Embed Size (px)
Citation preview
Störkörpermessstand - Versuchsbeschreibung -
Oktober 2005

2
Inhalt Motivation .................................................................................................................................. 3 Theoretischer Hintergrund ......................................................................................................... 3
Der Rechteck-Hohlleiter .................................................................................................... 3 Der quaderförmige Resonator ............................................................................................ 5 Güte und die 3dB-Methode ................................................................................................ 6 Feldstörung......................................................................................................................... 6
Störkörpermessverfahren ........................................................................................................... 7 Vorbereitung............................................................................................................................... 7 Aufgaben .................................................................................................................................... 7 Messverfahren ............................................................................................................................ 8
Aufbau:............................................................................................................................... 8 Computereinstellungen: ..................................................................................................... 9 Zu Aufgabe 2/3 : Gerätebeschreibung : ........................................................................... 10
Wichtig! Die Anschlüsse der Kabel an Frequenzgenerator und Vektorvoltmeter (sog. Tastköpfe) sind hochempfindlich und dürfen nicht belastet oder gebogen werden.

3
Motivation Bestimmung von elektromagnetischen Feldern mit verschiedenen Störkörpern. In diesem Versuch sollen in einer quaderförmigen Kavität die Moden, die es vorher zu bestimmen und experimentell zu nachzuweisen gilt, eine qualitative und quantitative Beschreibung der Felder und Ströme erstellt werden.
Theoretischer Hintergrund Ein Hohlraumresonator besteht wie der Name schon preisgibt, aus einem Hohlraum, der allseitig mit leitenden Wänden abgeschlossen ist. Wird im Resonator ein Feld eingekoppelt, so können als Eigenschwingungen in ihm stehende Wellen entstehen. Die Einkopplung geschieht über eine Antenne die in den Resonator reinragt. An diese Antenne wird nun eine Hochfrequenz angelegt entsprechend der anzuregenden Schwingungen. Diese stehenden Wellen bezeichnet man auch als Moden, wobei hier die 1. Mode (Grundmode) die der niedrigsten Frequenz entspricht.
Der Rechteck-Hohlleiter Zunächst wird ein unendlich langer, im Querschnitt rechteckiger, Hohlleiter betrachtet. In diesem können stehende Wellen nur in zwei Raumrichtungen entstehen. Die Moden lassen sich wie folgt berechnen: Da nur mit Frequenzen oberhalb der Grenzfrequenz ein Rechteckhohlleiter zur Schwingung geeignet ist, führt man die Wellenlänge ( λ = c / f ) anstatt der Frequenz ein. Bei der Grundmode in einem Quaderförmigen Resonator steht das elektrische Feld entlang der kürzesten Abmessung, in Abbildung 45.1 wäre das entlang der y-Achse, zwischen oberer und unterer Platte (Abstand b). Für die Grenzwellenlänge ergibt sich demnach λg = 2b, da die Grundmode die Form einer halben Sinuswelle hat. Die Grenzfrequenz ergibt sich aus ωg = π / b * c oder fg = ½ c / b c entspricht hierbei der Lichtgeschwindigkeit. Zunächst nimmt man an, dass das Leitermaterial unendlich gut leitend ist, was zur Folge hat, dass die Eindringtiefe des Feldes unendlich klein wird. Demnach müsste die Tagentialkomponente der elektrischen Feldstärke an der gesamten Leiterinnen- seite verschwinden. Daraus ergeben sich folgende Grenzbedingungen:
Ex = 0 für y = 0 und y = b Ey = 0 für x = 0 und x = a Ez = 0 für x = 0, x = a und y = b
Mit zu Hilfenahme der Maxwell Gleichungen des Resonator: div (E) = 0
4
div (H) = 0 rot (E) = -iωμH rot (H) = iωεE lässt sich aus den beiden Feldgleichungen, der Zeitabhängigkeit eiωt der elektrischen und magnetischen Felder (der Einfachheit halber wird dies durch eine Multiplikation mit iωt ersetzt, die sich jedoch auf beiden Seiten der Gleichung heraushebt) und der Einführung eines noch unbekannten Fortpflanzungsmaßes γ auf folgende Gleichungen schließen :
∂yHz – γHy = iωεEz γHz - ∂xHz = iωεEy ∂xHy - ∂yHx = iωεEz
∂yEz – γEy = -iωμHx γEx - ∂xEz = -iωμHy ∂xEy - ∂yEx = -iωμHZ
Mit den oben genannten Gleichungen werden alle möglichen Feldformen, mit den sich elektromagnetische Wellen längs des Leiters ausbreiten können beschrieben. Für uns sind von Bedeutung die zwei unterschiedlichen Klassen von Wellen, nämlich die TE -(transversalelektrische) und die TM (transversalmagnetische) –Welle. Diese zeichnen sich dadurch aus, dass entweder das elektrische oder das magnetische Feld keine z-Komponente besitzt. Als Beispiel betrachten wir nun weiter die TE-Wellen, bei denen Ez = 0 ist. Nach Einsetzen von dieser Bedingung und Miteinanderverrechnen obiger Gleichungen folgt daraus:
∂2x^2 Ex + ∂2
y^2 Ex = - (ω2εμ + γ²) Ex
∂2x^2 Ey + ∂2
y^2 Ey = - (ω2εμ + γ²) Ey
Durch trigonometrische Lösungsansätze und den Grenzbedingungen folgt:
Ex = 0 = A cos(px) sin (qb) für alle x
Ey = 0 = -A p/q sin (pa) cos (qy) für alle y
Die erste Gleichung fordert: qb = n π Und aus der 2. folgt: pa = mπ mit m,n є Ν0 Ganz allgemein geschrieben ergibt dies: Ex = A cos(mπx/a) sin (nπy/b) Ey = -A m/n b/a sin (mπx/a) cos (nπy/b) Und für das Fortpflanzungsmaß: γ² = - ω²εμ + (mπ/a)² + (nπ/b)² (*)
5
Da m und n beliebige ganze Zahlen sind, werden durch die obigen Gleichungen unendlich viele Wellenformen beschrieben. Welche Wellenform sich bildet, hängt von der Art der Anregung am Anfang des Hohlleiters und der Anregungsfrequenz ω ab. Eine mögliche Grundmode ist die TE01-Welle (m = 0, n = 1), für die gilt:
γ2 = - ω2 ε μ + (π / b)2
Bei hohen Frequenzen wird γ, wie aus der oberer Gleichung ersichtlich, imaginär, also gilt:
γ = ± i β mit β = √[ω2εμ – (π/b)2]
In komplexer Schreibweise bedeutet das für die TE01-Welle:
Ex = A e±iβz sin (π y/b) Hx = 0
Ey = 0 Hy = + β/(ωμ) A e±iβz sin ( π y/b)
Ez = 0 Hz = 1/ (iωμ) A π/b e±iβz cos (π y/b)
Daraus lässt sich folgende Schlussfolgerung ziehen:
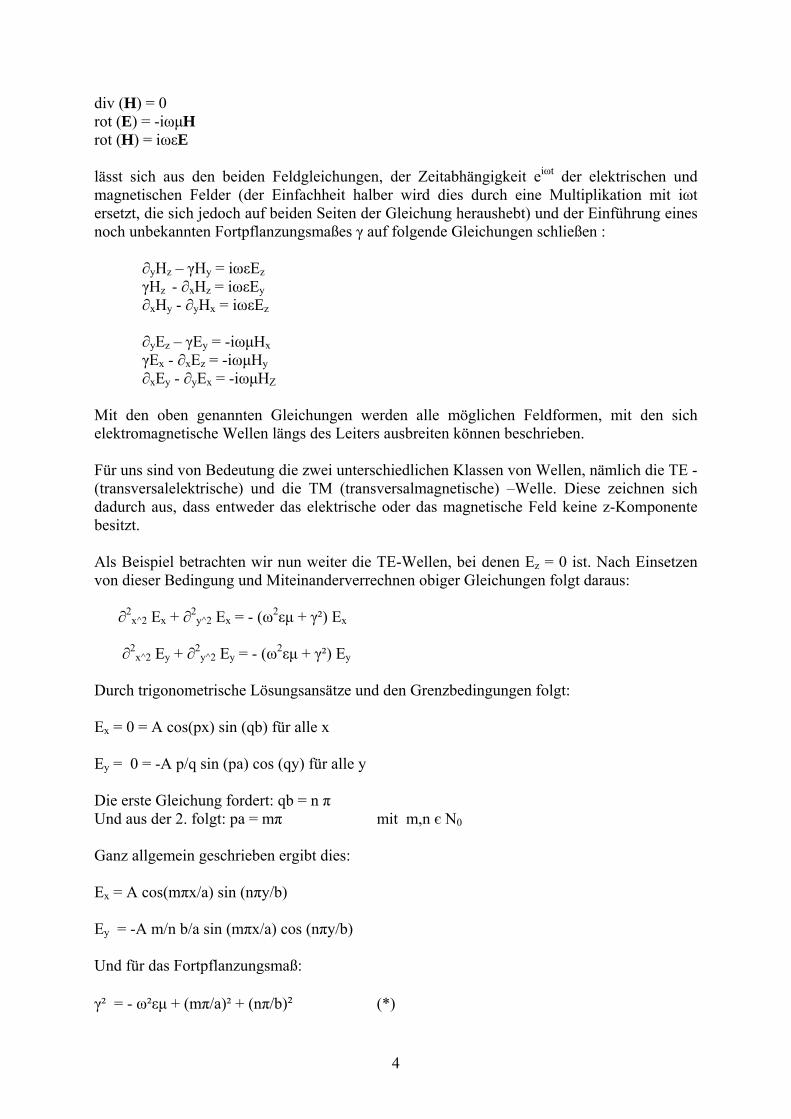
Die elektrischen Feldlinien liegen in x-Richtung und sind gerade Linien. Die magnetischen Feldlinien hingegen sind durch geschlossene Kurven mit den E-Linien verkettet. Da sie keine x-Koordinaten haben, lässt sich daraus schließen, dass sie in einer Ebene, parallel zur y-z-Ebene liegen.
Der quaderförmige Resonator Damit eine stehende Welle in z-Richtung entstehen kann (was bei diesem Versuch notwenig ist), muss folgende Vorraussetzung gelten: βl = pπ mit p є Ν wobei l die Länge des Hohlraums in z-Richtung darstellt. Setzt man nun (*) ein, so ergibt sich für einen rechteckigen Hohlleiter (mit γ² = -β²):
ωg² εμ = (mπ/a)² + (nπ/b)² + (pπ/l)²
x-Achse y-Achse
z-Achse
z-Achse

