Embed Size (px)
Citation preview
Gerätebeschreibung HG 43600XA
Laserscanner— mit Orientierungsrechner —
HG 43600XA
Deutsch, Revision 06 Entw. von: A.B. / L.M.
Stand: 28.11.2014 Gez.: RAD
Götting KG, Celler Str. 5, D-31275 Lehrte - Röddensen (Germany), Tel.: +49 (0) 51 36 / 80 96 -0,Fax: +49 (0) 51 36 / 80 96 -80, eMail: [email protected], Internet: www.goetting.de
Inhalt HG 43600XA
Inhalt
1 Allgemeine Hinweise .........................................................4
1.1 Bestimmungsgemäße Verwendung ......................................... 4
1.2 Hinweise zur Sicherheit (Laser) ............................................... 4
1.3 Hinweise zur Positioniergenauigkeit ........................................ 5
1.4 Pflegehinweise ....................................................................... 5
2 Einbauhinweise .................................................................6
2.1 Montage ................................................................................. 6
2.1.1 Austrittshöhe des Laserstrahls ....................................................... 7
2.1.2 Nivellieren des Laserscanners ....................................................... 7
2.2 Elektrische Schnittstelle: Belegung der M23-Buchse am Gerät. 9
2.3 Anschluss von 100baseT Ethernet (RJ 45) .............................. 9
2.4 Bedeutung der LEDs am Gerät.............................................. 10
2.5 Reflexmarken ....................................................................... 10
2.6 Markencodes ........................................................................ 11
3 Software ......................................................................... 12
3.1 Serviceprogramm LST .......................................................... 12
3.2 Softwareupdate .................................................................... 15
4 Der integrierte Orientierungsrechner ................................ 16
4.1 Funktionsbeschreibung ......................................................... 16
4.2 Positionsberechnung Laser ................................................... 16
4.3 Positionsberechnung Odometrie............................................ 17
4.4 Positionsberechnung Navigations-Punkt ................................ 17
4.5 Inbetriebnahme des Orientierungsrechners ........................... 17
4.6 Serviceschnittstelle ............................................................... 17
4.6.1 Terminalmodus ............................................................................ 18
4.6.2 Main Monitor ............................................................................... 19
4.6.3 Tag Menu .................................................................................... 21
4.6.4 Special Parameter ....................................................................... 23
4.6.5 Parameter Laserscanner .............................................................. 25
4.6.6 Parameter Vehicle ....................................................................... 26
4.6.7 Parameter System ....................................................................... 28
4.6.8 Save Parameter........................................................................... 29
Deutsch, Revision 06, Stand: 28.11.2014 2
Inhalt HG 43600XA
4.6.9 Status / Logging .......................................................................... 30
4.6.10 Information .................................................................................. 32
4.6.11 Softwareupdates.......................................................................... 32
4.6.11.1 Vorbereitungen für Update der Software über die Ethernetschnitt-stelle .......................................................................................33
4.6.11.2 Softwareupdate mit Ethernetzugriff .......................................... 34
4.6.11.2.1 Über den Bootloader ................................................ 34
4.6.11.2.2 Über die Webserveranwendung ................................ 35
4.6.11.3 Softwareupdate ohne Ethernetzugriff ....................................... 36
4.6.12 Up- und Download der Konfigurations- bzw. Markendaten ............ 37
5 Technische Daten ........................................................... 39
6 Anhang ........................................................................... 40
A Parameterzuordnung ....................................................................... 40
B Ergänzung zur Einrichtung............................................................... 40
C Durchführen eines Einmessvorganges einer neuen Reflektormarke mit Hilfe der integrierten Einmessfunktion ............................................. 40
D Erläuterungen zum Einfluss des Parameters <SPE Tolerance> im Menü Spezialfunktionen................................................................... 41
E Erläuterungen zum Einfluss der Parameter <Tag Width Tolerance> und <Percentage Width Tolerance> im Menü Spezialfunktionen .... 42
7 Abbildungsverzeichnis ..................................................... 43
8 Tabellenverzeichnis......................................................... 44
9 Stichwortverzeichnis ........................................................ 45
10 Handbuch-Konventionen ................................................. 46
11 Hinweise ......................................................................... 47
11.1 Urheberrechte ...................................................................... 47
11.2 Haftungsausschluss .............................................................. 47
11.3 Markenzeichen und Firmennamen ......................................... 47
Deutsch, Revision 06, Stand: 28.11.2014 3
Allgemeine Hinweise HG 43600XA
1 Allgemeine Hinweise
Sie halten die Gerätebeschreibung für den Laserscanner HG 43600XA der
Götting KG in Händen. Der Laserscanner ermöglicht eine sehr flexible Fahrzeugfüh-
rung. Anhand von Reflexmarken kann ein Fahrzeug je nach Programmierung quasi
autonom geführt werden.
In Verbindung mit hinderniserkennenden Sensoren (Ultraschall oder optische Syste-
me) ist es möglich, beim Auftauchen eines Hindernisses das Fahrzeug über alternati-
ve Wege zum Ziel zu führen. Die Positioniergenauigkeit ist so gut, dass auch die hohen
Anforderungen bei der automatischen Lastübergabe erfüllt werden.
1.1 Bestimmungsgemäße Verwendung
ACHTUNG! Der Laserscanner HG 43600XA darf nur im Industriebereich ein-
gesetzt werden.
Er ist ausschließlich dafür konstruiert, Reflexmarken (Bezugsquelle: siehe Abschnitt
2.5 ab Seite 10) in seiner Umgebung zu erkennen und daraus eine Position und eine
Orientierung zu berechnen.
Um ein komplettes Fahrzeug zu führen und zu positionieren, ist es nötig, ein Positio-
niersystem aufzubauen, das in der Lage ist, ein angeschlossenes Fahrzeug auf der
Grundlage der gelieferten Positionsdaten zu steuern. Der Laserscanner ist dann Be-
standteil des Systems.
1.2 Hinweise zur Sicherheit (Laser)
Bild 1 Laser Klasse 1
Die optische Ausgangsleistung des Lasers ist für die Augen (generell: menschliches
Gewebe) ungefährlich. Die optische Ausgangsleistung des Laser ist begrenzt und
augensicher gemäß
- EN 60825-1, VDE 0837 und IEC 825-1.
Der Sensor entspricht daher den Anforderungen der ´Laser Klasse 1´.
Der Sensor tastet mit unsichtbarer Laserstrahlung die Umgebung nach Reflexmar-
ken ab. Der Laser ist im Stillstand ausgeschaltet und wird erst beim Überschreiten ei-
ner Mindestdrehzahl des Sensors eingeschaltet.
LASER KLASSE 1
Deutsch, Revision 06, Stand: 28.11.2014 4
Allgemeine Hinweise HG 43600XA
1.3 Hinweise zur Positioniergenauigkeit
Die Genauigkeit der nachfolgenden Positionsberechnung ist naturgemäß von der An-
ordnung der erkannten Marken abhängig. Sofern mindestens 4 Marken mit einem Ab-
stand von mindestens 15o und einer Entfernung zum Sensor von nicht mehr als 15 m
erfasst werden, ist die Wiederholgenauigkeit der Absolutpositionsmessung besser
als ±5 mm. Die Differenz zwischen der absoluten und der Wiederholgenauigkeit ist
durch eventuelle Fehler bei der Markenvermessung bedingt.
HINWEIS! Die Vermessung der Koordinaten und Ausrichtung der Reflekto-
ren muss von erfahrenem Fachpersonal durchgeführt werden.
Ungenauigkeiten in der Vermessung führen zwangsläufig zu
einer ungenauen Ermittlung der Position und in der Gesamtbe-
trachtung zu einer fehlerhaften Navigation.
1.4 Pflegehinweise
Um einen störungsfreien Betrieb des Laserscanners zu gewährleisten, achten Sie da-
rauf, dass das Fenster des Laserscanners sauber ist. Die transparente PMMA-Haube
darf nicht mit Papiertüchern gereinigt werden, verwenden Sie nur weiche Stofftücher.
Zweckmäßig sind z. B. nebelfeuchte Mikrofasertücher oder Einweg-Brillenputztücher.
Deutsch, Revision 06, Stand: 28.11.2014 5
Einbauhinweise HG 43600XA
2 Einbauhinweise
2.1 Montage
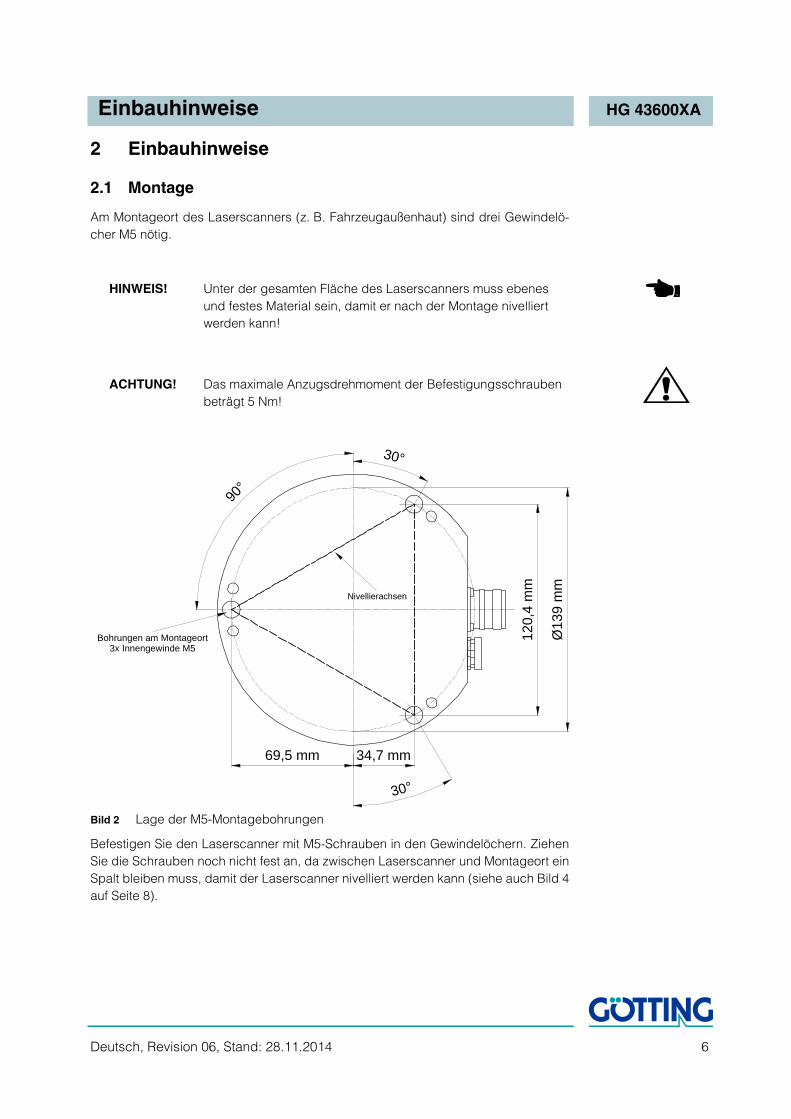
Am Montageort des Laserscanners (z. B. Fahrzeugaußenhaut) sind drei Gewindelö-
cher M5 nötig.
HINWEIS! Unter der gesamten Fläche des Laserscanners muss ebenes
und festes Material sein, damit er nach der Montage nivelliert
werden kann!
ACHTUNG! Das maximale Anzugsdrehmoment der Befestigungsschrauben
beträgt 5 Nm!
Bild 2 Lage der M5-Montagebohrungen
Befestigen Sie den Laserscanner mit M5-Schrauben in den Gewindelöchern. Ziehen
Sie die Schrauben noch nicht fest an, da zwischen Laserscanner und Montageort ein
Spalt bleiben muss, damit der Laserscanner nivelliert werden kann (siehe auch Bild 4
auf Seite 8).
Nivellierachsen
30°
90°
30°
Ø13
9 m
m
Bohrungen am Montageort3x Innengewinde M6
120,
4 m
m
69,5 mm 34,7 mm
Bohrungen am Montageort3x Innengewinde M5
Deutsch, Revision 06, Stand: 28.11.2014 6
Einbauhinweise HG 43600XA
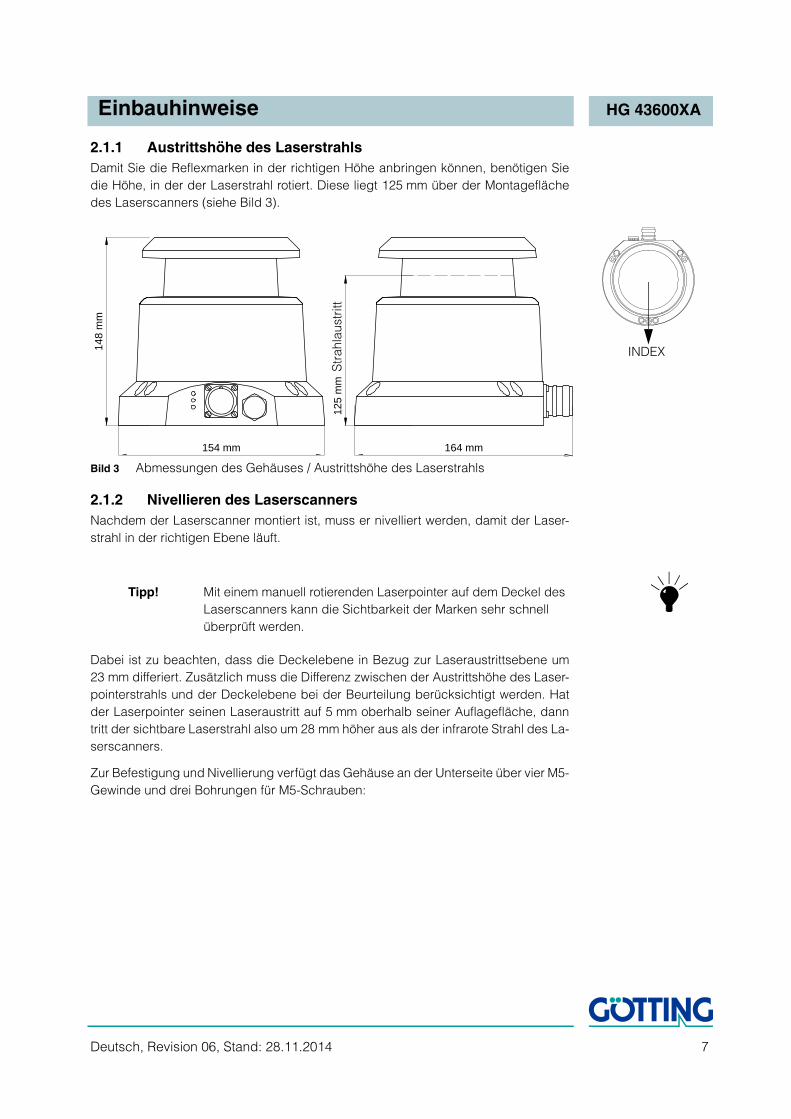
2.1.1 Austrittshöhe des Laserstrahls
Damit Sie die Reflexmarken in der richtigen Höhe anbringen können, benötigen Sie
die Höhe, in der der Laserstrahl rotiert. Diese liegt 125 mm über der Montagefläche
des Laserscanners (siehe Bild 3).
Bild 3 Abmessungen des Gehäuses / Austrittshöhe des Laserstrahls
2.1.2 Nivellieren des Laserscanners
Nachdem der Laserscanner montiert ist, muss er nivelliert werden, damit der Laser-
strahl in der richtigen Ebene läuft.
Tipp! Mit einem manuell rotierenden Laserpointer auf dem Deckel des
Laserscanners kann die Sichtbarkeit der Marken sehr schnell
überprüft werden.
Dabei ist zu beachten, dass die Deckelebene in Bezug zur Laseraustrittsebene um
23 mm differiert. Zusätzlich muss die Differenz zwischen der Austrittshöhe des Laser-
pointerstrahls und der Deckelebene bei der Beurteilung berücksichtigt werden. Hat
der Laserpointer seinen Laseraustritt auf 5 mm oberhalb seiner Auflagefläche, dann
tritt der sichtbare Laserstrahl also um 28 mm höher aus als der infrarote Strahl des La-
serscanners.
Zur Befestigung und Nivellierung verfügt das Gehäuse an der Unterseite über vier M5-
Gewinde und drei Bohrungen für M5-Schrauben:
INDEX148
mm
154 mm 164 mm
125
mm
Str
ah
lau
str
itt
Deutsch, Revision 06, Stand: 28.11.2014 7
Einbauhinweise HG 43600XA
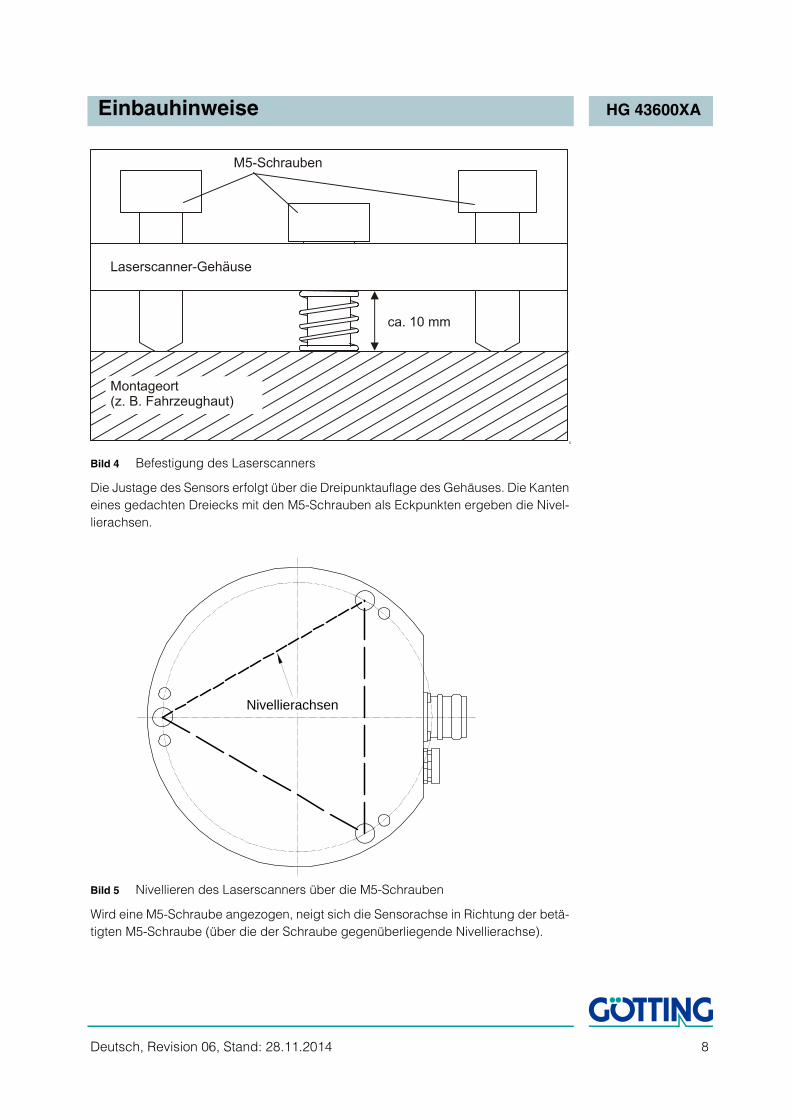
Bild 4 Befestigung des Laserscanners
Die Justage des Sensors erfolgt über die Dreipunktauflage des Gehäuses. Die Kanten
eines gedachten Dreiecks mit den M5-Schrauben als Eckpunkten ergeben die Nivel-
lierachsen.
