Embed Size (px)
Citation preview

BachelorarbeitNumerische Simulation der Umströmung einer
Sattelzugkonfiguration unter realen Strömungsbedingungen undVergleich mit experimentellen Daten
Henri KarhulaMatrikelnummer 294206
für den StudiengangComputational Engineering Science,
Rheinisch-Westfälische Technische Hochschule Aachen,durchgeführt am
Institut für Aerodynamik und Strömungstechnik,Deutsches Zentrum für Luft- und Raumfahrt,
in Göttingen
Am DLR betreut durch Prof. Dr.-Ing. Claus Wagnerund Dipl.-Ing. Johannes Haff
30. Mai 2013

Eidesstattliche Erklärung
Hiermit versichere ich, dass diese von mir abgegebene schriftliche Arbeit von mir selbst-
ständig verfasst wurde. Dafür habe ich nur die in dieser Arbeit in nachprüfbarer Weise
zitierte und aufgelistete Literatur bzw. Quellen verwendet. Mir ist bewusst, dass ich bei
einem eventuellen Verstoß mit Konsequenzen zu rechnen habe. Weiter versichere ich, dass
ich diese Arbeit noch keinem anderen Institut oder an einer Universität zur Beurteilung
vorgelegt habe.
Göttingen, 30. Mai 2013
Henri Karhula

InhaltsverzeichnisEidesstattliche Erklärung
Inhaltsverzeichnis
Nomenklatur
Vorwort
Einleitung 1
1 Grundlagen der Strömungsmechanik 41.1 Eigenschaften von Gasen . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.1.1 Viskosität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.1.2 Reynoldszahl . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2 Grundlagen der Umströmung von Lastkraftwagen . . . . . . . . . . . . . . 71.2.1 Ablösung und Totwasser . . . . . . . . . . . . . . . . . . . . . . . 81.2.2 Unterbodenströmung bzw. Couette-Strömung . . . . . . . . . . . . 91.2.3 Gesamtwiderstand eines Fahrzeugs . . . . . . . . . . . . . . . . . 9
1.3 Grundlagen numerischer Strömungssimulationen . . . . . . . . . . . . . . 111.3.1 Reynoldsgemittelte Navier-Stokes-Gleichungen . . . . . . . . . . . 121.3.2 Turbulenzmodelle . . . . . . . . . . . . . . . . . . . . . . . . . . 131.3.3 Volumengittergenerierung . . . . . . . . . . . . . . . . . . . . . . 14
2 Experimentelle Untersuchungen 182.1 Windkanalversuch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.2 Fahrversuch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3 Numerische Untersuchungen 213.1 Modellgeometrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.2 Berechnungsgitter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2.1 Volumengitterqualität . . . . . . . . . . . . . . . . . . . . . . . . 253.3 Randbedingungen und Konfigurationen . . . . . . . . . . . . . . . . . . . 263.4 Konfiguration des Lösers . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4 Ergebnisse der Numerischen Simulationen 294.1 Konfiguration A (Maßstab 1:15) . . . . . . . . . . . . . . . . . . . . . . . 304.2 Konfiguration B (Maßstab 1:1) . . . . . . . . . . . . . . . . . . . . . . . 39
5 Vergleich der Ergebnisse 475.1 Vergleich von Konfiguration A mit den Ergebnissen des Windkanalversuches 475.2 Vergleich von Konfiguration B mit den Ergebnissen des Fahrversuches . . . 50
6 Zusammenfassung und Ausblick 52
Literaturverzeichnis 53
Abbildungs- und Tabellenverzeichnis 54

Nomenklatur
Lateinische SymboleFormelzeichen Einheit Bezeichnung
E Nm2 Elastizitätsmodul
p Pa Druck
v m3 spezifisches Volumen
u, v, w ms
Geschwindigkeit
y, l m Abstand oder Länge
Re − Reynoldszahl
Sr − Strouhalzahl
f 1s
Frequenz
FR N Rollwiderstandskraft
fR − Rollwiderstandsbeiwert
G N Gewichtskraft
ca − Auftriebsbeiwert
FA N Auftriebskraft
cw − Widerstandsbeiwert
FW N Widerstandskraft
A m2 Fläche
t s Zeitvariable
g ms2
Erdbeschleunigung
r m Radius
Griechische SymboleFormelzeichen Einheit Bezeichnung
ρ kgm3 Dichte
τ Nm2 Schubspannung
η Pa s dynamische Viskosität
ν m2
skinematische Viskosität
σ Nm2 Normalspannung

ZeichenFormelzeichen Einheit Bezeichnung
~• − Vektor~∇ − Nabla-Operator
•′ − Schwankungswert (Varianz)
• − Zeitlicher Mittelwert
AbkürzungenAbkürzung Bezeichnung
DLR Deutsches Zentrum für Luft- und Raumfahrt
LKW Lastkraftwagen
DNS Direkte Numerische Simulation
URANS Unstetige Reynoldsgemittelte Navier-Stokes Gleichung
SST Shear-Stress-Transport
PIV Particle Image Velocimetry
SWG Seitenwindversuchsanlage Göttingen

Vorwort
Die vorliegende Bachelorarbeit entstand während meiner Tätigkeit am Institut für Aerody-
namik und Strömungstechnik des Deutschen Zentrums für Luft- und Raumfahrt (DLR) in
Göttingen im Frühjahr 2013.
Ich möchte mich bei Univ.-Prof. Dr. rer. nat. Naumann für die Betreuung meiner Ar-
beit bedanken.
Außerdem bedanke mich herzlich bei Herrn Prof. Dr.-Ing. Claus Wagner für die Ermögli-
chung dieser Bachelorarbeit.
Auch möchte ich mich bei allen Kollegen des Instituts für die gute Zusammenarbeit und
angenehme Atmosphäre danken. Besonders möchte ich Herrn Dipl.-Ing. Johannes Haff für
eine hervorragende Betreuung und Dr.-Ing.habil. Mikhail Konstantynov danken.
Ebenfalls danken möchte ich dem Konzern cd-adapco für die Benutzungserlaubnis der
Software STAR-CCM+ und einen sehr netten Kontakt.

Einleitung
Lastkraftwagen (LKW) dienen als Nutzfahrzeuge für den Transport von Gütern und über-
nehmen heutzutage mehr als zwei Drittel der innerdeutschen Güterverkehrsleistung. Auf-
grund der hohen Infrastrukturdichte des Verkehrsnetzes sind diese in vielen Bereichen deut-
lich flexibler als der Bahnverkehr. Sie dienen in Logistikkonzepten als Transporteure von
Gütern und sind als diese nicht mehr wegzudenken. Als Nachteile lassen sich aber leicht
ein hoher Treibstoffverbrauch und hohe Abgasausstoß aufzählen. Deshalb forscht man am
DLR an den Möglichkeiten, dieses Transportsystem für die Zukunft zu verbessern.
Heutzutage kann man annehmen, dass etwa 60% aller Verluste bei Nutzfahrzeugen von
aerodynamischen Verlusten stammen. Während nur 30% durch den Rollwiderstand der
Reifen und nur 10% durch mechanische Verluste verursacht werden, wird klar, dass eine
Optimierung der aerodynamischen Eigenschaften von Nutzfahrzeugen beachtliche Einspa-
rungen von Kraftstoff und eine Reduzierung des Schadstoffausstoßes hervorbringen kann.
Vor diesem Hintergrund werden am DLR in Göttingen experimentelle und numerische Un-
tersuchungen der Aerodynamik von LKW durchgeführt. Da numerische Ergebnisse heute
noch immer eine Validierung durch Messergebnisse benötigen, werden noch viele Aspekte
im Windkanal untersucht. Jedoch sind die Möglichkeiten in einem Windkanal begrenzt.
Um realistische Messergebnisse zu erhalten müssen Bedingungen eingehalten werden, die
im Windkanal nur begrenzt realisierbar, wenn nicht unmöglich, sind.
Am DLR in Göttingen wurden vor diesem Hintergrund sowohl Experimente im Windkanal
als auch sehr aufwendige Fahrversuche durchgeführt.
Ein deutlicher Unterschied zwischen den oben genannten Windkanalversuch und Fahr-
versuch ist die Skalierung und die Reynoldszahl. Jedoch kommen auch Radrotation und
eine bewegte Fahrbahn dazu. Im Rahmen dieser Arbeit wollen wir besonderen Fokus auf
diese beiden Einflüsse legen. Es hat sich bisher schon feststellen lassen, dass die Fahr-
bahntranslation besonders mit großer Unterbodenfläche einen deutlichen Einfluss auf das
Strömungsfeld hat. So gibt es auch Windkanäle mit einem Laufband um diesen Effekt bes-
ser beobachten zu können, allerdings werden Ergebnisse aus solchen Messungen hier nicht
beachtet.
Bezüglich der Radrotation wurde auch schon festgehalten, dass durch diesen Effekt zusätz-
liche Wirbel im Strömungsfeld induziert werden. Diese Wirbel haben auch einen Einfluss
auf den aerodynamischen Widerstand eines Fahrzeugs sind aber von verschiedenen Eigen-
1

schaften abhängig. So hat man unterschiedliches Verhalten bei Rädern in Reifenkammern
und freiliegenden Rädern beobachtet. Im Rahmen dieser Arbeit wird also zusätzlich der
Einfluss von zehn rotierenden Rädern an fünf Achsen auf das Strömungsfeld beobachtet.
In dieser Arbeit werden zunächst die Grundlagen der Strömungsmechanik mit besonderem
Blick auf die Eigenschaften von LKW besprochen. Darauf aufbauend werden die Ergebnis-
se der oben genannten experimentellen Versuche mit, im Rahmen dieser Arbeit, erstellten
numerischen Simulationen verglichen. Hierbei werden nicht nur die Ergebnisse der un-
terschiedlichen Quellen betrachtet, sondern auch ausgewählte Randbedingungen und ihr
Einfluss auf die Umströmung von LKW untersucht.
Stand der Technik
Das folgende Kapitel gibt eine kurze Zusammenfassung über numerische Strömungssimu-
lationen im Bereich der Nutzfahrzeugaerodynamik.
2004 veröffentlichte Salari [10] Ergebnisse numerischer Simulationen an einem GTS-Modell.
Bei diesem Modell handelt es sich um ein generisches Modell einer Sattelzugkonfiguration,
welches sich gut für die Validierung numerischer Simulationen eignet. Die Ergebnisse der
Simulationen, die mit unterschiedlichen Volumengitterauflösungen und Turbulenzmodellen
berechnet wurden, wurden mit NASA Windkanal-Experimenten verglichen. Diese Arbeit
zeigte, dass durch die angemessene Wahl des Turbulenzmodelles sehr gute Widerstands-
beiwerte berechnet werden können. Im selben Jahr zeigt eine Veröffentlichung von Maddox
[11], dass durch einen Detached Eddy Simulation Ansatz noch bessere Ergebnisse am glei-
chen GTS-Modell erzielt werden können.
Simulationergebnisse mit einem detaillierten Modell wurden 2010 von Hyams [12] veröffent-
licht. In dieser Arbeit wurde das GCM Modell, das eine Langhauber-Front hat, zusammen
mit einem Detached Eddy Simulation Ansatz verwendet. Auch schon in dieser Arbeit wurde
unter anderem der Einfluss von rotierenden Rädern simuliert, jedoch wurden nur statische
Konfigurationen mit Experimenten validiert. Zusätzlich wurden auch hier zwei Skalierungen
untersucht, die beide zur Validierung von entsprechenden experimentellen Daten dienten.
Die Arbeit endete mit dem Fazit, dass gute Ergebnisse erzielt wurden, dass es jedoch bei
der Simulation von bestimmten Geometrien und der Reifenrotationen Verbesserungspoten-
tial gibt.
2012 zeigte Pevitt [13] einen Vergleich von Simulationen mit veschiedenen Lastkraftwa-
2

gengeometrien und Anströmwinkeln in Verbindung mit Experimenten. Bei den Modellen
handelt es sich um grobe Geometrien, die dazu dienen, starke Unterschiede besser zu unter-
suchen. Die mit der Software ANSYS CFX durchgeführten Simulationen stellen die Kräfte
gut dar und zeigen, dass durch die Modifikation der Fahrzeuggeometrie immernoch eine
deutliche Verbesserung des Widerstandsbeiwertes erzielt werden kann.
In dieser Arbeit werden nicht die Einflüsse von abweichenden Geometrien, sondern beson-
ders die Auswirkungen von Skalierung und Randbedingungen untersucht.
3

