Embed Size (px)
Citation preview
Numerische Methoden in der StrömungstechnikWS 2004/05Dr.-Ing. Iris Pantle/Dr.-Ing. Franco MagagnatoFachgebiet Strömungsmaschinen
I. Einführung in die Numerischen Methoden (CFD)II. Grundgleichungen der StrömungsmechanikIII. Diskretisierung: Finite-Differenzen MethodeIV. Finite-Volumen MethodeV. Lösungsalgorithmen für stationäre und instationäre
StrömungenVI. Verfahren der inkompressiblen Navier-Stokes GleichungenVII. Verfahren der kompressiblen Navier-Stokes GleichungenVIII. Fallbeispiele für technische AnwendungenIX. Turbulenzmodellierung
Literatur:
Joel H. Ferziger, Milovan Peric“Computational Methods for Fluid Dynamics”Springer-Verlag, Berlin Heidelberg 1999 (2nd Edition)
Diese Vorlesung (.ppt):
http://www-ism.uni-karlsruhe.de/è Lehreè Vorlesungenè Numerische Methoden in der Strömungstechnikè Scroll down zum Ende der Seite
I. Einführung in die Numerischen Methoden (CFD)
I.1 Was ist CFD?
I.2 Möglichkeiten und Grenzen von CFD
I.3 Modellbildung
I.3.1 Geometrisches Modell
I.3.2 Mathematisches Modell
I.3.3 Numerische Methode
I.3.4 Gittertypen
I.4 Diskretisierungsmethoden
I.4.1 Eigenschaften von numerischen Methoden
I.4.2 Finite-Differenzen Methode
I.4.3 Finite-Volumen Methode
I.4.4 Finite-Elemente Methode
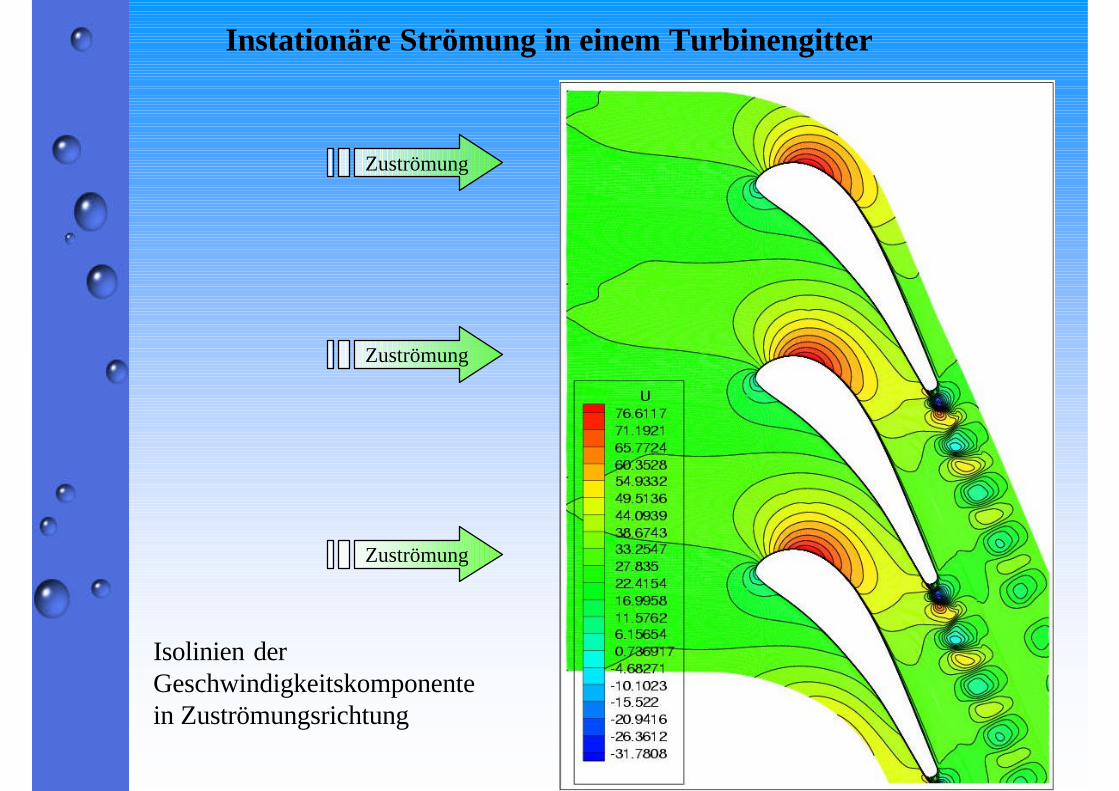
Isolinien der Geschwindigkeitskomponente in Zuströmungsrichtung
Instationäre Strömung in einem Turbinengitter
Zuströmung
Zuströmung
Zuströmung
I.1 Was ist CFD (Computational Fluid Dynamics)?
• Idealisierung des Strömungsprozesses (Geometrie, Thermodynamik, Strömungsphysik, Strömungsgebiet, Randbedingungen)
• Näherung des physikalischen Prozesses durch numerische Approximationen
• Aufteilung des Strömungsgebiets durch endlich große Zellen • Annahme eines (meist konst.) Strömungszustandes (ρ,u,T,p usw.) in
einer Zelle• Diskretisierung des mathematischen Modells (Differentialgleichungen)
è Gleichungssystem• Vorgabe von geeigneten Rand- und Anfangsbedingungen• Lösen des Gleichungssystems mit einer numerischen Methode• Überprüfung der Lösung auf Plausibilität• Auswertung der Ergebnisse
I.2 Möglichkeiten und Grenzen von CFD
• Untersuchung von schwer messbaren Strömungen• Berechnung vor der Prototypfertigung • Berechnung von gefährlichen Strömungen (Explosionen, Chemische
Reaktionen) • Variationen von Strömungsparametern (Re-, Ma-Zahlen, Temperatur usw.)• Geometrievariationen können relativ schnell durchgeführt werden• detaillierte Einblicke in das Strömungsgeschehen
• Lösungen sind Approximationen! • enthalten Idealisierungen (z.B. geometrische)• Physik der Turbulenz, reale Chemie, Zweiphasenströmung, Akustik usw.
muß modelliert werden• Lösungen werden iterativ erzeugt, d.h. sie enthalten Konvergenzfehler
Sorgfältige Überprüfung der Ergebnisse
I.3.1 Geometrisches Modell
• Idealisierung der realen Geometrie durch Beschränkung auf die
wesentlichen, strömungsmechanischen Merkmale
• Auffüllen von schmalen Spalten
• Glätten von Sicken, Absätze, Stufen
• Eliminieren von Geometriedetails (z.B. Spiegel beim Automobil)
• Verkleinern des Strömungsgebiets auf ein Minimum (Fernfeldrand
bei Außenströmung ca. 10-20 Fahrzeuglängen)
• Beschränkung bei Innenströmungen auf adäquate Größe
I.3.2 Mathematisches Modell
• Kompressible Navier-Stokes-Gleichungen
• Inkompressible Navier-Stokes-Gleichungen
• Stationäre Strömung
• Reibungsfreie Strömung (Euler)
• Potentialströmung (Drehungsfreiheit )
• Schleichende Strömung (Stokes-Strömung)
• Zweidimensional
• Grenzschichtströmung
Auf
wan
d
0=×∇ ur
I.3.3 Numerische Methode
• Finite-Differenzen Methode
• Finite-Volumen Methode
• Finite-Elemente Methode
• Lattice Gas (Gitter-Gas) Methoden
• Spektralmethode
• Boundary Element (Rand-Elemente) Methode
• Panel Methode
Werden in dieser Vorlesung intensiver besprochen
I.3.4 Gittertypen
• Kartesische Koordinaten
• Zylinderkoordinaten
• Kugelkoordinaten
• Orthogonale Rechengitter
• Krummlinige orthogonale Rechengitter
• Krummlinige nicht-orthogonale Rechengitter
• Blockstrukturierte Rechengitter
• Unstrukturierte Rechengitter
• Hybride Rechengitter
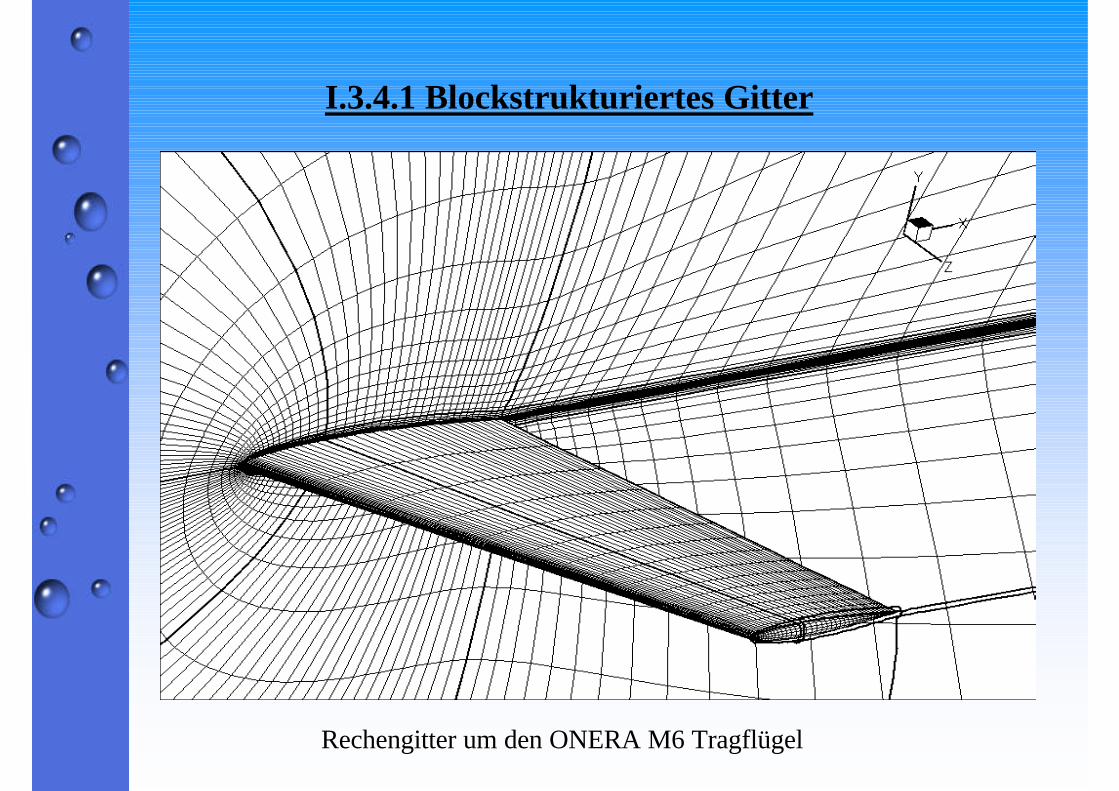
I.3.4.1 Blockstrukturiertes Gitter
Rechengitter um den ONERA M6 Tragflügel

I.3.4.2 Unstrukturiertes Gitter
Rechengitter um das Kundencenter der Volkswagen AG
I.4.1 Eigenschaften von numerischen Methoden
• Konsistenz
• Stabilität
• Konvergenz (Lax: Konsistenz+Stabilität=Konvergenz)
• Erhaltung
• Beschränktheit
• Genauigkeit beschränkt durch:
– Modellfehler
– Diskretisierungsfehler
– Konvergenzfehler
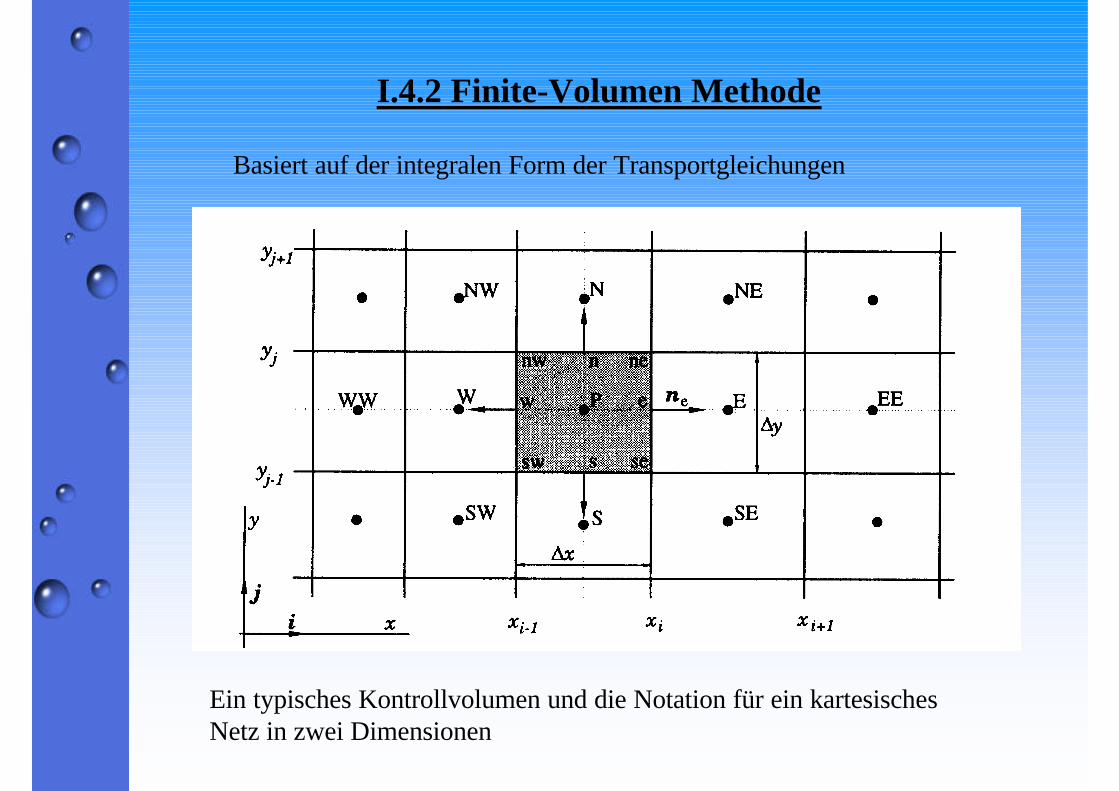
I.4.2 Finite-Volumen Methode
Ein typisches Kontrollvolumen und die Notation für ein kartesisches Netz in zwei Dimensionen
Basiert auf der integralen Form der Transportgleichungen
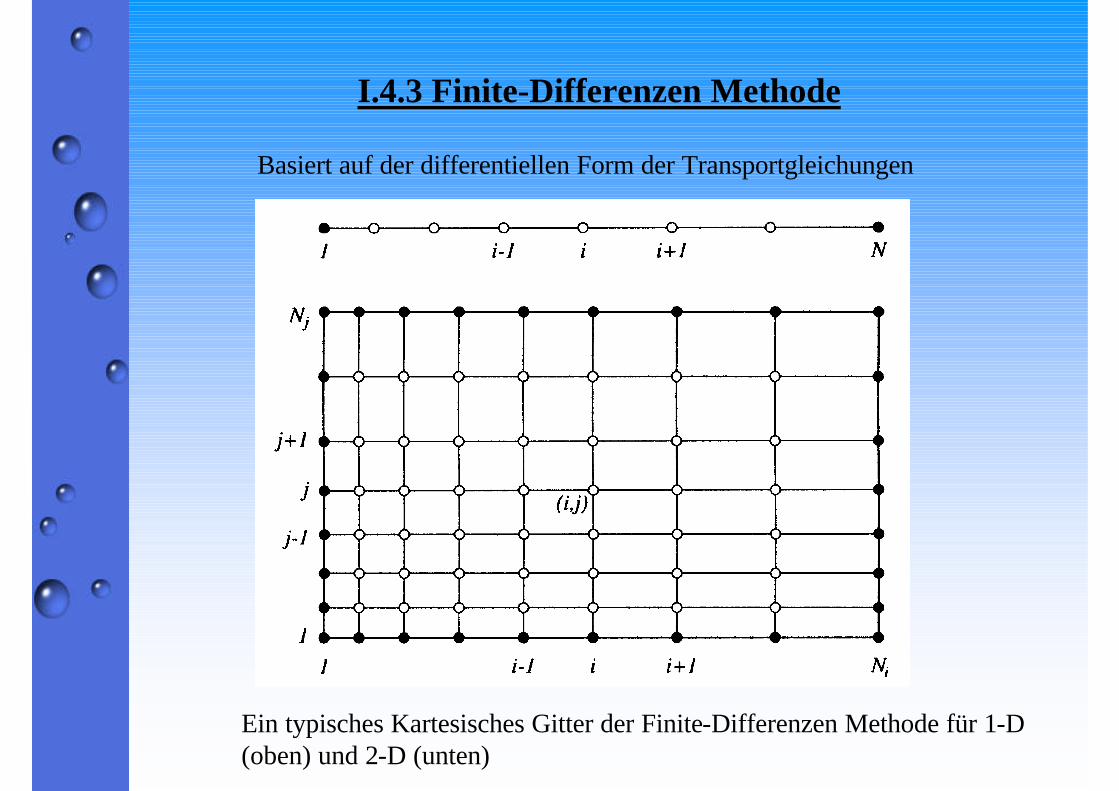
I.4.3 Finite-Differenzen Methode
Ein typisches Kartesisches Gitter der Finite-Differenzen Methode für 1-D (oben) und 2-D (unten)
Basiert auf der differentiellen Form der Transportgleichungen
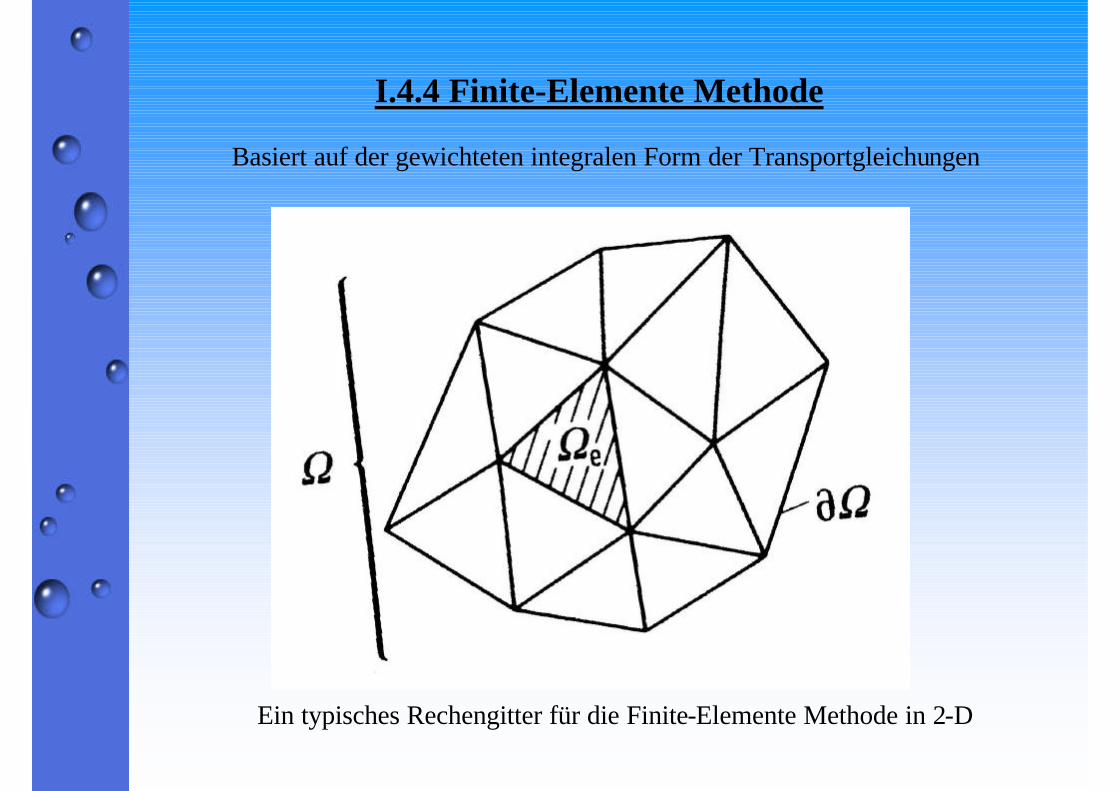
I.4.4 Finite-Elemente Methode
Ein typisches Rechengitter für die Finite-Elemente Methode in 2-D
Basiert auf der gewichteten integralen Form der Transportgleichungen
II. Grundgleichungen der Strömungsmechanik
II.1 Kompressible Navier-Stokes-Gleichungen
II.2 Inkompressible Navier-Stokes-Gleichungen
II.3 Reynolds-gemittelte Navier-Stokes-Gleichungen
II.4 Reynolds-gemittelte Navier-Stokes-Gleichungen mit chemischen Reaktionen
II.5 Reynolds-gemittelte Navier-Stokes-Gleichungen für Mehrphasenströmungen
II.6 Klassifikation der Transportgleichungen
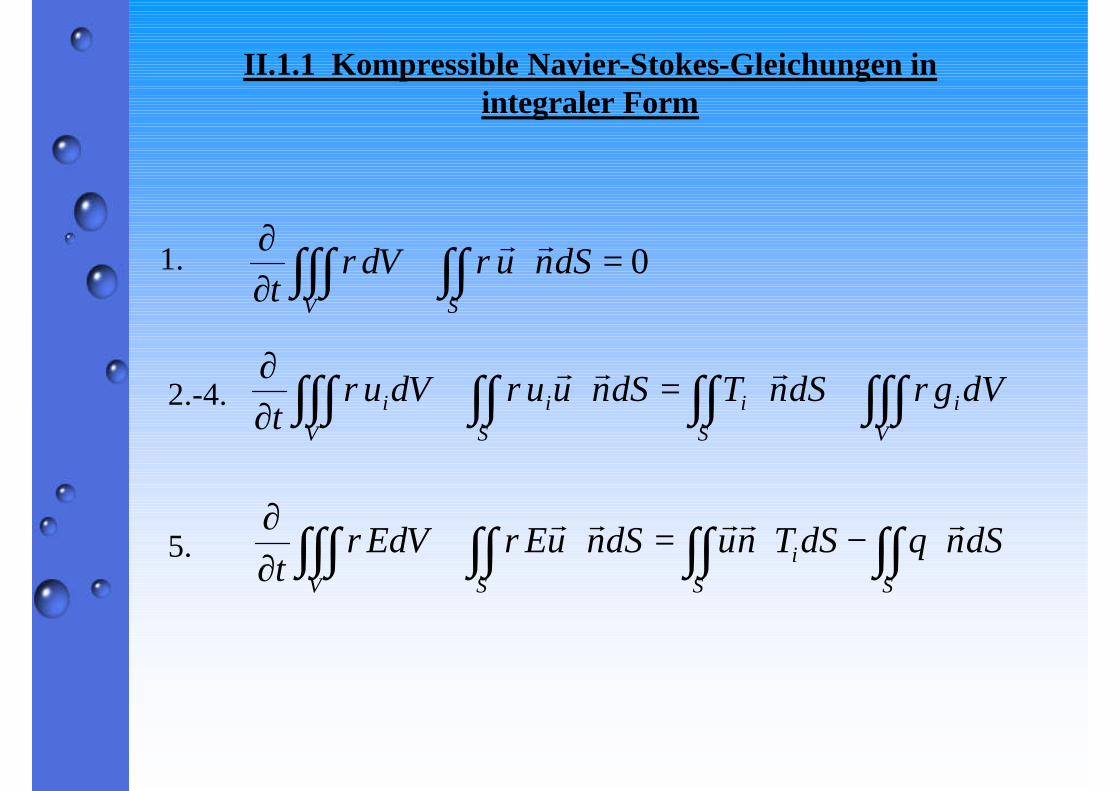
II.1.1 Kompressible Navier-Stokes-Gleichungen in integraler Form
0=⋅+∂∂
∫∫∫∫∫SV
dSnuVdt
rrρρ
∫∫ ∫∫∫∫∫∫∫∫ +⋅=⋅+∂∂
S Vii
Si
Vi dVgdSnTdSnuuVdu
tρρρ
rrr
∫∫ ∫∫∫∫∫∫∫ ⋅−⋅=⋅+∂∂
S Si
SV
dSnqdSTnudSnuEVEdt
rrrrrρρ
1.
