Embed Size (px)
Citation preview
4 Digitale Netzwerke Folie 1
Grundlagen der Technischen Informatik 1 Version: WS07/08
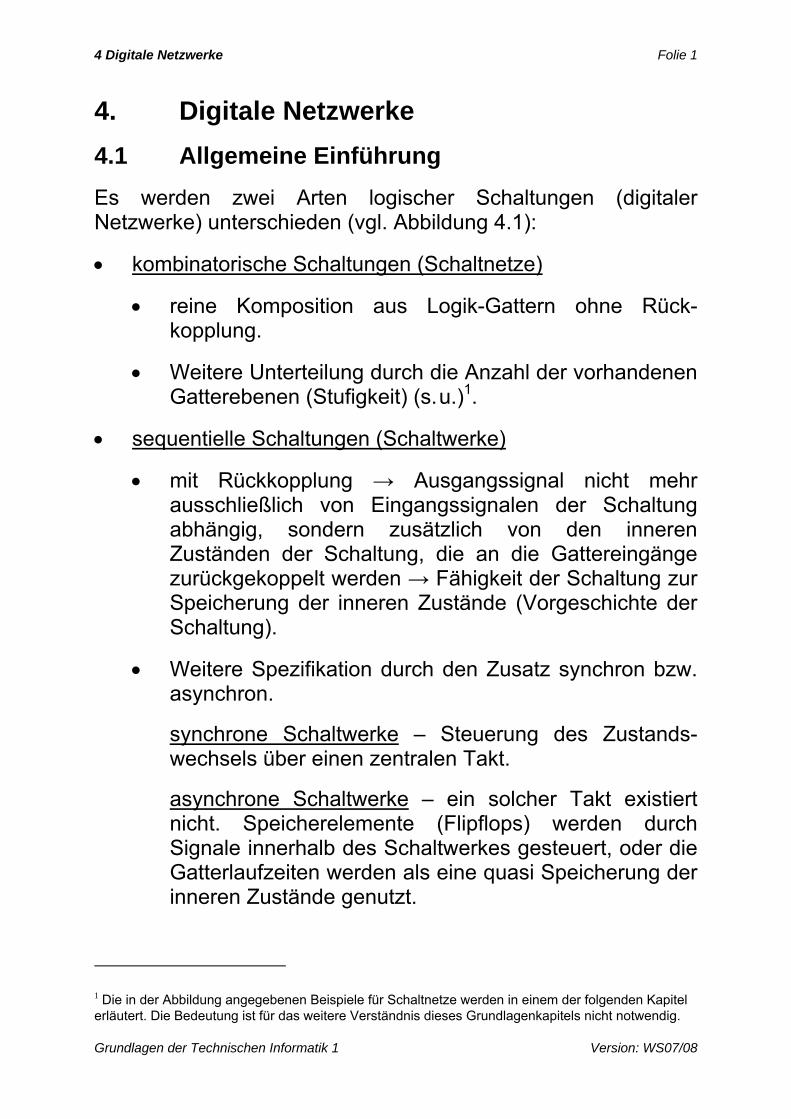
4. Digitale Netzwerke 4.1 Allgemeine Einführung Es werden zwei Arten logischer Schaltungen (digitaler Netzwerke) unterschieden (vgl. Abbildung 4.1):
• kombinatorische Schaltungen (Schaltnetze)
• reine Komposition aus Logik-Gattern ohne Rück-kopplung.
• Weitere Unterteilung durch die Anzahl der vorhandenen Gatterebenen (Stufigkeit) (s.u.)1.
• sequentielle Schaltungen (Schaltwerke)
• mit Rückkopplung → Ausgangssignal nicht mehr ausschließlich von Eingangssignalen der Schaltung abhängig, sondern zusätzlich von den inneren Zuständen der Schaltung, die an die Gattereingänge zurückgekoppelt werden → Fähigkeit der Schaltung zur Speicherung der inneren Zustände (Vorgeschichte der Schaltung).
• Weitere Spezifikation durch den Zusatz synchron bzw. asynchron.
synchrone Schaltwerke – Steuerung des Zustands-wechsels über einen zentralen Takt.
asynchrone Schaltwerke – ein solcher Takt existiert nicht. Speicherelemente (Flipflops) werden durch Signale innerhalb des Schaltwerkes gesteuert, oder die Gatterlaufzeiten werden als eine quasi Speicherung der inneren Zustände genutzt.
1 Die in der Abbildung angegebenen Beispiele für Schaltnetze werden in einem der folgenden Kapitel erläutert. Die Bedeutung ist für das weitere Verständnis dieses Grundlagenkapitels nicht notwendig.
4 Digitale Netzwerke Folie 2
Grundlagen der Technischen Informatik 1 Version: WS07/08
Digitales Netzwerk
zweistufig
(z.B. PLA-Struktur, zur Realisierung der
dis- oder konjunktiven Normalform)
Schaltnetz Schaltwerk
mehrstufig
(z.B. ortsequentieller Addierer)
synchron asynchron
Abbildung 4.1: Unterteilung Digitaler Netzwerke
4 Digitale Netzwerke Folie 3
Grundlagen der Technischen Informatik 1 Version: WS07/08
4.2 Kombinatorische Schaltungen 4.2.1 Definition
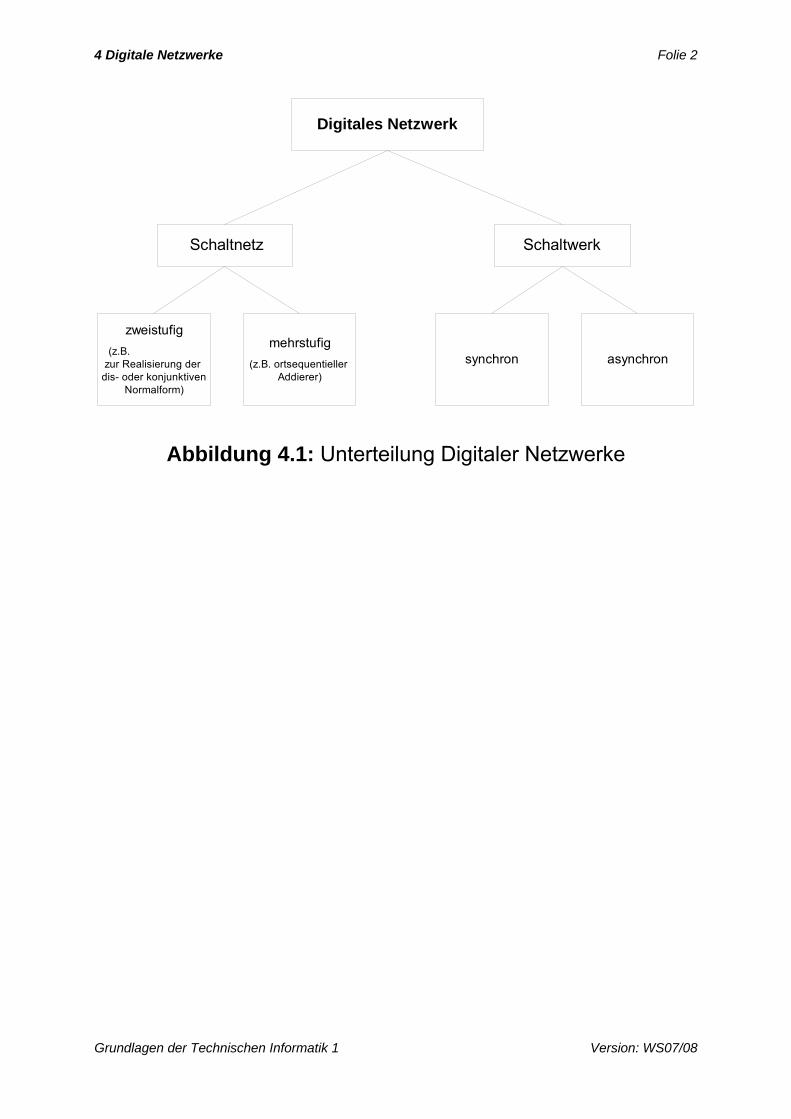
Das logische Verhalten des Schaltnetzes ist durch eine Schar Boolescher Funktionen beschreibbar:
A1 = f1(E1, E2,..., En) A2 = f2(E1, E2,..., En) : Am = fm(E1, E2,..., En).
Definition 4-1: Kombinatorische Schaltungen
Schaltnetze sind logische Schaltungen, deren Ausgangs-signale A1, A2,..., Am nur von den Eingangssignalen E1, E2,..., En (Eingangsbelegung) abhängen. D.h. die Ausgänge der Schaltung hängen zu jedem beliebigen Zeitpunkt nurvon der Eingangsbelegung ab.
... …
E1E2
En
A1A2
Am
Schaltnetz
Diese Schaltungen werden auch als Schaltnetzebezeichnet.
4 Digitale Netzwerke Folie 4
Grundlagen der Technischen Informatik 1 Version: WS07/08
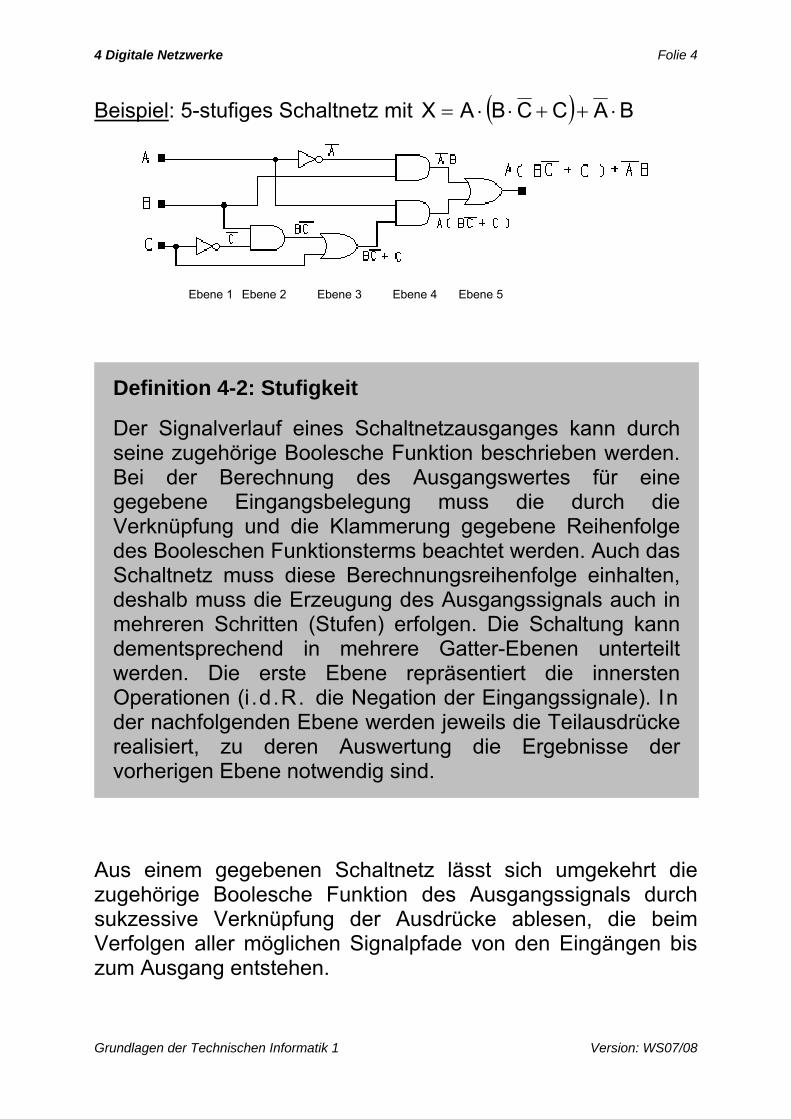
Beispiel: 5-stufiges Schaltnetz mit ( ) BACCBAX ⋅++⋅⋅=
Ebene 1 Ebene 2 Ebene 3 Ebene 4 Ebene 5
Aus einem gegebenen Schaltnetz lässt sich umgekehrt die zugehörige Boolesche Funktion des Ausgangssignals durch sukzessive Verknüpfung der Ausdrücke ablesen, die beim Verfolgen aller möglichen Signalpfade von den Eingängen bis zum Ausgang entstehen.
Definition 4-2: Stufigkeit
Der Signalverlauf eines Schaltnetzausganges kann durch seine zugehörige Boolesche Funktion beschrieben werden. Bei der Berechnung des Ausgangswertes für eine gegebene Eingangsbelegung muss die durch die Verknüpfung und die Klammerung gegebene Reihenfolge des Booleschen Funktionsterms beachtet werden. Auch das Schaltnetz muss diese Berechnungsreihenfolge einhalten, deshalb muss die Erzeugung des Ausgangssignals auch in mehreren Schritten (Stufen) erfolgen. Die Schaltung kann dementsprechend in mehrere Gatter-Ebenen unterteilt werden. Die erste Ebene repräsentiert die innersten Operationen (i .d.R. die Negation der Eingangssignale). Inder nachfolgenden Ebene werden jeweils die Teilausdrücke realisiert, zu deren Auswertung die Ergebnisse der vorherigen Ebene notwendig sind.
4 Digitale Netzwerke Folie 5
Grundlagen der Technischen Informatik 1 Version: WS07/08
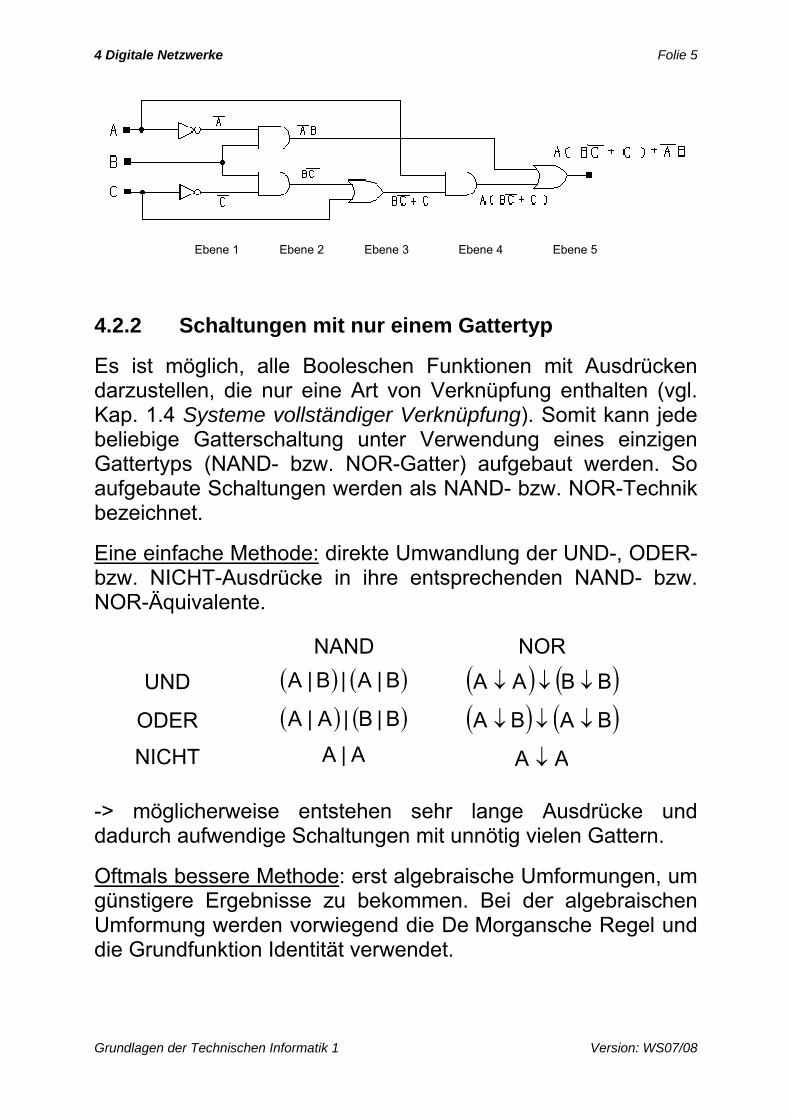
Ebene 1 Ebene 2 Ebene 3 Ebene 4 Ebene 5
4.2.2 Schaltungen mit nur einem Gattertyp
Es ist möglich, alle Booleschen Funktionen mit Ausdrücken darzustellen, die nur eine Art von Verknüpfung enthalten (vgl. Kap. 1.4 Systeme vollständiger Verknüpfung). Somit kann jede beliebige Gatterschaltung unter Verwendung eines einzigen Gattertyps (NAND- bzw. NOR-Gatter) aufgebaut werden. So aufgebaute Schaltungen werden als NAND- bzw. NOR-Technik bezeichnet.
