Embed Size (px)
Citation preview

PraktikumSchwingungsanalyse
(Stand: Sommersemester 2018)
Dipl.-Ing. Armin Rohnen LbA
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse2
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 3
Herzlich willkommen zum Praktikum (MTP/VTP) Schwingungsanalyse!
Auf der Webseite http://Schwingungsanalyse.com finden Sie (noch einmal) das Skript und Ihre Messdaten für die Praktikumsauswertung.
Bitte drucken Sie sich das Skript in DIN A4 (eine Seite je Blatt) zweiseitig aus und heften dies in ei-nem Ordner ab, so dass Sie in der Lage sind weitere Zwischenblätter mit Ergänzungen und Anmer-kungen einzufügen.
Dieses Praktikum basiert auf unterschiedlichen Literaturquellen. Eine Auswahl finden Sie in der Literaturliste.
Bitte bereiten Sie sich auf das Praktikum durch Studium dieses Skriptes vor.
Für die Durchführung der selbständigen Versuche sind MATLAB-Kenntnisse zwingend erforderlich. Insbesondere der Umgang mit der Anweisung spectrogram, das Bilden von Mittellungen und die graphische Ausgabe von Ergebnissen (plot, bar, surf, ...) sollten dem Studierenden geläufig sein.Die Datenerfassung erfolgt über zur Verfügung gestellten Programmcode oder mittels der MATLAB-APP „Analog-Input-Recorder“. Die verwendete MATLAB-Konfiguration und Ausstattung entspricht der Gleichen, welche den Studierenden zur Verfügung gestellt wird.
Für das Praktikum gibt es eine Eingangsprüfung. Hierzu werden Ihnen Fragen aus dem Fragenkata-log gestellt.
Im Anschluss an das Praktikum führen Sie eine Auswertung der Messdaten durch und erstellen einen kurzen (maximal 5 DIN A4 Blätter) Messbericht. Hierzu erhalten Sie im Praktikum die Aufga-benstellung.
Schalten Sie bitte während des Praktikums alles ab was Sie in der Aufmerksamkeit stören könnte. Bitte keine Handys oder anderweitige elektronischen Geräte, kein Facebook, kein twitter, keine Telefonate, … Sollte die Nutzung der sozialen Medien während des Praktikums überhand nehmen, werden die betreffenden Personen gebeten das Praktikum zu verlassen.
Haben Sie Fragen, dann stellen Sie diese bitte laut. Dann haben alle anderen Praktikumsteilnehmer auch etwas davon und nicht nur Ihre Nachbarschaft.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse4
Inhalt
1. Fragenkatalog
GRUNDLAGEN
2. Schwingungen messen Messkette Sensoren Anbringung und Position Impedanzwandler und Messverstärker Datenerfassung Kabel IEPE Kennwerte und Umrechnungen
3. Schwingungsanalyse - Zeitsignal Zeitsignaldarstellung Pegel(Verlauf) Gestalten und anwenden von Filter Abklingendes Zeitsignal Moduliertes Zeitsignal
4. Schwingungsanalyse - Transformation in den Frequenzbereich DFT / FFT - Grundlagen FFT in der praktischen Anwendung
5. Literatur
6. Schwingungsanalyse mit MATLAB
7. Datenerfassung mit MATLAB
BEISPIELE
8. Anwendungsbeispiel - Spieluhren9. Anwendungsbeispiel - Kennwerte Beschleunigungsaufnehmer10. Anwendungsbeispiel - Abgasanlage11. Anwendungsbeispiel - Getriebe12. Anwendungsbeispiel - Impulshammer-Messung / Übertragungsfunktionen13. Anwendungsbeispiel - Schwingungstilger14. Anwendungsbeispiel - Elektromotor
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 5
1. Fragenkatalog
Für die Eingangsprüfung zum Praktikum Schwingungsanalyse werden Ihnen Fragen aus diesem Fragenkatalog gestellt.
• Was bewirkt das Tiefpass-Filter in der Messkette?• Wie errechnet sich aus dem gemessenen Spannungswert die physikalische Größe des Mess-
werts?• Welche Position innerhalb einer Schwingform eines Objekts ist am geeignetsten für die
Platzierung eines Schwingungssensors?• Was ist ein Impedanzwandler?• Was ist ein Messverstärker?• Was wird durch IEPE beschrieben?• Wie lautet das Grundgesetz der Nachrichtentechnik?• Wofür steht RMS?• Was versteht man unter Dezibel?• Was sind Terzen?• Was versteht man unter einem modulierten Zeitsignal?• Womit wird in der Schwingungsanalyse üblicherweise die Transformation des Zeitsignals in
den Frequenzbereich durchgeführt?• Welche Annahme liegt der Fouriertransformation zugrunde?• Wie ist der Zusammenhang zwischen Frequenz- und Zeitauflösung der Fouriertransformati-
on?• Erklären Sie die MATLAB-Anweisung spectrogram
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse6
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 7
2. Schwingungen messen
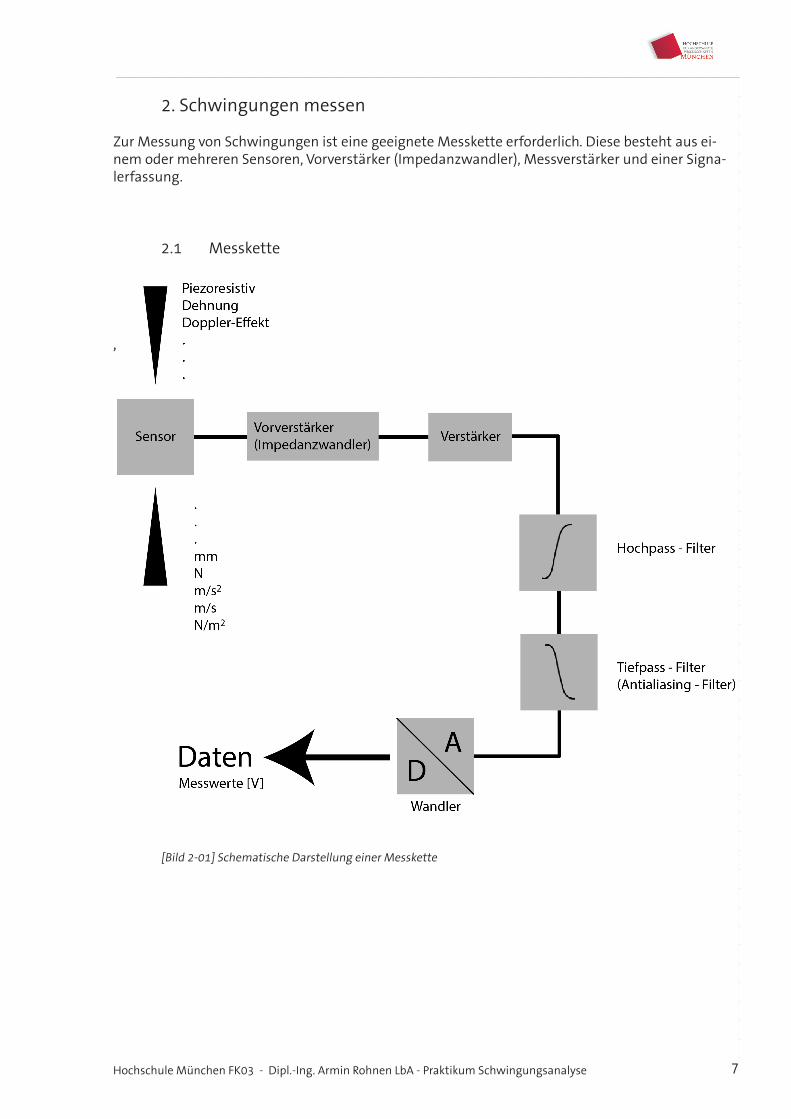
Zur Messung von Schwingungen ist eine geeignete Messkette erforderlich. Diese besteht aus ei-nem oder mehreren Sensoren, Vorverstärker (Impedanzwandler), Messverstärker und einer Signa-lerfassung.
2.1 Messkette
,
[Bild 2-01] Schematische Darstellung einer Messkette
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse8
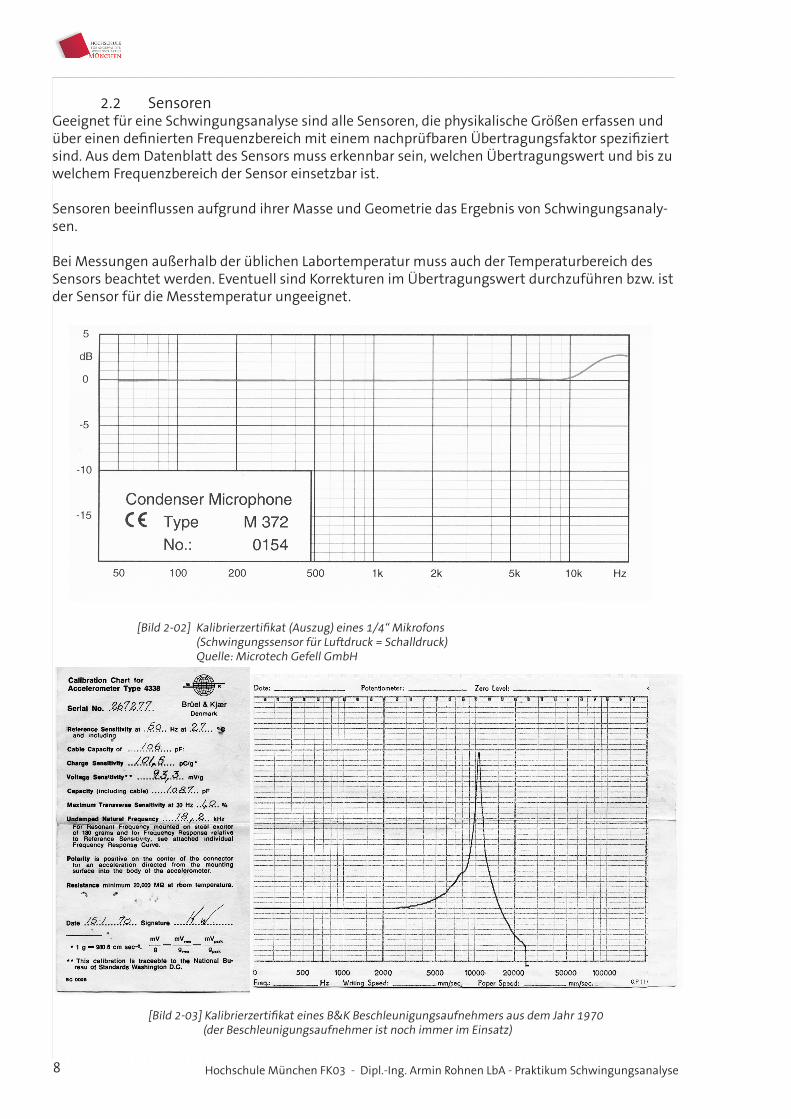
2.2 SensorenGeeignet für eine Schwingungsanalyse sind alle Sensoren, die physikalische Größen erfassen und über einen definierten Frequenzbereich mit einem nachprüfbaren Übertragungsfaktor spezifiziert sind. Aus dem Datenblatt des Sensors muss erkennbar sein, welchen Übertragungswert und bis zu welchem Frequenzbereich der Sensor einsetzbar ist.
Sensoren beeinflussen aufgrund ihrer Masse und Geometrie das Ergebnis von Schwingungsanaly-sen.
Bei Messungen außerhalb der üblichen Labortemperatur muss auch der Temperaturbereich des Sensors beachtet werden. Eventuell sind Korrekturen im Übertragungswert durchzuführen bzw. ist der Sensor für die Messtemperatur ungeeignet.
[Bild 2-02] Kalibrierzertifikat (Auszug) eines 1/4“ Mikrofons (Schwingungssensor für Luftdruck = Schalldruck) Quelle: Microtech Gefell GmbH
[Bild 2-03] Kalibrierzertifikat eines B&K Beschleunigungsaufnehmers aus dem Jahr 1970 (der Beschleunigungsaufnehmer ist noch immer im Einsatz)
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 9
2.3 Anbringung und Position Mit Ausnahme des Laservibrometers und den Schalldrucksensoren (Mikrofone) werden Sensoren auf das zu analysierende Objekt aufgebracht.
Dabei ist auf eine optimale Schwingungsübertragung zu achten. Neben der Oberfläche und Steifig-keit des Montagepunkts hat die Verbindungstechnik ebenso einen Einflus auf dass Messergebnis. Im Wesentlichen ist dies die maximal mögliche Analysefrequenz.
Verbindungstechnik typ. max. Analysefrequenz
Tastspitze ca. 1,5 Hz Kleben (Klebstoff bzw. Wachs) 300 Hz (X60 große Klebefuge) ... ca. 7 kHz (Wachs, Cyanacrylate) Magnet 3 ... 4 kHz Schraube ca. 8 kHz Isolierflansch 5 kHz
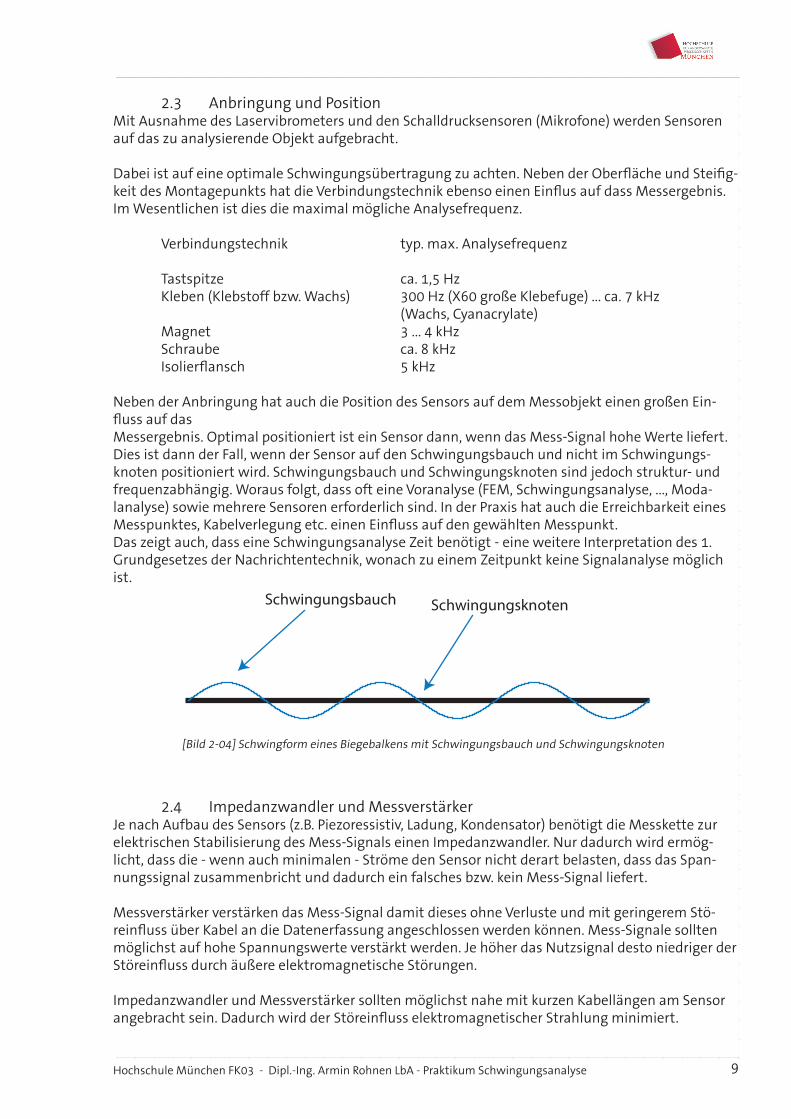
Neben der Anbringung hat auch die Position des Sensors auf dem Messobjekt einen großen Ein-fluss auf das Messergebnis. Optimal positioniert ist ein Sensor dann, wenn das Mess-Signal hohe Werte liefert. Dies ist dann der Fall, wenn der Sensor auf den Schwingungsbauch und nicht im Schwingungs-knoten positioniert wird. Schwingungsbauch und Schwingungsknoten sind jedoch struktur- und frequenzabhängig. Woraus folgt, dass oft eine Voranalyse (FEM, Schwingungsanalyse, ..., Moda-lanalyse) sowie mehrere Sensoren erforderlich sind. In der Praxis hat auch die Erreichbarkeit eines Messpunktes, Kabelverlegung etc. einen Einfluss auf den gewählten Messpunkt. Das zeigt auch, dass eine Schwingungsanalyse Zeit benötigt - eine weitere Interpretation des 1. Grundgesetzes der Nachrichtentechnik, wonach zu einem Zeitpunkt keine Signalanalyse möglich ist.
