Embed Size (px)
Citation preview
Christian Hähnel
Regelung zum effizienten Betrieb eines PEM-Brennstoffzellensystems
Hamburg, 2017

__

Regelung zum effizienten Betrieb
eines PEM-Brennstoffzellensystems
Von der Fakultät für Elektrotechnik
der Helmut-Schmidt-Universität/Universität der Bundeswehr Hamburg
zur Erlangung des akademischen Grades eines Doktor-Ingenieurs
genehmigte
Dissertation vorgelegt von
Christian Hähnel
aus Oranienburg
Hamburg, 2017

Erstgutachter: Prof. Dr.-Ing. Joachim Horn
Zweitgutachter: Prof. Dr.-Ing. Harald Aschemann
Tag der mündlichen Prüfung: 27. Februar 2017
__
Vorwort
Diese Arbeit entstand während meiner Zeit als wissenschaftlicher Mitarbeiter an
der Professur für Regelungstechnik der Helmut-Schmidt-Universität/Universität
der Bundeswehr Hamburg.
Allen Beteiligten danke ich für die Unterstützung bei der Erstellung dieser Disser-
tation. Mein besonderer Dank gilt dabei Herrn Prof. Dr.-Ing. Joachim Horn für
Anregung zu dieser Arbeit, das entgegengebrachte Vertrauen und die Übernahme
des Hauptreferats.
Herrn Prof. Dr.-Ing. Harald Aschemann danke ich für die Übernahme des Korrefe-
rats und Prof. Dr.-Ing. Stefan Dickmann für die Übernahme des Vorsitzes der Prü-
fungskommission.
Besonderer Dank gilt meiner Familie für den erbrachten Rückhalt während der Zeit
als Wissenschaftlicher Mitarbeiter und im Endstadium der Fertigstellung dieser
Arbeit.
Hamburg, im Februar 2017
Christian Hähnel

VII
__________________________________________________________________________
Inhaltsverzeichnis
1 Einleitung 1
2 Brennstoffzellen 5
2.1 Brennstoffzellenarten 5
2.2 Polymer-Elektrolyt-Membran-Brennstoffzellen 10
3 Physikalische Modellbildung 17
3.1 Polarisationskurve 18
3.2 Druckbildung im Kathodenvolumen 21
3.3 Druckbildung im Anodenvolumen 26
4 Regelung der Zellleistung und des Kathodendrucks 29
4.1 Nichtlineare Modellprädiktive Regelung 29
4.2 Reglermodell und Kostenfunktion zur Leistungsregelung 41
4.3 Reglermodell und Kostenfunktion zur Kathodendruckregelung 51
5 Regelung des Anodendrucks 55
5.1 Reglermodell und Druckregelung 55
5.2 Problemstellung 57
5.3 Iterativ Lernende Regelung 61
5.4 ILR-Struktur und Aufbau des Lernfilters 69
5.5 Optimierend Iterativ Lernende Regelung 79
6 Experimentelle Ergebnisse 87
6.1 Brennstoffzellenprüfstand und Peripherie 87
6.2 Brennstoffzellenstack PM 200 92
6.3 Leistungsregelung 94
6.4 Kathodendruckregelung 108
6.5 Anodendruckregelung 113
7 Zusammenfassung und Ausblick 129
Anhang: Modellprädiktive Regelung des Anodendrucks 131
Literaturverzeichnis 133
Veröffentlichungen und Fachbeiträge 141
VIII
__________________________________________________________________________
Nomenklatur
Verwendete Abkürzungen
Abkürzung Erläuterung
AN Anode
AFC Alkalische Brennstoffzellen (engl.: Alkaline Fuel Cell)
BZ Brennstoffzelle
BZS Brennstoffzellensystem
CVM (Einzel-)Zellspannungsüberwachung
(engl.: Cell Voltage Monitoring)
DMFC Direktmethanolbrennstoffzelle (engl.: Direct Methanol Fuel Cell)
EKF Erweitertes Kalman Filter
EW Endwert eines Messbereichs
FC Brennstoffzelle (engl.: Fuel Cell)
ILR Iterativ Lernende Regelung
KA Kathode
KF Kalman-Filter
MCFC Karbonat-Schmelze-Brennstoffzellen
(engl.: Molten Carbonate Fuel Cell)
MFC Massenstromgeregeltes Ventil zur Gasversorgung
(engl.: Mass Flow Controller)
MPR Modellprädiktive Regelung
NMPR Nichtlineare Modellprädiktive Regelung
OILR Optimierend Iterativ Lernende Regelung
PAFC Phosphorsäure-Brennstoffzellen (engl.: Phosphoric Acid Fuel Cell)
PEM Polymer-Elektrolyt-Membran
P Proportional (-Regler)
PI Proportional-Integral (-Regler)
SEP Wasserabscheider (Separator)
SOFC Oxidkeramische Brennstoffzellen (engl.: Solid Oxide Fuel Cell)
SPKF Sigma-Punkt Kalman Filter
SQP Sequentielle Quadratische Programmierung
IX
__________________________________________________________________________
Abkürzung Erläuterung
vol. Volumenprozent
WT Wärmetauscher
Physikalische Konstanten
Konstante Wert Einheit Erläuterung
F 96485 C/mol Faraday-Konstante
MH2 2,016 g/mol Molare Masse von Wasserstoff
MO2 32,00 g/mol Molare Masse von Sauerstoff
MN2 28,01 g/mol Molare Masse von Stickstoff
R 8,3145 J/(molK) allgemeine Gaskonstante
RH2 4124,24 J/(kgK) Spezifische Gaskonstante von Wasserstoff
RN2 296,84 J/(kgK) Spezifische Gaskonstante von Stickstoff
RO2 259,83 J/(kgK) Spezifische Gaskonstante von Sauerstoff
xO2 0,233 Massenanteil von Sauerstoff in der Luft
xN2 0,767 Massenanteil von Stickstoff in der Luft
Symbolverzeichnis
Konstante Einheit Erläuterung
A Systemmatrix des Zustandsraummodells
A Systemmatrix des Zustandsraummodells (linearisiert)
Ad Systemmatrix des Zustandsraummodells (zeitdiskret)
A m2
Geometrische Durchlassfläche des Ventils/der Blende
α Kontraktionszahl
B Eingangsmatrix des Zustandsraummodells
b Eingangsvektor des Zustandsraummodells
Bd Eingangsmatrix des Zustandsraummodells (zeitdiskret)
bd Eingangsvektor des Zustandsraummodells (zeitdiskret)
C Ausgangsmatrix des Zustandsraummodells
c Ausgangsvektor des Zustandsraummodells
cd Ausgangsvektor des Zustandsraummodells
(zeitdiskret)
C mol Kohlenstoff
X
__________________________________________________________________________
Konstante Einheit Erläuterung
D Durchgangsmatrix des Zustandsraummodells
dIMAX A/s Maximal zulässiger Stromstärkeanstieg
dIMIN A/s Maximal zulässiger Stromstärkeabfall
E Gütemaß der Regelgüte
E0 Reversible Standardzellspannung
e Regelabweichung
e- mol Elektron
e2 Auskopplungsvektor
ε Genauigkeit der Lösung des Optimierungsproblems
f % Relativer Regelfehler
f Funktion
fS Übertragungsverhalten einer Vorsteuerung
G Übertragungsfunktion
G0 Standardreaktionsenthalpie
g Funktion
H mol Wasserstoff
H Beobachtungsmatrix
h Ventilstellung der Abgasventile
I Einheitsmatrix
ISTACK A Brennstoffzellenstackstromstärke
i Zeitschritt in einer Iteration oder einem Prädiktion-
zeitraum
J Gütemaß der Optimierung
j Index für die Zeitabhängigkeit
K Proportionalverstärkung eines linearen Reglers
KV m3/s Durchflusskoeffizient
KVS
m3/s Durchflusskoeffizient bei maximaler Öffnung
k Zahl der Iteration
k Aktueller Zeitschritt
L Lernfilter
l Element des Lernfilters L
m Relativer Grad eines zeitdiskreten Systems
XI
__________________________________________________________________________
Konstante Einheit Erläuterung
N Dauer eines Lernvorgangs in Schritten
N mol Stoffmenge
λ Luftzahl, Stöchiometrie
nEL Anzahl überführter Elektronen
nZELLEN Anzahl der Einzelzellen eines Brennstoffzellenstacks
n Anzahl der Iterationen des Optimierers
Φ0 Relativer Durchflusskoeffizient bei geschlossenem
Ventil
Φ Transitionsmatrix
O mol Sauerstoff
P Impulsantwortmatrix
P Kovarianzmatrix
P , p Element der Impulsantwortmatrix P
PSTACK W Elektrische Brennstoffzellenstackleistung
p Pa Druck
p0 101325 Pa Standarddruck
ζ Modellparameter der Zellspannung
Q (Tiefpass-)Filtermatrix
Q Kovarianzmatrix des Prozessrauschens
Q As Elektrische Ladung
q Gewichtungsfaktoren
R Reglermatrix
R Kovarianzmatrix des Messrauschens
ρ kg/m3
Dichte
TSTACK K Brennstoffzellenstacktemperatur
T0 298,15 K Temperatur bei 25 °C
T s Dauer einer Iteration
tS s Abtastzeit
t Zeitabhängigkeit in Zeitschritten
u Eingangsgrößenvektor
u Eingangsgröße
USTACK V Brennstoffzellenstackspannung
XII
__________________________________________________________________________
Konstante Einheit Erläuterung
UZELLEN V Einzelzellspannung
W Nl/min Massenstrom
x Zustandsvektor
x Zustandsgröße
xU Messgröße der zu korrigierenden Eingangsgröße
y Ausgangsvektor
y Ausgangsgröße
z Störgröße
^ Geschätzte Größe
AN Größe im anodischen Gassystem
C Steuergröße (engl. control variable)
d Zeitdiskrete Darstellung
KA Größe im kathodischen Gassystem
M Messgröße
OPT Lösung eines Optimierungsproblems
P Größe der Leistungsregelung
p Größe der Druckregelung
REF Referenzwert einer Regelgröße
R Größe eines linearen Reglers
S Größe einer Strecke
STACK Größe des Brennstoffzellenstacks
ST Größe des Brennstoffzellenstacks (Abk.)
XIII
__________________________________________________________________________
Kurzfassung
Die vorliegende Arbeit soll einen Beitrag zum effizienten Betrieb von PEM-
Brennstoffzellensystemen im Hinblick auf deren Regelung leisten. Beschrieben
wird die Modellierung als Grundlage der Leistungs- und kathodenseitigen Druck-
regelung. Die Modellbildung basiert auf chemischen, strömungstechnischen, geo-
metrischen und elektrischen Zusammenhängen. Das elektrische Modell und die
Strömungsübergänge am verwendeten Ventil zur kathodenseitigen Nachdruckrege-
lung sowie dessen Ventilcharakteristik sind stark nichtlinear. Anwendung findet
daher die Nichtlineare Modellprädiktive Regelung für den kontinuierlichen Betrieb
der Brennstoffzelle zur elektrischen Leistungsbereitstellung. Für die aus verschie-
denen Gründen auftretenden Modellungenauigkeiten wird die Modellprädiktive
Regelungsstrategie um eine Modellkorrektur ergänzt, sodass stationäre Genauig-
keit während verschiedener Belastungsszenarien sichergestellt ist. Als Grundlage
der Modellkorrektur wird ein Erweitertes Kalman-Filter eingesetzt. Für die ano-
denseitige Druckregelung wird während der regelmäßigen Spülvorgänge die Itera-
tiv Lernende Regelung eingesetzt. Der Wasserstoffdruck soll während der Spül-
vorgänge, die dem Entfernen von angesammeltem Wasserkondensat auf den Reak-
tionsflächen und Stickstoff im System dienen, konstant bleiben, um einerseits den
Druckunterschied zwischen Anoden- und Kathodenvolumen zu begrenzen sowie
andererseits die positive Auswirkung des konstanten Drucks während der Spülvor-
gänge zu nutzen. Der Vorgang kann schneller und im Hinblick auf ein exakt zu
extrahierendes Volumen je Spülvorgang präziser durchgeführt werden. Der Aufbau
verschiedener Lernfilter und die Anwendung der klassischen Iterativ Lernenden
Regelung sowie der Optimierend Iterativ Lernenden Regelung werden gezeigt. Die
verschiedenen Regelungsstrategien werden an einem Brennstoffzellensystem mit
einer elektrischen Spitzenleistung von 4,4 kW umgesetzt.

XIV
__________________________________________________________________________
Seite 1
__________________________________________________________________________
1 Einleitung
Durch den Ausbau regenerativer Energien und der damit verbundenen unregelmä-
ßigen Energiewandlung aus Sonnen- und Windkraftanlagen rücken zeitunabhängi-
ge Energiewandler und -speicher mehr in den Fokus der Forschung und Entwick-
lung. Neben Pump-, Druck-, Batterie- und Schwungradspeichern stellen Brenn-
stoffzellen einen Teil dieser Energiewandler und -speicher dar. Brennstoffzellen
sind in der Lage, chemische Energie in elektrische und thermische Energie zu
wandeln. Auf diesem Weg ist es möglich, die zunächst nicht benötigte und somit
überschüssige elektrische Energie aus regenerativen Energien beispielsweise in
Wasserstoff oder Methanol zu wandeln, um sie transport- und vor allem speicher-
fähig zu machen. Die anschließend vorliegenden chemischen Energieträger können
dann in verschiedensten Bereichen Anwendung finden. Bereiche der Mobilität, wie
in der Personenbeförderung, im Lieferverkehr oder in der Schifffahrt, sowie statio-
näre Anwendungen, wie Heizungsanlagen mit Kraftwärmekopplung in Privathaus-
halten, haben Einzug in den Markt der Brennstoffzellen erhalten. Mit dem steigen-
den Anspruch an den Umweltschutz bietet die lokal emissionsfreie Brennstoffzelle
zudem eine Möglichkeit für den innerstädtischen Verkehr.
Unabhängig davon, ob chemische in elektrische, mechanische in thermische, ther-
mische in elektrische oder elektrische in elektrische Energie gewandelt wird, müs-
sen sich alle Energiewandler vergleichenden Betrachtungen stellen. Auch die
Brennstoffzelle unterliegt als galvanischer Energiewandler der Untersuchung ihres
Wirkungsgrads, ihrer Teillastfähigkeit, ihrer Langlebig- und Zuverlässigkeit. Hin-
sichtlich aller genannten Vergleichsfaktoren werden die Energiewandlungen von
internen und externen Faktoren beeinflusst. Mit Blick auf die internen Einflüsse
der chemischen Reaktion einer Brennstoffzelle ist die Betriebsführung im Allge-
meinen zu nennen. Die Betriebsführung überwacht die Zuführungen der Reaktan-
ten, das Einhalten von Temperaturen, um nicht zuletzt die bereitgestellte elektri-
sche Energie unter den Gesichtspunkten des Wirkungsgrads, des Verschleißes und
der Langlebigkeit sicherzustellen.
Mit zunehmendem Anspruch an eine schnelle Energiebereitstellung findet die
Betriebsführung unter Beachtung von optimalen Betriebsbedingungen nicht nur in
gleichbleibenden, stationären Arbeitspunkten Einfluss, sondern auch in dynami-
schen Lastszenarien. Für alle Energiewandler und die dazugehörige Peripherie ist
dieser Anspruch in den Fokus gerückt. Die Beachtung von Betriebsbedingungen
mit dem Ziel der Bereitstellung elektrischer Energie bildet die Grundlage dieser
Arbeit für eine Brennstoffzelle. Bei Lastanforderungen sind die Vorgaben der
Einleitung Seite 2
__________________________________________________________________________
Hersteller arbeitspunktabhängig zu beachten. Hierzu zählen die Ein- und Aus-
gangstemperaturen, die Drücke der zugeführten Reaktanten sowie deren Druckun-
terschied und die Reaktantenzufuhr. Die vorliegende Arbeit soll zur Einhaltung
dieser Vorgaben - auch während der Lastwechsel im gesamten Arbeitsbereich - mit
Blick auf die Effizienz und Langlebigkeit einer Polymer-Elektrolyt-Membran-
(PEM-) Brennstoffzelle beitragen.
Aufbau und Ziele der Arbeit
Zu Beginn der Arbeit wird ein Überblick über die verbreiteten Brennstoffzellenar-
ten gegeben. Näher eingegangen wird auf den verwendeten Typ der PEM-
Brennstoffzellen. Anschließend werden im dritten Kapitel als Grundlage für die
Regelung regelungsorientierte Modelle mit Hilfe der physikalischen Grundlagen
aufgestellt. Diese Modelle beziehen sich einerseits auf die Brennstoffzellenleistung
in Abhängigkeit der Haupteinflussparameter und andererseits auf die Reaktanten-
zuführung sowie die Druckbildung im Brennstoffzellensystem. Für die Druckbil-
dung werden Ventile mit gleichprozentigen Kennlinien verwendet, welche in
Kombination mit Strömungsübergängen starke nichtlineare Zusammenhänge bil-
den.
Diese Modelle dienen als Grundlage der im vierten Kapitel vorgestellten Regelung
der elektrischen Brennstoffzellenstackleistung sowie des Anoden- und Kathoden-
drucks. Als Regelungsstrategie wird die Nichtlineare Modellprädiktive Rege-
lung (NMPR) zur Leistungs- und kathodenseitigen Druckregelung verwendet. Die
Grundlage dieser Regelungsstrategie mit den dazugehörigen Gütefunktionalen und
den Regelungsmodellen, als Ausgangspunkt für die nichtlinearen Optimierungs-
probleme, werden ausführlich dargestellt. Die NMPR wird zudem genutzt, da ne-
ben den nichtlinearen Modellen relative und absolute Beschränkungen direkt in
den Reglerentwurf einfließen können. Zu diesen Beschränkungen zählen die ar-
beitspunktabhängige Luftzahl, die Verstellgeschwindigkeiten des Abgasventils, der
Stackstromstärkeanstieg sowie die Arbeitsbereiche der Stackstromstärke und der
Stackspannung. Die Luftzahl beschreibt hierbei das Verhältnis von bereitgestelltem
und benötigtem Sauerstoff für die chemische Reaktion. Für auftretende Modellun-
genauigkeiten wird die NMPR-Strategie um eine Modellkorrektur erweitert. Für
diese Korrektur, welche auf das elektrische Modell Einfluss nimmt, wird ein Er-
weitertes Kalman-Filter (EKF) genutzt.
Das Ziel der Leistungsregelung ist es, von jedem Arbeitspunkt einen möglichst
schnellen Lastwechsel präzise zu einem gewünschten Arbeitspunkt durchzuführen.
Die genannten Vorgaben des Brennstoffzellenherstellers gilt es dabei in Hinblick
auf die Effizienz und Langlebigkeit einzuhalten. Der Fokus liegt hierbei auf der
Einleitung Seite 3
__________________________________________________________________________
Versorgung der Brennstoffzelle mit den benötigten Reaktanten Wasser- und Sauer-
stoff. Ein weiterer Schwerpunkt bei der Umsetzung der Regelung in dieser Arbeit
ist die Echtzeitfähigkeit und die Anwendung aller gezeigten Strategien am realen
Brennstoffzellensystem.
Für die nicht direkt messbaren Positionen der Abgasventile werden Schätzungen
vorgenommen. Für das kathodenseitige Abgasventil kommt ein Sigma-Punkt-
Kalman-Filter (SPKF) zum Einsatz. Dieses kann mit oder ohne Information des
Ventilsollwerts betrieben werden, sodass es gleichzeitig die Grundlage einer
Fehlerdetektion bilden kann.
Das fünfte Kapitel beschreibt die Verfahren zur anodischen Druckregelung. Um
diese Regelung und die Wasserstoffzufuhr im Betrieb sicherzustellen, wird ein
linearer Regler mit statischer Vorsteuerung gewählt. Der nicht genutzte Wasser-
stoff wird über eine Rezirkulation an den Beginn des Brennstoffzellenstacks ge-
führt und somit erneut genutzt. In Abhängigkeit der gewandelten Ladungsmenge
ist es notwendig, das anodenseitige Abgasventil regelmäßig zu öffnen, um den
durch die Membran diffundierten Stickstoff und das angesammelte Wasserkonden-
sat herauszuspülen. Der Einfluss dieser beiden Stoffe auf die chemische Reaktion
und die Beschädigung des Brennstoffzellenstacks soll somit verhindert werden. Für
diesen regelmäßig auftretenden Vorgang wird die Iterativ Lernende Rege-
lung (ILR) eingesetzt, um einerseits den Druck während der Spülvorgänge mög-
lichst konstant zu halten und andererseits diesen Vorgang möglichst schnell durch-
zuführen. Im Rahmen dieser Arbeit kommt es erstmals zur Anwendung einer ILR
an einem Brennstoffzellensystem. Einleitend für die Anwendung der ILR werden
die Implementierungsmöglichkeiten dieses Reglers in die vorhandene Regelungs-
struktur gezeigt und die verschiedenen Aufbauvarianten des der ILR zugrunde
liegenden Lernfilters dargestellt. Abschließend wird in diesem Kapitel die Anwen-
dung der Optimierend Iterativ Lernenden Regelung (OILR) und die Anpassung des
Spülvolumens für den Spülvorgang vorgestellt.
Das sechste Kapitel der Arbeit zeigt das verwendete PEM-Brennstoffzellensystem
mit dem Brennstoffzellenstack PM 200 der Fa. Proton Motor und die experimentel-
len Ergebnisse der Leistungsregelung sowie der anoden- und kathodenseitigen
Druckregelung auch während der Spülvorgänge. Für die Druckregelung während
der Spülvorgänge werden die Einflüsse und die Ergebnisse durch die unterschiedli-
chen Lernfilter vergleichend gegenübergestellt.
Alle erstellten Regelungsstrategien werden an einem Brennstoffzellenprüfstand der
Fa. FuelCon, der bis zu einer maximalen elektrischen Leistung von 5 kW ausgelegt
ist, durchgeführt. Der verwendete Brennstoffzellenstack der Fa. Proton Motor
Einleitung Seite 4
__________________________________________________________________________
liefert bis zu 4,4 kW elektrische Leistung, besteht aus 48 Einzelzellen und hat eine
Spitzenstromstärke im Arbeitsbereich von 150 A.
In der vorliegenden Arbeit werden Vorgaben des effizienten Betriebs anhand von
Herstellerangaben als Referenz- und Grenzwerte genutzt. Die Arbeit zeigt neben
den Ergebnissen der unterschiedlichen Regelungsstrategien keine zusätzlichen
Untersuchungen für die optimalen oder effizientesten Betriebsbedingungen einer
PEM-Brennstoffzelle. Zudem findet keine Betrachtung der für den Betrieb not-
wendigen Peripheriegeräte wie Kühlung, Reaktantenbereitstellung oder Span-
nungswandlung hinsichtlich der Gesamteffizienz sowie der An- und Abfahrvor-
gänge statt.
Seite 5
__________________________________________________________________________
2 Brennstoffzellen
In diesem Kapitel werden zunächst die verschiedenen Brennstoffzellentypen vor-
gestellt, um die Unterschiede, Betriebsanforderungen und Einsatzszenarien darzu-
stellen. Anschließend wird auf den in der Arbeit verwendeten Typ, die PEM-
Brennstoffzelle, eingegangen. Die Darstellungen und Ausführungen basieren
auf [38], [39], [40] und [48].
Brennstoffzellen gehören zu den galvanischen Elementen, die unter Nutzung von
zugeführten Reaktanten deren chemische Energie in elektrische wandeln. Es
kommt ohne den Umweg über thermische Energie zur Wandlung der freien Ent-
halpie einer elektrochemischen Redoxreaktion. Diese Oxidation, die Energiewand-
lung, findet immer bei einem vorhandenen thermodynamischen Ungleichgewicht
statt. Bei Brennstoffzellen gibt es kein Zwischenmedium wie Wasser oder Dampf
und keine Verbrennung oder Explosion mit offener Flamme. Folglich kommt es
nicht zu einer Wandlung von chemischer in thermische und anschließend in me-
chanische und elektrische Energie wie in Wärmekraftmaschinen unter Nutzung
von Generatoren. Diese direkte Wandlung resultiert in höhere Wirkungsgrade
durch den Wegfall der Wandlungsverluste.
2.1 Brennstoffzellenarten
Verschiedene Arten von Brennstoffzellen waren in den letzten Jahren im Fokus der
Forschung und Entwicklung. Diese kommen aufgrund ihrer spezifischen Eigen-
schaften zu verschiedenen Einsatzgebieten. Nachfolgend ist zunächst dargestellt,
wie sich die Brennstoffzellarten nach Reaktionsgasen, Betriebstemperaturen und
Wirkungsgraden unterscheiden.
Brennstoffzellen Seite 6
__________________________________________________________________________
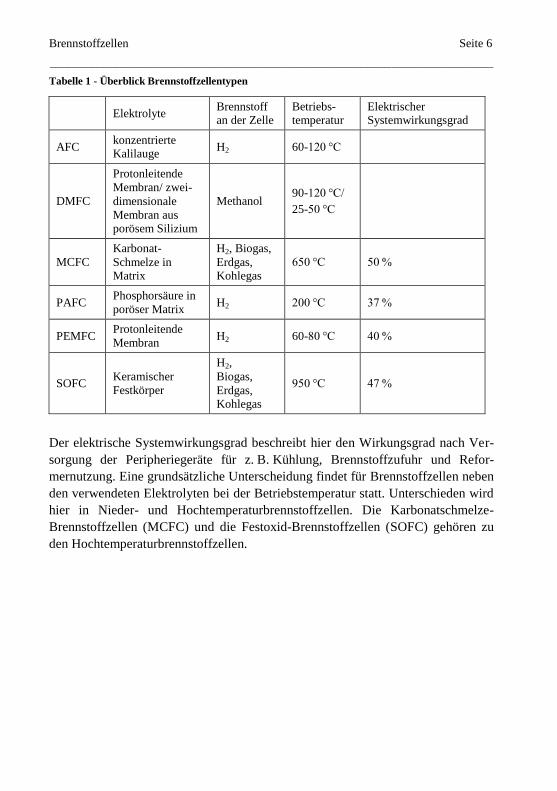
Tabelle 1 - Überblick Brennstoffzellentypen
Elektrolyte Brennstoff an der Zelle
Betriebs-temperatur
Elektrischer Systemwirkungsgrad
AFC konzentrierte Kalilauge
H2 60-120 °C
DMFC
Protonleitende
Membran/ zwei-
dimensionale
Membran aus porösem Silizium
Methanol 90-120 °C/
25-50 °C
MCFC
Karbonat-
Schmelze in Matrix
H2, Biogas,
Erdgas, Kohlegas
650 °C 50 %
PAFC Phosphorsäure in
poröser Matrix H2 200 °C 37 %
PEMFC Protonleitende
Membran H2 60-80 °C 40 %
SOFC Keramischer
Festkörper
H2,
Biogas,
Erdgas, Kohlegas
950 °C 47 %
Der elektrische Systemwirkungsgrad beschreibt hier den Wirkungsgrad nach Ver-
sorgung der Peripheriegeräte für z. B. Kühlung, Brennstoffzufuhr und Refor-
mernutzung. Eine grundsätzliche Unterscheidung findet für Brennstoffzellen neben
den verwendeten Elektrolyten bei der Betriebstemperatur statt. Unterschieden wird
hier in Nieder- und Hochtemperaturbrennstoffzellen. Die Karbonatschmelze-
Brennstoffzellen (MCFC) und die Festoxid-Brennstoffzellen (SOFC) gehören zu
den Hochtemperaturbrennstoffzellen.
Brennstoffzellen Seite 7
__________________________________________________________________________
Alkalische Brennstoffzellen
(Alkaline Fuel Cell, AFC)
Reaktanten: Wasserstoff (Anode), reiner Sauerstoff (Kathode)
Anodenreaktion: 2 22H 4OH 4H O 4e
Kathodenreaktion: 2 2O 2H O 4e 4OH
Die AFC gehört zu den Niedertemperaturbrennstoffzellen und wird im Gegensatz
zu den meisten anderen Brennstoffzellentypen mit reinem Sauerstoff betrieben. Für
den Einsatz in der bemannten Raumfahrt oder in U-Booten bietet dies einen Vor-
teil, da ein Betrieb somit außenluftunabhängig möglich ist. Die Robustheit dieser
Brennstoffzellensysteme unterstreicht zudem der Einsatz unter extremen Bedin-
gungen. Ein weiterer Vorteil ist der vergleichsweise hohe Wirkungsgrad und das
gute dynamische Verhalten, d. h. Lastwechsel sind schnell realisierbar und einer
Leistungsanforderung kann entsprechend nachgekommen werden. Der Einsatz des
reinen Sauerstoffs ist zudem in der möglichen Reaktion mit Kohlendioxid aus der
Luft mit dem alkalischen Elektrolyt zu Kaliumkarbonat begründet. Eine Blockade
der Poren zur Gasdiffusion wäre die Folge. Die sehr hohe Empfindlichkeit gegen-
über Kohlendioxid ist als Nachteil zu nennen. Auch die im Vergleich geringe Le-
bensdauer durch die korrosiven Elektrolyte ist ein Nachteil dieses Brennstoffzel-
lentyps.
Direktmethanol-Brennstoffzellen
(Direct Methanol Fuel Cell, DMFC)
Reaktanten: Methanol (Anode), Luftsauerstoff (Kathode)
Anodenreaktion: 3 2 22CH OH 2H O 12H 12e 2CO
Kathodenreaktion: 2 23O 12H 12e 6H O
Eine Verwendung von flüssigem Methanol ist bei der DMFC ohne vorherige Re-
formierung zu Wasserstoff direkt möglich. Ein einfacher Umgang mit dem Brenn-
stoff, z. B. beim Nachfüllen der Vorratsbehälter, und eine geringere Baugröße als
bei einer PEM-Brennstoffzelle mit Reformer, was für einen mobilen Einsatz
spricht, sind die Folge. Für die benötigte Reaktion auf der Anodenseite wird dem
Methanol Wasser beigefügt. Auch das Reaktionswasser, welches kathodenseitig
entsteht, kann für diesen Vorgang genutzt werden. Dem liegt allerdings ein auf-
wendiges Wassermanagement zugrunde. Die DMFC gehört zu den Niedertempera-
turbrennstoffzellen und verwendet in der Regel ein Gemisch aus Platin und Ruthe-
Brennstoffzellen Seite 8
__________________________________________________________________________
nium als Katalysator. Ein Nachteil der Nutzung von Methanol ist dessen Wasser-
löslichkeit, was ihm ermöglicht, durch die Membran zu diffundieren. Dieser Vor-
gang verunreinigt die Kathoden und setzt folglich die Zellspannung herab.
Phosphorsäure-Brennstoffzellen
(Phosphoric Acid Fuel Cell, PAFC)
Reaktanten: Wasserstoff (Anode), Luftsauerstoff (Kathode)
Anodenreaktion: 22H 4H 4e
Kathodenreaktion: 2 24H 4e O 2H O
Die PAFC ist in verschiedensten industriellen Anwendungen eingesetzt und ent-
sprechend weitverbreitet, da sie eine hohe Nutzungsdauer von bis zu 40000 h und
mehr aufweist. Die PAFC wird mit Umgebungsdruck betrieben, was zusätzliche
Peripherie einspart. Wie der DMFC ist es der PAFC möglich, CO2-haltige Reakti-
onsgase, wie z. B. Biogas, zu verwenden. Die hohe Arbeitstemperatur von
über 160 °C bringt den Vorteil der erhöhten CO-Toleranz im zugeführten Brenn-
stoff. Diese Toleranz ermöglicht den Einsatz eines Reformers, der den Wasserstoff
in einem vorherigen Wandlungsschritt aus z. B. Erdgas der Reaktion zur Verfü-
gung stellt. Ein weiterer Vorteil der hohen Betriebstemperatur ist der mögliche
Einsatz der Brennstoffzelle in kombinierten Energie-Wärme-Systemen. Diese
Kombination erhöht den Gesamtwirkungsgrad des Systems erheblich. Nachteil der
hohen Betriebstemperatur sind lange Anfahrprozesse, was in der Folge einen
schnellen Einsatz unmöglich macht. Die Elektroden der PAFC bestehen aus einem
porösen Trägermaterial mit dem Hauptbestandteil Graphit, welches wiederum mit
einer porösen Schicht aus Platin-Partikeln und Polytetrafluorethylen bestückt ist.
Die als Elektrolyt verwendete hochkonzentrierte Phosphorsäure ist in einer Struk-
tur mit Siliziumcarbid gebunden.
Festoxid-Brennstoffzellen
(Solid Oxide Fuel Cell, SOFC)
Reaktanten: Wasserstoff, Methan (Anode),
Luftsauerstoff (Kathode)
Anodenreaktion: 2
2 22H 2O 2H O 4e
Kathodenreaktion: 2
2O 4e 2O
Für den Aufbau dieser Hochtemperaturbrennstoffzelle gibt es verschiedene bauli-
che und chemische Konzepte unter Nutzung verschiedener oxidionenleitender
Brennstoffzellen Seite 9
__________________________________________________________________________
Keramiken. Sehr hohe Zellreaktionen werden durch die hohen Temperaturen be-
dingt und ermöglichen sehr hohe Stromdichten bis 250 mA/cm2. Die hohen Tem-
peraturen ermöglichen eine interne Reformierung von Methan zu Wasserstoff und
eine Toleranz von CO-Verunreinigungen in den Brennstoffen. Die hohe Lebens-
dauer und der einfache Systemaufbau zeichnen die SOFC aus. Zudem wird kein
Elektrolytmanagement benötigt, was die Überwachung an dieser Stelle vereinfacht.
Für den stationären und dauerhaften Einsatz ist sie aufgrund komplexer Anfahr-
vorgänge geeignet, da auch hier viel Zeit benötigt wird, um die Betriebstemperatur
zu erreichen. Mit der Auskopplung der sehr hohen nutzbaren Temperaturen eignet
sich die Zelle ideal für Kraft-Wärme-Kopplung.
Karbonatschmelze-Brennstoffzellen
(Molton Carbonate Fuel Cell, MCFC)
Reaktanten: Wasserstoff, Methan (Anode),
Luftsauerstoff (Kathode)
Anodenreaktion: 2
2 3 2 22H 2CO 2H O 2CO 4e
Kathodenreaktion: 2
2 2 3O 2CO 4e 2CO
Ähnlich der SOFC ermöglicht die hohe Betriebstemperatur von 650 °C eine interne
Reformierung von Methan oder anderen Kohlenwasserstoffen zu Wasserstoff. Die
notwendige Gasreinigung des Brenngases bezieht sich auf Schwefel- und Chlor-
verbindungen. Die MCFC nutzen als Elektrolyt eine Mischung aus Alkali-, Kali-
um- und Lithiumkarbonaten, die in geschmolzener Form in einer Matrix vorliegen.
Durch die Einbindung von Kohlendioxid in die chemische Reaktion eignet sich
die MCFC für die Wandlung von kohlenwasserstoffhaltigen Brennstoffen in elekt-
rische Energie. Die MCFC zeichnet sich durch einen hohen Wirkungsgrad von
über 55 % und die Möglichkeit der Auskopplung der Prozesswärme aus. Nachteile
zeigen sich bei der notwendigen Überwachung vom Elektrolyt und des CO2-
Tranfers zwischen Anoden und Kathodenvolumen sowie bei den langen Anfahr-
phasen eines solchen Brennstoffzellensystems. Ein Einsatz ist somit nur im Grund-
und Dauerlastbetrieb möglich.
Brennstoffzellen Seite 10
__________________________________________________________________________
2.2 Polymer-Elektrolyt-Membran-Brennstoffzellen
(Proton Exchange Membrane Fuel Cell, PEMFC)
Die in der Arbeit verwendete Polymer-Elektrolyt-Brennstoffzelle wird hinsichtlich
ihrer Nutzung, der chemischen Reaktion und der Betriebsbedingungen im Folgen-
den beschrieben.
Aufbau, Betrieb und Funktionsweise
Die PEMFC wird anodenseitig mit reinem Wasserstoff und kathodenseitig mit
Umgebungsluft betrieben. Eine einzelne Brennstoffzelle besteht aus Anode, Ka-
thode und der namensgebenden Polymerschicht. Die nicht leitfähige Polymer-
schicht ist für Protonen und Wasser durchlässig. Undurchlässig ist die Membran
hingegen für die gasförmigen Reaktanten. Sie dient somit als Separator. Zudem
übernimmt die Membran die Funktion des Elektrolyt- und des Katalysatorträgers
für die anodischen und kathodischen Elektrolytkatalysatoren.
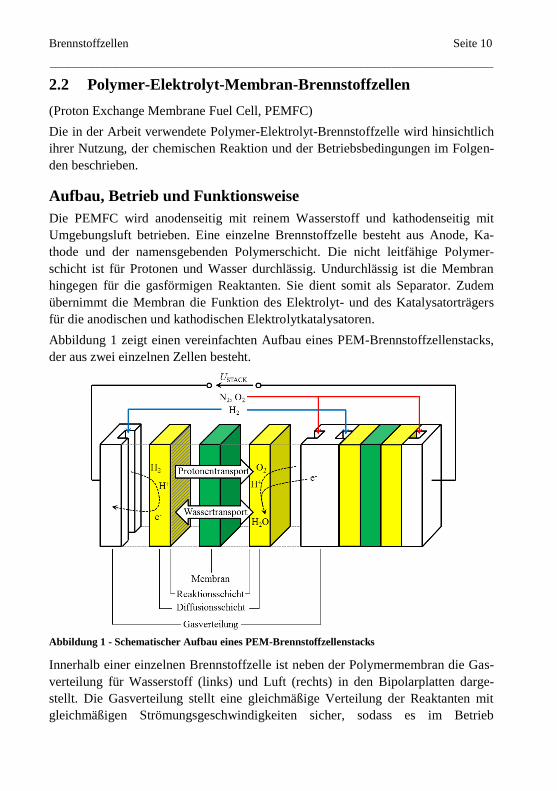
Abbildung 1 zeigt einen vereinfachten Aufbau eines PEM-Brennstoffzellenstacks,
der aus zwei einzelnen Zellen besteht.
Abbildung 1 - Schematischer Aufbau eines PEM-Brennstoffzellenstacks
Innerhalb einer einzelnen Brennstoffzelle ist neben der Polymermembran die Gas-
verteilung für Wasserstoff (links) und Luft (rechts) in den Bipolarplatten darge-
stellt. Die Gasverteilung stellt eine gleichmäßige Verteilung der Reaktanten mit
gleichmäßigen Strömungsgeschwindigkeiten sicher, sodass es im Betrieb
Brennstoffzellen Seite 11
__________________________________________________________________________
der PEMFC nicht zu lokalen Unterversorgungen und möglichen Schädigungen
kommt. Die dargestellten Einzelzellen werden durch ihre Anordnung in Reihe
verschaltet und durch die außenliegenden Endplatten zu einem Brennstoffzellen-
stack zusammengeführt. Die Endplatten stellen die elektrischen Anschlüsse dar
und ermöglichen den Stromfluss über den äußeren Kreis.
Der anodische Aufbau eines Brennstoffzellensystems ist abhängig von der Be-
triebsart der PEMFC. Eine mögliche Betriebsart ist der Rezirkulationsbetrieb. Es
findet eine Rezirkulation des nicht verbrauchten Wasserstoffs statt. Dieser kann
nach Entfeuchtung wieder am Einlass der Anode zugeführt werden. Eine andere
Möglichkeit ist das komplette Schließen des anodenseitigen Gassystems, sodass
nur der durch die chemische Reaktion verbrauchte Wasserstoff in das Brennstoff-
zellensystem nachgeführt wird. Eine dritte Möglichkeit ist der Durchströmungsbe-
trieb, wie er kathodenseitig durchgeführt wird. In diesem Fall wird der Wasserstoff
nur einmalig durch die Brennstoffzelle geführt und anschließend aus dem System
geleitet. Nicht verwendeter Wasserstoff verlässt das System an dieser Stelle unge-
nutzt und senkt somit den Gesamtwirkungsgrad des Systems. Bei diesem Verfah-
ren zum Betrieb der Brennstoffzelle entfallen die Spülvorgänge, da es dauerhaft zu
einem Gasaustausch kommt. Bei geschlossenem System sind die Spülvorgänge
notwendig, da es während der chemischen Reaktion auch zum Transport von
Stickstoff durch die Membran und zur Ansammlung von Wasserkondensat kommt.
Beide Stoffe behindern die chemische Reaktion und senken die Systemeffizienz.
Kathodenseitig verlässt die sauerstoffabgereicherte Luft das System in der Regel
als Abgas.
PEMFCs werden bei Kerntemperaturen von 55 °C bis 80 °C betrieben. Die für das
Temperaturmanagement notwendigen Kühlflüssigkeitskanäle befinden sich in den
Bipolarplatten. Neben den Kerntemperaturen sind im Betrieb Temperaturgradien-
ten über den gesamten Brennstoffzellenstack zu beachten. Bei Betrieb mit Tempe-
raturen von über 60 °C ist das Wassermanagement der Brennstoffzelle gesondert
zu betrachten. Ein Austrocknen der Membran und eine dauerhafte Schädigung
kann die Folge sein, obwohl Wasser als Nebenprodukt bei der Reaktion anfällt.
Abhilfe schafft die Verwendung von befeuchtetem Reaktionsgas, was zudem zu
einer Wirkungsgraderhöhung gegenüber der Verwendung von trockener Luft füh-
ren kann. Anodenseitig kann es auch zu einer Austrocknung in Folge der mittrans-
portierten Wassermoleküle durch ein Proton kommen. Eine zeitgleiche Austrock-
nung der Anode bei zu feuchter Kathode kann die Folge sein.
Eine weitere Abhängigkeit der chemischen Reaktion neben der Temperatur und
dem Wassermanagement der Brennstoffzelle ist der kathodenseitige Druck bzw.
der vorherrschende Sauerstoffpartialdruck. Die chemische Reaktion ist sehr stark
Brennstoffzellen Seite 12
__________________________________________________________________________
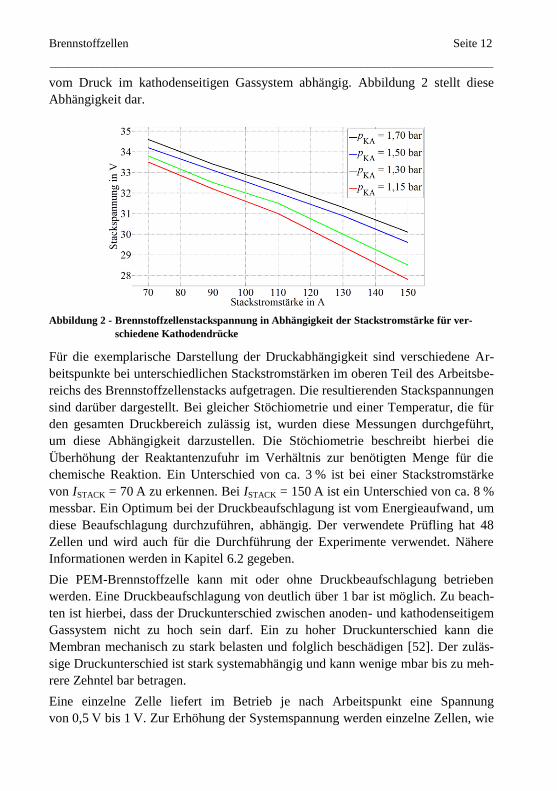
vom Druck im kathodenseitigen Gassystem abhängig. Abbildung 2 stellt diese
Abhängigkeit dar.
Abbildung 2 - Brennstoffzellenstackspannung in Abhängigkeit der Stackstromstärke für ver-
schiedene Kathodendrücke
Für die exemplarische Darstellung der Druckabhängigkeit sind verschiedene Ar-
beitspunkte bei unterschiedlichen Stackstromstärken im oberen Teil des Arbeitsbe-
reichs des Brennstoffzellenstacks aufgetragen. Die resultierenden Stackspannungen
sind darüber dargestellt. Bei gleicher Stöchiometrie und einer Temperatur, die für
den gesamten Druckbereich zulässig ist, wurden diese Messungen durchgeführt,
um diese Abhängigkeit darzustellen. Die Stöchiometrie beschreibt hierbei die
Überhöhung der Reaktantenzufuhr im Verhältnis zur benötigten Menge für die
chemische Reaktion. Ein Unterschied von ca. 3 % ist bei einer Stackstromstärke
von ISTACK = 70 A zu erkennen. Bei ISTACK = 150 A ist ein Unterschied von ca. 8 %
messbar. Ein Optimum bei der Druckbeaufschlagung ist vom Energieaufwand, um
diese Beaufschlagung durchzuführen, abhängig. Der verwendete Prüfling hat 48
Zellen und wird auch für die Durchführung der Experimente verwendet. Nähere
Informationen werden in Kapitel 6.2 gegeben.
Die PEM-Brennstoffzelle kann mit oder ohne Druckbeaufschlagung betrieben
werden. Eine Druckbeaufschlagung von deutlich über 1 bar ist möglich. Zu beach-
ten ist hierbei, dass der Druckunterschied zwischen anoden- und kathodenseitigem
Gassystem nicht zu hoch sein darf. Ein zu hoher Druckunterschied kann die
Membran mechanisch zu stark belasten und folglich beschädigen [52]. Der zuläs-
sige Druckunterschied ist stark systemabhängig und kann wenige mbar bis zu meh-
rere Zehntel bar betragen.
Eine einzelne Zelle liefert im Betrieb je nach Arbeitspunkt eine Spannung
von 0,5 V bis 1 V. Zur Erhöhung der Systemspannung werden einzelne Zellen, wie
Brennstoffzellen Seite 13
__________________________________________________________________________
in dem schematischen Aufbau in Abbildung 1 angedeutet, in Reihe zu einem
Brennstoffzellenstapel (engl.: stack) verschaltet. Die PEMFC weist Stromdichten
von bis zu 2 A/cm2 auf.
Chemische Reaktion
Auch bei der PEMFC stellt die räumlich getrennte Redoxreaktion das Grundprin-
zip der Energiewandlung dar. Bei der Anodenreaktion gemäß Gl. (1) spaltet sich
der zugeführte Wasserstoff in ein Proton und ein Elektron. Nach dem Protonen-
transport durch die Membran bildet sich entsprechend der Kathodenreaktion ge-
mäß Gl. (2) Wasser.
+
2H 2H 2e (1)
2 24H O 4e 2H O (2)
In Folge der chemischen Reaktion bildet sich eine elektrische Spannung aus. Diese
Spannung E0 entsteht im Idealfall unter der Annahme von Standarddruck p0 und
den Aktivitäten der Reaktanten und Produkte von eins.
0
0
EL
1,23 VF
GE
n
(3)
Die freie molare Standardreaktionsenthalpie ist durch ΔG0 angegeben. Die Anzahl
der überführten Elektronen beschreibt nEL. Die entstehende Spannung wird auch
als reversible Standardzellspannung bezeichnet. Sie bildet den Ausgangspunkt für
die Modellbildung des elektrischen Verhaltens der PEM-Brennstoffzelle. Unter
dem Einfluss der Drücke der Reaktanten Wasserstoff und Sauerstoff sowie der
Temperatur bildet sich die Nernst-Spannung aus. Den Einsatz dieser Gleichung
zeigt Kapitel 3.1.
Vor- und Nachteile
Die PEM-Brennstoffzelle zeigt Vor- und Nachteile in ihren Eigenschaften und
somit für die unterschiedlichen Anwendungen. Zu den Vorteilen zählt die ver-
gleichsweise hohe Leistungsdichte. Die PEM-Brennstoffzellentechnologie ermög-
licht somit eine sehr hohe Energiewandlung auf geringem Raum. Der einfache
Zellaufbau ist zudem der Ausgangspunkt für die verschiedensten baulichen Aus-
führungen der Brennstoffzellen. Entsprechend ist eine Eignung für ein sehr breites
Anwendungsgebiet, wie z. B. im öffentlichen oder privaten Nahverkehr, vorhan-
den. Die niedrige Betriebstemperatur ermöglicht schnelle Anfahrvorgänge und
Kaltstarts. Grundsätzlich ermöglicht dieser Brennstoffzellentyp sehr dynamische
Betriebsweisen, was ihn für einen Einsatz im Bereich von diversen sich verändern-

Brennstoffzellen Seite 14
__________________________________________________________________________
den Leistungsanforderungen prädestiniert. Die lange Lebensdauer von mehr
als 10000 Betriebsstunden stellt einen weiteren Vorteil dar und unterstreicht das
große Marktpotenzial besonders im Bereich der mobilen Anwendungen.
Als Nachteile der PEM-Technologie sind die sehr hohe Empfindlichkeit gegenüber
Verunreinigungen im Reaktionsgas und das aufwendige Wärme- und Wasserma-
nagement zu nennen. Die Toleranz gegenüber Kohlenstoffen im Reaktionsgas ist
sehr gering und kann zu Vergiftung führen. Falsches Wärme- und Wassermanage-
ment kann ein Austrocknen einzelner Zellflächen zur Folge haben und diese dau-
erhaft schädigen. Die aktuell hohen Systemkosten stehen einer Serienfertigung und
-anwendung entgegen.
Degradation
Die Degradation einer Brennstoffzelle beschreibt im Allgemeinen den Alterungs-
prozess der Membran und die daraus resultierenden Leistungsverluste. Die Verlus-
te können bis zum Ausfall kompletter Einzelzellen führen. Mit dem Ziel, eine
Brennstoffzelle in dem dazugehörigen System möglichst lange zu betreiben, gilt es,
den Alterungsprozess so gering wie möglich zu halten. Die Informationen in die-
sem Unterkapitel basieren auf den Ausführungen in [43]. Eine weitere Übersicht zu
den Hauptursachen der Degradation gibt [63]. Auswirkungen vom unbelasteten
Betrieb von Brennstoffzellen auf die Alterung der Zellen zeigt [81].
Der gesamte Vorgang der Degradation lässt sich im Einzelnen auf chemische,
mechanische und thermische Degradation sowie auf Shorting zurückführen.
Die chemische Degradation gilt als einflussreichster Faktor für die Alterung der
Brennstoffzellen. Dieser Zersetzungsprozess beschädigt die Membran am stärksten
und fördert somit die anderen Formen der Degradation zusätzlich. Der chemische
Vorgang wird durch Hydroxylradikale hervorgerufen. Diese entstehen als Neben-
oder Zwischenprodukt der eigentlichen chemischen Reaktion gemäß Gl. (2). Die
Radikale zersetzen die Kohlenstoffverbindungen innerhalb der Membran. Ein
Ausdünnen der Membran und ein ungewollter Gasdurchtritt ist die Folge. Insbe-
sondere wird hierdurch die mechanische Degradation zusätzlich begünstigt. Zur
Reduktion der chemischen Degradation werden zwei Strategien verfolgt. Einerseits
wird versucht, dass die schädlichen Radikale in Verbindung mit Wasser- oder
Wasserstoffmolekülen in unschädliche Radikale gewandelt werden. Andererseits
wird durch den Einsatz von Platin als Katalysator in der Elektrode versucht, die
Produktion der Hydroxylradikale möglichst gering zu halten.
Bei der mechanischen Degradation kommt es zwischen den verschiedenen Be-
standteilen einer PEM-Brennstoffzelle, wie Bipolarplatte, Diffusionsschicht und
Elektrode, zu mechanischen Spannungen. Die Spannungen werden durch lokal
Brennstoffzellen Seite 15
__________________________________________________________________________
unterschiedliche Befeuchtung und Temperaturen als Folge von Lastwechseln her-
vorgerufen. Diese mechanischen Spannungen ziehen kleinste Beschädigungen in
Form von Rissen, die häufig in Randgebieten der Membran auftreten, nach sich.
Direkter Gasdurchtritt durch die Membran resultiert hieraus.