Eine einfache Methode: direkte Umwandlung der UND-, ODER- bzw. NICHT-Ausdrücke in ihre entsprechenden NAND- bzw. NOR-Äquivalente.
NAND NOR
UND ( ) ( )B|A|B|A ( ) ( )BBAA ↓↓↓
ODER ( ) ( )B|B|A|A ( ) ( )BABA ↓↓↓
NICHT A|A AA ↓ -> möglicherweise entstehen sehr lange Ausdrücke und dadurch aufwendige Schaltungen mit unnötig vielen Gattern.
Oftmals bessere Methode: erst algebraische Umformungen, um günstigere Ergebnisse zu bekommen. Bei der algebraischen Umformung werden vorwiegend die De Morgansche Regel und die Grundfunktion Identität verwendet.
4 Digitale Netzwerke Folie 6
Grundlagen der Technischen Informatik 1 Version: WS07/08
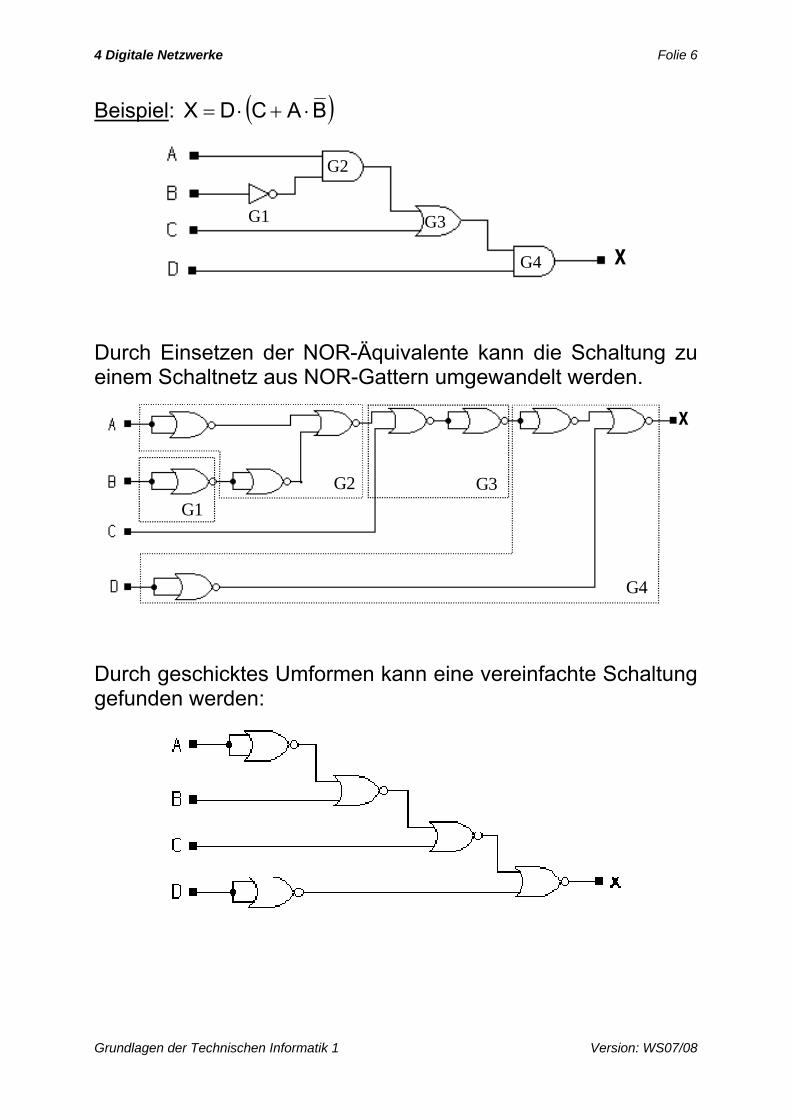
Beispiel: ( )BACDX ⋅+⋅=
G1
G2
G3
G4 X
Durch Einsetzen der NOR-Äquivalente kann die Schaltung zu einem Schaltnetz aus NOR-Gattern umgewandelt werden.
X
G4
G3G2G1
Durch geschicktes Umformen kann eine vereinfachte Schaltung gefunden werden:
4 Digitale Netzwerke Folie 7
Grundlagen der Technischen Informatik 1 Version: WS07/08
4.2.3 Realisierung von Schaltnetzen
Oft müssen auf Grund technologischer und/oder anderer Anforderung an die zu entwickelnde Schaltung bestimmte Randbedingungen eingehalten werden:
• zweistufiges Netzwerk, um die Signallaufzeit klein zu halten.
• Einschränkungen bezüglich der zu verwendeten Gatter, d.h. es dürfen nur Gatter eines Typs und/oder nur Gatter mit 2 Eingängen verwendet werden.
• komplexere (effektivere) Schaltnetze, so genannte Komplexgatter, als Elementargatter
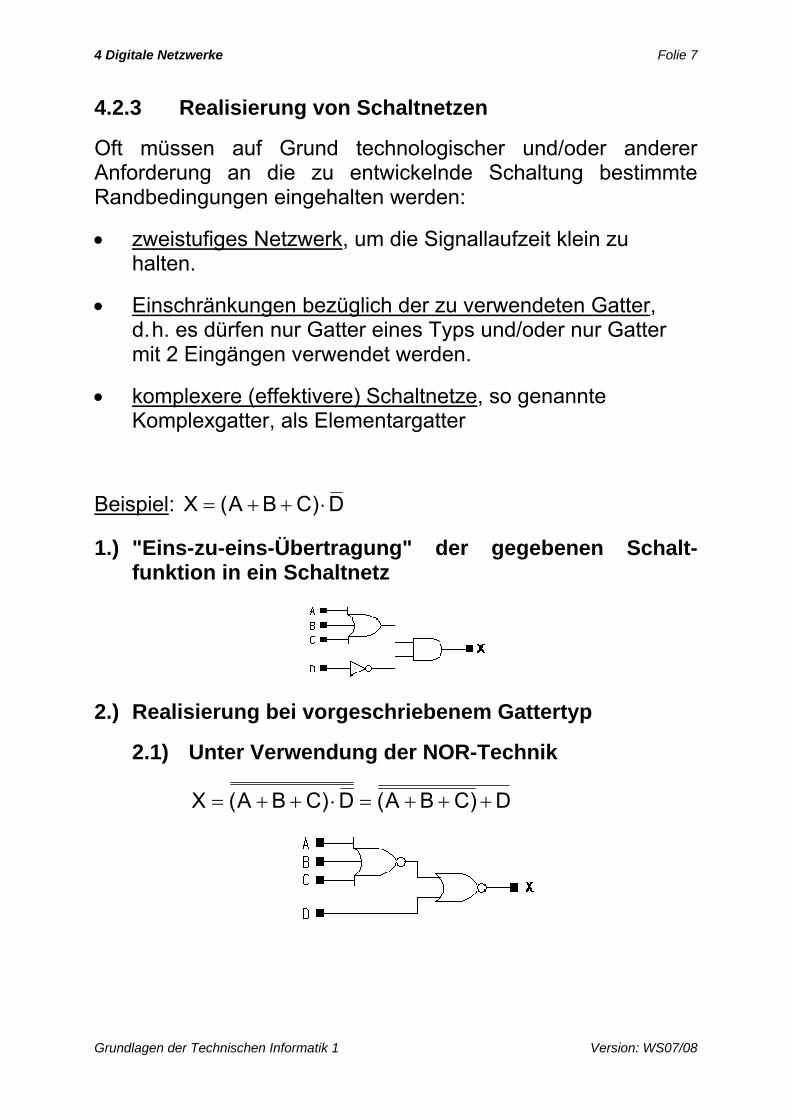
Beispiel: D)CBA(X ⋅++=
1.) "Eins-zu-eins-Übertragung" der gegebenen Schalt-funktion in ein Schaltnetz
2.) Realisierung bei vorgeschriebenem Gattertyp
2.1) Unter Verwendung der NOR-Technik
D)CBA(D)CBA(X +++=⋅++=
4 Digitale Netzwerke Folie 8
Grundlagen der Technischen Informatik 1 Version: WS07/08
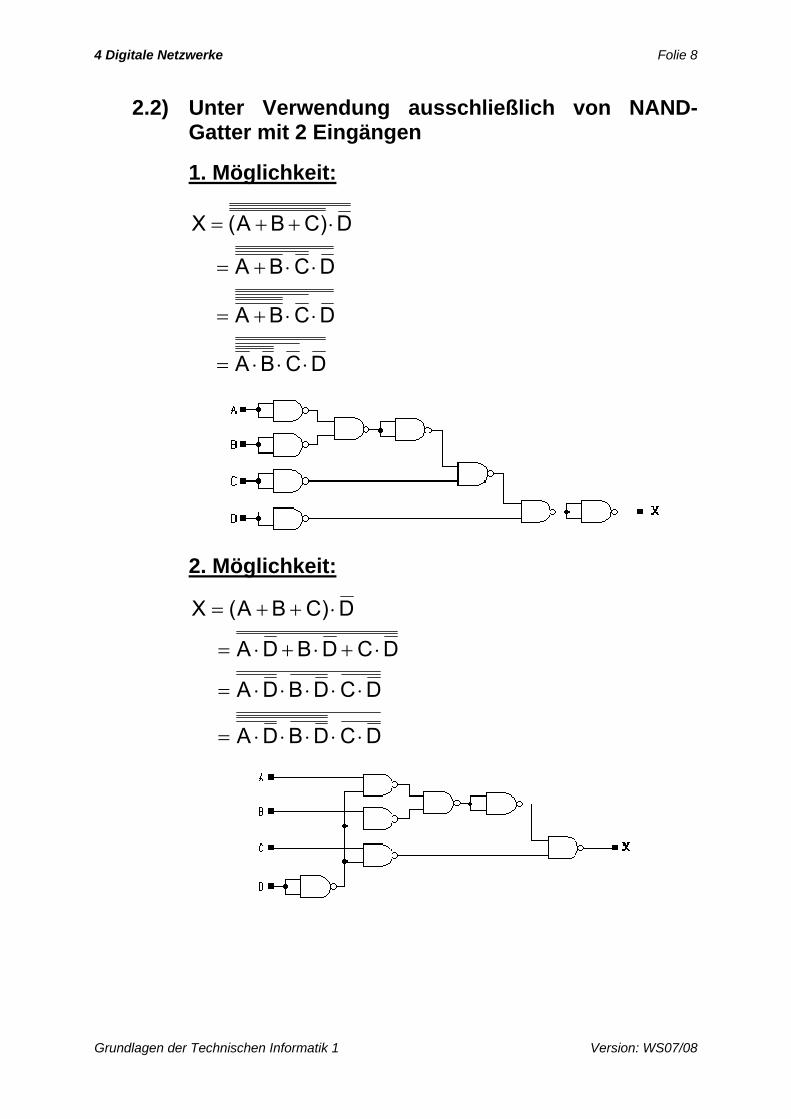
2.2) Unter Verwendung ausschließlich von NAND-Gatter mit 2 Eingängen
1. Möglichkeit:
DCBA
DCBA
DCBA
D)CBA(X
⋅⋅⋅=
⋅⋅+=
⋅⋅+=
⋅++=
2. Möglichkeit:
DCDBDA
DCDBDA
DCDBDA
D)CBA(X
⋅⋅⋅⋅⋅=
⋅⋅⋅⋅⋅=
⋅+⋅+⋅=
⋅++=
4 Digitale Netzwerke Folie 9
Grundlagen der Technischen Informatik 1 Version: WS07/08
4.3 Sequentielle Schaltungen 4.3.1 Definition
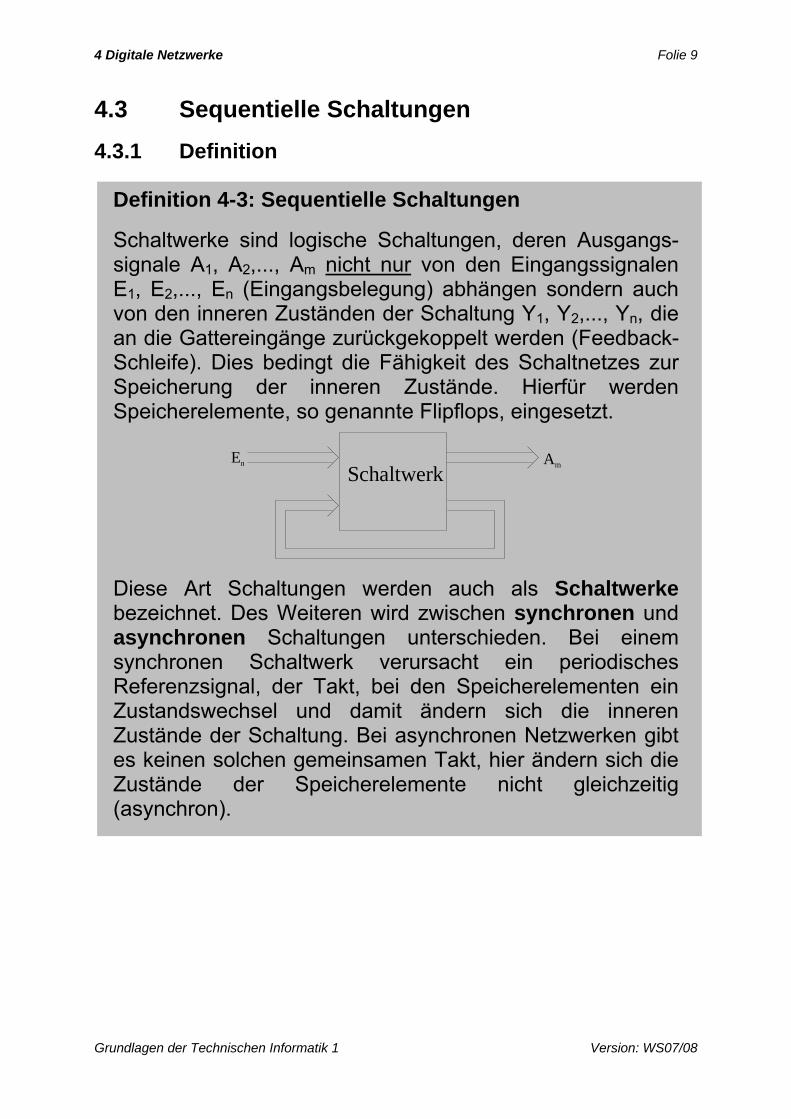
Definition 4-3: Sequentielle Schaltungen
Schaltwerke sind logische Schaltungen, deren Ausgangs-signale A1, A2,..., Am nicht nur von den Eingangssignalen E1, E2,..., En (Eingangsbelegung) abhängen sondern auch von den inneren Zuständen der Schaltung Y1, Y2,..., Yn, die an die Gattereingänge zurückgekoppelt werden (Feedback-Schleife). Dies bedingt die Fähigkeit des Schaltnetzes zur Speicherung der inneren Zustände. Hierfür werden Speicherelemente, so genannte Flipflops, eingesetzt.
En AmSchaltwerk
Diese Art Schaltungen werden auch als Schaltwerke bezeichnet. Des Weiteren wird zwischen synchronen und asynchronen Schaltungen unterschieden. Bei einem synchronen Schaltwerk verursacht ein periodisches Referenzsignal, der Takt, bei den Speicherelementen ein Zustandswechsel und damit ändern sich die inneren Zustände der Schaltung. Bei asynchronen Netzwerken gibt es keinen solchen gemeinsamen Takt, hier ändern sich die Zustände der Speicherelemente nicht gleichzeitig (asynchron).
4 Digitale Netzwerke Folie 10
Grundlagen der Technischen Informatik 1 Version: WS07/08
4.3.2 Flipflops
4.3.2.1 Einführung
Definition 4-4: Flipflop
Ein Flipflop ist ein elementarer 1-bit Speicher. Im Unter-schied zu den bisher kennen gelernten Verknüpfungs-gliedern (z.B. UND-Gatter) besitzt ein Flipflop zwei stabile Zustände (bistabiles Kippglied), nämlich Ausgang auf logisch 1 und Ausgang auf logisch 0. Durch kurzzeitige Ansteuerung des Flipflops (Impuls an einem Eingang) kann es von einem Zustand in den anderen umgeschaltet werden, in dem es dann bis zum nächsten Impuls verharrt. Mit einem Flipflop lassen sich also, solange die Stromversorgung anliegt, binäre Informationen beliebig lang speichern.
