Embed Size (px)
Citation preview

Hochfrequenztechnik II Mischer MI/1
Das Ziel eines Mischers besteht darin, ein Signal einer Frequenz !1 auf eine andere Frequenz !2
umzusetzen.
Beispielsweise liegt das Eingangssignal von einer Antenne bei einer hohen Frequenz vor, welches dann
zur einfacheren Signalverarbeitung auf eine kleinere Frequenz umgesetzt werden soll. Diese Funktion
wird von einem sog. �Mischer� vorgenommen.
1 Mischprinzipien
Das Prinzip eines Mischers besteht darin, das Eingangssignal mit einem �Lokal-Oszillator�-Signal zu
multiplizieren, wie in Abb. 1 schematisch dargestellt ist.
Eingangssignal Zwischenfrequenzsignal!1
!0
!z = |!0 ! !1|
us(t) uZF (t)
Lokaloszillator
Abb. 1: Grundprinzip eines Mischers.
Wir nehmen zunächst ein harmonisches Eingangssignal us(t) an:
us(t) = <[US exp(j!1t)
]= US cos(!1t + '1) =
1
2
[US exp(j!1t) + U�
S exp(�j!1t)]
(1)
Der Zeiger US ist dabei durch US = US exp(j'1) charakterisiert. Der Lokaloszillator hat die feste
Frequenz !0,
u0(t) =1
2
(U0 exp(j!0t) + c:c:
); (2)
wobei c:c: für �konjugiert komplex� (engl. conjugate complex) steht. Der Mischer vollzieht eine Mul-
tiplikation von u0(t) und us(t):
us(t) � u0(t) = 1
4
{[U0US exp[j(!0 + !1)t] + c:c
]+[U0U
�
S exp[j(!0 � !1)t] + c:c:]}
(3)
Nach der Multiplikation entstehen damit Signale sowohl bei der Summenfrequenz (!0 + !1) als auch
bei der Di�erenzfrequenz (!0 � !1). Wir gehen zunächst von einem Mischer aus, der das Eingangs-
signal von einer hohen Frequenz !1 auf eine niedrige Frequenz !z = j!0 � !1j, der sogenannten�Zwischenfrequenz�, umsetzt. Es wird dann nur die Di�erenzfrequenz aus Gl. (3) verwendet (nach
entsprechender Filterung), so dass sich für das Zwischenfrequenzsignal ergibt:
uZF (t) = A1
2U0US cos(!z t � '1) für !0 > !1 (4)
bzw.
uZF (t) = A1
2U0US cos(!z t + '1) für !0 < !1 (5)
A ist dabei eine charakteristische Konstante des Multiplizierers. uZF (t) gibt dabei sowohl die Amplitude
US als auch die Phase '1 des Eingangssignals wieder, wobei die Phase für !0 < !1 in Gleichlage und
für !0 > !1 in Kehrlage wiedergegeben wird.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/2
Wir unterscheiden damit zwischen Gleichlage- und Kehrlage-Mischern. Weiterhin unterscheiden wir
zwischen Aufwärts- und Abwärtsmischern, je nachdem ob !z gröÿer oder kleiner als !1 ist. Wir kommen
damit zu folgenden Mischprinzipien:
1. !0 < !1:
a) !z = !1 � !0: Abwärtsmischer in Gleichlage
b) !z = !1 + !0: Aufwärtsmischer in Gleichlage
2. !0 > !1:
a) !z = !0 � !1: Abwärtsmischer in Kehrlage (für !z < !1, sonst Aufwärtsmischer)
b) !z = !0 + !1: Aufwärtsmischer in Gleichlage
Die obigen Betrachtungen lassen sich auch auf nicht-harmonische Signale us(t) verallgemeinern, wobei
us(t) durch seine Fouriertransformierte US(j!) dargestellt wird:
us(t) d t US(j!) (6)
Mit einem Lokaloszillator-Signal
u0(t) = 2 cos(!0t) (7)
gilt dann
us(t) � u0(t) = US
(j(! � !0)
)+ US
(j(! + !0)
): (8)
Das Eingangsignal wird damit um die Frequenz !0 sowohl nach oben als auch nach unten verschoben,
es bleibt aber ansonsten unverändert, so dass keine Informationen verloren gehen.
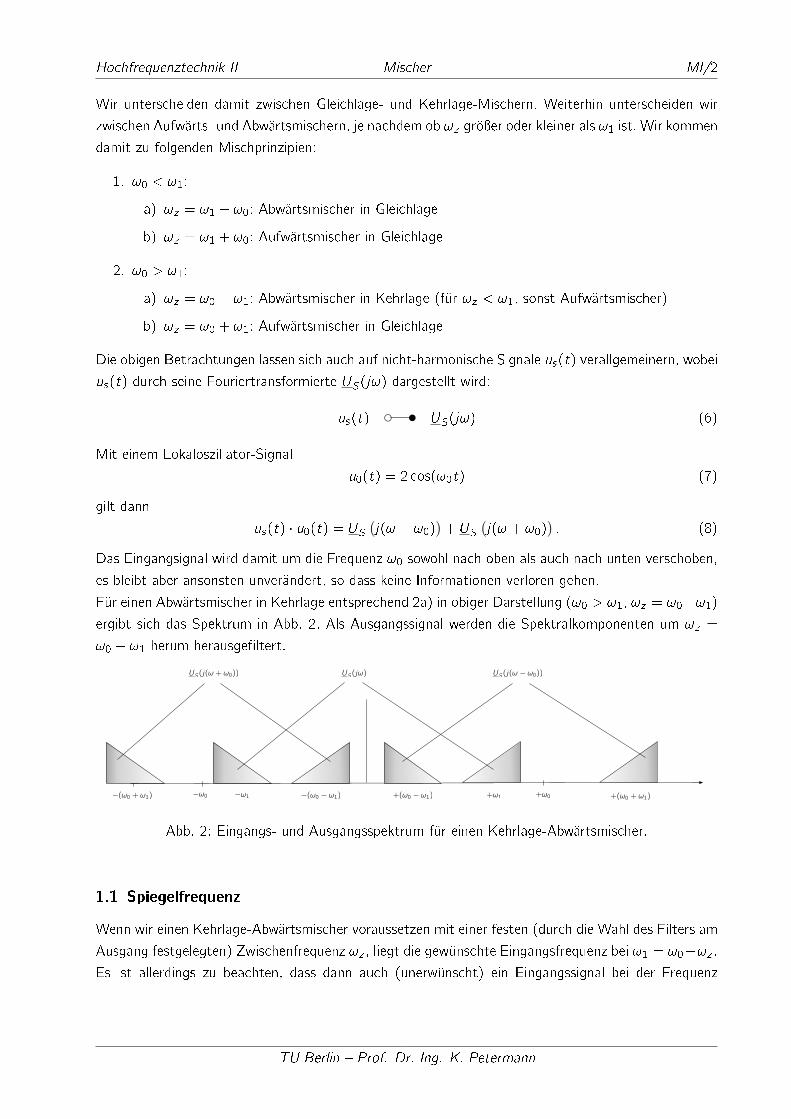
Für einen Abwärtsmischer in Kehrlage entsprechend 2a) in obiger Darstellung (!0 > !1, !z = !0�!1)ergibt sich das Spektrum in Abb. 2. Als Ausgangssignal werden die Spektralkomponenten um !z =
!0 � !1 herum herausge�ltert.
!(!0 + !1) !(!0 ! !1) +(!0 ! !1) +(!0 + !1)+!0!!0 !!1 +!1
US(j(! + !0)) US(j(! ! !0))US(j!)
Abb. 2: Eingangs- und Ausgangsspektrum für einen Kehrlage-Abwärtsmischer.
1.1 Spiegelfrequenz
Wenn wir einen Kehrlage-Abwärtsmischer voraussetzen mit einer festen (durch die Wahl des Filters am
Ausgang festgelegten) Zwischenfrequenz !z , liegt die gewünschte Eingangsfrequenz bei !1 = !0�!z .Es ist allerdings zu beachten, dass dann auch (unerwünscht) ein Eingangssignal bei der Frequenz
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/3
!0
1 = !0 + !z auf die gleiche Zwischenfrequenz !z umgesetzt wird. !0
1 wird als �Spiegelfrequenz�
bezeichnet, und der Abstand zwischen Soll-Eingangsfrequenz und Spiegelfrequenz ist durch
!0
1 � !1 = 2!z ; (9)
also die doppelte Zwischenfrequenz gegeben.
Um damit ein eindeutiges Zwischenfrequenzsignal zu ermöglichen, muss die Spiegelfrequenz am Ein-
gang durch entsprechende Filterung unterdrückt werden.
Es ist damit ein Kompromiss zu �nden zwischen einer einfachen Filterrealisierung am Eingang (mög-
lichst hohe Zwischenfrequenz) und einer unproblematischen Signalverarbeitung (möglichst niedrige
Zwischenfrequenz). Gegebenenfalls können auch mehrere Mischstufen hintereinander geschaltet wer-
den (zunächst hohe Zwischenfrequenz und am Ausgang niedrige Zwischenfrequenz).
