Embed Size (px)
Citation preview
Angewandte Mechanik __ T 138
Unter Benutzung der Beziehungen zwischen den Verschiebungen und den Verzerrungen des verformten Elementes, der dquivalenzbedingungen zwischen den Spannungen und den Schnittlasten sowie der Gleichge. wichtsbedingungen erhiilt man dann das Gleichungssystem
A,(@, u',a,a', r)a" + A2(u, u', a, a', r ) u" = A,(u, u', a, a', r ) , B,(u, u',a,a',r) a" + Bg(u, u', &,a', r ) u" = B,(u, u',a, a', r) .
Eier kennzeichnen die Striche Ableitungen nach dem Radius r. Die Aufgabe wird demnach auf ein reinel Verschiebungsproblem zuriickgefuhrt. Durch den Qrenziibergang r + 0 iibeneugt man aich, daB im Platten. mittelpunkt (fiir r = 0) ~ ' ' ( 0 ) = 0 und a"(o) = 0 sind. AuSerdem gilt in der Plattenmitte aus Symmetriec griinden: u(o) = 0, a (o ) = 0. Also nur die QroSen u'(o), a ' (o) sind frei wahlbar.
Das gesamte Verschiebungsfeld, das durch u(r) und a(r) charakterisiert ist, ist demnach von zwei An. fangsparametern a l (o ) und d ( o ) abhangig; denn fur ein Wertepaar [a'(o), u'(o)] konnen wir das Qleichungs. system (2) mit E l f e z. B. des RnNoE-KnTTA-NYsTRoEM-verfahrens numerisch integrieren und die GriiDen O L ~ ,
a;, u4, u; fiir d = 1,2, , . . dR (R = Plattenrandpunkt) berechnen. AnschlieBend konnen wir die Schnith lasten ermitteln.
Die Bestimmung passender Werte ~ ' ( 0 ) und a'(o), fiir die die vorgegebenen Randbedingungen erfiillb aind, erfolgt auf numerischem Wege unter Benutzung der zweidimensionalen , ,regula falsi".
Das Verfahren konvergiert gut. Der Vergleich der auf diesem Wege gewonnenen Gsungen mit den speziellen, in der Literatur angegebenen Ergebnissen zeigt eine gute Obereinstimmung .
Uber das Problem wird demnlchst an anderer Stelle ausfiihrlich berichtet werden.
Literetur 1 J. MYSZKOWBKI, Verfahren zur Berechnung der elatdischen Grenzlast dunner Platten, Diss. TU Berlin 1063. 2 J. MYEZKOWSKI, Elastische Orenzlast d h n e r Stahlplatten und ihre experimentelle Untersuchung, Stahlbau Bd. 87, Heft 4,
3 Y. OHASHI and 8. Mwa~aaar: On the Elasto-plastic Bending of a Clamped Circular Plate under a Partial Circular Uniform
4 Y. OHASHI and 8. M-AMI, Elasto-plastic Bending of Thin Annular Plates, Bulletin of ISME Vol. 0, NO. 34, S. 271 -283
6 Y. OH~SEX and 6. MWAMI, The Elasto-plastic Bending of a Clamped Thin Circular Plate, Proceedings of t h e 1 lth Inter-
6 Y. OHILSHI, and S. MWBAKAMI, Large Deflection in Elastoplastic Bending of a Simply Supported Circular Plate Under
7 Y. OHASHI and S. MWBAKAMI, A. ENDO: Elasto-plastic Bending of nn AnnularPlate at Large Deflection, Ing. Arch. Bd. 85,
8 6. T ~ ~ ~ O S H E N K O and 8. WOINOWSEY-KRIE~ER, Theory of Plates and Shells, second edition, New York/Toronto/London, 1960
AmcArifl: Professor Dr.-Ing. JERZY MYSZKOWSKI, Technische Universitiit Berlin, 1 Berlin 12, Stral3e des 17. Jun i 136
8. 120-122 (1068).
Load, Bulletin of ISME Vol. 7 No. 27, 6.401-498 (1064).
(1066).
national Congress of Applied Mechanioa in Munich Gept. 1964, Berlin/Heidelberg/New York 1966 Springer-Verlag.
a Uniform Load, Journal of Applied Mechanics Vol. 88, No. 4, 8.866-870 (1966).
S. 340-360 (1966/67).
McGraw-Hill Book Comp.
