Embed Size (px)
Citation preview
mu0 hiermit an dieser Stelle beendet werden. Man wird es auch dem Vortragenden nicht ver- iibeln, wenn er stellenweise fast grob vereinfacht, popularisiert hat, handelt es sich hier ja nicht um scharfe Einzelstudien sondern um allgemeine Hinweise fur weite Kreise.
Man wird nun vielleicht fragen, was rnit jener dritten Phase der Erkenntnis erreicht ist. Wird nicht unsere Mechanik dadurch zu sehr abstrahiert 7 Nun, es ware sicher ein gro0er padago- gischer Fehler, wenn man in dieser Weise dem Neuling die Mechanik beibringen wiirde; auch hier wird man mit Recht dem biologischen Prinzip folgen, da13 das Individuum in vielem die Entwick- lungsstadien der Art durchzumachen hat. Aber von einem gewissen Stadium ab wird es auch dem gebildeten Ingenieur und vor allem auch dem Physiker nicht schaden, sondern im hochsten MaBe nutzen, wenn er lernt, was seine Wissenschaft eigentlich ,,bedeutet", und der an der Spitze der Entwicklung befindliche Forscher wird sich solchen an die Wurzel der Dinge greifenden Methoden nicht entziehen konnen, wofur die heutigen Bemuhungen in der theoretischen Physik den un- mittelbaren Beweis erbringen. U. a. wird man dann auch der sicherlich merkwurdigen Gesamt- lage entgehen, bei der einerseits die Mathematik und damit doch wohl auch die auf ihr beruhende Physik zu einer Art Tautologie herabgewiirdigt wird, die auf geheimnisvolle Weisgiz.B. die Be- herrschung der Atomenergie in greifbare Nahe geruckt hat, wtihrend andererseits sozusagen jeden Augenblick von irgendeiner Revolution in der Physik und dem Umsturz irgendeines Weltbildes erzahlt wird. Die Moglichkeiten des menschlichen Geistes sind noch lange nicht alle bekannt, geschweige denn ausgenutzt ; sollte man nicht diese Halfte menschlicher Erkenntnis mit mehr Ruhe und-Hingabe, als es fruher ublich war, studieren und von vornherein in Rechnung stellen? Vieles deutet darauf hin, daR dies bereits geschieht. Wenn man dann noch, wie es fast unver- meidlich ist, und wofiir die Merkmale ebenfalls bereits sichtbar sind, erkennt und beriicksichtigt, daI3 der Intellekt nicht die einzige Funktjon des menschlichen Inneren ist, so befindet man sich, von allen Einzelheiten abgesehen, auf gutem Wege.
Zum ublichen AbschluR einer Ansprache bei einer solchen Gelegenheit sei es dem Vortragen- den gestattet, den Wunsch zu wiederholen, den er vor funf Jahren G e o r g H a m e 1 zugerufen hat: Man kann dem ernsthaften Manne kaum Gluck wiinschen; man wei0 kaum, was das ist. Wohl aber kann man ihm - un'd uns - noch fur miiglichst viele Jahre das wiinschen, was der auch von ihm immer wieder angefuhrte Goethe in einer seiner fruchtbarsten Perioden als wesent- lich erkannt und mit einem auch bei diesem Dichter ungewohnlich schonen Ausdruck formuliert hat : ,,Die klingende Existenz zwischen Behagen und Unbehagen I" Dal3 hierbei das ,,Unbehagen" immer weniger werden moge, wollen wir menschlich-freundlich mit warmem Wunsche hinzufiigen.
Ober den Parametereinflua auf einfache nichtstationare Bewegungen
Von W. Bader in Berlin-Lichtenberg I n den lineariaierfen Bewegung6gleichungen einw starren Kiirprs im widsrsfshmdan Medium werdars
die E u lerachen Winkel und der Geschwindigkeitsvektor als abhdngige Variable singefalist; Die Anwedung der einseiligen L a p I a c e -Transformation zeigt , dab einfache Erdwicklungen nuch f a l l d e n Potenzen der rnabhiingigen Variablen des transformierten Bereiches einen Einblick in den uitlichen Verlatrf der mechaniachen Vorgange gestalten. Kennfnis der Eigenfrequenzen is1 far den zsitlichen Verlauf unmittel- bar nach einer Gleichgewichtsting nicht erforderlich.
I n the linearised equations of movement of a rigid body in the resistant medium the anglea of E u l c r and the vector of celerily are in l rodud a8 dependent variables. The application of the one-sided tramformation of L a p l a c e shows that simple devel menfs following falling plencea of the independent
cases. Knowledge of the specific frequences is not necessary for the c h r d o g i c d course immsdidely after dielurbances of equilibrium.
Dam l w dqqcultiona de mouvement rendues Einhires d'un wrp rigide au mbdium rbiatan lm angles d'E u I er et l e vecteur de vitesee sont introduits comme des variables dbpandants. L'appliedion ds la transformation unilathde de L a p l a c e montre que des dbvelorvpements simples suivant d w ptencea tombanies des variables inddpendants du domaine tranaformd permettent rt comprendre Is cours chrono- logique dee procb m&haniques. La conmiseance des frhqumces ep&ifiquca n'ml p a nkeasaire pour 16 wurs chronologique immkdidement a p r b un ddrangement de l'dquilibre.
variables of the transformed range &ow the knowle 7 ge of the chronological course of the mechanical pro-
B JIEHe&p&iaEpOBa€EiHX J'PaBHeHKRX ABkiXKeHKa TBepAOrO Ten& B O O ~ O T ~ l q 0 ~ C X Cp0Ae BBOARl'da, B K&¶BCTBB H08&BBOEMMX n0p0MBHEbIX, ah3pOBH J'l'JlH €3 BeICTOpH CEOpmE. npKMeHeHKI3 O~HOCTOpOHH0rO npeobpaao~&?i~a h T I J l & C & llOK&aHB&BT, ¶TO IIpOCTH0 p&WlOX0HESI
BhISBJlBHEI? ~OCJl0AOB&T0JlbHOCTK MC3X&IIBPeCKEX UpOq0CCOB BO BpMeIIB. 3 H a H E e CObCTB0HHHX
Tp06y0TCR.