2.-4.
5.

II.1.1 Kompressible Navier-Stokes-Gleichungen in integraler Form - Nomenklatur
1.
2.-4.
5.
Kontinuitätsgleichung (continuity)
3 Impulsgleichungen für 3 Raumrichtungen (momentum)
Energiegleichung (energy)
Nicht iterativ zu lösen, aber zum Abgleich nötig:
Zustandsgleichung (equation of state)
j
ij
ij
jii
x
T
xp
x
uu
tu
∂
∂+
∂∂
−=∂
∂+
∂∂ )()( ρρ
j
iji
i
ii
i
i
x
Tu
xpuq
xEu
tE
∂
∂+
∂−∂
=∂
∂+
∂∂ )()()()( ρρ
∂∂
−∂
∂+
∂∂
=k
kij
i
j
j
iij x
ux
u
xu
T δµ32
ii x
Tq
∂∂
= λ)1(2
1−
+=γρp
uuE ii
0)(
=∂
∂+
∂∂
i
i
xu
tρρ
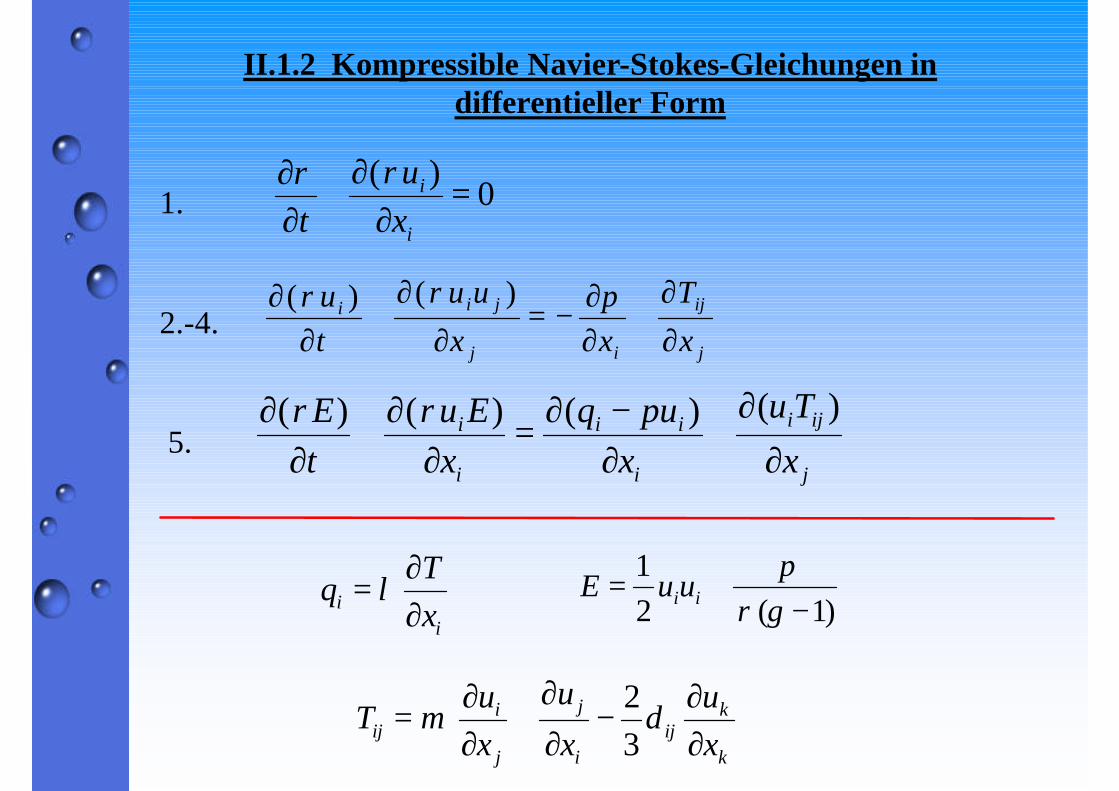
II.1.2 Kompressible Navier-Stokes-Gleichungen in differentieller Form
1.
5.
2.-4.
ij
ij
ij
jii gx
T
xp
x
uu
tu
+∂
∂+
∂∂
−=∂
∂+
∂∂
ρ1)(
ρµ
ν
ν
=
∂
∂+
∂∂
=i
j
j
iij x
u
xu
T
0=∂∂
i
i
xu
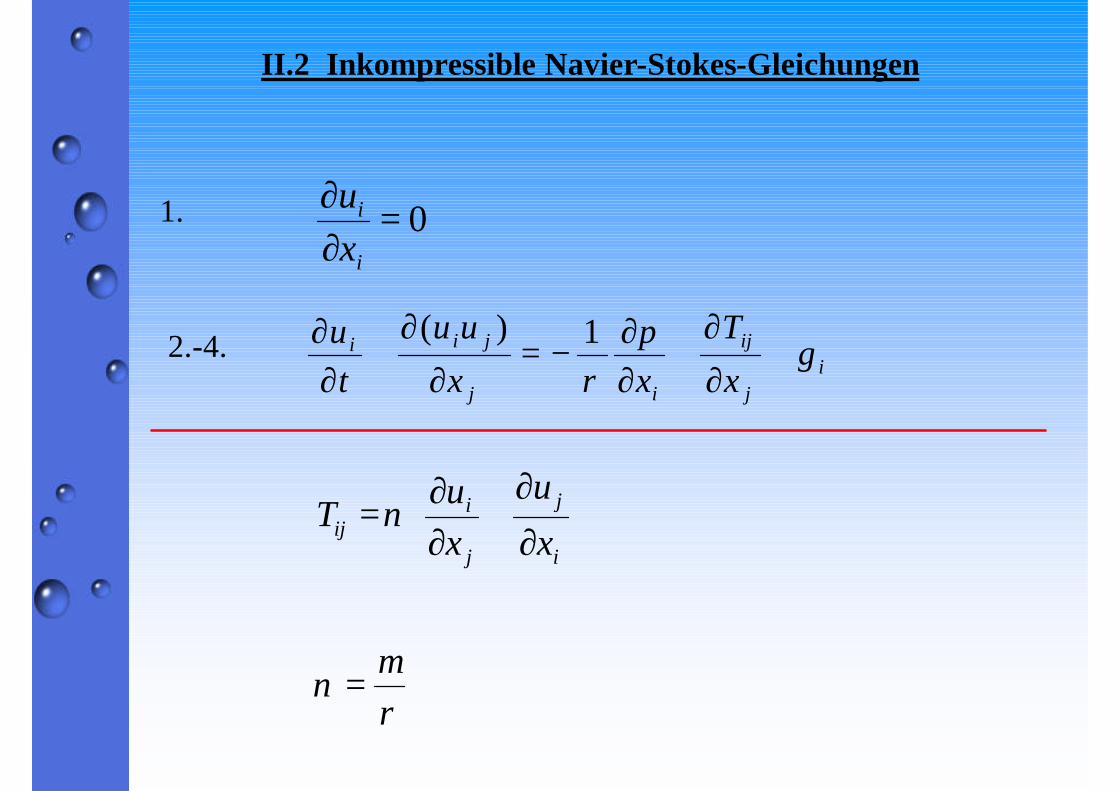
II.2 Inkompressible Navier-Stokes-Gleichungen
1.
2.-4.
j
ij
j
ij
ij
jii
xx
T
xp
x
uu
tu
∂∂
+∂∂
+∂∂
−=∂
∂+
∂∂ τρρ )()(
i
i
j
iji
i
ii
i
i
xx
Tu
xpuq
xEu
tE
∂∂
+∂
∂+
∂−∂
=∂
∂+
∂∂ θρρ )()()()(
∂∂
−∂
∂+
∂∂
=k
kij
i
j
j
iij x
ux
u
xu
T δµ32
ii x
Tq
∂∂
= λ)1(2
1−
+=γρp
uuE ii
0)(
=∂
∂+
∂∂
i
i
xu
tρρ
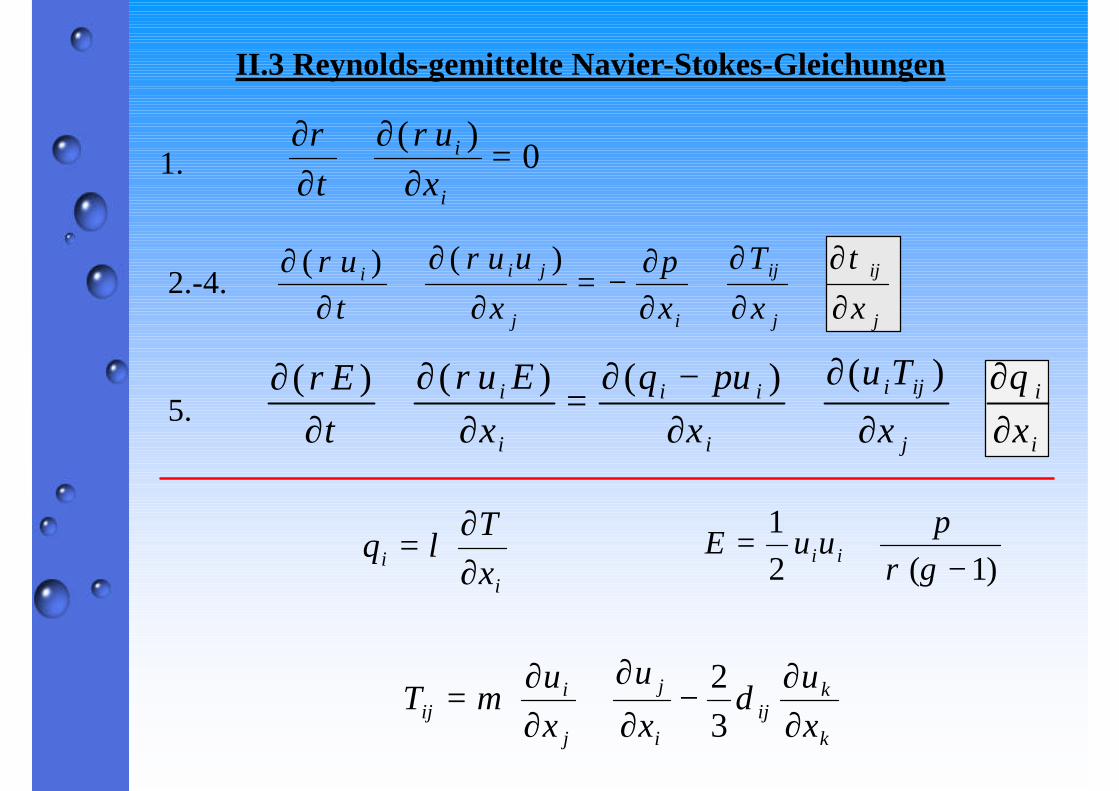
II.3 Reynolds-gemittelte Navier-Stokes-Gleichungen
1.
2.-4.
5.
II.4 Reynolds-gemittelte Navier-Stokes-Gleichungen mit chemischen Reaktionen
j
ij
j
ij
ij
jii
xx
T
xp
x
uu
tu
∂
∂+
∂
∂+
∂∂
−=∂
∂+
∂∂ τρρ )()(
i
i
j
iji
i
ii
i
i
xx
Tu
xpuq
xEu
tE
∂∂
+∂
∂+
∂−∂
=∂
∂+
∂∂ θρρ )()()()(
ij
ij
j
ij
j
jii
x
M
x
D
x
uY
tY
ωρρ &+
∂∂
+∂∂
=∂
∂+
∂∂ )(
∂∂
−∂∂
+∂∂
=k
kij
i
j
j
iij x
uxu
xu
T δµ32
j
iiij x
YD
∂∂
Γ= ρ
∑=
−∂∂
=gK
kkik
ii hD
xT
q1
λ ∑=
+−=gK
kkkii hY
puuE
121
ρ
0)(
=∂
∂+
∂∂
i
i
xu
tρρ
1.
2.-4.
5.
II.5 Reynolds-gemittelte Navier-Stokes-Gleichungen für Mehrphasenströmungen
ikj
ijkk
j
ijkk Mxx
T,
,, )()(+
∂
∂+
∂
∂+
ταα
ikki
kk
j
jkikkkikkk gx
px
uu
tu
ρααραρα
+∂
∂−=
∂
∂+
∂∂ )()()( ,,,
i
ikkkikk
i
kikkkkkk
x
upq
x
Eu
tE
∂
−∂=
∂
∂+
∂∂ )()()( ,,, ααραρα
ki
ikkkkk Sx
ut
=∂
∂+
∂∂ )()( ,ραρα
ki
ikk
j
ijkikk Exx
Tu+
∂∂
+∂
∂+
)()( ,,, θαα
02
1
=∑=k
kS σi
kik MM =∑
=
2
1,
σEEk
k =∑=
2
1
1.
2.-4.
5.