Die thermische Degradation ist häufig die Folge der zuvor beobachteten Alte-
rungsprozesse. Bei dieser Form der Degradation kommt es lokal zu sehr hohen
Temperaturen, die durch die direkte Verbrennungsreaktion von Wasserstoff und
Sauerstoff entstehen. Bei dem häufig verwendeten Membranmaterial Nafion sind
diese Effekte ab 400 °C zu beobachten, was auf die enorme thermische Energie der
direkten Verbrennung nach starkem Gasdurchtritt schließen lässt. Die thermische
Degradation ist die Folge aller anderen Alterungsprozesse und kann bei sehr hoher
Temperatur sogar das Schmelzen der Membran und die Zerstörung der Zelle zur
Folge haben.
Der zuletzt genannte Grund von Degradation ist das Shorting. Es beschreibt eine
Art Kurzschluss, bei dem ein Teil der Elektronen nicht über den äußeren Kreis,
sondern direkt von der Anode zur Kathode fließt. Dieser Kurzschluss reduziert die
abgegebene Leistung der Brennstoffzelle deutlich und führt an den Übergangsstel-
len zu Temperaturerhöhungen. Diese Arten der Kurzschlüsse werden nach weichen
und harten Kurzschlüssen unterschieden. Hierbei führen die weichen Kurzschlüsse
nicht unmittelbar zum Zellversagen. Sie können in erhöhter Anzahl aber einen
deutlichen Zellspannungseinbruch zur Folge haben. Ein harter Kurzschluss resul-
tiert in der Regel aus einem bestehenden weichen Kurzschluss und kann hingegen
direkt zu Gasdurchtritt und folglich dem Versagen der Zelle führen. Ein erhöhter
ohmscher Widerstand und ein Spannungsabfall einer Zelle sind Zeichen für einen
solchen Fehlerfall. Weiche Kurzschlüsse entstehen im Allgemeinen durch Über-
drücke in den Gassystemen. Harte Kurzschlüsse sind die Folge von Überspannun-
gen. Eine Möglichkeit, dem Auftreten von Kurzschlüssen entgegenzuwirken, ist
die Verwendung von stärkeren Membranen. Diese Maßnahme steht dem leichten
Protonenaustausch durch die Membran entgegen und ist entsprechend den Anfor-
derungen abzuwägen. Auch die Verwendung von besonders reinem und einwand-
freiem Membranmaterial kann das Auftreten von Kurzschlüssen verhindern.

Seite 17
__________________________________________________________________________
3 Physikalische Modellbildung
Als Grundlage modellbasierter Regelungsentwürfe und zur Durchführung von
Simulationen sind Modelle die unabdingbare Voraussetzung. In diesem Kapitel
werden die grundlegenden Modelle für die Brennstoffzellenspannung, die Anoden-
und Kathodendruckbildung sowie für die Reaktantenzufuhr dargestellt. Vor der
Beschreibung der drei Einzelmodelle und deren Zusammenhänge werden zunächst
die Annahmen für die Modellbildung und die gewählten Vereinfachungen genannt.
Für die Durchführung von Simulationen werden die Modelle, wie sie im Einzelnen
gezeigt werden, genutzt. Zur Auslegung der Regler werden weitere Vereinfachun-
gen innerhalb der Simulationsmodelle vorgenommen, um eine Berechnung in
Echtzeit zu gewährleisten. Diese zusätzlichen Vereinfachungen sind notwendig,
um in den vorgegebenen Abtastschritten die Berechnungen einzelner Steuergrößen
zu realisieren. Die für die Reglerentwürfe genutzten Modelle werden in den Kapi-
teln 4.2 und 4.3 dargestellt.
Annahmen
Für die Berechnung der Einzelzellspannung wird angenommen, dass alle Zellen
gleichmäßig und ausreichend befeuchtet sind. Alle Einzelzellen werden zudem als
identisch angenommen, wodurch nur ein Modell für eine Zelle bzw. einen Brenn-
stoffzellenstack dem elektrischen Spannungsmodell zugrunde liegt. Die Charakte-
risierung jeder einzelnen Zelle entfällt folglich. Mit der Annahme der Gleichheit
aller Zellen wird auch die Kerntemperatur im Brennstoffzellenstack für den gesam-
ten Brennstoffzellenstack angenommen [56]. Für die Berechnung innerhalb der
Reglerentwürfe wird die Stacktemperatur als konstant vorausgesetzt. Dies lässt
sich in der relativ kurzen Prädiktionszeit im Verhältnis zu den Zeitkonstanten des
Temperaturverhaltens einer Brennstoffzelle begründen. Zur Berechnung der
elektrischen Spannung werden zudem über den gesamten Brennstoffzellenstack
konstante Drücke des Wasserstoffs im Anodenvolumen und des Luftgemischs im
Kathodenvolumen angenommen. Als zugrunde gelegter Druck wird der am Ende
des Brennstoffzellenstacks vorherrschende Druck (Nachdruck) gewählt. Für die
Berechnung des Drucks im Kathodenvolumen wird die Annahme getroffen, dass
das Luftgemisch vor, während und nach der Reaktion immer die Eigenschaften von
Luft hat, wenn es sich nur auf die Druckbildung bezieht. Dies gilt folglich nicht für
die Berechnung des Sauerstoffpartialdrucks als Einflussgröße auf die Einzel-
zellspannung. Die Luft aus der Umgebung wird dabei als Gemisch aus 21 % (vol.)
Sauerstoff und 79 % (vol.) Stickstoff angenommen. Grundsätzlich werden für die
Physikalische Modellbildung Seite 18
__________________________________________________________________________
Modellierung der Druckbildung nur die gasförmigen Anteile der Reaktanten und
Reaktionsprodukte betrachtet bzw. als gasförmig angenommen. Die Anteile in
Form von Flüssigkeit und Dampf werden vernachlässigt.
3.1 Polarisationskurve
Für die Modellierung der Zellspannung werden die Ansätze aus [4] und [39] ge-
nutzt. Ausgehend von der Leerlaufspannung einer einzelnen Zelle wird dieses
Modell schrittweise aufgebaut.
Die Leerlaufspannung (Reversible Zellspannung) wird nachfolgend unter dem
Einfluss der Stacktemperatur TSTACK, des Wasserstoffdrucks pH2 und des Sauer-
stoffpartialdrucks pO2 beschrieben.
5 O2H2REV STACK 0 STACK
0 0
11,23 0,085 4,3 10 ln ln
2
ppU T T T
p p
(4)
Die Standardtemperatur und der Standarddruck werden durch T0 und p0 angegeben.
Der erste Term beschreibt den eigentlichen Teil der reversiblen Zellspannung ohne
den Einfluss von Temperatur und Druck unter Standardbedingungen gemäß
Gl. (3). Der zweite Term stellt die Temperaturabhängigkeit der Zellspannung dar.
Der dritte Term gibt den Einfluss der Drücke beider Reaktanten auf die Zellspan-
nung an [39]. Die reversible Zellspannung UREV ist folglich die sich einstellende
Spannung an den offenen Klemmen ohne eine vorhandene Stackstromstärke ISTACK
im äußeren elektrischen Kreis.
Für die Bildung der reversiblen Zellspannung und der nachfolgenden Berechnung
der Aktivierungsverluste geht der Sauerstoffpartialdruck in das Modell ein. Der
Sauerstoffpartialdruck ist der Druck im Kathodenvolumen, welcher durch Sauer-
stoffmoleküle gebildet wird. Der Druck im Kathodenvolumen setzt sich additiv aus
dem Stickstoffpartialdruck und dem Sauerstoffpartialdruck zusammen. Unter der
gemachten Annahme der Verteilung von Sauerstoff und Stickstoff in der Umge-
bungsluft ergibt sich folgender Zusammenhang für die Berechnung des Sauerstoff-
partialdrucks. Für diese Berechnung werden zunächst die Stoffmengen von Stick-
und Sauerstoff im Kathodenvolumen des Brennstoffzellenstacks ermittelt.
O2 KA KA,REAKT
O2
O2
KAN2 O2
N2
M
1M
x W WN
WN x
(5)
Physikalische Modellbildung Seite 19
__________________________________________________________________________
Die Massenanteile von Sauerstoff in der zugeführten Luft gibt xO2 an. Nach der
Ermittlung der Stoffmengen über den Verbrauch WKA,REAKT und die kathodenseiti-
ge, zugeführte Luft WKA wird der Sauerstoffpartialdruck ermittelt. Die Berechnung
von WKA,REAKT wird in Kapitel 3.2 ausgeführt.
O2O2 KA
O2 N2
=N
p pN N
(6)
Der kathodenseitig im Brennstoffzellenstack aufgebaute Druck wird als pKA be-
zeichnet. Dieser Zusammenhang macht deutlich, dass eine reine Betrachtung des
Drucks im Kathodenvolumen keine Rückschlüsse auf die Versorgung der Brenn-
stoffzelle mit Sauerstoff möglich macht.
Die zusätzliche Betrachtung eines Wasserstoffpartialdrucks ist nicht notwendig, da
der genutzte Wasserstoff eine Reinheit von über 99,9990 % [19] aufweist.
H2 ANp p (7)
Die in Gl. (4) gezeigte Leerlaufspannung gilt für den Fall von ISTACK = 0 im äuße-
ren Kreis. Die reale Zellspannung sinkt mit zunehmender Stackstromstärke ab.
Grund hierfür ist der Einfluss der Stackstromstärke auf die Aktivierungs- und ohm-
schen Verluste. Ein Teil dieser Spannungsverluste wird in Folge von Durchtritts-
verlusten hervorgerufen. Bei diesem Durchtritt gehen Elektronen durch die Pha-
sengrenzfläche zwischen Elektrode und Elektrolyt. Die Beeinflussung findet hier
maßgeblich durch die Sauerstoffreduktion statt. Der Einfluss an der Wasser-
stoffelektrode auf diese Durchtrittsverluste ist bei Verwendung von Platin als
Elektrolyt zu vernachlässigen. Diese Verluste werden auch als Aktivierungsverlus-
te bezeichnet und sind stark temperaturabhängig. Die nachfolgende Gleichung
beschreibt die Aktivierungsverluste unter dem Einfluss der Stackstromstärke, der
Stacktemperatur und des Sauerstoffpartialdrucks.
STACK498/ 6
AKT 1 STACK 2 3 STACK 4 O2
1ln ln 10
5,08
TU T I p e
(8)
Neben den Aktivierungsverlusten nimmt die Zellspannung aufgrund der Wider-
stände von Elektrolyten und Elektrodenreaktion ab. Diese Widerstände werden als
ohmscher Widerstand zusammengefasst und nachfolgend als ohmsche Verluste
eingeführt.
OHM OHM STACKU R I (9)
Physikalische Modellbildung Seite 20
__________________________________________________________________________
Die drei gezeigten Spannungen in Gl. (4), (8) und (9) bilden die Grundlage der
Polarisationskurve einer PEM-Brennstoffzelle und die Berechnung der Einzel-
zellspannung.
ZELLE REV AKT OHMU U U U (10)
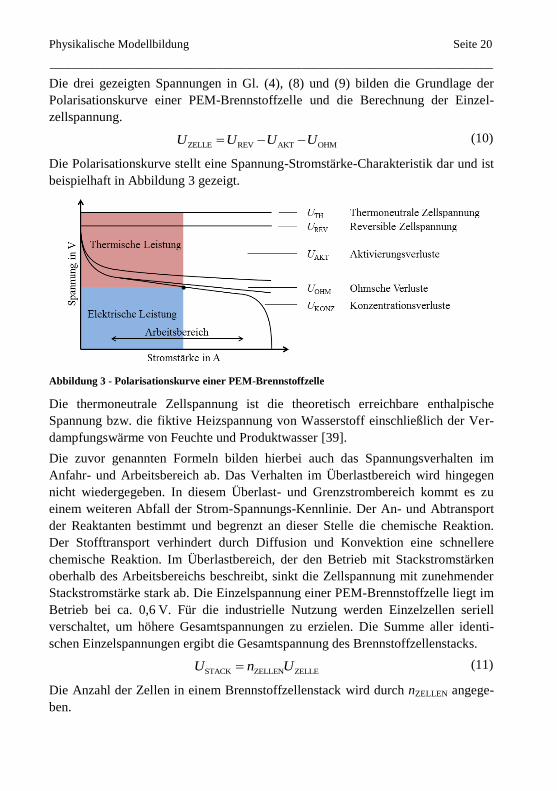
Die Polarisationskurve stellt eine Spannung-Stromstärke-Charakteristik dar und ist
beispielhaft in Abbildung 3 gezeigt.
Abbildung 3 - Polarisationskurve einer PEM-Brennstoffzelle
Die thermoneutrale Zellspannung ist die theoretisch erreichbare enthalpische
Spannung bzw. die fiktive Heizspannung von Wasserstoff einschließlich der Ver-
dampfungswärme von Feuchte und Produktwasser [39].
Die zuvor genannten Formeln bilden hierbei auch das Spannungsverhalten im
Anfahr- und Arbeitsbereich ab. Das Verhalten im Überlastbereich wird hingegen
nicht wiedergegeben. In diesem Überlast- und Grenzstrombereich kommt es zu
einem weiteren Abfall der Strom-Spannungs-Kennlinie. Der An- und Abtransport
der Reaktanten bestimmt und begrenzt an dieser Stelle die chemische Reaktion.
Der Stofftransport verhindert durch Diffusion und Konvektion eine schnellere
chemische Reaktion. Im Überlastbereich, der den Betrieb mit Stackstromstärken
oberhalb des Arbeitsbereichs beschreibt, sinkt die Zellspannung mit zunehmender
Stackstromstärke stark ab. Die Einzelspannung einer PEM-Brennstoffzelle liegt im
Betrieb bei ca. 0,6 V. Für die industrielle Nutzung werden Einzelzellen seriell
verschaltet, um höhere Gesamtspannungen zu erzielen. Die Summe aller identi-
schen Einzelspannungen ergibt die Gesamtspannung des Brennstoffzellenstacks.
STACK ZELLEN ZELLEU n U (11)
Die Anzahl der Zellen in einem Brennstoffzellenstack wird durch nZELLEN angege-
ben.
Physikalische Modellbildung Seite 21
__________________________________________________________________________
Die gewandelte elektrische Leistung folgt im Gleichspannungsfall wie beschrie-
ben.
STACK STACK STACKP U I (12)
Der Einfluss der einzelnen Parameter auf die Ausbildung der Stackspannung ist
unterschiedlich. Repräsentative Auswirkungen des Kathodendrucks sind bereits in
Abbildung 2 gezeigt und werden in [42] für unterschiedliche Bedingungen aufge-
führt. Zudem wird in [42] die Temperaturabhängigkeit einer Niedertemperatur-
brennstoffzelle dargestellt. Es wird gezeigt, dass mit steigender Temperatur bis
zum Ende eines vorgegebenen Betriebsfensters die Zellspannung steigt, was auf
die erhöhte Reaktionsgeschwindigkeit zurückzuführen ist. Oberhalb eines optima-
len Temperaturbereichs sinkt die Zellspannung in Folge möglicher Austrocknung
der Membran, da der Wasseraustrag aus der Zelle höher ist. Als allgemeiner Ein-
fluss der Stöchiometrie ist eine Spannungserhöhung ähnlich wie bei den Partial-
drücken festzustellen. An dieser Stelle werden durch die vermehrte Reaktantenzu-
fuhr die chemischen Prozesse beschleunigt.
Das Vorhandensein von Wasserstoff und Sauerstoff in den jeweiligen Reaktions-
räumen ist die Grundlage zur Ausbildung einer Zellspannung. In den folgenden
Unterkapiteln werden die Druckbildung und die Reaktantenzufuhr modelliert.
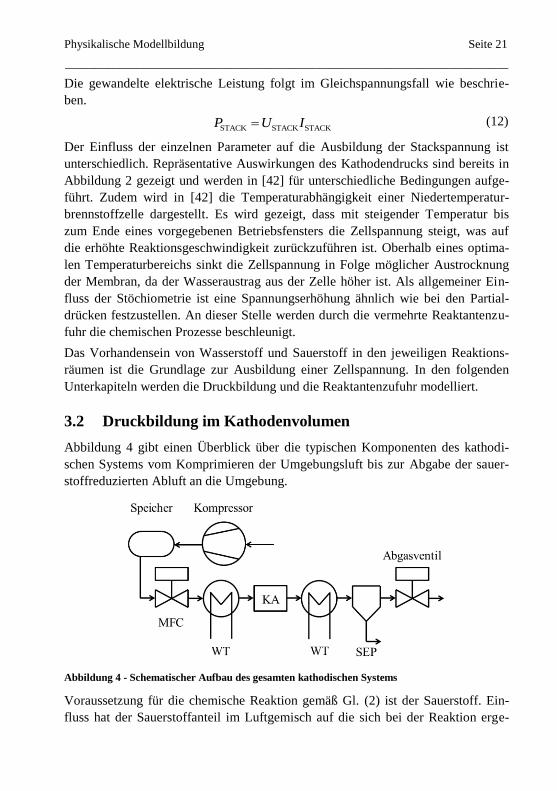
3.2 Druckbildung im Kathodenvolumen
Abbildung 4 gibt einen Überblick über die typischen Komponenten des kathodi-
schen Systems vom Komprimieren der Umgebungsluft bis zur Abgabe der sauer-
stoffreduzierten Abluft an die Umgebung.
Abbildung 4 - Schematischer Aufbau des gesamten kathodischen Systems
Voraussetzung für die chemische Reaktion gemäß Gl. (2) ist der Sauerstoff. Ein-
fluss hat der Sauerstoffanteil im Luftgemisch auf die sich bei der Reaktion erge-
Physikalische Modellbildung Seite 22
__________________________________________________________________________
bende Zellspannung gemäß Gl. (4) und (8). Um diesen Transport von Sauerstoff in
der Luft zu beschreiben, wird in diesem Unterkapitel der kathodenseitige Teil des
Brennstoffzellensystems modelliert.
Nach dem Komprimieren der Umgebungsluft wird diese in einem Druckluftspei-
cher (Speicher) vorgehalten. Das nachfolgende Ventil ist ein Massendurchflussreg-
ler (MFC). Nach der geregelten Massenzufuhr der Druckluft kann diese bei Bedarf
über einen Wärmetauscher (WT) erhitzt werden, bevor sie in das kathodische Vo-
lumen (KA) des Brennstoffzellenstacks geführt wird. Nach dem Brennstoffzellen-
stack wird dem Abgas Wärme (WT) und Feuchtigkeit (SEP, Wasserabscheider)
entzogen. Bevor das Luftgemisch das System an die Umgebung verlässt, findet die
Druckregelung über das Abgasventil statt.
Die Grundlage für das Modell zum Stofftransport bilden die Ausführungen in [41].
Es wird für die Modellbildung ein Ansatz mit einer Unterteilung des Systems in
drei Volumen gezeigt. Dieser Teil des vorgestellten Brennstoffzellenmodells wird
für die Nutzung in dieser Arbeit eingangsseitig um einen Massendurchflussregler
und ausgangsseitig um ein Abgasventil erweitert. Die Darstellung der Modellie-
rung findet nachfolgend in der Durchströmungsrichtung der Luft im Brennstoffzel-
lensystem statt.
Nach der Verdichtung der Umgebungsluft und deren Speicherung wird sie geregelt
dem Brennstoffzellensystem zugeführt. Die Komponenten werden aufgrund der
Eigenschaften des Massendurchflussreglers als System erster Ordnung modelliert.
KA,MFC
KA,MFC KA,MFC KA,MFC,REF
KA,MFC KA,MFC
1 KW W W
T T (13)
Die Eigenschaften des Verzögerungsgliedes werden über die Verstärkung KKA,MFC
und die Zeitkonstante TKA,MFC angegeben. Der Kompressor und der Druckspeicher
finden an dieser Stelle keinen weiteren Einfluss. Es wird angenommen, dass dem
Massendurchflussregler immer genügend Druckluft für die Bereitstellung des ge-
wünschten Massenstroms vorliegt.
Der dem System zugeführte Massenstrom wird über verschiedene Verrohrungen,
Wärmetauscher und Messeinrichtungen bis zu Beginn des Brennstoffzellenstacks
geleitet. Dieser Bereich bildet das erste der insgesamt drei Volumen ab. Die
Druckbildung in allen drei Volumen hängt vom jeweiligen geometrischen Volu-
men V, den Eigenschaften des Stoffgemischs R, der vorherrschenden Temperatur T
sowie den Zu- und Abflüssen W ab.
d R
d
p TW
t V (14)
Physikalische Modellbildung Seite 23
__________________________________________________________________________
Das zweite Volumen bildet die Brennstoffzelle. Hier wird die Gasverteilung inner-
halb des Brennstoffzellenstacks als ein Volumen angenommen.
Der Übergang zwischen den einzelnen Volumen wird als Strömung an einer Blen-
de modelliert.
BLENDE 2
pW A
(15)
Der durchtretende Massenstrom WBLENDE hängt dabei von der Druckdifferenz vor
und nach der Blende ∆p, den Stoffeigenschaften des durchströmenden Mediums
und den geometrischen Abmessungen der Blende ab [11]. Die Dichte wird durch ρ
angegeben. Die stoff- und geometrieabhängige Kontraktionszahl ist α. Die reale
Fläche A wird als Öffnung der Blende angenommen.
Neben den Zu- und Abflüssen zwischen den Volumen kommt im Bereich der
Brennstoffzelle der Verbrauch WKA,REAKT von Sauerstoff aufgrund der Reaktion
hinzu. Der Verbrauch ist direkt proportional zu der Stackstromstärke ISTACK und
der Anzahl der Einzelzellen eines Brennstoffzellenstacks nZELLEN.
O2KA,REAKT ZELLEN STACK
M
4FW n I (16)
Die molare Masse eines Sauerstoffmoleküls ist MO2. Die Faraday-Konstante wird
durch F dargestellt.
Das dritte Volumen bildet die Komponenten und Verrohrungen nach dem Brenn-
stoffzellenstack bis zum Abgasventil der Kathodenseite. Dieses Volumen fasst
einen weiteren Wärmetauscher und den Wasserabscheider zusammen. Der Über-
gang zwischen dem Brennstoffzellenstack und dem Volumen des Abgasteils wird
auch als Blende gemäß Gl. (15) modelliert.
Ein ähnlicher Ansatz zur Modellbildung des kathodischen Gassystems wird in [16]
genutzt.
Ventil und Ausströmung
Elementarer Bestandteil der Druckbildung im Kathodenstrang ist das Abgasventil.
Durch Verstellung des Ventils ist es möglich, den Nachdruck am Brennstoffzellen-
system zu beeinflussen. Der Einfluss auf den Druck im Brennstoffzellensystem
findet über die Stellung des Ventils statt, wobei diese beeinflusst, welche Menge an
Abgas das kathodische Gassystem verlässt. Je weniger das Ventil geöffnet ist,
desto weniger Abgas verlässt das System. Bei gleichbleibender zugeführter Menge
an Umgebungsluft steigt in der Folge der Druck im gesamten kathodischen Gas-
system.
Physikalische Modellbildung Seite 24
__________________________________________________________________________
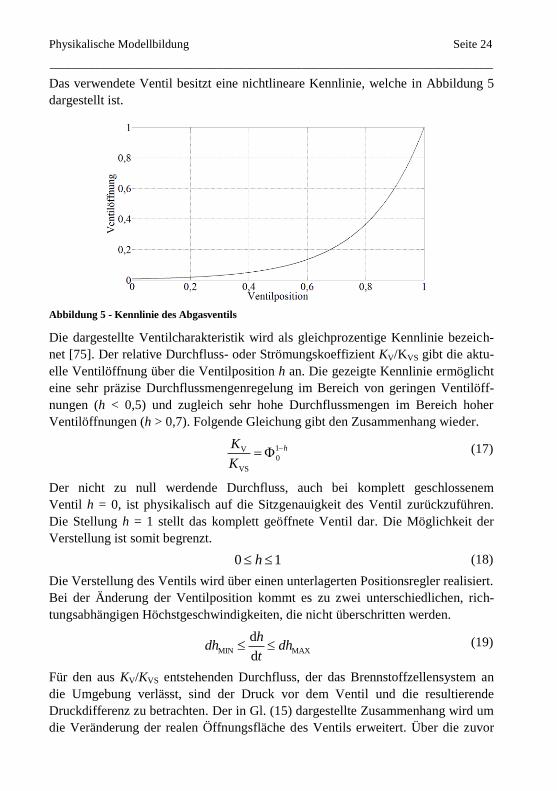
Das verwendete Ventil besitzt eine nichtlineare Kennlinie, welche in Abbildung 5
dargestellt ist.
Abbildung 5 - Kennlinie des Abgasventils
Die dargestellte Ventilcharakteristik wird als gleichprozentige Kennlinie bezeich-
net [75]. Der relative Durchfluss- oder Strömungskoeffizient KV/KVS gibt die aktu-
elle Ventilöffnung über die Ventilposition h an. Die gezeigte Kennlinie ermöglicht
eine sehr präzise Durchflussmengenregelung im Bereich von geringen Ventilöff-
nungen (h < 0,5) und zugleich sehr hohe Durchflussmengen im Bereich hoher
Ventilöffnungen (h > 0,7). Folgende Gleichung gibt den Zusammenhang wieder.
1V0
VS
hK
K
(17)
Der nicht zu null werdende Durchfluss, auch bei komplett geschlossenem
Ventil h = 0, ist physikalisch auf die Sitzgenauigkeit des Ventil zurückzuführen.
Die Stellung h = 1 stellt das komplett geöffnete Ventil dar. Die Möglichkeit der
Verstellung ist somit begrenzt.
0 1h (18)
Die Verstellung des Ventils wird über einen unterlagerten Positionsregler realisiert.
Bei der Änderung der Ventilposition kommt es zu zwei unterschiedlichen, rich-
tungsabhängigen Höchstgeschwindigkeiten, die nicht überschritten werden.
MIN MAX
d
d
hdh dh
t (19)
Für den aus KV/KVS entstehenden Durchfluss, der das Brennstoffzellensystem an
die Umgebung verlässt, sind der Druck vor dem Ventil und die resultierende
Druckdifferenz zu betrachten. Der in Gl. (15) dargestellte Zusammenhang wird um
die Veränderung der realen Öffnungsfläche des Ventils erweitert. Über die zuvor
Physikalische Modellbildung Seite 25
__________________________________________________________________________
beschriebenen Zusammenhänge der Ventilöffnung gemäß Gl. (17) ergibt sich eine
Abhängigkeit von dieser Ventilposition.
VABGAS ABGAS, 1
VS
h
KA h A
K (20)
Der gesamte Abgasmassenstrom ergibt sich aus dem folgenden Zusammenhang
mit der Abhängigkeit vom Druckunterschied vor dem Ventil und der Umgebung.
1
ABGAS ABGAS ABGAS, 1 0 2h
h
pW A
(21)
Die Druckdifferenz wird in diesem Fall durch den Druck p vor dem Ventil und
dem Umgebungsdruck p0 berechnet.
0p p p (22)
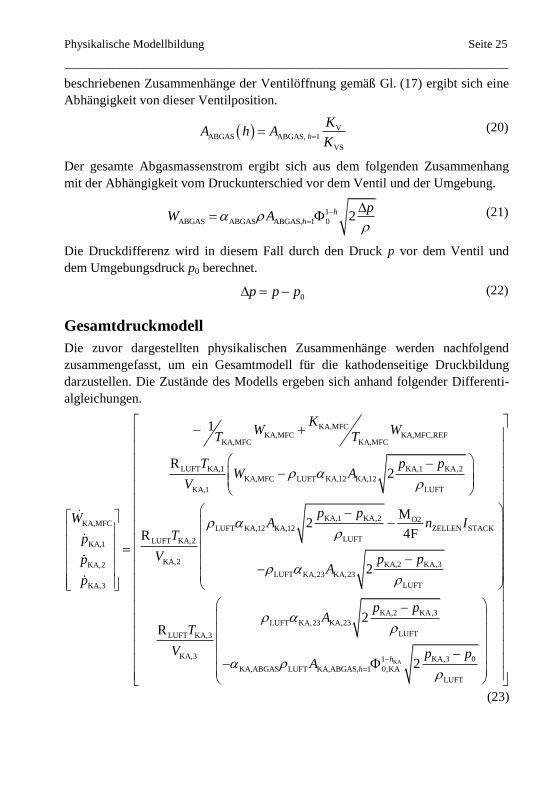
Gesamtdruckmodell
Die zuvor dargestellten physikalischen Zusammenhänge werden nachfolgend
zusammengefasst, um ein Gesamtmodell für die kathodenseitige Druckbildung
darzustellen. Die Zustände des Modells ergeben sich anhand folgender Differenti-
algleichungen.
KA,MFCKA,MFC KA,MFC,REF
KA,MFC KA,MFC
LUFT KA,1 KA,1 KA,2
KA,MFC LUFT KA,12 KA,12
KA,1 LUFT
KA,1 KA,2 OKA,MFC
LUFT KA,12 KA,12
LUFTLUFT KA,2KA,1
KA,2KA,2
KA,3
1
R2
M2
R
KW W
T T
T p pW A
V
p pW ATp
Vp
p
KA
2ZELLEN STACK
KA,2 KA,3
LUFT KA,23 KA,23
LUFT
KA,2 KA,3
LUFT KA,23 KA,23
LUFTLUFT KA,3
KA,3 KA,3 01
KA,ABGAS LUFT KA,ABGAS, 1 0,KA
LUFT
4F
2
2R
2h
h
n I
p pA
p pA
T
V p pA
(23)
Physikalische Modellbildung Seite 26
__________________________________________________________________________
Das Modell für die Druckbildung hat vier Zustände und wird für die Simulation
der Druckregelung und die Auslegung der Regelungsstrategien genutzt. Dieses
Modell wird zudem für die in nachfolgenden Kapiteln dargestellten Reglermodel-
len als Referenz verwendet, wenn diese vereinfacht werden. Die Eingangsgröße
des Druckmodells ist der Referenzwert des Massendurchflussreglers WKA,MFC,REF
und der Referenzwert des Abgasventils hKA,REF. Dieser hat über den unterlagerten
Positionsregler Einfluss auf die Ventilstellung hKA. Die Regelgröße ist der Druck
im zweiten Volumen, dem Brennstoffzellenstack, pKA,2. Der geringe Einfluss des
verbrauchten Sauerstoffs hinsichtlich der Dichte des Gasgemisches lässt die An-
nahme einer konstanten Dichte zu.
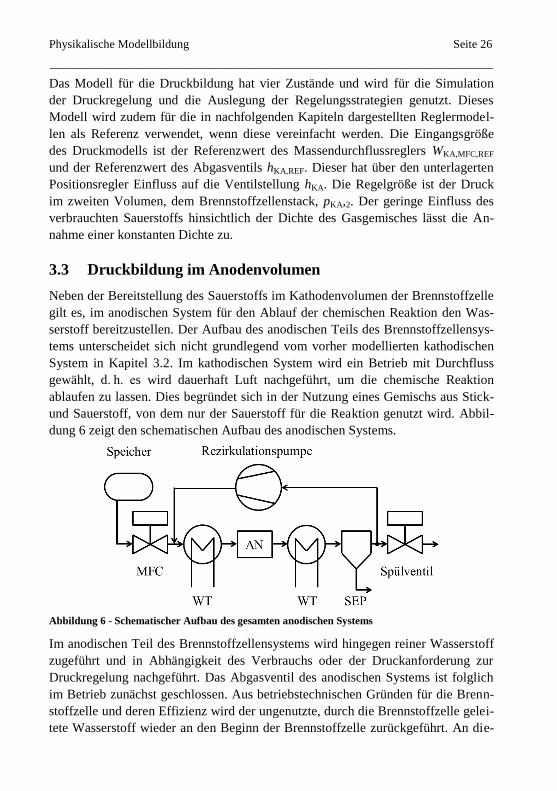
3.3 Druckbildung im Anodenvolumen
Neben der Bereitstellung des Sauerstoffs im Kathodenvolumen der Brennstoffzelle
gilt es, im anodischen System für den Ablauf der chemischen Reaktion den Was-
serstoff bereitzustellen. Der Aufbau des anodischen Teils des Brennstoffzellensys-
tems unterscheidet sich nicht grundlegend vom vorher modellierten kathodischen
System in Kapitel 3.2. Im kathodischen System wird ein Betrieb mit Durchfluss
gewählt, d. h. es wird dauerhaft Luft nachgeführt, um die chemische Reaktion
ablaufen zu lassen. Dies begründet sich in der Nutzung eines Gemischs aus Stick-
und Sauerstoff, von dem nur der Sauerstoff für die Reaktion genutzt wird. Abbil-
dung 6 zeigt den schematischen Aufbau des anodischen Systems.
Abbildung 6 - Schematischer Aufbau des gesamten anodischen Systems
Im anodischen Teil des Brennstoffzellensystems wird hingegen reiner Wasserstoff
zugeführt und in Abhängigkeit des Verbrauchs oder der Druckanforderung zur
Druckregelung nachgeführt. Das Abgasventil des anodischen Systems ist folglich
im Betrieb zunächst geschlossen. Aus betriebstechnischen Gründen für die Brenn-
stoffzelle und deren Effizienz wird der ungenutzte, durch die Brennstoffzelle gelei-
tete Wasserstoff wieder an den Beginn der Brennstoffzelle zurückgeführt. An die-
Physikalische Modellbildung Seite 27
__________________________________________________________________________
ser Stelle wird der Wasserstoff erneut durch die Brennstoffzelle geleitet. Es kommt
zu einer Rezirkulation. Durch die Vorgaben an den zu rezirkulierenden Wasser-
stoff wird dieser zunächst abgekühlt und entfeuchtet.
Im Unterschied zum kathodischen Gesamtsystem wird dem Speicher nicht dauer-
haft Wasserstoff zugeführt. Es wird ein Wasserstoffspeicher genutzt, dem Wasser-
stoff nach Bedarf entnommen wird. Das im Bereich der Kathode als Abgasventil
bezeichnete Ventil zur Druckregelung wird anodenseitig als Spülventil genutzt.
Dieses ermöglicht, den während der Reaktion zur Anode diffundierten Stickstoff
und das sich durch die Reaktion angesammelte Wasserkondensat aus dem System
auszuspülen und von den Reaktionsoberflächen zu lösen. Das als Spülventil ge-
nutzte Ventil besitzt auch die Charakteristik einer gleichprozentigen Kennlinie, wie
beispielhaft in Abbildung 5 dargestellt.
Die Rezirkulationspumpe, über die nur Brennstoffzellensysteme verfügen, deren
Brennstoffzellenstacks eine Rezirkulation des Wasserstoffs benötigen, ist ein gere-
geltes System, dessen Rezirkulationsvolumen von der Stackstromstärke abhängt.
Wird ein Brennstoffzellensystem ohne Rezirkulation und mit komplett geschlosse-
nem Abgasventil betrieben, wird dies als Dead-End-Betrieb bezeichnet.
Die Dynamik der Rezirkulation wird als System erster Ordnung modelliert.
REZREZ REZ REZ,REF
REZ REZ
1 KW W W
T T (24)
Die Verrohrungen zur Rezirkulationspumpe und zur erneuten Zuführung vor die
Brennstoffzelle werden den Volumen hinter und vor der Brennstoffzelle im Modell
hinzugefügt.
Die Übergänge zwischen den einzelnen Volumen werden wieder als Übergänge an
Blenden gemäß Gl. (15) modelliert.
Der durch die Reaktion hervorgerufene Wasserstoffverbrauch berechnet sich wie
nachfolgend dargestellt.
H2AN,REAKT ZELLEN STACK
M
2FW n I (25)
Der Wasserstoffverbrauch ist proportional zur Anzahl der Einzelzellen des Brenn-
stoffzellenstacks nZELLEN und zur Stackstromstärke ISTACK. Die molare Masse eines
Wasserstoffmoleküls wird mit MH2 bezeichnet. Im anodischen System hat der
Verbrauch einen wesentlich größeren Einfluss auf die Druckbildung als im katho-
dischen Teil. Der zugeführte Brennstoff kann vollständig verbraucht werden. Im
kathodischen Teil kann nur der Sauerstoffanteil der Luft verbraucht werden, wel-
cher max. 21 % vol. des zugeführten Gemischs beträgt.
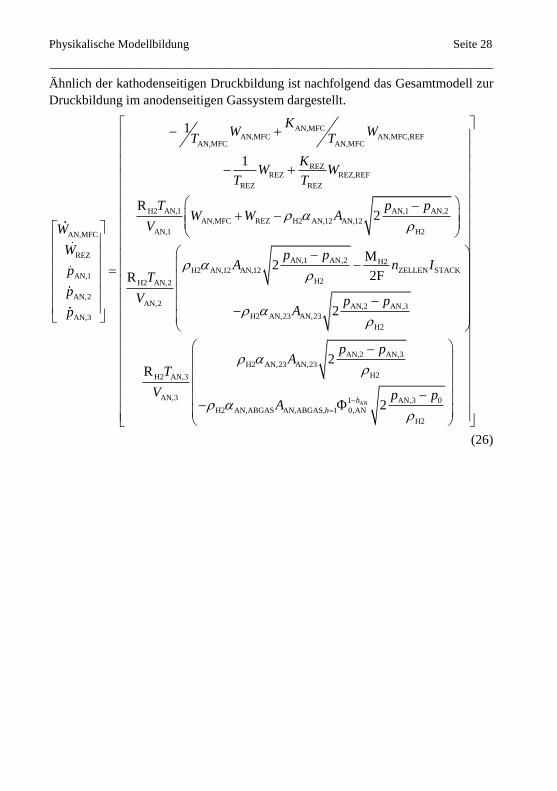
Physikalische Modellbildung Seite 28
__________________________________________________________________________
Ähnlich der kathodenseitigen Druckbildung ist nachfolgend das Gesamtmodell zur
Druckbildung im anodenseitigen Gassystem dargestellt.
AN,MFCAN,MFC AN,MFC,REF
AN,MFC AN,MFC
REZREZ REZ,REF
REZ REZ
H2 AN,1 AN,1 AN,2
AN,MFC REZ H2 AN,12 AN,12
AN,1 H2AN,MFC
REZ
H2 ANAN,1
H2 AN,2
AN,2AN,2
AN,3
1
1
R2
R
KW W
T T
KW W
T T
T p pW W A
VW
W
pT
pV
p
AN
AN,1 AN,2 H2,12 AN,12 ZELLEN STACK
H2
AN,2 AN,3
H2 AN,23 AN,23
H2
AN,2 AN,3
H2 AN,23 AN,23
H2H2 AN,3
AN,3 AN,3 01
H2 AN,ABGAS AN,ABGAS, 1 0,AN
H2
M2
2F
2
2R
2h
h
p pA n I
p pA
p pA
T
V p pA
(26)
Seite 29
__________________________________________________________________________
4 Regelung der Zellleistung und des Kathodendrucks
Rechenintensive Regelungsverfahren rückten mit dem Ausbau der Rechenleistung
immer mehr in den Fokus der Forschung, Entwicklung und Anwendung. Zu diesen
Verfahren gehört auch die Modellprädiktive Regelung. Diese nutzt vorhandene
Modelle und die Variation der Eingangsgrößen, um die Regelgröße für einen fest-
gelegten Zeitraum in der Zukunft zu berechnen und mit einem gewünschten Ver-
lauf zu vergleichen. In diesem Kapitel wird die für den Praxisteil dieser Arbeit
verwendete Regelungsmethode Nichtlineare Modellprädiktive Regelung, welche
für die Regelgrößen elektrische Brennstoffzellenleistung und Kathodendruck an-
gewendet wird, beschrieben.
4.1 Nichtlineare Modellprädiktive Regelung
Das genutzte Regelungsverfahren nutzt in der Regel physikalisch motivierte Mo-
delle, um ausgehend vom aktuellen Zustand x unter Nutzung eines Eingangsvek-
tors u die Regelgröße y an einen gewünschten, vorliegenden Referenzverlauf yREF
anzupassen. Im Fall eines nichtlinearen Modells
,x f x t u t (27)
oder nichtlinearer Beschränkungen
0g x (28)
wird von Nichtlinearer Modellprädiktiver Regelung (NMPR) gesprochen [1]. Die-
se Beschränkungen können sich hierbei auf Eingangs- und Zustandsgrößen bezie-
hen. Der Vorteil der NMPR ist, dass diese Beschränkungen direkt im Entwurfspro-
zess berücksichtigt werden. Der gesamte Zusammenhang lässt sich als nichtlinea-
res Optimierungsproblem auffassen. Zur Lösung dieses Problems gilt es, unter
Berücksichtigung der genannten Nebenbedingungen in Gl. (28) ein in der Regel
quadratisches Gütekriterium (Kostenfunktion) zu minimieren.
min J u t (29)
Die Lösung des Problems wird in der Regel unter Nutzung eines zeitdiskreten
Zusammenhangs im linearen Fall mit dem Modell
d d
T
d
1x i A x i b u i
y i c x i
(30)
Regelung der Zellleistung und des Kathodendrucks Seite 30
__________________________________________________________________________
durchgeführt. Neben den Zustands- und Ausgangsgrößen besteht das zeitdiskrete
Zustandsraummodell aus der Systemmatrix Ad, dem zeitdiskreten Eingangsvek-
tor bd und dem dazugehörigen Ausgangsvektor cd.
Ein Beispiel für eine zu minimierende Kostenfunktion ist
CP 1
2 2
1 REF 2PRÄD
1 0
1NN
i i
J q y k i y k i q u k i u k i
. (31)
Die prädizierte Regelgröße yPRÄD ergibt sich unter Variation des Eingangsvektors u
und dem Einsatz des Modells gemäß Gl. (30). Den jeweiligen Zeitpunkt innerhalb
des Prädiktions- oder Steuerhorizonts beschreibt i. Der jeweilige aktuelle Zeitpunkt
wird durch k beschrieben. Die Kostenfunktion bildet das Interesse und den Fokus
des Anwenders dieses Regelvorgangs ab. Sie ermöglicht ihm, die Realisierung
eines gewünschten Verhaltens, welches durch den berechneten Verlauf der Steuer-
größen und deren anschließende Applikation auf die Regelstrecke umgesetzt wird,
zu beeinflussen. In der gezeigten Kostenfunktion findet im ersten Summanden die
Betrachtung der Regelgröße über den gesamten Prädiktionshorizont NP statt. Die
Werte q1 und q2 führen neben der Gewichtung in der Kostenfunktion auch die
Anpassung der Größenordnung der betrachteten Terme durch. Neben der Bewer-
tung der prädizierten Regelgröße yPRÄD in Bezug auf den gewünschten Referenz-
verlauf yREF ist es möglich, eine Gewichtung der Nutzung der Steuergrößen u vor-
zunehmen. Bei realen Systemen wird dies zum Schutz von Bauteilen eingesetzt, da
es unter Nutzung dieses Teils der Kostenfunktion nicht zu einer hochfrequenten
Nutzung der Stellglieder kommt. Dies geschieht über den zweiten Summanden der
Kostenfunktion. Bei der Gewichtung der Nutzung des Stelleingriffs wird kein
Vergleich mit einer bekannten Referenz bewertet, sondern ausgehend vom aktuel-
len Wert der Steuergröße(n) die Änderung zum jeweils nachfolgenden Stelleingriff
berechnet. Mit dieser Betrachtung in der Kostenfunktion wird ein Tiefpassfilter zur
Anpassung eines hochfrequenten Stellsignals überflüssig. Eine Berechnung findet
hier folglich über den Steuerhorizont (engl.: control horizon) statt. Die Anzahl der
zu berechnenden Steuergrößen gibt NC an. Durch Multiplikation mit der Abtast-
zeit tS ergibt sich der zeitliche Steuerhorizont. Dieser Steuerhorizont kann maximal
so groß wie der Prädiktionshorizont gewählt werden. Im anderen Fall hätte die
Variation der Steuergrößen keinen Einfluss auf die prädizierte Regelgröße.
C PN N (32)
Neben der in Gl. (31) dargestellten Bewertung des Verlaufs der Regelgröße ist eine
unterschiedliche Gewichtung über den Verlauf der Steuer- und prädizierten Regel-
größe sowie deren Zustand am Ende des Prädiktionshorizonts möglich. Der Ma-
yersche Anteil beschreibt hierbei den Zustand am Ende des Prädiktionshorizonts.
Regelung der Zellleistung und des Kathodendrucks Seite 31
__________________________________________________________________________
Der Lagrangesche Anteil bewertet den Steuer- und Zustandsgrößenverlauf über
den gesamten Steuer- und Prädiktionshorizont. Speziell durch den Mayerschen
Anteil, der die Bewertung der Regelgröße am Ende des Prädiktionshori-
zonts yPRÄD(t+NPtS) darstellt, wird ein besseres Führungsverhalten erreicht. Neben
der Gewichtung der genannten Abweichung der Regelgröße und zur Nutzung der
Stellgröße ist es möglich, eine Gewichtung der Steuergröße von einem zuvor be-
rechneten Wert bzw. einem berechneten Verlauf zu ermitteln. Dieses Vorgehen
unterstützt die Stabilität der NMPR, da sich mit dieser Bewertung die Steuergröße
spätestens im stationären Fall wieder diesem Wert annähert. Weiterhin wird in
wirtschaftlich orientierten Prozessvorgängen die Bewertung des Einsatzes der
Steuergröße allgemein vorgenommen [20]. Ziel dieses Vorgehens ist die grund-
sätzliche Reduktion des eingesetzten Materials oder der aufzubringenden Energie.
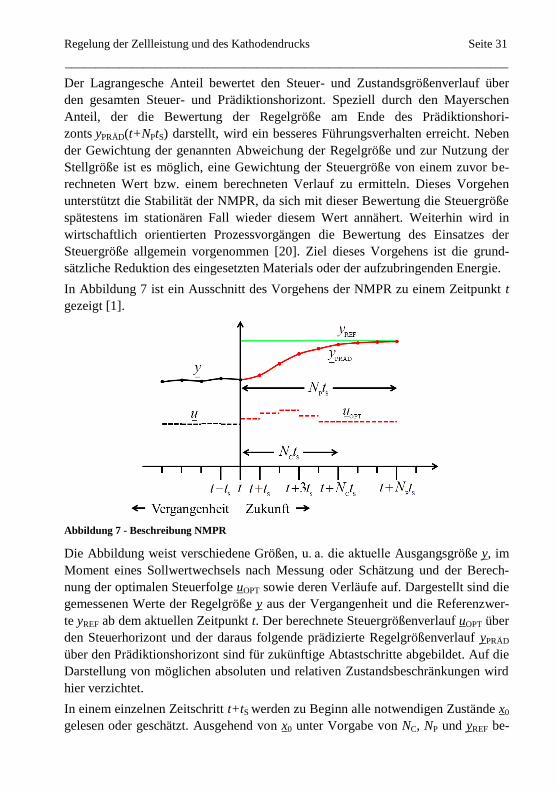
In Abbildung 7 ist ein Ausschnitt des Vorgehens der NMPR zu einem Zeitpunkt t
gezeigt [1].
Abbildung 7 - Beschreibung NMPR
Die Abbildung weist verschiedene Größen, u. a. die aktuelle Ausgangsgröße y, im
Moment eines Sollwertwechsels nach Messung oder Schätzung und der Berech-
nung der optimalen Steuerfolge uOPT sowie deren Verläufe auf. Dargestellt sind die
gemessenen Werte der Regelgröße y aus der Vergangenheit und die Referenzwer-
te yREF ab dem aktuellen Zeitpunkt t. Der berechnete Steuergrößenverlauf uOPT über
den Steuerhorizont und der daraus folgende prädizierte Regelgrößenverlauf yPRÄD
über den Prädiktionshorizont sind für zukünftige Abtastschritte abgebildet. Auf die
Darstellung von möglichen absoluten und relativen Zustandsbeschränkungen wird
hier verzichtet.
In einem einzelnen Zeitschritt t+tS werden zu Beginn alle notwendigen Zustände x0
gelesen oder geschätzt. Ausgehend von x0 unter Vorgabe von NC, NP und yREF be-

Regelung der Zellleistung und des Kathodendrucks Seite 32
__________________________________________________________________________
rechnet der Lösungsalgorithmus unter Nutzung von Gl. (27) und Beachtung von
Gl. (28) eine optimale Steuerfolge uOPT. Von dieser Steuerfolge wird nur der erste
Wert uOPT(0) auf die Strecke angewendet. Die restlichen Werte werden zunächst
verworfen. Mit Ablauf der Abtastzeit und dem Beginn eines weiteren Zeitschritts
beginnt dieser Algorithmus erneut. In Abbildung 7 kommt dies einer Verschiebung
um einen Zeitschritt gleich.
Zeitdiskretisierung bei nichtlinearen Modellen
Eine Bewertung der Terme des prädizierten Regelgrößenverlaufs yPRÄD der Kosten-
funktion kann nur zu bestimmten Zeitpunkten und nicht zeitkontinuierlich erfol-
gen. Aus diesem Grund werden die Zustands- und Ausgangsgrößen bei linearen
Modellen unter Nutzung der zeitdiskreten Modelle direkt berechnet und können
somit für die Prädiktion verwendet werden. Bei der Vorlage von nichtlinearen
Modellen wird eine Zeitintegration durchgeführt, um zu den gewünschten Zeit-
punkten konkrete Werte zur Betrachtung in der Kostenfunktion berechnen zu kön-
nen.
In dieser Arbeit wird das Runge-Kutta-Verfahren vierter Ordnung [51] verwendet,
um die Zeitintegration durchzuführen.
1
2 1
3 2
4 3
2
2
t
t
t
K f x t
hK f x t K
hK f x t K
K f x t h K
(33)
Ausgehend vom Anfangswert x(t) werden die Koeffizientenvektoren K1, K2, K3
und K4 nacheinander unter der Nutzung des Modells f(x(t)) ermittelt. Die Schritt-
weite wird durch ht angegeben. Dieses Einschrittverfahren ermöglicht somit die
Approximation der Zustände zu den gewünschten Zeitpunkten.
tt 1 2 3 42 2
6
hx t h x t K K K K (34)
Bei der Verwendung der Verfahren zur Zeitintegration wird unter Nutzung der
stückweisen konstanten Eingänge uOPT und der bekannten Anfangswerte x0 eine
Anzahl NP an Prädiktionspunkten unter Nutzung des Modells berechnet. Wie zu
Beginn beschrieben finden diese Werte dann Einzug in die zu minimierende Kos-
tenfunktion.
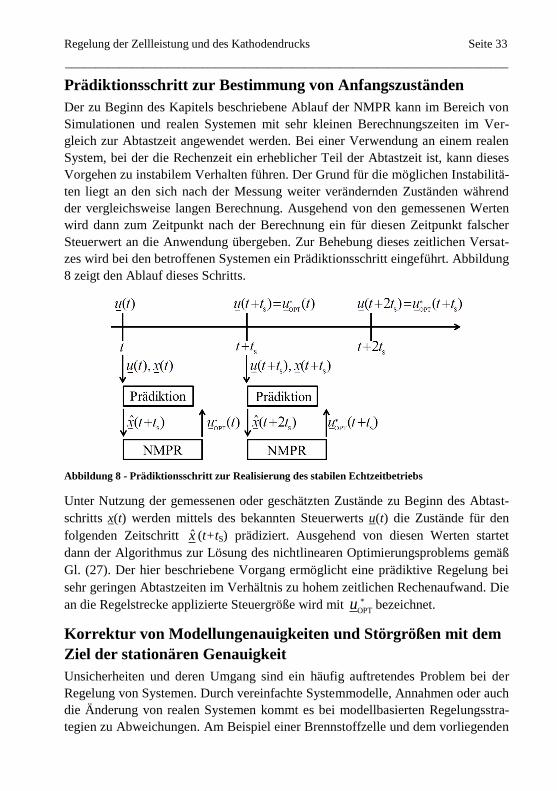
Regelung der Zellleistung und des Kathodendrucks Seite 33
__________________________________________________________________________
Prädiktionsschritt zur Bestimmung von Anfangszuständen
Der zu Beginn des Kapitels beschriebene Ablauf der NMPR kann im Bereich von
Simulationen und realen Systemen mit sehr kleinen Berechnungszeiten im Ver-
gleich zur Abtastzeit angewendet werden. Bei einer Verwendung an einem realen
System, bei der die Rechenzeit ein erheblicher Teil der Abtastzeit ist, kann dieses
Vorgehen zu instabilem Verhalten führen. Der Grund für die möglichen Instabilitä-
ten liegt an den sich nach der Messung weiter verändernden Zuständen während
der vergleichsweise langen Berechnung. Ausgehend von den gemessenen Werten
wird dann zum Zeitpunkt nach der Berechnung ein für diesen Zeitpunkt falscher
Steuerwert an die Anwendung übergeben. Zur Behebung dieses zeitlichen Versat-
zes wird bei den betroffenen Systemen ein Prädiktionsschritt eingeführt. Abbildung
8 zeigt den Ablauf dieses Schritts.
