Embed Size (px)
Citation preview
Aus dem
Zentrum für Angewandte Informatik, Flexibles Lernen und Telemedizin (CIFT)
(Leiter: Prof. Dr. Bernd Kordaß)
und dem Funktionsbereich für Zahnmedizinische Propädeutik / Community Dentistry
(Leiter: Prof. Dr. Bernd Kordaß)
der Poliklinik für zahnärztliche Prothetik und Werkstoffkunde
(Direktor: Prof. Dr. Reiner Biffar)
im Zentrum für Zahn-, Mund- und Kieferheilkunde
(Geschäftsführender Direktor Prof. Dr. Georg Meyer)
der Medizinischen Fakultät der Ernst-Moritz-Arndt Universität Greifswald
Der Virtuelle Artikulator „DentCAM“
Evaluation und Konzepte
zur praktischen Realisierung
Inaugural-Dissertation
zur Erlangung des akademischen Grades
Doktor der Zahnmedizin (Dr. med. dent.)
der Medizinischen Fakultät
der Ernst-Moritz-Arndt-Universität
Greifswald
2003
vorgelegt von:
Christian Gärtner
geboren am 27. März 1973
in Wülfrath (NRW)
Dekan: Prof. Dr. H. K. Kroemer
1.Gutachter: Prof. Dr. B. Kordaß (Greifswald)
2.Gutachter: Prof. Dr. W. B. Freesmeyer (Berlin)
(3. Gutachter:)
Tag der Disputation: Greifswald, 7. Juli 2003

Meiner Familie,
meinem Vater � und meiner Großmutter �
in Dankbarkeit.
Inhaltsverzeichnis
Inhaltsverzeichnis
1. Einleitung.......................................................................................................1
1.1 Problem- und Zielstellung..............................................................................1
1.2 Literaturübersicht: Artikulatoren in der Zahnmedizin .....................................3
1.2.1 Mechanische Artikulatorsysteme.............................................................4
1.2.2 Elektronische Artikulatorsysteme.............................................................11
1.2.3 Elektronische Registriersysteme .............................................................12
1.3 Virtuelle Realität in der Medizin.....................................................................14
1.4 Virtuelle Realität in der Zahnmedizin.............................................................18
2. Fragestellungen ............................................................................................23
3. Konzeption und Entwicklung des Virtuellen Artikulators..........................24
3.1 Funktionsumfang...........................................................................................25
3.2 Benutzeroberfläche .......................................................................................26
3.3 Datenvorbereitung und Auswertung..............................................................28
4. Material und Methode ...................................................................................31
4.1 Vorversuche ..................................................................................................32
4.1.1 3D-Laserscanner .....................................................................................32
4.1.2 Jaw-Motion-Analyser ...............................................................................36
4.2 Versuchsgruppen ..........................................................................................39
4.2.1 Prüfmessstand Simulator ........................................................................40
4.2.2 Artikulatoruntersuchung...........................................................................43
4.2.3 Probandenuntersuchung .........................................................................46
Inhaltsverzeichnis
5. Ergebnisse.....................................................................................................47
5.1 Auswertung der Vorversuche ........................................................................47
5.1.1 3D-Laserscanner .....................................................................................47
5.1.2 Jaw-Motion-Analyser ...............................................................................49
5.2 Auswertung der Versuchsgruppen ................................................................50
5.2.1 Prüfmessstand Simulator ........................................................................50
5.2.2 Artikulatoruntersuchung...........................................................................52
5.2.3 Probandenuntersuchung .........................................................................54
5.2.4 Zusammenfassung der Ergebnisse .........................................................56
6. Diskussion.....................................................................................................57
6.1 3D-Laserscanner...........................................................................................57
6.2 Jaw-Motion-Analyser.....................................................................................59
6.3 Versuchsgruppen ..........................................................................................61
6.3.1 Prüfmessstand Simulator ........................................................................61
6.3.2 Artikulatoruntersuchung...........................................................................61
6.3.3 Probandenuntersuchung .........................................................................62
6.4 Vergleich Virtueller Artikulator und mechanischer Artikulator........................63
6.5 Schlussfolgerung...........................................................................................65
6.6 Ausblick.........................................................................................................66
7. Zusammenfassung .......................................................................................68
8. Literaturverzeichnis ......................................................................................70
Einleitung
1
1. Einleitung
1.1 Problem- und Zielstellung
Virtuelle Welten werden in weiten Bereichen der Medizin bereits eingesetzt, um
durch neue und unkonventionelle Sichtweisen komplexe Sachverhalte und
Zusammenhänge besser als es mit herkömmlichen Techniken möglich ist,
darzustellen und zu verstehen. In der Zahnmedizin ist es üblicherweise Aufgabe
der mechanischen Artikulatoren die statische und die dynamische Okklusion,
also die Kontakte zwischen den Kauflächen und die zahngeführten
Bewegungsabläufe entlang der Kauflächen, darzustellen. Gegenüber der
tatsächlichen Situation in der Mundhöhle gibt es aber eine Reihe von werkstoff-
und verfahrenstechnisch bedingten Imponderabilien, die die Ergebnisse der
Bewegungssimulation im mechanischen Artikulator ungünstig beeinflussen
können (z.B. das individuelle Bewegungsmuster der Zahnreihen zueinander,
das spaltfreie Fügen von Registraten auf Gipsmodellen, das räumlich korrekte
schädel- bzw. gelenkbezügliche Montieren von Modellen, die Expansion des
Montage- und Modellgipses, die Verformung von Registrierträgermaterialien,
usw.). Zudem lassen sich viele biologische Faktoren, die die Eingliederung
einer zahntechnischen Arbeit entscheidend beeinflussen, auch mit hohem
Aufwand mechanisch nicht nachvollziehen. Zu den biologischen Faktoren, die
mechanisch nicht nachgeahmt werden können, zählen beispielsweise die
individuelle Variabilität der Kaufunktion, die Resilienz von Weichteilstrukturen im
menschlichen Kiefergelenk, die physiologische oder pathologische
Eigenbeweglichkeit der Zähne, die Beweglichkeit von Prothesen und die
Verbiegungen der Unterkieferspange bei Beanspruchung unter
Kaukrafteinfluss. Dementsprechend zeigen Untersuchungen von TAMAKI et al.
(1997) über die Reproduzierbarkeit von okklusalen Bewegungen im
mechanischen Artikulator, dass trotz individueller Registrierung und schädel-
gelenkbezüglicher Modellmontage nur 82% der protrusiven und 90% der
laterotrusiven Kontakte, die in-vivo vorhanden waren, im Artikulator
nachvollzogen werden konnten. Nur 62% der protrusiven und 81% der
laterotrusiven Kontakte waren im Artikulator korrekt lokalisiert. Zudem erzeugte
der mechanische Artikulator neue Kontakte, die in-vivo nicht vorhanden waren.
Einleitung
2
Jedoch ist es gerade in der Okklusions- und Funktionsanalyse entscheidend,
der biomechanischen Situation des Kausystems so nahe wie möglich zu
kommen - hier sind die Möglichkeiten eines Virtuellen Artikulators weitaus
vielseitiger. Im Gegensatz zu einem mechanischen Artikulator werden die
einzelnen Parameter wie Gelenkbahnneigung, Bennett-Winkel, Sideshift usw.
nicht am Patienten ermittelt und dem Artikulator eingegeben, sondern die
exakte Bewegungsbahn des Unterkiefers am Patienten elektronisch
aufgezeichnet und als Grundlage der weiteren Berechnungen herangezogen.
Ein „Virtueller Artikulator“, also ein mittels eines Computerprogramms
simulierter Artikulator, vermag grundsätzlich sämtliche biomechanischen
Parameter des individuellen Kauorgans zu simulieren und darzustellen, sofern
geeignete individuelle Daten und Messwerte verfügbar sind. So sollten für die
Berechnung der statischen und dynamischen Okklusion keine mittelwertigen
Vorgaben herangezogen werden, sondern die exakt digitalisierten, individuellen
Bewegungsbahnen des Unterkiefers. Mit Hilfe dieser Technik ist es zudem
möglich, verschiedene, für den Funktionstherapeuten interessante Parameter,
synchron zu analysieren. So könnte z.B. die Position der Kondylen zeitgleich zu
der aktuellen Kontaktpunkteverteilung dargestellt werden. Aber auch Parameter
wie Kräfteverteilungen, Zahneigenbeweglichkeiten und Belastungen von
Suprakonstruktionen lassen sich prinzipiell, sofern geeignete Messwerte
vorhanden sind, mittels der virtuellen Realität berechnen und darstellen. Ein
weiterer großer Bereich kann unter dem Stichwort „Interaktivität“
zusammengefasst werden: So ist es denkbar, einzelne Zähne oder funktionell
zusammengefasste Zahngruppen hinsichtlich ihrer räumlichen Orientierung zu
modifizieren und die daraus resultierenden Okklusions- und Bewegungsmuster
zu berechnen. Ferner könnten kieferorthopädische Kräfte simuliert und deren
langfristige Konsequenzen in Sekundenbruchteilen berechnet und analysiert
werden.
Das Ziel dieser Arbeit ist es, die Konzepte, die der Entwicklung eines „Virtuellen
Artikulators“ zugrunde liegen, zu erläutern und eine Computersoftware zu
evaluieren, mit deren Hilfe die Berechnung und Visualisierung der individuellen
Unterkieferbewegung möglich wird.
Einleitung
3
1.2 Literaturübersicht: Artikulatoren in der Zahnmedizin
Im zahnmedizinischen Sinne sind Artikulatoren Geräte, die Kiefer und
Kiefergelenke mit mechanischen Elementen nachvollziehen [BAUER und
GUTOWSKI 1978; CELENZA 1979; FUHR und REIBER 1985; KOECK 1989;
RUGH und JOHNSON 1988; SUVIN 1982]. Sie dienen zur Aufnahme von
Modellen der Zähne und der Kiefer [CELENZA 1979; HOFFMANN-AXTHELM
1992; RUGH und JOHNSON 1988], zur Sicherung der statischen
Lagebeziehungen beider Kiefer zueinander sowie zur Simulation der
dynamischen Bewegungen der Kiefergelenke und des Unterkiefers [BAUER
und GUTOWSKI 1978; CELENZA 1979; FUHR und SIEBERT 1981; FUHR und
REIBER 1985; HOFFMANN-AXTHELM 1992; KAMANN 1998; KOECK 1989;
KÖRBER 1987; LEJOYEUX 1976; RUGH und JOHNSON 1988; SUVIN 1982].
Eingesetzt werden Artikulatoren in der instrumentellen Funktionsanalyse zur
Erstellung einer Diagnose und zur Herstellung laborgefertigten Zahnersatzes in
der Zahntechnik [KÖRBER 1987; LEJOYEUX 1976; MEYER und MOTSCH
1987; RUGH und JOHNSON 1988; SUVIN 1982]. Zudem etablieren sich
moderne Artikulatoren zunehmend in Forschung und Lehre zur Simulation der
menschlichen Kiefergelenke, zur Darstellung der komplexen individuellen
Parametrisierbarkeit der biodynamischen Bewegungsmuster und zur
Überprüfung und Visualisierung von statischen und dynamischen
Okklusionsmustern.
Die Entwicklung von Artikulatoren weist eine etwa 150-jährige Geschichte auf,
während der eine Vielzahl von Geräten mit unterschiedlichen Funktions- und
Bauweisen entwickelt wurden. Die genaue Anzahl aller Entwicklungen und
deren Varianten ist heute nicht sicher zu bestimmen. Ein gewisser Überblick
kann u.a. aus den entsprechenden Arbeiten von BLOMBERG et al. (1961),
CROUSSILAT (1971), LANG (1970), LEJOYEUX (1976), MITCHELL und
WILKIE (1978) sowie REHM (1951) entnommen werden.
Einleitung
4
1.2.1 Mechanische Artikulatorsysteme
In der Literatur sind unterschiedliche Möglichkeiten zur Einteilung von
Artikulatorsystemen beschrieben worden. Die Einteilungen basieren u.a. auf
folgenden Kriterien:
• Prinzip der dominierenden Führungsfläche
• Existenz einer Gelenkführung
• Aufbau der Gelenkmechanik
• räumliche Orientierung der Führungsflächen
• Anordnung von Referenzebenen
• Justierbarkeit der mechanischen Parameter.
Bezüglich des Prinzips der dominierenden Führungsfläche (Führungsprinzip)
werden gelenkbezüglich arbeitende Artikulatoren und die so genannten
Kaubahnträger voneinander unterschieden [FUHR und SIEBERT 1981;
KÖRBER 1987]. Gelenkbezogene Artikulatoren sind mit künstlichen Gelenken,
die den menschlichen Kiefergelenken ähnlich sind, ausgestattet. Sie arbeiten,
bedingt durch eine posteriore Führung des beweglichen Artikulatorteils,
entsprechend dem Prinzip der Gelenkdominanz, d.h. im posterioren Bereich
dominiert die Führungsfunktion der Kiefergelenke. Bei solchen Artikulatoren
spielt auch die Front-Eckzahn-Führung eine entscheidende Rolle
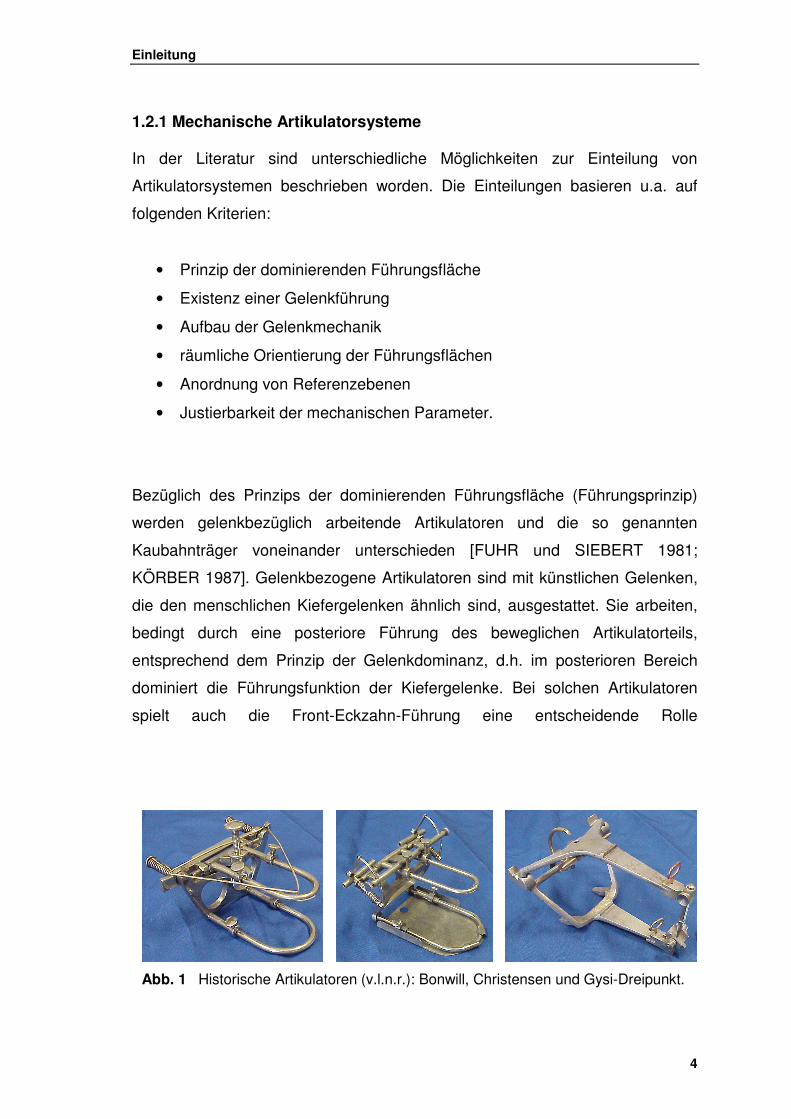
Abb. 1 Historische Artikulatoren (v.l.n.r.): Bonwill, Christensen und Gysi-Dreipunkt.
Einleitung
5
[CROUSSILAT 1971; FUHR und SIEBERT 1981; LEJOYEUX 1976; MITCHELL
und WILKIE 1978; RUGH und JOHNSON 1988]. Zu den gelenkbezogenen
Geräten werden (ohne Anspruch auf Vollständigkeit) u.a. die Evans-, Bonwill-,
Walker-, Grittmann-, Christensen-, Parfitt-, Gysi-“Simplex”-, Gysi-“Dreipunkt”-,
Gysi-“Adaptable”-, Gysi-“Truebyte”-, Aspelund-, Andresen-, Hanau-Kinoscope-,
Wriendt-, McCollum-“Gnathoscope”-, Dentatus ARH-, Stuart-, Condylator-,
Whip-Mix-, Denar D5A-, TMJ-, SAM 1-, SAM 2-, SAM 3-, Panadent-,
Gnathomat-, Artex T-, Artex TS-, Artex N-, Artex AN-, Artex Reference-, Stratos
200-, Protar I- und Protar II-Artikulatoren gezählt (siehe auch Abbildung 1). Die
künstlichen, mechanischen Gelenke bestehen aus einem führenden und einem
geführten Gelenkteil. Beide wurden in unterschiedlichen Ausführungen
entwickelt. So kann z.B. der führende Gelenkteil die Form eines Führungsstiftes
(Bonwill-, Christensen-Artikulator), einer Führungsfläche (Condylator, Bayer
Contact) oder einer künstlichen Gelenkpfanne (Whip-Mix-, SAM-Artikulator)
annehmen. Der geführte Gelenkteil besitzt entsprechend die Form eines
Führungsringes, eines Doppelkonus oder einer Kondylarkugel bzw.
Kondylarstiftes.
Die Mechanik der klassischen Kaubahnträger wird in ihrem Bewegungsfreiraum
durch die Führungsfunktion der Kauflächenmorphologie bestimmt. Die
Führungsfacetten der Zähne werden dabei als Führungselemente der
Okklusion verwendet [FUHR und SIEBERT 1981]. Einige Kaubahnträger (z.B.
die von Luce, Fehr, u.a.) können aber auch als kaubahnbezogene Artikulatoren
bezeichnet werden; ebenso besitzen Artikulatoren wie der Schröder-Rumpel,
Schröder-Trebitsch oder der Gnathomat eine „freischwingende Achse“, die
optional eine zusätzliche Gelenkführung ermöglicht [HUGGER 1993; IVOCLAR
AG 1993]. Solche kaubahnbezogenen Artikulatoren können mittels der
„Graviermethode“ eingesteuert werden [RUGH und JOHNSON 1988]: Die von
den Kauflächen vorgegebenen Bewegungsfreiräume werden mittels
unterschiedlich geformter Stifte in napfartige, z.B. mit thermoplastischer Masse
(in einigen Literaturstellen ist auch die Verwendung von Amalgam beschrieben
[POSSELT 1962]) beschickte Strukturen „eingraviert“; das derart geformte
Relief dient nach dem Aushärten der Masse als Führungsfläche für die Stifte
Einleitung
6
des Artikulators. Sofern bei diesen Artikulatoren Ober- und Unterteil gelenkartig
verbunden sind, entsprechen diese den Gelenkartikulatoren. Diese „Gelenke“
lassen sich jedoch mechanisch entkoppeln, so dass eine Führung
ausschließlich durch die von den Kauflächen vorgegebene Einschränkung der
Bewegungsfreiheit erfolgen kann. Diese Artikulatoren können sowohl als
gelenkbezogene als auch als kaubahnbezogene Artikulatoren eingesetzt
werden [FUHR und SIEBERT 1981; HUGGER 1993].
In die Gruppe der gelenklosen Artikulatoren gehören auch die elektronisch
gesteuerten Artikulatoren (Gnathic Replicator, ROSY). Diese Artikulatoren
besitzen weder eine Gelenkführung noch eine Führung durch einen Inzisalstift.
Der bewegliche Teil ist „freischwebend“ aufgehängt und wird durch Schritt- oder
Servomotoren angetrieben. Die Berechnung der Bewegungsbahnen und die
Ansteuerung der Motoren werden durch entsprechende Computerprogramme
übernommen, daher ist auch die „Wiedergabe“ elektronisch registrierter
Bewegungsmuster möglich [EDINGER 1992, 1999; GIBBS et al. 1982].
Eine weitere gebräuchliche Einteilung geht auf BERGSTRÖM (1950) zurück. Er
unterteilte die Artikulatoren anhand der Anordnung der kondylären
Führungsflächen in „Arcon“-Artikulatoren und „Non-Arcon“- oder „Condylar“-
Artikulatoren. Bei den Arcon-Artikulatoren ist die künstliche Gelenkpfanne
(= Führungsfläche) zum Artikulatoroberteil fixiert, die Kondylarkugeln zum
Unterteil des Artikulators. Die Non-Arcon-Artikulatoren sind genau
entgegengesetzt konstruiert, d.h. bei dieser Artikulatorkategorie ist die
Führungsfläche am Unterteil, die Kondylarkugeln (bzw. die Gelenkwalze) am
Oberteil des Artikulators angebracht. Historische Beispiele für Non-Arcon-
Artikulatoren sind die Gysi- und Schröder-Rumpel-Artikulatoren in Abbildung 2.

Einleitung
7
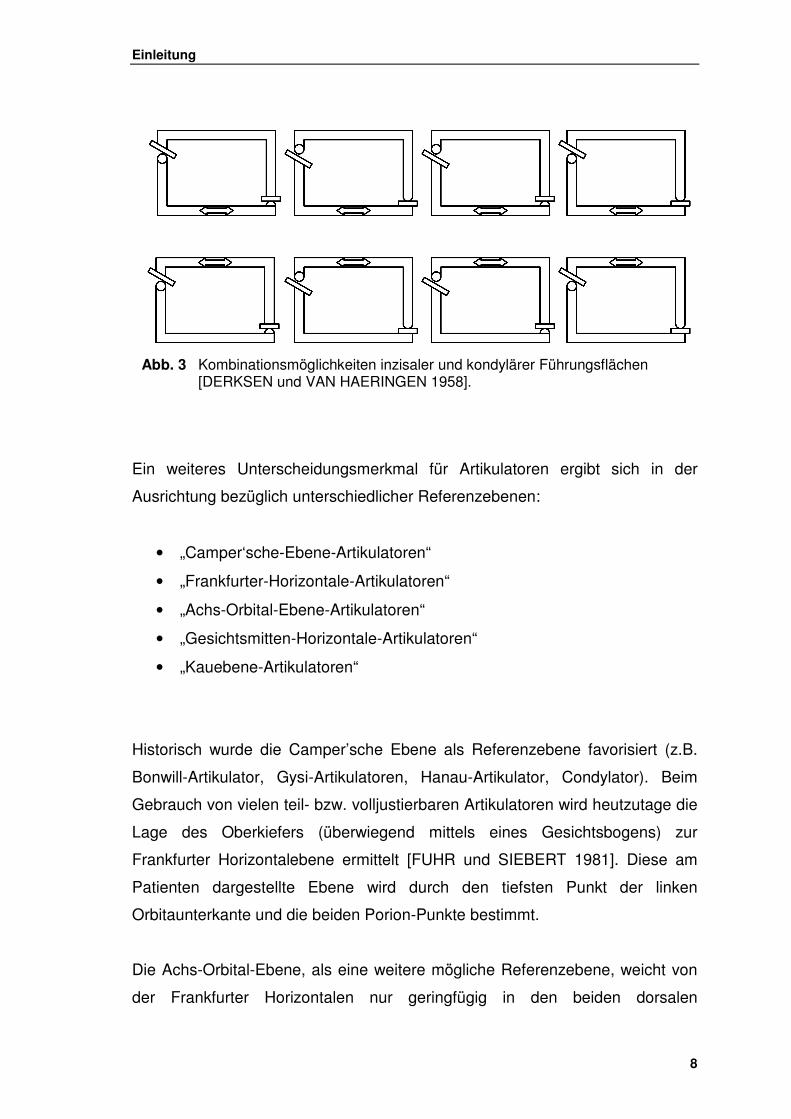
DERKSEN und VAN HAERINGEN (1958) stellten fest, dass die Anordnung der
vorderen inzisalen Führungsfläche von nicht minder großer Bedeutung ist. Auch
in der Inzisalführung von Gelenkartikulatoren kann jeweils der eine Teil zum
Oberteil, der andere zum Unterteil des Artikulators montiert werden. Nach
Abbildung 3 ergeben sich somit vier unterschiedliche Artikulatortypen
[DERKSEN und VON HAERINGEN 1958; DIETER 1984] und deren
Kombinationen:
a) Typ I-Artikulatoren: kondyläre und inzisale Führungsflächen sind zum
Oberteil fixiert (z.B. SAM 2, SAM 3, Artex Reference)
b) Typ II-Artikulatoren: kondyläre und inzisale Führungsflächen sind zum
Unterteil fixiert (z.B. Hanau H, Dentatus ARH, Condylator)
c) Typ III-Artikulatoren: kondyläre Führungsflächen sind zum Unterteil, die
inzisale Führungsfläche ist zum Oberteil fixiert (z.B. Wriendt)
d) Typ IV-Artikulatoren: kondyläre Führungsflächen sind zum Oberteil, die
inzisale Führungsfläche ist zum Unterteil fixiert (z.B. Stuart, Whip-Mix,
SAM 1, Panadent)
Abb. 2 Historische Artikulatoren: Gysi (links) und Schröder-Rumpel (rechts).
Einleitung
8
Ein weiteres Unterscheidungsmerkmal für Artikulatoren ergibt sich in der
Ausrichtung bezüglich unterschiedlicher Referenzebenen:
• „Camper‘sche-Ebene-Artikulatoren“
• „Frankfurter-Horizontale-Artikulatoren“
• „Achs-Orbital-Ebene-Artikulatoren“
• „Gesichtsmitten-Horizontale-Artikulatoren“
• „Kauebene-Artikulatoren“
Historisch wurde die Camper’sche Ebene als Referenzebene favorisiert (z.B.
Bonwill-Artikulator, Gysi-Artikulatoren, Hanau-Artikulator, Condylator). Beim
Gebrauch von vielen teil- bzw. volljustierbaren Artikulatoren wird heutzutage die
Lage des Oberkiefers (überwiegend mittels eines Gesichtsbogens) zur
Frankfurter Horizontalebene ermittelt [FUHR und SIEBERT 1981]. Diese am
Patienten dargestellte Ebene wird durch den tiefsten Punkt der linken
Orbitaunterkante und die beiden Porion-Punkte bestimmt.
Die Achs-Orbital-Ebene, als eine weitere mögliche Referenzebene, weicht von
der Frankfurter Horizontalen nur geringfügig in den beiden dorsalen
Abb. 3 Kombinationsmöglichkeiten inzisaler und kondylärer Führungsflächen
[DERKSEN und VAN HAERINGEN 1958].
Einleitung
9
Referenzpunkten ab. Es werden anstelle der beiden Porion-Punkte die arbiträr
oder individuell bestimmten Achsenpunkte verwendet.
Eine ungewöhnliche Referenzebene wird beim Artex-System vorgeschlagen:
Die Gipsmodelle werden in Bezug auf eine „Gesichtsmitten-Horizontale“
einartikuliert. Diese entspricht einer Ebene, die durch die beiden
Gelenkachsenpunkte und durch einen Punkt 42 mm kranial der Mitte der
Inzisalkanten von Zahn 11 und 21. Diese Ebene soll im Artikulator parallel zur
Okklusionsebene verlaufen [GIRRBACH DENTAL 1993; GIRRBACH 1991].
Eine weitere Einteilung bezieht sich auf die Justierbarkeit der Artikulatoren,
bzw. auf die Möglichkeit des Einstellens unterschiedlicher Werte für einige oder
alle individuellen Steuerelemente der künstlichen Gelenksysteme (siehe
Tabelle 1). Man kann wie folgt unterscheiden:
• Okkludatoren
• Mittelwertartikulatoren
• justierbare Artikulatoren:
o kaubahnbezogene Artikulatoren
o teiljustierbare Artikulatoren:
� einige Steuerelemente lassen sich auf individuelle Werte
einstellen (z.B. Whip-Mix-, SAM 1-, Dentatus ARH-
Artikulator)
o volljustierbare Artikulatoren:
� quasi alle Parameter lassen sich einstellen (z.B. Stuart-
Artikulator)
Einleitung
10
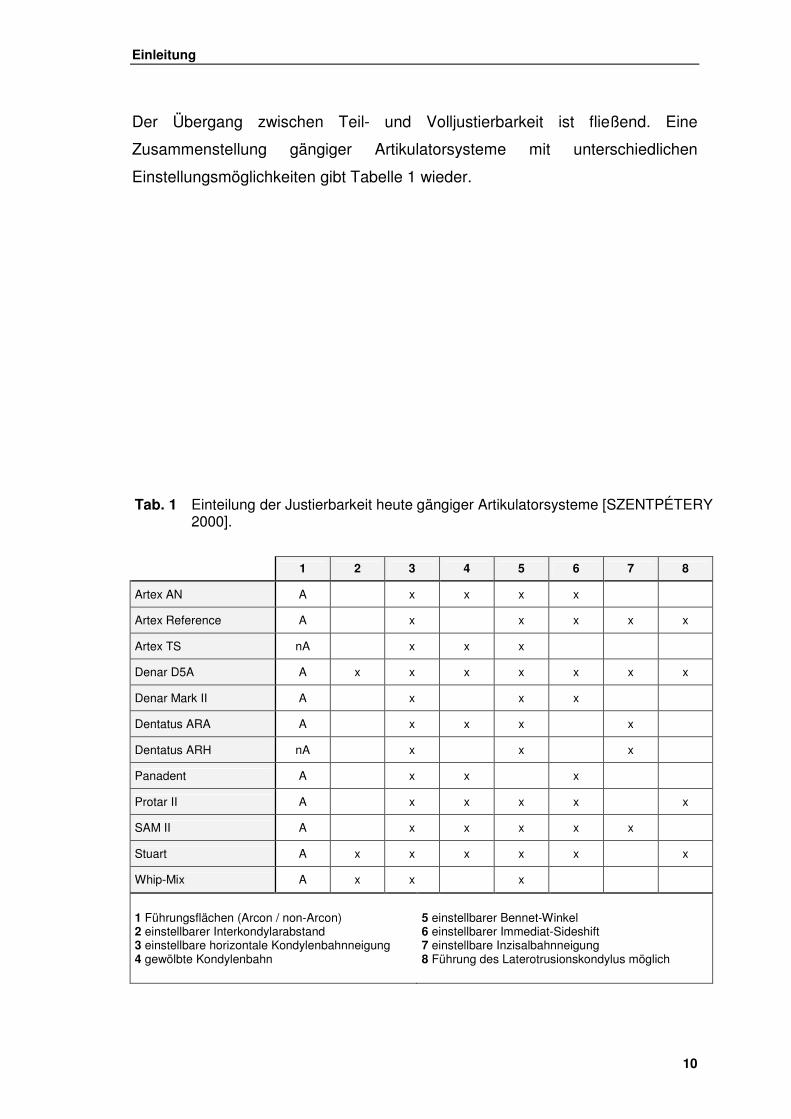
Der Übergang zwischen Teil- und Volljustierbarkeit ist fließend. Eine
Zusammenstellung gängiger Artikulatorsysteme mit unterschiedlichen
Einstellungsmöglichkeiten gibt Tabelle 1 wieder.