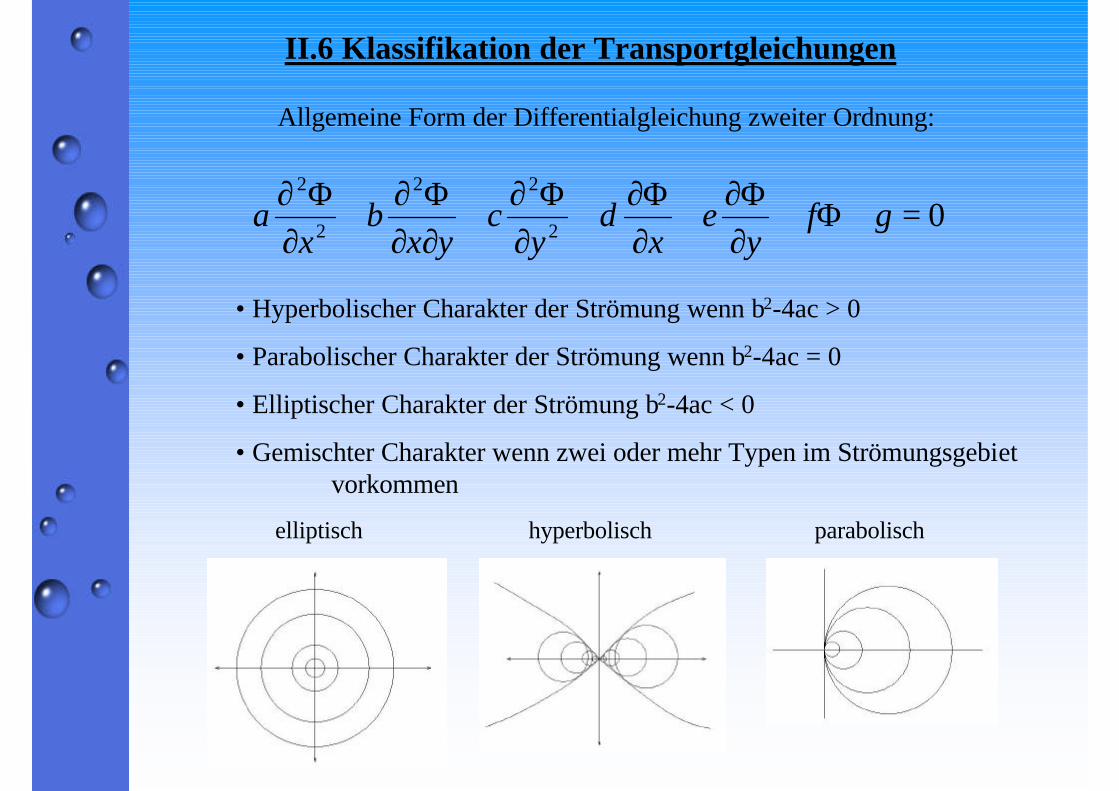
II.6 Klassifikation der Transportgleichungen
• Hyperbolischer Charakter der Strömung wenn b2-4ac > 0
• Parabolischer Charakter der Strömung wenn b2-4ac = 0
• Elliptischer Charakter der Strömung b2-4ac < 0
• Gemischter Charakter wenn zwei oder mehr Typen im Strömungsgebiet vorkommen
02
22
2
2
=+Φ+∂Φ∂
+∂Φ∂
+∂
Φ∂+
∂∂Φ∂
+∂
Φ∂gf
ye
xd
yc
yxb
xa
Allgemeine Form der Differentialgleichung zweiter Ordnung:
elliptisch hyperbolisch parabolisch
III. Finite Differenzen Methode
III.1 Einführung
III.2 Grundkonzept
III.3 Approximation der Ableitung ersten Grades
III.4 Approximation der Ableitung zweiten Grades
III.5 Implementierung der Randbedingungen
III.6 Das Algebraische Gleichungssystem
III.7 Diskretisierungsfehler
III.8 Beispiel
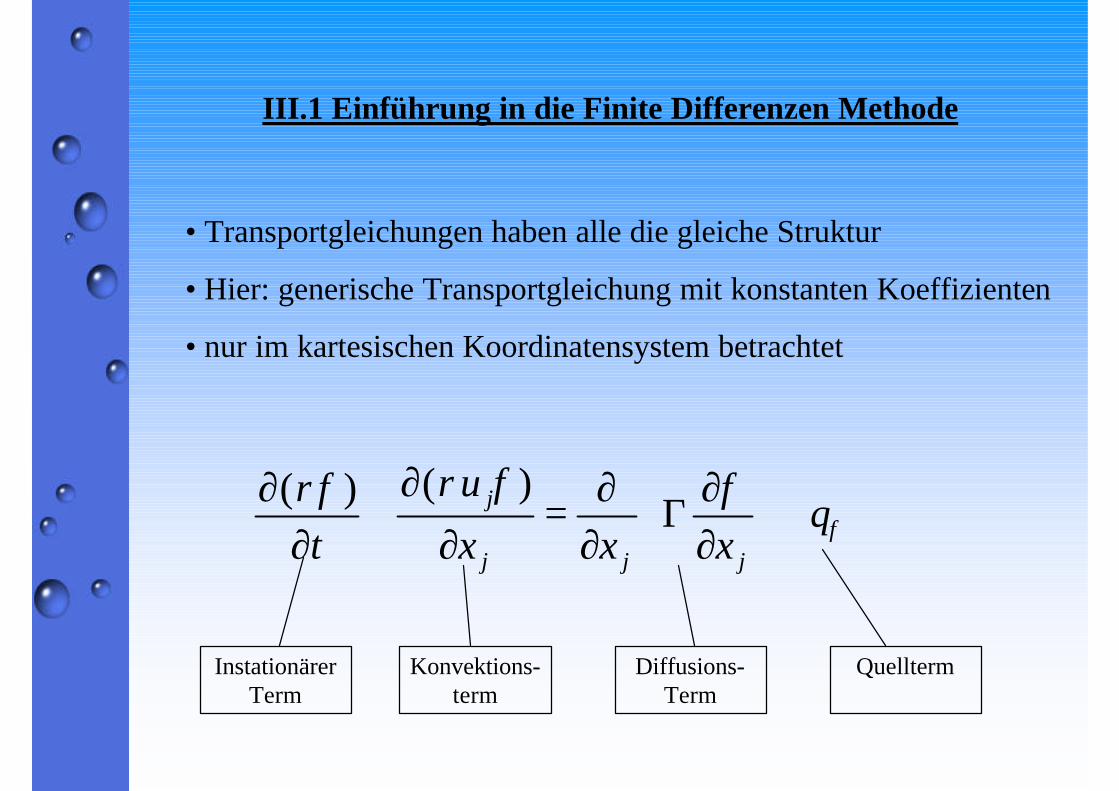
III.1 Einführung in die Finite Differenzen Methode
• Transportgleichungen haben alle die gleiche Struktur
• Hier: generische Transportgleichung mit konstanten Koeffizienten
• nur im kartesischen Koordinatensystem betrachtet
φφφρρφ
qxxx
u
t jjj
j +
∂∂
Γ∂∂
=∂
∂+
∂∂ )()(
InstationärerTerm
Konvektions-term
Diffusions-Term
Quellterm
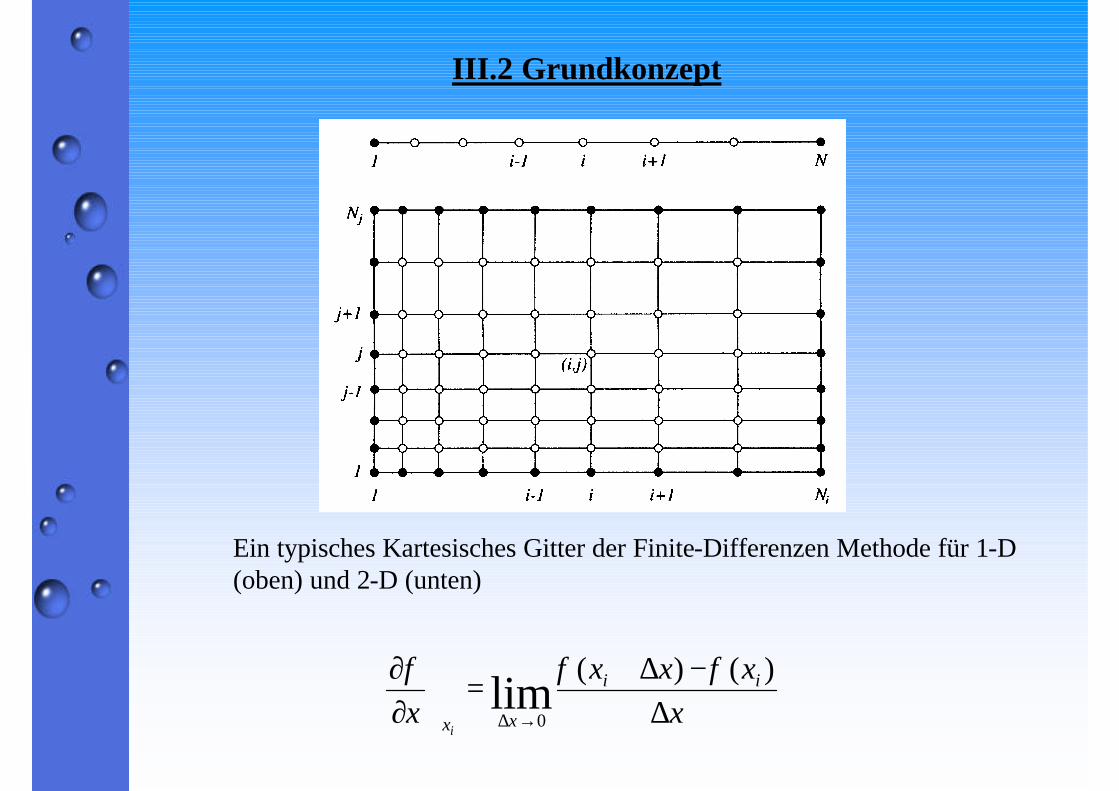
III.2 Grundkonzept
xxxx
xii
xxi∆
−∆+=
∂∂
→∆
)()(lim
0
φφφ
Ein typisches Kartesisches Gitter der Finite-Differenzen Methode für 1-D (oben) und 2-D (unten)
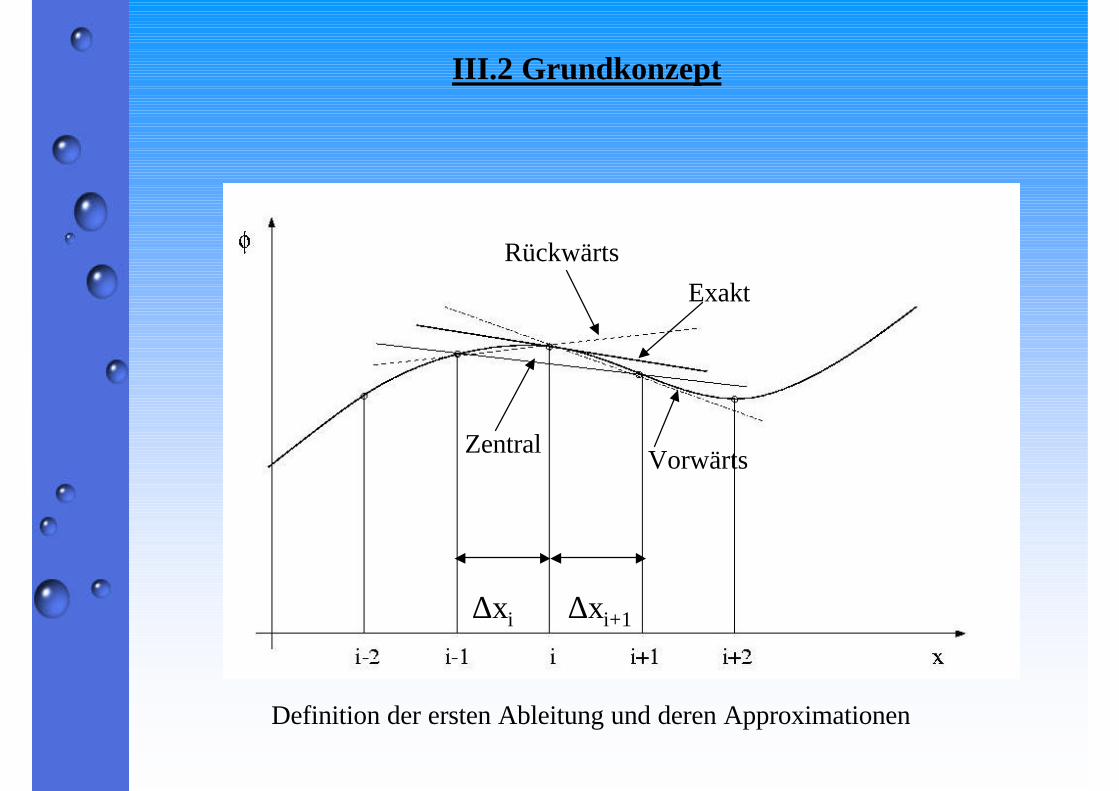
III.2 Grundkonzept
Exakt
Zentral Vorwärts
Rückwärts
∆xi ∆xi+1
Definition der ersten Ableitung und deren Approximationen
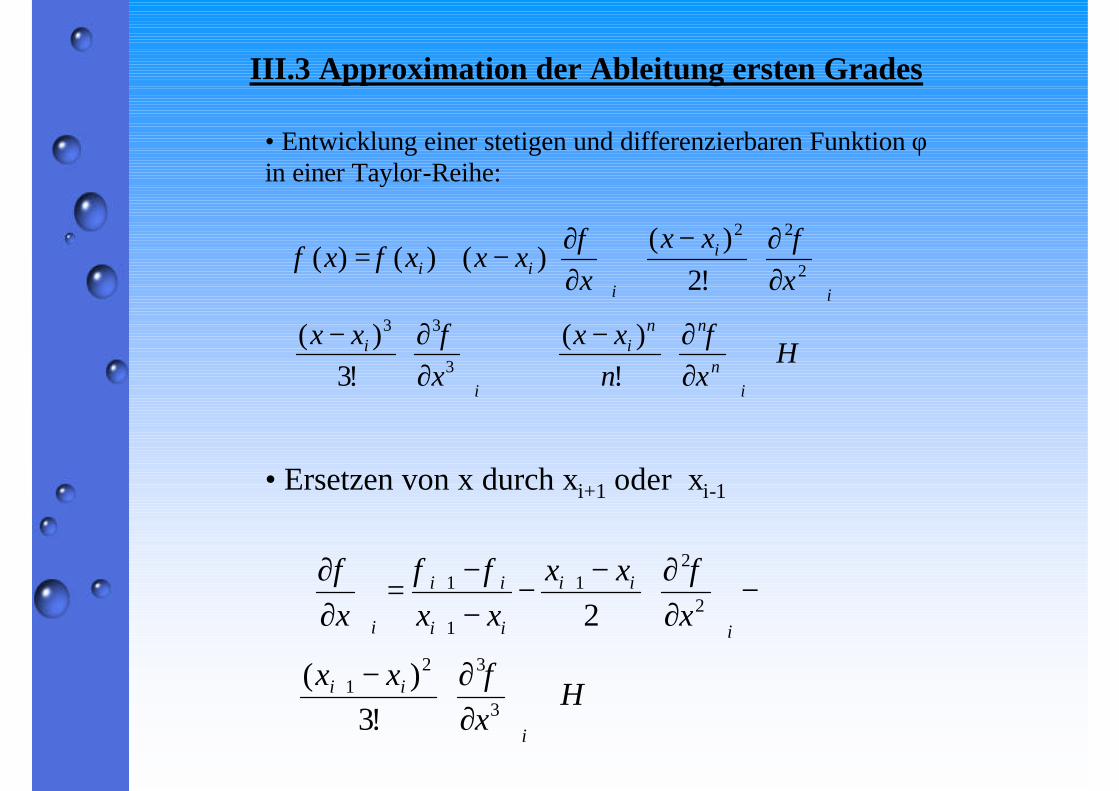
III.3 Approximation der Ableitung ersten Grades
• Entwicklung einer stetigen und differenzierbaren Funktion φin einer Taylor-Reihe:
Hxn
xxx
xx
xxx
xxxxx
in
nni
i
i
i
i
iii
+
∂∂−
+⋅⋅⋅+
∂∂−
+
∂∂−
+
∂∂
−+=
φφ
φφφφ
!)(
!3)(
!2)(
)()()(
3
33
2
22
• Ersetzen von x durch xi+1 oder xi-1
Hx
xx
xxx
xxx
i
ii
i
ii
ii
ii
i
+
∂∂−
−
∂∂−
−−−
=
∂∂
+
+
+
+
3
321
2
21
1
1
!3)(
2
φ
φφφφ
Fortsetzung III.3
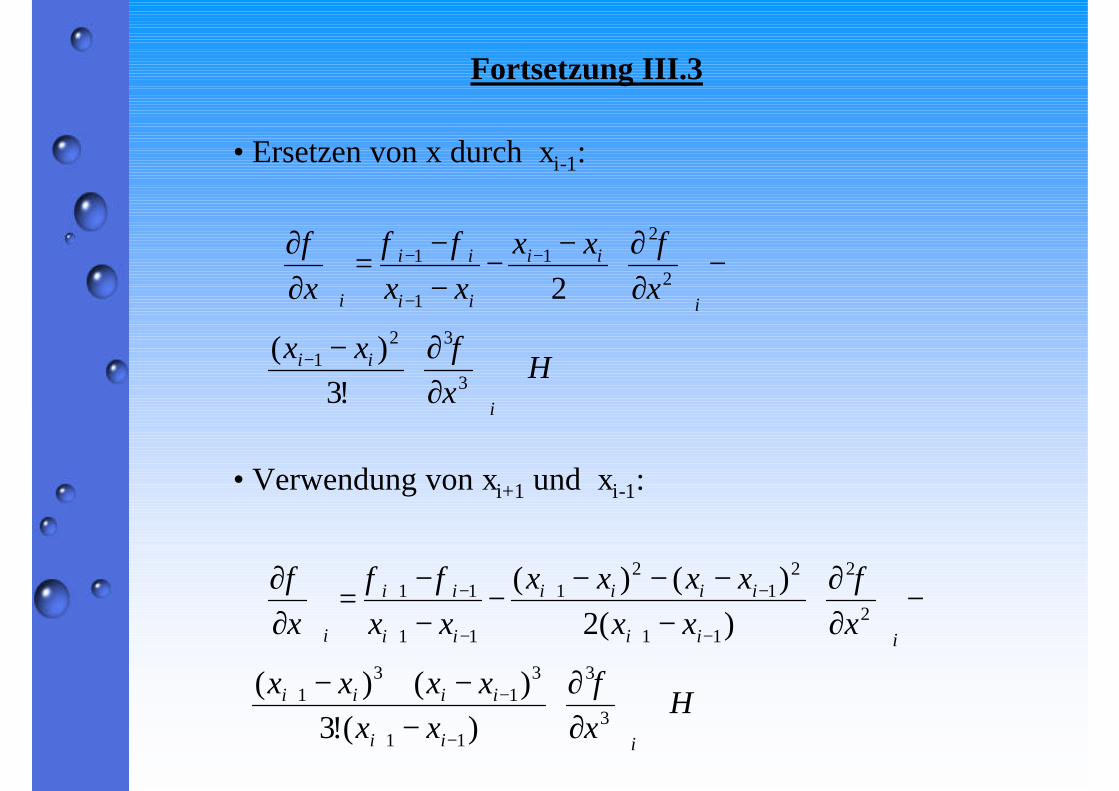
• Ersetzen von x durch xi-1:
Hx
xx
xxx
xxx
i
ii
i
ii
ii
ii
i
+
∂∂−
−
∂∂−
−−−
=
∂∂
−
−
−
−
3
321
2
21
1
1
!3)(
2
φ
φφφφ
• Verwendung von xi+1 und xi-1:
Hxxx
xxxx
xxxxxxx
xxx
iii
iiii
iii
iiii
ii
ii
i
+
∂∂
−−+−
−
∂∂
−−−−
−−−
=
∂∂
−+
−+
−+
−+
−+
−+
3
3
11
31
31
2
2
11
21
21
11
11
)(!3)()(
)(2)()(
φ
φφφφ
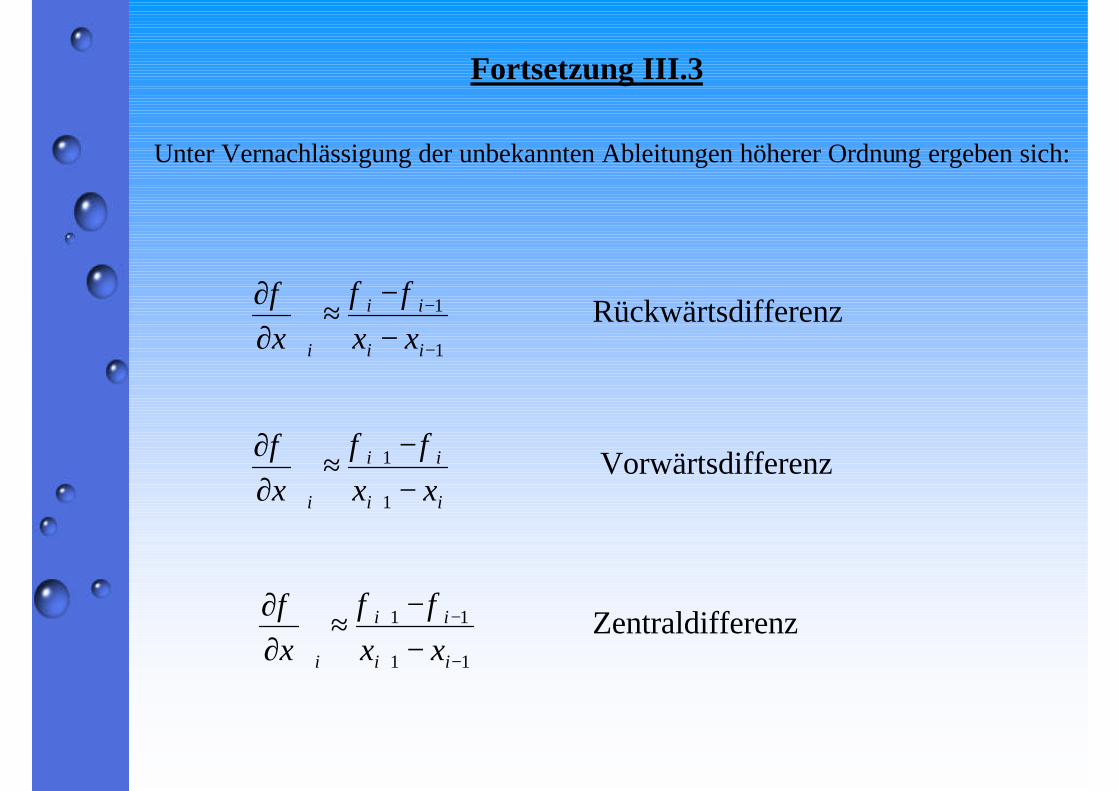
Fortsetzung III.3
Unter Vernachlässigung der unbekannten Ableitungen höherer Ordnung ergeben sich:
1
1
−
−
−−
≈
∂∂
ii
ii
i xxxφφφ
11
11
−+
−+
−−
≈
∂∂
ii
ii
i xxxφφφ
ii
ii
i xxx −−
≈
∂∂
+
+
1
1 φφφ
Rückwärtsdifferenz
Vorwärtsdifferenz
Zentraldifferenz
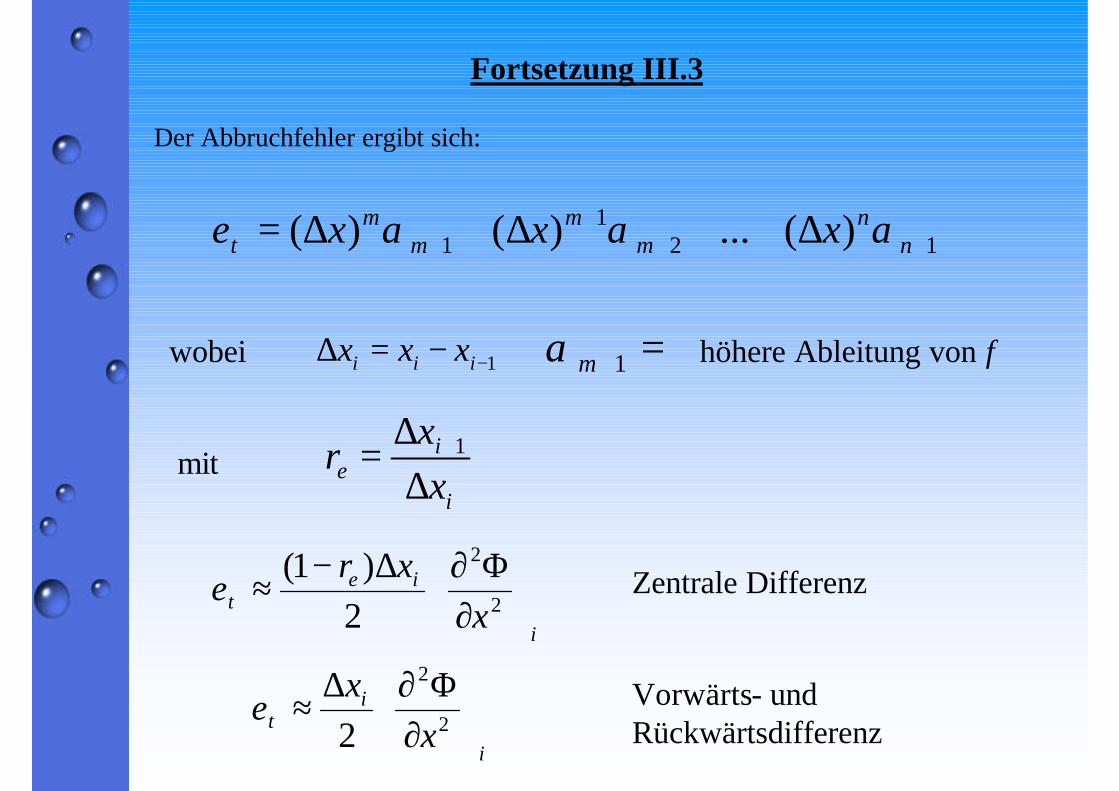
Fortsetzung III.3
Der Abbruchfehler ergibt sich:
i
ie
xxr
∂
Φ∂∆−≈ 2
2
2)1(
τε
wobei 1−−=∆ iii xxx =+1mα höhere Ableitung von φ
i
ie x
xr
∆∆
= +1mit
121
1 )(...)()( +++
+ ∆++∆+∆= nn
mm
mm xxx αααετ
Zentrale Differenz
i
i
xx
∂
Φ∂∆≈ 2
2
2τε Vorwärts- und Rückwärtsdifferenz
