Embed Size (px)
Citation preview
5. Lineares Input-Output System
Prof. Dr.-Ing. habil. Wilhelm Dangelmaier
Modul W 2336
SS 2017
Methoden der computergestützten
Produktion und Logistik
Lineares Input-Output System
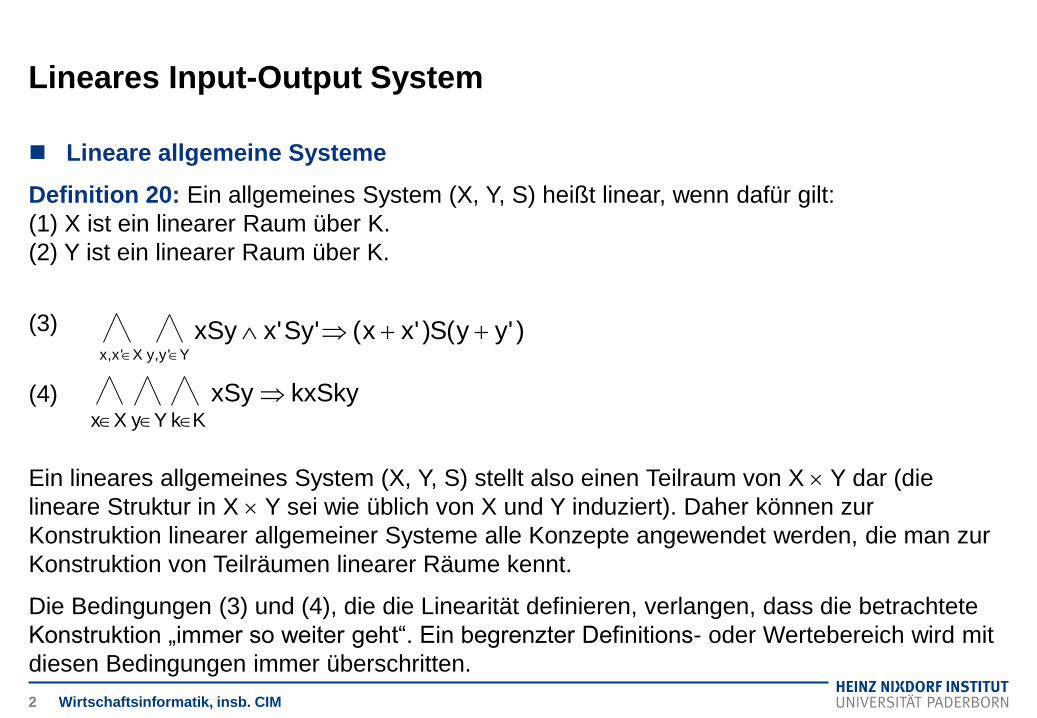
Lineare allgemeine Systeme
Definition 20: Ein allgemeines System (X, Y, S) heißt linear, wenn dafür gilt:
(1) X ist ein linearer Raum über K.
(2) Y ist ein linearer Raum über K.
(3)
(4)
Ein lineares allgemeines System (X, Y, S) stellt also einen Teilraum von X Y dar (die
lineare Struktur in X Y sei wie üblich von X und Y induziert). Daher können zur
Konstruktion linearer allgemeiner Systeme alle Konzepte angewendet werden, die man zur
Konstruktion von Teilräumen linearer Räume kennt.
Die Bedingungen (3) und (4), die die Linearität definieren, verlangen, dass die betrachtete
Konstruktion „immer so weiter geht“. Ein begrenzter Definitions- oder Wertebereich wird mit
diesen Bedingungen immer überschritten.
)'yy(S)'xx('Sy'xxSyY'y,yX'x,x
kxSkyxSyKkYyXx
Wirtschaftsinformatik, insb. CIM2
Lineares Input-Output System
Beispiel: Lineares System
Wir betrachten eine Kaffeemaschine. Linear abhängig von der Wassermenge, die als Input x
eingefüllt wird, ist die erzeugte Menge Dampf als Output y. Wir können hier R als Körper
nehmen.
x und x bzw. y und ӯ können bspw. zwei identische Kaffeemaschinen rein. Dasselbe
Ergebnis wird erzielt, wenn man in die erste zusätzlich x‘ füllt (3).
