Embed Size (px)
Citation preview
© Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
Simulation of Discrete Event Systems
Univ.-Prof. Dr.-Ing. Dipl.-Wirt.-Ing. Christopher M. Schlick
Lehrstuhl und Institut für Arbeitswissenschaft
RWTH Aachen
Bergdriesch 27
52062 Aachen
Tel.: 0241/80 99 440
E-Mail: [email protected]
Unit 2
Languages and Automata
Fall Winter 2013/2014
2- 2 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
1. Languages
- Introduction and Definition
- Operations on Languages
2. Automata
- Introduction and Definition
- Languages generated by Automata
- Blocking
- Unary Operations on Automata
- Binary Operations on Automata
- Moore Automata
- Mealy Automata
- Finite State Machines
Contents
2- 3 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
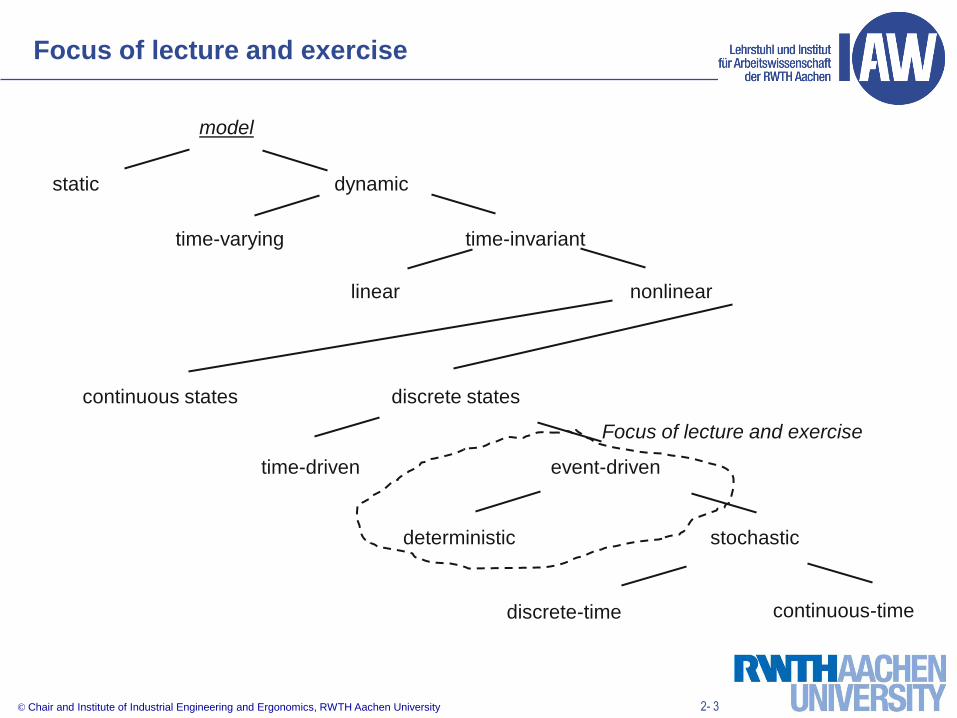
model
dynamic static
time-invariant time-varying
nonlinear linear
discrete states continuous states
event-driven time-driven
stochastic deterministic
continuous-time discrete-time
Focus of lecture and exercise
Focus of lecture and exercise
2- 4 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
1. Languages
1. Languages
2- 5 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
Basic entity of the formalism of discrete event systems is the symbol. A symbol is an abstract
entity which will not be defined formally because of its intuitive meaning. Alphabetic characters
and decimal numbers of the English language are examples of frequently used symbols of this
lecture series. However, also the mathematical formulas represent a symbol system of its own
right with a higher cardinality.
An alphabet is a finite set of symbols. If the symbols of an alphabet are concatenated according to
well defined rules, strings are generated. These strings may be stored sequentially in a
computer file. The -symbol represents a string without symbols (empty string). The empty string
symbol is the neutral element of the concatenation operation. The rules for string generation can
be considered as a formal automata-theoretic language.
In the domain of discrete event systems symbols encode both events and states. However, only
events are concatenated on the basis of formal languages. The generated events strings can be
considered as a symbolic representation of the behavior of a discrete event system. In that
sense formal languages are some kind of “rule base” that explains valid behavior of a discrete
event system.
Introduction to languages
2- 6 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
1. Def.: A (formal) language L with regard to an event set E is the set of all strings, which can be
generated using the elements of the set following another set of well defined
concatenation rules.
Examples for E={a, b, c}:
L1={a, b, ab, ba}
2. Def.: A string s (synonym word) is a sequence of events. The length of the string is denoted
with |s| and represents the number of concatenated events. The empty string is denoted
by the symbol and has zero length.
3. Def.: The Kleene closure E* is the set of all strings, which can be concatenated using the
elements of the event set E including with an arbitrary set of well defined concatenation
rules; therefore, a language L is always a subset of the Kleene closure E*.
L2={all strings being equal when read forwards and backwards} = {, a, b, aba, bab, aca, cac,...}
E*={, a, b, c, aa, ab, ac, ba, bb, bc, ca, cb, cc, aaa, aab, ...}
|E*|=
L3={anbn: 0 <= n <= 2} = {, ab, aabb}
Definitions
2- 7 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
4. Def.: Concatenation of languages: If La, Lb E*, then
5. Def.: Operations on strings: If s = tuv with t, u, v E*, then
- t is a prefix string of s
- u is a substring of s
- v is a suffix string of s
6. Def.: Prefix closure: Let L E*, then
* *: : ( )L s E t E st L
*: : ( ) ( ) ( )a b a b a a b bL L s E s s s s L s L
The prefix closure of a language L therefore includes the prefix strings of all strings of L; in
general L is a subset of its prefix closure; if the prefix closure and L are equal, the language
is a prefix closed language.
