Embed Size (px)
Citation preview
integrated by FAUDE
Integrator für Leichtbauroboter
und MRK-Systeme
MENSCH-ROBOTER-KOLLABORATION (MRK) ALS BASIS FÜR INDUSTRIE 4.0
AFES

32
I N H A L T S V E R Z E I C H N I S | E I N L E I T U N G
4
6
10
18
22
24
26
K A P I T E L 1
„Mensch, Roboter!“
K A P I T E L 2
Das Beste mit zwei Welten
K A P I T E L 3
Aufgabenfelder für MRK
K A P I T E L 4
Rechtliche Anforderungen
K A P I T E L 5
Leichtbauroboter und MRK-Systeme von FAUDE
K A P I T E L 6
Der Mensch in der Produktion
K A P I T E L 7
Quo vadis MRK?
IM DUETTKOMPLETT!Mensch-Roboter-Kollaboration als Basis einer wandelbaren Fabrik
ie Koexistenz von Mensch und Roboter am Arbeits-platz ist längst keine Vi-
sion mehr. Wie eine echte „Mensch-Ro-boter-Kollaboration“ (MRK) industriell realisiert wird, zeigt diese Broschüre von FAUDE, die insbesondere auf die techni-schen wie auch rechtlichen Rahmenbe-dingungen einer MRK eingeht und zu-dem eine Orientierung bezüglich einer MRK-Vorgehensweise gibt. Chancen wie auch Potenziale von MRK-Applikationen sind skizziert, die Produktionen wandelbar und fl exibel machen.
D

54
„ M E N S C H , R O B O T E R ! “
eit der Definition des Roboters als automatische, programmierbare Fer-tigungsmaschine, die dem Menschen Dienste erfüllt, hat sich die Rollen-verteilung gewandelt. Heute setzt die Produktion auf eine Interaktion von
Mensch und Roboter, die die Fertigung flexibel gestalten soll. Im Arbeitsraum herrscht eine multisensorielle Überwachung, die die Zusammenarbeit sicher gestalten soll, Kolli-sionen frühzeitig erkennen und auch mögliche Verletzungen der Mitarbeiter ausschlie-ßen muss. In der unmittelbaren Roboterumgebung sind statische Hindernisse sowie sich permanent verändernde, dynamische Bewegungen zu detektieren. Sichere Kine-matiken ergänzen das Schutzspektrum. Registriert der Roboter ein unerwartetes Hin-dernis, so verlangsamt sich seine Bewegung oder der Roboter bleibt stehen, so dass keine Kollision entsteht bzw. nur eine leichte Berührung des Menschen erfolgt – nur so bleibt in einer neuen Arbeitswelt eine gegenseitige Partnerschaft, die Partner schafft!
Im industriellen Aktionsfeld einer Mensch-Roboter-Interaktion tummeln sich diver-se Kombinationen, die es zu unterscheiden gilt. Kollaborierende Roboter arbeiten Seite an Seite mit Produktionsmitarbeitern, um die Qualität zu verbessern sowie die Effizienz der Fertigung zu erhöhen. Diese Leichtbauroboter, die Lasten von bis zu 14 Ki-logramm bewegen können, sind für das direkte Umfeld des Menschen sicher zertifiziert, ohne dass weitere Schutzmaßnahmen notwendig sind. Wirkende Kräfte werden im Fal-le einer Kollision deutlich abgemildert. Als Serviceroboter übernehmen sie körperlich belastende oder monotone Arbeiten, beispielsweise typische „Pick and Place“-Aufgaben oder das Handling zwischen verschiedenen Produktionsschritten. Allerdings besteht zur Erfüllung der Normen, Vorschriften und Verordnungen ein Bedarf an praktischen Handlungsanleitungen für Hersteller, Systemintegratoren und Betreiber. Laut der DGUV
PARALLEL ABLAUFENDE AR-BEITSSEQUENZEN MIT MRK
S
„MENSCH, ROBOTER!“Die zaunlose Zusammenarbeit zwischen Roboter und Mensch ist längst real. Als Prämisse gilt das sichere Wahrnehmen sämtlicher Bewegungen des Menschen durch den Roboter – inklusive den technischen Schutzfunktionen.
Klassisch eingehauster Industrieroboter
Reale Mensch-Roboter-Kollaboration
Industrieroboter ohne Schutzzaun
I
V
II
Hinweisschild Kollaborierendes
Robotersystem
fallen diese Systeme unter den Geltungsbereich der Ma-schinenrichtlinie 2006/42 EG und benötigen immer eine Risikobeurteilung der jeweiligen Applikation.
Die typischen Voraussetzungen für eine Mensch-Ro-botik-Kollaboration (MRK) auf einen genau definierten gemeinsamen Arbeitsbereich beziehen sich auf vier Schutzprinzipien der MRK, die in den Normen DIN EN ISO 10218 „Industrieroboter – Sicherheitsanforderungen“ Teil 1 und 2 aus dem Jahr 2012 verankert sind. Darin sind der sicherheitsgerichtete und überwachte Stillstand, die Handführung, die Geschwindigkeits- und Abstandsüber-wachung sowie die Leistungs- und Kraftbegrenzung de-finiert. Mittlerweile haben Unternehmen wie FAUDE die Vorgehensweise bei der Planung und Umsetzung von MRK-Applikationen professionalisiert. Gerade der Druck, die heutigen Produktionsprozesse auf die sich ständig verändernden Herausforderungen des Marktes umzu-stellen, verleiht der MRK als Hebel für flexible Systeme in Produktionsanlagen immer mehr Rückenwind.
Mensch-Roboter-Kooperation mit getrenntem Wirkungs-/Arbeitsbereich (Sicherheitsabstände)
Mensch-Roboter-Kooperation mit über-schneidendem Wirkungs-/Arbeitsbereich
IV
III

76
D A S B E S T E M I T Z W E I W E L T E N
Die Herstellung kundenindividueller (Serien-)Produkte mit niedrigen Losgrößen verlangt geradezu nach einer schnellen Änderung der Produktionsanlagen und deren Intra-Logistiksystemen. Gefragt sind fl exible Materialfl uss-konzepte und umstellbare Fördertechnologien, die der Forderung nach hoher Automation in fl exiblen und wand-lungsfähigen Produktionsprozessen gerecht werden.
