Embed Size (px)
Citation preview
Institute for Automation, Department of Computer Science, University of Technology
Uhrzeitführung
Satellitennavigationssysteme erfordern eine genaue Uhrzeitführung bei allen Systempartnern. Die Atomuhren sind ein häufiger Grund für den Ausfall eines Satelliten und daher in der Regel vierfach vorhanden, jedoch ist immer nur eine der Uhren aktiv.Gewählt: UTC-Zeit = koordinierte Weltzeit = Universal Time Coordinated.
Institute for Automation, Department of Computer Science, University of Technology
Universal Time Coordinated
UTC-ZeitUTC ist die Referenzzeit für Zeitangaben in der Luft- und Seefahrt, für den wissenschaftlichen Bereich, teilweise für internationale Projekte, die sich über mehrere Zeitzonen erstrecken wie zum Beispiel auf der Internationalen Raumstation ISS.
Institute for Automation, Department of Computer Science, University of Technology
Universal Time Coordinated
zahlreiche Nationen bemühen sich um eine nationale Uhrzeitrepräsentation.Die beteiligten Nationen übermitteln ihre nationalen Uhrzeitinformationen an ein gemeinsames Büro für die Generierung der Weltzeit, das „Bureau International des Poids et Mesures“(Internationales Büro für Maß und Gewicht BIPM) in Paris (Frankreich).
Institute for Automation, Department of Computer Science, University of Technology
Universal Time Coordinated
Die einzelnen nationalen Uhrzeitinformationen werden mit Gewichtungsfaktoren versehen, die ein Ausdruck für die nationalen Anstrengungen für die Erstellung der nationalen Uhrzeitpräsentationen sind. Aus diesem gewichteten Mittel wird eine synthetische Uhrzeitinformation gebildet, die zusätzlich mit Korrekturen in Form von eingefügten Schaltsekunden so versehen wird, dass die Zeitinformation in Übereinstimmung mit dem Umlauf der Erde um die Sonne gebracht wird.
Institute for Automation, Department of Computer Science, University of Technology
GPS-Systemzeit
05.01.1980 um 00.00 Uhr Start der GPS-Systemzeit. Die GPS-Systemzeit ist eine lineare Zeitskala, die bei Inbetriebnahme des Satellitensystems im Jahre 1980 mit der internationalen Zeitskala UTC gleichgesetzt wurde.Seit dieser Zeit wurden jedoch in der UTC-Zeit mehrfach Schaltsekunden eingefügt, um die UTC-Zeit der Änderung der Erddrehung anzupassen.
Institute for Automation, Department of Computer Science, University of Technology
GPS-Systemzeit
Aus diesem Grund unterscheidet sich heute die GPS-Systemzeit um eine ganzzahligeAnzahl von Sekunden von der UTC-Zeit.Die Anzahl der Differenzsekunden ist jedoch im Datenstrom der Satelliten enthalten, so dass der Empfänger intern synchron zur internationalen Zeitskala UTC laufen kann.
Institute for Automation, Department of Computer Science, University of Technology
Clock Generation
Temperaturstabilisierte QuarzoszillatorenDie Resonanzfrequenz eines Quarzes ist stark temperaturabhängig. Der Quarz und die gesamte Schaltung befindet sich in einem Quarzofen.Heizungsregelkreis wird mit einem Thermostaten bei konstanter Temperatur betrieben (Zweipunktregler).