Tab. 1 Einteilung der Justierbarkeit heute gängiger Artikulatorsysteme [SZENTPÉTERY 2000].
1 2 3 4 5 6 7 8
Artex AN A x x x x
Artex Reference A x x x x x
Artex TS nA x x x
Denar D5A A x x x x x x x
Denar Mark II A x x x
Dentatus ARA A x x x x
Dentatus ARH nA x x x
Panadent A x x x
Protar II A x x x x x
SAM II A x x x x x
Stuart A x x x x x x
Whip-Mix A x x x
1 Führungsflächen (Arcon / non-Arcon) 2 einstellbarer Interkondylarabstand 3 einstellbare horizontale Kondylenbahnneigung 4 gewölbte Kondylenbahn
5 einstellbarer Bennet-Winkel 6 einstellbarer Immediat-Sideshift 7 einstellbare Inzisalbahnneigung 8 Führung des Laterotrusionskondylus möglich
Einleitung
11
1.2.2 Elektronische Artikulatorsysteme
Eine neuartige Gruppe bilden solche Artikulatoren, die durch elektronische
Komponenten ergänzt werden.
• Der CPS-PC-Artikulator ist ein mechanischer Artikulator, dessen
Gelenkbewegungen durch elektronische Sensoren registriert und in einer
Computersoftware ausgewertet werden. Er eignet sich für die Einstellung
und für den Vergleich verschiedener zahngeführter Gelenkpositionen, so
kann er in der Diagnostik und Therapie von Kiefergelenkstörungen sowie
in der Kieferorthopädie angewendet werden [RB DENTAL ELEKTRONIK
1999]. Als Arbeitsartikulator in der Zahntechnik ist er nur für das
Aufwachsen zentrischer Okklusionsfelder geeignet, die Berücksichtigung
exzentrischer Bewegungen muss anschließend in einem volljustierbaren
Artikulator erfolgen [RB DENTAL ELEKTRONIK 1999]. In diesem Sinne
ist dies weder ein vollständiger mechanischer Artikulator noch ein echter
elektronischer Artikulator.
• Auch die Roboterartikulatoren (z.B. „Gnathic Replicator“ von Gibbs und
„ROSY“ von Edinger) gehören zu den elektronischen Artikulatoren. Die
elektronisch registrierten Kaubewegungen des Patienten lassen sich
mechanisch, durch elektronisch gesteuerte Schrittmotoren simulieren
[EDINGER et al. 1992, 1995; GIBBS et al. 1982].
Die Geschichte der Artikulatoren ist auch die Geschichte der
Registriermethoden, mit denen man die Artikulatoren einsteuert. Beispiele für
einige Messverfahren werden im nächsten Kapitel erläutert.
Einleitung
12
1.2.3 Elektronische Registriersysteme
Elektronische Registriersysteme dienen einer Umwandlung der Bewegungen
des Unterkiefers in auswertbare elektrische Signale. Moderne Systeme
erlauben eine computergestützte Auswertung und Weiterverarbeitung.
Das gelenkfern arbeitende ECRS-System (Elektronisches Computergestütztes
Registrier System [FREESMEYER und LUCKENBACH 1987], vorgestellt 1983)
wird durch acht Drehpotentiometer und zwei Linearpotentiometern als
Messwertgeber über Gestänge und Gelenke mit an den oberen und unteren
Schneidezähnen paraokklusal fixierten Schienen verbunden. Die über die
Potentiometer gemessenen Spannungswerte werden digitalisiert und mittels
spezieller Software in Winkelwerte umgerechnet, aus denen die
Raumkoordinaten ermittelt werden. Mittels einer CAD/CNC-Frässtation können
aus den Messdaten Kunststoffboxen für die Programmierung eines
mechanischen Artikulators gefräst werden.
Das SAS-System [MEYER und DAL RI 1985] wird auf einen Axiographen
montiert und ermittelt die Messgeberposition mittels spezieller
Widerstandsfolien, die gelenknah und senkrecht zueinander angeordnet sind.
Am Unterkieferbogen sind gelenknah zwei Wegaufnehmer derart angebracht,
dass deren Position relativ zu den Widerstandsfolien ermittelt werden kann. Die
so gewonnenen Messdaten werden in einem speziellen Computerprogramm
weiter verarbeitet und linearisiert, so dass eine entsprechende Darstellung und
Analyse am Bildschirm ermöglicht wird.
Das CADIAX-System ist ein gelenknah arbeitendes Messsystem, das 1988 an
den mechanischen SAM-Axiographen gekoppelt wurde [SLAVICEK 1988].
Ähnlich dem SAS-System nehmen zwei sagittal angebrachte Widerstandsfolien
jeweils einen Messtaster mit je zwei Messspitzen auf. Die zwei Messspitzen
ermöglichen zudem eine Bestimmung von rotativen Elementen, so dass dieses
System sechs Freiheitsgrade aufweist.
Einleitung
13
Der String-LR-Recorder [OHLROGGE 1982] arbeitet als optisches
Messsystem: Durch Aussenden und Empfangen von Lichtimpulsen, deren
Intensität und Laufzeitdifferenzen zur Ermittlung der Sensorposition
ausgewertet werden, ist auch eine gelenknahe Anwendung möglich. 1992 folgte
das weiterentwickelte Modell String-Condylocomp-LR 3.
HANSEN entwickelte 1980 das Ultraschallsystem MT-1602 [PRÖBSTER 1990]:
Über die Laufzeit von Ultraschallimpulsen werden die Abstände zwischen drei
Ultraschallsendern eines paraokklusal montierten Unterkiefer-Attachments und
drei Ultraschallempfängern im Kopfgestell ermittelt. Anhand dieser Messdaten
werden die kartesischen Koordinaten des Senderzentrums und dessen
Rotationswinkel ermittelt. Das System ermöglicht die koordinierte Darstellung
eines beliebigen Punktes im Raum.
Als Weiterentwicklung des MT-1602 brachte die Firma Zebris (D-Isny) 1997 den
Jaw-Motion-Analyser (JMA) heraus [BRUNNER 1999]. Drei
Miniaturschallsender im Mess- und Zeigesensor senden zu 4
Ultraschallempfängern im Kopfteil der Apparatur Ultraschallwellen aus, deren
Laufzeitmessung eine genaue Angabe beliebiger Punkte des Objektes mittels
einer speziellen Software (WinJaw) ermöglicht.
Das USR-Ultraschallsystem [EDINGER 1992] arbeitet ebenso wie der JMA
mittels Laufzeitmessungen von Ultraschallwellen und kann über die Software
ROSY einen Roboter-Artikulator schrittmotorisch ansteuern.
Neben den optisch- und ultraschallbasiert arbeitenden Systemen sind in der
Literatur eine Vielzahl weiterer Verfahren beschrieben (fotografische,
thermografische und magnetische Verfahren), die sich aber hinsichtlich
Praktikabilität und Genauigkeit nicht zur Ansteuerung eines Virtuellen
Artikulators eignen. Im Zusammenhang mit bildgebenden Verfahren, wie z.B.
der Kernspintomographie und der klinischen Funktionsanalyse, stellen jedoch
sämtliche Systeme zur Aufzeichnung von Unterkieferbewegungen ein wichtiges
diagnostisches Hilfsmittel dar [KORDAß et al. 1992].
Einleitung
14
1.3 Virtuelle Realität in der Medizin
Unter dem Begriff „Virtual Reality“ (VR) ist die Gesamtheit der möglichst dem
realen Leben angepassten, von Computern künstlich erzeugten und somit
steuer- bzw. manipulierbaren Sinneseindrücken (dreidimensionales Sehen,
Hören, Ertasten, usw.) zu verstehen - mit vielfältigen Anwendungsmöglichkeiten
in der Medizin. Vor allem der Fachbereich der Chirurgie könnte von der VR
aufgrund der direkten Implementierbarkeit bildgebender Verfahren unter
Berücksichtigung der Anatomie in großem Maße profitieren. Mit neuartigen
Visualisierungsmethoden und der Simulation dynamischer Vorgänge können
etablierte Methoden effizienter geplant, trainiert und eingesetzt werden. Mit
Einführung von digitalen bildgebenden Systemen wurde die VR in der Medizin
etabliert. Bildgebende Systeme haben sich im klinischen Betrieb bewährt und
diesen in vielen Bereichen stark beeinflusst, wenn nicht gar revolutioniert.
Abb. 4 VR in der Medizin: Lehre und Ausbildung, Operationsplanung,
Operationsunterstützung und Teleoperationen (Illustration).

Einleitung
15
An VR-Systeme wird grundsätzlich die Anforderung gestellt, den Benutzer in
eine virtuelle Umgebung zu integrieren. Nach BURDEA und COIFFET (1994)
sollte jede VR-Umgebung durch Immersion, Interaction und Imagination zu
definieren sein:
• Immersion (engl. für „eintauchen“): Dem Benutzer soll durch seine
Sinneseindrücke das Gefühl einer möglichst vollständigen Integration in
die virtuelle Umgebung gegeben werden. Zum aktuellen Stand der
Technik beschränken sich diese Sinneseindrücke auf die visuellen,
akustischen und haptischen Sinne.
• Interaction (engl. für „Interaktion“): Der Benutzer kann mit einer virtuellen
Umgebung interagieren und virtuelle Objekte verändern bzw. benutzen.
Neben Standardeingabegeräten (Tastatur, Maus und Joystick) kommen
zum Zweck der Interaktion vermehrt spezialisierte Datenhandschuhe,
Head-Tracking-Systeme, Sprachsteuerungen und
Gestenerkennungssysteme zum Einsatz.
• Schließlich soll durch Imagination beim Benutzer das Gefühl, Teil einer
virtuellen Welt zu sein, gefördert werden. Die Imagination ist sehr stark
von der Qualität der Immersion und Interaktion abhängig.
Breiten Einzug haben VR-Systeme im Bereich Training und Ausbildung
gefunden: Das System Voxel-Man in Abbildung 5 [LEMKE et al. 1995] war
Abb. 5 VoxelMan (links) und „Visible Human Project“ (rechts).
Einleitung
16
ursprünglich als anatomischer Atlas zur 3D-Visualisierung des menschlichen
Schädels konzipiert. Es beinhaltet jedoch Komponenten, die es erlauben,
Eingriffe zu simulieren, Organe zu segmentieren und Bestrahlungsplanungen
vorzunehmen. Diese Daten können derart aufbereitet werden, dass es den
Anforderungen an eine VR-Anwendung genügt.
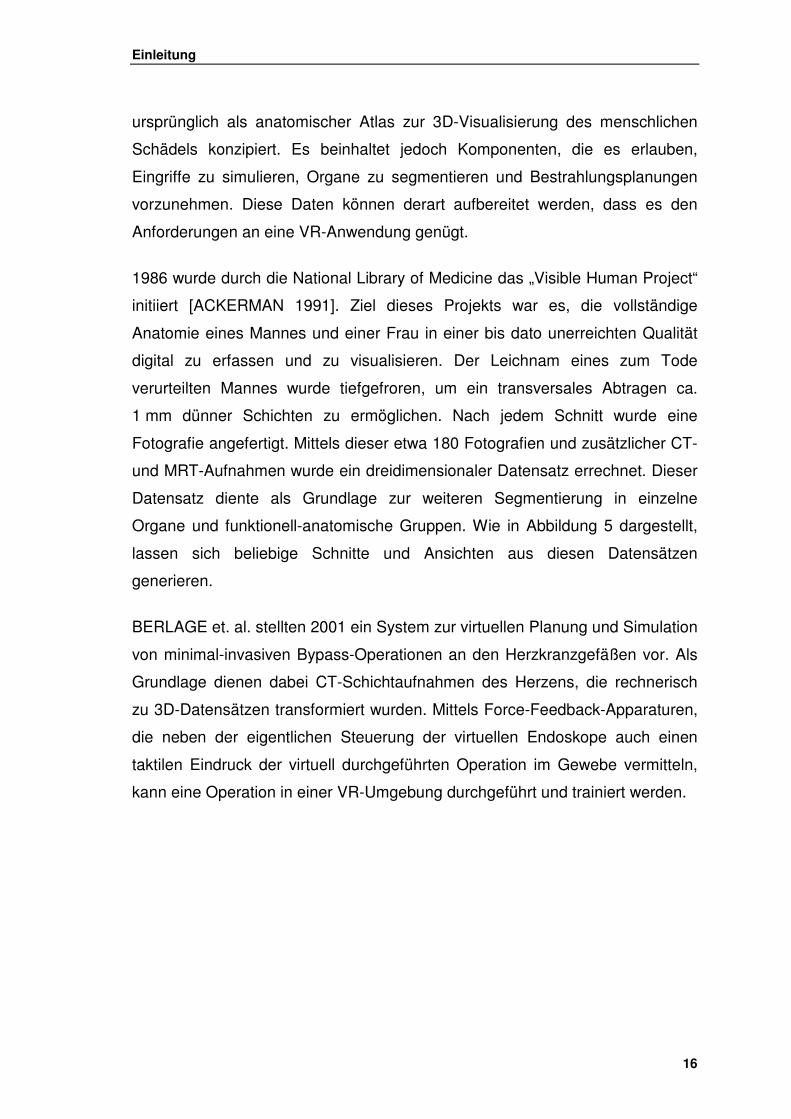
1986 wurde durch die National Library of Medicine das „Visible Human Project“
initiiert [ACKERMAN 1991]. Ziel dieses Projekts war es, die vollständige
Anatomie eines Mannes und einer Frau in einer bis dato unerreichten Qualität
digital zu erfassen und zu visualisieren. Der Leichnam eines zum Tode
verurteilten Mannes wurde tiefgefroren, um ein transversales Abtragen ca.
1 mm dünner Schichten zu ermöglichen. Nach jedem Schnitt wurde eine
Fotografie angefertigt. Mittels dieser etwa 180 Fotografien und zusätzlicher CT-
und MRT-Aufnahmen wurde ein dreidimensionaler Datensatz errechnet. Dieser
Datensatz diente als Grundlage zur weiteren Segmentierung in einzelne
Organe und funktionell-anatomische Gruppen. Wie in Abbildung 5 dargestellt,
lassen sich beliebige Schnitte und Ansichten aus diesen Datensätzen
generieren.
BERLAGE et. al. stellten 2001 ein System zur virtuellen Planung und Simulation
von minimal-invasiven Bypass-Operationen an den Herzkranzgefäßen vor. Als
Grundlage dienen dabei CT-Schichtaufnahmen des Herzens, die rechnerisch
zu 3D-Datensätzen transformiert wurden. Mittels Force-Feedback-Apparaturen,
die neben der eigentlichen Steuerung der virtuellen Endoskope auch einen
taktilen Eindruck der virtuell durchgeführten Operation im Gewebe vermitteln,
kann eine Operation in einer VR-Umgebung durchgeführt und trainiert werden.
Einleitung
17
LEE et al. präsentierten 2001 ein System zur virtuellen Endoskopie der oberen
Atemwege. CT- oder MRT-Aufnahmen der Atemwege werden derart
aufbereitet, dass eine fotorealistische, farbige Darstellung der Weichgewebe
möglich wird und mittels eines virtuellen Endoskops gescreent werden können.
Routinemäßige Untersuchungen des anatomischen Verlaufs der Luftwege
sollen mit diesem System nicht-invasiv und ohne Sedierung durchgeführt
werden können.
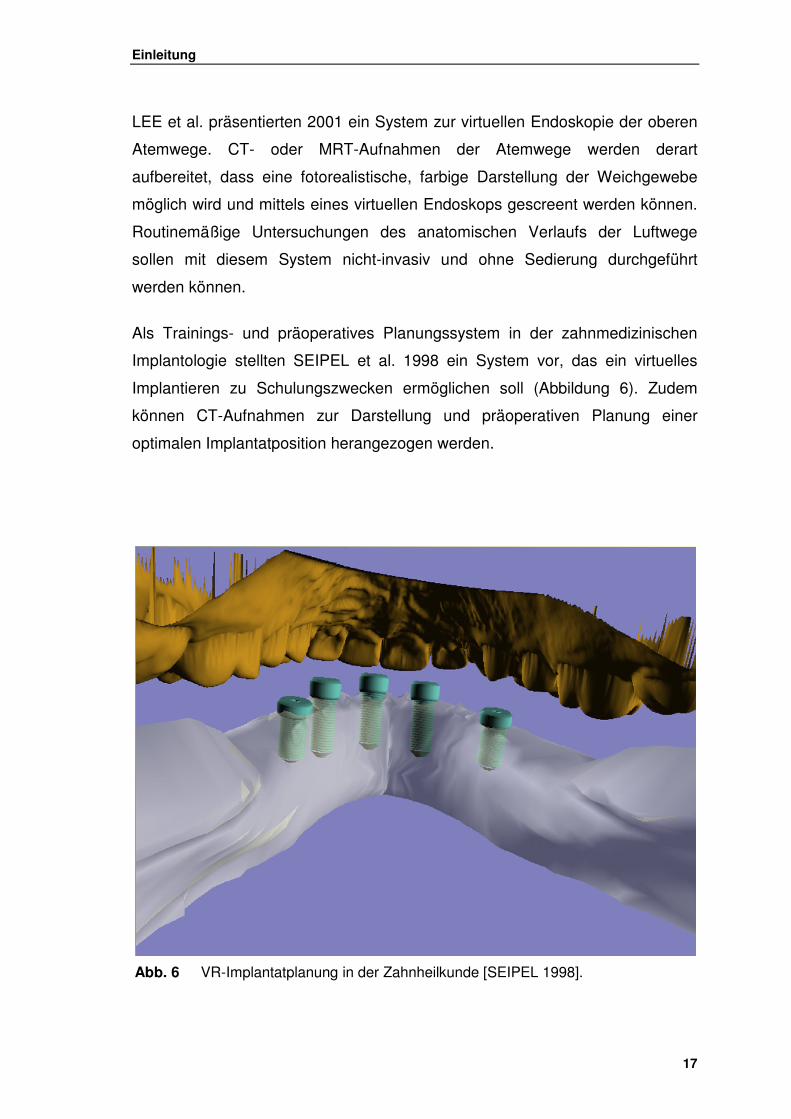
Als Trainings- und präoperatives Planungssystem in der zahnmedizinischen
Implantologie stellten SEIPEL et al. 1998 ein System vor, das ein virtuelles
Implantieren zu Schulungszwecken ermöglichen soll (Abbildung 6). Zudem
können CT-Aufnahmen zur Darstellung und präoperativen Planung einer
optimalen Implantatposition herangezogen werden.
Abb. 6 VR-Implantatplanung in der Zahnheilkunde [SEIPEL 1998].
Einleitung
18
1.4 Virtuelle Realität in der Zahnmedizin
In der modernen Zahnmedizin werden zunehmend computergestützte
Verfahren und Technologien zur Optimierung diagnostischer und
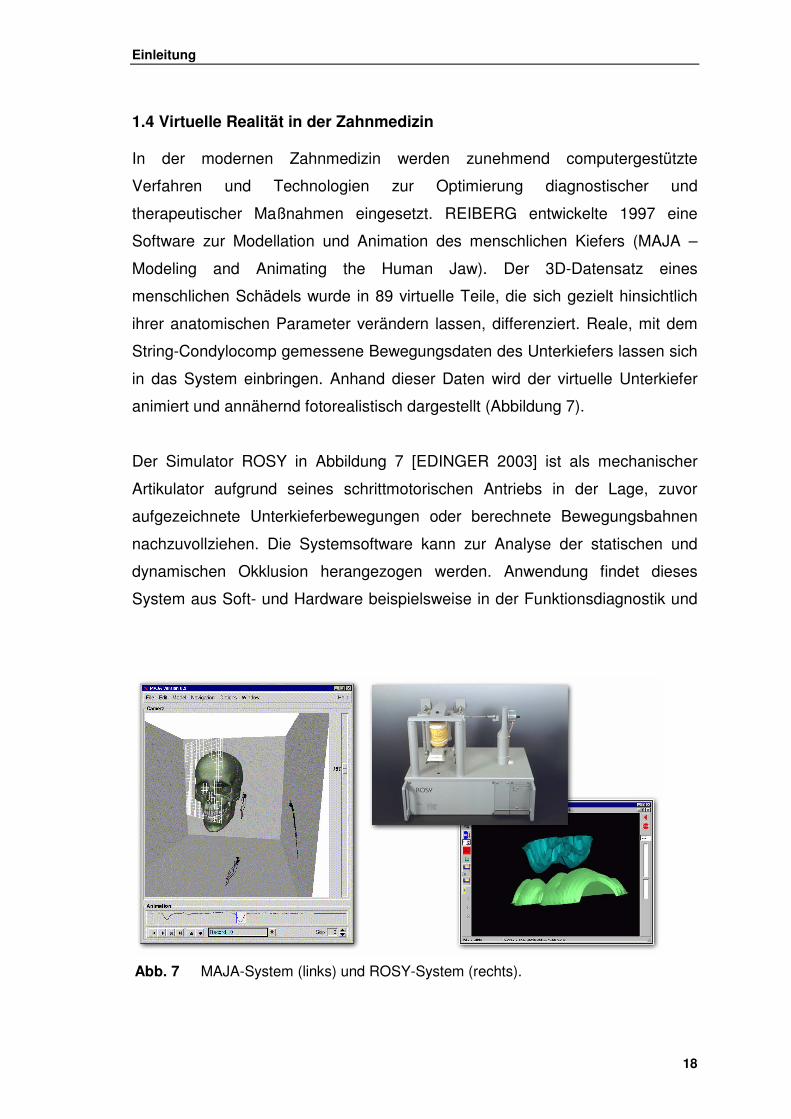
therapeutischer Maßnahmen eingesetzt. REIBERG entwickelte 1997 eine
Software zur Modellation und Animation des menschlichen Kiefers (MAJA –
Modeling and Animating the Human Jaw). Der 3D-Datensatz eines
menschlichen Schädels wurde in 89 virtuelle Teile, die sich gezielt hinsichtlich
ihrer anatomischen Parameter verändern lassen, differenziert. Reale, mit dem
String-Condylocomp gemessene Bewegungsdaten des Unterkiefers lassen sich
in das System einbringen. Anhand dieser Daten wird der virtuelle Unterkiefer
animiert und annähernd fotorealistisch dargestellt (Abbildung 7).
Der Simulator ROSY in Abbildung 7 [EDINGER 2003] ist als mechanischer
Artikulator aufgrund seines schrittmotorischen Antriebs in der Lage, zuvor
aufgezeichnete Unterkieferbewegungen oder berechnete Bewegungsbahnen
nachzuvollziehen. Die Systemsoftware kann zur Analyse der statischen und
dynamischen Okklusion herangezogen werden. Anwendung findet dieses
System aus Soft- und Hardware beispielsweise in der Funktionsdiagnostik und
Abb. 7 MAJA-System (links) und ROSY-System (rechts).
Einleitung
19
in der Herstellung von Okklusionsschienen. Eine Testversion kann im Internet
heruntergeladen werden. 1
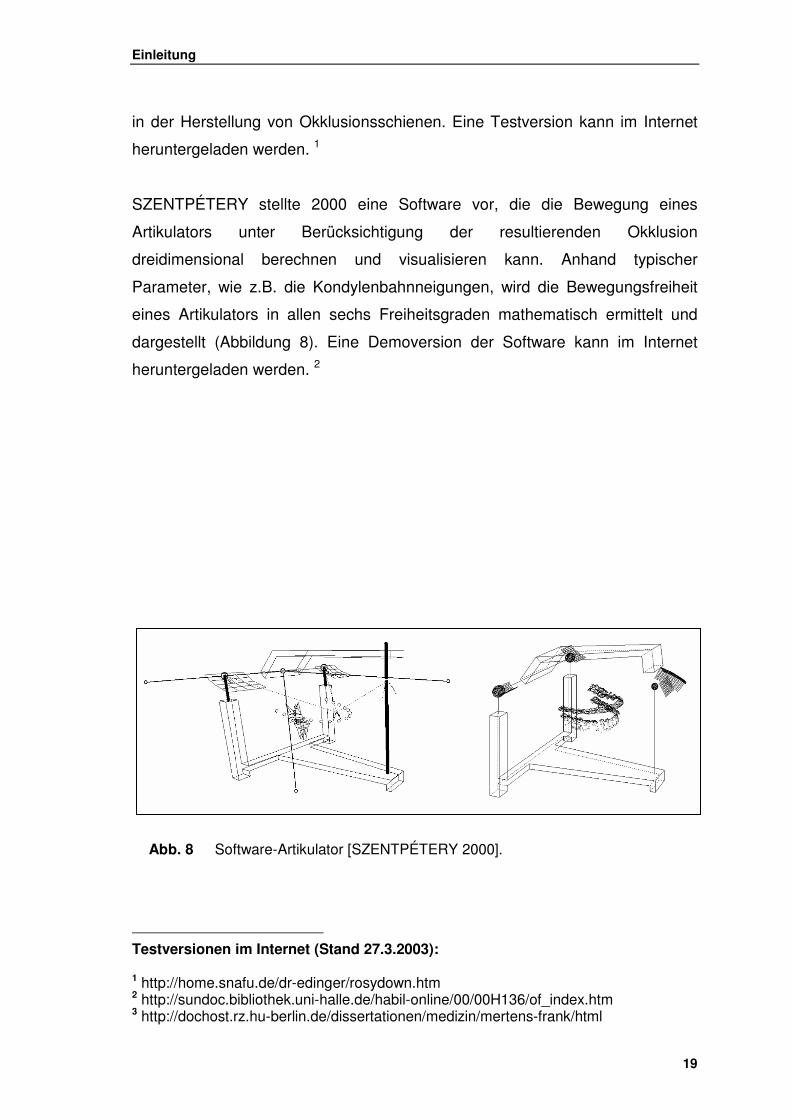
SZENTPÉTERY stellte 2000 eine Software vor, die die Bewegung eines
Artikulators unter Berücksichtigung der resultierenden Okklusion
dreidimensional berechnen und visualisieren kann. Anhand typischer
Parameter, wie z.B. die Kondylenbahnneigungen, wird die Bewegungsfreiheit
eines Artikulators in allen sechs Freiheitsgraden mathematisch ermittelt und
dargestellt (Abbildung 8). Eine Demoversion der Software kann im Internet
heruntergeladen werden. 2
Testversionen im Internet (Stand 27.3.2003): 1 http://home.snafu.de/dr-edinger/rosydown.htm 2 http://sundoc.bibliothek.uni-halle.de/habil-online/00/00H136/of_index.htm 3 http://dochost.rz.hu-berlin.de/dissertationen/medizin/mertens-frank/html
Abb. 8 Software-Artikulator [SZENTPÉTERY 2000].