ZAMM 60, T 138 - T 143 (1970)
Schalentheorie mit Schubverformungen in kovarianter Schreibweise l)
Von L. SCHMIEDER~)
Dic Gultigkeit einer von H. NEUBEB angegebenen Formel f i i r die kovariante Ableitung wird auf den ganzen Schalenraum ausgedehnt. Damit ist es mtjglich, den Verschiebungsvektor in eine Potenzreihe EU entwickeln und die Koeffizienten der linearen Glieder auf die Verkriimmungen und Schubverformungen der Mittelfliiche euriickzufuhren. Die elastische Energie wird uber die Schalendicke integriert, wobei die Momente der Spannungen auftreten. Das Stoffgesetz entateht dadurch, daB die Spannungen durch die Verformungen ausgedruckt werden. Die Genauigkeit der Theorie hiingt allein von der Zahl der die Potenzreihe bildenden Glieder ab. Zusiitzliche Hypotheeen sind nicht notwendig. Abbrechen der Potenzreihe nach dem line. aren Glied liefert Vbereinstimmung mit der auf die Schale angewandten bssmaTtheorie von W. GUNTHER. Dic Zahl der Spannungsfunktionen dieeer Theorie wird auf drei reduziert. Die Differentialgleichungen f k isotrope Schalen werden ange- geben. Sie enthalten die klwische Schalentheorie und eine eusiitzliche Cleichung fib die Schubverformungen, die fur Platten bereits 1044 von E. RIIISSNIUR angegeben worden war. Einfache Anwendungsbeispiele dienen eur Erliiuterung.
Die Normalen der Mittelflache bilden zusammen mit den beiden Kurvenscharen ua = const (a = 1,2) auf dcr Mittelflache selbst ein dreidimenaionales krummliniges Netz von Koordinatenlinien. Die kovariante Ableitung in diesem scheleneigenen Koordinatensystem (die ,,Raumableitung") wird auf der Mittelfliiche besonders einfach [l] :
1 (1) Pa UP* = !Da up* - b,B YS ; v 9 vpc = a3 vpo ;
V a kovariante Raumableitung nach ua, (2)
va Y8 = aav8 + baA vs ; v3 va = a, u~ ;
mit b& gemischter Haupttensor der Mittelflache,
V 8 !Da d = aaVl + Q,, tP kovariante Flkchenableitung einee Vektors.
kovariante Raumableitung nach w (Entfernung von der Mittelflache),
I ) Auszug &us einer Dissertation des Verfassers, vorgelegt an der TH-Miinchen, Juni 1968 *) Deutsche Forschungs- und Versuchsanstalt fur Luft- und Raumfahrt e.V. Oberpfaffenhofen.
T 139
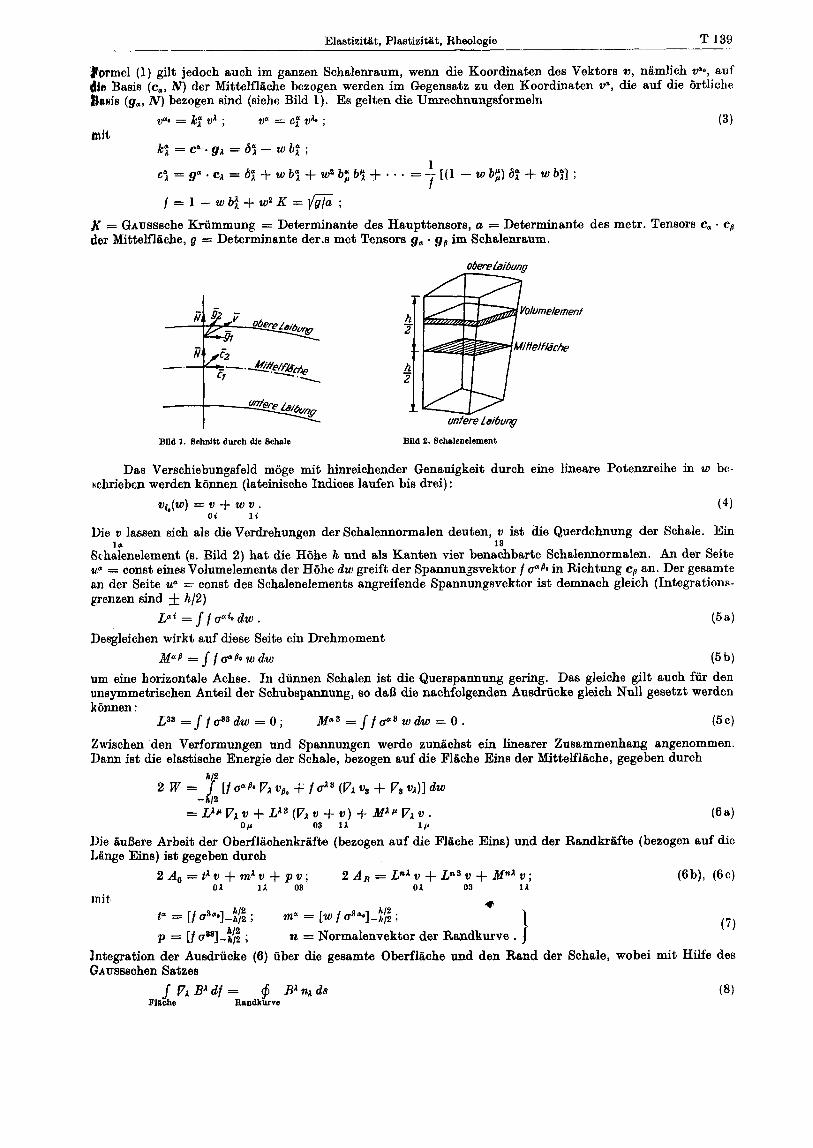
Rormel (1) gilt jedoch auch im ganzen Schalenraum, wenn die Koordinaten des Vektors v, namlich ~ P O , auf d h Basis (ca, N) der Mittelflache bezogen werden im aegensatz zu den Koordinaten 00, die auf die ortliche f b s i s (ga, N) bezogen sind (siehe Bild 1). Es gelten die Umrechnungsformeln
mit
-- Elastizitiit, Plastizitiit, Rheologie -
~a = ki ; va = c," V& ; (3)
k$ = ~ 1 * * 91 = 60, - w b," ; 1 e: = g u . g = 6", + w 60, + wa b;br; + . =-[( l - w b$)6," + w b f ] ; f
f = 1 - w b i + wa K = (6 ; K = Gausssche Kriimmung = Determinante des Haupttensors, a = Determinante des metr. Tensors c, - cp dor Mittelflache, g = Determ'nante der.s met Tensors ga . ge im Schalenraum.
