Embed Size (px)
Citation preview
Holonische MultiagentensimulationProposal zur Diplomarbeit
Steffen Glückselig
Dipl.-Inform. Manuel Fehler
Inhaltsverzeichnis
Einleitung und Motivation ................................................................................................... 1
Aufgabenstellung ................................................................................................................. 2
Theoretischer Teil ........................................................................................................ 2
Was ist ein Holon? ............................................................................................... 2
Vorteile holonischer Multiagentensysteme .......................................................... 4
Struktur von Holonen ........................................................................................... 5
Bildung von Holonen ........................................................................................... 7
Organisation und Koordination in Holonen ......................................................... 8
Anwendungen von holonischen Multiagentensystemen ...................................... 9
Praktischer Teil ............................................................................................................ 9
Implementierung ................................................................................................ 10
Datenstrukturen .......................................................................................... 10
Verhaltensmodellierung ............................................................................. 13
Visualisierung der Holarchie ..................................................................... 18
Testmodelle ........................................................................................................ 20
Zeitplan .............................................................................................................................. 22
Literaturverzeichnis ........................................................................................................... 22
Einleitung und MotivationSeit Anfang der 1990er Jahre ist neben dem Konzept des Agenten das des Holonen ins Interesse
1

der verteilten künstlichen Intelligenz und generell der verteilten Problemlösung gerückt. Der
Begriff 'Holon' wurde bereits 1967 vom ungarischen Autor Arthur Koestler in seinem Buch
"The ghost in the machine" geprägt [Koe67].
Die Arbeit von Gerber, Siekmann und Vierke [HMA99] etablierte das holonische Paradigma im
Bereich der Multiagentensysteme.
Im theoretischen Teil will diese Arbeit (auch) einen Überblick über die bisher auf diesem Gebiet
geleistete Forschung geben.
Um die Unterstützung des Designs und der Entwicklung von Modellen für
Multiagentensimulationen auf Basis des im theoretischen Teils erarbeiteten holonischen
Konzepts im Rahmen der visuellen Multiagentenentwicklungsumgebung SeSAm soll es im
praktischen Teil dieser Arbeit gehen.
Im Weiteren gehe ich auf diese beiden zentralen Aspekte der Diplomarbeit näher ein.
Aufgabenstellung
Theoretischer Teil
Im theoretischen Teil der Diplomarbeit soll es um die Erarbeitung des Holon-Begriffs und
seines Umfelds gehen. Die hier gewonnen Erkenntnisse dienen als Grundlage für die
erfolgreiche Bearbeitung des zweiten Teils dieser Diplomarbeit - dem praktischen Umsetzen.
Was ist ein Holon?
Als Holon bezeichnet man Agenten, die wiederum aus Agenten bestehen. Man spricht von
super- und sub-Holonen. Zwischen dem Holonen und seinen Mitgliedern besteht eine Ganzes-
Teil-Beziehung.
Das Konzept des Holonen soll im Rahmen der Diplomarbeit genauer definiert und anhand von
Beispielen verdeutlicht werden.
Die Vorstellungen, die mit dem Begriff 'Holon' verbunden sind, reichen von einer einfachen
Erhöhung des Abstraktionsgrads, über eher esoterische Anschauungen (vgl. Lovelocks Gaia-
Theorie [LOV00]) bis hin zu einem neuen Konzept der Systemmodellierung wie es z.B. in
Holonische Multiagentensimulation
2

TeleTruck [TT97] Anwendung findet. Dabei erweitern die Eigenschaften des Holonen die eines
traditionellen Agenten. Es werden zusätzlich folgende Eigenschaften vorausgesetzt (cf. Gerber,
Siekmann und Vierke in [HMA99]):
• Streben nach gemeinsamen Ziel der Sub-Holonen eines Super-Holons. Wegen der
Verteiltheit eines MAS sind optimale Gesamtlösungen oft nicht zu finden. Die erhöhte
Flexibilität der Lösung gleicht diesen Nachteil jedoch aus.
• Erhöhte Gruppenfähigkeit, d.h. die Agenten besitzen in ihrer Eigenschaft als Holon mehr
und andere Fähigkeiten als jeder einzelne Agent. Ein einfaches Beispiel ist die Fähigkeit
einer Gruppe von Ameisen eine 'Brücke' zu bauen. Eine Ameise allein könnte den zu
überbrückenden Raum nicht überwinden.
• Beliefs - im holonischen Fall können Inkonsistenzen im Wissen auftreten, die meist nicht
behoben werden können. Man begnügt sich daher meist mit Para-Konsistenz (siehe
[ParLog]).
• Bounded rationality - wie im Falle individueller Agenten soll versucht werden trotz
beschränkter Ressourcen bestmögliche Entscheidungen zu treffen. Im Falle von Sub-
Holonen werden diese Ressourcen oft zusätzlich noch mit anderen Agenten kooperativ oder
im Wettbewerb geteilt.
• Kommunikation ist ein wesentlicher Bestandteil dieses Konzepts. Je kooperativer Agenten
sind, desto höher ist oft der Kommunikationsaufwand. Im Falle von Holonen beschränkt
sich die Kommunikation der Sub-Holonen meist auf andere Sub-Holonen des selben Holons,
wohingegen der Holon nach außen durch den Holonen-Kopf repräsentiert wird. Der
Holonen-Kopf ist auch der Kommunikationspartner für andere Super-Holonen. Wie jede
Aufgabe kann der Holonen-Kopf auch die Kommunikation nach außen an Sub-Holonen
weitergeben und so Engpässe umgehen bzw. vermeiden.
Ferner werden gebräuchliche Begriffe im holonischen Paradigma (Holarchie, Heterarchie,
extended Contract Net Protocol, Emergenz, Selbstorganisation, bounded rationality) definiert
und erläutert.
Zum Punkt der 'bounded rationality' und dem kompetetiven Fall der Ressourcenverteilung sei
noch erwähnt, dass dieser - trotz der insgesamt kooperativen Natur holonischer Systeme -
durchaus eintreten kann und für das Erreichen einer möglichst optimalen Lösung hilfreich ist.
Als Beispiel stelle man sich ein virtuelles Unternehmen (VU) (siehe "Testmodelle" im
praktischen Teil) vor. Es kann durchaus vorkommen, dass mehrere Sub-Unternehmen dasselbe
Holonische Multiagentensimulation
3

Produkt herstellen können. Sie konkurrieren um die Produktion dieser Ware. Deshalb dienen
z.B. Marktmechanismen zur Koordination und Optimierung der Aufgabenvergabe auch
innerhalb des VUs. Insgesamt ist das VU ein kooperativer Zusammenschluss mehrere
Unternehmen, die miteinander im Wettstreit stehen können.
Im kooperativen Fall können Ressourcen und Aufgaben beispielsweise anhand der Fähigkeiten
oder dem Verhältnis von vorhandener Energie zu aufzuwendender Energie vergeben werden.
Vorteile holonischer Multiagentensysteme
Die Betrachtung eines Problems und die Realisierung als ein holonisches Multiagentensystem
bringen einige Vorteile gegenüber traditionellen Multiagentensystemen (cf. Gerber, Siekmann
und Vierke in [HMA99]). Diese Vorteile sollen durch den Vergleich von holonischen Lösungen
mit traditionellen Lösungen verdeutlicht und konkretisiert werden.
• Robustheit gegenüber Ausfällen von Teilen. Beim Ausfall von Teilen der
Kommunikationskanäle, die für die kooperative Koordination unabdingbar sind, wird auch
eine holonische Lösung Engpässe oder gar Zusammenbruch erleiden. Bei Ausfällen von
Sub-Holonen soll das holonische MAS in der Lage sein, sich davon zu erholen. Dies beruht
auf der Fähigkeit der Selbst-Organisation, der Fähigkeit des Systems eine Hierarchie zu
erzeugen, die der gegenwärtigen Problemstellung bestmöglich entspricht. Eine solche
Hierarchie richtet sich nach dem Problem und ist somit kontextabhängig. Inwieweit sich das
System beim Ausfall eines Holonenkopfs erholt hängt vom Mechanismus zur Bestimmung
des Kopfes ab und soll untersucht werden.
• Flexibilität gegenüber Veränderungen in der Umwelt. Zum Beispiel verringern
Unternehmen, deren Produktionsstraßen holonisch organisiert sind ihre Reaktionszeiten auf
Marktveränderungen erheblich (vgl. die Arbeit von van Dyke Parunak [ADA94]). Generell
sind Lösungen, die auf einem Operations Research-Ansatz (Definition siehe [ORDef])
basieren anfällig gegen Veränderungen in der Umwelt. Treten bei der Planung
unberücksichtigte Umstände ein, muss eine Lösung praktisch immer vollständig neu
erarbeitet werden. Dies ist bei Lösungen, die durch holonische MAS errechnet wurden nicht
der Fall. Auch in der Qualität der Lösungen können holonische MAS mit denen der OR
konkurrieren (vgl. Ergebnisse des TeleTruck-Projekts [TT97]).
• Rekursives Abbilden einer Aufgabendomäne, d.h. die in vielen Problemstellungen
natürliche Zerlegbarkeit von Aufgaben kann effizient genutzt werden.
