Embed Size (px)
Citation preview

Geometrische Aufgaben im Maschinenbau
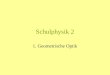
Gert F. Bär (TU Dresden) Im Maschinenbau ergeben sich bei der Konstruktion und Fertigung von Maschinenelementen zahlreiche Aufgaben der ebenen und räumlichen Geometrie. Oft treten dabei Regel-, Dreh- und Schraubflächen als Funktionsflächen auf, aber auch als Bewegflächen von Werkzeugschneiden, deren Hüllflächen dann zu berechnen sind. Hüllflächen treten auch als Funktionsflächen an Zahnrädern auf. Ihre Berechnung erfordert oft eine angepasste Visualisierung und Bewegungssimulation, um Kollisionsprobleme bequem zu erkennen. Eine Präsentation gelöster und ungelöster geometrischer Aufgaben mit vorwiegend antriebstechnischem Hintergrund soll auf die Bedeutung und Aktualität dieses Anwendungsbereichs der Geometrie hinweisen. Technische Darstellungslehre Vorlesungen über die Geschichte der Geometrie zeigen, dass sich diese Disziplin im Wechselspiel von Theorie und Praxis bis zum heutigen Stand entwickelt hat. Es sei an den Tempelbau der Ägypter, an das Delphische Problem der Griechen erinnert oder an Konstruktionszeichnungen von LEONARDO DA VINCI. Bei der wechselseitigen Bereicherung von geometrischer Theorie und Praxis hat die Konstruktion und der Bau von Maschinen (zur Erleichterung der menschlichen Arbeit) stets eine große Bedeutung gehabt. So können wir heute feststellen, dass der Maschinenbau eine historische und auch permanente Quelle geometrischer Aufgaben darstellt. Eine wichtige generelle Zielstellung ist dabei die Gestaltung von Maschinenelementen und -systemen. Hierbei kommen alle Grundobjekte der euklidischen Geometrie zum Einsatz, wie Punkt, Gerade, Ebene, Polygon, Prisma, Pyramide, Zylinder, Kegel, Kugel usw. Die Grundaufgaben sind das Verbinden und Schneiden dieser Grundobjekte zur Erzeugung neuer Objekte. RENÉ DESCARTES hat sich um 1637 mit mechanisch erzeugten Kurven beschäftigt – und Kurven durch algebraische Gleichungen beschrieben. Er gilt als Begründer der Analytischen Geometrie. Ohne diese Disziplin ist der Maschinenbau der Neuzeit undenkbar. Bei der Konstruktion eines Maschinenteils benötigt man Abbildungsverfahren, wie Parallelprojektion, Zentral- oder kotierte Projektion, um das geplante Teil sichtbar zu machen, beispielsweise für die fachliche Diskussion mit Konstruktionspartnern oder die Auftragserteilung für eine Herstellung des Maschinenteils. Es entwickelte sich die Technische Darstellungslehre, die durch das genaue Zeichnen auch das Lösen von Maßaufgaben ermöglichte - beispielsweise durch Abmessen einer konstruierten Kantenlänge an einem Prisma. Im weiten Feld der Konstruktiven Geometrie wurden wichtige qualitative Eigenschaften von Kurven und Flächen geschaffen. Ich möchte z. B. an die Lehrbücher von E. MÜLLER, J. KRAMES, F. HOHENBERG und E. KRUPPA erinnern. Im Zusammenhang mit Maschinenteilen finden wir Konstruktionen an Flächen zweiter Ordnung wie Drehzylinder oder Drehkegel, aber auch Rohrflächen, Kanal- und Schiebflächen. Sie treten bei der Konstruktion von Wellen und Achsen vielfach auf. Im Anlagenbau wird man sich beispielsweise für die Konstruktion der Durchdringungskurve eines Kegels und eines Zylinders interessieren, die Figur 1 zeigt. Wellen und Kupplungen
Im Maschinenbau werden Antriebssysteme entwickelt. Hier ein einfaches Beispiel: Ein E-Motor treibt eine Pumpe an. Durch unvermeidliche Montageabweichungen sind die Wellen von E-Motor und Pumpe nicht koaxial. Zum Ausgleich des Lagefehlers verwendet man eine Anbau-kupplung, welche die Wellen verbindet. Bei einer Klauenkupplung greifen Klauen von links nach rechts abwechselnd in die Lücken eines Zahnrades. Bei einer Bogenzahnkupplung wird die Wellendrehung durch eine innenverzahnte Hülse
5. Tagung der DGfGG 2009 G. Bär
5

′′S
′S
′X ′X
′′X ′′X
′P
′′P
′a2 ′′′a2
′Φ2
′′Φ2
′′′Φ2
′′a2
′Φ1
′′Φ1
′′′Φ1
′ej
′′ej
′gi
′′′gi
′gi
T
′′T
′′tX
′tX
′ki
′′′ki
′′′S
x13
x12
.