Einleitung
20
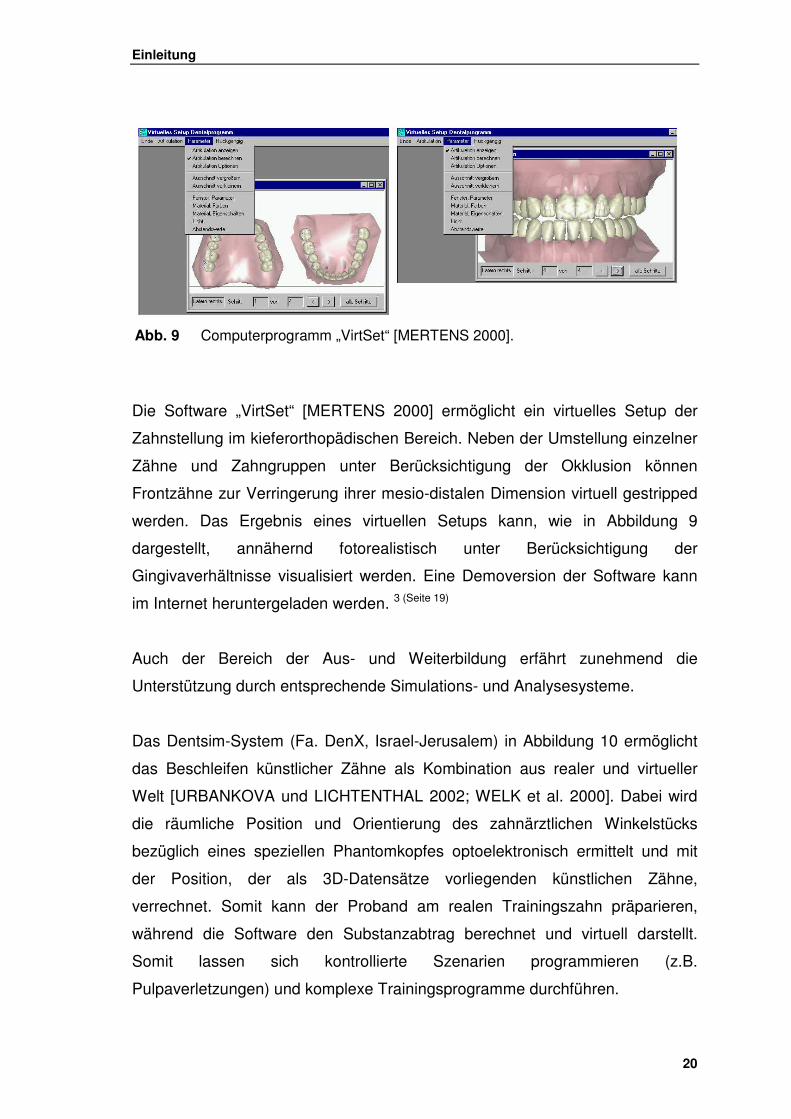
Die Software „VirtSet“ [MERTENS 2000] ermöglicht ein virtuelles Setup der
Zahnstellung im kieferorthopädischen Bereich. Neben der Umstellung einzelner
Zähne und Zahngruppen unter Berücksichtigung der Okklusion können
Frontzähne zur Verringerung ihrer mesio-distalen Dimension virtuell gestripped
werden. Das Ergebnis eines virtuellen Setups kann, wie in Abbildung 9
dargestellt, annähernd fotorealistisch unter Berücksichtigung der
Gingivaverhältnisse visualisiert werden. Eine Demoversion der Software kann
im Internet heruntergeladen werden. 3 (Seite 19)
Auch der Bereich der Aus- und Weiterbildung erfährt zunehmend die
Unterstützung durch entsprechende Simulations- und Analysesysteme.
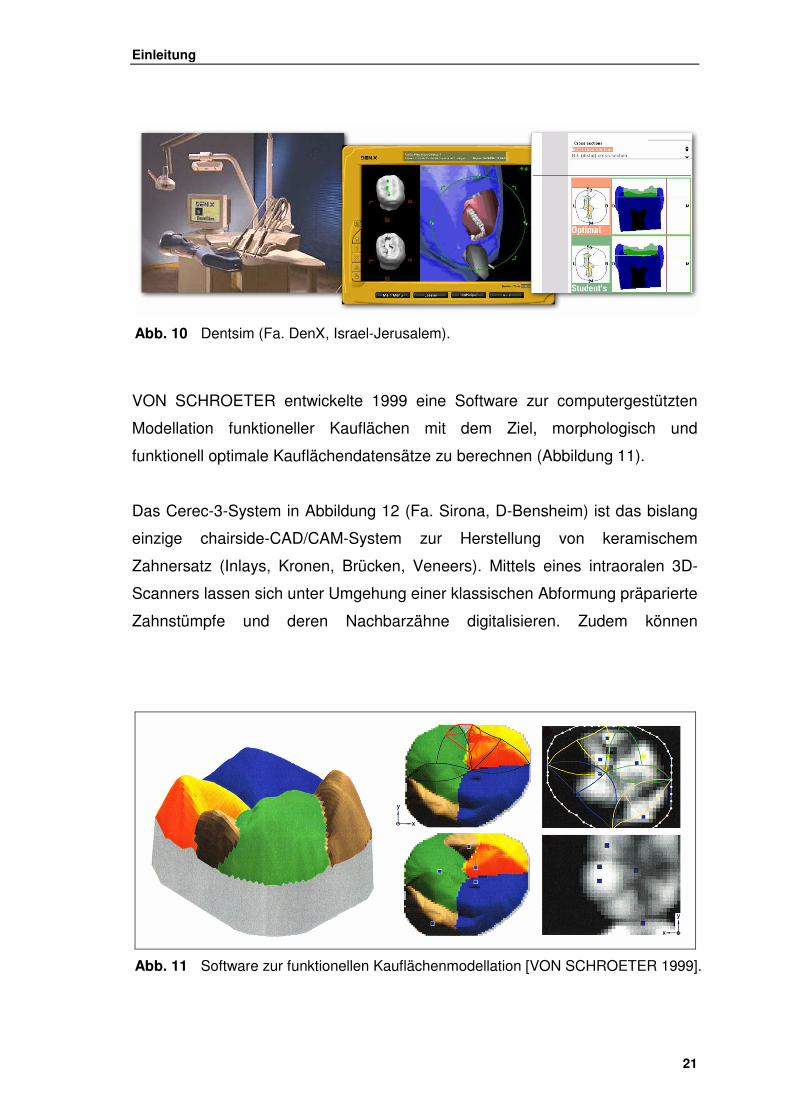
Das Dentsim-System (Fa. DenX, Israel-Jerusalem) in Abbildung 10 ermöglicht
das Beschleifen künstlicher Zähne als Kombination aus realer und virtueller
Welt [URBANKOVA und LICHTENTHAL 2002; WELK et al. 2000]. Dabei wird
die räumliche Position und Orientierung des zahnärztlichen Winkelstücks
bezüglich eines speziellen Phantomkopfes optoelektronisch ermittelt und mit
der Position, der als 3D-Datensätze vorliegenden künstlichen Zähne,
verrechnet. Somit kann der Proband am realen Trainingszahn präparieren,
während die Software den Substanzabtrag berechnet und virtuell darstellt.
Somit lassen sich kontrollierte Szenarien programmieren (z.B.
Pulpaverletzungen) und komplexe Trainingsprogramme durchführen.
Abb. 9 Computerprogramm „VirtSet“ [MERTENS 2000].
Einleitung
21
VON SCHROETER entwickelte 1999 eine Software zur computergestützten
Modellation funktioneller Kauflächen mit dem Ziel, morphologisch und
funktionell optimale Kauflächendatensätze zu berechnen (Abbildung 11).
Das Cerec-3-System in Abbildung 12 (Fa. Sirona, D-Bensheim) ist das bislang
einzige chairside-CAD/CAM-System zur Herstellung von keramischem
Zahnersatz (Inlays, Kronen, Brücken, Veneers). Mittels eines intraoralen 3D-
Scanners lassen sich unter Umgehung einer klassischen Abformung präparierte
Zahnstümpfe und deren Nachbarzähne digitalisieren. Zudem können
Abb. 10 Dentsim (Fa. DenX, Israel-Jerusalem).
Abb. 11 Software zur funktionellen Kauflächenmodellation [VON SCHROETER 1999].

Einleitung
22
herkömmliche Modelle extraoral eingescannt werden. Die Cerec-Software
erlaubt mit wenigen Arbeitsschritten eine individuelle, funktionsoptimierte
Konstruktion des Zahnersatzes am Bildschirm und übergibt den fertigen
Datensatz einer speziellen Fräsmaschine. Aus vorgesinterten Keramikrohlingen
wird innerhalb weniger Minuten der entsprechende Zahnersatz gefräst und
kann unmittelbar eingegliedert werden.
Abb. 12 Cerec 3 (Fa. Sirona, D-Bensheim): Cerec-Computersystem (oben) und Benutzeroberfläche „Cerec-3D“; Cerec-Fräseinheit mit 3D-Laserscanner (unten).
Einleitung
23
2. Fragestellungen
Das Ziel dieser Arbeit war es, einen „Virtuellen Artikulator“ zu entwickeln, also
eine Computersoftware mit deren Hilfe die Berechnung und Visualisierung der
individuellen Unterkieferbewegung möglich wird und auf deren Grundlage die
statische und dynamische Okklusion berechnet und dargestellt werden kann.
Ferner sollte der Virtuelle Artikulator für zukünftige Optimierungen derart
erweitert werden, dass sämtliche, zumindest aber viele Faktoren des
menschlichen Kauorgans berücksichtigt und nachempfunden werden können.
So wäre es beispielsweise denkbar, die Eigenbeweglichkeit der Zähne
messtechnisch zu erfassen und im Virtuellen Artikulator unter simulierter
Belastung auszuwerten.
Die folgenden Fragestellungen sollen im Rahmen der vorliegenden Arbeit
bearbeitet werden:
1. Kann eine Computer-Software entwickelt werden, die zur
Analyse und Simulation eines individuellen (Kau-)
Bewegungsmusters einschließlich der Berechnung und
Visualisierung der statischen und dynamischen Okklusion
herangezogen werden kann?
2. Verfügen die vorhandenen Mess- und Digitalisierungssysteme
zur Erfassung der individuellen Bewegungsmuster und der
Bezahnung über eine ausreichende Genauigkeit und
Auflösung?
3. Lässt sich eine signifikante Übereinstimmung der statischen
und dynamischen Okklusion im virtuellen und mechanischen
Artikulator bzw. zwischen Realität (Probanden) und virtueller
Realität (Virtueller Artikulator) feststellen?
Einleitung
24
3. Konzeption und Entwicklung des Virtuellen Artikulators
Die Entwicklung des Virtuellen Artikulators „DentCAM“ verfolgte mehrere Ziele:
1. Es sollte eine Software entwickelt werden, die es ermöglicht, das
komplexe Zusammenspiel von individueller Kiefergelenkbewegung und
der damit verbundenen dynamischen Okklusion zu visualisieren.
2. Zudem sollten Funktionen implementiert werden, die die erweiterten
Möglichkeiten der Computertechnologie im Vergleich zur herkömmlichen
Funktions- und Okklusionsanalyse verdeutlichen sollen.
3. Zugleich wurde ein Mehrgewinn an Information, Funktionalität und
Bedienkomfort angestrebt.
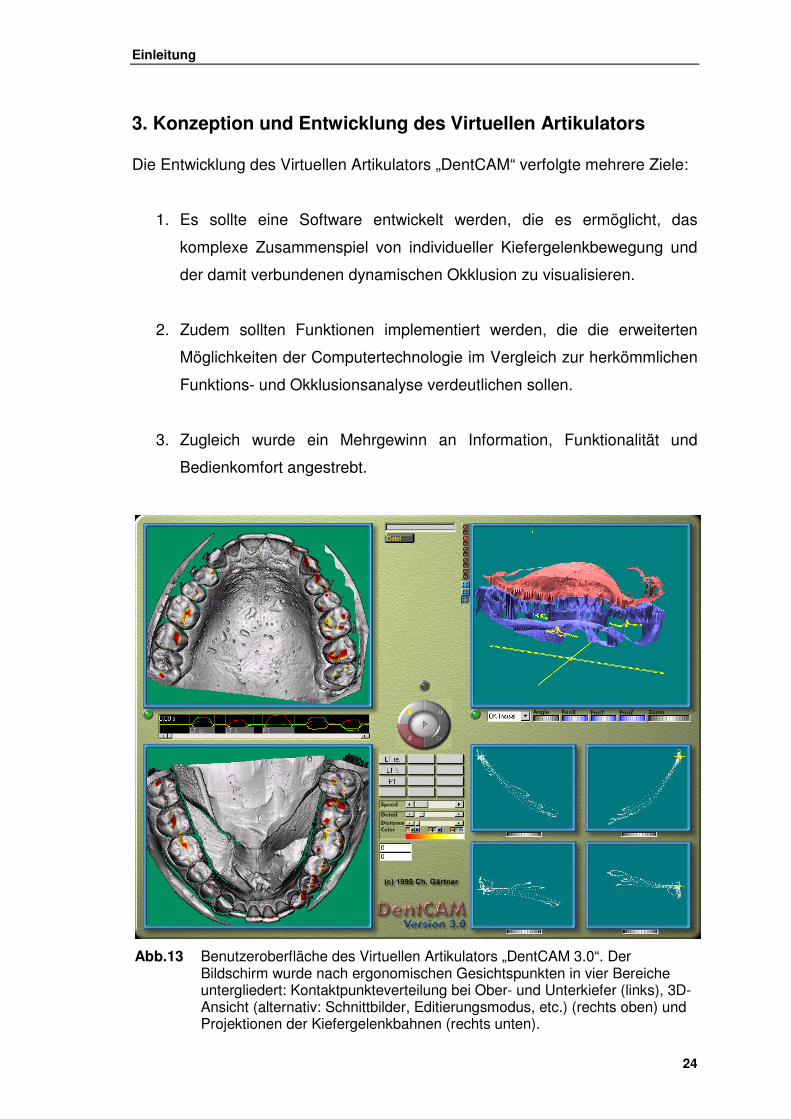
Abb.13 Benutzeroberfläche des Virtuellen Artikulators „DentCAM 3.0“. Der
Bildschirm wurde nach ergonomischen Gesichtspunkten in vier Bereiche untergliedert: Kontaktpunkteverteilung bei Ober- und Unterkiefer (links), 3D-Ansicht (alternativ: Schnittbilder, Editierungsmodus, etc.) (rechts oben) und Projektionen der Kiefergelenkbahnen (rechts unten).
Einleitung
25
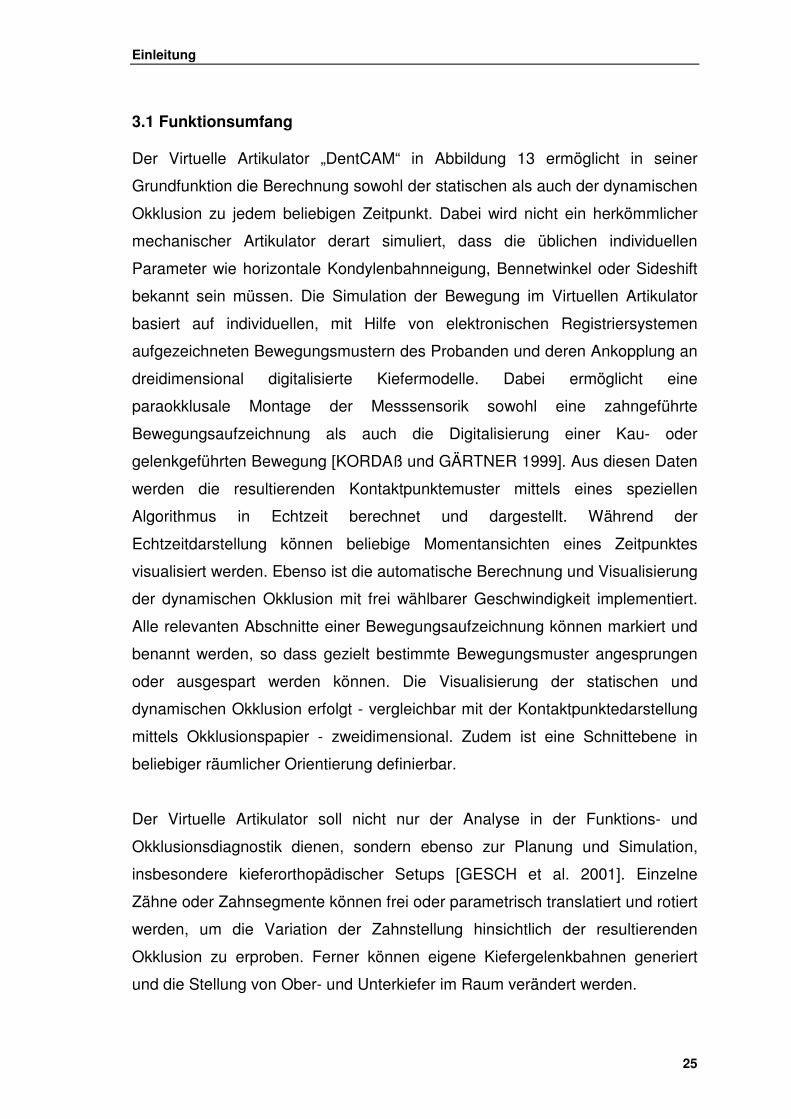
3.1 Funktionsumfang
Der Virtuelle Artikulator „DentCAM“ in Abbildung 13 ermöglicht in seiner
Grundfunktion die Berechnung sowohl der statischen als auch der dynamischen
Okklusion zu jedem beliebigen Zeitpunkt. Dabei wird nicht ein herkömmlicher
mechanischer Artikulator derart simuliert, dass die üblichen individuellen
Parameter wie horizontale Kondylenbahnneigung, Bennetwinkel oder Sideshift
bekannt sein müssen. Die Simulation der Bewegung im Virtuellen Artikulator
basiert auf individuellen, mit Hilfe von elektronischen Registriersystemen
aufgezeichneten Bewegungsmustern des Probanden und deren Ankopplung an
dreidimensional digitalisierte Kiefermodelle. Dabei ermöglicht eine
paraokklusale Montage der Messsensorik sowohl eine zahngeführte
Bewegungsaufzeichnung als auch die Digitalisierung einer Kau- oder
gelenkgeführten Bewegung [KORDAß und GÄRTNER 1999]. Aus diesen Daten
werden die resultierenden Kontaktpunktemuster mittels eines speziellen
Algorithmus in Echtzeit berechnet und dargestellt. Während der
Echtzeitdarstellung können beliebige Momentansichten eines Zeitpunktes
visualisiert werden. Ebenso ist die automatische Berechnung und Visualisierung
der dynamischen Okklusion mit frei wählbarer Geschwindigkeit implementiert.
Alle relevanten Abschnitte einer Bewegungsaufzeichnung können markiert und
benannt werden, so dass gezielt bestimmte Bewegungsmuster angesprungen
oder ausgespart werden können. Die Visualisierung der statischen und
dynamischen Okklusion erfolgt - vergleichbar mit der Kontaktpunktedarstellung
mittels Okklusionspapier - zweidimensional. Zudem ist eine Schnittebene in
beliebiger räumlicher Orientierung definierbar.
Der Virtuelle Artikulator soll nicht nur der Analyse in der Funktions- und
Okklusionsdiagnostik dienen, sondern ebenso zur Planung und Simulation,
insbesondere kieferorthopädischer Setups [GESCH et al. 2001]. Einzelne
Zähne oder Zahnsegmente können frei oder parametrisch translatiert und rotiert
werden, um die Variation der Zahnstellung hinsichtlich der resultierenden
Okklusion zu erproben. Ferner können eigene Kiefergelenkbahnen generiert
und die Stellung von Ober- und Unterkiefer im Raum verändert werden.

Einleitung
26
3.2 Benutzeroberfläche
Im Laufe der Entwicklung wurden verschiedene Benutzeroberflächen erstellt,
um die Ergonomie hinsichtlich der erweiterten Funktionalität zu optimieren.
Abbildung 14 zeigt den Verlauf der Weiterentwicklung der Benutzeroberflächen
des Virtuellen Artikulators „DentCAM“.
Die Benutzeroberfläche von DentCAM in Abbildung 13 setzt sich aus folgenden
vier Ansichtsfenstern zusammen, deren Inhalt synchron zur aktuellen
Zeitposition in der Bewegungsaufzeichnung in Echtzeit aktualisiert wird:
• Ein 3D-Rendermodul, in dem die okkludierenden Zahnreihen als 3D-
Objekte sichtbar werden, für beliebigen Ansichten gedreht, gewendet
und vergrößert werden und in Bewegung gesetzt werden können
(Abbildung 15, links).
• Zwei Okklusionsmodule für Ober- und Unterkiefer, in dem
Kontaktbeziehungen in statischer und dynamischer Okklusion sichtbar
werden und in zeitlich-räumlicher Zuordnung über die Kauflächen
„wandern“ können (Abbildung 15, Mitte).
• Ein Kiefergelenkmodul, das die Bewegungen der Gelenkbahnen in
transversaler und sagittaler Projektion darstellt und sich zur Analyse der
Wechselbeziehungen zwischen Gelenk- und Zahnführung eignet
(Abbildung 15, rechts).
Abb. 14 Weiterentwicklung der Benutzeroberflächen des Virtuellen Artikulators
„DentCAM 3.0“: (v.l.n.r.) MDI-Oberfläche (Multi-Document-Interface) 1998, 4-Fenster-Vollbildansicht 1999 und überarbeitetes Design 2000.
Einleitung
27
Abb. 16 Screenshot der Software
DentCAM (Erläuterungen im Text).
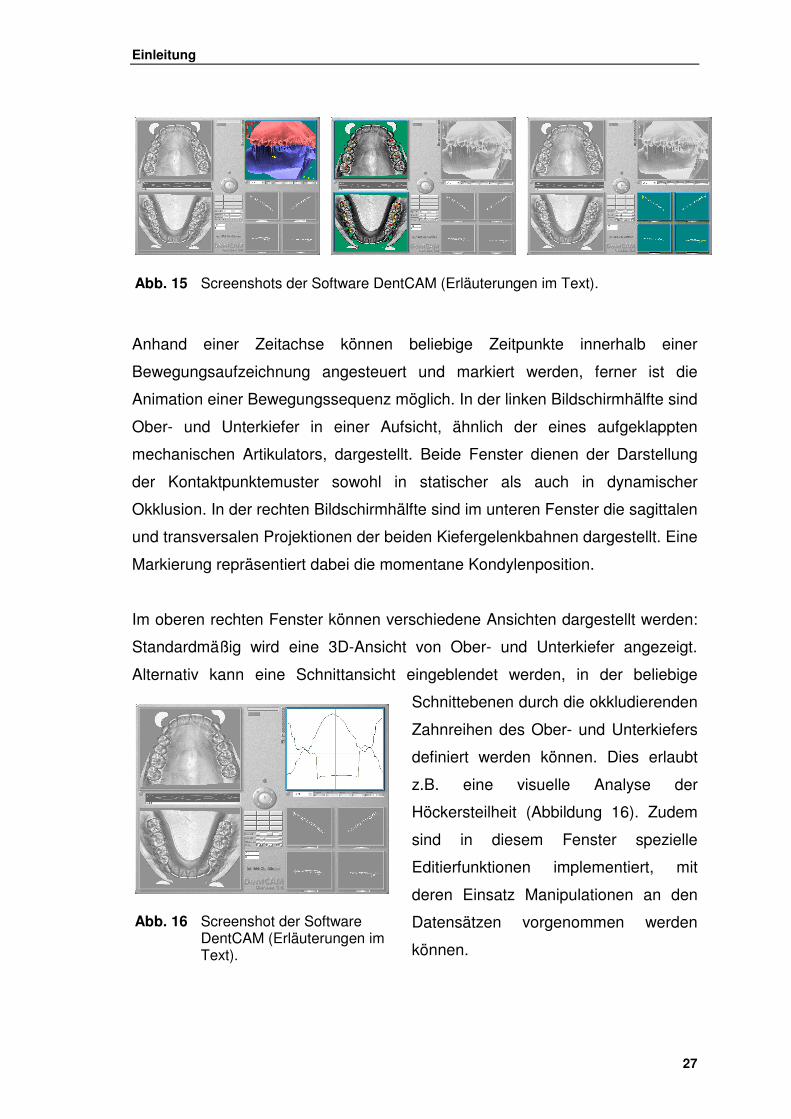
Anhand einer Zeitachse können beliebige Zeitpunkte innerhalb einer
Bewegungsaufzeichnung angesteuert und markiert werden, ferner ist die
Animation einer Bewegungssequenz möglich. In der linken Bildschirmhälfte sind
Ober- und Unterkiefer in einer Aufsicht, ähnlich der eines aufgeklappten
mechanischen Artikulators, dargestellt. Beide Fenster dienen der Darstellung
der Kontaktpunktemuster sowohl in statischer als auch in dynamischer
Okklusion. In der rechten Bildschirmhälfte sind im unteren Fenster die sagittalen
und transversalen Projektionen der beiden Kiefergelenkbahnen dargestellt. Eine
Markierung repräsentiert dabei die momentane Kondylenposition.
Im oberen rechten Fenster können verschiedene Ansichten dargestellt werden:
Standardmäßig wird eine 3D-Ansicht von Ober- und Unterkiefer angezeigt.
Alternativ kann eine Schnittansicht eingeblendet werden, in der beliebige
Schnittebenen durch die okkludierenden
Zahnreihen des Ober- und Unterkiefers
definiert werden können. Dies erlaubt
z.B. eine visuelle Analyse der
Höckersteilheit (Abbildung 16). Zudem
sind in diesem Fenster spezielle
Editierfunktionen implementiert, mit
deren Einsatz Manipulationen an den
Datensätzen vorgenommen werden
können.
Abb. 15 Screenshots der Software DentCAM (Erläuterungen im Text).
Einleitung
28
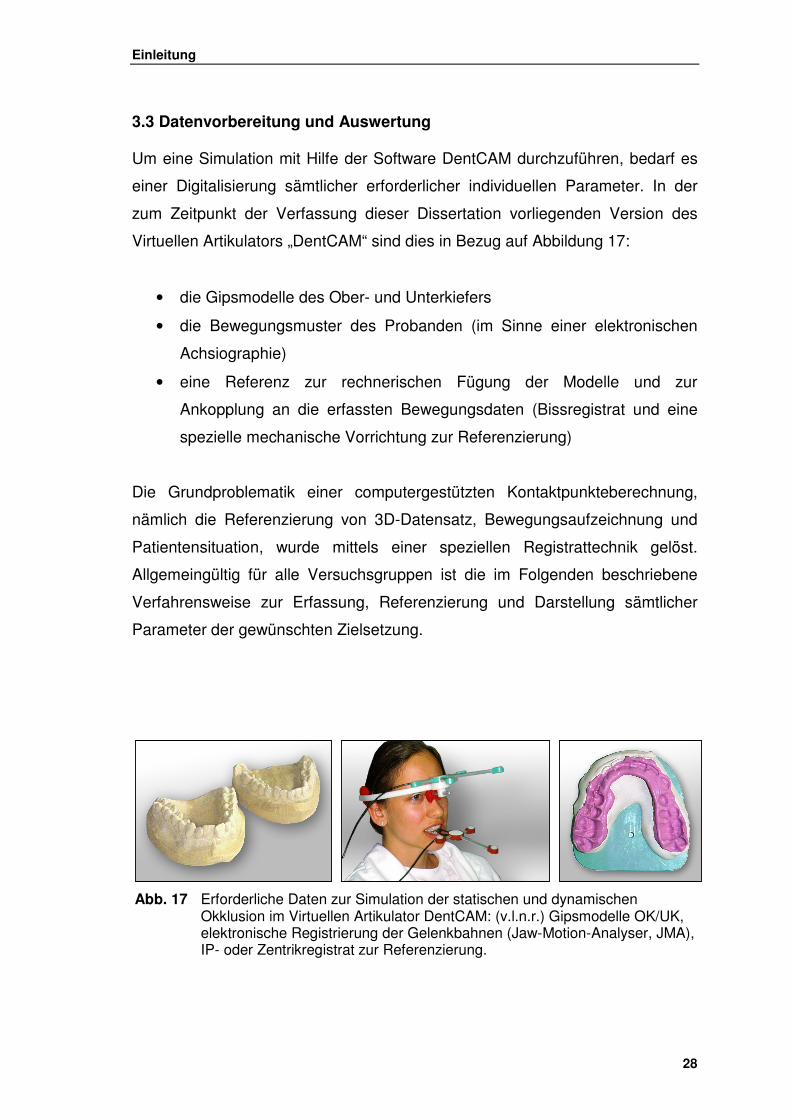
3.3 Datenvorbereitung und Auswertung
Um eine Simulation mit Hilfe der Software DentCAM durchzuführen, bedarf es
einer Digitalisierung sämtlicher erforderlicher individuellen Parameter. In der
zum Zeitpunkt der Verfassung dieser Dissertation vorliegenden Version des
Virtuellen Artikulators „DentCAM“ sind dies in Bezug auf Abbildung 17:
• die Gipsmodelle des Ober- und Unterkiefers
• die Bewegungsmuster des Probanden (im Sinne einer elektronischen
Achsiographie)
• eine Referenz zur rechnerischen Fügung der Modelle und zur
Ankopplung an die erfassten Bewegungsdaten (Bissregistrat und eine
spezielle mechanische Vorrichtung zur Referenzierung)
Die Grundproblematik einer computergestützten Kontaktpunkteberechnung,
nämlich die Referenzierung von 3D-Datensatz, Bewegungsaufzeichnung und
Patientensituation, wurde mittels einer speziellen Registrattechnik gelöst.
Allgemeingültig für alle Versuchsgruppen ist die im Folgenden beschriebene
Verfahrensweise zur Erfassung, Referenzierung und Darstellung sämtlicher
Parameter der gewünschten Zielsetzung.
Abb. 17 Erforderliche Daten zur Simulation der statischen und dynamischen
Okklusion im Virtuellen Artikulator DentCAM: (v.l.n.r.) Gipsmodelle OK/UK, elektronische Registrierung der Gelenkbahnen (Jaw-Motion-Analyser, JMA), IP- oder Zentrikregistrat zur Referenzierung.
Einleitung
29
Zunächst wurden Gipsmodelle von Ober- und Unterkiefer angefertigt und
separat eingescannt. Eine zentrische Fügung der Modelle im Artikulator war
nicht erforderlich, da die Zuordnung rechnerisch erfolgte. Hierzu wurde ein
habituelles Bissregistrat mittels einer 3D-laserscannfähigen Paste auf
Silikonbasis (Futar-D, Fa. Kettenbach, D-Eschenburg) am Probanden
genommen. Durch vestibuläres Ausstreichen des Überschusses im Oberkiefer
wurde nach einer Aushärtephase von 2 Minuten sichergestellt, dass das
Registrat bei der Disklusion der Zähne an den Oberkieferzähnen haften blieb.
