen auch gewisse Regularitätsbedingungen an die Filterfunktionen ψ undφ gestellt werden:
|ψ(hω)| ≤ C1sinc2(12hω),
|φ(hω)| ≤ C2
∣∣sinc(12hω)
∣∣ ,|ψ(hω)φ(hω)| ≤ C3 |sinc(hω)| .
(16)
Satz 2. Betrachte die numerische Lösung des Systems (6) mit (7) und (8) erhalten durchdie Methode (9) mit Schrittweite h. Sei der Startwert x1 gegeben durch (11) mit n = 0.Weiter sei angenommen, es gelten hω ≥ c0 ≥ 0, die Nicht-Resonanz-Bedingung (15) unddie Schranken (16) für ψ (hω) und φ (hω). Dann erlaubt die Lösung eine Entwicklungder Form
xn(t) =∑|k|<N
eikωtzkh (t) +Rh,N (t)
gleichmäßig für 0 ≤ t = nh ≤ T . Der Restterm ist von der Form
Rh,N (t) = t2hNΨr (t) mit r (t) = O(φ (hω)N + hm
),
wobei m ≥ 0 beliebig gewählt werden kann. Die Koeffizientenfunktionen zusammen mitall ihren Ableitungen (bis zu einer beliebigen festen Ordnung) sind beschränkt durch
z0h,0 = O(1), z1
h,0 = O(ω−2), zkh,0 = O(ω−k),z0h,1 = O(ω−2), z1
h,1 = O(ω−1), zkh,1 = O(ω−k)
für k = 2, . . . , N−1. Darüber hinaus gilt z−kh = zkh für alle k. Die Konstanten symbolisiertdurch die O-Notation sind unabhängig von ω und h mit (16), aber sie sind abhängig vonE,N,m, c und T .
Die Beweisstruktur ähnelt der des vorherigen Beweises 5.
5.2 Invarianten der Entwicklung
Die Gleichung (6) gehört zu der Hamiltonfunktion
H (x, x) = 12
(xT x+ xTΩx
)+ U(x).
Bekanntlich bleibt diese Energie erhalten, wodurch erwartet werden kann, dass sich ähn-lich zu dieser eine Invariante für die modulierte Fourier-Entwicklung der exakten Lösungfinden lässt. In den numerischen Experimenten hat man außerdem beobachten können,dass auch die oszillatorische Energie
I (x, x) = 12
(‖x1‖2 + ω2‖x1‖2
)5[GNI] Seiten 499-502 für den Beweis
17

sich annähernd konstant verhält.Mit yk(t) = eikωtzk(t) für alle 0 ≤ |k| < N sei
y = (y−N+1, . . . , y−2, y−1, y0, y1, y2, . . . , yN−1)
der Vektor, der als Einträge die Summanden der modulierten Fourier-Entwicklung derexakten Lösung besitzt. Mit ( 14) lässt sich erkennen, dass mit yα = (yα1 , . . . , yαm) dieser
yk + Ω2yk = −∑m≥0
∑0<|α1|,...,|αm|<N
s(α)=k
1m!U
(m+1)(y0)yα +O(ω−N
)erfüllt. Mit der Definition von
U(y) = U(y0) +∑
m≥0,|α|=0
1
m!U (m)(y0)yα
erhält man durch Indexverschiebung und Kombinatorik
∇y−kU(y) =∑m≥0
∑0<|α1|,...,|αm|<N
s(α)=k
1m!U
(m+1)(y0)yα
und somit die Hamiltonstruktur
yk + Ω2yk = −∇y−kU(y) +O(ω−N
). (17)
Damit ergeben sich die formalen ersten Integrale
H(y, y) = 12
∑|k|<N
((y−k
)Tyk +
(y−k
)TΩ2yk
)+ U(y)
I(y, y) = −iω∑k∈Z
k(y−k
)Tyk.
Letzteres ist vergleichbar mit der Energie des harmonischen Oszillators, die oben ange-führt ist.