Operations on languages
Note that and s are prefixes (respectively substrings, suffixes) of s.

2- 8 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
2. Automata
2. Automata
2- 9 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
7. Def.: A deterministic automaton G is represented by the tuple
G = (X, E, f, , x0, Xm) where
- X is the finite set of the states of the automaton,
- E is the finite set of transition enabling events,
- f : X E X is the state transition function,
- : X 2E the active event function (or feasible event function),
- x0 denotes the initial state of the automaton, and
- Xm X is the set of marked states.
Notation of transition function f: f(x, e) = y means, that a transition from state x to state y is caused
by the event e; usually, f is an incomplete mapping.
Notation of active event function : (x) represents simply the set of all events e, where the
transition function f(x, e) = y is defined; (x) can be considered as the set of active events of G
being in state x. 2E is a shorthand notation for the power set of E.
Definition of automaton
The marked states Xm are an especially important part of the formal specification of an
automaton. The meaning of a marked state is an allowed end state of the system. In that sense it
represents a significant sub-goal that has to be reached by design.
2- 10 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
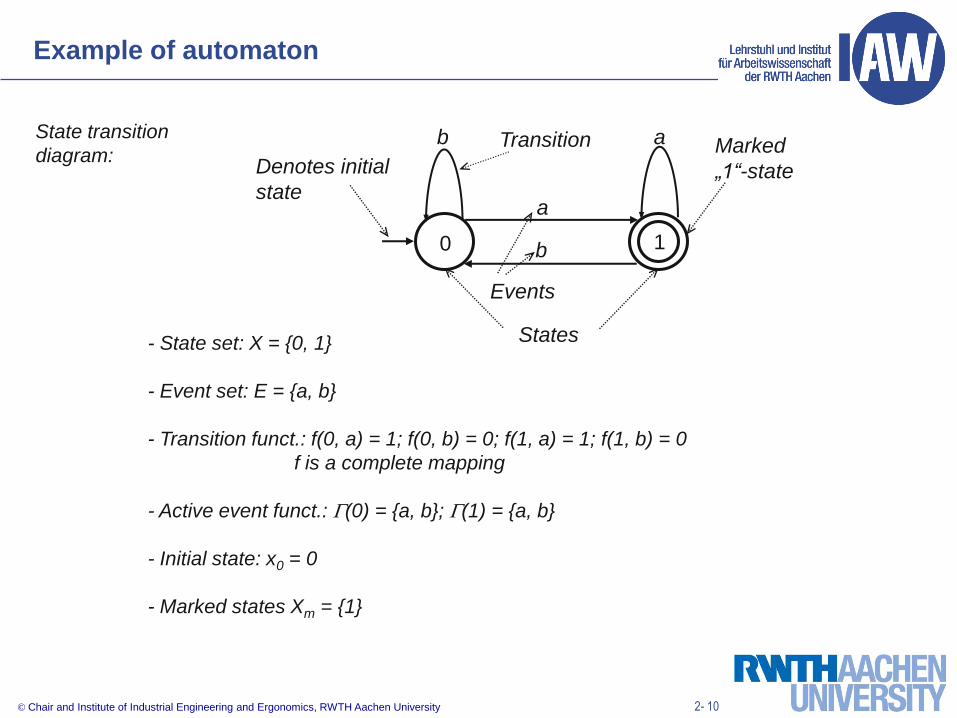
- State set: X = {0, 1}
- Event set: E = {a, b}
- Transition funct.: f(0, a) = 1; f(0, b) = 0; f(1, a) = 1; f(1, b) = 0
f is a complete mapping
- Active event funct.: (0) = {a, b}; (1) = {a, b}
- Initial state: x0 = 0
- Marked states Xm = {1}
State transition
diagram:
0
a
a
b
b
Denotes initial
state
Marked
„1“-state
1
Transition
Events
Example of automaton
States
2- 11 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
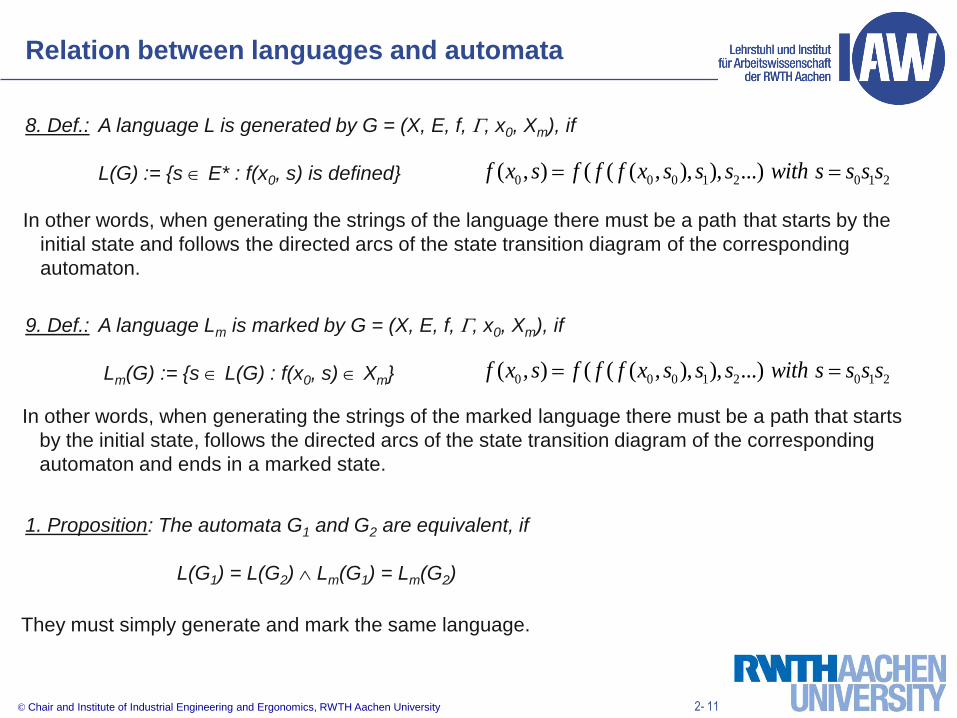
8. Def.: A language L is generated by G = (X, E, f, , x0, Xm), if
L(G) := {s E* : f(x0, s) is defined}
9. Def.: A language Lm is marked by G = (X, E, f, , x0, Xm), if
Lm(G) := {s L(G) : f(x0, s) Xm}
In other words, when generating the strings of the language there must be a path that starts by the
initial state and follows the directed arcs of the state transition diagram of the corresponding
automaton.