Dasselbe drücken wir mit (4) aus: Aus der Leistung einer Kaffeemaschine folgt die Leistung
von k parallelen Kaffeemaschinen.
Wirtschaftsinformatik, insb. CIM3
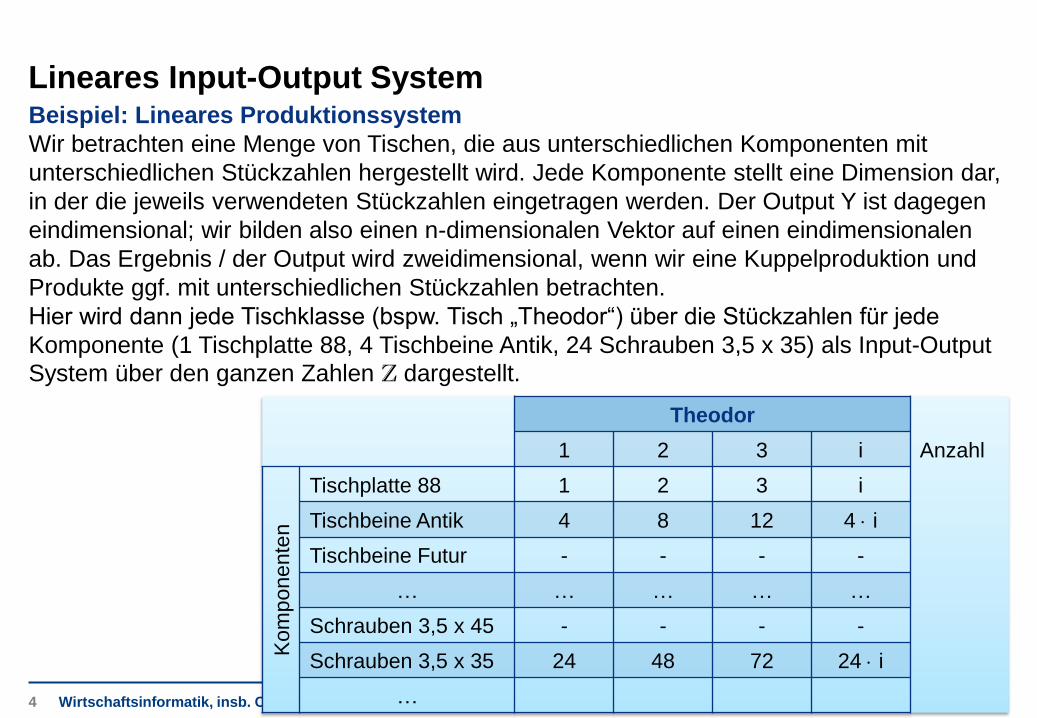
Lineares Input-Output SystemBeispiel: Lineares Produktionssystem
Wir betrachten eine Menge von Tischen, die aus unterschiedlichen Komponenten mit
unterschiedlichen Stückzahlen hergestellt wird. Jede Komponente stellt eine Dimension dar,
in der die jeweils verwendeten Stückzahlen eingetragen werden. Der Output Y ist dagegen
eindimensional; wir bilden also einen n-dimensionalen Vektor auf einen eindimensionalen
ab. Das Ergebnis / der Output wird zweidimensional, wenn wir eine Kuppelproduktion und
Produkte ggf. mit unterschiedlichen Stückzahlen betrachten.
Hier wird dann jede Tischklasse (bspw. Tisch „Theodor“) über die Stückzahlen für jede
Komponente (1 Tischplatte 88, 4 Tischbeine Antik, 24 Schrauben 3,5 x 35) als Input-Output
System über den ganzen Zahlen Z dargestellt.