Satz 3. Unter den gleichen Bedingungen wie bei Satz 1 erfüllt die Hamiltonfunktion dermodulierten Fourier-Entwicklung
H(y(t), y(t)) = H(y(0), y(0)) +O(ω−N ) (18)
H(y(t), y(t)) = H(x(t), x(t)) +O(ω−1), (19)
Ähnliche Abschätzungen lassen sich für die zweite Invariante finden
I(y(t), y(t)) = I(y(0), y(0)) +O(ω−N ) (20)
I(y(t), y(t)) = I(x(t), x(t)) +O(ω−1). (21)
Die mit O symbolisierten Konstanten sind unabhängig von ω und t mit 0 ≤ t ≤ T , aberabhängig von E, N und T .
18

Beweis. Das Multiplizieren von (17) mit(y−k
)T und Summierung über k liefert∑|k|<N
(y−k
)T (yk + Ω2yk
)= − d
dtU(y) +O
(ω−N
).
Die Integration dieses Ausdrucks von 0 bis t und das Benutzen von y−k = yk führt zu(18).Mit den Schranken von Satz 1 gilt für 0 ≤ t ≤ T
H (x, x) = 12‖y
00‖
2+ ‖y1
1‖2
+ ω2‖y11‖
2+ U(y0) +O
(ω−1
).
Andererseits erhält man aus den Ordnungsaussagen der modulierten Fourierentwicklungsowie der Taylorentwicklung von U und der eingangs dieses Kapitels angeführten Hamil-tonfunktion
H (x, x) = 12‖y
00‖
2+ 1
2‖y11 + y−1
1 ‖2
+ 12ω
2‖y11 + y−1
1 ‖2
+ U(y0) +O(ω−1
).
Benutzt man y11 = eiωtz1
1 und leitet daraus y11 = eiωt
(z1
1 + iωz11
)ab, dann erhält man mit
z11 = O
(ω−1
)unter Beachtung von y−1
1 = y11, einmal durch Einsetzen, das andere Mal
durch die Dreiecksungleichung, dass sowohl
y11 + y−1
1 = iω(y1
1 − y−11
)als auch
‖y11‖ = ω‖y1
1‖+O(ω−1
)erfüllt sind. Setzt man diese Erkenntnisse in die beiden Hamiltonfunktionen ein undverwendet die Parallelogrammgleichung, so erhält man (19).In ähnlicher Weise zu diesen Aussagen findet man die Behauptungen, welche die EnergieI betreffen6.
Ebenso kann auch für den numerischen Lösungsvektor
y = (y−N+1, . . . , y−2, y−1, y0, y1, y2, . . . , yN−1)
mit ykh(t) = eikωtzkh(t) für alle 0 ≤ |k| < N eine Hamiltonfunktion konstruiert werden7,mit der sich Abschätzungen entwickeln lassen. Allerdings erfordert dies eine weitere Be-dingung an die Filterfunktion φ:
φ ist analytisch und besitzt als reelle Nullstellen nur Vielfache von π. (22)
Satz 4. Unter den Bedingungen von Satz 2 und der Bedingung (22) existieren Hh(y)und Ih(y), sodass
Hh(y(t)) = H(y(0)) +O(thN ), Ih(y(t)) = I(y(0)) +O(thN ),
Hh(y(t)) = H(xn, xn) +O(h), Ih(y(t), y(t)) = I(xn) +O(h)
für 0 ≤ t = nh ≤ T gilt. Die mit O symbolisierten Konstanten sind unabhängig von ω,aber abhängig von E, N und T .
6[GNI] Seiten 505-506 für den vollständigen Beweis7[GNI] Seiten 507-510 für die Konstruktion und den Beweis des anschließenden Satzes
19

5.3 Langzeit-Energieerhaltung
Die Aussagen aus dem vorherigen Abschnitt besitzen nur auf dem Intervall [0, T ] Gül-tigkeit, wobei T ein fester Wert abhängig von ω ist. Diese Errungenschaften lassen sichaber auch auf viel längere Zeiträume erweitern.Wie bereits des öfteren erwähnt, stellt die Energieerhaltung der totalen Energie H (x, x)keine Überraschung dar. Doch die nahezu gleichbleibende oszillatorische Energie, einetypische Gegebenheit eines hoch oszillierenden Problems, ist bemerkenswert.