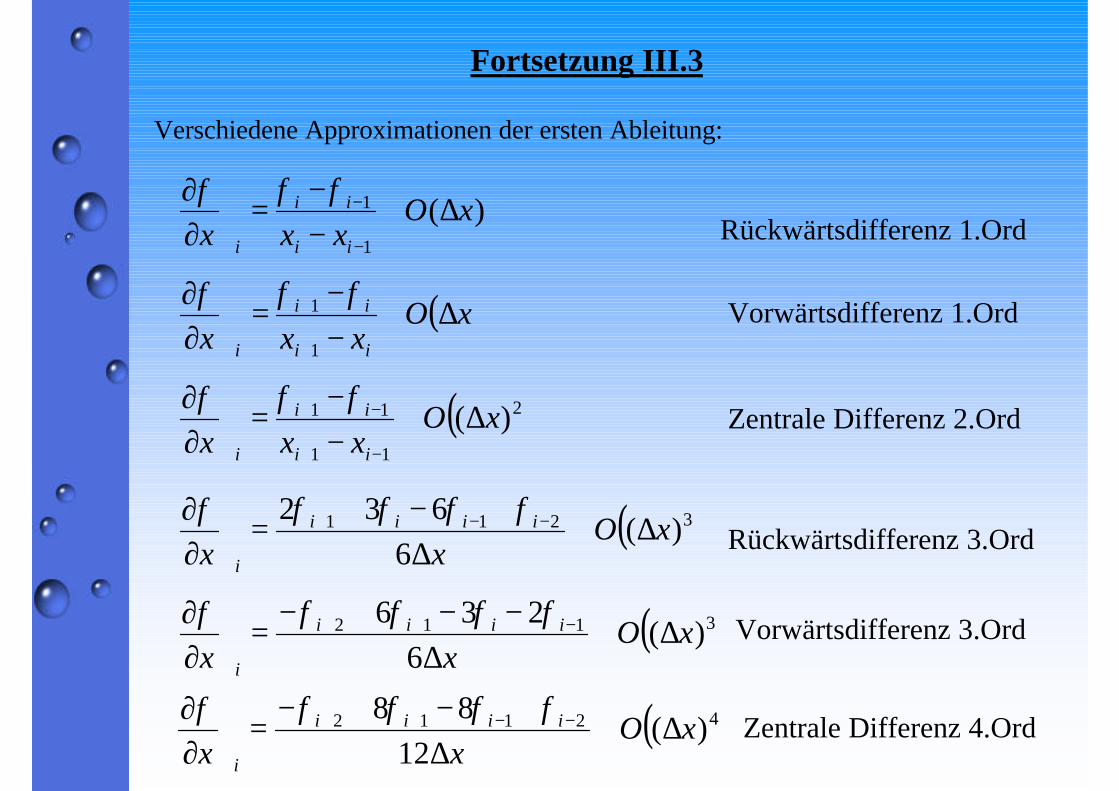
Fortsetzung III.3
Verschiedene Approximationen der ersten Ableitung:
)(1
1 xOxxx ii
ii
i
∆+−−
=
∂∂
−
−φφφ
( )2
11
11 )( xOxxx ii
ii
i
∆+−−
=
∂∂
−+
−+ φφφ
( )xOxxx ii
ii
i
∆+−−
=
∂∂
+
+
1
1 φφφ
Rückwärtsdifferenz 1.Ord
Vorwärtsdifferenz 1.Ord
Zentrale Differenz 2.Ord
( )3211 )(6
632xO
xxiiii
i
∆+∆
+−+=
∂∂ −−+ φφφφφ
( )3112 )(6
236xO
xxiiii
i
∆+∆
−−+−=
∂∂ −++ φφφφφ
( )42112 )(12
88xO
xxiiii
i
∆+∆
+−+−=
∂∂ −−++ φφφφφ
Rückwärtsdifferenz 3.Ord
Vorwärtsdifferenz 3.Ord
Zentrale Differenz 4.Ord
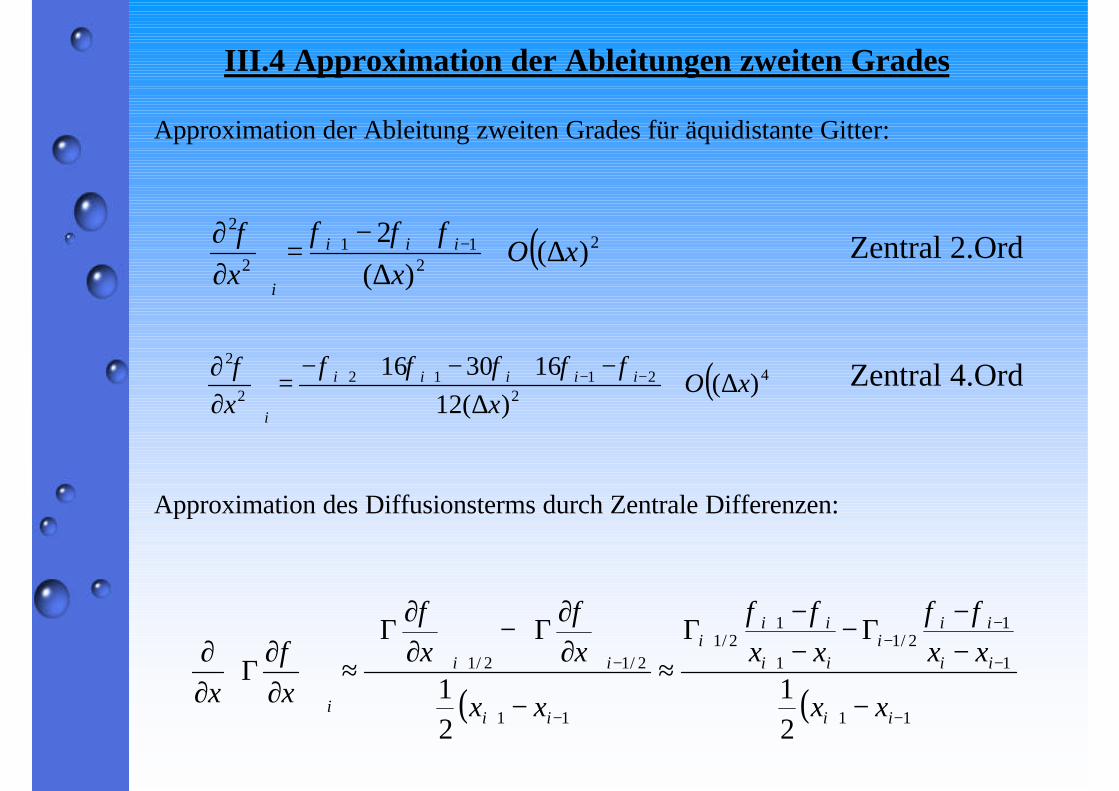
III.4 Approximation der Ableitungen zweiten Grades
Approximation der Ableitung zweiten Grades für äquidistante Gitter:
( )22
112
2
)()(
2xO
xxiii
i
∆+∆
+−=
∂∂ −+ φφφφ
( )42
21122
2
)()(12
163016xO
xxiiiii
i
∆+∆
−+−+−=
∂∂ −−++ φφφφφφ
Zentral 2.Ord
Zentral 4.Ord
Approximation des Diffusionsterms durch Zentrale Differenzen:
( ) ( )11
1
12/1
1
12/1
11
2/12/1
21
21
−+
−
−−
+
++
−+
−+
−
−−
Γ−−−
Γ≈
−
∂∂
Γ−
∂∂
Γ≈
∂∂
Γ∂∂
ii
ii
iii
ii
iii
ii
ii
i xx
xxxx
xx
xxxx
φφφφφφφ
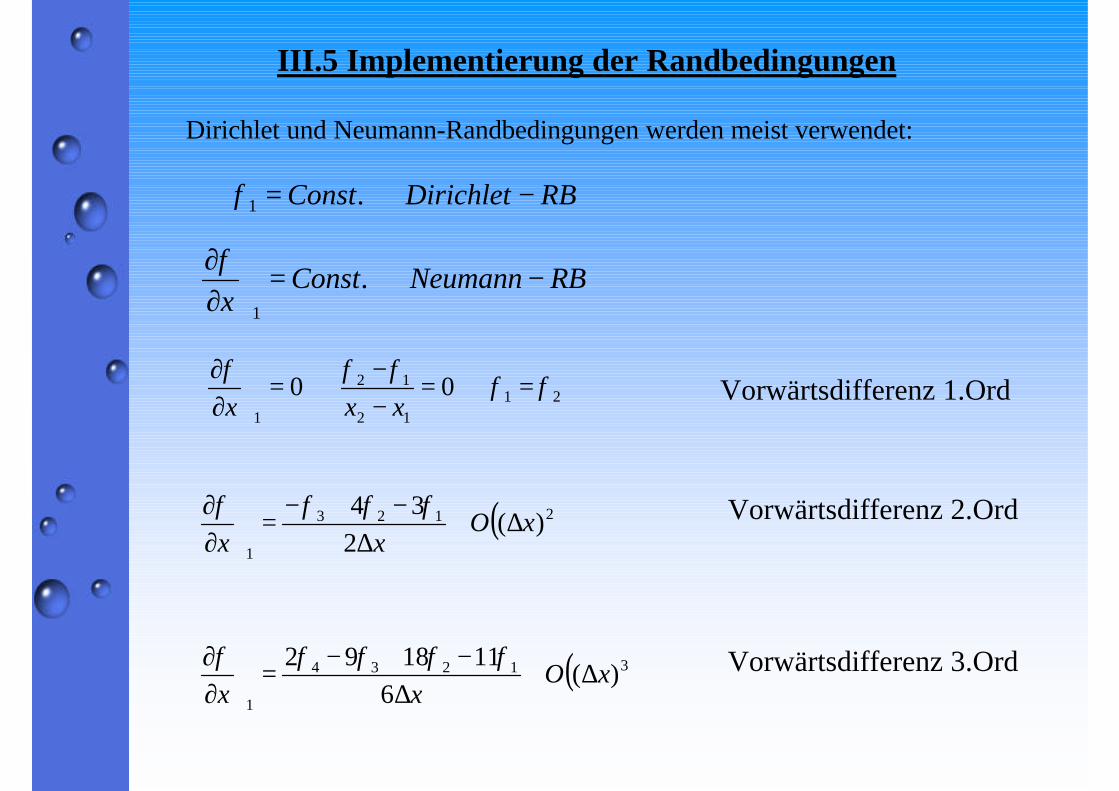
III.5 Implementierung der Randbedingungen
Dirichlet und Neumann-Randbedingungen werden meist verwendet:
RBDirichletConst −⇒= .1φ
Vorwärtsdifferenz 1.Ord
RBNeumannConstx
−⇒=
∂∂
.1
φ
2112
12
1
00 φφφφφ
=⇒=−−
⇒=
∂∂
xxx
( )2123
1
)(2
34xO
xx∆+
∆−+−
=
∂∂ φφφφ Vorwärtsdifferenz 2.Ord
( )31234
1
)(6
111892xO
xx∆+
∆−+−
=
∂∂ φφφφφ Vorwärtsdifferenz 3.Ord
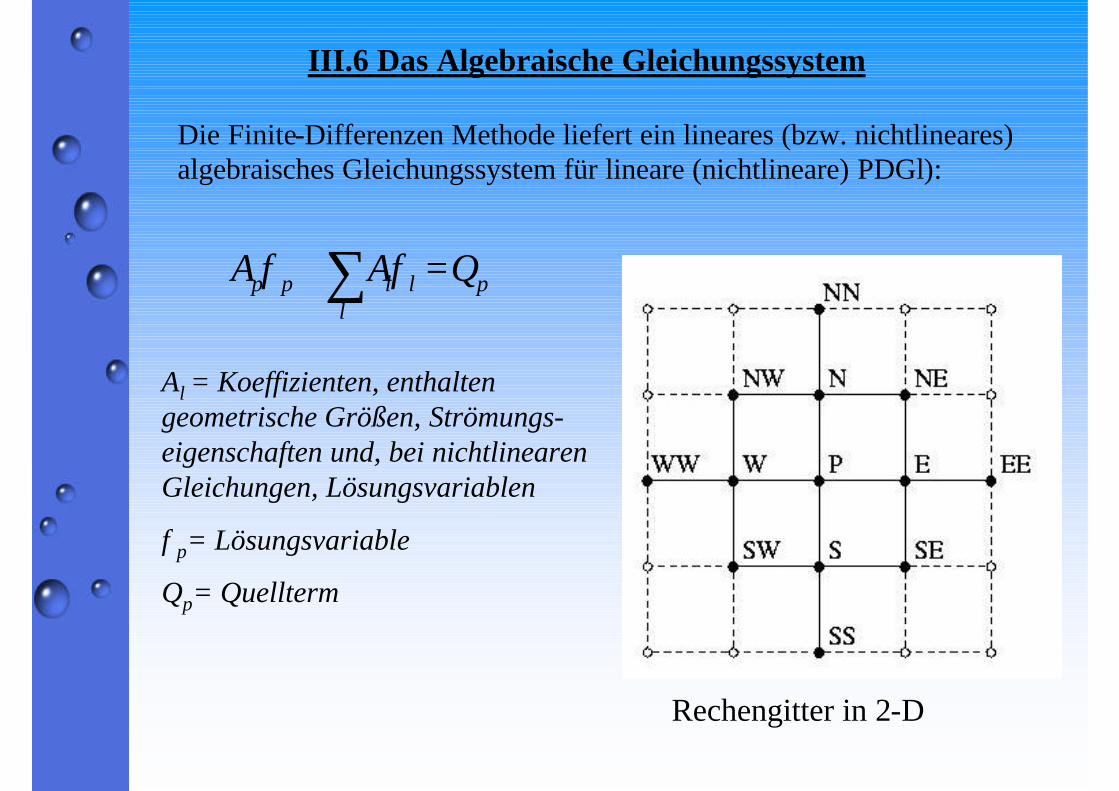
III.6 Das Algebraische Gleichungssystem
∑ =+l
pllpp QAA φφ
Die Finite-Differenzen Methode liefert ein lineares (bzw. nichtlineares) algebraisches Gleichungssystem für lineare (nichtlineare) PDGl):
Rechengitter in 2-D
Al = Koeffizienten, enthalten geometrische Größen, Strömungs-eigenschaften und, bei nichtlinearen Gleichungen, Lösungsvariablen
φp= Lösungsvariable
Qp= Quellterm
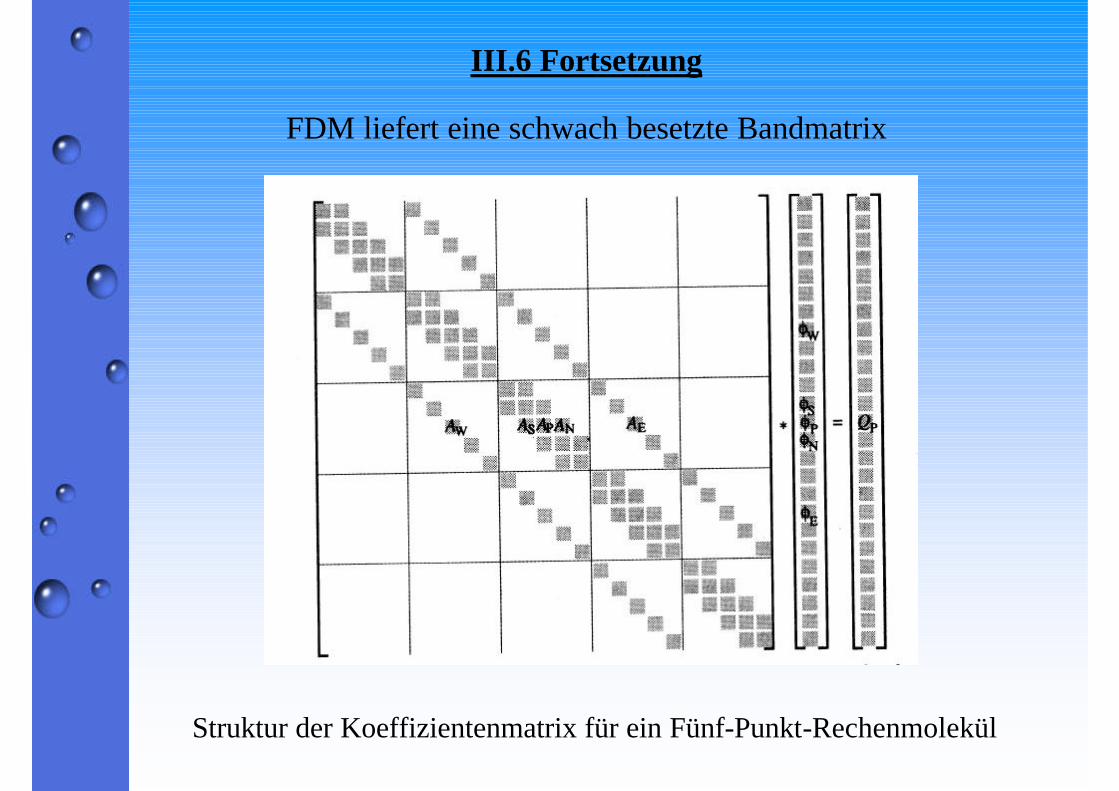
III.6 Fortsetzung
FDM liefert eine schwach besetzte Bandmatrix
Struktur der Koeffizientenmatrix für ein Fünf-Punkt-Rechenmolekül
III.7 Diskretisierungsfehler
Ersetzen der Differentialgleichung durch eine Differenzen-Gleichungliefert einen Abbruchfehler τh
L(Φ) = Lh(Φ) + τh =0
Die exakte Lösung φh der diskretisierten Gleichung auf dem Gitter hgenügt der folgenden Gleichung:
Lh(φh) = (Aφ-Q)h =0
Diese Lösung weicht von der exakten Lösung der Differentialgleichung um den Diskretisierungsfehler εd
h ab:dhh εφ +=Φ
III.7 Fortsetzung
Wobei H der Anteil der höheren Ableitungen ist.
α hängt von der Ableitung an dem entsprechenden Punkt und ist unabhängig von der Netzweite h.
p ist die Ordnung des Schemas.
Die Ordnung und den Diskretisierungsfehler kann man mit folgenden Formeln abschätzen:
2log
log2
42
−−
= hh
hh
pφφφφ
Hh pdh +≈ αε
HhHh ph
ph ++=++=Φ )2(2 αφαφ
122
−−
≈ phhd
h
φφε
III.8 Beispiel
∂∂
Γ∂∂
=∂
∂xxx
u φφρ )(
Stationäre 1-D Konvektion-Diffusionsgleichung
Randbed.: φ=φ0 bei x=0, φ=φl bei x=L (Dirichlet!!)