[Bild 2-04] Schwingform eines Biegebalkens mit Schwingungsbauch und Schwingungsknoten
2.4 Impedanzwandler und MessverstärkerJe nach Aufbau des Sensors (z.B. Piezoressistiv, Ladung, Kondensator) benötigt die Messkette zur elektrischen Stabilisierung des Mess-Signals einen Impedanzwandler. Nur dadurch wird ermög-licht, dass die - wenn auch minimalen - Ströme den Sensor nicht derart belasten, dass das Span-nungssignal zusammenbricht und dadurch ein falsches bzw. kein Mess-Signal liefert.
Messverstärker verstärken das Mess-Signal damit dieses ohne Verluste und mit geringerem Stö-reinfluss über Kabel an die Datenerfassung angeschlossen werden können. Mess-Signale sollten möglichst auf hohe Spannungswerte verstärkt werden. Je höher das Nutzsignal desto niedriger der Störeinfluss durch äußere elektromagnetische Störungen.
Impedanzwandler und Messverstärker sollten möglichst nahe mit kurzen Kabellängen am Sensor angebracht sein. Dadurch wird der Störeinfluss elektromagnetischer Strahlung minimiert.
Schwingungsbauch Schwingungsknoten
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse10
2.5 Datenerfassung Nachdem der physikalische Messwert über Impedanzwandlung und Verstärkung zu einem mess-fähigen Spannungswert gewandelt wurde, kann er nun über die Datenerfassung zu Messwerten überführt werden. Es liegt auf der Hand, dass die Datenerfassung für eine Schwingungsanalyse viele Messdaten je Sekunde generieren muss, damit die jeweiligen Frequenzen analysiert werden können.
Vor der tatsächlichen Analog-Digital-Wandlung muss jedoch sichergestellt werden, dass nur jene Signalanteile digitalisiert werden, die für die spätere Signalanalyse nötig sind. Hierzu sind die bei-den Filter in der Messkette verantwortlich. Das Hochpass-Filter entfernt den Gleichspannungsanteil und das Tiefpass-Filter entfernt jene Signalanteile die sich oberhalb der Abtastfrequenz befinden (näheres hierzu im Kapitel Abtasttheorem). Beide Filter müssen im analogen Teil der Messkette realisiert sein, sonst haben sie für die Digitalisierung keine Wirkung.
Für das Hochpass-Filter, welches meist bereits im Messverstärker vorhanden ist, haben sich die Eckfrequenzen 0,1; 0,2; 0,5; 1; 2 und 10 Hz bewährt. Das Tiefpass-Filter steht im direkten Zusam-menhang mit der tatsächlich genutzten Abtastrate. Es befindet sich im Analogteil des A/D-Wand-lers. Die Eckfrequenz muss so bemessen sein, dass diese nicht wesentlich höher liegt als die gerade verwendete Abtastfrequenz. Ist dies nicht der Fall, kommt es zu „scheinbaren“ tieffrequenten Signalanteilen, die jedoch tatsächlich nicht vorhanden sind.
Abtastraten bis zu 192 kHz bei 24 Bit Signalauflösung sind üblich. Das führt zu erheblichen Da-tenströmen. Eine Messung mit 10 Messpunkten (3-Achs-Sensoren) über 60 Sekunden in einem üblichen Frequenzbereich (12,5 kHz) ergibt 960.000 Messwerte (zu je drei Byte) je Sekunde, einen Datensatz von 172,8 MByte mit einem Datenstrom von 2,9 MByte/Sekunde (entspricht ca. 23 MBit/Sekunde).
2.6 KabelWie unter [Bild 2-01] ersichtlich, werden für die Messkette mindestens ein, oft jedoch mehrere (Mess)Kabel benötigt. Die in der Messtechnik übliche symmetrische Verkabelung mit Koax-Kabel (BNC und Co.) weist mehrere erhebliche Nachteile gegenüber der asymmetrischen Verkabelung (XLR) in der Audio-Technik auf.
1. Wird die Schirmung mit dem Nullpunkt (Masse) gekoppelt, führt das dazu, dass bei unge-schickter Verlegung, ggf. fehlendem Masseausgleich von Messobjekt und Messgerät, es zu einem „Netzbrummen“ kommt. Hier wird in der Schwingungsanalyse bei 50 Hz ein Mess-wert sichtbar, der real nicht existiert.
2. Es werden oft sehr kleine und mechanisch schwache Stecker verwendet, die vollkommen unbemerkt keine einwandfreie Signal- und Masseverbindung herstellen.
3. Es ist zwar von Vorteil für die Baugröße des A/D-Wandlers, wenn je Mess-Signal lediglich ein „PIN“ benötigt wird und der Nullpunkt den gemeinsame Masse/Schirm der Verkabe-lung darstellt. So werden jedoch alle Störungen, die die Schirmung nicht abfangen kann, in der Signalleitung und damit in der Messung sichtbar. Dies ist bei einer asymmetrischen Verkabelung, bei der immer der Spannungswert zwischen Signalleitung und Masseleitung gemessen wird, nicht der Fall, denn dort befindet sich die Störung auf Signalleitung und Masseleitung gleichermaßen.
Besonders kritisch gegen Störeinflüsse ist die Verkabelung von piezoresistiven Aufnehmern bis zum Impedanzwandler. Dieses Kabel verändert seine elektrische Kapazität bei Bewegung. Zudem ist der Impedanzwandler aufgrund der minimalen effektiven Spannungsänderungen sehr sensitiv gegen-über Störeinstrahlung über die Abschirmung des Kabels.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 11
2.7 IEPEDie Abkürzung IEPE steht für Integrated Electronics Piezo Electric. Hiermit wird ein Industriestan-dard für piezoelektrische Sensoren bezeichnet, die mit eingebauter Impedanzwandler-Elektronik versehen sind. Dabei kann es sich um Beschleunigungs-, Kraft- und Drucksensoren handeln. Auch für Messmikrofone wird der IEPE-Standard angewandt. Bei den Produktbezeichnungen ICP®, CCLD, u.a. produktspezifische, teilweise markengeschützte Bezeichnungen, handelt es sich um solche Sensorelektronik.
Die IEPE-Sensorelektronik wandelt das Signal des piezoelektrischen Sensors in ein Spannungssignal mit einer geringen Impedanz von etwa 100 Ω. Ein niederimpedantes Sensorsignal ist vorteilhaft, weil es sich verlustarm über lange Leitungen übertragen lässt. Außerdem kann auf die bei piezo-elektrischen Sensoren sonst erforderlichen störarmen Spezialkabel verzichtet werden.
Die Sensorelektronik wird mit einem Konstantstrom versorgt, der zwischen 2 und 20 mA liegt. Die Besonderheit des IEPE-Prinzips liegt darin, dass der Versorgungsstrom und das Sensorsignal gemeinsam über ein einfaches Koaxialkabel übertragen werden. Über dem Sensor bildet sich bei Speisung mit Konstantstrom eine positive Arbeitspunktspannung. Das eigentliche Mess-Signal des Sensors überlagert sich als Wechselspannung mit dieser Arbeitspunktspannung.
2.7 Kennwerte und UmrechnungenAm Analog-Digital-Wandler des Mess-Systems liegt eine Spannung an. Die Messwerte der Datener-fassung werden demnach als Spannungswerte erfasst. Um nun auf den physikalischen Messwert zu kommen sind Umrechnungen erforderlich.
In diesem Zusammenhang tritt der Begriff EU (Engineering Unit) auf. Unter Engineering Unit wird die Einheit aus dem ISO-Einheiten-System verstanden, die der physikalischen Größe zugeordnet ist. Zum Beispiel s der Größe Zeit, m der Größe Länge, usw. Für Beschleunigung ist dies m/s2, für Geschwindigkeit (auch Schwinggeschwindigkeit) m/s und für den Weg m.
Kennwerte von Sensoren, Impedanzwandler und Messverstärker:
Sensoren: mV/EU; pC(1)/EU Impedanzwandler: mV/pC Messverstärker: Verstärkungsfaktor, Verstärkungsfaktor dB(2)
Sensoren, Impedanzwandler und Messverstärker weisen als weiteren Kennwert den (Arbeits)Fre-quenzbereich auf, innnerhalb dessen ein lineares - immer proportionales - Übertragungsverhalten vorliegt.
Grundsätzlich ist ein lineares Übertragungsverhalten innerhalb der Messkette nicht zwingend er-forderlich. Ein nichtlineares Übertragunsgverhalten einzelner bis aller Komponenten der Messkette kann über ein „Korrekturkenfeld“ (Entzerrung) prinzipiell ausgeglichen werden. Dies verkompliziert jedoch den Umgang mit den original Messwerten (Rohdaten). Allerdings stößt die Korrekturmög-lichkeit nichtlinearer Messketten innerhalb der Messdynamik an seine Grenzen.
Berechnung der physikalischen Messgröße am Beispiel eines piezeoresitiven Sensors:
pC(1): Picocoulomb, ISO-Einheit für Ladung
dB(2): Dezibel, Kennzeichnung des dekadischen Logarithmus des Verhältnisses zweier gleichartiger Energie- bzw. Leistungsgrößen
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse12
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 13
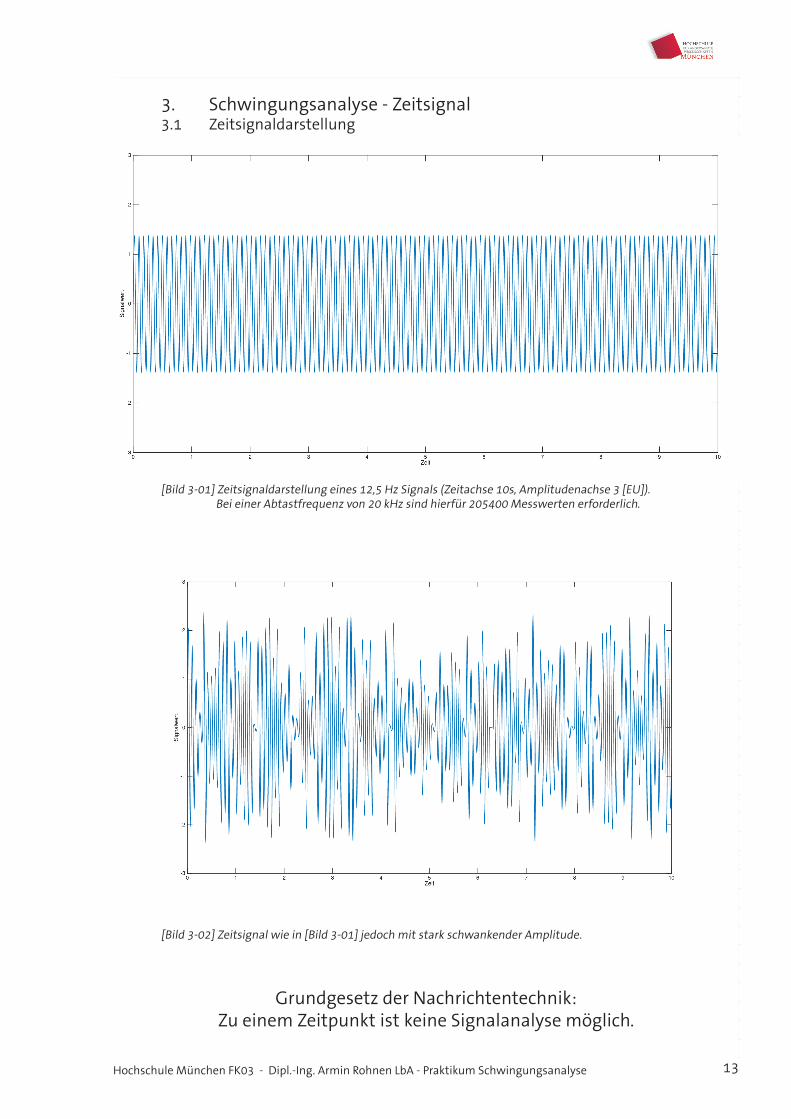
3. Schwingungsanalyse - Zeitsignal 3.1 Zeitsignaldarstellung
[Bild 3-01] Zeitsignaldarstellung eines 12,5 Hz Signals (Zeitachse 10s, Amplitudenachse 3 [EU]). Bei einer Abtastfrequenz von 20 kHz sind hierfür 205400 Messwerten erforderlich.
[Bild 3-02] Zeitsignal wie in [Bild 3-01] jedoch mit stark schwankender Amplitude.
Grundgesetz der Nachrichtentechnik:Zu einem Zeitpunkt ist keine Signalanalyse möglich.

Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse14
3.2 Pegel(verlauf)Bei der Darstellung des Pegelverlaufs wird i.d.R. der Effektivwert des zu bewertenden Signals be-trachtet.
Unter dem Effektivwert versteht man in der Elektrotechnik den quadratischen Mittelwert einer zeitlich veränderlichen physikalischen Größe. Vorzugsweise wird der Begriff auf Wechselgrößen angewandt, allgemein auf Größen mit stationärem Verlauf. Der Effektivwert hängt sowohl vom Scheitelwert als auch von der Kurvenform ab. In der englischen Sprache wird der Effektivwert mit RMS (Abkürzung für Root Mean Square, Quadratisches Mittel) bezeichnet.
[Bild 3-03] Eine sinusförmige Wechselsgröße. (hier eine Spannung) 1 = Scheitelwert (Amplitude), 2 = Spitze-Spitze(Tal)-Wert, 3 = Effektivwert, 4 = Periodendauer
[F3-01]
Die Schreibweise verdeutlicht die Merkregel, die in der englischen Bezeichnung „root mean square“ steckt: Wurzel aus dem Mittelwert des Quadrats.