Satz 5. Wenn die Lösung x (t) von (6) in einer kompakten Menge bleibt für 0 ≤ t ≤ ωN ,dann gilt
I(x(t), x(t)) = I(x(0), x(0)) +O(ω−1) +O(tω−N ).
Die Konstanten, symbolisiert mit O, sind unabhängig von ω und t mit 0 ≤ t ≤ ωN , aberabhängig von der Anfangsenergie E und dem Abbruchindex N .
Beweisskizze. 8 Wähle T > 0 so, dass die Sätze (1) und (3) anwendbar sind. Teile dasZeitintervall [0, t] in Intervalle der Länge T bis auf ein Restintervall, das im Allgemeinenkürzer als T ist, auf. Für diese Zeitintervalle sei jeweils die modulierte Fourierentwicklungbezogen auf den Anfangswert, der durch Auswertung der exakten Lösung am linken End-punkt eines Intervalls ermittelt wird, gegeben. Mit (21) können die Energien I am Anfangund am Ende des Gesamtintervalls auf Kosten der Größenordnung O(ω−1) in die konstru-ierten Energien I der modulierten Fourierentwicklung übergeführt werden. Die EnergieI zum Endpunkt eines Teilintervalls unterscheidet sich aufgrund von (20) nur in derGrößenordnung O(ω−N ) von derjenigen des Anfangspunktes desselben Intervalls und inderselben Größenordnung nähert es den exakten Wert der Energie I zum Anfangspunktdes nächsten Teilintervalls aufgrund der Approximationsgüte der modulierten Fourier-entwicklung im Vergleich zur exakten Lösung an. Das Bilden einer Teleskopsumme, diesich von Teilintervall zu Teilintervall hangelt, liefert dann das Ergebnis.
Wie immer können auch für die numerischen Näherungsversuche Grenzen für die Genau-igkeit der Energieerhaltung angegeben werden. Folgende Annahmen zum erfolgreichenAbschätzen müssen gemacht werden (das Anwenden der bisher aufgestellten Sätze mussmöglich sein):
• Die Energie ist beschränkt, das heißt, (8) ist erfüllt.
• Die Werte Φxn befinden sich in einem kompakten Teilmenge eines Gebietes, aufdem das Potential U glatt ist.
• Die Filterfunktionen φ und ψ sind gerade, reell-analytisch und es gelte ψ(0) = 1 =φ(0). Außerdem gelten die Regularitätsbedingungen (16) und (22).
• Die Bedingung hω ≥ c0 > 0 ist erfüllt.
• N ∈ N ist so gewählt, dass die Nicht-Resonanzbedingung (15) gilt.
8[GNI] Seite 506 für den vollständigen Beweis
20

Satz 6. Unter den obigen Bedingungen erfüllt die numerische Lösung von (6) erhaltendurch die Methode (11) und (12) mit (13)
H (xn, xn) = H (x0, x0) +O(h)
I (xn, xn) = I (x0, x0) +O(h)
für 0 ≤ nh ≤ h−N+1. Die Konstanten symbolisiert durch O sind unabhängig von n, h,ω, welche die obigen Bedingungen erfüllen, aber abhängig von N und den Konstanten inden Bedingungen.
Dem Beweis dieses Satzes liegt die gleiche Idee wie dem vorherigen zugrunde9.
6 Verhalten der Störmer-Verlet Diskretisierung
Bei Anwendungen wird die Störmer-Verlet-Methode typischerweise mit einer Schrittweiteh benutzt, so dass das Produkt hω sich im Bereich der linearen Stabilität bewegt, abervon 0 weg beschränkt ist. In der Molekulardynamik werden häufig Werte um hω = 1
2verwendet. Wie bereits erwähnt, liefert die Rückwärtsfehler-Analyse nur Ergebnisse fürhω → 0.Das Ziel muss deshalb sein, die modulierte Fourier-Entwicklung für das Störmer-Verlet-Verfahren zugänglich zu machen. Wendet man die Methode auf das nichtlineare Modell-problem (6) und (7) mit (8) an, so erhält man
xn+1 − 2xn + xn−1 = −h2Ω2xn − h2∇U (xn) ,
mit hω < 2 für die lineare Stabilität. Mit einer modifizierten Frequenz lässt sich dies alstrigonometrische Methode schreiben
xn+1 − 2 cos(hΩ)xn + xn−1 = −h2∇U (xn) ,
wobei
Ω =
(0 00 ωI
)mit sin
(12hω
)= 1
2hω.