.
.
.
.
′′tP
′′= ′′g gi i′′ki
′′a1
′′Δi
′′′P′′′Σ j
′′′gi
′′gj
′gj
′tP
′′′= ′′′X X
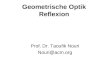
Figur 1: Konstruktion der Schnittkurve eines Drehkegels mit einem Drehzylinder in zugeordneten Normalrissen [1] und eine außenverzahnte Nabe übertragen. Figur 2 zeigt zwei Querschnitte durch eine solche Kupplung. Zunächst sollte man sich die Zähne der Nabe als das mengentheoretische Komplement der Hülsenzähne vorstellen. Anschließend müssen die Nabenzähne jedoch geeignet verjüngt werden, um eine Auslenkung der Nabenachse gegenüber der Hülsenachse während der Drehung von Hülse und Nabe zu gestatten. Die Verjüngung der Zähne von ihrer Mitte zum Rand kann bei ihrer Herstellung durch Wälzstoßen oder Wälzfräsen erreicht werden. Das Schneidrad wird zum Rand der Zähne hin tiefer in das Material hineinbewegt. Es wird typischerweise auf einem Kreisbogen bewegt, der den so genannten Bombierungsradius besitzt [2]. Das Streben nach technischen Verbesserungen der Kupplungen und ihrer wirtschaftlicheren Fertigung bringt geometrische Aufgaben hervor: Beschreibung der Zahngeometrie und des Zahneingriffs von Hülse und Nabe entsprechend möglicher Herstellungsverfahren mit differentialgeometrischen Methoden, nichtlineare Optimierung von Herstellungsparametern bezüglich der Belastbarkeit der Kupplung und der Übersetzungsfehler [3, 4].
5. Tagung der DGfGG 2009 G. Bär
6

Figur 2:. Geometrische und kinematische Verhältnisse an einer Zahnkupplung 1 Kupplungshülse, 2 Kupplungsnabe, 3 Zahnpaarung in Schwenkstellung, 4 Zahnpaarung in Kippstellung, 5 Teilkreis Hülse, 6 Teilkreis Nabe [2] Turbinenschaufeln
Ein anderes Feld der Geometrie benötigen die Turbinenbauer. Kompressorschaufeln an einer Gasturbine oder Wasserturbinenschaufeln müssen Luft- oder Wasserströme verdichten oder umlenken. Siehe die Figuren 3 und 4. Aus einem thermo- und hydrodynamischen Berechnungsmodell [5] erfolgt der Flächenentwurf der Kompressor- oder Turbinenschaufeln. Man startet mit Isolinien oder Punktgittermodellen, die zur weiteren Berechnung beispielsweise durch B-Spline-Flächen approximiert werden [6]. Die Gesamtoberfläche einer Schaufel kann nur durch Einzelflächen eines Flächenverbundes gut approximiert werden. Wie wählt man die Einzelflächen optimal aus mit Rücksicht auf die höchst unterschiedlichen Krümmungsverhältnisse über den Verlauf der Gesamtoberfläche? Antworten können durch Anwendung von Methoden der diskreten Differentialgeometrie [7] gefunden werden. Spannende Aufgaben liegen hier vor uns.