no y6HBaKiqEM c ~ e n e m HeaaBKcmmX nepeMe~~nX npeobp&so~a~~o% 06necl.a cnocodc~~ym
PBCTOT A ~ H BpeMemoro npoqecca ~ e n o c p e ~ c ~ ~ e a ~ o nocne Hapymenm paBHOBecKa HB
I. Bei der Untersuchung gewisser Bewegungsaufgaben, die technisch von groDer Bedeu- tung sind, wird seit langem' die sogenannte Methode der kleinen Schwingungen mit Vorteil
298 B a d e r , ttber den ParemetereinfluB auf einfache nichtstetioniire Bewegungen " ; ~ $ ~ ~ . ~ ~ $ ~ &
verwendet. Diese Aufgaben betreffen das Verhalten eines starren Korpers in der unmittel- baren Nahe eines stationaren Bewegungszustandes (€30 u t h "steady motion") und dienen dazu, entweder den Einschwingvorgang oder die Wirkung einer Storkraft zu berechnen. Da die vom umgebenden Medium auf den K6rper ausgeiibten Krafte ublicherweise nicht-konservativ sind. so mu13 zur Durchfiihrung der Rechnung die Einschrankung gemacht werden, dafl bei einer Bahnstorung keine mechanische Energie in eiqe andere Energieform umgewandelt wird.
Es moge v die Geschwindigkeit, o die Drehgeschwindigkeit des starren Korpers K (m: Masse, T: Tragheitstensor) sein, auf den die auBere Kraft P (Schwerkraft und Kraft des umgebenden Mediums der Dichte e ) wirke, deren Moment um den Korperschwerpunkt M sei. F bedeute eine charakteristische Bezugsflache, c eine Lange von K. Der stationare Zustand werde durch den Index ,,O" gekennzeichnet. Wird (H. Glauer t ) die Grol3e ts = 2 m / F p O , welche die Dimension einer Zeit hat, eingefiihrt, so ergeben sich als maostabsfreie GroBen fur
Geschwindigkeit qt) = v/vo Kraft F(G, 6, @, 5 ) = 2 P/Fe v i
Drehgeschwindigkeit 6(t) = w - ts Moment f i ( G , 6, @, 5 ) = 2 M/Fcevg
Masse ,u = 2 m/Fe G Massenverteihng T = Vmc2 u
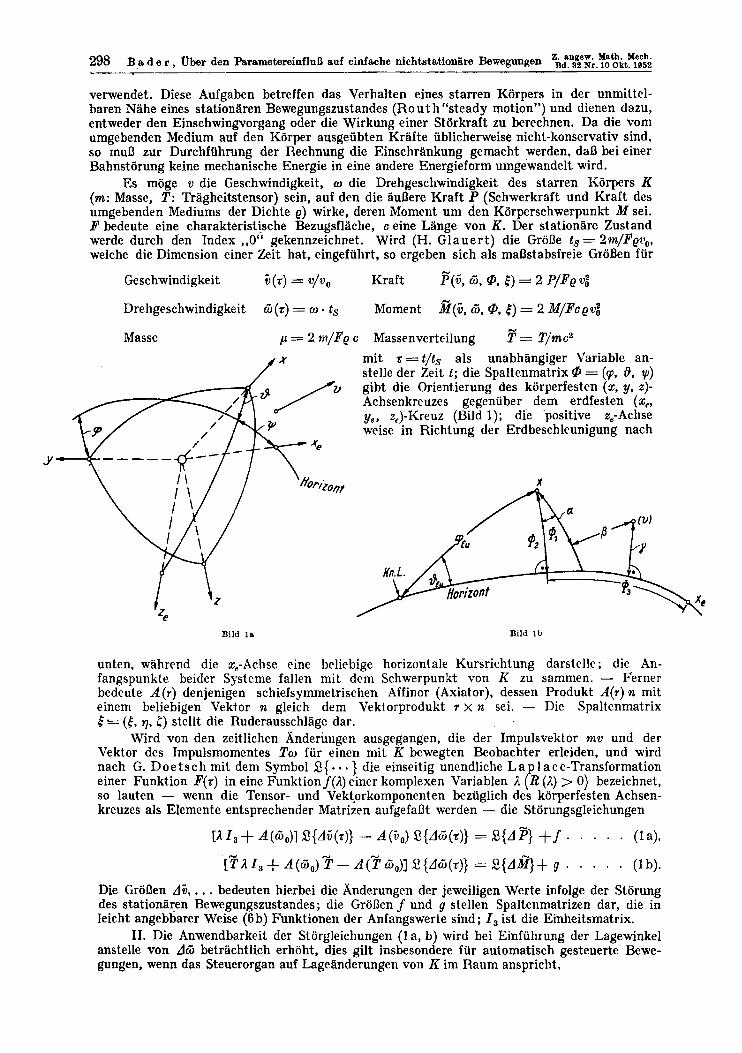
f " mit t = t/ts als unabhangiger Variable an- stelle der Zeit t ; die Spaltenmatrix @ = (pl, 6, y) gibt die Orientierung des korperfesten (2, y, 2)- Achsenkreuzes gegenuber dem erdfesten (ze, ye,. 2,)-Kreuz (Bild 1); die 'positive 2,-Achse weise in Richtung der Erdbeschleunigung nach
x
Bild l a Bild Ib
unten, wahrend die 2,-Achse eine beliebige horizontale Kursrichtung darstelle ; die An- fangspunkte beider Systeme fallen mit dem Schwerpunkt von K zu sammen. - Ferner bedeute A ( r ) denjenigen schiefsymmetrischen Affinor (Axiator), dessen Produkt A(r) n mit einem beliebigen Vektor n gleich dem Vektorprodukt 7 x n sei. - Die Spaltenmatrix 5 L (6, 17, C) stellt die Ruderausschlage dar.
