Embed Size (px)
Citation preview
Prof. Dr. Elmar Müller-Horsche 1 FH Augsburg Ingenieurmathematik 2
Stoffumfang 2.Semester - Lektionen
Komplexe Zahlen 1
2 3 4
Definition, Rechenregeln, Polardarstellung, Eulerformel Komplexe Wurzel Komplexe Schwingungen Komplexe Frequenzgänge
Fourierreihen, diskrete Fourier-
Transformation
5 6 7 8
Fourierreihen Anwendung der Fourieranalyse in der Schwingungslehre Diskrete Fouriertransformation Schnelle Fouriertransformation
Kurven und Flächen 9 10 11 12
Parametrische ebene Kurven Zylinder- und Kugelkoordinaten, 3D-Kurven Tangente, Normale, Krümmung Tangential- und Nomalbeschleunigung, 3D-Flächen
Partielle Ableitung 13 14 15 16 17
Funktionen mehrerer Veränderlicher, partielle Ableitung, Tangentialebene Kettenregel, Gradient Höhere Ableitungen, Extremwerte Mehrdimensionale Optimierung Taylorreihen mehrerer Veränderlicher
Mehrfachintegrale 18 19 20 21 22
Doppelintegrale Oberflächen, Schwerpunkte Flächenmomente Volumenintegrale Massenträgheitsmomente
Laplace-Transformation
23 24 25
Definition, Anwendungen, wichtige Bildfunktionen Rechenregeln, Transformationssätze Rücktransformation durch Partialbruchzerlegung
Differenzial-gleichungen (DGL)
26 27 28 29
Aufstellen von DGL, einfache Beispiele und Lösungen Anfangs- und Randwertprobleme Lösung mit der Laplacetransformation Differenzialgleichungssysteme

Prof. Dr. Elmar Müller-Horsche 2 FH Augsburg Ingenieurmathematik 2
Wie geht’s weiter im 2. Semester? Ähnlich wie im Ersten! Nur geht es jetzt häufiger in unbekanntes
Terrain. Die Grundlagen wurden im ersten Semester geschaffen. Auf sie wird bei den Funktionen mit mehreren Variablen zurückgegriffen. Sie zu differenzieren und zu integrieren, erfordert eigentlich keine neue Technik. Neu sind für viele Studenten sicher die komplexen Zahlen, die gleich am Anfang eingeführt werden. Grund: sie sind einfach so praktisch! Komplexe Rechnungen mögen zunächst etwas unanschaulich scheinen, nach einiger Übung erkennt man aber schnell ihre Eleganz und ihre Vorteile gegenüber den reellen Winkelfunktionen sin und cos. Die diskreten Fouriertransformationen bieten die beste Gelegenheit, noch einmal die komplexen Zahlen und die Matrizenrechnung zu üben und anzuwenden. Außerdem sind sie in der Messtechnik extrem wichtig und bilden die Grundlage der Schwingungsanalyse. Zum Schluss behandelt die Vorlesung das diffizile Gebiet der Differenzialgleichungen, zu deren Lösung die Laplace-Transformationen herangezogen werden. Mit diesen Methoden wird später im Hauptstudium in der Steuer- und Regelungstechnik intensiv weiter gearbeitet.
Hilfsmittel Es gilt weiterhin das Vorwort aus dem 1. Semester. Hier noch einmal eine kurze Wiederholung der verwendeten Symbole:
PM S. …
Brauch / Dreyer / Haacke Mathematik für Ingenieure Teubner Verlag Koch / Stämpfle Mathematik für das Ingenieurstudium http://www.hanser-elibrary.com/doi/book/10.3139/9783446433885 MATLAB installieren, für jeden eingeschriebenen Studenten kostenlos: https://www.hs-augsburg.de/rzservice/matlab/ Thuselt / Gennrich Praktische Mathematik mit MATLAB … http://link.springer.com/book/10.1007/978-3-642-25825-1
BDH
K S

Prof. Dr. Elmar Müller-Horsche 3 FH Augsburg Ingenieurmathematik 2
Lektion 1: Komplexe Zahlen, Rechenregeln, Polarform, Euler-Formel
Kapitel 11.1 + 11.2
Kapitel 11.1 + 11.2 (wie BDH, Zufall!)
1a
*
Rechne um in kartesisch oder polar:
0,7188332 1131 1 2
2
jj je j e eππ
−− +
1b
*
Sei: 4 3 2 1a j b j c j= − = − = − + Berechne kartesisch:
* **
*2 2 3
a b a ca b a b c
c b c
⋅ +⋅ − +⋅
Zeichne a, b und c in die komplexe Zahlenebene ein und überprüfe geometrisch die Rechnungen
store(BRAIN);
� �
( )
Re Im
2 2
2
,
( , )
: :
, arg( ) : tan
cos sin
1
al aginärteil teil
j
komplexe Einheit
komplexe Zahl z x j y x y reell
Punkt x y in der komplexen Ebene
Betrag z x y r
yPhase Argument z mit
xPolardarstellung z r j
Euler Formel r e
konj
j
ϕ
ϕ ϕ
ϕ ϕ
− −
= + ⋅
=
= + =
= =
= +
− = ⋅
= −
*
( )
( )
:
( ) ( )
,
j
j j
j
j
ugiert komplex z x jy r e
Rechenregeln z x jy re w u jv se
Addition z w x u j y v
Vektoraddition
Multiplikation z w rs e
Beträge multiplizieren Phasen addieren
z rDivision polar e
w s
Division k
ϕ
ϕ θ
ϕ θ
ϕ θ
−
+
−
= − = ⋅
= + = = + =+ = + + +
⋅ = ⋅
= ⋅
≙
* *
* 2( )
z z w z wartesisch Nenner reell
w w w s
⋅ ⋅= =⋅
BDH
K S
Prof. Dr. Elmar Müller-Horsche 4 FH Augsburg Ingenieurmathematik 2
Lektion 2: Komplexe Wurzel
Kapitel 11.2
Kapitel 11.3
2
*
Finde alle 3. Wurzeln von –1+j. Zeichne sie in die komplexe Zahlenebene ein.
store(BRAIN);
�
2
. !
0 .. 1j k
n nn n
pos reell n Lösungen
komplexe Wurzel z r e k nϕ π + ⋅ = ⋅ = −�������������
Lektion 3: Komplexe Schwingungen
Kapitel 11.2
Kapitel 11.4
Zeigerdiagramm.html: Die Projektion rotierender Zeiger führt zu Sinus- (oder Cosinus-) förmigen Schwingungen. Deshalb veranschaulicht man sich mechanische oder elektrische Schwingungen häufig mit Hilfe von Zeigerdiagrammen. Ein Vorteil: die Addition von Schwingungen läuft auf die Vektoraddition der entsprechenden Zeiger hinaus. Im Java-Applet kann man Schwingungen unterschiedlicher Amplitude und Phasenlage addieren und sich den Zusammenhang zwischen festem Zeigerdiagramm (nur die können in Lehrbüchern gezeigt werden!), daraus abgeleitetem rotierendem Zeigerdiagramm und zugehörigen Schwingungen klar machen.
3
**
Addiere die beiden Schwingungen: 2sin(ωt+π/6) und 3cos(ωt) einmal mit Hilfe der Additionstheoreme und dann komplex. Welche Methode ist schneller? Welche 2 Schwingungen werden außerdem bei der komplexen Rechnung quasi gratis addiert und welches Resultat erhält man?
store(BRAIN);
� � � �
{{
.
" "
ˆ( )
Re ( )( ) Im ( )
j t j j t
komplexer lässt pos AnfangsAnfangs Zeiger mit Amplitude phasewert rotierenZeiger
komplexe Schwingung s t b e x e e
s treelle Schwingung x t s t
HorizontaleZeigerprojektion auf Vertikale
ω ϕ ω
ω
−−
= ⋅ = ⋅ ⋅
=
≙
Komplexe Schwingungen lassen sich viel leichter addieren und differenzieren als reelle Schwingungen. Das ist der Hauptgrund für die Einführung der komplexen Zahlen in der Ingenieurmathematik. Der komplexe Anfangswert b beinhaltet Information über Amplitude x und Phasenlage ϕ.
BDH
BDH
K S
K S
Prof. Dr. Elmar Müller-Horsche 5 FH Augsburg Ingenieurmathematik 2
Lektion 4: Komplexe Frequenzgänge
MATLAB
frequenzgang.m: In MATLAB wird die komplexe Einheit durch „1i“ eingegeben. Das Arbeitsblatt zeigt, dass sich komplexe Rechenoperationen wie die reelllen programmieren lassen. Die Umrechnung in die Polarform geschieht mit den Funktionen abs() und angle(). Außerdem zeigt das Skript eine komplexere Grafik mit 2 Untergrafiken.
feder.html, federdaempfer.html, unwucht.html, daempfer.html: Für 4 verschiedene Anregungsformen werden je eine physikalische Animation und ihr Zusammenhang mit den Zeigerdiagrammen und dem Frequenzgang dargestellt. Interaktiv lassen sich die Anregungsfrequenz und die Dämpfung verändern. Schaue Dir die Applets gut an und mache Dir die Zusammenhänge klar, sie sind später in der Schwingungslehre sehr wichtig! Es steckt ziemlich viel Information in der Animation, nimm Dir also Zeit.
4
**
Unwuchtanregung: eine auf Dämpfern (Dämpfungsgrad θ=0,2) gelagerte 7kg schwere Maschine wird mit 2800 U/min betrieben. Die Eigenfrequenz des Maschine-Auflager-Systems liege bei f0=30Hz. Die Gesamtunwucht betrage 13 Gramm in 7cm Abstand von der Drehachse. Bestimme:Komplexen Frequenzgang, Amplitudenfrequenzgang, Phasenfrequenzgang und reelle Schwingungsamplitude der Maschine bei Betriebsbedingungen (z.B. mit den oben beschriebenen Java-Applets oder mit obigem MATLAB-Skript oder von Hand!) Welche maximale Amplitude tritt beim Hochfahren auf? Zeichne: Unwuchtlage und Maschinenauslenkung als Funktion der Zeit über mindestens eine Schwingungsdauer
store(BRAIN);
( ) ( )
( )
( )
arg( )
komplexer Frequenzgang F s t F r t
r t komplexe Anregung
s t komplexe Schwingung
Amplitudenfrequenzgang F
Phasenfrequenzgang F
= ⋅
==
Eingeschwungene angeregte Schwingungen schwingen genau mit Anregungsfrequenz ω. Damit kann man Anregung und sich ergebende Schwingung durch unterschiedlich lange und unterschiedlich orientierte Zeiger darstellen, die aber synchron mit gleicher Drehzahl ω drehen! Vom Anregungszeiger kommt man zum Schwingungszeiger durch komplexe Multiplikation mit dem komplexen Frequenzgang F. Er beinhaltet sowohl die Zeigerverlängerung oder –verkürzung (= Amplitudenfrequenzgang) als auch die Zeigerdrehung (= Phasenfrequenzgang). F hängt von der Systemdämpfung und der Anregungsfrequenz ab, nicht aber von der Zeit. F kann sehr einfach algebraisch bestimmt werden.