Figur 3: Laufradschaufel
einer Pelton-Turbine
Figur 4: Kompressorschaufeln in einer Gasturbinenstufe
5. Tagung der DGfGG 2009 G. Bär
7

Freiformflächen und CAGD
In den 60er Jahren haben DE CASTELJAU und BÉZIER [6,8] die Freiformflächen erfunden, um Automobilkarosserien mathematisch zu beschreiben. Sie haben damit für die Mathematik und Geometrie ein weites Forschungs- und Anwendungsgebiet geöffnet, welches jeder von Ihnen hinter den Buchstaben CAGD kennt. In diesem Gebiet arbeiten Geometer und Maschinebauer seit Jahren erfolgreich zusammen. Es werden immer noch Anwendungs-gebiete erschlossen, wie etwa im Schuh-Design (Figur 6). Es bestehen auch starke Quer-verbindungen zum Flächendesign in der Architektur [8]. Natürlich stellen Maschinenbau und Architektur unterschiedliche Genauig-keitsanforderungen an den Flächen-entwurf. Viele geometrische Aufgaben im Maschinenbau werden heute mit 3D-CAD-Software bearbeitet. Aus den Konstruktionsbüros sind die Zei-chenmaschinen verschwunden. Sie wurden durch Computerbildschirme ersetzt. Die technische Darstellungslehre
ist in Software verwandelt worden. Ebenso stecken große Teile der oben genannten Analytischen Geometrie in solcher 3D-CAD-Software. Somit steckt inzwischen ein großer Teil des geometrischen Wissens für den Maschinenbau in solcher Software.
Figur 5: Karosserie-Entwurf mit NURBS-Oberflächen aus Bonitz, P.: Freiformflächen in der rechnerunter-
Karosseriekonstruktion und im Industriedesign, Springer, 2009. stützten
Figur 6: Schuh-Konstruktion (http://www.opencascade.org/showroom/screenshots/)
5. Tagung der DGfGG 2009 G. Bär
8

Nach einer kurzen Einweisung könnte bereits ein Abiturient die in Figur 1 mit der Parallelkreis-methode punktweise konstruierte Schnittkurve zwischen zwei Drehzylindern auf dem Computerbildschirm visualisieren. Ein Anwender solcher Software kann also relativ befreit von geometrischen Detailkenntnissen, etwa dass diese Kurve von 4. Ordnung ist und daher von einer Ebene in höchstens vier Punkten geschnitten wird, seine Konstruktionsaufgabe erledigen. Weiter ver
Nach einer kurzen Einweisung könnte bereits ein Abiturient die in Figur 1 mit der Parallelkreis-methode punktweise konstruierte Schnittkurve zwischen zwei Drehzylindern auf dem Computerbildschirm visualisieren. Ein Anwender solcher Software kann also relativ befreit von geometrischen Detailkenntnissen, etwa dass diese Kurve von 4. Ordnung ist und daher von einer Ebene in höchstens vier Punkten geschnitten wird, seine Konstruktionsaufgabe erledigen. Weiter ver
e
h n
Figur 7: Getriebegehäuse-AutoCAD-3D-Konstruktion
einfachen Bibliotheken
il bis zur Baugruppe beherrscht. Es kann sogleich eine FEM-
ie Ingenieurausbildung an den Universitäten hat mit dieser Entwicklung Schritt gehalten. Die
enn ich den Maschinenbau als eine
einfachen Bibliotheken
il bis zur Baugruppe beherrscht. Es kann sogleich eine FEM-
ie Ingenieurausbildung an den Universitäten hat mit dieser Entwicklung Schritt gehalten. Die
enn ich den Maschinenbau als eine
Figur 8: Oben: 3D-Modelle der Schrauben-verdichter-Rotoren gedruckt im Labor unseres Instituts. Unten: Schraubenverdichter-Profile mit opti-mierter Leckströmung: h: Hauptrotorprofil, n: Nebenrotorprofil, e: Eingriffslinie
genormter genormter Maschinenelemente die Arbeit. Hier holt man sich per Mausklick passende Federn, Schrauben, Achsen, Kugellager, Wälzlager usw.
Maschinenelemente die Arbeit. Hier holt man sich per Mausklick passende Federn, Schrauben, Achsen, Kugellager, Wälzlager usw. Die Modellierung wird vom EinzelteDie Modellierung wird vom EinzelteBerechnung angeschlossen werden. Für die Fertigungsvorbereitung werden Einzelteilzeichnungen mit Bemaßung automatisch generiert, Stücklisten und vieles mehr.
Berechnung angeschlossen werden. Für die Fertigungsvorbereitung werden Einzelteilzeichnungen mit Bemaßung automatisch generiert, Stücklisten und vieles mehr. DDAusbildung in den Fächern "Technische Darstellungslehre" und "Analytische Geometrie" wurde stark reduziert, teilweise auf Null gesetzt. Hingegen wurde Informatik in den Lehrplan aufgenommen.
