Embed Size (px)
Citation preview
Turbulenzen
Markus Kargl
5. Februar 2010
1

Inhaltsverzeichnis
1 Turbulenz 31.1 Turbulenz - ein Naturphänomen ? . . . . . . . . . . . . . . . . . 31.2 Geschichtlicher Überblick der Entwicklung der Turbulenzforschung 3
2 Hydrodynamische Grundlagen 32.1 Herleitung der Navier-Stokes-Gleichung . . . . . . . . . . . . . . 32.2 Die Reynoldszahl . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.3 Lösbarkeit der Navier-Stokes-Gleichung . . . . . . . . . . . . . . 7
3 Numerische Lösungsansätze 83.1 Mathematische Grundlagen/Begrie . . . . . . . . . . . . . . . . 8
3.1.1 Denition: (schwache Ableitung) . . . . . . . . . . . . . . 83.1.2 Denition: (Sobolew-Raum) . . . . . . . . . . . . . . . . . 83.1.3 Sattel-Punkt-Approximation . . . . . . . . . . . . . . . . 93.1.4 Komdition eines Problem, rechnerischer Aufwand und Löser 9
3.2 Numerische Lösungsansätze . . . . . . . . . . . . . . . . . . . . . 103.2.1 Finite-Dierenzen-Methode: . . . . . . . . . . . . . . . . . 103.2.2 Finite-Elemente-Methode: . . . . . . . . . . . . . . . . . . 103.2.3 Finite-Volumen-Methode: . . . . . . . . . . . . . . . . . . 11
3.3 Probleme bei der numerischen Lösung . . . . . . . . . . . . . . . 11
4 Entstehung und Beschreibung von Turbulenzen 124.1 Lineare Satbilitätsanalyse . . . . . . . . . . . . . . . . . . . . . . 124.2 Hopfsche Bifukation und Poincaré-Abbildung . . . . . . . . . . . 134.3 Theorie von Landau und Hopf . . . . . . . . . . . . . . . . . . . . 164.4 Theorie von Ruelle und Takens . . . . . . . . . . . . . . . . . . . 174.5 Übereinstimmung der Theorie von Ruelle und Takens mit Expe-
rimenten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174.6 Theorie von Groÿmann . . . . . . . . . . . . . . . . . . . . . . . . 18
2

1 Turbulenz
1.1 Turbulenz - ein Naturphänomen ?
Turbulenzen sind kein Konstrukt der Mathematiker oder theoretischen Physi-ker, wir alle kennen Turbulenzen oder besser gesagt das auftretten turbulenterStrömungen. Zum Beispiel der Wasserstrahl eines Wasserhahns der, je weiterman aufdreht stärker verwibelt wird. Ein anderes Beispiel sind auch CAT's, cle-ar air turbulences, oder besser unter dem Namen Luftlöcher bekannt, die manimmer wieder bei einem Flug zu spüren bekommt. Turbulenzen sind ein sehrvielschichtiges und kompliziertes Problem mit sehr hohen Freiheitsgraden wasdzu führt, dass sich Turbulenzen bis heute einer exakten Berechnung entzie-hen. Durch numerische Simulationen ist man heute im stande immer genauereBerechnungen anzustellen, aber die Unkenntnis aller Anfangsbedingungen stehtimmer noch der exakten Lösung entgegen.Im folgenden soll nun zunächst kurz die Geschichte der Turbulenzforschung um-rissen, dann die hydrodynamischen Grundlagen besprochen und schlieÿlich dieStruktur, Eigenschaften, Lösungsansätze und die Theorie der Entstehung vonTurbulenzen eingegeangen werden.
1.2 Geschichtlicher Überblick der Entwicklung der Tur-bulenzforschung
Obwohl Leonardo da Vinci bereits im 16. Jahrhundert die turbulenten Strö-mungen von schnell eiÿenden Gewässern beobachtete und versuchte seine phy-sikalischen Eigenschaften zu studieren, so begann man erst gegen Ende des 19.Jahrhunderts, das physikalische Phänomen der Turbulenz ansatzweise zu ver-stehen.Osborne Reynolds leitete 1883 mit einer Reihe von Veröentlichungen das sta-tistische Zeitalter der Turbulenz ein. Im Jahr 1895 folgte eine Veröentlichung,in der er die Reynoldszahl und die gemittelte Navier-Stokes-Gleichung einführ-te. In den 30er bis 50er Jahren des 20. Jahrhunderts trug unter anderen LudwigPrandtl dazu bei, die Struktur von Turbulenzen systematisch zu beschreibenund somit verständlich zu machen. In den 60er und 70er Jahren kam im Zusam-menhang mit der Chaostheorie und der Chaosforschung eine Theorie zur Tur-bulenzentstehung auf. Sie geht im wesentlichen auf Lorenz, Ruelle und Takenszurück. In den letzten Jahren ist man jedoch von dieser Theorie wieder etwasabgerückt und wendet sich neuen Tehorien über Entstehungsmöglichkeiten vonTurbulenzen zu auf die später noch etwas eingegangen wird. Turbulenzen sindbis heute ein noch nicht vollständig gelöstes Problem, was unter anderem da-durch gezeigt wird, dass die vollständige Lösung der Navier-Stokes-Gleichung,welche eine fundamentale Rolle spielt bei der Entstehung der Turbulenzen, einesder 7 Millenniumsprobleme ist.
2 Hydrodynamische Grundlagen
2.1 Herleitung der Navier-Stokes-Gleichung
Für die Herleitung der Navier-Stokes-Gleichung beginnen wir mit einer Glei-chung des Flüssigkeitszustandes. Wir betrachten als Näherung nur inkompres-
3

sible Flüssigkeiten. Diese Näherung kann so lange gemacht werden, solange dieGeschwindigkeit die betrachtet wird klein im vergleich zur Schallgeschwindigkeitdes betrachteten Mediums ist. Inkopressibel bedeutet für die Zustandsgleichung:
% = const.
Die nächste Gleichung die benötigt wird drückt die Erhaltung der Materie aus.