6
oder 1/λ²g = (m/2a)² + (n/2b)² + (p/2l)² Wird ein Hohlraum mit einer dieser Resonanzwellenlängen erregt, so ergeben sich für die Feldstärke großen Amplituden, ähnlich wie bei einem Schwingkreis im Resonanzfall. Die Hochfrequenz wird hier über eine Antenne in den Resonator eingekoppelt. Dadurch entsteht Wandplatten Potentiale erzeugt, welche wiederum eine Spannung entstehen lassen. Weshalb ein Strom über die Wandinnenseiten fließt.
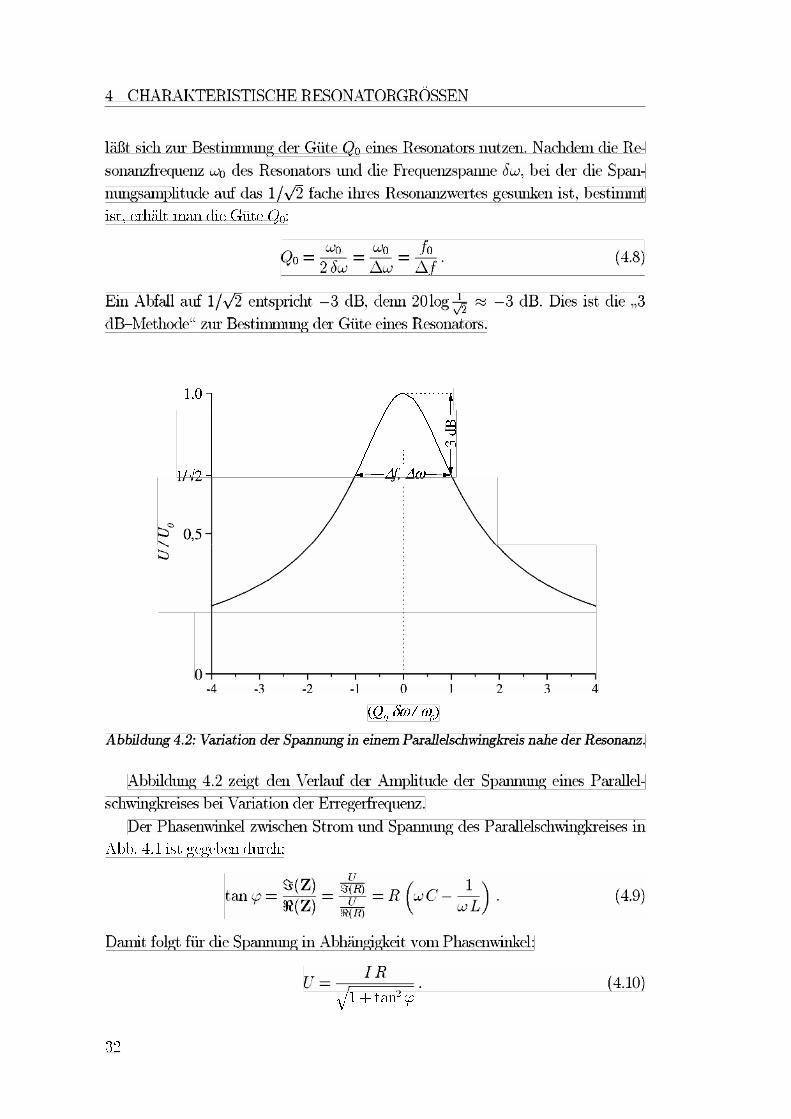
Güte und die 3dB-Methode Die Güte ist ein Maß für den Resonator und berechnet sich wie folgt:
Bf
Q 0=
Mit f0 als Resonanzfrequenz und B als Bandbreite Diese ergibt sich zu: B = f2 − f1 Hierbei sind f2 die obere und f1 die untere Grenzfrequenz. Bei Darstellung des Pegels in Abhängigkeit von der Frequenz ist die Bandbreite definiert als der Frequenzbereich, an dessen Grenzen sich der Spannungspegel um 3 dB gegenüber dem Extremwert geändert hat.
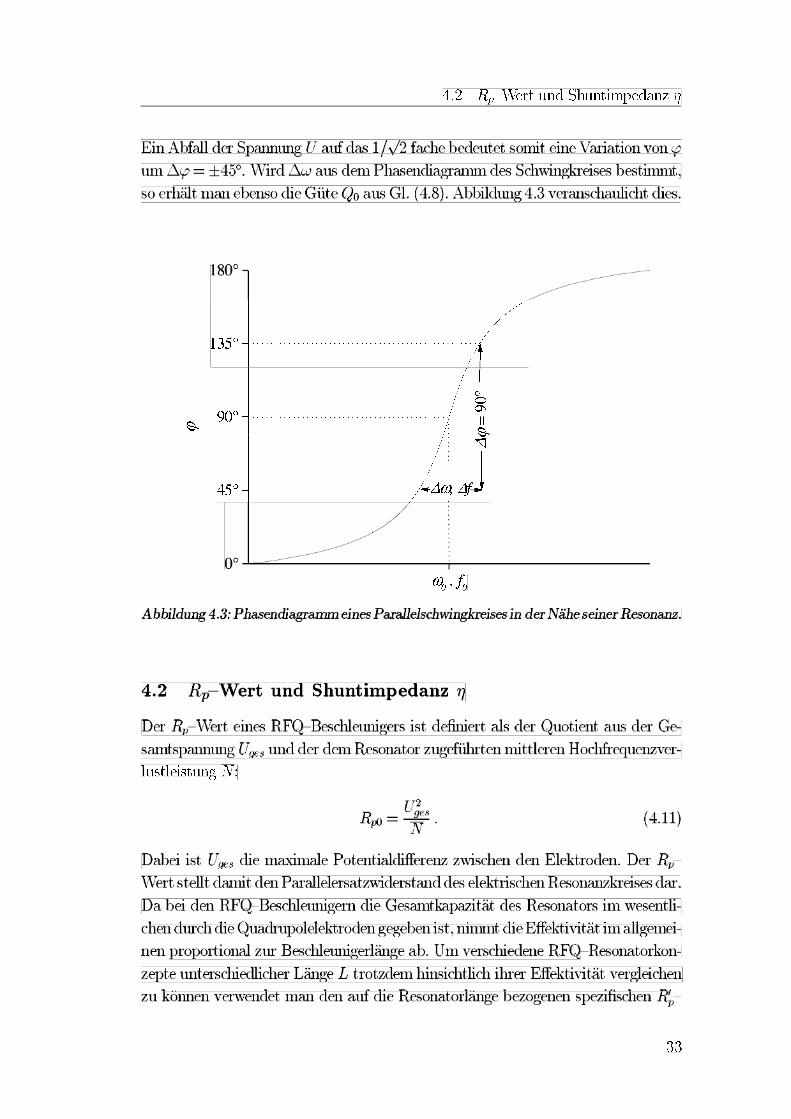
Feldstörung Der Störkörpermessstand ist mit zwei verschiedenen Störkörpermaterialien ausgestattet. Die Metallkugel besitzt Permeabilität und Dielektrizität, was zu einer Störung des elektrischen als auch des magnetischen Feldes führt. Die Teflonkugel hingegen besitzt nur Dielektrizität, wodurch nur das elektrische Feld gestört wird. Wird nun ein Störkörper in den Resonator eingebracht führt dieser, in Abhängigkeit von seiner Beschaffenheit (Material), zu einer Phasenverschiebung. Anhand dieser Phasenverschiebung lässt sich das E-Feld an dem Ort des Störkörpers berechnen. Wenn man nun das E-Feld aufintegriert kommt man auf den Rp-Wert, der den Vorteil, gegenüber der Güte hat, dass er unabhängig von der Größe des Resonators ist.
2
02
0
4⎟⎟⎠
⎞⎜⎜⎝
⎛ Δ= ∫
L
dp dz
fgfQR
επ
Wobei L die Länge des Resonators, Q die Güte, Δf die Phasenverschiebung, gd die Störkörperkonstante für kugelförmige Störkörper, ε0 die Dielektrischekonstante und f die Frequenz ist.