Ausbildung in den Fächern "Technische Darstellungslehre" und "Analytische Geometrie" wurde stark reduziert, teilweise auf Null gesetzt. Hingegen wurde Informatik in den Lehrplan aufgenommen. WW Quelle geometrischer Aufgaben sehe, dann denke ich auch an
igur 7 zeigt ein mit AUTOCAD entworfenes Getriebegehäuse. Im Inneren sehen wir andeutungs-
etriebe- und Verzahnungskonstruktionen sind eine echte Lücke bei 3D-CAD-Software. Für dieses
Bewegflächen oder als Hüllflächen.
eine Nutzung solcher 3D-CAD-Software bei neuen Projekten und an eine Mitarbeit bei der Verbesserung und Erweiterung geometrischer Software-Bestandteile, was natürlich geometrische Kenntnisse voraussetzt.. Fweise ein Zahnrad. Die Gehäuseöffnung soll die Lager für die zweite Getrieberadwelle aufnehmen, welche die erste kreuzen wird. GTeilgebiet der Antriebstechnik sind auch Kenntnisse in der Kinematik erforderlich [9]. Dabei sind Kurven- und Flächenklassen von Bedeutung, die durch Bewegungen definiert sind [10], z.B. als
5. Tagung der DGfGG 2009 G. Bär
9

Modellierung von Zylinder- oder Extruderschnecken sowie ihrer Herstellungswerkzeuge
Zahnrad- und Schneckenprofile sind oft aus Geradenstücken, Kreisbögen, Zykloiden, Epi- oder Hypotrochoiden und Evolventen zusammengesetzt. Diese Kurven sind als Punktbahnen kinematisch erzeugt und man erkennt deshalb ihre Bahnnormalen ohne Rechnung. Die Bahnnormalen spielen eine entscheidende Rolle für die Konstruktion eines Zahnradprofiles zu einem gegebenen Zahnradprofil: Zwei Zahnprofile, die sich in einem bestimmten Zeitintervall unter ständiger Berührung um zwei parallele Achsen drehen, müssen im Berührungspunkt identische Kurvennormalen besitzen, die durch den Momentanpol der ebenen Bewegung verlaufen [11]. Auf diese synthetische Weise wurde die Zykloidenverzahnung schon 1694 von PH. DE LA HIRE und die am häufigsten verwendete Evolventenverzahnung von L. EULER (1765) beschrieben. Will man weitere Zahnradprofile erschließen, kann von der Bewegung eines gegebenen Zahnrad-profils ausgegangen werden, welches eine Kurvenschar erzeugt. Mit differentialgeometrischen Metho-den berechnet man dann die Hüllkurve dieser Kurvenschar, die das Zahnradprofil des Gegenrades bildet. In [12] wird weiter gezeigt, wie ein Hüllkurvenpaar aus einer vorgegeben Eingriffslinie durch Integration gewonnen werden kann. Auf diese Weise wurden neue, optimale Zahnprofile für Schraubenverdichter berechnet. Siehe Figur 8. Die Werkstückgeometrie von Sonderverzahnungen, Zylinderschnecken- und Gewindeflanken kann durch Schraub- und Drehflächen modelliert werde. Das gilt auch für die Werkzeuge dieser Maschinenelemente bei ihrer Herstellung durch Fräsen, Schleifen oder Wirbeln [13].
Figur 9: Schleifen (links) und Wirbeln (rechts) einer Zylinderschnecke Beim Wirbeln rotieren die Schneiden des Wirbelrings mit hoher Geschwindigkeit um die Achse des Wirbelrings. Sie können als Kurven auf einer Drehfläche modelliert werden, die das Werkstück umschlingt. Hierbei gibt es zwei prinzipielle geometrische Aufgaben: Im ersten Fall ist eine Werkzeug-Drehfläche gegeben und ihre Schraubung um die Werkstückachse. Gesucht ist die eingehüllte Werkstück-Schraubfläche. Im zweiten Fall ist eine Werkstück-Schraubfläche gegeben. Gesucht ist die eingehüllte Werkzeug-Drehfläche, deren Achse geeignet gewählt werden kann. Beide Aufgaben lassen sich gemeinsam lösen, wenn eine Drehfläche als entartete Schraubfläche aufgefasst wird. Dann hat man zu einer gegebenen Schraubflächen eine berührende Schraubfläche zu bestimmen, wobei die Schraubachsen windschief zueinander liegen [14,15].
