Embed Size (px)
Citation preview
KAPITEL 4. Lineare Ausgleichsrechnung
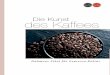
Beispiel 4.1. Das Ohmsche Gesetz:
U = RI
Eine Meßreihe von Daten:
(Ui, Ii) (Spannung, Stromstarke), i = 1, . . . , m.
Aufgabe: man bestimme aus diesen Meßdaten den Widerstand R im
Stromkreis. Theoretisch:
Ui = RIi, i = 1, . . . , m.
Aber Daten sind mit Fehlern behaftet.
-
6
##
##
##
##
##
##
###
b
b b
b
b
b
b
I
U
Ui
Ii
Dahmen-Reusken Kapitel 4 1
Man kann hierzu versuchen, die durch eine Wahl von R bedingten
Residuen Ui − RIi zu quadrieren, aufzusummieren und dasjenige R zu
suchen, das diesen Ausdruck minimiert:
f(R) :=m∑
i=1
(RIi − Ui)2 = min .
Da f eine quadratische Funktion ist, kann nur ein Extremum vorliegen,
das durch die Nullstelle der Ableitung gegeben ist:
0 = f ′(R) =m∑
i=1
2(RIi − Ui)Ii = 2R
( m∑
i=1
I2i
)
− 2m∑
i=1
UiIi.
Hier ergibt sich diese Nullstelle R∗ als
R∗ =
( m∑
i=1
UiIi
)/( m∑
i=1
I2i
)
. △
Dahmen-Reusken Kapitel 4 2
Beispiel 4.2.
In der Fourieranalyse wird eine T -periodische Funktion f durch eine
Linearkombination der T -periodischen trigonometrischen Polynome
1, cos(ct), sin(ct), cos(2ct), sin(2ct), . . . , cos(Nct), sin(Nct)
mit c := 2πT in der Form
gN(t) =1
2a0 +
N∑
k=1
(ak cos(kct) + bk sin(kct)) ,
approximiert.
Annahme: nicht f , sondern nur eine Reihe von Meßdaten
bi ≈ f(ti), 0 ≤ t1 < t2 < . . . < tm ≤ T,
ist bekannt, wobei m > 2N + 1.
Ansatz zur Bestimmung der Koeffizienten a0, a1, b1, a2, b2, . . . , aN , bN :
m∑
i=1
(gN(ti) − bi)2 = min . △
Dahmen-Reusken Kapitel 4 3
Das allgemeine lineare Ausgleichsproblem
Das Minimierungsproblem
m∑
i=1
(y(ti;x1, . . . , xn) − bi)2 =
m∑
i=1
(ai,1x1 + . . . + ai,nxn − bi)2 = min
wird in Matrixform dargestellt. Setzt man
A = (ai,j)m,ni,j=1 ∈ R
m×n, b ∈ Rm,
nimmt das Minimierungsproblem eine kompakte Form an:
‖Ax − b‖22 = minx∈Rn
.
Also:
Zu gegebenem A ∈ Rm×n und b ∈ R
n, bestimme x∗ ∈ Rn, fur das
‖Ax∗ − b‖2 = minx∈Rn
‖Ax − b‖2gilt.
Dahmen-Reusken Kapitel 4 4
Beispiel 4.3.
Man vermutet, daß die Meßdaten
t 0 1 2 3
y 3 2.14 1.86 1.72
einer Gesetzmaßigkeit der Form
y = f(t) = α1
1 + t+ β
mit noch zu bestimmenden Parametern α, β ∈ R gehorchen. Das zu-
gehorige lineare Ausgleichsproblem hat die Gestalt (4.14), mit
x =
(
αβ
)
, A =
1 112 113 114 1
, b =
32.141.861.72
. △
Dahmen-Reusken Kapitel 4 5
Normalgleichungen
Die Losung von (4.14) laßt sich auf die Losung des linearen Glei-
chungssystems
ATAx = AT b
reduzieren, das haufig als Normalgleichungen bezeichnet wird.
Beachte: fur A ∈ Rm×n ist die Matrix ATA ∈ Rn×n stets quadratisch.
Kernaussage:
Satz 4.5. x∗ ∈ Rn ist genau dann Losung des linearen Ausgleichs-
problems (4.14), wenn x∗ Losung der Normalgleichungen
ATAx = AT b
ist. Das System der Normalgleichungen hat stets mindestens eine
Losung. Sie ist genau dann eindeutig, wenn Rang(A) = n gilt.
Dahmen-Reusken Kapitel 4 6
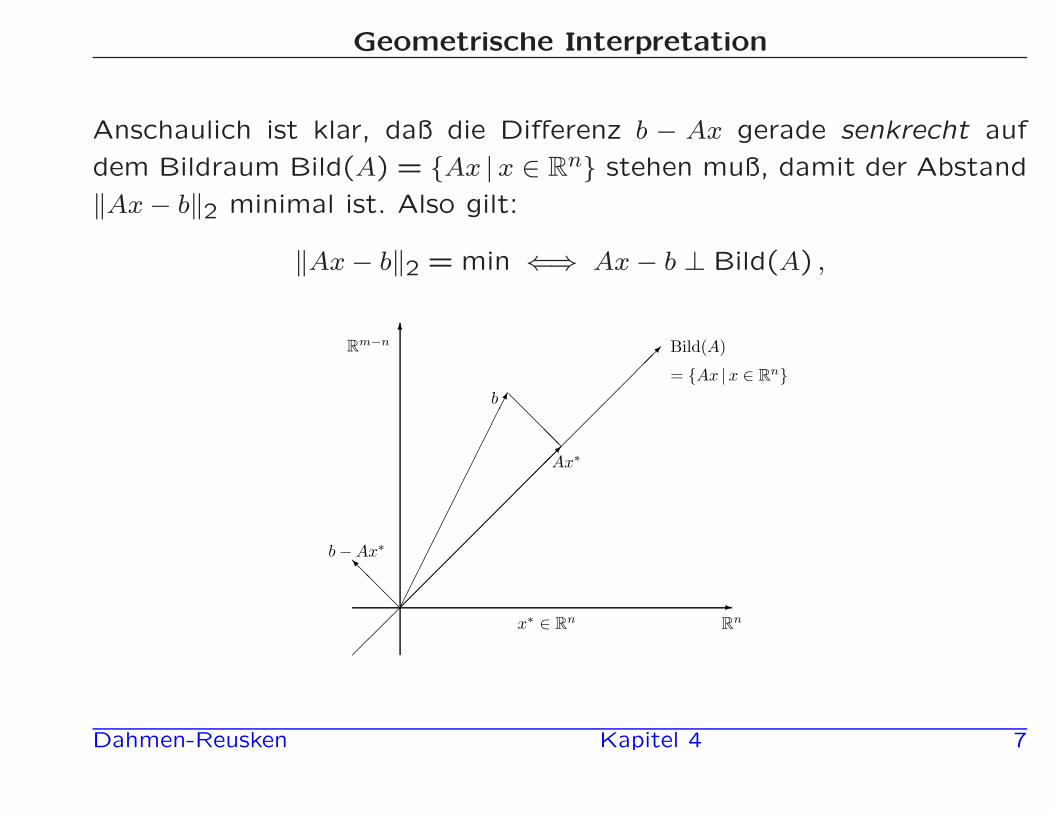
Geometrische Interpretation
Anschaulich ist klar, daß die Differenz b − Ax gerade senkrecht auf
dem Bildraum Bild(A) = {Ax | x ∈ Rn} stehen muß, damit der Abstand
‖Ax − b‖2 minimal ist. Also gilt:
‖Ax − b‖2 = min ⇐⇒ Ax − b ⊥ Bild(A) ,
-R
n
@@
@I
��������������
��
��
��
��
���Ax∗
x∗ ∈ Rn
b − Ax∗
b
6
��
��
��
��
��
��
��
��
����
Rm−n Bild(A)
= {Ax |x ∈ Rn}
@@
@@
Dahmen-Reusken Kapitel 4 7
In Beispiel 3.32 wurde bereits folgende Tatsache gezeigt:
Bemerkung 4.6. Falls A ∈ Rm×n vollen (Spalten-)Rang n hat,
so ist die Matrix ATA ∈ Rn×n symmetrisch positiv definit.
