Embed Size (px)
Citation preview
Heft 2 Kleine kitteilungeii 181
Eine Uebersioht iiber die magliahen Qestd tnngen der dnrch symmetrische Dyaden bewirkten Transformation miiflte Ton der Diskussion der Systeme von seohs orthogonalen Motoren ausgehen. Wenn Wir dann shtt eines Carteeiscben Koordinatensystems ein solches ~seohsfachee Eeohtwinkelsystemc ellgemeher Form der Definition der Dyade ZU- gmndelegen, so erhalten wir eine vie1 symmetrieohere Darstellmg. Es sei nur efa sehr spezieller Fall erwllhnt, der, wie es soheint, in den Anwendungen vorzuherrsohen scheint (Trilgheitsdyade in 11 3, ELstizit%tsdyade einee Stabes in 111 4). EIier haben die sechs Hauptntotoren an j e zweien die Kanten eines gewtlhnlichen Reohtwinkelkrenzes zn Aohsen; damit anoh jedesmal die zwei koaohsfalen Motoren sorthogonala sind, ist naoh I 8 not- wendig nnd hinreiohend, da8 sie entgegengesetzt gleiohe Steigung haben. Nennen wir die Steigungen f a, f 6, f 7, so mufl der Einheitsmotor mit den Komponenten 1, 0, 0, a, 0,O duroh die Transformation in I , , 0, 0, 11 a, 0, 0 iibergehen. Set& man dies in (14) ein, so erh8lt man 11 = PI1 a + P 4 1 , o =PI, a+ P 4 0 = Pis a + Pis, I1 re= P I 4 a+ P 4 4 , o = Pi5 a + P 4 5 = PIS a + P4 Die erste nnd vierte dieser Qleiohnngen zeigt wegen PII = P ~ I , da'J P 4 4 = PI, a' sein mnS, withrend aus den anderen, da sie auoh fiir -a besteheu miissen P i 4 = P 1 3 = P i 5
= P I 6 = P*, = Pa = P4s = P 4 6 = 0 folgt. SteUt man die gleiohe Ueberleguog fiir die beiden anderen Aohsen an, so fiidet man, daB die Matrix der von u n s betraohteten, wie wir sagen wollen wollsymmetrisahenr: Dyade, an! das Hauptaohsenkreuz bezogen, so aussieht :
A 1 0 0 4 4 0 0 0 Pas 0 0 Pos 0 0 0 Pa, 0 0 Pas A 4 0 0 aaPll o 0 0 P ~ s 6 0 P P 9 1 0 0 0 Pa6 0 0 yapat
d. h. sie enthat nur in der Hauptdiagonale und den beiden parallelen sHalbdiagonalenw nioht versohwindende Elemente. Die 1-Qleiohung nsoh (46) ist leioht aufzd6ien, sie liefert, wenn wir wieder P 4 4 statt aaPll uef. sohreiben:
Man sieht, daB - anders ale im Falle der Vektorreohnung - aus der Symmetrie der Dyade nicht a d die Realitst der 1 geschlossen werden kann.
Wir wollen nun eine Reihe von Anwendungen der bier vorgeiahrten Begriffs- bildungen und Formeln aut Aufgben aus der Meohanik starrer Karper, aus der Elastizi-
395
ii,li= ~ r r f 1 / ~ 1 1 * ~ 4 c , 1 3 , ~ = ~ 2 5 f I 'Pm*~r,5 , i5 ,1c A r l ~ a a . ~ 6 , -
Utstheorie und der Hydromechanik ausfiihrlioh betraohten l).
KLEINE MITTEILUNGEN Ueber die DrIUun&ssfei5&keSt zyllndrl- beweisende Satz lautet also : unter allen zy-
raer Stabe?) Es scheint bis jetzt unbeachtet lindrischen Stflben mit den gegebenen Haupt- geblieben zu sein, daS die Drillungssteifigkeit C biegungssteifigkeiten A und B besitzt der Stab eines zylindrischen Stabes stets der Ungleichung von elliptischer Querschnittsiorm die @ate - -
a A B C 5 - p
geniigt, wo A und B die Eauptbiegungsteifig- keiten (%Viderstandsmomente in den Haupt- biegungs-Richtungen) desselben Stab06 und u die Poisaonache Konstante bedeuten. Es sol1 hier eine Ableitung dieses Satzes gegeben werden.
