Embed Size (px)
Citation preview
KRIEG IM AETHER
Vorlesungen an der Eidgenössischen Technischen Hochschule in Zürichim Wintersemester 1967/1968
Leitung: Abteilung für Übermittlungstruppen, Oberstdivisionär E. Honegger
Wege zur Erhöhung der Sicherheitund Geschwindigkeit bei der
Datenübertragung mittels Telegraphiekanäle
Referent: B. Sakic
Diese Vorlesung wurde durch die Stiftung HAMFU digitalisiert und alsPDF Dokument für www.hamfu.ch aufbereitet.
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 1
WEGE ZUR ERHÖHUNG DER SICHERHEIT UND
GESCHWINDIGKEIT BEI DER DATENÜBERTRAG-UNG MITTELS TELEGRAPHIEKANÄLE
Datenübertragungssystem
Mit dem Aufschwung der Datenerfassungs- und Verarbeitungsgeräte und der digitalen Fernwirkgeräte-Fernmessungen, Fernsteuerungen, tritt mehr und mehr das Problem auf, eine grosse Anzahl von Datensicher und schnell zu Ubermitteln. Auf dem Uebertragungsweg sind die Daten den Störungen ausge-setzt, wodurch Verfälschungen entstehen. Wenn eine Nachricht wegen der Störungen in eine andereNachricht Ubergeht, führt das zu einem unerkennbaren Fehler. Das ist auch der Fall, wenn eineNachricht durch die Störung allein vorgetäuscht wird. Die Fehler, welche zu sinnlosen Nachrichtenführen, werden erkannt und führen zu Nachrichtenverlusten. Die Aufgabe der Datenübertragungssystemeist, sowohl die Verfälschungen, als auch die Verluste unter einem gewissen Prozentsatz zu halten.Dabei sind dem Uebertragungssystem die zur Verfügung stehende Bandbreite, die Signalleistung unddie Uebertragungszeit als physikalische Grenzen gestellt.
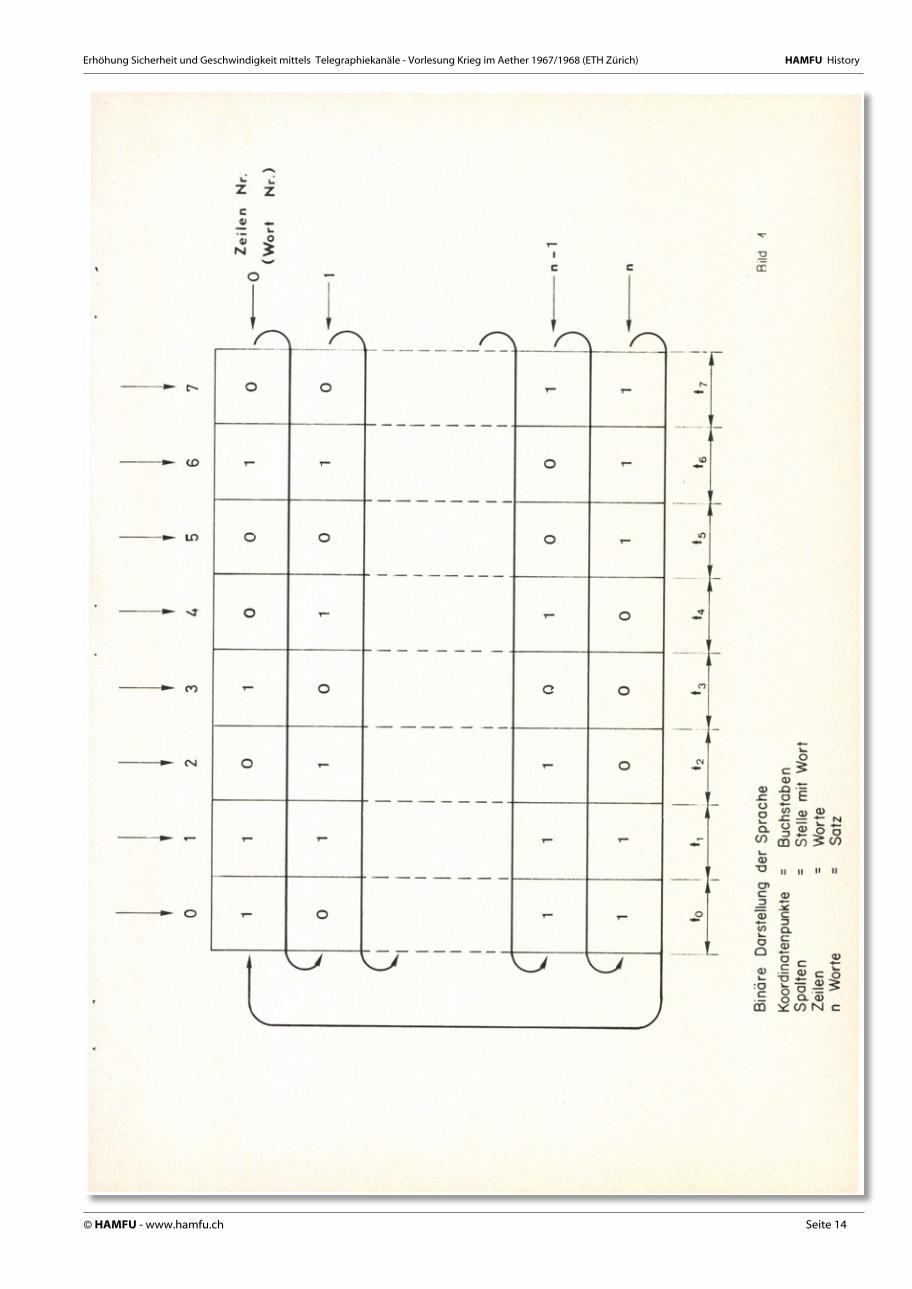
Eine absolut sichere Uebertragung gibt es nicht. In den nachfolgenden Ausführungen wird die Ueber-tragung binärer Daten im Zeitmultiplex-System behandelt. Diese sind aufgebaut aus zwei Buchstaben -Symbolen -, die nacheinander gesendet werden. So wird die Sprache des Uebertragungssystems aus zweiBuchstaben aufgebaut, aus "0" und "1", also aus "ja"- und "nein"-Entscheidungen, Angeordnet nach imvoraus bestimmten Regeln bilden die Folgen von Buchstaben die Worte der syntaktischen Maschinen-sprache. Diese Sprache lässt sich durch eine Uebertragungsmatrix darstellen (Bild l). EinzelneKoordinaten der Matrix sind mit Buchstaben belegt. Die Zeilen stellen die Wörter und die Spaltendie Stellen im Wort dar. N-Wörter bilden einen Satz. Nach vorbestimmten Uebersetzungsregeln wirdjeder Nachricht eine Kombination von Buchstaben zugeordnet. Das Uebertragungssystem hat zur Auf-gabe, den Inhalt der Gesamt-Matrix im Empfänger nachzubilden.
Dabei ist es notwendig, folgende Informationen zu Ubermitteln:
- den Inhalt einzelner Koordinatenpunkte
- die Zeitpunkte, welche den einzelnen Koordinaten zugeordnet sind
- den Zeitpunkt, welcher den Anfang und das Ende eines Wortes oder Satzes bestimmt.
Auf Grund dieser Informationen muss am Empfangsort geprüft werden, ob die Regeln der Sprache einge-halten wurden.
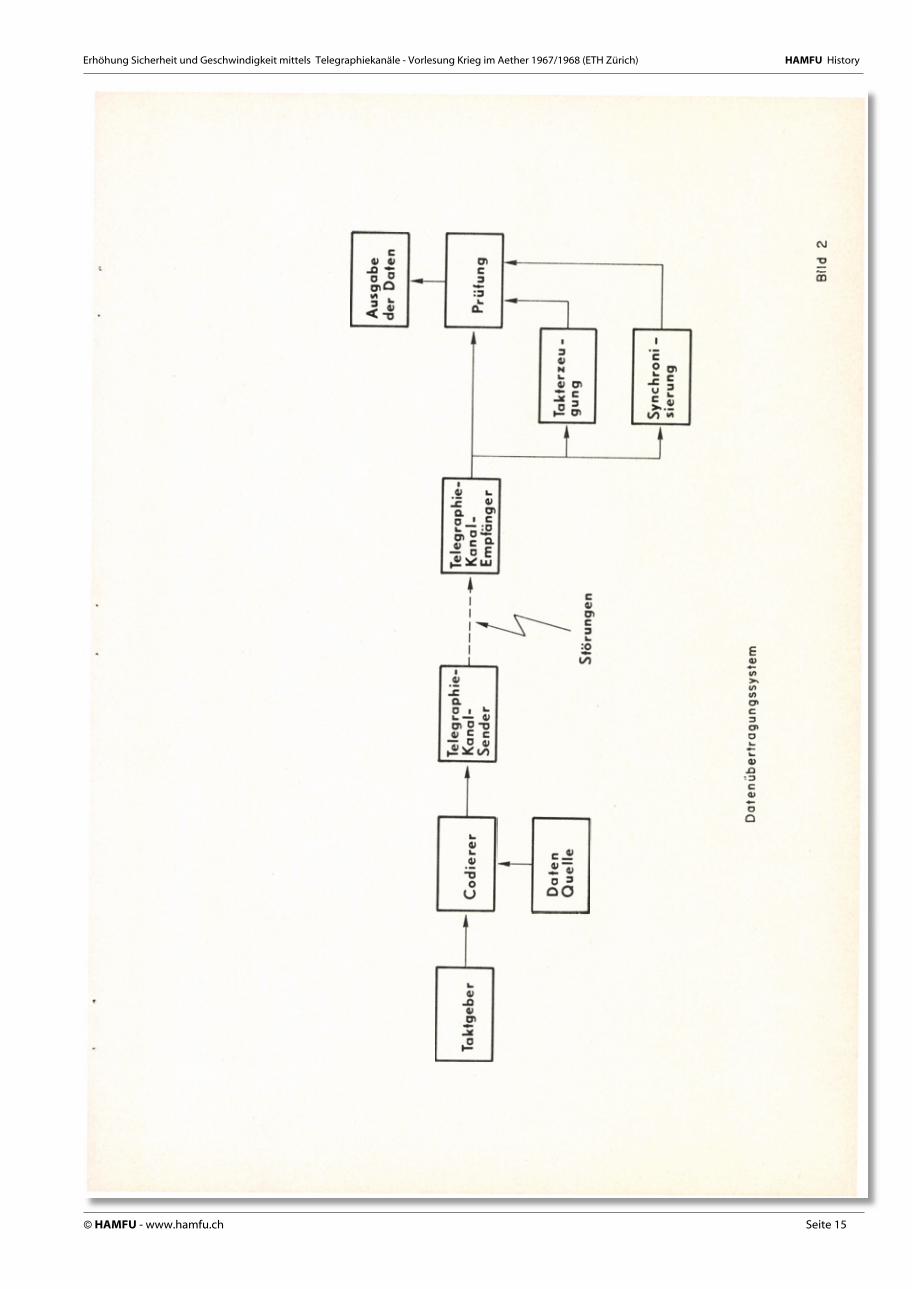
Diesen Anforderungen entsprechend, besteht jedes Datenübertragungssystem (Bild 2)
- auf der Senderseite aus einer Quelle, einem Codierer für die Erzeugung der Uebertragungsmatrixund einem Uebertragungskanal. Alle Vorgänge spielen sich im Rhythmus eines Taktgebers ab;
- auf der Empfangsseite aus dem Uebertragungskanal, einer Takterzeugung, Synchronisierung, Prüfungund Ausgabe der Daten,
Da die Signale auf dem Uebertragungsweg gestört werden, müssen die Uebertragungskanal e, Sender undEmpfänger, dafür sorgen, dass sich die den einzelnen Buchstaben zugeordneten Signale möglichst starkuntereinander unterscheiden und durch die Störungen wenig beeinflusst werden. Die Takterzeugung aufder Empfangsseite sorgt für die Auswertung der Signale in richtigen Zeitpunkten. Erst nach der Syn-chronisierung kann man Wörter unterscheiden und sie dann den Prüfregeln der Sprache unterziehen. DasVerhalten des ganzen Uebertragungssystemes hängt in erster Linie von diesen Komponenten ab. Wenn manin das System eine System-Gegenkopplung einführt, kann man einige Verbesserungen erzielen.
