Embed Size (px)
Citation preview
Systemarchitektur undSignalverarbeitung für die Diagnosevon magnetischen ABS-Sensoren
Von der Fakultät für Elektrotechnikder Helmut-Schmidt-Universität / Universität der Bundeswehr Hamburg
zur Erlangung des akademischen Grades einesDoktor-Ingenieurs
genehmigte
DISSERTATION
vorgelegt von
Martin Krey
aus Itzehoe
Hamburg, 2015

Gutachter: Univ.-Prof. Dr. phil. nat. habil. Bernd KlauerUniv.-Prof. Dr.-Ing. Gerd Scholl
Vorsitzender der Prüfungskommission: Univ.-Prof. Dr.-Ing. habil. Udo ZölzerTag der mündlichen Prüfung: 13.01.2015
Gedruckt mit freundlicher Unterstützung der HSU-Universität der Bundeswehr Hamburg.
Danksagung
Die vorliegende Arbeit entstand während meiner Tätigkeit als wissenschaftlicher Mitar-beiter am Department für Technik und Informatik der Hochschule für Angewandte Wis-senschaften Hamburg.Zunächst möchte ich mich bei Prof. Dr. phil. nat. habil. Bernd Klauer bedanken für dieÜbernahme des Erstgutachtens und für die Kooperation mit der HAW Hamburg. HerrnProf. Dr.-Ing. Gerd Scholl danke ich für die Übernahme des Zweitgutachtens und Prof.Dr.-Ing. habil. Udo Zölzer für den Vorsitz. Mein besonderer Dank geht an Prof. Dr.-Ing.Karl-Ragmar Riemschneider für die Betreuung dieser Arbeit, der nötigen Geduld, demunendlichen Optimismus und die Organisierung der durchgehenden Finanzierung. Weiter-hin bedanke ich mich bei allen Studenten, die im Forschungsprojekt ESZ-ABS mitgewirkthaben, für ihren ehrgeizigen Einsatz und der herausragenden Zusammenarbeit. Außerdemmöchte ich mich bei den Mitarbeitern und Professoren des Departments bedanken, dieuns im Forschungsprojekt unterstützt haben.
Dem Bundesministerium für Bildung und Forschung und der Abteilung Forschung &Transfer der HAW Hamburg danke ich für die Förderung. Weiterhin möchte ich michbei dem Industriepartner des Projektes, der NXP Semiconductors Germany GmbH inHamburg, bedanken für die Unterstützung und der Finanzierung des letzten Jahres.
Für die Motivation innerhalb des letzten Jahres und für die produktiven Wochenendenund Nachtschichten möchte ich mich bei meinen Freunden Dr.-Ing. Patrik Diffo und cand.Dr.-Ing. Kevin Harksen bedanken. Der Forschungsgruppe um Prof. Dr.-Ing. Peter Wulfund Prof. Peter Dalhoff danke ich für die Aufnahme in Ihre Räumlichkeiten und die nötigeMotivation am Ende.
Abschließend möchte ich mich bei Dipl.-Ing. Erik Christiansen und Prof. Dr.-Ing. StephanHußmann bedanken für die wegweisenden Ratschläge, die mich zum Ziel geführt haben.
Inhaltsverzeichnis
1 Einführung 1
1.1 Drehzahlsensoren: ABS-Sensor am Rad und Mikrosystem ABS-Sensor . . . 2
1.2 Motivation Zuverlässigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.3 Stand der Technik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4 Innovativer Ansatz und Gliederung der Arbeit . . . . . . . . . . . . . . . . 13
1.5 Grundkonzept . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2 Systemanalyse 17
2.1 Experimentelle Untersuchung des Sensor-Encoder-Systems . . . . . . . . . 18
2.1.1 Festlegung des Koordinatensystems . . . . . . . . . . . . . . . . . . 26
2.1.2 Versatz des Sensors zum Encoder . . . . . . . . . . . . . . . . . . . 28
2.1.3 Verkippung des Sensors zum Encoder . . . . . . . . . . . . . . . . . 32
2.1.4 Unrundlauf des Encoders . . . . . . . . . . . . . . . . . . . . . . . . 36
2.1.5 Verteilung der Harmonischen . . . . . . . . . . . . . . . . . . . . . 41
2.2 Sensorcharakterisierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
2.2.1 Analytische Kennfelder . . . . . . . . . . . . . . . . . . . . . . . . . 46
2.2.2 Messtechnische Kennfeldermittlung . . . . . . . . . . . . . . . . . . 48
2.2.3 Vergleich der analytischen und gemessenen Kennfelder . . . . . . . 56
2.3 Magnetostatische Simulation des Sensor-Encoder-Systems . . . . . . . . . . 58
2.3.1 Sensor-Modellierung . . . . . . . . . . . . . . . . . . . . . . . . . . 58
2.3.2 Encoder-Modellierung . . . . . . . . . . . . . . . . . . . . . . . . . 60
2.4 Signalsynthese der Sensor-Kennfelder mit FEM-Simulationen . . . . . . . . 66
2.4.1 Berechnung der Brückendifferenzspannung . . . . . . . . . . . . . . 67
2.4.2 Vergleich der Signalsynthese mit Messdaten . . . . . . . . . . . . . 69
2.5 Bewertung und Gegenüberstellung der Ergebnisse . . . . . . . . . . . . . . 76
i
Inhaltsverzeichnis
3 Diagnose-Algorithmen 79
3.1 Abbildung der Zeit auf den Encoderwinkel . . . . . . . . . . . . . . . . . . 80
3.2 Abtastverfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
3.2.1 Mitlaufende Vollabtastung . . . . . . . . . . . . . . . . . . . . . . . 93
3.2.2 Mitlaufende Unterabtastung . . . . . . . . . . . . . . . . . . . . . . 95
3.2.3 Mitlaufende Abtastverfahren mit Zwei-Zahnperioden-Analyse . . . 97
3.2.4 Gegenüberstellung der Abtastverfahren . . . . . . . . . . . . . . . . 100
3.2.5 Aufwandsvergleich der Abtastverfahren . . . . . . . . . . . . . . . . 102
3.3 Verfahren zur Ermittlung der harmonischen Anteile . . . . . . . . . . . . . 104
3.3.1 Reduzierte DFT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
3.3.2 Weitere Verfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
3.3.3 Vergleich der Verfahren . . . . . . . . . . . . . . . . . . . . . . . . . 106
3.4 Eigenschaften der Indikatoren . . . . . . . . . . . . . . . . . . . . . . . . . 107
3.4.1 Einfluss der genutzten Verfahren und Parameter . . . . . . . . . . . 107
3.4.2 Besondere Erfordernisse beim Indikator HDI . . . . . . . . . . . . . 109
3.5 Diagnosebewertung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
3.5.1 Stand der Technik . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
3.5.2 Neue Verfahren zur Diagnosebewertung . . . . . . . . . . . . . . . . 112
4 Systemarchitektur 117
4.1 Signalaufbereitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
4.1.1 Offset- und Verstärkungsregelung . . . . . . . . . . . . . . . . . . . 120
4.1.2 Dynamikkompression des Sensorsignals . . . . . . . . . . . . . . . . 123
4.2 Sensorgrundfunktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
4.2.1 Nulldurchgangserkennung . . . . . . . . . . . . . . . . . . . . . . . 131
4.2.2 Protokollausgabe zum Steuergerät . . . . . . . . . . . . . . . . . . . 134
4.3 Sensordiagnosefunktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
4.3.1 Übersicht der Funktionsblöcke . . . . . . . . . . . . . . . . . . . . . 137
4.3.2 Architekturvariante mit Vollabtastung und Pipelining . . . . . . . . 142
4.3.3 Architekturvariante mit Unterabtastung . . . . . . . . . . . . . . . 145
4.3.4 Bewertung und Vergleich der Architekturvarianten . . . . . . . . . 146
ii
Inhaltsverzeichnis
5 Experimenteller Nachweis 149
5.1 Hardware zur Signalaufbereitung . . . . . . . . . . . . . . . . . . . . . . . 150
5.1.1 Aufbauten zum konventionellen Konzept . . . . . . . . . . . . . . . 150
5.1.2 Aufbauten zum neuen Konzept mit approximiert logarithmischemVerstärker . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
5.2 Hardware zur Sensordiagnose auf Mikrocontroller-Basis . . . . . . . . . . . 157
5.2.1 Regelcontroller-Modul . . . . . . . . . . . . . . . . . . . . . . . . . 157
5.2.2 Signalcontroller-Modul . . . . . . . . . . . . . . . . . . . . . . . . . 158
5.3 Hardware zur Sensordiagnose auf FPGA-Basis . . . . . . . . . . . . . . . . 159
5.4 Hardware zur Sensordiagnose auf ASIC-Basis . . . . . . . . . . . . . . . . 160
5.5 Bewertung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
6 Zusammenfassung und Ausblick 167
6.1 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
6.2 Fazit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
6.3 Ausblick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
Anhang 173
A Beschreibung der Messaufbauten 175
A.1 Radmessplatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
A.2 Kreuzspulenmessplatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
A.3 Mixed-Signal-ASIC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
B DFT-Berechnung mittels rechteckförmiger Transformation 189
C Anisotroper Magnetoresistiver Effekt 193
D Aufstellung der studentischen Arbeiten 197
E Formelzeichen und Glossar 201
Literaturverzeichnis 209
Lebenslauf 218
iii

Kapitel 1
Einführung
Das Antiblockiersystem (ABS) ist wahrscheinlich das bekannteste und am weitesten ver-breitete Fahrstabilisierungssystem im Automobilbereich. Es verhindert das Blockieren derRäder durch eine Regelung des Schlupfes über die Steuerung des Bremsdrucks jedes ein-zelnen Rades. Dieses verkürzt den Bremsweg1 und durch die Verhinderung des Blockie-rens der Räder wird die Lenkfähigkeit des Fahrzeugs auch in kritischen Fahrsituationensichergestellt. Das erste in Serie verfügbare Fahrzeug mit einem elektronischen Antiblo-ckiersystem war der Chrysler Imperial im Jahre 1971. Entwickelt wurde dieses mit demNamen „Sure Break“ bezeichnete System von der Firma Bendix Corporation, die heu-te zu der Firma Honeywell gehört [16]. Im Jahre 1978 erfolgte die Serieneinführung desAntiblockiersystems bei der Mercedes-Benz S-Klasse und dem BMW 7er. Das in diesenFahrzeugen eingesetzte Antiblockiersystem entstand bei der Firma Bosch. Seit dem Jahr2003 wird das Antiblockiersystem in alle neuen Kraftfahrzeugen eingebaut. Die Verbändeder europäischen, der japanischen und der koreanischen Automobilhersteller schlossen ei-ne Selbstverpflichtung ab, die dieses beinhaltete [27]. Im Jahr 2012 wurde außerdem vomEuropäischen Parlament beschlossen, dass alle neuen Motorräder ab 125 KubikzentimeterHubraum ab dem Jahr 2016 mit einem Antiblockiersystem ausgestattet sein müssen [28].Das Antiblockiersystem besteht aus vielen mechanischen und elektronischen Komponen-ten. Die aktuelle Drehzahl der Fahrzeugräder wird von Raddrehzahlsensoren aufgenom-men, die im folgenden als ABS-Sensoren bezeichnet werden. Diese Sensoren liefern elek-trische Signale an das ABS-Steuergerät, welches hieraus den aktuellen Schlupf der Fahr-zeugräder berechnet. Mit Hilfe von komplexen Steuer- und Regelalgorithmen wird fürjedes Rad der optimale Bremsdruck berechnet. Zur Beeinflussung des Bremsdrucks steu-ert das ABS-Steuergerät die in einem Hydroaggregat befindlichen Magnetventile an.Die zuverlässige Funktion des Antiblockiersystems ist dringend erforderlich, weil das Sys-tem einen direkten Zugriff auf den Bremsdruck von jeden Bremszylinder hat. Der Brems-druck wird dabei vom Fahrer über das Bremspedal gesteuert, aber das Antiblockiersystementscheidet, wie viel Bremsdruck an die Bremszylinder weitergegeben wird. Neuere Fahr-stabilisierungssysteme, wie das Elektronische Stabilitätsprogramm (ESP), die Antriebs-schlupfregelung (ASR) und der Abstandsregeltempomat (ACC) können selbstständig ohneEinfluss des Fahrers Bremsmanöver einleiten.1Es gibt Ausnahmen, wie Neuschnee oder Kies, bei denen sich vor den blockierenden Rädern ein brem-sender Keil bildet [13].
1
1. Einführung
Die vorliegende Arbeit beschäftigt sich mit der Entwicklung einer erweiterten Zustandser-kennung für Raddrehzahlsensoren. Bei diesen Sensoren handelt es sich um magnetischeSensoren, die entweder auf induktiver Basis, auf Hall-Basis oder auf magnetoresistiverBasis arbeiten. In dieser Arbeit liegt der Fokus nur auf Raddrehzahlsensoren mit magne-toresistiver Basis, genauer dem anisotropen magnetoresistiven Effekt (AMR).
1.1 Drehzahlsensoren: ABS-Sensor am Rad und Mikro-system ABS-Sensor
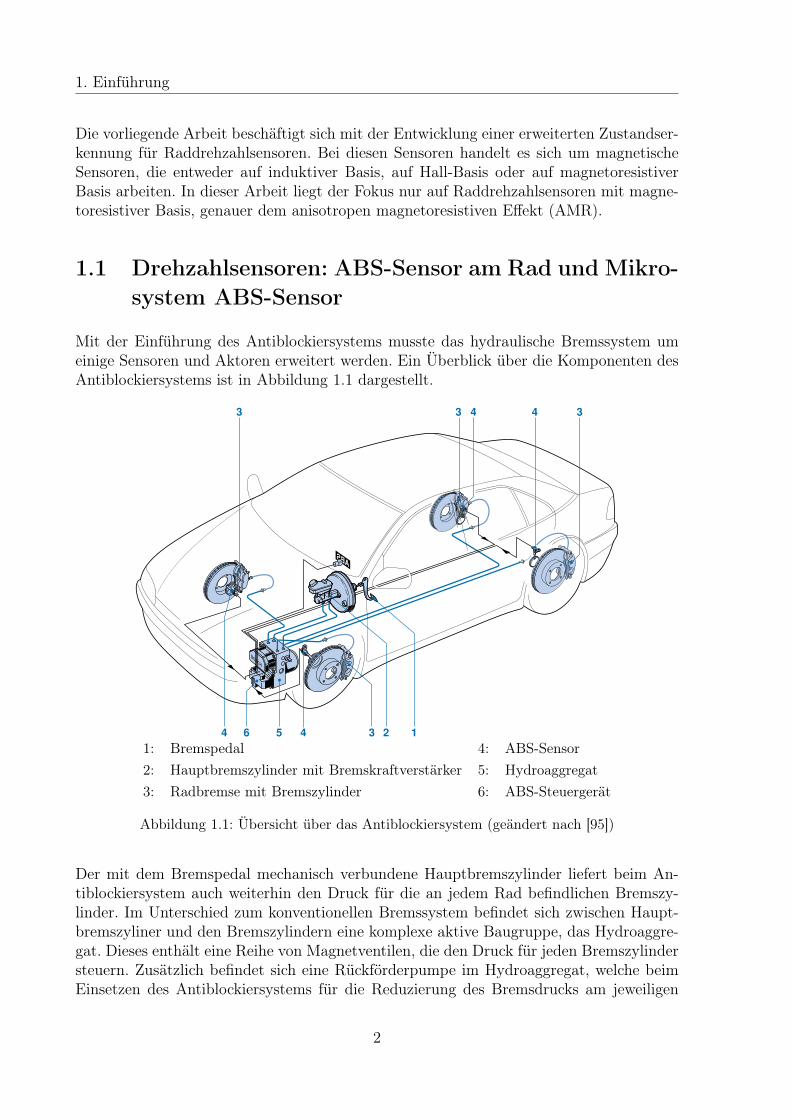
Mit der Einführung des Antiblockiersystems musste das hydraulische Bremssystem umeinige Sensoren und Aktoren erweitert werden. Ein Überblick über die Komponenten desAntiblockiersystems ist in Abbildung 1.1 dargestellt.
ABS
2 1
3 4 34
3
3
44 561: Bremspedal 4: ABS-Sensor2: Hauptbremszylinder mit Bremskraftverstärker 5: Hydroaggregat3: Radbremse mit Bremszylinder 6: ABS-Steuergerät
Abbildung 1.1: Übersicht über das Antiblockiersystem (geändert nach [95])
Der mit dem Bremspedal mechanisch verbundene Hauptbremszylinder liefert beim An-tiblockiersystem auch weiterhin den Druck für die an jedem Rad befindlichen Bremszy-linder. Im Unterschied zum konventionellen Bremssystem befindet sich zwischen Haupt-bremszyliner und den Bremszylindern eine komplexe aktive Baugruppe, das Hydroaggre-gat. Dieses enthält eine Reihe von Magnetventilen, die den Druck für jeden Bremszylindersteuern. Zusätzlich befindet sich eine Rückförderpumpe im Hydroaggregat, welche beimEinsetzen des Antiblockiersystems für die Reduzierung des Bremsdrucks am jeweiligen
2
1.1. Drehzahlsensoren: ABS-Sensor am Rad und Mikrosystem ABS-Sensor
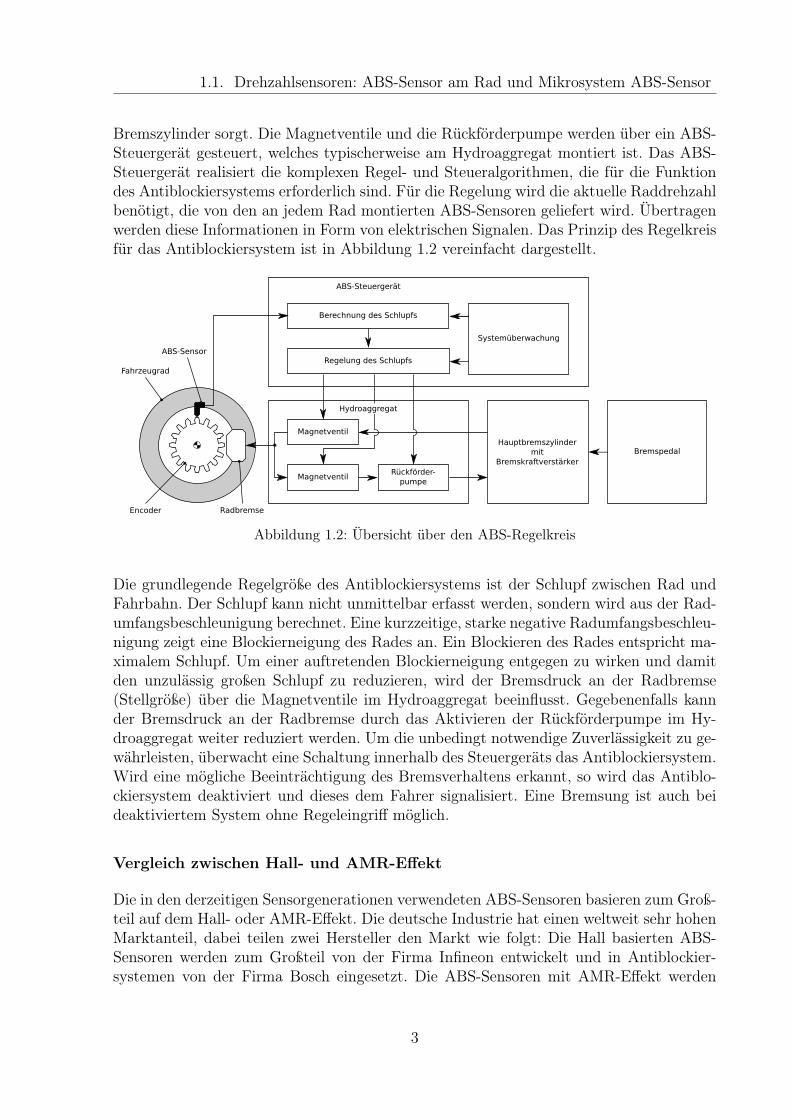
Bremszylinder sorgt. Die Magnetventile und die Rückförderpumpe werden über ein ABS-Steuergerät gesteuert, welches typischerweise am Hydroaggregat montiert ist. Das ABS-Steuergerät realisiert die komplexen Regel- und Steueralgorithmen, die für die Funktiondes Antiblockiersystems erforderlich sind. Für die Regelung wird die aktuelle Raddrehzahlbenötigt, die von den an jedem Rad montierten ABS-Sensoren geliefert wird. Übertragenwerden diese Informationen in Form von elektrischen Signalen. Das Prinzip des Regelkreisfür das Antiblockiersystem ist in Abbildung 1.2 vereinfacht dargestellt.
ABS-Steuergerät
Systemüberwachung
Berechnung des Schlupfs
Regelung des Schlupfs
Hydroaggregat
Fahrzeugrad
ABS-Sensor
Encoder
MagnetventilRückförder-
pumpe
Radbremse
Hauptbremszylindermit
Bremskraftverstärker
Magnetventil
Bremspedal
Abbildung 1.2: Übersicht über den ABS-Regelkreis
Die grundlegende Regelgröße des Antiblockiersystems ist der Schlupf zwischen Rad undFahrbahn. Der Schlupf kann nicht unmittelbar erfasst werden, sondern wird aus der Rad-umfangsbeschleunigung berechnet. Eine kurzzeitige, starke negative Radumfangsbeschleu-nigung zeigt eine Blockierneigung des Rades an. Ein Blockieren des Rades entspricht ma-ximalem Schlupf. Um einer auftretenden Blockierneigung entgegen zu wirken und damitden unzulässig großen Schlupf zu reduzieren, wird der Bremsdruck an der Radbremse(Stellgröße) über die Magnetventile im Hydroaggregat beeinflusst. Gegebenenfalls kannder Bremsdruck an der Radbremse durch das Aktivieren der Rückförderpumpe im Hy-droaggregat weiter reduziert werden. Um die unbedingt notwendige Zuverlässigkeit zu ge-währleisten, überwacht eine Schaltung innerhalb des Steuergeräts das Antiblockiersystem.Wird eine mögliche Beeinträchtigung des Bremsverhaltens erkannt, so wird das Antiblo-ckiersystem deaktiviert und dieses dem Fahrer signalisiert. Eine Bremsung ist auch beideaktiviertem System ohne Regeleingriff möglich.
Vergleich zwischen Hall- und AMR-Effekt
Die in den derzeitigen Sensorgenerationen verwendeten ABS-Sensoren basieren zum Groß-teil auf dem Hall- oder AMR-Effekt. Die deutsche Industrie hat einen weltweit sehr hohenMarktanteil, dabei teilen zwei Hersteller den Markt wie folgt: Die Hall basierten ABS-Sensoren werden zum Großteil von der Firma Infineon entwickelt und in Antiblockier-systemen von der Firma Bosch eingesetzt. Die ABS-Sensoren mit AMR-Effekt werden
3
1. Einführung
hingegen von der Firma NXP Semiconductors entwickelt und in Antiblockiersystemender Firma Continental eingesetzt.
Die physikalischen Prinzipien der magnetischen Sensoren unterscheiden sich stark vonein-ander. Der Hall-Effekt hat dabei folgende Eigenschaften:
• Das Ausgangssignal des Sensorelements der Hall-Sensoren ist um den Faktor 10 bis100 kleiner als die der AMR-Sensoren. Bei der Signalkonditionierung im Sensor sindsomit höhere Verstärkungen bis fünf Dekaden erforderlich. Das führt zu erhöhtenRauschen im Signal.
• Beim Hall-Effekt wird nur die magnetische Feldstärkenkomponente gemessen, dieorthogonal zur Sensoroberfläche ist (HZ).
• Das Ausgangssignal des Hall-Sensors verhält sich in weiten Bereichen linear zurmagnetischen Feldstärke.
• Differentielle Hall-Sensoren mit mehreren räumlich verteilten Hall-Elementen kön-nen an die Geometrie des Encoders gebunden sein.
• ABS-Sensoren auf Hall-Basis können in den verbreiteten CMOS- oder BiCMOS-Halbleiterprozessen gefertigt werden. Die Hall-Elemente befinden sich dabei auf demselben Silizium-Chip wie die Auswerteelektronik.
• Die Hall-Sensoren sind sehr empfindlich gegenüber mechanischem Stress, aufgrundvon piezoelektrischen Effekten. Der mechanische Stress kann beispielsweise von derKunststoffumspritzung des Sensorelements, von Vibrationen oder Temperatureffek-ten der Verbundmaterialien ausgehen [70].
Der AMR-Effekt besitzt folgende Eigenschaften:
• AMR-Sensoren liefern ein starkes Sensorsignal. Es sind typischerweise nur Verstär-kungen zwischen einer und drei Dekaden erforderlich. Das Signal ist vergleichsweiserauscharm. Die Signalqualität bei größeren Abständen zwischen Sensor und Encoderist dabei weniger vom Rauschen beeinflusst als bei Hall-Sensoren.
• Der AMR-Effekt misst die magnetischen Feldstärkenkomponenten, die in der Ebeneder Sensoroberfläche liegen (HX und HY ).
• Die Ausgangsspannung des Sensors, welche typischerweise von einer Wheatstone-Brücke mit vier magnetoresistiven Widerständen geliefert wird, ist somit auch vonbeiden Feldstärkenkomponenten (HX und HY ) abhängig. Das Verhalten ist somitnicht einfach durch eine Kennlinie zu beschreiben.
• Der AMR-Effekt zeigt starke Nichtlinearitäten. Erst durch die Verwendung speziellerStrukturen auf dem AMR-Sensor kann das Sensorkennfeld2 im mittleren Bereichlinearisiert werden.
2Das Sensorkennfeld beschreibt die Abhängigkeit der Sensorausgangsspannung von den beiden sensitivenFeldkomponenten HX und HY .
4
1.1. Drehzahlsensoren: ABS-Sensor am Rad und Mikrosystem ABS-Sensor
• AMR-Sensoren sind sensitiv auf den Gradienten der Zahnflanke des Encoders. Siesind somit weitgehend unabhängig von der Encoderform. Geringe Gradienten in derZahnflanke reduzieren jedoch den maximalen Encoder-Sensor-Abstand.
• Für die Integration im Sensor sind zwei separate Chips erforderlich, da die AMR-Widerstände aus einem ferromagnetischen Werkstoff (NiFe) bestehen, welcher nichtmit einem CMOS-Prozess kombiniert werden kann.
Weitere Details zur physikalischen Funktionsweise der AMR-Sensoren befinden sich imAnhang C. Viele Vor- und Nachteile der Sensoren mit Hall- und AMR-Effekt heben sichaus Anwendersicht gegeneinander auf, sodass beide Technologien große Marktanteile ha-ben.
Encoder
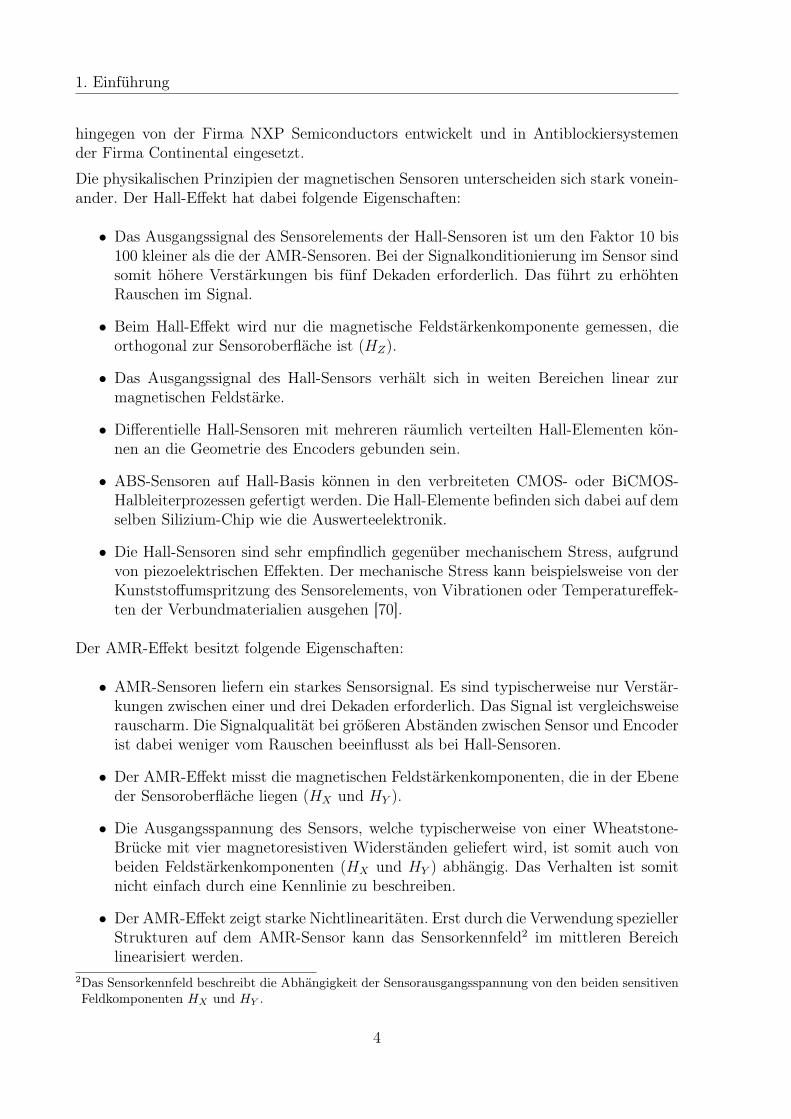
Die Encoder, die in Kombination mit den ABS-Sensoren verwendet werden, sind oft festerBestandteil des Radlagers und werden vom Fahrzeughersteller festgelegt. Der Encoderrotiert mit gleicher Winkelgeschwindigkeit wie das Fahrzeugrad. Die sensitive Fläche desABS-Sensors befindet sich in einem Abstand von nur wenigen Millimeter zur aktivenFläche des Encoders. Die Einbauposition ist in Abbildung 1.3 schematisch dargestellt.
ABS-Sensor
Digitales Signal
zum
ABS-Steuergerät
Encoderrad
Abbildung 1.3: Sensoreinbau am Fahrzeugrad
Bei den Encodern wird zwischen passiven und aktiven Encodern unterschieden. Die ers-ten Encoder, die in Antiblockiersystemen eingesetzt wurden, sind passive Encoder. Einevereinfachte Darstellung eines ABS-Sensors vor einem passiven Encoders zeigt die Abbil-dung 1.4(a). Passive Encoder besitzen geometrisch ausgeformte Zähne und sind aus einemferromagnetischen Werkstoff (z.B. Eisen) gefertigt. Diese sind in der Form mechanischenZahnrädern ähnlich, wenn sie als Werkstücke aus massiven Stahl gefertigt sind. Ande-re Varianten der passiven Encoder sind aus dünnen gestanzten Stahlblechen (kreisrundeLochbleche oder zahnradähnliche Stanzteile3) gefertigt. Sie sind deshalb nicht sehr stabilund weisen außerdem hohe mechanische Toleranzen auf.3Nach dem amerikanischen Hersteller Timken Company auch Timkenräder genannt.
5
1. Einführung
Encoder
AMR-Sensor
magnetischeFeldlinien
Stützmagnet
Auswerteeinheit
(a)
N
N
N
S
S
Encoder
AMR-Sensor
magnetischeFeldlinien
Permanentmagnet
Auswerteeinheit
(b)
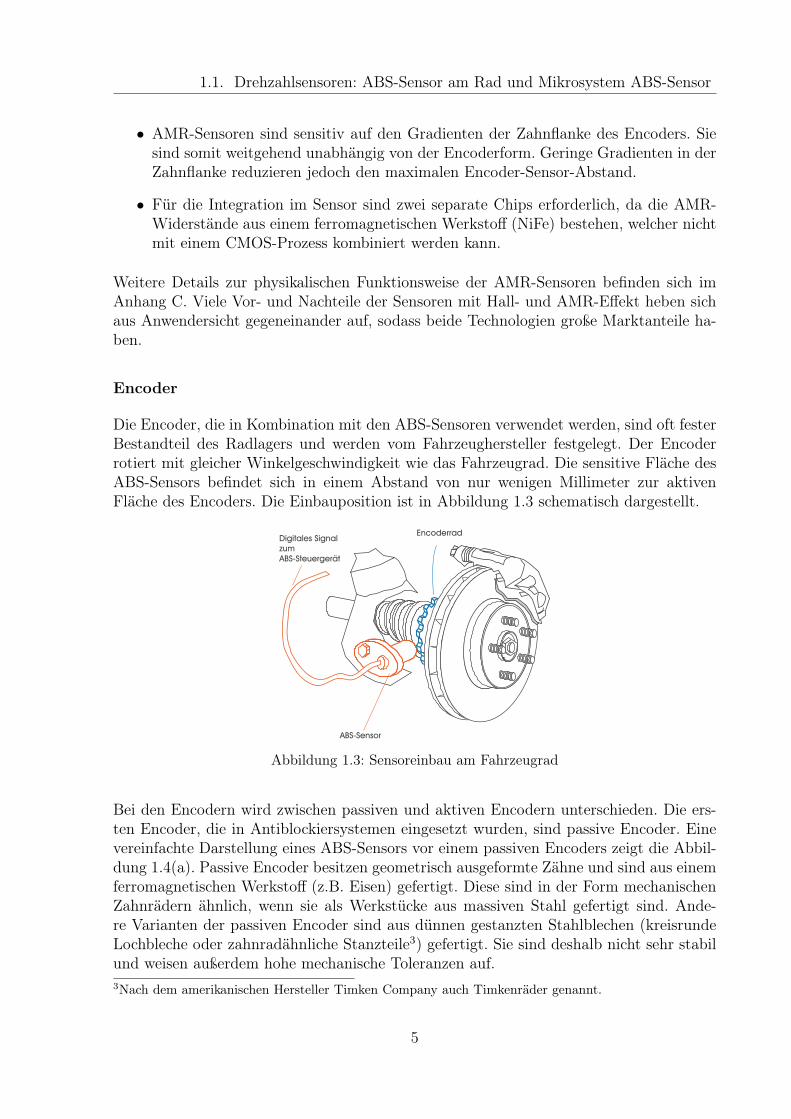
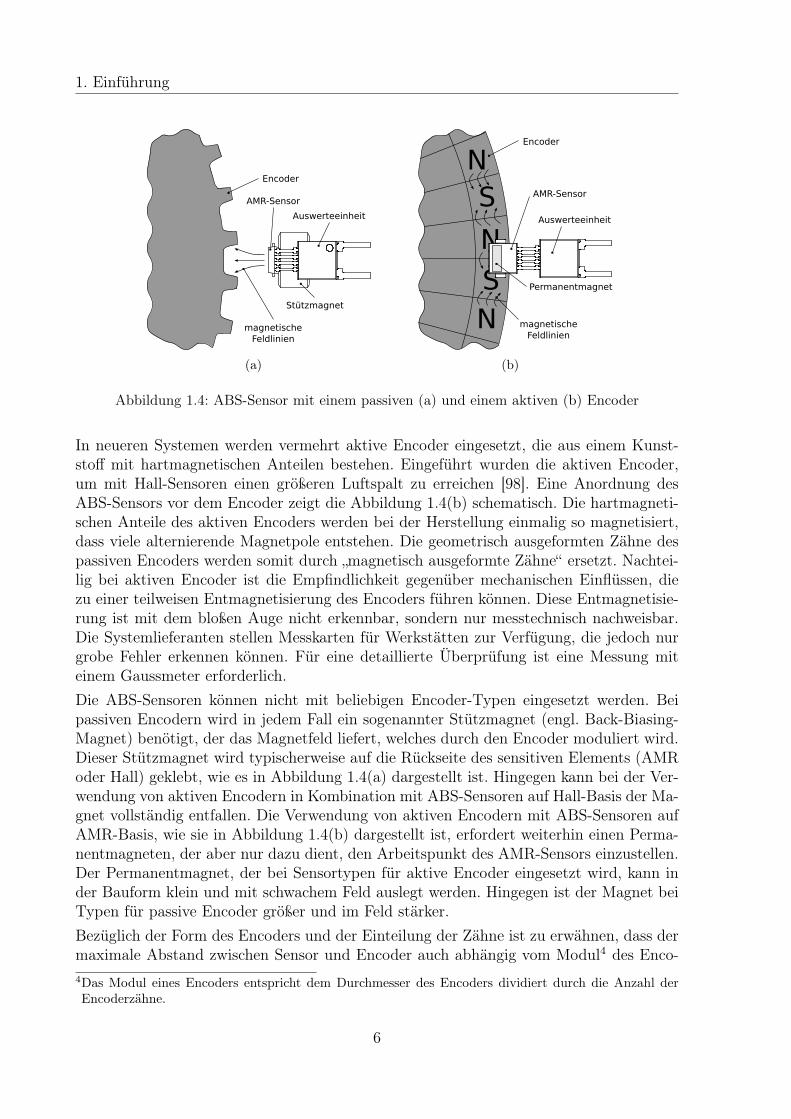
Abbildung 1.4: ABS-Sensor mit einem passiven (a) und einem aktiven (b) Encoder
In neueren Systemen werden vermehrt aktive Encoder eingesetzt, die aus einem Kunst-stoff mit hartmagnetischen Anteilen bestehen. Eingeführt wurden die aktiven Encoder,um mit Hall-Sensoren einen größeren Luftspalt zu erreichen [98]. Eine Anordnung desABS-Sensors vor dem Encoder zeigt die Abbildung 1.4(b) schematisch. Die hartmagneti-schen Anteile des aktiven Encoders werden bei der Herstellung einmalig so magnetisiert,dass viele alternierende Magnetpole entstehen. Die geometrisch ausgeformten Zähne despassiven Encoders werden somit durch „magnetisch ausgeformte Zähne“ ersetzt. Nachtei-lig bei aktiven Encoder ist die Empfindlichkeit gegenüber mechanischen Einflüssen, diezu einer teilweisen Entmagnetisierung des Encoders führen können. Diese Entmagnetisie-rung ist mit dem bloßen Auge nicht erkennbar, sondern nur messtechnisch nachweisbar.Die Systemlieferanten stellen Messkarten für Werkstätten zur Verfügung, die jedoch nurgrobe Fehler erkennen können. Für eine detaillierte Überprüfung ist eine Messung miteinem Gaussmeter erforderlich.Die ABS-Sensoren können nicht mit beliebigen Encoder-Typen eingesetzt werden. Beipassiven Encodern wird in jedem Fall ein sogenannter Stützmagnet (engl. Back-Biasing-Magnet) benötigt, der das Magnetfeld liefert, welches durch den Encoder moduliert wird.Dieser Stützmagnet wird typischerweise auf die Rückseite des sensitiven Elements (AMRoder Hall) geklebt, wie es in Abbildung 1.4(a) dargestellt ist. Hingegen kann bei der Ver-wendung von aktiven Encodern in Kombination mit ABS-Sensoren auf Hall-Basis der Ma-gnet vollständig entfallen. Die Verwendung von aktiven Encodern mit ABS-Sensoren aufAMR-Basis, wie sie in Abbildung 1.4(b) dargestellt ist, erfordert weiterhin einen Perma-nentmagneten, der aber nur dazu dient, den Arbeitspunkt des AMR-Sensors einzustellen.Der Permanentmagnet, der bei Sensortypen für aktive Encoder eingesetzt wird, kann inder Bauform klein und mit schwachem Feld auslegt werden. Hingegen ist der Magnet beiTypen für passive Encoder größer und im Feld stärker.Bezüglich der Form des Encoders und der Einteilung der Zähne ist zu erwähnen, dass dermaximale Abstand zwischen Sensor und Encoder auch abhängig vom Modul4 des Enco-4Das Modul eines Encoders entspricht dem Durchmesser des Encoders dividiert durch die Anzahl derEncoderzähne.
6

1.1. Drehzahlsensoren: ABS-Sensor am Rad und Mikrosystem ABS-Sensor
ders ist. Ein größeres Modul, was gleichbedeutend mit einem großen Abstand zwischenzwei Encoderzähnen ist, erlaubt einen größeren Abstand des Sensors vom Encoder. Beigleichem Durchmesser ist bei einem größeren Modul jedoch die Winkelauflösung geringer.
Funktionsweise der ABS-Sensoren auf AMR-Basis
Im folgenden soll kurz die Funktionsweise der ABS-Sensoren auf AMR-Basis erläutertwerden. Die AMR-Sensoren werden auch als Tangential-Sensoren bezeichnet. Der Grundhierfür liegt darin, dass sie auf Vorzeichen und Intensität der zum Encoderumfang tangen-tialen Magnetfeldkomponente HY empfindlich sind [98]. Die Intensität der Magnetfeld-komponente HY wird unter anderem stark von der Steilheit der Zahnflanken beeinflusst.Was selten in der Literatur beschrieben wird, ist dass AMR-Sensoren auch sensitiv auf ei-ne weitere Feldkomponente, der HX-Feldkomponente, sind. Die HX-Feldkomponente wirddurch die Magnetisierung des montierten Stützmagneten festgelegt.
Wie bereits erwähnt, ist der AMR-Sensor sensitiv auf die Feldkomponenten HX und HY .Auf die Feldkomponente HZ ist dieser hingegen nicht sensitiv. Durch die Bewegung desEncoders vor dem AMR-Sensor wird die durch den Stützmagneten gelieferte Feldkompo-nenteHZ abgelenkt, was zu der Erhöhung derHY -Feldstärke führt. Diese FeldkomponenteHY wird vom Sensor erfasst und führt zu einer Änderung des Widerstands der magneto-resistiven Elemente im Sensor. Durch die Verschaltung dieser magnetoresistiven Elemen-te als Wheatstone-Brücke werden Temperatureffekte reduziert und der magnetoresistiveEffekt verstärkt. In Abbildung 1.5 ist die Modulation durch den rotierenden Encodersymbolisch dargestellt. Der detaillierte Aufbau des AMR-Sensors und die Parameter desStützmagneten werden im Abschnitt 2.3.1 vorgestellt.
HZ
HY
α
HY
α α αα
Abbildung 1.5: Modulation der durch den Stützmagneten gelieferten magnetischen Feldstärkedurch die Bewegung des Encoders vor dem AMR-Sensor
7
1. Einführung
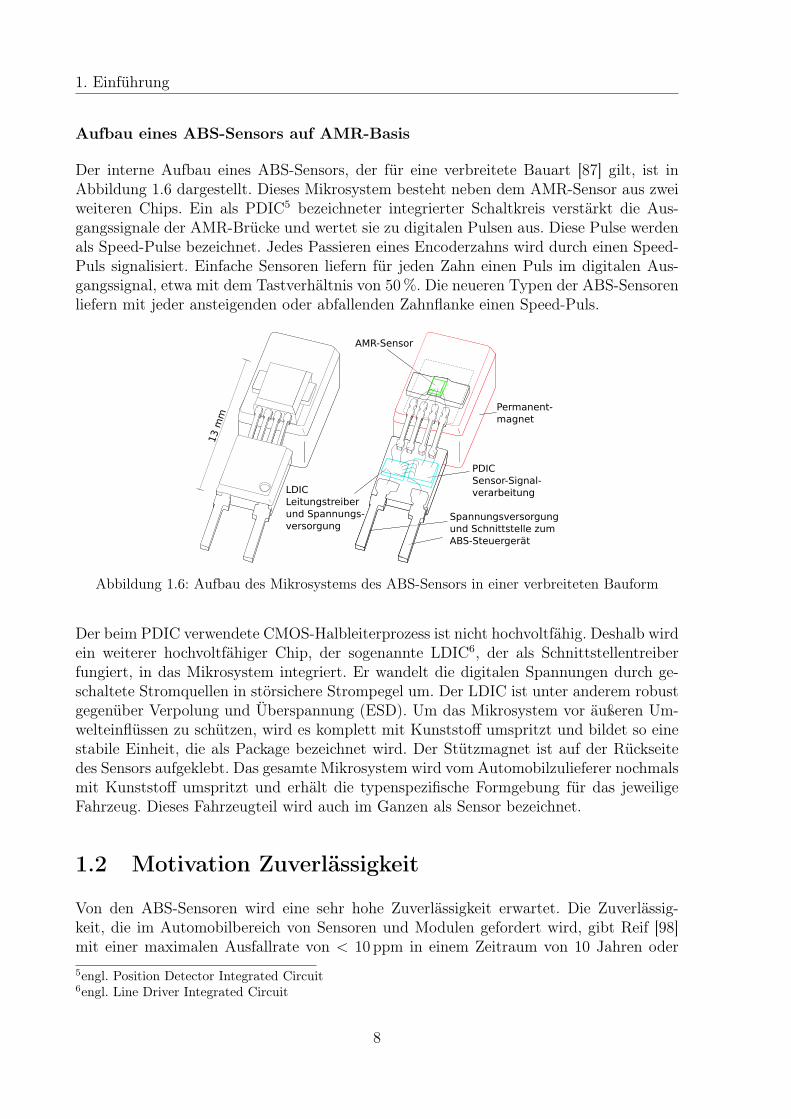
Aufbau eines ABS-Sensors auf AMR-Basis
Der interne Aufbau eines ABS-Sensors, der für eine verbreitete Bauart [87] gilt, ist inAbbildung 1.6 dargestellt. Dieses Mikrosystem besteht neben dem AMR-Sensor aus zweiweiteren Chips. Ein als PDIC5 bezeichneter integrierter Schaltkreis verstärkt die Aus-gangssignale der AMR-Brücke und wertet sie zu digitalen Pulsen aus. Diese Pulse werdenals Speed-Pulse bezeichnet. Jedes Passieren eines Encoderzahns wird durch einen Speed-Puls signalisiert. Einfache Sensoren liefern für jeden Zahn einen Puls im digitalen Aus-gangssignal, etwa mit dem Tastverhältnis von 50 %. Die neueren Typen der ABS-Sensorenliefern mit jeder ansteigenden oder abfallenden Zahnflanke einen Speed-Puls.
Permanent-magnet
AMR-Sensor
PDICSensor-Signal-verarbeitungLDIC
Leitungstreiberund Spannungs-versorgung
Spannungsversorgungund Schnittstelle zumABS-Steuergerät
13 m
m
Abbildung 1.6: Aufbau des Mikrosystems des ABS-Sensors in einer verbreiteten Bauform
Der beim PDIC verwendete CMOS-Halbleiterprozess ist nicht hochvoltfähig. Deshalb wirdein weiterer hochvoltfähiger Chip, der sogenannte LDIC6, der als Schnittstellentreiberfungiert, in das Mikrosystem integriert. Er wandelt die digitalen Spannungen durch ge-schaltete Stromquellen in störsichere Strompegel um. Der LDIC ist unter anderem robustgegenüber Verpolung und Überspannung (ESD). Um das Mikrosystem vor äußeren Um-welteinflüssen zu schützen, wird es komplett mit Kunststoff umspritzt und bildet so einestabile Einheit, die als Package bezeichnet wird. Der Stützmagnet ist auf der Rückseitedes Sensors aufgeklebt. Das gesamte Mikrosystem wird vom Automobilzulieferer nochmalsmit Kunststoff umspritzt und erhält die typenspezifische Formgebung für das jeweiligeFahrzeug. Dieses Fahrzeugteil wird auch im Ganzen als Sensor bezeichnet.
1.2 Motivation Zuverlässigkeit
Von den ABS-Sensoren wird eine sehr hohe Zuverlässigkeit erwartet. Die Zuverlässig-keit, die im Automobilbereich von Sensoren und Modulen gefordert wird, gibt Reif [98]mit einer maximalen Ausfallrate von < 10 ppm in einem Zeitraum von 10 Jahren oder5engl. Position Detector Integrated Circuit6engl. Line Driver Integrated Circuit
8
1.2. Motivation Zuverlässigkeit
einer Fahrleistung von 150 000 km an7. Weiterhin weist Reif darauf hin, dass der Wertfür Sensoren von Passagierschutzsystemen wesentlich niedriger ist. Die Halbleiter- undElektronikhersteller streben für Ihr Qualitätsmanagement im Rahmen einer sogenanntenNull-Fehler-Strategie an, dass das Ziel für die Ausfallraten ihrer ABS-Sensoren im Bereichvon < 1 ppm liegt.
Der Markt fordert neue Funktionen, eine höhere Auflösung und eine weitere Miniaturi-sierung der Sensoren, um unter anderem eine direkte Integration ins Radlager zu ermög-lichen. Dieses führt zu einer steigenden hohen Funktionsdichte bei gleichbleibend hohenRobustheitsanforderungen. Die Robustheit des Sensors erfordert die Widerstandsfähigkeitgegenüber starken Temperaturschwankungen, mechanischem Stress und elektromagneti-scher Verträglichkeit (EMV). Die Zuverlässigkeits- und Qualitätsstandards steigen, da dieInformationen der ABS-Sensoren für immer mehr Systeme im Fahrzeug eingesetzt werden.Die ISO-Norm ISO 26262 „Road vehicles – Functional safety“ [54] beschäftigt sich unteranderem mit dem Thema der funktionalen Sicherheit von sicherheitsrelevanten elektroni-schen Systemen im Automobil. Die Automobilindustrie fordert dabei von ihren Zulieferndie Einhaltung dieser Normen.
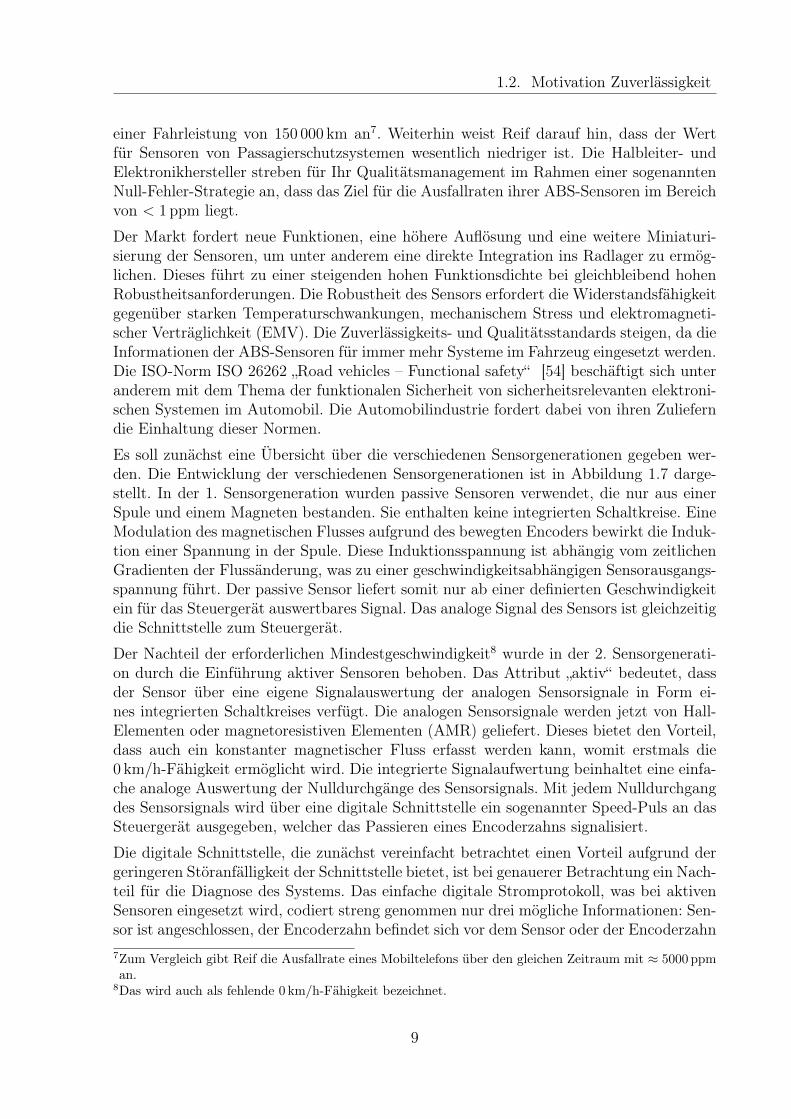
Es soll zunächst eine Übersicht über die verschiedenen Sensorgenerationen gegeben wer-den. Die Entwicklung der verschiedenen Sensorgenerationen ist in Abbildung 1.7 darge-stellt. In der 1. Sensorgeneration wurden passive Sensoren verwendet, die nur aus einerSpule und einem Magneten bestanden. Sie enthalten keine integrierten Schaltkreise. EineModulation des magnetischen Flusses aufgrund des bewegten Encoders bewirkt die Induk-tion einer Spannung in der Spule. Diese Induktionsspannung ist abhängig vom zeitlichenGradienten der Flussänderung, was zu einer geschwindigkeitsabhängigen Sensorausgangs-spannung führt. Der passive Sensor liefert somit nur ab einer definierten Geschwindigkeitein für das Steuergerät auswertbares Signal. Das analoge Signal des Sensors ist gleichzeitigdie Schnittstelle zum Steuergerät.
Der Nachteil der erforderlichen Mindestgeschwindigkeit8 wurde in der 2. Sensorgenerati-on durch die Einführung aktiver Sensoren behoben. Das Attribut „aktiv“ bedeutet, dassder Sensor über eine eigene Signalauswertung der analogen Sensorsignale in Form ei-nes integrierten Schaltkreises verfügt. Die analogen Sensorsignale werden jetzt von Hall-Elementen oder magnetoresistiven Elementen (AMR) geliefert. Dieses bietet den Vorteil,dass auch ein konstanter magnetischer Fluss erfasst werden kann, womit erstmals die0 km/h-Fähigkeit ermöglicht wird. Die integrierte Signalaufwertung beinhaltet eine einfa-che analoge Auswertung der Nulldurchgänge des Sensorsignals. Mit jedem Nulldurchgangdes Sensorsignals wird über eine digitale Schnittstelle ein sogenannter Speed-Puls an dasSteuergerät ausgegeben, welcher das Passieren eines Encoderzahns signalisiert.
Die digitale Schnittstelle, die zunächst vereinfacht betrachtet einen Vorteil aufgrund dergeringeren Störanfälligkeit der Schnittstelle bietet, ist bei genauerer Betrachtung ein Nach-teil für die Diagnose des Systems. Das einfache digitale Stromprotokoll, was bei aktivenSensoren eingesetzt wird, codiert streng genommen nur drei mögliche Informationen: Sen-sor ist angeschlossen, der Encoderzahn befindet sich vor dem Sensor oder der Encoderzahn7Zum Vergleich gibt Reif die Ausfallrate eines Mobiltelefons über den gleichen Zeitraum mit ≈ 5000 ppman.
8Das wird auch als fehlende 0 km/h-Fähigkeit bezeichnet.
9
1. Einführung
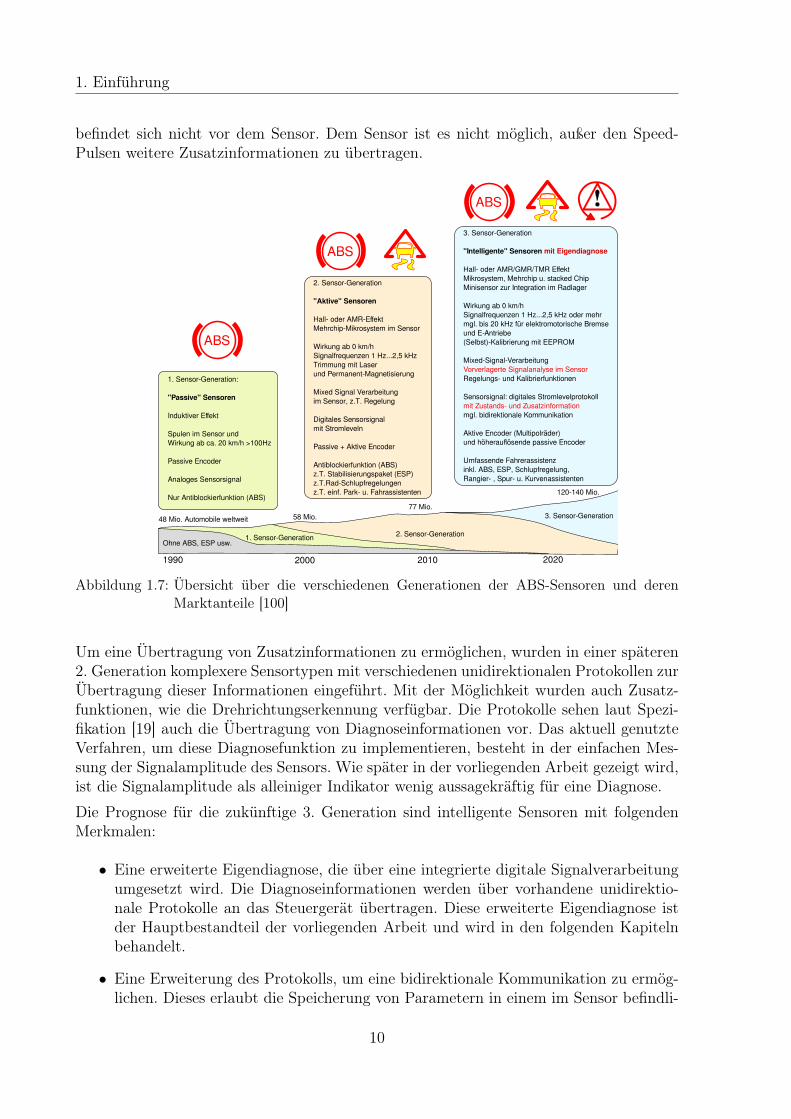
befindet sich nicht vor dem Sensor. Dem Sensor ist es nicht möglich, außer den Speed-Pulsen weitere Zusatzinformationen zu übertragen.
1. Sensor-Generation:
"Passive" Sensoren
Induktiver Effekt
Spulen im Sensor undWirkung ab ca. 20 km/h >100Hz
Passive Encoder
Analoges Sensorsignal
Nur Antiblockierfunktion (ABS)
2. Sensor-Generation
"Aktive" Sensoren
Hall- oder AMR-Effekt Mehrchip-Mikrosystem im Sensor
Wirkung ab 0 km/hSignalfrequenzen 1 Hz...2,5 kHzTrimmung mit Laserund Permanent-Magnetisierung
Mixed Signal Verarbeitung im Sensor, z.T. Regelung
Digitales Sensorsignal mit Stromleveln
Passive + Aktive Encoder
Antiblockierfunktion (ABS)z.T. Stabilisierungspaket (ESP)z.T.Rad-Schlupfregelungenz.T. einf. Park- u. Fahrassistenten
3. Sensor-Generation
"Intelligente" Sensoren mit Eigendiagnose
Hall- oder AMR/GMR/TMR EffektMikrosystem, Mehrchip u. stacked Chip Minisensor zur Integration im Radlager
Wirkung ab 0 km/hSignalfrequenzen 1 Hz...2,5 kHz oder mehr mgl. bis 20 kHz für elektromotorische Bremseund E-Antriebe(Selbst)-Kalibrierung mit EEPROM
Mixed-Signal-Verarbeitung Vorverlagerte Signalanalyse im Sensor Regelungs- und Kalibrierfunktionen
Sensorsignal: digitales Stromlevelprotokoll mit Zustands- und Zusatzinformationmgl. bidirektionale Kommunikation
Aktive Encoder (Multipolräder)und höherauflösende passive Encoder
Umfassende Fahrerassistenzinkl. ABS, ESP, Schlupfregelung, Rangier- , Spur- u. Kurvenassistenten
1990 2000 2010 2020
2. Sensor-Generation
3. Sensor-Generation
120-140 Mio.
48 Mio. Automobile weltweit 58 Mio.77 Mio.
1. Sensor-GenerationOhne ABS, ESP usw.
ABS
ABS
ABS
Abbildung 1.7: Übersicht über die verschiedenen Generationen der ABS-Sensoren und derenMarktanteile [100]
Um eine Übertragung von Zusatzinformationen zu ermöglichen, wurden in einer späteren2. Generation komplexere Sensortypen mit verschiedenen unidirektionalen Protokollen zurÜbertragung dieser Informationen eingeführt. Mit der Möglichkeit wurden auch Zusatz-funktionen, wie die Drehrichtungserkennung verfügbar. Die Protokolle sehen laut Spezi-fikation [19] auch die Übertragung von Diagnoseinformationen vor. Das aktuell genutzteVerfahren, um diese Diagnosefunktion zu implementieren, besteht in der einfachen Mes-sung der Signalamplitude des Sensors. Wie später in der vorliegenden Arbeit gezeigt wird,ist die Signalamplitude als alleiniger Indikator wenig aussagekräftig für eine Diagnose.
Die Prognose für die zukünftige 3. Generation sind intelligente Sensoren mit folgendenMerkmalen:
• Eine erweiterte Eigendiagnose, die über eine integrierte digitale Signalverarbeitungumgesetzt wird. Die Diagnoseinformationen werden über vorhandene unidirektio-nale Protokolle an das Steuergerät übertragen. Diese erweiterte Eigendiagnose istder Hauptbestandteil der vorliegenden Arbeit und wird in den folgenden Kapitelnbehandelt.
• Eine Erweiterung des Protokolls, um eine bidirektionale Kommunikation zu ermög-lichen. Dieses erlaubt die Speicherung von Parametern in einem im Sensor befindli-
10
1.3. Stand der Technik
chen EEPROM. Bei diesen Parametern kann es sich um Parameter für die Regelungoder für die Diagnosefunktion handeln.
• Eine neues Verfahren, welches die derzeitige Offset- und Verstärkungsregelung be-schleunigt. Besonders im Initialzustand, nach dem Power-Up des Sensors, müssenbisher erst einige Encoderzähne den Sensor passieren, damit der Sensor aktiv wird.Diese Zeit soll durch eine gleichzeitig wirkende Regelung verkürzt werden.
• Der Einsatz von neuen magnetischen Sensortechnologien, wie dem GMR-Effekt (Rie-senmagnetowiderstand) oder TMR-Effekt (magnetischer Tunnelwiderstand). DieseTechnologien liefern eine deutlich größere relative Änderung des Widerstandes imGegensatz zum derzeit verwendeten AMR-Effekt [114]. Hiermit kann der maximaleAbstand zwischen Sensor und Encoder weiter erhöht werden oder die notwendigeanaloge Verstärkung verkleinert werden.
• Eine Erhöhung der Encoderauflösung, was zu einer Steigerung der maximalen Si-gnalfrequenz im Sensor auf bis zu 20 kHz führt. Die erhöhte Encoderauflösung wirdfür eine Steigerung der Regelfrequenz des Antiblockiersystems benötigt, die im Zu-ge zukünftiger Entwicklungen elektromotorischer Bremsen möglich werden [13]. Dashydraulische Bremssystem ist derzeit auf circa 10 Regelvorgänge pro Sekunde be-grenzt. Durch die Steigerung der Regelfrequenz in Kombination mit elektromotori-schen Bremsen soll der Bremsvorgang weiter optimiert werden können.
1.3 Stand der Technik
Durch die digitale Signalausgabe der aktiven Sensoren ist keine Diagnose des Sensorsignalsim Steuergerät möglich, da der eigentliche Informationsträger - das analoge Signal des ma-gnetischen Sensors - an dieser Stelle nicht verfügbar ist. Somit ist eine Vorverlagerung derDiagnose direkt in den ABS-Sensor erforderlich. Weiterhin ist es erforderlich, dass zu-sätzlich zur Messgröße auch eine Angabe der Verlässlichkeit des gelieferten Messwertesübertragen wird. Entsprechende Protokolle, die die Übertragung der Diagnoseinforma-tionen beinhalten, sind bereits vom Verband der Automobilindustrie (VDA) spezifiziertworden. Der VDA zeigt durch die Definition eines einheitlichen Protokolls den Bedarf ei-ner Sensor-Eigendiagnose an. Im Abschnitt 4.2.2 wird die Funktionsweise dieses Protokollsbeschrieben.
Derzeit ist im Steuergerät eine Diagnose der ABS-Sensoren nur durch Prüfung der Plausi-bilität des Sensorsignals möglich. Neueste Sensorprodukte sind mit einer eingeschränktenEigendiagnose ausgestattet, die jedoch bisher nur die Sensoramplitude des Sensors auswer-tet [87]. Die Amplitude des Sensorsignals ist in vielen Fällen mehrdeutig und kann ohneweitere Information keinen ausreichend zuverlässigen Indikator für den Sensorzustand lie-fern. Es ist erforderlich, dass eine Abweichung vom sicheren Arbeitspunkt erkannt wird.
Weitere Belege für den von Fachleuten erkannten Bedarf den Sensorzustand zu ermittelnund zu berücksichtigen, finden sich im Patentschrifttum:
11
1. Einführung
• Lohberg und Grießer beschreiben in der Offenlegungsschrift [45] ein Verfahren, dasszur Analyse von Encoder-Abbildungsfehlern dient. Bei diesem Verfahren wird die ak-tuelle Feldstärke mit einer gespeicherten Referenzfeldstärke verglichen, wodurch aufden Luftspalt zwischen Sensor und Encoder geschlossen werden kann. Eine direkteMessung der Feldstärke im Sensor ist nicht möglich. Nur anhand der Sensoraus-gangsspannung lässt sich auf die Feldstärke schließen. Bei AMR-Sensoren lässt sichdieses Verfahren aufgrund der Nichtlinearitäten nicht zuverlässig einsetzen.
• Lohberg et al. beschreiben in der Offenlegungsschrift [34, 35] die Verwendung vonunterschiedlich sensitiven Sensoren und den Vergleich der Signalfrequenzen dieserSensoren. Liefert der weniger sensitive Sensor kein Signal mehr, ist dieses ein In-dikator für eine zu geringe Feldstärke. Ist das Signal hingegen übersteuert, dannwird zuerst der sensible Sensor eine Fehlfunktion zeigen. Somit kann bei einer Ab-weichung der Frequenzen der Sensoren voneinander bereits auf eine Fehlfunktiongeschlossen werden.
• Lohberg und Fritz nutzen in ihrer Offenlegungsschrift [31, 32, 33] einen ähnlichAnsatz zur vorherigen Offenlegungsschrift [34]. Statt der unterschiedlich sensitivenSensoren werden hier die Halbbrücken eines brückenförmig aufgebauten Sensors ge-nutzt. Dabei wird der Effekt genutzt, dass bei Verkippungen die Halbbrücken mitunterschiedlich starken Feldstärken beaufschlagt werden.
• Bielig beschreibt in der Offenlegungsschrift [11, 12] die Auswertung des Tastverhält-nisses des Sensorsignals bei einer bestimmten Komparatorschwelle. Die Veränderungder Amplitude oder des Offsets des Sensorsignals resultiert in einer Verschiebungdes Schaltpunktes der Komparatorschwelle.
• Steinrücken et al. beschreiben in der Offenlegungsschrift [39, 40, 41, 42, 43] einDiagnoseverfahren, das vorzugsweise für Hallsensoren eingesetzt werden kann. Beidiesen Verfahren wird die Über-/Unterschreitung von Schwellwerten des Sensorsi-gnals überwacht und gegebenenfalls gespeichert. Nach einem Neustart des Systemskann ein Vergleich mit den gespeicherten Schwellen erfolgen und eine Abweichungvom Arbeitspunkt erkannt werden.
Nach der Analyse des Stands der Technik lässt sich folgendes feststellen:
1. Von der Anwenderseite wird von einem intelligenten Sensor eine Eigendiagnose ge-fordert. Entsprechender Bedarf ist belegbar.
2. Es gibt eine Reihe von technischen Ansätzen, diesen Bedarf zu erfüllen. Sie nut-zen entweder statische Parameter oder Merkmale des Signals, die im Zeitbereichausgewertet werden (Amplituden, Offsets, Tastverhältnis).
3. Keiner dieser Ansätze führt zu einer vollständigen, befriedigenden Diagnosefunktion.
12
1.4. Innovativer Ansatz und Gliederung der Arbeit
1.4 Innovativer Ansatz und Gliederung der Arbeit
Üblicherweise wird der Entwickler eines Sensor-Encoder-Systems anstreben, ein System zudimensionieren, das weitgehend lineares Verhalten aufweist. Nachfolgend wird noch aus-führlich dargestellt, dass im Sensor-Encoder-System ausgeprägte Nichtlinearitäten vor-liegen. Diese haben zwei Ursachen, zum einen ist das magnetische Feld durch starkenichtlineare Verhältnisse gekennzeichnet und zum anderen weist die AMR-Sensorbrückecharakteristische nichtlineare Effekte auf. Bei den vorliegenden starken Nichtlinearitä-ten werden alle Parameter so abgeglichen, dass das entstehende System in einem nähe-rungsweise linearen Bereich arbeitet. Für die Diagnose sind auch die Bereiche außerhalbdes typischen Arbeitsbereichs zu betrachten, in dem die angestrebten optimalen Verhält-nisse nicht vorliegen, weil beispielsweise ein Fehlerfall oder eine Toleranzüberschreitungvorliegen. Bei nahezu allen Abweichungen von Parametern aus dem Arbeitspunkt sindverstärkte nichtlineare Effekte gegeben.
Dies führt zum Ausgangspunkt und zum neuartigen Ansatz dieser Arbeit. Die Hauptfra-gen hierbei lauten:
• Können die Nichtlinearitäten des Systems genutzt werden, um auf den Arbeitspunktdes Sensors zu schließen?
• Ist es technisch möglich, die Diagnose in den ABS-Sensor selbst zu verlagern, umeine bessere Aussage über den Zustand des Sensor-Encoder-Systems im Steuergerätzu erhalten?
Die Arbeit hat zur Aufgabe, einen Lösungsvorschlag auf diese Fragen zu erarbeiten. Derinnovative Grundgedanke lässt sich wie folgt beschreiben:
1. Die Nichtlinearitäten des Sensor-Encoder-Systems führen beim Verlassen des opti-malen Arbeitspunktes zu Verzerrungen im Signal des AMR-Sensors.
2. Im Frequenzbereich entstehen dadurch Harmonische.
3. Gelingt es diese im Sensorsignal zu erkennen, so kann die Einhaltung des Arbeits-punktes laufend diagnostiziert werden.
Im Bestreben, sich mit diesen Hauptfragen auseinanderzusetzen und eine ingenieurstech-nische Antwort zu finden, können eine Reihe von Teilfragen erstellt werden. Diese lassensich in mehrere Bereiche ordnen, denen die Gliederung der Kapitel folgt.
Zunächst wird im Kapitel 2 das Systemverhalten betrachtet und die wichtigsten Fragenhierzu sind:
• Wie kann in einem messtechnischen Experiment die Ausprägung von Harmonischenumfassend und repräsentativ bestimmt werden?
• Welche Harmonischen sind relevant?
13
1. Einführung
• Wie groß werden die Harmonischen?
• Welche Verkippungen oder Versätze des Sensors zum Encoder haben besonders star-ke Auswirkungen auf das Sensorsignal?
• Kann anhand der auftretenden Harmonischen auf eine bestimmte Fehlstellung desSensors geschlossen werden?
• Kann das System vollständig modelliert werden und wie stark stimmen die Simula-tionen mit der Realität überein?
Nach der Analyse des Systemverhaltens muss sich damit auseinandergesetzt werden, mitwelchen Verfahren und Algorithmen signifikante Aussagen über den Sensorzustand zuextrahieren sind. Diese Algorithmen werden in Kapitel 3 vorgestellt. Diskutiert werdendort Methoden, die zur Beantwortung der folgenden Fragen führen:
• Wie lässt sich die Harmonischenanalyse mit minimalem Aufwand realisieren?
• Wie kann das Problem der sich ständig ändernden Grundfrequenz des Signals gelöstwerden?
• Muss jede Periode des Signals vollständig abgetastet werden?
• Ist eine on-the-fly Berechnung möglich oder müssen Abtastwerte zwischengespei-chert werden?
• Wie können die Harmonischenanteile bestimmt werden?
Nachdem die Algorithmen beschrieben wurden, müssen die Implementationskonzepte da-für entwickelt werden. Gleichzeitig muss für eine Implementation sichergestellt werden,dass nicht ideale Signale so aufbereitet werden, das sie von den Algorithmen verarbeitetwerden können. Mit diesem Aspekt befasst sich das Kapitel 4. Insbesondere stellen sichfolgende Fragen zur Implementation:
• Wie ist eine aufwandsgünstige Offset- und Verstärkungsregelung zu realisieren?
• Wie lässt sich eine schnelle Regelung mit möglichst großer Dynamik entwickeln?
• Wie sind die Sensorgrundfunktionen zu implementieren?
• In welche Funktionsblöcke lässt sich die Diagnosefunktion zerlegen?
• Kann die Abarbeitung von Teilfunktionen parallelisiert erfolgen?
• Wie kann die Berechnung mit dem geringsten Ressourcenaufwand durchgeführt wer-den?
14
1.5. Grundkonzept
Als abschließender Schritt setzt sich die Arbeit mit der experimentellen Realisierung derzuvor erarbeiteten Methoden auseinander. Im Kapitel 5 wird dargestellt, wie diese Metho-den praktisch in Hardware umgesetzt werden können. Ziel dabei ist nicht nur die Funk-tionsfähigkeit nachzuweisen sondern auch die Rahmenbedingungen und Einschränkungenfür eine spätere industrielle Anwendung abzuschätzen.
• Wie gelingt der experimentelle Nachweis?
• Wie kann stufenweise eine Hardwareplattform entwickelt werden?
• Wie kann diese Hardwareplattform möglichst flexibel gehalten werden?
• Wie kann die Forderung nach minimalem Stromverbrauch und Flächenbedarf er-reicht werden?
Im anschließenden Kapitel 6 erfolgt eine abschließende Bewertung und eine kritische Dar-stellung der erreichten und offen gebliebenen Aspekte. Zudem sollen an dieser Stelle nochHinweise für weitere Arbeiten gegeben werden und zu weiterführenden Überlegungen an-geregt werden.
1.5 Grundkonzept
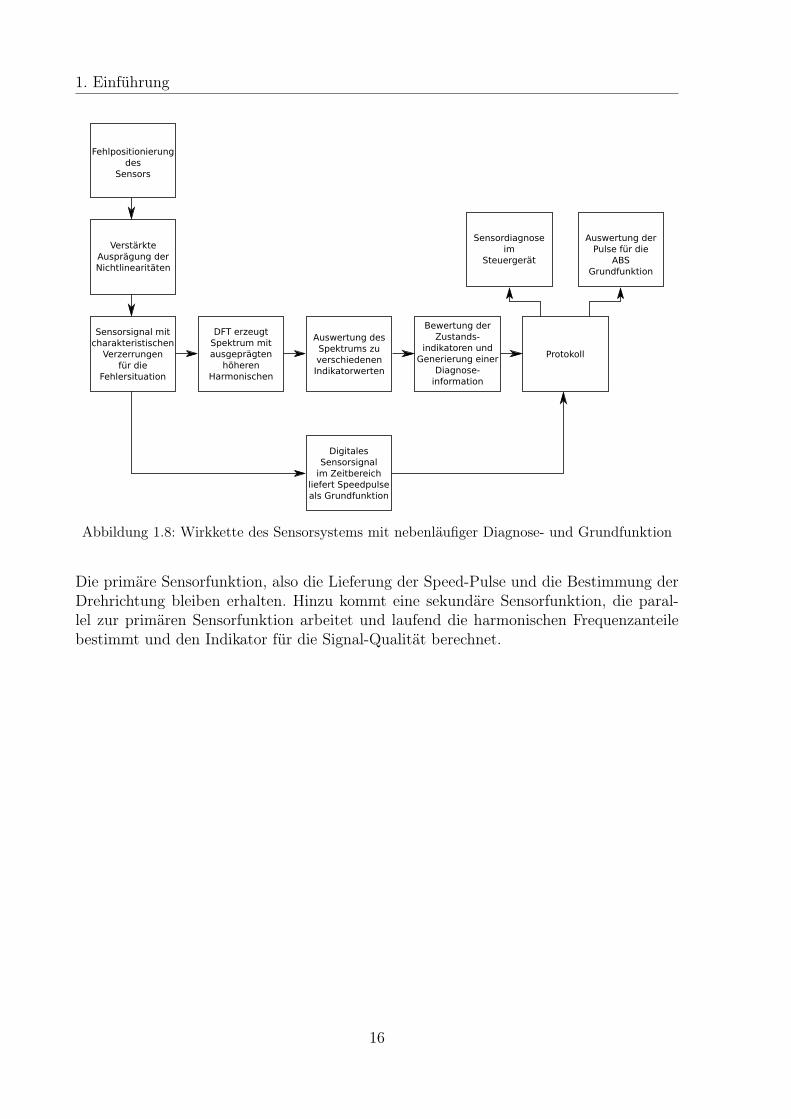
Das Grundkonzept besteht darin, das Sensorsignal des AMR-Sensors laufend auszuwer-ten. Die Signalverarbeitung, die diese Auswertung durchführt, soll direkt in den Sensor-ASIC integriert werden. Mit dem Verlassen der Safe-Operation-Area (SOA) entstehen aufGrund von Nichtlinearitäten des magnetischen Systems und des AMR-Sensors Oberwellenim Sensorsignal. Sie bilden sich aus, sobald wichtige Systemparameter, wie beispielsweisedie Einbauposition, eine Abweichung erfahren. Der Ablauf ist in der Wirkkette in Abbil-dung 1.8 dargestellt. Die entstehenden harmonischen Frequenzanteile lassen sich zu einemIndikator der Signal-Qualität zusammenfassen, welcher sich zur Eigendiagnose eignet.
15
1. Einführung
Fehlpositionierungdes
Sensors
DigitalesSensorsignal
im Zeitbereichliefert Speedpulseals Grundfunktion
Auswertung desSpektrums zuverschiedenenIndikatorwerten
Protokoll
DFT erzeugtSpektrum mitausgeprägten
höherenHarmonischen
Verstärkte Ausprägung derNichtlinearitäten
Sensorsignal mitcharakteristischen
Verzerrungenfür die
Fehlersituation
Sensordiagnoseim
Steuergerät
Bewertung der Zustands-
indikatoren undGenerierung einer
Diagnose-information
Auswertung derPulse für die
ABSGrundfunktion
Abbildung 1.8: Wirkkette des Sensorsystems mit nebenläufiger Diagnose- und Grundfunktion
Die primäre Sensorfunktion, also die Lieferung der Speed-Pulse und die Bestimmung derDrehrichtung bleiben erhalten. Hinzu kommt eine sekundäre Sensorfunktion, die paral-lel zur primären Sensorfunktion arbeitet und laufend die harmonischen Frequenzanteilebestimmt und den Indikator für die Signal-Qualität berechnet.
16
Kapitel 2
Systemanalyse
Das Kapitel Systemanalyse beschreibt eine detaillierte Untersuchung des Sensor-Encoder-Systems. Es werden hierbei Sensoren auf Basis des anisotropen magnetoresistiven Effek-tes in Kombination mit aktiven/passiven Encodern verwendet, wie sie auch in Kapitel1 beschrieben wurden. Die Systemanalyse beginnt im Abschnitt 2.1 mit experimentellenMessungen des Sensor-Encoder-Systems. Hierbei werden die elektrischen Ausgangssignaledes AMR-Sensors bei unterschiedlichsten Einbaupositionen an einem speziellen Messplatzgemessen. Der Encoder rotiert dabei mit konstanten Drehzahlen. Die elektrischen Signaledes Sensors werden im Zeit- sowie im Frequenzbereich analysiert und statistisch ausge-wertet, um die Aussagekraft der Indikatoren zur Zustandsdiagnose zu ermitteln.
Für die Untersuchung der Ursachen der Signalverzerrung ist ein Modell des magnetoresis-tiven Sensors erforderlich. Im Abschnitt 2.2 werden ein messtechnisch und ein analytischermitteltes Sensormodell in Form eines Kennfelds vorgestellt. Das Verfahren zur Erzeu-gung eines hochauflösenden Sensorkennfeldes weist zwei Schritte auf. Zunächst werdenSensorsignale mit einem computergesteuerten Kreuzspulenmessplatz erfasst und gespei-chert. Dann werden diese statistisch ausgewertet und ein Kennfeld berechnet. Nebendieser messtechnischen Methode gibt es auch einen numerischen Ansatz zur Kennfeld-bestimmung. Die analytische Kennfeldbestimmung basiert auf der numerischen Lösungeiner Näherungsgleichung zur Bestimmung der internen Magnetisierung mittels Newton-Raphson-Verfahren. Die Näherungsgleichung wird durch den Ansatz von Dibbern [20]geliefert.
Im Abschnitt 2.3 wird eine magnetostatische FEM-Simulation vorgestellt, mit der dieFeldstärken berechnet werden, die während der Rotation des Encoders auf den Sensoreinwirken. Für die Simulation sind detaillierte Modelle für Sensor und Encoder erfor-derlich. Es wird auf eine rechenintensive, mikromagnetische Beschreibung des Sensorsverzichtet. Stattdessen werden die mittleren Feldstärken auf der aktiven Sensoroberflächefür die weitere Verarbeitung verwendet. Bei der Modellierung der Encoder wird auch de-tailliert auf die Modellierung aktiver Encoder eingegangen, welche vorher messtechnischanalysiert wurden.
Ein Verfahren zur Berechnung des synthetischen Sensorausgangssignals aus den Ergeb-nissen der Sensorcharakterisierung und der FEM-Simulation wird im Abschnitt 2.4 vor-gestellt. Das Verfahren, welches die synthetisierte Sensorspannung liefert, wird anhand
17
2. Systemanalyse
von experimentellen Messungen mit den selben Einbaupositionen verifiziert. Die Ergeb-nisse und die gewählte Darstellungsform der Signalsynthese verdeutlichen die Entstehungder Signalverzerrungen im Sensorsignal. Diese werden durch eine nichtlineare magnetischeAnregung und dem nichtlinearen Kennfeld verursacht. Drei Beispiele mit unterschiedli-chen Encodern und unterschiedlichen Einbaupositionen werden angeführt und detaillierterläutert.
2.1 Experimentelle Untersuchung des Sensor-Encoder-Systems
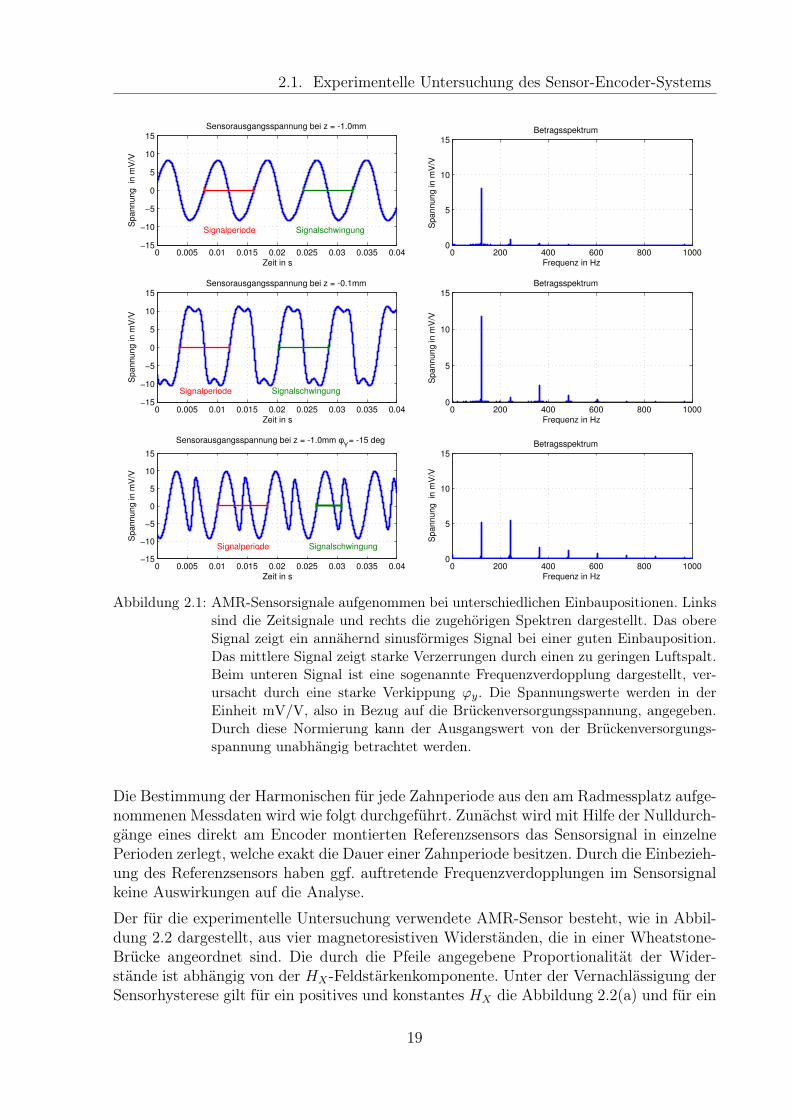
Die ersten Signalanalysen im Rahmen des Forschungsprojektes wurden in den Diplom-arbeiten von Mahtouf [76] und Jegenhorst [56] durchgeführt. In diesen Arbeiten wurdenmit Vormustern des Radmessplatzes erste spektrale Analysen des Sensorsignals durch-geführt. Diese Arbeiten führten zu dem Ergebnis, dass bei kleinem Luftspalt (z-Achse)starke Verzerrungen auftreten und durch die Verkippung der ϕy-Achse eine Frequenz-verdopplung erfolgt. Die Frequenzverdopplung bedeutet, dass der AMR-Sensor für jedemechanische Zahnperiode1 statt einer zwei Signalschwingungen im elektrischen Ausgangs-signal ausgibt. Verdeutlicht wird dieses in Abbildung 2.1. Werden nur die Nulldurchgängedes Signals ausgewertet, so werden die zwei Signalschwingungen fälschlicherweise als zweiSignalperioden erkannt. Anders ausgedrückt bedeutet dieses, dass das Sensorsignal einezusätzliche stark ausgeprägte Komponente enthält, dessen Frequenz doppelt so groß istwie die tatsächliche Zahnfrequenz des Encoders. Wie später innerhalb dieses Kapitelsgezeigt wird, liegt die Ursache für das Auftreten der Frequenzverdopplung in den Nicht-linearitäten des AMR-Sensors. Die Abbildung 2.1 zeigt zwei Beispiele für Sensorsignaleohne Frequenzverdopplung und eines mit Frequenzverdopplung. Sie verdeutlicht, wie starkdie Qualität des Sensorsignals von der Einbauposition abhängt.
Für die Bewertung der Qualität des Sensorsignals ist es erforderlich die auftretenden Ver-zerrungen zu analysieren. Hierfür ist das Signal spektral zu betrachten, um die durch dieVerzerrungen entstehenden Harmonischen auszuwerten. Eine Betrachtung im Zeitbereichist nicht sinnvoll, da hier nur Spitzenspannungen und Gesamtsignalleistungen ermitteltwerden können. Die Bestimmung der Harmonischen aus den Sensorsignalen kann auf zweiunterschiedliche Arten durchgeführt werden. Es können einzelne Zahnperioden ausgewer-tet werden oder komplette Encoderperioden. Die Analyse einzelner Zahnperioden liefertInformationen über den Zustand einzelner Encoderzähne. Die Analyse von Encoderpe-rioden hingegen zeigt Informationen über den Unrundlauf des Encoders. Näheres hierzuwird im Kapitel 2.1.4 beschrieben. In dieser Arbeit wird auf die Analyse einzelner Zahn-perioden Bezug genommen, anderenfalls wird der Bezug explizit erwähnt.1Eine Zahnperiode entspricht dem Übergang von einem Encoderzahn zum nächsten Encoderzahn, ent-sprechendes gilt für den Übergang von Pol zu Pol eines aktiven Encoders.
18
2.1. Experimentelle Untersuchung des Sensor-Encoder-Systems
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04−15
−10
−5
0
5
10
15
Zeit in s
Spa
nnun
g in
mV
/V
Sensorausgangsspannung bei z = -0.1mm
0 200 400 600 800 10000
5
10
15
Frequenz in HzS
pann
ung
in m
V/V
Betragsspektrum
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04−15
−10
−5
0
5
10
15
Zeit in s
Spa
nnun
g in
mV
/VSensorausgangsspannung bei z = -1.0mm
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04−15
−10
−5
0
5
10
15
Zeit in s
Spa
nnun
g in
mV
/V
Sensorausgangsspannung bei z = -1.0mm φ = -15 deg Y
0 200 400 600 800 10000
5
10
15
Frequenz in Hz
Spa
nnun
g in
mV
/V
Betragsspektrum
0 200 400 600 800 10000
5
10
15
Frequenz in Hz
Spa
nnun
g in
mV
/V
Betragsspektrum
Signalperiode
Signalperiode
Signalperiode
Signalschwingung
Signalschwingung
Signalschwingung
Abbildung 2.1: AMR-Sensorsignale aufgenommen bei unterschiedlichen Einbaupositionen. Linkssind die Zeitsignale und rechts die zugehörigen Spektren dargestellt. Das obereSignal zeigt ein annähernd sinusförmiges Signal bei einer guten Einbauposition.Das mittlere Signal zeigt starke Verzerrungen durch einen zu geringen Luftspalt.Beim unteren Signal ist eine sogenannte Frequenzverdopplung dargestellt, ver-ursacht durch eine starke Verkippung ϕy. Die Spannungswerte werden in derEinheit mV/V, also in Bezug auf die Brückenversorgungsspannung, angegeben.Durch diese Normierung kann der Ausgangswert von der Brückenversorgungs-spannung unabhängig betrachtet werden.
Die Bestimmung der Harmonischen für jede Zahnperiode aus den am Radmessplatz aufge-nommenen Messdaten wird wie folgt durchgeführt. Zunächst wird mit Hilfe der Nulldurch-gänge eines direkt am Encoder montierten Referenzsensors das Sensorsignal in einzelnePerioden zerlegt, welche exakt die Dauer einer Zahnperiode besitzen. Durch die Einbezieh-ung des Referenzsensors haben ggf. auftretende Frequenzverdopplungen im Sensorsignalkeine Auswirkungen auf die Analyse.
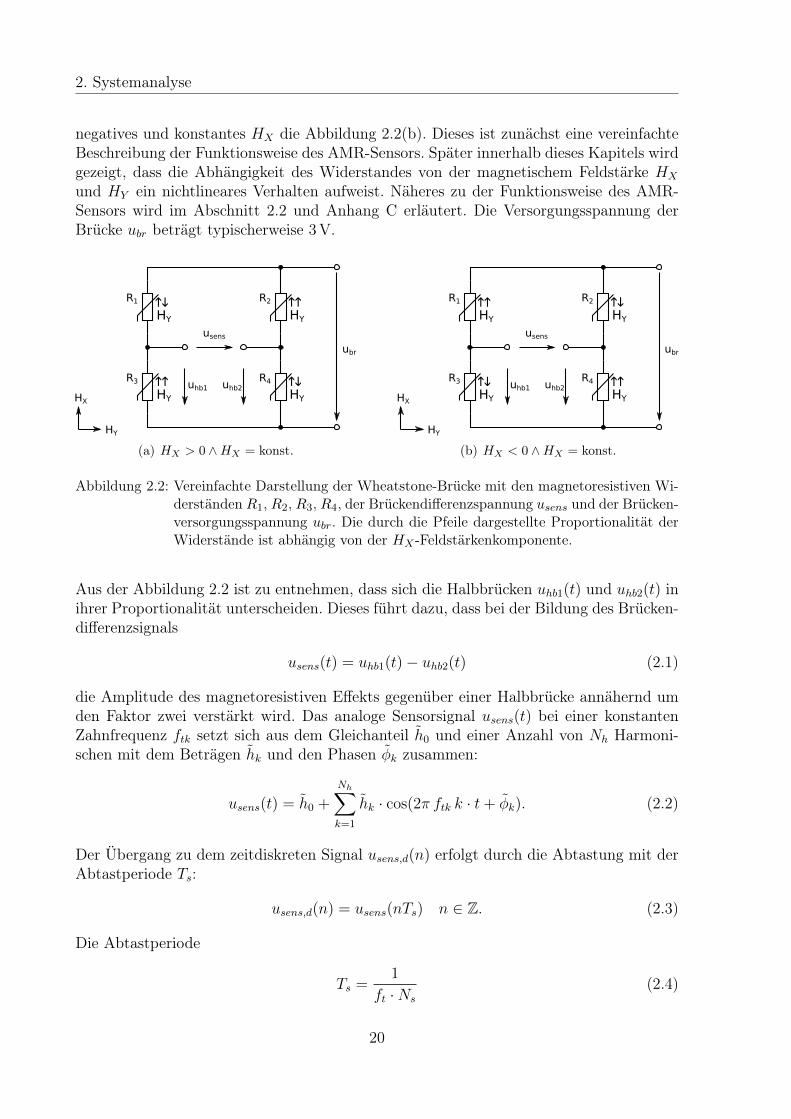
Der für die experimentelle Untersuchung verwendete AMR-Sensor besteht, wie in Abbil-dung 2.2 dargestellt, aus vier magnetoresistiven Widerständen, die in einer Wheatstone-Brücke angeordnet sind. Die durch die Pfeile angegebene Proportionalität der Wider-stände ist abhängig von der HX-Feldstärkenkomponente. Unter der Vernachlässigung derSensorhysterese gilt für ein positives und konstantes HX die Abbildung 2.2(a) und für ein
19
2. Systemanalyse
negatives und konstantes HX die Abbildung 2.2(b). Dieses ist zunächst eine vereinfachteBeschreibung der Funktionsweise des AMR-Sensors. Später innerhalb dieses Kapitels wirdgezeigt, dass die Abhängigkeit des Widerstandes von der magnetischem Feldstärke HX
und HY ein nichtlineares Verhalten aufweist. Näheres zu der Funktionsweise des AMR-Sensors wird im Abschnitt 2.2 und Anhang C erläutert. Die Versorgungsspannung derBrücke ubr beträgt typischerweise 3 V.
ubr
R1 R2
R3 R4
usens
uhb1 uhb2
HY
HX
HY
↑↓
HY
↑↑HY
↑↓
HY
↑↑
(a) HX > 0 ∧HX = konst.
ubr
R1 R2
R3 R4
usens
uhb1 uhb2
HY
HX
HY
↑↑
HY
↑↓HY
↑↑
HY
↑↓
(b) HX < 0 ∧HX = konst.
Abbildung 2.2: Vereinfachte Darstellung der Wheatstone-Brücke mit den magnetoresistiven Wi-derständen R1, R2, R3, R4, der Brückendifferenzspannung usens und der Brücken-versorgungsspannung ubr. Die durch die Pfeile dargestellte Proportionalität derWiderstände ist abhängig von der HX -Feldstärkenkomponente.
Aus der Abbildung 2.2 ist zu entnehmen, dass sich die Halbbrücken uhb1(t) und uhb2(t) inihrer Proportionalität unterscheiden. Dieses führt dazu, dass bei der Bildung des Brücken-differenzsignals
usens(t) = uhb1(t)− uhb2(t) (2.1)
die Amplitude des magnetoresistiven Effekts gegenüber einer Halbbrücke annähernd umden Faktor zwei verstärkt wird. Das analoge Sensorsignal usens(t) bei einer konstantenZahnfrequenz ftk setzt sich aus dem Gleichanteil h0 und einer Anzahl von Nh Harmoni-schen mit dem Beträgen hk und den Phasen φk zusammen:
usens(t) = h0 +
Nh∑k=1
hk · cos(2π ftk k · t+ φk). (2.2)
Der Übergang zu dem zeitdiskreten Signal usens,d(n) erfolgt durch die Abtastung mit derAbtastperiode Ts:
usens,d(n) = usens(nTs) n ∈ Z. (2.3)
Die Abtastperiode
Ts =1
ft ·Ns
(2.4)
20
2.1. Experimentelle Untersuchung des Sensor-Encoder-Systems
wird dabei so gewählt, dass genau Ns Abtastwerte innerhalb einer Periode entnommenwerden. Die für die spektrale Analyse benötigten Beträge der Harmonischen können durchBerechnung der DFT bestimmt werden [119]:
Usens,d(k) =1
Ns
Ns−1∑n=0
usens,d(n)W nkNs , (2.5)
WNs = e−j2π/Ns . (2.6)
Die DFT des Signals einer Zahnperiode liefert die benötigten Harmonischen:
hk =
|Usens,d(k)| wenn k = 0
2 · |Usens,d(k)| wenn 1 ≤ k < Ns2∧ k ∈ N.
(2.7)
Die Harmonischen hk gelten für eine ideale Berechnung ohne Fehlereffekte, die beispiels-weise durch die Quantisierung oder eine nicht ideale Abtastung entstehen. Deshalb wirdzusätzlich für die reale Implementierung eine Schätzung
hk ≈ hk (2.8)
für die idealen Harmonischen hk definiert, welche die genannten Fehler beinhaltet. Dash0 entspricht dabei dem Gleichanteil des Signals. Die Harmonische h1 ist das gewünschteunverzerrte Encodersignal, während h2 bis hk die höheren Harmonischen (Oberwellen)sind. Da das diskrete Signal usens,d(n) mit NS Abtastwerten genau eine Periode enthälttritt bei der Bestimmung der DFT kein Leck-Effekt auf. Somit ist keine Fensterung desEingangssignals erforderlich.
Nach der Berechnung der DFT wird das Spektrum normiert. Die Normierung erfolgt so,dass bei der ersten Harmonischen der Betrag auf den Wert 1 und die Phase auf den Winkel−π
2gesetzt wird. Der Gleichanteil aus der DFT wird nicht ausgewertet, da angestrebt wird,
diesen weitgehend zu eliminieren. Die hierfür eingesetzte Offsetregelung wird im Abschnitt4.1.1 beschrieben.
Einführung des Begriffs Indikators
Die Beträge der Harmonischen werden zu einem Indikator zusammengefasst, der das Maßder Verzerrung beschreibt. Die Betrachtung des Indikators gibt Aufschluss über den Ar-beitspunkt des Sensors und dient damit der Zustandsdiagnose des Sensors. Verzerrungs-maße werden auch in der Energietechnik und der Audiotechnik verwendet. In der Ener-gietechnik werden Verzerrungen der Netzspannung gemessen. Diese sogenannte Verzer-rungsblindleistung wird durch nichtlineare Verbraucher z.B. Schaltnetzteilen verursachtund belastet das Netz zusätzlich. Jegenhorst hat in seiner Diplomarbeit [56] verschiedenegenormte Verzerrungsmaße aus der Energietechnik beschrieben, welche hier kurz aufgelis-tet werden. Die in diesem Abschnitt 2.1 verwendeten Bezeichner entsprechen den Normenund Literaturquellen, sie sind daher uneinheitlich. Bei den eigenen Verzerrungsmaßen undin der weiteren Arbeit werden einheitliche Bezeichnungen benutzt.
21
2. Systemanalyse
Der in DIN 40110-1 [21] definierte Klirrfaktor, auch Oberschwingungsgehalt oder Verzer-rungsgehalt genannt, wird wie folgt errechnet:
k =
√Q2ges −Q2
1
Qges
. (2.9)
Der Klirrfaktor kann dabei zur Berechnung der Verzerrungsblindleistung verwendet wer-den. Berechnet wird dieser mit dem Effektivwert der Oberwellen, welche aus der Sub-straktion vom Effektivwert des Gesamtsignals Qges und dem Effektivwert der Grund-schwingung Q1 hervorgeht, im Verhältnis zum Effektivwert des Gesamtsignals. Durchdiese Subtraktion werden beim Klirrfaktor sämtliche Harmonische berücksichtigt, inklusi-ve der Frequenzanteile, die nur in Folge von Rauschen auftreten. Ähnlich ist das Gesamt-Verzerrungsverhältnis nach DIN EN 61000-2-4 [22] definiert:
TDR =
√Q2ges −Q2
1
Q1
. (2.10)
Im Gegensatz zum Klirrfaktor werden die Oberwellen bezogen auf den Effektivwert derGrundschwingung Q1 berechnet. Der Effektivwert der Oberwellen kann auch durch Auf-summierung der Effektivwerte der einzelnen Oberwellen Qh, somit ohne Rauschen, be-rechnet werden. Der Gesamt-Verzerrungsfaktor (Total Harmonic Distortion)
THD =
√√√√ H∑h=2
(Qh
Q1
)2
=
√∑Hh=2Q
2h
Q1
(2.11)
aus DIN EN 61000-2-4 [22], welcher identisch zum Verzerrungsmaß THD aus der Emp-fehlung IEEE 519-1992 [52] ist, verwendet diese Art der Berechnung. Das H entsprichtdabei der Anzahl der einzubeziehenden Harmonischen.
Es existieren auch Verzerrungsmaße, die nicht, wie die bereits genannten Verzerrungsma-ße, eine Berechnung einzelner Beträge der Harmonischen erfordern. Ein solches Verzer-rungsmaß ist der Scheitelfaktor ks, oder auch Crestfaktor genannt. Dieser wird aus demVerhältnis der Spitzenspannung u und dem Effektivwert U berechnet [73]:
ks =u
U. (2.12)
Der Scheitelfaktor nähert sich dabei mit „stumpfer“ werdender Kurvenform dem Wert 1.Für eine Rechtecksignal beträgt der Scheitelfaktor somit 1 und für ein Sinussignal 1,414.Mit dem Scheitelfaktor ist jedoch nur eine grobe Beschreibung der Kurvenform möglich[73].
Im Bereich der Audiotechnik sind Verzerrungsmaße gebräuchlich, um die Qualität vonVerstärkern zu quantifizieren. Temme [112] definiert ein anderes prozentuales Verzerrungs-maß
%THD =100√H2
2 +H23 + . . .+H2
N√H2
1 +H22 +H2
3 + . . .+H2N
, (2.13)
22
2.1. Experimentelle Untersuchung des Sensor-Encoder-Systems
wobei Hn dem Betrag der Harmonischen mit dem Index n entspricht. Diese Definition isttrotz ähnlicher Benennung als THD nicht identisch mit der Formel 2.11.Festzustellen ist, dass eine Vielzahl ähnlicher Verzerrungsmaße als THD bezeichnet wer-den. Es existiert keine eindeutige Definition für den Gesamt-Verzerrungsfaktor THD undfür den Klirrfaktor. Alle vorgenannten Verzerrungsmaße liefern ähnliche Ergebnisse beimVorliegen geringer Verzerrungen und nur geringem Rauschen, dies gilt für typische Signaleaus der Audiotechnik [108].Der Gleichanteil wird in allen vorgenannten Verzerrungsmaßen nicht berücksichtigt. Beiden Sensorsignalen fallen aber Gleichanteile als unvermeidbare Offsets an (siehe Abschnitt4.1.1). Für Sensorsignale ist die Frage der Verzerrungsmaße nicht untersucht, deshalbgibt es hier keine geläufigen Definitionen. Auf Grund dieser Beobachtungen werden dreieigene Verzerrungsmaße definiert, von denen gezeigt werden soll, dass sie eine deutlichsignifikante Wirkung als Indikator für die Abweichung des Arbeitspunktes haben.
Indikator HDn
Für die Beschreibung des Verzerrungsmaßes, welcher nur eine Anzahl von n Harmonischenmit einbezieht, wird ein Indikator HDn eingeführt:
HDn =
√∑nk=2 h
2k∑n
k=1 h2k
typisch n = 2 . . . 10. (2.14)
hk bezeichnet die Beträge der Harmonischen aus Gleichung 2.7, welche aus den Spek-tralanteilen der DFT Gleichung 2.5 berechnet werden. Weil nur eine begrenzte Anzahlvon Harmonischen mit einbezogen werden, ist keine vollständige Berechnung aller Spek-trallinien der DFT erforderlich. Durch die Einbeziehung einer begrenzten Anzahl vonHarmonischen wird höherfrequentes Rauschen vermindert berücksichtigt. Eventuell auf-tretende Gleichanteile haben keinen Einfluss. Wichtig ist es, die Anzahl n so gering wiemöglich zu halten und dennoch eine deutliche Indikatoraussage zu erzielen. EmpirischeUntersuchungen haben gezeigt, dass Werte von 5 oder 6 ausreichend sind. Genaueres dazuwird im Abschnitt 2.1.5 beschrieben.
Indikator HDI
Der Indikator HDI (Harmonic Distortion Infinite), welcher von Koch [60] definiert wurde,bezieht sämtliche Harmonische inklusive Rauschen mit in die Berechnung ein:
HDI =
√PobPges
=
√Pges − Pgl − P1
Pges − Pgl. (2.15)
Die Definition des HDI ist ähnlich dem Klirrfaktor aus Formel 2.9, jedoch wird der HDInicht über die Effektivwerte vom Strom bzw. Spannung, sondern über die Signalleistungder Oberwellen Pob, der Gesamtsignalleistung
Pges =1
Ns
(Ns−1∑n=0
usens,d(n)2
)(2.16)
23
2. Systemanalyse
und der Leistung des Gleichanteils
Pgl =1
Ns
(Ns−1∑n=0
usens,d(n)
)2
(2.17)
berechnet. Die Terme usens,d(n) bezeichnen die Abtastwerte. Die Summe der Oberwellenwird über die Subtraktion der Leistung der 1. Harmonischen
P1 =h212
(2.18)
von der Gesamtsignalleistung Pges abzüglich der Gleichsignalleistung Pgl gebildet. DieBestimmung von P1 erfolgt aus der DFT. Der Rechenaufwand im Vergleich zum HDn
reduziert sich, weil nur die 1. Harmonische über die DFT nach Gleichung 2.7 zu bestimmenist. Jedoch muss die Gleichleistung und die Gesamtleistung bestimmt werden.
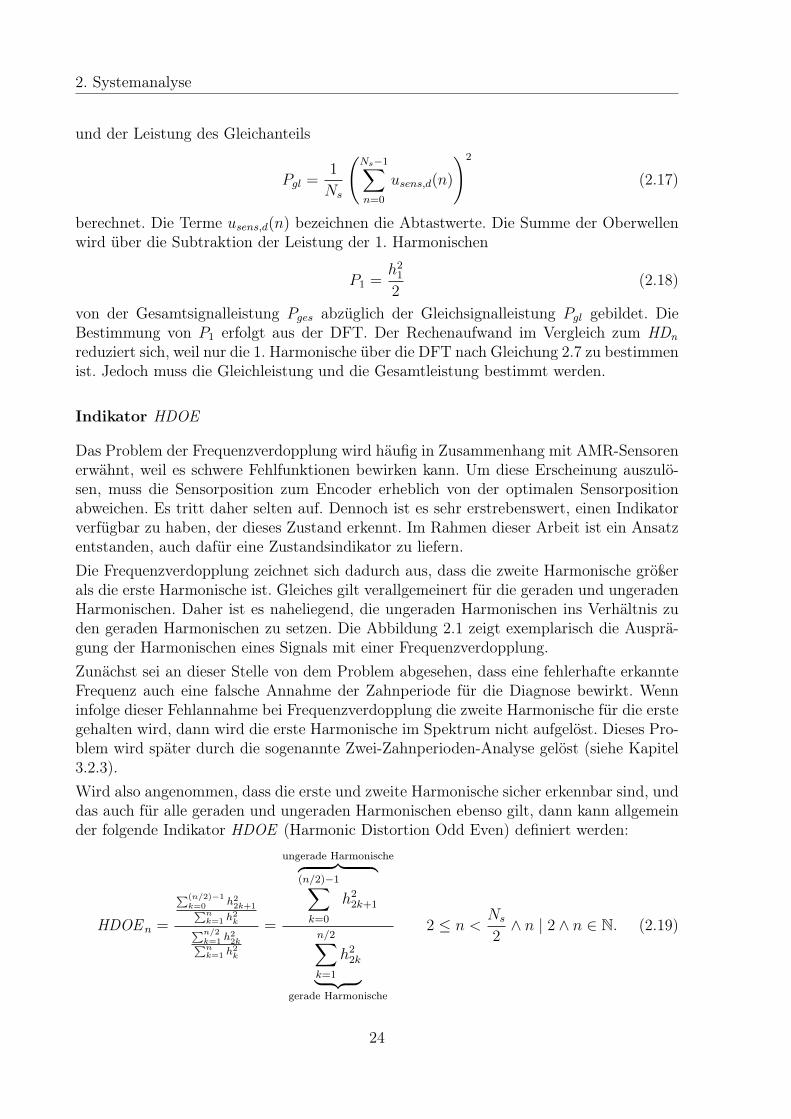
Indikator HDOE
Das Problem der Frequenzverdopplung wird häufig in Zusammenhang mit AMR-Sensorenerwähnt, weil es schwere Fehlfunktionen bewirken kann. Um diese Erscheinung auszulö-sen, muss die Sensorposition zum Encoder erheblich von der optimalen Sensorpositionabweichen. Es tritt daher selten auf. Dennoch ist es sehr erstrebenswert, einen Indikatorverfügbar zu haben, der dieses Zustand erkennt. Im Rahmen dieser Arbeit ist ein Ansatzentstanden, auch dafür eine Zustandsindikator zu liefern.Die Frequenzverdopplung zeichnet sich dadurch aus, dass die zweite Harmonische größerals die erste Harmonische ist. Gleiches gilt verallgemeinert für die geraden und ungeradenHarmonischen. Daher ist es naheliegend, die ungeraden Harmonischen ins Verhältnis zuden geraden Harmonischen zu setzen. Die Abbildung 2.1 zeigt exemplarisch die Ausprä-gung der Harmonischen eines Signals mit einer Frequenzverdopplung.Zunächst sei an dieser Stelle von dem Problem abgesehen, dass eine fehlerhafte erkannteFrequenz auch eine falsche Annahme der Zahnperiode für die Diagnose bewirkt. Wenninfolge dieser Fehlannahme bei Frequenzverdopplung die zweite Harmonische für die erstegehalten wird, dann wird die erste Harmonische im Spektrum nicht aufgelöst. Dieses Pro-blem wird später durch die sogenannte Zwei-Zahnperioden-Analyse gelöst (siehe Kapitel3.2.3).Wird also angenommen, dass die erste und zweite Harmonische sicher erkennbar sind, unddas auch für alle geraden und ungeraden Harmonischen ebenso gilt, dann kann allgemeinder folgende Indikator HDOE (Harmonic Distortion Odd Even) definiert werden:
HDOEn =
∑(n/2)−1k=0 h22k+1∑n
k=1 h2k∑n/2
k=1 h22k∑n
k=1 h2k
=
ungerade Harmonische︷ ︸︸ ︷(n/2)−1∑k=0
h22k+1
n/2∑k=1
h22k︸ ︷︷ ︸gerade Harmonische
2 ≤ n <Ns
2∧ n | 2 ∧ n ∈ N. (2.19)
24