Die exakte Lösung lautet:
)(11
0
/
0 φφφφ −−−
+= LPe
LxPe
ee
Γ=
uLPe
ρ
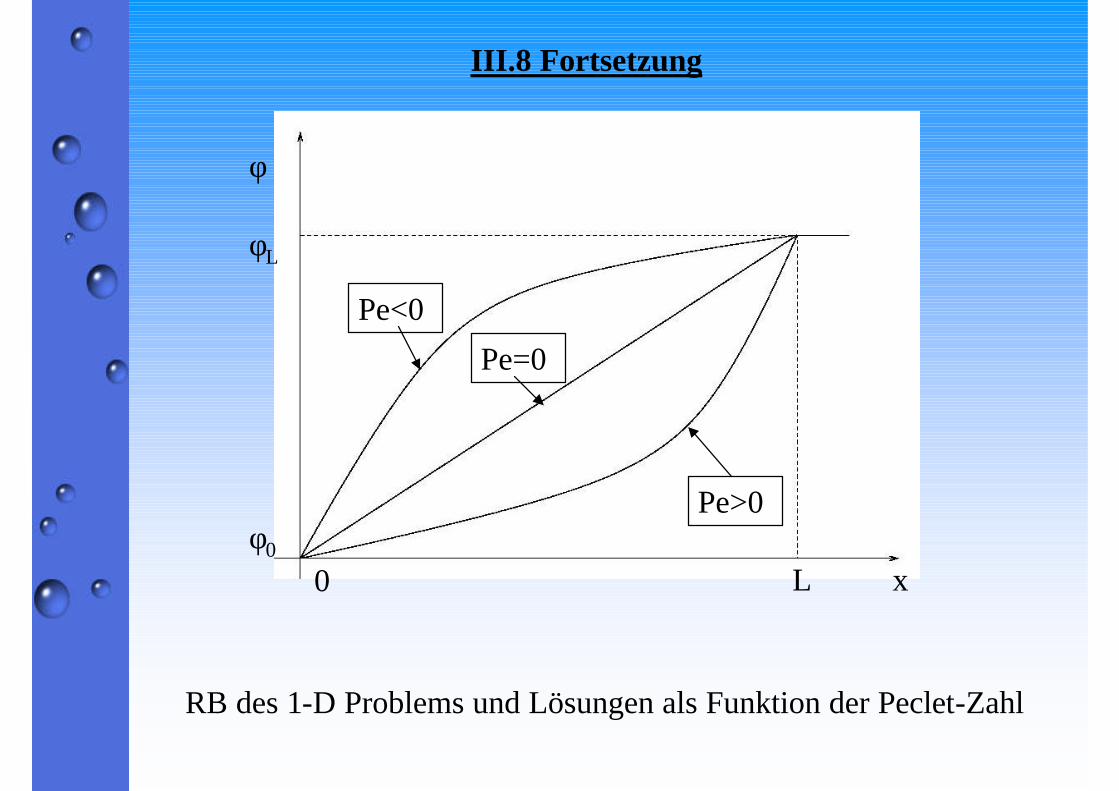
III.8 Fortsetzung
RB des 1-D Problems und Lösungen als Funktion der Peclet-Zahl
φL
φ
φ0
0 xL
Pe<0
Pe>0
Pe=0
III.8 Fortsetzung
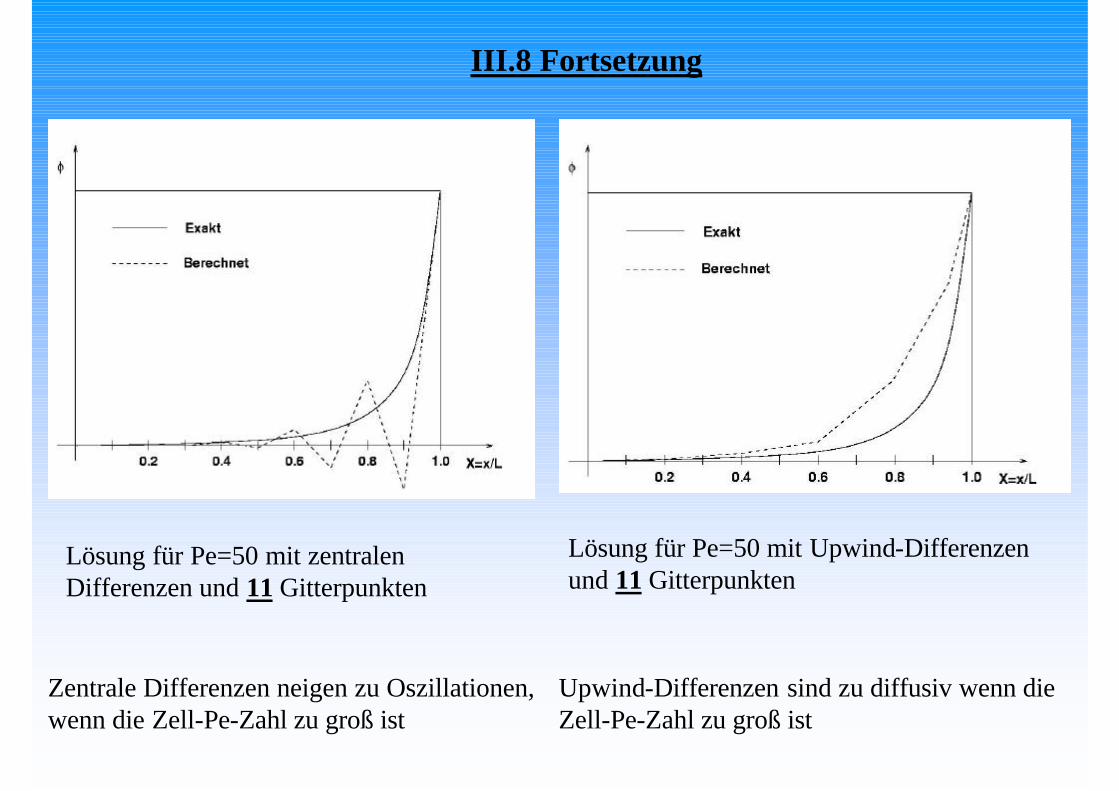
Lösung für Pe=50 mit zentralen Differenzen und 11 Gitterpunkten
Lösung für Pe=50 mit Upwind-Differenzenund 11 Gitterpunkten
Zentrale Differenzen neigen zu Oszillationen, wenn die Zell-Pe-Zahl zu groß ist
Upwind-Differenzen sind zu diffusiv wenn die Zell-Pe-Zahl zu groß ist
III.8 Fortsetzung
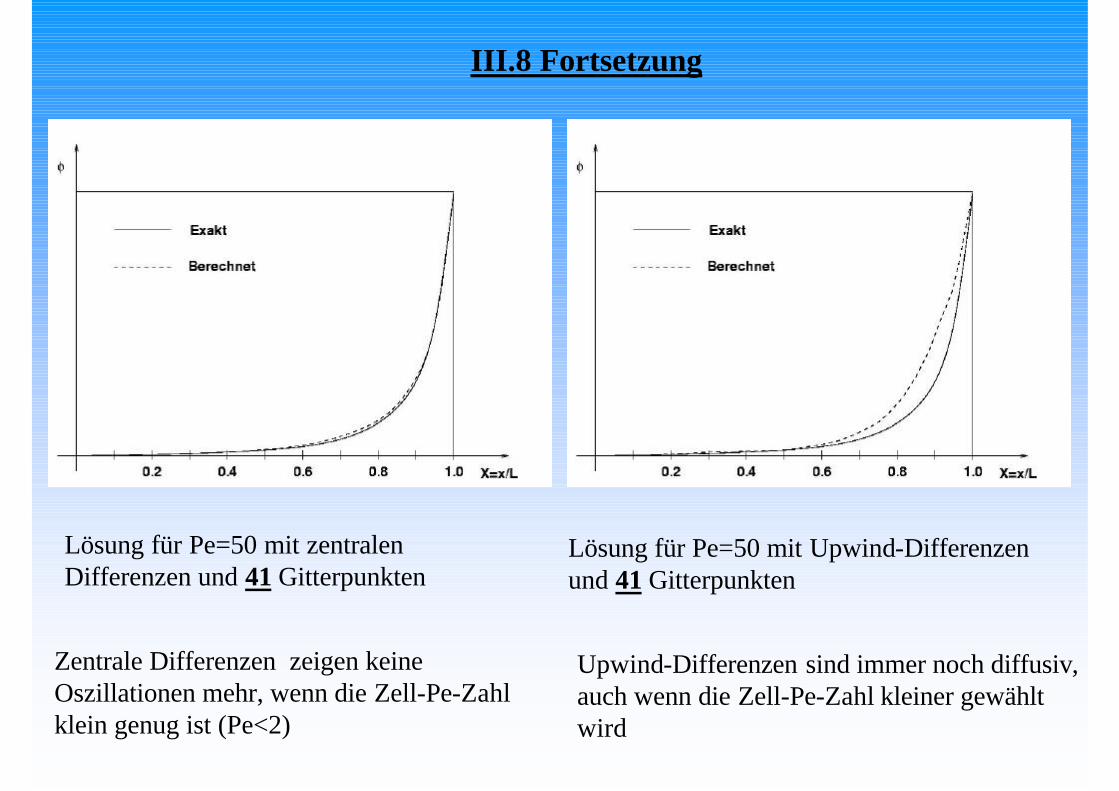
Lösung für Pe=50 mit zentralen Differenzen und 41 Gitterpunkten
Lösung für Pe=50 mit Upwind-Differenzenund 41 Gitterpunkten
Zentrale Differenzen zeigen keine Oszillationen mehr, wenn die Zell-Pe-Zahlklein genug ist (Pe<2)
Upwind-Differenzen sind immer noch diffusiv, auch wenn die Zell-Pe-Zahl kleiner gewählt wird
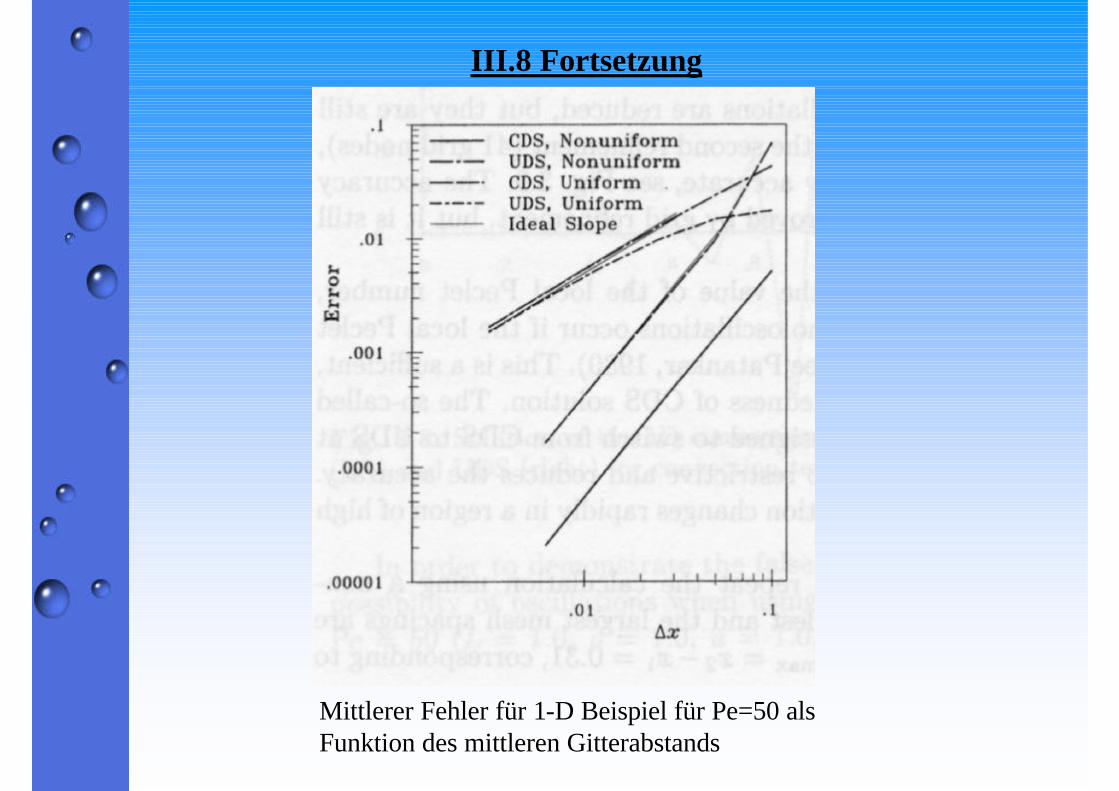
III.8 Fortsetzung
Mittlerer Fehler für 1-D Beispiel für Pe=50 als Funktion des mittleren Gitterabstands
IV. Finite Volumen Methode
IV.1 Einführung
IV.2 Approximation der Oberflächenintegrale
IV.3 Approximation der Volumenintegrale
IV.4 Interpolation der Konvektion- und Diffusionsflüsse
IV.5 Implementierung der Randbedingungen
IV.6 Das Algebraische Gleichungssystem
IV.7 Beispiel
IV.1 Einführung
∫∫∫Ω
Ω+⋅∇⋅Γ=⋅ dqdSndSnuSS
φφρφrrr
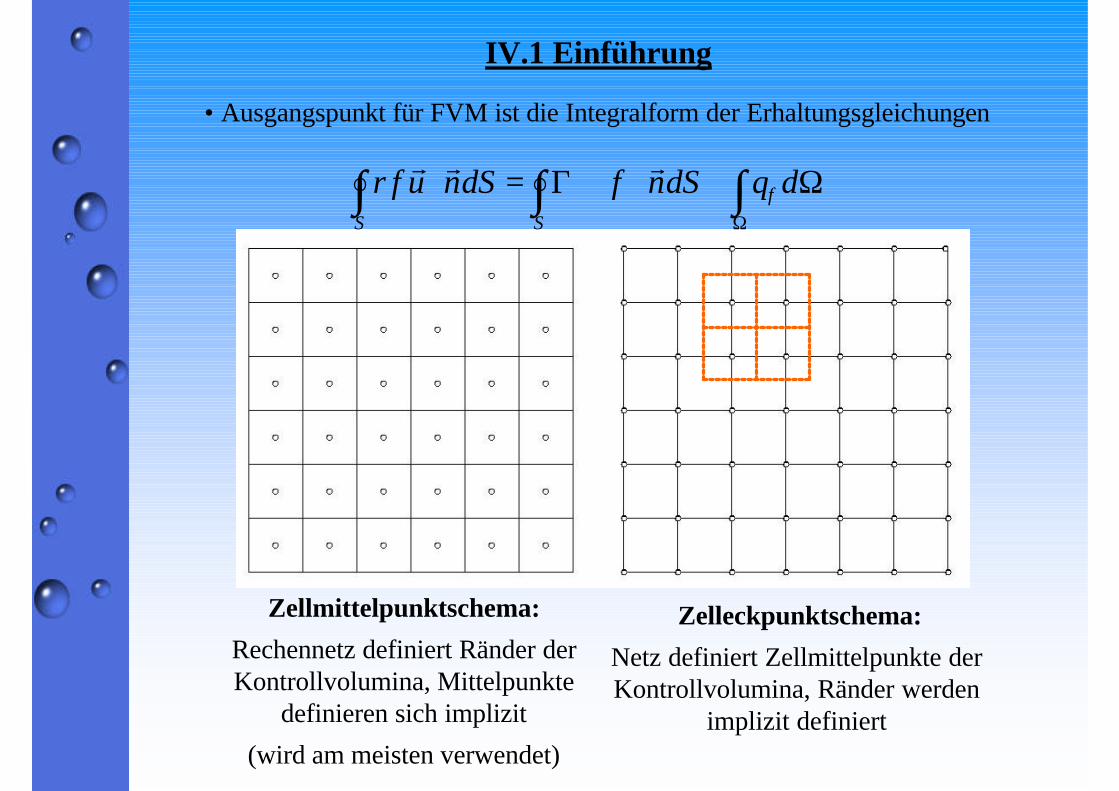
Zellmittelpunktschema:
Rechennetz definiert Ränder der Kontrollvolumina, Mittelpunkte
definieren sich implizit
(wird am meisten verwendet)
Zelleckpunktschema:
Netz definiert Zellmittelpunkte der Kontrollvolumina, Ränder werden
implizit definiert
• Ausgangspunkt für FVM ist die Integralform der Erhaltungsgleichungen
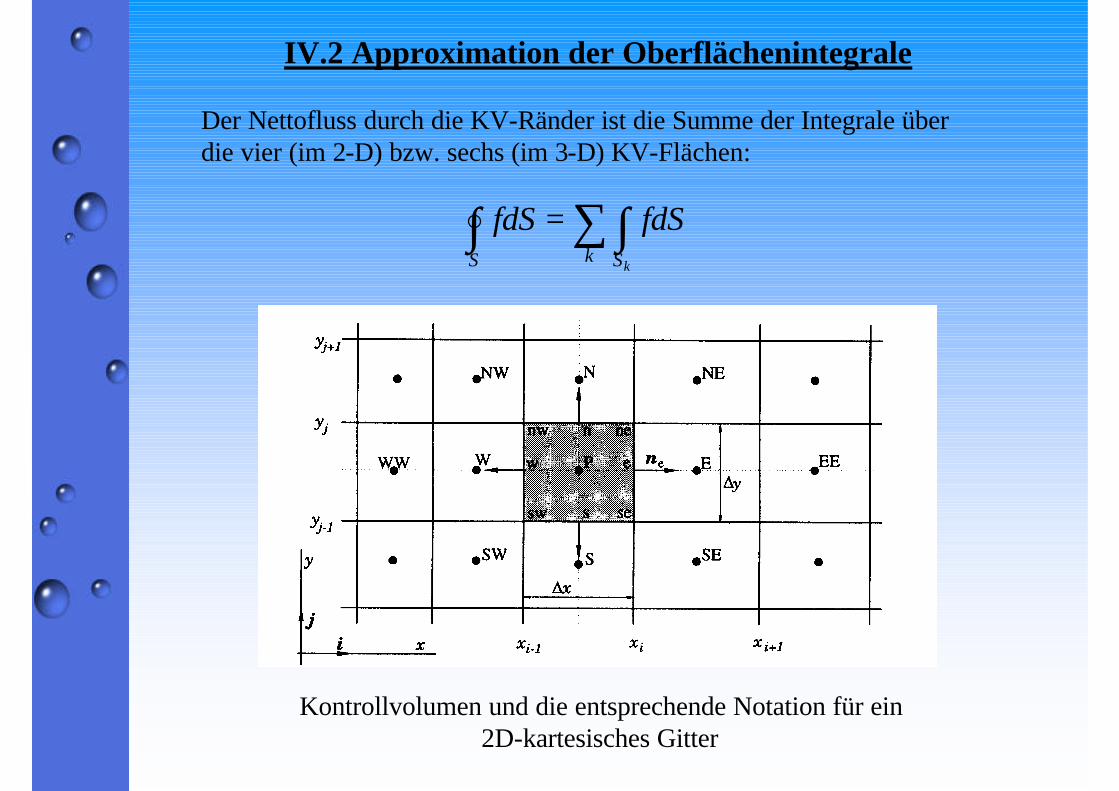
IV.2 Approximation der Oberflächenintegrale
∫ ∑ ∫=S k Sk
fdSfdS
Der Nettofluss durch die KV-Ränder ist die Summe der Integrale über die vier (im 2-D) bzw. sechs (im 3-D) KV-Flächen:
Kontrollvolumen und die entsprechende Notation für ein 2D-kartesisches Gitter
IV.2 Fortsetzung
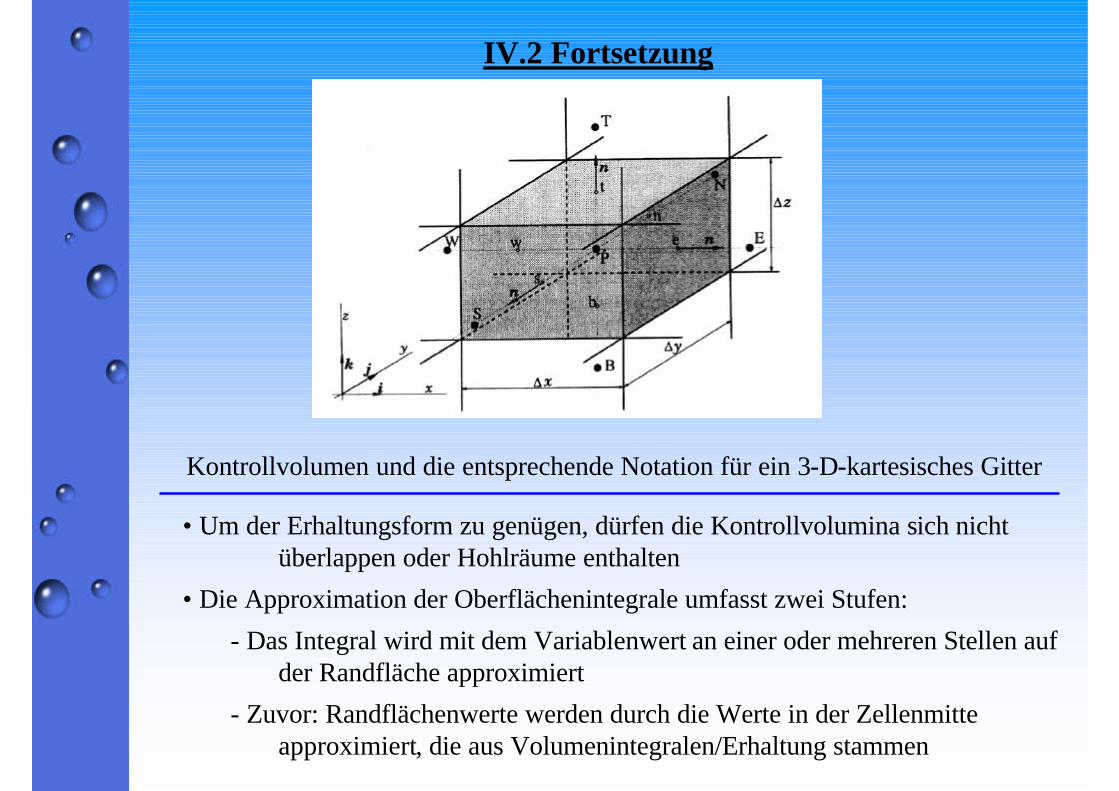
Kontrollvolumen und die entsprechende Notation für ein 3-D-kartesisches Gitter
• Um der Erhaltungsform zu genügen, dürfen die Kontrollvolumina sich nicht überlappen oder Hohlräume enthalten
• Die Approximation der Oberflächenintegrale umfasst zwei Stufen:
- Das Integral wird mit dem Variablenwert an einer oder mehreren Stellen auf der Randfläche approximiert
- Zuvor: Randflächenwerte werden durch die Werte in der Zellenmitte approximiert, die aus Volumenintegralen/Erhaltung stammen
IV.2 Fortsetzung
Einfachste Approximation ist die Integration mit der Mittelpunktsregel:
eeeeS
e SfSffdSFe
≈== ∫
Eine weitere Approximation ist die Integration mit der Trapezregel:
( )senee
Se ff
SfdSF
e
+≈= ∫ 2
2.Ordnung genau
2.Ordnung genau
Eine Approximation 4. Ordnung erhält man mit der Simpson-Regel:
( )seenee
Se fff
SfdSF
e
++≈= ∫ 46
4.Ordnung genau
IV.3 Approximation der Volumenintegrale
∫Ω
∆Ω≈∆Ω=Ω= PP qqqdQ
Die Quellterme erfordern die Integration über das Volumen
Die einfachste Approximation erhält man wieder mit der Mittelpunktsregel:
2.Ordnung genau
Eine Approximation höherer Ordnung erhält man unter Verwendung mehrerer Punkte innerhalb des Kontrollvolumens. Im 2-D z.B.:
( )nwneswseewnsPP qqqqqqqqqyx
Q ++++++++∆∆
≈ 44441636
4.Ordnung genau
IV.4 Interpolation der Konvektions- und Diffusionsflüsse
• Um die Flüsse an den Randflächen berechnen zu können, müssen die Berechnungsgrößen durch die Knotenpunktwerte angenähert werden
• Verwendet man nur einen Punkt, so nennt man dies ein Upwind-Schema
• Verwendet man zwei Punkte, so nennt man dies ein Zentrale-Differenzen-Schema
• Verwendet man drei Punkte, so nennt man dies ein Quadratisches Upwind-Schema
• Verwendet man mehr als drei Punkte, so nennt man dies ein Schema höherer Ordnung
Das Upwind-Schema ist 1.Ordnung genau. Es ist dem Vorwärts- bzw. Rückwärts-Differenzen-Verfahren 1.Ordnung der FDM äquivalent.
