Embed Size (px)
Citation preview
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-1
4. Allgemeine Anregung
4.1 Sprungantwort
4.2 Impulsantwort
4.3 Beispiel
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-2
4.1 Sprungantwort
● Antwort auf einen Lastsprung:– Ein schwach gedämpfter Schwinger wird aus der Ruhe
durch folgende zeitlich veränderliche Kraft belastet (Sprungfunktion):
– Die Anfangswerte sind
– Für t > 0 gilt:– Eine partikuläre Lösung dieser Gleichung ist
F t =F t =
0F 0
fürfür
t≤0t0
x 0=0, x 0=0 t
F(t)
F0
x2 x2 x=F 0 /m
x p t =F 0m
2 , t0 ; x p t =0, t≤0
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-3
4.1 Sprungantwort
– Die allgemeine Lösung lautetmit (vgl. 2.1.3)
– Anfangsbedingungen:● :
● :
● Daraus:
x t =x pt x h t
x ht =e− t
C 1cos d t C 2sin d t
x 0=0 xh 0=−x p 0=−F 0m
2
x 0=0 x h 0=0
C1=xh 0=−F 0m
2
C 2=
d
x h 0=−
d
F 0m
2
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-4
4.1 Sprungantwort
– Damit lautet die Lösung:
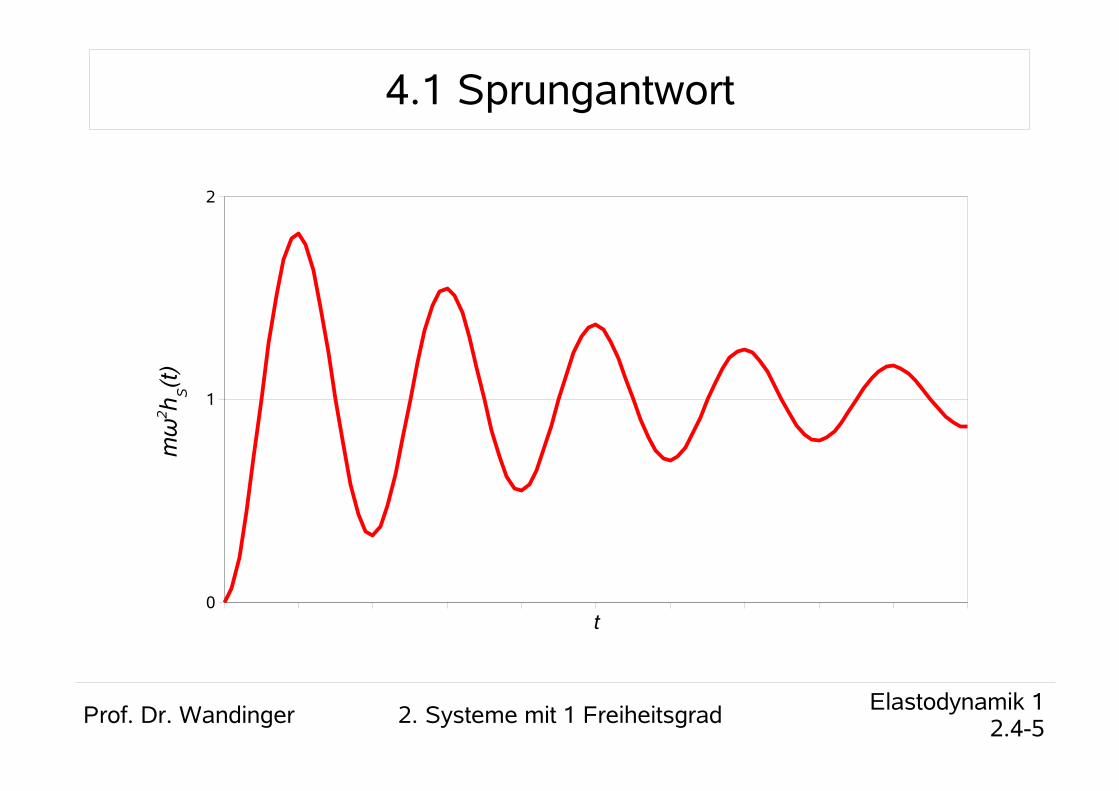
– Die Funktion
wird als Sprungantwort bezeichnet.– Mit der Sprungantwort gilt:
x t =F 0m
2 [1−e− t cosd t
d
sin d t ] , t0
hS t ={0, t≤01m
2 [1−e− t cosd t
d
sin d t ] , t0
x t =F 0hS t
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-5
0
1
2
t
mω
2 h S(t
)
4.1 Sprungantwort
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-6