2.1. Experimentelle Untersuchung des Sensor-Encoder-Systems
Vereinfacht auf die ersten zwei Harmonischen ergibt dieses:
HDOE2 =
erste Harmonische︷︸︸︷h21h22︸︷︷︸
zweite Harmonische
. (2.20)
Für diesen Indikator ist nicht der absolute Wert wichtig, sondern die Aussage, ob derNenner oder der Zähler größer sind. Das heißt:
HDOE > 1 ⇒ Die erste Harmonische überwiegt: Frequenzverdopplung nicht dominantHDOE ≤ 1 ⇒ Die zweite Harmonische überwiegt: Frequenzverdopplung dominant.
Die Berechnung muss daher nicht durch Division erfolgen, es ist ein einfacher Größenver-gleich mit logischem Ergebnis möglich.
Der Indikator HDOE ist nicht sinnvoll alleinstehend anzuwenden, weil er nur sehr seltenauftritt und nur eine binäre Auflösung besitzt. Er führt insbesondere als Ergänzung vonHDI oder HDn zu wichtigen Zusatzinformationen. Im Kapitel 3.2.3 wird er nochmalsvertiefend behandelt.
25
2. Systemanalyse
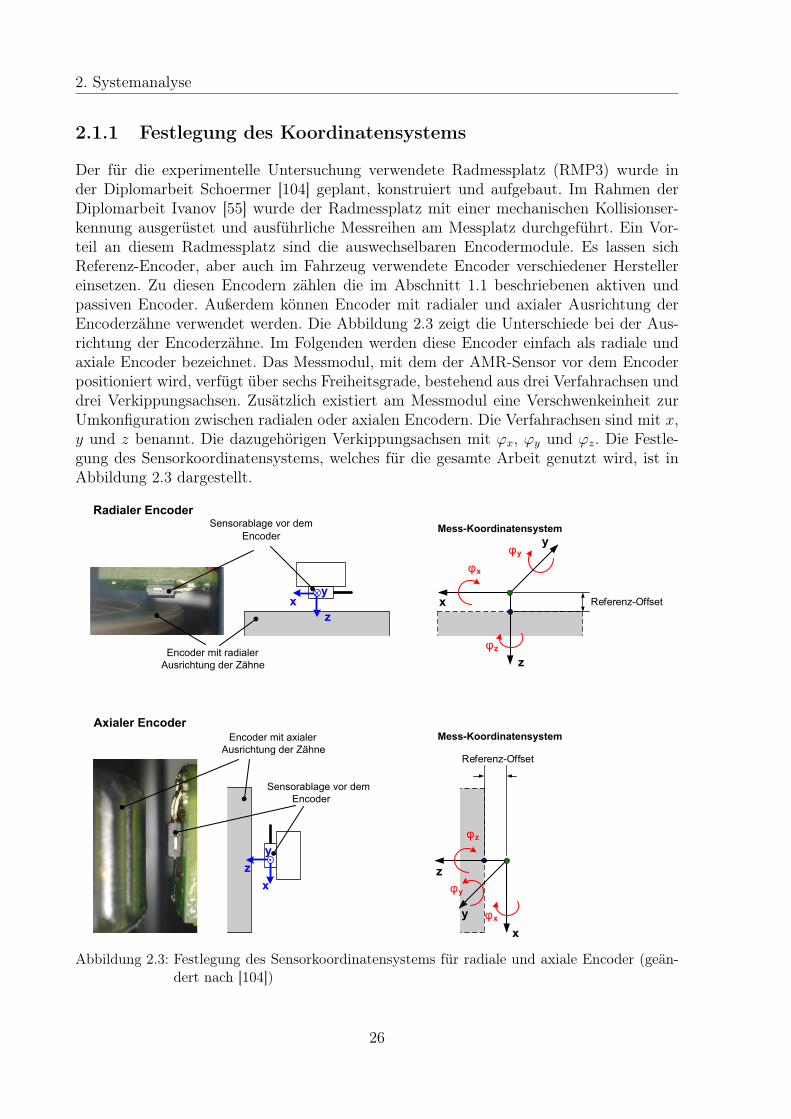
2.1.1 Festlegung des Koordinatensystems
Der für die experimentelle Untersuchung verwendete Radmessplatz (RMP3) wurde inder Diplomarbeit Schoermer [104] geplant, konstruiert und aufgebaut. Im Rahmen derDiplomarbeit Ivanov [55] wurde der Radmessplatz mit einer mechanischen Kollisionser-kennung ausgerüstet und ausführliche Messreihen am Messplatz durchgeführt. Ein Vor-teil an diesem Radmessplatz sind die auswechselbaren Encodermodule. Es lassen sichReferenz-Encoder, aber auch im Fahrzeug verwendete Encoder verschiedener Herstellereinsetzen. Zu diesen Encodern zählen die im Abschnitt 1.1 beschriebenen aktiven undpassiven Encoder. Außerdem können Encoder mit radialer und axialer Ausrichtung derEncoderzähne verwendet werden. Die Abbildung 2.3 zeigt die Unterschiede bei der Aus-richtung der Encoderzähne. Im Folgenden werden diese Encoder einfach als radiale undaxiale Encoder bezeichnet. Das Messmodul, mit dem der AMR-Sensor vor dem Encoderpositioniert wird, verfügt über sechs Freiheitsgrade, bestehend aus drei Verfahrachsen unddrei Verkippungsachsen. Zusätzlich existiert am Messmodul eine Verschwenkeinheit zurUmkonfiguration zwischen radialen oder axialen Encodern. Die Verfahrachsen sind mit x,y und z benannt. Die dazugehörigen Verkippungsachsen mit ϕx, ϕy und ϕz. Die Festle-gung des Sensorkoordinatensystems, welches für die gesamte Arbeit genutzt wird, ist inAbbildung 2.3 dargestellt.
z
y
x
φy
φx
Encoder mit radialer
Ausrichtung der Zähne
Sensorablage vor dem
Encoder
x
z
y
z
y
x
φy
φz
Encoder mit axialer
Ausrichtung der Zähne
Sensorablage vor dem
Encoder
x
z
y
φz
φx
Referenz-Offset
Mess-Koordinatensystem
Referenz-Offset
Radialer Encoder
Axialer EncoderMess-Koordinatensystem
Abbildung 2.3: Festlegung des Sensorkoordinatensystems für radiale und axiale Encoder (geän-dert nach [104])
26
2.1. Experimentelle Untersuchung des Sensor-Encoder-Systems
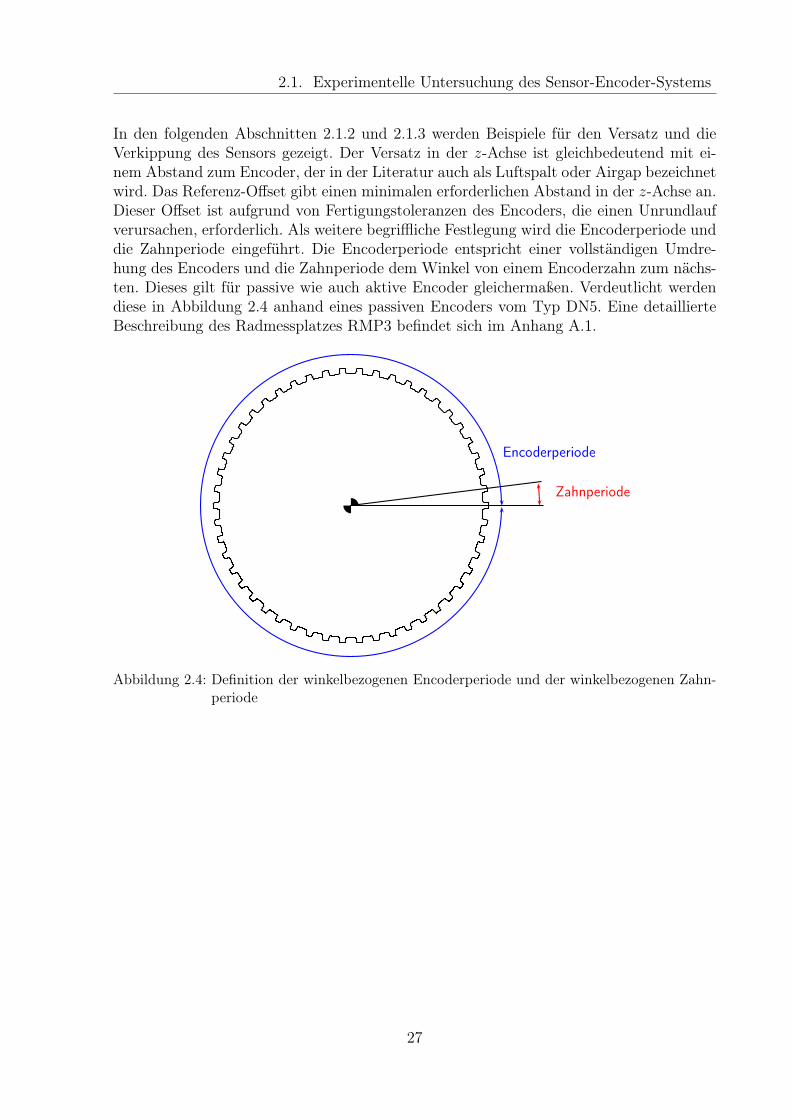
In den folgenden Abschnitten 2.1.2 und 2.1.3 werden Beispiele für den Versatz und dieVerkippung des Sensors gezeigt. Der Versatz in der z-Achse ist gleichbedeutend mit ei-nem Abstand zum Encoder, der in der Literatur auch als Luftspalt oder Airgap bezeichnetwird. Das Referenz-Offset gibt einen minimalen erforderlichen Abstand in der z-Achse an.Dieser Offset ist aufgrund von Fertigungstoleranzen des Encoders, die einen Unrundlaufverursachen, erforderlich. Als weitere begriffliche Festlegung wird die Encoderperiode unddie Zahnperiode eingeführt. Die Encoderperiode entspricht einer vollständigen Umdre-hung des Encoders und die Zahnperiode dem Winkel von einem Encoderzahn zum nächs-ten. Dieses gilt für passive wie auch aktive Encoder gleichermaßen. Verdeutlicht werdendiese in Abbildung 2.4 anhand eines passiven Encoders vom Typ DN5. Eine detaillierteBeschreibung des Radmessplatzes RMP3 befindet sich im Anhang A.1.
Encoderperiode
Zahnperiode
Abbildung 2.4: Definition der winkelbezogenen Encoderperiode und der winkelbezogenen Zahn-periode
27
2. Systemanalyse
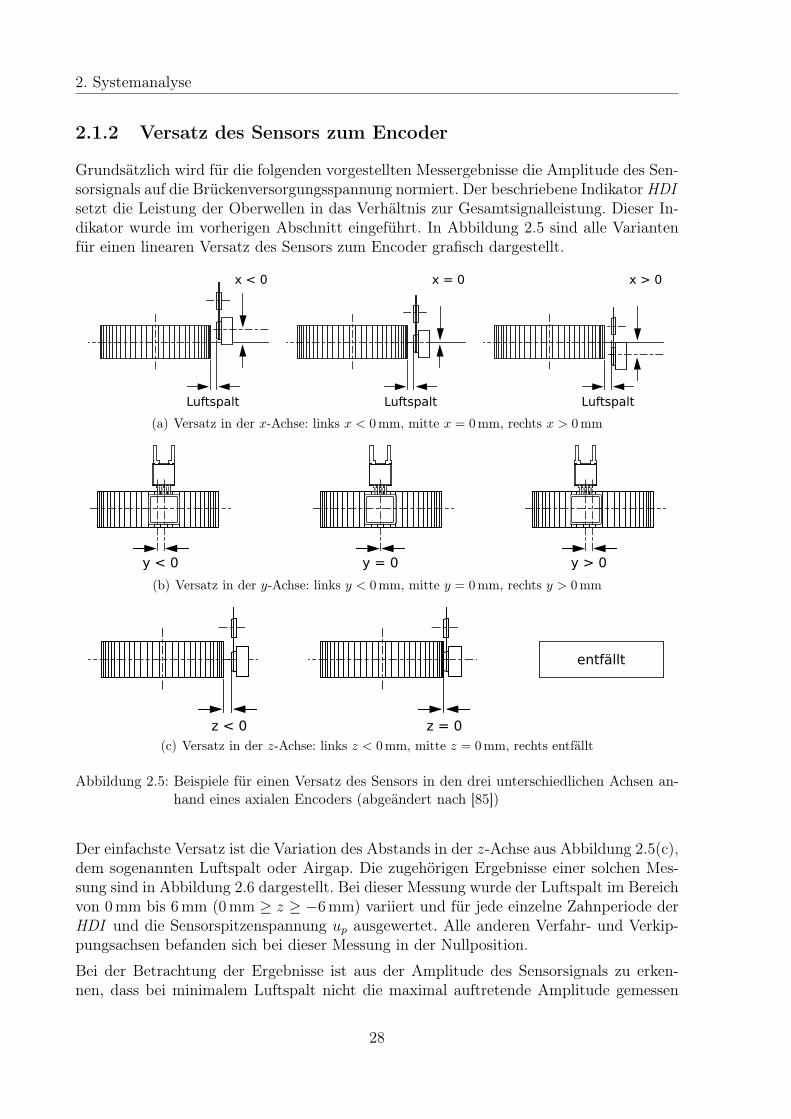
2.1.2 Versatz des Sensors zum Encoder
Grundsätzlich wird für die folgenden vorgestellten Messergebnisse die Amplitude des Sen-sorsignals auf die Brückenversorgungsspannung normiert. Der beschriebene Indikator HDIsetzt die Leistung der Oberwellen in das Verhältnis zur Gesamtsignalleistung. Dieser In-dikator wurde im vorherigen Abschnitt eingeführt. In Abbildung 2.5 sind alle Variantenfür einen linearen Versatz des Sensors zum Encoder grafisch dargestellt.
x < 0
Luftspalt
x = 0
Luftspalt
x > 0
Luftspalt
(a) Versatz in der x-Achse: links x < 0mm, mitte x = 0mm, rechts x > 0mm
y < 0 y = 0 y > 0
(b) Versatz in der y-Achse: links y < 0mm, mitte y = 0mm, rechts y > 0mm
z < 0 z = 0
entfällt
(c) Versatz in der z-Achse: links z < 0mm, mitte z = 0mm, rechts entfällt
Abbildung 2.5: Beispiele für einen Versatz des Sensors in den drei unterschiedlichen Achsen an-hand eines axialen Encoders (abgeändert nach [85])
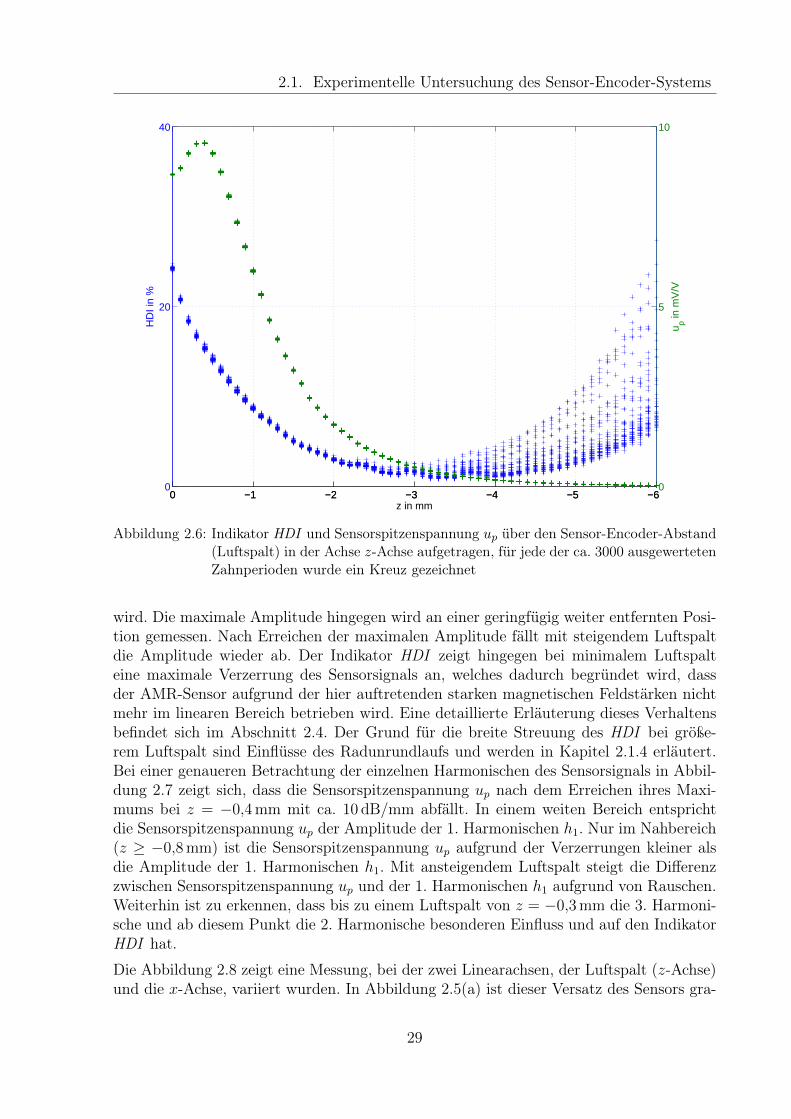
Der einfachste Versatz ist die Variation des Abstands in der z-Achse aus Abbildung 2.5(c),dem sogenannten Luftspalt oder Airgap. Die zugehörigen Ergebnisse einer solchen Mes-sung sind in Abbildung 2.6 dargestellt. Bei dieser Messung wurde der Luftspalt im Bereichvon 0 mm bis 6 mm (0 mm ≥ z ≥ −6 mm) variiert und für jede einzelne Zahnperiode derHDI und die Sensorspitzenspannung up ausgewertet. Alle anderen Verfahr- und Verkip-pungsachsen befanden sich bei dieser Messung in der Nullposition.
Bei der Betrachtung der Ergebnisse ist aus der Amplitude des Sensorsignals zu erken-nen, dass bei minimalem Luftspalt nicht die maximal auftretende Amplitude gemessen
28
2.1. Experimentelle Untersuchung des Sensor-Encoder-Systems
−6−5−4−3−2−100
20
40
HD
I in
%
z in mm−6−5−4−3−2−10
0
5
10
u p in m
V/V
Abbildung 2.6: Indikator HDI und Sensorspitzenspannung up über den Sensor-Encoder-Abstand(Luftspalt) in der Achse z-Achse aufgetragen, für jede der ca. 3000 ausgewertetenZahnperioden wurde ein Kreuz gezeichnet
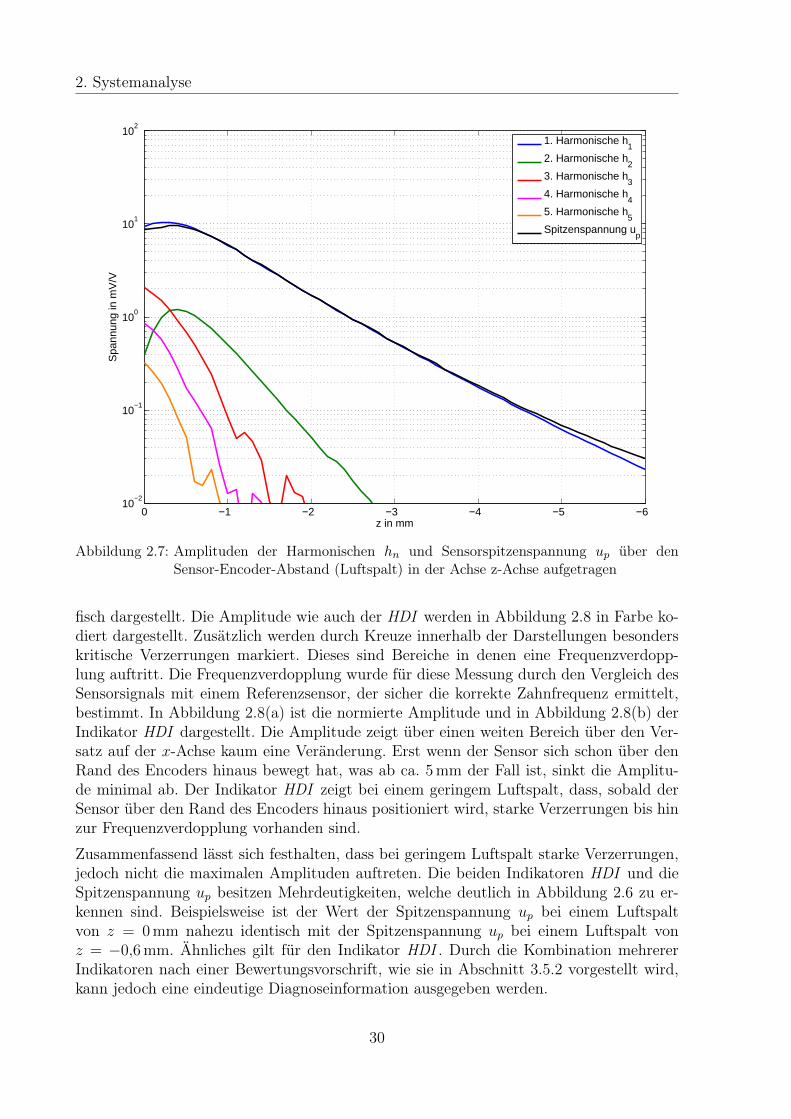
wird. Die maximale Amplitude hingegen wird an einer geringfügig weiter entfernten Posi-tion gemessen. Nach Erreichen der maximalen Amplitude fällt mit steigendem Luftspaltdie Amplitude wieder ab. Der Indikator HDI zeigt hingegen bei minimalem Luftspalteine maximale Verzerrung des Sensorsignals an, welches dadurch begründet wird, dassder AMR-Sensor aufgrund der hier auftretenden starken magnetischen Feldstärken nichtmehr im linearen Bereich betrieben wird. Eine detaillierte Erläuterung dieses Verhaltensbefindet sich im Abschnitt 2.4. Der Grund für die breite Streuung des HDI bei größe-rem Luftspalt sind Einflüsse des Radunrundlaufs und werden in Kapitel 2.1.4 erläutert.Bei einer genaueren Betrachtung der einzelnen Harmonischen des Sensorsignals in Abbil-dung 2.7 zeigt sich, dass die Sensorspitzenspannung up nach dem Erreichen ihres Maxi-mums bei z = −0,4 mm mit ca. 10 dB/mm abfällt. In einem weiten Bereich entsprichtdie Sensorspitzenspannung up der Amplitude der 1. Harmonischen h1. Nur im Nahbereich(z ≥ −0,8 mm) ist die Sensorspitzenspannung up aufgrund der Verzerrungen kleiner alsdie Amplitude der 1. Harmonischen h1. Mit ansteigendem Luftspalt steigt die Differenzzwischen Sensorspitzenspannung up und der 1. Harmonischen h1 aufgrund von Rauschen.Weiterhin ist zu erkennen, dass bis zu einem Luftspalt von z = −0,3 mm die 3. Harmoni-sche und ab diesem Punkt die 2. Harmonische besonderen Einfluss und auf den IndikatorHDI hat.
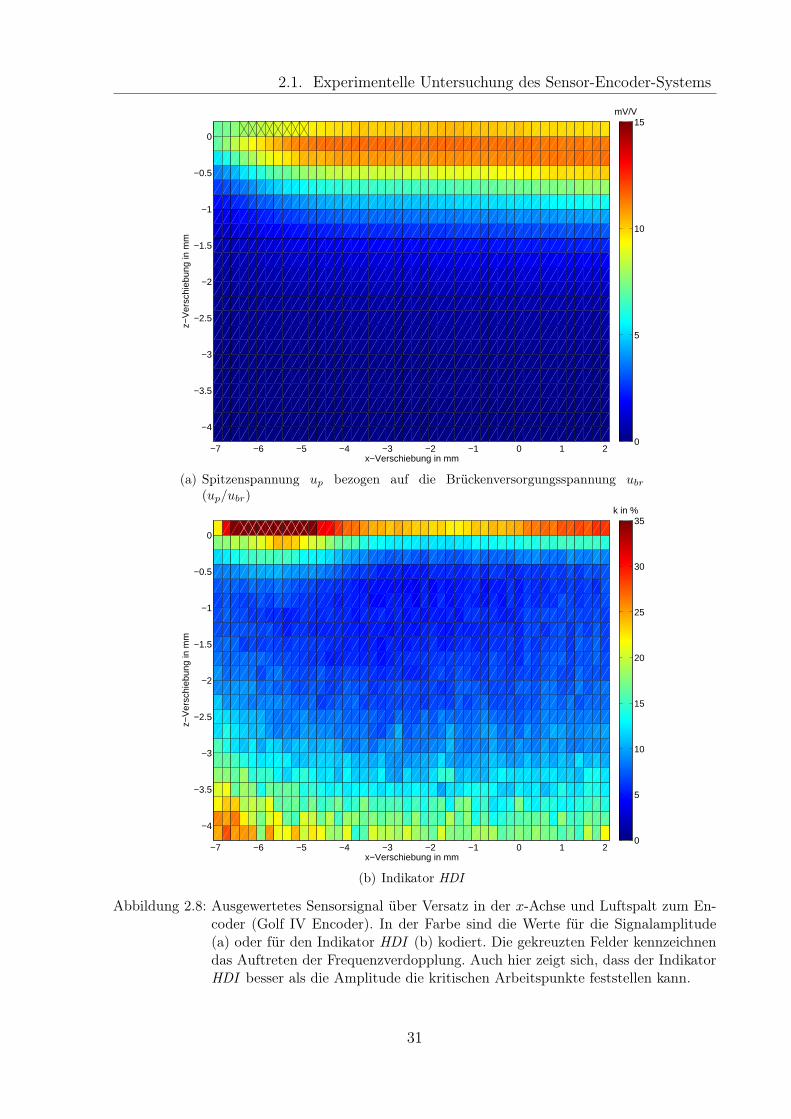
Die Abbildung 2.8 zeigt eine Messung, bei der zwei Linearachsen, der Luftspalt (z-Achse)und die x-Achse, variiert wurden. In Abbildung 2.5(a) ist dieser Versatz des Sensors gra-
29
2. Systemanalyse
−6−5−4−3−2−1010
−2
10−1
100
101
102
z in mm
Spa
nnun
g in
mV
/V
1. Harmonische h
1
2. Harmonische h2
3. Harmonische h3
4. Harmonische h4
5. Harmonische h5
Spitzenspannung up
Abbildung 2.7: Amplituden der Harmonischen hn und Sensorspitzenspannung up über denSensor-Encoder-Abstand (Luftspalt) in der Achse z-Achse aufgetragen
fisch dargestellt. Die Amplitude wie auch der HDI werden in Abbildung 2.8 in Farbe ko-diert dargestellt. Zusätzlich werden durch Kreuze innerhalb der Darstellungen besonderskritische Verzerrungen markiert. Dieses sind Bereiche in denen eine Frequenzverdopp-lung auftritt. Die Frequenzverdopplung wurde für diese Messung durch den Vergleich desSensorsignals mit einem Referenzsensor, der sicher die korrekte Zahnfrequenz ermittelt,bestimmt. In Abbildung 2.8(a) ist die normierte Amplitude und in Abbildung 2.8(b) derIndikator HDI dargestellt. Die Amplitude zeigt über einen weiten Bereich über den Ver-satz auf der x-Achse kaum eine Veränderung. Erst wenn der Sensor sich schon über denRand des Encoders hinaus bewegt hat, was ab ca. 5 mm der Fall ist, sinkt die Amplitu-de minimal ab. Der Indikator HDI zeigt bei einem geringem Luftspalt, dass, sobald derSensor über den Rand des Encoders hinaus positioniert wird, starke Verzerrungen bis hinzur Frequenzverdopplung vorhanden sind.
Zusammenfassend lässt sich festhalten, dass bei geringem Luftspalt starke Verzerrungen,jedoch nicht die maximalen Amplituden auftreten. Die beiden Indikatoren HDI und dieSpitzenspannung up besitzen Mehrdeutigkeiten, welche deutlich in Abbildung 2.6 zu er-kennen sind. Beispielsweise ist der Wert der Spitzenspannung up bei einem Luftspaltvon z = 0 mm nahezu identisch mit der Spitzenspannung up bei einem Luftspalt vonz = −0,6 mm. Ähnliches gilt für den Indikator HDI . Durch die Kombination mehrererIndikatoren nach einer Bewertungsvorschrift, wie sie in Abschnitt 3.5.2 vorgestellt wird,kann jedoch eine eindeutige Diagnoseinformation ausgegeben werden.
30
2.1. Experimentelle Untersuchung des Sensor-Encoder-Systems
−7 −6 −5 −4 −3 −2 −1 0 1 2
−4
−3.5
−3
−2.5
−2
−1.5
−1
−0.5
0
z−V
ersc
hieb
ung
in m
m
x−Verschiebung in mm
mV/V
0
5
10
15
(a) Spitzenspannung up bezogen auf die Brückenversorgungsspannung ubr(up/ubr)
−7 −6 −5 −4 −3 −2 −1 0 1 2
−4
−3.5
−3
−2.5
−2
−1.5
−1
−0.5
0
z−V
ersc
hieb
ung
in m
m
x−Verschiebung in mm
k in %
0
5
10
15
20
25
30
35
(b) Indikator HDI
Abbildung 2.8: Ausgewertetes Sensorsignal über Versatz in der x-Achse und Luftspalt zum En-coder (Golf IV Encoder). In der Farbe sind die Werte für die Signalamplitude(a) oder für den Indikator HDI (b) kodiert. Die gekreuzten Felder kennzeichnendas Auftreten der Frequenzverdopplung. Auch hier zeigt sich, dass der IndikatorHDI besser als die Amplitude die kritischen Arbeitspunkte feststellen kann.
31
2. Systemanalyse
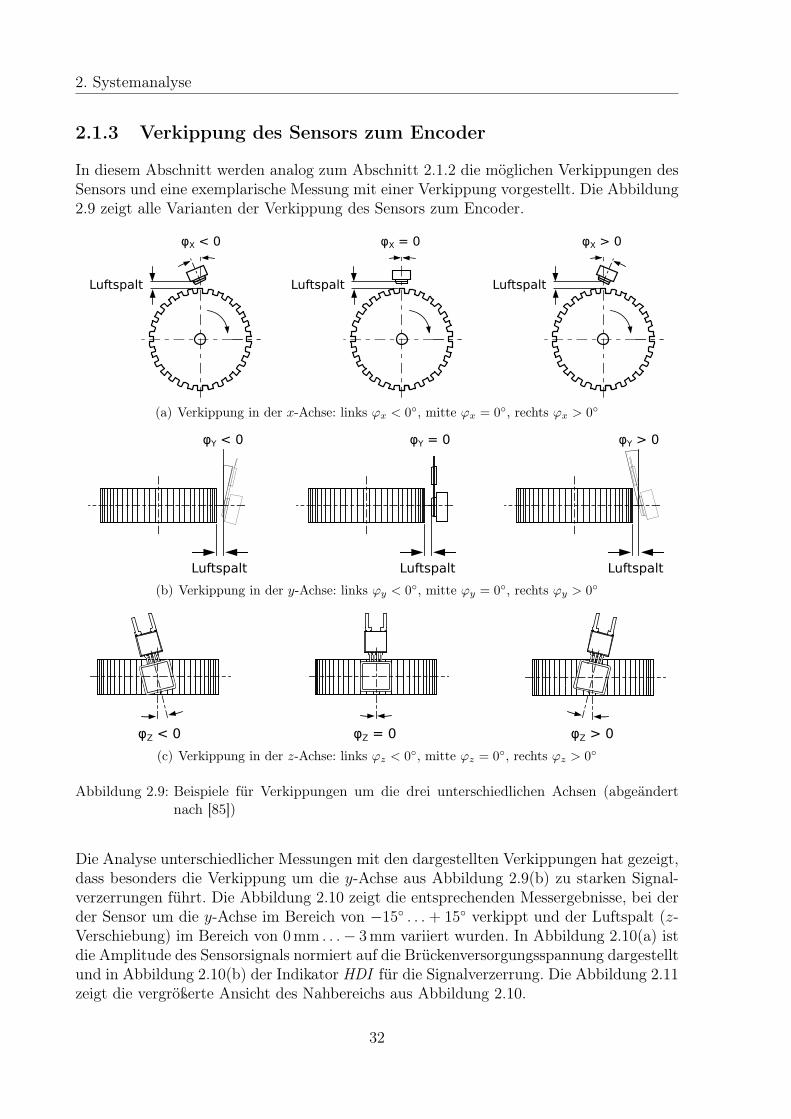
2.1.3 Verkippung des Sensors zum Encoder
In diesem Abschnitt werden analog zum Abschnitt 2.1.2 die möglichen Verkippungen desSensors und eine exemplarische Messung mit einer Verkippung vorgestellt. Die Abbildung2.9 zeigt alle Varianten der Verkippung des Sensors zum Encoder.
φX < 0 φX = 0 φX > 0
Luftspalt Luftspalt Luftspalt
(a) Verkippung in der x-Achse: links ϕx < 0, mitte ϕx = 0, rechts ϕx > 0
φY < 0
Luftspalt LuftspaltLuftspalt
φY = 0 φY > 0
(b) Verkippung in der y-Achse: links ϕy < 0, mitte ϕy = 0, rechts ϕy > 0
φZ < 0 φZ = 0 φZ > 0
(c) Verkippung in der z-Achse: links ϕz < 0, mitte ϕz = 0, rechts ϕz > 0
Abbildung 2.9: Beispiele für Verkippungen um die drei unterschiedlichen Achsen (abgeändertnach [85])
Die Analyse unterschiedlicher Messungen mit den dargestellten Verkippungen hat gezeigt,dass besonders die Verkippung um die y-Achse aus Abbildung 2.9(b) zu starken Signal-verzerrungen führt. Die Abbildung 2.10 zeigt die entsprechenden Messergebnisse, bei derder Sensor um die y-Achse im Bereich von −15 . . . + 15 verkippt und der Luftspalt (z-Verschiebung) im Bereich von 0mm . . .− 3mm variiert wurden. In Abbildung 2.10(a) istdie Amplitude des Sensorsignals normiert auf die Brückenversorgungsspannung dargestelltund in Abbildung 2.10(b) der Indikator HDI für die Signalverzerrung. Die Abbildung 2.11zeigt die vergrößerte Ansicht des Nahbereichs aus Abbildung 2.10.
32

2.1. Experimentelle Untersuchung des Sensor-Encoder-Systems
Wie auch im Abschnitt 2.1.2 wurden die Frequenzverdopplungen durch den Vergleich desSensorsignals mit einem Referenzsensor, der sicher die korrekte Zahnfrequenz ermittelt,bestimmt und durch Kreuze innerhalb der Darstellungen markiert. Bei der Betrachtungder Amplitude sind Bereiche, in denen die Frequenzverdopplung auftritt (gelb dargestellt),nicht zu identifizieren. Die Frequenzverdopplung des Sensorsignals wird im Gegensatzzur Amplitude mit dem Indikator HDI deutlich erkannt (dunkelrot dargestellt). Wirddie Verkippung betrachtet, zeichnet sich je nach Richtung der Verkippung eine starkeAsymmetrie ab, welches durch die Magnetisierung des Stützmagneten zu begründen ist.Näheres hierzu wird im Kapitel 2.4 erläutert.
Insgesamt zeigt dieses Beispiel, dass die Harmonischenanalyse mittels des Indikators HDIeine differenzierte Aussage über den Arbeitspunkt erlaubt.
33
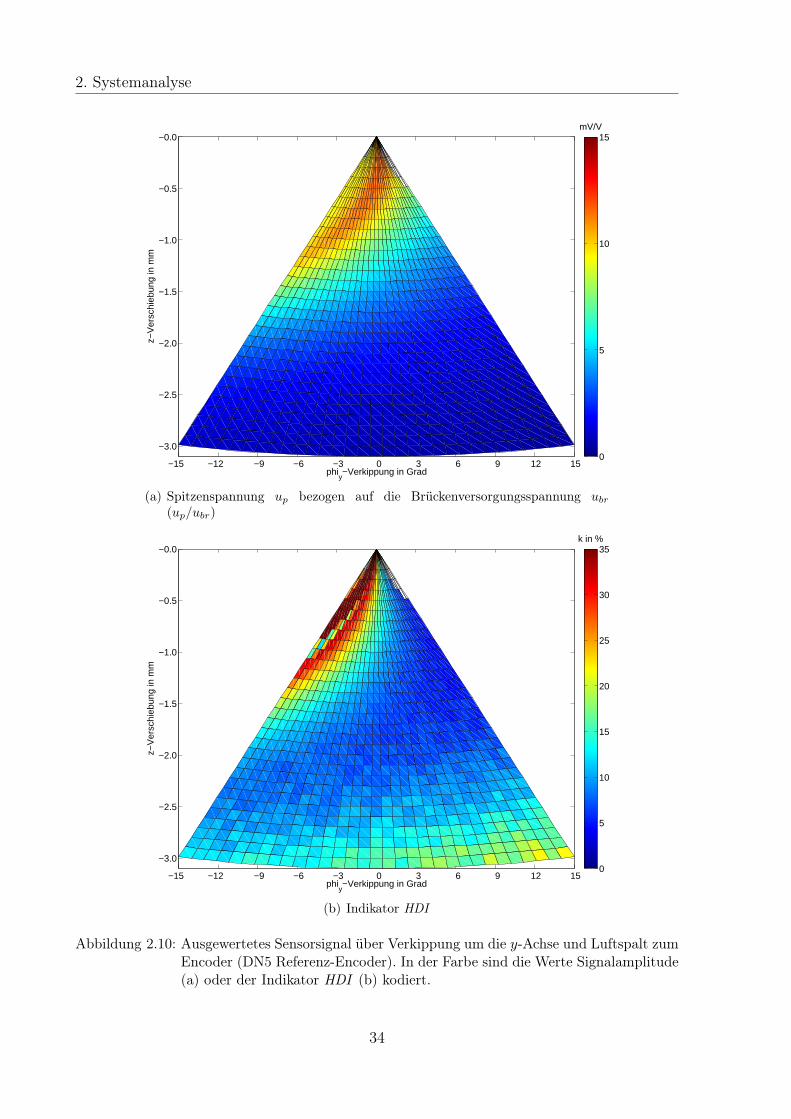
2. Systemanalyse
−15 −12 −9 −6 −3 0 3 6 9 12 15
−3.0
−2.5
−2.0
−1.5
−1.0
−0.5
−0.0z−
Ver
schi
ebun
g in
mm
phiy−Verkippung in Grad
mV/V
0
5
10
15
(a) Spitzenspannung up bezogen auf die Brückenversorgungsspannung ubr(up/ubr)
−15 −12 −9 −6 −3 0 3 6 9 12 15
−3.0
−2.5
−2.0
−1.5
−1.0
−0.5
−0.0
z−V
ersc
hieb
ung
in m
m
phiy−Verkippung in Grad
k in %
0
5
10
15
20
25
30
35
(b) Indikator HDI
Abbildung 2.10: Ausgewertetes Sensorsignal über Verkippung um die y-Achse und Luftspalt zumEncoder (DN5 Referenz-Encoder). In der Farbe sind die Werte Signalamplitude(a) oder der Indikator HDI (b) kodiert.
34
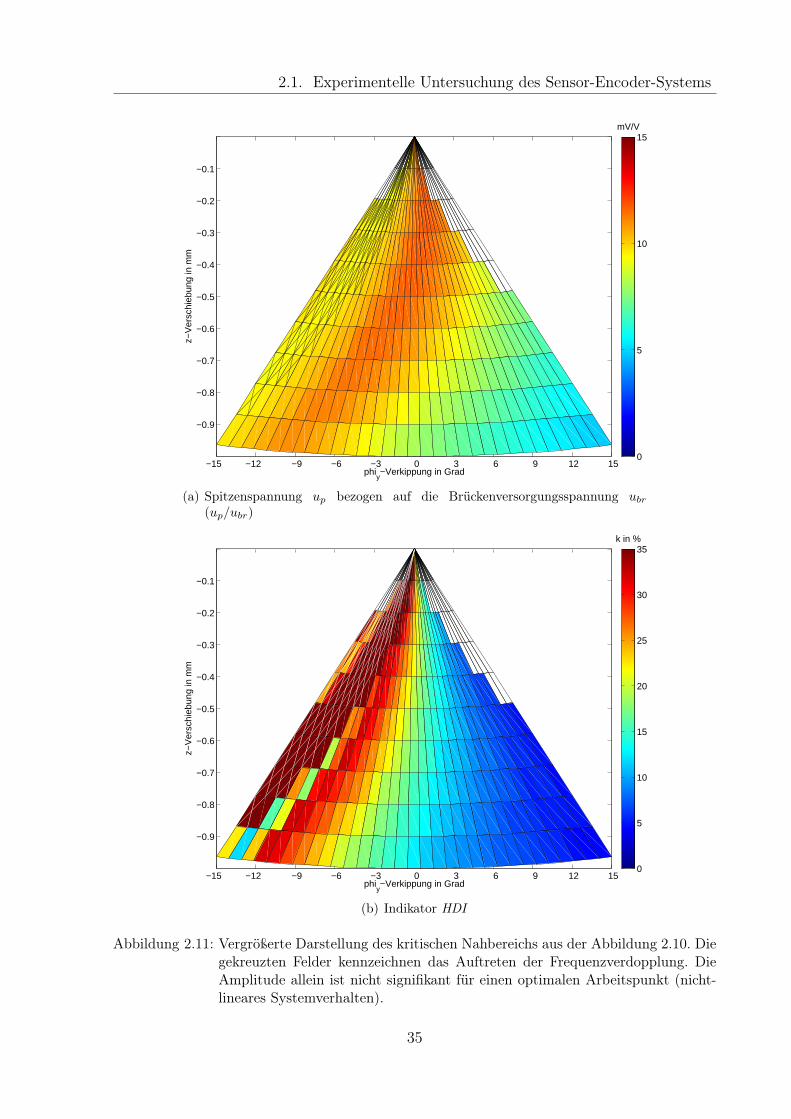
2.1. Experimentelle Untersuchung des Sensor-Encoder-Systems
−15 −12 −9 −6 −3 0 3 6 9 12 15
−0.9
−0.8
−0.7
−0.6
−0.5
−0.4
−0.3
−0.2
−0.1
z−V
ersc
hieb
ung
in m
m
phiy−Verkippung in Grad
mV/V
0
5
10
15
(a) Spitzenspannung up bezogen auf die Brückenversorgungsspannung ubr(up/ubr)
−15 −12 −9 −6 −3 0 3 6 9 12 15
−0.9
−0.8
−0.7
−0.6
−0.5
−0.4
−0.3
−0.2
−0.1
z−V
ersc
hieb
ung
in m
m
phiy−Verkippung in Grad
k in %
0
5
10
15
20
25
30
35
(b) Indikator HDI
Abbildung 2.11: Vergrößerte Darstellung des kritischen Nahbereichs aus der Abbildung 2.10. Diegekreuzten Felder kennzeichnen das Auftreten der Frequenzverdopplung. DieAmplitude allein ist nicht signifikant für einen optimalen Arbeitspunkt (nicht-lineares Systemverhalten).
35
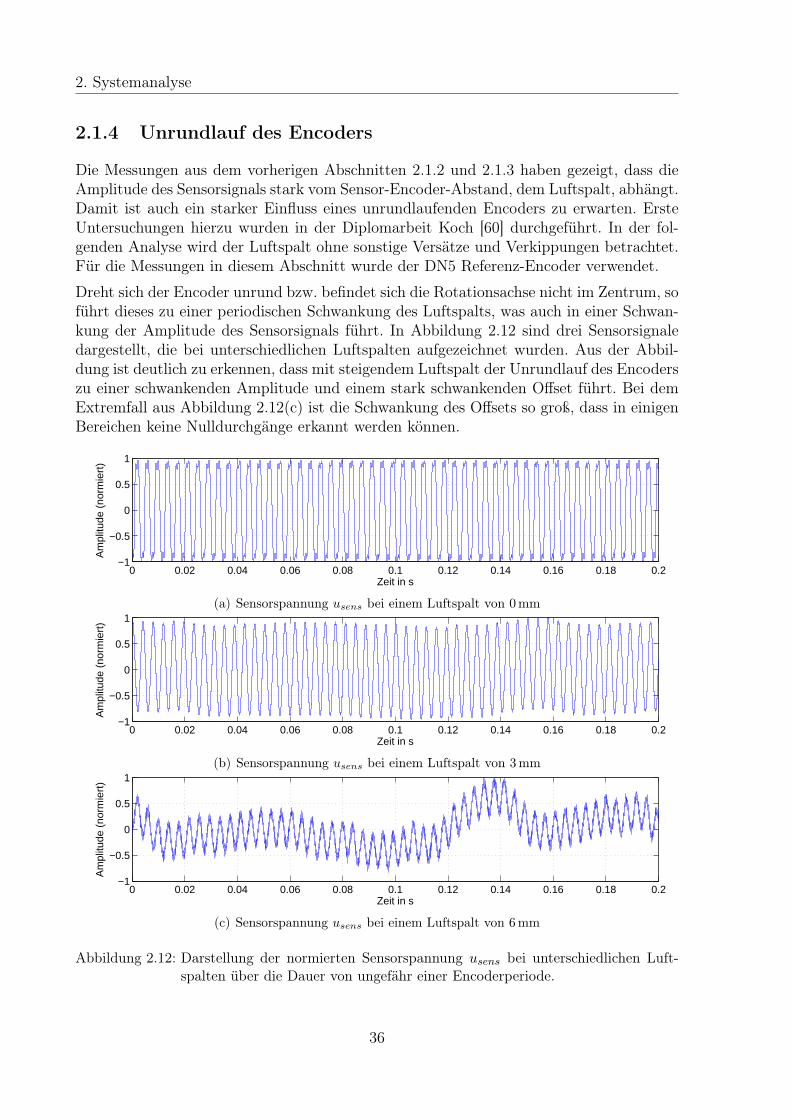
2. Systemanalyse
2.1.4 Unrundlauf des Encoders
Die Messungen aus dem vorherigen Abschnitten 2.1.2 und 2.1.3 haben gezeigt, dass dieAmplitude des Sensorsignals stark vom Sensor-Encoder-Abstand, dem Luftspalt, abhängt.Damit ist auch ein starker Einfluss eines unrundlaufenden Encoders zu erwarten. ErsteUntersuchungen hierzu wurden in der Diplomarbeit Koch [60] durchgeführt. In der fol-genden Analyse wird der Luftspalt ohne sonstige Versätze und Verkippungen betrachtet.Für die Messungen in diesem Abschnitt wurde der DN5 Referenz-Encoder verwendet.
Dreht sich der Encoder unrund bzw. befindet sich die Rotationsachse nicht im Zentrum, soführt dieses zu einer periodischen Schwankung des Luftspalts, was auch in einer Schwan-kung der Amplitude des Sensorsignals führt. In Abbildung 2.12 sind drei Sensorsignaledargestellt, die bei unterschiedlichen Luftspalten aufgezeichnet wurden. Aus der Abbil-dung ist deutlich zu erkennen, dass mit steigendem Luftspalt der Unrundlauf des Encoderszu einer schwankenden Amplitude und einem stark schwankenden Offset führt. Bei demExtremfall aus Abbildung 2.12(c) ist die Schwankung des Offsets so groß, dass in einigenBereichen keine Nulldurchgänge erkannt werden können.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2−1
−0.5
0
0.5
1
Zeit in s
Am
plitu
de (
norm
iert
)
(a) Sensorspannung usens bei einem Luftspalt von 0mm
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2−1
−0.5
0
0.5
1
Zeit in s
Am
plitu
de (
norm
iert
)
(b) Sensorspannung usens bei einem Luftspalt von 3mm
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2−1
−0.5
0
0.5
1
Zeit in s
Am
plitu
de (
norm
iert
)
(c) Sensorspannung usens bei einem Luftspalt von 6mm
Abbildung 2.12: Darstellung der normierten Sensorspannung usens bei unterschiedlichen Luft-spalten über die Dauer von ungefähr einer Encoderperiode.
36
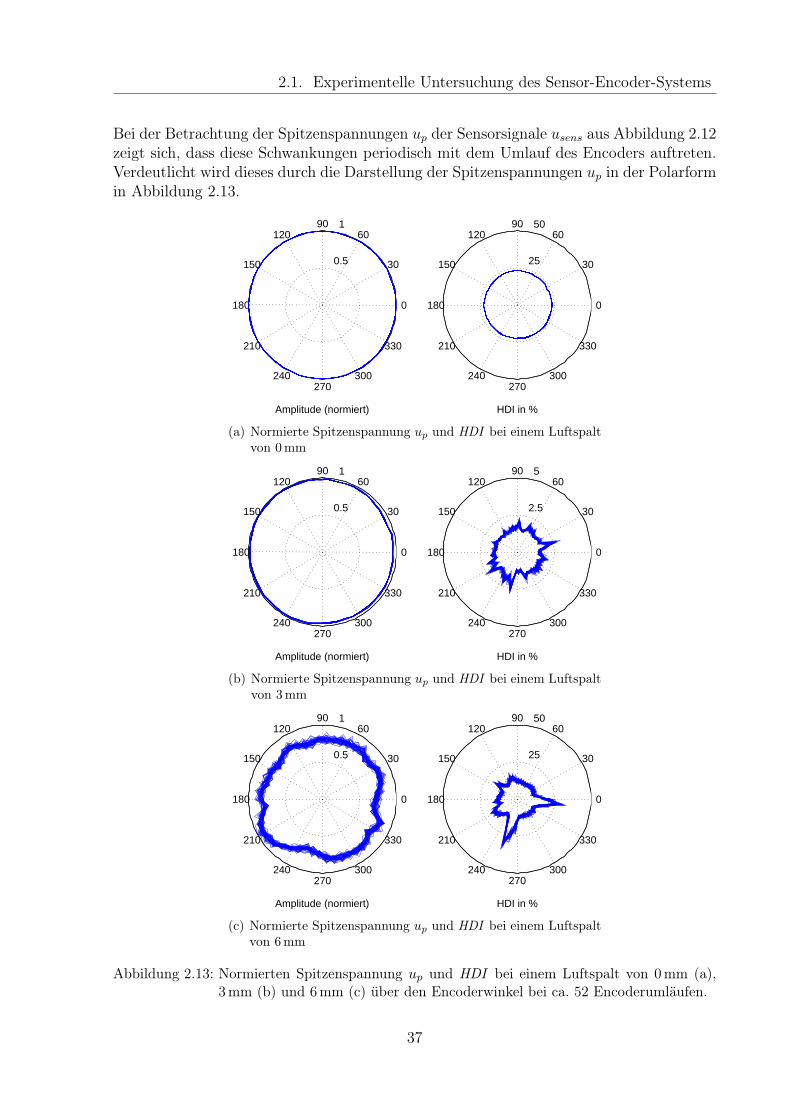
2.1. Experimentelle Untersuchung des Sensor-Encoder-Systems
Bei der Betrachtung der Spitzenspannungen up der Sensorsignale usens aus Abbildung 2.12zeigt sich, dass diese Schwankungen periodisch mit dem Umlauf des Encoders auftreten.Verdeutlicht wird dieses durch die Darstellung der Spitzenspannungen up in der Polarformin Abbildung 2.13.
25
50
30
210
60
240
90
270
120
300
150
330
180 0
HDI in %
0.5
1
30
210
60
240
90
270
120
300
150
330
180 0
Amplitude (normiert)
(a) Normierte Spitzenspannung up und HDI bei einem Luftspaltvon 0mm
2.5
5
30
210
60
240
90
270
120
300
150
330
180 0
HDI in %
0.5
1
30
210
60
240
90
270
120
300
150
330
180 0
Amplitude (normiert)
(b) Normierte Spitzenspannung up und HDI bei einem Luftspaltvon 3mm
25
50
30
210
60
240
90
270
120
300
150
330
180 0
HDI in %
0.5
1
30
210
60
240
90
270
120
300
150
330
180 0
Amplitude (normiert)
(c) Normierte Spitzenspannung up und HDI bei einem Luftspaltvon 6mm
Abbildung 2.13: Normierten Spitzenspannung up und HDI bei einem Luftspalt von 0mm (a),3mm (b) und 6mm (c) über den Encoderwinkel bei ca. 52 Encoderumläufen.
37

2. Systemanalyse
Wird das Sensorsignal über mehrere vollständige Encoderperioden ausgewertet, ergibtsich das Spektrum in Abbildung 2.14. Deutlich zu erkennen in der Mitte ist die Grund-schwingung (1. Harmonische) 1 bei der Zahnfrequenz von ft = 258 Hz und rechts außendie 2. Harmonische 2 bei 2 · ft = 516 Hz. Weitere stark ausgeprägte Anteile im Spek-trum befinden sich im Spektrum bei der Encoderfrequenz bzw. Umdrehungsfrequenz 3fe = 5,16 Hz und Vielfache dieser Frequenz 4. Diese Frequenz fe und Harmonische ent-stehen durch den Unrundlauf des Encoders. Die Anzahl der Encoderzähne kann mit derFormel
Nt =ftfe
(2.21)
bestimmt werden. Speziell auf das Beispiel aus Abbildung 2.14 bezogen bedeutet dieses
Nt =258 Hz
5,16 Hz= 50. (2.22)
Die Harmonischen der Frequenz fe entstehen durch den nichtlinearen Zusammenhangzwischen Luftspalt und Sensoramplitude, wie er auch in Abbildung 2.6 ersichtlich ist.Aufgrund der Modulation der Zahnfrequenz ft mit der Encoderfrequenz fe entstehenauch die Seitenbänder bei den Frequenzen ft ± n fe 5 und 2 ft ± n fe 6, wobei n ∈ N.
38
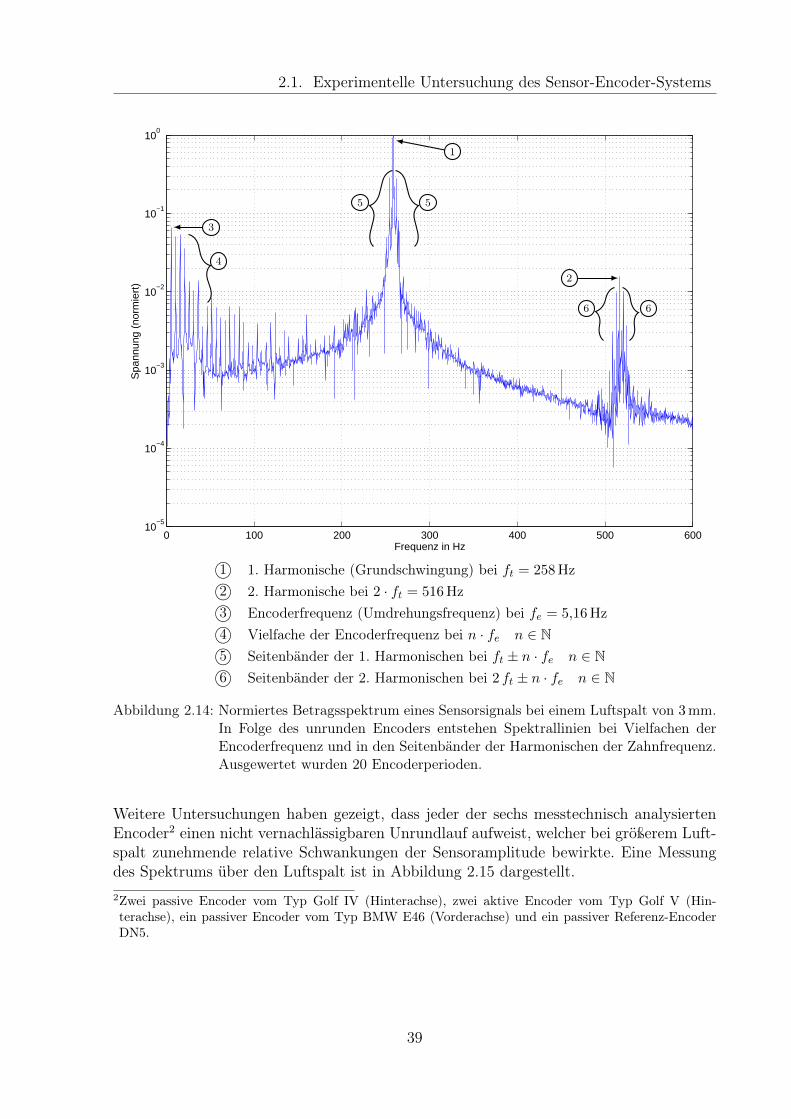
2.1. Experimentelle Untersuchung des Sensor-Encoder-Systems
0 100 200 300 400 500 60010
−5
10−4
10−3
10−2
10−1
100
Frequenz in Hz
Spa
nnun
g (n
orm
iert
)
1
2
3
4
55
6 6
1 1. Harmonische (Grundschwingung) bei ft = 258 Hz
2 2. Harmonische bei 2 · ft = 516 Hz
3 Encoderfrequenz (Umdrehungsfrequenz) bei fe = 5,16 Hz
4 Vielfache der Encoderfrequenz bei n · fe n ∈ N5 Seitenbänder der 1. Harmonischen bei ft ± n · fe n ∈ N6 Seitenbänder der 2. Harmonischen bei 2 ft ± n · fe n ∈ N
Abbildung 2.14: Normiertes Betragsspektrum eines Sensorsignals bei einem Luftspalt von 3 mm.In Folge des unrunden Encoders entstehen Spektrallinien bei Vielfachen derEncoderfrequenz und in den Seitenbänder der Harmonischen der Zahnfrequenz.Ausgewertet wurden 20 Encoderperioden.
Weitere Untersuchungen haben gezeigt, dass jeder der sechs messtechnisch analysiertenEncoder2 einen nicht vernachlässigbaren Unrundlauf aufweist, welcher bei größerem Luft-spalt zunehmende relative Schwankungen der Sensoramplitude bewirkte. Eine Messungdes Spektrums über den Luftspalt ist in Abbildung 2.15 dargestellt.2Zwei passive Encoder vom Typ Golf IV (Hinterachse), zwei aktive Encoder vom Typ Golf V (Hin-terachse), ein passiver Encoder vom Typ BMW E46 (Vorderachse) und ein passiver Referenz-EncoderDN5.
39
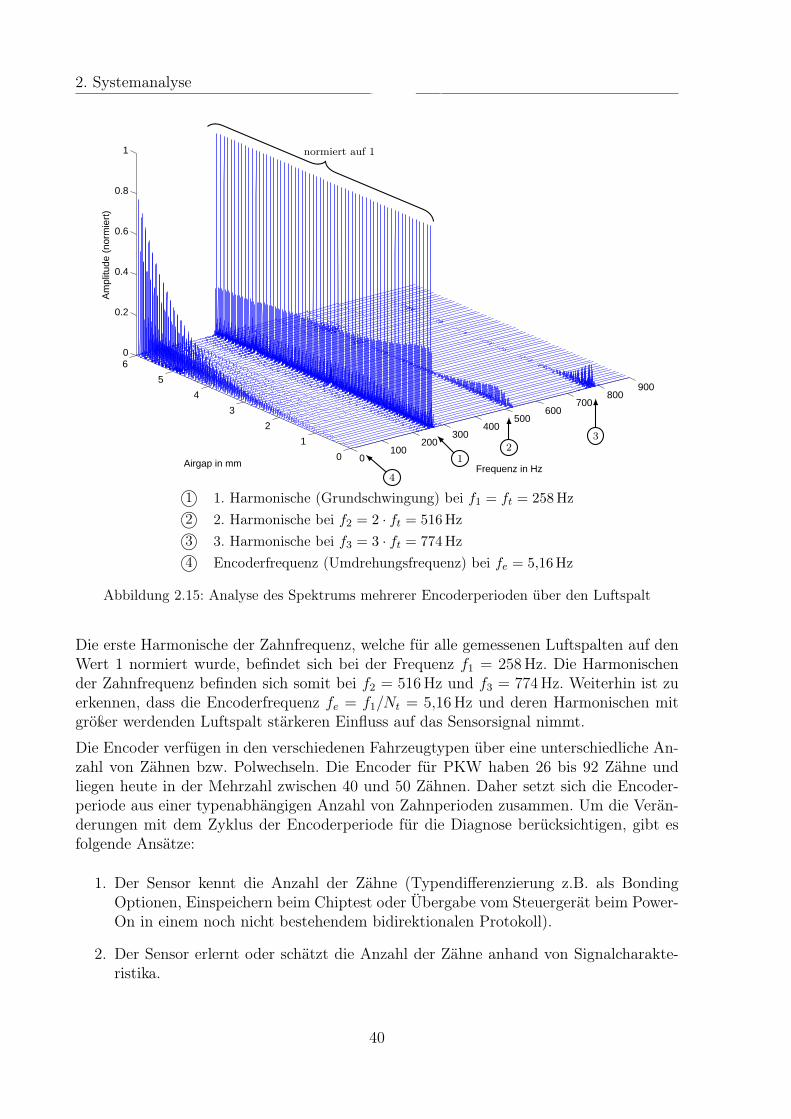
2. Systemanalyse
0100
200300
400500
600700
800900
0
1
2
3
4
5
60
0.2
0.4
0.6
0.8
1
Frequenz in HzAirgap in mm
Am
plitu
de (
norm
iert
)
4
12
3
normiert auf 1
1 1. Harmonische (Grundschwingung) bei f1 = ft = 258 Hz
2 2. Harmonische bei f2 = 2 · ft = 516 Hz
3 3. Harmonische bei f3 = 3 · ft = 774 Hz
4 Encoderfrequenz (Umdrehungsfrequenz) bei fe = 5,16 Hz
Abbildung 2.15: Analyse des Spektrums mehrerer Encoderperioden über den Luftspalt
Die erste Harmonische der Zahnfrequenz, welche für alle gemessenen Luftspalten auf denWert 1 normiert wurde, befindet sich bei der Frequenz f1 = 258 Hz. Die Harmonischender Zahnfrequenz befinden sich somit bei f2 = 516 Hz und f3 = 774 Hz. Weiterhin ist zuerkennen, dass die Encoderfrequenz fe = f1/Nt = 5,16 Hz und deren Harmonischen mitgrößer werdenden Luftspalt stärkeren Einfluss auf das Sensorsignal nimmt.
Die Encoder verfügen in den verschiedenen Fahrzeugtypen über eine unterschiedliche An-zahl von Zähnen bzw. Polwechseln. Die Encoder für PKW haben 26 bis 92 Zähne undliegen heute in der Mehrzahl zwischen 40 und 50 Zähnen. Daher setzt sich die Encoder-periode aus einer typenabhängigen Anzahl von Zahnperioden zusammen. Um die Verän-derungen mit dem Zyklus der Encoderperiode für die Diagnose berücksichtigen, gibt esfolgende Ansätze:
1. Der Sensor kennt die Anzahl der Zähne (Typendifferenzierung z.B. als BondingOptionen, Einspeichern beim Chiptest oder Übergabe vom Steuergerät beim Power-On in einem noch nicht bestehendem bidirektionalen Protokoll).
2. Der Sensor erlernt oder schätzt die Anzahl der Zähne anhand von Signalcharakte-ristika.
40
2.1. Experimentelle Untersuchung des Sensor-Encoder-Systems
3. Die Diagnoseverfahren ordnen einen breiten Bereich (z.B. das 40 . . . 55 fache einerZahnperiode) der Encoderperiode zu.
4. Das ABS-Steuergerät kennt die Anzahl der Encoderzähne oder wird entsprechendprogrammiert. Es führt mit dieser Information eine Diagnoseauswertung durch, diedie Erfassung zyklischer Schwankungen für jede Zahnperiode einzeln und lückenloserkennt.
2.1.5 Verteilung der Harmonischen
Für die Verwendung von Indikatoren, die auf die Ermittlung von Harmonischen zurückge-hen, ist es zunächst wichtig, einschätzen zu können, welche Harmonischen mit deutlichenAnteilen praktisch auftreten können. Außerdem ist zu entscheiden, welche Harmonischenvernachlässigbar sind und welche Fehler dadurch zu erwarten sind.
Dafür wurde eine Versuchsreihe durchgeführt, in der Signalverzerrungen durch starkeVersätze und Verkippungen der Sensorposition provoziert wurden. In der Versuchsreihewurden die Verteilungen und die Maximalwerte für die ersten 20 Harmonischen ermittelt.Die Maximalwerte sind erste Anhaltspunkte für die Auslegung der Indikatorberechnungin den späteren Kapiteln.
Die Bestimmung der Indikatoren beruht auf experimentell aufgenommenen Messdaten.Besonders starke Signalverzerrungen sind in Bereichen mit geringem Luftspalt und großenVerkippungen zu erwarten. Zur Analyse der Ausprägung der einzelnen Harmonischen wirdim folgenden eine Messung mit dem passiven Referenz-Encoder DN5 und den Parameternaus Tabelle 2.1 verwendet. Die Tabelle zeigt, dass nur die drei Verkippungsachsen ϕx, ϕyund ϕz in Kombination mit einem Versatz in der z-Achse untersucht wurden. Auf dieEinbeziehung der x und y-Achse wurde aus Aufwandsgründen verzichtet.
Achse min. Wert Schrittweite max. Wert
x 0,0 mm
y 0,0 mm
z 0,0 mm −0,2 mm −2,0 mm
ϕx −15 5 15
ϕy −15 5 15
ϕz −45 15 45
Tabelle 2.1: Verwendete Parameter zur Messung maximaler Verzerrungen am RadmessplatzRMP3
In der Abbildung 2.16 sind die Beträge der ersten 20 Harmonischen (blau) aus der Mess-reihe mit den Parametern aus Tabelle 2.1 dargestellt. Aus dieser Abbildung lässt sichdie maximale Ausprägung der einzelnen Harmonischen und deren Verteilung abschät-zen. Sämtliche Harmonische werden so normiert, dass die erste Harmonische h1 den Wert1 erhält. Die Harmonische h2 ist teilweise größer als h1. Dabei handelt es sich um diesogenannten Frequenzverdopplungen. Die Normierung der Harmonischen h1 ist in der
41
2. Systemanalyse
Abbildung 2.16 durch einen grauen Pfeil dargestellt. Die Normierung gleicht die starkunterschiedlichen Sensoramplituden in der Messreihe aus und stellt eine Vergleichbarkeitder Harmonischenanteile her.
Insgesamt sind die Harmonischen aus ca. 1800 Messpositionen mit jeweils ca. 50 ausge-werteten Perioden dargestellt. Auf Basis dieser Information sind folgende Dimensionie-rungen/Auslegungen der Signalverarbeitung möglich:
• Die Anzahl der in den Indikator HDn einbezogenen Harmonischen wird bestimmt,siehe später in diesem Kapitel.
• Die analoge Hardware zur Signalaufbereitung wird in der Bandbreite dimensioniert,siehe Kapitel 5.1.
• Die geringe Zahl stark ausgeprägter Harmonischen erfordert für die Berechnungkeine große Anzahl von Abtastwerten, siehe Kapitel 3.2.
• Bei der akkumulierenden Berechnung der Harmonischen muss beachtet werden, dasssie einen Wertebereich von mehreren Dekaden überspannen.
Zusammenfassend sind in Tabelle 2.2 die maximal auftretenden Pegel der ersten siebenHarmonischen aus Abbildung 2.16 aufgelistet.
Harmonische 1. 2. 3. 4. 5. 6. 7.
Max. Pegel 0 dB 0,72 dB -2,70 dB -10,17 dB -13,76 dB -15,76 dB -19,55 dB
Tabelle 2.2: Maximal auftretende Pegel der einzelnen Harmonischen aus Abbildung 2.16
42
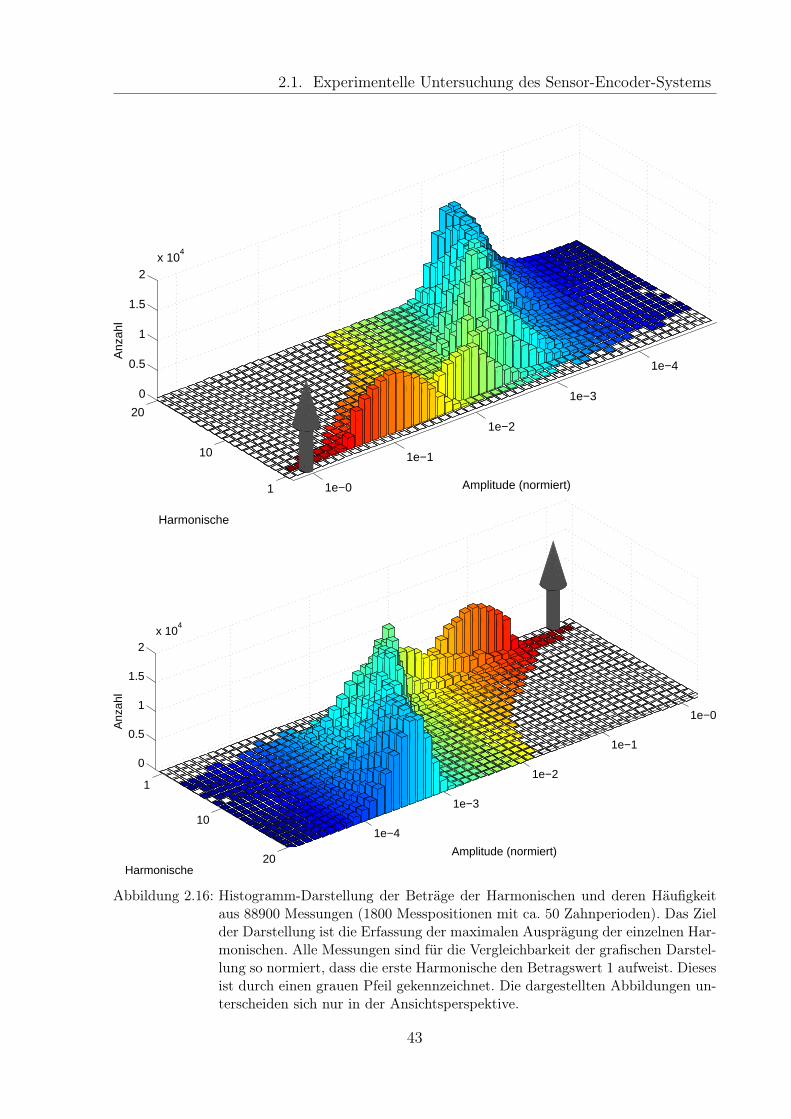
2.1. Experimentelle Untersuchung des Sensor-Encoder-Systems
1e−4
1e−3
1e−2
1e−1
1e−01
10
20
0
0.5
1
1.5
2x 10
4
Amplitude (normiert)
Harmonische
Anz
ahl
1e−4
1e−3
1e−2
1e−1
1e−0
1
10
20
0
0.5
1
1.5
2x 10
4
Amplitude (normiert)
Harmonische
Anz
ahl
Abbildung 2.16: Histogramm-Darstellung der Beträge der Harmonischen und deren Häufigkeitaus 88900 Messungen (1800 Messpositionen mit ca. 50 Zahnperioden). Das Zielder Darstellung ist die Erfassung der maximalen Ausprägung der einzelnen Har-monischen. Alle Messungen sind für die Vergleichbarkeit der grafischen Darstel-lung so normiert, dass die erste Harmonische den Betragswert 1 aufweist. Diesesist durch einen grauen Pfeil gekennzeichnet. Die dargestellten Abbildungen un-terscheiden sich nur in der Ansichtsperspektive.
43
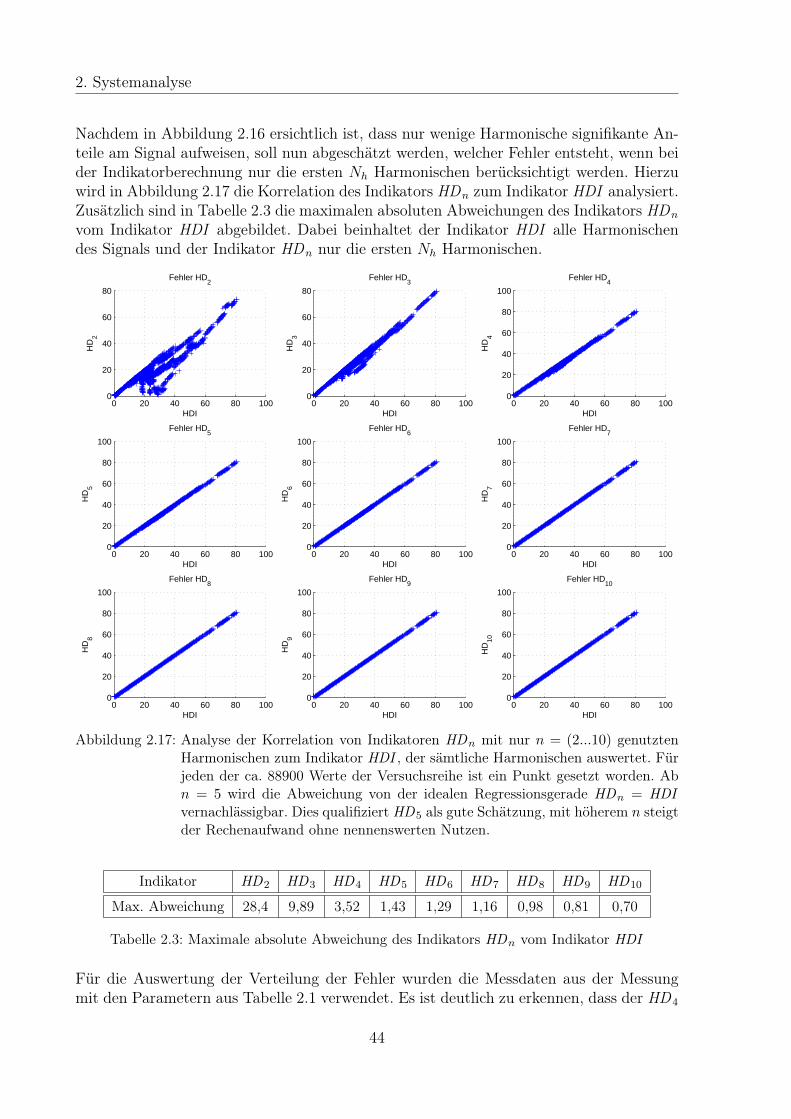
2. Systemanalyse
Nachdem in Abbildung 2.16 ersichtlich ist, dass nur wenige Harmonische signifikante An-teile am Signal aufweisen, soll nun abgeschätzt werden, welcher Fehler entsteht, wenn beider Indikatorberechnung nur die ersten Nh Harmonischen berücksichtigt werden. Hierzuwird in Abbildung 2.17 die Korrelation des Indikators HDn zum Indikator HDI analysiert.Zusätzlich sind in Tabelle 2.3 die maximalen absoluten Abweichungen des Indikators HDn
vom Indikator HDI abgebildet. Dabei beinhaltet der Indikator HDI alle Harmonischendes Signals und der Indikator HDn nur die ersten Nh Harmonischen.
0 20 40 60 80 1000
20
40
60
80
Fehler HD2
HDI
HD
2
0 20 40 60 80 1000
20
40
60
80
Fehler HD3
HDI
HD
3
0 20 40 60 80 1000
20
40
60
80
100
Fehler HD4
HDI
HD
4
0 20 40 60 80 1000
20
40
60
80
100
Fehler HD5
HDI
HD
5
0 20 40 60 80 1000
20
40
60
80
100
Fehler HD6
HDI
HD
6
0 20 40 60 80 1000
20
40
60
80
100
Fehler HD7
HDI
HD
7
0 20 40 60 80 1000
20
40
60
80
100
Fehler HD8
HDI
HD
8
0 20 40 60 80 1000
20
40
60
80
100
Fehler HD9
HDI
HD
9
0 20 40 60 80 1000
20
40
60
80
100
Fehler HD10
HDI
HD
10
Abbildung 2.17: Analyse der Korrelation von Indikatoren HDn mit nur n = (2...10) genutztenHarmonischen zum Indikator HDI , der sämtliche Harmonischen auswertet. Fürjeden der ca. 88900 Werte der Versuchsreihe ist ein Punkt gesetzt worden. Abn = 5 wird die Abweichung von der idealen Regressionsgerade HDn = HDIvernachlässigbar. Dies qualifiziert HD5 als gute Schätzung, mit höherem n steigtder Rechenaufwand ohne nennenswerten Nutzen.
Indikator HD2 HD3 HD4 HD5 HD6 HD7 HD8 HD9 HD10
Max. Abweichung 28,4 9,89 3,52 1,43 1,29 1,16 0,98 0,81 0,70
Tabelle 2.3: Maximale absolute Abweichung des Indikators HDn vom Indikator HDI
Für die Auswertung der Verteilung der Fehler wurden die Messdaten aus der Messungmit den Parametern aus Tabelle 2.1 verwendet. Es ist deutlich zu erkennen, dass der HD4
44
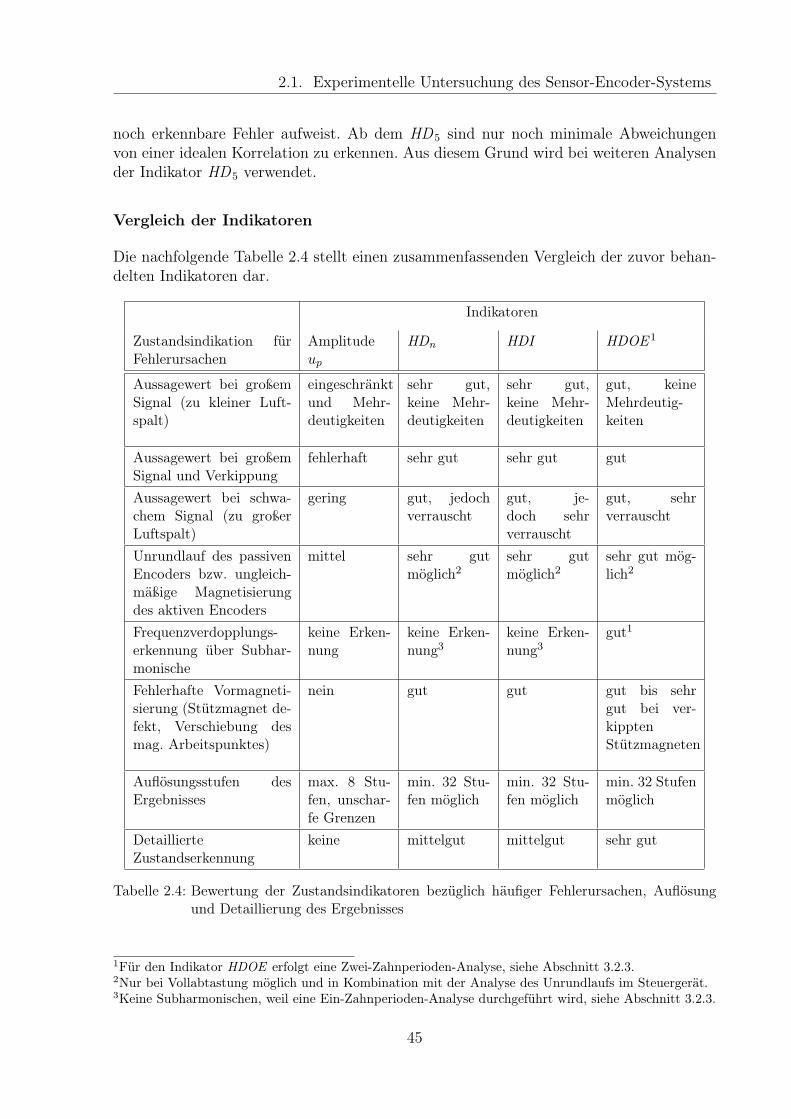
2.1. Experimentelle Untersuchung des Sensor-Encoder-Systems
noch erkennbare Fehler aufweist. Ab dem HD5 sind nur noch minimale Abweichungenvon einer idealen Korrelation zu erkennen. Aus diesem Grund wird bei weiteren Analysender Indikator HD5 verwendet.
Vergleich der Indikatoren
Die nachfolgende Tabelle 2.4 stellt einen zusammenfassenden Vergleich der zuvor behan-delten Indikatoren dar.
Indikatoren
Zustandsindikation fürFehlerursachen
Amplitudeup
HDn HDI HDOE 1
Aussagewert bei großemSignal (zu kleiner Luft-spalt)
eingeschränktund Mehr-deutigkeiten
sehr gut,keine Mehr-deutigkeiten
sehr gut,keine Mehr-deutigkeiten
gut, keineMehrdeutig-keiten
Aussagewert bei großemSignal und Verkippung
fehlerhaft sehr gut sehr gut gut
Aussagewert bei schwa-chem Signal (zu großerLuftspalt)
gering gut, jedochverrauscht
gut, je-doch sehrverrauscht
gut, sehrverrauscht
Unrundlauf des passivenEncoders bzw. ungleich-mäßige Magnetisierungdes aktiven Encoders
mittel sehr gutmöglich2
sehr gutmöglich2
sehr gut mög-lich2
Frequenzverdopplungs-erkennung über Subhar-monische
keine Erken-nung
keine Erken-nung3
keine Erken-nung3
gut1
Fehlerhafte Vormagneti-sierung (Stützmagnet de-fekt, Verschiebung desmag. Arbeitspunktes)
nein gut gut gut bis sehrgut bei ver-kipptenStützmagneten
Auflösungsstufen desErgebnisses
max. 8 Stu-fen, unschar-fe Grenzen
min. 32 Stu-fen möglich
min. 32 Stu-fen möglich
min. 32 Stufenmöglich
DetaillierteZustandserkennung
keine mittelgut mittelgut sehr gut
Tabelle 2.4: Bewertung der Zustandsindikatoren bezüglich häufiger Fehlerursachen, Auflösungund Detaillierung des Ergebnisses
1Für den Indikator HDOE erfolgt eine Zwei-Zahnperioden-Analyse, siehe Abschnitt 3.2.3.2Nur bei Vollabtastung möglich und in Kombination mit der Analyse des Unrundlaufs im Steuergerät.3Keine Subharmonischen, weil eine Ein-Zahnperioden-Analyse durchgeführt wird, siehe Abschnitt 3.2.3.
45
2. Systemanalyse
2.2 Sensorcharakterisierung
Die Sensorcharakterisierung dient dazu, ein hinreichend genaues Modell des magnetore-sistiven AMR-Sensors für das elektrische Ausgangssignal ud bei der Anregung durch einmagnetisches Feld HX und HY zu erstellen. Es stehen zwei Möglichkeiten zur Verfügung:die analytische Bestimmung und die messtechnische Bestimmung des Sensor-Kennfeldes.Die analytische Kennfeldbestimmung liefert ein Sensor-Kennfeld mit beliebiger Auflö-sung. Jedoch müssen verschiedene Parameter, wie die Legierung, Dicke und Struktur desPermalloy3 des AMR-Sensors bekannt sein. Bei der messtechnischen Kennfeldermittlungwird ein genaues Kennfeld für genau einen AMR-Sensor bestimmt. Die Auflösung desKennfeldes ist hier von der Messdauer abhängig.
2.2.1 Analytische Kennfelder
Für die Entwicklung analytischer Sensorkennfelder ist ein grundlegendes Verständnis derFunktionsweise anisotroper magnetoresistiver Sensoren erforderlich. Die grundlegende Be-schreibung des AMR-Effekts speziell für Drehzahlsensoren und Winkelsensoren wurde vonDibbern in [20] veröffentlicht. Eine detailliertere Beschreibung der physikalischen Zusam-menhänge von Dibbern hat Schoermer in [103] erarbeitet. Diese werden im Anhang Czusammenfassend dargestellt.
Berechnung eines analytischen Kennfeldes
Die Firma NXP Semiconductors [91] hat ein neues Verfahren zur numerischen Lösung derGleichung 2.23 entwickelt. Im Rahmen dieser Arbeit wird dieses Verfahren genutzt, umein analytisches Sensorkennfeld zu errechnen. Das Verfahren nutzt die aus Dibbern [20]bekannte Näherungsgleichung zur Bestimmung der internen Magnetisierung ϕ ~M mit dercharakteristischen Feldstärke H0 und dem externen magnetischen Feld HX und HY :
sin(ϕ ~M) =HY
H0 + HXcos(ϕ ~M
)
. (2.23)
Die Lösung dieser Gleichung nach ϕ ~M zur Bestimmung der internen Magnetisierung istnur mit einem iterativen numerischen Verfahren möglich. Deshalb wird die Gleichung 2.23gelöst durch das Minimalproblem
min
∣∣∣∣∣∣∣∣∣∣ HY
H0 + HXcos(ϕ ~M
)
− sin(ϕ ~M)
∣∣∣∣∣∣∣∣∣∣ , (2.24)
wobei das Newton-Raphson-Verfahren mit einem Startwert von
ϕ0 = tan−1(HY
HX
)(2.25)
3Permalloy ist eine weichmagnetische Nickel-Eisen-Legierung, welche einen magnetoresistiven Effekt auf-weist.
46
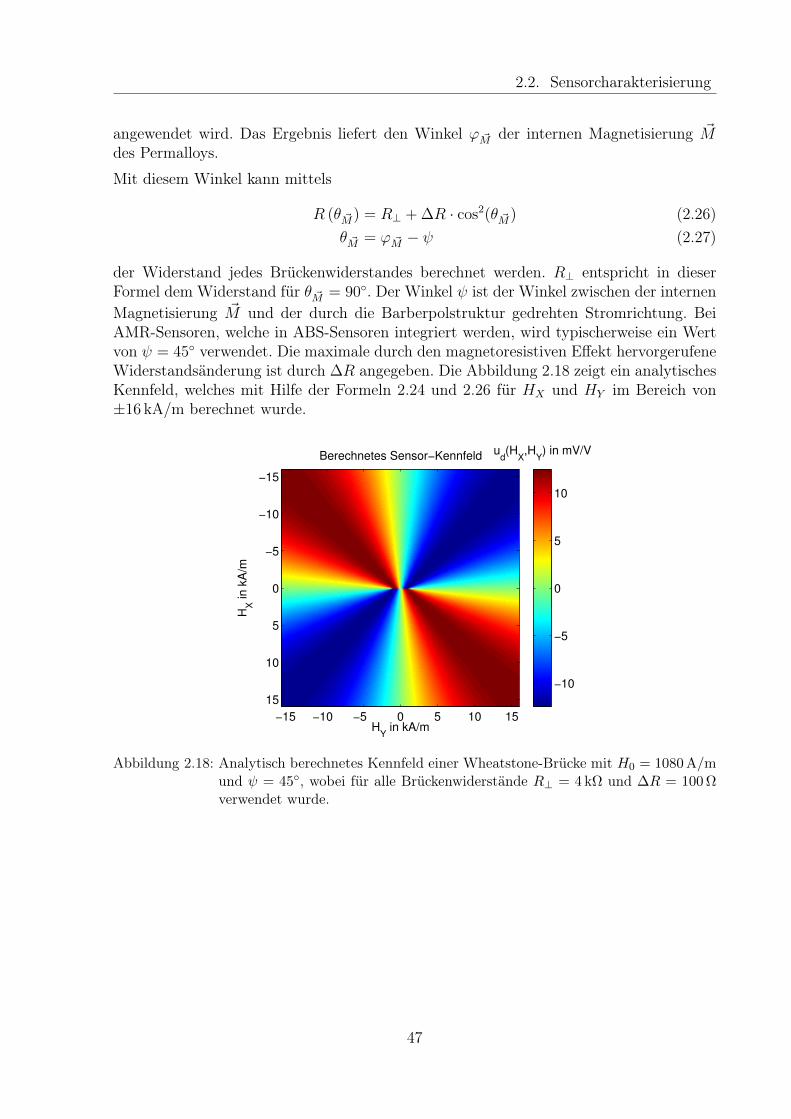
2.2. Sensorcharakterisierung
angewendet wird. Das Ergebnis liefert den Winkel ϕ ~M der internen Magnetisierung ~Mdes Permalloys.
Mit diesem Winkel kann mittels
R (θ ~M) = R⊥ + ∆R · cos2(θ ~M) (2.26)θ ~M = ϕ ~M − ψ (2.27)
der Widerstand jedes Brückenwiderstandes berechnet werden. R⊥ entspricht in dieserFormel dem Widerstand für θ ~M = 90. Der Winkel ψ ist der Winkel zwischen der internenMagnetisierung ~M und der durch die Barberpolstruktur gedrehten Stromrichtung. BeiAMR-Sensoren, welche in ABS-Sensoren integriert werden, wird typischerweise ein Wertvon ψ = 45 verwendet. Die maximale durch den magnetoresistiven Effekt hervorgerufeneWiderstandsänderung ist durch ∆R angegeben. Die Abbildung 2.18 zeigt ein analytischesKennfeld, welches mit Hilfe der Formeln 2.24 und 2.26 für HX und HY im Bereich von±16 kA/m berechnet wurde.
Berechnetes Sensor−Kennfeld
HY in kA/m
HX in k
A/m
−15 −10 −5 0 5 10 15
−15
−10
−5
0
5
10
15
ud(H
X,H
Y) in mV/V
−10
−5
0
5
10
Abbildung 2.18: Analytisch berechnetes Kennfeld einer Wheatstone-Brücke mit H0 = 1080 A/mund ψ = 45, wobei für alle Brückenwiderstände R⊥ = 4 kΩ und ∆R = 100 Ωverwendet wurde.
47
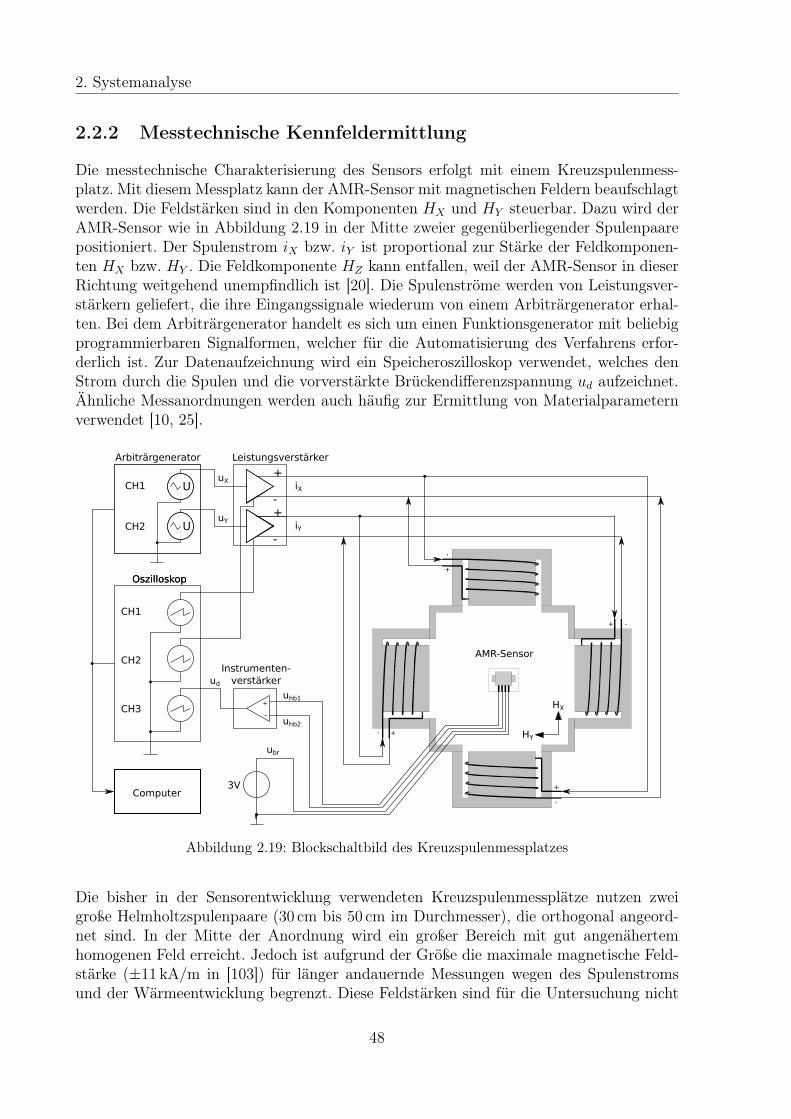
2. Systemanalyse
2.2.2 Messtechnische Kennfeldermittlung
Die messtechnische Charakterisierung des Sensors erfolgt mit einem Kreuzspulenmess-platz. Mit diesem Messplatz kann der AMR-Sensor mit magnetischen Feldern beaufschlagtwerden. Die Feldstärken sind in den Komponenten HX und HY steuerbar. Dazu wird derAMR-Sensor wie in Abbildung 2.19 in der Mitte zweier gegenüberliegender Spulenpaarepositioniert. Der Spulenstrom iX bzw. iY ist proportional zur Stärke der Feldkomponen-ten HX bzw. HY . Die Feldkomponente HZ kann entfallen, weil der AMR-Sensor in dieserRichtung weitgehend unempfindlich ist [20]. Die Spulenströme werden von Leistungsver-stärkern geliefert, die ihre Eingangssignale wiederum von einem Arbiträrgenerator erhal-ten. Bei dem Arbiträrgenerator handelt es sich um einen Funktionsgenerator mit beliebigprogrammierbaren Signalformen, welcher für die Automatisierung des Verfahrens erfor-derlich ist. Zur Datenaufzeichnung wird ein Speicheroszilloskop verwendet, welches denStrom durch die Spulen und die vorverstärkte Brückendifferenzspannung ud aufzeichnet.Ähnliche Messanordnungen werden auch häufig zur Ermittlung von Materialparameternverwendet [10, 25].
+
+
-
-
+ -
+-
+-
+-
U
U
OszilloskopOszilloskop
CH1
CH2
CH3
AMR-Sensor
Leistungsverstärker
uduhb1
uhb2
ubr
iX
iY
CH1
CH2
Arbiträrgenerator
Instrumenten-verstärker
3V
HX
HY
Computer
uX
uY
Abbildung 2.19: Blockschaltbild des Kreuzspulenmessplatzes
Die bisher in der Sensorentwicklung verwendeten Kreuzspulenmessplätze nutzen zweigroße Helmholtzspulenpaare (30 cm bis 50 cm im Durchmesser), die orthogonal angeord-net sind. In der Mitte der Anordnung wird ein großer Bereich mit gut angenähertemhomogenen Feld erreicht. Jedoch ist aufgrund der Größe die maximale magnetische Feld-stärke (±11 kA/m in [103]) für länger andauernde Messungen wegen des Spulenstromsund der Wärmeentwicklung begrenzt. Diese Feldstärken sind für die Untersuchung nicht
48
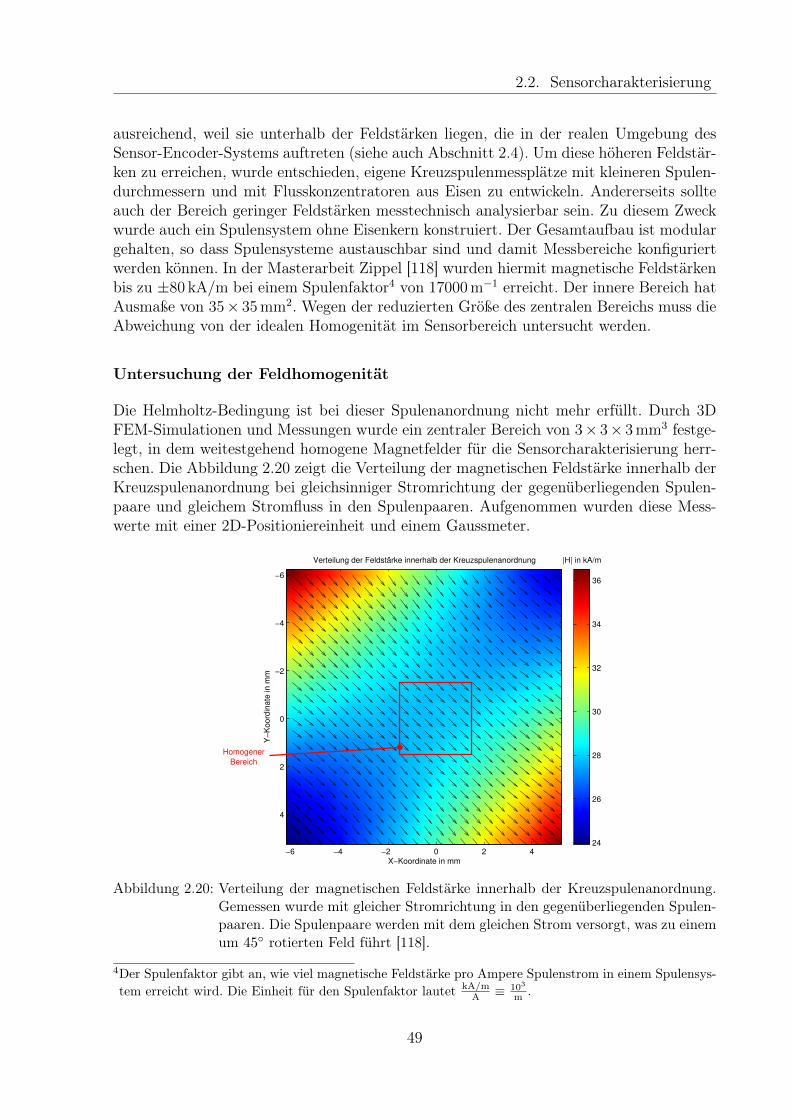
2.2. Sensorcharakterisierung
ausreichend, weil sie unterhalb der Feldstärken liegen, die in der realen Umgebung desSensor-Encoder-Systems auftreten (siehe auch Abschnitt 2.4). Um diese höheren Feldstär-ken zu erreichen, wurde entschieden, eigene Kreuzspulenmessplätze mit kleineren Spulen-durchmessern und mit Flusskonzentratoren aus Eisen zu entwickeln. Andererseits sollteauch der Bereich geringer Feldstärken messtechnisch analysierbar sein. Zu diesem Zweckwurde auch ein Spulensystem ohne Eisenkern konstruiert. Der Gesamtaufbau ist modulargehalten, so dass Spulensysteme austauschbar sind und damit Messbereiche konfiguriertwerden können. In der Masterarbeit Zippel [118] wurden hiermit magnetische Feldstärkenbis zu ±80 kA/m bei einem Spulenfaktor4 von 17000 m−1 erreicht. Der innere Bereich hatAusmaße von 35× 35 mm2. Wegen der reduzierten Größe des zentralen Bereichs muss dieAbweichung von der idealen Homogenität im Sensorbereich untersucht werden.
Untersuchung der Feldhomogenität
Die Helmholtz-Bedingung ist bei dieser Spulenanordnung nicht mehr erfüllt. Durch 3DFEM-Simulationen und Messungen wurde ein zentraler Bereich von 3× 3× 3 mm3 festge-legt, in dem weitestgehend homogene Magnetfelder für die Sensorcharakterisierung herr-schen. Die Abbildung 2.20 zeigt die Verteilung der magnetischen Feldstärke innerhalb derKreuzspulenanordnung bei gleichsinniger Stromrichtung der gegenüberliegenden Spulen-paare und gleichem Stromfluss in den Spulenpaaren. Aufgenommen wurden diese Mess-werte mit einer 2D-Positioniereinheit und einem Gaussmeter.
X−Koordinate in mm
Y−K
oord
inat
ein
mm
Verteilung der Feldstärke innerhalb der Kreuzspulenanordnung
−6 −4 −2 0 2 4
−6
−4
−2
0
2
4
|H| in kA/m
24
26
28
30
32
34
36
Homogener Bereich
Abbildung 2.20: Verteilung der magnetischen Feldstärke innerhalb der Kreuzspulenanordnung.Gemessen wurde mit gleicher Stromrichtung in den gegenüberliegenden Spulen-paaren. Die Spulenpaare werden mit dem gleichen Strom versorgt, was zu einemum 45 rotierten Feld führt [118].
4Der Spulenfaktor gibt an, wie viel magnetische Feldstärke pro Ampere Spulenstrom in einem Spulensys-tem erreicht wird. Die Einheit für den Spulenfaktor lautet kA/m
A ≡ 103
m .
49
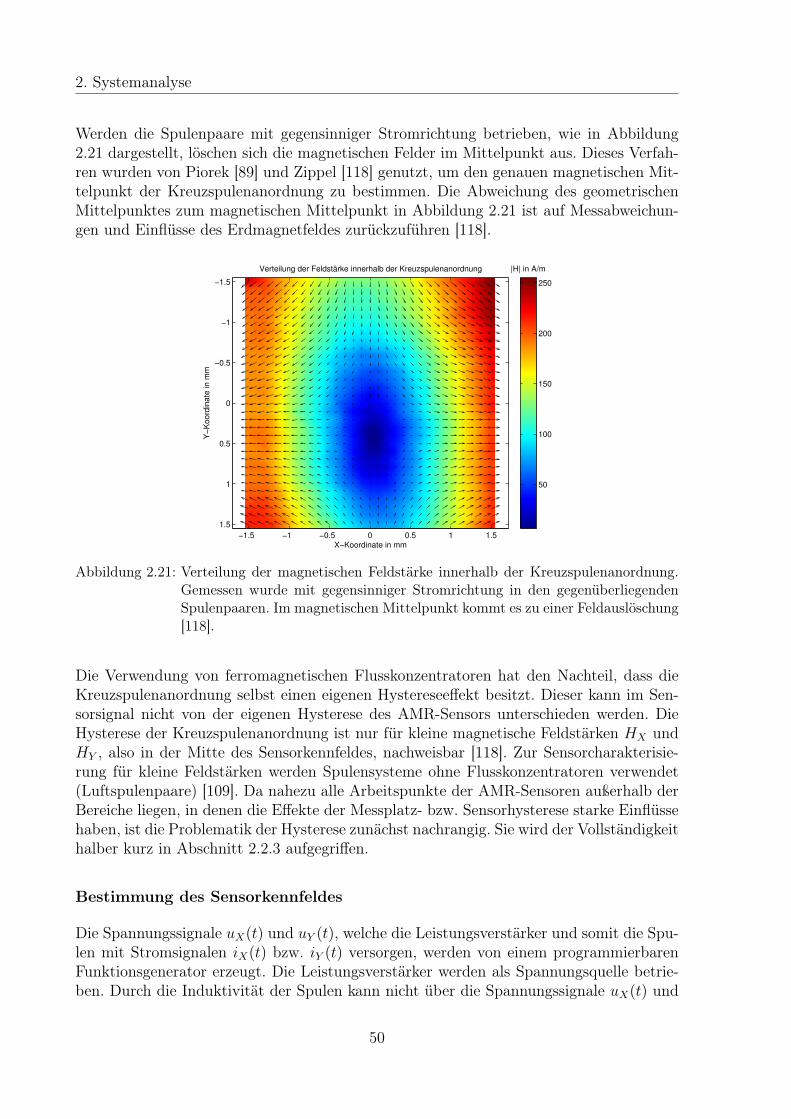
2. Systemanalyse
Werden die Spulenpaare mit gegensinniger Stromrichtung betrieben, wie in Abbildung2.21 dargestellt, löschen sich die magnetischen Felder im Mittelpunkt aus. Dieses Verfah-ren wurden von Piorek [89] und Zippel [118] genutzt, um den genauen magnetischen Mit-telpunkt der Kreuzspulenanordnung zu bestimmen. Die Abweichung des geometrischenMittelpunktes zum magnetischen Mittelpunkt in Abbildung 2.21 ist auf Messabweichun-gen und Einflüsse des Erdmagnetfeldes zurückzuführen [118].
X−Koordinate in mm
Y−
Koord
inate
in
mm
Verteilung der Feldstärke innerhalb der Kreuzspulenanordnung
−1.5 −1 −0.5 0 0.5 1 1.5
−1.5
−1
−0.5
0
0.5
1
1.5
|H| in A/m
50
100
150
200
250
Abbildung 2.21: Verteilung der magnetischen Feldstärke innerhalb der Kreuzspulenanordnung.Gemessen wurde mit gegensinniger Stromrichtung in den gegenüberliegendenSpulenpaaren. Im magnetischen Mittelpunkt kommt es zu einer Feldauslöschung[118].
Die Verwendung von ferromagnetischen Flusskonzentratoren hat den Nachteil, dass dieKreuzspulenanordnung selbst einen eigenen Hystereseeffekt besitzt. Dieser kann im Sen-sorsignal nicht von der eigenen Hysterese des AMR-Sensors unterschieden werden. DieHysterese der Kreuzspulenanordnung ist nur für kleine magnetische Feldstärken HX undHY , also in der Mitte des Sensorkennfeldes, nachweisbar [118]. Zur Sensorcharakterisie-rung für kleine Feldstärken werden Spulensysteme ohne Flusskonzentratoren verwendet(Luftspulenpaare) [109]. Da nahezu alle Arbeitspunkte der AMR-Sensoren außerhalb derBereiche liegen, in denen die Effekte der Messplatz- bzw. Sensorhysterese starke Einflüssehaben, ist die Problematik der Hysterese zunächst nachrangig. Sie wird der Vollständigkeithalber kurz in Abschnitt 2.2.3 aufgegriffen.
Bestimmung des Sensorkennfeldes
Die Spannungssignale uX(t) und uY (t), welche die Leistungsverstärker und somit die Spu-len mit Stromsignalen iX(t) bzw. iY (t) versorgen, werden von einem programmierbarenFunktionsgenerator erzeugt. Die Leistungsverstärker werden als Spannungsquelle betrie-ben. Durch die Induktivität der Spulen kann nicht über die Spannungssignale uX(t) und
50
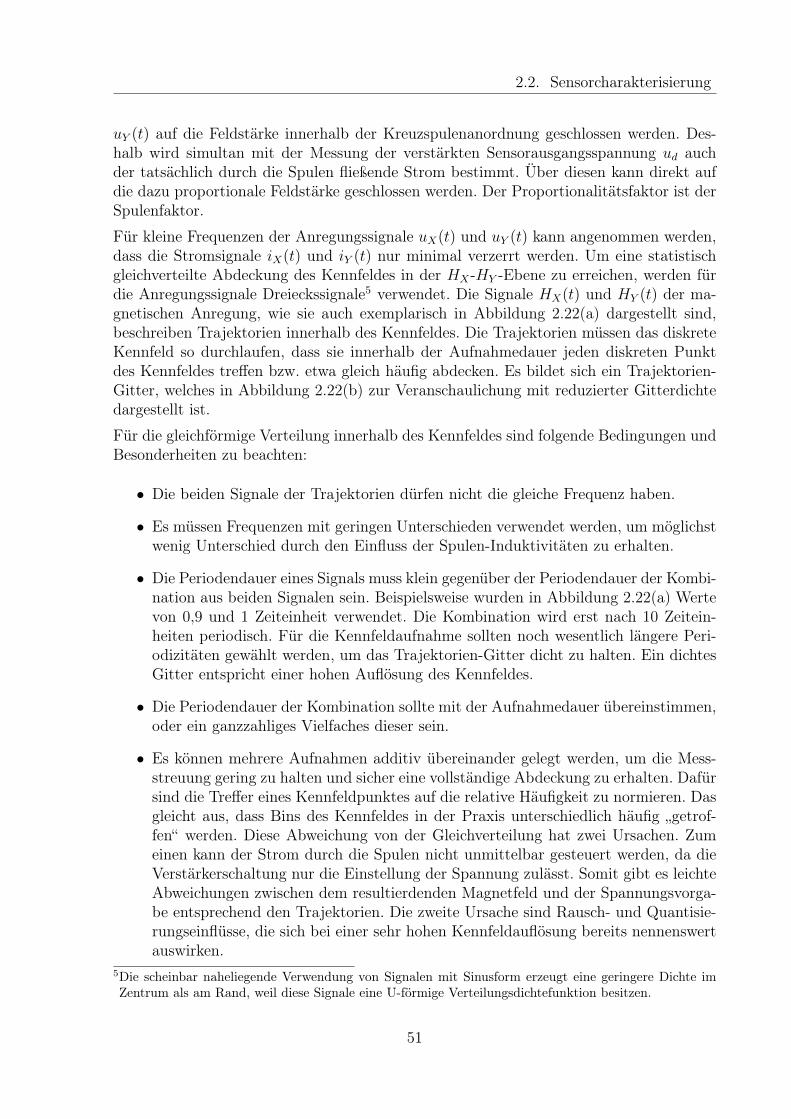
2.2. Sensorcharakterisierung
uY (t) auf die Feldstärke innerhalb der Kreuzspulenanordnung geschlossen werden. Des-halb wird simultan mit der Messung der verstärkten Sensorausgangsspannung ud auchder tatsächlich durch die Spulen fließende Strom bestimmt. Über diesen kann direkt aufdie dazu proportionale Feldstärke geschlossen werden. Der Proportionalitätsfaktor ist derSpulenfaktor.
Für kleine Frequenzen der Anregungssignale uX(t) und uY (t) kann angenommen werden,dass die Stromsignale iX(t) und iY (t) nur minimal verzerrt werden. Um eine statistischgleichverteilte Abdeckung des Kennfeldes in der HX-HY -Ebene zu erreichen, werden fürdie Anregungssignale Dreieckssignale5 verwendet. Die Signale HX(t) und HY (t) der ma-gnetischen Anregung, wie sie auch exemplarisch in Abbildung 2.22(a) dargestellt sind,beschreiben Trajektorien innerhalb des Kennfeldes. Die Trajektorien müssen das diskreteKennfeld so durchlaufen, dass sie innerhalb der Aufnahmedauer jeden diskreten Punktdes Kennfeldes treffen bzw. etwa gleich häufig abdecken. Es bildet sich ein Trajektorien-Gitter, welches in Abbildung 2.22(b) zur Veranschaulichung mit reduzierter Gitterdichtedargestellt ist.
Für die gleichförmige Verteilung innerhalb des Kennfeldes sind folgende Bedingungen undBesonderheiten zu beachten:
• Die beiden Signale der Trajektorien dürfen nicht die gleiche Frequenz haben.
• Es müssen Frequenzen mit geringen Unterschieden verwendet werden, um möglichstwenig Unterschied durch den Einfluss der Spulen-Induktivitäten zu erhalten.
• Die Periodendauer eines Signals muss klein gegenüber der Periodendauer der Kombi-nation aus beiden Signalen sein. Beispielsweise wurden in Abbildung 2.22(a) Wertevon 0,9 und 1 Zeiteinheit verwendet. Die Kombination wird erst nach 10 Zeitein-heiten periodisch. Für die Kennfeldaufnahme sollten noch wesentlich längere Peri-odizitäten gewählt werden, um das Trajektorien-Gitter dicht zu halten. Ein dichtesGitter entspricht einer hohen Auflösung des Kennfeldes.
• Die Periodendauer der Kombination sollte mit der Aufnahmedauer übereinstimmen,oder ein ganzzahliges Vielfaches dieser sein.
• Es können mehrere Aufnahmen additiv übereinander gelegt werden, um die Mess-streuung gering zu halten und sicher eine vollständige Abdeckung zu erhalten. Dafürsind die Treffer eines Kennfeldpunktes auf die relative Häufigkeit zu normieren. Dasgleicht aus, dass Bins des Kennfeldes in der Praxis unterschiedlich häufig „getrof-fen“ werden. Diese Abweichung von der Gleichverteilung hat zwei Ursachen. Zumeinen kann der Strom durch die Spulen nicht unmittelbar gesteuert werden, da dieVerstärkerschaltung nur die Einstellung der Spannung zulässt. Somit gibt es leichteAbweichungen zwischen dem resultierdenden Magnetfeld und der Spannungsvorga-be entsprechend den Trajektorien. Die zweite Ursache sind Rausch- und Quantisie-rungseinflüsse, die sich bei einer sehr hohen Kennfeldauflösung bereits nennenswertauswirken.
5Die scheinbar naheliegende Verwendung von Signalen mit Sinusform erzeugt eine geringere Dichte imZentrum als am Rand, weil diese Signale eine U-förmige Verteilungsdichtefunktion besitzen.
51
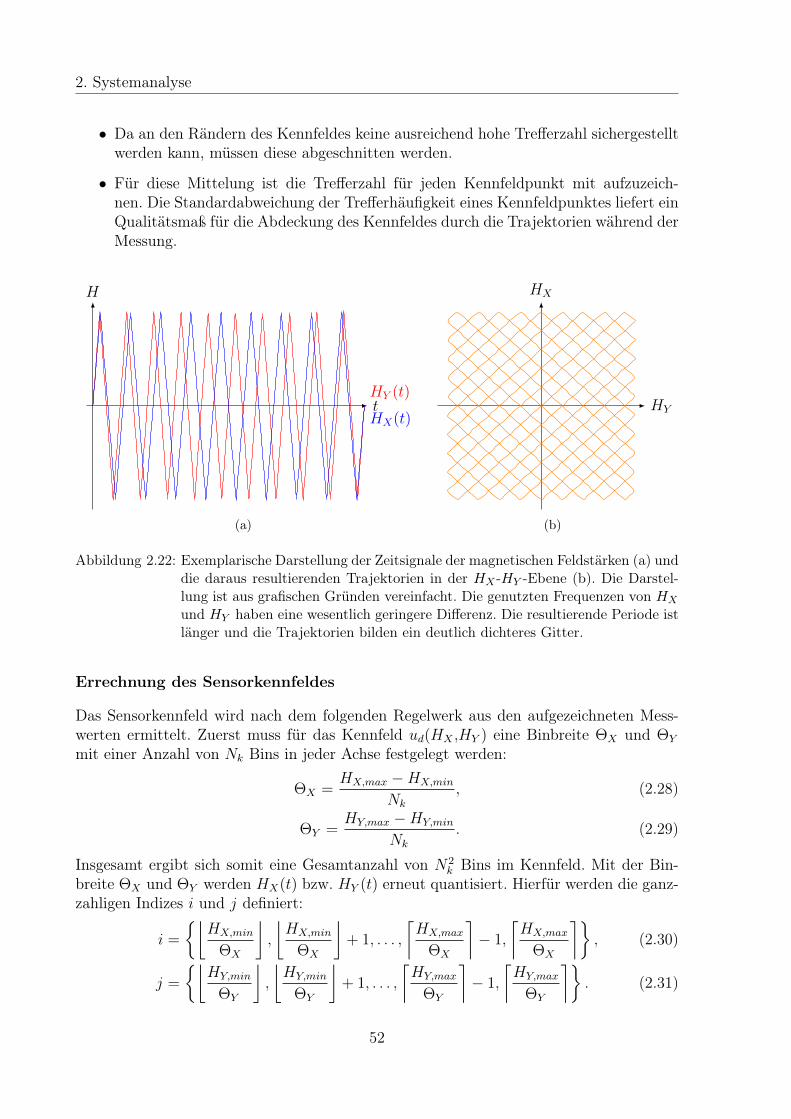
2. Systemanalyse
• Da an den Rändern des Kennfeldes keine ausreichend hohe Trefferzahl sichergestelltwerden kann, müssen diese abgeschnitten werden.
• Für diese Mittelung ist die Trefferzahl für jeden Kennfeldpunkt mit aufzuzeich-nen. Die Standardabweichung der Trefferhäufigkeit eines Kennfeldpunktes liefert einQualitätsmaß für die Abdeckung des Kennfeldes durch die Trajektorien während derMessung.
t
H
HY (t)
HX(t)
(a)
HY
HX
(b)
Abbildung 2.22: Exemplarische Darstellung der Zeitsignale der magnetischen Feldstärken (a) unddie daraus resultierenden Trajektorien in der HX -HY -Ebene (b). Die Darstel-lung ist aus grafischen Gründen vereinfacht. Die genutzten Frequenzen von HX
und HY haben eine wesentlich geringere Differenz. Die resultierende Periode istlänger und die Trajektorien bilden ein deutlich dichteres Gitter.
Errechnung des Sensorkennfeldes
Das Sensorkennfeld wird nach dem folgenden Regelwerk aus den aufgezeichneten Mess-werten ermittelt. Zuerst muss für das Kennfeld ud(HX ,HY ) eine Binbreite ΘX und ΘY
mit einer Anzahl von Nk Bins in jeder Achse festgelegt werden:
ΘX =HX,max −HX,min
Nk
, (2.28)
ΘY =HY,max −HY,min
Nk
. (2.29)
Insgesamt ergibt sich somit eine Gesamtanzahl von N2k Bins im Kennfeld. Mit der Bin-
breite ΘX und ΘY werden HX(t) bzw. HY (t) erneut quantisiert. Hierfür werden die ganz-zahligen Indizes i und j definiert:
i =
⌊HX,min
ΘX
⌋,
⌊HX,min
ΘX
⌋+ 1, . . . ,
⌈HX,max
ΘX
⌉− 1,
⌈HX,max
ΘX
⌉, (2.30)
j =
⌊HY,min
ΘY
⌋,
⌊HY,min
ΘY
⌋+ 1, . . . ,
⌈HY,max
ΘY
⌉− 1,
⌈HY,max
ΘY
⌉. (2.31)
52