In other words, when generating the strings of the marked language there must be a path that starts
by the initial state, follows the directed arcs of the state transition diagram of the corresponding
automaton and ends in a marked state.
1. Proposition: The automata G1 and G2 are equivalent, if
L(G1) = L(G2) Lm(G1) = Lm(G2)
They must simply generate and mark the same language.
Relation between languages and automata
0 0 0 1 2 0 1 2( , ) ( ( ( , ), ), ...)f x s f f f x s s s with s s s s
0 0 0 1 2 0 1 2( , ) ( ( ( , ), ), ...)f x s f f f x s s s with s s s s
2- 12 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
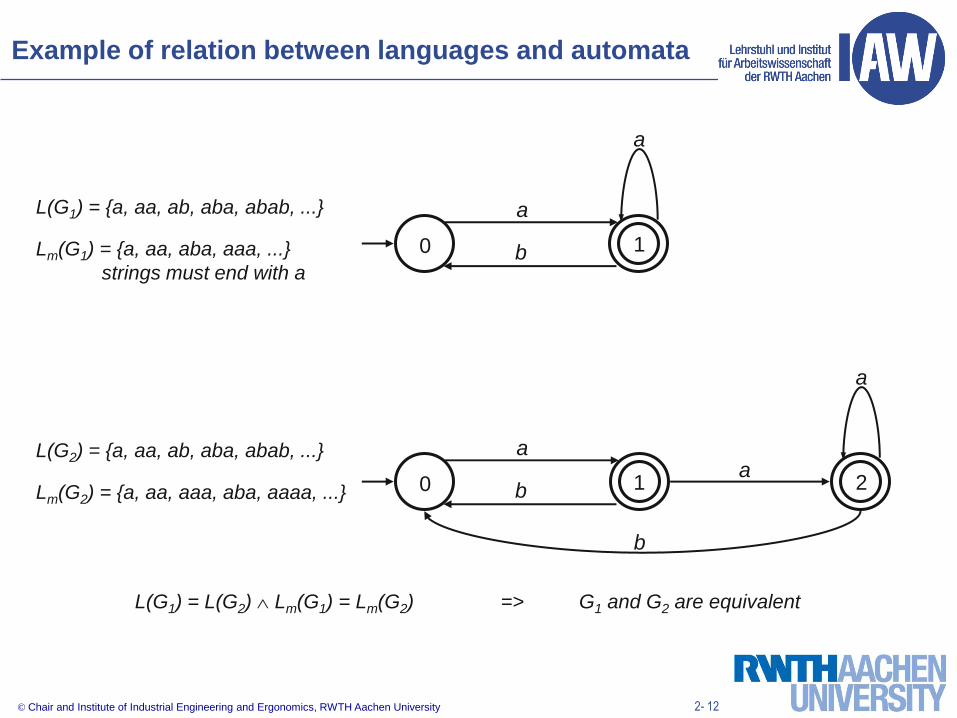
Lm(G1) = {a, aa, aba, aaa, ...}
strings must end with a
L(G1) = {a, aa, ab, aba, abab, ...}
Lm(G2) = {a, aa, aaa, aba, aaaa, ...}
L(G2) = {a, aa, ab, aba, abab, ...}
L(G1) = L(G2) Lm(G1) = Lm(G2) => G1 and G2 are equivalent
0
a
a
b 1
0
a
b 1
a
2 a
b
Example of relation between languages and automata
2- 13 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
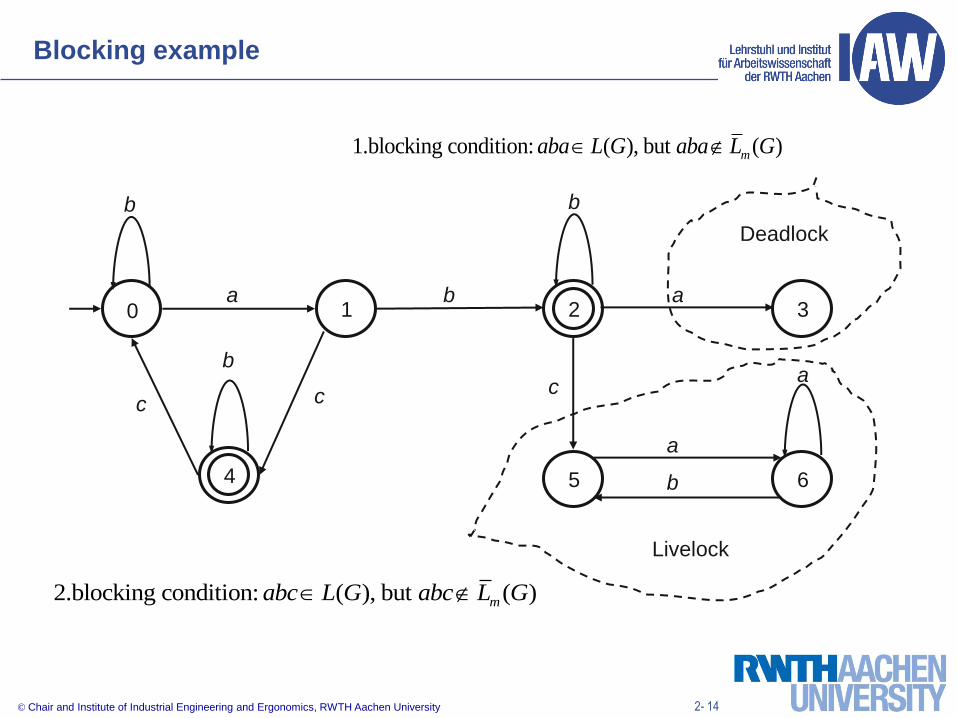
2. Proposition: An automaton is blocked, if
( ) ( )mL G L G
3. Proposition: An automaton is non-blocking, if
( ) ( )mL G L G
Types of blocking
Deadlock:
There is a deadlock in an automaton, if
the active event function of a reached
state is equal the empty set and a
marked state as a possible end state has
not been reached.
Livelock:
There is a livelock in an automaton, if
continuing state transitions only cover
unmarked states and there is no transition
to “break out” of this subspace. In that
sense the automaton iterates in an infinite
loop.
Analysis of automata: blocking
2- 14 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