Institute for Automation, Department of Computer Science, University of Technology
Clock Generation
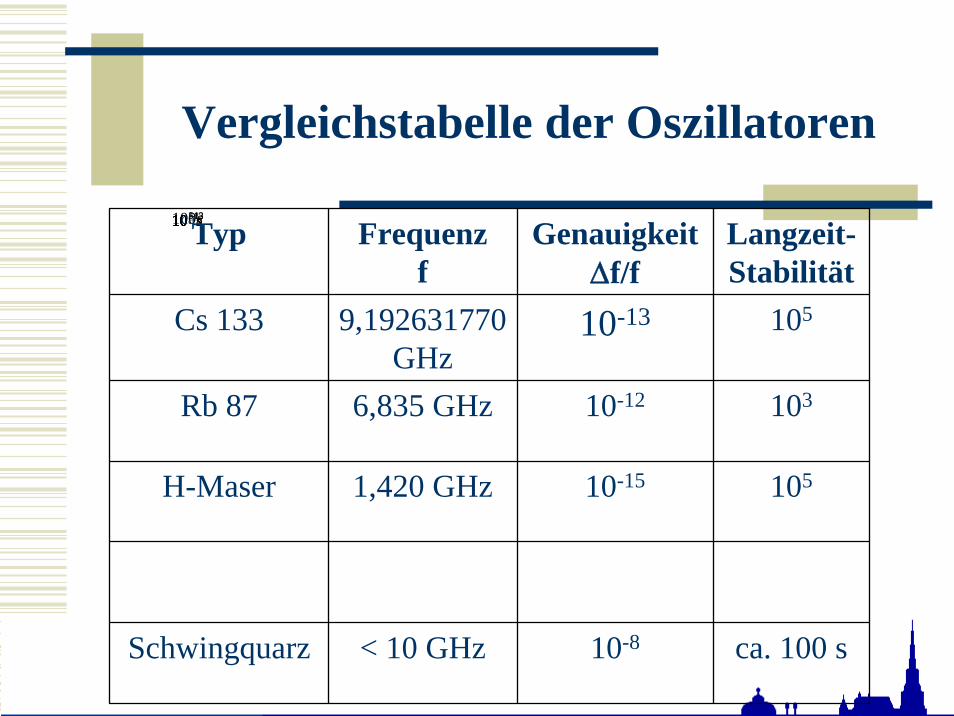
AtomuhrenCäsium, Rubidium und Wasserstoff sind die gängigsten Atome, mit denen Atomuhren betrieben werden. Die folgende Tabelle stellt ihre Eigenschaften gegenüber. Zum Vergleich sind die Werte für eine temperaturkompensierte Quarzuhr mit aufgenommen.
Institute for Automation, Department of Computer Science, University of Technology
Vergleichstabelle der Oszillatoren
1310 − s510 1210 −s310 1510 − s510 810 − s100ca. Typ Frequenzf
GenauigkeitΔf/f
Langzeit-Stabilität
Cs 133 9,192631770 GHz
10-13 105
Rb 87 6,835 GHz 10-12 103
H-Maser 1,420 GHz 10-15 105
Schwingquarz < 10 GHz 10-8 ca. 100 s
Institute for Automation, Department of Computer Science, University of Technology
Atomuhren
Cäsium-Atomuhren haben eine relative Frequenzabweichung von
das entspricht einer Abweichung von einer Sekunde in ca. 300.000 Jahren.
13f 10f
−Δ≤
Institute for Automation, Department of Computer Science, University of Technology
Atomuhren
Beim GPS-Navigationssystem wurden Atomuhren redundant vorgesehen: Im Fall eines Ausfalls der Cäsium-Atomuhr sind an Bord noch zwei Rubidium-Atomuhren, auf die im Störungsfall umgeschaltet werden kann. Rb-Uhren sind sehr kompakt und wiegen nur wenige Kilogramm.
Institute for Automation, Department of Computer Science, University of Technology
Atomuhren
Der Wasserstoff-Maser scheint die besten Eigenschaften zu haben: Die Gesamtmasse beträgt aber „nur“ ca. 50 kg, der elektrische Leistungsbedarf liegt bei etwa 50 W und das Volumen beträgt etwas weniger als 100 l.
Institute for Automation, Department of Computer Science, University of Technology
Atomuhren
Die Feinstruktur-Strahlungsfrequenz des 133Cäsiumsatoms definiert seit 1967 im internationalen Einheitensystem die Zeitdauer einer Sekunde:Eine Sekunde ist das 9.192.631.770-fache der Periodendauer der dem Übergang zwischen den beiden Hyperfeinstrukturniveaus des Grundzustandes von Atomen des Nuklids 133Cs entsprechenden Strahlung.