Wirtschaftsinformatik, insb. CIM4
Theodor
1 2 3 i Anzahl
Kom
ponente
n
Tischplatte 88 1 2 3 i
Tischbeine Antik 4 8 12 4 i
Tischbeine Futur - - - -
… … … … …
Schrauben 3,5 x 45 - - - -
Schrauben 3,5 x 35 24 48 72 24 i
…
Lineares Input-Output System
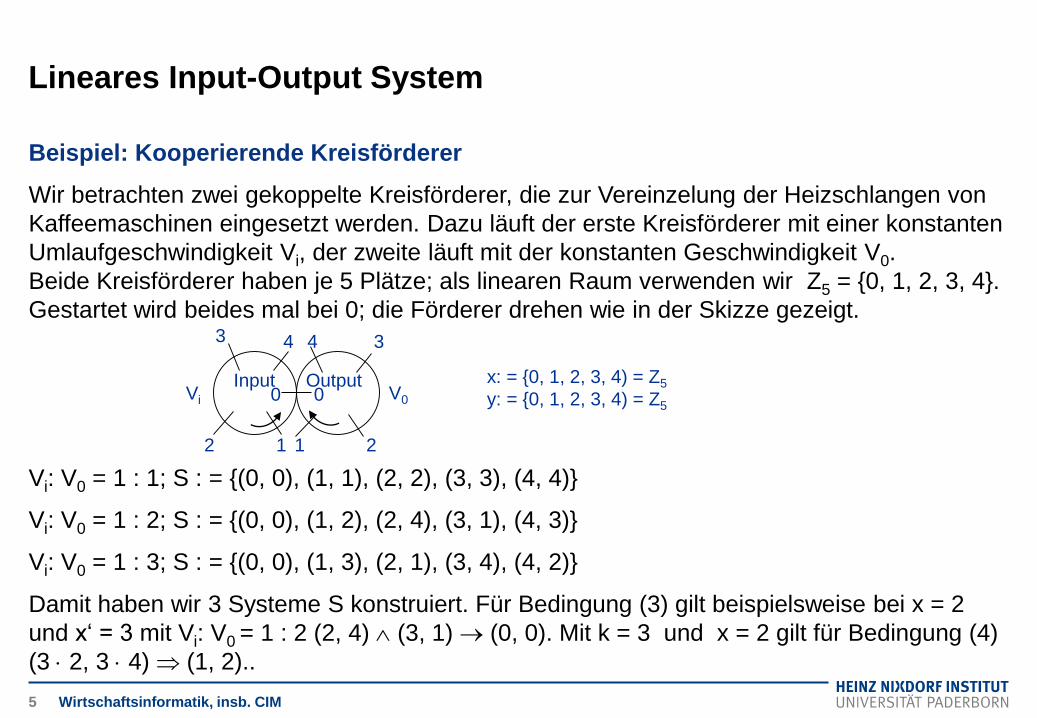
Beispiel: Kooperierende Kreisförderer
Wir betrachten zwei gekoppelte Kreisförderer, die zur Vereinzelung der Heizschlangen von
Kaffeemaschinen eingesetzt werden. Dazu läuft der erste Kreisförderer mit einer konstanten
Umlaufgeschwindigkeit Vi, der zweite läuft mit der konstanten Geschwindigkeit V0.
Beide Kreisförderer haben je 5 Plätze; als linearen Raum verwenden wir Z5 = {0, 1, 2, 3, 4}.
Gestartet wird beides mal bei 0; die Förderer drehen wie in der Skizze gezeigt.
Vi: V0 = 1 : 1; S : = {(0, 0), (1, 1), (2, 2), (3, 3), (4, 4)}
Vi: V0 = 1 : 2; S : = {(0, 0), (1, 2), (2, 4), (3, 1), (4, 3)}
Vi: V0 = 1 : 3; S : = {(0, 0), (1, 3), (2, 1), (3, 4), (4, 2)}
Damit haben wir 3 Systeme S konstruiert. Für Bedingung (3) gilt beispielsweise bei x = 2
und x‘ = 3 mit Vi: V0 = 1 : 2 (2, 4) (3, 1) (0, 0). Mit k = 3 und x = 2 gilt für Bedingung (4)
(3 2, 3 4) (1, 2)..