1.blocking condition: ( ), but ( )maba L G aba L G
0 a
b
b
1
b
2 b
4
3 a
5
a
6
a
c c c
b
2.blocking condition: ( ), but ( )mabc L G abc L G
Deadlock
Livelock
Blocking example
2- 15 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
10. Def.: The accessible part of an automaton G is represented by the „Ac“-operator being
defined as:
Ac(G) := (Xac, E, fac, , x0, Xm,ac) with
- Xac= { x X: s E* with f(x0 , s) = x }
- Xm,ac= Xm Xac
- fac = f | Xac E → Xac (the transition function is restricted to the smaller domain of
accessible states Xac )
In other words, the application of the Ac-operator results in removing all states and transitions of
the automaton, which cannot be accessed when following the directed arcs of the state
transition diagram starting with the initial state.
Clearly, this operator does not modify the generated and marked language of an original
automaton G.
Operations on automata: unary (I)
2- 16 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
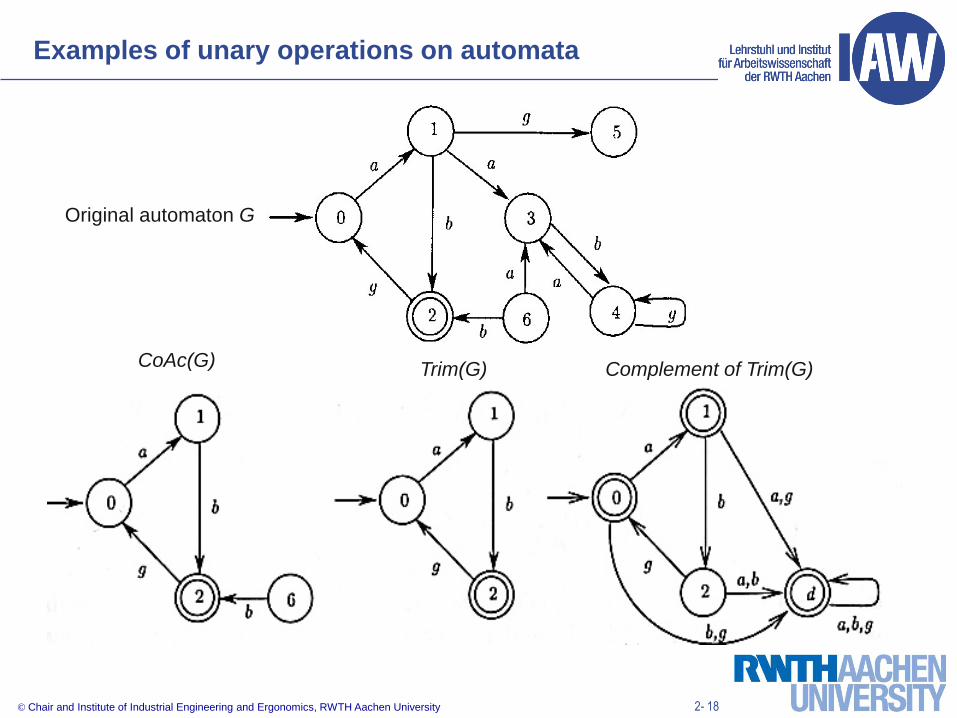
11. Def.: The co-accessible part of an automaton G is represented by the „CoAc“-operator, which
is defined as:
CoAc(G) := (Xcoac, E, fcoac, , x0,coac , Xm) with
- Xcoac= { x X: s E* with f(x , s) Xm }
- x0,coac =
- fcoac = f | Xcoac E → Xcoac (the transition function is restricted to the smaller domain of
co-accessible states Xcoac )
In other words, the application of the CoAc-operator results in removing all states and transitions of
the automaton, which do not end in a marked state when following the directed arcs of the state
transition diagram. Therefore, the language being generated by CoAc(G) may have fewer
elements due to state pruning. However, the marked language is not modified when using this
operator.