h Y unfere faibuqg
2
Blld 1. Schnltt durch die Bchele Blld 2. Schelenelement
Das Verschiebungsfeld moge mit hinreichender Genauigkeit durch eine lineare Potenzreihe in w be- duieben werden konnen (lateinische Indices laufen bis drei) :
Vi#(W) = v + w 2 , . O i l i
(4)
Die v lassen sich als die Verdrehungen der Schalemormalen deuten, v ist die Querdehnung der Schale. Ein
fichalenelement (8. Bild 2) hat die Hobe h und ala Kanten vier benachbarte Schalennormalen. An der Seite u a = const eines Volumelements der H6he dw greift der Spannungsvektor f aap# in Richtung ca an. Der gesamte an der Seite u' = const des Schalenelements angreifende Spannungsvektor ist demnach gleich (Integrations- grenzen sind * h/2 )
Desgleichen wirkt auf diese Seite ein Drehmoment
urn eine horizontale Achse. In diinnen Schalen ist die Querspannung gering. Das gleiche gilt auch fiir den unsymmetrischen Anteil der Schubspannung , so daB die nachfolgenden Auadriicke gleioh Null gesetzt werden konnen :
Zwischen den Verformungen und Spannungen werde zuntichst ein hea re r Zusammenhang angenommen. Dann ist die elastische Energie der Schale, bezogen auf die Fliiche Eins der Mittelfliiche, gegeben durch
l a 1s
Lai = S f & d w . (ba)
Map =Jfod@oWdw (5 b)
L33=Jfu83dw=O; M a 3 = S f c Y S ~ d w = 0 . (6 c )
= Llr Va v + La' (01 v + V ) + M a p Va v . @a) OlC 0s 11 1 P
IXe auBere Arbeit der Oberfliichenkrafte (bezogen auf die FlLche Eins) und der Rendkrafte (bezogen auf die Liinge Eins) ist gegeben durch
2 A0 = taw + + p ~ ; 2 A R = Lna v -t L"SV -t Mna V ; 0 1 i a 03 oa 0s i a
p = [faa81-h/2 h/2 ; n = Normalenvektor der Rendkurve . (7)
Integration der Ausdriioke (6) iiber die gesamte Oberflhche und den Rand der Sohele, wobei mit Hilfe des a Aussschen Satzes
__-- T 140 Angewandte Mechanik
die Flachenintegrale zum Teil in Randintegrale umgewandelt werden, liefert die potentielle Energie der Schale (elastische Energie + auDere Arbeit), deren virtuelle Bnderung null sein muB. Diese Anderung ergibt sich durch Einfiihren der virtuellen Verschiebungen dv, dv. Aus dem Verschwinden des Fltichenintegrals folgen die Gleichgewichtsbedingungen : o i l a
Aus dem Verschwinden des Randintegrals (a. G1. (6c)) folgt, daB em Rande entweder fiinf Verschiebungen oder fiinf KraftgrdBen vorgegeben werden miissen.
Die Entwicklungskoeffizienten v konnen auf die Schubverformungen zuriickgefiihrt werden. Diese sind in der Mittelflache gleich l a
ym ist die Querdehnung der Mittelflache. Somit ergeben sich die Beziehungen V = 2 y a s - v a V s ; v = y s s . l a 1s
Nach Einfuhren der Tensoren , Yab = v(avp) = a(aV,) - bap v a ;
Verkriimmungstensor der Mittelfllche = h d e r u n g des Haupttensors xu@ = xu@ + 2 Ba yp s - baa yss ;
Verzerrungstensor der Mittelfliiche XU@ = - P u b v a = - ( B a b - bi baa) va - (b: + b$ aa + @hap) V A ;
Erweiterter Verkriimmungstensor
konnen die Raumableitungen der Koeffizienten v folgendermaDen geschrieben werden : 1 b
Dcr Ausdruck fur die elastische Energie nimmt damit die Form an
2 W = Z a p yap + M a @ + 2 Las yas mit dem symmetrischen Tensor [2] , (14) (16)
Mit den virtuellen Anderungen der neuen Verriickungen vf , ya ergeben sich die Gleichgewichtsbedingungen jetzt in der Form [3]:
N
Lab = hub + bf:Maa.