• Erhöhter Abstraktionsgrad gegenüber der Betrachtung auf Ebene der individuellen
Holonische Multiagentensimulation
4
Agenten. Dies hat Vorteile für den Designer eines holonischen MAS. Er kann mit der
Entwicklung des Systems auf einer sehr hohen Abstraktionsebene beginnen und sich dann
bis auf die konkrete Ebene der einzelnen Agenten hinunterarbeiten. Auf der anderen Seite
nutzt die stufenweise Erhöhung der Systemkomplexität den Vorteil stabiler Zwischenstufen,
die in sich bereits funktionieren und sinnvolle Aufgaben erfüllen. Herbert Simon
veranschaulicht diesen Designansatz durch die Parabel von zwei Uhrmachern. Der eine
Uhrmacher baut jedesmal alle Teile auf einmal zusammen, der andere Uhrmacher baut erst
kleine Module und vereinigt diese Module zu immer größeren Modulen bis die erstrebte Uhr
resultiert (vgl. [PoW62]). Eine solche Herangehensweise bietet ähnliche Vorteile wie das
deklarative Programmieren. Zusätzlich braucht der Entwickler - zumindest zu Beginn des
Entwurfsprozesses - sich nicht um das genaue Wie der Implementierung zu kümmern,
sondern kann sich auf das Was konzentrieren.
• Modularität (zusammen mit stabilen Zwischenstufen) ermöglicht eine gute Skalierbarkeit
von Multiagentensystem im Allgemeinen und holonischen MAS im Besonderen.
Holonische Lösungen sind jedoch nicht in allen Einsatzgebieten sinnvoll. In der Diplomarbeit
werden die Eigenschaften von Domänen dargelegt, die für den sinnvollen Einsatz von
holonischen Systemen vorhanden sein müssen.
Einige Domänen, die diese Eigenschaften aufweisen, werden anhand von in der Praxis bereits
eingesetzten holonischen Anwendungen dargestellt. Besonders interessant - im Hinblick auf den
praktischen Teil dieser Arbeit - scheinen hier TeleTruck, das am DFKI von Hans-Jürgen
Bürckert, Klaus Fischer und Gero Vierke entwickelt wurde (vgl. [TT97]) und Holonic
Manufacturing Systems (HMS) zu sein. Zur Erforschung der Möglichkeiten solcher
Produktionssysteme hat sich das Holonic Manufacturing Systems Consortium (vgl. [HMSCo])
gegründet. In die Entwicklung solcher Systeme flossen bereits mehrere Millionen Dollar. Diese
Systeme befinden sich inzwischen bei etlichen namhaften Firmen (z.B. Nestlé, Toshiba Ltd. und
Hitachi Ltd.) im praktischen Einsatz oder werden aktiv erforscht (vgl. [HMSPa]).
Struktur von Holonen
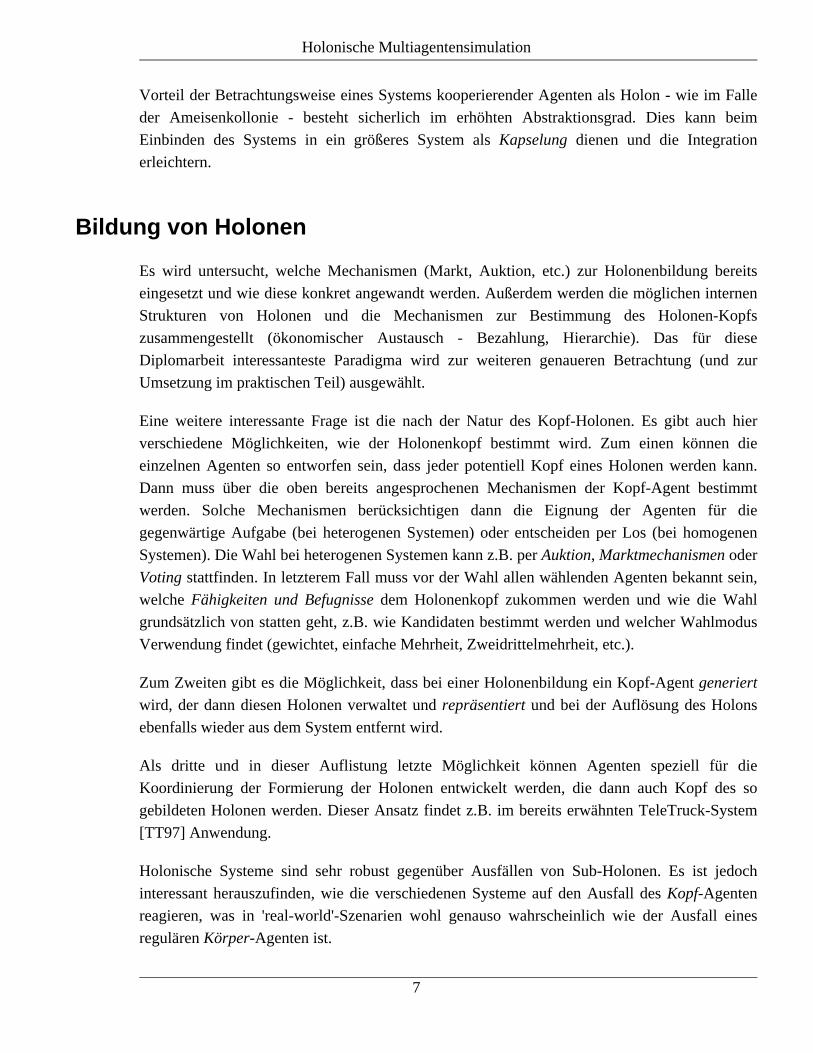
Gerber, Siekmann und Vierke postulieren in [HMA99] drei mögliche Holonenstrukturen:
1. Holon als Verbund von autonomen Agenten
Holonische Multiagentensimulation
5
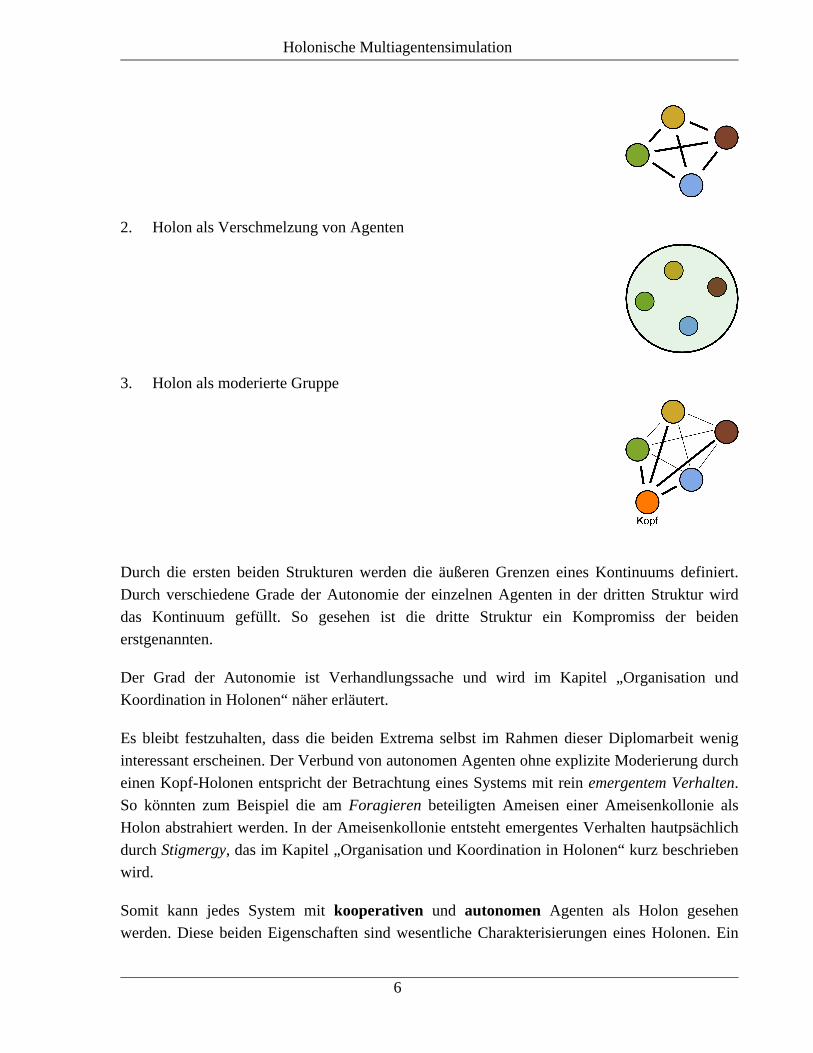
2. Holon als Verschmelzung von Agenten
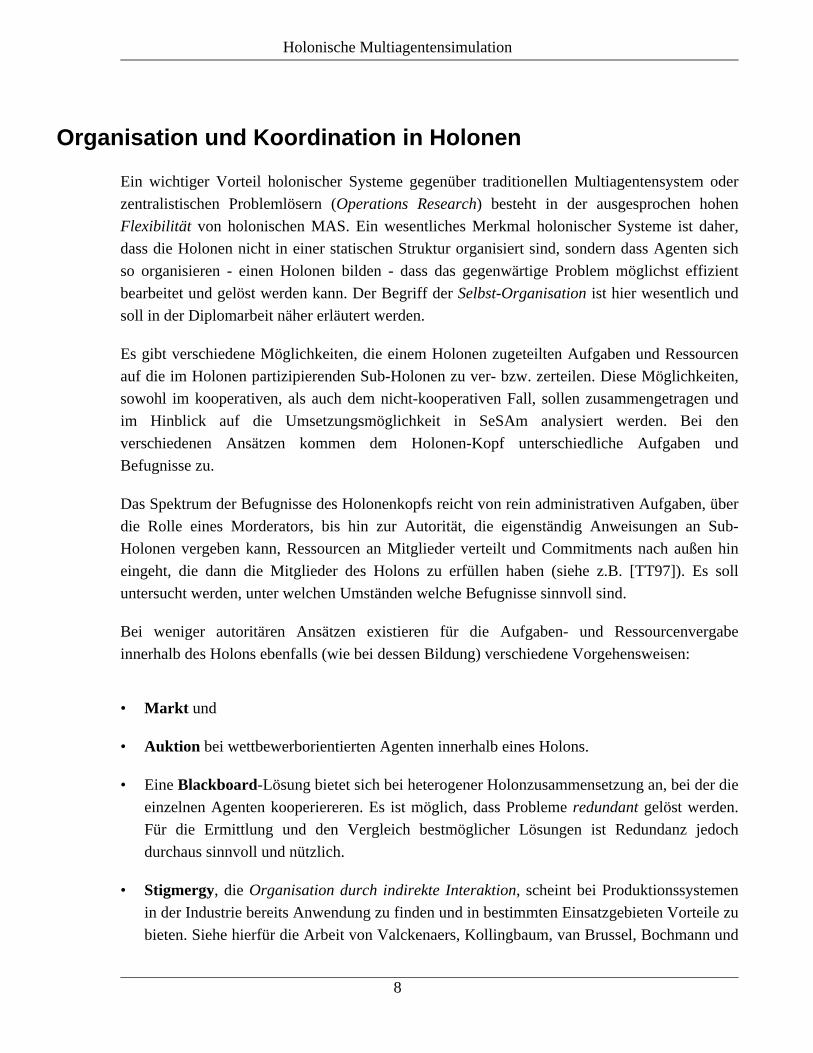
3. Holon als moderierte Gruppe
Durch die ersten beiden Strukturen werden die äußeren Grenzen eines Kontinuums definiert.