Institute for Automation, Department of Computer Science, University of Technology
Atomuhren
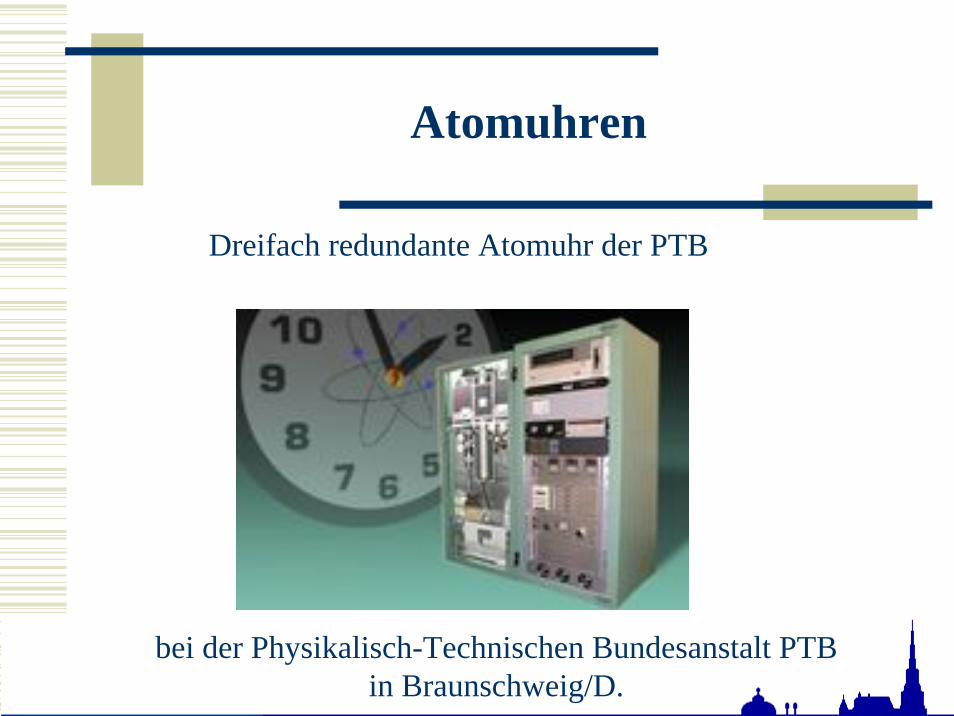
Dreifach redundante Atomuhr der PTB
bei der Physikalisch-Technischen Bundesanstalt PTB in Braunschweig/D.
Institute for Automation, Department of Computer Science, University of Technology
Atomuhren
In Atomuhren nutzt man die Energieunterschiede zwischen den Zuständen der Hyperfeinstruktur. Dabei werden durch Energiezufuhr Elektronen auf eine höhere Umlaufbahn um den Atomkern angehoben. Dort befinden sie sich in einem metastabilen Zustand und kehren stochastisch auf die ursprüngliche Umlaufbahn zurück.Dabei geben sie Energie in Form elektromagnetischer Strahlung ab, die ΔW = h•ν beträgt. Darin sind h das Plancksche Wirkungsquantum und ν die Frequenz.
Institute for Automation, Department of Computer Science, University of Technology
Atomuhren
Eine Entwicklung neben den hochpräzisen Uhren verfolgt den Bau preiswerter, kleiner, leichter und energiesparender Uhren, z. B. für den Einsatz in Satelliten, Raketen oder Drohnen. GPS, GLONASS oder künftig GALILEO benutzen Atomuhren in ihren Satelliten, um durch ihre hochgenaue Zeit die Positioniergenauigkeit zu erhöhen. Im Jahr 2003 ist es gelungen, eine Rubidiumatomuhr zu bauen, die nur ein Volumen von 40 cm3 einnimmt und einen Leistungsbedarf von einem Watt hat. Dabei erreicht sie eine Gangunsicherheit von ca. 3·10-12 .
Institute for Automation, Department of Computer Science, University of Technology
Uhrzeitführung im GPS-Empfänger
Im herkömmlichen Hand-Held-Navigations-empfänger befindet sich keine Atomuhr. Dennoch benötigt der Navigationsempfänger die Information über die UTC-Zeit. Dies wird dadurch erreicht, dass von einem oder mehreren Satelliten die Uhrzeit zunächst übernommen und dann mit Hilfe der Bahndaten und der dabei aufgetretenen Laufzeit korrigiert wird.Das Gleichungssystem wird gelöst !