Lässt sich der Verlauf des Signals u(t) nicht als Funktion angeben, kann man zur Berechnung des Effektivwertes ein Näherungsverfahren mit abgetasteten Messwerten anwenden. Mit in der Zeit T erfassten n Werten, so dass T zur Summe von ∆t wird. Bei konstanten Abständen ∆t vereinfacht sich das zu T=n * ∆t und der Effektivwert rechnet sich zu
[F3-02]
Für sinusförmige Signale gilt
[F3-03]
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 15
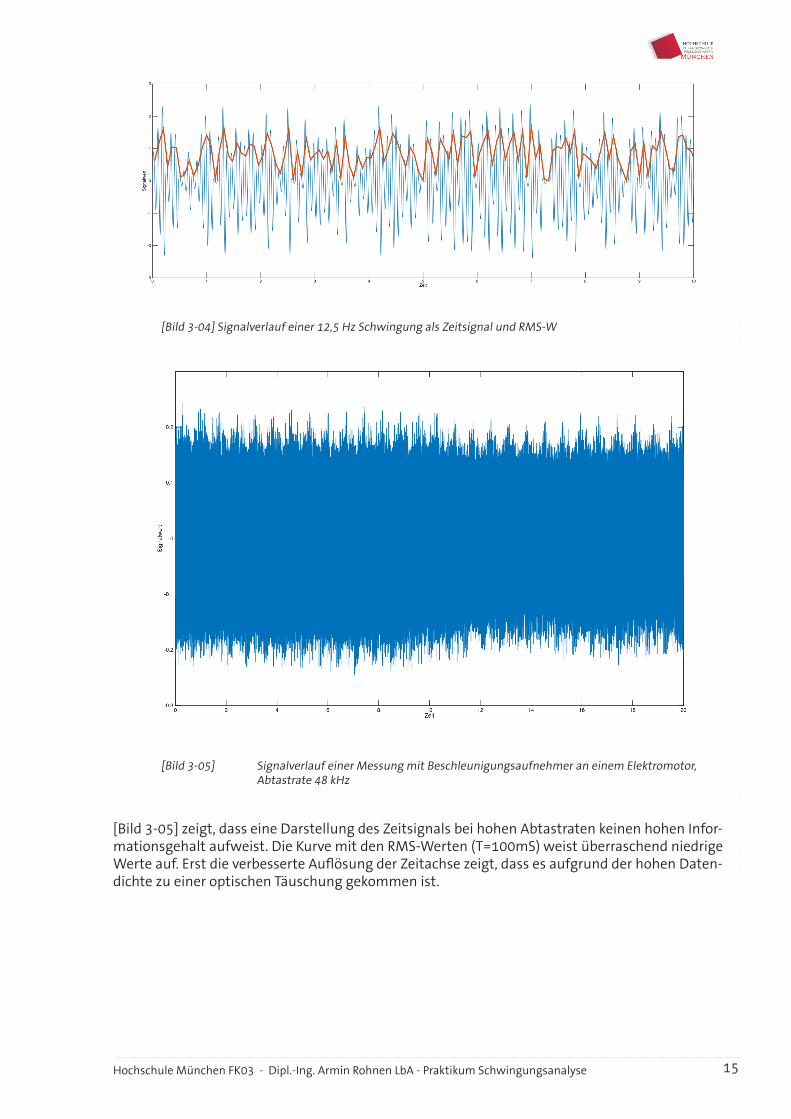
[Bild 3-04] Signalverlauf einer 12,5 Hz Schwingung als Zeitsignal und RMS-W
[Bild 3-05] Signalverlauf einer Messung mit Beschleunigungsaufnehmer an einem Elektromotor, Abtastrate 48 kHz
[Bild 3-05] zeigt, dass eine Darstellung des Zeitsignals bei hohen Abtastraten keinen hohen Infor-mationsgehalt aufweist. Die Kurve mit den RMS-Werten (T=100mS) weist überraschend niedrige Werte auf. Erst die verbesserte Auflösung der Zeitachse zeigt, dass es aufgrund der hohen Daten-dichte zu einer optischen Täuschung gekommen ist.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse16
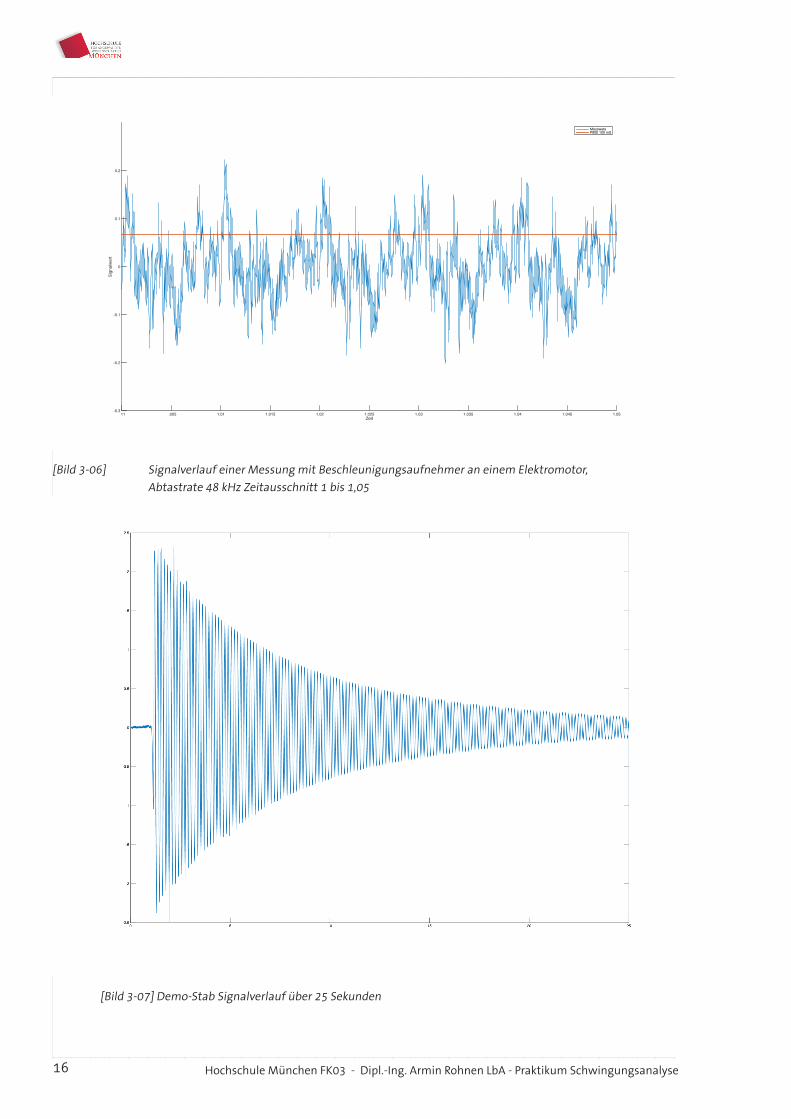
[Bild 3-06] Signalverlauf einer Messung mit Beschleunigungsaufnehmer an einem Elektromotor,
Abtastrate 48 kHz Zeitausschnitt 1 bis 1,05
[Bild 3-07] Demo-Stab Signalverlauf über 25 Sekunden
Zeit11 .005 1.01 1.015 1.02 1.025 1.03 1.035 1.04 1.045 1.05
Sign
alw
ert
-0.3
-0.2
-0.1
0
0.1
0.2
MessweteRMS 100 mS
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 17
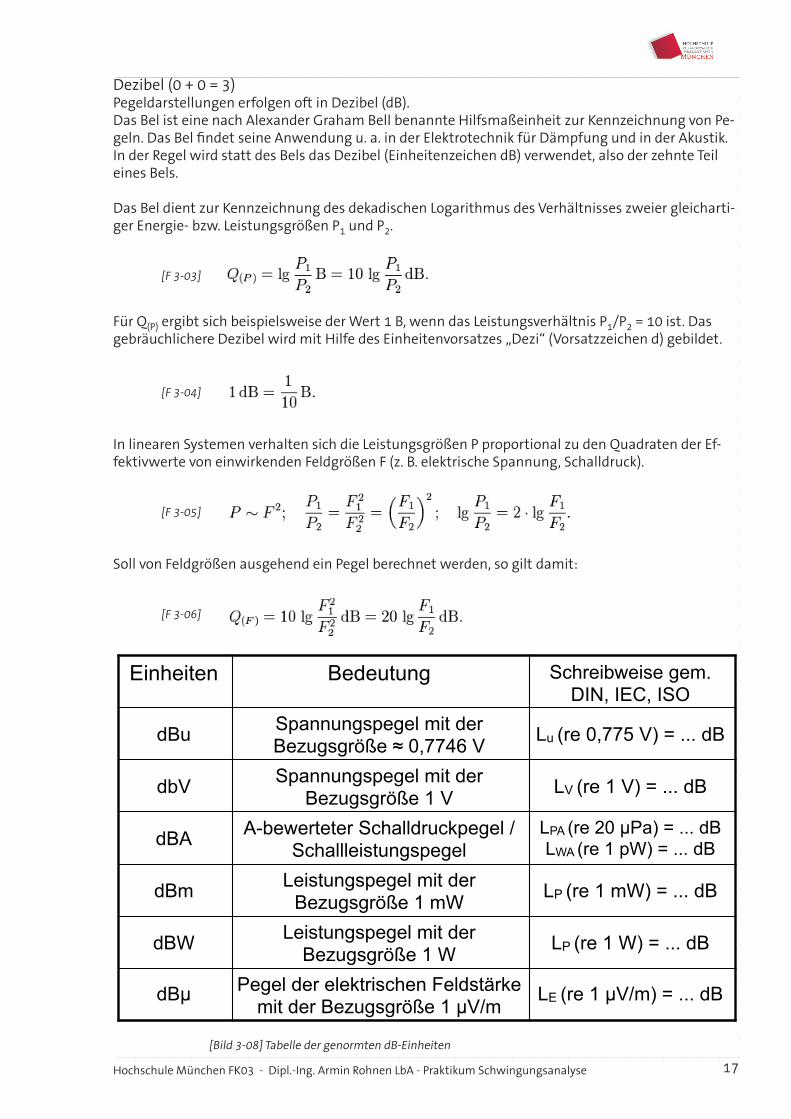
Dezibel (0 + 0 = 3)Pegeldarstellungen erfolgen oft in Dezibel (dB).Das Bel ist eine nach Alexander Graham Bell benannte Hilfsmaßeinheit zur Kennzeichnung von Pe-geln. Das Bel findet seine Anwendung u. a. in der Elektrotechnik für Dämpfung und in der Akustik. In der Regel wird statt des Bels das Dezibel (Einheitenzeichen dB) verwendet, also der zehnte Teil eines Bels.
Das Bel dient zur Kennzeichnung des dekadischen Logarithmus des Verhältnisses zweier gleicharti-ger Energie- bzw. Leistungsgrößen P1 und P2.
[F 3-03]
Für Q(P) ergibt sich beispielsweise der Wert 1 B, wenn das Leistungsverhältnis P1/P2 = 10 ist. Das gebräuchlichere Dezibel wird mit Hilfe des Einheitenvorsatzes „Dezi“ (Vorsatzzeichen d) gebildet.
[F 3-04]
In linearen Systemen verhalten sich die Leistungsgrößen P proportional zu den Quadraten der Ef-fektivwerte von einwirkenden Feldgrößen F (z. B. elektrische Spannung, Schalldruck).
[F 3-05]
Soll von Feldgrößen ausgehend ein Pegel berechnet werden, so gilt damit:
[F 3-06]
[Bild 3-08] Tabelle der genormten dB-Einheiten
Einheiten Bedeutung Schreibweise gem. DIN, IEC, ISO
dBu Spannungspegel mit der Bezugsgröße ≈ 0,7746 V Lu (re 0,775 V) = ... dB
dbV Spannungspegel mit der Bezugsgröße 1 V LV (re 1 V) = ... dB
dBA A-bewerteter Schalldruckpegel / Schallleistungspegel
LPA (re 20 µPa) = ... dBLWA (re 1 pW) = ... dB
dBm Leistungspegel mit der Bezugsgröße 1 mW LP (re 1 mW) = ... dB
dBW Leistungspegel mit der Bezugsgröße 1 W LP (re 1 W) = ... dB
dBµ Pegel der elektrischen Feldstärke mit der Bezugsgröße 1 µV/m
LE (re 1 µV/m) = ... dB
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse18
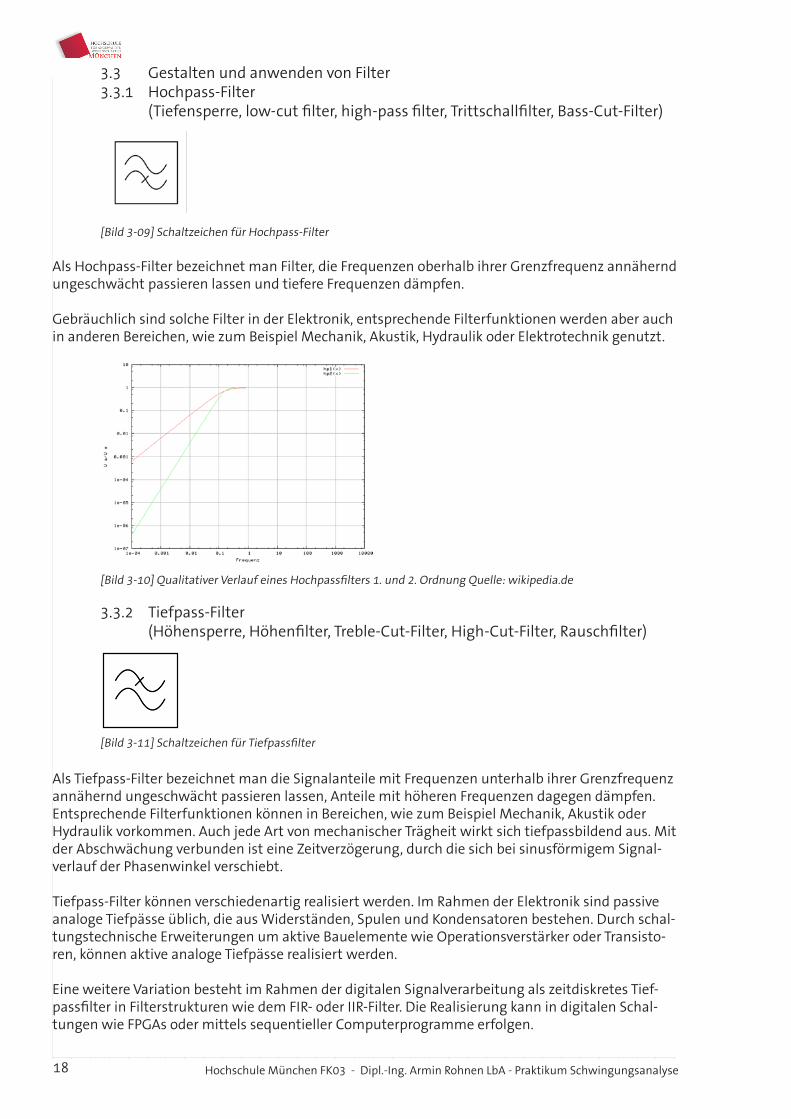
3.3 Gestalten und anwenden von Filter 3.3.1 Hochpass-Filter (Tiefensperre, low-cut filter, high-pass filter, Trittschallfilter, Bass-Cut-Filter)
[Bild 3-09] Schaltzeichen für Hochpass-Filter
Als Hochpass-Filter bezeichnet man Filter, die Frequenzen oberhalb ihrer Grenzfrequenz annähernd ungeschwächt passieren lassen und tiefere Frequenzen dämpfen.
Gebräuchlich sind solche Filter in der Elektronik, entsprechende Filterfunktionen werden aber auch in anderen Bereichen, wie zum Beispiel Mechanik, Akustik, Hydraulik oder Elektrotechnik genutzt.
[Bild 3-10] Qualitativer Verlauf eines Hochpassfilters 1. und 2. Ordnung Quelle: wikipedia.de
3.3.2 Tiefpass-Filter (Höhensperre, Höhenfilter, Treble-Cut-Filter, High-Cut-Filter, Rauschfilter)
[Bild 3-11] Schaltzeichen für Tiefpassfilter
Als Tiefpass-Filter bezeichnet man die Signalanteile mit Frequenzen unterhalb ihrer Grenzfrequenz annähernd ungeschwächt passieren lassen, Anteile mit höheren Frequenzen dagegen dämpfen. Entsprechende Filterfunktionen können in Bereichen, wie zum Beispiel Mechanik, Akustik oder Hydraulik vorkommen. Auch jede Art von mechanischer Trägheit wirkt sich tiefpassbildend aus. Mit der Abschwächung verbunden ist eine Zeitverzögerung, durch die sich bei sinusförmigem Signal-verlauf der Phasenwinkel verschiebt.
Tiefpass-Filter können verschiedenartig realisiert werden. Im Rahmen der Elektronik sind passive analoge Tiefpässe üblich, die aus Widerständen, Spulen und Kondensatoren bestehen. Durch schal-tungstechnische Erweiterungen um aktive Bauelemente wie Operationsverstärker oder Transisto-ren, können aktive analoge Tiefpässe realisiert werden.
Eine weitere Variation besteht im Rahmen der digitalen Signalverarbeitung als zeitdiskretes Tief-passfilter in Filterstrukturen wie dem FIR- oder IIR-Filter. Die Realisierung kann in digitalen Schal-tungen wie FPGAs oder mittels sequentieller Computerprogramme erfolgen.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 19
Tiefpässe für hohe Leistungen im Bereich der Hochfrequenztechnik und elektrischen Energietech-nik werden in analoger Technik aus Kondensatoren und Spulen aufgebaut. Hauptanwendung ist die Hochfrequenztechnik, man findet sie auch an den Lastausgängen von Frequenzumrichtern, Klasse-D-Verstärkern und in Netzfiltern.Tiefpass-Filter in der Niederfrequenztechnik werden anwendungsbezogen auch als Höhensperre, Höhenfilter, Treble-Cut-Filter, High-Cut-Filter oder Rauschfilter bezeichnet. Diese Begriffe sind in der Tontechnik gebräuchlich; sie weisen darauf hin, dass ein solches Filter, zum Beispiel in einem Equalizer, die „Höhen“ des Signals bzw. das Rauschen abschwächt, das vorwiegend hohe Frequen-zen enthält; siehe auch Entzerrung (Tontechnik). Weiterhin sind Tiefpässe den Tieftonlautsprechern in Lautsprecherboxen vorgeschaltet.
Tiefpass-Funktionen kommen auch in der Mechanik (Schwingungsdämpfung), Akustik (die Schall-ausbreitung tiefer Frequenzen ist verlustärmer), Optik (Kantenfilter), Hydraulik oder der Lichtaus-breitung in der Atmosphäre vor, werden dort jedoch nicht so genannt. In der Messtechnik wird der Tiefpass auch als arithmetischer Mittelwertbilder bezeichnet und angewendet, z. B. im Drehspul-messwerk oder bei der Erzeugung einer variablen Gleichspannung mittels Pulsweitenmodulation.