Durch verschiedene Grade der Autonomie der einzelnen Agenten in der dritten Struktur wird
das Kontinuum gefüllt. So gesehen ist die dritte Struktur ein Kompromiss der beiden
erstgenannten.
Der Grad der Autonomie ist Verhandlungssache und wird im Kapitel „Organisation und
Koordination in Holonen“ näher erläutert.
Es bleibt festzuhalten, dass die beiden Extrema selbst im Rahmen dieser Diplomarbeit wenig
interessant erscheinen. Der Verbund von autonomen Agenten ohne explizite Moderierung durch
einen Kopf-Holonen entspricht der Betrachtung eines Systems mit rein emergentem Verhalten.
So könnten zum Beispiel die am Foragieren beteiligten Ameisen einer Ameisenkollonie als
Holon abstrahiert werden. In der Ameisenkollonie entsteht emergentes Verhalten hautpsächlich
durch Stigmergy, das im Kapitel „Organisation und Koordination in Holonen“ kurz beschrieben
wird.
Somit kann jedes System mit kooperativen und autonomen Agenten als Holon gesehen
werden. Diese beiden Eigenschaften sind wesentliche Charakterisierungen eines Holonen. Ein
Holonische Multiagentensimulation
6
Vorteil der Betrachtungsweise eines Systems kooperierender Agenten als Holon - wie im Falle
der Ameisenkollonie - besteht sicherlich im erhöhten Abstraktionsgrad. Dies kann beim
Einbinden des Systems in ein größeres System als Kapselung dienen und die Integration
erleichtern.
Bildung von Holonen
Es wird untersucht, welche Mechanismen (Markt, Auktion, etc.) zur Holonenbildung bereits
eingesetzt und wie diese konkret angewandt werden. Außerdem werden die möglichen internen
Strukturen von Holonen und die Mechanismen zur Bestimmung des Holonen-Kopfs
zusammengestellt (ökonomischer Austausch - Bezahlung, Hierarchie). Das für diese
Diplomarbeit interessanteste Paradigma wird zur weiteren genaueren Betrachtung (und zur
Umsetzung im praktischen Teil) ausgewählt.
Eine weitere interessante Frage ist die nach der Natur des Kopf-Holonen. Es gibt auch hier
verschiedene Möglichkeiten, wie der Holonenkopf bestimmt wird. Zum einen können die
einzelnen Agenten so entworfen sein, dass jeder potentiell Kopf eines Holonen werden kann.
Dann muss über die oben bereits angesprochenen Mechanismen der Kopf-Agent bestimmt
werden. Solche Mechanismen berücksichtigen dann die Eignung der Agenten für die
gegenwärtige Aufgabe (bei heterogenen Systemen) oder entscheiden per Los (bei homogenen
Systemen). Die Wahl bei heterogenen Systemen kann z.B. per Auktion, Marktmechanismen oder
Voting stattfinden. In letzterem Fall muss vor der Wahl allen wählenden Agenten bekannt sein,
welche Fähigkeiten und Befugnisse dem Holonenkopf zukommen werden und wie die Wahl
grundsätzlich von statten geht, z.B. wie Kandidaten bestimmt werden und welcher Wahlmodus
Verwendung findet (gewichtet, einfache Mehrheit, Zweidrittelmehrheit, etc.).
Zum Zweiten gibt es die Möglichkeit, dass bei einer Holonenbildung ein Kopf-Agent generiert
wird, der dann diesen Holonen verwaltet und repräsentiert und bei der Auflösung des Holons
ebenfalls wieder aus dem System entfernt wird.
Als dritte und in dieser Auflistung letzte Möglichkeit können Agenten speziell für die
Koordinierung der Formierung der Holonen entwickelt werden, die dann auch Kopf des so
gebildeten Holonen werden. Dieser Ansatz findet z.B. im bereits erwähnten TeleTruck-System
[TT97] Anwendung.
Holonische Systeme sind sehr robust gegenüber Ausfällen von Sub-Holonen. Es ist jedoch
interessant herauszufinden, wie die verschiedenen Systeme auf den Ausfall des Kopf-Agenten
reagieren, was in 'real-world'-Szenarien wohl genauso wahrscheinlich wie der Ausfall eines
regulären Körper-Agenten ist.
Holonische Multiagentensimulation
7
Organisation und Koordination in Holonen
Ein wichtiger Vorteil holonischer Systeme gegenüber traditionellen Multiagentensystem oder
zentralistischen Problemlösern (Operations Research) besteht in der ausgesprochen hohen
Flexibilität von holonischen MAS. Ein wesentliches Merkmal holonischer Systeme ist daher,
dass die Holonen nicht in einer statischen Struktur organisiert sind, sondern dass Agenten sich
so organisieren - einen Holonen bilden - dass das gegenwärtige Problem möglichst effizient
bearbeitet und gelöst werden kann. Der Begriff der Selbst-Organisation ist hier wesentlich und
soll in der Diplomarbeit näher erläutert werden.
Es gibt verschiedene Möglichkeiten, die einem Holonen zugeteilten Aufgaben und Ressourcen
auf die im Holonen partizipierenden Sub-Holonen zu ver- bzw. zerteilen. Diese Möglichkeiten,
sowohl im kooperativen, als auch dem nicht-kooperativen Fall, sollen zusammengetragen und
im Hinblick auf die Umsetzungsmöglichkeit in SeSAm analysiert werden. Bei den
verschiedenen Ansätzen kommen dem Holonen-Kopf unterschiedliche Aufgaben und
Befugnisse zu.
Das Spektrum der Befugnisse des Holonenkopfs reicht von rein administrativen Aufgaben, über
die Rolle eines Morderators, bis hin zur Autorität, die eigenständig Anweisungen an Sub-
Holonen vergeben kann, Ressourcen an Mitglieder verteilt und Commitments nach außen hin
eingeht, die dann die Mitglieder des Holons zu erfüllen haben (siehe z.B. [TT97]). Es soll
untersucht werden, unter welchen Umständen welche Befugnisse sinnvoll sind.
Bei weniger autoritären Ansätzen existieren für die Aufgaben- und Ressourcenvergabe
innerhalb des Holons ebenfalls (wie bei dessen Bildung) verschiedene Vorgehensweisen:
• Markt und
• Auktion bei wettbewerborientierten Agenten innerhalb eines Holons.
• Eine Blackboard-Lösung bietet sich bei heterogener Holonzusammensetzung an, bei der die
einzelnen Agenten kooperiereren. Es ist möglich, dass Probleme redundant gelöst werden.
Für die Ermittlung und den Vergleich bestmöglicher Lösungen ist Redundanz jedoch
durchaus sinnvoll und nützlich.
• Stigmergy, die Organisation durch indirekte Interaktion, scheint bei Produktionssystemen
in der Industrie bereits Anwendung zu finden und in bestimmten Einsatzgebieten Vorteile zu
bieten. Siehe hierfür die Arbeit von Valckenaers, Kollingbaum, van Brussel, Bochmann und
Holonische Multiagentensimulation
8

Karuna in [StHM01].
Die Verwendung einer Auktion entspricht dabei einer one-to-many Vergabe, d.h. ein
Auftraggeber verhandelt mit mehreren Interessenten. Die anderen aufgeführten Möglichkeiten
entsprechen einer many-to-many Vergabe von Aufgaben und Ressourcen.
