Embed Size (px)
Citation preview
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 1
Visualisierung
Volumenvisualisierung
Prof. Dr. Detlef Krömker
29.01.2010 2
Übersicht
Volumendaten: Grundlagen – Begriffsbestimmung
Visualisierungspipeline für Volumendaten
Methoden der Volumenvisualisierung
� Dekompositionsmethoden
� Extraktion von Flächen
� Direkte Darstellung als semitransparente Elemente
29.01.2010 3
Grundlagen
Visualisierung von Volumendaten� Kurzbezeichnung: Volumenvisualisierung
� Ausgangspunkt: Merkmale in einem 3-dim. Bezugssystem mit skalaren Daten
Vergleichsweise häufiger DatenfallBeispiele:
� Computertomographie (CT)� Magnetresonanztomographie
(NMR, MRT, MRI)� 3D-Ultraschall� Laserraster- bzw.
Elektronenraster-Mikroskope� Simulationen� Berechnungen, z.B. Finite
Elemente (FE)
Beispiel:MRI-Aufnahme
Beispiel:CT-Aufnahme
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 4
Begriffsbestimmung Volumendaten
Begriff Volumendaten in der Literatur nicht einheitlich benutzt; doch oft:
� Ein skalarer Wert pro Beobachtungspunkt in einem 3-dimensionalen räumlichen Bezugssystem (oft mit lokalen Wirkungskreis)
� Regelmäßiges 3D-Gitter: Funktion f auf dem Gebiet
betrachtet an (nx+1) * (ny+1) * (nz+1) Gitterpunkten
� Partitionierung mit
� Volumendaten: Daten der Form
},...,0;,...,0;,...,0),,(,,,{( zyxkjikji nknjnizyxfzyx ===
]},[];,[];,[|),,({ maxminmaxminmaxmin zzzyyyxxxzyxXG ∈∈∈==
z
z
i
y
y
i
x
x
i
nin
zzdzdzizz
nin
yydydiyy
nin
xxdxdxixx
,...,0 ;mit *
,...,0 ;mit y *
,...,0 ;mit *
minmaxmin
minmaxmin
minmaxmin
=−
=+=
=−
=+=
=−
=+=
29.01.2010 5
Repräsentation von Volumendaten
Volumendaten i.A. basierend auf regelmäßigen Gittern
� Koordinaten der Gitterpunkte meist implizit (als Index) und nicht explizit gespeichert
� Speicherung in dreidimensionalen Arrays
Ausgangsdaten Datengitter Gitter im Raum
29.01.2010 6
Begriffsbestimmung Voxel
Voxel, Volumenelement� Volumenwert einer Gitterzelle
Häufige Unterscheidung � f(x,y,z) kontinuierlich� f(x,y,z) stückweise konstant
Oft besser als Abtastwert gemäß der Abtasttheorie betrachten!
Beobachtungspunkte können sein:� Zentrum einer Zelle:
1 Datenpunkt pro Zelle
� Eckpunkt einer Zelle: 8 Datenpunkte pro Zelle
� entspricht nur Verschiebung um ½ Voxelbreite in x, y, z
Auswertung im Zentrum des Voxels
Auswertung an Eckpunkten des Voxels
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 7
Beispiel: Volumendaten
Visible Human Project
� MRI- und CT-Daten eines Mannes und einer Frau in hoher Auflösung
� 15 GB (Visual Human Male) bzw. 40 GB (Visual Human Female)
http://www.nlm.nih.gov/research/visible/visible_human.html
29.01.2010 8
Beobachtungspunkt Eckpunkt der Zelle
Bestimmung der Werteverteilung innerhalb Zelle � Meist einfach durch trilineare Interpolation � Selten durch Interpolation höherer Ordnung
Trilineare Interpolation� WI Wert am Eckpunkt I = A, …, H mit
� A = (0,0,0), …. H = (1,1,1)
C
G H
D
E F
A B
(0,1,0)
(0,1,1) (1,1,1)
(1,1,0)
(0,0,1) (1,0,1)
(0,0,0) (1,0,0)
P
Wp =WA (1− xp)(1− yp )(1− zp)+WE(1− x p)(1− yp)(zp)+
WB (xp)(1− yp)(1− zp)+WF(xp)(1− yp )(zp )+
WC (1− xp)(yp)(1− zp)+WG(1− xp)(yp )(zp )+
WD(xp)(yp)(1− zp )+WH (xp)(yp)(zp )
Wenn A und H auf beliebigen Koordinaten (xa,ya,za ) liegen,
wird xp durch xp − xaxh − xa
ersetzt, yp,zp entsprechend.
29.01.2010 9
Gradientenberechnung
Für diverse Aufgaben (z.B. Beleuchtungsrechnung) wird der Gradientder skalaren Funktion f(x,y,z) benötigt:
Eigenschaften
� Gradienten stehen senkrecht auf Isoflächen: f(x,y,z) = const.
� I.d.R abgeschätzt durch Zentraldifferenzen:
Richtung-z y-, in x-,ktoren Einheitsve die sind ,, KJImit
Kz
fJ
y
fI
x
ffgrad
rrr
rrr
∂∂
∂∂
∂∂
++=
z
z
y
y
x
x
s
zyxfzyxfG
s
zyxfzyxfG
s
zyxfzyxfG
2
)1,,()1,,(
;2
),1,(),1,(
;2
),,1(),,1(
−−+=
−−+=
−−+=
Gx, Gy, Gz Komponenten des Gradienten,sx, sy, szSchrittweiten des Gitters
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 10
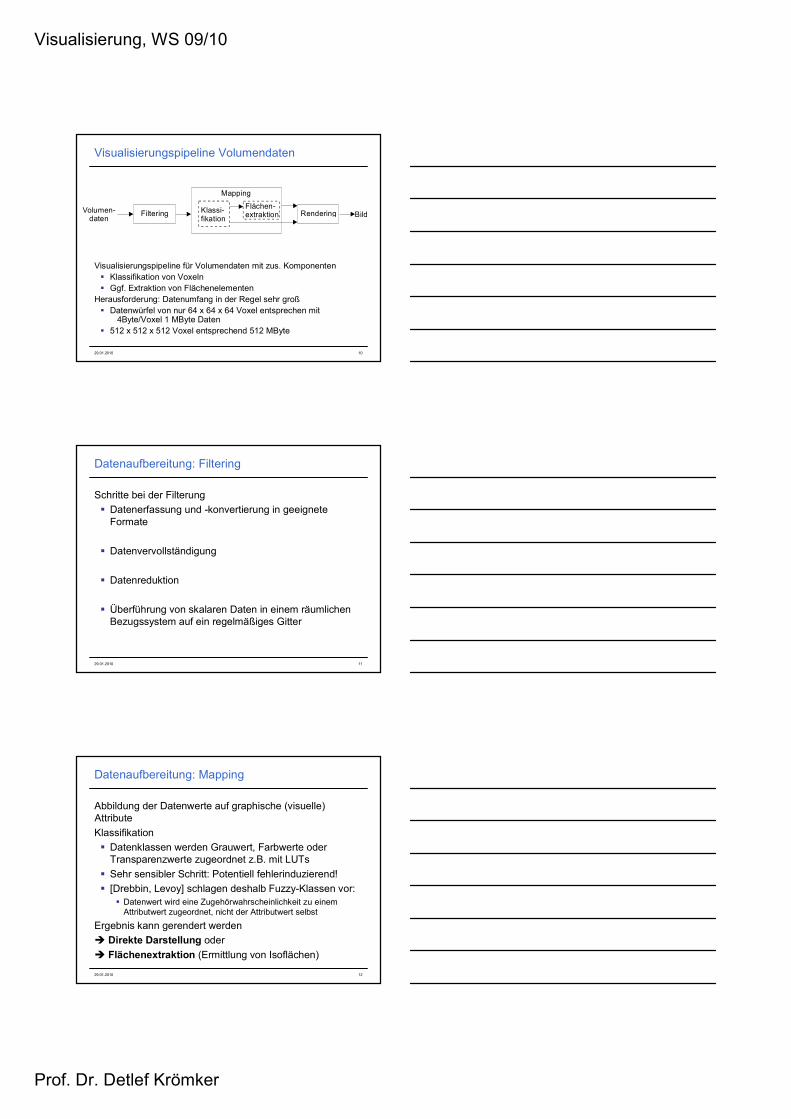
Visualisierungspipeline Volumendaten
Filtering Rendering
Mapping
Klassi-fikation
Flächen-extraktion
Volumen-daten
Bild
Visualisierungspipeline für Volumendaten mit zus. Komponenten� Klassifikation von Voxeln� Ggf. Extraktion von Flächenelementen
Herausforderung: Datenumfang in der Regel sehr groß� Datenwürfel von nur 64 x 64 x 64 Voxel entsprechen mit
4Byte/Voxel 1 MByte Daten� 512 x 512 x 512 Voxel entsprechend 512 MByte
29.01.2010 11
Datenaufbereitung: Filtering
Schritte bei der Filterung
� Datenerfassung und -konvertierung in geeignete Formate
� Datenvervollständigung
� Datenreduktion
� Überführung von skalaren Daten in einem räumlichen Bezugssystem auf ein regelmäßiges Gitter
29.01.2010 12
Datenaufbereitung: Mapping
Abbildung der Datenwerte auf graphische (visuelle) Attribute
Klassifikation
� Datenklassen werden Grauwert, Farbwerte oder Transparenzwerte zugeordnet z.B. mit LUTs
� Sehr sensibler Schritt: Potentiell fehlerinduzierend!
� [Drebbin, Levoy] schlagen deshalb Fuzzy-Klassen vor:� Datenwert wird eine Zugehörwahrscheinlichkeit zu einem Attributwert zugeordnet, nicht der Attributwert selbst
Ergebnis kann gerendert werden
� Direkte Darstellung oder
� Flächenextraktion (Ermittlung von Isoflächen)
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 13
Strategien zur Volumenvisualisierung
Direkte Darstellung
� Dekomposition der Datenmenge in Punkte, Volumenelemente oder Schichten und Darstellung dieser Elemente
� Darstellung als semitransparente Objekte („Wolken“)
Flächenextraktion
� i.d.R Bestimmung von Isoflächen und Darstellung dieser Flächen
29.01.2010 14
Dekompositionsmethoden
� Einfachste Variante: Darstellung der Gitterpunkte als farbige, ggf. transparente Pixel
� Pro: Einfach, schnell
� Contra: Durch die Winzigkeit der Primitive ist die Interpretation schwierig und eingeschränkt
� Beispiel: Quadermethode
29.01.2010 15
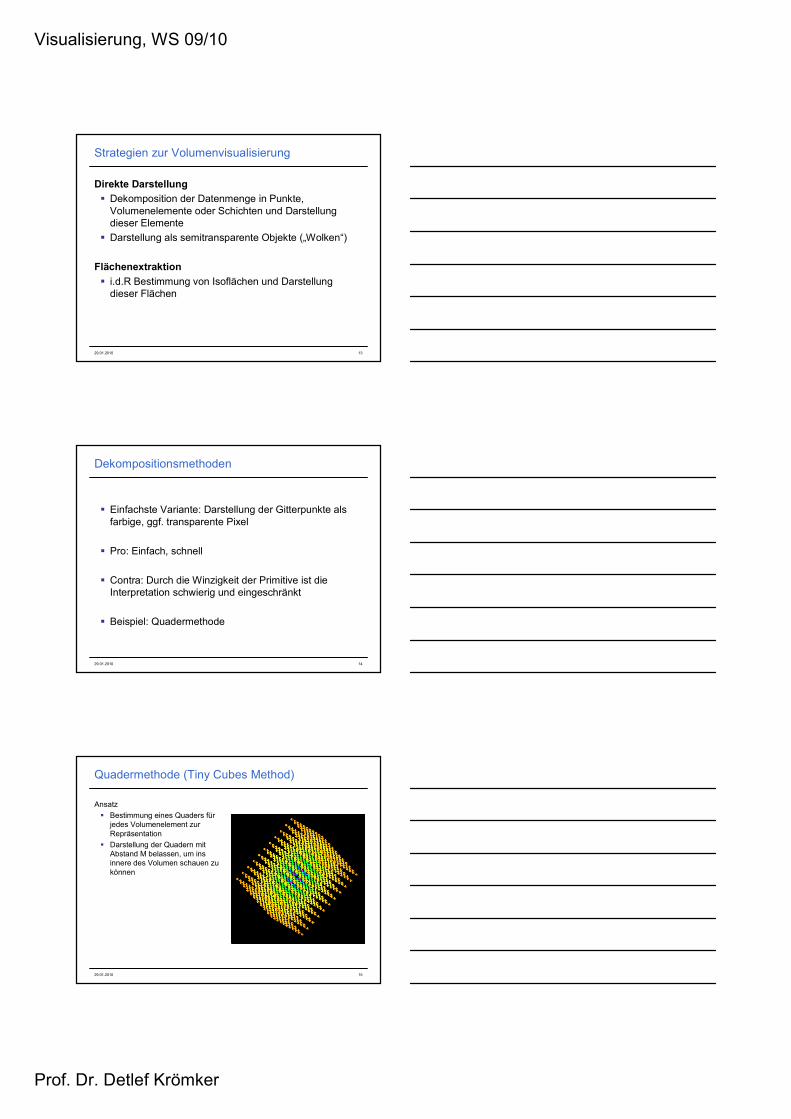
Quadermethode (Tiny Cubes Method)
Ansatz
� Bestimmung eines Quaders für jedes Volumenelement zur Repräsentation
� Darstellung der Quadern mit Abstand M belassen, um ins innere des Volumen schauen zu können
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 16
Quadermethode (Tiny Cubes Method)
Vorgehensweise� Maße und Positionen (untere linke Ecke) der Quader
bestimmen sich zu:
� Zuordnung von Farbwerten zu Eckpunkten� Gouraud-Schattierung von Quaderflächen
),,( zyx ∆∆∆
MMn
zz
MMn
yy
MMn
xx
z
z
y
y
x
x
−+
−=∆
−+
−=∆
−+
−=∆
)1(
)1(
)1(
minmax
minmax
minmax
zzk
yj
xxi
nkMkzz
njMjyy
niMixx
,...,1 und )1(
,...,1 und )1(
,...,1und)1(
0
y0
0
=+∆+=
=+∆+=
=+∆+=
29.01.2010 17
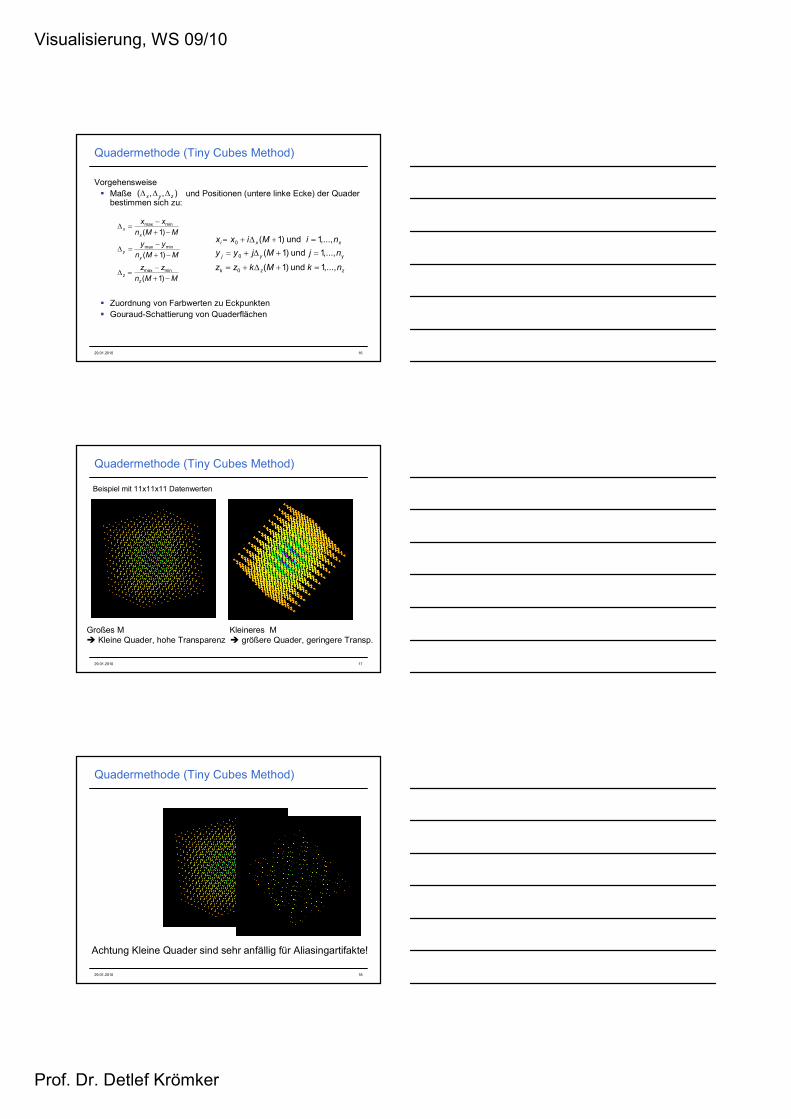
Quadermethode (Tiny Cubes Method)
Großes M Kleineres M� Kleine Quader, hohe Transparenz � größere Quader, geringere Transp.