Institute for Automation, Department of Computer Science, University of Technology
Anforderungen an satellitengestützte Navigationssysteme
rechtliche Verankerung der Positionsbestimmung für den NutzerIntegrität (d.h.: die Glaubwürdigkeit) für die PositionsbestimmungVerfügbarkeit des Dienstes zur Navigation weltweitStabilität des Dienstes gegenüber UnterbrechungenGenauigkeit der OrtungUnempfindlichkeit des Navigationssystems gegenüber StörungenNutzungskosten
Institute for Automation, Department of Computer Science, University of Technology
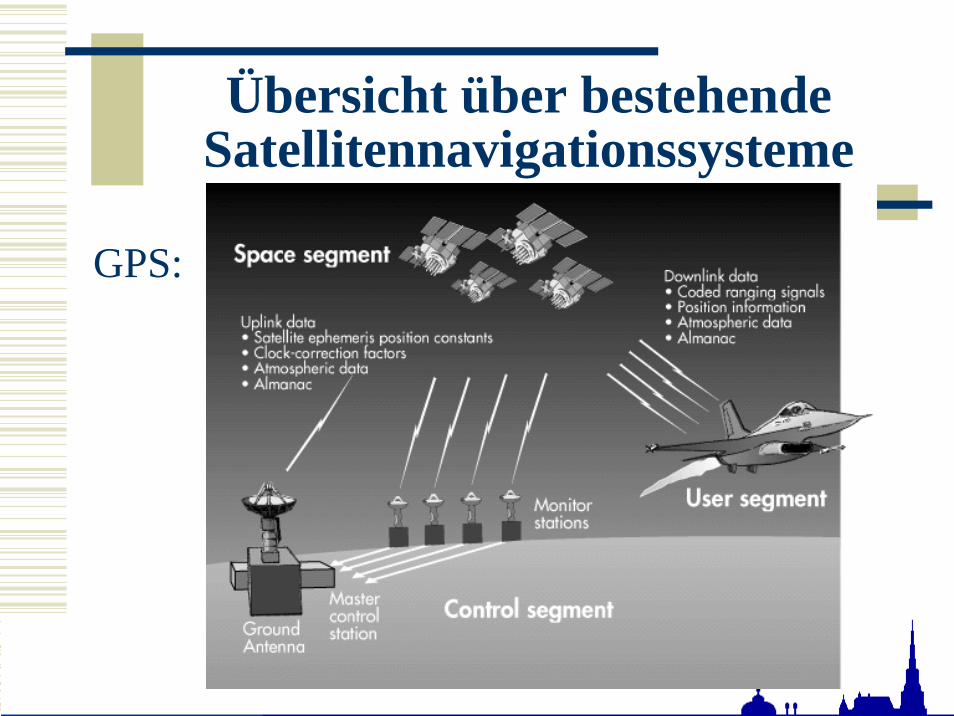
Übersicht über bestehende Satellitennavigationssysteme
GPS:
Institute for Automation, Department of Computer Science, University of Technology
Global Positioning System GPS
Komponenten des GPS-Systems: Satellit, Kontrollstation, Ladestation und Nutzer aus: www.aero.org/education/primers/gps/elements.htmlWeltraumsegment (Satelliten) Kontrollsegment (Kontrollstationen) Benutzersegment (GPS-Empfänger)
Institute for Automation, Department of Computer Science, University of Technology
Global Positioning System GPS
Weltraumsegment:Block I Satellit
Das Weltraumsegment besteht aus mindestens 24 Satelliten. Der erste dieser Satelliten wurde bereits 1978 in seine Umlaufbahn gebracht.
Institute for Automation, Department of Computer Science, University of Technology
Global Positioning System GPS
- Inzwischen gibt es fünf verschiedene Typen von GPS-Satelliten ( Block I, Block II, Block IIA, Block IIR und Block IIF ), die im Laufe der Jahre ständig weiterentwickelt wurden.- Zwischen 1978 und 1985 wurden 11 Block I-Satelliten mit jeweils einer Masse von 845kg gestartet, von denen heute jedoch kein einziger mehr in Betrieb ist. - Block II-Satelliten waren für eine Lebensdauer von 4,5 Jahren konzipiert, überlebten jedoch ihr geplantes Alter um weitere fünf Jahre. Einer dieser Satelliten war 13 Jahre lang in Betrieb.