7
Störkörpermessverfahren Bei diesem Verfahren wird durch das Einbringen eines dielektrischen oder metallischen Körpers in das Resonatorfeld eine Energiestörung erzeugt. Die Energieänderung ist proportional zum Volumen, der Polarisation und der Magnetisierung des Störkörpers. Diesem Versuch wurden zwei verschiedene Störkörper beigefügt, einmal ein Störkörper aus Teflon und einer aus Metall (beide haben den gleichen Radius). Der metallene Störkörper beeinflusst beide Felder, wohingegen der Teflonstörkörper nur das elektrische Feld beeinflusst.
Vorbereitung Zur Vorbereitung sollen die Begriffe TM-, TE- und TEM-Mode behandelt werden. Wie und weshalb fließen Ströme in einer Kavität, welche Potentiale – und dadurch Felder – können entstehen? Wie sehen die bei der jeweiligen Mode aus? Wie kann aus den Abmessungen des Störkörpers die tatsächliche Feldstärke berechnet werden?
Aufgaben
1. Berechnung der Grundmode und weiterer anhand der geometrischen Daten der Kavität.
2. Experimentelle Überprüfung der berechneten Moden. 3. Bestimmen der Güte des Resonators mit der 3dB-Methode. Dazu soll der
Frequenzgang im Bereich der Resonanz aufgenommen werden und aus der Kurve die Güte abgelesen werden.
4. Aufnahme von verschiedenen Kurven (den Hohlraumresonator längs in den verschiedenen Moden und quer) jeweils mit den unterschiedlichen Störkörpern. Es sind jeweils das elektrische und das magnetische Feld zu bestimmen und der Mode zuzuordnen.
5. Qualitative Auswertung (graphische Darstellung der unter Punkt 3 gemessenen Ergebnisse und diese erklären, graphische Darstellung der Feldlinien)
6. Quantitative Auswertung: Aus den geometrischen Abmessungen des Teflon-Störkörpers soll zu einer Grundmode ein Messergebnis mit absoluten Feldstärkewerten erstellt werden.