1 Grundlagen der Strömungsmechanik
Im Folgenden werden Begriffe und Definitionen aufgeführt, die uns helfen eine Strömung
zu beschreiben. Dabei werden wir uns besonders auf Aspekte konzentrieren die die Um-
strömung und Eigenschaften von LKW ausmachen.
1.1 Eigenschaften von Gasen
In der Strömungsmechanik arbeitet man mit strömenden Flüssigkeiten (Hydrodynamik)
und Gasen (Aerodynamik). In dieser Arbeit wird ausschließlich die Aerodynamik behandelt
und deshalb müssen besonders Eigenschaften von Gasen beachtet werden. Um die Strö-
mung von Gasen deutlich von der Strömung von Flüssigkeiten zu unterscheiden, führen wir
den Begriff der Dichte ρ ein.
Die Dichte ist temperatur- und druckabhängig. Wird beispielsweise eine Flüssigkeit bei
konstanter Temperatur gehalten und ein Druck ausgeübt, so kann man eine Volumenände-
rung feststellen. In der Regel ist diese Volumenänderung bei Flüssigkeiten sehr gering, so
dass man hier eine nahezu konstante Dichte annehmen kann. In der Hydrodynamik wird
die Druckabhängigkeit der Dichte durch Gleichung (1) beschrieben. Bleibt der Dichteun-
terschied kleiner als 5% spricht man von inkompressiblen Medien [1].
ρ =ρ0
1− ∆pE
(1)
ρ: Dichte bei einem beliebigen Druck
ρ0: Dichte bei O◦C
E: Elastizitätsmodul
∆p: Druckdifferenz zum Umgebungsdruck
Betrachtet man Gase, die bei konstanter Temperatur unter Druck gesetzt werden, ist
in der Regel eine große Volumenänderung und damit auch eine Dichteänderung zu sehen.
Bei einer Dichteänderung von über 5% spricht man von kompressiblen Medien [1]. Der
Zusammenhang von Volumen und Druck wird durch Gleichung (2) beschrieben.
p1v1 = p2v2 (2)
4

p1: Druck 1
v1: spezifisches Volumen 1
p2: Druck 2
v2: spezifisches Volumen 2
Allerdings gilt obige Gleichung nur bei idealen Gasen unter konstanter Temperatur. In
der Aerodynamik ist die Mach-Zahl die Kenngröße, die zur Beschreibung der Kompressibi-
lität herangezogen wird.
1.1.1 Viskosität
Neben der Dichte ist auch die Viskosität eine Stoffeigenschaft, die in der Aerodynamik von
Bedeutung ist. Die Viskosität (oder auch Zähigkeit des Fluids) beschreibt die Eigenschaft
eines Stoffes, einer Verformung oder Zerteilung einen Reibungswiderstand entgegenzuset-
zen. So hat beispielsweise Luft eine geringere Viskosität als Wasser und dies wiederum eine
geringere Viskosität als Honig.
Um die Viskosität besser zu verstehen, stelle man sich folgenden Versuchsaufbau vor:
Ein Fluid befindet sich zwischen zwei ebenen Platten. Die untere Platte ist fest, wohin-
gegen sich die obere Platte mit einer konstanten Geschwindigkeit bewegt. Das Fluid wird
dazwischen geschert, wodurch die Viskosität einen Reibungswiderstand ausübt. Dadurch
entsteht zwischen der bewegten und der festen Platte ein Geschwindigkeitsprofil, welches
an der festen Platte gleich Null ist und an der bewegten Platte der Geschwindigkeit der
Platte entspricht [2].
Im Fall eines newtonschen Fluids oder Gases lässt sich die Viskosität auch durch Glei-
chung (3) beschreiben. Diese Definition beschreibt die Viskosität über eine Proportionalität
zwischen Schwergeschwindigkeit und Scherspannung.
τ = ηdv
dy(3)
5

τ : Schubspannung
η: dynamische Viskosität
v: Strömungsgeschwindigkeit
y: Abstand zur festen Platte (oder auch Höhe)
Zusätzlich ist zu beobachten, dass die Viskosität, temperatur- und druckabhängig ist. Hier-
bei ist zu beachten, dass die Temperatur einen deutlich größeren Einfluss hat als der Druck.
Besonders gilt für Gase, anders als bei Flüssigkeiten, dass die kinematische Viskosität mit
steigender Temperatur zunimmt.
1.1.2 Reynoldszahl
Die Reynoldszahl Re ist eine dimensionslose Kenngröße welche in der Aerodynamik eine
große Rolle spielt. Besonders im Unterschallbereich dient die Reynoldszahl als wesentliche
Strömungskennzahl. Sie drückt das Verhältnis zwischen Trägheits- und Reibungskräften
über die mittlere Geschwindigkeit des strömenden Mediums, einen Längenfaktor und die
kinematische Viskosität aus (siehe Gleichung (4)). Bei stumpfen Körpern, wie beispielsweise
Fahrzeugen, wird die Länge oder Breite des Körpers als Längenfaktor bei der Bildung der
Reynoldszahl herangezogen. Da auch die Viskosität Teil der Reynoldszahl ist, ist auch diese
temperatur- und druckabhängig [2].
Re =ρvl
ν(4)
ρ Dichte
v: Strömungsgeschwindigkeit
l: Längenfaktor (Breite des stumpfen Körpers)
ν: kinematische Viskosität
Die Reynoldszahl ist wichtig bei allen Strömungen, die von Dichte, Viskosität, Geschwindig-
keit und einem Längenfaktor beeinflusst werden, da sie auch die Turbulenz der Strömung
beschreibt. Bei einer einfachen geraden Rohrströmung kann man bei kleinen Reynoldszah-
len eine laminare Strömung beobachten, d.h. eine Strömung frei von Bewegungen normal
zur Hauptströmungsrichtung. Sobald die Reynoldszahl der Strömung über einen kritischen
Wert steigt (zum Beispiel durch eine Geschwindigkeitserhöhung) kann man Querbewegun-
6

gen in der Strömung beobachten; man spricht in diesem Fall von Turbulenz. [2]
Besonders beim Vergleich der Umströmung in Windkanalexperimenten mit der realen Kör-
perumströmung muss auf die Reynoldszahl geachtet werden. Ein Windkanal ist durch seine
Abmessungen und maximale Geschwindigkeit stark beschränkt. Will man die Umströmung
eines großen Körpers mit hohen Geschwindigkeiten (also bei hoher Reynoldszahl) in ei-
nem Windkanal nachempfinden, muss ein Kompromiss gefunden werden, da die gleiche
Reynoldszahl nur durch eine Verringerung der kinematischen Viskosität ν realisiert werden
kann. Da sich eine starke Veränderung der Viskosität in der Regel als sehr aufwendig erweist
(beispielsweise realisiert durch kyrogene oder Hochdruckwindkanäle), wird auf Annahmen
zurückgegriffen, die einen Vergleich erlauben. Oft nimmt man an, dass die Geometrie von
stumpfen Körpern Abrisskanten der Strömung klar definiert, so dass diese nicht mehr in
Abhängigkeit der Reynoldszahl stehen.
1.2 Grundlagen der Umströmung von Lastkraftwagen
Bei Fahrzeugen handelt es sich im Gegensatz zu stromlinienförmigen Körpern aus der Luft-
fahrt um stumpfe Körper. Entsprechend ist als Unterschied zu nennen, dass der aerodynami-
sche Widerstand maßgeblich nicht durch Reibungswiderstände sondern durch Druckwider-
stände bestimmt wird. Bei der Umströmung eines stumpfen Körpers ist es charakteristisch,
dass an der Front ein Strömungsaufstau stattfindet, ein Überdruckgebiet entsteht und die
Strömung nach außen abgelenkt wird [3].
Zusätzlich beschäftigt man sich bei der Fahrzeugaerodynamik mit dem Einfluss der beweg-
ten Fahrbahn und der Rotation der Räder auf das Strömungsfeld. Besonders interessant
sind die Einflüsse auf die Ablöse- und Wirbelgebiete und deren dreidimensionale turbulente
Strömungsstrukturen.
Strouhalzahl
Um eine Aussage über die Schwankungsbewegungen einer Strömung zu geben, nutzt man
die Strouhalzahl Sr. Sie beschreibt das Verhältnis der lokalen Beschleunigung und der
konvektiven Beschleunigung und ist stark von der Geometrie des umströmten Körpers und
der Reynoldszahlabhängig [2].
7

Sr =lf
v(5)
f : Frequenz der Wirbel
l: Breite des stumpfen Körpers
v: Strömungsgeschwindigkeit
Bei der Strouhalzahl ist der Wechsel von laminarer zu turbulenter Strömung von großem
Einfluss. Man unterscheidet zwischen einem unterkritischen, überkritischen und einem
transkritischen Umschlag, welcher oft bei Fahrzeuggeometrien vorherrscht. Der Strömungs-
umschlag findet im transkritischen Fall an der Stelle mit der größten Breite statt, so dass
eine Nachlauf mit gleicher Breite entsteht [3].
Bei stumpfen Körpern sind diese Effekte von kleiner Bedeutung, da die Ablösung geometrie-
bedingt an scharfen Kanten stattfindet. Jedoch kann ein stumpfer Körper die Ausbildung
von alternierenden Wirbeln im Nachlauf hervorrufen, woraus Schwingungen des Körpers
entstehen können, welche dann zu Bauteilversagen führen können.
1.2.1 Ablösung und Totwasser
Im Allgemeinen kann man zwei Arten von Ablösungen unterscheiden; die druckinduzierte
und die geometrieinduzierte Ablösung. Bei stumpfen Körpern, besonders Fahrzeugen, ist
oft letzteres vorzufinden. Dabei reißt die Strömung an scharfen Kanten ab und es bildet sich
ein Strömungsnachlauf aus (siehe Abbildung 1). Das körpernahe Nachlaufgebiet ist durch
ein Rückstromgebiet, auch Totwasser genannt, charakterisiert. Hier sind zwei gegensinnig
rotierende Wirbel typisch für Fahrzeuge, die das gesamte Gebiet des Totwassers definieren.
Es herrscht ein Unterdruck. Ab dem Punkt bei dem die mittlere Strömungsrichtung wieder
der Hauptströmungsrichtung entspricht, spricht man vom fernen Nachlauf [4].
Durch den Unterdruck im Totwasser und dem Überdruckgebiet an der Fahrzeugfront ent-
steht ein Druckwiderstand, der maßgeblich zum Gesamtwiderstand des Fahrzeugs beiträgt.
Entsprechend liegt in der Manipulation des Totwassergebiets großes Potential zur Optimie-
rung des aerodynamischen Widerstands eines Fahrzeugs.
8

Abbildung 1: Geometrieinduzierte Ablösung und Wirbel im Totwassergebiet
1.2.2 Unterbodenströmung bzw. Couette-Strömung
Eine klassische Couette-Strömung ist definiert als das zweidimensionale Strömungsfeld,
welches zwischen einer ruhenden und einer bewegten Wand entsteht. Es wird also die
Entwicklung einer Fluidgeschwindigkeit durch eine Schleppströmung der bewegten Wand
beschrieben. So kann die Unterbodenströmung eines Fahrzeugs vereinfacht als Couette-
Strömung angenommen werden. Erschwerend kommt hinzu, dass der Unterboden des Fahr-
zeugs selten glatt ist und die Bewegung in drei Dimensionen eine komplexere Strömung
hervorbringt. Damit kann kein kontinuierliches Anliegen der Strömung an der Wand voraus-
gesetzt werden, so dass sich die Strömung ablöst und weitere Rückströmgebiete entstehen
[2].
In dieser Arbeit werden verschiedene Konfigurationen ausgewertet. Unter diesen auch wel-
che ohne bewegte Fahrbahn. In diesen Fällen entspricht die Strömung zwischen Fahrbahn
und Fahrzeug weniger einer Couette-Strömung, sondern mehr einer Kanalströmung. Dieser
Unterschied und sein Einfluss werden im Folgenden diskutiert.
1.2.3 Gesamtwiderstand eines Fahrzeugs
Die Verluste eines Fahrzeugs setzen sich aus drei Bereichen zusammen [4]:
• Aerodynamische Verluste (ca. 60%)
durch Luftwiderstand verursacht, abhängig von der Strömungsgeschwindigkeit, der
angeströmten Fläche und der aerodynamischen Güte.
• Rollwiderstandsverluste (ca. 30%)
durch den Kontakt von Fahrbahn und Reifen
9

• Mechanische Verluste (ca. 10%)
Aufgrund des großen Einflusses betrachten wir besonders den Luftwiderstand eines Fahr-
zeugs. Um diesen klarer betrachten zu können, unterteilen wir diesen noch in den Druckwi-
derstand und den Reibungswiderstand. Letzterer beschreibt die Reibung der Strömung an
der Fahrzeugoberfläche, während der Druckwiderstand maßgeblich durch die Strömungs-
verdrängung definiert ist.
Die wichtigsten Kräfte, die ein Fahrzeug beeinflussen, sind die Rollwiderstandskraft (Glei-
chung (6)), die Auftriebskraft (Gleichung (7)) und die Luftwiderstandskraft (Gleichung
(8)) [3]. In der Realität ist auch die Seitenkraft nennenswert, doch hier vernachlässigbar,
da wir nur tangentiale Fahrzeugumströmungen betrachten.
FR = fRG (6)
FR Rollwiderstandskraft
fR: Rollwiderstandsbeiwert
G: Gewichtskraft
Die Gewichtskraft drückt das Fahrzeug senkrecht zum Boden und wirkt somit gerade ge-
gen die Auftriebskraft. Eine hohe Gewichtskraft führt zu schlechteren Bremseigenschaften,
jedoch verschlechtert eine niedrige Gewichtskraft (bzw. eine Erhöhung der Auftriebskraft)
deutlich die Fahrstabilität.
Es folgt die dimensionslose Darstellung der aerodynamischen Kräfte.
ca =FA
Aρ2vr2
(7)
cw =FWAρ
2vr2
(8)
10

ca: Auftriebsbeiwert
cw: Widerstandsbeiwert
FA: Auftriebskraft
FW : Widerstandskraft
A: angeströmte Fläche
ρ: Dichte
vr: Relativgeschwindigkeit der Luft um das Fahrzeug
Die beiden Gleichungen (7) und (8) sind Grundlage für viele Optimierungsvorgänge, da
man an ihnen ablesen kann, welche Parameter Potenzial zur Verbesserung tragen. Die
Fahrgeschwindigkeit wäre wegen des quadratischen Einflusses der beste Ansatzpunkt, je-
doch ist die Geschwindigkeit nur durch den Fahrer beeinflussbar. Die Dichte der Luft ist fest
und die Querschnittsfläche trägt wenig Potenzial, da eine verkleinerte Querschnittsfläche
die Transportkapazität von Fahrzeugen einschränkt [5].
So bleibt die Verbesserung des cw-Wertes durch Veränderung der Fahrzeuggeometrie. Hier-
bei werden scharfe Kanten abgerundet, oder die Front des Fahrzeuges verlängert. Dies führt
zu einer Abschwächung des Überdruckgebietes an der Fahrzeugfront oder des Unterdruck-
gebietes im Totwasser des Nachlaufs. Hierbei ist zu beachten, dass Abrundungen schon mit
kleinen Radien große Effekte haben, während große Radien nur noch geringes Potenzial
aufweisen [5].
Folgende Tabelle zeigt übliche cw Werte verschiedener Fahrzeuge.
Fahrzeugtyp cw-Wert-Bereich
Personenkraftwagen 0.2 - 0.4
Lastkraftwagen 0.5 - 0.9
Motorrad 0.4 - 0.7
1.3 Grundlagen numerischer Strömungssimulationen
Die numerische Strömungssimulation hat sich in der Luft- und Raumfahrt, sowie in der
Energietechnik und Automobilbranche etabliert. Dies ist auf die Tatsache zurückzuführen,
dass numerische Simulationen eine kostengünstige Alternative zu experimentellen Versu-
chen sind. Dies gilt besonders in Fällen die wegen Größenverhältnissen und Randbedin-
gungen an die Grenzen der experimentellen Realisierbarkeit stoßen. Dennoch muss für die
11