Beispiel mit 11x11x11 Datenwerten
29.01.2010 18
Quadermethode (Tiny Cubes Method)
Achtung Kleine Quader sind sehr anfällig für Aliasingartifakte!
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 19
Quadermethode: Alternative
Tetraeder als Primitive Kugeln als PrimitiveNachteil: Induzieren Richtungen
Alternativer Ansatz� Andere Primitive für Zellen statt Quader: Kugeln, Tetraeder
29.01.2010 20
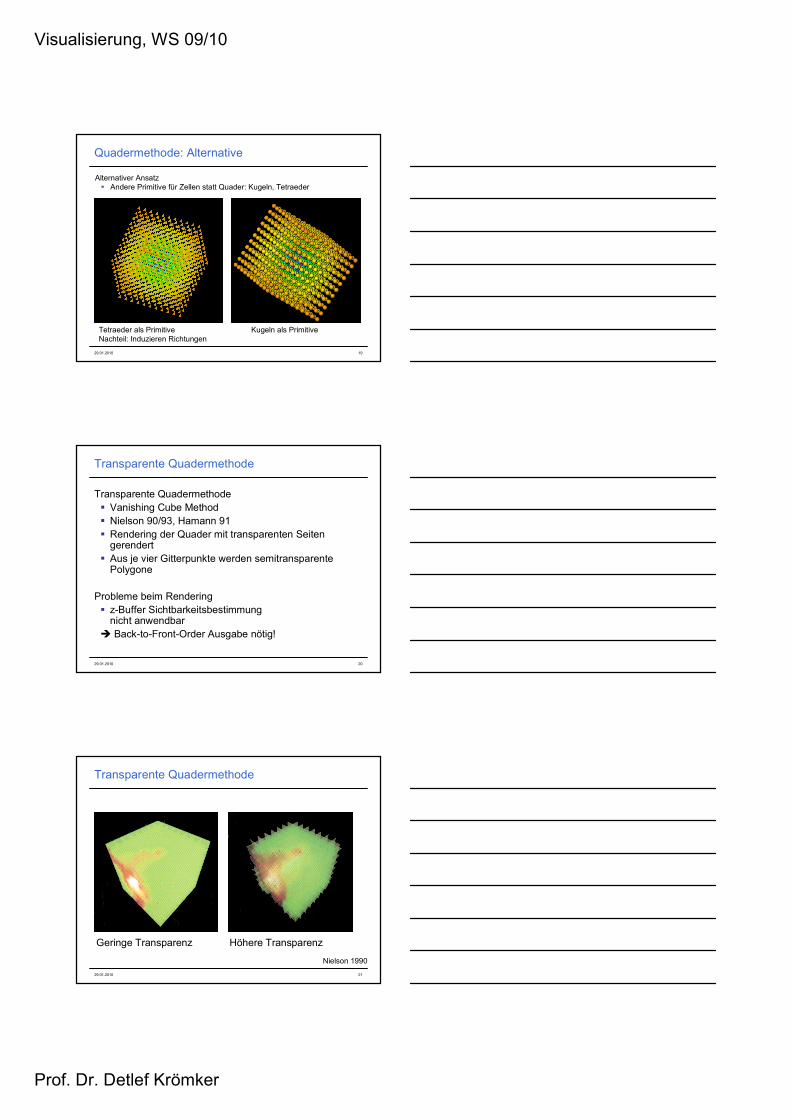
Transparente Quadermethode
Transparente Quadermethode� Vanishing Cube Method� Nielson 90/93, Hamann 91� Rendering der Quader mit transparenten Seiten gerendert
� Aus je vier Gitterpunkte werden semitransparente Polygone
Probleme beim Rendering� z-Buffer Sichtbarkeitsbestimmungnicht anwendbar
� Back-to-Front-Order Ausgabe nötig!
29.01.2010 21
Transparente Quadermethode
Geringe Transparenz Höhere Transparenz
Nielson 1990
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 22
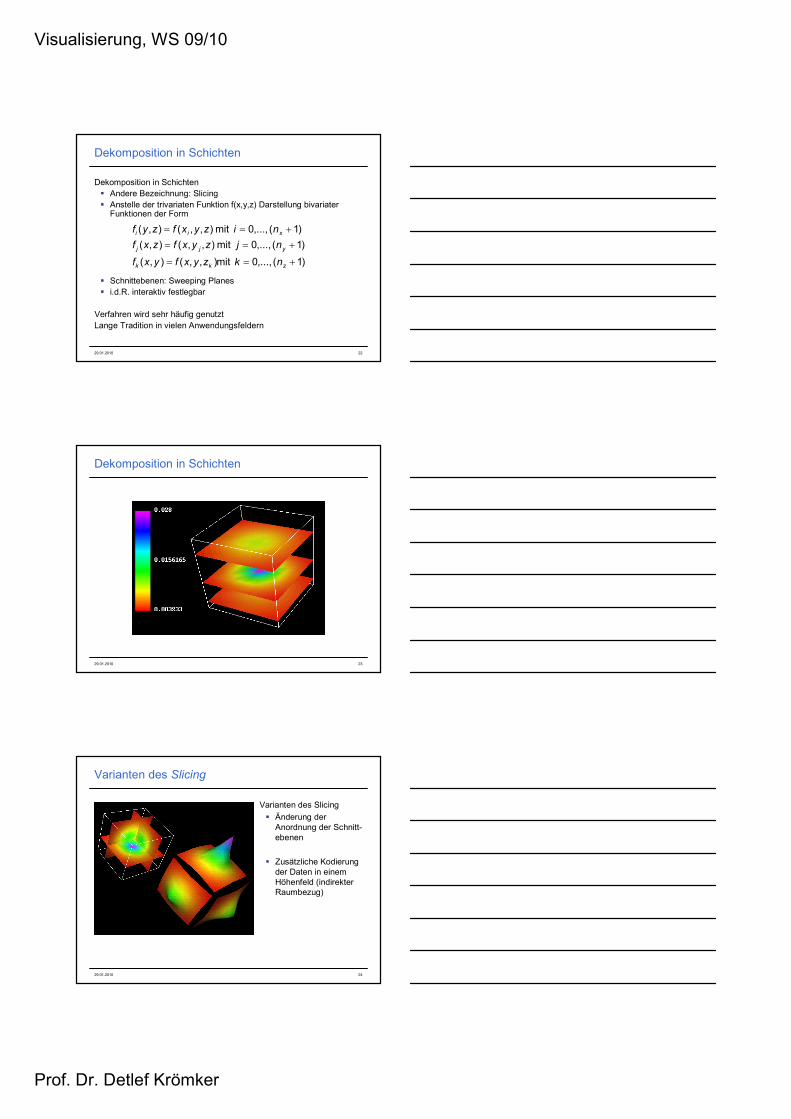
Dekomposition in Schichten
Dekomposition in Schichten� Andere Bezeichnung: Slicing� Anstelle der trivariaten Funktion f(x,y,z) Darstellung bivariater
Funktionen der Form
� Schnittebenen: Sweeping Planes� i.d.R. interaktiv festlegbar
Verfahren wird sehr häufig genutztLange Tradition in vielen Anwendungsfeldern
)1(,...,0 mit),,(),(
)1(,...,0 mit ),,(),(
)1(,...,0 mit ),,(),(
+==
+==
+==
zkk
yjj
xii
nkzyxfyxf
njzyxfzxf
nizyxfzyf
29.01.2010 23
Dekomposition in Schichten
29.01.2010 24
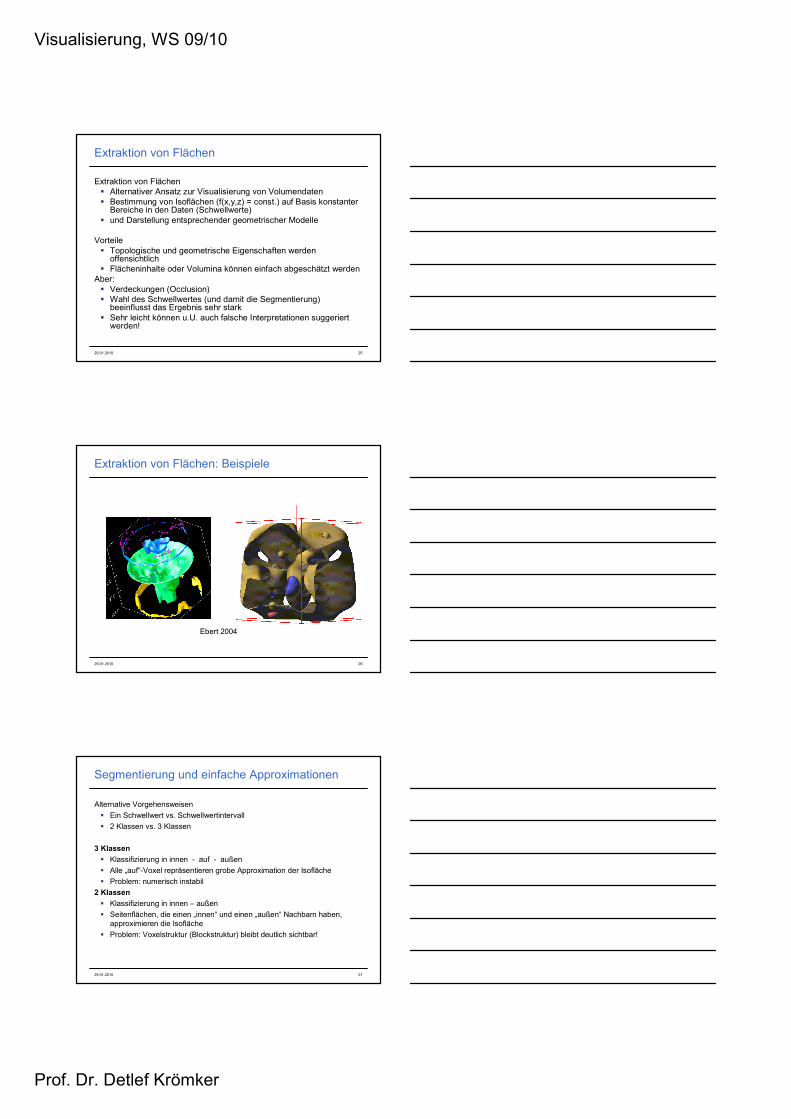
Varianten des Slicing
Varianten des Slicing
� Änderung der Anordnung der Schnitt-ebenen
� Zusätzliche Kodierung der Daten in einem Höhenfeld (indirekter Raumbezug)
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 25
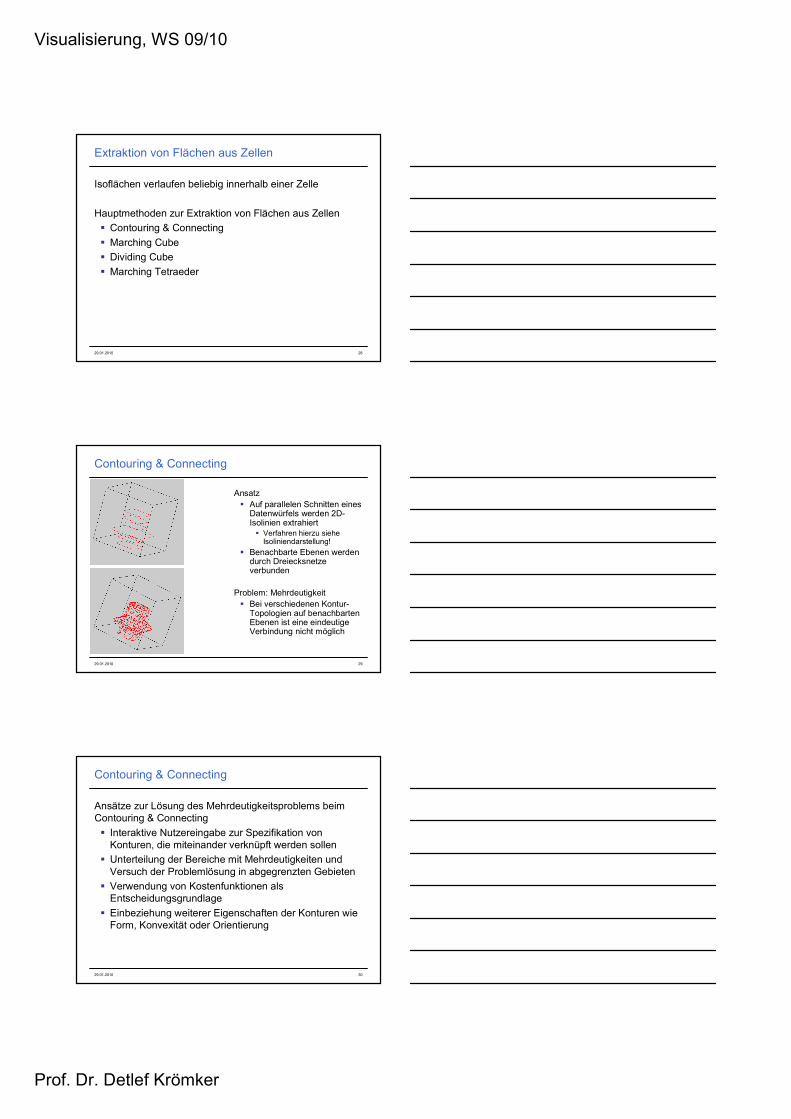
Extraktion von Flächen
Extraktion von Flächen� Alternativer Ansatz zur Visualisierung von Volumendaten� Bestimmung von Isoflächen (f(x,y,z) = const.) auf Basis konstanter
Bereiche in den Daten (Schwellwerte)� und Darstellung entsprechender geometrischer Modelle
Vorteile� Topologische und geometrische Eigenschaften werden
offensichtlich� Flächeninhalte oder Volumina können einfach abgeschätzt werden
Aber:� Verdeckungen (Occlusion)� Wahl des Schwellwertes (und damit die Segmentierung)
beeinflusst das Ergebnis sehr stark� Sehr leicht können u.U. auch falsche Interpretationen suggeriert
werden!
