Embed Size (px)
Citation preview

Mathematikstunde
355003 (2013S) Aktuelle Themen der Fachdidaktik SE
Berechnung der Mindestgröße einerParklücke beim paralellen rückwärts
Einparken in einem Zug
Autor:Rainer Peter Josef Sickinger(0957957)
LVA-LeiterIn:Markus Hohenwarter
6. April 2013

1 EinleitungInhalt dieser Unterrichtsstunde soll eine Herleitung einer Formel zur Berechnung der optimalen Größeeiner Parklücke beim parallelen Rückwärts-Einparken in einem Zug sein. Es wird ein mathematischesModell eines optimalen Einparkvorgangs erstellt. Dabei wird die reale Situation abstrahiert. Alle Da-ten, die man für die Berechnung der Parklücke benötigt, findet man in den Fahrzeugunterlagen. Fürdie Herleitungen und Berechnungen der Formel werden der Satz des Pythagoras und Trigonome-trische Funkionen benötigt. In einem explorativen Teil der Stunde sollen sich die SchülerInnen imComputerraum mit dem Problem des Rückwärts-Einparkens vertraut machen. In den anderen bei-den Unterrichtsstunden wird dann in einem fragend-entwickelnden Unterricht eine Formel für dieMindestgröße der Parklücke hergeleitet.
1.1 Allgemeine Informationen• Fach: Mathematik
• Zielgruppe: 8. Schulstufe
• Zeitraum: 3 Unterrichtseinheiten
1.2 Inhalt• Herleitung einer Formel zur Berechnung der optimalen Größe einer Parklücke beim parallelen
Rückwärts-Einparken in einem Zug.
• optimaler Einparkvorgang
• mathematisches Modell erstellen
• Abstraktion des Realen
• geometrische Zusammenhänge
• Satz des Pythagoras
• trigonometrische Funktionen
– Sinus– Cosinus– Arcuscosinus
1.3 VorwissenDie SchülerInnen sollten folgendes Vorwissen mitbringen:
• Kenntnisse über die Trigonometrischen Funkionen
• Kenntnisse über die Funktionsweise des Satzes des Pythagoras
1
1.4 ZieleFolgende Ziele sollen mit der Unterrichtsstunde erreicht werden:
• Die SchülerInnen sollen durch Abstraktion ein reales System in die mathematische Spracheübersetzen können.