3.3.3 Bandpassfilter
[Bild 3-12] Schaltzeichen für Bandpass-Filter
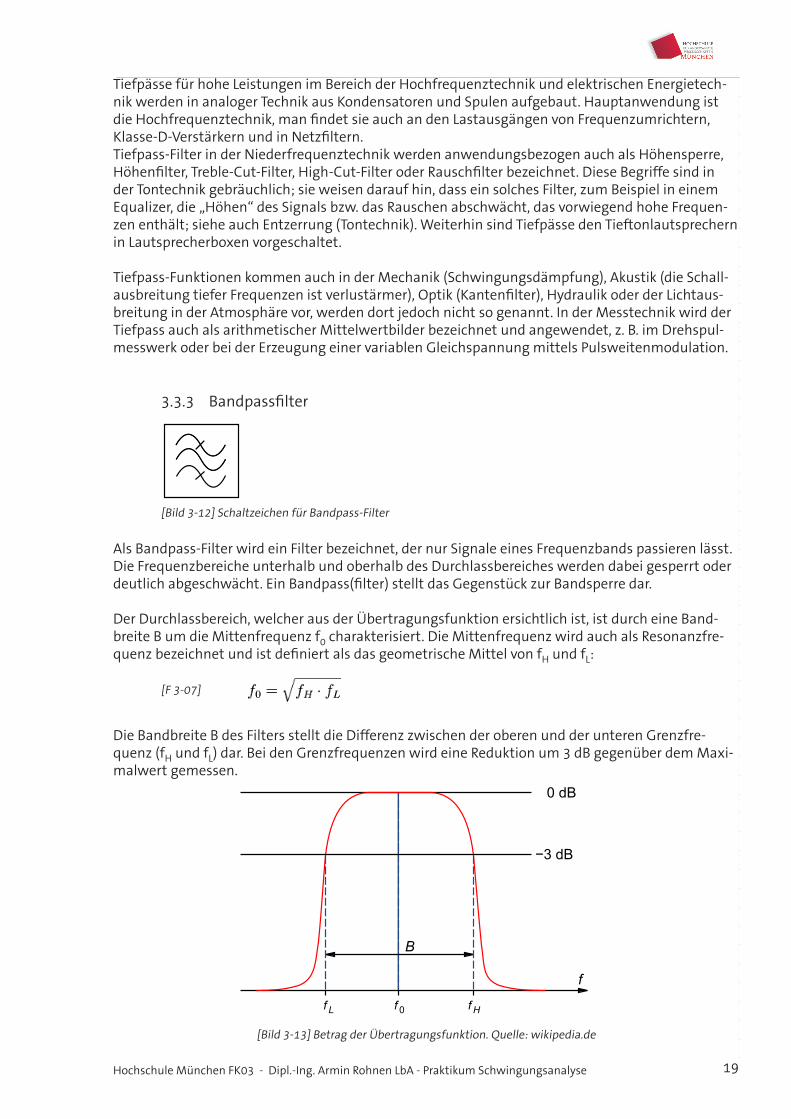
Als Bandpass-Filter wird ein Filter bezeichnet, der nur Signale eines Frequenzbands passieren lässt. Die Frequenzbereiche unterhalb und oberhalb des Durchlassbereiches werden dabei gesperrt oder deutlich abgeschwächt. Ein Bandpass(filter) stellt das Gegenstück zur Bandsperre dar.
Der Durchlassbereich, welcher aus der Übertragungsfunktion ersichtlich ist, ist durch eine Band-breite B um die Mittenfrequenz f0 charakterisiert. Die Mittenfrequenz wird auch als Resonanzfre-quenz bezeichnet und ist definiert als das geometrische Mittel von fH und fL:
[F 3-07]
Die Bandbreite B des Filters stellt die Differenz zwischen der oberen und der unteren Grenzfre-quenz (fH und fL) dar. Bei den Grenzfrequenzen wird eine Reduktion um 3 dB gegenüber dem Maxi-malwert gemessen.
[Bild 3-13] Betrag der Übertragungsfunktion. Quelle: wikipedia.de
f L f 0 f H
B
0 dB
f
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse20
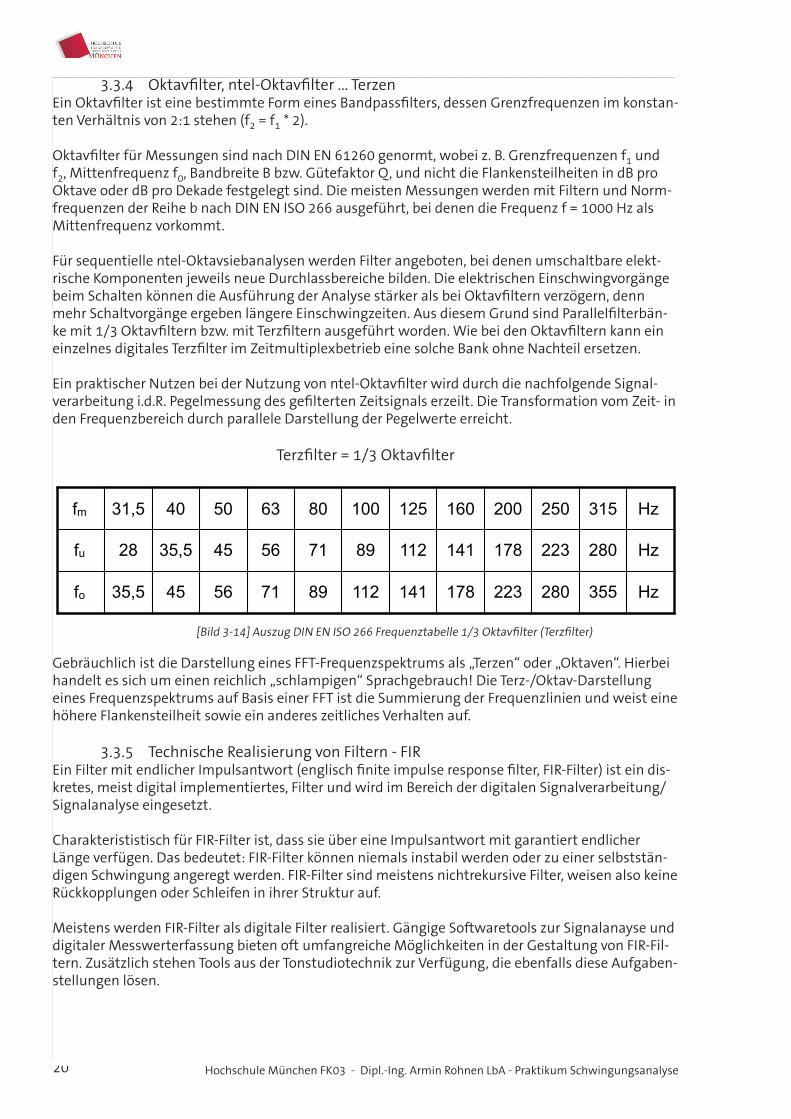
3.3.4 Oktavfilter, ntel-Oktavfilter ... TerzenEin Oktavfilter ist eine bestimmte Form eines Bandpassfilters, dessen Grenzfrequenzen im konstan-ten Verhältnis von 2:1 stehen (f2 = f1 * 2).
Oktavfilter für Messungen sind nach DIN EN 61260 genormt, wobei z. B. Grenzfrequenzen f1 und f2, Mittenfrequenz f0, Bandbreite B bzw. Gütefaktor Q, und nicht die Flankensteilheiten in dB pro Oktave oder dB pro Dekade festgelegt sind. Die meisten Messungen werden mit Filtern und Norm-frequenzen der Reihe b nach DIN EN ISO 266 ausgeführt, bei denen die Frequenz f = 1000 Hz als Mittenfrequenz vorkommt.
Für sequentielle ntel-Oktavsiebanalysen werden Filter angeboten, bei denen umschaltbare elekt-rische Komponenten jeweils neue Durchlassbereiche bilden. Die elektrischen Einschwingvorgänge beim Schalten können die Ausführung der Analyse stärker als bei Oktavfiltern verzögern, denn mehr Schaltvorgänge ergeben längere Einschwingzeiten. Aus diesem Grund sind Parallelfilterbän-ke mit 1/3 Oktavfiltern bzw. mit Terzfiltern ausgeführt worden. Wie bei den Oktavfiltern kann ein einzelnes digitales Terzfilter im Zeitmultiplexbetrieb eine solche Bank ohne Nachteil ersetzen.
Ein praktischer Nutzen bei der Nutzung von ntel-Oktavfilter wird durch die nachfolgende Signal-verarbeitung i.d.R. Pegelmessung des gefilterten Zeitsignals erzeilt. Die Transformation vom Zeit- in den Frequenzbereich durch parallele Darstellung der Pegelwerte erreicht.
Terzfilter = 1/3 Oktavfilter
[Bild 3-14] Auszug DIN EN ISO 266 Frequenztabelle 1/3 Oktavfilter (Terzfilter)
Gebräuchlich ist die Darstellung eines FFT-Frequenzspektrums als „Terzen“ oder „Oktaven“. Hierbei handelt es sich um einen reichlich „schlampigen“ Sprachgebrauch! Die Terz-/Oktav-Darstellung eines Frequenzspektrums auf Basis einer FFT ist die Summierung der Frequenzlinien und weist eine höhere Flankensteilheit sowie ein anderes zeitliches Verhalten auf.
3.3.5 Technische Realisierung von Filtern - FIREin Filter mit endlicher Impulsantwort (englisch finite impulse response filter, FIR-Filter) ist ein dis-kretes, meist digital implementiertes, Filter und wird im Bereich der digitalen Signalverarbeitung/Signalanalyse eingesetzt.
Charakterististisch für FIR-Filter ist, dass sie über eine Impulsantwort mit garantiert endlicher Länge verfügen. Das bedeutet: FIR-Filter können niemals instabil werden oder zu einer selbststän-digen Schwingung angeregt werden. FIR-Filter sind meistens nichtrekursive Filter, weisen also keine Rückkopplungen oder Schleifen in ihrer Struktur auf.
Meistens werden FIR-Filter als digitale Filter realisiert. Gängige Softwaretools zur Signalanayse und digitaler Messwerterfassung bieten oft umfangreiche Möglichkeiten in der Gestaltung von FIR-Fil-tern. Zusätzlich stehen Tools aus der Tonstudiotechnik zur Verfügung, die ebenfalls diese Aufgaben-stellungen lösen.
fm 31,5 40 50 63 80 100 125 160 200 250 315 Hz
fu 28 35,5 45 56 71 89 112 141 178 223 280 Hz
fo 35,5 45 56 71 89 112 141 178 223 280 355 Hz
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 21
3.3.6 Zeitliches Verhalten von FilterJedes analoge Filter benötigt eine Einschwingzeit bzw. einen Einschwingvorgang. Der Einschwing-vorgang erfolgt asymptotisch. Bei geringen Signalveränderungen ist eine sehr gute zeitliche Auf-lösung möglich. Bei großen Signalveränderungen (Impulsen) ist jedoch nur eine geringe zeitliche Auflösung erreichbar, weil diese wiederum zu einem Einschwingvorgang des Filters führt. Zudem weisen analoge Filter einen ausgeprägten Phasenversatz auf.
Digitale FIR-Filter benötigen eine Einschwingzeit. Diese ist in der Anzahl gleich der Filterkoeffizien-ten.
3.3.7 Filter anwendenUm Filter anwenden zu können wird Software benötigt. Zum Beispiel bietet MATLAB® eine Toolbox für Filter an. Die meisten Softwareprodukte (LMS, PAK, Artemis, Pulse, DIADem, LabVIEW) bieten Möglichkeiten Signale zu filtern. Die ntel-Oktavfilter sind meist als Funktionen mit anschließender RMS-Wert-Bildung ausgeführt.
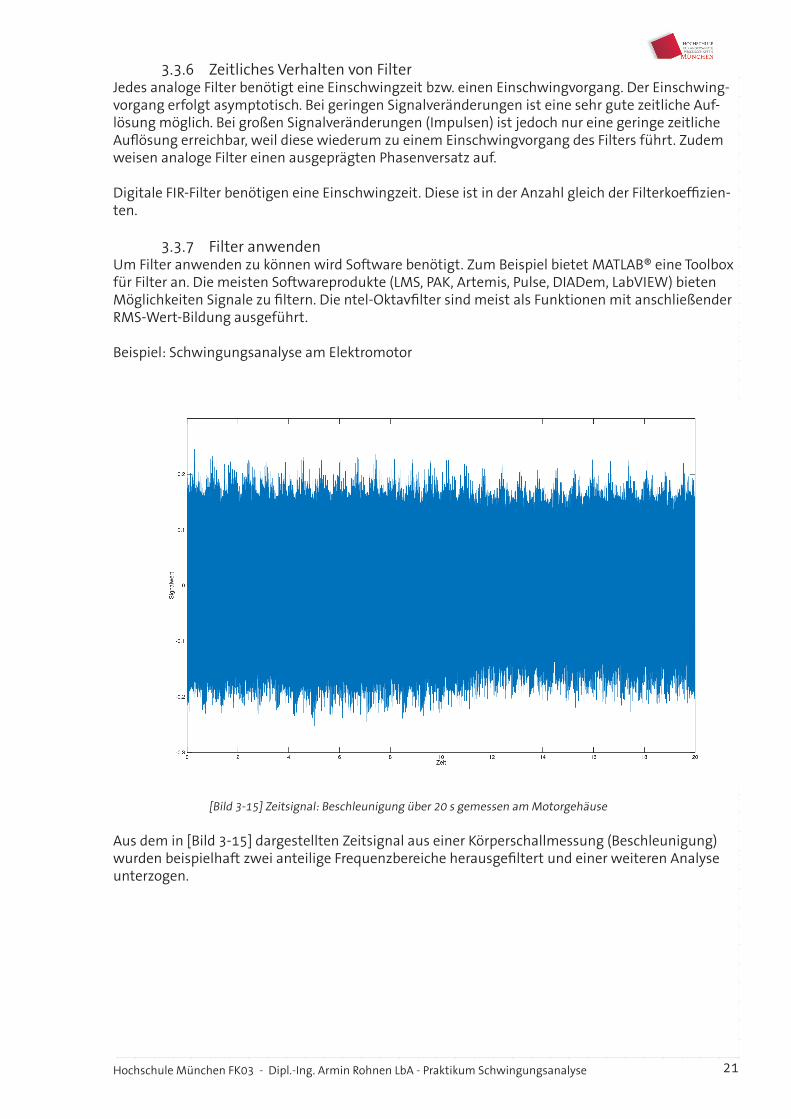
Beispiel: Schwingungsanalyse am Elektromotor
[Bild 3-15] Zeitsignal: Beschleunigung über 20 s gemessen am Motorgehäuse
Aus dem in [Bild 3-15] dargestellten Zeitsignal aus einer Körperschallmessung (Beschleunigung) wurden beispielhaft zwei anteilige Frequenzbereiche herausgefiltert und einer weiteren Analyse unterzogen.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse22
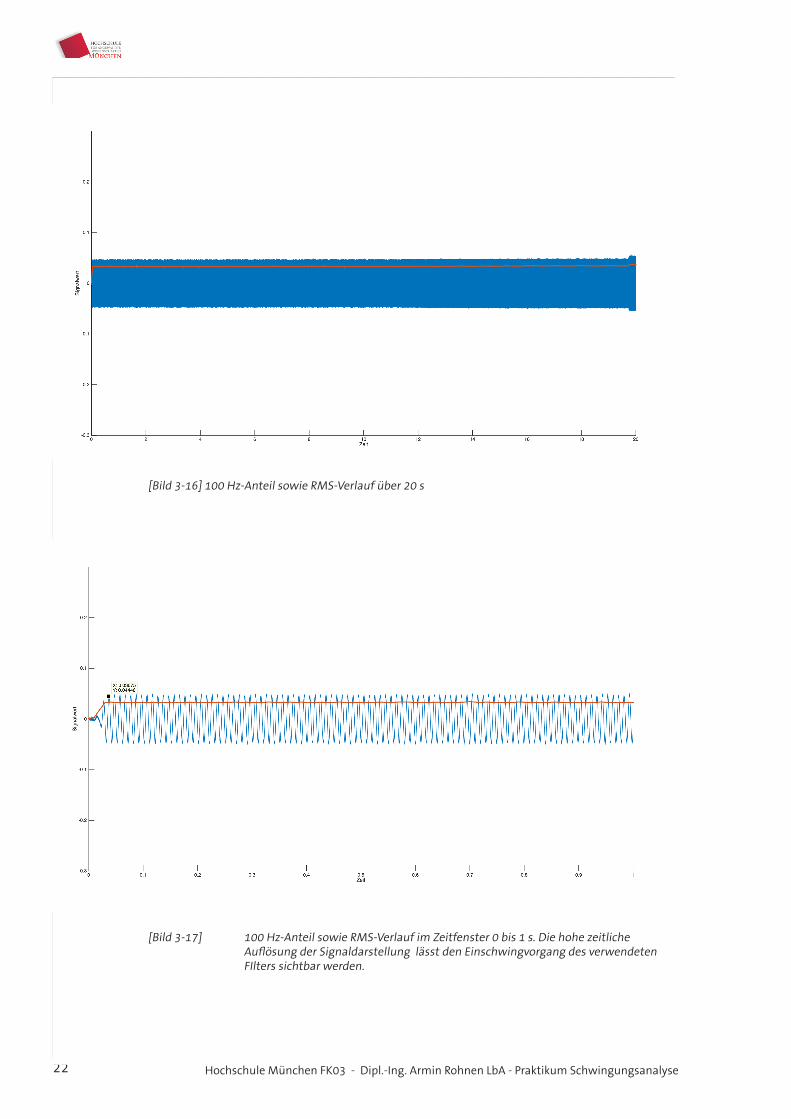
[Bild 3-16] 100 Hz-Anteil sowie RMS-Verlauf über 20 s
[Bild 3-17] 100 Hz-Anteil sowie RMS-Verlauf im Zeitfenster 0 bis 1 s. Die hohe zeitliche Auflösung der Signaldarstellung lässt den Einschwingvorgang des verwendeten FIlters sichtbar werden.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 23
3.4 Abklingendes Zeitsignal
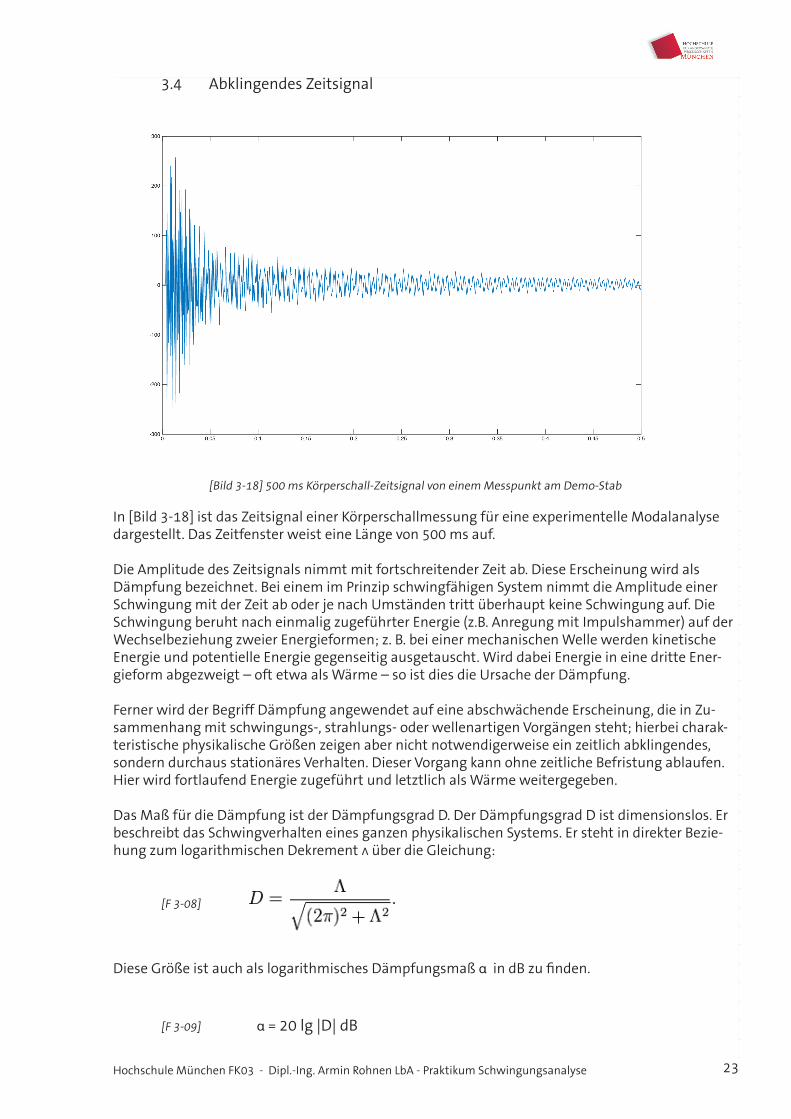
[Bild 3-18] 500 ms Körperschall-Zeitsignal von einem Messpunkt am Demo-Stab
In [Bild 3-18] ist das Zeitsignal einer Körperschallmessung für eine experimentelle Modalanalyse dargestellt. Das Zeitfenster weist eine Länge von 500 ms auf.