∇ · (%−→v ) = −∂%∂t
Da jedoch wie oben bereits gesagt nur inkompressible Medien betrachtet werden,ist die rechte Seite der Gleichung Null. Die nächste Gleichung ergibt sich ausdem zweiten Newtonschen Gesetz zu:
% · −→a = f
f bezeichnet hier Kraft pro Volumeneinheit, also eine Kraftdichte. Diese Kraft-dichte kann als Summe von drei Kräften geschrieben werden:Druckkraft pro Volumeneinheit, Schwerekraft ( im folgenden immer als Index afür aussen) und die Viskosität. Die Newtonsche Gleichung lautet somit:
% · −→a = −∇p+−→f a +
−→f visk
Nun Fehlt noch ein Ausdruck für die Beschleunigung. Sie ist nicht einfach ∂v∂t
sondern genügt der Gleichung:
−→a = (−→v · ∇)−→v +∂v
∂t
(Anmerkung des Authors: die Gleichung oben wurde schon mehrmals in Vorle-sungen gezeigt, weshalb sie hier nicht expliziet herleitet wird)Somit ergibt sich die Folgende Gleichung:
(−→v · ∇)−→v +∂v
∂t= −∇p+
−→f a +
−→f visk
Jetzt wird noch ein Ausdruck für die Viskositätskraft benötigt. Betrachtetman nun eine Flüssigkeit zwischen 2 Platten von denen die obere mit der Kraft−→F gezogen wird, so ist leicht zu erkennen, dass die Scherspannung
−→FA propor-
tional zu−→vd ist:
4
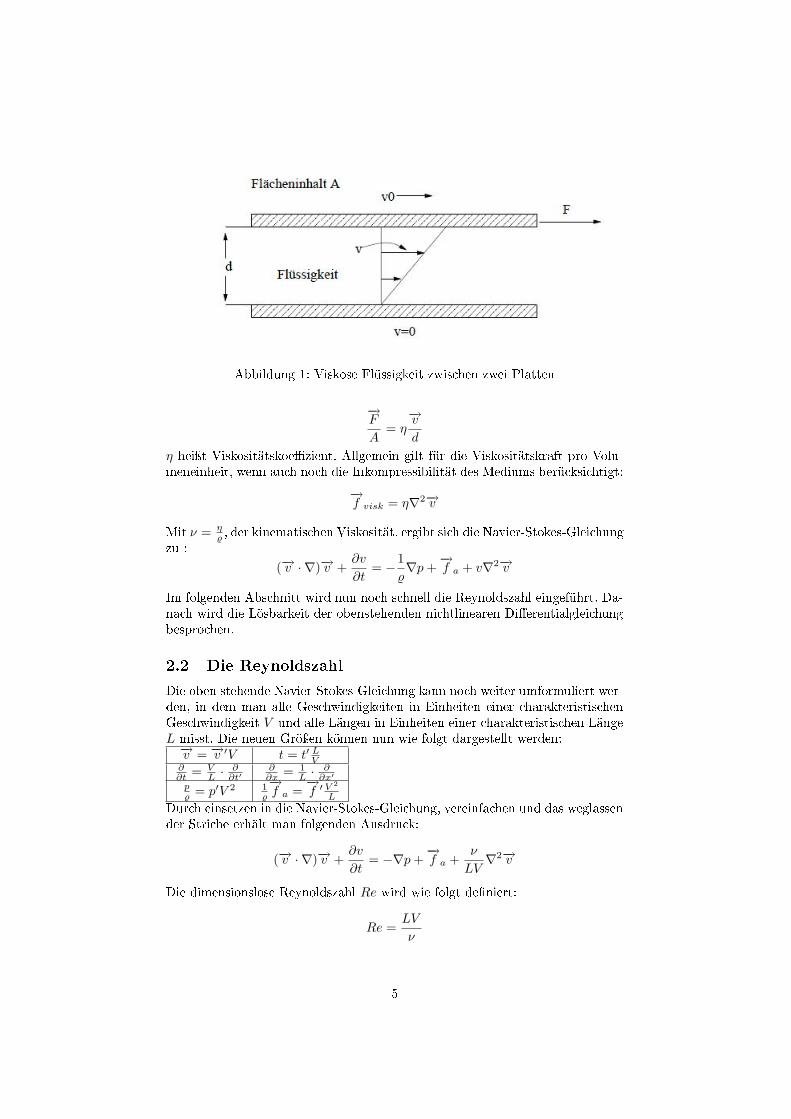
Abbildung 1: Viskose Flüssigkeit zwischen zwei Platten
−→F
A= η−→vd
η heiÿt Viskositätskoezient. Allgemein gilt für die Viskositätskraft pro Volu-meneinheit, wenn auch noch die Inkompressibilität des Mediums berücksichtigt:
−→f visk = η∇2−→v
Mit ν = η% , der kinematischen Viskosität, ergibt sich die Navier-Stokes-Gleichung
zu :
(−→v · ∇)−→v +∂v
∂t= −1
%∇p+
−→f a + v∇2−→v
Im folgenden Abschnitt wird nun noch schnell die Reynoldszahl eingeführt. Da-nach wird die Lösbarkeit der obenstehenden nichtlinearen Dierentialgleichungbesprochen.
2.2 Die Reynoldszahl
Die oben stehende Navier-Stokes-Gleichung kann noch weiter umformuliert wer-den, in dem man alle Geschwindigkeiten in Einheiten einer charakteristischenGeschwindigkeit V und alle Längen in Einheiten einer charakteristischen LängeL misst. Die neuen Gröÿen können nun wie folgt dargestellt werden:−→v = −→v ′V t = t′ LV∂∂t = V
L ·∂∂t′
∂∂x = 1
L ·∂∂x′
p% = p′V 2 1
%
−→f a =
−→f ′ V
2
L
Durch einsetzen in die Navier-Stokes-Gleichung, vereinfachen und das weglassender Striche erhält man folgenden Ausdruck:
(−→v · ∇)−→v +∂v
∂t= −∇p+
−→f a +
ν
LV∇2−→v
Die dimensionslose Reynoldszahl Re wird wie folgt deniert:
Re =LV
ν
5
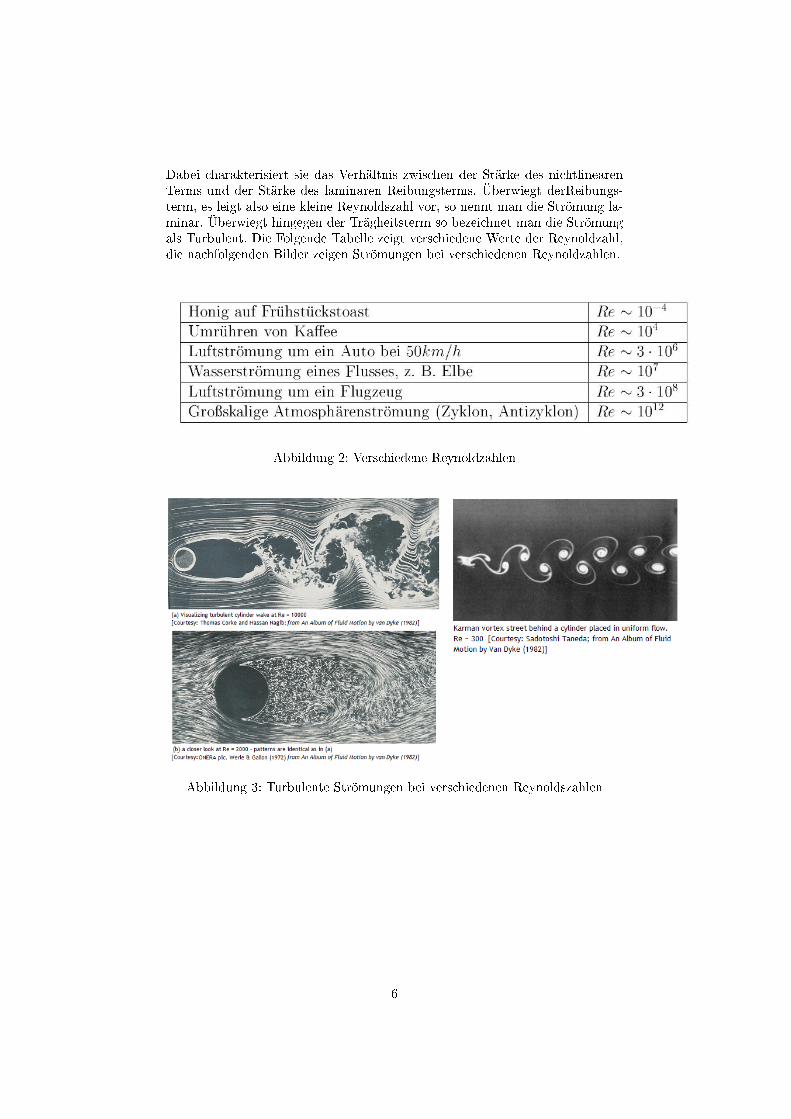
Dabei charakterisiert sie das Verhältnis zwischen der Stärke des nichtlinearenTerms und der Stärke des laminaren Reibungsterms. Überwiegt derReibungs-term, es leigt also eine kleine Reynoldszahl vor, so nennt man die Strömung la-minar. Überwiegt hingegen der Trägheitsterm so bezeichnet man die Strömungals Turbulent. Die Folgende Tabelle zeigt verschiedene Werte der Reynoldzahl,die nachfolgenden Bilder zeigen Strömungen bei verschiedenen Reynoldzahlen.
Abbildung 2: Verschiedene Reynoldzahlen
Abbildung 3: Turbulente Strömungen bei verschiedenen Reynoldszahlen
6

2.3 Lösbarkeit der Navier-Stokes-Gleichung
Das Problem der Lösbarkeit der Navier-Stokes-Gleichung ist folgendes: Wir be-trachten eine inkopressible Flüssigkeit in einem Behälter Ω mit Rand δΩ . ZurZeit t = 0 sei auf Ω ein divergenzfreies und auf δΩ ein verschwindendes Ge-schwindigkeitsfeld −→v 0(x) gegeben. Nun stellt sich die Frage, ob es eine ein-deutig bestimmte Lösung −→v (x, t) der Navier-Stokes-Gleichung existiert, die derAnfangswertbedingung genügt?Darauf ist jedoch bis heute keine befridigende Antwort gefunden worden. Manhat jedoch bereits folgende Resultate.Für glatte Geschwindigkeitsfelder gibt es zu beliebigen Reynoldszahlen eineeindeutug bestimmte glatte Lösung, jedoch nur für endliche Zeiten t, die mitsteigender Reynoldzahl immer kleiner wird. Für Reynoldszahlen unterhalb ei-nes kritischen Wertes ist die Existenz von Lösungen für alle Zeiten gesichert.Durch die nicht gesicherte Existenz von globalen Lösungen der Navier-Stokes-Gleichung für Dimensionen gröÿer oder gleich 3 zählt das Lösen der Navier-Stokes-Gleichung zu den 7 Millenniumsproblemen. Im Folgenden sollen nun nu-merische Lösungsverfahren dargestellt werden die zeigen wie solche Problemeangegangen werden können und wie groÿ der Rechenaufwand für diese Proble-me ist.
