Embed Size (px)
Citation preview

TECHNISCHE MECHANIK 3(1982)Heft4
Manuskripteingang: 18. 3.1982
Zur iterativen Lösung von Finite-Element-Schemata bei
inkompressiblem nichtlinearem Materialverhalten
H. Gründemann
l. Einleitung
Bei der anaiytischen Beschreibung inkompressibler Vor-
gänge tritt neben der Bewegungsgleichung, in die der
Geschwindigkeitsvektor v und die Mittelspannung
(Druck) p als unabhängige Bestimmungsgrößen einge-
hen, noch die Nebenbedingung divv = O als Einschrän-
kung für das Geschwindigkeitsfeld auf. Aus dieser Ge-
gebenheit resultieren Gleichungssysteme, die zwar noch
symmetrisch, aber nicht mehr definit sind. Nach Diskre-
tisierung mittels der Methode der finiten Elemente ent-
stehen Matrizengleichungssysteme, in denen unter Um-
ständen einige der Hauptminoren aus der Koeffizienten-
matrix verschwinden. Die Auflösung mittels klassischer
direkter Verfahren, z. B. Gauß-Algorithmus, ist deshalb
oftmals mit Komplikationen verbunden [3], [8], [9].
Diese negativen numerischen Auflösungseigenschaften
können sich in Verbindung mit einem Verlust an Appro-
ximationsgenauigkeit bei ungünstiger Wahl der Form-
funktionen weiter verschlechtern. Das Problem der Glei-
ehungsauflösung ist deshalb auch in Verbindung mit der
Verwendung geeigneter Formfunktionen zu sehen.
In diesem Artikel werden iterative Lösungsalgorithmen
vorgeschlagen und deren Konvergenzbedingungen ange-
geben. Neben Formulierungen in Form von Funktional-
gleichungen, die für theoretische Untersuchungen günstig
sind, werden auch unmittelbar rechentechnisch verwert-
bare Ausdrücke für die Iterationsalgorithmen angegeben.
Die Geschwindigkeitsberechnung basiert auf einem qua-
dratischen Ansatz für die Formfunktionen. Demgegen-
über wird der Druck elementweise linear unter Verzicht
auf Kompatibilitätsbedingungen berechnet. Diese Kom-
bination garantiert eine Approximationsordnung O (h2)
und damit die Quasioptimalität des Verfahrens. '
Die Algorithmen werden am Modellfall nichtnewton-
scher Fließvorgänge (strain rate sensitive materials [6])
metallischer Werkstoffe untersucht. Als Spezialfälle sind
das Fließen Newtonscher Flüssigkeiten und inkompres-
sible elastische Verformungsvorgänge enthalten.
2. Problemstellung
Um ein konkretes Problem vor Augen zu haben, betrach-
ten wir quasistationäre Vorgänge aus dem Bereich der
Metallverformung, die sich durch hohe Verzerrungsge-
schwindigkeiten auszeichnen. Als Beschreibungsgrund-
lage hat sich hier eine „Fließformulierung” durchge-
setzt [9], [8]. Zurückgehend auf Untersuchungen von
Perzyna [6] sind unter diesen extremen Deformations-
bedingungen constitutive Beziehungen zwischen dem
Tensor der Deviatorspannungen T und dem Tensor der
Verzerrungsgeschwindigkeiten D relevant. Konkret wird
bei Verzicht auf elastische Verformungsanteile der Zu-
sammenhang [6]
T = 2n(HD)D (1)
angegeben, wobei n eine skalare Funktion der zweiten
Invariante
11,2J = 2spur (D2) mit D = %(gradv+grad VT) (2)
ist, in die als Parameter materialspezifische Kennwerte
eingehen. Ein häufig verwendeter a priori-Ansatz für n ist
1
IID )n)l
Via—111) V57
mit den Materialparametem 0y, 7 und n. Diese Klasse
"(Hol = (“y +(
enthält ideal plastische Werkstoffe ( ä = 0) und den
Bingham-Körper (n = 1).
Für die ablaufenden rein dissipativen Prozesse (es treten
nur bleibende Verformungen auf) ist in guter Überein-
stimmung mit Realvorgängen die Annahme inkompres-
siblen Materialverhaltens gerechtfertigt [9], [3].