Wir bemerken, dab die rechte Seite obiger Ungleichung nichts anderee ist, als die Drillungssteiflgkeit eines zylindriachen Stabes von elliptischer Querschnittsform mit den Hauptbiegungssteifigkeiten A und B. Der zu
-(I + U) ( A + B)
DrillunGst eiflgkeit . Wir wllhlen die Haupttrtigheitsachsen des
Stabquerschnittes in dessen Schwerpunkte als die x- und y-Achsen. Dann wird die Drillunp- ateifigkeit C des Stabes durch die Formel
bestlmmt, wo p den Schubmodul bedeutet und lp eine Funktion von x und y ist, die im Inneren des Querschnittes der Differential-
9 2+ 8' 2 - - 0 . . . . . . . (2) gleichung
4 23 8 y3
I) Der AbscMtt 111 ersoheint im nilohsten Heft. Der hier mitgeteilte 5atz wurde vom Veriasser in einer russisohen Sohrift BUeber die r h m -
liohe Elastioa. (Petrograd, 1916) abgeleitet. 12
und sUr dessen Rande der Bandbedsngung
y COB (n,x) - 2 COB (m,y) . . . (8) 8r iG=
(n Richtung der Suljeren Bandkurvennormale) gentigt; das Doppelintegral in obiger Formel ist auf die Querschnittsflgche ausmdehnen. Nun wollen wir statt 'p ehe neue Funktion y
mittelst der Substitution A - B s y + y . . . . . . (4)
'p=,+,
einfiihren. Beachtet man, daD
*=- a E 1 f U
(E Elaetizitlltsmodul), und setzt den Wert von 'p aus (4) in (1) ein, so ergibt sich
Nun ist aber das Doppelintegral in dieser Formel stet8 eine negative UroBe ( d t AUS- nahme des Falles eines elliptischen Quer- achnittes, wo y=O und das Doppelintegral gleich Null wird). Es l&Bt sich nSmlich zeigen, dsB
ist. In der Tat, setzt man den Vert von (p aus
(4) in (2) und (3) ein, so gewinnt man' die Differentialgleichung und Randbedingung, de- nen die Funktion y gentigen mu6; sie lauten
Beseichnen wir mit d8 den Bogenelement der-Randkurve, so ergibt sich aus (7) und (8):
2 A + B
= -1y { B y COB (n,x) - As COB (?a, y ) ) d8
Dieses Resultat l&Bt sich auch schreiben
Nun foI& aber wfeder SUB (7) und (8)
= -$.y 2 { By cos (n,x)--As COB (nsy)) d s A + B
und daher &us (9) die Ul. (6), Demit ist aber die oben tmgekUndigte Ungleichung
bewiesen. Es seien au den soeben aufgestellten Satz
noch einige Bemerkungen angekniipft. ZunEtchst iat klar, daB der Satz auch auf
Hohlquexchnitte ohne weiteres fibertragbar ist. Auch in diesem Falle gilt die Unglei- chung (10); sie bee*, deS unCr alleii Hohl- querschnitten, die den gegebenen Hauptbie- gungsateifigkeiten A und B entsprechen, der von zwei llhnlichen und an l i ch gelegenen Ellipsen begrenzte Querschnitt die gr6Ste DrilluDgssteifigkeit aufweist.
Die Brbhn A, B, C spielen eine Rolle in der TheorSe der rlLumlichen Elaetica. In K i r chhoff s kinetischer Analogie entsprwhen ihnen die HaupttrLghei+momente des um einen Punkt rotierenden schweren stanen Kbrpers. Nun kiinnen die Haupttragheits- momente einee starren Kbrpers sehr wohl solche Werte annebmen, die der Ungleichung (10) nicht gentigen. Somit ist nicht jede LBsung des kingtisohen Problems auf die Elaetica ohne weiteree iibertragbar. Far eine Reihe bisher bekannter Llfeungen des Ro- tationsproblems (so b. B. fiir die von Son ja Kowplewski herrfibende Usung) wird ge- rade die Bedinguug (10) nicht befriedigt; in diesen FgUen acheitert also die kinetische Analogie.
In einer kiirelioh erachienenen Abhandlung iiber das kritische Drillungsmoment von Wellen macht Hr. R. Grammell) einige Bemerkungen fiber die Gr6Denverh<nisse der Biegungs- und Drillimgssteifigkelten zylindrischer SCltbe. Eine Zusammenfaesung der Ergebnisse, ,die sich auf die Drillun@&eifigkeit €fir versohie- dene bis jetzt untersuchte Querschnittsformen beziehen, hat Hrn. Brammel unter anderem zu der Vermutung veranlat, daO flir aUe Querschnitte C< 2B sei, wo B dig kleinere der beiden Hauptbiegungsetei~gkei~n iet. DaB diem Behauptung richtig id, folgt nun unmittelbar &us dem oben aufgestellten Satze. Zugleich sieht man, daB die von Hrn. Gr ammel angegebene Ungleichung sich st& versobllrfen 1Mt. 878
P e t e r s b urg , Polgtechnisches Institut. 28. Dezember 1923. E. Nicolai.
~
'1 R. Grammel: Dss Wtlsohe Drillnngsrnoment von Wellen. Dime Zeitsohr. Bd. 3, 1923, 8. 267. Hier werden die Br68en A, B, 0 mit a, &, 7 be- leiohnet.

Heft 2 B e h e l&.teiiungeri 18
Wovon M e dle $elb$ttcntrlcrpns eher btylramen we& ab? Eine biegsame WeUe von kreisf6rmigem Querschnitt nimmt iiir jede Rohtionsgeschwindigkeit a, eine Gleichgewichts- lage an, die stabfl. bt, w e l c h Wert m auch haben mag, und deren Dmhbiegtpg mit der Umlaufsgeschwindigkeit wgchst, so lange 'a, kleiner a& die Eigenfreqaenz v der Welle ist, mit ihr aber abnimmt, w&nn cn>v ist. A d dieser letzteren Eienschaft beruht 33ekannUch die Selbstzentrierung ebQ biegmmn Wellel). N u r f i i r den Fall m - v (Resonam) wird bei VemachBssigung van Energieverlusten die Durchbiegung unendlich @S. DieYer singdilre Zustand ist also als insmi l anzusehen.
G w anders werdea die VerMtnisse, wenn wir einen Freibeitsgrad unterdriicken, indem wir der Achse nur die M6glichkeit lassen, sich in e i n e r Richtung darchzubiegw, sei a, dab wir ihr eine (mitrotiemnde) FUwung geben, sei e$, &I3 der Querschoitt der Ache so stark von der Kreisform abweicht, daB die Durchbiegung in der ein0n Richtung praktisch mm6glich Ma). In diesem Falle &nes Frei- heitsgrades ist Mxlich die eu einer b e s t i i - ten Umlaufsge8chwhdigkeindigkeit m gaharige Durch- biegung sta'bil und whchst mit m, wenn m < v, labil, wenn a, > Y, wahrend bei zwei Freiheits- graden, wie schon' erwahnt, stets Stabiliat vorhanden ist.