Wird von den zeitlichen hderungen ausgegangen, die der Impulsvektor mu und der Vektor des Impulsmomentes Tw fur einen mit K bewegten Beobachter erleiden, und wird nach G. Doe t s c h mit dem Symbol i!{ . . . } die einseitig unendliche La p 1 a c e-Transformation einer Funktion F ( t ) in eine Funktion f (A) einer komplexen Variablen A (R (A) > 0) bezeichnet, so lauten - wenn die Tensor- und Vektprkomponenten beziiglich des korperfesten Achsen- kreuzes als Elemente entsprechender Matrizen aufgefaflt werden - die Storungsgleichungen
[ A I ~ + A($,)] i!{d.ir(t)) - A ( ; , ) i ! { ~ ~ ( t ) } = ~ { L I F } + j . . . . . ( la) ,
[ ~ A I ~ + A ( G , ) ~ - ~ ( ~ G ~ ) ] i ! { ~ G ( t ) } = i ! { A @ } + g . . . . . (1 b).
Die GroBen A$, . . . bedeuten hierbei die hderungen der jeweiligen Werte infolge der Storung des stationaren Bewegungszustandes; die Groflen f und g stellen Spaltenmatrizen dar, die in leicht angebbarer Weise (6 b) Funktionen der Anfangswerte sind ; I , ist die Einheitsmatrix.
11. Die Anwendbarkeit der Storgleichungen (1 a, b) wird bei Einfuhrung der Lagewinkel anstelle von AS betrachtlich erhoht, dies gilt insbesondere fur automatisch gesteuerte Bewe- gungen, wenn das Steuerorgan auf Lageanderungen von K im Raum anspricht.
%t:yl;. ~ ~ \ t , ~ ~ ~ ~ * B a d e r , a e r den ParametereinfIuO euf einfache nichtstationare Bewegungen 299
Als Grundbewegung soll im folgenden eine gradlinige stationare Bahn mit Hangen im Raum (q, + 0) und Schieben gegenuber der Bahn (vuo+ 0) von R vorausgesetzt werden. Mit der Spaltenmatrix 2{d@} = (y4, y5, ye) wird dann 2{46} = 10,2{d@}
-
mit
i = l
i = 2
0, =
k = l
xu+A
ZU
. . . . . . . . . . . . . (2). '1 0 -sin 6, 0 cosq, cos 6, s inq,
,O - sin yo cos So cos yo
k = 5
1 xp p-l
Ferner soll vereinfachend angenommen werden, daB eine Massen-Symmetrieebene des Kor- pers R mit der x z-Ebene zusammenfalle ; bedeuten I,,#, die jeweiligen Massentragheitsmomente, D, das auf die x y- und yz-Ebene bezogene Deviationsmoment, so wird mit Einfuhrung der Tragheitsradien i (I = i2 m)
. . . . . . . . . . . T=- - 62 1 (t 0 ;; 0 "f i: ; -;&I) (3)
mit = D, f I , , = D$Iz . Die dimensionslosen Ableitungen der durch das Medium hervorgerufenen Krafte und
Momente nach G,,,,, mogen nach Glaue r t durch die Indizes u, v, w, die nach 6z,v,z durch die Indizes p, q, r gekennzeichnet sein; bei der Kraft sollen die Buchstaben x, y, z z.B.
k = 6
A cos S,[fi,,sin yo - GI 0 cos %I + A xS2p-l
bei dem Moment sollen die Buchstaben I , my n, z.B.
zw + A
u mrU + 1 m;
die Komponenten bezuglich der korperfesten Achsen bedeuten.
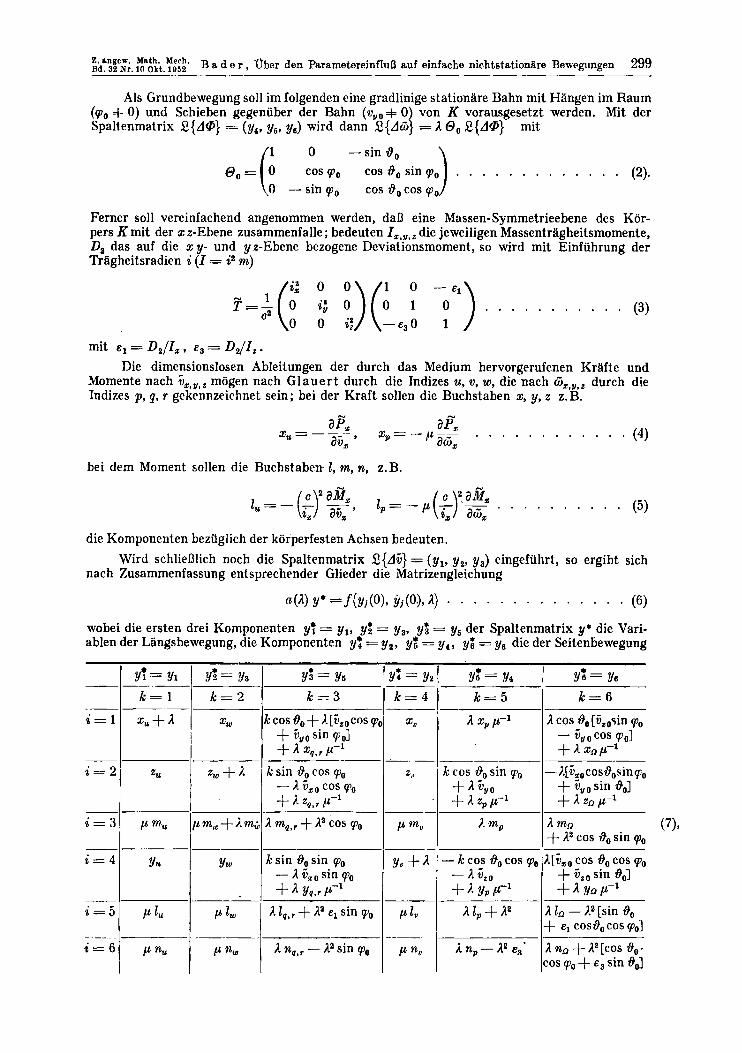
nach Zusammenfassung entsprechender Glieder die Matrizengleichung Wird schliel3lich noch die Spaltenmatrix 2{dV} = (yl, yZl ga) eingefuhrt, so ergibt sich
. . . . . . . . . . . . . n(1) y' =f(yj(0), &.(O$, A) * ( 6 )
wobei die ersten drei Komponenten yt = yl, y; = ys, y! = y5 der Spaltenmatrix y* die Vari- ablen der Langsbewegung, die Komponenten y: = y2, ys = y4, yg = y6 die der Seitenbewegung
k sin So cos yo - A 5,, cos yo + 1 zq9r II-'
A mq3, + A2 cos q0
z,,
p 'nu
1 Y:= Y1
k cos 8, sin p, + A % O + A ZP p-'
-1[~,,,cos8,sing;, + Gu0 sin So] + 1 2 0 p-'
i = 3 p m., 1 mP
- k cos 8 0 cos yo - A V z o + 1 YP P--l
1 1, + 1 2
1 mn (719 + A2 cos So sin yo
+ Gzo sin 6,] + 1 Yn II-' A la - A2 [sin 8, + E l cos8, cos yo]