8
Messverfahren Aufbau:
Ansicht des Versuchsaufbaus Der kupferne Kasten ist der Resonator links daneben der Hochfrequenzgenerator

9
Computereinstellungen: Labview Screenshot:
Benutzung des Computerprogramms Labview Nach dem Öffnen der Datei auf den Pfeil oben links drücken, damit die Messung aufgezeichnet werden kann. Aufnehmen einer Messung: Gleichzeitig den Startbutton auf dem Bildschirm drücken und den Motor, der den Störkörper betreibt anschalten. Die beste Einstellungen von „Glättung Ortsmessung“ und „Glättung Phase“ suchen (Voreinstellungen sind sinnvoll) und die Dauer der Messung einstellen (je nachdem ob quer oder längs gemessen wird). Nach gelungenem Test, auf den Hebel unter „Speichern“ drücken (Feld links daneben ist jetzt grün) und Messung nochmals wiederholen. Daten werden nichts als Graphik, sondern als Messwerttabelle abgespeichert. Um das gespeicherte Ergebnis benutzen und lesen zu können, sollte man als .txt abspeichern, ein Import der Datei in Excel, Origin oder ähnliche Programme ist leicht möglich.

10
Zu Aufgabe 2/3 : Gerätebeschreibung :
Einstellung der Frequenz
Auf linker Skala den Maximal-Ausschlag ablesen Rechte Skala zeigt Energieänderung des Feldes durch
Störkörper
Wichtig: Signalsenden ANSTELLEN!!!!! Bei
Messungen!!!! Schalter befindet sich
hinter dem Kabel
Feineinstellung

Storkorpermessstand mit LabView[1]
- Interner Bericht -
Philipp FischerInstitut fur Angewandte Physik
J.-W.-Goethe - UniversitatRobert-Mayer-Strasse 2-4, 60325 Frankfurt a. M., Germany
E-mail: [email protected]
15. Oktober 2004
1
Inhaltsverzeichnis
1 Inhalt 3
2 Aufbau 3
3 Inbetriebnahme 4
3.1 Die Kavitat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
3.2 Einkopplung und Auskopplung . . . . . . . . . . . . . . . . . . . . . . . . 4
3.3 Phasendifferenz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
3.4 Storkorper . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
3.5 Motorsteuerung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3.6 Verbindung zum Computer . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3.7 Messungs-Task . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.8 LabView Virtuelle Instrumente (VIs) . . . . . . . . . . . . . . . . . . . . . 7
3.9 Messung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.9.1 Messung starten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.9.2 Dateiformat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.9.3 Skalierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4 Beispielmessungen 9
5 Fehlerbetrachtung 12
6 Anhang: Modifikation der Hardware 14
2

1 Inhalt
In diesem Papier wird die technische Seite des Storkorpermessstandes beschrieben. Dieserwurde im September 2004 repariert, die A/D-Wandler erneuert und der Messvorgang aufein LabView-VI umgestellt.
2 Aufbau
Im groben setzt sich die Apparatur aus wenigen Bestandteilen zusammen. Diese sind:
• der auf einem Faden sitzender Storkorper, beispielsweise Metall oder Teflon,
• ein Schrittmotor, uber den der Faden gezogen wird; an diesem befidnet sich einPotentiometer, uber den die Position des Storkorpers festgestellt wird,
• eine Einheit, die den Schrittmotor startet und stoppt sowie dessen Geschwindigkeitregeln lasst,
• ein Frequenzgenerator,
• ein Vektorvoltmeter zur Bestimmung des Phasenunterschiedes zwischen ein- undausgekoppeltem Signal
• und das Vektorvoltmeter in Form einer PC-Steckkarte fur die Analog/Digital-Wandlung.
Die Messung des Ortes und der Phasendifferenz finden gleichzeitig statt, somit werdendie Ergebnisse als x/y-Graph ausgegeben. Die Messung und Ausgabe der Signale wirdmittels eines LabView-VIs ausgefurhrt.
3

3 Inbetriebnahme
3.1 Die Kavitat
Bei dem zu vermessenden Objekt handelt es sich meist um eine Kavitat, in der das elek-trische bzw. magnetische Feld gemessen werden soll. Eine Messung mit dem derzeitigenAufbau ist nur entlang einer Linie moglich, also eine lineare eindimensionale Feldmessung.
3.2 Einkopplung und Auskopplung
Das Feld wird in die Kavitat uber eine Antenne eingekoppelt. Hierbei ist keine großeLeistung bzw. kein starkes Feld notig. Uber ein Koaxialkabel wird der Frequenzgeneratormit der Kavitat verbunden, zusatzlich fuhrt ein Abzweig mit hohem Widerstand zumVektorvoltmeter. Am Frequenzgenerator ist dazu der grobe Frequenzbereich zu wahlen,zudem sollte eine mittlere Sendeleistung eingestellt werden. Der Sender wird an einemkleinen Schiebeknopf (am rechten Rand) auf Betrieb geschaltet.Die Auskopplung wird ebenfalls uber eine Antenne in der Kavitat vorgenommen. Ein wei-teres Koaxialkabel verbindet die Auskoppelantenne mit dem zweiten Eingang des Vektor-voltmeters. Am Vektorvoltmeter ist ebenfalls der Frequenzbereich einstellbar. Die Emp-findlichkeit ist zu Beginn relativ niedrig, muß aber beim Aufsuchen der Resonanz spaterhochgeregelt werden. Ebenso sollte mit maximalem Phasenausschlag von +-180 die Mes-sung begonnen werden.Nun kann am Frequenzgenerator die gewunschte Resonanzfrequenz gesucht werden. AmVektorvoltmeter halt man dafur die Amplitude des ausgekoppelten Signals im Auge undpasst die Empfindlichkeit bei Erreichen der Resonanz an.
3.3 Phasendifferenz
Die Anzeige der Phasendifferenz am Vektorvoltmeter kann mit einem Offset versehen wer-den und sollte vor der Messung auf Null stehen. Zudem ist die Einstellung +-180 voreiner ersten Messung gunstig. Der maximale Ausschlag kann dann bei folgenden Messun-gen angepasst werden.
3.4 Storkorper
Der Storkorpermessstand ist zur Zeit mit zwei verschiedenen Storkorpermaterialien aus-gestattet:
• eine Metallkugel besitzt Permeabilitat und Dielektrizitat, wird sie bei der Messung
4
verwendet, werden sowohl elektrisches als auch magnetisches Feld gestort.
• eine Teflonkugel besitzt nur Dielektrizitat. Dadurch ist es moglich, in einem Aufbaumit elektrischem und magnetischem Feld nur den elektrischen Anteil zu messen.
Der Storkorper wird auf einen (Nylon-)Faden gebunden. Dieser wird uber einige Rollenim Kreis gelegt und kann vom Schrittmotor gezogen werden. Um dem Faden die entspre-chende Spannung zu geben, werden die Enden des Fadens uber eine Metallfeder straffgespannt.
3.5 Motorsteuerung
Die Steuerung des Schrittmotors geschieht uber eine spezielle Hardware. Hier kann derMotor per Hand in beide Richtungen gestartet werden, sowie seine Geschwindigkeit ein-gestellt werden. In der Regel ist eine hohe Geschwindigkeit ausreichend. Hier befindensich auch die Anschlusse zur Messung der Position des Storkorpers, die uber das Poten-tiometer bestimmt wird. Der Spannungsbereich zur Ortsmessung variiert zwischen etwa2 und 7 Volt.
3.6 Verbindung zum Computer
An der Ruckseite des Vektorvoltmeters befindet sich der Ausgang zur Messung der Pha-sendifferenz. Diese liefert unabhangig von der Einstellung des Maximalausschlags einenWert zwischen +-500 mV, proportional zum Zeigerausschlag an der Frontseite. Die Po-lung der Messleitungen ist hierbei nicht unerheblich, die Messung funktioniert nur wenndie die Kabel richtig permutiert sind. Diese sind am Analogeingang AI0 des National
Instuments Connector Blocks CB-68LP verbunden.Zur Ortsmessung werden zwei Kabel von der Motorsteuerungsbox an den AnalogeingangAI1 angeschlossen.
5