Institute for Automation, Department of Computer Science, University of Technology
Global Positioning System GPS
Block II Satellit
GPS-Block IIA Satellit ( Quelle: NASA )
Institute for Automation, Department of Computer Science, University of Technology
Global Positioning System GPS
Block IIA-Satelliten:Der erste dieser Satelliten wurde 1989 von Cape Canaveral aus gestartet. Diese Satelliten haben eine "Spannweite" von ca. 5,1 m. Die Block II Satelliten sind für eine Betriebsdauer von 7,5 Jahren ausgelegt.Insgesamt wurden 9 Block II Satelliten und 18 Block IIA Satelliten bis September 1996 gestartet. Im Jahr 1990 wurde der erste Block IIA-Satellit ( A steht für "advanced" ) in seine Umlaufbahn gebracht.
Institute for Automation, Department of Computer Science, University of Technology
Technische Daten des Block IIA-Satelliten
Masse der Block II Satelliten: 1.500 kg Stromversorgung: Solarpanels mit 400 W Leistung. Nickel-Cadmium-Akkus als Energiespeicher im Erdschatten.Triebwerke: Hydrazin N2H4 ist giftig, hochtoxisch für Wasserorganismen.
Wegen seiner hochreaktiven Eigenschaften verwendet man Hydrazin vor allem als Raketentreibstoff in Korrekturtriebwerken, wo es katalytisch zersetzt wird. Hydrazin wird in der F-16 als Brennstoff für ein Not-Energieaggregat mitgeführt.
Institute for Automation, Department of Computer Science, University of Technology
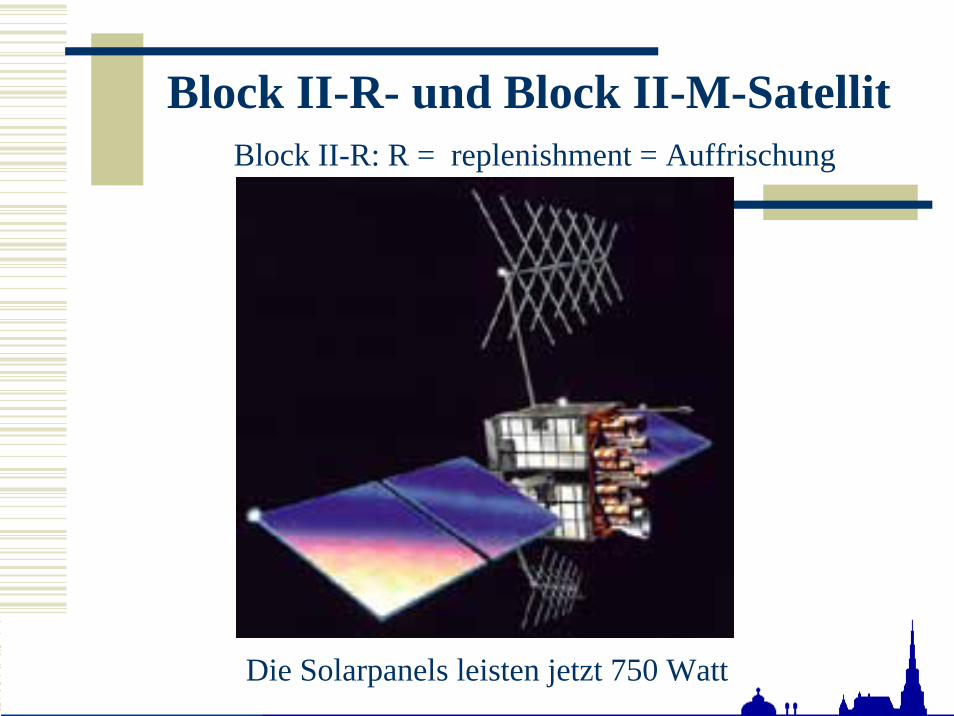
Block II-R- und Block II-M-SatellitBlock II-R: R = replenishment = Auffrischung
Die Solarpanels leisten jetzt 750 Watt
Institute for Automation, Department of Computer Science, University of Technology
Block II-R- und Block II-M-Satellit
Die Block II-Satelliten besitzen jeweils zwei Rubidium und zwei Cäsium-Atomuhren mit einer relativen Fequenzabweichung von .Aus der Grundfrequenz der Atomuhren (10,23 MHz) werden alle anderen Frequenzen abgeleitet. Die Satelliten des Blocks IIR haben drei Rubidium-Atomuhren an Bord.