Der Zweck der vorliegenden Arbeit ist, nach dem Grunde diestx vwschiedenen Varhaltens w fragen. bfan k6nnte vermnten, da8 die LabiiiUt auf der Unterdrkckung dues Frei: heitsgrades beruht, Shnlich wie beim Q@&, deswn stabilisierende Fithigkeit davon abhlngt, daS die Kreiselachse zwei Freiheibgrade hat, und der sie sofort verliert, wenn man ehm Freiheitsgrad unterdrdckt 8 ) . Wie V?ir sehen werden, ist der Grund bei der biegsamen We& ein anderer. Um clas zu erkennen, behmddn wir runlchst den Fall eines, dam den zweier Freiheitsgrade, und schlie8Iich, um wn diesem zu jenem ftberzugehen, eine nicht kreiafbrmige Welle, die also emi Eigenfrequezlzen hat. LiiBt man die eine der beiden Eigenfrequewen i m r e r gr60er und schlie8lich unendlich wer- den, so erhirlt man in der Grenze Starrheit in der einen Richtung, d. h. Unterdriickung dieses Freiheikgrades.
1. E i n F r e i h e i t s g r a d . Mit K l e i n und S o m r n e r f e l d k6nnen wir
die biegsame Welle fiir unwr PMblem dahh idealisieren, daB wir sie durch einen Massen- pnnkt rn ersetzen, der am .Symmetriegriinden in der E-q-Ehene festgehdten wird und in die
I) Siehe z. B. F. K l e i n nnd A. Sommerfe ld , Ueber die Theorfe dea Kreisels 4, Lefpsig 1910, 8. 584.
a) Aus praktimben (frtlnden kunnte man im letzten Fdle natiirlieh der Axe, aoweit eie in den Lagern lllnft, trotzdem BrolafDrmigen Querachnitt lassen.
a) Siehe z. B. F. Klein und A. Sommerfe ld , Ueber die Theorle des ~ W t ~ l s 4, Leipag 1910, B. 767.
-
ser mit der konstanten Winkelgeschwindigkeit m nm einen festen Punkt 0 umliuft, seine Gleich- gewtchtslage aber in einem Punkte C hat, in die er mit einer Kraft hingezogm wind, die proportional dem Abstaade des Sunktas m von c let.
Fiihren wir anstatt de-s im Raume f e s h Achsemeuzes P,q das mit der Winkdge- schwincligkeit m umlaufende SysWm s,? &, welches im betrachteten Augenblicke mit J ~ W zusammentpllen m a p , EO gilt4)
. . . * . (1). 1 .. .. + 2 - 2 f 4 - - w)31 .. .. q - y + 2 w x -may
1st ih Falle eines Freiheitsgrades dauernd g F 0, so wird, wenn I = c,, y = c, die Koor- dinaten von C sind,
die Bewegungsgleichung, die durch die Substi- tution
.. 5 - U # ' 3 ? E - W 2 ( 3 - C q ) . . . (2),
usz-- (3) in i + ( u g - m q u=o (4) 0 2
1 -- v9
Qbergeht.
von (3) fiir v>m: Die Integration mn (4) liefert mit Bonutzung
1 -- Y'l
fiir V < W :
1-- v3
Die Gleichungen (5) bestgtigea irlso w e r e obige Behauptug, da0 der Massenpunkt eine Gleichgewfchtsrage, und zwar im Abstande
1 -- von der Rotatiansaclise besitzt, daB
dime aber nur fStr v > m stabil, dagegen Iiir Y < m labil ist.
2. Z w e i F r e i h e i t s g r a d e e i n e r W e l l e van k r e i s f B r m i g e m Q u e r s c h n i t t .
Im FaHe einer nach aUen Seiten frei bweg- lichen kreisfBrmigen Welle lauten die Bewe- gungsgleichungen nach (1)
( 3
Setzen wir
so wird aus ( 6 )
. . . (8). I E - BLV + (d - $9 91 = 0
;; + 2LV 22 + (9' - 09 2, = 0 Der Ansatz
u = A e i S t ; v = ~ e ~ ' ~ . ? . . (91,
*) Siehe a. R (f. Etroh,hoff, Verlesuqen Pber MeohMlk, 4. Ad., Lelpzig 1897, 8. 87.
11'
Iiefert
' . (10). ( ~ 2 a' - ~ 9 ) A = Zi w z B (v l - w*- S I B = - Pimz A
Durch Mulliplikation der linken und rechten Seiten von (10) ergibt sich die Frequenzbe- dingung
durch Division die Gieichung des Amplituden- verhal tnisses
( Y q - d - 2 9 ) ' = 4 W ' E ' . . . . . (11),
(3'- - 1 . . . . . . * (11'). Aus (11) folgt
z , = v + w ; 8% = = v - w . . . (12) und durch Einsetzen dieser Werte in irgend- cine der beiden Gleichungen (l0)l)
so da5 wir mii Benutzung von (7) das Resultat erhalten
I 5=- c* + A1 COB [tV.+ m> I -I- ' 11 w2
1 - - Y )
-t- As COB [(v - w) t i - a11
Wir erkenneu aus diesen Gleichungen die Stabilitfit der Gleichgewichtslage ftir jeden Wcrt von rn und die Selbstzentrimg, wenn m 3 Y.