• Die SchülerInnen sollen verstehen, wie man aus einem mathematischen Modell Formeln ableitenkann.
• Die SchülerInnen sollen geometrische Zusammenhänge erkennen können.
• Die SchülerInnen sollen die Trigonometrischen Funktionen an einem praxisnahen mathemati-schen Modell anwenden können.
• Die SchülerInnen sollen Wagenpapiere verstehen und diverse Informationen daraus extrahierenkönnen.
1.5 Technische Vorraussetzungen• Computer für jeden Schüler
• Beamer
• Tafel
• Rainers Parking Simulator
• GeoGebra
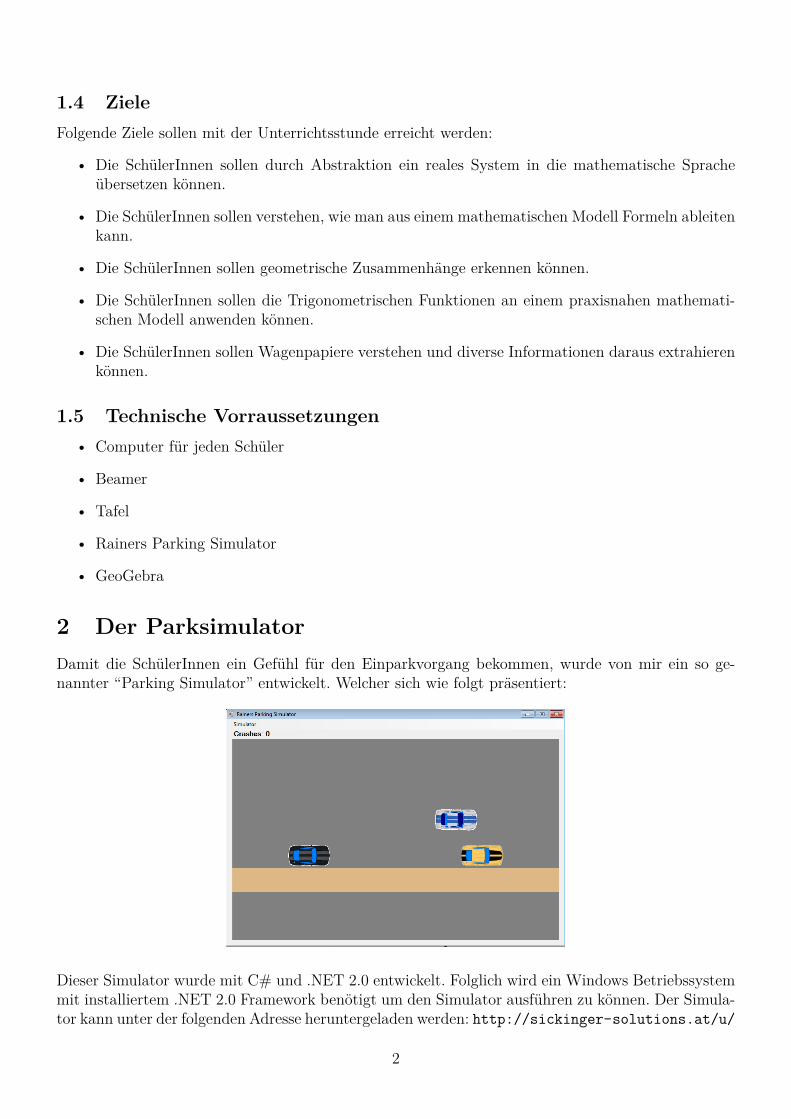
2 Der ParksimulatorDamit die SchülerInnen ein Gefühl für den Einparkvorgang bekommen, wurde von mir ein so ge-nannter “Parking Simulator” entwickelt. Welcher sich wie folgt präsentiert:
Dieser Simulator wurde mit C# und .NET 2.0 entwickelt. Folglich wird ein Windows Betriebssystemmit installiertem .NET 2.0 Framework benötigt um den Simulator ausführen zu können. Der Simula-tor kann unter der folgenden Adresse heruntergeladen werden: http://sickinger-solutions.at/u/
2
ParkSim/SickingerSolutionsParkingSimulator.exe. Den Quelltext kann man sich unter folgen-der URL besorgen: http://sickinger-solutions.at/u/ParkSim/Rainers_Parking_Simulator.zip. Wie der Name schon sagt, kann man mit diesem Simulator den Einparkvorgang am Computerausprobieren bzw. beobachten, ohne dass Blechschäden entstehen. Fährt man gegen ein anderes Autooder gegen den Bordstein wird das Fahrzeug einfach wieder auf die Startposition zurückgesetzt.
2.1 SteuerungGesteuert wird das graue Auto mit dem Pfeiltasten: ↑↓→←. Mit → fährt das Auto nach rechts, mit← nach links. Mit ↑ gibt man Gas und mit ↓ bremst man bzw. legt den Rückwärtsgang ein.
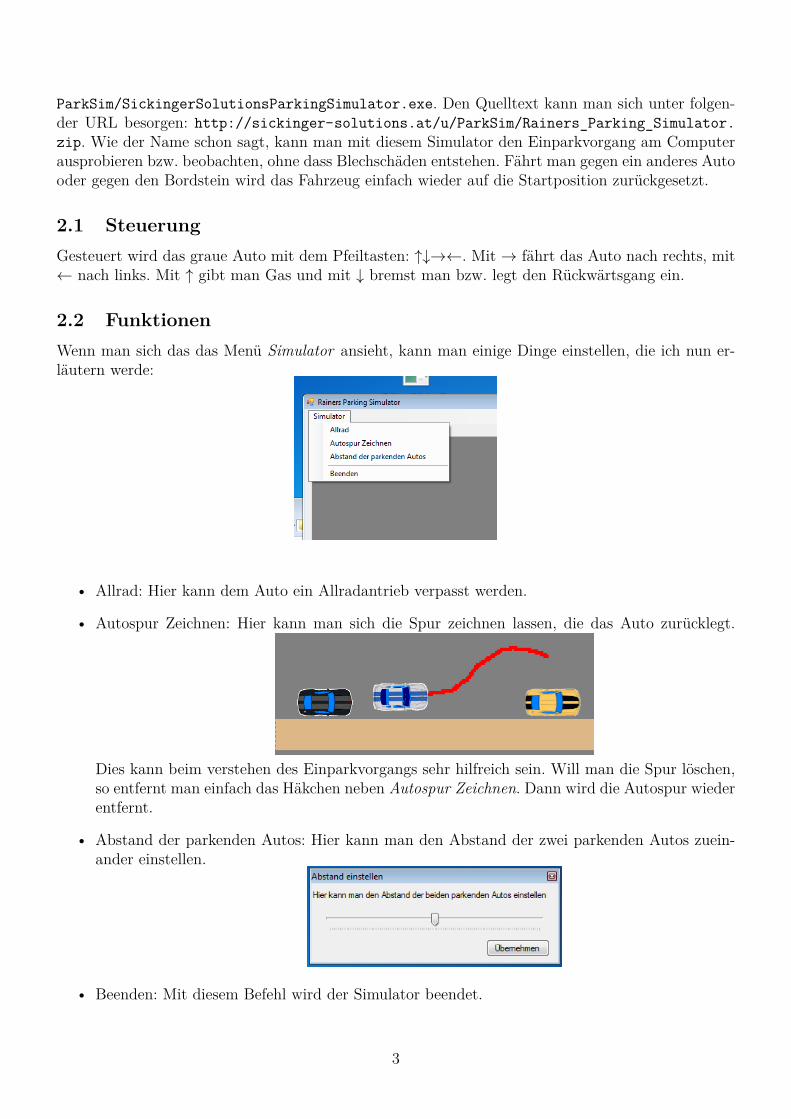
2.2 FunktionenWenn man sich das das Menü Simulator ansieht, kann man einige Dinge einstellen, die ich nun er-läutern werde:
• Allrad: Hier kann dem Auto ein Allradantrieb verpasst werden.