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 2
- 2 -
2. Der Uebertragungskanal
2.1. Optimale Signalformen und optimale Filter
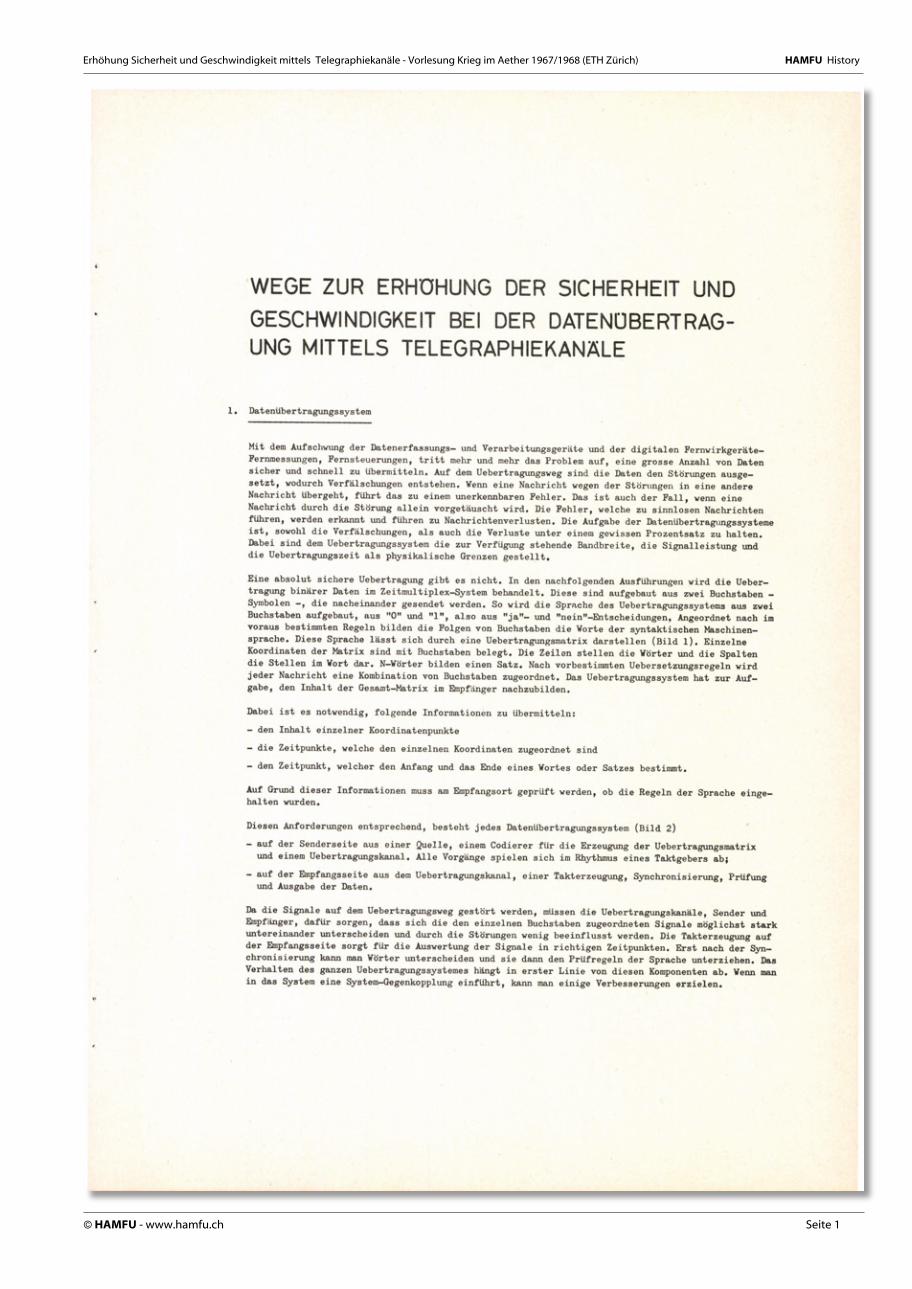
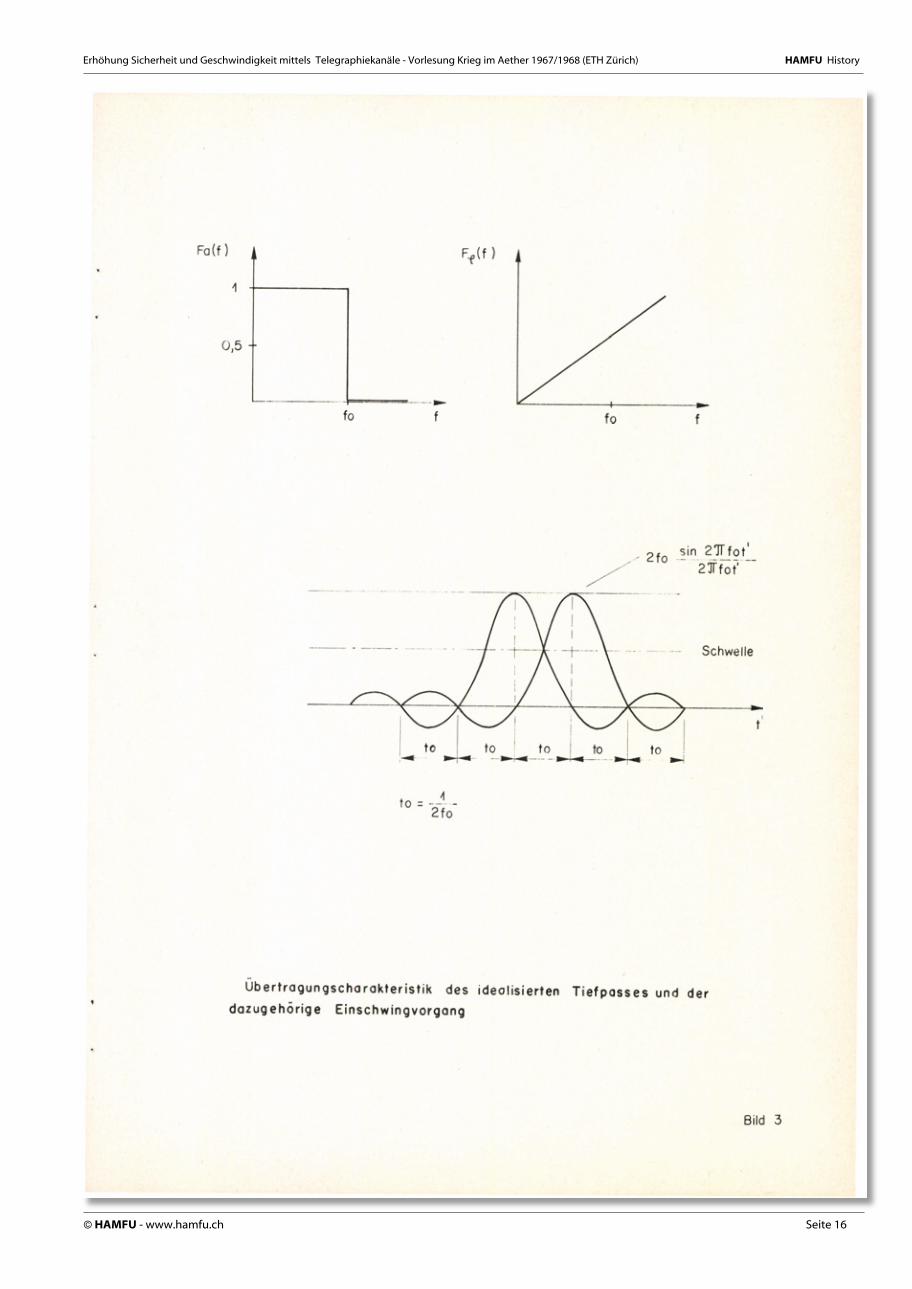
Bei der einfachsten Form der Uebertragung binärer Signale wird jedem Signal ein Zustanddes Uebertragungskanals zugeordnet. Das können zwei verschiedene Amplituden beliebigerkonstanter Frequenz, zwei verschiedene Frequenzen oder zwei Phasen eines Signals konstan-ter Amplitude sein. Diese Signale müssen im allgemeinen Uber frequenzbegrenzte Bänder er-mittelt werden. Demzufolge wird die Anzahl der übertragbaren Signale in einen Zeitraum be-schränkt. Es sei der einfachste Fall angenommen, wo eine "1" durch einen idealen Impulsdargestellt wird. Das diesem Impuls zugehörige Spektrum, erstreckt sich Uber alle Frequen-zen und hat konstante Amplitude. Wenn dieses Spektrum durch einen idealen Tiefpassfilterbegrenzt wird, dessen Amplituden- und Phasencharakteristik Bild 3 zeigt, entsteht am Aus-gang des Filters die Funktion
,f° sinTC 2 f 0 ( t - l )S (t) = 2 \ Fa (f) cos 21T f (t-T ) df « 2f0 —
; 2 or f0 (t - r )
sin 2Ot f Dt 1
= 2 f 0
2 T V
TT «• Laufzeit des Tiefpassfilters
Im optimalen Fall, wenn sich zwei aufeinander folgende Impulse im Moment der Auswertung(bei der maximalen Amplitude) nicht beeinflussen dürfen, kann das nächste Impulsmaximumbeim ersten Nulldurchgang des vorausgehenden eintreffen. Das bedeutet, der minimal erlaubteAbstand zweier Impulse ist t Q = £
2fo
Somit kann man im idealen Fall durch ein Uebertragungssystem mit Grenzfrequenz f 0, 2f 0
Impulse in der sec. übertragen.
Wenn im gewählten Zeitabstand t 0 der Impuls ausbleibt, wird das als eine "0" ausgewertet.Um diese beiden binären Zustände möglichst gut unterscheiden zu können, wird eine Bewertungs-schwelle gleich der Hälfte der maximalen Amplitude gesetzt. Der Zeitpunkt, wo das Signal dieSchwelle passiert, stellt den Uebergang zwischen zwei binären Zuständen dar.
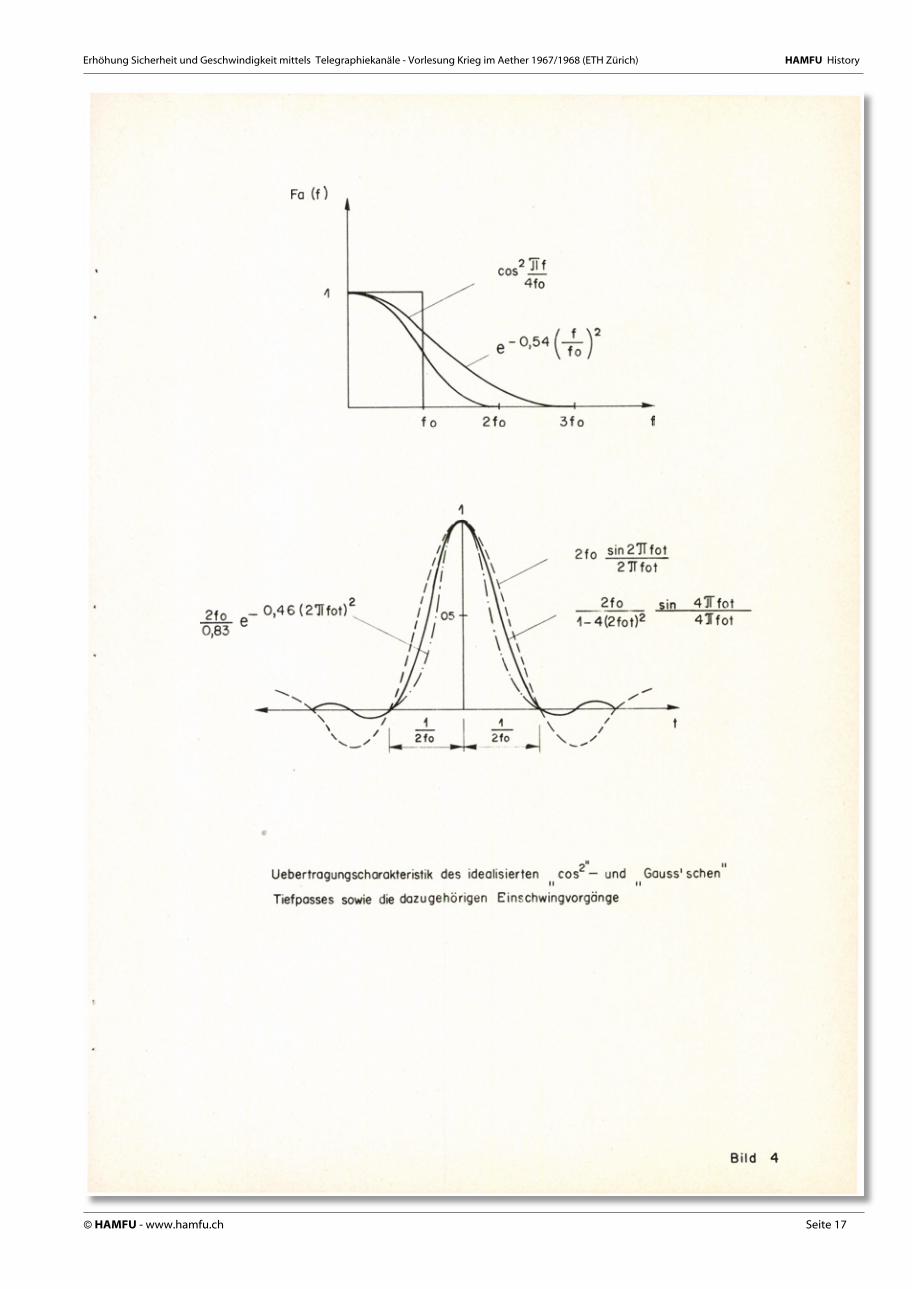
Solche ideale Amplituden- und Phasencharakteristik wie das Bild 3 zeigte, kann man beiphysikalischen Uebertragungspfaden nicht verwirklichen. Ein Filter ohne Phasenverzerrungmit unendlich steilem Anstieg der Dämpfung wäre physikalisch nur möglich, wenn seine Lauf-zeit unendlich gross wäre. Als Folge der UnVollkommenheiten der Uebertragungsfunktionen ent-stehen Verzerrungen der Signale auch dann, wenn keine Störungen vorhanden sind. Die Ver-zerrungen haben ein Nebensprechen zwischen zwei Signalen zur Folge: die Amplituden und dieUebergangspunkte zwischen zwei Signalen werden verändert. Für eine wirkungsvolle Auswertungder Signale muss dann die Taktverschiebung des Empfängers in engen Grenzen gehalten werden.Das Nebensprechen zweier Impulse wird umso kleiner, je schneller die Vor- und Nachschwingungengedämpft werden. Bereits 1924 hat sich Nyquist mit diesen Problemen auseinandergesetzt (1,2,3).Er hat Uebertragungsfunktionen gesucht, bei denen die Einschwingvorgänge schneller gedämpftwerden. Als Forderungen stellte er dabei, dass die Signal-Nullpunkte und die Uebergangspunktebei der halben Amplitude in gleichen Abständen erfolgen. Diese Forderungen erfüllen zentral-symmetrische Uebertragungsfunktionen um den Punkt f 0. Eine oft verwendete Funktion ist dieC032 OT f (Bjjij 4). Die Abschwächung des Nebensprechens bei der Erfüllung der gestelltenForderung muss man mit der doppelten Bandbreite bezahlen. Das minimale Nebensprechen würdesich bei dem Gauss'sehen Uebertragungsfaktor ergeben. Verlangt man, dass beim nächsten Impulsdas Signal auf 1% abklingt, müsste man gegenüber des idealisierten Tiefpasses dreifache Band-breite verwenden. Bei diesem Uebertragungsfaktor würden die Uebergangspunkte verschoben.
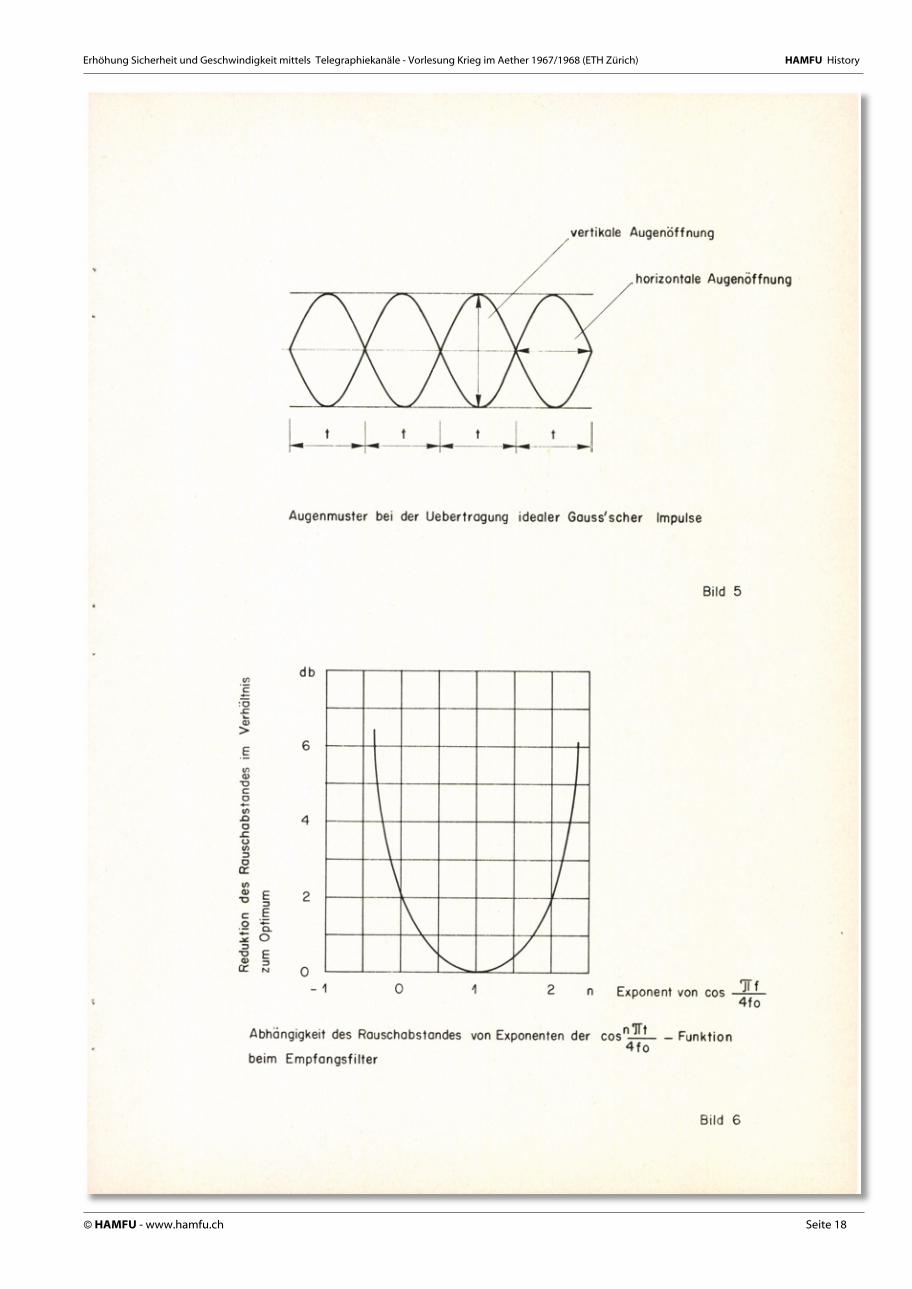
Besonders gut lässt sich das Nebensprechen durch die Augenmuster veranschaulichen. Experimen-tell kann man diese erhalten, wenn man eine Reihe von Zufallsimpulsen auf einem Oszillographenbetrachtet, der mit idealen Uebergangspunkten - Taktimpulsen des Senders - synchronisiert ist.Beschränkt z.B. auf ein 4 bit-Intervall, entsteht bei den Gauss'sehen Impulsen ein Oszillo-
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 3
- 3 -
gramm, wie Bild 5 zeigt. Durch die Verzerrungen oder das Nebensprechen bei anderen Ueber-tragungsfunktionen kann sich die vertikale oder horizontale Augenöffnung verändern. BeiVerkleinerung der vertikalen Augenöffnung ist es schwieriger zwischen zwei Signalen zuunterscheiden. Die Veränderung der horizontalen Augenöffnung führt zu einer zusätzlichenPulslänge-Modulation, die sich bei der Bestimmung der Abtaste-Zeitpunkte ungünstig aus-wirkt .