AIGzo cos So cos yo i = 4
i = 5
YX- y3 I = y5 I Y: = Ye
yu
p l u
k = 2
XW
i = 6 p n u
Yw
P 1w
1 np - 1 2 e3' A no + A2[cos 6,- cos v, + e3 sin SJ

300 B B d e r , Vber den PammetereinfluB auf einfmhe nkhtBt&tion&re Bewegungen ‘ , $ f ~ ~ r . $ ~ ~ M ~ ~ ~ ~
sind. In (7) ist das Koeffizientenschema aik der Storbewegung wiedergegeben ; die in (7) benutzten Abkilrzungen sind definiert durch
XP Y P 5 Y P ZP ’Q ?/P ‘P
wobei Oi die zu (3) transponierte Matrix ist ; ferner stellt g ts/v,= 2 G/F e vi = k (Gewicht des starren Korpers = G) eine charakteristische ZustandsgroBe der Bewegung dar. Bei Einfiihrung des sog. Schiebewinkels fl(vuo = - sin flo)und des Anstromungswinkels a~(vzo/vz0 = tg u,) kann in (7) bei qo = 0
geschrieben werden ; bedeutet y o der Winkel der stationaren Bewegung mit der horizontalen Ebene, so gilt im Falle wuo = 0 der einfache Zusammenhang 6, - y o = a,,
&, cos 6, + &,sin 6, = cos Po cos(6, - a,) . . . . . . . . . (8)
In dem Koeffizienten a3, wurde der EinfluI3 der GroBe
beriicksichtigt, welche bei gewissen Untersuchungen nicht vernachlassigbar ist (B. Me lv i l I J ones , W. Bader).
Besitzt der Korper eine metazentrische Hohe, so daB bei einer Lagenanderung dq ein Rollmoment (aM,/aq) A q entsteht, so lautet der Koeffizient a,, = A, + I, A + p 1 q mit
Bei der Untersuchung von Steuerungsfragen treten in (6) zusatzlich die GroI3en a,, auf; diese haben bei den Kraftgleichungen (i = 1, 2,4) die Form
a,,= xt=----- aE bei den Momentengleichungen (i = 3, 5, 6) die Form
wobei dE einen beliebigen Ruderausschlag darstellt. In diesem Falle erweitert sich (6) urn die Momentengleichung (6a) um die Ruderachse. Die Annahme, daB das Moment MR, welches der Ruderwelle durch die Steuerung aufgezwungen wird, proportional der gewahlten Aufschaltungs- groBe y; ist, fuhrt, falls der geometrische Ruderwinkel gleich dem wirksamen Ruderwinkel ist, zu der Beziehung
Hierbei ist MR positiv gerechnet, wenn es in positivem Sinne um die Ruderachse dreht; IR be- deutet, das Massentragheitsmoment des Ruders an der Ruderachse, C die Intensitat der Auf- schaltung ; das Dampfungsglied aMR/aoa und das Ruckfuhrglied aMR/aE mussen als gegebene Grol3en vorausgesetzt werden, deren Berechnung in vielen Fallen anhand einfachster Annahmen erfolgen kann. Als Steuergleichung tritt also in diesem Falle zu (6) mit y: = y, noch die Be- ziehung
(2 + 2 6nA + Ok) * y: + K %* = 0 (6a)
hinzu, deren Konstanten in leicht ersichtlicher Weise gebildet worden sind. 111. Einer Anwendung von (7) auf ein bestimmtes technisches Problem standen ungewohn-
liche Schwierigkeiten entgegen, wenn die 2 Haupttragheitsachsen enthaltende z z-Ebene nicht fast immer gleichzeitig eine geometrische Symmetrieebene des starren Korpers ware. Dann entfallt bei der besonders wichtigen stationaren Bewegung o h n e H a n g e n und Sch ieben der EinfluQ des Schiebens (vJ, des Rollens (w,) und des Wendens (oz) auf den Widerstand, die Normalkraft und das Lgngsmoment :
x,,=z,=m,=O; x = z = m p = O ; xt = zr = m, = 0, . . . . (9). P P

~ d ~ ~ ~ ~ ; . ~ & . ~ ~ ~ ~ * B a d e r , h r den ParametereinfluB auf einfwhe nichtstetionare Bewegungen 30 1
Das gleiche gilt fur die Wirkung des Anstromungswinkels (vr) und des Kippens (oU) auf die Seitenkraft, das Roll- und Wendemoment :
y,= Z,=n,=O; y,=Z,=n,=O . . . . . . . . . (9a).