3. D i e W e l l e v o n n i c h t k r e i s f c r m i g e m Q u e r s c h n i t t.
1st der Querschnitt der Welle nicht kreis- fdrmig, so existieren zwei voneinander ver- schiedene Eigenfrequenzen v1 und v, in den Richtungen s und q, so daB die Bewegungs- gteichungen lauten
die durch die Substitutionen
1-- 1 -- V13 4
. . (17) I
1 * . (191,
in ; - 2ro ; + (v*9 - w? Zd = 0
E + 2 m 2 ; . + ( 4 - (u3v=o ii bergehen.
Durch den Ansatz U = A d * L ; v = B P t . . . . (18)
ergibt sich ( ~ 1 2 - ( U S - 89) A = f i ~ ~ B (US' - 19 - B 3 B - 2 i ~ r A
oder durch Multiplikation resp. Division die Frequenzen- und Amplitudengleichung
(VIY - WS - 22) (q' - wz - #a) = 4&'03 (20);
1, Dnrch Einaetzen yon (12) in (10) erhalt man B/A eindeu-, wShrend (11') zwet Vorzeichan zu- lassen wurde.
Der Radikand ist stets positiv. Damit das Gleichgewicht stabil ist, miissen beide Werte v m z reell, d. h. die von zz positiv win.
Das ist der Fall fiir (Y18 - m'p) (V¶S - w 4 > 0 . . . . (221,
d. h. eratena fiir v * = - s ; V * = y . , zweitens f* 7 3 < m ; w~ < w
1st dagegen Vi>@; V s < @ oder YI < m ; V g > @ (241, so ist das Gleichgewicht labii.
In Worten: Das Gleichgewicht ist nur dann stabil, wenn die Winkelgeschwindigkeit nicht zwischen den beiden Eigenfrequenzen liegt. Lassen wir nun v2 ins Unendliche wachsen, d. h. nehmen wir der Welle einen Fmiheits- grad, so wird das Gleichgewicht nach (23) nur fiir a < v l stabil, wie wir bereits in 1. gefunden hatten. Wir erkennen aber auch gleichzeitig, daB wir die Welle nur dann als starr i~ einer Richtang anwhen kcinnen, wenn ihre Eigenfrequenz in dieser Richtung groB gegen die WinkeIgeschwindigkeit der Rotation ist. Die Labilit6t des Gleicbgewichts bei einem Freibeitsgrad und m > v wird also nicht durch Unterdfickung des anderen Freiheitsgrades hervorgerufen, wie beim Kreisel, sondern hat seinen Grund in der zu groSen Eigenfreqvenz des praktisch unterdriickten Freiheitsgrades.
La Plata, Januar 1923. Instituta de Ffsica. 280
R i c h a r d G a n s und R a m 6 n G. L o y a r t e .