Bild 5 Nivellieren des Laserscanners über die M5-Schrauben
Wird eine M5-Schraube angezogen, neigt sich die Sensorachse in Richtung der betä-
tigten M5-Schraube (über die der Schraube gegenüberliegende Nivellierachse).
Nivellierachsen
Deutsch, Revision 06, Stand: 28.11.2014 8
Einbauhinweise HG 43600XA
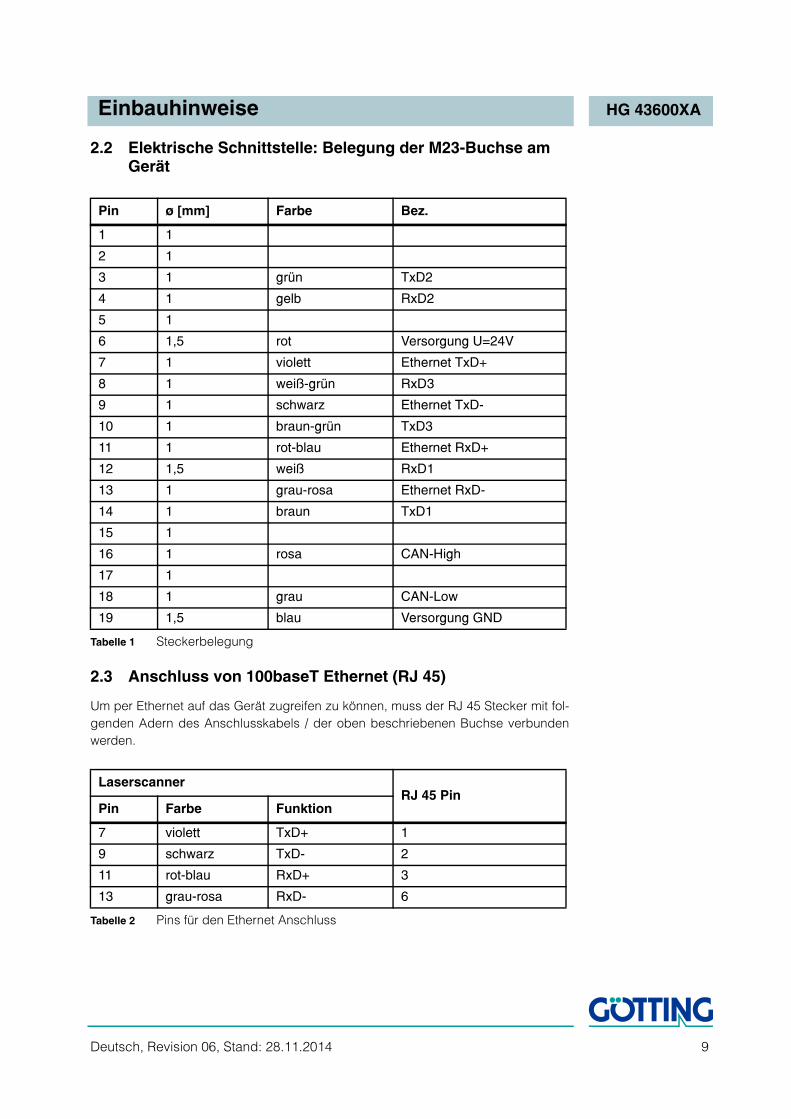
2.2 Elektrische Schnittstelle: Belegung der M23-Buchse am Gerät
2.3 Anschluss von 100baseT Ethernet (RJ 45)
Um per Ethernet auf das Gerät zugreifen zu können, muss der RJ 45 Stecker mit fol-
genden Adern des Anschlusskabels / der oben beschriebenen Buchse verbunden
werden.
Pin ø [mm] Farbe Bez.
1 1
2 1
3 1 grün TxD2
4 1 gelb RxD2
5 1
6 1,5 rot Versorgung U=24V
7 1 violett Ethernet TxD+
8 1 weiß-grün RxD3
9 1 schwarz Ethernet TxD-
10 1 braun-grün TxD3
11 1 rot-blau Ethernet RxD+
12 1,5 weiß RxD1
13 1 grau-rosa Ethernet RxD-
14 1 braun TxD1
15 1
16 1 rosa CAN-High
17 1
18 1 grau CAN-Low
19 1,5 blau Versorgung GND
Tabelle 1 Steckerbelegung
LaserscannerRJ 45 Pin
Pin Farbe Funktion
7 violett TxD+ 1
9 schwarz TxD- 2
11 rot-blau RxD+ 3
13 grau-rosa RxD- 6
Tabelle 2 Pins für den Ethernet Anschluss
Deutsch, Revision 06, Stand: 28.11.2014 9
Einbauhinweise HG 43600XA
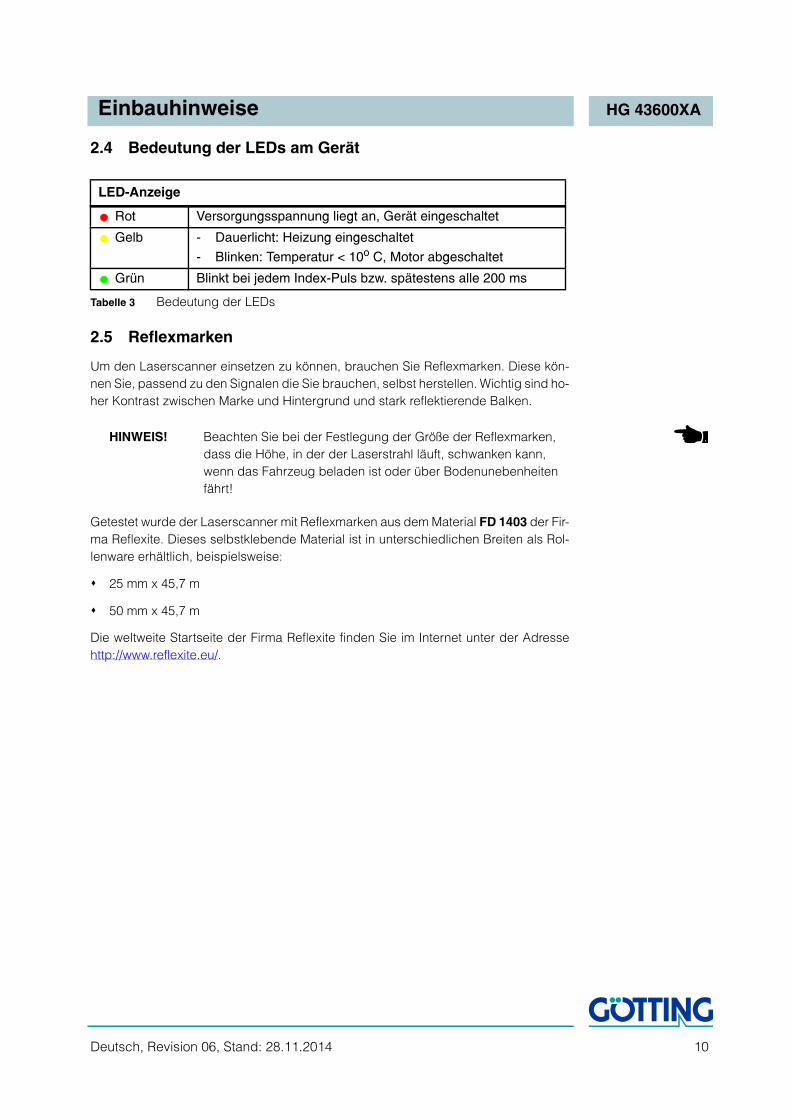
2.4 Bedeutung der LEDs am Gerät
2.5 Reflexmarken
Um den Laserscanner einsetzen zu können, brauchen Sie Reflexmarken. Diese kön-
nen Sie, passend zu den Signalen die Sie brauchen, selbst herstellen. Wichtig sind ho-
her Kontrast zwischen Marke und Hintergrund und stark reflektierende Balken.
HINWEIS! Beachten Sie bei der Festlegung der Größe der Reflexmarken,
dass die Höhe, in der der Laserstrahl läuft, schwanken kann,
wenn das Fahrzeug beladen ist oder über Bodenunebenheiten
fährt!
Getestet wurde der Laserscanner mit Reflexmarken aus dem Material FD 1403 der Fir-
ma Reflexite. Dieses selbstklebende Material ist in unterschiedlichen Breiten als Rol-
lenware erhältlich, beispielsweise:
25 mm x 45,7 m
50 mm x 45,7 m
Die weltweite Startseite der Firma Reflexite finden Sie im Internet unter der Adresse
http://www.reflexite.eu/.
LED-Anzeige
Rot Versorgungsspannung liegt an, Gerät eingeschaltet
Gelb - Dauerlicht: Heizung eingeschaltet
- Blinken: Temperatur < 10o C, Motor abgeschaltet
Grün Blinkt bei jedem Index-Puls bzw. spätestens alle 200 ms
Tabelle 3 Bedeutung der LEDs
Deutsch, Revision 06, Stand: 28.11.2014 10
Einbauhinweise HG 43600XA
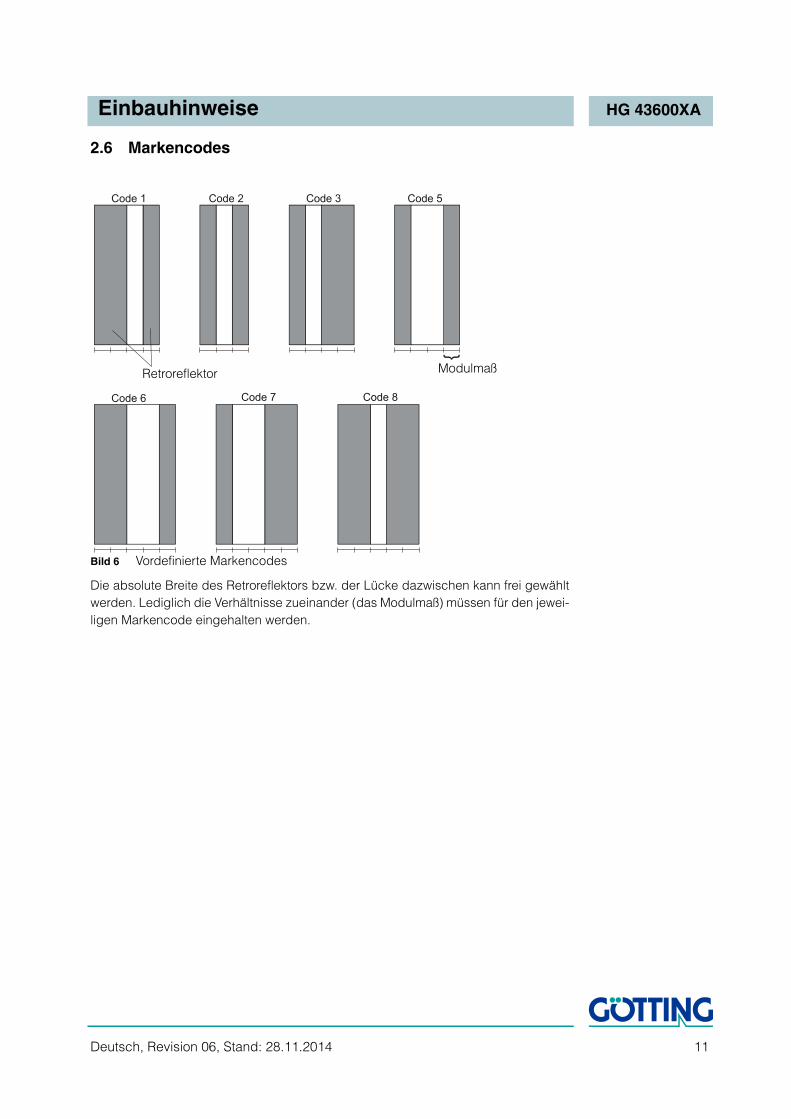
2.6 Markencodes
Bild 6 Vordefinierte Markencodes
Die absolute Breite des Retroreflektors bzw. der Lücke dazwischen kann frei gewählt
werden. Lediglich die Verhältnisse zueinander (das Modulmaß) müssen für den jewei-
ligen Markencode eingehalten werden.
ModulmaßRetroreflektor
Deutsch, Revision 06, Stand: 28.11.2014 11
Software HG 43600XA
3 Software
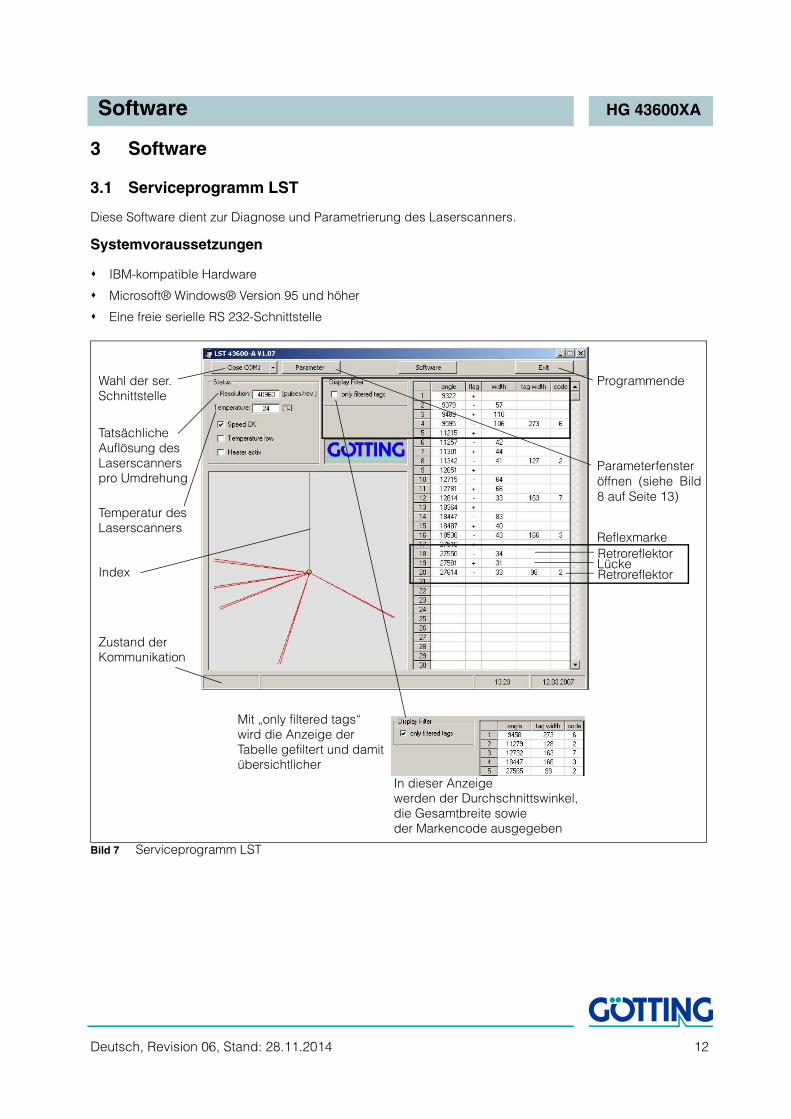
3.1 Serviceprogramm LST
Diese Software dient zur Diagnose und Parametrierung des Laserscanners.
Systemvoraussetzungen
IBM-kompatible Hardware
Microsoft® Windows® Version 95 und höher
Eine freie serielle RS 232-Schnittstelle
Bild 7 Serviceprogramm LST
Programmende
Lücke
Reflexmarke
Wahl der ser.Schnittstelle
TatsächlicheAuflösung desLaserscannerspro Umdrehung
Temperatur desLaserscanners
Index
Zustand derKommunikation
Parameterfenster
öffnen (siehe Bild
8 auf Seite 13)
Mit „only filtered tags“wird die Anzeige derTabelle gefiltert und damitübersichtlicher
In dieser Anzeigewerden der Durchschnittswinkel,die Gesamtbreite sowieder Markencode ausgegeben
Retroreflektor
Retroreflektor
Deutsch, Revision 06, Stand: 28.11.2014 12
Software HG 43600XA
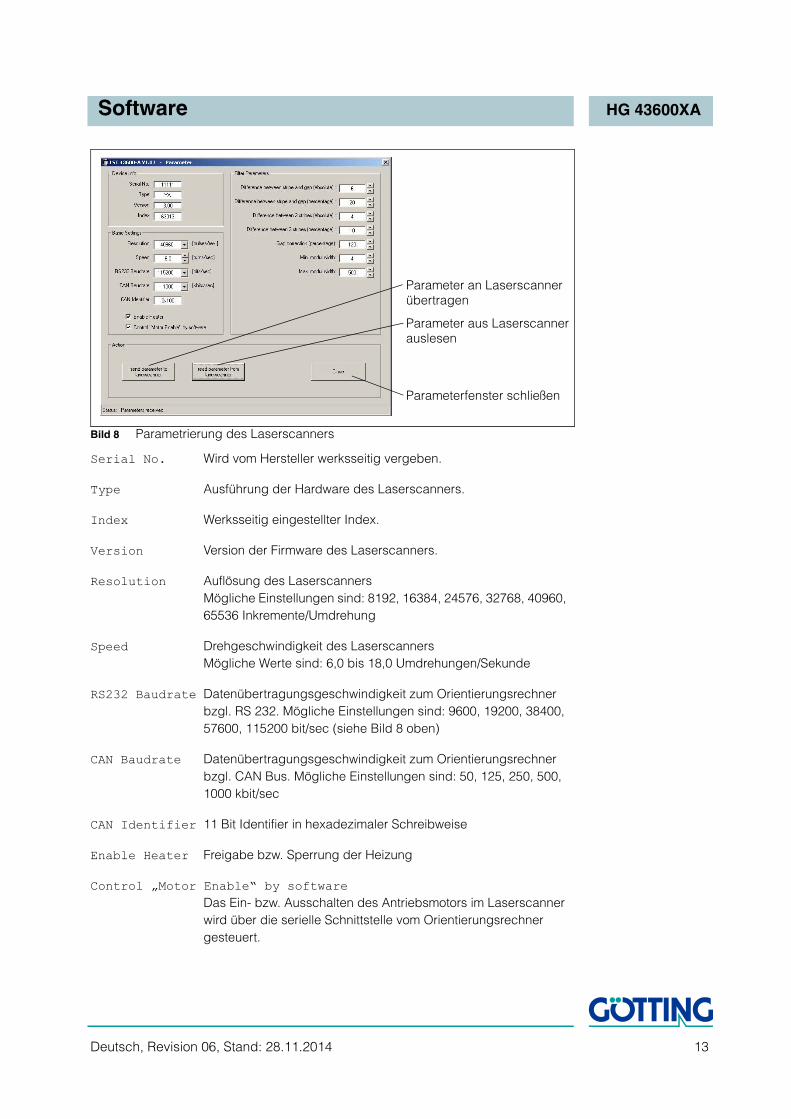
Bild 8 Parametrierung des Laserscanners
Serial No. Wird vom Hersteller werksseitig vergeben.
Type Ausführung der Hardware des Laserscanners.
Index Werksseitig eingestellter Index.
Version Version der Firmware des Laserscanners.