Die letzte Gleichung ergibt sich aus der Forderung
1− (hω)2
2= cos(hω).
Es ist offensichtlich, dass die neue Geschwindigkeitsberechnung
2hsinc(hΩ)x′n = xn+1 − xn−1
für xn = sinc(hΩ)x′n äquivalent zur bisherigen ist. Jetzt kann man die im vorherigenKapitel aufgestellte Theorie anwenden.
9[GNI] Seiten 511-512 für den Beweis
21
Satz 7. Sei die Störmer-Verlet-Methode auf das Problem (6) und (7) mit (8) mit einerSchrittweite h, 0 < c0 ≤ hω ≤ c1 < 2 und | sin(1
2khω)| ≥ c√h für k = 1, . . . , N für ein
N ≥ 2 und c > 0, angewandt. Weiterhin gelte, dass die Lösungswerte xn in einem Gebietliegen, auf dem alle Ableitungen von U beschränkt sind. Dann gilt für 0 ≤ nh ≤ h−N+1
H(xn, xn) + γ2‖xn,1‖
2 = H(x0, x0) + γ2‖x0,1‖2 +O(h)
I(xn, xn) + γ2‖xn,1‖
2 = I(x0, x0) + γ2‖x0,1‖2 +O(h)
entlang der numerischen Lösung, wobei
γ =(hω/2)2
1− (hω/2)2.
Die mit O symbolisierten Konstanten sind unabhängig von n, h, ω mit den obigen Be-dingungen.
Beweiskizze. 10 Auf die modifizierte Methode lässt sich Satz (6) anwenden. Aus denBeziehungen der Orts- und Geschwindigkeitsvariablen sowie der Frequenzen können dieAussagen für die modifizierte Methode in Abschätzungen für die Störmer-Verlet-Methodeumgewandelt werden.
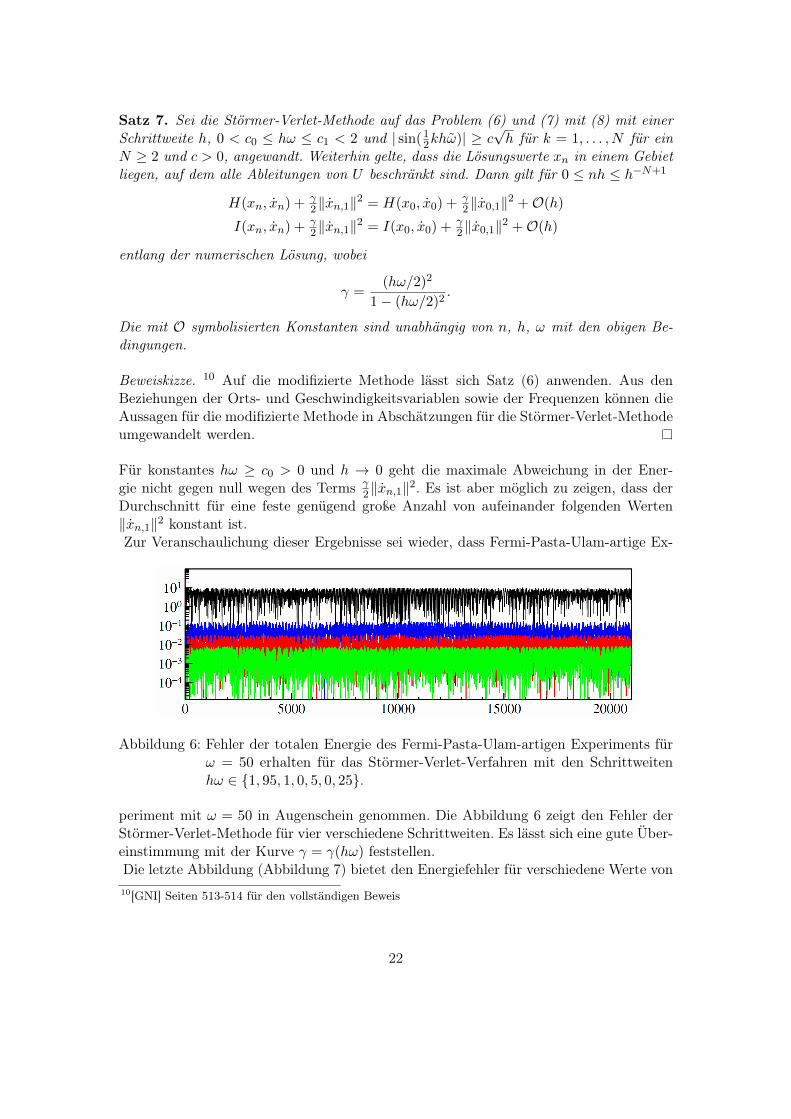
Für konstantes hω ≥ c0 > 0 und h → 0 geht die maximale Abweichung in der Ener-gie nicht gegen null wegen des Terms γ
2‖xn,1‖2. Es ist aber möglich zu zeigen, dass der
Durchschnitt für eine feste genügend große Anzahl von aufeinander folgenden Werten‖xn,1‖2 konstant ist.Zur Veranschaulichung dieser Ergebnisse sei wieder, dass Fermi-Pasta-Ulam-artige Ex-
Abbildung 6: Fehler der totalen Energie des Fermi-Pasta-Ulam-artigen Experiments fürω = 50 erhalten für das Störmer-Verlet-Verfahren mit den Schrittweitenhω ∈ 1, 95, 1, 0, 5, 0, 25.