29.01.2010 26
Extraktion von Flächen: Beispiele
Ebert 2004
29.01.2010 27
Segmentierung und einfache Approximationen
Alternative Vorgehensweisen
� Ein Schwellwert vs. Schwellwertintervall
� 2 Klassen vs. 3 Klassen
3 Klassen
� Klassifizierung in innen - auf - außen
� Alle „auf“-Voxel repräsentieren grobe Approximation der Isofläche
� Problem: numerisch instabil
2 Klassen
� Klassifizierung in innen – außen
� Seitenflächen, die einen „innen“ und einen „außen“ Nachbarn haben, approximieren die Isofläche
� Problem: Voxelstruktur (Blockstruktur) bleibt deutlich sichtbar!
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 28
Extraktion von Flächen aus Zellen
Isoflächen verlaufen beliebig innerhalb einer Zelle
Hauptmethoden zur Extraktion von Flächen aus Zellen
� Contouring & Connecting
� Marching Cube
� Dividing Cube
� Marching Tetraeder
29.01.2010 29
Contouring & Connecting
Ansatz � Auf parallelen Schnitten eines
Datenwürfels werden 2D-Isolinien extrahiert� Verfahren hierzu siehe Isoliniendarstellung!
� Benachbarte Ebenen werden durch Dreiecksnetze verbunden
Problem: Mehrdeutigkeit� Bei verschiedenen Kontur-
Topologien auf benachbarten Ebenen ist eine eindeutige Verbindung nicht möglich
29.01.2010 30
Contouring & Connecting
Ansätze zur Lösung des Mehrdeutigkeitsproblems beimContouring & Connecting
� Interaktive Nutzereingabe zur Spezifikation von Konturen, die miteinander verknüpft werden sollen
� Unterteilung der Bereiche mit Mehrdeutigkeiten und Versuch der Problemlösung in abgegrenzten Gebieten
� Verwendung von Kostenfunktionen als Entscheidungsgrundlage
� Einbeziehung weiterer Eigenschaften der Konturen wie Form, Konvexität oder Orientierung
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 31
Ablaufschema Contouring & Connecting ( nach Abramowski 1991)
Schritt 1: Konstruktion der konvexen Hüllen der gesuchten Körperscheiben Grund- und Deckfläche der Körperscheiben sind durch die Konturen auf zwei benachbarten Schnitten gegeben. Jede Kontur definiert ein Polygon. Die Punkte zur Spezifikation der Konturen definieren zwei Punktmengen, die Ausgangspunkt für die 2,5D-Delauny-Triangulierung[1] sind. Falls die Konturkanten keine Delaunykanten sind, erfolgt eine rekursive Halbierung dieser Kanten. Die 2,5D-Delauny-Triangulierung liefert die konvexen Hüllen der gesuchten Körperscheiben, bestehend aus benachbarten Tetraedern.
Schritt 2: Elimination überzähliger Tetraeder Da Punktmengen betrachtet werden, können Tetraeder konstruiert werden, die Kanten enthalten, die außerhalb der durch die jeweiligen Konturen definierten Polygone liegen. Diese Tetraeder gehören zwar zur konvexen Hülle der gesuchten Körperscheiben, nicht aber zu der gesuchten Körperscheibe selbst. Auf Grund der gegebenen Orientierung der Konturen ist es aber möglich, solche Kanten zu ermitteln und die entsprechenden Tetraeder zu eliminieren.
Schritt 3: Entfernung nicht solider VerbindungenNicht solide Verbindungen entstehen, wenn zwei benachbarte Tetraeder nur in einer parallelen Ebene auch nur eine Kante oder nur einen Punkt gemeinsam haben. In diesem Fall wurden zwei verschiedene Körperscheiben fälschlicherweise miteinander verbunden und müssen demzufolge wieder getrennt werden (vgl. Abb. 7.9).
[1] Ein Delauny-Dreieck erfüllt bezüglich einer gegebenen Punktmenge die Umkreisbedingung. Das heißt, kein Punkt der Punktmenge liegt innerhalb des Umkreises von . Mit der 2,5D-Delauny-Triangulierung werden Delauny-Triangulierungen auf zwei parallelen Ebenen mit Tetraedern verknüpft. Die Bedingungen, die hierbei an die Tetraeder zu stellen sind, werden in [Abramowski 91b] genau angegeben.
29.01.2010 32
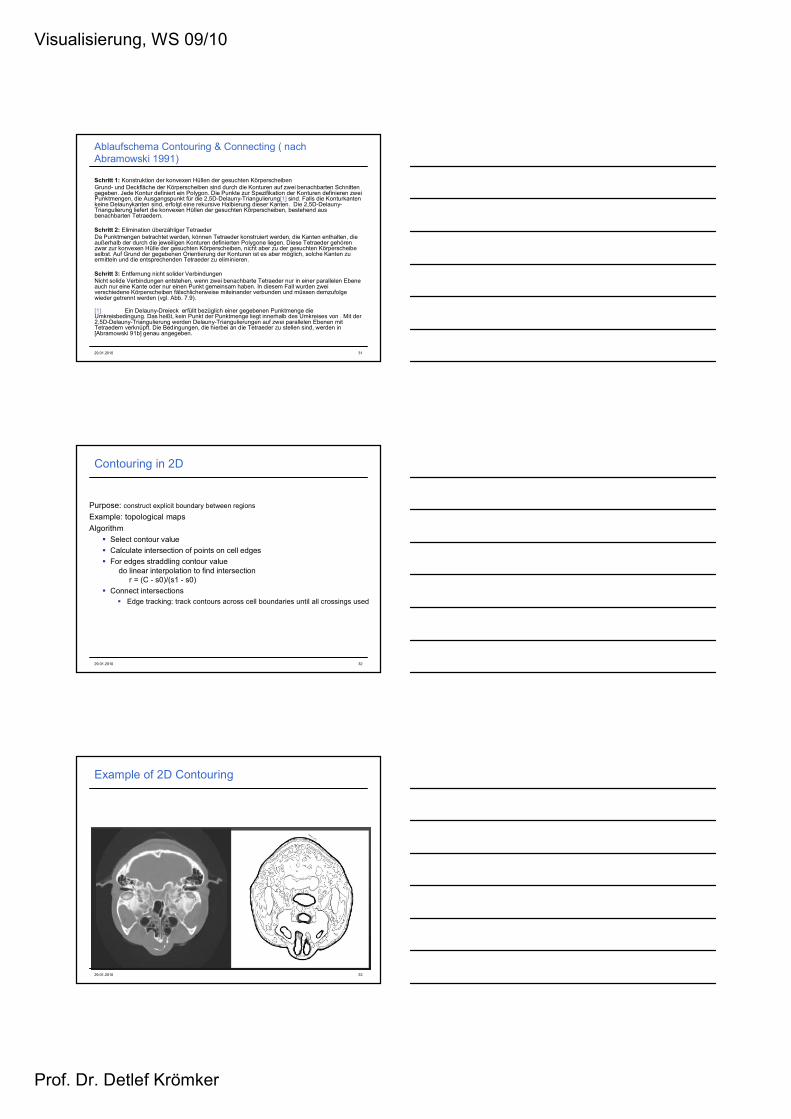
Contouring in 2D
Purpose: construct explicit boundary between regions
Example: topological maps
Algorithm
� Select contour value
� Calculate intersection of points on cell edges
� For edges straddling contour valuedo linear interpolation to find intersection
r = (C - s0)/(s1 - s0)
� Connect intersections
� Edge tracking: track contours across cell boundaries until all crossings used
29.01.2010 33
Example of 2D Contouring
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 34
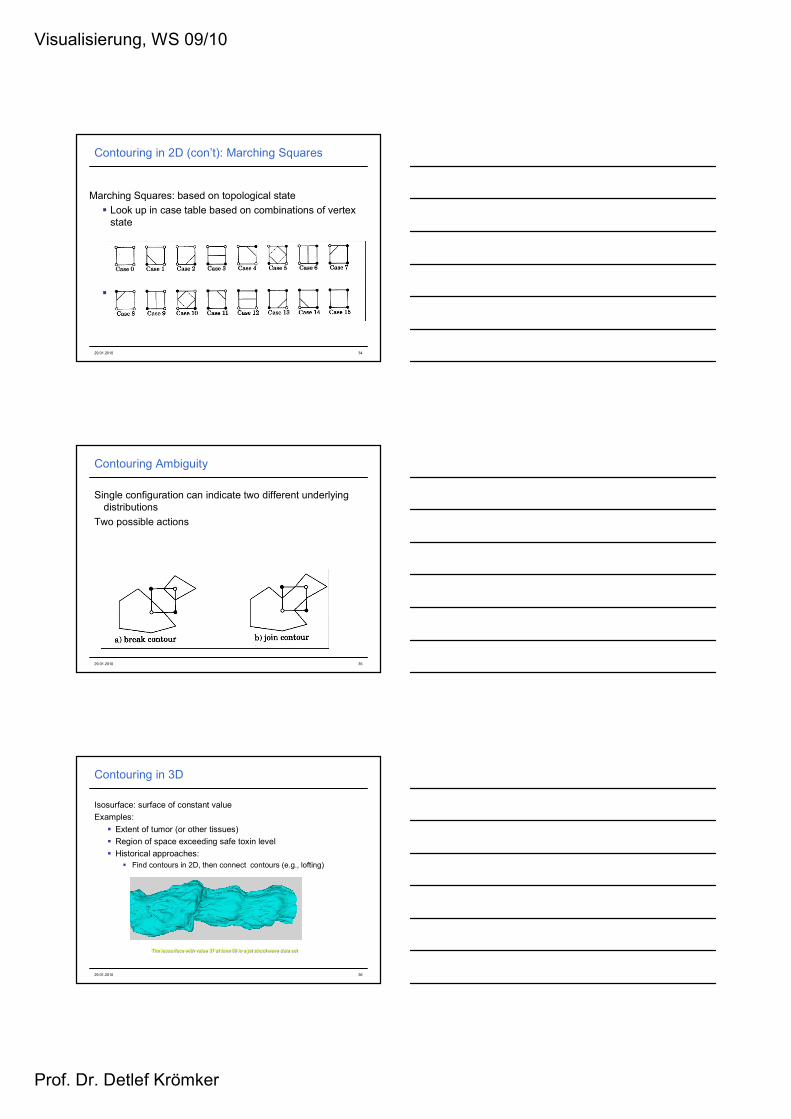
Contouring in 2D (con’t): Marching Squares
Marching Squares: based on topological state
� Look up in case table based on combinations of vertex state
� Merge duplicates (only for marching squares)
29.01.2010 35
Contouring Ambiguity
Single configuration can indicate two different underlying distributions
Two possible actions
29.01.2010 36
Contouring in 3D
Isosurface: surface of constant value
Examples:
� Extent of tumor (or other tissues)
� Region of space exceeding safe toxin level
� Historical approaches: � Find contours in 2D, then connect contours (e.g., lofting)
The isosurface with value 37 at time 60 in a jet shockwave data setThe isosurface with value 37 at time 60 in a jet shockwave data set

Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 37
Contouring in 3D
Treat volume as a set of 2D slices
� Apply 2D contouring algorithm on each slice.
� Or given as a set of hand-drawn contours
Stitch the slices together.