Die Pinbelegung zeigt, daß die Leitungen fur die Phasenmessung an den Pins 68 und 67angeschlossen werden mussen, die fur die Ortsmessung an 33 und 32.Vom Connector Block aus fuhrt eine abgeschirmte Leitung (SHC68-68-EPM) zum PC.Dort ist es am Messgerat angeschlossen. Das Gerat ist die PCI-Steckkarte National In-
struments PCI-6221 M Series Multifunction. Darauf befinden sich 16 A/D-Wandler 250kS/s Auflosung 16-bit, sowie 2 D/A-Ausgange und 24 digitale Anschlusse.
3.7 Messungs-Task
Der Task, der die Analogeingange spezifiziert sowie Messeingenschaften festlegt kann imsog. Measurement & Automation Explorer eingestellt werden. Dieser Explorer ist ein Zu-satzprogramm von National Instruments zur Konfiguration der angeschlossenen Hardwa-re. Seine Software-Schnittstelle liefert Messwerte direkt an LabView.
6

3.8 LabView Virtuelle Instrumente (VIs)
Das eigentliche Programm zur Steuerung bzw. Ausfuhrung der Messung ist im VI ent-halten. Ein VI besteht aus einer Oberflache mit Bedienelementen und Anzeigeelementen,wie sie bei Windows-Programmen ublich ist. Der zweite, wesentliche Teil ist das Block-diagramm. Dieses ahnelt einem Flussdiagramm. Hier sind verschiedene Elemente mitei-nenander verbunden, so dass beispielsweise Messignale nacheinander verschiedene Stufen,von der Aufnahme uber Verarbeitung zur Anzeige, durchlaufen.
3.9 Messung
3.9.1 Messung starten
Zur Messung wird das vorhandene Programm gestartet. Es erscheint die Bedienoberflache.
Folgende Großen sollen vor dem Start der Messung nun gewahlt werden:
• die Dauer der Messung in Sekunden sollte großzugig gewahlt werden, fur den vollenBereich bei maximaler Geschwindigkeit benotigt der Schrittmotor etwa 25 Sekunden
• die Samplerate, die angibt, wieviele Werte pro Sekunde aufgezeichnet werden sollen
• der maximale Ausschlag am Vektorvoltmeter muss eingestellt werden, damit dieWerte richtig skaliert werden konnen
7