Anschließend wurde das Registrat mittels einer mit Abformgips beschickten
Referenzplatte fixiert, um einerseits einer Verwindung des empfindlichen
Registrats vorzubeugen und andererseits eine rechnerische Fügung durch ein
„Matchen“ des Unterkieferdatensatzes in das Gipspositiv zu ermöglichen
(Abbildung 18 a). Die Referenzplatte war auf der dem Registrat abgewandten
Seite mit drei triangulär angeordneten Vertiefungen versehen, die noch im
Mund des Patienten mit der Pointerspitze des JMA-Systems angewählt und als
Referenz für die Bewegungsaufzeichnung definiert wurden (Abbildung 18 a).
Nach Entnahme des Registrats wurde dieses auf ein mit Futar-D präzisiertes
Dreibein fixiert und in die Objekthalterung des 3D-Laserscanners eingebaut
(Abbildung 18 b). Das Einscannen des Registrates erfolgte in drei Schichten:
Zunächst wurden die negativen Oberkieferzahnimpressionen im
Registratmaterial gescannt (Abbildung 18 b) und das Material anschließend
entfernt (Abbildung 18 c).
Die nunmehr freiliegenden Unterkieferzahnpositive aus Abformgips wurden
ohne Entnahme des Systems aus der Objekthalterung digitalisiert und
schließlich wurden nach Abnehmen der Registratplatte die 3 Spitzen des
Dreibeins als Korrelat zu den Vertiefungen an der Registratplatte eingescannt
(Abbildung 18, d). Durch diese Vorgehensweise wurde eine Referenzierung des
Negativ- und Positivregistrats mit den Referenzpunkten des JMA-Datensatzes
erreicht. Mit Hilfe des Matchingprogramms des 3D-Laserscannsystems
(Match3D, Fa. Willytec, D-München) wurden nun die 3D-Datensätze des Ober-
und Unterkiefers in die Datensätze des Registrates rechnerisch gefügt.
Einleitung
30
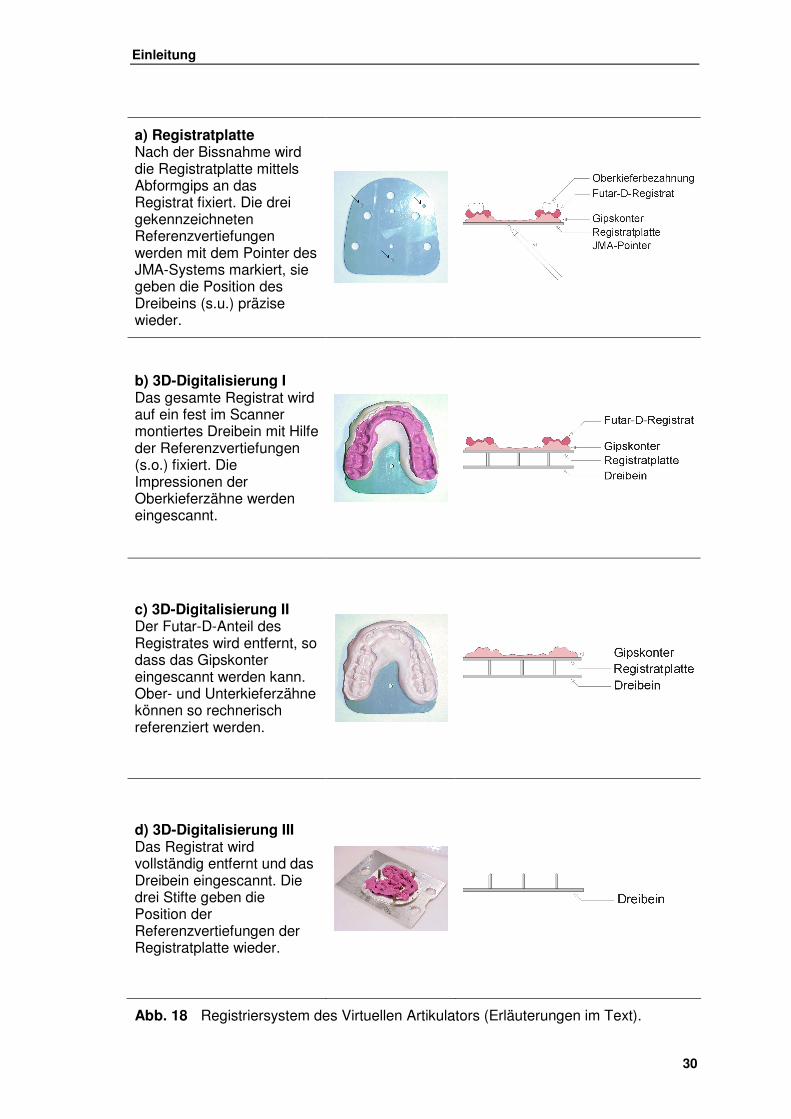
a) Registratplatte Nach der Bissnahme wird die Registratplatte mittels Abformgips an das Registrat fixiert. Die drei gekennzeichneten Referenzvertiefungen werden mit dem Pointer des JMA-Systems markiert, sie geben die Position des Dreibeins (s.u.) präzise wieder.
b) 3D-Digitalisierung I Das gesamte Registrat wird auf ein fest im Scanner montiertes Dreibein mit Hilfe der Referenzvertiefungen (s.o.) fixiert. Die Impressionen der Oberkieferzähne werden eingescannt.
c) 3D-Digitalisierung II Der Futar-D-Anteil des Registrates wird entfernt, so dass das Gipskonter eingescannt werden kann. Ober- und Unterkieferzähne können so rechnerisch referenziert werden.
d) 3D-Digitalisierung III Das Registrat wird vollständig entfernt und das Dreibein eingescannt. Die drei Stifte geben die Position der Referenzvertiefungen der Registratplatte wieder.
Abb. 18 Registriersystem des Virtuellen Artikulators (Erläuterungen im Text).
Material und Methode
31
4. Material und Methode
Folgende Materialen und Messgeräte wurden hinsichtlich deren Eignung zur
Verwendung als Datenschnittstelle zum Virtuellen Artikulator „DentCAM“
untersucht:
• Untersuchung der „Eingabekomponenten“:
o Laserscan-3D (Fa. Willytec, D-München):
� Klasse-I-Gips
� Klasse-III-Gips
� Klasse-IV-Gips
� Futar-D-Occlusion (Fa. Kettenbach, D-Eschenburg)
o Jaw-Motion-Analyser JMA (Fa. Zebris, D-Isny):
� adaptiert in eine XYZ-Fräsmaschine (Fa. Isel, D-Eiterfeld)
Zur Untersuchung der Genauigkeit, der Reliabilität und der Reproduzierbarkeit
des Gesamtsystems Virtueller Artikulator „DentCAM“ wurden folgende
Versuchsgruppen evaluiert:
• Untersuchungen des Gesamtsystems:
o Prüfmessstand Simulator
o Artikulatoruntersuchung
o Probandenuntersuchung
Material und Methode
32
4.1 Vorversuche
4.1.1 3D-Laserscanner
Um dem Virtuellen Artikulator Zugang zu den Messdaten und Modellen zu
verschaffen, müssen zunächst sämtliche Modelle und Registrate digitalisiert
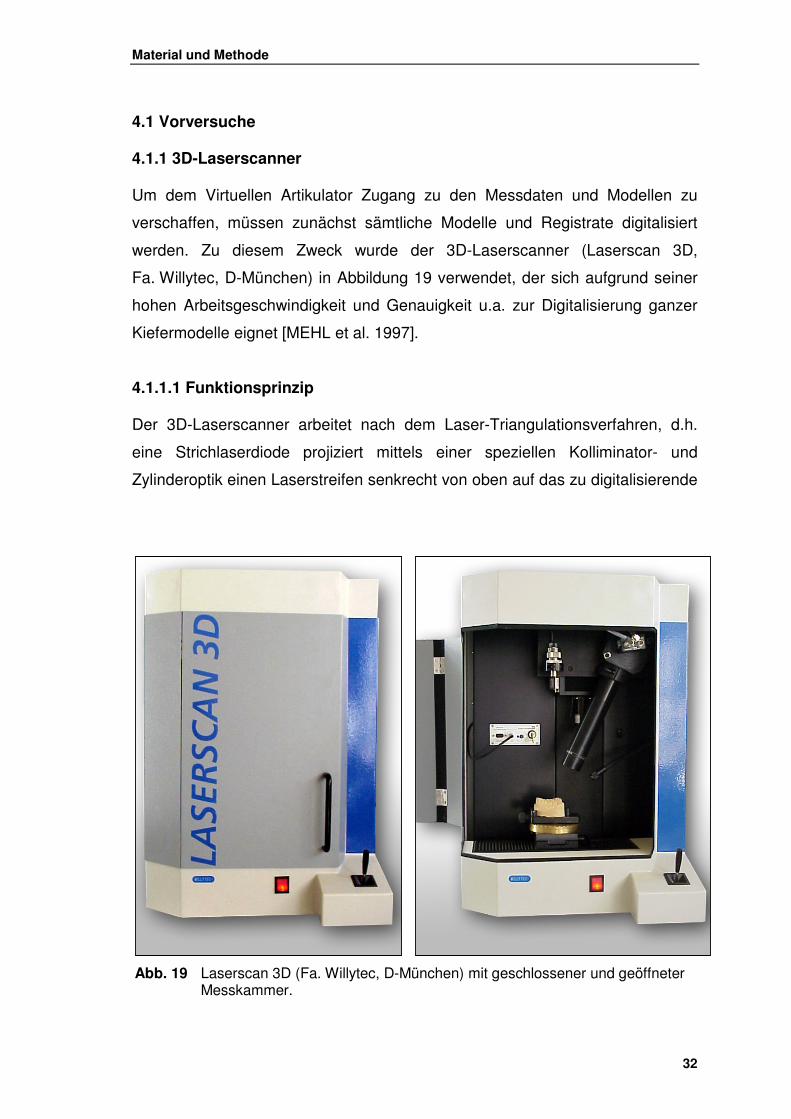
werden. Zu diesem Zweck wurde der 3D-Laserscanner (Laserscan 3D,
Fa. Willytec, D-München) in Abbildung 19 verwendet, der sich aufgrund seiner
hohen Arbeitsgeschwindigkeit und Genauigkeit u.a. zur Digitalisierung ganzer
Kiefermodelle eignet [MEHL et al. 1997].
4.1.1.1 Funktionsprinzip
Der 3D-Laserscanner arbeitet nach dem Laser-Triangulationsverfahren, d.h.
eine Strichlaserdiode projiziert mittels einer speziellen Kolliminator- und
Zylinderoptik einen Laserstreifen senkrecht von oben auf das zu digitalisierende
Abb. 19 Laserscan 3D (Fa. Willytec, D-München) mit geschlossener und geöffneter
Messkammer.
Material und Methode
33
Objekt. Eine CCD-Videokamera erfasst die Reflexion des an der
Objektoberfläche reflektierten Laserstrahls und führt ihre Signale einer
Auswertelektronik zu. Die aufbereiteten Bilddaten sind der Scannersoftware in
Form einer digitalen Matrix aus Helligkeitswerten zugänglich.
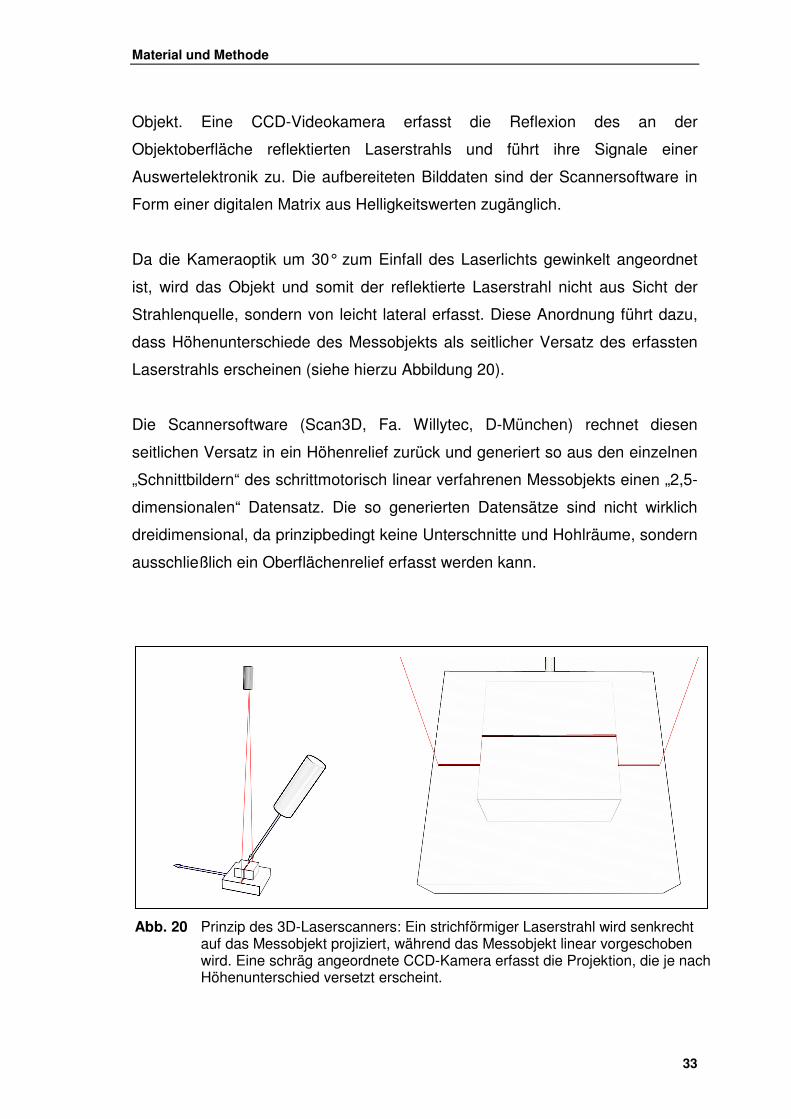
Da die Kameraoptik um 30° zum Einfall des Laserlichts gewinkelt angeordnet
ist, wird das Objekt und somit der reflektierte Laserstrahl nicht aus Sicht der
Strahlenquelle, sondern von leicht lateral erfasst. Diese Anordnung führt dazu,
dass Höhenunterschiede des Messobjekts als seitlicher Versatz des erfassten
Laserstrahls erscheinen (siehe hierzu Abbildung 20).
Die Scannersoftware (Scan3D, Fa. Willytec, D-München) rechnet diesen
seitlichen Versatz in ein Höhenrelief zurück und generiert so aus den einzelnen
„Schnittbildern“ des schrittmotorisch linear verfahrenen Messobjekts einen „2,5-
dimensionalen“ Datensatz. Die so generierten Datensätze sind nicht wirklich
dreidimensional, da prinzipbedingt keine Unterschnitte und Hohlräume, sondern
ausschließlich ein Oberflächenrelief erfasst werden kann.
Abb. 20 Prinzip des 3D-Laserscanners: Ein strichförmiger Laserstrahl wird senkrecht
auf das Messobjekt projiziert, während das Messobjekt linear vorgeschoben wird. Eine schräg angeordnete CCD-Kamera erfasst die Projektion, die je nach Höhenunterschied versetzt erscheint.
Material und Methode
34
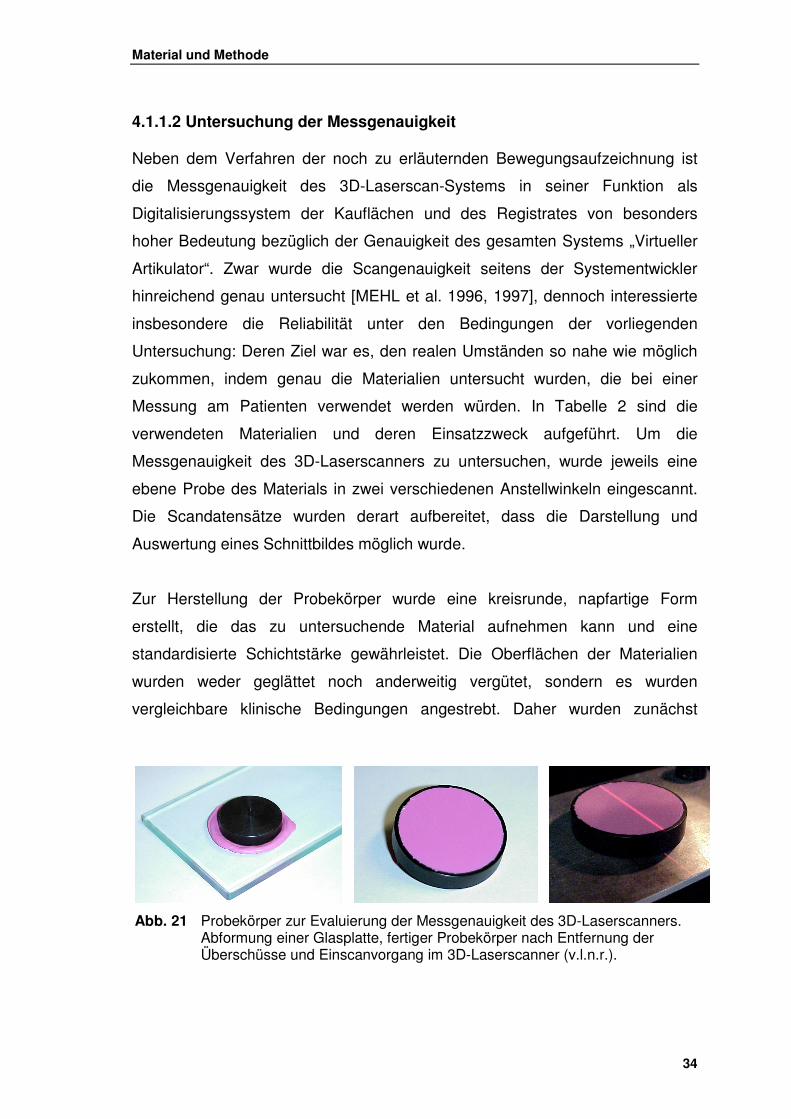
4.1.1.2 Untersuchung der Messgenauigkeit
Neben dem Verfahren der noch zu erläuternden Bewegungsaufzeichnung ist
die Messgenauigkeit des 3D-Laserscan-Systems in seiner Funktion als
Digitalisierungssystem der Kauflächen und des Registrates von besonders
hoher Bedeutung bezüglich der Genauigkeit des gesamten Systems „Virtueller
Artikulator“. Zwar wurde die Scangenauigkeit seitens der Systementwickler
hinreichend genau untersucht [MEHL et al. 1996, 1997], dennoch interessierte
insbesondere die Reliabilität unter den Bedingungen der vorliegenden
Untersuchung: Deren Ziel war es, den realen Umständen so nahe wie möglich
zukommen, indem genau die Materialien untersucht wurden, die bei einer
Messung am Patienten verwendet werden würden. In Tabelle 2 sind die
verwendeten Materialien und deren Einsatzzweck aufgeführt. Um die
Messgenauigkeit des 3D-Laserscanners zu untersuchen, wurde jeweils eine
ebene Probe des Materials in zwei verschiedenen Anstellwinkeln eingescannt.
Die Scandatensätze wurden derart aufbereitet, dass die Darstellung und
Auswertung eines Schnittbildes möglich wurde.
Zur Herstellung der Probekörper wurde eine kreisrunde, napfartige Form
erstellt, die das zu untersuchende Material aufnehmen kann und eine
standardisierte Schichtstärke gewährleistet. Die Oberflächen der Materialien
wurden weder geglättet noch anderweitig vergütet, sondern es wurden
vergleichbare klinische Bedingungen angestrebt. Daher wurden zunächst
Abb. 21 Probekörper zur Evaluierung der Messgenauigkeit des 3D-Laserscanners.
Abformung einer Glasplatte, fertiger Probekörper nach Entfernung der Überschüsse und Einscanvorgang im 3D-Laserscanner (v.l.n.r.).
Material und Methode
35
Alginatabformungen einer Glasplatte genommen, die mit den verwendeten
Gipsen ausgegossen wurden. Die Registrierung erfolgte hingegen unmittelbar
auf der Glasplatte (siehe hierzu Abbildung 21).
Als Ersatz für reale Zähne wurde eine Glasplatte gewählt, um der
Oberflächenrautiefe des Zahnschmelzes nahe zu kommen und um eine
definierbare Ebene mit in diesen Dimensionen vernachlässigbarer Rautiefe
vermessen zu können. Die so hergestellten Probekörper wurden jeweils zehn
Mal mit zwei verschiedenen Neigungswinkeln eingescannt. Zunächst wurden
die Proben parallel zur Nullebene des Scanners und in der Folge in einem
Winkel von 45° ausgerichtet.
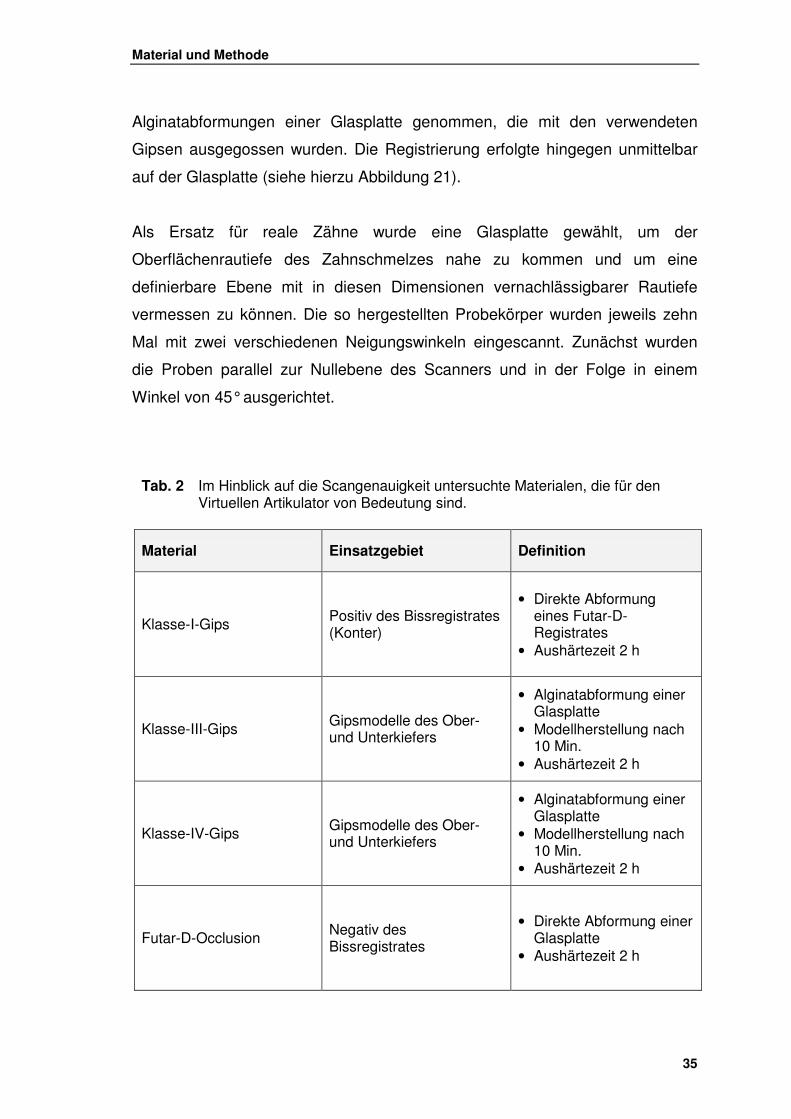
Tab. 2 Im Hinblick auf die Scangenauigkeit untersuchte Materialen, die für den
Virtuellen Artikulator von Bedeutung sind.
Material Einsatzgebiet Definition
Klasse-I-Gips Positiv des Bissregistrates (Konter)
• Direkte Abformung eines Futar-D-Registrates
• Aushärtezeit 2 h
Klasse-III-Gips Gipsmodelle des Ober- und Unterkiefers
• Alginatabformung einer Glasplatte
• Modellherstellung nach 10 Min.
• Aushärtezeit 2 h
Klasse-IV-Gips Gipsmodelle des Ober- und Unterkiefers
• Alginatabformung einer Glasplatte
• Modellherstellung nach 10 Min.
• Aushärtezeit 2 h
Futar-D-Occlusion Negativ des Bissregistrates
• Direkte Abformung einer Glasplatte
• Aushärtezeit 2 h
Material und Methode
36
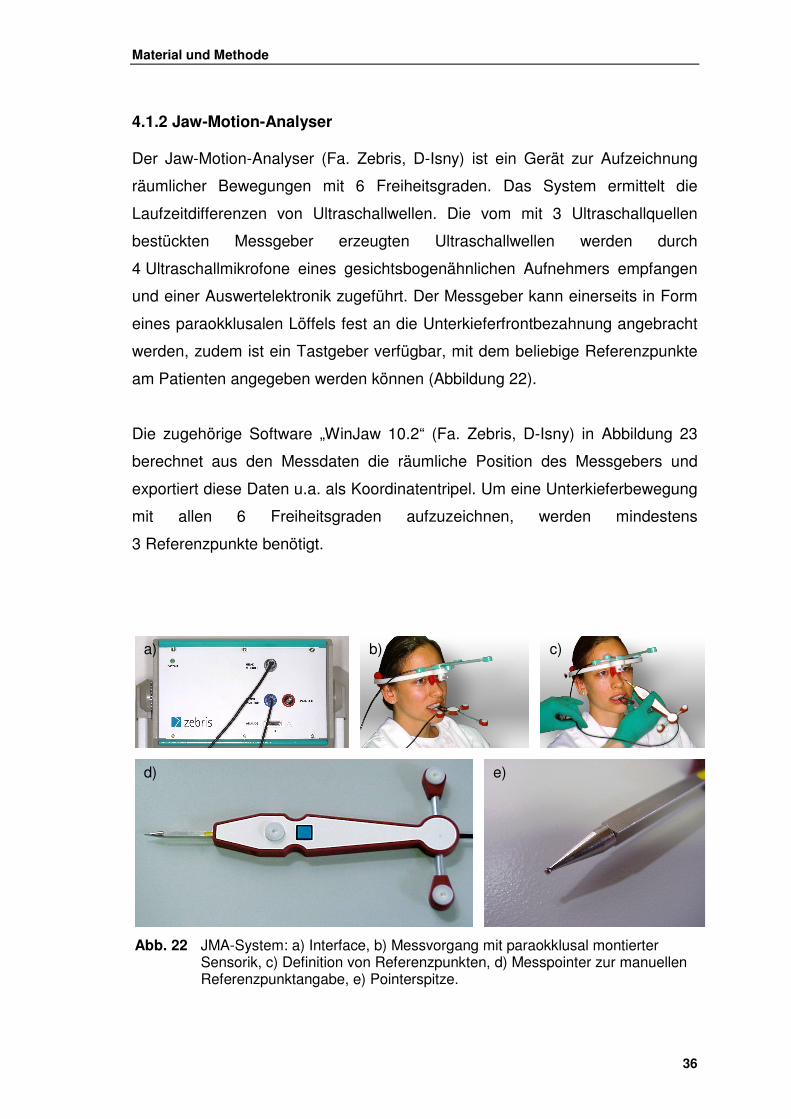
4.1.2 Jaw-Motion-Analyser
Der Jaw-Motion-Analyser (Fa. Zebris, D-Isny) ist ein Gerät zur Aufzeichnung
räumlicher Bewegungen mit 6 Freiheitsgraden. Das System ermittelt die
Laufzeitdifferenzen von Ultraschallwellen. Die vom mit 3 Ultraschallquellen
bestückten Messgeber erzeugten Ultraschallwellen werden durch
4 Ultraschallmikrofone eines gesichtsbogenähnlichen Aufnehmers empfangen
und einer Auswertelektronik zugeführt. Der Messgeber kann einerseits in Form
eines paraokklusalen Löffels fest an die Unterkieferfrontbezahnung angebracht
werden, zudem ist ein Tastgeber verfügbar, mit dem beliebige Referenzpunkte
am Patienten angegeben werden können (Abbildung 22).
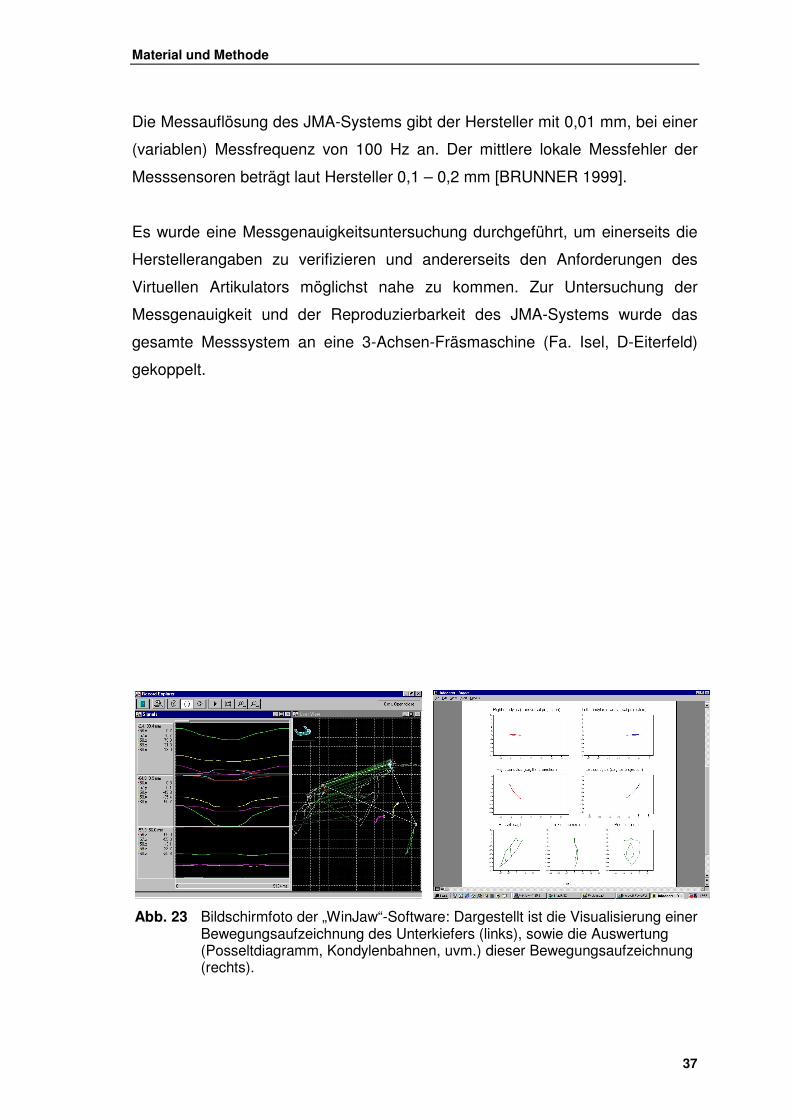
Die zugehörige Software „WinJaw 10.2“ (Fa. Zebris, D-Isny) in Abbildung 23
berechnet aus den Messdaten die räumliche Position des Messgebers und
exportiert diese Daten u.a. als Koordinatentripel. Um eine Unterkieferbewegung
mit allen 6 Freiheitsgraden aufzuzeichnen, werden mindestens
3 Referenzpunkte benötigt.
a) b) c)
d) e)
Abb. 22 JMA-System: a) Interface, b) Messvorgang mit paraokklusal montierter Sensorik, c) Definition von Referenzpunkten, d) Messpointer zur manuellen Referenzpunktangabe, e) Pointerspitze.
