Embed Size (px)
Citation preview
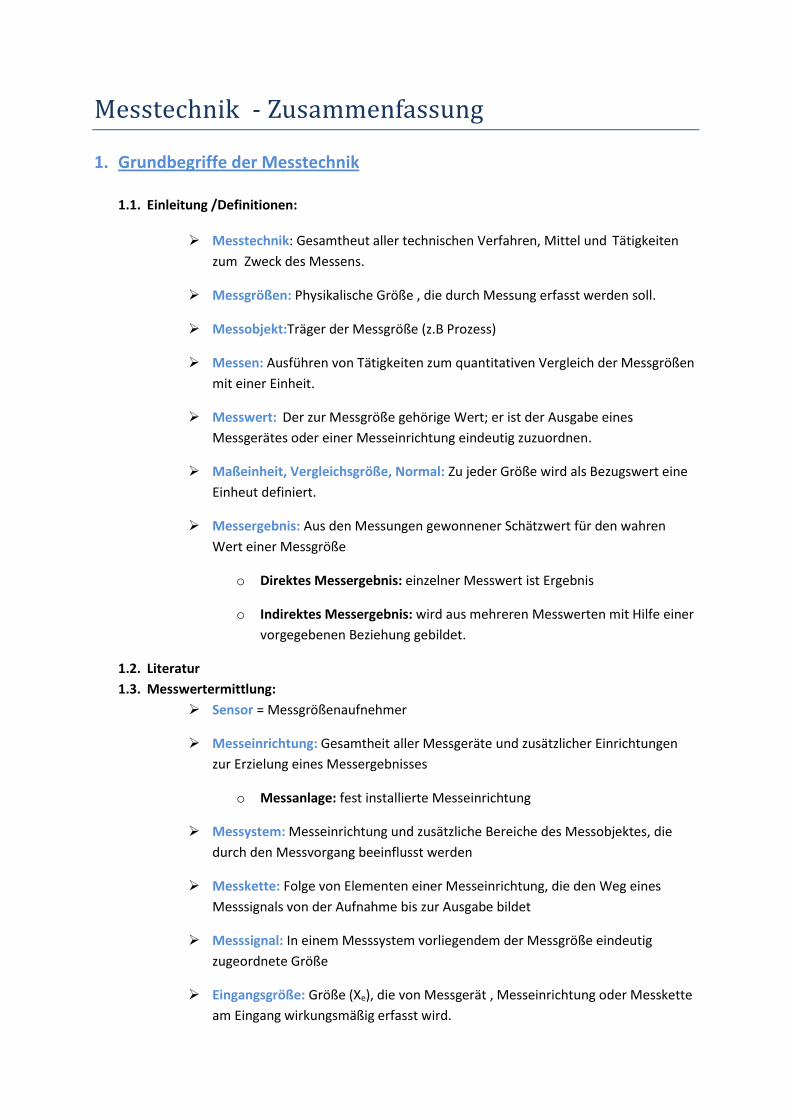
Messtechnik - Zusammenfassung
1. Grundbegriffe der Messtechnik
1.1. Einleitung /Definitionen:
Messtechnik: Gesamtheut aller technischen Verfahren, Mittel und Tätigkeiten
zum Zweck des Messens.
Messgrößen: Physikalische Größe , die durch Messung erfasst werden soll.
Messobjekt:Träger der Messgröße (z.B Prozess)
Messen: Ausführen von Tätigkeiten zum quantitativen Vergleich der Messgrößen
mit einer Einheit.
Messwert: Der zur Messgröße gehörige Wert; er ist der Ausgabe eines
Messgerätes oder einer Messeinrichtung eindeutig zuzuordnen.
Maßeinheit, Vergleichsgröße, Normal: Zu jeder Größe wird als Bezugswert eine
Einheut definiert.
Messergebnis: Aus den Messungen gewonnener Schätzwert für den wahren
Wert einer Messgröße
o Direktes Messergebnis: einzelner Messwert ist Ergebnis
o Indirektes Messergebnis: wird aus mehreren Messwerten mit Hilfe einer
vorgegebenen Beziehung gebildet.
1.2. Literatur
1.3. Messwertermittlung:
Sensor = Messgrößenaufnehmer
Messeinrichtung: Gesamtheit aller Messgeräte und zusätzlicher Einrichtungen
zur Erzielung eines Messergebnisses
o Messanlage: fest installierte Messeinrichtung
Messystem: Messeinrichtung und zusätzliche Bereiche des Messobjektes, die
durch den Messvorgang beeinflusst werden
Messkette: Folge von Elementen einer Messeinrichtung, die den Weg eines
Messsignals von der Aufnahme bis zur Ausgabe bildet
Messsignal: In einem Messsystem vorliegendem der Messgröße eindeutig
zugeordnete Größe
Eingangsgröße: Größe (Xe), die von Messgerät , Messeinrichtung oder Messkette
am Eingang wirkungsmäßig erfasst wird.
Ausgangsgröße: Größe (Xa), die am Ausgang eines Messgerätes, einer
Messeinrichtung oder einer Messkette als Antwort auf die Eingangsgröße
vorliegt.
Messprinzip: Physikalische Grundlage des auszuführenden quantitativen
Vergleichs von Messgröße und Einheit
Klassifizierung von Sensortypen:
o Mechanische Signale
o Akustische Signale
o Elektrische und Magnetische Signale
o Optische Signale und Strahlung
o Thermische Signale
o Chemische und Biologische Signale
Automatisierungstechnik: Ziel: Anlagen/ Maschinen sollen selbstständig und
unabhängig von Menschen betrieben werden; hoher Automatisierungsgrad unter
Ausnutzung von Elektronik (µ-Prozessoren)
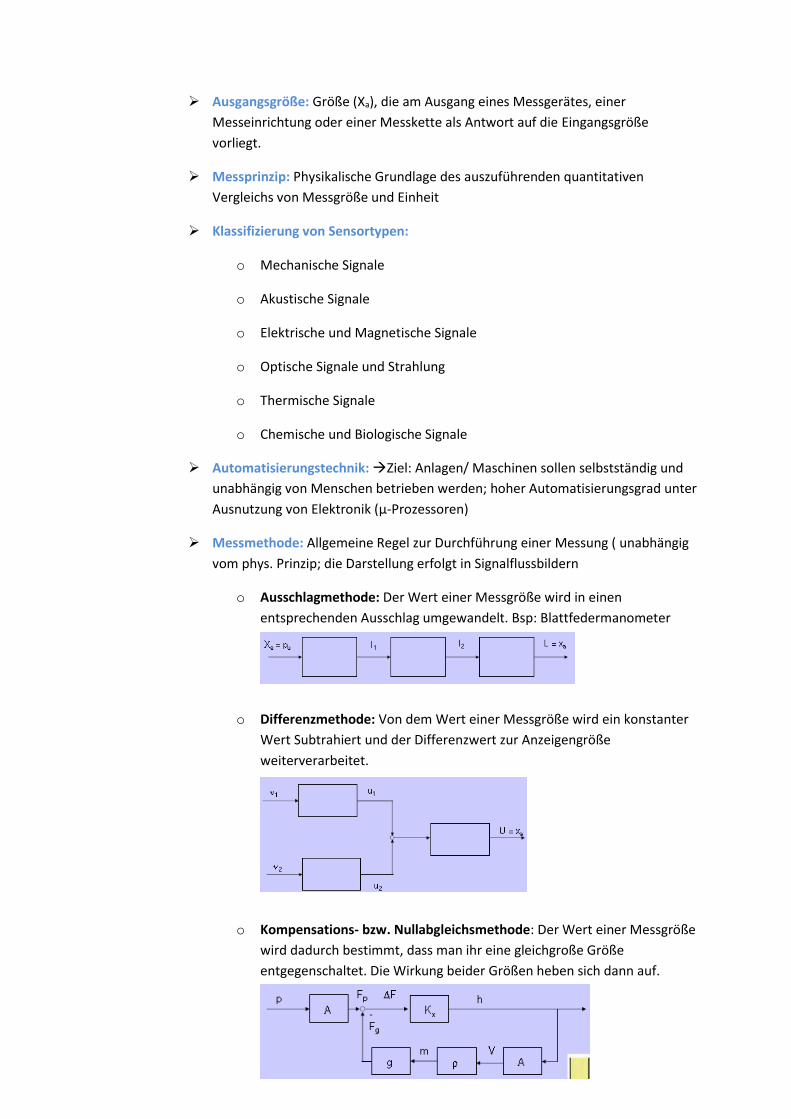
Messmethode: Allgemeine Regel zur Durchführung einer Messung ( unabhängig
vom phys. Prinzip; die Darstellung erfolgt in Signalflussbildern
o Ausschlagmethode: Der Wert einer Messgröße wird in einen
entsprechenden Ausschlag umgewandelt. Bsp: Blattfedermanometer
o Differenzmethode: Von dem Wert einer Messgröße wird ein konstanter
Wert Subtrahiert und der Differenzwert zur Anzeigengröße
weiterverarbeitet.
o Kompensations- bzw. Nullabgleichsmethode: Der Wert einer Messgröße
wird dadurch bestimmt, dass man ihr eine gleichgroße Größe
entgegenschaltet. Die Wirkung beider Größen heben sich dann auf.
o Nachführmethode: Ähnlich der Kompensationsmethode für Weg-
/Winkelgrößen Wird dadurch bestimmt, dass mittels Sensor
Änderungen erfasst und durch ein entsprechendes Stellsignal
nachgeführt werden (z.B. x-y-Schreiber)
Messverfahren: Mit einer Messmethode und bei Anwendung eines bestimmten
Messprinzips erhält man ein konkretes Messverfahren.
1.4. Kenngrößen von Messgeräten / Sensoren:
Statische Kenngrößen:
o Anzeigebereich: Gibt den Wertebereich der Messgröße an, der mit
diesem Messgerät bestimmt werden kann.
o Messbereich: Derjenige Teil eines Anzeigebereichs, der die angegebenen
Fehlerkennwerte garantiert, wird Messbereich genannt.
o Kennlinie: Beschreibt mathematischen Zusammenhang zwischen
Eingangs- und Ausgangsgrößen (Xa=Kp*Xe)
o Übertragungsfaktor: Kp gibt an, um wie viel sich das Ausgangsignal bei
der Variation des Eingangssignals ändert.
o Empfindlichkeit: (E) eines Messgerätes ist definiert als die Steigung der
Kennlinie im jeweiligen Arbeitspunkt.
o Kennlinienabweichungen:
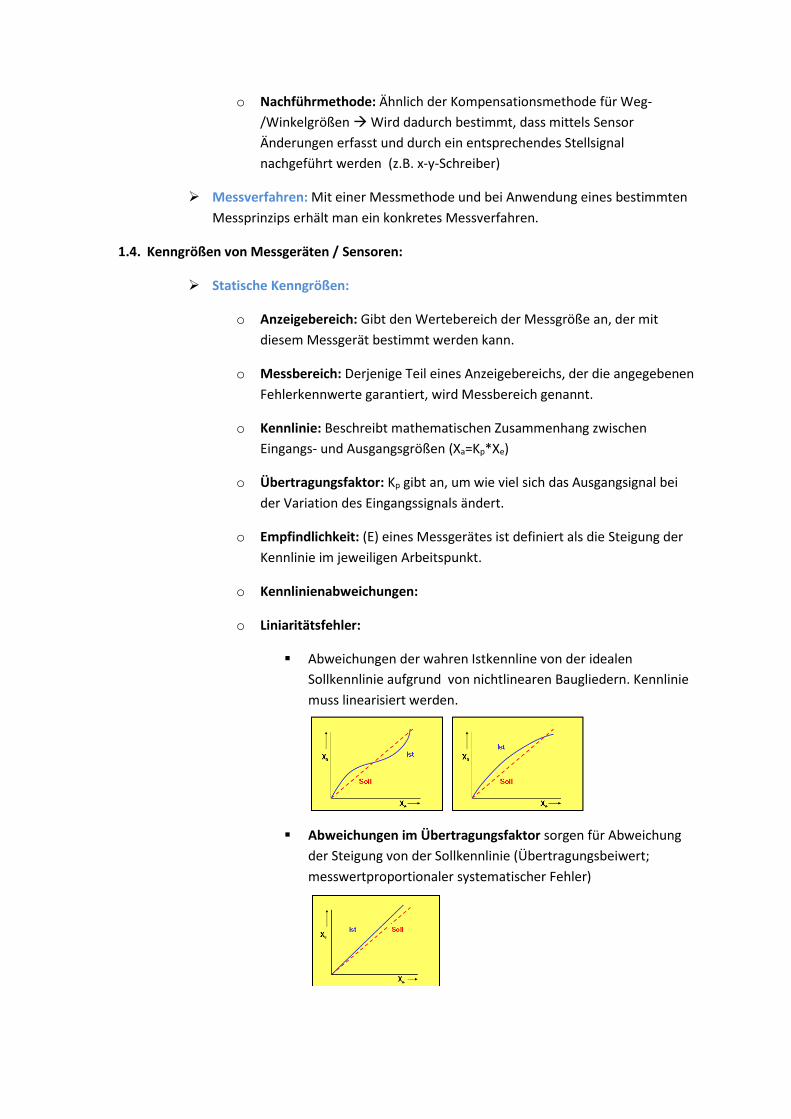
o Liniaritätsfehler:
Abweichungen der wahren Istkennline von der idealen
Sollkennlinie aufgrund von nichtlinearen Baugliedern. Kennlinie
muss linearisiert werden.