Bewertung der Genauigkeit der numerischen Simulationen eine Validierung über experi-
mentelle Messergebnisse stattfinden.
Als Grundlage der numerischen Strömungssimulationen dienen die Navier-Stokes-Gleichungen.
Eine direkte numerische Simulation (DNS) löst die Navier-Stokes-Gleichungen direkt, er-
fordert aber hohe Rechenleistung und Rechenkapazität. Grund dafür ist die Nichtlinearität
der Gleichungen für eine turbulente Strömung. Jede kleinste Turbulenz hat einen Einfluss
auf das Ergebnis. Da es viele Varianten zur Schreibweise der Navier-Stokes-Gleichungen
gibt, ist hier (Gleichung 9) eine übersichtliche Variante in Vektor-Notation angegeben.
ρ
(∂~v
∂t+(~v · ~∇
)~v
)= −~∇p+ η~∇2~v + ρ~g (9)
ρ: Dichte
~v: Geschwindigkeitsvektoren in x-,y-,z-Richtung
t: Zeitvariable~∇: Nabla-Operator
p: Druck
η: dynamische Viskosität
~g: Erdbeschleunigung
Es kommen gewissen Termen eine besondere Bedeutung zu. ∂~v∂t
steht für die lokale Be-
schleunigung,(~v · ~∇
)~v für die konvektive Beschleunigung, ~∇p für die Kraft durch den
Druckgradienten und ρ~g für die Volumenkräfte (beispielsweise Schwerkraft oder Zentrifu-
galkraft).
Nimmt man einen inkompressiblen Fall an, so lässt sich diese Navier-Stokes-Gleichung zu
der Impulsgleichung für reibungsfreie Fluide, oder auch Euler-Gleichung (10), vereinfachen.
Diese Annahme kann für unsere Zwecke getroffen werden, da LKW mit einer Maximalge-
schwindigkeit von 90kmh
eindeutig unterhalb einer Machzahl von 0.3 liegen.
∂~v
∂t+(~v · ~∇
)~v = −1
ρ~∇p+ ~g (10)
1.3.1 Reynoldsgemittelte Navier-Stokes-Gleichungen
Als Alternative zur DNS steht uns das Lösen der unstetigen Reynoldsgemittelten Navier-
Stokes-Gleichungen (URANS - Unsteady Reynolds Averaged Navier-Stokes-Equations) zur
12

Verfügung. Bei diesem Ansatz wird die Turbulenz nicht direkt gelöst, sondern empirisch
modelliert. Dadurch, dass die Turbulenzen nicht gelöst werden, verringert sich auch die
Rechenzeit und damit die Kosten der Simulation.
Bei URANS wird die Lösung in zwei Teile aufgeteilt; ein zeitlich gemitteltes Strömungs-
feld und eine ungeordnete, unregelmäßige Schwankungsbewegung. Damit besteht jede
Strömungsgröße, wie zum Beispiel die Geschwindigkeit u, aus einem zeitlich gemittelten
Wert und einer Schwankungsgröße. Durch diese Annahme lassen sich die Navier-Stokes-
Gleichungen vereinfachen, so dass ein Reynolds-Spannungstensor entsteht. Dieser Tensor
beschreibt die sogenannten Reynoldsspannungen, die an einer Fläche Kräfte senkrecht zur
Normalen ausüben [2].
Zieht man nun die Matrixschreibweise des Spannungstensors (11) heran, kann man erken-
nen, dass sich die Mittelwerte der Geschwindigkeitskomponenten einer turbulenten Strö-
mung gleich verhalten mit denen einer laminaren Strömung. Sie unterscheiden sich jedoch
bei der turbulenten Strömung durch zusätzliche Spannungen, weshalb diese auch unter
dem Begriff der turbulenten Scheinreibung bekannt sind.σ′xx τxy
′ τxz′
τxy′ σ′yy τyz
′
τxz′ τyz
′ σ′zz
= −ρ
u′u′ u′v′ u′w′
u′v′ v′v′ v′w′
u′w′ v′w′ w′w′
(11)
•′: Schwankungswert (Varianz)
•: Zeitlicher Mittelwert
σ, τ : Normalspannung, Schubspannung
u, v, w: Geschwindigkeiten in x-,y-,z-Richtung
Diese zusätzlichen Gleichungen können über Turbulenzmodelle beschrieben werden.
1.3.2 Turbulenzmodelle
Die Wahl des Turbulenzmodelles hat eine große Auswirkung auf die Genauigkeit der Lö-
sung der numerischen Simulation. Das Fehlerpotenzial ist groß, weil jedes Turbulenzmo-
dell mit physikalischen Randwerten bzw. Vereinfachungen verknüpft ist. Besonders ist der
Umschlagspunkt von laminarer zu turbulenter Strömung aufgrund des damit verbundenen
Druckanstiegs wichtig.
13

Man kann Turbulenzmodelle in verschiedene Gruppen einteilen.
Laminares Modell Reynoldsspannungen verschwinden,
ausschließlich für laminare Strömungen geeignet
Wirbelviskositätsmodelle Reynoldsspannungen werden durch
turbulente Viskosität oder Wirbelviskosität ersetzt
Reynolds-Spannungsmodelle Direkte Berechnung der Reynoldsspannungen
Wirbelsimulationsmodelle Keine Reynoldsmittelung, Lösen der vollständigen
Navier-Stokes-Gleichungen
Unter den einzelnen Gruppen von Turbulenzmodellen kann man auch weitere Untertei-
lungen vornehmen. Dennoch kann man im Allgemeinen sagen, dass das laminare Modell
mit einem geringen, die Wirbelviskositätsmodelle mit einem mittleren und die Reynolds-
Spannungsmodelle sowie die Wirbelsimulationsmodelle mit hohem bis sehr hohem Rechen-
aufwand verbunden sind.
Aufgrund des Verhältnisses zwischen Rechenaufwand und Genauigkeit der Lösung wollen
wir einen besonderen Blick auf die Wirbelviskositätsmodelle werfen. Man unterscheidet un-
ter diesen zwischen den Null-, Ein- und Zwei-Gleichungsmodellen. Wie Ihre Namensgebung
schon andeutet, bestimmen diese Modelle eine Lösung für den Transport von turbulenter
kinetischer Energie über eine bestimmte Menge an Differentialgleichungen. Die Industrie
setzt dabei meist auf die Zwei-Gleichungmodelle. Zu den bekanntesten gehören das k-ε-,
k-ω- und das Shear-Stress-Transport (SST) Modell. Hierbei steht k für die turbulente ki-
netische Energie, ε für die turbulente Dissipation und ω für die turbulente Frequenz.
Das k-ε-Modell liefert im Inneren eines Strömungsfeldes gute Ergebnisse, während das k-ω-
Modell in Wandnähe genaue Ergebnisse erzeugt. Durch das Kombinieren der Stärken dieser
beiden Modelle liefert das SST-Modell (oder auch SST-k-ω-Modell) genaue Ergebnisse in
Wandähe und auch im Inneren des Strömungsfeldes.
1.3.3 Volumengittergenerierung
Um die Strömungen innerhalb des Referenzvolumens simulieren zu können muss ein Volu-
mengitter vorhanden sein. Die Software STAR-CCM+ erlaubt uns zwischen unterschiedli-
chen Arten der Gittergenerierung auszuwählen.
14

Volumengitterarten
Die verschiedenen Volumengitterarten basieren auf unterschiedlichen geometrischen Grund-
figuren. Es werden hier nur die drei möglichen Volumengitterarten vorgestellt, die in der
benutzten Software zur Verfügung stehen.
Abbildung 2: Grobes Gitter aus Tetraedern mit lokaler Verfeinerung in der Mitte
Die Abbildung 2 zeigt ein Tetraeder-Gitter, welches eines der einfachsten Volumengitterar-
ten ist. Die Berechnung ist sehr günstig und das entstehende Volumengitter hat eine große
Zahl an Zellen. Jedoch neigt diese Herangehensweise zu Problemen, da eine geeignete Geo-
metrie gegeben sein muss. Das Tetraeder-Gitter neigt zu wenig Regelmäßigkeit und kann
besonders an Kanten oder Rundungen ungewünschte Artefakte oder Kanten hinterlassen
[7].
Das in Abbildung 3 sichtbare Polyeder-Gitter ist durchaus komplexer als ein Tetraeder-
Gitter, dennoch ist der Rechenaufwand im geringen bis mittleren Bereich. Bei der Be-
rechnung wird ein grobes Tetraeder-Gitter berechnet, welches dann als Grundlage für das
Polyeder-Gitter dient. Aufgrund dieser Tatsache ist auch dieses Verfahren fehleranfällig bei
ungeeigneten Geometrien [7].
15

Abbildung 3: Grobes Gitter aus Polyedern mit lokaler Verfeinerung in der Mitte
Ein Hexaeder-Gitter, wie in Abbildung 4 zu sehen, benötigt eine große Rechenleistung zur
Generierung. Die Erstellung basiert auf einem Marching Cubes-Algorithmus, wie man ihn
aus der Informatik kennt. In STAR-CCM+ wird das Volumengitter über einen Trimmer -
Algorithmus generiert. Die Eigenschaften der Hexaeder erlauben es diesem Algorithmus
auch bei schwierigen Geometrien gute Ergebnisse zu liefern. Dafür ist allerdings eine große
Menge an Zellen notwendig. Da dieser Algorithmus mit dem Ziel der Strömungssimulation
implementiert wurde, hat er diesbezüglich zusätzliche Eigenschaften. Unter anderem kann
der Algorithmus automatisch Gebiete erkennen, in welchen Strömungsphänomene erwartet
werden, und dort lokal das Gitter verfeinern [7].
Abbildung 4: Grobes Gitter aus Hexaedern mit lokaler Verfeinerung in der Mitte
16

Grenzschichtverfeinerung
Da in der Strömungsmechanik besonders das Grenzschichtverhalten von Interesse ist, muss
auch das Volumengitter entsprechend angepasst werden. Zu diesem Zweck wird in dieser
Arbeit die in STAR-CCM+ integrierte Prism Layer Mesh Funktion benutzt. Diese generiert,
wie in Abbildung 5 gezeigt, an gewünschten Oberflächen mehrere Zellschichten, deren
Größe, relative Dicke und Anzahl definiert werden kann.
Abbildung 5: Gitter aus Polyedern mit drei Prism Layer Mesh Zellschichten ander Ellipse in der Mitte.
17

2 Experimentelle Untersuchungen
Die Ergebnisse der simulierten Umströmung einer Sattelzugkonfiguration dieser wissen-
schaftlichen Arbeit sollen mit experimentellen Resultaten aus einem Windkanal- und einem
Fahrversuch verglichen werden. Diese Experimente wurden von der Gruppe Verkehr der Ab-
teilung Fluidsysteme des DLR durchgeführt. Dieses Kapitel beinhaltet eine Beschreibung
beider Versuche.
2.1 Windkanalversuch
Der Windkanalversuch wurde in der Seitenwindversuchsanlage Göttingen (SWG, rechts
in Abbildung 6) durchgeführt. Bei der Anlage handelt es sich um einen geschlossenen
Umlaufwindkanal Göttinger Bauart mit einer Antriebsleistung von 0, 5MW . Die maxi-
mal erreichbare Geschwindigkeit in der leeren Messstrecke beträgt 65ms. Die Messstrecke
hat eine Querschnittsfläche von 2, 4m x 1, 6m (Breite x Höhe) und eine Länge von 9m.
Das Sattelzugmodell wurde auf einer Bodenplatte (2, 6m Länge, 1, 2m Breite) installiert,
die einen Abstand von 200mm zum Windkanalboden hat, um einen Einfluss der Wind-
kanalgrenzschicht auf die Anströmung des Modelles zu verhindern. Die Geometrie des
verwendeten Sattelzugmodells (Abbildung 6, links) entspricht im Wesentlichen der des im
Fahrversuch verwendeten Fahrzeugs. Die Anströmung erfolgte tangential mit einer kon-
stanten Geschwindigkeit von 59ms, was einer Reynoldszahl von 650.000 in Bezug auf die
Modellbreite entspricht.
Abbildung 6: Links: Sattelzugmodell (1:15) auf der Grenzschichtplatte in derMessstrecke, Rechts: Seitenwindversuchsanlage Göttingen (SWG)
Zum Umfang der Untersuchungen gehörte die Messung der aerodynamischen Lasten mit-
tels eines in das Modell integrierten Kraftaufnehmers, die Messung des Basisdrucks am
Heck des Sattelaufliegers mittels instationärer Druckaufnehmer und die Messung des insta-
tionären Geschwindigkeitsfeldes mit Hilfe der laseroptischen Messmethode Particle Image
18