Für Mensch-Roboter-Kooperationen besteht insbeson-dere in der Montage ein großes Potenzial, da hier der Automatisierungsgrad noch nicht ausgeprägt genug ist und zudem die Mobilität ein wichtiger Faktor ist, um fl exibel auf die Anforderungen des Marktes reagieren zu können. Mit Robot-Farming, also ortsfl exiblen Robo-tereinheiten, hält man einen Schlüssel zur wandelbaren Fabrik der Zukunft in der Hand. Die Automobilindustrie bedient sich bereits diesen skalierbaren und kurzfristig einsetzbaren Konzepten, um Produktionsschwankun-
In der Fabrik der Zukunft bestimmen intelligente Betriebsmittel die adap-tive Produktion. Sie kommunizieren mit dem Produkt und sollen den Her-stellungsprozess selbstständig steuern. Das bedeutet, dass bei Industrie 4.0 das zu fertigende Produkt nur ganz grob bezüglich seiner Einzelteile, seiner Fügefolgen und Fügeprozesse defi niert werden kann. Im Rück-schluss bedeutet das eine extrem hohe Adaptionsfähigkeit der Betriebs-mittel – und damit kommt dem Industrie-Roboter eine ganz neue Funktion
und Aufgabe zu, die den fl exi-blen Materialfl uss innerhalb des Produktionsprozesses steuern und stationäre Abla-gen- und Werkzeug-Technik
ersetzen muss. Eine mobile Teilezuführung fällt dann in das Aufgabenge-biet der Industrierobotik. In der Montage müssen die Industrieroboter die Fügeprozesse variabel und ortsfl exibel zur Verfügung stellen. Innerhalb eines hoch individualisierten Produktionsablaufes sind das völlig neue Aufgaben der Roboter, in denen MRK eine zentrale Rolle spielen wird. Sta-tischer Materialfl uss und feste Fügefolgen, die zentral gesteuert werden, gehören somit der Vergangenheit an.
MRK UND DIE WANDELBARE FABRIK
INDUSTRIEROBOTIK & INDUSTRIE 4.0
„Es ist nicht unsere Aufgabe, die Zukunft voraus zu sagen, sondern auf sie gut vorbereitet zu sein.“Perikles
DAS BESTE MIT ZWEI WELTEN
gen auszugleichen. Ein einzelner Mensch kann gleich bis zu acht Roboter überwachen und betreuen, völlig ohne Schutzzaun. Agile und adaptive Robotersysteme mit fl e-xibleren Sicherheitsfunktionen für die sich verändernden Schutzanforderungen sind im Kommen und MRK gehört in der Industrierobotik zum klaren Wachstumsfeld.

98
D A S B E S T E M I T Z W E I W E L T E N
integrated by FAUDE
„Ob Leichtbau- oder MRK- Roboter, ob mit Kamerasystem oder ohne – FAUDE fi ndet als neutraler Systemintegrator für jede Realisierung die passende MRK-Anwendung.“
FAUDE ALS MRK-WEGBEREITER ARBEITSWELT 4.0 MIT LEICHTBAUROBOTERN
NOTWENDIGE KOMPONENTEN EINER SICHEREN MRK-PERIPHERIE
Arbeiten Mensch und Roboter Hand in Hand, so bedarf es bei heutigen MRK-Applikationen einer technologischen Vorgehensweise, die die direkte Zusammenarbeit erst möglich macht. Diese von FAUDE vorgegebenen Hand-lungsanleitungen gewähren einen fundierten und kon-solidierten Prozess zur Implementierung von passenden MRK-Lösungen in bestehende Anlagen, ohne den laufen-den Betrieb zu beeinträchtigen. Erfolgt die Integration und Investition stufenweise, so gelingt die MRK-Integrati-on mit den erforderlichen Komponenten und Systemen.
Gerade der vorherrschende Trend einer Losgröße 1 erfor-dert von der Produktion eine Flexibilität, deren Prozess-strukturen einer permanenten Veränderung unterlegen sind – sowohl für Mensch als auch Maschine. Um einer Volatilität in der Nachfrage über alle Produktionsstufen
Als neutraler Systemintegrator sieht FAUDE für die Rea-lisierung einer passenden MRK-Anwendung die genaue Prüfung und Auswahl der Arbeitsstationen inklusive einer stufenweise geplanten Investition, um die notwendigen Komponenten eines MRK-Systems in die laufende Pro-duktion zu integrieren. Der sichere Betrieb von Leicht-baurobotern und Leichtbauroboter in MRK sind seit 2010 Schwerpunkte, die zu einer eigens geschaff enen normge-rechten Sicherheitstechnik führten.
Komponenten eines MRK-Systems:
Leichtbauroboter oder MRK-Roboter Greifer mit Greifkraftsicherung, großen Radien und
ohne Kanten oder Nutzung von 3-D-Druck bei Vaku- umsaugerapplikationen Auf den Bediener angepasste Software HMI-Oberfl äche Passendes Zubehör wie eine robotergerechte Medien-
führung, die vor Kabelknicken und Kabelbrüchen schützt, ein Schutzring, der Ecken und Kanten abdeckt, Beleuchtungen, die anzeigen, wenn der Roboter los- fährt, u.a. Zuführsysteme, die den Anforderungen der TS15066
genügen 3-D-Kollisionsschutz mit aktiver Schutzhaut: Für den
UR5-Leichtbauroboter hat Faude diese Schutzschicht entwickelt, die Unfälle nicht nur dämpfen, sondern auch verhindern kann Bei ein paar Leichtbaurobotern sind diese Optionen
heute schon im Standard dabei
Optional sind:
Kamerasystem wie das „Flexvison®“ von FAUDE für die Industrielle Bildverarbeitung in 2-D / 3-D, z.B. für die Er- kennung der Bauteile Sensitive Sensorik, wie die Software von Artiminds mit
einem Kraft- Momenten- Sensor, bei der ein Roboter fühlen kann Einen autonomen Messwinkel: Dabei vermessen vier
Ultraschallsensoren im Messwinkel die Positionen der gestapelten KLTs im Raum. Ein Kompakt-PC speichert alle Daten, berechnet die absolute Position zum Ro- boter und sendet dies dem Roboter. Die Funktionswei- se entspricht einer Cloud
Darüber hinaus bietet FAUDE noch weitere Komponenten an, um ein mehr Flexibilität und Taktzeit zu realisieren.
LBR iiwa
Der Sensitive für
Mensch-Roboter-
Kollaboration
UR5
Der Bedienerfreundliche
ABB yumi
Der Zweiarmige
FANUC CR35iA
Der Kräftige
hinweg abfedern zu können, bedarf es ei-ner Steuerung der Produktionseffi zienz. Mit realen MRK-Applikationen bekommt man den nötigen Spielraum, der wandel-
baren Fabrik personell und technologisch näher zu kommen. Damit Faktoren wie Stückzahl, Typenvielfalt und Kosten pro-duktionstechnisch beherrschbar bleiben.