• eine Glattung der jeweiligen Messung kann gewahlt werden; ist keine Glattunggewunscht, sollten die Werte Glattung Phase und Glattung Ortsmessung einfachauf 1 gestellt werden.
• Soll die Messung in einer Text-Datei ausgegeben werden, ist Schalter Speichern
umzulegen.
Zum Start der Messung die Start-Taste betatigen und dann den Schrittmotor ebenfallsstarten. Es gibt wahrend der Messung keine Echtzeit-Anzeige. Die Werte werden erst nachder Messung als Graphen angezeigt.
3.9.2 Dateiformat
Die Messwerte werden in einer Textdatei abgelegt. Der Dateikopf enthalt alle wichtigenAngaben zur Messung, sowie Datum und Uhrzeit. Hier ein Beispiel:
Storkorpermessung
IAP, F-Praktikum,
aufgezeichnet mit LabView7,
VI Version September 2004, Philipp Fischer
Einstellungen:
Dauer der Messung: 30,00 s
Samplerate: 1000,00 Hz
Glattung der Ortsmessung: 100,00 Werte
Glattung der Phasenmessung: 100,00 Werte
waveform [0] [1]
t0 01.01.1904 02:00:00 01.01.1904 02:00:00
delta t 1,000000 1,000000
time Y[0] Y[1]
Auf die Kopfinformationen folgt eine Tabelle mit 4 Spalten, von denen die ersten zweidurch Datum und Uhrzeit belegt sind, die 3. Spalte gibt den Ort in cm wieder, die 4.Spalte die Phasendifferenz.
3.9.3 Skalierung
Zunachst wurde die Phasendifferenz skaliert. Der Ausgang liefert am Vektorvoltmeterliefert Werte zwischen +500 mV und -500 mV, proportional zum Anzeigewert. Dazu
8
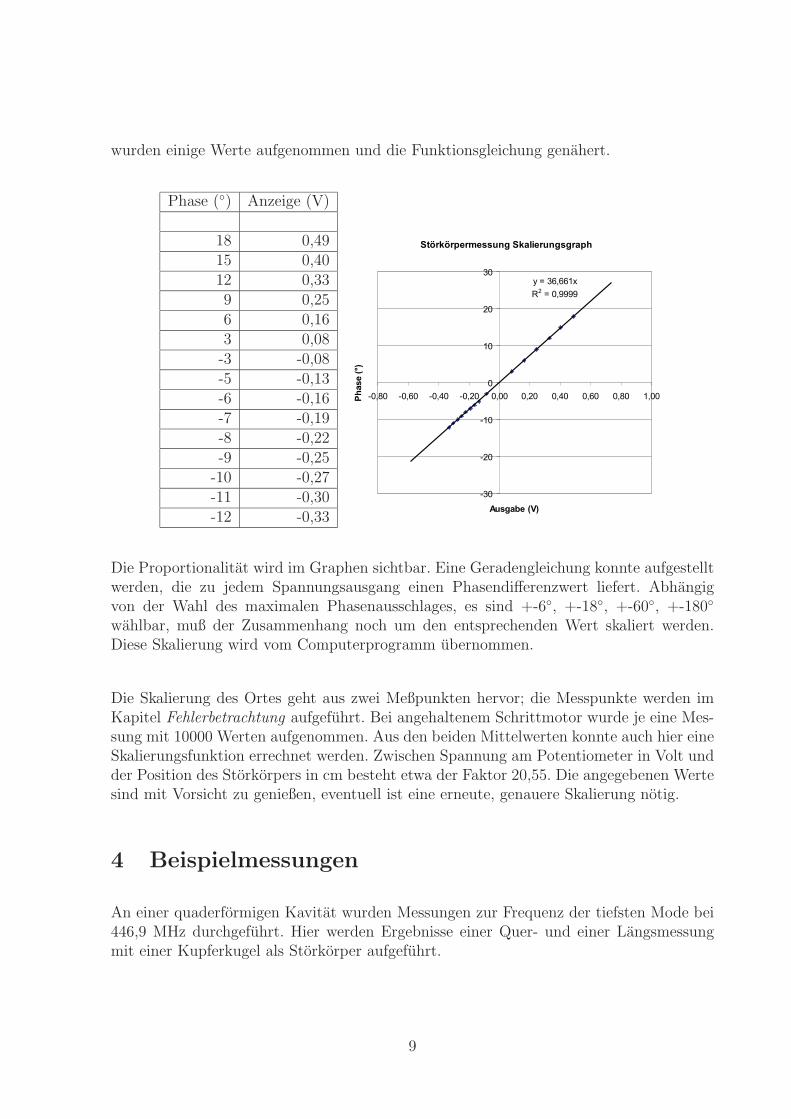
wurden einige Werte aufgenommen und die Funktionsgleichung genahert.
Phase () Anzeige (V)
18 0,4915 0,4012 0,339 0,256 0,163 0,08-3 -0,08-5 -0,13-6 -0,16-7 -0,19-8 -0,22-9 -0,25
-10 -0,27-11 -0,30-12 -0,33
Die Proportionalitat wird im Graphen sichtbar. Eine Geradengleichung konnte aufgestelltwerden, die zu jedem Spannungsausgang einen Phasendifferenzwert liefert. Abhangigvon der Wahl des maximalen Phasenausschlages, es sind +-6, +-18, +-60, +-180
wahlbar, muß der Zusammenhang noch um den entsprechenden Wert skaliert werden.Diese Skalierung wird vom Computerprogramm ubernommen.
Die Skalierung des Ortes geht aus zwei Meßpunkten hervor; die Messpunkte werden imKapitel Fehlerbetrachtung aufgefuhrt. Bei angehaltenem Schrittmotor wurde je eine Mes-sung mit 10000 Werten aufgenommen. Aus den beiden Mittelwerten konnte auch hier eineSkalierungsfunktion errechnet werden. Zwischen Spannung am Potentiometer in Volt undder Position des Storkorpers in cm besteht etwa der Faktor 20,55. Die angegebenen Wertesind mit Vorsicht zu genießen, eventuell ist eine erneute, genauere Skalierung notig.
4 Beispielmessungen
An einer quaderformigen Kavitat wurden Messungen zur Frequenz der tiefsten Mode bei446,9 MHz durchgefuhrt. Hier werden Ergebnisse einer Quer- und einer Langsmessungmit einer Kupferkugel als Storkorper aufgefuhrt.
9
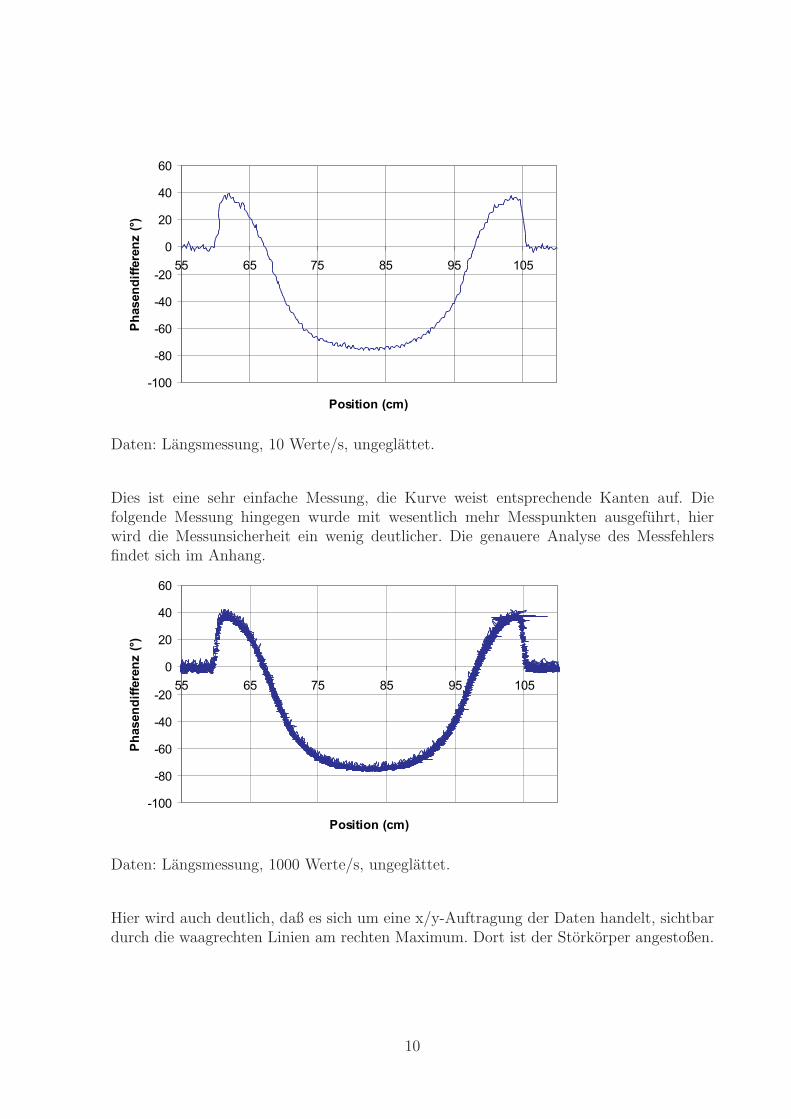
Daten: Langsmessung, 10 Werte/s, ungeglattet.
Dies ist eine sehr einfache Messung, die Kurve weist entsprechende Kanten auf. Diefolgende Messung hingegen wurde mit wesentlich mehr Messpunkten ausgefuhrt, hierwird die Messunsicherheit ein wenig deutlicher. Die genauere Analyse des Messfehlersfindet sich im Anhang.
Daten: Langsmessung, 1000 Werte/s, ungeglattet.
Hier wird auch deutlich, daß es sich um eine x/y-Auftragung der Daten handelt, sichtbardurch die waagrechten Linien am rechten Maximum. Dort ist der Storkorper angestoßen.
10