Material und Methode
37
Die Messauflösung des JMA-Systems gibt der Hersteller mit 0,01 mm, bei einer
(variablen) Messfrequenz von 100 Hz an. Der mittlere lokale Messfehler der
Messsensoren beträgt laut Hersteller 0,1 – 0,2 mm [BRUNNER 1999].
Es wurde eine Messgenauigkeitsuntersuchung durchgeführt, um einerseits die
Herstellerangaben zu verifizieren und andererseits den Anforderungen des
Virtuellen Artikulators möglichst nahe zu kommen. Zur Untersuchung der
Messgenauigkeit und der Reproduzierbarkeit des JMA-Systems wurde das
gesamte Messsystem an eine 3-Achsen-Fräsmaschine (Fa. Isel, D-Eiterfeld)
gekoppelt.
Abb. 23 Bildschirmfoto der „WinJaw“-Software: Dargestellt ist die Visualisierung einer
Bewegungsaufzeichnung des Unterkiefers (links), sowie die Auswertung (Posseltdiagramm, Kondylenbahnen, uvm.) dieser Bewegungsaufzeichnung (rechts).
Material und Methode
38
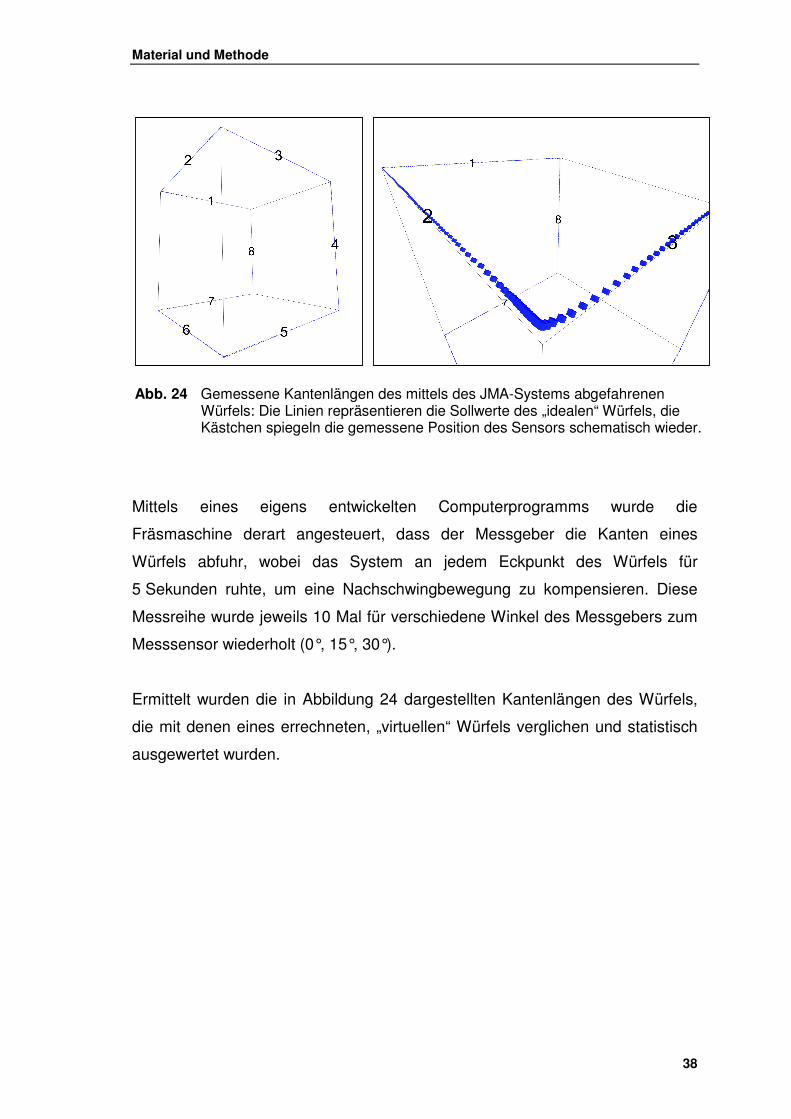
Mittels eines eigens entwickelten Computerprogramms wurde die
Fräsmaschine derart angesteuert, dass der Messgeber die Kanten eines
Würfels abfuhr, wobei das System an jedem Eckpunkt des Würfels für
5 Sekunden ruhte, um eine Nachschwingbewegung zu kompensieren. Diese
Messreihe wurde jeweils 10 Mal für verschiedene Winkel des Messgebers zum
Messsensor wiederholt (0°, 15°, 30°).
Ermittelt wurden die in Abbildung 24 dargestellten Kantenlängen des Würfels,
die mit denen eines errechneten, „virtuellen“ Würfels verglichen und statistisch
ausgewertet wurden.
Abb. 24 Gemessene Kantenlängen des mittels des JMA-Systems abgefahrenen
Würfels: Die Linien repräsentieren die Sollwerte des „idealen“ Würfels, die Kästchen spiegeln die gemessene Position des Sensors schematisch wieder.
Material und Methode
39
4.2 Versuchsgruppen
Zur Ermittlung der Genauigkeit und der Reproduzierbarkeit des Virtuellen
Artikulators wurden drei Versuchsgruppen untersucht und die Ergebnisse einer
statistischen Auswertung zugeführt.
• Prüfmessstand Simulator (Messgenauigkeit)
Als eine Art „künstlicher Proband“ wurde ein Simulator aufgebaut, in dem
mittels eines standardisierten Prüfkörpers die Bewegungsaufzeichnung
nachvollzogen werden sollte. Das Ziel dieser Untersuchung war es, die
Messgenauigkeit des Gesamtsystems „Virtueller Artikulator“ zu ermitteln.
• Artikulatoruntersuchung (Validierung)
10 Modellfälle wurden mittelwertig in einen mechanischen Artikulator
eingebaut. Einige Gelenkparameter wurden gezielt derart eingestellt,
dass beispielsweise eine deutliche Hyperbalance im Molarengebiet
resultierte. Anhand der Vergleiche zwischen den Kontaktpunktemustern
im mechanischen und im Virtuellen Artikulator wurde die
Übereinstimmung der Ergebnisse beider Systeme ermittelt.
• Probandenuntersuchung (Reproduzierbarkeit)
8 Probanden wurden von je 3 Untersuchern zu je 2 verschiedenen
Zeitpunkten vermessen und anhand dieser Messdaten die inter- und
intraindividuelle Übereinstimmung der Kontaktpunktemuster ermittelt.
Material und Methode
40
4.2.1 Prüfmessstand Simulator
Die Ermittlung der Messgenauigkeiten der einzelnen Komponenten lässt nur
bedingt eine Aussage über die Genauigkeit des Gesamtsystems zu. Daher
wurde zur Evaluation ein Simulator aufgebaut, der bedingt durch seinen Aufbau
das methodische Vorgehen wie am Patienten vorgesehen nachvollzieht.
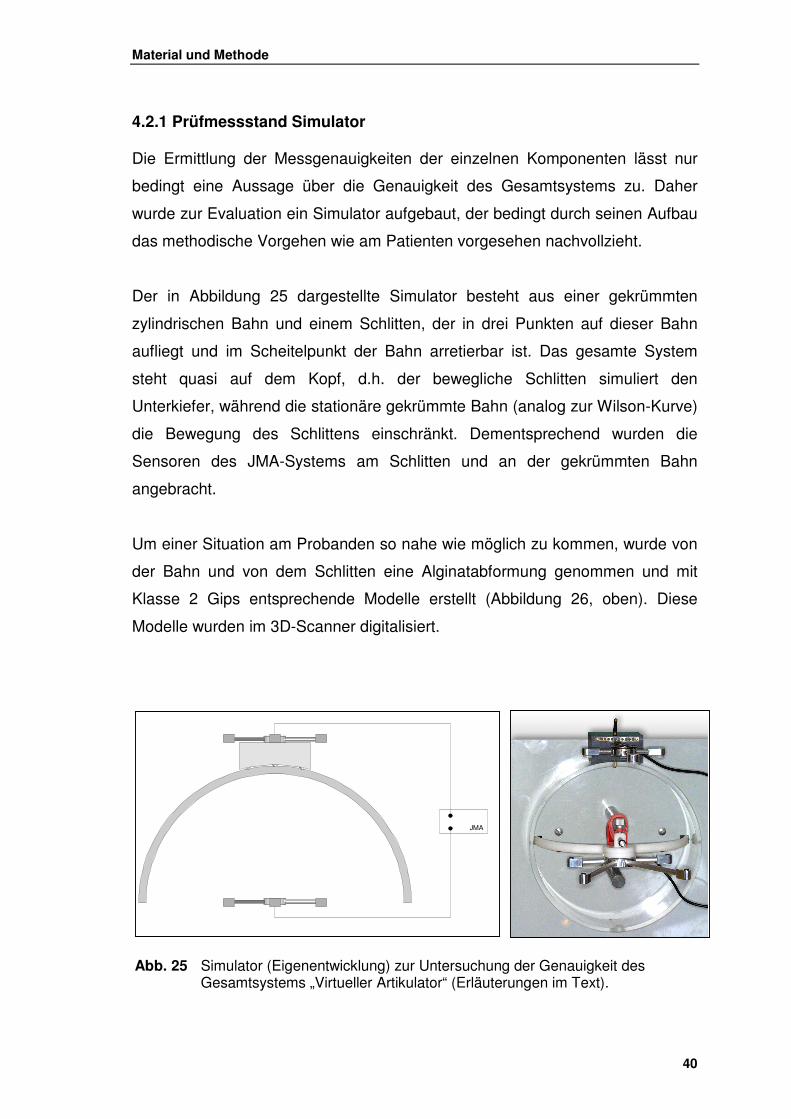
Der in Abbildung 25 dargestellte Simulator besteht aus einer gekrümmten
zylindrischen Bahn und einem Schlitten, der in drei Punkten auf dieser Bahn
aufliegt und im Scheitelpunkt der Bahn arretierbar ist. Das gesamte System
steht quasi auf dem Kopf, d.h. der bewegliche Schlitten simuliert den
Unterkiefer, während die stationäre gekrümmte Bahn (analog zur Wilson-Kurve)
die Bewegung des Schlittens einschränkt. Dementsprechend wurden die
Sensoren des JMA-Systems am Schlitten und an der gekrümmten Bahn
angebracht.
Um einer Situation am Probanden so nahe wie möglich zu kommen, wurde von
der Bahn und von dem Schlitten eine Alginatabformung genommen und mit
Klasse 2 Gips entsprechende Modelle erstellt (Abbildung 26, oben). Diese
Modelle wurden im 3D-Scanner digitalisiert.
JMA
Abb. 25 Simulator (Eigenentwicklung) zur Untersuchung der Genauigkeit des
Gesamtsystems „Virtueller Artikulator“ (Erläuterungen im Text).
Material und Methode
41
Äquivalent zur Probandenuntersuchung wurde auch im Simulator zunächst ein
„Bissregistrat“ mit Futar-D-Occlusion genommen und mit Hilfe der speziellen
Referenzplatte fixiert (Abbildung 26, unten). Nach der Digitalisierung der
Registratschichten wurden die eingescannten Modelle mit dem Datensatz der
Registrate verrechnet und referenziert. Somit wurde die „zentrische“ Situation
im Simulator virtuell nachempfunden. Aus dieser arretierbaren Position heraus
wurden nun Lateralbewegungen durchgeführt, der Schlitten also manuell auf
der Bahn entlang geführt. Diese Bewegungsmuster wurden mit den
angekoppelten Sensoren des JMA-Systems aufgezeichnet und in der
Datenbank der WinJaw-Software abgelegt. Die referenzierten 3D-Datensätze
der Modelle wurden nun zusammen mit den digitalisierten Bewegungsdaten in
den Virtuellen Artikulator eingelesen. Registratnahme und Messzyklus wurden
10 Mal wiederholt und durch einen eigens entwickelten Auswertalgorithmus im
Virtuellen Artikulator evaluiert. Bestimmt wurde der errechnete Abstand des 3D-
Datensatzes des Schlittens zum Datensatz der Kreisbahn über die gesamte
Verfahrstrecke. Da der Schlitten zu jedem Zeitpunkt sicher auf der Kreisbahn
fixiert war, sollte der errechnete Abstand als Korrelat zu den Kontaktpunkten ein
Minimum erreichen.
Material und Methode
42
Abformlöffel
Abformmasse
Gipsmodel
Gipsmodel
Registrat
RegistratRegistratplatte
Abformgips
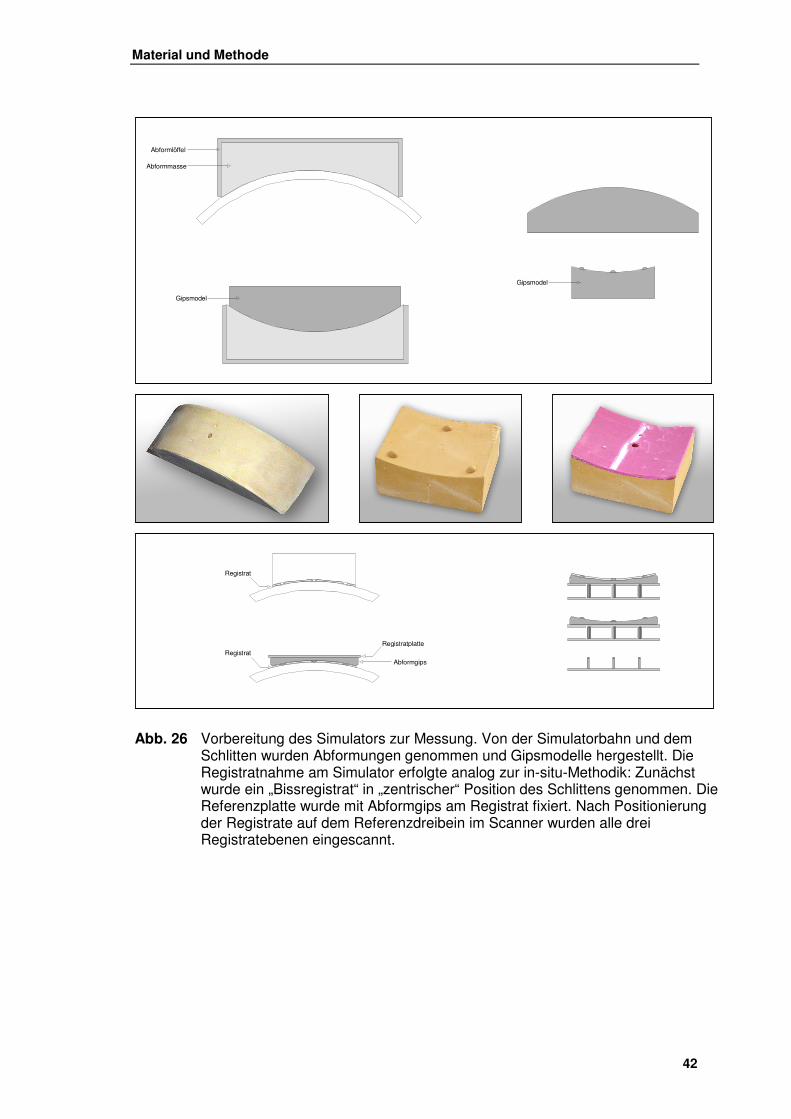
Abb. 26 Vorbereitung des Simulators zur Messung. Von der Simulatorbahn und dem
Schlitten wurden Abformungen genommen und Gipsmodelle hergestellt. Die Registratnahme am Simulator erfolgte analog zur in-situ-Methodik: Zunächst wurde ein „Bissregistrat“ in „zentrischer“ Position des Schlittens genommen. Die Referenzplatte wurde mit Abformgips am Registrat fixiert. Nach Positionierung der Registrate auf dem Referenzdreibein im Scanner wurden alle drei Registratebenen eingescannt.
Material und Methode
43
4.2.2 Artikulatoruntersuchung
In einem nächsten Schritt sollte die Reproduzierbarkeit des Virtuellen
Artikulators im Vergleich zu einem herkömmlichen mechanischen Artikulator
untersucht werden. Es wurden 10 Modellfälle im Artikulator „Protar 7“ (Fa.
Kavo, D-Biberach) evaluiert (Abbildung 27 a). Ober- und Unterkiefermodelle
wurden habituell einander zugeordnet und mittels einer Montagehilfe in den
Artikulator eingebaut. Zusätzlich wurden die horizontale Kondylenbahnneigung
(HKN), der Bennett-Winkel und der Bennett-Shift willkürlich am Artikulator
eingestellt. Es wurden bewusst Mediotrusionsvorkontakte und Hyperbalancen
provoziert, um die dynamische Okklusion im mechanischen Artikulator mit den
Ergebnissen im Virtuellen Artikulator auch unter unphysiologischen
Bedingungen vergleichen zu können. Der Einbau in den Artikulator erfolgte mit
Hilfe des Magnet-Sockel-Systems des Protar-Systems, um eine Möglichkeit der
exakten Modellrepositionierung zu erhalten.
In allen 10 Fällen wurde zunächst ein Registrat in der Schlussbisslage
genommen. Die dabei verwendeten Materialien und Registrierhilfen wurden in
Kapitel 3 beschrieben. Anschließend wurden für jede Situation mehrere
Bewegungsaufzeichnungen mit dem Jaw-Motion-Analyser (JMA)
vorgenommen, dabei simulierte der mechanische Artikulator die
a) b)
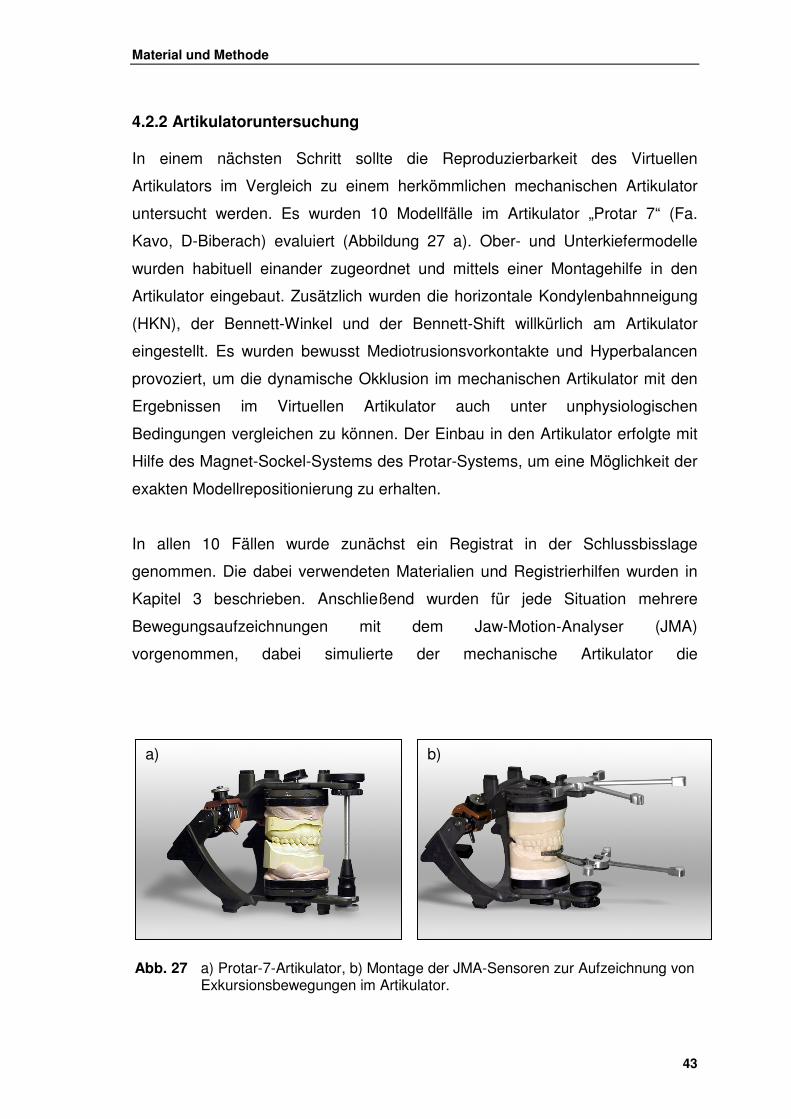
Abb. 27 a) Protar-7-Artikulator, b) Montage der JMA-Sensoren zur Aufzeichnung von
Exkursionsbewegungen im Artikulator.
Material und Methode
44
Unterkieferbewegungen des Probanden (Abbildung 27 b). Es wurden
zahngeführte Protrusions-, Rechts- und Linkslateralbewegungen aufgezeichnet.
Abschließend wurden sämtliche Ober- und Unterkiefermodelle sowie die
entsprechenden Registrate eingescannt und wie beschrieben zueinander
referenziert.
Um das Ergebnis der statischen Okklusionsanalyse des mechanischen und des
Virtuellen Artikulators möglichst signifikant vergleichen zu können, wurden die
Registrate im Durchlicht (Röntgenbildbetrachter) digital fotografiert und mittels
einer Bildbearbeitungssoftware (Photoshop 5.0, Fa. Adobe,
D-Unterschleissheim) derart nachbearbeitet, dass die „ausgedünnten“ bis
perforierten Impressionen im Registrat eindeutig schwarz, die übrigen Bereiche
eindeutig weiß eingefärbt wurden (Abbildung 28). Der Schwellenwert wurde
durch Mitteln aller Registratbilder festgelegt. Anhand dieser Bilddateien und der
Visualisierung im Virtuellen Artikulator wurde ein manueller Vergleich
durchgeführt: Die Kontaktpunktanzahl wurde ermittelt und mit der jeweils
anderen Methode verglichen.
a) c)
f) e) d)
b)
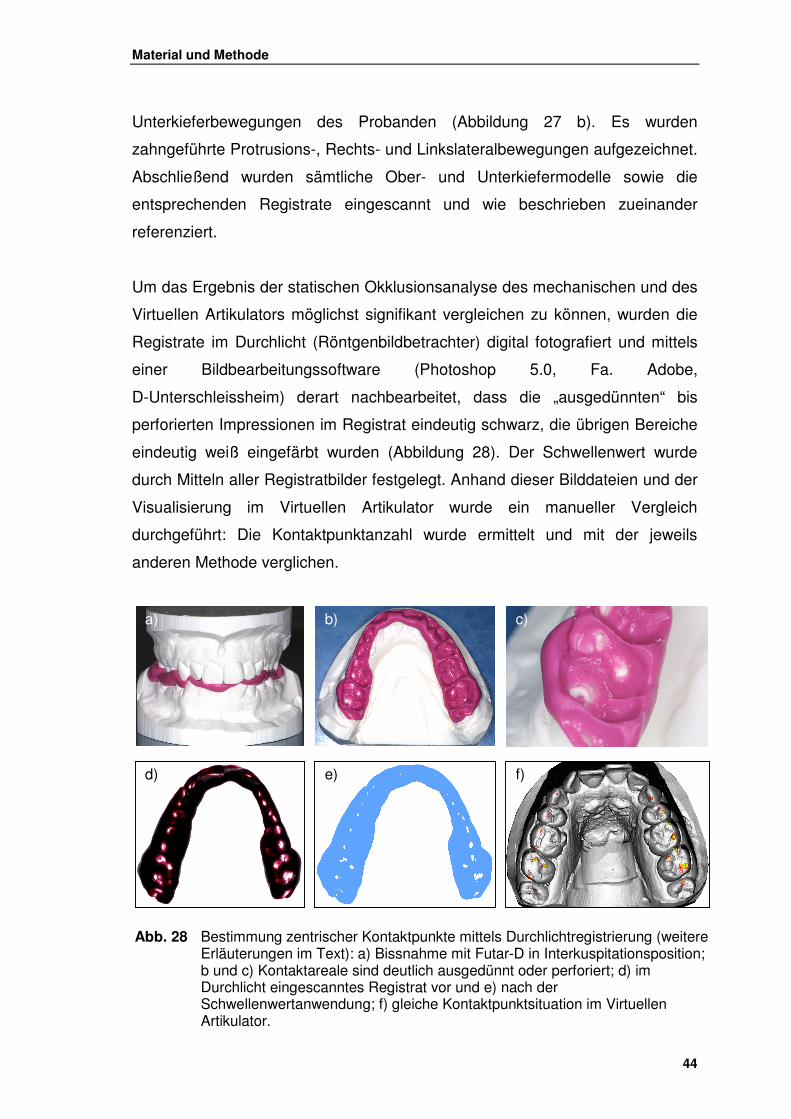
Abb. 28 Bestimmung zentrischer Kontaktpunkte mittels Durchlichtregistrierung (weitere
Erläuterungen im Text): a) Bissnahme mit Futar-D in Interkuspitationsposition; b und c) Kontaktareale sind deutlich ausgedünnt oder perforiert; d) im Durchlicht eingescanntes Registrat vor und e) nach der Schwellenwertanwendung; f) gleiche Kontaktpunktsituation im Virtuellen Artikulator.
Material und Methode
45
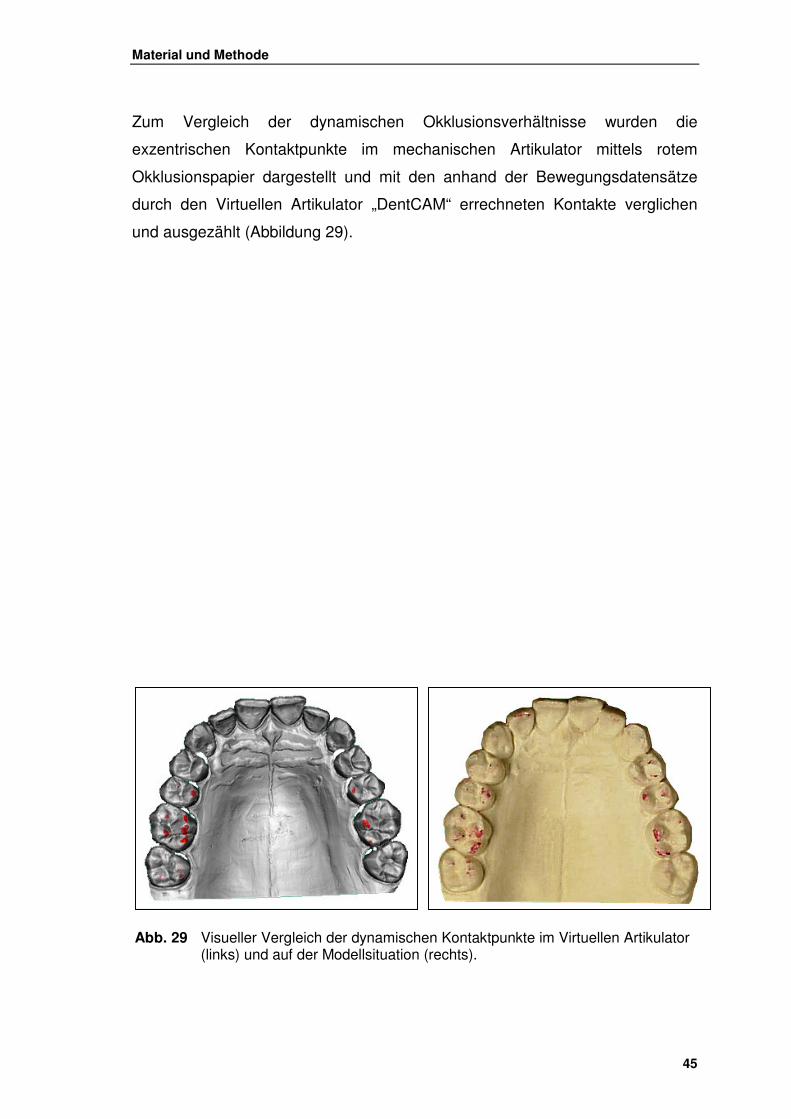
Zum Vergleich der dynamischen Okklusionsverhältnisse wurden die
exzentrischen Kontaktpunkte im mechanischen Artikulator mittels rotem
Okklusionspapier dargestellt und mit den anhand der Bewegungsdatensätze
durch den Virtuellen Artikulator „DentCAM“ errechneten Kontakte verglichen
und ausgezählt (Abbildung 29).