4.1 Sprungantwort
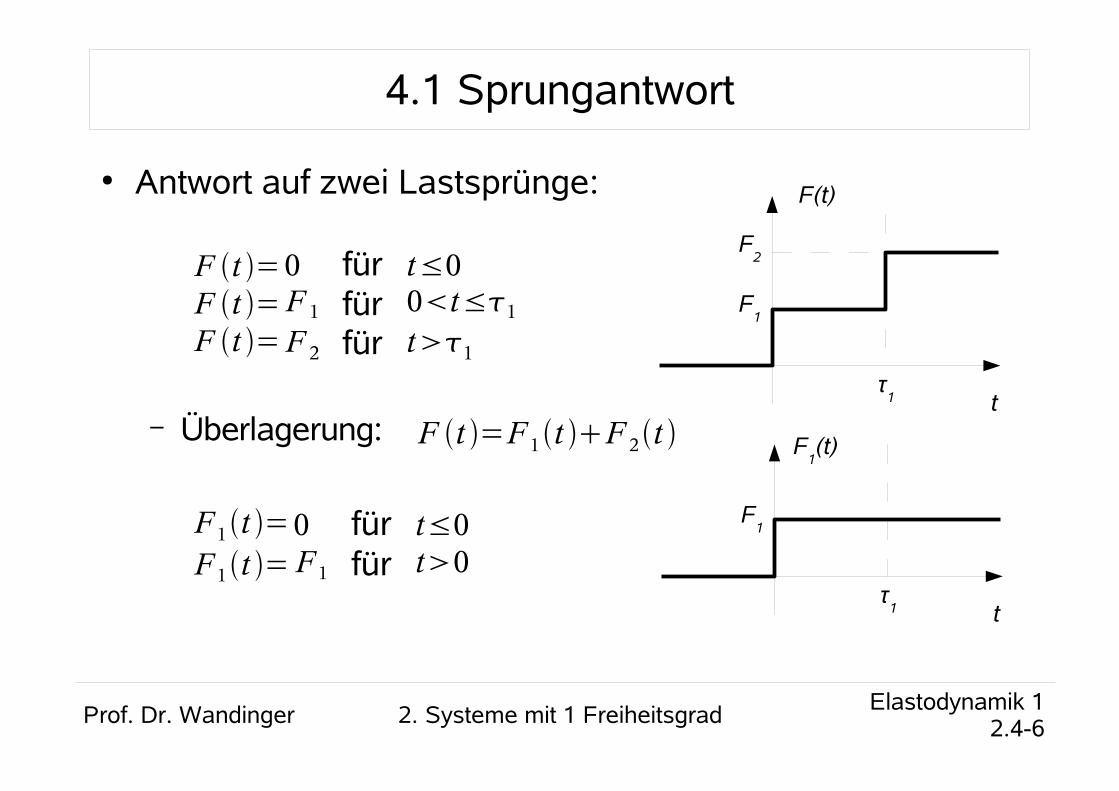
● Antwort auf zwei Lastsprünge:
– Überlagerung:
F t =F t =F t =
0F 1F 2
fürfürfür
t≤00t≤1
t1
t
F(t)
F1
F2
τ1
F t =F 1t F 2t
t
F1(t)
F1
τ1
F 1t =F 1t =
0F 1
fürfür
t≤0t0
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-7
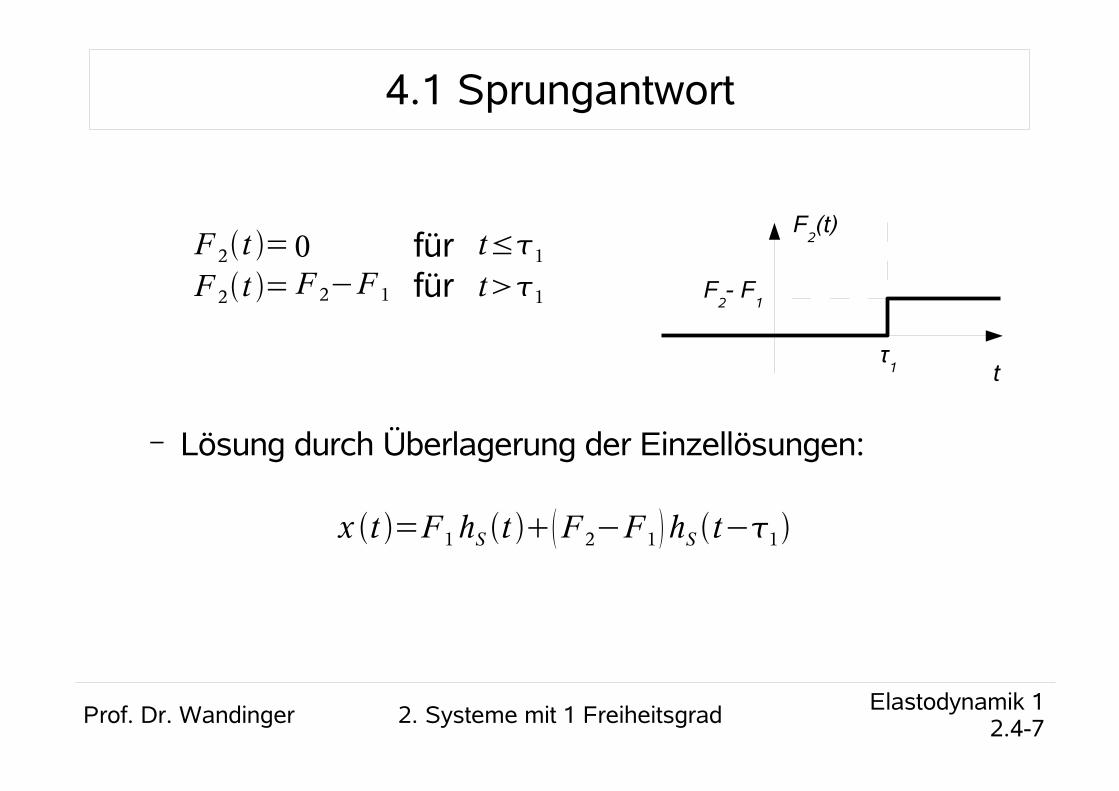
4.1 Sprungantwort
– Lösung durch Überlagerung der Einzellösungen:
F 2t =F 2t =
0F 2−F 1
fürfür
t≤1
t1
t
F2(t)
F2- F
1
τ1
x t =F1hS t F 2−F1 hS t−1
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-8
4.1 Sprungantwort
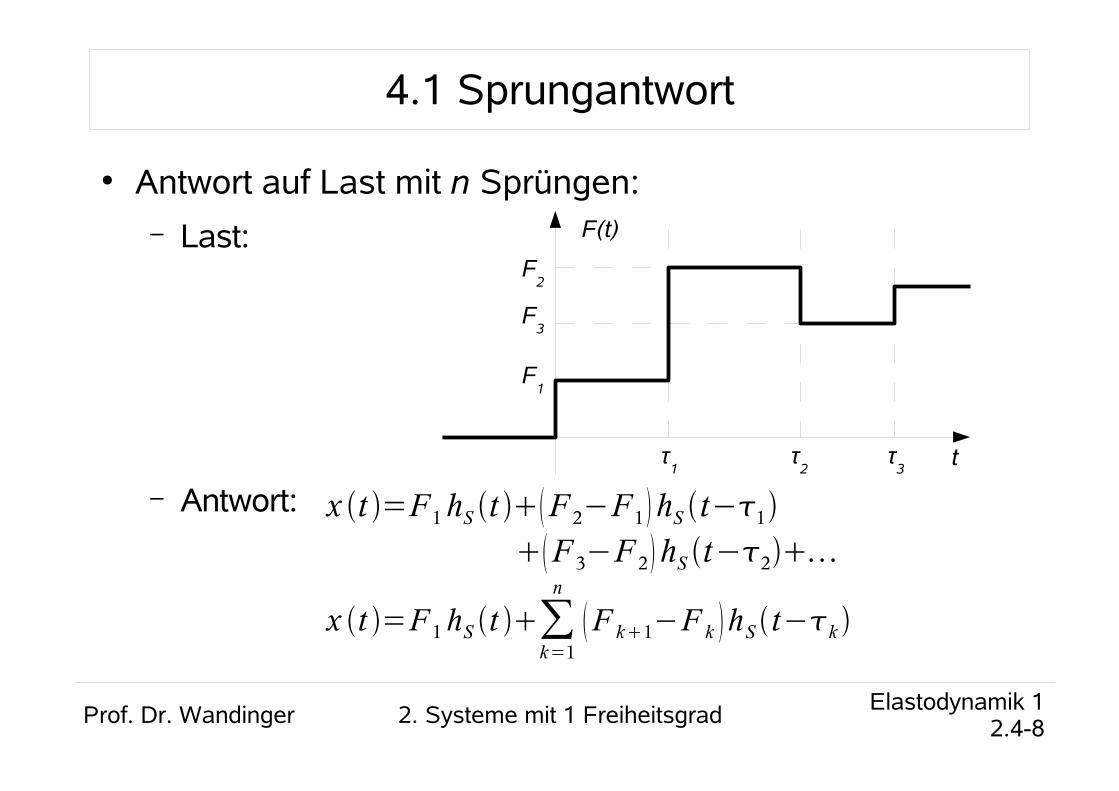
● Antwort auf Last mit n Sprüngen:– Last:
– Antwort:
t
F(t)
F1
F2
τ1