Die Amplitude des Zeitsignals nimmt mit fortschreitender Zeit ab. Diese Erscheinung wird als Dämpfung bezeichnet. Bei einem im Prinzip schwingfähigen System nimmt die Amplitude einer Schwingung mit der Zeit ab oder je nach Umständen tritt überhaupt keine Schwingung auf. Die Schwingung beruht nach einmalig zugeführter Energie (z.B. Anregung mit Impulshammer) auf der Wechselbeziehung zweier Energieformen; z. B. bei einer mechanischen Welle werden kinetische Energie und potentielle Energie gegenseitig ausgetauscht. Wird dabei Energie in eine dritte Ener-gieform abgezweigt – oft etwa als Wärme – so ist dies die Ursache der Dämpfung.
Ferner wird der Begriff Dämpfung angewendet auf eine abschwächende Erscheinung, die in Zu-sammenhang mit schwingungs-, strahlungs- oder wellenartigen Vorgängen steht; hierbei charak-teristische physikalische Größen zeigen aber nicht notwendigerweise ein zeitlich abklingendes, sondern durchaus stationäres Verhalten. Dieser Vorgang kann ohne zeitliche Befristung ablaufen. Hier wird fortlaufend Energie zugeführt und letztlich als Wärme weitergegeben.
Das Maß für die Dämpfung ist der Dämpfungsgrad D. Der Dämpfungsgrad D ist dimensionslos. Er beschreibt das Schwingverhalten eines ganzen physikalischen Systems. Er steht in direkter Bezie-hung zum logarithmischen Dekrement Λ über die Gleichung:
[F 3-08]
Diese Größe ist auch als logarithmisches Dämpfungsmaß α in dB zu finden.
[F 3-09] α = 20 lg |D| dB
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse24
Das logarithmische Dekrement errechnet sich aus dem natürlichen Logarithmus des Verhältnisses der Amplitude zweier beliebiger aufeinanderfolgender Ausschläge gleicher Richtung.
[F 3-10]
mit
xm= Amplitude des 1. Ausschlages. xn = Amplitude des 2. Ausschlages. δ = Abklingkonstante. D = Dämpfungsgrad. ω = Eigenkreisfrequenz der ungedämpften Schwingung. T = Schwingungsdauer.
Alternativ kann man Λ auch wie folgt berechnen
[F 3-11]
Die Ermittlung von Λ ist durch praktische Messung der Amplitude recht einfach. Daraus lässt sich dann problemlos der Dämpfungsgrad ermitteln.
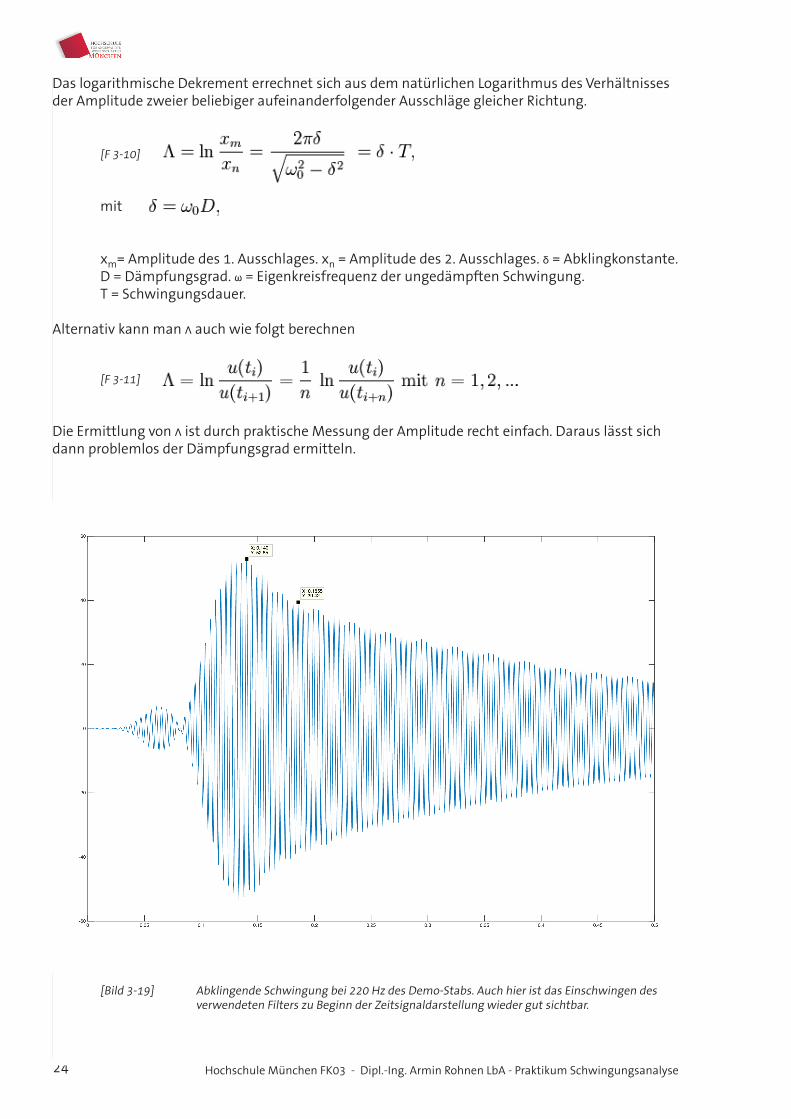
[Bild 3-19] Abklingende Schwingung bei 220 Hz des Demo-Stabs. Auch hier ist das Einschwingen des verwendeten Filters zu Beginn der Zeitsignaldarstellung wieder gut sichtbar.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 25
Messwerte aus [Bild 3-19]:
U(1) = 52,85 m/s2
U(2) = 39,42 m/s2
n = 10
Unter Anwendung von [F 3-11] und [F 3-08] ergibt sich Λ zu 0,0293 und der Dämpfungsrad D zu 0,0047
bzw. nach [F 3-09] das logarithmische Dämpfungsmaß α zu -46,6 dB.
3.5 Moduliertes ZeitsignalAm Beispiel eines einstufigen Getriebes lässt sich leicht die Modulation von Signalen mechani-schen Ursprungs darstellen.Betrachtet wird ein Getriebe dessen Eingangswelle mit einer Drehzahl = 120/min (Drehfrequenz = 2 Hz) betrieben wird. Das Zahnrad auf der Eingangswelle weist 80 Zähne auf. Hier-aus ergibt sich eine Zahneingriffsfrequenz fZahn = 160 Hz. Die Getriebeübersetzung beträgt i = nAntrieb / nAbtrieb = 10.
[Bild 3-20] Anwendungsbeispiel Getriebe: 160 Hz Zahneingriffsfrequenz
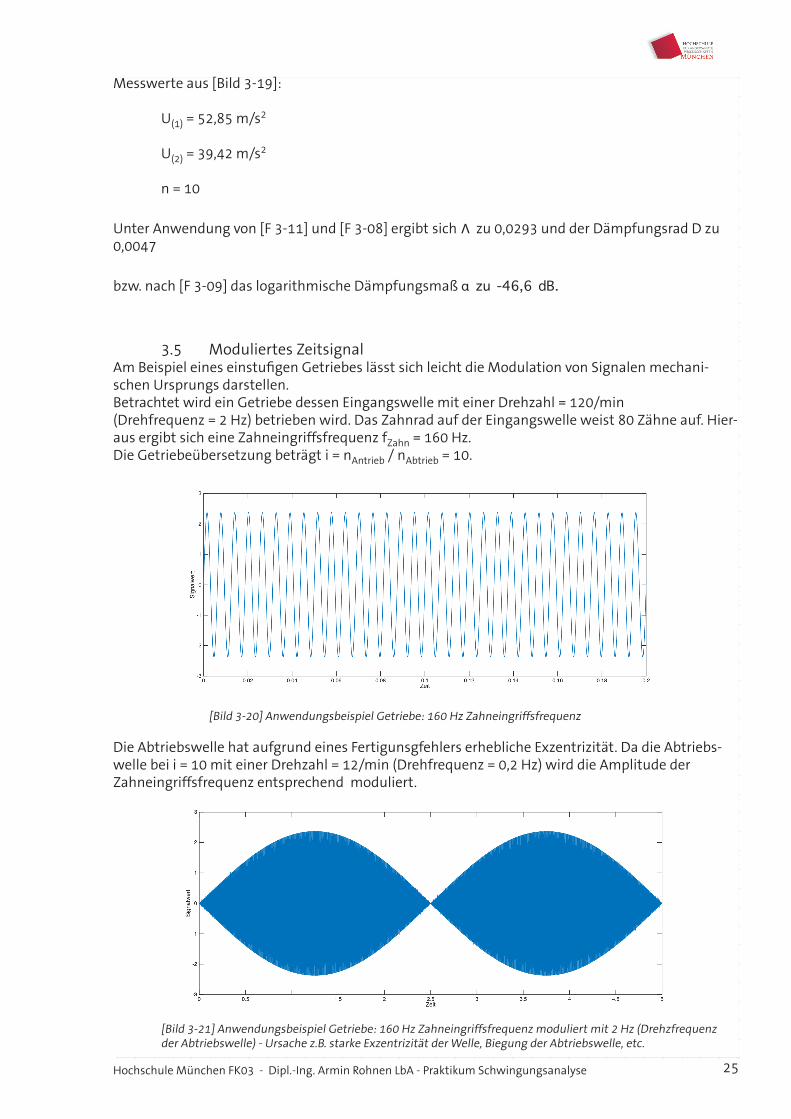
Die Abtriebswelle hat aufgrund eines Fertigunsgfehlers erhebliche Exzentrizität. Da die Abtriebs-welle bei i = 10 mit einer Drehzahl = 12/min (Drehfrequenz = 0,2 Hz) wird die Amplitude der Zahneingriffsfrequenz entsprechend moduliert.
[Bild 3-21] Anwendungsbeispiel Getriebe: 160 Hz Zahneingriffsfrequenz moduliert mit 2 Hz (Drehzfrequenz der Abtriebswelle) - Ursache z.B. starke Exzentrizität der Welle, Biegung der Abtriebswelle, etc.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse26
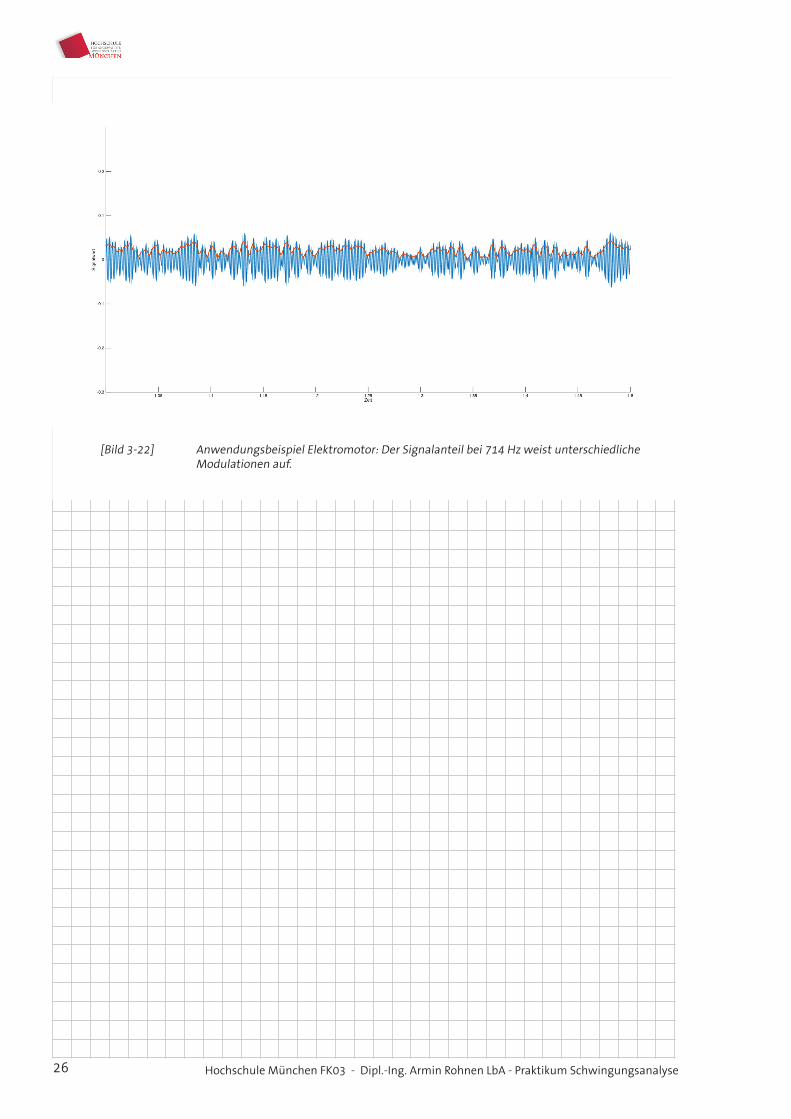
[Bild 3-22] Anwendungsbeispiel Elektromotor: Der Signalanteil bei 714 Hz weist unterschiedliche Modulationen auf.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 27
4. Schwingungsanalyse - Transformation in den Frequenzbereich 4.1 DFT / FFT - Grundlagen
Zu einem Zeitpunkt ist eine Signalanalyse nicht möglich.