IV.4.1 Upwind-Schema
( )( )
<⋅→>⋅→
=00
eE
ePe nu
nurrrr
φφ
φ 1.Ordnung genau
IV.4.1 Upwind-Schema
Upwind-Schema ist numerisch diffusiv. Die Taylor-Reihenentwicklung um den Punkt „p“ für :
Hx
xxx
xxP
Pe
PPePe +
∂∂−
+
∂∂
−+= 2
22
2)(
)(φφ
φφ
0)( >⋅ enurr
Abbruchfehler ist proportional zur 1. Ableitung. Man nennt ihn daher numerische, künstliche oder falsche Diffusion.
Die numerische Diffusion ist bei mehrdimensionalen Problemen noch größer, weil zusätzlich zur Diffusion in Strömungsrichtung noch diejenige in Normalenrichtung hinzukommt
Das Upwind-Schema erfordert sehr feine Gitter, um akkurate Lösungen zu erhalten
ee
de x
f
∂∂
Γ=φ
2)( xu enum
e∆
=Γρ
IV.4.2 Zentrale-Differenzen-Schema
Beim Zentrale-Differenzen-Schema approximiert man den Wert an der Zellfläche durch eine lineare Interpolation der beiden nächsten Nachbarn:
)1( ePeEe λφλφφ −+=
Abbruchfehler ist 2. Ordnung genau.
PE
Pee xx
xx−−
=λ
Hx
xxxx
P
eEPeePeEe +
∂∂−−
−−+= 2
2
2))((
)1(φ
λφλφφ
Die Annahme einer linearen Verteilung der Werte zwischen P und E führt zu einer einfacheren Approximation der Ableitung in den Diffusionsflüssen:
PE
PE
e xxx −−
≈
∂∂ φφφ
2.Ordnung genau
IV.4.3 Quadratisches Upwind-Schema (QUICK)
Für eine quadratische Interpolation des Randwerts benötigt man drei Punkte. Diese werden so gewählt, dass in Stromaufrichtung zwei Punkte und ein weiterer Punkt stromab gewählt werden:
<→−+−+>→−+−+
=0)()(0)()(
43
21
xEEEEPE
xWPPEPe ugg
uggφφφφφφφφφφ
φ
Hx
x
P
WEPe +
∂∂∆
−−+= 3
33
48)(3
81
83
86 φ
φφφφ
Das Schema ist 3.Ordnung genau für äquidistante und nicht-äquidistante Gitter:
))(())((
1WEPE
WePe
xxxxxxxx
g−−−−
=))((
))((2
WEWP
eEPe
xxxxxxxx
g−−−−
=
))(())((
3EEPEP
EEeEe
xxxxxxxx
g−−−−
= ))(())((
4EEPEEE
ePEe
xxxxxxxx
g−−−−
=
IV.5 Implementierung der Randbedingungen
An den physikalischen Rändern muss man bei der FVM Flüsse vorgeben.
• direkte Vorgabe, wenn bekannt (z.B. Massen- bzw. Wärmeflüsse)
• Berechnung aus Kombinationen von Randwerten und inneren Strömungswerten
Üblicherweise gibt man folgende Randbedingungen vor:
• An den Wänden: Massenflüsse zu Null setzen, Wärmeflüsse vorgeben (adiabate Wand: Wärmefluss Null vorgeben)
• An Einströmrändern: Geschwindigkeiten, Temperaturen und Drücke setzen
• An Ausströmrändern: Geschwindigkeiten und Temperaturen meist extrapolieren, Druck setzen
• An Symmetrierändern: alle Flüsse normal zum Rand Null setzen
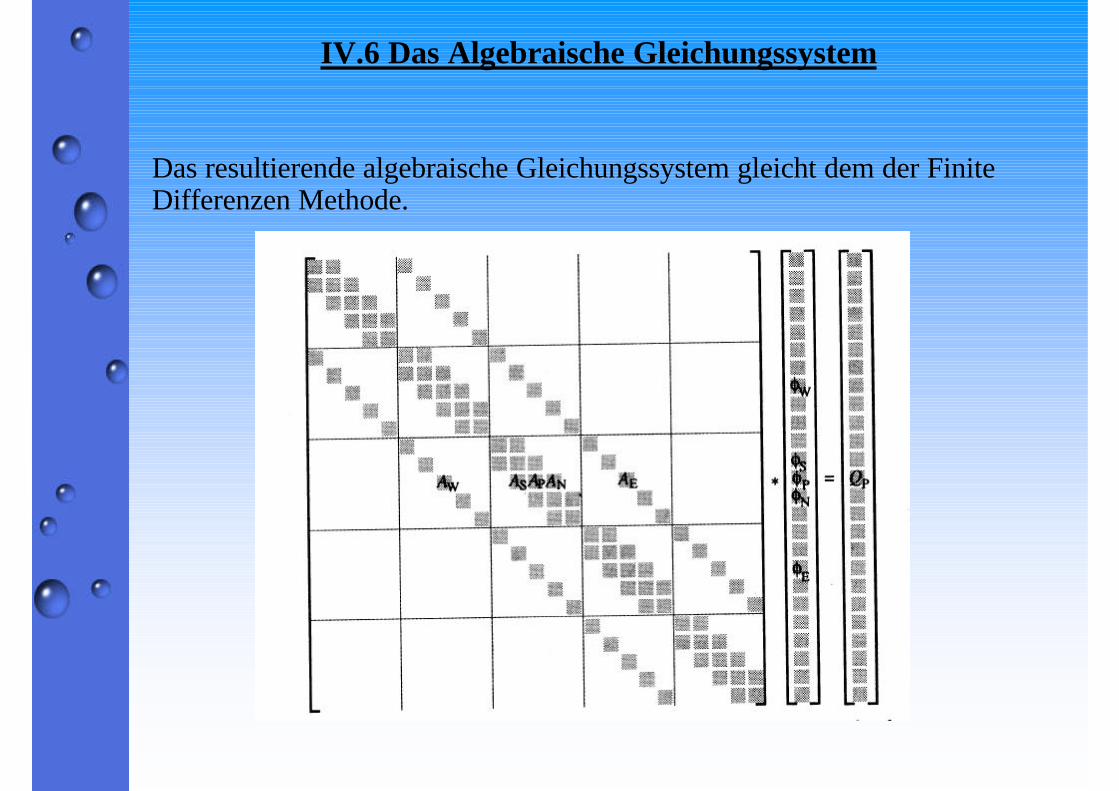
IV.6 Das Algebraische Gleichungssystem
Das resultierende algebraische Gleichungssystem gleicht dem der Finite Differenzen Methode.
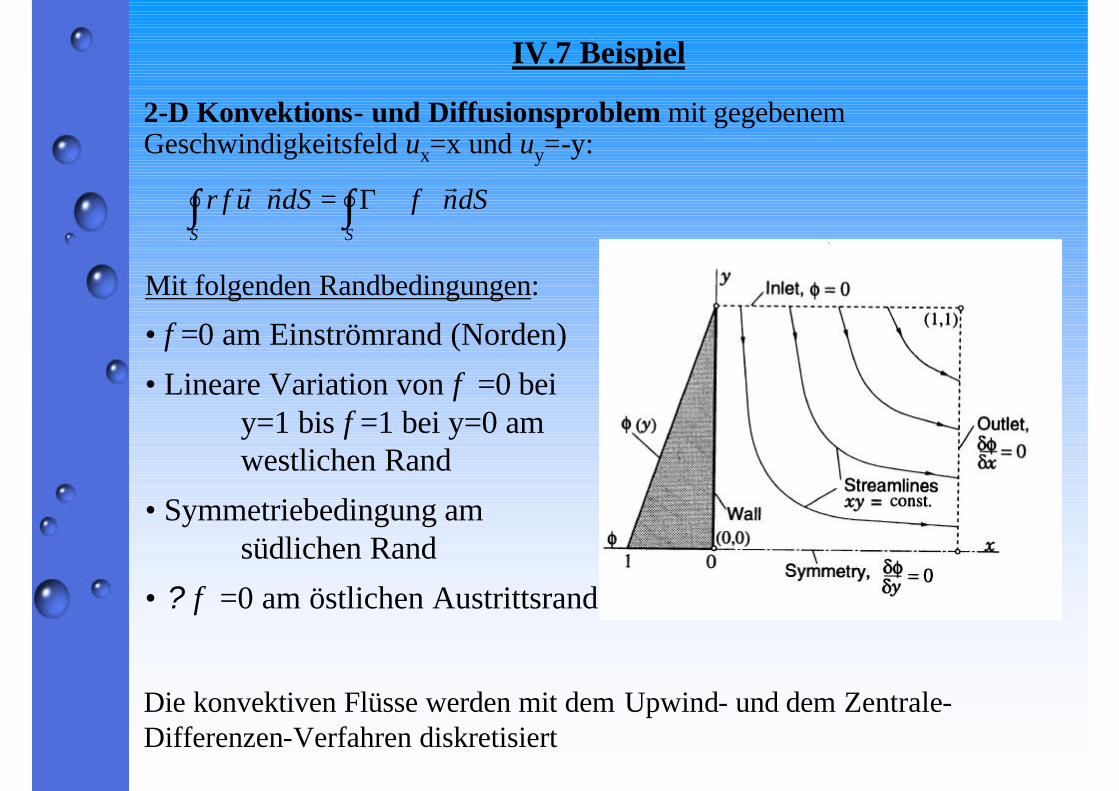
IV.7 Beispiel
2-D Konvektions- und Diffusionsproblem mit gegebenem Geschwindigkeitsfeld ux=x und uy=-y:
∫ ∫ ⋅∇⋅Γ=⋅S S
dSndSnurrr
φρφ
Mit folgenden Randbedingungen:
• φ=0 am Einströmrand (Norden)
• Lineare Variation von φ =0 bei y=1 bis φ=1 bei y=0 am westlichen Rand
• Symmetriebedingung am südlichen Rand
• ? φ =0 am östlichen Austrittsrand
Die konvektiven Flüsse werden mit dem Upwind- und dem Zentrale-Differenzen-Verfahren diskretisiert
IV.7 Fortsetzung
Der konvektiver Fluss setzt sich zusammen aus dem Massenfluss und dem mittleren Wert von φ (hier am Rand e diskretisiert):
∫ ≈⋅=S
eec
e mdSnuF φρφ &rr
Dieser Fluss wird wie folgt diskretisiert:
→+−→+
=CDSmm
UDSmmF
EeePee
EePece φλφλ
φφ&&
&&
)1()0,min()0,max(
Der diffusive Fluss wird mit der Mittelpunktsregel und zentralen Differenzen approximiert:
yxx
yx
dSnFPE
PE
S e
de ∆
−−
Γ=∆
∂∂
Γ≈⋅∇⋅Γ= ∫φφφ
φr
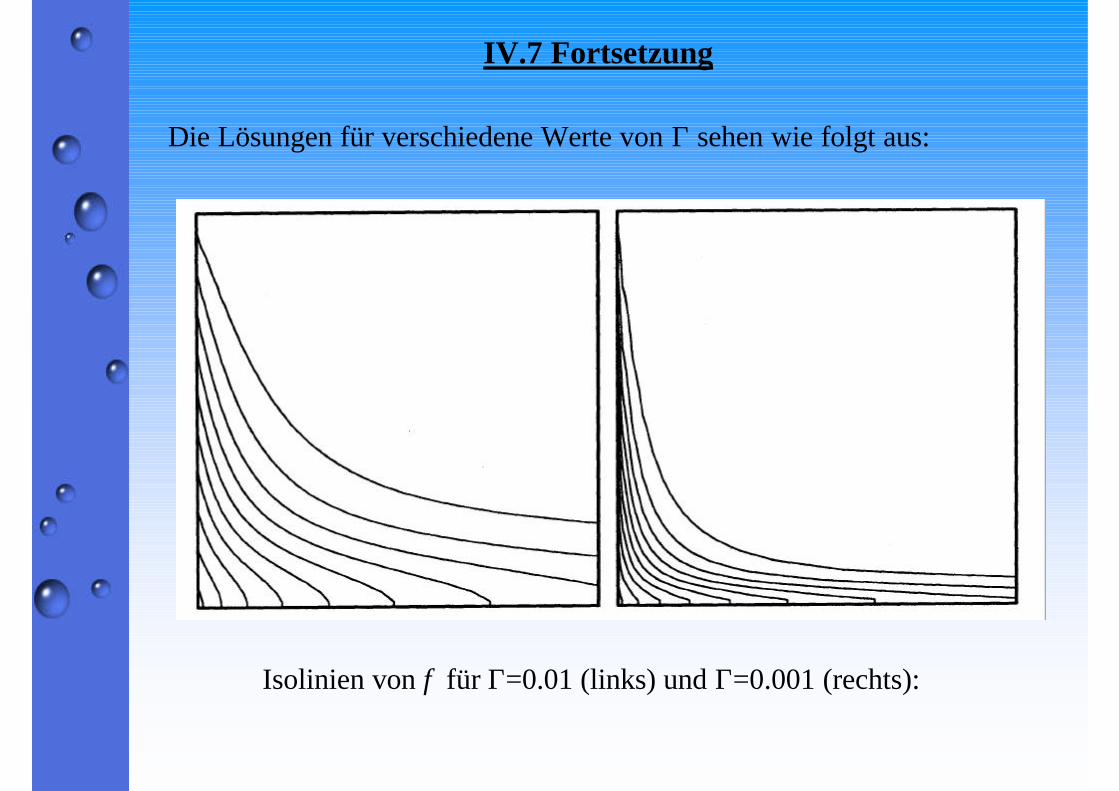
IV.7 Fortsetzung
Die Lösungen für verschiedene Werte von Γ sehen wie folgt aus:
Isolinien von φ für Γ=0.01 (links) und Γ=0.001 (rechts):
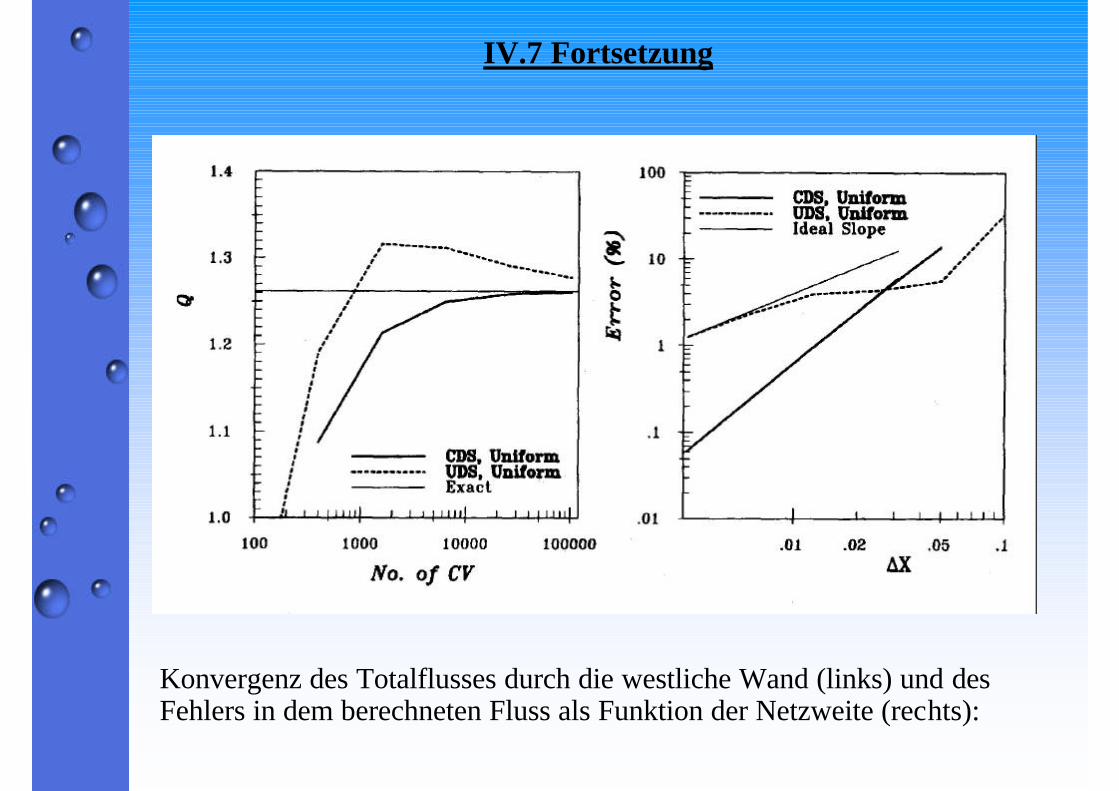
IV.7 Fortsetzung
Konvergenz des Totalflusses durch die westliche Wand (links) und des Fehlers in dem berechneten Fluss als Funktion der Netzweite (rechts):
V. Lösungsalgorithmen für lineare Gleichungssysteme
• V.1 Direkte Methoden
• V.2 Iterative Methoden
• V.2.1 Unvollständige LU-Zerlegung
• V.2.2 ADI-Methode
• V.2.3 Runge-Kutta-Methode
• V.2.4 Mehrgitter-Methode
• V.3 Gekoppelte Gleichungssysteme
• V.4 Nichtlineare Gleichungen
• V.5 Methoden für instationäre Probleme
• V.5.1 Zweischritt-Verfahren
• V.5.2 Mehrschritt-Verfahren
• V.5.3 Implizite Verfahren
V.1 Direkte Methoden
Direkte Methoden können für beliebige, vollbesetzte Matrizen verwendet werden und liefern exakte Lösungen. Sind aber nicht effizient: Operationen zu Lösung des LGS ~ n3/3 (Gauß‘sches Verfahren) bzw. ~ n2/2 (LU-Zerlegung).