Prof. Dr. Elmar Müller-Horsche 6 FH Augsburg Ingenieurmathematik 2
Lektion 5: Fourierreihen
Kapitel 7.3.1 und 7.3.2 Kapitel 13.1
MÜ-HOme/ IngMathe/ Material2
Fourier.zip: In avi-Animationen werden immer mehr Oberwellen aufaddiert und ergeben eine immer besser Übereinstimmung mit: Dreieckfunktion, Rechteckfunktion und gleichgerichteter Wechselstrom-Funktion. Beim Rechteck ergeben sich allerdings an den Unstetigkeitsstellen immer Überschwinger (Gibbssches Phänomen).
5
**
Im folgenden wird eine 2π-periodische Trapezfunktion definiert:
02
( ) 2
2achsensymm. bzgl.
punktsymm. bzgl.
ax x
a xf x
x
x
παα
πα
π
π
⋅ ≤ ≤ ≤ ≤ ≤=
= =
0
sin( )lim
nn
α
αα→
=
Skizze. Berechne sämtliche Fourierkoeffizienten.
Überlege zunächst, welche Koeffizienten aus Symmetriegründen von Null verschieden sind, dann, dass das Integral wiederum aus Symmetriegründen zwischen 0 und π/2 beschränkt werden kann. Zeige: für α = 0 ergibt sich die bekannte Rechteckreihe (verwende angegebenen Grenzwert), für α = π/2 die bekannte Dreieckreihe.
store(BRAIN);
2π – periodische Funktionen lassen sich wie folgt durch sin- und cos-Wellen darstellen („Fourierreihe“):
0
1 1
2
( ) ( 2 )
2cos sin
( cos sin )n nn
f x f x n
aDC Anteil
a x b x Grundwelle
a nx b nx Oberwellen
π
∞
=
= ± ⋅ =
+ −
+ + +
+ +∑
Die Fourierkoeffizienten an und bn lassen sich durch kompliziertere Integrale bestimmen:
} { } {2
0
1 cos 0,1,2..( ) 1,2,..sinn
n
a nxf x dx nb nx
π
π= =∫
Bei T-periodischen Funktionen ( ) ( )f t n T f t± ⋅ = wird einfach nur x
durch 2
2t f t tT
πω π= ⋅ = ⋅ ersetzt (f : Frequenz, ω : Kreisfrequenz).
BDH
K S
Prof. Dr. Elmar Müller-Horsche 7 FH Augsburg Ingenieurmathematik 2
Lektion 6: Anwendung der Fourieranalyse in der Schwingungslehre
MATLAB
exzenter.m: die Exzenteranregung eines Federpendels wie im physikalischen Praktikum führt nicht genau auf eine harmonische Anregung des Aufhängepunktes. Die Anregungsfunktion ist komplizierter als ein Sinus oder Cosinus. Im Skript werden die Amplituden von Grund- und Oberwellen bestimmt, sowie die Reaktionen des Pendels auf diese Bestandteile der Anregung. Die Anordnung entspricht einer großen Exzenterscheibe mit dicht daneben liegender kleiner Umlenkrolle. Die Anregung erfolgt dann entsprechend einem gleichgerichteten Sinus.
MÜ-HOme/ IngMathe/ Material2
AngerSwing.zip: In avi-Animationen werden einige Exzenteranregungen dargestellt. Die Pendelreaktionen werden immer dann besonders interessant, wenn eine Oberwelle resonant verstärkt wird. Im physikalischen Praktikum (Versuch: angeregte Schwingung) kommt das bei halber Resonanzfrequenz auch vor. Das Pendel bewegt sich dann in einem lustigen Dreivierteltakt.
6 **
Ein Federpendel (Eigenfrequenz f0 = 5Hz, Dämpfungsgrad θ = 0,1) wird am Aufhängepunkt mit der Trapezfunktion aus Lektion 5 hin und her bewegt (f = 1Hz, a = 1cm, α = π/3).
Bestimme mit Hilfe von Aufgabe 5 die 3 niedrigsten nicht verschwindenen Fourieranteile der Anregungsfunktion a(t).
Bestimme mit Hilfe der aus Lektion 4 bekannten Frequenzgänge die jeweilige Reaktion des Pendels auf diese 3 Anregungsanteile. Summiere die 3 Teilreaktionen auf und erstelle mit MATLAB o.ä. den Graphen der sich daraus ergebenden Näherung für die Pendelreaktion x(t).
store(BRAIN);
Aus der Schwingungslehre ist bekannt, wie ein System auf sin- oder cos-förmige Anregungen (= „harmonische Anregungen“) reagiert. Nichtharmonische Anregungen können aber mit der Fourierreihe durch die Überlagerung (= Aufsummation) einer Vielzahl von harmonischen Anregungen dargestellt werden. Die Reaktionen des System auf Grund- und Oberwellen werden dann einfach ebenfalls aufsummiert und man erhält die Systemreaktion bei nichtharmonischer Anregung.

Prof. Dr. Elmar Müller-Horsche 8 FH Augsburg Ingenieurmathematik 2
Lektion 7: Diskrete Fouriertransformation (DFT)
MÜ-HOme/ IngMathe/ Material2
DiskretFourier.pdf: Lerntext zu den diskreten und schnellen Fouriertransformationen. Auch in den moderneren Lehrbüchern kommt dieses wichtige Thema meistens etwas zu kurz, daher hier eine ausführlichere Ausarbeitung.
7
Arbeite den Text „Diskrete Fouriertransformationen“ (s.o.) sorgfältig
durch. Betätige die Java-FFT-Rechenmaschine (s. Lektion 8)
store(BRAIN);
Die diskrete Fouriertransformation ist eine numerische Näherung für die Koeffizienten an und bn der Fourierreihe. Die zur Berechnung notwendigen Integrale werden einfach mit der Treppenstufenmethode angenähert. an und bn werden dabei zu einem komplexen „Spektralwert“ cn zusammengefasst, wodurch die sin- und cos-Funktionen durch
jnxe± ersetzt werden können, was die Rechnung stark vereinfacht.
Lektion 8: Schnelle Fouriertransformation (FFT)
MÜ-HOme/ IngMathe/ Material2
FastFourier.pdf: Übungsblatt mit 2-stufigem FFT-Schema für 8 Punkte
Applet für eine 3-stufige FFT. Die komplexen Spektralwerte werden wieder in reelle Amplituden und Phasen zurückverwandelt und in einem Balkendiagramm dargestellt. Sowohl die Funktionswerte als auch die Fourieramplituden und -phasen können interaktiv verändert werden.
8
**
Führe mit Hilfe des separaten Arbeitsblattes FastFourier.pdf die 8-Punkte-FFT für eine Trapezfunktion durch: a = 1, α = π/4. Skizze! yk = ?
Vergleiche die Koeffizienten der FFT mit denen der Fourierreihe. Plotte: die trigonometrische Interpolation mit Hilfe der FFT-Koeffizienten und die nach dem 2. Glied abgebrochene Fourierreihe
store(BRAIN);
Die schnelle Fouriertransformation ist ein geschicktes Rechenschema zur Durchführung der DFT mit möglichst wenig Rechenoperationen. Sie ist der am häufigsten eingesetzte mathematische Algorithmus in unserer heutigen Zeit und spielt bei so bekannten Anwendungen wie Musik-komprimierung in mp3 und Bilddkomprimierung in jpg eine wichtige Rolle.