τ2
τ3
F3
x t =F1hS t F 2−F1 hS t−1
F 3−F 2 hS t−2
x t =F 1hS t ∑k=1
n
F k1−F k hS t−k
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-9
4.1 Sprungantwort
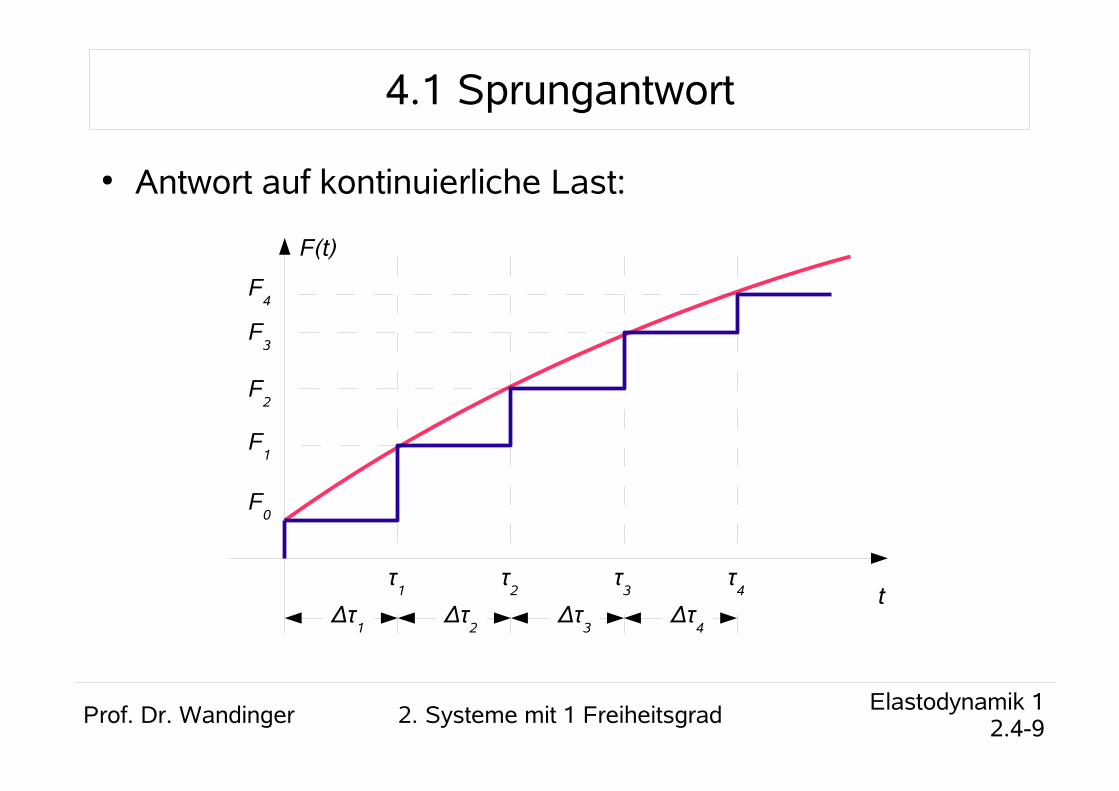
● Antwort auf kontinuierliche Last:
t
F(t)
τ1
τ2
τ3
τ4
F1
F2
F3
F4
F0
Δτ1
Δτ2
Δτ3
Δτ4
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-10
4.1 Sprungantwort
– Approximation durch Treppenfunktion:
bzw.
– Grenzübergang:
– Das Integral wird als Duhamel-Integral bezeichnet.
x t ≈F 0hS t ∑k=1
n
F k −F k−1hS t−k
x t ≈F 0hS t ∑k=1
n
F k −F k−1
k hS t−k k
k0 ⇒ x t =F 0hS t ∫0
tdFd
hS t−d
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-11
4.1 Sprungantwort
● Wenn die Sprungantwort hS(t) gegeben ist, kann die
Anwort des Systems x(t) auf eine beliebige Last F(t) mit dem Duhamel-Integral berechnet werden.
● Die Sprungantwort hS(t) hängt von den Anfangsbe-
dingungen ab.● Die vorgestellte Sprungantwort gehört zu den Anfangsbe-
dingungen und .x 0=0 x 0=0
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-12
4.2 Impulsantwort
● Zur Berechnung der Antwort mit Hilfe der Sprungantwort muss die Last nach der Zeit abgeleitet werden.
● Das ist ungünstig, wenn die Lastfunktion in tabellarischer Form gegeben ist.
● Durch partielle Integration kann eine Darstellung der Lösung gefunden werden, bei der über die Last integriert wird.