• Autospur Zeichnen: Hier kann man sich die Spur zeichnen lassen, die das Auto zurücklegt.
Dies kann beim verstehen des Einparkvorgangs sehr hilfreich sein. Will man die Spur löschen,so entfernt man einfach das Häkchen neben Autospur Zeichnen. Dann wird die Autospur wiederentfernt.
• Abstand der parkenden Autos: Hier kann man den Abstand der zwei parkenden Autos zuein-ander einstellen.
• Beenden: Mit diesem Befehl wird der Simulator beendet.
3
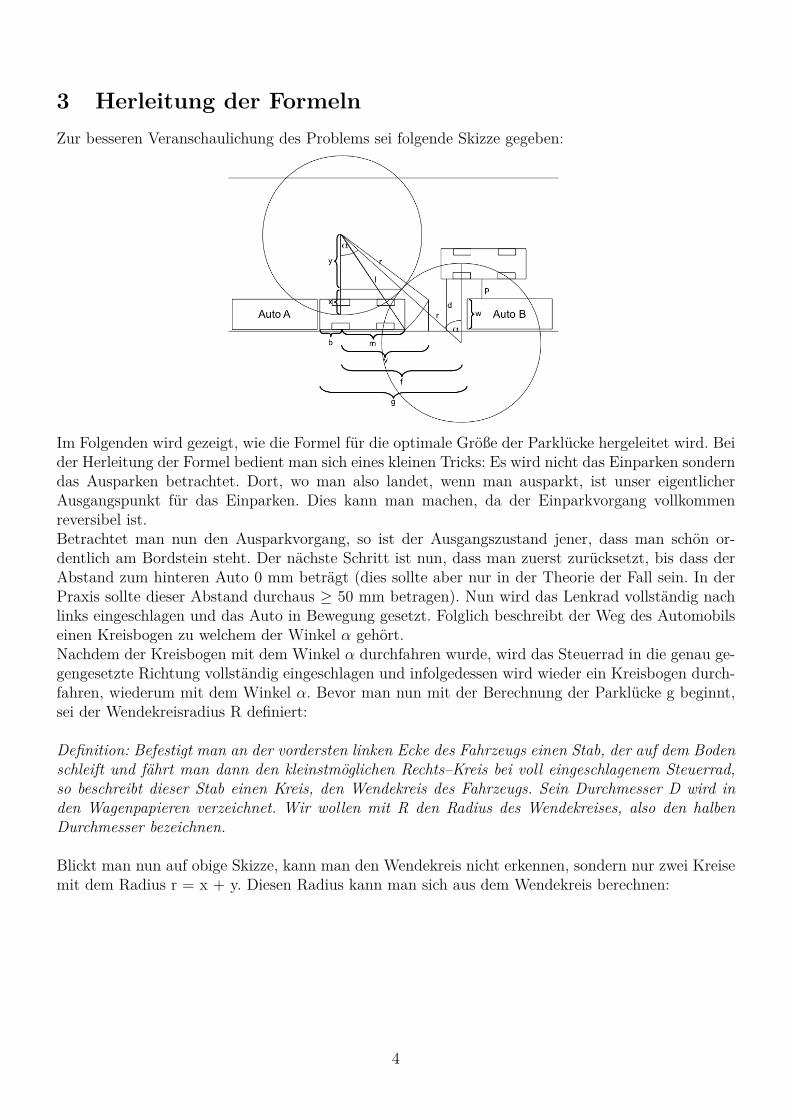
3 Herleitung der FormelnZur besseren Veranschaulichung des Problems sei folgende Skizze gegeben:
Im Folgenden wird gezeigt, wie die Formel für die optimale Größe der Parklücke hergeleitet wird. Beider Herleitung der Formel bedient man sich eines kleinen Tricks: Es wird nicht das Einparken sonderndas Ausparken betrachtet. Dort, wo man also landet, wenn man ausparkt, ist unser eigentlicherAusgangspunkt für das Einparken. Dies kann man machen, da der Einparkvorgang vollkommenreversibel ist.Betrachtet man nun den Ausparkvorgang, so ist der Ausgangszustand jener, dass man schön or-dentlich am Bordstein steht. Der nächste Schritt ist nun, dass man zuerst zurücksetzt, bis dass derAbstand zum hinteren Auto 0 mm beträgt (dies sollte aber nur in der Theorie der Fall sein. In derPraxis sollte dieser Abstand durchaus ≥ 50 mm betragen). Nun wird das Lenkrad vollständig nachlinks eingeschlagen und das Auto in Bewegung gesetzt. Folglich beschreibt der Weg des Automobilseinen Kreisbogen zu welchem der Winkel α gehört.Nachdem der Kreisbogen mit dem Winkel α durchfahren wurde, wird das Steuerrad in die genau ge-gengesetzte Richtung vollständig eingeschlagen und infolgedessen wird wieder ein Kreisbogen durch-fahren, wiederum mit dem Winkel α. Bevor man nun mit der Berechnung der Parklücke g beginnt,sei der Wendekreisradius R definiert:
Definition: Befestigt man an der vordersten linken Ecke des Fahrzeugs einen Stab, der auf dem Bodenschleift und fährt man dann den kleinstmöglichen Rechts–Kreis bei voll eingeschlagenem Steuerrad,so beschreibt dieser Stab einen Kreis, den Wendekreis des Fahrzeugs. Sein Durchmesser D wird inden Wagenpapieren verzeichnet. Wir wollen mit R den Radius des Wendekreises, also den halbenDurchmesser bezeichnen.