und die neuen RandgroBen (am Rande tritt die Ableitung aav3 auf, deren Anteil in Tangentenrichtung durch eine partielle Integration beseitigt wird) lauten :
Geometrische GroBen KraftgriiBen
I n der klassischen Schalentheorie werden die Schubverformungen gleich null gesetzt. Dam entflllt in (led) die letzte Randbedingung. Die Verformungstensoren enthalten sechs verschiedene Koordinaten, die auf drei Verschiebungen zuriickgefiihrt werden konnen. Es gelten daher, analog zu den Gleichungen von MAINARDO. CODAZZI und zum Theorema Egregium von GAUSS, die drei Vertriiglichkeitsbedhgungen :
Elestizitat, Plestizitiit, Rheologie T 141
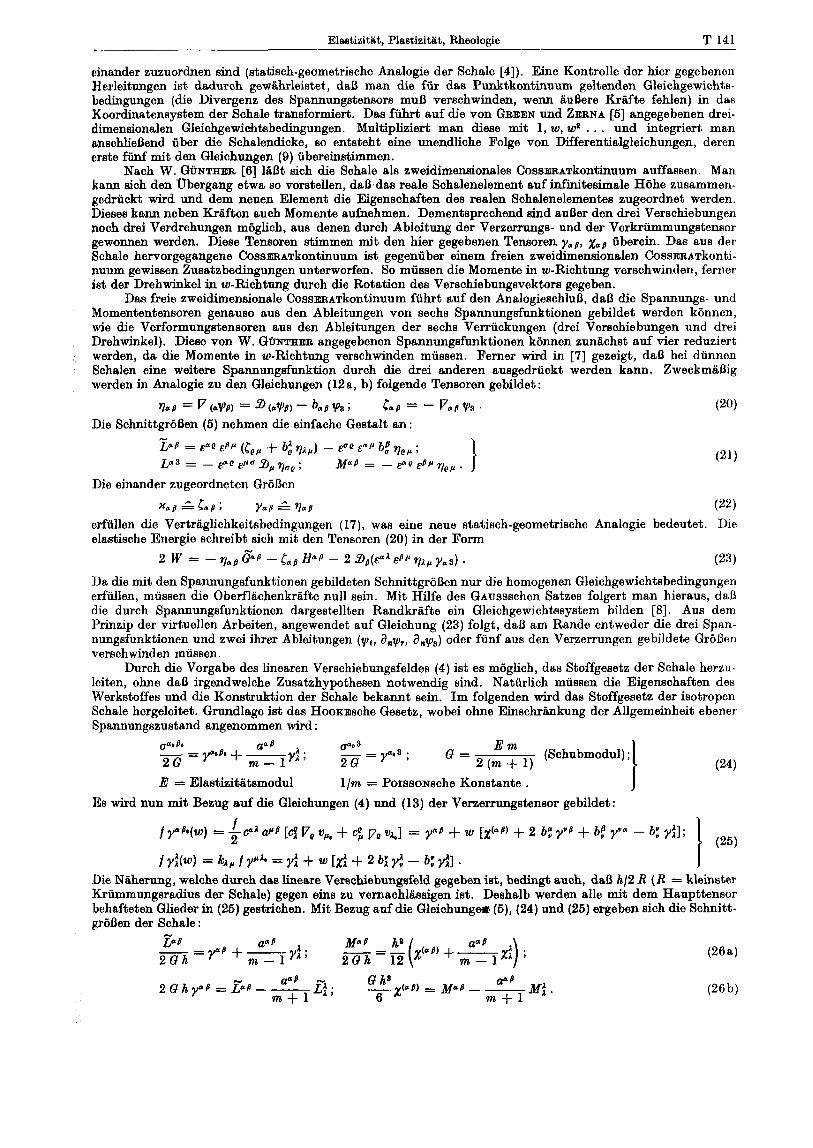
ninander zuzuordnen sind (statisch-geometrische Analogie der Schale [4]). Eine Kontrolle der hier gegebenen 13 erleitungen ist dadurch gewiihrleistet , daB man die fiir das Punktkontinuum geltenden Gleichgewichts- bedingungen (die Divergenz des Spannungstensors muB verschwinden, wenn iiuBere Kriifte fehlen) in das Koordinatensystem der Schale transformiert. Das fuhrt auf die von GREEN und ZERNA [6] angegebenen drei- dimensionalen Gleichgewichtsbedingungen. Multipliziert man diem mit 1, w, ws . . . und integriert man anschliel3end iiber die Schalendicke, so entsteht eine unendliche Folge von Differentialgleichungen, deren erste fiinf mit den Gleichungen (9) iibereinstimmen.