29.01.2010 38
Contouring in 3D
Find iso-surfaces from 2D contours� Segmentation: find closed contours in 2D slices and represent themas polylines
� Labeling: identify different structures by means of the iso-value of higher order characteristics
� Tracing/Stiching: connect contours representing the same objectfrom adjacent slices and form triangles
� Rendering: display triangles
29.01.2010 39
Contouring in 3D
Issues:� Choose topological or geometrical reconstruction
� Problems:� Sometimes there are many contours in each slice or there is a high
variation between slices
→ Tracing becomes very difficult
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 40
2
1
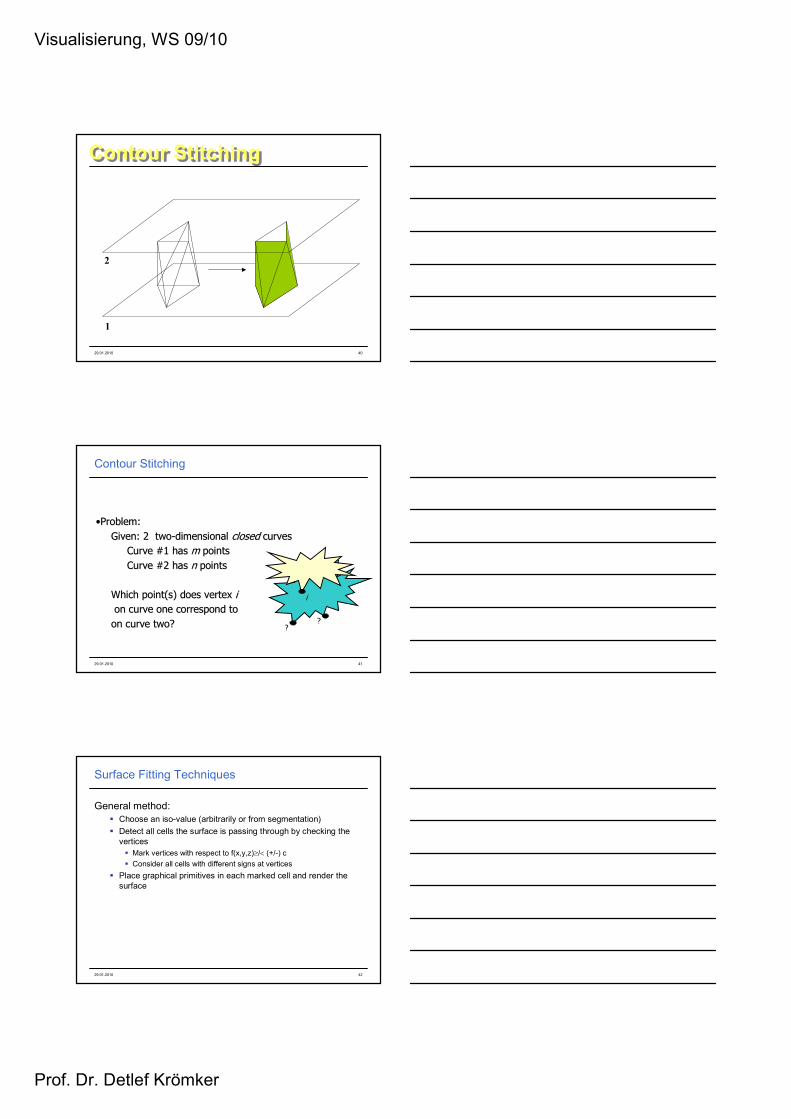
Contour StitchingContour Stitching
29.01.2010 41
Contour Stitching
••Problem:Problem:
Given: 2 twoGiven: 2 two--dimensional dimensional closedclosed curvescurves
Curve #1 has Curve #1 has mm pointspoints
Curve #2 has Curve #2 has nn pointspoints
Which Which point(spoint(s) does vertex ) does vertex ii
on curve one correspond to on curve one correspond to
on curve two?on curve two? ??
i
29.01.2010 42
Surface Fitting Techniques
General method:� Choose an iso-value (arbitrarily or from segmentation)
� Detect all cells the surface is passing through by checking thevertices
� Mark vertices with respect to f(x,y,z)≥/< (+/-) c
� Consider all cells with different signs at vertices
� Place graphical primitives in each marked cell and render thesurface
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 43
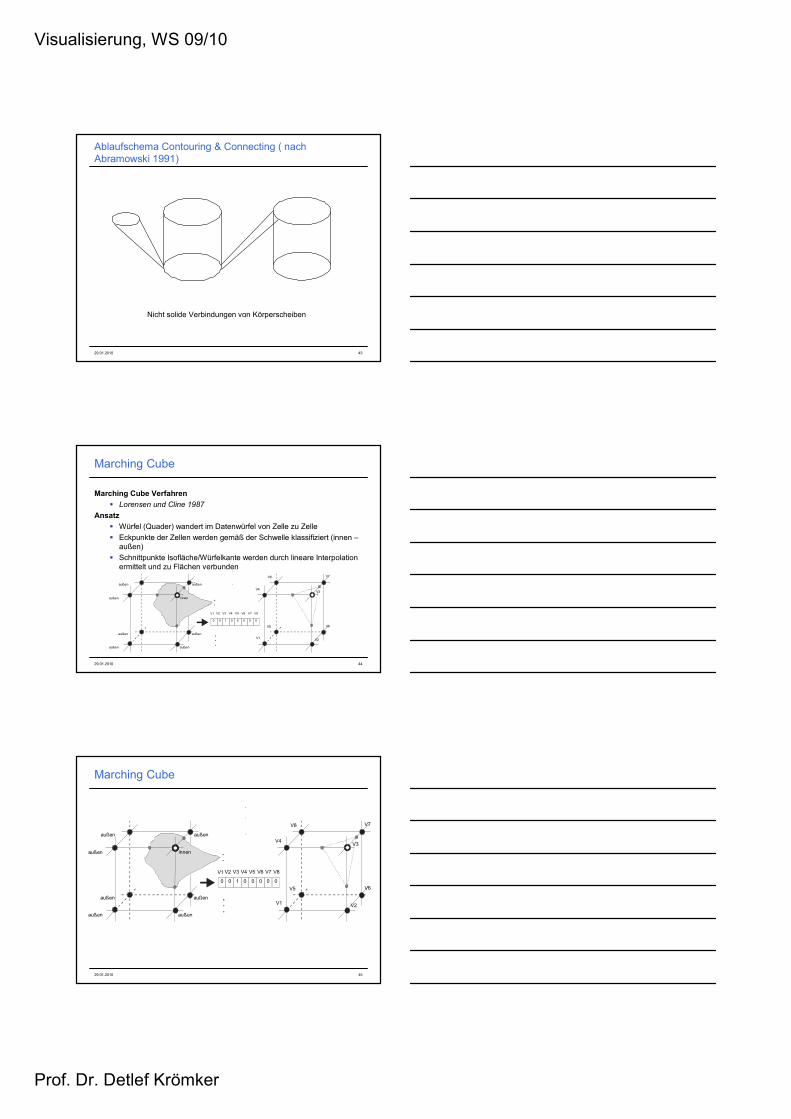
Ablaufschema Contouring & Connecting ( nach Abramowski 1991)
Nicht solide Verbindungen von Körperscheiben
29.01.2010 44
Marching Cube
Marching Cube Verfahren
� Lorensen und Cline 1987
Ansatz
� Würfel (Quader) wandert im Datenwürfel von Zelle zu Zelle
� Eckpunkte der Zellen werden gemäß der Schwelle klassifiziert (innen –außen)
� Schnittpunkte Isofläche/Würfelkante werden durch lineare Interpolation ermittelt und zu Flächen verbunden
innen
V1 V2 V3 V4 V5 V6 V7 V8
0 0 1 0 0 0 0 0
V1 V2
V3V4
V5 V6
V7V8
außen
außen
außenaußen
außen
außen
außen
29.01.2010 45
Marching Cube
innen
V1 V2 V3 V4 V5 V6 V7 V8
0 0 1 0 0 0 0 0
V1 V2
V3V4
V5 V6
V7V8
außen
außen
außenaußen
außen
außen
außen
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 46
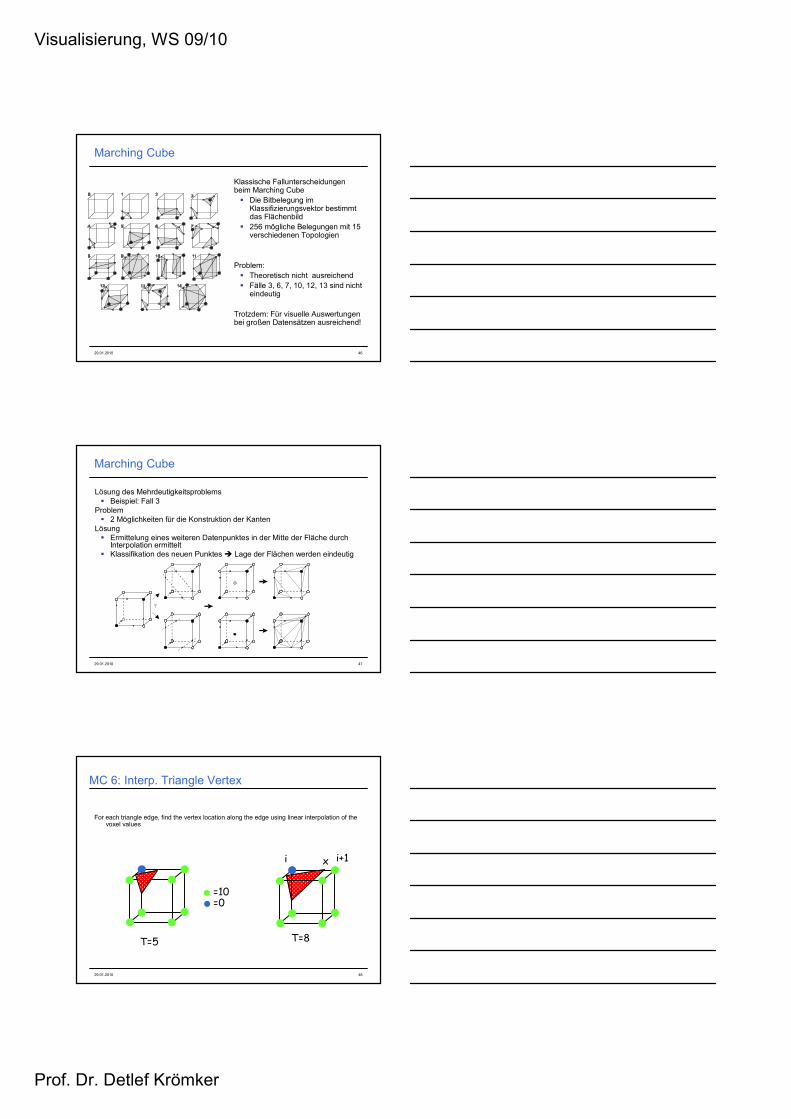
Marching Cube
Klassische Fallunterscheidungen beim Marching Cube � Die Bitbelegung im
Klassifizierungsvektor bestimmt das Flächenbild
� 256 mögliche Belegungen mit 15 verschiedenen Topologien
Problem: � Theoretisch nicht ausreichend� Fälle 3, 6, 7, 10, 12, 13 sind nicht
eindeutig
Trotzdem: Für visuelle Auswertungen bei großen Datensätzen ausreichend!
29.01.2010 47
Marching Cube
Lösung des Mehrdeutigkeitsproblems� Beispiel: Fall 3
Problem� 2 Möglichkeiten für die Konstruktion der Kanten
Lösung� Ermittelung eines weiteren Datenpunktes in der Mitte der Fläche durch
Interpolation ermittelt� Klassifikation des neuen Punktes � Lage der Flächen werden eindeutig
?