4 Digitale Netzwerke Folie 11
Grundlagen der Technischen Informatik 1 Version: WS07/08
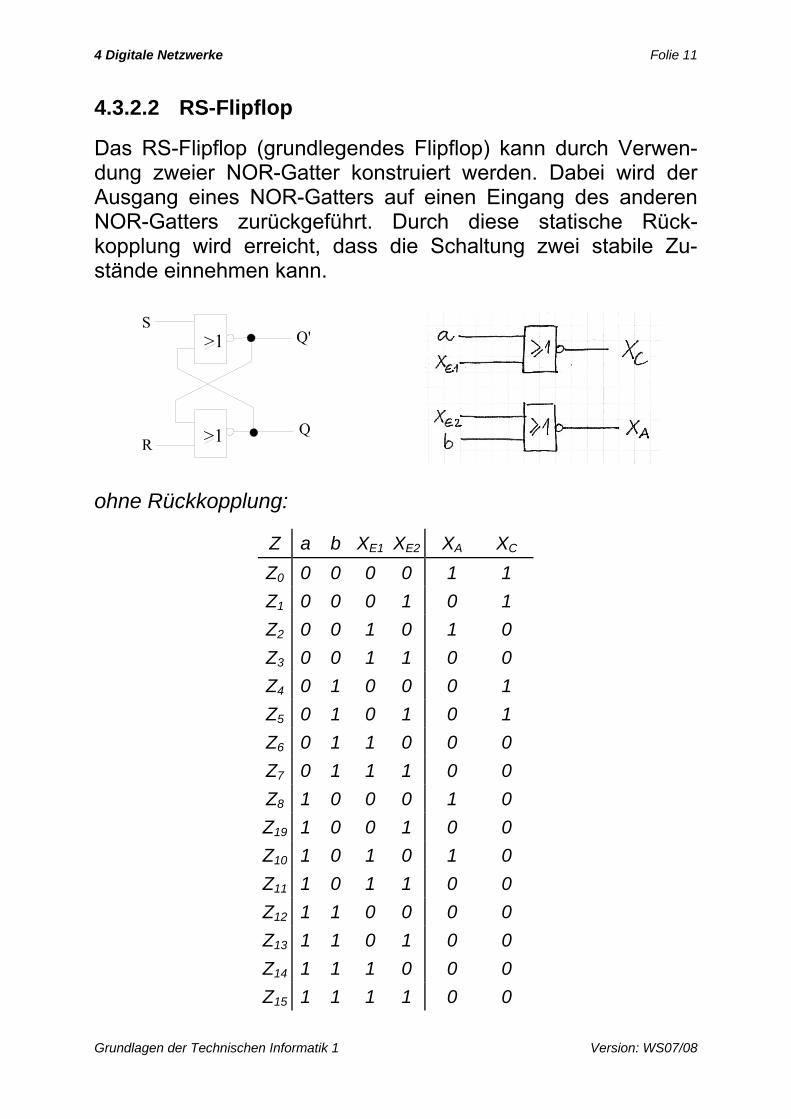
4.3.2.2 RS-Flipflop
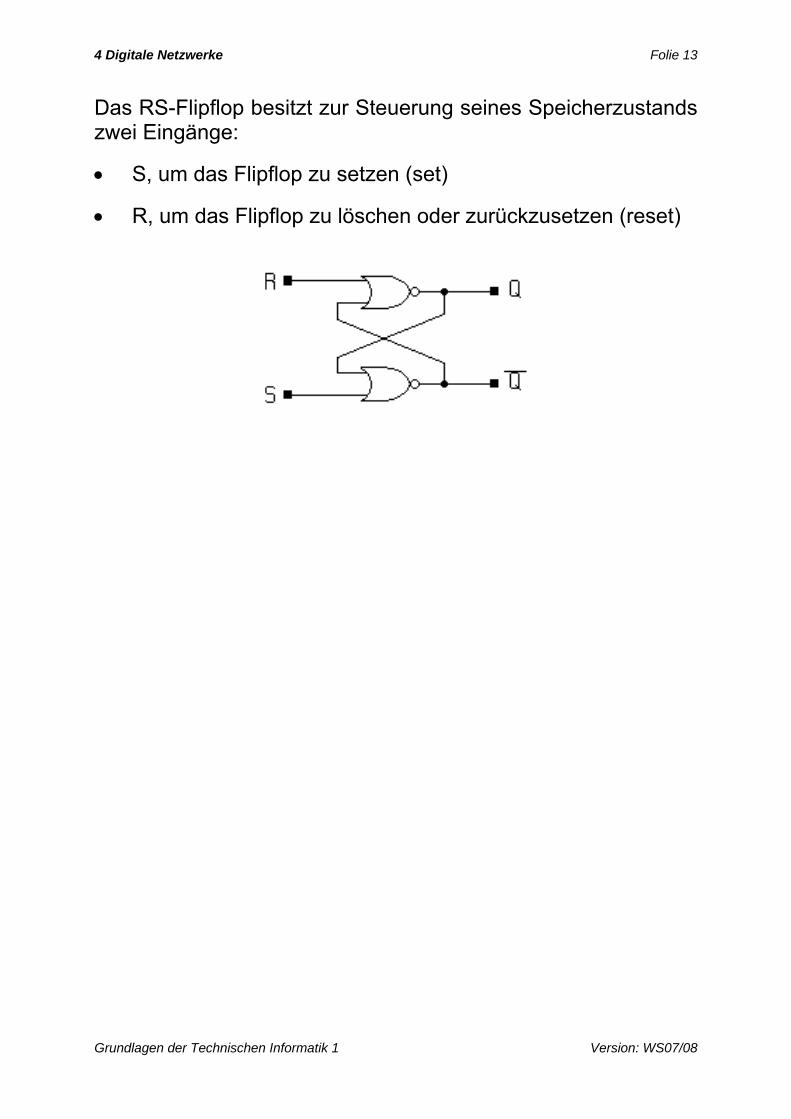
Das RS-Flipflop (grundlegendes Flipflop) kann durch Verwen-dung zweier NOR-Gatter konstruiert werden. Dabei wird der Ausgang eines NOR-Gatters auf einen Eingang des anderen NOR-Gatters zurückgeführt. Durch diese statische Rück-kopplung wird erreicht, dass die Schaltung zwei stabile Zu-stände einnehmen kann.
ohne Rückkopplung:
Z a b XE1 XE2 XA XC Z0 0 0 0 0 1 1 Z1 0 0 0 1 0 1 Z2 0 0 1 0 1 0 Z3 0 0 1 1 0 0 Z4 0 1 0 0 0 1 Z5 0 1 0 1 0 1 Z6 0 1 1 0 0 0 Z7 0 1 1 1 0 0 Z8 1 0 0 0 1 0 Z19 1 0 0 1 0 0 Z10 1 0 1 0 1 0 Z11 1 0 1 1 0 0 Z12 1 1 0 0 0 0 Z13 1 1 0 1 0 0 Z14 1 1 1 0 0 0 Z15 1 1 1 1 0 0
4 Digitale Netzwerke Folie 12
Grundlagen der Technischen Informatik 1 Version: WS07/08
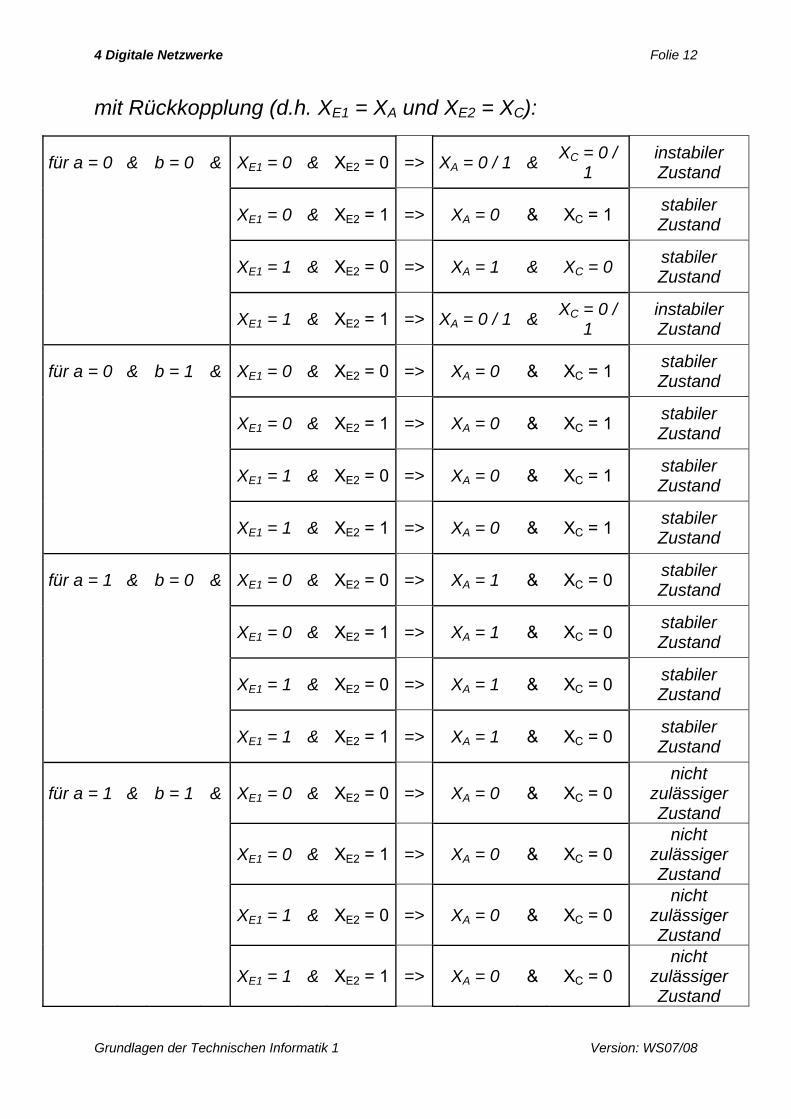
mit Rückkopplung (d.h. XE1 = XA und XE2 = XC):
für a = 0 & b = 0 & XE1 = 0 & XE2 = 0 => XA = 0 / 1 & XC = 0 / 1
instabiler Zustand
XE1 = 0 & XE2 = 1 => XA = 0 & XC = 1 stabiler Zustand
XE1 = 1 & XE2 = 0 => XA = 1 & XC = 0 stabiler Zustand
XE1 = 1 & XE2 = 1 => XA = 0 / 1 & XC = 0 / 1
instabiler Zustand
für a = 0 & b = 1 & XE1 = 0 & XE2 = 0 => XA = 0 & XC = 1 stabiler Zustand
XE1 = 0 & XE2 = 1 => XA = 0 & XC = 1 stabiler Zustand
XE1 = 1 & XE2 = 0 => XA = 0 & XC = 1 stabiler Zustand
XE1 = 1 & XE2 = 1 => XA = 0 & XC = 1 stabiler Zustand
für a = 1 & b = 0 & XE1 = 0 & XE2 = 0 => XA = 1 & XC = 0 stabiler Zustand
XE1 = 0 & XE2 = 1 => XA = 1 & XC = 0 stabiler Zustand
XE1 = 1 & XE2 = 0 => XA = 1 & XC = 0 stabiler Zustand
XE1 = 1 & XE2 = 1 => XA = 1 & XC = 0 stabiler Zustand
für a = 1 & b = 1 & XE1 = 0 & XE2 = 0 => XA = 0 & XC = 0 nicht
zulässiger Zustand
XE1 = 0 & XE2 = 1 => XA = 0 & XC = 0 nicht
zulässiger Zustand
XE1 = 1 & XE2 = 0 => XA = 0 & XC = 0 nicht
zulässiger Zustand
XE1 = 1 & XE2 = 1 => XA = 0 & XC = 0 nicht
zulässiger Zustand
4 Digitale Netzwerke Folie 13
Grundlagen der Technischen Informatik 1 Version: WS07/08
Das RS-Flipflop besitzt zur Steuerung seines Speicherzustands zwei Eingänge:
• S, um das Flipflop zu setzen (set)
• R, um das Flipflop zu löschen oder zurückzusetzen (reset)
4 Digitale Netzwerke Folie 14
Grundlagen der Technischen Informatik 1 Version: WS07/08
Die nachfolgende Tabelle zeigt für die jeweilige Eingangs-belegung abhängig vom vorherigen Zustand den resultierenden Folgezustand (Ausgangswert):
S R nQ 1nQ +1nQ +
1nQ + Funktion
0 0 0 0 0 1 0 1 0 0 1 1 1 0 0 1 0 1 1 1 0 1 1 1
DNF: nnn1n QRSQRSQRSQ ++=+
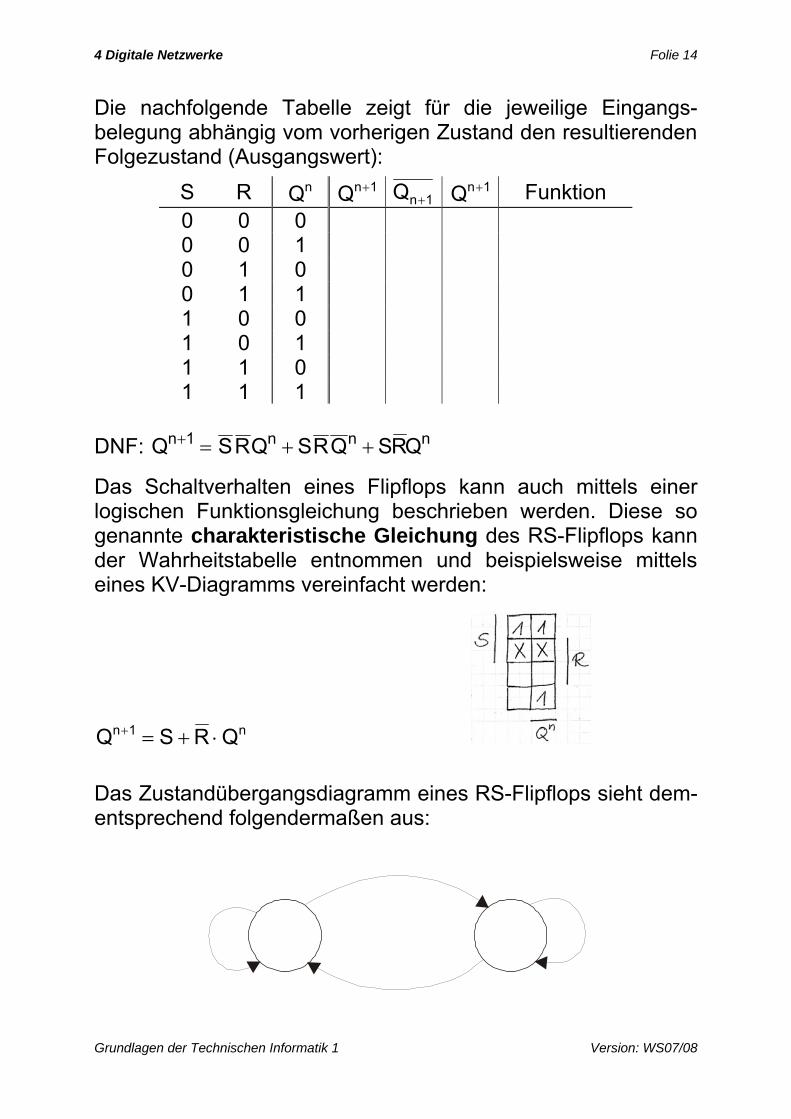
Das Schaltverhalten eines Flipflops kann auch mittels einer logischen Funktionsgleichung beschrieben werden. Diese so genannte charakteristische Gleichung des RS-Flipflops kann der Wahrheitstabelle entnommen und beispielsweise mittels eines KV-Diagramms vereinfacht werden:
n1n QRSQ ⋅+=+
Das Zustandübergangsdiagramm eines RS-Flipflops sieht dem-entsprechend folgendermaßen aus:
4 Digitale Netzwerke Folie 15
Grundlagen der Technischen Informatik 1 Version: WS07/08
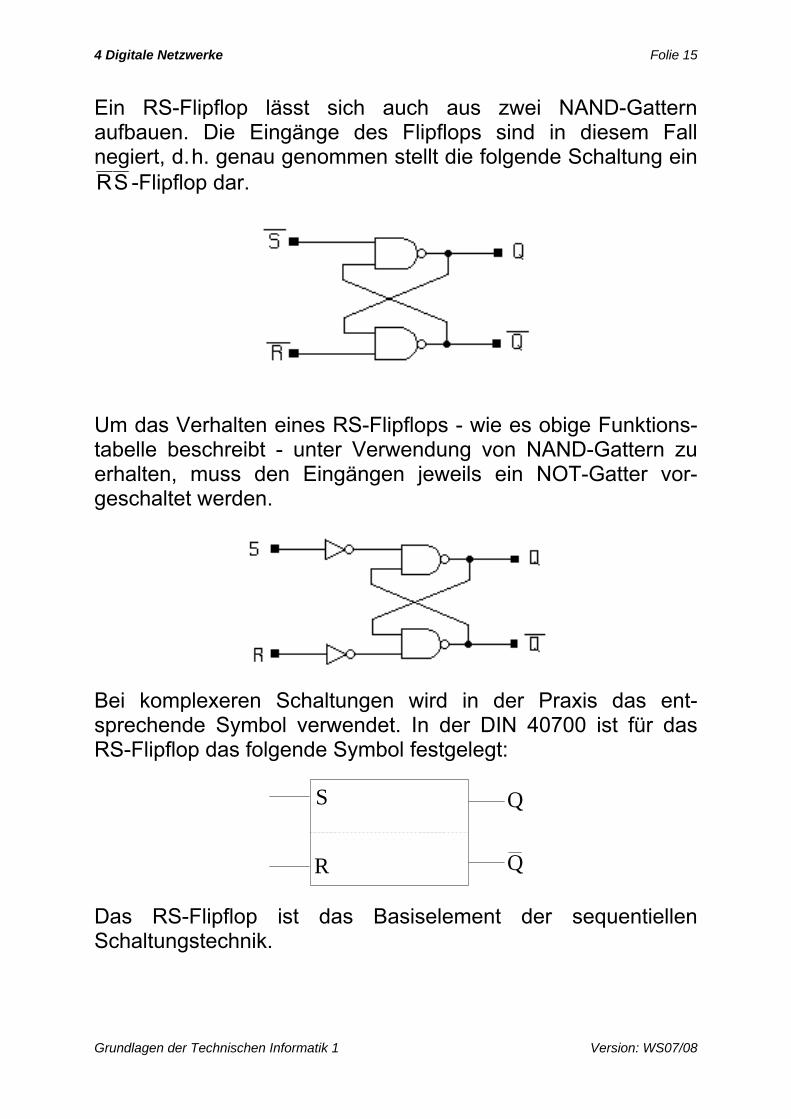
Ein RS-Flipflop lässt sich auch aus zwei NAND-Gattern aufbauen. Die Eingänge des Flipflops sind in diesem Fall negiert, d.h. genau genommen stellt die folgende Schaltung ein
SR -Flipflop dar.