7
3 Numerische Lösungsansätze
3.1 Mathematische Grundlagen/Begrie
In dem folgenden Abschnitt soll ein kurzer Überblick gegeben erden, welchemathematischen Werkzeuge benötigt werden um an das Problem der Lösungder Navier-Stokes-Gleichung überhaupt herangehen zu können. Es handelt sichheir jedoch nur um kurze, mathematisch nicht all zu genaue Denitionen, dasonst der Rahmen des Seminars bei weitem überschritten würde.
3.1.1 Denition: (schwache Ableitung)
Betrachte eine auf einem oenen Intervall I = (a, b) dierenzierbare Funktion fund eine Testfunktion φ so gilt:∫
I
f ′(t)φ(t)dt = −∫I
f(t)φ′(t)dt
Ist f eine L2-Funktion, dann kann, selbst wenn f nicht dierenzierbar ist eineFunktion g ∈ L2(a, b) existieren, die die Gleichung∫
I
g(t)φ(t)dt = −∫I
f(t)φ′(t)dt
für jede Testfunktion φ erfüllt. Eine solche Funktion g heiÿt schwache Ableitungvon f .
Eigenschaften: Die schwache Ableitung einer Funktion fällt genau dann mitder klassischen (starken) Ableitung zusammen, wobei hier nur Gleichheitim L2 Sinne vorliegt, zusammen wenn: ‖f − g‖L2 = 0.Eine Funktion die hinreichend oft schwach dierenzierbar ist ist auch starkdierenzierbar (siehe Einbettungssätze der Sobolwe-Räume z.B. Wiki ).Eine weitere Eigenschft ist, dass eine Funktion nur dann eine schwacheAbleitung besitzt wenn sie absolutstetig ist.
Beispiel: Sei f(x) := |x| dann hat f nur auf R\0 eine starke Ableitung. Da 0jedoch eine Nullmenge ist, kann hier die Ableitung beliebig gesetzt werden.Das hat zur Folge, dass die Signumsfunktion zur schwachen Ableitung vonf(x) wird.
3.1.2 Denition: (Sobolew-Raum)
Es seien Ω ⊂ Rn oen und 1 6 p 6 ∞. Der Raum derjenigen reellwertigenFunktionen u ∈ Lp(Ω), deren gemischte partielle schwache Ableitung bis zurOrdnung k in Lp(Ω) liegen, ist der Sobolew-RaumW kp(Ω). Dieser Raum wurdeeigens für das Lösen von partiellen Dierenzialgleichungen entwickelt.
8
Eigenschaft: W kp(Ω) ist bezüglich der Norm ‖ · ‖Wkp(Ω) ein Banachraum. Fürp = 2 wid die Norm durch das Skalarprodukt induziert.
Einbettungssätze und Sobolewzahl: Mit den obigen Bezeichnungen bildetman die Sobolewzahl γ wie folgt :
γ = k − n
p
Mit hilfe dieser Zahl lassen sich die Beziehungen zwischen Sobolewräumeneinfach darstellen. Sei Ω beschränkt in Rn und Ω′ ⊂ Ω eine Teilmengeoder eine glatte Untermannigfaltigkeit der Dimension n′ . Dann gilt dersobolewsche Einbettungssatz:
γ ≥ γ′ ∧ k ≥ k′ ⇒W kp(Ω) ⊂W k′p′(Ω)
Die Teilmenge ist somit als stetige Einbettung zu verstehen.
3.1.3 Sattel-Punkt-Approximation
Die Sattelpunktnäherung wird verwendet um Integrale der Form
I = limN→∞
∫ ∞∞
eNf(x)dx
näherungsweise zu berechnen. Falls die Funktion ein globales Minimum bei x0
besitzt, so erhält man :
I = limN→∞eNf(x)
√2π
Nf ′′(x0)
Dieses Verfahren ndet unter anderem Verwendung in der Funktionentheorie,der Funktionalanalysis, der Nichtlinearen Dynamik und der Quantenfeldtheorie.
3.1.4 Komdition eines Problem, rechnerischer Aufwand und Löser
Kondition: Unter Kondition eines Problems versteht man wie anfällig das Pro-blem gegenüber Eingabefehlen ist, oder umformuliert: wie schnell und wiestark panzen sich Fehler fort. Probleme mit Dierentialen, Integralenund Dierenzen zwischen gleichgroÿen Zahlen sind im Allgemeinen sehrschlecht Konditioniert.
rechnerischer Aufwand: Unter rechnerischem Aufwand versteht man in dernumerischen Mathematik die Anzahl der benötigten Rechenoperationen.Meistens wird jedoch lediglich die Anzahl der Multiplikationen gezählt,da diese ökonomisch betrachtet sehr viel aufwendiger sind als Additio-nen. Für das Lösen eines numerisch gutartigen Gleichungssystems gehtder Aufwand mit n3, wobei n die Anzahl der Freiheitsgrade darstellt.
Löser: Ein Löser beschreibt in der numerischen Mathematik eine Folge vonAlgoritmusschritten die gegen die gesuchte Lösungsvariable konvergieren.
9

3.2 Numerische Lösungsansätze
Die nachstehenden Zeilen sollen eine Kurze Einführung geben welche Möglich-keiten es gibt, partielle Dierentialgleichungen numerisch zu berechnen.
3.2.1 Finite-Dierenzen-Methode:
Die Finite-Dierenzen-Methode ist das einfachste numerische Verfahren zur Lö-sung gewöhnlicher und partieller Dierentialgleichungen. Zunächst wird das Ge-biet, für das die Gleichung gelten soll, in eine endliche (nite) Zahl von Git-terpunkten eines Gitters von senkrecht aufeinander stehenden Linien eingeteilt.Den Gitterpunkten entsprechen dann die Kreuzungspunkte. Die Ableitungen anden Gitterpunkten werden dann durch Dierenzen approximiert. Die partiellenDierentialgleichungen werden so in ein System von Dierenzengleichungen um-formuliert und mittels verschiedener Algorithmen entweder implizit oder explizitgelöst. Verfahren dieser Art nden verbreitete Anwendung bei uiddynamischenSimulationen, zum Beispiel in der Meteorologie und der Astrophysik.
3.2.2 Finite-Elemente-Methode:
Die Finite-Elemente-Methode, kurz FEM, ist ein numerisches Verfahren zur nä-herungsweisen Lösung, insbesondere elliptischer partieller Dierentialgleichun-gen mit Randbedingungen. Sie ist auch ein weit verbreitetes modernes Berech-nungsverfahren im Ingenieurwesen.Das untersuchte Lösungsgebiet G wird zunächst in Teilgebiete, die niten Ele-mente, eingeteilt.