2.2. Sensorcharakterisierung
Das bedeutet, zwischen den nach unten und noch oben gerundeten Endelementen derIndexmengen i und j wird mit ganzen Zahlen aufgefüllt. Die Werte HX,min und HX,max
bzw. HY,min und HY,max legen den abzudeckenden Feldstärkenbereich des Kennfelds fest.In Abbildung 2.23 sind die Trajektorien mit den Grenzen für die Quantisierung grafischdargestellt.
HY
HX
ΘY
ΘX
HX,max
HX,min
HY,min HY,max
Abbildung 2.23: Darstellung der Trajektorien (orange) mit einem Gitter, welches die Quantisie-rung mit den Binbreiten ΘX und ΘY bei Nk = 6 verdeutlicht.
Diese Quantisierung bestimmt die Einsortierung des Sensorspannungswertes us(HX ,HY )auf die Elemente der Mengen Hi,j:
us(HX ,HY )
∣∣∣∣−ΘX
2< (HX − iΘX) ≤ ΘX
2∧ −ΘY
2< (HY − jΘY ) ≤ ΘY
2
∈ Hi,j.
(2.32)
Die Zuordnungsvorschrift 2.32 wird für alle vorhandenen Werte us(HX ,HY ) durchlau-fen. Aus den Mengen Hi,j wird über die Kardinalität der jeweiligen Menge die mittlereSensorspannung berechnet:
ud(i,j) =
∑us∈Hi,j us
|us ∈ Hi,j|∀Hi,j 6= ∅. (2.33)
Die Indizes i und j können mit Gleichung 2.30 bzw. 2.31 in Feldstärken umgerechnetwerden, was zu dem gesuchten Kennfeld ud(HX ,HY ) führt.
Das gemessene Kennfeld des AMR-Sensors ist in Abbildung 2.24 (Mitte) dargestellt. DieAusgangsspannung ud ist in der Farbe codiert. Auf der linken und rechten Seite sind exem-plarisch aus dem Kennfeld extrahierte Kennlinien dargestellt. Die Extraktion wurde für
53

2. Systemanalyse
einen konstanten Wert der Feldkomponente HX durchgeführt. In jeder der vier extrahier-ten Kennlinien ist der nahezu lineare Bereich grün hinterlegt. Mit ansteigender FeldstärkeHY wird der lineare Bereich verlassen. Im nichtlinearen Bereich geht die Ausgangsspan-nung nicht in Sättigung, sondern fällt nach dem Erreichen eines Maximums wieder ab.Entsprechendes gilt auch für negative Feldstärken von HY . Die Kurven sind im Idealfallpunktsymmetrisch zum Ursprung. Weiterhin ist zu erkennen, dass mit steigendem HX derGradient im nahezu linearen Bereich kleiner wird. Die Empfindlichkeit des AMR-Sensorswird somit kleiner je größer das HX-Feld wird.
HY
in kA/m
HX
inkA
/m
AMR-Sensor-Kennfeld ud(H
X, H
Y)
−10 0 10−15
−10
−5
0
5
10
15
ud
in mV/V
−10 −5 0 5 10
−20 −10 0 10 20−15
−10
−5
0
5
10
15
u din
mV
/V
HY
in kA/m
d(10.1 kA/m, H
Y)
−20 −10 0 10 20−15
−10
−5
0
5
10
15
u din
mV
/V
HY
in kA/m
d(5.07 kA/m, H
Y)
−20 −10 0 10 20−15
−10
−5
0
5
10
15
u din
mV
/V
HY
in kA/m
d(−5.07 kA/m, H
Y)
−20 −10 0 10 20−15
−10
−5
0
5
10
15
u din
mV
/V
HY
in kA/m
d(−10.1 kA/m, H
Y)
u
u u
u
Abbildung 2.24: Kennfeld des AMR-Sensors mit extrahierten Kennlinien für einige konstanteWerte für HX . Der nahezu lineare Bereich der Kennlinien ist grün hinterlegt.
Wie bereits in Kapitel 1.1 erläutert, liefert ein sogenannter Stützmagnet ein definiertesHX-Feld. Das in Abbildung 2.24 dargestellte Kennfeld wurde ohne montierten Stütz-magnet aufgenommen. Die Sensorcharakterisierung kann aufgrund der großen Feldstär-ken der Kreuzspulenanordnung auch mit montierten Stützmagneten durchgeführt werden.Zwei solche gemessenen Kennfelder sind in Abbildung 2.25 dargestellt. Grundsätzlich be-wirkt der Stützmagnet je nach Magnetisierung eine Verschiebung des Kennfeldes in derHX-HY -Ebene. Magnetisierungen in Richtung der HZ-Komponente werden nicht erkannt,weil der AMR-Sensor auf diese Komponente nicht sensitiv ist. Im Anwendungsfall ist nureine Magnetisierung des Stützmagneten mit einer HX- und HZ-Komponente sinnvoll.
54
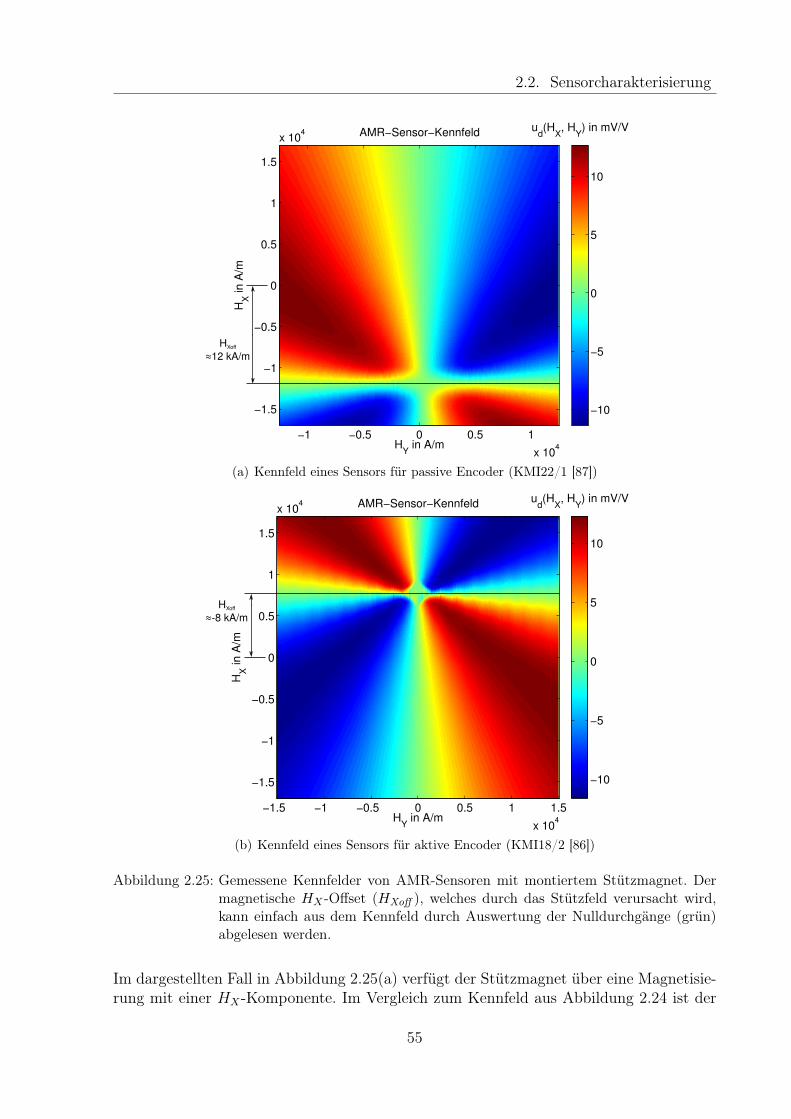
2.2. Sensorcharakterisierung
HY
in A/m
HX
inA
/m
AMR−Sensor−Kennfeld
−1 −0.5 0 0.5 1
x 104
−1.5
−1
−0.5
0
0.5
1
1.5
x 104 ud(H
X, H
Y) in mV/V
−10
−5
0
5
10
HXoff
≈12 kA/m
(a) Kennfeld eines Sensors für passive Encoder (KMI22/1 [87])
HY
in A/m
HX
inA
/m
AMR−Sensor−Kennfeld
−1.5 −1 −0.5 0 0.5 1 1.5
x 104
−1.5
−1
−0.5
0
0.5
1
1.5
x 104 u
d(H
X, H
Y) in mV/V
−10
−5
0
5
10
HXoff
≈-8 kA/m
(b) Kennfeld eines Sensors für aktive Encoder (KMI18/2 [86])
Abbildung 2.25: Gemessene Kennfelder von AMR-Sensoren mit montiertem Stützmagnet. Dermagnetische HX -Offset (HXoff ), welches durch das Stützfeld verursacht wird,kann einfach aus dem Kennfeld durch Auswertung der Nulldurchgänge (grün)abgelesen werden.
Im dargestellten Fall in Abbildung 2.25(a) verfügt der Stützmagnet über eine Magnetisie-rung mit einer HX-Komponente. Im Vergleich zum Kennfeld aus Abbildung 2.24 ist der
55
2. Systemanalyse
Mittelpunkt zu einer HX Feldstärke von ca. −12 kA/m verschoben. Somit bewirkt der beider Sensorcharakterisierung montierte Stützmagnet ein Offset von HXoff ≈ 12 kA/m aufden AMR-Sensor. In der Abbildung 2.25(b) ist die Magnetisierung der HX-Komponentemit HXoff ≈ −8 kA/m betragsmäßig kleiner und auch in entgegengesetzter Richtungerfolgt.
Alternative Methoden zur Bestimmung des Einflusses des Stützmagnetes auf den AMR-Sensor sind:
• Das schrittweise Verändern des HX-Feldes und Aufnehmen von Kennlinien wie inAbbildung 2.24. An dem Punkt wo die Kennlinie invertiert, entspricht die einge-stellte Feldstärke HX betragsmäßig der Feldstärke HXoff am AMR-Sensor.
• Eine FEM-Simulation des Stützmagneten mit bekannter interner Magnetisierung.
2.2.3 Vergleich der analytischen und gemessenen Kennfelder
In den Kapiteln 2.2.1 und 2.2.2 wurden die analytische und die messtechnische Bestim-mung von Kennfeldern des AMR-Sensors vorgestellt. Zur Betrachtung des Fehlers sinddiese zusammenfassend in Abbildung 2.26 dargestellt. Der absolute Fehler
Ed(ud) = |ud,meas(HX , HY )− ud,calc(HX , HY )| (2.34)
ist in Abbildung 2.26(c) abgebildet. Zur Verbesserung der Ansicht des verbleibenden Feh-lers ist in Abbildung 2.26(d) der absolute Fehler gewichtet mit der Funktion tan−1 (βE (Ud))dargestellt. Wobei β ein zusätzlicher Gewichtungsfaktor zur sinnvollen Darstellung ist.Sie zeigen, dass beide Kennfelder gut übereinstimmen bis auf den mittleren Bereich. Wiebereits in Kapitel 2.2.2 erläutert, handelt es sich hier um Fehler die auf die Hysteresedes Kreuzspulenmessplatzes und des AMR-Sensors zurückzuführen sind. Weitere Fehlerkönnen auf leichte Ungenauigkeiten bei der Positionierung des Sensors während des Mess-vorgangs zurückgeführt werden.
Aus der Literatur sind für die Beschreibung dieser Hystereseeffekte zwei unterschiedlicheVerfahren bekannt:
• Die Verwendung räumlich-integraler Modelle nach Preisach/Mayergoyz [10]. Hierzuwird der Sensor mit bestimmten Feldstärkenvektoren beaufschlagt und aus den auf-genommenen Ausgangsspannungen ein Modell berechnet. Mittels dieses vektoriellenHysteresemodells kann aus dem angelegten Feldstärkenvektoren und der Historie derFeldstärkenvektoren die Ausgangsspannung berechnet werden.
• Die Erstellung eines mikromagnetischen Modell und der numerischen Lösung derLandau-Lifschitz-Gilbert-Gleichung [37, 71]. Hierbei wird das Verhalten jeder ma-gnetische Domäne und deren Zusammenwirken genau beschreiben. Insbesonderewird hier auch das Layout des AMR-Sensors berücksichtigt. Beispielsweise wurdedieses Verfahren von Hinzke [48] eingesetzt, um magnetoresistive Nanostruktureninklusive der Hysteresen zu simulieren.
56
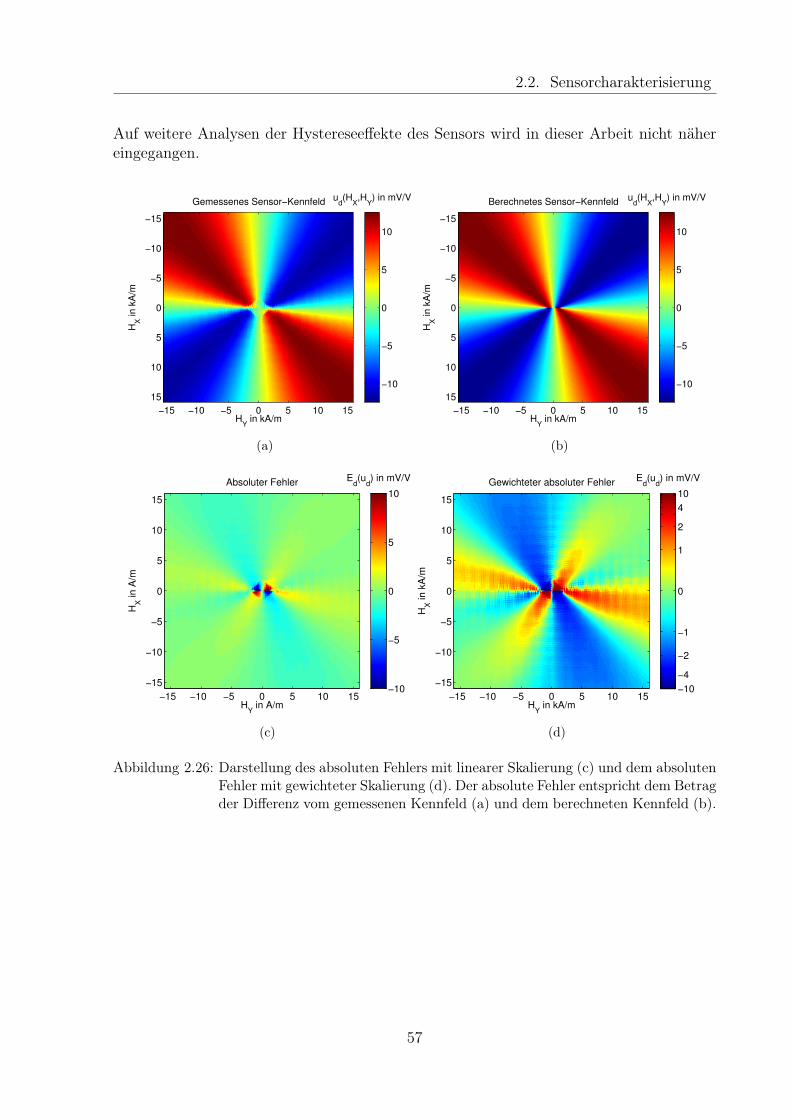
2.2. Sensorcharakterisierung
Auf weitere Analysen der Hystereseeffekte des Sensors wird in dieser Arbeit nicht nähereingegangen.
Gemessenes Sensor−Kennfeld
HY in kA/m
HX in k
A/m
−15 −10 −5 0 5 10 15
−15
−10
−5
0
5
10
15
ud(H
X,H
Y) in mV/V
−10
−5
0
5
10
(a)
Berechnetes Sensor−Kennfeld
HY in kA/m
HX in k
A/m
−15 −10 −5 0 5 10 15
−15
−10
−5
0
5
10
15
ud(H
X,H
Y) in mV/V
−10
−5
0
5
10
(b)
HY in A/m
HX in A
/m
Absoluter Fehler
−15 −10 −5 0 5 10 15
−15
−10
−5
0
5
10
15
Ed(u
d) in mV/V
−10
−5
0
5
10
(c)
Gewichteter absoluter Fehler
HY in kA/m
HX in k
A/m
−15 −10 −5 0 5 10 15
−15
−10
−5
0
5
10
15
Ed(u
d) in mV/V
−10
−4
−2
−1
0
1
2
4
10
(d)
Abbildung 2.26: Darstellung des absoluten Fehlers mit linearer Skalierung (c) und dem absolutenFehler mit gewichteter Skalierung (d). Der absolute Fehler entspricht dem Betragder Differenz vom gemessenen Kennfeld (a) und dem berechneten Kennfeld (b).
57

2. Systemanalyse
2.3 Magnetostatische Simulation des Sensor-Encoder-Systems
Die magnetischen Feldstärken, die während des Betriebs auf den AMR-Sensor wirken,lassen sich aufgrund der kleinen Sensorgröße von ca. 1,2 mm × 1,2 mm mit begrenztemAufwand nicht messtechnisch erfassen. Verfügbare 3D-Hall-Sonden haben eine sensiti-ve Fläche, die die Fläche der einzelnen Brückenwiderstände innerhalb des AMR-Sensorsübersteigt. Des weiteren sind die drei Hall-Elemente (HX , HY und HZ) innerhalb der3D-Hall-Sonde bis zu mehreren Millimeter versetzt montiert [74, 75, 106]. In der vomFraunhofer IIS entwickelten HallinOne-Technologie [26] können 3D-Hall-Elemente auf ei-nem Chip in CMOS Technologie hergestellt werden. Dabei haben die Hall-Elemente nureinen minimalen Versatz zueinander. Die HallinOne Technologie wird bisher nur für 3D-Positionsencoder-IC’s verwendet (beispielsweise in [1] von Austriamicrosystems) und fin-det noch keine Anwendung in der Messtechnik. Zur weiteren Analyse der magnetischenFeldstärken ist aus diesen Gründen eine FEM-Simulation notwendig. Im Folgenden wirddie Entwicklung des Modells für den AMR-Sensor wie auch für die Encoder für die FEM-Simulation vorgestellt.
2.3.1 Sensor-Modellierung
Da eine messtechnische Erfassung nicht möglich ist, werden die magnetischen Feldstärkenim Sensor-Encoder-System mit Hilfe von magnetostatischen FEM-Simulationen ermittelt.Die zu simulierende Zahnperiode des Encoders mit Nt Zähnen wird hierbei in Nsteps
Einzelsimulationen zerlegt. Der resultierende Winkel
α =s
Nsteps
· 360
Nt
s = 0, . . . , Nsteps − 1 (2.35)
beschreibt das Winkelinkrement für die Simulationen. Untersuchungen von Zippel [118]haben gezeigt, dass für die weitere Analyse der Harmonischen eine Anzahl von Nsteps ≥ 32Einzelsimulationen ausreichend sind.
Das simulierte magnetische Feld
~H(α;x, y, z, ~M) =
HX(α;x, y, z, ~M)
HY (α;x, y, z, ~M)
HZ(α;x, y, z, ~M)
(2.36)
liefert abhängig vom Encoderwinkel α, den Koordinaten x, y, z im Sensorkoordinaten-system und einem Parametersatz ~M die magnetische Feldstärke. Der Parametersatz ~Menthält zusätzliche Parameter, wie das 3D Sensor- und Encodermodell, die Magnetisierungdes Permanentmagnets und die Verkippungen/Verschiebungen des Sensors.
58
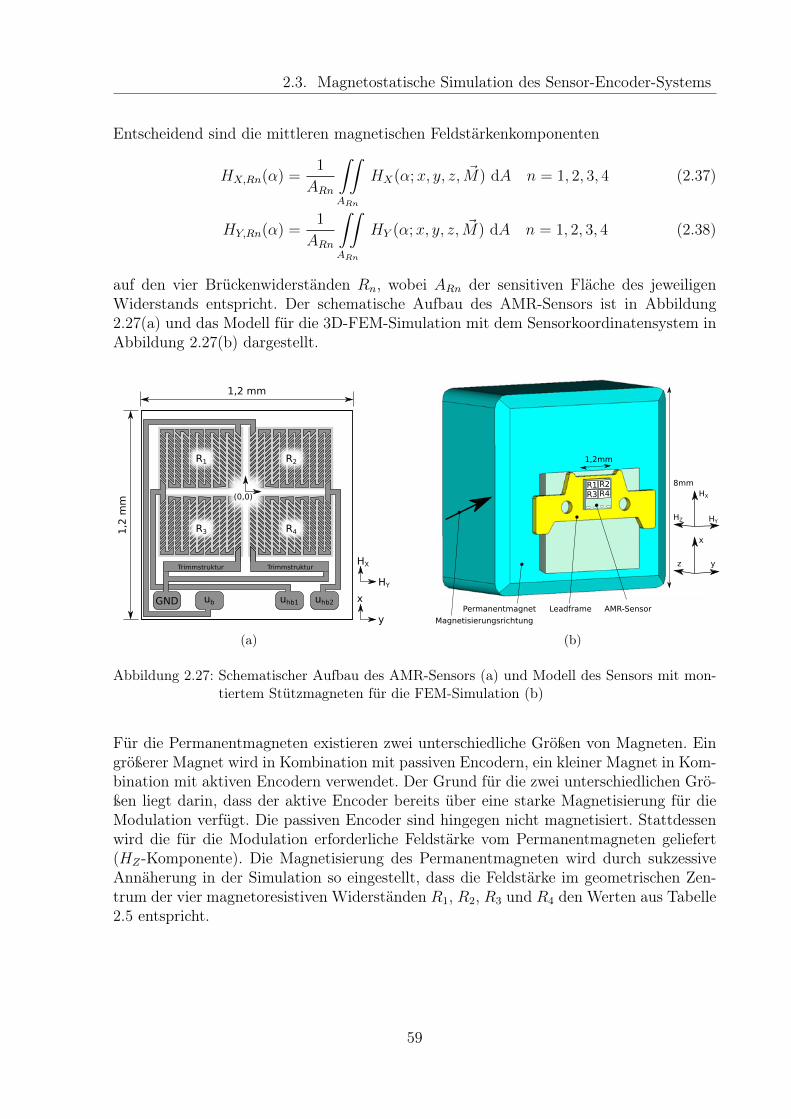
2.3. Magnetostatische Simulation des Sensor-Encoder-Systems
Entscheidend sind die mittleren magnetischen Feldstärkenkomponenten
HX,Rn(α) =1
ARn
∫∫ARn
HX(α;x, y, z, ~M) dA n = 1, 2, 3, 4 (2.37)
HY,Rn(α) =1
ARn
∫∫ARn
HY (α;x, y, z, ~M) dA n = 1, 2, 3, 4 (2.38)
auf den vier Brückenwiderständen Rn, wobei ARn der sensitiven Fläche des jeweiligenWiderstands entspricht. Der schematische Aufbau des AMR-Sensors ist in Abbildung2.27(a) und das Modell für die 3D-FEM-Simulation mit dem Sensorkoordinatensystem inAbbildung 2.27(b) dargestellt.
x
y
HX
HY
R1 R2
R3 R4
Trimmstruktur Trimmstruktur
(0,0)
GND ub uhb1 uhb2
1,2
mm
1,2 mm
(a)
R1 R2R3 R4
Permanentmagnet
8mm
Leadframe AMR-Sensor
1,2mm
Magnetisierungsrichtung
z
x
y
HZ
HX
HY
(b)
Abbildung 2.27: Schematischer Aufbau des AMR-Sensors (a) und Modell des Sensors mit mon-tiertem Stützmagneten für die FEM-Simulation (b)
Für die Permanentmagneten existieren zwei unterschiedliche Größen von Magneten. Eingrößerer Magnet wird in Kombination mit passiven Encodern, ein kleiner Magnet in Kom-bination mit aktiven Encodern verwendet. Der Grund für die zwei unterschiedlichen Grö-ßen liegt darin, dass der aktive Encoder bereits über eine starke Magnetisierung für dieModulation verfügt. Die passiven Encoder sind hingegen nicht magnetisiert. Stattdessenwird die für die Modulation erforderliche Feldstärke vom Permanentmagneten geliefert(HZ-Komponente). Die Magnetisierung des Permanentmagneten wird durch sukzessiveAnnäherung in der Simulation so eingestellt, dass die Feldstärke im geometrischen Zen-trum der vier magnetoresistiven Widerständen R1, R2, R3 und R4 den Werten aus Tabelle2.5 entspricht.
59
2. Systemanalyse
Encodertyp HX HY HZ
Passiver Encoder 12 kA/m 0 kA/m −35 kA/m
Aktiver Encoder −8 kA/m 0 kA/m 0 kA/m
Tabelle 2.5: Komponenten der magnetischen Feldstärke, die im Sensormittelpunkt zu erreichensind.
Dieser Wert für die Magnetisierung ist ohne Encoder zu erreichen. Die Festlegung desKoordinatensystems mit der angedeuteten Magnetisierungsrichtung für einen passivenEncoder ist in Abbildung 2.27(b) dargestellt. Eine Messung der HX- und HY -Feldstärkenkann mit dem im Abschnitt 2.2.2 beschriebenen Verfahren erfolgen. Die entsprechendenMaterialkonstanten des Magneten können dem Datenblatt [80] entnommen werden.
2.3.2 Encoder-Modellierung
Für die magnetostatische FEM-Simulation sind präzise Modelle der Encoder erforderlich.Im Folgenden wird auf das Verfahren der Modellierung der passiven und aktiven Encodereingegangen.
Modellierung passiver Encoder
Passive Encoder bestehen aus einem ferromagnetischen Material mit geometrisch aus-geformten Encoderzähnen. Im Datenblatt vom KMI16/1 [88] wird ein Referenz-Encoder(DN5) beschrieben, auf welchen die Spezifikation innerhalb des Datenblattes beruhen. Dieim Fahrzeug eingesetzten Encoder weichen teilweise stark von der Form des beschriebe-nen Referenz-Encoders ab, was Einflüsse auf die Performance des Sensor-Encoder-Systemshat. Abweichungen bestehen in der Größe des Encoders, die Anzahl der Encoderzähne,die Form der Encoderzähne, die Ausrichtung der Zähne, das verwendete Material unddie Toleranzen. Besonders die Form der Encoderzähne hat Einfluss auf das System. Erst-malig wurde dieses von Schoermer in [104] messtechnisch nachgewiesen. Für die weitereUntersuchung der Ursachen dieser Einflüsse wurden die von Schoermer [104] verwendetenEncoder von Zippel [118] in der FEM-Software CST EM Studio modelliert und simuliert.Die passiven Encoder können aufgrund ihrer komplexen Strukturen und des nichtlinearenferromagnetischen Materials nicht analytisch berechnet werden [51]. Weitere Simulatio-nen, auch mit dem Referenz-Encoder DN5, wurden in [64] vorgestellt.
Präzise Zeichnungen der Automobil-Encoder waren nicht verfügbar, deshalb wurden fürdie Modellierung die Automobil-Encoder mit einem Koordinatenmessgerät vermessen, dieAußenkontur zurückgerechnet und danach in die FEM-Software importiert. Eine Bestim-mung der magnetischen Parameter des Encoder-Materials war nicht möglich. Deshalbwurden für die Simulation die Parameter eines einfachen Baustahls (ST37) verwendet.In der FEM-Simulation wurde das komplette Encodermodell auf wenige Encoderzähnereduziert, um das Mesh und die Simulationsdauer klein zu halten. Ein Beispiel für das
60
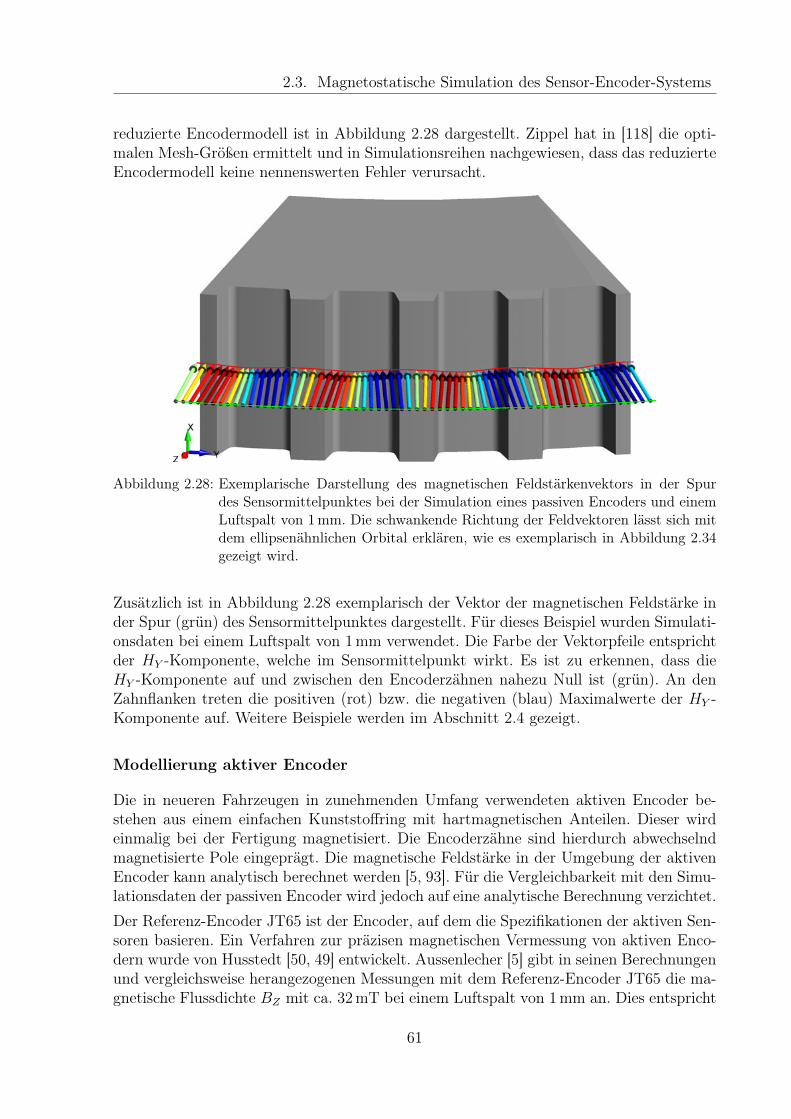
2.3. Magnetostatische Simulation des Sensor-Encoder-Systems
reduzierte Encodermodell ist in Abbildung 2.28 dargestellt. Zippel hat in [118] die opti-malen Mesh-Größen ermittelt und in Simulationsreihen nachgewiesen, dass das reduzierteEncodermodell keine nennenswerten Fehler verursacht.
Abbildung 2.28: Exemplarische Darstellung des magnetischen Feldstärkenvektors in der Spurdes Sensormittelpunktes bei der Simulation eines passiven Encoders und einemLuftspalt von 1 mm. Die schwankende Richtung der Feldvektoren lässt sich mitdem ellipsenähnlichen Orbital erklären, wie es exemplarisch in Abbildung 2.34gezeigt wird.
Zusätzlich ist in Abbildung 2.28 exemplarisch der Vektor der magnetischen Feldstärke inder Spur (grün) des Sensormittelpunktes dargestellt. Für dieses Beispiel wurden Simulati-onsdaten bei einem Luftspalt von 1 mm verwendet. Die Farbe der Vektorpfeile entsprichtder HY -Komponente, welche im Sensormittelpunkt wirkt. Es ist zu erkennen, dass dieHY -Komponente auf und zwischen den Encoderzähnen nahezu Null ist (grün). An denZahnflanken treten die positiven (rot) bzw. die negativen (blau) Maximalwerte der HY -Komponente auf. Weitere Beispiele werden im Abschnitt 2.4 gezeigt.
Modellierung aktiver Encoder
Die in neueren Fahrzeugen in zunehmenden Umfang verwendeten aktiven Encoder be-stehen aus einem einfachen Kunststoffring mit hartmagnetischen Anteilen. Dieser wirdeinmalig bei der Fertigung magnetisiert. Die Encoderzähne sind hierdurch abwechselndmagnetisierte Pole eingeprägt. Die magnetische Feldstärke in der Umgebung der aktivenEncoder kann analytisch berechnet werden [5, 93]. Für die Vergleichbarkeit mit den Simu-lationsdaten der passiven Encoder wird jedoch auf eine analytische Berechnung verzichtet.Der Referenz-Encoder JT65 ist der Encoder, auf dem die Spezifikationen der aktiven Sen-soren basieren. Ein Verfahren zur präzisen magnetischen Vermessung von aktiven Enco-dern wurde von Husstedt [50, 49] entwickelt. Aussenlecher [5] gibt in seinen Berechnungenund vergleichsweise herangezogenen Messungen mit dem Referenz-Encoder JT65 die ma-gnetische Flussdichte BZ mit ca. 32 mT bei einem Luftspalt von 1 mm an. Dies entspricht
61
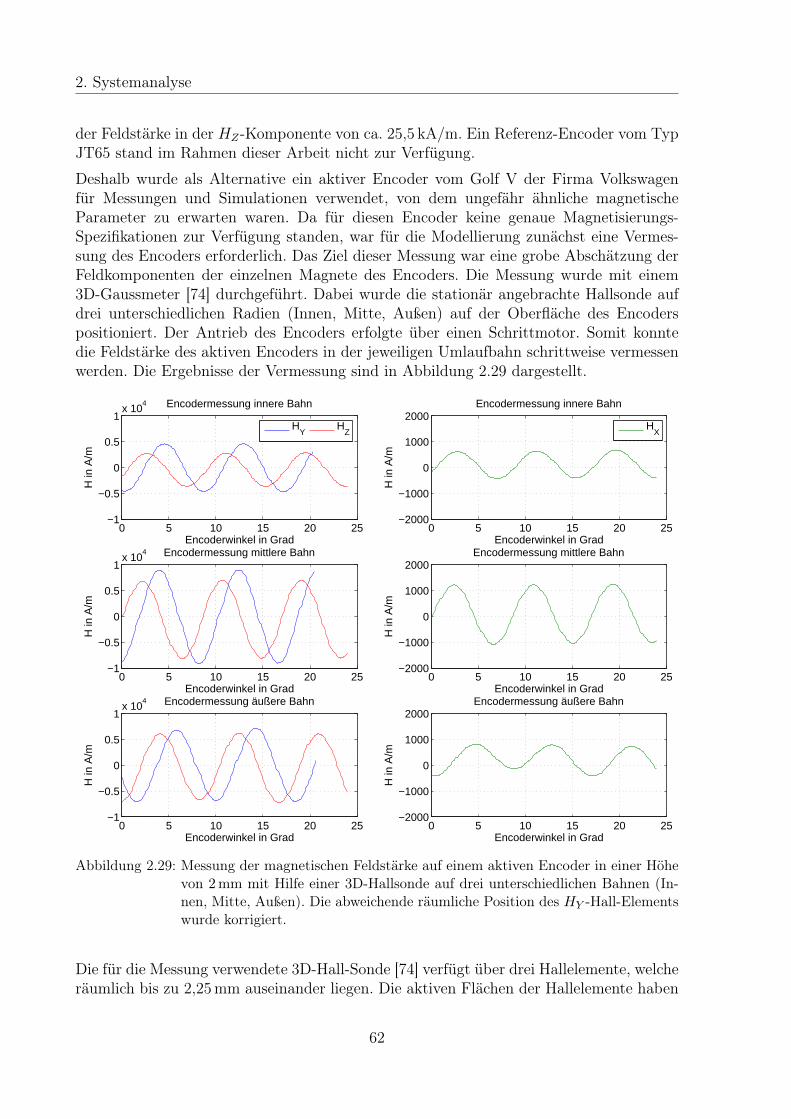
2. Systemanalyse
der Feldstärke in der HZ-Komponente von ca. 25,5 kA/m. Ein Referenz-Encoder vom TypJT65 stand im Rahmen dieser Arbeit nicht zur Verfügung.
Deshalb wurde als Alternative ein aktiver Encoder vom Golf V der Firma Volkswagenfür Messungen und Simulationen verwendet, von dem ungefähr ähnliche magnetischeParameter zu erwarten waren. Da für diesen Encoder keine genaue Magnetisierungs-Spezifikationen zur Verfügung standen, war für die Modellierung zunächst eine Vermes-sung des Encoders erforderlich. Das Ziel dieser Messung war eine grobe Abschätzung derFeldkomponenten der einzelnen Magnete des Encoders. Die Messung wurde mit einem3D-Gaussmeter [74] durchgeführt. Dabei wurde die stationär angebrachte Hallsonde aufdrei unterschiedlichen Radien (Innen, Mitte, Außen) auf der Oberfläche des Encoderspositioniert. Der Antrieb des Encoders erfolgte über einen Schrittmotor. Somit konntedie Feldstärke des aktiven Encoders in der jeweiligen Umlaufbahn schrittweise vermessenwerden. Die Ergebnisse der Vermessung sind in Abbildung 2.29 dargestellt.
0 5 10 15 20 25−1
−0.5
0
0.5
1x 10
4
Encoderwinkel in Grad
H in
A/m
Encodermessung innere Bahn
H
YH
Z
0 5 10 15 20 25−2000
−1000
0
1000
2000
Encoderwinkel in Grad
H in
A/m
Encodermessung innere Bahn
H
X
0 5 10 15 20 25−1
−0.5
0
0.5
1x 10
4
Encoderwinkel in Grad
H in
A/m
Encodermessung mittlere Bahn
0 5 10 15 20 25−2000
−1000
0
1000
2000
Encoderwinkel in Grad
H in
A/m
Encodermessung mittlere Bahn
0 5 10 15 20 25−1
−0.5
0
0.5
1x 10
4
Encoderwinkel in Grad
H in
A/m
Encodermessung äußere Bahn
0 5 10 15 20 25−2000
−1000
0
1000
2000
Encoderwinkel in Grad
H in
A/m
Encodermessung äußere Bahn
Abbildung 2.29: Messung der magnetischen Feldstärke auf einem aktiven Encoder in einer Höhevon 2 mm mit Hilfe einer 3D-Hallsonde auf drei unterschiedlichen Bahnen (In-nen, Mitte, Außen). Die abweichende räumliche Position des HY -Hall-Elementswurde korrigiert.
Die für die Messung verwendete 3D-Hall-Sonde [74] verfügt über drei Hallelemente, welcheräumlich bis zu 2,25 mm auseinander liegen. Die aktiven Flächen der Hallelemente haben
62
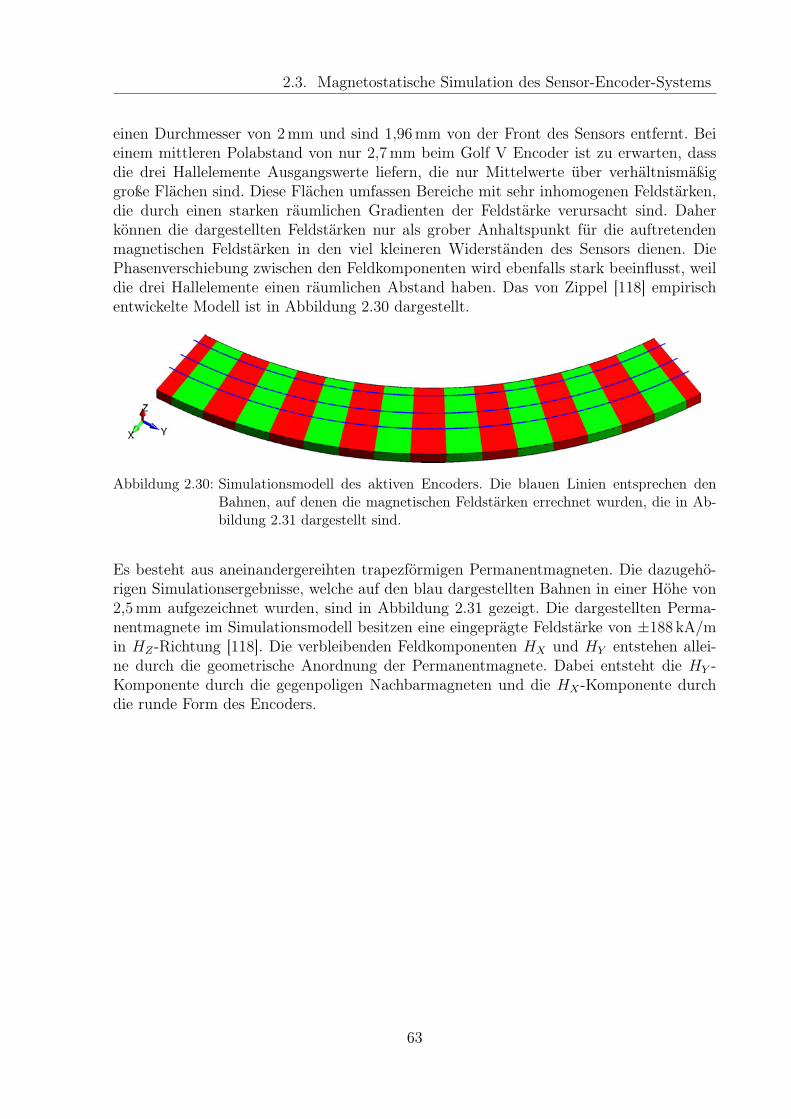
2.3. Magnetostatische Simulation des Sensor-Encoder-Systems
einen Durchmesser von 2 mm und sind 1,96 mm von der Front des Sensors entfernt. Beieinem mittleren Polabstand von nur 2,7 mm beim Golf V Encoder ist zu erwarten, dassdie drei Hallelemente Ausgangswerte liefern, die nur Mittelwerte über verhältnismäßiggroße Flächen sind. Diese Flächen umfassen Bereiche mit sehr inhomogenen Feldstärken,die durch einen starken räumlichen Gradienten der Feldstärke verursacht sind. Daherkönnen die dargestellten Feldstärken nur als grober Anhaltspunkt für die auftretendenmagnetischen Feldstärken in den viel kleineren Widerständen des Sensors dienen. DiePhasenverschiebung zwischen den Feldkomponenten wird ebenfalls stark beeinflusst, weildie drei Hallelemente einen räumlichen Abstand haben. Das von Zippel [118] empirischentwickelte Modell ist in Abbildung 2.30 dargestellt.
Abbildung 2.30: Simulationsmodell des aktiven Encoders. Die blauen Linien entsprechen denBahnen, auf denen die magnetischen Feldstärken errechnet wurden, die in Ab-bildung 2.31 dargestellt sind.
Es besteht aus aneinandergereihten trapezförmigen Permanentmagneten. Die dazugehö-rigen Simulationsergebnisse, welche auf den blau dargestellten Bahnen in einer Höhe von2,5 mm aufgezeichnet wurden, sind in Abbildung 2.31 gezeigt. Die dargestellten Perma-nentmagnete im Simulationsmodell besitzen eine eingeprägte Feldstärke von ±188 kA/min HZ-Richtung [118]. Die verbleibenden Feldkomponenten HX und HY entstehen allei-ne durch die geometrische Anordnung der Permanentmagnete. Dabei entsteht die HY -Komponente durch die gegenpoligen Nachbarmagneten und die HX-Komponente durchdie runde Form des Encoders.
63
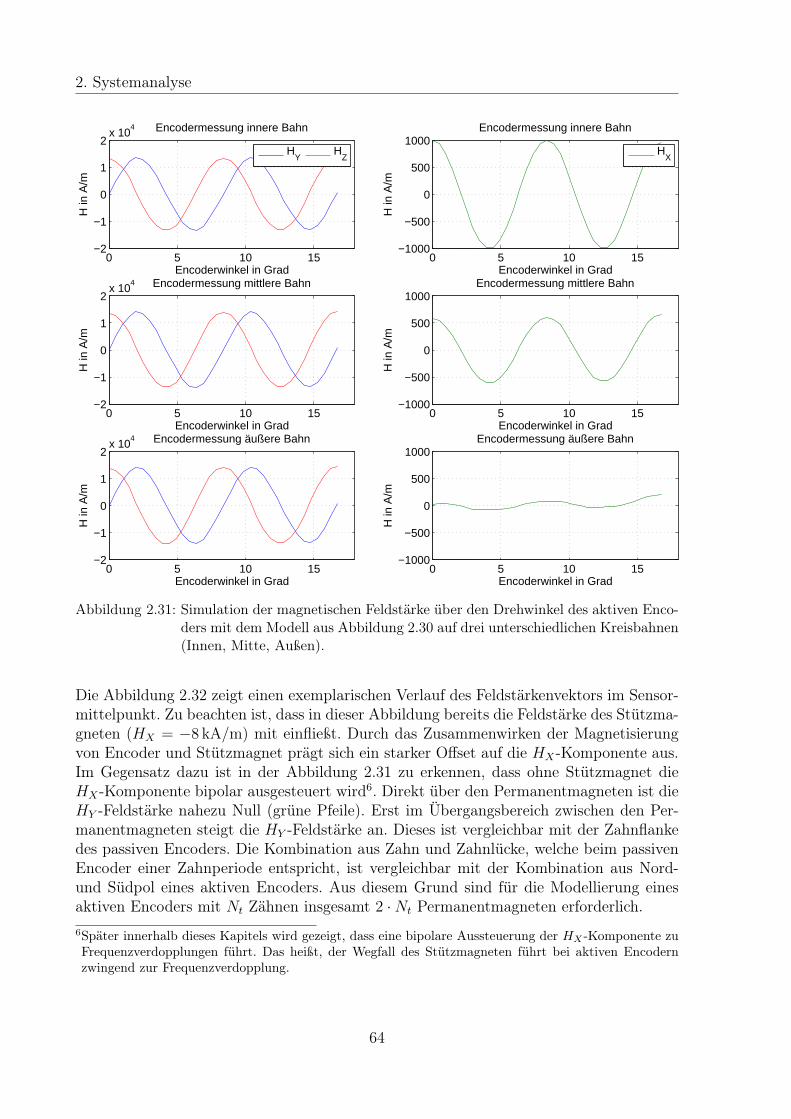
2. Systemanalyse
0 5 10 15−2
−1
0
1
2x 10
4
Encoderwinkel in Grad
H in
A/m
Encodermessung innere Bahn
H
YH
Z
0 5 10 15−1000
−500
0
500
1000
Encoderwinkel in Grad
H in
A/m
Encodermessung innere Bahn
H
X
0 5 10 15−2
−1
0
1
2x 10
4
Encoderwinkel in Grad
H in
A/m
Encodermessung mittlere Bahn
0 5 10 15−1000
−500
0
500
1000
Encoderwinkel in Grad
H in
A/m
Encodermessung mittlere Bahn
0 5 10 15−2
−1
0
1
2x 10
4
Encoderwinkel in Grad
H in
A/m
Encodermessung äußere Bahn
0 5 10 15−1000
−500
0
500
1000
Encoderwinkel in Grad
H in
A/m
Encodermessung äußere Bahn
Abbildung 2.31: Simulation der magnetischen Feldstärke über den Drehwinkel des aktiven Enco-ders mit dem Modell aus Abbildung 2.30 auf drei unterschiedlichen Kreisbahnen(Innen, Mitte, Außen).
Die Abbildung 2.32 zeigt einen exemplarischen Verlauf des Feldstärkenvektors im Sensor-mittelpunkt. Zu beachten ist, dass in dieser Abbildung bereits die Feldstärke des Stützma-gneten (HX = −8 kA/m) mit einfließt. Durch das Zusammenwirken der Magnetisierungvon Encoder und Stützmagnet prägt sich ein starker Offset auf die HX-Komponente aus.Im Gegensatz dazu ist in der Abbildung 2.31 zu erkennen, dass ohne Stützmagnet dieHX-Komponente bipolar ausgesteuert wird6. Direkt über den Permanentmagneten ist dieHY -Feldstärke nahezu Null (grüne Pfeile). Erst im Übergangsbereich zwischen den Per-manentmagneten steigt die HY -Feldstärke an. Dieses ist vergleichbar mit der Zahnflankedes passiven Encoders. Die Kombination aus Zahn und Zahnlücke, welche beim passivenEncoder einer Zahnperiode entspricht, ist vergleichbar mit der Kombination aus Nord-und Südpol eines aktiven Encoders. Aus diesem Grund sind für die Modellierung einesaktiven Encoders mit Nt Zähnen insgesamt 2 ·Nt Permanentmagneten erforderlich.6Später innerhalb dieses Kapitels wird gezeigt, dass eine bipolare Aussteuerung der HX -Komponente zuFrequenzverdopplungen führt. Das heißt, der Wegfall des Stützmagneten führt bei aktiven Encodernzwingend zur Frequenzverdopplung.
64

2.3. Magnetostatische Simulation des Sensor-Encoder-Systems
Abbildung 2.32: Vektor der magnetischen Feldstärke in der Spur des Sensormittelpunktes bei derSimulation eines aktiven Encoders im Zusammenwirken mit dem Stützmagne-ten. In dieser Ansicht wird der Encoder von außen betrachtet.
65
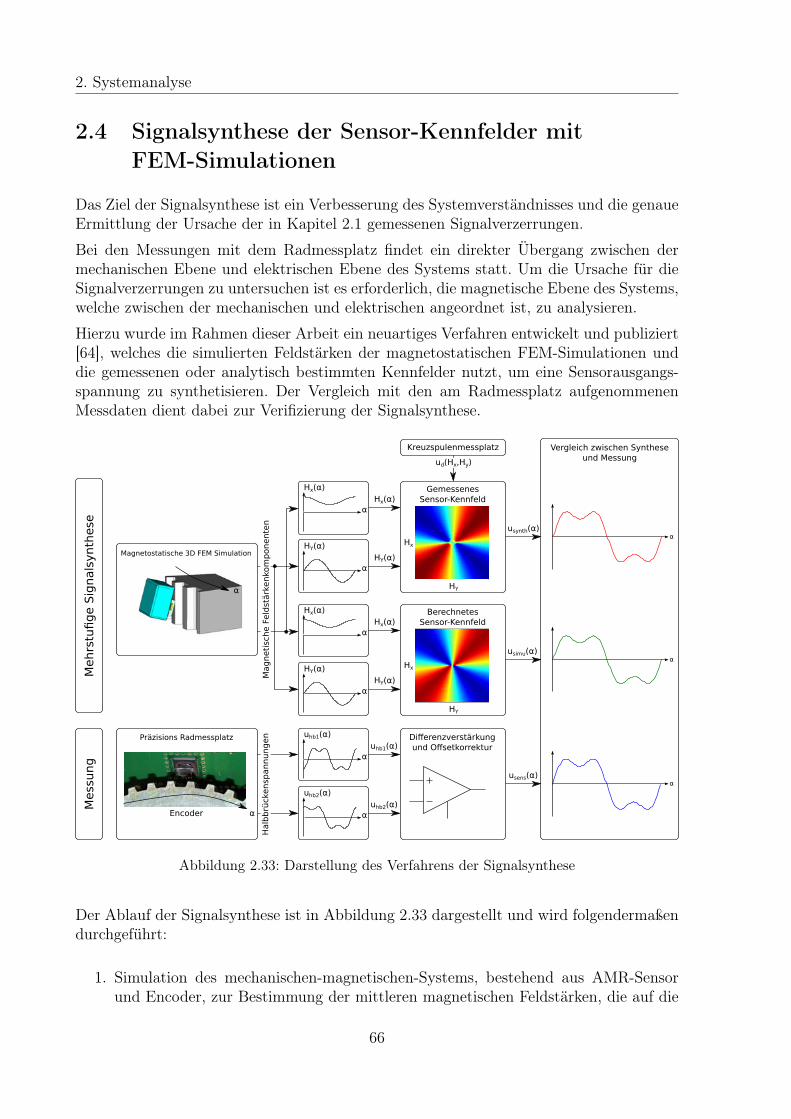
2. Systemanalyse
2.4 Signalsynthese der Sensor-Kennfelder mitFEM-Simulationen
Das Ziel der Signalsynthese ist ein Verbesserung des Systemverständnisses und die genaueErmittlung der Ursache der in Kapitel 2.1 gemessenen Signalverzerrungen.
Bei den Messungen mit dem Radmessplatz findet ein direkter Übergang zwischen dermechanischen Ebene und elektrischen Ebene des Systems statt. Um die Ursache für dieSignalverzerrungen zu untersuchen ist es erforderlich, die magnetische Ebene des Systems,welche zwischen der mechanischen und elektrischen angeordnet ist, zu analysieren.
Hierzu wurde im Rahmen dieser Arbeit ein neuartiges Verfahren entwickelt und publiziert[64], welches die simulierten Feldstärken der magnetostatischen FEM-Simulationen unddie gemessenen oder analytisch bestimmten Kennfelder nutzt, um eine Sensorausgangs-spannung zu synthetisieren. Der Vergleich mit den am Radmessplatz aufgenommenenMessdaten dient dabei zur Verifizierung der Signalsynthese.
Mehrs
tufig
e S
ign
als
yn
these
Mess
ung
Magnetostatische 3D FEM Simulation
Präzisions Radmessplatz
GemessenesSensor-KennfeldHx(α)
HY(α)
usynth(α)
α
α
Differenzverstärkungund Offsetkorrektur
usens(α)
uhb1(α)
uhb2(α)Encoder
HY
Hx
α
Hx(α)
HY(α)
α
α
uhb1(α)
uhb2(α)
α
α
Vergleich zwischen Syntheseund Messung
BerechnetesSensor-KennfeldHx(α)
HY(α)
usimu(α)
Magneti
sche F
eld
stärk
enko
mponente
n
HY
Hx
Hx(α)
HY(α)
α
α
Kreuzspulenmessplatz
ud(Hx,Hy)
α
α
Halb
brü
ckensp
annungen
Abbildung 2.33: Darstellung des Verfahrens der Signalsynthese
Der Ablauf der Signalsynthese ist in Abbildung 2.33 dargestellt und wird folgendermaßendurchgeführt:
1. Simulation des mechanischen-magnetischen-Systems, bestehend aus AMR-Sensorund Encoder, zur Bestimmung der mittleren magnetischen Feldstärken, die auf die
66
2.4. Signalsynthese der Sensor-Kennfelder mit FEM-Simulationen
einzelnen Brückenwiderstände des AMR-Sensors wirken, wie in Abschnitt 2.3 be-schrieben.
2a. Messung eines zweidimensionalen Sensor-Kennfeldes zur Umsetzung der auf denAMR-Sensor wirkenden magnetischen Feldstärken in elektrische Spannungen, wiein Abschnitt 2.2.2 beschrieben.
2b. Alternativ die Berechnung eines zweidimensionalen Sensor-Kennfeldes mit einemanalytischen Modell des Sensorverhaltens, wie in Abschnitt 2.2.1 beschrieben.
3. Berechnung der Brückendifferenzspannung mit den magnetischen Feldstärken ausder FEM-Simulation und dem zweidimensionalen Sensor-Kennfeld, wie im folgendenAbschnitt 2.4.1 beschrieben.
4. Vergleich der synthetisierten Signale mit Messdaten vom Radmessplatz, wie in fol-genden Abschnitt 2.4.2 beschrieben.
Im Abschnitt 2.4.2 wird die Anwendung des Verfahrens exemplarisch anhand von dreiBeispielen vorgestellt. Diese Beispiele beinhalten eine Signalsynthese mit einem passivenEncoder ohne Verkippung, einem passiven Encoder mit einer Verkippung in der y-Achseund einem aktiven Encoder ohne Verkippung.
2.4.1 Berechnung der Brückendifferenzspannung
Die insgesamt acht resultierenden Feldstärkenfunktionen HX,Rn(α) und HY,Rn(α), wobein = 1, 2, 3, 4 entspricht, der simulierten magnetischen Feldstärken können über das analy-tisch bestimmte Sensorkennfeld aus Abschnitt 2.2.1 oder dem messtechnisch ermitteltenKennfeld aus Abschnitt 2.2.2 in eine elektrische Spannung umgerechnet werden. Der Über-gang der simulierten Feldstärken über das Sensorkennfeld zu der elektrischen Spannungist grafisch in Abbildung 2.34 dargestellt.
67
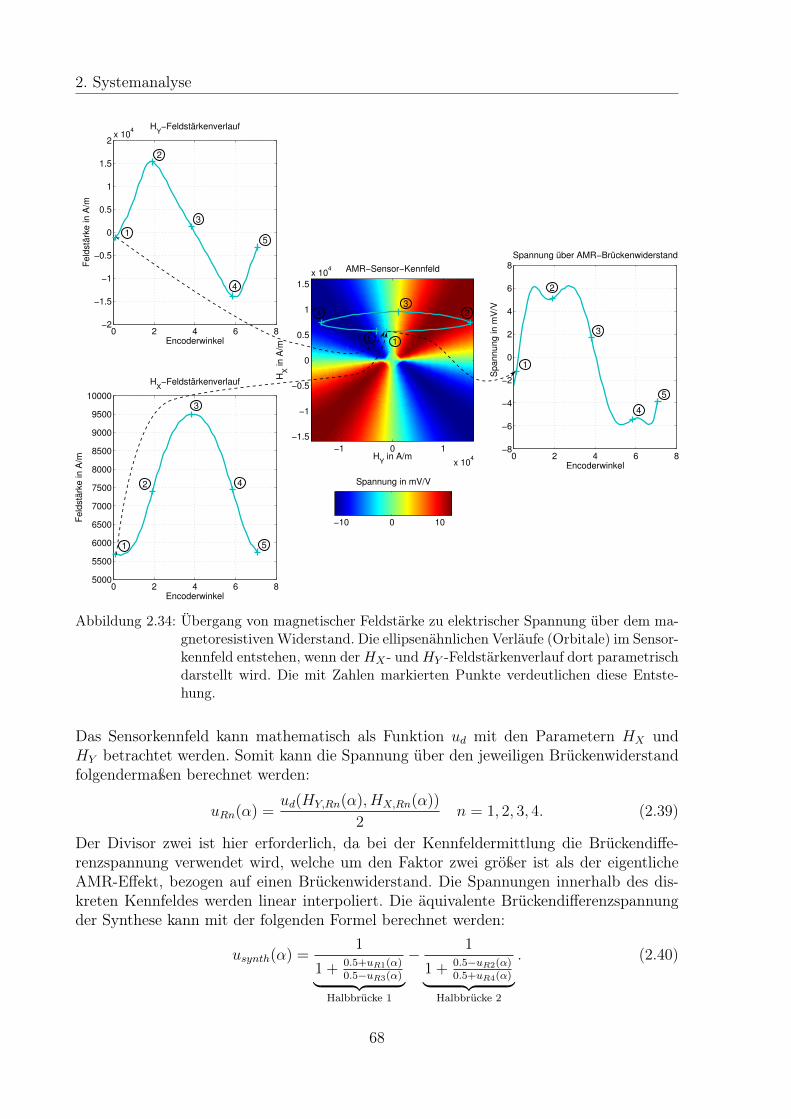
2. Systemanalyse
HYin A/m
HXinA/m
AMR−Sensor−Kennfeld
−1 0 1
x 104
−1.5
−1
−0.5
0
0.5
1
1.5x 104
Spannung in mV/V
−10 0 10
0 2 4 6 8−8
−6
−4
−2
0
2
4
6
8
Encoderwinkel
SpannunginmV/V
Spannung über AMR−Brückenwiderstand
0 2 4 6 8−2
−1.5
−1
−0.5
0
0.5
1
1.5
2x 10
4
Encoderwinkel
Feldstärke
inA/m
HY−Feldstärkenverlauf
0 2 4 6 85000
5500
6000
6500
7000
7500
8000
8500
9000
9500
10000
Encoderwinkel
Feldstärke
inA/m
HX−Feldstärkenverlauf
1
2
3
4
5
1
2
3
4
5
1
2
3
4
5
1
23
4
5
Abbildung 2.34: Übergang von magnetischer Feldstärke zu elektrischer Spannung über dem ma-gnetoresistivenWiderstand. Die ellipsenähnlichen Verläufe (Orbitale) im Sensor-kennfeld entstehen, wenn derHX - undHY -Feldstärkenverlauf dort parametrischdarstellt wird. Die mit Zahlen markierten Punkte verdeutlichen diese Entste-hung.
Das Sensorkennfeld kann mathematisch als Funktion ud mit den Parametern HX undHY betrachtet werden. Somit kann die Spannung über den jeweiligen Brückenwiderstandfolgendermaßen berechnet werden:
uRn(α) =ud(HY,Rn(α), HX,Rn(α))
2n = 1, 2, 3, 4. (2.39)
Der Divisor zwei ist hier erforderlich, da bei der Kennfeldermittlung die Brückendiffe-renzspannung verwendet wird, welche um den Faktor zwei größer ist als der eigentlicheAMR-Effekt, bezogen auf einen Brückenwiderstand. Die Spannungen innerhalb des dis-kreten Kennfeldes werden linear interpoliert. Die äquivalente Brückendifferenzspannungder Synthese kann mit der folgenden Formel berechnet werden:
usynth(α) =1
1 + 0.5+uR1(α)0.5−uR3(α)︸ ︷︷ ︸
Halbbrücke 1
− 1
1 + 0.5−uR2(α)0.5+uR4(α)︸ ︷︷ ︸
Halbbrücke 2
. (2.40)
68

2.4. Signalsynthese der Sensor-Kennfelder mit FEM-Simulationen
2.4.2 Vergleich der Signalsynthese mit Messdaten
Beispiel 1: Passiver Encoder ohne Verkippung
In Abbildung 2.35 ist eine Synthese dargestellt, bei dem ein passiver Encoder (BMWE46 Vorderachse) für die Synthese verwendet wurde. Zwischen Encoder und AMR-Sensorbefindet sich ein Luftspalt von z = −0,2 mm. In Abbildung 2.36 ist die Positionierung desSensors zum Encoder grafisch dargestellt.
Alle dargestellten Signale in Abbildung 2.35 beziehen sich auf eine Zahnperiode. Die linkeSeite zeigt die simulierten magnetischen Feldstärken auf den einzelnen Brückenwiderstän-den aus der FEM-Simulation über den Winkel α aufgetragen, wobei sich der Sensor beimStart und beim Ende der Simulation mittig über dem Encoderzahn befindet. Die Pha-senverschiebung, wie sie besonders gut in Abbildung 2.35 links oben bei HY,Rn(α) zuerkennen ist, resultiert aus der geometrischen Anordnung der Brückenwiderstände. DieBrückenwiderstände der Halbbrücke, bestehend aus R1 und R3, werden abhängig von derDrehrichtung früher oder später als die andere Halbbrücke, bestehend aus R2 und R4, mitdem magnetischen Feld beaufschlagt. Weiterhin ist das Signal HY,Rn(α) bipolar ausgesteu-ert und annähernd offsetfrei. Die Zahnflanken des Encoders sorgen für die Modulation desHY,Rn(α)-Signals. Dabei treten die Nulldurchgänge im Signal HY,Rn(α) auf, wenn sich diejeweilige Halbbrücke mittig zwischen zwei Encoderzähnen oder mittig auf einem Encoder-zahn befindet. In dem Signal von HX,Rn(α) lässt sich hingegen eine geringe Modulationmit einem starken Offset erkennen, welches durch den Stützmagneten eingeprägt wird. Diegeringe Modulation lässt sich dadurch erklären, dass sich der magnetische Fluss zwischenSensor und Encoder erhöht, wenn sich der Sensor über einem Encoderzahn befindet. Dermagnetische Feldstärkenvektor des Stützmagneten wird somit in Richtung des Encodersabgelenkt, was zu einer betragsmäßigen Reduzierung von HX,Rn führt. Befindet sich derSensor hingegen zwischen zwei Encoderzähnen, was als eine Vergrößerung des Luftspaltsbetrachtet werden kann, ist der magnetische Fluss geringer und HX,Rn wird betragsmä-ßig größer. Zu bemerken ist, dass HX,Rn ohne Encoder eine magnetische Feldstärke vonHX,Rn ≈ 12 kA/m annimmt. Mit zunehmenden Luftspalt nimmt auch die magnetischeFeldstärke HX,Rn zu, welches auch die Empfindlichkeit des Sensors reduziert.
69
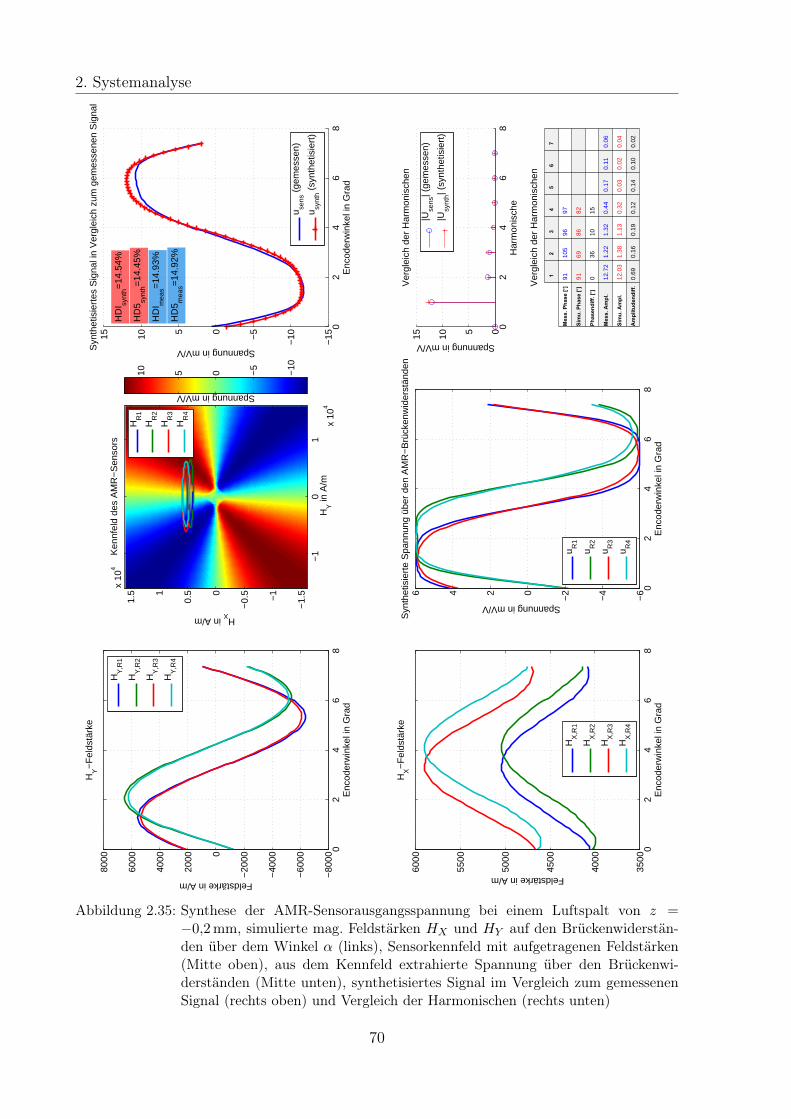
2. Systemanalyse
HY in
A/m
HX in A/m
Ken
nfel
d de
s A
MR
−S
enso
rs
−1
01
x 10
4
−1.
5
−1
−0.
50
0.51
1.5
x 10
4
Spannung in mV/V
−10
−5
0510H
R1
HR
2
HR
3
HR
4
02
46
8−
6
−4
−20246
Enc
oder
win
kel i
n G
rad
Spannung in mV/V
Syn
thet
isie
rte
Spa
nnun
g üb
er d
en A
MR
−B
rück
enw
ider
stän
den
u R1
u R2
u R3
u R4
Enc
oder
win
kel i
n G
rad
Spannung in mV/VSyn
thet
isie
rtes
Sig
nal i
n V
ergl
eich
zum
gem
esse
nen
Sig
nal
HD
I synt
h=14
.54%
HD
5 synt
h=14
.45%
HD
I mea
s=14
.93%
HD
5 mea
s=14
.92%
02
46
8−
15
−10−5051015
u sens
(ge
mes
sen)
u synt
h (sy
nthe
tisie
rt)
02
46
8051015
Ver
glei
ch d
er H
arm
onis
chen
Har
mon
isch
e
Spannung in mV/V
|U
sens
| (ge
mes
sen)
|Usy
nth| (
synt
hetis
iert
)
Ver
glei
ch d
er H
arm
onis
chen
12
34
56
7
Mes
s. P
hase
[°]
Sim
u. P
hase
[°]
Phas
endi
ff. [°
]
Mes
s. A
mpl
.
Sim
u. A
mpl
.
Am
plitu
dend
iff.
91 91 0 12.7
2
12.0
3
0.69
105
69 36 1.22
1.38
0.16
96 86 10 1.32
1.13
0.19
97 82 15 0.44
0.32
0.12
0.17
0.03
0.14
0.11
0.02
0.10
0.06
0.04
0.02
02
46
8−
8000
−60
00
−40
00
−20
000
2000
4000
6000
8000
Enc
oder
win
kel i
n G
rad
Feldstärke in A/m
HY−
Fel
dstä
rke
H
Y,R
1
HY
,R2
HY
,R3
HY
,R4
02
46
835
00
4000
4500
5000
5500
6000
Enc
oder
win
kel i
n G
rad
Feldstärke in A/m
HX−
Fel
dstä
rke
HX
,R1
HX
,R2
HX
,R3
HX
,R4
Abbildung 2.35: Synthese der AMR-Sensorausgangsspannung bei einem Luftspalt von z =−0,2 mm, simulierte mag. Feldstärken HX und HY auf den Brückenwiderstän-den über dem Winkel α (links), Sensorkennfeld mit aufgetragenen Feldstärken(Mitte oben), aus dem Kennfeld extrahierte Spannung über den Brückenwi-derständen (Mitte unten), synthetisiertes Signal im Vergleich zum gemessenenSignal (rechts oben) und Vergleich der Harmonischen (rechts unten)
70

2.4. Signalsynthese der Sensor-Kennfelder mit FEM-Simulationen
Z
X
Y
Abbildung 2.36: Verwendetes FEM-Simulationsmodell für die Synthese aus Abbildung 2.35, dar-gestellt ist ein Sensor-Encoder-System mit einem Luftspalt von z = −0,2 mm.
In dem Sensorkennfeld aus Abbildung 2.35 (Mitte oben) sind die Signale HY,Rn(α) undHX,Rn(α) parametrisch aufgetragen. Sie formen vier unterschiedliche Ellipsen, eine fürjeden Brückenwiderstand. Die vertikale Öffnung der Ellipsen entspricht der Modulati-on des HX-Feldes und die horizontale Öffnung die Modulation des HY -Feldes. Dadurchdass HX,Rn(α) nur im positivem Bereich ausgesteuert wird und HY,Rn(α) bipolar, be-finden sich die Ellipsen nur im erstem und zweitem Quadranten des Sensorkennfeldes.Während eines Umlaufs, was einer Zahnperiode entspricht, durchkreuzt jede Ellipse ein-malig einen stark roten (hohe positive Spannung), einen grünen (null Spannung) undeinen stark blauen (hohe negative Spannung) Bereich des Kennfeldes. Folglich müssen dieaus dem Sensorkennfeld extrahierten synthetisierten Spannungen der Brückenwiderstän-de uR1, uR2, uR3, uR4 über genau eine Periode verfügen, wie es mittig unten in Abbildung2.35 dargestellt ist. Mit den in Kapitel 2.4.1 beschriebenen Formeln lässt sich aus diesenSpannungen das Brückendifferenzsignal usynth zurückrechnen, welches rechts oben in rotdargestellt ist. Im Vergleich dazu ist in blau eine Periode des Signals usens dargestellt,welches bei einer Messung mit dem Radmessplatz mit demselben Encoder und der glei-chen Einbauposition aufgezeichnet wurde. Die Ausprägung der Harmonischen der Signaleusynth und usens sind unten rechts dargestellt. Der Vergleich des synthetisierten mit demgemessenen Signal zeigt sowohl im Winkelbereich als auch im Spektralbereich eine guteÜbereinstimmung.
Beispiel 2: Passiver Encoder mit Verkippung um die y-Achse
Der Aufbau der in Abbildung 2.37 dargestellten Signalsynthese ist ähnlich zur Abbildung2.35. Bei der FEM-Simulation wurde eine Sensorpositionierung mit einem Luftspalt vonz = −0,4 mm und einer zusätzlichen Verkippung um die y-Achse gewählt.
71
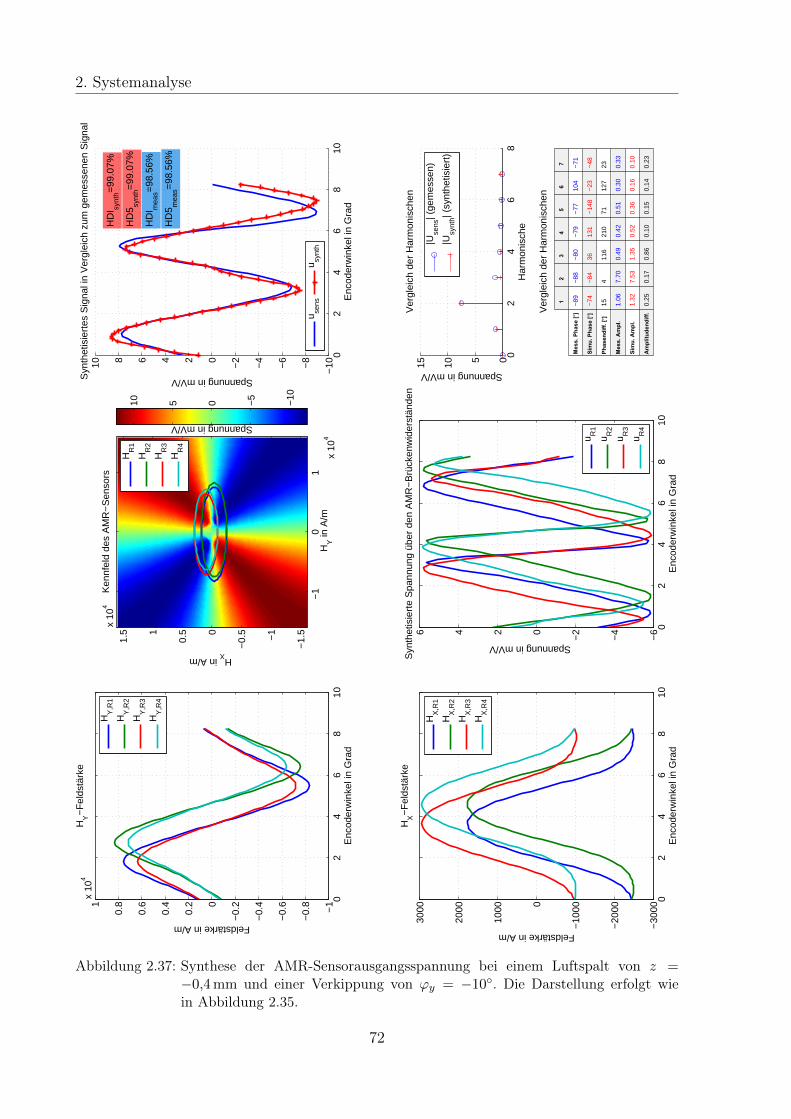
2. Systemanalyse
HY in
A/m
HX in A/m
Ken
nfel
d de
s A
MR
−S
enso
rs
−1
01
x 10
4
−1.
5
−1
−0.
50
0.51
1.5
x 10
4
Spannung in mV/V
−10
−5
0510H
R1
HR
2
HR
3
HR
4
02
46
810
−6
−4
−20246
Enc
oder
win
kel i
n G
rad
Spannung in mV/V
Syn
thet
isie
rte
Spa
nnun
g üb
er d
en A
MR
−B
rück
enw
ider
stän
den
u R1
u R2
u R3
u R4
Enc
oder
win
kel i
n G
rad
Spannung in mV/VSyn
thet
isie
rtes
Sig
nal i
n V
ergl
eich
zum
gem
esse
nen
Sig
nal
HD
I synt
h=99
.07%
HD
5 synt
h=99
.07%
HD
I mea
s=98
.56%
HD
5 mea
s=98
.56%
02
46
810
−10−8
−6
−4
−20246810
u sens
u synt
h
02
46
8051015
Ver
glei
ch d
er H
arm
onis
chen
Har
mon
isch
e
Spannung in mV/V
|U
sens
| (ge
mes
sen)
|Usy
nth| (
synt
hetis
iert
)
Ver
glei
ch d
er H
arm
onis
chen
12
34
56
7
Mes
s. P
hase
[°]
Sim
u. P
hase
[°]
Phas
endi
ff. [°
]
Mes
s. A
mpl
.
Sim
u. A
mpl
.
Am
plitu
dend
iff.
−89
−74
15 1.06
1.32
0.25
−88
−84
4 7.70
7.53
0.17
−80
36 116
0.49
1.35
0.86
−79
131
210
0.42
0.52
0.10
−77
−14
8
71 0.51
0.36
0.15
104
−23
127
0.30
0.16
0.14
−71
−48
23 0.33
0.10
0.23
02
46
810
−1
−0.
8
−0.
6
−0.
4
−0.
20
0.2
0.4
0.6
0.81
x 10
4
Enc
oder
win
kel i
n G
rad
Feldstärke in A/m
HY−
Fel
dstä
rke
H
Y,R
1
HY
,R2
HY
,R3
HY
,R4
02
46
810
−30
00
−20
00
−10
000
1000
2000
3000
Enc
oder
win
kel i
n G
rad
Feldstärke in A/m
HX−
Fel
dstä
rke
H
X,R
1
HX
,R2
HX
,R3
HX
,R4
Abbildung 2.37: Synthese der AMR-Sensorausgangsspannung bei einem Luftspalt von z =−0,4 mm und einer Verkippung von ϕy = −10. Die Darstellung erfolgt wiein Abbildung 2.35.
72
2.4. Signalsynthese der Sensor-Kennfelder mit FEM-Simulationen
Die simulierten Feldstärken aus der Abbildung 2.37 links sehen von der Signalform ähn-lich aus, wie die aus Abbildung 2.35, jedoch mit dem entscheidenden Unterschied, dassHX,Rn jetzt bipolar ausgesteuert wird und die Amplitude der Modulation größer ist. DerGrund für die starke Reduzierung des Offsets des HX,Rn-Feldes liegt darin, dass durchdie Verkippung um die y-Achse die Magnetisierung des Stützmagneten, wie sie auch inAbbildung 2.27(b) dargestellt ist, in Richtung des Encoders gedreht wird. Die Zentrender resultierenden Ellipsen im Sensorkennfeld (Mitte oben) befindet sich jetzt annäherndim Ursprung des Kennfeldes. Dieses hat zur Folge, dass während eines Umlaufs zwei Ma-xima (rot) und zwei Minima (blau) passiert werden und nicht wie im ersten Beispiel ausAbschnitt 2.4.2 ein Minima und ein Maxima. Die Spannungen über den Brückenwider-ständen (Mitte unten) und somit auch die zurückgerechnete Brückendifferenzspannungusynth (oben rechts in rot) zeigen bei einer mechanischen Zahnperiode und einer Periodeder magnetischen Anregung auf den ersten Blick zwei Perioden im elektrischen Ausgangs-signal. Diese Frequenzverdopplung des elektrischen Brückendifferenzsignals ist auch beider Betrachtung der Harmonischen (unten rechts) zu erkennen. Die zweite Harmonischeist dort wesentlich stärker ausgeprägt als alle anderen Harmonischen. Bei genauerer Be-trachtung des synthetisierten bzw. gemessenen Signals ist zu erkennen, dass die beidenMaxima bzw. die beiden Minima nicht die gleiche Amplitude haben. Streng genommenist das elektrische Signal somit nicht periodisch. Aus dieser Asymmetrie des elektrischenSignals lässt sich ableiten, dass weiterhin Bestandteile der ersten Harmonischen im Signalenthalten sind, wie es auch die Harmonischen (unten rechts) zeigen. Solange bei einemSignal mit Frequenzverdopplung die erste Harmonische noch vorhanden ist, kann diesenoch mit einer Signalverarbeitung detektiert werden. Auch in diesem Beispiel zeigt dassynthetisierte Signal und das gemessene Signal eine gute Übereinstimmung.
ZY
X
Abbildung 2.38: Verwendetes FEM-Simulationsmodell für die Synthese aus Abbildung 2.37, dar-gestellt ist Sensor-Encoder-System mit einem Luftspalt von z = −0,4 mm undeine Verkippung von ϕy = −10.
73
2. Systemanalyse
Beispiel 3: Aktiver Encoder ohne Verkippung
In diesem Beispiel wird im Gegensatz zu den beiden vorherigen Beispielen ein aktiverEncoder verwendet, welcher keine geometrisch ausgeformten Zähne besitzt sondern auseinem Kunststoff mit ferromagnetischen Anteilen besteht. Die Darstellung der Signalsyn-these in Abbildung 2.39 ist ähnlich wie die aus Abbildung 2.35.
Auffallend beim Signal HX,Rn (links unten) in Abbildung 2.39 ist der starke Offset und diekleine Modulation. Der Grund für den starken Offset liegt darin, dass bei passiven Enco-dern Stützmagneten verwendet werden, die nur eine Magnetisierung der HX-Komponentebesitzen. Der aktive Encoder besitzt im Gegensatz dazu nur eine minimale Magnetisie-rung der HX-Komponente, was der Grund für die geringere Modulation ist. Das benötigteAnregungsfeld liefert der Encoder durch eine starke HY /HZ-Magnetisierung. Weiterhinist zu beobachten, dass sich das HX-Offset der oberen Brückenwiderstände R1 und R2 be-sonders stark von denen der Brückenwiderstände R3 und R4 unterscheidet. Diese beidenWiderstands-Paare bewegen sich durch den geometrischen Aufbau innerhalb des Sensorsauf zwei unterschiedlichen Radien auf dem Encoder. Der simulierte aktive Encoder liefertabhängig vom Radius stark unterschiedliche HX-Felder, was der Grund für die unter-schiedlichen Offsets ist. Die Ellipsen im Sensorkennfeld (Mitte oben) besitzen durch diegeringe Modulation der HX-Komponente eine kleine vertikale Öffnung. In diesem Beispielbefinden sich diese Ellipsen außerdem in einem linearen Bereich des Sensorkennfeldes,was das synthetisierten Brückendifferenzsignal usynth (rechts oben) und die dazugehöri-gen Harmonischen (rechts unten) zeigen. Der Unterschied zwischen dem synthetisiertenBrückendifferenzsignal und dem gemessenen Signal ist auch in diesem Beispiel minimal.
74
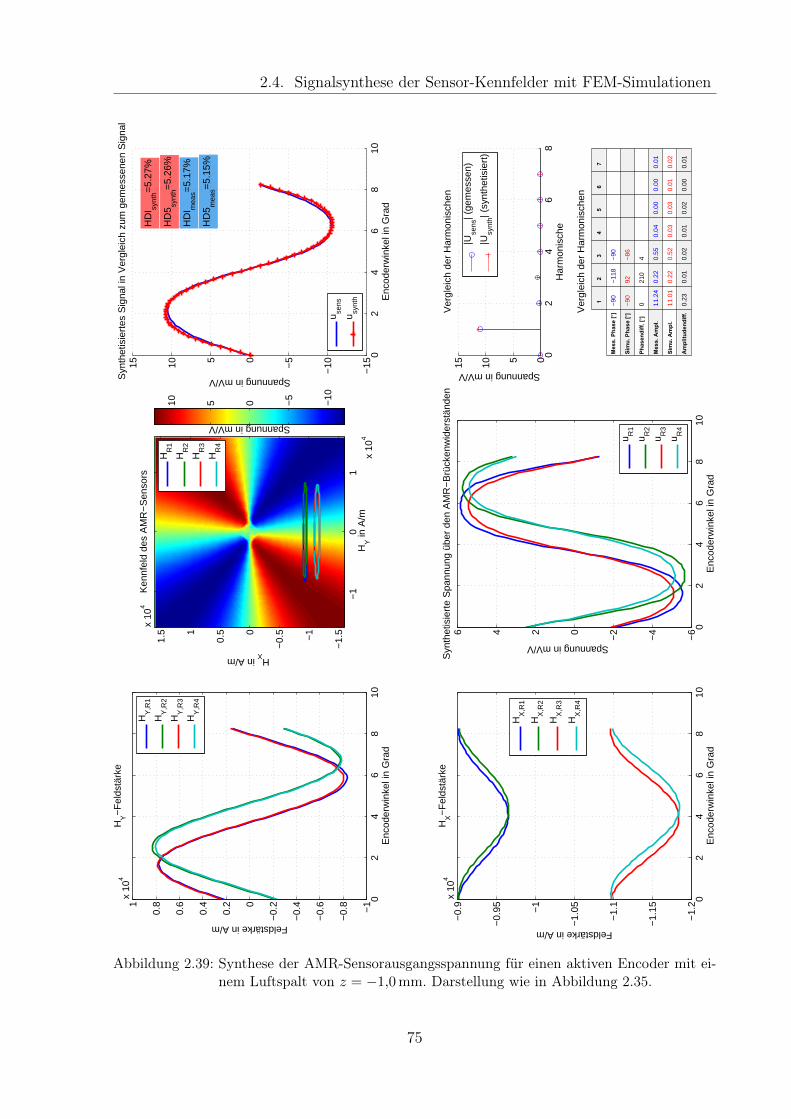
2.4. Signalsynthese der Sensor-Kennfelder mit FEM-Simulationen
HY in
A/m
HX in A/m
Ken
nfel
d de
s A
MR
−S
enso
rs
−1
01
x 10
4
−1.
5
−1
−0.
50
0.51
1.5
x 10
4
Spannung in mV/V
−10
−5
0510H
R1
HR
2
HR
3
HR
4
02
46
810
−6
−4
−20246
Enc
oder
win
kel i
n G
rad
Spannung in mV/V
Syn
thet
isie
rte
Spa
nnun
g üb
er d
en A
MR
−B
rück
enw
ider
stän
den
u R1
u R2
u R3
u R4
Enc
oder
win
kel i
n G
rad
Spannung in mV/VSyn
thet
isie
rtes
Sig
nal i
n V
ergl
eich
zum
gem
esse
nen
Sig
nal
HD
I synt
h=5.
27%
HD
5 synt
h=5.
26%
HD
I mea
s=5.
17%
HD
5 mea
s=5.
15%
02
46
810
−15
−10−5051015
u sens
u synt
h
02
46
8051015
Ver
glei
ch d
er H
arm
onis
chen
Har
mon
isch
e
Spannung in mV/V
|U
sens
| (ge
mes
sen)
|Usy
nth| (
synt
hetis
iert
)
Ver
glei
ch d
er H
arm
onis
chen
12
34
56
7
Mes
s. P
hase
[°]
Sim
u. P
hase
[°]
Phas
endi
ff. [°
]
Mes
s. A
mpl
.
Sim
u. A
mpl
.
Am
plitu
dend
iff.
−90
−90
0 11.2
4
11.0
1
0.23
−11
8
92 210
0.22
0.22
0.01
−90
−86
4 0.55
0.52
0.02
0.04
0.03
0.01
0.00
0.03
0.02
0.00
0.01
0.00
0.01
0.02
0.01
02
46
810
−1
−0.
8
−0.
6
−0.
4
−0.
20
0.2
0.4
0.6
0.81
x 10
4
Enc
oder
win
kel i
n G
rad
Feldstärke in A/m
HY−
Fel
dstä
rke
H
Y,R
1
HY
,R2
HY
,R3
HY
,R4
02
46
810
−1.
2
−1.
15
−1.
1
−1.
05−1
−0.
95
−0.
9x
104
Enc
oder
win
kel i
n G
rad
Feldstärke in A/m
HX−
Fel
dstä
rke
HX
,R1
HX
,R2
HX
,R3
HX
,R4
Abbildung 2.39: Synthese der AMR-Sensorausgangsspannung für einen aktiven Encoder mit ei-nem Luftspalt von z = −1,0 mm. Darstellung wie in Abbildung 2.35.
75
2. Systemanalyse
2.5 Bewertung und Gegenüberstellung der Ergebnisse
Im Abschnitt 2.4 konnte gezeigt werden, dass mit dem in dieser Arbeit entwickeltenVerfahren der Signalsynthese die Ursachen für komplexe Signalformen des Sensoraus-gangssignals ermittelt werden können. Das Konzept der Signalsynthese verwendet einemehrstufige Modellierung, bestehend aus FEM-Simulationen des magnetischen Systemsin Kombination mit messtechnisch oder analytisch berechneten Sensorkennfeldern desAMR-Sensors. Weiterhin ermöglicht das Verfahren eine anschauliche Visualisierung desVerlaufs der magnetischen Feldstärken im Sensor. Der Feldstärkenverlauf der HX- undHY -Komponente über eine Zahnperiode des Encoders formt bei parametrischer Darstel-lung ellipsenähnliche Orbitale im Sensor-Kennfeld. Die Form und Größe dieser Ellipsenist charakteristisch für unterschiedliche Sensorpositionen des Sensors zum Encoder. DieAbbildung 2.40 zeigt hierfür noch weitere Beispiele der Signalsynthese, die folgende Cha-rakteristika aufweisen:
• Bei einer typischen Einbauposition mit einem normalen Luftspalt befinden sich dieEllipsen in einem linearen Bereich des Sensorkennfeldes, was in einem annäherndsinusförmigen Sensorsignal resultiert.
• Wird der Sensor näher an den Encoder positioniert (kleiner Luftspalt), steigt dieAmplitude von HY,Rn und der lineare Bereich des Kennfeldes wird verlassen, was zuSignalverzerrungen führt.
• Eine entfernte Einbauposition (großer Luftspalt) führt dazu, dass HY kleiner wirdund zusätzlich HX steigt. Die Ellipse befindet sich in einem linearen Bereich, jedochsorgen beide Effekte für ein kleines Ausgangssignal.
• Die Verkippung um die x-Achse bewirkt ein HY -Offset, was eine Verschiebung derEllipse bewirkt. Das Sensorsignal wird hierdurch asymmetrisch verzerrt.
• Eine Verkippung um die y-Achse bewirkt ein HX-Offset. Wird die Magnetisierungdes Stützmagneten in Richtung des Encoders gedreht, bewegt sich die Ellipse bisin den Ursprung des Sensorkennfeldes, was zu der in Kapitel 2.4.2 beschriebenenFrequenzverdopplung führt.
• Wird der Sensor um die z-Achse rotiert, führt dieses zu einer Rotation der Ellipseim Sensorkennfeld.
Weitere Untersuchungen unterschiedlicher Sensorpositionen mit unterschiedlichen Enco-dern wurden in der betreuten studentischen Arbeit Zippel [118] in größerem Umfang nachdem Schema der Abbildung 2.35, 2.37 und 2.39 dargestellt.
Diese Ergebnisse haben erheblich dazu beigetragen, die Entstehung auch von komplexenSignalformen in Folge der nichtlinearen Zusammenhänge anschaulich zu verstehen.
76
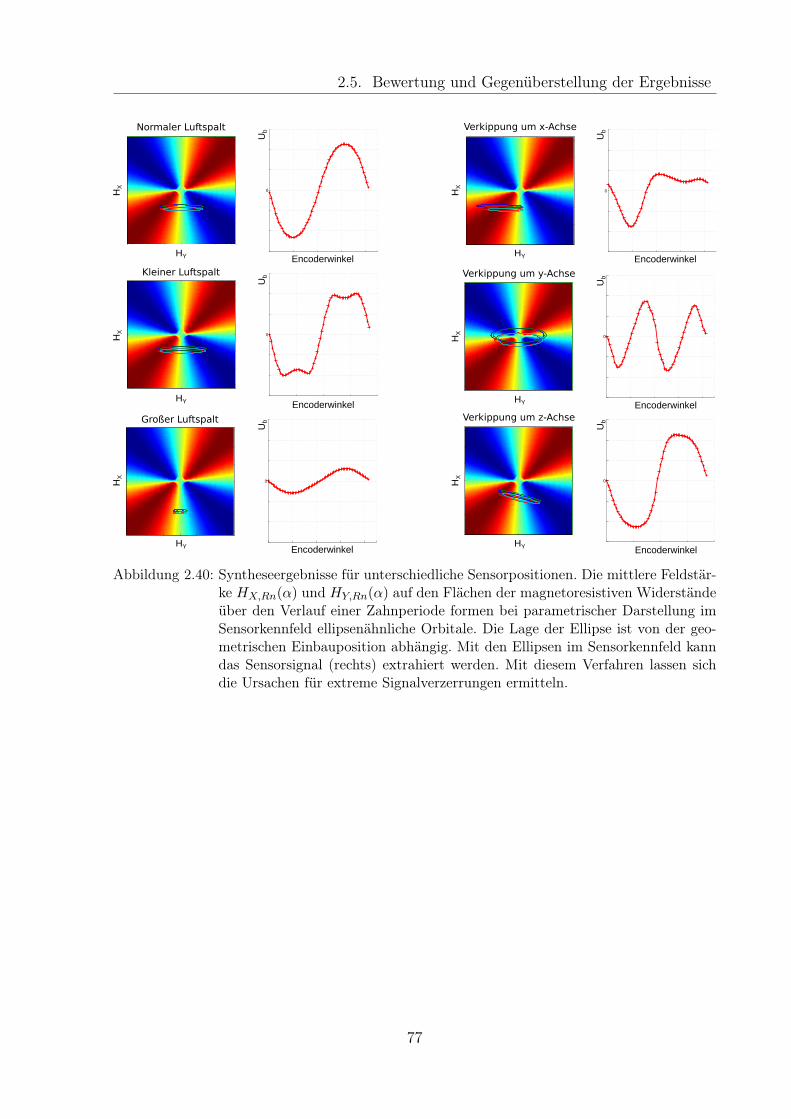
2.5. Bewertung und Gegenüberstellung der Ergebnisse
0
0
0
0 0
0
HX
HYU
bEncoderwinkel
HX
HY
Ub
HX
HY
Ub
HX
HY
Ub
HX
HY
Ub
HX
HY
Ub
Normaler Luftspalt Verkippung um x-Achse
Verkippung um y-Achse
Verkippung um z-Achse
Kleiner Luftspalt
Großer Luftspalt
Encoderwinkel
Encoderwinkel
Encoderwinkel
Encoderwinkel
Encoderwinkel
Abbildung 2.40: Syntheseergebnisse für unterschiedliche Sensorpositionen. Die mittlere Feldstär-ke HX,Rn(α) und HY,Rn(α) auf den Flächen der magnetoresistiven Widerständeüber den Verlauf einer Zahnperiode formen bei parametrischer Darstellung imSensorkennfeld ellipsenähnliche Orbitale. Die Lage der Ellipse ist von der geo-metrischen Einbauposition abhängig. Mit den Ellipsen im Sensorkennfeld kanndas Sensorsignal (rechts) extrahiert werden. Mit diesem Verfahren lassen sichdie Ursachen für extreme Signalverzerrungen ermitteln.
77