Unter diesen Annahmen zerfallt nach Ba i r s t o w die zu (6) gehorende Frequenz-Determinante la,
Mit
ist
welche in 1 vom 9. Grade ist, in das Produkt zweier dreireihigen Determinanten :. . . . . . . . . . . . . . . . \ a , k l = D 1 * D , . (10).
(11) Dl = i1.0 + a30 13 + a,, I s + al0 1 + a,, . . . . . . . . . .
as0 = m, + zw + xu + c1 m i
wobei c1 = cos a, - z,/p,
c3 = c1 xu + c , z, - ksin6,. c , = sin LZ, + x,/p
c4 = c1 x, + c, z, + kcos 8, gesetzt ist. Fur die 2. Determinante
D ~ = 1 ~ 0 ~ 8 ~ [ b ~ ~ 1 ~ + b ~ ~ 1 ~ + b ~ ~ 1 ~ + b ~ ~ 1 + b ~ J . . . . . . . . ' (12) ist
b40 = 1 - €1 €3
bso = 4 + nr + ~ u ( 1 - €1 €3) + €3
b,, = 4 nr - 1, np + yu(lp + nr + €3 1, + €1 np)
bl0 = Yu(Z, nr - I , np) + P 4 d4 - iu 12, d3
+ €1 np
- €3 4) - P nu(d1- €1 4) + P
boo = ,u k[cos 8,(ZU n, - I, n , ) - sin 8,(ZV np - I , nJ]
d, = cos a, + y, /p, wobei
d, = sin a, - y p / p a,= dlzp+a,z,-k(sin C O S ~ , )
d 4 = d, np + d, nr + k(cos 6, + €,sin 8,) ist.
Von diesen Koeffizienten, die erstmalig in vereinfachter Form von B r y a n , ReiBner und Ge h len aufgestellt wurden, sind bei der Potenzreihenentwicklung insbesondere diejenigen von Bedeutung, welche den hoheren Potenzen von 1 zugeordnet sind. Der Grund hierfur ist aus der Theorie der L a p 1 a c e-Transformation bekannt : aus dem Verhalten der Unterfunktion far 1 --+ 00 kann unter gewissen Voraussetzungen auf das Verhalten der Oberfunktion fur z --* 0 geschlossen werden.
Die durch (6) gegebenen Unterfunktionen yj haben die Form
Y: = gj(1Ylaikl (131, wobei die gi(1) ganze rationale Funktionen von 1 sind, welche aus [aikl dadurch gewonnen werden, daB die air durch die nachstehenden fi(l) ersetzt werden:
, . . (6b)

302 ~ ~ ! ~ ; , ~ ~ $ ~ t ~ $ ~
Somit sind die yj(A) regulare Funktionen, die mit wachsendem A gegen 0 streben. Nebenbei zeigt (6a) unmittelbar, daB bei einem ungesteuesten Korper der Bewegungszustand durch eine Storung ~ ~ ( 0 ) unbeeinflurJt bleibt : in diesem Fall wird
B a d e r , Ober den ParametereinfluI? auf einfade nichtstationiire Bewegungen -
yl(A) =$,(A) = * ' ' = y5(A) = =Y6(0)/Am
Unter Benutzung der Entwicklung:
1.- - - 1-4 - u30 A-5 + [ u : ~ --az0] A-6 - [a$, - 2 a20a30 + alo] A-' f . -. . . . . (14) Dl
ergibt gliedweise Zusammenfassung die Reihenentwicklung m -
y; = ,r c(v) A - V , Ilk 1 . . . . . . . . . . . . . V
welche fur hinreichend grorJe 111 konvergent ist ; obwohl dementsprechend ' der gesuchte Be- . . wegungsverlauf durch
zu j edem Zeitpunkt gegeben ist, wird man sich ausnahmslos auf kleine Werte von t beschranken mussen, da die Ermittlung der hoheren c(a') zu schwierig wird. Der EinfluI3 der verschiedenen Parameter auf die unmittelbar nach einer Slorung des stationaren Bewegungszustandes ein- setzende Bewegung kann somit nach (16) ohne Kenntnis der Eigenfrequenzen erfarJt werden. Begunstlgt wird diese Methode sehr oft durch den Umstand, dafl der ZeitmarJstab ts in technisch wichtigen Fallen griifler als die Zeiteinlieit ist.
Bei der Durchfuhtung dieser Rcchnung erweist sich mitunter das Auftreten bestimmter zalilenmal3ig grol3er Dampfungswerte (z. B. Zp) zunachst als storend. In diesem Falle empfiehlt es sich, bereits in der Entwicklung (15) eine Abspaltung des entsprechenden Dampfungsfaktors vorzunehmen. - Die Koeffizienten c@') setzen sich einerseits aus den Koeffizienten ai, bzw. bi, der Frequenzgleichungen und andererseits aus den Koeffizienlen der gl(l) zusammen. Die Be- rechnung der &') wird in der Regel vereinfacht, wenn nicht gleich zu Rechnungsbeginn: die durch (11 a) bzw. (12a) gegebenen Beziehungen eingefuhrt werden, da in vielen Fallen die Koeffizienten der gj(A) in einfacher Form mit a,, bzw. bi, zusammenhangen. Eine Beachtung dieser etwaigen Zusammenhange kann die Berechnung der c@') oft erheblich erleichtern.