Annahme: Wir beschranken uns in den Abschnitten 4.3 und 4.4 auf
den Fall, daß A vollen Spaltenrang hat: Rang(A) = n.
Der Fall Rang(A) < n wird in Abschnitt 4.7 diskutiert.
Dahmen-Reusken Kapitel 4 8
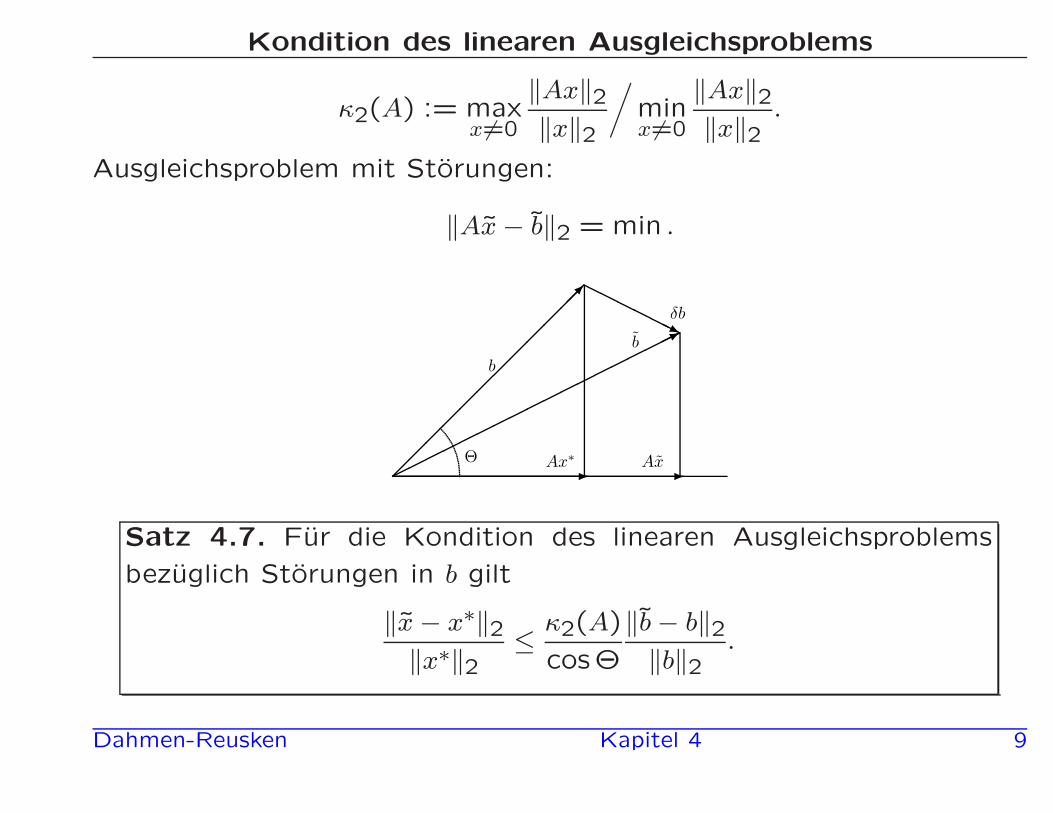
Kondition des linearen Ausgleichsproblems
κ2(A) := maxx6=0
‖Ax‖2‖x‖2
/
minx6=0
‖Ax‖2‖x‖2
.
Ausgleichsproblem mit Storungen:
‖Ax − b‖2 = min .
--������������������*
��
��
��
��
��
���HHHHHHj
Θ Ax∗ Ax
b
b
δb
Satz 4.7. Fur die Kondition des linearen Ausgleichsproblems
bezuglich Storungen in b gilt
‖x − x∗‖2‖x∗‖2
≤ κ2(A)
cosΘ
‖b − b‖2‖b‖2
.
Dahmen-Reusken Kapitel 4 9
Beispiel 4.8.
A :=
1 10 00 1
, b :=
0.0110
.
Man kann einfach nachrechnen, daß κ2(A) ≈ 2.62 und
x∗ = (ATA)−1AT b =
(
0.010
)
gilt. Fur b = (0.01,1,0.01)T erhalt man
x = (ATA)−1AT b =
(
00.01
)
.
Daraus folgt
‖x − x∗‖2‖x∗‖2
≈ 100‖b − b‖2‖b‖2
,
also eine schlechte Kondition. Es gilt
cosΘ =‖Ax∗‖2‖b‖2
= 0.01. △
Dahmen-Reusken Kapitel 4 10
Kondition des linearen Ausgleichsproblems
Satz 4.9. Fur die Kondition des linearen Ausgleichspro-
blems bezuglich Storungen in A gilt
‖x − x∗‖2‖x∗‖2
≤(
κ2(A) + κ2(A)2 tanΘ) ‖A − A‖2
‖A‖2.
Dahmen-Reusken Kapitel 4 11
Numerische Losung des linearen Ausgleichsproblems
Losung der Normalgleichungen
Die Matrix ATA ist symmetrisch positiv definit.
Folglich ergibt sich die Methode:
• Berechne ATA, AT b.
• Berechne die Cholesky-Zerlegung
LDLT = ATA
von ATA.
• Lose
Ly = AT b, LTx = D−1y
durch Vorwarts- bzw. Ruckwartseinsetzen.