Ueber ehcm hydrodymunI&en Vcrrach volt Jonkqrrky. In seinem Buche *A&ci- dynamiquecc (Paris 1916) beschreibt J o u- k o w s k y (S. 45) einen Versuch, durch den ge- zeigt werden soll, da5 der Widerstand eines Kbrpers in turbulenter StrBmung g M k r ist als in turbulenzfreier Str6mung. Der Vemuchs- kBrper war in diesern Falle eine ebene runde Scheibe, welche senkrecht von der Strbmung getroffen wurde. Dieses Ergebnis steht in Widerspruch mit Windkanalmessungen, welche bei gewissen Kcirperformen (z. B. Kugeln, Ellipwide, Ballonmodelle) gerade das Gegenteil, namlich eine Abmhme des Widerstandes in der turbulenten Strlimung oder bei anderen Kbrpern Q. B. Scheiben und KBrper mit Kan- ten senkre'cht zur Str6rn-g) einen von der Turbulenz unabhlngigen Widerstand aufwei- senl). Eine VergraDerung des Widerstandes ist bisher im Windkana1 nicht festgestellt worden. Es ist daher von Ibteresse, den Ursachen dieser Unstimmigkeit etwas nachzugehen.
'1 Vergl. L. Prsxldtl, Der Loftwideratand von Eugeh. Nachr. d. IL GeseU. der Wiss. 8. Qut-
berger, Zeitscbr. f. Flugt. u. Motorl. 1914, €3. 140. t i o m , &th. PhYS. Kl. 1914. - C. Wiesela-
Heft 2 IUei.ne Mitteilungen 186
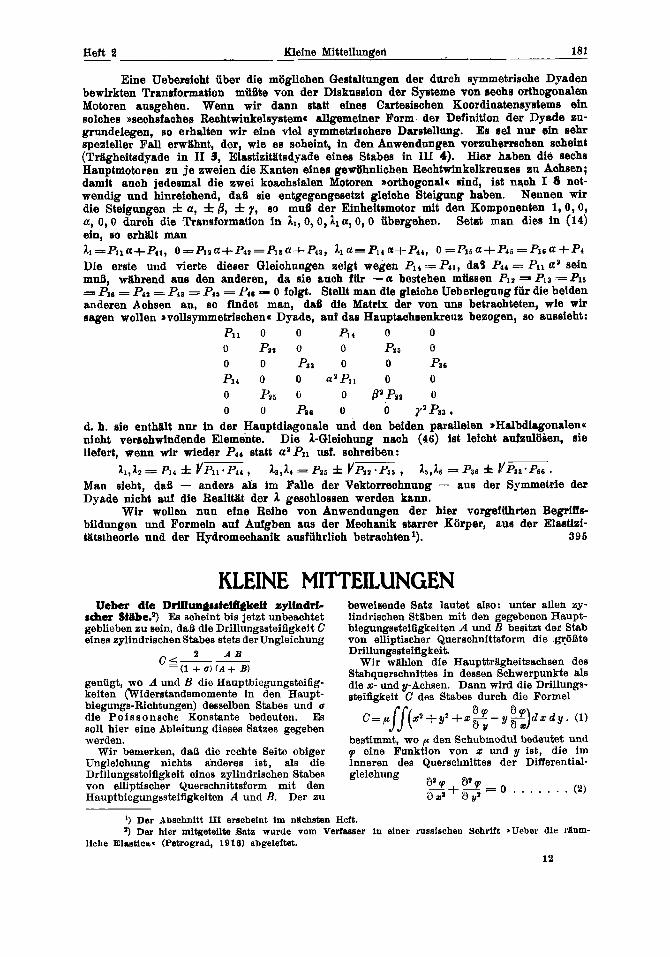
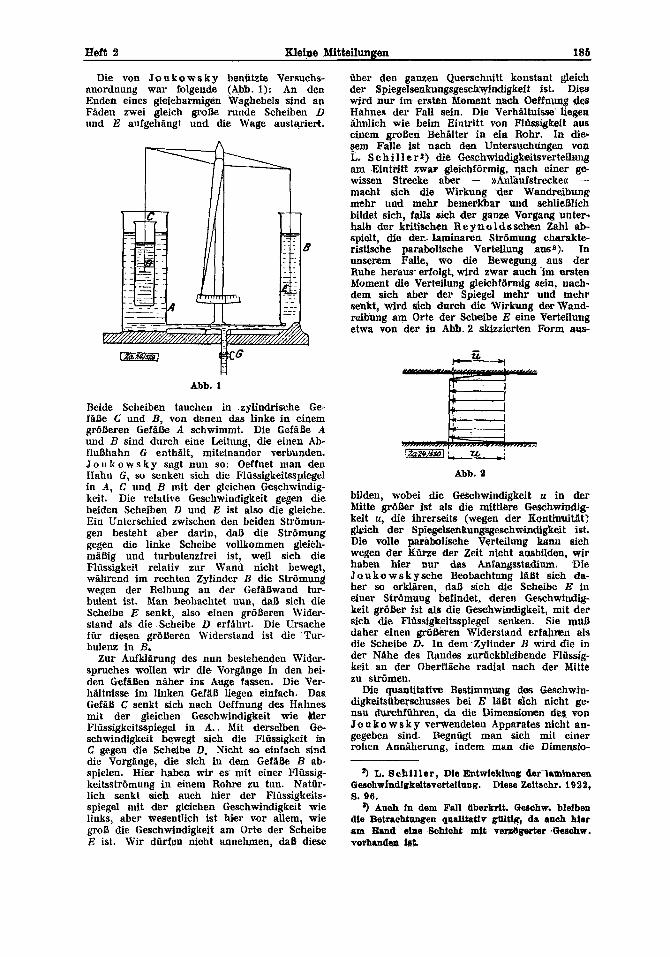
Die von J o u k o w s k y benutzte Versuchs- anordnung war folgende (Abb. 1): An den Enden eines gleichannigen Waghebels sind an Fiiden zwei gleich @Be runde Scheiben D und E aufgehiingt und die Wage austariert.
lz2Bsl
Abb. 1
Beide Scheiben tauchen in zylindrische Ge- fBDe C und B, von denen das linke in einem gr6Deren GefiiDe A schwimmt. Die GefiiEe A und B sind durch eine Leitung, die einen Ab- fluBhahn G enthzllt, miteinander verbundm. J o u k o w s k y sagt nun so: Oe€fnet man den Hahn G, so senken sich die Fliissigkeitsspiegel in A, C und B mit der gleichen Geschwindig- keit. Die relative Geschwindigkeit gegen die beiden Scheiben D und E ist also die gleiche. Ein Unterschied zwischen den beiden Strlrmun- gen besteht aber darin, daJ3 die Strdmung gegen die linke Scheibe vollkommen gleich- mPDig und turbulenzfrei ist, weil sich die Fliissigkeit relativ zur Wand nicht bewegt, wiihrend im rechten Zylinder B die Str6mung wegen der Reibung an der GefiiBwand tur- bulent ist. Man beobachtet nun, daD sich die Scheibe E senkt, also cinen gr6Deren Wider- stand als die Scheibe U erfihrt. Die Ursache fiir diesen grdBeren Widerstand ist die Tur- bulenz in B.