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-13
4.2 Impulsantwort
● Partielle Integration:– Produktregel:
– Integration:
– Auswerten des linken Integrals:
ddt
[ f t g t ]=dfdt
t g t f t dgdt
t
∫t1
t2ddt
[ f t g t ]dt=∫t1
t2dfdt
t g t dt∫t 1
t 2
f t dgdt
t dt
[ f t g t ]t 1t 2=∫
t1
t 2dfdt
t g t dt∫t2
t2
f t dgdt
t dt
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-14
4.2 Impulsantwort
– Ergebnis:
∫t 1
t 2dfdt
t g t dt= f t2g t2− f t1g t1−∫t1
t2
f t dgdt
t dt
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-15
4.2 Impulsantwort
● Anwendung auf Duhamel-Integral:
– Zum Zeitpunkt t = 0 gilt für die Sprungantwort: hS(0) = 0
– Damit lautet das Duhamel-Integral:
∫0
tdFd
hS t−d =F t hs0−F 0hst
−∫0
t
F dd hs t−d
x t =−∫0
t
F dd hS t−d
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-16
4.2 Impulsantwort
● Ableitung der Sprungantwort:
dd hS t−
=1
m2
dd [1−e
−t−
cos d t−
dsin d t− ]
=1
m2 [−e− t−
cos d t−
dsin d t−
−e−t−
d sin d t− − cos d t− ]
=−1
m2e−t−
2d
2
dsin d t−
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-17
4.2 Impulsantwort
– Mit folgt:d2=
2−
2
dd hS t−=−
1md
e− t−sin d t−
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-18
4.2 Impulsantwort
● Impulsantwort:– Mit der Impulsantwort
gilt:
hI t ={0 t≤0
1md
e− t sin d t t0
x t =∫0
t
F hI t−d
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-19
4.2 Impulsantwort
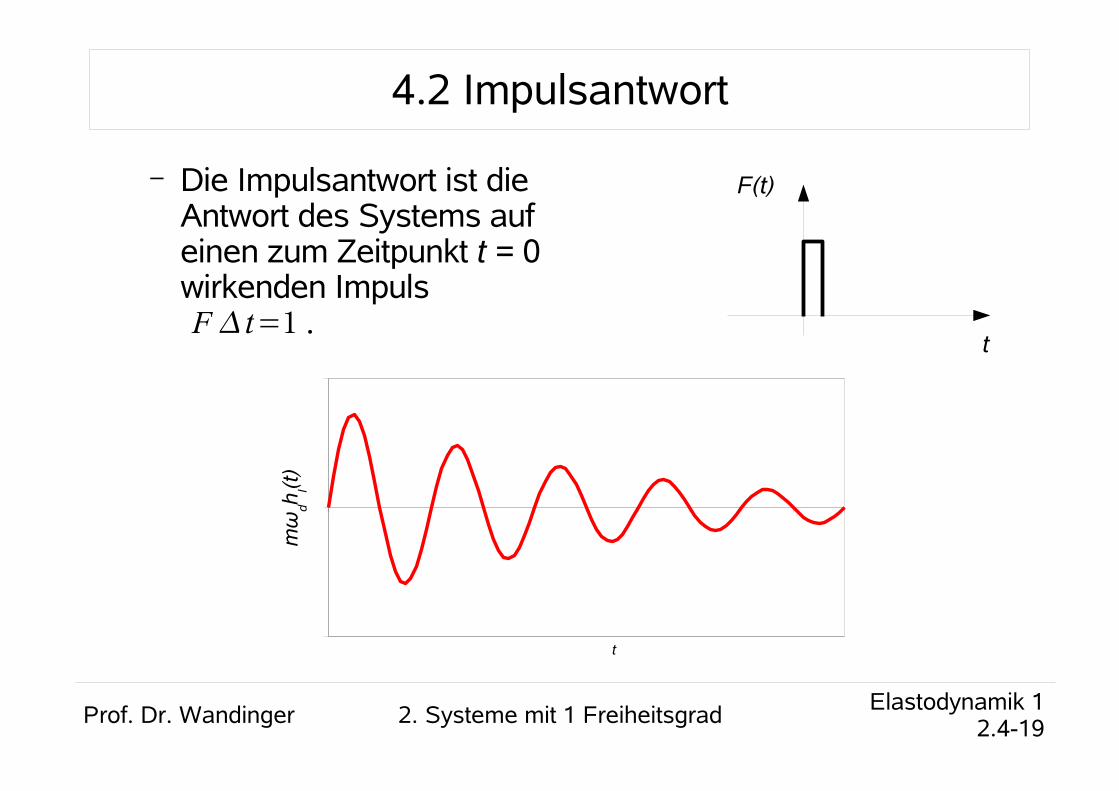
– Die Impulsantwort ist die Antwort des Systems auf einen zum Zeitpunkt t = 0 wirkenden Impuls .
