Embed Size (px)
Citation preview
1
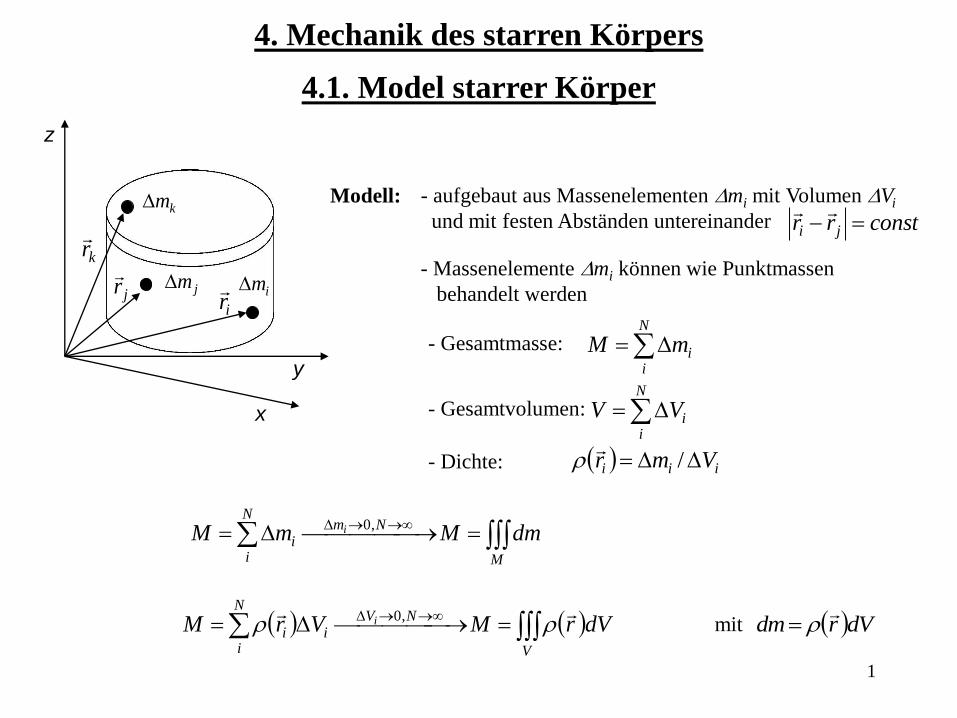
4. Mechanik des starren Körpers
4.1. Model starrer Körper
- aufgebaut aus Massenelementen mi mit Volumen Vi
und mit festen Abständen untereinander constrr ji
Modell:
- Gesamtmasse: N
iimM
dVrdm
mit
- Massenelemente mi können wie Punktmassen
behandelt werden
- Gesamtvolumen: N
iiVV
- Dichte: iii Vmr /
N
i V
NVii dVrMVrM i
,0
N
i M
Nmi dmMmM i ,0
x
y
z
irjr
kr
km
jmim
2
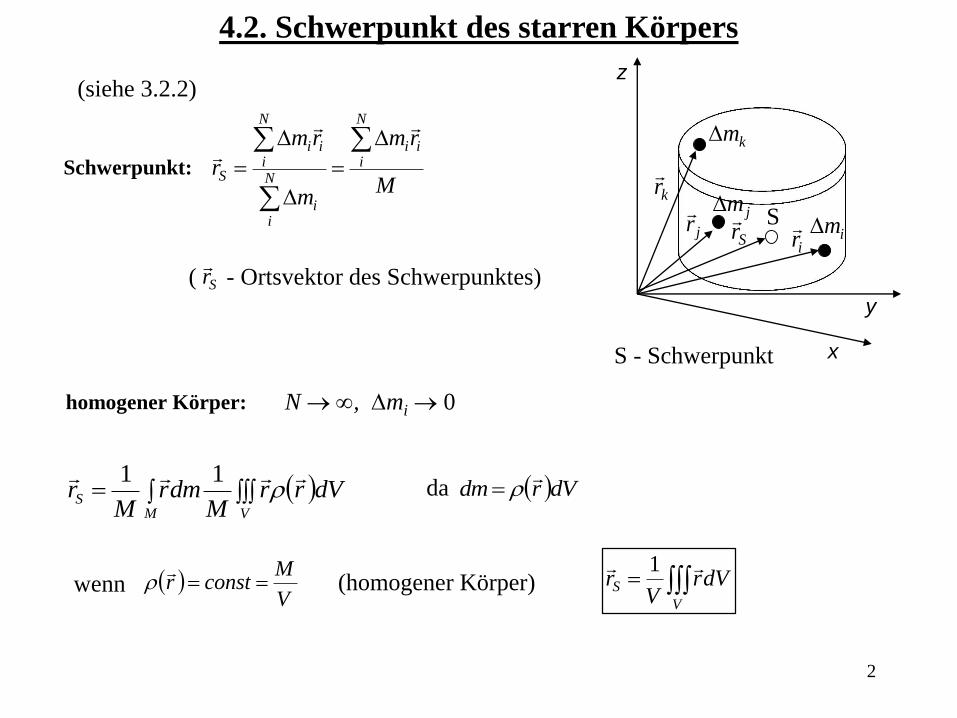
Schwerpunkt:M
rm
m
rm
r
N
iii
N
ii
N
iii
S
homogener Körper:
VM
S dVrrM
dmrM
r
11
V
S dVrV
r 1
V
Mconstr
dVrdm
4.2. Schwerpunkt des starren Körpers
x
y
z
irjr
kr
km
Sr jm
imS
S - Schwerpunkt
N , mi 0
da
wenn (homogener Körper)
(siehe 3.2.2)
Sr
( - Ortsvektor des Schwerpunktes)
3
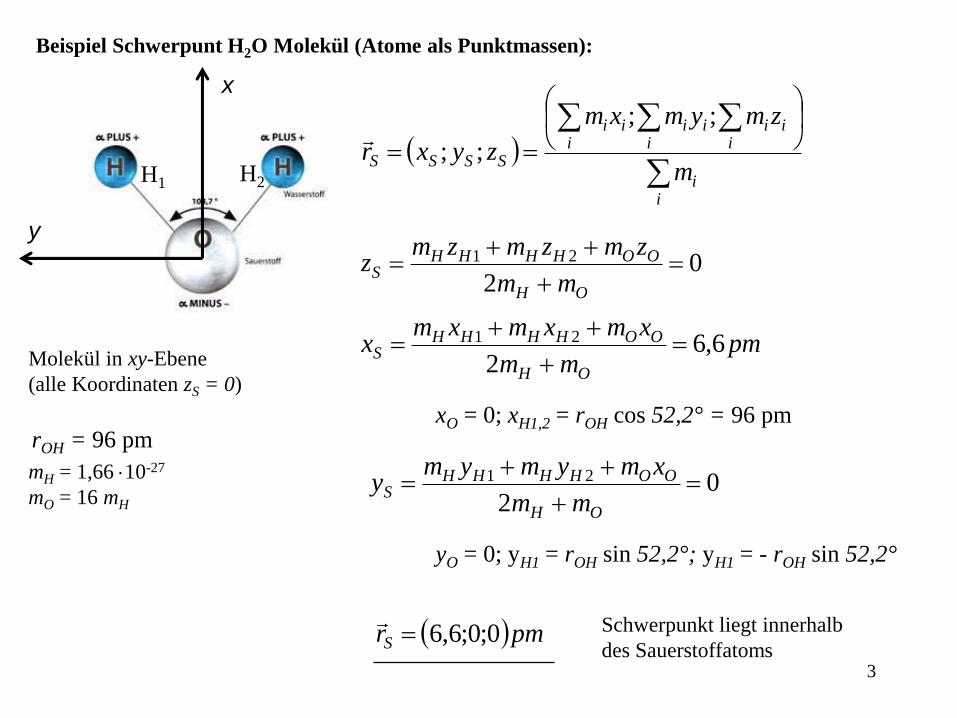
Beispiel Schwerpunt H2O Molekül (Atome als Punktmassen):
Molekül in xy-Ebene
(alle Koordinaten zS = 0)
mH = 1,66 10-27
mO = 16 mH
ii
i iiiii
iii
SSSSm
zmymxm
zyxr
;;
;;
02
21
OH
OOHHHHS
mm
zmzmzmz
pmmm
xmxmxmx
OH
OOHHHHS 6,6
2
21
x
y
H1 H2
xO = 0; xH1,2 = rOH cos 52,2° = 96 pmrOH = 96 pm
02
21
OH
OOHHHHS
mm
xmymymy
yO = 0; yH1 = rOH sin 52,2°; yH1 = - rOH sin 52,2°
pmrS 0;0;6,6 Schwerpunkt liegt innerhalb
des Sauerstoffatoms
44
Bewegung des Schwerpunkts:
SS
N
i
ii
S pvMdt
rdm
dt
rdM
G
SS Fdt
pd
dt
rdM
2
2
Exp.: Drehmomentkörper, Doppelkegel
N
iiiS
N
iii
S rmrMM
rm
r
(Der Gesamtimpuls eines isolierten Systems ( )
entspricht dem Impuls des Schwerpunktes
und ist konstant)
(vgl. mit Schwerpunktsatz in 1.3.2.2.)
0GF
Sp
- Schwerpunkt des starren Körpers bewegt sich wie PM mit Masse M unter Einfluss einer
äußeren Gesamtkraft .GF
- Schwerpunkt des starren Körpers bewegt sich als ob in ihm die gesamte Masse M des
Körpers vereinigt wäre und die resultierende aller Kräfte wirkt.GF
- Falls 0GF
constpS
constvS
Geschwindigkeit des Schwerpunktes
M
rm
r
N
iii
S
5
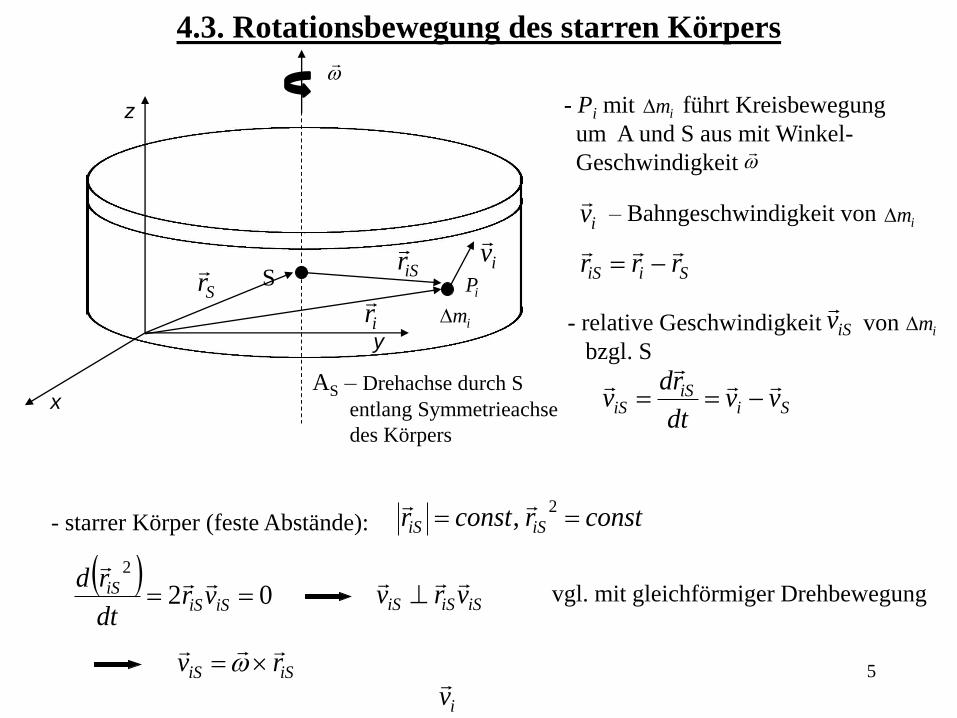
4.3. Rotationsbewegung des starren Körpers
S
x
y
z
irSr
iSr
im
iv
iP
AS – Drehachse durch S
entlang Symmetrieachse
des Körpers
iv
– Bahngeschwindigkeit von im
S
- Pi mit führt Kreisbewegung
um A und S aus mit Winkel-
Geschwindigkeit
im
iv
constrconstr iSiS 2
,
SiiS
iS vvdt
rdv
- relative Geschwindigkeit von
bzgl. SiSv
im
- starrer Körper (feste Abstände):
02
2
iSiSiS vr
dt
rd
iSiSiS vrv
iSiS rv
vgl. mit gleichförmiger Drehbewegung
SiiS rrr
- Gesamtgeschwindigkeit von :
6
iv
Allg. Bewegung des starren Körpers setzt sich zusammen aus Translations-
bewegung des Schwerpunkts und Rotationsbewegung um eine Achse durch
den Schwerpunkt
im
iSSi rvv
iSSi vvv
gilt für beliebiges des starren Körpersim
Exp.: Drehmomentkörper auf Tisch
- Freiheitsgrade f des starren Körpers:
Translation:
Rotation:
SSSSS zyxrv ,,
zyx ,,
f = 3
f = 3
Der starre Körper besitzt f = 3 Freiheitsgrade der Bewegung
7
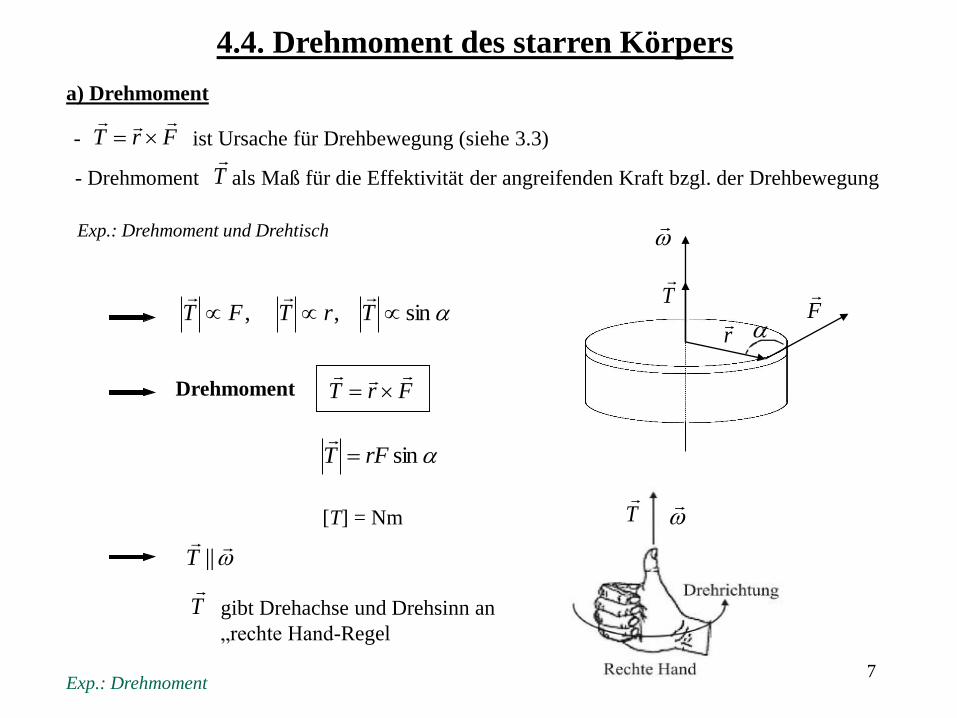
4.4. Drehmoment des starren Körpers
Exp.: Drehmoment und Drehtisch
Drehmoment FrT
[T] = Nm
- Drehmoment als Maß für die Effektivität der angreifenden Kraft bzgl. der DrehbewegungT
,FT
,rT
sinT
sinrFT
a) Drehmoment
FrT
- ist Ursache für Drehbewegung (siehe 3.3)
gibt Drehachse und Drehsinn an
„rechte Hand-Regel
||T
T
r
T
F
T
Exp.: Drehmoment
8
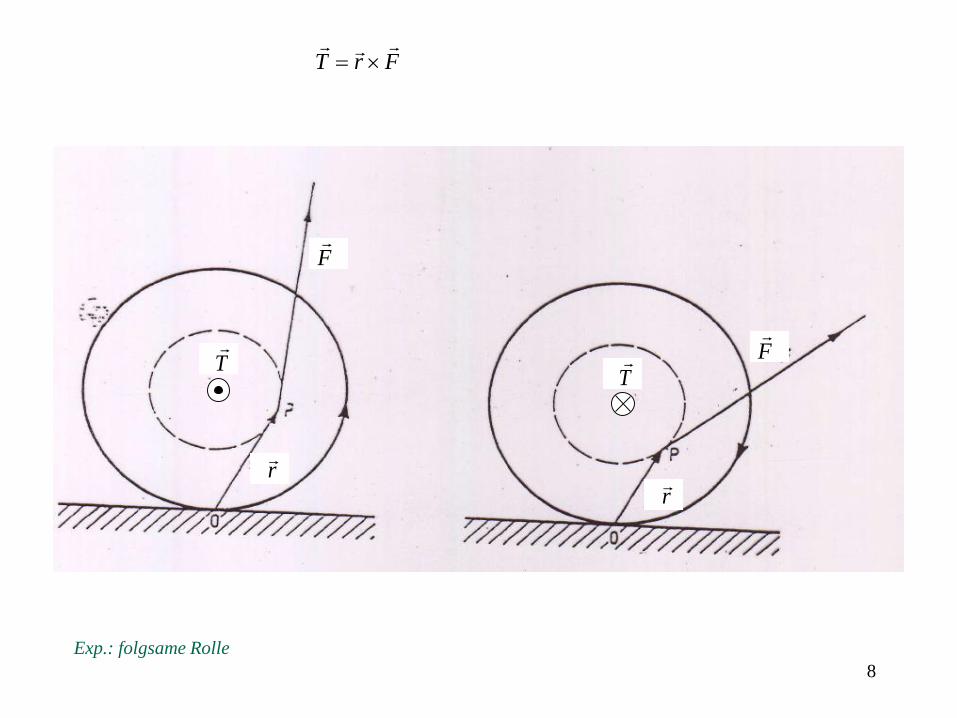
Exp.: folgsame Rolle
FrT
r
F
T
r
F
T
9
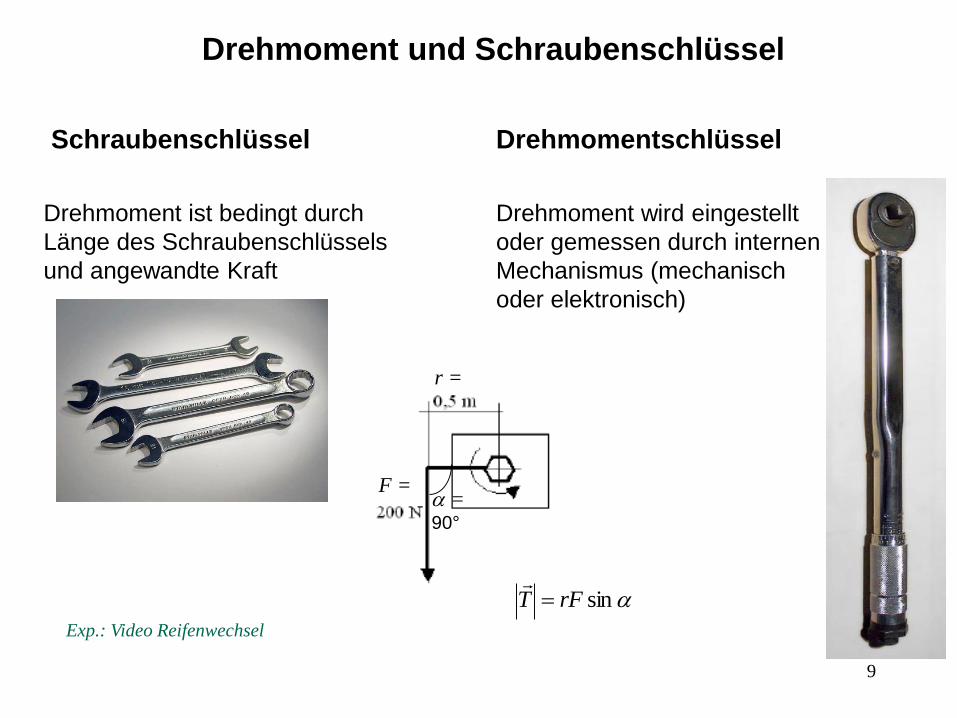
Drehmoment und Schraubenschlüssel
Schraubenschlüssel
Drehmoment ist bedingt durch
Länge des Schraubenschlüssels
und angewandte Kraft
Drehmomentschlüssel
Exp.: Video Reifenwechsel
sinrFT
r =
F = =90°
Drehmoment wird eingestellt
oder gemessen durch internen
Mechanismus (mechanisch
oder elektronisch)
10
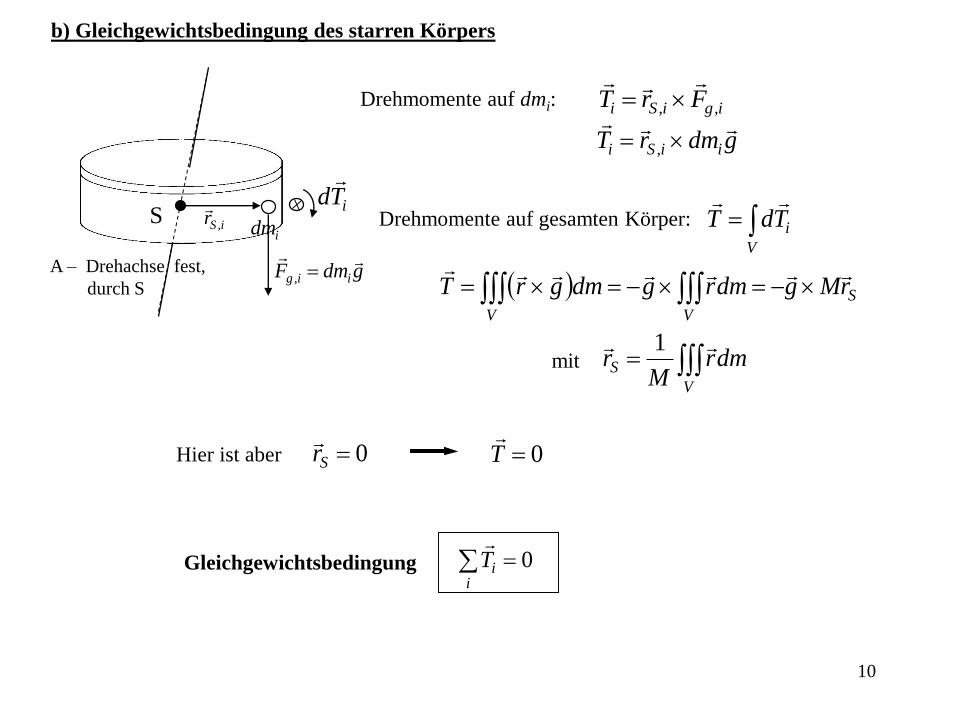
b) Gleichgewichtsbedingung des starren Körpers
Gleichgewichtsbedingung 0i
iT
Drehmomente auf dmi:
iSr ,
gdmF iig
,
iTd
idmS
A – Drehachse fest,
durch S
V
iTdT
gdmrT iiSi
,
Drehmomente auf gesamten Körper:
igiSi FrT ,,
S
VV
rMgdmrgdmgrT
mit V
S dmrM
r 1
Hier ist aber 0Sr
0T
11
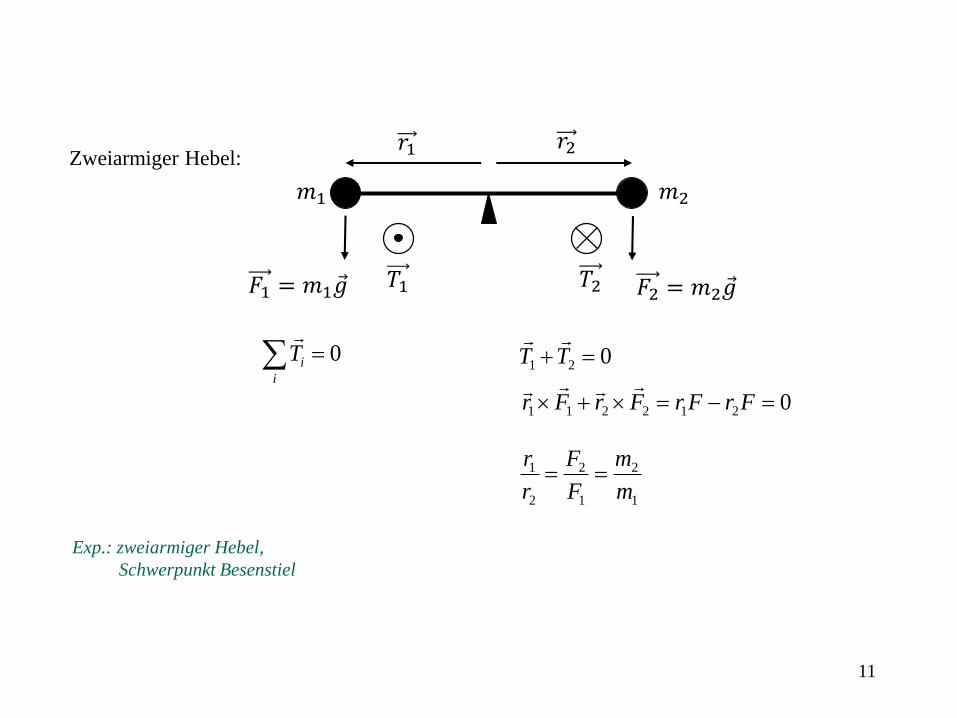
𝐹1 = 𝑚1 𝑔 𝐹2 = 𝑚2 𝑔𝑇1 𝑇2
𝑟1 𝑟2
𝑚1 𝑚2
Exp.: zweiarmiger Hebel,
Schwerpunkt Besenstiel
Zweiarmiger Hebel:
0i
iT
021 TT
0212211 FrFrFrFr
1
2
1
2
2
1
m
m
F
F
r
r
12
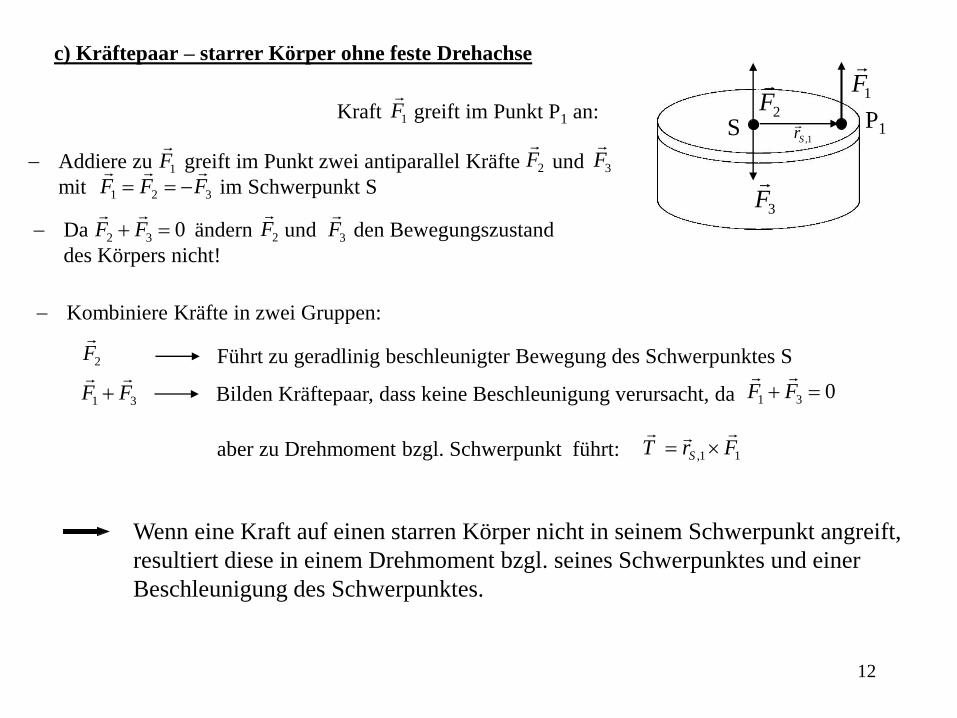
c) Kräftepaar – starrer Körper ohne feste Drehachse
1,Sr
1F
S P12F
3F
Kraft greift im Punkt P1 an:1F
1F
321 FFF
2F
3F
Addiere zu greift im Punkt zwei antiparallel Kräfte und
mit im Schwerpunkt S
Da ändern und den Bewegungszustand
des Körpers nicht!
032 FF
2F
3F
Kombiniere Kräfte in zwei Gruppen:
31 FF
2F
Führt zu geradlinig beschleunigter Bewegung des Schwerpunktes S
Bilden Kräftepaar, dass keine Beschleunigung verursacht, da
aber zu Drehmoment bzgl. Schwerpunkt führt:
031 FF
11, FrT S
Wenn eine Kraft auf einen starren Körper nicht in seinem Schwerpunkt angreift,
resultiert diese in einem Drehmoment bzgl. seines Schwerpunktes und einer
Beschleunigung des Schwerpunktes.
13
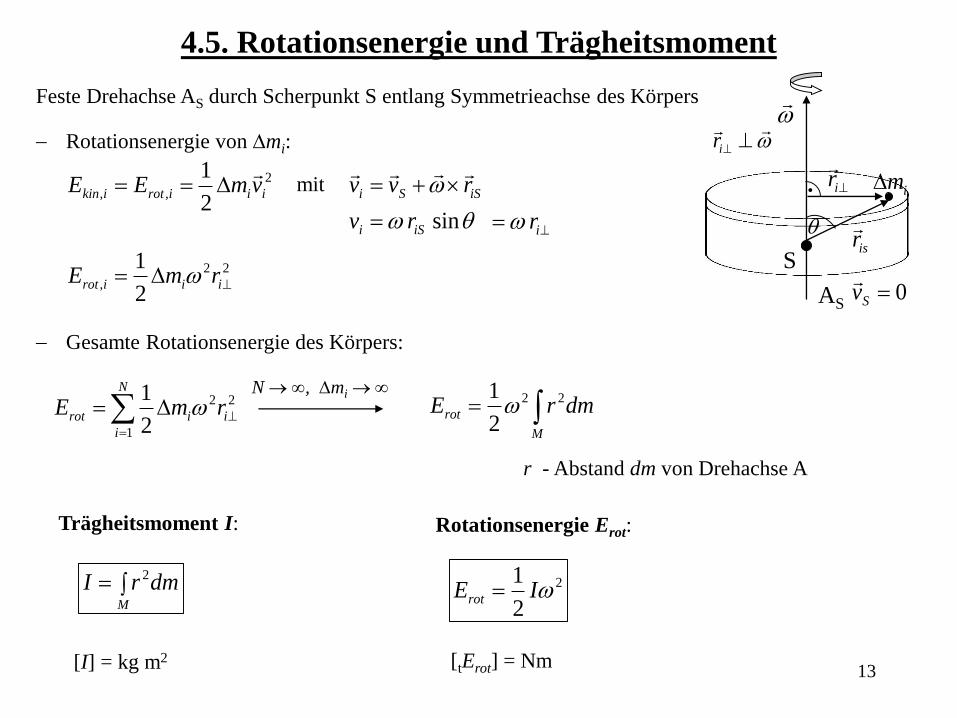
4.5. Rotationsenergie und Trägheitsmoment
r - Abstand dm von Drehachse A
Feste Drehachse AS durch Scherpunkt S entlang Symmetrieachse des Körpers
2
,,2
1iiirotikin vmEE
iSSi rvv
mit
siniSi rv ir
22
,2
1 iiirot rmE
ir
im
ir
S
AS0Sv
isr
Rotationsenergie von mi:
Gesamte Rotationsenergie des Körpers:
N
i
iirot rmE1
22
2
1
N , mi
M
rot dmrE 22
2
1
Trägheitsmoment I:
[I] = kg m2
M
dmrI 2
Rotationsenergie Erot:
2
2
1IErot
[tErot] = Nm
14
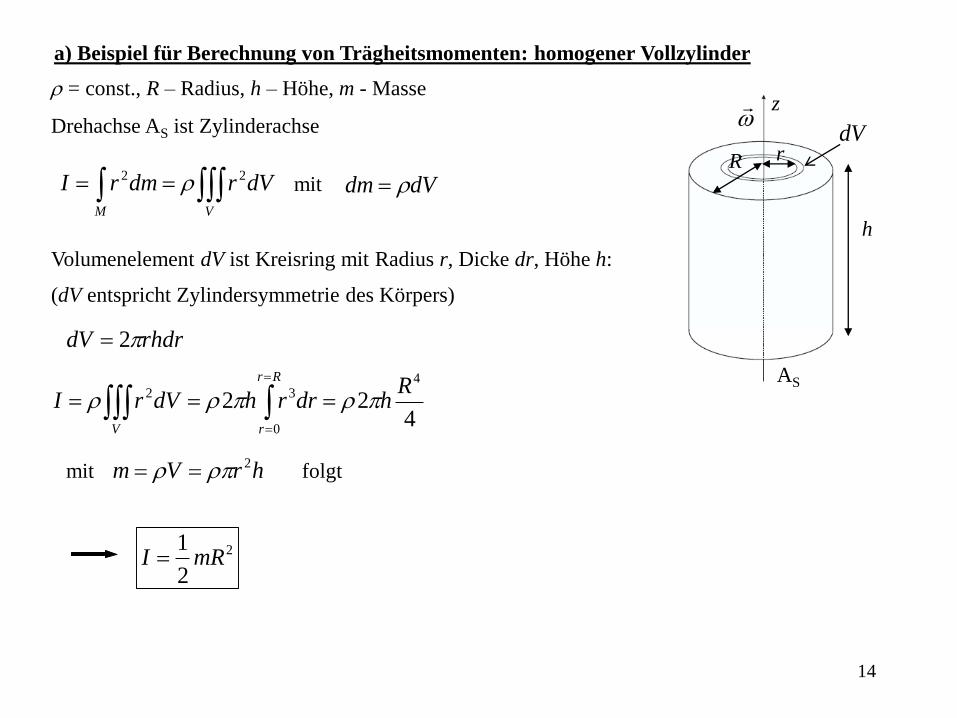
a) Beispiel für Berechnung von Trägheitsmomenten: homogener Vollzylinder
Drehachse AS ist Zylinderachse
= const., R – Radius, h – Höhe, m - Masse
VM
dVrdmrI 22 dVdm mit
Volumenelement dV ist Kreisring mit Radius r, Dicke dr, Höhe h:
(dV entspricht Zylindersymmetrie des Körpers)
rhdrdV 2
AS
z
rR
h
dV
422
4
0
32 RhdrrhdVrI
Rr
rV
mit folgthrVm 2
2
2
1mRI
15
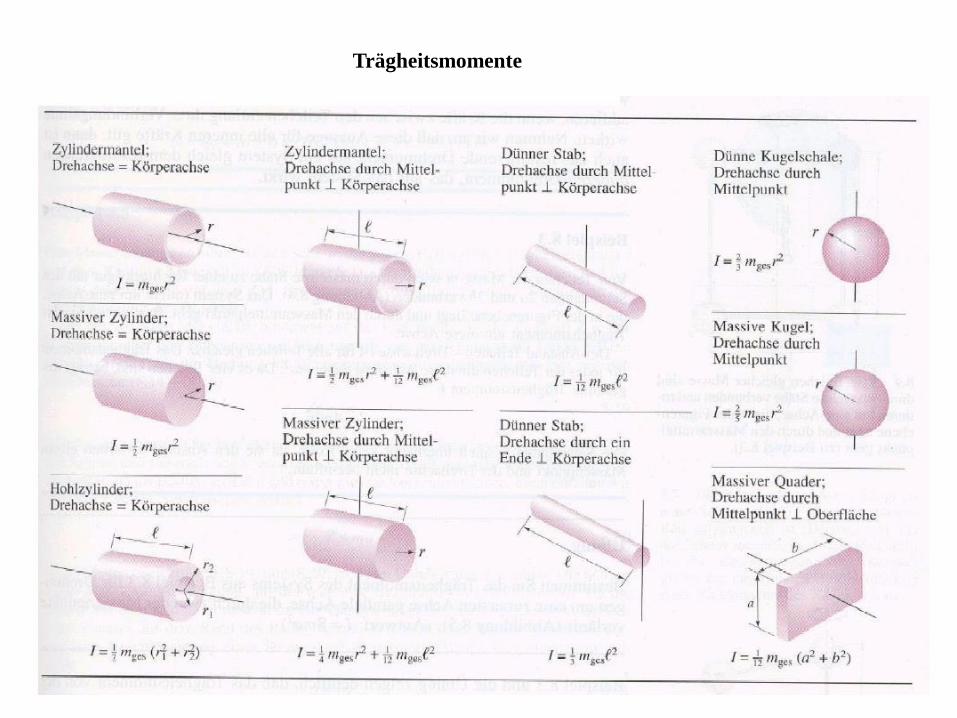
Trägheitsmomente
16
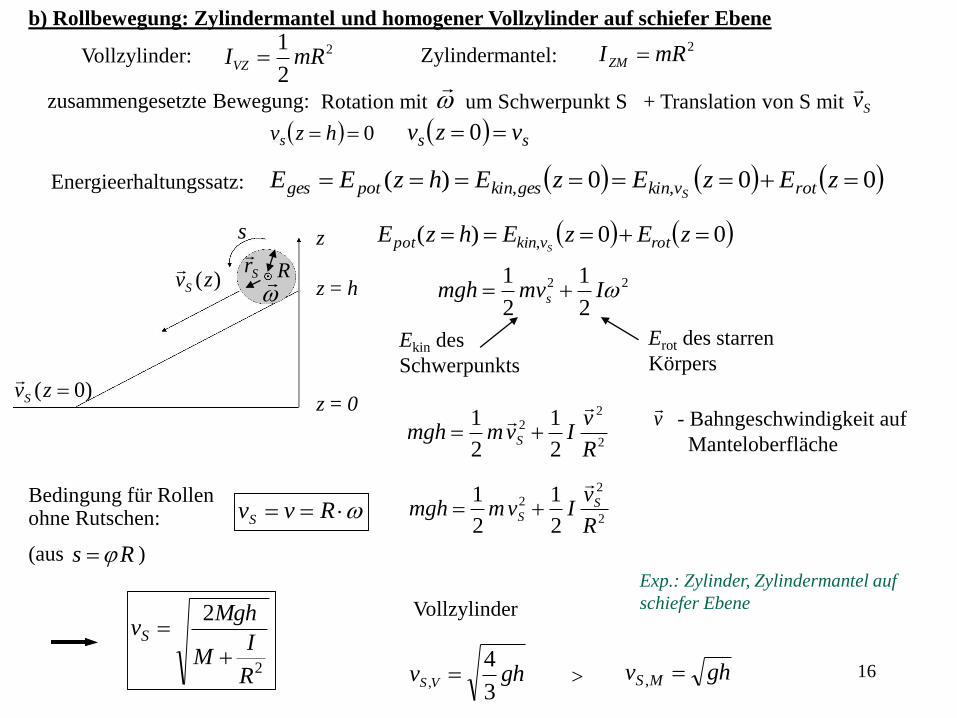
Zylindermantel:2
2
1mRIVZ Vollzylinder:
2mRIZM
Energieerhaltungssatz: 000)( ,, zEzEzEhzEE rotvkingeskinpotges S
00)( , zEzEhzE rotvkinpot S
22
2
1
2
1Imvmgh s
0 hzvs ss vzv 0
Ekin des
Schwerpunkts
Erot des starren
Körpers
z
z = h
z = 0
)(zvS
)0( zvS
RSr
b) Rollbewegung: Zylindermantel und homogener Vollzylinder auf schiefer Ebene
zusammengesetzte Bewegung: Rotation mit um Schwerpunkt S + Translation von S mit Sv
2
1
2
12
22
R
vIvmmgh S
v
- Bahngeschwindigkeit auf
Manteloberfläche
RvvS
Bedingung für Rollen ohne Rutschen: 2
22
2
1
2
1
R
vIvmmgh S
S
Rs (aus )
s
2
2
R
IM
MghvS
Vollzylinder
ghv VS3
4, ghv MS ,>
Exp.: Zylinder, Zylindermantel auf
schiefer Ebene
17
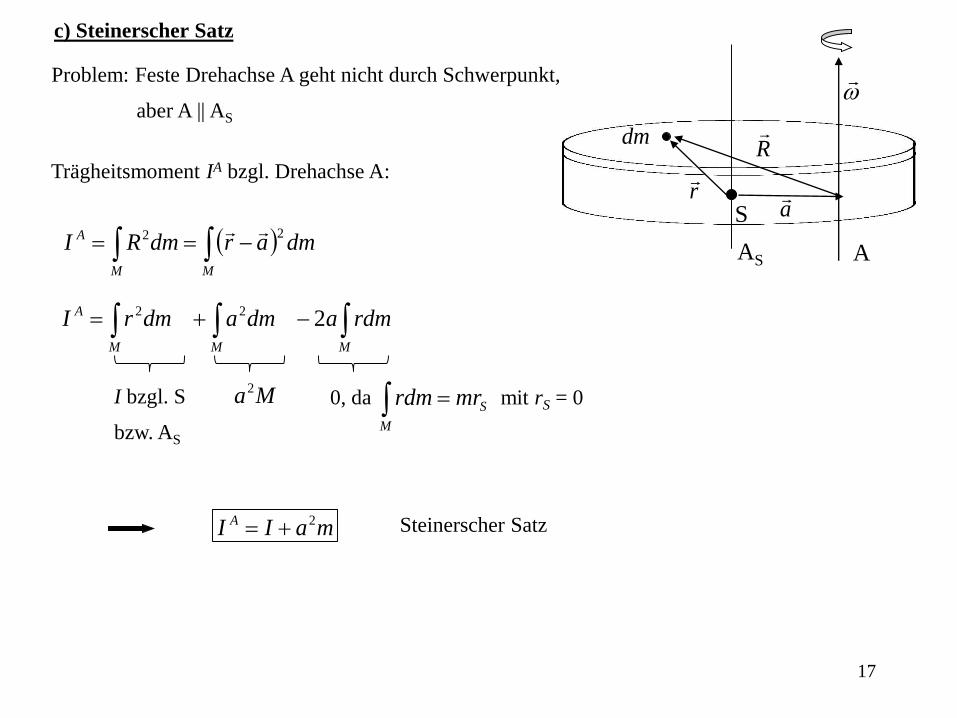
c) Steinerscher Satz
Problem: Feste Drehachse A geht nicht durch Schwerpunkt,
aber A || AS
dm
S
AS
r
A
a
R
MM
A dmardmRI22
Trägheitsmoment IA bzgl. Drehachse A:
MMM
A rdmadmadmrI 222
Ma2I bzgl. S
bzw. AS
0, da S
M
mrrdm mit rS = 0
maII A 2 Steinerscher Satz
18
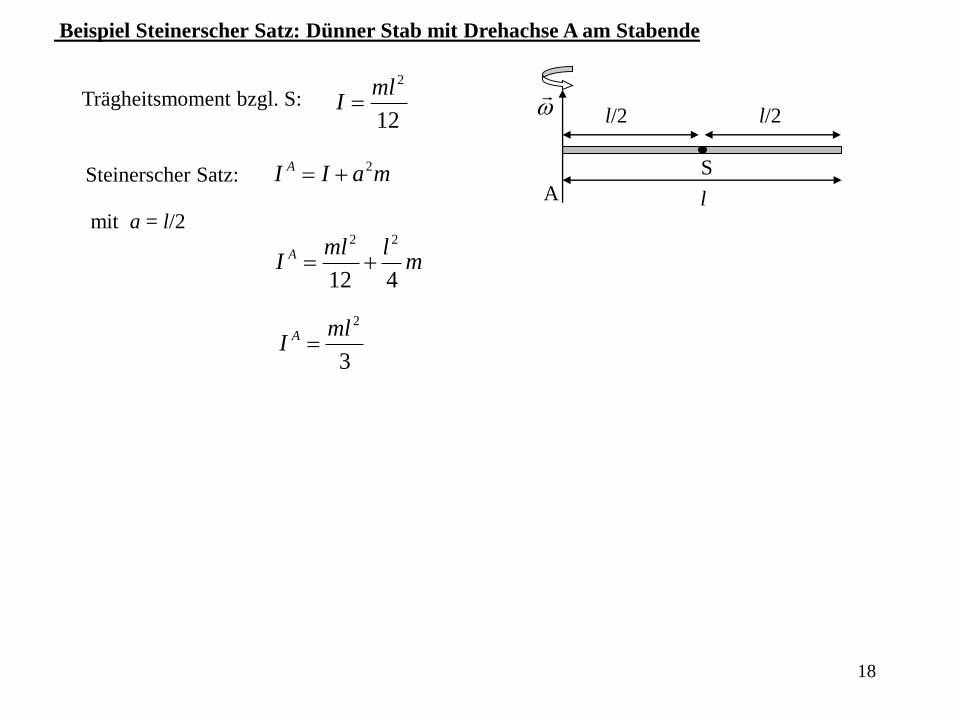
Beispiel Steinerscher Satz: Dünner Stab mit Drehachse A am Stabende
S
l
l/2 l/2
A
Trägheitsmoment bzgl. S:
maII A 2
12
2mlI
Steinerscher Satz:
mlml
I A
412
22
mit a = l/2
3
2mlI A
19
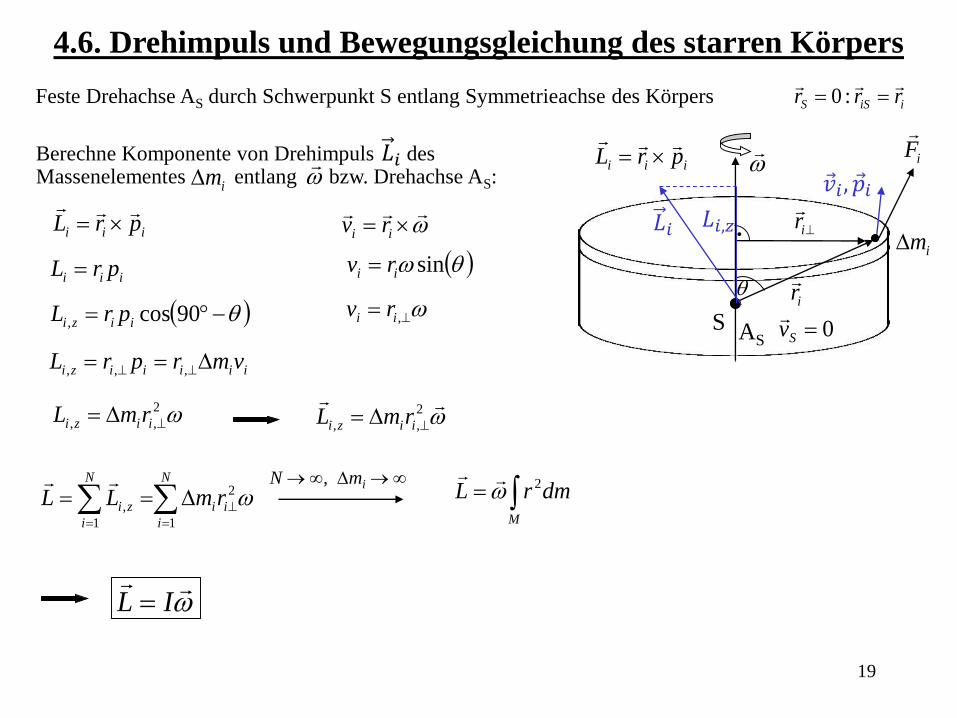
4.6. Drehimpuls und Bewegungsgleichung des starren Körpers
Feste Drehachse AS durch Schwerpunkt S entlang Symmetrieachse des Körpers
Berechne Komponente von Drehimpuls des Massenelementes entlang bzw. Drehachse AS:
𝐿𝑖
im
iii prL
90cos, iizi prL
iiiiizi vmrprL ,,,
iii prL
2
,, iizi rmL
ii rv
sinii rv
,ii rv
2
,, iizi rmL
N
i
ii
N
i
zi rmLL1
2
1
, N , mi
M
dmrL 2
IL
ir
im
S AS0Sv
ir
𝐿𝑖 𝐿𝑖,𝑧
iii prL
𝑣𝑖 , 𝑝𝑖
iF
iiSS rrr
:0
20
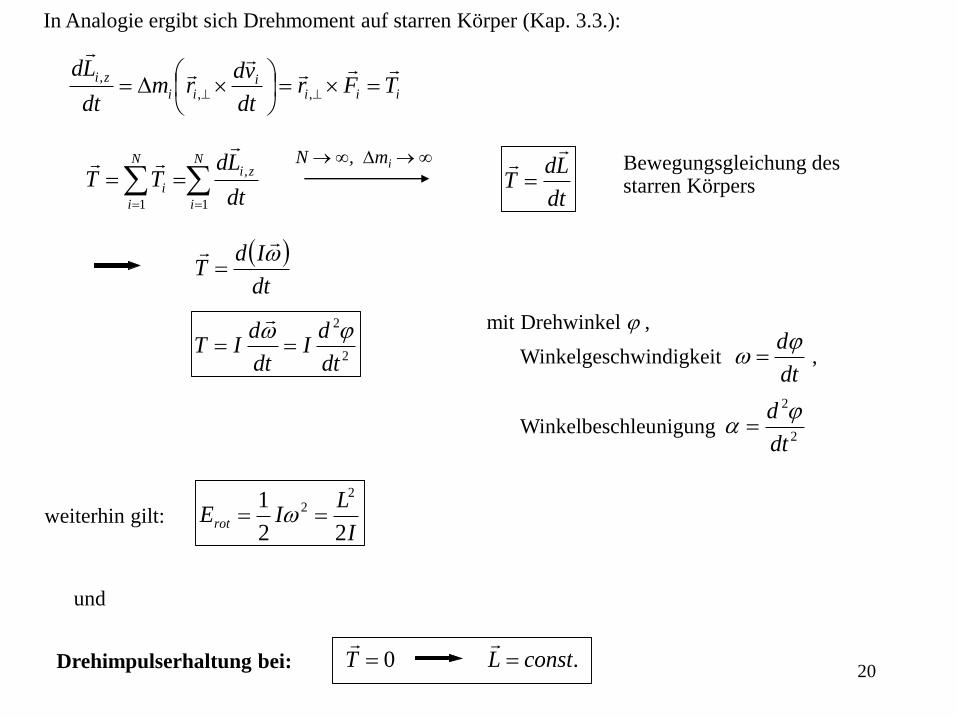
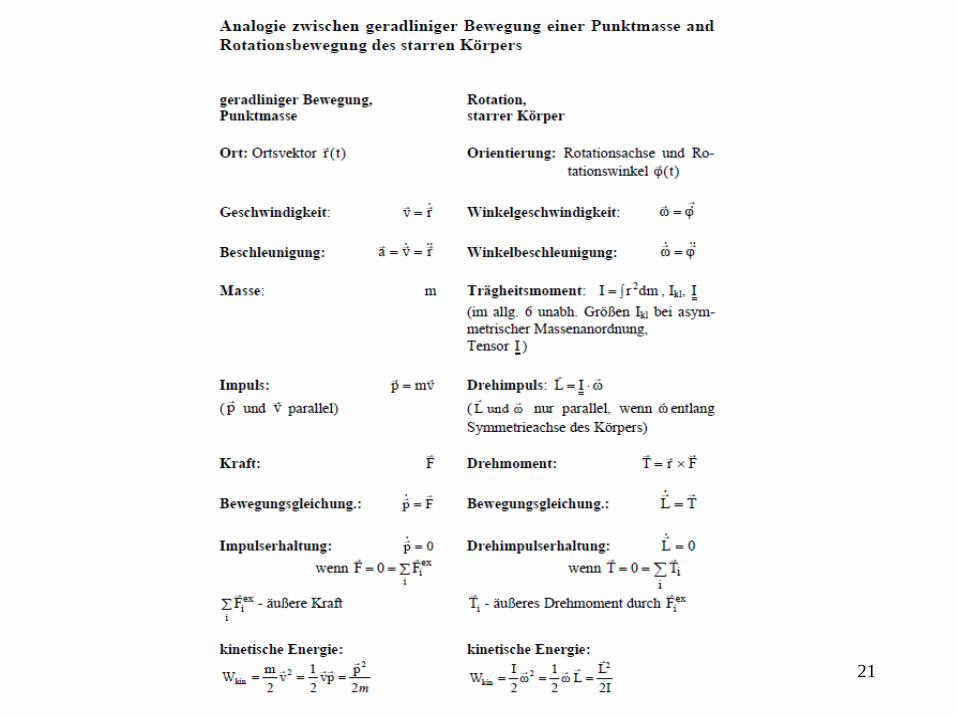
In Analogie ergibt sich Drehmoment auf starren Körper (Kap. 3.3.):
iiii
ii
ziTFr
dt
vdrm
dt
Ld
,,
,
N
i
ziN
i
idt
LdTT
1
,
1
N , mi
dt
LdT
Bewegungsgleichung des starren Körpers
dt
IdT
2
2
dt
dI
dt
dIT
mit Drehwinkel ,
Winkelgeschwindigkeit , dt
d
Winkelbeschleunigung2
2
dt
d
Drehimpulserhaltung bei: 0T
.constL
weiterhin gilt:I
LIErot
22
1 22
und
21
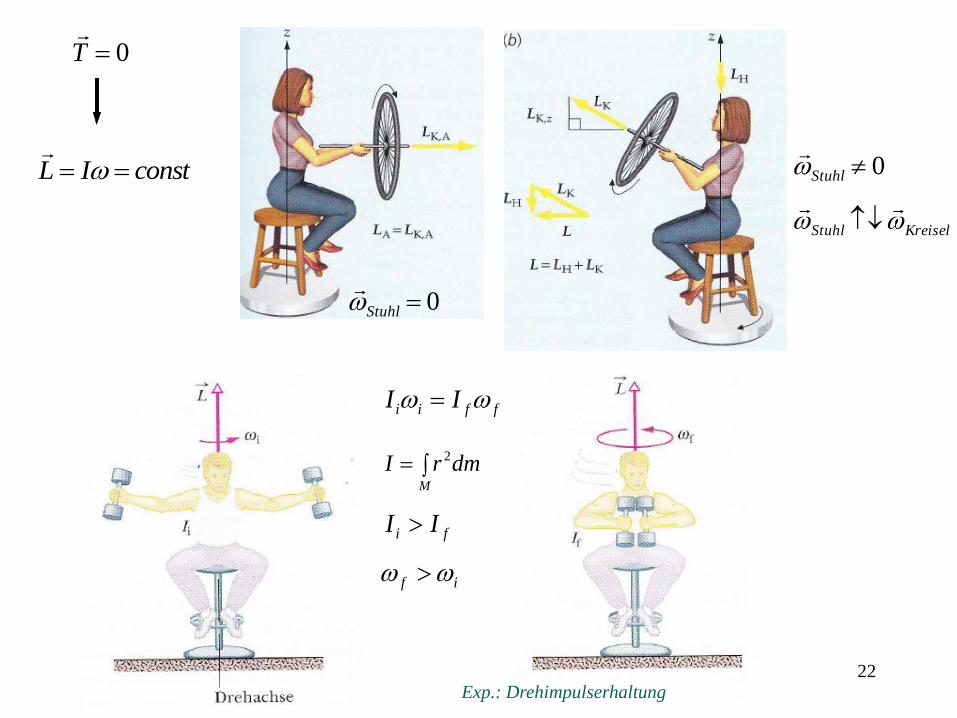
22
0Stuhl
0Stuhl
KreiselStuhl
fi II
M
dmrI 2
0T
constIL
ffii II
if
Exp.: Drehimpulserhaltung
rT
S
23
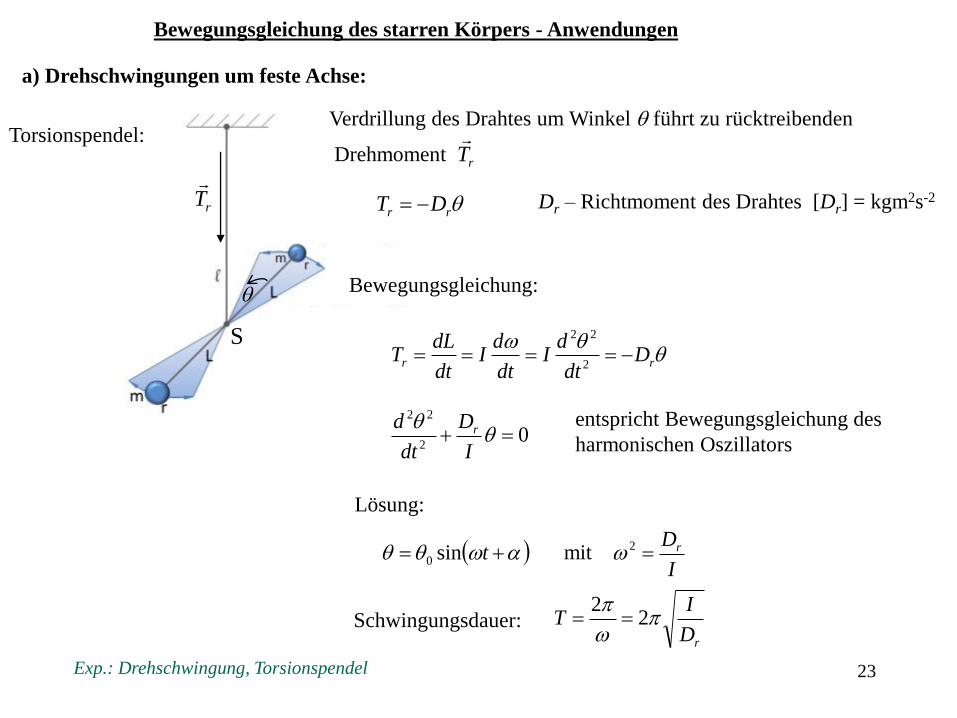
a) Drehschwingungen um feste Achse:
Torsionspendel:
Bewegungsgleichung des starren Körpers - Anwendungen
Verdrillung des Drahtes um Winkel führt zu rücktreibenden
Drehmoment rT
rr DT Dr – Richtmoment des Drahtes [Dr] = kgm2s-2
Bewegungsgleichung:
rr Ddt
dI
dt
dI
dt
dLT
2
22
02
22
I
D
dt
d rentspricht Bewegungsgleichung des
harmonischen Oszillators
Lösung:
tsin0I
Dr2mit
Schwingungsdauer:rD
IT
2
2
Exp.: Drehschwingung, Torsionspendel
a
K
A
24
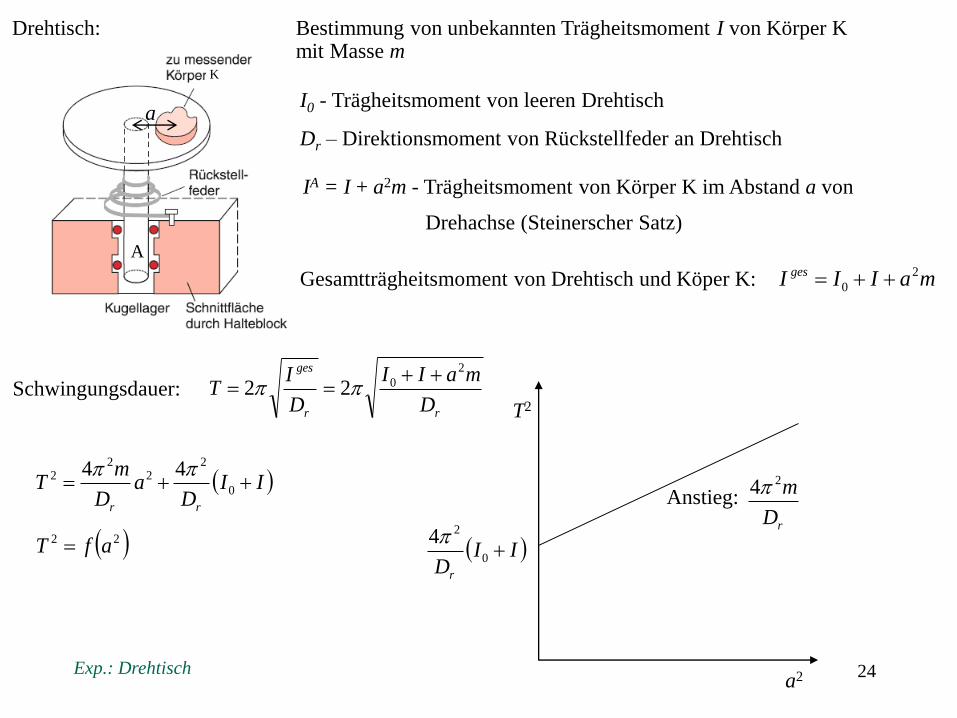
Drehtisch: Bestimmung von unbekannten Trägheitsmoment I von Körper K mit Masse m
I0 - Trägheitsmoment von leeren Drehtisch
Dr – Direktionsmoment von Rückstellfeder an Drehtisch
Gesamtträgheitsmoment von Drehtisch und Köper K: maIII ges 2
0
IA = I + a2m - Trägheitsmoment von Körper K im Abstand a von
Drehachse (Steinerscher Satz)
Schwingungsdauer:rr
ges
D
maII
D
IT
2
022
IID
aD
mT
rr
0
22
22 44
22 afT
T2
a2
IIDr
0
24rD
m24Anstieg:
Exp.: Drehtisch
S
SrA
gmFg
rT
25
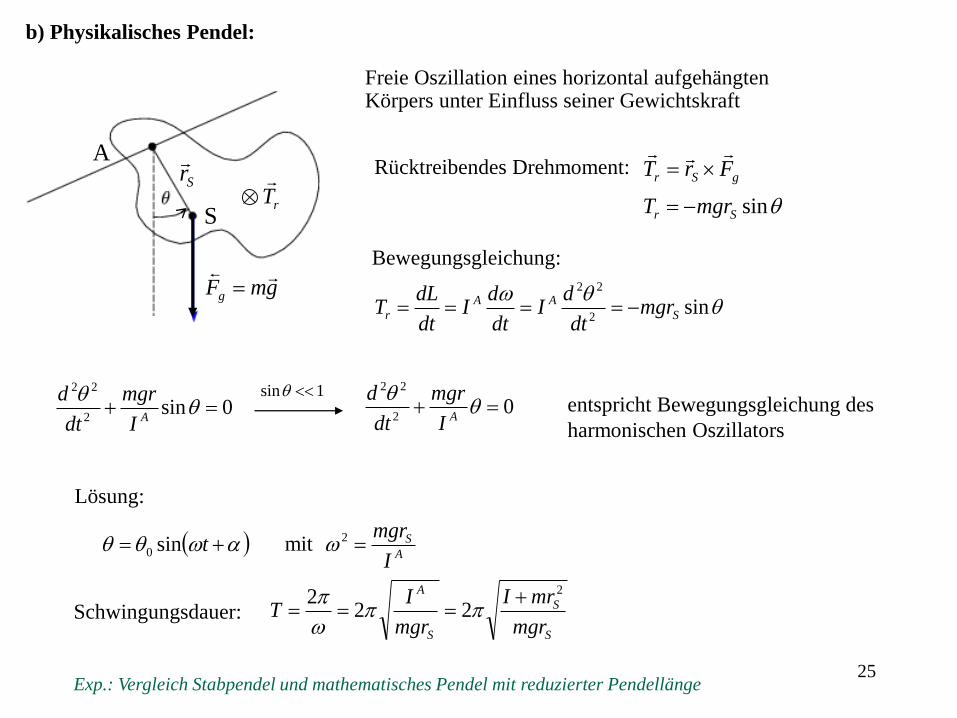
b) Physikalisches Pendel:
Freie Oszillation eines horizontal aufgehängten Körpers unter Einfluss seiner Gewichtskraft
sinSr mgrT
gSr FrT
Rücktreibendes Drehmoment:
Bewegungsgleichung:
sin2
22
S
AA
r mgrdt
dI
dt
dI
dt
dLT
0sin2
22
AI
mgr
dt
d0
2
22
AI
mgr
dt
d1sin entspricht Bewegungsgleichung des
harmonischen Oszillators
Lösung:
tsin0
Schwingungsdauer:S
S
S
A
mgr
mrI
mgr
IT
2
222
A
S
I
mgr2mit
Exp.: Vergleich Stabpendel und mathematisches Pendel mit reduzierter Pendellänge
26
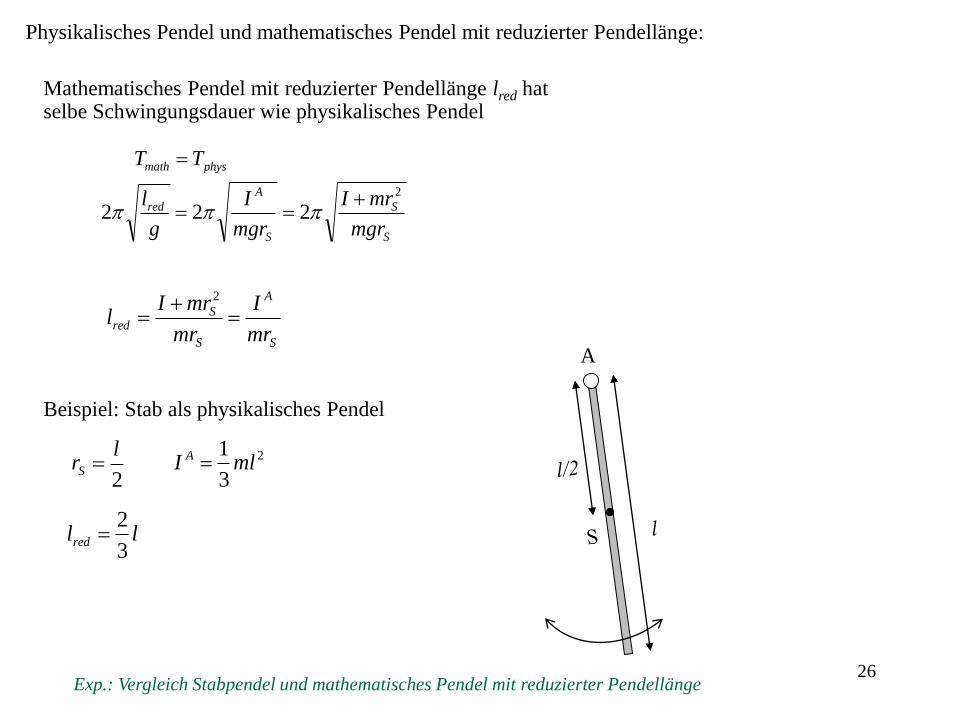
Physikalisches Pendel und mathematisches Pendel mit reduzierter Pendellänge:
Mathematisches Pendel mit reduzierter Pendellänge lred hat selbe Schwingungsdauer wie physikalisches Pendel
S
S
S
A
red
mgr
mrI
mgr
I
g
l 2
222
physmath TT
S
A
S
Sred
mr
I
mr
mrIl
2
Beispiel: Stab als physikalisches Pendel
A
2
lrS
2
3
1mlI A
llred3
2
Exp.: Vergleich Stabpendel und mathematisches Pendel mit reduzierter Pendellänge
27
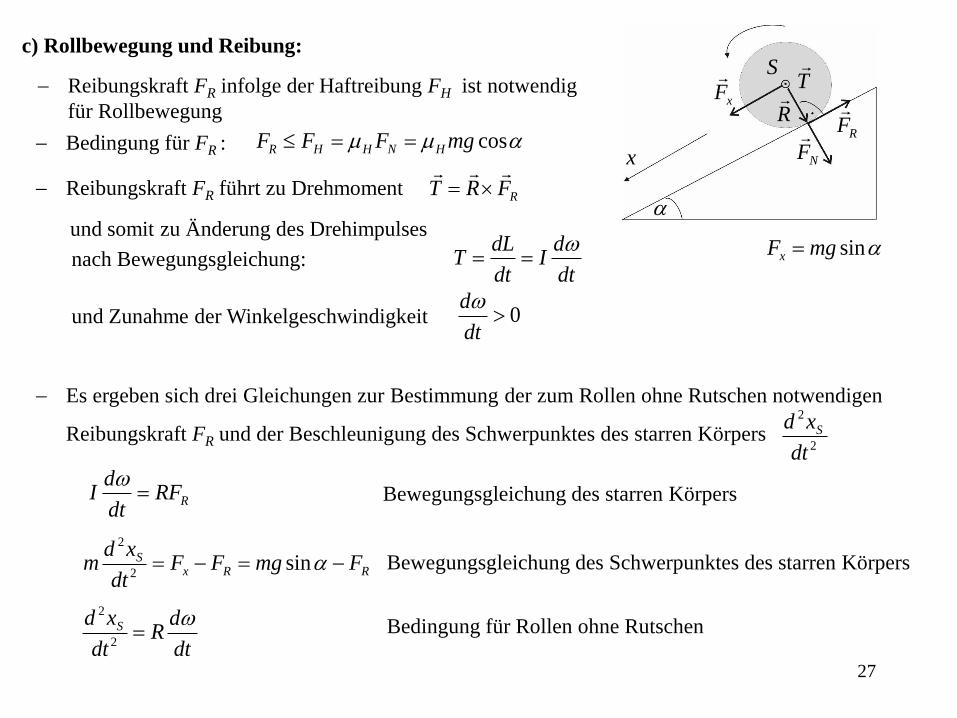
c) Rollbewegung und Reibung:
T
xF
RF
NF
R
S
x
Reibungskraft FR infolge der Haftreibung FH ist notwendig
für Rollbewegung
Bedingung für FR : cosmgFFF HNHHR
sinmgFx
Reibungskraft FR führt zu Drehmoment RFRT
und somit zu Änderung des Drehimpulses
dt
dI
dt
dLT
und Zunahme der Winkelgeschwindigkeit 0dt
d
nach Bewegungsgleichung:
Bewegungsgleichung des starren KörpersRRFdt
dI
RRxS FmgFF
dt
xdm sin
2
2
Bewegungsgleichung des Schwerpunktes des starren Körpers
dt
dR
dt
xd S
2
2
Bedingung für Rollen ohne Rutschen
Es ergeben sich drei Gleichungen zur Bestimmung der zum Rollen ohne Rutschen notwendigen
Reibungskraft FR und der Beschleunigung des Schwerpunktes des starren Körpers2
2
dt
xd S
28
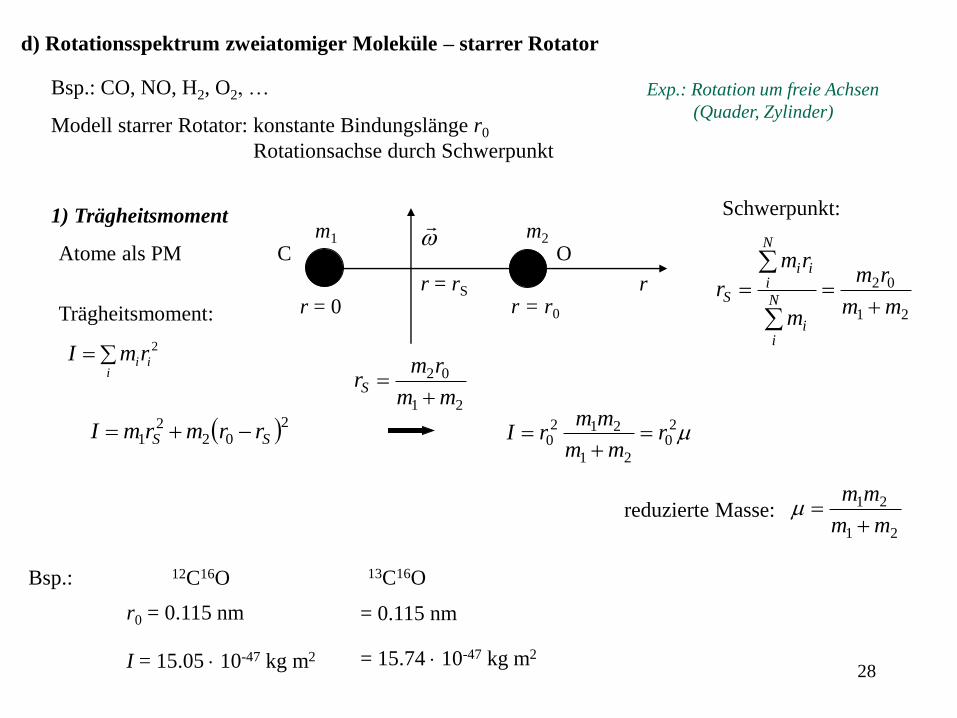
d) Rotationsspektrum zweiatomiger Moleküle – starrer Rotator
1) Trägheitsmoment
Bsp.: CO, NO, H2, O2, …
Modell starrer Rotator: konstante Bindungslänge r0
Rotationsachse durch Schwerpunkt
21
02
mm
rm
m
rm
rN
ii
N
iii
S
Schwerpunkt:
2022
1 SS rrmrmI
C
r = r0
rr = 0
m1 m2
O
r = rS
20
21
2120 r
mm
mmrI
21
02
mm
rmrS
reduzierte Masse:21
21
mm
mm
= 15.74 10-47 kg m2
12C16O
r0 = 0.115 nm
13C16O
= 0.115 nm
I = 15.05 10-47 kg m2
Bsp.:
Exp.: Rotation um freie Achsen
(Quader, Zylinder)
2
ii
irmI
Atome als PM
Trägheitsmoment:
29
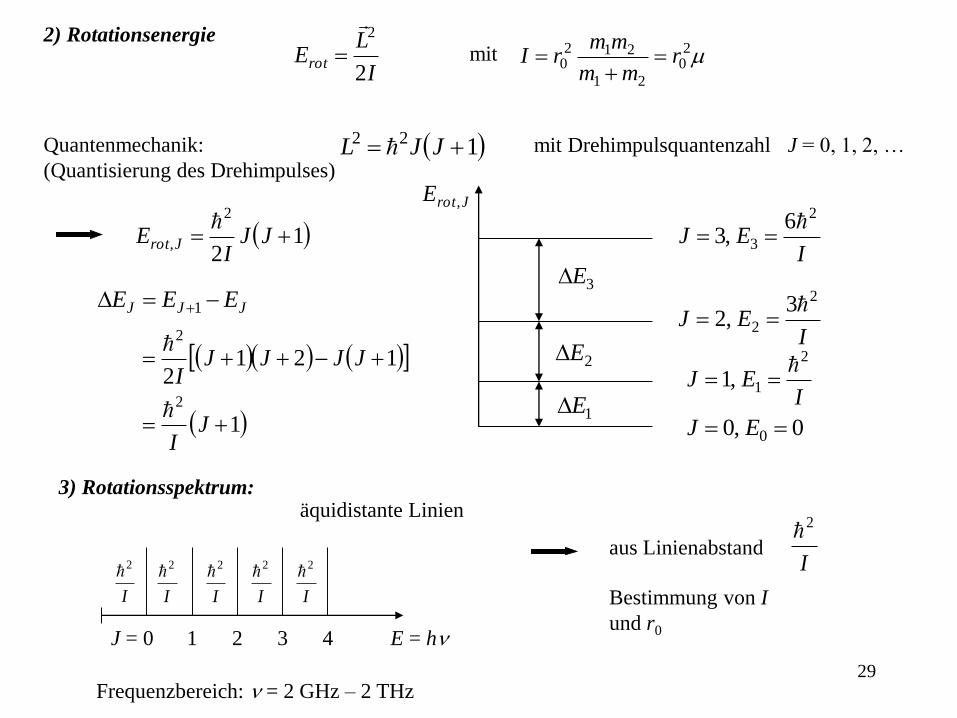
2) Rotationsenergie
I
LErot
2
2
Quantenmechanik:
(Quantisierung des Drehimpulses) 122 JJL mit Drehimpulsquantenzahl J = 0, 1, 2, …
12
2
, JJI
E Jrot
JrotE ,
1E
2E
3E
0,0 0 EJ
IEJ
2
1,1
IEJ
2
2
3,2
IEJ
2
3
6,3
JJJ EEE 1
1212
2
JJJJI
12
JI
3) Rotationsspektrum:
Bestimmung von I
und r0
aus LinienabstandI
2äquidistante Linien
Frequenzbereich: = 2 GHz – 2 THz
20
21
2120 r
mm
mmrI
mit
J = 0 1 2 3 4
I
2
I
2
I
2
I
2
E = h
I
2
30
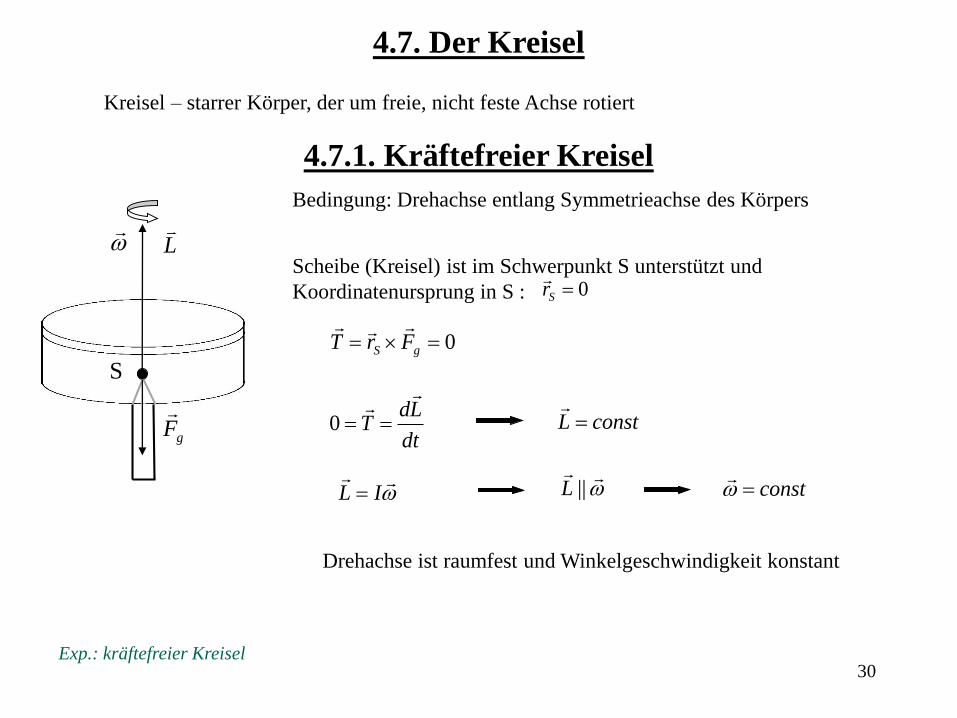
4.7. Der Kreisel
Kreisel – starrer Körper, der um freie, nicht feste Achse rotiert
4.7.1. Kräftefreier Kreisel
S
gF
L
Scheibe (Kreisel) ist im Schwerpunkt S unterstützt und
Koordinatenursprung in S : 0Sr
0 gS FrT
dt
LdT
0 constL
IL
||L const
Drehachse ist raumfest und Winkelgeschwindigkeit konstant
Bedingung: Drehachse entlang Symmetrieachse des Körpers
Exp.: kräftefreier Kreisel
31
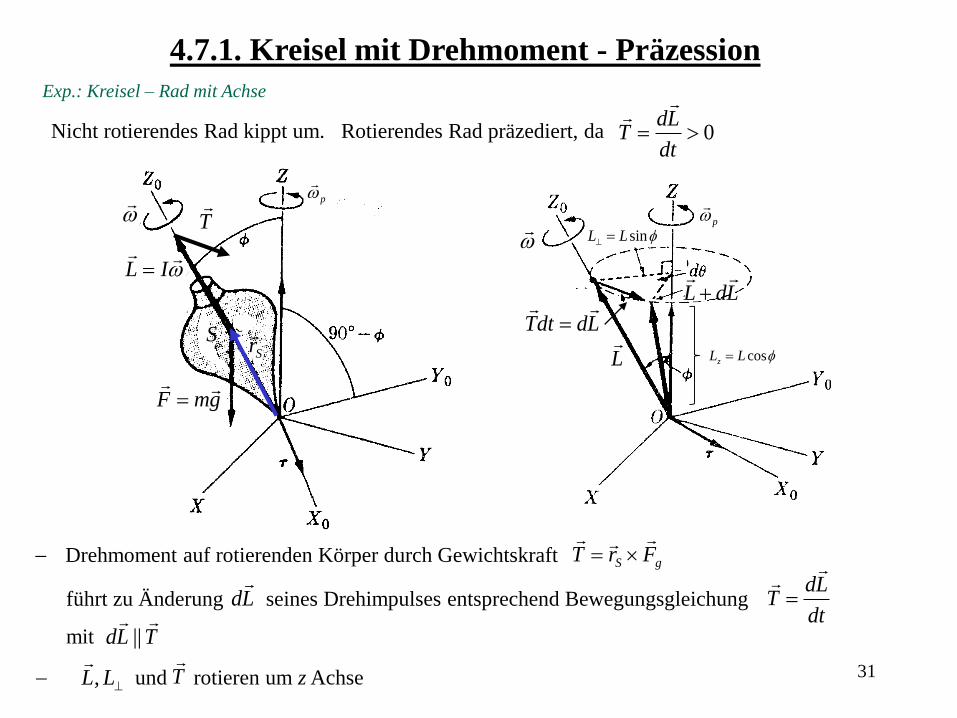
4.7.1. Kreisel mit Drehmoment - Präzession
Exp.: Kreisel – Rad mit Achse
Nicht rotierendes Rad kippt um. Rotierendes Rad präzediert, da 0dt
LdT
gS FrT
Drehmoment auf rotierenden Körper durch Gewichtskraft
führt zu Änderung seines Drehimpulses entsprechend Bewegungsgleichungdt
LdT
Ld
mit TLd
||
LL,
T
und rotieren um z Achse
IL
gmF
SrS
T
L
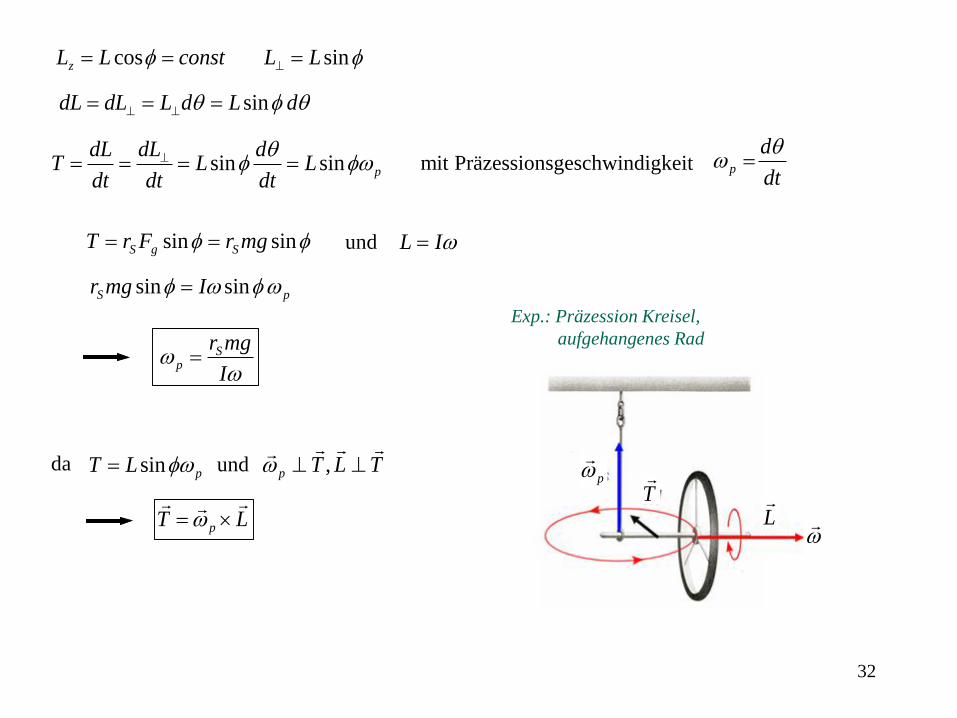
LddtT
LdL
cosLLz
sinLL p
p
32
constLLz cos sinLL
dLdLdLdL sin
pLdt
dL
dt
dL
dt
dLT
sinsin mit Präzessionsgeschwindigkeit
dt
dp
sinsin mgrFrT SgS und IL
pS Imgr sinsin
I
mgrSp
da undpLT sin TLTp
,
LT p
Exp.: Präzession Kreisel,
aufgehangenes Rad
p
T
L





