Zur Aufkliirung des nun bestehenden Wider- spruches wollen wir die Vorgiinge in den bei- den GeflBen niiher ins Atlge fassen. Die Ver- hatnisse im linken GefiiD liegen einfach. Das GefiiD C senkt sich nach Oeffnung des Hahnes mit der gleichen Geschwindigkeit wie Her Fliissigkeitsspiegel in A. Mit derselben Ge- schwindigkeit bewegt sich die Flassigkeit in C gegen die Scheibe D. Nicht so einfach sind die Vorgiinge, die sich in dem GefPBe B ab- spielen. Hier haben wir es mit einer Fliissig- keitsstramung in einem Rohm zu tun. Natiir- lich senkt sich auch hier der Fliissigkeits- spiegel mit der gleichen Geschwindigkeit wie links, aber wesentlich ist hier vor allem, wie grol3 die Geschwindigkeit am Orte der Scheibe E ist. Wir diirfen nicht annehmen, daD diese
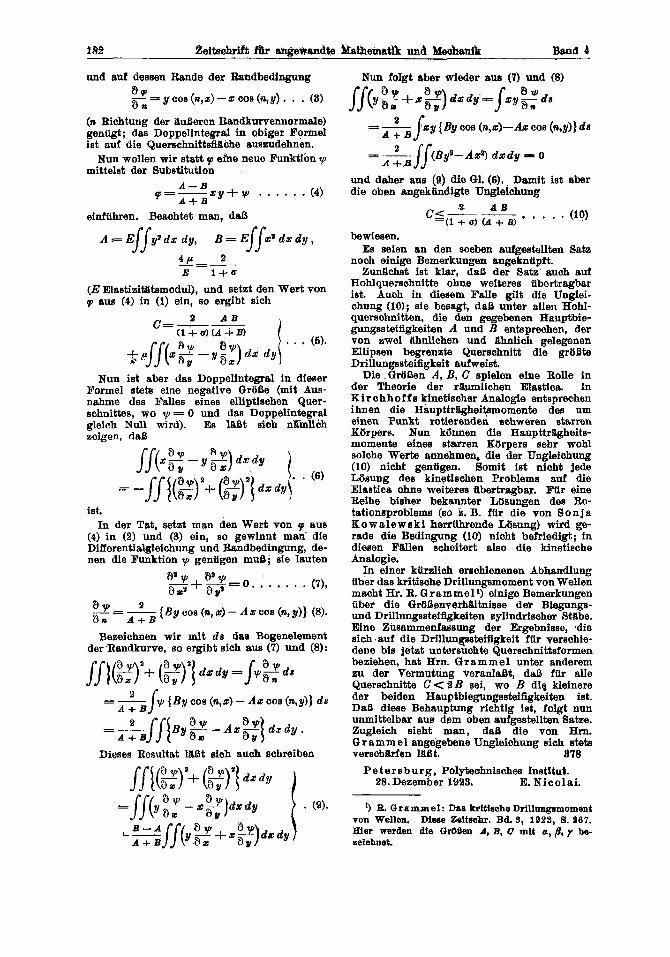
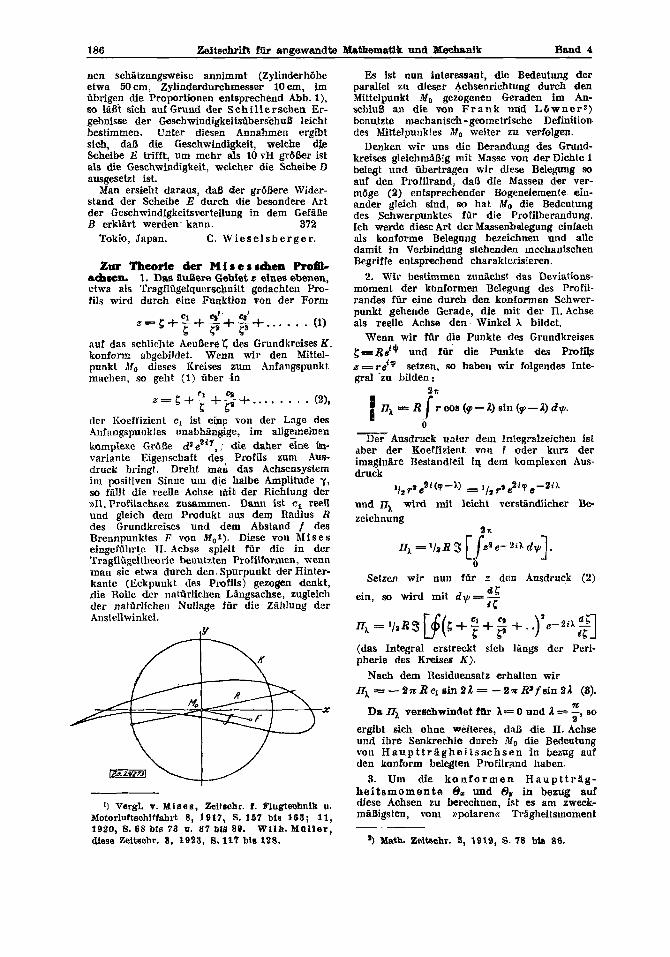
*er den ganzen Querschnitt konstant gl8iCh der Spiegelvenkungsgeschwindigkeit ist. Dies wird nur im ersten Moment nach Oe€fnung des Hahnes der Fall sein. Die Verhdtuisse liegen ghnlich wie beim Eintritt von Fliissigkeit aus einem groDen BehPlter in ein Rohr. In die- s m FalIe ist nach den Untersuchungen von L. S e hi 11 e r 8 ) die Geschwindigkeitsverteilung am Eintritt zwar gleichfLjrmig, nach einer ge- wissen Strecke aber - nAnbufstreckecc - macht sich die Wirkung der WandreiRung mehr und mehr bemerkbar und schlieBlich bildet sich, falls sich der ganze Vorgang unter- halh der krStischen Reynoldsschen Zahl ab- spielt, die der- laminaren Strdmung charakte- ristische parablische Verteilurkg auss). In unserem Falle, wo die Bewegung aus der Ruhe heraus- erfolgt, wird zwar auch im ersten Moment die Verteilung gleichftirmig sein, nach- dem sich aber der Spiegel mehr und mehr setikt, wird sich durch die Wirkung der Wand- reibung am Orte der Scheibe E eine Verteilung etwa von der in Abb. 2 skizzierten Form aus-
Abb. 2
bilden, wobei die Geschwindigkeit u in der Mitte gr6Ber ist als die mittlere Geschwindig- keit u, die ihrerseits (wegen der KontinuiUt) gl&h der Spiegekenkungsgeschwhdigkeit ist. Die volle parabolische Yerteilung kann sich wegen der Kame tier Zeit nicht ausbilden, wir haben hier nur das Anfangsstadium. Die J o u k o w s k y s c h e Beobachtung llDt sich da- her so erkliiren, daB sich die. Scheibe E in einer Strdmung hefindet, deren Geschwindig- keit grdDer ist ah die Geschwhdigkeit, mit der sich die Fliissigkeitsspiegel senken. Sie qnU3 daher einen gr6Derm Widerstand erfah-n a15 die Scheibe D. In dem-Zylinder B wird die in der Niihe des Randes zurackbleibende Fltissig- keit an der OberflBche radial nach der Mitte zu strdmen.