Clearly, there is a strong logical connection between accessibility, co-accessibility and blocking,
because a blocked automaton requires accessible states, which are not co-accessible !!!
Operations on automata: unary (II)
x0 , if x0 Xcoac
else not defined
2- 17 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
13. Def.: The complement of an automaton G is represented by the „Comp“-operator, which is
defined as:
Gcomp(G) := (Xcoac {xd}, E, ftotal, , x0, (Xcoac {xd}) \ Xm ) with
- ftotal(x, e) =
- ftotal(xd, e) = xd for all e E
12. Def.: The „Trim“-operator refers to the accessible and co-accessible part of an
automaton G as
Trim := CoAc(Ac(G)) = Ac(CoAc(G)) .
If the complement operator is applied to an automaton G, the marked language of Gcomp is equal
the complement set of the language being marked by G with respect to the Kleene closure E*.
Operations on automata: unary (III)
f(x, e), if e (x)
xd otherwise (dead state)
2- 18 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
Original automaton G
CoAc(G) Trim(G) Complement of Trim(G)
Examples of unary operations on automata
2- 19 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
14. Def.: The product of two automata G1 and G2 is defined such as:
G1 G2 := Ac(X1 X2, E1 E2, f, 1 2, (x01, x02), Xm1 Xm2 ) with
- f( (x1 ,x2), e) = ( f1 (x1, e), f2 (x2, e) ), if e 1 (x 1) 2(x 2)
otherwise not defined
In other words, the application of the product operator leads to a synchronization of the
transitions of the automata based on the shared events E1 E2 . All other events give not
defined results and do not result in a reaction of the product automaton. Therefore, the
behavior can be considered as a complete synchronization.