IV. Fur die nachstehende Rechnung ist eine Bewegung mit so geringer Seitenbewegung ('uyo(0) angenommen, daI3 die Voraussetzungen (9), (9a) noch hinreichend genau erfullt seien ; jedoch soll die Geschwindigkeitsabhangigkeit des .Roll- und Wendemomentes berucksichtigt werden, da diese insbesondere in der Nahe der Schallgeschwindigkeit unter Umstanden von Bedeutung sein konnen. Fur die Frequenz-Detcrminante (10) ergibt sich der Ausdruck
D = D,. D, + Cv0 cos 8,. p (€, I , + nu) A7 + . . . . . . . . . . (loa), wobei D, bzw. D, die durch (11) bzw. (12) definierten Deierminanten der reinen Langs- bzw. Seitenbewegung ist; die in folgendem nicht benotigten Koeffizienten der Potenzen A8,. - , A', welche 6,, als Faktor enthalten, sind lineare Ausdrucke von der Form C, 1, + C , nu, wobei die Cl,2 sich aus den Stabilitatsgroflen der Langs- und Seitenbewegung in verwickelter Form zusammensetzen ; selbst eine rein zahlenmaoige Ermittlung der Frequenzen erscheint ohne Anwendung mathematischer Gerate hoffnungslos.
Als Beispiel der Erfassung des Einflufles einer Langsslorung auf die Seitenbewegung soll nachstehend der zeitliche Verlauf der Querneigung A v ( z ) kurz betrachtet werden, der infolge einer Geschwindigkeitsstorung Av, (0) eintritt ; hierbei ergibt sich folgendes Verhalten :
Mit Rucksicht auf (6b) wird die Funktion f in (6) durch die Spal tenmatr ix
A%(O) {1, 0, 0, 0, 0, 0) -- V O
dargestellt; wegen (9), (9a) kann die Funktion g ( A ) in (13) in 2 Faktoren zerlegt werden
g = -z (0)gl g, die nach (7) sic11 zu 0 0
% 4 * '66
berechnen; fur hinreichend grol3e A gilt somit (€, = E, = 0):

~ d * ~ ~ ~ ; ~ ~ ~ ~ t . ~ ~ ~ ~ B a d e r , uber den ParametereinfluD auf einbche nichtstetionare Bewegungen 308 -
Die Entwicklung nach (14) ergibt
Werden vorubergehend die Abkiirzungen
A = xu+ I , + n,tg 6, B = (n, + x,)'tg 6, - 1, C = (p m, - z , m;) sin a,
eingefuhrt, so ist nach (16) die infolge der Geschwindigkeitsstorung einsetzende Rollbewegung durch den Ausdruck
gegeben, wenn his zur Zeit t = 0 die Geschwindigkeit des starren Korpers um den Betrag dv,(O) gegenuber dem Wert v, des stationaren Bewegungszustandes abweicht.
In Ubereinstimmung mit der unmittelbaren Anschauung wird mithin bei horizontaler Bewegung - bei hinreichend grol3em w, kann der Langsneigungswinkel 6, des starren Korpers dem Bahnneigungswinkel yo gleichgesetzt werden - der Hangewinkel drp(t) zunachst starker durch das Geschwindigkeits-Rollmoment I , als durch das Geschwindigkeits-Wendemoment nu beeinflufit. Bei geneigter Flugbahn setzt entweder bei Gleitbewegung (6, < 0) ode r bei Steig- bewegung (8, > 0) die Rollbewegung dpj verstarkt ein, je nach dem ob I , und nu entgegenge- setztes ode r gleiches Vorzeichen besitzen. - Ferner ist der Reihenentwicklung unmittelbar zu entnehmen, dal3 im Unterschallbereich die Rolldampfung 1, und der Widerstand xu gleichsinnig auf das Rollen dampfend wirken. Im uberschallgebiet kann gegebenenfalls q negativ werden, so daB eine Entdampfung eintreten kann, da hier I , als klein angenommen werden muI3. Auch der Einflul3 des Wende-Rollmomentes I , auf die einsetzende Rollbewegung ist gut erkennbar : bei ublichem Vorzeichen (bei positiver Wendedrehung entsteht ein positives Rollmoment: I , < 0) wirkt im Gleiten (6, < 0) das Wenderollmoment entdampfend ; bei horizontaler Bewegung kann das Wendemoment nu zunachst nur iiber I , auf die Rollbewegung einwirken; beim Steigen (8, > 0) wird das Rollmoment in seiner dampfenden Wirkung durch die Wendedampfung nr und den Widerstand z, unterstutzt.
Ware hingegen zur Zeit t < 0 der Korper im stationaren Bewegungszustand gewesen und wurde fur die Zeit t 2 0 auf den Korperschwerpunkt eine konstante Bunere Kraft Po in Richtung der korperfesten z-Achse wirken, so ware in (6a) zu setzen:
Dem entsprechend hatte sich fur den Hangewinkel der Wert
ergeben. Im letzteren Falle setzt naturgemal3 die Rollgeschwindigkeit sanfter (quadratisch mit der Zeit ansteigend) ein, da die Geschwindigkeitsstorung wegen der Tragheit von K erst von 0 aus anwachsen mu13 ; im ubrigen bleiben die sonstigen Schluflfolgerungen erhalten.