29.01.2010 48
MC 6: Interp. Triangle Vertex
For each triangle edge, find the vertex location along the edge using linear interpolation of the voxel values
=10=0
T=8T=5
i i+1x
[ ][ ] [ ]
−+
−+=
iviv
ivTix
1
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 49
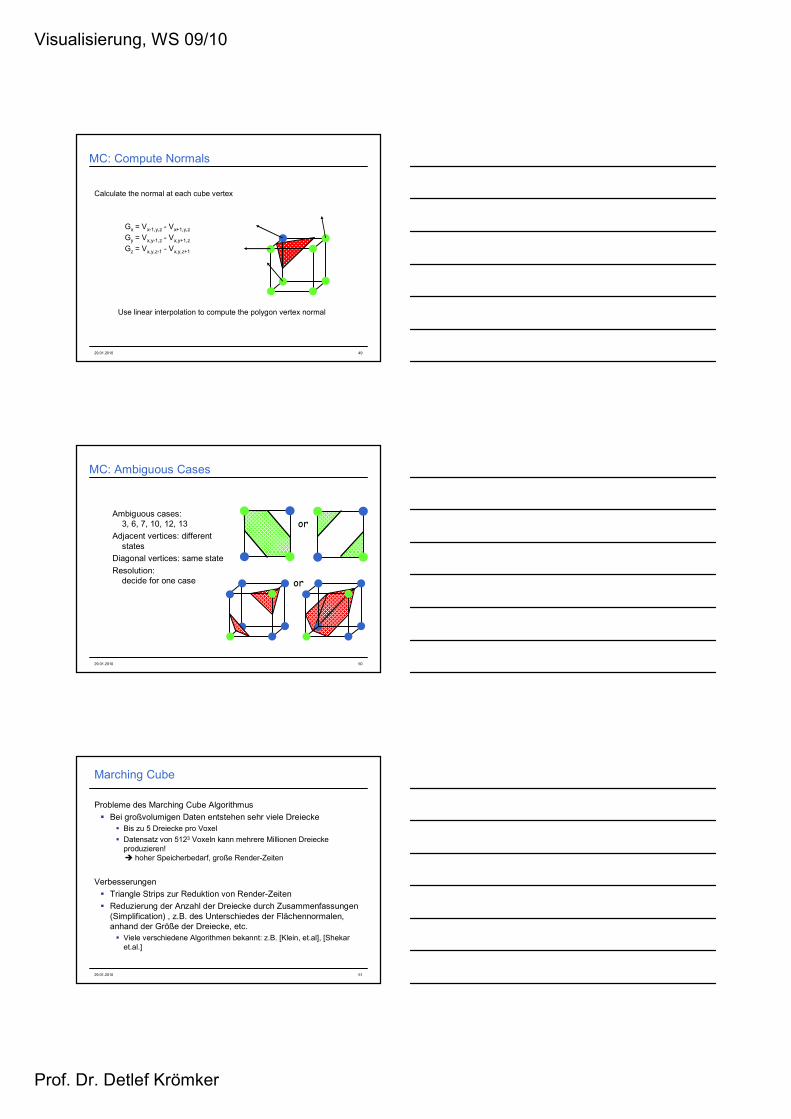
MC: Compute Normals
Calculate the normal at each cube vertex
Gx = Vx-1,y,z - Vx+1,y,z
Gy = Vx,y-1,z - Vx,y+1,z
Gz = Vx,y,z-1 - Vx,y,z+1
Use linear interpolation to compute the polygon vertex normal
29.01.2010 50
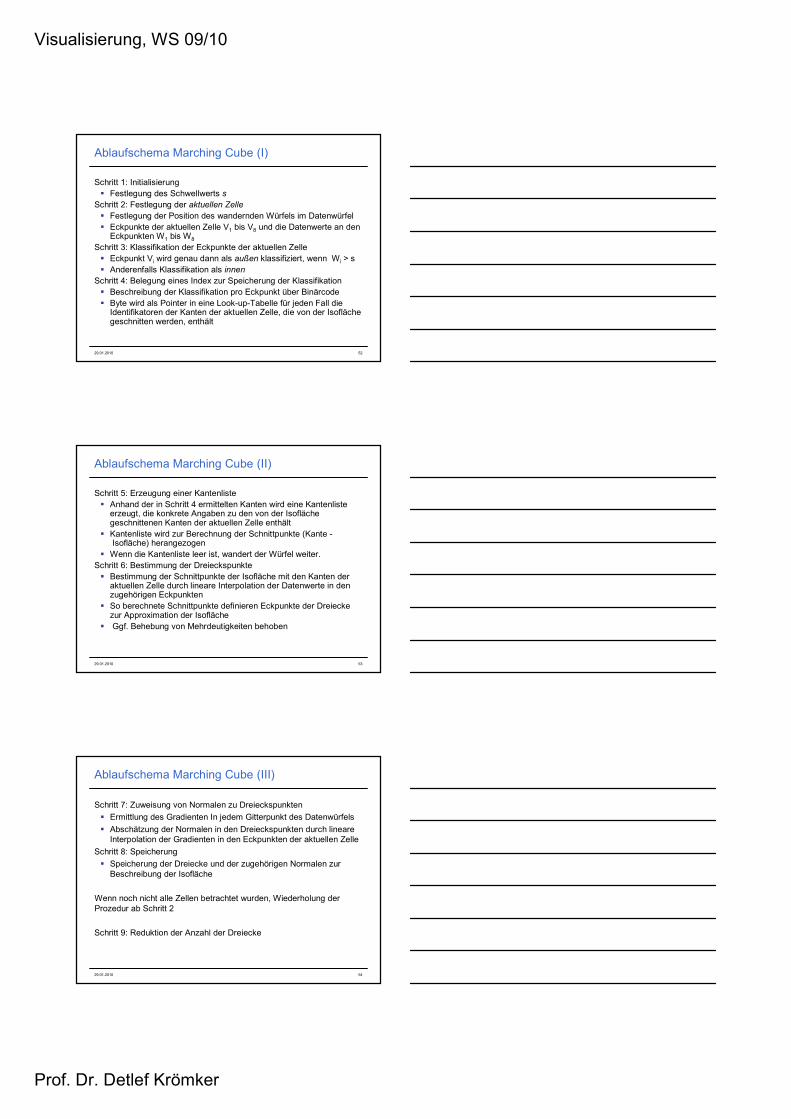
MC: Ambiguous Cases
Ambiguous cases:3, 6, 7, 10, 12, 13
Adjacent vertices: different states
Diagonal vertices: same state
Resolution:decide for one case
or
or
29.01.2010 51
Marching Cube
Probleme des Marching Cube Algorithmus
� Bei großvolumigen Daten entstehen sehr viele Dreiecke� Bis zu 5 Dreiecke pro Voxel
� Datensatz von 5123 Voxeln kann mehrere Millionen Dreiecke produzieren! � hoher Speicherbedarf, große Render-Zeiten
Verbesserungen
� Triangle Strips zur Reduktion von Render-Zeiten
� Reduzierung der Anzahl der Dreiecke durch Zusammenfassungen (Simplification) , z.B. des Unterschiedes der Flächennormalen, anhand der Größe der Dreiecke, etc.� Viele verschiedene Algorithmen bekannt: z.B. [Klein, et.al], [Shekar et.al.]
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 52
Ablaufschema Marching Cube (I)
Schritt 1: Initialisierung� Festlegung des Schwellwerts s
Schritt 2: Festlegung der aktuellen Zelle
� Festlegung der Position des wandernden Würfels im Datenwürfel� Eckpunkte der aktuellen Zelle V1 bis V8 und die Datenwerte an den
Eckpunkten W1 bis W8
Schritt 3: Klassifikation der Eckpunkte der aktuellen Zelle � Eckpunkt Vi wird genau dann als außen klassifiziert, wenn Wi > s� Anderenfalls Klassifikation als innen
Schritt 4: Belegung eines Index zur Speicherung der Klassifikation� Beschreibung der Klassifikation pro Eckpunkt über Binärcode � Byte wird als Pointer in eine Look-up-Tabelle für jeden Fall die
Identifikatoren der Kanten der aktuellen Zelle, die von der Isofläche geschnitten werden, enthält
29.01.2010 53
Ablaufschema Marching Cube (II)
Schritt 5: Erzeugung einer Kantenliste� Anhand der in Schritt 4 ermittelten Kanten wird eine Kantenliste
erzeugt, die konkrete Angaben zu den von der Isofläche geschnittenen Kanten der aktuellen Zelle enthält
� Kantenliste wird zur Berechnung der Schnittpunkte (Kante -Isofläche) herangezogen
� Wenn die Kantenliste leer ist, wandert der Würfel weiter.Schritt 6: Bestimmung der Dreieckspunkte� Bestimmung der Schnittpunkte der Isofläche mit den Kanten der
aktuellen Zelle durch lineare Interpolation der Datenwerte in den zugehörigen Eckpunkten
� So berechnete Schnittpunkte definieren Eckpunkte der Dreiecke zur Approximation der Isofläche
� Ggf. Behebung von Mehrdeutigkeiten behoben
29.01.2010 54
Ablaufschema Marching Cube (III)
Schritt 7: Zuweisung von Normalen zu Dreieckspunkten
� Ermittlung des Gradienten In jedem Gitterpunkt des Datenwürfels
� Abschätzung der Normalen in den Dreieckspunkten durch lineare Interpolation der Gradienten in den Eckpunkten der aktuellen Zelle
Schritt 8: Speicherung
� Speicherung der Dreiecke und der zugehörigen Normalen zur Beschreibung der Isofläche
Wenn noch nicht alle Zellen betrachtet wurden, Wiederholung der Prozedur ab Schritt 2
Schritt 9: Reduktion der Anzahl der Dreiecke
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 55
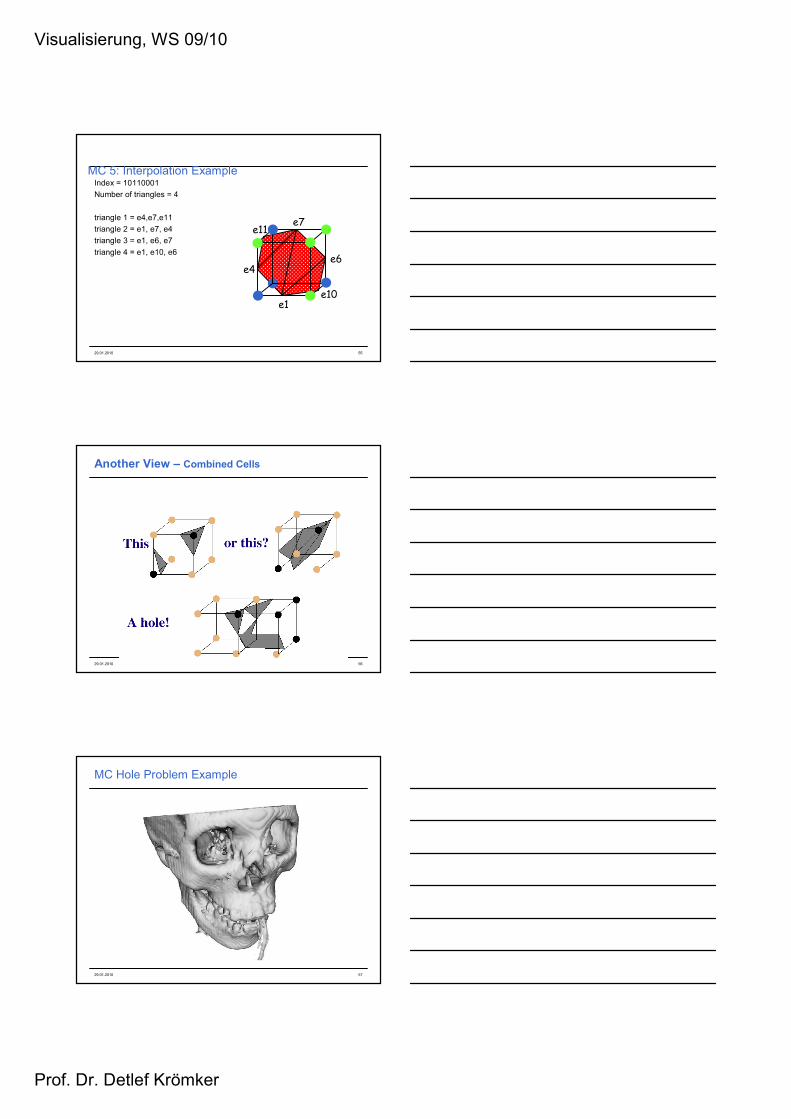
MC 5: Interpolation ExampleIndex = 10110001
Number of triangles = 4
triangle 1 = e4,e7,e11
triangle 2 = e1, e7, e4
triangle 3 = e1, e6, e7
triangle 4 = e1, e10, e6
e1e10
e6
e7e11
e4
29.01.2010 56
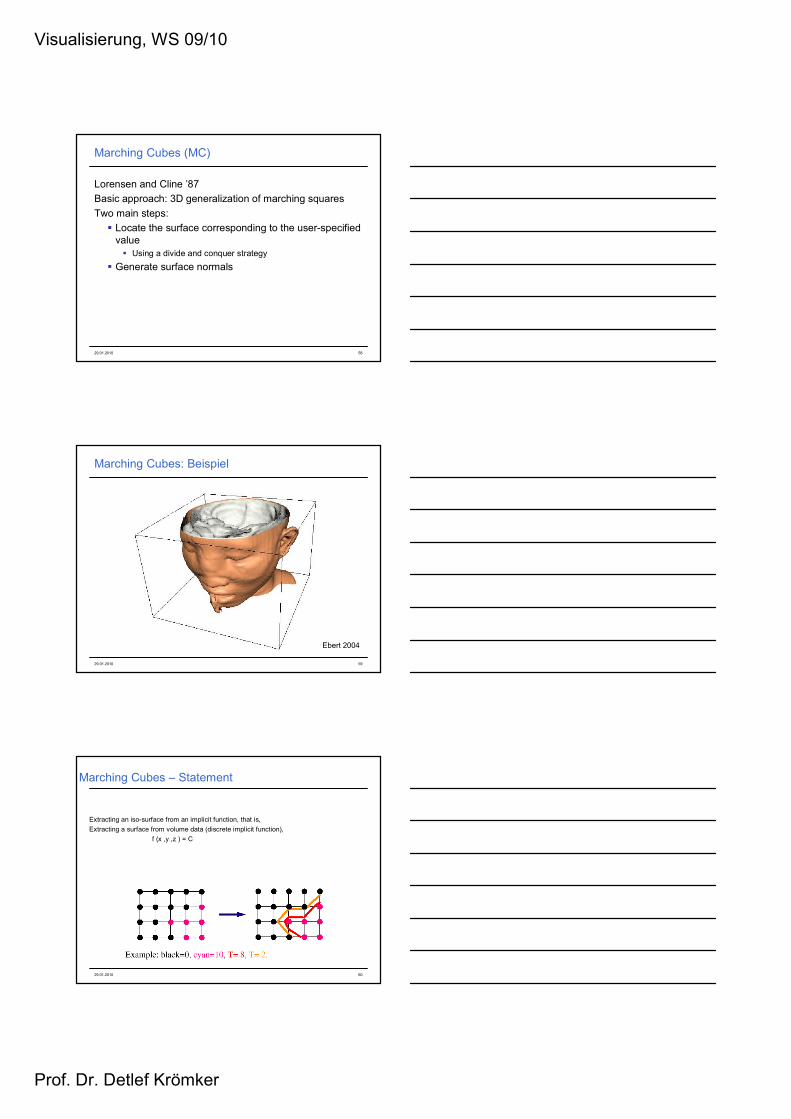
Another View – Combined Cells
29.01.2010 57
MC Hole Problem Example
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 58
Marching Cubes (MC)
Lorensen and Cline ’87
Basic approach: 3D generalization of marching squares
Two main steps:
� Locate the surface corresponding to the user-specified value� Using a divide and conquer strategy
� Generate surface normals
29.01.2010 59
Marching Cubes: Beispiel
Ebert 2004
29.01.2010 60
Marching Cubes – Statement
Extracting an iso-surface from an implicit function, that is,
Extracting a surface from volume data (discrete implicit function),
f (x ,y ,z ) = C
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 61
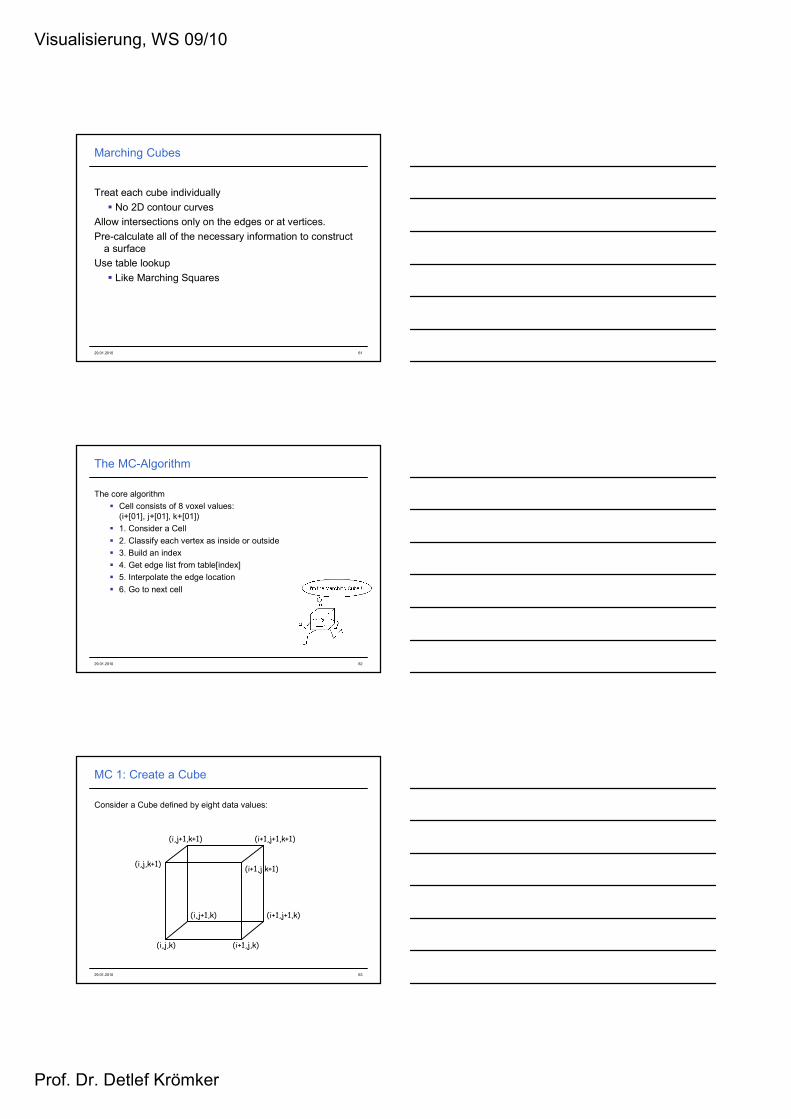
Marching Cubes
Treat each cube individually
� No 2D contour curves
Allow intersections only on the edges or at vertices.