Anwendungen von holonischen Multiagentensystemen
Wie aus dem vorhergehenden Text ersichtlich wird ist ein Hauptforschungsbereich auf dem
Gebiet der Holonik das der Produktionssysteme - der Holonic Manufacturing Systems. 1995
wurde zur tiefergehenden Forschung auf dem Gebiet der holonischen Produktionssysteme das
HMS Consortium gegründet. Es ging aus dem kollaborativen internationalen
Forschungsprogramm zu Intelligent Manufacturing Systems hervor, das in den Jahren 1993 und
1994 durch Australien, Kanada, Japan, den USA, der Europäischen Gemeinschaft und der
EFTA unternommen wurde, aus sechs Unterprojekten (HMS war das fünfte) bestand und in das
mehrere Millionen Dollar investiert wurden (vgl. [IHM98] und [HMSOv]).
Besonders in Japan und an der Katholischen Universität Leuven [KULeu] (hier in Form der
PMA Holonic Manufacturing Systems Group (GOA/HMS)) wurde die Forschung im Bereich der
HMS vorangetrieben.
Das Gebiet der HMS scheint das größte Anwendungsfeld für holonische Multiagentensysteme
zu sein. Es ist äußerst umfangreich und reicht vom flexiblen Zusammenbau von
Werkzeugmaschinen [MoMaTo] über die Verwendung zum Architekturdesign von mobilen
Robotern [HMV94] und den Einsatz in der Teambildung für RoboCup [RoboCup] bis hin zur
Steuerung von industriellen Großanlagen [HPCtrl].
Praktischer Teil
Im praktischen Teil der Diplomarbeit soll die Möglichkeit der Holonenbildung in die Shell forSimulated Agent Systems - SeSAm - integriert werden. SeSAm wird am Lehrstuhl 6 für
Informatik, Universität Würzburg entwickelt und ist eine visuelle Programmierumgebung für
Multiagentensysteme für die bisher das holonische Konzept noch nicht implementiert worden
ist.
Ausgehend von den Ergebnissen des theoretischen Teils dieser Diplomarbeit (Design und
Mechanismen der Holonenbildung, Holonenorganisation) soll es in SeSAm nach Abschluss
Holonische Multiagentensimulation
9
dieser Diplomarbeit möglich sein, holonische Multiagentensysteme komfortabel zu entwickeln,
zu validieren und zu verifizieren.
Implementierung
Es müssen die für die Holonenmodellierung notwendigen Daten- und Kontrollstrukturen
entwickelt und implementiert werden.
Datenstrukturen
Das Holonenobjekt
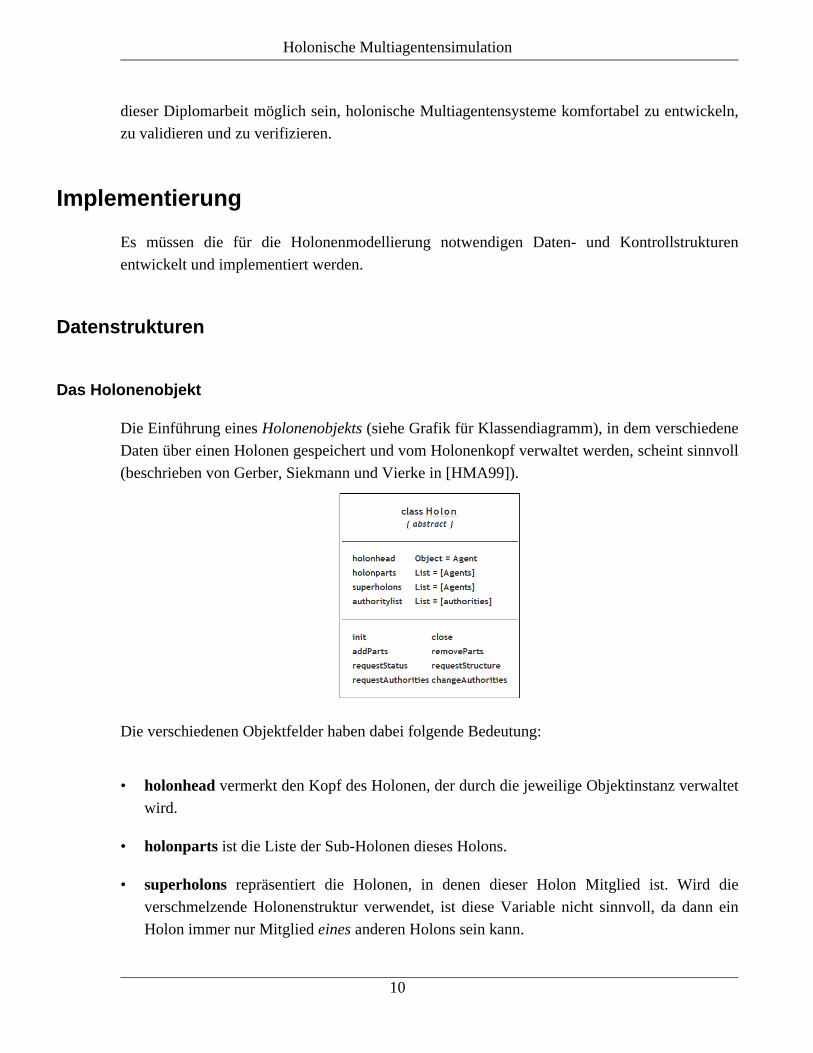
Die Einführung eines Holonenobjekts (siehe Grafik für Klassendiagramm), in dem verschiedene
Daten über einen Holonen gespeichert und vom Holonenkopf verwaltet werden, scheint sinnvoll
(beschrieben von Gerber, Siekmann und Vierke in [HMA99]).
Die verschiedenen Objektfelder haben dabei folgende Bedeutung:
• holonhead vermerkt den Kopf des Holonen, der durch die jeweilige Objektinstanz verwaltet
wird.
• holonparts ist die Liste der Sub-Holonen dieses Holons.
• superholons repräsentiert die Holonen, in denen dieser Holon Mitglied ist. Wird die
verschmelzende Holonenstruktur verwendet, ist diese Variable nicht sinnvoll, da dann ein
Holon immer nur Mitglied eines anderen Holons sein kann.
Holonische Multiagentensimulation
10

• authoritylist verwaltet die Zugriffsrechte auf die Methoden des Holons und optional die
Rechte für die Benutzung der Kommunikationskanäle. Außerdem könnte hier vermerkt
werden, welcher Sub-Holon welche Informationen bekommen darf.
Weiterhin stellt das Holonenobjekt folgende Methoden zur Verfügung:
• init ist der Konstruktor des Objekts. Hier werden die oben beschriebenen Variablen
initialisiert, was die Bindung der Sub-Holonen an den verwalteten Super-Holonen
einschließen kann. Für nachträgliche Änderungen existieren ebenfalls Methoden (siehe
unten).
• close ist der Destruktor des Objekts. Er gibt die Sub-Holonen wieder frei und löscht - je
nach Holonenstruktur - den Kopfholonen.
• addParts fügt einen Sub-Holonen dem Holonen hinzu.
• removeParts entfernt einen Sub-Holonen.
• requestStatus beantwortet Anfragen nach dem Zustand der einzelnen Sub-Holonen.
Mögliche Antworten sind z.B. "beschäftigt" oder "frei".
• requestStructure beantwortet Anfragen nach der Holonenstruktur. Hier wird auf das Feld
holonparts zugegriffen.
• requestAuthorities beantwortet Anfragen nach den Zugriffsrechten.
• changeAuthorities ändert Zugriffsrechte.
Auf die Methoden des Holonenobjekts hat ausschließlich der Holonenkopf Zugriff. Über den
Holonenkopf haben Sub-Holonen Zugriff auf die Holonenstruktur, den Zustand anderer
Holonenmitglieder und auf die Zugriffsrechte. Jeder Holon verwaltet eine eigene Liste mit
Referenzen auf Holonenobjekte der Holonen, in denen er Mitglied ist. Außerdem besitzt er
Methoden zum Hinzufügen (nach Erlaubnis) und Entfernen (ohne Zusage) in bzw. aus einem
Holonen (vgl. [HMA99]).
Die Referenz auf Holonenobjekte und nicht etwa auf Holonenköpfe ist sinnvoll, da die
Rollenzuteilung für den Holonenkopf im Laufe des Bestehens eines Holons sich durchaus
ändern kann. Es ist also wichtig, dass jeder Sub-Holon weiß, welcher Agent gegenwärtig Kopf
des Super-Holons ist. Dafür frägt er das Feld 'holonhead' des Holonenobjekts ab.
Holonische Multiagentensimulation
11
Inwieweit die Felder und Methoden des hier dargestellten Holonenobjekts für die
Implementierung in SeSAm ausreichen bzw. überflüssig sind, wird im Laufe der Diplomarbeit
erarbeitet werden.
Typisch für Holonen ist die Einschränkung der Kommunikation von Sub-Holonen auf intra-holonischen Datenaustausch. Da der Datenaustausch zwischen Agenten in SeSAm bisher
überhaupt nicht reglementiert ist - er erfolgt über Zugriff auf öffentliche Variablen - wird wohl
auch nicht im Rahmen dieser Diplomarbeit eine Reglementierung implementiert werden.