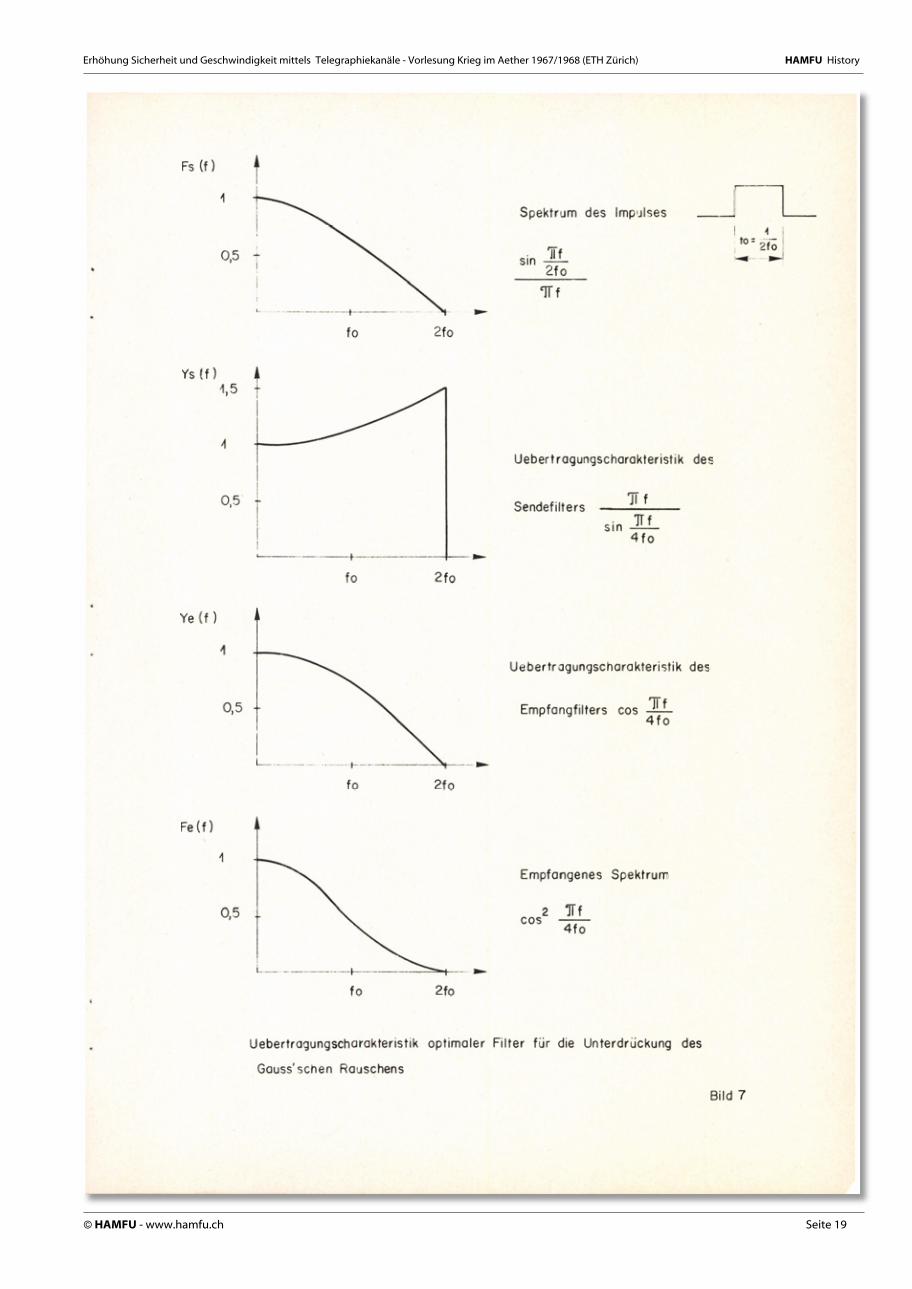
Die gewünschte Uebertragungsfunktion mit kleinen Vor- und Nachschwingungen soll das ge-samte System, d.h. der Kanalsender, der Uebertragungspfade und der Kanalempfänger ergeben.Demzufolge bleiben unendlich viele Möglichkeiten für die Bestimmung der Uebertragungsfunk-tionen einzelner Komponenten offen. Diese Freiheit der Wahl gestattet, die einzelne Kompo-nente so zu bestimmen, dass bei gestellten Anforderungen an das Nebensprechen, auch dieStörungen auf dem Uebertragungspfad unterdrückt werden. Vorausgesetzt, dass der Ueber-tragungspfad das Spektrum ira betrachteten Bereich nicht verändert, muss das Empfangsfilterbei gefordertem Signalspektrum das Störspektrum möglichst unterdrücken, und das Sendefilterdas Spektrum des ursprünglichen, binären Signales so umformen, dass die gemeinsame Ueber-tragungsfunktion des Sende- und Empfangsfilters das geforderte optimale Signalspektrumliefert. Die Filter, die nach diesen Gesichtspunkten entworfen werden, werden optimale,auch "matched" Filter genannt (3), (4).
Bei der Optimierung des Empfangsfilters wird das Signalleistungsspektrum dem Störleistungs-spektrum gegenübergestellt und eine Uebertragungsfunktion gesucht, wo das Verhältnis derStör- und Signalleistung minimal wird.
Setzt man z.B. voraus, dass die gesuchte Uebertragungsfunktion des Empfangsfilters Y (f)ist und betrachtet man den Einfluss des weissen Gauss'sehen Rauschens, bei dem alle Frequen-zen im Spektrum Amplitude = AR haben. Demzufolge wird die gesamte Störleistung nach demFilter
oo
P R = \ I I E ( F ) L 2 AR df
0
Wenn das Signal nach dem Empfangsfilter das gewünschte Spektrum
Ag F e (f) haben soll, muss
V ( f > * e M = A S - F e ( f )
sein, wobei Fg' (f) das vom Sender gelieferte Signalsspektrum ist. Nach dem Parseval'sehenTheorem ist die mittlere Leistung eines Impulses mit Spektrum (f), das mit Frequenz 2f 0
wiederholt wird, unter Berücksichtigung der vorhergehenden Gleichungen
P . - 4 . f 0 J % , . ( f , l = 4 F 0 Ag^ j -
O O
pFür das Verhältnis muss für die Optimierung das Minimum für fB gesucht werden. UnterVoraussetzung, P s dass das gewünschte optimale Spektrum A s 2
F e (f) = J _ cos2 T t2f 0 4f 0
ist, erreicht man über die Variationsrechnung (4) [Seite 105 - 106] für das optimaleEmpfangsfilter
Te (f) « cos U .f P s 4f 0
Die Optimierung für impulsartige Störungen zeigen (4), dass diese cos. Funktion im allge-meinen einen anderen Exponenten haben kann.
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 4
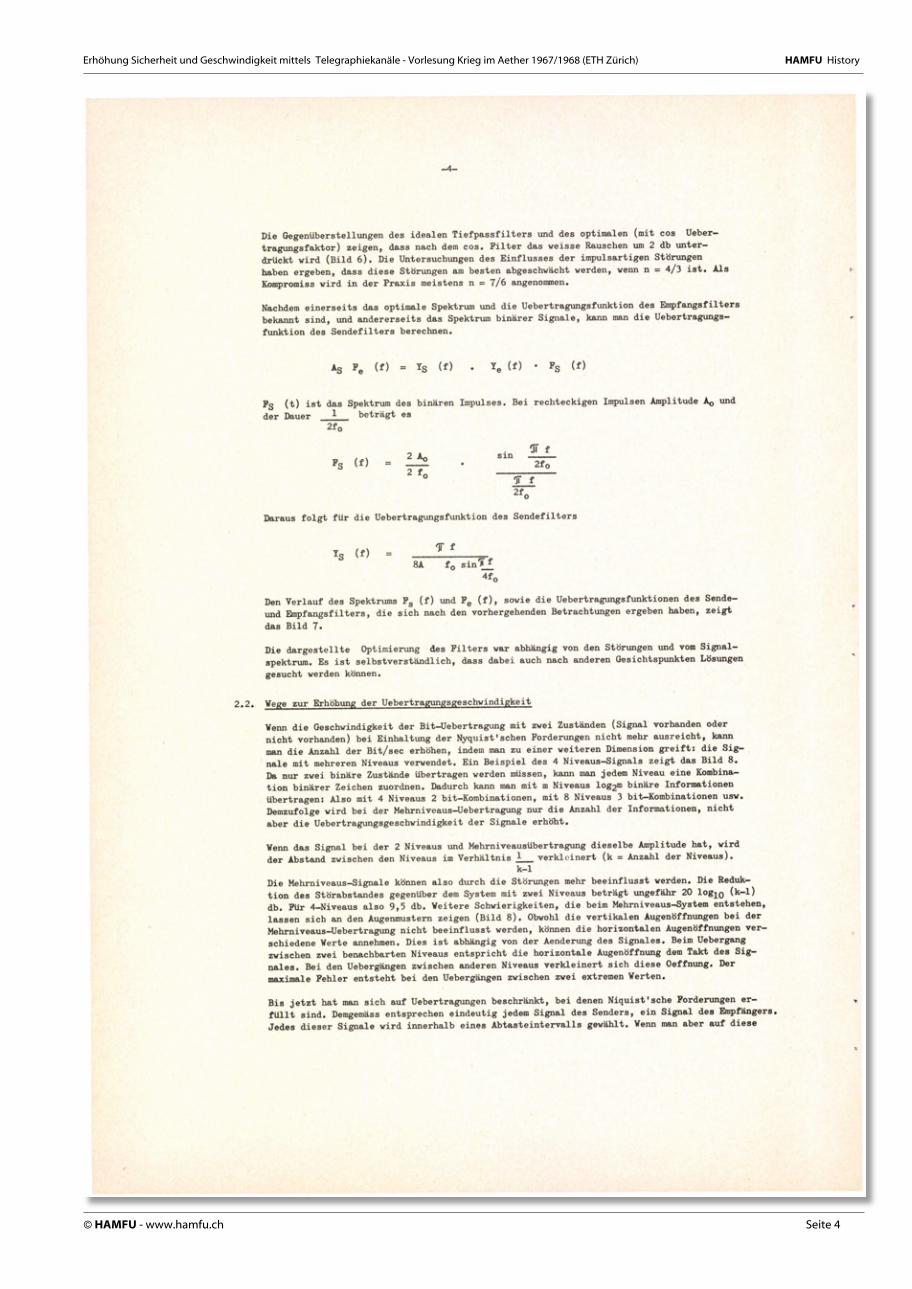
Die Gegenüberstellungen des idealen Tiefpassfilters und des optimalen (mit cos Ueber-tragungsfaktor) zeigen, dass nach dem cos. Filter das weisse Rauschen um 2 db unter-drückt wird (Bild 6). Die Untersuchungen des Einflusses der impulsartigen Störungenhaben ergeben, dass diese Störungen am besten abgeschwächt werden, wenn n = 4/3 ist. AlsKompromiss wird in der Praxis meistens n = 7/6 angenommen.
Nachdem einerseits das optimale Spektrum und die Uebertragungsfunktion des Empfangsfiltersbekannt sind, und andererseits das Spektrum binärer Signale, kann man die Uebertragungs-funktion des Sendefilters berechnen.
Ag F e (f) = Y S (*) • Te <f> ' P S (f>
Fg (t) ist das Spektrum des binären Impulses. Bei rechteckigen Impulsen Amplitude A„ undder Dauer 1 beträgt es
2fo
2 s l in % ÎF s (f) = • 2f 0
2 f„0
2 fo
Daraus folgt für die Uebertragungsfunktion des Sendefilters
T S (f) = T f
8A f 0 s i n ̂ £
« o
Den Verlauf des Spektrums F s (f) und F e (f), sowie die Uebertragungsfunktionen des Sende-und Empfangsfilters, die sich nach den vorhergehenden Betrachtungen ergeben haben, zeigtdas Bild 7.
Die dargestellte Optimierung des Filters war abhängig von den Störungen und vom Signal-spektrum. Es ist selbstverständlich, dass dabei auch nach anderen Gesichtspunkten Lösungengesucht werden können.