Pre-calculate all of the necessary information to construct a surface
Use table lookup
� Like Marching Squares
29.01.2010 62
The MC-Algorithm
The core algorithm
� Cell consists of 8 voxel values:(i+[01], j+[01], k+[01])
� 1. Consider a Cell
� 2. Classify each vertex as inside or outside
� 3. Build an index
� 4. Get edge list from table[index]
� 5. Interpolate the edge location
� 6. Go to next cell
29.01.2010 63
MC 1: Create a Cube
Consider a Cube defined by eight data values:
(i,j,k) (i+1,j,k)
(i,j+1,k)
(i,j,k+1)
(i,j+1,k+1) (i+1,j+1,k+1)
(i+1,j+1,k)
(i+1,j,k+1)
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 64
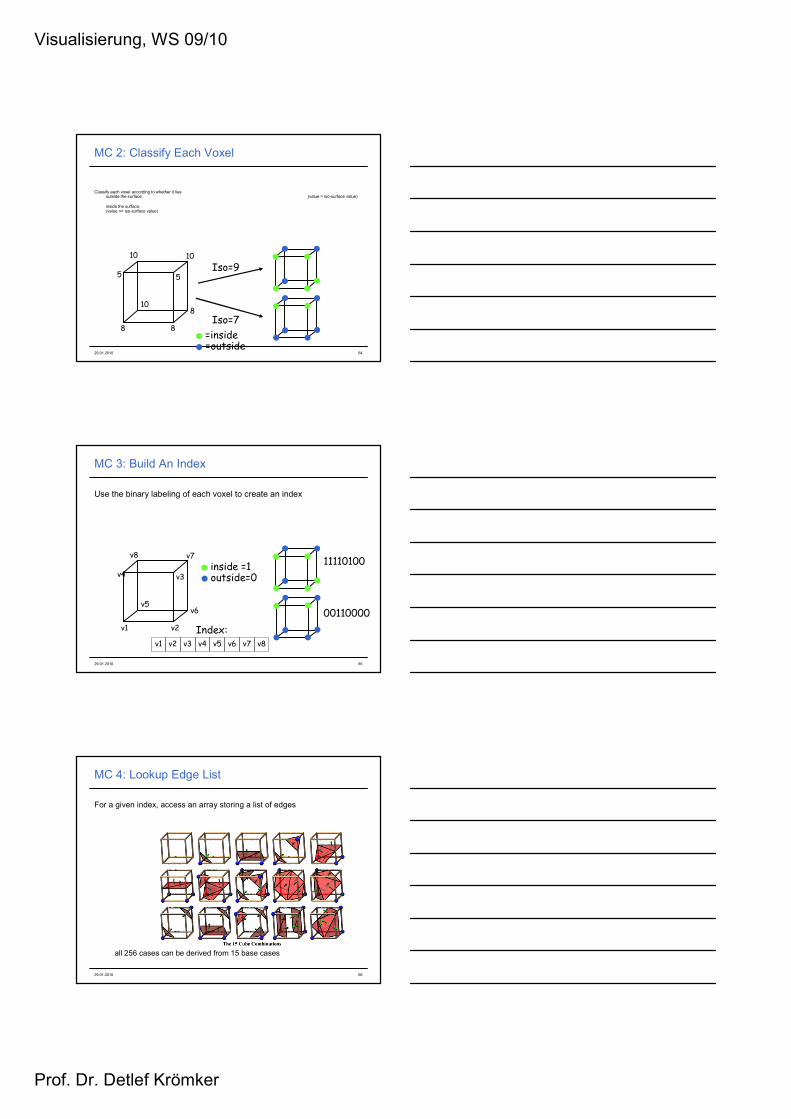
MC 2: Classify Each Voxel
Classify each voxel according to whether it liesoutside the surface: (value > iso-surface value)
inside the surface:(value <= iso-surface value)
8Iso=7
8
8
55
1010
10
Iso=9
=inside=outside
29.01.2010 65
MC 3: Build An Index
Use the binary labeling of each voxel to create an index
v1 v2
v6
v3v4
v7v8
v5
inside =1outside=0
11110100
00110000
Index:v1 v2 v3 v4 v5 v6 v7 v8
29.01.2010 66
MC 4: Lookup Edge List
For a given index, access an array storing a list of edges
all 256 cases can be derived from 15 base cases
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 67
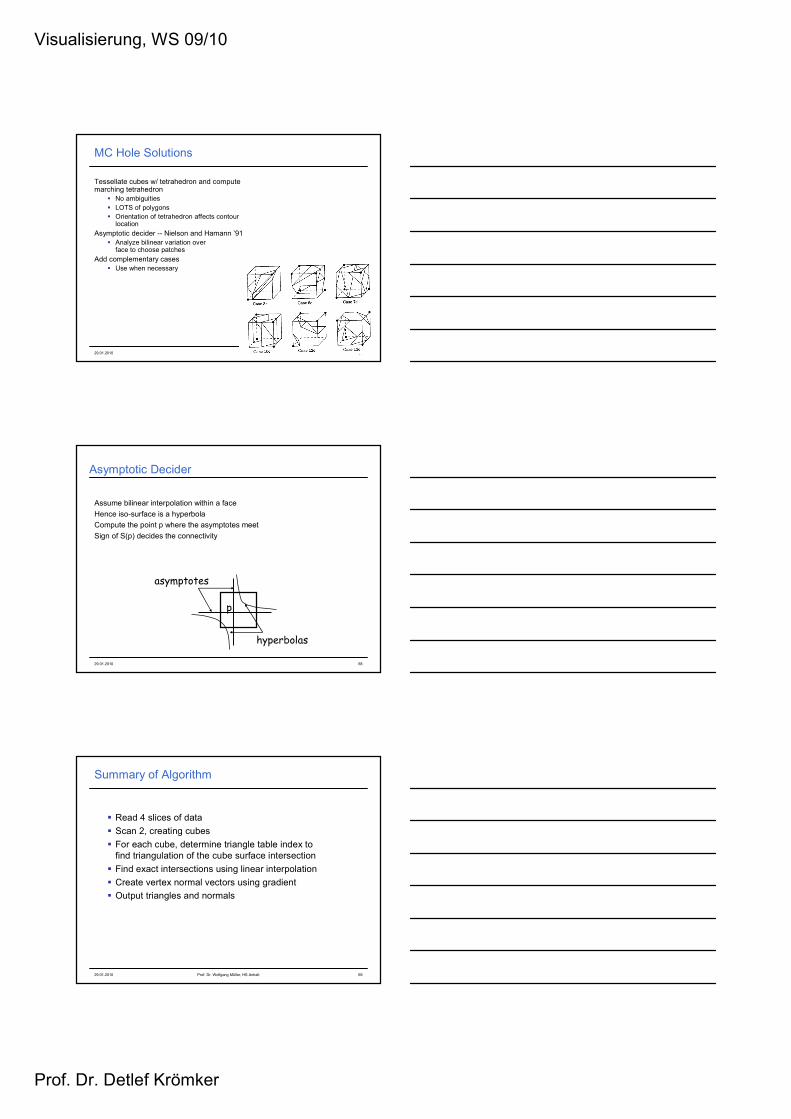
MC Hole Solutions
Tessellate cubes w/ tetrahedron and compute marching tetrahedron
� No ambiguities
� LOTS of polygons� Orientation of tetrahedron affects contour
location
Asymptotic decider -- Nielson and Hamann ’91� Analyze bilinear variation over
face to choose patches
Add complementary cases� Use when necessary
29.01.2010 68
Asymptotic Decider
Assume bilinear interpolation within a face
Hence iso-surface is a hyperbola
Compute the point p where the asymptotes meet
Sign of S(p) decides the connectivity
asymptotes
hyperbolas
p
29.01.2010 Prof. Dr. Wolfgang Müller, HS Anhalt 69
Summary of Algorithm
� Read 4 slices of data
� Scan 2, creating cubes
� For each cube, determine triangle table index to find triangulation of the cube surface intersection
� Find exact intersections using linear interpolation
� Create vertex normal vectors using gradient
� Output triangles and normals
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 70
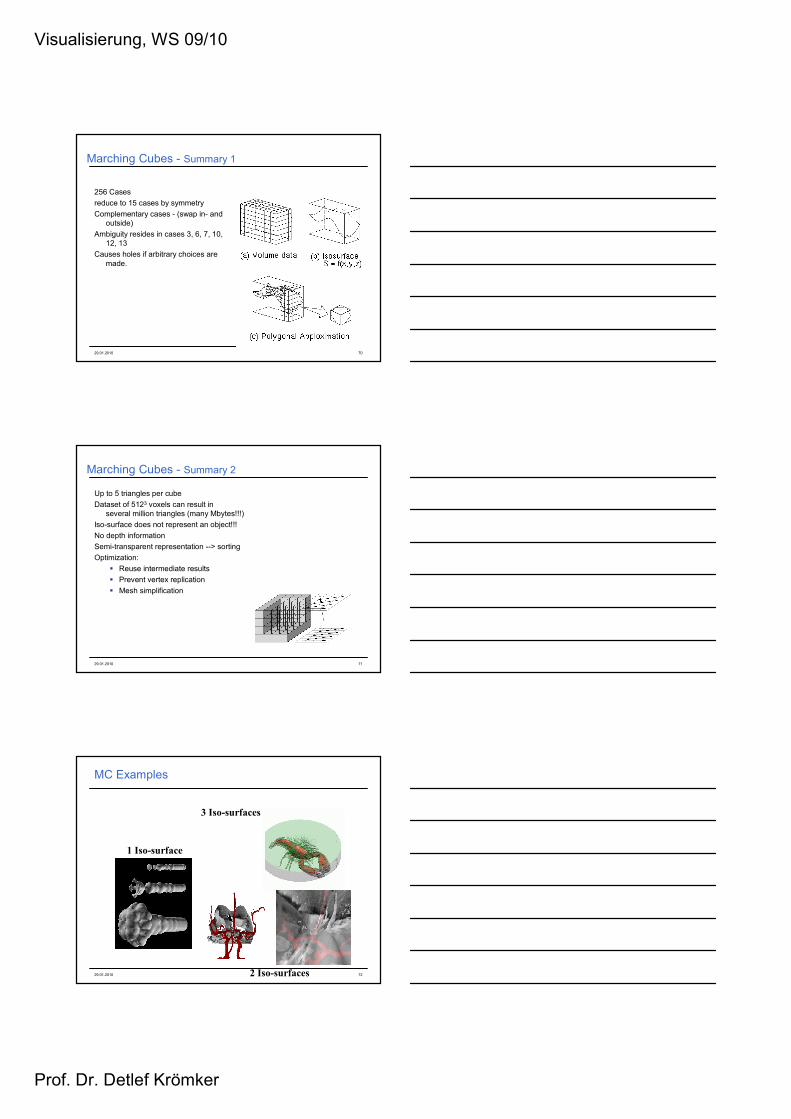
Marching Cubes - Summary 1
256 Cases
reduce to 15 cases by symmetry
Complementary cases - (swap in- and outside)
Ambiguity resides in cases 3, 6, 7, 10, 12, 13
Causes holes if arbitrary choices are made.
29.01.2010 71
Marching Cubes - Summary 2
Up to 5 triangles per cube
Dataset of 5123 voxels can result in several million triangles (many Mbytes!!!)
Iso-surface does not represent an object!!!