Abweichungen im Übertragungsfaktor sorgen für Abweichung
der Steigung von der Sollkennlinie (Übertragungsbeiwert;
messwertproportionaler systematischer Fehler)
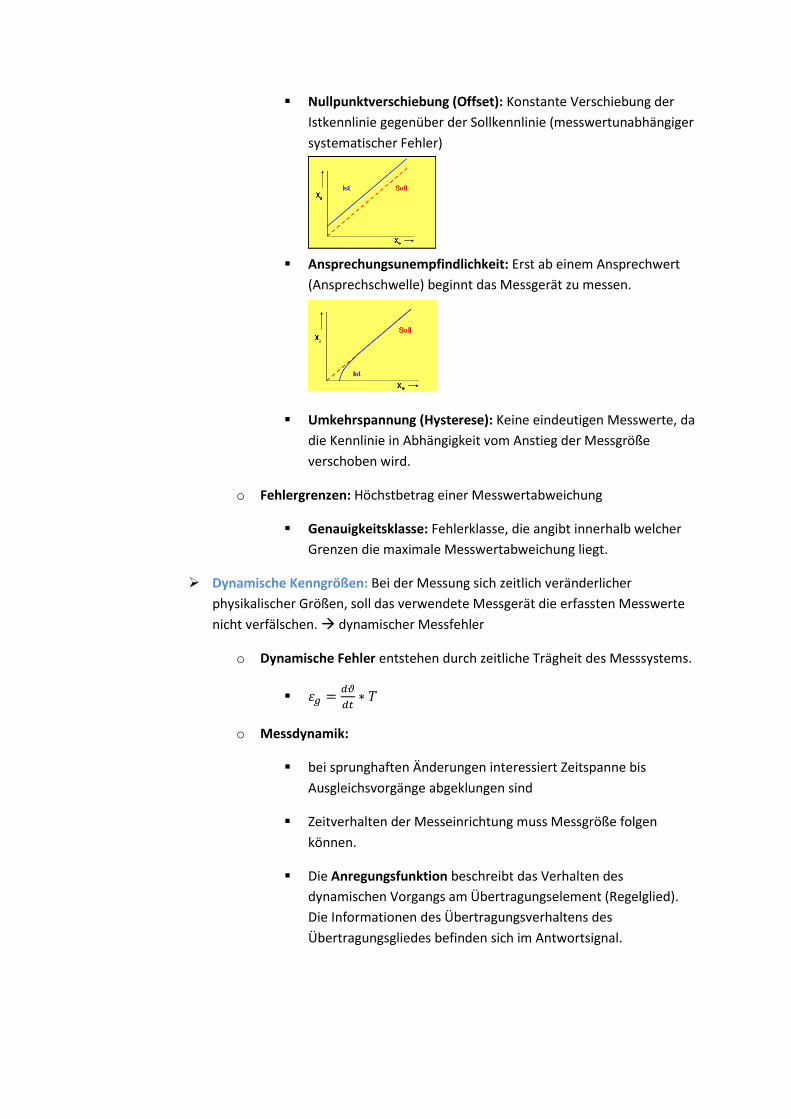
Nullpunktverschiebung (Offset): Konstante Verschiebung der
Istkennlinie gegenüber der Sollkennlinie (messwertunabhängiger
systematischer Fehler)
Ansprechungsunempfindlichkeit: Erst ab einem Ansprechwert
(Ansprechschwelle) beginnt das Messgerät zu messen.
Umkehrspannung (Hysterese): Keine eindeutigen Messwerte, da
die Kennlinie in Abhängigkeit vom Anstieg der Messgröße
verschoben wird.
o Fehlergrenzen: Höchstbetrag einer Messwertabweichung
Genauigkeitsklasse: Fehlerklasse, die angibt innerhalb welcher
Grenzen die maximale Messwertabweichung liegt.
Dynamische Kenngrößen: Bei der Messung sich zeitlich veränderlicher
physikalischer Größen, soll das verwendete Messgerät die erfassten Messwerte
nicht verfälschen. dynamischer Messfehler
o Dynamische Fehler entstehen durch zeitliche Trägheit des Messsystems.
𝜀𝑔 =𝑑𝜗
𝑑𝑡∗ 𝑇
o Messdynamik:
bei sprunghaften Änderungen interessiert Zeitspanne bis
Ausgleichsvorgänge abgeklungen sind
Zeitverhalten der Messeinrichtung muss Messgröße folgen
können.
Die Anregungsfunktion beschreibt das Verhalten des
dynamischen Vorgangs am Übertragungselement (Regelglied).
Die Informationen des Übertragungsverhaltens des
Übertragungsgliedes befinden sich im Antwortsignal.
o Zeitverhalten: Gesamtinformation liegtin der Sprungantwort aus
Sprungsignal am Eingang niedrige Genauigkeit
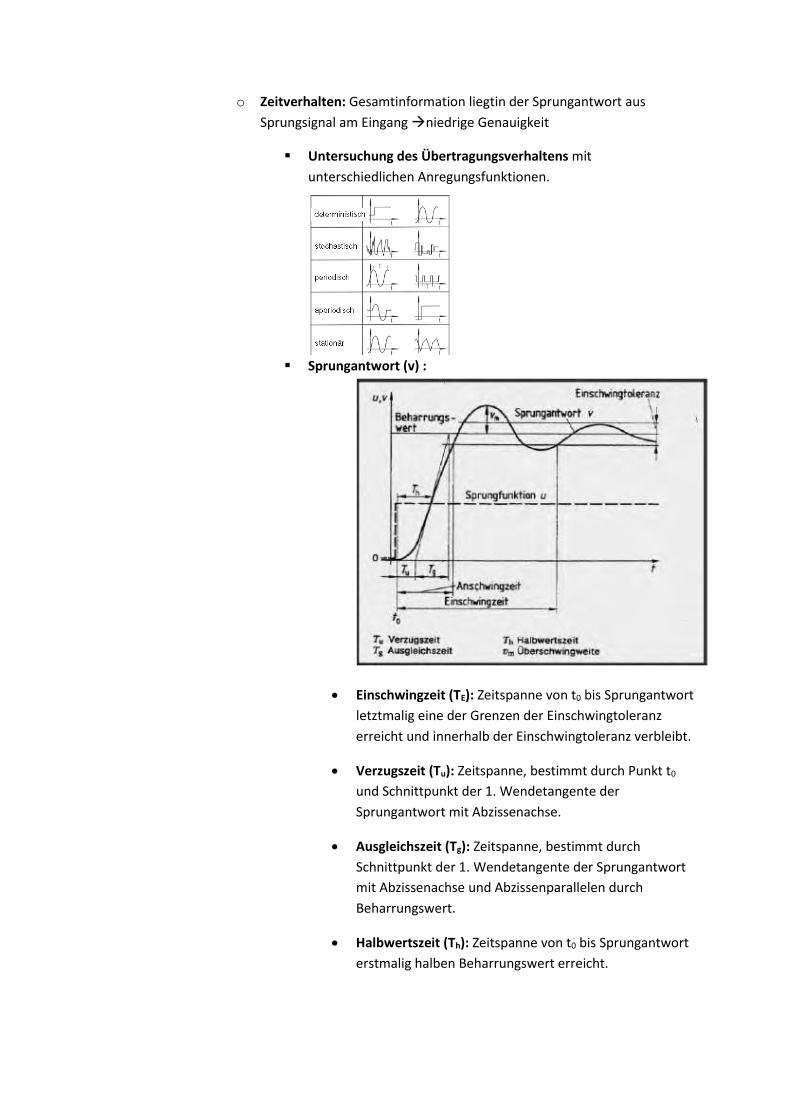
Untersuchung des Übertragungsverhaltens mit
unterschiedlichen Anregungsfunktionen.
Sprungantwort (v) :
Einschwingzeit (TE): Zeitspanne von t0 bis Sprungantwort
letztmalig eine der Grenzen der Einschwingtoleranz
erreicht und innerhalb der Einschwingtoleranz verbleibt.
Verzugszeit (Tu): Zeitspanne, bestimmt durch Punkt t0
und Schnittpunkt der 1. Wendetangente der
Sprungantwort mit Abzissenachse.
Ausgleichszeit (Tg): Zeitspanne, bestimmt durch
Schnittpunkt der 1. Wendetangente der Sprungantwort
mit Abzissenachse und Abzissenparallelen durch
Beharrungswert.
Halbwertszeit (Th): Zeitspanne von t0 bis Sprungantwort
erstmalig halben Beharrungswert erreicht.
Einschwingtoleranz: Differenz der zu vereinbarenden
größten und kleinsten Grenzabweichung der
Sprungantwort vom Beharrungswert.
Anschwingzeit (Ta): Zeitspanne von t0 bis Sprungantwort
erstmalig eine der Grenzen der Einschwingtoleranz
erreicht.
Überschwingweite (vm): Größte Abweichung der
Sprungantwort vom Beharrungszustand nach
erstmaligem Überschreiten einer der Grenzen der
Einschwingtoleranz.
o Frequenzverhalten: zur präzisen Ermittlung des dynamischen (zeitlichen)
Verhaltens eignet sich eine Sinus- bzw. Kosinusfunktion. Antwortsignal
beschreibt das Übertragungsverhalten des Übertragungsgliedes. Es gibt 2
Möglichkeiten: ω=const und ω≠const. Mehrere Messungen der
Ausgangsamplituden und des Phasenwinkels höhere Genauigkeit
Frequenzgang: ist eine komplexe Funktion der Frequenz und
beschreibt das Verhalten eines linearen zeitinvarianten Systems
in Abhängigkeit von der Frequenz.
Konstante Kreisfrequenz ω:
Amplitudenverhältnis:
(Aus/Ein)
Phasenwinkel ϕ: zeitliche Verzögerung des
Eingangssignals vom Ausgangssignal
Variable Kreisfrequenz ω: Amplitudenverhältnis und
Phasenwinkel ändern sich mit der Frequenz.
𝐺(𝑗𝜔) =𝑣(𝑗𝜔)
𝑢(𝑗𝜔)=
|𝑣(𝜔)|
|𝑢(𝜔)|𝑒𝑗𝜑(𝜔)
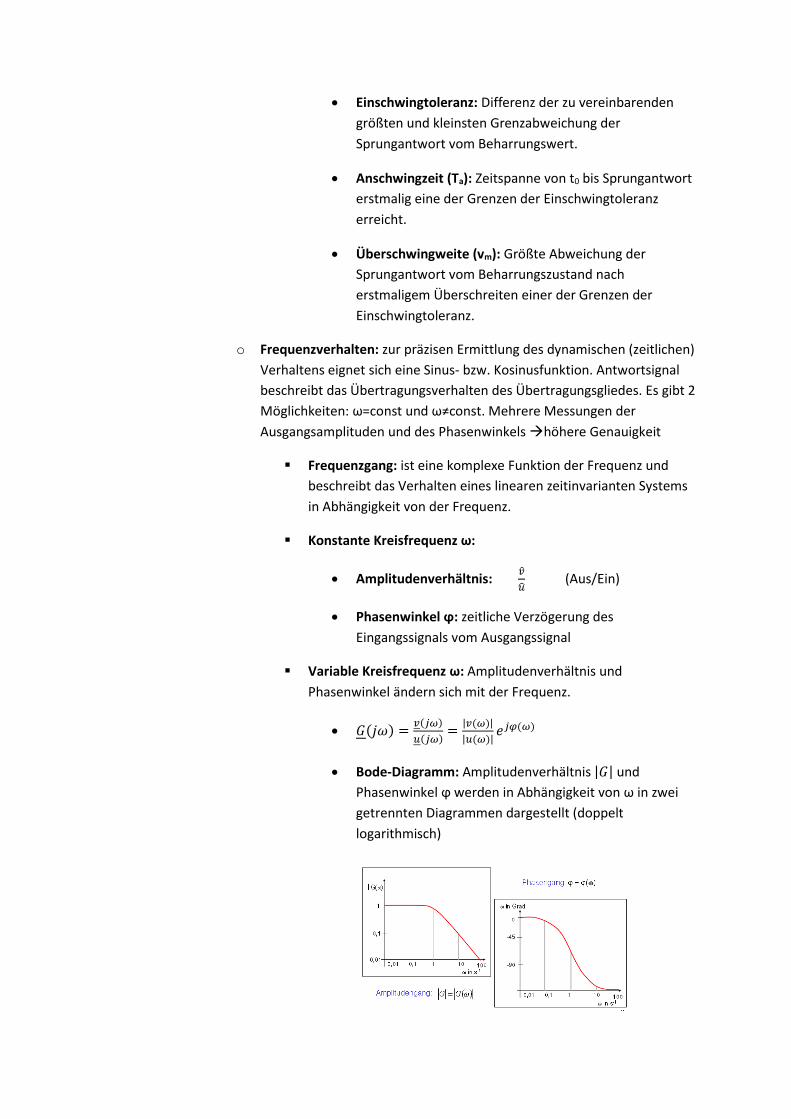
Bode-Diagramm: Amplitudenverhältnis |𝐺| und
Phasenwinkel ϕ werden in Abhängigkeit von ω in zwei
getrennten Diagrammen dargestellt (doppelt
logarithmisch)
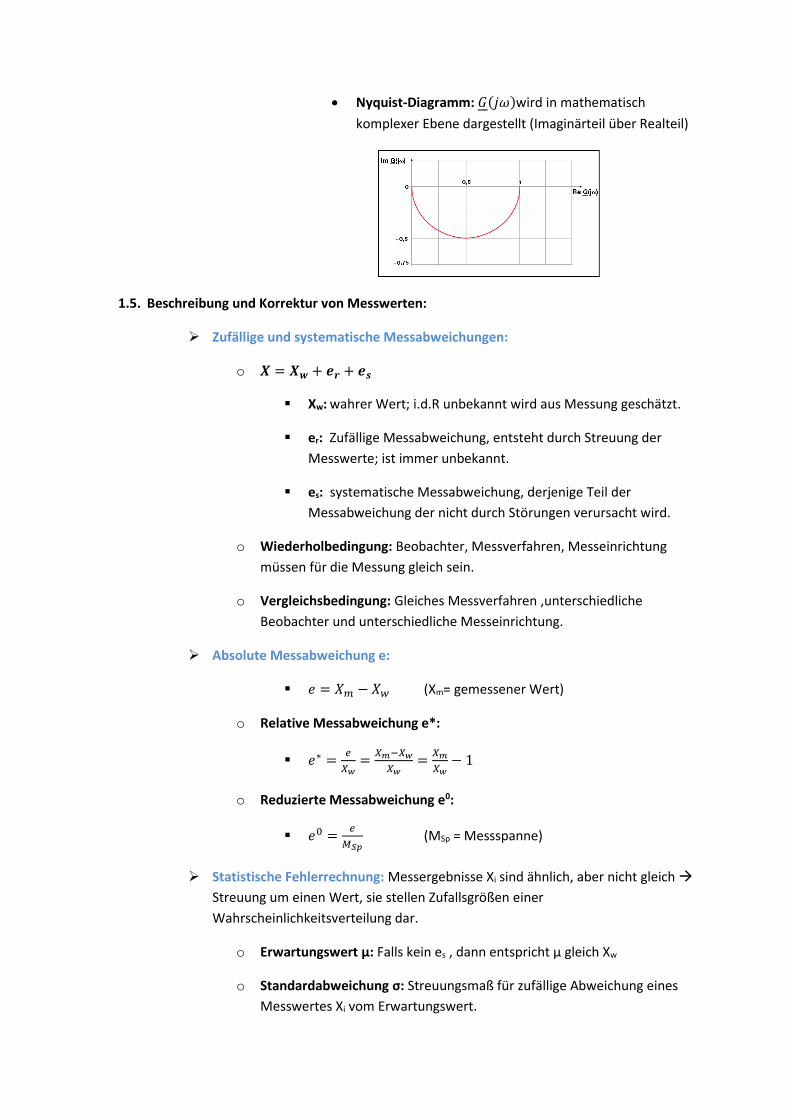
Nyquist-Diagramm: 𝐺(𝑗𝜔)wird in mathematisch
komplexer Ebene dargestellt (Imaginärteil über Realteil)
1.5. Beschreibung und Korrektur von Messwerten:
Zufällige und systematische Messabweichungen:
o 𝑿 = 𝑿𝒘 + 𝒆𝒓 + 𝒆𝒔
Xw: wahrer Wert; i.d.R unbekannt wird aus Messung geschätzt.
er: Zufällige Messabweichung, entsteht durch Streuung der
Messwerte; ist immer unbekannt.
es: systematische Messabweichung, derjenige Teil der
Messabweichung der nicht durch Störungen verursacht wird.
o Wiederholbedingung: Beobachter, Messverfahren, Messeinrichtung
müssen für die Messung gleich sein.
o Vergleichsbedingung: Gleiches Messverfahren ,unterschiedliche
Beobachter und unterschiedliche Messeinrichtung.