2.2. Wege zur Erhöhung der Uebertragungsgeschwindigkeit
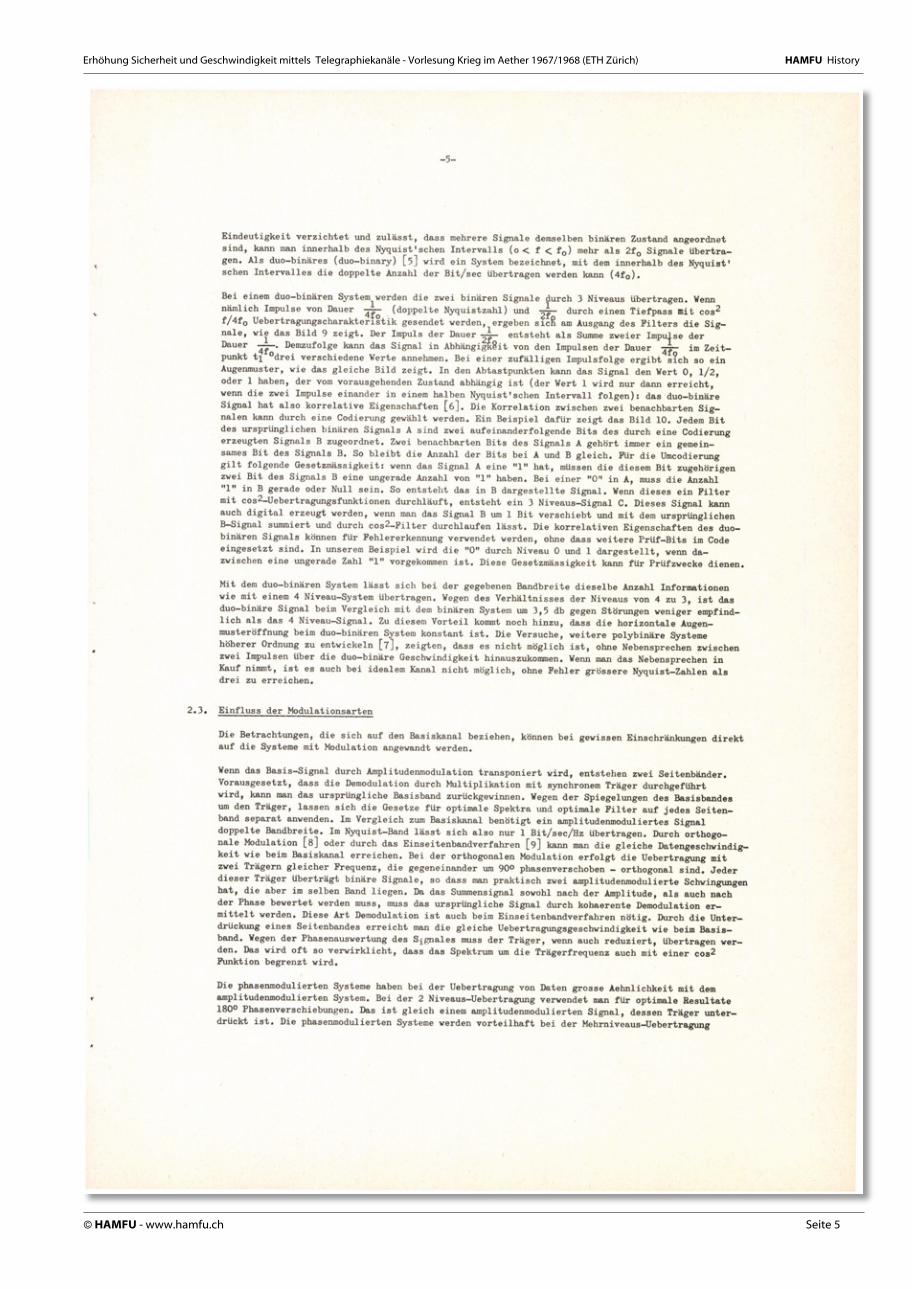
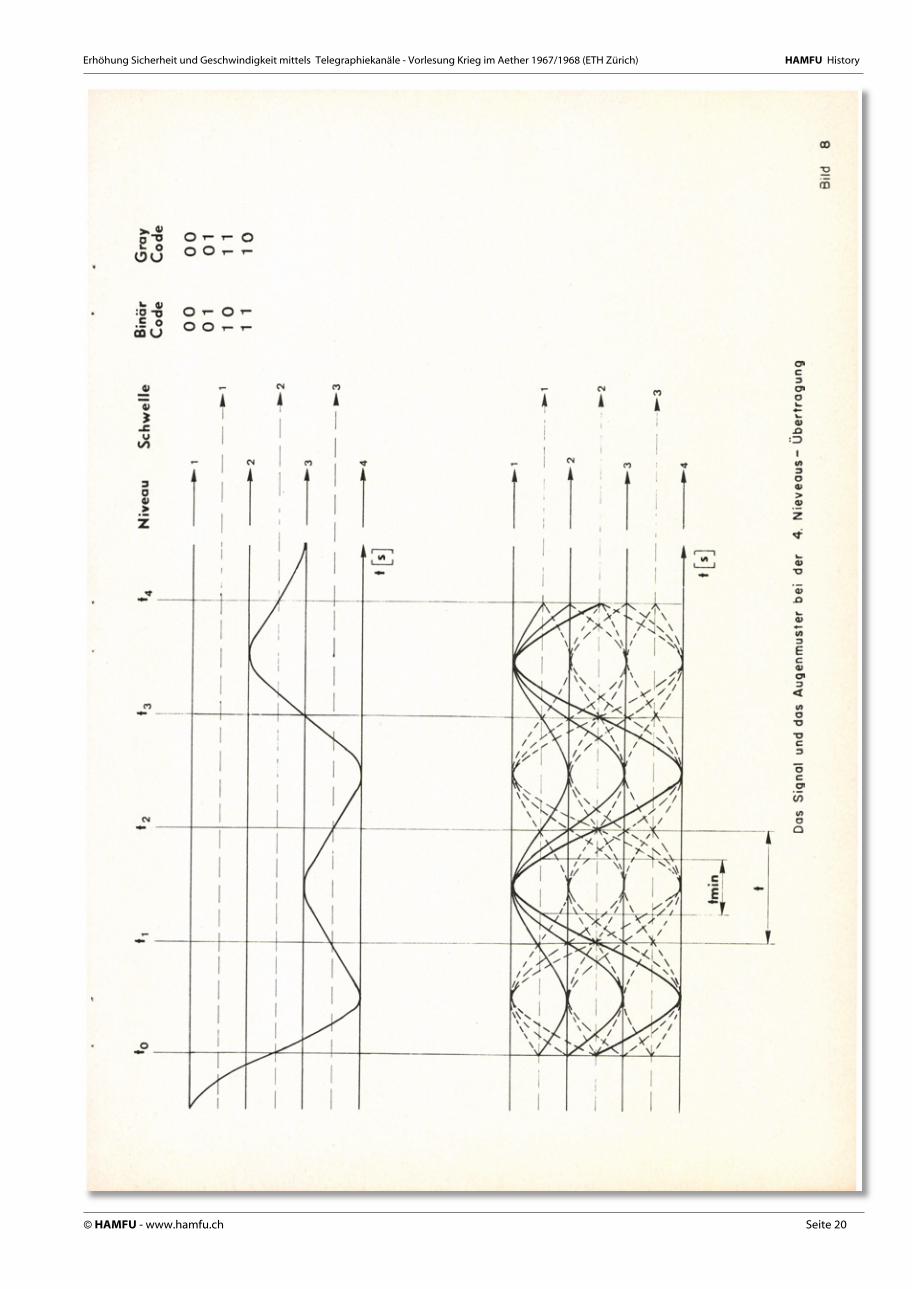
Wenn die Geschwindigkeit der Bit-Uebertragung mit zwei Zuständen (Signal vorhanden odernicht vorhanden) bei Einhaltung der Nyquist1 sehen Forderungen nicht mehr ausreicht, kannman die Anzahl der Bit/sec erhöhen, indem man zu einer weiteren Dimension greift! die Sig-nale mit mehreren Niveaus verwendet. Ein Beispiel des 4 Niveaus-Signals zeigt das Bild 8.Da nur zwei binäre Zustände übertragen werden müssen, kann man jedem Niveau eine Kombina-tion binärer Zeichen zuordnen. Dadurch kann man mit m Niveaus log2m binäre Informationenübertragen: Also mit 4 Niveaus 2 bit-Kombinationen, mit 8 Niveaus 3 bit-Kombinationen usw.Demzufolge wird bei der Mehrniveaus-Uebertragung nur die Anzahl der Informationen, nichtaber die Uebertragungsgeschwindigkeit der Signale erhöht.
Wenn das Signal bei der 2 Niveaus und Mehrniveausübertragung dieselbe Amplitude hat, wirdder Abstand zwischen den Niveaus im Verhältnis 1 verkleinert (k = Anzahl der Niveaus).
k-1Die Mehrniveaus-Signale können also durch die Störungen mehr beeinflusst werden. Die Reduk-tion des Störabstandes gegenüber dem System mit zwei Niveaus beträgt ungefähr 20 log 1 0 (k-l)db. Für 4—Niveaus also 9,5 db. Weitere Schwierigkeiten, die beim Mehrniveaus-System entstehen,lassen sich an den Augenmustern zeigen (Bild 8). Obwohl die vertikalen Augenöffnungen bei derMehrniveaus-Uebertragung nicht beeinflusst werden, können die horizontalen Augenöffnungen ver-schiedene Werte annehmen. Dies ist abhängig von der Aenderung des Signales. Beim Uebergangzwischen zwei benachbarten Niveaus entspricht die horizontale Augenöffnung dem Takt des Sig-nales. Bei den Uebergängen zwischen anderen Niveaus verkleinert sich diese Oeffnung. Dermaximale Fehler entsteht bei den Uebergängen zwischen zwei extremen Werten.
Bis jetzt hat man sich auf Uebertragungen beschränkt, bei denen Niquist'sche Forderungen er-füllt sind. Demgemäss entsprechen eindeutig jedem Signal des Senders, ein Signal des Empfängers.Jedes dieser Signale wird innerhalb eines Abtasteintervalls gewählt. Wenn man aber auf diese
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 5
- 5 -
E i n d e u t i g k e i t v e r z i c h t e t und z u l ä s s t , dass mehrere S i g na l e demselben b i nä r en Zustand angeordnets i n d , kann man i nn e rha l b des Ny qu i s t ' s e h en I n t e r v a l l s (o < f < f 0 ) mehr a l s 2 f 0 S i g na l e ü b e r t r a -gen. A l s duo-b inäre s (duo -b i na r y) [ 5 ] w i r d e i n System beze i chne t , m i t dem i n n e r h a l b des N y qu i s t 'sehen I n t e r v a l l e s d i e doppe l te Anzah l der B i t / s e c Ubert ragen werden kann ( 4 f 0 ) .
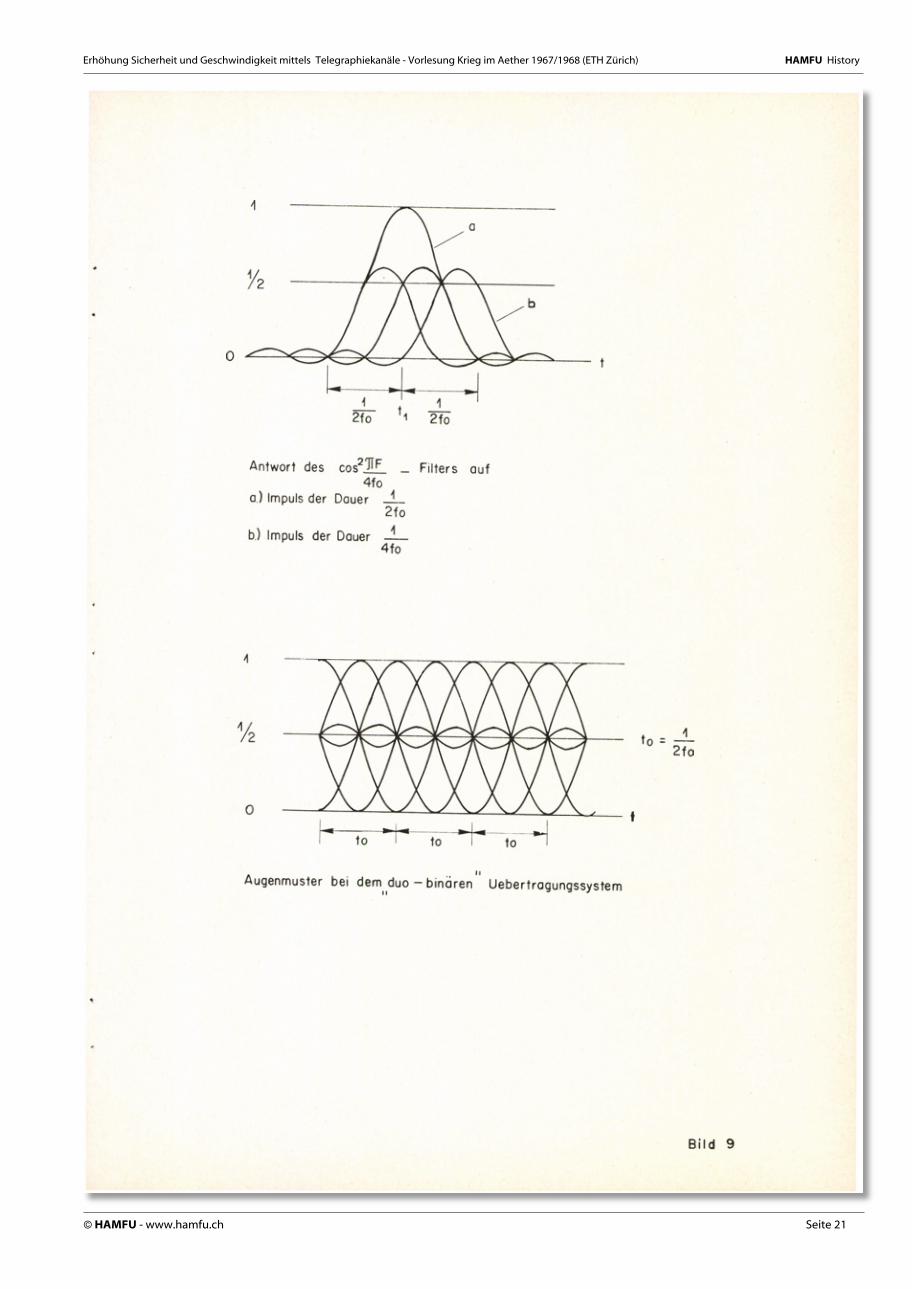
B e i einem duo-b inären System^werden d i e zwei b i nä re n S i g n a l e durch 3 Niveaus über t ragen . Wennnäm l i ch Impulse von Dauer — (doppe l te N y qu i s t z a h l ) und durch e inen T i e f p as s m i t co s 2
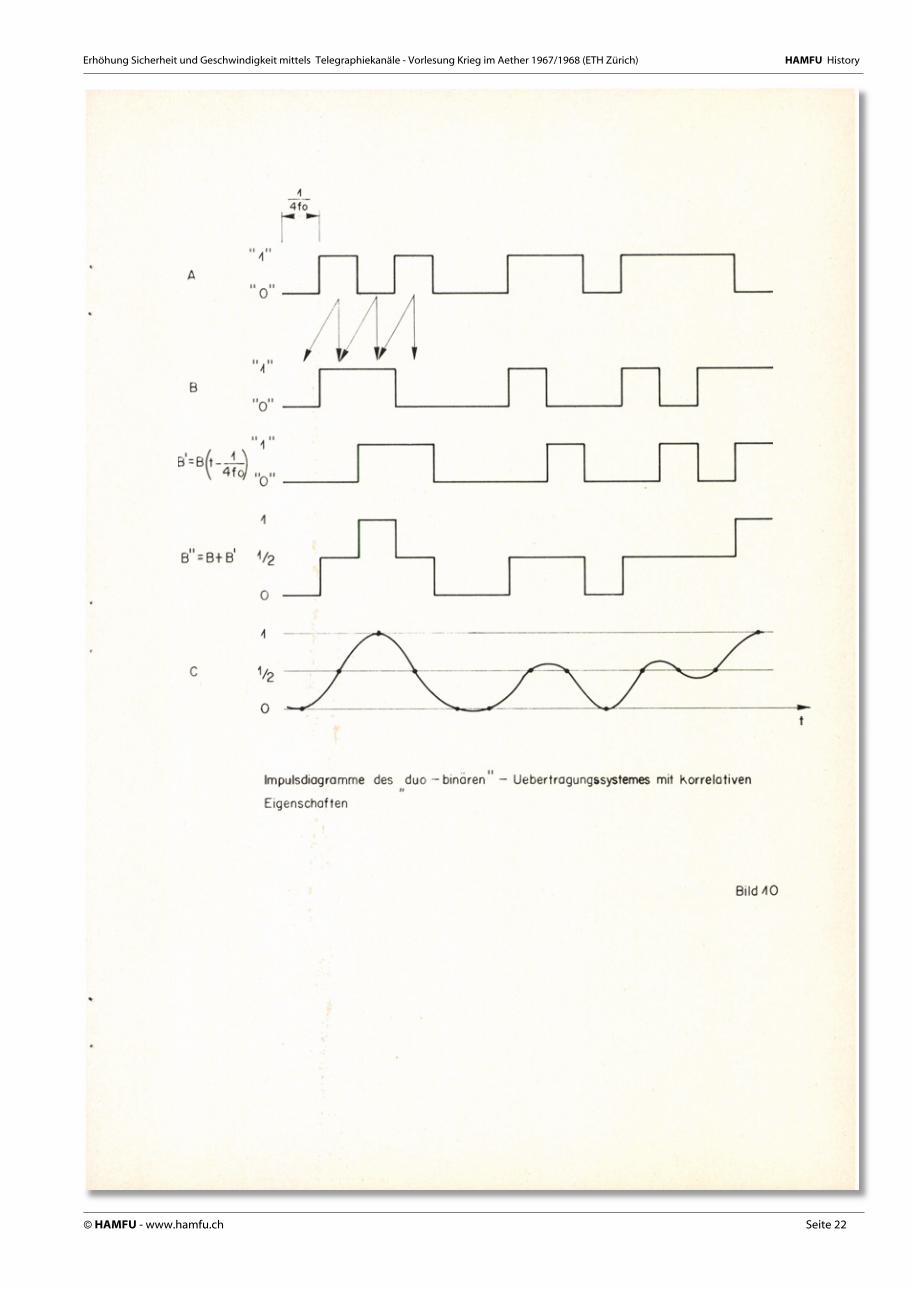
f / 4 f 0 U ebe r t r a gung s c ha r a k t e r i s t i k gesendet werden, ergeben s i e ß am Ausgang des F i l t e r s d i e S i g -n a l e , wie das B i l d 9 z e i g t . Der Impuls der Dauer e n t s t e h t a l s Summe zwe ie r Impulse derDauer - j p . Demzufolge kann das S i g n a l i n Abhäng igke i t von den Impulsen der Dauer - Ä - im Z e i t -punkt t i " d r e i ve r sch iedene Werte annehmen. B e i e i n e r z u f ä l l i g e n Impu l s f o lge e r g i b t s i c h so e i nAugenmuster, w ie das g l e i c h e B i l d z e i g t . In den Abta s tpunkten kann das S i g n a l den Wert 0 , 1 /2 ,oder 1 haben, der vom vorausgehenden Zustand abhängig i s t (der Wert 1 w i r d nur dann e r r e i c h t ,wenn d i e zwei Impulse e inander i n einem ha lben N y qu i s t ' s e h en I n t e r v a l l f o l g e n ) : das duo-b inäreS i g n a l ha t a l s o k o r r e l a t i v e E i g ens c ha f t e n [ ö ] . D ie K o r r e l a t i o n zwischen zwei benachbarten S i g -na l en kann durch e ine Cod ie rung gewählt werden. E i n B e i s p i e l da fü r z e i g t das B i l d 10. Jedem B i tdes u r s p r üng l i c h en b i nä r en S i g n a l s A s i n d zwei au fe i nande r fo l gende B i t s des durch e ine Cod ie rungerzeugten S i g n a l s B zugeordnet . Zwei benachbarten B i t s des S i g n a l s A gehör t immer e i n gemein-sames B i t des S i g na l s B. So b l e i b t d i e Anzah l der B i t s b e i A und B g l e i c h . Für d i e Umcodierungg i l t fo lgende Gese t zm äss i gke i t : wenn das S i g n a l A e ine "1" h a t , müssen d i e diesem B i t zugehör igenzwei B i t des S i g n a l s B e i ne ungerade Anzah l von "1" haben. B e i e i n e r "0" i n A, muss d i e Anzahl"1" i n B gerade oder N u l l s e i n . So e n t s t e h t das i n B d a r g e s t e l l t e S i g n a l . Wenn d i e se s e i n F i l t e rm i t co s 2 -Uebe r t ragungs funk t i onen d u r c h l ä u f t , en t s t eh t e i n 3 N i v e au s -S i g n a l C. D ieses S i g n a l kannauch d i g i t a l e r zeugt werden, wenn man das S i g n a l B um 1 B i t v e r s c h i e b t und mi t dem u r s p r ung l i c h enB - S i g n a l summiert und durch c o s 2 - F i l t e r du r c h l a u f en l ä s s t . D i e k o r r e l a t i v e n E i g ens c ha f t e n des duo-b i nä ren S i g n a l s können f ü r Feh le re rkennung verwendet werden, ohne dass w e i t e r e P r ü f - B i t s im Codee i n g e s e t z t s i n d . In unserem B e i s p i e l w i r d d i e "0" durch N iveau 0 und 1 d a r g e s t e l l t , wenn da-zwischen e ine ungerade Zah l "1" vorgekommen i s t . D ie se Gese t zmäss i gke i t kann f ü r P rüfzwecke d i enen.
M i t dem duo-b i nä ren System l ä s s t s i c h b e i der gegebenen Bandb re i t e d i e s e l b e Anzah l In f o rma t ionenwie mi t einem 4 Niveau-System über t ragen . Wegen des V e r h ä l t n i s s e s der Niveaus von 4 zu 3, i s t dasduo-b inäre S i g n a l beim V e r g l e i c h m i t dem b i nä re n System um 3 ,5 db gegen Störungen weniger empf ind-l i c h a l s das 4 N i v e a u - S i g n a l . Zu diesem V o r t e i l kommt noch h i n zu , dass d i e h o r i z o n t a l e Augen-musteröf fnung beim duo-b i nä ren System kons t an t i s t . D ie Versuche , we i t e r e p o l y b i nä r e Systemehöherer Ordnung zu en tw i c k e l n [ 7 ] , z e i g t e n , dass es n i c h t mög l i ch i s t , ohne Nebensprechen zwischenzwei Impulsen über d i e duo-b inäre Geschwind igke i t hinauszukommen. Wenn man das Nebensprechen i nKauf nimmt, i s t es auch b e i idea lem Kanal n i c h t mög l i ch , ohne F e h l e r g rö s se re Nyqu i s t - Z ah l e n a l sd r e i zu e r r e i c h e n .
2 . 3 . E i n f l u s s der Modu l a t i on sar t en
D i e Bet rachtungen, d i e s i c h auf den Ba s i s ka na l bez iehen, können b e i gew issen E inschränkungen d i r e k tauf d i e Systeme mi t Modu l a t i on angewandt werden.
Wenn das B a s i s - S i g n a l durch Ampl i tudenmodu lat ion t r a n s p o n i e r t w i r d , en ts tehen zwei Se i tenbände r .V o r ausgese t z t , dass d i e Demodulat ion durch M u l t i p l i k a t i o n m i t synchronem T räger durchgefüh r tw i r d , kann man das u r sp r üng l i c h e Bas i sband zurückgewinnen. Wegen der Sp iege lungen des Basi sbandesum den T räge r , l a s s e n s i c h d i e Gesetze f ü r op t ima le Spek t r a und opt ima le F i l t e r auf j edes S e i t e n -band separa t anwenden. Im V e r g l e i c h zum B a s i s k a na l b enö t i g t e i n amp l i t udenmodu l ie r te s S i g n a ldoppe l te Bandb re i t e . Im Nyqu i s t -Band l ä s s t s i c h a l s o nur 1 B i t / s e c / H z Uber t ragen. Durch o r t hogo -na l e Modu l a t i on [ 8 ] oder durch das E i n s e i t e nbandve r f ah r en [ 9 ] kann man d i e g l e i c h e Datengeschwind ig -k e i t wie beim Bas i s kana l e r r e i c h e n . Be i der o r thogona len Modu l a t i on e r f o l g t d i e Ueber tragung mi tzwei T rägern g l e i c h e r Frequenz, d i e gegeneinander um 90° phasenverschoben - o r t hogona l s i n d . J ed e rd i e s e r T räge r Ube r t r äg t b i nä re S i g n a l e , so dass man p r a k t i s c h zwei amp l i t udenmodu l ie r te Schwingungenha t , d i e aber im se lben Band l i e g e n . Da das Summensignal sowohl nach der Amp l i tude , a l s auch nachder Phase bewertet werden muss, muss das u r s p rüng l i c h e S i g n a l durch kohaerente Demodulat ion e r -m i t t e l t werden. D iese A r t Demodulat ion i s t auch beim E i n se i t enba ndv e r f ah r en n ö t i g . Durch d i e U n t e r -drückung e ines Se i tenbandes e r r e i c h t man d i e g l e i c h e Ueber t ragungsgeschwind igke i t w ie beim B a s i s -band. Wegen der Phasenauswertung des S i g n a l e s muss der T r äge r , wenn auch r e d u z i e r t , Ubert ragen wer -den. Das w i r d o f t so v e r w i r k l i c h t , dass das Spektrum um d i e T räger f requenz auch mi t e i n e r co s 2
Funk t i on begrenz t w i r d .
D ie phasenmodu l ier ten Systeme haben b e i de r Uebertragung von Daten grosse A e h n l i c h k e i t m i t demamp l i tudenmodu l i e r t en System. B e i der 2 N iveaus-Ueber t ragung verwendet man f ü r op t ima le R e s u l t a t e180° Phasenverschiebungen. Das i s t g l e i c h einem amp l i t udenmodu l i e r t en S i g n a l , dessen T räger u n t e r -d rück t i s t . D ie phasenmodu l ie r ten Systeme werden v o r t e i l h a f t b e i der Mehrn iveaus-Uebert ragung
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 6
eingesetzt. Wegen der binären Daten wird die Anzahl der Phasen als Multiplum von 2 gewählt. DieDemodulation erfolgt entweder durch Vergleich mit einem Referenzsignal oder durch différentielleDetektion, wo nur die Aenderung zwischen zwei aufeinanderfolgenden Signalen festgestellt wird.Bezüglich der Geschwindigkeit entspricht das phasenmodulierte System einem amplitudenmoduliertenjedoch zeigt das Phasenmodulations-System besseres Verhalten hinsichtlich des Rausch-Abstandes,da grössere Energie (Träger ist unterdrückt) in den Seitenbändern enthalten wird. Wegen der Ver-wandtschaft der phasen und amplitudenmodulierten Signale gelten auch für die optimalen Spektraund Filter gleiche Gesetzmässigkeiten.
Im allgemeinen besteht bei der Frequenzmodulation nicht die Möglichkeit, das Signal in additiveKomponenten zu zerlegen, weil es kein lineares Verhältnis zwischen dem Signal und der Modula-tionsfunktion gibt. Nur in einem besonders idealisierten Fall [ i o ] lässt sich ein frequenzmodu-liertes binäres Signal durch zwei amplitudenmodulierte Signale darstellen, dessen Trägerfrequen-zen gleich den getasteten Frequenzen sind. Das trifft zu, wenn der Abstand zwischen zwei ge-tasteten Frequenzen gleich der Anzahl der Bits/sec ist. Dadurch entsteht eine synchrone Tastung,wo keine Phasensprünge stattfinden. Die maximale Geschwindigkeit für dieses frequenzmodulierteSystem beträgt auch 1 Bit/sec/Hz. Als optimale Filter wurden da ebenfalls cos 2 Filter verwendet.Bewogen durch den Gedanken, dass man durch die Unterdrückung des Trägers bei der Amplitudenmodu-lation mehr Leistung (bei begrenzter Maximalleistung) in den Seitenbändern haben kann, wurden auchbeim erwähnten System die beiden getasteten Frequenzen unterdrückt [lO], Im Vergleich zu einemidealen Tiefpassfilter wurde beim Gauss'sehen Rauschen bei einem cos 2 Filter eine Verbesserung von2 db und beim selben Filter mit unterdrückten getasteten Frequenzen eine solche von 5 db erzielt.
Die Qualität eines Uebertragungssystemes kann man bewerten, indem man schaut, wie gross die Feh—lerwahrscheinlichkeit bei gegebenem Rauschabstand ist. Eine einfachere Beurteilung ist auf Grundder Signal-Raumdiagramme möglich. Bei diesen Diagrammen wird ein Signal, das eine allgemeine Formhat A(t) cos (io ct + 0 (t)), (ein Trägersignal cosi"ct moduliert in Phase und Amplitude) durchdas Polardiagramm von A und 0 beiu)0t als Referenz dargestellt. Wenn inmitten des Impuls-spektrums gewählt wird, entstehen einfache Muster, die zum Vergleich von Modulationsarten vor-teilhaft benutzt werden können. Näheres darüber ist der Literatur [ll] zu entnehmen.
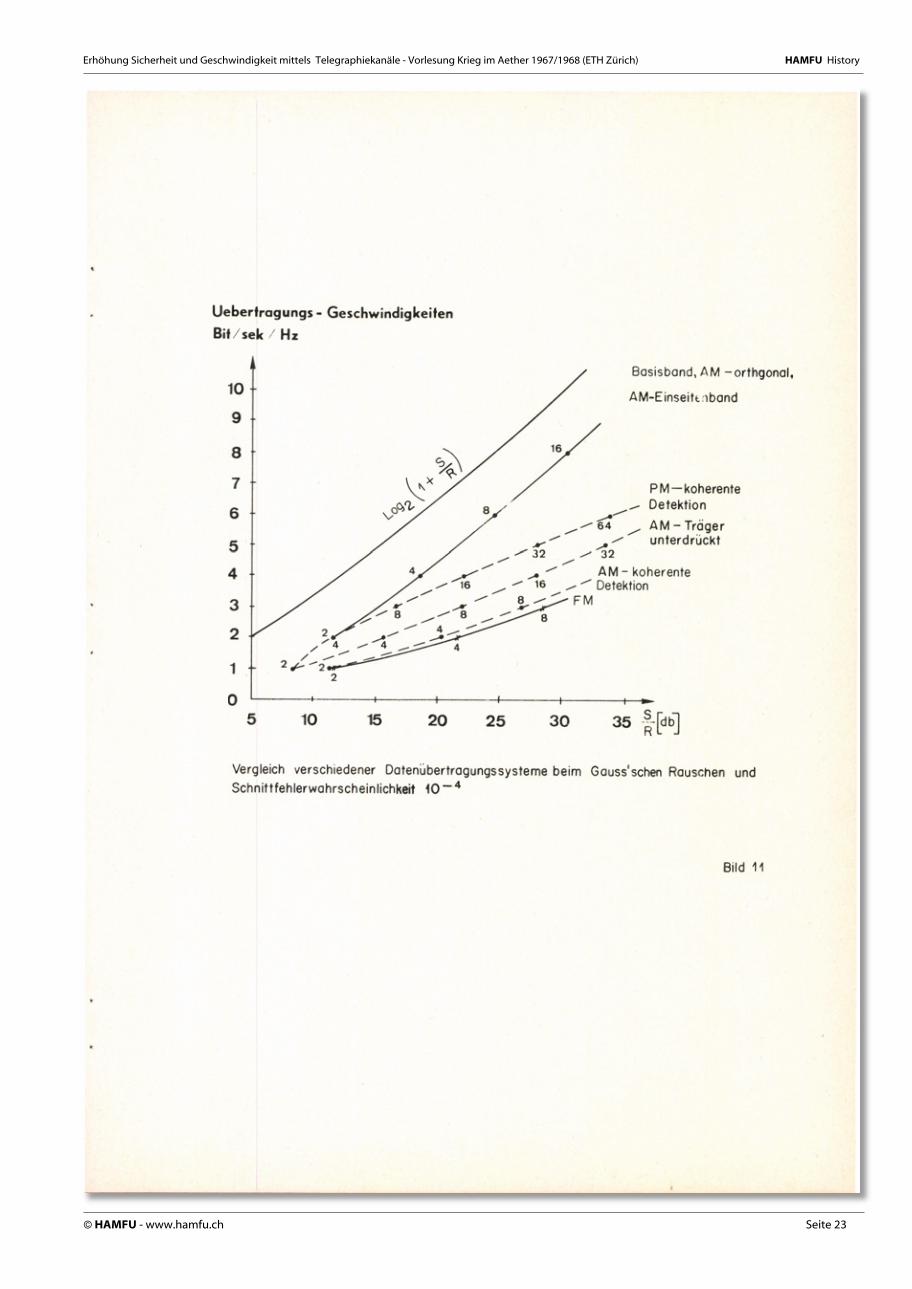
In [3] wurde das theoretische Verhalten optimierter Systeme verglichen. Das Bild 11 gibt darüberAuskunft. Das Verhalten verschiedener Systeme ist angegeben, deren Fehlerwahrscheinlichkeit IO" 4
beträgt, wenn sie Gauss'schem Rauschen ausgesetzt sind. Bei den physikalischen Systemen dürftedas Verhalten schlechter sein, die Verhältnisse zwischen den Systemen aber dürften mehr oderweniger unverändert bleiben: z.B. bei einem modernen System wurde innerhalb des Sprachbandestrotz des nichtlinearen Phasenganges 2 Bit/sec/Hz erreicht. So wurden bei 2700 Hz Bandbreite4800 Bit/sec übertragen, wobei man die Wahrscheinlichkeit von 10~4 beim Abstand zwischen Signalund Rauschen von 28 db erreicht hat [l2]. Zur Anwendung gelangt ein duo-binäres, frequenzmodu-liertes System.
Taktgewinnung
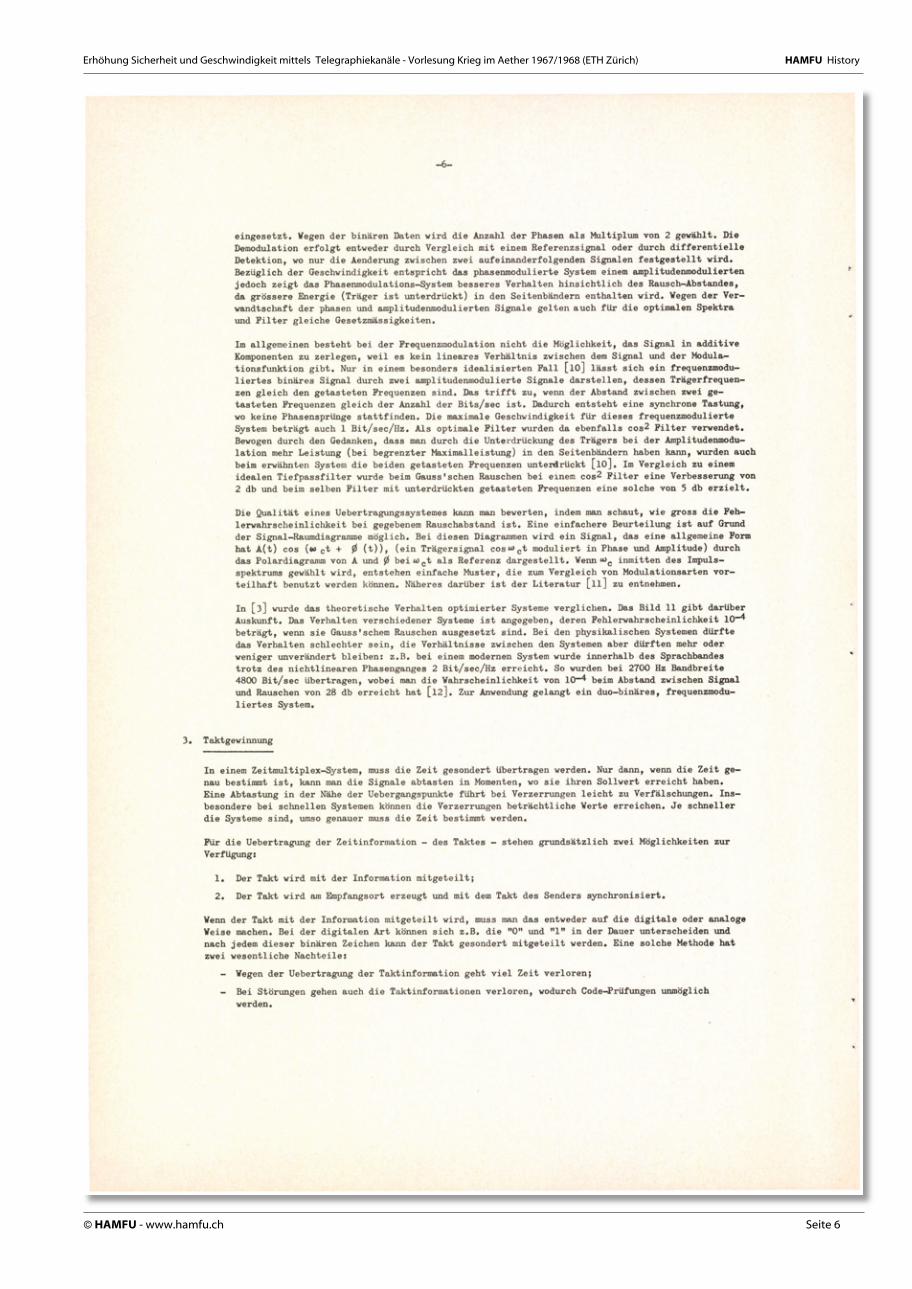
In einem Zeitmultiplex-System, muss die Zeit gesondert übertragen werden. Nur dann, wenn die Zeit ge-nau bestimmt ist, kann man die Signale abtasten in Momenten, wo sie ihren Sollwert erreicht haben.Eine Abtastung in der Nähe der Uebergangspunkte führt bei Verzerrungen leicht zu Verfälschungen. Ins-besondere bei schnellen Systemen können die Verzerrungen beträchtliche Werte erreichen. Je schnellerdie Systeme sind, umso genauer muss die Zeit bestimmt werden.
Für die Uebertragung der Zeitinformation - des Taktes - stehen grundsätzlich zwei Möglichkeiten zurVerfügung:
1. Der Takt wird mit der Information mitgeteilt;
2. Der Takt wird am Empfangsort erzeugt und mit dem Takt des Senders synchronisiert.
Wenn der Takt mit der Information mitgeteilt wird, muss man das entweder auf die digitale oder analogeWeise machen. Bei der digitalen Art können sich z.B. die "0" und "1" in der Dauer unterscheiden undnach jedem dieser binären Zeichen kann der Takt gesondert mitgeteilt werden. Eine solche Methode hatzwei wesentliche Nachteile:
- Wegen der Uebertragung der Taktinformation geht viel Zeit verloren;
- Bei Störungen gehen auch die Taktinformationen verloren, wodurch Code-Prüfungen unmöglichwerden.
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 7
- 7 -
Den zwe i ten N a c h t e i l haben auch d i e ana logen Methoden, wenn d i e T a k t i n f o r m a t i on aus dem modu l i e r t enS i g n a l heraus gewonnen w i r d . Ausserdem muss b e i d i e sen Methoden d i e Z e i t i n f o r m a t i o n entweder au fKos ten der Bandb re i te oder der S i g n a l l e i s t u n g U be r m i t t e l t werden.
D ie erwähnten N a ch t e i l e t r e t e n n i c h t a u f , wenn der T ak t beim Empfänger e rzeugt und durch d i e S i g -na l e des Senders s y n c h r o n i s i e r t w i r d . Da für n ö t i g e Z e i t i n f o r m a t i o n en werden aus den Aenderungen derb i nä r en Zustände entnommen. Abhängig von den Anforderungen des Systems, kann man e ine e i nma l i ges c h ne l l e , e ine k o n t i n u i e r l i c h e langsame oder e ine aus d i e sen be iden komb in i e r t e Synch ron i s i e r ungdurch füh ren .
S c hne l l e Syn ch ron i s i e r ung i s t gee i gne t , f ü r d i e Systeme, d i e d i e Nac h r i ch t e n i n t e rm i t t i e r end übe r -t r agen , a l s o f ü r S t a r t - S t o p - V e r f a h r e n . D ie Synch ron i s i e r ung w i r d e i n g e l e i t e t , indem mit der e r s t e nankommenden F l anke , e i n O s z i l l a t o r , we lche r den T akt e r zeug t , p h a s e n r i c h t i g g e s t a r t e t w i r d . B e is t a r k e r V e r ze r rung d i e s e r e r s t e n F lanke w i r d das ganze Telegramm b e e i n f l u s s t , was zu F e h l e rn undV e r l u s t e n des Telegrammes f üh ren kann. Für e i n so l ches System kann man t h e o r e t i s c h + 25$ V e r -ze rrungen zu l a s s en un te r der Vorausse tzung, dass d i e Auswertung der P u l s e i n i h r e r M i t t e e r f o l g t .D ie D i s t o r s i o n des Re f e r e nz t ak t e s muss man näm l i ch von der T o l e r anz der Abtas tung abz iehen . (Dad i e Re fe renz und das S i g n a l de r se l ben D i s t o r s i o n ausgese t z t s i n d , können b e i g r ös se ren Verzer rungena l s 25$, gewisse S i g na l e unausgewertet b l e i b e n . ) Nachdem d i e se Syn ch ron i s i e r ung durchge führ t i s t ,w i r d d i e Genau igke i t der w e i t e r e n T ak t impu lse von der S t a b i l i t ä t des verwendeten O s z i l l a t o r s ab -hängen. D ie se S t a b i l i t ä t des Sende- und Em p f a ng s o s z i l l a t o r s f ü h r t b e i l änge ren Impu ls f o l gen zu einera d d i t i v e n F e h l e r . B i s zu etwa l $ o S t a b i l i t ä t l a s s e n s i c h d i e O s z i l l a t o r e n m i t LC-Schwingkre i sen ver-w i r k l i c h e n . Ueber d i e se Genau igke i t h inaus müssen Quarz - oder m a gne t o s t r i k t i v e O s z i l l a t o r e n verwen-det werden.
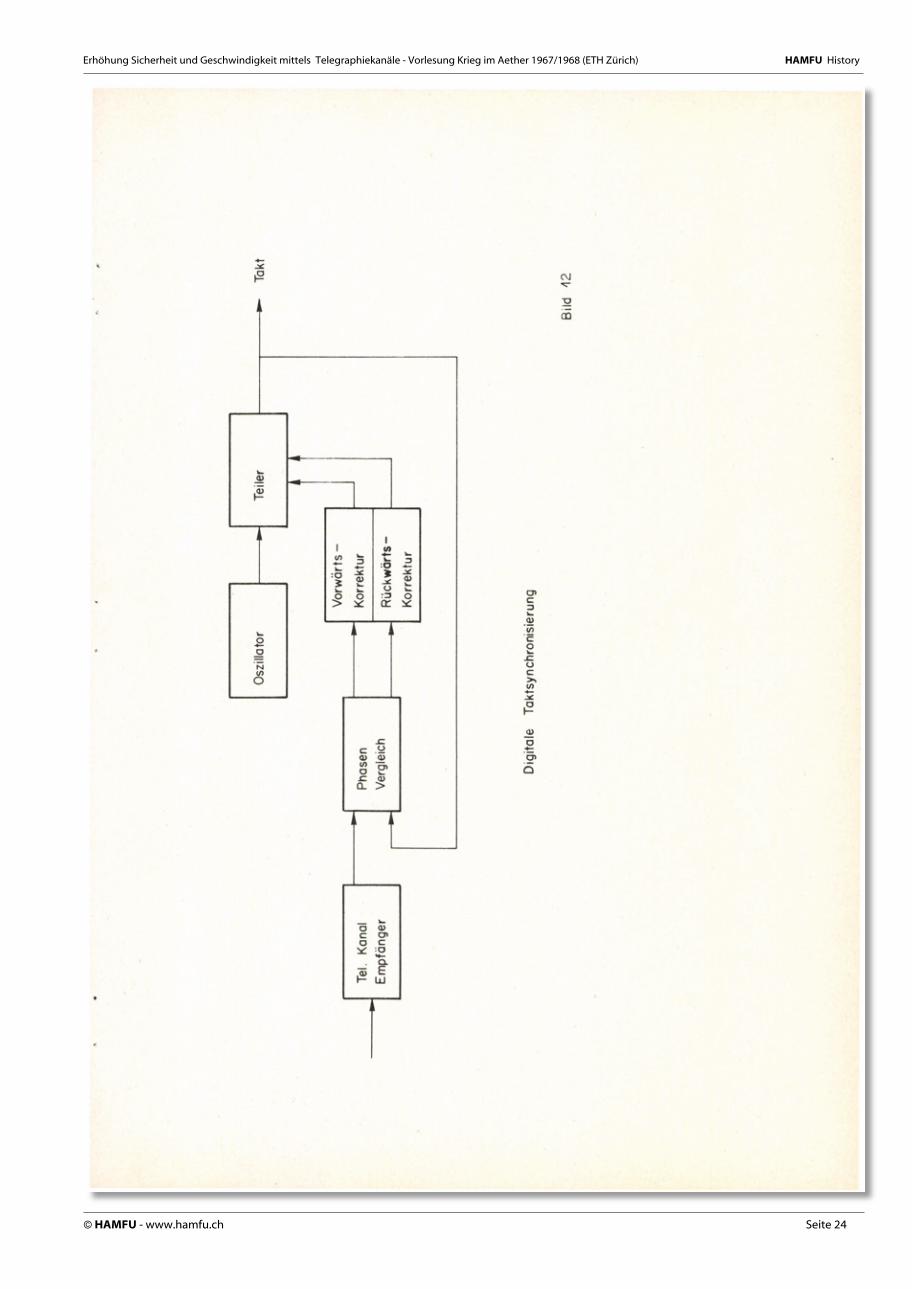
D ie S t a r t - S t o p - S y n ch r o n i s i e r u ng w i r d a l s o durch e ine A r t Steuerung e i n g e l e i t e t . Wenn man aber e inenR e ge l k r e i s b i l d e t , l ä s s t s i c h der T ak t i n v i e l engeren T o l e r anzen h a l t e n ( B i l d 12 ) . In diesem R e ge l -k r e i s w i r d d i e Phase des T ak tes m i t dem S i gna lwechse l v e r g l i c h e n . Je nach dem V e r g l e i c h s e r g ebn i sw i r d s i e dann vorwär ts oder rückwä r ts verschoben. D ie se Phasenversch iebung kann man auch a l s V e r -änderung der Frequenz des T ak tes a u f f a s sen und somit d i e Synch ron i s i e r ung durch Veränderung derFrequenz e ines O s z i l l a t o r s du rchführen . D ie R e g e l s c h l e i f e kann mi t analogen oder d i g i t a l e n S c h a l t u n -gen a r b e i t e n . B e i den analogen w i r d , gemäss dem V e r g l e i ch s e r g ebn i s d i e Frequenz des O s z i l l a t o r sdurch e ine Spannung geänder t , b e i den d i g i t a l e n kann d i e Phase ve rände r t werden, indem man i n e ineImpu l s f o l ge , d i e d i g i t a l he r abgese t z t w i r d , neue Impulse h i n zu f üg t oder aus der Fo lge herausnimmt
D ie se A r t von Synch ron i s i e r ung w i r d b e i den synchronen Systemen verwendet, d . h . wenn d i e Daten un -unterbrochen übe r t ragen werden. Wenn auch d i e L a n g z e i t - S t a t i s t i k d i e s e r Daten d i e g l e i c h e Wahrsche in -l i c h k e i t f ü r A u f t r e t e n von "0" und " L " e r g i b t , i s t au f d i e t a t s ä c h l i c h e n Codemuster Rü ck s i ch t zu neh-men. Man s o l l d i e l än gs t en Sequenzen g l e i c h a r t i g e r S i g na l e be t r a c h te n , w e i l b e i d i e sen e ine min ima leAnzah l In fo rmat ionen f ü r d i e T a k t ko r r e k t u r gewonnen werden kann. A u ch d i e se Sequenzen dü r f t e n jedochn i c h t p e r i o d i s c h w i e d e r ho l t werden, w e i l b e i s o l chen Prü fbed ingungen d i e s t a t i s t i s c h e n E i gen s c ha f t endes S i gn a l e s n i c h t a u f t r e t e n , und s i c h das System somit auf e inen p e r i o d i s c h en Vorgang e i n s p i e l t .
E i n w e i t e r e s P rob lem b e i d i e sen Synch ron i s i e rungen s t e l l t d i e Wahl der Z e i t kon s t an t e des Reg l e r s d a r .D iese muss e i n e r s e i t s g ro ss s e i n , so dass e i n M i t t e l w e r t a l l e r T aktabweichungen g e b i l d e t w i r d , wodurchdas System unem pf i n d l i c h gegen Störungen w i r d , a nde r s e i t s muss man aber ve r h i n de rn , dass das Systeme ine zu grosse E i n l a u f z e i t h a t , was i n gew issen S t ö r u n g s f ä l l e n zu grossem N a ch r i c h t e n v e r l u s t f üh renkann.
B e i den Systemen, d i e l ange Impu l s f o lgen über t ragen müssen, jedoch aber im Grunde a l s S t a r t - S t o p a u f z u -f a s s en s i n d , kann man d i e be iden Synch ron i s ie rungen kombin ie ren . Am Anfang des Impulszuges w i r d e ines c hne l l e e i nma l i ge Synch ron i s i e r ung durchgefüh r t und nachher übernimmt d i e langsame k o n t i n u i e r l i c h ei h r e Aufgabe. Verbesserungen können auf Kos ten der Uebe r t ragungsze i t e r r e i c h t werden, wenn man z u e r s te ine Fo lge mi t v i e l e n Wechsel sendet und Uber den M i t t e l w e r t der T aktabweichung e ine K o r r e k tu r v o rdem E i n t r e f f e n der t a t s ä c h l i c h e n I n f o rma t i on b i l d e t .
4 . S i che rung durch Codewahl
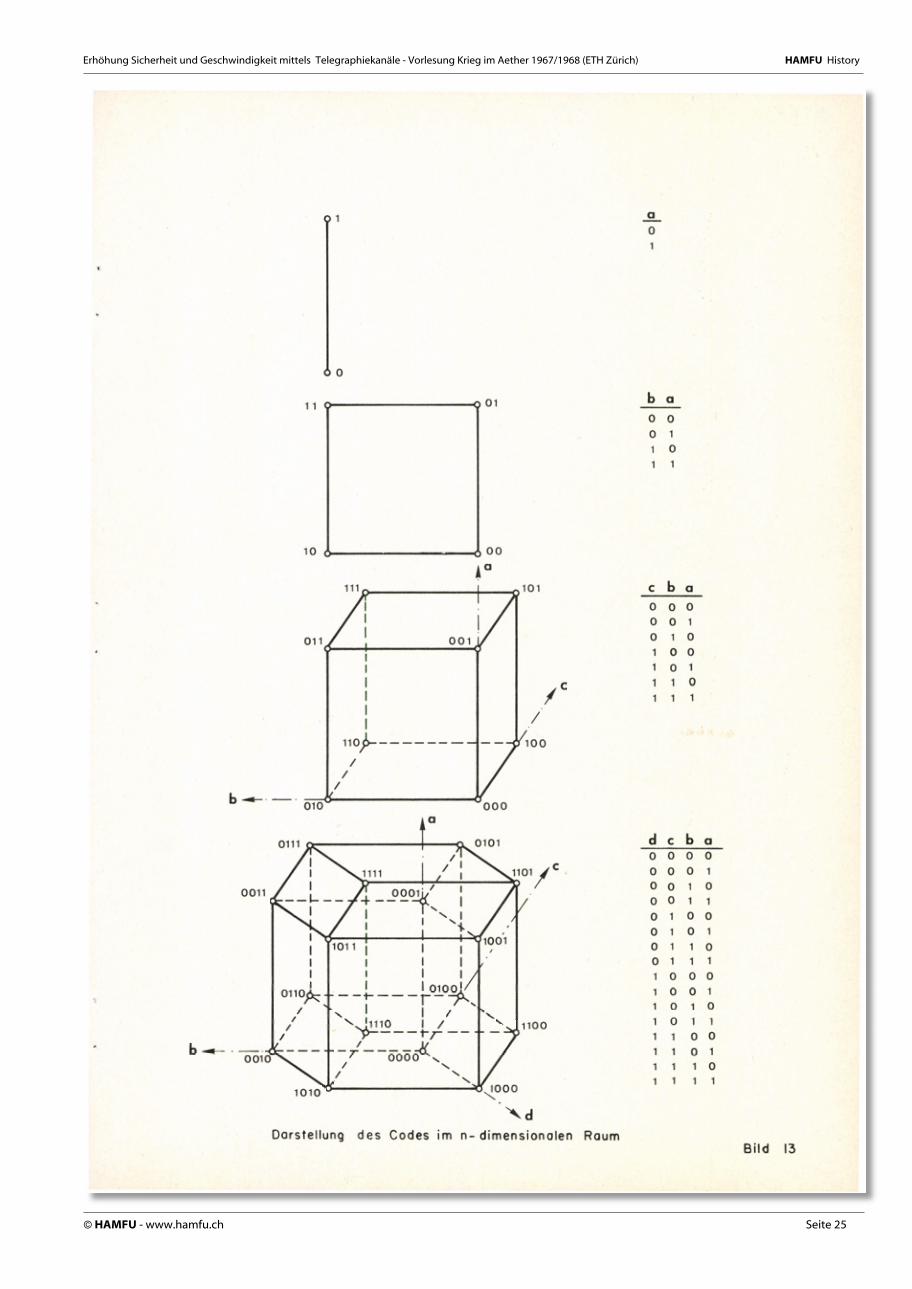
Der Code i s t d i e Zuordnung zw ischen den Daten und dem Codeze ichen. J e nach dem, w i e v i e l e ve r s ch i edeneWorte d i e Maschinensprache e r f a s sen muss, werden d i e Code aus mehreren oder wen iger b i nä re n Ze i chenaufgebaut . Durch zwei b i nä r e Ze i chen können nur zwei I n fo rma t i onen U be r m i t t e l t werden [ B i l d 13] , durchKombinat ionen von zwei Ze i chen v i e r , im a l l geme inen durch n Ze i chen 2 n Kombinat ionen. Geomet r i sch d a r -g e s t e l l t l i e g e n zwei Ze i chen auf e i n e r Geraden. Zwe ier -Kombinat ionen b i l d e n e i n Rechteck , D r e i e r -Kombinat ionen e i nen Wür f e l , usw. E i n n - s t e l l i g e r Code l ä s s t s i c h durch e inen n -d imens iona len Wür f e ld a r s t e l l e n , wo j e de r Koord i na t e (der Ecke des n_d imens iona len Wür f e l s ) e i n Codewort zugeordnet i s t .
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 8
- 8 -
Im Nullpunkt des Systèmes liegt das Null-Wort. Entsprechend der Richtung, in der man sich an denKanten des Würfels bewegt, ändert sich nur eine Koordinate, d.h. zwei benachbarte Code-Wörter unter-scheiden sich nur in einer Stelle. Bei der Datenübertragung werden hauptsächlich gleich lange Codesverwendet. Als Länge bezeichnet man die Anzahl der Stellen in einem Wort. Für die gleich langenCodes bezeichnet man den kürzesten Abstand zwischen zwei Wörtern am n-dimensionalen Würfel Hamming-Distanz. Man versteht also darunter die Anzahl der Stellen, in denen sich zwei Wörter unterscheiden.Bezeichnet man die kleinste Hamming-Distanz in einem Code mit d, so kann ein Fehler von Gewichtf * d - 1 (d.h. Verfälschung von f Stellen) nie ein anderes Code-Wort erzeugen. Der Code ist (d-l)-prüfbar. Bei Belegung sämtlicher Stellen in einem Code wird d = 1 und es können keine Fehler erkanntwerden.
Durch Einschieben von sinnlosen Wörtern zwischen den Code-Wörtern, kann die Distanz zwischen diesenbeliebig gross gewählt werden. Die Familie der Code-Wörter wird durch Zufügung redundanter Stellenerweitert. Bei genügender Redundanz ist beim Fehler auch eine Korrektur durch Rekonstruktion dessein—sollenden Code-Wortes möglich. Dabei wird jedem Code-Wort eine gewisse Umgebung von sinnlosenWörtern zugeordnet, die beim Empfang auf diese Wörter zurückzuführen sind. Sie bilden den Korrektur-bereich des Code-Wortes, das in seinem Zentrum liegt. Jene sinnlosen Wörter, die keinem Korrekturbe-reich zugewiesen sind, werden als Fehler erkannt und bilden einen Zwischenbereich. Ist kein Zwischen-bereich vorhanden, ist der Code maximal korrigierbar.
Ist in einem fehlerkorrigierbaren Code überhaupt kein Zwischenraum vorhanden, wird er dicht gepacktgenannt! Alle Stellen sind entweder durch Code-Wörter besetzt, oder solche, die korrigiert werdenkönnen. Für einen Korrekturbereich der Distanz 1 sind das z.B. Hamming-Codes, für den Korrekturbe-reich 2 gibt es keine, für 3 ist nur der Golay-Code bekannt.
Bei der gesicherten Uebertragung stellen die Code-Wörter eine Folge von m Informationszeichen und kPrüfschritten dar. Diese Prüfschritte haben nicht nur zur Aufgabe, die Distanz zwischen zwei Wörternzu erhöhen, sondern sind von der Information abhängig. Durch diese Abhängigkeit wird die Wahrschein-lichkeit einer falschen Decodierung vermindert. Eine Anzahl von Sicherungsmethoden, wie z.B. einfacheoder zweifache Paritätsprüfung, Wiederholung von Wörtern, "Selbstprüfung" werden heute oft verwendet[l4]. Diese, für die Instrumentation dankbaren Prüfungen, sind bei geforderter grösseren Hamming-Distanz nicht geeignet, weil sie sehr redundant sind und somit die Uebertragungszeit verlängern. DieCode-Wörter bei solchen Sicherungsverfahren sind nicht gleichmässig in den n-dimensionalen Raum ver-teilt. Eine fast gleichmässige Verteilung erreicht man bei optimalem Code. Dieses ist durch einemaximale Zahl zulässiger Code-Wörter bei gegebener Wortlänge und minimaler HammingDistanz gekennzeich-net. Als optimale Codes sind bekannt: der Hamming-Code [ 15] und einige zyklische Codes [l6 und 17J.Die zyklischen Bose-Chauduri-Codes nähern sich auch den Optimalcodes an.
Wie gross die Wahrscheinlichkeit unerkennbarer Fehler ist kann man bei jedem Codierungs-Verfahrenauf Grund der Schrittfehler-Wahrscheinlichkeit p berechnen. Vorausgesetzt, dass es sich um symmetrischeStörungen handelt, bei denen eine Verfälschung von "1" in "0" ebenso häufig vorkommt wie eine Ver-fälschung von "0" in "1", lässt sich für beliebige Werte von p die Wahrscheinlichkeit unerkannterWörterfehler nach
nH-k
Xr=l
m+k-rpr (1-p)
berechnen. Hier ist p die Schrittfehler-Wahrscheinlichkeit, (l-p) die Wahrscheinlichkeit der fehler-freien Uebertragung von m+k-r Bits, Kj, die Anzahl der nicht erkennbaren Störmuster mit r Fehler undnH-f die Anzahl der Informations- und PrUfschritte. (Wenn z.B. m Bits mit einer Paarzahlkontrolle ge-sichert werden, ist die Wahrscheinlichkeit, dass ein Fehler nicht erkannt wurde
u's— .mtl. 2r ,, , m+1—2r „ ^ .
p> . 2 _ 2r P (!-P) 2u Ê m+1
d.h., alle geraden Fehler, 2, 4, usw. können nicht erkannt werden.)
Bei starken Störungen, wenn die Schrittfehlerwahrscheinlichkeit den Wert 0,5 annimmt, ist nicht mehrdas Code-Verfahren, sondern die absolute Zahl der redundanten Stellen von Bedeutung [l9]. Da nämlichvon 2 m + k Code-Wörtern 2 m sinnvoll sind, sind bei Schrittfehlerwahrscheinlichkeit 0,5 alle Code-Wörtergleich wahrscheinlich. Die Wahrscheinlichkeit dafür, dass ein zulässiges Code-Wort empfangen wird,
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 9
- 9 -
welches nicht gesendet wurde, ist
12
-kP
2,m+k 2
Fordert man also bei starken Störungen grosse Sicherheit, müsste man hochredundante Codes bereit-stellen. Dies ist meistens nicht realisierbar. In solchen Fällen kombiniert man vorteilhafterweisedie Fehlererkennung mit einem Rauschdetektor und verhindert jede Auswertung der erhaltenen Code-Wörter.
Wenn starke Störungen in Bündeln auftreten, ist es möglich, deren Einfluss herabzusetzen [l9], in-dem man z.B. die Buchstaben eines Code-Wortes nicht nacheinander überträgt, sondern um eine Anzahl SStellen voneinander entfernt. Eine Bündelstörung kann somit nicht auf das ganze Code-Wort einwirken,vorausgesetzt, dass sie sich nicht über das ganze gespreizte Code-Wort erstreckt.
Bei der Wahl des Codes stellt sich grundsätzlich die Frage, welche Codesicherungsmethode gewähltwerden soll. Bei der Fehlererkennung ist der Informationsfluss wegen Verlustes der verfälschtenCode-Wörter kleiner (diese müssen nochmals angefordert werden) als bei der Fehlerkorrektur. Bei derFehlerkorrektur ist jedoch die Wahrscheinlichkeit unerkennbarer Fehler grösser als bei der Fehlerer-kennung. Die Untersuchungen der Gruppencode zeigten [l8], dass bei kleiner Schrittfehler-Wahrschein-lichkeit die Uebertragungsgeschwindigkeit wegen des Verlustes der Informationen und somit einerweiteren Abfrage unwesentlich beeinflusst wird. Bei höherer Schrittfehler-Wahrscheinlichkeit könnengrössere Uebertragungsgeschwindigkeiten erreicht werden, je mehr man Fehler korrigiert.
5. Synchronisierung
Sei es, dass es sich bei der Datenübertragung um ein Start-Stop- oder um ein synchrones System handelt,muss immer bestimmt werden, wo der Beginn eines Satzes ist. Für die Kennzeichnung dieses Beginnes wer-den gesonderte Wörter verwendet, die der Empfänger aus einer Impulsfolge heraussuchen muss. Beim Start-Stop-Verfahren ist der Fall einfacher, weil vor diesem Code in ungestörtem Fall eindeutige Impulsfolgengesendet werden. Beim Synchron-Verfahren kann, je nach der Codierung, eine begrenzte Anzahl Impulsfol-gen, sogar eine beliebige auftreten, wodurch die Bestimmung eines optimalen Synchronisierungs-Codeswesentlich erschwert wird.
Eine falsche Synchronisierung kann grundsätzlich in zwei Fällen erfolgen [20 und 2l]«
5.1. Wenn in einer Folge von Code-Wörtern, betrachtet durch ein zeitlich gleitendes Fenster ein"Synchronisierungs-Muster" festgestellt wird;
5.2. Wenn das "Synchronisierungs-Muster" aus einem Teil eines Code-Wortes und einem Teil desrichtigen Synchronisierungs-Codes entsteht.
Falls bei der Betrachtung durch ein gleitendes Fenster bei einer Impulsfolge von N-Bits alle Kombina-tionen vorkommen, muss die Länge des Synchronisierungs-Codes erweitert werden, bis man die geforderteWahrscheinlichkeit einer falschen Synchronisierung mit der Wahrscheinlichkeit des Auftretens einerKombination — i erreicht.
2N
Beim hochgesicherten Code ist die Suche nach optimalen Synchronisierungs-Codes wegen den vielen mög-lichen Kombinationen mit grossen Berechnungen auf einer Rechenmaschine verbunden. Einfacher kann manzu diesen Codes kommen, indem man die längste String-Länge (Folge von gleichen Binär-Zeichen) beieinem Code ermittelt und dann für die Synchronisierung ein Muster wählt, das noch längere Folgengleichartiger Signale enthält. Es ist gleich zu erwähnen, dass dies nach Möglichkeit vermieden werdensollte, weil solche gleichmässigen Codes leicht durch Störungen vorgetäuscht werden können, wie dasnoch im weiteren gezeigt wird.
Wenn bereits Impulskombinationen ermittelt wurden, die nie in den Impulsfolgen vorkommen und gegen-über diesen noch den gewünschten Hamming-Abstand haben, kann der erwähnte zweite Fall für falscheSynchronisierung herangezogen werden: Dieser wird auch dann verwendet, wenn alle Kombinationen mög-lich sind, was im weiteren untersucht wird. Es wird also ein Muster gesucht, das beim Ein- und Aus-laufen aus dem Synchronisierungsbereich bei gegebenen Störungen die kleinste Wahrscheinlichkeit füreine falsche Synchronisierung ergibt. Vorausgesetzt, dass sich der gesendete Synchronisierungs-Codeund das "Muster" in 5 Bits überlappen (beim Muster von N Bits kann bei falscher SynchronisierungO - 1, 2 ... N-1 Bits ein) ist die gesamte Wahrscheinlichkeit einer falschen Synchronisierung
S = 1
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 10
-10-
p (<T) ist die Wahrscheinlichkeit, dass bei der Ueberlappung von S Bits das Muster erkannt wird.