Velocimetry (PIV). Bei diesem Verfahren werden kleine Öltropfen in die Strömung gespeist
(hier: Di-Ethyl-Hexyl-Sebacat mit einem mittleren Durchmesser von 1µm). Durch die be-
sonders kleine Größe der Tropfen ist deren Einfluss auf die Strömung vernachlässigbar klein
und es kann davon ausgegangen werden, dass die Bewegung der Tropfen der Strömung
entspricht. Mit Hilfe eines gepulsten Lasers in Kombination mit einer entsprechenden An-
ordnung optischer Linsen werden ausgewählte Ebenen in der Strömung beleuchtet. Das
gestreute Licht der Öltröpfchen erzeugt Partikelbilder, welche mit hochauflösenden Ka-
meras gespeichert werden. Diese dienen der Berechnung des Geschwindigkeitsvektorfeldes
mittels aufwendiger Kreuzkorrelationsalgorithmen. Aus den Aufnahmen werden dann Vek-
torfelder erstellt. Detaillierte Informationen über die Messtechnik PIV können aus Raffel
[6] entnommen werden.
Im Gegensatz zum Fahrversuch wurde bei dem durchgeführten Windkanalexperiment weder
eine bewegte Fahrbahn noch die Rotation der Räder simuliert.
2.2 Fahrversuch
Ein Fahrversuch mit einer typischen europäischen Sattelzugkonfiguration mit einer 2-Achs-
Zugmaschine und einem 3-Achs-Auflieger wurde im Mai 2012 von der Gruppe Verkehr der
Abteilung Fluidsysteme des Instituts für Aerodynamik und Strömungstechnik durchgeführt.
Das gesamte Messequipment inklusive Versorgungs- und Steuerungssystemen wurde dabei
im Sattelauflieger mitgeführt. Mit Hilfe des laseroptischen Messverfahrens PIV wurde das
Geschwindigkeitsfeld in einer vertikalen Ebene hinter dem Sattelauflieger in der Fahrzeug-
mitte gemessen (Abbildung 7, links).
Abbildung 7: Links: Laser-Lichtschnitt in der vertikalen Fahrzeugmitte im Fahr-versuch, Rechts: Detailansicht der Fahrzeugrückseite mit modifizierter Rück-wand und installierten CCD-Kameras
Zusätzlich angebrachte Drucksensoren an einer modifizierten Aufliegerrückwand ermöglich-
ten die Messung der instationären Basisdruckverteilung (Abbildung 7, rechts). Die Mes-
19

sungen wurden unter anderem bei der für Sattelzüge typischen Reisegeschwindigkeit von
80kmh
durchgeführt. Dies entspricht einer Reynoldszahl von 3.500.000. Dieser Fahrversuch
lieferte Erkenntnisse über das reale Strömungsverhalten im nahen Nachlaufgebiet hinter
dem Sattelauflieger und die resultierende Basisdruckverteilung am Aufliegerheck.
20

3 Numerische Untersuchungen
Die numerischen Simulationen und die Volumengittergenerierung wurden mit dem Soft-
warepaket STAR-CCM+ (Version 7.04.006) durchgeführt. Die Modellgeometrie wurde mir
von Xhevahire Zani in Form von CAD-Daten zur Verfügung gestellt und entspricht der
Geometrie des Windkanalmodells. Dazu wurde das Fahrerhaus mit einem Lasersystem ver-
messen, in ein Flächenmodell konvertiert und anschließend mit der restlichen Geometrie
verbunden.
Dieses Kapitel beinhaltet eine Beschreibung der untersuchten Modellgeometrien, des er-
zeugten Berechnungsgitters sowie aller gesetzten Anfangs- und Randbedingungen und der
gewählten Konfigurationen des Gleichungslösers.
3.1 Modellgeometrie
Die Modellgeometrie entspricht der einer typischen europäischen Sattelzugkonfiguration.
Im Folgenden werden Einzelheiten der Geometrie im Detail betrachtet. Alle folgenden Maße
beziehen sich auf den Maßstab 1:1.
Der gesamte LKW hat grob die Maße 4, 2m× 16, 5m× 2, 5m (Höhe × Länge × Breite)
Fahrerhausgeometrie
Die Abmessungen der Fahrerhausgeometrie können Abbildung 8 entnommen werden.
Abbildung 8: CAD-Modell des verwendeten Fahrerhauses mit ungefähren Ab-messungen
21

Zwischen dem Fahrerhaus und dem Sattelauflieger ist ein Spalt mit einer Länge von bis zu
80cm. Zu der Geometrie gehören die Seitenspiegel, die in einer Höhe von 2, 1m angebracht
sind. Diese sind jeweils 75cm hoch, 24cm breit und 22cm seitlich vom Fahrerhaus entfernt.
Radgeometrie
Die insgesamt fünf Achsen mit je zwei Rädern entsprechen üblichen, im Strassenverkehr
genutzten LKW-Reifen. Jedes Rad (Abbildung 9) hat einen Radius von 54, 75cm und eine
Breite von 31, 5cm, bis auf die Räder der zweiten Achse der Sattelzugmaschine, welche
eine Breite von 63cm haben. Die Reifenachsen des Anhängers weisen je einen Abstand von
1, 35m auf.
Abbildung 9: CAD-Modell der drei Reifenachsen des Anhängers mit Abmessun-gen
Auffahrschutz
Der Auffahrschutz wird hier betrachtet, da dieser in vielen anderen Arbeiten vernachlässigt
wird, obwohl ein deutlicher Einfluss auf den Nachlauf zu erwarten ist. Da das Modell des
Windkanalversuchs eine andere Heckvariante als der LKW im 1:1 Maßstab hat, werden hier
nun beide Geometrien untersucht.
Der Auffahrschutz des Fahrversuches (Abbildung 10, links) ist zwar detaillierter, wird aber
in ihren wichtigsten Eigenschaften nachempfunden. Die äußeren Abmessungen entsprechen
einer Breite von 2, 5m (gleich der Fahrzeugbreite), einer Höhe von 30cm verbunden mit
dem Auflieger über zwei 40cm lange Streben. Beide Streben haben eine Dicke von 6cm
und sind in einem Abstand von 90cm voneinander angebracht. In der Realität wird der
22

Auffahrschutz zur Halterung von Lampen und Kennzeichen genutzt, wobei diese Details
bei dieser Untersuchung vernachlässigt werden.
Abbildung 10: CAD-Modelle der verwendeten Auffahrschutzgeometrie des si-mulierten Fahrversuches (links) und des Windkanalversuches (rechts)
Im Windkanalversuch wurde ein abweichender Auffahrschutz verwendet (Abbildung 10,
rechts). Dieser unterscheidet sich zur Heckgeometrie des Fahrversuches darin, dass er nicht
durch zwei Streben sondern durch eine geschlossene Platte mit dem Auflieger verbunden
ist.
3.2 Berechnungsgitter
Das Volumengitter, der Simulationen, wurde mit den STAR-CCM+ Funktionen Trimmer,
für die Erstellung des Oberflächen- und Volumengitters, und Prism Layer Mesh, für die
Erstellung der Grenzschichtgitter, generiert.
Das verwendete Referenzvolumen hat die Abmessungen 15m×66m×18m (Höhe × Länge
× Breite), wobei der Abstand zur Fahrzeugfront ungefähr 0, 7 und zum Fahrzeugheck un-
gefähr 2, 4 Fahrzeuglängen beträgt. Zu den Seiten beträgt der Abstand 3 Fahrzeugbreiten
und über dem LKW ist ein Abstand von ungefähr 2, 5 Fahrzeughöhen eingestellt.
Der LKW liegt nie genau auf der Fahrbahn, sondern schwebt 2mm (im Maßstab 1:15)
über dem Boden (wie im Windkanalversuch) oder wird 30mm (im Maßstab 1:1) in den
Boden versenkt, um den Fahrversuch möglichst genau zu reproduzieren.
Das strukturierte Volumengitter besteht aus ca. 32 Mio. Zellen, wobei die kleinsten Zellen
(im Maßstab 1:1) eine Zielzellenkantenlänge von 22, 5mm haben. Wie in Abbildung 11
zu sehen, befinden sich die kleinsten Zellen in der Nähe des LKW und dem näheren Teil
des Nachlaufs. Der vom LKW weiter entfernte Teil des Nachlaufs hat eine verdoppelte
Zielzellenkantenlänge von 45mm. Mit steigender Entfernung zum LKW verdoppelt sich
die Zielzellenkantenlänge immer weiter bis zur größten Zielzellenkantenlänge von 720mm.
23

Abbildung 11: Längsschnitte durch das Volumengitter in der Reifenmitte mitAngabe der Zellenkantenlängen
Am LKW und an der Fahrbahn wurden fünf Zellschichten erstellt, die eine genaue Simula-
tion der Grenzschicht ermöglichen sollen. Abbildung 12 zeigt, wie sich diese Zellschichten
an den Räder verhalten, wenn diese über der Fahrbahn schweben oder in die Fahrbahn
versenkt wurde. Es wurden fünf Prism Layer -Zellschichten mit einem Streckfaktor von 1, 2
und einer Gesamtdicke von 30mm (im Maßstab 1:1) definiert.
Abbildung 12: Längsschnitte durch das Volumengitter in der Reifenmitte: Linksmit 2mm (im Maßstab 1:15) versenkten Reifen, Rechts mit 30mm (im Maßstab1:1) schwebenden Reifen
Alle Werte für die Zielzellenkantenlängen und die Zahl der Zellschichten in Wandnähe wur-
den gewählt, um einen Kompromiss zwischen Genauigkeit und Rechenaufwand zu erhalten.
24

3.2.1 Volumengitterqualität
Zur Kontrolle der Qualität des benutzen Volumengitters ist zu sagen, dass es sich um ein
strukturiertes Gitter handelt und keine degenerierten Zellen vorkommen. Zusätzlich sind
99,99% aller Neigungswerte zwischen benachbarten Zellen unter 70◦ und der maximale
Neigungswert beträgt 89, 173◦.
Über diese Betrachtung hinaus wollen wir aber auch einen Blick auf die y+ Werte des
Volumengitters werfen. Abbildung 13 (oben) zeigt uns die y+ Werte der Konfiguration A,
welche durchschnittlich bei 30 liegen.
Abbildung 13: y+ Werte des Volumengitters auf dem Fahrzeug und der Fahr-bahn der Konfiguration A (oben) und Konfiguration B (unten)
Durch die Skalierung und Änderung der Strömungsgeschwindigkeit sind bei der Konfigura-
tion B, wie unten in Abbildung 13 zu sehen, deutlich höhere Werte vorhanden.
Bei der Benutzung des SST-k-ω-Turbulenzmodelles mit “All-y+”-Wand Modellierung liegen
die y+ beider Konfigurationen im optimalen (y+ ≈ 40) bis befriedigendem Bereich.
25

3.3 Randbedingungen und Konfigurationen
Im Folgenden werden die Randbedingungen der Simulationen aufgeführt. Folgende Werte
und Einstellungen wurden verwendet.
Fluid: Luft
Temperatur: 300K
Druck: 101325.0Pa
Dichte: 1.17659 kgm3
Viskosität: 1.85508 · 10−5Pa s
Einlass: Mass Flow Inlet
Auslass: Flow-Split Outlet
Fahrbahn: Wall, No-Slip
Seiten und Decke: Wall, Slip
Fahrzeug und Räder: Wall, No-Slip
Mit diesen Werten und Einstellungen werden zwei Konfigurationen genauer definiert.
Konfiguration A (Maßstab 1:15)
Konfiguration A entspricht dem Windkanalversuch bei einer Anströmgeschwindigkeit von
59msund einem passend dazu definierten Massenstrom am Einlass. Da wir im Windkanal
keine Reifenrotation oder Fahrbahntranslation haben, wird in dieser Konfiguration alles
statisch definiert. Die Reifen sind, wie auch im Windkanal, 2mm schwebend über der
Fahrbahn. Hierzu wurde auch das entsprechende Volumengitter verwendet.
Konfiguration B (Maßstab 1:1)
Konfiguration B stellt den Fahrversuch dar und ist deshalb mit einer Anströmgeschwindig-
keit von 22, 2̄ms(80km
h) und einem entsprechendem Massenstrom am Einlass eingestellt.
Zusätzlich wurde die Unterseite des Referenzvolumens als Fahrbahn definiert und mit einer
Translationsgeschwindigkeit entsprechend der Anströmgeschwindigkeit definiert. Passend
dazu werden die Räder und Reifenachsen um ihre jeweilige Rotationsachse mit 387, 59
Umdrehungen pro Minute eingestellt, was ebenfalls der Anströmgeschwindigkeit und damit
der simulierten Fahrgeschwindigkeit entspricht. In dieser Konfiguration sind die Räder 2mm
in den Boden versenkt. Dies wurde durch die Nutzung des entsprechenden Volumengitters
realisiert.
26

3.4 Konfiguration des Lösers
Die numerischen Untersuchungen wurden mit dem Softwarepaket STAR-CCM+ durch-
geführt und bestehen aus instationären Reynolds-gemittelte Navier-Stokes Simulationen.
Für die Turbulenzmodellierung wurde ein SST-k-ω-Turbulenzmodell verwendet. Bei diesem
handelt es sich um ein Wirbelviskositätsmodell, welches Turbulenzen sowohl in Wandnä-
he als auch in abgelösten Strömungsfeldern darstellen kann. Dies ist in unserem Fall eine
sinnvolle Wahl, da sowohl Grenzschichten am Fahrzeug als auch das Totwassergebiet des
Nachlaufs untersucht werden. Im Folgenden sind die verwendeten Programmeinstellungen
aufgeführt:
Raum: Dreidimensional
Zeit: Implizit Unstetig
Material: Gas
Strömung: Getrennte Strömung
Zustandsgleichung: Ideales Gas (kompressibel)
Energie: Getrennte Fluid Temperatur
Viskose Strömung: Turbulent
Reynoldsgemittelte Turbulenz: SST-k-ω-Turbulenz
mit All y+ Wand Modellierung
Durch die Auswahlen werden automatisch zusätzliche Modelle eingebunden oder weiter
definiert. Nennenswert ist, dass bei der Auswahl des k-ω-Turbulenz-Modells dieses als
SST-k-ω-Modell genauer definiert wird.
Es fällt auf, dass trotz des inkompressiblen Falls eine kompressible Lösung der Idealen
Gasgleichung gewählt wurde. Dies ist beabsichtigt, weil STAR-CCM+ mit dieser Konfi-
guration in der Regel eine bessere Konvergenz aufweist und somit unsere Berechnungen
weniger zeitaufwändig gestalten sollte.
Da ein impliziter Löser verwendet wird, muss auch der Zeitschritt und die Zahl der Iteration
pro Zeitschritt definiert werden. Folgende Werte wurden mit Beachtung von empfohlenen
Werten eingestellt:
27