Dahmen-Reusken Kapitel 4 12
Nachteile dieser Vorgehensweise
• Die Berechnung von ATA ist fur große m aufwendig und birgt
die Gefahr von Genauigkeitsverlust durch Ausloschungseffekte. Die
Eintrage von ATA sind also mit (moglicherweise erheblichen relati-
ven) Fehlern behaftet.
• Bei der Losung des Systems ATAx = AT b uber das Cholesky-
Verfahren werden die Rundungsfehler in ATA und AT b mit
κ2(ATA)
verstarkt. Es gilt
κ2(ATA) = κ2(A)2.
Folglich wird die Rundungsfehlerverstarkung durch κ2(A)2 beschrie-
ben.
Dahmen-Reusken Kapitel 4 13
Beispiel 4.12.
A =
√3
√3
δ 00 δ
, b =
2√
3δδ
, 0 < δ ≪ 1.
Das lineare Ausgleichsproblem ‖Ax − b‖2 = min hat die Losung
x∗ = (1,1)T (fur alle δ > 0). Außerdem gilt Θ = 0.
Daher wird die Kondition dieses Problems durch κ2(A) beschrieben.
Man rechnet einfach nach, daß
κ2(A) ≈√
6
δ
gilt. Ein stabiles Verfahren sollte ein Resultat x liefern, mit
‖x − x∗‖2‖x∗‖2
/ κ2(A) eps .
Dahmen-Reusken Kapitel 4 14
Die Losung dieses Problems uber die Normalgleichungen und das
Cholesky-Verfahren auf einer Maschine mit eps ≈ 10−16 ergibt:
δ = 10−4 :‖x − x∗‖2‖x∗‖2
≈ 2 ∗ 10−8 ≈ 1
3κ2(A)2 eps
δ = 10−6 :‖x − x∗‖2‖x∗‖2
≈ 2 ∗ 10−4 ≈ 1
3κ2(A)2 eps .
Dahmen-Reusken Kapitel 4 15

Losung uber QR-Zerlegung
Satz 4.13. Sei A ∈ Rm×n mit Rang(A) = n und b ∈ R
m. Sei
Q ∈ Rm×m eine orthogonale Matrix und R ∈ Rn×n eine obere
Dreiecksmatrix, so daß
QA = R :=
(
R∅
)
} n} m − n
.
Dann ist die Matrix R regular. Schreibt man
Qb =
(
b1b2
)
} n} m − n
,
dann ist x∗ = R−1b1 die Losung des linearen Ausgleichsproblems
(4.14). Die Norm ‖Ax∗ − b‖2 ist gerade durch ‖b2‖2 gegeben.
Grundidee:
‖Ax − b‖22 = ‖QAx − Qb‖22 = ‖Rx − Qb‖22 = ‖Rx − b1‖22 + ‖b2‖22.
Dahmen-Reusken Kapitel 4 16
Aus Satz 4.13 ergibt sich nun folgende Methode:
• Bestimme von A die QR-Zerlegung
QA =
(
R∅
)
(R ∈ Rn×n),
z.B. mittels Givens-Rotationen oder Householder-Spiegelung-
en und berechne Qb =(
b1b2
)
.
• Lose
Rx = b1
mittels Ruckwartseinsetzen.
Die Norm des Residuums minx∈Rn ‖Ax − b‖2 = ‖Ax∗ − b‖2 ist gerade
durch ‖b2‖2 gegeben.
Dahmen-Reusken Kapitel 4 17
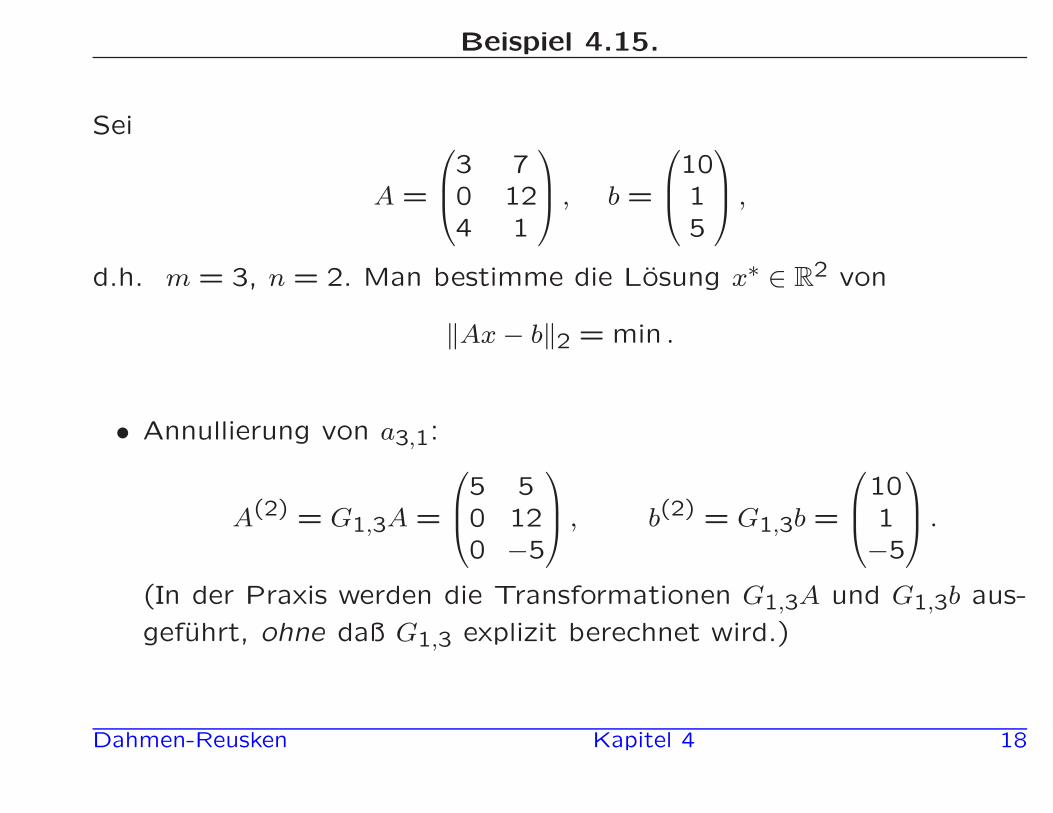
Beispiel 4.15.
Sei
A =
3 70 124 1
, b =
1015
,
d.h. m = 3, n = 2. Man bestimme die Losung x∗ ∈ R2 von
‖Ax − b‖2 = min .
• Annullierung von a3,1:
A(2) = G1,3A =
5 50 120 −5
, b(2) = G1,3b =
101−5
.
(In der Praxis werden die Transformationen G1,3A und G1,3b aus-
gefuhrt, ohne daß G1,3 explizit berechnet wird.)