Vielmehr werden die einzelnen Sub-Holonen zunächst selbst überprüfen, ob Kommunikation
erlaubt ist. Dies wird über einen Abgleich mit dem Holonenobjekt erfolgen. D.h. bei einem
Kommunikationswunsch überprüft jeder Agent, ob der entsprechenden Kommunikationspartner
ebenfalls Mitglied im selben Holonen ist (bei der Holonenbildung ohne vollständige
Verschmelzung kann ein Agent Mitglied in mehreren Holonen sein).
Im nächsten Abschnitt „Blackboardsystem“ wird eine alternative intra-holonische
Kommunikationsmöglichkeit vorgestellt, die in SeSAm implementiert werden könnte.
Eine weitere Möglichkeit der Kommunikation in SeSAm besteht in der Verwendung des FIPA-
Plugins. Man wird untersuchen müssen, inwieweit die Verwendung dieses Protokolls sinnvoll
für die holonische Multiagentensimulation in SeSAm ist.
Blackboardsystem
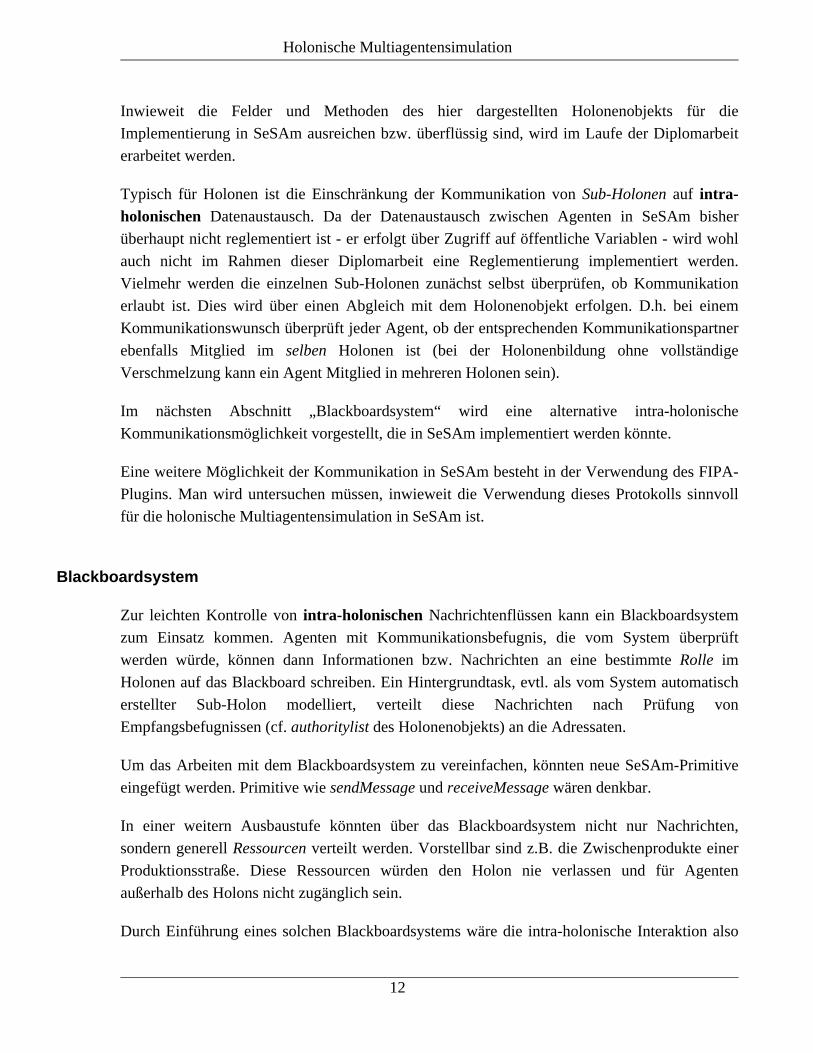
Zur leichten Kontrolle von intra-holonischen Nachrichtenflüssen kann ein Blackboardsystem
zum Einsatz kommen. Agenten mit Kommunikationsbefugnis, die vom System überprüft
werden würde, können dann Informationen bzw. Nachrichten an eine bestimmte Rolle im
Holonen auf das Blackboard schreiben. Ein Hintergrundtask, evtl. als vom System automatisch
erstellter Sub-Holon modelliert, verteilt diese Nachrichten nach Prüfung von
Empfangsbefugnissen (cf. authoritylist des Holonenobjekts) an die Adressaten.
Um das Arbeiten mit dem Blackboardsystem zu vereinfachen, könnten neue SeSAm-Primitive
eingefügt werden. Primitive wie sendMessage und receiveMessage wären denkbar.
In einer weitern Ausbaustufe könnten über das Blackboardsystem nicht nur Nachrichten,
sondern generell Ressourcen verteilt werden. Vorstellbar sind z.B. die Zwischenprodukte einer
Produktionsstraße. Diese Ressourcen würden den Holon nie verlassen und für Agenten
außerhalb des Holons nicht zugänglich sein.
Durch Einführung eines solchen Blackboardsystems wäre die intra-holonische Interaktion also
Holonische Multiagentensimulation
12
gegenüber der Außenwelt gekapselt.
Schematische Darstellung des Blackboardsystems
Jeder Holon sollte über ein eigenes Blackboardsystem verfügen.
Inter-holonische Kommunikation kann weiterhin durch Manipulation von veränderbaren
Variablen geschehen, wie das gegenwärtig in SeSAm ebenfalls gehandhabt wird. Allerdings ist
von außerhalb des Holons nur mit dem repräsentierenden Sub-Holon Kommunikation möglich.
Generell sollte festgehalten werden, dass Holonen nach außen hin, d.h. für andere Holonen und
Agenten im System, von Agenten nicht zu unterscheiden sind.
Verhaltensmodellierung
Für die Entwicklung von holonischen Multiagentensimulationen ist grundlegend, dass bei der
Verhaltensmodellierung sowohl das Verhalten des individuellen, autonomen Agenten, als auch
das des Holonen - als einem Verbund von mehreren Individuen - berücksichtigt und
unterschieden werden kann.
Je nach Struktur des Holonen und der Autonomie der einzelnen Sub-Holonen sind
unterscheidliche Ansätze - auch kombiniert - denkbar:
• Die Entwicklung von emergenten Systemen ist - ohne Eingehen auf die Schwierigkeiten
eines solchen Vorgehens - bereits jetzt mit SeSAm möglich. Eine Fortführung dieses
Ansatzes, d.h. das Entwickeln von holonischen Systemen auf Modellebene ohne explizite
Unterstützung durch SeSAm, könnte zum Beispiel im Kopieren von Verhaltensgraph-Teilen
zwischen unterschiedlichen Agenttypen bestehen.
• Als erste Stufe der expliziten Unterstützung der Entwicklung holonischer Systeme könnte
das Einführen neuer SeSAm-Primitive oder neuer Knotentypen im Verhaltensgraphen
Holonische Multiagentensimulation
13
dienen.
Primitive/Knoten wie joinHolon und removeFromHolon könnten zum Benutzen bzw. zum
Beenden der Benutzung eines verteilten Verhaltensgraphen, der das holonische Verhalten
repräsentiert, führen. Dieser 'globale' Verhaltensgraph könnte durch eine eigene
Agentenklasse repräsentiert werden.
• Die Autonomie der am Holon beteiligten Agenten muss weiterhin berücksichtigt werden.
Zu Beginn wird es vielleicht ausreichen im holonischen Verhaltensgraphen eine Möglichkeit
des Reasonings über die Mitgliedschaft im Holonen zu bieten - das nach der Holon-
Definition erforderliche Mindestmaß an Autonomie. Falls die Mitgliedschaft beendet
werden soll, könnte dann mit dem removeFromHolon-Primitiv der holonische
Verhaltensgraph verlassen werden.
Um das Reasoning über die Mitgliedschaft im Superholonen anstoßen zu können, könnte
ein neuer Knotentyp für den Verhaltensgraphen eingeführt werden, der wie der 'Emergency'-
Knoten des normalen Verhaltensgraphen funktioniert, d.h. durch Ereignisse im System (hier:
Aufruf durch den Kopf des Super-Holonen) aktiviert wird.
Für weitergehende Unterstützung der Autonomie könnte eine parallele Abarbeitung von
individuellen und holonischen Verhaltensgraphen interessant sein. Das holonische Verhalten
würde dem individuellen Verhalten sozusagen 'übergestülpt'. Die Sub-Holonen blieben
weiterhin autonom, müssten ihr Verhalten jedoch an das durch den Holonen vorgegebene
Verhalten anpassen - ob und wie das in SeSAm möglich wäre muss untersucht werden.
Dieses Vorgehen entspricht der Forderung, dass die Ziele der einzelnen Holonen mit den
Zielen des Super-Holonen nicht inkonsistent sein dürfen und der Möglichkeit, dass die Ziele
einzelner Sub-Holonen in einem Super-Holonen sich durchaus widersprechen können.
• Im holonischen Verhaltensgraphen könnten mehrere Sub-Graphen enthalten sein, die den
unterschiedlichen Rollen der einzelnen Agenten (bzw. Sub-Holonen) im Super-Holonen
entsprächen. Dies wäre eine relativ einfache Möglichkeit heterogene, d.h. in ihren
Fähigkeiten unterschiedliche Agenten zu einem Holonen zu vereinen. Es könnte dann
geprüft werden, ob ein interessierter Agent für eine im holonischen Verhalten vorgesehene
Roller überhaupt legitimiert ist bzw. die notwendigen Fähigkeiten besitzen kann.