t
F(t)
F t=1
t
mω
dh I(t)
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-20
4.3 Beispiel
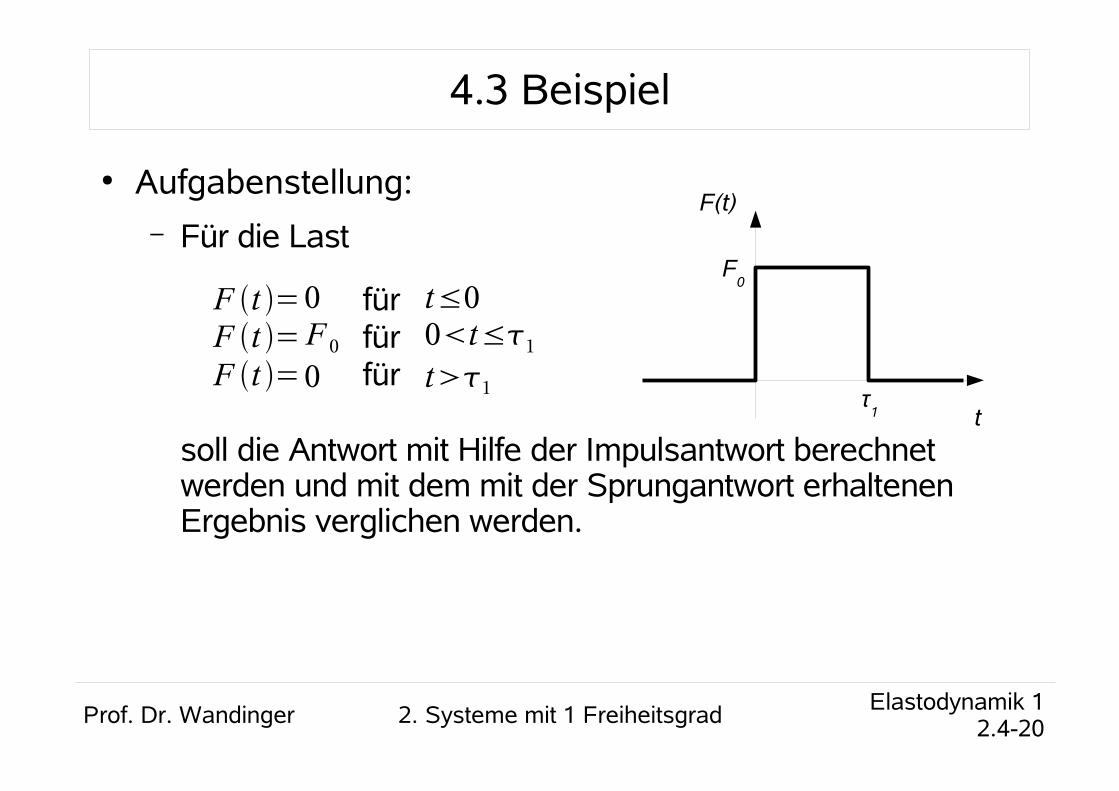
● Aufgabenstellung:– Für die Last
soll die Antwort mit Hilfe der Impulsantwort berechnet werden und mit dem mit der Sprungantwort erhaltenen Ergebnis verglichen werden.