G =m⋃i=1
Gi
Innerhalb des niten Elements werden für die gesuchte Lösung je n Ansatzfunk-tionen deniert, die nur auf wenigen der Teilgebiete ungleich Null sind. (Die-se Eigenschaft ist der eigentliche Grund für die Bezeichnung nite Elemente.)Durch eine Linearkombination der n Ansatzfunktionen innerhalb des Elemen-tes werden die möglichen Lösungen der numerischen Näherung festgelegt undfür jedes Element eine Elementmatrix aufgestellt. In der Anwendung sind dieLösungen zum Beispiel durch Materialeigenschaften und Stogesetze bestimmt.
y|Gi≈
n∑j=1
ci,jψi,j
Die Dierentialgleichungen und die Randbedingungen werden mit Testfunktio-nen multipliziert und über das Lösungsgebiet integriert. Das Integral wird durcheine Summe über einzelne Integrale der niten Elemente ersetzt, wobei die Inte-gration in der Regel durch eine näherungsweise numerische Integration an denGauÿpunkten ausgeführt wird. Da die Ansatzfunktionen nur auf wenigen derElemente ungleich Null sind, ergibt sich ein dünnbesetztes, häug sehr groÿes,lineares Gleichungssystem, bei dem die Faktoren der Linearkombination unbe-kannt sind. Diese groÿe Gesamtmatrix bildet man, indem man die Elementmatri-zen aufaddiert. Die Gesamtmatrix ist quadratisch, hat also genauso viele Zeilenwie Spalten. Die Dimension der Matrix ergibt sich aus der Anzahl der Elementemultipliziert mit der Anzahl der Ansatzfunktionen je Element. Abhängig vom
10
Elementtyp und der geforderten Stetigkeit des Ansatzes gehen Ansatzfunktio-nen benachbarter Elemente nur ein mal in die Gesamtmatrix ein. Die Dimensionder Matrix wird auch als Anzahl der Freiheitsgrade bezeichnet. Die Gesamtma-trix enthält dort Zahlenwerte, wo Freiheitsgrade in Elementen oder zwischenbenachbarten Elementen miteinander verbunden sind; an allen anderen Stellensind sie Null. Ist die Anzahl der Freiheitsgrade nicht allzu groÿ (bis ca. 500.000),lässt sich dieses Gleichungssystem am ezientesten mittels eines direkten Ver-fahrens lösen, zum Beispiel mit dem gauÿschen Eliminationsverfahren. Hierbeikann die dünnbesetzte Struktur des Gleichungssystems eektiv genutzt werden.Während beim Gauÿ-Algorithmus der Berechnungsaufwand für N GleichungenO(N3) beträgt, lässt sich der Aufwand durch geschickte Pivotwahl (zum Bei-spiel Markowitz-Algorithmus oder graphentheoretische Ansätze) aber deutlichreduzieren. Für mehr als 500.000 Unbekannte bereitet die schlechte Konditiondes Gleichungssystems den direkten Lösern zunehmend Schwierigkeiten, so dassman für groÿe Probleme im Allgemeinen iterative Löser, die schrittweise eineLösung verbessern, verwendet. Weiter soll nun nicht mehr eingestiegen werden,da dies den Rahmen des Seminars verlassen würde.
3.2.3 Finite-Volumen-Methode:
Das Finite-Volumen-Verfahren ist ein numerisches Verfahren zur Lösung von Er-haltungsgleichungen, also von speziellen, häug hyperbolischen, partiellen Dif-ferentialgleichungen, denen ein Erhaltungssatz zugrunde liegt. Am prominentes-ten ist der Einsatz der Finite-Volumen-Methode in der numerischen Strömungs-mechanik, wo sie als Standardverfahren zur Lösung kompressibler Strömungs-probleme, also der Euler- und Navier-Stokes-Gleichungen eingesetzt wird. DasVerfahren benutzt in seiner Herleitung eine integrale Form der Erhaltungsglei-chungen und erlaubt damit auch unstetige Lösungen, die für solche Gleichungentypisch sind. Ferner werden nur geringe Anforderungen an die Gitterzellen ge-stellt, was unstrukturierte und exible Geometrien erlaubt. Darüber hinaus wer-den die konservativen Gröÿen der Gleichung tatsächlich erhalten. Die zu lösendepartielle Dierentialgleichung wird nun wieder in einem Gebiet betrachtet, wasdann in nite Volumina eingeteilt wird. Das weitere Lösungsverfahren ist da-nach analog zu dem der niten-Elemente-Methode. Weiter soll nun nicht mehreingestiegen werden, da dies den Rahmen des Seminars verlassen würde.
3.3 Probleme bei der numerischen Lösung
Was bereitet eigentlich so groÿe Probleme bei der Lösung der Navier-Stokes-Gleichung?Das erste Problem ist die Gleichung selbst. Es handelt sich um eine nichtli-neare partielle Dierentialgleichung zweiter Ordnung was zur Folge hat, dasseinige fundamentalen Einbettungssätze für die Sobolew-Räume nicht mehr an-gewendet werden könne. Deshalb ist man auf rein numerische Lösungsverfahrenangewiesen. Das zweite Problem ist die geforderte Divergenzfreiheit. Sie hatals Folge, dass zu den ohnehin schon sehr hohen Freiheitsgraden noch zusätzli-che sehr hochdimensionale Nebenbedingungen dazukommen. Genau die selbenAuswirkungen hat die Einteilung in die Finiten-Volumina, die zu allem übelauch noch sehr hohe Anforderungen an die Oberächen der Volumina stellen (z.B.: Lipschitz Stetigkeit). Durch die Notwedigkeit die Sattelpunktnäherung zu
11

verwenden wird ausserdem auch noch die Konvergenzgeschwindigkeit der nume-rischen Löser herabgesetzt.All diese Probleme haben zur Folge, dass sich der Rechenaufwand erheblichvergröÿert. Daher haben die Lösungsverfahren für die Navier-Stokes-Gleichungeinen Rechenaufwand der mit n11 oder n12 geht. Einige neuere Methoden habensogar nur noch einen Aufwand von n8. Jedoch kann die Navier-Stokes-Gleichungimmer noch nicht in Echtzeit gelöst werden. (Kleines Gedankenspiel: n = 1023,benötigte Zeit für einen Rechenschritt: 10−12sec, Rechenaufwand n11; man be-nötigt also ca.3 · 10236a zur Lösung)
4 Entstehung und Beschreibung von Turbulen-
zen
Die zentrale Frage die sich eigentlich bereits während der gesamten Zeit stelltist, was sind Turbulenzen eigentlich ?Diese Frage ist und war sehr lange Zeit sehr umstritten. Im folgenden sollen nuneinige Theorien vorgestellt werden.
4.1 Lineare Satbilitätsanalyse
Heute ist man der Auassung, dass das auftreten von Turbulenzen und diestabilität von Lösungen der Navier-Stokes-Gleichung sich gegenseitig bedingen.Um nun den Begri der stabilität einer Lösung −→v 0(t) zu einem Anfangswert−→v (t) zu klären wechselt man in den Phasenraum der Navier-Stokes-Gleichungder im Folgenden mit P bezeichnet wird. Sei ein beliebiger Punkt −→v 1 gegebender sich in innitesimalem Abstand d vom Punkt −→v 0 bendet. −→v 1(t) sei diezum Anfangswert −→v 1 gehörende Lösung, die für alle Zeiten existiere.Die Lösung wird als stabil bezeichnet, wenn der Abstabd d der Lösung −→v 1(t)für alle Zeiten t innerhalb einer gewissen Grenze bleibt. Geht der Abstand sogargegen Null, so heiÿt −→v 0(t) asymptotisch stabil.Instabil bedeutet nun im Gegenzug, dass sich die Lösungskurve zu einem Punkt−→v 1 im Laufe der Zeit immer weiter von −→v 0 entfernt. Mit der nachfolgendenAbbildung soll dies veranschaulicht werden.
Abbildung 4: Verlauf von Lösungen im Phasenraum
12

Nun stellt sich die Frage: Wann wird eine Lösung stabil oder instabil?Dies prüft man mit einer Stabilitätsanalyse, wie von Lyapunov gezeigt wurde.Man betrachtet dabei die Duerenz −→ε (t) = −→v (t) − −→v 0(t) , wobei −→v (t) eineLösung ist, die innitesimal von −→v 0(t) entfernt startet. Im im Folgenden besserarbeiten zu können wird eine andere Schreibweise der Navier-Stokes-Gleichungeingeführt, welche auf folgenden Tatsachen beruht: wir betrachten den Phasen-raum P aller divergenzfreien Geschwindigkeitsfelder. Man kan dann eine Lösungzu vorgegebenen Anfangswert aus P einfach als ein Kurvenstück in diesem Raumdeuten, das durch den Punkt −→v 0 geht. Hier ist jedoch zu beachten, dass der Pha-senraum nun unendlichdimensional ist. Durch jeden Punkt −→v 0 darin erhaltenwir damit ein eindeutig bestimmtes Kurvenstück −→v (t). Die Tangentenvektoren∂−→v∂t an alle diese Kurven im Raum bestimmen ein Vektorfeld X auf P, das ex-plizit von Re abhängt. Die Integration dieses Vektorfeldes ist nun äquivalent zuder Lösung der Navier-Stokes-Gleichung:
d
dt−→v (t) =
−→X (−→v (t)) −→v 0 = −→v (0)
Für die Dierenz −→ε (t) erhält man daraus die Gleichung:
d
dt−→ε (t) ≈ δX(−→v 0(t))−→ε (t)
Da δX ein zeitabhängiger Operator ist, kann man nur sehr schwer Ausagenüber das zeitliche Verhalten von −→ε (t) machen. Es wird jedoch erheblich ver-einfacht, wenn man Lösungen untersucht die entweder zeitlich konstant oderperiosisch sind. Es soll nun zuerst der Fall der zeitlich konstanten Lösung be-trachtet werden, bei dem noch zusätzlich voerausgesetzt wird, dass es sich umein endlichdimensionales Problem handelt. Der Operator δX ist dann eine kon-stante Matrix, deren Eigenwerte und Eigenvektoren berechnet werden können.Wir erhalten dann folgende Lösung:
ε(t) =∑k
ak−→c keλkt
Haben alle Eigenwerte einen negativen Realteil, so klingt ε(t) ab und die Lösungist stabil. Hat jedoch nur ein Eigenwert einen positiven Realteil, so wächst dieserin der Summe an und die Lösung ist instabil. Diese Ergebnisse sind leider in derPraxis nur beschränkt nutzbar, da das Spektrum es Operators nur sehr seltenvollständig bekannt ist.