1310ff
−Δ≤
Institute for Automation, Department of Computer Science, University of Technology
Schweizer Atomuhr
Institute for Automation, Department of Computer Science, University of Technology
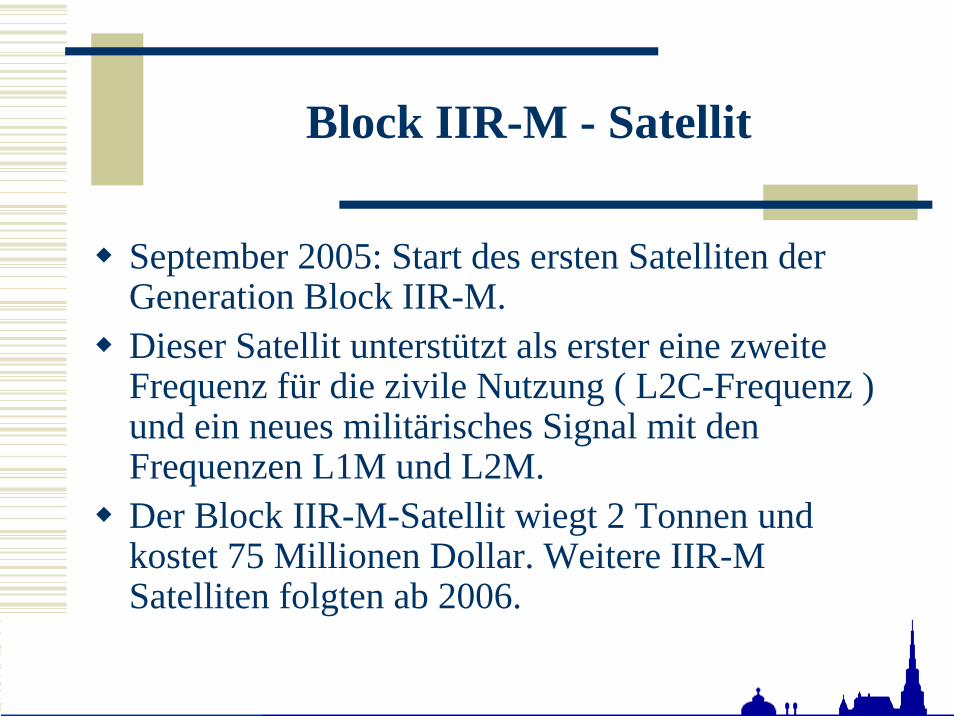
Block IIR-M - Satellit
September 2005: Start des ersten Satelliten der Generation Block IIR-M. Dieser Satellit unterstützt als erster eine zweite Frequenz für die zivile Nutzung ( L2C-Frequenz ) und ein neues militärisches Signal mit den Frequenzen L1M und L2M. Der Block IIR-M-Satellit wiegt 2 Tonnen und kostet 75 Millionen Dollar. Weitere IIR-M Satelliten folgten ab 2006.

Institute for Automation, Department of Computer Science, University of Technology
Bodensegment:(nach dem Master-Slave-Prinzip)
Position der Monitorstationen und der Master Control Station(Weltkarte:NASA; http://visibleearth.nasa.gov/)
Institute for Automation, Department of Computer Science, University of Technology
Master Control Station
Institute for Automation, Department of Computer Science, University of Technology
Monitor Stations
Betreibergesellschaft: NGA (National Geospatial Intelligence Agency)
Institute for Automation, Department of Computer Science, University of Technology
Nutzersegment
Institute for Automation, Department of Computer Science, University of Technology
Garmin Oregon 300
Institute for Automation, Department of Computer Science, University of Technology
Garmin Oregon 300
Automatische Routenführung (Abbiegehinweise auf Straßen)Elektronischer Kompass: ja Barometrischer Höhenmesser: ja Jagd- und Angelkalender: ja Sonnen- und Mondkalender: ja Gezeitentabellen: ja Flächenberechnung: ja Benutzerdefinierte POIs (es können weitere POIshinzugefügt werden)Übertragung von Gerät zu Gerät (Daten werden drahtlos mit ähnlichen Geräten ausgetauscht)
Institute for Automation, Department of Computer Science, University of Technology
Entwicklungs- und Betriebskostendes GPS
Die Entwicklungs- und Installationskosten des GPS-Systems beliefen sich auf 12 Milliarden US$ für Entwicklung und Inbetriebnahme.Die jährlichen Folgekosten durch Wartung, Instandsetzung und Inbetriebnahme von Ersatz-Satelliten betragen etwa 1 Milliarde US$. Dabei ging man von einer mittleren Lebensdauer (engl.: life cycle) von 7,5 Jahren aus.