Dahmen-Reusken Kapitel 4 18
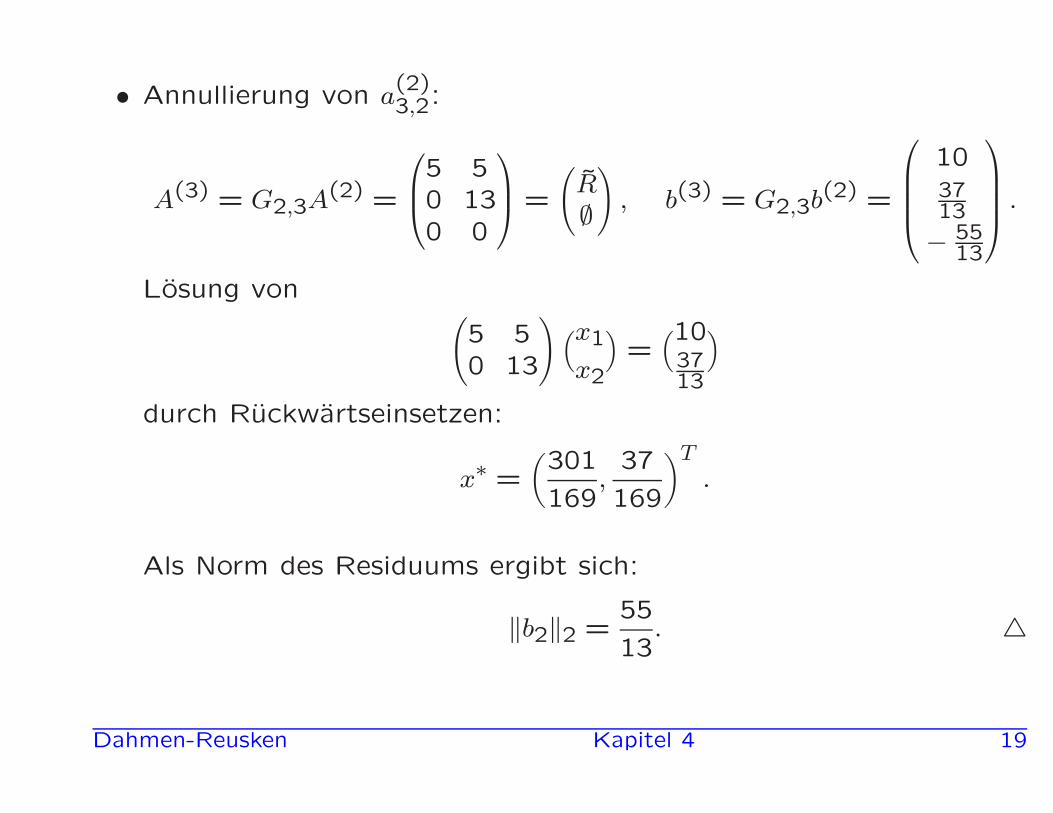
• Annullierung von a(2)3,2:
A(3) = G2,3A(2) =
5 50 130 0
=
(
R∅
)
, b(3) = G2,3b(2) =
103713
− 5513
.
Losung von(
5 50 13
)
(x1
x2
)
=(103713
)
durch Ruckwartseinsetzen:
x∗ =
(
301
169,
37
169
)T.
Als Norm des Residuums ergibt sich:
‖b2‖2 =55
13. △
Dahmen-Reusken Kapitel 4 19
Wegen Satz 3.41 gilt
κ2(A) = κ2(R),
d.h., das Quadrieren der Kondition, das bei den Normalgleichun-
gen auftritt, wird vermieden. Außerdem ist die Berechnung der
QR-Zerlegung uber Givens- oder Householder-Transformationen
ein sehr stabiles Verfahren, wobei die Fehlerverstarkung durch
κ2(A) (und nicht κ2(A)2) beschrieben wird.
Dahmen-Reusken Kapitel 4 20
Beispiel 4.16
Wir nehmen A und b wie in Beispiel 4.12. Die Methode uber die QR-
Zerlegung von A, auf einer Maschine mit eps ≈ 10−16, ergibt
δ = 10−4 :‖x − x∗‖2‖x∗‖2
≈ 2.2 ∗ 10−16,
δ = 10−6 :‖x − x∗‖2‖x∗‖2
≈ 1.6 ∗ 10−16.
Wegen der sehr guten Stabilitat dieser Methode sind diese Resultate
viel besser als die Resultate in Beispiel 4.12. △
Dahmen-Reusken Kapitel 4 21
4.5 Zum statistischen Hintergrund - lineare Regression
Gegeben seien Daten (t1, y1), . . . , (tm, ym) mit
ti: feste (deterministische) Meßpunkte,
yi: Realisierungen von Zufallsvariablen Yi.
Lineare Regression basiert auf dem Ansatz
Yi =n∑
k=1
ak(ti)xk + Fi, i = 1, . . . , m,
ak(t): geeignete Ansatzfunktionen,
Fi: Meßfehler (Zufallsvariablen).
Ziel: eine Schatzung x = (x1, . . . , xn)T fur den unbekannten Parame-
tersatz x = (x1, . . . , xn)T ∈ Rn bestimmen.
Einen solchen Schatzer liefert die lineare Ausgleichsrechnung.
Sei namlich x die Losung des linearen Ausgleichsproblems
‖Ax − y‖22 → min .
Dann ist x ebenfalls eine Zufallsvariable.
Dahmen-Reusken Kapitel 4 22
x als Best Linear Unbiased Estimator (BLUE)
Annahmen:
- Fi unabhangig, identisch verteilt mit Erwartungswert E(Fi) = 0
- Varianz-Kovarianzmatrix
V (F) := E(FFT ) =(
E(FiFj))m
i,j=1= σ2I
Dann gilt
E(x) = x, V (x) = E
(
(x − x)(x − x)T)
= σ2(ATA)−1.
Der Schatzer ist erwartungstreu und hat minimale Varianz.
Man spricht von einem Best Linear Unbiased Estimator (BLUE).
Dahmen-Reusken Kapitel 4 23
x als Maximum-Likelihood-Schatzer
Annahmen:
- Fi unabhangig, identisch verteilt mit Erwartungswert 0
- Varianz-Kovarianzmatrix V (F) = σ2I- Fi normalverteilt
⇒: Yi normalverteilt, E(Y ) = Ax, V (Y ) = σ2I. Dichtefunktion von Yi:
fi(z) =1
σ√
2πe−1
2
(
z−(Ax)iσ
)2
.
Fur die Meßreihe y1, . . . , ym ist die Likelihood-Funktion definiert durch
L(x; y1, . . . , ym) :=m∏
i=1
fi(yi) =
(
1
2πσ2
)m2
e− 1
2σ2‖y−Ax‖22.
Ein Parameterwert x heißt Maximum-Likelihood-Schatzwert, wenn
L(x; y1, . . . , ym) ≥ L(x; y1, . . . , ym) fur alle x ∈ Rn
Der Maximum-Likelihood-Schatzer ist gerade der Schatzer x aus dem
linearen Ausgleichsproblem, weil
‖y − Ax‖2 = minx∈Rn
‖y − Ax‖2.
Dahmen-Reusken Kapitel 4 24
4.6 Orthogonale Projektion auf einem Teilraum
Gegeben: ein Vektorraum V uber R mit einem Skalarprodukt 〈·, ·〉.
Durch ‖v‖ := 〈v, v〉12 wird eine Norm auf V definiert.
Aufgabe. Sei U ⊂ V ein n-dimensionaler Teilraum von V .
Zu v ∈ V bestimme u∗ ∈ U , fur das
‖u∗ − v‖ = minu∈U
‖u − v‖
gilt.
Im Falle des linearen Ausgleichsproblems ist U = Bild(A), A ∈ Rm×n,
V = Rm, 〈u, v〉 =
∑mj=1 ujvj, D.h. ‖ · ‖ = ‖ · ‖2.
Bemerkung 4.18. Weil U ein endlich-dimensionaler Teilraum ist, exi-
stiert ein Element in U mit minimalem Abstand zu v, d.h. es existiert
u∗ ∈ U , fur das ‖u∗ − v‖ = minu∈U ‖u − v‖ gilt. △
Dahmen-Reusken Kapitel 4 25
Satz 4.20. Unter den Bedingungen von Aufgabe 4.17 existiert ein
eindeutiges u∗ ∈ U , das
‖u∗ − v‖ = minu∈U
‖u − v‖
erfullt. Ferner gilt das genau dann, wenn
〈u∗ − v, u〉 = 0 ∀u ∈ U,
d.h. , u∗ − v senkrecht (bzgl. 〈·, ·〉) zu U ist.
u∗ ist somit die orthogonale Projektion (bzgl. 〈·, ·〉) von v auf U .
Die Losung der Aufgabe 4.17 ist also die orthogonale Projektion
(bzgl. 〈·, ·〉) von v auf den Unterraum U .
��
��
��
��
��
��
-
�
Uu∗
v
Dahmen-Reusken Kapitel 4 26
Eigenschaften der Projektion
Zu v ∈ V existiert ein eindeutiges PU(v) ∈ U , so daß v − PU(v) ⊥ U ,
d.h. , 〈v − PU(v), u〉 = 0 ∀ u ∈ U.
Mit PU : V → U ist also eine wohldefinierte Abbildung gegeben.
(i) Die Abbildung PU : V → U ist linear.
(ii) PU ist ein Projektor, d.h. PU(u) = u fur alle u ∈ U (P2U = PU).
(iii) Die Abbildung PU ist symmetrisch,
d.h. 〈PU(v), w〉 = 〈v, PU(w)〉, ∀ v, w ∈ V.
(iv) PU is beschrankt und zwar gilt ‖PU‖ = sup‖v‖=1 ‖PU(v)‖ = 1.
Dahmen-Reusken Kapitel 4 27
Wie kann man PU(v) berechnen?
Sei {φ1, . . . , φn} eine Basis fur U . Dann hat u = PU(v) eine eindeutige
Darstellung
PU(v) =n∑
j=1
cjφj
mit gewissen Koeffizienten cj = cj(v). Es gilt
0 = 〈v − PU(v), φk〉 = 〈v, φk〉 −n∑
j=1
cj〈φj, φk〉, k = 1, . . . , n.
Definiert man die Gram-Matrix G :=(
〈φk, φj〉)n
j,k=1und die Vektoren
c = (c1, . . . , cn)T , v = (〈v, φ1〉, . . . , 〈v, φn〉)T so ergibt sich
Gc = v
Die Berechnung einer orthogonalen Projektion lauft also im
allgemeinen auf die Losung eines symmetrisch positiv definiten
Gleichungssystems hinaus.
Dahmen-Reusken Kapitel 4 28
4.7 Singularwertzerlegung (SVD) und Pseudoinverse
Wir definieren die Losungsmenge
L(b) := {x ∈ Rn | x ist Losung des linearen Ausgleichproblems}
Lemma 4.24. Die Losungsmenge L(b) hat folgende Eigenschaften:
(i) Es existiert ein eindeutiges x∗ ∈ Rn, so daß x∗ = L(b)∩Kern(A)⊥,
wobei Kern(A)⊥ := {z ∈ Rn | yTz = 0 ,∀ y ∈ Kern(A)}.
(ii) Fur alle x ∈ L(b) \ {x∗} gilt ‖x‖2 > ‖x∗‖2, d.h., x∗ hat die kleinste
Euklidische Norm in L(b).
Folgerung 4.25. Sei b ∈ Rm, A ∈ Rm×n. Die Aufgabe
bestimme x∗ mit minimaler Euklidischer Norm,
fur das ‖Ax∗ − b‖2 = minx∈Rn ‖Ax − b‖2 gilt,
hat eine eindeutige Losung.
Dahmen-Reusken Kapitel 4 29
Singularwertzerlegung
Satz 4.27. Zu jeder Matrix A ∈ Rm×n existieren orthogonale
Matrizen U ∈ Rm×m, V ∈ R
n×n und eine Diagonalmatrix
Σ := diag(σ1, . . . , σp) ∈ Rm×n, p = min{m, n} ,
mit
σ1 ≥ σ2 ≥ . . . ≥ σp ≥ 0,
so daß
UTAV = Σ.
Die σi heißen Singularwerte von A (singular values). Die Spalten der
Matrizen U, V nennt man die Links- bzw.Rechtssingularvektoren.
Dahmen-Reusken Kapitel 4 30
Pseudoinverse
Satz 4.28. Sei UTAV = Σ eine Singularwertzerlegung von
A ∈ Rm×n mit Singularwerten
σ1 ≥ . . . ≥ σr > σr+1 = . . . = σp = 0, p = min{m, n}.Definiere A+ ∈ Rn×m durch
A+ = V Σ+UT mit
Σ+ = diag(σ−11 , . . . , σ−1
r ,0, . . . ,0) ∈ Rn×m .
Dann ist A+b = x∗ die Losung des allgemeinen linearen
Ausgleichproblems.
A+ heißt Pseudoinverse von A.
Dahmen-Reusken Kapitel 4 31
Lemma 4.29. Sei UTAV = Σ eine Singularwertzerlegung von A mitSingularwerten σ1 ≥ . . . ≥ σr > σr+1 = . . . = σp = 0, p = min{m, n}.Die Spalten der Matrizen U und V werden mit ui bzw. vi notiert.Dann gilt:
(i) Avi = σiui, ATui = σivi, i = 1, . . . , p.
(ii) Rang(A) = r.
(iii) Bild(A) = span{u1, . . . , ur}, Kern(A) = span{vr+1, . . . , vn}.
(iv) ‖A‖2 = σ1.
(v) Sei κ∗2(A) := ‖A‖2‖A+‖2 = σ1
σr. Falls Rang(A) = n ≤ m, so gilt
κ∗2(A) = κ2(A) =
max‖x‖2=1 ‖Ax‖2min‖x‖2=1 ‖Ax‖2
(vi) {σi | i = 1, . . . , r} = {√
λi(ATA) | i = 1, . . . , n } \ {0} .
Dahmen-Reusken Kapitel 4 32
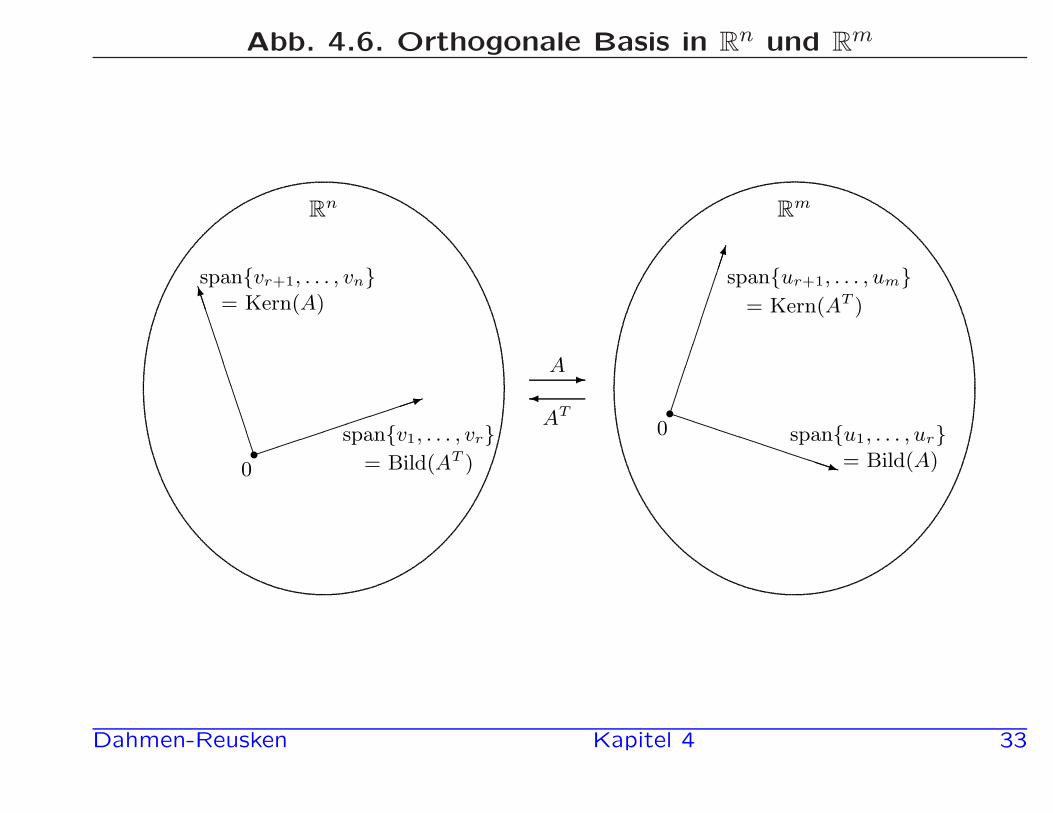
Abb. 4.6. Orthogonale Basis in Rn und R
m
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
..
.
.
.
..
.
.
.
..
.
.
..
.
..
.
..
.
..
.
..
.
..
..
..
.
...............................................................................................................................................
...................................................................................................................................................
..............................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
....................................................................................................................................................................................................................................................................................................................... .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
..
.
.
.
.
..
.
.
..
.
.
..
.
..
.
..
.
..
.
..
.
..
..
..........................................................................................................................................
.....................
.....................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
......................................................................................................................................................................................................................................................................................................................
BB
BBB
BBBM
��������1
r
span{vr+1, . . . , vn}
= Kern(A)
span{v1, . . . , vr}
= Bild(AT )
Rn
0
���������
PPPPPPPPq
r
span{ur+1, . . . , um}
= Kern(AT )
span{u1, . . . , ur}
= Bild(A)
Rm
0
�-A
AT
Dahmen-Reusken Kapitel 4 33
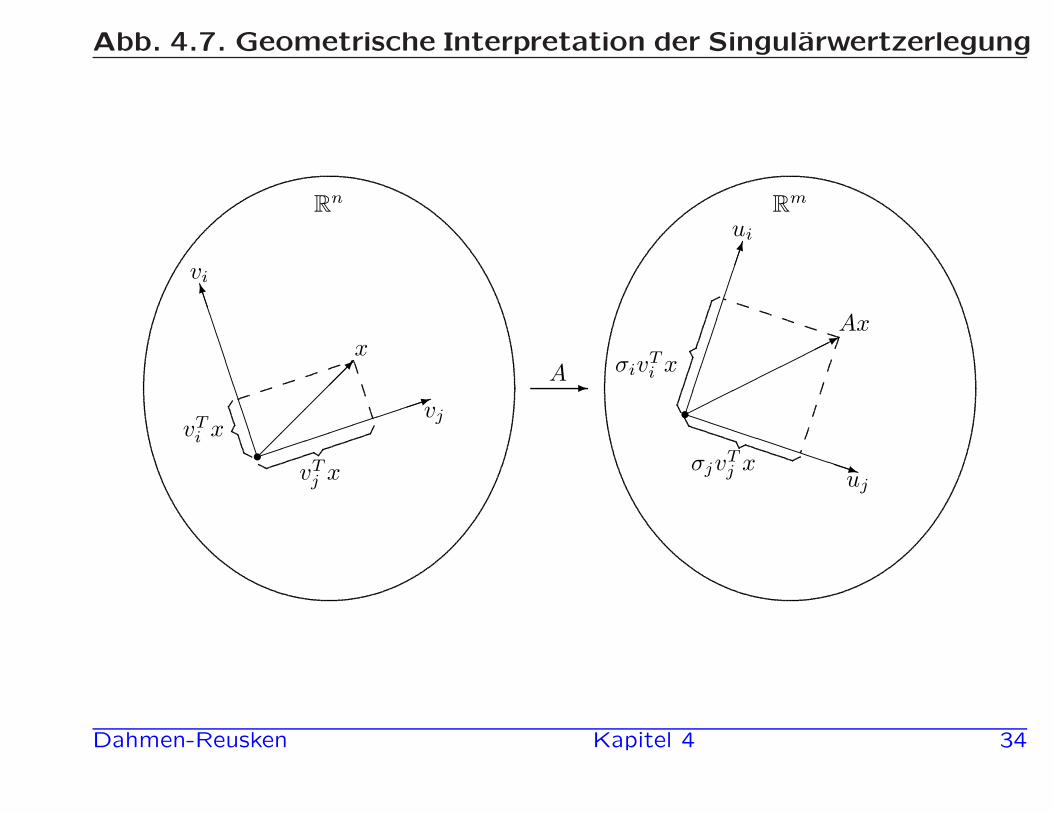
Abb. 4.7. Geometrische Interpretation der Singularwertzerlegung
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
..