4.2 Hopfsche Bifukation und Poincaré-Abbildung
In diesem Abschnitt sei eine kleine Reynoldszahl vorausgesetzt.Wie bereits vorher erwähnt wurde, existiert für kleine Reynoldszahlen eine sta-tionäre Lösunge −→v 0 der Navier-Stokes-Gleichung, welche auch noch asympto-tisch stabil ist. Sie beschreibt daher eine laminare Strömung. Aus der Theorieund Experimenten folgt, dass eine laminare Strömung nach einer kleinen Stö-rung wieder in eine laminare Strömung übergeht. Wechselt man nun wiederin den bereits vorher angesprochenen Phasenraum P so spiegelt sich die obenbeschreibene Situation wie folgt: Der Punkt −→v 0 stellt eine Art Senke dar, diesozusagen alle Punkte von P im laufe der Zeit anzieht. Mathematisch gesehen
13

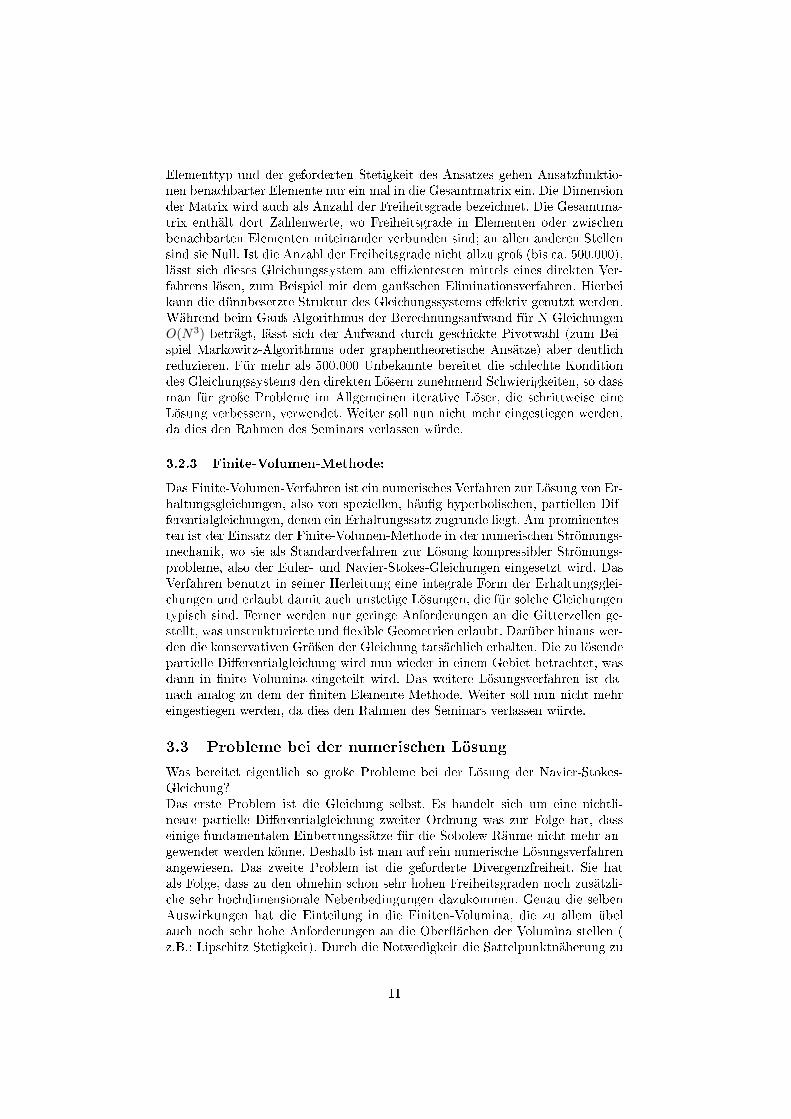
bedeuet dies, dass alle Eigenwerte des Operators δX negativen Realteil habenmüssen. Da die Eigenwerte auch von der Reynoldszahl abhängen, kann es pas-sieren wenn die Reynoldzahl anwächst, dass bei einigen Eigenwerten das Vor-zeichen der Realteile von negativ zu positiv wechselt, was zur Folge hat, dasssie die imaginäe Achse von C überqueren. Daraus resultiert jedoch, dass dieentsprechende Lösung instabil wird. Was geschieht nun in solch einem Fall?Die stationäre Lösung verschwindet natürlich nicht einfach, sie existiert natür-lich auch für höhere Reynoldszahlen weiter ist aber instabil. Genau hier trittnun Bifukation ein. An die Stelle der instabilen Lösung tritt nun eine neue sta-bile Lösung. Im Folgenden wird die Hopf-Bifukation etwas näher betrachtet.Sie tritt auf, wenn ein Paar von komplexkonjugierten Eigenwerten die imaginäreAchse keuzt. Hopf zeigte, dass in einer Umgebung von −→v 0 eine einparametrigeSchar von periodischen Lösungen Existiert. Es werden zwei Arten von Hopf-Bifukationen unterschieden: die normale oder superkritische und die anormaleoder subkritische. Das Auftreten der jeweiligen Fälle hängt vom Stabilitätsver-halten der Lösung −→v 0(t) ab. Der normale Fall titt ein, wenn die periodischeLösungsschar für Werte Realteil > Realteil∗ auftritt, bei denen −→v 0 instabil ist.Dann ist die Schar selbst stabil. Der zweite Fall ist genau umgekehrt.Im Weiteren wird nur die normale Hopf-Bifukation betrachtet. Betrachten wirnun wider das Bild im Phasenraum P. An die Stelle der vorher vorhanden Senketritt nun für Realteil > Realteil∗ eine periodische Bahn, ein sogenannter limitcycle. Dieser hat die Eigenschaft, dass Bahnen die in seiner Umgebung beginnenim Lauf der Zeit immer näher an ihn herankommen.Zusammengefasst kann also gesagt werden:Die normale Hopf-Bifukation beschreibt den Fall, in dem eine stationäre Lösungdurch eine periodische Lösung ersetzt wird.Was geschieht wenn die Reynoldzahl weiter vergröÿert wird? Wird die periodi-sche Lösung dann instabil?Dies tritt tatsächlich so ein, jedoch ist auch diese Instabilität mit den verfügba-ren mathematischen Grundlagen weitestgehend verstanden. Zu ihrer Beschrei-bung verwendet man die Methode der Poincaré-Abbildung. Wir betrachten nunwieder die periodische Lösung −→v (t). Ihr entspricht im Phasenraum P eine ge-schlossene, also periodische Bahn. Diese Bahn wird nun mit einem Hyperä-chenstück N im Punkt −→v geschnitten. Nun betrachtet man in einer kleinenUmgebung U(−→v ) die zeitliche Entwicklung eines Punktes −→w auf der Hyperä-che. Da die Bahn von −→v einen Grenzzykel beschreibt, wird die Bahn −→w (t) nacheiner Zeit τ , die inetwa die gleiche Gröÿenordnung wie die Periode besitzt, wie-der in der Umgebung U(−→v ) . Der Punkt auf der Hyperäche in dem sich dieBahn jetzt bendet soll im folgenden mit P ′−→ω heiÿen. Die Abbildung die −→ω aufP ′−→ω abbildet heiÿt heiÿt Pioncaré-Abbildung. Dies soll in der untenstehendenAbbildung schematisch dargestellt werden.