Abbildung 8 - Prädiktionsschritt zur Realisierung des stabilen Echtzeitbetriebs
Unter Nutzung der gemessenen oder geschätzten Zustände zu Beginn des Abtast-
schritts x(t) werden mittels des bekannten Steuerwerts u(t) die Zustände für den
folgenden Zeitschritt x (t+tS) prädiziert. Ausgehend von diesen Werten startet
dann der Algorithmus zur Lösung des nichtlinearen Optimierungsproblems gemäß
Gl. (27). Der hier beschriebene Vorgang ermöglicht eine prädiktive Regelung bei
sehr geringen Abtastzeiten im Verhältnis zu hohem zeitlichen Rechenaufwand. Die
an die Regelstrecke applizierte Steuergröße wird mit *OPT
u bezeichnet.
Korrektur von Modellungenauigkeiten und Störgrößen mit dem
Ziel der stationären Genauigkeit
Unsicherheiten und deren Umgang sind ein häufig auftretendes Problem bei der
Regelung von Systemen. Durch vereinfachte Systemmodelle, Annahmen oder auch
die Änderung von realen Systemen kommt es bei modellbasierten Regelungsstra-
tegien zu Abweichungen. Am Beispiel einer Brennstoffzelle und dem vorliegenden
Regelung der Zellleistung und des Kathodendrucks Seite 34
__________________________________________________________________________
System kommt es in der Praxis u. a. zu der angesprochenen Alterung, der Degrada-
tion, welche mit zunehmender Betriebsdauer oder fehlerhaftem Betrieb die elektri-
schen Eigenschaften der Brennstoffzelle ändert. Neben diesem betriebsbedingten
Verschleiß der elektrischen Eigenschaften kann auch eine Veränderung mechani-
scher Komponenten des Systems stattfinden. Hier kommt es beispielsweise zum
Verkleben von Ventilen, was in der Praxis häufig der Fall ist. Eine Ansammlung
von Ablagerungen verändert dann die Ventilcharakteristik und folglich findet eine
Beeinflussung der Druckregelung statt.
In dieser Arbeit wird eine Methode vorgestellt, die das Nutzen einer NMPR trotz
Ungenauigkeiten im Modell zulässt. Die Anwendung dieser Methode wird anhand
sich ändernder elektrischer Eigenschaften der Brennstoffzelle mit dem Ziel einer
präzisen Leistungsregelung gezeigt. Die Methode umfasst den Einsatz eines Erwei-
terten Kalman-Filters (EKF) und zeigt, wie trotz Abweichungen im Modell die
Regelgüte unter Einhaltung von Nebenbedingungen hoch gehalten wird. Vor der
Darstellung der Anwendung eines EKF wird zunächst auf die Möglichkeiten der
Verwendung eines Integralanteils sowie auf die Erweiterung des Systems um einen
Zustand, der die Störung abbildet, eingegangen.
Für die Umsetzung einer stationär genauen Modellprädiktiven Regelung bedarf es
in der Regel einer Erweiterung des Zustandsvektors, um die Störgröße abzubilden
und somit direkt beim Regelungsentwurf zu berücksichtigen. Für den linearen Fall
bietet die Literatur verschiedene Ansätze [49], [50], [57]. Einen vergleichenden
Überblick gibt [49]. Es werden drei verschiedene Verfahren vor- und gegenüberge-
stellt, um eine stationär genaue Modellprädiktive Regelung zu realisieren. Für zwei
der drei Verfahren wird das für das Gütefunktional benötigte Modell am Ein- und
Ausgang um die jeweiligen Störgrößen erweitert bzw. modifiziert. Es kommt spe-
ziell im ersten Verfahren zu einem integrierenden Störzustand. Durch einen spezi-
fischen Beobachter werden die Störgrößen zu jedem Zeitpunkt über das erweiterte
Zustandsmodell geschätzt und die MPR berechnet mit den Informationen der ge-
schätzten Zustände die neuen Steuergrößen zum Ausgleich der Regelabweichung.
In [50] wird gezeigt, dass stationäre Genauigkeit sowohl unter Einhaltung von
Nebenbedingungen als auch bei nichtlinearem Verhalten der Strecke teilweise
möglich ist. Ausführungen mit dem Hintergrund der Problemstellung stationär
genauer, prädiktiver Regler im Zusammenhang mit nichtlinearen Modellen zei-
gen [45] sowie [71] und stellen fest, dass der gezeigte Ansatz nicht auf eine beson-
dere Auslegung des Beobachters und der MPR begründet ist. Auch die Verwen-
dung eines nichtlinearen Beobachters in Zusammenarbeit mit einem linearisierten
Zustandsraummodell in der MPR kann zum Ziel führen. Für einen Erfolg muss
sowohl das Modell des Beobachters als auch das der MPR den gleichen stationären
Zustand einnehmen. Folglich sind integrierende Störgrößen bei nichtlinearen Cha-
Regelung der Zellleistung und des Kathodendrucks Seite 35
__________________________________________________________________________
rakteristika nicht generell erfolgreich und Informationen über das Verhalten des
Systems im stationären Zustand sind für die weitere Betrachtung notwendig.
Die zweite der drei Methoden aus [49] benötigt keine erweiterten Zustände. Ein
spezifischer Beobachter schätzt die Zustände hier am Ein- und Ausgang des Mo-
dells zur Korrektur. Nach [70] eignet sich ein Kalman-Filter, welches entsprechend
nach dem Grad der Nichtlinearität als EKF oder SPKF ausgeführt wird. Über die
Differenz der Messwerte und der geschätzten Zustände werden die Störgrößen
berechnet. Das Modell der prädiktiven Regelung wird mit den Informationen über
die Modelle anschließend angepasst [49]. Zudem zeigt [70] einen Vergleich der
Erweiterung um einen Zustand und den Einsatz eines Filters. Die Implementierung
des Filters in die Regelungsstruktur scheint hierbei einfacher realisierbar und bietet
ein breiteres Anwendungsspektrum.
Für die dritte Variante dient ein modifiziertes Modell, welches als „velocity form
model“ als Grundlage für die stationäre Genauigkeit bekannt ist. Die besonderen
Eigenschaften dieses Modells zeichnen sich durch die Zustandsdefinition über die
Schrittweite zwischen zwei Zuständen aus. Das neue Modell wird, ähnlich wie die
erste Variante, mit der Störung erweitert. Somit enthält das erweiterte Modell di-
rekt die Informationen über die aktuelle Störgröße. Ein zusätzlicher Störzustand
wird überflüssig. Die Vor- und Nachteile dieses Vorgehens werden in [50] ausge-
führt. Ein ähnlicher Erfolg wie beim zweiten Ansatz stellt sich hier bei einfachen
Anwendungen ein.
Eine weitere Alternative für den linearen Fall wird in [3] vorgestellt. Bei diesem
Vorgehen wird der Referenzwert für den prädiktiven Regler geändert und somit
kann die bleibende Regelabweichung ausgeglichen werden. Mittels eines Beobach-
ters wird die Ausgangsgröße geschätzt und diese vom Messwert am Ausgang sub-
trahiert. Über eine Rückkopplung wird der eigentliche Referenzwert über die Dif-
ferenz bzw. Störung am Ausgang korrigiert. Eine zusätzliche Filterung des neuen
Referenzsignals soll die Auswirkungen von Rauschprozessen unterbinden. Ein
ähnliches Vorgehen findet sich auch in [76]. Eine Anpassung des Referenzwerts
für den prädiktiven Regler erfolgt auch hier. Ein von der MPR unabhängiger PI-
Regler berechnet die Korrektur für den eigentlichen Referenzwert. Der PI-Regler
nutzt hier den Regelfehler, der die Differenz der Regelgröße zum Referenzwert
beschreibt, wobei dieser mit einem Verzögerungsglied erster Ordnung, welches
dem Verhalten der MPR nachempfunden ist, gefiltert wird. Der Lösungsansatz
eignet sich für MIMO-Systeme (engl.: Multiple Input Multiple Output) mit unbe-
kannten Störgrößen. Der Vorteil besteht in der einfachen Implementierung in die
bereits vorhandene Regelungsstruktur.
Regelung der Zellleistung und des Kathodendrucks Seite 36
__________________________________________________________________________
Für die Anwendung in dieser Arbeit wird die zweite [70] von den zunächst ge-
nannten Varianten nach [49] gewählt. Für diesen Lösungsansatz wird ein nichtline-
arer Zustandsschätzer benötigt und das Modell für den prädiktiven Regler kann
somit korrigiert werden.
Im zeitdiskreten Fall findet das Kalman-Filter neben anderen Beobachtern und
Zustandsschätzern für lineare und nichtlineare Zusammenhänge in verschiedenen
Ausprägungen breite Anwendung [67]. Das Kalman-Filter ist zunächst ein rekursi-
ver Zustandsschätzer für lineare Systeme. Die grundlegende Entwicklung des
Kalman-Filters geht auf [35] zurück. Das Filter basiert auf mathematischen Zu-
sammenhängen zur Berechnung von Erwartungswerten und auf Beschreibungen
von stochastischen Prozessen. Eine Zustandsschätzung erfolgt nach der Minimie-
rung eines Fehlerquadrats. Die nachfolgenden Ausführungen basieren auf [77]. Für
den Einsatz und die Beschreibung des EKF wird das nachfolgende nichtlineare
System betrachtet.
1 , 1 1x j f x j u j v j (35)
y j g x j w j (36)
Die Funktionen f und g ermöglichen die Berechnung der Zustände und Ausgangs-
größen. Sie sind differenzierbar. Das unabhängige, gaußverteilte, weiße, mittel-
wertfreie und stochastische Rauschen für den Prozess und die Messung werden
durch v und w dargestellt. Das Prozessrauschen bildet die Einflüsse auf die Zustän-
de ab und lässt sich durch Vereinfachung in der Modellbildung nur schwierig exakt
beschreiben. Das Messrauschen, welches auf die messbaren Ausgangsgrößen des
Systems wirkt, ist hingegen über die Auswertung der Messeinrichtung und des
entsprechenden Signalverlaufs zu bestimmen. Das EKF besteht zur Schätzung der
Zustandsgröße aus zwei Schritten, dem Prädiktions- und dem Korrekturschritt. Der
Prädiktionsschritt setzt sich, wie nachfolgend dargestellt, zusammen.
ˆ ˆ| 1 1| 1 , 1x j j f x j j u j (37)
T| 1 1 1| 1 1 1P j j F j P j j F j Q j (38)
Die geschätzten Zustände zum Zeitpunkt j unter dem Einfluss bzw. der Bedingtheit
der Informationen zum Zeitpunkt j-1 und der Eingangsgröße u(j-1)
beschreibt x (j|j-1). Die Kovarianz des Schätzfehlers wird mit P(j|j-1) dargestellt.
Die Kovarianzmatrix zum Prozessrauschen v ist Q(j). Der Zusammenhang zwi-
schen zwei aufeinanderfolgenden Zuständen x(j-1) und x(j) wird durch F(j-1) be-
schrieben. Die Beobachtungsmatrix wird durch H(j) dargestellt.
Regelung der Zellleistung und des Kathodendrucks Seite 37
__________________________________________________________________________
Beide Matrizen sind Jacobi-Matrizen und ergeben sich gemäß den nachfolgenden
Gleichungen.
ˆ 1| 1 , 1
ˆ | 1
1
x j j u j
x j j
fF j
x
gH j
x
(39)
Die durchgeführte Linearisierung wird um die letzte Ein-Schritt-Prädiktion durch-
geführt. Es folgt daher eine relativ genaue Approximation des nichtlinearen Ver-
haltens. Ausgehend von den Gl. (37) und (38) berechnen sich die Kalman-
Verstärkung K(j) und die Kovarianz P(j|j) gemäß den folgenden Zusammenhängen.
1
T T| 1 | 1K j P j j H j H j P j j H j R j
(40)
| | 1P j j I K j H j P j j (41)
Die Kovarianzmatrix des Messrauschens w ist R(j). Nachfolgend ergeben sich alle
geschätzten Zustände und die Innovation, welche die Abweichung von der Mes-
sung und der Schätzung hinsichtlich der Ausgangsgröße beschreibt.
ˆ | 1y j y k g x j j (42)
ˆ ˆ| | 1x j j x j j K j y j (43)
ˆ ˆ| |y j j g x j j (44)
Es liegen nun die geschätzten Zustands- und Ausgangsgrößen des Systems gemäß
Gl. (35) und (36) vor. Die Ergebnisse dieser Schätzung werden in der Regel zur
Bestimmung von aus verschiedenen Gründen nicht messbaren Größen eingesetzt.
Im Fall des Einsatzes zur Modellkorrektur bei der Anwendung von Modellprädik-
tiven Regelungen wird ein Zustandsschätzer genutzt, um einzelne Zustandsgrößen
anhand vorliegender Messwerte zu bestimmen und einen Modellfehler zu identifi-
zieren. Aus diesem Modellfehler ergibt sich folglich die Korrektur des von der
Prädiktiven Regelung genutzten Modells.
Anwendungsabhängig kann auf verschiedene Weise die Schätzung der Zustände
zur Korrektur der Modellungenauigkeiten erfolgen. Im Folgenden ist beschrieben,
wie sich durch Schätzung eines Zustands die von der Regelung verwendete Stell-
größe beeinflussen lässt.
In Abbildung 9 ist zunächst die verwendete Regelungsstruktur unter Nutzung einer
NMPR und das EKF als Teil der Modellkorrektur vereinfacht dargestellt. Diese
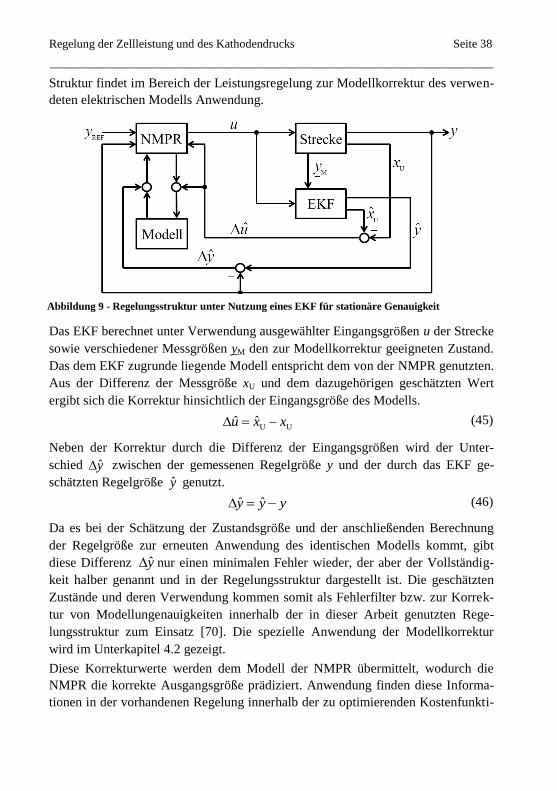
Regelung der Zellleistung und des Kathodendrucks Seite 38
__________________________________________________________________________
Struktur findet im Bereich der Leistungsregelung zur Modellkorrektur des verwen-
deten elektrischen Modells Anwendung.
Abbildung 9 - Regelungsstruktur unter Nutzung eines EKF für stationäre Genauigkeit
Das EKF berechnet unter Verwendung ausgewählter Eingangsgrößen u der Strecke
sowie verschiedener Messgrößen yM den zur Modellkorrektur geeigneten Zustand.
Das dem EKF zugrunde liegende Modell entspricht dem von der NMPR genutzten.
Aus der Differenz der Messgröße xU und dem dazugehörigen geschätzten Wert
ergibt sich die Korrektur hinsichtlich der Eingangsgröße des Modells.
U U
ˆ ˆu x x (45)
Neben der Korrektur durch die Differenz der Eingangsgrößen wird der Unter-
schied y zwischen der gemessenen Regelgröße y und der durch das EKF ge-
schätzten Regelgröße y genutzt.
ˆ ˆy y y (46)
Da es bei der Schätzung der Zustandsgröße und der anschließenden Berechnung
der Regelgröße zur erneuten Anwendung des identischen Modells kommt, gibt
diese Differenz y nur einen minimalen Fehler wieder, der aber der Vollständig-
keit halber genannt und in der Regelungsstruktur dargestellt ist. Die geschätzten
Zustände und deren Verwendung kommen somit als Fehlerfilter bzw. zur Korrek-
tur von Modellungenauigkeiten innerhalb der in dieser Arbeit genutzten Rege-
lungsstruktur zum Einsatz [70]. Die spezielle Anwendung der Modellkorrektur
wird im Unterkapitel 4.2 gezeigt.
Diese Korrekturwerte werden dem Modell der NMPR übermittelt, wodurch die
NMPR die korrekte Ausgangsgröße prädiziert. Anwendung finden diese Informa-
tionen in der vorhandenen Regelung innerhalb der zu optimierenden Kostenfunkti-
Regelung der Zellleistung und des Kathodendrucks Seite 39
__________________________________________________________________________
on. Der Einfluss des EKF auf das nichtlineare Optimierungsproblem gemäß
Gl. (31) zeigt die folgende Gleichung.
P
C
2*
1 REF PRÄD
1
12
2
0
ˆ ˆ,
1
N
i
N
i
J q y k i y k i u y
q u k i u k i
(47)
Ein Einfluss der Bewertung der hochfrequenten Nutzung des Eingangs in die Kos-
tenfunktion existiert nicht, da es sich hier nur um die Bewertung der Differenz von
zwei aufeinanderfolgenden Steuerwerten handelt.
Neben den Informationen über die Modellanpassungen u und y wird zur Ein-
haltung der Nebenbedingungen auch die Anpassung der Initialwerte an die NMPR
direkt übermittelt. Mit Hilfe dieser Information passt die NMPR fiktiv den Start-
wert der Steuergröße an.
SOLNP
Der numerische SQP-Algorithmus (Sequentielle Quadratische Programmierung)
SOLNP [78], [79] wird in dieser Arbeit zum Lösen des nichtlinearen Optimie-
rungsproblems gemäß Gl. (29) genutzt.
SQP-Verfahren gelten als effektive Verfahren zum Lösen eines Optimierungsprob-
lems mit Gleichungs- und Ungleichungsnebenbedingungen [51]. Eine Vielzahl von
Software-Paketen in wissenschaftlichen Standardprogrammen oder Rapid-
Prototyping-Anwendungen sind verfügbar und können je nach Auslegung komple-
xe Probleme mit bis zu mehreren tausend Unbekannten lösen. Grundsätzlich geht
es bei SQP-Verfahren um die Minimierung einer Gütefunktion unter Variation von
Eingangsgrößen. Das vorhandene Modell bildet hierbei den Zusammenhang zwi-
schen der Eingangsgröße und dem Gütefunktional.
Zur Regelung von Brennstoffzellensystemen wurde das Softwarepaket in [64]
bereits eingesetzt. Hier findet auch eine Untersuchung des Einflusses der Wahl der
inneren und äußeren Iterationsschritte statt, welche dem Nutzer als Einstellungen
des Softwarepakets u.a. zur Verfügung stehen.
Betrachtung der Rechenzeit
Bei Echtzeitanwendungen ist eine Betrachtung der Rechenzeit unerlässlich. Auch
mit der Nutzung des beschriebenen Prädiktionsschritts müssen alle Berechnungen
bis zum Setzen der nächsten Stelleingriffe abgeschlossen sein. Die folgenden
Punkte beschreiben Möglichkeiten zur Rechenzeitverkürzung ohne den Einfluss
des verwendeten Mediums (Hard- oder Software).

Regelung der Zellleistung und des Kathodendrucks Seite 40
__________________________________________________________________________
Der Lösungsvorgang des nichtlinearen Optimierungsproblems benötigt den größ-
ten Anteil der Zeit innerhalb eines Abtastschritts. Um das Lösen des Optimie-
rungsproblems zu beschleunigen, wird in diesem Teil der Arbeit die Betrachtung
der Startwerte für den Lösungsalgorithmus in den Fokus gerückt. Neben dem Ziel
der eigentlichen Konvergenz der nichtlinearen Optimierung und durch Steigerung
der Wahrscheinlichkeit einer erfolgreichen Lösung des Problems, kann mit geziel-
tem Setzen von Startwerten die Rechenzeit beeinflusst werden. In [25] werden drei
verschiedene Verfahren zur Bestimmung dieser Initialwerte genannt und beschrie-
ben. Das bestimmte Setzen von Startwerten zur Reduktion der Rechenzeit wird als
Warmstart einer NMPR bezeichnet.
Die nachfolgend genannten Verfahren haben grundlegend den gleichen Ansatz.
Ausgehend von ähnlichen Problemstellungen zwischen zwei aufeinanderfolgenden
Zeitschritten basieren die ersten beiden genannten Verfahren auf dem Ansatz der
Ähnlichkeiten zweier benachbarter Probleme beim Wechsel des Zeitschritts. Diese
Ähnlichkeit ermöglicht nach [18] und [80] eine schnelle Konvergenz des Lösungs-
verfahrens. Bei der zuletzt genannten Variante wird ein Vorgehen des Verschie-
bens von bereits bekannten Lösungen aus dem vorherigen Zeitschritt genutzt. Die-
ses Verfahren wird Verschiebungsmethode genannt und setzt identische Schritt-
weiten zwischen den Zeitpunkten der zu berechnenden Steuergrößen voraus. Eine
Berechnung neuer, grundsätzlicher Startwerte im Hinblick auf die Zustandsgrößen,
wie in den beiden anderen Verfahren, ist nicht notwendig. Bei der Verschiebungs-
methode wird die im vorherigen Zeitschritt berechnete Lösung uOPT bzgl. ihrer
nicht genutzten Einträge uOPT(t+tS,…, t+(NC-1)tS) ausgewertet. In dieser Variante
der Warmstartstrategie finden NC-1 Werte Anwendung. Die Startwerte für den
nachfolgenden Zeitschritt setzen sich aus ihnen, wie nachfolgend dargestellt, zu-
sammen.
S ,0 OPT, OPT, OPT, C OPT, C2 3 ...t t t t t tu u u u N u N
(48)
Unter der Annahme, dass sich die Lösung des nichtlinearen Optimierungsproblems
von einem zum nächsten Zeitschritt nicht wesentlich ändert und die Lösungen im
Bereich der gesetzten Startwerte liegen, reduziert dies den Rechenaufwand auf
einen Bruchteil der Zeit. Experimente mit Warmstartstrategie zeigten Lösungen in
einem Zehntel der Zeit von Berechnungen ohne dieses bestimmte Setzen von
Startwerten für das Lösen des Optimierungsproblems. Für die Vorgabe von Start-
punkten für die Optimierung bzgl. der Steuerwerte werden diese von Zeitschritt zu
Zeitschritt gemäß Gl. (48) angepasst. Alle Einträge des Vektors entsprechen den
verschobenen Lösungen des vorherigen Zeitschritts, wobei der letzte Eintrag des
Vektors der Startwerte uOPT,t(NC) durch den beispielsweise vorletzten
Wert uOPT,t(NC-1) ersetzt wird. Eine weitere Möglichkeit ist die Berechnung der
Regelung der Zellleistung und des Kathodendrucks Seite 41
__________________________________________________________________________
Steigung über die Differenz des letzten uOPT,t(NC) und vorletzten Steuer-
werts uOPT,t(NC-1), um daraus den zu ergänzenden Startwert zu ermitteln. Dieses
Verfahren findet in den Experimenten dieser Arbeit Anwendung.
Neben der Berechnung der eigentlichen Prädiktion durch die Zeitintegration spielt
der Aufbau der Kostenfunktion eine entscheidende Rolle für die Berechnungsdau-
er. Der in Gl. (31) einflussnehmende Term zur Nutzung der Eingänge wirkt sich
neben seiner eigentlichen Funktion auch auf die Rechenzeit aus. Durch die Bestra-
fung der stark abweichenden, aufeinanderfolgenden Steuergrößen wird auch die
Möglichkeit des Lösungsraums reduziert. Durch das Hinzufügen eines in dieser
Form gewichteten Terms werden die Lösungsmöglichkeiten des Optimierungs-
problems stark beeinflusst, was sich positiv auf die Rechenzeit auswirkt.
4.2 Reglermodell und Kostenfunktion zur Leistungsregelung
Die Regelung der elektrischen Leistung des Brennstoffzellenstacks unter Beach-
tung verschiedener betriebsbedingter Nebenbedingungen wird in diesem Unterka-
pitel dargestellt. Es existieren andere Arbeiten, die verschiedene Ansätze beschrei-
ben oder Ziele verfolgen, die auch in dieser Arbeit im Fokus stehen. Nachfolgend
werden einige dieser Arbeiten vorgestellt.
Einen linearen Regler zur Regelung der Stöchiometrie und der Stackstromstärke
zeigt [55]. Die der Regelung zugrunde liegenden nichtlinearen Modelle beschrei-
ben u. a. die Kompressordynamik, wobei die Ansteuerung des Kompressors die
Eingangsgröße darstellt. In [16] wird ein flachheitsbasierter Regler für die Regel-
größen Kathodendruck und Stöchiometrie verwendet. Das Ziel der Regelung ist die
Vermeidung von Unterversorgung der Brennstoffzelle mit Sauerstoff während
verschiedener Lastwechsel. Die Verwendung der Stöchiometrie als Regelgröße
ermöglicht die Anwendung geringer Stöchiometrie ohne die Gefahr der Unterver-
sorgung bei Änderungen der Arbeitspunkte. Eingangsgrößen bei den durchgeführ-
ten Simulationen sind die Referenzwerte des Massendurchflussreglers und der
Abgasventilstellung.
Die Anwendung einer modellprädiktiven Regelung in [17] regelt neben der Stöchi-
ometrie und dem Kathodendruck die dem Brennstoffzellensystem entnommene
Stromstärke. Als Steuergrößen bei diesen Simulationen dienen die Referenz des
Massendurchflussreglers, die Referenz der Abgasventilposition und die Referenz
der Stackstromstärke. In dieser Arbeit werden Mindestwerte des Kathodendrucks
und der Stöchiometrie sowie die Stellgrößenbeschränkungen als Nebenbedingun-
gen beachtet. Ein Prädiktionshorizont von 10 ms bei einer Abtastzeit von 1 ms
findet Anwendung. Sowohl der Druck als auch die Stöchiometrie sollen während
der Lastwechsel konstant gehalten werden.
Regelung der Zellleistung und des Kathodendrucks Seite 42
__________________________________________________________________________
In den in [12] gezeigten Simulationen werden drei Regelungsstrukturen auf Grund-
lage einer MPR vorgestellt. Der Fokus der einzelnen Strukturen liegt auf der Effi-
zienz des Brennstoffzellensystems, der Spannungsregelung und der Vermeidung
von Unterversorgung ähnlich den zuvor genannten Arbeiten. Die Nebenbedingun-
gen zur minimalen Stöchiometrie während des Betriebs und die physikalischen
Begrenzungen des verwendeten Kompressors werden beim Regelungsentwurf
beachtet. Die drei identischen Regelungsziele werden in [6] verfolgt. Die gezeigten
Simulationsergebnisse basieren auf einem Brennstoffzellensystem mit einer
elektrischen Leistung von 1,2 kW und einer Abtastzeit von wenigen Millisekunden.
Als anwendungsbezogenes Ziel wird die Lösung des in der MPR aufgezeigten
Optimierungsproblems innerhalb der gegebenen Abtastzeit angegeben, um die
Berechnung online durchführen zu können.
Weiterhin wird eine NMPR zur Regelung eines PEM-Brennstoffzellensystems
vorgestellt [82]. Die Arbeit zeigt praktische Ergebnisse an einem System mit weni-
gen Watt und einer Abtastzeit von 0,5 s. Mittels einer geeigneten Warmstartstrate-
gie wird in dieser Arbeit gezeigt, wie der Rechenaufwand zum Lösen des Optimie-
rungsproblems gesenkt wird. Die NMPR regelt in dieser Anwendung die anoden-
und kathodenseitige Stöchiometrie, die Brennstoffzellenstacktemperatur sowie die
elektrische Leistung. Als Eingangsgrößen werden die jeweilige Referenz der Mas-
sendurchflussregler, ein Heiz- und ein Kühleinfluss sowie die Stackstromstärke
verändert, um die Regelziele zu erreichen. Beachtung als Nebenbedingungen fin-
den die Stellgrößenbeschränkungen mit dem Einfluss auf die Temperatur, die Än-
derungsbeschränkungen der Stackstromstärke und die Mindestwerte der geregelten
Stöchiometrien.
Eine weitere Anwendung der NMPR zur Regelung eines PEM-
Brennstoffzellensystems findet sich in [64]. In dieser Arbeit steht ein multifunktio-
naler Ansatz im Fokus. Im Gegensatz zu den zunächst genannten Arbeiten mit dem
Schwerpunkt auf Stöchiometrie-, Druck- und Leistungsregelung findet sich hier ein
Ansatz zur Nutzung mehrerer Reaktionsprodukte der Brennstoffzelle. Die darge-
stellte Regelung zeigt die Bereitstellung von sauerstoffarmer Abluft mit möglichst
geringer Feuchtigkeit. Als Stellgrößen werden die Stackstromstärke und die Refe-
renz der Temperaturregelung genutzt. Experimentelle Ergebnisse zum Einsatz
einer modellprädiktiven Regelungsstrategie zeigt auch [47]. In dieser Arbeit soll
ein autonomer Saugroboter mit einer Brennstoffzelle betrieben werden. Neben der
Bereitstellung der elektrischen Energie ist die Bahnplanung ein Ziel dieser Arbeit.
Im Zuge der Bahnplanung kann der Bedarf an elektrischer Leistung für einen be-
stimmten Zeitraum abgeschätzt werden. Diese Information dient der MPR als Re-
ferenz.
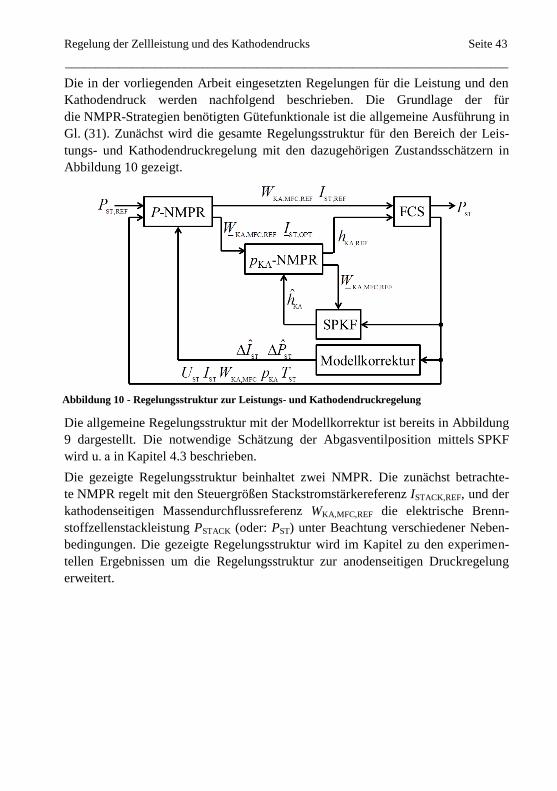
Regelung der Zellleistung und des Kathodendrucks Seite 43
__________________________________________________________________________
Die in der vorliegenden Arbeit eingesetzten Regelungen für die Leistung und den
Kathodendruck werden nachfolgend beschrieben. Die Grundlage der für
die NMPR-Strategien benötigten Gütefunktionale ist die allgemeine Ausführung in
Gl. (31). Zunächst wird die gesamte Regelungsstruktur für den Bereich der Leis-
tungs- und Kathodendruckregelung mit den dazugehörigen Zustandsschätzern in
Abbildung 10 gezeigt.
Abbildung 10 - Regelungsstruktur zur Leistungs- und Kathodendruckregelung
Die allgemeine Regelungsstruktur mit der Modellkorrektur ist bereits in Abbildung
9 dargestellt. Die notwendige Schätzung der Abgasventilposition mittels SPKF
wird u. a in Kapitel 4.3 beschrieben.
Die gezeigte Regelungsstruktur beinhaltet zwei NMPR. Die zunächst betrachte-
te NMPR regelt mit den Steuergrößen Stackstromstärkereferenz ISTACK,REF, und der
kathodenseitigen Massendurchflussreferenz WKA,MFC,REF die elektrische Brenn-
stoffzellenstackleistung PSTACK (oder: PST) unter Beachtung verschiedener Neben-
bedingungen. Die gezeigte Regelungsstruktur wird im Kapitel zu den experimen-
tellen Ergebnissen um die Regelungsstruktur zur anodenseitigen Druckregelung
erweitert.
Regelung der Zellleistung und des Kathodendrucks Seite 44
__________________________________________________________________________
Die Eingangsgrößen, der Zustandsvektor und die Ausgangsgröße sind nachfolgend
zusammengefasst für den Teil der Leistungsregelung dargestellt.
STACK,REF
NMPR,
KA,MFC,REF
KA,MFC
NMPR,P KA
KA
NMPR,P STACK
NMPR,P NMPR,P STACK STACK O 2 AN, , , , ,
P
Iu
W
W
x W
p
y P
f x u U T p p
(49)
Der Sauerstoffpartialdruck pO2 wird grundsätzlich gemäß Gl. (6) berechnet. Dieser
Partialdruck unterliegt im gezeigten Zusammenhang keiner Dynamik bzw. keinem
Transportverhalten durch das Brennstoffzellensystem. Hierfür wird innerhalb die-
ses Unterkapitels ein für die Regelung verwendetes Stofftransportmodell für Sau-
erstoff und Stickstoff durch das kathodenseitige Gassystem eingeführt.
Die NMPR für die Kathodendruckregelung, deren Kostenfunktion, das genutzte
Modell und die Nebenbedingungen werden im Kapitel 4.3 dargestellt.
Die Nebenbedingungen für die Leistungsregelung beziehen sich auf die Lastwech-
sel am Brennstoffzellensystem. Aufgrund von zu starkem Verschleiß in Folge von
thermischen Spannungen ist gefordert, dass Lastwechsel mit einem begrenzten
Stackstromstärkeanstieg dISTACK,MAX realisiert werden sollen [54]. Für den Fall von
sinkender Stackstromstärke ist dISTACK,MIN nicht konkret vorgegeben und wird zur
Erstellung der Nebenbedingung gleich der für den Stromstärkeanstieg gewählt.
STACK,MAX STACK,MINdI dI (50)
Für den zeitdiskreten Fall folgt die Begrenzung in Abhängigkeit der Abtastzeit tS.
STACK,MAX STACK,MAX SI dI t (51)
Die einzuhaltende Nebenbedingung soll somit auf zwei aufeinander folgende Zeit-
schritte und die dazugehörige, einzustellende Stackstromstärke ISTACK wirken.
STACK,MAX STACK S STACK STACK,MAXI I t t I t I (52)
Eine weitere Nebenbedingung ist direkt der Versorgung des Brennstoffzellenstacks
zuzuordnen. Bei der Zuführung von Umgebungsluft als Träger des für die Reaktion
benötigten Sauerstoffs ist auf die ausreichende bzw. zusätzliche Menge an Sauer-
stoff in Relation zur benötigten Menge durch die chemische Reaktion gemäß
Gl. (2) zu achten. Für eine effiziente chemische Reaktion ist es notwendig, dass
Regelung der Zellleistung und des Kathodendrucks Seite 45
__________________________________________________________________________
mehr Sauerstoff an der Membran zur Verfügung steht als für die Reaktion gemäß
Gl. (16) benötigt wird. Diese Überhöhung an zu bereitstellendem Sauerstoff wird
als Luftzahl λ bezeichnet. Im allgemeinen Fall heißt diese Überhöhung Stöchio-
metrie. In Abhängigkeit der aktuellen Stackstromstärke ISTACK ist diese Stöchio-
metrie einzuhalten.
STACKλ f I (53)
Der Zusammenhang in Verbindung mit der Stacktemperatur wird an dieser Stelle
vernachlässigt, da der angegebene Temperaturbereich so groß ist, dass es im Be-
trieb außerhalb des Anfahrens nicht zu Einschränkungen kommt. Die stackstrom-
stärkeabhängige Luftzahl soll während des Betriebs bestimmte Grenzen nicht über-
oder unterschreiten. Bei einer Unterschreitung kann es lokal zu Unterversorgung
und folglich zu Schädigung der Brennstoffzellen kommen. Bei einer zu hohen
Luftzahl kommt es zunächst nicht zu einer Schädigung. Ein erhöhter Wasseraus-
trag aus dem Brennstoffzellensystem kann die Folge sein. Dies kann eine Aus-
trocknung der Membran zur Folge haben. Diese Faktoren sind systemabhängig und
unterscheiden sich je nach Art der Befeuchtung der Reaktionsgase und des Was-
sermanagements.
Für einen einzuhaltenden Bereich mit der Obergrenze λMAX und der Untergrenze
für die Luftzahl λMIN ergibt sich die zweite Nebenbedingung für die NMPR.
MIN MAXλ λ λ (54)
Weitere Nebenbedingungen ergeben sich aus dem elektrischen Arbeitsbereich des
Brennstoffzellenstacks. Dieser teilt sich in die Betrachtung der Stackstromstärke
und der Stackspannung auf. Es folgen zwei weitere Nebenbedingungen, die den
gesamten Arbeitsbereich des Brennstoffzellensystems abgrenzen.
STACK,MIN STACK STACK,MAXI I I (55)
STACK,MIN STACK STACK,MAXU U U (56)
Die Grundlage jeder prädiktiven Regelung ist das verwendete Modell, welches
einerseits das Systemverhalten möglichst genau nachbilden soll und andererseits
im Rahmen der Möglichkeiten, wie Zeithorizont und gegebene Hardware, in der
Applikation an einem realen System rechenbar und somit überhaupt umsetzbar ist.
Die Grundlage für die Leistungsregelung bildet das in Gl. (10) gezeigte Modell mit
den dazugehörigen Spannungen und Spannungsverlusten. Für die Prädiktion der
elektrischen Leistung wird dieses Modell wie gezeigt übernommen. Für den jewei-
ligen Prädiktionshorizont wird die Brennstoffzellenstacktemperatur TSTACK in
Gl. (4) und (8) und der Anodendruck pAN in Gl. (4) als konstant angenommen. Der
Grund für diese Annahmen liegt in der sehr langsamen Änderung der Temperatur
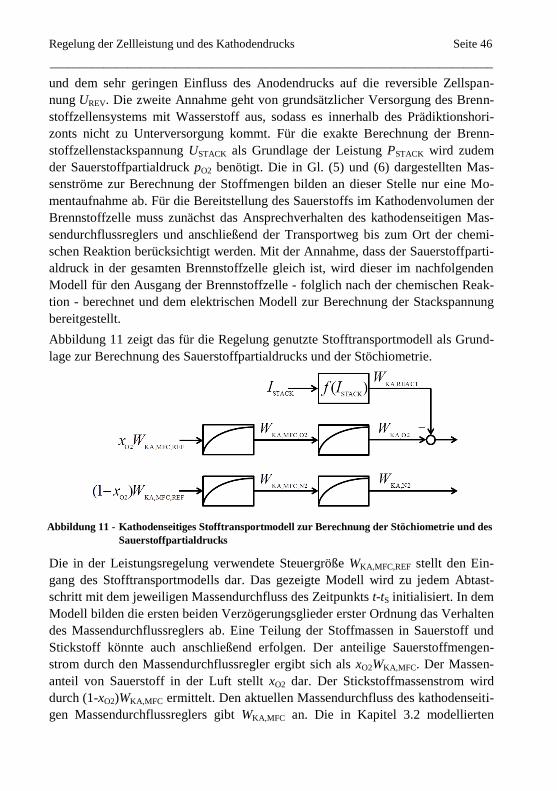
Regelung der Zellleistung und des Kathodendrucks Seite 46
__________________________________________________________________________
und dem sehr geringen Einfluss des Anodendrucks auf die reversible Zellspan-
nung UREV. Die zweite Annahme geht von grundsätzlicher Versorgung des Brenn-
stoffzellensystems mit Wasserstoff aus, sodass es innerhalb des Prädiktionshori-
zonts nicht zu Unterversorgung kommt. Für die exakte Berechnung der Brenn-
stoffzellenstackspannung USTACK als Grundlage der Leistung PSTACK wird zudem
der Sauerstoffpartialdruck pO2 benötigt. Die in Gl. (5) und (6) dargestellten Mas-
senströme zur Berechnung der Stoffmengen bilden an dieser Stelle nur eine Mo-
mentaufnahme ab. Für die Bereitstellung des Sauerstoffs im Kathodenvolumen der
Brennstoffzelle muss zunächst das Ansprechverhalten des kathodenseitigen Mas-
sendurchflussreglers und anschließend der Transportweg bis zum Ort der chemi-
schen Reaktion berücksichtigt werden. Mit der Annahme, dass der Sauerstoffparti-
aldruck in der gesamten Brennstoffzelle gleich ist, wird dieser im nachfolgenden
Modell für den Ausgang der Brennstoffzelle - folglich nach der chemischen Reak-
tion - berechnet und dem elektrischen Modell zur Berechnung der Stackspannung
bereitgestellt.
Abbildung 11 zeigt das für die Regelung genutzte Stofftransportmodell als Grund-
lage zur Berechnung des Sauerstoffpartialdrucks und der Stöchiometrie.
Abbildung 11 - Kathodenseitiges Stofftransportmodell zur Berechnung der Stöchiometrie und des
Sauerstoffpartialdrucks
Die in der Leistungsregelung verwendete Steuergröße WKA,MFC,REF stellt den Ein-
gang des Stofftransportmodells dar. Das gezeigte Modell wird zu jedem Abtast-
schritt mit dem jeweiligen Massendurchfluss des Zeitpunkts t-tS initialisiert. In dem
Modell bilden die ersten beiden Verzögerungsglieder erster Ordnung das Verhalten
des Massendurchflussreglers ab. Eine Teilung der Stoffmassen in Sauerstoff und
Stickstoff könnte auch anschließend erfolgen. Der anteilige Sauerstoffmengen-
strom durch den Massendurchflussregler ergibt sich als xO2WKA,MFC. Der Massen-
anteil von Sauerstoff in der Luft stellt xO2 dar. Der Stickstoffmassenstrom wird
durch (1-xO2)WKA,MFC ermittelt. Den aktuellen Massendurchfluss des kathodenseiti-
gen Massendurchflussreglers gibt WKA,MFC an. Die in Kapitel 3.2 modellierten
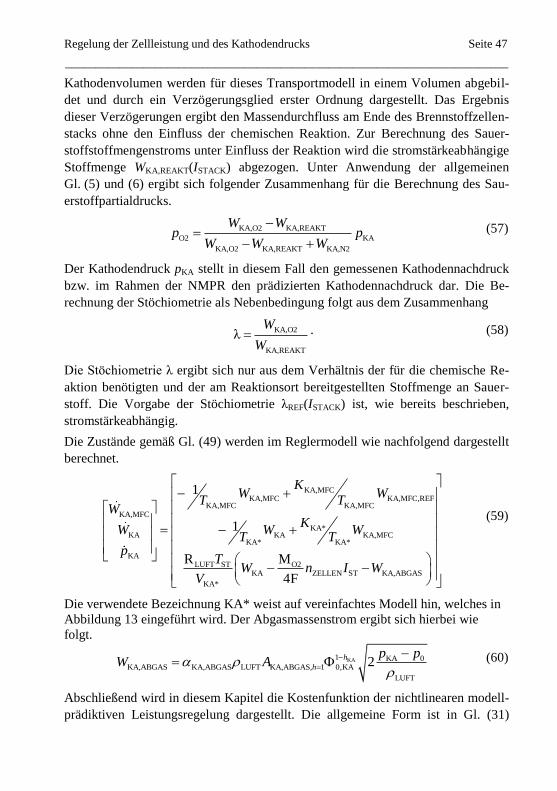
Regelung der Zellleistung und des Kathodendrucks Seite 47
__________________________________________________________________________
Kathodenvolumen werden für dieses Transportmodell in einem Volumen abgebil-
det und durch ein Verzögerungsglied erster Ordnung dargestellt. Das Ergebnis
dieser Verzögerungen ergibt den Massendurchfluss am Ende des Brennstoffzellen-
stacks ohne den Einfluss der chemischen Reaktion. Zur Berechnung des Sauer-
stoffstoffmengenstroms unter Einfluss der Reaktion wird die stromstärkeabhängige
Stoffmenge WKA,REAKT(ISTACK) abgezogen. Unter Anwendung der allgemeinen
Gl. (5) und (6) ergibt sich folgender Zusammenhang für die Berechnung des Sau-
erstoffpartialdrucks.
KA,O2 KA,REAKT
O2 KA
KA,O2 KA,REAKT KA,N2
W Wp p
W W W
(57)
Der Kathodendruck pKA stellt in diesem Fall den gemessenen Kathodennachdruck
bzw. im Rahmen der NMPR den prädizierten Kathodennachdruck dar. Die Be-
rechnung der Stöchiometrie als Nebenbedingung folgt aus dem Zusammenhang
KA,O2
KA,REAKT
λW
W . (58)
Die Stöchiometrie λ ergibt sich nur aus dem Verhältnis der für die chemische Re-
aktion benötigten und der am Reaktionsort bereitgestellten Stoffmenge an Sauer-
stoff. Die Vorgabe der Stöchiometrie λREF(ISTACK) ist, wie bereits beschrieben,
stromstärkeabhängig.
Die Zustände gemäß Gl. (49) werden im Reglermodell wie nachfolgend dargestellt
berechnet.
KA,MFCKA,MFC KA,MFC,REF
KA,MFC KA,MFCKA,MFC
KA*KA KA KA,MFC
KA* KA*
KALUFT ST O2
KA ZELLEN ST KA,ABGAS
KA*
1
1
R M
4F
KW W
T TW
KW W W
T Tp
TW n I W
V
(59)
Die verwendete Bezeichnung KA* weist auf vereinfachtes Modell hin, welches in
Abbildung 13 eingeführt wird. Der Abgasmassenstrom ergibt sich hierbei wie
folgt.
KA1 KA 0KA,ABGAS KA,ABGAS LUFT KA,ABGAS, 1 0,KA
LUFT
2h
h
p pW A
(60)
Abschließend wird in diesem Kapitel die Kostenfunktion der nichtlinearen modell-
prädiktiven Leistungsregelung dargestellt. Die allgemeine Form ist in Gl. (31)
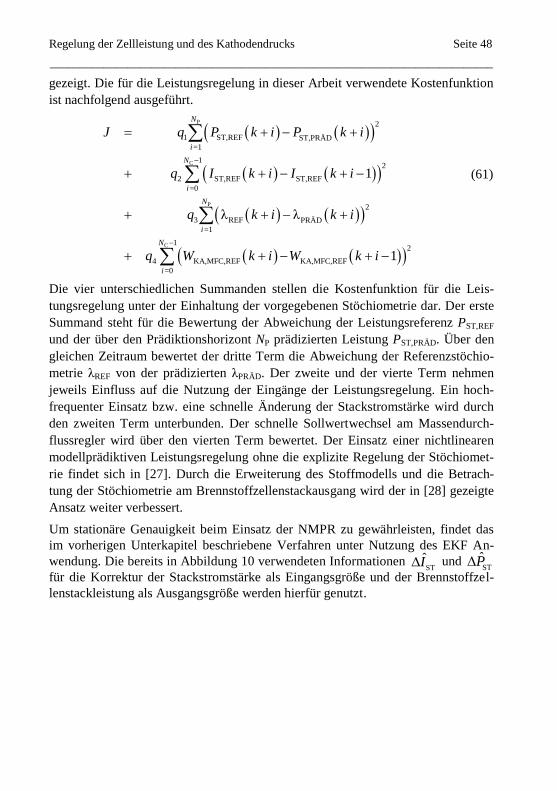
Regelung der Zellleistung und des Kathodendrucks Seite 48
__________________________________________________________________________
gezeigt. Die für die Leistungsregelung in dieser Arbeit verwendete Kostenfunktion
ist nachfolgend ausgeführt.
P
C
P
C
2
1 ST,REF ST,PRÄD
=1
12
2 ST,REF ST,REF
=0
2
3 REF PRÄD
=1
12
4 KA,MFC,REF KA,MFC,REF
=0
1
λ λ
1
N
i
N
i
N
i
N
i
J q P k i P k i
q I k i I k i
q k i k i
q W k i W k i
(61)
Die vier unterschiedlichen Summanden stellen die Kostenfunktion für die Leis-
tungsregelung unter der Einhaltung der vorgegebenen Stöchiometrie dar. Der erste
Summand steht für die Bewertung der Abweichung der Leistungsreferenz PST,REF
und der über den Prädiktionshorizont NP prädizierten Leistung PST,PRÄD. Über den
gleichen Zeitraum bewertet der dritte Term die Abweichung der Referenzstöchio-
metrie λREF von der prädizierten λPRÄD. Der zweite und der vierte Term nehmen
jeweils Einfluss auf die Nutzung der Eingänge der Leistungsregelung. Ein hoch-
frequenter Einsatz bzw. eine schnelle Änderung der Stackstromstärke wird durch
den zweiten Term unterbunden. Der schnelle Sollwertwechsel am Massendurch-
flussregler wird über den vierten Term bewertet. Der Einsatz einer nichtlinearen
modellprädiktiven Leistungsregelung ohne die explizite Regelung der Stöchiomet-
rie findet sich in [27]. Durch die Erweiterung des Stoffmodells und die Betrach-
tung der Stöchiometrie am Brennstoffzellenstackausgang wird der in [28] gezeigte
Ansatz weiter verbessert.
Um stationäre Genauigkeit beim Einsatz der NMPR zu gewährleisten, findet das
im vorherigen Unterkapitel beschriebene Verfahren unter Nutzung des EKF An-
wendung. Die bereits in Abbildung 10 verwendeten Informationen ST
I und ST
P
für die Korrektur der Stackstromstärke als Eingangsgröße und der Brennstoffzel-
lenstackleistung als Ausgangsgröße werden hierfür genutzt.
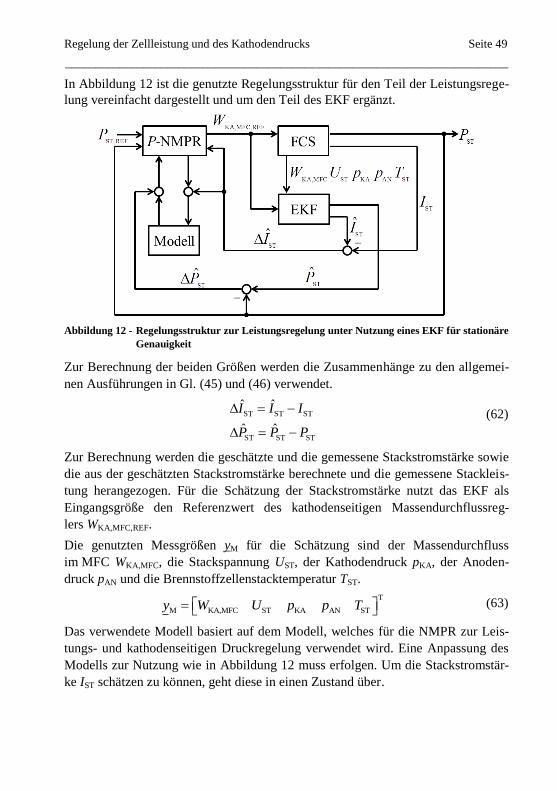
Regelung der Zellleistung und des Kathodendrucks Seite 49
__________________________________________________________________________
In Abbildung 12 ist die genutzte Regelungsstruktur für den Teil der Leistungsrege-
lung vereinfacht dargestellt und um den Teil des EKF ergänzt.