Unter diesen Voraussetzungen müssen neben (l) die fol-
genden Bilanzbeziehungen für Impuls und Masse (In-
kompressibilitätsbeziehung) erfüllt sein:
divrT — grad p + pg 0 (3)
divv = 0 (4)
(p — Massedichte, g -— äußere Volumenkräfte, g = p
Der hydrostatische Druck p geht als unabhängige Größe
in (3) ein. Nach Substitution der Beziehungen (1) und
(2) in (3) erhalten wir folgendes nichtlineares System
zur Bestimmung der constitutiv wesentlichen Größen v
und p:
— div(M1113) (gradv + gradvT» + gradP = PE
in n (5)
divv = 0
(Q — Gebiet welches durch den Körper eingenommen
wird).
Als Spezialfälle können in dieses Differentialgleichunge-
system Fließvorgänge Newtonscher Flüssigkeiten (n =
const.) und, indem v durch den Verschiebungsvektor u
ersetzt wird, auch inkompressible elastische Deforma-
tionsprobleme eingeordnet werden. In beiden Fällen ist
das System (5) linear.
29

Bei Metallverformungsvorgängen ohne Wirkenergieein-
fluß treten in der Regel nur Randbedingungen erster Art
auf.
v = cpv auf P (6)
(F — Rand des Gebietes D, «pv — vorgegebene Handge-
schwindigkeit). Zusätzlich muß gewährleistet sein, daß
die in den Körper Q pro Zeiteinheit einfließende Masse
gleich der in der gleichen Zeiteinheit aus SZ herausflie-
Benden Masse ist. Eine hierzu äquivalente analytische
Darstellung lautet
fov-dl‘:0. i (7)
Q
3. Iterative Lösungsmethoden
Die analytischen Untersuchungen und numerische Lös-
barkeit des Randwertproblems (5) bis (7) wird dadurch
erschwert, daß kein Zusammenhang zwischen kinemati-
schen Größen, z. B. dem Geschwindigkeitsvektor v und
dem hydrostatischen Druck besteht.
Zweckmäßig ist eine Erweiterung des Problems im funk-
tionalanalytischen Sinne durch die Formulierung einer
zu (5), (6) äquivalenten Variationsaufgabe (schwache
Formulierung). Zu diesem Zweck führen wir zunächst
folgende Funktionenräume ein:
Xo E — Raum aller auf Q definierten und auf F
in einem verallgemeinerten Sinne verschwindenden
Funktionen, die zusammen mit ihren ersten verallgemei-
nerten Ableitungen über Q quadratisch summierbar sind.
Po E Lg — Raum aller auf Q definierten und quadra-
tisch summierbaren Funktionen ga, die die Bedingung
f cpdfl = 0 erfüllen.
Q
Aus Gründen der einfacheren Darstellung beschränken
wir uns auf homogene Randbedingungen (an = O). Die
Lösung des Systems (5) ist dann im funktionalanalyti—
schen Sinne äquivalent zur Lösung folgender Variations-
aufgabe
Zu bestimmen ist ein Paar v, pE X?) x Po, so daß
gilt
Mo a(v;v,w)+b(w,p)=<g‚w> beiwexf’; (8)
b(v,r) = 0 bel.rEPo (9)
Mit den Funktionalen
a(u;v,w) = Sfln(IID(u))(M'Bv)T'(Bw)dQ
b(w,r) = —:{2rdivwdSl
<‚ > = f deng w Qg
und
30
F i ’3x1
2 3.2 8x2
0 a
2 a—
M : 1 B = *3a ö
0 1 —— —
1 8X2 3x1
i iöX3 ö 1
i i_— aX3 6x2 .—
Die Definitionsgebiete dieser Funktionale werden durch
die Zugehörigkeiten
3*
u‚v,wGXä; rEPO; g€(X0)
bestimmt.
Ist die Funktion n auf dem Intervall [0, °°) stetig und be-
schränkt und existieren Konstanten i.” > O und Cn, so
daß die Bedingungen
n(s)s—n(t)t>2n(s—t)
_ für s>t>0 (10)
In(s)svn(t)t|<Cnls—tl
erfüllt sind, so besitzt das Problem MO eine eindeutig be-
stimmte Lösung v, p 6 X3 x P0 und ist in dem Sinne
regulär, da6 kleinen Änderungen in den Kräften g auch
kleine Änderungen der Lösung v, p entsprechen. Diese
Aussage wird in [2] für lineare Probleme und für den all—
gemeinen Fall in [5] bewiesen. Zur numerischen Lösung
sind folgende Algorithmen geeignet.
3.1. Verallgemeinerter Iterationsalgorithmus nach Ar-
row-Hurwicz
Im Falle eines linearen Problems wird der hier in direkter
Weise auf nichtlineare Probleme verallgemeinerte Itera-
tionsprozeß als Arrow-Hurwicz Algorithmus bezeichnet
[7].
Ausgehend von bekannten Startwerten v0, p0 E 1
X2 x P0 ist eine Folge vmfl, per1 E X3 x Po zu
finden, so daß gilt
MA (vm+l —vm, w)J + va(vm;vm,w)
+ Vb w, m =V< ,w>
( P ) g bel. w e X3
(pm+1 _ipm’Os _„b(vm+1‚r):0 be]. rEP0
wobei
3
'2
l
(11, W), gradu? ' grad wi d Q bel. ui, wi E X0f19
(«ms = 6 q-rdfl bel.q,rEPo
Die Konvergenz der Folge der Iterationslösungen vm, pm
6 Xo x Po gegen die exakte Lösung v, p E Xi x Po des

Problems Mo ist unter den Bedingungen (10) bei beliebi-
gen Startwerten v°, p° gesichert, wenn der Iterationspa-
rameter V in den Schranken
2 c
0 < V < _;
36 Cn + 1
gewählt wird [5].
Formal erhält man beide Iterationsfunktionale, indem
(8) und (9) mit dem Parameter V durchmultipliziert und
auf der linken Seite die Funktionale( ' , ')J und( ' , ')S
addiert werden.
3.2. Numerische Lösung durch Regularisierung
Das Problem M0 ist in folgender Weise regularisierbar:
Zu bestimmen ist ein Paar v6, pé E X?) x P0, so
daß gilt
Mg a(ve;v€,w).+b(w,p)= <g,w> beLweXä
— €(pe, r)s + b (v6, r) = 0 bel. IE Po
(e > O — Regularisierungsparameter).
Durch das regularisierende Glied in der zweiten Funk-
tionalgleichung wird ein Zusammenhang zwischen hy-
drostatischem Druck pe und dem Geschwindigkeitsvek-
tor ve erzwungen, und aus der Nebenbedingung (9) wird
nunmehr eine vollwertige Bestimmungsgleichung. Damit
kann die Lösung des Problems Mg auf der Grundlage
herkömmlicher zweistufiger iterativer Lösungsverfahren
erfolgen {10].
Es kann gezeigt werden [5], daß unter den Bedingungen
(10) bei e —> O die re larisierten Lösungen v6, pe in der
Norm des Raumes X0 x Po gegen die exakte Lösung v, p
des Problems Mo konvergieren.
Problematisch ist die Wahl geeigneter Parameter 6 > O.
Bei der numerischen Lösung treten bei sehr kleinen Wer-
ten für e („klein” in Abhängigkeit von der Rechenarith-
metik) die typischen Erscheinungen numerischer Instabi-
lität auf (stark oszillierende Werte, im Extremfall Zah-
lenüberläufe). Um die Bedeutung optimaler Parameter E
auf die Regularisierung und Stabilität des Problems zu
verringern, ist es vorteilhaft, den Iterationsprozeß, der
ohnehin zur Lösung der nichtlinearen ‘Variationsaufgabe
notwendig ist, mit einer Nachiteration bezüglich der Re-
gularisierung zu verbinden. Dies führt zu folgendem Ite—
rationsprozeß 2
3.3. Regularisierung mit Nachiteration
Ausgehend von bekannten Startwerten v2, pg 6 X3;
x P0 ist die Folge v?” , pg'fl 6 X3 x Po zu fin-
den, so daß gilt
(V'enfl—vgn‚w)J +Va(v'en;v'€“‚w)
MW0
+Vb(w,p’e“”)=v<g,w> bel. wexfi
“P?”-P2“,r)rvb(v£‘”,r)=0 bel.r€Po
Ein ähnliches Iterationsverfahren wird zur Lösung linea-
rer Probleme in [l] mit Erfolg angewendet. In allen
untersuchten Parameterbereichen konnten durch Itera-
tion bessere Ergebnisse erreicht werden als bei einmali-
ger Lösung des regularisierten Problems.
Die Konvergenz des Verfahrens Mgp gegen die exakte
Lösung v, p ist unter den Bedingungen (10) für beliebi-
ges 6 > 0 und bei beliebigen Startwerten v2, pg gesi-
chert, wenn der lterationsparameter V in den Schranken
C
0<11< -fl
180%
eingeschlossen ist
4. Finite Element Diskretisierung
Bei Anwendung der Methode der finiten Elemente wer-
den die numerischen Lösungseigenschaften und der
Approximationsgrad der diskretisierten Gleichungssyste-
me entscheidend durch die verwendeten Formfunktio-
nen für v und p bestimmt.
h > O sei ein Diskretisierungsparameter und
Xoh CXo i Poh CPo
endlichdimensionale Unterräume. Das zu Mo diskreti-
sierte Problem lautet:
Zu bestimmen ist ein Paar vh, ph E Xäh x Poh, so
dafs gilt
Moh 3(Vh;Vh‚Wh)+ b(Wh»Ph) : <ngh> beLWhEX‘gh
13(th1‘11) = 0
Konkrete Räume Xoh und Poh sowie entsprechende
Approximationsbedingungen werden für zweidimensio-
nale Probleme im linearen Fall bei dreiseitigen Elemen-
ten in [2] und für den nichtlinearen Fall bei vierseitigen
Elementen in [5] angegeben. Das Ergebnis unter den
letztgenannten Bedingungen sei hier mitgeteilt:
Zur Definition der Räume Xoh und Poh werden über
jedem vierseitigen finiten Element 0.2- C Q (1 <j S m,
m — Elementanzahl der vernetzten Struktur) folgende
Ausdrücke für die gesuchten Größen vh und ph ange-
setzt:
9 _ „
Vh(X) I E ai Ni(X)
i=1
Ph (X) = aj + bj x1 + Cj x2 (12)
1
X1 _ a? )
x = < ) =X2 3(12)
Die Formfunktionen Ni (x) gehen durch subparametri-
ache Transformation (im Falle geradlinig begrenzter Ele-
mente) oder isoparametrische Transformation (bei Ele-
mentberandungen zweiter Ordnung) aus vollständigen
quadratischen Funktionen [8] (Lagrangesche Interpola-
tionspolynome zweiter Ordnung) hervor, die über dem
Standardgebiet
31
bei. Ph E Poh .

177
lo 7 3
1
81 9 1
5 if
b1
1 5 Z
Bild l
9-Knoten-Element in Standardform
definiert sind. Unter diesen Bedingungen ist ein kompa-
tibles Elementkonzept für die Berechnung von vh ge-
sichert. Demgegenüber ist durch den linearen Ansatz
(12) die Kompatibilität bei der Druckberechnung nicht
mehr gegeben, folglich ist ph an den Elementübergängen
unstetig, und die zu bestimmenden freien Parameter aj,
- und - können nicht mit Knotenpunktswerten für ph
i entifiziert werden. Dies wirkt sich jedoch keinesfalls
nachteilig auf die Approximationsgüte aus, sondern
sichert im Gegenteil die Quasioptimalität des Verfahrens,
d. h., die Approximation ist von der gleichen Größen-
ordnung wie die bestmöglichste Approximation durch
den Unterraum Xäh x Poh. Ist die Bedingung (10) er-
füllt und v e (wg (52))2, p e wg (n) n Po, so gilt die Ab-
schätzung [2], [5]:
2Iv—vhlxä + np_phupo g Ch (Ilvll(wg)2 + upuwä)‚
wobei C eine von h unabhängige Konstante ist.
sz — Raum der Funktionen, die zusammen mit allen
verallgemeinerten Ableitungen bis einschließlich der
Ordnungj quadratisch summierbar sind.
Die Iterationsverfahren MoA und M? können direkt zur
Lösung des diskretisierten Problems Moh Anwendung
finden:
FAusgehend von bekannten Startwerten vfi, pg E Xäh
x Poh, ist eine Folge vfl'”, pl?” 6 Xäh x Poh zu
finden, so daß gilt
M2}. (dn+l-Vü‚wh)1+"a(vf;vm’wh)
+ vb(wh‚p}'?)=v<g,wh>
32
bei. wh e xfih (13)
(pan*l—p‚?‚rh>.—vb<v‚?“‚rh>=0 bel-rhEPoh (14>
[Ausgehend von bekannten Startwerten vgh, pgh E Xäh
x Poh, ist eine Folge väfl , png e xgh J: P0,, zu fin-
den, so dafi gilt
€P 1
Moh ( 611+ — V3. N10] + “(v3 :v2" ,wh)
+Vb(wh,pgil+l) = V<g,wh> bel. whexfih
m+l
E (Peh
—pä.‚rh)s—vb(vä.”‚m)=0 bel-PhEPoh
Die Konvergenz dieser Verfahren ist unter den gleichen
Bedingungen wie für die Iterationsverfahren MA und
Mgp nachweisbar. Für den praktischen Gebrauch müs-
sen aus den Funktionalgleichungen äquivalente Matri-
zengleichungen hergeleitet werden. Bei der Entwick-
lung dieser Gleichungen stützen wir uns auf das Verfah-
ren Mäh.
l. Plerechnung von p$+l bei bekannten Größen p? und
v'l': :
Ausführlich geschrieben lautet die Gleichung (l4)
sszpi?“ —p{.“ + vdivvfl”) an = o bel. mePoh.
Diese Beziehung ist äquivalent zu
pfiri-l _PLn = _VRh (divviln'l'l)
wobei Rh der Orthoprojektor in Po auf den Raum Poh
ist. Da die Funktionen aus Poh stückweise linear und
nicht kompatibel sind, kann dieser Projektor gemäß dem
Ansatz
Rh‚(divv',{”1) |w = aw + bw x1 + cw x2 bel. wCSZ
elementweise berechnet werden. Der Vektor der Konstan-
ten
pw = (aw, bw, cw)T ist Lösung des Gleichungssystems
Rw Poo = bw (VLMI)
mit
(1.1) (x1,1) (x2.1) (Ldivvli
Rw: (1aX1)(X1‚X1)(X2aX1) ’hw(v) = (xlvdivv)
(1ax2)(x1,x2)(x2»xz) (xzadivv)
und
(wk) = fw'wdw.(4.)
Die elementweise Berechnung von pi?” erfolgt dann
über den Ausdruck
m
ph “Ln = pf,“ lw—V(1,x1,x2)R: bw(v;‚"+1) bel. (Eco.
15)
2. Berechnung von vgl” bei bekannten Größen p: und
V’h”

Gemäß dem Ansatz (11) werden die Funktionen v‘ng
über dem gesamten Gebiet Q durch
definiert, wobei sich die Summation über alle Knoten-
punkte (1, .. . ,n) aus Q erstreckt. Die Funktionen
vgl” sind dann eindeutig durch die Vektoren
am+l = (a(11)m+1, 3(12)m+1’ . . . ’ a(Il)m+l a(12)m+l)T
9
bestimmt. Nach Substitution des Ansatzes (16) in der
Funktionalbeziehung (l3) erhält man folgende Matri-
ze {eichung zur iterativen Berechnung der Vektoren
ma :
1(am+1—am):u(£_A(v§)am—G(p;f)) (17)
mit den Matrizen
Iij z Jij(1 O. _' w,
0 1) ‚ Jü—EJü.
Jg? = f (grad N,)T ~ grade dw
(‚0
ff Eff”; fi“: fNigdw(A)
Aü (v?) = 2 Ag]? of) ; A§f(v{.")= (£12011) (vE))(171'Bi)T ' Bjdw
Gap?) = 2 Grip?» 6%,?) = 35 (pi? Iw>gradNidw
= —(si..‚>T p...
1 < i, < n Die Summationen sind über alle Elemente w
zu nehmen, die xi (und als gemeinsamen
Knotenpunkt besitzen.
2 Pw,l
0 _ Pw,2 _
o2
aNi
0T6x1 (L (grad Ni) dw
N. .
Bi = 0 ä; S‘w = f x1 (grad Ni)T du)
6x2 (‚0 T
aNi aNi (L x2 (grad Ni) dw
31;; a
Ausgehend von bekannten Näherungswerten vm, pi?
wird im (m+1)ten Iterationsschritt van“, phm 1 wie
folgt bestimmt:
a) Berechnung des Näherungsskelets am+1 aus (17). Ge-
miiß der Beziehung (16) ist dann auch van“ ermit-
te t. ‚
b) Berechnung von pf?” aus (15).
Damit ist klar, daß die Geschwindigkeits-Druck-Berech-
nung v, p in jedem Iterationsschritt separat ausführbar
ist. wobei ein lineares Gleichungssystem der Dimension
2 n mit positiv definiter symmetrischer konstanter Koef-
fizientenmatrix I zu lösen ist und die Druckberechnung
elementweise durch Auflösung von Gleichungssystemen
mit drei Unbekannten erfolgt. Noch zweckmäßiger ist es,
das Iterationsverfahren (l7) mit iterativen Lösungs-
methoden für lineare Gleichungssysteme zu verbinden
[4].
Methodisch in gleicher Weise sind für das Verfahren M3l
Matrizengleichungen ableitbar. Die entsprechenden Itera-
tionsgleichungen lauten wie folgt:
m+1 _ m V n -1 m+l
peh w — peh w _ F (l’xl’x2) Rw bc.3<v(ah ) (18)
2V- m+1 m m m m
(1+ F L) (ae — ae ) = V(f— A(v6h) ae —G(peh)
_ 65 La‘e“), wobei (19)
_ w w_ i T . -1 . j
Li]- — ELij und Lij — (Sw) Rw Sw.
Auch hier ist in jedem Iterationsschritt ein lineares Glei-
chungssystem der Dimension 2n mit der positiv defini-
ten symmetrischen konstanten Koeffizientenmatrix
I + €12L zu lösen. Die Druckberechnung erfolgt in glei—
cher Weise wie beim Verfahren Mjh. Besteht nur Inter-
esse an der Berechnung von veh (oder vh)‚ so können die
Funktionen päl (oder p?) aus den Iterationsverfahren
eliminiert werden. Zur Berechnung der Dissipationslei-
stung und damit der Temperaturverteilung bei irreversib-
len Prozessen ist z. B. die Druckverteilung ph nicht er-
forderlich. Nachdem die Funktionen päh sukzessive durch
div véh (i = l, . . . , m) substituiert sind, erhält man aus
(19) folgende Iterationsgleichung
(1+ :—2L><a’;‘”— a?) =
y m .
v[f— Aug) Je“— G(p:h) _ 5h? — gig Lag] m > 1.
(20) “
Für m : 0 behält die Beziehung (l9) ihre Gültigkeit.
Mit diesem Iterationsverfahren konnten ausgezeichnete
Ergebnisse erzielt werden [1], [5]. Wird die Druckvertei-
lung ph nicht benötigt, so ist bei der rechentechnischen
Realisierung das Iterationsverfahren (20) gegenüber (18),
(19) zu bevorzugen.
In der gleichen Weise kann aus (l7) p: eliminiert wer-
den.
5. Beispiielrechnungen zum Fließpressen
Die Zuverlässigkeit des Iterationsverfahrens (20) wurde
anhand erster Beispielrechnungen aus der Umform- und
Spanungstechnik getestet. In den letzten Jahren hat sich
für diese Metallverformungsvorgänge als Modellgrundlage
bei Anwendung der Methode der finiten Elemente mehr
und mehr eine Fließformulierung durchgesetzt [3], [9].
33
An dieser Stelle sollen einige Ergebnisse zum Vorwärts-
fließpressen mitgeteilt werden. Weitere Rechnungen zur
Spanungsproblematik sind in unserem Fachartikel [ll]
enthalten.
In allen Rechnungen wurde von vgh = 0 ausgegangen.
Die constitutive Spannungsbeziehung beeinflußt ent-
scheidend das Konvergenzverhalten des Algorithmus
(20), denn die Materialparameter gehen wesentlich in die
Konstanten g7? und Cn ein, die ihrerseits Grenzen für den
Iterationsparameter V festlegen. Den Rechnungen wur-
den Materialparameter für den Werkstoff Ck 45 zugrun-
de gelegt [12]. Unter diesen Bedingungen konnten mit
V = 0.1 und im Parameterbereich
l _ 2n
3 1—211
mit 0.499 < u < 0.49995
in allen Beispielen bei Zugrundelegung der Toleranz
ev = 10'2 für das Abbruchkriterium
"am” _-am n
max "ai+1 —— aill
0<i<m
die Rechnungen nach weniger als 20 Iterationsschritten
beendet werden. [l 1e Rechenzeiten der Zentraleinheit
der EDVA 1040 im OS-Betriebssystem lagen in Abhän—
gigkeit von der Vernetzungstopologie (Anzahl der Kno-
tenpunkte, Elementzusammenhang) zwischen 3 und 12
Minuten.
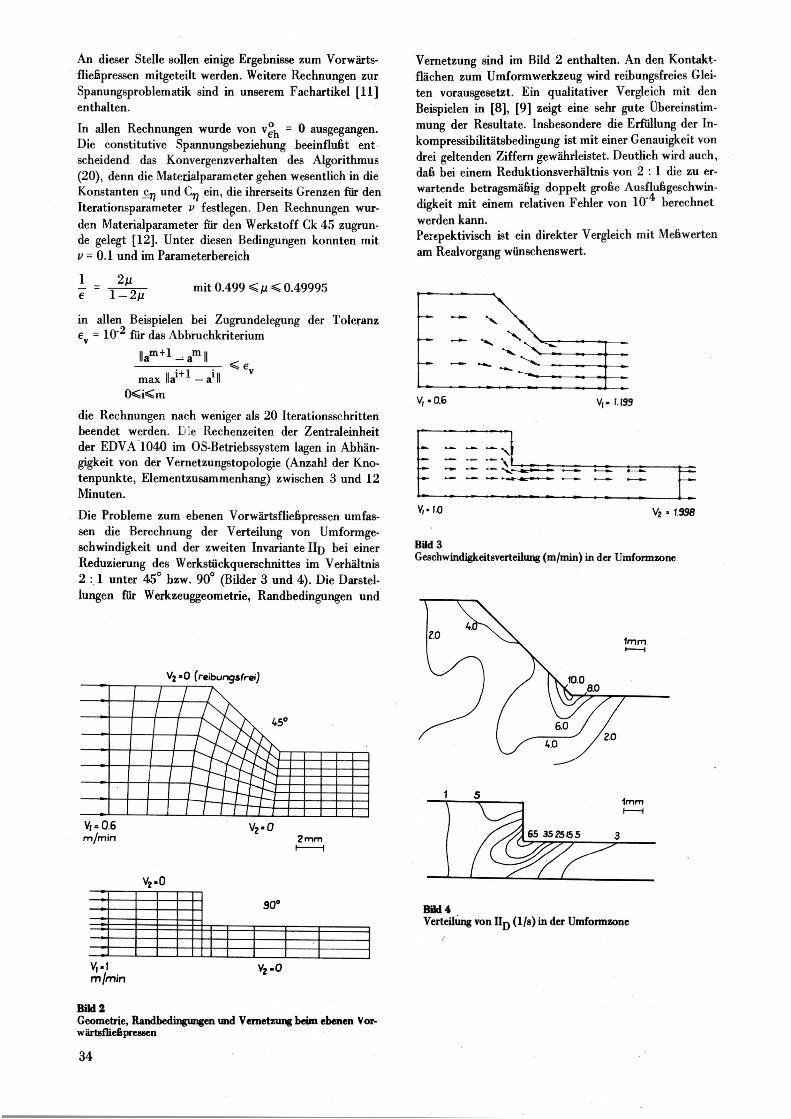
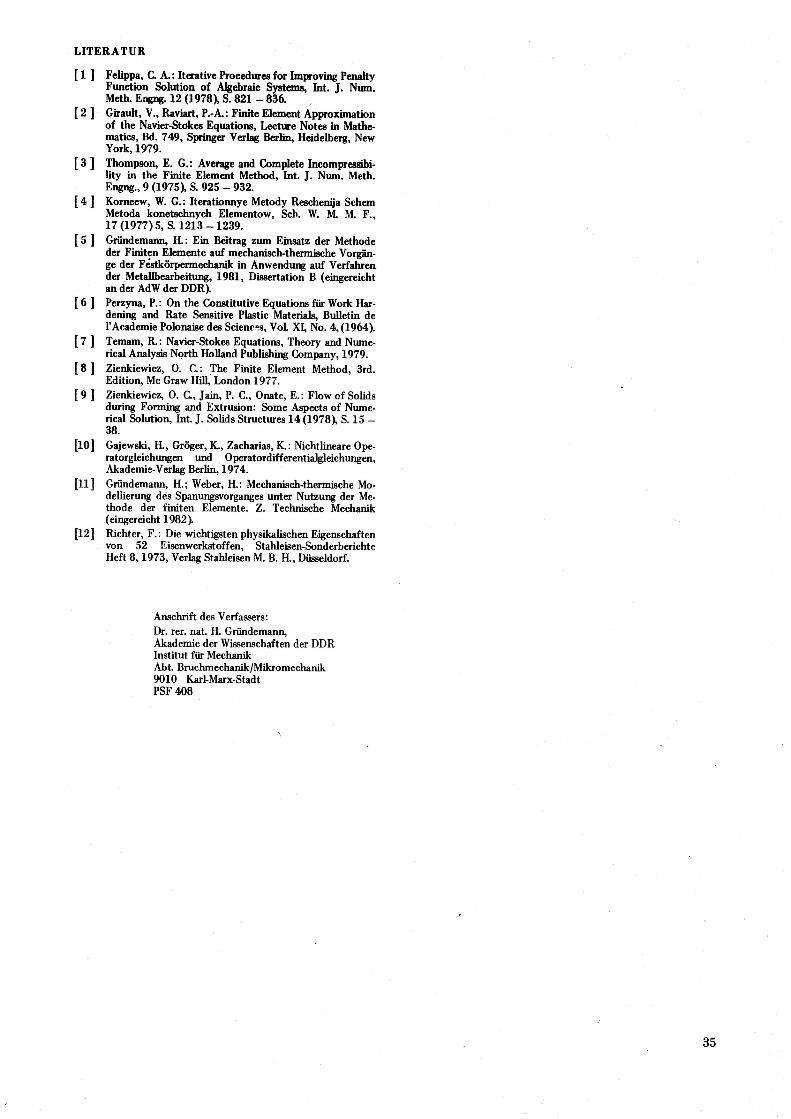
Die Probleme zum ebenen Vorwärtsfließpressen umfas-
sen die Berechnung der Verteilung von Umformge-
schwindigkeit und der zweiten Invariante IID bei einer
Reduzierung des Werkstiickquerschnittes im Verhältnis
2 :_ 1 unter 45° bzw. 90° (Bilder 3 und 4). Die Darstel-
lungen für Werkzeuggeometrie, Randbedingungen und
V2 -O (reibungsfrei)
V1=Ü.6 V210
m/rnin 2mm
Vz-O
v] 'l Vz IO
m/rnin
Bild 2
Geometrie, Randbedingungen und Vernetqu beim ebenen Vor-
wärtsfliefipressen
34
Vernetzung sind im Bild 2 enthalten. An den Kontakt-
flächen zum Umformwerkzeug wird reibungsfreies Glei-
ten vorausgesetzt. Ein qualitativer Vergleich mit den
Beispielen in [8], [9] zeigt eine sehr gute Übereinstim-
mung der Resultate. Insbesondere die Erfüllung der In-
kompressibilitätsbedingung ist mit einer Genauigkeit von
drei geltenden Ziffern gewährleistet. Deutlich wird auch,
daß bei einem Reduktionsverhältnis von 2 : l die zu er-
wartende betragsmäßig doppelt große Ausflußgeschwin-
digkeit mit einem relativen Fehler von 10'4 berechnet
werden kann.
Perspektivisch ist ein direkter Vergleich mit Meßwerten
am Realvorgang wünschenswert.
v, - 0.5 v‚. M93
u""\
m\*—_-o—. H o——a. ‚_-
..._.....r—._._.__ ._... ._.. ‚_..iÜl
HH
HH
V‚- 1.0 V2 I 1.998
Bild 3
Geschwüidigkeitsverteilung (mlmin) in der Umformmne
1mm
65 352’555 3
Bild 4 _
Verteilung von IID (l/s) in der Umformzone
LITERATUR
[1]
[2]
[31
t4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
Felippa, C. A.: Iterative Procedures for Improving Penalty
Function Solution of Algebraic Systems, Int. J. Num.
Meth. Engng. 12 (1978), S. 821 — 836. ,
Girault, V., Raviart, P.-A.: Finite Element Approximation
of the Navier-Stokes Equations, Lecture Notes in Mathe-
matics, Bd. 749, Springer Verlag Berlin, Heidelberg, New
York, 1979.
Thompson, E. 6.: Average and Complete Incompressibi-
lity in the Finite Element Method, Int. J. Num. Meth.
Engng., 9 (1975), S. 925 — 932.
Korneew, W. G.: Iterationnye Metody Reschenija Schem
Metoda konetschnych Elementow, Sch. W. M. M. F.,
17 (1977) 5, S. 1213 — 1239.
Gründemann, H.: Ein Beitrag zum Einsatz der Methode
der Finiten Elemente auf mechanisch-thermische Vorgän-
ge der Festkörpemechanik in Anwendung auf Verfahren
der Metallbearbeitung, 1981, Dissertation B (eingereicht
an der AdW der DDR).
Perzyna, P.: On the Constitutive Equations fiir Work Har-
dening and Rate Sensitive Plastic Materials, Bulletin de
l’Academie Polonaise des Sciences, Vol. XI, No. 4, (1964).
Temam, R.: Navier-Stokes Equations, Theory and Nume-
rical Analysis North Holland Publishing Company, 1979.
Zienkiewicz, O. C.: The Finite Element Method, 3rd.
Edition, Mc Graw Hill, London 1977.
Zienkiewicz, O. C., Jain, P. C., Onate, E.: Flow of Solids
during Forming and Extrusion: Some Aspects of Nume-
rical Solution, Int. J. Solids Structures 14 (1978), S. 15 —
38.
Gajewski, H., Gröger, K., Zacharias, K.: Nichtlineare Ope-
ratorgleichungen und 0peratordifferentialgleichungen,
Akademie-Verlag Berlin, 1974.
Gründemann, H.; Weber, H.: Mechanisch-thermische Mo-
dellierung des Spanungsvorganges unter Nutzung der Me-
thode der finiten Elemente. Z. Technische Mechanik
(eingereicht 1982).
Richter, F.: Die wichtigsten physikalischen Eigenschaften
von 52 Eisenwerkstoffen, Stahleisen-Sonderberichte
Heft 8, 1973, Verlag Stahleisen M. B. H., Düsseldorf.
Anschrift des Verfassers:
Dr. rer. nat. H. Griindemann,
Akademie der Wissenschaften der DDR
Institut für Mechanik
Abt. Bruchmechanik/Mikromeehanik
9010 Karl-Marx-Stadt
PSF 408
35





