Zeitschritt: 0.01s
Temporale Diskretizierung: 1. Ordnung
Innere Iterationen: 5
Unterrelaxationsfaktor Geschwindigkeit: 0, 5
Unterrelaxationsfaktor Druck: 0, 1
Unterrelaxationsfaktor Energie: 0, 9
Unterrelaxationsfaktor k-ω-Turbulenz: 0, 8
Konvektion k-ω-Turbulenz: 2. Ordnung Upwind
Mit diesen Einstellung wurde zunächst eine stetige Reynoldsgemittelte Navier-Stokes Glei-
chung gelöst, bis ein konvergiertes Strömungsfeld berechnet wurde. Für die Konfiguration
A wurden 1300 Iterationen und für die Konfiguration B 1800 Iterationen benötigt. Ausge-
hend von diesen Strömungsfeldern wurde die URANS Berechnung gestartet, welche eben-
falls bis zu einer konvergierten Lösung durchgeführt wurde. Diese finale Lösung wurde bei
der Konfiguration A nach 3 physikalischen Sekunden und bei der Konfiguration B nach 9
physikalischen Sekunden erreicht.
Zur Bestimmung der Konvergenz diente die Betrachtung der Residuen als auch der berech-
neten Kraftbeiwerte.
Nachdem die numerische Simulation ausgiebig beschrieben wurde, wenden wir uns an die
Ergebnisse und deren Auswertung.
28

4 Ergebnisse der Numerischen Simulationen
Die im Folgenden vorgestellten Ergebnisse sind im Rahmen dieser Arbeit mit dem Softwa-
repaket STAR-CCM+ (Version 7.04.006) berechnet worden.
Im Rahmen dieser Arbeit wurden zwei verschiedene Konfigurationen untersucht: Konfigu-
ration A, die Simulation des Windkanalversuches im SWG, und Konfiguration B, die Simu-
lation des durchgeführten Fahrversuches. Wir werden in beiden Fällen Geschwindigkeits-,
Vortizitäts- und Druckfelder betrachten. Darüberhinaus werden der Widerstandbeiwert so-
wie die Visualisierung ausgewählter Strömungsregionen mit Hilfe von Stromlinienbildern
für eine nähere Untersuchung genutzt.
Zur Nachvollziehbarkeit zeigt Abbildung 14 alle Schnittebenen, die im weiteren Verlauf
betrachtet werden:
Die angegebenen Maße beziehen sich auf den Maßstab 1:1.
H1 Horizontale Ebene in Höhe der Reifenachsen (0, 5m Höhe)
H2 Horizontale Ebene in Höhe der Seitenspiegel (2, 5m Höhe)
V1 Vertikale Ebene in der Fahrzeugmitte
V2 Vertikale Ebene in der Symmetrieebene der Reifenmitte (1, 05m von der Fahrzeugmitte)
V3 Vertikale Ebene mittig des linken Seitenspiegels (1, 425m von der Fahrzeugmitte)
Abbildung 14: Definierte Schnittebenen am LKW
Um die Ergebnisse der Simulation sinnvoll zu betrachten, werden wir uns zuerst der mitt-
leren Geschwindigkeitsverteilung um den LKW widmen. Daran anschließend folgt eine Be-
trachtung der turbulenten Strömungsstrukturen im Strömungsfeld und zuletzt das Verhal-
ten des Druckes sowie des Widerstandsbeiwertes.
29

Es ist zu beachten, dass alle folgenden Abbildungen, zur verbesserten Darstellung von De-
tails, nicht das gesamte Referenzvolumen zeigen. Es handelt sich jeweils nur um einzelne
Ausschnitte.
4.1 Konfiguration A (Maßstab 1:15)
Die Strömung fließt in y-Richtung (von links nach rechts) mit einer Anströmgeschwindigkeit
von 59ms. Die Bilder sind Momentaufnahmen bei 2, 9s simulierter Zeit.
Untersuchung des Geschwindigkeitsfeldes
Die folgenden Abbildungen zeigen, dass die Simulationen das allgemeine Strömungsverhal-
ten um einen Sattelzug gut beschreiben. Anhand von Abbildung 15 kann man sehen, dass
das Strömungsfeld nicht durch die offenen Seiten des Referenzvolumens beeinflusst wird
und sich die Geschwindigkeitswerte in einem plausiblen Bereich befinden.
Abbildung 15: Konturplot der Geschwindigkeitsmagnitude von Konfiguration Ain den Ebenen H2 (oben) und V1 (unten) in m
s
30

An der Fahrzeugfront erfolgt ein Strömungsaufstau und eine Ablenkung der Strömung um
das Fahrerhaus. Dadurch erfolgt eine Beschleunigung der Strömung und teilweise Strö-
mungsablösung. Der Bereich zwischen Fahrerhaus und Sattelauflieger ist durch ein Ablö-
segebiet charakterisiert, wobei sich die Strömung an Ober- und Seitenwänden des Sattel-
aufliegers wieder anlegt und wiederum am Ende des Aufliegers ablöst. Diese Ablösung am
Heck des Fahrzeuges ist Teil des Totwassergebietes, welches sich hinter dem LKW zusam-
menschürt. Die Länge des Nachlaufs entspricht in etwa der Hälfte der Fahrzeuglänge; das
Totwassergebiet hat eine Länge von etwa einem Viertel der Fahrzeuglänge.
Zwischen Fahrzeug und Fahrbahn entsteht ein Gebiet mit deutlich reduzierten Strömungs-
geschwindigkeiten, das zu Beginn (unter dem Fahrerhaus) noch mit hoher Geschwindigkeit
durchströmt wird.
Um einen besseren Eindruck vom Totwassergebiet zu erhalten, betrachten wir im Fol-
genden eine Detailansicht des Fahrzeugnachlaufs. Zunächst widmen wir uns den vertikalen
Ebenenansichten.
Abbildung 16 zeigt, dass die Strömung unter dem Fahrzeug hindurch führt und dann hinter
dem Auflieger rückströmend zur oberen Kante des Hecks geleitet wird. Daraufhin geht das
Fluid entweder in die Strömung oberhalb des Totwassergebiets über oder strömt das Heck
des Aufliegers entlang wieder nach unten. Dieser Rezirkulationswirbel ist charakteristisch
für das Totwassergebiet einer Sattelzugkonfiguration.
Abbildung 16: Konturplot der Geschwindigkeitsmagnitude und des Geschwin-digkeitsvektorfeldes von Konfiguration A bei t = 2, 9s in der Ebene V1 in m
s
31

Weitere Wirbel, die ebenfalls Rückströmung aufweisen, scheinen weiter vom Heck entfernt
in Fahrbahnnähe beobachtbar zu sein. Die beiden dunkelblauen Stellen in Fahrbahnnähe
in Abbildung 16 stellen deren Mittelpunkte dar. Diese entstehen, da das Fluid, das unter
dem Fahrzeug durchströmt, im nahen Nachlauf über die gesamte Fahrzeughöhe aufwärts
und erst hinter dem Totwassergebiet wieder abwärts zur Fahrbahn strömt.
Hinter dem Totwassergebietes ist zu sehen, dass die Strömung leicht an Geschwindigkeit
zunimmt und keine Rückstörmung mehr aufweist.
Abbildung 17 zeigt eine vertikale Schnittebene am Rand des Fahrzeugs (durch die Rei-
fenmitte). Betrachtet man hier das Totwassergebiet im Nachlauf, ist zu erkennen, dass
Rückströmungen nur noch in sehr geringem Maß vorkommen und auch keine Aufwärtsströ-
mung vorhanden ist. Aufgrund der niedrigen Geschwindigkeiten und der leichten Rückströ-
mung kann man davon ausgehen, dass hier eine weitere Begrenzung des Totwassergebietes
liegt.
Zusätzlich ist zu beobachten, dass das Totwassergebiet mit größerer Distanz zur Fahrzeug-
mitte deutlich an Länge verloren hat. Passend dazu, sind schon nach kurzer Distanz hohe
Geschwindigkeiten im Nachlauf zu beobachten (hier gelbgrün auf Höhe das Aufliegers).
Aufgrund der Geometrie des Hecks (insbesondere des Auffahrschutzes) hat sich das Tot-
wassergebiet in Bodennähe stark aufgelöst, da hier das Fluid nicht erst an der Unterkante
des Auffahrschutzes ablöst, sondern schon direkt am Auflieger. Es ist auch zu erkennen,
dass auch in dieser Schnittebene hinter dem Auffahrschutz noch Rückströmung stattfindet.
Abbildung 17: Konturplot der Geschwindigkeitsmagnitude und des Geschwin-digkeitsvektorfeldes von Konfiguration A bei t = 2, 9s in der Ebene V2 in m
s
32

Am hinteren Reifen ist auch ein kleines Rückströmgebiet zu erkennen. Hier strömt die Luft
am Reifen abwärts zur Fahrbahn und nimmt Geschwindigkeiten von ungefähr 1% der An-
strömgeschwindigkeit an.
Nun wollen wir die Nachlaufcharakteristik in der horizontalen Ebenen betrachten. Abbil-
dung 18 zeigt uns die Geschwindigkeiten auf Höhe der Reifenachsen. Es ist zu beobachten,
dass sich das Totwassergebiet auch auf diese Ebene erstreckt, da hinter dem Fahrzeugheck
Rückströmung stattfindet.
Da hier nur ein einzelner Zeitschritt eines instationären Systems beobachtet wird, ist keine
Symmetrie an der Fahrzeugmitte zu erwarten. Entsprechend sind zwei entgegengesetzte
Wirbel zu sehen, wie man sie bei einer Karmanschen Wirbelstrasse sehen würde. Nah am
Fahrzeugheck ist ein Wirbel mit negativer Wirbelstärke zu beobachten, der zum Rand
des Nachlaufs entgegen der x-Richtung positioniert ist. Im weiterentfernten Bereich des
Nachlaufs kann ein Wirbel entgegengesetzter Vortizität beobachtet werden.
Abbildung 18: Konturplot der Geschwindigkeitsmagnitude und des Geschwin-digkeitsvektorfeldes von Konfiguration A bei t = 2, 9s in der Ebene H1 in m
s
Anhand von Abbildung 19 betrachten wir einen höher gelegenen Schnitt durch den Nach-
lauf. Hier ist deutlich die Rückströmung des Rezirkulationswirbels in der Fahrzeugmitte zu
beobachten. Darüberhinaus scheinen in dieser Ebene zwei entgegengesetzt drehende Wirbel
das Fluid zu den Seiten rückströmen zu lassen.
Anders als in der Ebene H1, ist hier das instationäre Verhalten des Strömungsfeldes nur
schwach zu erkennen; das entfernte spitz zulaufende Ende des Totwassergebietes ist leicht
entgegen der x-Richtung geneigt. Ebenso ist zu sehen, dass das Totwassergebiet an einer
33

Seite des Nachlaufes weniger an Breite verliert als auf der anderen Seite. Die Form des
Totwassergebiets ist grob als parabelförmig zu beschreiben, obwohl es am Scheitelpunkt
spitz zuläuft.
Abbildung 19: Konturplot der Geschwindigkeitsmagnitude und des Geschwin-digkeitsvektorfeldes von Konfiguration A bei t = 2, 9s in der Ebene H2 in m
s
Um einen besseren Blick auf die Eigenschaften der Strömung zu erhalten, betrachten wir
nun ausgewählte Stromlinien.
Abbildung 20: Ausgewählte Stromlinien mit Geschwindigkeitsmagnitude derKonfiguration A bei t = 2, 9s im Totwassergebiet am Heck des LKW
Abbildung 20 zeigt eine ausgewählte Zahl von Stromlinien, die das Totwassergebiet des
LKW darstellen. Es ist zu erkennen, wie Stromlinien unter dem LKW hervorkommen, hin-
ter dem LKW mit einer Bewegung nach oben zur Fahrzeugmitte zurückströmen und dann
34

am Heck des LKW entlang wieder seitlich nach unten führen und abschließend das Tot-
wassergebiet verlassen. Vereinzelt sind auch Stromlinien zu erkennen, die durch den Rezir-
kulationswirbel aufwärts strömen und am oberen Ende des Totwassergebiets in die Umge-
bungsströmung übergehen, anstatt wieder abwärts am Fahrzeugheck entlang zu strömen.
Die Stromlinienvisualisierungen zeigen, dass der Großteil des Totwassergebietes durch Fluid-
material aus dem Aufliegerunterboden gebildet wird und nur aus einem geringen Teil von
den Seiten oder oberhalb des Fahrzeugs.
Eine bessere Beschreibung über den Einfluss der Räder auf den Nachlauf des LKW gibt
uns Abbildung 21. Dargestellt sind ausgewählte Stromlinien, die nah an den Reifen der
hinteren Reifenachsen vorbeiströmen und zeigen, dass in Fahrbahnnähe hinter dem Reifen
ein kleines Rückströmgebiet vorhanden ist.
Hinter dem Reifen führen alle Stromlinien abwärts zur Fahrbahn. Dort strömt das Fluid
in den Nachlauf des Fahrzeugs mit einer sich vom Fahrzeug entfernenden Bewegung. Die
Stromlinien die außen am Reifen vorbei führen, weisen hinter dem Rad in Fahrbahnnähe
starke Verwirbelungen auf, die (in y-Richtung betrachtet) negative Wirbelstärke aufweisen.
Die gleichen Stromlinien, die stattdessen am oberen Rand des Rades vorbeiströmen, er-
halten hinter dem Rad eine entgegengesetzte Rotation. Eine detaillierte Beschreibung der
Radumströmung um ein Fahrzeug anhand experimenteller und/oder numerischer Untersu-
chungen kann [8] und [9] entnommen werden.
Abbildung 21: Ausgewählte Stromlinien mit Geschwindigkeitsmagnitude derKonfiguration A bei t = 2, 9s an den Reifen der hinteren Reifenachsen desLKW
35