F t =F t =F t =
0F 00
fürfürfür
t≤00t≤1
t1t
F(t)
F0
τ1
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-21
4.3 Beispiel
● Lösung:– Zu berechnen ist
– Im Zeitintervall 0 ≤ t ≤ τ1 gilt:
– Für t > τ1 gilt:
x t =∫0
t
F 1md
e−t−sin d t−d
x t =F 0md
∫0
t
e−t−sin d t−d
x t =F 0md
∫0
1
e−t−sin d t−d
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-22
4.3 Beispiel
– Für beide Zeitbereiche wird die gleiche Stammfunktion
benötigt.– Die Substitution führt auf
S =∫ e− t−sin d t− d
u=t− , du=−d
S =−∫e−usin d u du=−
e−u
2d
2 −sin d u −d cos d u
=e−t−
2 sin d t−d cos d t−
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-23
4.3 Beispiel
● Ergebnis:
– Zeitintervall 1: 0 ≤ t ≤ τ1
x t =F 0md
S t −S 0
=F 0md
d
2−e− t
2 sin d t d cos d t
=F 0
m2 1−e
− t
cos d t
dsin d t
=F 0hS t
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-24
4.3 Beispiel
– Zeitintervall 2: t > τ1 :
x t =F 0md
S 1−S 0
=F0md
[ e− t−1
2 sin d t−1d cos d t−1
−e− t
2 sin d t d cos d t ]
=F0m
2e−t−1cos d t−1
dsin d t−1
−F0m
2e− t
cos d t
dsin d t
Prof. Dr. Wandinger 2. Systeme mit 1 Freiheitsgrad Elastodynamik 12.4-25
4.3 Beispiel
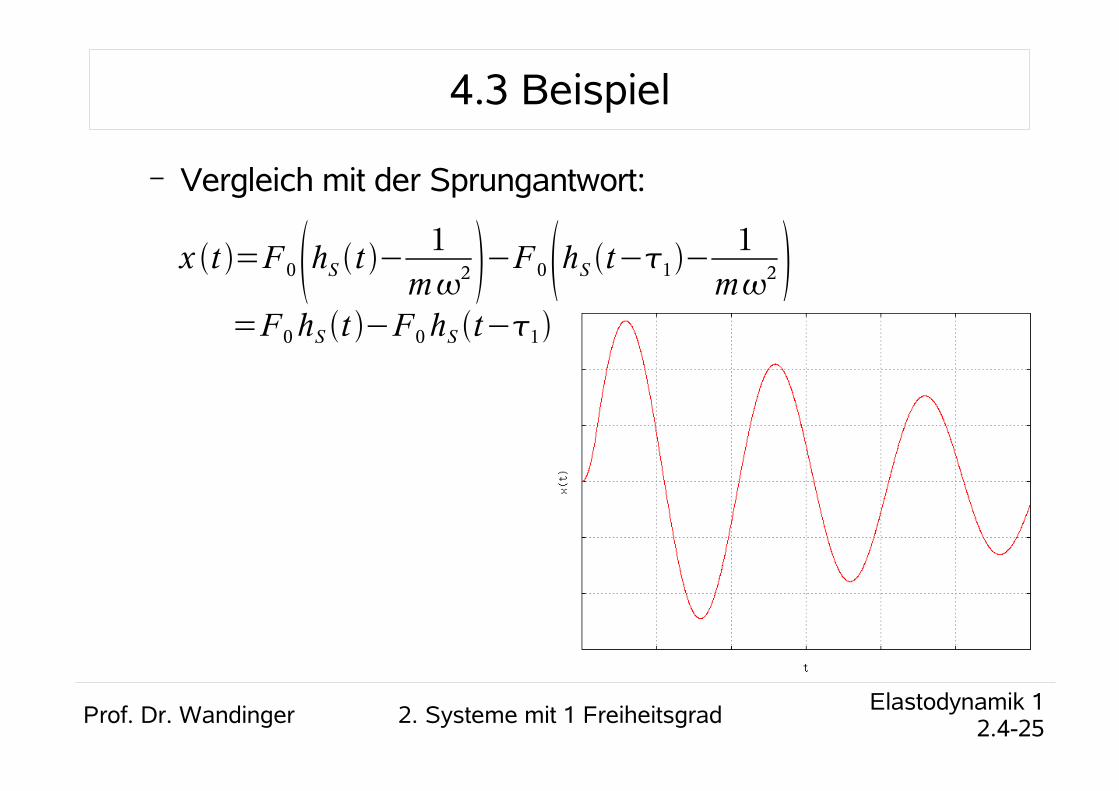
– Vergleich mit der Sprungantwort:
x t =F 0hS t −1m
2 −F 0hS t−1−1m
2 =F0hS t −F0hS t−1

