Die quantitative Bestimmung das Geschwin- digkeitsiiberschusses bei E llBt slch nicht ge- nau durchfiihren, da die Dimensionen des von J o u k o w s k y vemendeten Apparates nicht an- gegeben sind. Fkgniigt man sich mit eider rohen Andherung, indem man die Dimensio-
3 L. Sohiller, Die Entwiaklung der lamharen Oesohwindlgkeitsverteilaog. Dieee Zeitschr. 1922, 8. 96.
3 Auoh in dem Fall Uberkrit. Qeaohw. bleiben die Betraehtungen qualitativ gUltin, da rnoh hier am E n d ewe Sohioht mit vera8gerter Geaohw. vorhaadslr fat.
nen schitzungsweise annimmt (Zylinderhbhe etwa 50 cm, Zylinderdurchrnesser 10 cm, im iibrigen die Proprtionen entsprechend Abb. 1). so l&Bt sich auf Grund der Schi l lerschen Er- gebnisse der GesehwindigkeitsiiberschuB leicht bestimmen. Unter diesen Annahmeii ergibt sich, daD die Geschwindigkeit, welche dk Scheibe E trifft, urn mehr als 1 0 v H grbI3er ist als die Geschwindigkeit, welcher die Scheibe. D ausgesetzt ist.
Man ersieht daraus, daB der gr5Oez-e Wider- stand der Scheibe E durch die besondere Art der Geschwindigkeitsverteiluog in dem GefPBe R erklhrt werdeu kann. 372
C. W i e s e l s b e r g e r. Tokio, Japan.
Zur Theorle der Mirerrcfien Prom- adwen. 1. Das &ul3sre Gebiet B eines ebenen, etwa als TragIliigelquersebnitt gedachteb Pro- fils wird durch eine Funktion von der Form
c1 9’’ 9’
I: C¶ ca 2 = g + - + - - i - - + ... . . . (1) - -
auf das schliclite AeuBere des Giundkreises K r konform abgebildet. Wenn. wir den Mittel- punkt d l o dieses Kreises m m Anfangspunkt marhen, so geht (1) iiber in
ea z=g+-c1+-+ .... . . . . (2), 5 g p
der Koeffizient c, ist cine von der Lage des hnfangspunkfes ilnabhangige, iin allgeneinen komplexc Gr6Be @eair , ; die daher &e igl- variante Eigeiischaft de$ Profils zum Am- druck bringt. Dreht man das Achsensystem im positiven Sinne uni die halbe Amplitude y, so f a t die reelle Achse nliti der Richtung der ))Il. Profilachsecc zusammen. Dann ist el reell und gleich dtm Pmdukt awi dem Radius R des Grundkreises und dem Abstand f des Brennpunktes F von Mol). Diese von hI i ses eingefiihr~c TI. Achse spielt fiir die in der Tragfliigelthworic knutzten Profilformcn, wenn man sie etwa durch den Spurpunkt der Hinter- kante (Eckpunkt des Profils) gezogen denkt, die Roue d m naliirlicfren. Ungsachse, zugleich der natfirlichen Nullage far die Zlhlung der Anslellwinkel.
Vergl. v. M i a e e , Zeitechr. f. Flugtehik u. Motorluftschiffahrt 8, 1917, S. 157 bin 1.68; 11, 1920, S . 68 bis 73 u. 87 bf8 88. Willr. Mt l l l er , ate80 Zeibchr. 5, 1923, 8.117 bta 128,
Es ist nun inleressant, die Bedeutung der parallel zu dieser Achsenrichtung durch den Mittelpunkt M I , gemgenen Geraden im An- schlu5 an die von F r a n k uod L d w n e r a ) benutzte mechanisch -geometrische Definition des Mittelpunkles Mn weiter m verfolgen.
Denken wir uns die Berandung des Grund- kreises gleichrnaBig mit Masse von der Dichte 1 bdegt und iibertragw wir diese Belegung so auf den Profilrand, daO die Massen der ver- mdge (2) entsprechender BogeneIemenle ein- ander gleich sind, so hat Mo die Bedeutung des Schwerpunktes fiir die Profilberandung. tch werde diese Art der Massenbelegung einfach als konforme Belegung hezeichrten und alle damit in Verhindung stehenden mechanischen Bqriffe entsprechend charakterisieren. 2. Wfr bestimmen zun~chst das Deviations-
moment der kbnformen Belegung des Profil- randes fiir eine durch den konformen Schwer- punkt gehende Gerade, die n i t der 11. Achse als reelle Achse den Winkel X bildet.
Wenn wir fiir die Punkte des Grundkreises g=Rei$ und fiir die Punkte des Prof* z=r&? setzen, so h a b n wir folgendes Inte- gral -zu bilden:
2x 1 n, = R r con (9 -9 sin e - 2 1 dq.
Der Ausdmck unler dem lntegralzeichen is1 aber der Koeffizient von i oder kurz der imaginiire BestandCeil iq dein komplexen Aus- druck
und n, w i d mit leicht verstindlicher Be- zeichnung
0 -
l l a r ~ e ~ ~ ( ~ - ~ ) I I,, 2.119 ,-six
Setzen wir nun for z den ~Qusdrucb: (21 ein, 60 wird mit d v = - a 5
i C
(das Integral erstreckt sich kings der Peri- pherie des ICreises K).
n A e - 2 g R ~ ~ e i n 2 r Z = - Z ~ R ’ f e i n S I (3).