Institute for Automation, Department of Computer Science, University of Technology
GLONASS
GLONASS = GLObalnaya NAvigatsioannaya Sputnikovaya Sistema. Die russische Parallelentwicklung zu GPS. Für eine kommerzielle Nutzung ist es allerdings bislang kaum zu gebrauchen, weil es ähnlich wie GPS vom Militär kontrolliert wird und aktuell zu wenige operable Satelliten hat.
Institute for Automation, Department of Computer Science, University of Technology
GLONASS(Technische Daten)
24 Satelliten in 3 Bahnebenen mit je 8 Satelliten, von einander um 45 Grad getrenntBahninklination 64,8 GradOrbithöhe: 19.100 kmUmlaufzeit: 11 h 16 minDurchschnittliche Satelliten-Lebensdauer: 3 JahreStellitenstartmasse ( bei GLONASS-M-Typ-Satelliten ): 1,48 tGesamtlänge der Solarpanel: 7,23 mGesamtfläche der Solarpanel: 17,5 m2Elektrische Leistung der Solarpanel: 1,6 kW
Institute for Automation, Department of Computer Science, University of Technology
GLONASS(Technische Daten)
GLONASS-Satelliten verfügen über Laser-Reflektoren, welche die Bahnvermessung mit Laser-Technik erlauben. Die Bahnvermessung wird sowohl in Russland als auch durch das DLR in Neustrehlitz durchgeführt.Das GLONASS-System bietet durch seine höhere Inklination für höhere Breitengrade eine bessere Satelliten-Abdeckung als GPS.

Institute for Automation, Department of Computer Science, University of Technology
GALILEO
Das Raumsegment von GALILEO soll insgesamt 30 MEO-Satelliten(Mean Earth Orbiting) Satelliten umfassen, die in einer so genannten Walker-Konfiguration (27 + 3 Ersatzsatelliten = Spares) auf elliptischen Bahnen in drei Bahnebenen verteilt werden.
Institute for Automation, Department of Computer Science, University of Technology
GALILEO(Technische Daten)
Bahnhöhe: 23.616 km Inklination: 56o.Masse des Satelliten: 625 kgStromversorgung: 1.500 WAbmessungen: 2.7 x 1.2 x 1.1 m3
Kategorie: MinisatellitDer Satellit besitzt sämtliche Standardsysteme zur Bahn-und Lagekontrolle, Thermalkontrolle, usw. Laser-Reflektor ( im Gegensatz zu GPS ), um die Bahnbestimmung auch mit Laserentfernungsmessungen zu stützten.
Institute for Automation, Department of Computer Science, University of Technology
GALILEO(Komponenten)
Transponder, bei dem modernste Digital- und Halbleitertechnik eingesetzt wird. Atomuhren: 2 Rubidium-Atomuhren mit einer Frequenzdrift von 5·10-13 über 100 s ( Kurzzeitstabilität ) und zwei Wasserstoffmaser mit einer Frequenzdrift von 5·10-14 über 10.000 s ( Langzeitstabilität )Signalgenerator ( Navigation Signal Generation Unit ) mit Rechnereinheit, Frequenzgenerator ( FPGU ), Endverstärker ( Solid State Power Amplifier ), L-Band-Antenne.