• Gaußsches Eliminationsverfahren
• LU-Zerlegung
• Thomas Algorithmus
Q=φA
LGS mit Koeffizientenmatrix A:
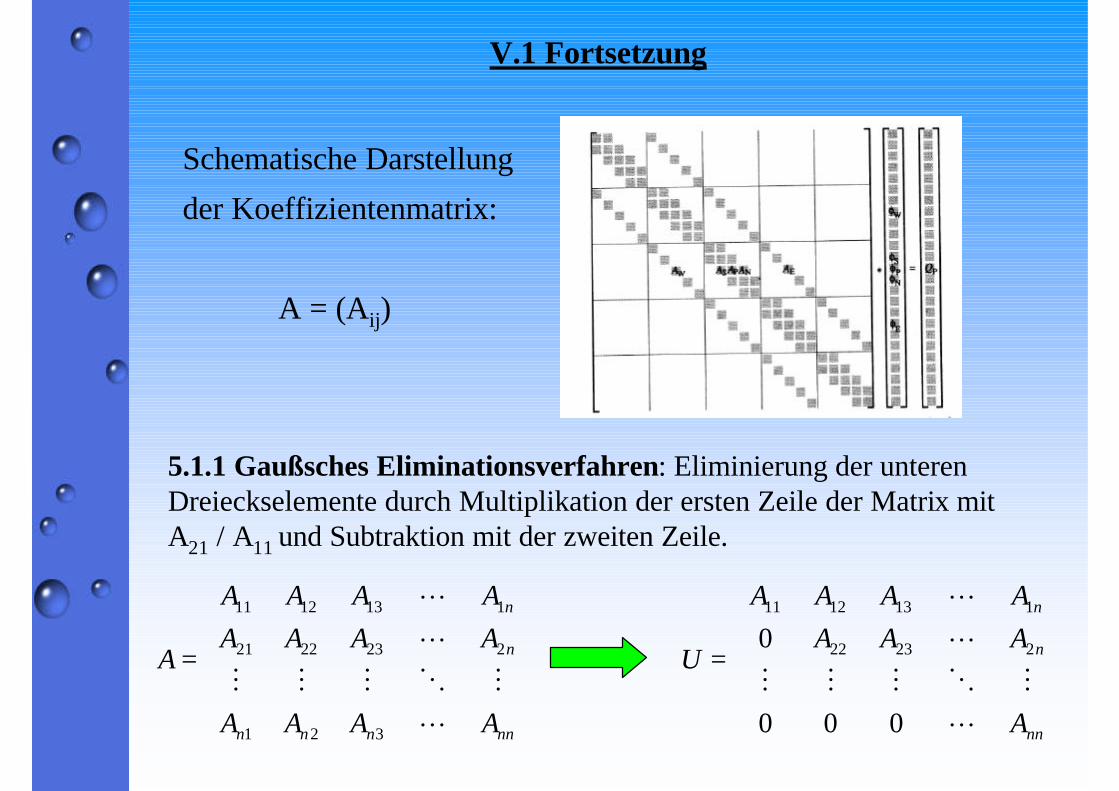
V.1 Fortsetzung
5.1.1 Gaußsches Eliminationsverfahren: Eliminierung der unteren Dreieckselemente durch Multiplikation der ersten Zeile der Matrix mit A21 / A11 und Subtraktion mit der zweiten Zeile.
=
nnnnn
n
n
AAAA
AAAAAAAA
A
LMOMMM
LL
321
2232221
1131211
=
nn
n
n
A
AAAAAAA
U
LMOMMM
LL
000
0 22322
1131211
Schematische Darstellung
der Koeffizientenmatrix:
A = (Aij)
V.1.2 LU-Zerlegung
Bei der LU-Zerlegung wird die volle Matrix A in eine untere (lower) Dreiecksmatrix L und in eine obere (upper) Dreiecksmatrix U zerlegt A=LU.
QYY
==
LUφ
Vorteil: gegenüber Gauß‘schem Eliminationsverfahren kann die Faktorisierung ohne die Kenntnis des Vektors Q durchgeführt werden. Der Aufwand ist proportional n2/2.
Nachteilig: dieses Verfahren ist, genau wie das Gauß‘scheEliminationsverfahren, nicht parallelisierbar oder vektorisierbar.
Aber: Varianten der LU-Zerlegung eignen sich gut für iterative Verfahren
V.1.3 Thomas Algorithmus
Wenn die Matrix A die Form einer tridiagonalen Bandmatrix hat (streng genommen nur bei 1-D Problemen), dann ist das Gauß‘scheEliminationsverfahren sehr effizient (~ n) und einfach.
1
1
−
−
−= iP
iE
iWi
PiP A
AAAA
1
*1*
−−−= i
P
iiW
ii AQA
QQiP
iiEi
i AAQ 1
*−−
=φ
φ
Dieses Verfahren wird im angelsächsischen Sprachraum auch TridiagonalMatrix Algorithm (TDMA) genannt. Einige (iterative) Lösungsverfahren nutzen diese Vorteile des Verfahrens durch Reduktion des Problems in eines mit Tridiagonalstruktur.
iiiEi
iPi
iW QAAA =++ +− 11 φφφ
V.2 Iterative Methoden
- Die Matrix A ist bei Strömungsproblemen leider nicht schwach besetzt: è direkte Lösungsmethoden eignen sich kaum.
- Der Diskretisierungsfehler ist üblicherweise viel größer als der Rundungsfehler durch die Computerarchitektur: è Lösung von Strömungsproblemen durch Iterative Methoden sinnvoll.
Iterative Methoden: Eine angenäherte Anfangslösung wird sukzessive durch eine verbesserte Zwischenlösung ersetzt, bis sich die Lösung „nicht“ mehr ändert.
nn QA ρφ −= hierbei ρn = Residuum
Der Konvergenzfehler εn = φ−φnnnA ρε =
Gegen Ende des Iterationsprozesses: das Residuum muss gegen Nullgehen. Dazu kann man ein iteratives Schema folgendermaßen schreiben:
BNM nn +=+ φφ 1
V.2 Fortsetzung
Da bei Konvergenz φn+1 = φn = φ ist, folgt daraus:
NMA −=
Ein iteratives Schema wird effektiv, wenn die Invertierung der Matrix Mund die Berechnung von Nφn einfach ist.
Das bedeutet: die Matrix M sollte diagonal, tridiagonal, block-tridiagonaloder eine Dreiecksform haben.
Für gute Konvergenzeigenschaften sollte M eine gute Approximation von A sein und N verhältnismäßig „klein“.
nnn NMBM φφφ )()( 1 −−=−+
QB =und
V.2 Fortsetzung
Konvergenz:
Bei Konvergenz φn+1 = φn = φ: è
Subtraktion dieser Gleichung von der Gleichung bei der n-ten Iteration liefert:
nn NM εε =+1
BNM += φφ
Ein Iteratives Verfahren konvergiert wenn
nn NM εε 11 −+ =oder
.0lim =∞→
n
nε
Dies hängt bei den LGS von den Eigenwerten und den Eigenvektoren der Iterationsmatrix (M-1N) ab. Sie sind wie folgt definiert:
kk
kNM Ψ=Ψ− λ1k=1,...,K mit K = Zahl der Gleichungen
V.2 Fortsetzung
Der Anfangsfehler sei:
Der Iterationsprozess liefert dann:
∑=
=K
k
kka
1
0 ψε
Durch vollständige Induktion kann man dann leicht zeigen, dass der Konvergenzfehler εn:
∑ ∑= =
−− Ψ===K
k
K
k
kkk
kk aaNMNM
1 1
1011 λψεε
∑=
=K
k
knkk
n a1
)( ψλε
Damit das iterative Verfahren konvergiert, müssen alle Eigenwerte kleiner eins (?k < 1) sein.
V.2 Fortsetzung
Der Konvergenzfehler wird nach einer Anzahl von Iterationen durch den größten Eigenwert dominiert, den Spektralradius λ1:
Def. Konvergenz: Die Reduktion des Konvergenzfehlers bis unter eineSchranke δ.
è
111 )(~ Ψnn a λε
Auflösen nach der benötigten Anzahl von Iterationen:
1
1
ln
ln
λ
δ
≈a
n
Man erkennt, dass die Konvergenzrate (~ 1/n) kleiner wird (n wird größer) für λ1à 1.
δλ ≈na )( 11
V.2 Fortsetzung
Ein einfaches Beispiel für eine Gleichung zeigt:
Löst man diese Gleichung mit einem iterativen Verfahren (p=Iterationszähler):
bax =
Dann erhält man für den Konvergenzfehler ε:
Man erkennt, dass der Konvergenzfehler schneller kleiner wird je kleiner das Verhältnis n/m wird.
bnxmx pp +=+1
pp
mn
εε =+1
V.2 Fortsetzung
Die einfachste Methode für ein iteratives Verfahren: die Jacobi-Methode. - Approximation der Matrix M durch eine Diagonalmatrix mit den Diagonalelementen von A.
- Beispiel hier: die Laplace-Gleichung mit zentralen Differenzen.
P
nEE
nNN
nWW
nSSpn
P A
AAAAQ φφφφφ
−−−−=+1
Diese Methode ist sehr langsam und wird daher in dieser Form nicht verwendet. Eine Variante davon wird als SOR-Verfahren (successiveover-relaxation) bezeichnet. Diese ist viel effizienter.
Der Relaxationsfaktor ω bestimmt die Konvergenzrate. Es gibt immer ein optimales ω welches für ein gegebenes Problem die Konvergenzrate minimiert. Leider kann man es nicht a priori bestimmen.
nP
P
nEE
nNN
nWW
nSSpn
P A
AAAAQφω
φφφφωφ )1(
111 −+
−−−−=
+++
V.2.1 Unvollständige LU-Zerlegung (SIP)
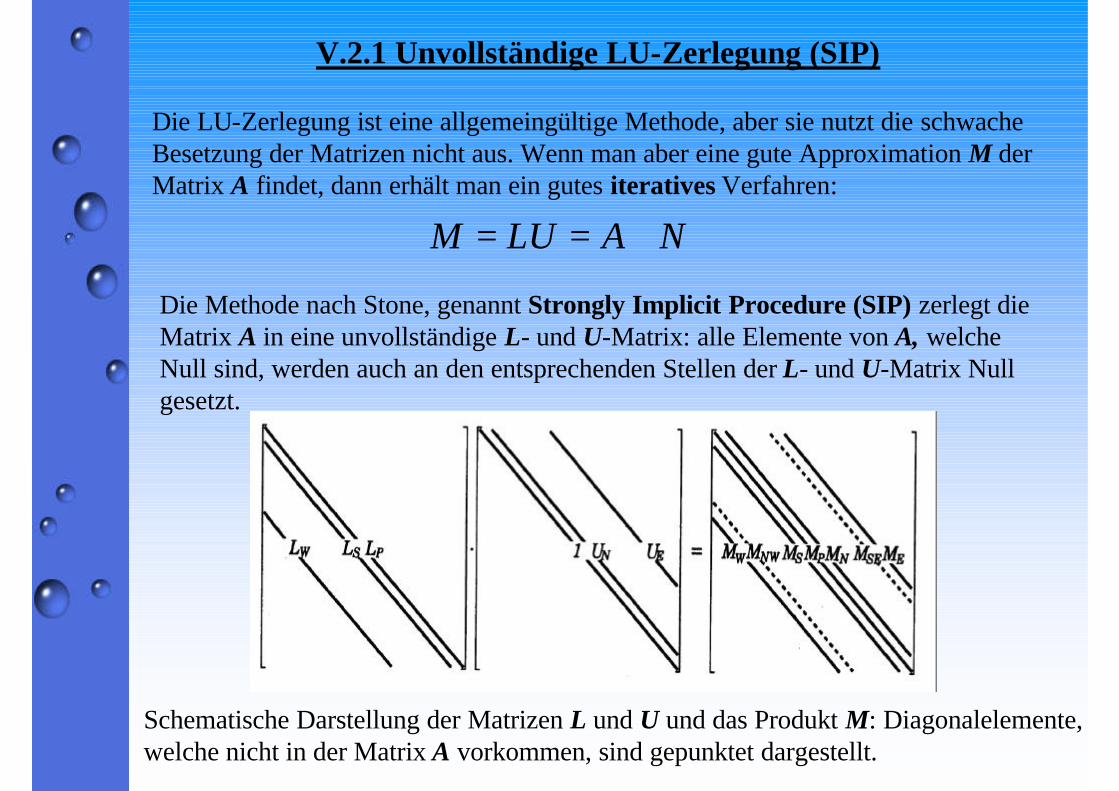
Die LU-Zerlegung ist eine allgemeingültige Methode, aber sie nutzt die schwache Besetzung der Matrizen nicht aus. Wenn man aber eine gute Approximation M der Matrix A findet, dann erhält man ein gutes iteratives Verfahren:
Die Methode nach Stone, genannt Strongly Implicit Procedure (SIP) zerlegt die Matrix A in eine unvollständige L- und U-Matrix: alle Elemente von A, welche Null sind, werden auch an den entsprechenden Stellen der L- und U-Matrix Null gesetzt.
NALUM +==
Schematische Darstellung der Matrizen L und U und das Produkt M: Diagonalelemente, welche nicht in der Matrix A vorkommen, sind gepunktet dargestellt.
V.2.2 ADI (Alternating Direction Implicit)-Methode
Eine weit verbreitete Vorgehensweise zur Lösung von stationären, elliptischen oder hyperbolischen Problemen ist die Erweiterung der Gleichungen mit einem instationären Term. Bei diesem dann parabolischen Problem fällt der Zusatzterm im auskonvergierten Zustand heraus (à 0). Man erhält die Lösung des Ausgangsproblems.
Beispiel: Laplace-Gleichung:
Die Zeitableitung muss z.B. mit einer Vorwärtsdifferenz in der Zeit diskretisiertwerden. Benutzt man das Crank-Nicolson-Verfahren (=Trapezregel bei PDEs), so ergibt sich:
∂∂
+∂∂
Γ=∂∂
2
2
2
2
yxtφφφ
++
+
Γ=
∆− +++
2
12
2
12
2
2
2
21
2 yxyxt
nnnnnn
δφδ
δφδ
δφδ
δφδφφ
2,1,,1
2
2
)(
2
xxjijiji
∆
+−= −+ φφφ
δφδ
Wobei folgende Abkürzungen verwendet werden:
21,,1,
2
2
)(
2
yyjijiji
∆
+−= −+ φφφ
δφδ
V.2.2 Fortsetzung
Stellt man diese Gleichung um, so sieht man, dass folgendes Gleichungssystem gelöst werden muss:
( ) ( )
−Γ∆−
Γ∆+
Γ∆+
=
Γ∆−
Γ∆−
+
+
2
12
2
22
2
2
2
2
12
2
2
2
421
21
21
21
yxt
yt
xt
yt
xt
nnn
n
δφφδ
δδ
φδδ
δδ
φδδ
δδ
n
yt
xt
φδδ
φδδ
Γ∆+=
Γ∆− 2
2*
2
2
21
21
Da gilt , ist der letzte Term proportional ∆t3 und kann vernachlässigt werden. Der Rest kann dann in zwei einfachere Gleichungen faktorisiert werden und durch die effiziente Thomas-Methode berechnet werden.
ttnn ∂∂∆≈−+ /1 φφφ
*2
21
2
2
21
21 φ
δδ
φδδ
Γ∆+=
Γ∆− +
xt
yt n
V.2.3 Runge-Kutta-MethodeDie klassische Runge-Kutta-Methode ist eine Mehrschritt-Methode für instationäreProbleme. Jameson et al. haben sie dahingehend modifiziert, um sie auch für stationäre Probleme verwenden zu können. Dazu haben sie die Stabilität des Verfahrens auf Kosten der Genauigkeit erhöht.
Für die Laplace-Gleichung: ( )nRyxt
φφφφ
=
∂∂
+∂∂
Γ=∂∂
2
2
2
2
mji
nji
m
jimji
mji
jijiji
jijiji
njiji
Rt
Rt
Rt
,1
,
1
,
0,,
1
,2
0,
2,
0
,1
0,
1,
,0,
φφ
αφφ
αφφ
αφφ
φφ
=
Ω∆
−=
Ω∆
−=
Ω∆
−=
=
+
−
M
è
)(
1
:
1
1
1
kk
m
kk
m
k
kk
nn
RR
wobei
Konsistenz
Rt
φ
β
βφφ
=
=
∆+=
∑
∑
=
=
+
V.2.3 Fortsetzung
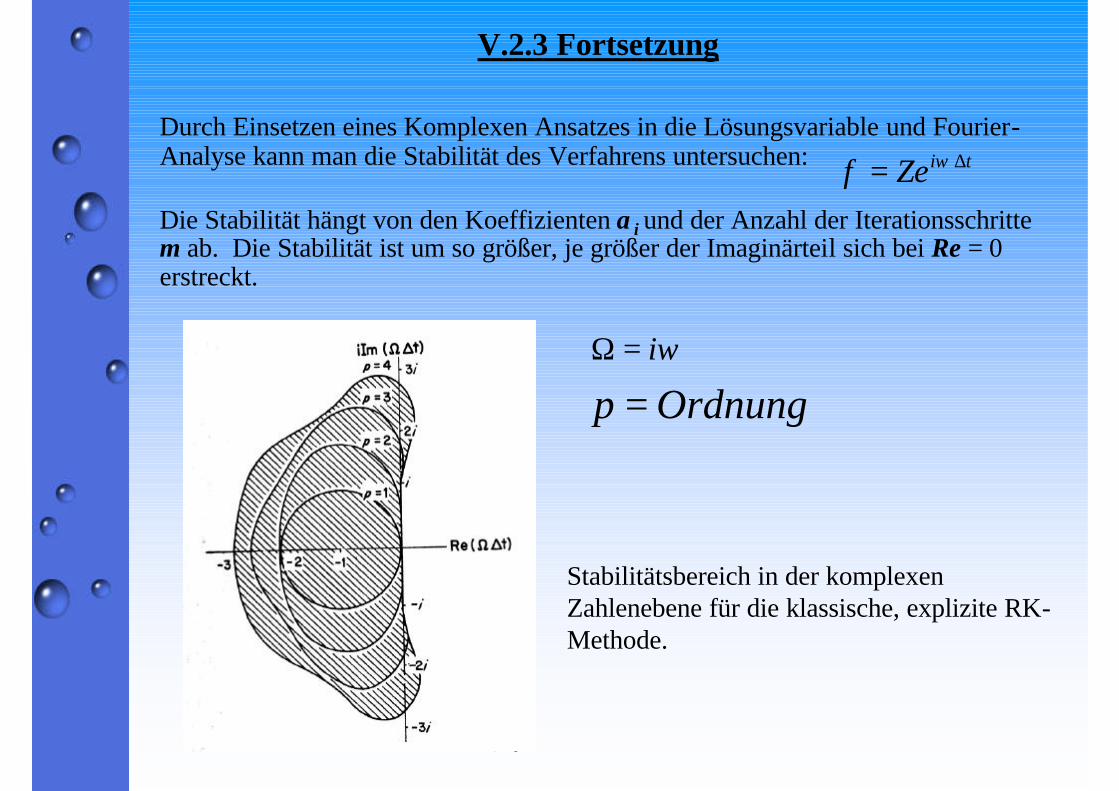
Durch Einsetzen eines Komplexen Ansatzes in die Lösungsvariable und Fourier-Analyse kann man die Stabilität des Verfahrens untersuchen:
Die Stabilität hängt von den Koeffizienten αi und der Anzahl der Iterationsschritte m ab. Die Stabilität ist um so größer, je größer der Imaginärteil sich bei Re = 0 erstreckt.