Resolution Auflösung des LaserscannersMögliche Einstellungen sind: 8192, 16384, 24576, 32768, 40960,
65536 Inkremente/Umdrehung
Speed Drehgeschwindigkeit des LaserscannersMögliche Werte sind: 6,0 bis 18,0 Umdrehungen/Sekunde
RS232 Baudrate Datenübertragungsgeschwindigkeit zum Orientierungsrechner
bzgl. RS 232. Mögliche Einstellungen sind: 9600, 19200, 38400,
57600, 115200 bit/sec (siehe Bild 8 oben)
CAN Baudrate Datenübertragungsgeschwindigkeit zum Orientierungsrechner
bzgl. CAN Bus. Mögliche Einstellungen sind: 50, 125, 250, 500,
1000 kbit/sec
CAN Identifier 11 Bit Identifier in hexadezimaler Schreibweise
Enable Heater Freigabe bzw. Sperrung der Heizung
Control „Motor Enable“ by softwareDas Ein- bzw. Ausschalten des Antriebsmotors im Laserscanner
wird über die serielle Schnittstelle vom Orientierungsrechner
gesteuert.
Parameter an Laserscannerübertragen
Parameter aus Laserscannerauslesen
Parameterfenster schließen
Deutsch, Revision 06, Stand: 28.11.2014 13
Software HG 43600XA
Filterparameter für die Markendekodierung
Difference between stripe and gap [absolute]Maximal zulässige Abweichung bezüglich der Breite des ersten
Retroreflektors und der Lücke zwischen beiden Reflektoren
absolut in Inkrementen.
Difference between stripe and gap [percentage]Maximal zulässige Abweichung bezüglich der Breite des ersten
Retroreflektors und der Lücke zwischen beiden Reflektoren in
Prozent.
Difference between 2 stripes [absolute]Maximal zulässige Abweichung der Breite zwischen 1. und 2.
Retroreflektor absolut in Inkrementen.
Difference between 2 stripes [percentage]Maximal zulässige Abweichung der Breite zwischen 1. und 2.
Retroreflektor in Prozent.
Gap correction [percentage]Prozentuale Korrektur der Lückenbreite.
Min. modul width Breite eines Retroreflektors einer Marke in Inkrementen, die
mindestens vorhanden sein muss, damit diese Messung über-
haupt weiterverarbeitet wird.
Max. modul width Breite eines Retroreflektors einer Marke in Inkrementen, die
höchstens vorhanden sein darf, damit diese Messung überhaupt
weiterverarbeitet wird.
Deutsch, Revision 06, Stand: 28.11.2014 14
Software HG 43600XA
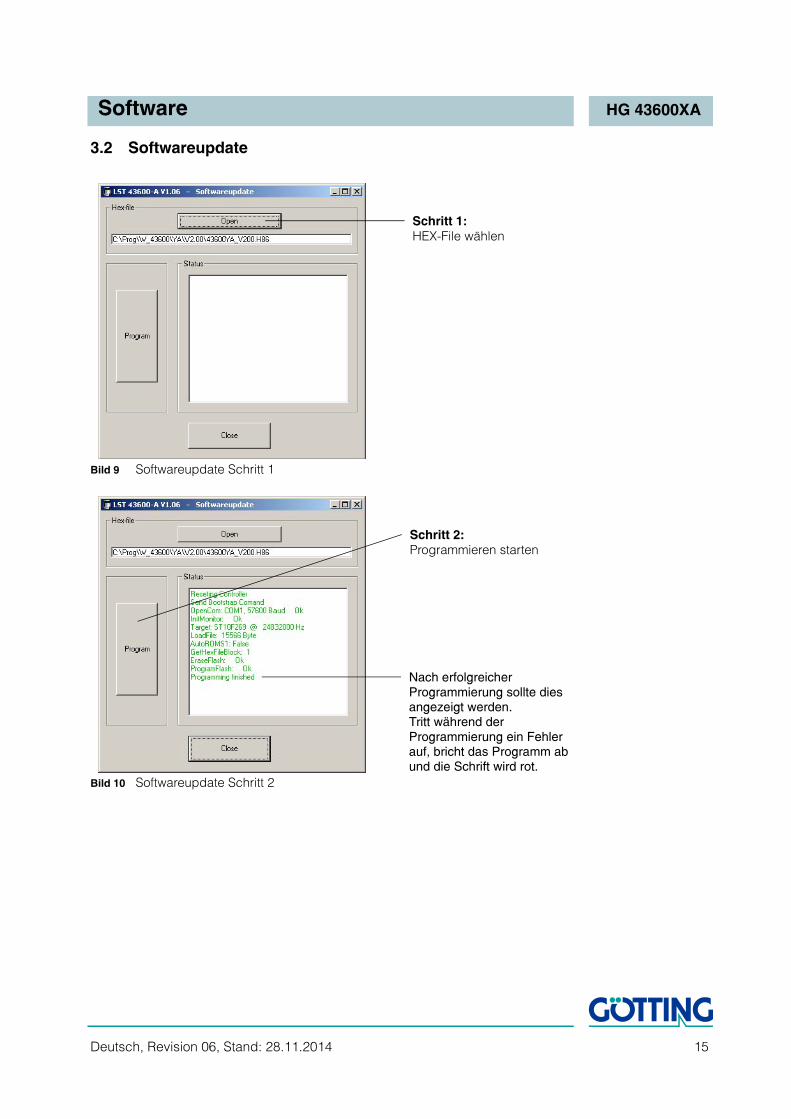
3.2 Softwareupdate
Bild 9 Softwareupdate Schritt 1
Bild 10 Softwareupdate Schritt 2
Schritt 1:HEX-File wählen
Schritt 2:Programmieren starten
Nach erfolgreicherProgrammierung sollte diesangezeigt werden.Tritt während derProgrammierung ein Fehlerauf, bricht das Programm abund die Schrift wird rot.
Deutsch, Revision 06, Stand: 28.11.2014 15
Der integrierte Orientierungsrechner HG 43600XA
4 Der integrierte Orientierungsrechner
4.1 Funktionsbeschreibung
Durch die Integration eines Orientierungsrechners in den Laserscanner ist es möglich,
aus den Daten der gescannten Reflektormarken und der internen odometrischen Po-
sitionsbestimmung eine, auf das Koordinatensystem der Reflektormarken bezogene,
Absolutposition zu erhalten. Diese Absolutposition wird der nachgeschalteten Bahn-
führungseinheit über verschieden wählbare Schnittstellen protokollgestützt zur Verfü-
gung gestellt.
Nach dem Start des Systems ermittelt der Laserscanner anhand der gescannten Mar-
ken im Raum eine initiale Startposition, auf die sich die weitere Berechnung der Odo-
metrie bezieht. Dabei kann unter optimalen Bedingungen mit mindestens vier
sichtbaren Marken eine verlässliche Positionsberechnung durchgeführt werden.
Die fortlaufend ermittelte Laserposition wird mit den, parallel berechneten, odometri-
schen Positionsdaten im Orientierungsrechner fusioniert. Das über die Fusion entstan-
dene Positionsergebnis wird im Anschluss an den Empfang der neuesten
odometrischen Daten (Lenkwinkel, Inkrementalgeberdaten) an den Laserscanner, zur
Bahnführungseinheit zurückgeführt.
4.2 Positionsberechnung Laser
Voraussetzung für die Ermittlung der Laserposition sind mindestens vier sichtbare und
genau eingemessene Reflektormarken im raumfesten Koordinatensystem.
Die ermittelten Koordinaten der Marken werden über die Terminalanwendung des Ori-
entierungsrechners dauerhaft im System innerhalb von 10 verschiedenen Markenta-
bellen, den Arealen, gespeichert. Dazu lassen sich pro Areal bis zu 255 Marken
eintragen. Eine Editierung oder auch Löschung der Markendaten ist über die gleiche
Anwendung möglich.
Das System verfügt über eine integrierte Einmessunterstützung um nachträglich posi-
tionierte Reflektormarken in das System einfügen und für die Navigation nutzen zu
können (siehe auch Abschnitt C auf Seite 40).
ACHTUNG! Diese Funktionalität sollte lediglich für einzelne Marken und nicht
für die alleinige Einmessung der Reflektormarken genutzt wer-
den!
Zur Ermittlung der Laserposition scannt das System den Raum nach sichtbaren Re-
flektormarken ab und identifiziert diese unter Zuhilfenahme ihrer gespeicherten Koor-
dinaten und Ausrichtung aus dem aktiv geschalteten Areal der Markentabelle.
Mit den identifizierten Reflektormarken wird im Anschluss über Triangulation eine La-
serposition für die danach erfolgende Positionsfusion errechnet.
Deutsch, Revision 06, Stand: 28.11.2014 16
Der integrierte Orientierungsrechner HG 43600XA
4.3 Positionsberechnung Odometrie
Der Orientierungsrechner benötigt für die Ermittlung der notwendigen odometrischen
Position von der Bahnführungseinheit die gezählten Inkremente der Radwegsensoren
und je nach Odometrietyp zusätzlich noch den Lenkwinkel. Aus diesen Informationen
errechnet das System zyklisch die Änderungen in der Position und Orientierung des
Fahrzeuges. Ausgehend vom letzten bekannten Ort und Richtung des Fahrzeuges,
kann mit den ermittelten Änderungen die neue Position und Ausrichtung des Fahrzeu-
ges bestimmt werden.
Die so erhaltene odometrische Position geht dann in die Fusion mit der Laserposition
ein.
Derzeit unterstützte Odometrie Modelle:
Drehzahldifferenz
Ackermann (Dreirad)
Tabelle 4 Liste der unterstützen Fahrzeugmodelle
4.4 Positionsberechnung Navigations-Punkt
Um einen beliebigen Punkt bezogen auf den Odometriepunkt des Fahrzeuges von der
Steuerung führen zu lassen, kann über einen parametrierbaren X- und Y-Offset ein Na-
vigations-Punkt definiert werden.
Grundsätzlich wird die Koordinate des Navigations-Punktes an die Bahnführungsein-
heit übermittelt, sodass bei fehlendem Offset die Koordinate des odometrischen Punk-
tes übertragen wird (siehe auch Abschnitt B auf Seite 40).
4.5 Inbetriebnahme des Orientierungsrechners
• Aufbau des Laserscanners gemäß vorhergehender Beschreibung
• Verbindung mit der Bahnführungseinheit über die CAN- oder die dritte serielle
Schnittstelle des Laserscanners herstellen.
• Anschluss eines Terminals über die zweite serielle Schnittstelle zur Parametrie-
rung des Orientierungsrechners.
• Verbindung mit der Versorgungsspannung herstellen.
• Parametrierung je nach Anforderung durchführen. Speichern der neu eingestell-
ten Parameter.
• Neustarten des Systems Aus- und Einschalten.
4.6 Serviceschnittstelle
Die Software des Orientierungsrechners wird beim Einschalten des Laserscanners au-
tomatisch geladen. An der zweiten seriellen Schnittstelle wird die Parametrieroberflä-
che im Terminalmodus in einem Terminalprogramm aufgerufen.
Deutsch, Revision 06, Stand: 28.11.2014 17
Der integrierte Orientierungsrechner HG 43600XA
Die Schnittstellenparameter sind 115200 Baud, 8 Datenbits, keine Parität, 1 Stopbit.
Terminalemulation VT100.
4.6.1 Terminalmodus
Um den Terminalmodus aufrufen zu können, wird ein Terminalprogramm benötigt. Die
Bedienung des Terminalmodus wurde erfolgreich getestet mit dem Terminalprogramm
„ckermit“ bzw. „kermit“ auf einem Linux Betriebssystem und mit dem Programm „Hy-
perterminal“ auf einem Windows Betriebssystem. Da auf den meisten Computern das
mitgelieferte Programm Hyperterm der Firma Microsoft vorhanden ist, bezieht sich die
folgende Beschreibung auf die Bedienung mit diesem Tool.
Wichtig ist es, zu beachten, dass die Terminalemulation VT100 eingestellt ist, andern-
falls können sich Darstellungs- und Bedienfehler ergeben.
Nach dem Start ist die Oberfläche im Terminalmodus des Orientierungsrechners vor
der Bedienung geschützt. Damit können eingekoppelte Signale auf der seriellen
Schnittstelle keine ungewollte Parametrierung vornehmen.
Um in den Terminalmodus zu gelangen, ist folgende Eingabe nötig:
edit Also ein eingangsseitiges Return gefolgt vom kleingeschriebenen Wort edit, ohne
jegliche Leerzeichen, gefolgt von einem abschließenden Return.
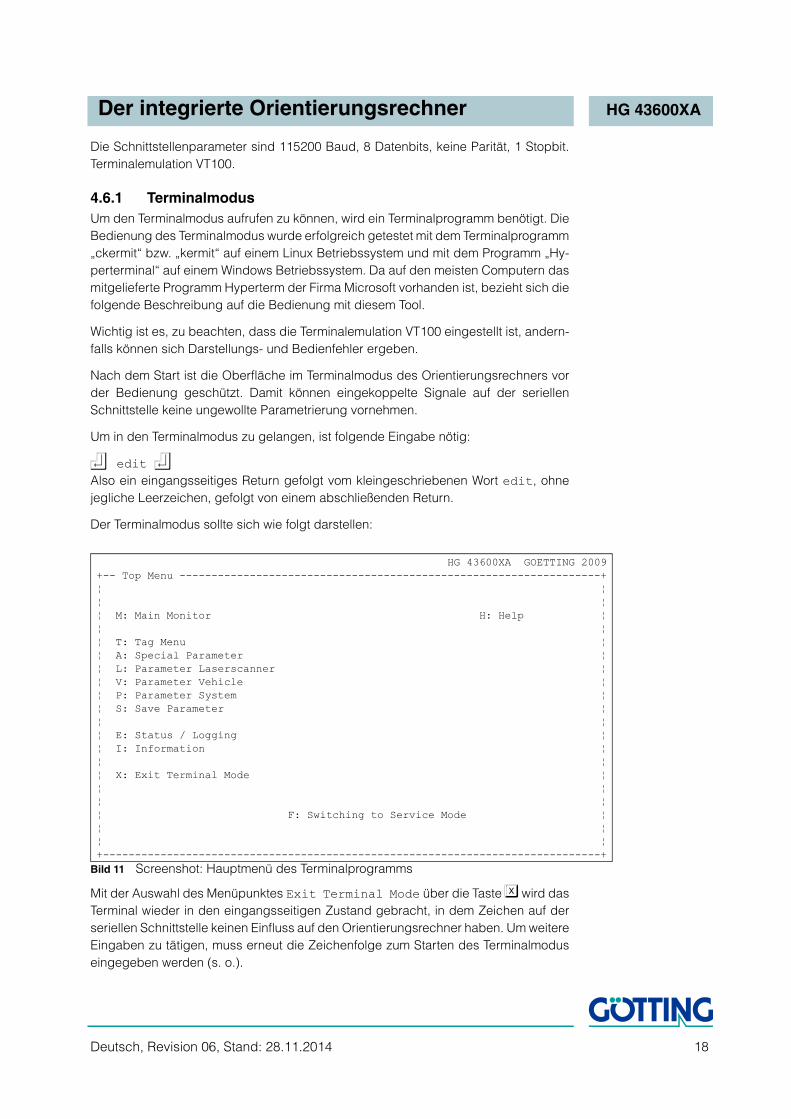
Der Terminalmodus sollte sich wie folgt darstellen:
Bild 11 Screenshot: Hauptmenü des Terminalprogramms
Mit der Auswahl des Menüpunktes Exit Terminal Mode über die Taste wird das
Terminal wieder in den eingangsseitigen Zustand gebracht, in dem Zeichen auf der
seriellen Schnittstelle keinen Einfluss auf den Orientierungsrechner haben. Um weitere
Eingaben zu tätigen, muss erneut die Zeichenfolge zum Starten des Terminalmodus
eingegeben werden (s. o.).
HG 43600XA GOETTING 2009+-- Top Menu ------------------------------------------------------------------+¦ ¦¦ ¦¦ M: Main Monitor H: Help ¦¦ ¦¦ T: Tag Menu ¦¦ A: Special Parameter ¦¦ L: Parameter Laserscanner ¦¦ V: Parameter Vehicle ¦¦ P: Parameter System ¦¦ S: Save Parameter ¦¦ ¦¦ E: Status / Logging ¦¦ I: Information ¦¦ ¦¦ X: Exit Terminal Mode ¦¦ ¦¦ ¦¦ F: Switching to Service Mode ¦¦ ¦¦ ¦+------------------------------------------------------------------------------+
Deutsch, Revision 06, Stand: 28.11.2014 18
Der integrierte Orientierungsrechner HG 43600XA
Die weiteren Menüpunkte werden im Folgenden beschrieben:
4.6.2 Main Monitor
Das Main Menü wird mit der Taste ausgewählt. Das Menü kann über die Taste verlassen werden. Sie befinden sich dann wieder im Hauptmenü.
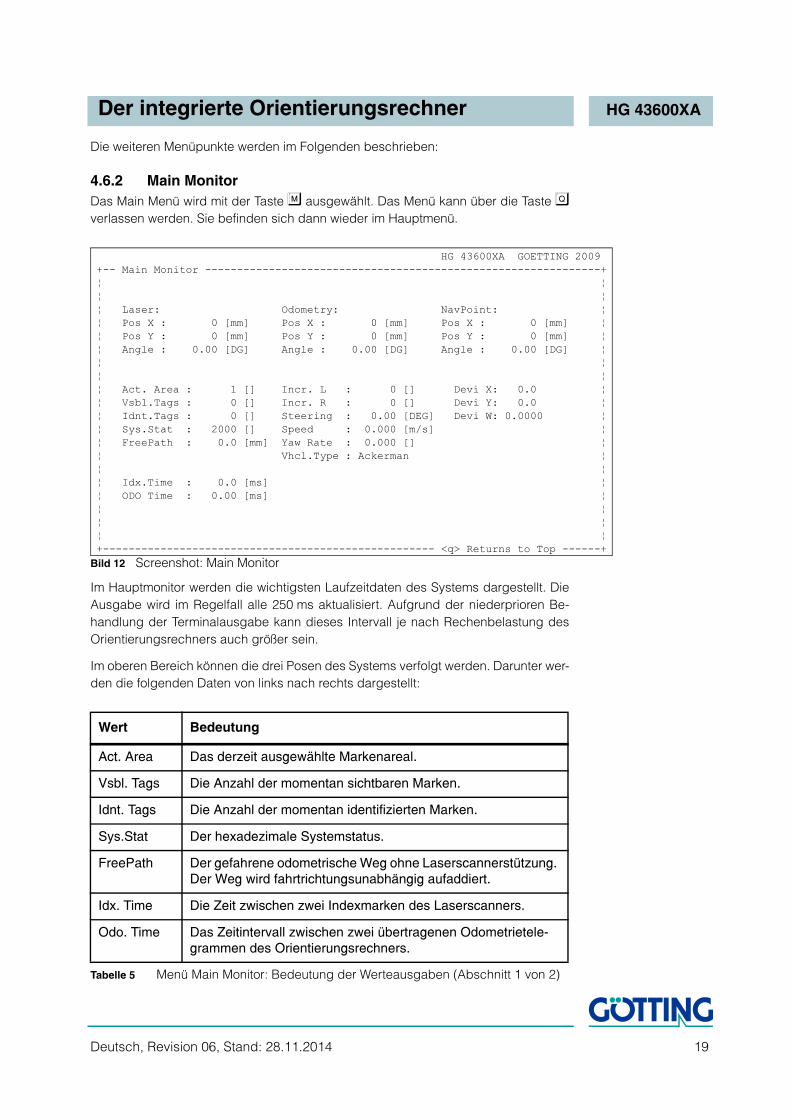
Bild 12 Screenshot: Main Monitor
Im Hauptmonitor werden die wichtigsten Laufzeitdaten des Systems dargestellt. Die
Ausgabe wird im Regelfall alle 250 ms aktualisiert. Aufgrund der niederprioren Be-
handlung der Terminalausgabe kann dieses Intervall je nach Rechenbelastung des
Orientierungsrechners auch größer sein.