14
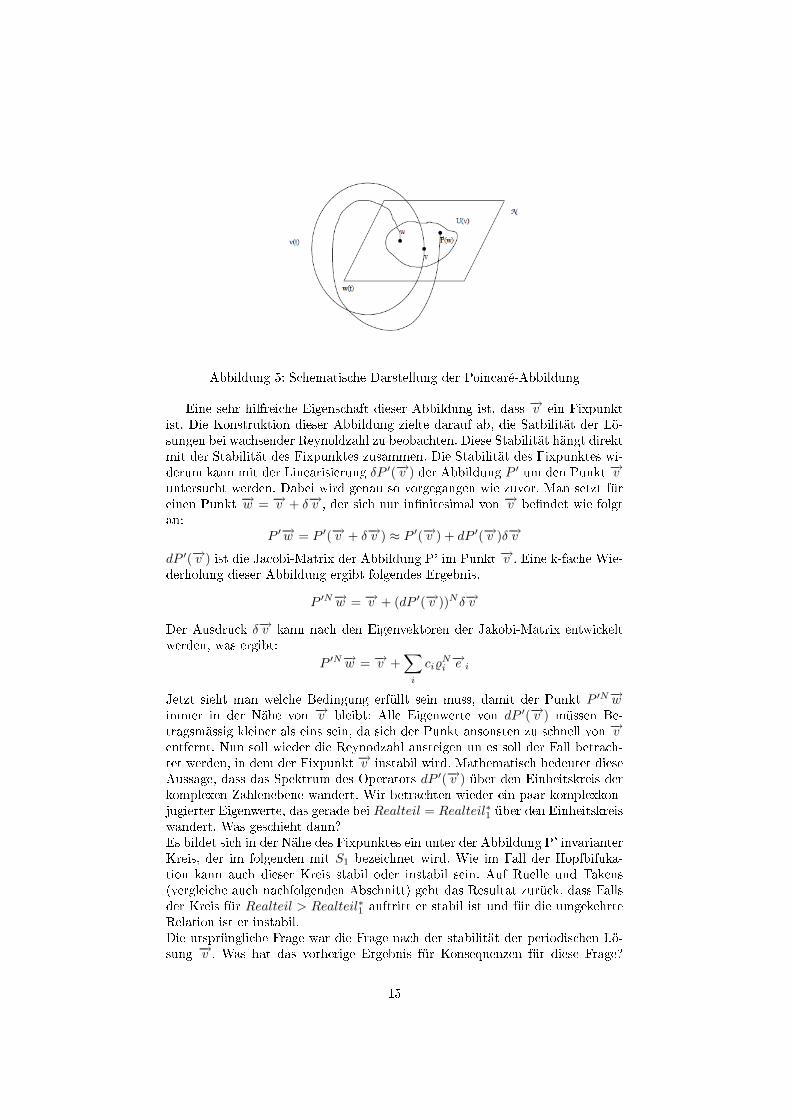
Abbildung 5: Schematische Darstellung der Poincaré-Abbildung
Eine sehr hilfreiche Eigenschaft dieser Abbildung ist, dass −→v ein Fixpunktist. Die Konstruktion dieser Abbildung zielte darauf ab, die Satbilität der Lö-sungen bei wachsender Reynoldzahl zu beobachten. Diese Stabilität hängt direktmit der Stabilität des Fixpunktes zusammen. Die Stabilität des Fixpunktes wi-derum kann mit der Linearisierung δP ′(−→v ) der Abbildung P ′ um den Punkt −→vuntersucht werden. Dabei wird genau so vorgegangen wie zuvor. Man setzt füreinen Punkt −→w = −→v + δ−→v , der sich nur innitesimal von −→v bendet wie folgtan:
P ′−→w = P ′(−→v + δ−→v ) ≈ P ′(−→v ) + dP ′(−→v )δ−→v
dP ′(−→v ) ist die Jacobi-Matrix der Abbildung P' im Punkt −→v . Eine k-fache Wie-derholung dieser Abbildung ergibt folgendes Ergebnis.
P ′N−→w = −→v + (dP ′(−→v ))Nδ−→v
Der Ausdruck δ−→v kann nach den Eigenvektoren der Jakobi-Matrix entwickeltwerden, was ergibt:
P ′N−→w = −→v +∑i
ci%Ni−→e i
Jetzt sieht man welche Bedingung erfüllt sein muss, damit der Punkt P ′N−→wimmer in der Nähe von −→v bleibt: Alle Eigenwerte von dP ′(−→v ) müssen Be-tragsmässig kleiner als eins sein, da sich der Punkt ansonsten zu schnell von −→ventfernt. Nun soll wieder die Reynodzahl ansteigen un es soll der Fall betrach-tet werden, in dem der Fixpunkt −→v instabil wird. Mathematisch bedeutet dieseAussage, dass das Spektrum des Operators dP ′(−→v ) über den Einheitskreis derkomplexen Zahlenebene wandert. Wir betrachten wieder ein paar komplexkon-jugierter Eigenwerte, das gerade bei Realteil = Realteil∗1 über den Einheitskreiswandert. Was geschieht dann?Es bildet sich in der Nähe des Fixpunktes ein unter der Abbildung P' invarianterKreis, der im folgenden mit S1 bezeichnet wird. Wie im Fall der Hopfbifuka-tion kann auch dieser Kreis stabil oder instabil sein. Auf Ruelle und Takens(vergleiche auch nachfolgenden Abschnitt) geht das Resultat zurück, dass Fallsder Kreis für Realteil > Realteil∗1 auftritt er stabil ist und für die umgekehrteRelation ist er instabil.Die ursprüngliche Frage war die Frage nach der stabilität der periodischen Lö-sung −→v . Was hat das vorherige Ergebnis für Konsequenzen für diese Frage?
15
Jetzt muss die zeitliche Entwicklung des Kreises S1 betrachten und nicht wievorher die zeitliche Entwicklung der Senke. Da S1 unter der Abbildung P ′ inva-riant ist, erhalten wir in der Umgebung um −→v einfach einen invarianten TorusT2. Die Situation ist schematisch in der untenstehenden Abbildung verdeutlicht.
Abbildung 6: Entstehung des Torus
Eine weitere Frage die sich stellt ist, welche Bewegung macht das Systemauf diesem Torus? Darüber kann keine genaue Aussage gemacht werden. Diesist auch der Punkt in dem sich die Theorien von Landau bzw. Ruelle und Takensbeginnen zu unterscheiden. Zusammengefasst kann nun gesagt werden:Es zeigt sich, dass bei einer Instabilität die stationäre laminare Strömung durcheine zeitlich periodische Lösung ersetzt wird, an deren Stelle widerum nach ei-niger Zeit ein invarianter Torus trittFür ein weiteres Verständnis sei jedem die Vorlesung Nichtlineare Dynamik vonHerrn Professor Brack aus dem WS 2001/2002 ans Herz gelegt.
4.3 Theorie von Landau und Hopf
Die Vorstellung von Landau und Hopf war, dass die Bewegung auf dem Torusdes letzten Abschnitts quasiperiodisch sein müsse. Das bedeutet, das die imLaufe der Zeit durchlaufene Bahn den Torus nicht umwickelt und deshalb nichtgeschlossen ist. Als Ergebnis dieser Überlegungen kann festgehalten werden: derÜbergang einer Strömung vom laminaren in den turbulenten Zusatnd bestehtin einer unendlichen Folge von quasiperiodischen Lösungen. Dem MathematikerHopf gelang es darauf hin ein mathematische Modell zu konstruieren, welchesdas von Landau postlierte Verhalten bei wachsender Reynoldszahl zeigt. Beiweiterem Interesse kann diese Theorie im Buch von Dieter H. Mayer mit demTitel Turbulenz: Durchbruch in einem lange ungelösten Problem? genauernachgelesen werden.