Blickt man nun auf obige Skizze, kann man den Wendekreis nicht erkennen, sondern nur zwei Kreisemit dem Radius r = x + y. Diesen Radius kann man sich aus dem Wendekreis berechnen:
4
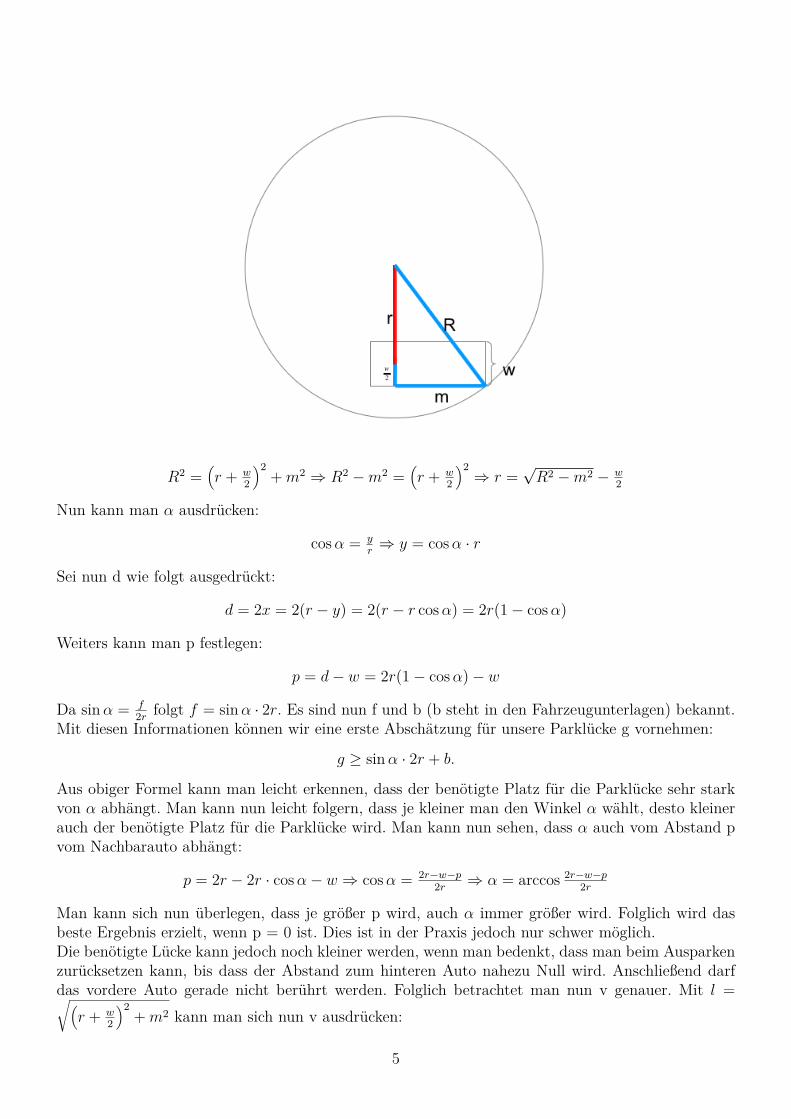
R2 =(r + w
2
)2+m2 ⇒ R2 −m2 =
(r + w
2
)2⇒ r =
√R2 −m2 − w
2
Nun kann man α ausdrücken:
cosα = yr⇒ y = cosα · r
Sei nun d wie folgt ausgedrückt:
d = 2x = 2(r − y) = 2(r − r cosα) = 2r(1− cosα)
Weiters kann man p festlegen:
p = d− w = 2r(1− cosα)− w
Da sinα = f2r
folgt f = sinα · 2r. Es sind nun f und b (b steht in den Fahrzeugunterlagen) bekannt.Mit diesen Informationen können wir eine erste Abschätzung für unsere Parklücke g vornehmen:
g ≥ sinα · 2r + b.