Um das Verhalten eines RS-Flipflops - wie es obige Funktions-tabelle beschreibt - unter Verwendung von NAND-Gattern zu erhalten, muss den Eingängen jeweils ein NOT-Gatter vor-geschaltet werden.
Bei komplexeren Schaltungen wird in der Praxis das ent-sprechende Symbol verwendet. In der DIN 40700 ist für das RS-Flipflop das folgende Symbol festgelegt:
Q
Q
S
R
Das RS-Flipflop ist das Basiselement der sequentiellen Schaltungstechnik.
4 Digitale Netzwerke Folie 16
Grundlagen der Technischen Informatik 1 Version: WS07/08
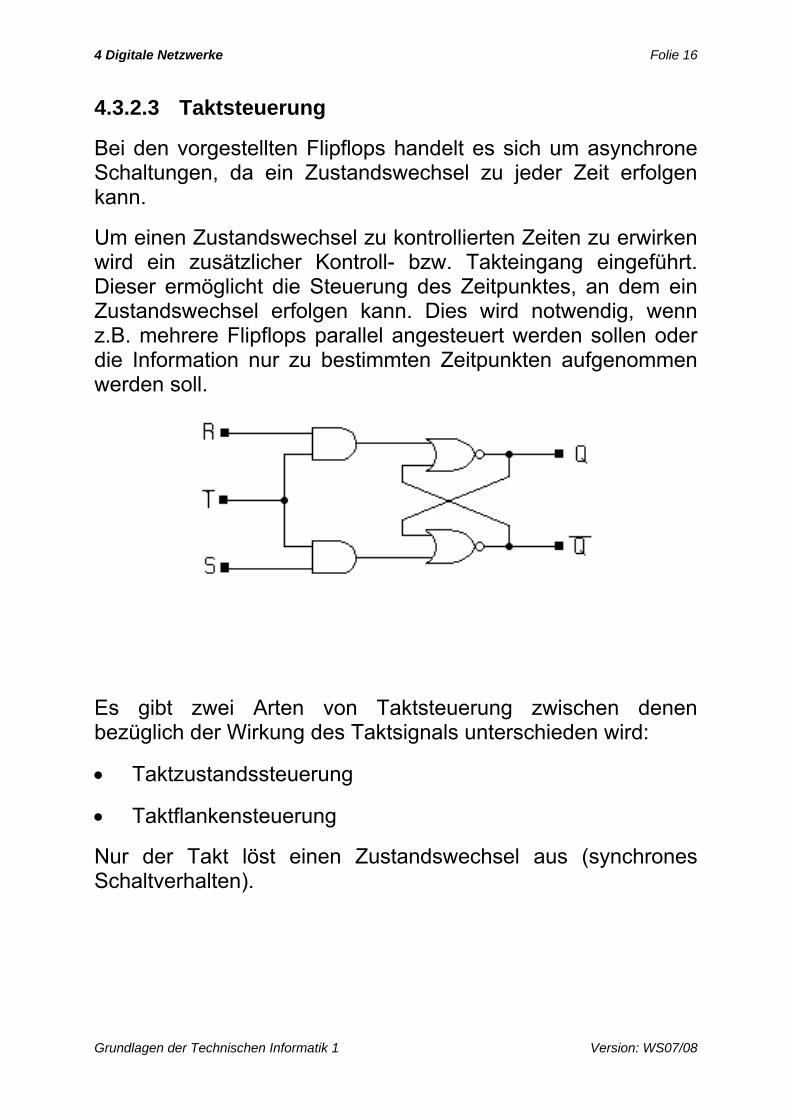
4.3.2.3 Taktsteuerung
Bei den vorgestellten Flipflops handelt es sich um asynchrone Schaltungen, da ein Zustandswechsel zu jeder Zeit erfolgen kann.
Um einen Zustandswechsel zu kontrollierten Zeiten zu erwirken wird ein zusätzlicher Kontroll- bzw. Takteingang eingeführt. Dieser ermöglicht die Steuerung des Zeitpunktes, an dem ein Zustandswechsel erfolgen kann. Dies wird notwendig, wenn z.B. mehrere Flipflops parallel angesteuert werden sollen oder die Information nur zu bestimmten Zeitpunkten aufgenommen werden soll.
Es gibt zwei Arten von Taktsteuerung zwischen denen bezüglich der Wirkung des Taktsignals unterschieden wird:
• Taktzustandssteuerung
• Taktflankensteuerung
Nur der Takt löst einen Zustandswechsel aus (synchrones Schaltverhalten).
4 Digitale Netzwerke Folie 17
Grundlagen der Technischen Informatik 1 Version: WS07/08
Taktzustandsgesteuerte Flipflops: Aufnehmen der Information an den Eingängen nur während der Dauer des Taktimpulses (1-Phase oder 0-Phase) auf.
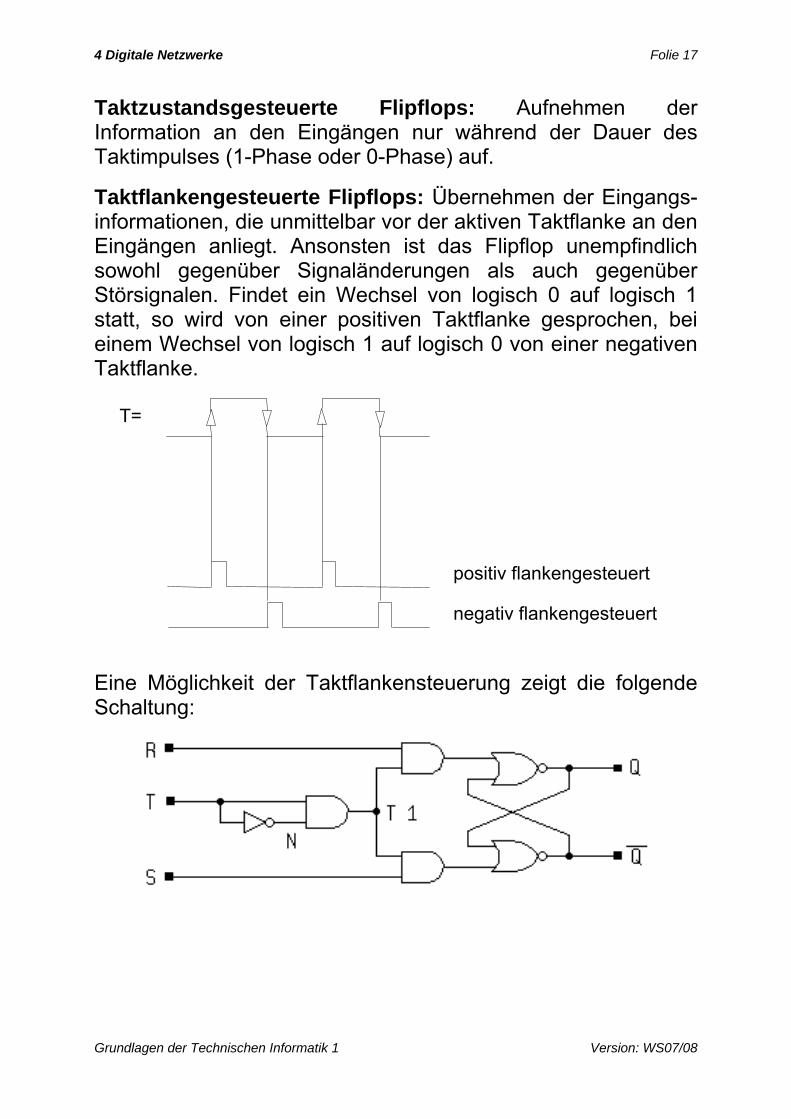
Taktflankengesteuerte Flipflops: Übernehmen der Eingangs-informationen, die unmittelbar vor der aktiven Taktflanke an den Eingängen anliegt. Ansonsten ist das Flipflop unempfindlich sowohl gegenüber Signaländerungen als auch gegenüber Störsignalen. Findet ein Wechsel von logisch 0 auf logisch 1 statt, so wird von einer positiven Taktflanke gesprochen, bei einem Wechsel von logisch 1 auf logisch 0 von einer negativen Taktflanke.
Eine Möglichkeit der Taktflankensteuerung zeigt die folgende Schaltung:
T=
positiv flankengesteuert
negativ flankengesteuert
4 Digitale Netzwerke Folie 18
Grundlagen der Technischen Informatik 1 Version: WS07/08
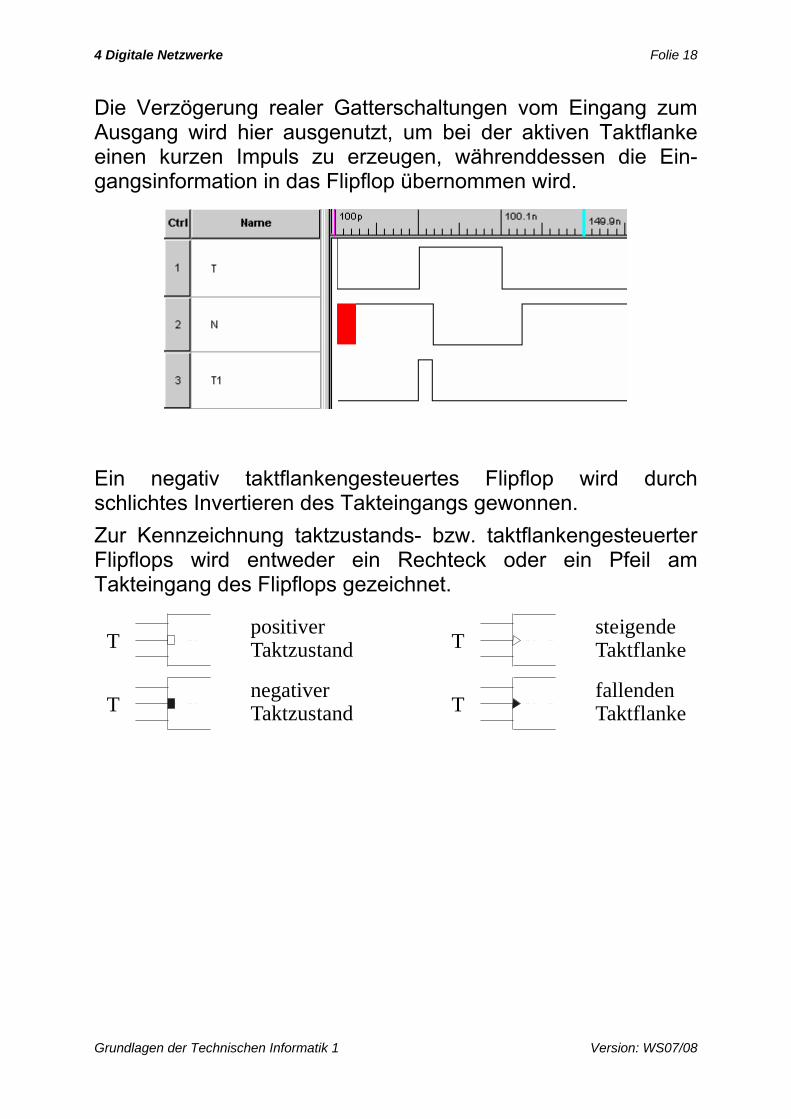
Die Verzögerung realer Gatterschaltungen vom Eingang zum Ausgang wird hier ausgenutzt, um bei der aktiven Taktflanke einen kurzen Impuls zu erzeugen, währenddessen die Ein-gangsinformation in das Flipflop übernommen wird.
Ein negativ taktflankengesteuertes Flipflop wird durch schlichtes Invertieren des Takteingangs gewonnen. Zur Kennzeichnung taktzustands- bzw. taktflankengesteuerter Flipflops wird entweder ein Rechteck oder ein Pfeil am Takteingang des Flipflops gezeichnet.
T
T
positiverTaktzustand
negativerTaktzustand
T
T
steigendeTaktflanke
fallendenTaktflanke
4 Digitale Netzwerke Folie 19
Grundlagen der Technischen Informatik 1 Version: WS07/08
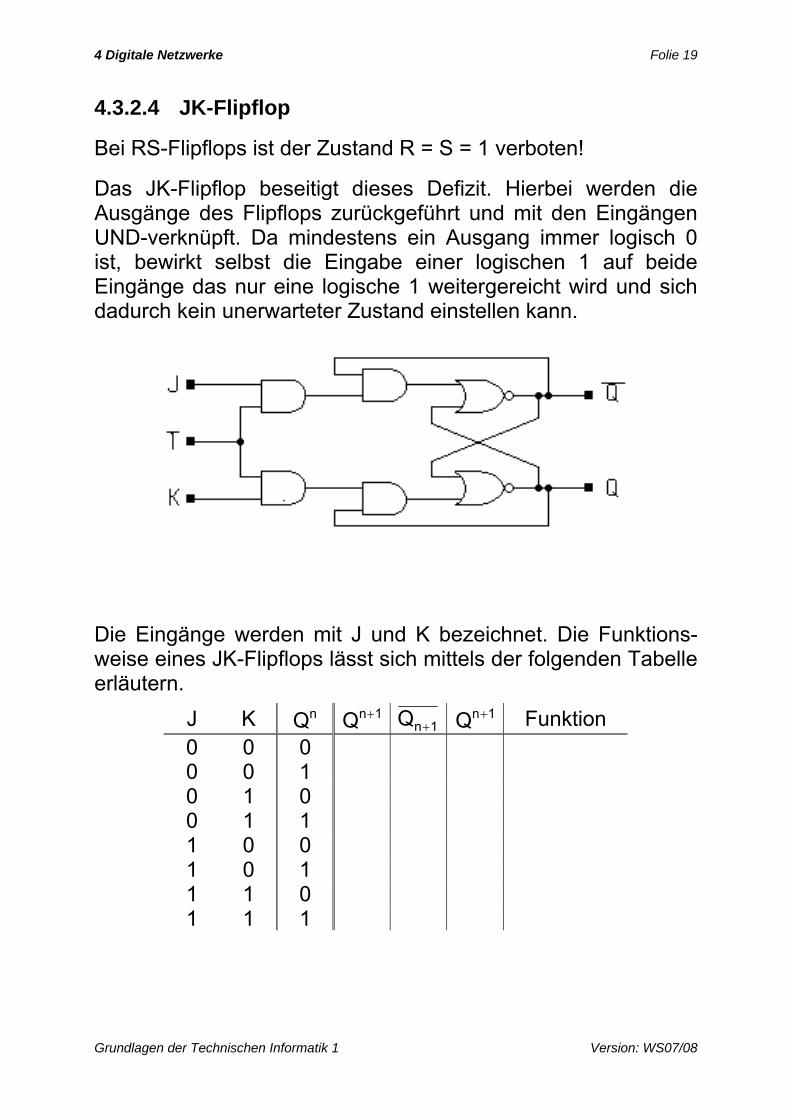
4.3.2.4 JK-Flipflop
Bei RS-Flipflops ist der Zustand R = S = 1 verboten!