16

4.4 Theorie von Ruelle und Takens
Zunächst kritisierten Ruelle und Takens an der Theorie von Landau folgendes:Nach einem Theorem des Mathematikers Peixoto gibt es zu einer quasiperiodi-schen Bewegung auf einem Torus T2 immer eine beliebig kleine Störung, die siein eine periodische Störung umwandelt. Da es aber in reellen Systemen immerStörungen gibt, sollte in der Natur eine solche quasiperiodische Bewegung garnich beobachtet werden können. Mitlerweile gibt es aber Untersuchungen diegezeigt haben, dass es für eine bestimmte Menge an Reynoldzhalen sehr wohlquasiperiodische Bewegungen auf dem Torus T2 gibt. Dies hat zur Folge, dassdie Theorie von Ruelle und Takens auch nicht unbegrezt aufrecht erhalren wer-den kann. Trotzdem soll kurz auf eine weitere Theorie von Ruelle und Takenseingegangen werden.Der Hauptunterschied zu der Theorie von Landau besteht darin, dass die Tur-bulenzen nicht nach einer unendlichen Folge von Instabilitäten einsetzt, sondenbereits nach einer endliche Anzahl. Was ist der Grund für diesen Unterschied?Was geschieht auf unserem Torus, wenn die Lösung wieder instabil wird? Ruelleund Takens gehen davon aus, dass der Torus T2 in einen Torus T3 bifukiert.Auf diesem Torus ist die Bewegung nur sehr schwer zu beschreiben, da sich dieBewegung bereits näherungsweise chaotisch verhält. Ruelle und Taken bringengerade diese chaotischen Bewegungen und Turbulenzen miteinender in Verbbin-dung. Sie führen als Ursache für das Chaos die sogennanten strange Attractorsan. Diese wurden bereits im Vortrag von Dominik besprochen weshalb jetzt nurnoch sehr kurz darauf eingegangen wird: ein Attractor heiÿt starnge wenn eszu jedem Punkt in seinem Anziehungsbereich einen innitesimal benachbartenPunkt gibt, der sich im Laufe der Zeit exponentiell schnell von ersten entfernt.Strange Attractors können nur in Systemen auftreten, in denen die Dimensiondes Phasenraums mindestens drei ist. Das heiÿt solche Objekte können frühes-tens nach einer Bifukation des Torus T2 in einen Torus T3 auftreten.Die Theorie zur Entstehung von Turbulenzen von Ruell und Takens ist nun fol-gende: eine Lösung der Navier-Stokes-Gleichung bendet sich um Anziehungsbe-reich eines strange attractors und führt dann die charakteristischen Bewegungenaus. Das heiÿt also, falls ein starnge attractor bereis nach einer Bifukation vonT2 nach T3 auftritt, so entstehen Turbulenzen bereits nach einer endlichen An-zahl von Instabilitäten und nicht wie in der Theorie von Lanau erst nach einerunendlichen Anzahl von Instabilitäten.
4.5 Übereinstimmung der Theorie von Ruelle und Takensmit Experimenten
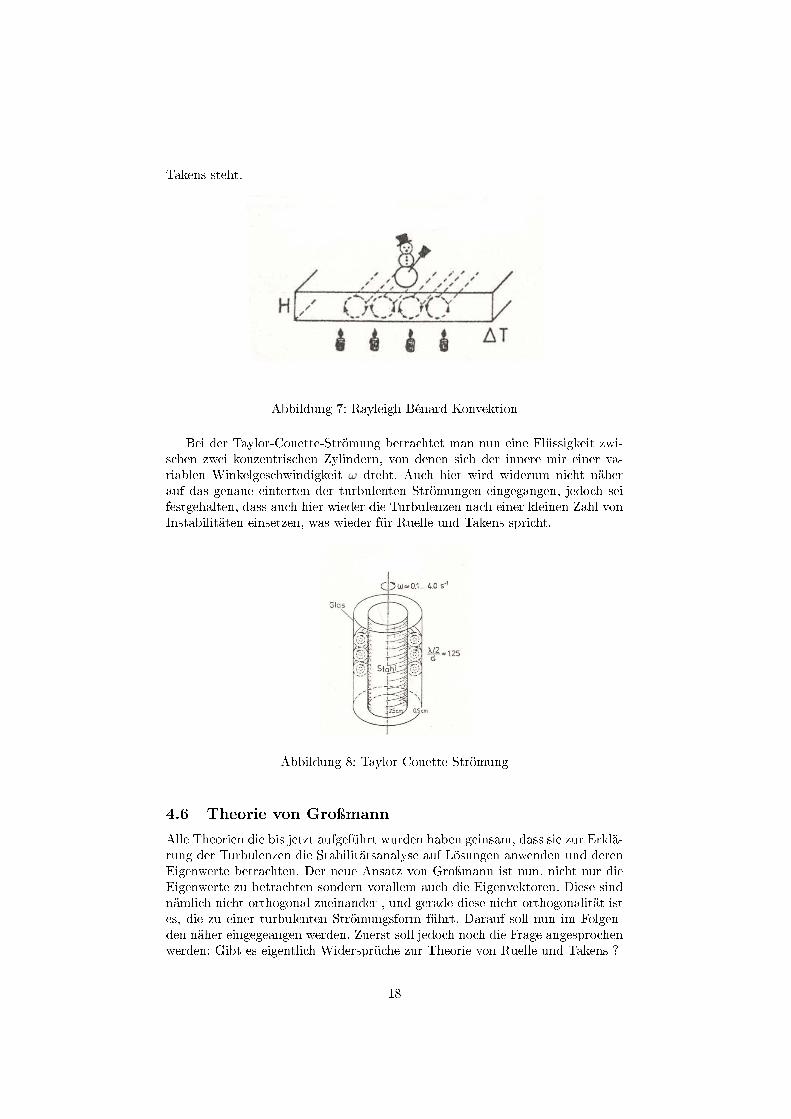
Zwei der bekanntesten und am besten verstandenen Experimente auf die sichdie Theorie von Ruelle und Takens anweden lässt, sind die Rayleigh-Bénard-Konvektion und die Taylor-Couette-Strömung.Bei der Rayleigh-Bénard-Konvektion wird eine Flüssigkeit ein einem Behälterbetrachtet, der von unten beheizt und von oben gekühlt wird. Bei genügend ho-hen Temperaturgradienten geht schlieÿlich die normale Wärmeleitung in Kon-vektion über. Es gibt verschiedene Theorien über diesen Übergang die jedochim Weiteren nicht gegenstand der Diskusion sind. Alle diese Übergangstheorienhaben jedoch gemein, dass turbulente Bewegungen bereits nach sehr wenigenInstabilitäten auftreten, was somit im Einklang mit der Theorie von Ruelle und
17
Takens steht.
Abbildung 7: Rayleigh-Bénard-Konvektion
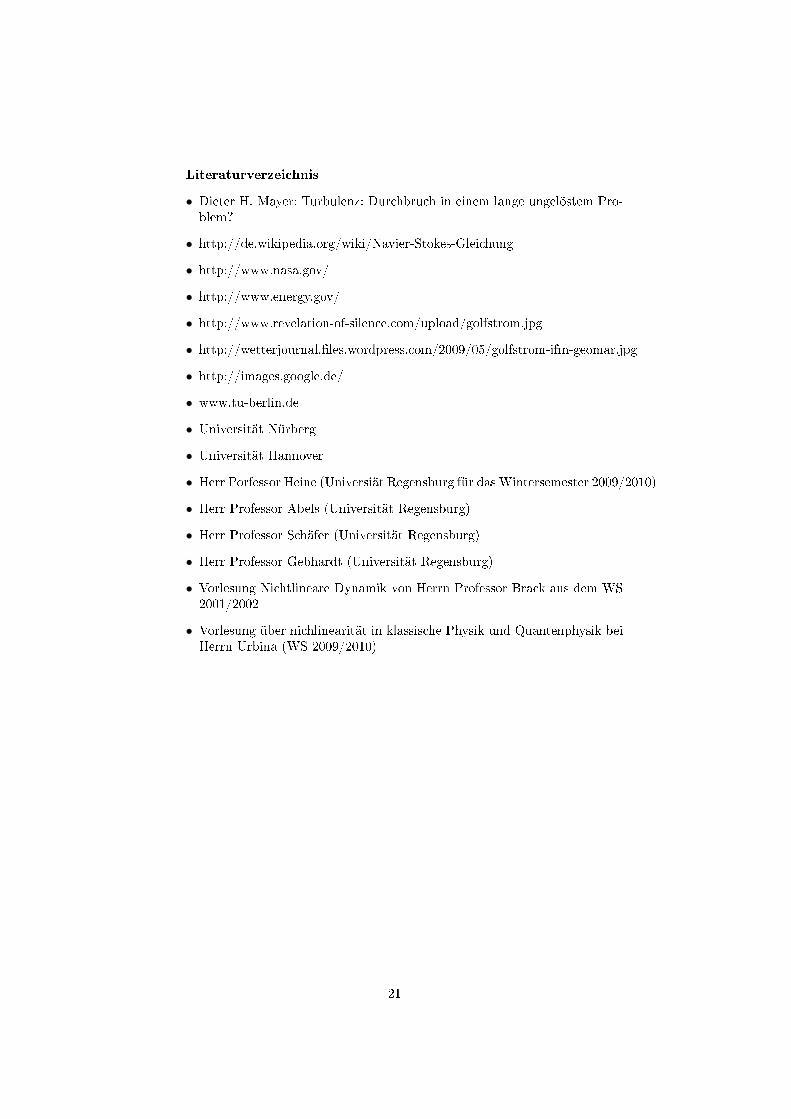
Bei der Taylor-Couette-Strömung betrachtet man nun eine Flüssigkeit zwi-schen zwei konzentrischen Zylindern, von denen sich der innere mir einer va-riablen Winkelgeschwindigkeit ω dreht. Auch hier wird widerum nicht näherauf das genaue einterten der turbulenten Strömungen eingegangen, jedoch seifestgehalten, dass auch hier wieder die Turbulenzen nach einer kleinen Zahl vonInstabilitäten einsetzen, was wieder für Ruelle und Takens spricht.