Abb. 29 Visueller Vergleich der dynamischen Kontaktpunkte im Virtuellen Artikulator
(links) und auf der Modellsituation (rechts).
Material und Methode
46
4.2.3 Probandenuntersuchung
Zur Untersuchung der Reliabilität und der Reproduzierbarkeit wurden
8 Probanden von jeweils 3 Untersuchern zu je 2 Zeitpunkten vermessen. Es
wurden je eine Abformung des Ober- und Unterkiefers und ein Registrat in
habitueller Interkuspidationsposition genommen. Jeder Untersucher nahm die
elektronische Registrierung der zahngeführten Unterkieferbewegungen mittels
des JMA vor, dabei wurden die Protrusion und die Laterotrusionen digitalisiert
und in der Datenbank der Software „WinJaw“ (Fa. Zebris, D-Isny)
aufgenommen. Diese Messreihe wurde nach etwa einem Monat wiederholt.
Mittels des 3D-Laserscanners „Scan-3D“ (Fa. Willytec, D-München) wurden die
Modelle des Ober- und Unterkiefers sowie die Registrate und das
Referenzpunktesystem digitalisiert. Die so gewonnenen Daten wurden zur
Analyse dem Virtuellen Artikulator zugeführt und mittels eines speziellen
Algorithmus rechnerisch referenziert. Somit wurden die digitalen
Bewegungsaufzeichnungen mit den Modelldatensätzen referenziert und der
weiteren Darstellung und Berechnung zugänglich gemacht.
Zur Auswertung des Probandenguts wurden sämtliche Kontaktpunkte entlang
des Zahnbogens flächenartig addiert und mit den Daten des Follow-Ups
verglichen. Zur Bestimmung der Reproduzierbarkeit wurde die
Intraclasskorrelation (ICC) innerhalb der Untersucher berechnet („SPSS 9.0“:
SPSS GmbH Software, D-München). Als Maß für die Reproduzierbarkeit wurde
eine ICC von mindestens 0,75 angestrebt [FLEISS 1981].
Ergebnisse
47
5. Ergebnisse
5.1 Auswertung der Vorversuche
5.1.1 3D-Laserscanner
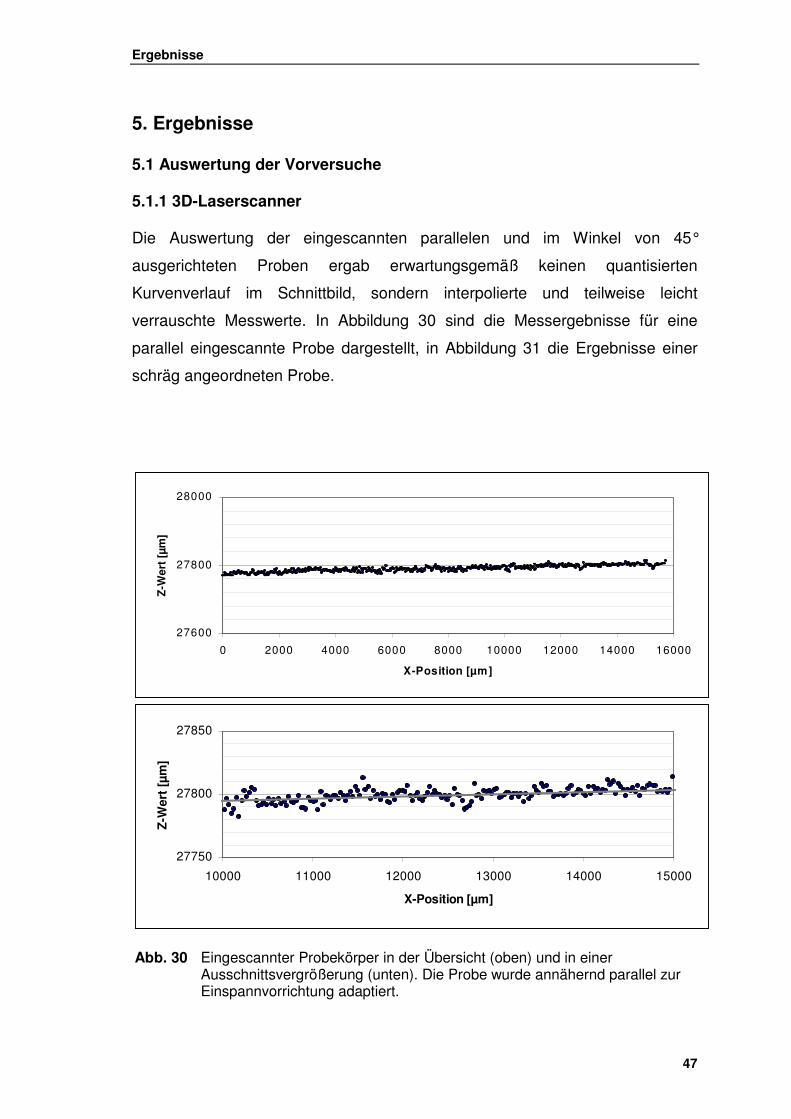
Die Auswertung der eingescannten parallelen und im Winkel von 45°
ausgerichteten Proben ergab erwartungsgemäß keinen quantisierten
Kurvenverlauf im Schnittbild, sondern interpolierte und teilweise leicht
verrauschte Messwerte. In Abbildung 30 sind die Messergebnisse für eine
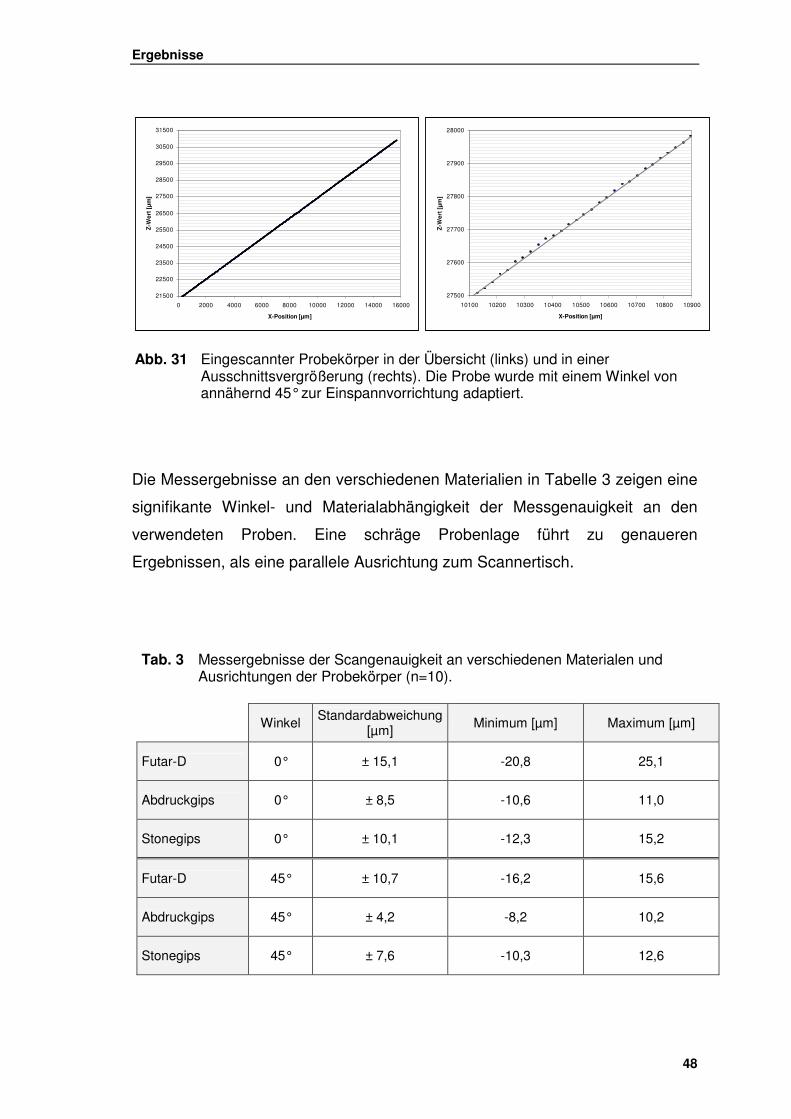
parallel eingescannte Probe dargestellt, in Abbildung 31 die Ergebnisse einer
schräg angeordneten Probe.
27600
27800
28000
0 2000 4000 6000 8000 10000 12000 14000 16000
X-Position [µm]
Z-W
ert [
µm]
27750
27800
27850
10000 11000 12000 13000 14000 15000
X-Position [µm]
Z-W
ert [
µm]
Abb. 30 Eingescannter Probekörper in der Übersicht (oben) und in einer
Ausschnittsvergrößerung (unten). Die Probe wurde annähernd parallel zur Einspannvorrichtung adaptiert.
Ergebnisse
48
Die Messergebnisse an den verschiedenen Materialien in Tabelle 3 zeigen eine
signifikante Winkel- und Materialabhängigkeit der Messgenauigkeit an den
verwendeten Proben. Eine schräge Probenlage führt zu genaueren
Ergebnissen, als eine parallele Ausrichtung zum Scannertisch.
Tab. 3 Messergebnisse der Scangenauigkeit an verschiedenen Materialen und
Ausrichtungen der Probekörper (n=10).
Winkel Standardabweichung [µm] Minimum [µm] Maximum [µm]
Futar-D 0° ± 15,1 -20,8 25,1
Abdruckgips 0° ± 8,5 -10,6 11,0
Stonegips 0° ± 10,1 -12,3 15,2
Futar-D 45° ± 10,7 -16,2 15,6
Abdruckgips 45° ± 4,2 -8,2 10,2
Stonegips 45° ± 7,6 -10,3 12,6
21500
22500
23500
24500
25500
26500
27500
28500
29500
30500
31500
0 2000 4000 6000 8000 10000 12000 14000 16000
X-Position [µm]
Z-W
ert [
µm]
27500
27600
27700
27800
27900
28000
10100 10200 10300 10400 10500 10600 10700 10800 10900
X-Position [µm]
Z-W
ert [
µm]
Abb. 31 Eingescannter Probekörper in der Übersicht (links) und in einer
Ausschnittsvergrößerung (rechts). Die Probe wurde mit einem Winkel von annähernd 45° zur Einspannvorrichtung adaptiert.
Ergebnisse
49
Zudem sind Abdruck- und Stonegipse präziser zu digitalisieren als das
Registriermaterial Futar-D-Occlusion (A-Silikon). Insgesamt zeigten die
Scanergebnisse eine für den Virtuellen Artikulator ausreichend hohe
Genauigkeit. Die Herstellerangabe der Genauigkeit von 2-10 µm konnte mit
dem vorgestellten Verfahren nicht bestätigt werden, da Materialien mit
signifikant größerer Rauhtiefe im Oberflächenbereich verwendet wurden.
5.1.2 Jaw-Motion-Analyser
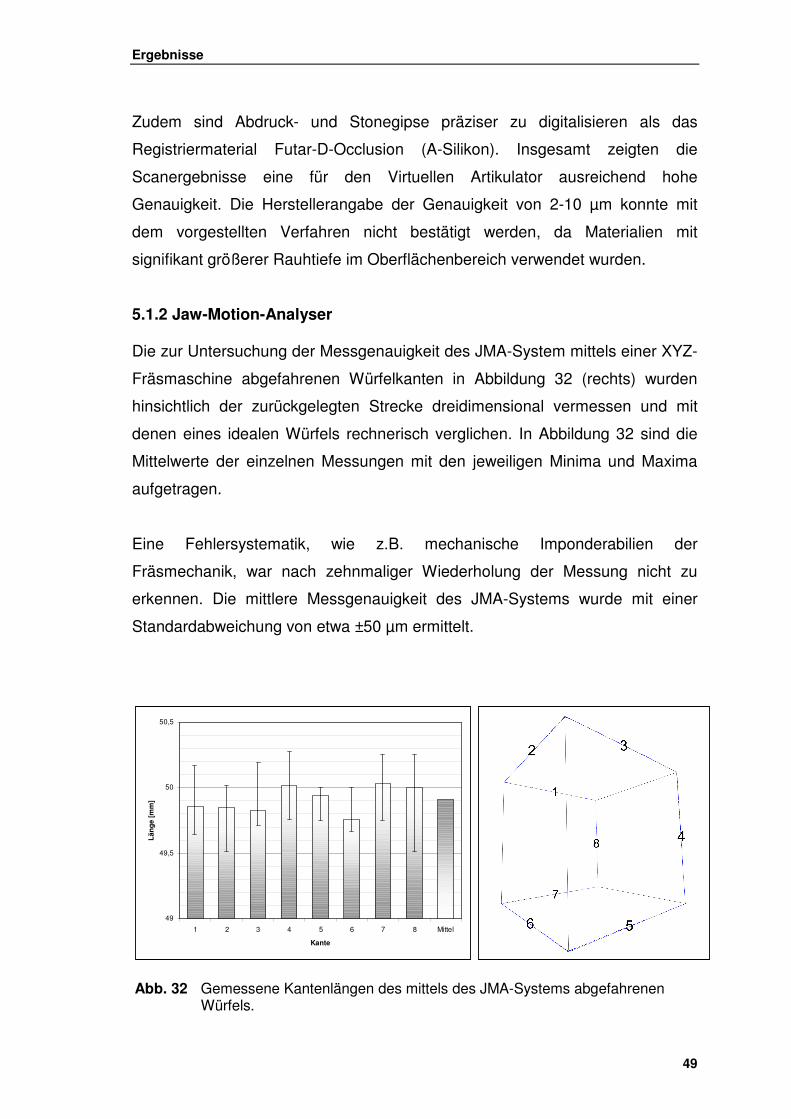
Die zur Untersuchung der Messgenauigkeit des JMA-System mittels einer XYZ-
Fräsmaschine abgefahrenen Würfelkanten in Abbildung 32 (rechts) wurden
hinsichtlich der zurückgelegten Strecke dreidimensional vermessen und mit
denen eines idealen Würfels rechnerisch verglichen. In Abbildung 32 sind die
Mittelwerte der einzelnen Messungen mit den jeweiligen Minima und Maxima
aufgetragen.
Eine Fehlersystematik, wie z.B. mechanische Imponderabilien der
Fräsmechanik, war nach zehnmaliger Wiederholung der Messung nicht zu
erkennen. Die mittlere Messgenauigkeit des JMA-Systems wurde mit einer
Standardabweichung von etwa ±50 µm ermittelt.
49
49,5
50
50,5
1 2 3 4 5 6 7 8 Mittel
Kante
Läng
e [m
m]
Abb. 32 Gemessene Kantenlängen des mittels des JMA-Systems abgefahrenen
Würfels.
Ergebnisse
50
5.2 Auswertung der Versuchsgruppen
5.2.1 Prüfmessstand Simulator
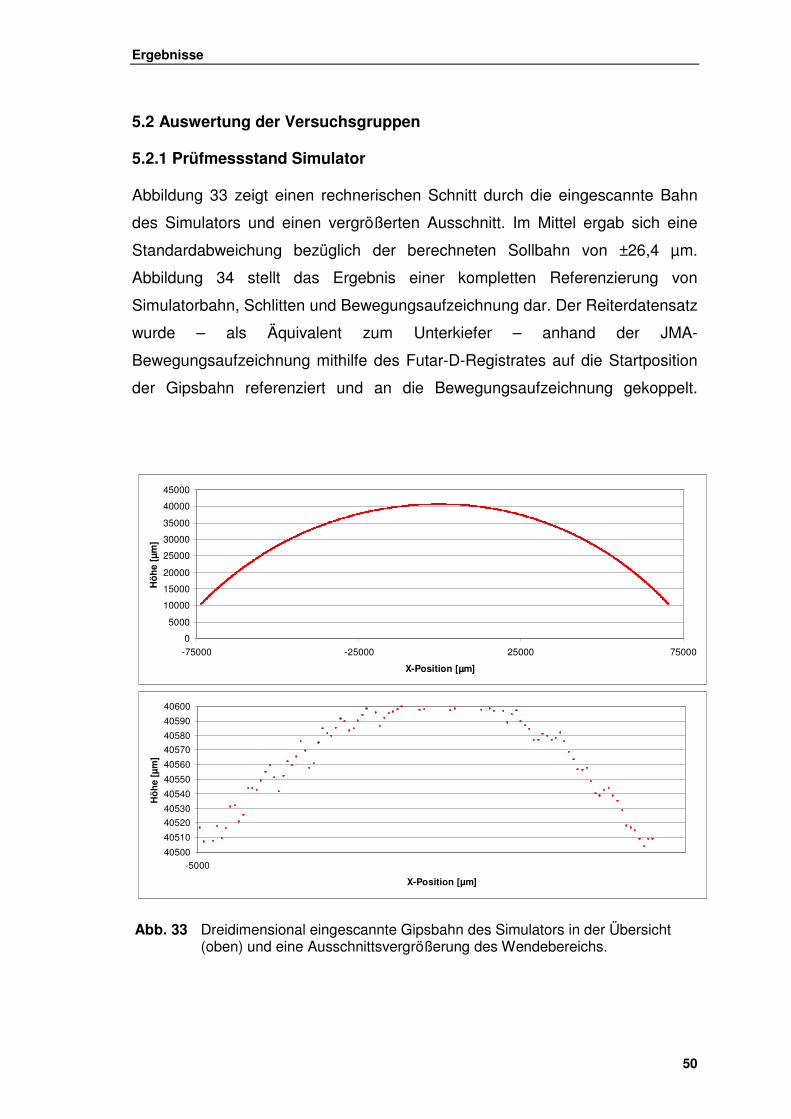
Abbildung 33 zeigt einen rechnerischen Schnitt durch die eingescannte Bahn
des Simulators und einen vergrößerten Ausschnitt. Im Mittel ergab sich eine
Standardabweichung bezüglich der berechneten Sollbahn von ±26,4 µm.
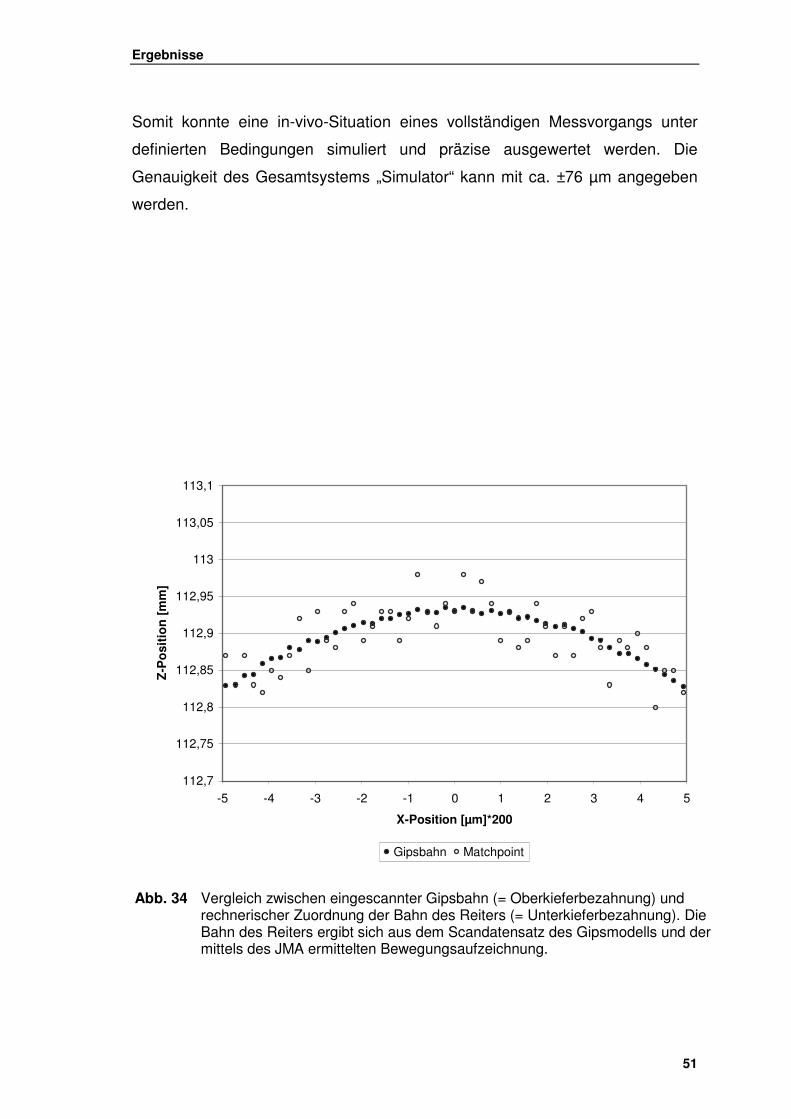
Abbildung 34 stellt das Ergebnis einer kompletten Referenzierung von
Simulatorbahn, Schlitten und Bewegungsaufzeichnung dar. Der Reiterdatensatz
wurde – als Äquivalent zum Unterkiefer – anhand der JMA-
Bewegungsaufzeichnung mithilfe des Futar-D-Registrates auf die Startposition
der Gipsbahn referenziert und an die Bewegungsaufzeichnung gekoppelt.
0
5000
10000
15000
20000
25000
30000
35000
40000
45000
-75000 -25000 25000 75000
X-Position [µm]
Höh
e [µ
m]
40500
40510
4052040530
40540
40550
40560
4057040580
40590
40600
-5000
X-Position [µm]
Höh
e [µ
m]
Abb. 33 Dreidimensional eingescannte Gipsbahn des Simulators in der Übersicht
(oben) und eine Ausschnittsvergrößerung des Wendebereichs.
Ergebnisse
51
Somit konnte eine in-vivo-Situation eines vollständigen Messvorgangs unter
definierten Bedingungen simuliert und präzise ausgewertet werden. Die
Genauigkeit des Gesamtsystems „Simulator“ kann mit ca. ±76 µm angegeben
werden.
112,7
112,75
112,8
112,85
112,9
112,95
113
113,05
113,1
-5 -4 -3 -2 -1 0 1 2 3 4 5
X-Position [µm]*200
Z-P
ositi
on [m
m]
Gipsbahn Matchpoint
Abb. 34 Vergleich zwischen eingescannter Gipsbahn (= Oberkieferbezahnung) und
rechnerischer Zuordnung der Bahn des Reiters (= Unterkieferbezahnung). Die Bahn des Reiters ergibt sich aus dem Scandatensatz des Gipsmodells und der mittels des JMA ermittelten Bewegungsaufzeichnung.
Ergebnisse
52
5.2.2 Artikulatoruntersuchung
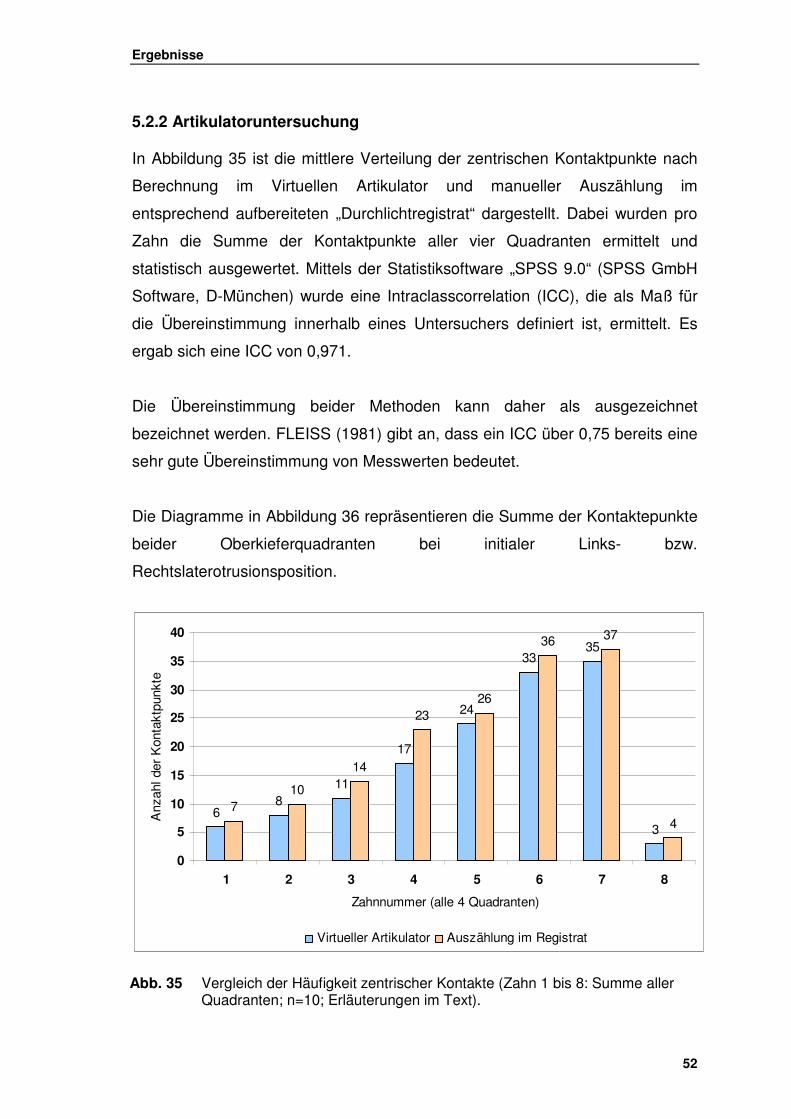
In Abbildung 35 ist die mittlere Verteilung der zentrischen Kontaktpunkte nach
Berechnung im Virtuellen Artikulator und manueller Auszählung im
entsprechend aufbereiteten „Durchlichtregistrat“ dargestellt. Dabei wurden pro
Zahn die Summe der Kontaktpunkte aller vier Quadranten ermittelt und
statistisch ausgewertet. Mittels der Statistiksoftware „SPSS 9.0“ (SPSS GmbH
Software, D-München) wurde eine Intraclasscorrelation (ICC), die als Maß für
die Übereinstimmung innerhalb eines Untersuchers definiert ist, ermittelt. Es
ergab sich eine ICC von 0,971.
Die Übereinstimmung beider Methoden kann daher als ausgezeichnet
bezeichnet werden. FLEISS (1981) gibt an, dass ein ICC über 0,75 bereits eine
sehr gute Übereinstimmung von Messwerten bedeutet.
Die Diagramme in Abbildung 36 repräsentieren die Summe der Kontaktepunkte
beider Oberkieferquadranten bei initialer Links- bzw.
Rechtslaterotrusionsposition.
68
11
17
24
3335
3
710
14
2326
36 37
4
0
5
10
15
20
25
30
35
40
1 2 3 4 5 6 7 8
Zahnnummer (alle 4 Quadranten)
Anz
ahl d
er K
onta
ktpu
nkte
Virtueller Artikulator Auszählung im Registrat
Abb. 35 Vergleich der Häufigkeit zentrischer Kontakte (Zahn 1 bis 8: Summe aller
Quadranten; n=10; Erläuterungen im Text).
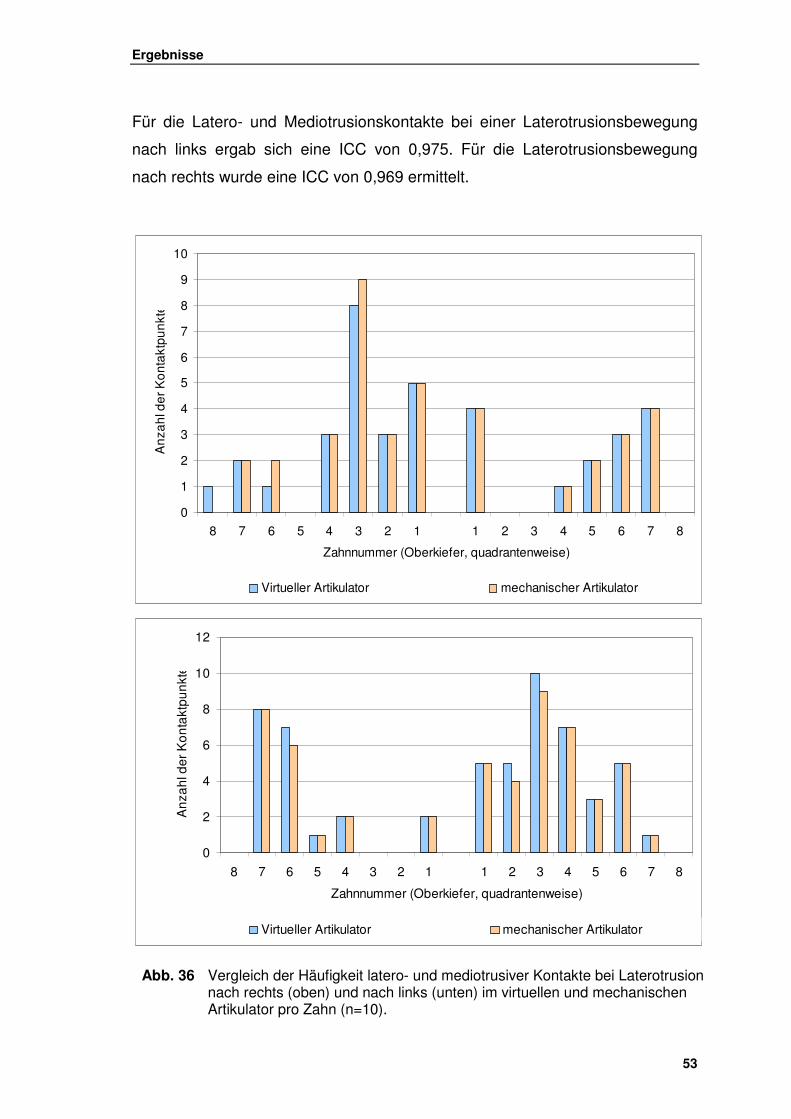
Ergebnisse
53
Für die Latero- und Mediotrusionskontakte bei einer Laterotrusionsbewegung
nach links ergab sich eine ICC von 0,975. Für die Laterotrusionsbewegung
nach rechts wurde eine ICC von 0,969 ermittelt.