Abbildung 12 - Regelungsstruktur zur Leistungsregelung unter Nutzung eines EKF für stationäre
Genauigkeit
Zur Berechnung der beiden Größen werden die Zusammenhänge zu den allgemei-
nen Ausführungen in Gl. (45) und (46) verwendet.
ST ST ST
ST ST ST
ˆ ˆ
ˆ ˆ
I I I
P P P
(62)
Zur Berechnung werden die geschätzte und die gemessene Stackstromstärke sowie
die aus der geschätzten Stackstromstärke berechnete und die gemessene Stackleis-
tung herangezogen. Für die Schätzung der Stackstromstärke nutzt das EKF als
Eingangsgröße den Referenzwert des kathodenseitigen Massendurchflussreg-
lers WKA,MFC,REF.
Die genutzten Messgrößen yM für die Schätzung sind der Massendurchfluss
im MFC WKA,MFC, die Stackspannung UST, der Kathodendruck pKA, der Anoden-
druck pAN und die Brennstoffzellenstacktemperatur TST.
T
M KA,MFC ST KA AN STy W U p p T (63)
Das verwendete Modell basiert auf dem Modell, welches für die NMPR zur Leis-
tungs- und kathodenseitigen Druckregelung verwendet wird. Eine Anpassung des
Modells zur Nutzung wie in Abbildung 12 muss erfolgen. Um die Stackstromstär-
ke IST schätzen zu können, geht diese in einen Zustand über.
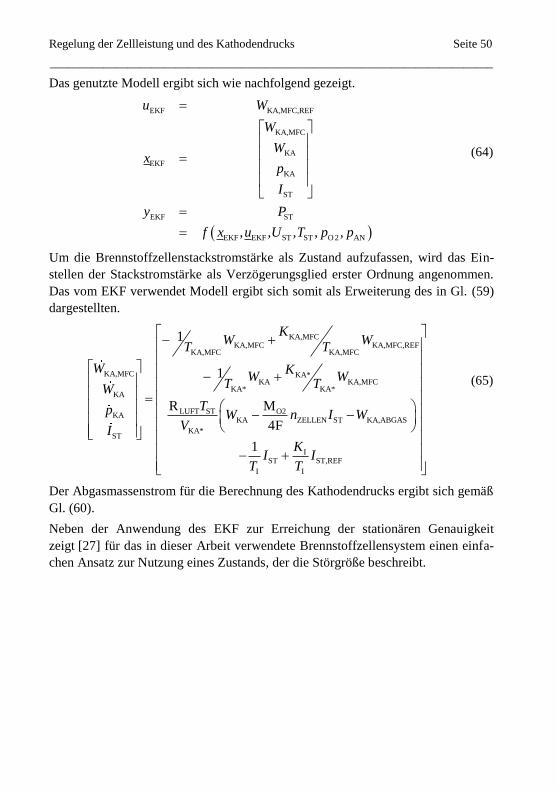
Regelung der Zellleistung und des Kathodendrucks Seite 50
__________________________________________________________________________
Das genutzte Modell ergibt sich wie nachfolgend gezeigt.
EKF KA,MFC,REF
KA,MFC
KA
EKF
KA
ST
EKF ST
EKF EKF ST ST O 2 AN, , , , ,
u W
W
Wx
p
I
y P
f x u U T p p
(64)
Um die Brennstoffzellenstackstromstärke als Zustand aufzufassen, wird das Ein-
stellen der Stackstromstärke als Verzögerungsglied erster Ordnung angenommen.
Das vom EKF verwendet Modell ergibt sich somit als Erweiterung des in Gl. (59)
dargestellten.
KA,MFCKA,MFC KA,MFC,REF
KA,MFC KA,MFC
KA,MFC KA*KA KA,MFC
KA* KA*KA
LUFT ST O2KA
KA ZELLEN ST KA,ABGAS
KA*ST
IST ST,REF
I I
1
1
R M
4F
1
KW W
T T
W KW W
T TW
Tp W n I WVI
KI I
T T
(65)
Der Abgasmassenstrom für die Berechnung des Kathodendrucks ergibt sich gemäß
Gl. (60).
Neben der Anwendung des EKF zur Erreichung der stationären Genauigkeit
zeigt [27] für das in dieser Arbeit verwendete Brennstoffzellensystem einen einfa-
chen Ansatz zur Nutzung eines Zustands, der die Störgröße beschreibt.
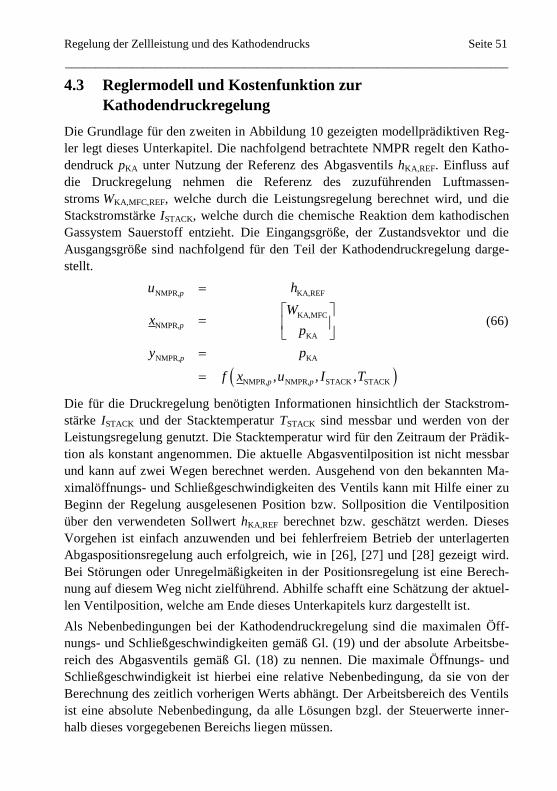
Regelung der Zellleistung und des Kathodendrucks Seite 51
__________________________________________________________________________
4.3 Reglermodell und Kostenfunktion zur
Kathodendruckregelung
Die Grundlage für den zweiten in Abbildung 10 gezeigten modellprädiktiven Reg-
ler legt dieses Unterkapitel. Die nachfolgend betrachtete NMPR regelt den Katho-
dendruck pKA unter Nutzung der Referenz des Abgasventils hKA,REF. Einfluss auf
die Druckregelung nehmen die Referenz des zuzuführenden Luftmassen-
stroms WKA,MFC,REF, welche durch die Leistungsregelung berechnet wird, und die
Stackstromstärke ISTACK, welche durch die chemische Reaktion dem kathodischen
Gassystem Sauerstoff entzieht. Die Eingangsgröße, der Zustandsvektor und die
Ausgangsgröße sind nachfolgend für den Teil der Kathodendruckregelung darge-
stellt.
NMPR, KA,REF
KA,MFC
NMPR,
KA
NMPR, KA
NMPR, NMPR, STACK STACK, , ,
p
p
p
p p
u h
Wx
p
y p
f x u I T
(66)
Die für die Druckregelung benötigten Informationen hinsichtlich der Stackstrom-
stärke ISTACK und der Stacktemperatur TSTACK sind messbar und werden von der
Leistungsregelung genutzt. Die Stacktemperatur wird für den Zeitraum der Prädik-
tion als konstant angenommen. Die aktuelle Abgasventilposition ist nicht messbar
und kann auf zwei Wegen berechnet werden. Ausgehend von den bekannten Ma-
ximalöffnungs- und Schließgeschwindigkeiten des Ventils kann mit Hilfe einer zu
Beginn der Regelung ausgelesenen Position bzw. Sollposition die Ventilposition
über den verwendeten Sollwert hKA,REF berechnet bzw. geschätzt werden. Dieses
Vorgehen ist einfach anzuwenden und bei fehlerfreiem Betrieb der unterlagerten
Abgaspositionsregelung auch erfolgreich, wie in [26], [27] und [28] gezeigt wird.
Bei Störungen oder Unregelmäßigkeiten in der Positionsregelung ist eine Berech-
nung auf diesem Weg nicht zielführend. Abhilfe schafft eine Schätzung der aktuel-
len Ventilposition, welche am Ende dieses Unterkapitels kurz dargestellt ist.
Als Nebenbedingungen bei der Kathodendruckregelung sind die maximalen Öff-
nungs- und Schließgeschwindigkeiten gemäß Gl. (19) und der absolute Arbeitsbe-
reich des Abgasventils gemäß Gl. (18) zu nennen. Die maximale Öffnungs- und
Schließgeschwindigkeit ist hierbei eine relative Nebenbedingung, da sie von der
Berechnung des zeitlich vorherigen Werts abhängt. Der Arbeitsbereich des Ventils
ist eine absolute Nebenbedingung, da alle Lösungen bzgl. der Steuerwerte inner-
halb dieses vorgegebenen Bereichs liegen müssen.
Regelung der Zellleistung und des Kathodendrucks Seite 52
__________________________________________________________________________
Für die Berechnung der NMPR des Kathodendrucks am realen System wird das in
Kapitel 3.2 erstellte Modell vereinfacht. Abbildung 13 gibt dabei einen Überblick
über diese Vereinfachung.
Abbildung 13 - Reglermodell zur Kathodendruckregelung
Die Komponenten R1 und R2 stellen hierbei die Wärmetauscher, Wasserabscheider
und die dazugehörige Verrohrung dar. Das Modell für den Regelungsentwurf
ergibt sich aus der Zusammenfassung der Komponenten Wärmetauscher, Brenn-
stoffzelle, Wasserabscheider und der dazugehörigen Verrohrung zu KA*. Das
Spülventil als grundlegendes Element der Druckregelung wird nicht vereinfacht
und geht, wie der Massendurchflussregler, unverändert in das Reglermodell über.
Das resultierende System ist ein System zweiter Ordnung.
KA
KA,MFCKA,MFC KA,MFC,REF
KA,MFC KA,MFC
O2KA,MFCKA,MFC ZELLEN STACK
LUFT STKA
1 KA 0KA*KA,ABGAS LUFT KA,ABGAS, 1 0,KA
LUFT
1
M
4FR
2h
h
KW W
T T
WW n I
Tp
p pVA
(67)
Auch die Nutzung des gesamten Modells ohne die genannte Vereinfachung ist
möglich. In [28] sind Ergebnisse mit der Nutzung einer ähnlichen Regelungsstrate-
gie gezeigt.
Abschließend in diesem Kapitel wird nachfolgend die Kostenfunktion der Katho-
dendruckregelung dargestellt. Die allgemeine Form ist in Gl. (31) eingeführt.
P
C
2
1 KA,REF KA,PRÄD
=1
12
2 KA,REF KA,REF
=0
1
N
i
N
i
J q p k i p k i
q h k i h k i
(68)
Im Gegensatz zur Kostenfunktion der Leistungsregelung gemäß Gl. (61) besteht
diese Kostenfunktion nur aus zwei Summanden. Im ersten Term wird der Refe-
Regelung der Zellleistung und des Kathodendrucks Seite 53
__________________________________________________________________________
renzdruckverlauf pKA,REF mit dem prädizierten Druckverlauf pKA,PRÄD über den
Prädiktionshorizont NP verglichen und bewertet. Mit Hilfe des zweiten Terms wird
der hochfrequente Einsatz des Abgasventils unterbunden. Bewertet wird immer
ausgehend vom aktuell an der Strecke applizierten Referenzwert der kathodenseiti-
gen Abgasventilposition. Die Abweichung zwischen zwei aufeinander folgenden
Referenzwerten, die im Rahmen der Lösung des nichtlinearen Optimierungsprob-
lems berechnet werden, wird über den gesamten Steuerhorizont NC ermittelt.
Schätzung der Abgasventilposition mittels
Sigma-Punkt-Kalman-Filter
Zur modellprädiktiven Regelung von Systemen ist es grundsätzlich notwendig, die
verschiedenen Zustände zu kennen. In der Regel werden diese benötigten physika-
lischen Größen gemessen. Eine Messung kann aus verschiedenen Gründen, wie
Kosten des Sensors, technisch nicht möglichen Anbringens eines Sensors oder
nicht verwendbarer Sensordaten, nicht immer durchgeführt oder verwendet wer-
den. In diesem Fall werden die Größen geschätzt. Diese Schätzung findet auf
Grundlage verschiedener vorhandener Messgrößen, den Eingangsgrößen, den Aus-
gangsgrößen und den physikalischen Zusammenhängen zwischen diesen Größen
statt.
Bei der Durchführung der Versuche des in der Arbeit verwendeten Brennstoffzel-
lenprüfstands ist es nicht möglich, die aktuelle Position der anoden- und kathoden-
seitigen Abgasventile zu messen. Während der Experimente liegen lediglich die
Sollgrößen beider Ventilpositionen, welche auch als Eingangsgrößen des Systems
verwendet werden, vor. Im Fokus der Schätzung steht das kathodenseitige Abgas-
ventil. Dieses ist während des Betriebs für die Druckbildung und die resultierende
Druckbeaufschlagung des kathodischen Gassystems verantwortlich. In Abhängig-
keit der Ventilposition verlässt mehr oder weniger Abgas das kathodenseitige Sys-
tem, was entsprechende Wirkung auf die Druckbildung im System hat. Der sich
einstellende Druck hat großen Einfluss auf die Effizienz der chemischen Reaktion,
wie in Abbildung 2 dargestellt, und die mechanische Belastung der Polymer-
Elektrolyt-Membran in Folge einer Druckdifferenz zum anodischen Gassystem. Im
Hinblick auf die Relevanz bzgl. des Einflusses auf die Effizienz oder eine zu hohe
mechanische Belastung des Brennstoffzellenstacks ist es notwendig, die Position
des kathodenseitigen Abgasventils zu kennen.
Um die Position festzustellen wird ein Sigma-Punkt-Kalman-Filter (SPKF) ver-
wendet. Nachfolgend werden hierfür kurz das grundsätzliche Vorgehen bzgl. des
Filters und das verwendete Modell beschrieben. Auf ausführliche theoretische
Regelung der Zellleistung und des Kathodendrucks Seite 54
__________________________________________________________________________
Grundlagen der Schritte des SPKF wird an dieser Stelle verzichtet, da das Ergebnis
der Schätzung in den Experimenten nicht direkt die Grundlage einer Regelung ist.
Die Ausführungen zum SPKF beruhen auf [47] und [51]. Die in [33] vorgeschla-
gene Variante ist im Bereich der Schätzung von nichtlinearen Prozessen eine Al-
ternative zum EKF, welches im vorherigen Unterkapitel beschrieben wird. Bei
stark nichtlinearen Prozessen kann es beim Einsatz des EKF zu schlechten Schät-
zungen kommen. Um dem entgegenzuwirken wurde die unscented transformation
eingeführt. Der Vorteil bei der Nutzung des SPKF ist der mögliche Einsatz bei
allgemeinen nichtlinearen Systemen. Während beim EKF die Approximation der
Systemgleichungen zu der Berechnung der Kovarianzen führt, werden beim SPKF
diese Kovarianzen über die Auswertung einer bestimmten Anzahl von Testpunkten
ermittelt. Diese Testpunkte entsprechen den namensgebenden Sigma-Punkten und
werden exakt durch die nichtlinearen Zusammenhänge abgebildet. Die notwendi-
gen Kovarianzmatrizen können somit auf deren Grundlage berechnet werden.
Ergebnisse zur Schätzung der kathodenseitigen Abgasventilposition sind auch
in [29] gezeigt.
Für die Durchführung der zuvor erläuterten Schätzung mittels SPKF werden die
mathematischen Zusammenhänge eines physikalischen Modells benötigt und ge-
nutzt. Für die Schätzung der kathodenseitigen Abgasventilposition wird das bereits
für die Regelung des Kathodendrucks genutzte Modell zugrunde gelegt, welches
zuvor vorgestellt wurde. An dieser Stelle bestehen zwei Möglichkeiten, die Ventil-
position zu schätzen. Einerseits kann die Schätzung mit allen zur Verfügung ste-
henden Messungen und Informationen durchgeführt werden, andererseits kann die
Schätzung mit einer reduzierten Informationsauswahl stattfinden. Der Unterschied
zwischen dem genannten Informationsstand bezieht sich auf die Kenntnis der Dy-
namik des Abgasventils in Gl. (19) und des aktuellen Sollwerts des Abgasventils.
Grundsätzlich stehen die Informationen des Sollwerts des Massendurchflussreg-
lers, des Istwerts des Massendurchflusses, der aktuellen Brennstoffzellenstack-
stromstärke und -temperatur für die Schätzung der Ventilposition zur Verfügung.
Für die Schätzung in dieser Arbeit werden nur die zuletzt genannten Daten ohne
die Information der Sollposition und der Dynamik des Ventils genutzt. Der Vorteil
der Nutzung in dieser Form ist die Möglichkeit der schnelleren Detektion von
Fehlern in der Ventilstellung und -positionierung, d. h. die Ventilstellung wird nur
in Abhängigkeit der genannten messbaren Zustände ermittelt. Der Nachteil der
Schätzung ohne den Sollwert und die Dynamik liegt in der Genauigkeit der Ergeb-
nisse.
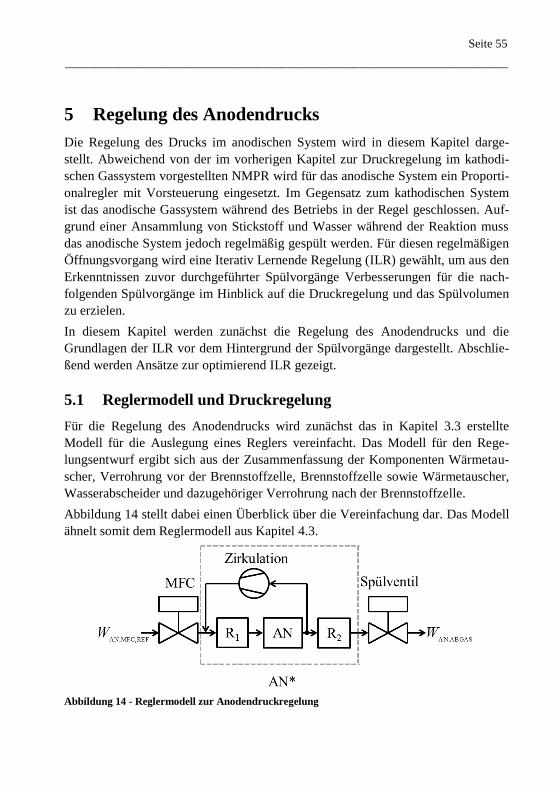
Seite 55
__________________________________________________________________________
5 Regelung des Anodendrucks
Die Regelung des Drucks im anodischen System wird in diesem Kapitel darge-
stellt. Abweichend von der im vorherigen Kapitel zur Druckregelung im kathodi-
schen Gassystem vorgestellten NMPR wird für das anodische System ein Proporti-
onalregler mit Vorsteuerung eingesetzt. Im Gegensatz zum kathodischen System
ist das anodische Gassystem während des Betriebs in der Regel geschlossen. Auf-
grund einer Ansammlung von Stickstoff und Wasser während der Reaktion muss
das anodische System jedoch regelmäßig gespült werden. Für diesen regelmäßigen
Öffnungsvorgang wird eine Iterativ Lernende Regelung (ILR) gewählt, um aus den
Erkenntnissen zuvor durchgeführter Spülvorgänge Verbesserungen für die nach-
folgenden Spülvorgänge im Hinblick auf die Druckregelung und das Spülvolumen
zu erzielen.
In diesem Kapitel werden zunächst die Regelung des Anodendrucks und die
Grundlagen der ILR vor dem Hintergrund der Spülvorgänge dargestellt. Abschlie-
ßend werden Ansätze zur optimierend ILR gezeigt.
5.1 Reglermodell und Druckregelung
Für die Regelung des Anodendrucks wird zunächst das in Kapitel 3.3 erstellte
Modell für die Auslegung eines Reglers vereinfacht. Das Modell für den Rege-
lungsentwurf ergibt sich aus der Zusammenfassung der Komponenten Wärmetau-
scher, Verrohrung vor der Brennstoffzelle, Brennstoffzelle sowie Wärmetauscher,
Wasserabscheider und dazugehöriger Verrohrung nach der Brennstoffzelle.
Abbildung 14 stellt dabei einen Überblick über die Vereinfachung dar. Das Modell
ähnelt somit dem Reglermodell aus Kapitel 4.3.
Abbildung 14 - Reglermodell zur Anodendruckregelung
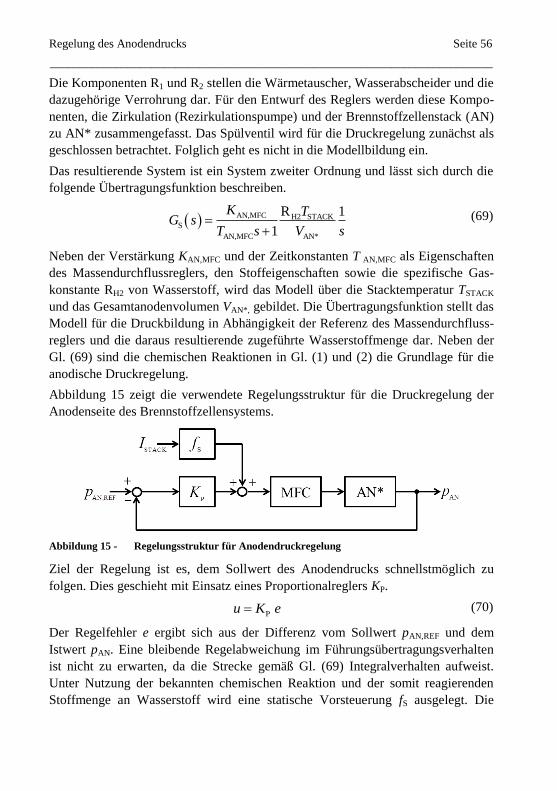
Regelung des Anodendrucks Seite 56
__________________________________________________________________________
Die Komponenten R1 und R2 stellen die Wärmetauscher, Wasserabscheider und die
dazugehörige Verrohrung dar. Für den Entwurf des Reglers werden diese Kompo-
nenten, die Zirkulation (Rezirkulationspumpe) und der Brennstoffzellenstack (AN)
zu AN* zusammengefasst. Das Spülventil wird für die Druckregelung zunächst als
geschlossen betrachtet. Folglich geht es nicht in die Modellbildung ein.
Das resultierende System ist ein System zweiter Ordnung und lässt sich durch die
folgende Übertragungsfunktion beschreiben.
AN,MFC H2 STACKS
AN,MFC AN*
R 1
1
K TG s
T s V s
(69)
Neben der Verstärkung KAN,MFC und der Zeitkonstanten T AN,MFC als Eigenschaften
des Massendurchflussreglers, den Stoffeigenschaften sowie die spezifische Gas-
konstante RH2 von Wasserstoff, wird das Modell über die Stacktemperatur TSTACK
und das Gesamtanodenvolumen VAN*, gebildet. Die Übertragungsfunktion stellt das
Modell für die Druckbildung in Abhängigkeit der Referenz des Massendurchfluss-
reglers und die daraus resultierende zugeführte Wasserstoffmenge dar. Neben der
Gl. (69) sind die chemischen Reaktionen in Gl. (1) und (2) die Grundlage für die
anodische Druckregelung.
Abbildung 15 zeigt die verwendete Regelungsstruktur für die Druckregelung der
Anodenseite des Brennstoffzellensystems.
Abbildung 15 - Regelungsstruktur für Anodendruckregelung
Ziel der Regelung ist es, dem Sollwert des Anodendrucks schnellstmöglich zu
folgen. Dies geschieht mit Einsatz eines Proportionalreglers KP.
Pu K e (70)
Der Regelfehler e ergibt sich aus der Differenz vom Sollwert pAN,REF und dem
Istwert pAN. Eine bleibende Regelabweichung im Führungsübertragungsverhalten
ist nicht zu erwarten, da die Strecke gemäß Gl. (69) Integralverhalten aufweist.
Unter Nutzung der bekannten chemischen Reaktion und der somit reagierenden
Stoffmenge an Wasserstoff wird eine statische Vorsteuerung fS ausgelegt. Die
Regelung des Anodendrucks Seite 57
__________________________________________________________________________
auftretende Regelabweichung und die Abweichung in Folge eines Sollwertwech-
sels gleicht dann der Proportionalregler aus.
Die für die Vorsteuerung fS verwendete Stoffmenge wird in Abhängigkeit der aktu-
ellen Stackstromstärke ISTACK und der Größe des verwendeten Brennstoffzellen-
stacks, welche sich durch die Anzahl der Einzelzellen nZELLEN ergibt, errechnet. Es
ergibt sich der aktuelle Verbrauch durch die chemische Reaktion in Gl. (1).
Das Stellglied im gezeigten Regelkreis ist der Massendurchflussregler (engl. mass
flow controller, MFC), der als Stellgröße einen Sollwert für den zuzuführenden
Wasserstoff erhält. Als Regelgröße wird der Anodennachdruck pAN verwendet.
Dieser kann im Brennstoffzellensystem messtechnisch erfasst werden. Die Berech-
nung des Sollwerts pAN,REF für den Anodendruck hängt direkt von der aktuellen
Stackstromstärke ab.
AN,REF STACKp f I (71)
Der Hersteller des Brennstoffzellenstacks gibt Angaben dazu vor [54]. Eine andere
Vorgabe für den Sollwert kann durch bestimmte betriebsbedingte Situationen,
auftretende Fehlerfälle oder Unterversorgungen erfolgen. Um den Brennstoffzel-
lenstack nicht dauerhaft zu schädigen, kann es zu Anpassungen dieser Werte für
den Zeitraum der Störung kommen. Beispiele für diese Einflüsse und Ansätze zur
Lösung unter Einfluss auf den Anodendruck zeigt [26].
5.2 Problemstellung
Neben der kontinuierlichen Druckregelung durch den Stelleingriff über den Mas-
sendurchflussregler bei geschlossenem, anodenseitigem Abgasventil (Spül,- Pur-
geventil) ist es für einen effizienten Betrieb notwendig die Anode zu spülen (engl.:
purge). Während des Spülvorgangs verändert sich das in Kapitel 5.1 genutzte Mo-
dell. Der zu modellierende Öffnungsvorgang von einem komplett geschlossenen
System bis hin zu einem System mit beliebig geöffnetem Abgasventil kann in
Anlehnung an die erstellten Modelle in Kapitel 3.2 nicht hinreichend genau vorge-
nommen werden. Untersuchungen zeigen hier, dass die Modelle das Verhalten im
Moment der Öffnung nur bedingt darstellen. Der sehr regelmäßig auftretende und
planbare Vorgang des Spülens sowie die Möglichkeit des Nutzens von vorhande-
ner Modellkenntnis sind Kriterien, die die Wahl und den Einsatz von ILR als Rege-
lungsstrategie befürworten. Die im Anschluss beschriebene ILR kann für ihren
Lern- und Regelvorgang mit, ohne oder nur mit unvollständigen Modellkenntnis-
sen erfolgreich eingesetzt werden. Jede vorhandene Modellkenntnis wirkt sich
dabei positiv auf den Lernerfolg und entsprechend auf die Regelgüte aus. Die ILR
ermöglicht somit auch eine gewünschte Regelgüte zu erzielen, wenn die Modelle
Regelung des Anodendrucks Seite 58
__________________________________________________________________________
Ungenauigkeiten aufweisen. Ziel ist es, den Anodendruck während des Spülvor-
gangs konstant zu halten, um einen zu hohen Druckunterschied zwischen anodi-
schem und kathodischem Gassystem zu vermeiden. Ein zu hoher Druckunterschied
kann durch zu hohe mechanische Belastung der Polymer-Elektrolyt-Membran zu
dauerhafter Schädigung führen.
Die in der Abbildung 15 gezeigte Regelungsstruktur mit dem Anodendruck pAN als
Regelgröße und der einzigen Stellgröße, der Referenz des Massendurchflussreg-
lers WAN,MFC,REF, verändern sich durch den Einsatz der ILR nicht. Außerhalb der
Anwendung bzw. des Eingriffs der ILR findet keine Beeinflussung des gezeigten
Systems statt. Für den effizienten Betrieb des Brennstoffzellenstacks ist neben dem
zu hohen Druckunterschied auch der ausströmende Wasserstoff zu beachten. Die-
ser soll nach Herstellerangaben [54] in Abhängigkeit der Einzelzellenanzahl des
Brennstoffzellenstacks pro Spülvorgang bei einem bestimmten Wert liegen.
Spülvorgang
Im Vorgriff auf die experimentellen Ergebnisse in Kapitel 6 und auf die Beschrei-
bung des Prüflings werden in diesem Unterkapitel bereits auszugsweise spezifische
Prüflingsdaten genutzt, um die Problemstellung besser zu erläutern.
Für einen chemisch stabilen und effizienten Betrieb des Brennstoffzellenstacks
wird das anodenseitige Gassystem durch Öffnen des Spülventils regelmäßig von
den unerwünschten Stoffen befreit. Dieser Vorgang erfolgt während des Betriebes
in Abhängigkeit der Laststromstärke ISTACK und der resultierenden Menge an ent-
standenem Reaktionswasser. Diese Spülvorgänge sollen den angesammelten, dif-
fundierten Stickstoff und Reaktionswasser aus dem anodenseitigen Gassystem
entfernen. Unregelmäßige oder längere Spülintervalle können Blockaden durch
flüssiges Reaktionswasser nach sich ziehen. Eine solche Blockade behindert die
Wasserstoffzufuhr an den einzelnen Zellen bzw. Reaktionsorten und es kommt zu
Wasserstoffverarmung, was eine Unterversorgung zur Folge hat. Diese Unterver-
sorgung ist der häufigste Grund für chemisch-physikalische Degradation in Brenn-
stoffzellen und kann die Elektroden irreparabel schädigen.
Die Zeitpunkte des Spülens werden entsprechend der resultierenden Menge an
Reaktionswasser direkt an der gewandelten Ladungsmenge durch das Brennstoff-
zellensystem bestimmt.
0
STACK
t
t
Q t I d (72)
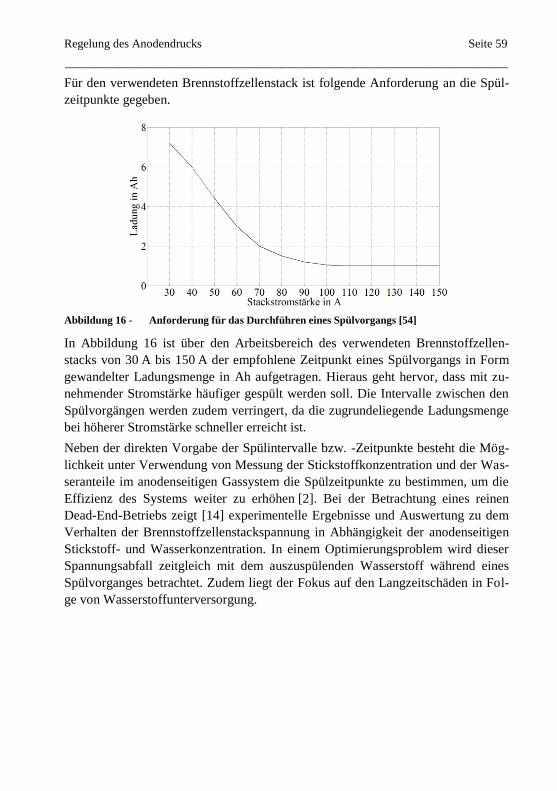
Regelung des Anodendrucks Seite 59
__________________________________________________________________________
Für den verwendeten Brennstoffzellenstack ist folgende Anforderung an die Spül-
zeitpunkte gegeben.
Abbildung 16 - Anforderung für das Durchführen eines Spülvorgangs [54]
In Abbildung 16 ist über den Arbeitsbereich des verwendeten Brennstoffzellen-
stacks von 30 A bis 150 A der empfohlene Zeitpunkt eines Spülvorgangs in Form
gewandelter Ladungsmenge in Ah aufgetragen. Hieraus geht hervor, dass mit zu-
nehmender Stromstärke häufiger gespült werden soll. Die Intervalle zwischen den
Spülvorgängen werden zudem verringert, da die zugrundeliegende Ladungsmenge
bei höherer Stromstärke schneller erreicht ist.
Neben der direkten Vorgabe der Spülintervalle bzw. -Zeitpunkte besteht die Mög-
lichkeit unter Verwendung von Messung der Stickstoffkonzentration und der Was-
seranteile im anodenseitigen Gassystem die Spülzeitpunkte zu bestimmen, um die
Effizienz des Systems weiter zu erhöhen [2]. Bei der Betrachtung eines reinen
Dead-End-Betriebs zeigt [14] experimentelle Ergebnisse und Auswertung zu dem
Verhalten der Brennstoffzellenstackspannung in Abhängigkeit der anodenseitigen
Stickstoff- und Wasserkonzentration. In einem Optimierungsproblem wird dieser
Spannungsabfall zeitgleich mit dem auszuspülenden Wasserstoff während eines
Spülvorganges betrachtet. Zudem liegt der Fokus auf den Langzeitschäden in Fol-
ge von Wasserstoffunterversorgung.
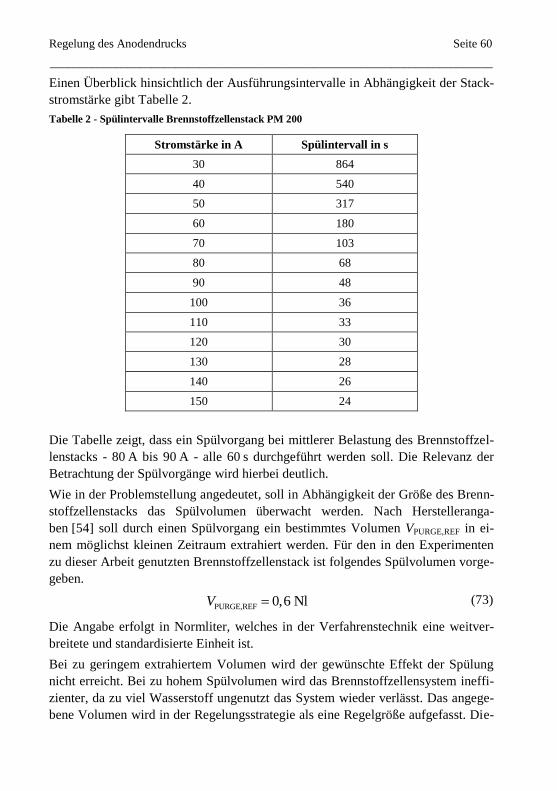
Regelung des Anodendrucks Seite 60
__________________________________________________________________________
Einen Überblick hinsichtlich der Ausführungsintervalle in Abhängigkeit der Stack-
stromstärke gibt Tabelle 2.
Tabelle 2 - Spülintervalle Brennstoffzellenstack PM 200
Stromstärke in A Spülintervall in s
30 864
40 540
50 317
60 180
70 103
80 68
90 48
100 36
110 33
120 30
130 28
140 26
150 24
Die Tabelle zeigt, dass ein Spülvorgang bei mittlerer Belastung des Brennstoffzel-
lenstacks - 80 A bis 90 A - alle 60 s durchgeführt werden soll. Die Relevanz der
Betrachtung der Spülvorgänge wird hierbei deutlich.
Wie in der Problemstellung angedeutet, soll in Abhängigkeit der Größe des Brenn-
stoffzellenstacks das Spülvolumen überwacht werden. Nach Herstelleranga-
ben [54] soll durch einen Spülvorgang ein bestimmtes Volumen VPURGE,REF in ei-
nem möglichst kleinen Zeitraum extrahiert werden. Für den in den Experimenten
zu dieser Arbeit genutzten Brennstoffzellenstack ist folgendes Spülvolumen vorge-
geben.
PURGE,REF 0,6 NlV (73)
Die Angabe erfolgt in Normliter, welches in der Verfahrenstechnik eine weitver-
breitete und standardisierte Einheit ist.
Bei zu geringem extrahiertem Volumen wird der gewünschte Effekt der Spülung
nicht erreicht. Bei zu hohem Spülvolumen wird das Brennstoffzellensystem ineffi-
zienter, da zu viel Wasserstoff ungenutzt das System wieder verlässt. Das angege-
bene Volumen wird in der Regelungsstrategie als eine Regelgröße aufgefasst. Die-
Regelung des Anodendrucks Seite 61
__________________________________________________________________________
se soll durch die Änderung der Öffnungszeiten des Spülventils beeinflusst werden.
Die Häufigkeit der Spülvorgänge und Relevanz des Vorgangs zeigen die Grundla-
ge für die Betrachtung dieses Vorgangs durch eine separate Regelungsstrategie.
5.3 Iterativ Lernende Regelung
Bei der Häufigkeit der auftretenden Spülvorgänge soll die ILR es ermöglichen, bei
diesen sich wiederholenden Vorgängen eine Verbesserung der Regelgüte von
Durchlauf (Iteration) zu Durchlauf zu erreichen. Hierfür wird unter Nutzung der
Abweichung von einer gegebenen Referenz der Stelleingriff für die folgende Itera-
tion angepasst. Grundsätzlich wird der Verlauf der Regelgröße yk gemessen und
mit dem Referenzverlauf yREF verglichen. Der entstehende Fehler ek bildet die
Grundlage für den Lernvorgang. Die aktuelle bzw. abgeschlossene Iteration ist
durch k bezeichnet.
REFk ke y y (74)
Der Fehlerverlauf ek wird für die Berechnung einer Steuerfolge uk+1 für die folgen-
de Iteration k+1 bewertet. Die Bewertung findet mittels Lernfilter L statt. Dieses
Filter kann mit oder ohne Modellkenntnis gebildet werden. Im einfachsten Fall und
ohne die Nutzung von Modellkenntnissen wird L als Diagonalmatrix ausgeführt.
1
1
1
1
0 0 0
0 0 0
0 0 0
0
0 0 0 0
l
l
L l
l
(75)
In Unterkapitel 5.4 wird auf die Bildung modellbasierter Lernfilter eingegangen.
Die Berechnung von uk+1 ergibt sich wie folgt:
+1k k ku Q u Le . (76)
Nach der Bewertung von ek durch L findet eine Addition mit der Steuerfolge aus
der vorherigen Iteration uk statt. Der entstandene Vektor wird in der Regel an die-
ser Stelle mit einer Filtermatrix Q multipliziert. In der Regel wird Q als Tiefpassfil-
ter ausgelegt, um Robustheit gegenüber Messrauschen zu sichern. Gl. (76) stellt
das grundlegende Lerngesetz zur Anwendung durch ILR dar. Ausgehend von die-
sem Lerngesetz müsste eine Reaktion auf die Regelgröße durch die Steuerfolge
unmittelbar und verzugslos erfolgen. Da dies in realen Systemen nicht möglich ist,
führt man eine zeitliche Korrektur des Fehlers bzw. der Steuerfolge für die nächste
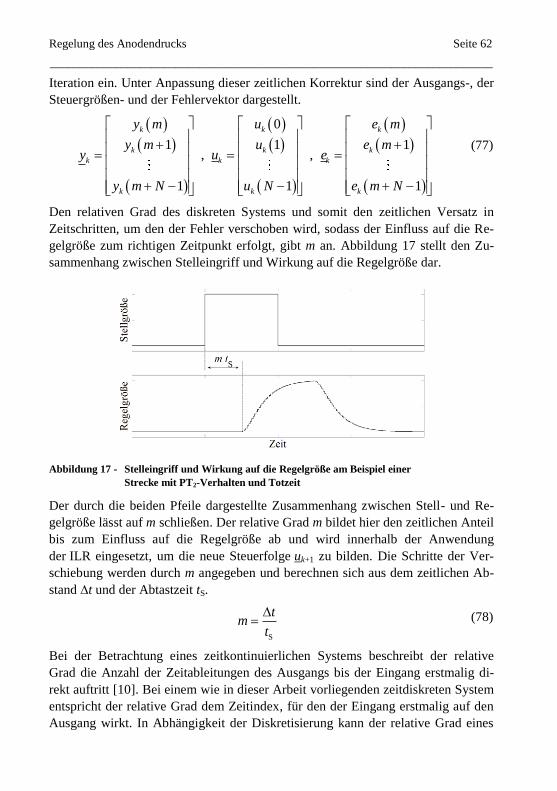
Regelung des Anodendrucks Seite 62
__________________________________________________________________________
Iteration ein. Unter Anpassung dieser zeitlichen Korrektur sind der Ausgangs-, der
Steuergrößen- und der Fehlervektor dargestellt.
0
1 1 1, ,
1 1 1
k k k
k k k
k k k
k k k
y m u e m
y m u e my u e
y m N u N e m N
(77)
Den relativen Grad des diskreten Systems und somit den zeitlichen Versatz in
Zeitschritten, um den der Fehler verschoben wird, sodass der Einfluss auf die Re-
gelgröße zum richtigen Zeitpunkt erfolgt, gibt m an. Abbildung 17 stellt den Zu-
sammenhang zwischen Stelleingriff und Wirkung auf die Regelgröße dar.
Abbildung 17 - Stelleingriff und Wirkung auf die Regelgröße am Beispiel einer
Strecke mit PT2-Verhalten und Totzeit
Der durch die beiden Pfeile dargestellte Zusammenhang zwischen Stell- und Re-
gelgröße lässt auf m schließen. Der relative Grad m bildet hier den zeitlichen Anteil
bis zum Einfluss auf die Regelgröße ab und wird innerhalb der Anwendung
der ILR eingesetzt, um die neue Steuerfolge uk+1 zu bilden. Die Schritte der Ver-
schiebung werden durch m angegeben und berechnen sich aus dem zeitlichen Ab-
stand ∆t und der Abtastzeit tS.
S
tm
t
(78)
Bei der Betrachtung eines zeitkontinuierlichen Systems beschreibt der relative
Grad die Anzahl der Zeitableitungen des Ausgangs bis der Eingang erstmalig di-
rekt auftritt [10]. Bei einem wie in dieser Arbeit vorliegenden zeitdiskreten System
entspricht der relative Grad dem Zeitindex, für den der Eingang erstmalig auf den
Ausgang wirkt. In Abhängigkeit der Diskretisierung kann der relative Grad eines
Regelung des Anodendrucks Seite 63
__________________________________________________________________________
diskreten Systems höher sein als die Anzahl seiner Zustände. In diesem Fall kann
auch der relative Grad als Regelungsparameter verstanden werden.
Voraussetzungen zur Anwendung der ILR
Wie für den Einsatz jeder Regelungsstrategie gibt es auch für den Einsatz der ILR
grundlegende Voraussetzungen:
Bekanntheit des Referenzverlaufs,
Realisierbarkeit des Referenzverlaufs,
identische Anfangsbedingungen zu Beginn einer jeden Iteration und
begrenzte und identische Länge aller Iterationen.
Die Bekanntheit des Referenzverlaufs bedeutet, dass eine Solltrajektorie yREF für
jede Iteration k bekannt ist, um aus dem Fehler ek die Grundlage für die resultie-
rende Steuerfolge uk+1 zu bilden.
Die Realisierbarkeit des Referenzverlaufs bedeutet, dass die Dynamik des Systems
und die der Stellgrößen in der Lage sein müssen, die Solltrajektorie nach einer
unendlichen Zahl an Iterationen zu erreichen.
Da eine lernende Regelung grundsätzlich von der gleichen Solltrajektorie ausgeht
und eine Verbesserung mit jeder Iteration folgen soll, müssen die Anfangsbedin-
gungen jeder Iteration gleich sein.
Als abschließende Voraussetzung muss die Dauer jeder Iteration begrenzt sein.
Nur durch die identischen Iterationslängen ist eine problemlose Zuordnung des
ermittelten Fehlers ek(i) zu den zugehörigen Zeitpunkten i durch das Lernfilter zur
neuen Steuerfolge möglich.
Einen guten Überblick über die ILR und deren Grundzüge gibt [13]. Neben den
zeitdiskreten Ansätzen zeigt [62] auch die Analyse im Zeit- und Frequenzbereich.
Nicht alle der grundsätzlichen Bedingungen können eingehalten bzw. die Informa-
tionen aus Iterationen, die den Voraussetzungen nicht entsprechen, sollen trotzdem
verwertet werden. Ein Beispiel hierfür zeigt die Anwendung der ILR in [66]. Die
Informationen aus einer Iteration mit kürzerer Dauer werden hier für die Berech-
nung der resultierenden Steuerfolge trotzdem genutzt.
Anwendbarkeit zur Druckregelung während des Spülvorgangs
Mit Hilfe des aufgezeigten, primären Regelziels - konstanter Anodendruck wäh-
rend des Spülvorgangs - und den Voraussetzungen wird zunächst die Anwendbar-
keit der ILR für dieses Problem betrachtet. Aus dieser Betrachtung sollten erneute
Problemstellungen, Anpassungen und schließlich die Entscheidung über die sinn-
volle Anwendung von ILR erfolgen.
Regelung des Anodendrucks Seite 64
__________________________________________________________________________
Für die Anwendung der ILR spricht die wiederkehrende Anforderung des Spülens,
dessen Zeitpunkt durch die Überwachung der gewandelten Ladungsmenge zudem
bekannt und planbar ist. Da die Gesamtdauer eines Spülvorgangs eine bestimmte
Dauer nicht überschreitet, ist bei ausreichend großer Wahl dieser Gesamtdauer,
eine immer gleiche Iterationsdauer gewährleistet. Während des ordinären Betriebs
der Brennstoffzelle sichert die Anodendruckregelung in Abhängigkeit von der
aktuellen Stackstromstärke gemäß Gl. (71) einen konstanten Anodendruck. Die
gleichen Anfangsbedingungen für jede einzelne Stromstärke sind somit gegeben.
Das Vorhandensein einer Solltrajektorie ist ebenfalls durch Gl. (71) sichergestellt.
Alle grundsätzlichen Voraussetzungen für die Anwendung der ILR liegen folglich
vor. Die Realisierbarkeit des gewünschten Druckverlaufs bzw. bis zu welcher Re-
gelgüte durch das Hinzufügen von zusätzlichem Wasserstoff bleibt in den Experi-
menten zu zeigen.
Folgende Punkte sollten für die Anwendung der ILR während der Spülvorgänge
zudem betrachtet werden. Grundsätzlich sind die Brennstoffzellen einem dynami-
schen Betrieb und somit wechselnden Lastszenarien ausgesetzt. Entsprechend wird
nicht mehrfach hintereinander bei einer identischen Stackstromstärke gespült.
Zudem kann nicht gewährleistet werden, dass während des Spülvorgangs kein
Lastwechsel durchgeführt wird. Ein Lastwechsel hätte eine Änderung des Anoden-
referenzdrucks zur Folge und die ILR kann nicht mehr für einen bekannten Refe-
renzwert für die gesamte Iteration ausgehen. In den Experimenten zur Druckrege-
lung mittels ILR wird keine Stackstromstärkeänderung während der Spülvorgänge
durchgeführt, um einen über die Iteration gleichbleibenden Referenzdruck zu ge-
währleisten. Die Temperatur kann zudem über den gesamten Betriebszeitraum
einer Brennstoffzelle schwanken. Von den Bedingungen direkt nach dem Anfahren
des Systems von wenigen °C bis über 60 °C bei Betrieb mit kathodenseitiger
Druckbeaufschlagung unterscheidet sich die Stacktemperatur deutlich. Für den
Einsatz der ILR wird deshalb die Annahme getroffen, dass die Betriebstemperatur
des Brennstoffzellenstacks keinen Einfluss auf die Druckregelung während der
Spülvorgänge hat.
Verwendung von Modellkenntnis und Einbindung der ILR
Bei der Anwendung einer iterativ lernenden Regelung werden zwei verschiedene
Bereiche betrachtet. Einerseits wird nach der Bildung des Lernfilters L und ande-
rerseits nach der Einbindung der Regelung in die vorhandene Regelungsstruktur
bzw. an das System unterschieden. Die folgenden Ausführungen orientieren sich
an [13].
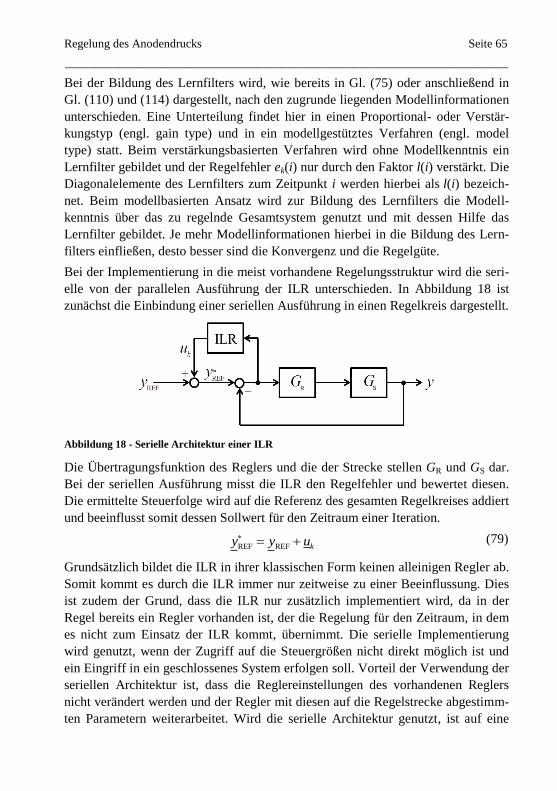
Regelung des Anodendrucks Seite 65
__________________________________________________________________________
Bei der Bildung des Lernfilters wird, wie bereits in Gl. (75) oder anschließend in
Gl. (110) und (114) dargestellt, nach den zugrunde liegenden Modellinformationen
unterschieden. Eine Unterteilung findet hier in einen Proportional- oder Verstär-
kungstyp (engl. gain type) und in ein modellgestütztes Verfahren (engl. model
type) statt. Beim verstärkungsbasierten Verfahren wird ohne Modellkenntnis ein
Lernfilter gebildet und der Regelfehler ek(i) nur durch den Faktor l(i) verstärkt. Die
Diagonalelemente des Lernfilters zum Zeitpunkt i werden hierbei als l(i) bezeich-
net. Beim modellbasierten Ansatz wird zur Bildung des Lernfilters die Modell-
kenntnis über das zu regelnde Gesamtsystem genutzt und mit dessen Hilfe das
Lernfilter gebildet. Je mehr Modellinformationen hierbei in die Bildung des Lern-
filters einfließen, desto besser sind die Konvergenz und die Regelgüte.
Bei der Implementierung in die meist vorhandene Regelungsstruktur wird die seri-
elle von der parallelen Ausführung der ILR unterschieden. In Abbildung 18 ist
zunächst die Einbindung einer seriellen Ausführung in einen Regelkreis dargestellt.
Abbildung 18 - Serielle Architektur einer ILR
Die Übertragungsfunktion des Reglers und die der Strecke stellen GR und GS dar.
Bei der seriellen Ausführung misst die ILR den Regelfehler und bewertet diesen.
Die ermittelte Steuerfolge wird auf die Referenz des gesamten Regelkreises addiert
und beeinflusst somit dessen Sollwert für den Zeitraum einer Iteration.
REF REF ky y u (79)
Grundsätzlich bildet die ILR in ihrer klassischen Form keinen alleinigen Regler ab.