Absolute Messabweichung e:
𝑒 = 𝑋𝑚 − 𝑋𝑤 (Xm= gemessener Wert)
o Relative Messabweichung e*:
𝑒∗ =𝑒
𝑋𝑤=
𝑋𝑚−𝑋𝑤
𝑋𝑤=
𝑋𝑚
𝑋𝑤− 1
o Reduzierte Messabweichung e0:
𝑒0 =𝑒
𝑀𝑆𝑝 (MSp = Messspanne)
Statistische Fehlerrechnung: Messergebnisse Xi sind ähnlich, aber nicht gleich
Streuung um einen Wert, sie stellen Zufallsgrößen einer
Wahrscheinlichkeitsverteilung dar.
o Erwartungswert µ: Falls kein es , dann entspricht µ gleich Xw
o Standardabweichung σ: Streuungsmaß für zufällige Abweichung eines
Messwertes Xi vom Erwartungswert.
o Bei Abwesenheit systematischer Abeichungen es gilt:
Mittelwert: entspricht als Schätzwert dem wahren Wert bei
ausreichend großer Anzahl n der Messungen =1
𝑛∑ 𝑥𝑖
𝑛𝑖=1 µ
Streuung: definiert denjenigen Bereich, in dem der wahre Wert
mit bestimmter statistischer Sicherheit liegt. Hat gleiche Einheit
wie Messergebnis und definiert Zuverlässigkeit der Messwerte
und ist Maß für mittleren zu erwartenden Fehler bei
Einzelmessung.
𝒔 = √𝟏
𝒏−𝟏∑ (𝒙𝒊 − )𝟐𝒏
𝒊=𝟏 σ
Stichproben-Variant = s2 = Quadrat der Standardabweichung
Absolute Häufigkeit: ℎ𝑚 =∆𝑛
∆𝑥
Relative Häufigkeit: 𝑓𝑚 =ℎ𝑚
𝑛=
∆𝑛
∆𝑥/𝑛:
o Histogramm:
Klassenanzahl N:
𝑁 ≈ √𝑛 für n ≤ 150
𝑁 ≈ 5𝑙𝑜𝑔 𝑛 für n ≥ 150
Klassenbreite: ∆𝑥 =𝑋𝑚𝑎𝑥−𝑋𝑚𝑖𝑛
𝑁
o Verteilungsfunktion: Wenn n ∞ dann spricht man von einer
Wahrscheinlichkeitsdichtefunktion.
Bei Φ(x,µ,σ) und Erwartungswert=0 wird die Verteilungsfunktion
mit steigendem σ flacher
Gaussverteilung: Φ(x,µ=0,σ=1) Fläche unter der Kurve = 1
Untere Vertrauensgrenze: 𝑥1 = 𝜇 − 𝜎
Obere Vertrauensgrenze: 𝑥2 = 𝜇 + 𝜎
Sicherheit= P
Gilt nur für n≥200
Student-Verteilung (t- Verteilung): Mittelts t-Faktor lassen sich
Vertrauensgrenzen und Vertrauensbereiche ermitteln bei
unbekannter Standartabweichung.
t(x Messwerten, x% Sicherheit) siehe Tabelle!
Vertrauensgrenzen: ±𝑡
√𝑛∗ 𝑠
Fehlerfortpflanzung: Wird ein Wert aus mehreren Messwerten errechnet und
sind alle Fehlerbehaftet, so ist auch das Ergebnis fehlerbehaftet. Bei indirekten
Messungen addieren sich die Fehler aus den Einzelmessungen.
o Systematische Abweichung: kleine Abweichungen der einzelnen
Messwerte Annäherung.
∆𝑦 =𝜕𝑓
𝜕𝑥1
∆𝑥1 +𝜕𝑓
𝜕𝑥2
∆𝑥2 + ⋯ +𝜕𝑓
𝜕𝑥𝑛
∆𝑥𝑛
o Zufällige Abweichung:
𝜎𝑦 = √(𝜕𝑓
𝜕𝑥1∗ 𝜎𝑥1)
2+ (
𝜕𝑓
𝜕𝑥2∗ 𝜎𝑥2)
2+ ⋯ + (
𝜕𝑓
𝜕𝑥𝑛∗ 𝜎𝑥𝑛
)2
𝑠𝑦 = √(𝜕𝑓
𝜕𝑥1∗ 𝑠𝑥1)
2+ (
𝜕𝑓
𝜕𝑥2∗ 𝑠𝑥2)
2+ ⋯ + (
𝜕𝑓
𝜕𝑥𝑛∗ 𝑠𝑥𝑛
)2
bei
unbekannter Standardabweichung 𝜎𝑖 → 𝑆𝑡𝑟𝑒𝑢𝑢𝑛𝑔 𝑠𝑖
Regression und Korrelation:
o Regression: im einfachsten Fall wird lineare Abhängigkeit einer Funktion
y von einer Variablen xi betrachtet.
Gerade: y=ax+b
Abweichung: 𝑒𝑖 = 𝑦𝑖 − (𝑎𝑥𝑖 + 𝑏)
Forderung: 𝐹(𝑎, 𝑏) = ∑(𝑦𝑖 − 𝑎𝑥𝑖 − 𝑏)2 = 𝑀𝑖𝑛𝑖𝑚𝑢𝑚 Minimale
Abweichung der Fehlerquadrate.
Wenn lineare Regressionsansätze nicht ausreichen, dann
Potenzreihenerweiterung
Logarithmischer Ansatz
Exponentieller Ansatz
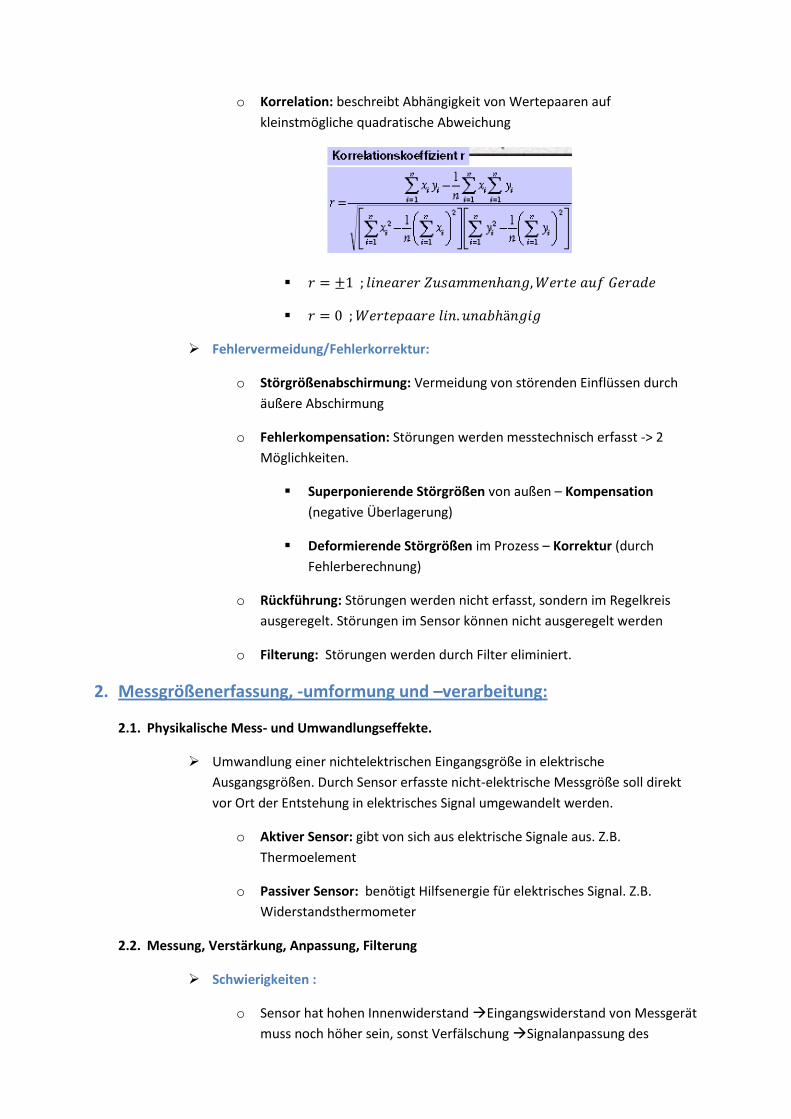
o Korrelation: beschreibt Abhängigkeit von Wertepaaren auf
kleinstmögliche quadratische Abweichung
𝑟 = ±1 ; 𝑙𝑖𝑛𝑒𝑎𝑟𝑒𝑟 𝑍𝑢𝑠𝑎𝑚𝑚𝑒𝑛ℎ𝑎𝑛𝑔, 𝑊𝑒𝑟𝑡𝑒 𝑎𝑢𝑓 𝐺𝑒𝑟𝑎𝑑𝑒
𝑟 = 0 ; 𝑊𝑒𝑟𝑡𝑒𝑝𝑎𝑎𝑟𝑒 𝑙𝑖𝑛. 𝑢𝑛𝑎𝑏ℎä𝑛𝑔𝑖𝑔
Fehlervermeidung/Fehlerkorrektur:
o Störgrößenabschirmung: Vermeidung von störenden Einflüssen durch
äußere Abschirmung
o Fehlerkompensation: Störungen werden messtechnisch erfasst -> 2
Möglichkeiten.
Superponierende Störgrößen von außen – Kompensation
(negative Überlagerung)
Deformierende Störgrößen im Prozess – Korrektur (durch
Fehlerberechnung)
o Rückführung: Störungen werden nicht erfasst, sondern im Regelkreis
ausgeregelt. Störungen im Sensor können nicht ausgeregelt werden
o Filterung: Störungen werden durch Filter eliminiert.
2. Messgrößenerfassung, -umformung und –verarbeitung:
2.1. Physikalische Mess- und Umwandlungseffekte.
Umwandlung einer nichtelektrischen Eingangsgröße in elektrische
Ausgangsgrößen. Durch Sensor erfasste nicht-elektrische Messgröße soll direkt
vor Ort der Entstehung in elektrisches Signal umgewandelt werden.
o Aktiver Sensor: gibt von sich aus elektrische Signale aus. Z.B.
Thermoelement
o Passiver Sensor: benötigt Hilfsenergie für elektrisches Signal. Z.B.
Widerstandsthermometer
2.2. Messung, Verstärkung, Anpassung, Filterung
Schwierigkeiten :
o Sensor hat hohen Innenwiderstand Eingangswiderstand von Messgerät
muss noch höher sein, sonst Verfälschung Signalanpassung des
Messsignals an hochohmigen Verstärker danach wird verstärktes
Signal gefiltert, korrigiert (linearisiert) ausgegeben.
o Ausgangssignale meist genormt : 0-10V bzw. (0)/4-20mV
o Digitalisierung des Signals durch Mikroprozessoren und Mikrokontrollern
Analoge Signalverarbeitung: Rechner können nur digitale Signale verarbeiten
Messsignal muss von analog in Digitalwerte umgewandelt werden A/D-
Umsetzer)
o ADU quantisiert kontinuierliches Signal in der Zeit als auch in der
Amplitude. Signal nach der Umwandlung treppenförmig in einem
Amplituden-Zeit-Diagramm.
o Der Hauptparameter des ADUs sind seine Auflösung in Bit und seine
Geschwindigkeit. Dies begrenzt die max. Eingangssignal frequenz.
Abtastung und A/D-Umwandlung:
o Abtastung des analog Signals vom S&H-Glied mit Abtastfrequenz
(S&H=Sample and Hold)
o Abtastfrequenz muss mindestens doppelt so hoch sein wie die maximal
möglichen Eingangsfrequenzen. (Nyquist-Frequenz)
o Tiefpass-Filter Glätten das Signal um Artefakte zu vermeiden
o S&H-Schaltung ist vorgeschaltet und hält Signalfluss für fehlerfreie
Digitalisierung konstant.
o Bsp. 10bit A/D-Wandler: Zahlenbereich 0-1023 mit Messbereich von 0-
10V min. Quantisierungsschritt =10mV Auflösung
Digitale Signalverabeitung Zusammenfassung:
o Analogsignal wird mit Abtastfrequenz fs=1/T abgetastet
o Messsignal muss während Wandlungszeit konstant sein S&H-Glied
o Signalamplitude wird in A/D-Wandler quantisiert
o „hohe“ Frequenzen müssen unterdrückt werden (anti-alaising-Filter)
o Informationsverlust des Analogsignals muss durch hohe Abtastrate und
kleine Quantisierungsschritte niedrig gehalten werden
Frequenzfilter : sind Schaltungen mit vorgegebenen frequenzabhängigen
Übertragungsverhalten. Bestimmte Frequenzbereiche werden unterdrückt.
o Beschreibung durch Übertragungsfunktion.
Lineare Filter: Eigenschaften unabhängig vom Signalpegel
(unverzerrtes Signal) Bsp: Hochpass, Tiefpass, Bandpass.
Nichtlineare Filter: Eigenschaften sind Signalpegel und vom
zeitlichen Verlauf des Signals abhängig. (Verzerrtes Signal) Bsp:
Begrenzer, Gleichrichter, Verzerrer.
o Filterklassifizierung durch: Komplexität, Frequenzgang, verwendete
Bauelemente, Schaltungsstruktur, Berechnungsmethode, Trennschärfe,
Phasenverschiebung.
Selektionsverhalten eines Filters:
o Tiefpassfilter: schwächt hohe Frequenzen bis zu einer Grenzfrequenz
und lässt tiefere Frequenzen praktisch ohne Abschwächung
(Verstärkung=1) passieren. Bsp: Anti-Aliasing-Filter,
Rauschunterdrückung.
o Hochpassfilter: schwächt tiefe Frequenzen bis zu einer Grenzfrequenz,
alle höheren Frequenzen werden durchgelassen. Dadurch lassen sich u.a.
Gleichspannungsanteile oder langsames Driften im Signal unterdrücken.
o Bandpassfilter: schwächt alle Frequenzen außerhalb eines
Frequenzintervalls, das durch zwei Grenzfrequenzen festgelegt ist.
Amplituden- oder frequenzmodulierte Signale tragen den Hauptanteil
der Informationen in begrenztem Frequenzband. Ein Bandpass lässt diese
Anteile aus Frequenzgemischen passieren und sperrt die Anteile
unterhalb und oberhalb der Grenzfrequenzen. Bsp: Hochfrequenzbereich
eines Radios.
o Bandstopfilter: (Saugkreis, Notch-Filter,Bandsperre) ist die Umkehrung
des Bandpassfilters.