Nach W. G~XTHER [6] laBt sich die Schale als zweidimensionales CossERATkontinuum auffassen. Man kann sich den Ubergang etwa so vorstellen, daB das reale Schalenelement auf infinitesimale Hohe zusammen- gedriickt wird und dem neuen Element die Eigenschaften des realen Schalenelementes zugeordnet werden. Dieses kann neben Kraften auch Momente aufnehmen. Dementsprechend sind auBer den drei Verschiebungen noch drei Verdrehungen moglich, aus denen durch Ableitung der Verzerrungs- und der Verkriimmungstensor gewonnen werden. Diese Tensoren stimmen mit den hier gegebenen Tensoren yap, xaB iiberein. Das &us der Schale hervorgegangene CossERATkontinuum ist gegenuber einem fieien zweidimensionalen COSSERATkonti- nuum gewissen Zusatzbedingungen unterworfen. So miissen die Momente in w-Richtung verschwinden, ferncr ist der Drehwinkel in w-Richtung durch die Rotation des Verschiebungsvektors gegeben.
Das freie zweidimensionale CossERATkontinuum fuhrt auf den AnalogieschluB, daB die Spannungs- und Momententensoren genauso &us den Ableitungen von sechs Spannungsfunktionen gebildet werden konnen, wie die Verformungstensoren &us den Ableitungen der sechs Verriickungen (drei Verschiebungen und drei Drehwinkel). Diese von W. G~~NTHER angegebenen Spannungsfunktionen konnen zuniichst auf vier reduziert werden, da die Momente in w-Richtung verschwinden miissen. Ferner wird in [7] gezeigt, daB bei dunnen Schalen eine weitere Spannungsfunktion durch die drei anderen ausgedriickt werden kann. ZweckmiiBig werden in Analogie zu den Gleichungen (12a, b) folgende Tensoren gebildet :
Die einander zugeordneten GrBDen
(22) A Zap ; ?'a@ = erfiillen die Vertraglichkeitsbedingungen (17), was eine neue statisch-geometrische Analogie bedeutet. Die elastische Energie schreibt sich mit den Tensoren (20) in der Form
A
u
2 w = - llas a a p - cap H ~ P - 2 dD, (s~ lSlr . (23) Da die mit den Spannungsfunktionen gebildeten SchnittgroBen nur die homogenen Gleichgewichtabedingungen erfiillen, miissen die Oberflachenkriifte null sein. Mit Hilfe des GAnssschen Satzes folgert man hieraus, dalJ die durch Spannungsfunktionen dargestellten Randkriifte ein Gleichgewichtssystem bilden [8]. Aus dem l ' rh ip der virtuellen Arbeiten, angewendet auf Gleichung (23) folgt, daB am Rande entweder die drei Span- nungsfunktionen und zwei ihrer Ableitungen (y,, anyr, any3) oder fiinf aus den Verzerrungen gebildete GroBen verschwinden miissen.
Durch die Vorgabe des linearen Verschiebungsfeldes (4) ist es moglich, das Stoffgesetz der Schale herzu- leiten, ohne daB irgendwelche Zusatzhypothesen notwendig sind. Naturlich miissen die Eigenschaften des Werkstoffes und die Konstruktion der Schale bekannt sein. Im folgenden wird das Stoffgesetz der isotropen Schale hergeleitet. Grundlage ist das HooKarsche Gesetz, wobei ohne Einschriinkung der Allgemeinheit ebener Spannungszustand angenommen wird :
E = Elastizitiitsmodul l /m = PoIssoNsche Konstante . J Es wird nun mit Bezug auf die Gleichungen (4) und (13) der Verzerrungstensor gebildet:
i f Y"@*(w) = 3 Pa ~Pfl [cf c7, wpm + C: WA] = + w [x(*@) + 2 b: Y'B + bf 7'" - b: 941;
f y i w = s p f V A = r: + w [xi + 2 bi 7; - b: yil - .Die Niiherung, welche durch des h e a r e Verschiebungsfeld gegeben ist, bedingt auch, daB h/2 R (R = kleinster Kriimmungsradius der Schale) gegen eins zu vernachliissigen ist. Deshalb werden alle mit dem Haupttensor behafteten Glieder in (25) gestrichen. Mit Bezug auf die Gleichungw, (5), (24) und (25) ergeben sich die Schnitt- groBen der Schale :

- T 142 Angewandte Mechanik
Die Schubspannung wird a16 konstant iiber den Querschnitt angesetzt und liefert die Schnittkrafte
Die Differentialgleichungen der isotropen Schale erhiilt man durch Einsetzen der durch die Verzerrungan ausgedriickten SchnittgroDen in die Gleichgewichtsbedingungen nach ubergang auf die Verschiebungen und Schubverformungen. Gr6Benabschatzungen und numerische Erfahrungen zeigen [Q], daD auf der linken Seib der Gleichungen ( lea) nur das erste Glied berucksichtigt werden muD, wlihrend in Gleichung (16b) das letzt@ Glied auf der linken Seite weggelassen werden kann. Ferner durfen im Verkrummungstensor alle mit den Haupttensor der Flliche behafteten Glieder weggelassen werden. SchlieDlich wird der symmetrische Ant4 des Tensors a, vg durch die zweifache Ableitung einer skalaren Funktion q~ ausgedriickt, womit die Verfors mungstensoren die Gestalt annehmen :
Nach einigen Zwischenrechnungen und Vernachlassigungen, wobei von den Gleichungen (168) die Divergene von den Gleichungen (16c) die Rotation zu bilden ist, ergeben sich die drei Differentialgleichungen ( A = 2):)
L a 3 = 2 Q h y a 3 ; M u 3 = 0. (260)
Yap = a m p 9 - bag us ; X(as) = - va + 2 a (aYPa) * (273
m A A q - (b3.B; + a, t i m - 1 m - I
Symmetrische Differentialgleichungen der Art (28a, b) wurden unter anderem von WLASSOW [ 101 gegeben, Die homogene Differentialgleichung (28 c) liefert Funktionen, die lediglich am Rand oder in der unmittelbaren Umgebung einer Einzelkraft auftreten und rasch abklingen. Dies ist der Qrund dafiir, daS die klassische Schalentheorie, in der die Schubspannungen vernachllissigt werden, in sehr vielen Fallen richtige Ergebnisse liefert.
Die Differentialgleichungen der isotropen Schale fur die Spannungsfunktionen gewinnt man mit Hilfe der vereinfachten Darstellungen :
Die mit diesen Tensoren gebildeten VerzerrungsgroBen (26 c) sind nun in die Vertriiglichkeitsbedingungen einzusetzen. Die Rechnung liefert mit iihnlichen Vernachliissigungen, wie sie bei den Gleichgewichtsbedinm gungen vorgenommen worden sind, die Differentialgleichungen :
Cap = - a u p ~3 ; a a ~g = a u p @ + Eap Y’ * (29)
(1 - - ~ d ) d ! P - ~ t . , , b ~ @ . B ~ ~ s = o . (300)
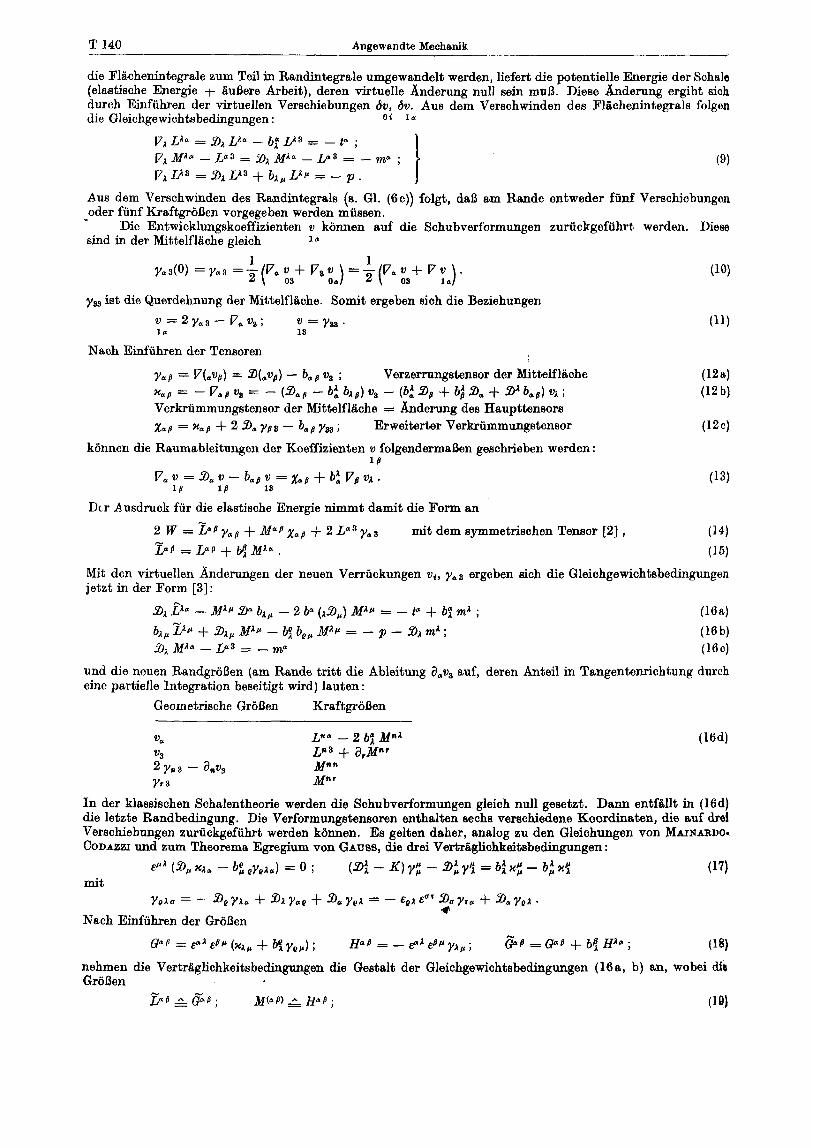
Ein Beispiel dafiir, daD die Vernachllissigung der Schubspannungen zu vollig falschen Ergebnissen fiihren kann, ist die Torsion eines Plattenstreifens (a. Bild 3). Wenn die Verdrehungen klein sind, so daB die Auslen- kungen innerhalb eines Quadrates, dessen Seitenlange gleich der Breite des Streifens ist, die Plattendicke
A f M
Bfld 8. Plnttenstrelfen, elngeap~nnt LL nicht uberschreiten, dann k6nnen die LiingskrGfte gleich null gesetzt werden, und ein Vergleich mit der strena gen Theorie von DE ST. VENANT ist mtiglich. Die Ltisung der Differentialgleichung (28b), welche hier die einfache Gestalt
annimmt, ist eine Schraubenflache mit dem Steigungswinkel €J?
Die Losung der homogenen Qleiahungen (28c) lautet wegen y18 = 0:
d dw, = 0 (Kn%oFmoFmche Plattangleichung) (31)
v a = € J x y . (32 a)
(32 b)
Elastizitit, Plastizitiit, Rheologie T 143
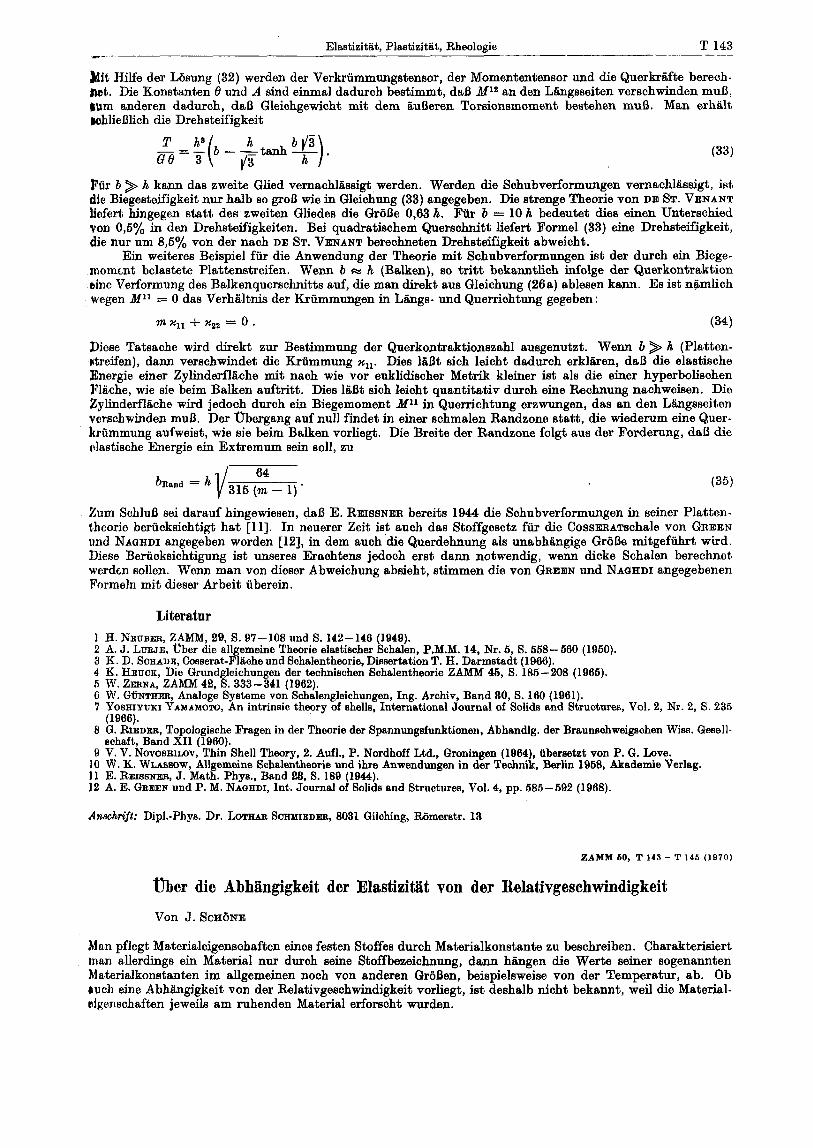
&it Hilfe der Losung (32) werden der Verkriimmungstensor, der Momententensor und die Querkriifte berech- not. Die Konstanten 8 und A sind einmal dadurch bestimmt, daB MI2 an den Langsseiten verschwinden mu& Bum anderen dadurch, daB Gleichgewicht mit dem iiuBeren Torsionsmoment bestehen muD. Man erhalt MhlieBlich die Drehsteifigkeit
Fur b > h kann das mweite Glied vernachliissigt werden. Werden die Schubverformungen vernechliissigt, ist die Biegesteifigkeit nur halb so groB wie in Gleichung (33) angegeben. Die strenge Theorie von DE ST. VENANT slofert hingegen statt des zweiten Gliedes die Gr6Be 0,63 h. Fiir b = 10 h bedeutet dies einen Unterschied 'Yon 0,6% in den Drehsteifigkeiten. Bei qurtdratischem Querschnitt liefert Formel (33) eine Drehsteifigkeit, die nur urn 8,6% von der nach DE ST. VENANT berechneten Drehsteifigkeit abweicht.
Ein weiteres Beispiel fiir die Anwendung der Theorie mit Schubverformungen ist der durch ein Biege- moment belastete Plattenstreifen. Wenn b NN h (Balken), so tritt bekanntlich infolge der Querkontraktion aine Verformung des Balkenquerschnitts auf, die man direkt aus Gleichung (26a) ablesen kann. Es ist nlimlich wegen M1l = 0 das Verhiiltnis der Krummungen in Liings- und Querrichtung gegeben :
mx,, + x22 = 0 . (34)
Diese Tatsache wird direkt zur Bestimmung der Querkontraktionszahl ausgenutzt. Wenn b > h (Platten- rtreifen), d a m verschwindet die Kriimmung xll. Dies l&Bt sich leicht dadurch erkliiren, daB die elastische Energie einer Zylinderflliche mit nach wie vor euklidischer Metrik kleiner ist als die einer hyperbolischen Flache, wie sie beim Balken auftritt. Dies liiBt sich Jeicht quantitativ durch eine Rechnung nachweisen. Die Zylinderflache wird jedoch durch ein Biegemoment M11 in Querrichtung erzwungen, das an den Llingsseiten vorschwinden muB. Der Obergang auf null findet in einer schmalen Randzone statt, die wiederum eine Quer- kriimmung aufweist, wie sie beim Balken vorliegt. Die Breite der Randzone folgt aus der Forderung, daB die cllastische Energie ein Extremum sein soll, zu
64 316 (m - 1) bItand = h (35)
%urn SchluB sei darauf hingewiesen, dalj E. REISSNER bereits 1944 die Schubverformungen in seiner Ylatten- theorie beriicksichtigt hat [ll]. In neuerer Zeit ist auch das Stoffgesetz fiir die CossERATschale von GREEN und NAGADI angegeben worden [12], in dem auch die Querdehnung als unabhiingige Qr65e mitgefiihrt wird. lliese Beriicksichtigung ist unseres Erachtens jedoch erst d a m notwendig, wenn dicke Schalen berechnet werdtm sollen. Wenn man von dieser Abweichung absieht, stimmen die von GREEN und NAGHDI angegebenen Formeln mit dieser Arbeit uberein.
Literatur 1 H. NEUBER, ZAMM, 29, S. 97-108 und S. 142-1140 (lQ49). 2 A. J. LURJE, Uber die allgemeine Theorie elaetischer Schalen, P.M.M. 14, Nr. 6, S. 658-6680 (1960). 3 K. D. SOHADE, Cosserat-Fliiche und Schalentheorie, Dissertation T. H. Darmstadt (1966). 4 K. HEUOK, Die Grundgleichungen der technischen Sohalentheorie ZAMM 45, S. 186-208 (1966). 6 W. ZERNA, ZAMM 42, S. 333-341 (1962). 0 W. G~~NTHER, Analoge Systemo von Schalengleichungen, Ing. Archiv, Band 80, S. 160 (1961). 7 YOSHIYURI YAMAMOTO, An intrinsic theory of shells, International JourneJ of Solids and Struotures, Vol. 2, Nr. 2, S. 236
8 0 . RIEDER, Topologische Fragen in der Theorie der Spannungsfunktionen, Abhandlg. der Braunschweigschen Wiss. &sell ~
H V. V. NOVOSHII.OV, Thin Shell Theory, 2. Aufl., P. Nordhoff Ltd., Qroningen (1964), iibersetzt von P. 0. Love.
(1966).
achaft, Band XI1 (1960).
10 W. K. W~assow, Allgemeine Schalentheorie und ihre Anwendungen in der Technik, Berlin 1968, Aksdemie Verleg. 11 E. REISSNIER, J. Math. Phys., Band 28, S. 189 (1944). 12 A. E. GREEN und P. M. NAQHDI, Int. Journal of Solids and Structures, Vol. 4, pp. 586-692 (1968).
Awchrifl: DipLPhys. Dr. LOTHAR SOEMIEDEB, 8031 Qilching, Romerstr. 15
ZAMM 60, T 143 - T 145 (1970)
ther die Abhangigkeit der Elastizitiit von der Relativgeschwindigkeit
Von J. S C H ~ N E
Man pflegt Materialeigenschaften eines festen Stoffes durch Materialkonstante zu beschreiben. Charakterisiert tnan allerdings ein Material nur durch seine Stoffbezeichnung, dann hangen die Werte seiner sogenannten Materialkonstanten im allgemeinen noch von anderen Glr6Den, beispielsweise von der Temperatur, ab. Ob buch eine Abhlingigkeit von der Relativgeschwindigkeit vorliegt, ist deshalb nicht bekannt, weil die Material- eigenschaften jeweils am ruhenden Material erforscht wurden.