Abb. 36 Vergleich der Häufigkeit latero- und mediotrusiver Kontakte bei Laterotrusion nach rechts (oben) und nach links (unten) im virtuellen und mechanischen Artikulator pro Zahn (n=10).
0
2
4
6
8
10
12
8 7 6 5 4 3 2 1 1 2 3 4 5 6 7 8
Zahnnummer (Oberkiefer, quadrantenweise)
Anz
ahl d
er K
onta
ktpu
nkte
Virtueller Artikulator mechanischer Artikulator
0
1
2
3
4
5
6
7
8
9
10
8 7 6 5 4 3 2 1 1 2 3 4 5 6 7 8
Zahnnummer (Oberkiefer, quadrantenweise)
Anz
ahl d
er K
onta
ktpu
nkte
Virtueller Artikulator mechanischer Artikulator
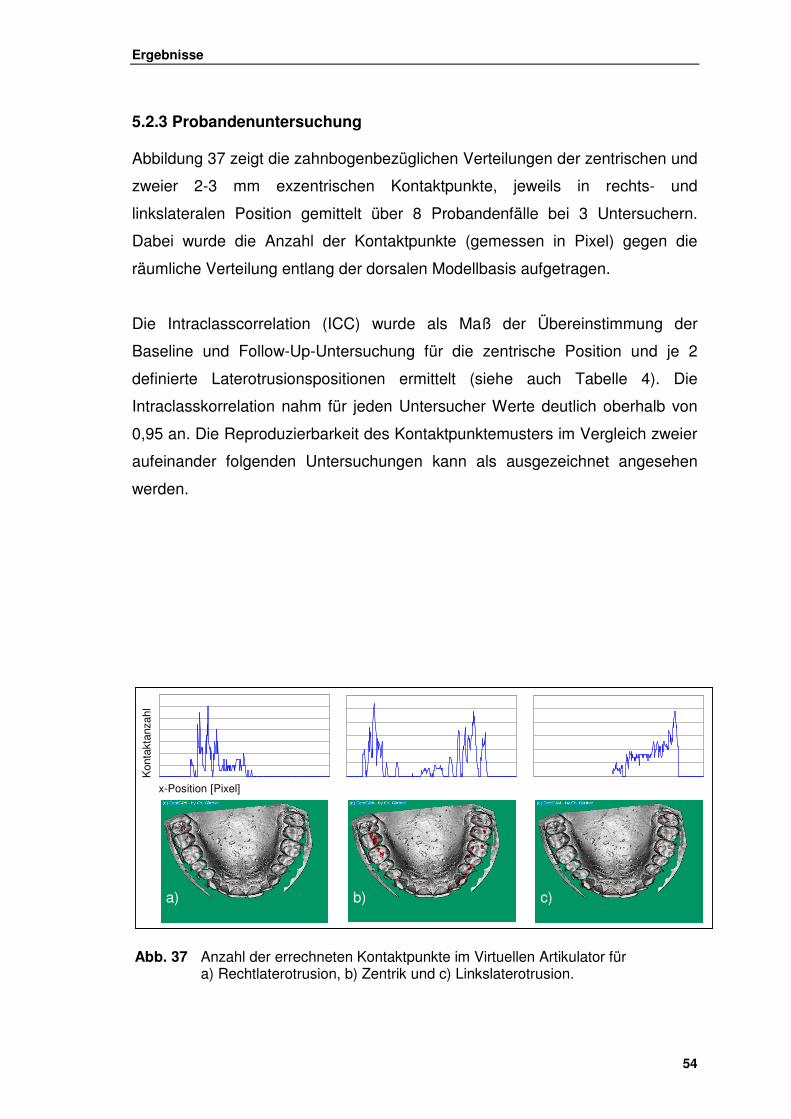
Ergebnisse
54
5.2.3 Probandenuntersuchung
Abbildung 37 zeigt die zahnbogenbezüglichen Verteilungen der zentrischen und
zweier 2-3 mm exzentrischen Kontaktpunkte, jeweils in rechts- und
linkslateralen Position gemittelt über 8 Probandenfälle bei 3 Untersuchern.
Dabei wurde die Anzahl der Kontaktpunkte (gemessen in Pixel) gegen die
räumliche Verteilung entlang der dorsalen Modellbasis aufgetragen.
Die Intraclasscorrelation (ICC) wurde als Maß der Übereinstimmung der
Baseline und Follow-Up-Untersuchung für die zentrische Position und je 2
definierte Laterotrusionspositionen ermittelt (siehe auch Tabelle 4). Die
Intraclasskorrelation nahm für jeden Untersucher Werte deutlich oberhalb von
0,95 an. Die Reproduzierbarkeit des Kontaktpunktemusters im Vergleich zweier
aufeinander folgenden Untersuchungen kann als ausgezeichnet angesehen
werden.
x-Position [Pixel]
Kon
takt
anza
hl
a) b) c)
Abb. 37 Anzahl der errechneten Kontaktpunkte im Virtuellen Artikulator für
a) Rechtlaterotrusion, b) Zentrik und c) Linkslaterotrusion.
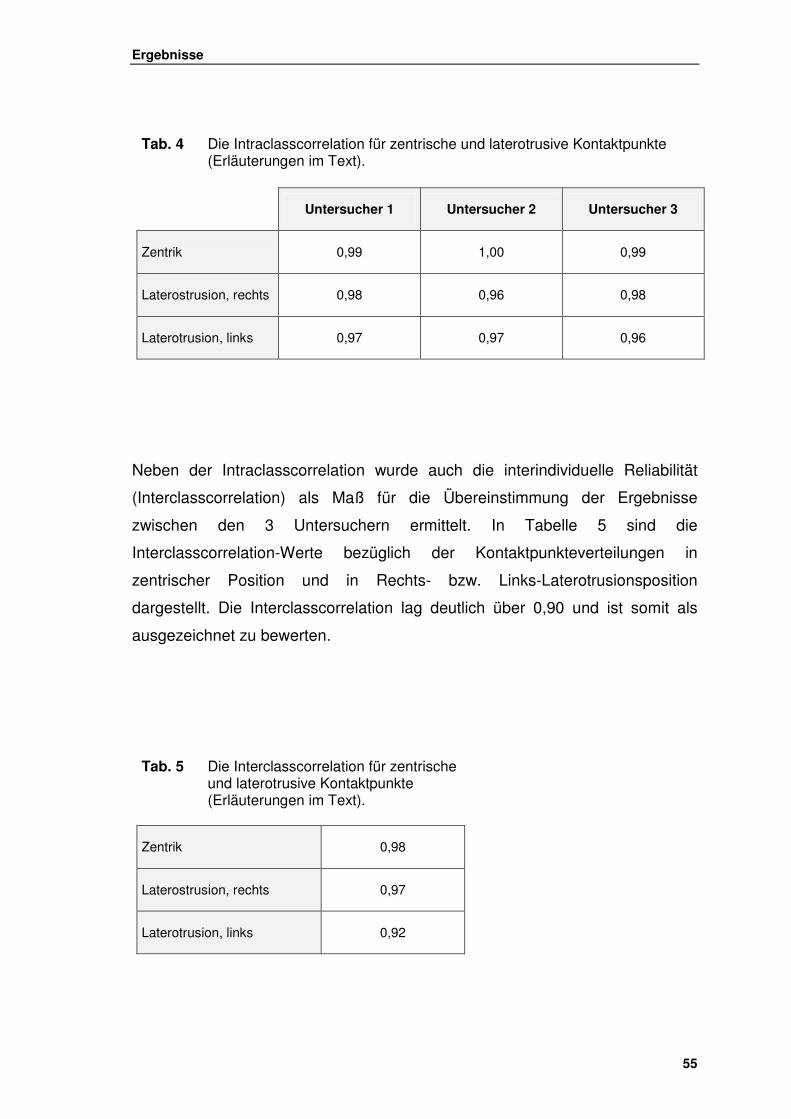
Ergebnisse
55
Neben der Intraclasscorrelation wurde auch die interindividuelle Reliabilität
(Interclasscorrelation) als Maß für die Übereinstimmung der Ergebnisse
zwischen den 3 Untersuchern ermittelt. In Tabelle 5 sind die
Interclasscorrelation-Werte bezüglich der Kontaktpunkteverteilungen in
zentrischer Position und in Rechts- bzw. Links-Laterotrusionsposition
dargestellt. Die Interclasscorrelation lag deutlich über 0,90 und ist somit als
ausgezeichnet zu bewerten.
Tab. 5 Die Interclasscorrelation für zentrische
und laterotrusive Kontaktpunkte (Erläuterungen im Text).
Zentrik 0,98
Laterostrusion, rechts 0,97
Laterotrusion, links 0,92
Tab. 4 Die Intraclasscorrelation für zentrische und laterotrusive Kontaktpunkte
(Erläuterungen im Text).
Untersucher 1 Untersucher 2 Untersucher 3
Zentrik 0,99 1,00 0,99
Laterostrusion, rechts 0,98 0,96 0,98
Laterotrusion, links 0,97 0,97 0,96
Ergebnisse
56
5.2.4 Zusammenfassung der Ergebnisse
Die Auswertung der eingescannten Materialproben ergab eine signifikante
Winkel- und Materialabhängigkeit der Messgenauigkeit. Eine schräge
Probenlage führt zu genaueren Ergebnissen, als eine parallele Ausrichtung zum
Scannertisch. Insgesamt zeigten die Scanergebnisse eine für den Virtuellen
Artikulator ausreichend hohe Genauigkeit von durchschnittlich etwa ±26 µm.
Als mittlere räumliche Auflösung des JMA-Systems wurde ±50 µm ermittelt.
Die Untersuchungen im Simulator ergaben hinsichtlich der Scangenauigkeit im
Mittel eine Abweichung von ± 26.4 µm von der berechneten Sollbahn,
insgesamt betrug die ermittelte Auflösung des Gesamtsystems „Simulator“ etwa
±76 µm.
Die Auswertung des Vergleiches der im herkömmlichen, mechanischen
Artikulator montierten Modelle und der Kontaktpunktberechnung im Virtuellen
Artikulator ergab eine Intraclasscorrelation (ICC) von 0,971. Die
Übereinstimmung der statischen und dynamischen Kontaktpunktemuster kann
daher als ausgezeichnet bezeichnet werden.
Die Untersuchung der 8 Probandenfälle zeigte bereits in einem visuellen
Vergleich der statischen und dynamischen Kontaktpunktemuster eine gute
Übereinstimmung. Die ICC lag für die zentrische Position und je 2 definierte
Laterotrusionspositionen konstant über 0,95 und deutet somit auf eine
ausgezeichnete Übereinstimmung hin.
Die Bestimmung der intraindividuelle Reliabilität (Intraclasscorrelation) ergab für
jeden Untersucher Werte deutlich oberhalb von 0,90. Daher kann die
Reproduzierbarkeit des Kontaktpunktemusters im Vergleich zweier aufeinander
folgenden Untersuchungen als ausgezeichnet angesehen werden.
Diskussion
57
6. Diskussion
6.1 3D-Laserscanner
Jedes digitale Messverfahren besitzt aufgrund seiner Eigenschaft, digitale
Daten zu erzeugen, eine begrenzte Auflösung. Zum einen ist diese direkt
abhängig von der internen Rechengenauigkeit des Systems: Ein
16-Bit-Datenwert wird maximal 216 Werte repräsentieren können, ein
32-Bit-Datenwert bereits 232 Werte. Das 3D-Scannersystem arbeitet mit einem
32-Bit-Datenformat, so dass jeder Messwert maximal etwa 4,3 Milliarden Werte
annehmen kann. Dies entspräche bei einer vertikalen Auflösung des 3D-
Laserscan-Systems von physikalisch etwa 56,0 µm einer maximal erfassbaren
Objektdimension von ca. 2400 km (!).
Als deutlich signifikanter stellt sich die tatsächliche physikalische Auflösung und
Genauigkeit der verwendeten Sensoren und Stellantriebe dar. Der
3D-Laserscanner besitzt eine räumliche physikalische Auflösung von ca.
x:27,5 · y:30,0 · z:56,0 µm. Diese Werte ergeben sich aus der Schrittweite der
verwendeten Schrittmotoren, deren angekoppelter Mechanik zum Vorschub des
Messobjekts und der optischen Auflösung des CCD-Sensorsystems der
Videokamera.
Ein CCD-Sensor (CCD = Charged Coupled Device) stellt prinzipiell eine
rasterförmige Anordnung aus mehreren 100.000 Fototransistoren, also
lichtempfindlichen Halbleitern, dar. Je mehr solcher Sensoren pro Fläche
angeordnet sind, desto größer ist die resultierende Auflösung. Doch auch
weitere Faktoren, wie das Objektiv der Kamera (Verzeichnung, Vergrößerung)
und die mechanische Stabilität der Gesamtkonstruktion, bestimmen neben
speziellen Interpolationsalgorithmen die Auflösung des Systems.
Die Anzahl der Sensoren auf dem CCD-Array der hier verwendeten Kamera
beträgt x:768 · y:576. Berücksichtigt man den Vergrößerungsfaktor des
Objektivs und den mittleren Abstand zum Messobjekt, so ergibt sich eine
theoretische Auflösung von 56,0 µm in der Vertikalen, 27,0 µm in X- und
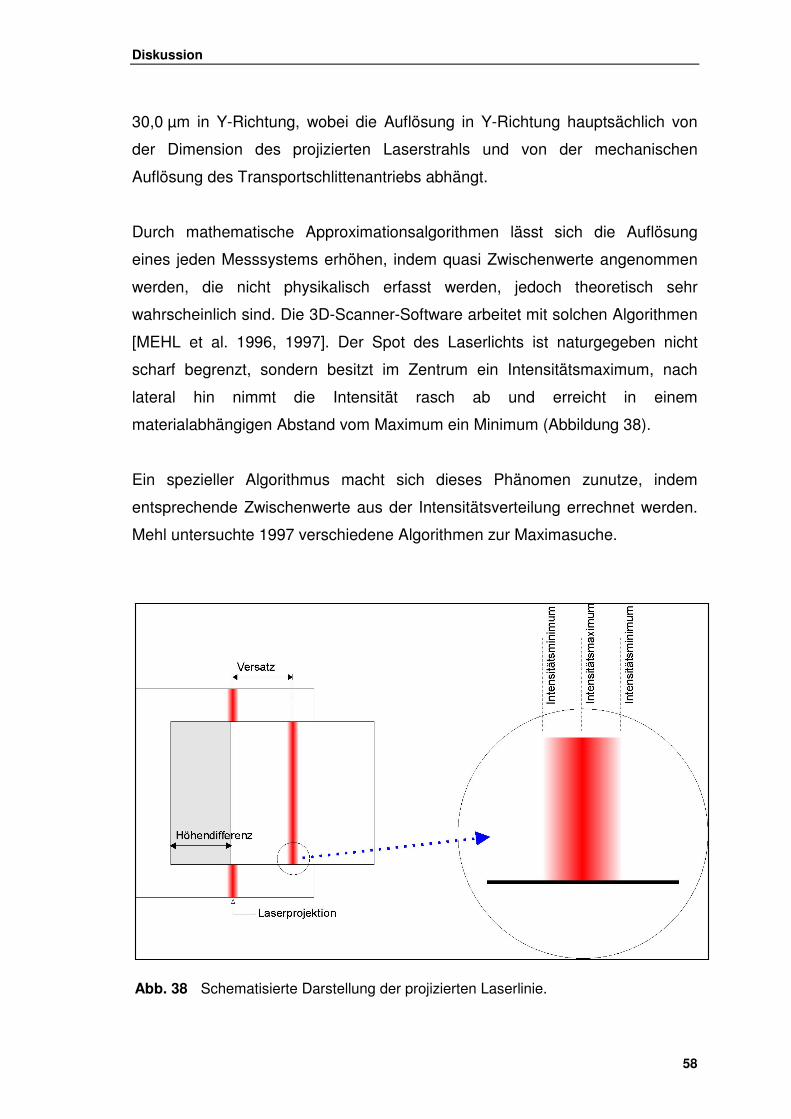
Diskussion
58
30,0 µm in Y-Richtung, wobei die Auflösung in Y-Richtung hauptsächlich von
der Dimension des projizierten Laserstrahls und von der mechanischen
Auflösung des Transportschlittenantriebs abhängt.
Durch mathematische Approximationsalgorithmen lässt sich die Auflösung
eines jeden Messsystems erhöhen, indem quasi Zwischenwerte angenommen
werden, die nicht physikalisch erfasst werden, jedoch theoretisch sehr
wahrscheinlich sind. Die 3D-Scanner-Software arbeitet mit solchen Algorithmen
[MEHL et al. 1996, 1997]. Der Spot des Laserlichts ist naturgegeben nicht
scharf begrenzt, sondern besitzt im Zentrum ein Intensitätsmaximum, nach
lateral hin nimmt die Intensität rasch ab und erreicht in einem
materialabhängigen Abstand vom Maximum ein Minimum (Abbildung 38).
Ein spezieller Algorithmus macht sich dieses Phänomen zunutze, indem
entsprechende Zwischenwerte aus der Intensitätsverteilung errechnet werden.
Mehl untersuchte 1997 verschiedene Algorithmen zur Maximasuche.
Abb. 38 Schematisierte Darstellung der projizierten Laserlinie.
Diskussion
59
Die Intensität der Reflexion ergibt sich nicht nur aus der vertikalen Dimension
des Objekts, sondern hängt unmittelbar mit den Materialeigenschaften des
Messobjekts zusammen. Eine zum Laser komplementäre Färbung oder eine
wenig opake Oberfläche führen zu signifikant schlechteren Ergebnissen. Zudem
versagt jegliche Approximation, wenn die zu vermessende Oberfläche nicht den
„Erwartungen“ des Algorithmus entspricht. Verläuft das Oberflächenrelief nicht
mathematisch stetig oder sind abrupte Unterbrechungen der Kontinuität (z.B.
Randspalten) zu erwarten, kann keine exakte Approximation stattfinden. Daher
sind die vorliegenden Messergebnisse in Kapitel 5 nicht in einem 56 µm-Raster
quantisiert, sondern der Kurvenverlauf der einzelnen Messpunkte beinhaltet
Zwischenwerte und ist durch Messrauschen beeinflusst.
6.2 Jaw-Motion-Analyser
Die Funktionsweise des JMA-Systems basiert auf Laufzeitmessungen von
Ultraschallwellen, die durch spezielle Generatoren erzeugt werden. Die
generierten Ultraschallwellen werden durch Spezialmikrophone detektiert und
einer Auswertelektronik zugeführt. Anhand der Laufzeitdifferenzen der
Ultraschallwellen ermittelt die Elektronik die räumliche Orientierung der
Sensoren bezüglich der Schallgeneratoren.
Dieses Verfahren wird in vielen technischen Anwendungen genutzt und hat sich
insbesondere zur Abstandsmessung und Positionsbestimmung bewährt. Die
Hauptschwierigkeit besteht darin, dass die Ausbreitungsgeschwindigkeit von
Schallwellen von der Temperatur bzw. der Dichte und des Feuchtigkeitsgehalts
des schallleitenden Mediums abhängt. Das JMA-System ermittelt die
Raumtemperatur und korrigiert anhand von Eichkurven die Messergebnisse
[BRUNNER 1999]. Zudem ist die räumliche Auflösung von der Schallfrequenz
und der Schnelligkeit bzw. Präzision der Auswertelektronik abhängig. Bei einer
durchschnittlichen Schallgeschwindigkeit im Medium Luft von etwa 357 m/s
ergeben sich für die Messdistanzen im zahnärztlichen Bereich wenige
Millisekunden Laufzeitunterschied zwischen den einzelnen Sensoren. Die
räumliche Auflösung des JMA-Systems beträgt nach den vorliegenden
Messungen unter Normalbedingungen etwa 50 µm. Bedenkt man jedoch, das
Diskussion
60
die Sensoren relativ weit anterior von den Zahnreihen des Unterkiefers
extraoral angebracht sind, ergibt sich ein langer Hebelarm bezüglich der
Kiefergelenke. Nach dem Strahlensatz ist demnach die Genauigkeit im Bereich
der Kiefergelenke wesentlich größer anzunehmen, da eine große Auslenkung
im Sensorbereich einer relativ geringen Auslenkung im Kiefergelenkbereich
entspricht und somit die physikalisch gemessene Strecke auf eine wesentlich
kleinere Strecke heruntergerechnet werden kann. Dies gilt allerdings nur für die
Rotationskomponenten einer Unterkieferbewegung. Eine genaue Aussage über
den Gewinn an Auflösung im Gelenkbereich (bzw. in jedem anderen posterior
des Sensors gelegenen Bereich) ist demnach schwer zu treffen und hängt zum
einen von der Distanz der Sensoren ab, zum anderen von dem
Bewegungsmodus (Translation oder Rotation). Studien haben zudem gezeigt,
dass einige ultraschallbasierende Messsysteme einer nicht unerheblichen
Störung durch Fremdschallquellen unterliegen [EDINGER 1999]. So ist durch
die hochfrequenten Turbinengeräusche aus dem Nachbarbehandlungszimmer
oder entsprechender Musikbeschallung der Räumlichkeiten mit
Messungenauigkeiten zu rechnen.
Bezüglich des Virtuellen Artikulators ist aber zu berücksichtigen, dass die
Ermittlung der Kontaktpunkte stets unter Zahnführung erfolgt, d.h. die
Bewegungsaufzeichnung limitiert lediglich den Bewegungsfreiraum des
Unterkiefers, die Bewegungsspur unterhalb der Messauflösung des JMA wird
durch die Okklusion selbst bestimmt. Ferner ist zu überlegen, mit welcher
Wiederholgenauigkeit ein Proband selbst seine Bewegung zu reproduzieren
vermag.
Die Ergebnisse zeigen deutlich, dass das JMA-System sich hervorragend zur
digitalen Bewegungsaufzeichnung eignet. Insbesondere ist zu berücksichtigen,
dass für eine Achsiographie der Kiefergelenke die Konstellation der Sensoren
dahingehend optimal ist, dass ca. 20 cm anterior der Gelenke gemessen wird
und somit die Auflösung der Translationskomponenten im Gelenk- und
Zahnreihenbereich u.U. ein Vielfaches der sensornahen Auflösung beträgt.
Diskussion
61
6.3 Versuchsgruppen
6.3.1 Prüfmessstand Simulator
Der speziell entwickelte Simulator ist bedingt durch seinen geometrisch
einfachen Aufbau zur Evaluierung des Gesamtsystems „Virtueller Artikulator“
relativ gut geeignet. Die Komplexität einer individuellen Situation am Probanden
bezüglich der Morphologie der Zähne und des Bewegungsmusters erreicht der
Simulator nicht. Zudem ist, bedingt durch die räumliche Dimension des
Simulators, mit nicht näher untersuchten mechanischen Imponderabilien im
Sinne einer Verwindung und Wärmeausdehnung zu rechnen. Die mathematisch
leicht nachvollziehbare Geometrie ist jedoch zumindest zur theoretischen
Evaluierung gut geeignet, da diese eine reproduzierbare Berechnung der Ist-
und Soll-Wert-Differenzen ermöglicht. Mechanische Fehlerquellen wie
Abformfehler oder Verwindungen der gekrümmten Bahn sind mit einfachen
Mitteln nur schwer zu eliminieren, aufgrund der Parallelitäten zur
Probandensituation jedoch durchaus erwünscht, denn die knöcherne
Unterkieferspange ist ebenso wenig verwindungssteif. Die Genauigkeit des
Gesamtsystems konnte mittels des Simulators auf ±76 µm bestimmt werden,
vernachlässigt wurde jedoch die Tatsache, dass der Virtuelle Artikulator die
individuellen Bewegungsbahnen stets unter Zahnkontakt berechnet und somit
zu einer entscheidenden Verbesserung der vertikalen Genauigkeit beiträgt.
6.3.2 Artikulatoruntersuchung
Die Methodik der statischen Kontaktpunkteauszählung im „Durchlichtregistrat“
erwies sich als geeignet, um einen präzisen Vergleich von Modellsituation und
virtueller Darstellung zu ermöglichen. Neben der Kontaktpunkteanzahl könnte
auch die Fläche der einzelnen Kontaktpunkte berechnet und verglichen werden,
jedoch erwies sich dieser Ansatz als unbrauchbar, da die Messwerte ein zu
großes Rauschen aufwiesen. Jedoch ist in diesem Ansatz durchaus Potential
vorhanden, welches man in einer weiteren Untersuchung ausschöpfen könnte.
Verglichen mit einer Kontaktpunktedarstellung mittels Okklusionspapier scheint
Diskussion
62
die Durchlichtmethode eine ungleich präzisere Form der Ermittlung von
statischen Kontaktpunkten darzustellen.
Der Vergleich dynamischer Kontaktpunkte bei initialer Laterotrusion mittels
Okklusionspapier zeigte eine ausgezeichnete Übereinstimmung zwischen der
Modellsituation und der Berechnung im Virtuellen Artikulator „DentCAM“. Die
Anwendung von Okklusionspapier erwies sich als hinreichend genau, die
Anfertigung eines „Durchlichtregistrates“ erschien aufgrund der unzureichend
präzisen Durchführbarkeit in Dynamik nicht sinnvoll.
6.3.3 Probandenuntersuchung
Die Methodik der flächenhaften Summierung der Kontaktpunkte erwies sich als
ausreichend genau, jedoch ließen sich probandeninduzierte Einflüsse nicht
völlig ausschließen. So wird ein Proband nach etwa 1 Monat keine vollkommen
identische Bewegung, die in Bezug auf die räumliche Orientierung und die
Geschwindigkeitskomponenten exakt übereinstimmt, ausführen können. Ein
Vergleich von dynamischen Okklusionsverhältnissen entspricht dem Vergleich
von Bewegungen mit sechs Freiheitsgraden. Eine solche mathematische
Berechnung gestaltet sich äußerst komplex und ist mit gängigen statistischen
Methoden nicht zufrieden stellend durchführbar.
Es zeigte sich ferner, dass die Untersucher bezüglich der Erhebung der
relevanten Messdaten einen signifikant geringen Einfluss auf die resultierenden
Messergebnisse ausübten. Entscheidend ist, dass der Proband die
Exkursionsbewegungen reproduzierbar und in möglichst gleichförmiger
Bewegung vollzieht.
Diskussion
63
6.4 Vergleich Virtueller Artikulator und mechanischer Artikulator
Zur Simulation der dynamischen Okklusion in DentCAM bedarf es zumindest
der folgenden Messdaten, die am Patienten aufgenommen werden müssen:
• Gipsmodelle von Ober- und Unterkiefer
• spezielles Bissregistrat
• Datensatz der zu untersuchenden Unterkieferbewegungen
Zudem ist eine (rechnerische) Referenzierung der gesamten Messdaten
unerlässlich, d.h. die Unterkieferbewegungen müssen in einen räumlichen
Bezug zu den Datensätzen der digitalisierten Modelle gebracht werden können;
diese müssen ihrerseits mit Hilfe des Bissregistrates referenziert werden.
DELONG et al. untersuchten 2002 diesbezüglich unterschiedliche Verfahren zur
Referenzierung von Ober- und Unterkieferdatensätzen in die ursprüngliche
Okklusionsbeziehung. Sie stellten fest, dass ein direktes Generieren der
Kauflächen aus dem Datensatz des Registrates heraus signifikant schlechtere
Ergebnisse liefert, als das rechnerische Referenzieren der Modelldatensätze in
das virtuelle Registrat.
Ein praxisgerechtes Vorgehen bei der Verwendung eines mechanischen, teil-
oder volljustierbaren Artikulators kann wie folgt zusammengefasst werden: Es
sind Ober- und Unterkiefermodelle anzufertigen und mittels einer
Gesichtsbogenübertragung - unter Zuhilfenahme eines geeigneten
Bissregistrates - in den Artikulator einzubauen. Dies geschieht in der Regel
durch die Verwendung von schnellabbindendem Gips der Klasse I. Je nach
erforderlicher Präzision werden weitere Registrate, wie z.B. ein Protrusions-
oder Laterotrusionsregistrat angefertigt, um verschiedene Parameter wie die
horizontale Kondylenbahnneigung oder den Bennetwinkel näherungsweise zu
ermitteln. Unter Umständen kann eine Achsiographie zur Parametrisierung
herangezogen werden.