2 Realisierung von Mischern mit nichtlinearen Kennlinien
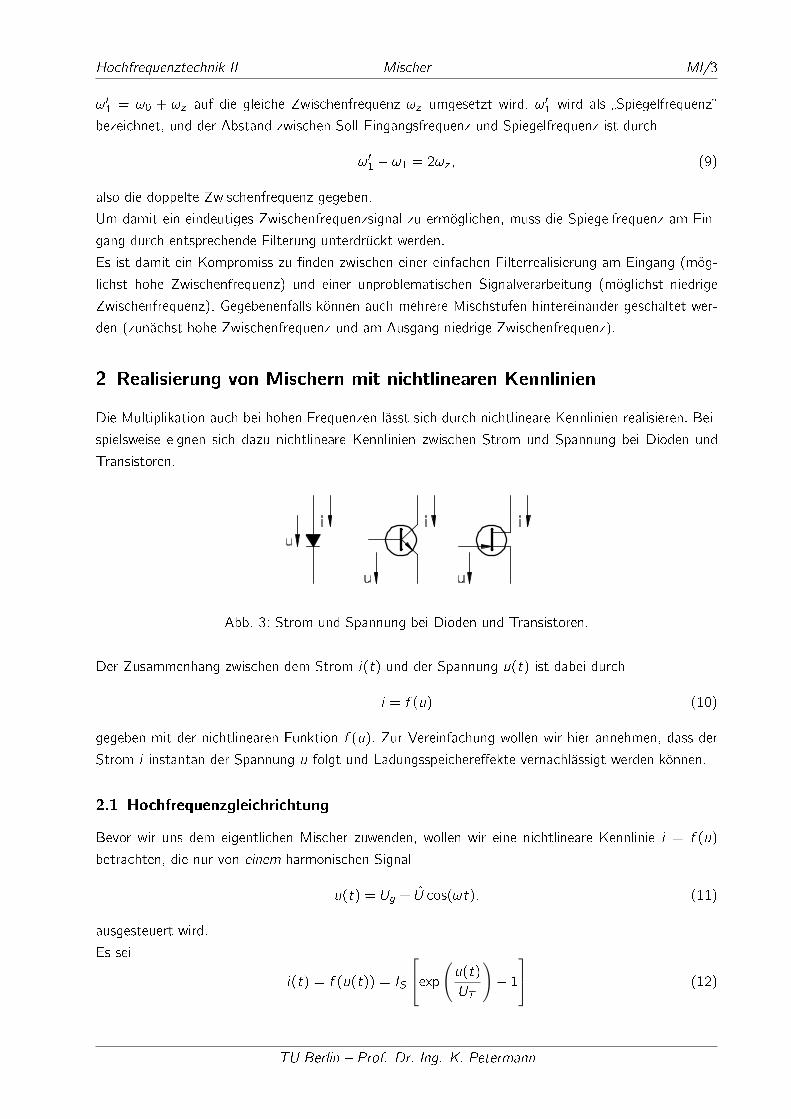
Die Multiplikation auch bei hohen Frequenzen lässt sich durch nichtlineare Kennlinien realisieren. Bei-
spielsweise eignen sich dazu nichtlineare Kennlinien zwischen Strom und Spannung bei Dioden und
Transistoren.
Abb. 3: Strom und Spannung bei Dioden und Transistoren.
Der Zusammenhang zwischen dem Strom i(t) und der Spannung u(t) ist dabei durch
i = f (u) (10)
gegeben mit der nichtlinearen Funktion f (u). Zur Vereinfachung wollen wir hier annehmen, dass der
Strom i instantan der Spannung u folgt und Ladungsspeichere�ekte vernachlässigt werden können.
2.1 Hochfrequenzgleichrichtung
Bevor wir uns dem eigentlichen Mischer zuwenden, wollen wir eine nichtlineare Kennlinie i = f (u)
betrachten, die nur von einem harmonischen Signal
u(t) = Ug + U cos(!t): (11)
ausgesteuert wird.
Es sei
i(t) = f (u(t)) = IS
exp(u(t)UT
)� 1
(12)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/4
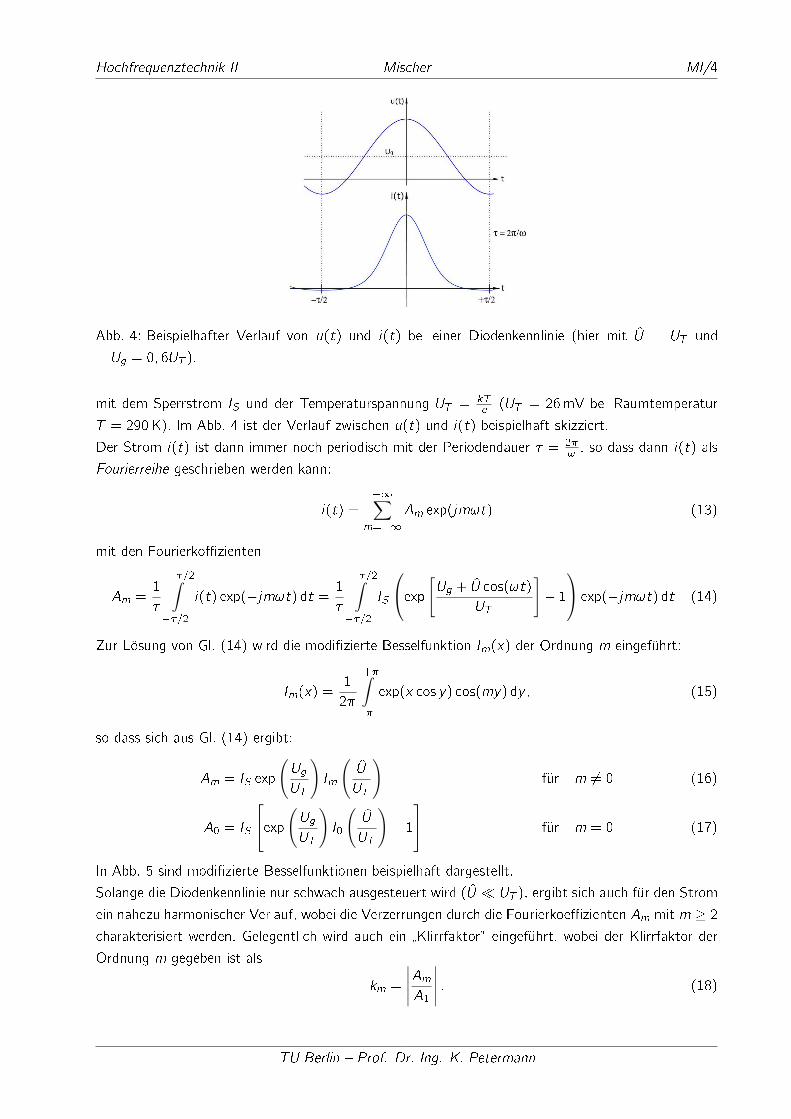
Abb. 4: Beispielhafter Verlauf von u(t) und i(t) bei einer Diodenkennlinie (hier mit U = UT und
Ug = 0; 6UT ).
mit dem Sperrstrom IS und der Temperaturspannung UT = kTe (UT = 26mV bei Raumtemperatur
T = 290K). Im Abb. 4 ist der Verlauf zwischen u(t) und i(t) beispielhaft skizziert.
Der Strom i(t) ist dann immer noch periodisch mit der Periodendauer � = 2�! , so dass dann i(t) als
Fourierreihe geschrieben werden kann:
i(t) =+1∑
m=�1
Am exp(jm!t) (13)
mit den Fourierko�zienten
Am =1
�
+�=2∫��=2
i(t) exp(�jm!t) dt =1
�
+�=2∫��=2
IS
exp [Ug + U cos(!t)
UT
]� 1
exp(�jm!t) dt (14)
Zur Lösung von Gl. (14) wird die modi�zierte Besselfunktion Im(x) der Ordnung m eingeführt:
Im(x) =1
2�
+�∫��
exp(x cos y) cos(my) dy ; (15)
so dass sich aus Gl. (14) ergibt:
Am = IS exp
(Ug
UT
)Im
(U
UT
)für m 6= 0 (16)
A0 = IS
exp(Ug
UT
)I0
(U
UT
)� 1
für m = 0 (17)
In Abb. 5 sind modi�zierte Besselfunktionen beispielhaft dargestellt.