2.3. Messbussysteme: werden verwendet neben Anzeige des Messwertes auch zur Steuerung
und Regelung
Analoge Datenübertragung: 4…20mA ist besser um Fehler zu erkennen. 0mA
Kabelbruch z.b.
Digitale Datenübertragung: serlielle und parallele Schnittstelle
o Serielle Schnittstelle: für Datenaustusch zwischen Computer und
Peripheriegeräten. Übertragung der Bits über eine Leitung.
o Parallele Schnittstelle: ist digitaler Ein- oder Ausgang eines PCs oder
Peripheriegerätes. Übertragung der Bits über mehrere Leitungen. Heute
Verwendung in Automatisierung
o Busmesssysteme:
CAN-Bus, Profibus, DIN.Messbus, IEC-Bus
3. Temperaturmessung:
3.1. Generelles zur Temperaturmessung: am häufigsten zu bestimmende Messgröße in MSR-
Technik. Thermodynamik definiert Temperatur als Maß für innere Energie eines Systems.
Der Sensor muss Temperatur definiert erkennen mit möglichst geringer Rückwirkung zum
System.
Absolute Temperatur: mittlere kinetische Energie pro Freiheitsgrad eines
Teilchens oder Teilchensytems in K
Temperaturskalen: Willkürliche Festlegung der Größenordnungen der
Temperatur in Bezug zu einem Vergleichswert.
o Epirische Temperatur: Celsiustemperatur
o Thermodynamische Temperatur: Definition über Gasgleichung
o Internationale praktische Temperaturskale: basiert auf Phasenübergang
von Stoffen.
Unterschiedliche Messverfahren:
o Berührungsmessung: Wärmeübertragung durch Berührung
Temperatur im Medium
1) Mechanische Erfassung: therm. Ausdehnungskoeffizient
2) Elektrische Erfassung: Widerstandsänderung,
Thermospannung
3) Sonderverfahren: Segerkegel, Temperaturmessfarben,
Faseroptische Messung mit Lichtwellenleitern
o Strahlungsmessung: Wärmeübertragung über Strahlung Temperatur
an der Oberfläche
Gesamt-/ Teilstrahlung
3.2. Berührende Temperaturmessung:
1) Quecksilberthermometer: bei Temp. ϑ0 hat Quecksilber ein definiertes
Volumen. In Medium mit höherer Temperatur nimmt Thermometer Wärme auf
und das Messmedium kühlt ab. Durch Wärmestrom dehnt sich erst das
Vorratsgefäß das das Quecksilber aus. Der Flüssigkeitspegel steigt. Maß für
Temperaturändern. Voraussetzung ist der Unterschied des thermischen
Ausdehnungskoeffizienten des Behälter- und des Behälterinhalts. Nur
Vorratsgefäß darf in Medium Eintauchen. Andere Flüssigkeiten für Messung:
Alkohol, Isopentan, Toluol
Quecksilber gehört nicht zu den benetzenden Flüssigkeiten.
Einsatz: generell in Flüssigkeiten (Prozessen) / Medizin
(Temperaturmessung)
2) Bimetall (Thermobimetall): Metallstreifen aus zwei Schichten
unterschiedlichen Materials sind mit einander Verbunden. Bei
Temperaturveränderung verformen sich beide Materialien unterschiedlich
(unterschiedlicher Temparaturausdehnungskoeffizient)
o Anwendungsbeispiele: Startautomatik beim Vergaser,
Zeigerthermometer, Temperaturregelung beim Bügeleisen
3) Widerstandsthermometer (passiv): Der elektrische Widerstand ändert sich
unter Einfluss der Temperatur. 1. Näherung: [𝑅(𝜗) = 𝑅0(1 + 𝛼𝜗)]
Thermoresistives Messprinzip: „Thermistor“
o Metalle: mit positiven Widerstandskoeffizient
Am besten eignet sich Platin, da dieses einen einen einigermaßen
guten Temp.koeffizient besitzt und außerdem inert ist.
Herstellung:
Stabthermometer: Pt-Draht auf isoliertem Träger in
Metallhülse eingekapselt. (Grafik Aufbau)
Dickschicht-, Dünnschichtthermometer: für industrielle
Anwendung, robust, kurze Ansprechzeit, Substrat mit
sehr dünner Metallschicht (mäanderförmig , Abgleich
durch Lasertrimmen. Geringe Genauigkeit, geringe
Langzeitstabilität. Grafik Aufbau)
Halbleiter: abhängig von Herstellung positiver oder negativer
Temperaturkoeffizient.
Monokristallin: Si-Widerstandstermometer erfasst den
Ausbreitungswiderstand eines Si-Kristalls mit T↑ steigt
R↑ (verminderte Beweglichkeit der freien
Ladungsträger)
Polykristallin:
o Heißleiter (NTC): postitiver
Temperaturkoeffizient. Anzahl der freien
Ladungsträger steigt bei T↑(-80-1000°C)
𝑅 = 𝑅0𝑒𝐵(
1
𝜗−
1
𝜗0)
𝛼 =1
𝑅∗
𝑑𝑅
𝑑𝜗= −
𝐵
𝜗2 [𝐾−1]
𝑇 ↑→ 𝛼 ↓
Vorteile: bei RT schnellere Ansprechzeit
und höhere Auflösung als Pt100
Nachteile: Nicht linear neg. Temp.koeff.,
schlechtere Toleranz bei Herstellung,
Einsatz durch Eigenerwärmung begrenzt

Herstellung: gesinterte Metalloxide als
Tropfen zwischen zwei
Anschlussdrähten, Widerstand durch
Mischverhältnis. Messing oder
Epoxygehäuse (Materialien: Eisenoxide
mit Dot.Mat. wie TiO2.
Einsatz: in Automatisierungs-technik,
Konsumerelektronik, Begrenzung von
Einschalt-strömen durch Gelaus bei
kritischer Temperhöhung.
o Kaltleiter (PTC): leitet bei tiefen Temperaturen
besser pos. Temp.Ko. (1000-1400°C)
Unterhalb der Curie-Temp spontane Polarisation
statt Ladungs-trägerdichte ↑ mit T↑. Oberhalb
der Curie-Temp keine Polarisation
exponentieller Anstieg.
𝑅 = 𝑅0𝑒𝜗−𝜗0
𝛼 =1
𝑅∗
𝑑𝑅
𝑑𝜗= 𝐵 [𝐾−1]
𝑇 ↑→ 𝛼 ↑
Vorteile: hoher Temp.ko., sehr
empfindlich oberhalb von TC (Curie-
Temp)
Nachteile: hohe Streuung der
Materialkonstanten B ; daher
hauptsächlich Einsatz für
Temp.überwachung
Herstellung: Gesinterte halbleitende,
polykristalline Keramiken als Scheiben-,
Rohr-, oder Stabform. Keramiken: BaTiO3
o Kennlinien:

o Messprinzip: konstanter Strom wird durch
Widerstand geschickt Spannungsabfall U an R
als Messsignal.
o Schwierigkeit: Heizleast [𝑃 = 𝑖2 ∗ 𝑈]
Temperaturverfälschung durch Selbsterwärmung
[Δ𝑇 = 𝑆 ∗ 𝑃 ](S= Selbsterwärmungskoeffizient).
o Messanordnung: Zweileiter, Dreileiter,
Vierleitermesstechnik. (Vierleiter am genausten.)
4) Quarzthermometer: Durch Temp.änderung ändert sich
Ausdehnungskoeffizient (geom. Abmessungen) im Quarz Änderung der
Resonanzfrequenz
o 𝑓 = 𝑓0(1 + 𝛼𝜗 + 𝛽𝜗2 + 𝛾𝜗3 mit f0=Eigenfrequenz bei 0°C
o Messbereich: -80°C-250°C, Messung kleiner Differenzen d.h hohe
Genauigkeit aber aufwändige Elektronik.
5) Rauschthermometer:
o Spannung des thermischen Widerstandsrauschens eines ohmschen R (
Ausnutzung der Wärmebewegung von Elektronen im Frequenzbereich
Δf)
o Thermisches Rauschen (Johnson-Rauschen) wird verursacht durch
Dichteschwankungen der Transportelektronen durch deren thermische
Bewegung.
o Mittleres Rauschspannungsquadrat:
𝑈2 = 4𝑘𝐵 ∗ 𝑇 ∗ 𝑅 ∗ ∆𝑓 mit kB= 1,38E-23 J/K
o Messbereich: -270-900°C, hoher apparativer Aufwand, alle Störeinflüsse
müssen ausgeblendet werden, hauptsächlich wissenschaftliche Zwecke
6) Thermoelement: Zwischen 2 metallischen Leitern unterschiedlicher
Materialien bildet sich in Abhängigkeit von der Temp. Eine Thermospannung aus
(Thermo- bzw. Seebeckeffekt).
o Kontaktspannung U12:
𝑈12 =𝑘𝐵∗𝜗12
𝑒∗ ln (
𝑛1
𝑛2) = (
𝑘𝐵
𝑒∗ ln (
𝑛1
𝑛2)) ∗ 𝜗12
n1,n2: Elektronenzahldichte; e= 1,602E-19C
𝑈𝑇ℎ = 𝑘𝐴𝐵 ∗ (𝜗𝑀 − 𝜗𝑉) 𝑚𝑖𝑡 𝑘𝐴𝐵 =𝑘𝐵
𝑒∗ ln (
𝑛1
𝑛2)
o Thermoempfindlichkeit: 𝑘𝐴𝐵 = −𝑘𝐵𝐴
Um kAB für beliebige Werkstoffkombinationen angeben zu
können, existiert Thermoelektrische Spannungsreihe gegen
Platin als Referenz
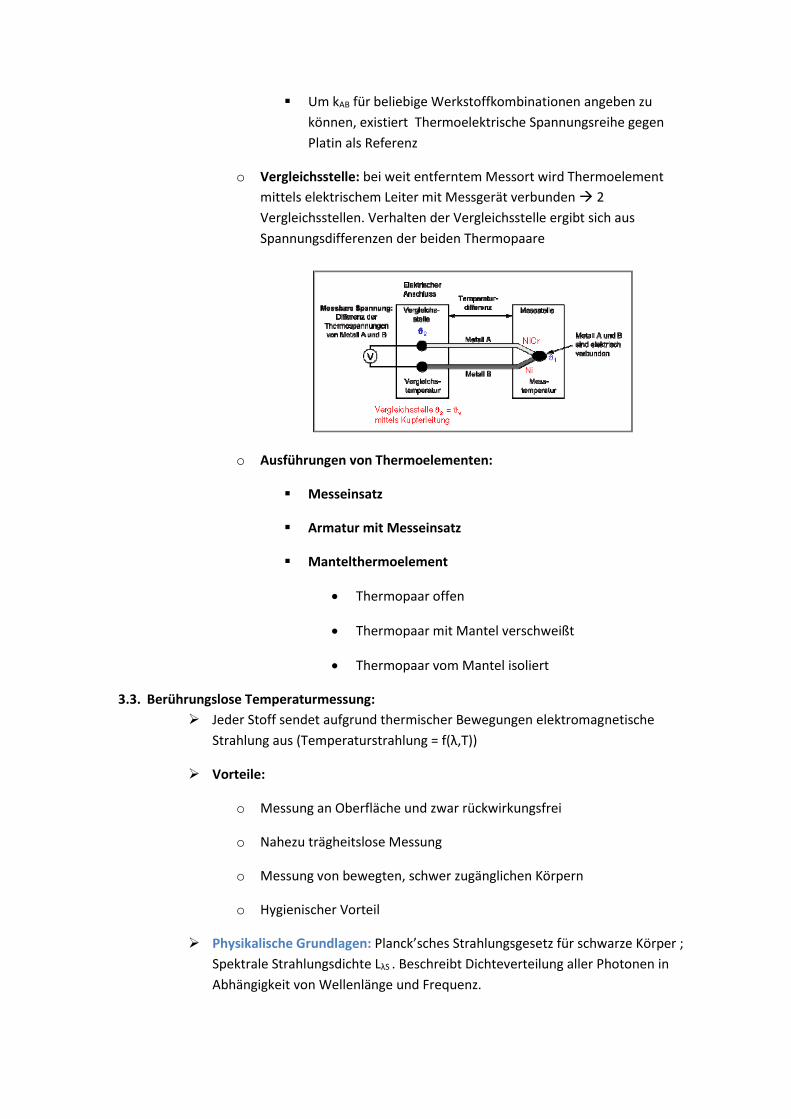
o Vergleichsstelle: bei weit entferntem Messort wird Thermoelement
mittels elektrischem Leiter mit Messgerät verbunden 2
Vergleichsstellen. Verhalten der Vergleichsstelle ergibt sich aus
Spannungsdifferenzen der beiden Thermopaare
o Ausführungen von Thermoelementen:
Messeinsatz
Armatur mit Messeinsatz
Mantelthermoelement
Thermopaar offen
Thermopaar mit Mantel verschweißt
Thermopaar vom Mantel isoliert
3.3. Berührungslose Temperaturmessung:
Jeder Stoff sendet aufgrund thermischer Bewegungen elektromagnetische
Strahlung aus (Temperaturstrahlung = f(λ,T))
Vorteile:
o Messung an Oberfläche und zwar rückwirkungsfrei
o Nahezu trägheitslose Messung
o Messung von bewegten, schwer zugänglichen Körpern
o Hygienischer Vorteil
Physikalische Grundlagen: Planck’sches Strahlungsgesetz für schwarze Körper ;
Spektrale Strahlungsdichte LλS . Beschreibt Dichteverteilung aller Photonen in
Abhängigkeit von Wellenlänge und Frequenz.