Abbildung 8: Taylor-Couette-Strömung
4.6 Theorie von Groÿmann
Alle Theorien die bis jetzt aufgeführt wurden haben geinsam, dass sie zur Erklä-rung der Turbulenzen die Stabilitätsanalyse auf Lösungen anwenden und derenEigenwerte betrachten. Der neue Ansatz von Groÿmann ist nun, nicht nur dieEigenwerte zu betrachten sondern vorallem auch die Eigenvektoren. Diese sindnämlich nicht orthogonal zueinander , und gerade diese nicht orthogonalität istes, die zu einer turbulenten Strömungsform führt. Darauf soll nun im Folgen-den näher eingegeangen werden. Zuerst soll jedoch noch die Frage angesprochenwerden: Gibt es eigentlich Widersprüche zur Theorie von Ruelle und Takens ?
18

Diese Frage kann eindeutig mit ja beantwortet werden. Das beginnt bereits beiden eben erwähnten Experimenten. Dreht sich nämlich bei dem Taylor-Couette-Experiment nicht der innere sondern der äussere Zylinder, so sollte die laminareStrömung eigentlich stabil sein, da es keinerlei Gefälle der Azimuntalgeschwin-digkeiten von innen nach aussen gibt. Das ist jedoch nicht der Fall, sobald dieDrehgeschwindigkeit nur groÿ genug wird. Also Turbulenzen ohne Instabilität?Wie also nun Turbulenzen in Strömungen entstehen wenn es nun keinerlei an-fängliche Instabilitäten gab soll in den nachstehenden Zeilen versucht werdenzu erklären. Gehen wir zur Navier-Stokes-Gleichung zurück:
(−→v · ∇)−→v +∂v
∂t= −∇p+
−→f a +
ν
LV∇2−→v
Es ist bekannt, dass es eine zeitunabhängige Lösung dieser Gleichung gibt, näm-lich die laminare Grundströmung. Sei soll mit V bezeichnt werden. Jetzt be-trachtet man die Grundströmung mit eine kleinen Störung, also −→v = V + δv.Was von weiterer Bedeutung ist, ist die zeitliche Entwicklung dieser Störung.Für kleine Störungen kann man die Navier-Stokes-Gleichung linearisieren undman erhält:
∂
∂tδ−→v = −(
−→V · ∇)δ−→v − (δ−→v · ∇)
−→V − p+ ν4δ−→v = Mδ−→v
Daraus bekommt man die Eigenlösungen eλt−→v λ(−→x ) wegenM−→v λ(−→x ) = λ−→v λ(−→x ).Von den einzelnen Beiträgen zuM sind je zwei proportional zu V und zwei pro-portional zu ν . Entscheidend für den Operator M ist der Beitrag (δ−→v · ∇)
−→V .
Dieser beschreibt den Transpoert der laminaren Flüssigkeitsströmung−→V zur die
Strömung δ−→v . Daher kann er auch als Operator aufgefasst werden:
((δ−→v · ∇)−→V )i ∼= Vi,jδvj
Dabei beschreibt die Matrix Vi,j das Gefälle der i-ten Geschwindigkeitskom-ponente in j-Richtung. Da diese Matrix im allgemeinen weder hermitesch nochnormal ist, besitzt sie somit auch kein vollständiges System aus orthogonalen Ei-genvektoren. Die Eigenvektoren neigen daher zur sogennanten Bündelung, auchals Parallelisierung bekannt. Die gesamte Theorien sollen an einem einfachenBeispeil etwas verdeutlicht werden. Sei nun die Matrix M wie folgt gewählt:
M =(λ1 Re
λ2
)M ist ein nicht normaler Operator in einem koplexen Vektorraum. Der Ein-
fachheit seien die Realteile der Eigenwerte negativ und die Imaginärteile pro-portional zu Re oder zu Null proportional. Die Eigenvektoren berechnen sichzu:
−→v 1 = (1, 0)T
−→v 2 = (Re
(λ1 − λ2), 1)T
Man sieht, dass sie nicht orthogonal zueinander sind sondern um so parallele, jegröÿer Re ist. Wenn die Reynoldzahl nicht groÿ genug ist kommt es wegen derimmer vorhandenen Dämpfung in realen Systemen zu keiner Verstärkung, somit
19

muss die Reynoldszahl eien gewissen Wert überscheiten bis Turbulenzen auftre-ten. Das anwachsen der Reynoldzahl würde alleine jedoch auch nichts bewirkenwäre da nicht noch der Term der Nichtlinearität. Dieser verursacht nämlich eineWechselwirkung mit den anfäglich kleinen Störungen beginnt der Kreislauf derVerstärkung und Wechselwirkung wieder. Wegen des nichtlinearen Charaktersder Strömung geschieht all dies chaotisch, was somit die Strömung turbulentmacht.Zusammengefasst kann also gesagt werden:Der Einsatz von Turbulenzen unterscheidet sich also wesentlich von den bis-her dargestellten Theorien der Instabilitäten, Bifukationen, usw. . Die LandauTheorie ist also für den Turbulenzeinsatz nich brauchbar, denn wie man gesehenhat muss bei manchen Strömungen ein anderes Phänomwen verabtwortlich seinfür das einsetzen von Zurbulenzen, da es dort keine Instabilitäten gibt. Es liegtsomit auch nahe in Fällen in denen Instabilitäten durchaus wirksam werden,den Turbulenzeinsatz auch mit dem nicht normalen Mechanismus zu erklären.
20
Literaturverzeichnis
• Dieter H. Mayer: Turbulenz: Durchbruch in einem lange ungelöstem Pro-blem?
• http://de.wikipedia.org/wiki/Navier-Stokes-Gleichung
• http://www.nasa.gov/
• http://www.energy.gov/
• http://www.revelation-of-silence.com/upload/golfstrom.jpg
• http://wetterjournal.les.wordpress.com/2009/05/golfstrom-ifm-geomar.jpg
• http://images.google.de/
• www.tu-berlin.de
• Universität Nürberg
• Universität Hannover
• Herr Porfessor Heine (Universiät Regensburg für das Wintersemester 2009/2010)
• Herr Professor Abels (Universität Regensburg)
• Herr Professor Schäfer (Universität Regensburg)
• Herr Professor Gebhardt (Universität Regensburg)
• Vorlesung Nichtlineare Dynamik von Herrn Professor Brack aus dem WS2001/2002
• Vorlesung über nichlinearität in klassische Physik und Quantenphysik beiHerrn Urbina (WS 2009/2010)
21

![INDEX [] · Der Projektraum Lungomare nimmt sein 10-jähriges Bestehen zum Anlass und erö"net im Juni 2013 das Lungomare Gasthaus, einen temporären Denk- und Aktionsraum](https://img.pdfslide.org/doc/110x75/5e05bf85ac50a76f9146e646/index-der-projektraum-lungomare-nimmt-sein-10-jhriges-bestehen-zum-anlass.jpg)


