The state of the product automaton is denoted as an ordered pairs (x1, x2). The first component
of the pair is associated with the state of G1 and the second component is associated with the
state of G2.
Operations on automata: binary (I)
2- 20 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
0 a
b
a
1
2
a, c c
b
0
a
a
b
b
1
(0,0)
a
a
(0,1)
=
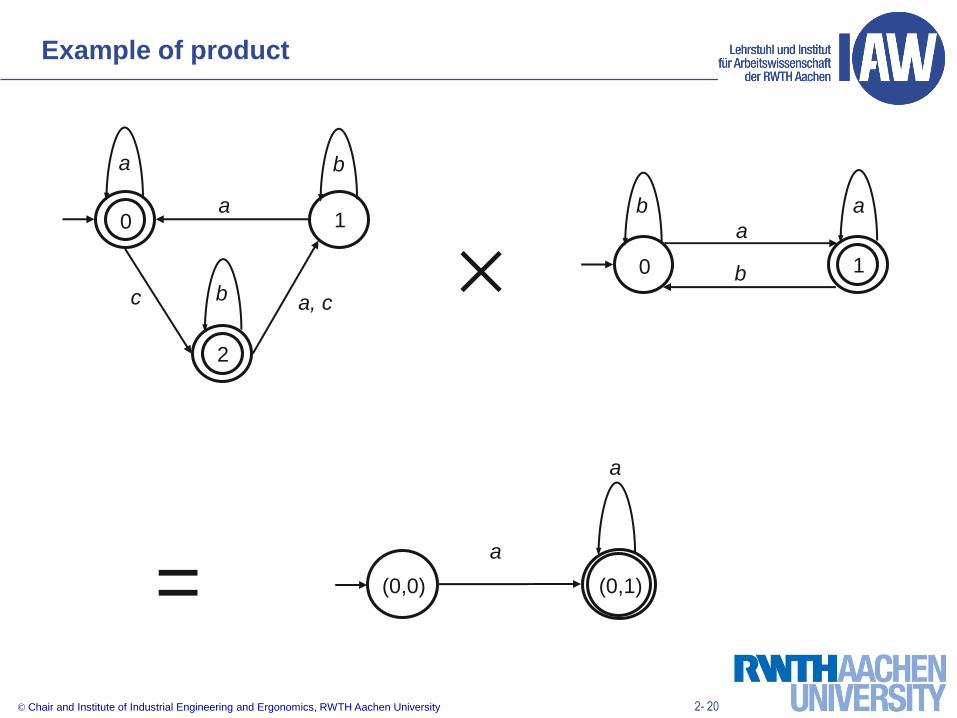
Example of product
2- 21 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
4. Proposition: The intersection of two languages can be generated and marked with the help of
the product of the associated automata:
- L(G1) L(G2) = L(G1 G2)
- Lm (G1) Lm (G2) = Lm (G1 G2)
Intersections
2- 22 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
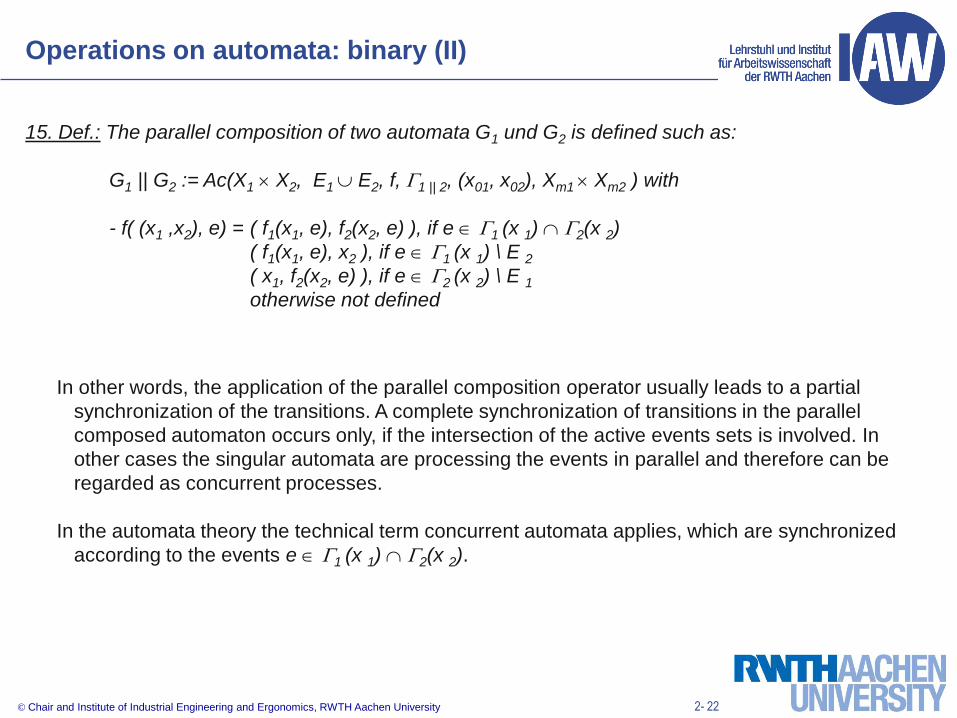
15. Def.: The parallel composition of two automata G1 und G2 is defined such as:
G1 || G2 := Ac(X1 X2, E1 E2, f, 1 || 2, (x01, x02), Xm1 Xm2 ) with
- f( (x1 ,x2), e) = ( f1(x1, e), f2(x2, e) ), if e 1 (x 1) 2(x 2)
( f1(x1, e), x2 ), if e 1 (x 1) \ E 2
( x1, f2(x2, e) ), if e 2 (x 2) \ E 1
otherwise not defined
In other words, the application of the parallel composition operator usually leads to a partial
synchronization of the transitions. A complete synchronization of transitions in the parallel
composed automaton occurs only, if the intersection of the active events sets is involved. In
other cases the singular automata are processing the events in parallel and therefore can be
regarded as concurrent processes.
In the automata theory the technical term concurrent automata applies, which are synchronized
according to the events e 1 (x 1) 2(x 2).
Operations on automata: binary (II)