Im oberen Bereich können die drei Posen des Systems verfolgt werden. Darunter wer-
den die folgenden Daten von links nach rechts dargestellt:
Wert Bedeutung
Act. Area Das derzeit ausgewählte Markenareal.
Vsbl. Tags Die Anzahl der momentan sichtbaren Marken.
Idnt. Tags Die Anzahl der momentan identifizierten Marken.
Sys.Stat Der hexadezimale Systemstatus.
FreePath Der gefahrene odometrische Weg ohne Laserscannerstützung. Der Weg wird fahrtrichtungsunabhängig aufaddiert.
Idx. Time Die Zeit zwischen zwei Indexmarken des Laserscanners.
Odo. Time Das Zeitintervall zwischen zwei übertragenen Odometrietele-grammen des Orientierungsrechners.
Tabelle 5 Menü Main Monitor: Bedeutung der Werteausgaben (Abschnitt 1 von 2)
HG 43600XA GOETTING 2009+-- Main Monitor --------------------------------------------------------------+¦ ¦¦ ¦¦ Laser: Odometry: NavPoint: ¦¦ Pos X : 0 [mm] Pos X : 0 [mm] Pos X : 0 [mm] ¦¦ Pos Y : 0 [mm] Pos Y : 0 [mm] Pos Y : 0 [mm] ¦¦ Angle : 0.00 [DG] Angle : 0.00 [DG] Angle : 0.00 [DG] ¦¦ ¦¦ ¦¦ Act. Area : 1 [] Incr. L : 0 [] Devi X: 0.0 ¦¦ Vsbl.Tags : 0 [] Incr. R : 0 [] Devi Y: 0.0 ¦¦ Idnt.Tags : 0 [] Steering : 0.00 [DEG] Devi W: 0.0000 ¦¦ Sys.Stat : 2000 [] Speed : 0.000 [m/s] ¦¦ FreePath : 0.0 [mm] Yaw Rate : 0.000 [] ¦¦ Vhcl.Type : Ackerman ¦¦ ¦¦ Idx.Time : 0.0 [ms] ¦¦ ODO Time : 0.00 [ms] ¦¦ ¦¦ ¦¦ ¦+---------------------------------------------------- <q> Returns to Top ------+
Deutsch, Revision 06, Stand: 28.11.2014 19
Der integrierte Orientierungsrechner HG 43600XA
Incr. L Die vom Bahnführungsrechner gelieferten Inkremente des lin-ken Rades.
Incr. R Die vom Bahnführungsrechner gelieferten Inkremente des rechten Rades.
Steering Der vom Bahnführungsrechner gelieferte Lenkwinkel.
Speed Die berechnete und an den Bahnführungsrechner übertragene, vorzeichenbehaftete Geschwindigkeit.
Yaw Rate Die ermittelte Drehrate des Laserscanners.
Vhcl. Type Der ausgewählte Odemtrietyp.
Dev. X Abweichung von odometrischer zur verschobenen Laserposi-tion in X.
Dev. Y Abweichung von odometrischer zur verschobenen Laserposi-tion in Y.
Dev. Hdg Abweichung von odometrischem zum Laserheading.
Wert Bedeutung
Tabelle 5 Menü Main Monitor: Bedeutung der Werteausgaben (Abschnitt 2 von 2)
Deutsch, Revision 06, Stand: 28.11.2014 20
Der integrierte Orientierungsrechner HG 43600XA
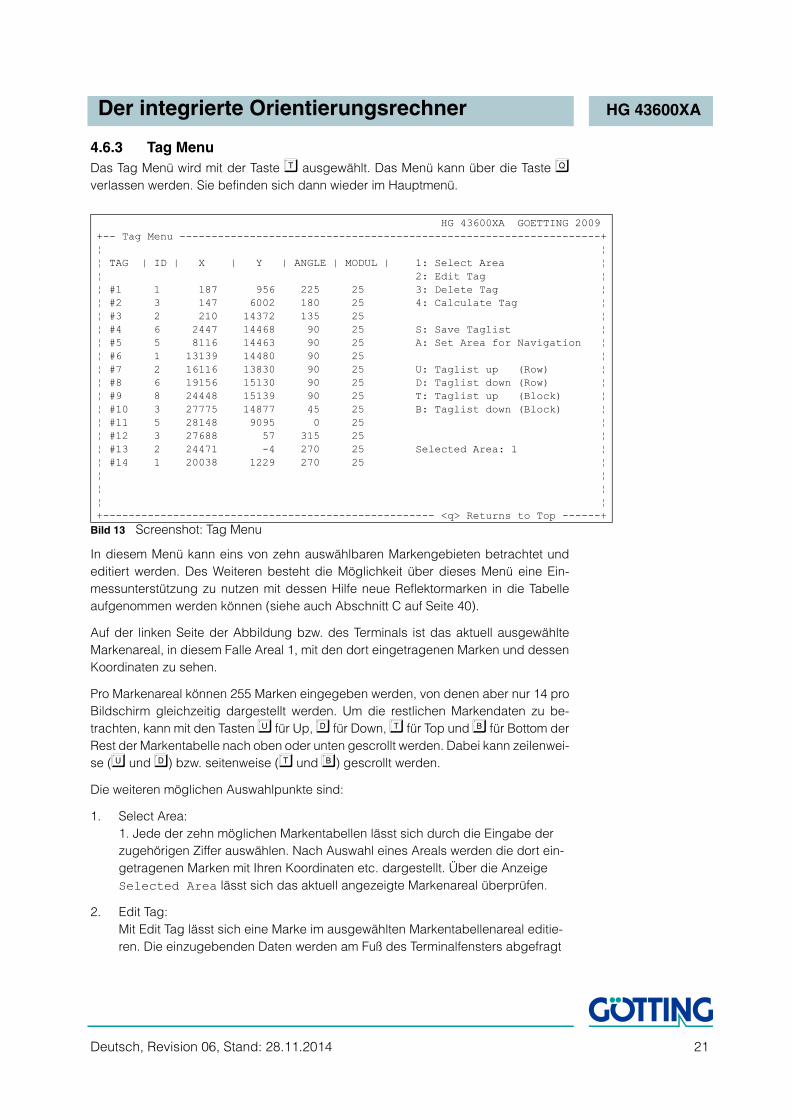
4.6.3 Tag Menu
Das Tag Menü wird mit der Taste ausgewählt. Das Menü kann über die Taste verlassen werden. Sie befinden sich dann wieder im Hauptmenü.
Bild 13 Screenshot: Tag Menu
In diesem Menü kann eins von zehn auswählbaren Markengebieten betrachtet und
editiert werden. Des Weiteren besteht die Möglichkeit über dieses Menü eine Ein-
messunterstützung zu nutzen mit dessen Hilfe neue Reflektormarken in die Tabelle
aufgenommen werden können (siehe auch Abschnitt C auf Seite 40).
Auf der linken Seite der Abbildung bzw. des Terminals ist das aktuell ausgewählte
Markenareal, in diesem Falle Areal 1, mit den dort eingetragenen Marken und dessen
Koordinaten zu sehen.
Pro Markenareal können 255 Marken eingegeben werden, von denen aber nur 14 pro
Bildschirm gleichzeitig dargestellt werden. Um die restlichen Markendaten zu be-
trachten, kann mit den Tasten für Up, für Down, für Top und für Bottom der
Rest der Markentabelle nach oben oder unten gescrollt werden. Dabei kann zeilenwei-
se ( und ) bzw. seitenweise ( und ) gescrollt werden.
Die weiteren möglichen Auswahlpunkte sind:
1. Select Area:1. Jede der zehn möglichen Markentabellen lässt sich durch die Eingabe der
zugehörigen Ziffer auswählen. Nach Auswahl eines Areals werden die dort ein-
getragenen Marken mit Ihren Koordinaten etc. dargestellt. Über die Anzeige
Selected Area lässt sich das aktuell angezeigte Markenareal überprüfen.
2. Edit Tag:Mit Edit Tag lässt sich eine Marke im ausgewählten Markentabellenareal editie-
ren. Die einzugebenden Daten werden am Fuß des Terminalfensters abgefragt
HG 43600XA GOETTING 2009+-- Tag Menu ------------------------------------------------------------------+¦ ¦¦ TAG | ID | X | Y | ANGLE | MODUL | 1: Select Area ¦¦ 2: Edit Tag ¦¦ #1 1 187 956 225 25 3: Delete Tag ¦¦ #2 3 147 6002 180 25 4: Calculate Tag ¦¦ #3 2 210 14372 135 25 ¦¦ #4 6 2447 14468 90 25 S: Save Taglist ¦¦ #5 5 8116 14463 90 25 A: Set Area for Navigation ¦¦ #6 1 13139 14480 90 25 ¦¦ #7 2 16116 13830 90 25 U: Taglist up (Row) ¦¦ #8 6 19156 15130 90 25 D: Taglist down (Row) ¦¦ #9 8 24448 15139 90 25 T: Taglist up (Block) ¦¦ #10 3 27775 14877 45 25 B: Taglist down (Block) ¦¦ #11 5 28148 9095 0 25 ¦¦ #12 3 27688 57 315 25 ¦¦ #13 2 24471 -4 270 25 Selected Area: 1 ¦¦ #14 1 20038 1229 270 25 ¦¦ ¦¦ ¦¦ ¦+---------------------------------------------------- <q> Returns to Top ------+
Deutsch, Revision 06, Stand: 28.11.2014 21
Der integrierte Orientierungsrechner HG 43600XA
und nach Fertigstellung der Eingabe in der Tabelle dargestellt. Dabei wird bei
Leereingaben (Eingabe von Return) der Wert des ursprünglichen Eintrages bei-
behalten.
3. Delete Tag:Mit Hilfe dieser Auswahl lässt sich jede beliebige Marke über die Auswahl der
Markennummer in der Tabelle löschen.
4. Calculate Tag:Hinter diesem Menüpunkt versteckt sich die Einmessunterstützung für neue
Reflektormarken. Die einzugebenden Daten werden am Fuß des Terminalfens-
ters abgefragt (siehe Abschnitt C auf Seite 40).
- S: Save Taglist:Durch diese Auswahl werden die geänderten Markendaten dauerhaft im System
gespeichert. Außerdem werden zusätzliche systeminterne Informationen in Bezug
auf die Markentabellen berechnet.
- A: Set Area for Navigation:Mit der Auswahl dieses Punktes ist es möglich das neu ausgewählte Markenareal
als Grundlage für die Navigation zu benutzen. Diese Funktion ist zu Testzwecken
oder in kleinen Umgebungen in der nur ein Markenareal benötigt wird, nützlich.
Mit der Auswahl dieses Punktes werden die systeminternen Informationen im
Bezug auf die Markentabellen berechnet und für die aktuelle Navigation genutzt.
Die Auswahl des Areals bleibt über den Neustart erhalten.
HINWEIS! Ein geänderter Markentabelleninhalt muss aber trotzdem noch
mittels der Auswahl von S: gesichert werden. Anderfalls sind
nach dem Neustart des Systems die geänderten Markendaten
verloren.
Grundsätzlich muss ein einmal vorgenommener Eingabevorgang bis zum Ende
durchgeführt werden. Ein Abbruch der Eingabe mittels Esc ist nicht möglich.
Tipp! Sollte versehentlich z. B. die Editierung einer Marke ausgewählt
werden, so kann über die Eingabe von <Return> der ursprüng-
lich vorhandene Wert beibehalten werden.
Die Funktion der Backspace Taste ist in einer korrekt eingestellten VT100 Umgebung
wirksam, sodass während des Eingabevorganges eine fehlerhafte Eingabe editiert
werden kann.
Markeninformationen
Bei der Eingabe der Reflektormarken in die Tabelle werden neben den X-Y Koordina-
ten weitere Informationen benötigt. So wird für die abgefragte ID der jeweilige Marken-
code (siehe Abschnitt 2.6 auf Seite 11) eingetragen. Also für eine Marke mit dem Code
Zwei die ID 2.
Deutsch, Revision 06, Stand: 28.11.2014 22

Der integrierte Orientierungsrechner HG 43600XA
Weiter muss die Ausrichtung der Marke angegeben werden. Dabei wird die Richtung,
in Bezug auf das Koordinatensystem des Raumes eingetragen, in die der Betrachter
schaut, wenn er die reflektierende Seite der Marke betrachtet. Schaut der Betrachter
also entlang der positiven Y-Achse auf die Reflektorseite einer Marke, dann hat diese
Marke eine Ausrichtung von 90o. Dieser Wert wird dann in die Tabelle mit eingetragen.
Für die Modulbreite (siehe Abschnitt 2.6 auf Seite 11) wird die Breite eines Reflektor-
modules auf der Reflektormarke eingetragen. Das herkömmlich gelieferte Reflektor-
material wird in einer Breite von 1 Zoll — also ca. 25 mm — geliefert, so dass im
überwiegenden Fall hier ein Wert von 25 eingetragen wird.
4.6.4 Special Parameter
Das Menü Special Parameter wird mit der Taste ausgewählt. Das Menü kann über
die Taste verlassen werden. Sie befinden sich dann wieder im Hauptmenü.
Bild 14 Screenshot: Special Parameter
1. Pos. Quality Tol.:Maximal zulässige Abweichung der Laserpositionsqualität (ganzzahlig 1-20).
Dabei bedeutet ein kleiner Wert eine gute und ein großer Wert eine schlechte
Qualität.
2. Tag Window Tol.:Größe des Winkelerkennungsfensters in dem der Winkel einer Marke erwartet
wird. Die Eingabe erfolgt im Bogenmaß.
3. Width Tol.:Toleranz der zulässigen Abweichung der berechneten Markenbreite (siehe auch
Abschnitt E auf Seite 42).
HG 43600XA GOETTING 2009+-- Special Parameter ---------------------------------------------------------+¦ ¦¦ Start Position Estimate ¦¦ Position calculation D: Trigger SPE ¦¦ 1: Pos Quality Tol. : 1.000 [--] E: Perm. SPE : OFF ¦¦ 2: Tag Window Tol. : 0.100 [RD] F: Min.Tags SPE : 5 ¦¦ 3: Width Tolerance : 0.003 [RD] G: SPE Tol. : 0.002 [RD] ¦¦ 4: percentage Width Tol.: 4 [--] H: Quality biggest Area ¦¦ 5: Tag Window : 0.250 [RD] ¦¦ ¦¦ Controller ¦¦ 6: Controller Heading : 0.100 [--] ¦¦ 7: Controller dX : 0.050 [--] ¦¦ 8: Controller dY : 0.050 [--] ¦¦ ¦¦ Peak Elimination ¦¦ A: Peak max. dW : 3.14159 [RD] ¦¦ B: Peak max. dX : 100.0 [mm] ¦¦ C: Peak max. dY : 100.0 [mm] ¦¦ ¦¦ ¦+---------------------------------------------------- <q> Returns to Top ------+
Deutsch, Revision 06, Stand: 28.11.2014 23
Der integrierte Orientierungsrechner HG 43600XA
4. Perct. Width Tol.:Prozentual zulässige Abweichung der Markenbreite. Dieser Parameter ist dem
aus Punkt 3 nachgeschaltet. Damit kann ein Entfernungseinfluss kompensiert
werden (siehe auch Abschnitt E auf Seite 42).
5. Tag Window:Größe des Fensters welches ab einer bestimmten Anzahl gesehener Reflektoren
die Anzahl der Marken für eine Positionsberechnung begrenzt.Dabei wird von der letzten gesehenen Marke der parametrierte Wert lang
gewartet, bevor für eine neue sichtbare Marke eine Identifikation durchgeführt
wird.
6. Controller Heading:Regelungsfaktor zur Beeinflussung der Fusion des Headings.
7. Controller dX:Regelungsfaktor zur Beeinflussung der X-Koordinatenfusion.
8. Controller dY:Regelungsfaktor zur Beeinflussung der Y-Koordinatenfusion.
A. Peak max. dW:Schwellwert Headingdifferenz, bei Überschreitung dieses Wertes wird keine
Sensorfusion mit diesem Positionsergebnis durchgeführt.
B. Peak max. dX:Schwellwert Koordinatendifferenz in X, bei Überschreitung dieses Wertes wird
keine Sensorfusion mit diesem Positionsergebnis durchgeführt.
C. Peak max. dY:Schwellwert Koordinatendifferenz in Y, bei Überschreitung dieses Wertes wird
keine Sensorfusion mit diesem Positionsergebnis durchgeführt.
D. Trigger SPE:Manuelle Auslösung des Aufsetzvorganges. Funktioniert nur bei stehendem
Fahrzeug und bei Einhaltung der mindestens erforderliche Marken (Parameter
F).
E. Permanentes Aufsetzen:Permanente Berechnung einer Schätzposition in Ruhelage.Nur geeignet zu Testzwecken oder bei Messevorführungen, bei denen keine
odometrischen Daten verfügbar sind.
F. Min. Tags SPE:Anzahl der mindestens erforderlichen sichtbaren Marken zur Durchführung des
AufsetzvorgangesF. , bei dem eine Schätzposition ermittelt wird.
G. SPE Tol.:Zulässige max. Abweichung in der Markenbreite zur Bestimmung einer Schätz-
position. Dieser Wert weicht vom Paramter 3 dahingehend ab, dass hiermit die
Grundgesamtheit aller Markenkombinationen für die Ermittlung einer Schätzpo-
sition begrenzt wird (siehe auch Abschnitt D auf Seite 41).
Deutsch, Revision 06, Stand: 28.11.2014 24
Der integrierte Orientierungsrechner HG 43600XA
H. Qualitätsbeurteilung:Auswahl des Algorithmus zur Qualitätsbeurteilung. Zum Zeitpunkt der Doku-
menterstellung ist lediglich die Funktion der größten Fläche als Merkmal wirk-
sam.