Betrachtung der Vortizität
Nach der Betrachtung der Geschwindigkeiten wollen wir einen besseren Eindruck über die
Turbulenzen erhalten. Dazu betrachten wir die Vortizität in den zwei vertikalen Ebenen.
Anhand von Abbildung 22 ist zu sehen, dass sowohl unterhalb als auch oberhalb des Fahrer-
hauses die Wirbelstärke der Strömung besonders hoch ist. Ebenso sind an der Kontur des
Totwassergebietes, hohe Wirbelstärken zu beobachten, die durch stark turbulenten Strö-
mungsstrukturen im Totwassergebiet hervorgerufen werden. In diesem Bereich scheinen
besonders an der oberen Scherschicht und dem fahrbahnnahen Teil des Totwassergebietes
starke Verwirbelungen vorhanden zu sein.
Abbildung 22: Konturplot der Vortizitätsmagnitude von Konfiguration A beit = 2, 9s in der Ebene V1 in 1
s
Mit Hilfe von Abbildung 23 bestätigt sich, dass die Geometrie des Fahrerhauses starke
Verwirbelungen an der Fahrzeugseite verursacht.
Abbildung 23: Konturplot der Vortizitätsmagnitude von Konfiguration A beit = 2, 9s in der Ebene V3 in 1
s
Für diese Arbeit ist jedoch das Verhalten in Fahrbahnnähe und im Nachlauf besonders inter-
essant, da diese Strömungsbereiche ein bisher noch weitestgehend ungenutztes Potential
zur Reduzierung des aerodynamischen Widerstands innehaben und die Ergebnisse dieser
36

Arbeit, als Grundlage für weiterführende Untersuchungen dienen. An diesen Stellen ist zu
erkennen, dass alle Räder starke Verwirbelungen hervorrufen und dass dies auch deutliche
Auswirkungen auf den Nachlaufs in Fahrbahnnähe zu haben scheinen.
Auswertung des Druckbeiwertes
Anhand von Abbildung 24 erhalten wir einen Eindruck über den auftretenden Druckun-
terschied, welcher maßgeblich den aerodynamischen Druckwiderstand eines Sattelzugs be-
stimmt. Der Druck an der Fahrzeugfront wird durch den Staudruck beschrieben und nimmt
Werte im Bereich von ungefähr 2200Pa an. Der berechnete Staudruck beträgt bei der si-
mulierten Anströmgeschwindigkeit von 59msund einer Dichte von 1.17659 kg
m3 2047Pa. Am
Heck ist ein Unterdruck im Totwassergebiet von etwa −400Pa abzulesen. Die Differenz
vom Druck zwischen der Fahrzeugfront und dem Heck beträgt somit in etwa 2600Pa. Bei
genauerer Betrachtung des Nachlaufes ist erkennbar, dass im Bereich des Totwassergebiets
ein deutlicher Unterdruck auftritt, während im fernen Nachlauf wieder der Normal- bzw.
leichter Überdruck herrscht.
Es fällt zusätzlich auf, dass an der oberen und unteren Kante der Fahrzeugfront starker
Unterdruck herrscht, welcher mit den hohen Geschwindigkeiten an den gleichen Stellen
korreliert. Passend herrscht unter dem ganzen Fahrerhaus ebenso ein Unterdruck. Dieses
löst sich aber schon nach der zweiten Reifenachse wieder auf und nimmt Werte im Bereich
des Umgebungsdrucks an.
Abbildung 24: Druckdifferenz in Bezug auf den Referenzdruck in Pa der Kon-figuration A bei t = 2, 9s in der Ebene V1
Für die Betrachtung des aerodynamischen Gesamtwiderstands des Fahrzeugs wurde der
Widerstandsbeiwert nach Gleichung 12 berechnet. Über zehn instationäre Zeitschritte (von
37

t0 = 2, 1s bis t9 = 3, 0s) gemittelt, folgt der Widerstandsbeiwert:
cw,A =FWAρ
2vr2
= 0, 619 (12)
Für die Dichte ρ wurde der Wert 1, 17659 kgm3 und als Referenzfläche die projezierte Stirn-
fläche des LKW A = 0, 0445m2 eingesetzt.
Instationäres Verhalten
Aufgrund der deutlichen Änderungen des Strömunsgfeldes und insbesondere des Nachlau-
fes, wird im Folgenden das instationäre Verhalten dieser Konfiguration betrachtet.
Anhand von Abbildung 25 ist zu erkennen, dass das offene Ende des Totwassergebiets
im Nachlauf um etwa eine halbe Fahrzeugbreite schwingt. Ebenso ist zu sehen, dass sich
mit derselben Frequenz ein Gebiet mit erhöhter Geschwindigkeit an der Fahrzeugseite (in
gelb-grün) von einer Seite des Fahrzeuges zur anderen und zurück verlagert. Daraus ist zu
schließen, dass sich “Vortex Shedding“ hinter dem Fahrzeug bildet.
Abbildung 25: Konturplots der Geschwindigkeitsmagnitude von KonfigurationA bei zehn Zeitschritten in einem Abstand von ∆t = 0, 1s in der Ebene H2
38

4.2 Konfiguration B (Maßstab 1:1)
Dieses Kapitel beschreibt die Ergebnisse der Simulation eines Sattelzuges im Orignialmaß-
stab bei Geradeausfahrt und einer typischen Fahrzeuggeschwindigkeit von 22.2̄ms(80km
h).
Für die realistische Beschreibung der Umströmung des Sattelzugs, wurden die Simulationen
mit einer bewegten Fahrbahn und rotierenden Rädern durchgeführt. Die Strömung fließt in
y-Richtung (von links nach rechts). Die hier gezeigten Abbildungen sind Momentaufnahmen
bei einer Simulationszeit von 9, 2s.
Untersuchung des Geschwindigkeitsfeldes
Anhand von Abbildung 26 ist zu erkennen, dass die Simulation das Strömungsfeld gut
darstellt und plausible Geschwindigkeitswerte zeigt. Ebenso zeigt sich, dass das Refrenzvo-
lumen eine ausreichende Größe besitzt und die Umströmung des Sattelzuges nicht beein-
flusst.
Abbildung 26: Konturplot der Geschwindigkeitsmagnitude von Konfiguration Bbei t = 9, 2s in den Ebenen H2 (oben) und V1 (unten) in m
s
Es ist desweiteren zu erkennen, dass in Übereinstimmung zu den Ergebnissen von Konfigu-
39

ration A an der Fahrzeugfront ein Strömungsaufstau stattfindet, der zur Beschleunigung
und stellenweise Ablösung der Strömung führt. Die Strömung löst unter dem Fahrerhaus,
am Zwischenraum von Fahrerhaus und Auflieger und am Ende des Aufliegers ab. Mit der
Ablösung am Heck des Fahrzeuges beginnt der Nachlauf, der eine Gesamtlänge von et-
wa der halben Fahrzeuglänge aufweist. Die Länge des Totwassergebietes entspricht in der
betrachteten H2 Ebene etwa einem Drittel der Fahrzeuglänge und ist damit stärker aus-
geprägt, als bei der Simulation des Windkanalversuches mit ungefähr einem Viertel der
Fahrzeuglänge. Es ist zu vermuten, dass dies unter anderem der Einfluss des bewegten
Unterbodens ist. Die Höhe des Nachlauf des Sattelzuges nimmt deutlich mit steigender
Entfernung zum Fahrzeugheck ab.
Eine genauere Betrachtung des instationären Nachlaufs anhand von Abbildung 27 zeigt
uns, dass mehrere Rezirkulationswirbel das Totwassergebiet beschreiben. Am deutlichsten
ist der Wirbel an der unteren Hälfte des Aufliegers zu erkennen. Dieser Wirbel mit positiver
Wirbelstärke führt das Fluid unter dem Fahrzeug hervor.
Oberhalb von diesem Wirbel ist ein weiterer Rezirkulationswirbel, der eine negative Wir-
belstärke aufweist. Dieser Wirbel nimmt den oberen Teil des Totwassergebietes ein und
ersteckt sich über dessen gesamte Länge. Nach der Ablösung an der oberen Kante des
Aufliegerhecks strömt das Fluid teilweise abwärts in das Totwassergebiet, dann rückströ-
mend, leicht aufwärts gerichtet, zum Heck des Fahrzeugs und schließlich wieder in die
Umgebungsströmung.
Abbildung 27: Konturplot der Geschwindigkeitsmagnitude und des Geschwin-digkeitsvektorfeldes von Konfiguration B bei t = 9, 2s in der Ebene V1 in m
s
40

Vor dem Auffahrschutz kommt es zum Strömungsaufstau, die Strömung löst an den Vor-
derkanten ab und es bildet sich ein Strömungsnachlauf aus.
Es fällt auf, dass die Strömung, die das Totwassergebiet verlässt, besonders in Fahrbahn-
nähe eine höhere Geschwindigkeit aufweist. Dies ist auf die Fahrbahntranslation zurückzu-
führen, die weitere Rezirkulationswirbel in Fahrbahnnähe verhindert.
In Abbildung 27 ist darüberhinaus noch eine Quelle (im dunkelblauen Punkt) am unteren,
hinteren Ende des Totwassergebietes zu erkennen. Dies zeigt deutlich, dass an dieser Stelle
die Strömung orthogonal zur betrachteten Ebene gerichtet ist. Dies weist auf stark dreidi-
mensionale Strömungstrukturen im Nachlauf dieser Konfiguration hin, die in dieser Form
bei der Unterschung von Konfiguration A so nicht beobachtet wurden.
Mit der Betrachtung von Abbildung 28 wird klar, dass sich alle drei genannten Rezir-
kulationswirbel auch seitlich bis zum Fahrzeugrand erstrecken, jedoch deutlich an Länge
verlieren. Die Länge des Totwassergebietes ist hier auf ein Drittel der maximalen Länge
gefallen.
Abbildung 28: Konturplot der Geschwindigkeitsmagnitude und des Geschwin-digkeitsvektorfeldes von Konfiguration B bei t = 9, 2s in der Ebene V2 in m
s
In mittlerer Höhe hinter dem Fahrzeugheck ist auch in dieser Ebene eine Quelle zu beob-
achten, die sich durch die Rezirkulation aus der Fahrzeugmitte zum seitlichen Fahrzeugrand
erklären lässt. Dies zeigt klar, dass hier das Fluid das Totwassergebiet seitlich verlässt.
Am hinteren Reifen ist in dieser Ebene eine weitere Rückströmung zu erkennen, die nicht
nur in Fahrbahnnähe abwärts gerichtet ist, sondern an der oberen Hälfte des Reifen auch
mit der Reifenrotation aufwärts strömt. Dies stellt einen deutlichen Unterschied zu Kon-
41

figuration A dar, bei welcher eine ausschließlich abwärts gerichtete Strömung hinter dem
Reifen beobachtet wurden.
Im Folgenden betrachten wir den Nachlauf des Sattelzuges in den horizontalen Ebenen.
Abbildung 29 zeigt, deutlich die Rückströmung hinter den Reifen und dem Auffahrschutz.
Im Vergleich zu Konfiguration A sieht der Nachlauf in dieser Ebene sehr ähnlich aus.
Sie unterscheiden sich dadurch, dass in dieser Konfiguration weniger Rückströmung zu
beobachten ist, da sich das Totwassergebiet vermutlich aufgrund der abweichenden Heck-
geometrie und der Fahrbahntranslation weniger tief zur Fahrbahn erstreckt.
Desweiteren sind im Nachlauf auch deutlich Bewegungen des Fluids zu den Seiten zu beob-
achten. Dies ist auf das “Vortex Shedding“, das auch schon in Konfiguration A beobachtet
wurde, zurückzuführen.
Abbildung 29: Konturplot der Geschwindigkeitsmagnitude und des Geschwin-digkeitsvektorfeldes von Konfiguration B bei t = 9, 2s in der Ebene H1 in m
s
Mit Hilfe von Abbildung 30 erhalten wir einen besseren Eindruck über den höchstgelegenen
Rezirkulationswirbel des Totwassergebietes. Es wird deutlich, dass das Totwassergebiet, wie
auch schon in Konfiguration A, nicht nur aus Wirbeln in der vertikalen Ebene besteht. Of-
fensichtlich weist es auch Wirbel in der horizontalen Ebene auf. Es scheinen zwei Wirbel
(möglicherweise zwei Enden eines hufeisenförmigen Wirbels) das Fluid in der Fahrzeugmitte
rückströmen zu lassen und an den Seiten des Totwassergebietes in die Umgebungsströmung
zu führen. Im Weiteren weist, im Vergleich zu Konfiguration A, das Totwassergebiet hier
eine deutlich längere und breitere Kontur auf. Die Kontur läuft auch nicht spitz zu, sondern
neigt zu einer Parabelform.
42