Lλs(𝑇𝑠) =𝑐1
λ5∗(𝑒𝑐2
λTs−1)∗Ω
𝑐1 = 3,742 ∗ 10−16 𝑊𝑚2
𝑐2 = 1,438 ∗ 10−2 𝐾𝑚
Ω = Raumwinkel
o Jeder Körper sendet Wärmestrahlung aus, wobei die Intensität von der
Oberflächenbeschaffenheit abhängt. (Emissionsgrad beim Spiegel fast
Null)
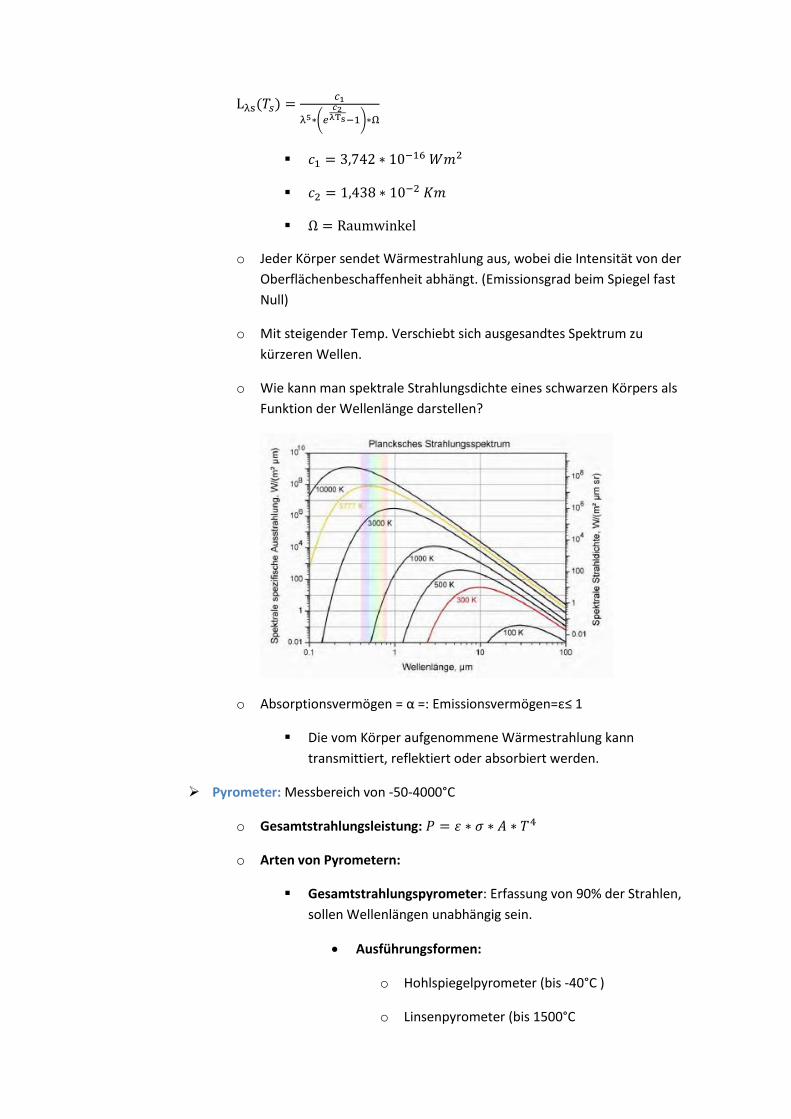
o Mit steigender Temp. Verschiebt sich ausgesandtes Spektrum zu
kürzeren Wellen.
o Wie kann man spektrale Strahlungsdichte eines schwarzen Körpers als
Funktion der Wellenlänge darstellen?
o Absorptionsvermögen = α =: Emissionsvermögen=ε≤ 1
Die vom Körper aufgenommene Wärmestrahlung kann
transmittiert, reflektiert oder absorbiert werden.
Pyrometer: Messbereich von -50-4000°C
o Gesamtstrahlungsleistung: 𝑃 = 𝜀 ∗ 𝜎 ∗ 𝐴 ∗ 𝑇4
o Arten von Pyrometern:
Gesamtstrahlungspyrometer: Erfassung von 90% der Strahlen,
sollen Wellenlängen unabhängig sein.
Ausführungsformen:
o Hohlspiegelpyrometer (bis -40°C )
o Linsenpyrometer (bis 1500°C
Detektormaterialien:
o Thermische Detektoren (Bolometer,
pyroelektrischer Sensor, Thermosäule)
o Photoelektrische Detektoren (Photosensoren)
Teilstrahlungs-/Bandstrahlpyrometer: ausblenden eines
bestimmten Wellenlängenbereichs aus dem kompletten
Spektralbereich.
Spektralfotometer: Temperaturmessung nur in sehr schmalen
Wellenlängenbereich.
Verhältnis- /Quotientenpyrometer (2-Farbenpyrometer):
Verhältnis zweier Signale aus jeweils unterschiedlichen schmalen
Wellenlängenbereich.
Vorteil: Vermeidung von Fehlern durch ungenaues
Einstellen von ε
o Einsatz von Pyrometern: Prozessüberwachung, Sicherheitstechnik,
medizinische Anwendung, Messtechnik
Bolometer: Strahlungssensor, der abgestrahlte Energie- / Leistungsdichte
detektieren kann, indem er die durch Absorption stattfindende Erwärmung
registriert. Temperaturabhängigkeit des elektrischen Widerstandes aufgrund
von Strahlung als Sensorsignal.
o Empfindlichkeit: 𝑆 =𝛼∗𝐼𝐵∗𝑅𝐵∗𝛽
𝐺∗√1+𝜔2∗𝜏𝑇 𝑚𝑖𝑡 𝛽 =
1
𝑅𝐵∗
𝜕𝑅𝐵
𝜕𝜗
RB = Bolometerwiderstand
IB = Strom
α = Absorptionsgrad
-
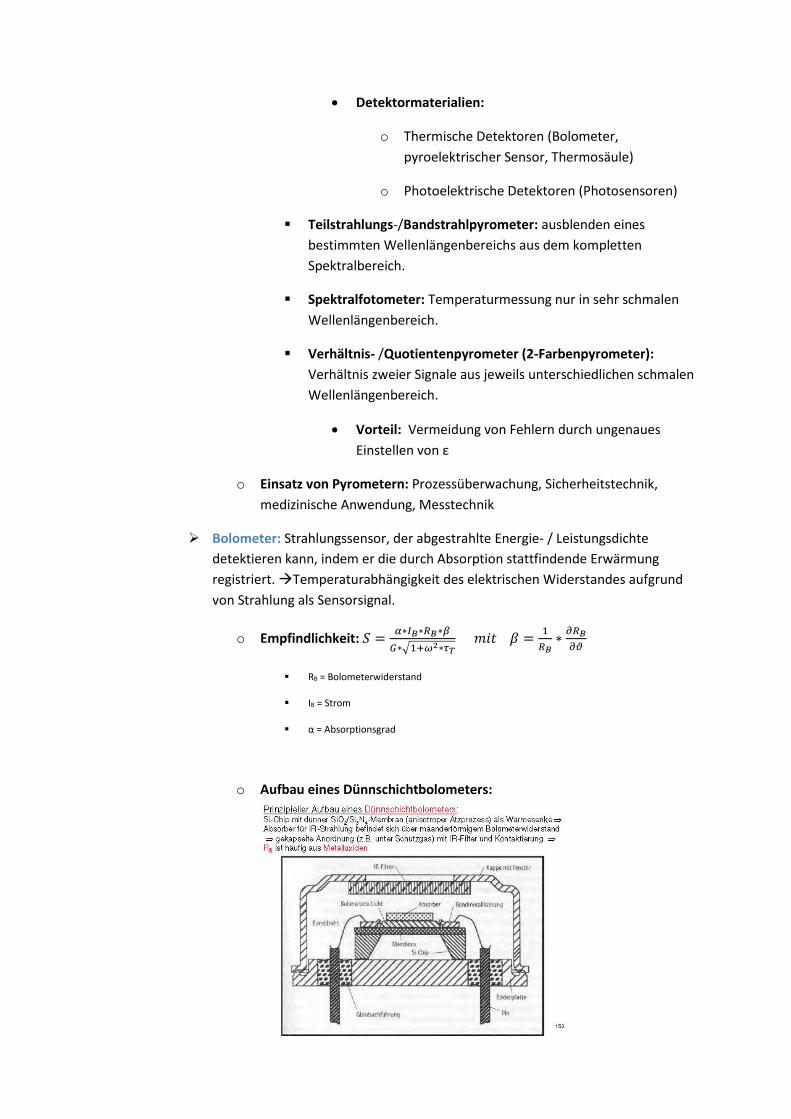
o Aufbau eines Dünnschichtbolometers:
Pyroelektrischer Sensor: Änderung der spontanen Polarisation in einem
pyroelektrischen Kristall aufgrund einer Temp. Änderung, daraus folgt
Ladungsbildung an äußeren Kristallschichten Freie Ladungen als Maß der
Temp.änderung.
o ΔQ = 𝐾Q ∗ 𝐴 ∗ Δ𝜗 𝑚𝑖𝑡 𝐾𝑄 = 𝐿𝑎𝑑𝑢𝑛𝑔𝑠𝑒𝑚𝑝𝑓𝑖𝑛𝑑𝑙𝑖𝑐ℎ𝑘𝑒𝑖𝑡 𝐴 = 𝐹𝑙ä𝑐ℎ𝑒
o Verstärkung des Messeffektes erfolgt über Feldeffekttransistoren.
o Sensorschicht besteht aus z.B. LiNbO3
o Sensor ist hermetisch unter Schutzgas
o Einsatzgebiete: Bewegungsmelder, Feuermelder, Kalorimeter
Photosensoren: basieren auf innerem Photoeffekt Anregung von Elektronen in
höheren Energiezustand Strahlungsabhängige Leitfähigkeitsänderung im
Halbleiter. Elektrisches Ausgangssignal ist prop. Zur Anzahl n der einfallenden
Lichtquanten.
o Typen:
Photowiderstand (Photoleiter): Widerstand ändert sich in
Abhängigkeit der Anzahl der einfallenden Photonen: Mehr Licht
kleinerer Widerstand.
Δ𝑈𝑠 = (Δ𝐺
𝐺02 ) ∗ 𝐼𝐵 𝑚𝑖𝑡 Δ𝐺 = 𝐿𝑒𝑖𝑡𝑤𝑒𝑟ä𝑛𝑑𝑒𝑟𝑢𝑛𝑔 𝐺0 = 𝐷𝑢𝑛𝑘𝑒𝑙𝑙𝑒𝑖𝑡𝑤𝑒𝑟𝑡
Materialien: CdS, CdSe,…
Photodiode: in Sperrschicht eines pn-Übergangs werden durch
Absorption Photonen Ladungsträger erzeugt Kennlinien
Verschiebung (IK, UL).
Materialien: Si., Ge, InSb,…
Einsatzgebiete: Temperaturmessung, Rauchmeldet,
Empfänger für Lichtschranken.
(Schottky-Barriere Sensor)
4. Längenmessung
4.1. Definition: Länge, Abmessung, Dicke, Abstand, Füllstand, Winkel, Position, Weg
Direkte Messung: direkter Vergleich mit einem Maßstab; ist nur in einem
begrenzten Längenbereich möglich, da Vergleichsmaßstäbe nötig sind
Indirekte Messung: indirekte Methoden messen nicht die Entfernung selbst,
sondern eine von der Entfernung abhängige Größe. Es muss eine Kalibrierung mit
bekannten Maßstäben erfolgen.
Hodometrie: indirekte Wegmessmethode, welche auf die Umdrehung eines
Rades entlang eines Weges zählt und anschließend durch die Anzahl der
Umdrehungen auf die Strecke schließen lässt.
o Einsatz: Kilometerzähler im Auto, Vermessung
4.2. Berührende Längenmessung: Ausnutzung des elek Effektes als Messprinzip
(Widerstandsänderung)
Widerstandswegaufnehmer (Potentiometer): stetig einstellbarer
Spannungsteiler aus Träger und beweglichen Schleifer besteht
(elektromechanischer Sensor) anhängig von äußerer Beschaltung ergibt sich
verstellbarer Widerstand oder Spannungsteiler.
o Einsatz: Laustärkeregelung in Radios, Spannungsteiler, Positionsmessung
o Messbereich: 5mm-4m
o Potentiometerschaltung mit veränderlichem R (um Weg x):
𝑈1
𝑈=
𝑋1
𝑋
o Nachteile:
Gewährleistung des Schleifkontakts
Endliche Auflösung durch Drahtwindung
Hochohmige Signalverarbeitung nötig
Dehnungsmessstreifen (DMS): Erfassung von dehnenden Verformungen
Änderung des elek. Widerstandes. Messung erfolgt meist in Brückenschaltungen .
104-107 Lastspiele möglich. -50-200°C (statisch) und 200-250°C (dynamisch)
o Bsp.: Metallischer Leiter:
𝑅 =4𝜌𝑙
𝜋𝑑2 →Δ𝑅
𝑅=
Δ𝜌
𝜌+
Δ𝑙
𝑙−
2Δ𝑑
𝑑 (Herleitung s. Übung)
𝐷𝑒ℎ𝑛𝑢𝑛𝑔 𝜀: 𝜀 =Δ𝑙
𝑙

𝑃𝑜𝑖𝑠𝑠𝑜𝑛𝑧𝑎ℎ𝑙 𝜇: 𝜇 =Δ𝑑
𝑑∗
𝑙
Δ𝑙
→ Δ𝑅
𝑅= 𝜀 [
1
𝜀∗
Δ𝜌
𝜌+ 1 + 2𝜇] = 𝜀 ∗ 𝐾
o Metall DMS:
K-Faktor ist kleiner 10
Gitter mit <10µm in isolierten Trägermaterial
120<R<1000Ω, i=10-20mA
o Halbleiter DMS:
höhere Empfindlichkeit als Metall DMS (k-Faktor <200),
sehr dünne Streifen (50µm dick)
hohe Temperaturempfindlichkeit, nichtlineare Kennlinie
Grundmaterial: n-dotiertes Si, Dehnungstreifen aus p-
dotierten Si
o Kennlinien:
GRAFIK Folie 179
o Anwendungsgebiete: Dehnungsmessung an Maschienen,
Druchbehältern, Folien und Papierherstellung, Kraft-, Druck-,
Beschleunigungsmessung.
4.3. Berührungslose Längenmessung:
Induktive Wegmessung: Veränderung der Induktivität einer Spule.
o Taucherankeraufnehmer aus Spule mit beweglichem Kern.
o Bewegungsobjekt wird mechanisch an den Kern gebunden.
o Änderung der Induktivität und somit der Reaktanz der Spule
o Weitgehend verschleiß- und hystersefrei
o Messbereich: 10-9-10-2m ; max: ∆U=1V
o z.B. Profilometer:
Erregerspule in der Mitte wird von zwei Sekundärspulen
umgeben.
An Primärspule liegt const. Wechselspannung.
Beweglicher Weicheisenkern verändert Kopplungsfaktor
zwischen Spulen
Kein Ausgangsignal bei Kern Mittellage
Verschiebung des Kerns führt zu Änderung der magn. Kopplung
wodurch eine auswertbare Ausgangsspannung entsteht
Magnetfeldsonde (Hall-Sonde): zur Lage-, Positionserfassung wird ein Hall-
Sensor von einem konstanten Strom durchflossen und in ein senkrecht dazu
verlaufendes Magnetfeld gebracht, liefert er Ausgangsspannung, die prop zum
Produk aus magn. Feldstärke und Strom ist. Der Hall-Effekt kompensiert die auf
die Elektronen wirkende Lorentzkraft.
o Vorteil vs. Induktive Wegmessen: Auch Signal wenn Magnetfeld
konstant ist.
o RH ist entscheidende Größe für die Empfindlichkeit der Magnetsonde.
o 𝐹𝐿 = 𝐹𝐵 → 𝑈𝐻 = 𝑣 ∗ 𝑏 ∗ 𝐵 = 𝑅𝐻 ∗𝑖
𝑑∗ 𝐵
RH=Hall-Konstante; v= Geschw. der Elektr.
o Kennlinie:
o Anwendungsgebiete: Kompass in der Navigation, Lageerkennung,
Kontaktlose Taster/ Schalter, Laserdrucker, potentialfreies Strommessen,
Ablesen von beschrifteten Magnetfolien.