Somit kommt es durch die ILR immer nur zeitweise zu einer Beeinflussung. Dies
ist zudem der Grund, dass die ILR nur zusätzlich implementiert wird, da in der
Regel bereits ein Regler vorhanden ist, der die Regelung für den Zeitraum, in dem
es nicht zum Einsatz der ILR kommt, übernimmt. Die serielle Implementierung
wird genutzt, wenn der Zugriff auf die Steuergrößen nicht direkt möglich ist und
ein Eingriff in ein geschlossenes System erfolgen soll. Vorteil der Verwendung der
seriellen Architektur ist, dass die Reglereinstellungen des vorhandenen Reglers
nicht verändert werden und der Regler mit diesen auf die Regelstrecke abgestimm-
ten Parametern weiterarbeitet. Wird die serielle Architektur genutzt, ist auf eine
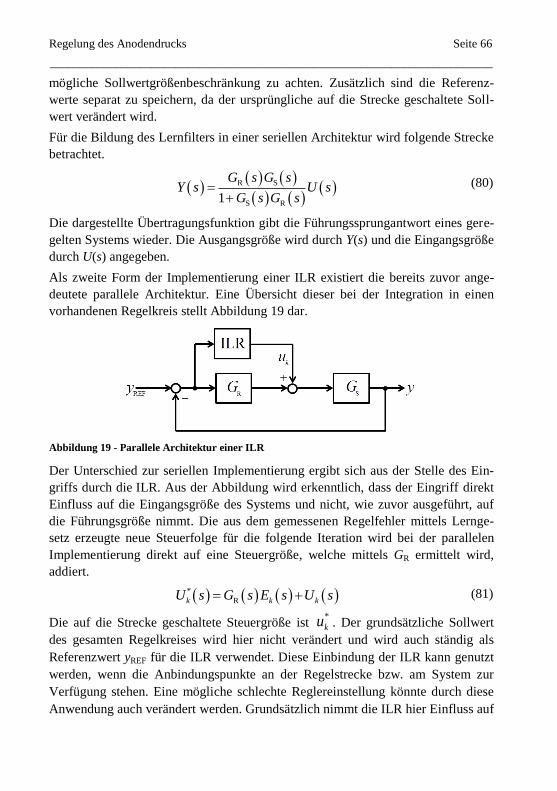
Regelung des Anodendrucks Seite 66
__________________________________________________________________________
mögliche Sollwertgrößenbeschränkung zu achten. Zusätzlich sind die Referenz-
werte separat zu speichern, da der ursprüngliche auf die Strecke geschaltete Soll-
wert verändert wird.
Für die Bildung des Lernfilters in einer seriellen Architektur wird folgende Strecke
betrachtet.
R S
S R1
G s G sY s U s
G s G s
(80)
Die dargestellte Übertragungsfunktion gibt die Führungssprungantwort eines gere-
gelten Systems wieder. Die Ausgangsgröße wird durch Y(s) und die Eingangsgröße
durch U(s) angegeben.
Als zweite Form der Implementierung einer ILR existiert die bereits zuvor ange-
deutete parallele Architektur. Eine Übersicht dieser bei der Integration in einen
vorhandenen Regelkreis stellt Abbildung 19 dar.
Abbildung 19 - Parallele Architektur einer ILR
Der Unterschied zur seriellen Implementierung ergibt sich aus der Stelle des Ein-
griffs durch die ILR. Aus der Abbildung wird erkenntlich, dass der Eingriff direkt
Einfluss auf die Eingangsgröße des Systems und nicht, wie zuvor ausgeführt, auf
die Führungsgröße nimmt. Die aus dem gemessenen Regelfehler mittels Lernge-
setz erzeugte neue Steuerfolge für die folgende Iteration wird bei der parallelen
Implementierung direkt auf eine Steuergröße, welche mittels GR ermittelt wird,
addiert.
*
Rk k kU s G s E s U s (81)
Die auf die Strecke geschaltete Steuergröße ist *
ku . Der grundsätzliche Sollwert
des gesamten Regelkreises wird hier nicht verändert und wird auch ständig als
Referenzwert yREF für die ILR verwendet. Diese Einbindung der ILR kann genutzt
werden, wenn die Anbindungspunkte an der Regelstrecke bzw. am System zur
Verfügung stehen. Eine mögliche schlechte Reglereinstellung könnte durch diese
Anwendung auch verändert werden. Grundsätzlich nimmt die ILR hier Einfluss auf
Regelung des Anodendrucks Seite 67
__________________________________________________________________________
das Verhalten des Reglers bzw. des Ausgangssignals. Im Unterschied zur seriellen
Architektur wird für die Bildung des Lernfilters folgende Strecke betrachtet.
S
S R1
G sY s U s
G s G s
(82)
Mit dem Ort des Eingriffs der ILR verändert sich auch das zu betrachtende System.
Der dargestellte Zusammenhang entspricht einer Störübertragungsfunktion. Bei der
Verwendung der parallelen Architektur ist eine mögliche Stellgrößenbegrenzung
zu beachten. Auf die Wahl der Architektur wird im Verlauf der Arbeit eingegan-
gen.
Konvergenz
Der im Bereich der Regelungstechnik immer im Fokus stehende Aspekt der Stabi-
lität muss auch beim Einsatz der ILR beachtet werden. Der Begriff der Stabilität
und dessen Betrachtung findet bei dieser Regelungsstrategie Einfluss auf den Ver-
lauf des Regelfehlers von Iteration zu Iteration. Mit dem Ziel des sich ständig ver-
ringernden Regelfehlers wird bei ILR die Konvergenz verfolgt, welche die Be-
trachtung der Stabilität bei der Anwendung ersetzt. Eine Betrachtung der Konver-
genz findet unter bestimmten Voraussetzungen statt [10]. Diese Voraussetzungen
stimmen mit den Bedingungen für eine erfolgreiche Anwendung der ILR überein.
Jede Iteration soll innerhalb einer festen Dauer enden, jede Iteration startet mit den
gleichen Anfangsbedingungen und für die gewünschte Trajektorie existiert eine
eindeutige Steuerfolge. Betrachtet wird das Lerngesetz nach Gl. (76). Der Fehler-
verlauf für das in der ILR verwendete System wird asymptotisch stabil und kon-
vergiert folglich, wenn die dargestellte Ungleichung erfüllt ist.
spr 1Q I LP (83)
Der Spektralradius wird hierbei mit spr beschrieben. Der Spektralradius steht für
den Betrag des betragsmäßig größten Eigenwerts [46]. Bei der Betrachtung des
verstärkungsbasierten Lernfilters aus Gl. (75) lässt sich aus dieser Ungleichung die
Verstärkung des Lernfilters L ermitteln. In dieser Form lassen sich auch für mo-
dellbasierte Lernfilter Konvergenzanalysen durchführen. Bei der Verwendung von
modellgestützten Lernfiltern besteht somit die Möglichkeit zur theoretischen Un-
tersuchung, wenn das Lernfilter aus einem genügend realistischen Modell erstellt
wird.
In dieser Arbeit wird zur Auslegung des rein verstärkungsorientierten Lernfilters
die Konvergenzanalyse genutzt.
Regelung des Anodendrucks Seite 68
__________________________________________________________________________
Anwendung der ILR
Die Betrachtung von lernenden Systemen in der Regelungstechnik führt auf die
sechziger Jahre zurück [24], [59], [72]. Erste Arbeiten zur ILR wurden in den acht-
ziger Jahren veröffentlicht [7], [15]. Im Bereich der Forschung auf dem Gebiet der
ILR kommt es in den letzten Jahren zu verschiedensten Anwendungen.
Ein Beispiel für die Anwendung in der Medizintechnik ist in [66] veröffentlicht.
Diese Anwendung zeigt den Einsatz der ILR zur Kompensation einer Fußhebe-
schwäche. Hierbei wird mittels Elektrostimulation der Fußwinkel beim Laufen
bzw. Auftreten so beeinflusst, dass der Fußwinkelverlauf sich einer gewünschten
Bewegung annähert. Diese Annäherung wird durch den Einsatz der ILR realisiert,
die auf Grundlage des sich ergebenden Fehlers zwischen dem gewünschten und
tatsächlichen Verlauf des Fußwinkels basiert. Als Stellglied dient die Elektrostimu-
lation der Beinmuskulatur während des Fußhebens. In dieser Arbeit werden auch
nicht vollständig durchgeführte Iterationen bzw. deren Informationen zur Berech-
nung einer neuen Steuerfolge genutzt.
Häufiger findet die ILR Anwendung zur Positionierung im Bereich von elektrisch
betriebenen Antrieben [9], [32], [37], [68], wobei es bei [37] auch im zeitgleichen
Einsatz zur Identifikation der Strecke genutzt wird. In [32] wird mittels ILR die
Steuerung eines Nanopositionierers bei Rasterkraftmikroskopen realisiert. Ein
Rasterkraftmikroskop ist ein atomares Kraftmikroskop, das die Oberfläche mecha-
nisch abtastet und atomare Kräfte auf einer Nanometerskala misst. Bei dieser An-
wendung zur Positionierung werden sowohl die serielle als auch die parallele Art
der Implementierung verwendet und gegenübergestellt. Der Vergleich ergab, dass
in diesem Fall die parallele Architektur bessere Resultate in Bezug auf die Regel-
güte und die serielle Architektur bessere Konvergenzeigenschaften hervorbringt.
Einen Einsatz der ILR im Bereich eines Verbrennungsmotors zeigt [83]. Bei dieser
Anwendung gilt es die Einspritzung eines Dieselmotors so anzupassen, dass der
Kraftstoffverbrauch und der CO2-Ausstoß reduziert werden. Die Einspritzmengen
über den Einspritzzeitraum werden bei dieser Anwendung der ILR beeinflusst.
Vergleichend gegenübergestellt wird in dieser Arbeit die Verwendung von modell-
basierten und nicht modellbasierten Verfahren zur Erstellung eines Lernfilters. Der
Einsatz der modellbasierten Erstellung eines Lernfilters ergibt hierbei, dass hin-
sichtlich der Konvergenz und der bleibenden Regelabweichungen bessere Ergeb-
nisse erzielt werden.
Auch prädiktive Verfahren können durch lernende Regelung unterstützt wer-
den [30]. Bei einem Vorgang der Papierherstellung wird die ILR genutzt, um die
Referenzwerte, die die MPR benötigt, so zu verändern, dass das gewünschte Re-
gelziel unter der Betrachtung des elektrischen Energiebedarfs erfüllt wird.
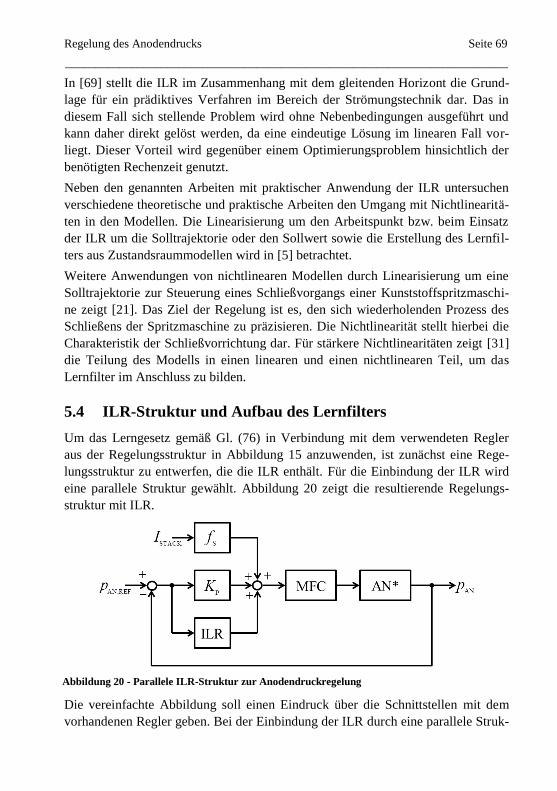
Regelung des Anodendrucks Seite 69
__________________________________________________________________________
In [69] stellt die ILR im Zusammenhang mit dem gleitenden Horizont die Grund-
lage für ein prädiktives Verfahren im Bereich der Strömungstechnik dar. Das in
diesem Fall sich stellende Problem wird ohne Nebenbedingungen ausgeführt und
kann daher direkt gelöst werden, da eine eindeutige Lösung im linearen Fall vor-
liegt. Dieser Vorteil wird gegenüber einem Optimierungsproblem hinsichtlich der
benötigten Rechenzeit genutzt.
Neben den genannten Arbeiten mit praktischer Anwendung der ILR untersuchen
verschiedene theoretische und praktische Arbeiten den Umgang mit Nichtlinearitä-
ten in den Modellen. Die Linearisierung um den Arbeitspunkt bzw. beim Einsatz
der ILR um die Solltrajektorie oder den Sollwert sowie die Erstellung des Lernfil-
ters aus Zustandsraummodellen wird in [5] betrachtet.
Weitere Anwendungen von nichtlinearen Modellen durch Linearisierung um eine
Solltrajektorie zur Steuerung eines Schließvorgangs einer Kunststoffspritzmaschi-
ne zeigt [21]. Das Ziel der Regelung ist es, den sich wiederholenden Prozess des
Schließens der Spritzmaschine zu präzisieren. Die Nichtlinearität stellt hierbei die
Charakteristik der Schließvorrichtung dar. Für stärkere Nichtlinearitäten zeigt [31]
die Teilung des Modells in einen linearen und einen nichtlinearen Teil, um das
Lernfilter im Anschluss zu bilden.
5.4 ILR-Struktur und Aufbau des Lernfilters
Um das Lerngesetz gemäß Gl. (76) in Verbindung mit dem verwendeten Regler
aus der Regelungsstruktur in Abbildung 15 anzuwenden, ist zunächst eine Rege-
lungsstruktur zu entwerfen, die die ILR enthält. Für die Einbindung der ILR wird
eine parallele Struktur gewählt. Abbildung 20 zeigt die resultierende Regelungs-
struktur mit ILR.
Abbildung 20 - Parallele ILR-Struktur zur Anodendruckregelung
Die vereinfachte Abbildung soll einen Eindruck über die Schnittstellen mit dem
vorhandenen Regler geben. Bei der Einbindung der ILR durch eine parallele Struk-
Regelung des Anodendrucks Seite 70
__________________________________________________________________________
tur arbeitet der Regler während der Eingriffe durch die ILR weiter. Der vorgegebe-
ne Sollwert für den Anodendruck pAN,REF bleibt hierbei unverändert. Beim Eingriff
über eine serielle Struktur würde dieser als Stelleingriff genutzt werden.
Die ILR misst während einer Iteration den Regelfehler ek zu jedem Zeitpunkt i mit
der Abtastzeit tS. Neben den Informationen über den Regelfehler liegen der ILR
das nichtlineare Modell, die aktuell kumulierte Ladungsmenge und ein Speicher
mit den Daten der vorherigen Iterationen vor. Die Ladungsmenge wird herangezo-
gen, um die Zeitpunkte der Spülvorgänge für einen effizienten Betrieb gemäß den
Herstellervorgaben zu ermitteln.
Für die erfolgreiche Anwendung der ILR ist das benötigte Lernfilter L aufzustellen.
Die vorhandenen Modellkenntnisse werden hierbei verwendet, um den Lernerfolg
und somit die Konvergenz zu steigern. Da der Lernvorgang zeitdiskret abläuft, ist
es sinnvoll und später zum Erstellen von L notwendig, dass das vorhandene Modell
zunächst in Zustandsraumdarstellung vorliegt.
T
x t Ax t bu t
y t c x t du t
(84)
Bei den vorliegenden Steuer- und Ausgangsgrößen gehen die Eingangs- und Aus-
gangsmatrizen in Vektoren über.
Der Zustandsvektor xAN setzt sich in dem Modell für die Anode, wie in Kapitel 5.1
beschrieben, aus zwei Zuständen, dem Massenstrom im Massendurchflussreg-
ler WAN,MFC und dem Anodendruck pAN zusammen.
AN,MFC
AN
AN
AN AN
Wx
p
y p
(85)
Die Eingänge und die Beeinflussung des Gesamtsystems finden durch den Refe-
renzwert des Massendurchflussreglers WAN,MFC,REF und die Ventilstellung des Ab-
gasventils hAN statt. Der Referenzwert des Massendurchflussreglers hat als Steuer-
größe für den Vorgang der Druckregelung Einfluss.
AN AN,MFC,REFu W (86)
Die Stellung des Spülventils hAN und dessen zeitlicher Verlauf hat Einfluss in der
Erstellung des zeitvarianten Lernfilters.
In Gl. (84) bildet das Modell lineare Zusammenhänge ab. Für die Erstellung des
Lernfilters ist die Einbindung der nichtlinearen Zusammenhänge im Bereich des
turbulenten Übergangs an einer Blende und der nichtlinearen Charakteristik des
Abgasventils das Ziel. Bei der Modellbildung für das anodenseitige Gassystem
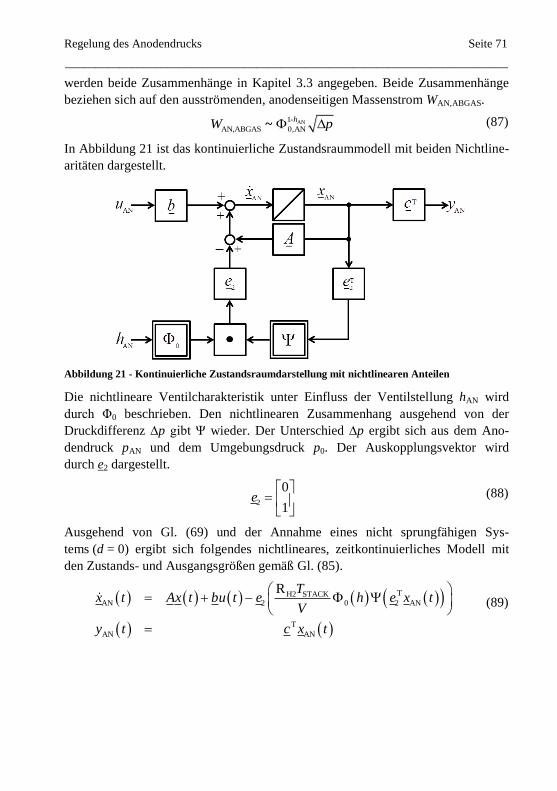
Regelung des Anodendrucks Seite 71
__________________________________________________________________________
werden beide Zusammenhänge in Kapitel 3.3 angegeben. Beide Zusammenhänge
beziehen sich auf den ausströmenden, anodenseitigen Massenstrom WAN,ABGAS.
AN1-
AN,ABGAS 0,AN
hW p (87)
In Abbildung 21 ist das kontinuierliche Zustandsraummodell mit beiden Nichtline-
aritäten dargestellt.
Abbildung 21 - Kontinuierliche Zustandsraumdarstellung mit nichtlinearen Anteilen
Die nichtlineare Ventilcharakteristik unter Einfluss der Ventilstellung hAN wird
durch Φ0 beschrieben. Den nichtlinearen Zusammenhang ausgehend von der
Druckdifferenz ∆p gibt Ψ wieder. Der Unterschied ∆p ergibt sich aus dem Ano-
dendruck pAN und dem Umgebungsdruck p0. Der Auskopplungsvektor wird
durch e2 dargestellt.
2
0
1e
(88)
Ausgehend von Gl. (69) und der Annahme eines nicht sprungfähigen Sys-
tems (d = 0) ergibt sich folgendes nichtlineares, zeitkontinuierliches Modell mit
den Zustands- und Ausgangsgrößen gemäß Gl. (85).
TH2 STACKAN 2 0 2 AN
T
AN AN
R Tx t Ax t bu t e h e x t
V
y t c x t
(89)
~
Regelung des Anodendrucks Seite 72
__________________________________________________________________________
Die linearen, zeitkontinuierlichen Anteile sind durch
AN,MFC
AN,MFC
0
K
Tb
(90)
AN,MFC
P
AN,MFC AN,MFC
H2 STACK
AN
1
R0
KK
T TA
T
V
(91)
0
1c
(92)
gegeben. Die Dynamik des geschlossen Regelkreises in Abbildung 20 gemäß des
Stelleingriffes einer parallelen ILR-Architektur in Gl. (82) stellt A stellt dar. Der
Verstärkungsfaktor KAN,MFC ergibt sich hierbei aus der Umrechnung der am Brenn-
stoffzellensystem verwendeten und in der Verfahrenstechnik üblichen Ein-
heit Nl/min zu ρH2/60000.
Vor dem Übergang in ein zeitdiskretes Zustandsraummodell sind die nichtlinearen
Anteile aus Gl. (89) zu linearisieren. Diese Linearisierung findet entlang der Refe-
renz statt und ist nachfolgend allgemein dargestellt.
0
0 0
d
d x
ff x f x x x
x (93)
Unter Verwendung des gesamten Zusammenhangs des ausströmenden Wasser-
stoffs und dessen physikalischen Eigenschaften
AN 0AN H2
H2
2p p
p A
(94)
ergibt sich folgender Zusammenhang für die Linearisierung.
AN,REF
AN AN,REF AN AN,REF
AN
d
dp
p p p pp
(95)
Die stoff- und geometrieabhängige Kontraktionszahl des ausströmenden Mediums
stellt α dar. Die reale, maximale Öffnungsfläche des Ventils gibt A an.
Regelung des Anodendrucks Seite 73
__________________________________________________________________________
Nachfolgend wird die Ableitung nach pAN berechnet.
AN,REF AN,REF
AN,REF
AN 0H2
AN AN H2
H2 AN 0
H2 AN
H2
H2 AN,REF 0
H2
AN,REF 0
d d2
d d
2 d
d
2 1
2
1
2
p p
p
p pA
p p
A p pp
Ap p
Ap p
(96)
Nach erfolgter Linearisierung von Ψ ist die Abhängigkeit von der Ventilstel-
lung hAN als Öffnungs- und Schließvorgang innerhalb eines Spülvorgangs einzu-
binden. Der auf den Anodendruck Einfluss nehmende, ausströmende Wasserstoff-
massenstrom ist innerhalb einer Iteration von der sich zeitlich ändernden Ventilpo-
sition abhängig.
AN ANh h t (97)
Die Ventilstellung wirkt sich über die gleichprozentige Charakteristik des Ventils
gemäß Gl. (17) auf die Öffnung des Ventils aus.
AN1
0,AN 0,AN
h tt
(98)
Der Zusammenhang zwischen der nichtlinearen Ventilkennlinie und der Ventilöff-
nung ergibt sich aus:
AN1
VS 0,AN
h tA K
. (99)
Die Zusammenfassung der Nichtlinearitäten lässt sich in einer Funktion darstellen.
AN
AN,MFC,REF AN AN,MFC,REF AN,REF
1 H2VS 0,AN AN AN,REF
AN,REF 0
, , , ,
1
2
h t
f W p t f W p t
K p pp p
(100)
Die linearen Anteile aus Gl. (91) werden mit dieser Funktion zu einem zeitvarian-
ten, zeitkontinuierlichen System, in dem die gegebenen Nichtlinearitäten um den
Anodendrucksollwert linearisiert wurden.
Regelung des Anodendrucks Seite 74
__________________________________________________________________________
Die resultierende Systemmatrix A (t) beschreibt diesen Zusammenhang.
AN
AN,MFC
P
AN,MFC AN,MFC
H2 STACK
AN
1H2 STACK H2VS 0,AN
AN AN,REF 0
1
R0
0 0
R 10
2
h t
KK
T TA t
T
V
TK
V p p
(101)
Das sich ergebende System ist nachfolgend dargestellt.
T
x t A t x t bu t
y t c x t
(102)
Die Voraussetzung zum Aufbau des Lernfilters ist ein zeitdiskretes Zustands-
raummodell folgender Form.
d, d,
T
d
1 i ix i A x i b u i
y i c x i
(103)
Für das zeitdiskrete Zustandsraummodell werden neben der Systemmatrix Ad,i der
zeitdiskrete Eingangsvektor bd,i und der dazugehörige Ausgangsvektor cd benötigt.
Für die notwendige Diskretisierung wird angenommen, dass die Systemmatrizen
und die Ventilstellung über den Zeitraum tS gleich bleiben. Diese Annahme entfällt
für die Eigenschaften der Eingangsgröße, da diese nur mit jedem Abtastschritt
geändert wird und folglich über einen Abtastzeitraum konstant ist.
Unter der Voraussetzung der Existenz der Inversen der Systemmatrix gemäß [22]
erfolgt die Diskretisierung. Die der Diskretisierung zugrunde liegenden Zusam-
menhänge sind nachfolgend dargestellt.
S S
d,
A it t
iA e (104)
S S1
d, S
A it t
ib A it e I b
(105)
dc c (106)
Den Zeitpunkt innerhalb einer Iteration gibt i an.
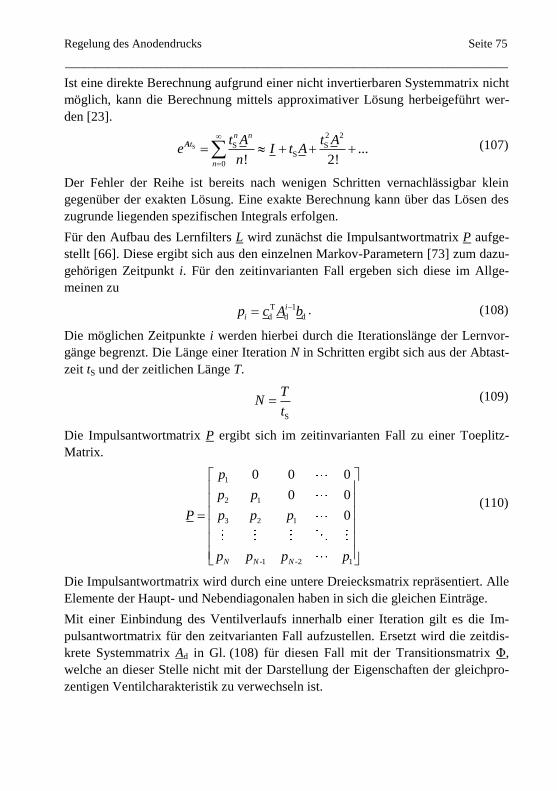
Regelung des Anodendrucks Seite 75
__________________________________________________________________________
Ist eine direkte Berechnung aufgrund einer nicht invertierbaren Systemmatrix nicht
möglich, kann die Berechnung mittels approximativer Lösung herbeigeführt wer-
den [23].
S
2 2
S SS
0
...! 2!
n nt
n
t A t Ae I t A
n
A (107)
Der Fehler der Reihe ist bereits nach wenigen Schritten vernachlässigbar klein
gegenüber der exakten Lösung. Eine exakte Berechnung kann über das Lösen des
zugrunde liegenden spezifischen Integrals erfolgen.
Für den Aufbau des Lernfilters L wird zunächst die Impulsantwortmatrix P aufge-
stellt [66]. Diese ergibt sich aus den einzelnen Markov-Parametern [73] zum dazu-
gehörigen Zeitpunkt i. Für den zeitinvarianten Fall ergeben sich diese im Allge-
meinen zu
T 1
d d d
i
ip c A b . (108)
Die möglichen Zeitpunkte i werden hierbei durch die Iterationslänge der Lernvor-
gänge begrenzt. Die Länge einer Iteration N in Schritten ergibt sich aus der Abtast-
zeit tS und der zeitlichen Länge T.
S
TN
t (109)
Die Impulsantwortmatrix P ergibt sich im zeitinvarianten Fall zu einer Toeplitz-
Matrix.
1
2 1
3 2 1
-1 -2 1
0 0 0
0 0
0
N N N
p
p p
P p p p
p p p p
(110)
Die Impulsantwortmatrix wird durch eine untere Dreiecksmatrix repräsentiert. Alle
Elemente der Haupt- und Nebendiagonalen haben in sich die gleichen Einträge.
Mit einer Einbindung des Ventilverlaufs innerhalb einer Iteration gilt es die Im-
pulsantwortmatrix für den zeitvarianten Fall aufzustellen. Ersetzt wird die zeitdis-
krete Systemmatrix Ad in Gl. (108) für diesen Fall mit der Transitionsmatrix Φ,
welche an dieser Stelle nicht mit der Darstellung der Eigenschaften der gleichpro-
zentigen Ventilcharakteristik zu verwechseln ist.
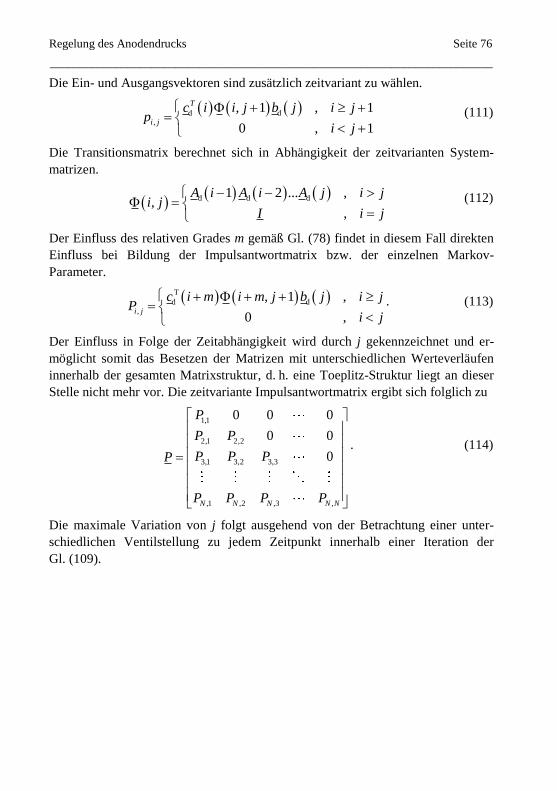
Regelung des Anodendrucks Seite 76
__________________________________________________________________________
Die Ein- und Ausgangsvektoren sind zusätzlich zeitvariant zu wählen.
d d
,
, 1 , 1
0 , 1
T
i j
c i i j b j i jp
i j
(111)
Die Transitionsmatrix berechnet sich in Abhängigkeit der zeitvarianten System-
matrizen.
d d d1 2 ... ,
,,
A i A i A j i ji j
I i j
(112)
Der Einfluss des relativen Grades m gemäß Gl. (78) findet in diesem Fall direkten
Einfluss bei Bildung der Impulsantwortmatrix bzw. der einzelnen Markov-
Parameter.
T
d d
,
, 1 ,
0 ,i j
c i m i m j b j i jP
i j
. (113)
Der Einfluss in Folge der Zeitabhängigkeit wird durch j gekennzeichnet und er-
möglicht somit das Besetzen der Matrizen mit unterschiedlichen Werteverläufen
innerhalb der gesamten Matrixstruktur, d. h. eine Toeplitz-Struktur liegt an dieser
Stelle nicht mehr vor. Die zeitvariante Impulsantwortmatrix ergibt sich folglich zu
1,1
2,1 2,2
3,1 3,2 3,3
,1 ,2 ,3 ,
0 0 0
0 0
0
N N N N N
P
P P
P P PP
P P P P
. (114)
Die maximale Variation von j folgt ausgehend von der Betrachtung einer unter-
schiedlichen Ventilstellung zu jedem Zeitpunkt innerhalb einer Iteration der
Gl. (109).
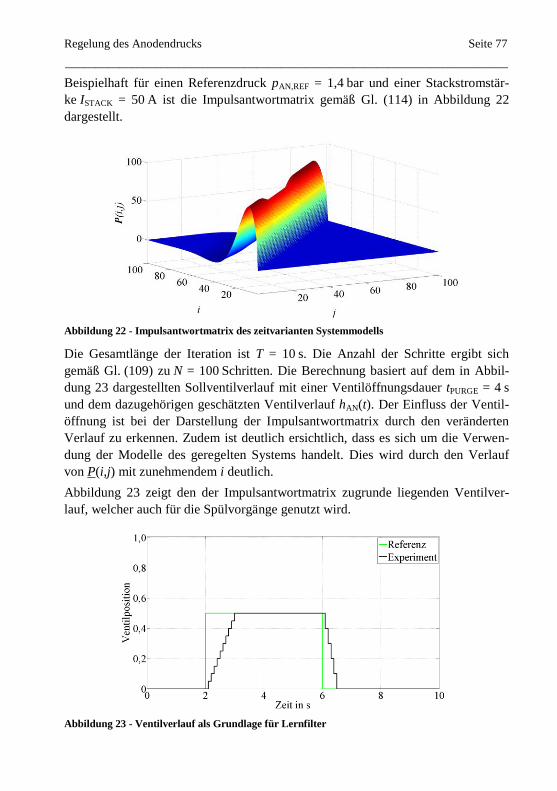
Regelung des Anodendrucks Seite 77
__________________________________________________________________________
Beispielhaft für einen Referenzdruck pAN,REF = 1,4 bar und einer Stackstromstär-
ke ISTACK = 50 A ist die Impulsantwortmatrix gemäß Gl. (114) in Abbildung 22
dargestellt.
Abbildung 22 - Impulsantwortmatrix des zeitvarianten Systemmodells
Die Gesamtlänge der Iteration ist T = 10 s. Die Anzahl der Schritte ergibt sich
gemäß Gl. (109) zu N = 100 Schritten. Die Berechnung basiert auf dem in Abbil-
dung 23 dargestellten Sollventilverlauf mit einer Ventilöffnungsdauer tPURGE = 4 s
und dem dazugehörigen geschätzten Ventilverlauf hAN(t). Der Einfluss der Ventil-
öffnung ist bei der Darstellung der Impulsantwortmatrix durch den veränderten
Verlauf zu erkennen. Zudem ist deutlich ersichtlich, dass es sich um die Verwen-
dung der Modelle des geregelten Systems handelt. Dies wird durch den Verlauf
von P(i,j) mit zunehmendem i deutlich.
Abbildung 23 zeigt den der Impulsantwortmatrix zugrunde liegenden Ventilver-
lauf, welcher auch für die Spülvorgänge genutzt wird.
Abbildung 23 - Ventilverlauf als Grundlage für Lernfilter
Regelung des Anodendrucks Seite 78
__________________________________________________________________________
Die unterlagerte Positionsregelung bekommt nach zwei Sekunden innerhalb einer
Iteration den neuen Referenzwert übermittelt. Nach weiteren vier Sekunden erhält
der Regler den Befehl zum Schließen des Spülventils. Die Ungleichheit zwischen
dem Öffnungs- und dem Schließvorgang ist auf die unterschiedlichen Geschwin-
digkeiten zurückzuführen, mit denen die richtungsabhängige Bewegung des Ven-
tils durchgeführt wird.
Die resultierende Impulsantwortmatrix gemäß Gl. (114) hat die Struktur einer
unteren Dreiecksmatrix und lässt sich zur Bildung des gewünschten Lernfilters
invertieren.
1L P (115)
Das Lernfilter L für das zeitvariante System liegt an dieser Stelle vor und hat die
Dimension N x N.
Der Ansatz zur Nutzung eines über alle Iterationen konstanten Lernfilters schlägt
u.a. [5] vor. Neben der in dieser Arbeit gezeigten Linearisierung um den Refe-
renzwert zur Erstellung des Lernfilters ist es auch möglich, iterationsweise das
Lernfilter anzupassen. In diesem Fall würde die Linearisierung gemäß Gl. (96)
iterationsweise anhand des Druckverlaufs der vorherigen Iteration stattfinden.
Tiefpassfilter
Neben dem Lernfilter L im Lerngesetz aus Gl. (76) wird ein Tiefpassfilter in Form
einer Filtermatrix Q eingesetzt. Diese Filterung verhindert das Lernen von hoch-
frequenten Fehlern, steigert die Robustheit gegen Messrauschen und mindert den
hochfrequenten Einsatz der Aktuatoren. Bei der Verwendung am Brennstoffzellen-
prüfstand schützt das Tiefpassfilter den Massendurchflussregler vor zu schnellen
Sollwertwechseln.
Zur Anwendung in dieser Arbeit wird das Tiefpassfilter in Form eines gleitenden
Mittelwerts ausgelegt. Ein Mittelwertfilter summiert eine vorgegebene Anzahl an
Werten und dividiert durch diese. Die entstehende Filtermatrix Q unter Berück-
sichtigung von insgesamt drei Werten ist nachfolgend beispielhaft angedeutet.
0 0 0
0 0
0 0 0
0 0
0 0
0 0 0 0
q q
q q q
q qQ
q q q
q q q
q q
(116)
Regelung des Anodendrucks Seite 79
__________________________________________________________________________
Die Elemente q der Matrix besitzen in diesem Fall den Wert q = 1/3. Die Gewich-
tung der Randzeilen wird bei der Verwendung dieses Filters nicht auf den Wert 1/2
korrigiert. Da es sich bei der parallelen Struktur der ILR um einen zusätzlichen
Wert für den Massendurchflussregler handelt, wird dieser durch die Nichtanpas-
sung im Randbereich zusätzlich gefiltert.
5.5 Optimierend Iterativ Lernende Regelung
Durch die zuvor gezeigten Lerngesetze, Lernfilter und deren Anwendung kann
nicht sichergestellt werden, dass sich eine Verbesserung von Iteration zu Iteration
einstellt, obwohl die Nutzung eines sehr genauen Modells diese Monotonie bereits
sichert. Um die Konvergenz von Iteration zu Iteration zusätzlich zu erhöhen und
andere Vorteile, wie das Unterbinden der hochfrequenten Nutzung von Eingängen
und die Beachtung von Nebenbedingungen, zu nutzen, wird in diesem Unterkapitel
die Optimierend Iterativ Lernende Regelung (OILR) vorgestellt. Theoretische
Betrachtungen werden zu diesem Thema in [5] dargestellt. Mit Nutzung der vor-
handenen Modellkenntnis soll iterationsweise der Regelfehler reduziert und somit
das Gütemaß minimiert werden. Das beispielhafte Gütemaß wird gemäß Gl. (117)
ausgeführt. Später wird für die explite Anwendung der OILR die 2-Norm verwen-
det.
2
1
1 N
k k
i
E e iN
(117)
Die Teilung durch die Länge einer Iteration N ermöglicht einen Vergleich des
Regelfehlers bei unterschiedlichen Iterationslängen. Das Gütemaß Ek gilt es iterati-
onsweise zu verringern. Ausgehend vom Fehler ek der durchgeführten Iteration k
soll der Regelfehler der Iteration k+1 betrachtet, minimiert und wenn möglich
aufgehoben werden. Der Verlauf des Regelfehlers ek der bereits durchgeführten
Iteration ist hier bekannt, da er gemessen werden konnte. Der Regelfehlerverlauf ek
ist durch den in der vorherigen Iteration angewendeten Stellgrößenverlauf uk her-
vorgerufen worden. Den prädizierten Fehler ePRÄD,k+1 für die folgende Iteration gilt
es zu minimieren und an den Fehler der letzten Iteration ek anzugleichen. Für diese
Anpassung erfolgt nur eine Änderung des Stellgrößenverlaufs uk. Diese Ände-
rung ∆uk+1 führt mit dem Stellgrößenverlauf der vorherigen Iteration uk zu dem
neuen Stellgrößenverlauf uk+1.
1 1k k ku u u (118)
Unter Nutzung der Modellkenntnis gemäß Gl. (114), wie im vorherigen Kapitel in
der Impulsantwortmatrix dargestellt, kann man auf den Regelfehler der nachfol-
genden Iteration schließen.
Regelung des Anodendrucks Seite 80
__________________________________________________________________________
Die Änderung ∆uk+1 multipliziert mit der Impulsantwortmatrix wird genutzt, um
die Änderung des Fehlers in der folgenden Iteration zu prädizieren.
1PRÄD, 1 kk
e P u (119)
Es resultiert der Zusammenhang zwischen Gütekriterium und Eingangsgröße.
2
1 1 2k k kJ u e P u (120)
Die 2-Norm wird durch || ∙ ||2 beschrieben und ist für einen Vek-
tor z = [z1 z2 … zN]T nachfolgend definiert.
2 2 2
1 22... Nz z z z (121)
Ziel ist es, das Gütekriterium J zu minimieren. Das Optimierungsproblem folgt als
Abhängigkeit der Veränderung der Eingangsgröße zwischen zwei aufeinanderfol-
genden Iterationen. Der dargestellte, zu minimierende Fehler geht unter Nutzung
der Modellkenntnisse und der Variation der Eingangsgröße in ein Optimierungs-
problem über.
+1min kJ u (122)
Die Abweichung von der Steuergröße der vorherigen Iteration k wird durch ∆uk+1
dargestellt. An dieser Stelle ähnelt das Problem dem während einer modellprädik-
tiven Regelung gemäß Gl. (29) und eine Lösung des Problems scheint bereits in
der ersten Iteration möglich. An dieser Stelle gilt es nochmals darauf hinzuweisen,
dass die Modellkenntnisse nicht genau genug vorliegen und aus diesem Grund bei
diesem sehr regelmäßigen Vorgang des Spülens die ILR als Regelungsstrategie
gewählt wird. Auch mit dem Einsatz der OILR ist das Ziel eine schrittweise An-
passung des Verlaufs der Regelgröße an den bekannten Referenzwert unter Nut-
zung der zuvor gemachten Erfahrungen bzw. Fehler. Mit dem nachfolgend aufge-
stellten Gütefunktional für das Optimierungsproblem gemäß Gl. (122) wird der
Unterschied zur MPR deutlich.
Das zunächst in Gl. (120) gezeigte Gütemaß wird um die Bewertung der hochfre-
quenten Nutzung der Eingänge und die Abweichung der Steuergröße gegenüber
der vorherigen Iteration erweitert.
2
1 1 1 2
12
2 1 1
1
2
3 1
1
1 1
k k k
N
k k k k
i
N
k
i
J u q e P u
q u i u i u i u i
q u i
(123)
Regelung des Anodendrucks Seite 81
__________________________________________________________________________
Die Nutzung des dritten Terms begründet sich zudem in der Modellunkenntnis.
Der Term sichert die schrittweise Annäherung an die Referenz und verhindert die
theoretisch sofortige Lösung. Da dieses Regelungsverfahren auch aufgrund von
Modellunkenntnis angewendet wird, ist eine sofortige, exakte Lösung entsprechend
nicht möglich. Die Gewichtungsfaktoren, insbesondere q1 und q3, geben vor, wie
schnell zwischen den Iterationen in Richtung Referenz konvergiert werden soll.
Als spezifisches Gütefunktional für die Druckregelung während der Spülvorgänge
mittels OILR ergibt sich der folgende Zusammenhang.
2
AN,MFC,ILR, +1 1 AN,REF AN, AN,MFC,ILR, +12
21
AN,MFC,ILR, AN,MFC,ILR, +1
2
1 AN,MFC,ILR, AN,MFC,ILR, +1
2
3 AN,MFC,ILR, +1
1
1 1
k k k
Nk k
i k k
N
k
i
J W q p p P W
W i W iq
W i W i
q W i
(124)
Die Verläufe, welche durch die lernende Regelung berechnet bzw. genutzt werden,
gibt WAN,MFC,ILR an. Für das Lösen des gestellten Optimierungsproblems gemäß
Gl. (122) ist es nicht notwendig, die Lösung innerhalb eines Abtastschritts zu er-
halten. Es genügt, die Berechnung zwischen zwei Spülvorgängen abzuschließen.
Aus diesem Grund ist eine gesonderte Betrachtung des Optimierers nicht notwen-
dig. Es können Matlab-Standard-Algorithmen wie Fminsearch oder Fmincon ver-
wendet werden. Die notwendigen Startwerte vor jeder Optimierung können durch
drei verschiedene Ansätze berechnet werden. Da es sich bei dem Ergebnis der
Optimierung nur um die Abweichung der zuvor angewendeten Steuerfolge handelt,
können die Startwerte als Nullvektor gewählt werden. Die zweite Möglichkeit des
Setzens der Startwerte der Optimierung ist die Übernahme der vorherigen Lösung.
Die sinnvollste Lösung, wie die Herangehensweise und die Betrachtung der Re-
chenzeit der Optimierung zeigt, ist die Wahl der Startwerte durch die Anwendung
eines Lerngesetzes gemäß Gl. (76) unter Nutzung des auch in der Optimierung
verwendeten Modells bzw. des dazugehörigen Lernfilters.
1
+1,0k ku P e (125)
Da das Optimierungsproblem gemäß Gl. (123) ein quadratisches Gütemaß mit
lediglich linearen Zusammenhängen repräsentiert, ist es möglich, die Lösung ana-
lytisch zu bestimmen. Eine Herleitung dafür ist in [5] gezeigt.
Regelung des Anodendrucks Seite 82
__________________________________________________________________________
Zur Lösung ist eine Darstellung in Matrizenform notwendig und nachfolgend für
den allgemeinen Fall gezeigt.
2
1 1 2
T
1 2 1
T
1 3 1
k k k
k k k k
k k
J u e P u
u u Q u u
u Q u
(126)
Die verwendete Matrizen Q2 und Q3 ergibt sich dabei wie nachfolgend dargestellt.
T
2 2Q q D D (127)
( 1)x1 1 0 0 0
0 1 1 0 0
0 0 1 1 0
0
0 0 0 0 1 1
N N
D
(128)
x
3
3
3 3
3
0 0 0
0 0 0
0 0
0
0 0 0
N Nq
q
Q q
q
(129)
Der hochfrequente Einsatz der Stellgröße wird durch die Matrix Q2 bewertet und
somit unterbunden. Die Matrix Q3 hingegen bewertet den gesamten Einsatz der
Stellgröße, hier im speziellen den zusätzlich eingespülten Wasserstoff bzw. den für
die dazugehörige Referenz des Massendurchflussreglers, während einer Iteration.
Als Ergebnis für die Steuerfolge der folgenden Iteration lässt sich der folgende
Zusammenhang berechnen.
1T
1 2 3 2
1T T
2 2 3
R Q Q P P Q
R Q Q P P P
(130)
Es ergeben sich zwei Reglermatrizen, die die Steuerfolge für die Iteration k+1
einerseits aus der Steuerfolge der Iteration k und andererseits aus dem Fehlervek-
tor ek berechnen.
Regelung des Anodendrucks Seite 83
__________________________________________________________________________
In Anlehnung an das in Gl. (76) dargestellte Lerngesetz ergibt sich als Lösung des
optimierenden Ansatzes der folgende Zusammenhang mit den beiden zuvor ge-
nannten Reglermatrizen.
1 1 2k k k ku u R u R e (131)
Anpassung des Spülvolumens
Für den effizienten und sicheren Betrieb ist vorgegeben, dass bei jedem Spülvor-
gang ein bestimmtes Volumen aus dem anodischen Gassystem gespült wird. Diese
Vorgabe gilt als Referenz VPURGE,REF für das nachfolgend beschriebene Vorgehen.
Wird bei jedem Spülvorgang stark von dieser Referenzmenge abgewichen, hat dies
unterschiedliche Folgen: Ist das ausgespülte Volumen zu gering, wird der Zweck
des Spülens nicht erreicht und die nicht erwünschten Stoffe im anodischen Gassys-
tem werden nicht entfernt. Ist das gespülte Volumen zu groß, wird zu viel Wasser-
stoff ungenutzt an die Umgebung abgegeben. Die Folge ist eine Senkung des Sys-
temwirkungsgrades in Folge des erhöhten Wasserstoffverbrauchs.
Bevor es zu einer Anpassung des Spülvolumens durch die Veränderung der Öff-
nungszeit des Abgasventils (Spülzeit) kommt, muss eine Bestimmung des Spülvo-
lumens nach jeder Iteration vorgenommen werden. Aufgrund der Modellungenau-
igkeiten im Bereich des Abgasventils während der Öffnungs- und Schließvorgänge
ist eine Schätzung wie beim kathodischen Abgasventil nicht möglich. Ein Massen-
durchflussmesser ist abgasseitig nicht vorhanden, um den Abgasmassenstrom
messtechnisch zu erfassen. Die Bestimmung des Spülvolumens muss auf einem
anderen Weg erfolgen. Für die Berechnung des Spülvolumens wird folglich ange-
nommen, dass sich vor und nach dem Spülvorgang gleiche Druckverhältnisse bei
gleicher Stackstromstärke im anodischen System vorfinden lassen. Diese Annahme
wird durch den Einsatz eines Druckreglers gestützt. Es wird gefolgert, dass die
dem Gassystem zugeführte Menge an Wasserstoff der Menge an Gasgemisch ent-
spricht, welche das System durch den Spülvorgang verlässt.
MFC,AN AN,REAKT AN,ABGASW W W (132)
Die zusätzlich zugeführte Menge lässt sich über die gemessene zugeführte Menge
an Wasserstoff über den Massendurchflussmesser abzüglich der durch die chemi-
sche Reaktion verbrauchten Menge an Wasserstoff bestimmen.
PURGE S MFC,AN AN,REAKT
1
N
i
V t W i W i
(133)
Regelung des Anodendrucks Seite 84
__________________________________________________________________________
Unter der genannten Annahme, dass sich die Stackstromstärke während eines
Spülvorgangs nicht verändert und die reagierende Wasserstoffmenge konstant
bleibt, ist eine weiter vereinfachte Darstellung der Gleichung möglich.
PURGE S AN,REAKT MFC,AN
=1
N
i
V t NW W i
(134)
Nach der Ermittlung des Spülvolumens erfolgt die Anpassung der Spülzeit in Ab-
hängigkeit des ausgespülten Volumens und der zuvor genutzten Spülzeit.
PURGE,REF
PURGE,*PURGE,PURGE, 1
PURGE,
, 0,01 bar=
, 0,01 bar
k k
kk
k k
Vt E
Vt
t E
(135)
Die Berechnung von Ek erfolgt gemäß Gl. (117).
Durch die Anpassung des Drucks durch die (O)ILR kommt es durch die Druckab-
hängigkeit der Ausflussmenge zu einer Erhöhung dieser. Eine Veränderung des
Öffnungszeitraums/-verhaltens des Spülventils wird vorgenommen, um das Spül-
volumen der Herstellervorgabe anzupassen.
Anwendung der OILR
Die OILR hat sich im Bereich der Anwendung der Iterativ Lernenden Regelungen
gegenüber dem zuvor dargestellten Verfahren aufgrund höherer Konvergenz in den
letzten Jahren durchgesetzt. Der Unterschied im Bereich der Konvergenz gegen-
über dem zuvor dargestellten Verfahren mit dem Aufbau unterschiedlicher Lernfil-
ter ist vergleichend im Kapitel 6.5 dargestellt. Die OILR wird entsprechend auf
verschiedensten Anwendungsgebieten, welche nachfolgend genannt und kurz be-
schrieben sind, eingesetzt.
Zur Anwendung kommt die OILR beispielsweise bei der Positionierung und dem
Verfahren von technischen Anlagen unter Nutzung von pneumatischen Mus-
keln [60], [61]. Bei den sich regelmäßig wiederholenden Positionierungsabläufen
wird die Präzision in den einzelnen Abläufen durch die OILR unterstützt. Pneuma-
tische Muskeln gelten als sehr schnelle und präzise mechanische Systeme.
Eine andere Anwendung zeigt [8], in der die OILR zur Temperaturregelung von
Metallstäben, die durch verschiedene Segmente modelliert sind, genutzt wird.
In [34] wird das in diesem Kapitel beschriebene Regelungsverfahren für die Her-
stellung von Polyhydroxybutyrat in Batchprozessen eingesetzt. Bei wiederkehren-
den Prozessen des Produktionsvorgangs in der chemischen Industrie treten unbe-
kannte Störungen auf. Die Modellungenauigkeiten im Hinblick auf diese Störun-
Regelung des Anodendrucks Seite 85
__________________________________________________________________________
gen werden mit jeder Iteration verringert bzw. neu identifiziert, um das Modell
iterativ Schritt für Schritt bei diesem komplexen Vorgang anzupassen.
In [68] findet die OILR Anwendung beim Nachfahren von Trajektorien beim Ein-
satz eines Portalkrans. Iterationsweise wird hier der vorgegebene Bahnverlauf mit
monoton steigender Regelgüte durchgeführt.
Die periodische Anpassung der Steuergrößen kann auch in der Strömungstechnik
Verwendung finden [69]. Der Einfluss der regelmäßig auftretenden Störungen
kann in dieser Anwendung reduziert werden, sodass der gesamte Vorgang in der
Folge konstanter ablaufen kann.
Neben den praktischen Anwendungen zeigen verschiedene Arbeiten den Umgang
mit weiteren Eigenschaften der OILR, den Umgang mit Nebenbedingungen, den
Vergleich zur klassischen ILR und die Anpassung von Abtastzeiten während der
einzelnen Zyklen in Simulationen. Zu diesen Arbeiten mit den theoretischen Aus-
führungen zählen u. a. [5], [36] und [62].