Input OutputVi V0
4 4 3
2112
3
0 0x: = {0, 1, 2, 3, 4) = Z5
y: = {0, 1, 2, 3, 4) = Z5
Wirtschaftsinformatik, insb. CIM5
Lineares Input-Output System
Definition 21: Eine Teilmenge U der Relation S eines linearen allgemeinen Systems heißt
linear, wenn sie gegenüber Vektoraddition und Skalarmultiplikation abgeschlossen ist, wenn
also gilt
(3)
(4)
Wie üblich wollen wir die Bedingungen (1) und (2) auch durch die Symbolik
(1’)
(2’)
abkürzen. Mit jeder linearen Teilmenge U kann das zugehörige lineare allgemeine System
(X, Y, U) betrachtet werden. Wir nennen jedes solche System ein lineares Teilsystem von (X,
Y, S).
)yy(U)xx(yUxxUyYy,yXx,x
yxUxUyKYyXx
UUU
UUK
Wirtschaftsinformatik, insb. CIM6
Lineares Input-Output System
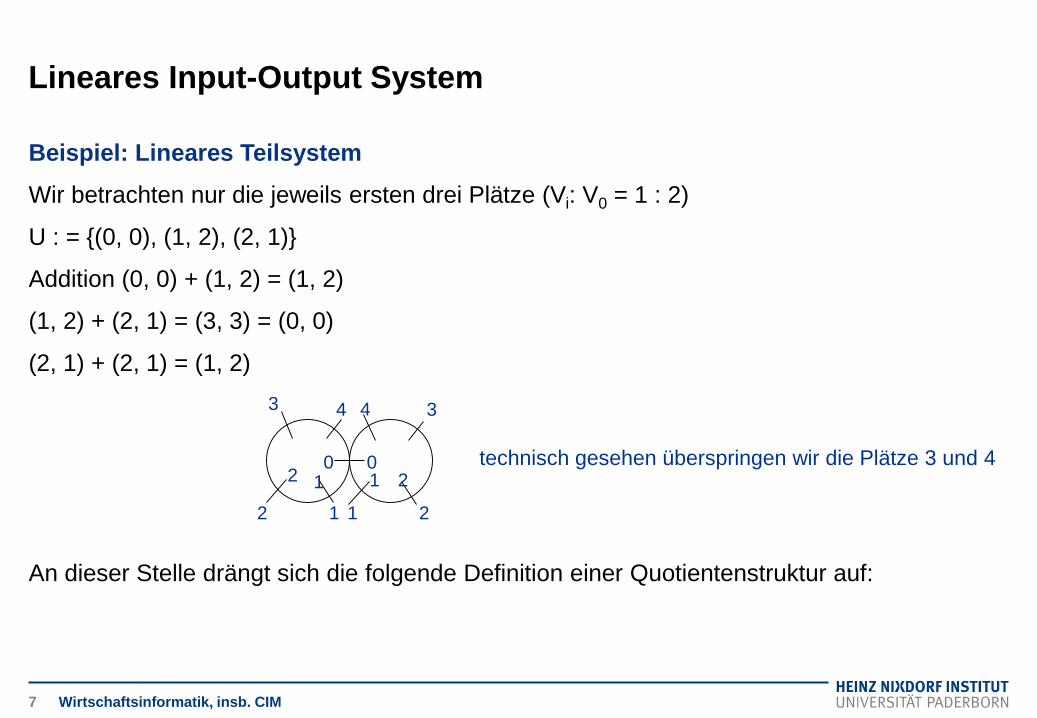
Beispiel: Lineares Teilsystem
Wir betrachten nur die jeweils ersten drei Plätze (Vi: V0 = 1 : 2)
U : = {(0, 0), (1, 2), (2, 1)}
Addition (0, 0) + (1, 2) = (1, 2)
(1, 2) + (2, 1) = (3, 3) = (0, 0)
(2, 1) + (2, 1) = (1, 2)
An dieser Stelle drängt sich die folgende Definition einer Quotientenstruktur auf:
2 2
4 4 3
2112
3
0 0 technisch gesehen überspringen wir die Plätze 3 und 411
Wirtschaftsinformatik, insb. CIM7
Lineares Input-Output System
Definition 22: Für ein lineares allgemeines System (X, Y, S) und ein zugehöriges Teilsystem
(X, Y, U) erklären wir die Äquivalenzrelation ~ auf S durch
und den Quotientenraum (S/U, , ) als das algebraische System, das gegeben ist durch
(1) S/U ist die Quotientenmenge von S bezüglich ~.