5. Tagung der DGfGG 2009 G. Bär
10

Bei der Lösung des Problems wendet man vorteilhaft Liniengeometrie [16] an. Damit
unbrauchbar. Das Beispiel verdeutlicht die hohe praktische Bedeutung geometrischer Simulationsrechnungen. Solche geometrischen Methoden wurden 2008 an unserem Institut durch einen Drittmittelauftrag in eine entsprechende Software verwandelt, die zunächst die Wirbelwerkzeugberechnung für Zylinder-schnecken betrifft. Für alle zugelassenen DIN-Flankenformen von Zylinder-schnecken kann das Programm Werk-zeugprofile und Prüfmaße berechnen. Eine Fortsetzung des Projektes könnte in der geometrischen Modellierung einesneuen Herstellungsverfahrens für
chneckenräder bestehen, welches den ekannten klassischen Verfahren (Radial- oder Tangentialwälzfräsen [17]) überlegen sein müßte.
ypoid-Kegelradgetriebe
d oder schneidend. Es
kann nämlich formuliert werden, dass die Berührungslinie zwischen den beiden Schraubflächen durch die Schnittgeraden-menge (Geradennetz) der beiden durch die Schraubungen definierten linearen Gera-denkomplexe ausgeschnitten wird. Aus der Berührungslinie kann dann ein Achsschnitt oder Stirnschnitt der eingehüllten Schraubfläche berechnet werden. Die Figur 10 stellt ein gestricheltes Schleifscheibenprofil und drei Wirbel-stahlprofile dar, die für die Herstellung der Schraubfläche mit dem eingezeichneten Achsschnitt a für unterschiedliche Achs-winkel berechnet wurden. Das Berech-nungsbeispiel soll zeigen, dass eine Tangentenunstetigkeit in einem Punkt des Achsschnitts Werkzeugprofile nach sich zieht, die Spitzen oder Lücken besitzen. Solche Werkzeugprofile sind technisch
Figur 10: Schleifscheibenpofil und Wirbelstahlprofile für unterschiedliche Achswinkel zwischen Schnecken und Werkzeugachse
Figur 11: Zylinderschneckengetriebe-Modell, Zylinderschnecke mit Welle (oben) und Schneckenrad. (unten) S
b H
Sie sehen in Figur 12 das virtuelle Modell der Zahnradflanken eines Hypoid-Kegelradgetriebes. Solche Getriebe haben hohe Gebrauchseigenschaften und werden in PKW-, LKW- und Schiffbau-Antrieben eingesetzt. Den sehr guten Einsatzmöglichkeiten steht ein hoher Aufwand bei der Auslegungsberechnung, der Berechnung der Einstellungsparameter für die Ritzel- bzw. Tellerrad-Herstellung und für die Tragbildkorrektur gegenüber. Die Drehung des Ritzels wird durch bogenförmige Zähne auf eine Drehung des Tellerrades bertragen. Die Drehachsen sind windschief, speziell auch senkrecht kreuzenü
besteht noch immer die Aufgabe, solche Getriebe in vielerlei Hinsicht zu optimieren.
5. Tagung der DGfGG 2009 G. Bär
11

Die Herstellung des Ritzels und des Tellerrades erfolgt auf Kegelrad-Verzahnmaschinen verschiedenen Typs. In Abhängigkeit vom Her-stellungsverfahren sind Zahnrad-flanken als Hüllflächen mit ihren Krümmungseigenschaften aus den Werkzeugschneiden-Bewegungen zu modellieren. Figur 13 zeigt einen Werkzeugkopf der mit Schneidmessern bestückt ist,
nes Ritzels. bei der Herstellung ei
Wohin verlagert sich das Kon-taktbild durch Fertigungsabweichungen und Getriebebelastung? Welche Abweichungen ergeben sich dann bei der Übertra-gungsfunktion? Die Arbeiten [18, 19, 20] geben durch Anwendung und Weiterentwicklung der Differentialgeometrie sowie durch ihre Integration in die Singularitätentheorie [21] und unter dem praktischen Einsatz des Automatischen Differenzierens [22] hierauf wichtige Antworten. Ist dieser Erfolg der durchgängigen Modellierung von Getriebeeigenschaften
ngspara-nschaften auf
önnten Kronenradgetriebe als
e von Maschinenteilen
Nachdem die Ritzel- und die Tellerrad-Flanken parametrisiert wurden, erfolgt die Modellierung des Zahnflankenkontaktes in einem virtuellen Getriebe. Haben die Flanken das gewünschte Zahnflan-kenkontaktbild in der Mitte der Zahnflanken, wie dies in Figur 12 als dunkler Fleck auf jedem Zahn zu
a
w
T
R
Figur 1RitzelAchsw
2: Zahnoberfläche eines Tellerrades T und eines s R mi d a, inkel
t windschiefen Drehachsen, Achsabstan w
erkennen ist?