= 2 80
ergibt sich ohne weiteres, daB die 11. Achse nnd ibre Senkrechte durch ,+fo die Bedeutung voii H a u p t t r i i g h e i l s a c h s e n i n bemug auf den konform belegten ProFilrand haben.
3. Urn die k o n f o r m e n H a u p t t r P g - heitsmoments 8, und 19” in bezug auf diese Achsen zu berechnen, ist es am zweck- mlBigsten, v o m ))polaren(( TrPgheitsmoment
Nach dem Residuensatz erhalten wir
7c Da IT, verschwindet f i r A= 0 und
9 Math. Zeiteehr. 5, 1919, 6. 78 bia 88.

= 8. + 8, susaugehen und die weitere be- kannte Gleichung
die durch (3) in die einfache Beziehung
bbcrgeht, herauzmiaben. Das polare Triighehmoment in bazng auf
Mo i a t
q -((e,--e3etn1w#t,
e.-@,=4crnR'f.. . . , . (4)
8 o = R P d v . 0 j.
Unterscbeidet man die konjugiert komplexe GrlBe wn der Grundgr6Be durch horizontale Stricbe. so hat man ,-a = Z . z und
-
Auswertunu ernibt
Damit hat zunichst-die immer <1 aus- fallende Snmme
dne anschauliche Deutung erfuhren. Da nm- lich 3 = & , a im s h e obiger Annahme das
Quadrat d& TrPgheitsradius ist, 80 ist die Summe S . P = k 0 ~ - Z P also gleich dem Ueber- bjlluB des Quadrats des polaren Tragheits: radius filr die ProlilbeIegung gegenaer dem entsprechenden Quadrat fttr die Kreishdegung
htit (4) erhalten wir fiir 8. und 8, die A m rlrficke
2 R R
Die Form der Trigheitsellipse hZngt, wie man sieht, wesentlich ab wn der GrtSbe von 1.
1st f - 0 , so -geht die Ettfpe in &en Kreis dber. Man Bieht ferher, d a B d i e (Cnlmann- s c h e n ) Z e n t r a l e l l i p s e n aIler P r o f i l e Inlt d e n s e l b e n I n v a r i a n t e n R a n d f e i n e k o n f o k a l e S c h a r b i l d e n , d e r e n B r e n n p u n k t e von Mo d e n A b s t a n d mf h a b e n .
4. B e s o n d e r e FBlle. 1st daa Profil dn Joukowskisches , so haben wir statt (2)
wo swischen c05=c.e iX, R, f und dem WB1- bungswinkel y (Winkel zwischen der ersten und zweiten Profilachse) die Beziehungen be- stehen c'= R' +, Rf - mf COB 'p I (81-
Man erhHlt dann a m (6) die folgenden Werte
h B'- Rf + Pc l& fcosx ROtnrp c=- R an' (x L q)!
f- sm'x * x
Wird z. B. '&=iRsinrp, 60 ist j=Rm.+cp. Das Prow geht in einen doppelberandeten Kreisbogen ftber, nod es &d
e.,=dP(i+ I ~ C O S ' ~ ~ , e,=nR*Bin9~.
8. n R (R-CfY, e, = a R (R -jY. Unter allen ProiUen mil denselben Werten
R und f hat also die Ellipse die kleinsten TrPgheilmmente.
Wenn R==f wkd, so geht das Profil iiber in die doppelt gedhlte Strecke mit den End- punkten $2R, -2R und es wird
Wird &=O, so erhalten wir ale Profil eine Ellipse mit den Achsen R f ! und I 3 - f mit
8. =I BRR', 9, .I 0. 1st endlich f = O , 90 geht die Abbildung i n
die Ideulil&t Gber mit 8.5 @,=nR=,
wie w erwarten war. Der Kreh hat das kleinats 8. und das gr6Dte 8,. eo4
Hannover-Linden. W. hfiiller.
BUCHBESPREGHUNGEN d a usktsa Uakwbren-
r&.ftaa. Eernuagegeben von dara scbrfft- leitung der ~Naturwisaemohaim. Enter Band. M i b 81 Ahbildungen. Verlng van Jnliue Springer, Berfin lQ2S. 4D8 8.
Die Schrilfleitung der nNaturwissenschaftem beabsichtigt, a l l jmlieh einen Sammelband er- scheinen zu lassen, in dem in _msammenfassen- den Darstellungen tiber die wichfigsten Fort- schritte des letzten Jahres in einzelnen Zweigen der Physik und den ihr benachbarten Wissens- gebieten berichtet werden soll. Die AnMtze dta vorliegenden e r s t e n Bauds dieser nEr-
gebnisse der erakten Naturwissenscbaftenn, die teilweise etwas weikr zurikkgreifen, entspre- &en fast durchweg dem Pmgraxxh des Heraus- gebers. Sie sollen so gehalten sein, das auch der den Detailfr&gen eines bmtimmten SpeziJ- gebietes Fernsteheride sick einen Ueberblick iiber den gegenwHrtigen Stand der aktuellsten Fragen exakter Ncttuffarschu~vemchaWen kann.
An erster Stelle berichtet R. P r a g e r - Neubabelsberg iiber die F o r t s c h r i t t e d e r A s t r o n o m i e im J a h r e 1921.. Dabei werden allerdhgs alle jene Fragen ausgeschlossen, die im Zusammenhang mit den spektmskopischen