(2) : S/U S/U S/U mit [(x, y)] [( x, y )]: = [(x + x, y + y)].
(3) : K S/U S/U mit [(x, y)]: = [(x, y)].
Wir erkennen, dass die Operationen und in der üblichen Weise einen linearen Raum
definieren. Es gilt damit: Der Quotientenraum (S/U, , ) ist ein linearer Raum über K.
Mit jedem Quotientenraum S/U eines linearen allgemeinen Systems (X, Y, S) liegt so eine
Partition desselben in Teilsysteme vor. Wir werden nachfolgend gerade solche Partitionen
bevorzugt zur Parametrisierung von allgemeinen Systemen benutzen.
U)y,x(U)y,x(:)y,x(~)y,x(
Wirtschaftsinformatik, insb. CIM8
Lineares Input-Output System
Beispiel: Äquivalenzrelation
Es gelte bspw. die Äquivalenzrelation für jeweils 5 Stationen
0 (0, 5, 10, 15, ...)
1 (1, 6, 11, 16, ...)
2 (2, 7, 12, 18, ...)
...
und S/U = {0, 1, 2, 3, 4}.
Wirtschaftsinformatik, insb. CIM9
Lineares Input-Output System
Wir führen nun das Konzept einer linearen Struktur bei Zustandsparametrisierungen (X, Y, Z,
p) ein.
Definition 23: Eine Zustandsparametrisierung (X, Y, Z, p) eines allgemeinen Systems (X, Y,