Aus obiger Formel kann man leicht erkennen, dass der benötigte Platz für die Parklücke sehr starkvon α abhängt. Man kann nun leicht folgern, dass je kleiner man den Winkel α wählt, desto kleinerauch der benötigte Platz für die Parklücke wird. Man kann nun sehen, dass α auch vom Abstand pvom Nachbarauto abhängt:
p = 2r − 2r · cosα− w ⇒ cosα = 2r−w−p2r
⇒ α = arccos 2r−w−p2r
Man kann sich nun überlegen, dass je größer p wird, auch α immer größer wird. Folglich wird dasbeste Ergebnis erzielt, wenn p = 0 ist. Dies ist in der Praxis jedoch nur schwer möglich.Die benötigte Lücke kann jedoch noch kleiner werden, wenn man bedenkt, dass man beim Ausparkenzurücksetzen kann, bis dass der Abstand zum hinteren Auto nahezu Null wird. Anschließend darfdas vordere Auto gerade nicht berührt werden. Folglich betrachtet man nun v genauer. Mit l =√(
r + w2
)2+m2 kann man sich nun v ausdrücken:
5

v2 = l2 −(r − w
2
)2=(r + w
2
)2+m2 −
(r − w
2
)2= r2 + rw + w2
4 +m2 − r2 + rw − w2
4 = 2rw +m2
⇒ v =√
2rw +m2
Nun kann man die optimale Abschätzung für die Parklücke treffen:
g ≥ v + b =√
2rw +m2 + b
3.1 ZusammenfassungWir brauchen also folgende Daten aus den Fahrzeugpapieren:
w Breite des Fahrzeugsb Abstand Hinterachse hintenm Abstand von der Hinterachse bis zur FahrzeugfrontR Wendekreisradius
Außerdem muss man den Abstand p zum Nachbarauto wissen (Für die Theorie reicht auch p = 0).Nun kann man mit den folgenden Formeln die Mindestgröße der Parklücke berechnen:
• r =√R2 −m2 − w
2
• α = arccos 2r−w−p2r
• g ≥√
2rw +m2 + b
6
4 StundenplanungIm Folgenden wird die genaue Planung der Stunde tabellarisch aufgeführt.
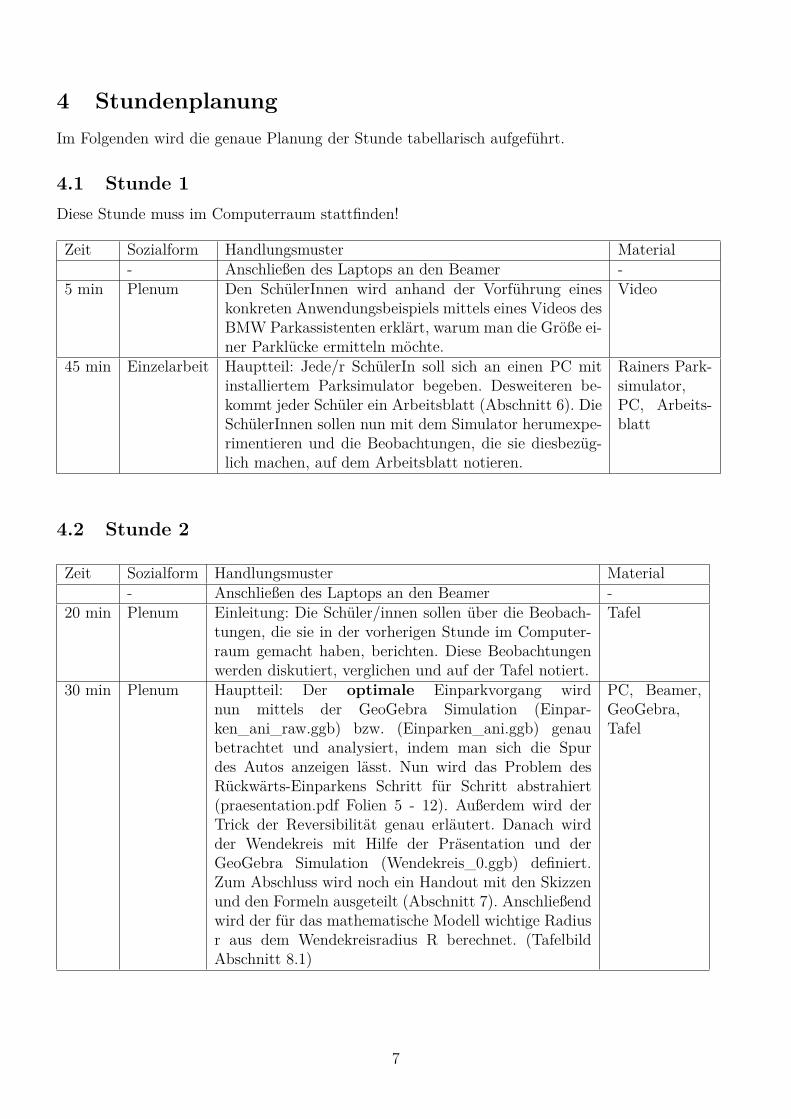
4.1 Stunde 1Diese Stunde muss im Computerraum stattfinden!
Zeit Sozialform Handlungsmuster Material- Anschließen des Laptops an den Beamer -
5 min Plenum Den SchülerInnen wird anhand der Vorführung eineskonkreten Anwendungsbeispiels mittels eines Videos desBMW Parkassistenten erklärt, warum man die Größe ei-ner Parklücke ermitteln möchte.