Prof. Dr. Elmar Müller-Horsche 9 FH Augsburg Ingenieurmathematik 2
Lektion 9: Parametrische ebene Kurven
Kapitel 8.1 Kapitel 9.1; 9.3; 9.5; 9.7
MÜ-HOme/ IngMathe/ Material2
Zykloide.zip: avi-Film, ein Kreis rollt auf einer Geraden ab Wankel.zip: avi-Film, bei dem ein großer Kreis über einem kleineren Kreis abrollt (= Hypozykloide). Stimmt das Radienverhältnis, so kann man damit die Kontur eines Rotationskolbenmotor-Gehäuses mit 3 Arbeitskammern erzeugen.
9
** Zeige: die Parameterdarstellung
( ) cos cos2 ( ) sin cos2 0 45x yϕ ϕ ϕ ϕ ϕ ϕ ϕ= ⋅ = ⋅ ≤ ≤ °
erfüllt die implizite Darstellung der Lemniskate: 2 2 2 2 2( ) 0x y x y+ − + = und stellt damit den Lemniskatenbogen im 1. Quadranten dar. Bestimme Punkte (x,y) im Abstand ∆ϕ=5° und mache eine Skizze.
An welchen Stellen ϕ treten horizontale und vertikale Tangenten auf? Bestimme die entsprechenden Punkte (x,y)
Welche Steigung besitzt der Lemniskatenbogen im Ursprung? Welche Fläche schließt der Bogen mit der x-Achse ein?
store(BRAIN);
Bei parametrische Kurven werden die Punktkoordinaten als Funktion einer
Hilfsgröße (= Parameter) dargestellt: ( )( )( ) ( )x tr t y t=�
.
Parameter können z.B. sein: Zeit t, Abrollwinkel ϕ, zurückgelegte Wegstrecke s usw.
Steigung: dy y
dx x=ɺ
ɺ (Punkt = Ableitung nach dem Parameter, auch wenn
dieser nicht die Zeit t ist!)
Bogenlänge: 2 2b
a
s x y dt= +∫ ɺ ɺ
BDH
K S

Prof. Dr. Elmar Müller-Horsche 10 FH Augsburg Ingenieurmathematik 2
Lektion 10: Zylinder- und Kugelkoordinaten, 3D - Kurven
www. http://www-hm.ma.tum.de/integration/course/html/ch2/home.htm
10
**
Gegeben ist folgende Bahn auf der Erdoberfläche in Kugelkoordinaten (Erdradius R):
( ) ( ) ln tan2 42 2 2
v t v tt t
R R
π πθ ϕ ⋅ ⋅ = − = +
Die Bahn startet z.Zt. t = 0 am Äquator. Wann wird der Pol erreicht?
Wie oft wird dabei die Erde umrundet?
Zeige: Die Geschwindigkeit beträgt stets v = konst., der Kurs ist stets genau NO.
store(BRAIN);
Zylinderkoordinaten r, ϕ, z :
2 2cos
sin tan
:
r
z
Geschwindigkeiten
v r radial
v r tangential
v z
x r r x y
yy r
axi
z z
al
x
ϕ
ϕ
ϕ ϕ
ϕ== ⋅
=
= ⋅ = +
= ⋅ =
=
ɺ
ɺ
ɺ
Kugelkoordinaten r, ϕ, θ :
2 2 2sin cos
sin sin tan
cos cos
:
sin
r
x r r x y z
yy r
xz
z rr
Geschwindigkeiten
v r radial
v r tangential Süd
v r tangential Ostθ
ϕ
θ ϕ
θ ϕ ϕ
θ θ
θθ ϕ
= ⋅ = + +
= ⋅ =
= ⋅ =
=
= ⋅= ⋅
ɺ
ɺ
ɺ
x
y
z
z
r ϕ
P
x
y
z
θ r
ϕ
P

Prof. Dr. Elmar Müller-Horsche 11 FH Augsburg Ingenieurmathematik 2
Lektion 11: Tangente, Normale, Krümmung
Kapitel 8.3.1 Kapitel 9.3; 9.4
MÜ-HOme/ IngMathe/ Material2
Schmiegekreis.zip: avi-Film, der den Schmiegekreis an den verbogenen Kreisring zeigt (Aufgabe 11a). Die Bahnkurve seines Mittelpunktes heißt Evolute
MATLAB
klothoide.m erstellt zwei Graphen der in Aufgabe 11b behandelten Kurve. Die Konstante k beträgt 1 und 2 und erzeugt unterschiedlich eng gewickelte Spiralen. Die Klothoide dient heute im Straßen- und Schienenbau als Übergangsbogen von der Geraden zum Kreis.
11a
**
Betrachte den verbogenen Kreisring in kartesischen Koordinaten: cos
( ) sin
sin 2
r
ϕϕ ϕ
ϕ
=
�
Versuche eine kleine 3D-Skizze
Bestimme: ˆ ˆ( ) : ( ) ( )d v d
v r v v T Td v d
ϕ ϕ ϕϕ ϕ
= = =�
� � �
Bestimme bei ϕ=90°: Krümmung κ und Hauptnormaleneinheitsvektor N
11b
**
Klothoiden können folgendermaßen beschrieben werden (die vorkommenden Integrale lassen sich „elementar“ nicht lösen):
2 2
0 0
( ) cos ( ) sin .2 2
h hkt ktx h dt y h dt k konst= = =∫ ∫
Zeige: der Parameter h ist identisch mit der Bogenlänge s Zeige: die Krümmung der Kurve ist proportional zu ihrer Länge, je länger sie wird, desto stärker krümmt sie sich κ(s)=k·s (Bilder s. klothoide.htm)
BDH
K S

Prof. Dr. Elmar Müller-Horsche 12 FH Augsburg Ingenieurmathematik 2
Lektion 11: Tangente, Normale, Krümmung (Fortsetzung)
store(BRAIN);
Verallgemeinerte Geschwindigkeit (t sei irgendein Parameter, nicht
notwendigerweise die Zeit): ( )
( ) ( ) ( )( )
x tv t r t y t
z t
= =
ɺ� �ɺ ɺɺ
Tangenteneinheitsvektor: ˆ vT
v=�
(Geschwindigkeit immer tangential)
Hauptnormale: ˆ
ˆˆ
TN
T=ɺ
ɺ
Krümmungsradius ρ, Krümmung κ : 1:
T
vκ
ρ==
ɺ
Krümmung einer ebenen Kurve, dargestellt durch Funktion y = f(x):
( )3
22
'': ''
1 '
ff
f
κ = ≅+
(Näherung für flache Kurven f ‘<<1)
κ ist hier Vorzeichen behaftet: pos., wenn nach oben gekrümmt.
Lektion 12: Tangential-und Normalbeschleunigung, 3D - Flächen
12
**
Zum Kampf gegen die Langeweile in der Formel 1 plant Bernie die berühmte Parabolica in Monza als Vollgaskurve bremsfrei zu gestalten (v=300km/h=const.). Wie der Name schon sagt, hat die Kurve bei geschickter Koordinatenwahl die Form: y=ax2. Im Scheitel beträgt der Kurvenradius 50m. Bestimme: - a - Zentrifugalbeschleunigung z(x), z(0) - Gesamtbeschleunigung gz(x) (incl. Erdbeschleunigung), gz(0) - Kurvenneigung α(x) (0° flach, 90° senkrechte Wand), so daß die
Resultierende aus Zentrifugal- und Erdbeschleunigung senkrecht zur Oberfläche steht, α(0)
- Ab 9g Gesamtbeschleunigung wird Basti kurzfristig ohnmächtig („black out“). Wie lange dauert seine Bildstörung jeweils beim Durchfahren der Kurve?
store(BRAIN);
Beschleunigung �
�
2ˆ ˆ( ) :
tangential
normal
va t v v T N
ρ= = ⋅ + ⋅� �ɺ ɺ
3D – Flächen benötigen 2 Parameter