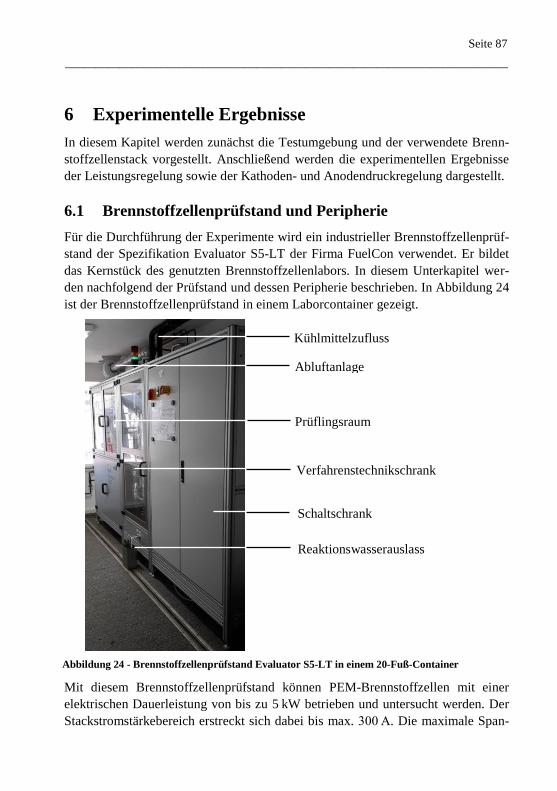
Seite 87
__________________________________________________________________________
6 Experimentelle Ergebnisse
In diesem Kapitel werden zunächst die Testumgebung und der verwendete Brenn-
stoffzellenstack vorgestellt. Anschließend werden die experimentellen Ergebnisse
der Leistungsregelung sowie der Kathoden- und Anodendruckregelung dargestellt.
6.1 Brennstoffzellenprüfstand und Peripherie
Für die Durchführung der Experimente wird ein industrieller Brennstoffzellenprüf-
stand der Spezifikation Evaluator S5-LT der Firma FuelCon verwendet. Er bildet
das Kernstück des genutzten Brennstoffzellenlabors. In diesem Unterkapitel wer-
den nachfolgend der Prüfstand und dessen Peripherie beschrieben. In Abbildung 24
ist der Brennstoffzellenprüfstand in einem Laborcontainer gezeigt.
Abbildung 24 - Brennstoffzellenprüfstand Evaluator S5-LT in einem 20-Fuß-Container
Mit diesem Brennstoffzellenprüfstand können PEM-Brennstoffzellen mit einer
elektrischen Dauerleistung von bis zu 5 kW betrieben und untersucht werden. Der
Stackstromstärkebereich erstreckt sich dabei bis max. 300 A. Die maximale Span-
Abluftanlage
Kühlmittelzufluss
Schaltschrank
Reaktionswasserauslass
Verfahrenstechnikschrank
Prüflingsraum
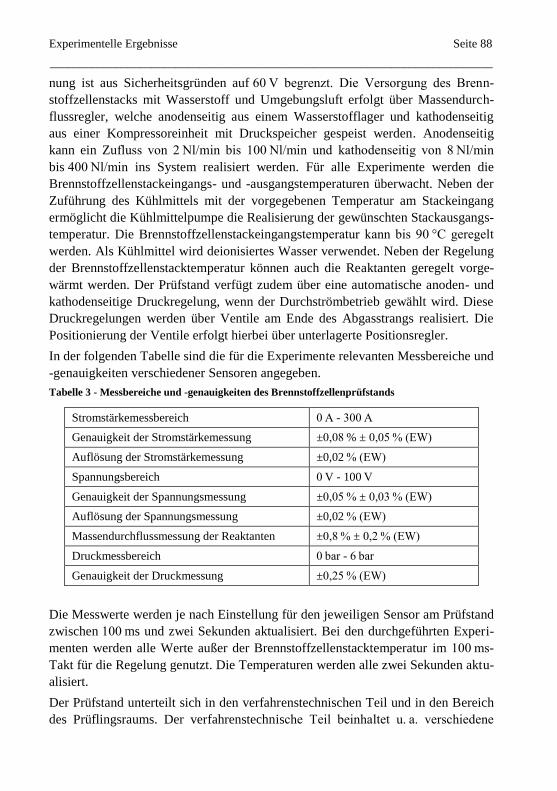
Experimentelle Ergebnisse Seite 88
__________________________________________________________________________
nung ist aus Sicherheitsgründen auf 60 V begrenzt. Die Versorgung des Brenn-
stoffzellenstacks mit Wasserstoff und Umgebungsluft erfolgt über Massendurch-
flussregler, welche anodenseitig aus einem Wasserstofflager und kathodenseitig
aus einer Kompressoreinheit mit Druckspeicher gespeist werden. Anodenseitig
kann ein Zufluss von 2 Nl/min bis 100 Nl/min und kathodenseitig von 8 Nl/min
bis 400 Nl/min ins System realisiert werden. Für alle Experimente werden die
Brennstoffzellenstackeingangs- und -ausgangstemperaturen überwacht. Neben der
Zuführung des Kühlmittels mit der vorgegebenen Temperatur am Stackeingang
ermöglicht die Kühlmittelpumpe die Realisierung der gewünschten Stackausgangs-
temperatur. Die Brennstoffzellenstackeingangstemperatur kann bis 90 °C geregelt
werden. Als Kühlmittel wird deionisiertes Wasser verwendet. Neben der Regelung
der Brennstoffzellenstacktemperatur können auch die Reaktanten geregelt vorge-
wärmt werden. Der Prüfstand verfügt zudem über eine automatische anoden- und
kathodenseitige Druckregelung, wenn der Durchströmbetrieb gewählt wird. Diese
Druckregelungen werden über Ventile am Ende des Abgasstrangs realisiert. Die
Positionierung der Ventile erfolgt hierbei über unterlagerte Positionsregler.
In der folgenden Tabelle sind die für die Experimente relevanten Messbereiche und
-genauigkeiten verschiedener Sensoren angegeben.
Tabelle 3 - Messbereiche und -genauigkeiten des Brennstoffzellenprüfstands
Stromstärkemessbereich 0 A - 300 A
Genauigkeit der Stromstärkemessung ±0,08 % ± 0,05 % (EW)
Auflösung der Stromstärkemessung ±0,02 % (EW)
Spannungsbereich 0 V - 100 V
Genauigkeit der Spannungsmessung ±0,05 % ± 0,03 % (EW)
Auflösung der Spannungsmessung ±0,02 % (EW)
Massendurchflussmessung der Reaktanten ±0,8 % ± 0,2 % (EW)
Druckmessbereich 0 bar - 6 bar
Genauigkeit der Druckmessung ±0,25 % (EW)
Die Messwerte werden je nach Einstellung für den jeweiligen Sensor am Prüfstand
zwischen 100 ms und zwei Sekunden aktualisiert. Bei den durchgeführten Experi-
menten werden alle Werte außer der Brennstoffzellenstacktemperatur im 100 ms-
Takt für die Regelung genutzt. Die Temperaturen werden alle zwei Sekunden aktu-
alisiert.
Der Prüfstand unterteilt sich in den verfahrenstechnischen Teil und in den Bereich
des Prüflingsraums. Der verfahrenstechnische Teil beinhaltet u. a. verschiedene
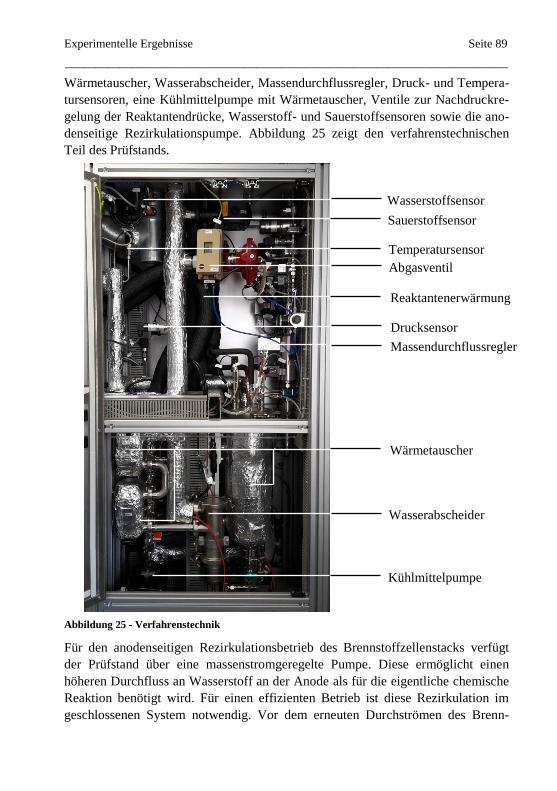
Experimentelle Ergebnisse Seite 89
__________________________________________________________________________
Wärmetauscher, Wasserabscheider, Massendurchflussregler, Druck- und Tempera-
tursensoren, eine Kühlmittelpumpe mit Wärmetauscher, Ventile zur Nachdruckre-
gelung der Reaktantendrücke, Wasserstoff- und Sauerstoffsensoren sowie die ano-
denseitige Rezirkulationspumpe. Abbildung 25 zeigt den verfahrenstechnischen
Teil des Prüfstands.
Abbildung 25 - Verfahrenstechnik
Für den anodenseitigen Rezirkulationsbetrieb des Brennstoffzellenstacks verfügt
der Prüfstand über eine massenstromgeregelte Pumpe. Diese ermöglicht einen
höheren Durchfluss an Wasserstoff an der Anode als für die eigentliche chemische
Reaktion benötigt wird. Für einen effizienten Betrieb ist diese Rezirkulation im
geschlossenen System notwendig. Vor dem erneuten Durchströmen des Brenn-
Wärmetauscher
Wasserabscheider
Wasserstoffsensor
Sauerstoffsensor
Drucksensor
Reaktantenerwärmung
Kühlmittelpumpe
Temperatursensor
Abgasventil
Massendurchflussregler
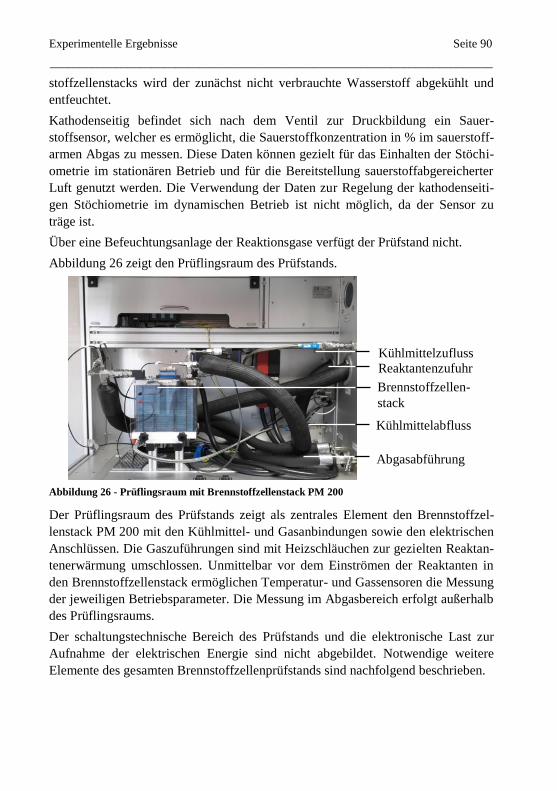
Experimentelle Ergebnisse Seite 90
__________________________________________________________________________
stoffzellenstacks wird der zunächst nicht verbrauchte Wasserstoff abgekühlt und
entfeuchtet.
Kathodenseitig befindet sich nach dem Ventil zur Druckbildung ein Sauer-
stoffsensor, welcher es ermöglicht, die Sauerstoffkonzentration in % im sauerstoff-
armen Abgas zu messen. Diese Daten können gezielt für das Einhalten der Stöchi-
ometrie im stationären Betrieb und für die Bereitstellung sauerstoffabgereicherter
Luft genutzt werden. Die Verwendung der Daten zur Regelung der kathodenseiti-
gen Stöchiometrie im dynamischen Betrieb ist nicht möglich, da der Sensor zu
träge ist.
Über eine Befeuchtungsanlage der Reaktionsgase verfügt der Prüfstand nicht.
Abbildung 26 zeigt den Prüflingsraum des Prüfstands.
Abbildung 26 - Prüflingsraum mit Brennstoffzellenstack PM 200
Der Prüflingsraum des Prüfstands zeigt als zentrales Element den Brennstoffzel-
lenstack PM 200 mit den Kühlmittel- und Gasanbindungen sowie den elektrischen
Anschlüssen. Die Gaszuführungen sind mit Heizschläuchen zur gezielten Reaktan-
tenerwärmung umschlossen. Unmittelbar vor dem Einströmen der Reaktanten in
den Brennstoffzellenstack ermöglichen Temperatur- und Gassensoren die Messung
der jeweiligen Betriebsparameter. Die Messung im Abgasbereich erfolgt außerhalb
des Prüflingsraums.
Der schaltungstechnische Bereich des Prüfstands und die elektronische Last zur
Aufnahme der elektrischen Energie sind nicht abgebildet. Notwendige weitere
Elemente des gesamten Brennstoffzellenprüfstands sind nachfolgend beschrieben.
Reaktantenzufuhr
Kühlmittelzufluss
Kühlmittelabfluss
Abgasabführung
Brennstoffzellen-
stack
Experimentelle Ergebnisse Seite 91
__________________________________________________________________________
Elektronische Last
Die elektronische Last, welche sich unterhalb des Prüflingsraums befindet, ermög-
licht die Belastung des Brennstoffzellenstacks unter verschiedenen Einstellungen.
Es ist möglich, bestimmte Leistungen, Spannungen oder Stromstärken explizit
abzurufen oder ein gewünschtes ohmsches Widerstandverhalten abzubilden. In den
Experimenten werden auch die Änderungen an der elektronischen Last alle 100 ms
gemessen bzw. geändert. Die elektronische Last ist Teil des Prüfstands und wird
über die Software des Prüfstands bedient und ausgewertet.
Wärmetauscher (extern)
Ein Umlaufkühler vom Typ UC060T, welcher sich im Laborcontainer befindet,
ermöglicht die Kühlung des Brennstoffzellenstacks und der elektronischen Last.
Die Abwärme des Brennstoffzellenstacks in Folge der chemischen Reaktion wird
über den internen Wärmetauscher und den inneren Kühlkreislauf abgeführt.
Kompressoreinheit und Stickstoffversorgung
Die Bereitstellung der Druckluft für die Zuführung des kathodenseitig benötigten
Sauerstoffs sichert ein Kompressor vom Typ MSM mini 4Dx-200. Die Entnahme
und Zuführung der Luft in das kathodenseitige Gassystem wird über den bereits
genannten Massendurchflussregler realisiert. Neben der Bereitstellung des Sauer-
stoffs für die chemische Reaktion stellt die Kompressoreinheit die Steuerluft für
die pneumatisch betriebenen Ventile im Brennstoffzellenprüfstand bereit. Die
Kompressoreinheit mit integriertem Druckluftspeicher besitzt zusätzlich einen Öl-
und Wasserabscheider zur Aufbereitung der zuvor komprimierten Umgebungsluft.
Für die Nachbereitung des Brennstoffzellenbetriebs und für den Fall eines fehler-
haften Betriebs verfügt der Brennstoffzellenprüfstand über die Möglichkeit der
Zuführung von Stickstoff, um vorhandene Reaktanten aus dem System zu spülen
und brennbare Gasgemische zu vermeiden.
Einzelzellspannungsüberwachung
(engl.: Cell Voltage Monitoring, CVM)
Für die exakte Messung und Kontrolle aller Zellspannungen verfügt der Prüfstand
über eine Einzelzellspannungsüberwachung. Diese ermöglicht es, bis zu 50 Einzel-
zellen zu überprüfen. Eine Auswertung über den Zustand jeder einzelnen Zelle
kann zu jedem Zeitpunkt während des Betriebs erfolgen. Unterversorgungen oder
defekte Zellen können somit identifiziert werden. Die Messung jeder Zelle kann
dabei in einem Bereich von ±2,5 V bei einer Genauigkeit von 1 mV durchgeführt
werden.
Experimentelle Ergebnisse Seite 92
__________________________________________________________________________
Gleichspannungswandler
Im Bereich unterhalb des Prüflingsraums befindet sich neben der elektronischen
Last auch ein Gleichspannungswandler. Dieser ist für die in dieser Arbeit durchge-
führten Experimente nicht notwendig, aber in der Regel für den realen Einsatz
eines Brennstoffzellensystems und die entsprechenden Testreihen zu nutzen. Da
die Ausgangsspannung einer Brennstoffzelle nicht konstant und somit für viele
Anwendungen nicht nutzbar ist, werden Brennstoffzellen in der Regel mit Gleich-
spannungswandlern betrieben. Diese Spannungswandler, die je nach Anwendungs-
gebiet als Hoch- und/oder Tiefsetzsteller ausgeführt sind, erfüllen zwei Aufgaben:
Einerseits wird die Ausgangsspannung des dann zu betrachtenden Gesamtsystems
konstant und einstellbar; andererseits sind Spannungswandler in der Lage, ihren
Eingangsstrom zu begrenzen und bestimmen somit, welche elektrische Energie im
Brennstoffzellenstack gewandelt wird. Beide Punkte stellen in diesem Zusammen-
hang den Eingriff auf die Stromstärke der Brennstoffzelle dar und sind in der An-
wendung die einzigen Möglichkeiten, diese einzustellen bzw. gezielt zu beeinflus-
sen. Der verbaute Hochsetzsteller vom Typ CCH63250-SSU (DCDC24/48/5000)
der Fa. Zahn Electronic kann bis zu 5 kW elektrische Leistung mit einer eingangs-
seitigen Stromstärke bis 250 A wandeln. Ausgangsseitig ist eine Stromstärke
von 125 A bei einer geregelten Ausgangsspannung zwischen 48 V und 60 V mög-
lich. Der Wirkungsgrad liegt oberhalb von 96 %, sodass eine Flüssigkeitskühlung
nicht benötigt wird.
6.2 Brennstoffzellenstack PM 200
Der für die Experimente verwendete Brennstoffzellenstack ist vom Typ PM 200
der Fa. Proton Motor. Der Brennstoffzellenstack ist eine Polymer-Elektrolyt-
Membran-Niedertemperatur-Brennstoffzelle. Als Reaktionsstoffe werden hochrei-
ner Wasserstoff und der Sauerstoff der Umgebungsluft verwendet. Der für die
Experimente verwendete Prüfling ist in Abbildung 26 bereits dargestellt. Der Prüf-
ling ist in der Standardgröße von 48 Zellen für eine Nennlast von 4 kW und einer
Spitzenlast von 4,4 kW ausgeführt [54]. Der Betrieb erfolgt flüssigkeitsgekühlt.
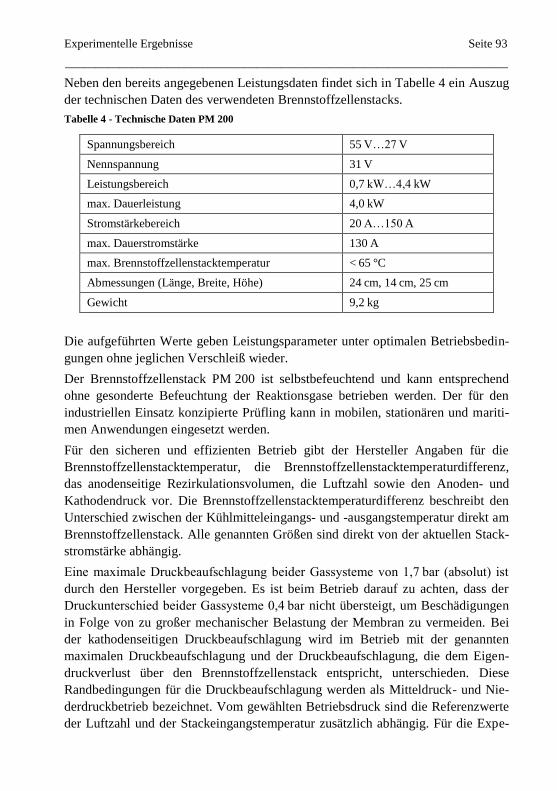
Experimentelle Ergebnisse Seite 93
__________________________________________________________________________
Neben den bereits angegebenen Leistungsdaten findet sich in Tabelle 4 ein Auszug
der technischen Daten des verwendeten Brennstoffzellenstacks.
Tabelle 4 - Technische Daten PM 200
Spannungsbereich 55 V…27 V
Nennspannung 31 V
Leistungsbereich 0,7 kW…4,4 kW
max. Dauerleistung 4,0 kW
Stromstärkebereich 20 A…150 A
max. Dauerstromstärke 130 A
max. Brennstoffzellenstacktemperatur < 65 °C
Abmessungen (Länge, Breite, Höhe) 24 cm, 14 cm, 25 cm
Gewicht 9,2 kg
Die aufgeführten Werte geben Leistungsparameter unter optimalen Betriebsbedin-
gungen ohne jeglichen Verschleiß wieder.
Der Brennstoffzellenstack PM 200 ist selbstbefeuchtend und kann entsprechend
ohne gesonderte Befeuchtung der Reaktionsgase betrieben werden. Der für den
industriellen Einsatz konzipierte Prüfling kann in mobilen, stationären und mariti-
men Anwendungen eingesetzt werden.
Für den sicheren und effizienten Betrieb gibt der Hersteller Angaben für die
Brennstoffzellenstacktemperatur, die Brennstoffzellenstacktemperaturdifferenz,
das anodenseitige Rezirkulationsvolumen, die Luftzahl sowie den Anoden- und
Kathodendruck vor. Die Brennstoffzellenstacktemperaturdifferenz beschreibt den
Unterschied zwischen der Kühlmitteleingangs- und -ausgangstemperatur direkt am
Brennstoffzellenstack. Alle genannten Größen sind direkt von der aktuellen Stack-
stromstärke abhängig.
Eine maximale Druckbeaufschlagung beider Gassysteme von 1,7 bar (absolut) ist
durch den Hersteller vorgegeben. Es ist beim Betrieb darauf zu achten, dass der
Druckunterschied beider Gassysteme 0,4 bar nicht übersteigt, um Beschädigungen
in Folge von zu großer mechanischer Belastung der Membran zu vermeiden. Bei
der kathodenseitigen Druckbeaufschlagung wird im Betrieb mit der genannten
maximalen Druckbeaufschlagung und der Druckbeaufschlagung, die dem Eigen-
druckverlust über den Brennstoffzellenstack entspricht, unterschieden. Diese
Randbedingungen für die Druckbeaufschlagung werden als Mitteldruck- und Nie-
derdruckbetrieb bezeichnet. Vom gewählten Betriebsdruck sind die Referenzwerte
der Luftzahl und der Stackeingangstemperatur zusätzlich abhängig. Für die Expe-
Experimentelle Ergebnisse Seite 94
__________________________________________________________________________
rimente in dieser Arbeit wird der Mitteldruckbetrieb genutzt. Für den Betrieb des
Brennstoffzellenstacks PM 200 liegt die Solleingangstemperatur im Mitteldruckbe-
trieb bei einer Stackstromstärke von 30 A bei 48,8 °C und bei über 130 A
bei 60 °C.
Bei dem in Tabelle 4 angegebenen Arbeitsbereich für die Stackstromstärke ist zu
beachten, dass Stromstärken zwischen 20 A und 30 A nur für einen geringen Anteil
der Betriebsdauer zu nutzen sind. Stromstärken unter 20 A zählen zum An- und
Abfahrprozess und sind nur transient zu durchfahren. Der Bereich oberhalb
von 130 A bis zur Spitzenlast von 150 A wird als Überlastbereich bezeichnet. Der
Brennstoffzellenstack soll in diesem Bereich nach Angaben des Herstellers
max. 5 % der Gesamtbetriebsdauer belastet werden. Im gesamten Betriebsbereich
ist auf die einzelnen Zellspannungen bzw. auf die niedrigste Spannung aller Ein-
zelzellen zu achten. Ein Unterschreiten von 0,5 V ist zu vermeiden.
6.3 Leistungsregelung
Beginnend mit den Ergebnissen der Leistungsregelung findet in diesem Unterkapi-
tel die Darstellung der experimentellen Ergebnisse statt. Zu den einzelnen Experi-
menten werden die Einstellungen erläutert und nach der Darstellung der Ergebnisse
ausgewertet. Die Darstellungen umfassen stets die spezifischen Nebenbedingungen
der Regelung.
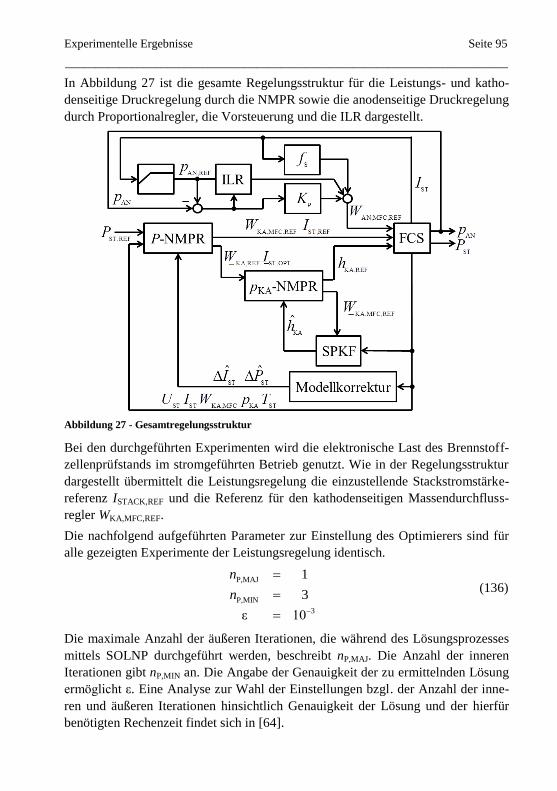
Experimentelle Ergebnisse Seite 95
__________________________________________________________________________
In Abbildung 27 ist die gesamte Regelungsstruktur für die Leistungs- und katho-
denseitige Druckregelung durch die NMPR sowie die anodenseitige Druckregelung
durch Proportionalregler, die Vorsteuerung und die ILR dargestellt.
Abbildung 27 - Gesamtregelungsstruktur
Bei den durchgeführten Experimenten wird die elektronische Last des Brennstoff-
zellenprüfstands im stromgeführten Betrieb genutzt. Wie in der Regelungsstruktur
dargestellt übermittelt die Leistungsregelung die einzustellende Stackstromstärke-
referenz ISTACK,REF und die Referenz für den kathodenseitigen Massendurchfluss-
regler WKA,MFC,REF.
Die nachfolgend aufgeführten Parameter zur Einstellung des Optimierers sind für
alle gezeigten Experimente der Leistungsregelung identisch.
P,MAJ
P,MIN
3
1
3
ε 10
n
n
(136)
Die maximale Anzahl der äußeren Iterationen, die während des Lösungsprozesses
mittels SOLNP durchgeführt werden, beschreibt nP,MAJ. Die Anzahl der inneren
Iterationen gibt nP,MIN an. Die Angabe der Genauigkeit der zu ermittelnden Lösung
ermöglicht ε. Eine Analyse zur Wahl der Einstellungen bzgl. der Anzahl der inne-
ren und äußeren Iterationen hinsichtlich Genauigkeit der Lösung und der hierfür
benötigten Rechenzeit findet sich in [64].
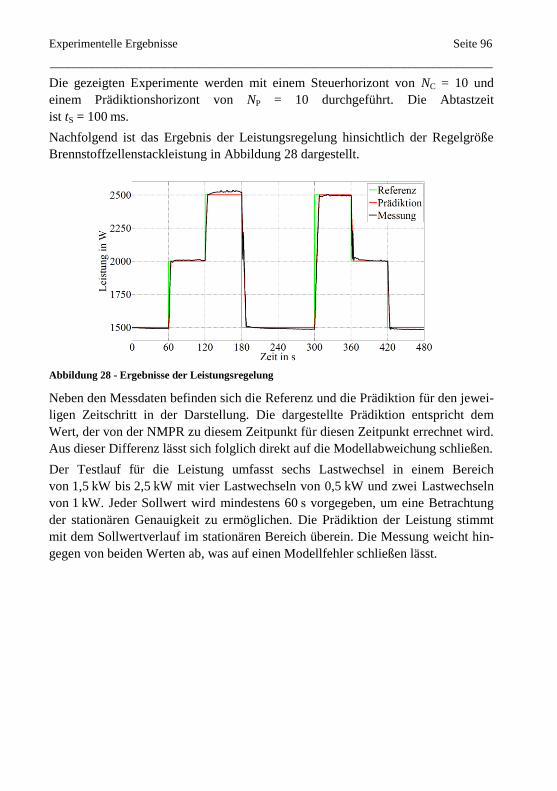
Experimentelle Ergebnisse Seite 96
__________________________________________________________________________
Die gezeigten Experimente werden mit einem Steuerhorizont von NC = 10 und
einem Prädiktionshorizont von NP = 10 durchgeführt. Die Abtastzeit
ist tS = 100 ms.
Nachfolgend ist das Ergebnis der Leistungsregelung hinsichtlich der Regelgröße
Brennstoffzellenstackleistung in Abbildung 28 dargestellt.
Abbildung 28 - Ergebnisse der Leistungsregelung
Neben den Messdaten befinden sich die Referenz und die Prädiktion für den jewei-
ligen Zeitschritt in der Darstellung. Die dargestellte Prädiktion entspricht dem
Wert, der von der NMPR zu diesem Zeitpunkt für diesen Zeitpunkt errechnet wird.
Aus dieser Differenz lässt sich folglich direkt auf die Modellabweichung schließen.
Der Testlauf für die Leistung umfasst sechs Lastwechsel in einem Bereich
von 1,5 kW bis 2,5 kW mit vier Lastwechseln von 0,5 kW und zwei Lastwechseln
von 1 kW. Jeder Sollwert wird mindestens 60 s vorgegeben, um eine Betrachtung
der stationären Genauigkeit zu ermöglichen. Die Prädiktion der Leistung stimmt
mit dem Sollwertverlauf im stationären Bereich überein. Die Messung weicht hin-
gegen von beiden Werten ab, was auf einen Modellfehler schließen lässt.
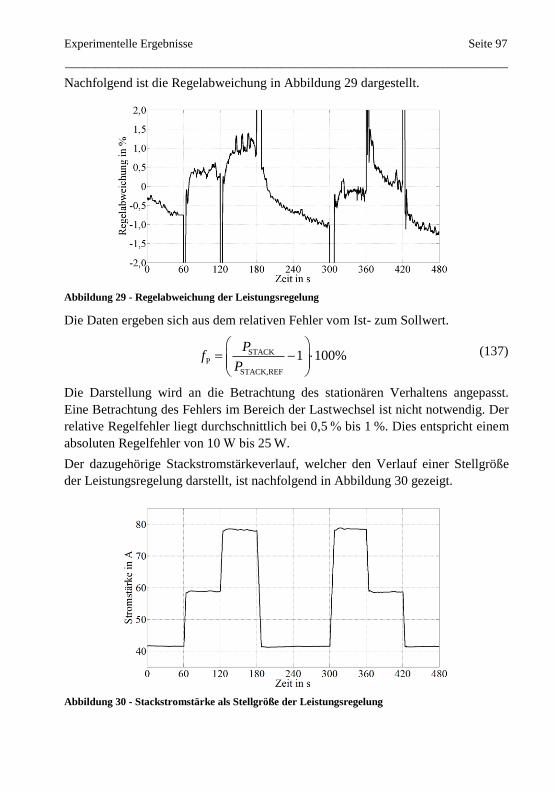
Experimentelle Ergebnisse Seite 97
__________________________________________________________________________
Nachfolgend ist die Regelabweichung in Abbildung 29 dargestellt.
Abbildung 29 - Regelabweichung der Leistungsregelung
Die Daten ergeben sich aus dem relativen Fehler vom Ist- zum Sollwert.
STACKP
STACK,REF
1 100%P
fP
(137)
Die Darstellung wird an die Betrachtung des stationären Verhaltens angepasst.
Eine Betrachtung des Fehlers im Bereich der Lastwechsel ist nicht notwendig. Der
relative Regelfehler liegt durchschnittlich bei 0,5 % bis 1 %. Dies entspricht einem
absoluten Regelfehler von 10 W bis 25 W.
Der dazugehörige Stackstromstärkeverlauf, welcher den Verlauf einer Stellgröße
der Leistungsregelung darstellt, ist nachfolgend in Abbildung 30 gezeigt.
Abbildung 30 - Stackstromstärke als Stellgröße der Leistungsregelung
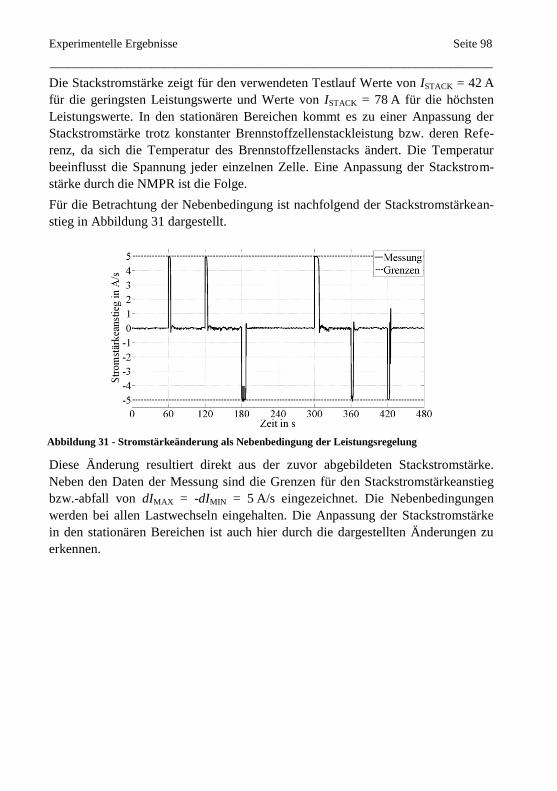
Experimentelle Ergebnisse Seite 98
__________________________________________________________________________
Die Stackstromstärke zeigt für den verwendeten Testlauf Werte von ISTACK = 42 A
für die geringsten Leistungswerte und Werte von ISTACK = 78 A für die höchsten
Leistungswerte. In den stationären Bereichen kommt es zu einer Anpassung der
Stackstromstärke trotz konstanter Brennstoffzellenstackleistung bzw. deren Refe-
renz, da sich die Temperatur des Brennstoffzellenstacks ändert. Die Temperatur
beeinflusst die Spannung jeder einzelnen Zelle. Eine Anpassung der Stackstrom-
stärke durch die NMPR ist die Folge.
Für die Betrachtung der Nebenbedingung ist nachfolgend der Stackstromstärkean-
stieg in Abbildung 31 dargestellt.
Abbildung 31 - Stromstärkeänderung als Nebenbedingung der Leistungsregelung
Diese Änderung resultiert direkt aus der zuvor abgebildeten Stackstromstärke.
Neben den Daten der Messung sind die Grenzen für den Stackstromstärkeanstieg
bzw.-abfall von dIMAX = -dIMIN = 5 A/s eingezeichnet. Die Nebenbedingungen
werden bei allen Lastwechseln eingehalten. Die Anpassung der Stackstromstärke
in den stationären Bereichen ist auch hier durch die dargestellten Änderungen zu
erkennen.
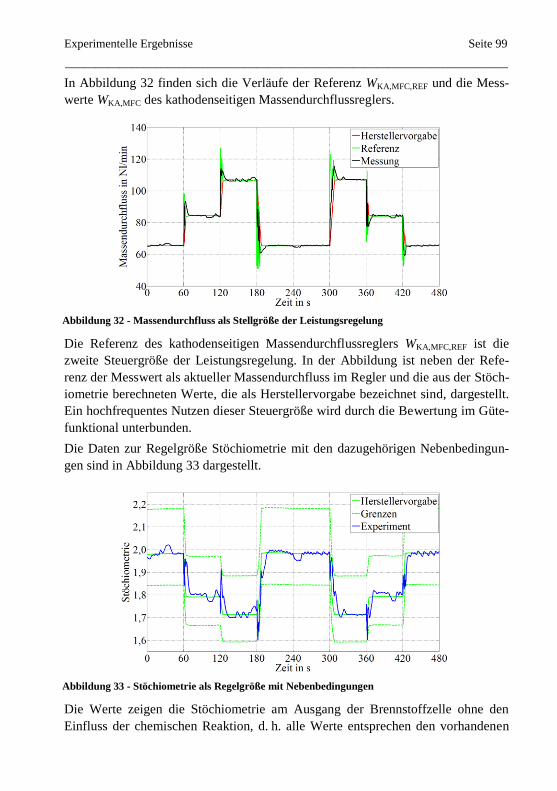
Experimentelle Ergebnisse Seite 99
__________________________________________________________________________
In Abbildung 32 finden sich die Verläufe der Referenz WKA,MFC,REF und die Mess-
werte WKA,MFC des kathodenseitigen Massendurchflussreglers.
Abbildung 32 - Massendurchfluss als Stellgröße der Leistungsregelung
Die Referenz des kathodenseitigen Massendurchflussreglers WKA,MFC,REF ist die
zweite Steuergröße der Leistungsregelung. In der Abbildung ist neben der Refe-
renz der Messwert als aktueller Massendurchfluss im Regler und die aus der Stöch-
iometrie berechneten Werte, die als Herstellervorgabe bezeichnet sind, dargestellt.
Ein hochfrequentes Nutzen dieser Steuergröße wird durch die Bewertung im Güte-
funktional unterbunden.
Die Daten zur Regelgröße Stöchiometrie mit den dazugehörigen Nebenbedingun-
gen sind in Abbildung 33 dargestellt.
Abbildung 33 - Stöchiometrie als Regelgröße mit Nebenbedingungen
Die Werte zeigen die Stöchiometrie am Ausgang der Brennstoffzelle ohne den
Einfluss der chemischen Reaktion, d. h. alle Werte entsprechen den vorhandenen
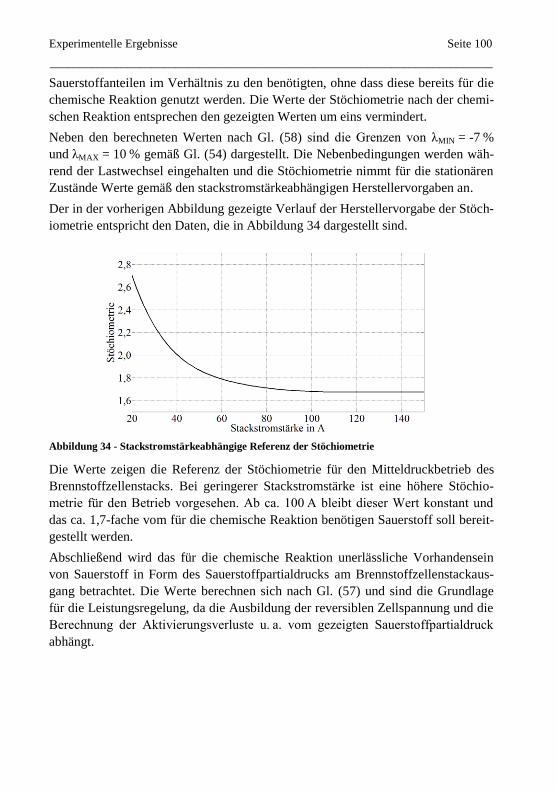
Experimentelle Ergebnisse Seite 100
__________________________________________________________________________
Sauerstoffanteilen im Verhältnis zu den benötigten, ohne dass diese bereits für die
chemische Reaktion genutzt werden. Die Werte der Stöchiometrie nach der chemi-
schen Reaktion entsprechen den gezeigten Werten um eins vermindert.
Neben den berechneten Werten nach Gl. (58) sind die Grenzen von λMIN = -7 %
und λMAX = 10 % gemäß Gl. (54) dargestellt. Die Nebenbedingungen werden wäh-
rend der Lastwechsel eingehalten und die Stöchiometrie nimmt für die stationären
Zustände Werte gemäß den stackstromstärkeabhängigen Herstellervorgaben an.
Der in der vorherigen Abbildung gezeigte Verlauf der Herstellervorgabe der Stöch-
iometrie entspricht den Daten, die in Abbildung 34 dargestellt sind.
Abbildung 34 - Stackstromstärkeabhängige Referenz der Stöchiometrie
Die Werte zeigen die Referenz der Stöchiometrie für den Mitteldruckbetrieb des
Brennstoffzellenstacks. Bei geringerer Stackstromstärke ist eine höhere Stöchio-
metrie für den Betrieb vorgesehen. Ab ca. 100 A bleibt dieser Wert konstant und
das ca. 1,7-fache vom für die chemische Reaktion benötigen Sauerstoff soll bereit-
gestellt werden.
Abschließend wird das für die chemische Reaktion unerlässliche Vorhandensein
von Sauerstoff in Form des Sauerstoffpartialdrucks am Brennstoffzellenstackaus-
gang betrachtet. Die Werte berechnen sich nach Gl. (57) und sind die Grundlage
für die Leistungsregelung, da die Ausbildung der reversiblen Zellspannung und die
Berechnung der Aktivierungsverluste u. a. vom gezeigten Sauerstoffpartialdruck
abhängt.
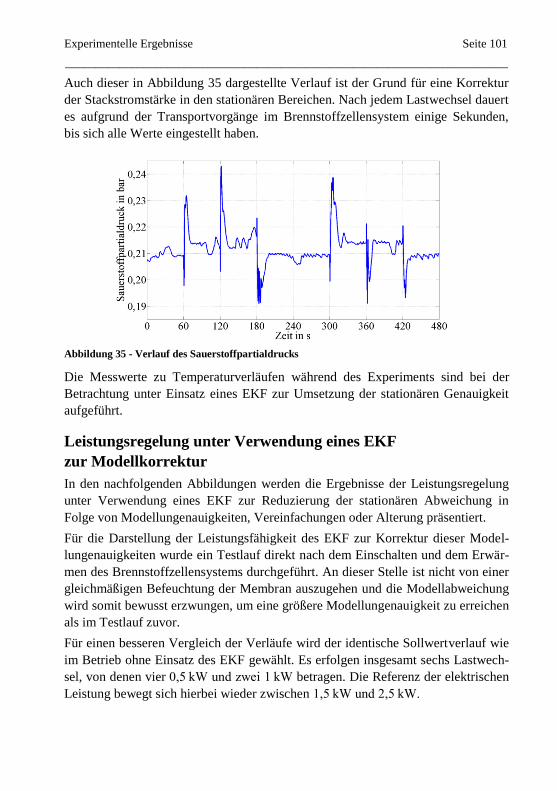
Experimentelle Ergebnisse Seite 101
__________________________________________________________________________
Auch dieser in Abbildung 35 dargestellte Verlauf ist der Grund für eine Korrektur
der Stackstromstärke in den stationären Bereichen. Nach jedem Lastwechsel dauert
es aufgrund der Transportvorgänge im Brennstoffzellensystem einige Sekunden,
bis sich alle Werte eingestellt haben.
Abbildung 35 - Verlauf des Sauerstoffpartialdrucks
Die Messwerte zu Temperaturverläufen während des Experiments sind bei der
Betrachtung unter Einsatz eines EKF zur Umsetzung der stationären Genauigkeit
aufgeführt.
Leistungsregelung unter Verwendung eines EKF
zur Modellkorrektur
In den nachfolgenden Abbildungen werden die Ergebnisse der Leistungsregelung
unter Verwendung eines EKF zur Reduzierung der stationären Abweichung in
Folge von Modellungenauigkeiten, Vereinfachungen oder Alterung präsentiert.
Für die Darstellung der Leistungsfähigkeit des EKF zur Korrektur dieser Model-
lungenauigkeiten wurde ein Testlauf direkt nach dem Einschalten und dem Erwär-
men des Brennstoffzellensystems durchgeführt. An dieser Stelle ist nicht von einer
gleichmäßigen Befeuchtung der Membran auszugehen und die Modellabweichung
wird somit bewusst erzwungen, um eine größere Modellungenauigkeit zu erreichen
als im Testlauf zuvor.
Für einen besseren Vergleich der Verläufe wird der identische Sollwertverlauf wie
im Betrieb ohne Einsatz des EKF gewählt. Es erfolgen insgesamt sechs Lastwech-
sel, von denen vier 0,5 kW und zwei 1 kW betragen. Die Referenz der elektrischen
Leistung bewegt sich hierbei wieder zwischen 1,5 kW und 2,5 kW.
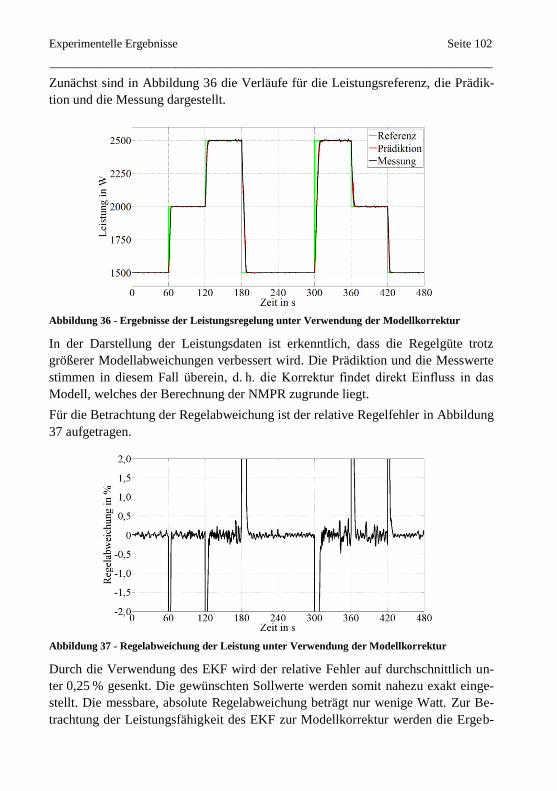
Experimentelle Ergebnisse Seite 102
__________________________________________________________________________
Zunächst sind in Abbildung 36 die Verläufe für die Leistungsreferenz, die Prädik-
tion und die Messung dargestellt.
Abbildung 36 - Ergebnisse der Leistungsregelung unter Verwendung der Modellkorrektur
In der Darstellung der Leistungsdaten ist erkenntlich, dass die Regelgüte trotz
größerer Modellabweichungen verbessert wird. Die Prädiktion und die Messwerte
stimmen in diesem Fall überein, d. h. die Korrektur findet direkt Einfluss in das
Modell, welches der Berechnung der NMPR zugrunde liegt.
Für die Betrachtung der Regelabweichung ist der relative Regelfehler in Abbildung
37 aufgetragen.
Abbildung 37 - Regelabweichung der Leistung unter Verwendung der Modellkorrektur
Durch die Verwendung des EKF wird der relative Fehler auf durchschnittlich un-
ter 0,25 % gesenkt. Die gewünschten Sollwerte werden somit nahezu exakt einge-
stellt. Die messbare, absolute Regelabweichung beträgt nur wenige Watt. Zur Be-
trachtung der Leistungsfähigkeit des EKF zur Modellkorrektur werden die Ergeb-
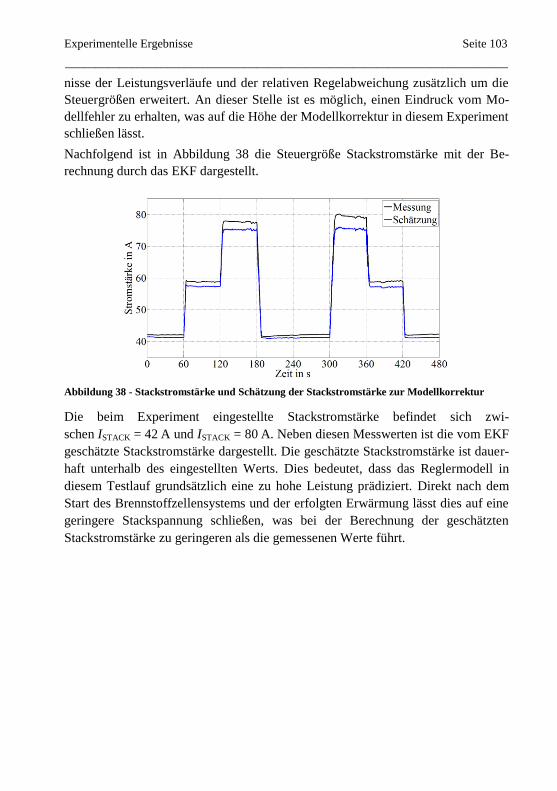
Experimentelle Ergebnisse Seite 103
__________________________________________________________________________
nisse der Leistungsverläufe und der relativen Regelabweichung zusätzlich um die
Steuergrößen erweitert. An dieser Stelle ist es möglich, einen Eindruck vom Mo-
dellfehler zu erhalten, was auf die Höhe der Modellkorrektur in diesem Experiment
schließen lässt.
Nachfolgend ist in Abbildung 38 die Steuergröße Stackstromstärke mit der Be-
rechnung durch das EKF dargestellt.
Abbildung 38 - Stackstromstärke und Schätzung der Stackstromstärke zur Modellkorrektur
Die beim Experiment eingestellte Stackstromstärke befindet sich zwi-
schen ISTACK = 42 A und ISTACK = 80 A. Neben diesen Messwerten ist die vom EKF
geschätzte Stackstromstärke dargestellt. Die geschätzte Stackstromstärke ist dauer-
haft unterhalb des eingestellten Werts. Dies bedeutet, dass das Reglermodell in
diesem Testlauf grundsätzlich eine zu hohe Leistung prädiziert. Direkt nach dem
Start des Brennstoffzellensystems und der erfolgten Erwärmung lässt dies auf eine
geringere Stackspannung schließen, was bei der Berechnung der geschätzten
Stackstromstärke zu geringeren als die gemessenen Werte führt.
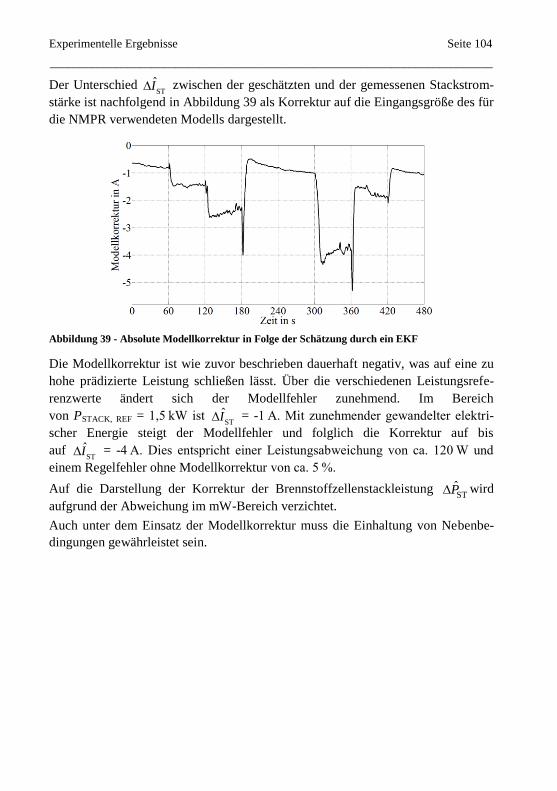
Experimentelle Ergebnisse Seite 104
__________________________________________________________________________
Der Unterschied ST
I zwischen der geschätzten und der gemessenen Stackstrom-
stärke ist nachfolgend in Abbildung 39 als Korrektur auf die Eingangsgröße des für
die NMPR verwendeten Modells dargestellt.
Abbildung 39 - Absolute Modellkorrektur in Folge der Schätzung durch ein EKF
Die Modellkorrektur ist wie zuvor beschrieben dauerhaft negativ, was auf eine zu
hohe prädizierte Leistung schließen lässt. Über die verschiedenen Leistungsrefe-
renzwerte ändert sich der Modellfehler zunehmend. Im Bereich
von PSTACK, REF = 1,5 kW ist ST
I = -1 A. Mit zunehmender gewandelter elektri-
scher Energie steigt der Modellfehler und folglich die Korrektur auf bis
auf ST
I = -4 A. Dies entspricht einer Leistungsabweichung von ca. 120 W und
einem Regelfehler ohne Modellkorrektur von ca. 5 %.
Auf die Darstellung der Korrektur der Brennstoffzellenstackleistung STP wird
aufgrund der Abweichung im mW-Bereich verzichtet.
Auch unter dem Einsatz der Modellkorrektur muss die Einhaltung von Nebenbe-
dingungen gewährleistet sein.