.
.
.
..
.
.
.
..
.
.
..
.
..
.
..
.
..
.
..
.
..
..
..
.
...............................................................................................................................................
...................................................................................................................................................
..............................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
....................................................................................................................................................................................................................................................................................................................... .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
..
.
.
.
..
.
.
.
..
.
.
..
.
..
.
..
.
..
.
..
.
..
....................................................................................................................................................
...................................................................................................................................................
..............................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.......................................................................................................................................................................................................................................................................................................................
BB
BBB
BBBM
��������1
r
vi
vTi x
vTj x
vj
Rn
x
��
����
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.............
.............
.............
.............
.............
...
.
.
.
.
.
.
.
.
.
.
...............................................................
.....................................................
......
.
..
.
..
.
............
.
.
.
.
.
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
........
���������
PPPPPPPPq
r
σjvTj x
σivTi x
ui
uj
Rm
Ax
�������*.............
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.............
.............
.............
.............
.............
...
..........
.
.
.
..
.
.
.
.
.
.....................................................
.....................................................
........
.
.
.
.
.
.
.
.
..........
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
........
.
.
.
.
.
.
.
.
-A
Dahmen-Reusken Kapitel 4 34
4.7.1 Berechnung von Singularwerten
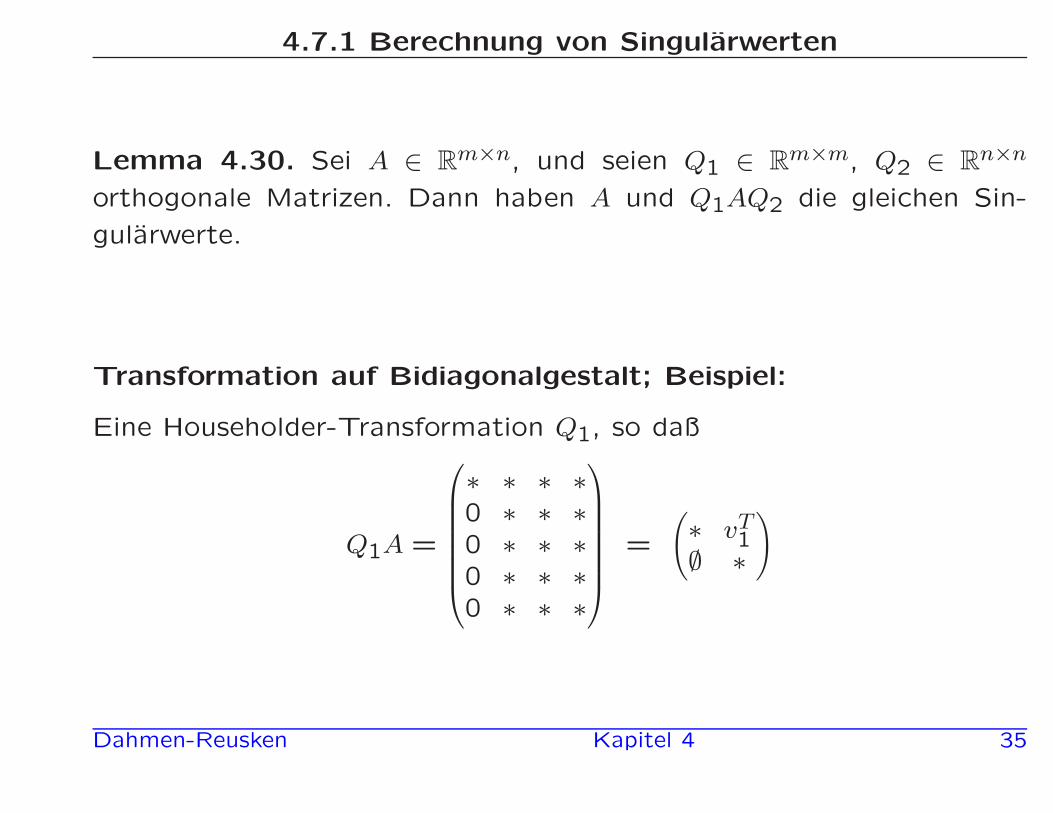
Lemma 4.30. Sei A ∈ Rm×n, und seien Q1 ∈ Rm×m, Q2 ∈ Rn×n
orthogonale Matrizen. Dann haben A und Q1AQ2 die gleichen Sin-
gularwerte.