• Natürlich muss auch über die Unterstützung der Holonenbildung nachgedacht werden.
Inwieweit diese nötig und sinnvoll ist wird sich jedoch wohl erst im Laufe der Diplomarbeit
herausstellen. Als eine mögliche Vorgehensweise wäre die Implementierung eines
Mechanismus (zum Beispiel einer Auktion) vorstellbar, wobei für die Erweiterung mit
anderen Mechanismen Möglichkeiten - zum Beispiel ähnlich Plugins - geschaffen werden
Holonische Multiagentensimulation
14

könnten.
• Schließlich könnte es von Nutzen sein, wenn die Komplexität der vorhandenen
Möglichkeiten einen gewissen Umfang erreicht hat, einen Wizard für die Unterstützung der
Modellierung von holonischen Systemen zu entwerfen, der bei der Zusammenstellung des
Systems behilflich wäre.
Wahrscheinlich wird sich diese Art der Unterstützung jedoch auf viele separate Dialoge
verteilen.
Grafische Unterstützung
Im Folgenden wird dargestellt, wie es dem Entwickler ermöglicht werden soll, das Modell eines
holonischen Multiagentensystems mit SeSAm zu erstellen.
Grundsätzliche gibt es zwei Richtungen für den Entwurf von holonischen Systemen:
• 'bottom-up': Zuerst wird das Verhalten der einzelnen Agenten entwickelt. Diese werden
dann gruppiert und zum holonischen Verhalten kombiniert.
Diese Entwicklungsrichtung scheint uninteressant zu sein, da sie keinen sinnvollen
Gebrauch von den im holonischen Konzept möglichen Abstraktionsebenen macht.
• 'top-down': Der Entwickler beginnt beim Erstellen des holonischen Verhaltens, d.h. es wird
auf einer hohen Abstraktionsebene mit der Modellentwicklung begonnen. Je Holonenebene
wird das Verhalten immer konkreter bis der Entwickler schließlich beim Verhalten einzelner
Agenten angelangt ist.
Für beide Entwurfsparadigmen scheint das oben bereits angesprochene Einführen zusätzlicher
Knoten (joinHolon, removeFromHolon und reasonAboutMembership) in den Verhaltensgraphen
der einzelnen Agenten bzw. Holonenrollen hilfreich.
Dabei würden die joinHolon- und removeFromHolon-Knoten ähnlich den bereits in SeSAm
vorhandenen Exit- bzw. Start-Knoten funktionieren. Der reasonAboutMembership-Knoten des
Agenten (bzw. Sub-Holonen) würde durch den Super-Holonen aktiviert. Sein Verhalten wäre
ähnlich dem des Emergency-Knotens.
Durch einen Doppelklick auf die beiden erstgenannten Knoten könnte ein Dialogfenster für die
Holonische Multiagentensimulation
15
Auswahl des beizutretenden (bzw. des zu verlassenden) Holons geöffnet werden, in dem dann
auch die infrage kommenden Rollen selektiert werden können. Das System würde dann prüfen
müssen, ob für die gegenwärtig editierte Agentenklasse die ausgewählte Rolle überhaupt
zugänglich ist und gegebenenfalls eine Fehlermeldung bzw. die Möglichkeit zur Änderung
bieten.
Zusätzlich sollten Interaktionsbefugnisse, d.h. der Inhalt der authoritylist, visualisiert werden.
Dies könnte z.B. durch Kanten oder, besser, Pfeile im Graphen geschehen. Diese Informationen
können entweder aus der von Hand (über eine Dialogsequenz) zu erstellenden authoritylist
bezogen werden, oder im Graphen direkt editiert werden. Als dritte Möglichkeit könnte bei der
Bearbeitung der Verhaltensgraphen für die einzelnen Rollen im Holon Interaktionsbefugnisse
durch ein Kontextmenü hinzugefügt werden, wenn diese nötig werden. Bei den letzten beiden
Eingabemöglichkeiten wäre es nötig, dass diese Informationen in der authoritylist
rückgespeichert werden.
Für die Unterstützung des bottom-up-Entwurfs könnte die Möglichkeit geschaffen werden
bereits entworfene Agenten einem oder mehreren Holonen und in den Holonen einer möglichen
Rolle zuzuordnen.
Falls eine Agentenklasse beim Eintritt in einen Holon immer dieselbe Rolle bzw. dasselbe
Verhalten an den Tag legt (und dieses Verhalten auch keine andere Agentenklasse im Holon
aufweist), könnte es sinnvoll sein, das holonische Verhalten dieser Agentenklasse direkt im
Verhaltensgraphen der Klasse - nicht beim Holonen - zu modellieren. Zur Visualisierung der
Holarchie (siehe unten), wäre es sinnvoll den Übergang ins holonische Verhalten in einem
solchermaßen abgeschlossenen Agentengraphen trotzdem zu vermerken. Zu diesem Zweck
könnte der joinHolon-Knoten alternativ zur Verzweigung zum Verhaltensgraphen des Holonen
auch wie eine in SeSAm bereits bekannte composed activity fungieren, die dann das holonische
Verhalten direkt im Agentengraphen kapselt.
Das nachfolgende Bild zeigt den möglichen Workflow bei der Bearbeitung des joinHolon-
Knotens im Verhaltensgraphen des einzelnen Agenten bzw. Sub-Holonen.
Holonische Multiagentensimulation
16
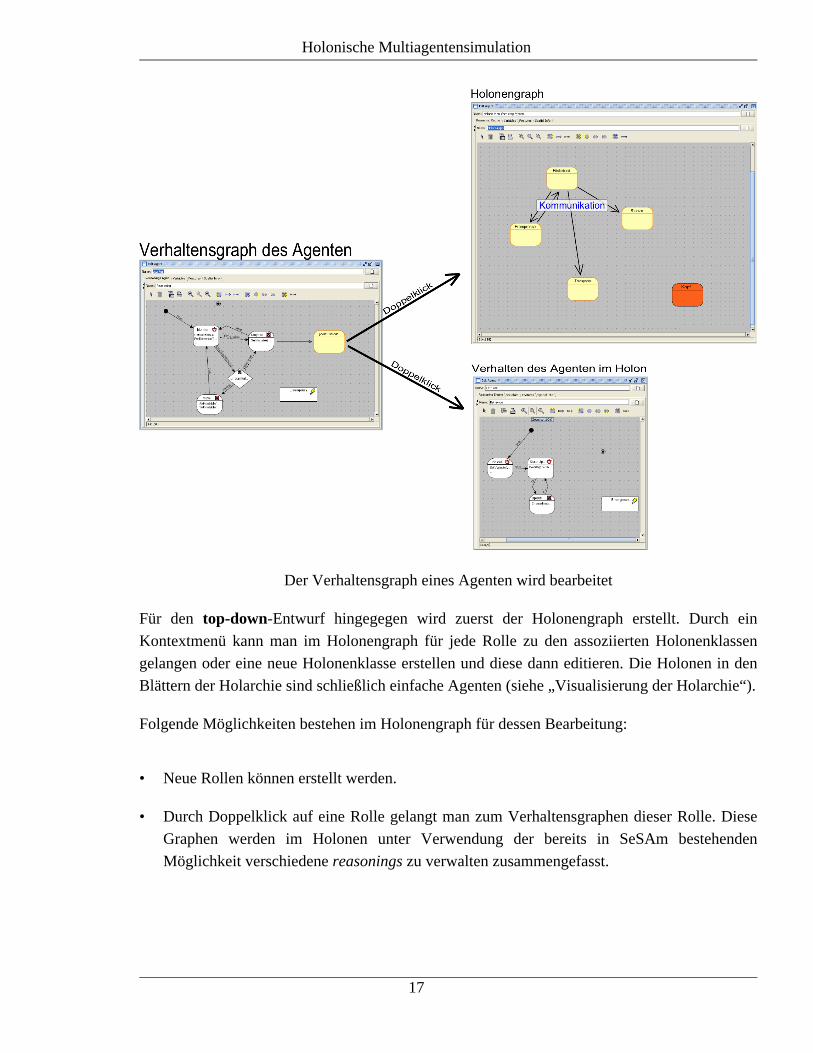
Der Verhaltensgraph eines Agenten wird bearbeitet
Für den top-down-Entwurf hingegegen wird zuerst der Holonengraph erstellt. Durch ein
Kontextmenü kann man im Holonengraph für jede Rolle zu den assoziierten Holonenklassen
gelangen oder eine neue Holonenklasse erstellen und diese dann editieren. Die Holonen in den
Blättern der Holarchie sind schließlich einfache Agenten (siehe „Visualisierung der Holarchie“).
Folgende Möglichkeiten bestehen im Holonengraph für dessen Bearbeitung:
• Neue Rollen können erstellt werden.
• Durch Doppelklick auf eine Rolle gelangt man zum Verhaltensgraphen dieser Rolle. Diese
Graphen werden im Holonen unter Verwendung der bereits in SeSAm bestehenden
Möglichkeit verschiedene reasonings zu verwalten zusammengefasst.