Prof. Dr. Elmar Müller-Horsche 13 FH Augsburg Ingenieurmathematik 2
Lektion 13: Funktionen mehrerer Veränderlicher, partielle Ableitung, Tangentialebene
Kapitel 9.2.1 Kapitel 10.1; 10.3
13a
*
Zeichne die Höhenlinien z = 0, 0.5 .. 3 folgender Funktionen in die xy-Ebene und errechne jeweils die partiellen Ableitungen erster Ordnung:
2 2( , ) 3 1 ( , ) 92 4
x yz f x y z f x y x y
= = − − = = − −
13b
*
Skizziere die folgende Funktion („Affensattel“) perspektivisch im Bereich , 1x y ≤ (Symmetrie der x- und y-Schnitte? wie sehen die Randschnitte
aus?) und berechne die partiellen Ableitungen: 3 2( , ) 3z x y x xy= −
13c
*
Wie kann die im Ursprung zentrierte obere Halbkugel mit Radius 2 nahe den Punkten (0,0) (1,0) (2,0) (1,1) durch ebene Flächen approximiert werden?
store(BRAIN);
Partielles Differenzieren
( , )f x y
x
∂∂
(eigenes Symbol! Kurzform: xf )
bedeutet Berechnung der Steigung in x-Richtung der Schnittlinie y = konst. Man differenziert einfach nach x, behandelt y wie eine Konstante. Bsp.:
3 2 4 4
2 2 3
3 4 3
( , )
3 4 ( 1,1) 1
2 4 ( 1,1) 3
x x
y y
f x y x y x y y
ff x y x y f
xf
f x y x y fy
= + +∂ = = + − = −∂∂ = = + + − =∂
xf und yf geben die Steigung der Tangentialebene t(x,y) an die Fläche
( , )z f x y= in x- und y-Richtung an. Diese wäre im obigen Beispiel: ( , ) ( 1,1) ( 1,1) ( ( 1)) ( 1,1) ( 1)
1 ( 1) 3( 1) 3 3
x yt x y f f x f y
x y x y
= − + − ⋅ − − + − ⋅ − =
= − + + − = − − +
Dies ist dann auch gleich die lineare Näherung einer „mehrdimensionalen“ Funktion, hier in der Umgebung des Punktes (-1,1).
BDH
K S

Prof. Dr. Elmar Müller-Horsche 14 FH Augsburg Ingenieurmathematik 2
Lektion 14: Kettenregel, Gradient
Kapitel 9.2.1 Kapitel 10.3
14a
**
Sei 2 2 2 1
sin( ) mit und z x y x st y st
= = = + . Berechne und z z
s t
∂ ∂∂ ∂
einmal durch direktes Substituieren und dann mit Hilfe der Kettenregel
14b
**
Berechne ( , )z x y∇�
der Halbkugel. Welche Richtung hat der Gradient in jedem Punkt? Wie ist sein Betrag?
store(BRAIN);
Abhängigkeitsbäume und Kettenregel: sämtliche zur Endvariablen führende Wege ergeben einen Term in der Kettenregel. Im Beispiel führen 2 Wege von f nach r (über x und y) aber 3 Wege nach s (über x, y und z).
f f x f y
r x r y r
f f x f y f dz
s x s y s z ds
∂ ∂ ∂ ∂ ∂= ⋅ + ⋅∂ ∂ ∂ ∂ ∂∂ ∂ ∂ ∂ ∂ ∂= ⋅ + ⋅ + ⋅∂ ∂ ∂ ∂ ∂ ∂
Gradient einer Funktion zweier Veränderlicher: ( , )
( , ) : ( , )x
y
f x yf x y f x y
∇ =
�
Die partiellen Ableitungen bilden einfach die Komponenten eines Vektors, der „Gradient“ heißt. Mit dem Gradienten kann man die Steigung der Fläche z=f(x,y) an beliebigen Stellen 0 0( , )x y in beliebige Richtungen der xy-Ebene
ausrechnen („Richtungsableitung“). Die Richtung sei durch den Einheitsvektor u gegeben. Die gesuchte Steigung ist dann:
0 0 ˆ( , )f x y u∇ ⋅�
(Skalarprodukt).
BDH
f(x,y,z)
y(r,s) x(r,s) z(s)
s r
K S

Prof. Dr. Elmar Müller-Horsche 15 FH Augsburg Ingenieurmathematik 2
Lektion 15: Höhere Ableitungen, Extremwerte
Kapitel 9.2.1 Kapitel 10.3
15a
**
Sei ( , , ) lnzyg x y z x= Vereinfache den Ausdruck und berechne
sämtliche partielle Ableitungen bis zur 2. Ordnung. Bestätige am Beispiel den Satz von Schwarz.
15b
**
Sei
1 1 1 1( , ) 1 1f x y
x y x y
= + ⋅ + ⋅ +
. Bestimme die mögliche Lage
der Extremwerte und den Typ.
store(BRAIN);
Bezeichnungsweise: ( )
2
x xyy
f ff f
y x y x
∂ ∂ ∂ = = = ∂ ∂ ∂ ∂
Satz von Schwarz: die Reihenfolge bei höheren gemischten Ableitungen ist egal, z.B.: yx xyf f=
Extremwerte (horizontale Tangentialebene!) von z = f(x,y) treten nur an den Stellen auf, an denen die ersten partiellen Ableitungen verschwinden:
0x yf f= =
Die Kriterien für die Art der Extremstelle mit Hilfe der 2. Ableitungen sind jetzt komplizierter als bei Funktionen einer Variablen:
( )( )( )( )
2
2
2
2
0 0
0 0
0
0
xx xx yy xy
xx xx yy xy
xx yy xy
xx yy xy
Maximum f und f f f
Minimum f und f f f
Sattel f f f
unklar f f f
< ⋅ − >
> ⋅ − >
⋅ − <
⋅ − =
BDH
K S

Prof. Dr. Elmar Müller-Horsche 16 FH Augsburg Ingenieurmathematik 2
y y
2x
z z
Lektion 16: Mehrdimensionale Optimierung
Kapitel 9.2.1
16a
*
Ein 48cm langer Draht wird in maximal 3 Stücke der Länge 4a, 4b und 4c zerschnitten. Aus den Stücken werden Quadrate mit Kanten a, b und c gebogen. Welche Aufteilung ergibt maximale und minimale Gesamtfläche der Quadrate? Verwende die 2. Ableitungen zur Typbestimmung und beachte mögliche Extremwerte an den Grenzen des Wertebereichs für a, b und c.
16b
**
Ein hausförmiges Fenster gem. Skizze soll maximale Fläche A bei gegebenem Umfang L aufweisen. Bestimme die optimalen Abmessungen für x, y und z. Typbestimmung mit 2. Ableitungen schwierig. Besser: mit MATLAB die Funktion A(x,z) als Gebirge darstellen lassen.
Lektion 17: Taylorreihen mehrerer Veränderlicher
Kapitel 9.2.2
17a
*
Schreibe die Taylorentwicklung für f(x+∆x, y+∆y, z+∆z) bei (x,y,z) bis zur 3. Ordnung Term für Term in Indexschreibweise hin (z.B. fxxy).
17b
**
Ein Dehnungsmessstreifen hat den Widerstand R
A
ρ= ℓ (spezifischer
Widerstand ρ, Länge l, Querschnitt A). Zeige durch Taylorentwicklung bis zur 2. Ordnung: wenn sich die Eingangsgrößen ρ, l, A um ∆ρ, ∆l und ∆A ändern, so ändert sich R gemäß:
1R A A
R A A
ρ ρρ ρ
∆ ∆ ∆ ∆ ∆ ∆ ∆ = + − ⋅ − + ⋅
ℓ ℓ
ℓ ℓ
Betrachte konkret folgende Änderungen:
0 0 000 00 001,50 ( ) 2,30 2 1,53
A
A
ρ ε νερ
∆ ∆ ∆= = = − = − =ℓ
ℓ
Die Querschnittsänderung entspricht einer freien Dehnung mit Querdehnzahl ν=1/3. Bestimme ∆R/R in linearer und quadratischer Näherung.
Taylorreihe einer
Funktion mit 3 Variablen
Für eine Funktion f(x,y,z) mit 3 Variablen gilt z.B. (Entwicklungspunkt sei (a,b,c), Schrittweiten seine h, k und l ):
0
1( , , ) ( , , )
!
n
n
f a h b k c l h k l f a b cn x y z
∞
=
∂ ∂ ∂+ + + = ⋅ + ⋅ + ⋅ ∂ ∂ ∂ ∑
BDH
BDH