Transformation auf Bidiagonalgestalt; Beispiel:
Eine Householder-Transformation Q1, so daß
Q1A =
∗ ∗ ∗ ∗0 ∗ ∗ ∗0 ∗ ∗ ∗0 ∗ ∗ ∗0 ∗ ∗ ∗
=
(
∗ vT1
∅ ∗
)
Dahmen-Reusken Kapitel 4 35
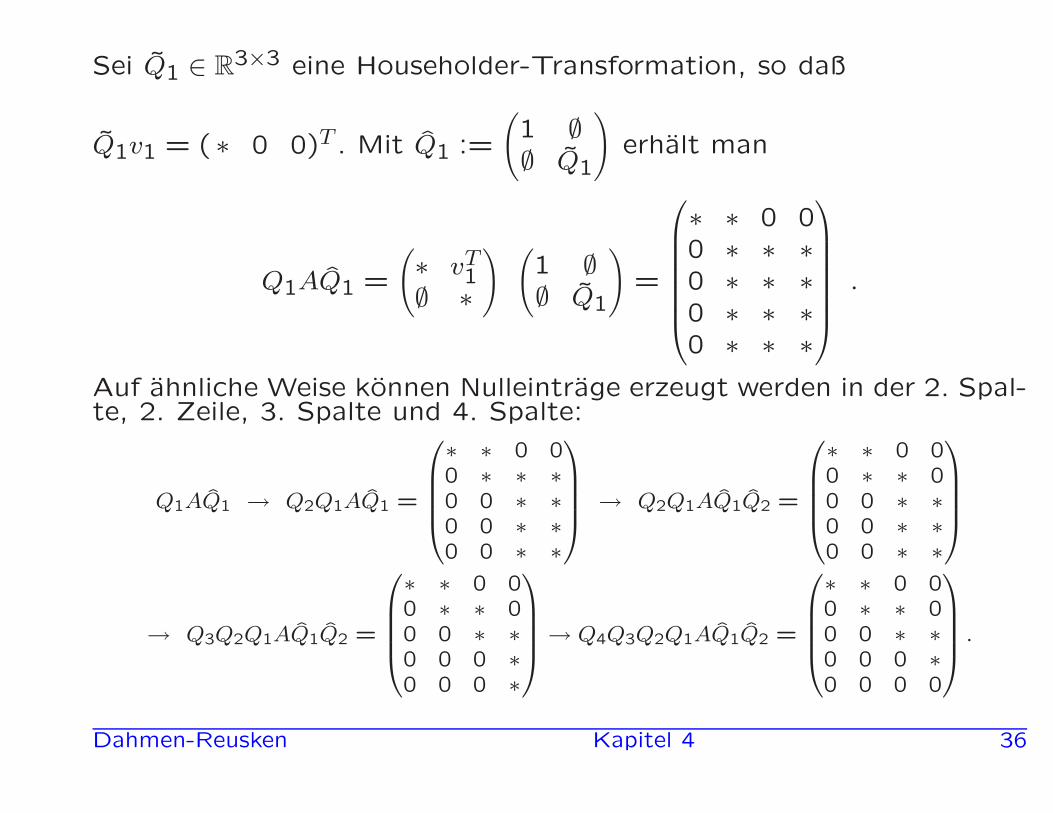
Sei Q1 ∈ R3×3 eine Householder-Transformation, so daß
Q1v1 = ( ∗ 0 0)T . Mit Q1 :=
(
1 ∅∅ Q1
)
erhalt man
Q1AQ1 =
(
∗ vT1
∅ ∗
) (
1 ∅∅ Q1
)
=
∗ ∗ 0 00 ∗ ∗ ∗0 ∗ ∗ ∗0 ∗ ∗ ∗0 ∗ ∗ ∗
.
Auf ahnliche Weise konnen Nulleintrage erzeugt werden in der 2. Spal-te, 2. Zeile, 3. Spalte und 4. Spalte:
Q1AQ1 → Q2Q1AQ1 =
∗ ∗ 0 00 ∗ ∗ ∗0 0 ∗ ∗0 0 ∗ ∗0 0 ∗ ∗
→ Q2Q1AQ1Q2 =
∗ ∗ 0 00 ∗ ∗ 00 0 ∗ ∗0 0 ∗ ∗0 0 ∗ ∗
→ Q3Q2Q1AQ1Q2 =
∗ ∗ 0 00 ∗ ∗ 00 0 ∗ ∗0 0 0 ∗0 0 0 ∗
→ Q4Q3Q2Q1AQ1Q2 =
∗ ∗ 0 00 ∗ ∗ 00 0 ∗ ∗0 0 0 ∗0 0 0 0
.
Dahmen-Reusken Kapitel 4 36
Bemerkung 4.31. Der Aufwand zur Berechnung der oberen Bidiago-
nalmatrix B in 4.65 betragt mn2 + O(mn) Operationen. △
Die Matrix A und die sich ergebende Bidiagonalmatrix B haben die
gleichen Singularwerte.
Die Singularwerte der Matrix A sind die Wurzeln der Eigenwerte der
Tridiagonalmatrix BTB.
Fur die Berechnung der Eigenwerte dieser Matrix werden im allgemei-
nen sehr viel weniger arithmetische Operationen benotigt als fur die
Berechnung der Eigenwerte der (vollbesetzten) Matrix ATA.
Dahmen-Reusken Kapitel 4 37
4.7.2 Rangbestimmung
Lemma 4.32. Sei UTAV = Σ eine Singularwertzerlegung von A mit
Singularwerten σ1 ≥ . . . ≥ σr > σr+1 = . . . = σp = 0, p = min{m, n}.Fur 0 ≤ k ≤ p − 1 gilt:
min{ ‖A − B‖2 | B ∈ Rm×n, Rang(B) ≤ k } = σk+1 .
Folgerung 4.33. Fur A und A = A + ∆A ∈ Rm×n mit Singularwerten
σ1 ≥ . . . ≥ σp bzw. σ1 ≥ . . . ≥ σp, p = min{m, n}, gilt
|σk − σk||σ1|
≤ ‖∆A‖2‖A‖2
, fur k = 1, . . . , p.
In diesem Sinne ist das Problem der Singularwertbestimmung gut kon-
ditioniert.
Dahmen-Reusken Kapitel 4 38
Der Numerische Rang
Sei A = (ai,j) eine mit Rundungsfehlern behaftete Annaherung von A,
wobei ai,j = ai,j(1 + ǫi,j) mit |ǫi,j| ≤ eps.
Mit E := (ai,jǫi,j) ∈ Rm×n ergibt sich
‖A − A‖2 = ‖E‖2 ≤ √m‖E‖∞ ≤ √
m‖A‖∞ eps ≤ √mn‖A‖2 eps .
Deswegen definieren wir:
BA(eps) := {C ∈ Rm×n | ‖A − C‖2
‖A‖2≤ √
mn eps } .
Der numerische Rang Rangnum(A) der Matrix A ist:
Rangnum(A) := min{Rang(B) | B ∈ BA(eps) } .
Dieser numerische Rang hangt von der Maschinengenauigkeit eps ab.
Dahmen-Reusken Kapitel 4 39
Bestimmung des numerischen Ranges:
Seien σ1 ≥ . . . ≥ σp die Singularwerte der Matrix A. Es gilt
minRang(B)≤k
‖A − B‖2‖A‖2
=σk+1
σ1, 1 ≤ k < p .
Die Umgebung BA(eps) enthalt also eine Matrix B mit Rang(B) = k
genau dann, wenn σk+1/σ1 ≤ √mn eps.
Der numerische Rang der Matrix A ist deshalb:
Rangnum(A) = min{1 ≤ k ≤ p | σk+1 ≤ σ1√
mn eps }.
Dahmen-Reusken Kapitel 4 40
4.34. Beispiel
Wir betrachten die Matrizen
A1 =
110
13 0
210
23 3
310
33 0
410
43 7
, A2 = A1 + 10 eps
1000
(
1 0 0)
,
wobei eps ≈ 2 ∗ 10−16. Es gilt Rang(A1) = 2, Rang(A2) = 3 .
Die berechneten Singularwerte dieser Matrizen sind
7.776, 1.082, 1.731 ∗ 10−16 bzw. 7.776, 1.082, 2.001 ∗ 10−15.
In beiden Fallen sind die drei berechneten Singularwerte strikt positiv,
jedoch gilt
Rangnum(A1) = Rangnum(A2) = 2.
In der Praxis wurde man hieraus schließen, daß beide Matrizen den
Rang 2 haben. △
Dahmen-Reusken Kapitel 4 41