Das JK-Flipflop beseitigt dieses Defizit. Hierbei werden die Ausgänge des Flipflops zurückgeführt und mit den Eingängen UND-verknüpft. Da mindestens ein Ausgang immer logisch 0 ist, bewirkt selbst die Eingabe einer logischen 1 auf beide Eingänge das nur eine logische 1 weitergereicht wird und sich dadurch kein unerwarteter Zustand einstellen kann.
Die Eingänge werden mit J und K bezeichnet. Die Funktions-weise eines JK-Flipflops lässt sich mittels der folgenden Tabelle erläutern.
J K nQ 1nQ +1nQ +
1nQ + Funktion
0 0 0 0 0 1 0 1 0 0 1 1 1 0 0 1 0 1 1 1 0 1 1 1
4 Digitale Netzwerke Folie 20
Grundlagen der Technischen Informatik 1 Version: WS07/08
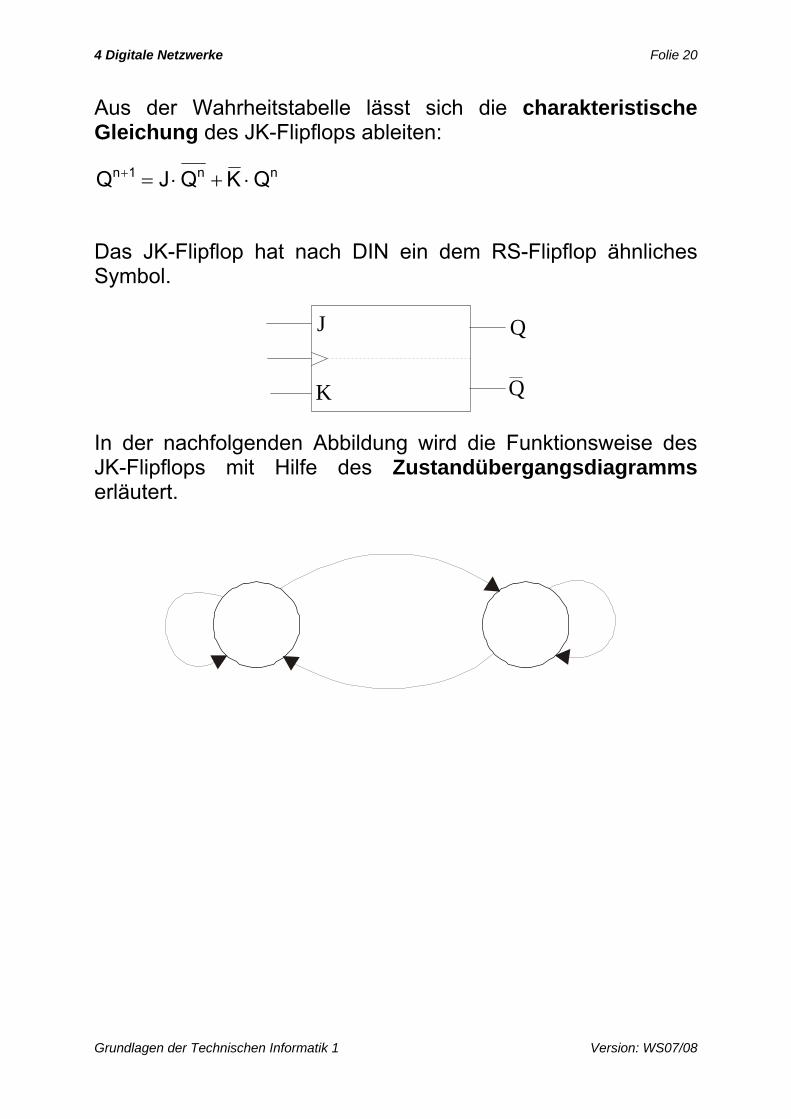
Aus der Wahrheitstabelle lässt sich die charakteristische Gleichung des JK-Flipflops ableiten:
nn1n QKQJQ ⋅+⋅=+
Das JK-Flipflop hat nach DIN ein dem RS-Flipflop ähnliches Symbol.
Q
Q
J
K
In der nachfolgenden Abbildung wird die Funktionsweise des JK-Flipflops mit Hilfe des Zustandübergangsdiagramms erläutert.
4 Digitale Netzwerke Folie 21
Grundlagen der Technischen Informatik 1 Version: WS07/08
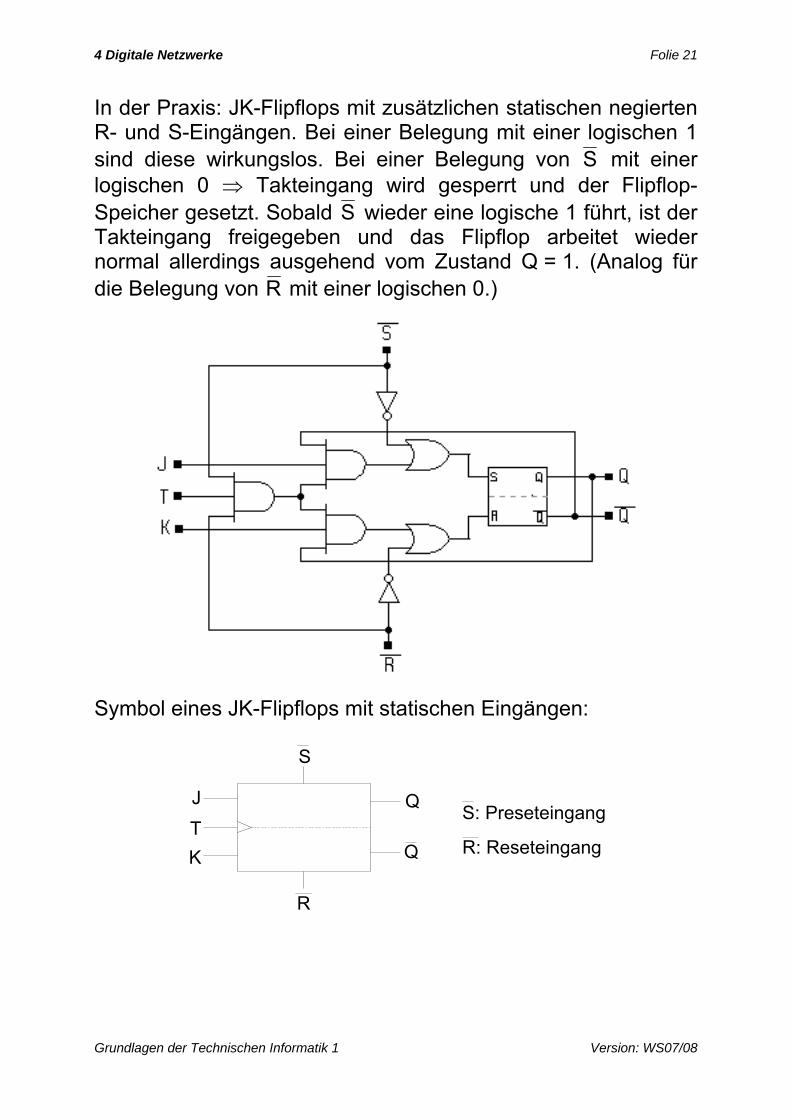
In der Praxis: JK-Flipflops mit zusätzlichen statischen negierten R- und S-Eingängen. Bei einer Belegung mit einer logischen 1 sind diese wirkungslos. Bei einer Belegung von S mit einer logischen 0 ⇒ Takteingang wird gesperrt und der Flipflop-Speicher gesetzt. Sobald S wieder eine logische 1 führt, ist der Takteingang freigegeben und das Flipflop arbeitet wieder normal allerdings ausgehend vom Zustand Q = 1. (Analog für die Belegung von R mit einer logischen 0.)
Symbol eines JK-Flipflops mit statischen Eingängen:
Q
Q
J
K T
S
R
S: Preseteingang
R: Reseteingang
4 Digitale Netzwerke Folie 22
Grundlagen der Technischen Informatik 1 Version: WS07/08
4.3.2.5 D-Flipflop
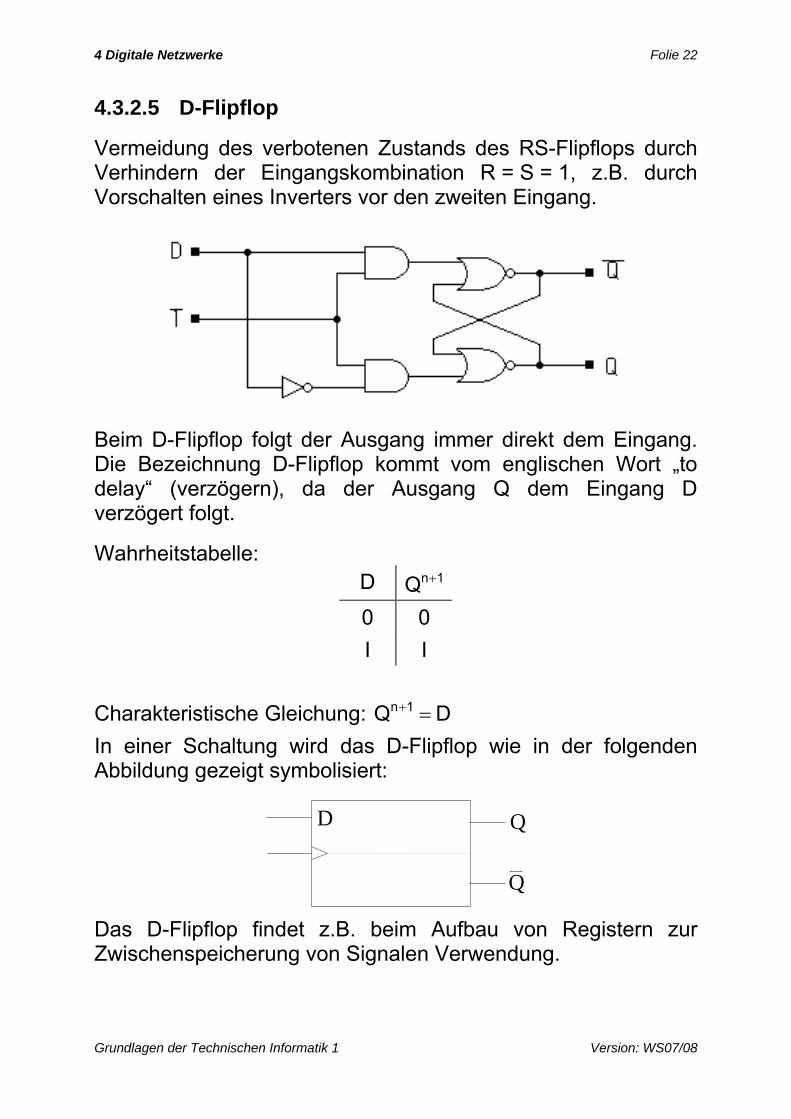
Vermeidung des verbotenen Zustands des RS-Flipflops durch Verhindern der Eingangskombination R = S = 1, z.B. durch Vorschalten eines Inverters vor den zweiten Eingang.
Beim D-Flipflop folgt der Ausgang immer direkt dem Eingang. Die Bezeichnung D-Flipflop kommt vom englischen Wort „to delay“ (verzögern), da der Ausgang Q dem Eingang D verzögert folgt.
Wahrheitstabelle: D 1nQ +
0 0 I I
Charakteristische Gleichung: DQ 1n =+ In einer Schaltung wird das D-Flipflop wie in der folgenden Abbildung gezeigt symbolisiert:
Q
Q
D
Das D-Flipflop findet z.B. beim Aufbau von Registern zur Zwischenspeicherung von Signalen Verwendung.
4 Digitale Netzwerke Folie 23
Grundlagen der Technischen Informatik 1 Version: WS07/08
4.3.2.6 T-Flipflop
Aus dem JK-Flipflop kann durch einfache Beschaltung ein T-Flipflop oder Taktuntersetzer gewonnen werden:
Der Ausgangszustand des T-Flipflops hängt nicht von der Eingangsvariablen ab, sondern ändert sich jeweils mit dem Taktsignal ⇒ Toggle-Flipflop (T-Flipflop). Bei dieser Schaltung handelt es sich somit um einen Binärteiler oder Frequenz-halbierer. Funktionstabelle:
E 1nQ + 0 nQ
I nQ
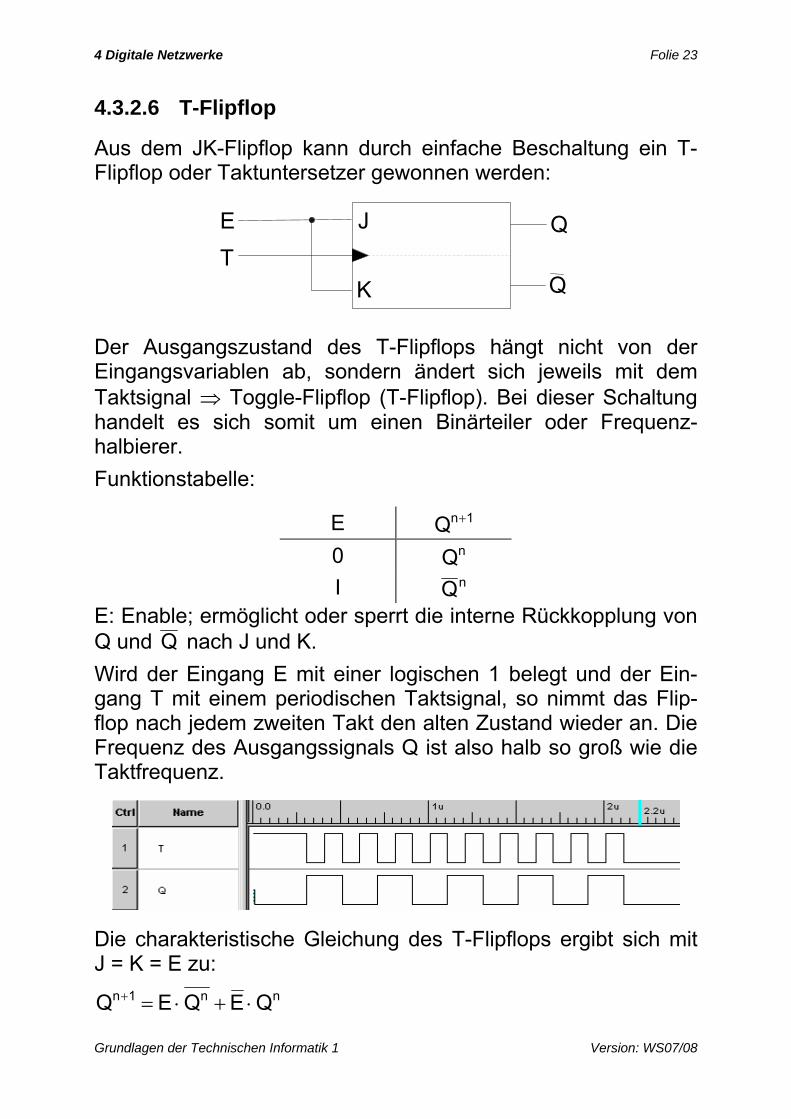
E: Enable; ermöglicht oder sperrt die interne Rückkopplung von Q und Q nach J und K. Wird der Eingang E mit einer logischen 1 belegt und der Ein-gang T mit einem periodischen Taktsignal, so nimmt das Flip-flop nach jedem zweiten Takt den alten Zustand wieder an. Die Frequenz des Ausgangssignals Q ist also halb so groß wie die Taktfrequenz.