Solange die Diodenkennlinie nur schwach ausgesteuert wird (U � UT ), ergibt sich auch für den Strom
ein nahezu harmonischer Verlauf, wobei die Verzerrungen durch die Fourierkoe�zienten Am mit m � 2
charakterisiert werden. Gelegentlich wird auch ein �Klirrfaktor� eingeführt, wobei der Klirrfaktor der
Ordnung m gegeben ist als
km =
∣∣∣∣∣Am
A1
∣∣∣∣∣ : (18)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/5
Im
x
I0
I1I2 I3
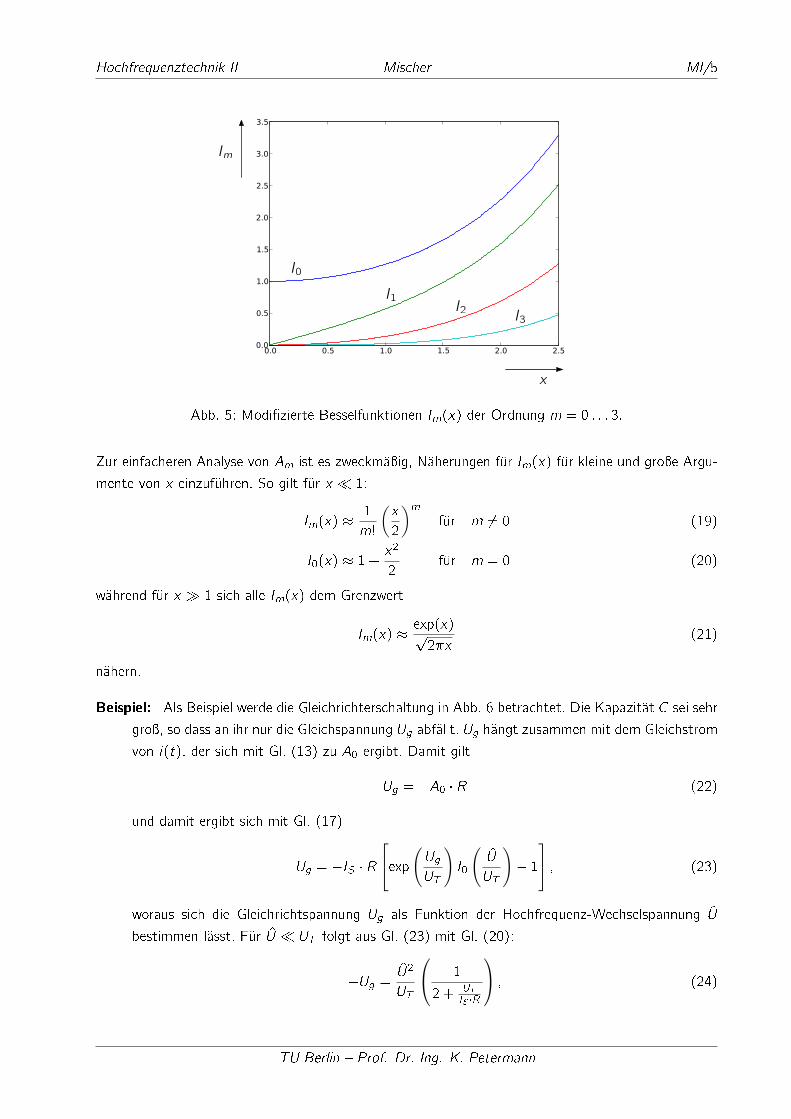
Abb. 5: Modi�zierte Besselfunktionen Im(x) der Ordnung m = 0 : : : 3.
Zur einfacheren Analyse von Am ist es zweckmäÿig, Näherungen für Im(x) für kleine und groÿe Argu-
mente von x einzuführen. So gilt für x � 1:
Im(x) � 1
m!
(x
2
)mfür m 6= 0 (19)
I0(x) � 1 +x2
2für m = 0 (20)
während für x � 1 sich alle Im(x) dem Grenzwert
Im(x) � exp(x)p2�x
(21)
nähern.
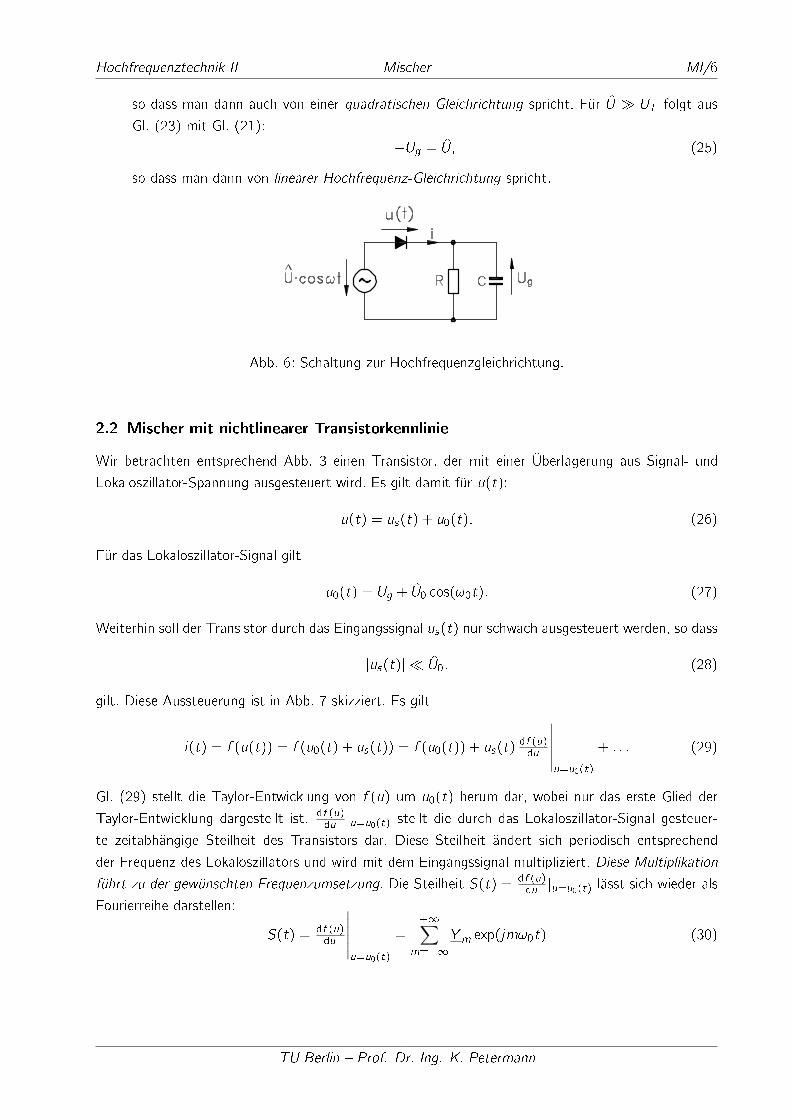
Beispiel: Als Beispiel werde die Gleichrichterschaltung in Abb. 6 betrachtet. Die Kapazität C sei sehr
groÿ, so dass an ihr nur die Gleichspannung Ug abfällt. Ug hängt zusammen mit dem Gleichstrom
von i(t), der sich mit Gl. (13) zu A0 ergibt. Damit gilt
Ug = �A0 � R (22)
und damit ergibt sich mit Gl. (17)
Ug = �IS � Rexp(Ug
UT
)I0
(U
UT
)� 1
; (23)
woraus sich die Gleichrichtspannung Ug als Funktion der Hochfrequenz-Wechselspannung U
bestimmen lässt. Für U � UT folgt aus Gl. (23) mit Gl. (20):
�Ug =U2
UT
1
2 + UTIS �R
; (24)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/6
so dass man dann auch von einer quadratischen Gleichrichtung spricht. Für U � UT folgt aus
Gl. (23) mit Gl. (21):
�Ug = U; (25)
so dass man dann von linearer Hochfrequenz-Gleichrichtung spricht.
Abb. 6: Schaltung zur Hochfrequenzgleichrichtung.
2.2 Mischer mit nichtlinearer Transistorkennlinie
Wir betrachten entsprechend Abb. 3 einen Transistor, der mit einer Überlagerung aus Signal- und
Lokaloszillator-Spannung ausgesteuert wird. Es gilt damit für u(t):
u(t) = us(t) + u0(t): (26)
Für das Lokaloszillator-Signal gilt
u0(t) = Ug + U0 cos(!0t): (27)
Weiterhin soll der Transistor durch das Eingangssignal us(t) nur schwach ausgesteuert werden, so dass
jus(t)j � U0: (28)
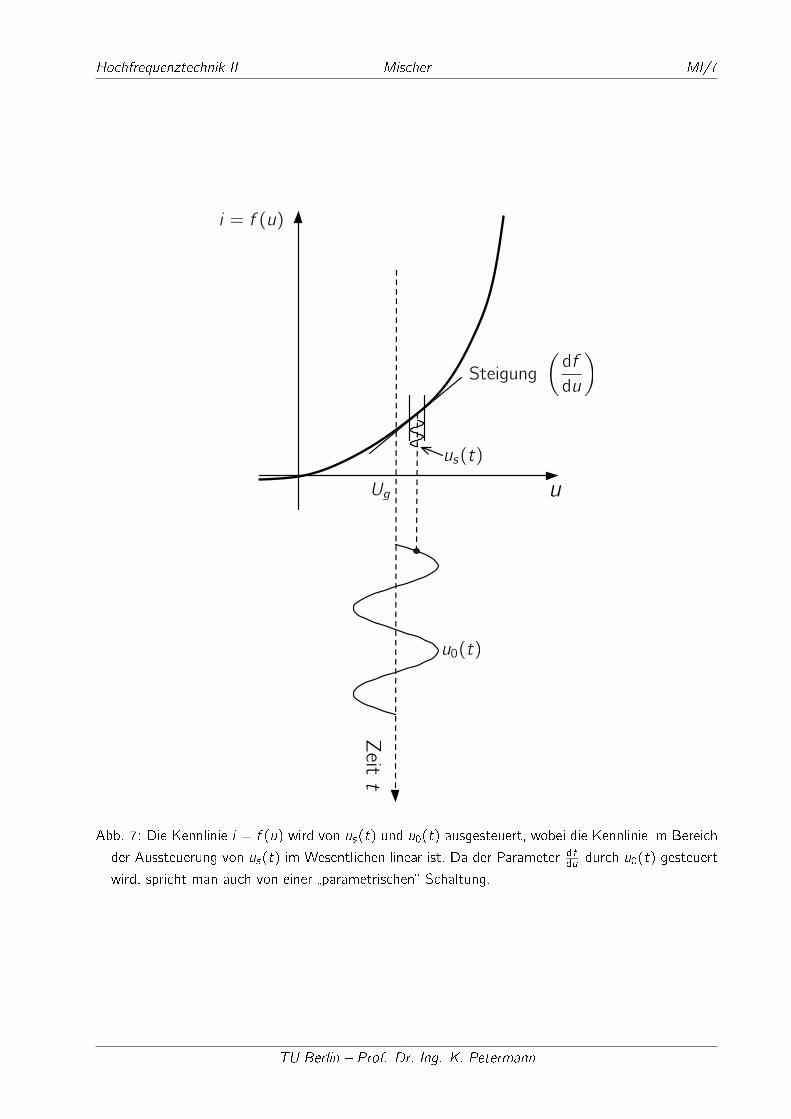
gilt. Diese Aussteuerung ist in Abb. 7 skizziert. Es gilt
i(t) = f (u(t)) = f (u0(t) + us(t)) = f (u0(t)) + us(t)df (u)du
∣∣∣∣∣∣u=u0(t)
+ : : : (29)
Gl. (29) stellt die Taylor-Entwicklung von f (u) um u0(t) herum dar, wobei nur das erste Glied der
Taylor-Entwicklung dargestellt ist. df (u)du ju=u0(t) stellt die durch das Lokaloszillator-Signal gesteuer-
te zeitabhängige Steilheit des Transistors dar. Diese Steilheit ändert sich periodisch entsprechend
der Frequenz des Lokaloszillators und wird mit dem Eingangssignal multipliziert. Diese Multiplikation