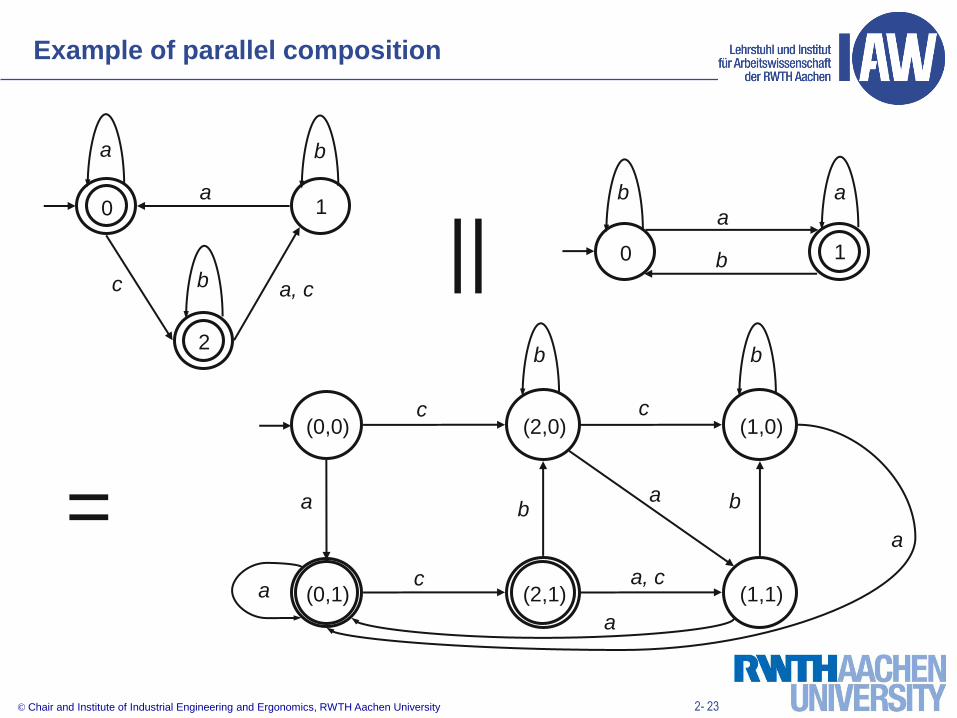
2- 23 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
0 a
b
a
1
2
a, c c
b
0
a
a
b
b
1
(0,0) c
b
(2,0)
||
= (0,1)
c (2,1)
c
b
(1,0)
a, c (1,1) a
a b b a
a
a
Example of parallel composition
2- 24 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
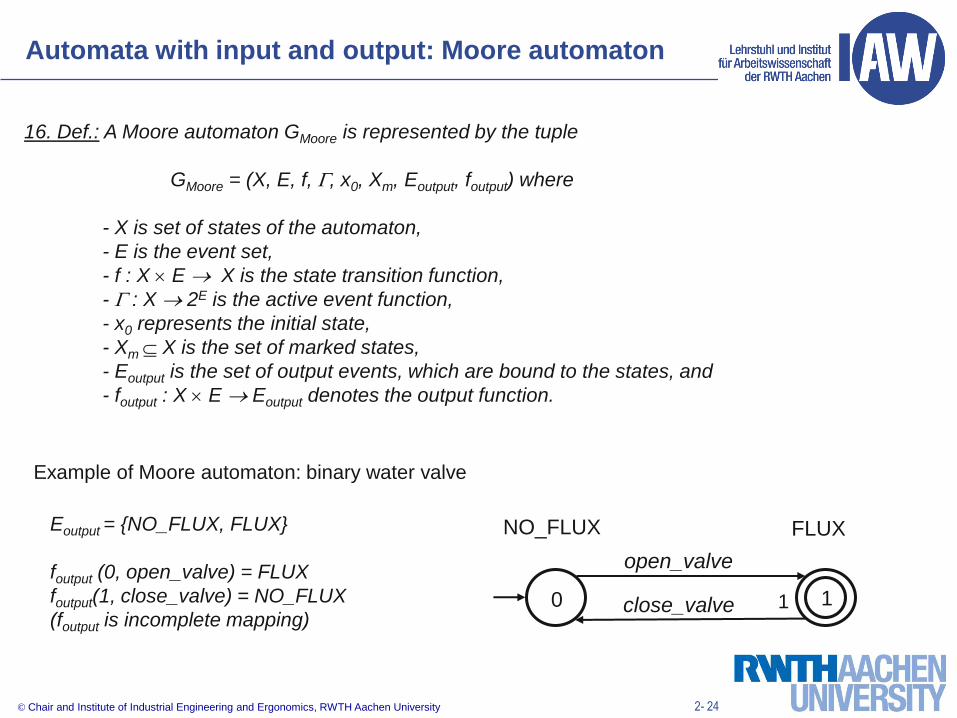
16. Def.: A Moore automaton GMoore is represented by the tuple
GMoore = (X, E, f, , x0, Xm, Eoutput, foutput) where
- X is set of states of the automaton,
- E is the event set,
- f : X E X is the state transition function,
- : X 2E is the active event function,
- x0 represents the initial state,
- Xm X is the set of marked states,
- Eoutput is the set of output events, which are bound to the states, and
- foutput : X E Eoutput denotes the output function.
1
Example of Moore automaton: binary water valve
Eoutput = {NO_FLUX, FLUX}
foutput (0, open_valve) = FLUX
foutput(1, close_valve) = NO_FLUX
(foutput is incomplete mapping)
0
open_valve
1 close_valve
NO_FLUX FLUX
Automata with input and output: Moore automaton
2- 25 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
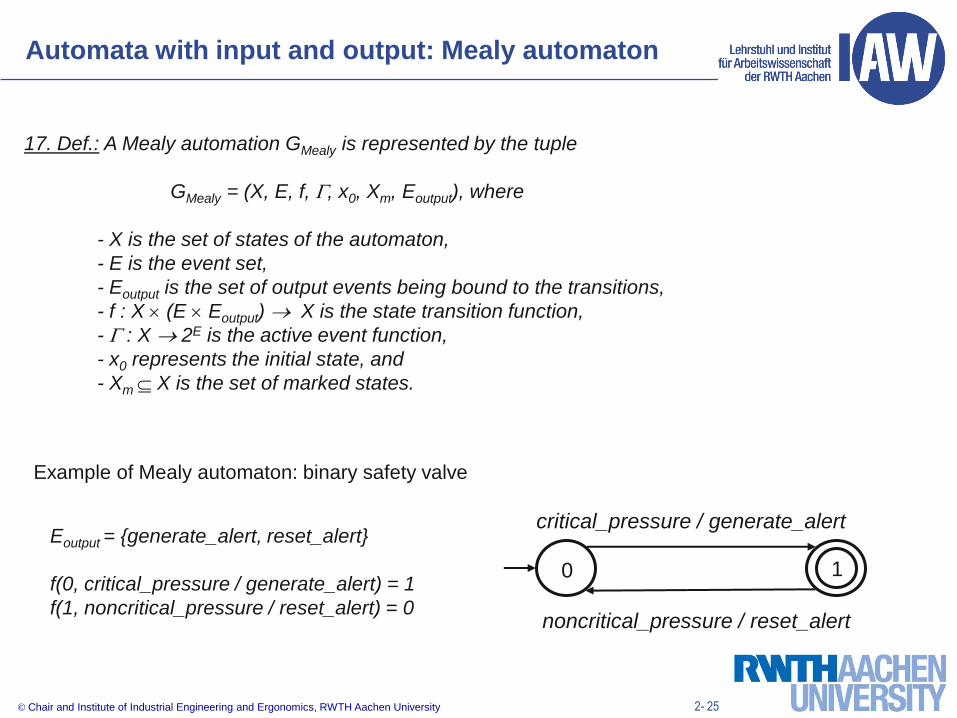
Eoutput = {generate_alert, reset_alert}
f(0, critical_pressure / generate_alert) = 1
f(1, noncritical_pressure / reset_alert) = 0
17. Def.: A Mealy automation GMealy is represented by the tuple
GMealy = (X, E, f, , x0, Xm, Eoutput), where
- X is the set of states of the automaton,
- E is the event set,
- Eoutput is the set of output events being bound to the transitions,
- f : X (E Eoutput) X is the state transition function,
- : X 2E is the active event function,
- x0 represents the initial state, and
- Xm X is the set of marked states.