Die Fourier-Analyse ist die Theorie der Fourier-Reihen und Fourier-Integrale. Ihre Ursprünge reichen in das 18. Jahrhundert zurück. Benannt sind die Fourier-Analyse, die Fourier-Reihe und die Fou-rier-Integrale nach dem französischen Mathematiker Jean Baptiste Joseph Fourier, der im Jahr 1822 in seiner „Théorie analytique de la chaleur“ Fourier-Reihen untersuchte.
Die Fourier-Analyse ist in vielen Wissenschafts- und Technikzweigen von außerordentlicher prakti-scher Bedeutung. Die Anwendungen reichen von der Physik (Akustik, Optik, Gezeiten, Astrophysik) über viele Teilgebiete der Mathematik (Zahlentheorie, Statistik, Kombinatorik und Wahrscheinlich-keitstheorie), der Signalverarbeitung und Kryptographie bis zur Ozeanographie und Wirtschafts-wissenschaften. Je nach Anwendungszweig erfährt die Zerlegung vielerlei Interpretationen. In der Akustik ist sie beispielsweise die Frequenz-Transformation des Schalls in Oberschwingungen.
Aus Sicht der abstrakten harmonischen Analyse sind sowohl die Fourier-Reihen und die Fourier-In-tegrale als auch die Laplace-Transformation, die Mellin-Transformation oder auch die Walsh-Trans-formation (dabei werden die trigonometrischen Funktionen durch die Walsh-Funktionen ersetzt) Spezialfälle einer allgemeineren (Fourier-)Transformation.
Die schnelle Fourier-Transformation (englisch fast Fourier transform, daher meist FFT abgekürzt) ist ein Algorithmus zur effizienten Berechnung der diskreten Fourier-Transformation (DFT). Mit ihr kann ein digitales Signal in seine Frequenzanteile zerlegt und anschließend analysiert werden.
Analog gibt es für die diskrete inverse Fourier-Transformation die inverse schnelle Fourier-Trans-formation (IFFT). Es kommen bei der IFFT die gleichen Algorithmen mit anderen Koeffizienten zur Anwendung.
00 .050 .1 0.15 0.20 .250 .3 0.35 0.40 .450 .5-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse28
Die FFT hat zahlreiche Anwendungen im Bereich der Ingenieurswissenschaften, der Naturwissen-schaften und der angewandten Mathematik. Sie ist ein wichtiger Bestandteil fast aller moder-nen Medien- und Kommunikationstechnologien und findet sich z. B. bei der Komprimierung von digitalen Bildern, insbesondere beim weit verbreiteten JPEG-Verfahren, und ist ein Bestandteil der meisten Verfahren zur Videokompression, etwa den MPEG-Standards, die bei der DVD, der Blu-ray-Technologie und beim Digitalfernsehen verwendet werden. Außerdem kommt sie in Mobil-funktechnologien wie UMTS und LTE und bei der drahtlosen Datenübertragung zum Einsatz, etwa in der WLAN-Funknetztechnik.
Die FFT gehört zu den „Teile-und-herrsche-Verfahren“, so dass – im Gegensatz zur direkten Be-rechnung – zuvor berechnete Zwischenergebnisse wiederverwendet und dadurch arithmetische Rechenoperationen eingespart werden können. Genau genommen wurde eine Form des Algorith-mus bereits 1805 von Carl Friedrich Gauß entworfen, der ihn zur Berechnung der Flugbahnen der Asteroiden (2) Pallas und (3) Juno verwendete. Zum ersten Mal publiziert wurde eine Variante des Algorithmus von Carl Runge im Jahre 1903 und 1905.
Aus dem Lösungsansatz von Fourier zur Wärmeausbreitung in Festkörpern mittels Fourier-Reihen (ca. 1807), nach der sich jede stetig differenzierbare Funktion, die auf dem Intervall [0,T] definiert ist, in eine Fourierreihe entwickeln läst. Mit der Grundfrequenz F=1/T und den Kreisfrequenzen gilt:
[F 4-01]
Die Fourier-Transformation erlaubt es, sich Funktionen mit reellem Argument (und diversen Ein-schränkungen), Schwingungen zusammengesetzt zu denken:
[F 4-02]
Eine wichtige Erkenntnis der Fourier-Theorie ist, dass die Amplitude sich ähnlich bestimmen lässt:
[F 4-03]
Beim Übergang von der Fourier-Transformation zur DFT sind folgende Veränderungen zu beachten:• Das Signal muss zu diskreten, äquidistanten Zeitpunkten vorliegen (T: Abstand zweier aufein-
anderfolgender Zeitpunkte), 0 ist einer dieser Zeitpunkte.• Das Signal muss eine endliche Länge aufweisen (2N+1: Anzahl der Werte), welche als Werte
innerhalb eines großen Intervalls [-NT,NT] interpretiert werden.• Die Integrale bei der Berechnung der Fourier-Koeffizienten werden bei der DFT zu Summen.• Das Spektrum wird nur für eine endliche Anzahl von Frequenzen berechnet.
Jede periodische Funktion mit reellem Argument und Periode L kann als Funktionenreihe mit sinusförmigen Funktionsverlauf, die Bruchteile von L als Periode haben, dargestellt werden (so genannte Fourier-Reihen):
[F 4-04]
Die diskrete Fourier-Transformation besitzt ein periodisches Spektrum, es wiederholt sich mit der Abtastfrequenz und ist symmetrisch zur Abtastfrequenz.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 29
[F 4-05]
Enthält das abgetastete Signal Frequenzanteile oberhalb der halben Abtastfrequenz überlappen sich die Spektren des ursprünglichen Signals mit den an der Abtastfrequenz gespiegelten Signalan-teilen und es kommt zum Alias-Effekt.
4.1.1 Alias-EffektIn der Regel entsteht das zeitdiskrete Signal durch Diskretisierung eines kontinuierlichen Signals. Die durch die DFT entstehenden Spektren sind nur dann mit den Spektren des zugrundeliegen-den kontinuierlichen Signals identisch, wenn bei der Abtastung das Abtasttheorem nicht verletzt wurde. Für Signale im Basisband muss gelten, dass die Abtastfrequenz mehr als doppelt so groß sein muss wie die maximal auftretende Frequenz (Nyquist-Frequenz). Bei Verletzung des Abtast-theorems tritt eine Verfälschung des Originalsignals auf (Aliasing im Zeitbereich). Eine Möglichkeit des Anti-Aliasing ist die Bandbegrenzung des Signals am Eingang des Systems, um diesen Effekt zu vermeiden.
4.1.2 Leck-Effekt (Leakage effect)Aufgrund der zeitlichen Begrenzung des Signals kann es dazu kommen, dass das Eingangssignal abgeschnitten wird. Ein abgeschnittenes Eingangssignal kann nur dann korrekt mit der DFT trans-formiert werden, wenn es periodisch fortsetzbar ist. Falls das Signal nicht periodisch fortsetzbar ist, enthält es Frequenzen, die nicht zu den von der DFT berechneten diskreten Frequenzen gehören. Die DFT „nähert“ diese Frequenzen durch die benachbarten Frequenzen an, dabei wird die Energie auf diese Frequenzen verteilt. Dies wird als Leck-Effekt (engl. leakage effect) bezeichnet.
Die zeitliche Begrenzung kommt einer Multiplikation mit einer Rechteckfunktion gleich. Dies ist eine andere Betrachtungsweise um den Leck-Effekt zu erklären. Das gilt natürlich auch im Falle anderer Fensterfunktionen (z. B. Hamming, von Hann, Gauss). Somit ist das Spektrum der Fenster-funktion (bzw. die Breite des Spektrums) ausschlaggebend für das Leck. Die Amplitudengenauigkeit ist das andere Kriterium einer Fensterfunktion.
4.1.3 DFT als BandfilterbankEine DFT einer zeitbegrenzten Funktion kann man auch als Bandfilterbank ansehen. Die Mittenfre-quenzen dieser Bandfilter entsprechen den Frequenzlinien der Funktion, die entsteht, wenn man den betrachteten Zeitabschnitt periodisch wiederholt (Vielfache von 1/Fensterbreite).
Die Breite und Flankensteilheit der Bandfilter wird durch die Fourier-Transformierten des Zeitfens-ters bestimmt. Durch die Wahl einer geeigneten Zeitfenster-Funktion kann man die Eigenschaften der Bandfilter verändern.
4.1.4 Zeit- und Frequenz-Auflösung der DFT
• Will man Signale mit hoher Frequenzauflösung analysieren, muss man die Zeitfenster sehr groß machen, man erhält eine geringe Zeitauflösung.
• Benötigt man eine hohe Zeitauflösung, muss man die Breite der Zeitfenster sehr kurz ma-chen, dann kann man aber nur wenige Frequenzlinien bestimmen.
• Es gilt: Frequenz-Auflösung ≈ 1/Zeitfensterbreite (wird eine Frequenzauflösung von 1 kHz gewünscht muss das Zeitfenster mindestens 1 ms lang sein).
4.1.5 FFTFür Blocklängen N, die sich als Potenz von 2 darstellen lassen, kann die Berechnung mit dem Algo-rithmus der schnellen Fourier-Transformation (FFT) erfolgen.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse30
Die diskrete Fouriertransformation (DFT) eines Vektors der Dimension 2n lautet
[F 4-06]
Die klassische Variante der FFT ist im Gegensatz zur DFT nur durchführbar, wenn die Länge des Ein-gangsvektors einer Zweierpotenz entspricht. Die Anzahl der Abtastpunkte kann also beispielsweise 1, 2, 4, 8, 16, 32 usw. betragen. Andere Längen sind mit alternativen Algorithmen möglich.
4.1.6 Ergebnis der FFT
Das Ergebnis einer FFT ist nie falsch.
Der FFT-Algorithmus liefert aus n komplexen Eingangswerten n komplexe Ergebniswerte.
Der Betrag jedes dieser Ausgangswerte entspricht der Länge, und das Argument jedes Ausgangs-werts dem Winkel eines Vektors zum Zeitpunkt t=0. Wenn man nun alle Vektoren mit den richti-gen Geschwindigkeiten um den Nullpunkt kreisen lässt - und sie zueinander addiert - erhält man wieder die Eingangswerte.
Tendenziell ist das Quantisierungsrauschen bei der schnellen Fourier-Transformation aufgrund der geringeren Zahl an fehlerbehafteten Rechenoperationen geringer als bei der DFT.
4.1.7 Zusammenfassung FFT
• Allgemein handelt es sich hierbei um die Transformation aus dem Zeitbereich x(t) in den Frequenzbereich X(jω)
• Annahme, dass sich alle Signale aus unendlich vielen Sinus- und Kosinusschwingungen zusammensetzen lassen
• Ergebnis besteht aus einem Real- und einem Imaginär-Teil• Für die praktische Anwendung sind weitere Rechenschritte erforderlich• Nutzung der FFT als Softwarefunktion bzw. als Funktionsaufruf Ergebnis = FFT(Daten)
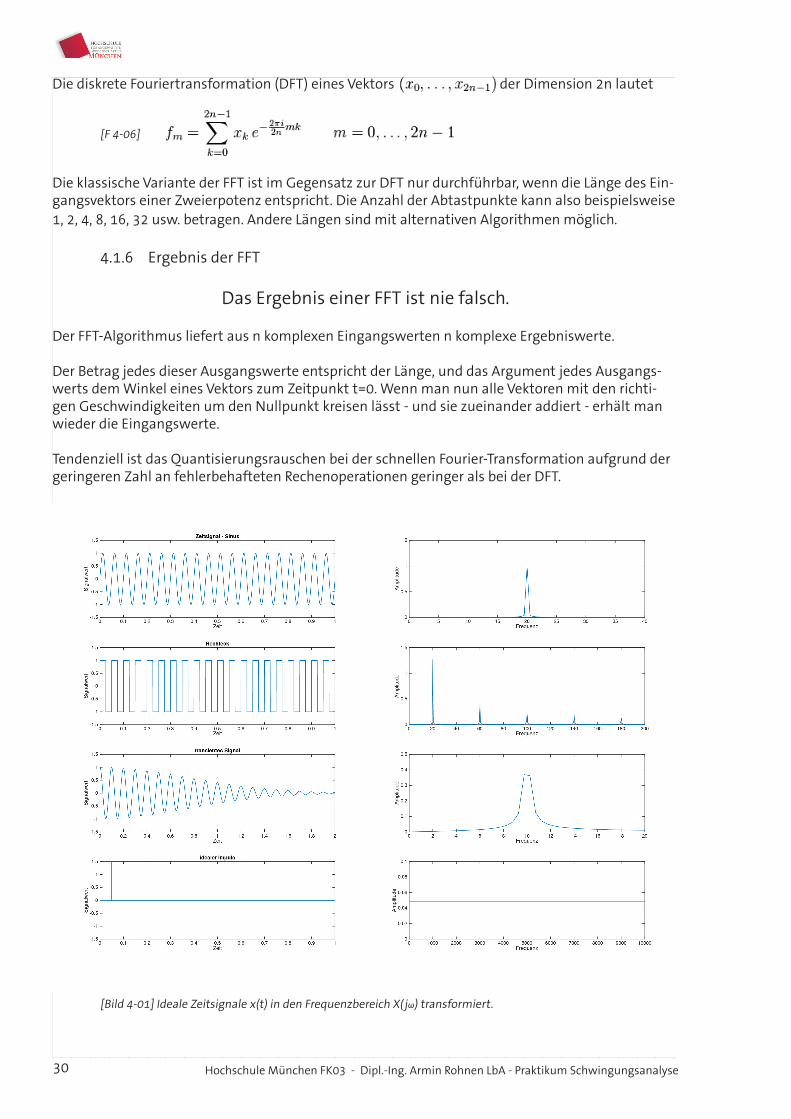
[Bild 4-01] Ideale Zeitsignale x(t) in den Frequenzbereich X( jω) transformiert.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 31
4.2 FFT in der praktischen AnwendungIn der praktischen Anwendung wird man eine FFT nicht eigenständig programmieren. Vielmehr werden in der Praxis für die Frequenz- und Schwingungsanalyse Softwaretools eingesetzt, die u.a. die Funktionalität der FFT zur Verfügung stellen. Maximal wird ein Funktionsaufruf wie z.B. Ergeb-nis = FFT(Daten) erfolgen.
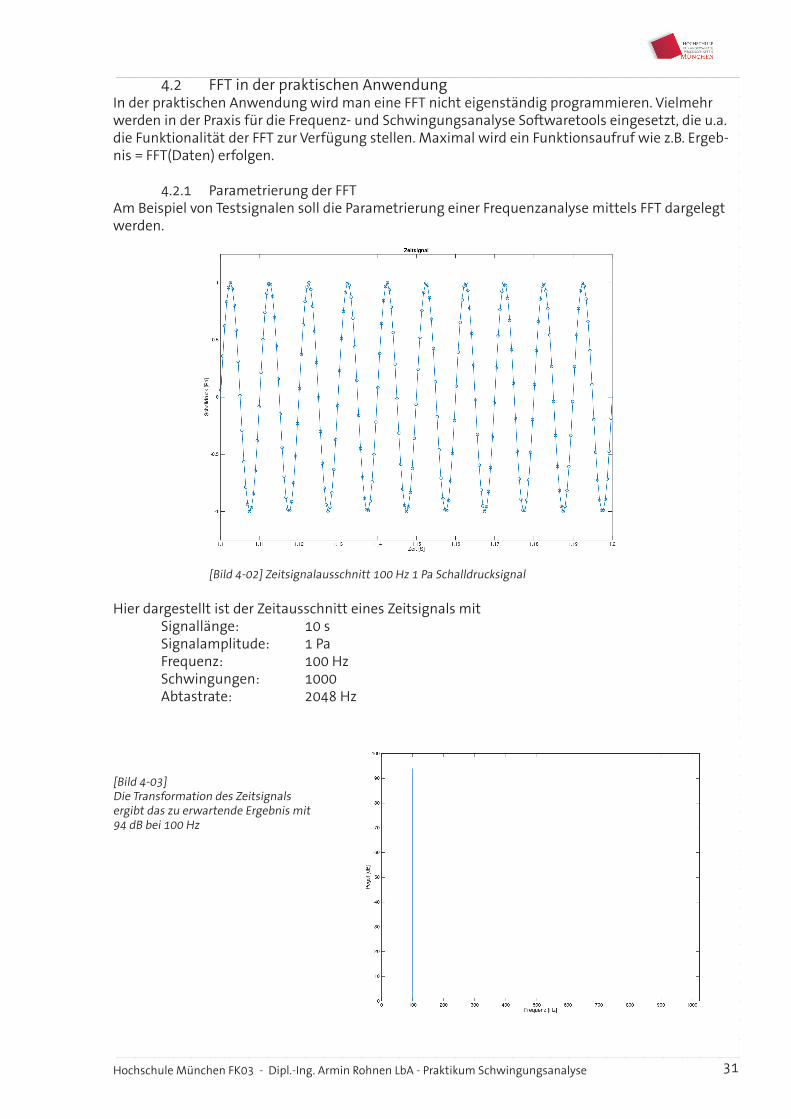
4.2.1 Parametrierung der FFTAm Beispiel von Testsignalen soll die Parametrierung einer Frequenzanalyse mittels FFT dargelegt werden.