führt zu der gewünschten Frequenzumsetzung. Die Steilheit S(t) = df (u)du ju=u0(t) lässt sich wieder als
Fourierreihe darstellen:
S(t) = df (u)du
∣∣∣∣∣∣u=u0(t)
=+1∑
m=�1
Y m exp(jm!0t) (30)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/7
u
i = f (u)
Ug
Zeitt
u0(t)
us(t)
Steigung
!df
du
"
Abb. 7: Die Kennlinie i = f (u) wird von us(t) und u0(t) ausgesteuert, wobei die Kennlinie im Bereich
der Aussteuerung von us(t) im Wesentlichen linear ist. Da der Parameter dfdu durch u0(t) gesteuert
wird, spricht man auch von einer �parametrischen� Schaltung.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/8
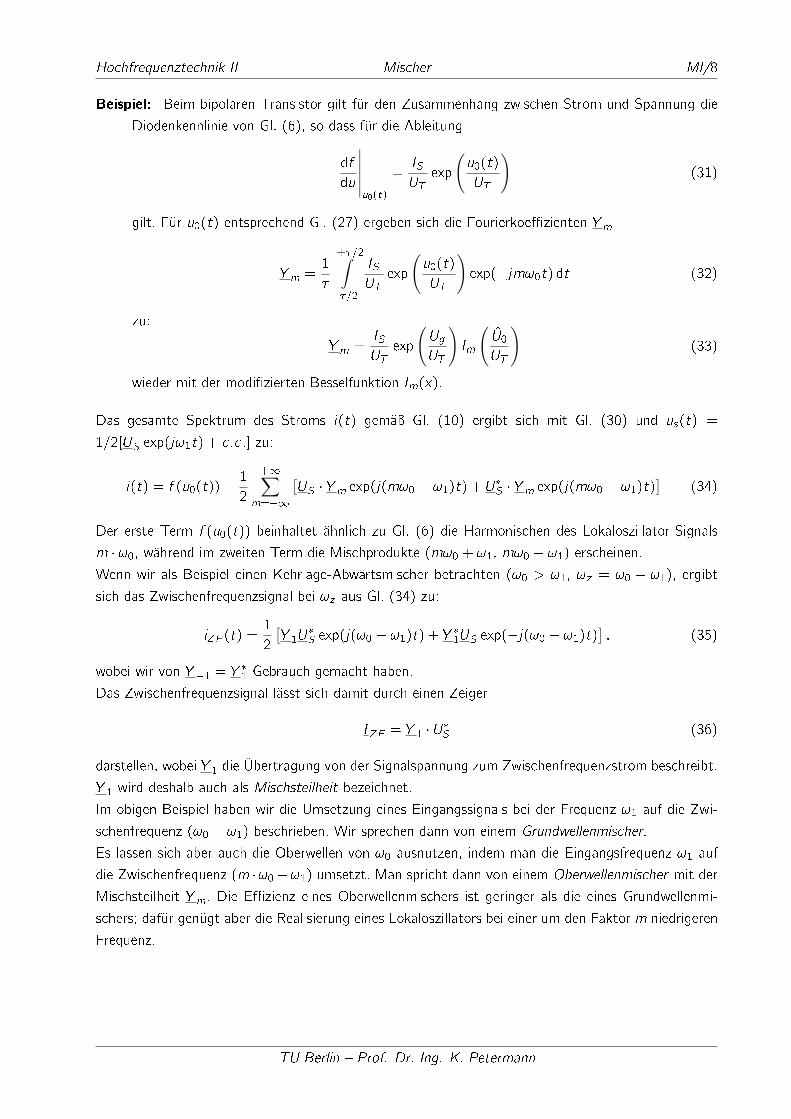
Beispiel: Beim bipolaren Transistor gilt für den Zusammenhang zwischen Strom und Spannung die
Diodenkennlinie von Gl. (6), so dass für die Ableitung
df
du
∣∣∣∣∣∣u0(t)
=ISUT
exp
(u0(t)
UT
)(31)
gilt. Für u0(t) entsprechend Gl. (27) ergeben sich die Fourierkoe�zienten Y m
Y m =1
�
+�=2∫��=2
ISUT
exp
(u0(t)
UT
)exp(�jm!0t) dt (32)
zu:
Y m =ISUT
exp
(Ug
UT
)Im
(U0
UT
)(33)
wieder mit der modi�zierten Besselfunktion Im(x).
Das gesamte Spektrum des Stroms i(t) gemäÿ Gl. (10) ergibt sich mit Gl. (30) und us(t) =
1=2[US exp(j!1t) + c:c:] zu:
i(t) = f (u0(t)) +1
2
+1∑m=�1
[US � Y m exp(j(m!0 + !1)t) + U�
S � Y m exp(j(m!0 � !1)t)]
(34)
Der erste Term f (u0(t)) beinhaltet ähnlich zu Gl. (6) die Harmonischen des Lokaloszillator-Signals
m � !0, während im zweiten Term die Mischprodukte (m!0 + !1, m!0 � !1) erscheinen.
Wenn wir als Beispiel einen Kehrlage-Abwärtsmischer betrachten (!0 > !1, !z = !0 � !1), ergibt
sich das Zwischenfrequenzsignal bei !z aus Gl. (34) zu:
iZF (t) =1
2
[Y 1U
�
S exp(j(!0 � !1)t) + Y �
1US exp(�j(!0 � !1)t)]; (35)
wobei wir von Y�1 = Y �
1 Gebrauch gemacht haben.
Das Zwischenfrequenzsignal lässt sich damit durch einen Zeiger
IZF = Y 1 � U�
S (36)
darstellen, wobei Y 1 die Übertragung von der Signalspannung zum Zwischenfrequenzstrom beschreibt.
Y 1 wird deshalb auch als Mischsteilheit bezeichnet.
Im obigen Beispiel haben wir die Umsetzung eines Eingangssignals bei der Frequenz !1 auf die Zwi-
schenfrequenz (!0 � !1) beschrieben. Wir sprechen dann von einem Grundwellenmischer.
Es lassen sich aber auch die Oberwellen von !0 ausnutzen, indem man die Eingangsfrequenz !1 auf
die Zwischenfrequenz (m �!0�!1) umsetzt. Man spricht dann von einem Oberwellenmischer mit der
Mischsteilheit Y m. Die E�zienz eines Oberwellenmischers ist geringer als die eines Grundwellenmi-
schers; dafür genügt aber die Realisierung eines Lokaloszillators bei einer um den Faktor m niedrigeren
Frequenz.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/9
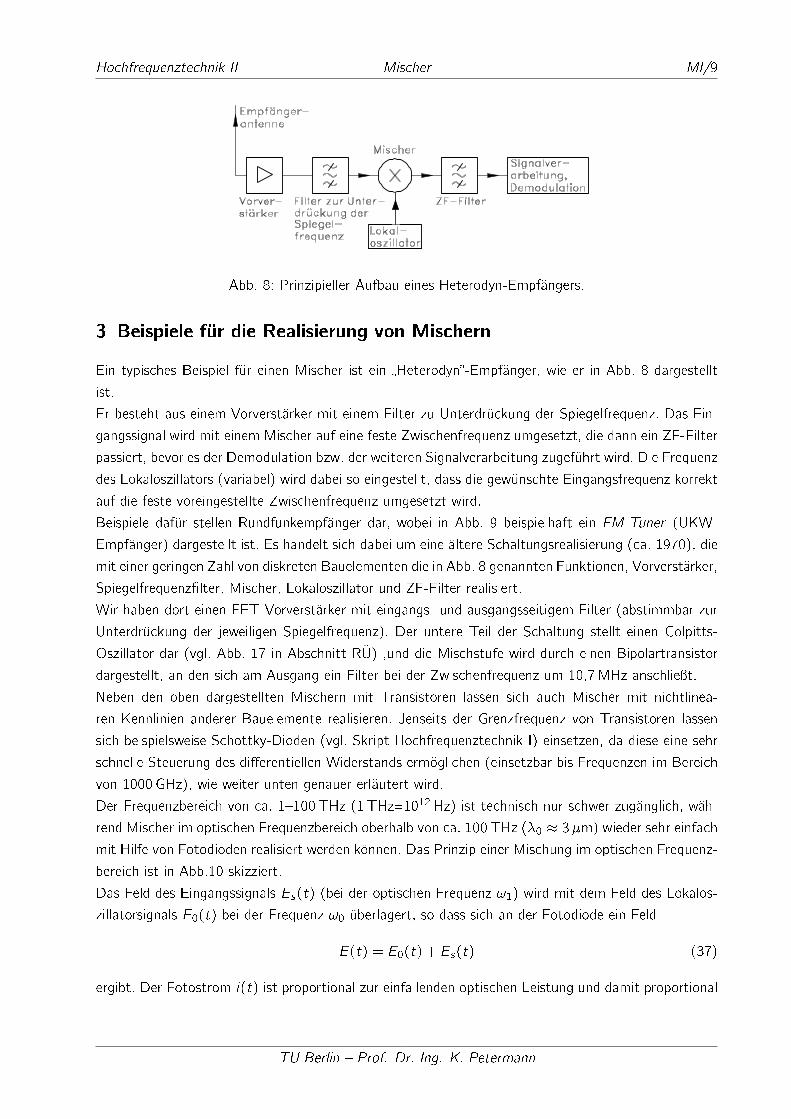
Abb. 8: Prinzipieller Aufbau eines Heterodyn-Empfängers.