Bild 13: Herstellung eines bogenverzahnten Ritzels von den Auslegungs- und Fertigumetern bis zu den Trageige
ar? Beispielsweise kweitere räumliche Verzahnungen übertragbAlternative zu den Hypoid-Kegelradgetrieben untersucht werden. Auch Schneckenradgetriebe sindnoch nicht ausgereizt bezüglich verschiedener Optimalitätskriterien. Optische Qualitätskontroll
Ein weiteres Anwendungsgebiet der Geometrie, zu dem in unserem Institut Beiträge geleistet wurden, ist die optische Qualitätskontrolle von Maschinenteilen und einer weiteren Vielzahl physikalischer Objekte. Es geht dabei um die Rekonstruktion interessanter Abmessungen der Objekte durch opto-elektronische Messverfahren. Diese Verfahren werten Einzel- oder Mehrfachbilder von 3D-Mess-systemen aus. Neben Aufgaben der Bildverarbeitung kommen Themen der projektiven Geometrie (Perpektive, Doppelverhälnis, Kollineationen, Quadriken) und des CAGD zur Anwendung [23]].
5. Tagung der DGfGG 2009 G. Bär
12

Zur Ermittlung funktionsbestimmenLabormessplatz nach dem Streifenpr
ihre Daten zu einem PC übertragen und die Prüflinge durch speziell entwickelte
endungsbereich der Projektiven Geometrie, werden. Dabei geht es um die Modellierung inematik, der Bewegungsplanung und der
untersucht, dessen Spindel von fünf Beinen atischen Aufgabe, d. h. die Positionen und
d ein o 14. Dabei
wurden Oberflächenpunktjeweiligen funktionsbestimmendeAuswertungsprogramme berechnet [24 Geometrische Robotik
Aufgrund der gebotenen Kürze kann ein aktueller AnwKinematik und der Liniengeometrie nur noch erwähnt und Untersuchung der geometrischen Struktur, der KArbeitsräume von seriellen und parallelen Robotern [9]. An unserem Institut wurde ein Fräsroboter (Figur 15) gesteuert wird [25]. Dabei lösten wir die direkte kinemOrientierungen der Frässpindel für vorgegebene Beinlängen wurden bestimmt. Singuläre Lagen konnten ebenfalls charakterisiert werden. Das sind jene Lagen der RoboterBewegung des Roboters eingeschränkt ist. Das Beispiel verdeutlicht typische Problemstellungen in
ejektionsprinzip aufgebaut und getestet. Siehe Figur
e der Prüflinge optisch erfaßt,n Parameter der
].
r Parameter von Lehrdornen und Gewinden wurde
beine, bei denen die
Probleme in polynomiale Gleichungssysteme transformiert. Die Verbesserung der algebraischen Computer-Manipulationssysteme zur Lösung solcher
leichungssysteme, vorzugsweise mit der Resul-
diesem Arbeitsgebiet. Oft werden hier mechanische
erden damit in geometrische Konstruktionsaufgaben uf dieser Hyperquadrik übertragen. Eine Fülle von nregungen enthält der jüngste Konferenzbericht 6].