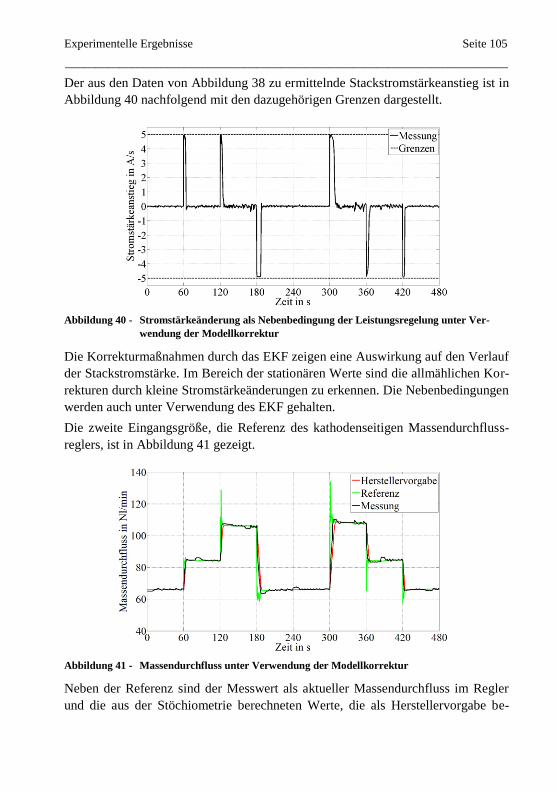
Experimentelle Ergebnisse Seite 105
__________________________________________________________________________
Der aus den Daten von Abbildung 38 zu ermittelnde Stackstromstärkeanstieg ist in
Abbildung 40 nachfolgend mit den dazugehörigen Grenzen dargestellt.
Abbildung 40 - Stromstärkeänderung als Nebenbedingung der Leistungsregelung unter Ver-
wendung der Modellkorrektur
Die Korrekturmaßnahmen durch das EKF zeigen eine Auswirkung auf den Verlauf
der Stackstromstärke. Im Bereich der stationären Werte sind die allmählichen Kor-
rekturen durch kleine Stromstärkeänderungen zu erkennen. Die Nebenbedingungen
werden auch unter Verwendung des EKF gehalten.
Die zweite Eingangsgröße, die Referenz des kathodenseitigen Massendurchfluss-
reglers, ist in Abbildung 41 gezeigt.
Abbildung 41 - Massendurchfluss unter Verwendung der Modellkorrektur
Neben der Referenz sind der Messwert als aktueller Massendurchfluss im Regler
und die aus der Stöchiometrie berechneten Werte, die als Herstellervorgabe be-
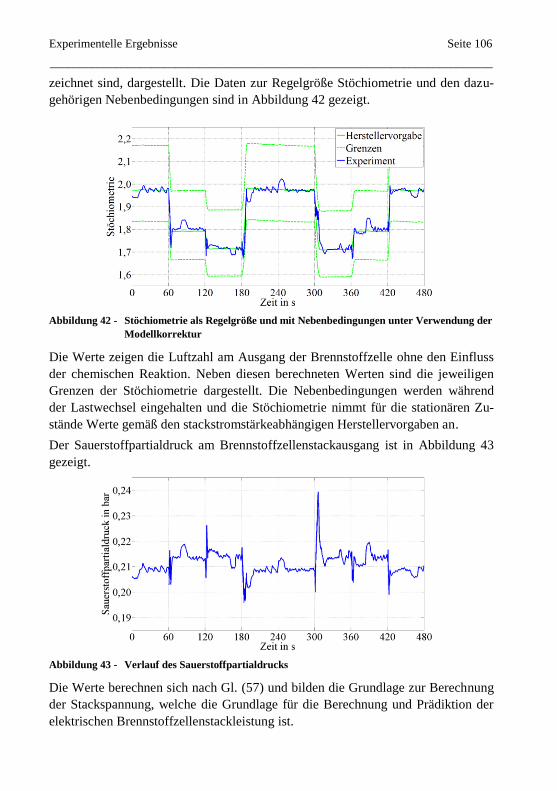
Experimentelle Ergebnisse Seite 106
__________________________________________________________________________
zeichnet sind, dargestellt. Die Daten zur Regelgröße Stöchiometrie und den dazu-
gehörigen Nebenbedingungen sind in Abbildung 42 gezeigt.
Abbildung 42 - Stöchiometrie als Regelgröße und mit Nebenbedingungen unter Verwendung der
Modellkorrektur
Die Werte zeigen die Luftzahl am Ausgang der Brennstoffzelle ohne den Einfluss
der chemischen Reaktion. Neben diesen berechneten Werten sind die jeweiligen
Grenzen der Stöchiometrie dargestellt. Die Nebenbedingungen werden während
der Lastwechsel eingehalten und die Stöchiometrie nimmt für die stationären Zu-
stände Werte gemäß den stackstromstärkeabhängigen Herstellervorgaben an.
Der Sauerstoffpartialdruck am Brennstoffzellenstackausgang ist in Abbildung 43
gezeigt.
Abbildung 43 - Verlauf des Sauerstoffpartialdrucks
Die Werte berechnen sich nach Gl. (57) und bilden die Grundlage zur Berechnung
der Stackspannung, welche die Grundlage für die Berechnung und Prädiktion der
elektrischen Brennstoffzellenstackleistung ist.
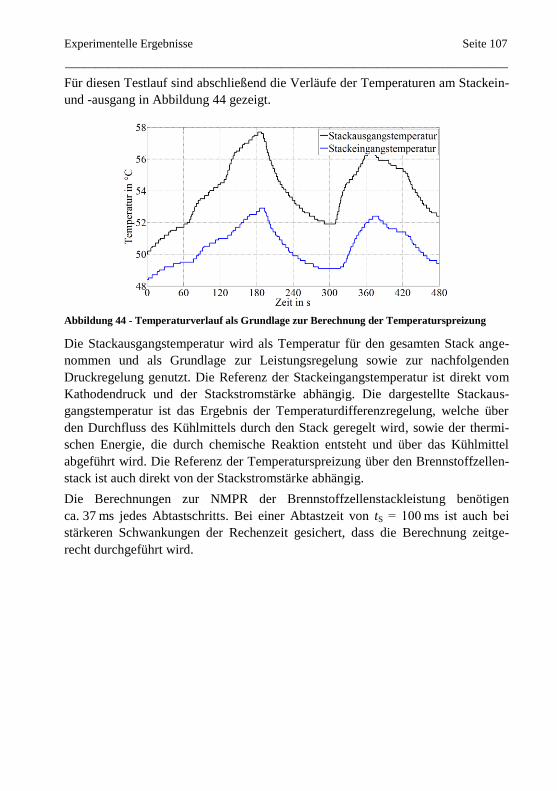
Experimentelle Ergebnisse Seite 107
__________________________________________________________________________
Für diesen Testlauf sind abschließend die Verläufe der Temperaturen am Stackein-
und -ausgang in Abbildung 44 gezeigt.
Abbildung 44 - Temperaturverlauf als Grundlage zur Berechnung der Temperaturspreizung
Die Stackausgangstemperatur wird als Temperatur für den gesamten Stack ange-
nommen und als Grundlage zur Leistungsregelung sowie zur nachfolgenden
Druckregelung genutzt. Die Referenz der Stackeingangstemperatur ist direkt vom
Kathodendruck und der Stackstromstärke abhängig. Die dargestellte Stackaus-
gangstemperatur ist das Ergebnis der Temperaturdifferenzregelung, welche über
den Durchfluss des Kühlmittels durch den Stack geregelt wird, sowie der thermi-
schen Energie, die durch chemische Reaktion entsteht und über das Kühlmittel
abgeführt wird. Die Referenz der Temperaturspreizung über den Brennstoffzellen-
stack ist auch direkt von der Stackstromstärke abhängig.
Die Berechnungen zur NMPR der Brennstoffzellenstackleistung benötigen
ca. 37 ms jedes Abtastschritts. Bei einer Abtastzeit von tS = 100 ms ist auch bei
stärkeren Schwankungen der Rechenzeit gesichert, dass die Berechnung zeitge-
recht durchgeführt wird.
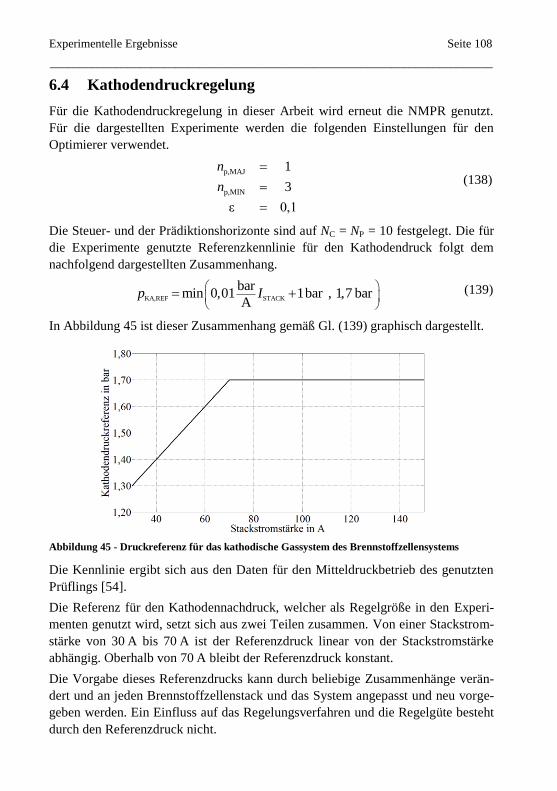
Experimentelle Ergebnisse Seite 108
__________________________________________________________________________
6.4 Kathodendruckregelung
Für die Kathodendruckregelung in dieser Arbeit wird erneut die NMPR genutzt.
Für die dargestellten Experimente werden die folgenden Einstellungen für den
Optimierer verwendet.
p,MAJ
p,MIN
1
3
ε 0,1
n
n
(138)
Die Steuer- und der Prädiktionshorizonte sind auf NC = NP = 10 festgelegt. Die für
die Experimente genutzte Referenzkennlinie für den Kathodendruck folgt dem
nachfolgend dargestellten Zusammenhang.
KA,REF STACK
barmin 0,01 1bar , 1,7 bar
Ap I
(139)
In Abbildung 45 ist dieser Zusammenhang gemäß Gl. (139) graphisch dargestellt.
Abbildung 45 - Druckreferenz für das kathodische Gassystem des Brennstoffzellensystems
Die Kennlinie ergibt sich aus den Daten für den Mitteldruckbetrieb des genutzten
Prüflings [54].
Die Referenz für den Kathodennachdruck, welcher als Regelgröße in den Experi-
menten genutzt wird, setzt sich aus zwei Teilen zusammen. Von einer Stackstrom-
stärke von 30 A bis 70 A ist der Referenzdruck linear von der Stackstromstärke
abhängig. Oberhalb von 70 A bleibt der Referenzdruck konstant.
Die Vorgabe dieses Referenzdrucks kann durch beliebige Zusammenhänge verän-
dert und an jeden Brennstoffzellenstack und das System angepasst und neu vorge-
geben werden. Ein Einfluss auf das Regelungsverfahren und die Regelgüte besteht
durch den Referenzdruck nicht.
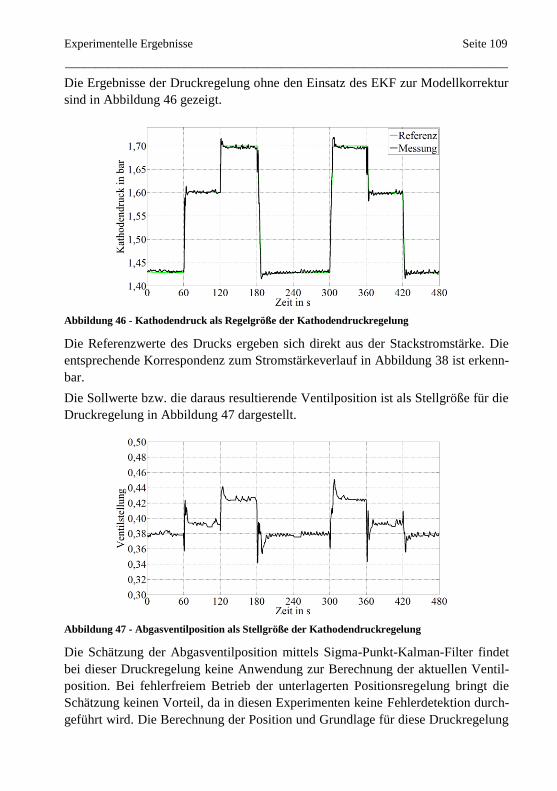
Experimentelle Ergebnisse Seite 109
__________________________________________________________________________
Die Ergebnisse der Druckregelung ohne den Einsatz des EKF zur Modellkorrektur
sind in Abbildung 46 gezeigt.
Abbildung 46 - Kathodendruck als Regelgröße der Kathodendruckregelung
Die Referenzwerte des Drucks ergeben sich direkt aus der Stackstromstärke. Die
entsprechende Korrespondenz zum Stromstärkeverlauf in Abbildung 38 ist erkenn-
bar.
Die Sollwerte bzw. die daraus resultierende Ventilposition ist als Stellgröße für die
Druckregelung in Abbildung 47 dargestellt.
Abbildung 47 - Abgasventilposition als Stellgröße der Kathodendruckregelung
Die Schätzung der Abgasventilposition mittels Sigma-Punkt-Kalman-Filter findet
bei dieser Druckregelung keine Anwendung zur Berechnung der aktuellen Ventil-
position. Bei fehlerfreiem Betrieb der unterlagerten Positionsregelung bringt die
Schätzung keinen Vorteil, da in diesen Experimenten keine Fehlerdetektion durch-
geführt wird. Die Berechnung der Position und Grundlage für diese Druckregelung
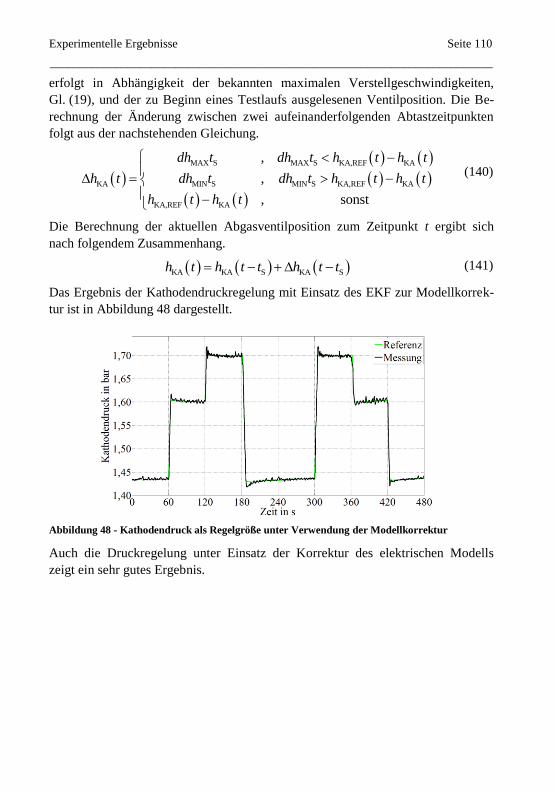
Experimentelle Ergebnisse Seite 110
__________________________________________________________________________
erfolgt in Abhängigkeit der bekannten maximalen Verstellgeschwindigkeiten,
Gl. (19), und der zu Beginn eines Testlaufs ausgelesenen Ventilposition. Die Be-
rechnung der Änderung zwischen zwei aufeinanderfolgenden Abtastzeitpunkten
folgt aus der nachstehenden Gleichung.
MAX S MAX S KA,REF KA
KA MIN S MIN S KA,REF KA
KA,REF KA
,
,
, sonst
dh t dh t h t h t
h t dh t dh t h t h t
h t h t
(140)
Die Berechnung der aktuellen Abgasventilposition zum Zeitpunkt t ergibt sich
nach folgendem Zusammenhang.
KA KA S KA Sh t h t t h t t (141)
Das Ergebnis der Kathodendruckregelung mit Einsatz des EKF zur Modellkorrek-
tur ist in Abbildung 48 dargestellt.
Abbildung 48 - Kathodendruck als Regelgröße unter Verwendung der Modellkorrektur
Auch die Druckregelung unter Einsatz der Korrektur des elektrischen Modells
zeigt ein sehr gutes Ergebnis.
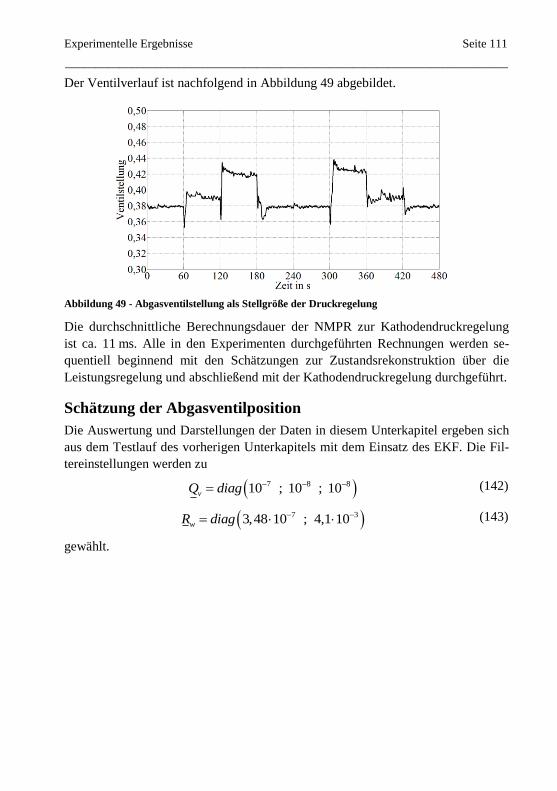
Experimentelle Ergebnisse Seite 111
__________________________________________________________________________
Der Ventilverlauf ist nachfolgend in Abbildung 49 abgebildet.
Abbildung 49 - Abgasventilstellung als Stellgröße der Druckregelung
Die durchschnittliche Berechnungsdauer der NMPR zur Kathodendruckregelung
ist ca. 11 ms. Alle in den Experimenten durchgeführten Rechnungen werden se-
quentiell beginnend mit den Schätzungen zur Zustandsrekonstruktion über die
Leistungsregelung und abschließend mit der Kathodendruckregelung durchgeführt.
Schätzung der Abgasventilposition
Die Auswertung und Darstellungen der Daten in diesem Unterkapitel ergeben sich
aus dem Testlauf des vorherigen Unterkapitels mit dem Einsatz des EKF. Die Fil-
tereinstellungen werden zu
7 8 810 ; 10 ; 10vQ diag (142)
7 33,48 10 ; 4,1 10wR diag (143)
gewählt.
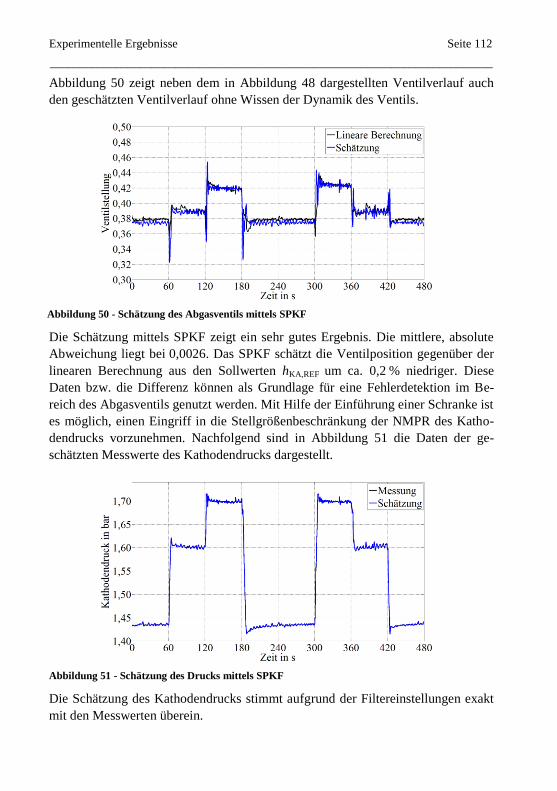
Experimentelle Ergebnisse Seite 112
__________________________________________________________________________
Abbildung 50 zeigt neben dem in Abbildung 48 dargestellten Ventilverlauf auch
den geschätzten Ventilverlauf ohne Wissen der Dynamik des Ventils.
Abbildung 50 - Schätzung des Abgasventils mittels SPKF
Die Schätzung mittels SPKF zeigt ein sehr gutes Ergebnis. Die mittlere, absolute
Abweichung liegt bei 0,0026. Das SPKF schätzt die Ventilposition gegenüber der
linearen Berechnung aus den Sollwerten hKA,REF um ca. 0,2 % niedriger. Diese
Daten bzw. die Differenz können als Grundlage für eine Fehlerdetektion im Be-
reich des Abgasventils genutzt werden. Mit Hilfe der Einführung einer Schranke ist
es möglich, einen Eingriff in die Stellgrößenbeschränkung der NMPR des Katho-
dendrucks vorzunehmen. Nachfolgend sind in Abbildung 51 die Daten der ge-
schätzten Messwerte des Kathodendrucks dargestellt.
Abbildung 51 - Schätzung des Drucks mittels SPKF
Die Schätzung des Kathodendrucks stimmt aufgrund der Filtereinstellungen exakt
mit den Messwerten überein.
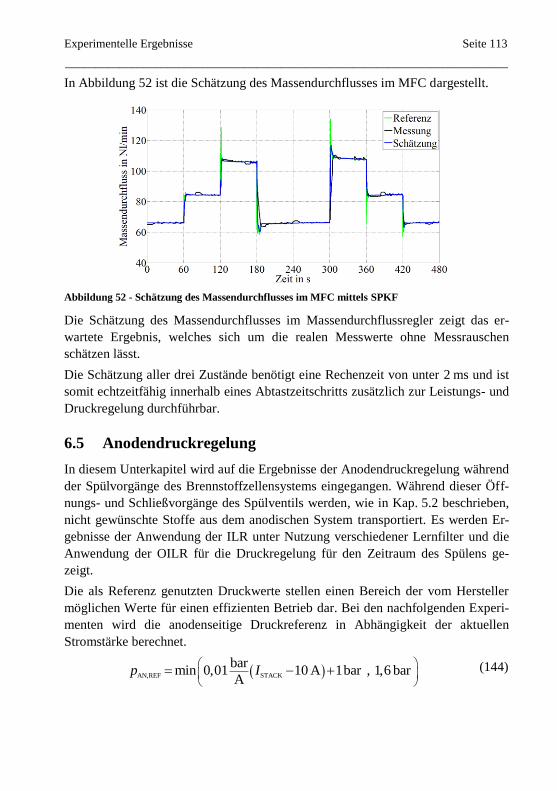
Experimentelle Ergebnisse Seite 113
__________________________________________________________________________
In Abbildung 52 ist die Schätzung des Massendurchflusses im MFC dargestellt.
Abbildung 52 - Schätzung des Massendurchflusses im MFC mittels SPKF
Die Schätzung des Massendurchflusses im Massendurchflussregler zeigt das er-
wartete Ergebnis, welches sich um die realen Messwerte ohne Messrauschen
schätzen lässt.
Die Schätzung aller drei Zustände benötigt eine Rechenzeit von unter 2 ms und ist
somit echtzeitfähig innerhalb eines Abtastzeitschritts zusätzlich zur Leistungs- und
Druckregelung durchführbar.
6.5 Anodendruckregelung
In diesem Unterkapitel wird auf die Ergebnisse der Anodendruckregelung während
der Spülvorgänge des Brennstoffzellensystems eingegangen. Während dieser Öff-
nungs- und Schließvorgänge des Spülventils werden, wie in Kap. 5.2 beschrieben,
nicht gewünschte Stoffe aus dem anodischen System transportiert. Es werden Er-
gebnisse der Anwendung der ILR unter Nutzung verschiedener Lernfilter und die
Anwendung der OILR für die Druckregelung für den Zeitraum des Spülens ge-
zeigt.
Die als Referenz genutzten Druckwerte stellen einen Bereich der vom Hersteller
möglichen Werte für einen effizienten Betrieb dar. Bei den nachfolgenden Experi-
menten wird die anodenseitige Druckreferenz in Abhängigkeit der aktuellen
Stromstärke berechnet.
AN,REF STACK
barmin 0,01 10 A 1bar , 1,6 bar
Ap I
(144)
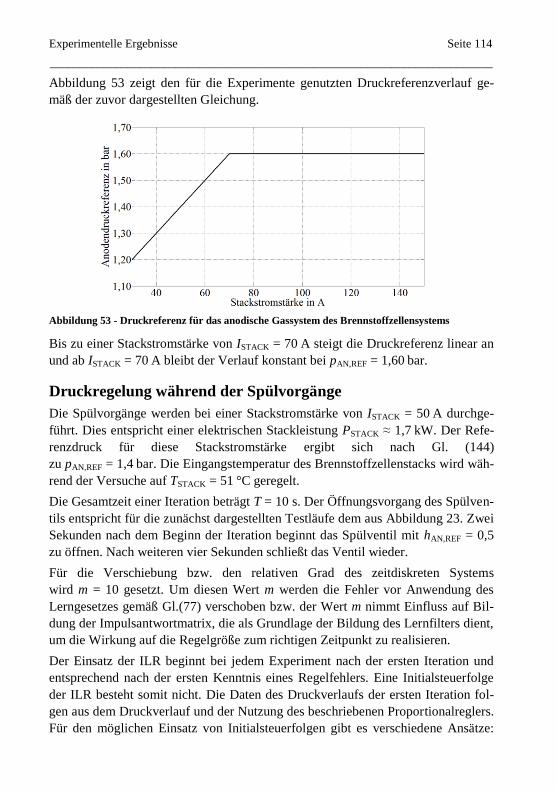
Experimentelle Ergebnisse Seite 114
__________________________________________________________________________
Abbildung 53 zeigt den für die Experimente genutzten Druckreferenzverlauf ge-
mäß der zuvor dargestellten Gleichung.
Abbildung 53 - Druckreferenz für das anodische Gassystem des Brennstoffzellensystems
Bis zu einer Stackstromstärke von ISTACK = 70 A steigt die Druckreferenz linear an
und ab ISTACK = 70 A bleibt der Verlauf konstant bei pAN,REF = 1,60 bar.
Druckregelung während der Spülvorgänge
Die Spülvorgänge werden bei einer Stackstromstärke von ISTACK = 50 A durchge-
führt. Dies entspricht einer elektrischen Stackleistung PSTACK ≈ 1,7 kW. Der Refe-
renzdruck für diese Stackstromstärke ergibt sich nach Gl. (144)
zu pAN,REF = 1,4 bar. Die Eingangstemperatur des Brennstoffzellenstacks wird wäh-
rend der Versuche auf TSTACK = 51 °C geregelt.
Die Gesamtzeit einer Iteration beträgt T = 10 s. Der Öffnungsvorgang des Spülven-
tils entspricht für die zunächst dargestellten Testläufe dem aus Abbildung 23. Zwei
Sekunden nach dem Beginn der Iteration beginnt das Spülventil mit hAN,REF = 0,5
zu öffnen. Nach weiteren vier Sekunden schließt das Ventil wieder.
Für die Verschiebung bzw. den relativen Grad des zeitdiskreten Systems
wird m = 10 gesetzt. Um diesen Wert m werden die Fehler vor Anwendung des
Lerngesetzes gemäß Gl.(77) verschoben bzw. der Wert m nimmt Einfluss auf Bil-
dung der Impulsantwortmatrix, die als Grundlage der Bildung des Lernfilters dient,
um die Wirkung auf die Regelgröße zum richtigen Zeitpunkt zu realisieren.
Der Einsatz der ILR beginnt bei jedem Experiment nach der ersten Iteration und
entsprechend nach der ersten Kenntnis eines Regelfehlers. Eine Initialsteuerfolge
der ILR besteht somit nicht. Die Daten des Druckverlaufs der ersten Iteration fol-
gen aus dem Druckverlauf und der Nutzung des beschriebenen Proportionalreglers.
Für den möglichen Einsatz von Initialsteuerfolgen gibt es verschiedene Ansätze:
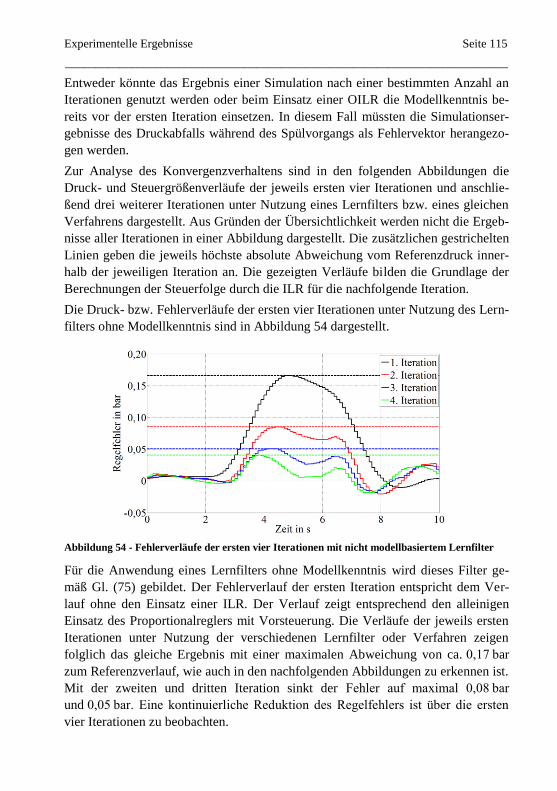
Experimentelle Ergebnisse Seite 115
__________________________________________________________________________
Entweder könnte das Ergebnis einer Simulation nach einer bestimmten Anzahl an
Iterationen genutzt werden oder beim Einsatz einer OILR die Modellkenntnis be-
reits vor der ersten Iteration einsetzen. In diesem Fall müssten die Simulationser-
gebnisse des Druckabfalls während des Spülvorgangs als Fehlervektor herangezo-
gen werden.
Zur Analyse des Konvergenzverhaltens sind in den folgenden Abbildungen die
Druck- und Steuergrößenverläufe der jeweils ersten vier Iterationen und anschlie-
ßend drei weiterer Iterationen unter Nutzung eines Lernfilters bzw. eines gleichen
Verfahrens dargestellt. Aus Gründen der Übersichtlichkeit werden nicht die Ergeb-
nisse aller Iterationen in einer Abbildung dargestellt. Die zusätzlichen gestrichelten
Linien geben die jeweils höchste absolute Abweichung vom Referenzdruck inner-
halb der jeweiligen Iteration an. Die gezeigten Verläufe bilden die Grundlage der
Berechnungen der Steuerfolge durch die ILR für die nachfolgende Iteration.
Die Druck- bzw. Fehlerverläufe der ersten vier Iterationen unter Nutzung des Lern-
filters ohne Modellkenntnis sind in Abbildung 54 dargestellt.
Abbildung 54 - Fehlerverläufe der ersten vier Iterationen mit nicht modellbasiertem Lernfilter
Für die Anwendung eines Lernfilters ohne Modellkenntnis wird dieses Filter ge-
mäß Gl. (75) gebildet. Der Fehlerverlauf der ersten Iteration entspricht dem Ver-
lauf ohne den Einsatz einer ILR. Der Verlauf zeigt entsprechend den alleinigen
Einsatz des Proportionalreglers mit Vorsteuerung. Die Verläufe der jeweils ersten
Iterationen unter Nutzung der verschiedenen Lernfilter oder Verfahren zeigen
folglich das gleiche Ergebnis mit einer maximalen Abweichung von ca. 0,17 bar
zum Referenzverlauf, wie auch in den nachfolgenden Abbildungen zu erkennen ist.
Mit der zweiten und dritten Iteration sinkt der Fehler auf maximal 0,08 bar
und 0,05 bar. Eine kontinuierliche Reduktion des Regelfehlers ist über die ersten
vier Iterationen zu beobachten.
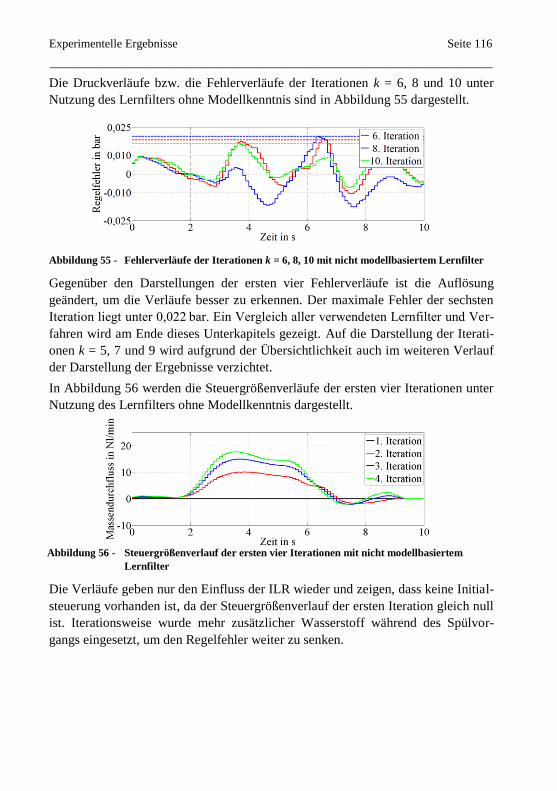
Experimentelle Ergebnisse Seite 116
__________________________________________________________________________
Die Druckverläufe bzw. die Fehlerverläufe der Iterationen k = 6, 8 und 10 unter
Nutzung des Lernfilters ohne Modellkenntnis sind in Abbildung 55 dargestellt.
Abbildung 55 - Fehlerverläufe der Iterationen k = 6, 8, 10 mit nicht modellbasiertem Lernfilter
Gegenüber den Darstellungen der ersten vier Fehlerverläufe ist die Auflösung
geändert, um die Verläufe besser zu erkennen. Der maximale Fehler der sechsten
Iteration liegt unter 0,022 bar. Ein Vergleich aller verwendeten Lernfilter und Ver-
fahren wird am Ende dieses Unterkapitels gezeigt. Auf die Darstellung der Iterati-
onen k = 5, 7 und 9 wird aufgrund der Übersichtlichkeit auch im weiteren Verlauf
der Darstellung der Ergebnisse verzichtet.
In Abbildung 56 werden die Steuergrößenverläufe der ersten vier Iterationen unter
Nutzung des Lernfilters ohne Modellkenntnis dargestellt.
Abbildung 56 - Steuergrößenverlauf der ersten vier Iterationen mit nicht modellbasiertem
Lernfilter
Die Verläufe geben nur den Einfluss der ILR wieder und zeigen, dass keine Initial-
steuerung vorhanden ist, da der Steuergrößenverlauf der ersten Iteration gleich null
ist. Iterationsweise wurde mehr zusätzlicher Wasserstoff während des Spülvor-
gangs eingesetzt, um den Regelfehler weiter zu senken.
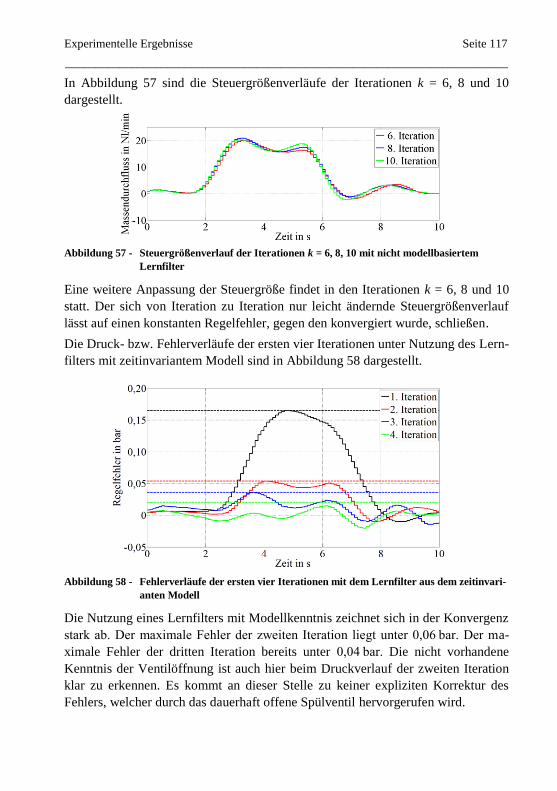
Experimentelle Ergebnisse Seite 117
__________________________________________________________________________
In Abbildung 57 sind die Steuergrößenverläufe der Iterationen k = 6, 8 und 10
dargestellt.
Abbildung 57 - Steuergrößenverlauf der Iterationen k = 6, 8, 10 mit nicht modellbasiertem
Lernfilter
Eine weitere Anpassung der Steuergröße findet in den Iterationen k = 6, 8 und 10
statt. Der sich von Iteration zu Iteration nur leicht ändernde Steuergrößenverlauf
lässt auf einen konstanten Regelfehler, gegen den konvergiert wurde, schließen.
Die Druck- bzw. Fehlerverläufe der ersten vier Iterationen unter Nutzung des Lern-
filters mit zeitinvariantem Modell sind in Abbildung 58 dargestellt.
Abbildung 58 - Fehlerverläufe der ersten vier Iterationen mit dem Lernfilter aus dem zeitinvari-
anten Modell
Die Nutzung eines Lernfilters mit Modellkenntnis zeichnet sich in der Konvergenz
stark ab. Der maximale Fehler der zweiten Iteration liegt unter 0,06 bar. Der ma-
ximale Fehler der dritten Iteration bereits unter 0,04 bar. Die nicht vorhandene
Kenntnis der Ventilöffnung ist auch hier beim Druckverlauf der zweiten Iteration
klar zu erkennen. Es kommt an dieser Stelle zu keiner expliziten Korrektur des
Fehlers, welcher durch das dauerhaft offene Spülventil hervorgerufen wird.
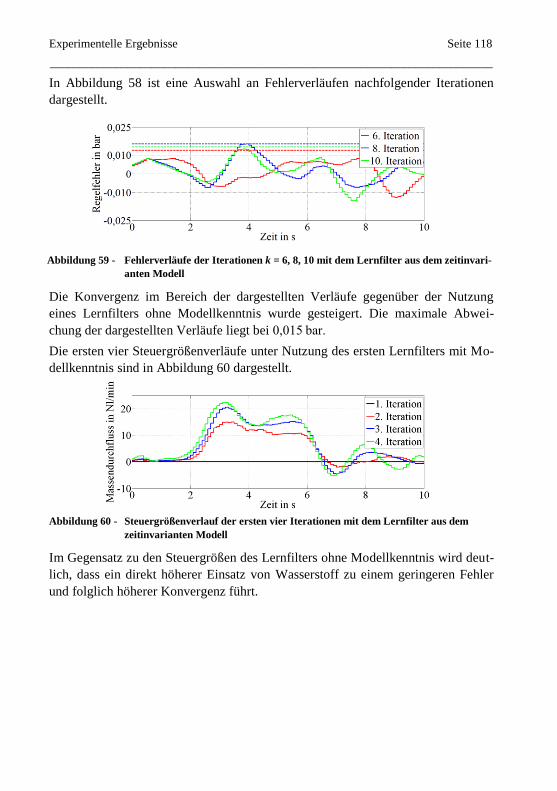
Experimentelle Ergebnisse Seite 118
__________________________________________________________________________
In Abbildung 58 ist eine Auswahl an Fehlerverläufen nachfolgender Iterationen
dargestellt.
Abbildung 59 - Fehlerverläufe der Iterationen k = 6, 8, 10 mit dem Lernfilter aus dem zeitinvari-
anten Modell
Die Konvergenz im Bereich der dargestellten Verläufe gegenüber der Nutzung
eines Lernfilters ohne Modellkenntnis wurde gesteigert. Die maximale Abwei-
chung der dargestellten Verläufe liegt bei 0,015 bar.
Die ersten vier Steuergrößenverläufe unter Nutzung des ersten Lernfilters mit Mo-
dellkenntnis sind in Abbildung 60 dargestellt.
Abbildung 60 - Steuergrößenverlauf der ersten vier Iterationen mit dem Lernfilter aus dem
zeitinvarianten Modell
Im Gegensatz zu den Steuergrößen des Lernfilters ohne Modellkenntnis wird deut-
lich, dass ein direkt höherer Einsatz von Wasserstoff zu einem geringeren Fehler
und folglich höherer Konvergenz führt.
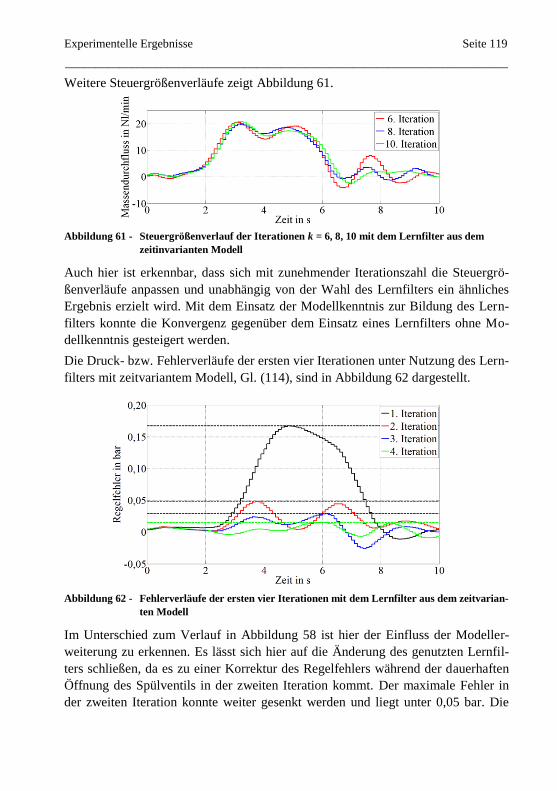
Experimentelle Ergebnisse Seite 119
__________________________________________________________________________
Weitere Steuergrößenverläufe zeigt Abbildung 61.
Abbildung 61 - Steuergrößenverlauf der Iterationen k = 6, 8, 10 mit dem Lernfilter aus dem
zeitinvarianten Modell
Auch hier ist erkennbar, dass sich mit zunehmender Iterationszahl die Steuergrö-
ßenverläufe anpassen und unabhängig von der Wahl des Lernfilters ein ähnliches
Ergebnis erzielt wird. Mit dem Einsatz der Modellkenntnis zur Bildung des Lern-
filters konnte die Konvergenz gegenüber dem Einsatz eines Lernfilters ohne Mo-
dellkenntnis gesteigert werden.
Die Druck- bzw. Fehlerverläufe der ersten vier Iterationen unter Nutzung des Lern-
filters mit zeitvariantem Modell, Gl. (114), sind in Abbildung 62 dargestellt.
Abbildung 62 - Fehlerverläufe der ersten vier Iterationen mit dem Lernfilter aus dem zeitvarian-
ten Modell
Im Unterschied zum Verlauf in Abbildung 58 ist hier der Einfluss der Modeller-
weiterung zu erkennen. Es lässt sich hier auf die Änderung des genutzten Lernfil-
ters schließen, da es zu einer Korrektur des Regelfehlers während der dauerhaften
Öffnung des Spülventils in der zweiten Iteration kommt. Der maximale Fehler in
der zweiten Iteration konnte weiter gesenkt werden und liegt unter 0,05 bar. Die
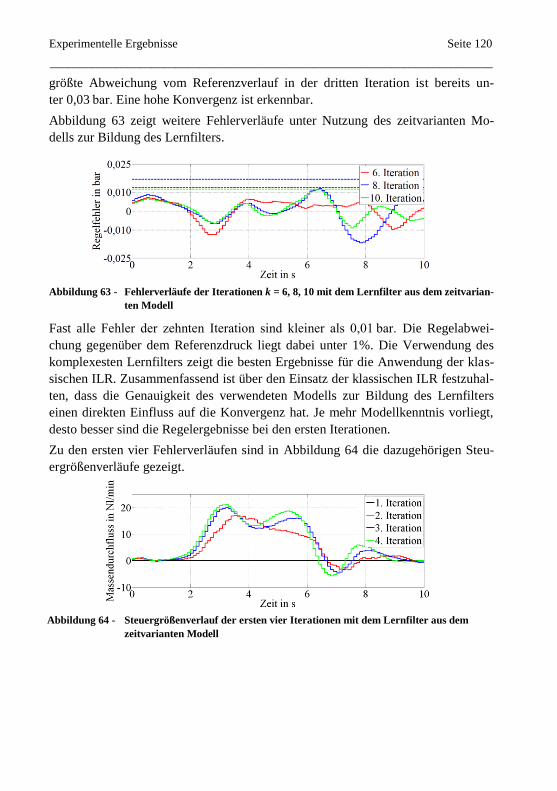
Experimentelle Ergebnisse Seite 120
__________________________________________________________________________
größte Abweichung vom Referenzverlauf in der dritten Iteration ist bereits un-
ter 0,03 bar. Eine hohe Konvergenz ist erkennbar.
Abbildung 63 zeigt weitere Fehlerverläufe unter Nutzung des zeitvarianten Mo-
dells zur Bildung des Lernfilters.
Abbildung 63 - Fehlerverläufe der Iterationen k = 6, 8, 10 mit dem Lernfilter aus dem zeitvarian-
ten Modell
Fast alle Fehler der zehnten Iteration sind kleiner als 0,01 bar. Die Regelabwei-
chung gegenüber dem Referenzdruck liegt dabei unter 1%. Die Verwendung des
komplexesten Lernfilters zeigt die besten Ergebnisse für die Anwendung der klas-
sischen ILR. Zusammenfassend ist über den Einsatz der klassischen ILR festzuhal-
ten, dass die Genauigkeit des verwendeten Modells zur Bildung des Lernfilters
einen direkten Einfluss auf die Konvergenz hat. Je mehr Modellkenntnis vorliegt,
desto besser sind die Regelergebnisse bei den ersten Iterationen.
Zu den ersten vier Fehlerverläufen sind in Abbildung 64 die dazugehörigen Steu-
ergrößenverläufe gezeigt.
Abbildung 64 - Steuergrößenverlauf der ersten vier Iterationen mit dem Lernfilter aus dem
zeitvarianten Modell
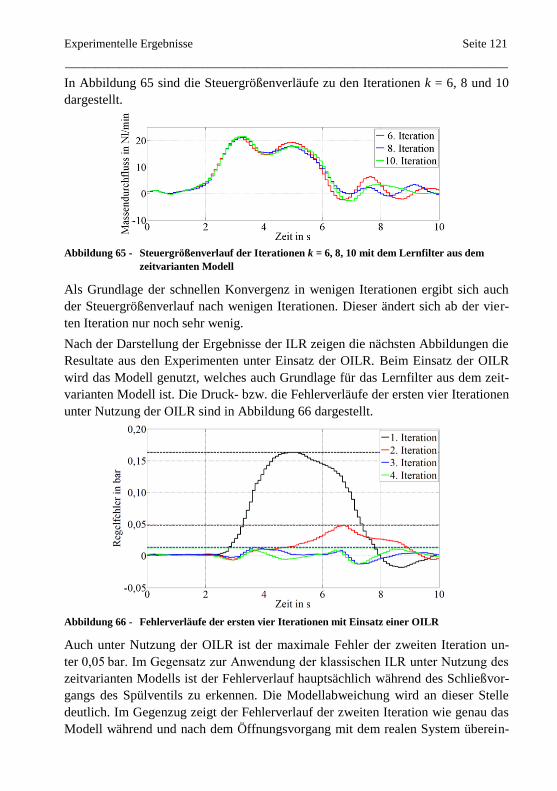
Experimentelle Ergebnisse Seite 121
__________________________________________________________________________
In Abbildung 65 sind die Steuergrößenverläufe zu den Iterationen k = 6, 8 und 10
dargestellt.
Abbildung 65 - Steuergrößenverlauf der Iterationen k = 6, 8, 10 mit dem Lernfilter aus dem
zeitvarianten Modell
Als Grundlage der schnellen Konvergenz in wenigen Iterationen ergibt sich auch
der Steuergrößenverlauf nach wenigen Iterationen. Dieser ändert sich ab der vier-
ten Iteration nur noch sehr wenig.
Nach der Darstellung der Ergebnisse der ILR zeigen die nächsten Abbildungen die
Resultate aus den Experimenten unter Einsatz der OILR. Beim Einsatz der OILR
wird das Modell genutzt, welches auch Grundlage für das Lernfilter aus dem zeit-
varianten Modell ist. Die Druck- bzw. die Fehlerverläufe der ersten vier Iterationen
unter Nutzung der OILR sind in Abbildung 66 dargestellt.
Abbildung 66 - Fehlerverläufe der ersten vier Iterationen mit Einsatz einer OILR
Auch unter Nutzung der OILR ist der maximale Fehler der zweiten Iteration un-
ter 0,05 bar. Im Gegensatz zur Anwendung der klassischen ILR unter Nutzung des
zeitvarianten Modells ist der Fehlerverlauf hauptsächlich während des Schließvor-
gangs des Spülventils zu erkennen. Die Modellabweichung wird an dieser Stelle
deutlich. Im Gegenzug zeigt der Fehlerverlauf der zweiten Iteration wie genau das
Modell während und nach dem Öffnungsvorgang mit dem realen System überein-
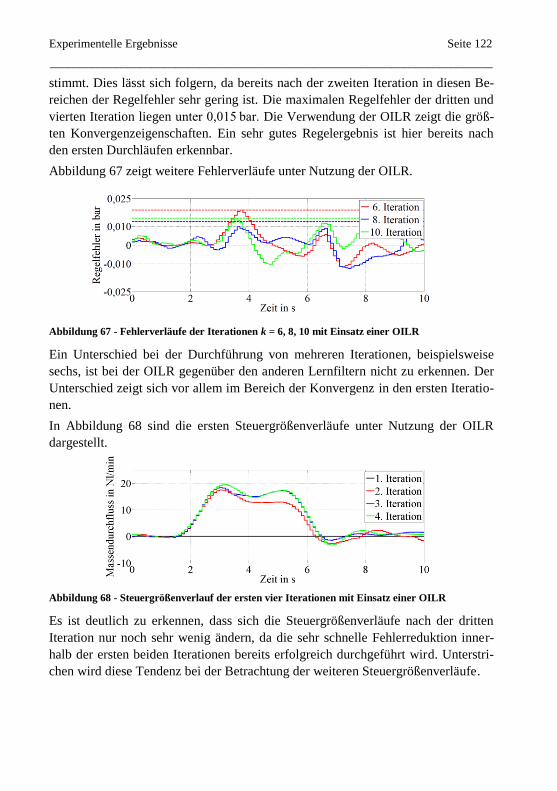
Experimentelle Ergebnisse Seite 122
__________________________________________________________________________
stimmt. Dies lässt sich folgern, da bereits nach der zweiten Iteration in diesen Be-
reichen der Regelfehler sehr gering ist. Die maximalen Regelfehler der dritten und
vierten Iteration liegen unter 0,015 bar. Die Verwendung der OILR zeigt die größ-
ten Konvergenzeigenschaften. Ein sehr gutes Regelergebnis ist hier bereits nach
den ersten Durchläufen erkennbar.
Abbildung 67 zeigt weitere Fehlerverläufe unter Nutzung der OILR.
Abbildung 67 - Fehlerverläufe der Iterationen k = 6, 8, 10 mit Einsatz einer OILR
Ein Unterschied bei der Durchführung von mehreren Iterationen, beispielsweise
sechs, ist bei der OILR gegenüber den anderen Lernfiltern nicht zu erkennen. Der
Unterschied zeigt sich vor allem im Bereich der Konvergenz in den ersten Iteratio-
nen.
In Abbildung 68 sind die ersten Steuergrößenverläufe unter Nutzung der OILR
dargestellt.
Abbildung 68 - Steuergrößenverlauf der ersten vier Iterationen mit Einsatz einer OILR
Es ist deutlich zu erkennen, dass sich die Steuergrößenverläufe nach der dritten
Iteration nur noch sehr wenig ändern, da die sehr schnelle Fehlerreduktion inner-
halb der ersten beiden Iterationen bereits erfolgreich durchgeführt wird. Unterstri-
chen wird diese Tendenz bei der Betrachtung der weiteren Steuergrößenverläufe.