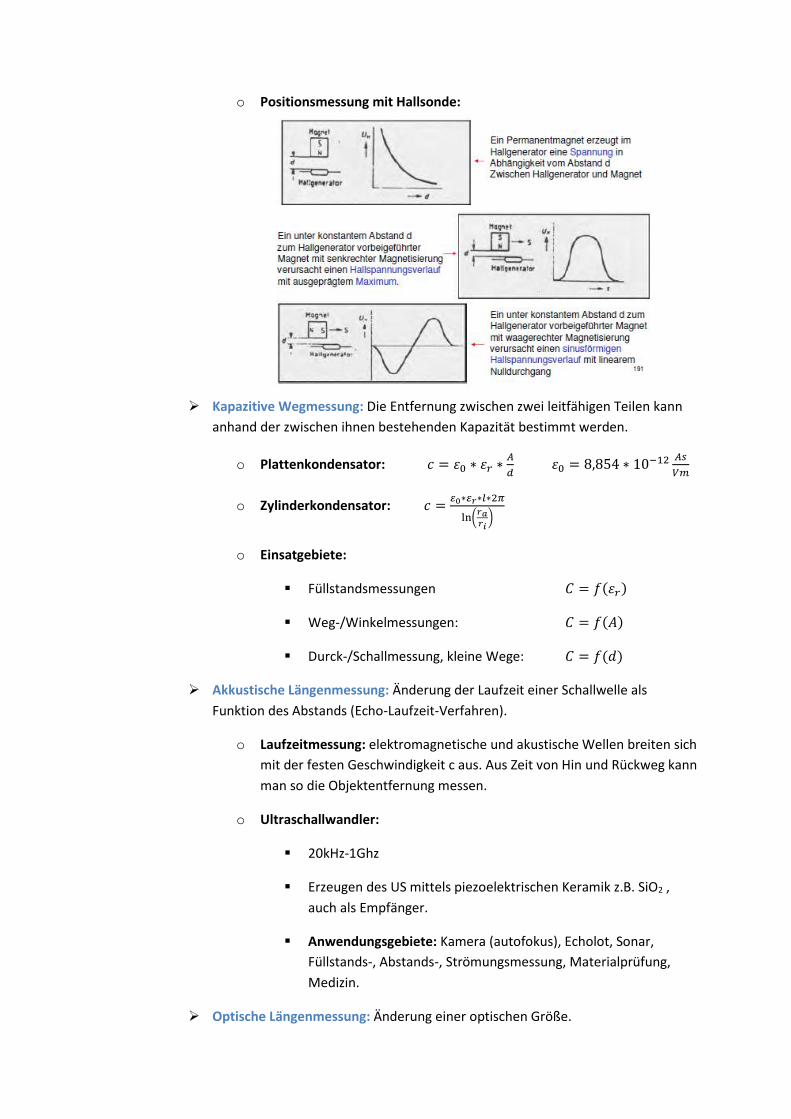
o Positionsmessung mit Hallsonde:
Kapazitive Wegmessung: Die Entfernung zwischen zwei leitfähigen Teilen kann
anhand der zwischen ihnen bestehenden Kapazität bestimmt werden.
o Plattenkondensator: 𝑐 = 𝜀0 ∗ 𝜀𝑟 ∗𝐴
𝑑 𝜀0 = 8,854 ∗ 10−12 𝐴𝑠
𝑉𝑚
o Zylinderkondensator: 𝑐 =𝜀0∗𝜀𝑟∗𝑙∗2𝜋
ln(𝑟𝑎𝑟𝑖
)
o Einsatgebiete:
Füllstandsmessungen 𝐶 = 𝑓(𝜀𝑟)
Weg-/Winkelmessungen: 𝐶 = 𝑓(𝐴)
Durck-/Schallmessung, kleine Wege: 𝐶 = 𝑓(𝑑)
Akkustische Längenmessung: Änderung der Laufzeit einer Schallwelle als
Funktion des Abstands (Echo-Laufzeit-Verfahren).
o Laufzeitmessung: elektromagnetische und akustische Wellen breiten sich
mit der festen Geschwindigkeit c aus. Aus Zeit von Hin und Rückweg kann
man so die Objektentfernung messen.
o Ultraschallwandler:
20kHz-1Ghz
Erzeugen des US mittels piezoelektrischen Keramik z.B. SiO2 ,
auch als Empfänger.
Anwendungsgebiete: Kamera (autofokus), Echolot, Sonar,
Füllstands-, Abstands-, Strömungsmessung, Materialprüfung,
Medizin.
Optische Längenmessung: Änderung einer optischen Größe.
o Bildverarbeitungsverfahren: Laseroptisches Abtasten
Bild wird aufgenommen Verarbeitung mit
AlgorithmusBestimmung der geom. AbmessungenEinsatz für
kompakte Körper
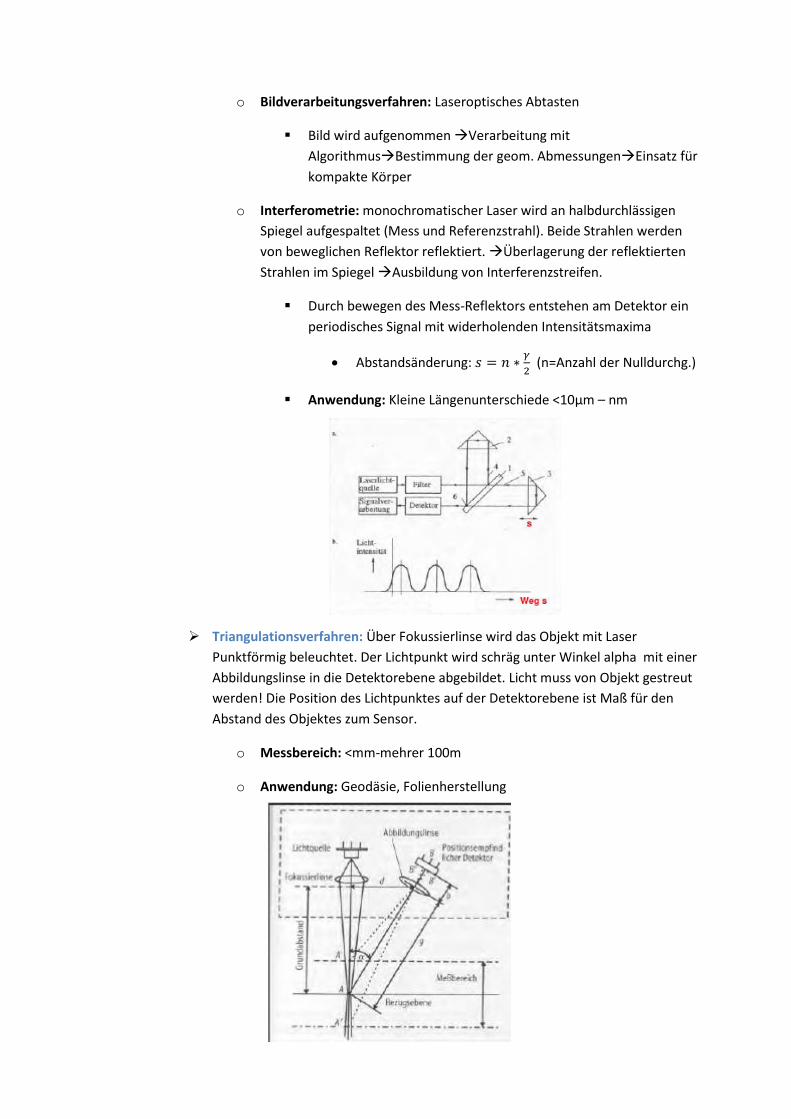
o Interferometrie: monochromatischer Laser wird an halbdurchlässigen
Spiegel aufgespaltet (Mess und Referenzstrahl). Beide Strahlen werden
von beweglichen Reflektor reflektiert. Überlagerung der reflektierten
Strahlen im Spiegel Ausbildung von Interferenzstreifen.
Durch bewegen des Mess-Reflektors entstehen am Detektor ein
periodisches Signal mit widerholenden Intensitätsmaxima
Abstandsänderung: 𝑠 = 𝑛 ∗𝛾
2 (n=Anzahl der Nulldurchg.)
Anwendung: Kleine Längenunterschiede <10µm – nm
Triangulationsverfahren: Über Fokussierlinse wird das Objekt mit Laser
Punktförmig beleuchtet. Der Lichtpunkt wird schräg unter Winkel alpha mit einer
Abbildungslinse in die Detektorebene abgebildet. Licht muss von Objekt gestreut
werden! Die Position des Lichtpunktes auf der Detektorebene ist Maß für den
Abstand des Objektes zum Sensor.
o Messbereich: <mm-mehrer 100m
o Anwendung: Geodäsie, Folienherstellung
Inkrementalverfahren: ist dadurch gegkennzeichnet, das der gesamte Messweg
in gleich große, abzählbare Intervalle (Inkremente) zerlegt wird. Dabei bestimmt
die Breite der Intervalle das Auflösungsvermögen.
o Anwendung: Robotik zur Prozessautomatisierung
Faseroptische Verfahren: z.B. Füllstandsänderung in Flüssigkeiten Änderung
der Brechungszahl zwischen Glasfaser und Medium abhängig vom Füllstand.
o Sensor aus IR-LED und Empfänger Licht in Prisma gerichtet Solange
Spitze nicht in Flüssigkeit erfolgt Lichtrefelxion zur LED. steigt
Flüssigkeit wird Licht gebrochen und weniger Licht erreicht den Sensor.
5. Kraft- und Deruckmessung:
5.1. Allgemeines /Definition:
Kraft: F=m*a
Messeffekt: Kraftänderung basiert auf bzw. induziert häufig Längenänderung
eines Materials.
Einsatzgebiet:
o Ermittlung mechanischer Belastungen
o Massenbestimmung
o Drehmomentbestimmung
Verfahren:
o DMS
o Piezoelektrische Kraftmessung
o Magnetoelektrische Kraftmessung
o Dynamometer
Druck: 𝑝 =𝐹
𝐴 [
𝑁
𝑚2]
Druckdifferenz: ∆𝑝 = 𝑝1 − 𝑝2
Differenzdruck: 𝑝12 (𝑑𝑖𝑟𝑒𝑘𝑡𝑒 𝑀𝑒𝑠𝑠𝑔𝑟öß𝑒)
5.2. Kraftmessung:
Kraft- /Drehmomentmessung mit DMS: Piezoresistiver Effekt beruht auf
Veränderung des spezifischen Widerstands eines Materials durch Kraft, Zug,
Druck.
o DMS auf einem Federkörper: auf Ober und Unterseite je zwei identische
DMS. Verdrahtung der vier DMS zur Weahtstone’schen Brückenschaltun.
Dabei addieren sich spannungsbedingte Widerstandsänderungen bei
gleichzeitiger Temperaturkompensation.
z.B. Wägesensor mit symmetrischer elastischer Verformung
einer Flachbiegefeder (Personenwaage)
Kraftmessdosen: bestehend aus elastischen, zylindrischen
Körper, der durch angreifende Kräfte gestreckt oder gestaucht
wird. Der Körper ist mit DMS beklebt, welche die
Normalspannungen erfassen.
Messbereich: 50N-5*109N
Messung von Drehmomenten: über DMS die auf einem
tordierten Zylinder angeordnet sind
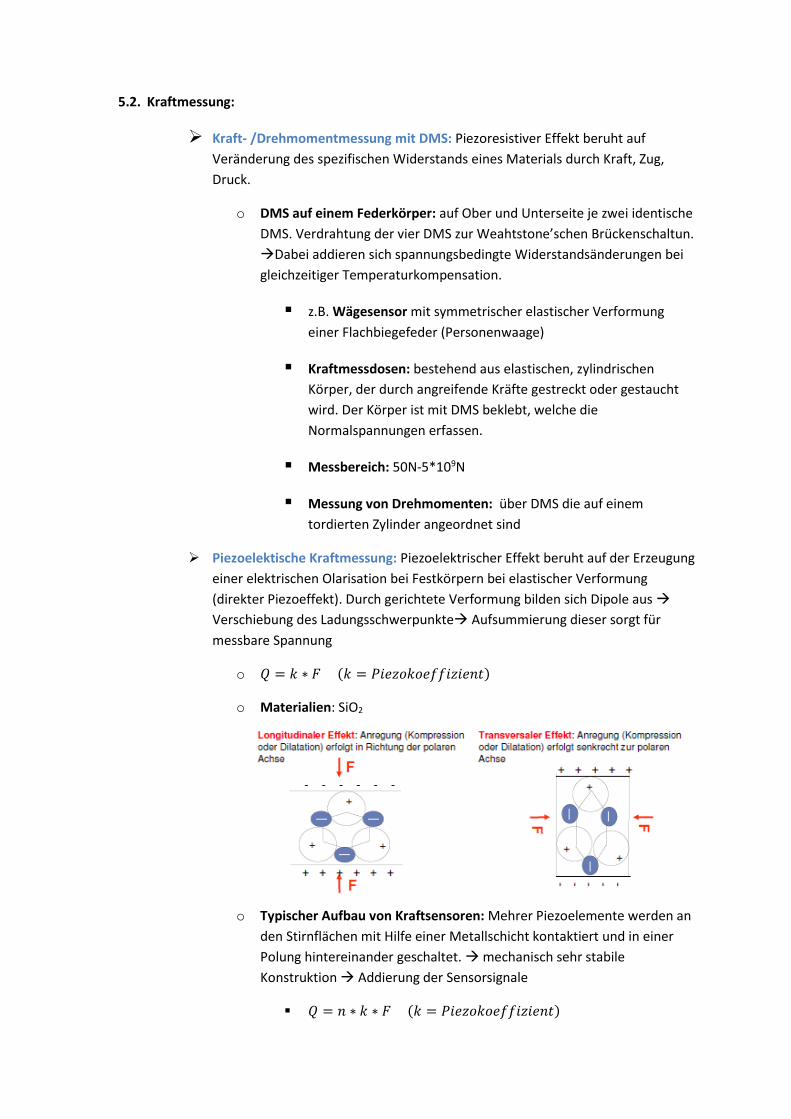
Piezoelektische Kraftmessung: Piezoelektrischer Effekt beruht auf der Erzeugung
einer elektrischen Olarisation bei Festkörpern bei elastischer Verformung
(direkter Piezoeffekt). Durch gerichtete Verformung bilden sich Dipole aus
Verschiebung des Ladungsschwerpunkte Aufsummierung dieser sorgt für
messbare Spannung
o 𝑄 = 𝑘 ∗ 𝐹 (𝑘 = 𝑃𝑖𝑒𝑧𝑜𝑘𝑜𝑒𝑓𝑓𝑖𝑧𝑖𝑒𝑛𝑡)
o Materialien: SiO2
o Typischer Aufbau von Kraftsensoren: Mehrer Piezoelemente werden an
den Stirnflächen mit Hilfe einer Metallschicht kontaktiert und in einer
Polung hintereinander geschaltet. mechanisch sehr stabile
Konstruktion Addierung der Sensorsignale
𝑄 = 𝑛 ∗ 𝑘 ∗ 𝐹 (𝑘 = 𝑃𝑖𝑒𝑧𝑜𝑘𝑜𝑒𝑓𝑓𝑖𝑧𝑖𝑒𝑛𝑡)

o Auslesen des Sensores: Piezoelektrischer Kraftaufnehmer stellt
Stromquelle dar, die Kondensator speist. Strom fließt vom Sensor nur bei
Kraftänderung! Wenn Kraft const. Dann entlädt sich der Kondesator.