Video
45 min Einzelarbeit Hauptteil: Jede/r SchülerIn soll sich an einen PC mitinstalliertem Parksimulator begeben. Desweiteren be-kommt jeder Schüler ein Arbeitsblatt (Abschnitt 6). DieSchülerInnen sollen nun mit dem Simulator herumexpe-rimentieren und die Beobachtungen, die sie diesbezüg-lich machen, auf dem Arbeitsblatt notieren.
Rainers Park-simulator,PC, Arbeits-blatt
4.2 Stunde 2
Zeit Sozialform Handlungsmuster Material- Anschließen des Laptops an den Beamer -
20 min Plenum Einleitung: Die Schüler/innen sollen über die Beobach-tungen, die sie in der vorherigen Stunde im Computer-raum gemacht haben, berichten. Diese Beobachtungenwerden diskutiert, verglichen und auf der Tafel notiert.
Tafel
30 min Plenum Hauptteil: Der optimale Einparkvorgang wirdnun mittels der GeoGebra Simulation (Einpar-ken_ani_raw.ggb) bzw. (Einparken_ani.ggb) genaubetrachtet und analysiert, indem man sich die Spurdes Autos anzeigen lässt. Nun wird das Problem desRückwärts-Einparkens Schritt für Schritt abstrahiert(praesentation.pdf Folien 5 - 12). Außerdem wird derTrick der Reversibilität genau erläutert. Danach wirdder Wendekreis mit Hilfe der Präsentation und derGeoGebra Simulation (Wendekreis_0.ggb) definiert.Zum Abschluss wird noch ein Handout mit den Skizzenund den Formeln ausgeteilt (Abschnitt 7). Anschließendwird der für das mathematische Modell wichtige Radiusr aus dem Wendekreisradius R berechnet. (TafelbildAbschnitt 8.1)