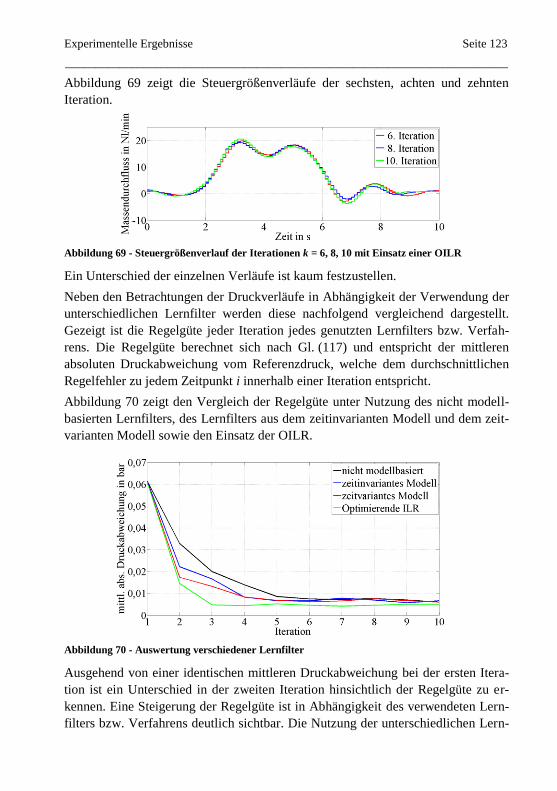
Experimentelle Ergebnisse Seite 123
__________________________________________________________________________
Abbildung 69 zeigt die Steuergrößenverläufe der sechsten, achten und zehnten
Iteration.
Abbildung 69 - Steuergrößenverlauf der Iterationen k = 6, 8, 10 mit Einsatz einer OILR
Ein Unterschied der einzelnen Verläufe ist kaum festzustellen.
Neben den Betrachtungen der Druckverläufe in Abhängigkeit der Verwendung der
unterschiedlichen Lernfilter werden diese nachfolgend vergleichend dargestellt.
Gezeigt ist die Regelgüte jeder Iteration jedes genutzten Lernfilters bzw. Verfah-
rens. Die Regelgüte berechnet sich nach Gl. (117) und entspricht der mittleren
absoluten Druckabweichung vom Referenzdruck, welche dem durchschnittlichen
Regelfehler zu jedem Zeitpunkt i innerhalb einer Iteration entspricht.
Abbildung 70 zeigt den Vergleich der Regelgüte unter Nutzung des nicht modell-
basierten Lernfilters, des Lernfilters aus dem zeitinvarianten Modell und dem zeit-
varianten Modell sowie den Einsatz der OILR.
Abbildung 70 - Auswertung verschiedener Lernfilter
Ausgehend von einer identischen mittleren Druckabweichung bei der ersten Itera-
tion ist ein Unterschied in der zweiten Iteration hinsichtlich der Regelgüte zu er-
kennen. Eine Steigerung der Regelgüte ist in Abhängigkeit des verwendeten Lern-
filters bzw. Verfahrens deutlich sichtbar. Die Nutzung der unterschiedlichen Lern-
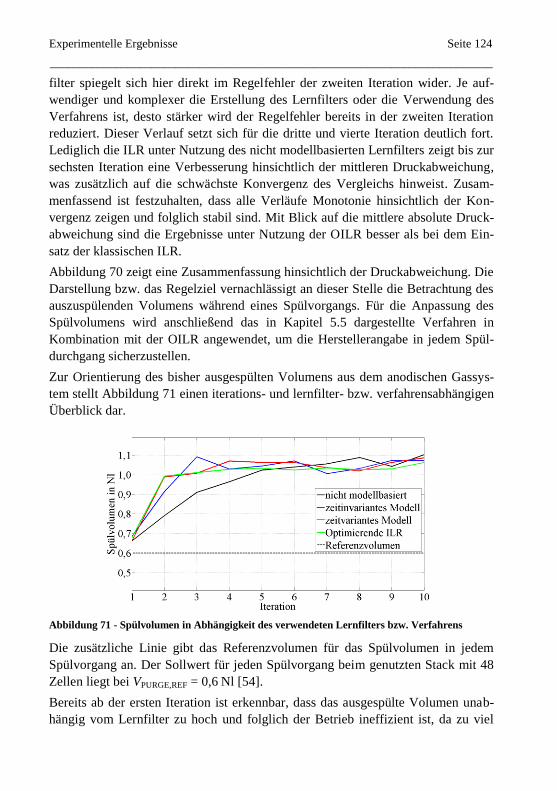
Experimentelle Ergebnisse Seite 124
__________________________________________________________________________
filter spiegelt sich hier direkt im Regelfehler der zweiten Iteration wider. Je auf-
wendiger und komplexer die Erstellung des Lernfilters oder die Verwendung des
Verfahrens ist, desto stärker wird der Regelfehler bereits in der zweiten Iteration
reduziert. Dieser Verlauf setzt sich für die dritte und vierte Iteration deutlich fort.
Lediglich die ILR unter Nutzung des nicht modellbasierten Lernfilters zeigt bis zur
sechsten Iteration eine Verbesserung hinsichtlich der mittleren Druckabweichung,
was zusätzlich auf die schwächste Konvergenz des Vergleichs hinweist. Zusam-
menfassend ist festzuhalten, dass alle Verläufe Monotonie hinsichtlich der Kon-
vergenz zeigen und folglich stabil sind. Mit Blick auf die mittlere absolute Druck-
abweichung sind die Ergebnisse unter Nutzung der OILR besser als bei dem Ein-
satz der klassischen ILR.
Abbildung 70 zeigt eine Zusammenfassung hinsichtlich der Druckabweichung. Die
Darstellung bzw. das Regelziel vernachlässigt an dieser Stelle die Betrachtung des
auszuspülenden Volumens während eines Spülvorgangs. Für die Anpassung des
Spülvolumens wird anschließend das in Kapitel 5.5 dargestellte Verfahren in
Kombination mit der OILR angewendet, um die Herstellerangabe in jedem Spül-
durchgang sicherzustellen.
Zur Orientierung des bisher ausgespülten Volumens aus dem anodischen Gassys-
tem stellt Abbildung 71 einen iterations- und lernfilter- bzw. verfahrensabhängigen
Überblick dar.
Abbildung 71 - Spülvolumen in Abhängigkeit des verwendeten Lernfilters bzw. Verfahrens
Die zusätzliche Linie gibt das Referenzvolumen für das Spülvolumen in jedem
Spülvorgang an. Der Sollwert für jeden Spülvorgang beim genutzten Stack mit 48
Zellen liegt bei VPURGE,REF = 0,6 Nl [54].
Bereits ab der ersten Iteration ist erkennbar, dass das ausgespülte Volumen unab-
hängig vom Lernfilter zu hoch und folglich der Betrieb ineffizient ist, da zu viel
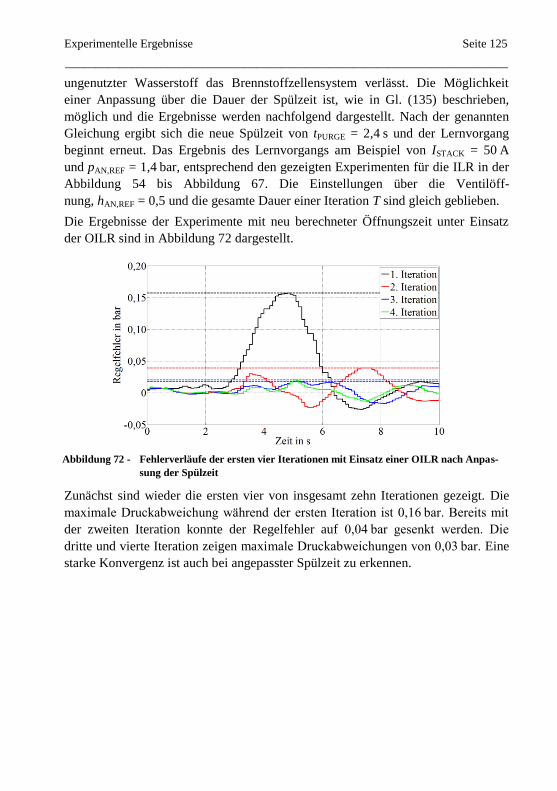
Experimentelle Ergebnisse Seite 125
__________________________________________________________________________
ungenutzter Wasserstoff das Brennstoffzellensystem verlässt. Die Möglichkeit
einer Anpassung über die Dauer der Spülzeit ist, wie in Gl. (135) beschrieben,
möglich und die Ergebnisse werden nachfolgend dargestellt. Nach der genannten
Gleichung ergibt sich die neue Spülzeit von tPURGE = 2,4 s und der Lernvorgang
beginnt erneut. Das Ergebnis des Lernvorgangs am Beispiel von ISTACK = 50 A
und pAN,REF = 1,4 bar, entsprechend den gezeigten Experimenten für die ILR in der
Abbildung 54 bis Abbildung 67. Die Einstellungen über die Ventilöff-
nung, hAN,REF = 0,5 und die gesamte Dauer einer Iteration T sind gleich geblieben.
Die Ergebnisse der Experimente mit neu berechneter Öffnungszeit unter Einsatz
der OILR sind in Abbildung 72 dargestellt.
Abbildung 72 - Fehlerverläufe der ersten vier Iterationen mit Einsatz einer OILR nach Anpas-
sung der Spülzeit
Zunächst sind wieder die ersten vier von insgesamt zehn Iterationen gezeigt. Die
maximale Druckabweichung während der ersten Iteration ist 0,16 bar. Bereits mit
der zweiten Iteration konnte der Regelfehler auf 0,04 bar gesenkt werden. Die
dritte und vierte Iteration zeigen maximale Druckabweichungen von 0,03 bar. Eine
starke Konvergenz ist auch bei angepasster Spülzeit zu erkennen.
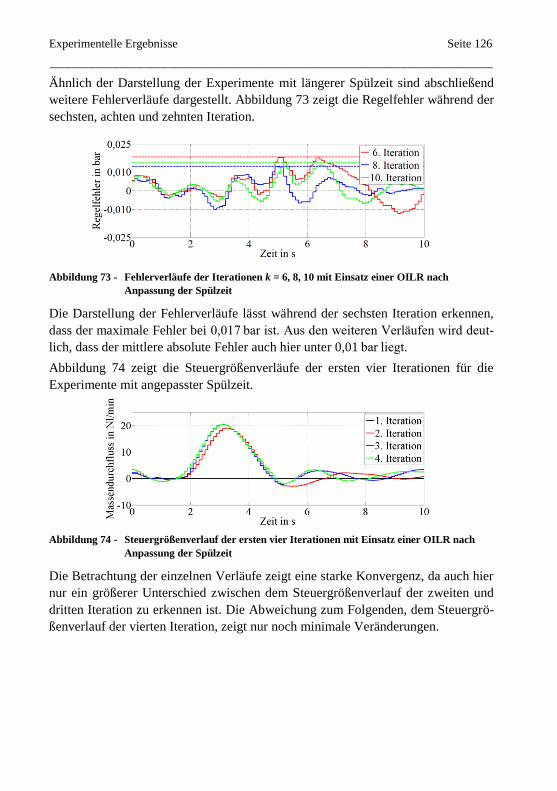
Experimentelle Ergebnisse Seite 126
__________________________________________________________________________
Ähnlich der Darstellung der Experimente mit längerer Spülzeit sind abschließend
weitere Fehlerverläufe dargestellt. Abbildung 73 zeigt die Regelfehler während der
sechsten, achten und zehnten Iteration.
Abbildung 73 - Fehlerverläufe der Iterationen k = 6, 8, 10 mit Einsatz einer OILR nach
Anpassung der Spülzeit
Die Darstellung der Fehlerverläufe lässt während der sechsten Iteration erkennen,
dass der maximale Fehler bei 0,017 bar ist. Aus den weiteren Verläufen wird deut-
lich, dass der mittlere absolute Fehler auch hier unter 0,01 bar liegt.
Abbildung 74 zeigt die Steuergrößenverläufe der ersten vier Iterationen für die
Experimente mit angepasster Spülzeit.
Abbildung 74 - Steuergrößenverlauf der ersten vier Iterationen mit Einsatz einer OILR nach
Anpassung der Spülzeit
Die Betrachtung der einzelnen Verläufe zeigt eine starke Konvergenz, da auch hier
nur ein größerer Unterschied zwischen dem Steuergrößenverlauf der zweiten und
dritten Iteration zu erkennen ist. Die Abweichung zum Folgenden, dem Steuergrö-
ßenverlauf der vierten Iteration, zeigt nur noch minimale Veränderungen.
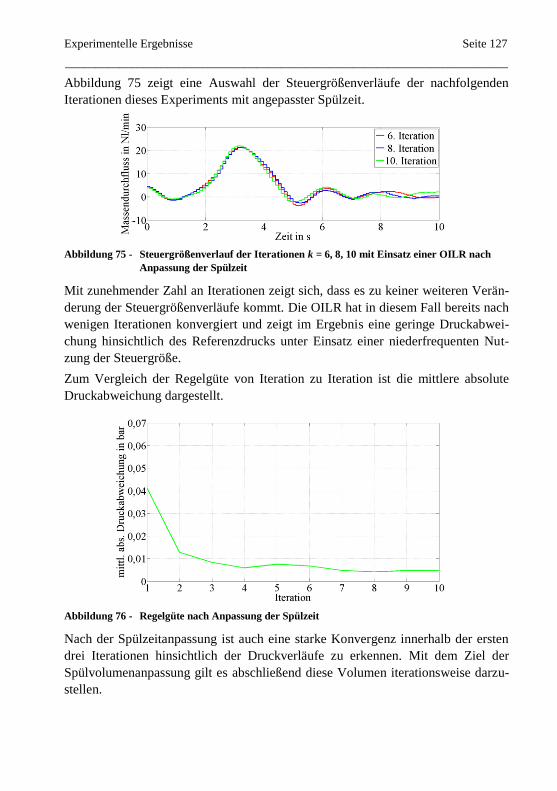
Experimentelle Ergebnisse Seite 127
__________________________________________________________________________
Abbildung 75 zeigt eine Auswahl der Steuergrößenverläufe der nachfolgenden
Iterationen dieses Experiments mit angepasster Spülzeit.
Abbildung 75 - Steuergrößenverlauf der Iterationen k = 6, 8, 10 mit Einsatz einer OILR nach
Anpassung der Spülzeit
Mit zunehmender Zahl an Iterationen zeigt sich, dass es zu keiner weiteren Verän-
derung der Steuergrößenverläufe kommt. Die OILR hat in diesem Fall bereits nach
wenigen Iterationen konvergiert und zeigt im Ergebnis eine geringe Druckabwei-
chung hinsichtlich des Referenzdrucks unter Einsatz einer niederfrequenten Nut-
zung der Steuergröße.
Zum Vergleich der Regelgüte von Iteration zu Iteration ist die mittlere absolute
Druckabweichung dargestellt.
Abbildung 76 - Regelgüte nach Anpassung der Spülzeit
Nach der Spülzeitanpassung ist auch eine starke Konvergenz innerhalb der ersten
drei Iterationen hinsichtlich der Druckverläufe zu erkennen. Mit dem Ziel der
Spülvolumenanpassung gilt es abschließend diese Volumen iterationsweise darzu-
stellen.
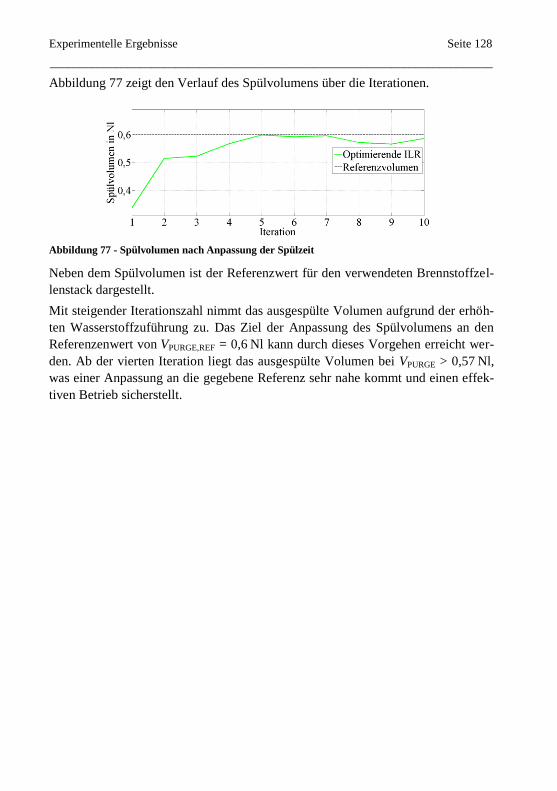
Experimentelle Ergebnisse Seite 128
__________________________________________________________________________
Abbildung 77 zeigt den Verlauf des Spülvolumens über die Iterationen.
Abbildung 77 - Spülvolumen nach Anpassung der Spülzeit
Neben dem Spülvolumen ist der Referenzwert für den verwendeten Brennstoffzel-
lenstack dargestellt.
Mit steigender Iterationszahl nimmt das ausgespülte Volumen aufgrund der erhöh-
ten Wasserstoffzuführung zu. Das Ziel der Anpassung des Spülvolumens an den
Referenzenwert von VPURGE,REF = 0,6 Nl kann durch dieses Vorgehen erreicht wer-
den. Ab der vierten Iteration liegt das ausgespülte Volumen bei VPURGE > 0,57 Nl,
was einer Anpassung an die gegebene Referenz sehr nahe kommt und einen effek-
tiven Betrieb sicherstellt.
Seite 129
__________________________________________________________________________
7 Zusammenfassung und Ausblick
Im Rahmen der vorliegenden Arbeit werden zwei verschiedene Regelungsstrate-
gien für den Betrieb eines PEM-Brennstoffzellensystems dargestellt. Für die elekt-
rische Leistungsregelung, die kathodenseitige Druckregelung und Brennstoffzufüh-
rung wird die Nichtlineare Modellprädiktive Regelung verwendet. Für eine effi-
zient ablaufende chemische Reaktion wird anodenseitig die Iterativ Lernende Re-
gelung eingesetzt, um unerwünschte Stoffe aus dem entsprechenden Gassystem des
Brennstoffzellensystems regelmäßig auszuspülen. Der Fokus beim Einsatz der
Nichtlinearen Modellprädiktiven Regelung liegt auf der Leistungsbereitstellung
unter der Beachtung von Nebenbedingungen beim Wechsel zwischen verschiede-
nen Arbeitspunkten. Regelungsziel beim Einsatz der Iterativ Lernenden Regelung
ist die anodenseitige Druckregelung während der Spülvorgänge. In dieser Arbeit
kommt es erstmals zum Einsatz einer zyklisch lernenden Regelung an einem
Brennstoffzellensystem.
Die Ansätze beider Regelungsstrategien werden an einem realen Brennstoffzellen-
system experimentell getestet und deren Ergebnisse dargestellt.
Die notwendige Modellbildung für die Anwendung beider Regelungsstrategien
basiert auf physikalischen Modellen. Die Modelle der chemischen Zusammenhän-
ge zur Ausbildung einer elektrischen Spannung in Folge der Wandlung von Was-
serstoff unter Nutzung von Sauerstoff in elektrische Energie bilden die Grundlage
der elektrischen Leistungsregelung. Strömungstechnische Zusammenhänge werden
genutzt, um die Versorgung des Brennstoffzellenstacks mit den beiden Reaktanten
zu modellieren. Sowohl die elektrischen Modelle als auch die strömungstechni-
schen Ansätze sind nichtlinear. Beides findet in den Regelungsstrategien entspre-
chend Beachtung.
Bei der Leistungsregelung des Brennstoffzellensystems kommt ein Fehlermodell
unter Nutzung eines Erweiterten Kalman-Filters zum Einsatz. Dieses Filter stellt
die stationäre Genauigkeit im Fall von Modellungenauigkeiten in Folge von Ver-
schleiß oder Vereinfachungen bei der Modellbildung sicher.
Beim Einsatz der Iterativ Lernenden Regelung werden verschiedene Lernfilter
eingesetzt. Im komplexesten Fall basieren diese auf der Grundlage eines zeitvari-
anten Modells. Dieses Modell wird zudem bei der Anwendung einer Optimierend
Iterativ Lernenden Regelung eingesetzt. Die Unterschiede beim Einsatz verschie-
dener Lernfilter und dem Einsatz der Optimierend Iterativ Lernenden Regelung
werden gezeigt. In den dargestellten Anwendungen der lernenden Regelung findet
Zusammenfassung und Ausblick Seite 130
__________________________________________________________________________
die Betrachtung einzelner Arbeitspunkte in Form von konstanten Stackstromstär-
ken und dem dazugehörigen Anodensolldruck statt.
Der Beitrag dieser Arbeit zum dynamischen Betrieb von PEM-Brennstoffzellen
unter Beachtung von verschiedenen Betriebsbedingungen kann die Grundlage für
die Erweiterung des zu betrachtenden Systems um einen Gleichspannungswandler,
welcher für eine konstante Systemausgangsspannung benötigt wird, bilden. Der
Spannungswandler ist in diesem Fall die einzige Eingriffsmöglichkeit hinsichtlich
der elektrischen Belastung des Brennstoffzellensystems.
Bei der Betrachtung zukünftiger Regelungsstrategien für den Einsatz während der
anodenseitigen Spülvorgänge rückt die Modellbildung erneut in den Fokus. Für die
Anwendung einer modellbasierten prädiktiven Regelung ist es notwendig, die
Modelle im Bereich des Öffnungs- und Schließvorgangs des Spülventils anzupas-
sen. Ziel einer prädiktiven Regelungsstrategie sollte sein, die Wasserstoffdruckre-
gelung während der Spülvorgänge auch bei Lastwechseln sicherzustellen und
gleichzeitig das ausgespülte Volumen zu überwachen.
Seite 131
__________________________________________________________________________
Anhang:
Modellprädiktive Regelung des Anodendrucks
Neben der in Kapitel 5.1 vorgestellten Regelungsstrategie zur Regelung des Ano-
dendrucks mit geschlossenem Spülventil ist es möglich, ähnlich der kathodenseiti-
gen Druckregelung, einen modellprädiktiven Ansatz zu nutzen.
Reglermodell und Kostenfunktion zur Anodendruckreglung
Die Grundlagen eines modellprädiktiven Reglers (MPR) sind das aufgestellte Mo-
dell und die gewählte Kostenfunktion. Bei Verwendung der MPR wird das in Ka-
pitel 5.1 vorgestellte Modell zur Prädiktion der Regelgröße über den Prädiktions-
horizont verwendet. Grundlage der MPR ist die Ausführung zur NMPR für den
Kathodendruck in Kapitel 4.3.
Die verwendete Kostenfunktion ist in Gl. (145) gezeigt.
P
C
C
2
1 AN,REF AN,PRÄD
=1
12
2 AN,MFC,REF AN,MFC,REF
=0
12
3 AN,MFC,REF AN,REAKT
=0
1
N
i
N
i
N
i
J q p k i p k i
q W k i W k i
q W k i W k i
(145)
Die Kostenfunktion besteht für die Druckregelung im anodischen Gassystem aus
drei Summanden. Der erste Term bewertet die Abweichung zwischen prädiziertem
Druckverlauf pAN,PRÄD und dem Referenzdruck pAN,REF. Der zweite Teil verhindert
die hochfrequenten Referenzwertwechsel für den Massendurchflussregler, ähnlich
dem Vorgehen in Gl. (61). Der dritte Term bewertet hier zusätzlich die Abwei-
chung der Massendurchflussreferenz WAN,MFC,REF vom stromstärkeabhängigen
Verbrauch WAN,REAKT gemäß Gl. (25). Dieser Term sichert neben der Bewertung
des hochfrequenten Einsatzes des Stellglieds die Orientierung an einem weiteren
Referenzwert und trägt somit zur Erhöhung der Robustheit der Regelung bei.
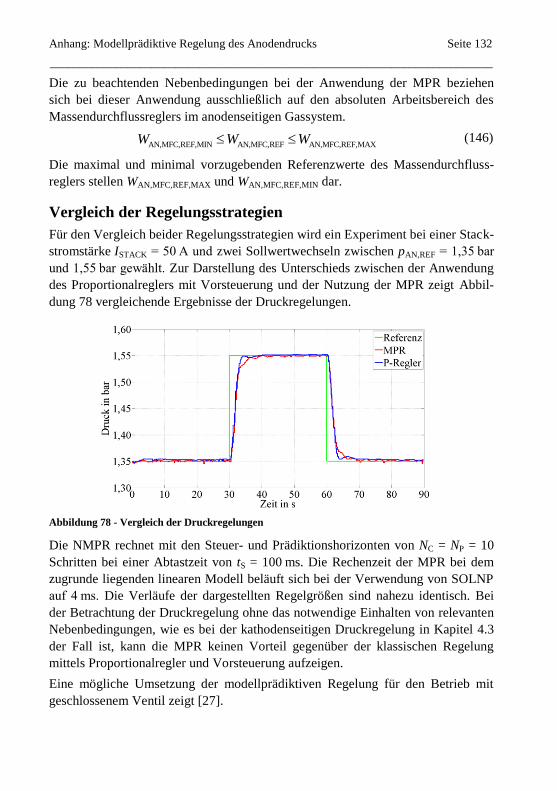
Anhang: Modellprädiktive Regelung des Anodendrucks Seite 132
__________________________________________________________________________
Die zu beachtenden Nebenbedingungen bei der Anwendung der MPR beziehen
sich bei dieser Anwendung ausschließlich auf den absoluten Arbeitsbereich des
Massendurchflussreglers im anodenseitigen Gassystem.
AN,MFC,REF,MIN AN,MFC,REF AN,MFC,REF,MAXW W W (146)
Die maximal und minimal vorzugebenden Referenzwerte des Massendurchfluss-
reglers stellen WAN,MFC,REF,MAX und WAN,MFC,REF,MIN dar.
Vergleich der Regelungsstrategien
Für den Vergleich beider Regelungsstrategien wird ein Experiment bei einer Stack-
stromstärke ISTACK = 50 A und zwei Sollwertwechseln zwischen pAN,REF = 1,35 bar
und 1,55 bar gewählt. Zur Darstellung des Unterschieds zwischen der Anwendung
des Proportionalreglers mit Vorsteuerung und der Nutzung der MPR zeigt Abbil-
dung 78 vergleichende Ergebnisse der Druckregelungen.
Abbildung 78 - Vergleich der Druckregelungen
Die NMPR rechnet mit den Steuer- und Prädiktionshorizonten von NC = NP = 10
Schritten bei einer Abtastzeit von tS = 100 ms. Die Rechenzeit der MPR bei dem
zugrunde liegenden linearen Modell beläuft sich bei der Verwendung von SOLNP
auf 4 ms. Die Verläufe der dargestellten Regelgrößen sind nahezu identisch. Bei
der Betrachtung der Druckregelung ohne das notwendige Einhalten von relevanten
Nebenbedingungen, wie es bei der kathodenseitigen Druckregelung in Kapitel 4.3
der Fall ist, kann die MPR keinen Vorteil gegenüber der klassischen Regelung
mittels Proportionalregler und Vorsteuerung aufzeigen.
Eine mögliche Umsetzung der modellprädiktiven Regelung für den Betrieb mit
geschlossenem Ventil zeigt [27].
Seite 133
__________________________________________________________________________
Literaturverzeichnis
[1] Allgöwer, F.; Findeisen, R.; Nagy, Z. K.: Nonlinear Model Predictive
Control: From Theory to Application. In: Journal of Chinese Institute of
Chemical Engineers, Vol. 35, Nr. 3, 2004, S. 299-315
[2] Al-Saleh, F.; Buday, V.; Klein, O.; von Unwerth, T.; Scholl, S.: The Load
Dependent Purge Strategy. In: Journal of Fuel Cell Science and Techno-
logy, 2014, Vol. 11
[3] Alvaraodo, I.; Limon, D.; Alamo, T.; Camacho, E. F.: Output feedback
robust tube based MPC for tracking of piece-wise constant references. In:
46th
Conference on Decision and Control, New Orleans, 2007;
S. 2175-2180
[4] Amphlett, J. C.; Baumert, R. M.; Mann, R. F.; Peppley, B. A.; Rob-
erge, P. R.; Harris, T. J.: Performance Modeling of the Ballard Mark IV
Solid Polymer Electrolyte Fuel Cell. In: Journal of the Electrochemical
Society, 1995, Vol. 142, Nr. 1, S. 1-15
[5] Andres, D.; Hengen, H.; Pandit, M.: Optimierend iterativ lernende Rege-
lungen. In: at - Automatisierungstechnik, Oldenbourg Wissenschaftsver-
lag, 2002, Vol. 50, S. 112-118
[6] Arce, A.; Ramírez, D. R.; del Real, A.; Bordons, C.: Constrained Explicit
Predictive Control Strategies for PEM Fuel Cell Systems. In: 46th
IEEE
Conference on Decision and Control, 2007, S. 6088-6093
[7] Arimoto, S.; Kawamura, S.; Miyazaki, F.: Bettering Operation of Robots
by Learning. In: Journal of Robotics Systems, Vol. 2, Nr. 1, 1984,
S. 123-140
[8] Aschemann, H.; Rauh, A.: An Integro-Differential Approach to Control-
Oriented Modelling and Multivariable Norm-Optimal Iterative Learning
Control for a Heated Rod. In: 20th
International Conference on Methods
and Models in Automation and Robotics MMAR, 2015, S. 447-452
[9] Baßler, S.; Dünow, P.; Marquardt, M.; Daasch, A.: Application of Itera-
tive Learning Control Methods for a Service Robot with Multi-body Kin-
ematics. In: 20th
International Conference on Methods and Models in Au-
tomation and Robotics MMAR, 2015, S. 465-470
Literaturverzeichnis Seite 134
__________________________________________________________________________
[10] Böck, M.; Glück, T.; Kemmetmüller, W.; Kugi, A.; Steinböck, A.: Fortge-
schrittene Methoden der nichtlinearen Regelung. In: Vorlesungsskript,
Technische Universität Wien, 2014
[11] Böswirth, L. und Bschorer, S.: Technische Strömungslehre: Lehrbuch und
Übungsbuch. Vieweg Teubner Verlag, 9. Auflage, 2012
[12] Bordons, C.; Acre, A.; del Real, A.: Constrained Predictive Control Strat-
egies for PEM fuel cells. In: American Control Conference ACC, 2006
[13] Bristow, D. A.; Tharayil, M.; Alleyne, A. G.: Survey of Iterative Learning
Control. In: IEEE Control Systems Magazine, Vol. 26, Nr. 3, 2006,
S.69-114
[14] Chen, J.; Siegel, J. B.; Stefanopoulou, A. G.; Waldecker, J. R.: Optimiza-
tion of purge cycle for dead-ended anode fuel cell operation. In: Internati-
onal Journal of Hydrogen Energy, 2013, Vol. 38, S. 5092-5105
[15] Craig, J.: Adaptive Control of Manipulators Through repeated Trials. In:
American Control Conference ACC, 1984, S. 1566-1573
[16] Danzer, M.; Wilhelm, J.; Aschemann, H.; Hofer, E.: Model-based control
of cathode pressure and oxygen excess ratio of a PEM fuel cell system. In:
Journal of Power Sources, Vol. 176, 2008, S.515-522
[17] Danzer, M.; Wittmann, S.; Hofer, E.: Prevention of fuel cell starviation by
model predictive control of pressure, excess ratio, and current. In: Journal
of Power Sources, Vol. 190, 2009, S. 86-91
[18] Diehl, M.; Bock, H. G.; Schlöder, J. P.; Findeisen, R.; Nagy, Z.;
Allgöwer, F.: Real-time optimization and nonlinear model predictive con-
trol of process governed by differential algebraic equations. In: Journal of
Process Control, Vol. 12, Nr. 4, 2002, S. 577-585
[19] DIN EN ISO 14175:2008-06: Schweißzusätze - Gase und Mischgase für
das Lichtbogenschweißen und verwandte Prozesse (ISO 14175:2008);
Deutsche Fassung EN ISO 14175:2008
[20] Dittmar, R.; Pfeiffer, B.-M.: Modellbasierte prädiktive Regelung – Eine
Einführung für Ingenieure. In: Oldenbourg Verlag München Wien, 2004
[21] Dorner, D.; Radermacher, T.; Wagener, B.; Weber, J.: Iterativ Lernende
Regelung einer Kunststoff-Spritzmaschine. In:
at - Automatisierungstechnik, De Gruyter, Oldenbourg, 2014, Vol. 62,
Nr. 3, S. 226-236
Literaturverzeichnis Seite 135
__________________________________________________________________________
[22] Föllinger, O.: Lineare Abtastsysteme. In: Methoden der Regelungs- und
Automatisierungstechnik, Oldenbourg, 1993
[23] Föllinger, O.: Regelungstechnik. 12. Überarbeitete Auflage, VDE Verlag,
2016
[24] Fu, K. S.: Learning Control Systems - Review and Outlook. In: IEEE
Transactions on Automatic Control, Vol. AC-15, 1970, S. 210-221
[25] Grüne, L.; Pannek, J.: Nonlinear Model Predictive Control - Theory and
Algorithms. In: Communications and Control Engineering, Springer-
Verlag London, 2011
[26] Hähnel, C.; Aul, V.; Horn, J.: Error Handling Approach of a PEM Fuel
Cell System by Nonlinear Model Predictive Control. In: 23rd
Mediterrane-
an Conference on Control and Automation MED, 2015, S. 540-545
[27] Hähnel, C.; Aul, V.; Horn J.: Power Control for Efficient Operation of a
PEM Fuel Cell System by Nonlinear Model Predictive Control. In: 1st
Conference on Modelling, Identification and Control of Nonlinear Sys-
tems MICNON, 2015, S. 184-189
[28] Hähnel, C.; Aul, V.; Horn J.: Power Efficient Operation of a PEM Fuel
Cell System using Cathode Pressure and Excess Ratio by Nonlinear Mod-
el Predictive Control. In: 14th
European Control Conference ECC, 2015,
S. 527-532
[29] Hähnel, C.; Aul, V.; Schultze, M.; Horn J.: State Estimation of Exhaust
Valve Position by Kalman Filter in PEM Fuel Cell Systems. In: 4th
Inter-
national Conference on Renewable Energy and Applications ICRERA,
2015
[30] Hassan Hossein Nia, S.: Robust Model Predictive Control Using Iterative
Learning Control. In: 14th
European Control Conference ECC, 2015,
S. 3519-3524
[31] Hengen, H.; Hillenbrand, S.; Pandit, M.: Algorithms for Iterative Learning
Control of Nonlinear Plants employing Time-variant System Descriptions.
In: International Conference on Control Applications, Anchorage, 2000,
S. 570-575
[32] Jeffrey, A.; Butterworth, L.; Pao, Y.; Abramovitch, D. Y.: A Comparison
of ILC Architectures for Nanopositioners with Applications to AFM Ras-
ter Tracking. In: American Control Conference ACC, San Francisco,
2011, S. 2266-2271
Literaturverzeichnis Seite 136
__________________________________________________________________________
[33] Julier, S; Uhlmann, J; Durrant-Whyte, H.: A new approach for filtering
nonlinear systems. In: American Control Conference ACC, 1995,
S. 1628–1632
[34] Jung, S.; Zhang, J.; Oliveira, R.: Iterative Learning Control of Polyhy-
droxybutyrate Production in a Sequencing Batch Reactor. In: 20th
Interna-
tional Conference on Methods and Models in Automation and Robotics
MMAR, 2015, S. 459-464
[35] Kalman, R. E.: A new Approach to Linear Filtering and Prediction Prob-
lems. In: Transactions of the AMSE-Journal of Basic Engineering,
Vol. 82, 1960, S. 35-45
[36] Kennel, F.; Liu, S.: Iterative Learning Control for Periodic Systems using
Model Predictive Methods with Adaptive Sampling Rates. In: 19th
IFAC
World Congress IFAC, 2014, S. 6587-6592
[37] Kowalów, D.; Patan, M.; Paszke, W.; Romanek, A.: Sequential design for
model calibration in iterative learning control of DC motor. In: 20th
Inter-
national Conference on Methods and Models in Automation and Robotics
MMAR, 2015, S. 794-799
[38] Krewitt, W.; Pehnt, M.; Fischedick, M.; Temming, V.: Brennstoffzellen in
der Kraft-Wärme-Kopplung - Ökobilanzen, Szenarien, Marktpotenziale.
Erich Schmidt Verlag, 2004
[39] Kurzweil, P.: Thermodynamik und Kinetik der Brennstoffzelle. In: Brenn-
stoffzellentechnik: Grundlagen, Komponenten, Systeme, Anwendungen,
2. Auflage, Springer-Vieweg-Verlag, 2013
[40] Larminie, L.; Dicks, A.: Fuel Cell Systems Explained. 2. Auflage, Wiley,
2003
[41] Lee, J. M.; Cho, B. H.: A Dynamic Model of a PEM Fuel Cell System. In:
APEC in Washington, 2009, S. 720-724
[42] Löhn, H.: Leistungsvergleich von Nieder- und Hochtemperatur-
Polymerelektrolytmembran-Brennstoffzellen - Experimentelle Untersu-
chungen, Modellierung und numerische Simulation. Dissertation, Darm-
stadt, 2010
[43] Mench, M. M.; Kumbur, E. C.; Veziroglu, T. N.: Polymer Electrolyte Fuel
Cell Degradation. In: Academic Press Elsevier, 2012
[44] Moore, K. L.: Iterative Learning Control for Deterministic Systems. In:
Advances in Industrial Control, Springer-Verlag London, 1993
Literaturverzeichnis Seite 137
__________________________________________________________________________
[45] Morari, M.; Maeder, U.: Nonlinear offset-free model predictive control.
In: Automatica, 2012, Vol. 48, S. 2059-2067
[46] Nahrstedt, H.; Schauer, T.; Hesse, S.; Raisch, J.: Iterativ lernende Rege-
lung einer Gang-Neuroprothese. In: at - Automatisierungstechnik, Olden-
bourg Wissenschaftsverlag, 2008, Vol. 56, Nr. 9, S. 494-501
[47] Niemeyer, J.: Modellprädiktive Regelung eines PEM-Brennstoff-
zellensystems. Dissertation, Karlsruhe, 2009
[48] O’Hayre, R.; CHA, S.-W.; Collela, W.; Prinz, F. B.: Fuel Cell Fundamen-
tals. 2. Auflage, Wiley, 2009
[49] Pannocchia, G.: Offset-free tracking MPC: A tutorial review and compari-
son of different formulations. In: 14th
European Control Conference ECC,
2015, S. 527-532
[50] Pannocchia, G.; Rawlings, J. B.: Disturbance Model for Offset-Free Mod-
el-Predictive Control. In: American Institute of Chemical Engineers
AIChE Journal, Vol. 49, Nr. 2, 2003, S.426-437
[51] Papageorgiou, M.; Leibold, M.; Buss, M.: Optimierung - Statische, dyna-
mische, stochastische Verfahren für die Anwendung. 3. Auflage, Springer
Vieweg Berlin Heidelberg, 2012
[52] Pasel, J.; Samsun, R. C.; Janßen, H.; Lehnert, W.; Peters, R.; Stolten, D.:
Teilprojekt Brennstoffzelle, Infrastruktur, Komponenten und System
(Brinks) - Schlussbericht. In: Verbundvorhaben Öko-effiziente Flugsys-
teme für die nächste Generation (EFFESYS), Forschungszentrum Jülich,
2013
[53] Pérez-Castro, A.; Sánchez, J.; Guzmán, J. L.: Model correction mecha-
nism for nonlinear time variant systems as support to predictive control
strategies. In: 19th
IFAC World Congress IFAC 2014, S. 5975-5980
[54] Proton Power Systems plc Group: Betriebsanweisung PM 200. In: Be-
triebsanweisung PM 200 PEM-Brennstoffzellenstapel für den Betrieb mit
Wasserstoff und Luft, 2011
[55] Pukrushpan, J. T.; Stefanopoulou, A. G.; Peng, H.: Control of Fuel Cell
Breathing. In: IEEE Control Systems Magazine, 2004, S. 30-46
[56] Pukrushpan, J. T.; Stefanopoulou, A. G.; Peng, H.: Control of Fuel Cell
Power Systems - Principles, Modeling, Analysis and Feedback Design. In:
AIC - Advances in Industrial Control, Springer-Verlag London, 2005
Literaturverzeichnis Seite 138
__________________________________________________________________________
[57] Rau, M.: Nichtlineare modellbasierte prädiktive Regelung auf Basis lern-
fähiger Zustandsraummodelle. Lehrstuhl für elektrische Antriebssysteme,
TU München, Dissertation, 2003
[58] Rezaeizadeh, A.; Smith, R. S.: An Adaptive Iterative Control Scheme for
Reducing CO2 Emission in Gasoline Engines. In: 14th
European Control
Conference ECC, 2015, S. 1388-1391
[59] Sklansky, J.: Learning Systems for Automatic Control. In: IEEE Transac-
tions on Automatic Control, Vol. AC-11, Nr. 1, 1966, S. 6-19
[60] Schindele, D.; Aschemann, H.: Chapter 7: Norm-Optimal Iterative Learn-
ing Control for a Pneumatic Parallel Robot. In: Multibody System Dy-
namics, Robotics and Control, Springer-Verlag Wien, 2013
[61] Schindele, D.; Aschemann, H.: ILC for a Fast Linear Axis Driven by
Pneumatic Muscle Actuators. In: International Conference on Mechatro-
nics, 2011, S.967-972
[62] Schmidt, F.: Analyse und Entwurf iterativ lernender Regelungen. In: Be-
richte aus Steuerungs- und Regelungstechnik, Shaker Verlag Aachen,
1996
[63] Schmittinger, W.; Vahidi, A.: A review of the main parameters influenc-
ing long-term performance and durability of PEM fuel cells. In: Journal of
Power Sources, Vol. 180, Nr. 8, 2008, S. 1-14
[64] Schultze, M.: Modellierung und Regelung eines Multifunktionalen Brenn-
stoffzellensystems zur Bereitstellung sauerstoffarmer Abluft. In: Fort-
schritt-Berichte VDI, Reihe 8, Nr. 1240, 2015
[65] Schultze, M.; Hähnel, C.; Horn. J.: Nonlinear Model Predictive Control of
a PEM Fuel Cell System for Cathode Exhaust Gas Generation. In: 19th
IFAC World Congress IFAC, 2014, S. 9432-9437
[66] Seel, T.; Schauer, T; Raisch, J.: Iterativ lernende Regelung mit variabler
Zykluslänge für FES-basierte Kompensation einer Fußhebeschwäche. In:
at - Automatisierungstechnik, Oldenbourg Wissenschaftsverlag, 2013,
Vol. 61, Nr. 9, S. 630-637
[67] Simon, D.: Optimal State Estimation. John Wiley & Sons, New York,
2006
[68] Son, T. D.; Pipeleers, G.; Swevers, J.: Experimental Validation of Robust
Iterative Learning Control on an Overhead Crane Test Setup. In: 19th
IFAC World Congress IFAC 2014, S. 5981-5986
Literaturverzeichnis Seite 139
__________________________________________________________________________
[69] Steinberg, S. J.; Staats, M.; Nitsche, W.; King, R.: Comparison of Iterative
Learning and Repetitive Control Applied to a Compressor Stator Cascade.
In: Active Flow and Combustion Control, Springer-Verlag Berlin, 2014
[70] Tatjewski, P.: Disturbance Modeling and State Estimation for Offset-free
Predictive Control with State-Space Process Models. In: Int. Journal of
applied mathematics and computer science, Vol. 24, Nr. 2, 2014,
S. 313-323
[71] Tenny, M. J.; Rawlings J. B.: Closed-Loop Behavior of Nonlinear Model
Predictive Control. In: American Institute of Chemical Engineers AIChE,
Vol. 50, 2004, S.2142-2154
[72] Tsypkin, Y.: Adaption and Learning in Automatic Systems. In: Academic
Press, New York, 1971
[73] Unbehauen, R.: Systemtheorie 1 - Allgemeine Grundlagen, Signale und
lineare Systeme im Zeit- und Frequenzbereich. 8. Auflage, Oldenbourg
Wissenschaftsverlag, 2002
[74] Valtin, M.; Seel, T.; Raisch, J; Schauer, T.: Iterative learning control of
drop foot stimulation with array electrodes for selective muscle activation.
In: 19th
IFAC World Congress IFAC 2014, S. 6587-6592
[75] Verband Deutscher Maschinen und Anlagenbauer e.V.: Regelungstechni-
sche Anforderungen an die Hydraulik bei Planung und Ausführung von
Heizungs-, Kälte-, Trinkwarmwasser- und Raumlufttechnischen Anlagen.
VDMA-Einheitsblatt 24199, 2005
[76] Waschl, H.; Bagterp Jorgensen, J.; Kjobsted Huusom, J.; del Re, L.: A
Novel Tuning Approach for Offset-Free MPC. In: 14th
European Control
Conference ECC, 2015, S. 545-550
[77] Welch, G.; Bishop, G.: An Introduction to the Kalman Filter. University
of North Carolina at Chapel Hill, 2004
[78] Ye, Y.: Interior algorithms for linear, quadratic and linearly constrained
nonlinear programming. Department of EES, Standford University, Cali-
fornia, U.S., Dissertation, 1987
[79] Ye, Y.: SOLNP USER’S GUIDE - A Nonlinear Optimization Program in
MATLAB, 1989
Literaturverzeichnis Seite 140
__________________________________________________________________________
[80] Zavala, V. M.; Biegler, L. T.: Nonlinear programming strategies for state
estimation and model predictive control. In: Nonlinear Model Predictive
Control - Lecture Notes in Control and Information Sciences, Springer
Verlag Berlin Heidelberg, Vol. 384, 2009, S. 419-432
[81] Zhang, S.; Yuan, X.-Z.; Hin, J. N. C.; Wang, H.; Friedrich, K. A.; Schul-
ze, M.: Effects of open-circuit operation on membrane and catalystlayer
degradation in proton exchange membrane fuel cells. In: Journal of Power
Sources, Vol. 195, Nr. 4, 2010, S. 1142-1148
[82] Ziougou, C.; Georgiados, M. C.; Pistikopoulos, E. N.; Voutetakis, S.;
Papadopoulu, S.: Performance Improvement of an NMPC Problem by
Search Space Reduction and Experimental Validation to a PEM Fuel Cell
System. In: European Control Conference ECC, 2013, S. 2555-2560
[83] Zweigel, R.; Thelen, F.; Abel, D.; Albin, T.: Iterative learning approach
for diesel combustion control using injection rate shaping. In: 14th
Euro-
pean Control Conference ECC, 2015, S. 3173-3178
Seite 141
__________________________________________________________________________
Veröffentlichungen und Fachbeiträge
[1] Schultze, M.; Hähnel, C.; Horn. J.: Nonlinear Model Predictive Control of
a PEM Fuel Cell System for Cathode Exhaust Gas Generation. In: 19th
IFAC World Congress 2014, S. 9432-9437
[2] Hähnel, C.; Horn J.: Begrenzung des Differenzdrucks zwischen Anode
und Kathode eines PEM-Brennstoffzellensystems mittels Nichtlinearer
Modellprädiktiver Regelung. In: GMA-Fachausschuss 1.30 in
Anif/Salzburg, 2014
[3] Hähnel, C.; Aul, V.; Horn, J.: Error Handling Approach of a PEM Fuel
Cell System by Nonlinear Model Predictive Control. In: 23rd
Mediter-
ranean Conference on Control and Automation 2015, S. 540-545
[4] Hähnel, C.; Aul, V.; Horn J.: Power Control for Efficient Operation of a
PEM Fuel Cell System by Nonlinear Model Predictive Control. In: 1st
Conference on Modelling, Identification and Control of Nonlinear Sys-
tems 2015, S. 184-189
[5] Hähnel, C.; Aul, V.; Horn J.: Power Efficient Operation of a PEM Fuel
Cell System using Cathode Pressure and Excess Ratio by Nonlinear Mod-
el Predictive Control. In: 14th
European Control Conference 2015,
S. 3345-3350
[6] Hähnel, C.; Aul, V.; Horn J.: Online Identification of an Electric PEMFC
Model for Power Control by NMPC. In: 20th
International Conference on
Methods and Models in Automation and Robotics MMAR 2015,
S. 133-138
[7] Schultze, M.; Hähnel, C.; Horn. J.: Modellprädiktive Leistungsregelung
eines Brennstoffzellensystems mit Wechselrichter in einem Microgrid. In:
Tagungsband zur NEIS, 2015, S. 154-159
[8] Hähnel, C.; Mahner, C.; Horn, J.: Iterativ Lernende Regelung eines PEM-
Brennstoffzellensystems während anodenseitiger Spülvorgänge. In:
GMA-Fachausschuss 1.30 in Anif/Salzburg, 2015
[9] Hähnel, C.; Aul, V.; Schultze, M.; Horn J.: State Estimation of Exhaust
Valve Position by Kalman Filter in PEM Fuel Cell Systems. In: 4th
Inter-
national Conference on Renewable Energy and Applications ICRERA,
2015
Veröffentlichungen und Fachbeiträge Seite 142
__________________________________________________________________________
[10] Hähnel, C.; Horn, J.: Iterativ Lernende Regelung des Anodendrucks wäh-
rend der Spülvorgänge eines PEM-Brennstoffzellensystems. In: 50. Rege-
lungstechnisches Kolloquium in Boppard, 2016
[11] Hähnel, C.; Horn, J.: Iterative Learning Control of a PEM Fuel Cell Sys-
tem during Purge Processes. In: IEEE International Energy Conference
ENERGYCON, Belgien, 2016
[12] Schultze, M.; Hähnel, C.; Horn. J.: Application of a Hardware-in-the-loop
DC/DC Converter and Microgrid Simulation to a PEMFC. In: IEEE In-
ternational Energy Conference ENERGYCON, Belgien, 2016
[13] Hähnel, C.; Cloppenborg, A.; Horn. J.: Offset-Free Nonlinear Model
Predictive Control of Electrical Power of a PEM Fuel Cell System Using
an Extended Kalman Filter. In: 23rd
Mediterranean Conference on Control
and Automation MED, 2016, S. 106-111
[14] Hähnel, C.; Cloppenborg, A.; Horn. J.: Optimal Iterative Control of a
PEM Fuel Cell System during Purge Processes. In: 21th
International Con-
ference on Methods and Models in Automation and Robotics MMAR
2016
[15] Hähnel, C.; Horn, J.: Iterativ Lernende Regelung des Anodendrucks wäh-
rend der Spülvorgänge eines Brennstoffzellensystems. In: at –
Automatisierungstechnik, De Gruyter Oldenbourg, 2016, Vol. 64, Nr. 8,
S. 671-680
[16] Hähnel, C.; Cloppenborg, A.; Horn, J.: On the Way to Purge Volume
Control during Purge Processes of a Fuel Cell System by Predictive Con-
trol Strategy. In: 20th IFAC World Congress 2017
(zur Veröffentlichung angenommen)
__________________________________________________________________________
Lebenslauf
Persönliche Daten
Name: Christian Hähnel
Geburtsdatum: 28. März 1985
Geburtsort: Oranienburg
Beruflicher Werdegang
seit 01/2016 Teamleiter in der Unterabteilung Zentrale Aufgaben,
Kommando Luftwaffe, Berlin
01/2012 - 12/2015 Wissenschaftlicher Mitarbeiter an der Professur für
Regelungstechnik, Helmut-Schmidt-
Universität/Universität der Bundeswehr Hamburg
06/2009 - 12/2011 Technischer Leiter Luftraumüberwachung, Cölpin,
Mecklenburg-Vorpommern
07/2004 - 09/2005 Offizierausbildung, Bayreuth und Fürstenfeldbruck,
Bayern
Akademischer Werdegang
10/2005 - 05/2009 Studium der Elektrotechnik an der
Helmut-Schmidt-Universität/Universität der
Bundeswehr Hamburg
Abschluss: Diplom-Ingenieur





