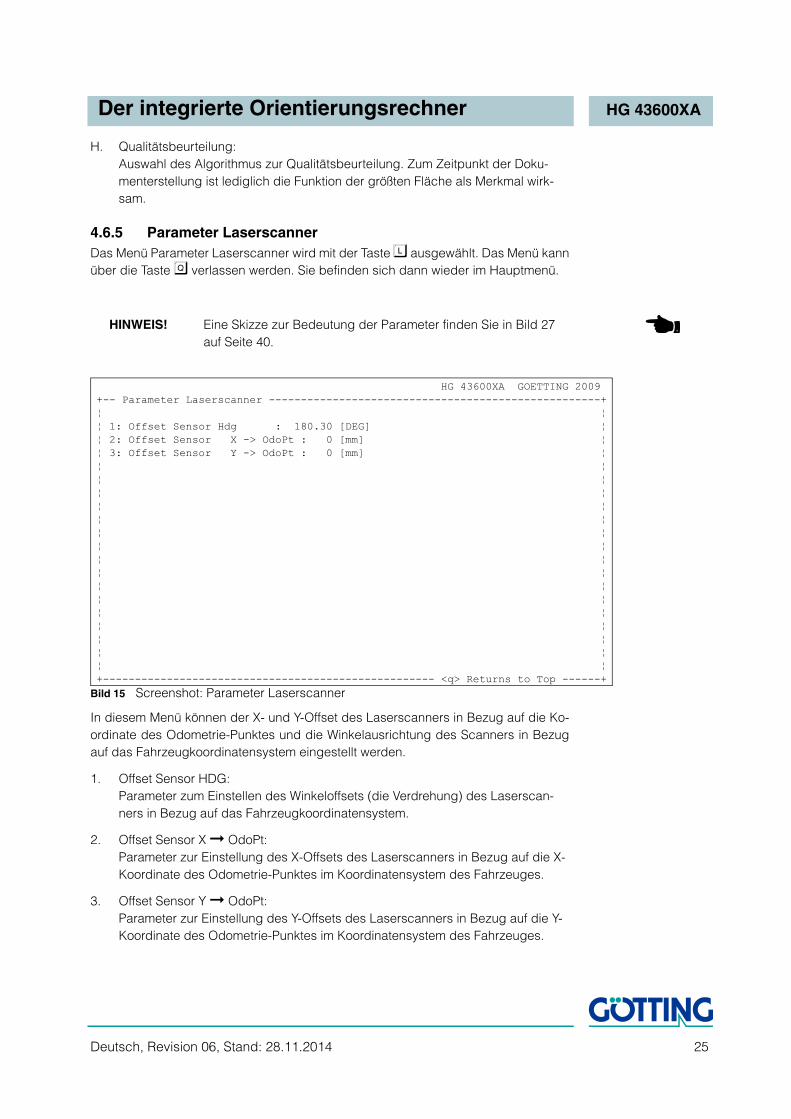
4.6.5 Parameter Laserscanner
Das Menü Parameter Laserscanner wird mit der Taste ausgewählt. Das Menü kann
über die Taste verlassen werden. Sie befinden sich dann wieder im Hauptmenü.
HINWEIS! Eine Skizze zur Bedeutung der Parameter finden Sie in Bild 27
auf Seite 40.
Bild 15 Screenshot: Parameter Laserscanner
In diesem Menü können der X- und Y-Offset des Laserscanners in Bezug auf die Ko-
ordinate des Odometrie-Punktes und die Winkelausrichtung des Scanners in Bezug
auf das Fahrzeugkoordinatensystem eingestellt werden.
1. Offset Sensor HDG:Parameter zum Einstellen des Winkeloffsets (die Verdrehung) des Laserscan-
ners in Bezug auf das Fahrzeugkoordinatensystem.
2. Offset Sensor X OdoPt:Parameter zur Einstellung des X-Offsets des Laserscanners in Bezug auf die X-
Koordinate des Odometrie-Punktes im Koordinatensystem des Fahrzeuges.
3. Offset Sensor Y OdoPt:Parameter zur Einstellung des Y-Offsets des Laserscanners in Bezug auf die Y-
Koordinate des Odometrie-Punktes im Koordinatensystem des Fahrzeuges.
HG 43600XA GOETTING 2009+-- Parameter Laserscanner ----------------------------------------------------+¦ ¦¦ 1: Offset Sensor Hdg : 180.30 [DEG] ¦¦ 2: Offset Sensor X -> OdoPt : 0 [mm] ¦¦ 3: Offset Sensor Y -> OdoPt : 0 [mm] ¦¦ ¦¦ ¦¦ ¦¦ ¦¦ ¦¦ ¦¦ ¦¦ ¦¦ ¦¦ ¦¦ ¦¦ ¦¦ ¦¦ ¦¦ ¦¦ ¦+---------------------------------------------------- <q> Returns to Top ------+
Deutsch, Revision 06, Stand: 28.11.2014 25
Der integrierte Orientierungsrechner HG 43600XA
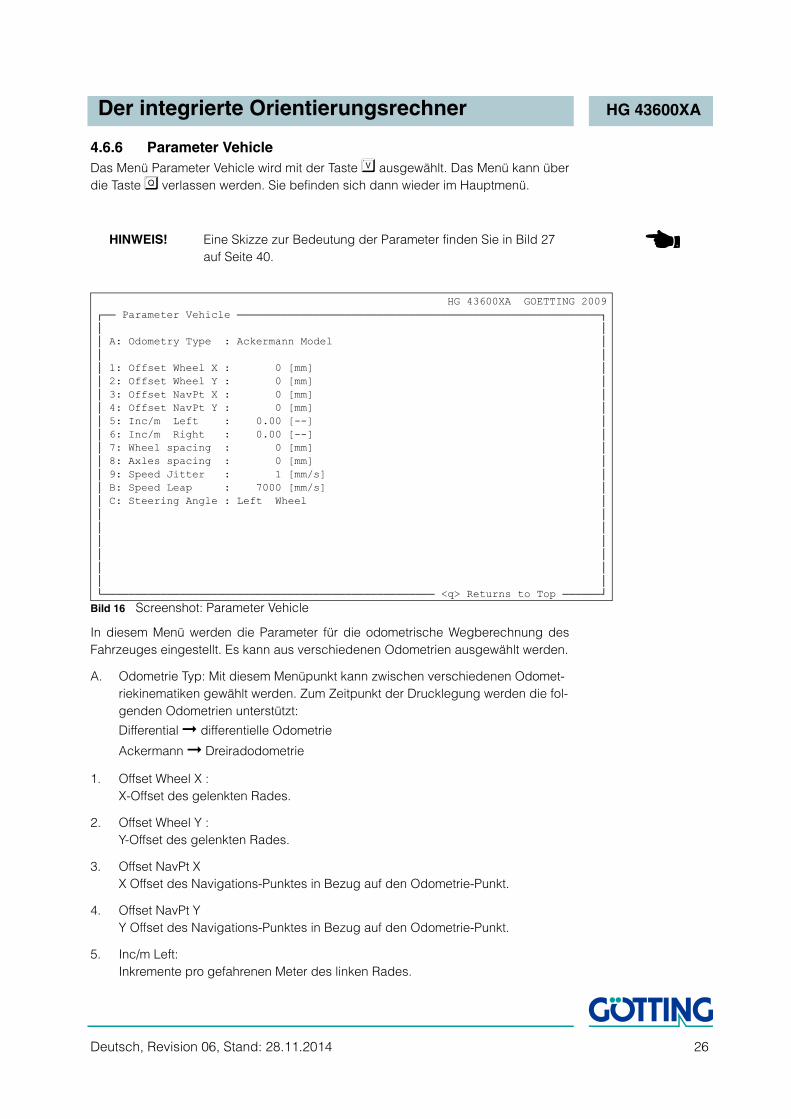
4.6.6 Parameter Vehicle
Das Menü Parameter Vehicle wird mit der Taste ausgewählt. Das Menü kann über
die Taste verlassen werden. Sie befinden sich dann wieder im Hauptmenü.
HINWEIS! Eine Skizze zur Bedeutung der Parameter finden Sie in Bild 27
auf Seite 40.
Bild 16 Screenshot: Parameter Vehicle
In diesem Menü werden die Parameter für die odometrische Wegberechnung des
Fahrzeuges eingestellt. Es kann aus verschiedenen Odometrien ausgewählt werden.
A. Odometrie Typ: Mit diesem Menüpunkt kann zwischen verschiedenen Odomet-
riekinematiken gewählt werden. Zum Zeitpunkt der Drucklegung werden die fol-
genden Odometrien unterstützt:
Differential differentielle Odometrie
Ackermann Dreiradodometrie
1. Offset Wheel X :X-Offset des gelenkten Rades.
2. Offset Wheel Y :Y-Offset des gelenkten Rades.
3. Offset NavPt XX Offset des Navigations-Punktes in Bezug auf den Odometrie-Punkt.
4. Offset NavPt YY Offset des Navigations-Punktes in Bezug auf den Odometrie-Punkt.
5. Inc/m Left:Inkremente pro gefahrenen Meter des linken Rades.
HG 43600XA GOETTING 2009┌── Parameter Vehicle ─────────────────────────────────────────────────────────┐│ ││ A: Odometry Type : Ackermann Model ││ ││ 1: Offset Wheel X : 0 [mm] ││ 2: Offset Wheel Y : 0 [mm] ││ 3: Offset NavPt X : 0 [mm] ││ 4: Offset NavPt Y : 0 [mm] ││ 5: Inc/m Left : 0.00 [--] ││ 6: Inc/m Right : 0.00 [--] ││ 7: Wheel spacing : 0 [mm] ││ 8: Axles spacing : 0 [mm] ││ 9: Speed Jitter : 1 [mm/s] ││ B: Speed Leap : 7000 [mm/s] ││ C: Steering Angle : Left Wheel ││ ││ ││ ││ ││ ││ │└──────────────────────────────────────────────────── <q> Returns to Top ──────┘
Deutsch, Revision 06, Stand: 28.11.2014 26
Der integrierte Orientierungsrechner HG 43600XA
6. Inc/m Right:Inkremente pro gefahrenen Meter des rechten Rades.
7. Wheel Spacing :Radabstand zwischen den Inkrementalgeberrädern. Dieser Parameter ist erfor-
derlich bei der Odometrieberechnung differentielles Modell.
8. Axles Spacing :Achsabstand zwischen dem/r gelenktem Rad/Achse und der starren Achse.
Dieser Parameter ist erforderlich bei der Odometrieberechung Ackermannmo-
dell.
9. Speed Jitter:Maximal zulässige Geschwindigkeit ab der das Fahrzeug noch als haltend vom
System definiert wird.Bei hoch auflösenden Inkrementalgebern kann die Vibration des Fahrzeuges im
Stand dazu führen, dass weiterhin Inkremente gezählt werden. Das führt zu
einer ungewollt detektierten Bewegung. Diese verhindert dass das Fahrzeug
eine Schätzposition ermitteln kann.
B. Speed LeapErkennungsschwelle Geschwindigkeitssprung.Beim Neustart der Bahnführungseinheit kann es zu einem Sprung der Inkremen-
talgeberwerte kommen. Daraus resultiert ein Geschwindigkeitssprung im Orien-
tierungsrechner, der beim Überschreiten des parametrierten Wertes detektiert
werden kann.In diesem Fall erhält die Bahnführungseinheit vom System eine schlechte Navi-
gationsqualität. Anschließend ermittelt der Orientierungsrechner dann bei ste-
hendem Fahrzeug eine neue Schätzposition.
HINWEIS! Es ist unbedingt notwendig, dass das Fahrzeug in diesem Fall
von der Steuerung zum Stehen gebracht wird! Andernfalls kann
aufgrund der Bewegung des Fahrzeuges keine Schätzposition
berechnet werden.
C. Steering Angle:Dieser Parameter wählt für die Odometrieberechnung gemäß Ackermann das
Rad aus, von dem der Lenkwinkel und die Inkremente der Radsensoren ausge-
wertet werden.
Deutsch, Revision 06, Stand: 28.11.2014 27
Der integrierte Orientierungsrechner HG 43600XA
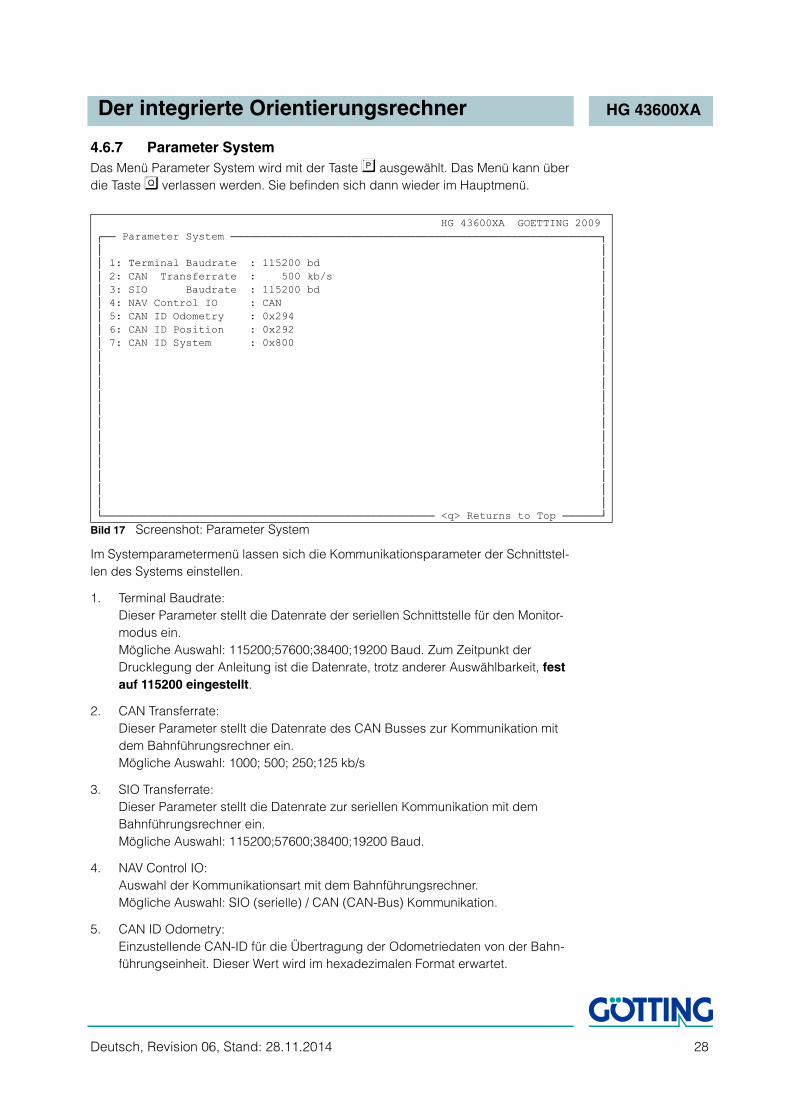
4.6.7 Parameter System
Das Menü Parameter System wird mit der Taste ausgewählt. Das Menü kann über
die Taste verlassen werden. Sie befinden sich dann wieder im Hauptmenü.
Bild 17 Screenshot: Parameter System
Im Systemparametermenü lassen sich die Kommunikationsparameter der Schnittstel-
len des Systems einstellen.
1. Terminal Baudrate:Dieser Parameter stellt die Datenrate der seriellen Schnittstelle für den Monitor-
modus ein.Mögliche Auswahl: 115200;57600;38400;19200 Baud. Zum Zeitpunkt der
Drucklegung der Anleitung ist die Datenrate, trotz anderer Auswählbarkeit, fest
auf 115200 eingestellt.
2. CAN Transferrate:Dieser Parameter stellt die Datenrate des CAN Busses zur Kommunikation mit
dem Bahnführungsrechner ein.Mögliche Auswahl: 1000; 500; 250;125 kb/s
3. SIO Transferrate:Dieser Parameter stellt die Datenrate zur seriellen Kommunikation mit dem
Bahnführungsrechner ein.Mögliche Auswahl: 115200;57600;38400;19200 Baud.
4. NAV Control IO:Auswahl der Kommunikationsart mit dem Bahnführungsrechner. Mögliche Auswahl: SIO (serielle) / CAN (CAN-Bus) Kommunikation.
5. CAN ID Odometry:Einzustellende CAN-ID für die Übertragung der Odometriedaten von der Bahn-
führungseinheit. Dieser Wert wird im hexadezimalen Format erwartet.
HG 43600XA GOETTING 2009┌── Parameter System ──────────────────────────────────────────────────────────┐│ ││ 1: Terminal Baudrate : 115200 bd ││ 2: CAN Transferrate : 500 kb/s ││ 3: SIO Baudrate : 115200 bd ││ 4: NAV Control IO : CAN ││ 5: CAN ID Odometry : 0x294 ││ 6: CAN ID Position : 0x292 ││ 7: CAN ID System : 0x800 ││ ││ ││ ││ ││ ││ ││ ││ ││ ││ ││ ││ │└──────────────────────────────────────────────────── <q> Returns to Top ──────┘
Deutsch, Revision 06, Stand: 28.11.2014 28
Der integrierte Orientierungsrechner HG 43600XA
6. CAN ID Position:CAN-ID für die Übertragung der ermittelten Positions- und Statusdaten vom Ori-
entierungsrechner zur Bahnführungseinheit.Dieser Wert wird im hexadezimalen Format erwartet.Die Positionsdaten erfordern eine weitere CAN-ID für die Übertragung der
Daten. Diese ist fest auf den Wert (parametrierte ID+1) eingestellt und darf
daher nicht anderweitig belegt sein.
7. CAN ID System:CAN-ID für die Parametrierung des Orientierungsrechners über den CAN Bus.
Dieses Feature ist zum Zeitpunkt der Dokumenterstellung noch nicht implemen-
tiert. Es wird daher empfohlen, diesen Parameter mit dem hexadezimalen Wert
0x800 zu versehen.
Damit die Odometriedaten im notwendigen Zeitraster von 50 Millisekunden zum Ori-
entierungsrechner gelangen können, ist auf die Priorisierung der Odometrie Daten auf
dem CAN Bus zu achten. Kleine CAN ID's besitzen eine hohe Priorität im Transport
und große ID's kleine.
Bei einer zusätzlichen Belegung des CAN Busses auf dem die Kommunikation des
Orientierungsrechners mit der Bahnführungseinheit stattfindet, kann das Timing lei-
den, wenn für die Odometriedaten eine zu groß gewählte ID parametriert wird.
Das kann im schlimmsten Fall zu Fehlern bei der Positionsberechnung führen. Kont-
rollieren lässt sich ein gleichbleibendes Timing im Main Monitor unter Zuhilfenahme
der Anzeige der Odo Time (siehe Bild 12 auf Seite 19).
4.6.8 Save Parameter
Bei dem Aufruf des Menüpunktes Save Parameter mit der Taste werden die in den
vorhergehenden Menüs eingestellten Parameter — nach einer Sicherheitsabfrage —
dauerhaft im System abgespeichert.
HINWEIS! Die Inhalte der Markentabelle werden über diesen Punkt nicht
gespeichert. Die Speicherung der Markentabelleninhalte erfolgt
im Markentabellenmenü.
HINWEIS! Nach einer neuen Parametrierung, insbesondere der Schnittstel-
len, muss das System neu gestartet werden!