S) heißt linear, wenn dafür gilt:
(1) (X, Y, S) ist linear über K.
(2) Z ist ein linearer Raum über K.
(3) Für p: Z P(X Y) gilt:
(3a) p(0) ist ein Teilraum von S
(3b) {p(z): z Z} = S/p(0)
(3c)
(3d)
Die Bilder der Parametrisierungsabbildung p sind also bei einer linearen
Zustandsparametrisierung gleich den Nebenklassen der Zerlegung von S nach dem
Teilraum p(0), dem Bild des Nullzustandes.
)z(p)z(p)zz(pZz,z
)az(pKZz
)z(p
Wirtschaftsinformatik, insb. CIM10
Lineares Input-Output System
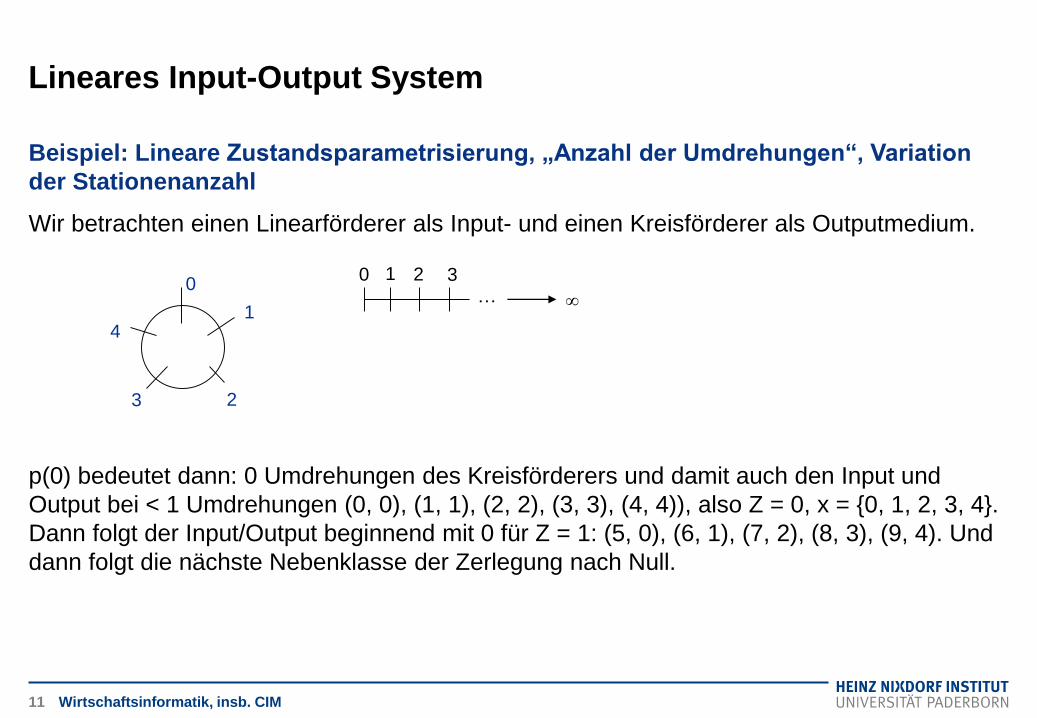
Beispiel: Lineare Zustandsparametrisierung, „Anzahl der Umdrehungen“, Variation
der Stationenanzahl
Wir betrachten einen Linearförderer als Input- und einen Kreisförderer als Outputmedium.
p(0) bedeutet dann: 0 Umdrehungen des Kreisförderers und damit auch den Input und
Output bei < 1 Umdrehungen (0, 0), (1, 1), (2, 2), (3, 3), (4, 4)), also Z = 0, x = {0, 1, 2, 3, 4}.
Dann folgt der Input/Output beginnend mit 0 für Z = 1: (5, 0), (6, 1), (7, 2), (8, 3), (9, 4). Und
dann folgt die nächste Nebenklasse der Zerlegung nach Null.
4
23
0
1…
0 1 2 3
Wirtschaftsinformatik, insb. CIM11
Lineares Input-Output System
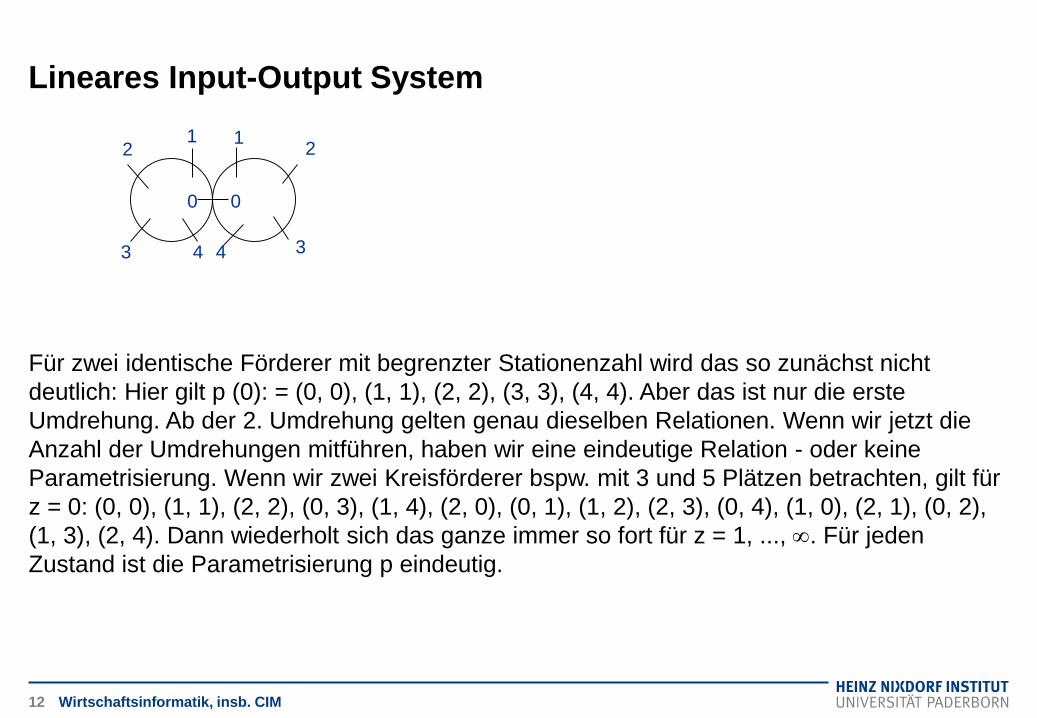
Für zwei identische Förderer mit begrenzter Stationenzahl wird das so zunächst nicht
deutlich: Hier gilt p (0): = (0, 0), (1, 1), (2, 2), (3, 3), (4, 4). Aber das ist nur die erste
Umdrehung. Ab der 2. Umdrehung gelten genau dieselben Relationen. Wenn wir jetzt die
Anzahl der Umdrehungen mitführen, haben wir eine eindeutige Relation - oder keine
Parametrisierung. Wenn wir zwei Kreisförderer bspw. mit 3 und 5 Plätzen betrachten, gilt für
z = 0: (0, 0), (1, 1), (2, 2), (0, 3), (1, 4), (2, 0), (0, 1), (1, 2), (2, 3), (0, 4), (1, 0), (2, 1), (0, 2),
(1, 3), (2, 4). Dann wiederholt sich das ganze immer so fort für z = 1, ..., . Für jeden
Zustand ist die Parametrisierung p eindeutig.
1 12
3443
2
0 0
Wirtschaftsinformatik, insb. CIM12
Lineares Input-Output System
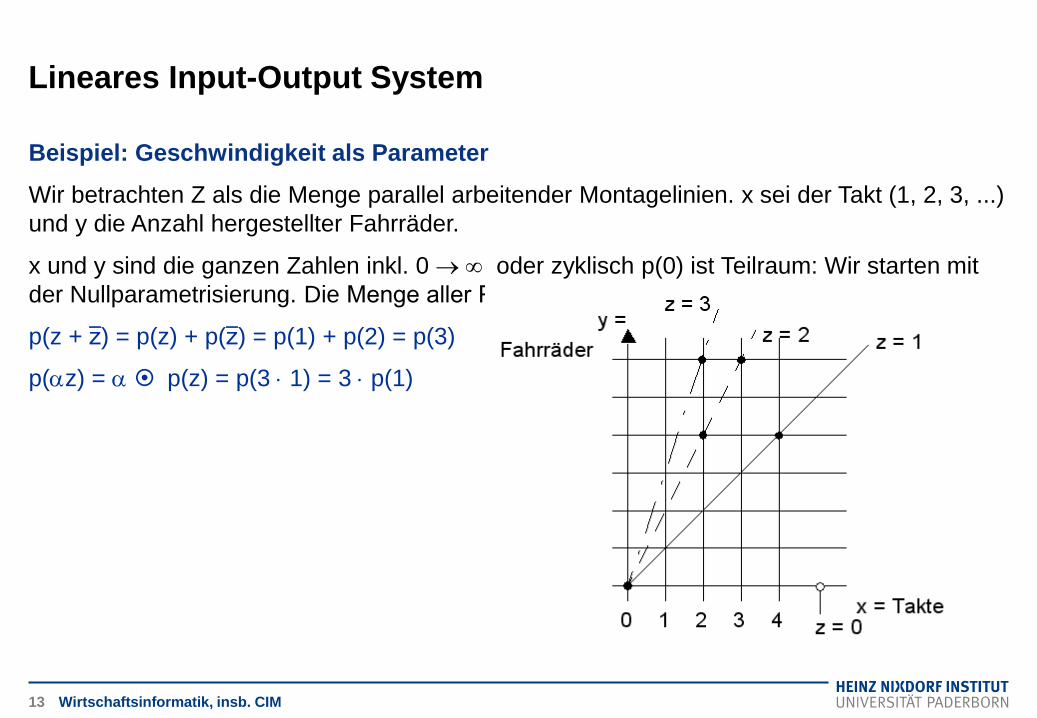
Beispiel: Geschwindigkeit als Parameter
Wir betrachten Z als die Menge parallel arbeitender Montagelinien. x sei der Takt (1, 2, 3, ...)
und y die Anzahl hergestellter Fahrräder.
x und y sind die ganzen Zahlen inkl. 0 oder zyklisch p(0) ist Teilraum: Wir starten mit
der Nullparametrisierung. Die Menge aller Parameter ergibt S’
p(z + z) = p(z) + p(z) = p(1) + p(2) = p(3)
p(z) = p(z) = p(3 1) = 3 p(1)
Wirtschaftsinformatik, insb. CIM13
Lineares Input-Output System
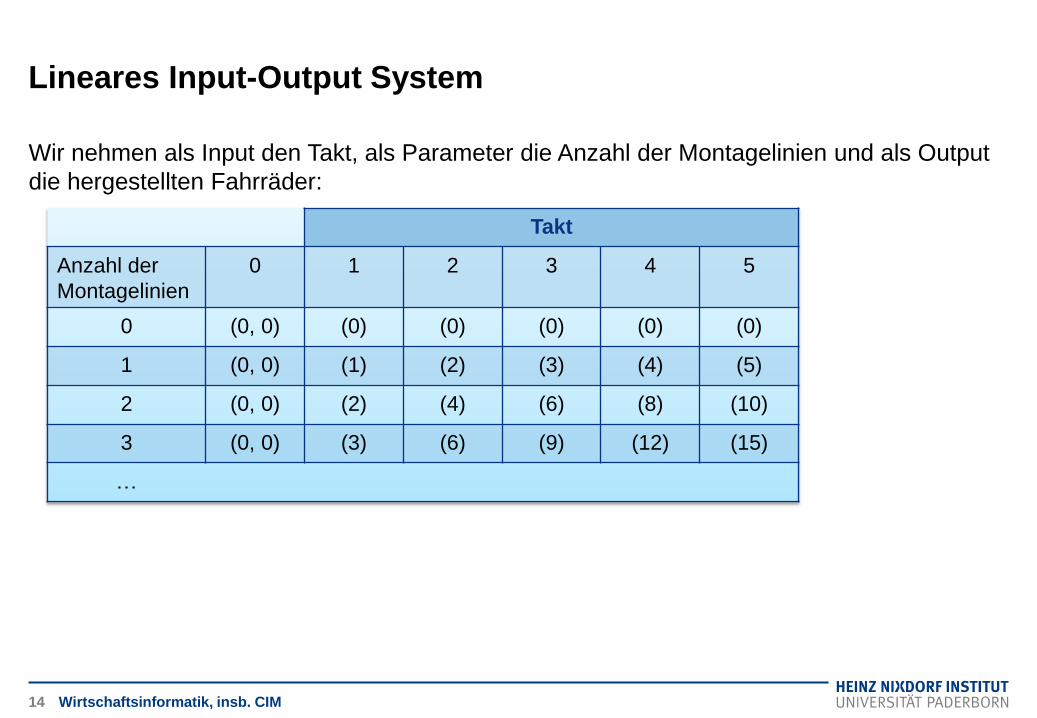
Wir nehmen als Input den Takt, als Parameter die Anzahl der Montagelinien und als Output
die hergestellten Fahrräder:
Addition: p(1) + p(2) = p(3) (nur der 2. Stelle der Relation!)
Takt
Anzahl der
Montagelinien
0 1 2 3 4 5
0 (0, 0) (0) (0) (0) (0) (0)
1 (0, 0) (1) (2) (3) (4) (5)
2 (0, 0) (2) (4) (6) (8) (10)
3 (0, 0) (3) (6) (9) (12) (15)
…
Wirtschaftsinformatik, insb. CIM14
Lineares Input-Output System
Aufgaben
Gib Schaltungen linearer allgemeiner Systeme an, bei denen die Linearität erhalten bleibt.
Gib Schaltungen linearer Zustandsparametrisierungen an, bei denen die Linearität
erhalten bleibt.
Wirtschaftsinformatik, insb. CIM15





