[Bild 4-02] Zeitsignalausschnitt 100 Hz 1 Pa Schalldrucksignal
Hier dargestellt ist der Zeitausschnitt eines Zeitsignals mit Signallänge: 10 s Signalamplitude: 1 Pa Frequenz: 100 Hz Schwingungen: 1000 Abtastrate: 2048 Hz
[Bild 4-03]Die Transformation des Zeitsignalsergibt das zu erwartende Ergebnis mit 94 dB bei 100 Hz
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse32
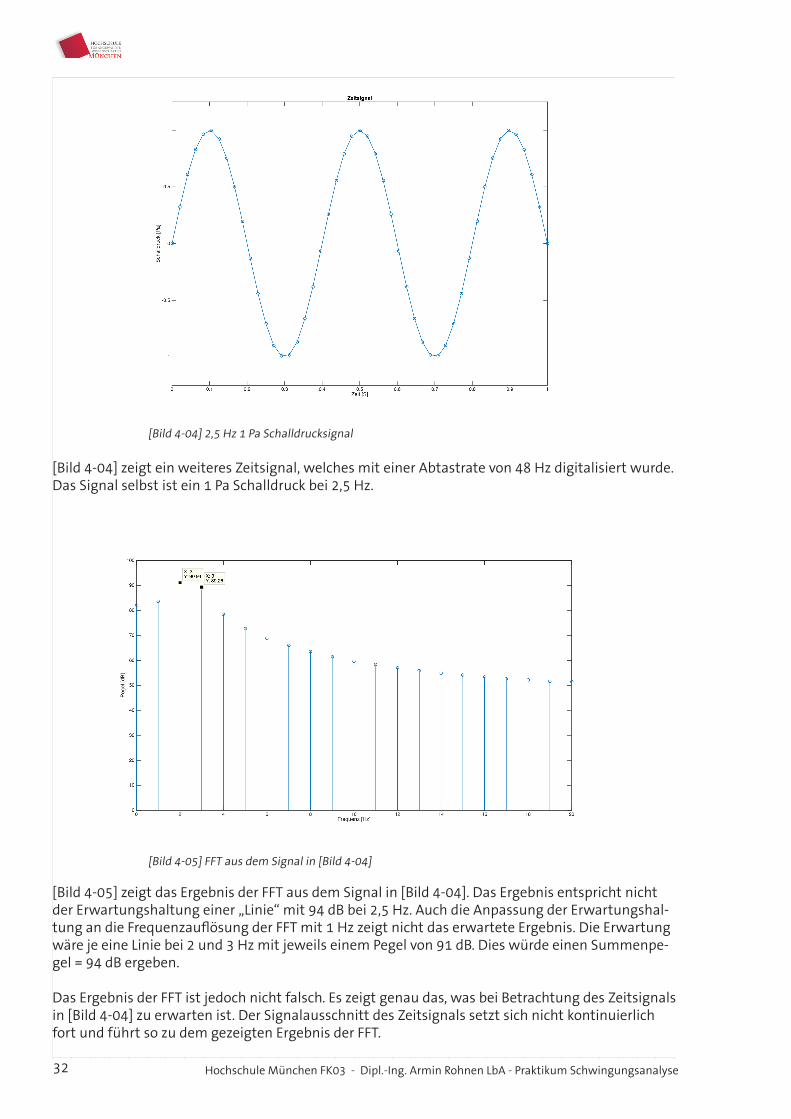
[Bild 4-04] 2,5 Hz 1 Pa Schalldrucksignal
[Bild 4-04] zeigt ein weiteres Zeitsignal, welches mit einer Abtastrate von 48 Hz digitalisiert wurde. Das Signal selbst ist ein 1 Pa Schalldruck bei 2,5 Hz.
[Bild 4-05] FFT aus dem Signal in [Bild 4-04]
[Bild 4-05] zeigt das Ergebnis der FFT aus dem Signal in [Bild 4-04]. Das Ergebnis entspricht nicht der Erwartungshaltung einer „Linie“ mit 94 dB bei 2,5 Hz. Auch die Anpassung der Erwartungshal-tung an die Frequenzauflösung der FFT mit 1 Hz zeigt nicht das erwartete Ergebnis. Die Erwartung wäre je eine Linie bei 2 und 3 Hz mit jeweils einem Pegel von 91 dB. Dies würde einen Summenpe-gel = 94 dB ergeben.
Das Ergebnis der FFT ist jedoch nicht falsch. Es zeigt genau das, was bei Betrachtung des Zeitsignals in [Bild 4-04] zu erwarten ist. Der Signalausschnitt des Zeitsignals setzt sich nicht kontinuierlich fort und führt so zu dem gezeigten Ergebnis der FFT.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 33
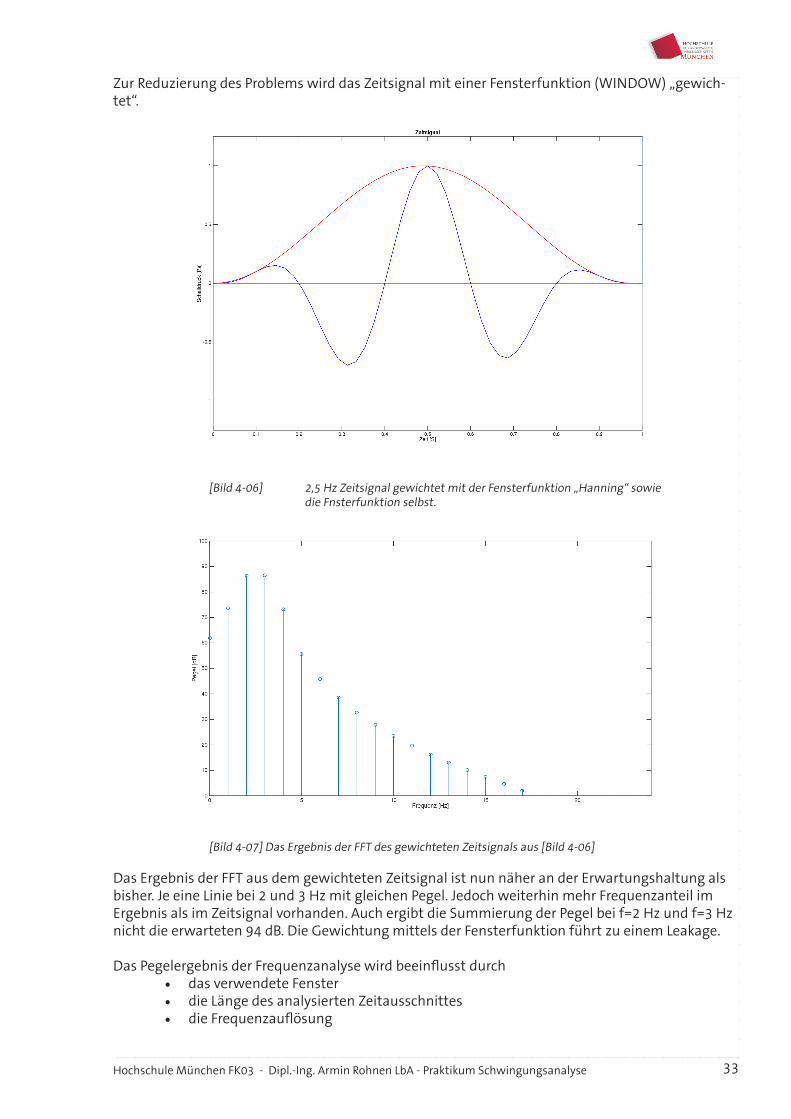
Zur Reduzierung des Problems wird das Zeitsignal mit einer Fensterfunktion (WINDOW) „gewich-tet“.
[Bild 4-06] 2,5 Hz Zeitsignal gewichtet mit der Fensterfunktion „Hanning“ sowie die Fnsterfunktion selbst.
[Bild 4-07] Das Ergebnis der FFT des gewichteten Zeitsignals aus [Bild 4-06]
Das Ergebnis der FFT aus dem gewichteten Zeitsignal ist nun näher an der Erwartungshaltung als bisher. Je eine Linie bei 2 und 3 Hz mit gleichen Pegel. Jedoch weiterhin mehr Frequenzanteil im Ergebnis als im Zeitsignal vorhanden. Auch ergibt die Summierung der Pegel bei f=2 Hz und f=3 Hz nicht die erwarteten 94 dB. Die Gewichtung mittels der Fensterfunktion führt zu einem Leakage.
Das Pegelergebnis der Frequenzanalyse wird beeinflusst durch• das verwendete Fenster• die Länge des analysierten Zeitausschnittes• die Frequenzauflösung
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse34
4.2.2 (Frequenz) Spektrum und Spektrogramm
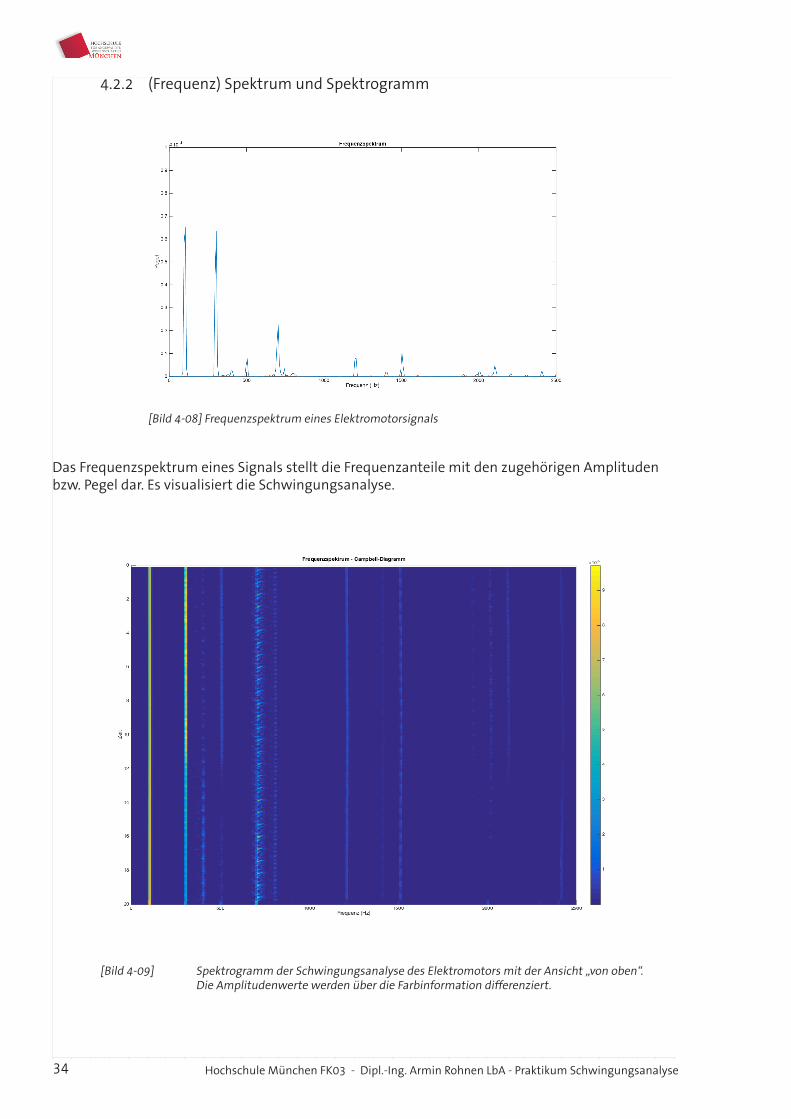
[Bild 4-08] Frequenzspektrum eines Elektromotorsignals
Das Frequenzspektrum eines Signals stellt die Frequenzanteile mit den zugehörigen Amplituden bzw. Pegel dar. Es visualisiert die Schwingungsanalyse.
[Bild 4-09] Spektrogramm der Schwingungsanalyse des Elektromotors mit der Ansicht „von oben“. Die Amplitudenwerte werden über die Farbinformation differenziert.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 35
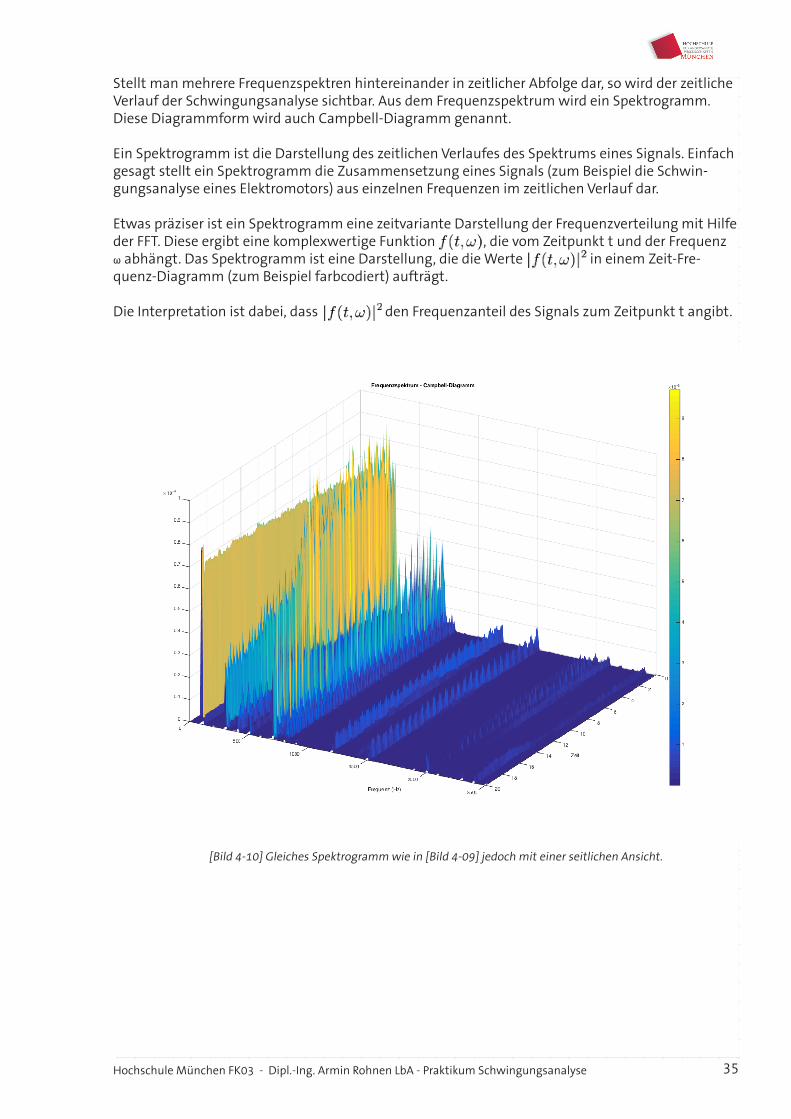
Stellt man mehrere Frequenzspektren hintereinander in zeitlicher Abfolge dar, so wird der zeitliche Verlauf der Schwingungsanalyse sichtbar. Aus dem Frequenzspektrum wird ein Spektrogramm. Diese Diagrammform wird auch Campbell-Diagramm genannt.
Ein Spektrogramm ist die Darstellung des zeitlichen Verlaufes des Spektrums eines Signals. Einfach gesagt stellt ein Spektrogramm die Zusammensetzung eines Signals (zum Beispiel die Schwin-gungsanalyse eines Elektromotors) aus einzelnen Frequenzen im zeitlichen Verlauf dar.
Etwas präziser ist ein Spektrogramm eine zeitvariante Darstellung der Frequenzverteilung mit Hilfe der FFT. Diese ergibt eine komplexwertige Funktion , die vom Zeitpunkt t und der Frequenz ω abhängt. Das Spektrogramm ist eine Darstellung, die die Werte in einem Zeit-Fre-quenz-Diagramm (zum Beispiel farbcodiert) aufträgt.
Die Interpretation ist dabei, dass den Frequenzanteil des Signals zum Zeitpunkt t angibt.