Die charakteristische Gleichung des T-Flipflops ergibt sich mit J = K = E zu:
nn1n QEQEQ ⋅+⋅=+
Q
Q
J
K
ET
4 Digitale Netzwerke Folie 24
Grundlagen der Technischen Informatik 1 Version: WS07/08
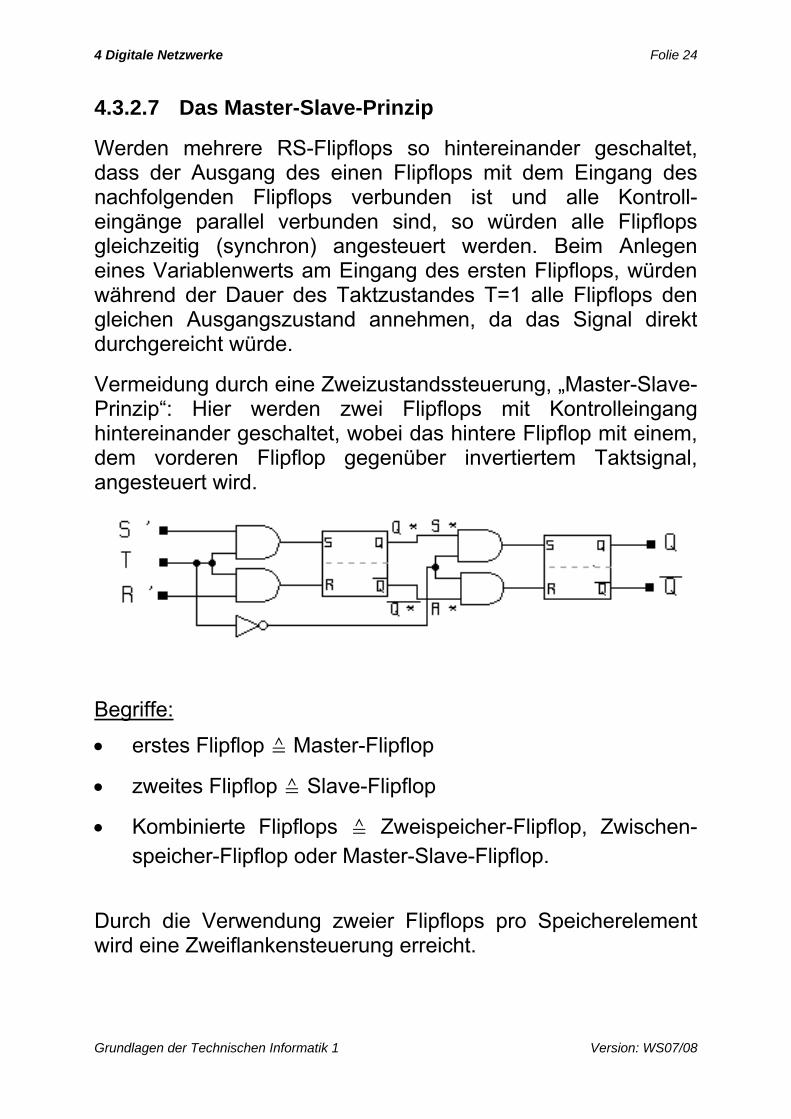
4.3.2.7 Das Master-Slave-Prinzip
Werden mehrere RS-Flipflops so hintereinander geschaltet, dass der Ausgang des einen Flipflops mit dem Eingang des nachfolgenden Flipflops verbunden ist und alle Kontroll-eingänge parallel verbunden sind, so würden alle Flipflops gleichzeitig (synchron) angesteuert werden. Beim Anlegen eines Variablenwerts am Eingang des ersten Flipflops, würden während der Dauer des Taktzustandes T=1 alle Flipflops den gleichen Ausgangszustand annehmen, da das Signal direkt durchgereicht würde.
Vermeidung durch eine Zweizustandssteuerung, „Master-Slave-Prinzip“: Hier werden zwei Flipflops mit Kontrolleingang hintereinander geschaltet, wobei das hintere Flipflop mit einem, dem vorderen Flipflop gegenüber invertiertem Taktsignal, angesteuert wird.
Begriffe:
• erstes Flipflop ≙ Master-Flipflop
• zweites Flipflop ≙ Slave-Flipflop
• Kombinierte Flipflops ≙ Zweispeicher-Flipflop, Zwischen-speicher-Flipflop oder Master-Slave-Flipflop.
Durch die Verwendung zweier Flipflops pro Speicherelement wird eine Zweiflankensteuerung erreicht.
4 Digitale Netzwerke Folie 25
Grundlagen der Technischen Informatik 1 Version: WS07/08
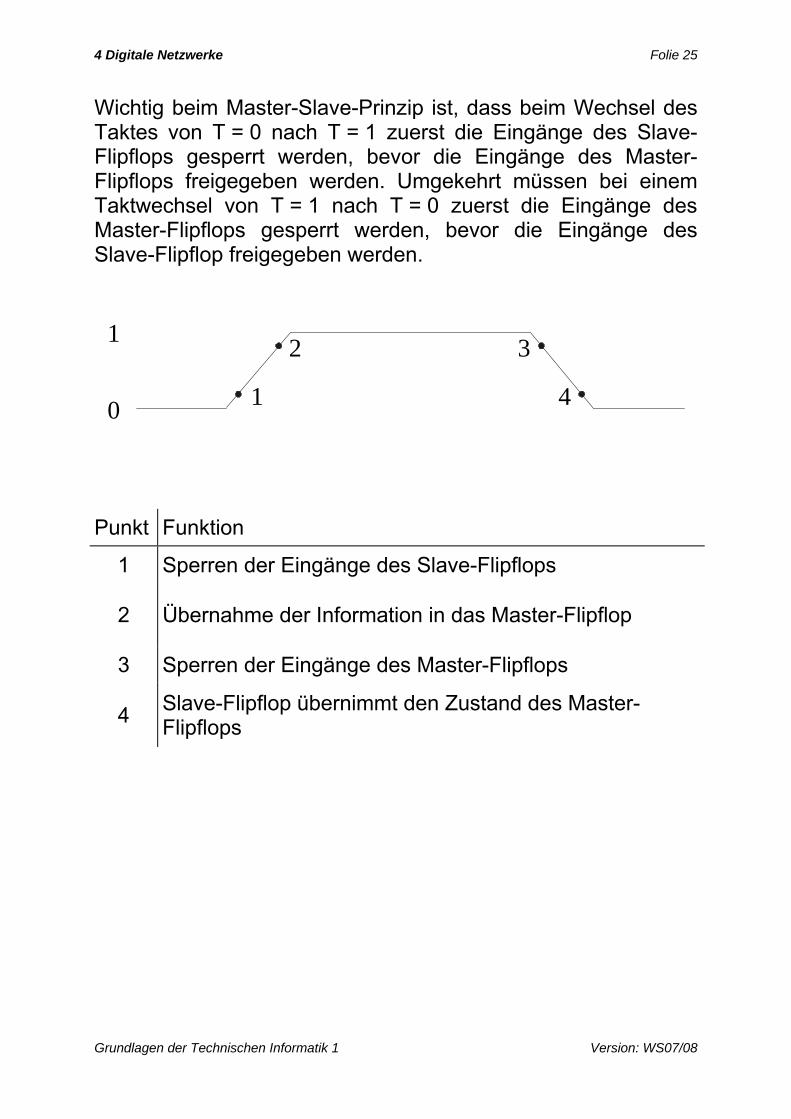
Wichtig beim Master-Slave-Prinzip ist, dass beim Wechsel des Taktes von T = 0 nach T = 1 zuerst die Eingänge des Slave-Flipflops gesperrt werden, bevor die Eingänge des Master-Flipflops freigegeben werden. Umgekehrt müssen bei einem Taktwechsel von T = 1 nach T = 0 zuerst die Eingänge des Master-Flipflops gesperrt werden, bevor die Eingänge des Slave-Flipflop freigegeben werden.
1
0 1
2 3
4
Punkt Funktion
1 Sperren der Eingänge des Slave-Flipflops
2 Übernahme der Information in das Master-Flipflop
3 Sperren der Eingänge des Master-Flipflops
4 Slave-Flipflop übernimmt den Zustand des Master-Flipflops
4 Digitale Netzwerke Folie 26
Grundlagen der Technischen Informatik 1 Version: WS07/08
4.4 Register 4.4.1 Einführung
Information liegt selten in Form eines einzelnen Bits vor.
Außerdem werden für die Verknüpfung nicht zeitgleich ein-treffender Informationen Zwischenspeicher mit kurzer Zugriffs-zeit benötigt.
⇒ Zusammenfassung mehrerer Flipflops (entsprechend der Breite eines Datenwortes) zu einer Einheit (Register). Taktsignale aller Flipflops werden gleichzeitig angesteuert ⇒ synchron.
Register gibt es in verschiedenen Ausführungen.
4 Digitale Netzwerke Folie 27
Grundlagen der Technischen Informatik 1 Version: WS07/08
4.4.2 Schieberegister
Aufgabe: Information schrittweise z.B. innerhalb einer Speicher-kette (Schieberegister) weiterführen.
Die Daten werden durch Taktimpulse um eine oder mehrere Stellen verschoben, wobei bei jedem Taktimpuls die Daten nur um eine Stelle verschoben werden.
Einsatzgebiet: Z.B. bei der Realisierung der digitalen Grund-rechenarten Multiplizieren und Dividieren (realisierbar durch Addition bzw. Subtraktion und einer Stellenverschiebung).
Das Schieben einer Dualzahl entspricht einer mathematischen Operation. Werden den Ausgängen des Schieberegisters Stellenwertigkeiten zugeordnet, so bedeutet eine Stellen-verschiebung der Dualzahl
• nach rechts eine Multiplikation mit 2 pro Stelle und
• nach links eine Division durch 2 pro Stelle.
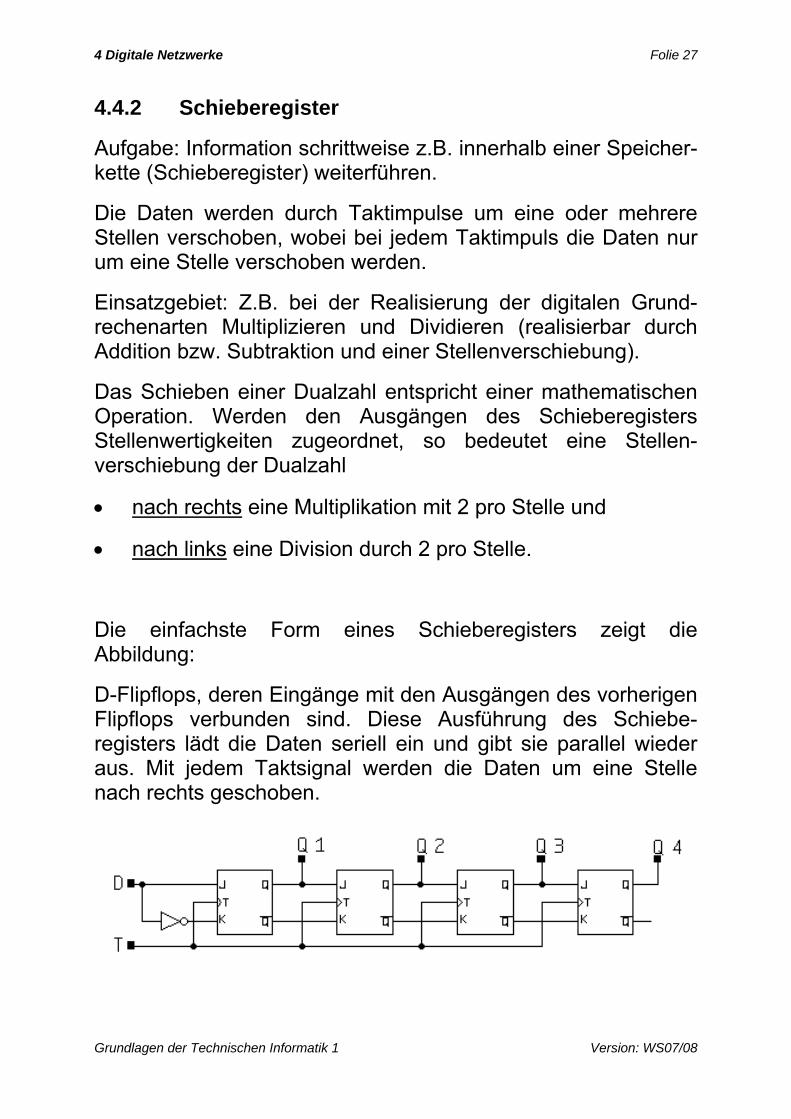
Die einfachste Form eines Schieberegisters zeigt die Abbildung:
D-Flipflops, deren Eingänge mit den Ausgängen des vorherigen Flipflops verbunden sind. Diese Ausführung des Schiebe-registers lädt die Daten seriell ein und gibt sie parallel wieder aus. Mit jedem Taktsignal werden die Daten um eine Stelle nach rechts geschoben.
4 Digitale Netzwerke Folie 28
Grundlagen der Technischen Informatik 1 Version: WS07/08
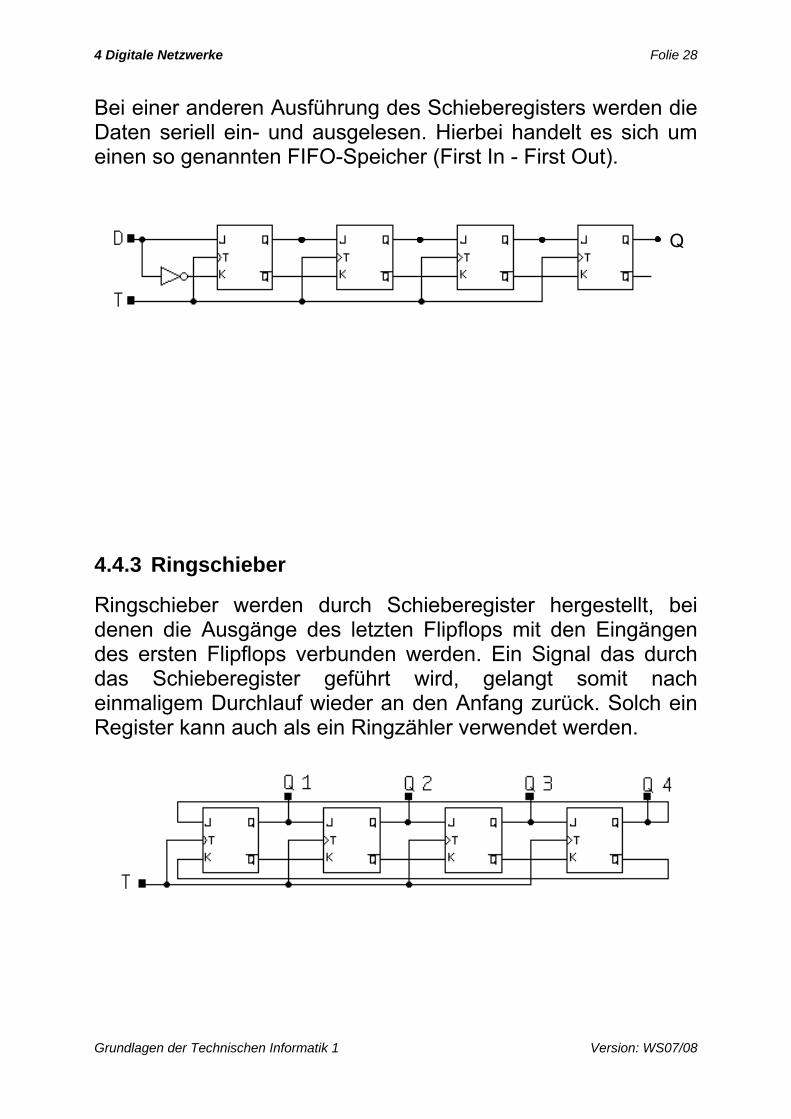
Bei einer anderen Ausführung des Schieberegisters werden die Daten seriell ein- und ausgelesen. Hierbei handelt es sich um einen so genannten FIFO-Speicher (First In - First Out).
4.4.3 Ringschieber
Ringschieber werden durch Schieberegister hergestellt, bei denen die Ausgänge des letzten Flipflops mit den Eingängen des ersten Flipflops verbunden werden. Ein Signal das durch das Schieberegister geführt wird, gelangt somit nach einmaligem Durchlauf wieder an den Anfang zurück. Solch ein Register kann auch als ein Ringzähler verwendet werden.