3 Beispiele für die Realisierung von Mischern
Ein typisches Beispiel für einen Mischer ist ein �Heterodyn�-Empfänger, wie er in Abb. 8 dargestellt
ist.
Er besteht aus einem Vorverstärker mit einem Filter zu Unterdrückung der Spiegelfrequenz. Das Ein-
gangssignal wird mit einem Mischer auf eine feste Zwischenfrequenz umgesetzt, die dann ein ZF-Filter
passiert, bevor es der Demodulation bzw. der weiteren Signalverarbeitung zugeführt wird. Die Frequenz
des Lokaloszillators (variabel) wird dabei so eingestellt, dass die gewünschte Eingangsfrequenz korrekt
auf die feste voreingestellte Zwischenfrequenz umgesetzt wird.
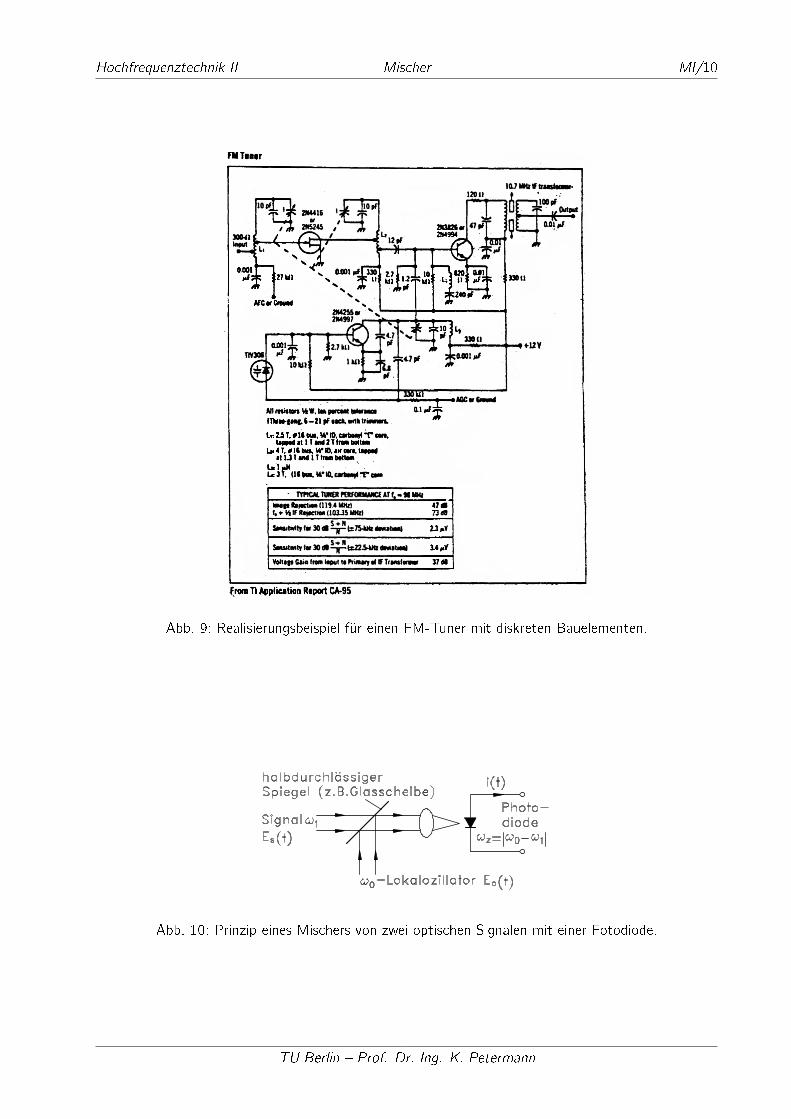
Beispiele dafür stellen Rundfunkempfänger dar, wobei in Abb. 9 beispielhaft ein FM-Tuner (UKW-
Empfänger) dargestellt ist. Es handelt sich dabei um eine ältere Schaltungsrealisierung (ca. 1970), die
mit einer geringen Zahl von diskreten Bauelementen die in Abb. 8 genannten Funktionen, Vorverstärker,
Spiegelfrequenz�lter, Mischer, Lokaloszillator und ZF-Filter realisiert.
Wir haben dort einen FET-Vorverstärker mit eingangs- und ausgangsseitigem Filter (abstimmbar zur
Unterdrückung der jeweiligen Spiegelfrequenz). Der untere Teil der Schaltung stellt einen Colpitts-
Oszillator dar (vgl. Abb. 17 in Abschnitt RÜ) ,und die Mischstufe wird durch einen Bipolartransistor
dargestellt, an den sich am Ausgang ein Filter bei der Zwischenfrequenz um 10,7MHz anschlieÿt.
Neben den oben dargestellten Mischern mit Transistoren lassen sich auch Mischer mit nichtlinea-
ren Kennlinien anderer Bauelemente realisieren. Jenseits der Grenzfrequenz von Transistoren lassen
sich beispielsweise Schottky-Dioden (vgl. Skript Hochfrequenztechnik I) einsetzen, da diese eine sehr
schnelle Steuerung des di�erentiellen Widerstands ermöglichen (einsetzbar bis Frequenzen im Bereich
von 1000GHz), wie weiter unten genauer erläutert wird.
Der Frequenzbereich von ca. 1�100THz (1THz=1012Hz) ist technisch nur schwer zugänglich, wäh-
rend Mischer im optischen Frequenzbereich oberhalb von ca. 100THz (�0 � 3�m) wieder sehr einfach
mit Hilfe von Fotodioden realisiert werden können. Das Prinzip einer Mischung im optischen Frequenz-
bereich ist in Abb.10 skizziert.
Das Feld des Eingangssignals Es(t) (bei der optischen Frequenz !1) wird mit dem Feld des Lokalos-
zillatorsignals E0(t) bei der Frequenz !0 überlagert, so dass sich an der Fotodiode ein Feld
E(t) = E0(t) + Es(t) (37)
ergibt. Der Fotostrom i(t) ist proportional zur einfallenden optischen Leistung und damit proportional
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/10
Abb. 9: Realisierungsbeispiel für einen FM-Tuner mit diskreten Bauelementen.
Abb. 10: Prinzip eines Mischers von zwei optischen Signalen mit einer Fotodiode.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/11
zu E2(t), so dass sich ergibt:
i(t) / E2(t) = E20 + E2
s + 2E0(t)Es(t) (38)
Der Mischterm in Gl. (38) wird durch E0(t)Es(t) repräsentiert, wobei bei dieser Multiplikation die
gewünschte Zwischenfrequenz !z = j!0�!1j entsteht. Dieses Prinzip wird in der kohärenten optischenNachrichtentechnik angewandt.
4 Mischer mit Schottky-Dioden
Die Schottky-Diode wird wieder durch eine Dioden-Kennlinie i = f (u) entsprechend Gl. (12) charak-
terisiert, wobei der Ein�uss von parasitäten Kapazitäten sehr gering ist.
Die Schottky-Diode wird nur mit einer Überlagerung von Lokaloszillator, Eingangssignal und Zwi-
schenfrequenzsignal ausgesteuert, wobei diese drei Signale in irgendeiner Weise an die Schottky-Diode
herangeführt werden müssen. Um die im Allgemeinen recht komplizierte Analyse handhabbar zu ma-
chen, wollen wir hier als Beispiel eine ideale Spannungseinprägung voraussetzen.