V. Bei ungekoppelter Langs- oder Seitenbewegung sind die in (16) auftretenden Koeffi- zienten i. a. betrachtlich einfacher, so daI3 nach (6a) auch automatisch geregelte Vorgange gut dargestellt werden konnen, wie nachstehendes Beispiel der gesteuerten Langsbewegung zeigt. Zur Regelung moge ein Pendelkreisel,' der auf Lageanderungen anspricht, verwendet werden ; wird mit 8 = (0, q, 0) die Steuergleichung in der vereinfachten Form dq = K a d6 verwendet. wobei je nach Art des Ruders entweder die Kraft x,, oder das Moment vn,, vorzugsweise beeinflufit
304 B a d e r , h r den ParametareihfluD auf einfache nichtatetioniire Bewegungen z&~f~&.~~$!~~~;
wird, und wird eine Lagenstorung 46(0) als Anfangsstiirung vorausgesetzt, so ergibt sich fur den Verlauf der Langsneigung der Ausdruckl)
wenn die stationare Bewegung horizontal verlauft. Es ist beachtenswert, daB die Steuerung friiher als die statische Stabilitat in den Bewegungsverlauf eingreift. Ein Vergleich der einzelnen Zu- standsgroBen der Bewegung bei verschiedenen Steuerungen zeigt u. a,, da13 es grundsatzlich giinstig ist, wenn der Wert der unmittelbar gestorten ZustandsgroRe (im obigen Fall die GroBe 66(0)) erst nach gewisser &it durch die Steuerung beeinfluBt wird; denn in diesem Falle bleibt der Ausschlag dq(z) hinreichend lange erhalten, so daI3 die anderen Storungen der einzelnen Variablen, die anfanglich beim gesteuerten wie beim ungesteuerten starren Korper einsetzen, in ihren Amplituden verhaltnismaflig klein bleiben. In Obereinstimmung hiermit ergibt sich z. B.
wobei k die in (7) eingefuhrte GroBe darstellt. Bei geeigneter Wahl der Aufschaltungs-Intensitat K kann somit das Anwachsen der Geschwindigkeitsstorung bei ejner Langsneigungsstorung in gewilnschtem Sinn beeinfluat werden. Entsprechend kann ohne Schwierigkeiten der oft vor- liegende Fall einer momentanen Geschwindigkeitsstorung untersucht werden. Hier zeigt die Rechnung, daB die Lagesteuerung verhaltnismaBig spat in den zeitlichen Verlauf der Langs- neigung eingreift :
wobei ua0 nach (11) im wesentlichen das Dampfungsglied der sogenannten schnellen Dreh- schwingung ist. - Dieses Verhalten der Steuerung kann jedoch nicht als ein Mangel aufgefaBt werden: die durch den Pendelkreisel erfaote Grone d6(z) mu13 eine gewisse Zeit moglichst unbe- einflul3t bleiben, damit die Steuerung ihre Aufgabe erfullen kann. Der wirksamste Eingriff in den Bewegungszustand diirfte dann eintreten, wenn : 1) diejenige Zustandsgroae der Bewegung, auf deren Abweichung von einem vorgegebenen Soll-Wert die Steuerung anspricht, stark gedampft aperiodisch auf ihren Soll-Wert zuriickgefuhrt wird ; 2) die anderen, ursprunglich nicht ge- storten ZustandsgroRen zunachst kurzzeitig in gleicher Richtung aber bei kleinen Amplituden wie bei einem freien ungesteuerten Korper verlaufen ; anschlieflend sollen diese Variablen eben- falls stark gedampft aperiodisch ihrem stationaren Wert zustreben. - Infolge der Massentragheit des Ruders wird der Grad der Nennerdeterminanten D, bzw. D, in (10) um 2 Potenzen erhoht; in diesem Falle iibt der gesteuerte starre Korper gegeniiber einer Storung anfanglich langsamer eine Gegenwirkung aus als bei vernachlassigbarer Rudermasse.
einer Verzogerungszeit 1, auf einen Steuerbefehl antwortet : A t = O fur t < t ,
A t = C* A Y k ( t - t l ) fur 12 t l .
Mit Y k = 2{AYk}, nimmt in (6) die i-te Zeile die Form an:
(z, = tJts). Die zugeordnete Frequenzdeterminante lautet somit
1) Betreffa der StabilitatsgroOe m i , welche i. a. mit mh anniihernd ubereinetimmt, vgl. e. B. W. Bader, Die flugmechanische Stabilitatsbedingungen, Jb. 1939 d. deutschen Luftfahrtforschung I, 254-283.
2. angew. Math. Mech. . Kleine Mitteilungen ‘ 305
Hierbei ist im allgemeinen Fall Do die durch (10) bestimmte 6-reihige Determinante, kelche dem ungesteuerten Bewegungssystem zugeordnet ist, wahrend Dk [ai7] diejenige Determinante ist, welche aus laikl hervorgeht, wenn in der k-ten Spalte die Glieder aik durch ai, ersetzt werden. Die Auflosung von (6c) liefert
Bd. 82 Nr. 10 Okt. 1952
Hierbei geben die Indizes in den Determinanten D diejenigen Spalten an, welche durch die in den eckigen Klammern stehenden GroDen ersetzt werden sollen; in Dj,.Jfi; ai7] ist demgemiiB die j-te Spalte in (aik( durch die GroBenfi und die &te Spalte durch die GroDen ui7 zu ersetzen. Somit sind die D ganze rationale Funktionen niedrigeren Grades als Dq. Die L a p 1 a c e-Trans- formierten der abhiingigen Variablen nehmen nach (13a) fur beliebiges 7 die Form an
. (15a).