Q
4 Digitale Netzwerke Folie 29
Grundlagen der Technischen Informatik 1 Version: WS07/08
4.4.4 Seriell/Parallel-Umsetzer
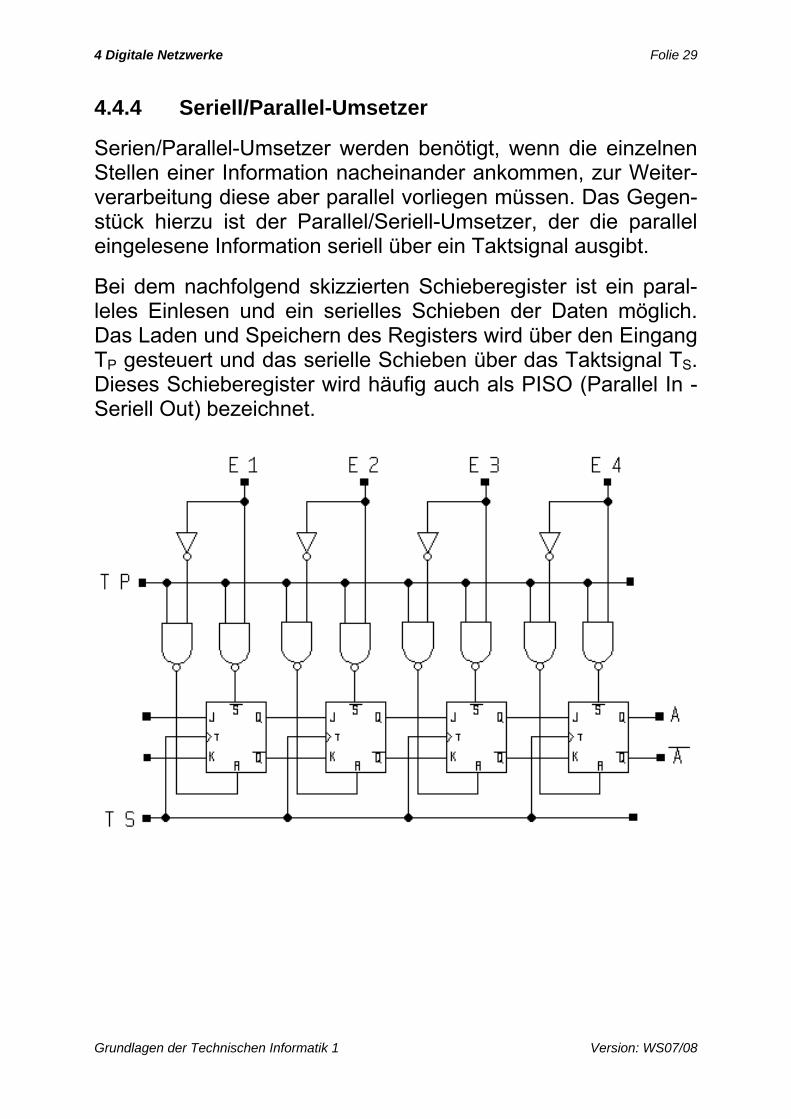
Serien/Parallel-Umsetzer werden benötigt, wenn die einzelnen Stellen einer Information nacheinander ankommen, zur Weiter-verarbeitung diese aber parallel vorliegen müssen. Das Gegen-stück hierzu ist der Parallel/Seriell-Umsetzer, der die parallel eingelesene Information seriell über ein Taktsignal ausgibt.
Bei dem nachfolgend skizzierten Schieberegister ist ein paral-leles Einlesen und ein serielles Schieben der Daten möglich. Das Laden und Speichern des Registers wird über den Eingang TP gesteuert und das serielle Schieben über das Taktsignal TS. Dieses Schieberegister wird häufig auch als PISO (Parallel In - Seriell Out) bezeichnet.
4 Digitale Netzwerke Folie 30
Grundlagen der Technischen Informatik 1 Version: WS07/08
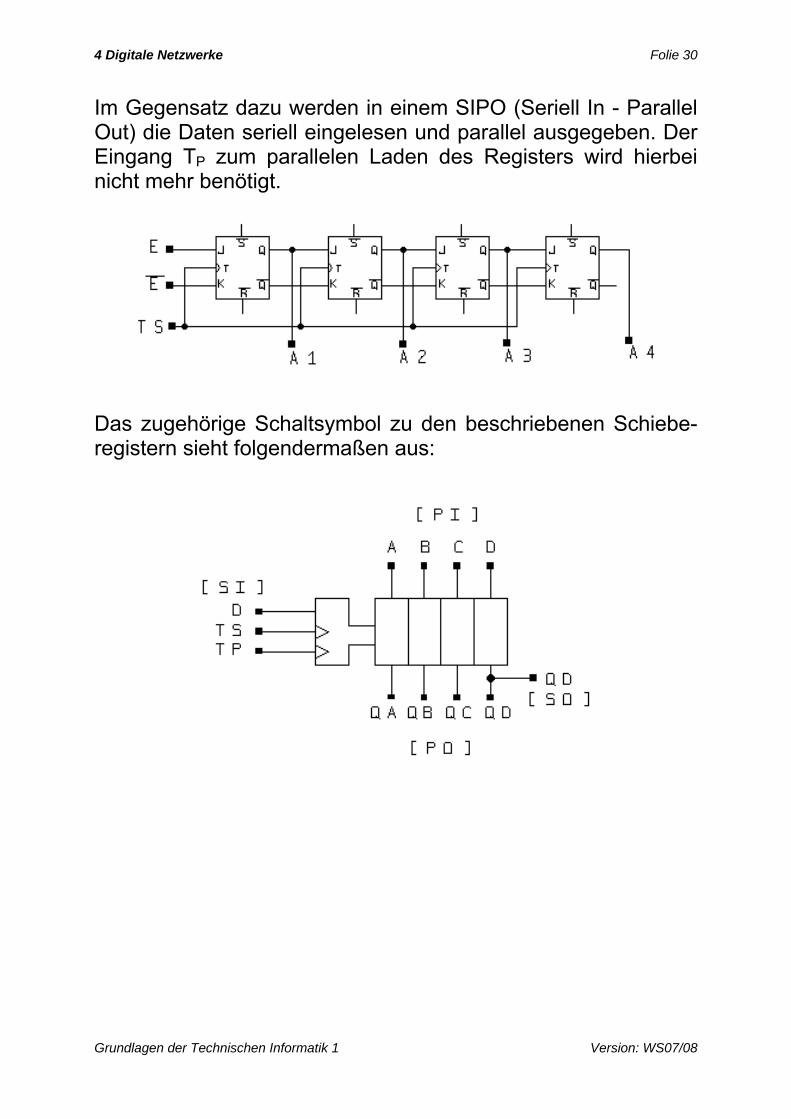
Im Gegensatz dazu werden in einem SIPO (Seriell In - Parallel Out) die Daten seriell eingelesen und parallel ausgegeben. Der Eingang TP zum parallelen Laden des Registers wird hierbei nicht mehr benötigt.
Das zugehörige Schaltsymbol zu den beschriebenen Schiebe-registern sieht folgendermaßen aus:
4 Digitale Netzwerke Folie 31
Grundlagen der Technischen Informatik 1 Version: WS07/08
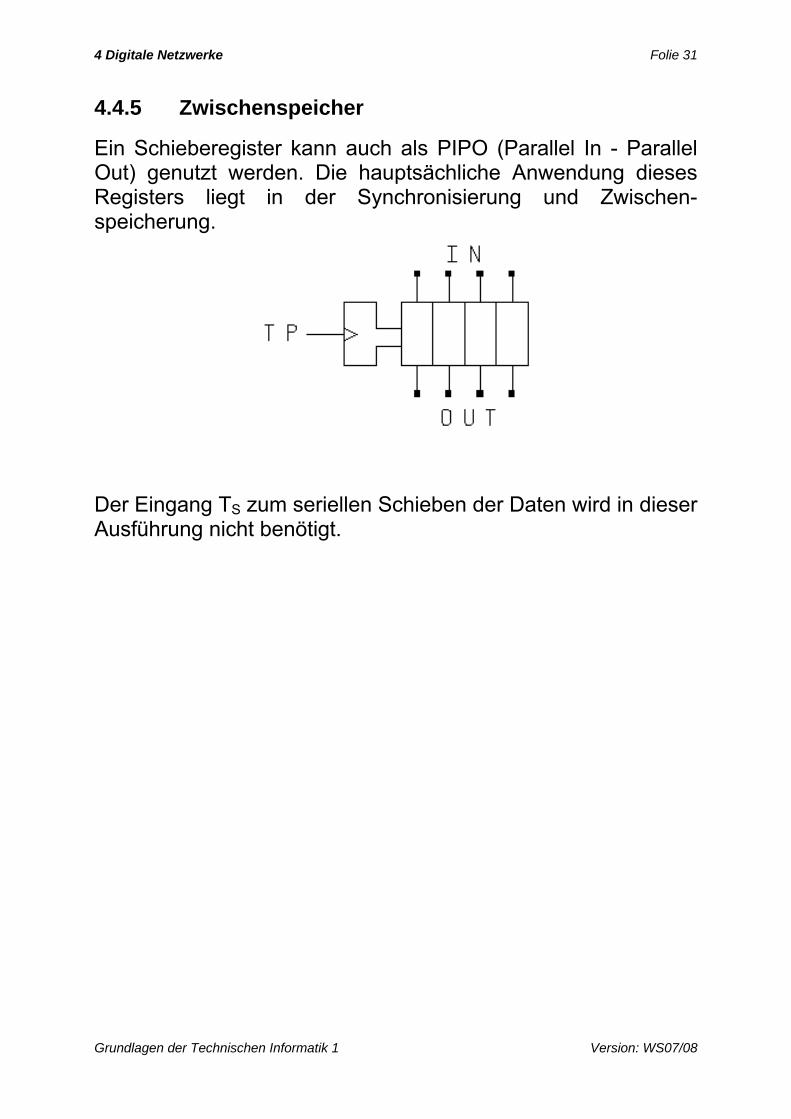
4.4.5 Zwischenspeicher
Ein Schieberegister kann auch als PIPO (Parallel In - Parallel Out) genutzt werden. Die hauptsächliche Anwendung dieses Registers liegt in der Synchronisierung und Zwischen-speicherung.
Der Eingang TS zum seriellen Schieben der Daten wird in dieser Ausführung nicht benötigt.
4 Digitale Netzwerke Folie 32
Grundlagen der Technischen Informatik 1 Version: WS07/08
4.5 Zähler 4.5.1 Einführung
Zähler werden in vielen Bereichen der Informationsverarbeitung benötigt, wenn eine große Anzahl von Ereignissen über einen großen Zeitraum oder eine sehr schnelle Folge von Ereignissen gemessen werden soll. Elektronische Zähler sind in der Lage eine Folge von Impulsen am Eingang des Zählers abzuzählen. Zähler sind Schaltungen, bei denen eine eindeutige Zuordnung zwischen der Anzahl der Impulse am Eingang und den Zuständen an den Ausgängen besteht. Bei einer Anzahl n Ausgänge sind 2n Kombinationen denkbar, welche einen bestimmten Zählerzustand repräsentieren. Diese Ausgänge können zur Anzeige oder zur Weiterverarbeitung verwendet werden. Vorwärts Zähler: Addition der einkommenden Impulse. Rückwärts Zähler: Subtraktion der einkommenden Impulse. Synchrone Zählern: Parallele Ansteuerung aller Bausteine
über eine Taktleitung. Asynchrone Zähler: Weitergeben des Taktsignal vom
Ausgang eines Bausteins auf den Eingang des nachfolgenden Bausteins.
Ferner unterscheidet der Zählcode Zähler in Binär- oder BCD-Zähler. BCD-Zähler ermöglichen bei entsprechender Innen-schaltung das Zählen im Aiken- oder 3-Exzess-Code.
4 Digitale Netzwerke Folie 33
Grundlagen der Technischen Informatik 1 Version: WS07/08
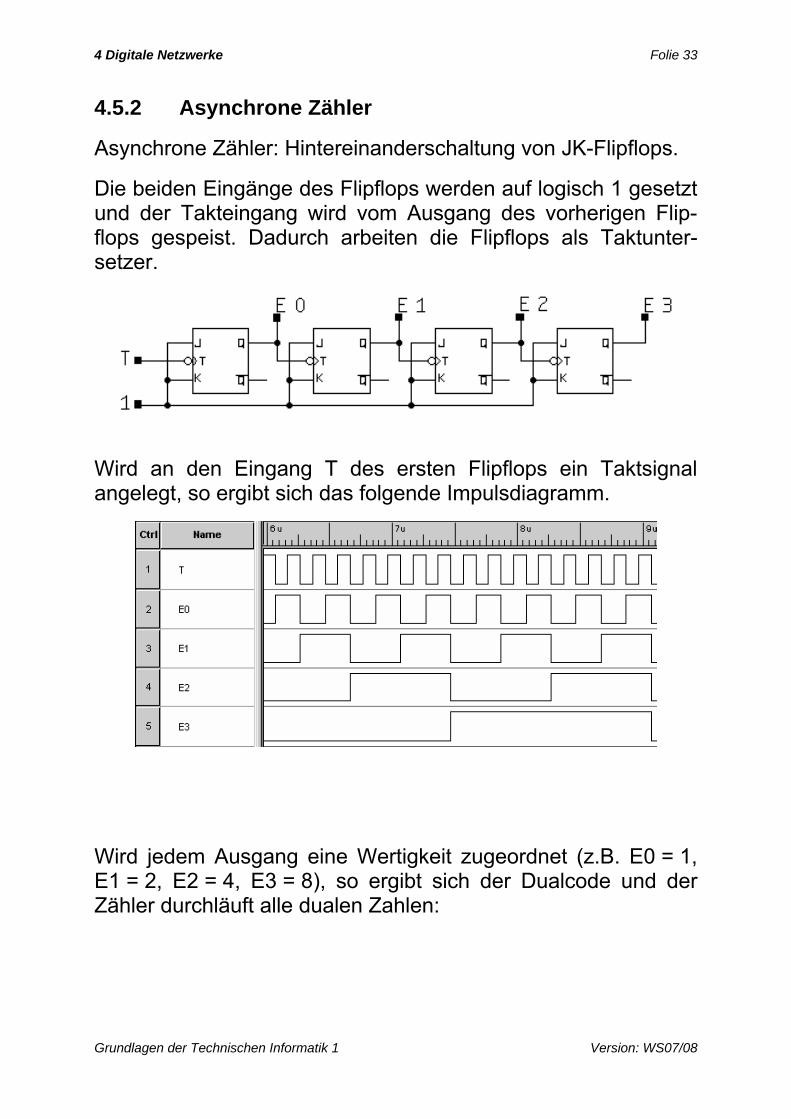
4.5.2 Asynchrone Zähler
Asynchrone Zähler: Hintereinanderschaltung von JK-Flipflops.
Die beiden Eingänge des Flipflops werden auf logisch 1 gesetzt und der Takteingang wird vom Ausgang des vorherigen Flip-flops gespeist. Dadurch arbeiten die Flipflops als Taktunter-setzer.
Wird an den Eingang T des ersten Flipflops ein Taktsignal angelegt, so ergibt sich das folgende Impulsdiagramm.
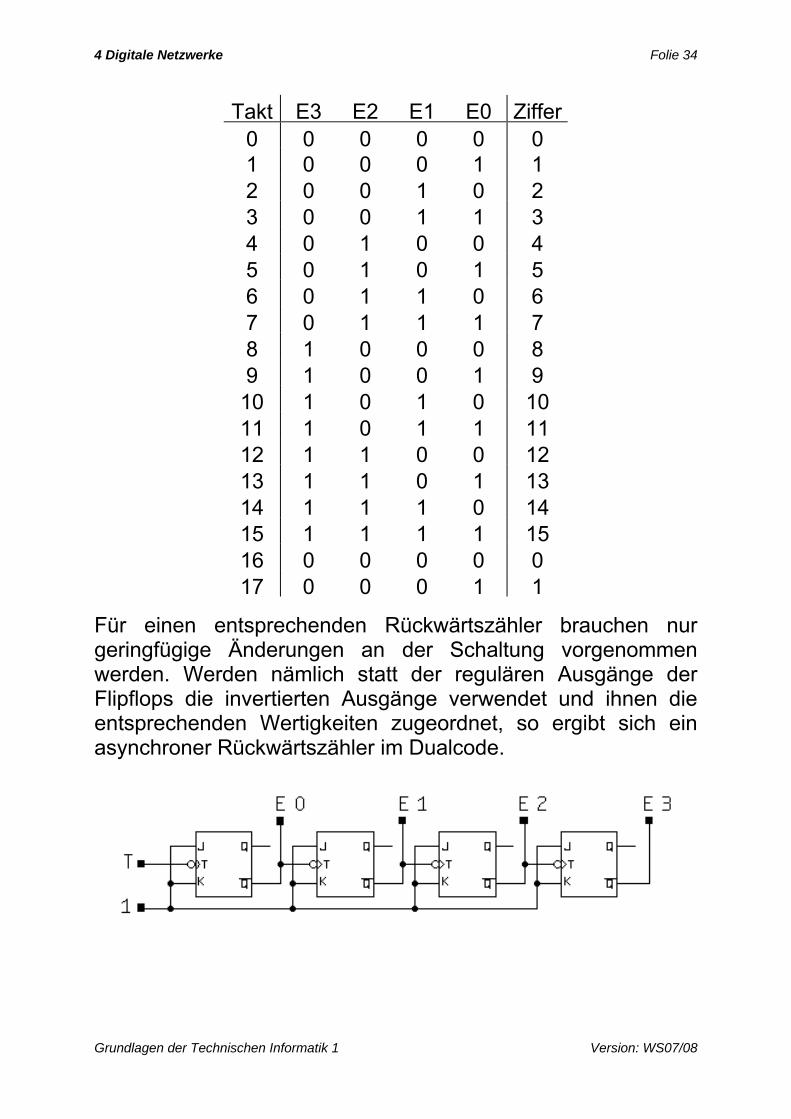
Wird jedem Ausgang eine Wertigkeit zugeordnet (z.B. E0 = 1, E1 = 2, E2 = 4, E3 = 8), so ergibt sich der Dualcode und der Zähler durchläuft alle dualen Zahlen:
4 Digitale Netzwerke Folie 34
Grundlagen der Technischen Informatik 1 Version: WS07/08
Takt E3 E2 E1 E0 Ziffer 0 0 0 0 0 01 0 0 0 1 12 0 0 1 0 23 0 0 1 1 34 0 1 0 0 45 0 1 0 1 56 0 1 1 0 67 0 1 1 1 78 1 0 0 0 89 1 0 0 1 910 1 0 1 0 1011 1 0 1 1 1112 1 1 0 0 1213 1 1 0 1 1314 1 1 1 0 1415 1 1 1 1 1516 0 0 0 0 017 0 0 0 1 1
Für einen entsprechenden Rückwärtszähler brauchen nur geringfügige Änderungen an der Schaltung vorgenommen werden. Werden nämlich statt der regulären Ausgänge der Flipflops die invertierten Ausgänge verwendet und ihnen die entsprechenden Wertigkeiten zugeordnet, so ergibt sich ein asynchroner Rückwärtszähler im Dualcode.
