Embed Size (px)
Citation preview

Projekt der 4HTA

Projekt der 4HTA Seite 2
Inhalt Idee Konstruktion Ablauf der Fertigung
MEA – Fertigung „Mechanischer Bereich“
ETE – Elektronische Verkabelung SPS – Programmierung MB - Materialbeschaffung
Endprodukt Gesamte Fertigungsstraße Einzelnen Stationen

Projekt der 4HTA Seite 3
IDEEDie Idee entstand durch das Interesse an dem praxisnahen Aufbau von Fertigungsstrassen und durch die Entdeckung von ausrangierten Fertigungsstationen im Werkstättenbereich.

Projekt der 4HTA Seite 4
Konstruktion Zuerst haben wir alle
ausrangierten Teile in Proe Wildfire konstruiert um damit eine vernünftige Idee zur Zusammenstellung herauszufinden.

Projekt der 4HTA Seite 5
Ablauf der Fertigung MEA – Fertigung „Mechanischer
Bereich“ ETE – Elektronische Verkabelung SPS – Programmierung MB - Materialbeschaffung

Projekt der 4HTA Seite 6
MEA – Mechanischer Bereich Mitarbeiter: Steinböck Markus;
Popovic Damir; Tanzer Gerald;
Leiter: Senigl Christoph
Aufgabe: Sie waren für die Fertigung der gesamten Anlage (ausgenommen der ausrangierten Teile) zuständig.Sowie die Instandhaltung der einzelnen Stationen und deren pneumatischen Verbindungen.

Projekt der 4HTA Seite 7
ETE – Elektronische Verkabelung Leiter: Kuntner Patrick Mitarbeiter: Karlas Georgos;
Tschemernjak Georg; Aufgabe: Sie waren für die
Verkabelung der einzelnen Stationen sowie des Zentral Schaltkasten und der SPS zuständig.

Projekt der 4HTA Seite 8
SPS – Programmierung Leiter: Meißner Manuel Mitarbeiter: Annerl Patrick Aufgabe: Wir waren für die
Programmierung der SPS verantwortlich sowie der Programmierung des Panels und dem ACO POS.

Projekt der 4HTA Seite 9
Endprodukt Gesamte Fertigungsstraße Einzelnen Stationen

Projekt der 4HTA Seite 10
Gesamte Fertigungsstraße
Station 1
Station 2
Station 3
Station 4
Zentral-schaltkasten

Projekt der 4HTA Seite 11
Einzelne Stationen Station 1 (Dreharmroboter): Station 2 (Rollenbahn): Station 3 (Kipptisch): Station 4 (Hubtisch):

Projekt der 4HTA Seite 12
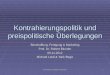
Station 1 (Dreharmroboter): Besteht aus 2 Teilen:
Materialtisch und Dreharmroboter.
Vom Materialtisch werden die zu bearbeitenden Platten weg gehoben.
Der Dreharmroboter bringt die Platte durch drehen um 180° auf die Station 2.
x
180°-Arm
90°-Arm
z

Projekt der 4HTA Seite 13
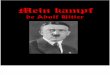
Station 2 (Rollenbahn): Diese Station
befördert die Platte von der Station 1 (Dreharmroboter) zur Station 3 (Kipptisch) durch das bewegen der Rollen.
Kleinverteiler
Motor

Projekt der 4HTA Seite 14
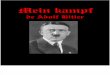
Station 3 (Kipptisch): Diese Station
nimmt die Platte durch kippen aus der Fertigungsstrasse heraus und fährt sie an eine Bohrmaschine heran. Danach geht sie wieder in die Ausgangsstellung zurück und befördert sie zu Station 4 weiter.
Spannzylinder
90°
Ventilinsel

Projekt der 4HTA Seite 15
Station 4 (Hubtisch): Diese Station
befördert die Platte von Station 3 in das Magazin.
Hubmodul

Projekt der 4HTA Seite 16
Ein Dankeschön an Direktor:
HR Dipl.-Ing. Dr. techn. Israiloff Peter Abteilungsvorstand:
Dipl. – Ing. Klaus Adamer Werkstättenleiter:
Ing. Dipl.– Päd. Posch Josef unserem Coach:
Dipl.-Ing. Dr. Zeinar Christian Sowie unseren Lehrern:
Dipl.-Ing. Dr. Reiterer MichaelDipl.-Päd. Gaudriot Peter, OSR. Dipl.-Päd. Gössinger Franz, OSR Dipl.-Päd Kapoun Gerhard, Dipl.-Päd. Meches Anton, Dipl.-Päd. Miksik Franz, Dipl.-Päd. Pflüger Gerhard, Dipl.-Päd. Schmidt Josef, Dipl.-Päd. Sulzer Gottfried, Dipl.-Ing. Dr. Leeb Klaus,

Projekt der 4HTA Seite 17
Sponsoren FESTO CSERNO PEPPERL & FUCHS HERON