𝑇𝑄 = 𝑅𝑄 ∗ 𝐶𝑄
𝑈𝑄 =𝑄
𝐶=
𝐾∗𝐹0
𝐶 𝑆𝑝𝑎𝑛𝑛𝑢𝑛𝑔 𝑑𝑒𝑠 𝑄𝑢𝑎𝑟𝑧𝑒𝑠.
o Vorteile:
Starrer, robuster Aufbau
Geringe Temp Abhängigkeit
Keine äußere Versorgungsspannung nötig
Hoher Wirkungsgrad (direkte Wandlung von mech. In elekt. En.)
o Nachteile:
Nur Kraftänderung erfassbar
Empfindliche elektronische Weiterverarbeitung da kleine Ladung
o Anwendungsgebiete:
Kraft- , Druckmessung, Beschleunigungsmessung, Füllstands und
Durchflussmessung,…
Magnetoelastische Kraftmessung: Durch den Einfluss einer von außen
einwirkenden Kradft wird die Magnetische Permeabilität µ verändert.
Änderung des Magnetischen Flusses.
o Klassifizierung von magnetischen Materialien
Diamagnetische Stoffe (0 ≤ 𝜇𝑟 < 1 )
Paramagnetische Stoffe (𝜇𝑟 > 1)
Ferromagnetische Stoffe (𝜇𝑟 ≫ 1)
o Magnetostriktion: Formänderung des Materials durch äußeres H-Feld
o Magnetoelastik: Materialspannung durch äußere Kraft Änderung der
magnet. Eigenschaften des Materials.
5.3. Druckmessung:
Druckmessgerät (Manomater): Messeinrichtung zur Erfassung des
physikalischen Drucks eines Mediums. Bei Gasmessung meist Außenluft als
Referenzdruck.
Mechanische Druckmessung: Deformations-Durckmessgerät: Kraft führt zu
elastischer Deformation Verformungsgrad = Druckmaß
o Ausführungsformen:
Plattenfedermanometer
Doppelmembran/ Kapselmanometer
Dosenmanometer
Schneckenfedermanometer
Bourdonmanometer
Hydrostatische Druckmessung: Druck der sich auf ruhende Flüssigkeit durch
Gravitation einstellt. Hängt nur von Höhe des Flüssigkeitsspiegel über dem
Messpunkt ab.
o Definition des Drucks: 𝑝 = ℎ ∗ 𝜌𝐹𝑙 ∗ 𝑔 + 𝑝𝑎𝑚𝑏
o U-Rohrmanometer: Druck wird durch Verschiebung der Flüssigkeitssäule
in einem U-Rohr angegeben. Bei Druckdifferenz verschiebt sich
Flüssigkeitssäule zur seite mit geringerem Druck
Druckgleichgewicht: 𝑝1 = 𝑝2 + ℎ ∗ 𝜌𝐹𝑙 ∗ 𝑔
Druckdifferenz: ∆𝑝 = 𝑝1 − 𝑝2 = ℎ ∗ 𝜌𝐹𝑙 ∗ 𝑔
Arbeitsbereich: 0-25 Pa (0-0,25mbar)
o Schrägrohrmanometer: 2. Säule wird schräg gestellt größeres h bei
gleichem ∆𝑝 höhere Empfindlichkeit!
Druckdifferenz: ∆𝑝 = 𝑝1 − 𝑝2 = 𝐿 ∗ 𝑠𝑖𝑛𝛼 ∗ 𝜌𝐹𝑙 ∗ 𝑔
o Barometer
o Ringwaage: Hohlring mit Trennwand ist mir Sperrflüssigkeit gefüllt.
Beide Kammern sind an die zu messenden Differenzdrücke ageschlossen.
Druckdifferenz zwischen beiden Kammern dreht Ringkörper so weit bis
sich Kräftegleichgewicht eingestellt hat.
Drehwinkel: 𝑠𝑖𝑛𝛼 ≈ 𝛼 =∆𝑝∗𝐴∗𝑟
𝑚∗𝑔∗𝑟
Arbeitsbereich: -25-50Pa
Anwendungsgebiete:
Reinraumtechnik
Gebäude-Automatisierungstechnik

Elektrische Manomater:
o Piezoelektrischer Sensor (aktiv):
o Piezoresistiver Sensor (Passiv):
Oberflächendehnung: 𝜀 = 𝑐 ∗ [𝑟2∗𝑝
𝑡2∗𝐸]
C=Materialkonst. E=e-modul material
DMS werden gestaucht bzw gedehnt. Brücke wird mit U gespeist
und Messignal ∆𝑈 wird an Brückendiagonalen abgegriffen.
Dünnfilm DMS: Herstellung mittels thermischen Aufdampfens
Vorteile:
o Kostengünstige Herstellung bei hohen
Stückzahlen
o Abgleichen der Widerstände durch Lasertrim
o Miniaturisierung, geringe
Temperaturempfindlichkeit
o Kapazitiver Drucksensor (Passiv): Druckinduzierte Abstandsänderung
einer beweglihen Elektrode gegenüber einer festen Elektrode
Aufbau: in Si-Chip eindiffundierter Kondensator, mist teil eines
internen Verstärlers , dessen Verstärkungsfaktor von C abhängt.
6. Strömungs- und Durchflussmessung:
6.1 Allgemeines und Strömungsgeschwindigkeiten: Es gibt laminare(f=0,5) und turbulente
Strömung (f=0,8-0,9)
Allgemein:
o 𝑣𝑚𝑎𝑥 =𝑣
𝑓
o 𝑅𝑒𝑦𝑛𝑜𝑙𝑑𝑠𝑧𝑎ℎ𝑙: 𝑅𝑒 =𝑣𝑚𝑎𝑥∗𝑑∗𝜌
𝜂 (laminar < Rkrit < turbulent ≈ 2300)
o 𝑑𝑦𝑛 𝑉𝑖𝑠𝑘𝑜𝑠𝑖𝑡ä𝑡: 𝜂 = 𝜌 ∗ 𝑣
Druckdifferenzmessung: Gesamtdruck pg besteht aus statischen Druck ps und
dyn Druck pd
o 𝑝𝑔 = 𝑝𝑠 + 𝑝𝑑
o 𝑝𝑔 wird parallel zur Strömung gemessen. (Pitot-Rohr)
o 𝑝𝑠wird senkreicht zur Strömung gemessen.
o 𝑝𝑑 wird durch Strömung allein bestimmt.
𝑝𝑑 =𝜌
2∗ 𝑣2 𝑣 = √
2𝑝𝑑
𝜌
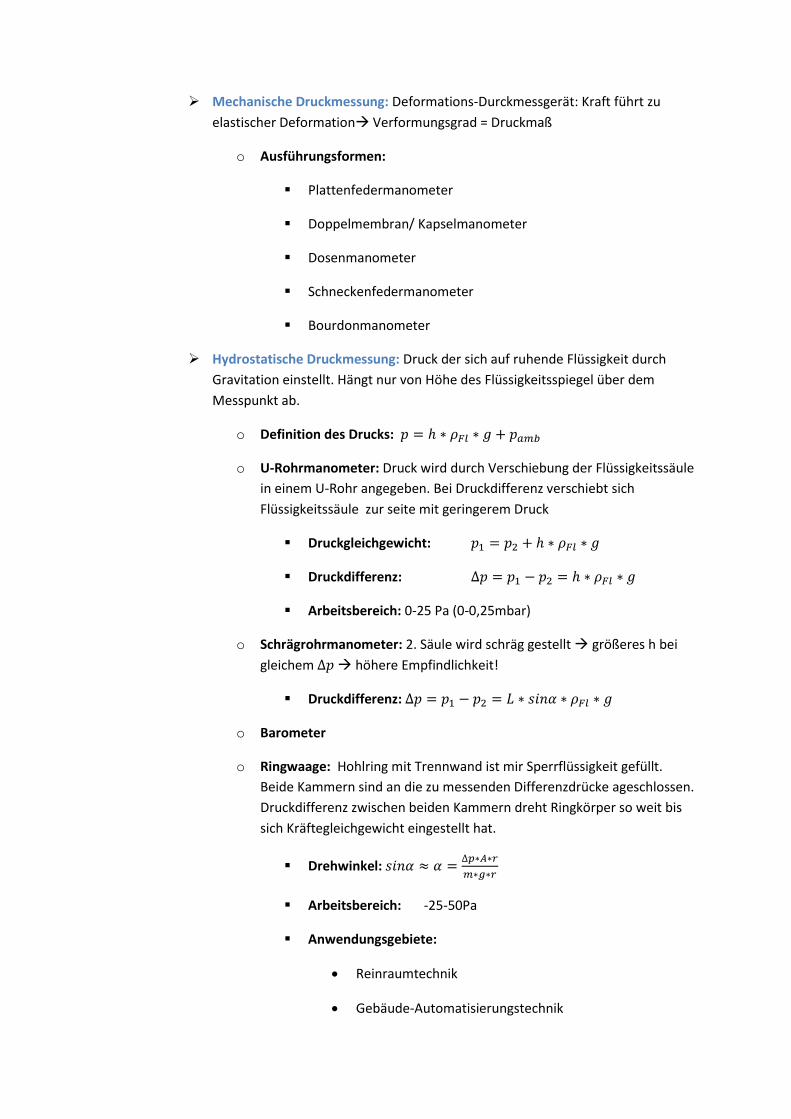
Prandtl-Sonde:
o Zur Bestimmung des Staudrucks (pd).
o Ist Kombination aus Pitotrohr und dyn Drucksonde.
o Da Staudruck dem Quadrat der Strömungsgeschwindigkeit proportional
ist lässt sich dies zur Geschwindigkeitsmessung verwenden
Durchflussmessung: Bestimmung der Stoffmenge pro Zeiteinheit in def.
Leitungsquerschnitt.
o Massenstrom: = ∗ 𝜌 = 𝜌 ∗ 𝐴 ∗ [𝑘𝑔
𝑠]
o Volumenstrom: = 𝐴 ∗ [𝑚3
ℎ]
o = 𝑓(𝜌, 𝑝, 𝑇, 𝑅𝑒, )
6.2. Mechanische Durchflussmessung:
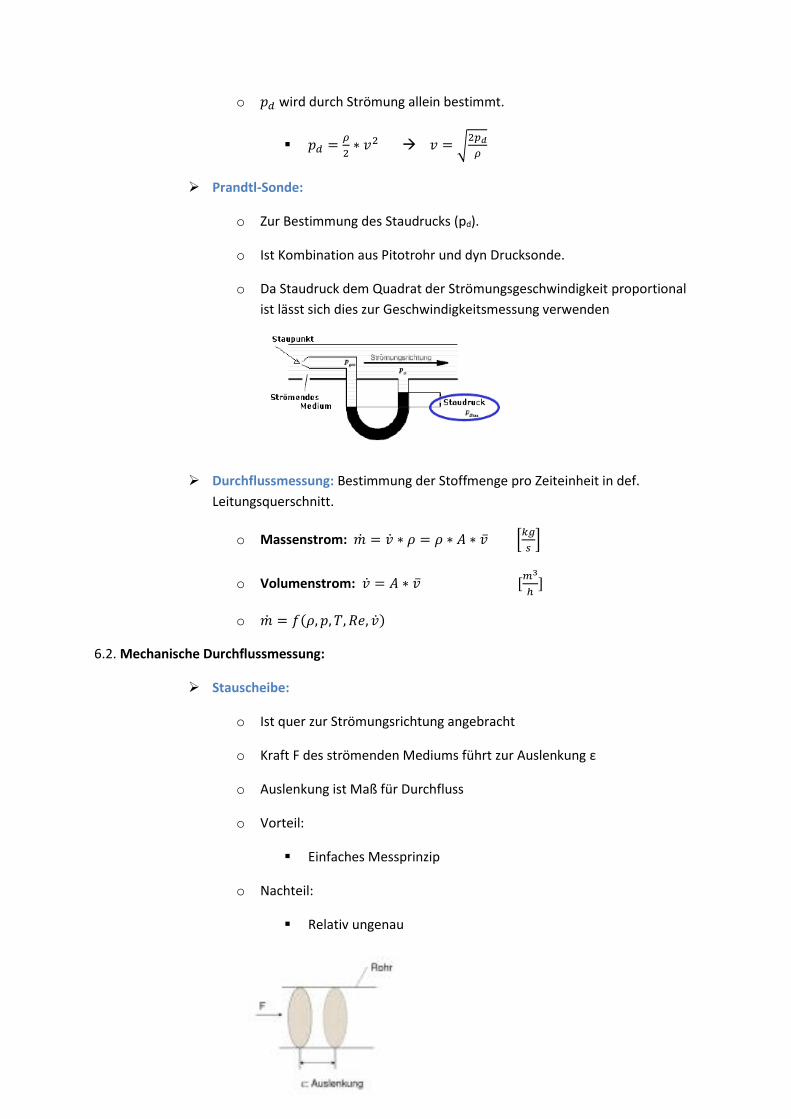
Stauscheibe:
o Ist quer zur Strömungsrichtung angebracht
o Kraft F des strömenden Mediums führt zur Auslenkung ε
o Auslenkung ist Maß für Durchfluss
o Vorteil:
Einfaches Messprinzip
o Nachteil:
Relativ ungenau

Schwebekörper Durchflussmesser:
o konisches Rohr wird von unten von einem Fluid durchströmt;
o im Rohr befindet sich vertikal ein beweglicher Schwebekörper
o Position hängt vom Volumenstrom ab
o Schwebeköper erfährt Auftriebskraft Fa und entgegengesetzte
Schwerkraft Fg
o Strömungswiderstand FW wirkt in Strömungsrichtung und hängt von
Form des Körpers Strömungsgeschw. Sowie Dichte/Visk. Des Fluids ab.
