Embed Size (px)
Citation preview

Bitte decken Sie die schraffierte Fläche mit einem Bild ab.
Please cover the shaded area with a picture.
(24,4 x 7,6 cm)
ADAS
Prezentare generală

Public
Oana Filibiu
2Florin Vartolomei © Continental AG
1 Introducere în ADAS
1.1 Generalități
1.2 Niveluri de autonomie
1.3 Beneficii
1.4 Provocări
1.5 Tendințe și perspective
6 December 2019

Public
Oana Filibiu
3Florin Vartolomei © Continental AG
2 ADCU
2.1 Descriere
2.2 Implementare
6 December 2019

Public
Oana Filibiu
4
6 December 2019
1.1 Generalități
Sense Plan Act
Advanced Driver Assistance Systems (sisteme avansate pentru
asistarea condusului) reprezintă familia de sisteme care oferă
funcționalități ce vin în ajutor conducătorului auto în vederea:
✓ Îmbunatățirii confortului;
✓ Reducerii riscurilor (creșteera siguranței);
✓ Preluarea sarcinilor asociate condusului.
La baza funcționării sisteme de asistență moderne se regăsesc
multiple informații captate cu ajutorul diverselor tehnologii de
senzori (ultrasonici camerelor video, LiDAR, RADAR). Aceste
informații sunt procesate rezultând virtualizarea mediului
înconjurator (computer vision) iar rezultatele obținute sunt
folosite pentru a asista sau înlocui comenzile șoferului în
efectuarea manevrelor.
Florin Vartolomei © Continental AG

Public
Oana Filibiu
5
6 December 2019
1.1 Generalități
Plan
De monitorizare – sisteme care utilizează senzori pentru a observa mediul înconjurător sau
modul de conducere a vehiculului și oferă posibilitatea șoferului să obțină informații
suplimentare de care are nevoie pentru efectuarea unor manevre.
De exemplu: Surround View - sistem de vizualizare 360 grade în jurul automobilului care
folosește 4 (sau 6) camere video astfel plasate pentru a-l ajuta pe șofer să vizualizeze
obiectelor aflate în imediata vecinătate.
De avertizare – sisteme care alertează șoferul cu privire la posibile problemele sau situații
critice din timpul condusului sau prevăzute din traiectoria altor vehicule și care ar putea crește
riscul de accident.
De exemplu: Lane Departure Warning - Sistem care avertiză șoferul atunci când vehiculul
începe să părăseasca banda sa de deplasare (dacă nu este în funcțiune semnalul de
schimbare a direcției de mers).
Tipuri de sisteme ADAS:
Florin Vartolomei © Continental AG

Public
Oana Filibiu
6
6 December 2019
1.1 Generalități
Plan
Adaptive – sisteme care își modifică răspunsul și gradul de intervenție (se adaptează) în
funcție de informațiile preluate din mediul înconjurător.
De exemplu: Adaptive Cruise Control – sistem adaptiv de control al regimului de croazieră
ce ajustează automat viteza vehiculului pentru a menține o distanță sigură față de vehicule
din față. Această funcție este, de asemenea, cunoscută sub numele de Dynamic Cruise
Control.
Automate – sisteme care preiau anumite funcții pe care un șofer nu le poate îndeplini în
siguranță (suprascriu comenzile șoferului).
De exemplu: Collision Avoidance/Mitigation System – sistem automat de siguranță
conceput pentru a preveni sau reduce consecințele unei coliziuni. La identificarea unei
coliziuni iminente, sistemul acționează în mod autonom (fără nici o intervenție a șoferului) prin
frânare (la viteză mică de deplasare), schimbarea direcției (la viteze mai) sau ambele.
Tipuri de sisteme ADAS:
Florin Vartolomei © Continental AG

Public
Oana Filibiu 6 December 2019
7Florin Vartolomei © Continental AG
1.1 Generalități
Ultrasound
Ultrasonic System
✓ ADAS oferă tehnologie avansată pentru sisteme de asistență și autonomie
✓ Sinergie între mai multe tehnologii de senzori
✓ Domenii de activitate în ADAS:
• Ingineria sistemelor;
• Electronică;
• Telecomunicații;
• Mecanică;
• Analiză de siguranță;
• Senzorică;
• Software;
• Algorithm;
• Securitate informațională.

Public
Oana Filibiu 6 December 2019
8Florin Vartolomei © Continental AG
1.1 Generalități

Public
Oana Filibiu
9
6 December 2019
1.1 Generalități
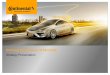
Exemple de functionalități ale sistemelor ADAS:
Florin Vartolomei © Continental AG
Recunoașterea indicatoarelor
rutiereAsistență la mersul cu spatele Asistență la parcare A.C.C.
patent US9834155B2

Public
Oana Filibiu
10Florin Vartolomei © Continental AG
6 December 2019
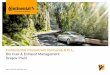
1.2 Niveluri de autonomie
Niv
el
5
Niv
el
4
Niv
el
3
Niv
el
2
Nivel 0Fără asistență
Toate acțiunile și întreaga
responsabilitate asociate
conducerii vehiculului aparțin
șoferului.
Manevrele sunt executate
manual, fără intervenție din
partea vehiculului.
Niv
el
1
Conducator uman Vehicul autonom

Public
Oana Filibiu
11Florin Vartolomei © Continental AG
6 December 2019
1.2 Niveluri de autonomie
Nivel 1Asistarea șoferului .
Vehiculul are capabilitatea de
oferi asistență șoferului pentru
un singur tip de control la orice
moment de timp (direcție,
accelerație sau frânare, dar
niciodată două sau mai multe
în paralel).
Niv
el
0
Niv
el
2
Niv
el
4
Niv
el
3
Niv
el
5
Conducator uman Vehicul autonom

Public
Oana Filibiu
12Florin Vartolomei © Continental AG
6 December 2019
1.2 Niveluri de autonomie
Nivel 2Autonomie parțială .
Permite vehiculului să
automatizeze anumite părți ale
experienței condusului.
Șoferul deține controlul deplin
pe întreaga durată a efectuării
manevrelor și poate interveni
asupra lor.
Niv
el
0
Niv
el
1
Niv
el
4
Niv
el
3
Niv
el
5
Conducator uman Vehicul autonom

Public
Oana Filibiu
13Florin Vartolomei © Continental AG
6 December 2019
1.2 Niveluri de autonomie
Nivel 3Autonomie
condiționată
Anumite manevre dependente
de mediul înconjurător sunt
effectuate exclusiv de vehicul
la autorizarea șoferului.
Intervenția umană este soli-
citată în situații critice. .
Niv
el
0
Niv
el
1
Niv
el
4
Niv
el
2
Niv
el
5
Conducator uman Vehicul autonom

Public
Oana Filibiu
14Florin Vartolomei © Continental AG
6 December 2019
1.2 Niveluri de autonomie
Nivel 4Autonomie ridicată .
Vehiculul ia decizii singur în
diverse situații sau condiții de
drum sau trafic.
Intervenția umană poate
suprascrie comenzile dar de
regulă nu este necesară pentru
majoritatea situațiilor. .
Niv
el
0
Niv
el
1
Niv
el
3
Niv
el
2
Niv
el
5
Conducator uman Vehicul autonom

Public
Oana Filibiu
15Florin Vartolomei © Continental AG
6 December 2019
1.2 Niveluri de autonomie
Nivel 5Autonomie completă .
Vehiculul administrează singur
toate aspectele și efectuează
în siguranță manevrele
asociate condusului în toate
condițiile de drum și mediu, cel
puțin la fel de bine precum un
conducător auto.
Niv
el
1
Niv
el
3
Niv
el
2
Niv
el
4
Niv
el
0Conducator uman Vehicul autonom

Public
Oana Filibiu
16
6 December 2019
1.3 Beneficii
Plan
Sigurață – Experții în materie de siguranță în conducere preconizează că, odată ce
tehnologia fără șofer va fi complet dezvoltată, coliziunile din trafic (precum și decese sau
vătămări și costuri rezultate) vor fi reduse substanțial. Acestea se datorează deseori erorii
umane: timpul de reacție întârziat, nepăstrarea distanței față de alte vehicule sau orice forme
de distragere a atenției de la drum sau datorită conduslui agresiv, aspecte care vor fi regasi la
condusul autonom.
Confort – Prin definiție, autonomia completă scutește pasagerii de sarcinile asociate
condusului. De asemenea se pot elimina constrângerile privind capacitatea de a conduce.
Mai mult, pentru persoanele cu dizabilități, mașinile autonome vor oferi mobilitate sporită:
eliminarea volanului precum restul comenzilor asociate șofatului dar și a cerinței ca orice
pasager să ocupe o poziție orientată spre direcția de mers, ar oferi interiorului automobilului o
flexibilitate ergonomică mai mare.
Florin Vartolomei © Continental AG

Public
Oana Filibiu
17
6 December 2019
1.3 Beneficii
Plan
Trafic – Prin introducerea unor limite mai mari de viteză și datorită capacității sistemelor
autonome de a menține distanțe mai mici între vehicule, capacitatea utilă a drumului se va
mări (un număr mai mare de vehicule vor putea folosi carosabilul pe unitatea de timp) iar
congestionarea traficului va fi redusă la minimum. Efectul va fi cu atât mai important cu cât
vehiculele vor începe să comunice între ele. Considerând datele suplimentare astfel obținute
și predictibilitatea comportamentului rutier, capacitatea autorităților de a gestiona fluxul de
vehicule ar crește, combinată cu o nevoie mai mică de semnalizare rutieră.
Mediu – Automatizarea vehiculului poate reduce consumul de resurse necesare deplasării
prin optimizarea modului de condus. Îmbunătățirea fluxului de trafic prin utilizarea pe scară
largă a mașinilor autonome se traduce printr-o utilizare mai eficientă a combustibilului. Cu
toate acestea, îmbunătățirea eficienței energetice a vehiculului nu se înseamnă neapărat
reducerea netă a consumului de energie, fiind de așteptat ca prin introducerea vehiculelor
autonome consumatorii să fie încurajați să călătorească mai mult.
Florin Vartolomei © Continental AG

Public
Oana Filibiu
18
6 December 2019
1.3 Beneficii
Plan
Financiar – Prin utilizarea vehiculelor autonome sunt reduse costurile asociate accidentelor
(timpul necesar și prețul repararii vehiculelor), precum și costurile medicale. Condusul
autonom (considerat mai sigur) este de așteptat să reducă de asemenea costurile de
asigurare a vehiculelor.
Florin Vartolomei © Continental AG
Productivitate – Autonomia totală va permite transportarea ocupanților vehiculului până la
destinație (de ex. aeroport sau centru comercial), în timp ce vehiculul parchează singur. Într-
un vehicul complet automat, toți ocupanții ar putea desfășura în siguranță activități mai
productive sau recreative, cum ar fi răspunsul la e-mail, conferințe sau vizionarea unui film.
Noi job-uri – În timp ce vehiculele autonome vor conduce la pierderi de locuri de muncă din
activități asociate șofatului (de ex. șoferi de taxi, curieri, șofer de camion), tot acestea vor
crește, de asemenea, cererea pentru alte locuri de muncă, precum experți în domeniul
automotive, dezvoltatori de software, ingineri în telecomunicații, etc.

Public
Oana Filibiu 6 December 2019
19Florin Vartolomei © Continental AG
1.4 Provocări

Public
Oana Filibiu 6 December 2019
20Florin Vartolomei © Continental AG
1.4 Provocări: Cyber Security
În viitor, vehiculele vor fi conectate permanent. Aceasta servește pentru noi funcții din interiorul mașinii și nu
numai, precum securitatea vehiculului sau gestionarea inteligentă a traficului.
Securitatea cibernetică este una dintre sarcinile majore cu care se confruntă întreaga industrie auto.
✓ Niveluri la care se aplică securitatea cibernetică:
• Componentele electronice individuale, în
special cele responsabile cu preluarea și/sau
procesarea de date;
• Comunicarea între componentele individuale;
• Numeroasele interfețe dintre vehicul și
exteriorul său;
• Transferul și prelucrarea datelor în afara
vehiculului, inclusiv accesul la date stocate în
servere (cloud).

Public
Oana Filibiu
21
6 December 2019
1.5 Tendințe și perspective: CUbE
Plan
Florin Vartolomei © Continental AG
Continental Cube.mp4

Public
Oana Filibiu
22Florin Vartolomei © Continental AG
2 ADCU
2.1 Descriere
2.2 Implementare
6 December 2019

Public
Oana Filibiu 6 December 2019
23Florin Vartolomei © Continental AG
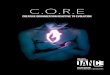
2.1 ADCU - Descriere
Categorie Tip Valoare
CPU nVIDIA Tegra Parker 8 core, 64 bit, 16 nm
Memory RAM – LPDDR4 Up to 16GB, 128-bit
Storage eMMC 128GB
Video 2x Pascal GPU 256 CUDA cores
HDMI – Full HD 2 ports
Connectivity
Ethernet 100 Mbit/s
Ethernet 1 Gbit/s
USB 3.0 2 ports Assisted/Automated Driving Control Unit

Public
Oana Filibiu
24
6 December 2019
2.1 ADCU - Descriere
Assisted/Automated Driving Control Unit (unitatea de control asistat/automatizat a condusului) reprezintă o
platformă de procesare multifuncțională, securizată, destinată aplicațiilor din sfera condusului cu un grad
înalt de automatizare (Highly Automated Driving - HAD).
Florin Vartolomei © Continental AG
Platforma este realizată prin integrarea componentelor hardware
și software adecvate care monitorizează mișcarea unui vehicul și
ghidează manevrele acestuia în timpul rulării. Mai mult, ADCU
realizează un model complex al mediu lui înconjurător
(Environment Model - EM) bazat pe fluxuri de informații preluate
de la senzorii integrați dar și utilizând informații suplimentare.
Acest model este utilizat de algoritmii de planificare a traiectoriei
pentru a determina calea optimă (ecologică, sigură, convenabilă)
și pentru a gestiona corect multitudinea de actuatoare prezente
(de exemplu pentru frână, controlul direcției, suspensiei, etc.).

Public
Oana Filibiu
25
6 December 2019
2.1 ADCU - Descriere
Florin Vartolomei © Continental AG
Caracteristici:
✓ Interfațare: unitațile de control prezente pe șasiu, sistemul de propulsie, alte elemente din ADAS;
✓ Unități single/dual/multi core ce procesează cantități mari de informații;
✓ Multiple interfețe de comunicații (e.g. FlexRay, CAN, etc.);
✓ Senzori prezenți extern, având conectivitate diversă;
✓ Nivel ridicat de siguranță în funcționare: ASIL D (Automotive Safety Integrity Level):
✓ Cele mai ridicate cerințe de integritate asupra produsului,
✓ Se implementează multiple căi și structuri redundante precum și mecanisme de prevenție și
detecție a disfuncționalităților (failsafe).
Beneficii:
✓ Numărul mic de ECU-uri ce duce la economie de spațiu, costuri și reducerea masei implementării;
✓ Platformă de procesare modulară (bazată pe module) și scalabilă (adaptabilă la volumul de date);
✓ Suportă topologiile vehiculelor a caror funcționare este orientată pe domenii (zone de comandă);
✓ Obiective: siguranță, securitate și performanță.

Public
Oana Filibiu
26
6 December 2019
2.1 ADCU - Implementare
Florin Vartolomei © Continental AG
Exemplu de implementare:
ADCU - Texas Instruments

Public
Oana Filibiu
27
6 December 2019
2.1 ADCU - Implementare
Florin Vartolomei © Continental AG
DRIVE PX2 - Platformă computațională performantă
destinată condusului autonom dezvoltată de .

Public
Oana Filibiu
28
6 December 2019
2.1 ADCU - Implementare
Florin Vartolomei © Continental AG
Implementare ADCU nVidia DRIVE PX2

Public
Oana Filibiu
29
6 December 2019
2.1 ADCU - Implementare
Florin Vartolomei © Continental AG
Prototip funcțional nVidia PX2

Public
Oana Filibiu
Vă mulțumesc pentru atenție!
30© Continental AG
6 December 2019