Genauer sehen wir, dass das Ende des Wirbels an der Seite in x-Richtung weiter vom
Fahrzeugheck entfernt ist, als das gegenüberliegende Wirbelende. Dies passt zu den Er-
kenntnissen des instationären Verhaltens, aus den Betrachtungen in der Ebene H1.
Abbildung 30: Konturplot der Geschwindigkeitsmagnitude und des Geschwin-digkeitsvektorfeldes von Konfiguration B bei t = 9, 2s in der Ebene H2 in m
s
Bei Betrachtung von Abbildung 31 wird die Größenordnung der mittleren Rezirkulations-
wirbel im Nachlauf deutlich.
Abbildung 31: Ausgewählte Stromlinien mit Geschwindigkeitsmagnitude derKonfiguration B bei t = 9, 2s im Totwassergebiet am Heck des LKW
Alle gezeigten Stromlinien führen unter dem Fahrzeug entlang und werden am Auffahr-
schutz verwirbelt oder strömen am Auffahrschutz vorbei und bilden das Totwassergebiet
am Aufliegerheck. Dort führen die Stromlinien in einen der beiden Rezirkulationswirbel. Es
43

ist zu beobachten, dass viele der gezeigten Stromlinien zuerst durch den unteren Wirbel
führen und später durch den oberen Wirbel strömen und schließlich das Totwassergebiet
verlassen. Es ist aber auch zu erkennen, dass das Fluid auch seitlich das Totwassergebiet
verlässt. Diese Ergebnisse stehen in starkem Kontrast zu den Resultaten des simulierten
Windkanalversuches (Abbildung 20). Der zweite ober Wirbel ist im Fall des simulierten
Fahrversuchs deutlich stärker ausgeprägt.
Abbildung 32 verdeutlicht die Umströmung um das hintere Rad des Aufliegers. Die Rei-
fenrotation induziert eine aufwärtsgerichtete Strömungskomponente. Darüberhinaus ist zu
sehen, dass die Stromlinien an der äußeren Seite des Reifens wenig beeinflusst werden und
direkt weiter in den Nachlauf strömen. Allgemein fällt auf, dass das Fluid, im Gegensatz
zu Konfiguration A, keine Abwärtsströmung zur Fahrbahn aufweist und stattdessen sogar
leicht zur Fahrzeugmitte geleitet wird, bevor es den Nachlauf hinter dem Auflieger erreicht.
Abbildung 32: Ausgewählte Stromlinien mit Geschwindigkeitsmagnitude derKonfiguration B bei t = 9, 2s an den Reifen der hinteren Reifenachsen desLKW
Betrachtung der Vortizität
Um nun einen besseren Eindruck über die Turbulenzen zu erhalten, betrachten wir dir Vor-
tiztät in ausgewählten Ebenen.
Abbildung 33 zeigt uns, dass die Wirbelstärken unter dem Fahrerhaus sehr ähnlich zur
Konfiguration A sind, sich im Nachlauf jedoch eindeutig unterschieden. Es ist zu sehen,
dass zwar auch hier hohe Wirbelstärken in der Schwerschicht am oberen Totwassergebiets-
44

rand auftreten, doch in Fahrbahnnähe sind hier nur schwache Verwirbelungen auszumachen.
Diese Vortizitäten entstehen nur durch die Geometrie des Auffahrschutzes und lösen sich
bis zum fernen Nachlauf der Sattelzugkonfiguration auch wieder auf.
Abbildung 33: Konturplot der Vortizitätsmagnitude von Konfiguration B beit = 9, 2s in der Ebene V1 in 1
s
Mit Hilfe von Abbildung 34 wird klar, dass auch bei dieser Konfiguration hohe Wirbelstär-
ken an den vorderen beiden Reifenachsen zu beobachten sind.
Darüberhinaus scheinen in Fahrbahnnähe aber keine weiteren hohen Wirbelstärken auf-
zutreten. Im Totwassergebiet auf Höhe der Reifenachsen ist, wie auch in Konfiguration
A, noch ein Gebiet mit erhöhter Wirbelstärke vorhanden. Hier ist diese Struktur dennoch
weniger stark und wesentlich kleiner.
Abbildung 34: Konturplot der Vortizitätsmagnitude von Konfiguration B beit = 9, 2s in der Ebene V3 in 1
s
Auswertung des Druckbeiwertes
Bei Betrachtung von Abbildung 35 erkennen wir auch anhand der Druckwerte den Strö-
mungsaufstau an der Fahrzeugfront und das Totwassergebiet hinter dem Sattelauflieger.
Im Vergleich zum Druckfeld von Konfiguration A weist dieses ähnliche Züge auf, scheint
jedoch das Unterdruckgebiet des Totwassers kleiner ausfallen zu lassen. Die Fahrzeugfront
45

weist einen Überdruck von etwa 300Pa auf und am Fahrzeugheck ist ein Unterdruck von
etwa −50Pa abzulesen. Dies entspricht einen Durckunterschied von rund 350Pa zwischen
Fahrzeugfront und -heck. Berechnet man den Staudruck mit der simulierten Anströmge-
schwindigkeit von 22, 2̄msund einer Dichte von 1.17659 kg
m3 so erhält man einen Wert von
290Pa.
Abbildung 35: Druckdifferenz vom Referenzdruck in Pa der Konfiguration Bbei t = 9, 2s in der Ebene V1
Die niedrigsten Unterdruckwerte von etwa −300Pa sind an den Abrisskanten an der Fahr-
zeugfront zu beobachten, an denen man mit den vorherigen Abbildungen auch die höchsten
Geschwindigkeiten beobachtet hat.
Schließlich, um den aerodynamischen Widerstand nun an einem Wert fest zu machen,
wurde der Widerstandsbeiwert nach Gleichung 13 berechnet. Über zehn instationäre Zeit-
schritte (von t0 = 8, 5s bis t9 = 9, 4s) gemittelt folgt mit der Dichte ρ = 1, 17659 kgm3 und
der Referenzfläche A = 10, 0125m2 der Widerstandsbeiwert:
cw,B =FWAρ
2vr2
= 0, 605 (13)
46

5 Vergleich der Ergebnisse
Im Folgenden werden die Ergebnisse der numerischen und experimentellen Untersuchungen
verglichen. Dazu werden die gemittelten Geschwindigkeitsfelder des Nachlaufs sowie die
gemittelte Druckverteilung am Aufliegerheck betrachtet.
5.1 Vergleich von Konfiguration A mit den Ergebnissen des
Windkanalversuches
Um einschätzen zu können, wie genau die Strömungsstrukturen des Nachlaufs des Experi-
mentes durch die Simulation berechnet wurden, betrachten wir zunächst ein Geschwindig-
keitsvektorfeld. In Abbildung 36 ist der Konturplot der gemittelten Geschwindigkeitskom-
ponente in z-Richtung und das mittlere Geschwindigkeitsvektorfeld in der Symmetrieebene
des Aufliegernachlaufs dargestellt. Die Geschwindigkeit ist dimensionslos in Abhängigkeit
von der Anströmgeschwindigkeit dargestellt. Der schwarze Bereich am jeweils linken Ab-
bildungsrand repräsentiert die Aufliegerbox. Es ist zu berücksichtigen, dass nur jeder dritte
Vektor dargestellt ist. Es zeigt sich, dass das im Experiment gemessene Totwassergebiet in
Größe und Form gut mit der Simulation dieser Arbeit übereinstimmt. Beide weisen deutlich
einen Rezirkulationswirbel auf, der das Fluid aufwärts zur oberen Fahrzeugkante strömen
lässt. Ebenso stimmt in beiden Fällen das Strömungsfeld oberhalb des Rezirkulationswirbels
nah der oberen Strömungsscherschicht recht gut überein.
Abbildung 36: Konturplot der gemittelten Geschwindigkeitskomponente in z-Richtung relativ zur Anströmgeschwindigkeit und des gemittelten Geschwin-digkeitsvektorfeldes des Windkanalversuches (links) und der Konfiguration A(rechts) in der Ebene V1 aufgetragen über die relative Fahrzeuglänge Y/Lmund die relative Fahrzeughöhe Z/Hm
47

Obwohl die Strömungsfelder in ihren Qualitäten sehr ähnlich sind, sind quantitative Un-
terschiede beobachtbar. Am Fahrzeugheck weist die Simulation höhere abwärts gerichtete
Geschwindigkeiten im Bereich 0, 1 < Z/Hm < 0, 8 auf. Dafür ist die Geschwindigkeit
der aufwärts gerichteten Rezirkulation in der Simulation niedriger als im Experiment. Dar-
überhinaus ist zu erkennen, dass in der Simulation das Fluid, das unter dem Fahrzeug
hervorkommt, erst nach dem Punkt Y/Lm = 1, 12 in eine aufwärts gerichtete Rückströ-
mung übergeht, während die Ergebnisse des Experimentes dieses Verhalten schon nach
Y/Lm = 1, 07 aufweist.
Nach der Betrachtung der Geschwindigkeitsfeldes in der Symmetrieebene des Nachlaufs
widmen wir uns dem Basisdruck am Aufliegerheck. Bei genauerer Betrachtung von Abbil-
dung 37 wird ersichtlich, dass die Ergebnisse des Experimentes mit denen der Simulation
qualitativ ähnlich sind, jedoch quantitativ voneinander abweichen. Es ist zu erkennen, dass
sowohl bei den gemessenen als auch den vorhergesagten Daten die höchsten Druckbeiwerte
im Bereich von Z/Hm ≈ 0, 95 auftreten und die Minimalwerte in der unteren Basishälfte
liegen. Darüberhinaus kann festgestellt werden, dass in beiden Ergebnissen mit steigendem
X/Wm Wert der Durckbeiwert um ungefähr 0, 02 fällt.
Abbildung 37: Konturplot der gemittelten Druckbeiwerte cp des Windkanalver-suches (links) und der Konfiguration A (rechts) am Aufliegerheck aufgetragenüber die relative Fahrzeugbreite X/Wm und die relative Fahrzeughöhe Z/Hm
Quantitativ jedoch weist die Simulation um 0, 08 kleinere Beiwerte auf, als das Experimen-
te. Dieser quantitative Unterschied scheint mit der erhöhten berechneten Geschwindigkeit
am Fahrzeugheck zu korrelieren. In Abbildung 37 (rechts) sind auch Bereiche mit erhöh-
ten Druckbeiwerten in den unteren Ecken des Fahrzeughecks zu beobachten. Diese sind
48

nur begrenzt mit den experimentellen Daten vergleichbar, da die Messgeräte den Druck
in diesen Bereichen nicht aufgenommen haben, aber man kann in den experimentellen
Ergebnissen eine Tendenz zu einem erhöhten Druck beobachten. Insgesamt lässt sich aus
der Betrachtung der Basisdruckverteilung ein höherer berechneter aerodynamischer Wider-
stand ableiten.
Für eine genauere Betrachtung der Geschwindigkeiten am Fahrzeugheck zeigt Abbildung
38 die mittlere Geschwindigkeitskomponente in z-Richtung 8mm hinter dem Auflieger. Hier
ist zu erkennen, dass die Geschwindigkeiten im nicht abgelösten Bereich nah nah des Bo-
dens quantitativ sehr gut übereinstimmen. Im Bereich des Aufliegerhecks bis Z/Hm ≈ 0, 7
liegen die simulierten Geschwindigkeiten deutlich über denen im Experiment. Nach dem
Bernoulli-Prinzip bedeuten höhere Geschwindigkeiten horizontal zur Aufliegerrückwand ei-
ne Reduzierung des Basisdruckes. Dieses Ergebnis ist konsistent zu den Beobachtungen der
Basisdruckverteilung.
Abbildung 38: Konturplot der gemittelten Geschwindigkeitsmagnitude inz-Richtung relativ zur Anströmgeschwindigkeit W/Uinf des Fahrversuches(schwarz) und der Konfiguration B (weiß) 8mm hinter dem Fahrzeugheck auf-getragen über die relative Fahrzeughöhe Z/Hm
Schließlich liefert der Vergleich der gemittelten aerodynamischen Widerstandsbeiwerte für
den Windkanalversuch einen Beiwert von cw,Windkanal = 0, 602 und für die Simulation der
Konfiguration A von cw,A = 0, 619. Damit ergibt sich eine Abweichung vom Windkanal-
versuch von 2, 81%.
49

5.2 Vergleich von Konfiguration B mit den Ergebnissen des
Fahrversuches
Aufgrund von Problemen bei der Datenverarbeitung stehen diesem Vergleich nur die Ge-
schwindigkeitsvektorfelder des Nachlaufs zur Verfügung. Da die Messung des Nachlaufs bei
einem Fahrversuch sehr komplex und aufwendig ist, steht darüberhinaus nur ein kleiner Teil
des Nachlaufs in Form von verarbeiteten Daten zum Vergleich bereit.
Abbildung 39 zeigt die dimensionslose mittlere Geschwindigkeit in Strömungsrichtung als
Kontourplot und das gemittelte Geschwindigkeitsvektorfeld in einer Ebene auf der Hälfte
der Aufliegerbreite. Sowohl die experimentellen (Abbildung 39, links) als auch die nu-
merischen Ergebnisse (Abbildung 39, rechts) zeigen einen Rezirkulationsgebiet positiver
Wirbelstärke. Das Wirbelzentrum liegt im Fall des Fahrversuches bei Z/Hm ≈ 0, 4 und
Y/Lm ≈ 1, 035 während dieser in der Simulation stromabfährts und vertikal nach oben
verlagert ist (Z/Hm ≈ 0, 47 und Y/Lm ≈ 1, 06). Die gemessen Daten zeigen eine deutliche
Symmetrie des Wirbelkerns wohingegen dieser in der Simulation vertikal gestaucht ist.
Abbildung 39: Kontourplot der gemittelten Geschwindigkeitskomponente in y-Richtung relativ zur Anströmgeschwindigkeit und des mittleren Geschwindig-keitsvektorfeldes des Fahrversuches (links) und der Konfiguration B (rechts)in der Ebene V1 aufgetragen über die relative Fahrzeuglänge Y/Lm und dierelative Fahrzeughöhe Z/Hm
Diese Unterschiede können durch die deutlich höheren simulierten Geschwindigkeiten be-
gründet sein, welche im Bereich von 0, 2 < Z/Hm < 0, 3 nahezu doppelt so hohe Werte
aufweisen. Dies korreliert mit dem verschobenen Rezirkulationswirbel. Eine mögliche Ursa-
che für diese Abweichung ist der Detailmangel der Simulationsgeometrie im Vergleich zur
echten Sattelzugkonfiguration.
50