Daten: Langsmessung, 100 Werte/s, Glattungsintervall 10 Werte.
Diese Messung ist wesentlich deutlicher, es wurde ein gleitender Mittelwert uber 100Messwerte verwendet. Da die Samplefrequenz mit 100 Hz immer noch recht hoch gewahltist, sind Abschwachungen der Extrema kaum sichtbar.
-100
-80
-60
-40
-20
0
20
40
60
55 65 75 85 95 105
Position (cm)
Ph
asen
dif
fere
nz
(°)
Daten: Langsmessung, 1000 Werte/s, Glattungsintervall 100 Werte.
Diese letzte Darstellung beinhaltet nun eine starkere Glattung, sie schopft die Moglichkei-ten der Messkarte noch mehr aus, da das Verhaltnis aus Samplefrequenz und Glattungs-intervall jedoch gleich bleibt, ergeben sich hierbei keine weiteren Qualitatseinbußenbezuglich Verschiebungen oder Abschwachungen der Extrema.
11
5 Fehlerbetrachtung
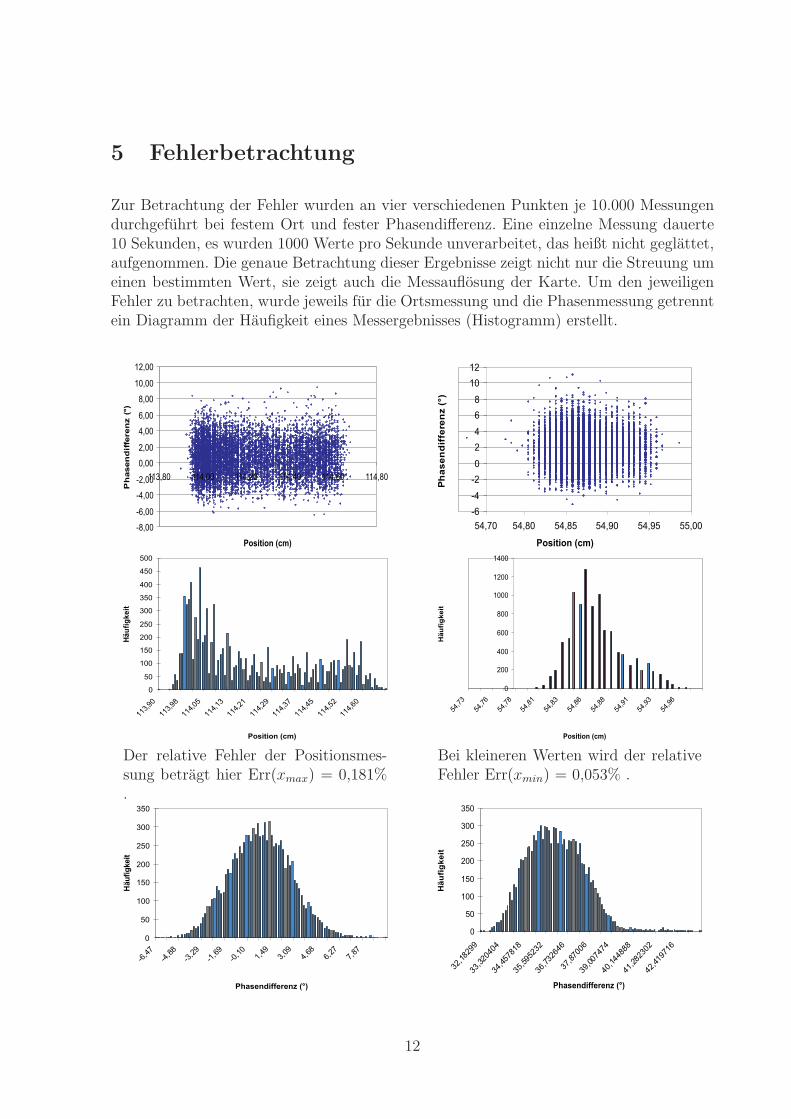
Zur Betrachtung der Fehler wurden an vier verschiedenen Punkten je 10.000 Messungendurchgefuhrt bei festem Ort und fester Phasendifferenz. Eine einzelne Messung dauerte10 Sekunden, es wurden 1000 Werte pro Sekunde unverarbeitet, das heißt nicht geglattet,aufgenommen. Die genaue Betrachtung dieser Ergebnisse zeigt nicht nur die Streuung umeinen bestimmten Wert, sie zeigt auch die Messauflosung der Karte. Um den jeweiligenFehler zu betrachten, wurde jeweils fur die Ortsmessung und die Phasenmessung getrenntein Diagramm der Haufigkeit eines Messergebnisses (Histogramm) erstellt.
-8,00
-6,00
-4,00
-2,00
0,00
2,00
4,00
6,00
8,00
10,00
12,00
113,80 114,00 114,20 114,40 114,60 114,80
Position (cm)
Ph
asen
dif
feren
z(°
)
-6
-4
-2
0
2
4
6
8
10
12
54,70 54,80 54,85 54,90 54,95 55,00
Position (cm)
Ph
as
en
dif
fere
nz
(°)
0
50
100
150
200
250
300
350
400
450
500
113,
90
113,
98
114,
05
114,
13
114,
21
114,
29
114,
37
114,
45
114,
52
114,
60
Position (cm)
Hä
ufi
gk
eit
0
200
400
600
800
1000
1200
1400
54,73
54,76
54,78
54,81
54,83
54,86
54,88
54,91
54,93
54,96
Position (cm)
Häu
fig
keit
Der relative Fehler der Positionsmes-sung betragt hier Err(xmax) = 0,181%.
Bei kleineren Werten wird der relativeFehler Err(xmin) = 0,053% .
0
50
100
150
200
250
300
350
-6,4
7
-4,8
8
-3,2
9
-1,6
9
-0,1
01,
493,
094,
686,
277,
87
Phasendifferenz (°)
Häu
fig
keit
0
50
100
150
200
250
300
350
32,182
99
33,320
404
34,457
818
35,595
232
36,732
646
37,870
06
39,007
474
40,144
888
41,282
302
42,419
716
Phasendifferenz (°)
Hä
ufi
gk
eit
12
30,00
32,00
34,00
36,00
38,00
40,00
42,00
44,00
46,00
62,20 62,25 62,30 62,35 62,40 62,45
Position (cm)
Ph
asen
dif
fere
nz
(°)
-86,00
-85,00
-84,00
-83,00
-82,00
-81,00
-80,00
-79,00
-78,00
-77,00
83,50 83,60 83,70 83,80 83,90 84,00
Position (cm)
Ph
asen
dif
fere
nz
(°)
0
200
400
600
800
1000
1200
1400
62,151
4
62,176
779
62,202
158
62,227
537