No depth information
Semi-transparent representation --> sorting
Optimization:
� Reuse intermediate results
� Prevent vertex replication
� Mesh simplification
29.01.2010 72
MC Examples
1 Iso-surface
2 Iso-surfaces
3 Iso-surfaces
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 73
MC Extensions
Higher order surfaces
� Use parametric cubics instead of polygons
� Particularly useful for large or irregular grids
� Use gradients to get curvature
Adaptive subdivision
� Estimate error based on gradient
� Subdivide mesh adaptively
29.01.2010 74
Dividing Cube
Dividing Cube Verfahren� Levoy 1990� Alternatives Verfahren zu Marching Cube
Ansatz: Erzeugung von Oberflächenpunkten anstelle von Dreiecken� Klassifizierung von Zellen in „innen“ – „außen“ – „Oberfläche“
� Innen-Zelle: Alle in der Zelle präsenten Datenwerte sind kleiner als der gegebene Schwellwert
� Außen-Zelle: Alle in der Zelle präsenten Datenwerte sind größer als der gegebene Schwellwert
� Oberflächenzelle: Die durch den Schwellwert spezifizierte Isofläche schneidet die Zelle
� Rekursive Unterteilung von Oberflächenzellen und erneute Klassifikation (Ermittlung neuer Datenpunkte durch trilineare Interpolation)
� Oberflächenzellen nach dem letzten Unterteilungsschritt werden als Oberflächenpunkte aufgefasst� Berechnung von Normalen (z.B. durch Zentraldifferenzen)
29.01.2010 75
Dividing Cube
Vorteile� Entstehende Punkt-Informationen können effizient unter
Verwendung heutiger Graphik-Hardware gerendert werden� Keine Scan-Konvertierung des Volumens� Stattdessen: Projektion von Pixel-grossen Punkten� Aktueller Bezug zu anderen Punktbasierten Techniken
� “Points as Display Primitives” (Levoy & Whitted)� Splatting Techniken (Westover, etc.)� Surfels (Pfister & Gross)� Andere punkt-basierte Rendering Techniken (OpenGL)
� Keine störenden Artefakte aufgrund mangelnder Auflösung von Dreiecken
� Geringerer Aufwand als bei komplexer Klassifikation mit MarchingCube Verfahren
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 76
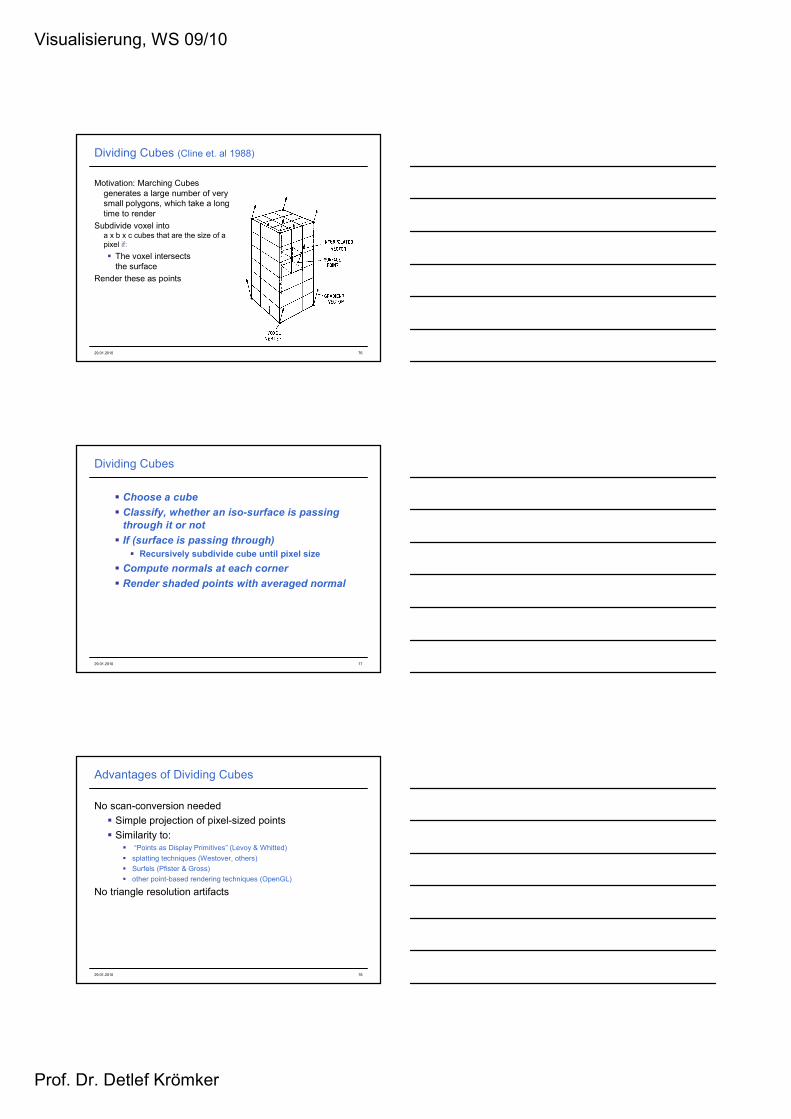
Dividing Cubes (Cline et. al 1988)
Motivation: Marching Cubes generates a large number of very small polygons, which take a long time to render
Subdivide voxel into a x b x c cubes that are the size of a pixel if:
� The voxel intersects the surface
Render these as points
29.01.2010 77
Dividing Cubes
� Choose a cube
� Classify, whether an iso-surface is passing
through it or not
� If (surface is passing through)
� Recursively subdivide cube until pixel size
� Compute normals at each corner
� Render shaded points with averaged normal
29.01.2010 78
Advantages of Dividing Cubes
No scan-conversion needed
� Simple projection of pixel-sized points
� Similarity to:� “Points as Display Primitives” (Levoy & Whitted)
� splatting techniques (Westover, others)
� Surfels (Pfister & Gross)
� other point-based rendering techniques (OpenGL)
No triangle resolution artifacts
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 79
Vergleich Marching Cube und Dividing Cube
Vergleich unter dem Aspekt des Rendering
Dividing Cubes
� (+) Point Shading Hardware inzwischen von OpenGL unterstützt
� (-) Adaptive Subdivision langsam
Marching Cubes
� (+) Gut bei Hardware-unterstütztem Polygon-Rendering� Graphikkarten-Entwicklung in diesem Bereich getrieben durch
Computerspiele-Sektor
� Preiswerte Graphik-Hardware verfügbar
� (-) Erzeugt ggf. mehrere Millionen Polygone� Verfahren zur Polygon Simplification notwendig
29.01.2010 80
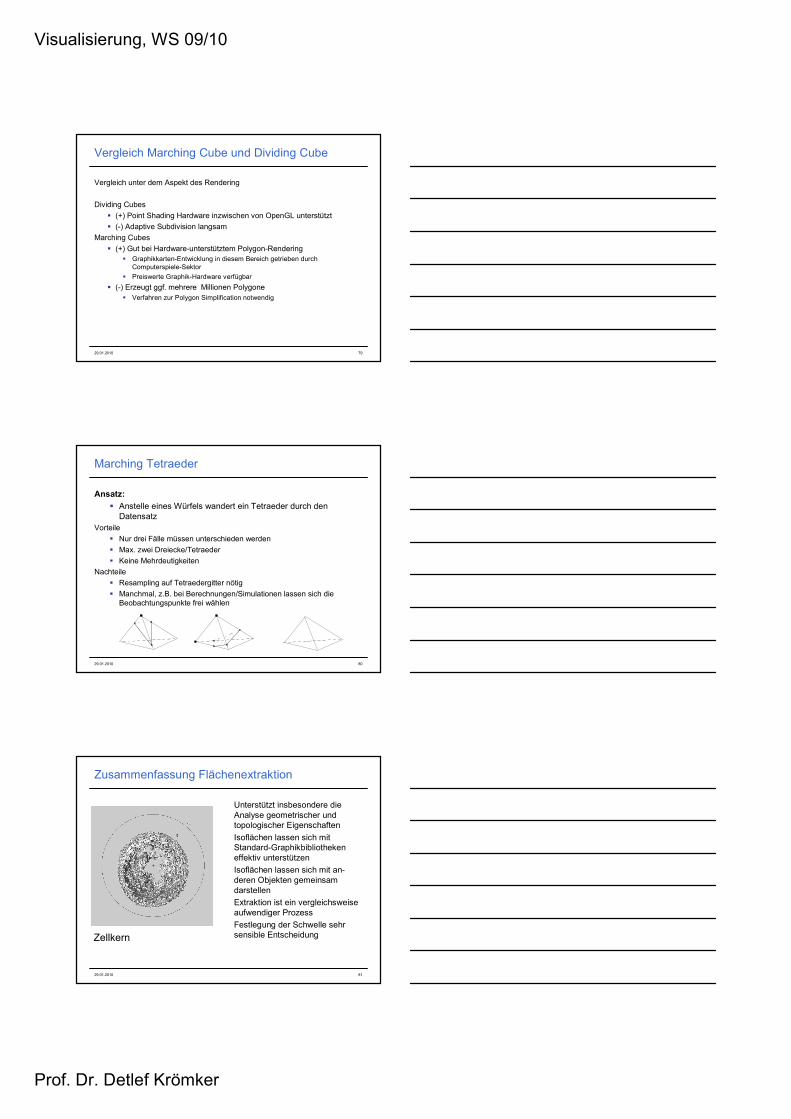
Ansatz:
� Anstelle eines Würfels wandert ein Tetraeder durch den Datensatz
Vorteile
� Nur drei Fälle müssen unterschieden werden
� Max. zwei Dreiecke/Tetraeder
� Keine Mehrdeutigkeiten
Nachteile
� Resampling auf Tetraedergitter nötig
� Manchmal, z.B. bei Berechnungen/Simulationen lassen sich die Beobachtungspunkte frei wählen
Marching Tetraeder
29.01.2010 81
Zusammenfassung Flächenextraktion
Unterstützt insbesondere die Analyse geometrischer und topologischer Eigenschaften
Isoflächen lassen sich mit Standard-Graphikbibliotheken effektiv unterstützen
Isoflächen lassen sich mit an-deren Objekten gemeinsam darstellen
Extraktion ist ein vergleichsweise aufwendiger Prozess
Festlegung der Schwelle sehr sensible EntscheidungZellkern
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 82
Volume Rendering
Volume Rendering� Direkte Darstellung als semitransparente Elemente
� Abbildung von Datenwerten auf Transparenz und Farbe
� Kontinuierliche Darstellung der Datenwerte, einschließlich verschwommener Grenzen
� Darstellung des gesamten Datensatzes� Techniken
� Volume Tracing� Shear-Warp factorization� Splatting� Hardware Texturing
29.01.2010 83
Volume Rendering
Bildebene mit x*y Pixeln
Datenwürfel mit N*N*N Volumenelementen
Volumenelement V(i, j, k)
Strahl
Pixel (x, y)mit Farbe Cx,y
29.01.2010 Prof. Dr. Wolfgang Müller, HS Anhalt 84
Volume Rendering
Grundsätzliche Ansätze:
Bildraumverfahren (Volume Ray Casting)
FOR each pixel on image plane DOFOR each sampling point on associated ray DO
compute contribution to pixel;
Objektraumverfahren
FOR each volume element DOFOR each pixel projected onto DO
compute contribution to pixel;
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 85
Volume Ray Casting
Transferfunktion zur Beschreibung des Anteils, den ein Volumes an einem Pixel hat� Transferfunktion definiert Abbildung von Datenwerten auf