Holonische Multiagentensimulation
17
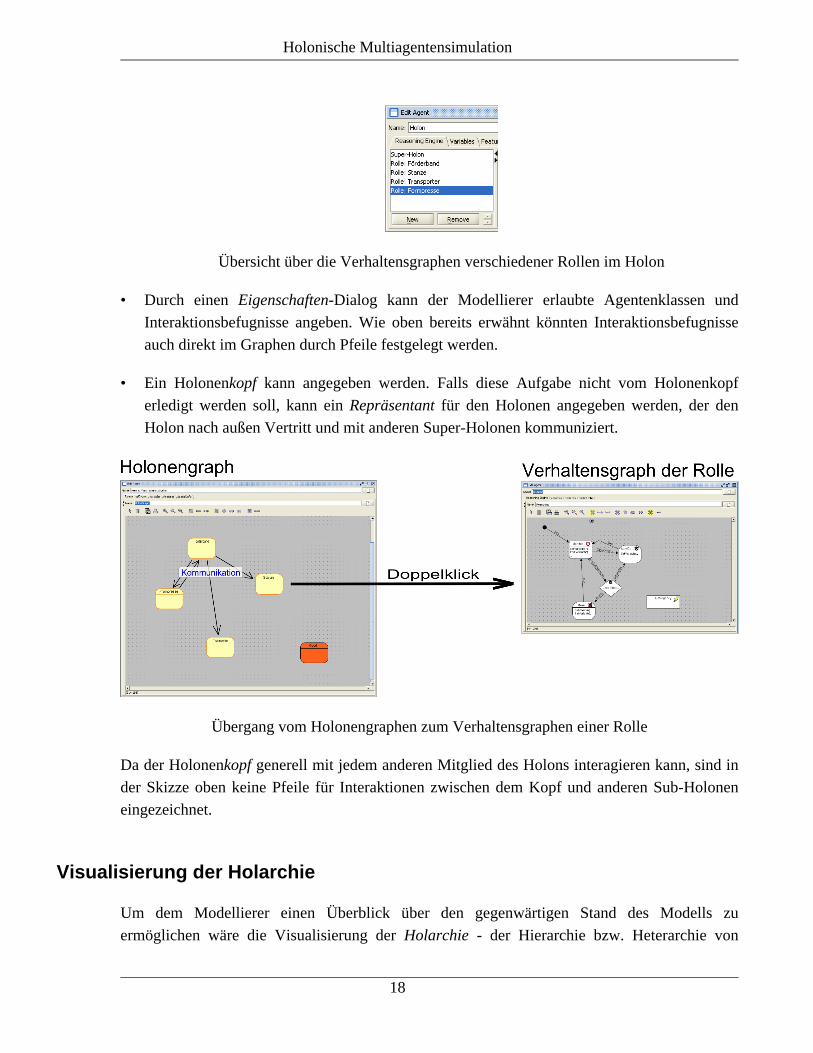
Übersicht über die Verhaltensgraphen verschiedener Rollen im Holon
• Durch einen Eigenschaften-Dialog kann der Modellierer erlaubte Agentenklassen und
Interaktionsbefugnisse angeben. Wie oben bereits erwähnt könnten Interaktionsbefugnisse
auch direkt im Graphen durch Pfeile festgelegt werden.
• Ein Holonenkopf kann angegeben werden. Falls diese Aufgabe nicht vom Holonenkopf
erledigt werden soll, kann ein Repräsentant für den Holonen angegeben werden, der den
Holon nach außen Vertritt und mit anderen Super-Holonen kommuniziert.
Übergang vom Holonengraphen zum Verhaltensgraphen einer Rolle
Da der Holonenkopf generell mit jedem anderen Mitglied des Holons interagieren kann, sind in
der Skizze oben keine Pfeile für Interaktionen zwischen dem Kopf und anderen Sub-Holonen
eingezeichnet.
Visualisierung der Holarchie
Um dem Modellierer einen Überblick über den gegenwärtigen Stand des Modells zu
ermöglichen wäre die Visualisierung der Holarchie - der Hierarchie bzw. Heterarchie von
Holonische Multiagentensimulation
18
Holonen - hilfreich.
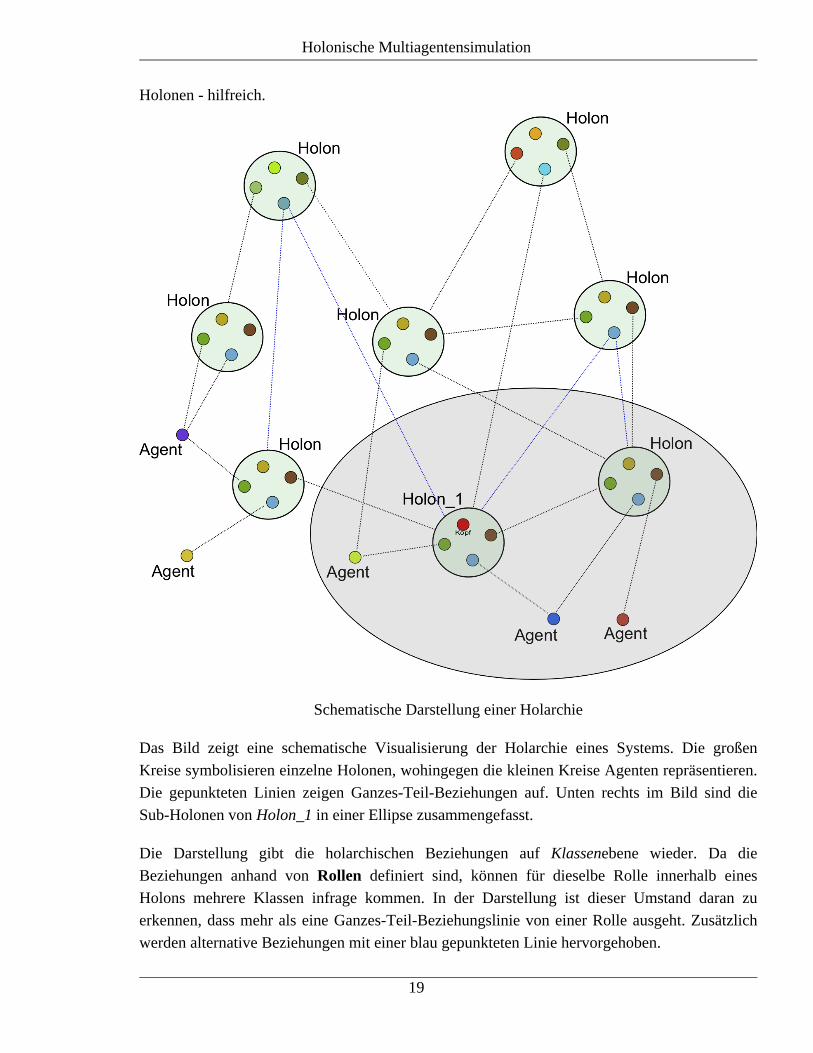
Schematische Darstellung einer Holarchie
Das Bild zeigt eine schematische Visualisierung der Holarchie eines Systems. Die großen
Kreise symbolisieren einzelne Holonen, wohingegen die kleinen Kreise Agenten repräsentieren.
Die gepunkteten Linien zeigen Ganzes-Teil-Beziehungen auf. Unten rechts im Bild sind die
Sub-Holonen von Holon_1 in einer Ellipse zusammengefasst.
Die Darstellung gibt die holarchischen Beziehungen auf Klassenebene wieder. Da die
Beziehungen anhand von Rollen definiert sind, können für dieselbe Rolle innerhalb eines
Holons mehrere Klassen infrage kommen. In der Darstellung ist dieser Umstand daran zu
erkennen, dass mehr als eine Ganzes-Teil-Beziehungslinie von einer Rolle ausgeht. Zusätzlich
werden alternative Beziehungen mit einer blau gepunkteten Linie hervorgehoben.
Holonische Multiagentensimulation
19
Die doch stark ineinandergreifenden Editiermöglichkeiten im Verhaltensgraphen für Agenten
und Holonen könnten es sinnvoll machen, die holonische Unterstützung in SeSAm an- und
abschalten zu können bzw. bestimmte Teile davon (wie im bereits bei der Primitiveingabe
vorhandenen Expertenmodus).
Testmodelle
Zur Validierung der Implementierung und zum Test der verschiedenen Mechanismen (zur
Kopfbestimmung und zur Aufgabenverteilung) werden im Laufe und parallel zur
Implementierung verschiedene Evaluationsmodelle in SeSAm erstellt. Folgende Szenarien
bieten sich an:
Beispiel 1. TeleTruck
Dabei handelt es sich um das von Buerckert, Fischer und Vierke in [TT97] eingeführte Szenario
zur Demonstration des holonischen Konzepts.
Es wird ein Transportszenario beschrieben, in dem die LKWs mit ihrer Fracht und die
Speditionen als Holonen modelliert werden.
Beispiel 2. Vogelschwarm
Ein Beispiel aus der Biologie soll holonisches Verhalten im emergenten Fall verdeutlichen.
Bei einem Vogelschwarm wird der Anführer (Kopf-Holon) anhand verschiedener
Charakteristika gewählt (z.B. Gesundheitszustand, Fitness, Wissen). Diese Wahl ist jedoch nicht
fix, sondern es findet ein ständiger Wechsel in der Führung statt. Ähnlich bei einem Radrennen,
wo der Führer Tempo macht und nach einer Zeit von einem frischeren Fahrer abgewechselt
wird.