Die formale Riicktransformation von (15 a), bereitet keine Schwierigkeit : jeweils nach einem ganzen Vielfachen der &it z1 ist eine weitere Summe in (15a) zu beriicksichtigen. Da die Doppel- summe fiir hinreichend groDe Werte von /A1 konvergiert, stellen die Ausdriicke (16) die Losung der Aufgabe dar. Zuniichst gilt wie fruher fiir beliebiges i
0 S t < tl . . (16a).
Die Aufschaltungskonstante C tritt hierbei nicht auf, so daB wie gefordert die gestorte Ekwegung zunachst ungesteuert verlhuft. Nach Ablauf der Verzogerungszeit wird
zv-1 2-l { Y f (41 = + c p j (Y - 1) ,
Auch hier ist der Anwendbarkeit der so entstehenden Ausdriicke dadurch eine Grenze gesetzt, d d die Berechnung der Koeffizienten c t \ mit zunehmendem Y schwieriger wird. Fiir die Unter- suchung technisch ausgefiihrter Steuerungen spielt dieser Umstand jedoch keine so groBe Rolle, da die Nachhinkezeit t , durch entsprechende Bauweise der Steuerorgane klein gegeniiber der GroDe ts gehalten wird; daher kann im gewissen Umfang fiir Zeiten t < 1 der charakteristische EinfluD der Verzogerungszeit auf den Bewegungsverlauf erfaBt werden. - Die mathematische Behandlung bleibt natiirlich im wesentlichen unverandert, wenn anstelle der Zustandsgr6Be Yk deren zeitliche Ableitung Yk gewiihlt wird; das gleiche gilt fur die Behandlung einer Propor- tionalregelung mit Stellgeschwindigkeitszuordnung (A t ’= K 9 A Yk). Ehgegangen am 20. September 1951.
KLEINE MITTEILUNGEN Verhlndertr Torrlonrverwlilbung
, ,Aufgefrischt “ Bei Stllben mit prektisch vorkommenden Quer-
echnitten ist bei Torsionebeanspruchung der Zusam- menhang zwischen der Drillung 6, dem Moment H und der QuerschnittsverwOlbung bekannt. Es wird hier ein Weg gezeigt, wie mit dieeer Kenntnis der EixifluD der verhinderten Verwblbung zu unter- suchen iet.
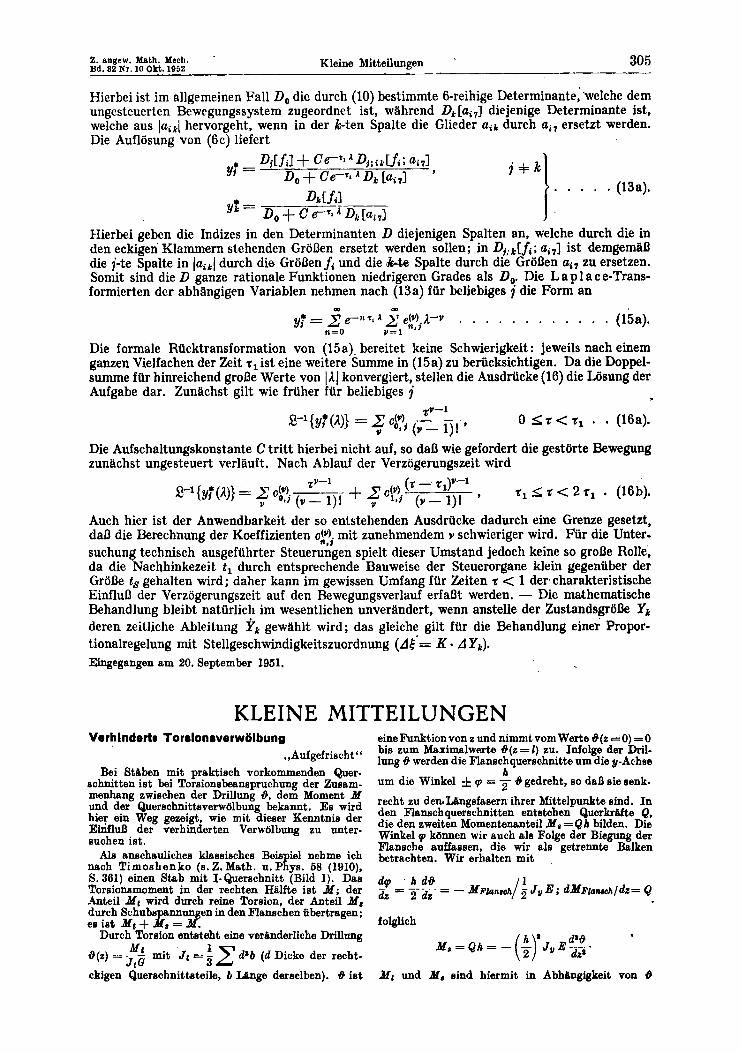
Als anschaulichee klaeaischee Beis iel nehme ich nach Timoehenko (8. 2. Math. u. P&s. 68 (IBIO), S. 361) einen Stab mit I- Querschnitt (Bild 1). Das Torsiommoment in der rechten Hiilfte iet H; der Anteil 111, wird durch reine Torsion, der Anteil Ha durch Schubs nntmgen in den Flanscben Ubertragen; es ist ~t + = H.
Durch Torsion entetaht eine veriinderliche Drillung
6(z) = - Mt mit Jt = 52 dsb (d Dicke der recht- Jt a
ckigen Querechnitteteile, b Mnge derselben). 8 ist
eineFunktionvonzundnimmtvomWerte 6(z=O)=O bis zum Maximalwerte 6 ( z = l ) zu. Infolge der Dril- lung 8 werden die Flanechquerschnitb um die y-Achse
um die Winkel f q = 2 8 gedreht, so daD eie aenk.
recht zu den-lilngsfasern ihrer Mittelpunkte sind. In den Flanschquerschnitten entstehen QuerkrUte Q, die den zweiten Momentenanteil Ma = Q h bilden. Die Winkel Q k6nnen wir auch als Folge der Biegung der Flaneche auffaesen, die wir als getrennte Balken betrachtes. Wir erhalten mit
h
folglich
HI und JZ8 Bind hiermit in Abhbgigkeit von 6





