4 Digitale Netzwerke Folie 35
Grundlagen der Technischen Informatik 1 Version: WS07/08
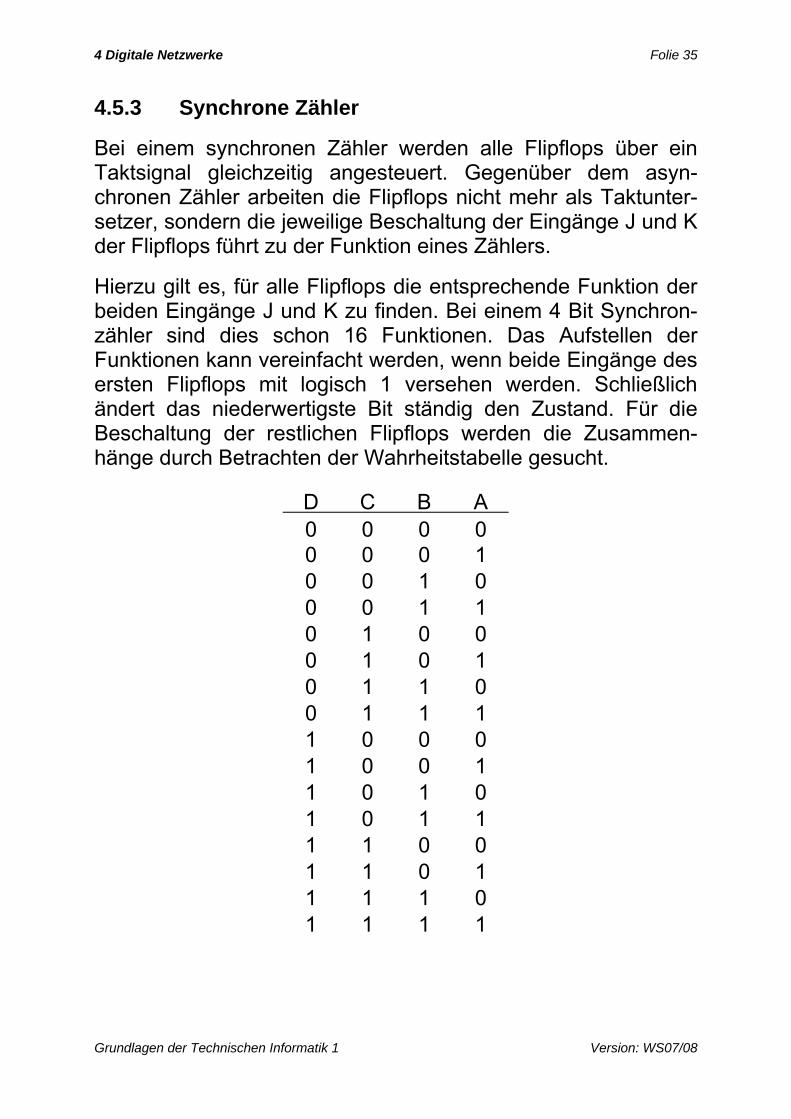
4.5.3 Synchrone Zähler
Bei einem synchronen Zähler werden alle Flipflops über ein Taktsignal gleichzeitig angesteuert. Gegenüber dem asyn-chronen Zähler arbeiten die Flipflops nicht mehr als Taktunter-setzer, sondern die jeweilige Beschaltung der Eingänge J und K der Flipflops führt zu der Funktion eines Zählers.
Hierzu gilt es, für alle Flipflops die entsprechende Funktion der beiden Eingänge J und K zu finden. Bei einem 4 Bit Synchron-zähler sind dies schon 16 Funktionen. Das Aufstellen der Funktionen kann vereinfacht werden, wenn beide Eingänge des ersten Flipflops mit logisch 1 versehen werden. Schließlich ändert das niederwertigste Bit ständig den Zustand. Für die Beschaltung der restlichen Flipflops werden die Zusammen-hänge durch Betrachten der Wahrheitstabelle gesucht.
D C B A0 0 0 00 0 0 10 0 1 00 0 1 10 1 0 00 1 0 10 1 1 00 1 1 11 0 0 01 0 0 11 0 1 01 0 1 11 1 0 01 1 0 11 1 1 01 1 1 1
4 Digitale Netzwerke Folie 36
Grundlagen der Technischen Informatik 1 Version: WS07/08
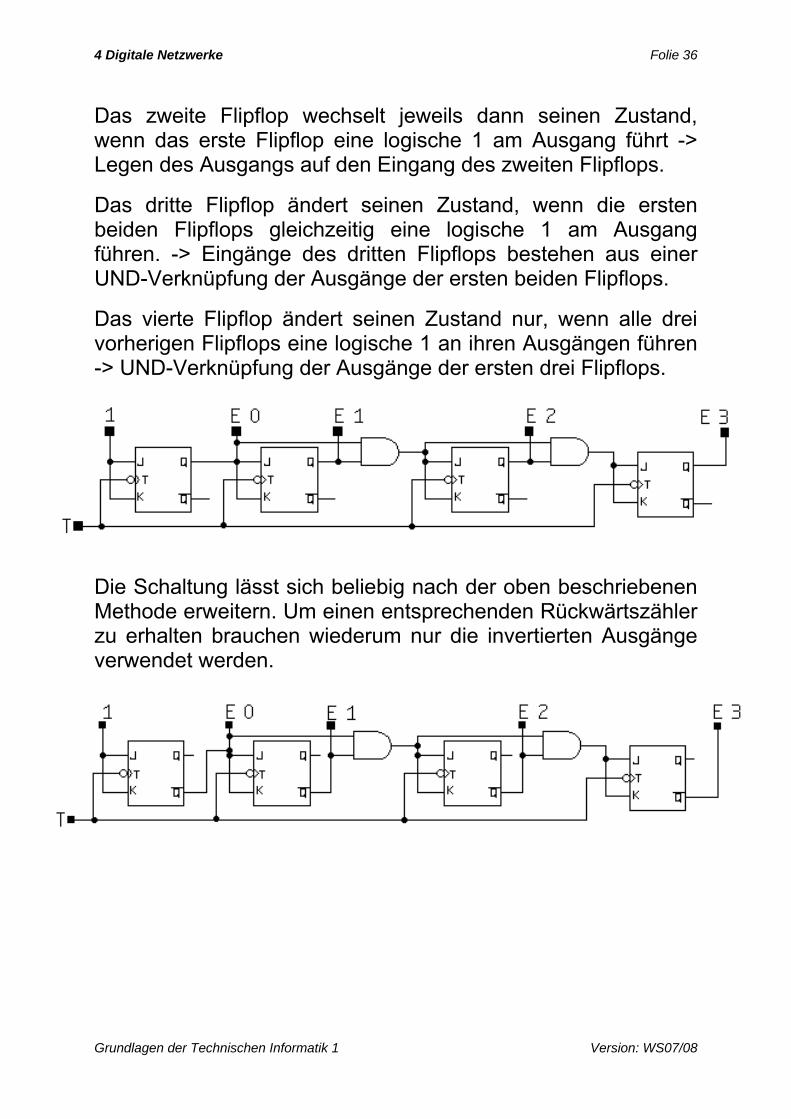
Das zweite Flipflop wechselt jeweils dann seinen Zustand, wenn das erste Flipflop eine logische 1 am Ausgang führt -> Legen des Ausgangs auf den Eingang des zweiten Flipflops.
Das dritte Flipflop ändert seinen Zustand, wenn die ersten beiden Flipflops gleichzeitig eine logische 1 am Ausgang führen. -> Eingänge des dritten Flipflops bestehen aus einer UND-Verknüpfung der Ausgänge der ersten beiden Flipflops.
Das vierte Flipflop ändert seinen Zustand nur, wenn alle drei vorherigen Flipflops eine logische 1 an ihren Ausgängen führen -> UND-Verknüpfung der Ausgänge der ersten drei Flipflops.
Die Schaltung lässt sich beliebig nach der oben beschriebenen Methode erweitern. Um einen entsprechenden Rückwärtszähler zu erhalten brauchen wiederum nur die invertierten Ausgänge verwendet werden.
4 Digitale Netzwerke Folie 37
Grundlagen der Technischen Informatik 1 Version: WS07/08
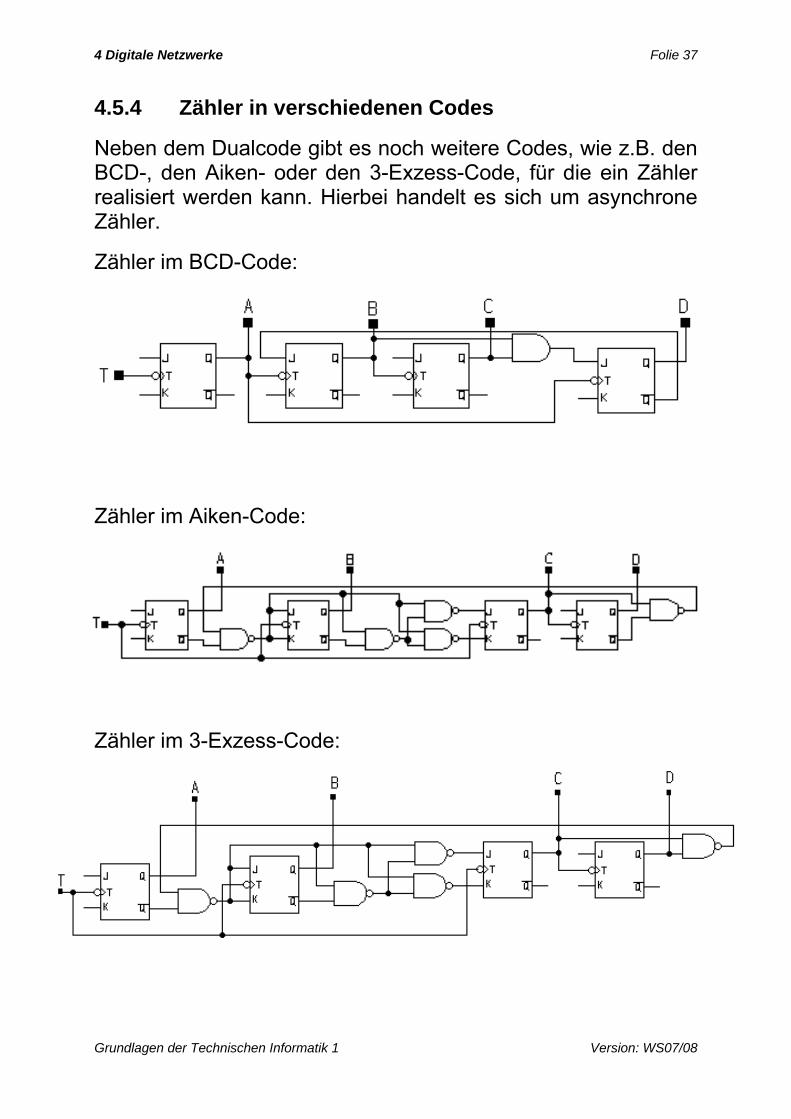
4.5.4 Zähler in verschiedenen Codes
Neben dem Dualcode gibt es noch weitere Codes, wie z.B. den BCD-, den Aiken- oder den 3-Exzess-Code, für die ein Zähler realisiert werden kann. Hierbei handelt es sich um asynchrone Zähler.
Zähler im BCD-Code:
Zähler im Aiken-Code:
Zähler im 3-Exzess-Code:
4 Digitale Netzwerke Folie 38
Grundlagen der Technischen Informatik 1 Version: WS07/08
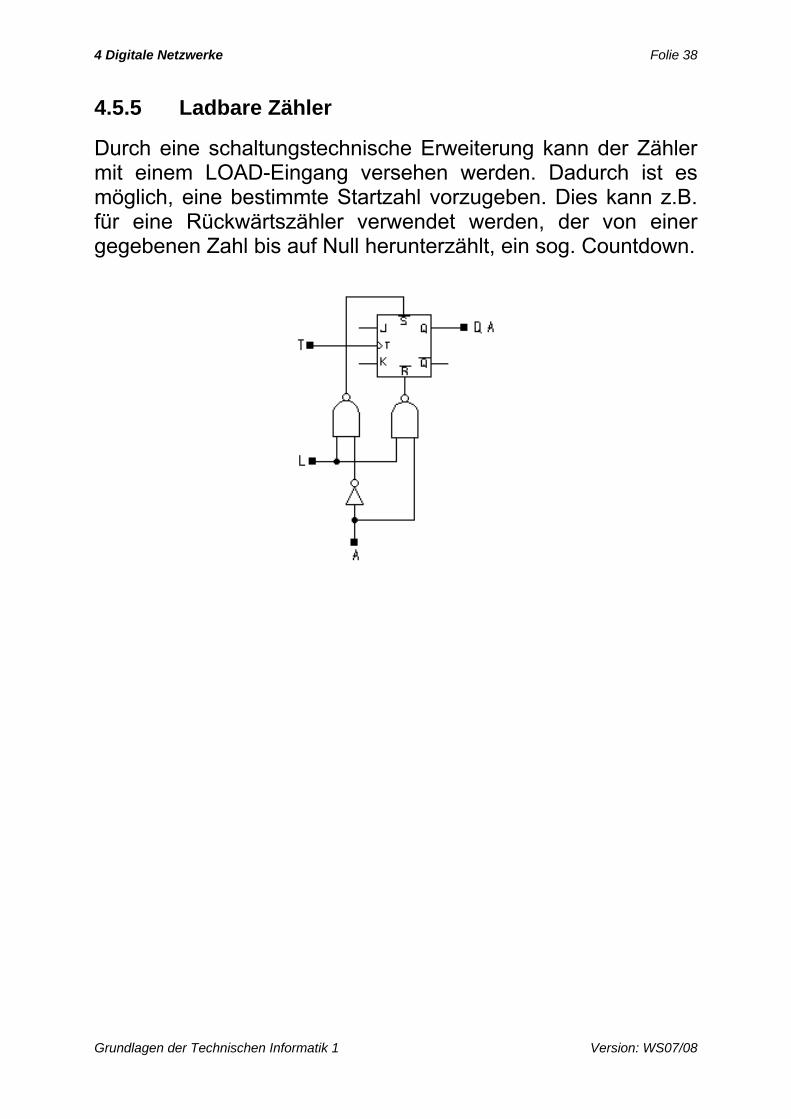
4.5.5 Ladbare Zähler
Durch eine schaltungstechnische Erweiterung kann der Zähler mit einem LOAD-Eingang versehen werden. Dadurch ist es möglich, eine bestimmte Startzahl vorzugeben. Dies kann z.B. für eine Rückwärtszähler verwendet werden, der von einer gegebenen Zahl bis auf Null herunterzählt, ein sog. Countdown.