Figur 15: Frässpindel des METROM P800 [http://www.metrom.com]
Gtantenmethode, erlaubt die computerunterstützte weiterführende Behandlung alter kinematischer Ideen von SCHOENFLIES, BOREL/BRICARD, BLASCHKE/-GRÜNWALD, BENNETT und STUDY. Insbesondere gestatten Study-Parameter die Abbildung von Raumbewegungen auf die Punkte einer Hyperquadrik des 7-dimensionalen reellen projektiven Raumes. Synthese- und Analyseprobleme von Mechanismen waA[2
Figur 14: Schema eines Messplatzes nacStreifenprojektionsprinzip (links), Lichtschnitte auf einem zylindrischenLehrdorn und approximierte Ellipsenp(rechts) für eine Schnittellipse
h dem
unkte
5. Tagung der DGfGG 2009 G. Bär
13

Literatur
[1] Klix, W.-D.: Konstruktive Geometrie - darstellend und analytisch. Carl Hanser Verlag, 2001. [2] G. Bär, G. Kunze: Zum Eingriffsverhalten einer Kupplungsverzahnung. Maschinenbautechnik, Berlin 35 (1986) 12, 560-563. [3] Pries, M: Geometrie und Kinematik von Bogenzahnkupplung. Diss. TU Dresden, Fak. MN, Inst. für Geometrie, 1990. [4] Wächter, J.: Untersuchung von doppelbombierten verlagerungsfähigen Kupplungen mit Evolventenverzahnung. Diplomarbeit TU Dresden, Fak. MN, Inst. für Geometrie, 2007. [5] Menny, K.: Strömungsmaschinen. Teubner Verlag, 2006. [6] Prautzsch, H. et al.: Bézier and B-Spline Techniques. Springer, 2002. [7] Bobenko, A.I. et al.: Discrete Differential Geometry. Birkhäuser, 2008. [8] Pottmann,H. et.al.: Architectural Geometry. Bentley, 2007. [ . Springer, 1997. [ g für Ingenieure und Naturwissenschaftler. Teubner 2001. [ Bibliographisches Institut, Mannheim, 1968. [ Conjugate Profiles. Journal for Geometry and Graphics, 003).
er: Computational Line Geometry. Springer 2001. lytische Behandlung des Wälzfräsens. Mech. Mach. Theory 28 (1993),
ldt-Univ. Berlin, Fak. II, 2007. hniques of algorithmic differentiation.
, 2000. ection Images. Proceedings 3D Analysis and
essung von Lehrdornen und Gewinden. ung" Stuttgart, 5.10-6.10.1999, 307-312. ntapod Robot. JGG 10 (2006), 2, 125-134.
inematics. Proc. 5th Int. Workshop on
[email protected] ttp://www.math.tu-dresden.de/~baer
Dresden
9] Husty, M. et al.: Kinematik und Robotik10] Bär, G.: Geometrie - Eine Einführun11] Wunderlich, W.: Ebene Kinematik.12] Bär, G.: Explicit Calculation Methods for
Vol. 7, No.2, 201-210 (2[13] Bär, G.: CAD of Worms and Their Machining Tools. Comput.& Graphics. Vol.14 (1990), No. 3/4, 405-411. [14] Bär, G.: Curvatures of the enveloped helicoid. Mech. Mach. Theory, Vol. 32 (1997), No.1, 111- 120. [15] Bär, G.: Berührende Schraubflächen mit Schraublinienkanten. Mathematica Pannonica 8/2
(1997), 225-236. [16] H. Pottmann, J. Walln17] Bär, G., Pries, M.: Ana[
No.1, 65-71. [18] Bär, G., Iotchev. V.: Accurate Tooth Contact Determination for Hypoid Bevel Gears using Automatic Differentiation. 4th World Congress on Gearing and Power Transmission, M.C.I., Paris, March 16-18, 1999, Vol.1, 519-529. [19] Vogel, O.; Griewank, A.; Bär, G.: Direct gear tooth contact analysis for hypoid bevel gears. Computer Methods in Applied Mechanics and Engineering 191 (2002), 3965-3982. [20] Achtmann, J.; Bär, G.: Optimized Bearing Ellipses of Hypoid Gears.
ASME J. Mech. Design, Vol.125, No.4, pp.739-745 (2003). [21] Vogel, O.: Gear-Tooth-Flank and Gear-Tooth-Contact Analysis for Hypoid Gears- An Application of Singularity Theory. Diss. Humbo[22] Griewank, A.: Evaluating derivatives, principles and tec Frontiers in Applied Mathematics, Vol 19, SIAM[23] Bär, G.; Korthals, T.: 3D-Evaluation of Light Inters Synthesis '96. Infix, 23-29. [24] Bär, G.; Döbbecke, T.; Kunzmann, S.: Optische Verm Proc. DGZfP-Fachtagung "Optische Formerfass[25] Bär, G. und G. Weiss: Kinematic Analysis of a Pe[26] Kecskeméthy, A., Müller, A.(eds): Computational K Computational Kinematics. Springer, 2009. Anschrift des Autors:
Prof. Dr. G. F. Bär Email: gInstitut für Geometrie URL: hTU Dresden 01062
5. Tagung der DGfGG 2009 G. Bär
14