Kapitel 3
Diagnose-Algorithmen
Das Kapitel 2 hat gezeigt, dass aus dem Sensorsignal aussagekräftige Indikatoren für dieZustandsbestimmung abgeleitet werden können. Bei der experimentellen Untersuchungin diesem Kapitel wurden die Messungen am Radmessplatz bei konstanten Drehzahlendurchgeführt. Im realen Betrieb im Fahrzeug ist die Drehzahl des Rades nur bei kon-stanter Fahrzeuggeschwindigkeit konstant. Diese Phasen sind nicht ausreichend, um einekontinuierliche Diagnose zu gewährleisten. Es muss auch mit einer ständig änderndenDrehzahl gerechnet werden. Andererseits sind Phasen mit hoher positiver oder negati-ver Beschleunigung sehr selten1, sodass für diese kurze Ausnahmezeit auf die Diagnoseverzichtet werden kann.
Im Abschnitt 3.1 muss zunächst das Problem gelöst werden, dass auch bei einer sich stän-dig ändernden Drehzahl eine spektrale Analyse zur Berechnung der Indikatoren durchge-führt werden kann. Aufgrund der ständig ändernden Drehzahl muss auch die Abtastungder Drehzahl des Rades angepasst werden, damit eine spektrale Analyse zur Berechnungder Indikatoren durchgeführt werden kann. Als Lösung wird vorgeschlagen, bereits für dieAbtastung nicht wie üblich die Zeit als Bezugsgröße zu verwenden, sondern den momen-tanen Drehwinkel des Encoders.
Der Übergang der Abbildung der Zeit auf den Drehwinkel ist ein aus dem Maschinenbauunter der Bezeichnung Ordnungsanalyse bekanntes Verfahren [61, 62]. Hier wird es auf denDrehwinkel des Encoders angewendet. In diesem Abschnitt werden zunächst die Verfah-ren zur Ordnungsanalyse vorgestellt. Weiterhin wird die Anwendbarkeit dieser Verfahrengeprüft und ein neues Verfahren vorgestellt, das im Sensor keine zusätzlichen Hilfsmittelfür die Erkennung des Drehwinkels erfordert. Dabei muss die Regelung der Abtastrateaus dem Sensorsignal selbst erfolgen.
Im Abschnitt 3.2 werden zwei grundsätzliche Verfahren zur winkeläquidistanten Abtas-tung des Signals behandelt. Das Sensorsignal wird im theoretisch einfachen Fall vollständigwinkeläquidistant in einer Periode abgetastet, was jedoch eine schnelle Datenverarbeitungin den folgenden Stufen erfordert. Alternativ kann das Sensorsignal winkeläquidistant un-terabgetastet werden, welches die Implementierung auf leistungsschwacher Hardware wiez.B. Mikrocontrollern ermöglicht.1Hohe Beschleunigungen gibt es unmittelbar im Anfahr- und Anhaltemoment oder beim Einsetzen desBlockierens der Räder.
79
3. Diagnose-Algorithmen
Im Abschnitt 3.3 werden Verfahren zur Bestimmung der harmonischen Anteile erläutert.Die angepasste DFT, die in ihrem Berechnungsaufwand reduziert wurde, wird vorgestelltund mit anderen Verfahren verglichen.
Der Abschnitt 3.4 beschäftigt sich mit der Bestimmung der Indikatoren. Dabei wird kurzauf den Einfluss der Parameter, wie Rauschen oder der Anzahl der Abtastwerte, einge-gangen.
Im letzten Abschnitt 3.5 werden Verfahren zum Diagnosebewertung unter Einbeziehungverschiedener Indikatoren vorgeschlagen. Aus dieser Diagnosebewertung werden die Dia-gnoseinformationen abgeleitet, die zum Steuergerät übertragen werden.
3.1 Abbildung der Zeit auf den Encoderwinkel
Die Frequenz des Signals des AMR-Sensors ist abhängig von der aktuellen Zahnfrequenz.Bei der Verwendung von AMR-Sensoren als ABS-Sensoren befinden sich diese an jedemRadlager am Fahrzeug. Für moderne Fahrerassistenzsysteme, wie die automatische Ein-parkhilfe oder die Berganfahrhilfe, werden immer höhere Wegauflösungen benötigt. Der-zeit ist eine Zahnanzahl von 40 bis 50 Zähnen üblich, welches einer Wegauflösung von ca.50mm bis 40mm je Zahnperiode entspricht, wenn ein gewöhnlicher Reifentyp 195/65 R15mit einem Umfang von ca. 2m verwendet wird. Eine höhere Zahnanzahl liefert somit einehöhere Wegauflösung. Durch die Auswertung der Nulldurchgänge des Sensorsignals kanndie Auflösung zusätzlich verdoppelt (ca. 25mm bis 20mm) werden.
Die Frequenz des Sensorsignals ist abhängig von der Drehzahl des Encoders und von derAnzahl der Encoderzähne. Wird beispielsweise von einem Radumfang von 2m und einemEncoder mit 50 Zähnen bei einer maximalen Geschwindigkeit von 300 km/h ausgegangen,so ergibt sich eine maximale Frequenz des Sensorsignals von 2,08 kHz. Anderseits sindsehr geringe Geschwindigkeiten und damit auch geringe Signalfrequenzen möglich. Bran-chenüblich wird eine untere Frequenzgrenze von 1Hz verwendet, ab der die spezifizierteVollfunktion garantiert wird. Als obere Frequenzgrenze sind 2500Hz spezifiziert [87]. DieFrequenz des Sensorsignals ist nur bei gleichbleibender Geschwindigkeit konstant. Auf-grund von Beschleunigungen und Verzögerungen ist dieses selten der Fall. Daraus folgt,dass es sich bei dem Sensorsignal nicht um ein zeitlich periodisches Signal handelt.
Für die erforderliche Spektralanalyse des Sensorsignals ist die übliche zeitlich äquidi-stante Abtastung möglich, jedoch erfordert dieses viele Ressourcen in der auswertendenHardware. Es muss sichergestellt werden, dass bei der maximalen Sensorfrequenz die Ab-tastfrequenz ausreichend ist, um entsprechend viele Abtastpunkte pro Zahnperiode auf-zunehmen. Zusätzlich muss eine ausreichende Speichertiefe vorhanden sein, damit bei derminimalen Sensorfrequenz mindestens eine vollständige Zahnperiode aufgezeichnet wird.Es ist naheliegend, statt der zeitdiskreten Abtastung eine winkeläquidistante Abtastungzu verwenden, weil die Beziehung zwischen Encoderzahn und Winkel konstant ist. DasVerfahren der winkeläquidistanten Abtastung, welche auch unter der äquidistanten Dreh-winkelabtastung [62] bekannt ist, ist ein verbreitetes Verfahren aus der Ordnungsanalyseim Maschinenbau. In der Abbildung 3.1 ist die Abbildung der Zeit auf den Encoderwin-kel anhand eines Sensorsignals usens(t) mit konstanter Beschleunigung dargestellt. Das
80
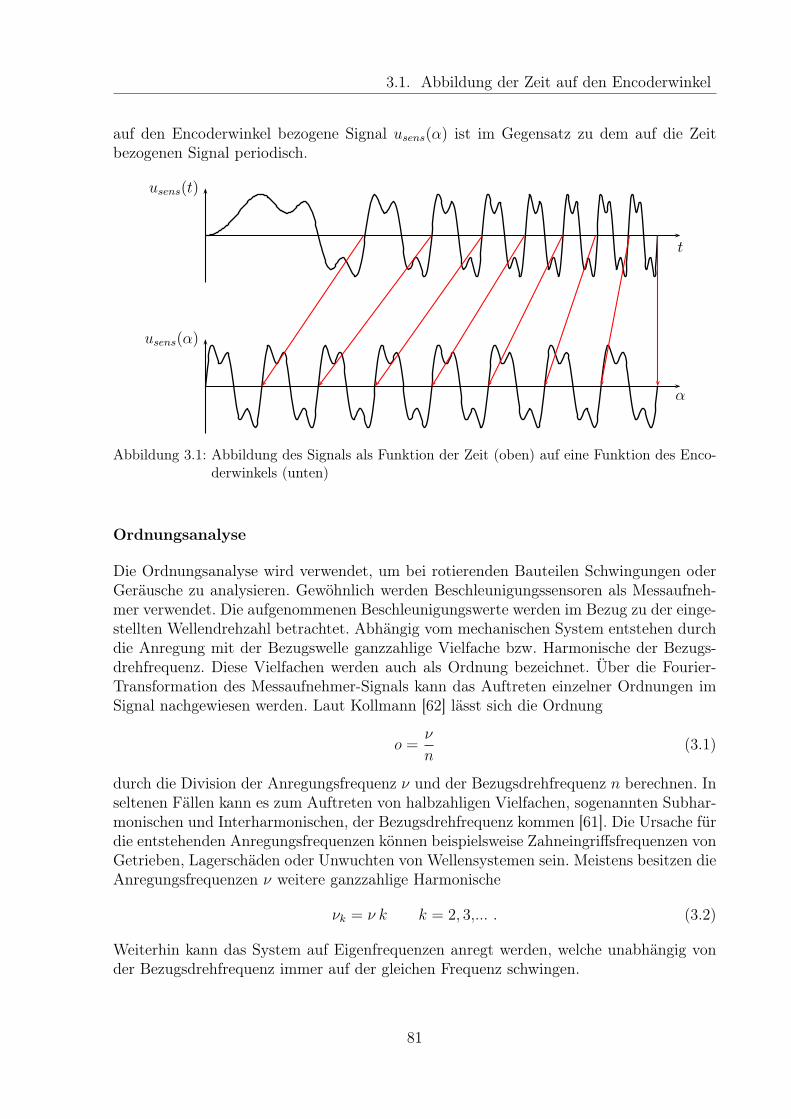
3.1. Abbildung der Zeit auf den Encoderwinkel
auf den Encoderwinkel bezogene Signal usens(α) ist im Gegensatz zu dem auf die Zeitbezogenen Signal periodisch.
t
usens(t)
α
usens(α)
Abbildung 3.1: Abbildung des Signals als Funktion der Zeit (oben) auf eine Funktion des Enco-derwinkels (unten)
Ordnungsanalyse
Die Ordnungsanalyse wird verwendet, um bei rotierenden Bauteilen Schwingungen oderGeräusche zu analysieren. Gewöhnlich werden Beschleunigungssensoren als Messaufneh-mer verwendet. Die aufgenommenen Beschleunigungswerte werden im Bezug zu der einge-stellten Wellendrehzahl betrachtet. Abhängig vom mechanischen System entstehen durchdie Anregung mit der Bezugswelle ganzzahlige Vielfache bzw. Harmonische der Bezugs-drehfrequenz. Diese Vielfachen werden auch als Ordnung bezeichnet. Über die Fourier-Transformation des Messaufnehmer-Signals kann das Auftreten einzelner Ordnungen imSignal nachgewiesen werden. Laut Kollmann [62] lässt sich die Ordnung
o =ν
n(3.1)
durch die Division der Anregungsfrequenz ν und der Bezugsdrehfrequenz n berechnen. Inseltenen Fällen kann es zum Auftreten von halbzahligen Vielfachen, sogenannten Subhar-monischen und Interharmonischen, der Bezugsdrehfrequenz kommen [61]. Die Ursache fürdie entstehenden Anregungsfrequenzen können beispielsweise Zahneingriffsfrequenzen vonGetrieben, Lagerschäden oder Unwuchten von Wellensystemen sein. Meistens besitzen dieAnregungsfrequenzen ν weitere ganzzahlige Harmonische
νk = ν k k = 2, 3,... . (3.2)
Weiterhin kann das System auf Eigenfrequenzen anregt werden, welche unabhängig vonder Bezugsdrehfrequenz immer auf der gleichen Frequenz schwingen.
81
3. Diagnose-Algorithmen
Äquivalenzen zur Ordnungsanalyse
Übertragen auf das Sensor-Encoder-System kann die Zahnfrequenz, welche mit dem AMR-Sensor gemessen wird, wie die Zahneingriffsfrequenz in einem Getriebe betrachtet werden.Die Zahnfrequenz νz kann bei bekannter Drehfrequenz n wie folgt berechnet werden:
νz = n z. (3.3)
Die Konstante z entspricht der Anzahl der Zähne des Encoders. Eine Unwucht bzw. einUnrundlauf des Encoders, wie er bereits in Kapitel 2.1.4 analysiert wurde, gibt Kollmann[62] mit der Anregungsfrequenz
νu = n (3.4)
an. Kollmann weist darauf hin, dass es zur Entstehung von Seitenbändern anderer Anre-gungsfrequenzen wie der Zahnfrequenz kommen kann. Diese Seitenbänder wurden eben-falls in Kapitel 2.1.4 dargestellt.
Kollmann [62] unterteilt die Verfahren zur Ordnungsanalyse in die folgenden Kategorien:
1. Zeitbasierte Frequenzanalyse
2. Drehwinkelbasierte Frequenzanalyse mit variabler Abtastfrequenz mit Referenzsen-sor
3. Drehwinkelbasierte Frequenzanalyse mit konstanter Abtastfrequenz mit Referenz-sensor
4. Modellbasierte Verfahren (Vold-Kalman-Filter)
Die zeitbasierte Frequenzanalyse setzt eine konstante Bezugsdrehfrequenz für die Ord-nungsanalyse voraus [62]. Die beiden Verfahren der drehwinkelbasierten Frequenzanaly-se sind sogenannte Order-Tracking-Verfahren, welche unabhängig von der eingestelltenBezugsdrehfrequenz die Ordnungen bestimmen. Somit sind diese Verfahren auch für Si-gnale mit schwankenden Frequenzen geeignet. Die Order-Tracking-Verfahren verwendenüblicherweise Referenzsensoren an der Bezugswelle, welche ganzzahlige Inkremente proUmdrehung liefern. Im Fall der drehwinkelbasierten Frequenzanalyse mit variabler Ab-tastfrequenz wird mit Hilfe des Referenzsensors die Abtastfrequenz geregelt. Eine Phasen-regelschleife (PLL) kann erforderlich sein, wenn der Referenzsensor weniger Inkrementeliefert als Abtastpunkte pro Umdrehung erforderlich sind. Die drehwinkelbasierte Fre-quenzanalyse mit konstanter Abtastfrequenz zeichnet das Signal des Referenzsensors unddes Messaufnehmers zunächst auf. Darauf folgend wird auf Basis des Referenzsensorsi-gnals das zeitlich äquidistant abgetastete Signal des Messaufnehmers auf entsprechendeDrehwinkelwerte abgebildet. Diese Anpassungsrechnung wird im Bereich der Ordnungs-analyse als Resampling bezeichnet [62]. Beim Vold-Kalman-Filter handelt es um einenFilter mit variabler Mittenfrequenz. Die Ordnungen werden direkt aus dem Zeitsignal mitHilfe eines Referenzsignals geschätzt. Eine detaillierte Beschreibung ist aus Kolerus [61]zu entnehmen.
82
3.1. Abbildung der Zeit auf den Encoderwinkel
Notwendigkeit eines weiteren Verfahrens
Die im vorherigen Abschnitt beschriebenen Verfahren der Ordnungsanalyse werden üb-licherweise in Messgeräten eingesetzt und sind nicht für eine Integration innerhalb einesSensors mit minimalen Hardware- und Energiebedarf ausgelegt. Die folgende Aufzählungbetrachtet die einzelnen Verfahren der Ordnungsanalyse bezüglich der Eignung für eineSensorintegration:
1. Das Verfahren der zeitbasierten Frequenzanalyse ist wegen der hierfür erforderlichenkonstanten Signalfrequenz nicht anwendbar.
2. Die drehwinkelbasierte Frequenzanalyse mit variabler Abtastfrequenz erscheint gutgeeignet, weil nur geringer Rechenaufwand erforderlich ist, jedoch wird bei diesemVerfahren stets ein zusätzlicher Referenzsensor benötigt.
3. Die drehwinkelbasierte Frequenzanalyse mit konstanter Abtastfrequenz ist nur mitvergleichbar hohem Rechenaufwand zu realisieren, da ein großer Frequenzbereichvon 1 . . . 2500 Hz des zu analysierenden Signals abgedeckt werden muss. Dieses er-fordert die Zwischenspeicherung vieler Abtastwerte mit nachträglichem Resampling.
4. Das modellbasierte Verfahren ist ein sehr rechenintensives Verfahren, welches typi-scherweise umfangreiche Matrizenrechnungen benötigt.
Da keines der aufgezählten Verfahren eine direkte Eignung aufweist, ergibt sich die Not-wendigkeit, ein neues Verfahren zu entwickeln, welches vom bekannten Stand der Technikabweicht.
Prädiktion der Periodendauer ohne Referenzsensor
Die drehwinkelbasierte Frequenzanalyse mit variabler Abtastfrequenz, welche einen Refe-renzsensor benötigt, ist aufgrund des geringen Rechenaufwands eine gut geeignete Basisfür die Entwicklung eines neuen Verfahrens zur Ordnungsanalyse. Jedoch ist in der Anwen-dung bei ABS-Sensoren ein Referenzsensor, neben dem eigentlichen Sensor, nicht sinnvoll.In erster Linie ist dafür der erhöhte Schaltungsaufwand als Grund zu nennen, in zweiterLinie ist für den Referenzsensor ebenfalls eine sehr hohe Zuverlässigkeit erforderlich.
Der Lösungsansatz besteht darin, das für die Ordnungsanalyse benötigte Referenzsi-gnal aus dem eigentlichen Sensorsignal zu schätzen und damit eine „drehwinkelbasierteFrequenzanalyse mit variabler Abtastfrequenz ohne Referenzsensor“ zu entwickeln. DieSchätzung erfolgt auf Basis der Nulldurchgänge des Sensorsignals. In der Einführung imAbschnitt 1.2 wurde beschrieben, dass die Generierung von Speed-Pulsen ebenfalls aufBasis von Nulldurchgängen arbeitet. Bei der realen Implementierung für die Ermittlungder Nulldurchgänge wird zusätzlich eine Hysterese verwendet, auf die in Kapitel 4.2.1eingegangen wird. Die Speed-Pulse ersetzen somit die Funktion des Referenzsensors derOrdnungsanalyse. Bei der Ordnungsanalyse werden üblicherweise vollständige Encoderpe-rioden abgetastet, was vollständigen Umdrehungen entspricht. In der vorliegenden Arbeit
83
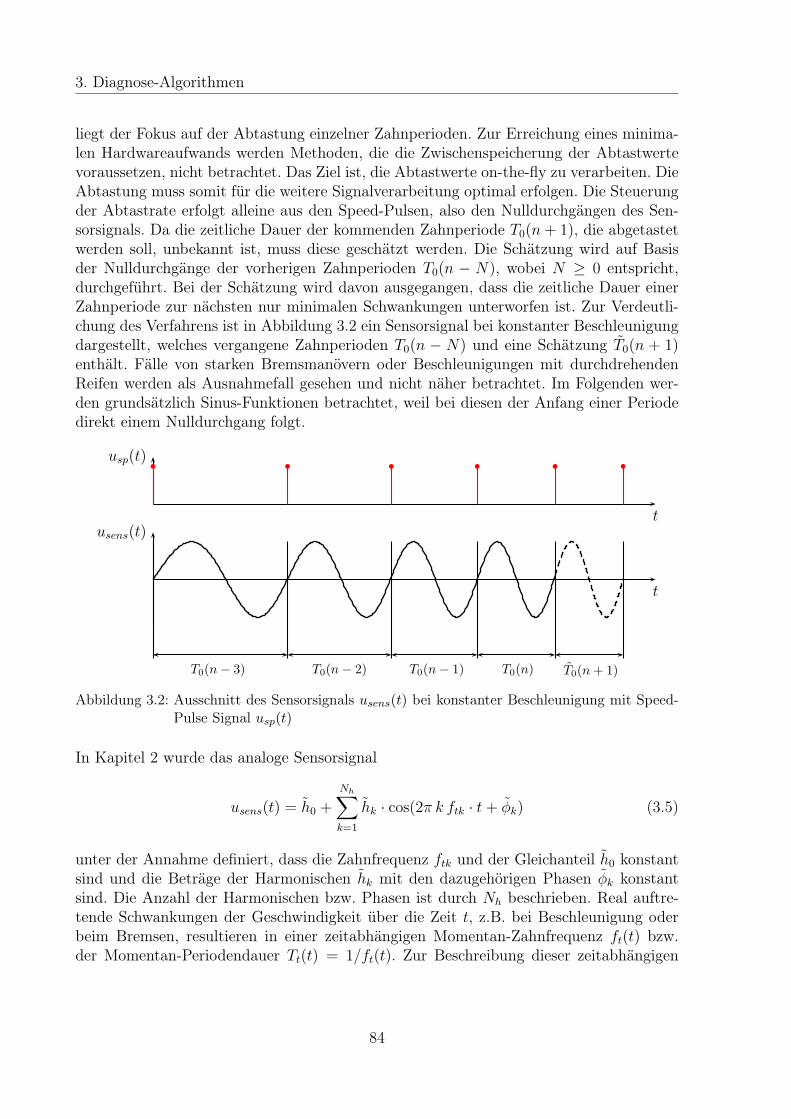
3. Diagnose-Algorithmen
liegt der Fokus auf der Abtastung einzelner Zahnperioden. Zur Erreichung eines minima-len Hardwareaufwands werden Methoden, die die Zwischenspeicherung der Abtastwertevoraussetzen, nicht betrachtet. Das Ziel ist, die Abtastwerte on-the-fly zu verarbeiten. DieAbtastung muss somit für die weitere Signalverarbeitung optimal erfolgen. Die Steuerungder Abtastrate erfolgt alleine aus den Speed-Pulsen, also den Nulldurchgängen des Sen-sorsignals. Da die zeitliche Dauer der kommenden Zahnperiode T0(n+ 1), die abgetastetwerden soll, unbekannt ist, muss diese geschätzt werden. Die Schätzung wird auf Basisder Nulldurchgänge der vorherigen Zahnperioden T0(n − N), wobei N ≥ 0 entspricht,durchgeführt. Bei der Schätzung wird davon ausgegangen, dass die zeitliche Dauer einerZahnperiode zur nächsten nur minimalen Schwankungen unterworfen ist. Zur Verdeutli-chung des Verfahrens ist in Abbildung 3.2 ein Sensorsignal bei konstanter Beschleunigungdargestellt, welches vergangene Zahnperioden T0(n − N) und eine Schätzung T0(n + 1)enthält. Fälle von starken Bremsmanövern oder Beschleunigungen mit durchdrehendenReifen werden als Ausnahmefall gesehen und nicht näher betrachtet. Im Folgenden wer-den grundsätzlich Sinus-Funktionen betrachtet, weil bei diesen der Anfang einer Periodedirekt einem Nulldurchgang folgt.
t
usp(t) b b b b b b
t
usens(t)
T0(n− 3) T0(n− 2) T0(n− 1) T0(n) T0(n+ 1)
Abbildung 3.2: Ausschnitt des Sensorsignals usens(t) bei konstanter Beschleunigung mit Speed-Pulse Signal usp(t)
In Kapitel 2 wurde das analoge Sensorsignal
usens(t) = h0 +
Nh∑k=1
hk · cos(2π k ftk · t+ φk) (3.5)
unter der Annahme definiert, dass die Zahnfrequenz ftk und der Gleichanteil h0 konstantsind und die Beträge der Harmonischen hk mit den dazugehörigen Phasen φk konstantsind. Die Anzahl der Harmonischen bzw. Phasen ist durch Nh beschrieben. Real auftre-tende Schwankungen der Geschwindigkeit über die Zeit t, z.B. bei Beschleunigung oderbeim Bremsen, resultieren in einer zeitabhängigen Momentan-Zahnfrequenz ft(t) bzw.der Momentan-Periodendauer Tt(t) = 1/ft(t). Zur Beschreibung dieser zeitabhängigen
84

3.1. Abbildung der Zeit auf den Encoderwinkel
Größen wird die zeitabhängige Phase
φ(t) = φ(t = 0) + 2π
t∫0
ft(τ) dτ = φ(t = 0) + 2π
t∫0
1
Tt(τ)dτ (3.6)
eingeführt. Danach wird ftk aus Gleichung 3.5 durch φ(t) ersetzt:
usens(t) = h0 +
Nh∑k=1
hk · cos(φ(t) · k + φk). (3.7)
Die zusätzliche Phase φk ist konstant. Für die Signalverarbeitung ist es erforderlich, dasanaloge Signal usens(t) in ein zeitdiskretes Signal
usens,d(n) = h0 +
Nh∑k=1
hk · cos(2π kn
Ns
+ φk) n = 0, 1, 2, . . . Ns − 1 (3.8)
mit einer Periode undNs Abtastwerten zu überführen. Die diskrete Fourier-Transformationdes Signals usens,d(n) liefert die Harmonischen hk und die Phasen φk für die Zustands-diagnose mit den in Kapitel 2.1 beschriebenen Indikatoren HDI , HDn und HDOE . DieHarmonischen hk und die daraus berechneten Indikatoren sind abhängig von der Qualitätder Schätzung der Zahnperiodendauer T0(n + 1), wie im weiteren Verlauf des Kapitelsgezeigt wird.
Für die Umsetzung des Sensorsignals mit zeitabhängiger Periodendauer Tt(t) aus Glei-chung 3.6 und 3.7 in ein diskretes Signal mit konstanter Periodendauer aus Gleichung 3.8ist eine mitlaufende Abtastung erforderlich, welche abhängig von der aktuellen Signal-frequenz die Abtastrate anpasst. Auf die eigentlichen Abtastverfahren wird in Kapitel3.2 eingegangen. Zunächst wird die Prädiktion der Zahnperiodendauer T0 betrachtet. Imeinfachsten Fall bei konstanter Geschwindigkeit kann für die Schätzung der kommendenZahnperiodendauer
T0(n+ 1) = T0(n) (3.9)
die aktuelle Dauer verwendet werden. Die Abbildung 3.3 zeigt ein Sensorsignal bei kon-stanter Geschwindigkeit, was auch das konstante Signal Tt(t) zeigt. Der absolute Prädik-tionsfehler
Ea(n) = T0(n)− T0(n) (3.10)
ist in diesem Fall 0.
85
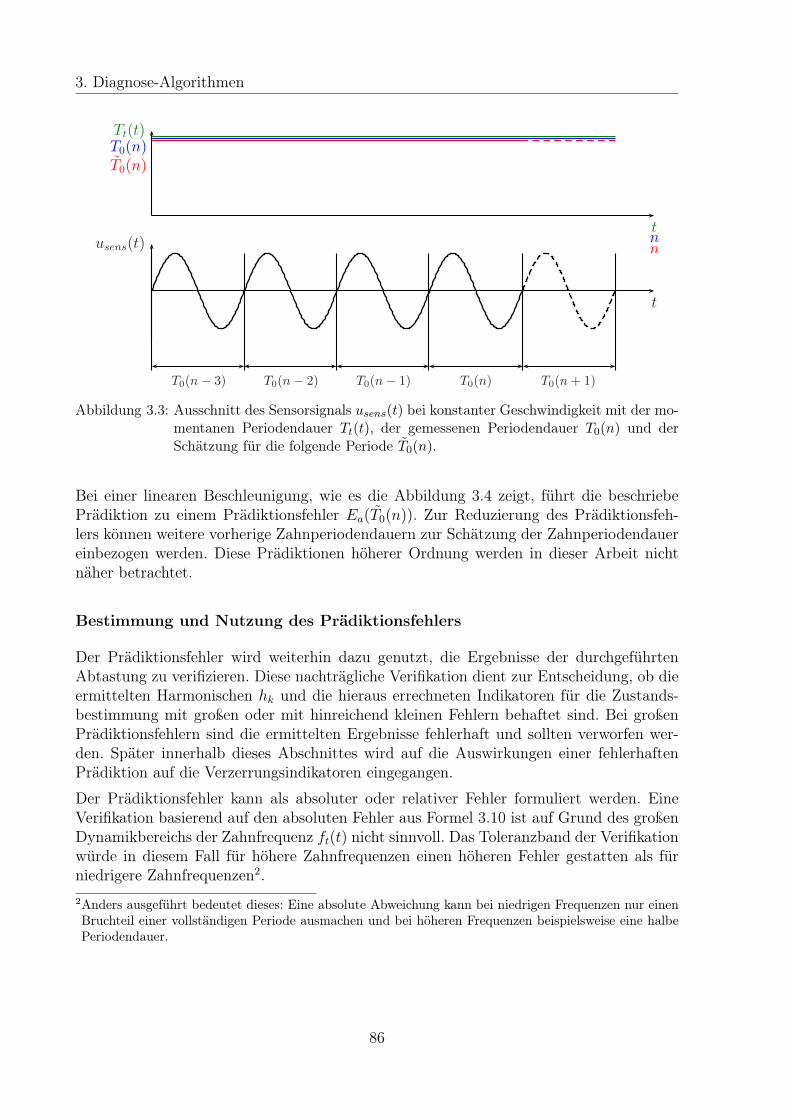
3. Diagnose-Algorithmen
t
Tt(t)T0(n)T0(n)
nn
t
usens(t)
T0(n− 3) T0(n− 2) T0(n− 1) T0(n) T0(n+ 1)
Abbildung 3.3: Ausschnitt des Sensorsignals usens(t) bei konstanter Geschwindigkeit mit der mo-mentanen Periodendauer Tt(t), der gemessenen Periodendauer T0(n) und derSchätzung für die folgende Periode T0(n).
Bei einer linearen Beschleunigung, wie es die Abbildung 3.4 zeigt, führt die beschriebePrädiktion zu einem Prädiktionsfehler Ea(T0(n)). Zur Reduzierung des Prädiktionsfeh-lers können weitere vorherige Zahnperiodendauern zur Schätzung der Zahnperiodendauereinbezogen werden. Diese Prädiktionen höherer Ordnung werden in dieser Arbeit nichtnäher betrachtet.
Bestimmung und Nutzung des Prädiktionsfehlers
Der Prädiktionsfehler wird weiterhin dazu genutzt, die Ergebnisse der durchgeführtenAbtastung zu verifizieren. Diese nachträgliche Verifikation dient zur Entscheidung, ob dieermittelten Harmonischen hk und die hieraus errechneten Indikatoren für die Zustands-bestimmung mit großen oder mit hinreichend kleinen Fehlern behaftet sind. Bei großenPrädiktionsfehlern sind die ermittelten Ergebnisse fehlerhaft und sollten verworfen wer-den. Später innerhalb dieses Abschnittes wird auf die Auswirkungen einer fehlerhaftenPrädiktion auf die Verzerrungsindikatoren eingegangen.
Der Prädiktionsfehler kann als absoluter oder relativer Fehler formuliert werden. EineVerifikation basierend auf den absoluten Fehler aus Formel 3.10 ist auf Grund des großenDynamikbereichs der Zahnfrequenz ft(t) nicht sinnvoll. Das Toleranzband der Verifikationwürde in diesem Fall für höhere Zahnfrequenzen einen höheren Fehler gestatten als fürniedrigere Zahnfrequenzen2.2Anders ausgeführt bedeutet dieses: Eine absolute Abweichung kann bei niedrigen Frequenzen nur einenBruchteil einer vollständigen Periode ausmachen und bei höheren Frequenzen beispielsweise eine halbePeriodendauer.
86
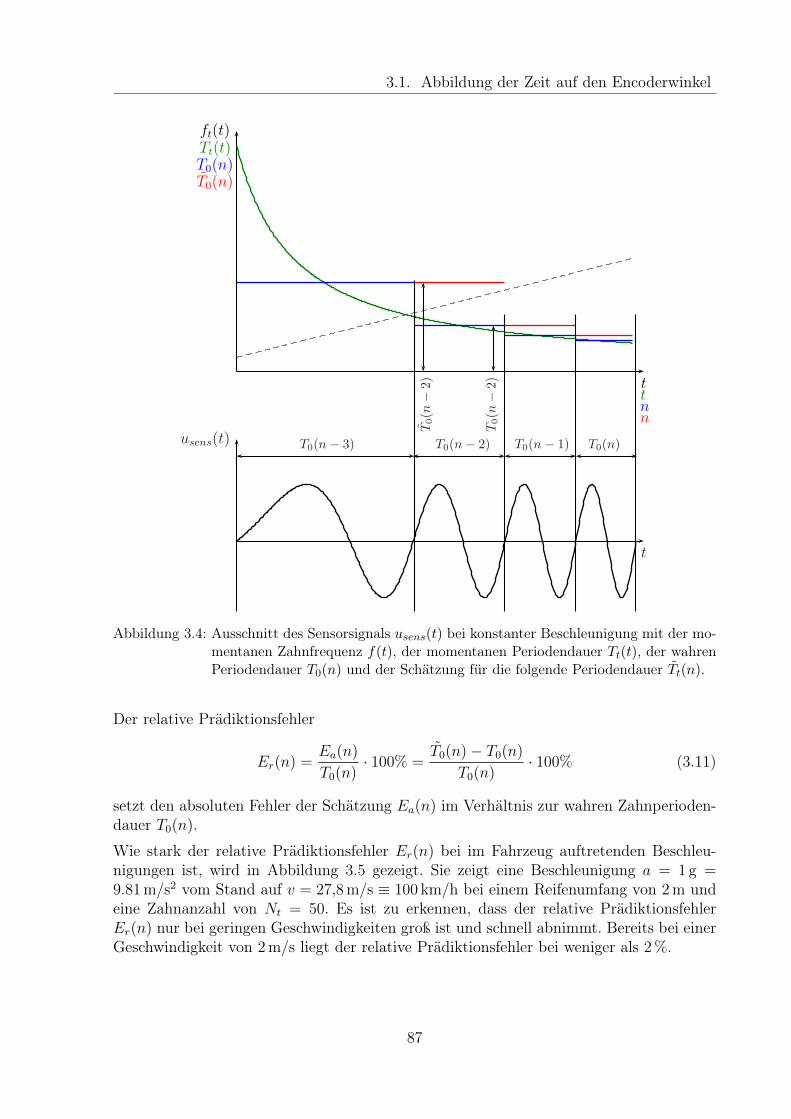
3.1. Abbildung der Zeit auf den Encoderwinkel
t
ft(t)Tt(t)T0(n)T0(n)
tnn
T0(n
−2)
T0(n
−2)
t
usens(t) T0(n− 3) T0(n− 2) T0(n− 1) T0(n)
Abbildung 3.4: Ausschnitt des Sensorsignals usens(t) bei konstanter Beschleunigung mit der mo-mentanen Zahnfrequenz f(t), der momentanen Periodendauer Tt(t), der wahrenPeriodendauer T0(n) und der Schätzung für die folgende Periodendauer Tt(n).
Der relative Prädiktionsfehler
Er(n) =Ea(n)
T0(n)· 100% =
T0(n)− T0(n)
T0(n)· 100% (3.11)
setzt den absoluten Fehler der Schätzung Ea(n) im Verhältnis zur wahren Zahnperioden-dauer T0(n).
Wie stark der relative Prädiktionsfehler Er(n) bei im Fahrzeug auftretenden Beschleu-nigungen ist, wird in Abbildung 3.5 gezeigt. Sie zeigt eine Beschleunigung a = 1 g =9.81 m/s2 vom Stand auf v = 27,8 m/s ≡ 100 km/h bei einem Reifenumfang von 2 m undeine Zahnanzahl von Nt = 50. Es ist zu erkennen, dass der relative PrädiktionsfehlerEr(n) nur bei geringen Geschwindigkeiten groß ist und schnell abnimmt. Bereits bei einerGeschwindigkeit von 2 m/s liegt der relative Prädiktionsfehler bei weniger als 2 %.
87
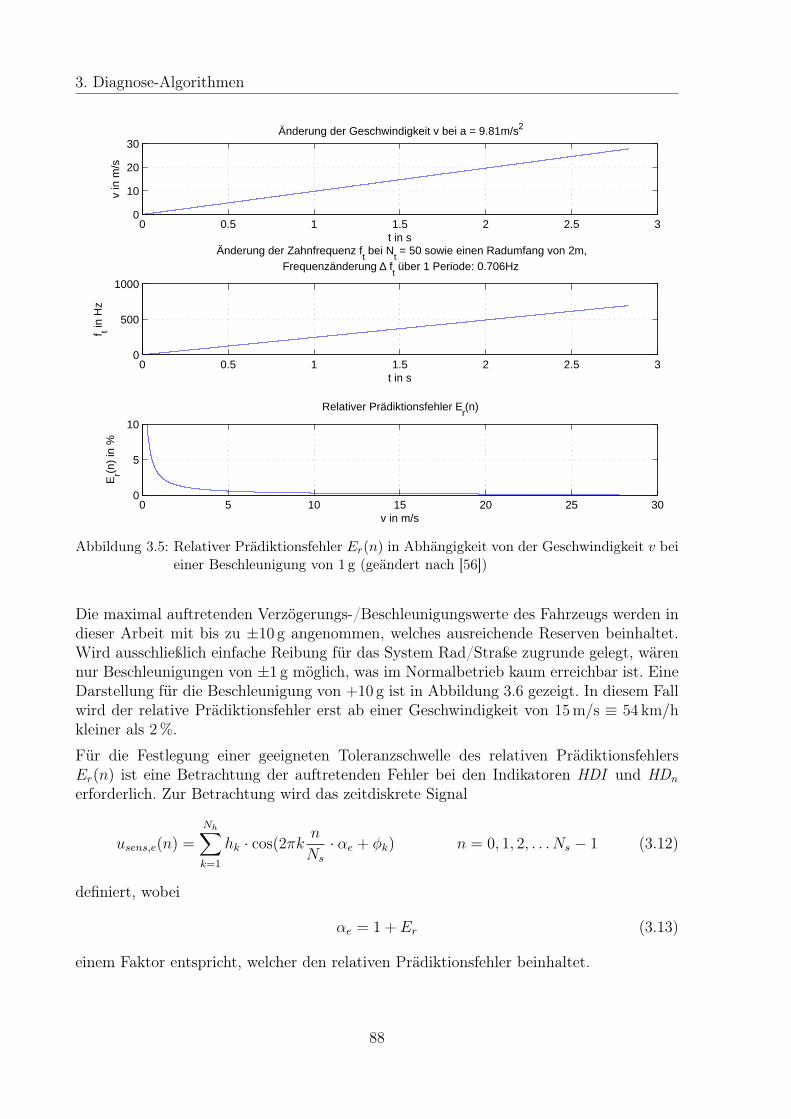
3. Diagnose-Algorithmen
0 0.5 1 1.5 2 2.5 30
10
20
30
v in
m/s
t in s
Änderung der Geschwindigkeit v bei a = 9.81m/s2
0 0.5 1 1.5 2 2.5 30
500
1000
f t in H
z
t in s
Änderung der Zahnfrequenz ft bei N
t = 50 sowie einen Radumfang von 2m,
Frequenzänderung ∆ ft über 1 Periode: 0.706Hz
0 5 10 15 20 25 300
5
10
Er(n
) in
%
v in m/s
Relativer Prädiktionsfehler Er(n)
Abbildung 3.5: Relativer Prädiktionsfehler Er(n) in Abhängigkeit von der Geschwindigkeit v beieiner Beschleunigung von 1 g (geändert nach [56])
Die maximal auftretenden Verzögerungs-/Beschleunigungswerte des Fahrzeugs werden indieser Arbeit mit bis zu ±10 g angenommen, welches ausreichende Reserven beinhaltet.Wird ausschließlich einfache Reibung für das System Rad/Straße zugrunde gelegt, wärennur Beschleunigungen von ±1 g möglich, was im Normalbetrieb kaum erreichbar ist. EineDarstellung für die Beschleunigung von +10 g ist in Abbildung 3.6 gezeigt. In diesem Fallwird der relative Prädiktionsfehler erst ab einer Geschwindigkeit von 15 m/s ≡ 54 km/hkleiner als 2 %.
Für die Festlegung einer geeigneten Toleranzschwelle des relativen PrädiktionsfehlersEr(n) ist eine Betrachtung der auftretenden Fehler bei den Indikatoren HDI und HDn
erforderlich. Zur Betrachtung wird das zeitdiskrete Signal
usens,e(n) =
Nh∑k=1
hk · cos(2πkn
Ns
· αe + φk) n = 0, 1, 2, . . . Ns − 1 (3.12)
definiert, wobei
αe = 1 + Er (3.13)
einem Faktor entspricht, welcher den relativen Prädiktionsfehler beinhaltet.
88
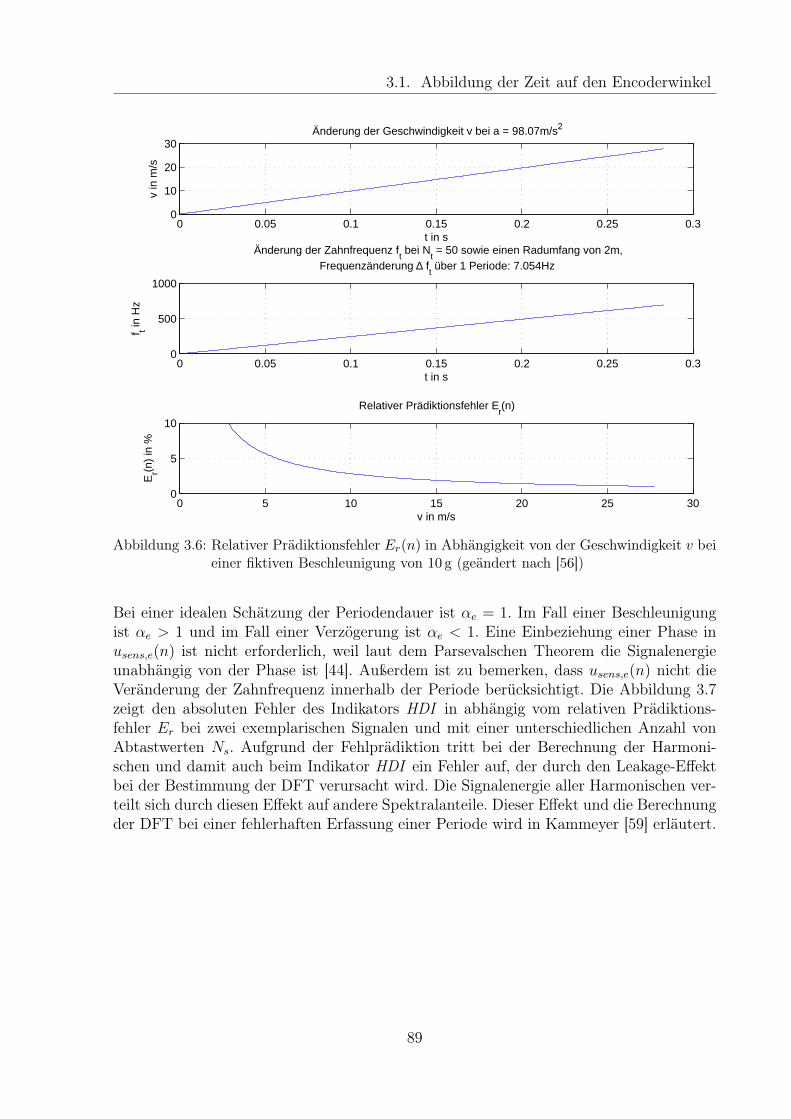
3.1. Abbildung der Zeit auf den Encoderwinkel
0 0.05 0.1 0.15 0.2 0.25 0.30
10
20
30v
in m
/s
t in s
Änderung der Geschwindigkeit v bei a = 98.07m/s2
0 0.05 0.1 0.15 0.2 0.25 0.30
500
1000
f t in H
z
t in s
Änderung der Zahnfrequenz ft bei N
t = 50 sowie einen Radumfang von 2m,
Frequenzänderung ∆ ft über 1 Periode: 7.054Hz
0 5 10 15 20 25 300
5
10
Er(n
) in
%
v in m/s
Relativer Prädiktionsfehler Er(n)
Abbildung 3.6: Relativer Prädiktionsfehler Er(n) in Abhängigkeit von der Geschwindigkeit v beieiner fiktiven Beschleunigung von 10 g (geändert nach [56])
Bei einer idealen Schätzung der Periodendauer ist αe = 1. Im Fall einer Beschleunigungist αe > 1 und im Fall einer Verzögerung ist αe < 1. Eine Einbeziehung einer Phase inusens,e(n) ist nicht erforderlich, weil laut dem Parsevalschen Theorem die Signalenergieunabhängig von der Phase ist [44]. Außerdem ist zu bemerken, dass usens,e(n) nicht dieVeränderung der Zahnfrequenz innerhalb der Periode berücksichtigt. Die Abbildung 3.7zeigt den absoluten Fehler des Indikators HDI in abhängig vom relativen Prädiktions-fehler Er bei zwei exemplarischen Signalen und mit einer unterschiedlichen Anzahl vonAbtastwerten Ns. Aufgrund der Fehlprädiktion tritt bei der Berechnung der Harmoni-schen und damit auch beim Indikator HDI ein Fehler auf, der durch den Leakage-Effektbei der Bestimmung der DFT verursacht wird. Die Signalenergie aller Harmonischen ver-teilt sich durch diesen Effekt auf andere Spektralanteile. Dieser Effekt und die Berechnungder DFT bei einer fehlerhaften Erfassung einer Periode wird in Kammeyer [59] erläutert.
89
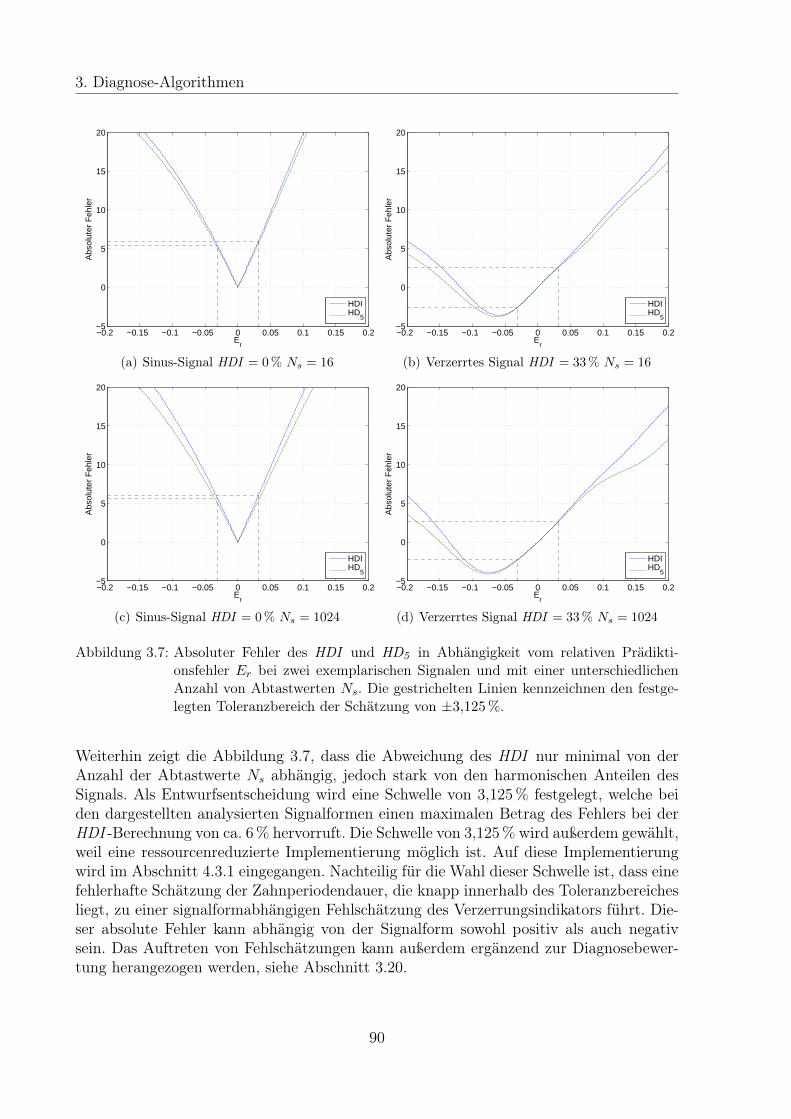
3. Diagnose-Algorithmen
−0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2−5
0
5
10
15
20
Er
Abs
olut
er F
ehle
r
HDIHD
5
(a) Sinus-Signal HDI = 0 % Ns = 16
−0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2−5
0
5
10
15
20
Er
Abs
olut
er F
ehle
r
HDIHD
5
(b) Verzerrtes Signal HDI = 33 % Ns = 16
−0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2−5
0
5
10
15
20
Er
Abs
olut
er F
ehle
r
HDIHD
5
(c) Sinus-Signal HDI = 0 % Ns = 1024
−0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2−5
0
5
10
15
20
Er
Abs
olut
er F
ehle
r
HDIHD
5
(d) Verzerrtes Signal HDI = 33 % Ns = 1024
Abbildung 3.7: Absoluter Fehler des HDI und HD5 in Abhängigkeit vom relativen Prädikti-onsfehler Er bei zwei exemplarischen Signalen und mit einer unterschiedlichenAnzahl von Abtastwerten Ns. Die gestrichelten Linien kennzeichnen den festge-legten Toleranzbereich der Schätzung von ±3,125 %.
Weiterhin zeigt die Abbildung 3.7, dass die Abweichung des HDI nur minimal von derAnzahl der Abtastwerte Ns abhängig, jedoch stark von den harmonischen Anteilen desSignals. Als Entwurfsentscheidung wird eine Schwelle von 3,125 % festgelegt, welche beiden dargestellten analysierten Signalformen einen maximalen Betrag des Fehlers bei derHDI -Berechnung von ca. 6 % hervorruft. Die Schwelle von 3,125 % wird außerdem gewählt,weil eine ressourcenreduzierte Implementierung möglich ist. Auf diese Implementierungwird im Abschnitt 4.3.1 eingegangen. Nachteilig für die Wahl dieser Schwelle ist, dass einefehlerhafte Schätzung der Zahnperiodendauer, die knapp innerhalb des Toleranzbereichesliegt, zu einer signalformabhängigen Fehlschätzung des Verzerrungsindikators führt. Die-ser absolute Fehler kann abhängig von der Signalform sowohl positiv als auch negativsein. Das Auftreten von Fehlschätzungen kann außerdem ergänzend zur Diagnosebewer-tung herangezogen werden, siehe Abschnitt 3.20.
90
3.2. Abtastverfahren
3.2 Abtastverfahren
Die Kombination aus der im vorherigen Kapitel behandelten Prädiktion der Zahnperi-odendauer T0(n) und der in diesem Abschnitt behandelten Abtastverfahren liefert ein aufden Encoder bezogenes winkeläquidistantes Signal. Das Signal ist für die weitere Ord-nungsanalyse erforderlich. Es werden zwei Abtastverfahren erläutert, die das kontinuier-liche Zeitsignal usens(t) über eine Abtastung auf ein winkeläquidistantes Signal usens(α)abbilden und ein diskretes winkeläquidistantes Signal usens,d(n) liefern:
usens(t)→ usens(α)→ usens,d(n). (3.14)
Im folgenden Abschnitt 3.3 wird aus diesem winkeläquidistanten Signal das Ordnungs-spektrum berechnet, das für die Berechnung der Zustandsindikatoren benötigt wird.
Im Rahmen dieser Arbeit wurden zwei Abtastverfahren, die mitlaufende Vollabtastung imAbschnitt 3.2.1 und die mitlaufende Unterabtastung im Abschnitt 3.2.2, entwickelt. Diemitlaufende Vollabtastung entnimmt innerhalb jeder Zahnperiode des Encoders Ns Ab-tastwerte. Im Regelfall steht somit ein Zustandsindikator für jeden einzelnen Encoderzahnzur Verfügung3. Im Gegensatz dazu setzt sich das Signal der mitlaufenden Unterabtastungaus den Abtastpunkten unterschiedlicher Zahnperioden zusammen.
In den nächsten Abschnitten wird der Übersicht halber zunächst nur eine Zahnperiode indie Analyse einbezogen, welches im folgenden als Ein-Zahnperioden-Analyse bezeichnetwird. Im Abschnitt 3.2.3 wird dann die Erkennung der Frequenzverdopplung mit derZwei-Zahnperioden-Analyse erläutert. Die Einbeziehung vollständiger Encoderperioden,also Nt Zahnperioden, ist theoretisch möglich, wenn dem Sensor die Anzahl der Zähne Nt
bekannt ist.
Anzahl der Abtastwerte
Das diskrete winkeläquidistante Signal usens,d(n) besteht aus Ns Abtastwerten und enthältim Fall der Vollabtastung exakt eine Zahnperiode bzw. zwei Zahnperioden des Sensor-signals usens(t). Im folgenden wird beschrieben, was bei der Wahl für die Anzahl derAbtastwerte zu beachten ist.
Im Abschnitt 2.1.5 wurde dargestellt, dass die Ermittlung von fünf Harmonischen aus-reichend ist. Um die Erkennung von sogenannten Frequenzverdopplungen, die später in-nerhalb dieses Abschnitts erläutert werden, zu ermöglichen, wird die Anzahl nochmalsauf 10 auszuwertende Harmonische erhöht4. Laut Abtasttheorem sind deshalb nur > 20Abtastwerte erforderlich. In Anbetracht der ressourceneffizienten Implementierung wurdedie Entwurfsentscheidung getroffen, für die Anzahl der Abtastwerte Ns eine Zweierpotenzmit dem Wert 64 = 26 zu verwenden. Weiterhin wird durch die Erhöhung der Anzahlder Abtastwerte erreicht, dass die Rauschleistung, welche sich auf das gesamte Spektrumverteilt, für die entscheidenden Spektralanteile reduziert wird.3Bei ausnahmsweise fehlerhafter Schätzung der Zahnperiodendauer fällt das Ergebnis für einzelne Zähnekurzzeitig aus.
4Dieses beinhaltet auch die Interharmonischen des Signals, die später für die Erkennung der Frequenz-verdopplung benötigt werden.
91
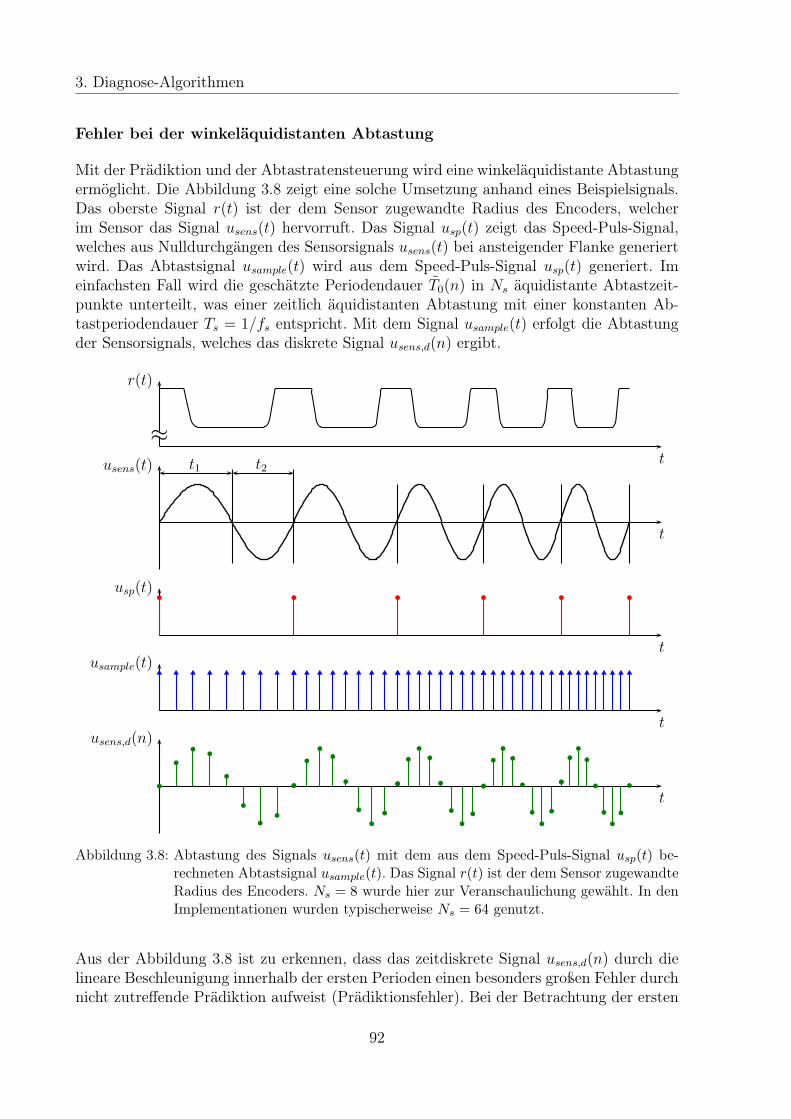
3. Diagnose-Algorithmen
Fehler bei der winkeläquidistanten Abtastung
Mit der Prädiktion und der Abtastratensteuerung wird eine winkeläquidistante Abtastungermöglicht. Die Abbildung 3.8 zeigt eine solche Umsetzung anhand eines Beispielsignals.Das oberste Signal r(t) ist der dem Sensor zugewandte Radius des Encoders, welcherim Sensor das Signal usens(t) hervorruft. Das Signal usp(t) zeigt das Speed-Puls-Signal,welches aus Nulldurchgängen des Sensorsignals usens(t) bei ansteigender Flanke generiertwird. Das Abtastsignal usample(t) wird aus dem Speed-Puls-Signal usp(t) generiert. Imeinfachsten Fall wird die geschätzte Periodendauer T0(n) in Ns äquidistante Abtastzeit-punkte unterteilt, was einer zeitlich äquidistanten Abtastung mit einer konstanten Ab-tastperiodendauer Ts = 1/fs entspricht. Mit dem Signal usample(t) erfolgt die Abtastungder Sensorsignals, welches das diskrete Signal usens,d(n) ergibt.
t
r(t)
≈
t
usp(t) b b b b b b
t
usens(t) t1 t2
t
usample(t) u u u u u u u u uu u u u u u u u uu u u u u u u u uu u u u u u u u uu u u u u u u u u
t
usens,d(n)
b
b
bb
b
b
bb
b b
b
bb
b
b
b
b
b b
b
b
b
b
b
b
b
bb
b
b
b
b
b
b
b
b b
b
b
b
b
b
b
b
b
Abbildung 3.8: Abtastung des Signals usens(t) mit dem aus dem Speed-Puls-Signal usp(t) be-rechneten Abtastsignal usample(t). Das Signal r(t) ist der dem Sensor zugewandteRadius des Encoders. Ns = 8 wurde hier zur Veranschaulichung gewählt. In denImplementationen wurden typischerweise Ns = 64 genutzt.
Aus der Abbildung 3.8 ist zu erkennen, dass das zeitdiskrete Signal usens,d(n) durch dielineare Beschleunigung innerhalb der ersten Perioden einen besonders großen Fehler durchnicht zutreffende Prädiktion aufweist (Prädiktionsfehler). Bei der Betrachtung der ersten
92
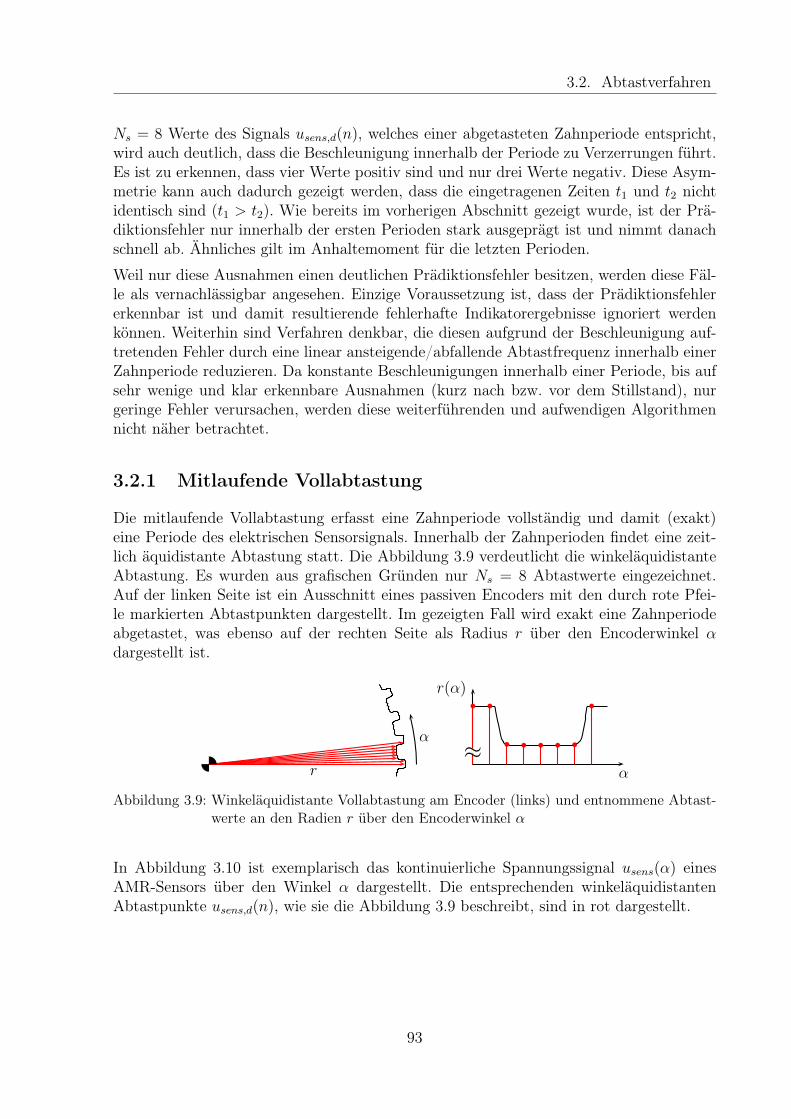
3.2. Abtastverfahren
Ns = 8 Werte des Signals usens,d(n), welches einer abgetasteten Zahnperiode entspricht,wird auch deutlich, dass die Beschleunigung innerhalb der Periode zu Verzerrungen führt.Es ist zu erkennen, dass vier Werte positiv sind und nur drei Werte negativ. Diese Asym-metrie kann auch dadurch gezeigt werden, dass die eingetragenen Zeiten t1 und t2 nichtidentisch sind (t1 > t2). Wie bereits im vorherigen Abschnitt gezeigt wurde, ist der Prä-diktionsfehler nur innerhalb der ersten Perioden stark ausgeprägt ist und nimmt danachschnell ab. Ähnliches gilt im Anhaltemoment für die letzten Perioden.
Weil nur diese Ausnahmen einen deutlichen Prädiktionsfehler besitzen, werden diese Fäl-le als vernachlässigbar angesehen. Einzige Voraussetzung ist, dass der Prädiktionsfehlererkennbar ist und damit resultierende fehlerhafte Indikatorergebnisse ignoriert werdenkönnen. Weiterhin sind Verfahren denkbar, die diesen aufgrund der Beschleunigung auf-tretenden Fehler durch eine linear ansteigende/abfallende Abtastfrequenz innerhalb einerZahnperiode reduzieren. Da konstante Beschleunigungen innerhalb einer Periode, bis aufsehr wenige und klar erkennbare Ausnahmen (kurz nach bzw. vor dem Stillstand), nurgeringe Fehler verursachen, werden diese weiterführenden und aufwendigen Algorithmennicht näher betrachtet.
3.2.1 Mitlaufende Vollabtastung
Die mitlaufende Vollabtastung erfasst eine Zahnperiode vollständig und damit (exakt)eine Periode des elektrischen Sensorsignals. Innerhalb der Zahnperioden findet eine zeit-lich äquidistante Abtastung statt. Die Abbildung 3.9 verdeutlicht die winkeläquidistanteAbtastung. Es wurden aus grafischen Gründen nur Ns = 8 Abtastwerte eingezeichnet.Auf der linken Seite ist ein Ausschnitt eines passiven Encoders mit den durch rote Pfei-le markierten Abtastpunkten dargestellt. Im gezeigten Fall wird exakt eine Zahnperiodeabgetastet, was ebenso auf der rechten Seite als Radius r über den Encoderwinkel αdargestellt ist.
α
r α
r(α)b b
b b b b b
b
≈
Abbildung 3.9: Winkeläquidistante Vollabtastung am Encoder (links) und entnommene Abtast-werte an den Radien r über den Encoderwinkel α
In Abbildung 3.10 ist exemplarisch das kontinuierliche Spannungssignal usens(α) einesAMR-Sensors über den Winkel α dargestellt. Die entsprechenden winkeläquidistantenAbtastpunkte usens,d(n), wie sie die Abbildung 3.9 beschreibt, sind in rot dargestellt.
93
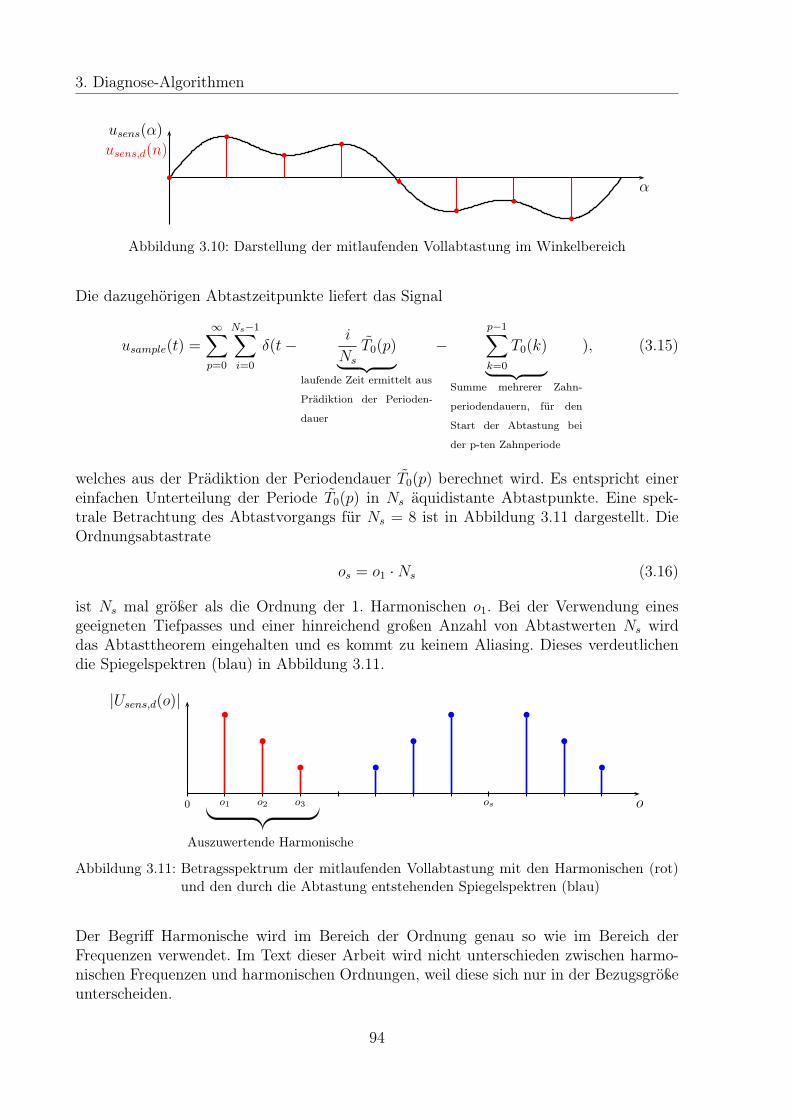
3. Diagnose-Algorithmen
α
usens(α)usens,d(n)
b
b
b
b
b
b
b
b
Abbildung 3.10: Darstellung der mitlaufenden Vollabtastung im Winkelbereich
Die dazugehörigen Abtastzeitpunkte liefert das Signal
usample(t) =∞∑p=0
Ns−1∑i=0
δ(t− i
Ns
T0(p)︸ ︷︷ ︸laufende Zeit ermittelt aus
Prädiktion der Perioden-
dauer
−p−1∑k=0
T0(k)︸ ︷︷ ︸Summe mehrerer Zahn-
periodendauern, für den
Start der Abtastung bei
der p-ten Zahnperiode
), (3.15)
welches aus der Prädiktion der Periodendauer T0(p) berechnet wird. Es entspricht einereinfachen Unterteilung der Periode T0(p) in Ns äquidistante Abtastpunkte. Eine spek-trale Betrachtung des Abtastvorgangs für Ns = 8 ist in Abbildung 3.11 dargestellt. DieOrdnungsabtastrate
os = o1 ·Ns (3.16)
ist Ns mal größer als die Ordnung der 1. Harmonischen o1. Bei der Verwendung einesgeeigneten Tiefpasses und einer hinreichend großen Anzahl von Abtastwerten Ns wirddas Abtasttheorem eingehalten und es kommt zu keinem Aliasing. Dieses verdeutlichendie Spiegelspektren (blau) in Abbildung 3.11.
o
|Usens,d(o)|
0 oso1 o2 o3
Auszuwertende Harmonische
Abbildung 3.11: Betragsspektrum der mitlaufenden Vollabtastung mit den Harmonischen (rot)und den durch die Abtastung entstehenden Spiegelspektren (blau)
Der Begriff Harmonische wird im Bereich der Ordnung genau so wie im Bereich derFrequenzen verwendet. Im Text dieser Arbeit wird nicht unterschieden zwischen harmo-nischen Frequenzen und harmonischen Ordnungen, weil diese sich nur in der Bezugsgrößeunterscheiden.
94

3.2. Abtastverfahren
Für die Abtastung muss sichergestellt werden, dass sich die auszuwertenden Harmonischennicht mit den durch die Abtastung entstehenden Spiegelspektren überlagern. Dieses wirdin der Praxis durch analoge Vorfilter realisiert. In der realisierten Hardware zur Signal-aufbereitung (siehe Abschnitt 5.1) existiert ein Vorfilter, welcher grundsätzlich die Band-breite begrenzt. Aufgrund der dynamischen Abtastrate ist streng genommen ein Filtermit einstellbarer Grenzfrequenz erforderlich. Es wurde die Entwurfsentscheidung getrof-fen, auf diesen einstellbaren Filter zu verzichten, weil Messungen mit einem Oszilloskopmit hoher Abtastrate gezeigt haben, dass im betreffenden Bereich des Spektrums keinenennenswerten Anteile vorhanden sind [56].
3.2.2 Mitlaufende Unterabtastung
Sind nur begrenzte Hardwareressourcen bezüglich Abtastrate, Verarbeitungsgeschwindig-keit und Stromversorgung verfügbar, kann unter bestimmten Umständen eine Unterab-tastung des Sensorsignals durchgeführt werden. Die Unterabtastung ist bekannt unter derBezeichnung Bandpassunterabtastung aus der Nachrichtentechnik [58], wobei der Abtast-vorgang direkt das Abwärtsmischen eines bandbegrenzten Bandpasssignals in das Basis-band bewirkt. In der vorliegenden Arbeit wird die Unterabtastung in ähnlicher Weisegenutzt. Das Ziel ist es, die Harmonischen des Sensorsignals in einen niederfrequentenBereich des Spektrum zu mischen. Hierfür werden über mehrere Zahnperioden hinwegAbtastwerte an unterschiedlichen, aber genau definierten Positionen innerhalb der Zahn-periode entnommen, welche sich dann zu einem diskreten Signal usens,d(n) zusammenset-zen. Die Unterabtastung setzt voraus, dass das Sensorsignal
usens(α) = usens
(α± i 2π
Nt
)i = 0, 1, 2, . . . (3.17)
bezogen auf den Encoderwinkel α periodisch ist, wobei die Konstante Nt der Anzahl derEncoderzähne entspricht. Es werden also mehrere Encoderzähne einbezogen, um nur eineSignalperiode für die Diagnose zu erzeugen. Die zugrunde liegende Modellvorstellung ist,dass alle Zähne gleich sind ohne jegliche Toleranz.
Übertragen auf einen Encoder bedeutet dieses, dass jeder Zahn immer die gleichen elek-trischen Ausgangssignale im Sensor hervorruft. In der Praxis wird dieses nicht erreicht.Das Beispiel aus Abbildung 3.12 visualisiert den Abtastvorgang anhand eines Encoders.Auf der linken Seite sind die Abtastpunkte am Encoder markiert und auf der rechtenSeite ist dargestellt, dass sich die einzelnen Abtastpunkte wieder zu einer Zahnperiodezusammensetzen.
95
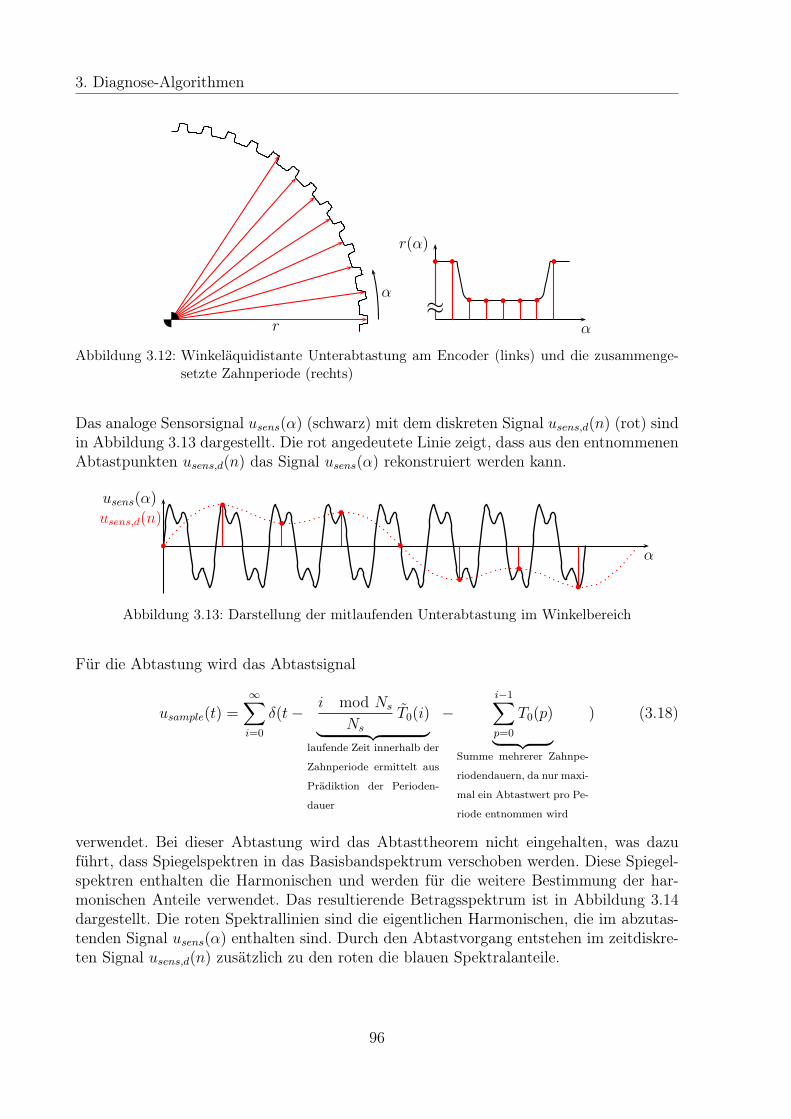
3. Diagnose-Algorithmen
α
r α
r(α)b b
b b b b b
b
≈
Abbildung 3.12: Winkeläquidistante Unterabtastung am Encoder (links) und die zusammenge-setzte Zahnperiode (rechts)
Das analoge Sensorsignal usens(α) (schwarz) mit dem diskreten Signal usens,d(n) (rot) sindin Abbildung 3.13 dargestellt. Die rot angedeutete Linie zeigt, dass aus den entnommenenAbtastpunkten usens,d(n) das Signal usens(α) rekonstruiert werden kann.
α
usens(α)usens,d(n)
b
b
b
b
b
b
b
b
Abbildung 3.13: Darstellung der mitlaufenden Unterabtastung im Winkelbereich
Für die Abtastung wird das Abtastsignal
usample(t) =∞∑i=0
δ(t− i mod Ns
Ns
T0(i)︸ ︷︷ ︸laufende Zeit innerhalb der
Zahnperiode ermittelt aus
Prädiktion der Perioden-
dauer
−i−1∑p=0
T0(p)︸ ︷︷ ︸Summe mehrerer Zahnpe-
riodendauern, da nur maxi-
mal ein Abtastwert pro Pe-
riode entnommen wird
) (3.18)
verwendet. Bei dieser Abtastung wird das Abtasttheorem nicht eingehalten, was dazuführt, dass Spiegelspektren in das Basisbandspektrum verschoben werden. Diese Spiegel-spektren enthalten die Harmonischen und werden für die weitere Bestimmung der har-monischen Anteile verwendet. Das resultierende Betragsspektrum ist in Abbildung 3.14dargestellt. Die roten Spektrallinien sind die eigentlichen Harmonischen, die im abzutas-tenden Signal usens(α) enthalten sind. Durch den Abtastvorgang entstehen im zeitdiskre-ten Signal usens,d(n) zusätzlich zu den roten die blauen Spektralanteile.
96
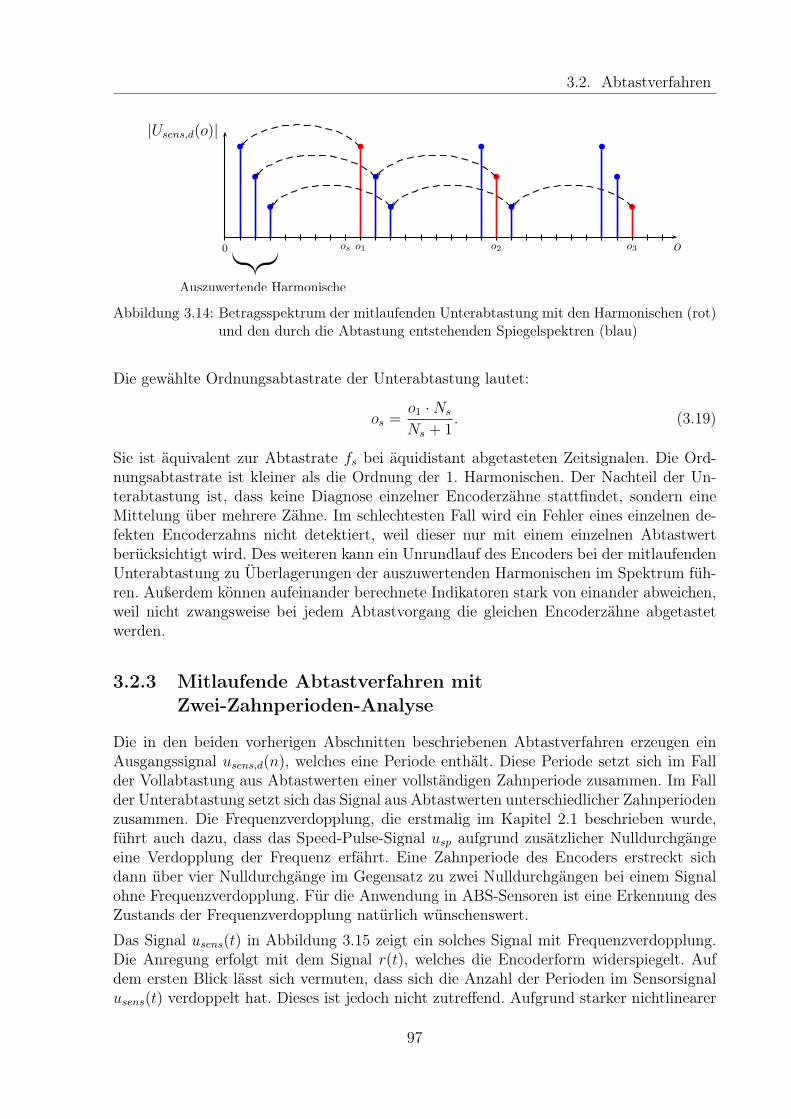
3.2. Abtastverfahren
o
|Usens,d(o)|
0 os o1 o2 o3
Auszuwertende Harmonische
Abbildung 3.14: Betragsspektrum der mitlaufenden Unterabtastung mit den Harmonischen (rot)und den durch die Abtastung entstehenden Spiegelspektren (blau)
Die gewählte Ordnungsabtastrate der Unterabtastung lautet:
os =o1 ·Ns
Ns + 1. (3.19)
Sie ist äquivalent zur Abtastrate fs bei äquidistant abgetasteten Zeitsignalen. Die Ord-nungsabtastrate ist kleiner als die Ordnung der 1. Harmonischen. Der Nachteil der Un-terabtastung ist, dass keine Diagnose einzelner Encoderzähne stattfindet, sondern eineMittelung über mehrere Zähne. Im schlechtesten Fall wird ein Fehler eines einzelnen de-fekten Encoderzahns nicht detektiert, weil dieser nur mit einem einzelnen Abtastwertberücksichtigt wird. Des weiteren kann ein Unrundlauf des Encoders bei der mitlaufendenUnterabtastung zu Überlagerungen der auszuwertenden Harmonischen im Spektrum füh-ren. Außerdem können aufeinander berechnete Indikatoren stark von einander abweichen,weil nicht zwangsweise bei jedem Abtastvorgang die gleichen Encoderzähne abgetastetwerden.
3.2.3 Mitlaufende Abtastverfahren mitZwei-Zahnperioden-Analyse
Die in den beiden vorherigen Abschnitten beschriebenen Abtastverfahren erzeugen einAusgangssignal usens,d(n), welches eine Periode enthält. Diese Periode setzt sich im Fallder Vollabtastung aus Abtastwerten einer vollständigen Zahnperiode zusammen. Im Fallder Unterabtastung setzt sich das Signal aus Abtastwerten unterschiedlicher Zahnperiodenzusammen. Die Frequenzverdopplung, die erstmalig im Kapitel 2.1 beschrieben wurde,führt auch dazu, dass das Speed-Pulse-Signal usp aufgrund zusätzlicher Nulldurchgängeeine Verdopplung der Frequenz erfährt. Eine Zahnperiode des Encoders erstreckt sichdann über vier Nulldurchgänge im Gegensatz zu zwei Nulldurchgängen bei einem Signalohne Frequenzverdopplung. Für die Anwendung in ABS-Sensoren ist eine Erkennung desZustands der Frequenzverdopplung natürlich wünschenswert.
Das Signal usens(t) in Abbildung 3.15 zeigt ein solches Signal mit Frequenzverdopplung.Die Anregung erfolgt mit dem Signal r(t), welches die Encoderform widerspiegelt. Aufdem ersten Blick lässt sich vermuten, dass sich die Anzahl der Perioden im Sensorsignalusens(t) verdoppelt hat. Dieses ist jedoch nicht zutreffend. Aufgrund starker nichtlinearer
97
3. Diagnose-Algorithmen
Verzerrungen haben sich in der Mitte der Periode nur zusätzliche Nulldurchgänge ausge-prägt. Wie in Kapitel 2.4.2 beschrieben, enthält das frequenzverdoppelte Signal weiterhinspektrale Anteile der tatsächlichen Zahnfrequenz. Verdeutlicht wird dieses durch die ge-punktete Linie auf dem Signal usens(t) in Abbildung 3.15. Die Aufgabe besteht darindiesen Zustand der zusätzlich auftretenden Nulldurchgänge, wie es auch das Signal usp(t)zeigt, zu erkennen.
Der in den vorherigen Abschnitten beschriebene Ansatz, einzelne Zahnperioden abzu-tasten, führt im Fall einer Frequenzverdopplung zu Fehlern. Diese Fehler können sichfolgendermaßen auswirken:
1. Die geschätzte Periodendauer T0 entspricht nie der tatsächlichen Periodendauer T0,was zur Folge hat, dass sämtliche aufgezeichnete Abtastwerte verworfen werden.
2. Die geschätzte Periodendauer T0 entspricht der bestimmten Periodendauer T0 unddie Abtastung wird durchgeführt, die Harmonischen und der Verzerrungsindikatorwerden berechnet. Jedoch schwankt der Verzerrungsindikator stark von Periode zuPeriode.
Der neue Ansatz ist, die Blocklänge der Abtastung auf insgesamt fünf Nulldurchgängeauszuweiten und dadurch die Periodizität des Signals zu überprüfen. Es wird so grund-sätzlich von der Möglichkeit einer Frequenzverdopplung ausgegangen. Bei Signalen ohneFrequenzverdopplung, wie in Abbildung 3.16 dargestellt, werden zwei Zahnperioden ab-getastet. Das zugehörige Ordnungsspektrum zeigt |Usens,d(o)|. Handelt es sich bei demabgetasteten Signal usens,d(α) um zwei einzelne Perioden, so besitzt jede zweite Spektral-linie, beginnend mit der ersten, den Wert Null.
Bei einer Frequenzverdopplung, wie in Abbildung 3.15, wird hingegen nur eine Zahnpe-riode abgetastet. Aus dem Ordnungsspektrum |Usens,d(o)| lässt sich erkennen, dass imVergleich zu Abbildung 3.16 auch Anteile an ungeraden Spektralanteilen ausgeprägt sind.Diese zusätzlich auftretenden Anteile zeigen, dass kein periodisches Signal abgetastet wur-de. Nach der im Abschnitt 3.1 beschriebenen Ordnungsanalyse können diese bei der Fre-quenzverdopplung auftretenden Anteile als interharmonische oder subharmonische Ord-nungen bezeichnet werden.
Der Indikator HDOE aus Abschnitt 2.1 bildet einen aussagekräftigen Indikator für die Fre-quenzverdopplung, in dem die geraden und die ungeraden Spektralanteile ins Verhältnisgesetzt werden.
98
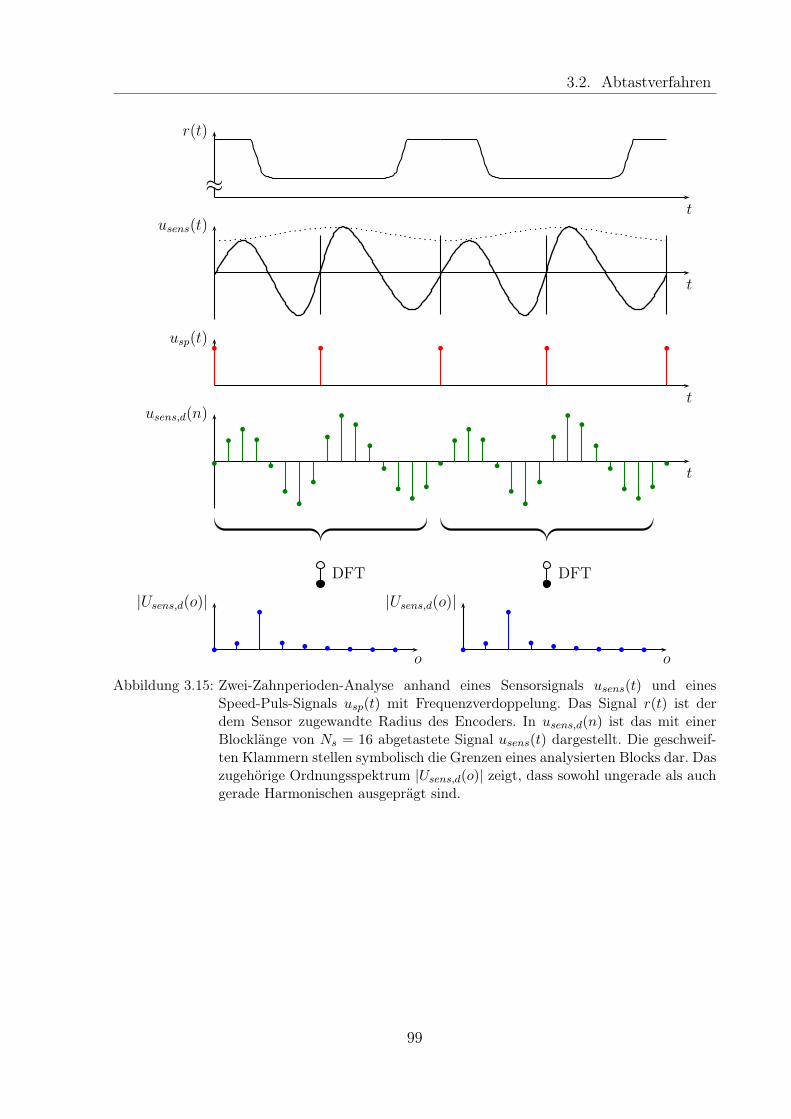
3.2. Abtastverfahren
t
r(t)
≈
t
usp(t) b b b b b
t
usens(t)
t
usens,d(n)
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
DFT DFT
o
|Usens,d(o)|
bb
b
b b b b b b
o
|Usens,d(o)|
bb
b
b b b b b b
Abbildung 3.15: Zwei-Zahnperioden-Analyse anhand eines Sensorsignals usens(t) und einesSpeed-Puls-Signals usp(t) mit Frequenzverdoppelung. Das Signal r(t) ist derdem Sensor zugewandte Radius des Encoders. In usens,d(n) ist das mit einerBlocklänge von Ns = 16 abgetastete Signal usens(t) dargestellt. Die geschweif-ten Klammern stellen symbolisch die Grenzen eines analysierten Blocks dar. Daszugehörige Ordnungsspektrum |Usens,d(o)| zeigt, dass sowohl ungerade als auchgerade Harmonischen ausgeprägt sind.
99
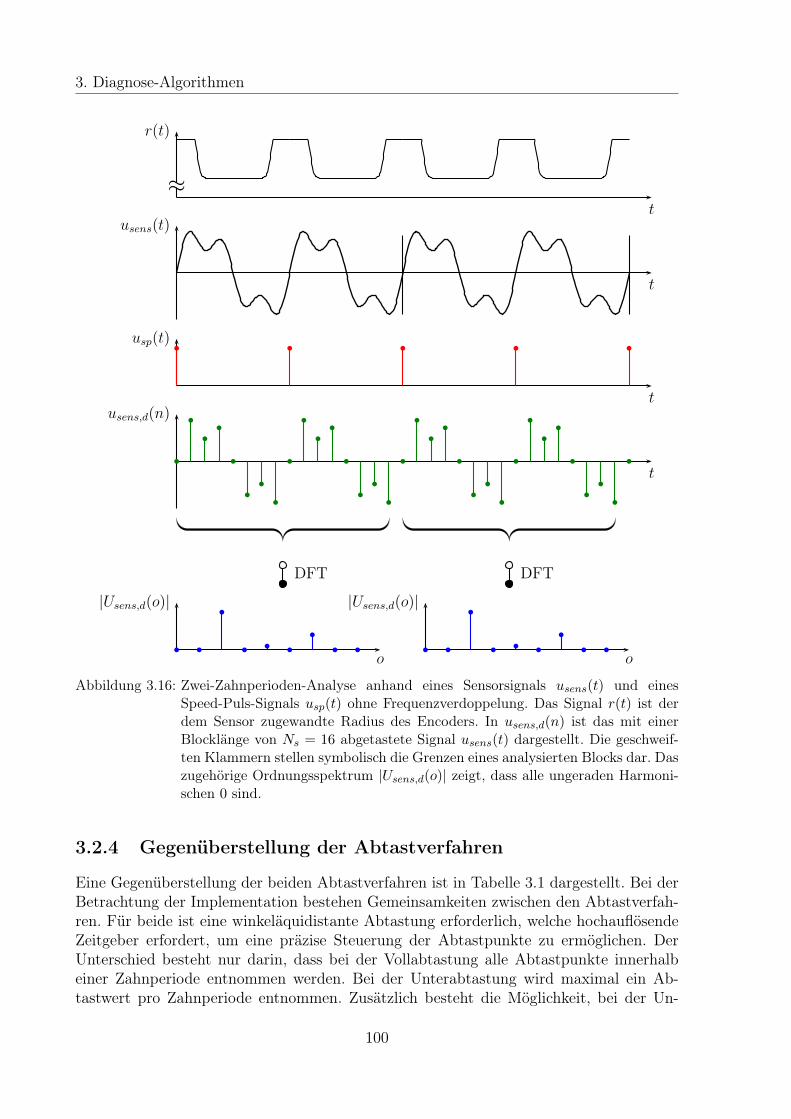
3. Diagnose-Algorithmen
t
r(t)
≈
t
usp(t) b b b b b
t
usens(t)
t
usens,d(n)
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
DFT DFT
o
|Usens,d(o)|
b b
b
bb
b
b
b b
o
|Usens,d(o)|
b b
b
bb
b
b
b b
Abbildung 3.16: Zwei-Zahnperioden-Analyse anhand eines Sensorsignals usens(t) und einesSpeed-Puls-Signals usp(t) ohne Frequenzverdoppelung. Das Signal r(t) ist derdem Sensor zugewandte Radius des Encoders. In usens,d(n) ist das mit einerBlocklänge von Ns = 16 abgetastete Signal usens(t) dargestellt. Die geschweif-ten Klammern stellen symbolisch die Grenzen eines analysierten Blocks dar. Daszugehörige Ordnungsspektrum |Usens,d(o)| zeigt, dass alle ungeraden Harmoni-schen 0 sind.
3.2.4 Gegenüberstellung der Abtastverfahren
Eine Gegenüberstellung der beiden Abtastverfahren ist in Tabelle 3.1 dargestellt. Bei derBetrachtung der Implementation bestehen Gemeinsamkeiten zwischen den Abtastverfah-ren. Für beide ist eine winkeläquidistante Abtastung erforderlich, welche hochauflösendeZeitgeber erfordert, um eine präzise Steuerung der Abtastpunkte zu ermöglichen. DerUnterschied besteht nur darin, dass bei der Vollabtastung alle Abtastpunkte innerhalbeiner Zahnperiode entnommen werden. Bei der Unterabtastung wird maximal ein Ab-tastwert pro Zahnperiode entnommen. Zusätzlich besteht die Möglichkeit, bei der Un-
100
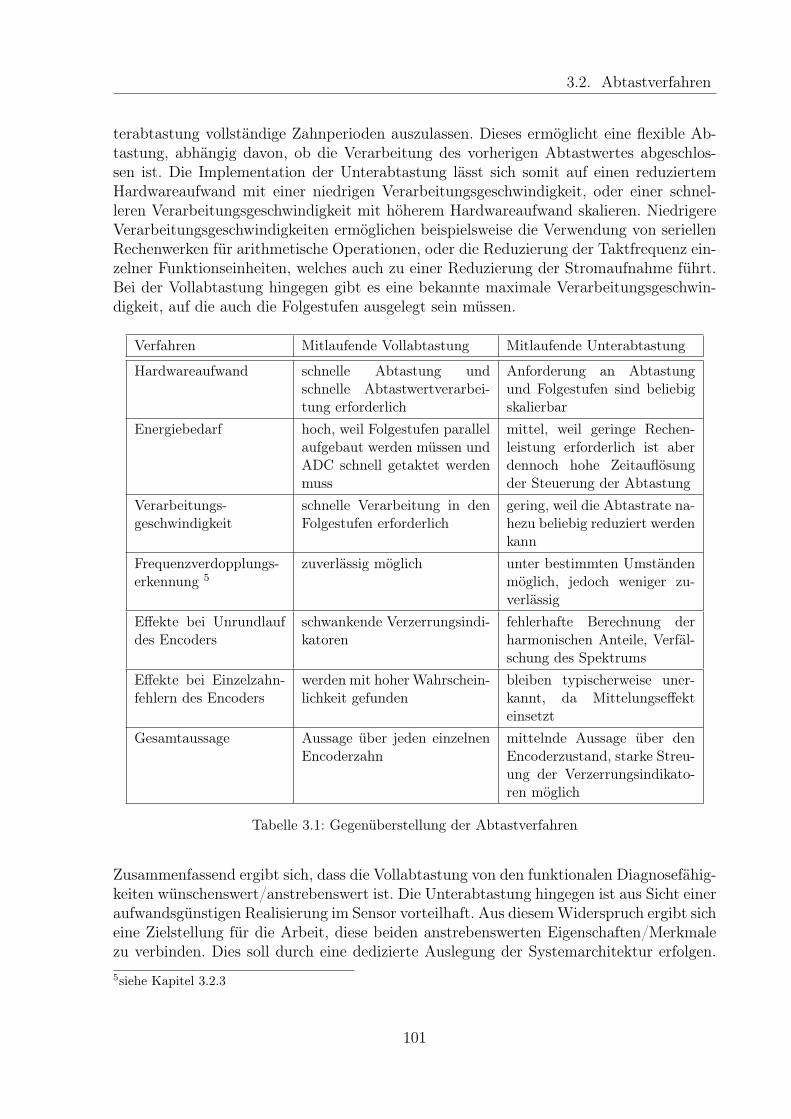
3.2. Abtastverfahren
terabtastung vollständige Zahnperioden auszulassen. Dieses ermöglicht eine flexible Ab-tastung, abhängig davon, ob die Verarbeitung des vorherigen Abtastwertes abgeschlos-sen ist. Die Implementation der Unterabtastung lässt sich somit auf einen reduziertemHardwareaufwand mit einer niedrigen Verarbeitungsgeschwindigkeit, oder einer schnel-leren Verarbeitungsgeschwindigkeit mit höherem Hardwareaufwand skalieren. NiedrigereVerarbeitungsgeschwindigkeiten ermöglichen beispielsweise die Verwendung von seriellenRechenwerken für arithmetische Operationen, oder die Reduzierung der Taktfrequenz ein-zelner Funktionseinheiten, welches auch zu einer Reduzierung der Stromaufnahme führt.Bei der Vollabtastung hingegen gibt es eine bekannte maximale Verarbeitungsgeschwin-digkeit, auf die auch die Folgestufen ausgelegt sein müssen.
Verfahren Mitlaufende Vollabtastung Mitlaufende Unterabtastung
Hardwareaufwand schnelle Abtastung undschnelle Abtastwertverarbei-tung erforderlich
Anforderung an Abtastungund Folgestufen sind beliebigskalierbar
Energiebedarf hoch, weil Folgestufen parallelaufgebaut werden müssen undADC schnell getaktet werdenmuss
mittel, weil geringe Rechen-leistung erforderlich ist aberdennoch hohe Zeitauflösungder Steuerung der Abtastung
Verarbeitungs-geschwindigkeit
schnelle Verarbeitung in denFolgestufen erforderlich
gering, weil die Abtastrate na-hezu beliebig reduziert werdenkann
Frequenzverdopplungs-erkennung 5
zuverlässig möglich unter bestimmten Umständenmöglich, jedoch weniger zu-verlässig
Effekte bei Unrundlaufdes Encoders
schwankende Verzerrungsindi-katoren
fehlerhafte Berechnung derharmonischen Anteile, Verfäl-schung des Spektrums
Effekte bei Einzelzahn-fehlern des Encoders
werden mit hoher Wahrschein-lichkeit gefunden
bleiben typischerweise uner-kannt, da Mittelungseffekteinsetzt
Gesamtaussage Aussage über jeden einzelnenEncoderzahn
mittelnde Aussage über denEncoderzustand, starke Streu-ung der Verzerrungsindikato-ren möglich
Tabelle 3.1: Gegenüberstellung der Abtastverfahren
Zusammenfassend ergibt sich, dass die Vollabtastung von den funktionalen Diagnosefähig-keiten wünschenswert/anstrebenswert ist. Die Unterabtastung hingegen ist aus Sicht eineraufwandsgünstigen Realisierung im Sensor vorteilhaft. Aus diesemWiderspruch ergibt sicheine Zielstellung für die Arbeit, diese beiden anstrebenswerten Eigenschaften/Merkmalezu verbinden. Dies soll durch eine dedizierte Auslegung der Systemarchitektur erfolgen.5siehe Kapitel 3.2.3
101
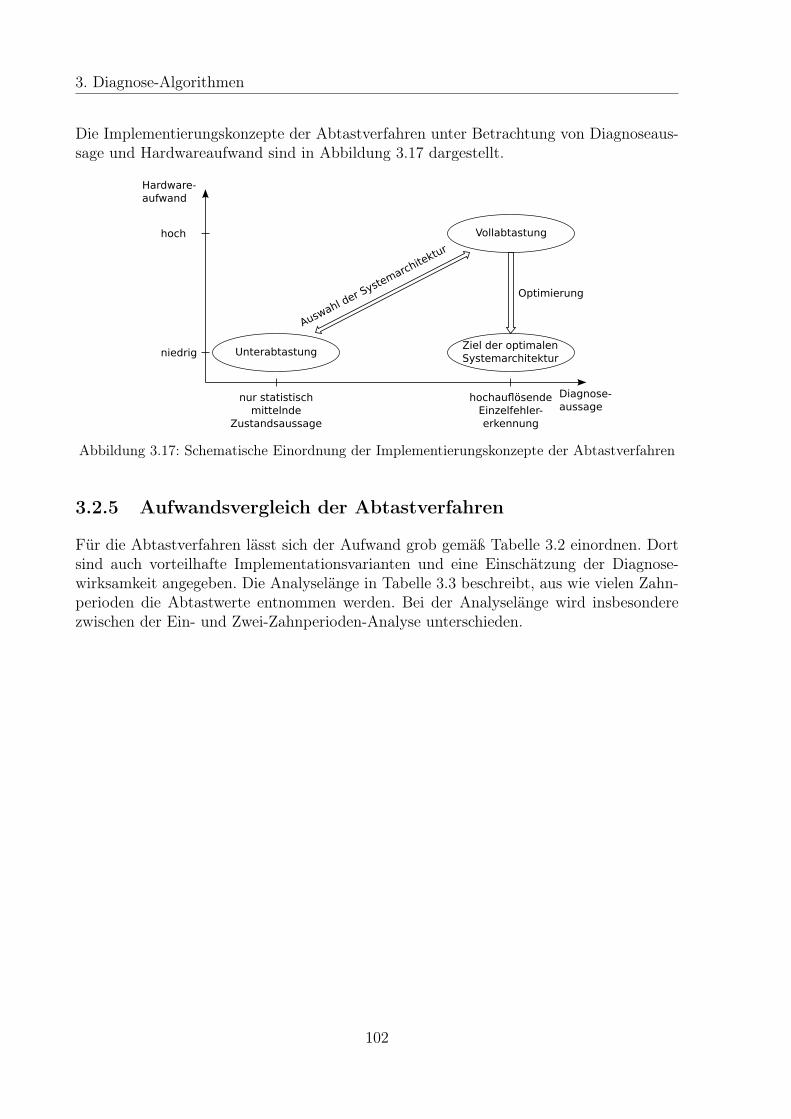
3. Diagnose-Algorithmen
Die Implementierungskonzepte der Abtastverfahren unter Betrachtung von Diagnoseaus-sage und Hardwareaufwand sind in Abbildung 3.17 dargestellt.
Hardware-aufwand
niedrig
Diagnose-aussage
hoch
nur statistischmittelnde
Zustandsaussage
hochauflösendeEinzelfehler-erkennung
Unterabtastung
Vollabtastung
Ziel der optimalenSystemarchitektur
Optimierung
Auswahl der S
ystemarchite
ktur
Abbildung 3.17: Schematische Einordnung der Implementierungskonzepte der Abtastverfahren
3.2.5 Aufwandsvergleich der Abtastverfahren
Für die Abtastverfahren lässt sich der Aufwand grob gemäß Tabelle 3.2 einordnen. Dortsind auch vorteilhafte Implementationsvarianten und eine Einschätzung der Diagnose-wirksamkeit angegeben. Die Analyselänge in Tabelle 3.3 beschreibt, aus wie vielen Zahn-perioden die Abtastwerte entnommen werden. Bei der Analyselänge wird insbesonderezwischen der Ein- und Zwei-Zahnperioden-Analyse unterschieden.
102
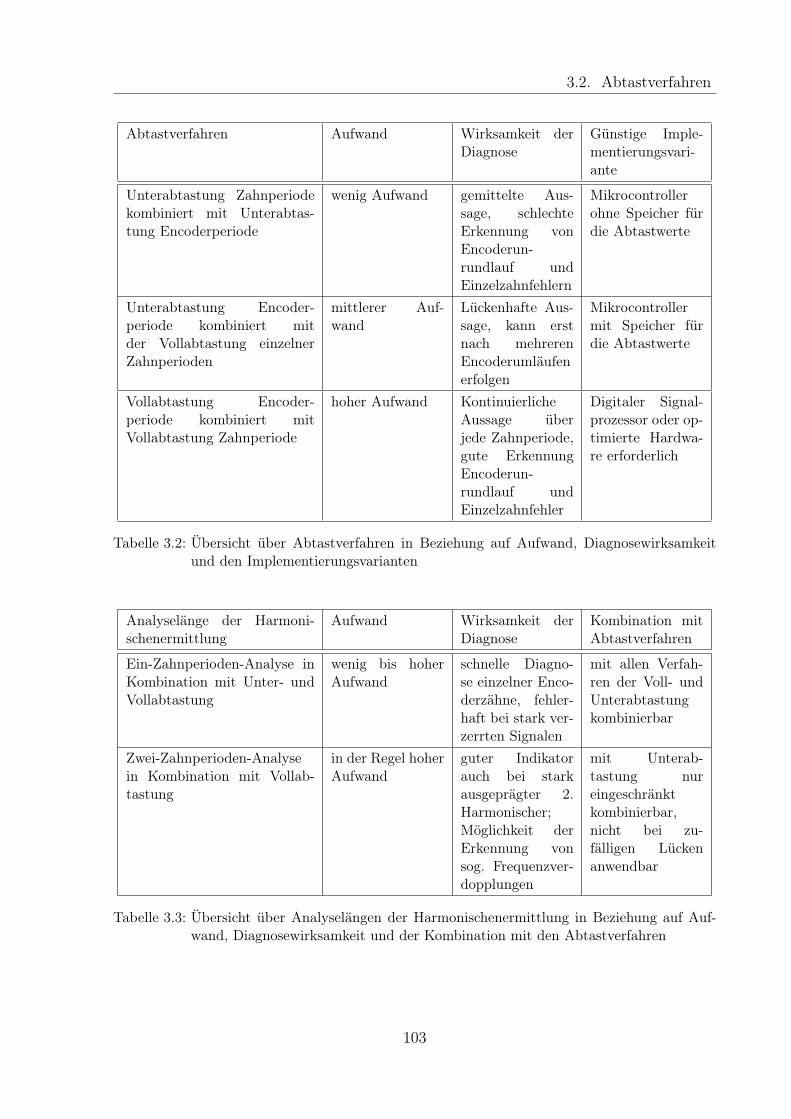
3.2. Abtastverfahren
Abtastverfahren Aufwand Wirksamkeit derDiagnose
Günstige Imple-mentierungsvari-ante
Unterabtastung Zahnperiodekombiniert mit Unterabtas-tung Encoderperiode
wenig Aufwand gemittelte Aus-sage, schlechteErkennung vonEncoderun-rundlauf undEinzelzahnfehlern
Mikrocontrollerohne Speicher fürdie Abtastwerte
Unterabtastung Encoder-periode kombiniert mitder Vollabtastung einzelnerZahnperioden
mittlerer Auf-wand
Lückenhafte Aus-sage, kann erstnach mehrerenEncoderumläufenerfolgen
Mikrocontrollermit Speicher fürdie Abtastwerte
Vollabtastung Encoder-periode kombiniert mitVollabtastung Zahnperiode
hoher Aufwand KontinuierlicheAussage überjede Zahnperiode,gute ErkennungEncoderun-rundlauf undEinzelzahnfehler
Digitaler Signal-prozessor oder op-timierte Hardwa-re erforderlich
Tabelle 3.2: Übersicht über Abtastverfahren in Beziehung auf Aufwand, Diagnosewirksamkeitund den Implementierungsvarianten
Analyselänge der Harmoni-schenermittlung
Aufwand Wirksamkeit derDiagnose
Kombination mitAbtastverfahren
Ein-Zahnperioden-Analyse inKombination mit Unter- undVollabtastung
wenig bis hoherAufwand
schnelle Diagno-se einzelner Enco-derzähne, fehler-haft bei stark ver-zerrten Signalen
mit allen Verfah-ren der Voll- undUnterabtastungkombinierbar
Zwei-Zahnperioden-Analysein Kombination mit Vollab-tastung
in der Regel hoherAufwand
guter Indikatorauch bei starkausgeprägter 2.Harmonischer;Möglichkeit derErkennung vonsog. Frequenzver-dopplungen
mit Unterab-tastung nureingeschränktkombinierbar,nicht bei zu-fälligen Lückenanwendbar
Tabelle 3.3: Übersicht über Analyselängen der Harmonischenermittlung in Beziehung auf Auf-wand, Diagnosewirksamkeit und der Kombination mit den Abtastverfahren
103