Prof. Dr. Elmar Müller-Horsche 17 FH Augsburg Ingenieurmathematik 2
Lektion 18: Doppelintegrale
Kapitel 9.3.1
www. http://www-hm.ma.tum.de/integration/course/html/ch2/home.htm
18a
**
( )P
x y dA P+∫∫ : Parallelogramm mit Ecken (2,2) (1,-1) (-2,-2) (-1,1)
18b
**
2 2
2 3
1
(4 5)x y
x y x dA+ ≤
− +∫∫
18c
**
2 2 2
2 2( )x y a
a x y dA+ ≤
− +∫∫
18d
**
(1 )D
x y dA D− −∫∫ : Dreieck mit Ecken (0,0) (1,0) (0,1)
store(BRAIN);
Mehrfachintegrale werden schrittweise von innen nach außen integriert. Es wird immer nur „ganz normal“ mit einer Integrationsvariablen integriert, die weiter außen stehenden Integrationsvariablen werden dabei als konstant angesehen:
.: ( )
( , ) ( )
( , )
b d b
a c a
äußeres Iinneres Integral A x
b d
a c
f x y dy dx A x dx
dx dy f x y alternative Schreibweise
=
= =
=
∫ ∫ ∫
∫ ∫
������������
Ergebnis der inneren Integration ist eine Funktion A(x), die die Fläche im Schnitt x = konstant zwischen der Funktion f und der xy-Ebene im Bereich c<y<d darstellt. A(x)dx ist als Scheibenvolumen zu interpretieren, Scheibendicke ist dx. Alle Scheiben des Aufschnittes werden bei der äußeren Integration zusammengezählt. Das Ergebnis ist damit das Volumen zwischen der Funktionsfläche z = f(x,y) und der xy-Ebene im rechteckigen Bereich a<x<b und c<y<d. Die Integrationsreihenfolge darf vertauscht werden. Bei konstanten Grenzen des Integrationsbereiches ist dies unproblematisch. Bei abhängigen Grenzen müssen diese aber beim Vertauschen von innerer und äußerer Integration verändert werden! Obwohl das Ergebnis als Volumen interpretiert werden kann (s.o.), spricht man beim Doppelintegral von einem Flächenintegral, da das Integrationsgebiet ein flächiger Bereich der xy-Ebene ist. dy·dx ist dort das Flächenelementchen, das gelegentlich auch mit dA abgekürzt wird.
BDH

Prof. Dr. Elmar Müller-Horsche 18 FH Augsburg Ingenieurmathematik 2
Lektion 19: Oberflächen, Schwerpunkte
www. http://www-hm.ma.tum.de/integration/course/html/ch2/home.htm
19
**
Berechne die Fläche des in Aufgabe 13b betrachteten Affensattels im Bereich 2 2 2 1r x y= + ≤ . Benutze Polarkoordinaten.
store(BRAIN);
Das Freiform-Oberflächenelementchen (Freiformfläche durch z=f(x,y) gegeben) kann folgendermaßen bestimmt werden:
2 2 2 21 1x y x ydS f f dA f f dx dy= + + = + + ⋅
Die Integration über einen Bereich der xy-Ebene ergibt dann die entsprechende Gesamtoberfläche. Flächenelement dA in der xy-Ebene mit Polarkoordinaten berechnet: dA r dr dϕ= ⋅ ⋅ Statische Momente Sx, Sy ebener Querschnitte bezüglich x- oder y-Achse:
x y
G G
S y dA S x dA= ⋅ = ⋅∫∫ ∫∫
Der Querschnitt sei durch Gebiet G in der xy-Ebene gegeben. Entscheidend ist immer der Abstand des Flächenelementchens dA von der jeweiligen Achse. Der Abstand von der x-Achse ist z.B. y! Schwerpunkt ( , )x y ebener Querschnitte:
( , ) ,y xS S
x yA A
=
A: Querschnittfläche
Lektion 20: Flächenmomente
20
**
Bestimme das axiale Flächenmoment Ix eines viertelelliptischen Querschnittes im ersten Quadranten mit Halbachse 1cm in x-Richtung und Halbachse 2cm in y-Richtung durch Flächenintegration in kartesischen Koordinaten (Ellipsenmittelpunkt im Ursprung).
store(BRAIN);
In der Biegetheorie werden die Flächenmomente 2. Grades benötigt: 2
2
2 2
.
.y
x
x ypG
xy
I axiales Flächenmoment bzgl y AchsexI axiales Flächenmoment bzgl x Achsey dA polares Flächenmoment I IIx y
DeviationsmomentIxy
− −= = ++
∫∫

Prof. Dr. Elmar Müller-Horsche 19 FH Augsburg Ingenieurmathematik 2
Lektion 21: Volumenintegrale
Kapitel 9.3.1
www. http://www-hm.ma.tum.de/integration/course/html/ch2/home.htm
21
**
Gegeben sei neben stehender Schnitt durch ein Drehteil (Drehachse z, alle Maße mm). Gebe den funktionalen Verlauf r(z) des oberen Halbkreis-Bogens an (in mm). Runde im Folgenden bei der Ergebnisangabe stets genau auf 5 signifikante Stellen, nicht mehr und nicht weniger (Bsp.: 1,2345 oder 1234500).
- Berechne das Volumen des Ringes 2
- Berechne durch Volumenintegration in Zylinderkoordinaten das Volumen von Halbtorus 1
- Berechne das Gesamtgewicht (Dichte Stahl ρ=7,8311)
- Berechne den Abstand a des Flächenschwerpunktes des gezeigten Querschnitts von der Drehachse (aus der Vorlesung ist vielleicht noch
bekannt, dass der Flächenschwerpunkt des Halbkreises 4
3
R
π von der
geraden Linie entfernt liegt
- Berechne nochmal das Gesamtvolumen nach der 2. Guldinschen
Regel. Die früheren Ergebnisse sollten natürlich bestätigt werden
store(BRAIN);
Volumenintegrale sind 3-fach Integrale und bestehen aus innerem, mittlerem und äußerem Integral:
( , , ) ( , , )
( , , )
f fb d b d
a c e a c e
inneres Integral
mittleres Integral
äußeres Integral
G
f x y z dz dy dx dx dy dz f x y z
f x y z dV
= =
=
∫ ∫ ∫ ∫ ∫ ∫
∫∫∫
�������������������������������
Die Integrale werden wieder schrittweise von innen nach außen berechnet, wobei die weiter außen stehenden Integrationsvariablen jeweils als konstant angesehen werden. dx·dy·dz ist dabei das Volumenelementchen dV in kartesischen Koordinaten. dV in Zylinderkoordinaten: dV r dr d dzϕ= ⋅ ⋅ ⋅ dV in Kugelkoordinaten: 2 sindV r dr d dθ θ ϕ= ⋅ ⋅ ⋅
BDH
1
2
r
z
832
1614
Prof. Dr. Elmar Müller-Horsche 20 FH Augsburg Ingenieurmathematik 2
Lektion 22: Massenträgheitsmomente
Kapitel 9.3.1
www. http://www-hm.ma.tum.de/integration/course/html/ch2/home.htm
22
***
Eine Betonsäule mit Radius a verlaufe in z-Richtung. Mit einem Kernbohrer wird aus ihr konzentrisch zur x-Richtung ein Kern mit Radius b<a gebohrt. Bestimme vom Bohrkern Masse m und Massenträgheits-moment Jx:
Skizze
Führe die notwendigen Integrationen in kartesischen Koordinaten durch. Überlege zunächst, welche Salami-Schnittrichtung die einfachsten Scheiben ergibt.
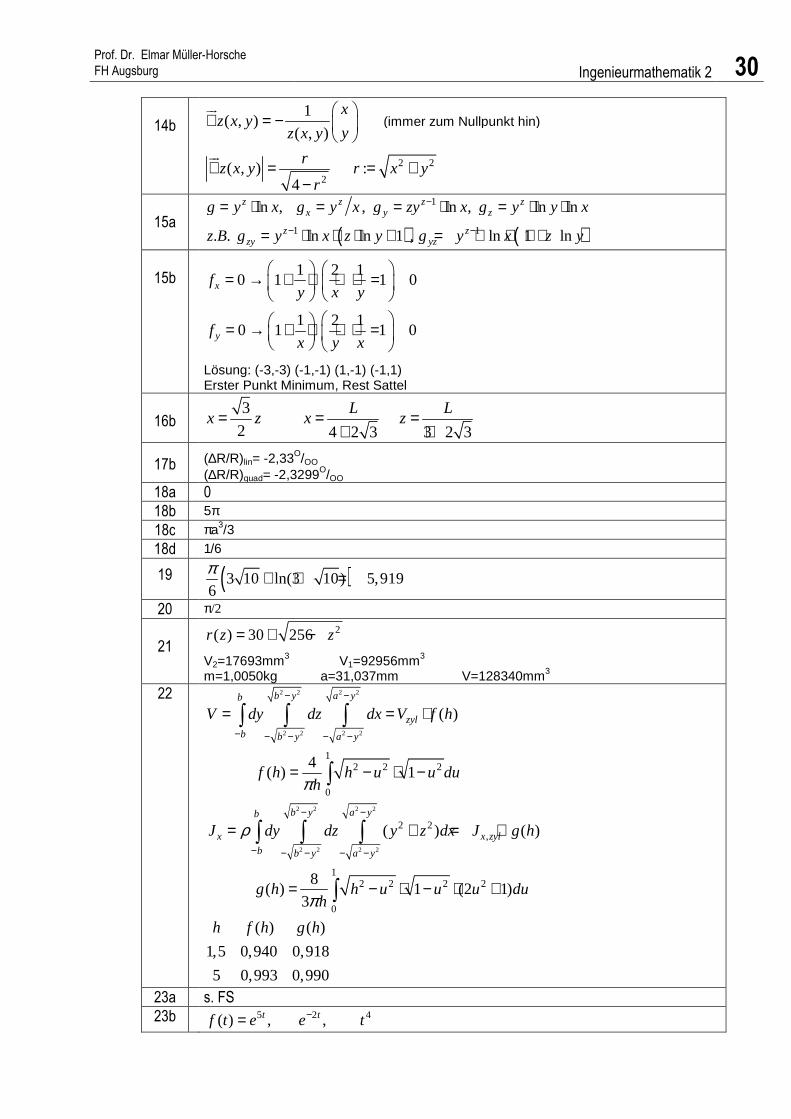
Gebe das Ergebnis folgendermaßen an: m=mzyl·f(h), J=Jzyl·g(h), wobei für die zylindrischen Werte von Radius b und Länge 2a auszugehen ist und h=a/b bedeutet. Weil der Bohrkern etwas kleiner als der zugehörige Zylinder ist, sind f(h) und g(h) <1. Für großes h sollte sowohl f(h) als auch g(h) gegen 1 streben, da dann die Stirnflächen sich immer mehr ebenen Kreisflächen annähern. Beide Funktionen sind durch nicht mehr elementar berechenbare Integrale gegeben. Bestimme ihre Werte für h=1,5 und h=5 mit MATLAB (function „integral“) oder mit der Treppenstufenmethode in EXCEL.
store(BRAIN);
Viele Formeln für Drehbewegungen kann man durch Modifikation der entsprechenden Formeln für linearen Bewegungen erhalten. Die Geschwindigkeit v wird durch die Kreisfrequenz ω ersetzt und die Masse m durch das Massenträgheitsmoment J:
( )
( )
2
2
:Drehachse
G
G
J Abstand von Drehachse dm
Abstand von Drehachse dVρ
= ⋅ =
= ⋅
∫∫∫
∫∫∫
Falls die x-Achse Drehachse ist, gilt also beispielsweise:
( )2 2x
G
J y z dm= + ⋅∫∫∫
dm ist dabei das Massenelementchen, das durch ρ·dV oder in kartesischen Koordinaten durch ρ·dx·dy·dz bestimmt werden kann (ρ: Dichte). Das Integrationsgebiet G erstreckt sich über den gesamten Drehkörper und ist im Allgemeinen durch abhängige Grenzen in einem möglichst günstigen Koordinatensystem anzugeben. Darin besteht meistens die Schwierigkeit bei der konkreten Berechnung!
BDH