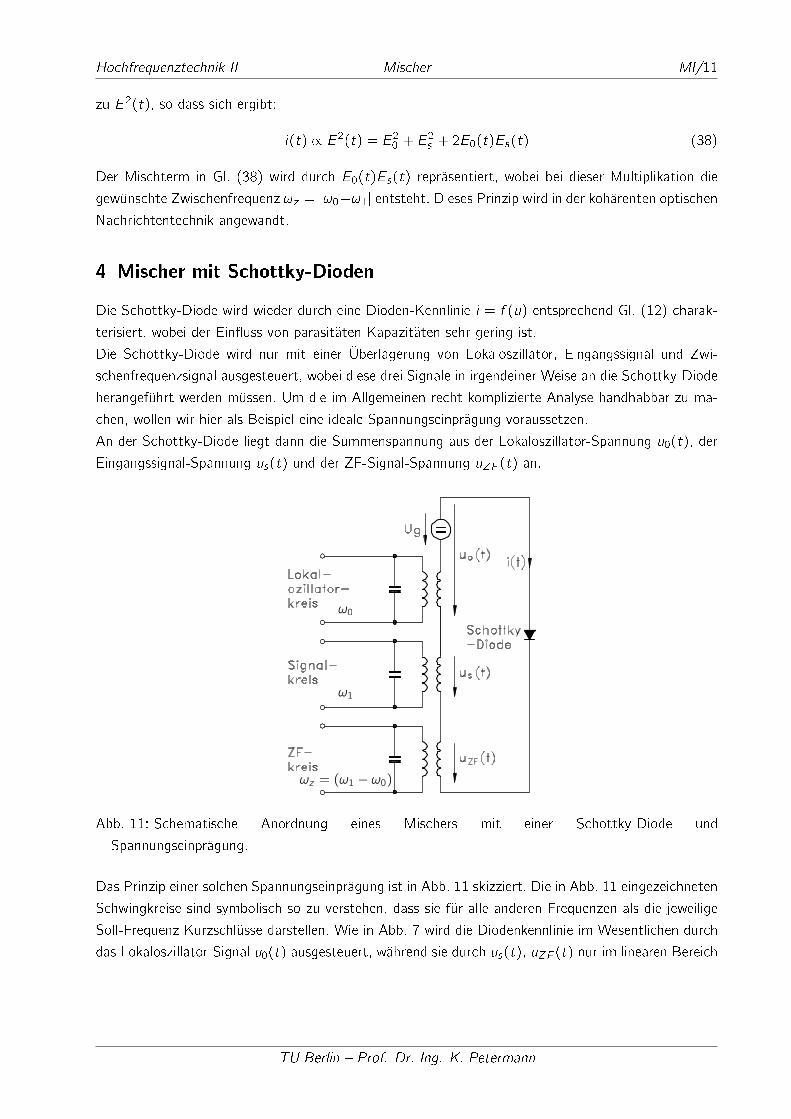
An der Schottky-Diode liegt dann die Summenspannung aus der Lokaloszillator-Spannung u0(t), der
Eingangssignal-Spannung us(t) und der ZF-Signal-Spannung uZF (t) an.
!0
!1
!z = (!1 ! !0)
Abb. 11: Schematische Anordnung eines Mischers mit einer Schottky-Diode und
Spannungseinprägung.
Das Prinzip einer solchen Spannungseinprägung ist in Abb. 11 skizziert. Die in Abb. 11 eingezeichneten
Schwingkreise sind symbolisch so zu verstehen, dass sie für alle anderen Frequenzen als die jeweilige
Soll-Frequenz Kurzschlüsse darstellen. Wie in Abb. 7 wird die Diodenkennlinie im Wesentlichen durch
das Lokaloszillator-Signal u0(t) ausgesteuert, während sie durch us(t), uZF (t) nur im linearen Bereich
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik II Mischer MI/12
betrieben wird. Der Strom durch die Schottky-Diode i(t) ergibt sich dann ähnlich wie in Gl. (29) zu
i(t) = f (u(t)) = f [u0(t)) + us(t) + uZF (t)] = f (u0(t)) + [us(t) + uZF (t)]dfdu
∣∣∣∣∣∣u0(t)
; (39)
wobei sich dfdu ju0(t) als ein zeitabhängiger Leitwert g(t) au�assen lässt, der sich periodisch mit der
Periode � = 2�=!0 wieder wie in Gl. (20) als Fourierreihe entwickeln lässt:
g(t) =df
du
∣∣∣∣∣∣u0(t)
=+1∑
m=�1
Y m exp(jm!0t); (40)
wobei Y m = Y �
m für alle reellen g(t) gelten muss.
Die Mischung mit der Schottky-Diode erfolgt also im Wesentlichen dadurch, dass durch Aussteuerung
der Schottky-Diode mit u0(t) ein zeitabhängiger di�erentieller Leitwert g(t) entsteht.
Damit entspricht Abb. 11 der Anordnung in Abb. 12.
Signalkreis!1 !z = (!1 ! !0)
ZF-Kreis
Abb. 12: Mischung mit einem sich periodisch verändernden Leitwert g(t) (resistiver Mischer) und
Spannungseinprägung.
Aus Abb. 12 folgt
i(t) =[us(t) + uZF (t)
]g(t); (41)
was genau Gl. (39) entspricht (ohne den für die Mischung unerheblichen Term f [u0(t)]). Das g(t) in
Abb. 12 muss nicht unbedingt mit einer Schottky-Diode realisiert werden, möglich ist z. B. auch die
Steuerung des Kanalleitwerts eines FETs durch die Gate-Source-Spannung.
Für einen Gleichlage-Abwärtsmischer (!1 > !0, !z = !1 � !0) führt Gl. (41) mit
us(t) =1
2
[US exp(j!1t) + c:c:
](42)
uZF (t) =1
2
[UZF exp(j(!1 � !0)t) + c:c:
](43)
und g(t) gemäÿ Gl. (40) auf
i(t) =1
2
[US exp(j!1t) + UZF exp(j(!1 � !0)t) + c:c:
] +1∑m=�1
Y m exp(jm!0t) (44)
Gl. (44) führt auf unendlich viele Frequenzkomponenten j!1 � m!0j, wovon für den Mischvorgang
in Abb. 12 nur die Frequenzkomponenten bei !1 und !z = (!1 � !0) interessieren, da alle anderen
Frequenzkomponenten im Rahmen des Ansatzes der Spannungseinprägung kurzgeschlossen werden.
Aus Gl. (44) folgt für die Stromkomponenten bei !1 und (!1 � !0) (Y �1 = Y �
1; Y = Y0 reell)
i(t) =1
2
[(US � Y0 + UZF � Y 1) exp(j!1t) + (UZF Y0 + US � Y �
1) exp(j(!1 � !0)t) + c:c:]; (45)
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik II Mischer MI/13
wobei für die Ströme bei der Signalfrequenz und Zwischenfrequenz wieder Stromzeiger eingeführt
werden können:
is(t) =1
2
[IS exp(j!1t) + c:c:
]; (46)
iZF =1
2
[IZF exp(j(!1 � !0)t) + c:c:
]; (47)
so dass sich aus Gl. (45) ergibt:
IS = (US � Y0 + UZF � Y 1) (48)
IZF = (UZF � Y0 + US � Y �
1) (49)
Gl. (48) und (49) lassen sich in Matrix-Schreibweise formulieren: IS
IZF
=
Y0 Y 1
Y �
1 Y0
US
UZF
(50)
Gl. (50) entspricht formal der Beschreibung mit y -Parametern gemäÿ Abb. 13. Das Netzwerk ent-
sprechend Abb. 12 und 13 ist ja auch ein lineares Netzwerk, aber es ist nicht zeitinvariant, weshalb
die Zeiger IS, US bzw. IZF , UZF auf jeweils unterschiedliche Frequenzen bezogen sind.
IS IZF
UZFUS(Y )
Abb. 13: Mischer als lineares Umsetzungsnetzwerk.
Interessant ist nun der maximal erreichbare Konversionswirkungsgrad von der Signalfrequenz !1 zu
der Zwischenfrequenz !ZF = !1 � !0. Dazu kann die aus den y -Parametern bekannte maximale
Leistungsverstärkung G0
m herangezogen werden. Aus Gl. (RÜ 27) mit Gl. (RÜ 26) folgt:
G0
m =jy
21j2
2<(y11)<(y
22)�<(y
12y21) +
√[2<(y
11)<(y
22)�<(y
12y21)]2 � jy
12y21j2
(51)
In Gl. (50) gilt y11
= y22
= Y0 und für reelles Y 1 (wie in Gl. (33)) gilt Y 1 = Y �
1 = Y1=y12 = y21, so
dass aus Gl. (51) folgt:
G0
m =
(Y1
Y0
)21 +
√√√√1�(Y1
Y0
)2�2
(52)
Für die harmonische Aussteuerung einer Diodenkennlinie folgt aus Gl. (33)
Y1
Y0=
I1
(U0
UT
)I0
(U0
UT
) : (53)
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik II Mischer MI/14
Die maximale Leistungsverstärkung G0
m nähert sich 1 für Y1Y0! 1, was für U0
UT!1 erreicht wird. Für
ein noch realistisches U0
UT= 10 ergibt sich beispielsweise ein G0
m = 0; 5 (�3 dB), was trotz der hier
durchgeführten Näherungen (ideale Spannungseinprägung) ein realistisches Ergebnis darstellt.
Dieses maximale G0
m wird erreicht, wenn sowohl auf der Signal- als auch auf der ZF-Seite an den
Leitwert Y =√Y 20 � Y 2
1 angepasst wird.
Die Rauschzahl eines derartigen realistischen Mischers ist ähnlich wie bei einem passiven Netzwerk
F � 1
G0
m
; (54)
wenn G0
m die verfügbare Konversionse�zienz des Mischers (Gm < 1) bezeichnet.
5 Gegentaktmischer
Der Nachteil des Mischers mit Schottky-Dioden, wie wir ihn in Abschnitt 4 diskutiert haben, besteht
darin, dass neben dem gewünschten Produkt
[us(t) + uZF (t)] � g(t)
mit g(t) = dfdu ju0(t) in Gl. (39) mit dem Term f (u0(t)) noch die Harmonischen von !0 erscheinen. Zur
Vermeidung dieses Terms werden Schottky-Dioden-Mischer häu�g als sogenannte �Gegentaktmischer �
aufgebaut.
Das Prinzip eines Gegentaktmischers zeigt Abb. 14.
Abb. 14: Prinzip eines Gegentaktmischers mit u1(t) = u0(t)+us(t)+uZF (t) und u2 = u0(t)�us(t)�uZF (t).
Wir gehen dabei von zwei gleichen Schottky-Dioden aus, die jeweils mit der Spannung
u1 = u0(t) + us(t) + uZF (t) (55)
und
u2 = u0(t)� us(t)� uZF (t) (56)
ausgesteuert werden. Der Di�erenzstrom i(t) = i1(t)� i2(t) ergibt sich als
i(t) = f (u1(t))� f (u2(t))
= 2[us(t) + uZF (t)]g(t) (57)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/15
mit g(t) entsprechend Gl. (40), so das man dann wieder die Multiplikation wie in Gl. (41) erhält.
Ein solcher Mischer lässt sich aufbauen mit einem 3 dB180� -Koppler, 180
�-Hybrid oder Magisches T (ver-
gleiche Hochfrequenztechnik I, Abschn. HS), der z. B. als Ringkoppler (HFT I, Abschn. HS, Abb. 13)
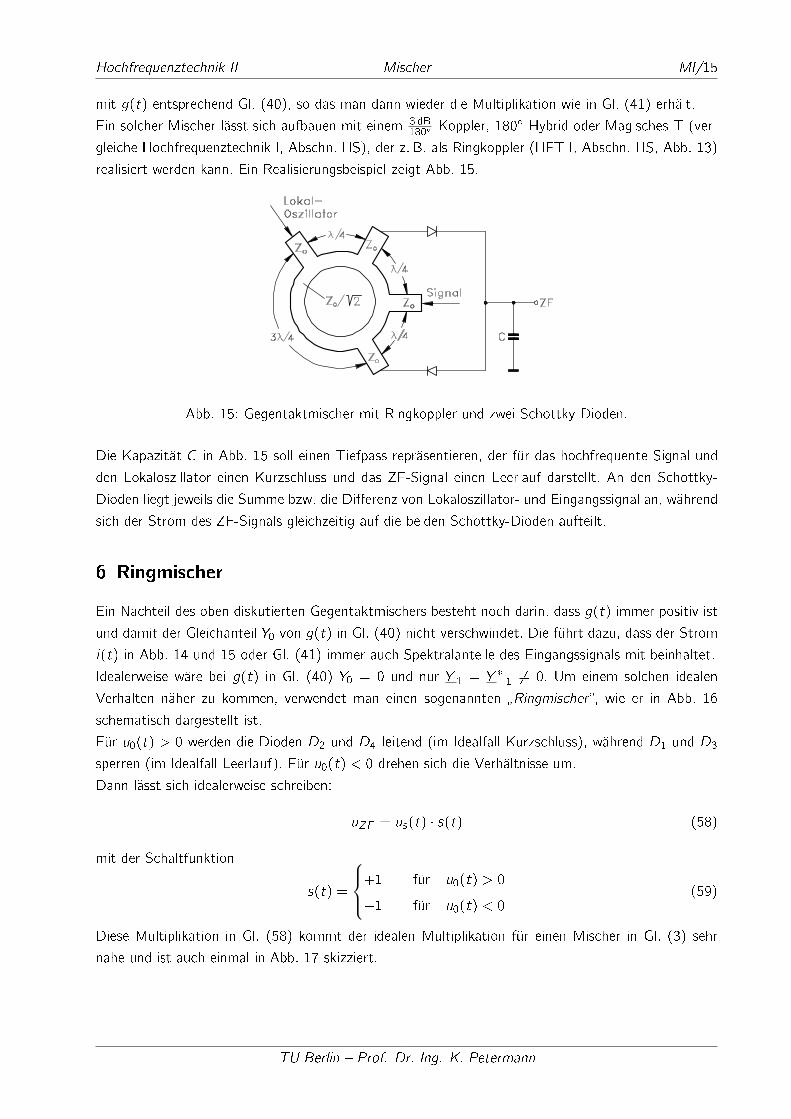
realisiert werden kann. Ein Realisierungsbeispiel zeigt Abb. 15.
Abb. 15: Gegentaktmischer mit Ringkoppler und zwei Schottky-Dioden.
Die Kapazität C in Abb. 15 soll einen Tiefpass repräsentieren, der für das hochfrequente Signal und
den Lokaloszillator einen Kurzschluss und das ZF-Signal einen Leerlauf darstellt. An den Schottky-
Dioden liegt jeweils die Summe bzw. die Di�erenz von Lokaloszillator- und Eingangssignal an, während
sich der Strom des ZF-Signals gleichzeitig auf die beiden Schottky-Dioden aufteilt.
6 Ringmischer
Ein Nachteil des oben diskutierten Gegentaktmischers besteht noch darin, dass g(t) immer positiv ist
und damit der Gleichanteil Y0 von g(t) in Gl. (40) nicht verschwindet. Die führt dazu, dass der Strom
i(t) in Abb. 14 und 15 oder Gl. (41) immer auch Spektralanteile des Eingangssignals mit beinhaltet.
Idealerweise wäre bei g(t) in Gl. (40) Y0 = 0 und nur Y 1 = Y �
�1 6= 0. Um einem solchen idealen
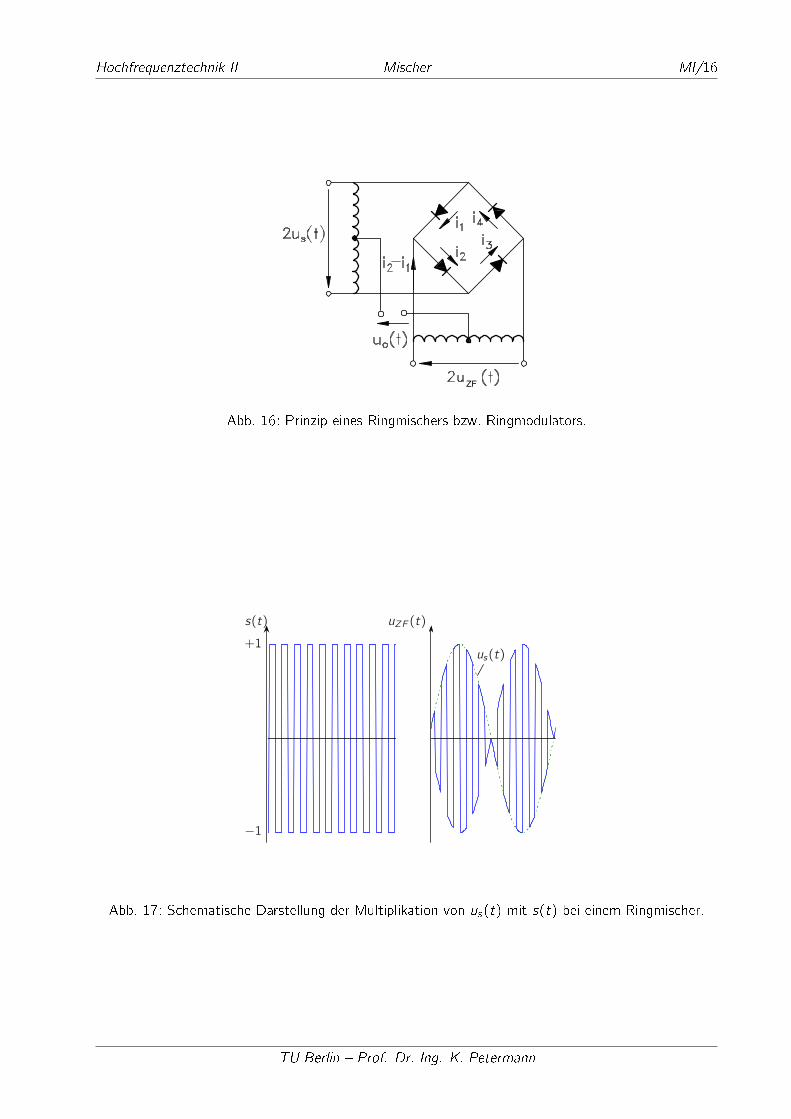
Verhalten näher zu kommen, verwendet man einen sogenannten �Ringmischer �, wie er in Abb. 16
schematisch dargestellt ist.
Für u0(t) > 0 werden die Dioden D2 und D4 leitend (im Idealfall Kurzschluss), während D1 und D3
sperren (im Idealfall Leerlauf). Für u0(t) < 0 drehen sich die Verhältnisse um.