Im Bereich 0, 3 < Z/Hm unterscheiden die Ergebnisse sich quantitativ nicht in Rela-
tion zum Zentrum des dargestellten Rezirkulationswirbels. Beide Ergebnisse zeigen eine
Geschwindigkeit von ungefähr null am Fahrzeugheck, sowie eine Rückströmung mit einer
relativen Geschwindigkeit von 0, 2 in der oberen Hälfte des Rezirkulationswirbels.
51

6 Zusammenfassung und Ausblick
Im Rahmen dieser Arbeit wurden ein Windkanalversuch und ein Fahrversuch numerisch
simuliert. Diese unterscheiden sich nicht nur durch ihre Skalierung und abweichenden An-
strömgeschwindigkeiten, sondern auch durch den Einfluss von Reifenrotation und einer
bewegten Fahrbahn. Darüberhinaus unterscheiden sie sich auch in einer unterschiedlichen
Geometrie des Auffahrschutzes.
Die Simulation des Windkanalversuches (Konfiguration A), die im Maßstab 1:15 mit einer
Anströmgeschwindigkeit von 59msohne Reifenrotation und bewegte Fahrbahn definiert wur-
de, weist qualitativ sehr gute Ergebnisse in Bezug auf das Geschwindigkeitsfeld im Nachlauf
und die Basisdruckverteilung auf. Das Geschwindigkeitsfeld im Nachlauf wurde auch quan-
titativ sehr gut berechnet, wobei sich in Bezug auf die Basisdruckverteilung recht große
Unterschiede ergeben. Die Genauigkeit des berechneten aerodynamischen Widerstandsbei-
wertes ist trotz dieser Unterschiede überraschenderweise sehr gut und liegt deutlich unter
3% Abweichung vom gemessenen Wert.
Die Simulation des Fahrversuches (Konfiguration B) weist weniger genaue Ergebnisse auf.
Die im Maßstab 1:1 durchgeführte Simulation zeigt durch die Reifenrotation, Fahrbahn-
translation und Anströmgeschwindigkeit von 22, 2̄ms
zwar ähnliche Strömungsstrukturen
wie der Fahrversuch, jedoch sind deutlich quantitive und auch qualitative Abweichungen
zu beobachten.
Unklar ist geblieben, welchen Einfluss Reifenrotation, eine bewegte Fahrbahn und eine
Veränderung der Reynoldszahl, einzeln betrachtet, haben. Zusammen ist ein deutlicher
Unterschied in den Strömungsstrukturen im Nachlauf, sowie an Reifen und Fahrbahn zu
beobachten, der zeigt, dass die Simulation eines Windkanals stark von der eines Fahrver-
suches abweichen. Da die Einflüsse der genannten Unterschiede nicht einzeln untersucht
wurden, ist es möglich, dass es sich bei den kleinen Abweichungen der Widerstandsbeiwerte
um einen Zufall handelt, der mit anderen Konfigurationen drastisch größer ausfallen könnte.
Zusammenfassend lässt sich sagen, dass die Ergebnisse der numerischen Simulationen nah
an ihren jeweiligen experimentellen Ergebnissen liegen. Besonders qualitativ geben die ge-
messenen Werte gut wieder, während wir quantitativ deutliche Abweichungen beobachtet
haben. Betrachtet man jedoch Windkanalversuch und Fahrversuch vergleichend, fällt auf,
dass diese sich drastisch in ihren Strömungsstrukturen unterscheiden.
52

Literaturverzeichnis
[1] Labuhn, D. , Romberg, O. “Keine Panik vor Thermodynamik!, 4. Auflage”, View-
eg+Teubner, 2009, ISBN 978-3-8348-0645-1
[2] Schröder, W. ”Fluidmechanik, 3. Auflage“, Wissenschatverlag Mainz in Aachen,
2010, ISBN 3-86130-371-X
[3] Hucho, W.-H. ”Aerodynamik der stumpfen Körper, 2. Auflage“, Vieweg+Teubner,
2011, ISBN 978-3-8348-1462-3
[4] Leder, A. ”Abgelöste Strömungen“, Vieweg+Teubner, 1992, ISBN 978-3-5280-
6436-5
[5] Edited by Hucho, W.-H. “Aerodynamics of Road Vehicles, Fourth Edition“, SAE
International, 1998, ISBN 0-7680-8029-7
[6] Raffel, M. , Willert, C.E. , Kompenhans, J. ”Particle Image Velocimetry - A
practical Guide“, Springer, 1997
[7] STAR-CCM+ Documentation (v. 7.04.006)
[8] Regert, T. , Lajos, T. ”Description of flow field in the wheelhouses of cars“, 2007
[9] Thivolle-Cazat, E. , Gillieron, P. ”Flow analysis around a rotating wheel“, 2006
[10] Salari, K., ”Computational Predicition of Aerodynamic Forces for a Simplified
Integrated Tractor-Trailer Geometry”, 2004
[11] Maddox, S., ”Detached-Eddy Simulation of the Ground Transportation System.
Aerodynamic Heavy Vehicles: Trucks Buses Trains”, 2004
[12] Hyams, D. G., ”Computational Simulation of Model and Full Scale Class 8 Trucks
with Drag Reduction Devices”, 2010
[13] Pevitt, C., ”A Computational Simulation of Aerodynamic Drag Reductions for
Heavy Commercial Vehicles”, 2012

Abbildungsverzeichnis
1 Geometrieinduzierte Ablösung und Wirbel im Totwassergebiet . . . . . . . 9
2 Grobes Gitter aus Tetraedern mit lokaler Verfeinerung in der Mitte . . . . 15
3 Grobes Gitter aus Polyedern mit lokaler Verfeinerung in der Mitte . . . . . 16
4 Grobes Gitter aus Hexaedern mit lokaler Verfeinerung in der Mitte . . . . . 16
5 Gitter aus Polyedern mit drei Prism Layer Mesh Zellschichten an der Ellipse
in der Mitte. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
6 Links: Sattelzugmodell (1:15) auf der Grenzschichtplatte in der Messstre-
cke, Rechts: Seitenwindversuchsanlage Göttingen (SWG) . . . . . . . . . . 18
7 Links: Laser-Lichtschnitt in der vertikalen Fahrzeugmitte im Fahrversuch,
Rechts: Detailansicht der Fahrzeugrückseite mit modifizierter Rückwand
und installierten CCD-Kameras . . . . . . . . . . . . . . . . . . . . . . . 19
8 CAD-Modell des verwendeten Fahrerhauses mit ungefähren Abmessungen . 21
9 CAD-Modell der drei Reifenachsen des Anhängers mit Abmessungen . . . . 22
10 CAD-Modelle der verwendeten Auffahrschutzgeometrie des simulierten Fahr-
versuches (links) und des Windkanalversuches (rechts) . . . . . . . . . . . 23
11 Längsschnitte durch das Volumengitter in der Reifenmitte mit Angabe der
Zellenkantenlängen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
12 Längsschnitte durch das Volumengitter in der Reifenmitte: Links mit 2mm
(im Maßstab 1:15) versenkten Reifen, Rechts mit 30mm (im Maßstab 1:1)
schwebenden Reifen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
13 y+ Werte des Volumengitters auf dem Fahrzeug und der Fahrbahn der
Konfiguration A (oben) und Konfiguration B (unten) . . . . . . . . . . . . 25
14 Definierte Schnittebenen am LKW . . . . . . . . . . . . . . . . . . . . . 29
15 Konturplot der Geschwindigkeitsmagnitude von Konfiguration A in den Ebe-
nen H2 (oben) und V1 (unten) in ms
. . . . . . . . . . . . . . . . . . . . 30
16 Konturplot der Geschwindigkeitsmagnitude und des Geschwindigkeitsvek-
torfeldes von Konfiguration A bei t = 2, 9s in der Ebene V1 in ms
. . . . . 31
17 Konturplot der Geschwindigkeitsmagnitude und des Geschwindigkeitsvek-
torfeldes von Konfiguration A bei t = 2, 9s in der Ebene V2 in ms
. . . . . 32
18 Konturplot der Geschwindigkeitsmagnitude und des Geschwindigkeitsvek-
torfeldes von Konfiguration A bei t = 2, 9s in der Ebene H1 in ms
. . . . . 33
19 Konturplot der Geschwindigkeitsmagnitude und des Geschwindigkeitsvek-
torfeldes von Konfiguration A bei t = 2, 9s in der Ebene H2 in ms
. . . . . 34

20 Ausgewählte Stromlinien mit Geschwindigkeitsmagnitude der Konfiguration
A bei t = 2, 9s im Totwassergebiet am Heck des LKW . . . . . . . . . . . 34
21 Ausgewählte Stromlinien mit Geschwindigkeitsmagnitude der Konfiguration
A bei t = 2, 9s an den Reifen der hinteren Reifenachsen des LKW . . . . . 35
22 Konturplot der Vortizitätsmagnitude von Konfiguration A bei t = 2, 9s in
der Ebene V1 in 1s
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
23 Konturplot der Vortizitätsmagnitude von Konfiguration A bei t = 2, 9s in
der Ebene V3 in 1s
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
24 Druckdifferenz in Bezug auf den Referenzdruck in Pa der Konfiguration A
bei t = 2, 9s in der Ebene V1 . . . . . . . . . . . . . . . . . . . . . . . . 37
25 Konturplots der Geschwindigkeitsmagnitude von Konfiguration A bei zehn
Zeitschritten in einem Abstand von ∆t = 0, 1s in der Ebene H2 . . . . . . 38
26 Konturplot der Geschwindigkeitsmagnitude von Konfiguration B bei t =
9, 2s in den Ebenen H2 (oben) und V1 (unten) in ms
. . . . . . . . . . . . 39
27 Konturplot der Geschwindigkeitsmagnitude und des Geschwindigkeitsvek-
torfeldes von Konfiguration B bei t = 9, 2s in der Ebene V1 in ms
. . . . . 40
28 Konturplot der Geschwindigkeitsmagnitude und des Geschwindigkeitsvek-
torfeldes von Konfiguration B bei t = 9, 2s in der Ebene V2 in ms
. . . . . 41
29 Konturplot der Geschwindigkeitsmagnitude und des Geschwindigkeitsvek-
torfeldes von Konfiguration B bei t = 9, 2s in der Ebene H1 in ms
. . . . . 42
30 Konturplot der Geschwindigkeitsmagnitude und des Geschwindigkeitsvek-
torfeldes von Konfiguration B bei t = 9, 2s in der Ebene H2 in ms
. . . . . 43
31 Ausgewählte Stromlinien mit Geschwindigkeitsmagnitude der Konfiguration
B bei t = 9, 2s im Totwassergebiet am Heck des LKW . . . . . . . . . . . 43
32 Ausgewählte Stromlinien mit Geschwindigkeitsmagnitude der Konfiguration
B bei t = 9, 2s an den Reifen der hinteren Reifenachsen des LKW . . . . . 44
33 Konturplot der Vortizitätsmagnitude von Konfiguration B bei t = 9, 2s in
der Ebene V1 in 1s
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
34 Konturplot der Vortizitätsmagnitude von Konfiguration B bei t = 9, 2s in
der Ebene V3 in 1s
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
35 Druckdifferenz vom Referenzdruck in Pa der Konfiguration B bei t = 9, 2s
in der Ebene V1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46

36 Konturplot der gemittelten Geschwindigkeitskomponente in z-Richtung re-
lativ zur Anströmgeschwindigkeit und des gemittelten Geschwindigkeitsvek-
torfeldes des Windkanalversuches (links) und der Konfiguration A (rechts)
in der Ebene V1 aufgetragen über die relative Fahrzeuglänge Y/Lm und die
relative Fahrzeughöhe Z/Hm . . . . . . . . . . . . . . . . . . . . . . . . 47
37 Konturplot der gemittelten Druckbeiwerte cp des Windkanalversuches (links)
und der Konfiguration A (rechts) am Aufliegerheck aufgetragen über die re-
lative Fahrzeugbreite X/Wm und die relative Fahrzeughöhe Z/Hm . . . . 48
38 Konturplot der gemittelten Geschwindigkeitsmagnitude in z-Richtung rela-
tiv zur Anströmgeschwindigkeit W/Uinf des Fahrversuches (schwarz) und
der Konfiguration B (weiß) 8mm hinter dem Fahrzeugheck aufgetragen
über die relative Fahrzeughöhe Z/Hm . . . . . . . . . . . . . . . . . . . . 49
39 Kontourplot der gemittelten Geschwindigkeitskomponente in y-Richtung re-
lativ zur Anströmgeschwindigkeit und des mittleren Geschwindigkeitsvek-
torfeldes des Fahrversuches (links) und der Konfiguration B (rechts) in der
Ebene V1 aufgetragen über die relative Fahrzeuglänge Y/Lm und die rela-
tive Fahrzeughöhe Z/Hm . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Tabellenverzeichnis
1 Übliche cw Werte verschiedener Fahrzeuge . . . . . . . . . . . . . . . 10
2 Turbulenzmodelle . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3 Randbedingungen des Lösers . . . . . . . . . . . . . . . . . . . . . 25
4 Programmeinstellungen des Lösers . . . . . . . . . . . . . . . . . . 26
5 Einstellte Werte des Lösers . . . . . . . . . . . . . . . . . . . . . . 27





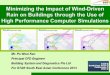



![10.5.4 Elektrodynamik 2015.ppt [Kompatibilitätsmodus] · Elektrodynamik Physik für E-Techniker Oder: 1. Es wird magnetisches MomentEs wird magnetisches Moment induziert 2. Ring](https://img.pdfslide.org/doc/110x75/5e20a6cf3bec3d2f133a6ae2/1054-elektrodynamik-2015ppt-kompatibilittsmodus-elektrodynamik-physik-fr.jpg)