Präsentationsparameter (Farben, Grauwerte, Transparenz)� Bestimmt Sichtbarkeit und Erkennbarkeit von Strukturen
Typische Transferfunktionen� Fensterung� Bi- bzw. Trilevel-Fensterung� Inverse Fensterung� Stückweise lineare Funktionen� Polynome höheren Grades bzw. Splines
Problem: kein erkennbarer Bezug zwischen Eigenschaften der Transferfunktion und der Visualisierung
29.01.2010 86
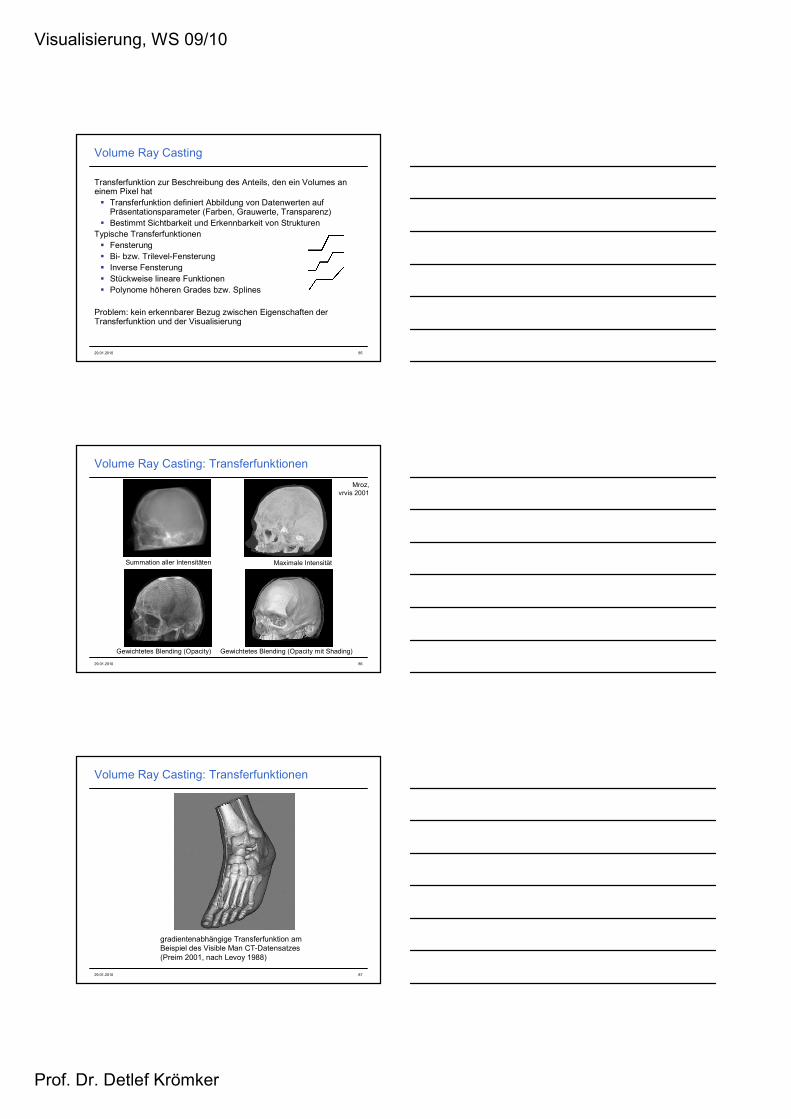
Volume Ray Casting: Transferfunktionen
Summation aller Intensitäten Maximale Intensität
Gewichtetes Blending (Opacity) Gewichtetes Blending (Opacity mit Shading)
Mroz,vrvis 2001
29.01.2010 87
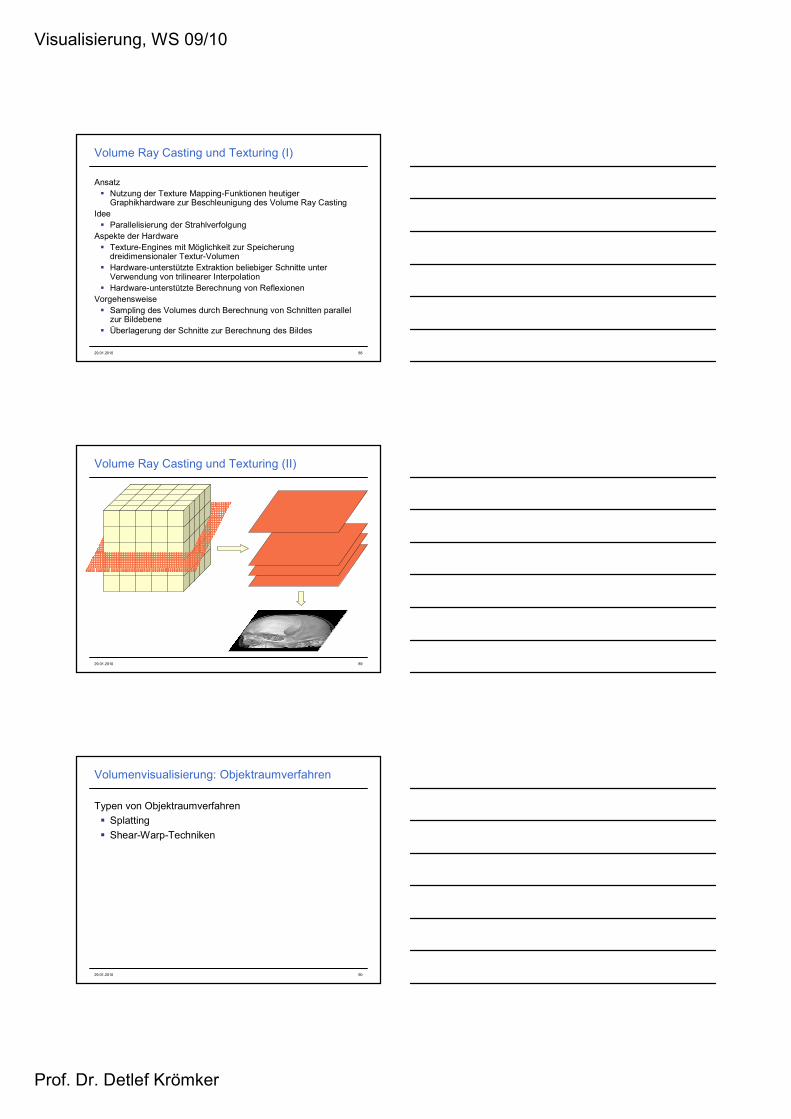
Volume Ray Casting: Transferfunktionen
gradientenabhängige Transferfunktion am Beispiel des Visible Man CT-Datensatzes (Preim 2001, nach Levoy 1988)
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 88
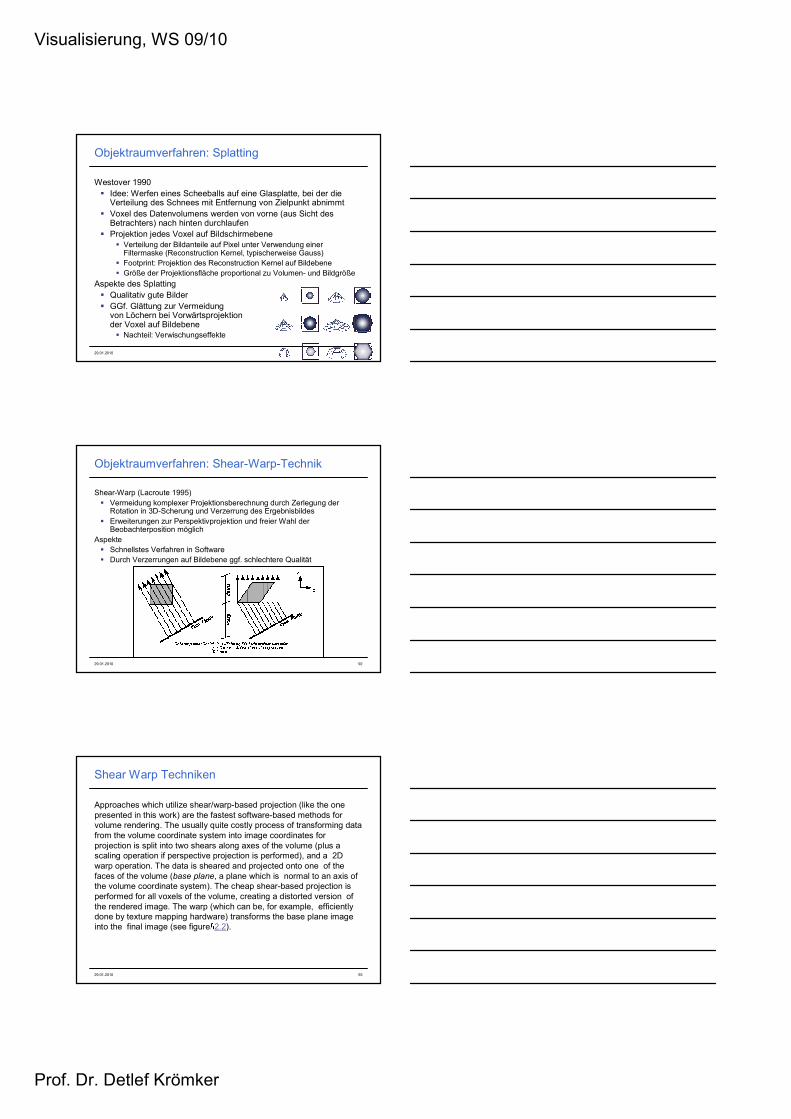
Volume Ray Casting und Texturing (I)
Ansatz� Nutzung der Texture Mapping-Funktionen heutiger
Graphikhardware zur Beschleunigung des Volume Ray CastingIdee� Parallelisierung der Strahlverfolgung
Aspekte der Hardware� Texture-Engines mit Möglichkeit zur Speicherung
dreidimensionaler Textur-Volumen� Hardware-unterstützte Extraktion beliebiger Schnitte unter
Verwendung von trilinearer Interpolation� Hardware-unterstützte Berechnung von Reflexionen
Vorgehensweise� Sampling des Volumes durch Berechnung von Schnitten parallel
zur Bildebene� Überlagerung der Schnitte zur Berechnung des Bildes
29.01.2010 89
Volume Ray Casting und Texturing (II)
29.01.2010 90
Volumenvisualisierung: Objektraumverfahren
Typen von Objektraumverfahren
� Splatting
� Shear-Warp-Techniken
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 91
Objektraumverfahren: Splatting
Westover 1990� Idee: Werfen eines Scheeballs auf eine Glasplatte, bei der die
Verteilung des Schnees mit Entfernung von Zielpunkt abnimmt� Voxel des Datenvolumens werden von vorne (aus Sicht des
Betrachters) nach hinten durchlaufen� Projektion jedes Voxel auf Bildschirmebene
� Verteilung der Bildanteile auf Pixel unter Verwendung einer Filtermaske (Reconstruction Kernel, typischerweise Gauss)
� Footprint: Projektion des Reconstruction Kernel auf Bildebene� Größe der Projektionsfläche proportional zu Volumen- und Bildgröße
Aspekte des Splatting� Qualitativ gute Bilder� GGf. Glättung zur Vermeidung
von Löchern bei Vorwärtsprojektionder Voxel auf Bildebene� Nachteil: Verwischungseffekte
29.01.2010 92
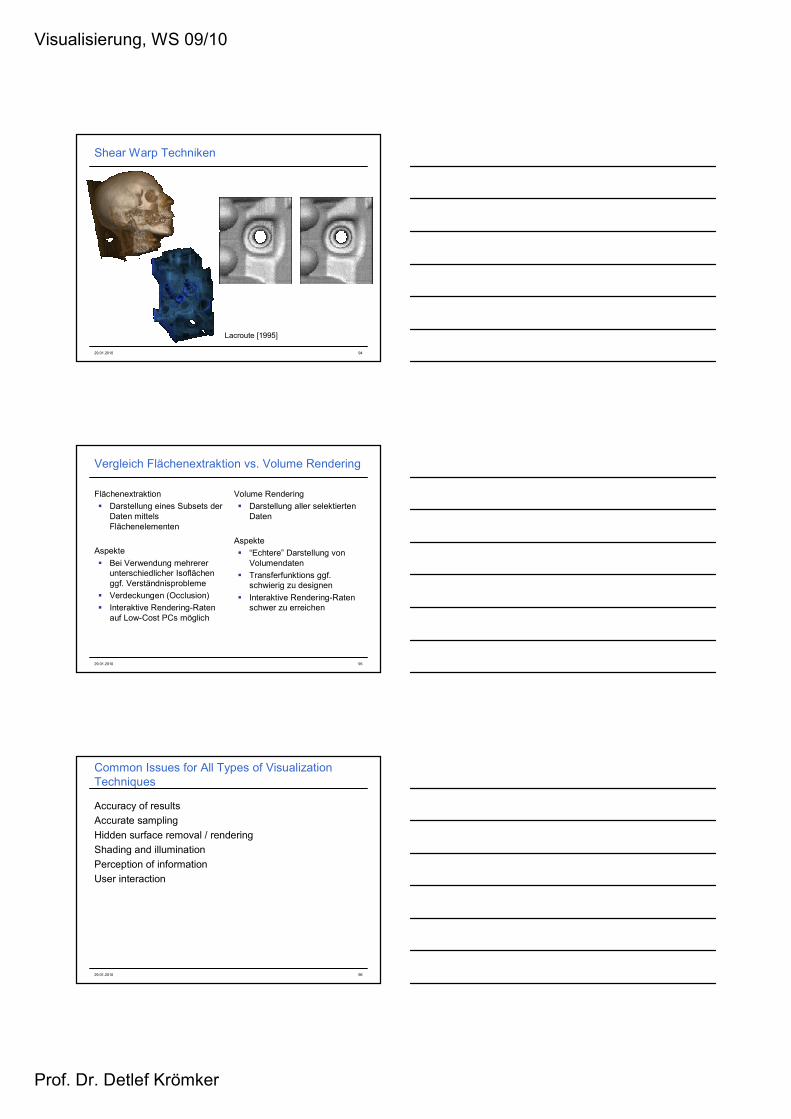
Objektraumverfahren: Shear-Warp-Technik
Shear-Warp (Lacroute 1995) � Vermeidung komplexer Projektionsberechnung durch Zerlegung der
Rotation in 3D-Scherung und Verzerrung des Ergebnisbildes� Erweiterungen zur Perspektivprojektion und freier Wahl der
Beobachterposition möglichAspekte� Schnellstes Verfahren in Software� Durch Verzerrungen auf Bildebene ggf. schlechtere Qualität
29.01.2010 93
Shear Warp Techniken
Approaches which utilize shear/warp-based projection (like the one presented in this work) are the fastest software-based methods for volume rendering. The usually quite costly process of transforming data from the volume coordinate system into image coordinates for projection is split into two shears along axes of the volume (plus a scaling operation if perspective projection is performed), and a 2D warp operation. The data is sheared and projected onto one of the faces of the volume (base plane, a plane which is normal to an axis of the volume coordinate system). The cheap shear-based projection is performed for all voxels of the volume, creating a distorted version of the rendered image. The warp (which can be, for example, efficiently done by texture mapping hardware) transforms the base plane image into the final image (see figureハ2.2).
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 94
Shear Warp Techniken
Lacroute [1995]
29.01.2010 95
Vergleich Flächenextraktion vs. Volume Rendering
Flächenextraktion
� Darstellung eines Subsets der Daten mittels Flächenelementen
Aspekte
� Bei Verwendung mehrerer unterschiedlicher Isoflächen ggf. Verständnisprobleme
� Verdeckungen (Occlusion)
� Interaktive Rendering-Raten auf Low-Cost PCs möglich
Volume Rendering
� Darstellung aller selektierten Daten
Aspekte
� “Echtere” Darstellung von Volumendaten
� Transferfunktions ggf. schwierig zu designen
� Interaktive Rendering-Raten schwer zu erreichen
29.01.2010 96
Common Issues for All Types of Visualization Techniques
Accuracy of results
Accurate sampling
Hidden surface removal / rendering
Shading and illumination
Perception of information
User interaction
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 97
Hierarchische Datenstrukturen
Spezielle Datenstrukturen können den Zugriff und die Analyse von 3D-Daten unterstützen und beschleunigen
� Octree
� B-Tree
� K-D-Tree
29.01.2010 98
Zusammenfassung
Volumenvisualisierung
� Flächenrekonstruktion (z.B. Marching Cubes)
� Direktes Volumenrendering (z.B. Splatting)
Beide Verfahren mit spezifischen Vor- und Nachteilen
Zentrale Probleme
� Große Datenmengen
� Hohe Renderingzeiten
Viele technische Ansätze zur Beschleunigung der Verfahren
29.01.2010 99
Hausaufgabe
Schumann, Müller: Kap. 7.2, 7.3, 7.4, 7.5
Visualisierung, WS 09/10
Prof. Dr. Detlef Krömker
29.01.2010 100
Danksagung
Diese Vorlesung basiert auf Material von
� Prof. Dr. Wolfgang Müller
� Prof. Dr. Colin Ware
� Prof. Dr. Ralf Dörner
� Prof. David Ebert, PhD