Deutsch, Revision 06, Stand: 28.11.2014 29
Der integrierte Orientierungsrechner HG 43600XA
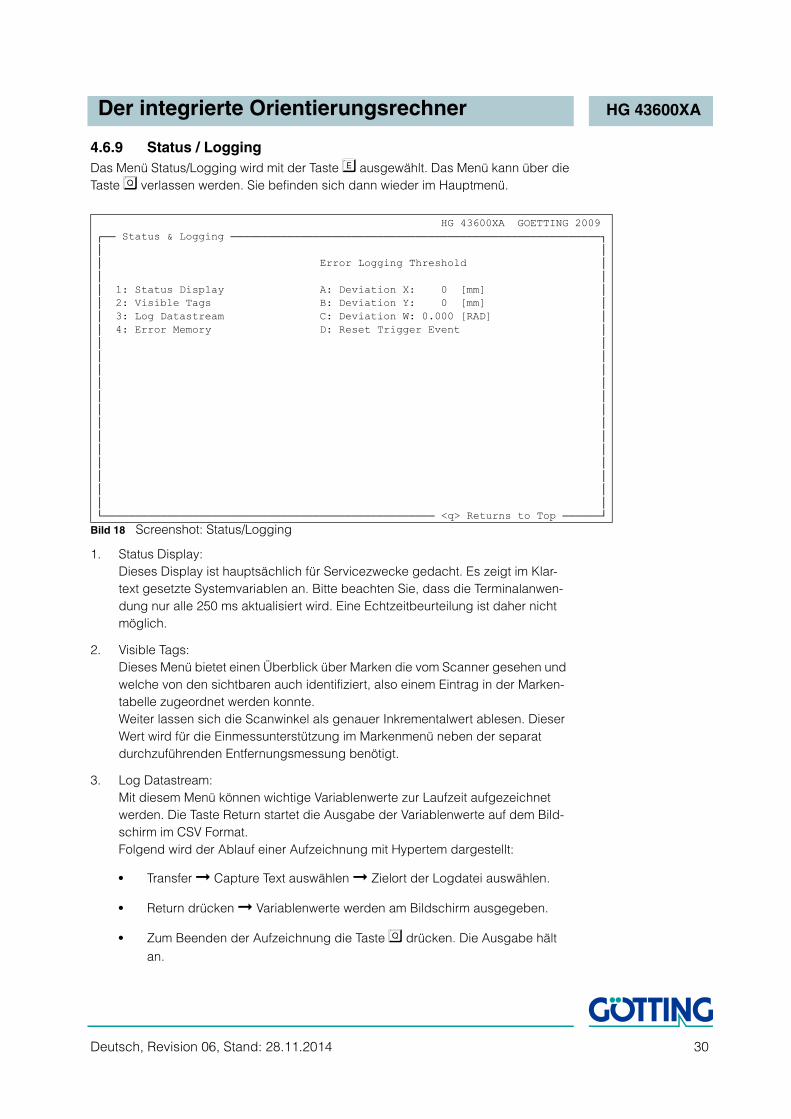
4.6.9 Status / Logging
Das Menü Status/Logging wird mit der Taste ausgewählt. Das Menü kann über die
Taste verlassen werden. Sie befinden sich dann wieder im Hauptmenü.
Bild 18 Screenshot: Status/Logging
1. Status Display:Dieses Display ist hauptsächlich für Servicezwecke gedacht. Es zeigt im Klar-
text gesetzte Systemvariablen an. Bitte beachten Sie, dass die Terminalanwen-
dung nur alle 250 ms aktualisiert wird. Eine Echtzeitbeurteilung ist daher nicht
möglich.
2. Visible Tags:Dieses Menü bietet einen Überblick über Marken die vom Scanner gesehen und
welche von den sichtbaren auch identifiziert, also einem Eintrag in der Marken-
tabelle zugeordnet werden konnte.Weiter lassen sich die Scanwinkel als genauer Inkrementalwert ablesen. Dieser
Wert wird für die Einmessunterstützung im Markenmenü neben der separat
durchzuführenden Entfernungsmessung benötigt.
3. Log Datastream:Mit diesem Menü können wichtige Variablenwerte zur Laufzeit aufgezeichnet
werden. Die Taste Return startet die Ausgabe der Variablenwerte auf dem Bild-
schirm im CSV Format.Folgend wird der Ablauf einer Aufzeichnung mit Hypertem dargestellt:
• Transfer Capture Text auswählen Zielort der Logdatei auswählen.
• Return drücken Variablenwerte werden am Bildschirm ausgegeben.
• Zum Beenden der Aufzeichnung die Taste drücken. Die Ausgabe hält
an.
HG 43600XA GOETTING 2009┌── Status & Logging ──────────────────────────────────────────────────────────┐│ ││ Error Logging Threshold ││ ││ 1: Status Display A: Deviation X: 0 [mm] ││ 2: Visible Tags B: Deviation Y: 0 [mm] ││ 3: Log Datastream C: Deviation W: 0.000 [RAD] ││ 4: Error Memory D: Reset Trigger Event ││ ││ ││ ││ ││ ││ ││ ││ ││ ││ ││ ││ ││ │└──────────────────────────────────────────────────── <q> Returns to Top ──────┘
Deutsch, Revision 06, Stand: 28.11.2014 30
Der integrierte Orientierungsrechner HG 43600XA
• Im Hyperterminal Transfer Capture Text Stop aufrufen.
• Erneutes Drücken der Taste führt ins Hauptmenü zurück.
4. Error Memory:Mit diesem Menü kann das Fehlerprotokoll ausgelesen werden. Die Taste Return
startet die Ausgabe der Variablenwerte auf dem Bildschirm im CSV Format. Der
Ablauf einer Aufzeichnung der Ausgabe ist wie unter dem vorhergehenden
Punkt beschrieben, durchzuführen.
HINWEIS! Es ist möglich, dass einige Zeilen der Ausgabe verstümmelt aus-
gegeben werden. Diese lassen sich im Tabellenkalkulationspro-
gramm über die Suche nach leeren Feldern in der letzten Spalte
der Ausgabe leicht herausfinden. Überlange Zeilen sind eben-
falls zu löschen.
A. Deviation X:Mit diesem Parameter lässt sich der Schwellwert der Abweichung der Koordi-
nate X für die Aufzeichnung eines Fehlerspeicher Datenmitschnittes einstellen.
B. Deviation Y:Mit diesem Parameter lässt sich der Schwellwert der Abweichung der Koordi-
nate Y für die Aufzeichnung eines Fehlerspeicher Datenmitschnittes einstellen.
C. Deviation W:Mit diesem Parameter lässt sich der Schwellwert der Abweichung des Winkels
für die Aufzeichnung eines Fehlerspeicher Datenmitschnittes einstellen.
D. Reset Trigger Event:Mit dem Aufruf wird das Event zur Aufzeichnung eines Datenmitschnittes als
Fehlerprotokoll gelöscht.
Deutsch, Revision 06, Stand: 28.11.2014 31
Der integrierte Orientierungsrechner HG 43600XA
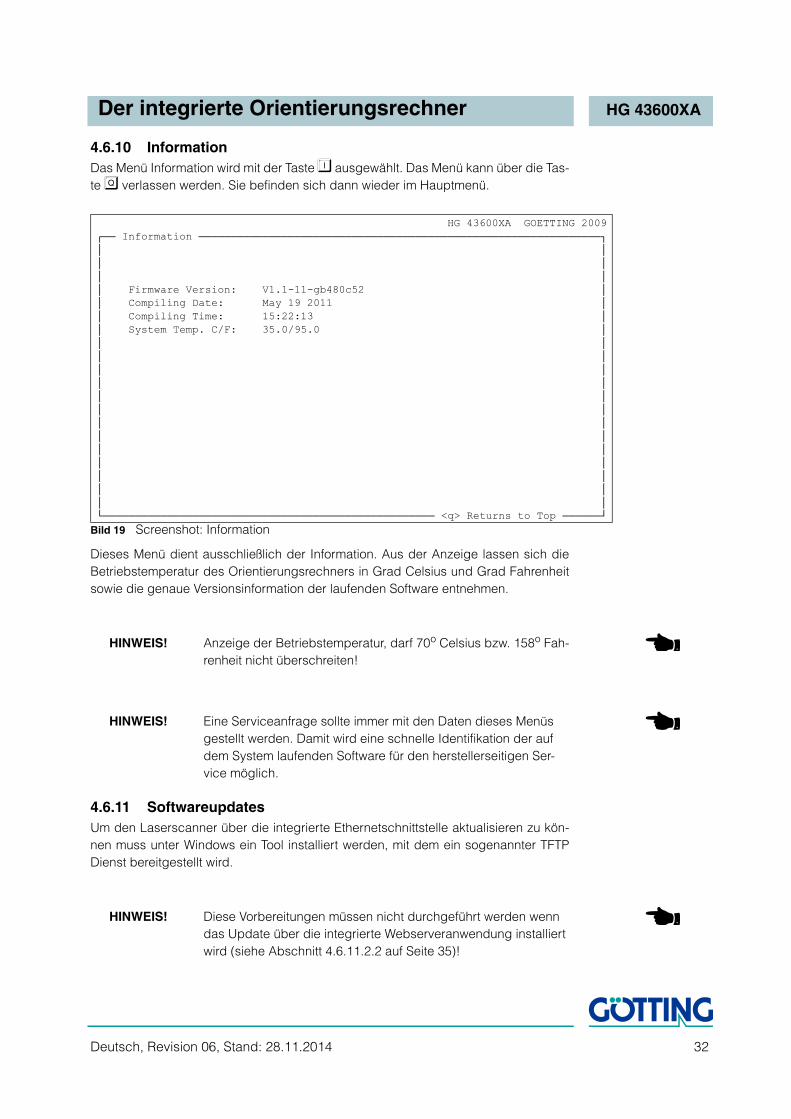
4.6.10 Information
Das Menü Information wird mit der Taste ausgewählt. Das Menü kann über die Tas-
te verlassen werden. Sie befinden sich dann wieder im Hauptmenü.
Bild 19 Screenshot: Information
Dieses Menü dient ausschließlich der Information. Aus der Anzeige lassen sich die
Betriebstemperatur des Orientierungsrechners in Grad Celsius und Grad Fahrenheit
sowie die genaue Versionsinformation der laufenden Software entnehmen.
HINWEIS! Anzeige der Betriebstemperatur, darf 70o Celsius bzw. 158o Fah-
renheit nicht überschreiten!
HINWEIS! Eine Serviceanfrage sollte immer mit den Daten dieses Menüs
gestellt werden. Damit wird eine schnelle Identifikation der auf
dem System laufenden Software für den herstellerseitigen Ser-
vice möglich.
4.6.11 Softwareupdates
Um den Laserscanner über die integrierte Ethernetschnittstelle aktualisieren zu kön-
nen muss unter Windows ein Tool installiert werden, mit dem ein sogenannter TFTP
Dienst bereitgestellt wird.
HINWEIS! Diese Vorbereitungen müssen nicht durchgeführt werden wenn
das Update über die integrierte Webserveranwendung installiert
wird (siehe Abschnitt 4.6.11.2.2 auf Seite 35)!
HG 43600XA GOETTING 2009┌── Information ───────────────────────────────────────────────────────────────┐│ ││ ││ ││ Firmware Version: V1.1-11-gb480c52 ││ Compiling Date: May 19 2011 ││ Compiling Time: 15:22:13 ││ System Temp. C/F: 35.0/95.0 ││ ││ ││ ││ ││ ││ ││ ││ ││ ││ ││ ││ ││ │└──────────────────────────────────────────────────── <q> Returns to Top ──────┘
Deutsch, Revision 06, Stand: 28.11.2014 32
Der integrierte Orientierungsrechner HG 43600XA
Das empfohlene und getestete Tool nennt sich Tftpd32 und kann über http://
tftpd32.jounin.net bezogen werden. Dieses Tool wird unter der European Union Public
Licence V. 1.1 angeboten und kann frei verwendet werden.
4.6.11.1 Vorbereitungen für Update der Software über die Ethernetschnittstelle
Als Erstes muss die IP Adresse des Computers, auf dem das TFTP32 Tool läuft, auf
die Nummer 192.168.0.133 eingestellt werden. Dazu sind auf einem Windows PC die
folgenden Schritte nötig:
1. Rechtsklick auf Netzwerkumgebung.
2. Eigenschaften auswählen.
3. Rechtsklick auf Netzwerkkarte bzw. Netzwerkverbindung.
4. Eigenschaften auswählen.
5. Internetprotokoll (TCP/IP) Eigenschaften auswählen.
Tipp! Notieren Sie sich die bestehenden Einstellungen, damit Sie sie
bei Bedarf wiederherstellen können!
6. Im gezeigten Dialog die IP Adresse 192.168.0.133 und Netzmaske
255.255.255.0 eingeben.
7. Mit OK abschließen.
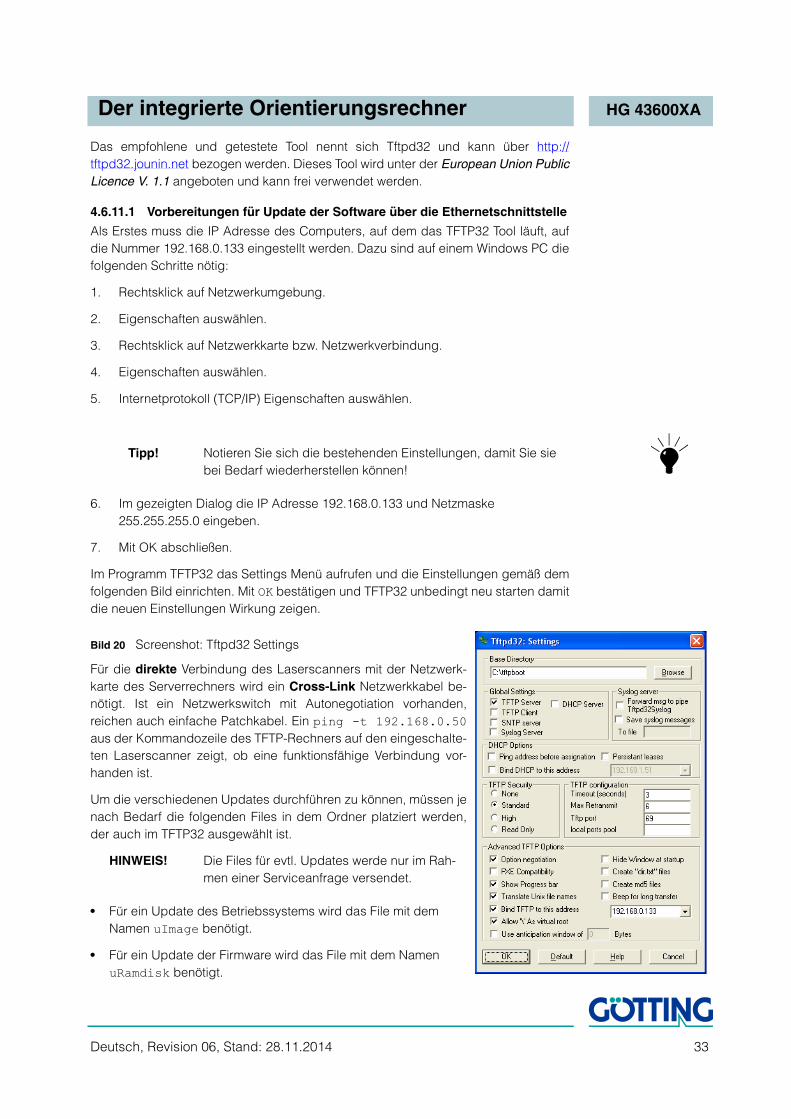
Im Programm TFTP32 das Settings Menü aufrufen und die Einstellungen gemäß dem
folgenden Bild einrichten. Mit OK bestätigen und TFTP32 unbedingt neu starten damit
die neuen Einstellungen Wirkung zeigen.
Bild 20 Screenshot: Tftpd32 Settings
Für die direkte Verbindung des Laserscanners mit der Netzwerk-
karte des Serverrechners wird ein Cross-Link Netzwerkkabel be-
nötigt. Ist ein Netzwerkswitch mit Autonegotiation vorhanden,
reichen auch einfache Patchkabel. Ein ping -t 192.168.0.50aus der Kommandozeile des TFTP-Rechners auf den eingeschalte-
ten Laserscanner zeigt, ob eine funktionsfähige Verbindung vor-
handen ist.
Um die verschiedenen Updates durchführen zu können, müssen je
nach Bedarf die folgenden Files in dem Ordner platziert werden,
der auch im TFTP32 ausgewählt ist.
HINWEIS! Die Files für evtl. Updates werde nur im Rah-
men einer Serviceanfrage versendet.
• Für ein Update des Betriebssystems wird das File mit dem
Namen uImage benötigt.
• Für ein Update der Firmware wird das File mit dem Namen
uRamdisk benötigt.
Deutsch, Revision 06, Stand: 28.11.2014 33
Der integrierte Orientierungsrechner HG 43600XA
4.6.11.2 Softwareupdate mit Ethernetzugriff
4.6.11.2.1 Über den Bootloader
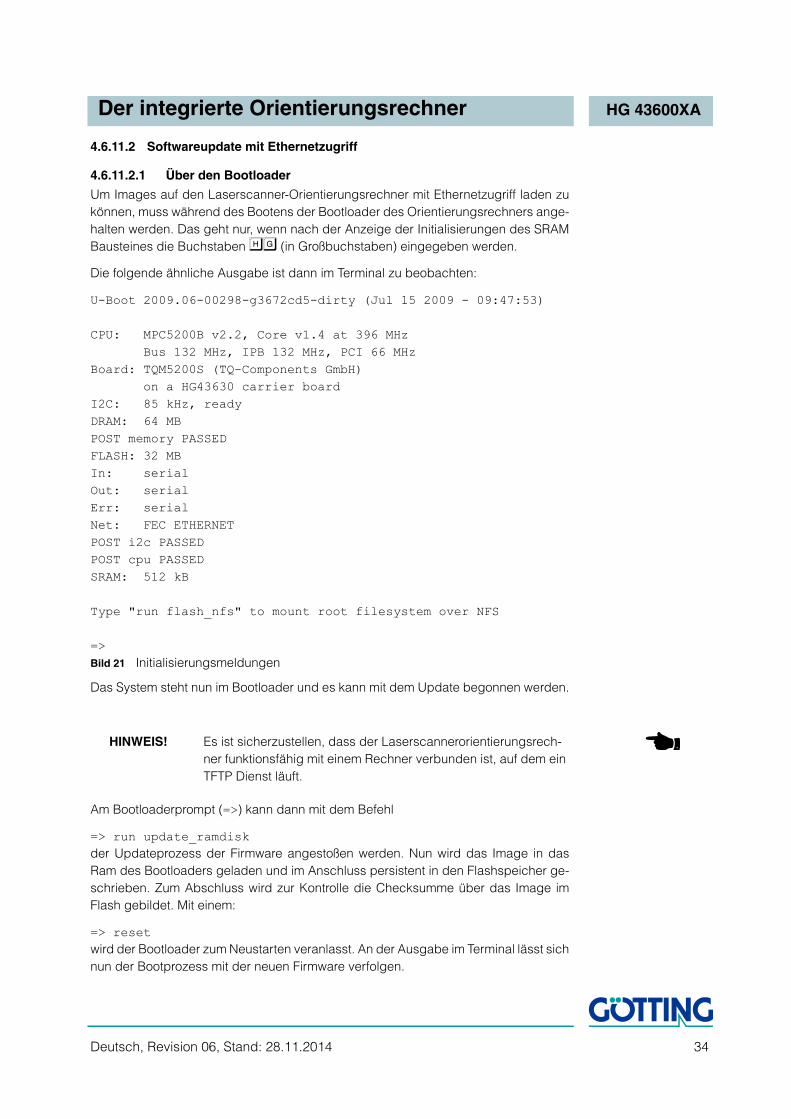
Um Images auf den Laserscanner-Orientierungsrechner mit Ethernetzugriff laden zu
können, muss während des Bootens der Bootloader des Orientierungsrechners ange-
halten werden. Das geht nur, wenn nach der Anzeige der Initialisierungen des SRAM
Bausteines die Buchstaben (in Großbuchstaben) eingegeben werden.
Die folgende ähnliche Ausgabe ist dann im Terminal zu beobachten:
U-Boot 2009.06-00298-g3672cd5-dirty (Jul 15 2009 - 09:47:53)
CPU: MPC5200B v2.2, Core v1.4 at 396 MHz Bus 132 MHz, IPB 132 MHz, PCI 66 MHzBoard: TQM5200S (TQ-Components GmbH) on a HG43630 carrier boardI2C: 85 kHz, readyDRAM: 64 MBPOST memory PASSEDFLASH: 32 MBIn: serialOut: serialErr: serialNet: FEC ETHERNETPOST i2c PASSEDPOST cpu PASSEDSRAM: 512 kB
Type "run flash_nfs" to mount root filesystem over NFS
=>Bild 21 Initialisierungsmeldungen
Das System steht nun im Bootloader und es kann mit dem Update begonnen werden.