Beispiel 3. Erzschürfen auf dem Mars
Durch das bekannte und in der VKI beliebte Beispiel des autonomen Erzschürfens durch
Roboter auf dem Mars (vgl. u.a. Brooks und Flynn in [BF89]) soll die Robustheit und
Holonische Multiagentensimulation
20

Flexibilität von holonischer Organisation veranschaulicht werden.
Beispiel 4. Signalübertragung in Ameisenhaufen
Vgl. Hofstadter in [GEB91].
Zur Bewältigung einer Aufgabe sammelt sich eine Menge von Ameisen. Diese Ansammlung
nennt Hofstadter Signal und enspricht dem hier vorgestellten Konzept des Holons. Beim Weg
zur Stelle, an der die Aufgabe (Furagieren, Kämpfen, etc.) erfüllt werden soll, regt so ein
solches Signal andere, nicht am Signal beteiligte Ameisen an, ebenfalls Signale zu bilden, die
teilweise jedoch andere Aufgaben bearbeiten. Das Szenario ist analog zur Signalausbreitung im
Gehirn.
Dieses Beispiel mag den biologischen Tatsachen nicht vollständig entsprechen, soll jedoch zur
Verdeutlichung des Verschmelzens mehrerer autonomer Agenten zu einem Super-Holon
herangezogen werden. In diesem Beispiel wird ersichtlich, dass eine Ameise, die Bestandteil
eines Signals ist, nicht gleichzeitig Teil eines anderen Signals sein kann.
Beispiel 5. Gehirnsignale
Dieses Szenario ist dem der 'Signalübertragung in Ameisenhaufen' ähnlich. Hier ist es jedoch
möglich, dass eine Gehirnzelle (analog: Ameise) Mitglied in mehreren Holonen (Signale)
gleichzeitig ist. Dies entspricht der möglichen Überlappung von Gehirnsignalen (ebenfalls
[GEB91]).
Beispiel 6. Job-Shop Scheduling
In intelligenten Manufaktursystemen, aus denen das Konzept der holonischen
Manufaktursysteme hervorgegangen ist, besteht eine wichtige Aufgabe in der Neuzuweisung
von Ressourcen und Arbeitsplätzen bei Ausfällen und neuen Aufträgen.
Im Job-Shop (Auftragsfertigung) Modell soll es darum gehen einfache Fertigungsstraßen zu
simulieren, die flexibel auf Ausfälle einzelner Werkzeuge reagieren und fähig sein sollen neue,
andersartige Aufträge effizient abzuarbeiten. Konkrete Beispiele sind Paint-shop scheduling und
Holonische Multiagentensimulation
21
automobile assembly.
Beispiel 7. Virtuelle Unternehmen
Der heutige Markt erfordert eine hohe Flexibilität bei der Produktion neuer Waren. Auf
Kundenwünsche soll möglichst schnell eingegangen werden können. Dazu bilden sich oft
sogenannte virtuelle Unternehmen, d.h. Zusammenschlüsse von ansonsten autonomen
Unternehmen, die alleine den schnell sich ändernden Kundenwunsch nicht erfüllen können. Erst
der Zusammenschluß erlaubt es ihnen den Markt entsprechend zu bedienen. Dabei entsteht eine
höchst flexible Produktionskette.
In diesem Beispiel existiert also kein expliziter Holonenkopf. Es handelt sich eher um ein
emergentes Phänomen und entspricht so dem ersten Fall der oben aufgeführten Holonenstruktur.
Andererseits ist es möglich dasjenige Unternehmen als Holonen-Kopf einzusetzen, das den
Auftrag vom Markt übernommen hat. Nach außen hin würde das Produkt dann diesem
Unternehmen zugesprochen werden. Wann ein Unternehmen einen solchen Auftrag annimmt
unterliegt Preisabstimmungen und -verhandlungen mit den Zulieferern - den anderen
Unternehmen im dafür zu gründenden virtuellen Unternehmen.
ZeitplanDie Arbeit ist in folgende zeitliche Abschnitte untergliedert:
• Ab 25. Juni 2004: Theoretische Erarbeitung
• Ab 20. Juli 2004: Implementierung in Java für SeSAm
• Anfang August 2004: Zwischenvortrag mit der Präsentation der bisherigen theoretischen
Ergebnisse und einem Ausblick auf den Rest der Diplomarbeit.
• Anfang August 2004: Erste Modelle zum Test der Implementierung sollen in SeSAm erstellt
werden.
• Ab 10. Oktober 2004: Schriftliche Ausarbeitung
• 20. Dezember 2004: Abgabe der fertig ausgearbeiteten Arbeit
Holonische Multiagentensimulation
22
Literaturverzeichnis[ADA94] Applications of Distributed Artificial Intelligence in Industry. Kapitel 4. Dr.. H. van
Dyke Parunak. Wiley Inter-Science. 1994.
[BF89] Fast, Cheap and Out of Control. A Robot Invasion of the Solar System. 478–485.
Journal of the British Interplanetary Society. 1989.
[Cor03] Collaborating Software. Blackboard and Multi-Agent Systems & the Future. Daniel D.
Corkill. Proceedings of the International Lisp Conference. New York . 2003.
[Cor91] Blackboard Systems. Daniel D. Corkill. Blackboard Technology Group, Inc.. 1991.
[DIS/HMS] Distributed Intelligent Systems.
http://www.ifm.eng.cam.ac.uk/automation/research/distributed_intelligent.html.
Addresse gültig am: Juni 2004.
[EVar02] Varieties of Emergence. David J. Chalmers. Templeton Foundation workshop on
emergence in Granada. 2002.
[Fle02] JACK. A System for Building Holonic Coalitions. Martyn Fletcher. Agent Oriented
Software Ltd.. 2002.
[GEB91] Gödel, Escher, Bach. ein Endloses Geflochtenes Band. Douglas R. Hofstadter.
Deutscher Taschenbuchverlag. 3-423-30017-5. 1991.
[GOA/HMS] PMA Holonic Manufacturing Systems Group (GOA/HMS).
http://www.mech.kuleuven.ac.be/pma/project/goa/. Addresse gültig am: Juni 2004.
[HES01] The Holonic Enterprise as a Collaborative Information Ecosystem. 5th International
Conference on Autonomous Agents. 2001.
[HMA99] Holonic Multi-Agent Systems. 1999.
[HMSCo] Holonic Manufacturing Systems Consortium. http://hms.ifw.uni-hannover.de/.
Addresse gültig am: Juni 2004.
[HMSOv] Holonic Manufacturing Systems Overview.
http://hms.ifw.uni-hannover.de/public/Intro/overview.htm. Addresse gültig am: Juni
2004.
Holonische Multiagentensimulation
23

[HMSPa] HMS International Partners.
http://hms.ifw.uni-hannover.de/public/Feasibil/partners.htm. Addresse gültig am: Juni
2004.
[HMV94] Holonic Manufacturing Systems. the vision matching the problem. H. Van Brussel.
Proc. of First European Conf. on Holonic ManufacturingSystems. 1994.
[HPCtrl] Holonic Production Control to Support Mass Customisation.
http://www.ifm.eng.cam.ac.uk/automation/publications/papers/mass_customisation2610
02.pdf. Addresse gültig am: Juni 2004. 2002.
[IHM98] Integration of Scheduling and Control in Holonic Manufacturing Systems. Concepts
for Holonic Manufacturing. Kapitlel 3. Luc Bongaerts. Ph.D. Thesis PMA/K.U.Leuven.
1998.
[Koe67] The Ghost in the Machine. Arthur Koestler. Hutchinson. 0090838807. 1967.
[KULeu] Katholische Universität Leuven. http://www.mech.kuleuven.ac.be/. Addresse gültig
am: Juni 2004.
[LOV00] Gaia. A New Look at Life on Earth. James Lovelock. Oxford University Press.
0192862189. 2000.
[MoMaTo] Integrated Machine and Control Design for Reconfigurable Machine Tools.
http://www-personal.engin.umich.edu/~tilbury/papers/aim99.pdf. Addresse gültig am:
Juni 2004.
[OMA02] Self-Organization in Multiagents Systems. From Agent Interaction to Agent
Organization. 2002.
[ORDef] Operations Research. http://de.wikipedia.org/wiki/Operations_Research. Addresse
gültig am: Juni 2004.
[ParLog] Paraconsistent Logic. http://plato.stanford.edu/entries/logic-paraconsistent/. Addresse
gültig am: Juni 2004.
[Pich98] Searching for Arthur Koestler’s Holons. a systemstheoretical perspective. Prof. Dr.
Franz Pichler. 1998.
[PoW62] Parable of the Watchmakers. Herbert Simon. The Architecture of Complexity.
http://www.mech.kuleuven.ac.be/pma/project/goa/hms-int/parable.html. Addresse gültig
am: Juni 2004. 1962.
Holonische Multiagentensimulation
24

[RoboCup] Holons and agents in robotic teams. A synergistic approach.
http://www.airg.ro/cercetare/articole/HolAgRobDubai.pdf. Addresse gültig am: Juni
2004.
[StHM01] Stigmergy in Holonic Manufacturing Systems. 5th International Conference on
Autonomous Agents. 2001.
[StMA03] Self-organising in Multi-agent Coordination and Control using Stigmergy. First
International Workshop on Engineering Self-Organising Applications (ESOA 2003).
2003.
[TT97] TeleTruck. A Holonic Fleet Management System. DFKI: TM-97-03. 1997.
Holonische Multiagentensimulation
25