PC, Beamer,GeoGebra,Tafel
7
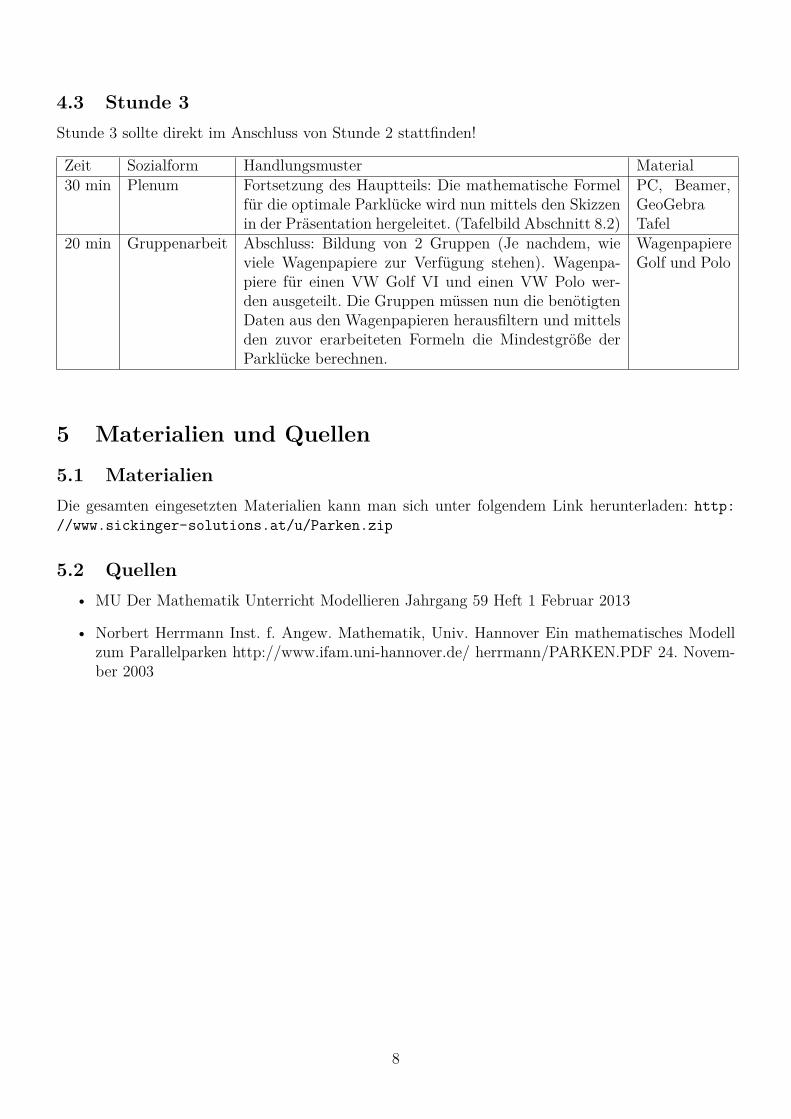
4.3 Stunde 3Stunde 3 sollte direkt im Anschluss von Stunde 2 stattfinden!
Zeit Sozialform Handlungsmuster Material30 min Plenum Fortsetzung des Hauptteils: Die mathematische Formel
für die optimale Parklücke wird nun mittels den Skizzenin der Präsentation hergeleitet. (Tafelbild Abschnitt 8.2)
PC, Beamer,GeoGebraTafel
20 min Gruppenarbeit Abschluss: Bildung von 2 Gruppen (Je nachdem, wieviele Wagenpapiere zur Verfügung stehen). Wagenpa-piere für einen VW Golf VI und einen VW Polo wer-den ausgeteilt. Die Gruppen müssen nun die benötigtenDaten aus den Wagenpapieren herausfiltern und mittelsden zuvor erarbeiteten Formeln die Mindestgröße derParklücke berechnen.
WagenpapiereGolf und Polo
5 Materialien und Quellen
5.1 MaterialienDie gesamten eingesetzten Materialien kann man sich unter folgendem Link herunterladen: http://www.sickinger-solutions.at/u/Parken.zip
5.2 Quellen• MU Der Mathematik Unterricht Modellieren Jahrgang 59 Heft 1 Februar 2013
• Norbert Herrmann Inst. f. Angew. Mathematik, Univ. Hannover Ein mathematisches Modellzum Parallelparken http://www.ifam.uni-hannover.de/ herrmann/PARKEN.PDF 24. Novem-ber 2003
8
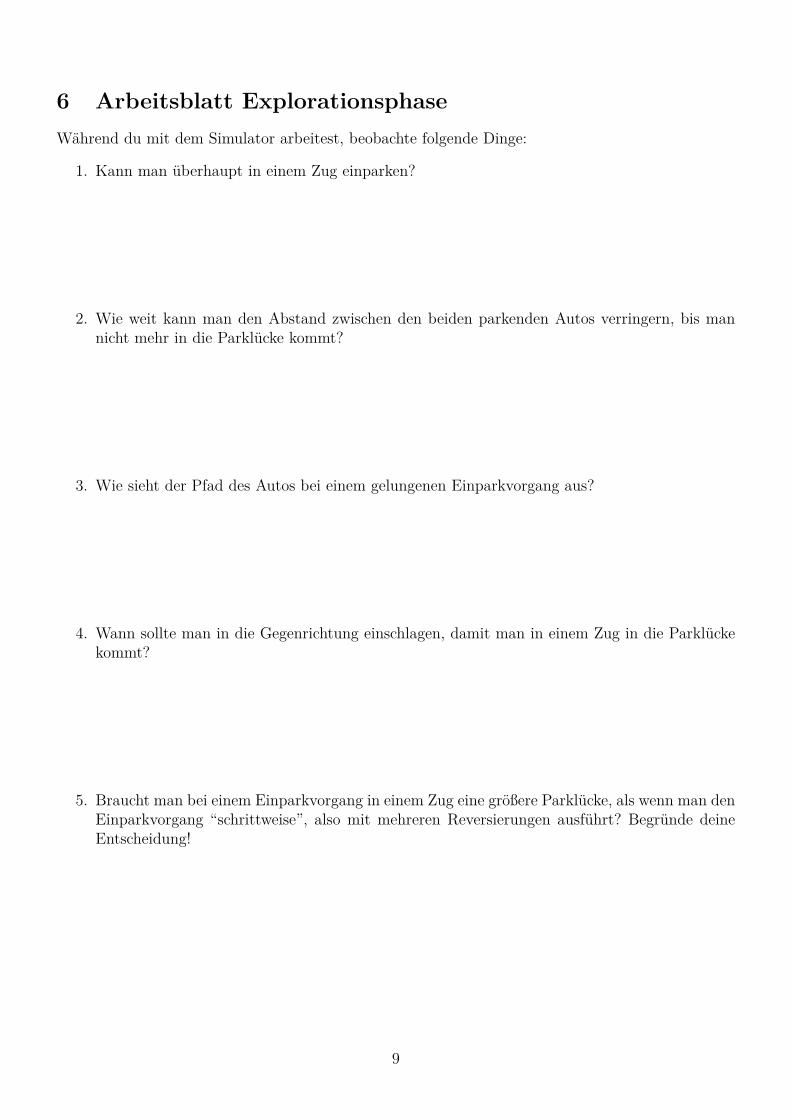
6 Arbeitsblatt ExplorationsphaseWährend du mit dem Simulator arbeitest, beobachte folgende Dinge:
1. Kann man überhaupt in einem Zug einparken?
2. Wie weit kann man den Abstand zwischen den beiden parkenden Autos verringern, bis mannicht mehr in die Parklücke kommt?