HINWEIS! Es ist sicherzustellen, dass der Laserscannerorientierungsrech-
ner funktionsfähig mit einem Rechner verbunden ist, auf dem ein
TFTP Dienst läuft.
Am Bootloaderprompt (=>) kann dann mit dem Befehl
=> run update_ramdiskder Updateprozess der Firmware angestoßen werden. Nun wird das Image in das
Ram des Bootloaders geladen und im Anschluss persistent in den Flashspeicher ge-
schrieben. Zum Abschluss wird zur Kontrolle die Checksumme über das Image im
Flash gebildet. Mit einem:
=> resetwird der Bootloader zum Neustarten veranlasst. An der Ausgabe im Terminal lässt sich
nun der Bootprozess mit der neuen Firmware verfolgen.
Deutsch, Revision 06, Stand: 28.11.2014 34
Der integrierte Orientierungsrechner HG 43600XA
4.6.11.2.2 Über die Webserveranwendung
Ab der Firmwareversion V1.1-g8f9d145 (siehe auch Menüpunkt Information in Ab-
schnitt 4.6.10 auf Seite 32) kann das Firmwareupdate alternativ über eine integrierte
Webserveranwendung installiert werden. Dazu muss lediglich gewährleistet werden,
dass der Konfigurations-PC über eine IP im Netzwerkbereich des Laserscanners ver-
fügt. Im Auslieferungszustand des Laserscanners hat dieser die IP Adresse
192.168.0.50, so dass die IP Adresse des PC ebenfalls im Netzbereich 192.168.0.xxx
liegen muss (z. B. 192.168.0.51, siehe auch Abschnitt 4.6.11.1 auf Seite 33 zur Konfi-
guration der IP-Adresse).
Mit einem Internetbrowser kann die Oberfläche des Tools dann über die Eingabe der
Laserscanner IP Adresse erreicht werden.
Bild 22 Screenshot: Webserveranwendung
Mit einem Klick auf die Schaltfläche Auswählen öffnet sich ein Dialogfenster zur Datei-
auswahl. In diesem Fenster kann die zu installierende Firmwaredatei ausgewählt wer-
den. Mit einem Klick auf Datei senden wird das Update gestartet. Nun kann es ein bis
zwei Minuten dauern, bis das Update erfolgt ist. Der Vorgang endet mit dem Neustart
des Orientierungsrechners. Eine fehlerhafte Übertragung beendet das Update vorzei-
tig. Es muss im Anschluss neu durchgeführt werden.
Des Weiteren kann über die Webanwendung ebenfalls die Markentabellen- und Kon-
figurationsdatei aus dem System geladen werden. Ein browsergestützter Upload die-
ser Dateien ist zum Zeitpunkt der Drucklegung noch nicht implementiert.
Deutsch, Revision 06, Stand: 28.11.2014 35
Der integrierte Orientierungsrechner HG 43600XA
4.6.11.3 Softwareupdate ohne Ethernetzugriff
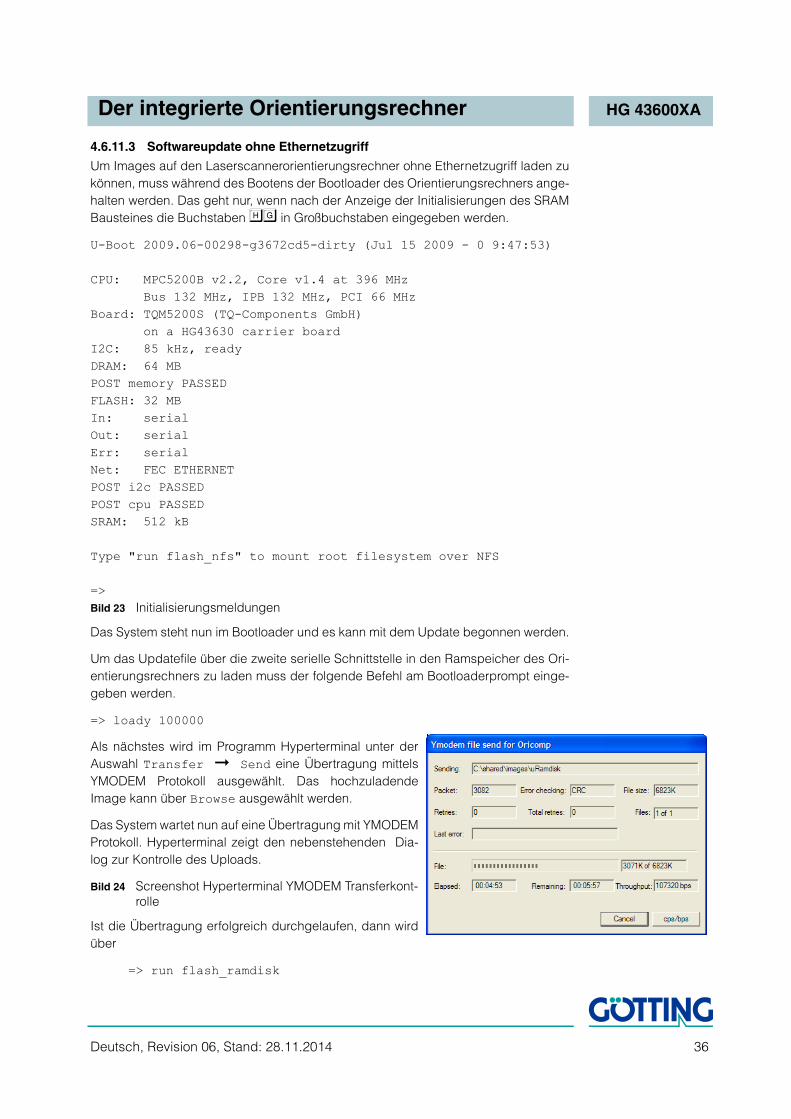
Um Images auf den Laserscannerorientierungsrechner ohne Ethernetzugriff laden zu
können, muss während des Bootens der Bootloader des Orientierungsrechners ange-
halten werden. Das geht nur, wenn nach der Anzeige der Initialisierungen des SRAM
Bausteines die Buchstaben in Großbuchstaben eingegeben werden.
U-Boot 2009.06-00298-g3672cd5-dirty (Jul 15 2009 - 0 9:47:53)
CPU: MPC5200B v2.2, Core v1.4 at 396 MHz Bus 132 MHz, IPB 132 MHz, PCI 66 MHzBoard: TQM5200S (TQ-Components GmbH) on a HG43630 carrier boardI2C: 85 kHz, readyDRAM: 64 MBPOST memory PASSEDFLASH: 32 MBIn: serialOut: serialErr: serialNet: FEC ETHERNETPOST i2c PASSEDPOST cpu PASSEDSRAM: 512 kB
Type "run flash_nfs" to mount root filesystem over NFS
=>Bild 23 Initialisierungsmeldungen
Das System steht nun im Bootloader und es kann mit dem Update begonnen werden.
Um das Updatefile über die zweite serielle Schnittstelle in den Ramspeicher des Ori-
entierungsrechners zu laden muss der folgende Befehl am Bootloaderprompt einge-
geben werden.
=> loady 100000
Als nächstes wird im Programm Hyperterminal unter der
Auswahl Transfer Send eine Übertragung mittels
YMODEM Protokoll ausgewählt. Das hochzuladende
Image kann über Browse ausgewählt werden.
Das System wartet nun auf eine Übertragung mit YMODEM
Protokoll. Hyperterminal zeigt den nebenstehenden Dia-
log zur Kontrolle des Uploads.
Bild 24 Screenshot Hyperterminal YMODEM Transferkont-
rolle
Ist die Übertragung erfolgreich durchgelaufen, dann wird
über
=> run flash_ramdisk
Deutsch, Revision 06, Stand: 28.11.2014 36
Der integrierte Orientierungsrechner HG 43600XA
das Image in das Ram des Bootloaders geladen und im Anschluss persistent in den
Flashspeicher geschrieben. Zum Abschluss wird zur Kontrolle die Checksumme über
das Image im Flash gebildet. Mit einem:
=> resetwird der Bootloader zum Neustarten veranlasst. An der Ausgabe im Terminal lässt sich
nun der Bootprozess mit der neuen Firmware verfolgen.
4.6.12 Up- und Download der Konfigurations- bzw. Markendaten
Um mehrere Orientierungsrechner mehrfach mit gleichen Marken- bzw. Konfigurati-
onsdaten zu versehen, besteht die Möglichkeit, die Daten über die serielle Schnittstel-
le als separate Dateien aus einem bereits konfigurierten Laserscanner herunter und
anschließend in einen weiteren Orientierungsrechner hochzuladen. Im Anschluss an
den Neustart dieses Laserscanners sind die Daten dann verfügbar.
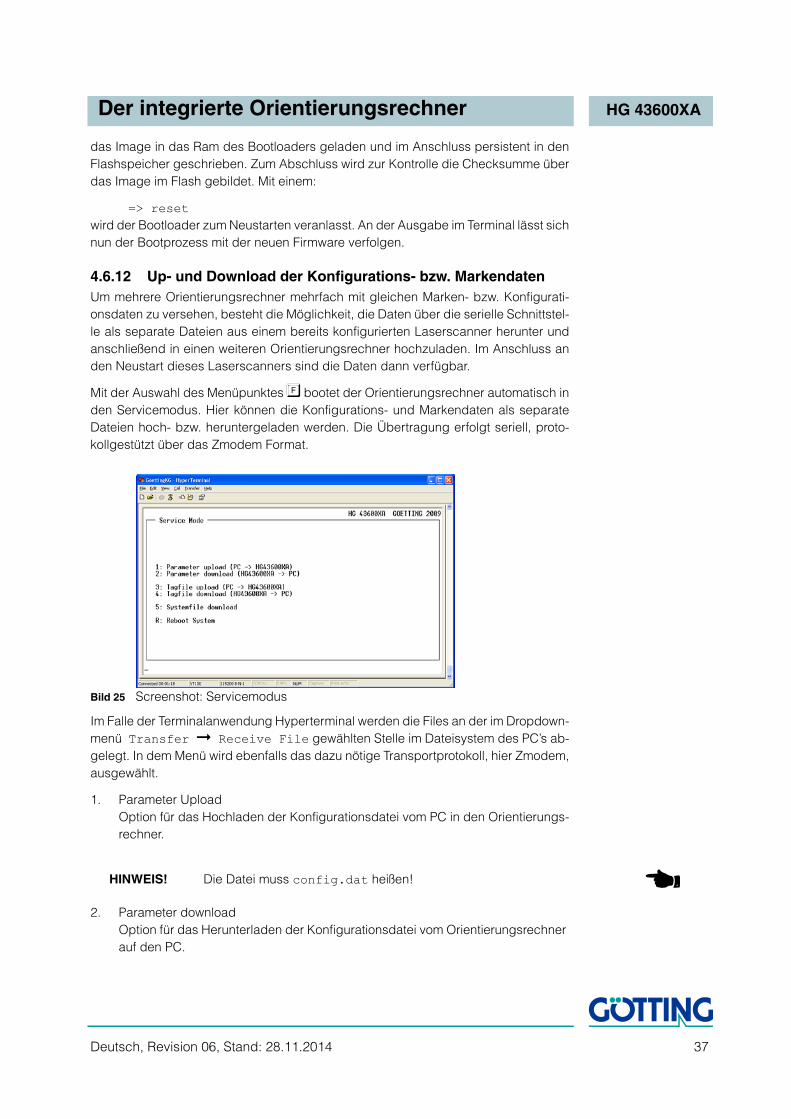
Mit der Auswahl des Menüpunktes bootet der Orientierungsrechner automatisch in
den Servicemodus. Hier können die Konfigurations- und Markendaten als separate
Dateien hoch- bzw. heruntergeladen werden. Die Übertragung erfolgt seriell, proto-
kollgestützt über das Zmodem Format.
Bild 25 Screenshot: Servicemodus
Im Falle der Terminalanwendung Hyperterminal werden die Files an der im Dropdown-
menü Transfer Receive File gewählten Stelle im Dateisystem des PC's ab-
gelegt. In dem Menü wird ebenfalls das dazu nötige Transportprotokoll, hier Zmodem,
ausgewählt.
1. Parameter UploadOption für das Hochladen der Konfigurationsdatei vom PC in den Orientierungs-
rechner.
HINWEIS! Die Datei muss config.dat heißen!
2. Parameter downloadOption für das Herunterladen der Konfigurationsdatei vom Orientierungsrechner
auf den PC.
Deutsch, Revision 06, Stand: 28.11.2014 37
Der integrierte Orientierungsrechner HG 43600XA
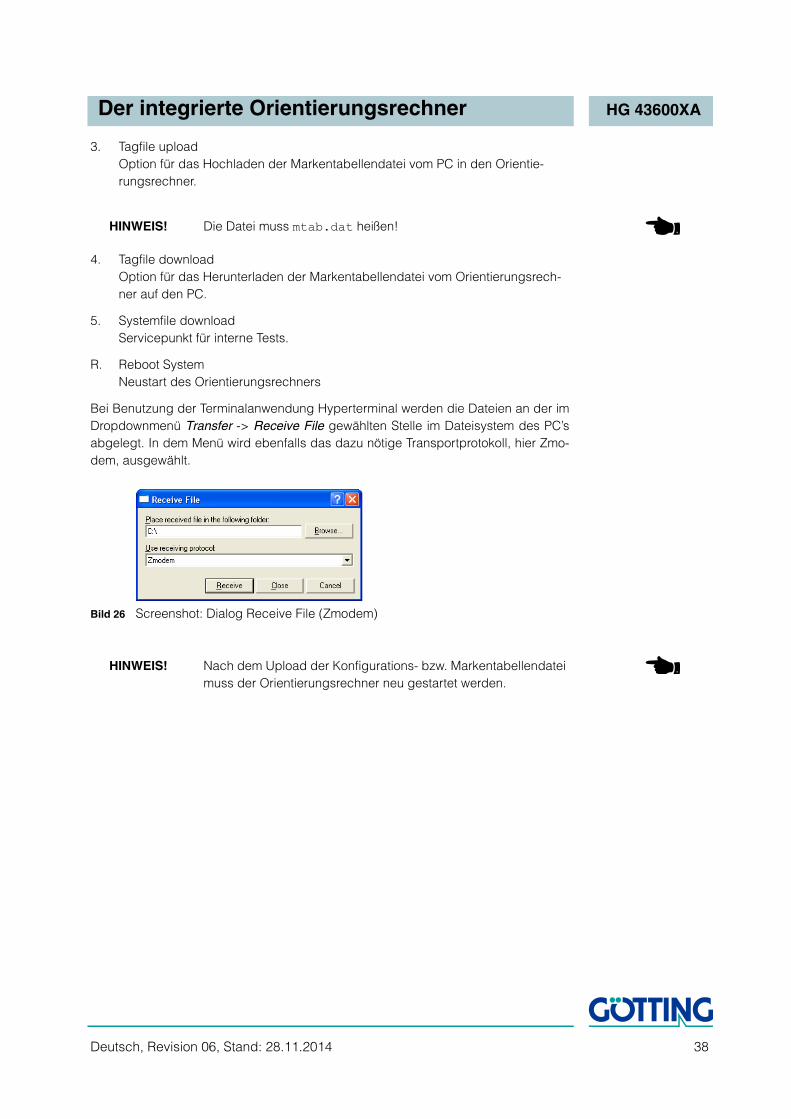
3. Tagfile uploadOption für das Hochladen der Markentabellendatei vom PC in den Orientie-
rungsrechner.
HINWEIS! Die Datei muss mtab.dat heißen!
4. Tagfile downloadOption für das Herunterladen der Markentabellendatei vom Orientierungsrech-
ner auf den PC.
5. Systemfile downloadServicepunkt für interne Tests.
R. Reboot SystemNeustart des Orientierungsrechners
Bei Benutzung der Terminalanwendung Hyperterminal werden die Dateien an der im
Dropdownmenü Transfer -> Receive File gewählten Stelle im Dateisystem des PC's
abgelegt. In dem Menü wird ebenfalls das dazu nötige Transportprotokoll, hier Zmo-
dem, ausgewählt.
Bild 26 Screenshot: Dialog Receive File (Zmodem)
HINWEIS! Nach dem Upload der Konfigurations- bzw. Markentabellendatei
muss der Orientierungsrechner neu gestartet werden.