Im Vordergrund steht dabei immer die passende wirtschaftliche Lösung, die die Übernahme von körperlich belastenden Arbeiten und monotonen, ungünstigen Tätigkeiten fokussiert.

1110
K A P I T E L R U B R I K
on FAUDE detektierte Arbeitsplätze, die auf eine reale MRK-Periphe-rie transformiert wurden, sind beispielhaft für weitere Tätigkeiten in der Produktion, die sich am Arbeitsplatz gemeinsam von Mensch und
Roboter sicher erledigen lassen. Bezüglich Peripherie, verwendeter Komponenten und Umgebung herrschen individuelle Bedingungen vor, die es immer für eine MRK-Vorge-hensweise zu prüfen gilt. Mit inbegriff en sind von FAUDE immer Projektierung, Schulung und Inbetriebnahme vor Ort sowie die CE-Kennzeichnung inklusive Dokumentation der Automatisierungslösung.
AUFGABENFELDER FÜR MRKDer Gang durch die Produktionslinien off eriert eine Vielzahl an teilautomatisierten, manuell-unterstützten Aufgaben.
DIE MRK-TO-DO-LISTE VDie Aufgabenfelder im Überblick:
Beladen und Entladen von Werkzeug-Maschinen Verschrauben Befetten und Beölen an automatisierten Stationen Bewegen und Zuführen von Bauteilen Prüfen und Messen von Geräten und Anlagen
Peripherie, Komponenten und
Umgebung müssen für eine
MRK-Vorgehensweise geprüft
werden.
1312
A U F G A B E N F E L D E R F Ü R M R K
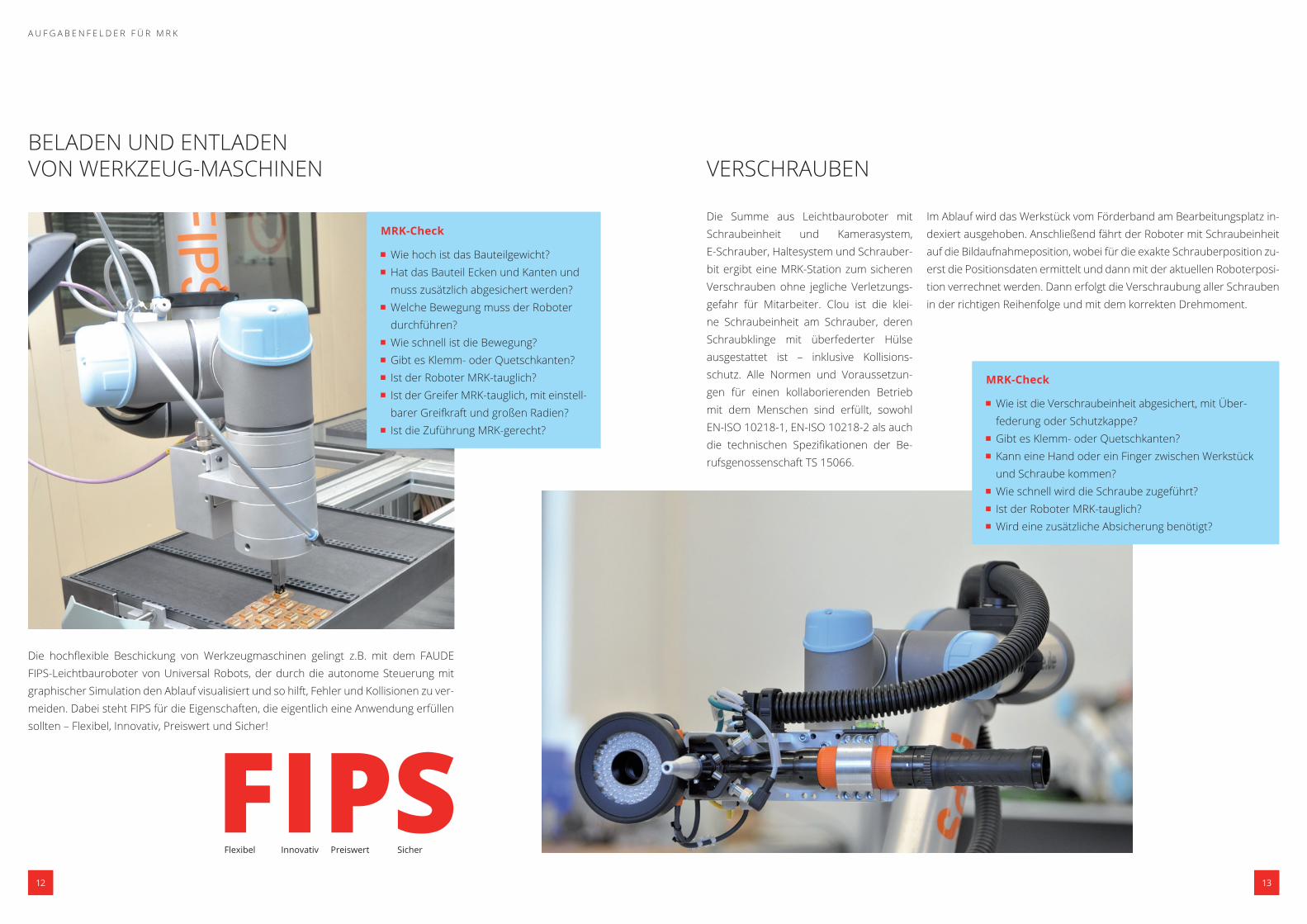
Die hochflexible Beschickung von Werkzeugmaschinen gelingt z.B. mit dem FAUDE FIPS-Leichtbauroboter von Universal Robots, der durch die autonome Steuerung mit graphischer Simulation den Ablauf visualisiert und so hilft, Fehler und Kollisionen zu ver-meiden. Dabei steht FIPS für die Eigenschaften, die eigentlich eine Anwendung erfüllen sollten – Flexibel, Innovativ, Preiswert und Sicher!
BELADEN UND ENTLADEN VON WERKZEUG-MASCHINEN
MRK-Check
Wie hoch ist das Bauteilgewicht? Hat das Bauteil Ecken und Kanten und
muss zusätzlich abgesichert werden? Welche Bewegung muss der Roboter
durchführen? Wie schnell ist die Bewegung? Gibt es Klemm- oder Quetschkanten? Ist der Roboter MRK-tauglich? Ist der Greifer MRK-tauglich, mit einstell-
barer Greifkraft und großen Radien? Ist die Zuführung MRK-gerecht?
VERSCHRAUBEN
MRK-Check
Wie ist die Verschraubeinheit abgesichert, mit Über- federung oder Schutzkappe? Gibt es Klemm- oder Quetschkanten? Kann eine Hand oder ein Finger zwischen Werkstück
und Schraube kommen? Wie schnell wird die Schraube zugeführt? Ist der Roboter MRK-tauglich? Wird eine zusätzliche Absicherung benötigt?
Die Summe aus Leichtbauroboter mit Schraubeinheit und Kamerasystem, E-Schrauber, Haltesystem und Schrauber-bit ergibt eine MRK-Station zum sicheren Verschrauben ohne jegliche Verletzungs-gefahr für Mitarbeiter. Clou ist die klei-ne Schraubeinheit am Schrauber, deren Schraubklinge mit überfederter Hülse ausgestattet ist – inklusive Kollisions-schutz. Alle Normen und Voraussetzun-gen für einen kollaborierenden Betrieb mit dem Menschen sind erfüllt, sowohl EN-ISO 10218-1, EN-ISO 10218-2 als auch die technischen Spezifikationen der Be-rufsgenossenschaft TS 15066.
Im Ablauf wird das Werkstück vom Förderband am Bearbeitungsplatz in-dexiert ausgehoben. Anschließend fährt der Roboter mit Schraubeinheit auf die Bildaufnahmeposition, wobei für die exakte Schrauberposition zu-erst die Positionsdaten ermittelt und dann mit der aktuellen Roboterposi-tion verrechnet werden. Dann erfolgt die Verschraubung aller Schrauben in der richtigen Reihenfolge und mit dem korrekten Drehmoment.
FIPSFlexibel Innovativ Preiswert Sicher

1514
K A P I T E L R U B R I K
Zum Aufbringen von unterschiedlichen Medien wie hoch-viskose dickflüssige Fette oder niedrigviskose dünnflüssi-ge Öle hat FAUDE ein Dosiersystem für kollaborierende Roboter entwickelt. Mit Hilfe des FIPS-Leichtbauroboters von Universal Robots und eines speziell angefertigten Nadel-/Dosiersystems wird eine kontinuierliche Prozess-beobachtung und -überwachung durch den Mitarbeiter gewährleistet. Weitere Effekte sind Steigerung der Pro-zessqualität, verbesserte Arbeitsergonomie bei gleichzei-tig niedriger Komplexität, niedrigere Investitionskosten und eine hohe Flexibilität.
In dem energieeffizienten Platzierungsprozess der Be-ölpunkte wird das Werkstück an der Roboterstation in-dexiert ausgehoben. Daraufhin fährt der Roboter mit dem am Roboterkopf befestigten Dosiersystem auf die einzel-nen Beölpositionen. Schutztechnisch kann es durch die sphärisch gelagerte Dosiernadel weder zu Verletzungen noch Kollisionen mit Körper- oder Bauteilen kommen. Bauteil- oder Positionstoleranzen sind durch die spezielle Lagerung ausgeglichen. Nach jedem Zyklus fährt der Ro-boter zur Kalibrierposition, um die Prozesssicherheit der Nadelpositionierung zu gewährleisten.
BEFETTEN UND BEÖLEN AN AUTOMATISIERTEN STATIONEN
MRK-Check
Wie ist die Dosiernadel abgesichert? Gibt es Klemm- oder Quetschkanten? Kann die Hand zwischen Werkstück und Dosierung
kommen? Wie schnell ist die Bewegung? Ist der Roboter MRK-tauglich? Wird eine zusätzliche Absicherung benötigt?
1716
A U F G A B E N F E L D E R F Ü R M R K
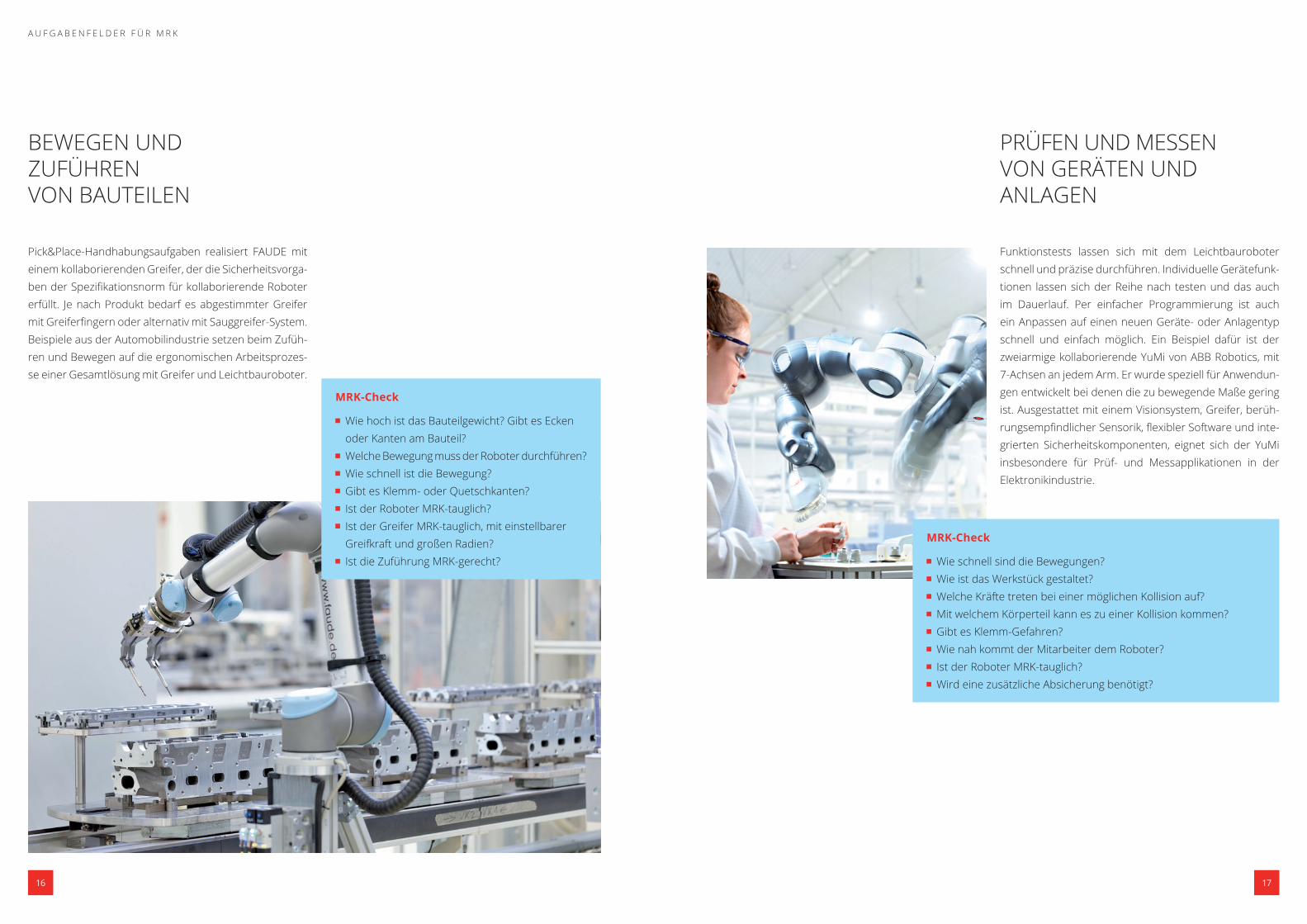
Pick&Place-Handhabungsaufgaben realisiert FAUDE mit einem kollaborierenden Greifer, der die Sicherheitsvorga-ben der Spezifikationsnorm für kollaborierende Roboter erfüllt. Je nach Produkt bedarf es abgestimmter Greifer mit Greiferfingern oder alternativ mit Sauggreifer-System. Beispiele aus der Automobilindustrie setzen beim Zufüh-ren und Bewegen auf die ergonomischen Arbeitsprozes-se einer Gesamtlösung mit Greifer und Leichtbauroboter.
BEWEGEN UND ZUFÜHREN VON BAUTEILEN
MRK-Check
Wie hoch ist das Bauteilgewicht? Gibt es Ecken oder Kanten am Bauteil? Welche Bewegung muss der Roboter durchführen? Wie schnell ist die Bewegung? Gibt es Klemm- oder Quetschkanten? Ist der Roboter MRK-tauglich? Ist der Greifer MRK-tauglich, mit einstellbarer
Greifkraft und großen Radien? Ist die Zuführung MRK-gerecht?
Funktionstests lassen sich mit dem Leichtbauroboter schnell und präzise durchführen. Individuelle Gerätefunk-tionen lassen sich der Reihe nach testen und das auch im Dauerlauf. Per einfacher Programmierung ist auch ein Anpassen auf einen neuen Geräte- oder Anlagentyp schnell und einfach möglich. Ein Beispiel dafür ist der zweiarmige kollaborierende YuMi von ABB Robotics, mit 7-Achsen an jedem Arm. Er wurde speziell für Anwendun-gen entwickelt bei denen die zu bewegende Maße gering ist. Ausgestattet mit einem Visionsystem, Greifer, berüh-rungsempfindlicher Sensorik, flexibler Software und inte-grierten Sicherheitskomponenten, eignet sich der YuMi insbesondere für Prüf- und Messapplikationen in der Elektronikindustrie.
PRÜFEN UND MESSEN VON GERÄTEN UND ANLAGEN
MRK-Check
Wie schnell sind die Bewegungen? Wie ist das Werkstück gestaltet? Welche Kräfte treten bei einer möglichen Kollision auf? Mit welchem Körperteil kann es zu einer Kollision kommen? Gibt es Klemm-Gefahren? Wie nah kommt der Mitarbeiter dem Roboter? Ist der Roboter MRK-tauglich? Wird eine zusätzliche Absicherung benötigt?

1918
R E C H T L I C H E A N F O R D E R U N G E N
Wenn die Rede von einer Mensch-Roboter-Kollaboration (MRK) ist, dann fungiert der Roboter als Produktionsas-sistent, der den Werker in einem gemeinsamen Arbeits-prozess unterstützt. Der Ausschluss der Gefährdung des Menschen durch entsprechende Sicherheitsmaßnahmen ist oberste Prämisse. Zwei Dinge sind aus produktions-rechtlicher Perspektive interessant: Übernimmt das Un-ternehmen selbst die Entwicklung von Maschinen und Anlagen mit MRK-Komponenten, dann zählt der Aspekt der Maschinensicherheit inklusive CE-Kennzeichnung dazu. Beschafft sich das Unternehmen MRK-Systeme und setzt diese für die Produktion ein, so stehen die Betrei-berhaftung und die Arbeitssicherheit an vorderster Front.
Beim Kauf haben nackte, kooperierende Leichtbaurobo-ter den Status einer unvollständigen Maschine – ohne CE-Zeichen. Erst die Integration in ihre direkte Arbeitsum-gebung und die komplette Risikobeurteilung macht sie zu abgeschlossenen Maschinen. In der Risikobeurteilung sind die Aspekte der MRK maßgebend, also sowohl die sogenannte bestimmungsgemäße Verwendung als auch die vorhersehbare Fehlanwendung durch Personen im Einflussbereich des kollaborierenden Roboters. Än-dert sich die konkrete MRK-Anwendung, so erlischt die CE-Konformität bereits wieder.
RECHTLICHE ANFORDERUNGENDGUV-Voraussetzungen und Checkliste MRK – Normen, Rechte, Voraussetzungen
WAHRE ODER WARE MRK?
20
R E C H T L I C H E A N F O R D E R U N G E N
Sicherheitsanforderungen bei kollaborierenden Industrierobotern sind ein noch recht neues Feld. Bisher sind in der DIN EN ISO 10218 alle Details berücksichtigt, bei der Ge-staltung und dem Bau (Teil 1) sowie bei der Integration (Teil 2) von Industrierobotern. In der weiterführenden Spezifi kation ISO/TS15066 sind die Sicherheitsanforderungen für den speziellen Anwendungsbereich der kollaborierenden Industrieroboter defi niert. Oberstes Ziel der technischen Schutzmaßnahmen ist die Minimierung des Verletzungs-risikos anhand von biomechanischen Grenzwerten für die zulässigen Kontakte zwischen Mensch und Roboter. Es steht nun an, die Ergebnisse der ISO/TS15066 in die überarbei-tete Fassung der ISO 10218-Norm einfl ießen zu lassen. Wichtig ist, gemäß der Norm, die Regelung der Geschwindigkeit, Bahn und Kraft des kooperierenden Roboters.
Nach heutigem Stand ist die Bewegung von kooperierenden Robotern auf 250 bis 750 mm/s beschränkt – ganz im Gegensatz zu den „eingesperrten Genossen“, die bis zu 10 m/s Fahrgeschwindigkeit haben. Laut BG/BGIA-Empfehlungen für die „Gefährdungsbe-urteilung nach Maschinenrichtlinie – Gestaltung von Arbeitsplätzen mit kollaborieren-den Robotern“ liegt die maximal zulässige Stoßkraft für den Bereich des Kopfes bei 90N, Grenzwert bei der Flächenpressung ist 20N/cm². In der Praxis sind für diese niedrigen Grenzwerte Zusatzmaßnahmen erforderlich, um die Menschen vor Roboter-Unfällen zu schützen.
Für andere Körperbereiche können Lösungsmöglichkeiten wie die Kraftbegrenzung des Roboters, eine Teilumhausung oder die Reduktion der Geschwindigkeit bzw. Vergröße-rung der Aufschlagfl äche ausreichend sein. Um sicher zu sein, empfi ehlt die TS15066 die Kollisionskraft an den Körperteilen zu messen. Für zuverlässige Werte ist das noch recht teure Messgerät und viel Erfahrung notwendig.
Der Einsatz von kollaborierenden Robotern in Fabriken bringt große Vorteile für die In-dustrie und entlastet die Mitarbeiter. Dabei muss jedoch sichergestellt werden, dass die Menschen, die mit den Robotern zusammenarbeiten, so gut wie möglich vor Kollisio-nen geschützt werden. Entsprechende Messungen zeigen, wo die Gefahren liegen. Um sie entsprechend zu reduzieren, kann es nötig sein, dass ein Roboter nicht mit Einsatz seiner vollen Kraft oder Geschwindigkeit arbeitet. Zum Schutz vor Kollisionen sind die Geräte mit kapazitiven oder taktilen Sensoren sowie teilweise mit Schaumstoff polstern umgeben. Ebenfalls besitzen die Gelenke eine Krafterkennung, die Hindernisse bei Kol-lisionen erkennt.
CHECKLISTE MRKNORMEN UND RECHTE
Aus der Praxiserfahrung heraus, hat FAUDE eine Checkliste entwickelt, die MRK-Anwen-dungsfälle systematisch identifi ziert, analysiert und auch bewertet. Potenzielle Einsatz-felder für MRK-taugliche Montageplätze lassen sich in erster Linie detektieren. Für ein Ranking geeigneter Applikationen ist diese Liste dienlich, da sie neben der Tauglichkeit auch die Montageplanung und -realisierung für die MRK unerlässliche Perspektive zur Maschinen- und Arbeitssicherheit hinterfragt.
DIN EN ISO 10218, TS15066,
ISO 10218-Norm – Mit dem
FAUDE-Sicherheitspaket werden
Menschen, die mit Robotern
zusammenarbeiten, bestmög-
lich geschütz
Liegt eine Risikobeurteilung des MRK-Anwendungsfalls vor?
Ja, es kann eine Mensch-Roboter-Kollaboration stattfi nden. Nein, es kann keine Mensch-Roboter-Kollaboration stattfi nden.
Es ist immer die gesamte Applikation zu betrachten (Prozess, Spanner, Greiftechnik, Roboter), d.h. nicht nur der Roboter.
Die Sicherheitsfunktionen müssen entsprechend den ermittelten Anforderungen mit geeigneten Komponenten umgesetzt werden.
Komplette Risikobeurteilung erfolgt erst in ihrer Arbeitsumgebung.
Die Geräte müssen Ein-Fehlersicher sein sowie Performance Level d und Kategorie 3 erfüllen. Sie brauchen als Schutzmaßnahme auf jeden Fall einen Not-Halt und einen 3-stufi gen Zustimmschalter.
So muss praktisch bei jeder neuen Anwendung eine neue CE-Erklärung ausgestellt werden.
Risikobeurteilung: wird betrachtet, dass bei bestimmungsgemäßer Anwendung keine Kollisionen mit Hals und Kopf sowie kein Einklemmen möglich sind.
Die nötigen Sicherheitsabstände müssen platzseitig im Betrieb gegeben sein.

2322
K A P I T E L R U B R I K
LEICHTBAUROBOTERUND MRK-SYSTEME VON FAUDE“Der Leichtbauroboter – unendliche Weiten“
ir schreiben das Jahr 2016. Dies sind die Abenteuer von FAUDE, das mit seiner 40 Mann starken
Besatzung unterwegs ist, um Produktionsstätten mit Leichtbaurobotern zu durchdringen und die Arbeitswel-ten zu revolutionieren. Damit der Mensch in neue Tätig-keitsfelder eintaucht, die mit und auch neben einem Ro-boter bisher noch unbekannt waren.
FAUDE als neutraler IntegratorUnabhängig von der Marke des Leichtbauroboters sieht FAUDE die MRK-Applikation als wirtschaftlich umsetzbare Lösung. Erst nach erfolgreich abgeschlossener Risikoana-lyse ohne oder nur mit minimalen Schutzvorrichtungen lässt sich das korrekte Einrichten von MRK-Anwendungen
„FAUDE ermöglicht Ihnen eine wandel-bare Fabrik – auf dem neuesten Stand der Technik, Industrie 4.0.“Dirk Thamm, Geschäftsführer von FAUDE
W
22
realisieren. Daher zählt nur die Gesamt-applikation inklusive Greifanwendung, die Aufschluss gibt über die Stufen der Zu-sammenarbeit von Mensch und Roboter. Angefangen bei der Koexistenz über die sequenzielle Zusammenarbeit bis hin zur wirklichen Kollaboration. Dafür sind inter-ne Kraftregelungen und individuell justier-bare Sicherheitsfunktionen nötig.
2524
D E R M E N S C H I N D E R P R O D U K T I O N
DER MENSCH IN DER PRODUKTIONDes Werkers bester Assistent
n kommenden Zeiten einer intelli-genten Produktion bleibt als Kons-tante der Mensch, der die Prozesse
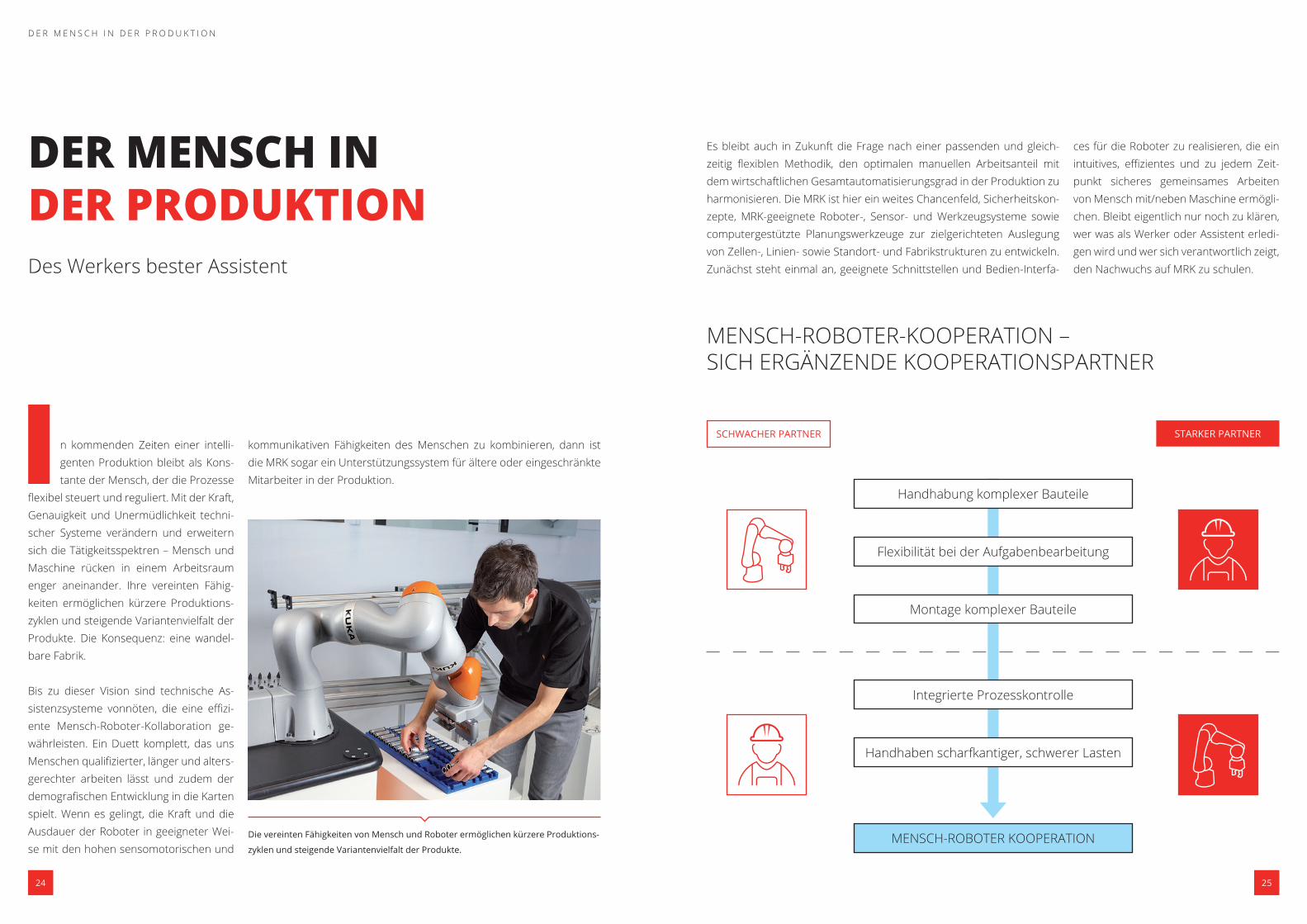
flexibel steuert und reguliert. Mit der Kraft, Genauigkeit und Unermüdlichkeit techni-scher Systeme verändern und erweitern sich die Tätigkeitsspektren – Mensch und Maschine rücken in einem Arbeitsraum enger aneinander. Ihre vereinten Fähig-keiten ermöglichen kürzere Produktions-zyklen und steigende Variantenvielfalt der Produkte. Die Konsequenz: eine wandel-bare Fabrik.
Bis zu dieser Vision sind technische As-sistenzsysteme vonnöten, die eine effizi-ente Mensch-Roboter-Kollaboration ge-währleisten. Ein Duett komplett, das uns Menschen qualifizierter, länger und alters-gerechter arbeiten lässt und zudem der demografischen Entwicklung in die Karten spielt. Wenn es gelingt, die Kraft und die Ausdauer der Roboter in geeigneter Wei-se mit den hohen sensomotorischen und
kommunikativen Fähigkeiten des Menschen zu kombinieren, dann ist die MRK sogar ein Unterstützungssystem für ältere oder eingeschränkte Mitarbeiter in der Produktion.I
Es bleibt auch in Zukunft die Frage nach einer passenden und gleich-zeitig flexiblen Methodik, den optimalen manuellen Arbeitsanteil mit dem wirtschaftlichen Gesamtautomatisierungsgrad in der Produktion zu harmonisieren. Die MRK ist hier ein weites Chancenfeld, Sicherheitskon-zepte, MRK-geeignete Roboter-, Sensor- und Werkzeugsysteme sowie computergestützte Planungswerkzeuge zur zielgerichteten Auslegung von Zellen-, Linien- sowie Standort- und Fabrikstrukturen zu entwickeln. Zunächst steht einmal an, geeignete Schnittstellen und Bedien-Interfa-
ces für die Roboter zu realisieren, die ein intuitives, effizientes und zu jedem Zeit-punkt sicheres gemeinsames Arbeiten von Mensch mit/neben Maschine ermögli-chen. Bleibt eigentlich nur noch zu klären, wer was als Werker oder Assistent erledi-gen wird und wer sich verantwortlich zeigt, den Nachwuchs auf MRK zu schulen.
Die vereinten Fähigkeiten von Mensch und Roboter ermöglichen kürzere Produktions-
zyklen und steigende Variantenvielfalt der Produkte.
Handhabung komplexer Bauteile
Integrierte Prozesskontrolle
Flexibilität bei der Aufgabenbearbeitung
Handhaben scharfkantiger, schwerer Lasten
Montage komplexer Bauteile
MENSCH-ROBOTER KOOPERATION
SCHWACHER PARTNER STARKER PARTNER
MENSCH-ROBOTER-KOOPERATION – SICH ERGÄNZENDE KOOPERATIONSPARTNER

2726
Q U O V A D I S M R K ?
QUO VADIS MRK?
„Grob geschätzt gab es im letzten Jahr einen MRK-Markt von ungefähr 100Mio.€, der bis zum Jahr 2020 auf 3 Mrd. € ansteigen soll. Voraussetzung dafür ist die Sensibilisierung und auch das Verständnis von real kol-laborierenden Robotern. In der Retrospektive würden wir so manche MRK-Applikation nicht mehr so lösen, wie wir es in den Anfängen gemacht haben. Heute rei-fen die Erkenntnisse zu den ergonomischen Fakten wie Radien, Abstände oder Kräfte, die man dem Menschen zumuten darf. Zusammen mit den fortschreitenden technischen Errungenschaften gehen die sicherheit-stechnischen Applikationen immer mehr Hand in Hand mit den Bemühungen, Arbeitskräfte zu entlasten.
Bei Volkswagen musste sich der Werker beim Einbau der Glühstiftkerzen 1.000 Mal am Tag weit nach vorne beugen. Mit der realisierten MRK-Installation gibt es deut-lich weniger Arbeitsausfälle durch Rückenschmerzen, das die Controller wie auch Be-triebsrat und Berufsgenossenschaft honorierten. Und der Mitarbeiter erfreut sich ob der Tatsache, dass sein Arbeitsplatz durch den Roboter ergänzt und nicht ersetzt wird.