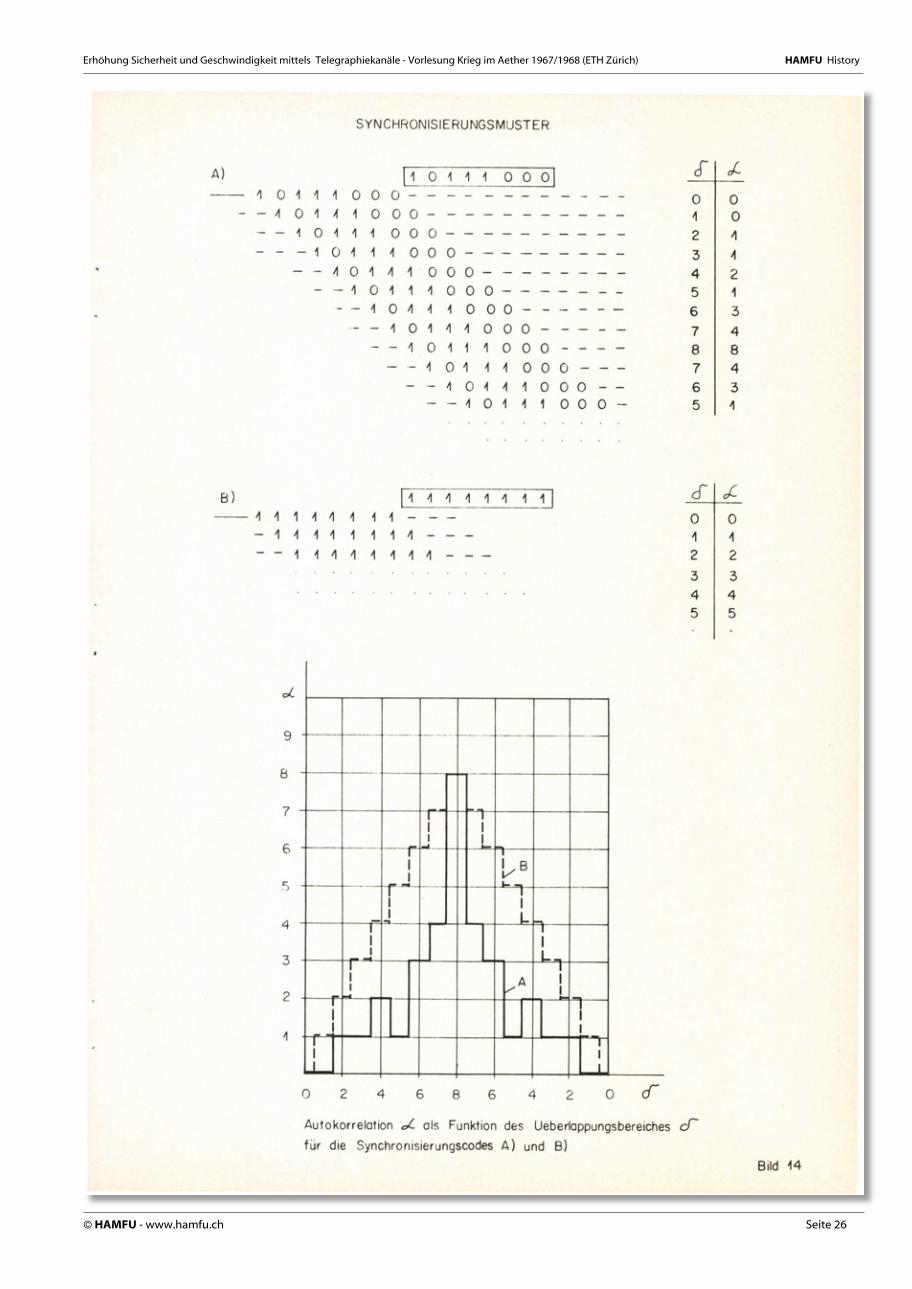
Diese Wahrscheinlichkeit ist in erster Linie abhängig von denoC Bits, die beim Einlaufen im Syn-chronismus mit dem Muster übereinstimmen. Der Faktor 2 ist gegeben wegen des Ein- und Auslaufens.Diese Zusammenhänge sieht man im Bild 14. Für zwei Synchronisierungs-Muster ist die AbhängigkeitOC von S gezeigt. oC ist eigentlich die Autokorrelation des Synchronisierungs-Musters. Für denguten Synchronisierungs-Code A zeigt die Autokorrelation im richtigen Synchronisierungs-Punkteinen Sprung von 4, d.h. es müssen im Minimum 4 Bits vorgetäuscht werden, damit es zu einer falsch-en Synchronisierung kommt. Der Synchronisierungs-Code B, der aus einer Folge von 8 x "1" aufgebautist, hat ausgesprochen schlechte Synchronisierungs-Eigenschaften. Bereits bei einem Fehler fürS = 7 kann es zu einer falschen Synchronisierung kommen. Wenn die Autokorrelation bekannt ist,kann man die Wahrscheinlichkeit p ( S ) berechnen und verschiedenen Mustern gegenüber stellen.
Beim Ein- oder Auslaufen des Synchronisierungs-Codes kann es zu einer falschen Synchronisierungkommen, wenn das "Muster" bei 5" Ueberlappungs- und N- & Zufallsimpulsen erkannt wird. Erlaubt manweiterhin, dass noch bei Abweichungen eine Synchronisierung zustande kommt, wovon i Abweichungenbei S Bits vorkommen dürfen, wird
Z. für V é SS für S £ V
P (S) - Z pi' p " £ - i 'I - o
wo p^ die Wahrscheinlichkeit ist, dass trotz der i Fehler bei 8 Bits diese noch als richtig er-kannt werden, p" £. -i ist die gleichartige Wahrscheinlichkeit für £ - i Fehler bei N- S Bits. DieSumme erstreckt sich Uber alle zulässigen Fehler. Die obere Grenze der Summation wird durch £oder S bestimmt, je nachdem, welches kleiner ist (z.B. beiS £ £. können nicht mehr Fehler als oauftreten).
Die Wahrscheinlichkeit p" £ -i bestimmt die Anzahl der Kombinationen von N- S Bits und die Anzahlvon Verfälschungen r. Vorausgesetzt, dass alle Kombinationen möglich sind, wird
fc - i für Z-i â N - 5
A J - S )
Die Wahrscheinlichkeit p'i ist abhängig von der Ueberlappung S und der AutokorrelationoC. Da dieseWerte vom "Muster" und von den ankommenden Codes abhängig sind, muss bei der Berechnung p'i dieSchrittfehlerwahrscheinlichkeit des Uebertragungsweges berücksichtigt werden.
Da ( ) pj (l_p)oC_J die Wahrscheinlichkeit ist, dass bei der Schrittfehlerwahrscheinlichkeit p,von den oC Bits die übereinstimmen j verändert und «<•- j unverändert werden, und da
Ii - I I V i - p j pJ
die Wahrscheinlichkeit ist, dass von 5 -<*Bits, die nicht übereinstimmen, i-j unverändert und(S-ai) - (i-j) in das "Muster" verändert werden, wird
für i £ «
p " r ( î i ^ o - T ) - - - - p j - i p r « - ) ^ ' ]j = Ï - 0 4 Ofr
Auf Grund dieser Wahrscheinlichkeiten kann die gesamte Wahrscheinlichkeit einer falschen Synchroni-sierung P a ermittelt werden. Dafür muss man die Anzahl der Stellen N wählen, für alle "Muster" dieAutokorrelation berechnen und mit diesen Werten bei angenommenen Werten für maximal zulässige Feh-ler und die Schrittfehlerwahrscheinlichkeit p, die Wahrscheinlichkeiten für verschiedene "Code-Muster" berechnen. Wegen ihres Umfanges müssen solche Berechnungen für längere Codes an den Rechen-maschinen durchgeführt werden.
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 11
Verbesserungen der Datenübertragung durch Gegenkopplung-Rückmeldung
Bei einem System, das nur in einer Richtung arbeitet, gehen die fehlerhaften Nachrichten ver-loren, falls der Fehler ausserhalb des Korrekturbereiches liegt oder Uberhaupt keine Fehler-korrektur stattfindet. Eine Verbesserung kann man durch Gegenkopplung erzielen, veil man danndem Sender mitteilen kann, wie eine Nachricht angekommen ist. Die Entscheidung, ob eine Nach-richt wiederholt werden muss, kann entweder der Sender oder der Empfänger treffen. Entscheidetder Empfänger Uber die Annahme oder Ablehnung einer Nachricht und teilt dies dem Sender mit,so handelt es sich um eine Entscheidungs-RUckmeldung. Venn sich aber die Code-Vörter zerlegenlassen in einen Informations- und einen Kontrollteil, kann man sich in der Vorwärtsrichtungauf die Uebertragung des Informationsteiles beschränken. Der Empfänger muss dann den Kontroll-teil ermitteln und ihn zurücksenden. Es obliegt dem Sender zu entscheiden, ob eine Nachrichtwiederholt werden muss. Das bezeichnet man als Redundanz-Rückmeldung. Ein besonderer Fall trittauf, wenn der Informations- und der Kontrollteil gleich sind: Eine Nachricht wird also dem Sen-der zurückgesendet, wo sie mit der örtlich gespeicherten verglichen wird. Es handelt sich dabeium ein System mit Informations-RUckmeldung.
Die Systeme mit Entscheidungs-RUckmeldung sind leicht zu realisieren, weil dem Sender nur zweiInformationen mitgeteilt werden, bei denen die Entscheidung beim Sender liegt, setzen einengrossen apparativen Aufbau beim Sender voraus.
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 12
-12-
H. Nyquist "Certains factors affectitt* telegraph speed"Bell System Tech. J., Vol. 3, pp 324 - 346,Apr. 1924
2. E. Hölzler undH. Holzwarth
3. V.R. BennettJ.R. Davey
4. W.B. DavenportW.L. Root
5. A. Lender
6. A. Lender
7. R.D. Howson
"Theorie und Technik der Pulsmodulation"Springer-Verlag, Berlin 1957
"Data Transmission"Mc Graw-Hill, New York 1965
"An Introduction to the Theory of Random Signals and Noise"Mc Graw-Hill, New York 1958
"The duobinary technique for high-speed data Transmission"IEEE Trans, on Communication and ElectronicsVol. 82, pp. 214 - 218, May 1963
"Correlative level coding for binary-data transmission"IEEE Spectrum, February 1966, p. 104- 115
"An Analyses of the Capabilities of Polybinary Data Transmission"IEEE Transactions on Communication TechnologyVol. 13, No. 3, 1965
8. F. Eggimann
9. P. LeutholdF. Tisi
"Datenübertragung auf Telefonleitungen"ETH Promotionsarbeit Nr. 3633, 1965
"Ein Einseitenbandsystem für Datenübertragung"A.E.U. 21 (1967), Heft 7, S. 354 - 362
10. W.R. BennettJ. Salz
11. J.R. Davey
12. E. HopnerR.W. CalfeeL.P. West
13. B. Sakic
14. A. BrothmanE.H. BrothmanR.D. Reiser
15. W. Hamming
"Binary Data Transmission by FM over a Real Channel""The Bell System Tech. Journal"Vol. 42, Sept. 1963, Nr. 5, S. 2387 - 2426
"Digital Data Signal Space Diagrams""The Bell System Tech. Journal"Vol. 43, Nov. 1964, Nr. 6, S. 2973 - 2984
"Un modem pour modulation de frequence à bande latérale unique"Journal de Télécommunications, Vol. 34, Nr. 2,Februar 1967, S. 55 - 66
"Eigenschaften und Wirkungswese der digital-zyklischen Fernmessung"Brown Boveri, Mitt. Bd. 51, 1964Nr. 4, S. 232 - 241
"Statistical evaluation of standard security practices in digitaldata transmission"AIEE Confernce Paper, CP 62 - 1045, April 1962
"Error Detecting and Error Correcting Codes"Bell System Techn. J. 29 (1950), pp. 147 - 160
16. W.W. Peterson "Error Correcting Codes"Published by the NIT-Press and J. Wiley Sons Inc. New York,London (1961)
17. J. Swoboda
18. H. Nili
19. H. Marko
"Restfehlwahrscheinlichkeit von Binärcodes"A.E.U. Band 20 (1966) Nr. 3, S. 131 - 148
"Fehlerwahrseheiniichkeit und Geschwindigkeit bei der Uebertragungdigitaler Informationen durch Gruppen-Codes"A.E.U. 18 (1964). S. 282 - 292
"Die Fehlerkorrekturverfahren für die Datenübertragung auf stark ge-störten Verbindungen"Nachrichtentech. Fachber. 25 (1962) S. 101 - 108
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 13
-13-
20. J.L. Maury "Developement of Optimum Frame Synchronisation Codes forF.J. Styles Goddard Space Flight Center PCM Telemetry Standards"
Proceedings of the National Telemetering, Conference1964/3-1
21. R.G. Masching "A Simplified Approach to Optimal PCM Frame SynchronisationsFormats"Proceedings of the National Telemetering Conference1964/3-2
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 14
z zc<v
' 5 gM >
ir
m
co
CN
(UJCOO
CLCO1_CU"O
enc
"05
c0)- QO
O3CD
o£
E<D 0)= t £
en 5 co
Il H M
O
<Dk—: 0CQÜ
QJ2cQ .C
OCTDOO
0)c t:jü c o
CL (UCO N c
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 15
CM
TJ
CD
1
cok._C c
ync 3
L.41
uo ui
k.VL.0)
TSo
u
Ea>C/l»>t/></>a>c
a>a
a>jQ
aQ
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 16
to = -2fo
Ubert ragungscharakter is t ik des idealisierten T iefpasses und derdazugehörige Einschwingvorgang
Bild 715
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 17
1
2"
Uebertragungscharakteristik des idealisierten | cos — und Gauss' sehen
Tiefpasses sowie die dazugehörigen Einschwingvorgänge
Bi ld 4
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 18
Augenmuster bei der Uebertragung idealer Gauss'scher Impulse
Bild 5
C:ax:a>>
</5a>
X)cac/>•Oo-CoVi3oer<0a>•o
co
3T3a>er
db
EECL
O
EN 0
1
\ /\ /V\
V .
0 n Exponent von cos —û-î-4fo
Abhängigkeit des Rauschabstandes von Exponenten der cos4 f o
beim Empfangsfilter
— Funktion
vertikale Augenöffnung
horizontale Augenöffnung
Bild 6
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 19
Uebertragungscharakteristik optimaler Filter für die Unterdrückung des
Gauss'sehen Rauschens
Bild
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 20
00
251
o T O T-
èâ 0 0
c m:o -o O y- O •<-.£ oCÛ U
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 21
Antwort des cos2Üf_ _ Filters auf4fo
a ) Impuls der Dauer2fo
b.) Impuls der Dauer —4fo
4
%
0
- - Jto to to ^
Augenmuster bei dem duo - binären Uebertragungssystem
Bi ld 9
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 22
14fo
4
b" = b+b ' V 2
0
Impulsdiagramme desIiduo-b inären" - Uebertragungssystemes mit Korrelativen
Eigenschaften
Bild AO
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 23
U e b e r t r a g u n g s - G e s c h w i n d i g k e i t e n
B i t / s e k / H z
Vergleich verschiedener Datenubertragungssysteme beim Gauss'sehen Rauschen undSchnittfehlerwahrscheinlichkeit 10 ~ 4
Bild 11
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 24
(M
T>m
0>
o
Itot-O*JÉo
ÛC
c y(U cus p£ 2
CPc3«
V)'co-Coc>></>JÉo
0)o'5>Q
o a>c a>o coCLE
1- ÜJ
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 25
1 Cl
0
1
0011
0010
o i i n À _ L ' 0 1 0 0 ! ̂
— îX s j j L l 1 0 ! ' Iy r ;
/ VT O O O C T N
1100
1010 ^ 1 0 0 0
X d
0 0
0 1
1 0
1 1
c b a
0 0 0
0 0 1
0 1 0
1 0 0
1 0 1
1 1 0
1 1 1
d c b a
0 0 0 0
0 0 0 1
0 0 1 0
0 0 1 1
0 1 0 0
0 1 0 1
0 1 1 00 1 1 1
1 0 0 0
1 0 0 1
1 0 1 0
1 0 1 1
1 1 0 0
1 1 0 1
1 1 1 0
1 1 1 1
Darstellung des Codes im n-d imensionolen RaumBild I3
Erhöhung Sicherheit und Geschwindigkeit mittels Telegraphiekanäle - Vorlesung Krieg im Aether 1967/1968 (ETH Zürich) HAMFU History
© HAMFU - www.hamfu.ch Seite 26
SYNCHRONISIE RUNGSMUSTER
A)1 0 1 1 4 0 0 0
- - 4 0 1 4 4 0 0 01 0 1 4 1 0 0
- - — 1 0 4 1 4 0- - A 0 1 \ 1
- — 4 0 1 1- - 1 0 A
- - — 4 0
[ 1 0 1 1 J O O P
B)
0 0 0 -1 0 0 0
1 0 0 01 41 10 1
4
0 0 0
1 0 0 04 4 0 0 0
0 4 4 4 0 0 0 -4 0 1 4 1 0 0 0
1 4 1 4 1 1 1 1
— 4 1 1 4 4 4 1 1- 1 4 4 4 1 1 1 1
1 4 1 1 4 4 4 4
cT JL
0 01 023 44 25 16 37 48 87 46 35 1
S0 01 42 23 34 45 5
cJL
4
3
2
4
TII
rII
0 8 0 cT
Autokorrelation c / als Funktion des Ueberlappungsbereiches cTfür die Synchronisierungscodes A) und B)
Bild 14




![Ioana DĂRĂBAN (TIMIȘ)...rem 4.8, Theorem 4.9, Examples 6.8-6.10, Example 6.11, Example 6.12, Definition 7.22 and Theorem 7.12. Most of them were published in [158] (Timi, I., On](https://img.pdfslide.org/doc/110x75/6095202dd89f566a9a15615e/ioana-drban-timi-rem-48-theorem-49-examples-68-610-example-611.jpg)





![TRUTOUCH X Series 4K EN-2 - comm-tec.de · Video Auflösung 1920 x 1080 @ 30fps (Max ) Bildwiederholrate 30fps/60fps Elektrisch Stromverbrauch 2F]NRFQ C < 8YFSIG^ 2TIZX C < 2F]NRFQ](https://img.pdfslide.org/doc/110x75/5e0f5bab7f1b730c185b18c9/trutouch-x-series-4k-en-2-comm-tecde-video-auflsung-1920-x-1080-30fps-max.jpg)

