o =1
√𝑐𝑤∗ (𝐴𝑅 − 𝐴𝑆) ∗ √
2∗𝑔∗𝑉𝑠∗(𝜌𝑠−𝜌𝑚)
𝜌𝑚∗𝐴𝑆
o 𝐹𝐺 = 𝐹𝐴 + 𝐹𝑊
𝐹𝐴 = 𝑉𝑠 ∗ 𝜌𝑀 ∗ 𝑔
𝐹𝐺 = 𝑉𝑆 ∗ 𝜌𝑆 + 𝑔
𝐹𝑊 = 𝑐𝑤 ∗ 𝐴𝑆 ∗𝜌𝑀
2∗ 𝑣2
𝑣 =𝑉
𝐴𝑅−𝐴𝑆
o Vorteile:
Relativ einfach und günstig herstellbar
Keine ext. Stromversorgung
Messung von kleinsten Volumenströmungen
Hohe Wiederholgenauigkeit
o Nachteile:
Kalibriert für entsprechendes Fluid
Nur senkrechter Einbau mit Strömung von unten nach oben
Volumenzähler: Aufteilung des strömenden Volumens in einzelne Teilvolumina
und Zählung pro Zeiteinheit.
o Volumenzähler mit Messkammer (unmittelbarer Volumenzähler):
Ausführungsformen:
Drehkolbengaszähler
Ovalradzähler
Trommelgaszähler
Vorteile:
Einsetzbar in Flüssigkeiten mit hoher Viskosität
Kleine Messabweichung
Nachteile:
Merklicher Druckverlust
Verschleißanfällig, verschmutzungsempfindlich
o Volumenzähler ohne Messkammer (mittelbarer Volumenzähler):
Ausführungsformen:
Turbinenradzähler
Flügelradanemometer
Vorteile:
Einfacher robuster Aufbau
Großer Temp.Bereich
Kleine Messabweichungen
Nachteile:
Starke Abhängigkeit von der Viskosität
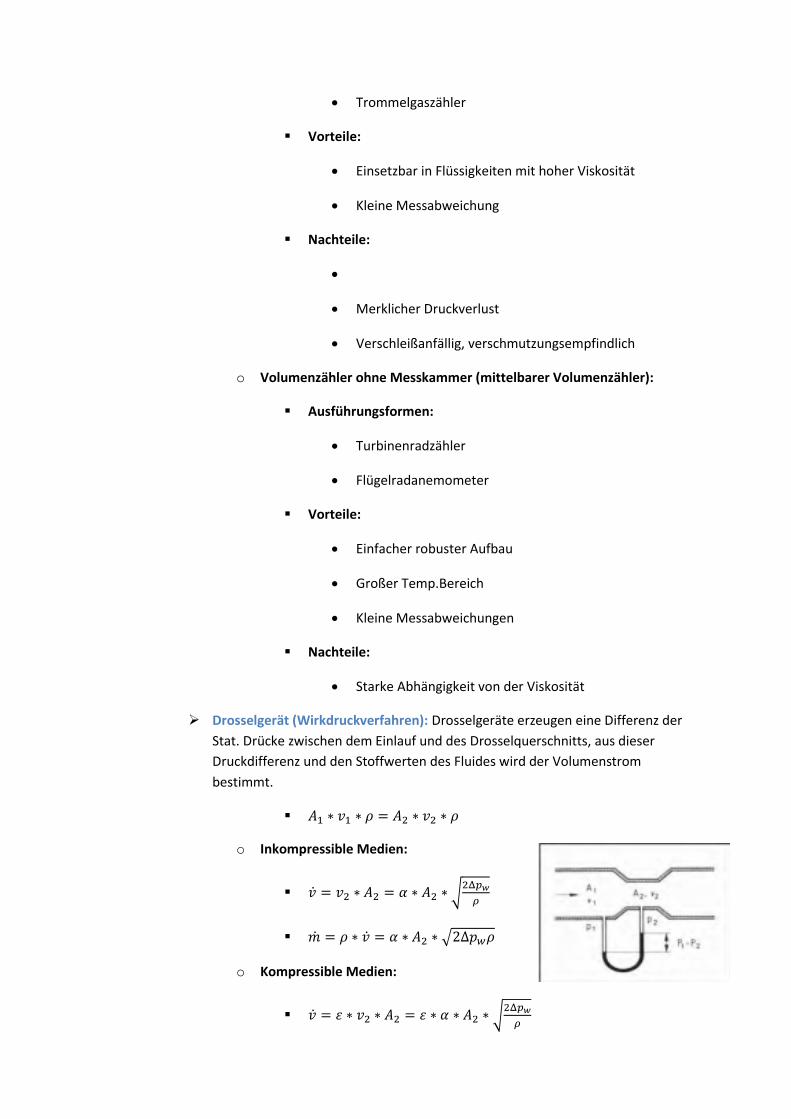
Drosselgerät (Wirkdruckverfahren): Drosselgeräte erzeugen eine Differenz der
Stat. Drücke zwischen dem Einlauf und des Drosselquerschnitts, aus dieser
Druckdifferenz und den Stoffwerten des Fluides wird der Volumenstrom
bestimmt.
𝐴1 ∗ 𝑣1 ∗ 𝜌 = 𝐴2 ∗ 𝑣2 ∗ 𝜌
o Inkompressible Medien:
= 𝑣2 ∗ 𝐴2 = 𝛼 ∗ 𝐴2 ∗ √2Δ𝑝𝑤
𝜌
= 𝜌 ∗ = 𝛼 ∗ 𝐴2 ∗ √2Δ𝑝𝑤𝜌
o Kompressible Medien:
= 𝜀 ∗ 𝑣2 ∗ 𝐴2 = 𝜀 ∗ 𝛼 ∗ 𝐴2 ∗ √2Δ𝑝𝑤
𝜌
= 𝜌 ∗ = 𝜀 ∗ 𝛼 ∗ 𝐴2 ∗ √2Δ𝑝𝑤𝜌
α=Durchflusszahl ε=Expansionszahl bei Gasen
o Nachteile: für hohe Genauigkeit benötigt man lange Rohrstrecken (5-
10fache des Rohrdurchmessers)
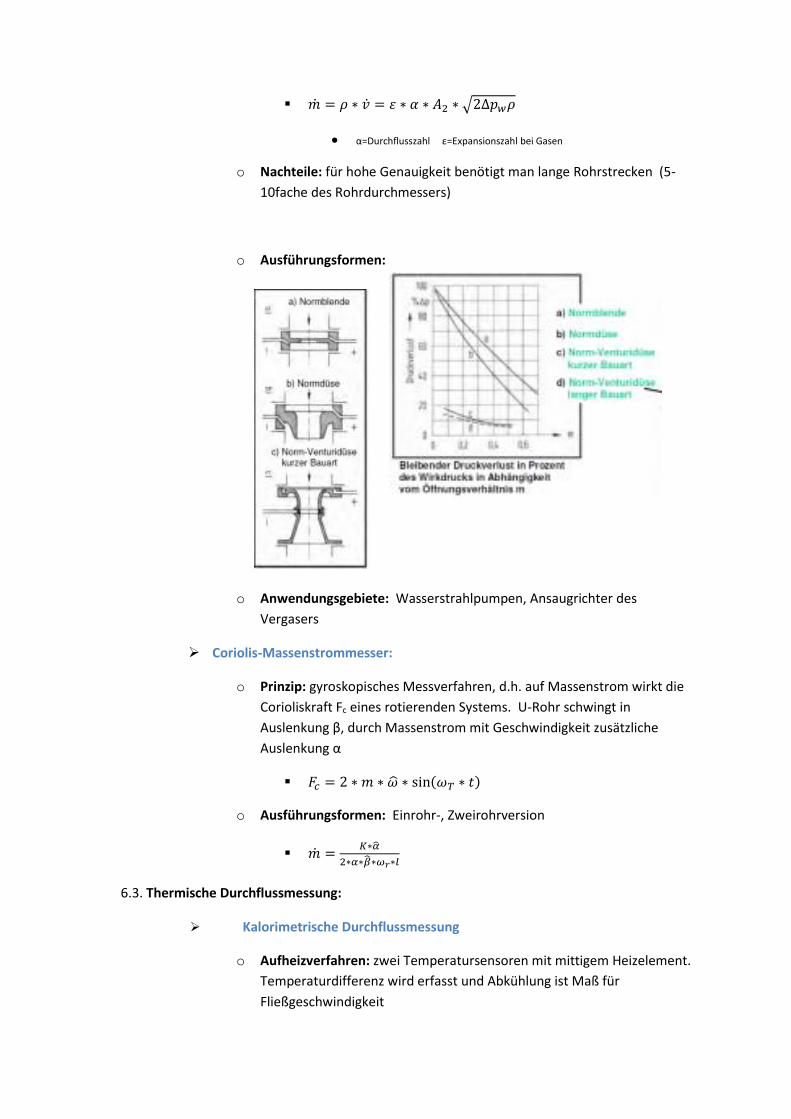
o Ausführungsformen:
o Anwendungsgebiete: Wasserstrahlpumpen, Ansaugrichter des
Vergasers
Coriolis-Massenstrommesser:
o Prinzip: gyroskopisches Messverfahren, d.h. auf Massenstrom wirkt die
Corioliskraft Fc eines rotierenden Systems. U-Rohr schwingt in
Auslenkung β, durch Massenstrom mit Geschwindigkeit zusätzliche
Auslenkung α
𝐹𝑐 = 2 ∗ 𝑚 ∗ ∗ sin(𝜔𝑇 ∗ 𝑡)
o Ausführungsformen: Einrohr-, Zweirohrversion
=𝐾∗
2∗𝛼∗∗𝜔𝑟∗𝑙
6.3. Thermische Durchflussmessung:
Kalorimetrische Durchflussmessung
o Aufheizverfahren: zwei Temperatursensoren mit mittigem Heizelement.
Temperaturdifferenz wird erfasst und Abkühlung ist Maß für
Fließgeschwindigkeit
o Hitzedrahtmethode (Anemometer): Draht ist senkrecht zum
strömendem Medium. Strom erwärmt Draht. Draht wird zu v prop.
Abgekühlt.
Material: Pt, Ni, W
Ausführungsformen: Dualsonde oder Einfachsonde,
Hitzedrahtsonde oder Heißfilmsonde. Mikroanemometer
Kurze Drähte: M. lokaler Strömungsgeschw.
Lange Drähte: M. Strömungsgeschw. Über gesamtes
Rohr.
6.4. Magnetisch – Induktive Durchflussmessung:
Prinzip: Beruht auf Farraday’schem Gesetz. Ladungsträger in Flüssigkeit werden
durch Magnetfeld abgelenkt. D.h. durch Ladungstrennung entsteht eine
Spannung proportional zur Strömungsgeschwindigkeit.
o 𝐹𝐿 = 𝑞 ∗ 𝑣 ∗ 𝐵
o 𝐹𝐸 = 𝑞 ∗ 𝐸 = 𝑞 ∗𝑈
𝑑
o 𝑈 = 𝑐 ∗ 𝑑 ∗ 𝐵
o Voraussetzung: 𝜎 >5𝜇𝑚
𝑐𝑚
6.5. Ultraschall Durchflussmessung:
Grundlagen:
o Mitführeffekt: Phasendifferenzmessung, Frequenzmessung
o Dopplereffekt: bewegt sich Schallquelle auf Beobachter zu oder weg,
verändert sich die Frequenz.
o 𝑓± = 𝑓 ∗1±
𝑉𝑏𝑐
1±𝑉𝑞
𝑐
𝑉𝑏 = 𝑏𝑒𝑤. 𝐵𝑒𝑜𝑏. 𝑚𝑖𝑡 𝑟𝑢ℎ𝑒𝑛𝑑𝑒𝑟 𝑆𝑐ℎ𝑎𝑙𝑙𝑞𝑢𝑒𝑙𝑙𝑒 ; 𝑉𝑞 𝑎𝑛𝑑𝑒𝑟𝑠𝑟𝑢𝑚
Ultraschall-Laufzeit-Verfahren: homogenes Medium mit wenig Feststoff
o 2 Sender , 2 Empfänger Laufzeit wird gemessen. Schall in
Durchflussrichtung ist schneller übertragen.
Ultraschall-Doppler-Verfahren: teilgefüllte Rohre, viel Feststoff.
o Basiert auf Streuung des Schalls.
6.6. Optische Durchflussmessung:
Laufzeit und Dopplerverfahren mittels Tracerpartikeln.

o Sonst wie Ultraschall-Dirchflussmessung.
7. Konzentrationsbestimmung
7.1. Einführung/Übersicht
Konzentration:
o Stoffmengenkonzentration: Stoffmenge pro Volumen in mol/l
o Massenkonzentration: Masse pro Volumen in g/l
Problematik: Sensoren in direkter Wechselwirkung mit Umgebung. Wesentlich
anfälliger für Vergiftung, Querempfindlichkeit, Korossion, Alterung
Aufbau: Chemo/Biosensor: Messprobe Sensor Signalwandler Anzeige
o Sensivität, Selektivität, Stabilität
o Chemosensor: mini Sensor, der chemische Verbindungen/Ionen selektiv
und reversibel erfasst und elektr. Ausgangssignal liefert
o Biosensor: mini Sensor, bei dem biologische Erkennungsmechanismen
zur Stofferkennung angewendet werden (Untergruppe der
Chemorezeptoren)
Anwendungsgebiete: Umweltanalytik, Drogendetektion,
Lebensmitteltechnologie, Prozesstechnik.
7.2. pH-Wertmessung:
Definition: Maß für die Stärke der sauren (𝐻+) bzw der basischen (𝑂𝐻−) Wirkung
einer wässrigen Lösung
o 𝑝𝐻 = −𝑙𝑔(𝐻+)
Messmethoden:
o Indikatorpapier: Verfärbung eines Farbstoffes ist Maß für pH. Es gibt
unterschiedliche Indikatorfarbstoffe.
Elektrochemische Messung:
o Potentiometrische Messkette: beruht darauf, dass das Potential
bestimmter elektrochemischer Elektroden (ionensensitive Elektrode) von
der Konzentration der sie umgebenden Lösung abhängt.
Ionensensitive Elektrode wird mit einer nicht pH-abhängigen
Elektrode(Referenzelektrode) zusammen geschaltet. Es ergibt
sich eine Potentialdifferenz. Prinzip: Galvanisches Element.

pH-Glaselektrode: Glasmembran hat einseitig Kontakt zu
Analyt auf der anderen Seite Kontakt zu internen
Pufferlösung. Innere Referezelement (AgCl beschichtetes
Ag) taucht in Pufferlösung und gewährleistet definierten
elektrischen Kontakt zum Voltmeter.
Referenzelektrode: muss konstantes Potential liefern und
gleichzeitig stabilen Kontakt zur Analytlösung gewährleisten.
Diaphragma.
o Anforderung: Keine Reaktion mit Analyt durch
Diffusion. niedriges Diffusionspotential.
Kalibierkruve:
Säure Fehler bei <<pH durch z.B. Cl-
Alkalifehler bei >>pH durch z.B. Na+
Nernstgleichung:
o 𝑈 = 𝑈0 + 2,3 ∗𝑅𝑇
𝑍𝐹∗ log(𝑎𝑀)
o Bei RT : 59,1mV/pH
Vereinfachung: pH- Einstabmesskette
: