Embed Size (px)
Citation preview
ENTwurfstechnik Intelligente MEchatronik
ANSPRECHPARTNER GEFÖRDERT VON
Idealisiertes Dynamikmodell
Delta-Roboter
0.20.40.60.81.01.21.4
00.7
1
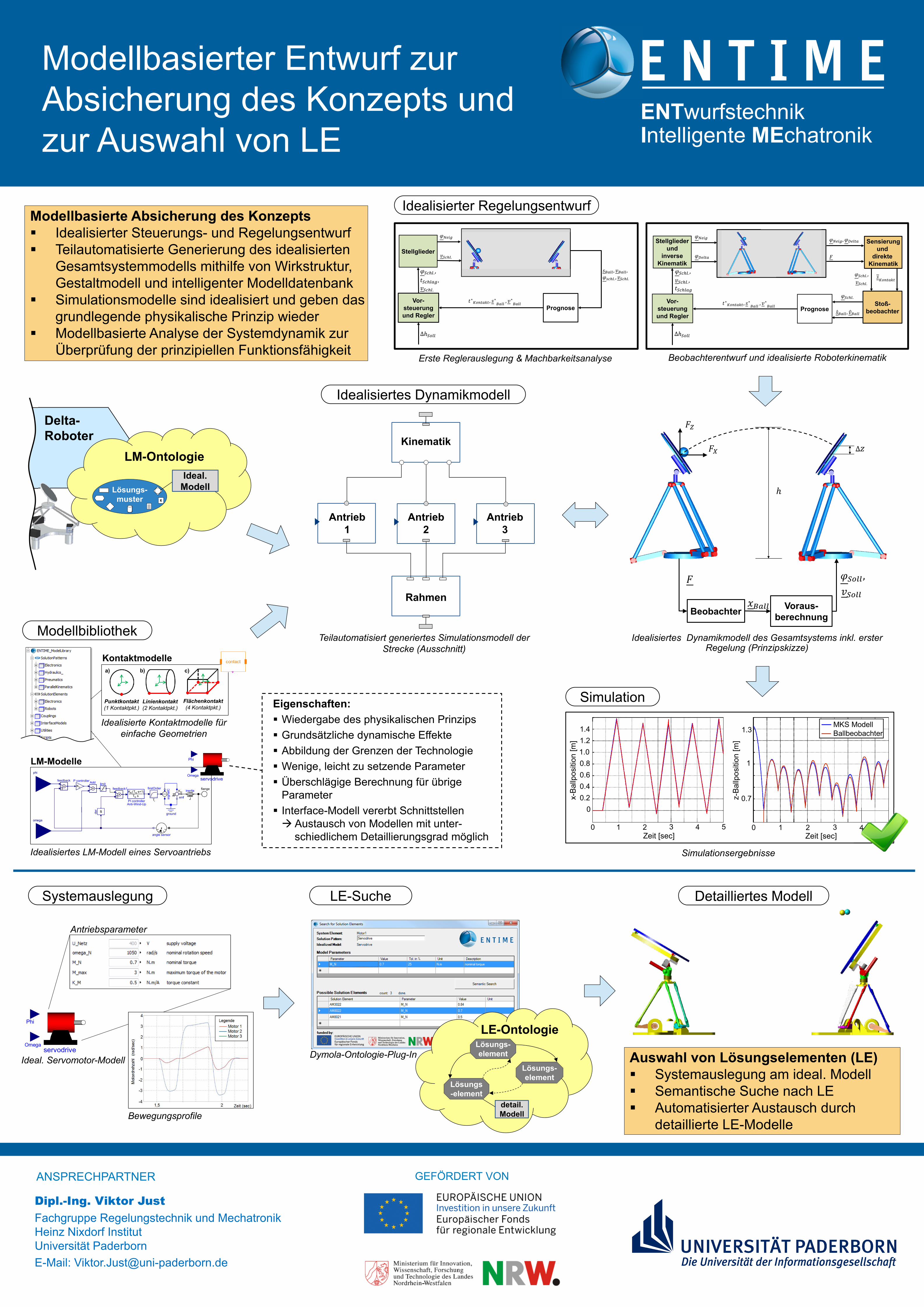
1.3MKS ModellBallbeobachter
0 1 2 3 4 5Zeit [sec]
0 1 2 3 4 5Zeit [sec]
x-Ba
llpos
ition
[m]
z-Ba
llpos
ition
[m]
Zeit [sec] Zeit [sec]
Modellbasierter Entwurf zur Absicherung des Konzepts und zur Auswahl von LE
Dipl.-Ing. Viktor Just Fachgruppe Regelungstechnik und Mechatronik Heinz Nixdorf Institut Universität Paderborn E-Mail: [email protected]
Kinematik
Antrieb 1
Antrieb 2
Antrieb 3
Rahmen
K
Lösungs-muster
Ideal. Modell
LM-Ontologie
Simulationsergebnisse
Teilautomatisiert generiertes Simulationsmodell der Strecke (Ausschnitt)
Idealisiertes Dynamikmodell des Gesamtsystems inkl. erster Regelung (Prinzipskizze)
Beobachter Voraus-berechnung
𝐹
𝑥𝐵𝐵𝐵𝐵
𝜑𝑆𝑆𝐵𝐵 , 𝑣𝑆𝑆𝐵𝐵
𝐹𝑋
𝐹𝑍
ℎ
Δ𝑧
Vor- steuerung und Regler
Sensierung und
direkte Kinematik
Beobachterentwurf und idealisierte Roboterkinematik
Prognose Stoß-
beobachter
servodrive
Phi
Omega
emf
KM
ground
sign
alC
angle sensor
K (R T s+1)NT sN
PI controller
der
P controller
inertia
J
feedback1
-1+
-1
limitfirstOrder
Ti
omega
flange
phi
s
Add
-1+
KV
feedback
-1+
Anti-Wind-Up
-1
Idealisiertes LM-Modell eines Servoantriebs
Linienkontakt (2 Kontaktpkt.)
Flächenkontakt (4 Kontaktpkt.)
b) c) a)
Punktkontakt (1 Kontaktpkt.)
Kontaktmodelle
LM-Modelle
Idealisierte Kontaktmodelle für einfache Geometrien
Eigenschaften: Wiedergabe des physikalischen Prinzips Grundsätzliche dynamische Effekte Abbildung der Grenzen der Technologie Wenige, leicht zu setzende Parameter Überschlägige Berechnung für übrige
Parameter Interface-Modell vererbt Schnittstellen Austausch von Modellen mit unter- schiedlichem Detaillierungsgrad möglich
Idealisierter Regelungsentwurf
Modellbibliothek
Simulation
Modellbasierte Absicherung des Konzepts Idealisierter Steuerungs- und Regelungsentwurf Teilautomatisierte Generierung des idealisierten
Gesamtsystemmodells mithilfe von Wirkstruktur, Gestaltmodell und intelligenter Modelldatenbank
Simulationsmodelle sind idealisiert und geben das grundlegende physikalische Prinzip wieder
Modellbasierte Analyse der Systemdynamik zur Überprüfung der prinzipiellen Funktionsfähigkeit
Systemauslegung LE-Suche
Antriebsparameter
Bewegungsprofile
Dymola-Ontologie-Plug-In servodrive
Phi
Omega
Ideal. Servomotor-Modell
LE-Ontologie
Lösungs-element
Lösungs-element
Lösungs-element
detail. Modell
Detailliertes Modell
Vor- steuerung und Regler
Stellglieder
Prognose
Erste Reglerauslegung & Machbarkeitsanalyse
Auswahl von Lösungselementen (LE) Systemauslegung am ideal. Modell Semantische Suche nach LE Automatisierter Austausch durch
detaillierte LE-Modelle
𝑠𝐵𝐵𝐵𝐵 ,𝑣𝐵𝐵𝐵𝐵 , 𝜑𝑠𝑠𝑠𝐵.,𝑣𝑆𝑠𝑠𝐵.
∆ℎ𝑆𝑆𝐵𝐵
𝜑𝑆𝑠𝑠𝐵., 𝑡𝑆𝑠𝑠𝐵𝐵𝑔 , 𝑣𝑆𝑠𝑠𝐵.
𝑣𝑆𝑠𝑠𝐵.
𝑡∗𝐾𝑆𝐾𝐾𝐵𝐾𝐾 , 𝑠∗𝐵𝐵𝐵𝐵 ,𝑣∗𝐵𝐵𝐵𝐵
𝜑𝑆𝑠𝑠𝐵., 𝑣𝑆𝑠𝑠𝐵.
𝐹
𝑠𝐾𝑆𝐾𝐾𝐵𝐾𝐾
𝜑𝑆𝑠𝑠𝐵.
�̂�𝐵𝐵𝐵𝐵 ,𝑣�𝐵𝐵𝐵𝐵
𝜑𝑆𝑠𝑠𝐵., 𝑣𝑆𝑠𝑠𝐵., 𝑡𝑆𝑠𝑠𝐵𝐵𝑔
𝑡∗𝐾𝑆𝐾𝐾𝐵𝐾𝐾 , 𝑠∗𝐵𝐵𝐵𝐵 ,𝑣∗𝐵𝐵𝐵𝐵
Stellglieder und
inverse Kinematik
𝜑𝐷𝐷𝐵𝐾𝐵
∆ℎ𝑆𝑆𝐵𝐵
𝜑𝑁𝐷𝑁𝑔,𝜑𝐷𝐷𝐵𝐾𝐵 𝜑𝑁𝐷𝑁𝑔 𝜑𝑁𝐷𝑁𝑔





