periment mit ω = 50 in Augenschein genommen. Die Abbildung 6 zeigt den Fehler derStörmer-Verlet-Methode für vier verschiedene Schrittweiten. Es lässt sich eine gute Über-einstimmung mit der Kurve γ = γ(hω) feststellen.Die letzte Abbildung (Abbildung 7) bietet den Energiefehler für verschiedene Werte von10[GNI] Seiten 513-514 für den vollständigen Beweis
22

Abbildung 7: Totale Energie des Fermi-Pasta-Ulam-artigen Experiments entlang nume-rischer Lösungen der Störmer-Verlet-Methode
h und ω dar. Der Term γ2‖xn,1‖
2 dominiert den Fehler für große Schrittweiten und hängtwesentlich vom Produkt hω ab. Es ist außerdem zu beobachten, dass der numerischeWert von H um eine Konstante oszilliert die vom wahren Wert von H abweicht.
23

Literatur
[GNI] E. Hairer et al.: Geometric Numerical Integration: Structure-Preserving Algo-rithms for Ordinary Differential Equations. Springer Series in Computational Ma-thematics 31, Second Edition, Berlin Heidelberg 2010.
[HO] E. Hairer: Geometric Numerical Integrators, Lecture 4: High oscillations. TUMünchen, München, 2010.
[SHD] B. Leimkuhler, S. Reich: Simulating Hamiltonian Dynamics. Cambridge Mo-nographs on Applied and Computational Mathematics, Cambridge University Press,Cambridge, UK, 2004.
24





![] î w - Kawasaki...S [ 345 h 1,402 S ÇQ R Q KZ8 G c z_ .'ö #."I 9 0£_>8ZG]v.b ~4O_ : ö. ö5 v 8 b Q lgG]v.b ~4O 5 b Q_| vb[6 g ' p -c 39 h 9,403 S Ç\^WZ>~ G ?}*c º Øl)Þ~2zMmA2](https://img.pdfslide.org/doc/110x75/5ecc0554046eb57dda332008/-w-s-345-h-1402-s-q-r-q-kz8-g-c-z-i-9-08zgvb.jpg)







![js081007.ppt [Kompatibilitätsmodus] u... · elektromagnetischen 'Kolbenmotor', der bereits mit einem Kommutator ausgestattet war und eine lineare oszillierende Bewegung zum Antrieb](https://img.pdfslide.org/doc/110x75/5e2311fb80138b721830094f/kompatibilittsmodus-u-elektromagnetischen-kolbenmotor-der-bereits-mit.jpg)