Institute for Automation, Department of Computer Science, University of Technology
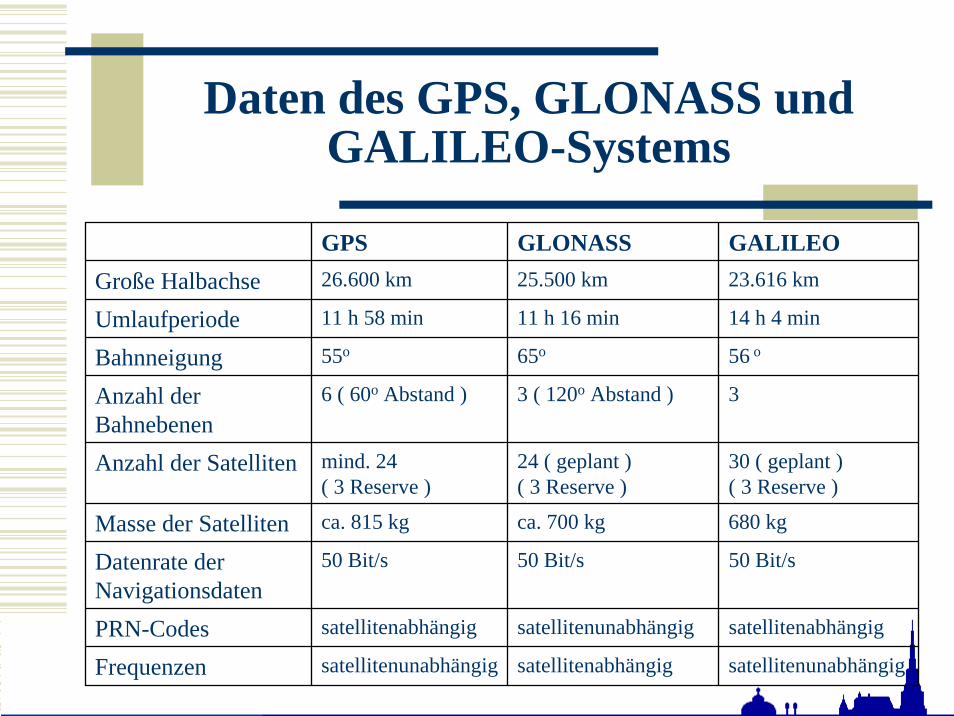
Daten des GPS, GLONASS und GALILEO-Systems
GPS GLONASS GALILEOGroße Halbachse 26.600 km 25.500 km 23.616 km
Umlaufperiode 11 h 58 min 11 h 16 min 14 h 4 min
Bahnneigung 55o 65o 56 o
Anzahl derBahnebenen
6 ( 60o Abstand ) 3 ( 120o Abstand ) 3
Anzahl der Satelliten mind. 24 ( 3 Reserve )
24 ( geplant )( 3 Reserve )
30 ( geplant )( 3 Reserve )
Masse der Satelliten ca. 815 kg ca. 700 kg 680 kg
Datenrate derNavigationsdaten
50 Bit/s 50 Bit/s 50 Bit/s
PRN-Codes satellitenabhängig satellitenunabhängig satellitenabhängig
Frequenzen satellitenunabhängig satellitenabhängig satellitenunabhängig
![Heute Zahnersatz morgen krank.ppt [Kompatibilitätsmodus]€¦ · Block 1 Herbst 2017 Block 2 Herbst 2017 Block 3 Herbst 2017 Block 4 Herbst 2017 Stuttgart Block 1 am 13./14. Januar](https://img.pdfslide.org/doc/110x75/605b58c7c61acf3c9d0ae9ae/heute-zahnersatz-morgen-krankppt-kompatibilittsmodus-block-1-herbst-2017-block.jpg)





![SOLTIS Kollektion 99 bei TKM Klaus Madzar Wien · 169/179 daNi 5 cm 169/179 daNi 5 cm EN ISO 1421 Weiterreißkraft [Kette/Schuß] 11/13 daN 11/13 daN DIN 53.363 Fungizide Behandlung](https://img.pdfslide.org/doc/110x75/5e78089dbace3f3e71627d5c/soltis-kollektion-99-bei-tkm-klaus-madzar-wien-169179-dani-5-cm-169179-dani-5.jpg)













![Musterstatik Dachscheibe 3-seitig gelagert Typ 1 seitig gelagerte Scheibe Typ 1.pdf · Berechnungsgrundlagen: [TD Block Q /Block Q3] LIGNO Block Q / Block Q3 Technische Daten, Ausgabe](https://img.pdfslide.org/doc/110x75/5e17cbb2c4b33f196b629457/musterstatik-dachscheibe-3-seitig-gelagert-typ-1-seitig-gelagerte-scheibe-typ-1pdf.jpg)