Aus Sicht des Volkswagen Konzerns katalysiert die Fokussierung der Arbeitsstationen auf eine Mensch-Maschine-Kooperation den Prozess zur vollautomatisierten Produk-tion. Durch die intelligente und vor allem sichere Kooperation ist ein sehr hoher Grad von adaptiver Flexibilität erreichbar, da der intuitiv agierende Werker – zumindest heute noch – sich wesentlich schneller auf neue Aufgabenstellungen einstellen kann als der Roboter. Durch die konsequente Zusammenarbeit mit dem Menschen „lernt“ aber auch der Roboter, mehr Aufgaben nach und nach autark ohne Hilfe des Men-schen selbstständig auszuführen. Das „sichere Miteinander“ mixt dann die Aufgaben, wobei meines Erachtens der Roboter im Automatik-Betrieb selbstständig Teilaufga-ben innerhalb der Produktionssequenz übernimmt und dem Menschen als „intelli-genter Manipulator“ dient, der schwere oder großfl ächige Teile trägt und vom Werker direkt und kraftgeführt bewegt wird.“
Derzeit verrichten 1,7 Millionen Roboter ihre Arbeit und bis 2018 sollen es bis zu drei Millionen sein. Damit sum-miert sich laut den Zahlen des IFR der internationale Marktwert für Robotersysteme branchenübergreifend auf rund 32 Milliarden US-Dollar.
nteressant ist im Hinblick auf MRK die durchschnittliche Roboter-dichte im produzierenden Gewerbe, die weltweit bei 66 Roboter-einheiten pro 10 000 Arbeitnehmer liegt. MRK ist ein noch kleines
Applikationsfeld, jedoch mit der Weiterentwicklung der Digitalisierung und der Sensoren ist zu erwarten, dass Roboter mögliche Kollisionen be-reits vor der Berührung des Menschen erkennen und rechtzeitig stoppen oder ausweichen. Diese Erkennung ist heute besonders im Bereich des Greifers noch schwierig, wird aber eines Tages auch Realität sein. Die Ent-wicklung bei MRK schreitet voran. Dies sieht man auch deutlich an der Firmenentwicklung im Markt: es gibt immer mehr Start-up-Unternehmen, die durch Ihre Software noch mehr aus den gegeben Möglichkeiten ma-chen, wie z.B. die Firma Artiminds, die aus dem KIT Karlsruhe entstanden ist und mit Ihrer Software die Offl ine-Programmierung möglich macht und mit Modulbausteinen die Programmierung revolutioniert. Inwieweit es in Zukunft möglich sein wird, „fertige“ kooperierende Industrieroboter mit CE-Zeichen zu kaufen, bleibt abzuwarten.
Zukünftig werden Roboter mögliche Kollisionen bereits vor der Berüh-rung des Menschen erkennen und rechtzeitig stoppen oder ausweichen. Kooperierende Roboter, die kapazitiv eine drohende Kollision erkennen, existieren bereits. Technisch anspruchsvoll stellt es sich derzeit für die
»Robot Farming« – nur eine Vision?
Visionäres »Robot Farming«,
bei dem Mitarbeiter Roboter
an verschiedenen Orten für
unterschiedliche Aufgaben
fl exibel einsetzen können,
treibt die Szenerie. Abhängig
von geforderter Stückzahl und
Fertigungsumfängen nutzen die
Werker innovative Produktions-
peripherien ohne Schutzzäune
und Vorrichtungen, setzen an
den Stationen Roboter nach
Bedarf ein und gestalten so
moderne Arbeitsbereiche aus –
kognitive und physische Fähig-
keiten des Menschen sind mit
der Wiederholgenauigkeit, der
Präzision und der Ausdauer der
Roboter ideal kombiniert.
Dirk ThammGeschäftsführer von FAUDE
KOLLEGE ROBOTER WIRD REALITÄT
I Greifer dar, diese Erkennung zu realisie-ren. Der Weg, fertig bestückte, kooperie-rende Industrieroboter mit CE-Zeichen zu produzieren, ist noch fern – dazu braucht es einfach noch einer sicherheitstechni-schen Bewertung über die Gefährdungs-beurteilung des einzelnen Arbeitsplatzes.
Gerade für das Bild einer smarten Fabrik braucht es eine Verschmelzung des Mitar-beiter-Prozesswissens mit dem digitalen Prozessabbild für die sensitiven Leicht-bau-Roboter. Das betriff t auch die metho-dische Unterstützung der Anlagenkonst-rukteure, beispielsweise mit Softwaretools zur MRK- gerechten Konzeption ihrer Ge-samtanlage. Entsprechende Schulungen für involvierte Mitarbeiter fl ankieren das MRK-Gesamtbild. Erst dann kann das ein-fache und intuitive Arbeiten der Kollegen „Mensch und Roboter“ funktionieren.
FAUDEAutomatisierungstechnik GmbH
Max-Planck-Str. 1071116 Gä[email protected]
Tel: +49 7034 / 25 67 - 0Fax: +49 7034 / 25 67 - 67
www.faude.de
ImpressumHerausgeber: FAUDEAutomatisierungstechnik GmbH
Konzept und grafische Gestaltung: Stadler und Partner www.stadlerquerdenker.de
Text:Paul KhoTechnische Kho-mmunikationwww.kho-mmunikation.de
Bildquellen:Universal Robots A/S KUKA-Roboter GmbH FANUC Deutschland GmbH Schunk GmbH und Co. KGABB Automation GmbHVolkswagen AGDeutsche Gesetzliche Unfallversicherung e.V. (DGUV)FAUDE Automatisierungstechnik GmbHMariya II/Shutterstock.comsuns07butterfly/Shutterstock.comTATSIANAMA/Shutterstock.comJirsak/Shutterstock.comsaginbay/Shutterstock.com Juni 2016 – 500 Exemplare
Rechtlicher Hinweis
Diese FAUDE-Broschüre dient als Statusmeldung und verschafft Herstellern von Roboteranlagen eine Übersicht zu relevanten Normen, Gesetzen und technischen Anforderungen bezüglich der Sicherheit bei dem Themenfeld Mensch-Robotoer-Kollaboration. Der Inhalt dieser Publikation erhebt keinen Anspruch auf Vollständigkeit oder auf die exakte Auslegung der bestehen-den Rechtsvorschriften. Es ersetzt nicht das Studium der relevanten Richtlinien, Gesetze und Verordnungen.





