3. Wie sieht der Pfad des Autos bei einem gelungenen Einparkvorgang aus?
4. Wann sollte man in die Gegenrichtung einschlagen, damit man in einem Zug in die Parklückekommt?
5. Braucht man bei einem Einparkvorgang in einem Zug eine größere Parklücke, als wenn man denEinparkvorgang “schrittweise”, also mit mehreren Reversierungen ausführt? Begründe deineEntscheidung!
9

7 Handout Skizze und Formeln
r = x + y.
R2 =(r + w
2
)2+m2 ⇒ R2 −m2 =
(r + w
2
)2⇒ r =
√R2 −m2 − w
2
cosα = yr⇒ y = cosα · r
d = 2x = 2(r − y) = 2(r − r cosα) = 2r(1− cosα)
p = d− w = 2r(1− cosα)− w
Da sinα = f2r
folgt f = sinα · 2r. Es sind nun f und b (b steht in den Fahrzeugunterlagen) bekanntsomit können wir eine erste Abschätzung für unsere Parklücke g treffen:
g ≥ sinα · 2r + b.
p = 2r − 2r · cosα− w ⇒ cosα = 2r−w−p2r
⇒ α = arccos 2r−w−p2r
Mit l =√(
r + w2
)2+m2 kann man sich nun v ausdrücken:
v2 = l2 −(r − w
2
)2=(r + w
2
)2+m2 −
(r − w
2
)2= r2 + rw + w2
4 +m2 − r2 + rw − w2
4 = 2rw +m2
⇒ v =√
2rw +m2
Optimale Abschätzung für die Parklücke:
g ≥ v + b =√
2rw +m2 + b
10

7.1 ZusammenfassungWir brauchen also folgende Daten aus den Fahrzeugpapieren:
w Breite des Fahrzeugsb Abstand Hinterachse hintenm Abstand von der Hinterachse bis zur FahrzeugfrontR Wendekreisradius
Nun kann man mit den folgenden Formeln die Mindestgröße der Parklücke berechnen:
• r =√R2 −m2 − w
2
• α = arccos 2r−w−p2r
• g ≥√
2rw +m2 + b
11
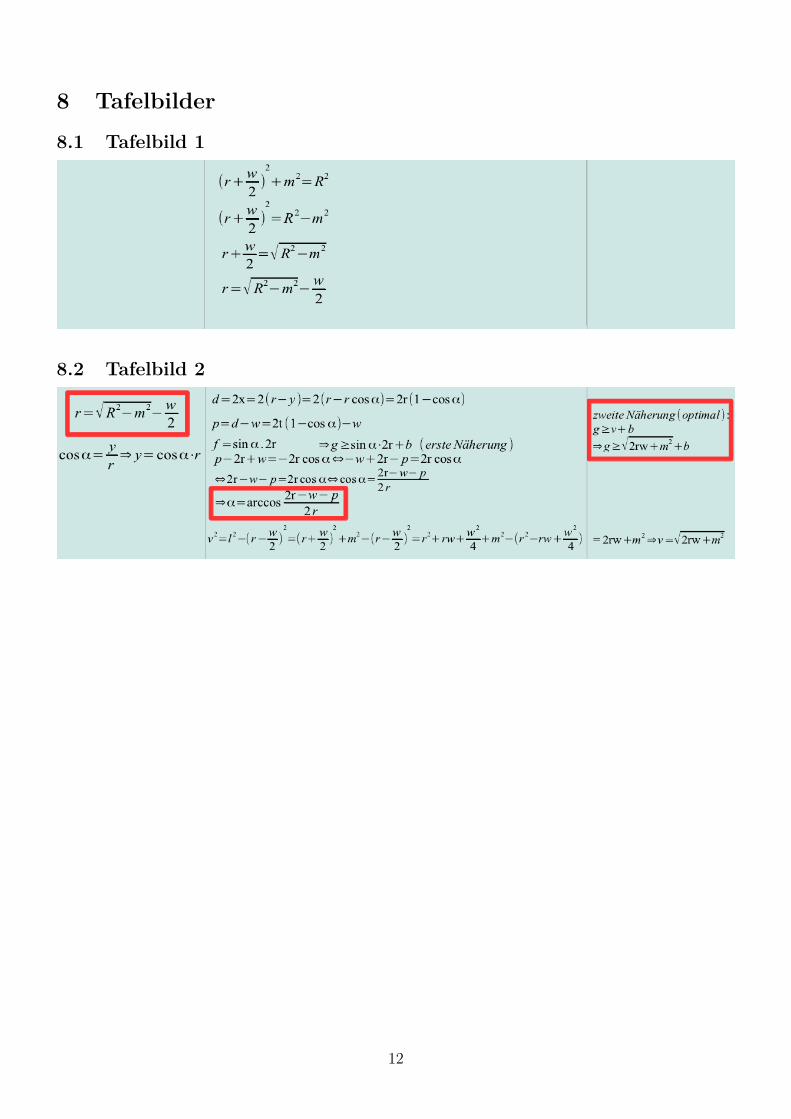
8 Tafelbilder
8.1 Tafelbild 1
8.2 Tafelbild 2
12