Example of Mealy automaton: binary safety valve
0
critical_pressure / generate_alert
1
noncritical_pressure / reset_alert
Automata with input and output: Mealy automaton
2- 26 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
5. Proposition: The Moore automaton GMoore and the Mealy automaton GMealy can be transformed
to an automaton G without outputs.
-L(GMoore) E*: L(G) E* with L(GMoore) = L(G)
-L(GMealy) E*: L(G) E* with L(GMealy) = L(G)
Transformation procedure for Mealy automaton:
Define all combinations of input / output events as singular events of the transformed event set
and specify the state transition function accordingly.
Transformation procedure for Moore automaton:
Associate the state output to all events that enter the state and thus construct a Mealy
automaton. Then, transform the Mealy automaton according to the above procedure.
In other words, the Moore and Mealy notation are equivalent approaches to modeling and
simulation of discrete event systems. Individual preference may depend on the application
domain.
Transformation of automata
2- 27 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
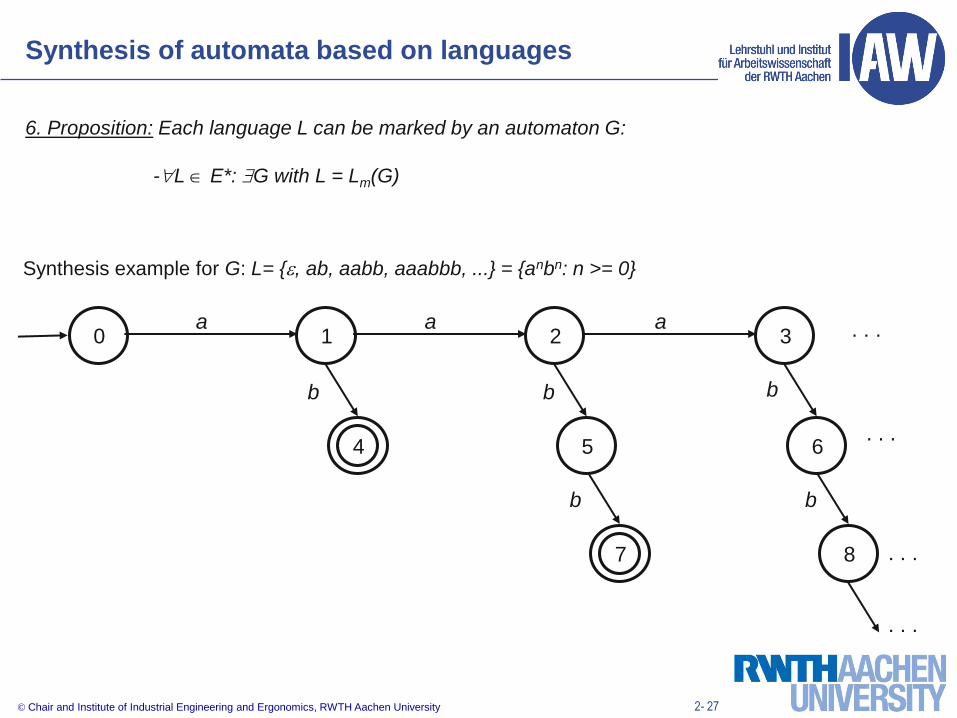
6. Proposition: Each language L can be marked by an automaton G:
-L E*: G with L = Lm(G)
Synthesis example for G: L= {, ab, aabb, aaabbb, ...} = {anbn: n >= 0}
0 1 a
2 a
3 a . . .
4
b
5
b
6
b
7
b
8
b
. . .
. . .
. . .
Synthesis of automata based on languages

2- 28 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
7. Proposition: There are languages, which cannot be marked by an automaton with a finite
number of states:
-L E*: G with L = Lm(G) and |X|
18. Def: A language is regular, if it can be marked with the help of an automaton with a finite
number of states. Otherwise the language is irregular.
The associated technical term is “finite-state automaton” marking a regular language.
Finite-state automata are an important subset of the set of all automata, because they can be
simulated efficiently with the help of digital computers. If irregular languages have to be
simulated with automata-theoretic methods, theoretically a computer with an infinite amount of
storage is needed that costs an infinite amount of money (at least today!).
In the next but one lecture we are going to introduce marked Petri nets, which are an ingenious
modeling method that is able to generate and mark also irregular languages with a finite
structure of states and transitions. Therefore, we have to introduce a new modeling element
that is able to represent local event processing.
Example : L = {, ab, aabb, aaabbb, ...} = {anbn: n >= 0}
Regular and irregular languages
2- 29 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
• CASSANDRAS, C.,G.; LAFORTUNE, S. (2007): Introduction to Discrete Event Systems.
2nd edition. Boston (MA): Kluwer Academic Publishers.
• HOPCROFT, J.E.; MOTWANI. R.; ULLMAN, J.D. (2001): Introduction to Automata
Theory, Languages and Computation. Second edition. Boston (MA): Addison-Wesley.
References
2- 30 © Chair and Institute of Industrial Engineering and Ergonomics, RWTH Aachen University
Open Questions ???
Questions ?





