Deutsch, Revision 06, Stand: 28.11.2014 38
Technische Daten HG 43600XA
Deutsch, Revision 06, Stand: 28.11.2014 39
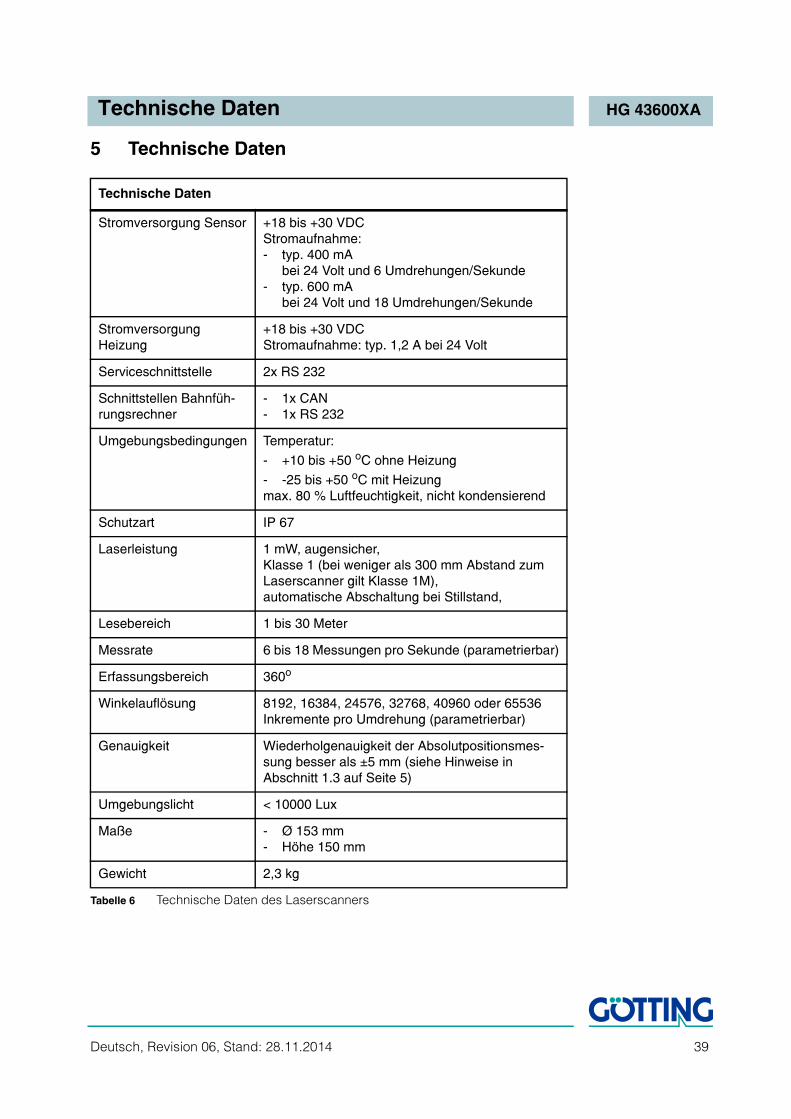
5 Technische Daten
Technische Daten
Stromversorgung Sensor +18 bis +30 VDCStromaufnahme:- typ. 400 mA
bei 24 Volt und 6 Umdrehungen/Sekunde- typ. 600 mA
bei 24 Volt und 18 Umdrehungen/Sekunde
StromversorgungHeizung
+18 bis +30 VDCStromaufnahme: typ. 1,2 A bei 24 Volt
Serviceschnittstelle 2x RS 232
Schnittstellen Bahnfüh-rungsrechner
- 1x CAN- 1x RS 232
Umgebungsbedingungen Temperatur:
- +10 bis +50 oC ohne Heizung
- -25 bis +50 oC mit Heizungmax. 80 % Luftfeuchtigkeit, nicht kondensierend
Schutzart IP 67
Laserleistung 1 mW, augensicher,Klasse 1 (bei weniger als 300 mm Abstand zum Laserscanner gilt Klasse 1M),automatische Abschaltung bei Stillstand,
Lesebereich 1 bis 30 Meter
Messrate 6 bis 18 Messungen pro Sekunde (parametrierbar)
Erfassungsbereich 360o
Winkelauflösung 8192, 16384, 24576, 32768, 40960 oder 65536 Inkremente pro Umdrehung (parametrierbar)
Genauigkeit Wiederholgenauigkeit der Absolutpositionsmes-sung besser als ±5 mm (siehe Hinweise in Abschnitt 1.3 auf Seite 5)
Umgebungslicht < 10000 Lux
Maße - Ø 153 mm- Höhe 150 mm
Gewicht 2,3 kg
Tabelle 6 Technische Daten des Laserscanners
Anhang HG 43600XA
6 Anhang
A Parameterzuordnung
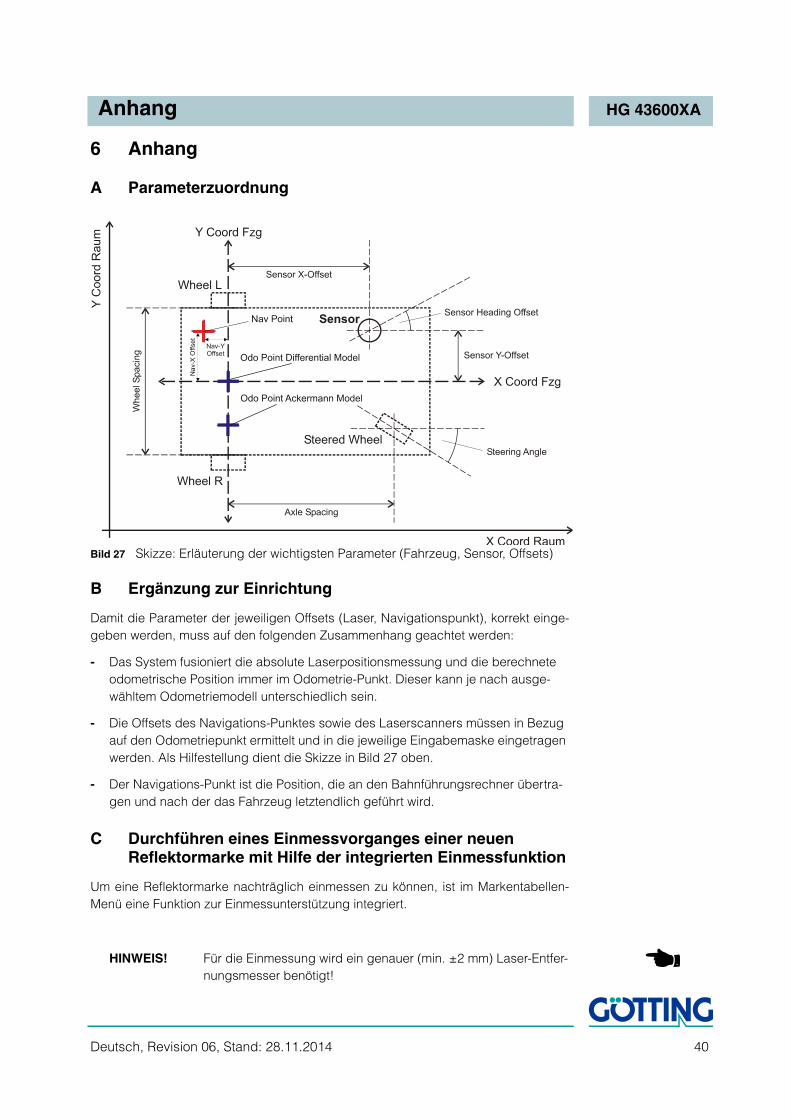
Bild 27 Skizze: Erläuterung der wichtigsten Parameter (Fahrzeug, Sensor, Offsets)
B Ergänzung zur Einrichtung
Damit die Parameter der jeweiligen Offsets (Laser, Navigationspunkt), korrekt einge-
geben werden, muss auf den folgenden Zusammenhang geachtet werden:
- Das System fusioniert die absolute Laserpositionsmessung und die berechnete
odometrische Position immer im Odometrie-Punkt. Dieser kann je nach ausge-
wähltem Odometriemodell unterschiedlich sein.
- Die Offsets des Navigations-Punktes sowie des Laserscanners müssen in Bezug
auf den Odometriepunkt ermittelt und in die jeweilige Eingabemaske eingetragen
werden. Als Hilfestellung dient die Skizze in Bild 27 oben.
- Der Navigations-Punkt ist die Position, die an den Bahnführungsrechner übertra-
gen und nach der das Fahrzeug letztendlich geführt wird.
C Durchführen eines Einmessvorganges einer neuen Reflektormarke mit Hilfe der integrierten Einmessfunktion
Um eine Reflektormarke nachträglich einmessen zu können, ist im Markentabellen-
Menü eine Funktion zur Einmessunterstützung integriert.
HINWEIS! Für die Einmessung wird ein genauer (min. ±2 mm) Laser-Entfer-
nungsmesser benötigt!
Deutsch, Revision 06, Stand: 28.11.2014 40
Anhang HG 43600XA
HINWEIS! Diese Funktion jetzt noch nicht aufrufen! Bitte lesen Sie erst den
weiteren Text.
1. Als Erstes muss der Winkel der noch unbekannten Marke ermittelt werden. Dazu
gehen Sie bitte in das Menü Status/Logging Visible Tags (siehe
Abschnitt 4.6.9 auf Seite 30). Dort wird zu der gesuchten Marke der Winkel unter
der die unbekannte Marke gescannt wurde in Inkrementen oder in Grad ange-
zeigt. Den inkrementellen Winkelwert sollten Sie sich nun notieren.
2. Als Nächstes messen Sie mit dem Laserentfernungsmesser den Abstand zur
Marke. Dabei ist die Marke immer genau in der Mitte anzupeilen.
HINWEIS! Bei dem Markencode Zwei liegt dieser Punkt mittig zwischen den
beiden Reflektorstreifen der Marke. Bei der Codierung Eins oder
Drei liegt die Mitte genau auf der Kante des breiten Reflektor-
streifens der Marke (siehe auch Abschnitt 2.6 auf Seite 11).
3. Nun rufen Sie das Markentabellen Menü auf und wählen die Einmessfunktion
aus. Nach dem Aufruf fragt das System nach der Position in der Tabelle die für
die berechnete Marke genutzt werden soll.
4. Anschliessend ist die Code ID der Marke einzugeben (siehe Abschnitt 2.6 auf
Seite 11).
5. Danach wird nach dem Winkel in Inkrementen gefragt. Hier ist der notierte Wert
aus dem Status Menü einzutragen.
6. Jetzt fehlt noch die Eingabe der gemessenen Entfernung und die Ausrichtung
der Marke.
7. Abschliessend muss das Modulmass (siehe Abschnitt 2.6 auf Seite 11) der
Marke eingegeben werden.
Nach der Eingabe aller Daten wird die berechnete Marke mit Ihren Koordinaten direkt
in das System eingetragen.
ACHTUNG! Die neu eingetragene Marke ist nach dem Auschalten wieder
gelöscht, sofern sie nach dem Einmessvorgang nicht über die
Speicherfunktion dauerhaft gesichert wurde.
D Erläuterungen zum Einfluss des Parameters <SPE Tole-rance> im Menü Spezialfunktionen
Nach dem erfolgreichen Start des Orientierungsrechners im Laserscanner befindet
sich dieser auf der 0-Position des Raum-Koordinatensystems. Es ist nun erforderlich
die aktuelle Position und Ausrichtung des Laserscanners, die Pose, zur ermitteln.
Deutsch, Revision 06, Stand: 28.11.2014 41
Anhang HG 43600XA
Dazu stehen die Daten der gescannten Reflektoren nach einem Umlauf des Scanner-
kopfes zur Verfügung. Diese Daten werden in der Form Code, Breite und Winkel durch
den Orientierungsrechner verarbeitet.
Aus der Menge der sichtbaren Marken wird über den SPE-Algorithmus (SPE: Start Po-
sition Estimate) für jede mögliche Reflektorkombination eine Pose bestimmt. Von jeder
einzelnen Pose ausgehend, wird die Breite der Marken berechnet, die für die Ermitt-
lung der Pose herangezogen wurden. Überschreitet dabei die Differenz zwischen der
gescannten und der ermittelten Breite der Marke die parametrierte SPE Toleranz, dann
wird diese Pose verworfen.
Je größer die Toleranz parametriert wird, umso wahrscheinlicher wird die Ermittlung
von sehr ungenauen bzw. fehlerhaften Schätzungen.
Erfolgt trotzdem keine SPE mit einem eindeutigen Ergebnis, kann dies an symmetri-
schen Anordnungen der Marken im Raum liegen, die der Algorithmus an dieser Posi-
tion nicht eindeutig auflösen kann. In diesem Falle muss das Fahrzeug verfahren und
die SPE an einer anderen Stelle erneut durchgeführt werden.
E Erläuterungen zum Einfluss der Parameter <Tag Width Tolerance> und <Percentage Width Tolerance> im Menü Spezialfunktionen
Um eine visuell erfasste Reflektormarke einem Eintrag in der Markentabelle zuordnen
zu können, werden verschieden Auswertungen durchgeführt. Eine davon ist die Er-
mittlung der absoluten Breite der Marke betrachtet von der aktuellen Position des Las-
cerscanners. Ist diese durchgeführt, wird das Ergebnis mit der gescannten Breite der
Marke verglichen. Ist die Berechnung innerhalb der parametrierten Toleranz, dann
wird das Breitenkriterium als erfüllt angesehen.
Befindet sich der Scanner in unmittelbarer Nähe einer Reflektormarke, dann wirken
sich geringe Änderungen in der Position bei der Ermittlung der berechneten Breite an-
ders aus, als wenn die gescannte Marke in einiger Entfernung zum Scanner steht. Mit
einer einfachen, absoluten Betrachtung werden in diesem Falle zu viele Zuordnungen
verworfen. Daher existiert zusätzlich zu dem Filterkriterium der absoluten Breite noch
eine Bedingung, welche das prozentuale Verhältnis von der gescannten zur berech-
neten Breite betrachtet.
Der Arbeitsablauf des Filters ist also wie folgt:
Wird das Kriterium der absoluten Breite verletzt, erfolgt zusätzlich eine prozentuale
Betrachtung der berechneten zur gescannten Breite. Befindet sich dieses Verhältnis
im Rahmen des parametrierten Wertes, dann wird der Wert der gescannten Breite als
gültig angesehen, andernfalls wird er verworfen.
Deutsch, Revision 06, Stand: 28.11.2014 42
Abbildungsverzeichnis HG 43600XA
Deutsch, Revision 06, Stand: 28.11.2014 43
7 Abbildungsverzeichnis
Bild 1 Laser Klasse 1........................................................................................ 4
Bild 2 Lage der M5-Montagebohrungen.......................................................... 6
Bild 3 Abmessungen des Gehäuses / Austrittshöhe des Laserstrahls............ 7
Bild 4 Befestigung des Laserscanners ............................................................ 8
Bild 5 Nivellieren des Laserscanners über die M5-Schrauben ....................... 8
Bild 6 Vordefinierte Markencodes .................................................................. 11
Bild 7 Serviceprogramm LST ......................................................................... 12
Bild 8 Parametrierung des Laserscanners..................................................... 13
Bild 9 Softwareupdate Schritt 1...................................................................... 15
Bild 10 Softwareupdate Schritt 2...................................................................... 15
Bild 11 Screenshot: Hauptmenü des Terminalprogramms.............................. 18
Bild 12 Screenshot: Main Monitor .................................................................... 19
Bild 13 Screenshot: Tag Menu ......................................................................... 21
Bild 14 Screenshot: Special Parameter............................................................ 23
Bild 15 Screenshot: Parameter Laserscanner.................................................. 25
Bild 16 Screenshot: Parameter Vehicle............................................................ 26
Bild 17 Screenshot: Parameter System............................................................ 28
Bild 18 Screenshot: Status/Logging................................................................. 30
Bild 19 Screenshot: Information ....................................................................... 32
Bild 20 Screenshot: Tftpd32 Settings............................................................... 33
Bild 21 Initialisierungsmeldungen .................................................................... 34
Bild 22 Screenshot: Webserveranwendung..................................................... 35
Bild 23 Initialisierungsmeldungen .................................................................... 36
Bild 24 Screenshot Hyperterminal YMODEM Transferkontrolle....................... 36
Bild 25 Screenshot: Servicemodus .................................................................. 37
Bild 26 Screenshot: Dialog Receive File (Zmodem) ........................................ 38
Bild 27 Skizze: Erläuterung der wichtigsten Parameter (Fahrzeug, Sensor, Off-
sets)...................................................................................................... 40
Tabellenverzeichnis HG 43600XA
Deutsch, Revision 06, Stand: 28.11.2014 44
8 Tabellenverzeichnis
Tabelle 1 Steckerbelegung............................................................................... 9
Tabelle 2 Pins für den Ethernet Anschluss ....................................................... 9
Tabelle 3 Bedeutung der LEDs....................................................................... 10
Tabelle 4 Liste der unterstützen Fahrzeugmodelle ........................................ 17
Tabelle 5 Menü Main Monitor: Bedeutung der Werteausgaben..................... 19
Tabelle 6 Technische Daten des Laserscanners ........................................... 39
Stichwortverzeichnis HG 43600XA
Deutsch, Revision 06, Stand: 28.11.2014 45
9 Stichwortverzeichnis
A
Auflösung 13
B
Bootloader 34, 36
C
config.dat 37
D
Drehgeschwindigkeit 13
E
Ethernetschnittstelle 32
F
Fahrzeugführung 4Fahrzeugmodelle 17Firmennamen 47
G
Genauigkeit 5, 39
H
Haftungsausschluss 47Heizung 13Hyperterminal 18, 36, 38
K
Konfigurationsdatei 37Konfigurationsdaten 37
L
Laser
Austrittshöhe 7Laser Klasse 1 4Laserscanner
Fenster 5störungsfreier Betrieb 5
LEDs 10LST 12
M
Markeninformationen 22Markentabellendatei 38Markenzeichen 47Montage 6Montagebohrungen 6mtab.dat 38
N
Nivellieren 7
O
Orientierungsrechner 16
P
Positioniergenauigkeit 4, 5Positionsberechnung 16
Laser 16Odometrie 17
R
Reflexmarken 7, 10Material 10
S
Servicemodus 37Serviceprogramm 12Serviceschnittstelle 17Software 12Softwareupdate 15Softwareupdates 32Steckerbelegung 9
T
Technische Daten 39Terminalmodus 18Tftpd32 33
U
Urheberrechte 47
W
Webserveranwendung 35
Handbuch-Konventionen HG 43600XA
Deutsch, Revision 06, Stand: 28.11.2014 46
10 Handbuch-Konventionen
In Dokumentationen der Götting KG werden zum Zeitpunkt der Drucklegung dieser
Beschreibung folgende Symbole und Auszeichnungen verwendet:
Für Sicherheitshinweise kommen je nach Gewichtung und Gefährdungsgrad fol-
gende Symbole zum Einsatz:
HINWEIS!
ACHTUNG!
VORSICHT!
WARNUNG!
Weiterführende Informationen und Tipps werden folgendermaßen angezeigt:
Tipp!
Programmtexte und -variablen werden durch Verwendung der Schriftart Courier hervorgehoben.
Wenn für Eingaben bei der Bedienung von Programmen Tastenkombinationen
verwendet werden, dann werden dazu jeweils die benötigten asten
ervorgehoben (bei den Programmen der Götting KG können üblicherweise
große und kleine Buchstaben gleichwertig verwendet werden).
Abschnitte, Abbildungen und Tabellen werden automatisch fortlaufend über das
gesamte Dokument nummeriert. Zusätzlich hat jedes Dokument nach dem Titel-
blatt ein Inhaltsverzeichnis mit Angabe der Seitenzahlen und — bei einer Länge
von mehr als ca. 10 Seiten — auch im Anschluss an den Inhalt ein Abbildungs-
und Tabellenverzeichnis. Bei Bedarf (bei entsprechend langen und komplexen
Dokumenten) wird auch ein Stichwortverzeichnis angeboten.
Jedes Dokument hat auf der Titelseite einen Tabellenblock mit Metainformationen
zu Entwickler, Autor, Revision und Stand (Datum). Die Informationen zu Revision
und Stand sind außerdem in der Fußzeile auf jeder Seite vermerkt, sodass überall
eindeutig zu erkennen ist, von wann die Informationen stammen und zu welchem
Dokument sie gehören.
Online-Version (PDF) und gedrucktes Handbuch werden aus einer Quelle erstellt.
Durch den konsequenten Einsatz von Adobe FrameMaker für die Dokumentation
sind in der PDF-Variante automatisch alle Verzeichniseinträge (inkl. Seitenzahlen
im Stichwortverzeichnis) und Querverweise per Maus anklickbar und führen zum
verknüpften Inhalt.
Hinweise HG 43600XA
Deutsch, Revision 06, Stand: 28.11.2014 47
11 Hinweise
11.1 Urheberrechte
Dieses Werk ist urheberrechtlich geschützt. Alle dadurch begründeten Rechte bleiben
vorbehalten. Zuwiderhandlungen unterliegen den Strafbestimmungen des Urheber-
rechts.
11.2 Haftungsausschluss
Die angegebenen Daten verstehen sich als Produktbeschreibungen und sind nicht als
zugesicherte Eigenschaften aufzufassen. Es handelt sich um Richtwerte. Die angege-
benen Produkteigenschaften gelten nur bei bestimmungsgemäßem Gebrauch.
Diese Anleitung ist nach bestem Wissen erstellt worden. Der Einbau und Betrieb der
Geräte erfolgt auf eigene Gefahr. Eine Haftung für Mangelfolgeschäden ist ausge-
schlossen. Änderungen, die dem technischen Fortschritt dienen, bleiben vorbehalten.
Ebenso behalten wir uns das Recht vor, inhaltliche Änderungen der Anleitung vorzu-
nehmen, ohne Dritten Kenntnis geben zu müssen.
11.3 Markenzeichen und Firmennamen
Soweit nicht anders angegeben, sind die genannten Produktnamen und Logos ge-
setzlich geschützte Marken der Götting KG. Alle anderen Produkt- oder Firmennamen
sind gegebenenfalls Warenzeichen oder eingetragene Warenzeichen bzw. Marken
der jeweiligen Firmen.





