Prof. Dr. Elmar Müller-Horsche 21 FH Augsburg Ingenieurmathematik 2
Lektion 23: Laplace-Transformation
Kapitel 13.1 Kapitel 16.1
23a
**
Bestimme durch Integration die Bildfunktionen F(p) folgender Funktionen:
( ) cos , ( ) sinh , ( ) cosh , ( ) atf t t f t kt f t kt f t teω= = = =
23b
*
Wie lauten die Zeitfunktionen zu folgenden Bildfunktionen?
5
1 1 24( ) , ( ) , ( )
5 2F p F p F p
p p p= = =
− +
store(BRAIN);
Mit der Laplace-Transformation (LT):
� { } �0
( ) ( ) : ( ) pt
Bildfunktion Originalim Bildbereich funktion im
Zeitbereich
F p f t f t e dt∞
−
−
= = ⋅∫L
wird aus der ursprünglichen Zeitfunktion f(t) eine andere Funktion F(p). Man spricht von der Bildfunktion, deren Variable p den Bildbereich bildet.
p hat die Dimension 1
s und wird in vielen Lehrbüchern auch mit s
abgekürzt. Um die Verwechslungsgefahr mit der Sekunde zu vermeiden, verwenden wir hier aber p. Der große Vorteil der LT ist folgender: aus komplizierten mathematischen Operationen im Zeitbereich (z.B. Differenzieren) werden einfache algebraische Operationen im Bildbereich (Multiplikation mit p). Häufig kann man dann schnell die Lösung einer Differenzialgleichung im Bildbereich finden und braucht nur noch deren Rücktransformation. Hin- und Rücktransformation geschieht meist mit Hilfe von Tabellen („Korrespondenztafeln“). Hier die wichtigsten Korrespondenzen:
1
2 2
2 2
( ) ( )
1
1
!
1
sin
cos
nn
at
F p f t
Einschaltfunktionp
Impulsfunktion
nt
p
ep a
tp
pt
p
ω ωω
ωω
+
→←
−
+
+
-1L
L
BDH
0
1 f
t
0
1/a f
t
Fläche = 1
a
0lima→
K S

Prof. Dr. Elmar Müller-Horsche 22 FH Augsburg Ingenieurmathematik 2
Lektion 24: Laplace-Transformation: Rechenregeln, Transformationssätze
Kapitel 13.2 Kapitel 16.2; 16.3
MÜ-HOme/ IngMathe/ Material2
faltung.zip: In der Physik tauchen Faltungen im Zusammenhang mit Filterfunktionen auf. Das tatsächliche Sonnenspektrum f1 wird z.B. durch die Filterfunktion f2 des Spektrometers verschmiert und ergibt ein modifiziertes Messergebnis. In der Animation wird an einem weiteren Beispiel diese Verschmierung veranschaulicht.
24a
*
{ }71 2 3 1
t
t t U e τ− + + −
L L
24b
**
Lösung Y(p) der Integrodifferenzialgleichung im Bildbereich:
( )
( ) ( ) ( )0
3 7 13 2sin 5
0 0 0 1 0 2
t
y y y y d t
y y y
τ τ+ − + =
= = =
∫iii i
i ii
24c
**
( ) ( ){ }32
cosh 1cost t
e te
πω ϕ
− −
L L
store(BRAIN);
Linearität der LT:
{ }1 2 1 2( ) ( ) ( ) ( )a f t b f t a F p b F p⋅ ± ⋅ = ⋅ ± ⋅L
Differenzieren im Zeitbereich:
{ }{ } { }2 ( )
( ) ( ) (0)
( ) ( ) (0) (0) ( ) .n
f t p F p f
f t p F p p f f f t usw
= ⋅ −
= ⋅ − ⋅ − =
ɺ
ɺɺ ɺ
L
L L
Integrieren im Zeitbereich:
0
( )( )
t F pf d
pτ τ
= ∫L
Verschiebung im Zeitbereich um a nach rechts (Vorsicht, die verschobene Funktion wird im Bereich 0<t<a Null gesetzt!):
{ }( ) ( )paf t a e F p−− = ⋅L
Dämpfungssatz:
{ }( ) ( )ate f t F p a− ⋅ = +L
Ähnlichkeitssatz:
{ } 1( )
pf at F
a a =
L
Faltungssatz: { }1 2 1 2
1 2 1 20
( ) ( )
: ( ) ( ) ( ) : ( ) ( )t
f f F p F p
Faltungsintegral f t f t f t f f t dτ τ τ
⊗ = ⋅
= ⊗ = ⋅ −∫
L
BDH
K S

Prof. Dr. Elmar Müller-Horsche 23 FH Augsburg Ingenieurmathematik 2
Lektion 25: LT-Rücktransformation durch Partialbruchzerlegung
Kapitel 13.2.4 Kapitel 16.5
25a
**
Berechne die Faltung cos cost tω ω⊗ und zeige damit:
( )2
122 2
sin cos
2
p t t t
p
ω ω ωωω
−
+ = +
L
25b
**
Berechne durch reelle Partialbruchzerlegung:
21
3 2
3
5 8 4
p p
p p p− − − + + +
L
25c
**
Berechne durch komplexe Partialbruchzerlegung: 1
2
1
2 2p p− − +
L
store(BRAIN);
Rationale Funktionen kommen häufig als Lösungen von DGL im Bildraum vor. Sie lassen sich mit der Partialbruchzerlegung, der Linearitätsregel und den Korrespondenztafeln leicht zurück transformieren.
Lektion 26: Aufstellen von Differenzialgleichungen (DGL), einfache Beispiele und Lösungen
Kapitel 12.1 Kapitel 12.1; 12.2
26a
***
Durch das nebenstehende Modell soll ein Auto simuliert werden, das z.Zt. t=0 einen 10 cm hohen Bordstein überfährt. m1 ist die Karosse, m2 sind die Räder. Stelle die Differenzial-gleichungen für x1(t) und x2(t) auf unter Verwendung der üblichen Abkürzungen:
{2 21 2
1/ 2 1/ 2 31/ 2 1/ 2 2
2
2
2 ; ;
0,1 0 0; ( ) 1 0
k D D
m m m
D m ta t tm
δ ω ω
σ
= = =
⋅ <= = ≥
Gebe das DGl-System auch als reine Zahlengleichung an (in MKS-Einheiten)
BDH
BDH
m1= 1000 kg
0,1 m
m2= 50 kg
D1= 40 k= 16 to/s
D2= 50 kN/m
x1(t)
x2(t)
K S
K S

Prof. Dr. Elmar Müller-Horsche 24 FH Augsburg Ingenieurmathematik 2
Lektion 26: Aufstellen von Differenzialgleichungen .. (Fortsetzung)
26b
**
Stelle die Differenzialgleichung für die Geschwindigkeit v(t) einer frei fallenden Masse m auf und löse sie durch Trennung der Variablen. Der Luftwiderstand sei:
2
2vw wF c A
ρ= ⋅ ⋅
cw Widerstandsbeiwert (≅ 1)
ρ Luftdichte (≅ 1,2) A angeströmte Fläche (Fallschirmspringer ≅ 0,6 m2)
Verwende die Abkürzung: 2
w
mgv
c Aρ∞ =⋅ ⋅
Wie schnell wird der Springer (m = 75 kg)?
store(BRAIN);
Versucht man in der Bewegungslehre, in der Biegelehre oder in der Statik konkrete Problemstellungen in die mathematische Formelsprache zu übersetzen, so gelangt man häufig zu sog. Differenzialgleichungen (DGL). Die gesuchte Funktion (Bahn-Zeit-Funktion, Biegelinie oder Seilzug-Umschlingungswinkel-Funktion) ist mit ihren Ableitungen in einer Gleichung verknüpft:
( )( , , ',..., ) 0 : ( )nf x y y y gesucht y x= Dies stellt die allgemeine Form einer DGL n-ter Ordnung dar. Diese sind nicht eindeutig lösbar sondern besitzen n unabhängige Integrationskonstante, die über Anfangs- oder Randbedingungen bestimmt werden müssen („wo befand sich die Masse z.Zt. t=0 und wie schnell war sie da“ ist z.B. eine typische Anfangsbedingung in der Dynamik). Lösungsmethode: Trennnung der Variablen bei DGL vom Typ:
1 2
1 2 1 2
1 2
( ) ( )
( ) ( ) ( ) ( ) ( !)
: ( ( )) ( ) :
dyf y f x
dx
f y dy f x dx f y dy f x dx Merkhilfe
Lösung F y x F x C F Stammfunktion von f
⋅ =
⋅ = ⋅ ⋅ = ⋅
= +∫ ∫
Lösungsüberlagerung bei Linearer DGL vom Typ:
�( )
2 1 0( ) ... '' ( ) ' ( ) ( ) ( )nn
Störfunktion
y f x y f x y f x y f x g x⋅ + + ⋅ + ⋅ + ⋅ =
1) Finde allgemeine Lösung yh(x) der „homogenen Gleichung“ (rechte Seite = 0). Diese Lösung beinhaltet i.A. n unabhängige Integrations-konstante (s.o.).
2) Finde eine spezielle Lösung ys(x) der „inhomogenen Gleichung“ (incl. Störfunktion auf der rechten Seite). Diese Lösung ist nicht eindeutig. Man versucht, die einfachste Lösung zu finden. Die Lösung beinhaltet keine Anpassparameter (Integrationskonstante).
3) Komplettlösung ist dann einfach die Summe: y(x) = yh(x) + ys(x). Die Integrationskonstanten der homogenen Lösung müssen dann noch aus Anfangs- oder Randbedingungen bestimmt werden.

Prof. Dr. Elmar Müller-Horsche 25 FH Augsburg Ingenieurmathematik 2
Lektion 27: Anfangs- und Randwertprobleme
Kapitel 12.2 Kapitel 12.1; 12.4
27a
**
Die homogene Schwingungsdifferenzialgleichung lautet:
202 0x x xδ ω+ + =ɺɺ ɺ
Zeige durch einsetzen:
( )( ) tx t A t B e δ−= ⋅ + ⋅ ist eine Lösung falls 0δ ω= . A, B beliebige
Konstante
( )( ) sin cos td dx t A t B t e δω ω −= ⋅ + ⋅ ⋅ ist eine Lösung falls 0δ ω< mit:
2 20dω ω δ= −
27b
***
Gebe die DGl und die Randbedingungen für den Knickfall IV (s.u.) an. Verwende die Beziehungen:
2'' E EM F w M EI Mw a b
EI EI F F
⋅ −= − = − = =
ME ist dabei das vom Lager auf den Stab (Länge l) ausgeübte unbekannte Biegemoment beim Ausknicken (gepunktet). Man bekommt 4 Rand-bedingungen. Für welche Integrationskonstanten der homogenen Lösung und für welches a gibt es von Null verschiedene Lösungen?
BDH
x
w ME F
K S

Prof. Dr. Elmar Müller-Horsche 26 FH Augsburg Ingenieurmathematik 2
Lektion 28: Lösung mit der Laplacetransformation
Kapitel 13.4 Kapitel 16.6
PM S. 391
Hier kann man sich schon mal in SIMULINK üben und damit z.B. 28a simulieren. Die benötigte Datei heißt Einschwing.slx und steht unter „Material 2.Semester“ zum download zur Verfügung stehen. Mit dem verwendeten Block „transfer func“ können allerdings nur Anfangsbe-dingungen = 0 verarbeitet werden, was in der Aufgabe aber der Fall ist.
28a
**
Löse '' 2 ' 5 3 (0) '(0) 0y y y y y+ + = = =
28b
**
Löse die angeregte Schwingungs-DGl 2 20 0 ˆ2 sinx x x a tδ ω ω ω+ + = ⋅ɺɺ ɺ
mit folgenden Werten und Anfangsbedingungen: 1 1
0ˆ 2 ; 4 ; 5 ; (0) 1; (0) 0a cm s s x xω ω δ− −= = = = = =ɺ
28c
**
Löse das System:
' 6 0 (0) 1
' 5 2 0 (0) 0
y z y y
z z y z
+ + = =+ + = =
store(BRAIN);
Die Lineare DGL mit konstanten Koeffizienten und Anfangs-bedingungen:
( )2 1 0
( 1) ( 2)
... '' ' ( ) (*)
( 0), (0), ... , '(0), (0) :
nn
n n
a y a y a y a y g t
y t y y y vorgegebene Werte− −
⋅ + + ⋅ + ⋅ + ⋅ =
=
(Variable jetzt mal die Zeit t) kann nach Schema f mit Hilfe der Laplace-Transformation gelöst werden. Dazu werden einfach linke und rechte Seite von (*) Laplace transformiert :
( ){ } { }
11 ( )
0
1 0
( ) (0) ... (**)
( ) (0) ( ) ( )
( ) ( ) ( ) ( )
nn n i i
ni
a p Y p p y
a p Y p y a Y p G p
Y p y t G p g t
−− −
=
⋅ ⋅ − ⋅ + +
+ ⋅ ⋅ − + ⋅ =
= =
∑
L L
(**) kann dann nach Y(p) (= Lösung im Bildraum) aufgelöst werden. Es ergeben sich dabei oft rationale Funktionen. Um die gesuchte Lösung y(t) im Zeitbereich zu erhalten, muss man nur noch mit Partialbruchzerlegung zurück transformieren. Diese Lösung enthält dann keine freien Integrationskonstanten mehr und erfüllt sämtliche vorgegebenen Anfangsbedingungen. Das Verfahren ist auch bei gekoppelten DGL-Systemen anwendbar. Man bekommt im Bildraum ein algebraisches Gleichungssystem, das nach Y1(p), Y2(p) usw. aufgelöst werden muss.
BDH
K S

Prof. Dr. Elmar Müller-Horsche 27 FH Augsburg Ingenieurmathematik 2
Lösungen der etwas schwierigeren Aufgaben
1a / 42 1 3 4 3,5j jj e e j jπ π + −
1b 16-24j -9+3j 2-10j j
2 24 36 2 0,1,2
j n
e nπ π + ⋅ =
3
( )( )
419 sin( ) arctan
3
Im 3 4
2cos( / 6) 3sin 19 cos( )
j t
t
j e
t t t
ω
ω ϕ ϕ
ω π ω ω ϕ
+ =
+
+ − = +
4
0
2
2
maxmax
28001,56
60 30
( , )1 2
(1,56 / 0,2) 1,42 0,62
1,56 arg( ) 156
0,013 7ˆ ˆ 1,56 203
7
ˆ( 0,2) 2,55 332
f
f
Fj
F j
F F
kg cmx F a m
kg
F x m
η
ηη θη θη
µ
θ µ
= = =⋅
=− + ⋅
= − −= = − °
⋅= ⋅ = ⋅ =
= = =
5 2
20
4 4 sin( )( ) sin( )
1,3,5,7...
4 sin(3 ) sin(3 )( ) sin sin
9
sin(5 ) sin(5 )...
25
na n
b f x nx dxn
n
a xf x x
x
π απ πα
ααπα
α
= ⋅ = ⋅
=⋅= ⋅ ⋅ + +
⋅ + +
∫

Prof. Dr. Elmar Müller-Horsche 28 FH Augsburg Ingenieurmathematik 2
6
0
2
5 7
( )
0, 2 1, 0408 2, 4 1, 0960sin(2 0, 0419)
1 5 90 0, 2106sin(10 2)
1, 4 1 163, 7 0, 0215sin(14 2,
6 3 sin10 sin14( ) sin 2 ..
25 49Grundwellemit f Oberwellen mit f und f
f f AF PF z t
t
t
t
t ty t t
η
π
π π
π
π πππ
=
− ° −
− ° − −
− ° + −
= − +
������������
8571)
8 FFT Fourierreihe
c0 = 0
12 1
4c j
+= − 12 1
1,20712
b+= = 1 2
8 21,1463b
π= =
c2 = 0
32 1
4c j
−= − 32 1
0,20712
b−= = 3 2
8 20,1274
9b
π= =
c4 = 0
9 hor.: x‘ = 0 bei ϕ=0 Punkt (1,0)
vert.: y‘ = 0 bei ϕ=30° Punkt 3 1
,2 2 2 2
Steigung im Ursprung: 1 Fläche: 1/4
10
Pol (θ = 0):
2
Rt
v
π= Erde wird dabei unendlich oft umrundet.
2 2sin
:Nord Ost Nord Ost
Nord Ost
v R v R v v v
NO v v
θ θ ϕ= − ⋅ = ⋅ ⋅ = +=
ɺ ɺ
0 0.2 0.4 0.6 0.8 11.5
1
0.5
0
0.5
1
1.5
y t( )
z t( )
t
Pendelreaktion(Grund- und 2 Oberwellen)
trapezförmige Anregung(genähert durch Grund-und 2 Oberwellen)
0 0.25 0.5 0.75 1 1.25 1.5 1.75 21.5
1
0.5
0
0.5
1
1.5
ff x( )
ff xx( )
f x( )
x
π
xx
π,
x
π,
nach 2.Glied abgebrocheneFourierreihe
trigonometrische Interpolationmit FFT-Koeffizienten
Aufgabe 6 Aufgabe 8

Prof. Dr. Elmar Müller-Horsche 29 FH Augsburg Ingenieurmathematik 2
11a
Skizze s. avi-file „Schmiegekreis und Evolute eines verbogenen Kreisringes“
32
sin
cos 3 2cos 4
2cos 2
sin cos4sin 4 1ˆ cos sin
3 2cos 4(3 2cos 4 ) 2cos 2 4sin 2
0ˆ(90 ) 0,2 (90 ) 1
0
v v
dT
d
N
ϕϕ ϕ
ϕϕ ϕ
ϕ ϕ ϕϕ ϕϕ ϕ ϕ
κ
− = = +
− − = ⋅ + ⋅ − + + −
° = ° = −
�
11b
2 2
2
2
1
cos2ˆ
sin2
ˆ
dx dyds dh dh s h
dh dh
dx khd dhT r
dyds khdh
dT k h k s
dhκ
= + ⋅ = ⋅ → =
= = =
= = ⋅ = ⋅
�
12
( )
22
32 2 2
2 2
2
4 2
32
(9 )
0
1 1
2 50 100
2( ) , (0) 14,15
1 4
( ) ( ) , (0) 14,19
tan , (0) 85,96
120
(9 ) 29,932
( 9 ) 2 63,25 0,76x g
am m
v az x v z g
a x
gz x g z x gz g
v
g
v a
gx g m
as
s gz g ds m t sv
ρ
α αρ
= =⋅
= = ⋅ =+
= + =
= = °
−= =
> = = = =∫
13c
(0 ,0 ) 2 (1 ,0 ) 33
(2 ,0 ) 00
(1 ,1 ) 22 2
(horizontale Ebene),
(Ebene x-Achse, x=2)
xz x y z x y
xz x y
x yz x y
⊥
∆+ ∆ + ∆ ≅ + ∆ + ∆ ≅ −
∆+ ∆ + ∆ ≅ −
∆ ∆+ ∆ + ∆ ≅ − −
14a
3 4 3 4 4 2 3
4 3 2 2 4 4 2 3
(4 2 )cos( )
(4 3 )cos( )
zs t st s t s t
sz
s t s t s t s tt
∂ = + +∂∂ = + +∂
Prof. Dr. Elmar Müller-Horsche 30 FH Augsburg Ingenieurmathematik 2
14b
2 2
2
1( , )
( , )
( , ) :4
(immer zum Nullpunkt hin)x
z x yyz x y
rz x y r x y
r
∇ = −
∇ = = +−
��
��
15a
( ) ( )
1
1 1
ln , , ln , ln ln
. . ln ln 1 , ln 1 ln
z z z zx y z
z zzy yz
g y x g y x g zy x g y y x
z B g y x z y g y x z y
−
− −
= ⋅ = = ⋅ = ⋅ ⋅
= ⋅ ⋅ ⋅ + = ⋅ ⋅ + ⋅
15b
1 2 1
0 1 1 0
1 2 10 1 1 0
x
y
fy x y
fx y x
= → + ⋅ + + =
= → + ⋅ + + =
Lösung: (-3,-3) (-1,-1) (1,-1) (-1,1) Erster Punkt Minimum, Rest Sattel
16b
3
2 4 2 3 3 2 3
L Lx z x z= = =
+ +
17b (∆R/R)lin= -2,33O/OO
(∆R/R)quad= -2,3299O/OO
18a 0 18b 5π 18c πa3/3 18d 1/6
19 ( )3 10 ln(3 10) 5,9196
π + + =
20 π/2
21 2( ) 30 256r z z= + −
V2=17693mm3 V1=92956mm3 m=1,0050kg a=31,037mm V=128340mm3
22 2 2 2 2
2 2 2 2
2 2 2 2
2 2 2 2
12 2 2
0
2 2,
12 2 2 2
0
( )
4( ) 1
( ) ( )
8( ) 1 (2 1)
3
( ) ( )
1,5 0,940 0,918
5 0,993 0,990
b y a yb
zyl
b b y a y
b y a yb
x x zyl
b b y a y
V dy dz dx V f h
f h h u u duh
J dy dz y z dx J g h
g h h u u u duh
h f h g h
π
ρ
π
− −
− − − − −
− −
− − − − −
= = ⋅
= − ⋅ −
= + = ⋅
= − ⋅ − ⋅ +
∫ ∫ ∫
∫
∫ ∫ ∫
∫
23a s. FS 23b 5 2 4( ) , ,t tf t e e t−=

Prof. Dr. Elmar Müller-Horsche 31 FH Augsburg Ingenieurmathematik 2
24a
( )2 8
1 2 15120
1
U
p p pp p τ+ +
+
24b 4 3 2
6 4 3 2
3 6 75 160( )
3 82 13 176 325 25
p p p pY p
p p p p p
+ + +=+ − + − +
24c
( ) ( )( )2
2 22 2
1
3 3
pp
e pp pe
ϕωπ
ωπ
− ⋅ ⋅ + − − −
25a sin cos
2
t t tω ω ωω
+
25b 2 22 3t t te e te− − −− + − 25c sinte t 26a ( ) ( )
( ) ( )
( ) ( )( )
21 1 1 2 1 1 2
2 22 2 2 1 2 2 1 3 2
1 1 2 1 2
2 2 1 2 1
2 0
2 ( )
16 40 0
320 1800 800 100 ( )
x x x x x
x x x x x x a t
x x x x x
x x x x x t
δ ω
δ ω ω σ
σ
+ − + − =
+ − + − + = ⋅
+ − + − =
+ − + − = ⋅
ɺɺ ɺ ɺ
ɺɺ ɺ ɺ
ɺɺ ɺ ɺ
ɺɺ ɺ ɺ
26b 2
1
( ) tanh (0) 0!
45,6 164
v v
g v
gtv t v v
v
m kmv
s h
∞
∞∞
∞
+ =
= ⋅ =
= =
ɺ
27b 2
2
'' ( ) sin cos
(0) '(0) 0 ( ) (1 cos )
( ) '( ) 0 2
2Knick
x xa w w b w x A B b
a ax
w w w x ba
lw l w l
a
F EIl
π
π
+ = → = + +
= = → = −
= = → =
→ = ⋅
28a ( )2
2
( ) 2 5
3 1 2( )
5 2 5
3 sin 2(
3!
) 1 cos 25 2
t
Y p p p
pY p
p p p
ty t
p
e t−
⋅ + + = →
+= − + +
= − +

Prof. Dr. Elmar Müller-Horsche 32 FH Augsburg Ingenieurmathematik 2
28b ( )22
2
2 8
128( ) 10 16 10
16
2,4 0,6 0,8( )
2 8 16
( ) 2,4 0,6 0,8cos 4(t in s, x in cm) t t
X p p p pp
pX p
p p p
x t e e t− −
⋅ + + = + ++
= − −+ + +
= − −
28c 7 73
4 4
t t t te e e ey z
− −+ −= =





