62,252
916
62,278
295
62,303
674
62,329
053
62,354
432
62,379
811
Position (cm)
Häu
fig
keit
0
50
100
150
200
250
300
350
400
83,5434
5
83,5855
26
83,6276
02
83,6696
78
83,7117
54
83,7538
3
83,7959
06
83,8379
82
83,8800
58
83,9221
34
Position (cm)
Häu
fig
keit
0
50
100
150
200
250
300
350
32,182
99
33,320
404
34,457
818
35,595
232
36,732
646
37,870
06
39,007
474
40,144
888
41,282
302
42,419
716
Phasendifferenz (°)
Hä
ufi
gk
eit
0
50
100
150
200
250
300
350
400
450
500
-85,508
04
-84,748
976
-83,989
912
-83,230
848
-82,471
784
-81,712
72
-80,953
656
-80,194
592
-79,435
528
-78,676
464
Phasendifferenz (°)
Häu
fig
keit
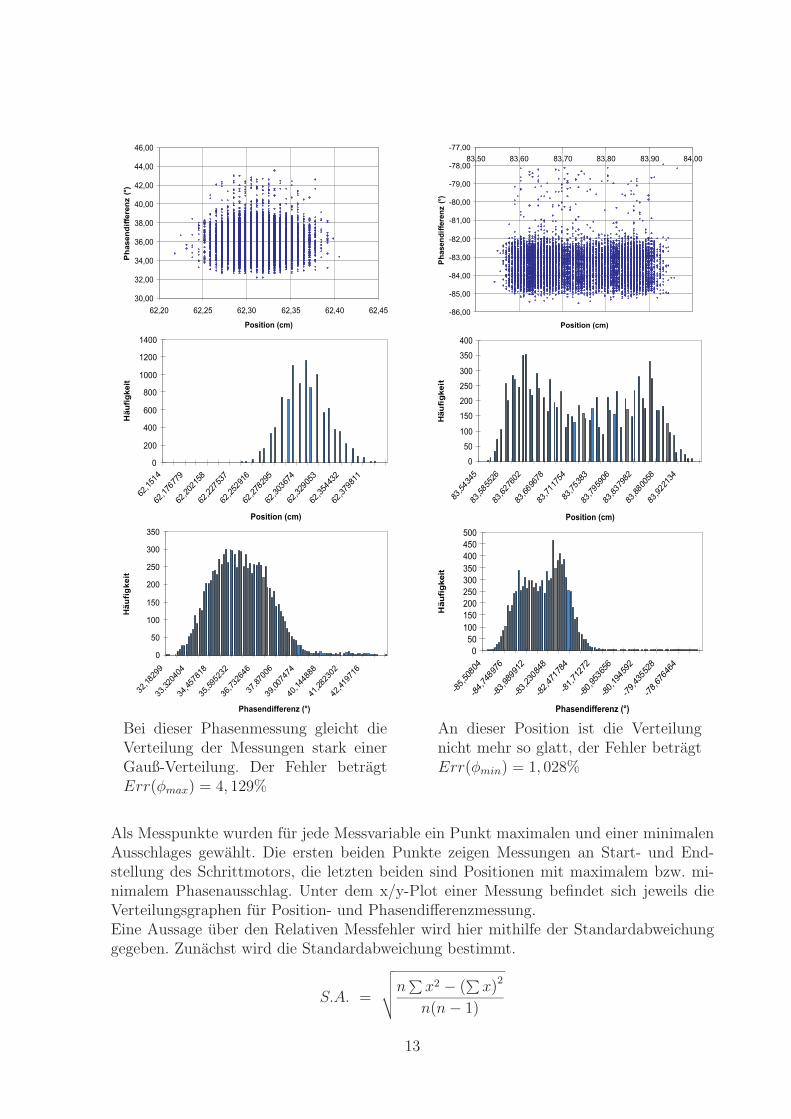
Bei dieser Phasenmessung gleicht dieVerteilung der Messungen stark einerGauß-Verteilung. Der Fehler betragtErr(φmax) = 4, 129%
An dieser Position ist die Verteilungnicht mehr so glatt, der Fehler betragtErr(φmin) = 1, 028%
Als Messpunkte wurden fur jede Messvariable ein Punkt maximalen und einer minimalenAusschlages gewahlt. Die ersten beiden Punkte zeigen Messungen an Start- und End-stellung des Schrittmotors, die letzten beiden sind Positionen mit maximalem bzw. mi-nimalem Phasenausschlag. Unter dem x/y-Plot einer Messung befindet sich jeweils dieVerteilungsgraphen fur Position- und Phasendifferenzmessung.Eine Aussage uber den Relativen Messfehler wird hier mithilfe der Standardabweichunggegeben. Zunachst wird die Standardabweichung bestimmt.
S.A. =
√
√
√
√
n∑
x2− (
∑
x)2
n(n − 1)
13
Der Mittelwert wird bestimmt:
M =1
n
∑
x
Aus Standardabweichung und Mittelwert kann ein relativer Fehler errechnet werden:
r.F. =S.A.
M
6 Anhang: Modifikation der Hardware
Aufgrund des sehr hohen Innenwiderstandes der Apparatur zur Ortsmessung (Potentio-meter) und des ebenfalls sehr hohen Innenwiderstandes der A/D-Wandler PCI-Karte wie-sen die Messungen zunachst starke Storungen auf. Unabhangig von der Sample-Frequenzwurden zum selben Ort Werte mit bis zu 30 % Differenz gemessen.Um einen konstanten Messwert mit geringem Rauschen zu erhalten, ist ein stabiler Span-nungsabfall am Potentiometer erforderlich. Um das zu erreichen, wurde am Positions-Messausgang ein 1 MΩ Widerstand parallel geschaltet. Damit ist der Spannungsabfallstabilisiert.
Literatur
[1] National Instruments, LabView 7 Express, Version 7.0, (c) 2003 National Instruments,ni.com/germany/labview.
14
























![Projekt VarioPump : Drosselung des Medikamentenstroms ... · Ergebnisse der Strömungsmessungen Keramik Mittlere Porengröße [µm] Infiltration Ermittelte Permeabilität [m²] ZrO](https://img.pdfslide.org/doc/110x75/5e2244c99d1c8a05642e083d/projekt-variopump-drosselung-des-medikamentenstroms-ergebnisse-der-strmungsmessungen.jpg)