3. Diagnose-Algorithmen
3.3 Verfahren zur Ermittlung der harmonischen Antei-le
Die harmonischen Anteile, welche zur Bestimmung der Zustandsindikatoren erforderlichsind, werden aus dem Ordnungsspektrum entnommen. Für die praktische Realisierungwird das Ordnungsspektrum
Usens,d(o) =1
Ns
Ns−1∑n=0
usens,d(n) · e−j2π on/Ns (3.20)
mit der diskreten Fourier-Transformation (DFT) des winkeläquidistant abgetasteten Si-gnals usens,d(n) bestimmt. Üblich ist die Anwendung auf zeitlich äquidistante Werte, wiebeispielsweise von Kammeyer [59] beschrieben. Analog dazu lässt sich die DFT auch aufwinkeläquidistante Werte anwenden. Für die Einheit des Ordnungsspektrums wird 1
rad
verwendet. Da es sich bei usens,d(n) um ein reelles Signal handelt, können die negati-ven Anteile des Ordnungsspektrums Usens,d(−o) aufgrund der Symmetrie vernachlässigtwerden, was den Rechenaufwand der DFT halbiert:
Usens,d(o) = U∗sens,d(−o) (3.21)
Als Bezugsgröße innerhalb des Ordnungsspektrums wird die Ordnung der Zähne des En-coders
ot = oe ·Nt (3.22)
verwendet, welche um den Faktor Nt (Anzahl der Encoderzähne) höher ist, als die Ord-nung oe der Wellendrehzahl. Die Harmonischen der Ordnung der Encoderzähne
on = ot · n n = 1, 2, 3, . . . (3.23)
sind wiederum ganzzahlige Vielfache dieser. Im Bereich der Ordnungsanalyse wird nor-malerweise die Drehfrequenz als Bezugsordnung gewählt. Dieses ist jedoch nicht möglich,da der Sensor in der praktischen Anwendung keine Kenntnis über die Anzahl der Enco-derzähne hat.
Weiterhin wurde in Abschnitt 2.1.5 gezeigt, dass nur eine begrenzte Auswahl an Harmoni-schen für die Zustandsdiagnose notwendig ist. Somit ist eine vollständige Berechnung derDFT nicht notwendig, was zu der im folgenden Abschnitt 3.3.1 beschriebenen reduzier-ten DFT führt. Die bekannte schnelle Fourier-Transformation (FFT), wie sie ebenfalls inKammeyer [59] beschrieben wurde, kann nicht angewendet werden, weil diese nur block-weise arbeitet. Die Zwischenspeicherung, die für die blockweise Verarbeitung erforderlichist, benötigt viele Hardwareressourcen. Die DFT hingegen kann on-the-fly berechnet wer-den, somit müssen die aufgenommenen Abtastwerte nicht zwischengespeichert werden,sondern können sofort im Algorithmus verarbeitet werden. Weiterhin müssen, wie bereitserwähnt, nur ein kleiner Anteil der Spektrallinien berechnet werden.
104
3.3. Verfahren zur Ermittlung der harmonischen Anteile
3.3.1 Reduzierte DFT
Die für die reduzierte DFT benötigten Sinus- und Cosinus-Funktionen können bei derpraktischen Umsetzung unterschiedlich implementiert werden. Die bekanntesten Verfah-ren sind Look-Up-Tabellen und der CORDIC-Algorithmus. Teichert [111] hat diese undweitere Verfahren auf ihre Vor- und Nachteile untersucht und ist zu dem Ergebnis gekom-men, dass das Verfahren mit Look-Up-Tabellen am flexibelsten und am schnellsten ist.Der CORDIC-Algorithmus hingegen arbeitet iterativ und erreicht nur hohe Geschwindig-keiten durch eine aufwendige Pipelinestruktur.
Der Begriff der reduzierten DFT bedeutet, dass nicht sämtliche spektrale Anteile berech-net werden, sondern nur eine begrenzte Anzahl von Nh Harmonischen (typ. Nh = 5 . . . 10Harmonische). Die DFT in Matrixschreibweise lautet:
U = W · u. (3.24)
Dabei handelt es sich bei dem Vektor u um das Eingangssignal, welches die Abtastwerteenthält. Der Vektor u hat eine Länge von Ns Abtastwerten. Der auf die Anzahl derAbtastwerte normierte Harmonischen-Vektor ist mit U bezeichnet. Die expandierte Formder DFT aus Gleichung 3.24 für Nh = 5 Harmonische lautet:
U1
U2
U3
U4
U5
=1
Ns
w(0) w(1) w(2) . . . w(1 · (Ns − 1))
w(0) w(2) w(4) . . . w(2 · (Ns − 1))
w(0) w(3) w(6) . . . w(3 · (Ns − 1))
w(0) w(4) w(8) . . . w(4 · (Ns − 1))
w(0) w(5) w(10) . . . w(5 · (Ns − 1))
·
u0
u2
u3...
uNs−1
(3.25)
Die zugehörige Definition der Drehfaktoren w für die Koeffizienten innerhalb der MatrixW ist in Gleichung 3.26 dargestellt.
w(n) = e−j2πnNs = cos
(2πn
Ns
)− j · sin
(2πn
Ns
)(3.26)
In dieser Arbeit wurden für die Anzahl der Abtastwerte Ns ein Wert von 32 oder 64 ver-wendet. Die Verwendung von Zweierpotenzen ermöglicht eine effiziente Implementierungder Normierung. Diese Drehfaktoren werden in einer Look-Up-Tabelle abgelegt. Aufgrundder Symmetrie der Sinus-/Cosinus-Funktionen muss in der Look-Up-Tabelle nur insgesamteine Viertelperiode einer Sinus- oder Cosinus-Funkion abgelegt werden. Hieraus könnendann durch Vorzeichenänderung und Spiegelung die vollständigen Perioden für Sinus undCosinus und deren Harmonischen mit wenig Aufwand bestimmt werden.
105
3. Diagnose-Algorithmen
3.3.2 Weitere Verfahren
Ein im Rahmen dieser Arbeit entwickeltes alternatives Verfahren zur Bestimmung derDFT mittels einer rechteckförmigen Transformation ist die RAFT (Rect ApproximatedFourier-Transformation), welche in Anhang B beschrieben wird. Die RAFT ersetzt diein der DFT verwendeten Sinus/Cosinus-Funktionen durch einfache Rechteckfunktionen,welches eine Look-Up-Tabelle nahezu überflüssig macht. Rechenoperationen im zeitkri-tischen Pfad werden damit auf Additionen und Subtraktionen reduziert. Es sind jedochaufwendige spektrale Korrekturberechnungen notwendig, um auf das Ordnungsspektrumschließen zu können. Diese Korrekturberechnungen können jedoch in einem nicht zeit-kritischen Pfad durchgeführt werden. Außerdem erfordert dieses Verfahren eine erhöhteAnzahl an Abtastwerten und ist nur für eine begrenzte Anzahl von Harmonischen mög-lich. Die RAFT hat ein gewisses Optimierungspotenzial im Aufwand, der allerdings eineeingeschränkte Flexibilität zur Folge hat. Die Implementierung der RAFT wurde in die-ser Arbeit nicht vollständig untersucht. Erste Untersuchungen befinden sich jedoch imAnhang B und in der Masterarbeit Zahn [117].
Eine weitere Alternative zur DFT ist der Goertzel-Algorithmus [59], wie er in der ArbeitJegenhorst [56] für diese spezielle Anwendung auf einem Mikrocontroller implementiertwurde. Der Goertzel-Algorithmus bildet ein IIR-Filter, um eine Spektralkomponente zuselektieren. Daher ist für jede Harmonische, die ausgewertet werden soll, ein Filter zu ver-wenden. Bei Betrachtung des Aufwands wird der Ansatz, die Harmonischen durch Filterzu separieren umso interessanter, je weniger Harmonische benötigt werden. Dieses ist beimIndikator HDI gegeben, wie bereits im Abschnitt 2.1 erläutert. In dieser Arbeit ist derGoertzel-Algorithmus dennoch zurückgestellt worden, weil nicht die endgültige Optimie-rung, sondern die prinzipielle Machbarkeit im Vordergrund stand. Für diese Rückstellungsprachen zunächst:
• die zu erwartenden hohen Bitbreiten der rekursiven Multiplikationen und Additio-nen,
• die höhere Komplexität der rekursiven Strukturen hinsichtlich einer Untersuchungder Stabilität,
• eventuelle sogenannte parasitäre Eigenschwingungen und
• die Filterrauschleistung bzw. der numerische Fehler.
In zukünftigen Arbeiten sollte die Alternative des Goertzel-Algorithmus als zusätzlicheOptimierungsmöglichkeit wieder aufgegriffen werden.
3.3.3 Vergleich der Verfahren
Die untersuchten Verfahren für die Bestimmung der harmonischen Anteile sind in Tabelle3.4 aufgelistet. Zu jedem Algorithmus wird die Anzahl der reellen Multiplikationen unddie Anzahl der für die Berechnung benötigten Register angegeben. Bei den angegebenenWerten handelt es sich um eine Abschätzung für reelle Eingangssignale. Der FFT und der
106
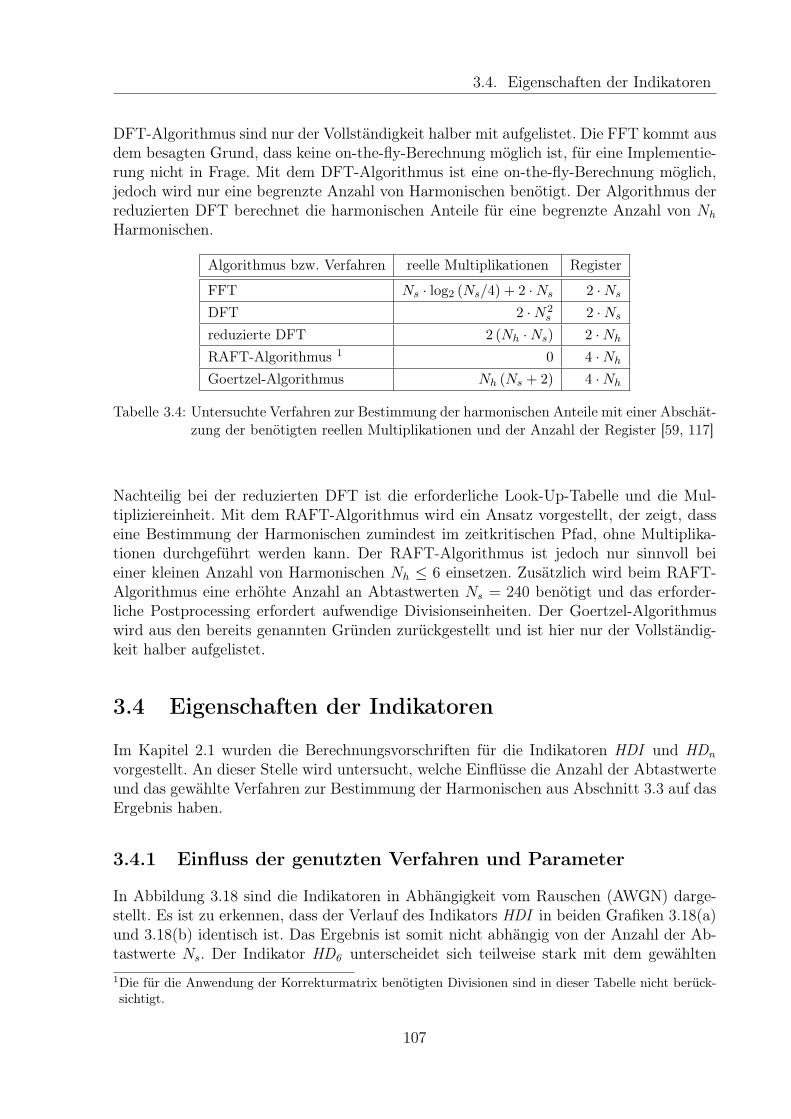
3.4. Eigenschaften der Indikatoren
DFT-Algorithmus sind nur der Vollständigkeit halber mit aufgelistet. Die FFT kommt ausdem besagten Grund, dass keine on-the-fly-Berechnung möglich ist, für eine Implementie-rung nicht in Frage. Mit dem DFT-Algorithmus ist eine on-the-fly-Berechnung möglich,jedoch wird nur eine begrenzte Anzahl von Harmonischen benötigt. Der Algorithmus derreduzierten DFT berechnet die harmonischen Anteile für eine begrenzte Anzahl von Nh
Harmonischen.
Algorithmus bzw. Verfahren reelle Multiplikationen Register
FFT Ns · log2 (Ns/4) + 2 ·Ns 2 ·Ns
DFT 2 ·N2s 2 ·Ns
reduzierte DFT 2 (Nh ·Ns) 2 ·Nh
RAFT-Algorithmus 1 0 4 ·Nh
Goertzel-Algorithmus Nh (Ns + 2) 4 ·Nh
Tabelle 3.4: Untersuchte Verfahren zur Bestimmung der harmonischen Anteile mit einer Abschät-zung der benötigten reellen Multiplikationen und der Anzahl der Register [59, 117]
Nachteilig bei der reduzierten DFT ist die erforderliche Look-Up-Tabelle und die Mul-tipliziereinheit. Mit dem RAFT-Algorithmus wird ein Ansatz vorgestellt, der zeigt, dasseine Bestimmung der Harmonischen zumindest im zeitkritischen Pfad, ohne Multiplika-tionen durchgeführt werden kann. Der RAFT-Algorithmus ist jedoch nur sinnvoll beieiner kleinen Anzahl von Harmonischen Nh ≤ 6 einsetzen. Zusätzlich wird beim RAFT-Algorithmus eine erhöhte Anzahl an Abtastwerten Ns = 240 benötigt und das erforder-liche Postprocessing erfordert aufwendige Divisionseinheiten. Der Goertzel-Algorithmuswird aus den bereits genannten Gründen zurückgestellt und ist hier nur der Vollständig-keit halber aufgelistet.
3.4 Eigenschaften der Indikatoren
Im Kapitel 2.1 wurden die Berechnungsvorschriften für die Indikatoren HDI und HDn
vorgestellt. An dieser Stelle wird untersucht, welche Einflüsse die Anzahl der Abtastwerteund das gewählte Verfahren zur Bestimmung der Harmonischen aus Abschnitt 3.3 auf dasErgebnis haben.
3.4.1 Einfluss der genutzten Verfahren und Parameter
In Abbildung 3.18 sind die Indikatoren in Abhängigkeit vom Rauschen (AWGN) darge-stellt. Es ist zu erkennen, dass der Verlauf des Indikators HDI in beiden Grafiken 3.18(a)und 3.18(b) identisch ist. Das Ergebnis ist somit nicht abhängig von der Anzahl der Ab-tastwerte Ns. Der Indikator HD6 unterscheidet sich teilweise stark mit dem gewählten1Die für die Anwendung der Korrekturmatrix benötigten Divisionen sind in dieser Tabelle nicht berück-sichtigt.
107
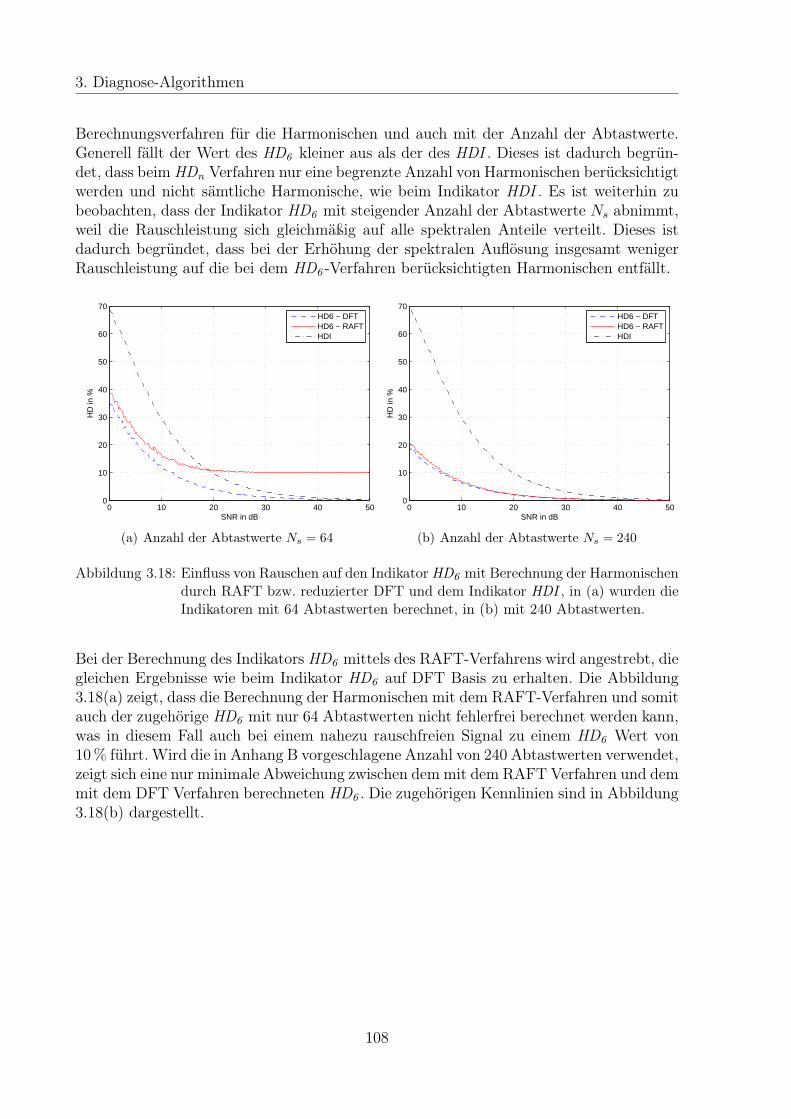
3. Diagnose-Algorithmen
Berechnungsverfahren für die Harmonischen und auch mit der Anzahl der Abtastwerte.Generell fällt der Wert des HD6 kleiner aus als der des HDI . Dieses ist dadurch begrün-det, dass beim HDn Verfahren nur eine begrenzte Anzahl von Harmonischen berücksichtigtwerden und nicht sämtliche Harmonische, wie beim Indikator HDI . Es ist weiterhin zubeobachten, dass der Indikator HD6 mit steigender Anzahl der Abtastwerte Ns abnimmt,weil die Rauschleistung sich gleichmäßig auf alle spektralen Anteile verteilt. Dieses istdadurch begründet, dass bei der Erhöhung der spektralen Auflösung insgesamt wenigerRauschleistung auf die bei dem HD6 -Verfahren berücksichtigten Harmonischen entfällt.
0 10 20 30 40 500
10
20
30
40
50
60
70
SNR in dB
HD
in %
HD6 − DFTHD6 − RAFTHDI
(a) Anzahl der Abtastwerte Ns = 64
0 10 20 30 40 500
10
20
30
40
50
60
70
SNR in dB
HD
in %
HD6 − DFTHD6 − RAFTHDI
(b) Anzahl der Abtastwerte Ns = 240
Abbildung 3.18: Einfluss von Rauschen auf den Indikator HD6 mit Berechnung der Harmonischendurch RAFT bzw. reduzierter DFT und dem Indikator HDI , in (a) wurden dieIndikatoren mit 64 Abtastwerten berechnet, in (b) mit 240 Abtastwerten.
Bei der Berechnung des Indikators HD6 mittels des RAFT-Verfahrens wird angestrebt, diegleichen Ergebnisse wie beim Indikator HD6 auf DFT Basis zu erhalten. Die Abbildung3.18(a) zeigt, dass die Berechnung der Harmonischen mit dem RAFT-Verfahren und somitauch der zugehörige HD6 mit nur 64 Abtastwerten nicht fehlerfrei berechnet werden kann,was in diesem Fall auch bei einem nahezu rauschfreien Signal zu einem HD6 Wert von10 % führt. Wird die in Anhang B vorgeschlagene Anzahl von 240 Abtastwerten verwendet,zeigt sich eine nur minimale Abweichung zwischen dem mit dem RAFT Verfahren und demmit dem DFT Verfahren berechneten HD6 . Die zugehörigen Kennlinien sind in Abbildung3.18(b) dargestellt.
108
3.4. Eigenschaften der Indikatoren
Für die Implementierung haben sich in Experimenten folgende Parameterkombinationenbewährt:
• Anzahl der Abtastwerte pro Zahnperiode: 64 (oder 32 Abtastwerte im Falle derZwei-Zahnperioden-Analyse).
• Auflösung der eingesetzten ADC: 10 oder 12 Bit.
• Typische Aussteuerung des ADC: 75% des Wertebereichs. Dies wird durch Regel-verfahren gemäß Abschnitt 4.1.1 in der Signalvorverarbeitung geliefert.
• Angestrebte Mindestaussteuerung des ADC: 50% des Wertebereichs. Durch Regel-verfahren wird dies sichergestellt. Nur bei schwachen Signalen kann die Mindestaus-steuerung bei der höchsten Verstärkungsstufe nicht mehr geliefert werden.
• Auflösung der Drehfaktoren: 10 bis 12 Bit
• Skalierungsfaktor des Zählers der Ganzzahl-Division: 27 = 128
• Rechenbreite der Ganzzahl-Radizierung: 44 Bit. Es wurde das Verfahren nach Liund Chu [72] angewandt.
Diese Parameterkombinationen wurden empirisch ermittelt. Dabei wurde ein minimalerHardwareaufwand grob abschätzend angestrebt. Weitere Optimierungen der Parameterhinsichtlich der unteren Aufwandsgrenzen wurden im Rahmen dieser Arbeit nicht be-trachtet.
3.4.2 Besondere Erfordernisse beim Indikator HDI
Der Indikator HDI berücksichtigt sämtliche Harmonische, dieses bezieht auch Rauschenmit ein. Wird zunächst ein offsetfreies Signal angenommen, dann kann der HDI , wiebereits im Abschnitt 2.1 beschrieben, mit folgender Formel bestimmt werden:
HDI =
√Pges − P1
Pges. (3.27)
Selbstverständlich wird für das Ergebnis des HDI ein reeller Wert angenommen. Hierfürmüssen folgende Bedingungen eingehalten werden:
Pges − P1 ≥ 0 (3.28)Pges ≥ P1. (3.29)
Theoretisch werden diese Bedingungen eingehalten, jedoch kann bei der praktischen Im-plementierung mit einem nahezu verzerrungsfreien Eingangssignal die Leistung der erstenHarmonischen P1 durch numerische Fehler die Größe der Gesamtleistung Pges überstei-gen. Dadurch entsteht unter der Wurzel der Gleichung 3.27 ein negativer Wert. Bei der
109
3. Diagnose-Algorithmen
Auswertung der Gleichung 3.27 führt dieses zu einem komplexen Ergebnis und ist so-mit nicht anwendbar. Dieser Fehler tritt nur bei Signalen mit kleinen Verzerrungsmaßenauf. Durch einfache Vorzeichenprüfung vor dem Radizieren kann dieser Fall erkannt wer-den und durch Nullsetzen des Indikators HDI unproblematisch als Sonderfall behandeltwerden.
An dieser Stelle soll nur auf einige Besonderheiten der realisierten HDI Berechnung hin-gewiesen werden:
• Um numerische Effekte durch Skalierung und Abschneidefehler von Operanden beiRechenoperationen zu vermeiden, wurden in der gesamten Berechnung des Indika-tors HDI auf derartige Skalierungen verzichtet.6
• Die Leistung des Gesamtsignals Pges ist nur mit den Quantisierungsfehlern der Ab-tastung behaftet.
• Die Leistung der ersten Harmonischen P1 ist mit den Quantisierungsfehlern der Ab-tastung und den Quantisierungsfehlern der verwendeten quantisierten Drehfaktorenin der Look-Up-Tabelle behaftet.
Eine ausführliche Abhandlung über die Fehler, die bei der DFT auftreten, befindet sichin Heute [47]. Für den speziellen Fall der Festkommaberechnung finden sich weitere Be-trachtungen in Meyer [78].
6Hier besteht Optimierungspotenzial, dass nach einer gründlichen Untersuchung der numerischen Stabi-lität erschlossen werden könnte.
110
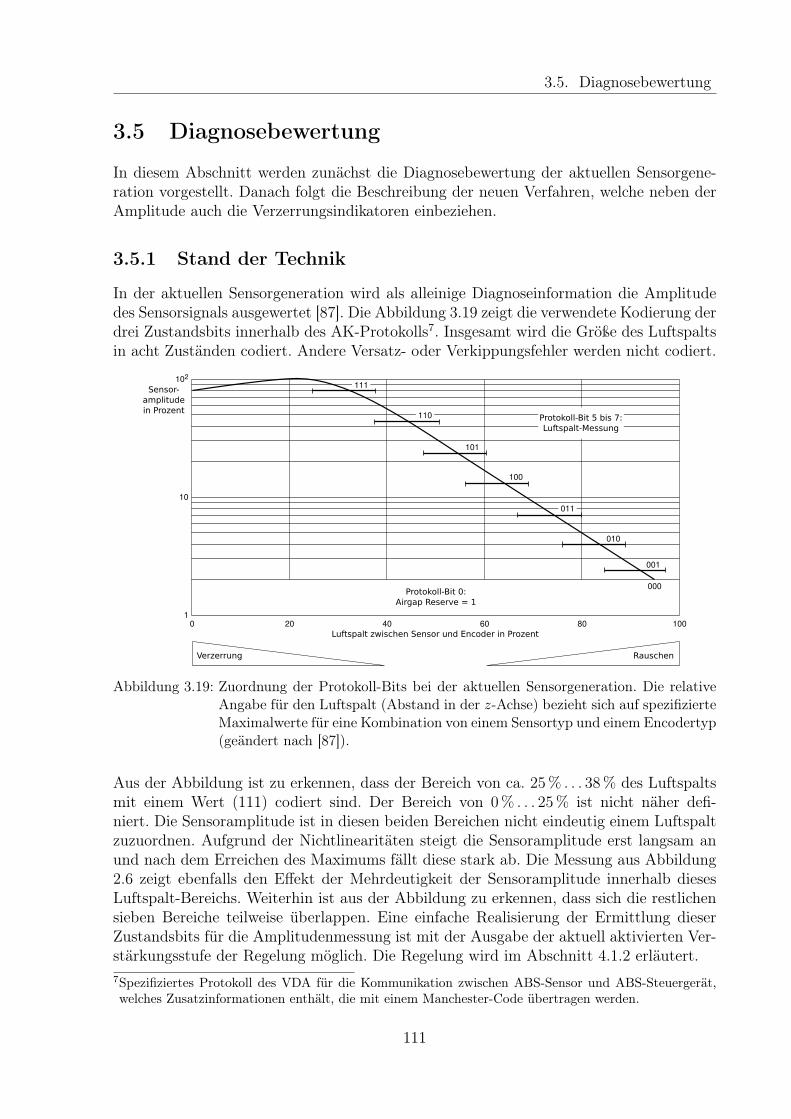
3.5. Diagnosebewertung
3.5 Diagnosebewertung
In diesem Abschnitt werden zunächst die Diagnosebewertung der aktuellen Sensorgene-ration vorgestellt. Danach folgt die Beschreibung der neuen Verfahren, welche neben derAmplitude auch die Verzerrungsindikatoren einbeziehen.
3.5.1 Stand der Technik
In der aktuellen Sensorgeneration wird als alleinige Diagnoseinformation die Amplitudedes Sensorsignals ausgewertet [87]. Die Abbildung 3.19 zeigt die verwendete Kodierung derdrei Zustandsbits innerhalb des AK-Protokolls7. Insgesamt wird die Größe des Luftspaltsin acht Zuständen codiert. Andere Versatz- oder Verkippungsfehler werden nicht codiert.
0 20 40 60 80 100
102
10
1
111
110
101
100
011
010
001
000
Verzerrung Rauschen
Luftspalt zwischen Sensor und Encoder in Prozent
Sensor-amplitudein Prozent
Protokoll-Bit 0:Airgap Reserve = 1
Protokoll-Bit 5 bis 7:Luftspalt-Messung
Abbildung 3.19: Zuordnung der Protokoll-Bits bei der aktuellen Sensorgeneration. Die relativeAngabe für den Luftspalt (Abstand in der z-Achse) bezieht sich auf spezifizierteMaximalwerte für eine Kombination von einem Sensortyp und einem Encodertyp(geändert nach [87]).
Aus der Abbildung ist zu erkennen, dass der Bereich von ca. 25 % . . . 38 % des Luftspaltsmit einem Wert (111) codiert sind. Der Bereich von 0 % . . . 25 % ist nicht näher defi-niert. Die Sensoramplitude ist in diesen beiden Bereichen nicht eindeutig einem Luftspaltzuzuordnen. Aufgrund der Nichtlinearitäten steigt die Sensoramplitude erst langsam anund nach dem Erreichen des Maximums fällt diese stark ab. Die Messung aus Abbildung2.6 zeigt ebenfalls den Effekt der Mehrdeutigkeit der Sensoramplitude innerhalb diesesLuftspalt-Bereichs. Weiterhin ist aus der Abbildung zu erkennen, dass sich die restlichensieben Bereiche teilweise überlappen. Eine einfache Realisierung der Ermittlung dieserZustandsbits für die Amplitudenmessung ist mit der Ausgabe der aktuell aktivierten Ver-stärkungsstufe der Regelung möglich. Die Regelung wird im Abschnitt 4.1.2 erläutert.7Spezifiziertes Protokoll des VDA für die Kommunikation zwischen ABS-Sensor und ABS-Steuergerät,welches Zusatzinformationen enthält, die mit einem Manchester-Code übertragen werden.
111
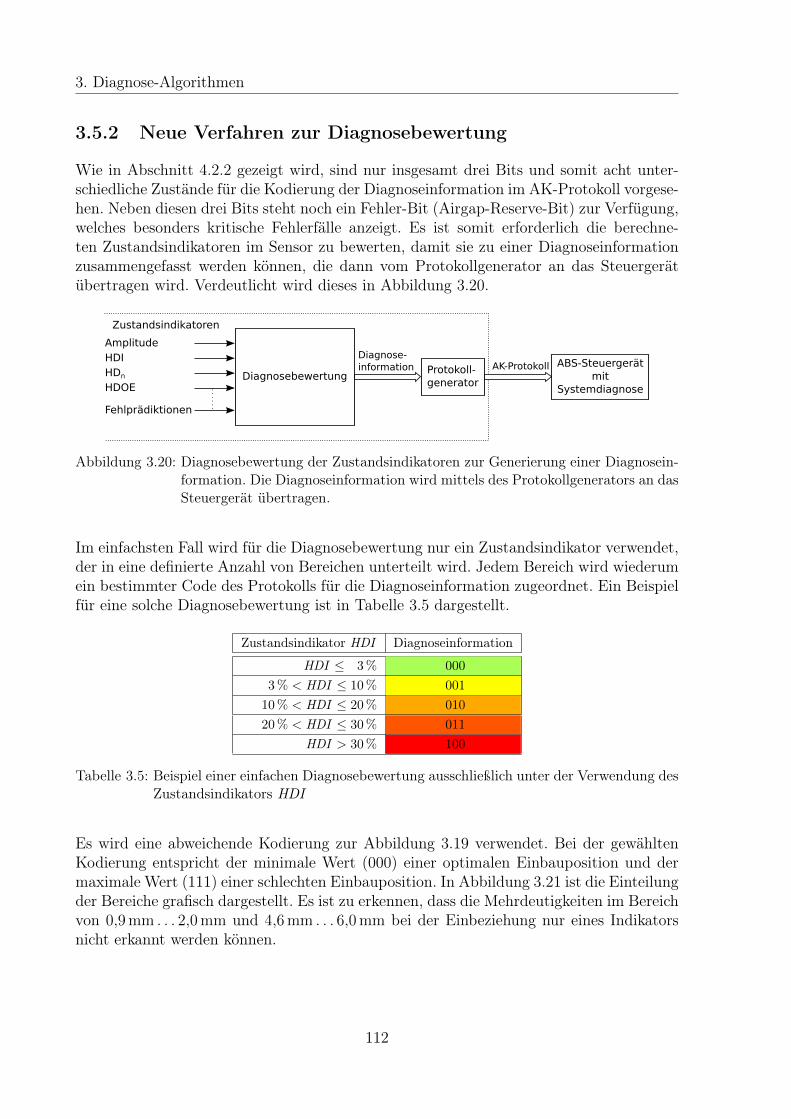
3. Diagnose-Algorithmen
3.5.2 Neue Verfahren zur Diagnosebewertung
Wie in Abschnitt 4.2.2 gezeigt wird, sind nur insgesamt drei Bits und somit acht unter-schiedliche Zustände für die Kodierung der Diagnoseinformation im AK-Protokoll vorgese-hen. Neben diesen drei Bits steht noch ein Fehler-Bit (Airgap-Reserve-Bit) zur Verfügung,welches besonders kritische Fehlerfälle anzeigt. Es ist somit erforderlich die berechne-ten Zustandsindikatoren im Sensor zu bewerten, damit sie zu einer Diagnoseinformationzusammengefasst werden können, die dann vom Protokollgenerator an das Steuergerätübertragen wird. Verdeutlicht wird dieses in Abbildung 3.20.
Zustandsindikatoren
Protokoll-generator
Diagnosebewertung
Diagnose-information
AmplitudeHDIHDn
HDOE
ABS-Steuergerätmit
Systemdiagnose
AK-Protokoll
Fehlprädiktionen
Abbildung 3.20: Diagnosebewertung der Zustandsindikatoren zur Generierung einer Diagnosein-formation. Die Diagnoseinformation wird mittels des Protokollgenerators an dasSteuergerät übertragen.
Im einfachsten Fall wird für die Diagnosebewertung nur ein Zustandsindikator verwendet,der in eine definierte Anzahl von Bereichen unterteilt wird. Jedem Bereich wird wiederumein bestimmter Code des Protokolls für die Diagnoseinformation zugeordnet. Ein Beispielfür eine solche Diagnosebewertung ist in Tabelle 3.5 dargestellt.
Zustandsindikator HDI Diagnoseinformation
HDI ≤ 3 % 000
3 % < HDI ≤ 10 % 001
10 % < HDI ≤ 20 % 010
20 % < HDI ≤ 30 % 011
HDI > 30 % 100
Tabelle 3.5: Beispiel einer einfachen Diagnosebewertung ausschließlich unter der Verwendung desZustandsindikators HDI
Es wird eine abweichende Kodierung zur Abbildung 3.19 verwendet. Bei der gewähltenKodierung entspricht der minimale Wert (000) einer optimalen Einbauposition und dermaximale Wert (111) einer schlechten Einbauposition. In Abbildung 3.21 ist die Einteilungder Bereiche grafisch dargestellt. Es ist zu erkennen, dass die Mehrdeutigkeiten im Bereichvon 0,9 mm . . . 2,0 mm und 4,6 mm . . . 6,0 mm bei der Einbeziehung nur eines Indikatorsnicht erkannt werden können.
112
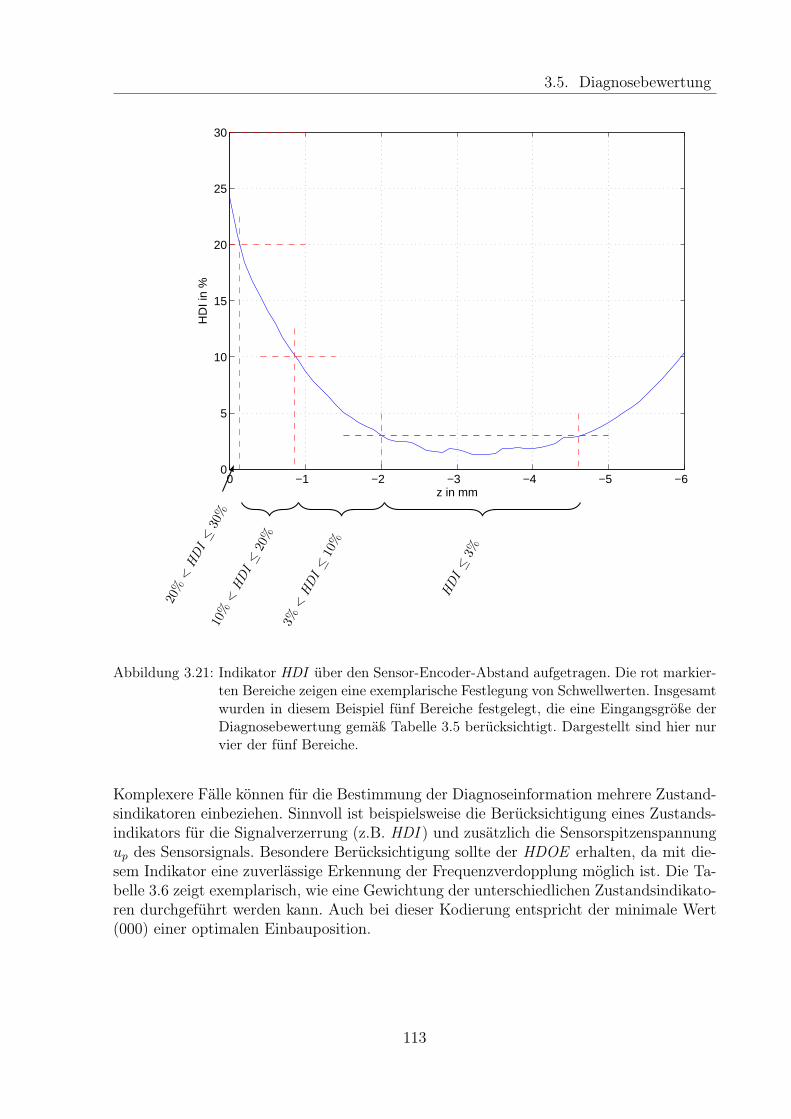
3.5. Diagnosebewertung
−6−5−4−3−2−100
5
10
15
20
25
30
HD
I in
%
z in mm
10%<HDI≤
20%
3%<HDI≤
10%
HDI≤
3%
20%<HDI≤
30%
Abbildung 3.21: Indikator HDI über den Sensor-Encoder-Abstand aufgetragen. Die rot markier-ten Bereiche zeigen eine exemplarische Festlegung von Schwellwerten. Insgesamtwurden in diesem Beispiel fünf Bereiche festgelegt, die eine Eingangsgröße derDiagnosebewertung gemäß Tabelle 3.5 berücksichtigt. Dargestellt sind hier nurvier der fünf Bereiche.
Komplexere Fälle können für die Bestimmung der Diagnoseinformation mehrere Zustand-sindikatoren einbeziehen. Sinnvoll ist beispielsweise die Berücksichtigung eines Zustands-indikators für die Signalverzerrung (z.B. HDI ) und zusätzlich die Sensorspitzenspannungup des Sensorsignals. Besondere Berücksichtigung sollte der HDOE erhalten, da mit die-sem Indikator eine zuverlässige Erkennung der Frequenzverdopplung möglich ist. Die Ta-belle 3.6 zeigt exemplarisch, wie eine Gewichtung der unterschiedlichen Zustandsindikato-ren durchgeführt werden kann. Auch bei dieser Kodierung entspricht der minimale Wert(000) einer optimalen Einbauposition.
113
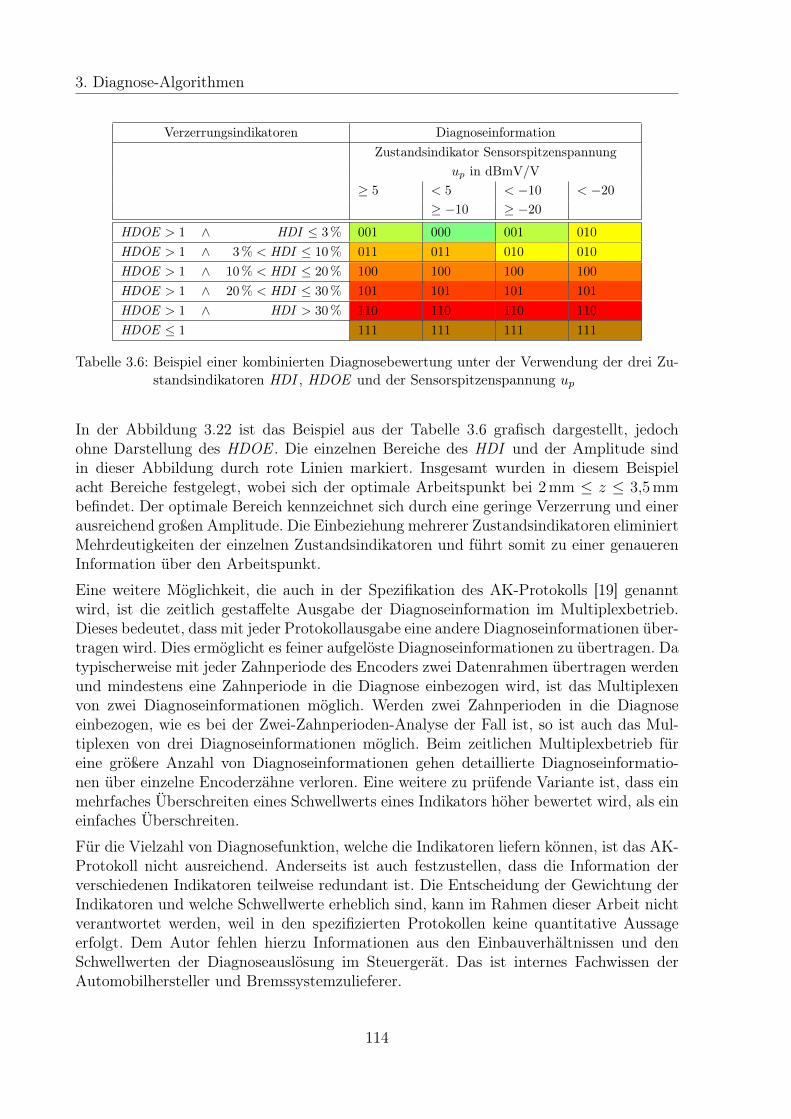
3. Diagnose-Algorithmen
Verzerrungsindikatoren DiagnoseinformationZustandsindikator Sensorspitzenspannung
up in dBmV/V
≥ 5 < 5 < −10 < −20
≥ −10 ≥ −20
HDOE > 1 ∧ HDI ≤ 3 % 001 000 001 010
HDOE > 1 ∧ 3 % < HDI ≤ 10 % 011 011 010 010
HDOE > 1 ∧ 10 % < HDI ≤ 20 % 100 100 100 100
HDOE > 1 ∧ 20 % < HDI ≤ 30 % 101 101 101 101
HDOE > 1 ∧ HDI > 30 % 110 110 110 110
HDOE ≤ 1 111 111 111 111
Tabelle 3.6: Beispiel einer kombinierten Diagnosebewertung unter der Verwendung der drei Zu-standsindikatoren HDI , HDOE und der Sensorspitzenspannung up
In der Abbildung 3.22 ist das Beispiel aus der Tabelle 3.6 grafisch dargestellt, jedochohne Darstellung des HDOE . Die einzelnen Bereiche des HDI und der Amplitude sindin dieser Abbildung durch rote Linien markiert. Insgesamt wurden in diesem Beispielacht Bereiche festgelegt, wobei sich der optimale Arbeitspunkt bei 2 mm ≤ z ≤ 3,5 mmbefindet. Der optimale Bereich kennzeichnet sich durch eine geringe Verzerrung und einerausreichend großen Amplitude. Die Einbeziehung mehrerer Zustandsindikatoren eliminiertMehrdeutigkeiten der einzelnen Zustandsindikatoren und führt somit zu einer genauerenInformation über den Arbeitspunkt.
Eine weitere Möglichkeit, die auch in der Spezifikation des AK-Protokolls [19] genanntwird, ist die zeitlich gestaffelte Ausgabe der Diagnoseinformation im Multiplexbetrieb.Dieses bedeutet, dass mit jeder Protokollausgabe eine andere Diagnoseinformationen über-tragen wird. Dies ermöglicht es feiner aufgelöste Diagnoseinformationen zu übertragen. Datypischerweise mit jeder Zahnperiode des Encoders zwei Datenrahmen übertragen werdenund mindestens eine Zahnperiode in die Diagnose einbezogen wird, ist das Multiplexenvon zwei Diagnoseinformationen möglich. Werden zwei Zahnperioden in die Diagnoseeinbezogen, wie es bei der Zwei-Zahnperioden-Analyse der Fall ist, so ist auch das Mul-tiplexen von drei Diagnoseinformationen möglich. Beim zeitlichen Multiplexbetrieb füreine größere Anzahl von Diagnoseinformationen gehen detaillierte Diagnoseinformatio-nen über einzelne Encoderzähne verloren. Eine weitere zu prüfende Variante ist, dass einmehrfaches Überschreiten eines Schwellwerts eines Indikators höher bewertet wird, als eineinfaches Überschreiten.
Für die Vielzahl von Diagnosefunktion, welche die Indikatoren liefern können, ist das AK-Protokoll nicht ausreichend. Anderseits ist auch festzustellen, dass die Information derverschiedenen Indikatoren teilweise redundant ist. Die Entscheidung der Gewichtung derIndikatoren und welche Schwellwerte erheblich sind, kann im Rahmen dieser Arbeit nichtverantwortet werden, weil in den spezifizierten Protokollen keine quantitative Aussageerfolgt. Dem Autor fehlen hierzu Informationen aus den Einbauverhältnissen und denSchwellwerten der Diagnoseauslösung im Steuergerät. Das ist internes Fachwissen derAutomobilhersteller und Bremssystemzulieferer.
114
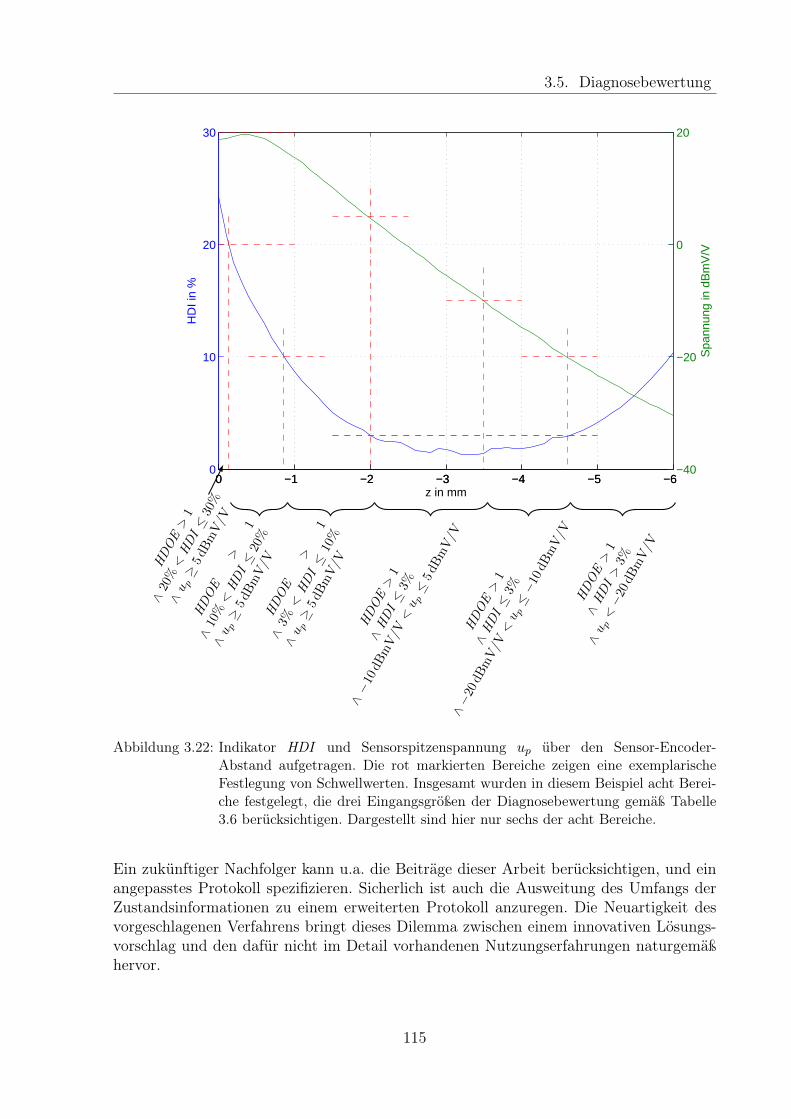
3.5. Diagnosebewertung
−6−5−4−3−2−100
10
20
30
HD
I in
%
z in mm−6−5−4−3−2−10
−40
−20
0
20
Spa
nnun
g in
dB
mV
/V
HDOE
>
1
∧10
%<HDI≤
20%
∧u p≥
5dB
mV/V
HDOE
>
1
∧3%
<HDI≤
10%
∧u p≥
5dB
mV/V
HDOE>
1
∧HDI≤
3%
∧−
10dB
mV/V
<u p≤
5dB
mV/V
HDOE>
1
∧HDI≤
3%
∧−
20dB
mV/V
<u p≤−1
0dB
mV/V
HDOE>
1
∧HDI>
3%
∧u p<−2
0dB
mV/V
HDOE>
1
∧20
%<HDI≤
30%
∧u p≥
5dB
mV/V
Abbildung 3.22: Indikator HDI und Sensorspitzenspannung up über den Sensor-Encoder-Abstand aufgetragen. Die rot markierten Bereiche zeigen eine exemplarischeFestlegung von Schwellwerten. Insgesamt wurden in diesem Beispiel acht Berei-che festgelegt, die drei Eingangsgrößen der Diagnosebewertung gemäß Tabelle3.6 berücksichtigen. Dargestellt sind hier nur sechs der acht Bereiche.
Ein zukünftiger Nachfolger kann u.a. die Beiträge dieser Arbeit berücksichtigen, und einangepasstes Protokoll spezifizieren. Sicherlich ist auch die Ausweitung des Umfangs derZustandsinformationen zu einem erweiterten Protokoll anzuregen. Die Neuartigkeit desvorgeschlagenen Verfahrens bringt dieses Dilemma zwischen einem innovativen Lösungs-vorschlag und den dafür nicht im Detail vorhandenen Nutzungserfahrungen naturgemäßhervor.
115

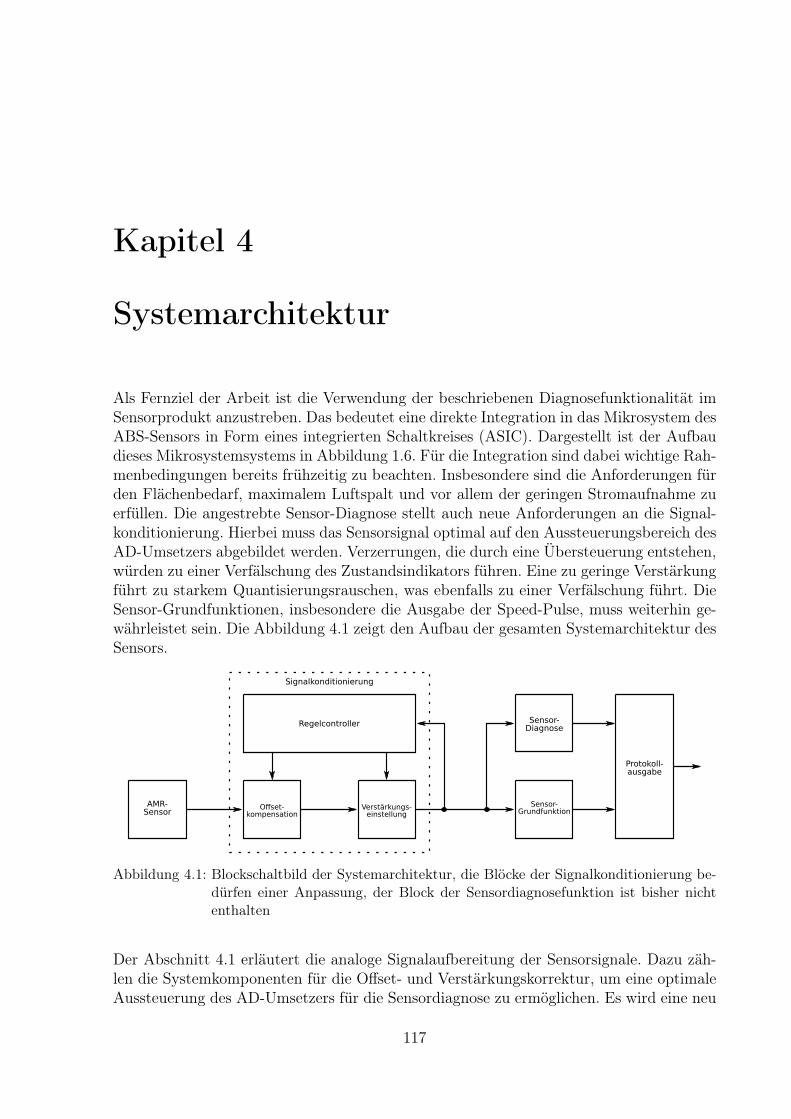
Kapitel 4
Systemarchitektur
Als Fernziel der Arbeit ist die Verwendung der beschriebenen Diagnosefunktionalität imSensorprodukt anzustreben. Das bedeutet eine direkte Integration in das Mikrosystem desABS-Sensors in Form eines integrierten Schaltkreises (ASIC). Dargestellt ist der Aufbaudieses Mikrosystemsystems in Abbildung 1.6. Für die Integration sind dabei wichtige Rah-menbedingungen bereits frühzeitig zu beachten. Insbesondere sind die Anforderungen fürden Flächenbedarf, maximalem Luftspalt und vor allem der geringen Stromaufnahme zuerfüllen. Die angestrebte Sensor-Diagnose stellt auch neue Anforderungen an die Signal-konditionierung. Hierbei muss das Sensorsignal optimal auf den Aussteuerungsbereich desAD-Umsetzers abgebildet werden. Verzerrungen, die durch eine Übersteuerung entstehen,würden zu einer Verfälschung des Zustandsindikators führen. Eine zu geringe Verstärkungführt zu starkem Quantisierungsrauschen, was ebenfalls zu einer Verfälschung führt. DieSensor-Grundfunktionen, insbesondere die Ausgabe der Speed-Pulse, muss weiterhin ge-währleistet sein. Die Abbildung 4.1 zeigt den Aufbau der gesamten Systemarchitektur desSensors.
Offset-kompensation
Sensor-Diagnose
AMR-Sensor
Regelcontroller
Sensor-Grundfunktion
Verstärkungs-einstellung
Protokoll-ausgabe
Signalkonditionierung
Abbildung 4.1: Blockschaltbild der Systemarchitektur, die Blöcke der Signalkonditionierung be-dürfen einer Anpassung, der Block der Sensordiagnosefunktion ist bisher nichtenthalten
Der Abschnitt 4.1 erläutert die analoge Signalaufbereitung der Sensorsignale. Dazu zäh-len die Systemkomponenten für die Offset- und Verstärkungskorrektur, um eine optimaleAussteuerung des AD-Umsetzers für die Sensordiagnose zu ermöglichen. Es wird eine neu
117
4. Systemarchitektur
entwickelte Signalaufbereitung auf Basis eines logarithmischen Verstärkers in Kombinati-on mit einer linearen Verstärkerbank vorgestellt. Diese ermöglicht die direkte Erkennungeines Signals über einen großen Aussteuerungs- und Offsetbereich und eine wesentlicheBeschleunigung des Regelverfahrens.
Im Abschnitt 4.2 wird eine Einführung in die Sensorgrundfunktionen gegeben. Dabeiwerden Verfahren zur Nulldurchgangserkennung beschrieben, die zur Generierung derSpeed-Pulse erforderlich sind. Dort wird anhand der Schnittstellen und Protokolle zumSteuergerät erläutert, wie die Speed-Pulse und Diagnoseinformationen übertragen wer-den. Außerdem wird vorgestellt, dass der VDA bereits die Übertragung mehrerer Bits mitDiagnoseinformationen in dem Ausgabeprotokoll als Standard vorgesehen hat. Die anzu-wendenden Diagnoseverfahren sind jedoch ungewöhnlicherweise offen gelassen worden1.
Der Abschnitt 4.3 stellt die Implementierung der neu entwickelten Diagnoseverfahren vor.Dazu werden die Architekturen der entwickelten Funktionsblöcke zur Steuerung der win-keläquidistanten Abtastung, der Berechnung der reduzierten DFT und der Bestimmungdes Zustandsindikators vorgestellt. Darauf aufbauend werden zwei entwickelte Architek-turvarianten erläutert, die eine ressourceneffiziente Implementierung der in Kapitel 3 be-schriebenen Algorithmen zur Sensordiagnose erlauben.
4.1 Signalaufbereitung
Das Sensorsignal kann nicht unmittelbar in digitale Werte umgesetzt werden. Es sindVerstärkerstufen und Offsetkorrekturen in der Signalaufbereitung notwendig, die analogrealisiert werden müssen. Für das Sensorsignal gilt:
• Die Sensoramplitude liegt im Bereich von µV bis mV. Diese geringen Signalspan-nungen müssen in den Bereich der AD-Umsetzer-Aussteuerung von 0 bis Vcc (Vcc ≈1,65 . . . 3,3 V) überführt werden. Der AD-Umsetzer sollte gut ausgesteuert werden,damit der Anteil des Quantisierungsrauschen gering bleibt. Er darf aber in keinemFall übersteuert werden, weil sonst die entstehenden Harmonischen der Übersteue-rungsverzerrung die Indikatoren verfälschen.
• Der Offset des Sensors ist beim Einschalten der Versorgung unbekannt. Er setztsich aus elektrischen und magnetischen Anteilen zusammen. Die elektrischen An-teile resultieren aus der Asymmetrie der Brückenwiderstände und liegen im Bereichweniger Prozente der Brückenversorgungsspannung, obwohl die Widerstandsbrückeninnerhalb der AMR-Sensoren bereits bei der Herstellung durch Lasertrimmung aufdem Wafer abgeglichen wurden [81, 103]. Die Anordnung der Trimmstrukturen istin Abbildung 2.27(a) schematisch dargestellt. Magnetische Offsetanteile sind durch
1Zitat aus [19]: „The following options for use are imaginable for the freely assignable (optional) additionalinformation:- More detailed information on the air gap (e.g. signal amplitude measurement as equivalent to the airgap)- Information on the status of the sensor- Display for multiplex operation (for any multiple use of bits)- Integration of the brake pad wear signal if necessary“
118
4.1. Signalaufbereitung
eine Reihe von Einzelfaktoren und deren Toleranzen bestimmt. Dazu zählen dieMagnetisierungsstärke, die Richtung sowie die Inhomogenität des Stützmagneten.Weiterhin ist der magnetische Offset auch abhängig von der Einbauposition des Sen-sors. Der Brückenabgleich bei der Herstellung wird unter der Annahme eines idealpositionierten Encoders durchgeführt. Magnetische Offsets, die durch eine Fehlposi-tionierung des Sensors verursacht werden, können bei der Lasertrimmung noch nichtberücksichtigt werden. Gleiches gilt für Temperaturverschiebungen des Offsets2. DieGesamtoffsetspannung kann bis etwa ±5 % der Brückenversorgungsspannung betra-gen. Der Offsetanteil ist damit um ein Vielfaches größer als die Amplitude eineskleinen Sensorsignals. Eine modellhafte Darstellung, wie der elektrische und dermagnetische Offset das Sensor-Ausgangssignal beeinflussen ist in Abbildung 4.2 ge-zeigt.
Generell problematisch für die Regelung eines AMR-Sensors ist die Situation am Regel-beginn. Hier fehlen entscheidende Informationen über das Signal und dem Systemzustandbzw. Betriebszustand:
• Es ist unbekannt, ob beim Einschalten des Sensors der Encoder rotiert oder sich imStillstand befindet.
• Im Stillstand ist die aktuelle Position des Sensors zum Encoder unbekannt3. Es kannnach dem Einschalten nicht unterschieden werden, welcher Anteil das vom Encoderverursachte Sensorsignal ist oder welcher Anteil vom Offset bewirkt wird.
Weiterhin ist problematisch:
• Die nichtflüchtige Speicherung von Regelungsparametern innerhalb des Sensors warbisher nicht vorgesehen4. Dafür bestanden zwei Ursachen, zum einen sind Halb-leiterprozesse für nichtflüchtige Speicher aufwendiger als Standard-CMOS Prozes-se, zum anderen stehen die Spezifikationswerte für die Datenerhaltung (RetentionRate) und die zulässige Schreibhäufigkeit (Endurance) im Widerspruch zu den Zu-verlässigkeitsforderungen. Das gilt insbesondere, weil ein Temperaturbereich von−40 C . . .+ 150 C abzusichern ist [53, 96]. Im hohen Temperaturbereich ist durchdie erhöhte Ladungsträgerbeweglichkeit ein erhöhter Ladungsverlust (Leakage) anden Speicherzellen gegeben. Sehr aktuelle Entwicklungen erlauben auch nichtflüchti-ge Speicher in erhöhten Temperaturbereichen [8]. Soweit bekannt, wird diese Technikbei Winkelsensoren angewendet [82].
• Es muss eine extrem große relative Bandbreite von 1 Hz . . . 2500 Hz sichergestelltwerden [53, 87]. Die Bandbreite ist deshalb als groß zu bezeichnen, weil das Fre-quenzverhältnis von 1:2500 nicht mehr erlaubt, analoge Filterschaltungen oder RC-Zeitglieder passend zu dimensionieren. Zu dem ist eine kapazitive Wechselstrom-
2Ein nur geringer Offsetanteil ist vom Erdmagnetfeld bewirkt. Es kann vernachlässigt werden, da dieserOffsetanteil sich mit der Fahrzeugbewegung ändert.
3Kurz ausgedrückt, der Sensor kann im Stillstand vor einem Encoderzahn oder einer Zahnlücke stehen.4Es gibt Konzepte der sogenannten Selbstkalibrierung bei Hall-Sensoren, die auf der Einspeicherung vonOffsets nach der Montage am Encoder basieren [116].
119
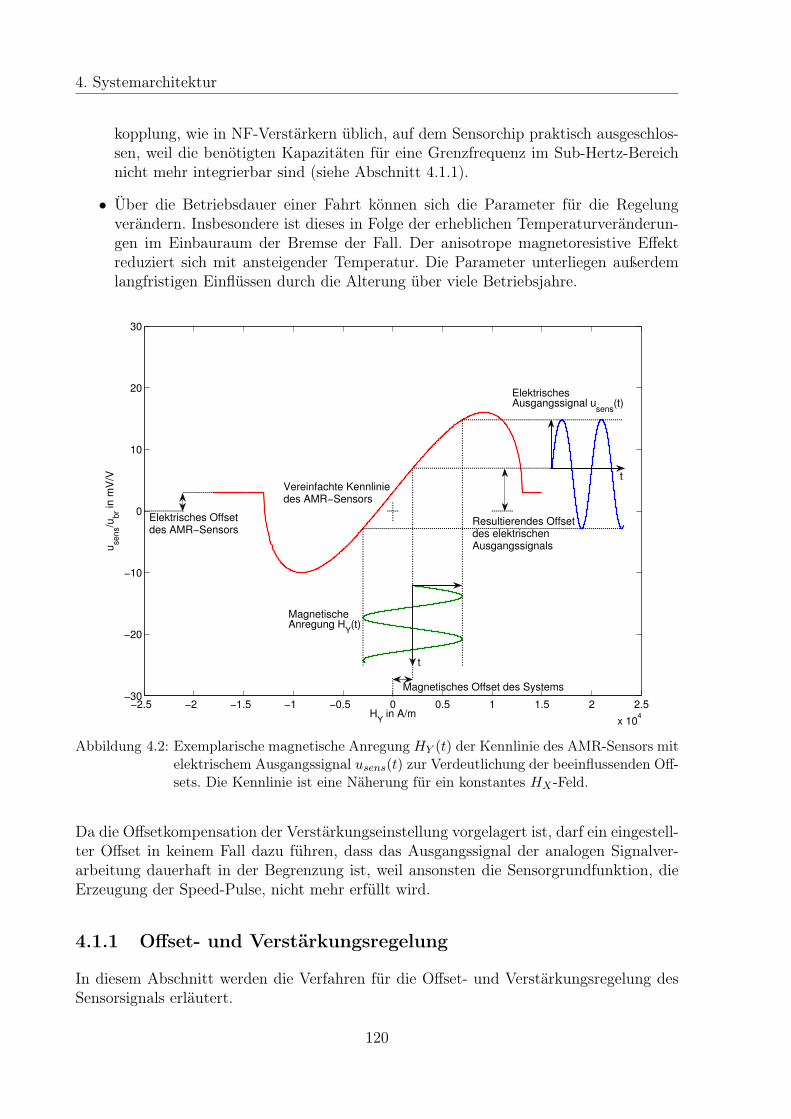
4. Systemarchitektur
kopplung, wie in NF-Verstärkern üblich, auf dem Sensorchip praktisch ausgeschlos-sen, weil die benötigten Kapazitäten für eine Grenzfrequenz im Sub-Hertz-Bereichnicht mehr integrierbar sind (siehe Abschnitt 4.1.1).
• Über die Betriebsdauer einer Fahrt können sich die Parameter für die Regelungverändern. Insbesondere ist dieses in Folge der erheblichen Temperaturveränderun-gen im Einbauraum der Bremse der Fall. Der anisotrope magnetoresistive Effektreduziert sich mit ansteigender Temperatur. Die Parameter unterliegen außerdemlangfristigen Einflüssen durch die Alterung über viele Betriebsjahre.
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5
x 104
−30
−20
−10
0
10
20
30
HY
in A/m
u sens
/ubr
inm
V/V
ElektrischesAusgangssignal u
sens(t)
MagnetischeAnregung H
Y(t)
Resultierendes Offsetdes elektrischenAusgangssignals
Elektrisches Offsetdes AMR−Sensors
Magnetisches Offset des Systems
Vereinfachte Kennliniedes AMR−Sensors
t
t
Abbildung 4.2: Exemplarische magnetische Anregung HY (t) der Kennlinie des AMR-Sensors mitelektrischem Ausgangssignal usens(t) zur Verdeutlichung der beeinflussenden Off-sets. Die Kennlinie ist eine Näherung für ein konstantes HX -Feld.
Da die Offsetkompensation der Verstärkungseinstellung vorgelagert ist, darf ein eingestell-ter Offset in keinem Fall dazu führen, dass das Ausgangssignal der analogen Signalver-arbeitung dauerhaft in der Begrenzung ist, weil ansonsten die Sensorgrundfunktion, dieErzeugung der Speed-Pulse, nicht mehr erfüllt wird.
4.1.1 Offset- und Verstärkungsregelung
In diesem Abschnitt werden die Verfahren für die Offset- und Verstärkungsregelung desSensorsignals erläutert.
120

4.1. Signalaufbereitung
Offsetregelung
Das Herausfiltern des Offsetanteils mittels einer einfachen Hochpassschaltung erscheintzunächst naheliegend. Die hierfür erforderlichen Kapazitäten und Widerstände lassen sichjedoch in den zur Verfügung stehenden CMOS-Prozessen nicht technisch realisieren5. Esist somit eine Regelung erforderlich, die den Offset eliminiert. Die Offsetkorrektur istvor der Verstärkung des Sensorsignals durchzuführen, weil Offsets gleichzeitig mit demNutzsignal verstärkt werden.
Ein Verfahren, welches für die Offsetregelung in ABS-Sensoren verwendet wird, ist dieTastgrad-Regelung. Diese nutzt als Regelgröße nicht die Amplitude des Sensorsignals son-dern deren Tastverhältnis. Im Rahmen des Forschungsprojektes wurde dieses Verfahrender Offsetregelung erstmalig von Jegenhorst [56] und Stahl [110] auf einem Mikrocontrol-ler realisiert. Das Verfahren bildet die Architektur der analogen Signalverarbeitung deraktuellen Sensorgeneration KMI22/1 [88] nach.
Das Tastverhältnis
δsens =tpT· 100 % (4.1)
des Sensorsignals kann aus dem Speed-Puls-Signal, welches für die Sensorgrundfunktionentscheidend ist, bestimmt werden. Die gesamte Periodendauer wird hier durch T unddie Pulsdauer durch tp angegeben. In der Abbildung 4.3 wird die Abhängigkeit des Tast-verhältnisses von Offset-Spannung uoff verdeutlicht. Im links dargestellten Signal ist keinOffset vorhanden, was zu einem Tastverhältnis δsens = 50 % führt. Das rechts dargestellteSignal hat einen positiven Offset, was zu einem Tastverhältnis von δsens > 50 % führt. Aufdie Generierung des Speed-Puls-Signals aus dem Sensorsignal wird im Abschnitt 4.2.1eingegangen. Jegenhorst [56] hat gezeigt, dass sich bei einem annähernd sinusförmigenSensorsignal der Offset der n-ten Zahnperiode
uoff (n) =umax(n)− umin(n)
2· sin
(π
(δsens(n)
100 %− 1
2
))(4.2)
aus dem Tastverhältnis δsens und dem Minimum umin und Maximum umax der Spannunginnerhalb der Zahnperiode berechnen lässt. Unter der Voraussetzung, dass der Offset nichtschwankt und dass es sich bei dem auszuregelnden Signal um einen Sinus handelt, kanndirekt nach erfolgter Messung des Tastgrades, der Maximalspannung und der Minimal-spannung einer Zahnperiode der Offset kompensiert werden. Alternativ kann auch ohneeine Berechnung nach Gleichung 4.2 der Offset mittels eines Reglers, der sich schritt-weise dem zu kompensierenden Offset annähert, kompensiert werden. Die Stellgröße istdie Verstärker-Offsetspannung, welche dem Referenzeingang des Instrumentenverstärkerszugeführt wird. Die Regelschaltung wird im folgenden Kapitel näher erläutert.5Laut der Prozessbeschreibung der verwendeten CMOS-Technologie C35B4C3 [6] sind die höchsten Ka-pazitäten von 0,86 fF/µm2 in Polysilizium-Layern zu erreichen. Bei einer Kapazität von 1 nF ergibt sichsomit ein Flächenbedarf von 1,16 mm2, damit sind die Rahmenbedingungen für die Diagnose in derFläche allein ausgefüllt. Wird eine Grenzfrequenz von 1 Hz festgelegt, so wird für diesen Hochpass einWiderstand von 159 MΩ benötigt, was nicht zu realisieren ist.
121
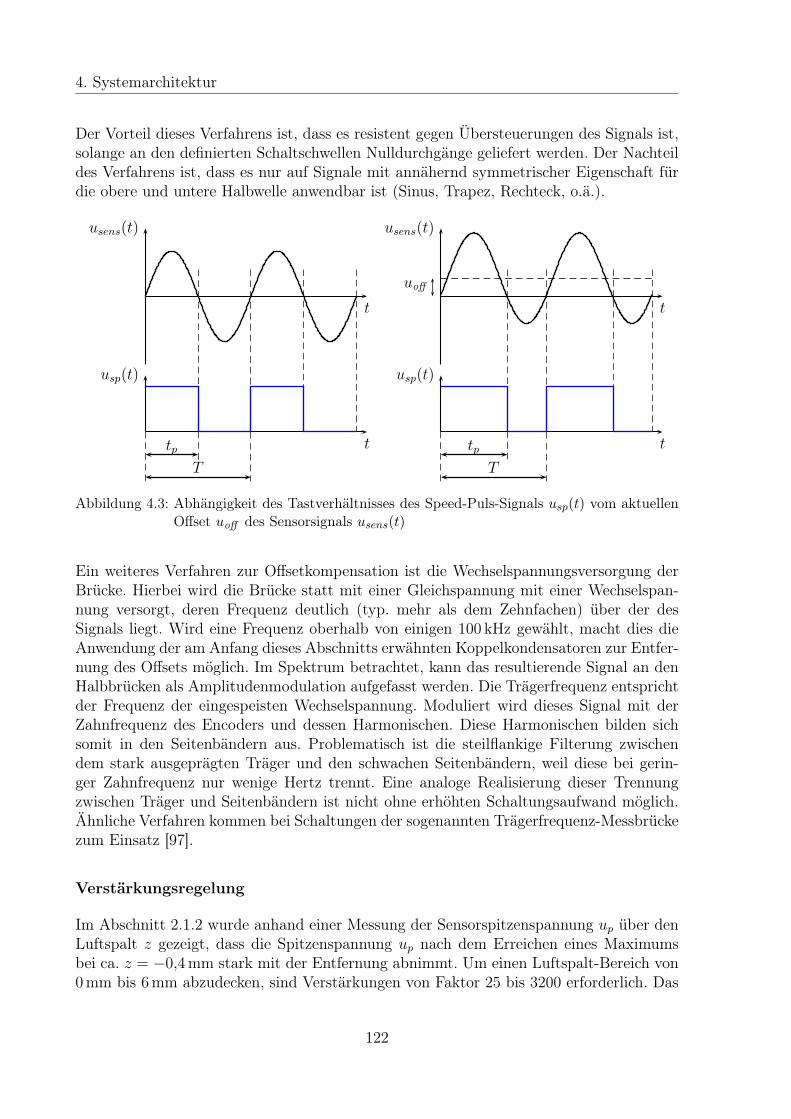
4. Systemarchitektur
Der Vorteil dieses Verfahrens ist, dass es resistent gegen Übersteuerungen des Signals ist,solange an den definierten Schaltschwellen Nulldurchgänge geliefert werden. Der Nachteildes Verfahrens ist, dass es nur auf Signale mit annähernd symmetrischer Eigenschaft fürdie obere und untere Halbwelle anwendbar ist (Sinus, Trapez, Rechteck, o.ä.).
t
usens(t)
t
usp(t)
tp
T
t
usens(t)
uoff
t
usp(t)
tp
T
Abbildung 4.3: Abhängigkeit des Tastverhältnisses des Speed-Puls-Signals usp(t) vom aktuellenOffset uoff des Sensorsignals usens(t)
Ein weiteres Verfahren zur Offsetkompensation ist die Wechselspannungsversorgung derBrücke. Hierbei wird die Brücke statt mit einer Gleichspannung mit einer Wechselspan-nung versorgt, deren Frequenz deutlich (typ. mehr als dem Zehnfachen) über der desSignals liegt. Wird eine Frequenz oberhalb von einigen 100 kHz gewählt, macht dies dieAnwendung der am Anfang dieses Abschnitts erwähnten Koppelkondensatoren zur Entfer-nung des Offsets möglich. Im Spektrum betrachtet, kann das resultierende Signal an denHalbbrücken als Amplitudenmodulation aufgefasst werden. Die Trägerfrequenz entsprichtder Frequenz der eingespeisten Wechselspannung. Moduliert wird dieses Signal mit derZahnfrequenz des Encoders und dessen Harmonischen. Diese Harmonischen bilden sichsomit in den Seitenbändern aus. Problematisch ist die steilflankige Filterung zwischendem stark ausgeprägten Träger und den schwachen Seitenbändern, weil diese bei gerin-ger Zahnfrequenz nur wenige Hertz trennt. Eine analoge Realisierung dieser Trennungzwischen Träger und Seitenbändern ist nicht ohne erhöhten Schaltungsaufwand möglich.Ähnliche Verfahren kommen bei Schaltungen der sogenannten Trägerfrequenz-Messbrückezum Einsatz [97].
Verstärkungsregelung
Im Abschnitt 2.1.2 wurde anhand einer Messung der Sensorspitzenspannung up über denLuftspalt z gezeigt, dass die Spitzenspannung up nach dem Erreichen eines Maximumsbei ca. z = −0,4 mm stark mit der Entfernung abnimmt. Um einen Luftspalt-Bereich von0 mm bis 6 mm abzudecken, sind Verstärkungen von Faktor 25 bis 3200 erforderlich. Das
122
4.1. Signalaufbereitung
in dieser Arbeit vorgeschlagene Diagnoseverfahren stellt neue Anforderungen an die Ver-stärkungsregelung. Die neue Herausforderung besteht darin, das Signal optimal und ohneÜbersteuerungen auf den Aussteuerungsbereich eines AD-Umsetzers abzubilden. Damitunterscheidet es sich von den in der aktuellen Sensorgeneration angewandten Regelver-fahren.
In der aktuellen Sensorgeneration wird ein schaltbarer Verstärker mit unterschiedlichenVerstärkungsstufen eingesetzt und mittels eines Komparators die Einhaltung einer Schwel-le im Bereich von 75 % der Gesamtaussteuerung geprüft. Diese sukzessive Überprüfungder einzelnen Verstärkerstufen ist langsam, was durch die Einschwingzeit der Stufen desschaltbaren Verstärkers verursacht wird [3]. Um die Einschwingzeit des schaltbaren Ver-stärkers zu berücksichtigen, benötigt die Schwellenüberprüfung mehrere Encoderperioden.Dieses Verfahren wurde von Stahl [110] in einem diskreten Verstärkeraufbau erprobt undauf einem Mikrocontroller implementiert.
Generell ist eine schnelle Einstellung der Verstärkung innerhalb weniger Zahnperiodenanzustreben. Ein denkbarer Ansatz besteht in der Verwendung einer Verstärkerbank mitangeschlossenem Analogmultiplexer und AD-Umsetzern oder Komparatoren. Bei dieserSchaltung wird mit einer hohen Geschwindigkeit die Aussteuerung jeder einzelnen Ver-stärkerstufe geprüft und die Verstärkerstufe mit dem besten Signal an die folgenden Stufenweitergeleitet. Dieses Verfahren stellt hohe Anforderungen an die Toleranzen der Verstär-kerschaltung und erfordert einen relativ hohen Versorgungsstrom. Für die Reduzierungdes Hardwareaufwands ist es anzustreben, eine direkte Auswahl der optimalen Verstär-kungsstufe zu erreichen.
Weiterhin ist zu beachten, dass möglichst keine Regelvorgänge während einer aktivenAbtastung stattfinden. Der Diagnose muss außerdem signalisiert werden, wenn ein Regel-vorgang, d.h. eine Korrektur des Offsets oder der Verstärkung während der Abtastung,stattgefunden hat. Daraufhin müssen in der Diagnoseeinheit sämtliche Abtastwerte ver-worfen werden, um eine Auswertung der Indikatoren zu verhindern.
4.1.2 Dynamikkompression des Sensorsignals
Ein neues Konzept für die analoge Signalaufbereitung basiert auf der Idee von Matz [77].Sie sieht den Einsatz von logarithmischen Verstärkern in der analogen Signalvorverarbei-tung der ABS-Sensoren vor. Ziel ist es die Dynamik des Sensorsignals vom µV- bis zummV-Bereich auf einen Bereich abzubilden, der für die hoch priorisierte Nulldurchgangser-kennung optimal ist. Die bekannten Verfahren zur Nulldurchgangserkennung werden imfolgenden Abschnitt beschrieben. Außerdem kann mit einer logarithmischen Verstärkungerreicht werden, dass sich das Sensorsignal über einen breiten Offsetbereich weiterhin imAussteuerungsbereich befindet. Die Berechnung der Indikatoren direkt aus dem abgetas-teten logarithmischen Signal ist theoretisch möglich. Im Rahmen des Forschungsprojekteswurde in der Masterarbeit Rostock [101] eine direkte digitale Verarbeitung des logarith-mischen Signals simulativ erprobt. Die dabei berechneten Indikatoren weisen nur einengeringen Fehler gegenüber denen aus linear verstärkten Signalen auf. Weil Einflüsse realerVerstärker schwer erfassbar sind und diese simulativ noch nicht modelliert wurden, wird
123

4. Systemarchitektur
im Folgenden jedoch nicht die Verwendung des logarithmischen Signals für die Sensordia-gnose in Betracht gezogen. Somit kann nicht auf zusätzliche lineare Verstärker verzichtetwerden.
Verfahren zur Dynamikkompression sind aus der Audiotechnik und dem Bereich der Funk-technik bekannt. In der Audiotechnik werden Kompressoren verwendet, um das Übersteu-ern und somit Verzerrungen zu verhindern. Sie sind hier nicht anwendbar, weil die mul-tiplikative Bewertung des Signals mit Ansprech- und Rücklaufzeiten durchgeführt wird[119]. Somit kann auch nicht von der Ausgangsamplitude des Kompressors direkt auf dasEingangssignal geschlossen werden.
Im Bereich der Funktechnik wird die Dynamikkompression in RSSI6-Schaltungen ver-wendet, um über einen großen Dynamikbereich die Empfangsfeldstärke zu messen. Mitdem Signal der RSSI-Schaltung wird die Verstärkung des Empfangssignals geregelt [107].Innerhalb der RSSI-Schaltungen befinden sich oft logarithmische Verstärker.
Bekannt sind logarithmische Verstärker, welche über Dioden oder Bipolar-Transistorenim Rückkopplungspfad einer Operationsverstärkerschaltung diese Kennlinie erreichen. Beider Verwendung von Dioden können bis zu zwei Dekaden und mit Bipolar-Transistoren biszu neun Dekaden abgedeckt werden [113]. Die Verwendung dieser Bauelemente führt zustarken Temperaturabhängigkeiten der Schaltung. In Anbetracht einer geplanten CMOS-Implementierung des Gesamtsystems muss außerdem bedacht werden, dass für die Inte-gration von Bipolar-Transistoren ein spezieller BiCMOS-Prozess erforderlich ist. Aus dengenannten Gründen muss eine alternative Schaltung verwendet werden, welche ebenfallseine logarithmische Kennlinie annähert.
Weniger bekannt sind approximiert logarithmische Verstärker, bei denen die Kennlinieüber die Zusammenschaltung von mehreren linearen verstärkten Signalen erreicht wird.Die erste bekannte Erwähnung des approximiert logarithmischen Verstärkers wurde vonSelove [105] bereits 1948 veröffentlicht. Selove hat diesen Verstärker speziell für die Dyna-mikkompression von Radar-Signalen entwickelt. Chambers und Page [15] haben ebenfallseinen approximiert logarithmischen Verstärker entwickelt. Dieser wurde für die Verwen-dung in einem HF-Empfänger entwickelt und basiert auf Röhrentechnik. Shaterian et al.haben einen ausführlichen Übersichtsartikel über approximiert logarithmische Verstärkerund deren Schaltungsdesign verfasst [107]. Im folgenden Abschnitt wird die Theorie derapproximiert logarithmischen Verstärker zusammenfassend erläutert.
Approximiert logarithmische Verstärker (Lin-Log-Verstärker)
Der approximiert logarithmische Verstärker nähert die Logarithmus-Funktion durch dieSummierung unterschiedlich linear verstärkter Signale an. Die linear arbeitenden Verstär-ker können dabei unterschiedlich angeordnet werden:
• serielle Verkettung von Verstärkern mit gleichen Verstärkungsfaktoren und parallelerAufsummierung,
6Indikator für die Empfangsfeldstärke (Received Signal Strength Indication)
124
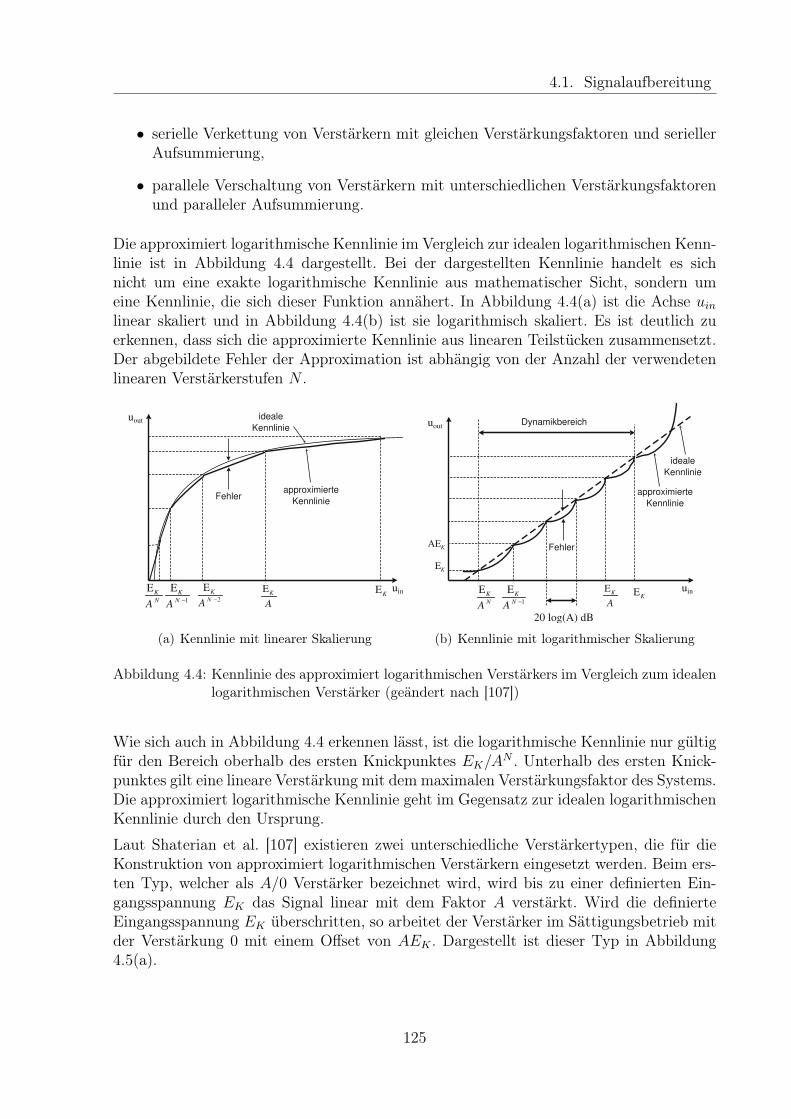
4.1. Signalaufbereitung
• serielle Verkettung von Verstärkern mit gleichen Verstärkungsfaktoren und seriellerAufsummierung,
• parallele Verschaltung von Verstärkern mit unterschiedlichen Verstärkungsfaktorenund paralleler Aufsummierung.
Die approximiert logarithmische Kennlinie im Vergleich zur idealen logarithmischen Kenn-linie ist in Abbildung 4.4 dargestellt. Bei der dargestellten Kennlinie handelt es sichnicht um eine exakte logarithmische Kennlinie aus mathematischer Sicht, sondern umeine Kennlinie, die sich dieser Funktion annähert. In Abbildung 4.4(a) ist die Achse uinlinear skaliert und in Abbildung 4.4(b) ist sie logarithmisch skaliert. Es ist deutlich zuerkennen, dass sich die approximierte Kennlinie aus linearen Teilstücken zusammensetzt.Der abgebildete Fehler der Approximation ist abhängig von der Anzahl der verwendetenlinearen Verstärkerstufen N .
uout
EKEK
AEK
NA 1
EKNA − 2
EKNA −
idealeKennlinie
Fehlerapproximierte
Kennlinie
uin
EK
20 log(A) dB
EKEK
AEK
NA 1
EKNA −
Fehler
idealeKennlinie
approximierteKennlinie
uin
uout
AEK
Dynamikbereich
(a) Kennlinie mit linearer Skalierung (b) Kennlinie mit logarithmischer Skalierung
Abbildung 4.4: Kennlinie des approximiert logarithmischen Verstärkers im Vergleich zum idealenlogarithmischen Verstärker (geändert nach [107])
Wie sich auch in Abbildung 4.4 erkennen lässt, ist die logarithmische Kennlinie nur gültigfür den Bereich oberhalb des ersten Knickpunktes EK/AN . Unterhalb des ersten Knick-punktes gilt eine lineare Verstärkung mit dem maximalen Verstärkungsfaktor des Systems.Die approximiert logarithmische Kennlinie geht im Gegensatz zur idealen logarithmischenKennlinie durch den Ursprung.
Laut Shaterian et al. [107] existieren zwei unterschiedliche Verstärkertypen, die für dieKonstruktion von approximiert logarithmischen Verstärkern eingesetzt werden. Beim ers-ten Typ, welcher als A/0 Verstärker bezeichnet wird, wird bis zu einer definierten Ein-gangsspannung EK das Signal linear mit dem Faktor A verstärkt. Wird die definierteEingangsspannung EK überschritten, so arbeitet der Verstärker im Sättigungsbetrieb mitder Verstärkung 0 mit einem Offset von AEK . Dargestellt ist dieser Typ in Abbildung4.5(a).
125
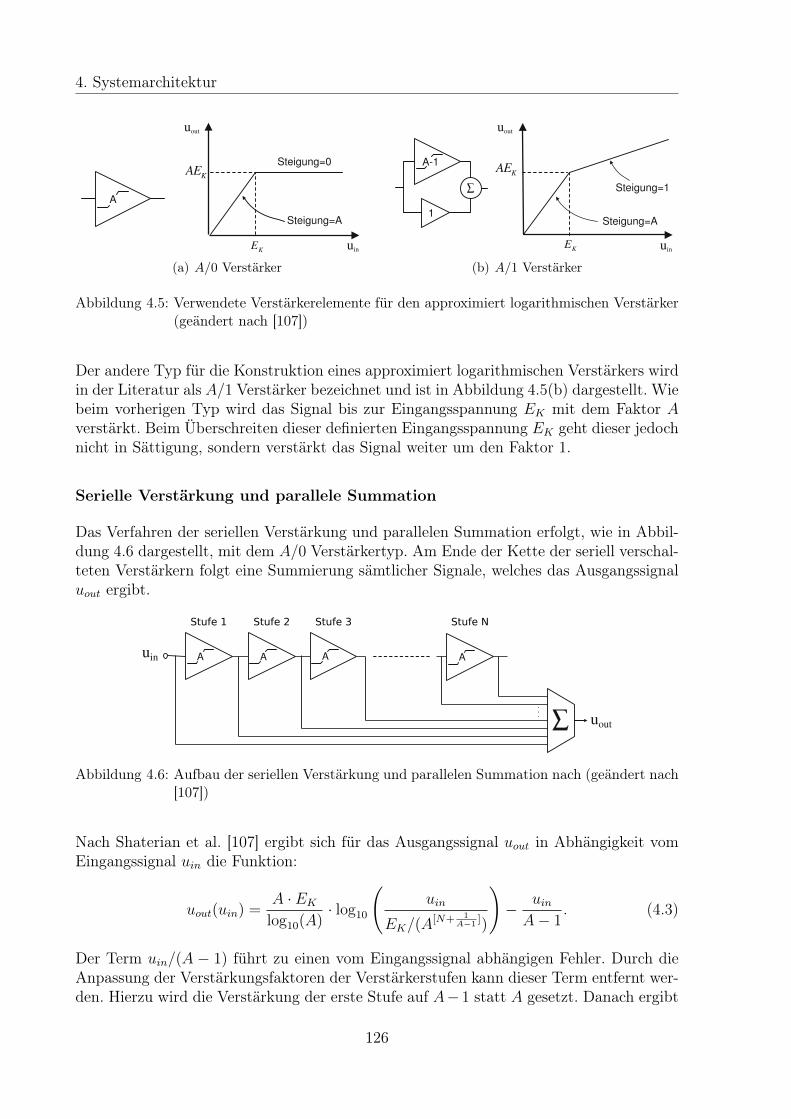
4. Systemarchitektur
Steigung=A
KE
KAE
A
KE
KAE∑ Steigung=1
Steigung=A
uout uout
uin uin
Steigung=0 A-1
1
(a) A/0 Verstärker (b) A/1 Verstärker
Abbildung 4.5: Verwendete Verstärkerelemente für den approximiert logarithmischen Verstärker(geändert nach [107])
Der andere Typ für die Konstruktion eines approximiert logarithmischen Verstärkers wirdin der Literatur als A/1 Verstärker bezeichnet und ist in Abbildung 4.5(b) dargestellt. Wiebeim vorherigen Typ wird das Signal bis zur Eingangsspannung EK mit dem Faktor Averstärkt. Beim Überschreiten dieser definierten Eingangsspannung EK geht dieser jedochnicht in Sättigung, sondern verstärkt das Signal weiter um den Faktor 1.
Serielle Verstärkung und parallele Summation
Das Verfahren der seriellen Verstärkung und parallelen Summation erfolgt, wie in Abbil-dung 4.6 dargestellt, mit dem A/0 Verstärkertyp. Am Ende der Kette der seriell verschal-teten Verstärkern folgt eine Summierung sämtlicher Signale, welches das Ausgangssignaluout ergibt.
∑
AA A Auin
uout
Stufe 1 Stufe 2 Stufe 3 Stufe N
Abbildung 4.6: Aufbau der seriellen Verstärkung und parallelen Summation nach (geändert nach[107])
Nach Shaterian et al. [107] ergibt sich für das Ausgangssignal uout in Abhängigkeit vomEingangssignal uin die Funktion:
uout(uin) =A · EK
log10(A)· log10
(uin
EK/(A[N+ 1
A−1])
)− uinA− 1
. (4.3)
Der Term uin/(A − 1) führt zu einen vom Eingangssignal abhängigen Fehler. Durch dieAnpassung der Verstärkungsfaktoren der Verstärkerstufen kann dieser Term entfernt wer-den. Hierzu wird die Verstärkung der erste Stufe auf A− 1 statt A gesetzt. Danach ergibt
126
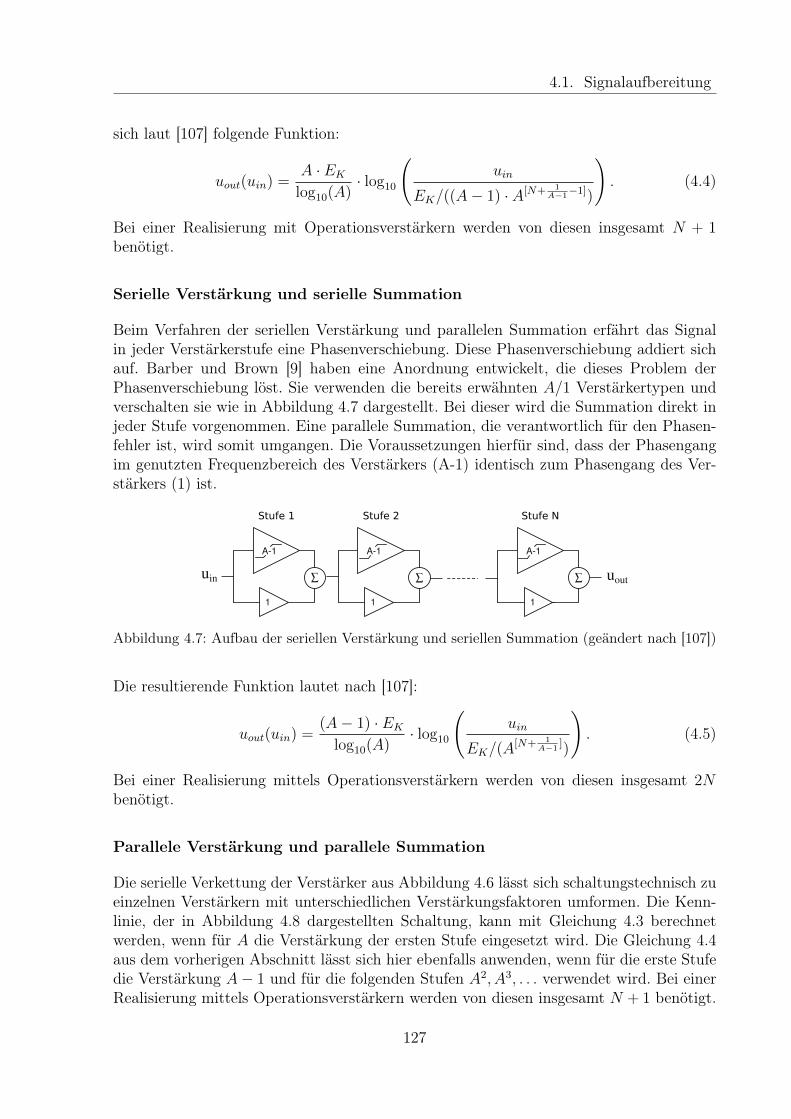
4.1. Signalaufbereitung
sich laut [107] folgende Funktion:
uout(uin) =A · EK
log10(A)· log10
(uin
EK/((A− 1) · A[N+ 1A−1−1])
). (4.4)
Bei einer Realisierung mit Operationsverstärkern werden von diesen insgesamt N + 1benötigt.
Serielle Verstärkung und serielle Summation
Beim Verfahren der seriellen Verstärkung und parallelen Summation erfährt das Signalin jeder Verstärkerstufe eine Phasenverschiebung. Diese Phasenverschiebung addiert sichauf. Barber und Brown [9] haben eine Anordnung entwickelt, die dieses Problem derPhasenverschiebung löst. Sie verwenden die bereits erwähnten A/1 Verstärkertypen undverschalten sie wie in Abbildung 4.7 dargestellt. Bei dieser wird die Summation direkt injeder Stufe vorgenommen. Eine parallele Summation, die verantwortlich für den Phasen-fehler ist, wird somit umgangen. Die Voraussetzungen hierfür sind, dass der Phasengangim genutzten Frequenzbereich des Verstärkers (A-1) identisch zum Phasengang des Ver-stärkers (1) ist.
∑
A-1
∑ ∑uin uout
Stufe 1 Stufe 2 Stufe N
A-1 A-1
1 1 1
Abbildung 4.7: Aufbau der seriellen Verstärkung und seriellen Summation (geändert nach [107])
Die resultierende Funktion lautet nach [107]:
uout(uin) =(A− 1) · EK
log10(A)· log10
(uin
EK/(A[N+ 1
A−1])
). (4.5)
Bei einer Realisierung mittels Operationsverstärkern werden von diesen insgesamt 2Nbenötigt.
Parallele Verstärkung und parallele Summation
Die serielle Verkettung der Verstärker aus Abbildung 4.6 lässt sich schaltungstechnisch zueinzelnen Verstärkern mit unterschiedlichen Verstärkungsfaktoren umformen. Die Kenn-linie, der in Abbildung 4.8 dargestellten Schaltung, kann mit Gleichung 4.3 berechnetwerden, wenn für A die Verstärkung der ersten Stufe eingesetzt wird. Die Gleichung 4.4aus dem vorherigen Abschnitt lässt sich hier ebenfalls anwenden, wenn für die erste Stufedie Verstärkung A− 1 und für die folgenden Stufen A2, A3, . . . verwendet wird. Bei einerRealisierung mittels Operationsverstärkern werden von diesen insgesamt N + 1 benötigt.
127
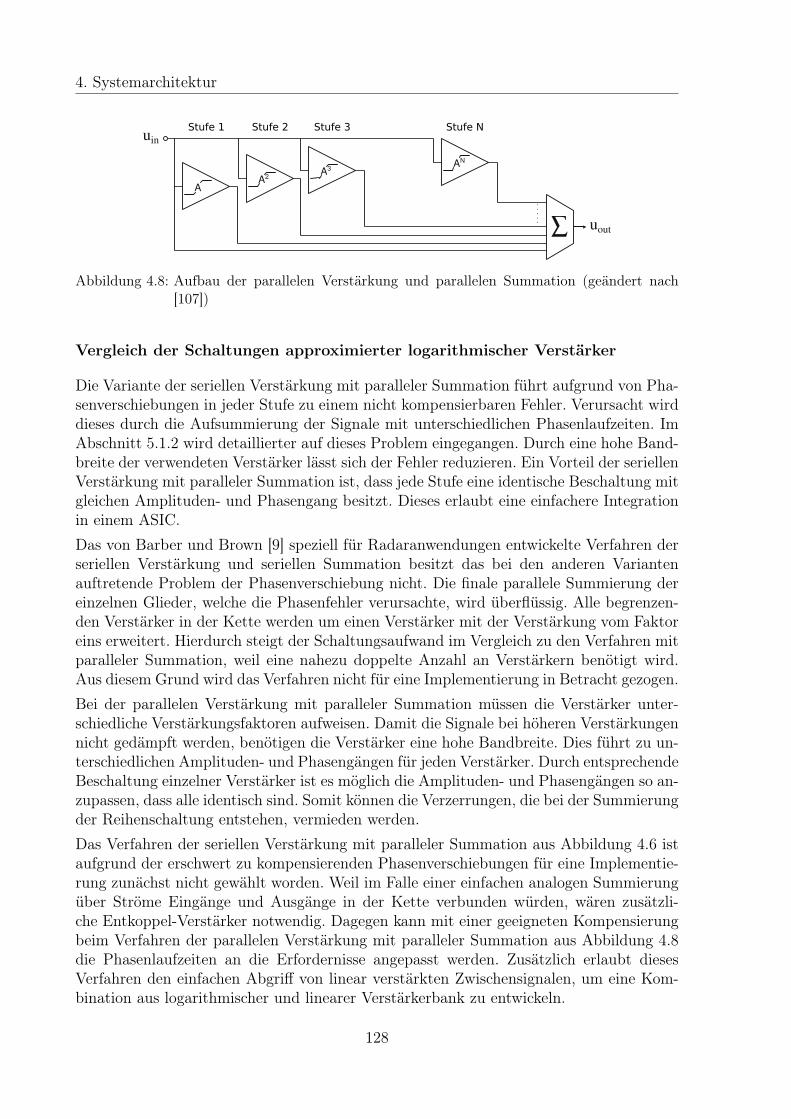
4. Systemarchitektur
∑
AA2 A3 AN
uin
uout
Stufe 1 Stufe 2 Stufe 3 Stufe N
Abbildung 4.8: Aufbau der parallelen Verstärkung und parallelen Summation (geändert nach[107])
Vergleich der Schaltungen approximierter logarithmischer Verstärker
Die Variante der seriellen Verstärkung mit paralleler Summation führt aufgrund von Pha-senverschiebungen in jeder Stufe zu einem nicht kompensierbaren Fehler. Verursacht wirddieses durch die Aufsummierung der Signale mit unterschiedlichen Phasenlaufzeiten. ImAbschnitt 5.1.2 wird detaillierter auf dieses Problem eingegangen. Durch eine hohe Band-breite der verwendeten Verstärker lässt sich der Fehler reduzieren. Ein Vorteil der seriellenVerstärkung mit paralleler Summation ist, dass jede Stufe eine identische Beschaltung mitgleichen Amplituden- und Phasengang besitzt. Dieses erlaubt eine einfachere Integrationin einem ASIC.Das von Barber und Brown [9] speziell für Radaranwendungen entwickelte Verfahren derseriellen Verstärkung und seriellen Summation besitzt das bei den anderen Variantenauftretende Problem der Phasenverschiebung nicht. Die finale parallele Summierung dereinzelnen Glieder, welche die Phasenfehler verursachte, wird überflüssig. Alle begrenzen-den Verstärker in der Kette werden um einen Verstärker mit der Verstärkung vom Faktoreins erweitert. Hierdurch steigt der Schaltungsaufwand im Vergleich zu den Verfahren mitparalleler Summation, weil eine nahezu doppelte Anzahl an Verstärkern benötigt wird.Aus diesem Grund wird das Verfahren nicht für eine Implementierung in Betracht gezogen.Bei der parallelen Verstärkung mit paralleler Summation müssen die Verstärker unter-schiedliche Verstärkungsfaktoren aufweisen. Damit die Signale bei höheren Verstärkungennicht gedämpft werden, benötigen die Verstärker eine hohe Bandbreite. Dies führt zu un-terschiedlichen Amplituden- und Phasengängen für jeden Verstärker. Durch entsprechendeBeschaltung einzelner Verstärker ist es möglich die Amplituden- und Phasengängen so an-zupassen, dass alle identisch sind. Somit können die Verzerrungen, die bei der Summierungder Reihenschaltung entstehen, vermieden werden.Das Verfahren der seriellen Verstärkung mit paralleler Summation aus Abbildung 4.6 istaufgrund der erschwert zu kompensierenden Phasenverschiebungen für eine Implementie-rung zunächst nicht gewählt worden. Weil im Falle einer einfachen analogen Summierungüber Ströme Eingänge und Ausgänge in der Kette verbunden würden, wären zusätzli-che Entkoppel-Verstärker notwendig. Dagegen kann mit einer geeigneten Kompensierungbeim Verfahren der parallelen Verstärkung mit paralleler Summation aus Abbildung 4.8die Phasenlaufzeiten an die Erfordernisse angepasst werden. Zusätzlich erlaubt diesesVerfahren den einfachen Abgriff von linear verstärkten Zwischensignalen, um eine Kom-bination aus logarithmischer und linearer Verstärkerbank zu entwickeln.
128
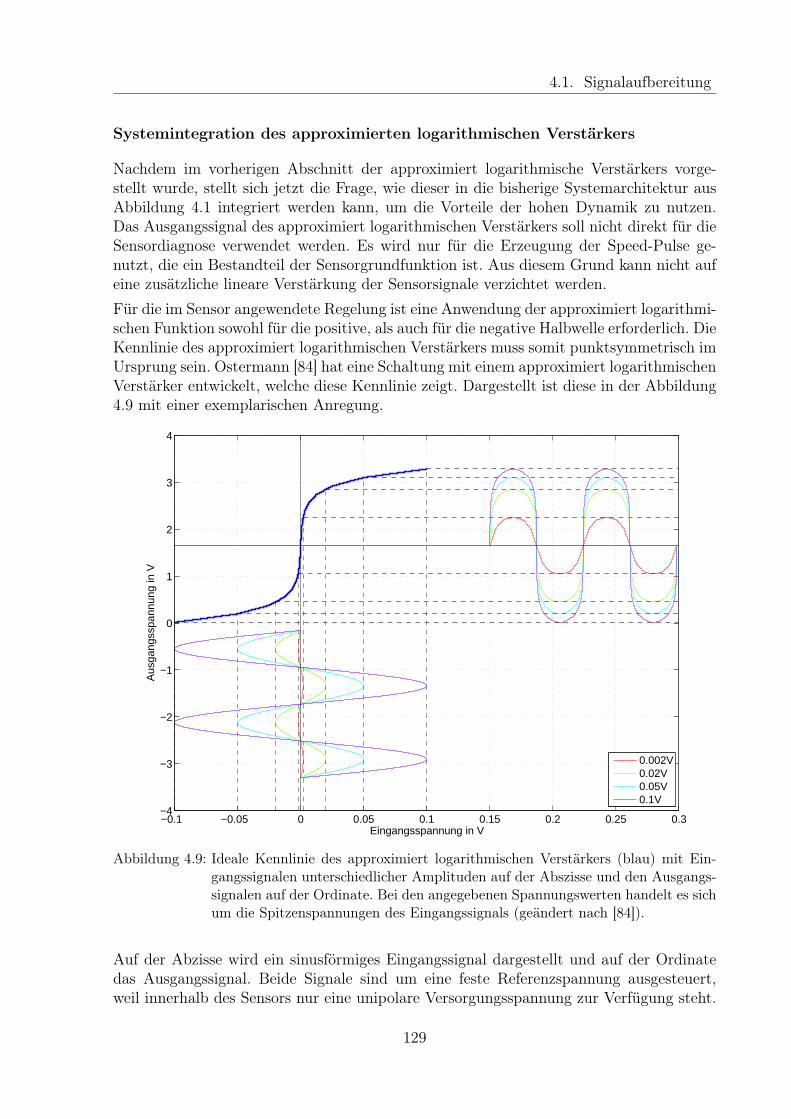
4.1. Signalaufbereitung
Systemintegration des approximierten logarithmischen Verstärkers
Nachdem im vorherigen Abschnitt der approximiert logarithmische Verstärkers vorge-stellt wurde, stellt sich jetzt die Frage, wie dieser in die bisherige Systemarchitektur ausAbbildung 4.1 integriert werden kann, um die Vorteile der hohen Dynamik zu nutzen.Das Ausgangssignal des approximiert logarithmischen Verstärkers soll nicht direkt für dieSensordiagnose verwendet werden. Es wird nur für die Erzeugung der Speed-Pulse ge-nutzt, die ein Bestandteil der Sensorgrundfunktion ist. Aus diesem Grund kann nicht aufeine zusätzliche lineare Verstärkung der Sensorsignale verzichtet werden.Für die im Sensor angewendete Regelung ist eine Anwendung der approximiert logarithmi-schen Funktion sowohl für die positive, als auch für die negative Halbwelle erforderlich. DieKennlinie des approximiert logarithmischen Verstärkers muss somit punktsymmetrisch imUrsprung sein. Ostermann [84] hat eine Schaltung mit einem approximiert logarithmischenVerstärker entwickelt, welche diese Kennlinie zeigt. Dargestellt ist diese in der Abbildung4.9 mit einer exemplarischen Anregung.
−0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25 0.3−4
−3
−2
−1
0
1
2
3
4
Eingangsspannung in V
Aus
gang
sspa
nnun
g in
V
0.002V0.02V0.05V0.1V
Abbildung 4.9: Ideale Kennlinie des approximiert logarithmischen Verstärkers (blau) mit Ein-gangssignalen unterschiedlicher Amplituden auf der Abszisse und den Ausgangs-signalen auf der Ordinate. Bei den angegebenen Spannungswerten handelt es sichum die Spitzenspannungen des Eingangssignals (geändert nach [84]).
Auf der Abzisse wird ein sinusförmiges Eingangssignal dargestellt und auf der Ordinatedas Ausgangssignal. Beide Signale sind um eine feste Referenzspannung ausgesteuert,weil innerhalb des Sensors nur eine unipolare Versorgungsspannung zur Verfügung steht.
129
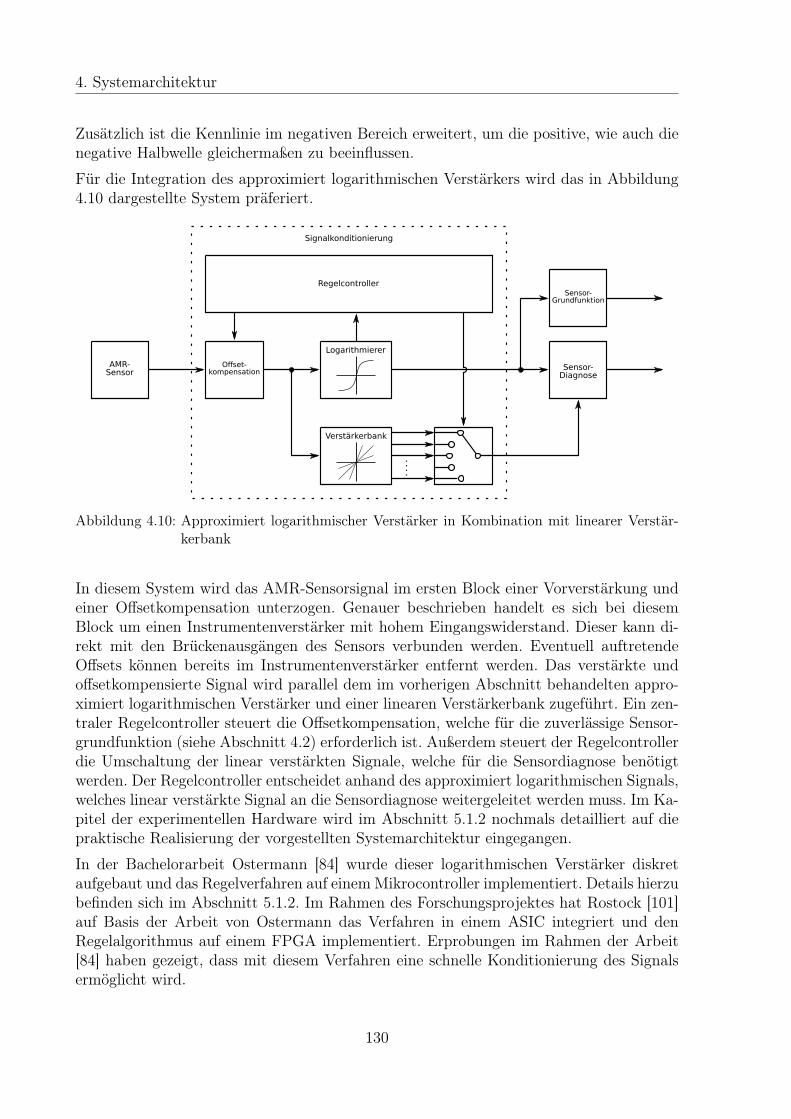
4. Systemarchitektur
Zusätzlich ist die Kennlinie im negativen Bereich erweitert, um die positive, wie auch dienegative Halbwelle gleichermaßen zu beeinflussen.
Für die Integration des approximiert logarithmischen Verstärkers wird das in Abbildung4.10 dargestellte System präferiert.
Offset-kompensation
Sensor-Diagnose
AMR-Sensor
Regelcontroller
Verstärkerbank
Logarithmierer
Sensor-Grundfunktion
Signalkonditionierung
Abbildung 4.10: Approximiert logarithmischer Verstärker in Kombination mit linearer Verstär-kerbank
In diesem System wird das AMR-Sensorsignal im ersten Block einer Vorverstärkung undeiner Offsetkompensation unterzogen. Genauer beschrieben handelt es sich bei diesemBlock um einen Instrumentenverstärker mit hohem Eingangswiderstand. Dieser kann di-rekt mit den Brückenausgängen des Sensors verbunden werden. Eventuell auftretendeOffsets können bereits im Instrumentenverstärker entfernt werden. Das verstärkte undoffsetkompensierte Signal wird parallel dem im vorherigen Abschnitt behandelten appro-ximiert logarithmischen Verstärker und einer linearen Verstärkerbank zugeführt. Ein zen-traler Regelcontroller steuert die Offsetkompensation, welche für die zuverlässige Sensor-grundfunktion (siehe Abschnitt 4.2) erforderlich ist. Außerdem steuert der Regelcontrollerdie Umschaltung der linear verstärkten Signale, welche für die Sensordiagnose benötigtwerden. Der Regelcontroller entscheidet anhand des approximiert logarithmischen Signals,welches linear verstärkte Signal an die Sensordiagnose weitergeleitet werden muss. Im Ka-pitel der experimentellen Hardware wird im Abschnitt 5.1.2 nochmals detailliert auf diepraktische Realisierung der vorgestellten Systemarchitektur eingegangen.
In der Bachelorarbeit Ostermann [84] wurde dieser logarithmischen Verstärker diskretaufgebaut und das Regelverfahren auf einemMikrocontroller implementiert. Details hierzubefinden sich im Abschnitt 5.1.2. Im Rahmen des Forschungsprojektes hat Rostock [101]auf Basis der Arbeit von Ostermann das Verfahren in einem ASIC integriert und denRegelalgorithmus auf einem FPGA implementiert. Erprobungen im Rahmen der Arbeit[84] haben gezeigt, dass mit diesem Verfahren eine schnelle Konditionierung des Signalsermöglicht wird.
130
4.2. Sensorgrundfunktionen
4.2 Sensorgrundfunktionen
Die Sensorgrundfunktionen, zu denen die Nulldurchgangserkennung und die digitale Pro-tokollausgabe zählen, sind Stand der Technik und werden im folgenden Abschnitt nurzusammenfassend erläutert.
4.2.1 Nulldurchgangserkennung
Wie bereits im Abschnitt 1.2 erwähnt, ist für die Funktion des Sensors eine zuverlässigeErkennung der Nulldurchgänge im Sensorsignal erforderlich. Aus den Nulldurchgängenwerden die Speed-Pulse generiert, die von der Protokolleinheit an das Steuergerät über-tragen werden.
Das Sensorsignal usens(t) enthält abhängig von der eingestellten Verstärkungsstufe einenRauschanteil mit unterschiedlicher Amplitude. Dieses kann sich besonders bei der Auswer-tung der Nulldurchgänge durch Rauschen und Störungen nahe der Schaltschwelle negativauswirken. Aus diesem Grund sind in allen folgenden Verfahren Schalthysteresen zu ver-wenden.
Zudem können noch systematische Störgrößen durch Vibrationen und magnetische Störfel-der (Wechselfelder) hinzukommen. Komparatoren mit Hysteresen sind als Standardzellenin CMOS-Technologie verfügbar7. Diese werden hier nicht näher betrachtet, weil diesetypischerweise über keine einstellbare Hysterese verfügen. Derartige Schaltungen sind inder Sensoranwendung nur in der ersten Generation von ABS-Sensoren eingesetzt worden[85, 86]. Die festen Hystereseschwellen können der Verstärkungsregelung nicht folgen. Siewerden in den folgenden Generationen mit integrierter Regelung nicht mehr verwendetund werden auch hier nicht mehr näher betrachtet.
Nulldurchgangserkennung durch schnelle Abtastung mittels ADC
Mit der Verfügbarkeit hochintegrierter digitaler Signalverarbeitung erscheint es zunächstnaheliegend, die Nulldurchgangserkennung digital mittels eines schnellen AD-Umsetzerszu implementieren. Bei einer angegebenen maximalen Zahnfrequenz [87] von ft = 2500 Hzund bei einem angenommenen erlaubten Jitter8 der Nulldurchgangserkennung von 1%muss die Abtastrate fs etwa 100-mal höher liegen als die maximale Zahnfrequenz. Die-ses führt zu einer Abtastratenforderung von fs = 250 kHz an den einzusetzenden AD-Umsetzer, um eine Nulldurchgangserkennung durch Auswertung der Abtastwerte zu er-möglichen. Dreschhoff hat in seiner Diplomarbeit [24] diese digitale Nulldurchgangser-kennung mittels FPGA und einem schnellen AD-Umsetzer implementiert. Dieser AD-Umsetzer müsste dauerhaft mit der maximalen Abtastrate betrieben werden, was einenhohen Leistungsaufwand zur Folge hat. Für die Diagnose ist ein separater AD-Umsetzer er-forderlich, weil hier die in Kapitel 3 beschriebene winkeläquidistante Abtastung verwendetwird. Soll dieses vermieden werden, so wäre die Verwendung eines schnellen AD-Umsetzers7Austriamicrosystems C35 COMP mit typ. 17 mV Hysterese8Die Maximalwerte für das Jitter bei Hall-basierten ABS-Sensoren liegen im Bereich von 2 % . . . 6 % [53].
131
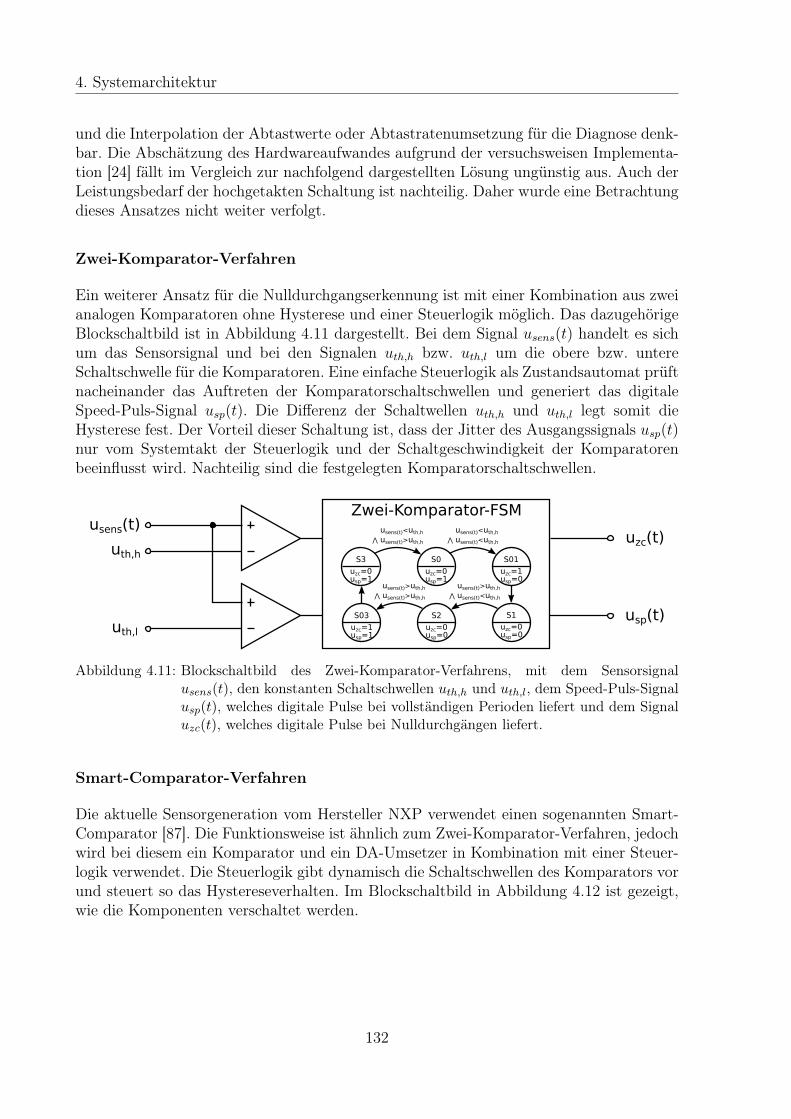
4. Systemarchitektur
und die Interpolation der Abtastwerte oder Abtastratenumsetzung für die Diagnose denk-bar. Die Abschätzung des Hardwareaufwandes aufgrund der versuchsweisen Implementa-tion [24] fällt im Vergleich zur nachfolgend dargestellten Lösung ungünstig aus. Auch derLeistungsbedarf der hochgetakten Schaltung ist nachteilig. Daher wurde eine Betrachtungdieses Ansatzes nicht weiter verfolgt.
Zwei-Komparator-Verfahren
Ein weiterer Ansatz für die Nulldurchgangserkennung ist mit einer Kombination aus zweianalogen Komparatoren ohne Hysterese und einer Steuerlogik möglich. Das dazugehörigeBlockschaltbild ist in Abbildung 4.11 dargestellt. Bei dem Signal usens(t) handelt es sichum das Sensorsignal und bei den Signalen uth,h bzw. uth,l um die obere bzw. untereSchaltschwelle für die Komparatoren. Eine einfache Steuerlogik als Zustandsautomat prüftnacheinander das Auftreten der Komparatorschaltschwellen und generiert das digitaleSpeed-Puls-Signal usp(t). Die Differenz der Schaltwellen uth,h und uth,l legt somit dieHysterese fest. Der Vorteil dieser Schaltung ist, dass der Jitter des Ausgangssignals usp(t)nur vom Systemtakt der Steuerlogik und der Schaltgeschwindigkeit der Komparatorenbeeinflusst wird. Nachteilig sind die festgelegten Komparatorschaltschwellen.
Zwei-Komparator-FSMusens(t)
uth,h
uth,l
uzc(t)
usp(t)
S0
uzc=0usp=1
S01
uzc=1usp=0
S1
uzc=0usp=0
S2
uzc=0usp=0
S03
uzc=1usp=1
S3
uzc=0usp=1
usens(t)<uth,h
⋀ usens(t)<uth,h
usens(t)>uth,h
⋀ usens(t)<uth,h
usens(t)>uth,h
⋀ usens(t)>uth,h
usens(t)<uth,h
⋀ usens(t)>uth,h
Abbildung 4.11: Blockschaltbild des Zwei-Komparator-Verfahrens, mit dem Sensorsignalusens(t), den konstanten Schaltschwellen uth,h und uth,l, dem Speed-Puls-Signalusp(t), welches digitale Pulse bei vollständigen Perioden liefert und dem Signaluzc(t), welches digitale Pulse bei Nulldurchgängen liefert.
Smart-Comparator-Verfahren
Die aktuelle Sensorgeneration vom Hersteller NXP verwendet einen sogenannten Smart-Comparator [87]. Die Funktionsweise ist ähnlich zum Zwei-Komparator-Verfahren, jedochwird bei diesem ein Komparator und ein DA-Umsetzer in Kombination mit einer Steuer-logik verwendet. Die Steuerlogik gibt dynamisch die Schaltschwellen des Komparators vorund steuert so das Hystereseverhalten. Im Blockschaltbild in Abbildung 4.12 ist gezeigt,wie die Komponenten verschaltet werden.
132
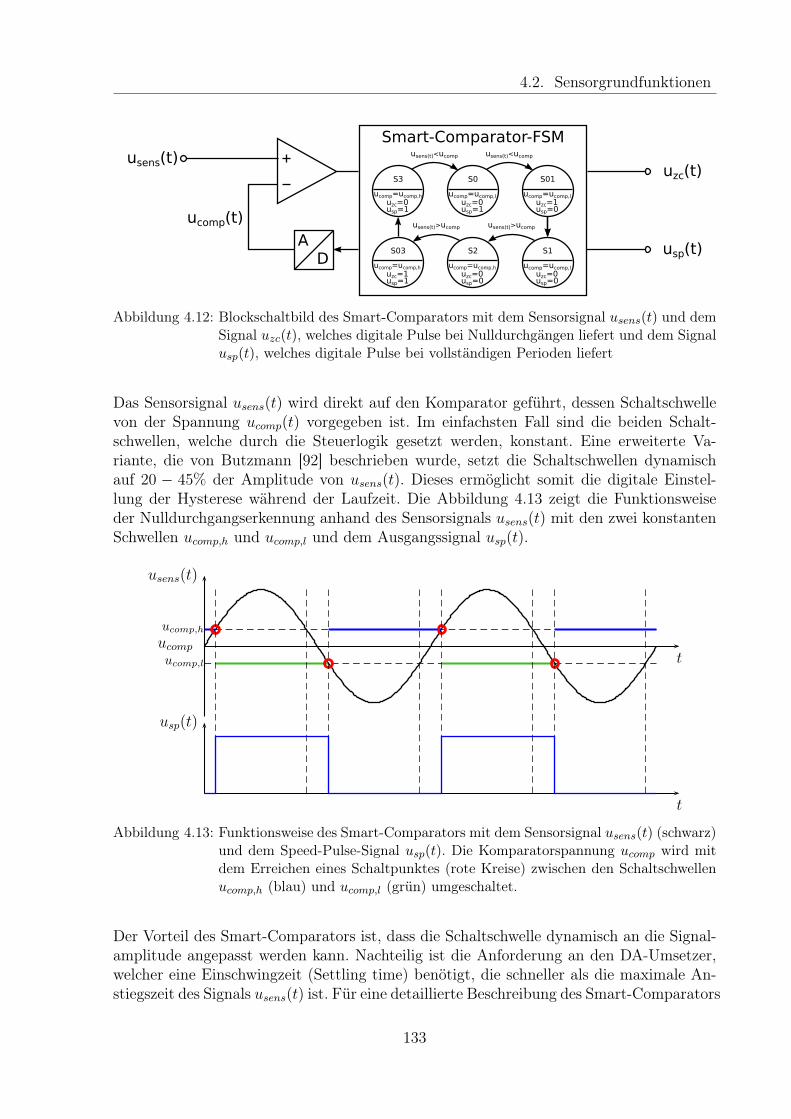
4.2. Sensorgrundfunktionen
Smart-Comparator-FSMusens(t)
ucomp(t)
uzc(t)
usp(t)A
D
S0
uzc=0usp=1
ucomp=ucomp,l
S2
uzc=0usp=0
ucomp=ucomp,h
S01
uzc=1usp=0
ucomp=ucomp,l
S3
uzc=0usp=1
ucomp=ucomp,h
S1
uzc=0usp=0
ucomp=ucomp,l
S03
uzc=1usp=1
ucomp=ucomp,h
usens(t)<ucomp usens(t)<ucomp
usens(t)>ucompusens(t)>ucomp
Abbildung 4.12: Blockschaltbild des Smart-Comparators mit dem Sensorsignal usens(t) und demSignal uzc(t), welches digitale Pulse bei Nulldurchgängen liefert und dem Signalusp(t), welches digitale Pulse bei vollständigen Perioden liefert
Das Sensorsignal usens(t) wird direkt auf den Komparator geführt, dessen Schaltschwellevon der Spannung ucomp(t) vorgegeben ist. Im einfachsten Fall sind die beiden Schalt-schwellen, welche durch die Steuerlogik gesetzt werden, konstant. Eine erweiterte Va-riante, die von Butzmann [92] beschrieben wurde, setzt die Schaltschwellen dynamischauf 20 − 45% der Amplitude von usens(t). Dieses ermöglicht somit die digitale Einstel-lung der Hysterese während der Laufzeit. Die Abbildung 4.13 zeigt die Funktionsweiseder Nulldurchgangserkennung anhand des Sensorsignals usens(t) mit den zwei konstantenSchwellen ucomp,h und ucomp,l und dem Ausgangssignal usp(t).
t
usens(t)
ucomp,h
ucomp
ucomp,l
t
usp(t)
Abbildung 4.13: Funktionsweise des Smart-Comparators mit dem Sensorsignal usens(t) (schwarz)und dem Speed-Pulse-Signal usp(t). Die Komparatorspannung ucomp wird mitdem Erreichen eines Schaltpunktes (rote Kreise) zwischen den Schaltschwellenucomp,h (blau) und ucomp,l (grün) umgeschaltet.
Der Vorteil des Smart-Comparators ist, dass die Schaltschwelle dynamisch an die Signal-amplitude angepasst werden kann. Nachteilig ist die Anforderung an den DA-Umsetzer,welcher eine Einschwingzeit (Settling time) benötigt, die schneller als die maximale An-stiegszeit des Signals usens(t) ist. Für eine detaillierte Beschreibung des Smart-Comparators
133
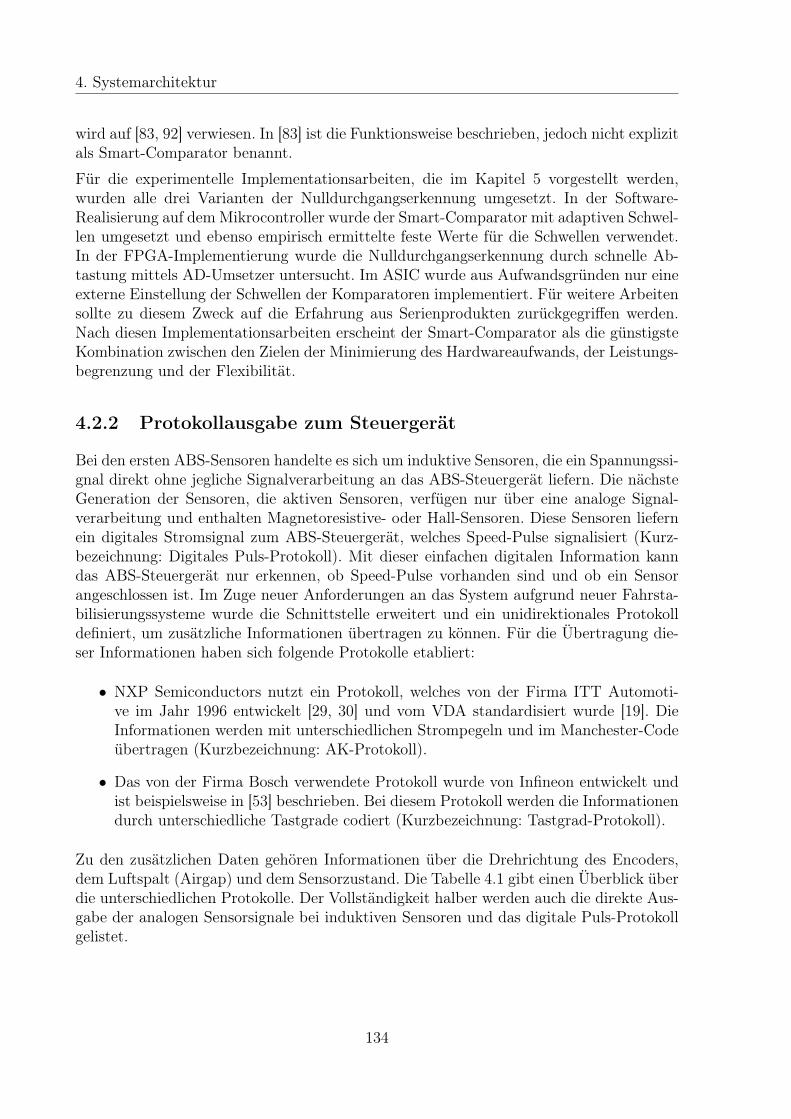
4. Systemarchitektur
wird auf [83, 92] verwiesen. In [83] ist die Funktionsweise beschrieben, jedoch nicht explizitals Smart-Comparator benannt.
Für die experimentelle Implementationsarbeiten, die im Kapitel 5 vorgestellt werden,wurden alle drei Varianten der Nulldurchgangserkennung umgesetzt. In der Software-Realisierung auf demMikrocontroller wurde der Smart-Comparator mit adaptiven Schwel-len umgesetzt und ebenso empirisch ermittelte feste Werte für die Schwellen verwendet.In der FPGA-Implementierung wurde die Nulldurchgangserkennung durch schnelle Ab-tastung mittels AD-Umsetzer untersucht. Im ASIC wurde aus Aufwandsgründen nur eineexterne Einstellung der Schwellen der Komparatoren implementiert. Für weitere Arbeitensollte zu diesem Zweck auf die Erfahrung aus Serienprodukten zurückgegriffen werden.Nach diesen Implementationsarbeiten erscheint der Smart-Comparator als die günstigsteKombination zwischen den Zielen der Minimierung des Hardwareaufwands, der Leistungs-begrenzung und der Flexibilität.
4.2.2 Protokollausgabe zum Steuergerät
Bei den ersten ABS-Sensoren handelte es sich um induktive Sensoren, die ein Spannungssi-gnal direkt ohne jegliche Signalverarbeitung an das ABS-Steuergerät liefern. Die nächsteGeneration der Sensoren, die aktiven Sensoren, verfügen nur über eine analoge Signal-verarbeitung und enthalten Magnetoresistive- oder Hall-Sensoren. Diese Sensoren liefernein digitales Stromsignal zum ABS-Steuergerät, welches Speed-Pulse signalisiert (Kurz-bezeichnung: Digitales Puls-Protokoll). Mit dieser einfachen digitalen Information kanndas ABS-Steuergerät nur erkennen, ob Speed-Pulse vorhanden sind und ob ein Sensorangeschlossen ist. Im Zuge neuer Anforderungen an das System aufgrund neuer Fahrsta-bilisierungssysteme wurde die Schnittstelle erweitert und ein unidirektionales Protokolldefiniert, um zusätzliche Informationen übertragen zu können. Für die Übertragung die-ser Informationen haben sich folgende Protokolle etabliert:
• NXP Semiconductors nutzt ein Protokoll, welches von der Firma ITT Automoti-ve im Jahr 1996 entwickelt [29, 30] und vom VDA standardisiert wurde [19]. DieInformationen werden mit unterschiedlichen Strompegeln und im Manchester-Codeübertragen (Kurzbezeichnung: AK-Protokoll).
• Das von der Firma Bosch verwendete Protokoll wurde von Infineon entwickelt undist beispielsweise in [53] beschrieben. Bei diesem Protokoll werden die Informationendurch unterschiedliche Tastgrade codiert (Kurzbezeichnung: Tastgrad-Protokoll).
Zu den zusätzlichen Daten gehören Informationen über die Drehrichtung des Encoders,dem Luftspalt (Airgap) und dem Sensorzustand. Die Tabelle 4.1 gibt einen Überblick überdie unterschiedlichen Protokolle. Der Vollständigkeit halber werden auch die direkte Aus-gabe der analogen Sensorsignale bei induktiven Sensoren und das digitale Puls-Protokollgelistet.
134
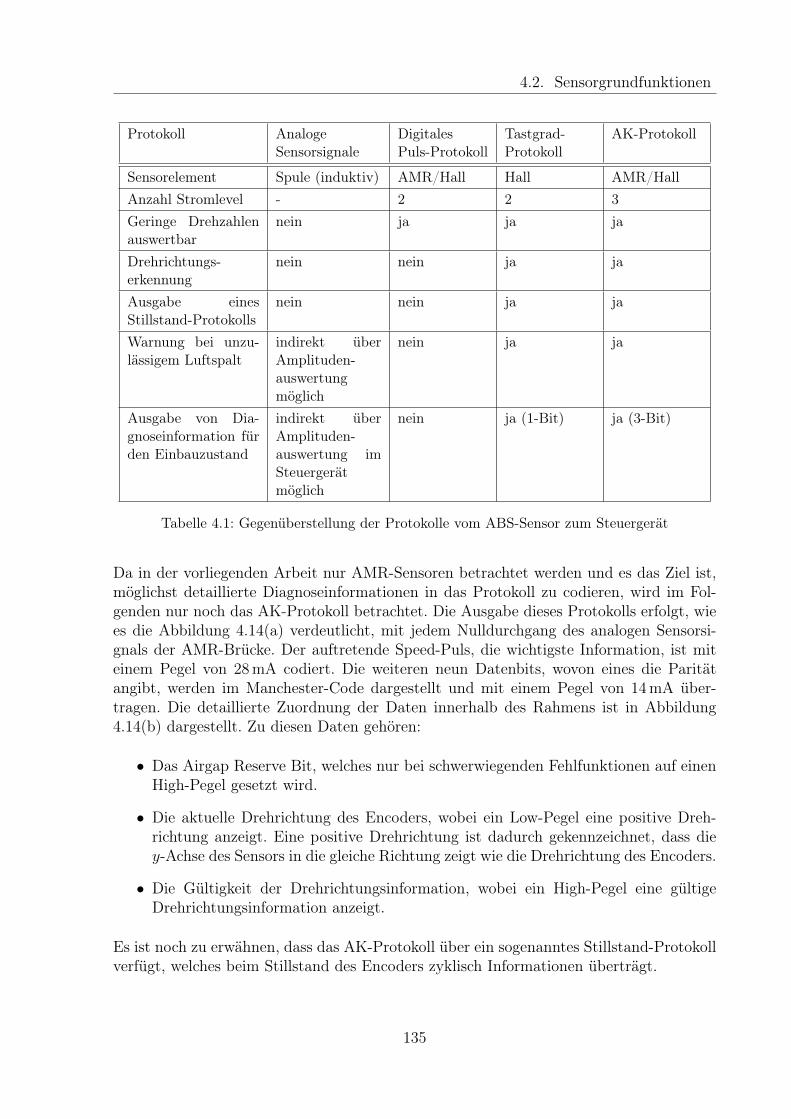
4.2. Sensorgrundfunktionen
Protokoll AnalogeSensorsignale
DigitalesPuls-Protokoll
Tastgrad-Protokoll
AK-Protokoll
Sensorelement Spule (induktiv) AMR/Hall Hall AMR/HallAnzahl Stromlevel - 2 2 3Geringe Drehzahlenauswertbar
nein ja ja ja
Drehrichtungs-erkennung
nein nein ja ja
Ausgabe einesStillstand-Protokolls
nein nein ja ja
Warnung bei unzu-lässigem Luftspalt
indirekt überAmplituden-auswertungmöglich
nein ja ja
Ausgabe von Dia-gnoseinformation fürden Einbauzustand
indirekt überAmplituden-auswertung imSteuergerätmöglich
nein ja (1-Bit) ja (3-Bit)
Tabelle 4.1: Gegenüberstellung der Protokolle vom ABS-Sensor zum Steuergerät
Da in der vorliegenden Arbeit nur AMR-Sensoren betrachtet werden und es das Ziel ist,möglichst detaillierte Diagnoseinformationen in das Protokoll zu codieren, wird im Fol-genden nur noch das AK-Protokoll betrachtet. Die Ausgabe dieses Protokolls erfolgt, wiees die Abbildung 4.14(a) verdeutlicht, mit jedem Nulldurchgang des analogen Sensorsi-gnals der AMR-Brücke. Der auftretende Speed-Puls, die wichtigste Information, ist miteinem Pegel von 28 mA codiert. Die weiteren neun Datenbits, wovon eines die Paritätangibt, werden im Manchester-Code dargestellt und mit einem Pegel von 14 mA über-tragen. Die detaillierte Zuordnung der Daten innerhalb des Rahmens ist in Abbildung4.14(b) dargestellt. Zu diesen Daten gehören:
• Das Airgap Reserve Bit, welches nur bei schwerwiegenden Fehlfunktionen auf einenHigh-Pegel gesetzt wird.
• Die aktuelle Drehrichtung des Encoders, wobei ein Low-Pegel eine positive Dreh-richtung anzeigt. Eine positive Drehrichtung ist dadurch gekennzeichnet, dass diey-Achse des Sensors in die gleiche Richtung zeigt wie die Drehrichtung des Encoders.
• Die Gültigkeit der Drehrichtungsinformation, wobei ein High-Pegel eine gültigeDrehrichtungsinformation anzeigt.
Es ist noch zu erwähnen, dass das AK-Protokoll über ein sogenanntes Stillstand-Protokollverfügt, welches beim Stillstand des Encoders zyklisch Informationen überträgt.
135
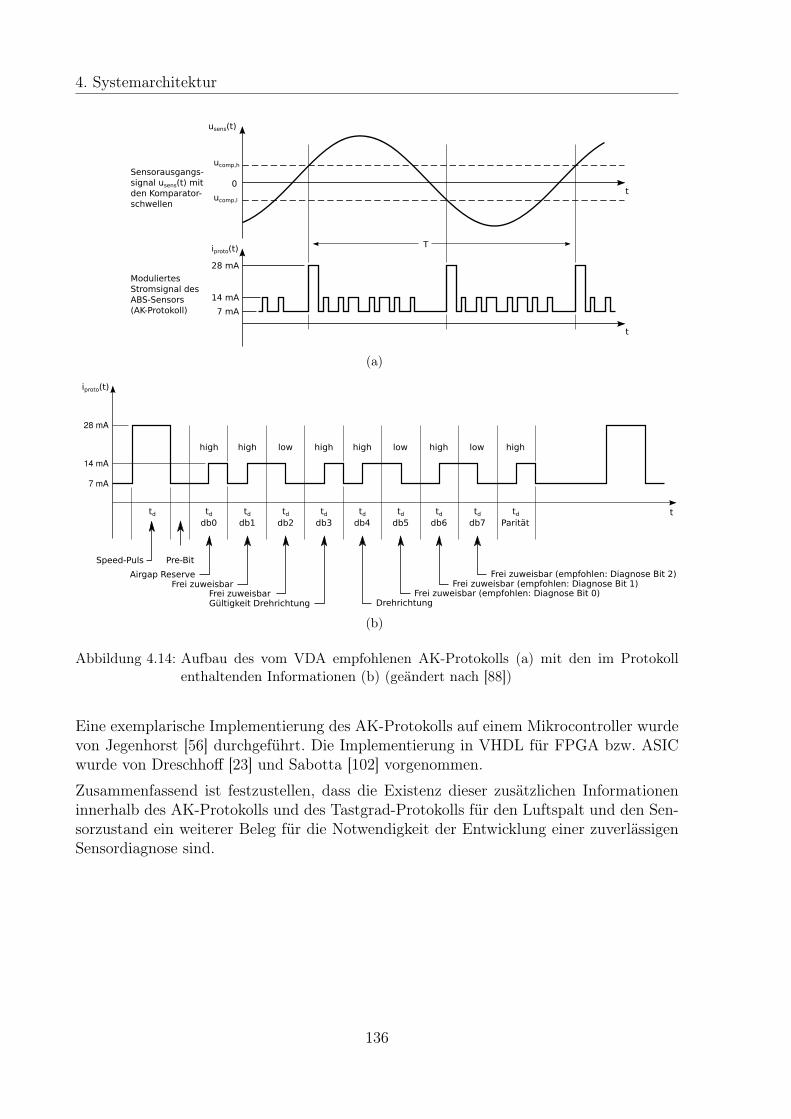
4. Systemarchitektur
ucomp,l
ucomp,h
0Sensorausgangs-signal usens(t) mitden Komparator-schwellen
Moduliertes Stromsignal des ABS-Sensors(AK-Protokoll)
usens(t)
t
t
iproto(t)
28 mA
14 mA
7 mA
T
(a)
Speed-Puls Pre-Bit
Airgap ReserveFrei zuweisbar
Frei zuweisbarGültigkeit Drehrichtung Drehrichtung
Frei zuweisbar (empfohlen: Diagnose Bit 0)Frei zuweisbar (empfohlen: Diagnose Bit 1)
Frei zuweisbar (empfohlen: Diagnose Bit 2)
14 mA
7 mA
28 mA
t
iproto(t)
db0 db1 db2 db3 db4 db5 db6 db7td td td td td td td td td
Parität
high high high high high highlow low low
td
(b)
Abbildung 4.14: Aufbau des vom VDA empfohlenen AK-Protokolls (a) mit den im Protokollenthaltenden Informationen (b) (geändert nach [88])
Eine exemplarische Implementierung des AK-Protokolls auf einem Mikrocontroller wurdevon Jegenhorst [56] durchgeführt. Die Implementierung in VHDL für FPGA bzw. ASICwurde von Dreschhoff [23] und Sabotta [102] vorgenommen.
Zusammenfassend ist festzustellen, dass die Existenz dieser zusätzlichen Informationeninnerhalb des AK-Protokolls und des Tastgrad-Protokolls für den Luftspalt und den Sen-sorzustand ein weiterer Beleg für die Notwendigkeit der Entwicklung einer zuverlässigenSensordiagnose sind.
136
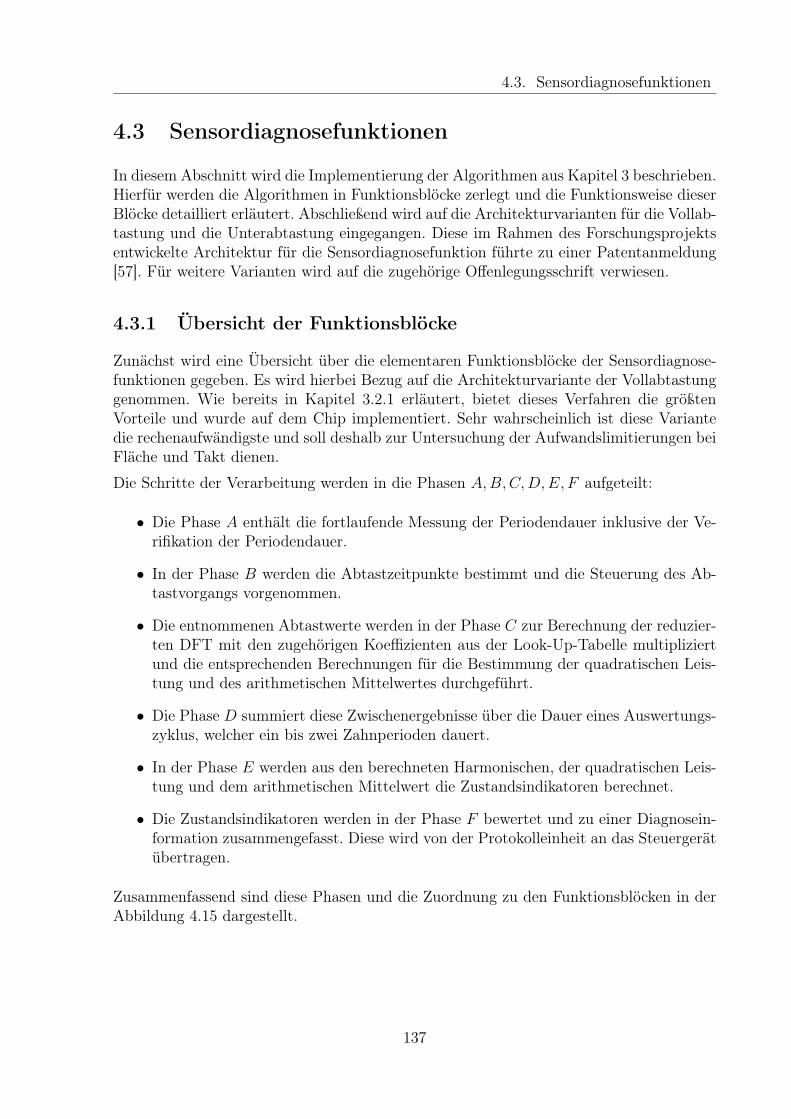
4.3. Sensordiagnosefunktionen
4.3 Sensordiagnosefunktionen
In diesem Abschnitt wird die Implementierung der Algorithmen aus Kapitel 3 beschrieben.Hierfür werden die Algorithmen in Funktionsblöcke zerlegt und die Funktionsweise dieserBlöcke detailliert erläutert. Abschließend wird auf die Architekturvarianten für die Vollab-tastung und die Unterabtastung eingegangen. Diese im Rahmen des Forschungsprojektsentwickelte Architektur für die Sensordiagnosefunktion führte zu einer Patentanmeldung[57]. Für weitere Varianten wird auf die zugehörige Offenlegungsschrift verwiesen.
4.3.1 Übersicht der Funktionsblöcke
Zunächst wird eine Übersicht über die elementaren Funktionsblöcke der Sensordiagnose-funktionen gegeben. Es wird hierbei Bezug auf die Architekturvariante der Vollabtastunggenommen. Wie bereits in Kapitel 3.2.1 erläutert, bietet dieses Verfahren die größtenVorteile und wurde auf dem Chip implementiert. Sehr wahrscheinlich ist diese Variantedie rechenaufwändigste und soll deshalb zur Untersuchung der Aufwandslimitierungen beiFläche und Takt dienen.
Die Schritte der Verarbeitung werden in die Phasen A,B,C,D,E, F aufgeteilt:
• Die Phase A enthält die fortlaufende Messung der Periodendauer inklusive der Ve-rifikation der Periodendauer.
• In der Phase B werden die Abtastzeitpunkte bestimmt und die Steuerung des Ab-tastvorgangs vorgenommen.
• Die entnommenen Abtastwerte werden in der Phase C zur Berechnung der reduzier-ten DFT mit den zugehörigen Koeffizienten aus der Look-Up-Tabelle multipliziertund die entsprechenden Berechnungen für die Bestimmung der quadratischen Leis-tung und des arithmetischen Mittelwertes durchgeführt.
• Die Phase D summiert diese Zwischenergebnisse über die Dauer eines Auswertungs-zyklus, welcher ein bis zwei Zahnperioden dauert.
• In der Phase E werden aus den berechneten Harmonischen, der quadratischen Leis-tung und dem arithmetischen Mittelwert die Zustandsindikatoren berechnet.
• Die Zustandsindikatoren werden in der Phase F bewertet und zu einer Diagnosein-formation zusammengefasst. Diese wird von der Protokolleinheit an das Steuergerätübertragen.
Zusammenfassend sind diese Phasen und die Zuordnung zu den Funktionsblöcken in derAbbildung 4.15 dargestellt.
137
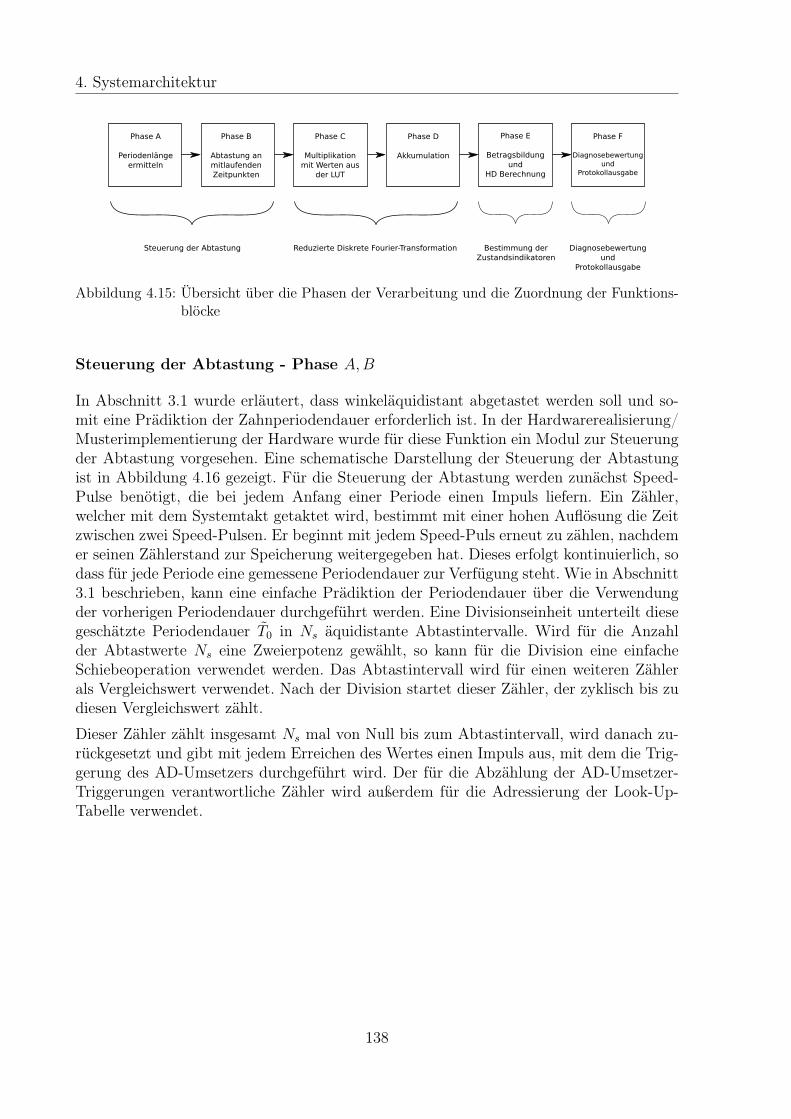
4. Systemarchitektur
Phase A
Periodenlängeermitteln
Phase E
Betragsbildung und
HD Berechnung
Phase F
Diagnosebewertungund
Protokollausgabe
Phase D
Akkumulation
Phase B
Abtastung an mitlaufendenZeitpunkten
Phase C
Multiplikation mit Werten aus
der LUT
Reduzierte Diskrete Fourier-TransformationSteuerung der Abtastung Bestimmung derZustandsindikatoren
Diagnosebewertungund
Protokollausgabe
Abbildung 4.15: Übersicht über die Phasen der Verarbeitung und die Zuordnung der Funktions-blöcke
Steuerung der Abtastung - Phase A,B
In Abschnitt 3.1 wurde erläutert, dass winkeläquidistant abgetastet werden soll und so-mit eine Prädiktion der Zahnperiodendauer erforderlich ist. In der Hardwarerealisierung/Musterimplementierung der Hardware wurde für diese Funktion ein Modul zur Steuerungder Abtastung vorgesehen. Eine schematische Darstellung der Steuerung der Abtastungist in Abbildung 4.16 gezeigt. Für die Steuerung der Abtastung werden zunächst Speed-Pulse benötigt, die bei jedem Anfang einer Periode einen Impuls liefern. Ein Zähler,welcher mit dem Systemtakt getaktet wird, bestimmt mit einer hohen Auflösung die Zeitzwischen zwei Speed-Pulsen. Er beginnt mit jedem Speed-Puls erneut zu zählen, nachdemer seinen Zählerstand zur Speicherung weitergegeben hat. Dieses erfolgt kontinuierlich, sodass für jede Periode eine gemessene Periodendauer zur Verfügung steht. Wie in Abschnitt3.1 beschrieben, kann eine einfache Prädiktion der Periodendauer über die Verwendungder vorherigen Periodendauer durchgeführt werden. Eine Divisionseinheit unterteilt diesegeschätzte Periodendauer T0 in Ns äquidistante Abtastintervalle. Wird für die Anzahlder Abtastwerte Ns eine Zweierpotenz gewählt, so kann für die Division eine einfacheSchiebeoperation verwendet werden. Das Abtastintervall wird für einen weiteren Zählerals Vergleichswert verwendet. Nach der Division startet dieser Zähler, der zyklisch bis zudiesen Vergleichswert zählt.
Dieser Zähler zählt insgesamt Ns mal von Null bis zum Abtastintervall, wird danach zu-rückgesetzt und gibt mit jedem Erreichen des Wertes einen Impuls aus, mit dem die Trig-gerung des AD-Umsetzers durchgeführt wird. Der für die Abzählung der AD-Umsetzer-Triggerungen verantwortliche Zähler wird außerdem für die Adressierung der Look-Up-Tabelle verwendet.
138
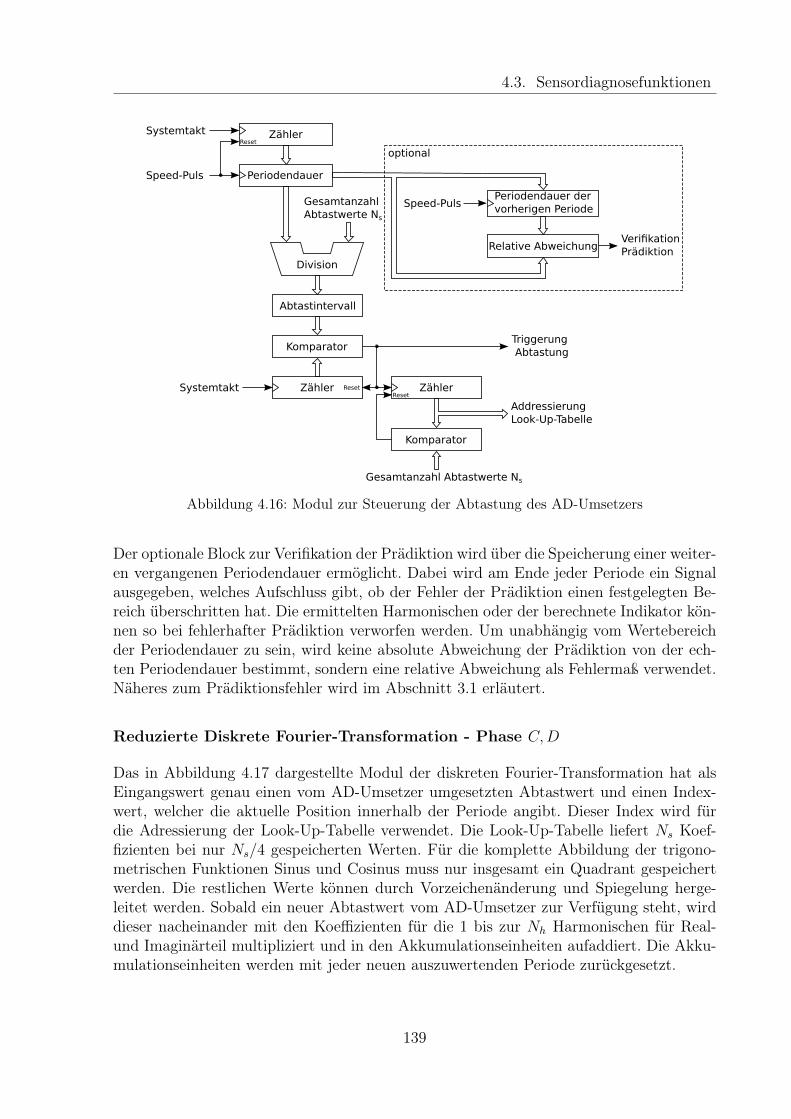
4.3. Sensordiagnosefunktionen
Systemtakt Zähler
Periodendauer
Abtastintervall
Division
Komparator
ZählerSystemtakt
Triggerung Abtastung
Reset
Periodendauer der vorherigen Periode
Speed-Puls
Reset
ZählerReset
Komparator
Gesamtanzahl Abtastwerte Ns
AddressierungLook-Up-Tabelle
Gesamtanzahl Abtastwerte Ns
Relative Abweichung
Speed-Puls
VerifikationPrädiktion
optional
Abbildung 4.16: Modul zur Steuerung der Abtastung des AD-Umsetzers
Der optionale Block zur Verifikation der Prädiktion wird über die Speicherung einer weiter-en vergangenen Periodendauer ermöglicht. Dabei wird am Ende jeder Periode ein Signalausgegeben, welches Aufschluss gibt, ob der Fehler der Prädiktion einen festgelegten Be-reich überschritten hat. Die ermittelten Harmonischen oder der berechnete Indikator kön-nen so bei fehlerhafter Prädiktion verworfen werden. Um unabhängig vom Wertebereichder Periodendauer zu sein, wird keine absolute Abweichung der Prädiktion von der ech-ten Periodendauer bestimmt, sondern eine relative Abweichung als Fehlermaß verwendet.Näheres zum Prädiktionsfehler wird im Abschnitt 3.1 erläutert.
Reduzierte Diskrete Fourier-Transformation - Phase C,D
Das in Abbildung 4.17 dargestellte Modul der diskreten Fourier-Transformation hat alsEingangswert genau einen vom AD-Umsetzer umgesetzten Abtastwert und einen Index-wert, welcher die aktuelle Position innerhalb der Periode angibt. Dieser Index wird fürdie Adressierung der Look-Up-Tabelle verwendet. Die Look-Up-Tabelle liefert Ns Koef-fizienten bei nur Ns/4 gespeicherten Werten. Für die komplette Abbildung der trigono-metrischen Funktionen Sinus und Cosinus muss nur insgesamt ein Quadrant gespeichertwerden. Die restlichen Werte können durch Vorzeichenänderung und Spiegelung herge-leitet werden. Sobald ein neuer Abtastwert vom AD-Umsetzer zur Verfügung steht, wirddieser nacheinander mit den Koeffizienten für die 1 bis zur Nh Harmonischen für Real-und Imaginärteil multipliziert und in den Akkumulationseinheiten aufaddiert. Die Akku-mulationseinheiten werden mit jeder neuen auszuwertenden Periode zurückgesetzt.
139
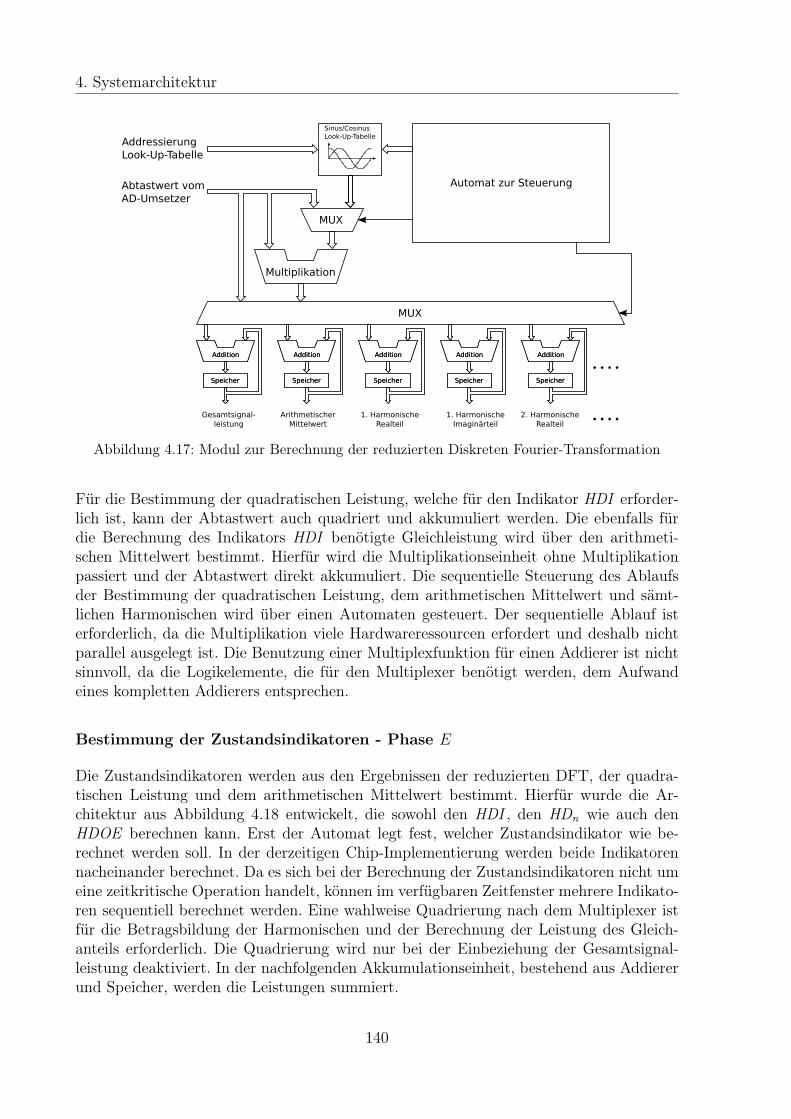
4. Systemarchitektur
AddressierungLook-Up-Tabelle
Multiplikation
Abtastwert vom AD-Umsetzer
MUX
MUX
Addition
Speicher
Addition
Speicher
Addition
Speicher
Addition
Speicher
Addition
Speicher
Addition
Speicher
Addition
Speicher
Addition
Speicher
Addition
Speicher
Addition
Speicher
Gesamtsignal-leistung
ArithmetischerMittelwert
1. HarmonischeRealteil
1. HarmonischeImaginärteil
2. HarmonischeRealteil
Automat zur Steuerung
Sinus/CosinusLook-Up-Tabelle
Abbildung 4.17: Modul zur Berechnung der reduzierten Diskreten Fourier-Transformation
Für die Bestimmung der quadratischen Leistung, welche für den Indikator HDI erforder-lich ist, kann der Abtastwert auch quadriert und akkumuliert werden. Die ebenfalls fürdie Berechnung des Indikators HDI benötigte Gleichleistung wird über den arithmeti-schen Mittelwert bestimmt. Hierfür wird die Multiplikationseinheit ohne Multiplikationpassiert und der Abtastwert direkt akkumuliert. Die sequentielle Steuerung des Ablaufsder Bestimmung der quadratischen Leistung, dem arithmetischen Mittelwert und sämt-lichen Harmonischen wird über einen Automaten gesteuert. Der sequentielle Ablauf isterforderlich, da die Multiplikation viele Hardwareressourcen erfordert und deshalb nichtparallel ausgelegt ist. Die Benutzung einer Multiplexfunktion für einen Addierer ist nichtsinnvoll, da die Logikelemente, die für den Multiplexer benötigt werden, dem Aufwandeines kompletten Addierers entsprechen.
Bestimmung der Zustandsindikatoren - Phase E
Die Zustandsindikatoren werden aus den Ergebnissen der reduzierten DFT, der quadra-tischen Leistung und dem arithmetischen Mittelwert bestimmt. Hierfür wurde die Ar-chitektur aus Abbildung 4.18 entwickelt, die sowohl den HDI , den HDn wie auch denHDOE berechnen kann. Erst der Automat legt fest, welcher Zustandsindikator wie be-rechnet werden soll. In der derzeitigen Chip-Implementierung werden beide Indikatorennacheinander berechnet. Da es sich bei der Berechnung der Zustandsindikatoren nicht umeine zeitkritische Operation handelt, können im verfügbaren Zeitfenster mehrere Indikato-ren sequentiell berechnet werden. Eine wahlweise Quadrierung nach dem Multiplexer istfür die Betragsbildung der Harmonischen und der Berechnung der Leistung des Gleich-anteils erforderlich. Die Quadrierung wird nur bei der Einbeziehung der Gesamtsignal-leistung deaktiviert. In der nachfolgenden Akkumulationseinheit, bestehend aus Addiererund Speicher, werden die Leistungen summiert.
140
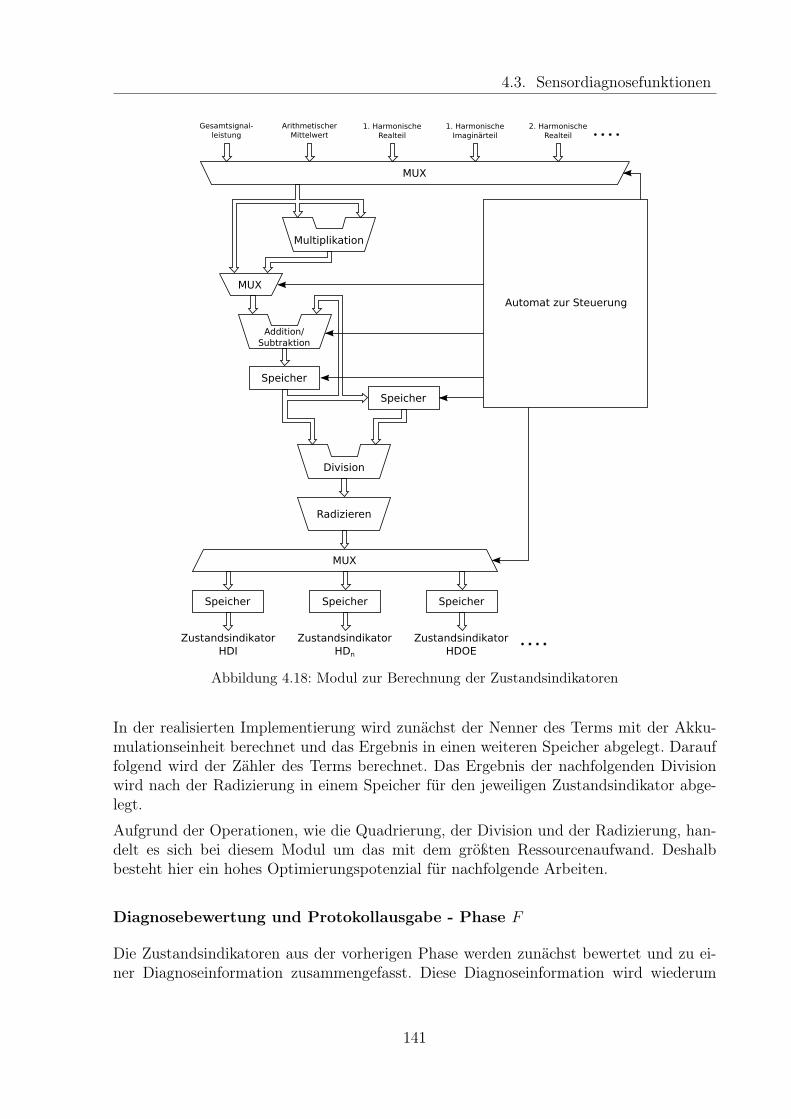
4.3. Sensordiagnosefunktionen
MUX
Addition/Subtraktion
Speicher
Speicher
Division
Radizieren
Gesamtsignal-leistung
ArithmetischerMittelwert
1. HarmonischeRealteil
1. HarmonischeImaginärteil
2. HarmonischeRealteil
Automat zur Steuerung
Multiplikation
MUX
MUX
ZustandsindikatorHDI
Speicher
ZustandsindikatorHDn
Speicher
ZustandsindikatorHDOE
Speicher
Abbildung 4.18: Modul zur Berechnung der Zustandsindikatoren
In der realisierten Implementierung wird zunächst der Nenner des Terms mit der Akku-mulationseinheit berechnet und das Ergebnis in einen weiteren Speicher abgelegt. Darauffolgend wird der Zähler des Terms berechnet. Das Ergebnis der nachfolgenden Divisionwird nach der Radizierung in einem Speicher für den jeweiligen Zustandsindikator abge-legt.
Aufgrund der Operationen, wie die Quadrierung, der Division und der Radizierung, han-delt es sich bei diesem Modul um das mit dem größten Ressourcenaufwand. Deshalbbesteht hier ein hohes Optimierungspotenzial für nachfolgende Arbeiten.
Diagnosebewertung und Protokollausgabe - Phase F
Die Zustandsindikatoren aus der vorherigen Phase werden zunächst bewertet und zu ei-ner Diagnoseinformation zusammengefasst. Diese Diagnoseinformation wird wiederum
141
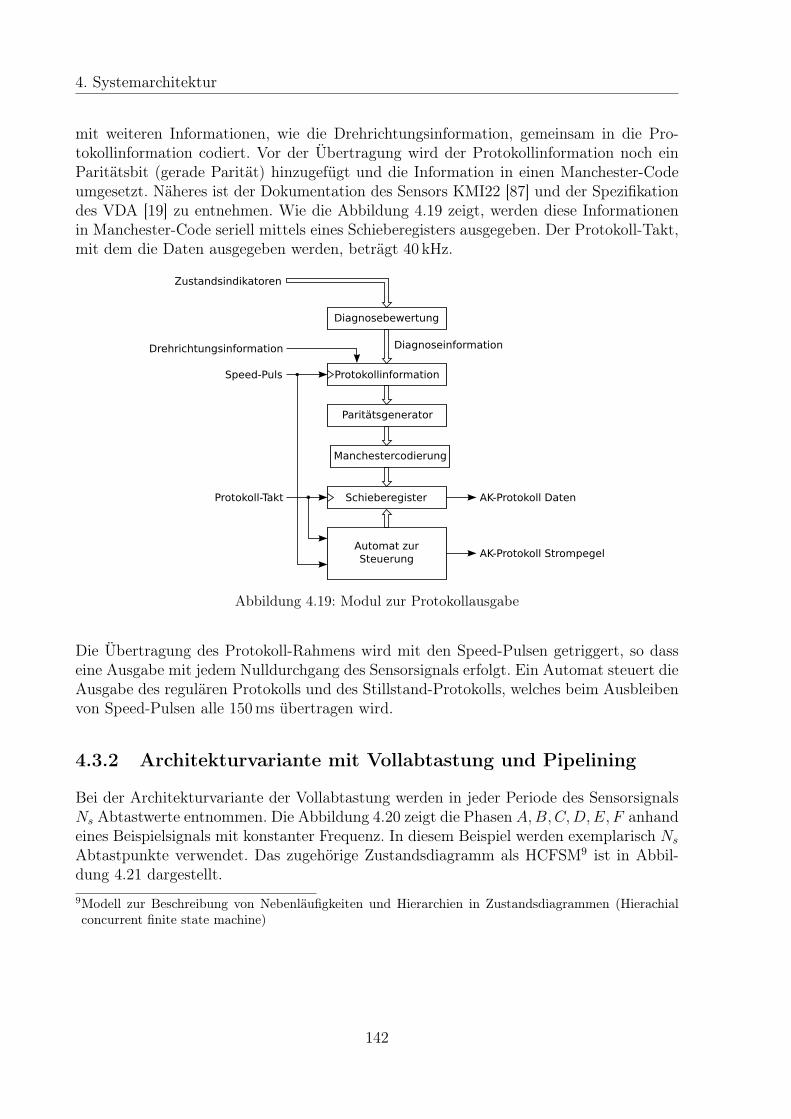
4. Systemarchitektur
mit weiteren Informationen, wie die Drehrichtungsinformation, gemeinsam in die Pro-tokollinformation codiert. Vor der Übertragung wird der Protokollinformation noch einParitätsbit (gerade Parität) hinzugefügt und die Information in einen Manchester-Codeumgesetzt. Näheres ist der Dokumentation des Sensors KMI22 [87] und der Spezifikationdes VDA [19] zu entnehmen. Wie die Abbildung 4.19 zeigt, werden diese Informationenin Manchester-Code seriell mittels eines Schieberegisters ausgegeben. Der Protokoll-Takt,mit dem die Daten ausgegeben werden, beträgt 40 kHz.
Automat zur Steuerung
Zustandsindikatoren
Speed-Puls Protokollinformation
Protokoll-Takt Schieberegister AK-Protokoll Daten
AK-Protokoll Strompegel
Drehrichtungsinformation
Paritätsgenerator
Manchestercodierung
Diagnosebewertung
Diagnoseinformation
Abbildung 4.19: Modul zur Protokollausgabe
Die Übertragung des Protokoll-Rahmens wird mit den Speed-Pulsen getriggert, so dasseine Ausgabe mit jedem Nulldurchgang des Sensorsignals erfolgt. Ein Automat steuert dieAusgabe des regulären Protokolls und des Stillstand-Protokolls, welches beim Ausbleibenvon Speed-Pulsen alle 150 ms übertragen wird.
4.3.2 Architekturvariante mit Vollabtastung und Pipelining
Bei der Architekturvariante der Vollabtastung werden in jeder Periode des SensorsignalsNs Abtastwerte entnommen. Die Abbildung 4.20 zeigt die Phasen A,B,C,D,E, F anhandeines Beispielsignals mit konstanter Frequenz. In diesem Beispiel werden exemplarisch Ns
Abtastpunkte verwendet. Das zugehörige Zustandsdiagramm als HCFSM9 ist in Abbil-dung 4.21 dargestellt.9Modell zur Beschreibung von Nebenläufigkeiten und Hierarchien in Zustandsdiagrammen (Hierachialconcurrent finite state machine)
142
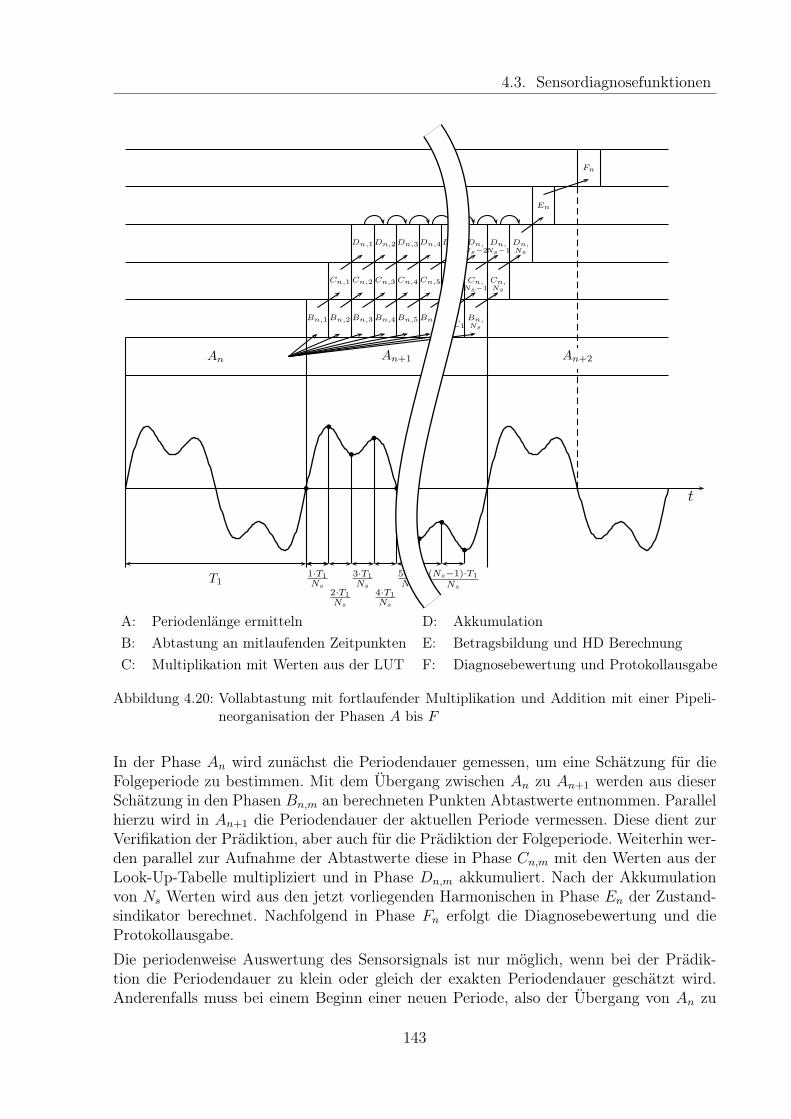
4.3. Sensordiagnosefunktionen
b
b
b
b
b
b
b
b
An An+1 An+2
Bn,1 Bn,2 Bn,3 Bn,4 Bn,5 Bn,6
Cn,1 Cn,2 Cn,3 Cn,4 Cn,5 Cn,6
Dn,1Dn,2Dn,3Dn,4Dn,5
Bn,Ns−1
Bn,Ns
Cn,Ns−1
Cn,Ns
Dn,Ns−2
Dn,Ns−1
Dn,Ns
En
Fn
t
1·T1
Ns
3·T1
Ns
5·T1
Ns
(Ns−1)·T1
Ns2·T1
Ns
4·T1
Ns
T1
A: Periodenlänge ermitteln D: AkkumulationB: Abtastung an mitlaufenden Zeitpunkten E: Betragsbildung und HD BerechnungC: Multiplikation mit Werten aus der LUT F: Diagnosebewertung und Protokollausgabe
Abbildung 4.20: Vollabtastung mit fortlaufender Multiplikation und Addition mit einer Pipeli-neorganisation der Phasen A bis F
In der Phase An wird zunächst die Periodendauer gemessen, um eine Schätzung für dieFolgeperiode zu bestimmen. Mit dem Übergang zwischen An zu An+1 werden aus dieserSchätzung in den Phasen Bn,m an berechneten Punkten Abtastwerte entnommen. Parallelhierzu wird in An+1 die Periodendauer der aktuellen Periode vermessen. Diese dient zurVerifikation der Prädiktion, aber auch für die Prädiktion der Folgeperiode. Weiterhin wer-den parallel zur Aufnahme der Abtastwerte diese in Phase Cn,m mit den Werten aus derLook-Up-Tabelle multipliziert und in Phase Dn,m akkumuliert. Nach der Akkumulationvon Ns Werten wird aus den jetzt vorliegenden Harmonischen in Phase En der Zustand-sindikator berechnet. Nachfolgend in Phase Fn erfolgt die Diagnosebewertung und dieProtokollausgabe.Die periodenweise Auswertung des Sensorsignals ist nur möglich, wenn bei der Prädik-tion die Periodendauer zu klein oder gleich der exakten Periodendauer geschätzt wird.Anderenfalls muss bei einem Beginn einer neuen Periode, also der Übergang von An zu
143
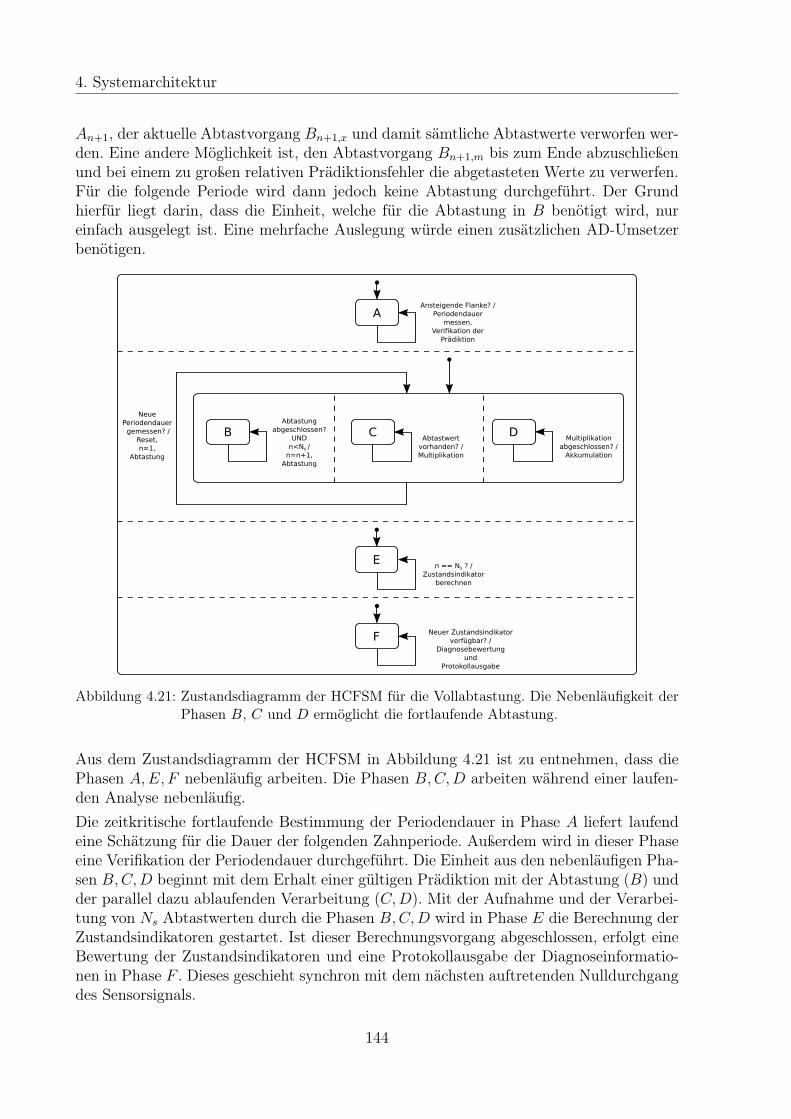
4. Systemarchitektur
An+1, der aktuelle Abtastvorgang Bn+1,x und damit sämtliche Abtastwerte verworfen wer-den. Eine andere Möglichkeit ist, den Abtastvorgang Bn+1,m bis zum Ende abzuschließenund bei einem zu großen relativen Prädiktionsfehler die abgetasteten Werte zu verwerfen.Für die folgende Periode wird dann jedoch keine Abtastung durchgeführt. Der Grundhierfür liegt darin, dass die Einheit, welche für die Abtastung in B benötigt wird, nureinfach ausgelegt ist. Eine mehrfache Auslegung würde einen zusätzlichen AD-Umsetzerbenötigen.
AAnsteigende Flanke? /
Periodendauermessen,
Verifikation der Prädiktion
B C D
E
F Neuer Zustandsindikatorverfügbar? /
Diagnosebewertungund
Protokollausgabe
Abtastung abgeschlossen?
UNDn<Ns /
n=n+1,Abtastung
Abtastwertvorhanden? /Multiplikation
Multiplikation abgeschlossen? /
Akkumulation
n == Ns ? /Zustandsindikator
berechnen
NeuePeriodendauer gemessen? /
Reset,n=1,
Abtastung
Abbildung 4.21: Zustandsdiagramm der HCFSM für die Vollabtastung. Die Nebenläufigkeit derPhasen B, C und D ermöglicht die fortlaufende Abtastung.
Aus dem Zustandsdiagramm der HCFSM in Abbildung 4.21 ist zu entnehmen, dass diePhasen A,E, F nebenläufig arbeiten. Die Phasen B,C,D arbeiten während einer laufen-den Analyse nebenläufig.Die zeitkritische fortlaufende Bestimmung der Periodendauer in Phase A liefert laufendeine Schätzung für die Dauer der folgenden Zahnperiode. Außerdem wird in dieser Phaseeine Verifikation der Periodendauer durchgeführt. Die Einheit aus den nebenläufigen Pha-sen B,C,D beginnt mit dem Erhalt einer gültigen Prädiktion mit der Abtastung (B) undder parallel dazu ablaufenden Verarbeitung (C,D). Mit der Aufnahme und der Verarbei-tung von Ns Abtastwerten durch die Phasen B,C,D wird in Phase E die Berechnung derZustandsindikatoren gestartet. Ist dieser Berechnungsvorgang abgeschlossen, erfolgt eineBewertung der Zustandsindikatoren und eine Protokollausgabe der Diagnoseinformatio-nen in Phase F . Dieses geschieht synchron mit dem nächsten auftretenden Nulldurchgangdes Sensorsignals.
144
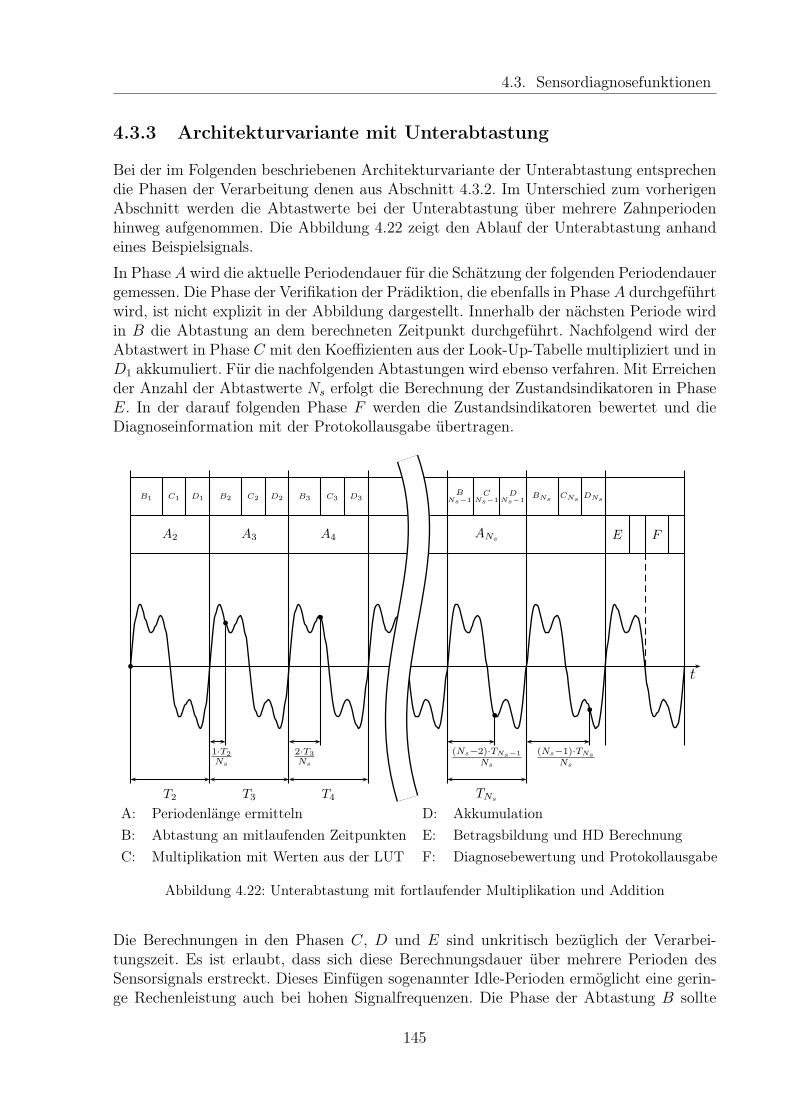
4.3. Sensordiagnosefunktionen
4.3.3 Architekturvariante mit Unterabtastung
Bei der im Folgenden beschriebenen Architekturvariante der Unterabtastung entsprechendie Phasen der Verarbeitung denen aus Abschnitt 4.3.2. Im Unterschied zum vorherigenAbschnitt werden die Abtastwerte bei der Unterabtastung über mehrere Zahnperiodenhinweg aufgenommen. Die Abbildung 4.22 zeigt den Ablauf der Unterabtastung anhandeines Beispielsignals.
In Phase A wird die aktuelle Periodendauer für die Schätzung der folgenden Periodendauergemessen. Die Phase der Verifikation der Prädiktion, die ebenfalls in Phase A durchgeführtwird, ist nicht explizit in der Abbildung dargestellt. Innerhalb der nächsten Periode wirdin B die Abtastung an dem berechneten Zeitpunkt durchgeführt. Nachfolgend wird derAbtastwert in Phase C mit den Koeffizienten aus der Look-Up-Tabelle multipliziert und inD1 akkumuliert. Für die nachfolgenden Abtastungen wird ebenso verfahren. Mit Erreichender Anzahl der Abtastwerte Ns erfolgt die Berechnung der Zustandsindikatoren in PhaseE. In der darauf folgenden Phase F werden die Zustandsindikatoren bewertet und dieDiagnoseinformation mit der Protokollausgabe übertragen.
t
A2
B1 C1 D1 B2 C2 D2
A3
B3 C3 D3
A4
BNs−1
CNs−1
DNs−1
ANs
BNsCNs
DNs
E F
T2
1·T2
Ns
T3
2·T3
Ns
T4
(Ns−2)·TNs−1
Ns
TNs
(Ns−1)·TNs
Ns
A: Periodenlänge ermitteln D: AkkumulationB: Abtastung an mitlaufenden Zeitpunkten E: Betragsbildung und HD BerechnungC: Multiplikation mit Werten aus der LUT F: Diagnosebewertung und Protokollausgabe
Abbildung 4.22: Unterabtastung mit fortlaufender Multiplikation und Addition
Die Berechnungen in den Phasen C, D und E sind unkritisch bezüglich der Verarbei-tungszeit. Es ist erlaubt, dass sich diese Berechnungsdauer über mehrere Perioden desSensorsignals erstreckt. Dieses Einfügen sogenannter Idle-Perioden ermöglicht eine gerin-ge Rechenleistung auch bei hohen Signalfrequenzen. Die Phase der Abtastung B sollte
145
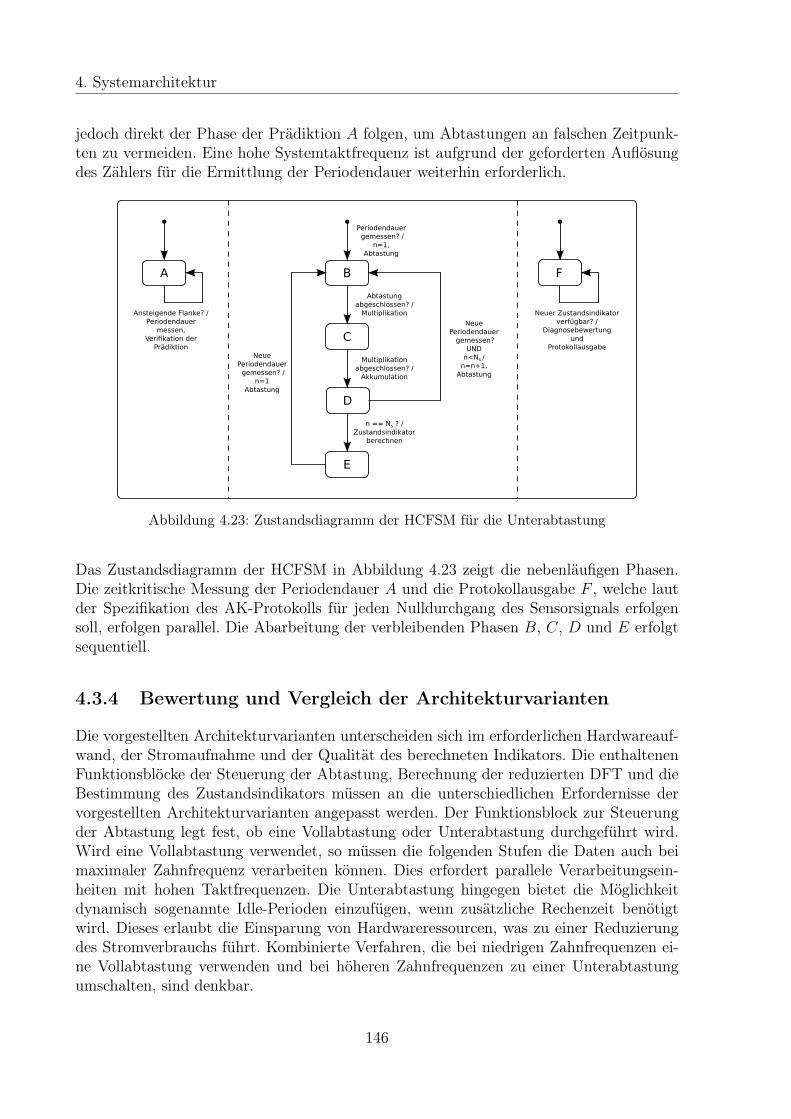
4. Systemarchitektur
jedoch direkt der Phase der Prädiktion A folgen, um Abtastungen an falschen Zeitpunk-ten zu vermeiden. Eine hohe Systemtaktfrequenz ist aufgrund der geforderten Auflösungdes Zählers für die Ermittlung der Periodendauer weiterhin erforderlich.
A
Ansteigende Flanke? /Periodendauer
messen,Verifikation der
Prädiktion
B
C
D
E
F
Neuer Zustandsindikatorverfügbar? /
Diagnosebewertungund
Protokollausgabe
Periodendauer gemessen? /
n=1,Abtastung
NeuePeriodendauer
gemessen? UND
n<Ns /n=n+1,
Abtastung
Abtastung abgeschlossen? /
Multiplikation
Multiplikation abgeschlossen? /
Akkumulation
n == Ns ? /Zustandsindikator
berechnen
NeuePeriodendauer gemessen? /
n=1Abtastung
Abbildung 4.23: Zustandsdiagramm der HCFSM für die Unterabtastung
Das Zustandsdiagramm der HCFSM in Abbildung 4.23 zeigt die nebenläufigen Phasen.Die zeitkritische Messung der Periodendauer A und die Protokollausgabe F , welche lautder Spezifikation des AK-Protokolls für jeden Nulldurchgang des Sensorsignals erfolgensoll, erfolgen parallel. Die Abarbeitung der verbleibenden Phasen B, C, D und E erfolgtsequentiell.
4.3.4 Bewertung und Vergleich der Architekturvarianten
Die vorgestellten Architekturvarianten unterscheiden sich im erforderlichen Hardwareauf-wand, der Stromaufnahme und der Qualität des berechneten Indikators. Die enthaltenenFunktionsblöcke der Steuerung der Abtastung, Berechnung der reduzierten DFT und dieBestimmung des Zustandsindikators müssen an die unterschiedlichen Erfordernisse dervorgestellten Architekturvarianten angepasst werden. Der Funktionsblock zur Steuerungder Abtastung legt fest, ob eine Vollabtastung oder Unterabtastung durchgeführt wird.Wird eine Vollabtastung verwendet, so müssen die folgenden Stufen die Daten auch beimaximaler Zahnfrequenz verarbeiten können. Dies erfordert parallele Verarbeitungsein-heiten mit hohen Taktfrequenzen. Die Unterabtastung hingegen bietet die Möglichkeitdynamisch sogenannte Idle-Perioden einzufügen, wenn zusätzliche Rechenzeit benötigtwird. Dieses erlaubt die Einsparung von Hardwareressourcen, was zu einer Reduzierungdes Stromverbrauchs führt. Kombinierte Verfahren, die bei niedrigen Zahnfrequenzen ei-ne Vollabtastung verwenden und bei höheren Zahnfrequenzen zu einer Unterabtastungumschalten, sind denkbar.
146

4.3. Sensordiagnosefunktionen
Bei der konkreten Implementierung der Funktionsblöcke ist zur Reduzierung der Hard-wareressourcen das grundsätzliche Problem des Multiplexing gegen eine Mehrfachinstan-zierung abzuwägen. Letztlich gibt es dort kein universell anwendbares Verfahren und istsomit auf experimentelle Implementationen angewiesen. Im vorliegenden Fall wurde sichfür eine Mehrfachinstanzierung von Addierern und Multiplexing von Multiplizierern ent-schieden.
Zusammenfassend ist festzustellen, dass die Qualität der Indikatoren der Vollabtastunghöher ist, wie es im Abschnitt 3.2.5 beschrieben wurde. Die Unterabtastung hingegenzeichnet sich dadurch aus, dass der Hardwareaufwand kleiner ist und somit auf leistungs-schwachen Plattformen zu implementieren ist. In einem realen System kann das für dieUnterabtastung geforderte winkelbezogene periodische Signal nie sichergestellt werden.Eine Implementierung der Unterabtastung sollte deshalb nur für experimentelle Plattfor-men, wie beispielsweise Mikrocontroller, verwendet werden. Die Nutzung der Architek-turvariante der Vollabtastung ist anzustreben.
147

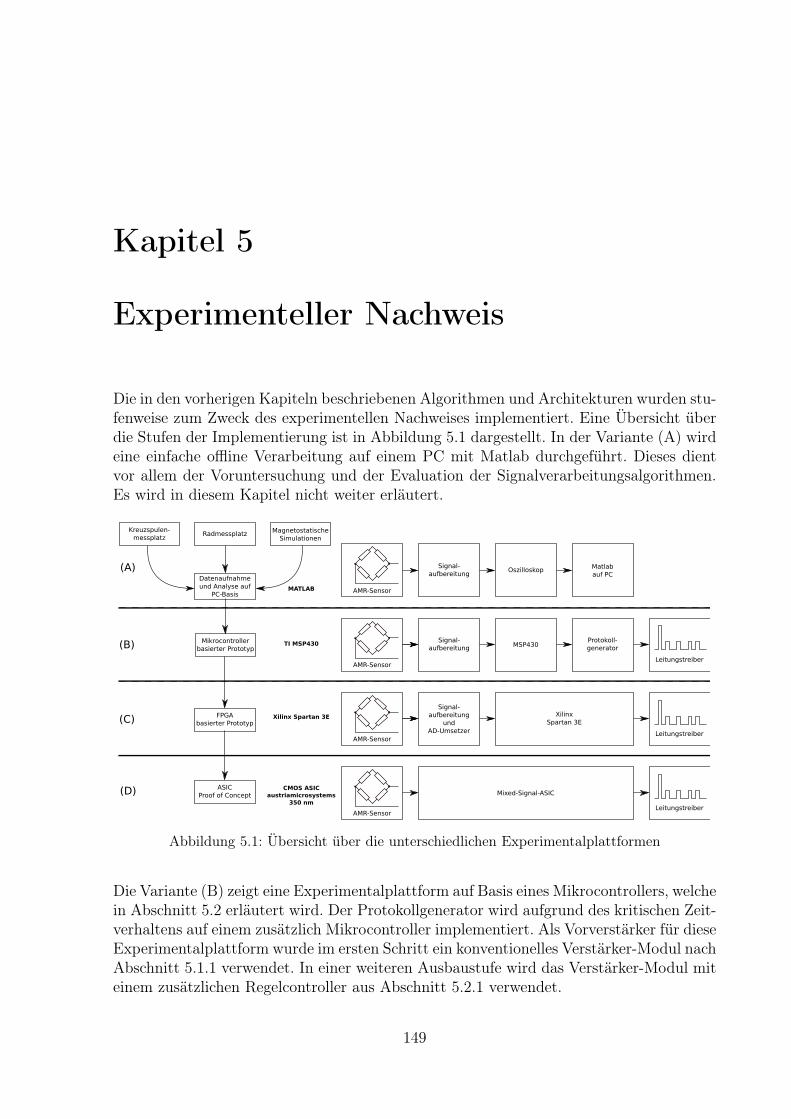
Kapitel 5
Experimenteller Nachweis
Die in den vorherigen Kapiteln beschriebenen Algorithmen und Architekturen wurden stu-fenweise zum Zweck des experimentellen Nachweises implementiert. Eine Übersicht überdie Stufen der Implementierung ist in Abbildung 5.1 dargestellt. In der Variante (A) wirdeine einfache offline Verarbeitung auf einem PC mit Matlab durchgeführt. Dieses dientvor allem der Voruntersuchung und der Evaluation der Signalverarbeitungsalgorithmen.Es wird in diesem Kapitel nicht weiter erläutert.
Signal-aufbereitung
undAD-Umsetzer
Kreuzspulen-messplatz
Radmessplatz MagnetostatischeSimulationen
Datenaufnahmeund Analyse auf
PC-Basis
Mikrocontrollerbasierter Prototyp
FPGAbasierter Prototyp
ASICProof of Concept
MATLAB
TI MSP430
Xilinx Spartan 3E
CMOS ASICaustriamicrosystems
350 nm
(A)
(B)
(C)
(D)
MSP430Protokoll-generator
Leitungstreiber
XilinxSpartan 3E
Mixed-Signal-ASIC
OszilloskopSignal-
aufbereitungMatlabauf PC
AMR-Sensor
AMR-Sensor
AMR-Sensor
AMR-Sensor
Leitungstreiber
Leitungstreiber
Signal-aufbereitung
Abbildung 5.1: Übersicht über die unterschiedlichen Experimentalplattformen
Die Variante (B) zeigt eine Experimentalplattform auf Basis eines Mikrocontrollers, welchein Abschnitt 5.2 erläutert wird. Der Protokollgenerator wird aufgrund des kritischen Zeit-verhaltens auf einem zusätzlich Mikrocontroller implementiert. Als Vorverstärker für dieseExperimentalplattform wurde im ersten Schritt ein konventionelles Verstärker-Modul nachAbschnitt 5.1.1 verwendet. In einer weiteren Ausbaustufe wird das Verstärker-Modul miteinem zusätzlichen Regelcontroller aus Abschnitt 5.2.1 verwendet.
149
5. Experimenteller Nachweis
In der Variante (C), welche in Abschnitt 5.3 beschrieben ist, wird an Stelle der Mikro-controller ein leistungsfähiges FPGA eingesetzt. Die in der Programmiersprache C imple-mentierten Algorithmen werden in VHDL umgesetzt. Auf diese Weise können die gesamteSignalverarbeitung und der Protokollgenerator in einem einzelnen FPGA implementiertwerden. Die Verstärkermodule der Mikrocontroller-Variante (B) können hier wiederver-wendet werden. Weil das eingesetzte FPGA über keine internen analogen Komponentenverfügt, ist ein zusätzliches Modul mit AD-Umsetzer und Komparatoren für diese Varianteerforderlich.
Der Entwurf eines Mixed-Signal-ASIC in Variante (D) wird in Abschnitt 5.4 vorgestellt.Im ASIC sind die wesentlichen analogen und digitalen Module der Signalverarbeitung ex-perimentell implementiert worden. Der ASIC beinhaltet eine eingeschränkte analoge Si-gnalkonditionierung, die Sensorgrundfunktionen, die in den vorherigen Kapiteln beschrie-benen Diagnosefunktionen und die Generierung des AK-Protokolls. Somit ermöglicht derASIC alle Funktionen vom Anschluss der AMR-Sensorbrücke bis zur Ausgabe des AK-Protokolls. Dieser Chip kann Ausgangspunkt für Folgearbeiten mit dem Ziel des Transfersin die Produktentwicklung sein.
5.1 Hardware zur Signalaufbereitung
Im Folgenden werden die im Rahmen dieser Arbeit entwickelten Module zur Signalaufbe-reitung der analogen Signale des AMR-Sensors beschrieben. Die Module basieren auf dasin Abschnitt 4.1 beschriebene Verfahren zur Offset- und Verstärkungsregelung. Zunächstwird in Abschnitt 5.1.1 ein Verstärker-Modul erläutert, welches die Funktionen in derderzeitigen Sensorgeneration nachbildet. Danach erfolgt im Abschnitt 5.1.2 die Vorstel-lung eines neuen Konzeptes mit einer Kombination aus einer linearen Verstärkerbank undeinem approximiert logarithmischen Verstärker. Dies bildet einen neuen Ansatz, um dieRegelung der zwei Steuergrößen, der Verstärkung und dem Offset zu beschleunigen.
5.1.1 Aufbauten zum konventionellen Konzept
Der konventionelle Verstärker, wie er auch im Blockschaltbild in Abbildung 5.2 dargestelltist, wird direkt mit dem AMR-Sensor verbunden und liefert am Ausgang ein verstärktesBrückendifferenzsignal und zwei verstärkte Halbbrückensignale. Die Ausgangssignale wer-den mit dem Regelcontroller verbunden, welcher den Regelvorgang steuert, oder direktmit dem Signalcontroller verbunden ist. Für die Sensorgrundfunktion ist eine ausreichendausgesteuerte Brückendifferenzspannung zwingend erforderlich. Eine Kombination aus ei-nem Instrumentenverstärker und einem einstellbaren Verstärker sind hierfür vorgesehen.Der Instrumentenverstärker [2] verfügt über einen hohen Eingangswiderstand und einekonstante Vorverstärkung vom Faktor 25 und liefert bei einer Brückenversorgungsspan-nung von 3 V immer eine Ausgangsspannung, die sich innerhalb des Aussteuerungsbereichsdes Verstärkers befindet. Ein an dem Instrumentenverstärker angeschlossener einstellbarerVerstärker, der vom Regelcontroller oder Signalcontroller gesteuert wird, kann das Signalzusätzlich in mehreren Stufen von Faktor 1 bis 128 verstärken, um den AD-Umsetzer im
150
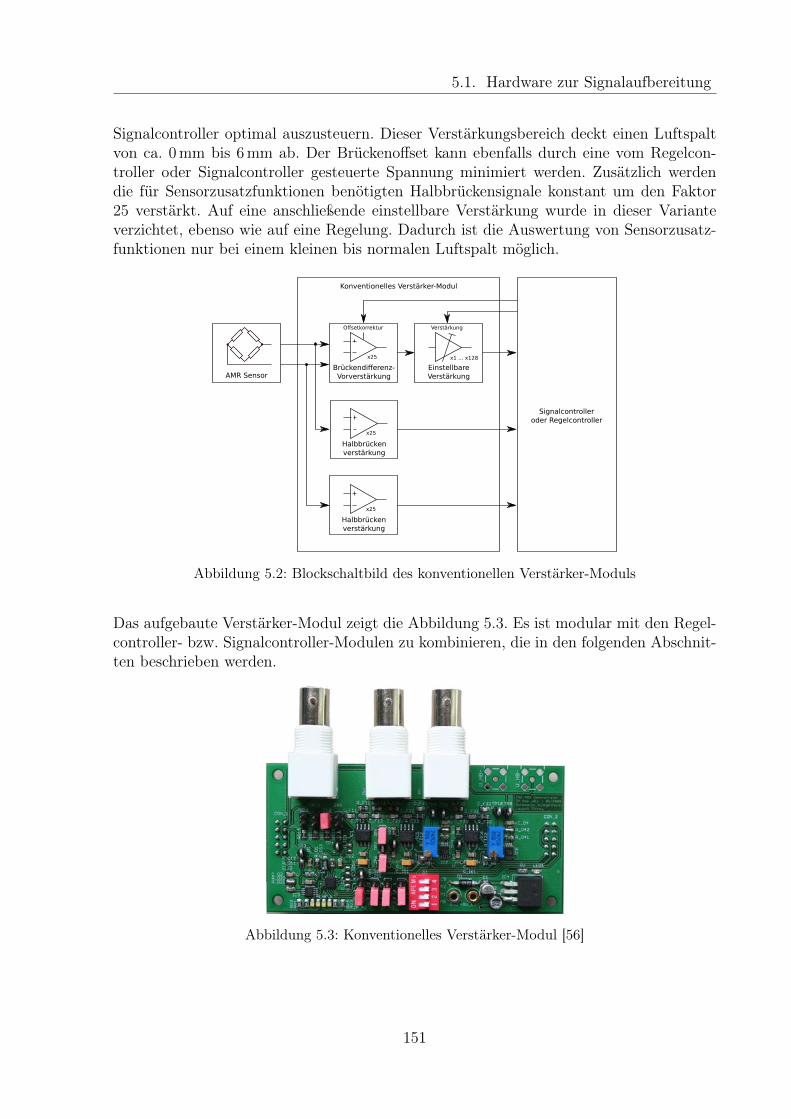
5.1. Hardware zur Signalaufbereitung
Signalcontroller optimal auszusteuern. Dieser Verstärkungsbereich deckt einen Luftspaltvon ca. 0 mm bis 6 mm ab. Der Brückenoffset kann ebenfalls durch eine vom Regelcon-troller oder Signalcontroller gesteuerte Spannung minimiert werden. Zusätzlich werdendie für Sensorzusatzfunktionen benötigten Halbbrückensignale konstant um den Faktor25 verstärkt. Auf eine anschließende einstellbare Verstärkung wurde in dieser Varianteverzichtet, ebenso wie auf eine Regelung. Dadurch ist die Auswertung von Sensorzusatz-funktionen nur bei einem kleinen bis normalen Luftspalt möglich.
AMR SensorBrückendifferenz-Vorverstärkung
Halbbrückenverstärkung
Halbbrückenverstärkung
EinstellbareVerstärkung
x25 x1 ... x128
x25
x25
Signalcontrolleroder Regelcontroller
Offsetkorrektur Verstärkung
Konventionelles Verstärker-Modul
Abbildung 5.2: Blockschaltbild des konventionellen Verstärker-Moduls
Das aufgebaute Verstärker-Modul zeigt die Abbildung 5.3. Es ist modular mit den Regel-controller- bzw. Signalcontroller-Modulen zu kombinieren, die in den folgenden Abschnit-ten beschrieben werden.
Abbildung 5.3: Konventionelles Verstärker-Modul [56]
151
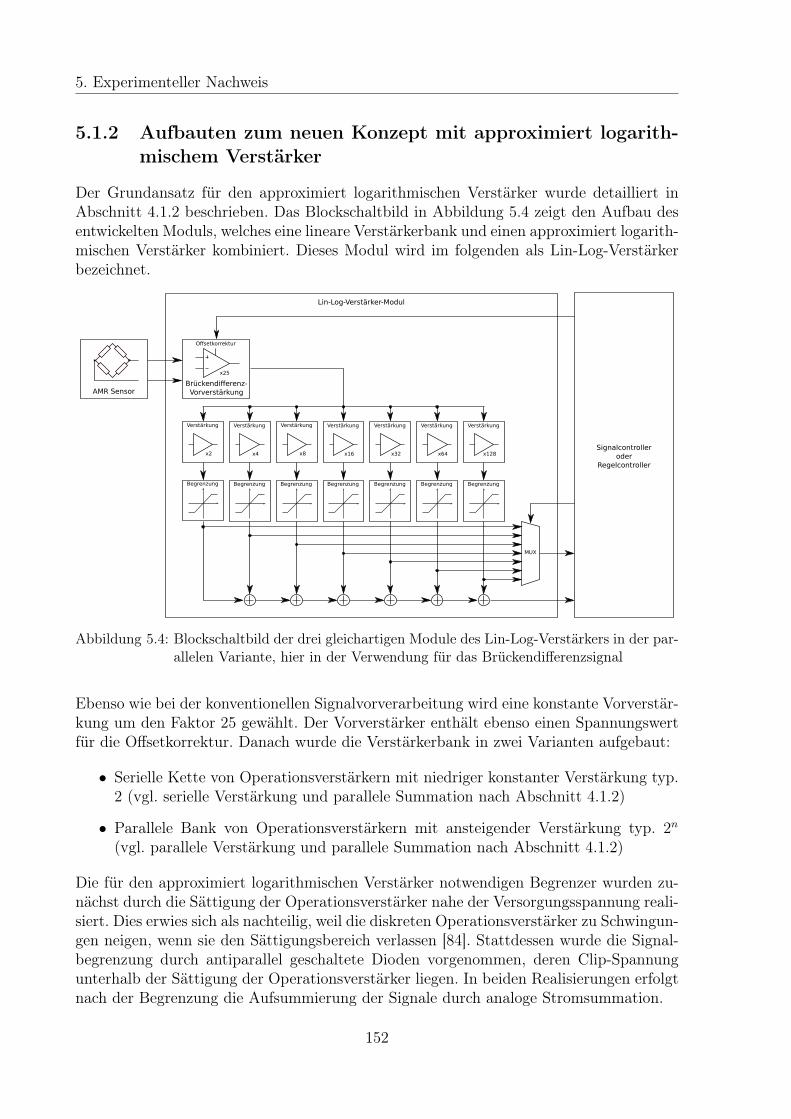
5. Experimenteller Nachweis
5.1.2 Aufbauten zum neuen Konzept mit approximiert logarith-mischem Verstärker
Der Grundansatz für den approximiert logarithmischen Verstärker wurde detailliert inAbschnitt 4.1.2 beschrieben. Das Blockschaltbild in Abbildung 5.4 zeigt den Aufbau desentwickelten Moduls, welches eine lineare Verstärkerbank und einen approximiert logarith-mischen Verstärker kombiniert. Dieses Modul wird im folgenden als Lin-Log-Verstärkerbezeichnet.
AMR SensorBrückendifferenz-Vorverstärkung
x25
Signalcontrolleroder
Regelcontroller
Offsetkorrektur
Lin-Log-Verstärker-Modul
x2
Verstärkung
x4
Verstärkung
x8
Verstärkung
x16
Verstärkung
x32
Verstärkung
x64
Verstärkung
x128
Verstärkung
Begrenzung Begrenzung Begrenzung Begrenzung Begrenzung Begrenzung Begrenzung
MUX
Abbildung 5.4: Blockschaltbild der drei gleichartigen Module des Lin-Log-Verstärkers in der par-allelen Variante, hier in der Verwendung für das Brückendifferenzsignal
Ebenso wie bei der konventionellen Signalvorverarbeitung wird eine konstante Vorverstär-kung um den Faktor 25 gewählt. Der Vorverstärker enthält ebenso einen Spannungswertfür die Offsetkorrektur. Danach wurde die Verstärkerbank in zwei Varianten aufgebaut:
• Serielle Kette von Operationsverstärkern mit niedriger konstanter Verstärkung typ.2 (vgl. serielle Verstärkung und parallele Summation nach Abschnitt 4.1.2)
• Parallele Bank von Operationsverstärkern mit ansteigender Verstärkung typ. 2n
(vgl. parallele Verstärkung und parallele Summation nach Abschnitt 4.1.2)
Die für den approximiert logarithmischen Verstärker notwendigen Begrenzer wurden zu-nächst durch die Sättigung der Operationsverstärker nahe der Versorgungsspannung reali-siert. Dies erwies sich als nachteilig, weil die diskreten Operationsverstärker zu Schwingun-gen neigen, wenn sie den Sättigungsbereich verlassen [84]. Stattdessen wurde die Signal-begrenzung durch antiparallel geschaltete Dioden vorgenommen, deren Clip-Spannungunterhalb der Sättigung der Operationsverstärker liegen. In beiden Realisierungen erfolgtnach der Begrenzung die Aufsummierung der Signale durch analoge Stromsummation.
152
5.1. Hardware zur Signalaufbereitung
Das summierte Signal entspricht dem approximiert logarithmisch verstärkten Signal. Eswird an das Modul des Regelcontrollers übergeben. Während im Abschnitt 4.1.2 ein idealesSignal gezeigt wurde, gibt es bei physischer Realisierung folgende Besonderheiten:
1. Die Clip-Spannung tritt nicht an einem idealen Punkt ein, sondern verläuft übereinen Bereich von mehreren Millivolt, was zu einer Ausrundung führt.
2. Jeder Operationsverstärker verursacht eine Phasenbeeinflussung durch seinen Pha-sengang. Mit steigender Verstärkung steigt die Phasenverschiebung. Gleiches giltbei Erhöhung der Frequenz. Damit werden im Summierer Signale unterschiedlicherPhasenlage zusammengefasst und es entsteht eine von vielen Parametern abhängigeFehlergröße.
In der realen Schaltung wurde diesen Punkten folgendermaßen begegnet:
1. Die Ausrundung der Clip-Spannung bei Eintritt in die Sättigung bzw. beim Ver-lassen der Sättigung des Verstärkers hat sich als wenig problematisch erwiesen. Sieträgt dazu bei, dass die Näherung des logarithmischen Verhaltens sogar verbessertwird [84, 101]. Es wurde hier auf Maßnahmen verzichtet.
2. Durch Simulationen wurde der Phasengang der Verstärkerstufen festgestellt undmit Hilfe analoger Kompensationsglieder weitgehend korrigiert. Ziel der Korrekturwar es, einen möglichst übereinstimmenden Phasengang aller Verstärkerstufen zuerhalten. Eine solche Korrektur ist mit einfachen Mitteln (RC-Glieder) nicht füralle Frequenzen gleichartig möglich, sodass ein kleinerer Restfehler verbleibt. In derVariante der seriellen Verstärkerkette ist die Phasenkorrektur nur durch zusätzli-che Verstärkerstufen vor der Summierung möglich, die nur zur Phasenbeeinflussungdienen. Dadurch steigt der Aufwand erheblich. Ein Verzicht auf diese zusätzlichenVerstärkerstufen zur Korrektur und Entkopplung hat sich nicht bewährt, weil dieseSchaltung zum Schwingen neigt. Zudem summiert sich bei der seriellen Variantedas Signalrauschen bei hohen Verstärkungen, wenn alle Verstärkerstufen im linea-ren, nicht begrenzten Bereich sind. Bei der parallelen Variante des approximiertlogarithmischen Verstärkers gelang ein diskreter Aufbau nach genauer Berechnungder Phasenkorrekturen.
Das logarithmisch approximierte Signal wird dem Regelcontroller-Modul zugeführt. Dortwird anhand dieses Signals entschieden, welches linear verstärkte Ausgangssignal (Ver-stärkung mit dem Faktor 2, 4, 8, 16, 32, 64 oder 128) an die Folgestufen weitergeleitetwird. Diese Auswahl erfolgt mittels eines diskreten Analog-Multiplexers. Im Gegensatzzu der konventionellen Lösung aus Abschnitt 5.1.1 soll mit den Lin-Log-Verstärkern zuUntersuchungszwecken auch die Halbbrückensignale geregelt werden können. Hierfür sindinsgesamt drei Lin-Log-Verstärker-Module erforderlich. Jedes dieser Module ist konfigu-rierbar für die Verwendung als Brückendifferenzverstärker oder als Halbbrückenverstärker.Ein einzelnes Modul ist in Abbildung 5.5(a) dargestellt. Der Gesamtaufbau mit diesenModulen, Regelcontroller und Signalcontroller auf Mikrocontroller-Basis ist in Abbildung5.5(b) dargestellt.
153
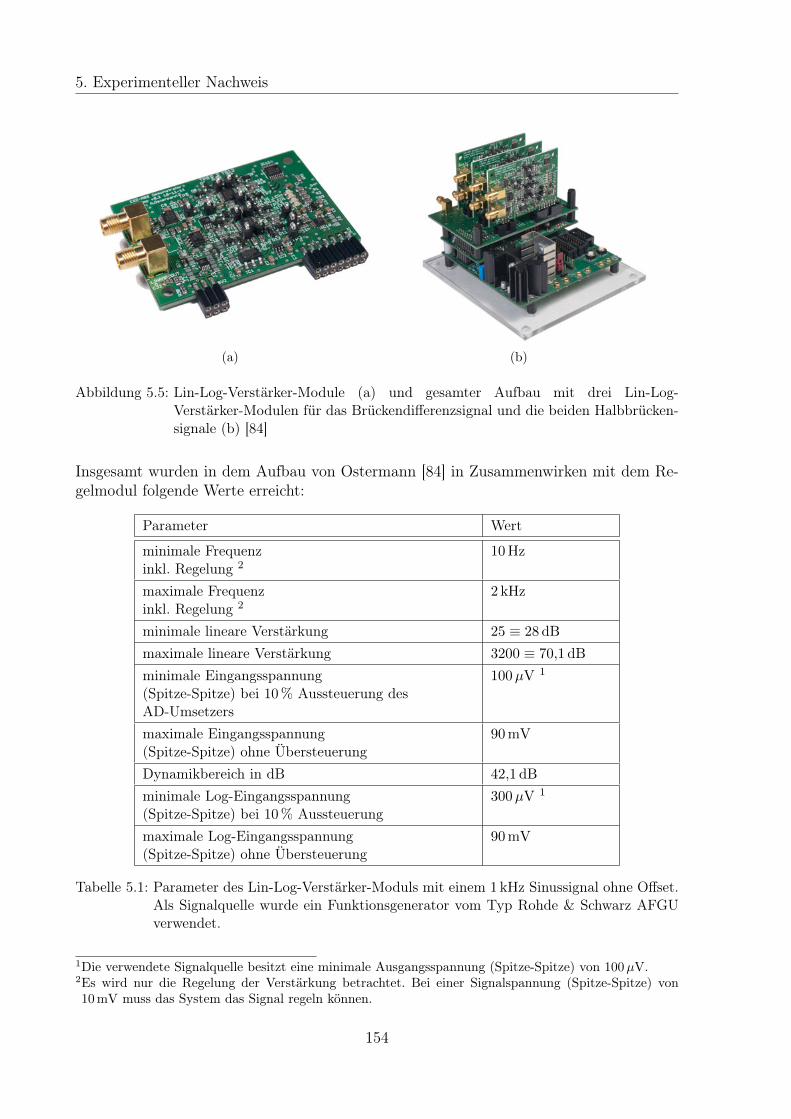
5. Experimenteller Nachweis
(a) (b)
Abbildung 5.5: Lin-Log-Verstärker-Module (a) und gesamter Aufbau mit drei Lin-Log-Verstärker-Modulen für das Brückendifferenzsignal und die beiden Halbbrücken-signale (b) [84]
Insgesamt wurden in dem Aufbau von Ostermann [84] in Zusammenwirken mit dem Re-gelmodul folgende Werte erreicht:
Parameter Wert
minimale Frequenzinkl. Regelung 2
10 Hz
maximale Frequenzinkl. Regelung 2
2 kHz
minimale lineare Verstärkung 25 ≡ 28 dB
maximale lineare Verstärkung 3200 ≡ 70,1 dB
minimale Eingangsspannung(Spitze-Spitze) bei 10% Aussteuerung desAD-Umsetzers
100µV 1
maximale Eingangsspannung(Spitze-Spitze) ohne Übersteuerung
90 mV
Dynamikbereich in dB 42,1 dB
minimale Log-Eingangsspannung(Spitze-Spitze) bei 10% Aussteuerung
300µV 1
maximale Log-Eingangsspannung(Spitze-Spitze) ohne Übersteuerung
90 mV
Tabelle 5.1: Parameter des Lin-Log-Verstärker-Moduls mit einem 1 kHz Sinussignal ohne Offset.Als Signalquelle wurde ein Funktionsgenerator vom Typ Rohde & Schwarz AFGUverwendet.
1Die verwendete Signalquelle besitzt eine minimale Ausgangsspannung (Spitze-Spitze) von 100µV.2Es wird nur die Regelung der Verstärkung betrachtet. Bei einer Signalspannung (Spitze-Spitze) von10 mV muss das System das Signal regeln können.
154
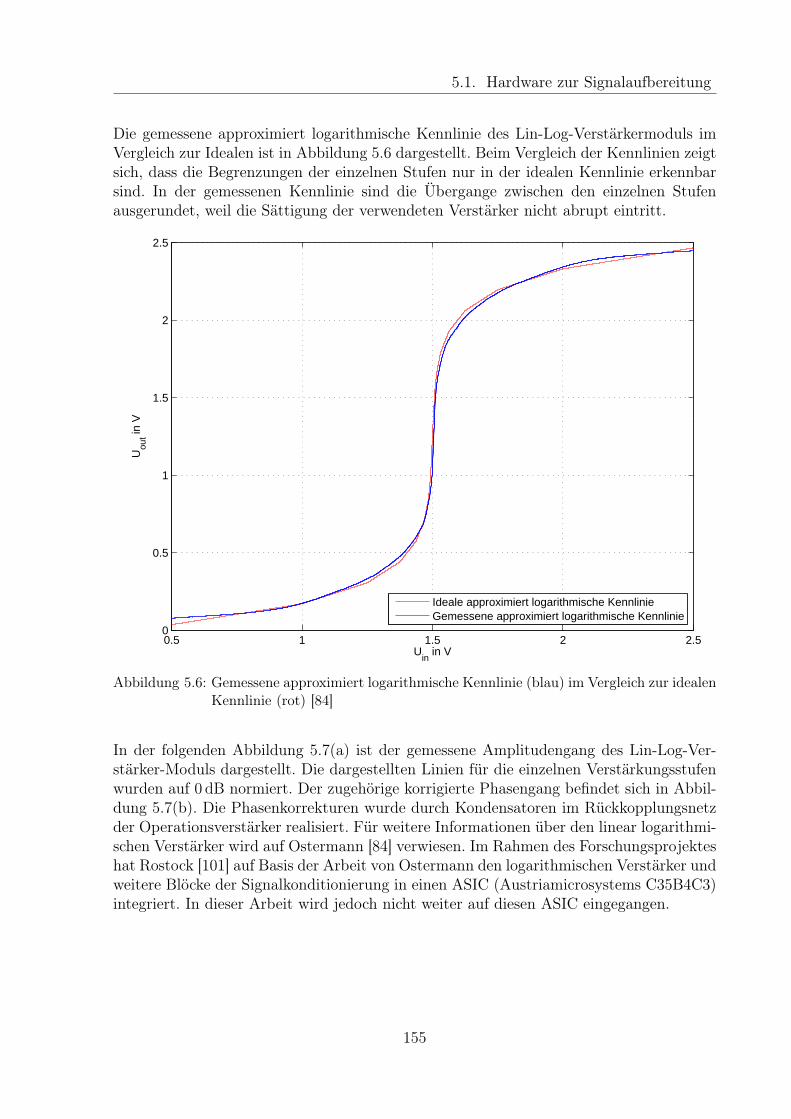
5.1. Hardware zur Signalaufbereitung
Die gemessene approximiert logarithmische Kennlinie des Lin-Log-Verstärkermoduls imVergleich zur Idealen ist in Abbildung 5.6 dargestellt. Beim Vergleich der Kennlinien zeigtsich, dass die Begrenzungen der einzelnen Stufen nur in der idealen Kennlinie erkennbarsind. In der gemessenen Kennlinie sind die Übergange zwischen den einzelnen Stufenausgerundet, weil die Sättigung der verwendeten Verstärker nicht abrupt eintritt.
0.5 1 1.5 2 2.50
0.5
1
1.5
2
2.5
Uin
in V
Uou
t in V
Ideale approximiert logarithmische KennlinieGemessene approximiert logarithmische Kennlinie
Abbildung 5.6: Gemessene approximiert logarithmische Kennlinie (blau) im Vergleich zur idealenKennlinie (rot) [84]
In der folgenden Abbildung 5.7(a) ist der gemessene Amplitudengang des Lin-Log-Ver-stärker-Moduls dargestellt. Die dargestellten Linien für die einzelnen Verstärkungsstufenwurden auf 0 dB normiert. Der zugehörige korrigierte Phasengang befindet sich in Abbil-dung 5.7(b). Die Phasenkorrekturen wurde durch Kondensatoren im Rückkopplungsnetzder Operationsverstärker realisiert. Für weitere Informationen über den linear logarithmi-schen Verstärker wird auf Ostermann [84] verwiesen. Im Rahmen des Forschungsprojekteshat Rostock [101] auf Basis der Arbeit von Ostermann den logarithmischen Verstärker undweitere Blöcke der Signalkonditionierung in einen ASIC (Austriamicrosystems C35B4C3)integriert. In dieser Arbeit wird jedoch nicht weiter auf diesen ASIC eingegangen.
155
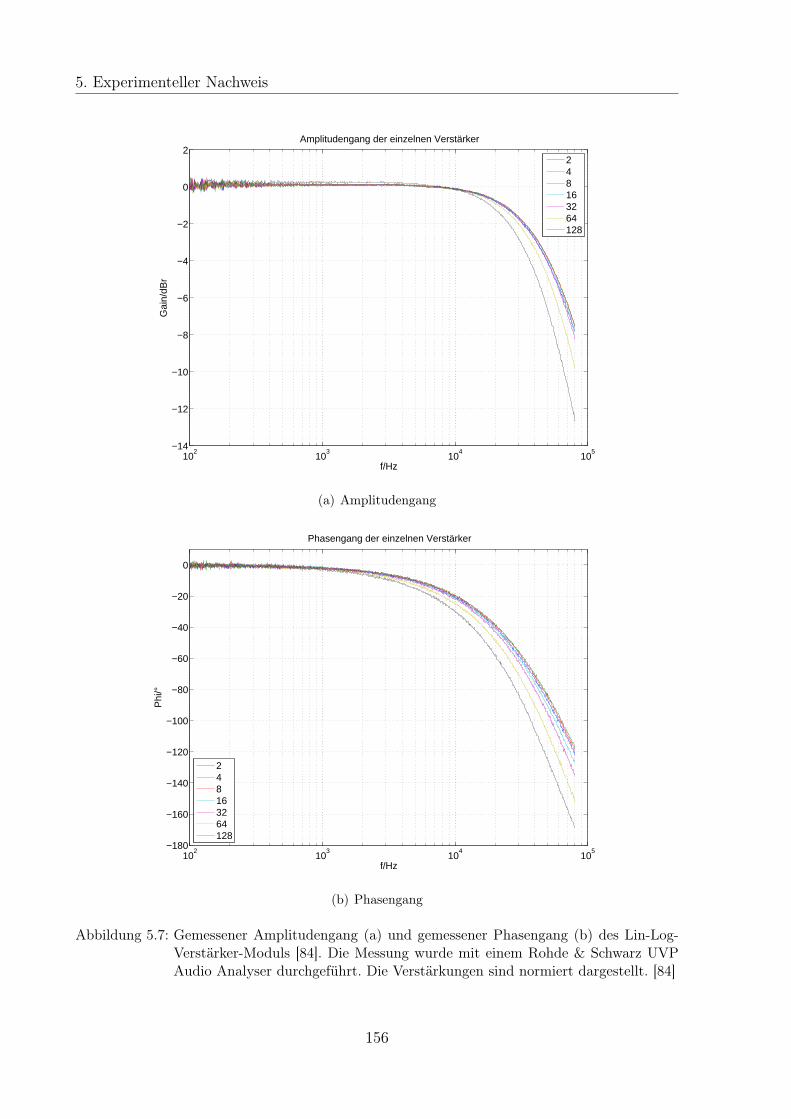
5. Experimenteller Nachweis
102
103
104
105
−14
−12
−10
−8
−6
−4
−2
0
2Amplitudengang der einzelnen Verstärker
f/Hz
Gai
n/dB
r
248163264128
(a) Amplitudengang
102
103
104
105
−180
−160
−140
−120
−100
−80
−60
−40
−20
0
Phasengang der einzelnen Verstärker
f/Hz
Phi
/°
248163264128
(b) Phasengang
Abbildung 5.7: Gemessener Amplitudengang (a) und gemessener Phasengang (b) des Lin-Log-Verstärker-Moduls [84]. Die Messung wurde mit einem Rohde & Schwarz UVPAudio Analyser durchgeführt. Die Verstärkungen sind normiert dargestellt. [84]
156
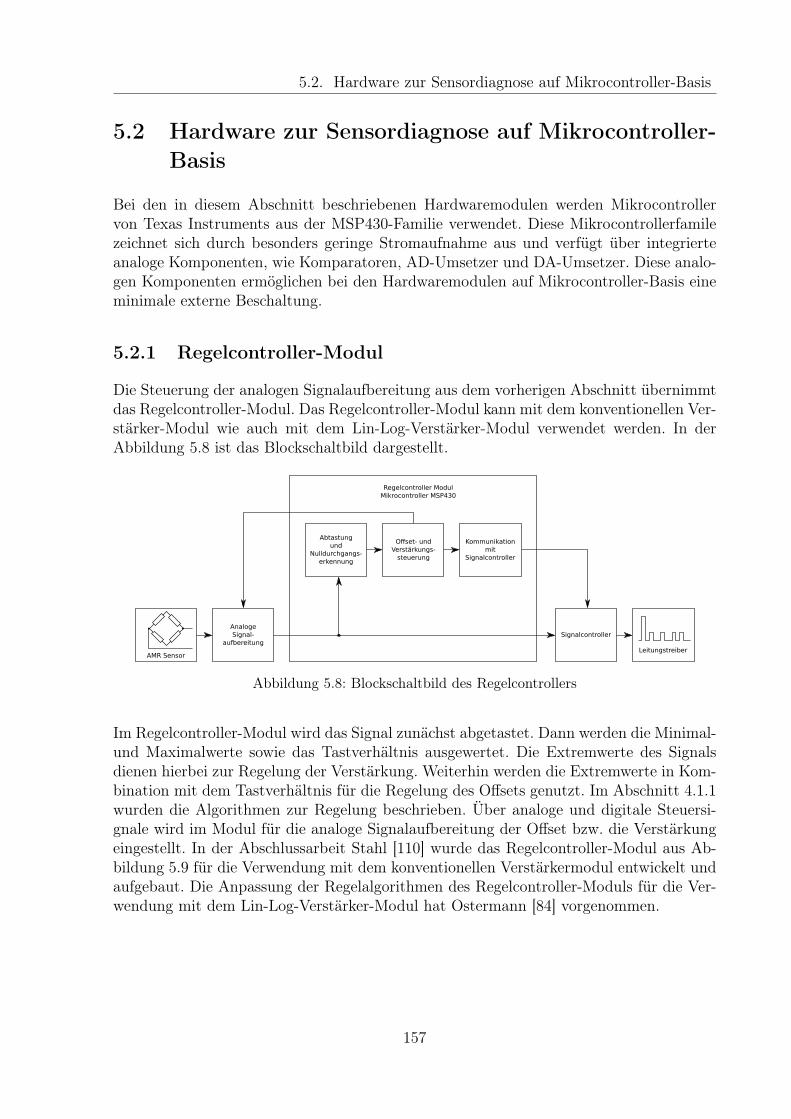
5.2. Hardware zur Sensordiagnose auf Mikrocontroller-Basis
5.2 Hardware zur Sensordiagnose auf Mikrocontroller-Basis
Bei den in diesem Abschnitt beschriebenen Hardwaremodulen werden Mikrocontrollervon Texas Instruments aus der MSP430-Familie verwendet. Diese Mikrocontrollerfamilezeichnet sich durch besonders geringe Stromaufnahme aus und verfügt über integrierteanaloge Komponenten, wie Komparatoren, AD-Umsetzer und DA-Umsetzer. Diese analo-gen Komponenten ermöglichen bei den Hardwaremodulen auf Mikrocontroller-Basis eineminimale externe Beschaltung.
5.2.1 Regelcontroller-Modul
Die Steuerung der analogen Signalaufbereitung aus dem vorherigen Abschnitt übernimmtdas Regelcontroller-Modul. Das Regelcontroller-Modul kann mit dem konventionellen Ver-stärker-Modul wie auch mit dem Lin-Log-Verstärker-Modul verwendet werden. In derAbbildung 5.8 ist das Blockschaltbild dargestellt.
Regelcontroller ModulMikrocontroller MSP430
AMR SensorLeitungstreiber
Offset- undVerstärkungs-
steuerung
AnalogeSignal-
aufbereitung
Kommunikationmit
Signalcontroller
Abtastungund
Nulldurchgangs-erkennung
Signalcontroller
Abbildung 5.8: Blockschaltbild des Regelcontrollers
Im Regelcontroller-Modul wird das Signal zunächst abgetastet. Dann werden die Minimal-und Maximalwerte sowie das Tastverhältnis ausgewertet. Die Extremwerte des Signalsdienen hierbei zur Regelung der Verstärkung. Weiterhin werden die Extremwerte in Kom-bination mit dem Tastverhältnis für die Regelung des Offsets genutzt. Im Abschnitt 4.1.1wurden die Algorithmen zur Regelung beschrieben. Über analoge und digitale Steuersi-gnale wird im Modul für die analoge Signalaufbereitung der Offset bzw. die Verstärkungeingestellt. In der Abschlussarbeit Stahl [110] wurde das Regelcontroller-Modul aus Ab-bildung 5.9 für die Verwendung mit dem konventionellen Verstärkermodul entwickelt undaufgebaut. Die Anpassung der Regelalgorithmen des Regelcontroller-Moduls für die Ver-wendung mit dem Lin-Log-Verstärker-Modul hat Ostermann [84] vorgenommen.
157
5. Experimenteller Nachweis
Abbildung 5.9: Regelcontroller-Modul [110]
5.2.2 Signalcontroller-Modul
Das Signalcontroller-Modul ist die zentrale Komponente im System, welche die Zustand-sindikatoren berechnet. Für die Erkennung der Nulldurchgänge wird das Smart-Compa-rator-Verfahren aus Abschnitt 4.2.1 verwendet. Dieses erfolgt mit dem im Mikrocontrollerintegrierter Komparator in Kombination mit dem integrierten DA-Umsetzer. Die Abtas-tung erfolgt mit einem integrierten AD-Umsetzer. In der Abbildung 5.10 ist der Aufbau desSignalcontrollers in einem Blockschaltbild dargestellt. Die analogen Komponenten sind imBlock der Abtastung und Nulldurchgangserkennung enthalten. Bei den nachfolgenden dreiBlöcken handelt es sich um die Implementierung der Funktionen der winkeläquidistantenAbtastung, die Bestimmung der Harmonischen und die Berechnung der Zustandsindika-toren. Die dort implementierten Algorithmen sind in Abschnitt 4.3 beschrieben. Aufgrundder beschränkten Rechenleistung ist es auf dieser Hardware nur möglich, die in Abschnitt4.3.3 beschriebene Unterabtastung durchzuführen.
Signalcontroller Modul
AMR SensorLeitungstreiber
Digitale SignalverarbeitungMikrocontroller MSP430
Protokoll- Generator
Bestimmung derHarmonischen
Berechnung derZustands-
indikatoren
Winkel-äquidistanteAbtastung
AnalogeSignal-
aufbereitung
Debug Interface
Protokoll GeneratorMikrocontroller
MSP430Abtastungund
Nulldurchgangs-erkennung
Abbildung 5.10: Blockschaltbild des Signalcontroller-Moduls auf Mikrocontroller-Basis
Die Protokoll-Ausgabe als Schnittstelle zum ABS-Steuergerät ist im Modul des Protokoll-generators implementiert. Wie bereits im Abschnitt 4.2.2 erläutert, wird bei dem Protokollein genaues Zeitverhalten vorausgesetzt. Weil dies auch für die vorgeschaltete Signalverar-beitung gilt, musste hierfür ein separater Mikrocontroller vorgesehen werden. Der Signal-controller ist als aufgebautes Modul in Abbildung 5.11 dargestellt. Er wurde im Rahmender Diplomarbeit Jegenhorst [56] entwickelt.
158
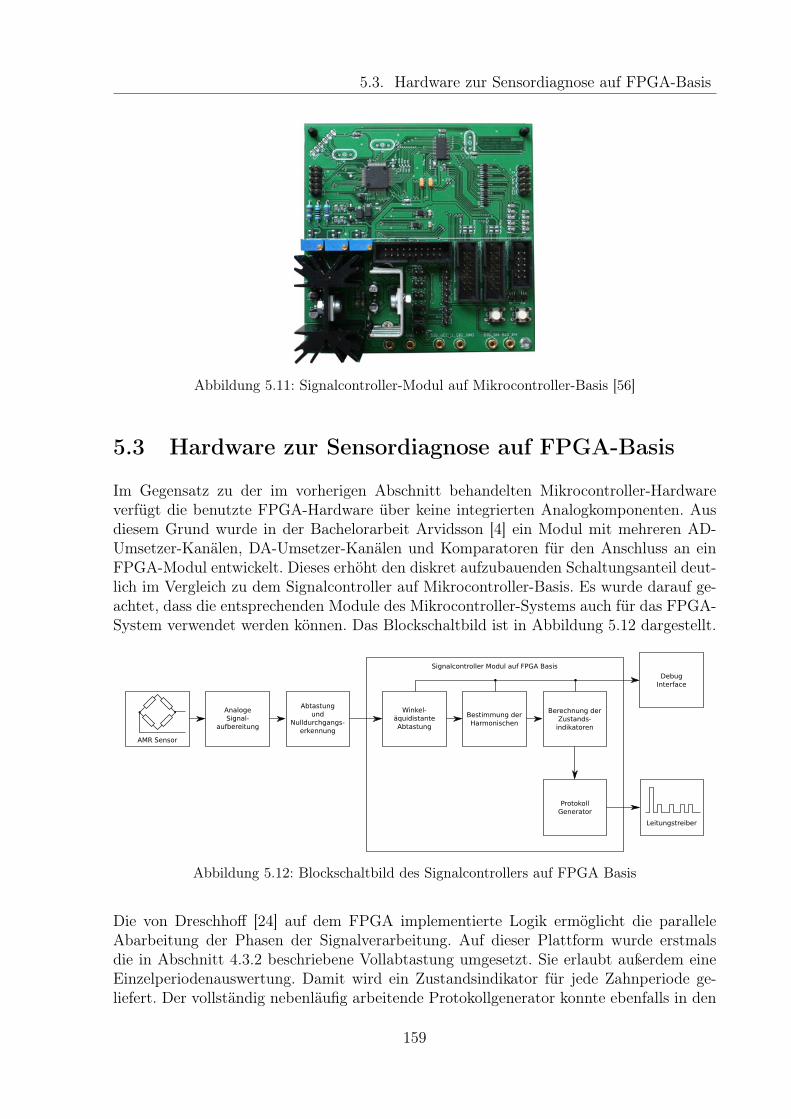
5.3. Hardware zur Sensordiagnose auf FPGA-Basis
Abbildung 5.11: Signalcontroller-Modul auf Mikrocontroller-Basis [56]
5.3 Hardware zur Sensordiagnose auf FPGA-Basis
Im Gegensatz zu der im vorherigen Abschnitt behandelten Mikrocontroller-Hardwareverfügt die benutzte FPGA-Hardware über keine integrierten Analogkomponenten. Ausdiesem Grund wurde in der Bachelorarbeit Arvidsson [4] ein Modul mit mehreren AD-Umsetzer-Kanälen, DA-Umsetzer-Kanälen und Komparatoren für den Anschluss an einFPGA-Modul entwickelt. Dieses erhöht den diskret aufzubauenden Schaltungsanteil deut-lich im Vergleich zu dem Signalcontroller auf Mikrocontroller-Basis. Es wurde darauf ge-achtet, dass die entsprechenden Module des Mikrocontroller-Systems auch für das FPGA-System verwendet werden können. Das Blockschaltbild ist in Abbildung 5.12 dargestellt.
Signalcontroller Modul auf FPGA Basis
AMR Sensor
Leitungstreiber
Protokoll Generator
Bestimmung derHarmonischen
Berechnung derZustands-
indikatoren
Winkel-äquidistanteAbtastung
AnalogeSignal-
aufbereitung
Debug Interface
Abtastungund
Nulldurchgangs-erkennung
Abbildung 5.12: Blockschaltbild des Signalcontrollers auf FPGA Basis
Die von Dreschhoff [24] auf dem FPGA implementierte Logik ermöglicht die paralleleAbarbeitung der Phasen der Signalverarbeitung. Auf dieser Plattform wurde erstmalsdie in Abschnitt 4.3.2 beschriebene Vollabtastung umgesetzt. Sie erlaubt außerdem eineEinzelperiodenauswertung. Damit wird ein Zustandsindikator für jede Zahnperiode ge-liefert. Der vollständig nebenläufig arbeitende Protokollgenerator konnte ebenfalls in den
159
5. Experimenteller Nachweis
FPGA integriert werden. Weiterhin wurde bereits bei der Entwicklung der Architektur derVHDL-Module für das FPGA die zukünftige Implementation auf einem ASIC bedacht.Aus diesem Grund wurden auf dem FPGA keine speziellen für FPGA optimierte IP-Coresgenutzt und der Systemtakt mit 12,5 MHz bewusst niedrig gewählt. Dies ermöglicht eineWiederverwendung des VHDL-Codes für die ASIC-Implementierung.
5.4 Hardware zur Sensordiagnose auf ASIC-Basis
Auf Basis der Architektur der FPGA-Experimentalplattform wurde im Rahmen diesesForschungsprojektes unter Mitwirkung der studentischen Arbeit Sabotta [102] ein Test-chip als ASIC in CMOS-Technologie entwickelt. Ein kleiner Satz von Musterchips wurdeauf einem Multi-Project-Wafer von der Firma Austriamicrosystems in 350 nm Standard-Technologie gefertigt. Die Technologie C35B4C3 verfügt über vier Metalllagen, einen High-Resistance-Layer für die Integration hochohmiger Widerstände und ist für eine Betriebs-spannung von 3,3 V ausgelegt. Weitere Details zur Technologie sind aus [6] zu entnehmen.Bei dem Design wurde für den Analog- sowie den Digitalteil auf die von der Firma Aus-triamicrosystems zur Verfügung gestellten Standardzellen zurückgegriffen [7]. Die VHDL-Module wurden mit Hilfe der Cadence-Toolchain synthetisiert. Zur Verifikation der Funk-tion wurden für alle digitalen und analogen Module Simulationen durchgeführt. Details zudem entwickelten ASIC, mit besonderem Fokus auf die Varianten der Implementierung,wurden in [65] veröffentlicht.
In Anlehnung an die in den vorherigen Abschnitten beschriebenen Module wurde derASIC in drei unabhängige Schaltungsteile aufgeteilt. Dieses ist in Abbildung 5.13 deutlicherkennbar. Folgende Schaltungsteile sind realisiert worden:
1. Eine analoge Signalaufbereitung, welche einen AD-Umsetzer mit Vorverstärkern,Komparatoren und eine Power-On-Reset Schaltung enthält. Das Design erlaubt, miteiner minimalen externen Beschaltung von Widerständen, den direkten Anschlussan die Halbbrücken des AMR-Sensors ohne zusätzlichen Vorverstärker. Auf eineintegrierte Regelung des Sensorsignals wurde zunächst verzichtet. Die Einstellungder Verstärkung und der Offsetkorrektur des Sensorsignals kann über eine externeBeschaltung mit passiven Bauelementen durchgeführt werden.
2. Ein Schaltungsblock für die digitale Signalverarbeitung. Hier wird das digitalisier-te Sensorsignal eingespeist, welche die analoge Signalaufbereitung liefert. In diesemBlock werden sowohl die Grundfunktionen der Sensor-Signalverarbeitung als auchdie neuen Diagnose-Funktionen realisiert. Für die Steuerung der Abtastung wurdendie Ein- und Zwei-Zahnperioden-Analyse realisiert. Die Bestimmung der harmoni-schen Anteile erfolgt mit der reduzierten DFT. Zu Debug-Zwecken werden dieseWerte in komplexer Form als Bitstrom auf einer synchronen seriellen Schnittstelleausgegeben Die berechneten Zustandsindikatoren HDI und HD5 werden für jedeZahnperiode auf einer weiteren synchronen seriellen Schnittstelle ausgegeben. DieBerechnung des Zustandsindikators HDOE wurde nicht integriert. Es ist ebenfallsvorgesehen, die Zustandsindikatoren an den Protokollgenerator weiterzuleiten. Zu
160
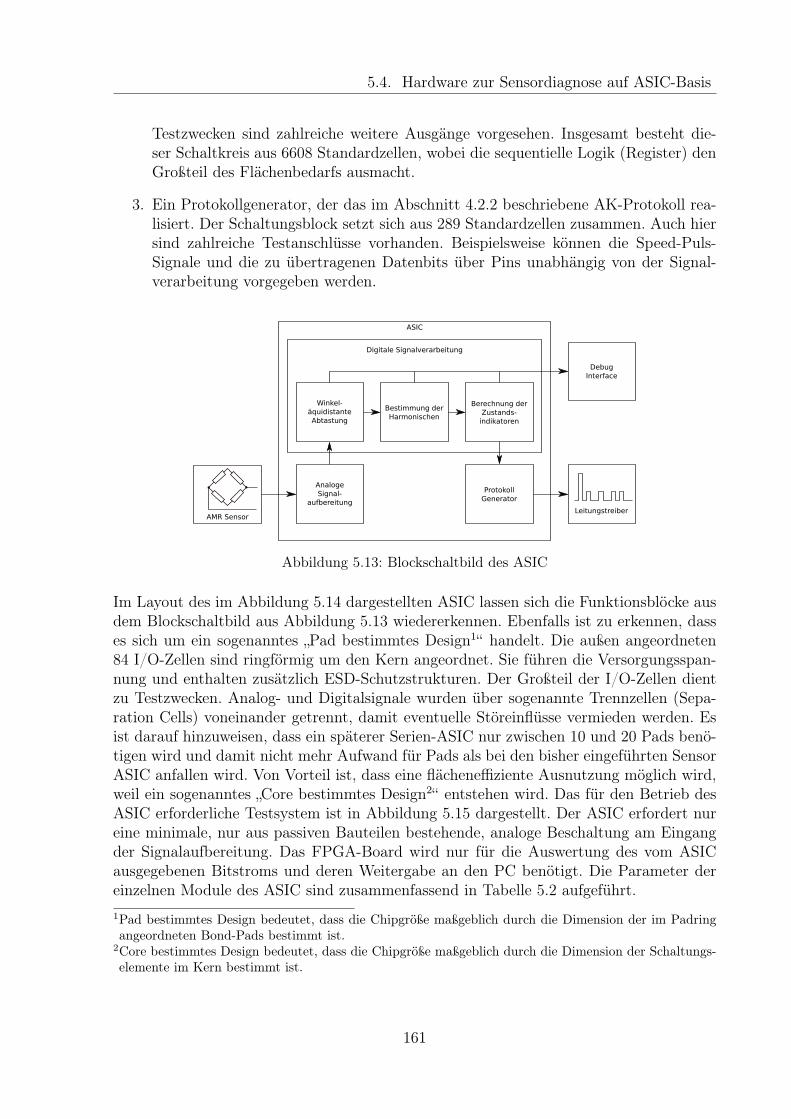
5.4. Hardware zur Sensordiagnose auf ASIC-Basis
Testzwecken sind zahlreiche weitere Ausgänge vorgesehen. Insgesamt besteht die-ser Schaltkreis aus 6608 Standardzellen, wobei die sequentielle Logik (Register) denGroßteil des Flächenbedarfs ausmacht.
3. Ein Protokollgenerator, der das im Abschnitt 4.2.2 beschriebene AK-Protokoll rea-lisiert. Der Schaltungsblock setzt sich aus 289 Standardzellen zusammen. Auch hiersind zahlreiche Testanschlüsse vorhanden. Beispielsweise können die Speed-Puls-Signale und die zu übertragenen Datenbits über Pins unabhängig von der Signal-verarbeitung vorgegeben werden.
ASIC
AMR SensorLeitungstreiber
Digitale Signalverarbeitung
Protokoll Generator
Bestimmung derHarmonischen
Berechnung derZustands-
indikatoren
Winkel-äquidistanteAbtastung
AnalogeSignal-
aufbereitung
Debug Interface
Abbildung 5.13: Blockschaltbild des ASIC
Im Layout des im Abbildung 5.14 dargestellten ASIC lassen sich die Funktionsblöcke ausdem Blockschaltbild aus Abbildung 5.13 wiedererkennen. Ebenfalls ist zu erkennen, dasses sich um ein sogenanntes „Pad bestimmtes Design1“ handelt. Die außen angeordneten84 I/O-Zellen sind ringförmig um den Kern angeordnet. Sie führen die Versorgungsspan-nung und enthalten zusätzlich ESD-Schutzstrukturen. Der Großteil der I/O-Zellen dientzu Testzwecken. Analog- und Digitalsignale wurden über sogenannte Trennzellen (Sepa-ration Cells) voneinander getrennt, damit eventuelle Störeinflüsse vermieden werden. Esist darauf hinzuweisen, dass ein späterer Serien-ASIC nur zwischen 10 und 20 Pads benö-tigen wird und damit nicht mehr Aufwand für Pads als bei den bisher eingeführten SensorASIC anfallen wird. Von Vorteil ist, dass eine flächeneffiziente Ausnutzung möglich wird,weil ein sogenanntes „Core bestimmtes Design2“ entstehen wird. Das für den Betrieb desASIC erforderliche Testsystem ist in Abbildung 5.15 dargestellt. Der ASIC erfordert nureine minimale, nur aus passiven Bauteilen bestehende, analoge Beschaltung am Eingangder Signalaufbereitung. Das FPGA-Board wird nur für die Auswertung des vom ASICausgegebenen Bitstroms und deren Weitergabe an den PC benötigt. Die Parameter dereinzelnen Module des ASIC sind zusammenfassend in Tabelle 5.2 aufgeführt.1Pad bestimmtes Design bedeutet, dass die Chipgröße maßgeblich durch die Dimension der im Padringangeordneten Bond-Pads bestimmt ist.
2Core bestimmtes Design bedeutet, dass die Chipgröße maßgeblich durch die Dimension der Schaltungs-elemente im Kern bestimmt ist.
161
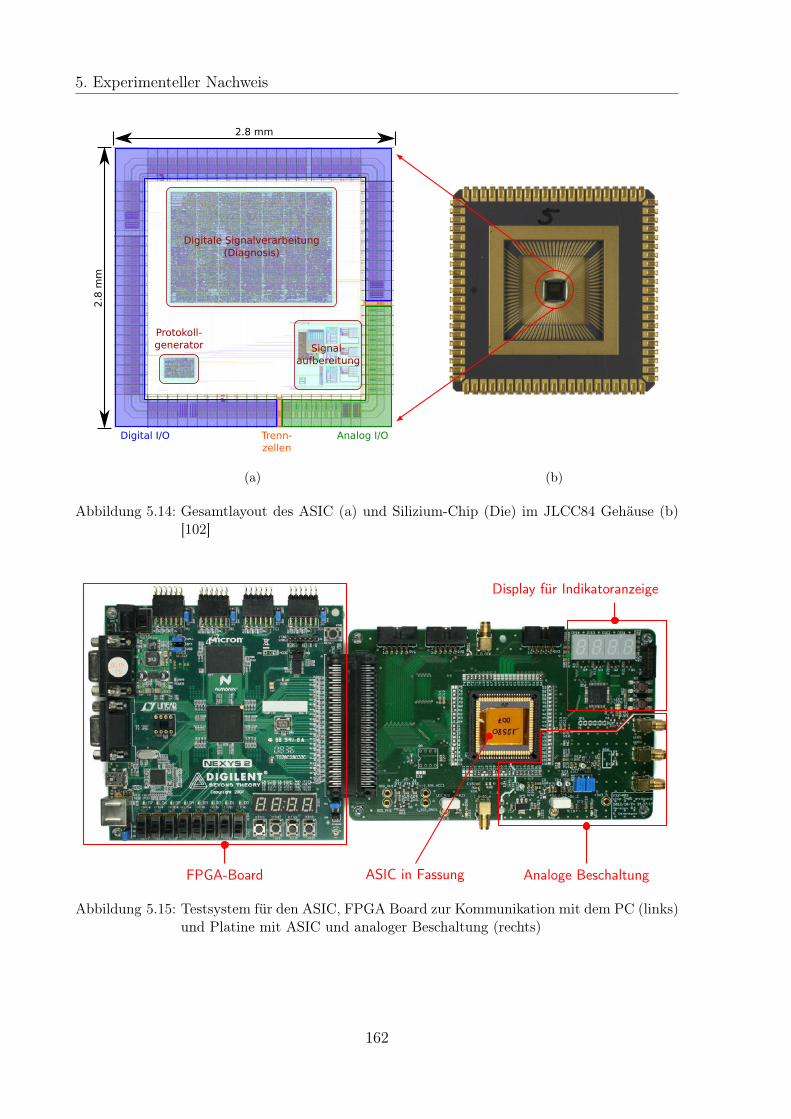
5. Experimenteller Nachweis
Digitale Signalverarbeitung(Diagnosis)
Signal-aufbereitung
Protokoll-generator
Analog I/OTrenn-zellen
Digital I/O
2.8 mm
2.8
mm
(a) (b)
Abbildung 5.14: Gesamtlayout des ASIC (a) und Silizium-Chip (Die) im JLCC84 Gehäuse (b)[102]
FPGA-Board ASIC in Fassung Analoge Beschaltung
Display für Indikatoranzeige
Abbildung 5.15: Testsystem für den ASIC, FPGA Board zur Kommunikation mit dem PC (links)und Platine mit ASIC und analoger Beschaltung (rechts)
162
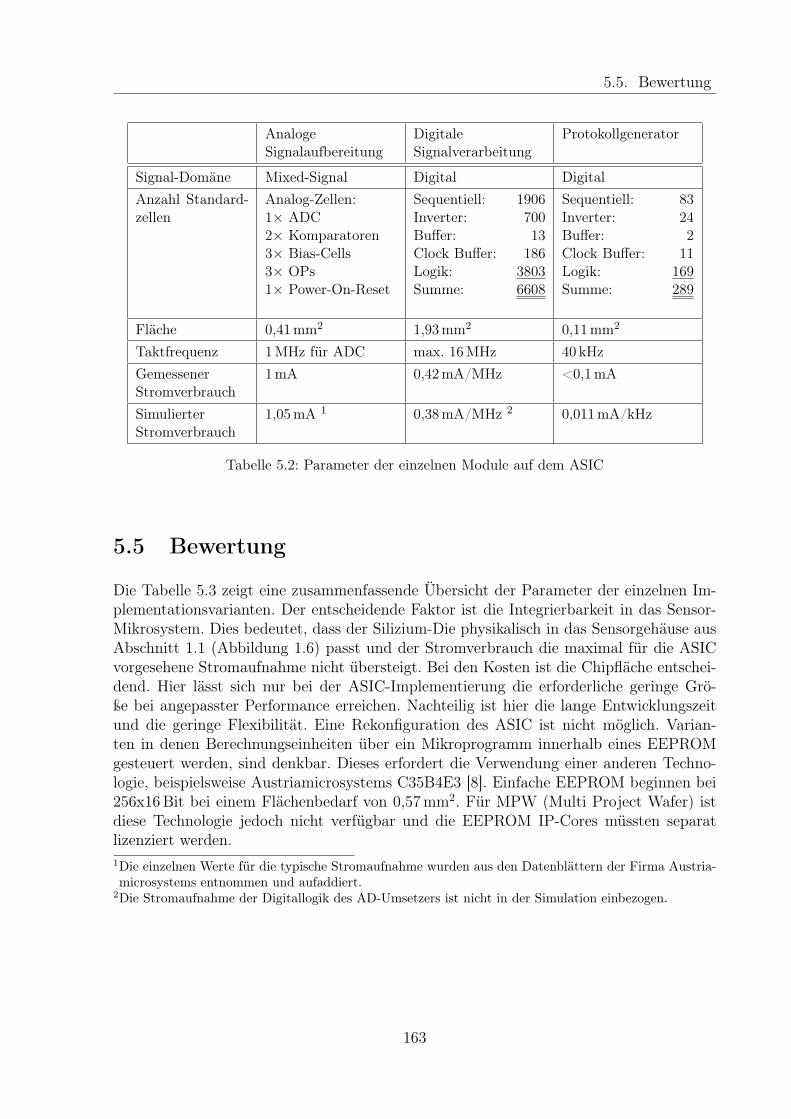
5.5. Bewertung
AnalogeSignalaufbereitung
DigitaleSignalverarbeitung
Protokollgenerator
Signal-Domäne Mixed-Signal Digital DigitalAnzahl Standard-zellen
Analog-Zellen:1× ADC2× Komparatoren3× Bias-Cells3× OPs1× Power-On-Reset
Sequentiell: 1906Inverter: 700Buffer: 13Clock Buffer: 186Logik: 3803Summe: 6608
Sequentiell: 83Inverter: 24Buffer: 2Clock Buffer: 11Logik: 169Summe: 289
Fläche 0,41mm2 1,93mm2 0,11mm2
Taktfrequenz 1MHz für ADC max. 16MHz 40 kHzGemessenerStromverbrauch
1mA 0,42mA/MHz <0,1mA
SimulierterStromverbrauch
1,05mA 1 0,38mA/MHz 2 0,011mA/kHz
Tabelle 5.2: Parameter der einzelnen Module auf dem ASIC
5.5 Bewertung
Die Tabelle 5.3 zeigt eine zusammenfassende Übersicht der Parameter der einzelnen Im-plementationsvarianten. Der entscheidende Faktor ist die Integrierbarkeit in das Sensor-Mikrosystem. Dies bedeutet, dass der Silizium-Die physikalisch in das Sensorgehäuse ausAbschnitt 1.1 (Abbildung 1.6) passt und der Stromverbrauch die maximal für die ASICvorgesehene Stromaufnahme nicht übersteigt. Bei den Kosten ist die Chipfläche entschei-dend. Hier lässt sich nur bei der ASIC-Implementierung die erforderliche geringe Grö-ße bei angepasster Performance erreichen. Nachteilig ist hier die lange Entwicklungszeitund die geringe Flexibilität. Eine Rekonfiguration des ASIC ist nicht möglich. Varian-ten in denen Berechnungseinheiten über ein Mikroprogramm innerhalb eines EEPROMgesteuert werden, sind denkbar. Dieses erfordert die Verwendung einer anderen Techno-logie, beispielsweise Austriamicrosystems C35B4E3 [8]. Einfache EEPROM beginnen bei256x16Bit bei einem Flächenbedarf von 0,57 mm2. Für MPW (Multi Project Wafer) istdiese Technologie jedoch nicht verfügbar und die EEPROM IP-Cores müssten separatlizenziert werden.1Die einzelnen Werte für die typische Stromaufnahme wurden aus den Datenblättern der Firma Austria-microsystems entnommen und aufaddiert.
2Die Stromaufnahme der Digitallogik des AD-Umsetzers ist nicht in der Simulation einbezogen.
163
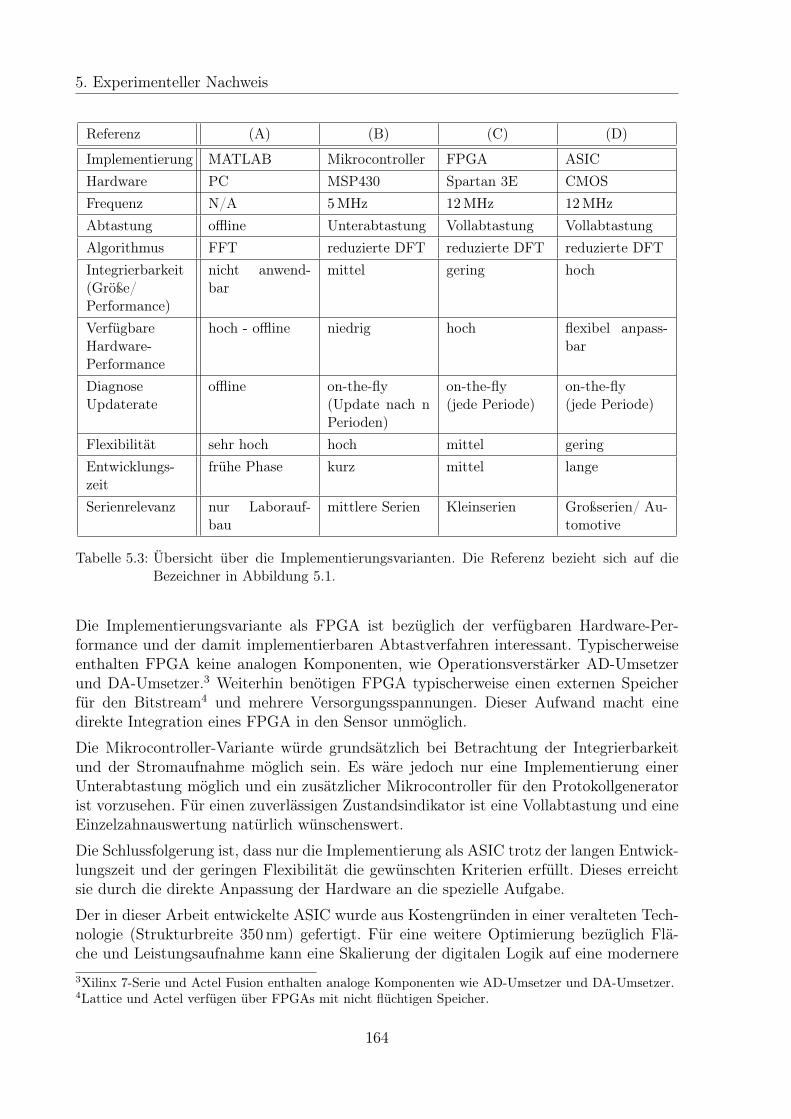
5. Experimenteller Nachweis
Referenz (A) (B) (C) (D)
Implementierung MATLAB Mikrocontroller FPGA ASICHardware PC MSP430 Spartan 3E CMOSFrequenz N/A 5 MHz 12 MHz 12 MHz
Abtastung offline Unterabtastung Vollabtastung VollabtastungAlgorithmus FFT reduzierte DFT reduzierte DFT reduzierte DFTIntegrierbarkeit(Größe/Performance)
nicht anwend-bar
mittel gering hoch
VerfügbareHardware-Performance
hoch - offline niedrig hoch flexibel anpass-bar
DiagnoseUpdaterate
offline on-the-fly(Update nach nPerioden)
on-the-fly(jede Periode)
on-the-fly(jede Periode)
Flexibilität sehr hoch hoch mittel geringEntwicklungs-zeit
frühe Phase kurz mittel lange
Serienrelevanz nur Laborauf-bau
mittlere Serien Kleinserien Großserien/ Au-tomotive
Tabelle 5.3: Übersicht über die Implementierungsvarianten. Die Referenz bezieht sich auf dieBezeichner in Abbildung 5.1.
Die Implementierungsvariante als FPGA ist bezüglich der verfügbaren Hardware-Per-formance und der damit implementierbaren Abtastverfahren interessant. Typischerweiseenthalten FPGA keine analogen Komponenten, wie Operationsverstärker AD-Umsetzerund DA-Umsetzer.3 Weiterhin benötigen FPGA typischerweise einen externen Speicherfür den Bitstream4 und mehrere Versorgungsspannungen. Dieser Aufwand macht einedirekte Integration eines FPGA in den Sensor unmöglich.
Die Mikrocontroller-Variante würde grundsätzlich bei Betrachtung der Integrierbarkeitund der Stromaufnahme möglich sein. Es wäre jedoch nur eine Implementierung einerUnterabtastung möglich und ein zusätzlicher Mikrocontroller für den Protokollgeneratorist vorzusehen. Für einen zuverlässigen Zustandsindikator ist eine Vollabtastung und eineEinzelzahnauswertung natürlich wünschenswert.
Die Schlussfolgerung ist, dass nur die Implementierung als ASIC trotz der langen Entwick-lungszeit und der geringen Flexibilität die gewünschten Kriterien erfüllt. Dieses erreichtsie durch die direkte Anpassung der Hardware an die spezielle Aufgabe.
Der in dieser Arbeit entwickelte ASIC wurde aus Kostengründen in einer veralteten Tech-nologie (Strukturbreite 350 nm) gefertigt. Für eine weitere Optimierung bezüglich Flä-che und Leistungsaufnahme kann eine Skalierung der digitalen Logik auf eine modernere3Xilinx 7-Serie und Actel Fusion enthalten analoge Komponenten wie AD-Umsetzer und DA-Umsetzer.4Lattice und Actel verfügen über FPGAs mit nicht flüchtigen Speicher.
164
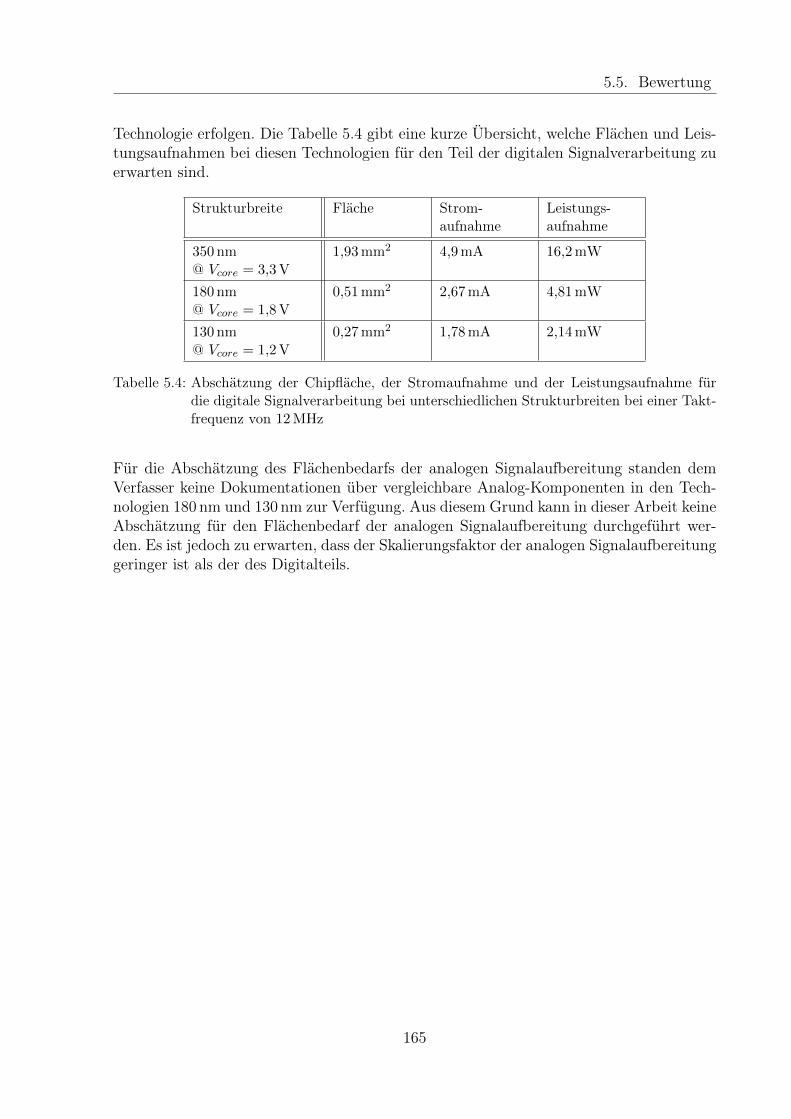
5.5. Bewertung
Technologie erfolgen. Die Tabelle 5.4 gibt eine kurze Übersicht, welche Flächen und Leis-tungsaufnahmen bei diesen Technologien für den Teil der digitalen Signalverarbeitung zuerwarten sind.
Strukturbreite Fläche Strom-aufnahme
Leistungs-aufnahme
350 nm@ Vcore = 3,3 V
1,93 mm2 4,9 mA 16,2 mW
180 nm@ Vcore = 1,8 V
0,51 mm2 2,67 mA 4,81 mW
130 nm@ Vcore = 1,2 V
0,27 mm2 1,78 mA 2,14 mW
Tabelle 5.4: Abschätzung der Chipfläche, der Stromaufnahme und der Leistungsaufnahme fürdie digitale Signalverarbeitung bei unterschiedlichen Strukturbreiten bei einer Takt-frequenz von 12 MHz
Für die Abschätzung des Flächenbedarfs der analogen Signalaufbereitung standen demVerfasser keine Dokumentationen über vergleichbare Analog-Komponenten in den Tech-nologien 180 nm und 130 nm zur Verfügung. Aus diesem Grund kann in dieser Arbeit keineAbschätzung für den Flächenbedarf der analogen Signalaufbereitung durchgeführt wer-den. Es ist jedoch zu erwarten, dass der Skalierungsfaktor der analogen Signalaufbereitunggeringer ist als der des Digitalteils.
165

Kapitel 6
Zusammenfassung und Ausblick
Die Entwicklung von Sensoren für sicherheitskritische Anwendungen im Automobilbereichist ein aufwendiger und langjähriger Prozess. Nach der Erstellung erster Prototypen isteine ausgiebige Charakterisierung des Sensors erforderlich. Während dieser Charakteri-sierung wird geprüft, ob der Sensor innerhalb der geplanten Spezifikationen zuverlässigarbeitet. In der anschließenden Serienfertigung wird wiederum jeder einzelne Sensor vorseiner Auslieferung an die Automobilzulieferer auf alle Funktionen überprüft. Die vorlie-gende Arbeit, welche im Rahmen des BMBF geförderten Forschungsprojektes ESZ-ABS[99] durchgeführt wurde, kann diesen Entwicklungsprozess selbstverständlich nicht leisten.Der Fokus dieser Arbeit liegt auf der konzeptionellen Entwicklung einer Zustandsdiagnosefür ABS-Sensoren. Die Konzeption entstand unabhängig von Produktentwicklungszyklender Industrie. Somit war es erforderlich, alle für diese Arbeit benötigten Funktionsblöckedes ABS-Sensors und die Messplätze selbstständig zu entwickeln.
6.1 Zusammenfassung
Diese Arbeit beschäftigt sich mit der Entwicklung von neuartigen Diagnosealgorithmenfür die Zustandserkennung von ABS-Sensoren auf AMR-Basis. Hierfür wurde zunächsteine messtechnische Analyse des Gesamtsystems aus Encoder und Sensor vorgenommen.Durchgeführt wurde dieses mit einem präzisen vollautomatisierten Radmessplatz, wel-cher insgesamt über sechs Freiheitsgrade verfügt. Dieser Radmessplatz wurde ebenfallsim Rahmen des Projekts entwickelt. Aus diesen Messungen konnten besonders kritischeSensor-Positionen ermittelt werden, in denen die aktuell verwendete Sensorgenerationkeine zuverlässigen Diagnoseinformationen liefert. Die Sensorsignale zeigten in diesen Be-reichen besonders ausgeprägte charakteristische Verzerrungen.
Zur Analyse der Ursachen dieser Verzerrungen im Sensorsignal ist ein vertieftes Ver-ständnis der Funktionsweise des AMR-Sensors erforderlich. Wird dieser Sensor in einemnichtlinearen Arbeitsbereich betrieben, zeigt das Sensorsignal starke Verzerrungen. Einneuartiges in dieser Arbeit entwickeltes Messsystem ermöglicht eine schnelle automati-sierte messtechnische Kennfeldbestimmung von AMR-Sensoren mittels eines statistischenVerfahrens. Diese Kennfelder besitzen eine hohe Auflösung und zeigen im Vergleich zum
167
6. Zusammenfassung und Ausblick
theoretischen Modell nur geringe Abweichungen in wenigen Bereichen. Der für die Mes-sungen benötigte Kreuzspulenmessplatz, der für unterschiedliche Feldstärkenbereiche kon-figuriert werden kann, wurde im Rahmen des Projektes entwickelt.
Das magnetische System aus AMR-Sensor und Encoder besitzt ebenfalls nichtlineare Ei-genschaften. Aufgrund der komplexen Geometrien können die magnetischen Feldstärken,die auf den AMR-Sensor einwirken, nur mithilfe einer magnetostatischen FEM basier-ten 3D-Feldsimulationen bestimmt werden. Dabei wurden Simulationsmodelle für passiveund aktive Encoder und dazugehörige Sensoren entwickelt. Die mit dem Radmessplatzermittelten kritischen Sensor-Positionen konnten hier detaillierter untersucht werden unddie Ursachen für das Verlassen des linearen Arbeitsbereichs des AMR-Sensors bestimmtwerden.
Die aus den magnetostatischen FEM-Simulationen bestimmten Feldstärken ermöglichendie Synthese einer elektrischen Sensorausgangsspannung über das vermessene bzw. analy-tisch berechnete Sensorkennfeld. Der Vergleich der synthetischen Sensorspannungen mitam Radmessplatz aufgenommenen Sensorspannungen zeigen eine gute Übereinstimmung.Anhand der Synthese-Ergebnisse vieler verschiedener auch grenzlagiger Sensor-Positionenund der Vergleich mit den realen Sensorspannungen konnte die Plausibilität des Verfah-rens nachgewiesen werden. Darüber hinaus wurde mit diesem Verfahren die Ursache fürbesonders kritische Signalverzerrungen ermittelt.
Die Signalverzerrungen lassen sich über das Spektrum des Sensorsignals auswerten. Dortentstehen durch die Verzerrung harmonische Frequenzanteile der Grundschwingung. Dadie Frequenz des Sensorsignals im realen Betrieb ständigen Schwankungen unterliegt,machte dieses die Entwicklung eines mitlaufenden Abtastverfahren erforderlich. Mit die-sem Abtastverfahren wird eine winkeläquidistante Abtastung des Sensorsignals erreicht.Es erlaubt dann wiederum die Nutzung der diskreten Fourier-Transformation zur Bestim-mung der harmonischen Anteile. Für den Grad der Verzerrung des Sensorsignals wurdenneue Indikatoren definiert, die an den bekannten Klirrfaktor aus der Audiotechnik ange-lehnt sind.
Nahezu alle ABS-Sensoren die derzeit in Neufahrzeugen eingesetzt werden, besitzen ei-ne digitale Schnittstelle. Der Großteil hiervon liefert nur einfache Speed-Pulse mit je-dem Passieren eines Encoderzahns. Die ABS-Sensoren der neueren Generation verfügenbereits über ein Zusatzprotokoll, welches die Ausgabe von Zustandsinformationen mitjedem Speed-Puls vorsieht. Diese spezifizierten Protokolle zeigen, dass die Übertragungvon Diagnoseinformationen vom ABS-Sensor an das Steuergerät als notwendig erachtetwird. Weiterhin impliziert es auch, dass Diagnoseinformationen direkt innerhalb des ABS-Sensors aus den analogen Sensorsignal bestimmt werden müssen.
Die Harmonischenanalyse und die Berechnung der Indikatoren direkt in einem Sensor zuintegrieren, erfordert die Einhaltung einiger Parameter bezüglich Größe und Stromauf-nahme. Die Größe ist insgesamt auf wenige mm2 begrenzt und die Schnittstellendefini-tion erlaubt auch nur eine Stromaufnahme von einigen mA. Der Einsatz von Mikrocon-trollern gestaltet sich unter diesen Rahmenbedingungen als schwierig. Die Verwendungvon FPGAs kann an dieser Stelle bereits ausgeschlossen werden. Im Rahmen der Arbeitdienten diese nur als Experimentalplattform zur Evaluation der Algorithmen. Für einedirekte Integration der Zustandsdiagnose in den Sensor wurde ein Mixed-Signal-ASIC
168
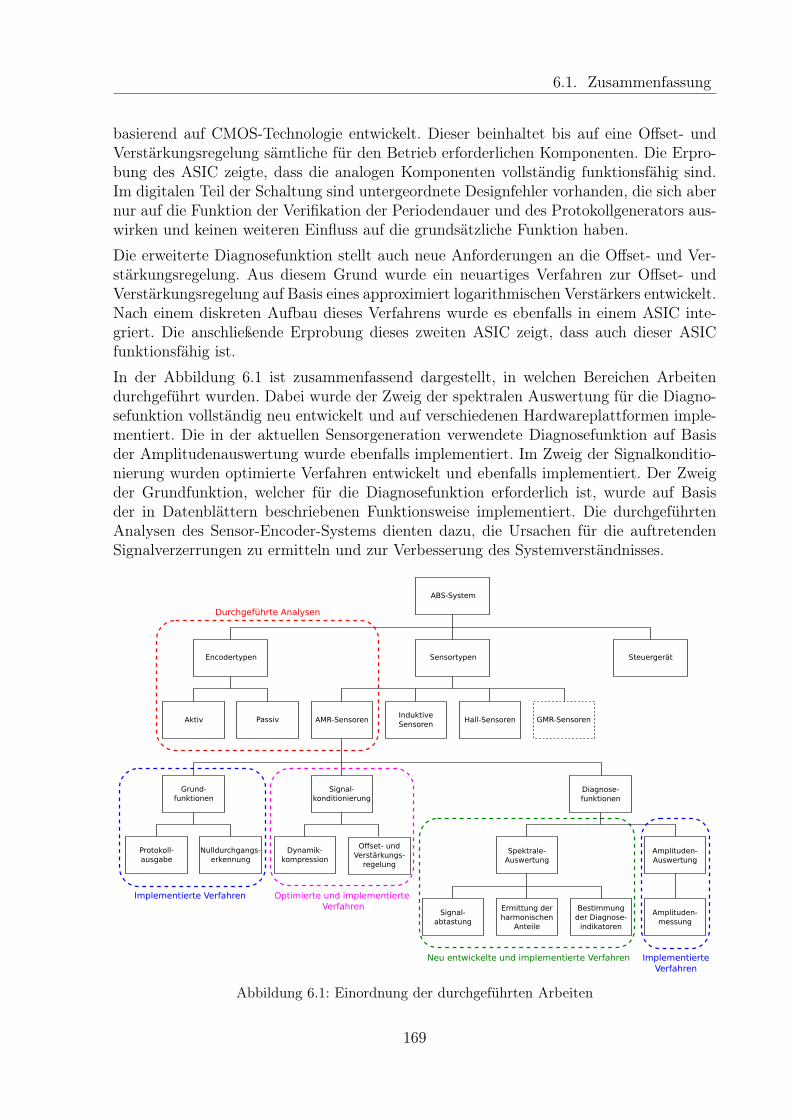
6.1. Zusammenfassung
basierend auf CMOS-Technologie entwickelt. Dieser beinhaltet bis auf eine Offset- undVerstärkungsregelung sämtliche für den Betrieb erforderlichen Komponenten. Die Erpro-bung des ASIC zeigte, dass die analogen Komponenten vollständig funktionsfähig sind.Im digitalen Teil der Schaltung sind untergeordnete Designfehler vorhanden, die sich abernur auf die Funktion der Verifikation der Periodendauer und des Protokollgenerators aus-wirken und keinen weiteren Einfluss auf die grundsätzliche Funktion haben.
Die erweiterte Diagnosefunktion stellt auch neue Anforderungen an die Offset- und Ver-stärkungsregelung. Aus diesem Grund wurde ein neuartiges Verfahren zur Offset- undVerstärkungsregelung auf Basis eines approximiert logarithmischen Verstärkers entwickelt.Nach einem diskreten Aufbau dieses Verfahrens wurde es ebenfalls in einem ASIC inte-griert. Die anschließende Erprobung dieses zweiten ASIC zeigt, dass auch dieser ASICfunktionsfähig ist.
In der Abbildung 6.1 ist zusammenfassend dargestellt, in welchen Bereichen Arbeitendurchgeführt wurden. Dabei wurde der Zweig der spektralen Auswertung für die Diagno-sefunktion vollständig neu entwickelt und auf verschiedenen Hardwareplattformen imple-mentiert. Die in der aktuellen Sensorgeneration verwendete Diagnosefunktion auf Basisder Amplitudenauswertung wurde ebenfalls implementiert. Im Zweig der Signalkonditio-nierung wurden optimierte Verfahren entwickelt und ebenfalls implementiert. Der Zweigder Grundfunktion, welcher für die Diagnosefunktion erforderlich ist, wurde auf Basisder in Datenblättern beschriebenen Funktionsweise implementiert. Die durchgeführtenAnalysen des Sensor-Encoder-Systems dienten dazu, die Ursachen für die auftretendenSignalverzerrungen zu ermitteln und zur Verbesserung des Systemverständnisses.
ABS-System
Encodertypen Sensortypen Steuergerät
Aktiv PassivInduktiveSensoren
AMR-Sensoren Hall-Sensoren GMR-Sensoren
Diagnose-funktionen
Grund-funktionen
Signal-konditionierung
Offset- undVerstärkungs-
regelung
Dynamik-kompression
Signal-abtastung
Ermittung derharmonischen
Anteile
Bestimmung der Diagnose-
indikatoren
Protokoll-ausgabe
Nulldurchgangs-erkennung
Durchgeführte Analysen
Neu entwickelte und implementierte Verfahren
Implementierte Verfahren Optimierte und implementierte Verfahren
Spektrale-Auswertung
Amplituden-Auswertung
Amplituden-messung
Implementierte Verfahren
Abbildung 6.1: Einordnung der durchgeführten Arbeiten
169
6. Zusammenfassung und Ausblick
6.2 Fazit
In diesem Abschnitt wird auf die im Abschnitt 1.4 abgeleiteten Fragen eingegangen.Die zum Kapitel 2 gestellten Teilfragen, welche sich mit der messtechnischen Analyse desSensor-Encoder-Systems beschäftigen, liefern folgende Antworten: Die Ausprägung derHarmonischen im Sensorsignal kann am Radmessplatz über die Kombination der Versatz-und Verkippungsachsen analysiert werden. Dabei sind besonders die Kombination derMaximalwerte für Versatz und Verkippung entscheidend. Bei der Auswertung der Mess-daten hat sich gezeigt, dass nur fünf Harmonische nennenswert ausgeprägt sind. Jedochist zu beachten, dass bei der Frequenzverdopplung die zweite Harmonische die Größeder ersten Harmonische übersteigen kann. Systematische Messungen am Radmessplatzhaben gezeigt, dass besonders die Verkippung um die ϕy-Achse und eine Verschiebungin der x-Achse zu starken Signalverzerrungen und zur Frequenzverdopplung führt. EineSchätzung der Fehlstellung des Sensors anhand der auftretenden Harmonischen wurdeim Rahmen dieser Arbeit nicht untersucht. Jedoch zeigen die Beispiele der Signalsynthe-se am Ende des zweiten Kapitels, dass eine grobe Schätzung der Fehlstellung prinzipiellmöglich ist. Zusätzlich beinhalten die Phasen der Harmonischen weitere Informationenfür eine detaillierte Analyse des Arbeitspunktes. Diese wurden im Rahmen dieser Arbeitnicht untersucht und bieten Potenzial für weitere Untersuchungen. Eine Modellierungund Simulation des Sensor-Encoder-Systems konnte für insgesamt drei passive und einemaktiven Encoder erfolgreich durchgeführt werden.Zum Kapitel 3 können die Teilfragen wie folgt beantwortet werden: Wie gezeigt wurde,kann die Harmonischenanalyse mit minimalem Aufwand realisiert werden, wenn speziel-le Abtastverfahren genutzt werden. Das Problem der ständig ändernden Grundfrequenzwird durch eine Abbildung der Zeit auf den Encoderwinkel, die direkt mit der Abtas-tung des Sensorsignals erfolgt, gelöst. Eine vollständige Abtastung des Sensorsignals istnicht zwingend erforderlich. Wird von einem idealen Encoder ausgegangen, der ein win-kelbezogen periodisches Signal liefert, kann auch eine Unterabtastung des Sensorsignalsdurchgeführt werden. Eine on-the-fly Berechnung ist möglich, weil bei der Berechnungder Harmonischenanteile entsprechende Verfahren gewählt wurden. Die Bestimmung derHarmonischenanteile kann mit einer angepassten diskreten Fourier-Transformation, dienur eine bestimmte Anzahl von Spektrallinien berechnet, durchgeführt werden.Die Teilfragen zum Kapitel 4 können folgendermaßen beantwortet werden: Die in der Si-gnalaufbereitung benötigte aufwandsgünstige Offset- und Verstärkungsregelung lässt sichmit einem approximiert logarithmischen Verstärker erreichen. Es konnte gezeigt werden,dass dieser Verstärkertyp über einen hohen Dynamikbereich ein zuverlässiges Signal liefert.Auf Basis des approximiert logarithmisch verstärkten Signals lässt sich auch eine Offsetre-gelung implementieren. Die Implementierung der Sensorgrundfunktionen erfolgt weiterhinauf Basis der Nulldurchgänge, jedoch werden die Nulldurchgänge des approximiert loga-rithmischen verstärkten Signals ausgewertet. Die Funktionsblöcke der Diagnosefunktionkönnen in vier Blöcke zerlegt werden. Dabei wird zunächst die Abtastung des Sensorsi-gnals gesteuert und anschließend aus diesen Abtastwerten eine reduzierte DFT berechnet.Aus den resultierenden Harmonischen werden die Zustandsindikatoren berechnet und zumSteuergerät übertragen. Die Einteilung der Funktionsblöcke erfolgte so, dass eine Abar-beitung der Teilfunktionen parallelisiert erfolgen kann. Für die kontinuierliche Berechnung
170
6.3. Ausblick
und Ausgabe von Diagnoseinformationen ist es möglich, die Funktionsblöcke in einer Pi-pelinestruktur anzuordnen. Die Berechnung mit dem geringsten Ressourcenaufwand kannüber den Multiplexbetrieb der aufwendigen Funktionseinheiten wie Multiplizierern undüber die Optimierung von Look-Up-Tabellen erfolgen. Besonders im Funktionsblock fürdie Berechnung der Zustandsindikatoren besteht weiterhin hohes Optimierungspotenzial,weil diese Einheit bisher noch einen Großteil des Schaltungsaufwandes bzw. der Chipflächeeinnimmt.
Die zum experimentellen Nachweis in Kapitel 5 gestellten Teilfragen können wie folgtbeantwortet werden: Für den experimentellen Nachweis sollte zunächst eine Offline-Aus-wertung der am Radmessplatz aufgezeichneten Sensorsignale auf dem PC durchgeführtwerden. Mit diesen Ergebnissen ist die Verifikation, der mit den unterschiedlichen Hard-wareplattformen ermittelten Ergebnissen, möglich. Bei der stufenweisen Entwicklung derHardwareplattformen kann zunächst eine Implementierung der am PC evaluierten Al-gorithmen auf einem Low-Power-Mikrocontroller erfolgen, welche sich durch eine hoheFlexibilität auszeichnet. Anschließend kann eine optimierte Implementierung der Algo-rithmen auf einem FPGA oder ASIC erfolgen. Die Hardwareplattformen können durcheine Modularisierung flexibel gehalten werden. Die Forderung nach minimalem Strom-verbrauch und Flächenbedarf für das Sensorsystem kann nur mit einer ASIC Integrationerreicht werden.
Insgesamt als Fazit können die anfangs gestellten Forschungsfragen wie folgt beantwortetwerden: Durch messtechnische Experimente konnte nachgewiesen werden, dass die Nicht-linearitäten des Sensor-Encoder-Systems sinnvoll für die Bestimmung des Arbeitspunkteseingesetzt werden können. Weiterhin wurde anhand mehrerer realisierter Experimental-plattformen gezeigt, dass es technisch möglich ist, diese Sensordiagnose in den ABS-Sensorzu integrieren.
6.3 Ausblick
Wie bereits in der Zusammenfassung erwähnt wurde, sind im Rahmen der Arbeit einASIC für die Diagnosefunktionalität und ein weiteres ASIC für die Signalkonditionierungentwickelt worden. Eine Entwicklung eines kombinierten ASIC, welche beide Funktionenvereint, sollte in zukünftigen Arbeiten angestrebt werden. Besonders auffallend bei derAuswertung des Flächenbedarfs des ASIC (siehe Abbildung A.10 im Anhang) war, dassdas Postprocessing, das für die Berechnung der Zustandsindikatoren zuständig ist, überzwei Drittel der Gesamtfläche der digitalen Signalverarbeitung einnimmt. Der Grund hier-für ist, dass für den Muster-ASIC vorsorglich die höchstmögliche interne Rechengenau-igkeit gewählt wurde. Zukünftig sollte jedoch eine Anpassung der Auflösung der Berech-nungen im Postprocessing auf die Auflösung der Diagnoseinformation (siehe Abschnitt3.5) erfolgen. Zusätzlich ist zu prüfen, ob aufwendige Operationen im Postprocessing, wieMultiplikationen und Divisionen, optimiert oder ersetzt werden können. Eine Reduktionder Anzahl der Register führt auch zu einer Reduzierung der Leistungsaufnahme. Zurweiteren deutlichen Reduzierung der Leistungsaufnahme ist die Core-Spannung zu sen-ken, weil diese einen quadratischen Einfluss auf die Leistungsaufnahme hat. Dieses ist nurunter Verwendung einer moderneren Halbleiter-Technologie möglich, wie z.B. die 180 nm
171
6. Zusammenfassung und Ausblick
Technologie. Bei dieser kann nahezu eine Halbierung der Core-Spannung des Digitalteilserfolgen, welches auch die Leistungsaufnahme und den Flächenbedarf auf etwa ein Viertelreduziert. Weiteres Potenzial besteht in der Reduzierung der Systemtaktfrequenz bzw.deren dynamischen Anpassung an die aktuellen Erfordernisse. Eine zeitweise Abschal-tung einzelner Funktionseinheiten durch Clock-Gating kann ebenfalls zur Reduzierungder Leistungsaufnahme beitragen.
Die Betrachtung der Messungen am Radmessplatz haben charakteristische Ausprägungenvon Beträgen und Phasen der Harmonischen für unterschiedliche Verkippungsrichtungengezeigt. Eine noch stärker differenzierte statistische Analyse von unterschiedlichen Sensor-Positionen kann dazu genutzt werden, um neue Indikatoren zu definieren, die detaillierteDiagnoseinformationen liefern. Dabei ist zu beachten, dass es bei unterschiedlichen Enco-dern auch zu unterschiedlichen Ergebnissen kommen kann.
Der Aspekt der Hysterese des AMR-Sensors und deren Modellierung ist bereits Thema ineinem Forschungsantrag [100] als Weiterführung des Forschungsgebiets der magnetischenSensorik.
Mit dem Erfolg dieser weiterführenden Arbeiten wagt der Verfasser die Prognose, dass ineinigen Jahren Diagnoseverfahren, die in den Sensor vorverlagert sind, zur Verbesserungder Zuverlässigkeit der Fahrstabilisierungssysteme beitragen können.
172
Anhang
173

Anhang A
Beschreibung der Messaufbauten
In den folgenden Abschnitten werden die in dieser Arbeit entwickelten und verwendetenMessaufbauten beschrieben.
A.1 Radmessplatz
Für die experimentelle Untersuchung der Sensorsignale des AMR-Sensors bei unterschied-lichen Sensoreinbaupositionen vor dem rotierenden Encoder wurde im Rahmen des Pro-jektes ein vollständig automatisierter Radmessplatz entwickelt. Der AMR-Sensor kann inallen Achsen der Verschiebung und der Verkippung positioniert werden. Der Ablauf derMessung, mit der Einstellung der Sensorverschiebung/-verkippung und der Aufnahmeder Signale, wird vollständig von einem PC gesteuert. Der Radmessplatz besteht aus dreiModulen: dem Antriebsmodul, dem Messmodul und dem Steuerungsmodul. In AbbildungA.1 ist das Zusammenwirken dieser Module schematisch dargestellt.
175
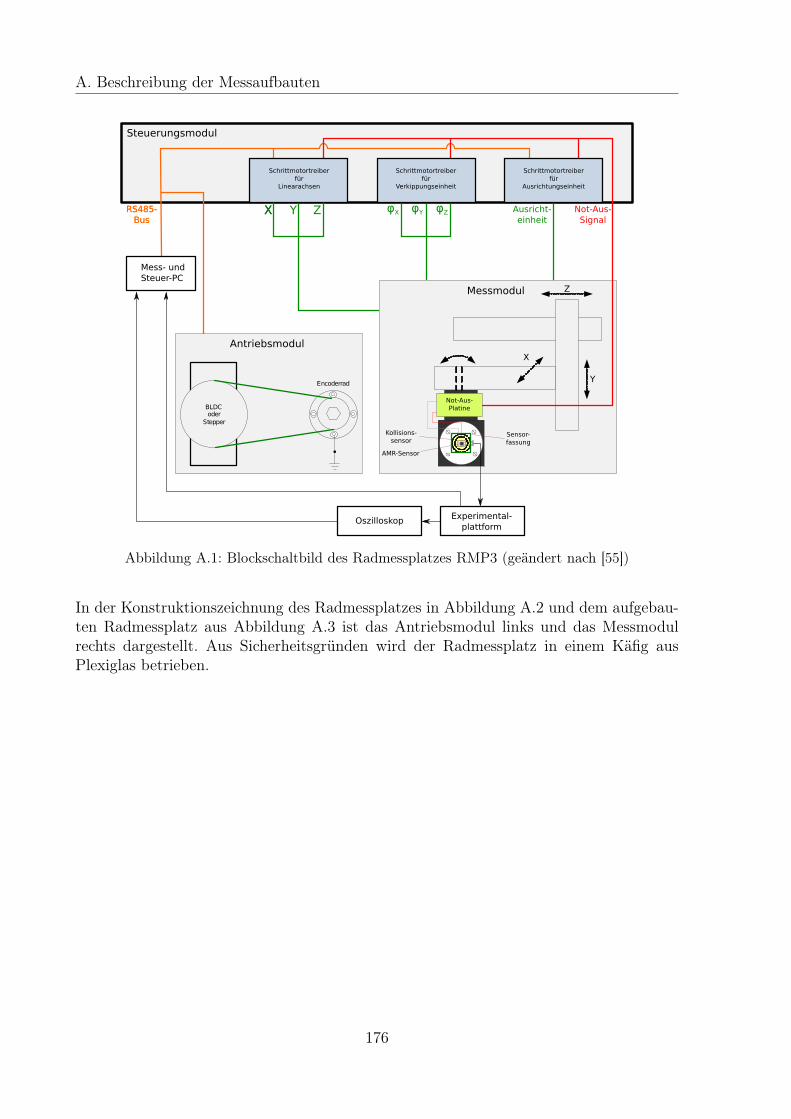
A. Beschreibung der Messaufbauten
Schrittmotortreiberfür
Linearachsen
Antriebsmodul
Messmodul
Mess- und Steuer-PC
Z
AMR-Sensor
Encoderrad Y
X
BLDCoder
Stepper
Not-Aus-Platine
Schrittmotortreiberfür
Verkippungseinheit
Schrittmotortreiberfür
Ausrichtungseinheit
φX φY φZ
Experimental-plattform
X Y Z
Oszilloskop
XRS485-Bus
RS485-Bus
Not-Aus-Signal
Ausricht-einheit
Steuerungsmodul
Kollisions-sensor
Sensor-fassung
Abbildung A.1: Blockschaltbild des Radmessplatzes RMP3 (geändert nach [55])
In der Konstruktionszeichnung des Radmessplatzes in Abbildung A.2 und dem aufgebau-ten Radmessplatz aus Abbildung A.3 ist das Antriebsmodul links und das Messmodulrechts dargestellt. Aus Sicherheitsgründen wird der Radmessplatz in einem Käfig ausPlexiglas betrieben.
176
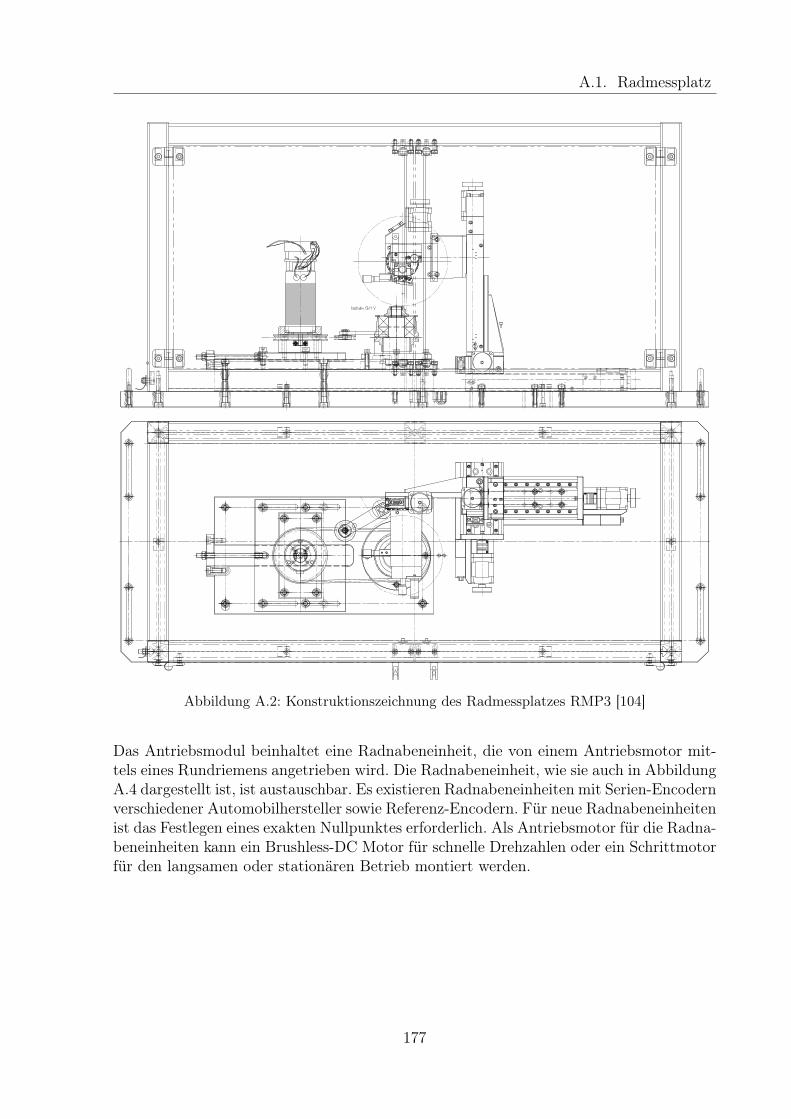
A.1. Radmessplatz
Abbildung A.2: Konstruktionszeichnung des Radmessplatzes RMP3 [104]
Das Antriebsmodul beinhaltet eine Radnabeneinheit, die von einem Antriebsmotor mit-tels eines Rundriemens angetrieben wird. Die Radnabeneinheit, wie sie auch in AbbildungA.4 dargestellt ist, ist austauschbar. Es existieren Radnabeneinheiten mit Serien-Encodernverschiedener Automobilhersteller sowie Referenz-Encodern. Für neue Radnabeneinheitenist das Festlegen eines exakten Nullpunktes erforderlich. Als Antriebsmotor für die Radna-beneinheiten kann ein Brushless-DC Motor für schnelle Drehzahlen oder ein Schrittmotorfür den langsamen oder stationären Betrieb montiert werden.
177
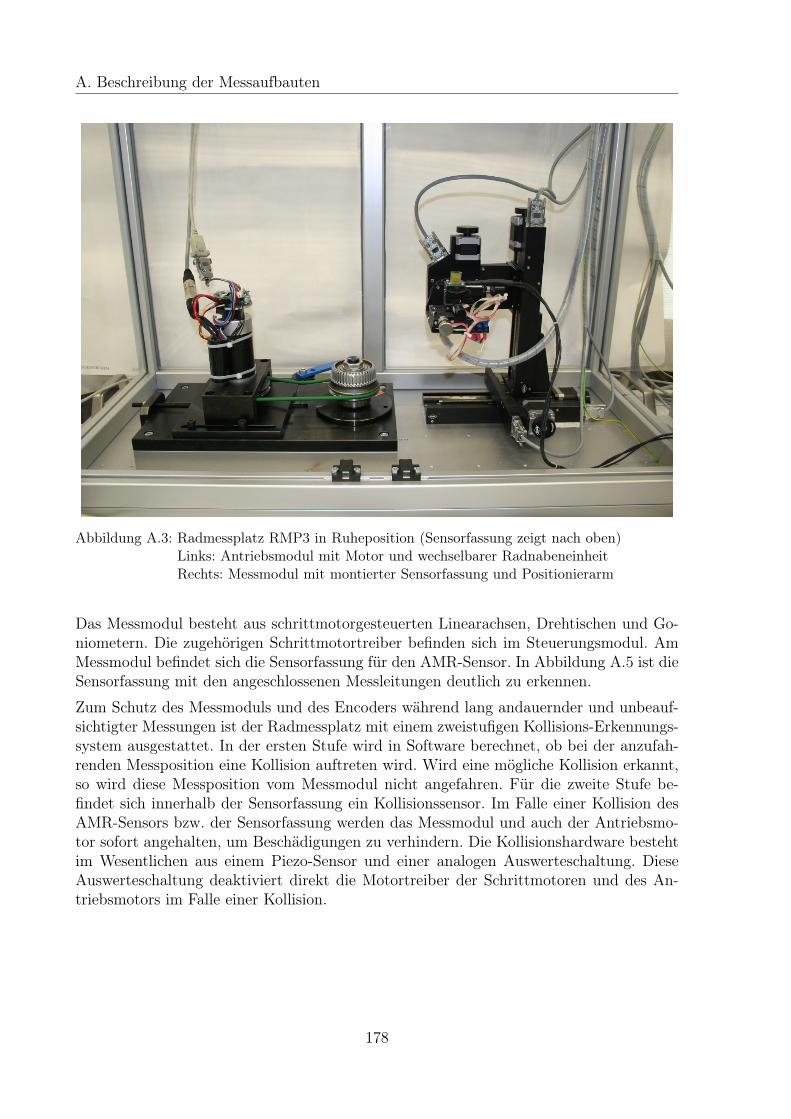
A. Beschreibung der Messaufbauten
Abbildung A.3: Radmessplatz RMP3 in Ruheposition (Sensorfassung zeigt nach oben)Links: Antriebsmodul mit Motor und wechselbarer RadnabeneinheitRechts: Messmodul mit montierter Sensorfassung und Positionierarm
Das Messmodul besteht aus schrittmotorgesteuerten Linearachsen, Drehtischen und Go-niometern. Die zugehörigen Schrittmotortreiber befinden sich im Steuerungsmodul. AmMessmodul befindet sich die Sensorfassung für den AMR-Sensor. In Abbildung A.5 ist dieSensorfassung mit den angeschlossenen Messleitungen deutlich zu erkennen.
Zum Schutz des Messmoduls und des Encoders während lang andauernder und unbeauf-sichtigter Messungen ist der Radmessplatz mit einem zweistufigen Kollisions-Erkennungs-system ausgestattet. In der ersten Stufe wird in Software berechnet, ob bei der anzufah-renden Messposition eine Kollision auftreten wird. Wird eine mögliche Kollision erkannt,so wird diese Messposition vom Messmodul nicht angefahren. Für die zweite Stufe be-findet sich innerhalb der Sensorfassung ein Kollisionssensor. Im Falle einer Kollision desAMR-Sensors bzw. der Sensorfassung werden das Messmodul und auch der Antriebsmo-tor sofort angehalten, um Beschädigungen zu verhindern. Die Kollisionshardware bestehtim Wesentlichen aus einem Piezo-Sensor und einer analogen Auswerteschaltung. DieseAuswerteschaltung deaktiviert direkt die Motortreiber der Schrittmotoren und des An-triebsmotors im Falle einer Kollision.
178
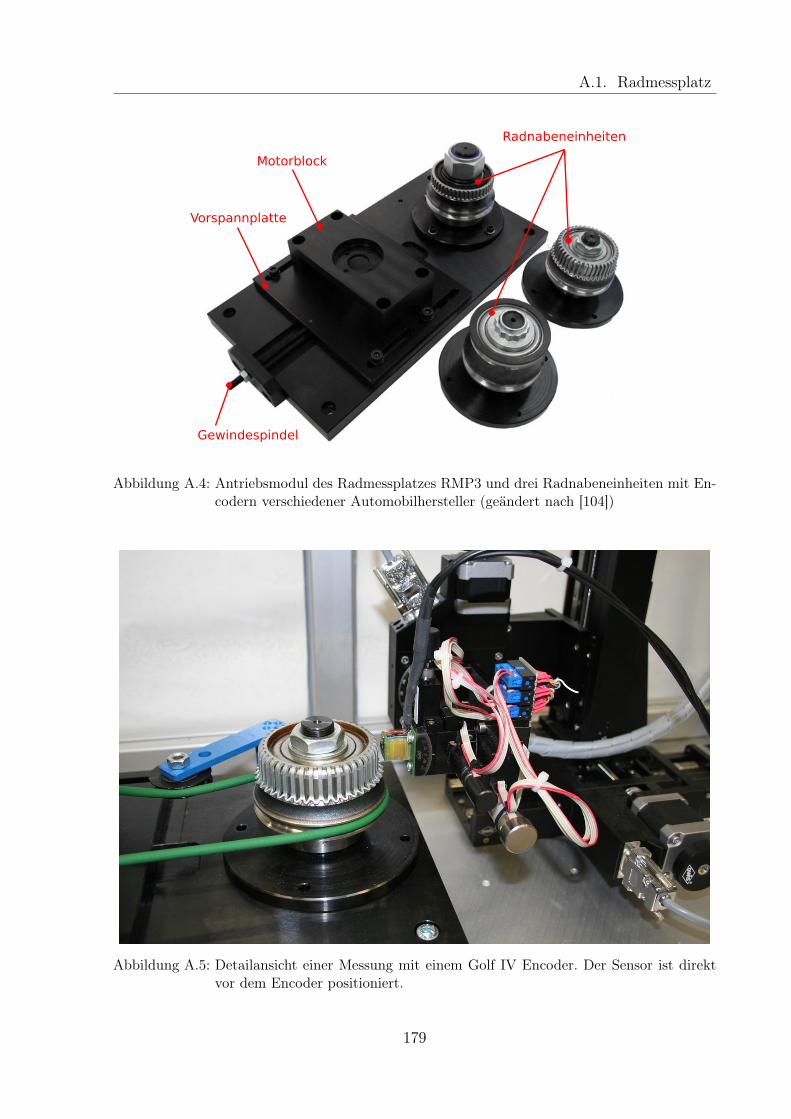
A.1. Radmessplatz
Motorblock
Radnabeneinheiten
Gewindespindel
Vorspannplatte
Abbildung A.4: Antriebsmodul des Radmessplatzes RMP3 und drei Radnabeneinheiten mit En-codern verschiedener Automobilhersteller (geändert nach [104])
Abbildung A.5: Detailansicht einer Messung mit einem Golf IV Encoder. Der Sensor ist direktvor dem Encoder positioniert.
179
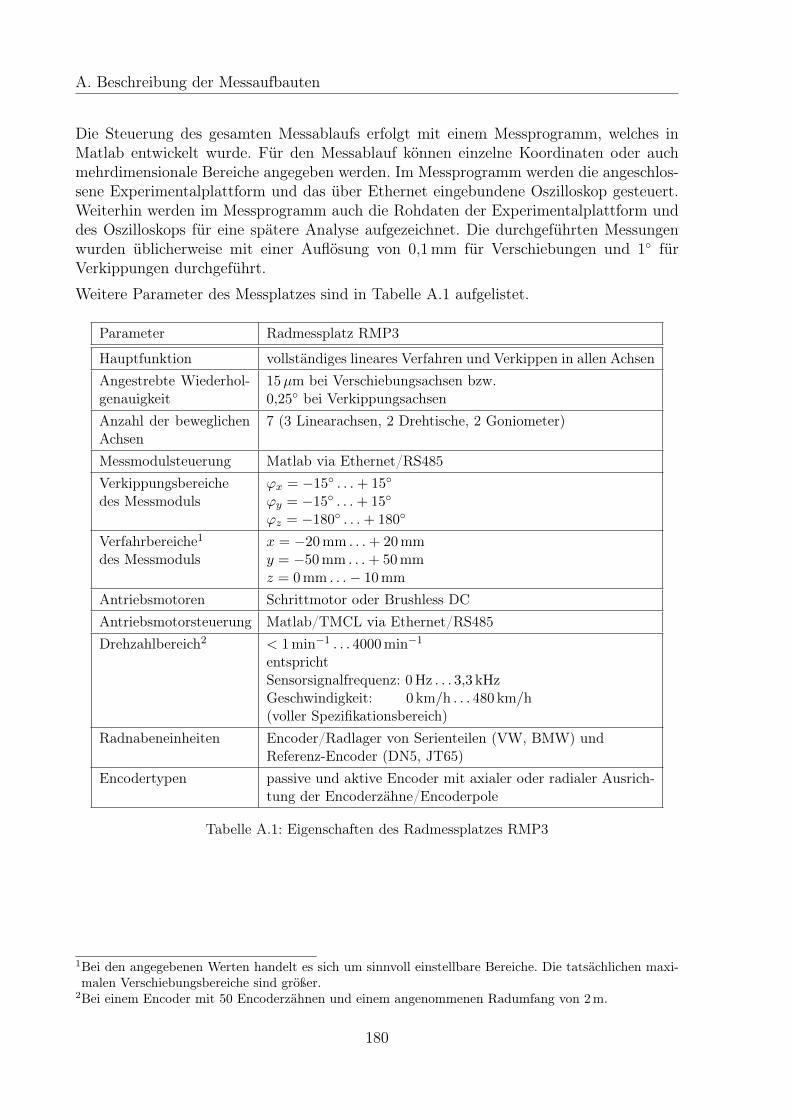
A. Beschreibung der Messaufbauten
Die Steuerung des gesamten Messablaufs erfolgt mit einem Messprogramm, welches inMatlab entwickelt wurde. Für den Messablauf können einzelne Koordinaten oder auchmehrdimensionale Bereiche angegeben werden. Im Messprogramm werden die angeschlos-sene Experimentalplattform und das über Ethernet eingebundene Oszilloskop gesteuert.Weiterhin werden im Messprogramm auch die Rohdaten der Experimentalplattform unddes Oszilloskops für eine spätere Analyse aufgezeichnet. Die durchgeführten Messungenwurden üblicherweise mit einer Auflösung von 0,1 mm für Verschiebungen und 1 fürVerkippungen durchgeführt.
Weitere Parameter des Messplatzes sind in Tabelle A.1 aufgelistet.
Parameter Radmessplatz RMP3
Hauptfunktion vollständiges lineares Verfahren und Verkippen in allen AchsenAngestrebte Wiederhol-genauigkeit
15µm bei Verschiebungsachsen bzw.0,25 bei Verkippungsachsen
Anzahl der beweglichenAchsen
7 (3 Linearachsen, 2 Drehtische, 2 Goniometer)
Messmodulsteuerung Matlab via Ethernet/RS485Verkippungsbereichedes Messmoduls
ϕx = −15 . . .+ 15
ϕy = −15 . . .+ 15
ϕz = −180 . . .+ 180
Verfahrbereiche1
des Messmodulsx = −20 mm . . .+ 20 mmy = −50 mm . . .+ 50 mmz = 0 mm . . .− 10 mm
Antriebsmotoren Schrittmotor oder Brushless DCAntriebsmotorsteuerung Matlab/TMCL via Ethernet/RS485Drehzahlbereich2 < 1 min−1 . . . 4000 min−1
entsprichtSensorsignalfrequenz: 0 Hz . . . 3,3 kHzGeschwindigkeit: 0 km/h . . . 480 km/h(voller Spezifikationsbereich)
Radnabeneinheiten Encoder/Radlager von Serienteilen (VW, BMW) undReferenz-Encoder (DN5, JT65)
Encodertypen passive und aktive Encoder mit axialer oder radialer Ausrich-tung der Encoderzähne/Encoderpole
Tabelle A.1: Eigenschaften des Radmessplatzes RMP3
1Bei den angegebenen Werten handelt es sich um sinnvoll einstellbare Bereiche. Die tatsächlichen maxi-malen Verschiebungsbereiche sind größer.
2Bei einem Encoder mit 50 Encoderzähnen und einem angenommenen Radumfang von 2 m.
180
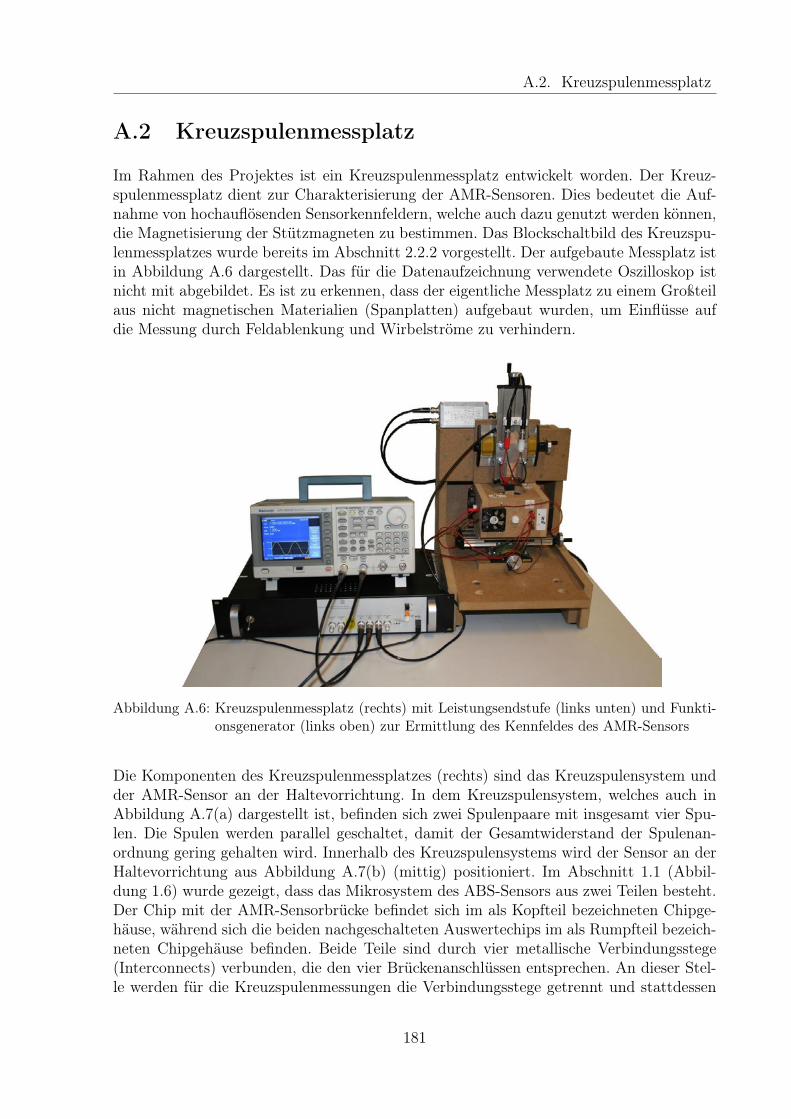
A.2. Kreuzspulenmessplatz
A.2 Kreuzspulenmessplatz
Im Rahmen des Projektes ist ein Kreuzspulenmessplatz entwickelt worden. Der Kreuz-spulenmessplatz dient zur Charakterisierung der AMR-Sensoren. Dies bedeutet die Auf-nahme von hochauflösenden Sensorkennfeldern, welche auch dazu genutzt werden können,die Magnetisierung der Stützmagneten zu bestimmen. Das Blockschaltbild des Kreuzspu-lenmessplatzes wurde bereits im Abschnitt 2.2.2 vorgestellt. Der aufgebaute Messplatz istin Abbildung A.6 dargestellt. Das für die Datenaufzeichnung verwendete Oszilloskop istnicht mit abgebildet. Es ist zu erkennen, dass der eigentliche Messplatz zu einem Großteilaus nicht magnetischen Materialien (Spanplatten) aufgebaut wurden, um Einflüsse aufdie Messung durch Feldablenkung und Wirbelströme zu verhindern.
Abbildung A.6: Kreuzspulenmessplatz (rechts) mit Leistungsendstufe (links unten) und Funkti-onsgenerator (links oben) zur Ermittlung des Kennfeldes des AMR-Sensors
Die Komponenten des Kreuzspulenmessplatzes (rechts) sind das Kreuzspulensystem undder AMR-Sensor an der Haltevorrichtung. In dem Kreuzspulensystem, welches auch inAbbildung A.7(a) dargestellt ist, befinden sich zwei Spulenpaare mit insgesamt vier Spu-len. Die Spulen werden parallel geschaltet, damit der Gesamtwiderstand der Spulenan-ordnung gering gehalten wird. Innerhalb des Kreuzspulensystems wird der Sensor an derHaltevorrichtung aus Abbildung A.7(b) (mittig) positioniert. Im Abschnitt 1.1 (Abbil-dung 1.6) wurde gezeigt, dass das Mikrosystem des ABS-Sensors aus zwei Teilen besteht.Der Chip mit der AMR-Sensorbrücke befindet sich im als Kopfteil bezeichneten Chipge-häuse, während sich die beiden nachgeschalteten Auswertechips im als Rumpfteil bezeich-neten Chipgehäuse befinden. Beide Teile sind durch vier metallische Verbindungsstege(Interconnects) verbunden, die den vier Brückenanschlüssen entsprechen. An dieser Stel-le werden für die Kreuzspulenmessungen die Verbindungsstege getrennt und stattdessen
181
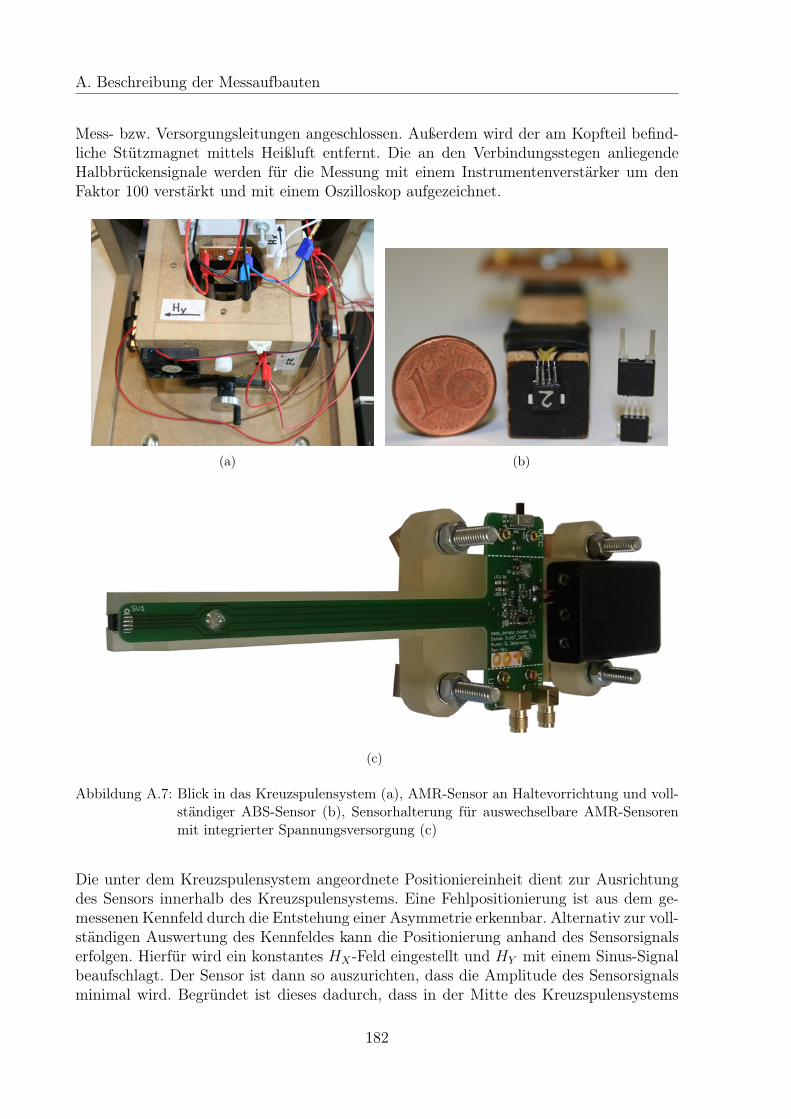
A. Beschreibung der Messaufbauten
Mess- bzw. Versorgungsleitungen angeschlossen. Außerdem wird der am Kopfteil befind-liche Stützmagnet mittels Heißluft entfernt. Die an den Verbindungsstegen anliegendeHalbbrückensignale werden für die Messung mit einem Instrumentenverstärker um denFaktor 100 verstärkt und mit einem Oszilloskop aufgezeichnet.
(a) (b)
(c)
Abbildung A.7: Blick in das Kreuzspulensystem (a), AMR-Sensor an Haltevorrichtung und voll-ständiger ABS-Sensor (b), Sensorhalterung für auswechselbare AMR-Sensorenmit integrierter Spannungsversorgung (c)
Die unter dem Kreuzspulensystem angeordnete Positioniereinheit dient zur Ausrichtungdes Sensors innerhalb des Kreuzspulensystems. Eine Fehlpositionierung ist aus dem ge-messenen Kennfeld durch die Entstehung einer Asymmetrie erkennbar. Alternativ zur voll-ständigen Auswertung des Kennfeldes kann die Positionierung anhand des Sensorsignalserfolgen. Hierfür wird ein konstantes HX-Feld eingestellt und HY mit einem Sinus-Signalbeaufschlagt. Der Sensor ist dann so auszurichten, dass die Amplitude des Sensorsignalsminimal wird. Begründet ist dieses dadurch, dass in der Mitte des Kreuzspulensystems
182
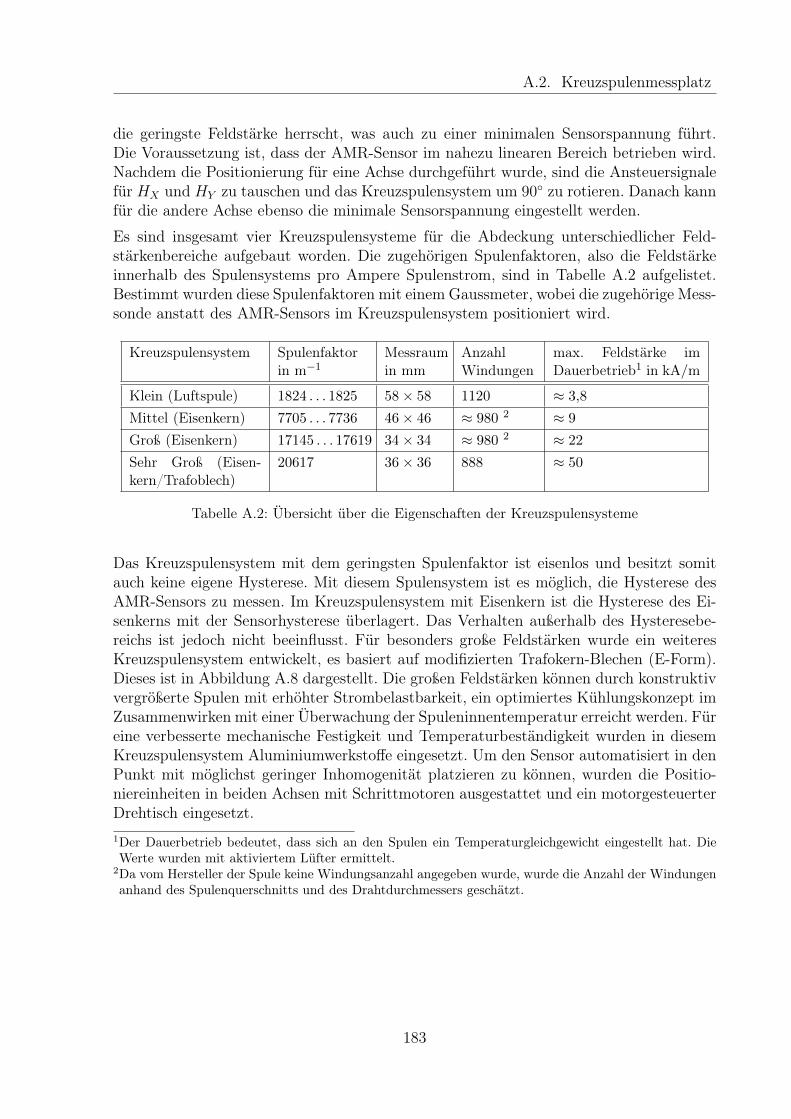
A.2. Kreuzspulenmessplatz
die geringste Feldstärke herrscht, was auch zu einer minimalen Sensorspannung führt.Die Voraussetzung ist, dass der AMR-Sensor im nahezu linearen Bereich betrieben wird.Nachdem die Positionierung für eine Achse durchgeführt wurde, sind die Ansteuersignalefür HX und HY zu tauschen und das Kreuzspulensystem um 90 zu rotieren. Danach kannfür die andere Achse ebenso die minimale Sensorspannung eingestellt werden.
Es sind insgesamt vier Kreuzspulensysteme für die Abdeckung unterschiedlicher Feld-stärkenbereiche aufgebaut worden. Die zugehörigen Spulenfaktoren, also die Feldstärkeinnerhalb des Spulensystems pro Ampere Spulenstrom, sind in Tabelle A.2 aufgelistet.Bestimmt wurden diese Spulenfaktoren mit einem Gaussmeter, wobei die zugehörige Mess-sonde anstatt des AMR-Sensors im Kreuzspulensystem positioniert wird.
Kreuzspulensystem Spulenfaktorin m−1
Messraumin mm
AnzahlWindungen
max. Feldstärke imDauerbetrieb1 in kA/m
Klein (Luftspule) 1824 . . . 1825 58× 58 1120 ≈ 3,8
Mittel (Eisenkern) 7705 . . . 7736 46× 46 ≈ 980 2 ≈ 9
Groß (Eisenkern) 17145 . . . 17619 34× 34 ≈ 980 2 ≈ 22
Sehr Groß (Eisen-kern/Trafoblech)
20617 36× 36 888 ≈ 50
Tabelle A.2: Übersicht über die Eigenschaften der Kreuzspulensysteme
Das Kreuzspulensystem mit dem geringsten Spulenfaktor ist eisenlos und besitzt somitauch keine eigene Hysterese. Mit diesem Spulensystem ist es möglich, die Hysterese desAMR-Sensors zu messen. Im Kreuzspulensystem mit Eisenkern ist die Hysterese des Ei-senkerns mit der Sensorhysterese überlagert. Das Verhalten außerhalb des Hysteresebe-reichs ist jedoch nicht beeinflusst. Für besonders große Feldstärken wurde ein weiteresKreuzspulensystem entwickelt, es basiert auf modifizierten Trafokern-Blechen (E-Form).Dieses ist in Abbildung A.8 dargestellt. Die großen Feldstärken können durch konstruktivvergrößerte Spulen mit erhöhter Strombelastbarkeit, ein optimiertes Kühlungskonzept imZusammenwirken mit einer Überwachung der Spuleninnentemperatur erreicht werden. Füreine verbesserte mechanische Festigkeit und Temperaturbeständigkeit wurden in diesemKreuzspulensystem Aluminiumwerkstoffe eingesetzt. Um den Sensor automatisiert in denPunkt mit möglichst geringer Inhomogenität platzieren zu können, wurden die Positio-niereinheiten in beiden Achsen mit Schrittmotoren ausgestattet und ein motorgesteuerterDrehtisch eingesetzt.1Der Dauerbetrieb bedeutet, dass sich an den Spulen ein Temperaturgleichgewicht eingestellt hat. DieWerte wurden mit aktiviertem Lüfter ermittelt.
2Da vom Hersteller der Spule keine Windungsanzahl angegeben wurde, wurde die Anzahl der Windungenanhand des Spulenquerschnitts und des Drahtdurchmessers geschätzt.
183

A. Beschreibung der Messaufbauten
(a) (b)
Abbildung A.8: Entwurf des Kreuzspulensystems für sehr große Feldstärken als 3D-Modell (a)und umgesetztes Kreuzspulensystem (b) [118]
184
A.3. Mixed-Signal-ASIC
A.3 Mixed-Signal-ASIC
Bei dem bereits im Abschnitt 5.15 vorgestellten ASIC handelt es sich um ein erstes Test-muster, um zu zeigen, dass sich die vorgestellten Algorithmen und Verfahren bei denAnforderungen an Größe und Stromaufnahme integrieren lassen. Aufgrund des komple-xen Designs für das erste Testmuster konnten technische Fehler nicht vollkommen ausge-schlossen werden. Weiterhin wurden im ersten Schritt nicht alle gewünschten Funktionenintegriert, weil dieses die Systemkomplexität weiter erhöht und damit auch Wahrschein-lichkeit von Fehlern ansteigt. In diesem Abschnitt wird die Teststrategie erläutert und dasDesign Errata und die technischen Fehler aufgelistet. Zusätzlich wird auf den Flächenbe-darf der Funktionsblöcke und der Simulation der Leistungsaufnahme eingegangen.Die realisierte Teststrategie besteht darin, sämtliche Schnittstellen zwischen den Funk-tionsblöcke aufzutrennen und nach außen zu führen, damit im Fall eines DesignfehlersFunktionsblöcke deaktiviert bzw. extern nachgebildet werden können. Auf spezielle Test-strukturen, welche eine Funktionsüberprüfung direkt auf dem Wafer erlauben, wurde ver-zichtet. Üblicherweise werden hier sogenannte Scan Tests verwendet. Diese ermöglicht dieEinspeisung von Testmustern über einen speziellen Eingang zur Überprüfung der Logikund der Flip-Flops.
Limitierungen und Design Errata
Der entstandene Mixed-Signal-ASIC hat Mustercharakter. Es wurde aus Aufwandsgrün-den auf Teilschritte der üblichen Verifikation und Unterstützung des Produktionstestsverzichtet. Insbesondere sei auf folgende Einschränkungen, Erweiterungsnotwendigkeitenund Design Errata hingewiesen:
• Eine Verstärkungs- und Offsetregelung für das Sensorsignal wurde nicht integriert.Derzeit ist der Chip aufgrund der eingestellten konstanten Verstärkung nur bis zueinem Luftspalt von ca. 1 mm funktionsfähig.
• Zukünftig sollte ein kombinierter Chip entwickelt werden, welcher die Grund- undDiagnosefunktionalität nach Sabotta [102] und eine integrierte analoge Signalkon-ditionierung nach Rostock [101] enthält.
• Zur Reduzierung der Leistungsaufnahme sollte die System-Taktfrequenz von 16 MHzauf mindestens 8 MHz herabgesetzt werden.
• Die starre Kopplung der System-Taktfrequenz mit der Taktfrequenz des AD-Umsetzerssollte zukünftig entfernt werden, damit diese unabhängig voneinander betreiben wer-den könnnen.
• Derzeit liegt der minimale HDI bei ca. 4 %. Zur Optimierung der HDI -Berechnungsollte die Auflösung der Look-Up-Tabelle erhöht werden und die Skalierung ange-passt werden.
• Eine Auswertung der Halbbrückenspannungen des AMR-Sensors zur Bestimmungder Drehrichtung des Encoders wird nicht durchgeführt.
185
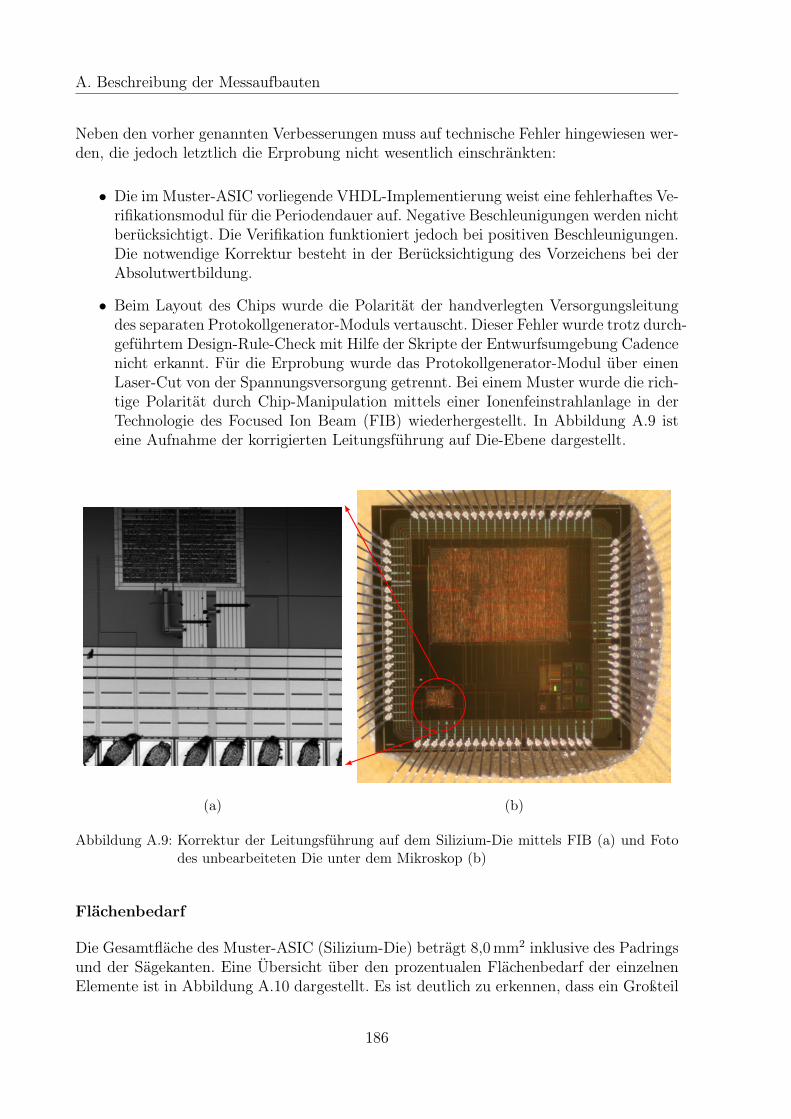
A. Beschreibung der Messaufbauten
Neben den vorher genannten Verbesserungen muss auf technische Fehler hingewiesen wer-den, die jedoch letztlich die Erprobung nicht wesentlich einschränkten:
• Die im Muster-ASIC vorliegende VHDL-Implementierung weist eine fehlerhaftes Ve-rifikationsmodul für die Periodendauer auf. Negative Beschleunigungen werden nichtberücksichtigt. Die Verifikation funktioniert jedoch bei positiven Beschleunigungen.Die notwendige Korrektur besteht in der Berücksichtigung des Vorzeichens bei derAbsolutwertbildung.
• Beim Layout des Chips wurde die Polarität der handverlegten Versorgungsleitungdes separaten Protokollgenerator-Moduls vertauscht. Dieser Fehler wurde trotz durch-geführtem Design-Rule-Check mit Hilfe der Skripte der Entwurfsumgebung Cadencenicht erkannt. Für die Erprobung wurde das Protokollgenerator-Modul über einenLaser-Cut von der Spannungsversorgung getrennt. Bei einem Muster wurde die rich-tige Polarität durch Chip-Manipulation mittels einer Ionenfeinstrahlanlage in derTechnologie des Focused Ion Beam (FIB) wiederhergestellt. In Abbildung A.9 isteine Aufnahme der korrigierten Leitungsführung auf Die-Ebene dargestellt.
(a) (b)
Abbildung A.9: Korrektur der Leitungsführung auf dem Silizium-Die mittels FIB (a) und Fotodes unbearbeiteten Die unter dem Mikroskop (b)
Flächenbedarf
Die Gesamtfläche des Muster-ASIC (Silizium-Die) beträgt 8,0 mm2 inklusive des Padringsund der Sägekanten. Eine Übersicht über den prozentualen Flächenbedarf der einzelnenElemente ist in Abbildung A.10 dargestellt. Es ist deutlich zu erkennen, dass ein Großteil
186
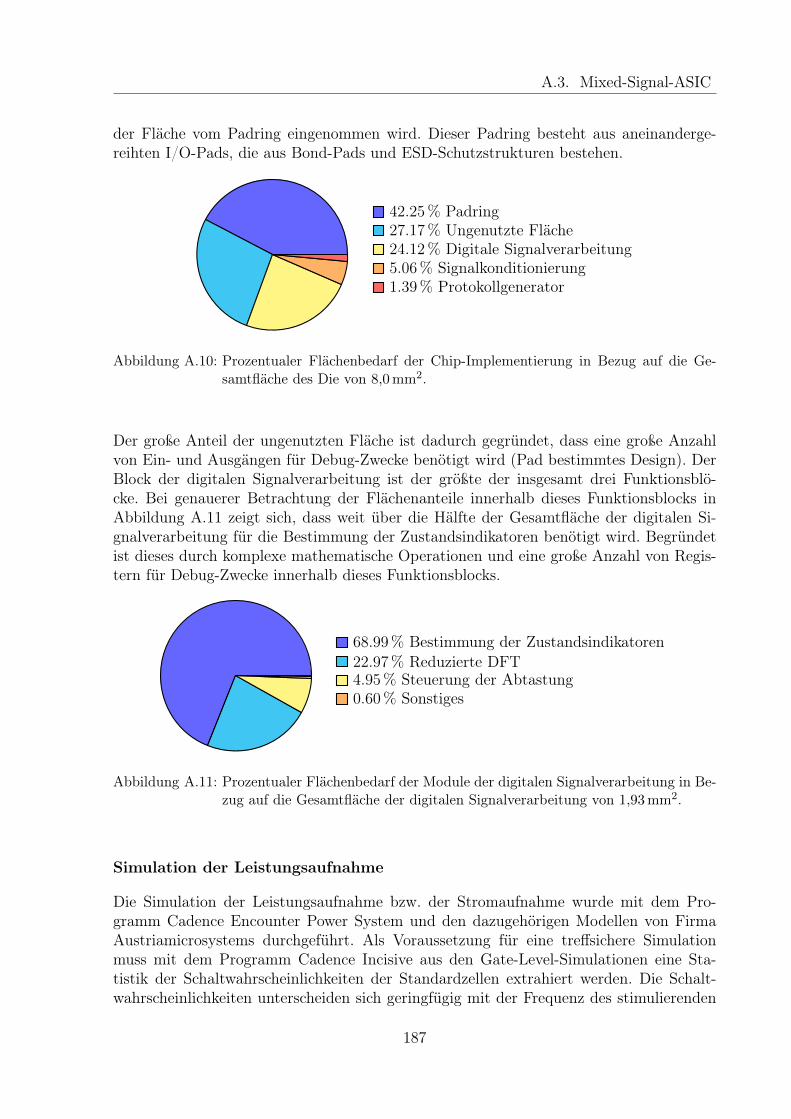
A.3. Mixed-Signal-ASIC
der Fläche vom Padring eingenommen wird. Dieser Padring besteht aus aneinanderge-reihten I/O-Pads, die aus Bond-Pads und ESD-Schutzstrukturen bestehen.
42.25% Padring27.17% Ungenutzte Fläche24.12% Digitale Signalverarbeitung5.06% Signalkonditionierung1.39% Protokollgenerator
Abbildung A.10: Prozentualer Flächenbedarf der Chip-Implementierung in Bezug auf die Ge-samtfläche des Die von 8,0 mm2.
Der große Anteil der ungenutzten Fläche ist dadurch gegründet, dass eine große Anzahlvon Ein- und Ausgängen für Debug-Zwecke benötigt wird (Pad bestimmtes Design). DerBlock der digitalen Signalverarbeitung ist der größte der insgesamt drei Funktionsblö-cke. Bei genauerer Betrachtung der Flächenanteile innerhalb dieses Funktionsblocks inAbbildung A.11 zeigt sich, dass weit über die Hälfte der Gesamtfläche der digitalen Si-gnalverarbeitung für die Bestimmung der Zustandsindikatoren benötigt wird. Begründetist dieses durch komplexe mathematische Operationen und eine große Anzahl von Regis-tern für Debug-Zwecke innerhalb dieses Funktionsblocks.
68.99% Bestimmung der Zustandsindikatoren22.97% Reduzierte DFT4.95% Steuerung der Abtastung0.60% Sonstiges
Abbildung A.11: Prozentualer Flächenbedarf der Module der digitalen Signalverarbeitung in Be-zug auf die Gesamtfläche der digitalen Signalverarbeitung von 1,93 mm2.
Simulation der Leistungsaufnahme
Die Simulation der Leistungsaufnahme bzw. der Stromaufnahme wurde mit dem Pro-gramm Cadence Encounter Power System und den dazugehörigen Modellen von FirmaAustriamicrosystems durchgeführt. Als Voraussetzung für eine treffsichere Simulationmuss mit dem Programm Cadence Incisive aus den Gate-Level-Simulationen eine Sta-tistik der Schaltwahrscheinlichkeiten der Standardzellen extrahiert werden. Die Schalt-wahrscheinlichkeiten unterscheiden sich geringfügig mit der Frequenz des stimulierenden
187
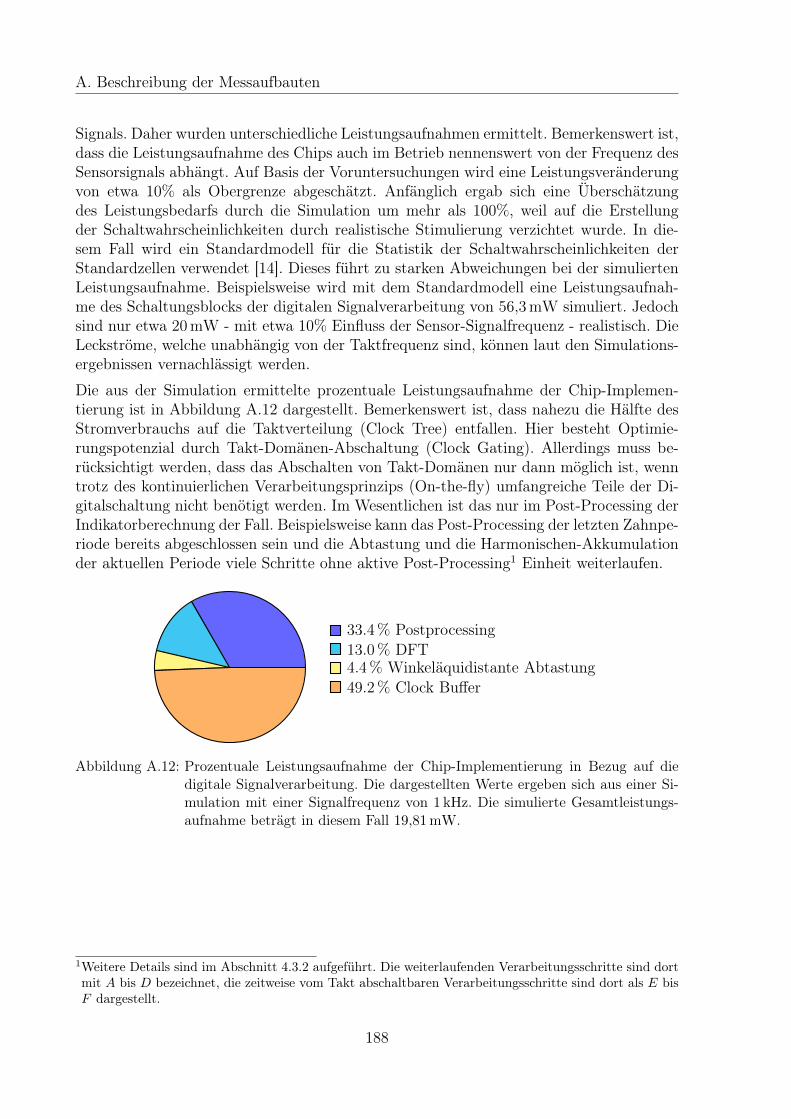
A. Beschreibung der Messaufbauten
Signals. Daher wurden unterschiedliche Leistungsaufnahmen ermittelt. Bemerkenswert ist,dass die Leistungsaufnahme des Chips auch im Betrieb nennenswert von der Frequenz desSensorsignals abhängt. Auf Basis der Voruntersuchungen wird eine Leistungsveränderungvon etwa 10% als Obergrenze abgeschätzt. Anfänglich ergab sich eine Überschätzungdes Leistungsbedarfs durch die Simulation um mehr als 100%, weil auf die Erstellungder Schaltwahrscheinlichkeiten durch realistische Stimulierung verzichtet wurde. In die-sem Fall wird ein Standardmodell für die Statistik der Schaltwahrscheinlichkeiten derStandardzellen verwendet [14]. Dieses führt zu starken Abweichungen bei der simuliertenLeistungsaufnahme. Beispielsweise wird mit dem Standardmodell eine Leistungsaufnah-me des Schaltungsblocks der digitalen Signalverarbeitung von 56,3 mW simuliert. Jedochsind nur etwa 20 mW - mit etwa 10% Einfluss der Sensor-Signalfrequenz - realistisch. DieLeckströme, welche unabhängig von der Taktfrequenz sind, können laut den Simulations-ergebnissen vernachlässigt werden.
Die aus der Simulation ermittelte prozentuale Leistungsaufnahme der Chip-Implemen-tierung ist in Abbildung A.12 dargestellt. Bemerkenswert ist, dass nahezu die Hälfte desStromverbrauchs auf die Taktverteilung (Clock Tree) entfallen. Hier besteht Optimie-rungspotenzial durch Takt-Domänen-Abschaltung (Clock Gating). Allerdings muss be-rücksichtigt werden, dass das Abschalten von Takt-Domänen nur dann möglich ist, wenntrotz des kontinuierlichen Verarbeitungsprinzips (On-the-fly) umfangreiche Teile der Di-gitalschaltung nicht benötigt werden. Im Wesentlichen ist das nur im Post-Processing derIndikatorberechnung der Fall. Beispielsweise kann das Post-Processing der letzten Zahnpe-riode bereits abgeschlossen sein und die Abtastung und die Harmonischen-Akkumulationder aktuellen Periode viele Schritte ohne aktive Post-Processing1 Einheit weiterlaufen.
33.4% Postprocessing13.0% DFT4.4% Winkeläquidistante Abtastung49.2% Clock Buffer
Abbildung A.12: Prozentuale Leistungsaufnahme der Chip-Implementierung in Bezug auf diedigitale Signalverarbeitung. Die dargestellten Werte ergeben sich aus einer Si-mulation mit einer Signalfrequenz von 1 kHz. Die simulierte Gesamtleistungs-aufnahme beträgt in diesem Fall 19,81 mW.
1Weitere Details sind im Abschnitt 4.3.2 aufgeführt. Die weiterlaufenden Verarbeitungsschritte sind dortmit A bis D bezeichnet, die zeitweise vom Takt abschaltbaren Verarbeitungsschritte sind dort als E bisF dargestellt.
188
Anhang B
DFT-Berechnung mittelsrechteckförmiger Transformation
Im Rahmen dieser Arbeit wurden auch Verfahren untersucht, welche die DFT mittelseiner rechteckförmigen Transformation berechnen. Der Ansatz dieser Verfahren bestehtdarin, die Auflösung der Koeffizienten der Transformationsmatrix für die Berechnung derDFT zu reduzieren. Der Inhalt der Transformationsmatrix enthält somit nur noch Wer-te aus der Menge −1, 1 oder −1, 0, 1, was dazu führt, dass Multiplikationen durchAdditionen bzw. Subtraktionen ersetzt werden können. Das Einsparen dieser Multiplika-tionen und die Optimierung der erforderlichen Look-Up-Tabelle zur Aufnahme Transfor-mationsmatrix führt wiederum zu einer Reduzierung des Hardwareaufwands. Nach dieserTransformation mit den Rechtecksignalen ist für die Berechnung der DFT eine Korrekturdes Ergebnisvektors erforderlich. Entscheidend für die Auswahl der Transformation ist dieKomplexität dieser Korrekturmatrix. Eine geringe Komplexität zeichnet sich durch einehohe Anzahl von Nullen innerhalb der Korrekturmatrix aus.Bekannte Rechteck-Transformationen sind die Haar- und die Walsh-Hadamard-Transfor-mation. Die Haar-Transformation [46] nutzt in der Transformationsmatrix nur Werte ausder Menge −1, 0, 1. Bei der Walsh-Hadamard-Transformation [115] werden nur Werteaus der Menge −1, 1 verwendet. Beide Verfahren finden Anwendung in der digitalenBildverarbeitung zur Kompression von Bilddaten und sind nicht direkt für eine Berech-nung der DFT entwickelt worden. Die arithmetische Fourier-Transformation (AFT) vonReed et al. [94] wurde für den speziellen Anwendungsfall der Bestimmung der Fourier-Analyse entwickelt. Meyer-Bäse [79] hat ein ähnliches Verfahren mit den Namen QDFT(grob quantisierte DFT) beschrieben. Die erforderlichen Korrekturmatrizen für die Haar-und die Walsh-Hadamard-Transformation sind sehr aufwendig. Bei der AFT und QDFTbeträgt die Anteil der Nullen in der Korrekturmatrix bereits über 82 %.Typischerweise setzen die oben genannten Verfahren voraus, dass alle Spektrallinien be-rechnet werden müssen. Für die Anwendung der Verfahren im Rahmen dieser Arbeitist nur eine Auswertung für wenige Harmonische (Anzahl typ. 5-10) erforderlich. Aufden Mehraufwand für die Berechnung sämtlicher Spektrallinien soll verzichtet werdenund erfordert somit die Entwicklung eines angepassten Verfahrens. Das im Rahmen die-ser Arbeit entwickelte alternative Verfahren ist die RAFT (Rect Approximated Fourier-Transformation). Es wird bei der Berechnung davon ausgegangen, dass das Eingangssignal
189

B. DFT-Berechnung mittels rechteckförmiger Transformation
nur über eine begrenzte Anzahl von Harmonischen verfügt. Eine genaue Untersuchung derGrenzen des RAFT-Verfahrens wurde in der vom Verfasser betreuten Masterarbeit vonZahn [117] durchgeführt. Zusätzlich hat Zahn eine exemplarische Implementierung desRAFT-Verfahrens zur Abschätzung des Hardwareaufwandes vorgestellt.
Es wird zunächst die reduzierte DFT aus Gleichung 3.24 aufgegriffen:
X = W · x.
Das X entspricht dem Harmonischen-Vektor und x dem Eingangsvektor mit den Ab-tastwerten. Die Koeffizientenmatrix W wird in eine Transformationsmatrix T und eineKorrekturmatrix K zerlegt, so ergibt sich die Annäherung:
X = K · (T · x) . (B.1)
Der zeitkritische Pfad, der bei der reduzierten DFT durch die Multiplikationen mit denKoeffizienten W entsteht, wird hier aufgespalten. Im zeitkritischen Pfad wird der Ein-gangsvektor x mit einer Transformationsmatrix multipliziert, die nur einfache Rechnen-operationen wie Additionen und Substraktionen beinhaltet. Nachdem die MultiplikationvonT und x abgeschlossen ist, wird in einem anschließenden, nicht zeitkritischen Pfad eineKorrekturrechnung durch die Multiplikation mit der Korrekturmatrix K durchgeführt.
Entwicklung einer Transformationsmatrix
Es wird eine Transformationsmatrix T gesucht, die nur die Koeffizienten mit den Wer-ten −1, 1 enthält. Ausgehend von der komplexen Exponentialfunktion, wie sie auch inGleichung 3.26 verwendet wurde, wird v(n) mit den Rechteckfunktionen cor(n) und sir(n)nach Gauss [36] definiert:
v(n) = cor
(n
Ns
)− j · sir
(n
Ns
)(B.2)
v(n) = (−1)b2nNs
+ 12c − j · (−1)b2
nNsc. (B.3)
Die Rechteckfunktionen cor(n) und sir(n), werden auch Walsh-Cosinus bzw. Walsh-Sinusbezeichnet. Analog zu den Sinus- und Cosinus-Funktionen in Gleichung 3.25 werden diecor(n) und sir(n) Funktionen in die Transformationsmatrix T übertragen:
T =
v(0) v(1) v(2) . . . v(1 · (Ns − 1))
v(0) v(2) v(4) . . . v(2 · (Ns − 1))
v(0) v(3) v(6) . . . v(3 · (Ns − 1))
v(0) v(4) v(8) . . . v(4 · (Ns − 1))
v(0) v(5) v(10) . . . v(5 · (Ns − 1))
. (B.4)
Die Transformationsmatrix wird auf Eingangsvektor x angewendet. Da die enthalten Ko-effizienten nur die Werte 1 oder −1 besitzen, kann diese Operation ohne Multiplizierer
190
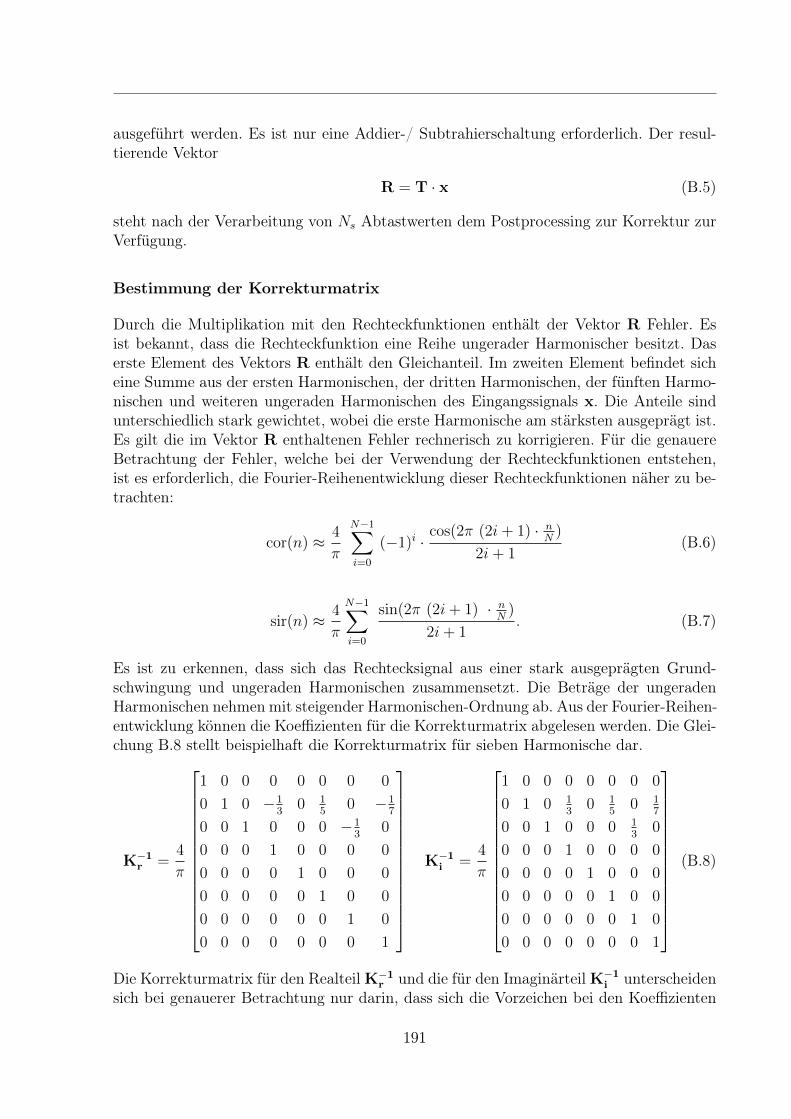
ausgeführt werden. Es ist nur eine Addier-/ Subtrahierschaltung erforderlich. Der resul-tierende Vektor
R = T · x (B.5)
steht nach der Verarbeitung von Ns Abtastwerten dem Postprocessing zur Korrektur zurVerfügung.
Bestimmung der Korrekturmatrix
Durch die Multiplikation mit den Rechteckfunktionen enthält der Vektor R Fehler. Esist bekannt, dass die Rechteckfunktion eine Reihe ungerader Harmonischer besitzt. Daserste Element des Vektors R enthält den Gleichanteil. Im zweiten Element befindet sicheine Summe aus der ersten Harmonischen, der dritten Harmonischen, der fünften Harmo-nischen und weiteren ungeraden Harmonischen des Eingangssignals x. Die Anteile sindunterschiedlich stark gewichtet, wobei die erste Harmonische am stärksten ausgeprägt ist.Es gilt die im Vektor R enthaltenen Fehler rechnerisch zu korrigieren. Für die genauereBetrachtung der Fehler, welche bei der Verwendung der Rechteckfunktionen entstehen,ist es erforderlich, die Fourier-Reihenentwicklung dieser Rechteckfunktionen näher zu be-trachten:
cor(n) ≈ 4
π
N−1∑i=0
(−1)i ·cos(2π (2i+ 1) · n
N)
2i+ 1(B.6)
sir(n) ≈ 4
π
N−1∑i=0
sin(2π (2i+ 1) · nN
)
2i+ 1. (B.7)
Es ist zu erkennen, dass sich das Rechtecksignal aus einer stark ausgeprägten Grund-schwingung und ungeraden Harmonischen zusammensetzt. Die Beträge der ungeradenHarmonischen nehmen mit steigender Harmonischen-Ordnung ab. Aus der Fourier-Reihen-entwicklung können die Koeffizienten für die Korrekturmatrix abgelesen werden. Die Glei-chung B.8 stellt beispielhaft die Korrekturmatrix für sieben Harmonische dar.
K−1r =4
π
1 0 0 0 0 0 0 0
0 1 0 −13
0 15
0 −17
0 0 1 0 0 0 −13
0
0 0 0 1 0 0 0 0
0 0 0 0 1 0 0 0
0 0 0 0 0 1 0 0
0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 1
K−1i =
4
π
1 0 0 0 0 0 0 0
0 1 0 13
0 15
0 17
0 0 1 0 0 0 13
0
0 0 0 1 0 0 0 0
0 0 0 0 1 0 0 0
0 0 0 0 0 1 0 0
0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 1
(B.8)
Die Korrekturmatrix für den RealteilK−1r und die für den ImaginärteilK−1i unterscheidensich bei genauerer Betrachtung nur darin, dass sich die Vorzeichen bei den Koeffizienten
191

B. DFT-Berechnung mittels rechteckförmiger Transformation
in K−1r alternieren. Nach der Bildung der inversen Matrizen, welche in Gleichung B.9gezeigt sind, kann der Vektor R mittels einer Multiplikation korrigiert werden.
Kr =
π4
0 0 0 0 0 0 0
0 π4
0 π12
0 − π20
0 π28
0 0 π4
0 0 0 π12
0
0 0 0 π4
0 0 0 0
0 0 0 0 π4
0 0 0
0 0 0 0 0 π4
0 0
0 0 0 0 0 0 π4
0
0 0 0 0 0 0 0 π4
Ki =
π4
0 0 0 0 0 0 0
0 π4
0 − π12
0 − π20
0 − π28
0 0 π4
0 0 0 − π12
0
0 0 0 π4
0 0 0 0
0 0 0 0 π4
0 0 0
0 0 0 0 0 π4
0 0
0 0 0 0 0 0 π4
0
0 0 0 0 0 0 0 π4
(B.9)
Die Koeffizientenmatrix zur Korrekturrechnung, welche hier über die Fourier-Reihenent-wicklung hergeleitet wurde, kann auch über die Selbstähnlichkeit der Matrix bestimmtwerden [117].
Die Korrektur erfolgt getrennt für Real- und Imaginärteil:
X = Kr · ReR+ j ·Ki · ImR. (B.10)
Der Ergebnisvektor X enthält eine Näherung für die im Eingangssignal x enthaltenenHarmonischen.
Es ist noch zu erwähnen, dass für die Anwendung des RAFT-Verfahrens keine beliebigeAnzahl an Abtastwerten verwendet werden kann. Dieses ist dadurch begründet, dass dieSymmetrie der Rechteckfunktionen eingehalten werden muss. Die Anzahl der benötigtenAbtastwerte
Ns = 4 · lcm(Θ) mit Θ = 1, 2, . . . , Nh (B.11)
wird über die lcm-Funktion (kleinste gemeinsame Vielfache) berechnet, welche als Para-meter die Harmonischen bis zur Anzahl der zu ermittelnden Harmonischen Nh enthält.Für fünf Harmonische ergibt sich somit eine erforderliche Anzahl an Abtastwerten von 240.Eine Anzahl von 10 Harmonischen erfordert bereits eine Anzahl von 22176 Abtastwerten.Das RAFT-Verfahren ist somit nur sinnvoll einsetzbar für die Analyse eines Signals miteiner begrenzten Anzahl von Harmonischen.
Zahn [117] hat nachgewiesen, dass das RAFT-Verfahren eine gute Näherung liefert für dieBerechnung des Spektrums mit einer begrenzten Anzahl von Harmonischen. Für weitereUntersuchungen des RAFT-Verfahrens und deren Implementierung wird auf Zahn [117]verwiesen.
192
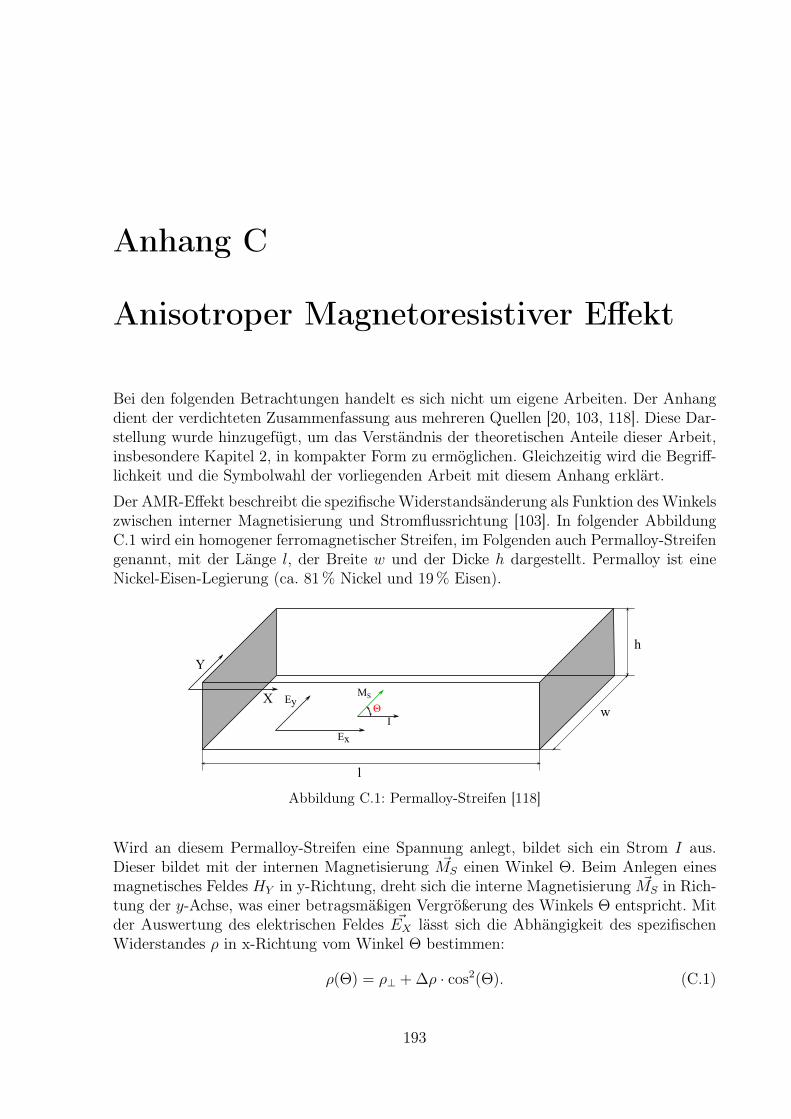
Anhang C
Anisotroper Magnetoresistiver Effekt
Bei den folgenden Betrachtungen handelt es sich nicht um eigene Arbeiten. Der Anhangdient der verdichteten Zusammenfassung aus mehreren Quellen [20, 103, 118]. Diese Dar-stellung wurde hinzugefügt, um das Verständnis der theoretischen Anteile dieser Arbeit,insbesondere Kapitel 2, in kompakter Form zu ermöglichen. Gleichzeitig wird die Begriff-lichkeit und die Symbolwahl der vorliegenden Arbeit mit diesem Anhang erklärt.
Der AMR-Effekt beschreibt die spezifische Widerstandsänderung als Funktion des Winkelszwischen interner Magnetisierung und Stromflussrichtung [103]. In folgender AbbildungC.1 wird ein homogener ferromagnetischer Streifen, im Folgenden auch Permalloy-Streifengenannt, mit der Länge l, der Breite w und der Dicke h dargestellt. Permalloy ist eineNickel-Eisen-Legierung (ca. 81 % Nickel und 19 % Eisen).
h
l
w
Ex
EyΘ
MS
I
Y
X
Abbildung C.1: Permalloy-Streifen [118]
Wird an diesem Permalloy-Streifen eine Spannung anlegt, bildet sich ein Strom I aus.Dieser bildet mit der internen Magnetisierung ~MS einen Winkel Θ. Beim Anlegen einesmagnetisches Feldes HY in y-Richtung, dreht sich die interne Magnetisierung ~MS in Rich-tung der y-Achse, was einer betragsmäßigen Vergrößerung des Winkels Θ entspricht. Mitder Auswertung des elektrischen Feldes ~EX lässt sich die Abhängigkeit des spezifischenWiderstandes ρ in x-Richtung vom Winkel Θ bestimmen:
ρ(Θ) = ρ⊥ + ∆ρ · cos2(Θ). (C.1)
193
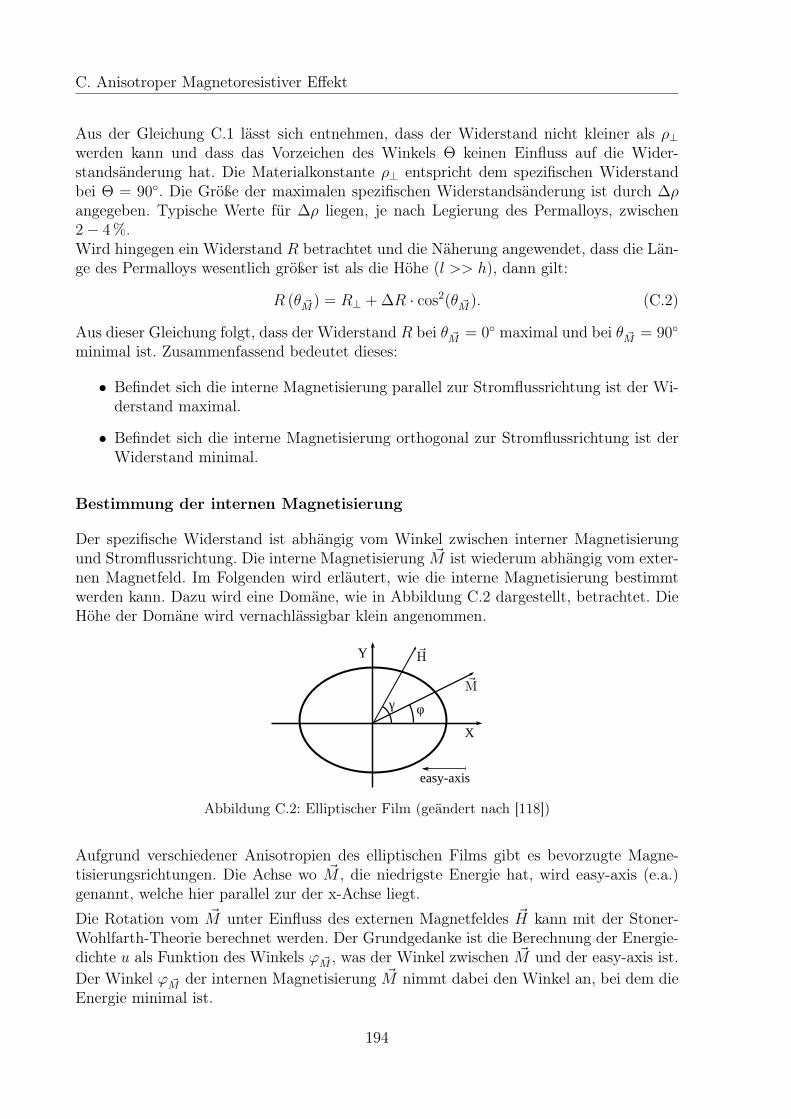
C. Anisotroper Magnetoresistiver Effekt
Aus der Gleichung C.1 lässt sich entnehmen, dass der Widerstand nicht kleiner als ρ⊥werden kann und dass das Vorzeichen des Winkels Θ keinen Einfluss auf die Wider-standsänderung hat. Die Materialkonstante ρ⊥ entspricht dem spezifischen Widerstandbei Θ = 90. Die Größe der maximalen spezifischen Widerstandsänderung ist durch ∆ρangegeben. Typische Werte für ∆ρ liegen, je nach Legierung des Permalloys, zwischen2− 4 %.Wird hingegen ein Widerstand R betrachtet und die Näherung angewendet, dass die Län-ge des Permalloys wesentlich größer ist als die Höhe (l >> h), dann gilt:
R (θ ~M) = R⊥ + ∆R · cos2(θ ~M). (C.2)
Aus dieser Gleichung folgt, dass der Widerstand R bei θ ~M = 0 maximal und bei θ ~M = 90
minimal ist. Zusammenfassend bedeutet dieses:
• Befindet sich die interne Magnetisierung parallel zur Stromflussrichtung ist der Wi-derstand maximal.
• Befindet sich die interne Magnetisierung orthogonal zur Stromflussrichtung ist derWiderstand minimal.
Bestimmung der internen Magnetisierung
Der spezifische Widerstand ist abhängig vom Winkel zwischen interner Magnetisierungund Stromflussrichtung. Die interne Magnetisierung ~M ist wiederum abhängig vom exter-nen Magnetfeld. Im Folgenden wird erläutert, wie die interne Magnetisierung bestimmtwerden kann. Dazu wird eine Domäne, wie in Abbildung C.2 dargestellt, betrachtet. DieHöhe der Domäne wird vernachlässigbar klein angenommen.
Y
X
φγ
easy-axis
Abbildung C.2: Elliptischer Film (geändert nach [118])
Aufgrund verschiedener Anisotropien des elliptischen Films gibt es bevorzugte Magne-tisierungsrichtungen. Die Achse wo ~M , die niedrigste Energie hat, wird easy-axis (e.a.)genannt, welche hier parallel zur der x-Achse liegt.Die Rotation vom ~M unter Einfluss des externen Magnetfeldes ~H kann mit der Stoner-Wohlfarth-Theorie berechnet werden. Der Grundgedanke ist die Berechnung der Energie-dichte u als Funktion des Winkels ϕ ~M , was der Winkel zwischen ~M und der easy-axis ist.Der Winkel ϕ ~M der internen Magnetisierung ~M nimmt dabei den Winkel an, bei dem dieEnergie minimal ist.
194

Die Energiedichte setzt sich aus der Feldenergiedichte, der Anisotropienenergiedichte undder Entmagnetisierungsenergiedichte zusammen, welche hier nicht weiter beschrieben wer-den. Die interne Magnetisierung ~M nimmt den Winkel ϕ ~M mit den niedrigsten Energieu an. Deshalb wird u nach ϕ ~M abgeleitet und auf Null gesetzt, welches folgende Formelliefert:
sin(ϕ ~M) =HY
H0 + HXcos(ϕ ~M
)
. (C.3)
Bei H0 handelt es sich um die charakteristische Feldstärke, welches eine Materialkonstanteist.Alternativ lässt sich der Winkel der internen Magnetisierung ϕ grafisch mit dem sogenann-ten Stoner-Wolfrath-Astroid [20] aus Abbildung C.3 bestimmen. Die Abbildung zeigt zweiBeispiele ( ~H und ~H ′) für extern angelegte Feldstärken. Für die grafische Lösung werdenvon der Spitze der externen Feldstärke ~H Tangenten (gestrichelt) an den Astroid ange-legt. Die resultierenden Winkel ϕ1 und ϕ2 sind zwei mögliche Lösungen für den Winkelder internen Magnetisierung ~M . Für die externe Feldstärke ~H ′ existiert nur die Lösungϕ′, weil diese außerhalb des Astroid liegt.
HY
H0
H0
HX
γγ'
φ1
φ'φ2
Abbildung C.3: Stoner-Wolfrath-Astroid [118]
Die Stoner-Wolfrath-Theorie dient auch zur Untersuchung der Hysteresekurven in Abbil-dung C.4. Hierbei wird ~M bei der Änderung von ~H aufgetragen. Die linke Seite zeigt dasVerhalten der easy-axis und die rechte Seite das Verhalten der hard-axis. Die Betrach-tung der easy-axis (HX) zeigt, dass nur zwei stabile Zustände (MX = ±MS) vorhandensind. Untersuchungen haben gezeigt, dass die Umschaltung bei der KoerzitivfeldstärkeHC (durchgehend dargestellt) stattfindet und nicht wie angenommen bei der charakte-ristischen Feldstärke H0 (gestrichelt dargestellt). Wird hingegen die hard-axis (HY ) be-trachtet, zeichnet sich ein linearer Verlauf von MY bis zur Sättigungsmagnetisierung MS
ab.
195
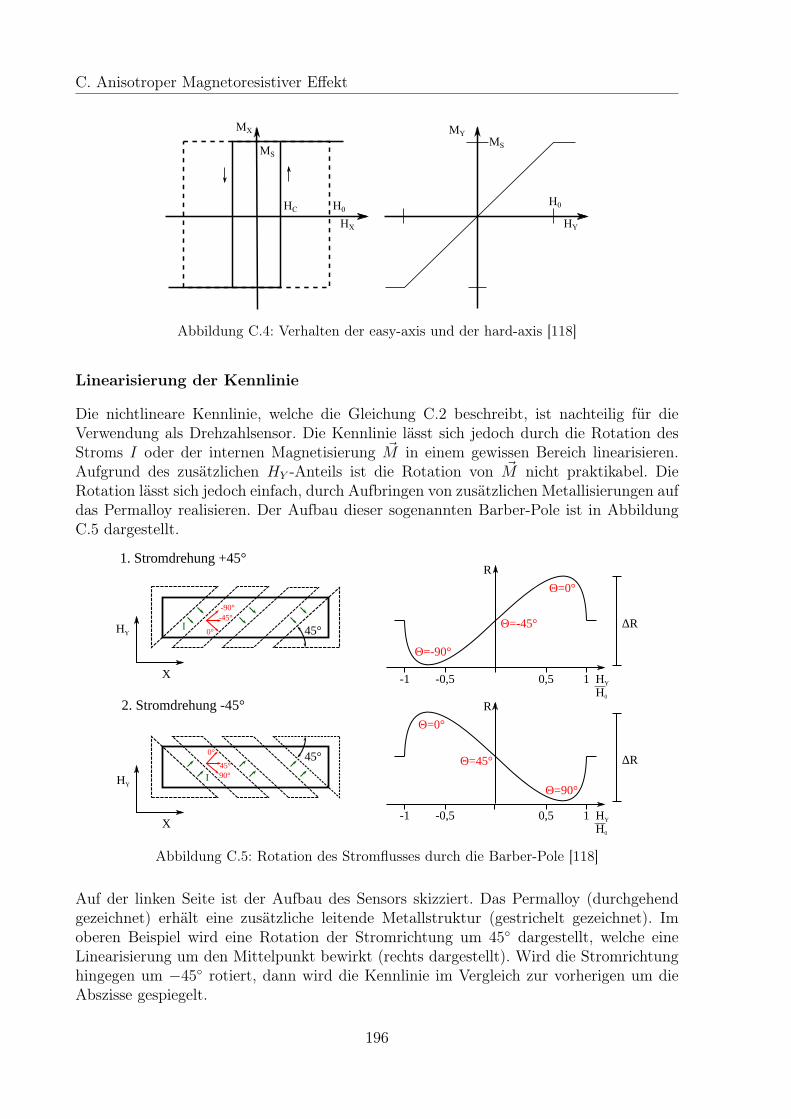
C. Anisotroper Magnetoresistiver Effekt
MX MY
MS
MS
HX HY
H0H0HC
Abbildung C.4: Verhalten der easy-axis und der hard-axis [118]
Linearisierung der Kennlinie
Die nichtlineare Kennlinie, welche die Gleichung C.2 beschreibt, ist nachteilig für dieVerwendung als Drehzahlsensor. Die Kennlinie lässt sich jedoch durch die Rotation desStroms I oder der internen Magnetisierung ~M in einem gewissen Bereich linearisieren.Aufgrund des zusätzlichen HY -Anteils ist die Rotation von ~M nicht praktikabel. DieRotation lässt sich jedoch einfach, durch Aufbringen von zusätzlichen Metallisierungen aufdas Permalloy realisieren. Der Aufbau dieser sogenannten Barber-Pole ist in AbbildungC.5 dargestellt.
45°
X
ΔR
Θ=0°
Θ=-45°
Θ=-90°
45° ΔR
Θ=0°
Θ=45°
Θ=90°
-1 -0,5 0,5 1X
0°
45°90°
-90°-45°
0°
I
I
1. Stromdrehung +45°
2. Stromdrehung -45°
HY
HY
R
HY
H0
-1 -0,5 0,5 1
R
HY
H0
Abbildung C.5: Rotation des Stromflusses durch die Barber-Pole [118]
Auf der linken Seite ist der Aufbau des Sensors skizziert. Das Permalloy (durchgehendgezeichnet) erhält eine zusätzliche leitende Metallstruktur (gestrichelt gezeichnet). Imoberen Beispiel wird eine Rotation der Stromrichtung um 45 dargestellt, welche eineLinearisierung um den Mittelpunkt bewirkt (rechts dargestellt). Wird die Stromrichtunghingegen um −45 rotiert, dann wird die Kennlinie im Vergleich zur vorherigen um dieAbszisse gespiegelt.
196
Anhang D
Aufstellung der studentischen Arbeiten
Die betreuten studentischen Arbeiten, welche im BMBF geförderten ForschungsprojektESZ-ABS durchgeführt wurden, werden im folgenden chronologisch aufgelistet und be-schrieben. In Abbildung D.1 befindet sich zusätzlich eine Übersicht, wie diese Arbeitenaufeinander aufbauen und sich schrittweise ergänzen.
Kreuzspulenmessplatz
• Siebenmorgen [109] hat den ersten Kreuzspulenmessplatz entwickelt und erste Kenn-felder des AMR-Sensors aufgenommen und analysiert.
• Piorek [89] hat einen AMR basierten Winkelsensor mit dem Kreuzspulenmessplatzuntersucht und die manuelle Positionierung des bereits vorhandenen Messplatzesmit Schrittmotoren automatisiert.
• Zippel [118] hat das aus AMR-Sensor und Encoder bestehende magnetische Systemin einer 3D-FEM-Simulationssoftware modelliert und simuliert, um genauere Kennt-nisse über den Verlauf der magnetischen Feldstärken im AMR-Sensor zu erhalten.
Radmessplatz
• Mahtouf [76] hat mit dem provisorischen Radmessplatz RMP1 und einem Speicher-oszilloskop erste Messdaten aufgenommen und in Matlab ausgewertet. Es wurdendie ersten praktischen Nachweise erbracht, dass die Verzerrung des Sensorsignals einIndikator für den Arbeitspunkt des Sensors ist.
• Schoermer [104] hat den Radmessplatz RMP3 entwickelt und erste Messungen auf-genommen. Zu den Besonderheiten zählt, dass mit diesem Messplatz auch Encoder-Serienteile der Automobilindustrie verwendet werden können.
• Ivanov [55] hat eine Kollisionserkennung auf Basis eines Piezosensors für den Rad-messplatz RMP3 entwickelt. Beim Auslösen des in der Sensorfassung integriertenPiezosensors werden sämtliche Motoren des Messsystems deaktiviert. Außerdemwurde umfangreiches Datenmaterial zur Positionierung des AMR-Sensors zum En-coder erfasst.
197
D. Aufstellung der studentischen Arbeiten
• Coulibaly [17] hat ein neues Encoder-Modul mit dem vom Industriepartner spezi-fizierten Referenz-Encoder konstruiert und aufgebaut. Weiterhin wurde der Rad-messplatz an das neue Encoder-Modul angepasst.
Experimentalplattformen
• Jegenhorst [56] hat die mikrocontrollerbasierte Experimentalplattform entwickeltund die erste Implementierung der Harmonischenanalyse durchgeführt.
• Dreschhoff [23] hat einen Protokollgenerator in programmierbarer Logik implemen-tiert, der das AK-Protokoll der neuesten Sensorgeneration realisiert.
• Stahl [110] hat ein Modul zur die Offset- und Verstärkungsregelung des Sensorsi-gnals für die Experimentalplattform entwickelt und die Regelalgorithmen auf derMikrocontroller Experimentalplattform implementiert.
• Koch [60] hat einen optimierten Algorithmus (HDI ) zur Harmonischen-Schätzungentwickelt. Weiterhin wurde untersucht, wie sich unrundlaufende Encoder auf dasErgebnis der Zustandsindikatoren auswirken.
• Arvidsson [4] hat für den Aufbau der FPGA Experimentalplattform ein Modul mitADCs, DACs und Komparatoren für den Anschluss an ein FPGA-Evaluierungsboardentwickelt.
• Dreschhoff [24] hat die Signalverarbeitungsalgorithmen für die Zustandsdiagnose inVHDL auf der FPGA Experimentalplattform implementiert.
• Poppinga [90] hat ein neuen Indikator zur zuverlässigen Erkennung von Frequenz-verdopplungen im Sensorsignal entwickelt und auf der Mikrocontroller-Experimen-talplattform implementiert.
• Ostermann [84] hat ein Modul mit einer linearen/logarithmischen Verstärkerbankfür die Experimentalplattform entwickelt und diskret mit Operationsverstärkernaufgebaut. Zusätzlich wurde ein neues Regelverfahren für Verstärkung und Offsetimplementiert.
• Sabotta [102] hat eine erste Mixed-Signal-Chip-Implementierung der Signalaufbe-reitung, der Sensorgrundfunktion und der Sensordiagnosefunktion für einen ASICdurchgeführt. Die Umsetzung des Digitalteils stand hierbei im Vordergrund.
• Zahn [117] hat ein alternatives Verfahren zur Berechnung der DFT entwickelt undexemplarisch in VHDL implementiert. Das alternative Verfahren verwendet stattCosinus- und Sinusfunktionen einfache Rechtecksignale.
• Rostock [101] hat die lineare/logarithmische Verstärkerbank in einen Mixed-Signal-ASIC integriert und das Verhalten dieser Implementation charakterisiert. Weiterhinwurden neue Regelverfahren für Verstärkung und Offset in VHDL implementiertund evaluiert.
198
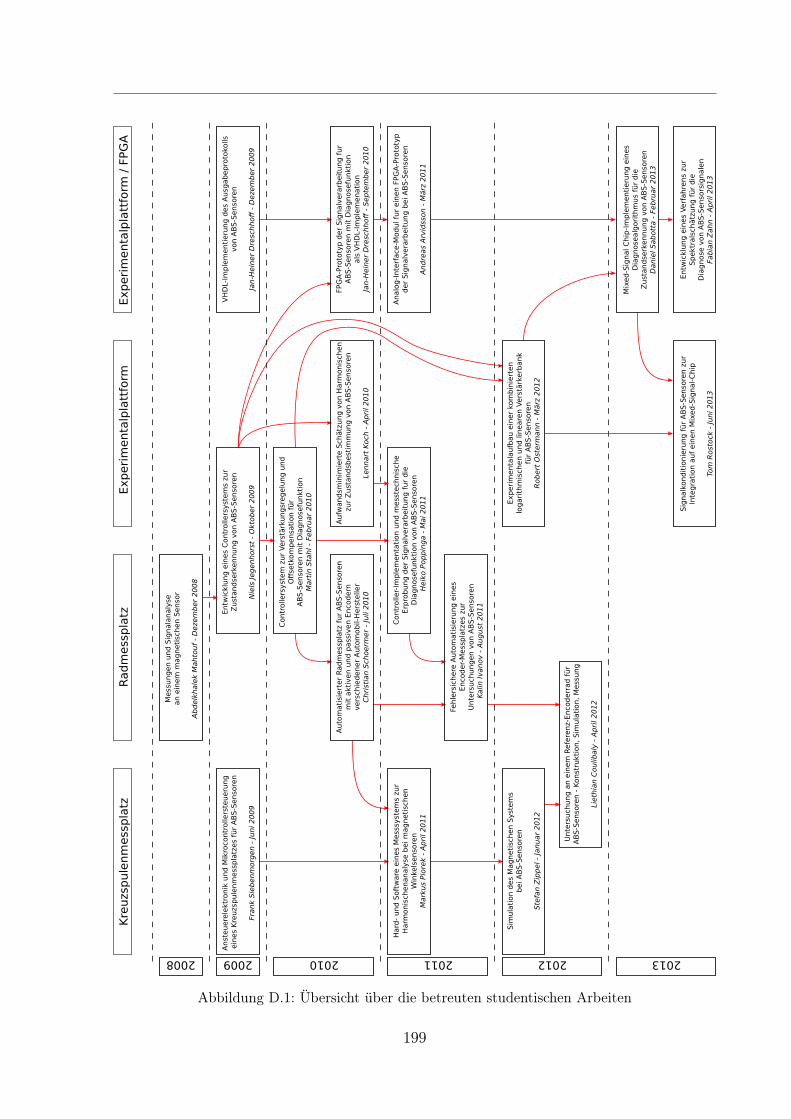
Kre
uzs
pu
len
mess
pla
tzR
ad
mess
pla
tz
Anst
eu
ere
lekt
ron
ik u
nd
Mik
roco
ntr
olle
rste
ueru
ng
ein
es
Kre
uzs
pu
len
mess
pla
tzes
für
AB
S-S
en
sore
n
Fran
k S
ieb
en
morg
en
- Ju
ni 2
00
9
Mess
un
gen
un
d S
ign
ala
naly
se
an
ein
em
mag
neti
sch
en
Sen
sor
Ab
delk
hale
k M
ah
tou
f -
Deze
mb
er
20
08
Exp
eri
men
talp
latt
form
En
twic
klu
ng
ein
es
Con
trolle
rsyst
em
s zu
r Z
ust
an
dse
rken
nu
ng
von
AB
S-S
en
sore
n
Nie
ls Jeg
en
hors
t -
Okt
ob
er
20
09
Con
trolle
rsyst
em
zu
r Vers
tärk
un
gsr
eg
elu
ng
un
d
Off
setk
om
pen
sati
on
fü
r A
BS
-Sen
sore
n m
it D
iag
nose
fun
ktio
nM
art
in S
tah
l -
Feb
ruar
20
10
Aufw
an
dsm
inim
iert
e S
chätz
un
g v
on
Harm
on
isch
en
zu
r Z
ust
an
dsb
est
imm
un
g v
on
AB
S-S
en
sore
n
Lenn
art
Koch
- A
pri
l 2
01
0
FPG
A-P
roto
typ
der
Sig
nalv
era
rbeit
un
g f
ur
AB
S-S
en
sore
n m
it D
iag
nose
fun
ktio
n
als
VH
DL-
Imp
lem
en
ati
on
Jan
-Hein
er
Dre
sch
hoff
- S
ep
tem
ber
20
10
Auto
mati
siert
er
Rad
mess
pla
tz f
ur
AB
S-S
en
sore
n
mit
akt
iven
un
d p
ass
iven
En
cod
ern
vers
chie
den
er
Au
tom
ob
il-H
ers
telle
rC
hri
stia
n S
choerm
er
- Ju
li 2
01
0
VH
DL-
Imp
lem
en
tieru
ng
des
Au
sgab
ep
roto
kolls
von A
BS
-Sen
sore
n
Jan
-Hein
er
Dre
sch
hoff
- D
eze
mb
er
20
09
Analo
g-I
nte
rface
-Mod
ul fu
r ein
en
FPG
A-P
roto
typ
d
er
Sig
nalv
era
rbeit
un
g b
ei A
BS
-Sen
sore
n
And
reas
Arv
idss
on
- M
ärz
20
11
Hard
- u
nd
Soft
ware
ein
es
Mess
syst
em
s zu
rH
arm
on
isch
en
an
aly
se b
ei m
ag
neti
sch
en
Win
kels
en
sore
nM
ark
us
Pio
rek
- A
pri
l 2
01
1
Con
trolle
r-Im
ple
men
tati
on
un
d m
ess
tech
nis
che
Erp
rob
un
g d
er
Sig
nalv
era
rbeit
un
g f
ur
die
D
iag
nose
fun
ktio
n v
on
AB
S-S
en
sore
nH
eik
o P
op
pin
ga -
Mai 2
01
1
Exp
eri
men
talp
latt
form
/ F
PG
A
Feh
lers
ich
ere
Au
tom
ati
sieru
ng
ein
es
En
cod
er-
Mess
pla
tzes
zur
Un
ters
uch
un
gen
von
AB
S-S
en
sore
nKalin
Ivan
ov -
Au
gu
st 2
01
1
Sim
ula
tion
des
Mag
neti
sch
en
Syst
em
s b
ei A
BS
-Sen
sore
n
Ste
fan
Zip
pel -
Jan
uar
20
12
Exp
eri
men
tala
ufb
au
ein
er
kom
bin
iert
en
lo
gari
thm
isch
en
un
d lin
eare
n V
ers
tärk
erb
an
kfü
r A
BS
-Sen
sore
nR
ob
ert
Ost
erm
an
n -
März
20
12
Un
ters
uch
un
g a
n e
inem
Refe
ren
z-En
cod
err
ad
fü
r A
BS
-Sen
sore
n -
Kon
stru
ktio
n,
Sim
ula
tion
, M
ess
un
g
Lieth
ian
Cou
libaly
- A
pri
l 2
01
2
Mix
ed
-Sig
nal C
hip
-Im
ple
men
tieru
ng
ein
es
Dia
gnose
alg
ori
thm
us
für
die
Z
ust
an
dse
rken
nu
ng
von
AB
S-S
en
sore
nD
an
iel S
ab
ott
a -
Feb
ruar
20
13
2008 2009 2010 2011 2012 2013
En
twic
klu
ng
ein
es
Verf
ah
ren
s zu
r S
pekt
rals
chätz
un
g f
ür
die
D
iag
nose
von
AB
S-S
en
sors
ign
ale
nFa
bia
n Z
ah
n -
Ap
ril 2
01
3
Sig
nalk
on
dit
ion
ieru
ng
fü
r A
BS
-Sen
sore
n z
ur
Inte
gra
tion
au
f ein
en
Mix
ed
-Sig
nal-
Chip
Tom
Rost
ock
- Ju
ni 2
01
3
Abbildung D.1: Übersicht über die betreuten studentischen Arbeiten
199

Anhang E
Formelzeichen und Glossar
Formelzeichen
α Drehwinkel des Encoders
αe Fehlerfaktor innerhalb des Signals usens,e(n) für die Betrach-tung des Einflusses des relativen Prädiktionsfehlers auf dieVerzerrungsindikatoren (αe = 1 + Er).
∆R Maximale durch den magnetoresistiven Effekt hervorgerufeneWiderstandsänderung
δ Dirac-Impuls
∆ρ Maximale spezifische Widerstandsänderung, welche durch denmagnetoresistiven Effekt hervorgerufen wird
δsens Tastverhältnis des Sensorsignals
ΘX ,ΘY Binbreiten für die Quantisierung des Sensor-Kennfeldes
Θ ~M Winkel der internen Magnetisierung ~M
ρ(Θ ~M) Spezifischer Widerstand in Abhängigkeit vom Winkel Θ ~M
ρ⊥ Spezifischen Widerstand bei Θ ~M = 90 (Materialkonstante)
ϕx, ϕy, ϕz Verkippungswinkel des Sensor-Koordinatensystems
ϕ0 Startwert für die numerische Bestimmung des Winkels derinternen Magnetisierung ~M
ϕ ~M Winkel der internen Magnetisierung ~M (siehe Anhang C)
A Verstärkungsfaktor der einzelnen Verstärkerstufen des appro-ximiert logarithmischen Verstärkers
ARn Sensitive Fläche des Brückenwiderstands Rn eines AMR-Sensors
201
E. Formelzeichen und Glossar
Ea(n) Absoluter Prädiktionsfehler (siehe Abschnitt 3.1 Seite 85)
Ed(ud) Absoluter Fehler des Sensor-Kennfeldes
EK Eingangsspannung, ab der die Verstärkerstufen des approxi-miert logarithmischen Verstärkers in Sättigung gehen.
Er(n) Relativer Prädiktionsfehler (siehe Abschnitt 3.1 Seite 87)
fe Encoderfrequenz, entspricht der Anzahl der vollständigenUmdrehungen des Encoders pro Sekunde
fn Frequenz der n. Harmonischen
ftk konstante Zahnfrequenz
ft Zahnfrequenz, entspricht der Anzahl der Encoderzähne dieden Sensor pro Sekunde passieren
H0 Charakteristische Feldstärke des AMR-Sensors(Materialkonstante)
h0 Gleichanteil
HC Koerzitivfeldstärke
hk Betrag der k. Harmonischen
HX , HY , HZ Magnetische Feldstärkenkomponenten im Sensor-Koordinatensystem
HXoff Magnetischer HX-Offset im AMR-Sensor, welches durch denStützmagneten eingeprägt wird
HX,Rn, HY,Rn Mittlere Magnetische Feldstärke auf dem BrückenwiderstandRn
~H Vektor der externen magnetischen Feldstärke
~H, ~H ′ Extern anliegendes Magnetfeld
iproto Stromsignal eines Sensors mit AK-Protokoll
iX , iY Spulenstrom beim Kreuzspulenmessplatz
k Üblicher Bezeichner für den Klirrfaktor (nur im Kapitel 2)
k, n, i Indexbezeichnung in verschiedenen Gleichungen
K−1r ,K−1i Real- bzw. Imaginärteil der Korrekturmatrix, welche erforder-lich sind, um aus dem Ergebnis der Multiplikation der Trans-formationsmatrix mit dem Eingangsvektor eine Lösung zu be-rechnen, die der DFT ähnlich ist (siehe Anhang B).
MS Sättigungsmagnetisierung
202
~M Interne Magnetisierung des magnetoresistiven Sensorelements
Nh Anzahl der Harmonischen
Nk Anzahl der Bins für die HX- und HY -Achse
Nsteps Anzahl der Einzelsimulationen (siehe Abschnitt 2.3.1)
Ns Anzahl der Abtastwerte in einer Blocklänge
Nt Anzahl der Encoderzähne bei passiven Encodern oder Anzahlder Polpaare bei aktiven Encodern
oe Ordnung der Wellendrehzahl (siehe Abschnitt 3.1 auf Seite104)
on n-te Ordnung der Bezugsordnung, welche typ. die Wellendreh-zahl ist (siehe Abschnitt 3.1).
os Ordnungsabtastrate (siehe Abschnitt 3.1 auf Seite 94)
ot Ordnung des Signals, welches der an der Welle befindlicheEncoder liefert (siehe Abschnitt 3.1 auf Seite 104).
P1 Signalleistung der 1. Harmonischen (siehe Abschnitt 2.1 aufSeite 23)
Pges Gesamt-Signalleistung (siehe Abschnitt 2.1 auf Seite 23)
Pgl Signal-Gleichleistung (siehe Abschnitt 2.1 auf Seite 23)
Pob Signalleistung der Oberwellen (siehe Abschnitt 2.1 auf Seite23)
Q1 Effektivwert der ersten Harmonischen
Qges Effektivwert des gesamten Signals
r(α) Radius des Encoders beim Winkel α (siehe Abschnitt 3.2.1)
R(θ ~M) Magnetoresistiver Widerstand in Abhängigkeit vom Winkelθ ~M
r(t) Radius des Encoders beim Zeitpunkt t (siehe Abschnitt 3.2.1)
R1, R2, R3, R4 Brückenwiderstände innerhalb des AMR-Sensors
R⊥ Magnetoresistiver Widerstand bei R(θ ~M = 90)
R Produkt aus Transformationsmatrix T und den Abtastwertenim Vektor x
sir, cor Walsh-Sinus bzw. Walsh-Cosinus (siehe Anhang B)
Tt Reziprokwert der Zahnfrequenz ft
203
E. Formelzeichen und Glossar
T Transformationsmatrix, welche in dieser Arbeit zur DFT-Berechnung einer rechteckförmigen Transformation verwendetwird (siehe Anhang B).
ud Brückendifferenzspannung des AMR-Sensors
us(HX , HY ) Sensorausgangsspannung in Abhängigkeit von den Feldkom-ponenten HX und HY
ubr Brückenversorgungsspannung (typ. 3 V)
ucomp(t) Zeitabhängige Schaltschwelle des Smart-Comparators
ud,calc(HX , HY ) Berechnetes Sensor-Kennfeld in Abhängigkeit von den Feld-komponenten HX und HY
ud,meas(HX , HY ) Gemessenes Sensor-Kennfeld in Abhängigkeit von den Feld-komponenten HX und HY
uhb1, uhb2 Halbbrückenspannung der Wheatstone-Brücke
uin Eingangssignal des approximiert logarithmischen Verstärkers
uoff Offset im Sensorsignal
uout Ausgangssignal des approximiert logarithmischen Verstärkers
up Spitzenspannung des Signals usens(t)
up/ubr Sensorspitzenspannung bezogen auf Brückenversorgungsspan-nung (Einheit mV/V), hier liegt ein nahezu konstantes Ver-hältnis bei ansonsten gleichen Parametern für AMR-Sensorenvor.
uRn Spannung über den Brückenwiderstand Rn eines AMR-Sensors
usample(t) Abtastzeitpunkte für die Abtastung des Signals usens(α)
usens,d(n) Winkeldiskrete Sensorausgangsspannung usens(α)
Usens,d(o) Ordnungsspektrum
usens,e(n) Winkeldiskrete Sensorausgangsspannung mit fehlerhafterPrädiktion
usens(α) Sensorausgangsspannung in Abbildung auf den Encoderwin-kel α
usens(t) Sensorausgangsspannung als Zeitsignal
usimu(α) Synthetisierte Sensorausgangsspannung in Abbildung auf denEncoderwinkel α, unter der Verwendung eines berechnetenSensorkennfeldes
204
usp(t) Speed-Pulse-Signal, welches Impulse an jedem Anfang einerPeriode im Signal usens(t) liefert
usynth(α) Synthetisierte Sensorausgangsspannung in Abbildung auf denEncoderwinkel α, unter der Verwendung eines gemessenenSensorkennfeldes
uth,h, uth,l, Obere und untere Komparatorschwelle
uX , uY Spannungssignal des Arbiträrgenerators beimKreuzspulenmessplatz
uzc(t) Speed-Pulse-Signal, welches Impulse bei Nulldurchgängen imSignal usens(t) liefert.
u Vektor, welcher die Abtastwerte enthält (siehe 3.3.1)
U Vektor, welcher die Harmonischen enthält (siehe 3.3.1)
v Geschwindigkeit
Vcc Versorgungsspannung
WN Drehfaktor der diskreten Fourier-Transformation
W Matrix, welche die Drehfaktoren der DFT beinhaltet (siehe3.3.1)
x, y, z Lineare Achsen des Sensor-Koordinatensystems
205
E. Formelzeichen und Glossar
Glossar
ABS-Sensor/Raddrehzahlsensor
Sensor zur Erfassung der Drehzahl von Fahrzeugrädern, wel-che ihre Information an das ABS-Steuergerät liefern.
ABS-Steuergerät Zentrales Steuergerät des Antiblockiersystems, welches eineelektronische Regelung beinhaltet, die mit den angeschlosse-nen ABS-Sensoren die aktuelle Drehzahl der einzelnen Fahr-zeugräder erfasst und den optimalen Bremsdruck für jedesFahrzeugrad bestimmt.
ABS-System Antiblockiersystem, welches bei Fahrzeugen durch die Rege-lung des Schlupfes über die Steuerung des Bremsdrucks dasBlockieren der Räder verhindert.
AK-Protokoll Spezifiziertes Protokoll des VDA für die Kommunikation zwi-schen ABS-Sensor und ABS-Steuergerät, welches Zusatzinfor-mationen enthält, die mit einem Manchester-Code übertragenwerden.
Aktiver Encoder Encoder für ABS-Sensoren mit magnetisch ausgeformten Zäh-nen, welcher aus einem Kunststoff mit hartmagnetischem An-teilen besteht, häufig auch Multipolrad genannt
AMR-Effekt Anisotroper magnetoresistiver Effekt (siehe Anhang C)
AMR-Sensor Inkremental- oder Winkelsensor, welcher auf Basis des aniso-tropen magnetoresistiven Effekts funktioniert.
AWGN Additives weißes gaußsches Rauschen
DFT Diskrete Fourier-Transformation
Digitales Puls-Protokoll
Protokoll für die Kommunikation zwischen ABS-Sensor undABS-Steuergerät, welches nur digitale Pulse für jeden passie-renden Encoderzahn liefert (Speed-Pulse).
EPA Ein-Zahnperioden-Analyse, welches ein Verfahren ist, das eineZahnperiode in die Auswertung einbezieht.
ESP-System Elektronisches Stabilitätsprogramm, welches ein Fahrstabili-sierungssystem ist, das durch gezieltes Abbremsen der Rädereinem Ausbrechen des Fahrzeuges entgegenwirkt.
ESZ-ABS Akronym des Forschungsprojekts „Experimentelle digitale Si-gnalverarbeitung und Zustandserkennung für ABS-Sensoren“.Das Projekt wurde vom Bundesministerium für Bildung undForschung gefördert und an der Hochschule für angewandteWissenschaften Hamburg von 2008 bis 2013 bearbeitet.
FFT Schnelle Fourier-Transformation (Fast Fourier Transform)
206
Frequenz-verdopplung
Entstehung von zusätzlichen Nulldurchgängen im Sensoraus-gangssignal hervorgerufen durch deutlich ausgeprägte Harmo-nische, welche in Folge der Nichtlinearitäten des AMR-Sensorsund des magnetischen Systems entstehen, mit Folge, dass diedoppelte Zahnfrequenz der tatsächlichen Zahnfrequenz aus-gegeben wird. Das gilt als schwerwiegende Fehlfunktion desSensors.
HCFSM Modell zur Beschreibung von Nebenläufigkeiten und Hierar-chien in Zustandsdiagrammen (Hierachial concurrent finitestate machine)
HD Harmonische Verzerrung (Harmonic Distortion)
HDn Verzerrungsindikator, welcher die Summe der 2. bis zur n.Harmonischen in das Verhältnis zur Summe der 1. bis zur n.Harmonischen setzt (siehe Abschnitt 2.1 auf Seite 23).
HDI Verzerrungsindikator, welcher die erste Harmonische des Si-gnals ins Verhältnis zur Signalgesamtleistung setzt (siehe Ab-schnitt 2.1 auf Seite 23).
HDOE Verzerrungsindikator speziell für die Erkennung der Frequenz-verdopplung. Hierzu wird die Summe der ungeraden Harmoni-schen ins Verhältnis zu der Summe der geraden Harmonischengesetzt (siehe Abschnitt 2.1 auf Seite 24).
Inkrementalgeber Sensor zur Erfassung von relativen Winkeländerungen, dabeiwerden Pulse je Winkelschritt ausgegeben.
KSMP Im Forschungsprojekt ESZ-ABS entwickelter Kreuzspulen-messplatz (siehe Anhang A.2).
lcm Kleinstes gemeinsames Vielfaches (least common multiple)
MPW Multi Project Wafer bezeichnet die Integration von verschie-denen Halbleiterschaltungen auf einem Wafer.
Passiver Encoder Encoder für ABS-Sensoren mit geometrisch ausgeformtenZähnen, welcher aus einem ferromagnetischen Werkstoff ge-fertigt ist.
Permalloy Permalloy ist eine weichmagnetische Nickel-Eisen-Legierung(ca. 81 % Nickel und 19 % Eisen).
RAFT Rechteck-Fourier-Transformation (Rect ApproximatedFourier-Transformation), welche eine angenäherte DFT-Berechnung mittels rechteckförmiger Transformationermöglicht.
207
E. Formelzeichen und Glossar
RMP1, RMP2,RMP3
Im Forschungsprojekt ESZ-ABS entwickelte Radmessplätze(siehe Anhang A.1).
Tastgrad-Protokoll
Protokoll für Kommunikation zwischen ABS-Sensor und ABS-Steuergerät, welches Zusatzinformationen enthält, die mit un-terschiedlichen Tastgraden codiert übertragen werden. DiesesProtokoll wird in einer Reihe von ABS-Sensortypen (z.B. In-fineon TLE4941, Philips KMI15) verwendet.
TDR Gesamt-Verzerrungsverhältnis (Total Distortion Ratio), wel-ches aus den Oberwellen, bezogen auf den Effektivwert derGrundschwingung des Signals, berechnet wird (siehe Ab-schnitt 2.1 auf Seite 22).
THD Gesamte Harmonische Verzerrung (Total Harmonic Distorti-on) (siehe Abschnitt 2.1 auf Seite 22)
VDA Verband der Automobilindustrie
Winkelsensor Sensor zur Messung des absoluten Winkels. Dieser Sensorkann auch als aktiver magnetischer Sensor hergestellt werden,z.B. als AMR-Sensor mit zwei um 45 versetzten magnetore-sistiven Messbrücken.
ZPA Zwei-Zahnperioden-Analyse, welches ein Verfahren ist, daszwei Zahnperioden in die Auswertung einbezieht und genutztwerden kann, um eine Frequenzverdopplung des Sensorsignalszu erkennen (siehe Abschnitt 3.2.3).
208
Literaturverzeichnis
[1] ams AG: AS540x 3D Hall Magnetic Encoder IC. 2012
[2] Analog Devices: AD8226 - Wide Supply Range, Rail-to-Rail Output Instru-mentation Amplifier. Version:A, Juni 2009. http://www.analog.com/static/imported-files/data_sheets/AD8226.pdf, Abruf: 14.08.2009
[3] Analog Devices: AD8231 - Zero Drift, Digitally Programmable Instrumen-tation Amplifier. Version: B, April 2011. http://www.analog.com/static/imported-files/data_sheets/AD8231.pdf, Abruf: 04.11.2013
[4] Arvidsson, Andreas: Analog-Interface-Modul für einen FPGA-Prototyp der Signal-verarbeitung bei ABS-Sensoren, Hochschule für Angewandte Wissenschaften Ham-burg, Bachelorarbeit, März 2011
[5] Ausserlechner, U.: Closed analytical formulae for multi-pole magnetic rings. In:Progress In Electromagnetics Research B Bd. 38, 2012, S. 71–105
[6] austriamicrosystems: ENG-182: 0.35 µm CMOS C35 Process Parameters. 2008
[7] austriamicrosystems: 0.35 µm CMOS Libraries (C35). Version: 2013. http://asic.ams.com/databooks/index_c35.html, Abruf: 23.04.2013
[8] austriamicrosystems: 0.35 µm Embedded Flash Technology.Version: 2013. http://www.ams.com/eng/Products/Full-Service-Foundry/Process-Technology/Embedded-Flash, Abruf: 23.04.2013
[9] Barber, W.L. ; Brown, E.R.: A true logarithmic amplifier for radar IF applica-tions. In: Solid-State Circuits, IEEE Journal of 15 (1980), Juni, Nr. 3, S. 291–295.– ISSN 0018–9200
[10] Bertotti, Giorgio ; Mayergoyz, Issak D.: The Science of Hysteresis: Mathema-tical modeling and applications. Academic Press, 2006. – ISBN 9780123694317
[11] Schutzrecht EP 000000569924 B1 (11. Mai 1993). Bielig, Peter (Erfinder); Knorr-Bremse GmbH (Anmelder). Verfahren und Vorrichtung zur Überwachung einesSensors
[12] Schutzrecht DE 000004216142 A1 (15. Mai 1992). Bielig, Peter (Erfinder); Knorr-Bremse GmbH (Anmelder). Verfahren und Vorrichtung zur Überwachung einesSensors
209
Literaturverzeichnis
[13] Breuer, Bert (Hrsg.) ; Bill, Karlheinz H. (Hrsg.): Bremsenhandbuch: Grundlagen,Komponenten, Systeme, Fahrdynamik. 2. Auflage. Vieweg Verlag, 2004. – ISBN9783528139520
[14] Cadence Design Systems, Inc.: Low Power in Encounter RTL Compiler. Pro-duct Version 9.1. Cadence, 2010
[15] Chambers, T. H. ; Page, I. H.: The High-Accuracy Logarithmic Receiver. In:Proceedings of the IRE 42 (1954), Nr. 8, S. 1307–1314. – ISSN 0096–8390
[16] Chrysler Motors Corporation: Four-Wheel Sure Brake. Pressemitteilung,August 1970
[17] Coulibaly, Liethian Y.: Untersuchung an einem Referenz-Encoderrad für ABS-Sensoren - Konstruktion, Simulation, Messung, Hochschule für Angewandte Wis-senschaften Hamburg, Diplomarbeit, April 2012
[18] Cronin, Brendan: Automotive Requirements for AMR Position Measurement Si-gnal Conditioning. In: 12th Symposium - Magnetoresistive Sensors and MagneticSystems (2013), März
[19] Daimler AG: Requirement Specifications for Standardized Interface for WheelSpeed Sensors with Additional Information „AK-Protokoll“. 4.0. Februar 2008
[20] Dibbern, Uwe: Magnetic Sensors. In: Göpel, W. (Hrsg.) ; Hesse, J. (Hrsg.) ;Zemel, J. N. (Hrsg.): Sensors a Comprehensive Survey Bd. 5. Weinheim Germany: VCH, 1989
[21] Norm DIN 40110-1 Teil 1 1994. Wechselstromgrößen; Zweileiter-Stromkreise
[22] Norm DIN EN 61000-2-4 Teil 2 2002. Elektromagnetische Verträglichkeit
[23] Dreschhoff, Jan-Heiner: VHDL-Implementierung des Ausgabeprotokolls vonABS-Sensoren, Hochschule für Angewandte Wissenschaften Hamburg, Studienar-beit, Dezember 2009
[24] Dreschhoff, Jan-Heiner: FPGA-Prototyp der Signalverarbeitung für ABS-Sensoren mit Diagnosefunktion als VHDL-Implemenation, Hochschule für Ange-wandte Wissenschaften Hamburg, Diplomarbeit, 2010
[25] Enokizono, M. ; Suzuki, T. ; Sievert, J. D.: Measurement of Iron Loss UsingRotational Magnetic Loss Measurement Apparatus. In: Magnetics in Japan, IEEETranslation Journal on 6 (1991), Juni, Nr. 6, S. 508–514. – ISSN 0882–4959
[26] Schutzrecht DE 10150955 C1 (16. Oktober 2001). Ernst, Roland ; Hackner,Michael ; Hohe, Hans-Peter (Erfinder); Fraunhofer-Gesellschaft (Anmelder). Ver-tikaler Hall-Sensor
[27] Europäische Kommission: Mitteilung der Kommission an den Rat und das Eu-ropäische Parlament Fußgängerschutz: Selbstverpflichtung der europäischen Auto-mobilindustrie - 52001DC0389. Juli 2001
210
Literaturverzeichnis
[28] Europäisches Parlament: Mehr Sicherheit für Motorräder dank neuer Bestim-mungen für Typgenehmigungen - 20121116IPR55754. Pressemitteilung, November2012
[29] Schutzrecht DE 19650935 A1 (7. Dezember 1996). Fey, Wolfgang ; Loreck, Heinz; Zinke, Olaf ; Zydek, Michael (Erfinder); ITT Automotive Europe GmbH (An-melder). Verfahren und Schaltungsanordnung zur Übertragung von Drehzahlinfor-mationen und Zusatzdaten
[30] Schutzrecht WO 001998025148 A3 (8. November 1997). Fey, Wolfgang ; Loreck,Heinz ; Zinke, Olaf ; Zydek, Michael (Erfinder); ITT Automotive Europe GmbH(Anmelder). Method and Circuit for Transmitting Information on Rotational Speedand Additional Data
[31] Schutzrecht DE 102006036197 A1 (01. August 2006). Fritz, Wolfgang ; Lohberg,Peter (Erfinder); Continental Teves AG (Anmelder). Anordnung zur Raddrehzah-lerfassung mit erhöhter Eigensicherheit
[32] Schutzrecht EP 000001910780 B1 (01. August 2006). Fritz, Wolfgang ; Lohberg,Peter (Erfinder); Continental Teves AG (Anmelder). Anordnung zur Raddrehzah-lerfassung mit erhöhter Eigensicherheit
[33] Schutzrecht US 020100090690 A1 (01. August 2006). Fritz, Wolfgang ; Lohberg,Peter (Erfinder); Continental Teves AG (Anmelder). Arrangement for Wheel Rota-tional Speed Detection With Increased Intrinsic Safety
[34] Schutzrecht DE 102005022596 A1 (17. Mai 2005). Fritz, Wolfgang ; Lohberg,Peter ; Rink, Klaus (Erfinder); Continental Teves AG (Anmelder). Anordnung zureigensicheren Raddrehzahlerfassung
[35] Schutzrecht WO 2006122945 A1 (17. Mai 2006). Fritz, Wolfgang ; Lohberg, Peter; Rink, Klaus (Erfinder); Continental Teves AG (Anmelder). System for Intrinsi-cally Safe Detection of a Wheel Rotational Speed
[36] Gauss, Eugen: WALSH-Funktionen für Ingenieure und Naturwissenschaftler. Teub-ner Verlag, 1994
[37] Gilbert, T. L.: A Lagrangian formulation of the gyromagnetic equation of themagnetization field. In: Physical Review Bd. 100, 1955
[38] Gintner, Klemens: Ein Sensor auf Basis des anisotropen magnetoresistiven Effek-tes, Friedrich-Alexander-Universität Erlangen-Nürnberg, Diss., 1999
[39] Schutzrecht DE 000010305940 A1 (12. Februar 2003). Gintner, Klemens ; Ret-tig, Rasmus ; Steinrücken, Heinrich ; Walter, Klaus (Erfinder); Robert BoschGmbH (Anmelder). Verfahren zur Diagnose eines Sensors
[40] Schutzrecht EP 000001595113 A1 (12. September 2003). Gintner, Klemens ; Ret-tig, Rasmus ; Steinrücken, Heinrich ; Walter, Klaus (Erfinder); Robert BoschGmbH (Anmelder). Verfahren zur Diagnose eines Sensors
211
Literaturverzeichnis
[41] Schutzrecht WO 002004070319 A1 (12. September 2003). Gintner, Klemens ; Ret-tig, Rasmus ; Steinrücken, Heinrich ; Walter, Klaus (Erfinder); Robert BoschGmbH (Anmelder). Diagnostic Method for a Sensor
[42] Schutzrecht US 020060152226 A1 (26. April 2005). Gintner, Klemens ; Ret-tig, Rasmus ; Steinrücken, Heinrich ; Walter, Klaus (Erfinder); Robert BoschGmbH (Anmelder). Diagnostic Method for a Sensor
[43] Schutzrecht US 000007095238 B2 (26. April 2005). Gintner, Klemens ; Ret-tig, Rasmus ; Steinrücken, Heinrich ; Walter, Klaus (Erfinder); Robert BoschGmbH (Anmelder). Diagnostic Method for a Sensor
[44] Girod, Bernd ; Rabenstein, Rudolf ; Stenger, Alexander K. E.: Einführungin die Systemtheorie: Signale und Systeme in der Elektrotechnik und Informations-technik. 4. Auflage. Vieweg+Teubner Verlag, 2007. – ISBN 9783835101760
[45] Schutzrecht DE 102006036270 A1 (03. August 2006). Grießer, Martin ; Lohberg,Peter (Erfinder); Continental Teves AG (Anmelder). Verfahren zur Bestimmungdes Encoder-Abbildungsfehlers im magnetischen Luftspalt eines Raddrehzahlerfas-sungssystems
[46] Haar, Alfred: Zur Theorie der orthogonalen Funktionensysteme. In:MathematischeAnnalen 69 (1910), Nr. 3, S. 331–371. – ISSN 0025–5831
[47] Heute, Ulrich: Fehler in DFT und FFT: neue Aspekte in Theorie und Anwendung,Universität Erlangen-Nürnberg, Habilitationsschrift, 1982
[48] Hinzke, Denise: Computersimulationen zur Dynamik magnetischer Nanostruktu-ren, Gerhard-Mercator-Universität Duisburg, Diss., 2002
[49] Husstedt, H. ; Ausserlechner, U. ; Kaltenbacher, M.: Measurement of amulti-pole encoder with a magnetic and coordinate measuring machine. In: Instru-mentation and Measurement Technology Conference (I2MTC), 2012 IEEE Interna-tional, 2012. – ISSN 1091–5281, S. 2040–2044
[50] Husstedt, Hendrik: Measurement of Magnetic Fields for the Testing of AutomotiveSensors, Universität Klagenfurt, Diss., 2012
[51] Ida, N. ; Bastos, J.: Electromagnetics and Calculation of Fields. Springer, 1997.– ISBN 9780387948775
[52] Norm IEEE Std 519-1992 Chapter 8 1993. IEEE Recommended Practices and Re-quirements for Harmonic Control in Electrical Power Systems
[53] Infineon: TLE 4942 Differential Two-Wire Hall Effect Sensor IC. Datenblatt.2001
[54] Norm ISO 26262 Teil 1 bis 10 2011. Road vehicles – Functional safety
212
Literaturverzeichnis
[55] Ivanov, Kalin: Fehlersichere Automatisierung eines Encoder-Messplatzes zur Un-tersuchung von ABS-Sensoren, Hochschule für Angewandte Wissenschaften Ham-burg, Diplomarbeit, August 2011
[56] Jegenhorst, Niels: Entwicklung eines Controllersystems zur Zustandserkennungvon ABS-Sensoren, Hochschule für Angewandte Wissenschaften Hamburg, Diplom-arbeit, Oktober 2009
[57] Schutzrecht EP 12178415 (Januar 2012). Jegenhorst, Niels ; Krey, Martin ;Riemschneider, Karl-Ragmar (Erfinder); NXP Semiconductors Germany GmbH(Anmelder). Verfahren und Schaltungsanordnungen zur Diagnose von magnetischenDrehzahlsensoren
[58] Kammeyer, Karl-Dirk: Nachrichtenübertragung. 5. Auflage. Vieweg+TeubnerVerlag, 2011. – ISBN 9783834808967
[59] Kammeyer, Karl-Dirk: Digitale Signalverarbeitung: Filterung und Spektralanalyse.8. Auflage. Vieweg+Teubner Verlag, 2012. – ISBN 9783834816443
[60] Koch, Lennart: Aufwandsminimierte Schätzung von Harmonischen zur Zustands-bestimmung von ABS-Sensoren, Hochschule für Angewandte Wissenschaften Ham-burg, Diplomarbeit, April 2010
[61] Kolerus, Josef ; Wassermann, Johann: Zustandsüberwachung von Maschinen:Das Lehr- und Arbeitsbuch für den Praktiker. 4. Auflage. Expert-Verlag, 2008. –ISBN 9783816925972
[62] Kollmann, Franz G. ; Schösser, Thomas F. ; Angert, Roland: PraktischeMaschinenakustik. 1. Auflage. Springer, 2005. – ISBN 9783540200949
[63] Krey, M. ; Riemschneider, K.-R.: Diagnose von magnetischen Drehzahlsensorendurch fortlaufende Harmonischen-Analyse. In: Internationales Forum Mechatronik.Cham, Germany, September 2011, S. 93–105
[64] Krey, M. ; Riemschneider, K.-R. ; Zippel, S.: Signal synthesis for magneto-resistive speed sensors based on field simulations combined with measured sensorcharacteristic diagrams. In: Instrumentation and Measurement Technology Confe-rence (I2MTC), 2012 IEEE International, 2012. – ISSN 1091–5281, S. 300–305
[65] Krey, M. ; Sabotta, D. ; Zahn, F. ; Riemschneider, K.-R. ; Rettig, R.:Development of Advanced Diagnostic Functions in Very High Volume AutomotiveSensor Applications. In: SOC Conference (SOCC), 2013 IEEE International, 2013,S. 123–128
[66] Krey, Martin ; Riemschneider, Karl-Ragmar: Selbst-Diagnose von ABS-Sensoren mittels integrierter Signalverarbeitung. In: Vortragsreihe Innovationenin Forschung und Entwicklung an der HAW Hamburg (2010)
[67] Krey, Martin ; Riemschneider, Karl-Ragmar: Diagnose von magentischer Sen-soren mittels integrierter Signalverarbeitung. In: Microtec Nord, Hamburg (2011)
213
Literaturverzeichnis
[68] Krey, Martin ; Riemschneider, Karl-Ragmar: Signalverarbeitung zur Funkti-onsdiagnose bei magnetischen Sensoren. In: EForum - Magazin des DepartmentsInformations- und Elektrotechnik an der HAW Hamburg (2011)
[69] Krey, Martin ; Riemschneider, Karl-Ragmar: Eigendiagnose für Raddrehzahl-Sensoren durch Signalanalyse im Sensor-ASIC. In: Tille, Thomas (Hrsg.): Sensorenim Automobil V. Expert-Verlag, 2014. – ISBN 978–3–8169–3207–9, S. 167–181
[70] Kuetgens, Ulrich: PTB-News – Zuverlässige Kfz-Sensoren. Januar 2009
[71] Landau, D. L. ; Lifshitz, E.: On the theory of the dispersion of magnetic per-meability in ferromagnetic bodies. In: Phys. Z. Sowjetunion Bd. 8, 1935, S. 153
[72] Li, Yamin ; Chu, Wanming: A new non-restoring square root algorithm and itsVLSI implementations. In: Computer Design: VLSI in Computers and Processors,1996. ICCD ’96. Proceedings., 1996 IEEE International Conference on, 1996. –ISSN 1063–6404, S. 538–544
[73] Lindner, H. ; Brauer, H. ; Lehmann, C.: Taschenbuch der Elektrotechnik undElektronik. 8. Aufl. Leipzig : Fachbuchverlag, 2005. – ISBN 978–3446210561
[74] Magnet-Physik: Bedienungsanleitung Model FH37 Feldstärkenmessgerät. Fir-menschrift. 1995
[75] Magnet-Physik: Drei-Achsen-Sonde MMZ-2502-UH Datenblatt in Bedienungs-anleitung Model FH37 Feldstärkenmessgerät. 1995
[76] Mahtouf, Abdelkhalek: Messungen und Signalanalyse an einem magnetischenSensor, Hochschule für Angewandte Wissenschaften Hamburg, Diplomarbeit, De-zember 2008
[77] Matz, Hartmut: Persönliche Kommunikation nach Vortrag „Selbst-Diagnose vonAMR-Sensoren mittels integrierter Signalverarbeitung“. 2011
[78] Meyer, Raimund: Zur Realisierung von digitalen Systemen mit Festkomma-Signalprozessoren, Universität Erlangen-Nürnberg, Diss., 1994
[79] Meyer-Bäse, Uwe: Schnelle digitale Signalverarbeitung: Algorithmen, Architektu-ren, Anwendungen. Springer, 2000. – ISBN 9783540676621
[80] MS-Schramberg GmbH & Co. KG: Datenblatt Hartferritmagnet BariumferritHF 8/22. 2008
[81] Norina, Yana: Untersuchung zum Re-Design des Magnetoresistiven ABS SensorsKMZDS24, Hochschule für Angewandte Wissenschaften Hamburg, Studienarbeit,November 2008
[82] NXP Semiconductors: KMA210 Programmable angle sensor. Datenblatt. 2011
214
Literaturverzeichnis
[83] O’Riordan, N.: An automotive multi-chip module for rotational speed and direc-tion measurement. In: Systems on a Chip (Ref. No. 2000/110), IEE Workshop on,2000, S. 8/1–8/6
[84] Ostermann, Robert: Experimentalaufbau einer kombinierten logarithmischen undlinearen Verstärkerbank für ABS-Sensoren, Hochschule für Angewandte Wissen-schaften Hamburg, Bachelorarbeit, März 2012
[85] Philips Semiconductors: KMI15/1 Integrated rotational speed sensor. Daten-blatt. 2000
[86] Philips Semiconductors: KMI18/2 Integrated rotational speed sensor. Daten-blatt. 2000
[87] Philips Semiconductors: KMI22/1 Rotational speed sensor for extended air gapapplication and direction detection. Datenblatt. 2000
[88] Philips Semiconductors: Semiconductor Sensors Data Handbook SC17. Fir-menschrift. 2001
[89] Piorek, Markus: Hard- und Software eines Messsystems zur Harmonischenana-lyse bei magnetischen Winkelsensoren, Hochschule für Angewandte WissenschaftenHamburg, Diplomarbeit, April 2011
[90] Poppinga, Heiko: Controller-Implementation und messtechnische Erprobung derSignalverarbeitung für die Diagnosefunktion von ABS-Sensoren, Hochschule für An-gewandte Wissenschaften Hamburg, Bachelorarbeit, Mai 2011
[91] Preisner, Thomas: Persönliche Kommunikation bei NXP Semiconductors. 2011
[92] Prochaska, M. ; Klabunde, B. ; Butzmann, S.: Simulation von magnetoresis-tiven Sensorsystemen. In: Hanser Automotive (5-6.2008)
[93] Ravaud, R. ; Lemarquand, G. ; Lemarquand, V. ; Depollier, C.: The threeexact components of the magnetic field created by a radially magnetized tile perma-nent magnet. In: Progress In Electromagnetics Research Bd. 88, 2008, S. 307–319
[94] Reed, Irving S. ; Tufts, D.W. ; Yu, X. ; Truong, T.-K. ; Shih, M.-T. ; Yin, X.:Fourier analysis and signal processing by use of the Mobius inversion formula. In:Acoustics, Speech and Signal Processing, IEEE Transactions on 38 (1990), Nr. 3, S.458–470. – ISSN 0096–3518
[95] Reif, Konrad (Hrsg.): Fahrstabilisierungssysteme und Fahrerassistenzsysteme(Bosch Fachinformation Automobil). Vieweg+Teubner Verlag, 2010. – ISBN9783834813145
[96] Reif, Konrad: Automobilelektronik: Eine Einführung für Ingenieure. 4. Auflage.Vieweg+Teubner Verlag, 2011. – ISBN 9783834814982
[97] Reif, Konrad (Hrsg.): Sensoren 1: Grundlagen und Messprinzipien (Automobilelek-tronik lernen). 1. Auflage. Springer Vieweg Verlag, 2012. – ISBN 9783658000400
215
Literaturverzeichnis
[98] Reif, Konrad (Hrsg.): Sensoren im Kraftfahrzeug (Bosch Fachinformation Auto-mobil). 2. Auflage. Vieweg+Teubner Verlag, 2012. – ISBN 9783834817785
[99] Riemschneider, Karl-Ragmar: Experimentelle digitale Signalverarbeitung und Zu-standserkennung für ABS-Sensoren (ESZ-ABS) - Forschungsantrag. Programm In-genieurNachwuchs 2008 des Bundesministeriums für Bildung und Forschung, 2008
[100] Riemschneider, Karl-Ragmar: Eigendiagnose für magnetische ABS-Sensorendurch mitlaufende Harmonischen-Schätzung im Sensor-ASIC (SENDIA) - For-schungsantrag. BMBF Programm Validierung des Innovationspotenzials wissen-schaftlicher Forschung - VIP, 2013
[101] Rostock, Tom: Signalkonditionierung für ABS-Sensoren zur Integration auf einenMixed-Signal-Chip, Hochschule für Angewandte Wissenschaften Hamburg, Master-arbeit, Juni 2013
[102] Sabotta, Daniel: Mixed-Signal Chip-Implementierung eines Diagnosealgorithmusfür die Zustandserkennung von ABS-Sensoren, Hochschule für Angewandte Wissen-schaften Hamburg, Masterarbeit, Februar 2013
[103] Schoermer, Christian: AMR-Messbrücken für ABS-Sensoren, Hochschule für An-gewandte Wissenschaften Hamburg / NXP Semiconductors, Studienarbeit, März2008
[104] Schoermer, Christian: Automatisierter Radmessplatz für ABS-Sensoren mit ak-tiven und passiven Encodern verschiedener Automobil-Hersteller, Hochschule fürAngewandte Wissenschaften Hamburg, Diplomarbeit, 2010
[105] Selove, W.: MTI Receivers. In: Van Voorhis, S.N. (Hrsg.): Microwave Receivers.McGraw-Hill, 1948 (Radiation Laboratory series), Kapitel 21
[106] SENIS GmbH: Datasheet Integrated 3-Axis Hall Probe 03A. 2011
[107] Shaterian, M. ; Abrishamifar, A. ; Shamsi, H.: Analysis and design of the truepiecewise approximation logarithmic amplifiers. In: Analog Integrated Circuits andSignal Processing 72 (2012), Nr. 1, S. 193–203. – ISSN 0925–1030
[108] Shmilovitz, D.: On the definition of total harmonic distortion and its effect onmeasurement interpretation. In: Power Delivery, IEEE Transactions on 20 (2005),jan, Nr. 1, S. 526–528. – ISSN 0885–8977
[109] Siebenmorgen, Frank: Ansteuerelektronik und Mikrocontrollersteuerung einesKreuzspulenmessplatzes für ABS-Sensoren, Hochschule für Angewandte Wissen-schaften Hamburg, Diplomarbeit, Juni 2009
[110] Stahl, Martin: Controllersystem zur Verstärkungsregelung und Offsetkompensationfür ABS-Sensoren mit Diagnosefunktion, Hochschule für Angewandte Wissenschaf-ten Hamburg, Bachelorarbeit, Februar 2010
216
Literaturverzeichnis
[111] Teichert, Frederik: Digital-Down-Converter für Field-Programmable-Gate-Arraysin VHDL, Hochschule für Angewandte Wissenschaften Hamburg / Plath GmbH,Diplomarbeit, März 2009
[112] Temme, Steve: Application Note - Audio Distortion Measurements. Brüel & Kjær,1992
[113] Tietze, Ulrich ; Schenk, Christoph: Halbleiter-Schaltungstechnik. Springer, 1999.– ISBN 9783540641926
[114] Tumanski, Slawomir: Modern magnetic field sensors – a review. In: PrzegladElektrotechniczny 10 (2013). – ISSN 0033–2097
[115] Walsh, J.L.: A Closed Set of Normal Orthogonal Functions. In: American Journalof Mathematics 45 (1923), Januar, Nr. 1, S. 5–24
[116] Schutzrecht DE 102 07 228 A1 (21. Februar 2002). Walter, Klaus ; Rettig,Rasmus (Erfinder); Robert Bosch GmbH (Anmelder). Verfahren zur Kalibrierungeines Sensors und Schaltungsanordnung zum Betreiben eines Sensors
[117] Zahn, Fabian: Entwicklung eines Verfahrens zur Spektralschätzung für die Diagno-se von ABS-Sensorsignalen, Hochschule für Angewandte Wissenschaften Hamburg,Masterarbeit, April 2013
[118] Zippel, Stefan: Analyse des magnetischen Systems eines ABS-Sensors - Feldsimula-tion, automatisierte Kennfeldmessung, Signalsynthese, Hochschule für AngewandteWissenschaften Hamburg, Masterarbeit, Januar 2012
[119] Zölzer, Udo: Digitale Audiosignalverarbeitung. 3. Auflage. Vieweg+Teubner Ver-lag, 2005. – ISBN 9783519261803
217
Lebenslauf
Persönliche Daten
Name: Martin Peter KreyGeburtsdatum: 07.07.1982Geburtsort: Itzehoe
Berufstätigkeit
09/2008 – 12/2013 Hochschule für Angewandte Wissenschaften HamburgWissenschaftlicher Mitarbeiter im Forschungsprojekt:„Experimentelle digitale Signalverarbeitung undZustandserkennung für ABS-Sensoren“
10/2007 – 08/2008 ITD GmbH in HeideHardware-/Softwareentwickler
09/2003 – 09/2006 inray Industriesoftware GmbH in SchenefeldHardware-/Softwareentwickler in Teilzeit
Studium
09/2003 – 08/2007 Fachhochschule Westküste in HeideStudium der Elektrotechnik mit derVertiefungsrichtung Elektronik
03/2007 – 08/2007 Diplomarbeit bei der Basler AG Ahrensburg
Schulausbildung und Berufsausbildung
08/2002 – 06/2003 Fachoberschule Technik Itzehoe09/1999 – 08/2002 Ausbildung zum Informationselektroniker
Schwerpunkt: Geräte- und Systemtechnik(ehem. Radio- und Fernsehtechniker)
08/1993 – 06/1999 Realschule Wilster
218





