Dann lässt sich idealerweise schreiben:
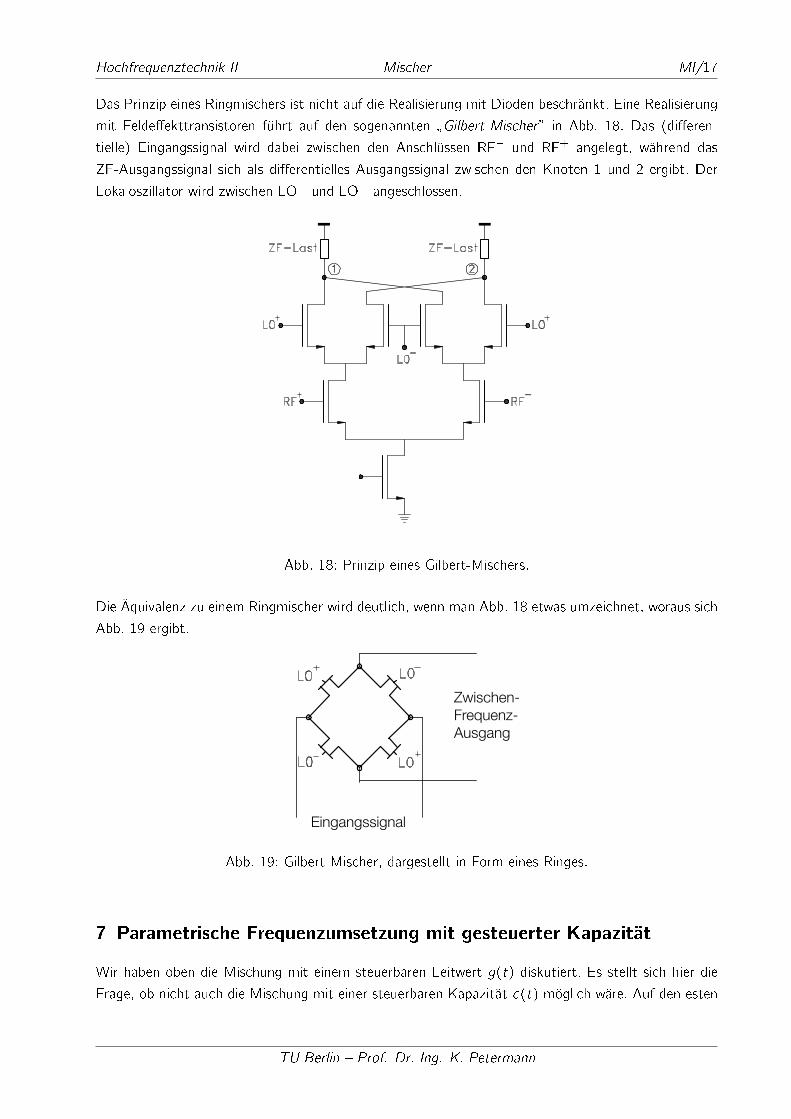
uZF = us(t) � s(t) (58)
mit der Schaltfunktion
s(t) =
+1 für u0(t) > 0
�1 für u0(t) < 0(59)
Diese Multiplikation in Gl. (58) kommt der idealen Multiplikation für einen Mischer in Gl. (3) sehr
nahe und ist auch einmal in Abb. 17 skizziert.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/16
ZF
Abb. 16: Prinzip eines Ringmischers bzw. Ringmodulators.
uZF (t)s(t)
+1
!1
us(t)
Abb. 17: Schematische Darstellung der Multiplikation von us(t) mit s(t) bei einem Ringmischer.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/17
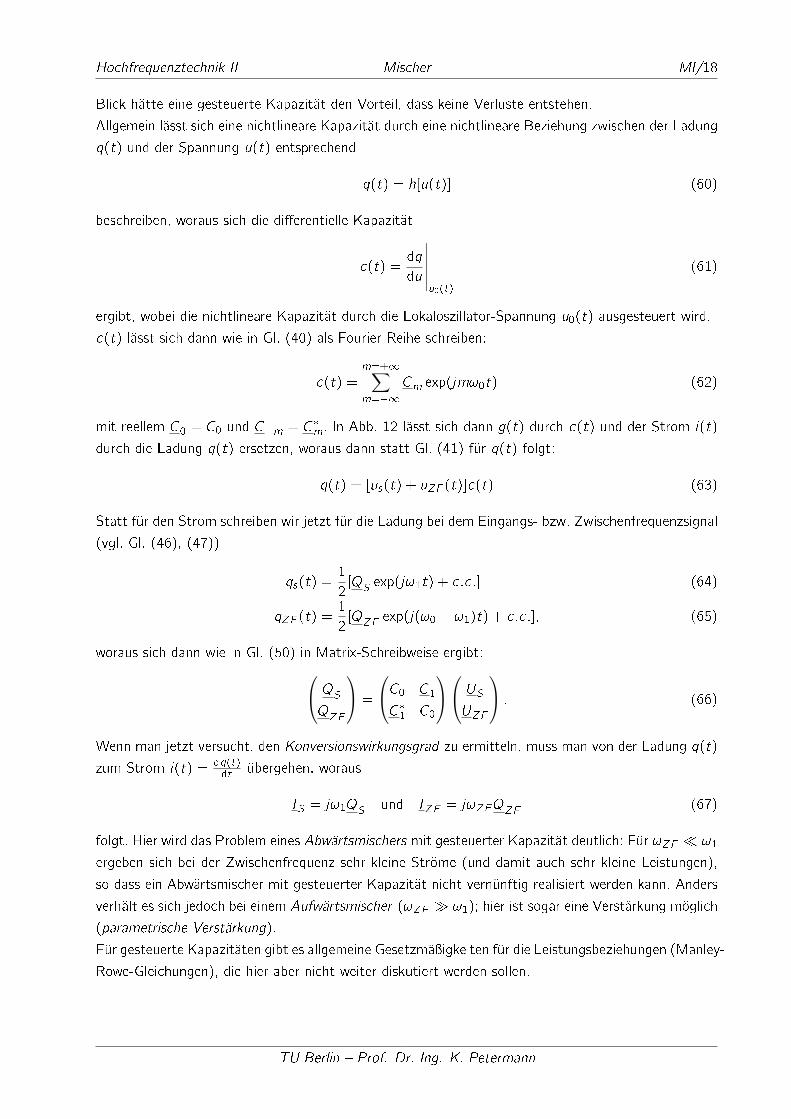
Das Prinzip eines Ringmischers ist nicht auf die Realisierung mit Dioden beschränkt. Eine Realisierung
mit Felde�ekttransistoren führt auf den sogenannten �Gilbert-Mischer � in Abb. 18. Das (di�eren-
tielle) Eingangssignal wird dabei zwischen den Anschlüssen RF� und RF+ angelegt, während das
ZF-Ausgangssignal sich als di�erentielles Ausgangssignal zwischen den Knoten 1 und 2 ergibt. Der
Lokaloszillator wird zwischen LO� und LO+ angeschlossen.
–
Abb. 18: Prinzip eines Gilbert-Mischers.
Die Äquivalenz zu einem Ringmischer wird deutlich, wenn man Abb. 18 etwas umzeichnet, woraus sich
Abb. 19 ergibt.
Eingangssignal
Zwischen-Frequenz-Ausgang
Abb. 19: Gilbert-Mischer, dargestellt in Form eines Ringes.
7 Parametrische Frequenzumsetzung mit gesteuerter Kapazität
Wir haben oben die Mischung mit einem steuerbaren Leitwert g(t) diskutiert. Es stellt sich hier die
Frage, ob nicht auch die Mischung mit einer steuerbaren Kapazität c(t) möglich wäre. Auf den esten
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/18
Blick hätte eine gesteuerte Kapazität den Vorteil, dass keine Verluste entstehen.
Allgemein lässt sich eine nichtlineare Kapazität durch eine nichtlineare Beziehung zwischen der Ladung
q(t) und der Spannung u(t) entsprechend
q(t) = h[u(t)] (60)
beschreiben, woraus sich die di�erentielle Kapazität
c(t) =dq
du
∣∣∣∣∣∣u0(t)
(61)
ergibt, wobei die nichtlineare Kapazität durch die Lokaloszillator-Spannung u0(t) ausgesteuert wird.
c(t) lässt sich dann wie in Gl. (40) als Fourier-Reihe schreiben:
c(t) =m=+1∑m=�1
Cm exp(jm!0t) (62)
mit reellem C0 = C0 und C�m = C�
m. In Abb. 12 lässt sich dann g(t) durch c(t) und der Strom i(t)
durch die Ladung q(t) ersetzen, woraus dann statt Gl. (41) für q(t) folgt:
q(t) = [us(t) + uZF (t)]c(t) (63)
Statt für den Strom schreiben wir jetzt für die Ladung bei dem Eingangs- bzw. Zwischenfrequenzsignal
(vgl. Gl. (46), (47))
qs(t) =1
2[QS exp(j!1t) + c:c:] (64)
qZF (t) =1
2[QZF exp(j(!0 � !1)t) + c:c:]; (65)
woraus sich dann wie in Gl. (50) in Matrix-Schreibweise ergibt: QS
QZF
=
C0 C1
C�
1 C0
US
UZF
: (66)
Wenn man jetzt versucht, den Konversionswirkungsgrad zu ermitteln, muss man von der Ladung q(t)
zum Strom i(t) = dq(t)dt übergehen, woraus
IS = j!1QS und IZF = j!ZFQZF (67)
folgt. Hier wird das Problem eines Abwärtsmischers mit gesteuerter Kapazität deutlich: Für !ZF � !1
ergeben sich bei der Zwischenfrequenz sehr kleine Ströme (und damit auch sehr kleine Leistungen),
so dass ein Abwärtsmischer mit gesteuerter Kapazität nicht vernünftig realisiert werden kann. Anders
verhält es sich jedoch bei einem Aufwärtsmischer (!ZF � !1); hier ist sogar eine Verstärkung möglich
(parametrische Verstärkung).
Für gesteuerte Kapazitäten gibt es allgemeine Gesetzmäÿigkeiten für die Leistungsbeziehungen (Manley-
Rowe-Gleichungen), die hier aber nicht weiter diskutiert werden sollen.
TU Berlin � Prof. Dr.-Ing. K. Petermann