Stabilitätsbereich in der komplexen Zahlenebene für die klassische, explizite RK-Methode.
tiZe ∆⋅= ωφ
ωi=Ω
Ordnungp =
V.2.4 Mehrgitter-Methode
- Verwendung unterschiedlich stark verfeinerter Gitter zur Konvergenzbeschleunigung
-- Konvergenzbeschleunigung = beschleunigte Abnahme des Konvergenzfehlers/Residuums
nn
nn
mitA
φφε
ρε
−=
= Voraussetzung:
- Konvergenzfehler ist stetige Funktion der Netzweite; z.B. SIP-Verfahren
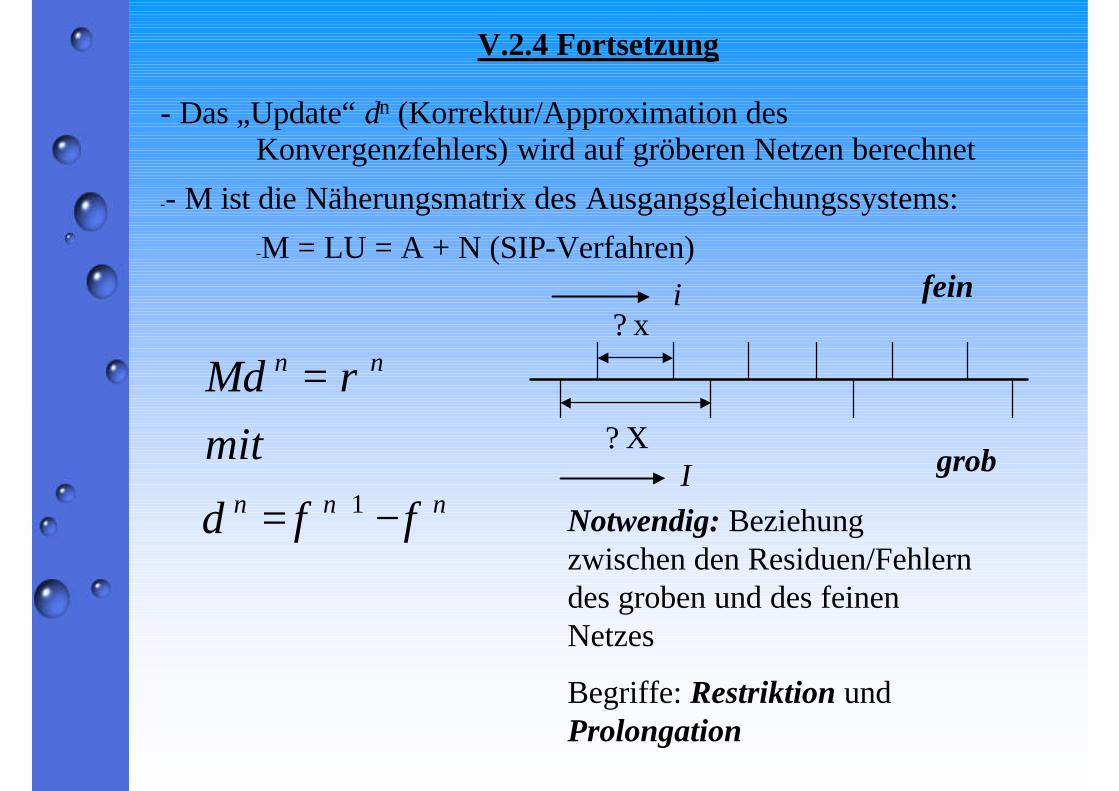
V.2.4 Fortsetzung
- Das „Update“ dn (Korrektur/Approximation des Konvergenzfehlers) wird auf gröberen Netzen berechnet
-- M ist die Näherungsmatrix des Ausgangsgleichungssystems:
-M = LU = A + N (SIP-Verfahren)
nnn
nn
mitM
φφδ
ρδ
−=
=
+1
? X
? xfein
grob
Notwendig: Beziehung zwischen den Residuen/Fehlern des groben und des feinen Netzes
Begriffe: Restriktion und Prolongation
I
i
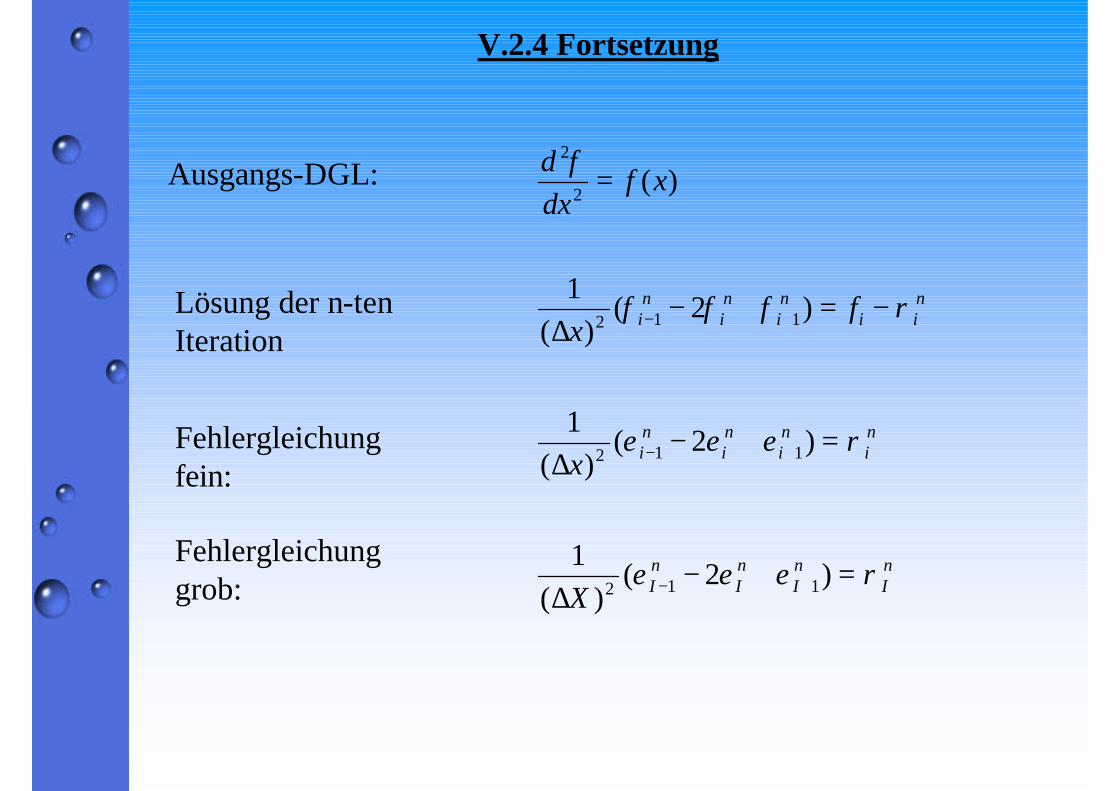
V.2.4 Fortsetzung
nI
nI
nI
nI
ni
ni
ni
ni
nii
ni
ni
ni
X
x
fx
xfdxd
ρεεε
ρεεε
ρφφφ
φ
=+−∆
=+−∆
−=+−∆
=
+−
+−
+−
)2()(
1
)2()(
1
)2()(
1
)(
112
112
112
2
2Ausgangs-DGL:
Lösung der n-tenIteration
Fehlergleichung fein:
Fehlergleichung grob:
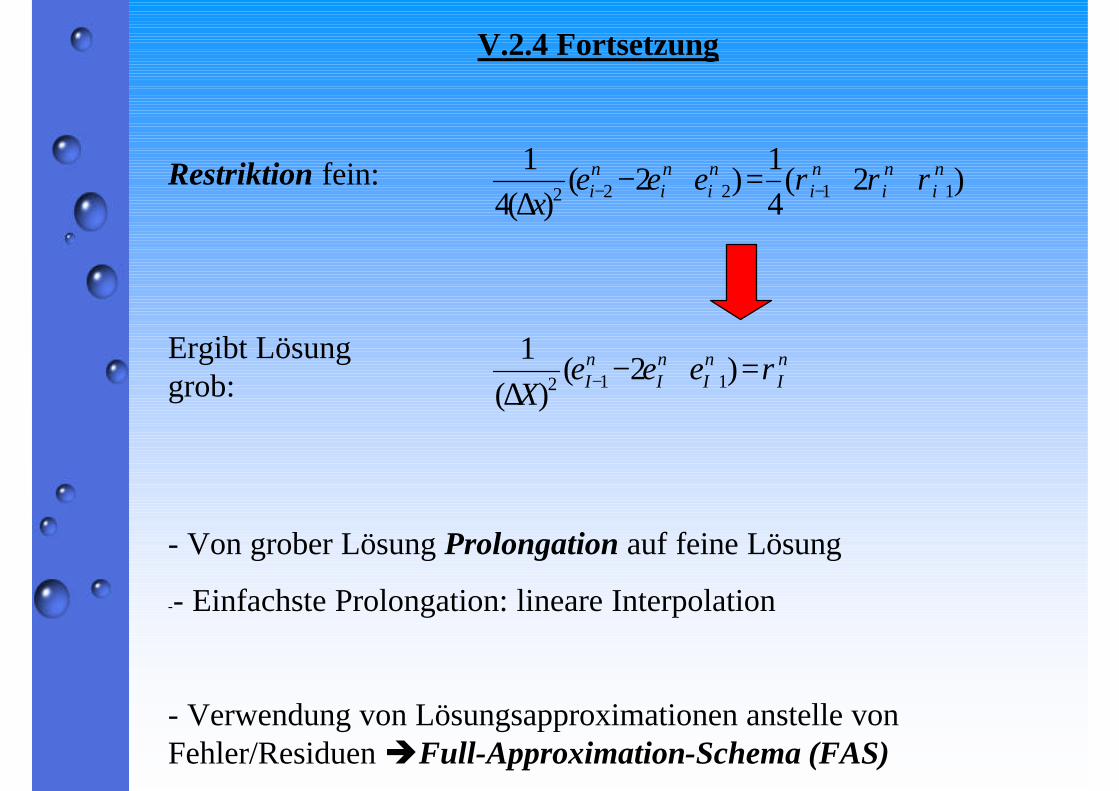
V.2.4 Fortsetzung
nI
nI
nI
nI
ni
ni
ni
ni
ni
ni
X
x
ρεεε
ρρρεεε
=+−∆
++=+−∆
+−
+−+−
)2()(
1
)2(41
)2()(4
1
112
11222Restriktion fein:
Ergibt Lösung grob:
- Von grober Lösung Prolongation auf feine Lösung
-- Einfachste Prolongation: lineare Interpolation
- Verwendung von Lösungsapproximationen anstelle von Fehler/Residuen èFull-Approximation-Schema (FAS)
V.2.4 Fortsetzung
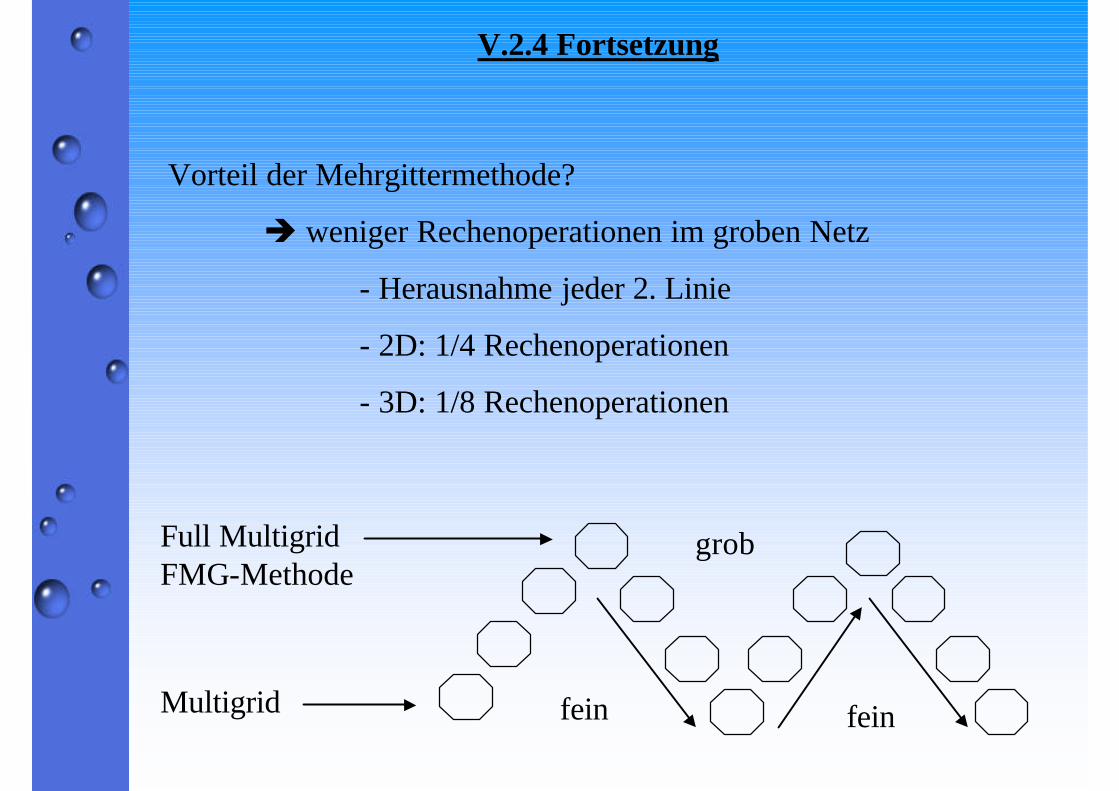
Vorteil der Mehrgittermethode?
è weniger Rechenoperationen im groben Netz
- Herausnahme jeder 2. Linie
- 2D: 1/4 Rechenoperationen
- 3D: 1/8 Rechenoperationen
fein
grob
feinMultigrid
Full MultigridFMG-Methode
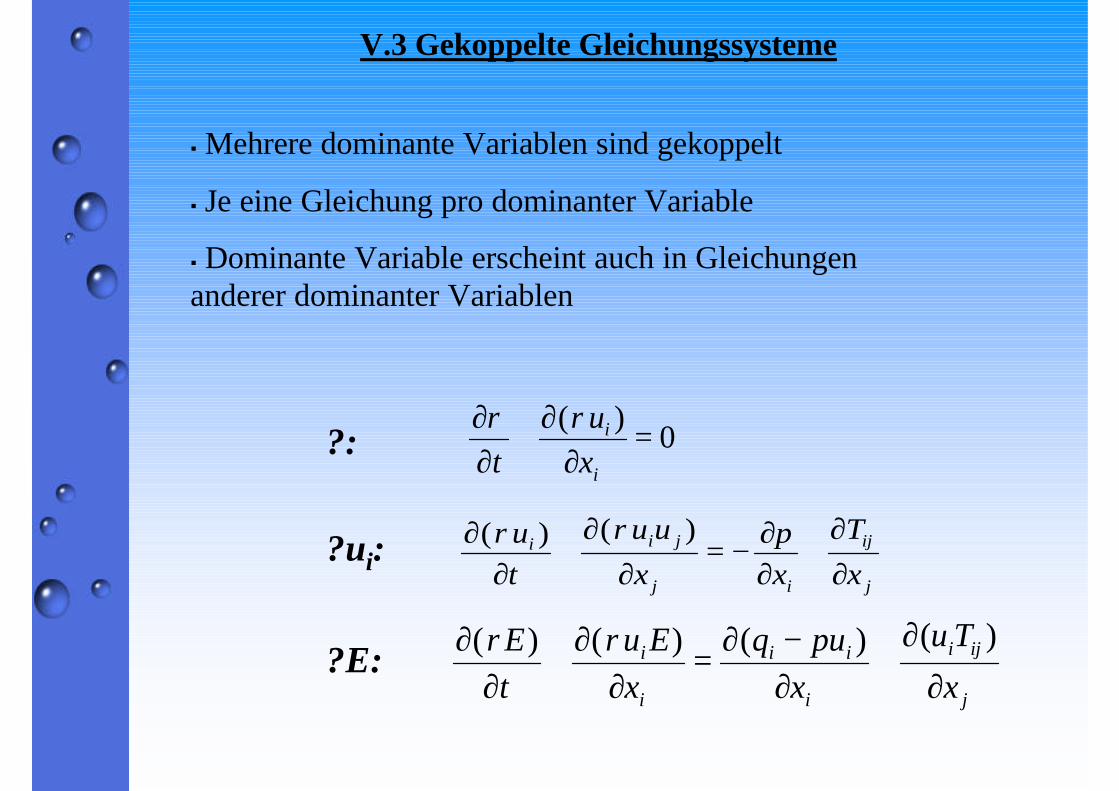
V.3 Gekoppelte Gleichungssysteme
§ Mehrere dominante Variablen sind gekoppelt
§ Je eine Gleichung pro dominanter Variable
§ Dominante Variable erscheint auch in Gleichungen anderer dominanter Variablen
j
ij
ij
jii
x
T
xp
x
uu
tu
∂∂
+∂∂
−=∂
∂+
∂∂ )()( ρρ
j
iji
i
ii
i
i
x
Tu
xpuq
xEu
tE
∂
∂+
∂−∂
=∂
∂+
∂∂ )()()()( ρρ
0)(
=∂
∂+
∂∂
i
i
xu
tρρ
?:
?ui:
?E:
V.3 Fortsetzung
Lösungsverfahren:
§ simultane Lösung aller Variablen
§ sequentiell: jede Gleichung wird nach der dominanten Variable gelöst, alle anderen sind temporär „bekannt“; danach Iteration durch die Gleichungen
1. Simultan
§ Alle Gleichungen in ein LGS pressen
§ Problem der Fluiddynamik: blockgebundene Matrizenstruktur
§ Sehr teuer in 3D und bei nicht-linearen Anteilen
V.3 Fortsetzung
2. Sequentiell
§ bei nicht-linearen Anteilen besonders geeignet
§ Lösung der einzelnen Gleichungen nach einer Variablen
§- ultimative Genauigkeit nicht angestrebt da ineffektiv
§- „innere Iterationen“
§ Lösung angestrebt, die alle Gleichungen hinreichend erfüllt
§- update der Koeffizientenmatrizen und der Quellvektoren nach jedem Zyklus
§- ein Zyklus geht einmal über alle Gleichungen
§- ein Zyklus: „äußere Iteration“
§- Multigrid-Methode für innere und äußere Iterationen anwendbar
V.3 Fortsetzung
2. Sequentiell - Fortsetzung
§ Problem: Lösungen konvergieren nicht, sondern schaukeln sich auf, die Berechnung wird instabil
§ Ansatz: Jede Variable darf sich pro äußerer Iteration nur um einen bestimmten Faktor ändern
§è Under-Relaxation Methoden:
)( 11 −− −+=
=+ ∑
nnewnn
lp
nll
nPp
wobei
QAA
φφαφφ
φφ
φ
10:<< φα
Faktor
V.4 Nichtlineare Gleichungen
§ Nichtlineare Gleichungen enthalten nichtlineare Terme: z.B. ?uiuj
§ Typische Methode: Newton-Iteration èanalog zur Nullstellensuche einer nicht-linearen Funktion einer Variable wird bei mehrere Variablen vorgegangen
§ Taylor-Reihe mehrerer Variablen:
j
kn
kki
n
j
kj
kj
kn
kki
ni
xxxxf
xxxxxf
xxxf
∂∂
−+=
=
∑=
+ ),...,,()(),...,,(
0),...,,(
21
1
121
21
V.4 Nichtlineare Gleichungen
-Komplizierte Berechnung, wenn
-- große Systeme wie bei Strömungsproblemen
-- implizite Berechnungsmethoden verwendet werden
Jacobi-Matrix des Systems:
j
kn
kki
ij xxxxf
a∂
∂=
),...,,( 21
Evaluation von n2 Elementen, Differentiation schwierig
V.4 Nichtlineare Gleichungen
-Beispiel konvektive Terme der Navier-Stokes-Gleichungen: Massenfluss aus äußerer Iteration bekannt
Andere Methoden: Picard Iteration
jiji uuuu 0)(ρρ ≈
-- Buchtip --
Buch:
Press, Vetterling, Teukolsky, Flannery:
Numerical Recipes [in Fortran 77/90, Pascal, C etc…]
„The Art of Scientific Computation“
Cambridge University Press





