Der Virtuelle Artikulator benötigt entsprechend seinem mechanischen
Äquivalent zur Zeit noch Gipsmodelle der Kiefer, da eine intraorale
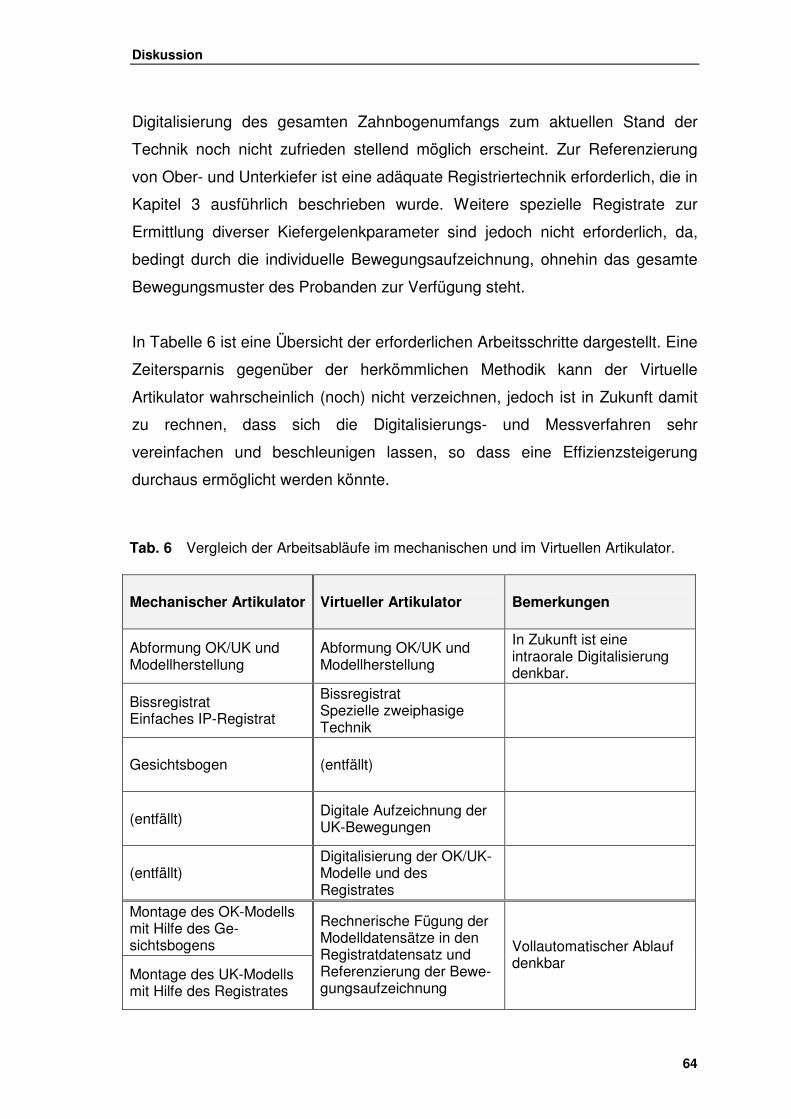
Diskussion
64
Digitalisierung des gesamten Zahnbogenumfangs zum aktuellen Stand der
Technik noch nicht zufrieden stellend möglich erscheint. Zur Referenzierung
von Ober- und Unterkiefer ist eine adäquate Registriertechnik erforderlich, die in
Kapitel 3 ausführlich beschrieben wurde. Weitere spezielle Registrate zur
Ermittlung diverser Kiefergelenkparameter sind jedoch nicht erforderlich, da,
bedingt durch die individuelle Bewegungsaufzeichnung, ohnehin das gesamte
Bewegungsmuster des Probanden zur Verfügung steht.
In Tabelle 6 ist eine Übersicht der erforderlichen Arbeitsschritte dargestellt. Eine
Zeitersparnis gegenüber der herkömmlichen Methodik kann der Virtuelle
Artikulator wahrscheinlich (noch) nicht verzeichnen, jedoch ist in Zukunft damit
zu rechnen, dass sich die Digitalisierungs- und Messverfahren sehr
vereinfachen und beschleunigen lassen, so dass eine Effizienzsteigerung
durchaus ermöglicht werden könnte.
Tab. 6 Vergleich der Arbeitsabläufe im mechanischen und im Virtuellen Artikulator.
Mechanischer Artikulator Virtueller Artikulator Bemerkungen
Abformung OK/UK und Modellherstellung
Abformung OK/UK und Modellherstellung
In Zukunft ist eine intraorale Digitalisierung denkbar.
Bissregistrat Einfaches IP-Registrat
Bissregistrat Spezielle zweiphasige Technik
Gesichtsbogen (entfällt)
(entfällt) Digitale Aufzeichnung der UK-Bewegungen
(entfällt) Digitalisierung der OK/UK-Modelle und des Registrates
Montage des OK-Modells mit Hilfe des Ge-sichtsbogens
Montage des UK-Modells mit Hilfe des Registrates
Rechnerische Fügung der Modelldatensätze in den Registratdatensatz und Referenzierung der Bewe-gungsaufzeichnung
Vollautomatischer Ablauf denkbar
Diskussion
65
6.5 Schlussfolgerung
Der Virtuelle Artikulator kann nicht nur die Funktions- und Okklusionsanalyse
entscheidend bereichern, sondern könnte z.B. auch als Instrument zur Planung
und Simulation komplexer kieferorthopädischer Fragestellungen eingesetzt
werden. Es könnten neue Möglichkeiten geschaffen werden, die in der Realität
nicht oder nur eingeschränkt denkbar wären. Zum einen verfügt der Virtuelle
Artikulator, bedingt durch die parametrische Verfügbarkeit von Translations-
und Rotationswerten der Stellung eines jeden Zahnes, über eine hohe
Genauigkeit hinsichtlich der Sollwerte einer Setup-Planung, zum anderen ist
jeder einzelne Arbeitsschritt kontrollierbar und reversibel. Zudem entfallen
mechanische Imponderabilien wie bei einem mechanischen Artikulator. Somit
ist die Präzision des Virtuellen Artikulators lediglich von der Auflösung der
verwendeten Messsysteme und Qualität der Rechenalgorithmen abhängig.
Bisher sind mechanische Bewegungssimulatoren (Artikulatoren) als Instrument
der Planung und Diagnostik bei komplexen Situationen und als Planungs- und
Arbeitsgrundlage für den Zahnarzt und Zahntechniker unverzichtbar. Soll die
individuelle Situation des Patienten so genau wie möglich nachgeahmt und
in-vitro verfügbar gemacht werden, haben mechanische Systeme prinzipiell
gravierende Einschränkungen: Beispielsweise lassen sich dynamische
Prozesse wie Zahneigenbeweglichkeiten, Resilienzen im Kiefergelenk und
belastungsabhängige Verbiegungen der Unterkieferspange grundsätzlich nicht
nachvollziehen, so dass Ungenauigkeiten, die ein Nachbessern und
Nacharbeiten erforderlich machen, systembedingt vorgegeben sind. Der
Einsatz der „Virtuellen Realität“ könnte diese Probleme minimieren.
Eine Fülle von verschiedenen Anwendungsbereichen könnten sich in Zukunft
anbieten: Planungsmodule für die zahnärztliche Prothetik, die Implantologie, die
Kieferorthopädie und die plastisch-rekonstruktive Chirurgie,
Patienteninformations- und Aufklärungsmodule, Zahntechnikmodule für
CAD/CAM-Verfahren, Analysemodule für die Funktionsdiagnostik und die
Prävention von Funktionsstörungen, Entwicklungsmodule für das Design
künstlicher Zähne und Kauflächen, Simulationsmodule für eine „virtuelle
Diskussion
66
Erprobung“ von Restaurationsmaterialien und deren Indikationen, Module für
die zahnärztliche und zahntechnische Ausbildung über die Simulation
komplexer Zusammenhänge im Kausystem und die Auswirkungen von
Behandlungsmaßnahmen.
6.6 Ausblick
Die Virtuelle Realität eröffnet Möglichkeiten, die in der realen Welt unter
Umständen nicht verfügbar sind. Aufgrund immer weiter fortschreitender
Techniken und Technologien werden Computer- und Visualisierungssysteme
immer genauer und echtzeitfähiger werden, so dass eine unmittelbare,
verzögerungsfreie Interaktion des Benutzers mit der virtuellen Welt resultieren
wird. Durch entsprechende Ausgabetechnologien wie z.B. 3D-Brillen,
holographische Anzeigesysteme oder „caves“ (z.B. würfelförmiger Raum, in
dem auf alle sechs Innenseiten entsprechend berechnete Animationen projiziert
werden) wird der Benutzer das Gefühl bekommen, tatsächlich in das virtuelle
Geschehen einzutauchen.
Der Virtuelle Artikulator „DentCAM“ zeigt schon zum aktuellen Stand viele neue
Möglichkeiten der computergestützten Funktions- und Okklusionsanalyse auf.
In der weiteren Entwicklung werden jedoch immer mehr biophysiologische
Parameter Berücksichtigung finden können, um der realen Situation so nahe
wie möglich zu kommen [KORDAß und GÄRTNER 2000].
Die folgenden Parameter ließen sich u.a. in Zukunft implementieren:
• physiologische Zahneigenbeweglichkeit
• Zahnverformung unter Kaudruckbelastung
• elastische Verformung der Unterkieferspange
• Verformung von Muskel- und Bandstrukturen
• Simulation parafunktioneller Kräfte
• Einbeziehung von Röntgenbildern (Wurzelkonfiguration)
Diskussion
67
Auch das Anwendungsspektrum könnte sich über die Funktions- und
Okklusionsanalyse hinaus erweitern, so dass z.B. folgende Bereiche Einzug in
die Virtuelle Realität erhalten könnten:
• Planungsmodule für die zahnärztliche Prothetik, die Implantologie, die
Kieferorthopädie und die plastisch-rekonstruktive Chirurgie
• Patienteninformations- und Aufklärungsmodule
• Zahntechnikmodule für CAD/CAM-Verfahren
• Analysemodule für die Funktionsdiagnostik und die Prävention von
Funktionsstörungen
• Entwicklungsmodule für das Design künstlicher Zähne und Kauflächen
• Simulationsmodule für die „virtuelle Erprobung“ von
Restaurationsmaterialien und deren Indikationen
• Module für die zahnärztliche und zahntechnische Ausbildung über die
Simulation komplexer Zusammenhänge im Kausystem und die
Auswirkungen von Behandlungsmaßnahmen
Zusammenfassung
68
7. Zusammenfassung
Im Zusammenhang mit der vorliegenden Arbeit wurde die Software „DentCAM“
entwickelt, die als „Virtueller Artikulator“ beschrieben werden kann. Der Virtuelle
Artikulator „DentCAM“ kann u.a. zur Visualisierung individueller
Bewegungsmuster der Kiefergelenke und zur Berechnung der daraus
resultierenden statischen und dynamischen Okklusionsbeziehung von Ober-
und Unterkieferbezahnung eingesetzt werden. Um eine Funktions- oder
Okklusionsanalyse mit dem Virtuellen Artikulator „DentCAM“ durchzuführen,
bedarf es einer Digitalisierung der Kiefermodelle und eines speziellen
Bissregistrates. Zudem ist eine elektronische, digitalisierbare und zahngeführte
Bewegungsaufzeichnung erforderlich.
Das Ziel der vorliegenden Arbeit war daher die Untersuchung des
3D-Scannersystems „Laserscan-3D“ (Fa. Willytec, D-München) und des
elektronischen Bewegungsmesssystems JMA („Jaw-Motion-Analyser“,
Fa. Zebris, D-Isny) hinsichtlich deren Eignung zur Verwendung als
Datenschnittstelle zum Virtuellen Artikulator „DentCAM“. Zudem sollte
aufgezeigt werden, ob die Reliabilität und die Reproduzierbarkeit des
Gesamtsystems „Virtueller Artikulator“ einen möglichen Einsatz des Virtuellen
Artikulators „DentCAM“ als Funktions- und Okklusionsanalysehilfe denkbar
erscheinen lassen.
Zur Untersuchung der Genauigkeit des 3D-Laserscanners wurden
4 Materialien, die zur Durchführung einer Analyse im Virtuellen Artikulator
erforderlich sind, parallel und in einem Winkel von 45° zur Nullebene des
Scannersystems dreidimensional eingescannt. Die vom Hersteller des
3D-Laserscansystems angegebene Genauigkeit ließ sich nicht nachvollziehen,
jedoch war die Genauigkeit der resultierenden Datensätze für die Anwendung
im Virtuellen Artikulator „DentCAM“ ausreichend.
Zur Untersuchung der Messgenauigkeit und der Reproduzierbarkeit des
Bewegungsmesssystems „JMA“ wurden dessen Sensoren an eine 3-Achsen-
Zusammenfassung
69
Fräsmaschine (Fa. Isel, D-Eiterfeld) gekoppelt. Die Kanten eines rechnerisch
konstruierten Würfels wurden abgefahren und die Messergebnisse mit den
berechneten Sollwerten verglichen. Es wurde eine ausreichende Mess- und
Wiederholgenauigkeit der Bewegungsaufzeichnungen im Zusammenhang mit
der weiteren Verarbeitung der gewonnenen Datensätze ermittelt.
Zur Untersuchung der Reliabilität, der Reproduzierbarkeit, der Inter- und der
Intraclasscorrelation des Gesamtsystems „Virtueller Artikulator“ wurden drei
Versuchsgruppen evaluiert:
• Prüfmessstand zur Evaluierung eines standardisierten Prüfkörpers
• 10 Modellfälle im mechanischen Artikulator
• 8 Probandenfälle (jeweils 3 Untersucher und 2 Messzeitpunkte)
Die Untersuchung ergab eine ausgezeichnete Reproduzierbarkeit hinsichtlich
der Darstellung von statischen und dynamischen Kontaktpunktemustern im
Virtuellen Artikulator „DentCAM“. Zudem konnte aufgezeigt werden, dass die
Untersucher bezüglich der Erhebung von relevanten Messdaten einen
signifikant geringen Einfluss auf die resultierenden Messergebnisse ausübten.
Zusammenfassend lässt sich festhalten, dass die untersuchten Messsysteme
geeignet erscheinen, die Datengrundlage für eine Visualisierung und
Auswertung im Virtuellen Artikulator „DentCAM“ bereit zu stellen. Die Reliabilität
und Reproduzierbarkeit des Virtuellen Artikulators „DentCAM“ ist ausreichend
hoch, um eine computergestützte Okklusionsanalyse unter Berücksichtigung
funktionsanalytischer Komponenten durchzuführen.
Eine routinemäßige Funktions- und Okklusionsanalyse am Probanden ist mit
dem Virtuellen Artikulator „DentCAM“ prinzipiell durchführbar. Optimierungen,
sowohl bezüglich der Genauigkeit des Verfahrens, als auch hinsichtlich der
Berücksichtigung weiterer biodynamischer Parameter, erscheinen jedoch
erstrebenswert.
Literaturverzeichnis
70
8. Literaturverzeichnis
ACKERMAN, M.J.:
Viewpoint: The Visible Human Project. J Biocommun 18, 14-26 (1991).
BAUER, A., GUTOWSKI, A.:
Gnathologie - Einführung in Theorie und Praxis. Quintessenz, Berlin (1978).
BERGSTRÖM, G.:
On the reproduction of dental articulation by means of articulators. Acta
Odontol Scand 9, 78-88 (1950).
BERLAGE, T., SCHMITGEN, A., SCHMITZ, CH., WELZ, A.:
Simulation and planning of minimally invasive coronary artery bypass
surgery. Proceedings of the International Symposium CARS, Berlin (2001).
BLOMBERG, S., HEYDEN, G., POSSELT, U.:
Artikulatoren. Quintessenz 1, 1-4 (1961).
BRUNNER, W.:
Informationsbroschüre Zebris JMA-System, Isny (1999).
BRUNNER, W.:
Persönliche Mitteilung und Demonstration im Rahmen eines Meetings mit der
Fa. Zebris, Greifswald (1999).
BURDEA, G., COIFFET, P.:
Virtual Reality Technology. Wiley, New York, 400-412 (1994).
CELENZA, F.V.:
An analysis of articulators. Dent Clin N Am 23, 305-326 (1979).
Literaturverzeichnis
71
CROUSSILAT, J.R.G.:
Occlusion et artculateurs. Julien Prelat, Marseille (1971).
DELONG, R., KO, C.C., ANDERSON, G.C., HODGES, J.S., DOUGLAS, W.H.:
Comparing maximum intercuspal contacs of virtual dental patients and
mounted dental casts. J Prosthet Dent 88, 622-630 (2002).
DERKSEN, A.A.D., VAN HAERINGEN, W.:
The protrusive movement in articulators. J Dent Res 37, 125-135 (1958).
DIETER, H.:
Untersuchung über Zusammenhänge der Gelenkbewegung und den
Frontzahnbeziehungen. Dissertation Med. Fak., Eberhard-Karls-Universität,
Tübingen (1984).
EDINGER, D.H.:
Die praktische Anwendung eines Robotersystems in der restaurativen
Zahnheilkunde. Quintessenz 43, 441-452 (1992).
EDINGER, D.H.:
Occlusal reconstruction using a robot system. J Gnathol 11, 19-26 (1992).
EDINGER, D.H., RALL, K., VON SCHROETER, P.:
Adding Dynamic Occlusion to Computer-Aided Tooth Restoration.
J Gnathol 14, 7-12 (1995).
EDINGER, D.H.:
Ein Robotersystem für die zahnärztliche Praxis. Phillip J 8, 301-306 (1999).
EDINGER, D.H.:
Instrumentelle Funktionsdiagnostik mit dem Simulator ROSY. Int J Comp
Dent 6, 37-49 (2003).
Literaturverzeichnis
72
FLEISS, J.L.:
Statistical Methods for Rates and Proportions. Wiley, New York, 321-322
(1981).
FREESMEYER, W.B., LUCKENBACH, A.:
ECR-System-Analyse der Zusammenhänge zwischen anteriorer und
posteriorer Führung. Dtsch Zahnärztl Z 42, 17-22 (1987).
FUHR, K., SIEBERT, G.:
Die Wirkungsweise von Artikulatoren. In: KETTERL, W.: Deutscher
Zahnärztekalender, Carl Hanser Verlag, München, 52-61 (1981).
FUHR, K., REIBER, T.:
Arcon- oder NonArcon-Artikulatoren? In: KETTERL, W.: Deutscher
Zahnärztekalender, Carl Hanser Verlag, München, 70-76 (1985).
GESCH, D., GÄRTNER, CH., KORDAß, B., HENSEL, S.:
Auswirkungen der Therapie von posterioren Zwangsbissen auf das
kraniomandibuläre System - visualisiert mit Hilfe eines virtuellen Artikulators.
Jahrestagung der DGKFO, Düsseldorf (2001).
GIBBS, C.H.:
Kieferbewegungen: Indikatoren für Dysfunktion? In: SCHMIEDSEDER, J.,
MOTSCH, A.: Registrierung der Unterkieferbewegungen, Quintessenz, Berlin
93-102 (1982).
GIBBS, C.H., WICKWIRE, N.A., JACOBSON, A.P., LUNDEEN, H.C., MAHAN,
P.E., LUPKIEWICZ, S.M.:
Comparison of typical chewing patterns in normal children and adults. J Am
Dent Assoc 105, 33-42 (1982).
Literaturverzeichnis
73
GIBBS, C.H., LUNDEEN, H.C.:
Jaw movements and forces druring chewing and swallowing and their clinical
significance. In: Lundeen, H.C., Gibbs, C.H.: Advances in occlusion, Wright,
New York, 117-136 (1982).
GIRRBACH DENTAL:
Das Original als Vorbild - Artex Analogsystem. Girrbach Dental, Pforzheim
(1993).
GIRRBACH DENTAL:
Der CNC-Zahntechniker. Girrbach Dental, Pforzheim (1993).
GIRRBACH DENTAL:
Girrbach Dental Systeme. Girrbach Dental, Pforzheim (1993).
GIRRBACH, K.:
Einige theoretische Grundlagen zur Auswahl eines Artikulatorsystems. Dent
Labor 39, 653-659 (1991).
HOFFMANN-AXTHELM, W.:
Lexikon der Zahnheilkunde. Band II, Quintessenz, Berlin, 62-63 (1992).
HUGGER, A.:
Artikulatoren und ihre Bedeutung für zahnärztliche und zahntechnische
Versorgungsleistungen. Teil I, Dental Spiegel 13, 48-50 (1993).
HUGGER, A.:
Artikulatoren und ihre Bedeutung für zahnärztliche und zahntechnische
Versorgungsleistungen. Teil II, Dental Spiegel 13, 28-32 (1993).
IVOCLAR AG:
Stratos 200: Der biofunktionelle Artikulator. Deutsche Ivoclar Dental GmbH,
Ellwangen (1993).
Literaturverzeichnis
74
KAMANN, W.K.:
Die fallspezifische, befundadäquate Artikulatorwahl in der Diagnostik und
Therapie. Dental Spiegel, 26-36 (1998).
KLETT, R.:
Elektronische Registrierverfahren für die Kiefergelenksdiagnostik. Dtsch
Zahnärztl Z 37, 991-996 (1982).
KOECK, B.:
Instrumentelle Funktionsdiagnostik. In: HUPFAUF, L.: Praxis der
Zahnheilkunde, Band 8, Urban & Schwarzenberg, München, 105-110 (1989).
KÖRBER, E.:
Die prothetische Versorgung des Lückengebisses. Befunderhebung und
Planung. 3. Auflage, Carl Hanser, München, 128-132 (1987).
KORDAß, B., HUGGER, A., ASSHEUER, J., MAI, J.K., STÜTTGEN, U.:
Zur Frage der Standardisierung kernspintomographischer Abbildungen für
die Beurteilung des Funktionszusatndes der Kiefergelenke. Zahnärztl Welt
Reform 101, 668-674 (1992).
KORDAß, B., GÄRTNER, CH.:
Matching von digitalisierten Kauflächen und okklusalen
Bewegungsaufzeichnungen. Dtsch Zahnärztl Z 54, 399-402 (1999).
KORDAß, B., GÄRTNER, CH.:
Der „Virtuelle Artikulator“ – Chancen und Einsatzmöglichkeiten der virtuellen
Realität in der Zahntechnik. Quintessenz Zahntech 26, 686-692 (2000).
LANG, N.P.:
Zur Geschichte der Artikulatoren. Schweiz Monatsschr Zahnheilk 80, 1105-
1149 (1970).
Literaturverzeichnis
75
LEE, H.J., HINRICHS, C., BAREDES, S., BOLANOWSKI, P., HO, T.:
The Role of CT Virtual Endoscopy for Evaluation of the Airway. Proceedings
of the International Symposium CARS, Berlin (2001).
LEJOYEUX, J.:
Prothese complete. Tome II, Maloine, S.A., Paris (1976).
LEMKE, H.U., INAMURA, K., JAFFE, C.C., FELIX, R.:
Voxel-Man, Proceedings of the International Symposium CARS,
Springer, Berlin (1995).
MEHL, A., GLOGER, W., KUNZELMANN, K.-H., HICKEL, R.:
Entwicklung eines neuen optischen Oberflächenmessgerätes zur präzisen
dreidimensionalen Zahnvermessung. Dtsch Zahnärztl Z 51, 23-28 (1996).
MEHL, A., GLOGER, W., KUNZELMANN, K.-H., HICKEL, R.:
A new optical 3D-device for the detection of wear. J Dent Res 76, 1799-1804
(1997).
MERTENS, F.:
Entwicklung eines Computerprogramms zur Durchführung elektronischer
Setups. Dissertation Med. Fak., Humboldt-Universität, Berlin (2000).
MEYER, G., DAL RI, H.:
Dreidimensionale elektronische Messung der Bewegungen des Kondylus
über die Scharnierachse des Unterkiefers. Dtsch Zahnärztl Z 40, 881-886
(1985).
MEYER, G., MOTSCH, A.:
Von der Artikulationslehre zur Funktionsdiagnostik. In: Akademie Praxis und
Wissenschaft in der DGZMK: Das Funktionsgestörte Kauorgan, Carl Hanser,
München, 9-33 (1987).
Literaturverzeichnis
76
MITCHELL, D.L., WILKIE, N.D.:
Articulators through the years. Part I, J Prosthet Dent 39, 330-338 (1978).
MITCHELL, D.L., WILKIE, N.D.:
Articulators through the years. Part II, J Prosthet Dent 39, 451-458 (1978).
OHLROGGE, H.H.:
Elektronische Registrierung der Kiefergelenksbewegungen. Dtsch Zahnärztl
Z 37, 263-268 (1982).
POSSELT, U.:
Physiology of occlusion and rehabilitation. Blackwell Scientific Publications,
Philadelphia, 242-253 (1962).
PRÖBSTER, L., BENZING, U.:
Vergleich der computerunterstützten Registriersysteme MT-1602 und
Compugnath. Dtsch Zahnärztl Z 45, 54-57 (1990).
RB DENTAL ELEKTRONIK:
CPS-PC - Der erste elektronische Artikulator. ZMK 321, 10-15 (1999).
REHM, H.:
Die angewandte Artikulationslehre. In: HÄUPL, K.: Zahnärztliche Prothetik,
Johann Abrosius Barth, Leipzig, 276-292 (1951).
REIBERG, J.:
Visualisierung und Animation von Kiefergelenksbewegungen mit dem
Modellierungs- und Animationssystem MAM/VRS. Diplomarbeit Inst. für
Computerwissenschaften, Universität Münster (1997).
RUGH, J.D., JOHNSON, R.W.:
Mandibular movements. In: MOHL, N.D., Zarb, G.A., CARLSSON, G.E.,
RUGH, J.D.: A textbook of occlusion, Quintessenz, Chicago, 129-132 (1988).
Literaturverzeichnis
77
SEIPEL, S., WAGNER, I.V., SCHNEIDER, W.:
Design of a 3D workbench interface for training in dental implantology.
Medinfo 9, 11-16 (1998).
SLAVICEK, R.:
Clinical and instrumnetal functional analysis for diagnosis and treatment
planning. Part VII, J Clin Orthod 22, 776-782 (1988).
SUVIN, M.:
Die Bewertung der Artikulatoren mit besonderer Berücksichtigung des
Gnathomats. Zahnärztl Welt 91, 44-48 (1982).
SZENTPÉTERY, A.:
Dreidimensionale mathematische Bewegungssimulation von Artikulatoren
und deren Anwendung bei der Entwicklung eines "Software-Artikulators".
Habilitationsschrift Med. Fak., Martin-Luther-Universität, Halle-Wittenberg
(2000).
TAMAKI K., CELAR A.G., BEYRER S., AOKI H.:
Reproduction of excursive tooth contact in an articulator with computerized
axiography data. J Prosthet Dent 78, 373-378 (1997).
URBANKOVA, A., LICHTENTHAL, R.M.:
DentSim Virtual Reality in Preclinical Operative Dentistry to Improve
Psychomotor Skills - A Pilot Study. J Dent Educ 66, 284-289 (2002).
VON SCHROETER, PH.:
Funktionelle computergestützte Kauflächenmodellation. Dissertation Med.
Fak., Technische Universität Hamburg-Harburg (1999).
WELK, A., SPLIETH, CH., KLINKE, T., KORDAß, B., MEYER, G.:
Der computergestützte Dentalsimulator in der Zahnmedizinischen
Ausbildung. Medizinische Ausbildung, Thieme Verlag 17, 125-130 (2000).
Eidesstattliche Erklärung
Eidesstattliche Erklärung
Hiermit erkläre ich, dass ich die vorliegende Dissertation selbstständig verfasst
und keine anderen als die angegebenen Hilfsmittel benutzt habe.
Die Dissertation ist bisher keiner anderen Fakultät vorgelegt worden.
Ich erkläre, dass ich bisher kein Promotionsverfahren erfolglos beendet habe
und dass eine Aberkennung eines bereits erworbenen Doktorgrades nicht
vorliegt.
Datum Unterschrift
Curriculum vitae
Curriculum vitae
Name Christian Gärtner
Geburtstag 27. März 1973
Geburtsort Wülfrath
Staatsangehörigkeit deutsch
Familienstand ledig
Vater Dr. rer. nat. Klaus Jürgen Gärtner
Mutter Christel Gärtner, geb. Grebe
Schulbildung 1979 – 1983 Grundschule Steinkulle, Haan
1983 – 1992 Dietrich-Bonhoeffer-Gymnasium,
Hilden
1992 Abitur
Zivildienst 1992 – 1994 Malteser-Hilfsdient, Solingen
Ausbildung zum Rettungshelfer
Berufsausbildung 1994 – 1994 Beginn des Studiums der
Pharmazie,
Heinrich-Heine-Universität
Düsseldorf
WS 1994/95 Beginn des Studiums der
Zahnmedizin an der
Ernst-Moritz-Arndt-Universität
Greifswald
10.08.1995 Naturwissenschaftliche
Vorprüfung
25.03.1997 Zahnärztliche Vorprüfung
Curriculum vitae
28.11.1998 Tagungsbestpreis im Rahmen
der DGZPW-Jahrestagung
für den Vortrag
„Der Virtuelle Artikulator“
02.11.1999 Staatsexamen
15.11.1999 Approbation zum Zahnarzt
Assistenzzeit 01.12.1999 –
01.12.2001 Assistent / Wiss. Mit. in der
Abteilung Prothetik und
Werkstoffkunde an
der EMA-Univ. Greifswald
01.01.2002 –
15.04.2002 Assistent in der
Gemeinschaftspraxis
Dr. Bungart und Schöbel,
Euskirchen
ab 01.06.2002 Projektleiter im CIFT
(Centrum für angewandte
Informatik, Flexibles Lernen
und Telemedizin), Greifswald
Leiter Prof. Dr. B. Kordaß
und Wiss. Mit. an der EMA-Univ.
Greifswald, Abteilung für
Prothetik und Werkstoffkunde
Datum Unterschrift
Danksagung
Danksagung
Mein Dank gilt allen denen, die das Entstehen dieser Arbeit auf
unterschiedlichste Weise gefördert haben.
Für die freundliche Überlassung des Themas, die ausgezeichnete persönliche
Betreuung und die intensive Unterstützung bei der Durchführung dieser Arbeit
gilt mein besonders herzlicher Dank meinem Doktorvater Herrn Prof. Dr. Bernd
Kordaß.
Herrn Christian Schwahn möchte ich für die intensive Unterstützung bezüglich
der statistischen Auswertungen danken.
Herrn Peter Schmidt danke ich für seine ausgiebige Unterstützung bezüglich
seiner feinmechanischer Arbeiten und seiner persönlichen Betreuung.
Meiner Familie bin ich ebenso wie meinen Freunden und Kollegen für die
geduldige Unterstützung sehr dankbar.
Mein besonderer Dank gilt denjenigen, die ich nicht namentlich erwähnt habe
und die mich durch vielerlei Denkanstöße und Fragestellungen entscheidend
unterstützt haben.