[Bild 4-10] Gleiches Spektrogramm wie in [Bild 4-09] jedoch mit einer seitlichen Ansicht.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse36
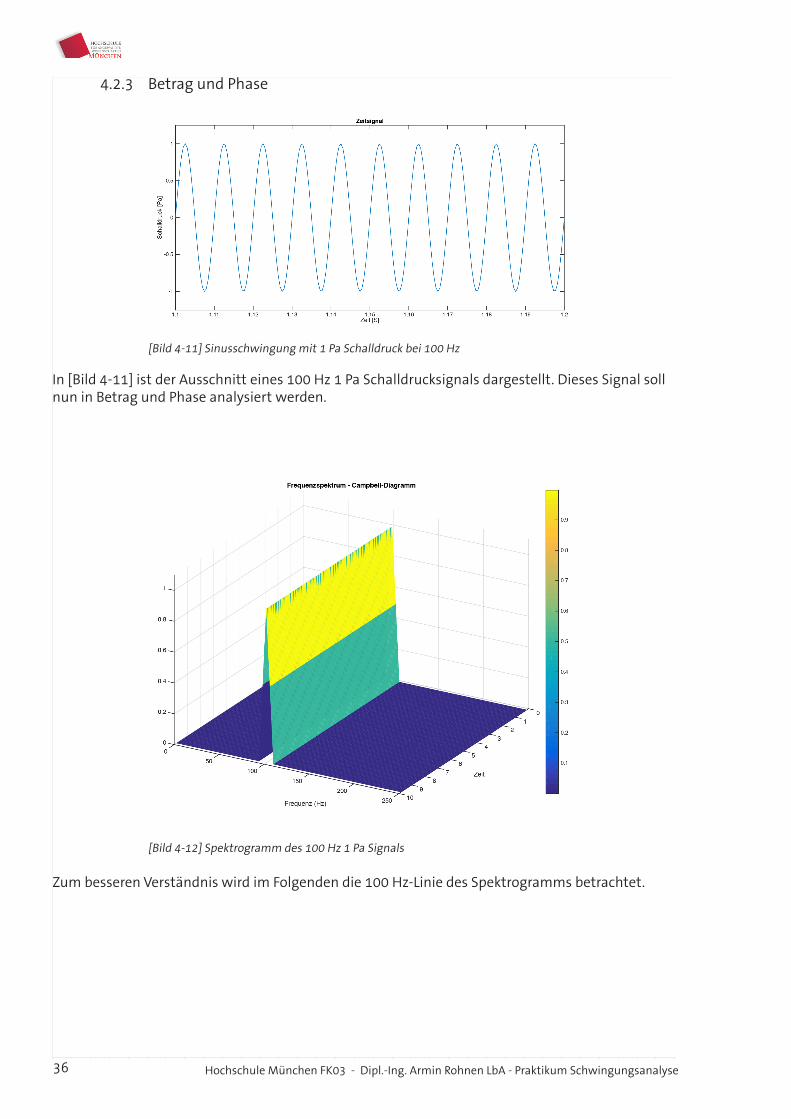
4.2.3 Betrag und Phase
[Bild 4-11] Sinusschwingung mit 1 Pa Schalldruck bei 100 Hz
In [Bild 4-11] ist der Ausschnitt eines 100 Hz 1 Pa Schalldrucksignals dargestellt. Dieses Signal soll nun in Betrag und Phase analysiert werden.
[Bild 4-12] Spektrogramm des 100 Hz 1 Pa Signals
Zum besseren Verständnis wird im Folgenden die 100 Hz-Linie des Spektrogramms betrachtet.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 37
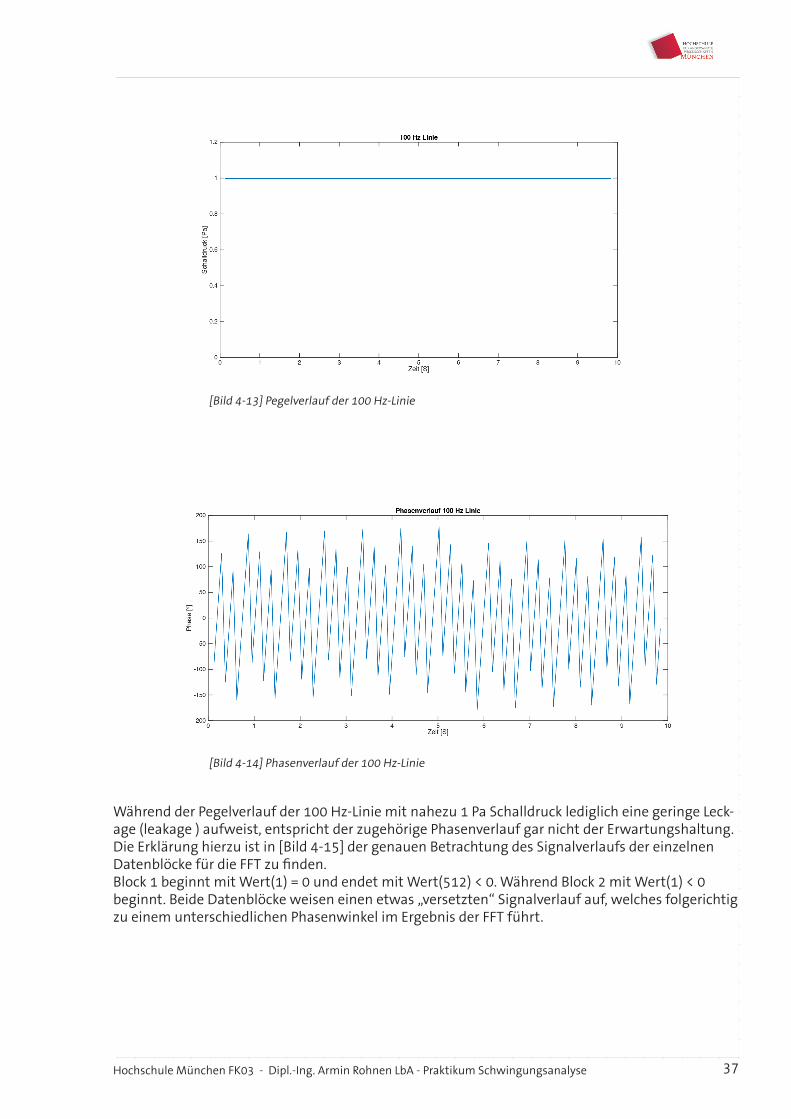
[Bild 4-13] Pegelverlauf der 100 Hz-Linie
[Bild 4-14] Phasenverlauf der 100 Hz-Linie
Während der Pegelverlauf der 100 Hz-Linie mit nahezu 1 Pa Schalldruck lediglich eine geringe Leck-age (leakage ) aufweist, entspricht der zugehörige Phasenverlauf gar nicht der Erwartungshaltung. Die Erklärung hierzu ist in [Bild 4-15] der genauen Betrachtung des Signalverlaufs der einzelnen Datenblöcke für die FFT zu finden. Block 1 beginnt mit Wert(1) = 0 und endet mit Wert(512) < 0. Während Block 2 mit Wert(1) < 0 beginnt. Beide Datenblöcke weisen einen etwas „versetzten“ Signalverlauf auf, welches folgerichtig zu einem unterschiedlichen Phasenwinkel im Ergebnis der FFT führt.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse38
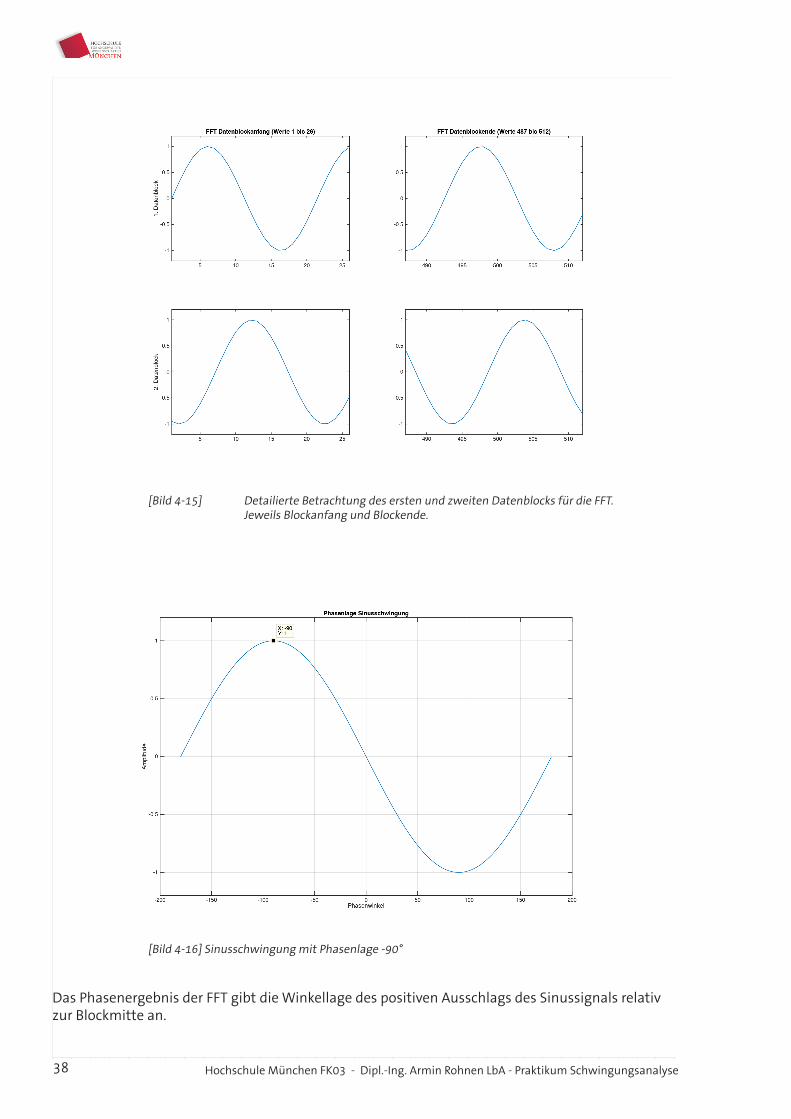
[Bild 4-15] Detailierte Betrachtung des ersten und zweiten Datenblocks für die FFT. Jeweils Blockanfang und Blockende.
[Bild 4-16] Sinusschwingung mit Phasenlage -90°
Das Phasenergebnis der FFT gibt die Winkellage des positiven Ausschlags des Sinussignals relativ zur Blockmitte an.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 39
4.2.4 Mittelung und Overlap
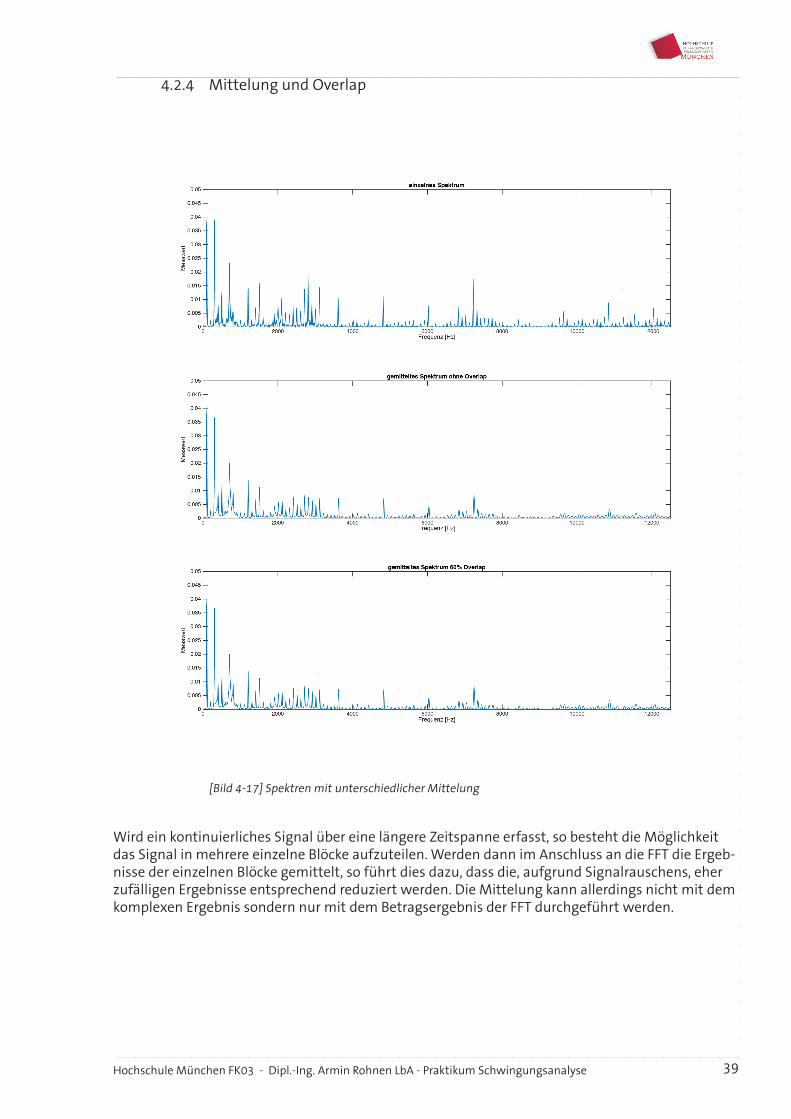
[Bild 4-17] Spektren mit unterschiedlicher Mittelung
Wird ein kontinuierliches Signal über eine längere Zeitspanne erfasst, so besteht die Möglichkeit das Signal in mehrere einzelne Blöcke aufzuteilen. Werden dann im Anschluss an die FFT die Ergeb-nisse der einzelnen Blöcke gemittelt, so führt dies dazu, dass die, aufgrund Signalrauschens, eher zufälligen Ergebnisse entsprechend reduziert werden. Die Mittelung kann allerdings nicht mit dem komplexen Ergebnis sondern nur mit dem Betragsergebnis der FFT durchgeführt werden.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse40
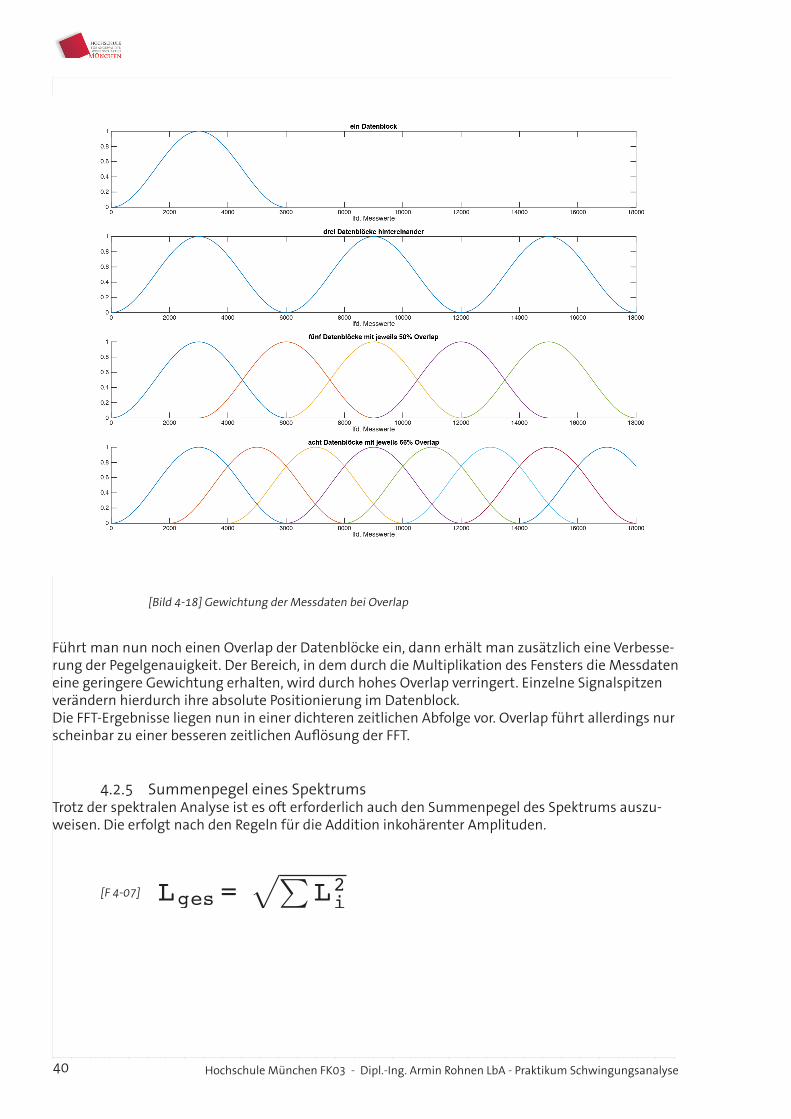
[Bild 4-18] Gewichtung der Messdaten bei Overlap
Führt man nun noch einen Overlap der Datenblöcke ein, dann erhält man zusätzlich eine Verbesse-rung der Pegelgenauigkeit. Der Bereich, in dem durch die Multiplikation des Fensters die Messdaten eine geringere Gewichtung erhalten, wird durch hohes Overlap verringert. Einzelne Signalspitzen verändern hierdurch ihre absolute Positionierung im Datenblock. Die FFT-Ergebnisse liegen nun in einer dichteren zeitlichen Abfolge vor. Overlap führt allerdings nur scheinbar zu einer besseren zeitlichen Auflösung der FFT.
4.2.5 Summenpegel eines SpektrumsTrotz der spektralen Analyse ist es oft erforderlich auch den Summenpegel des Spektrums auszu-weisen. Die erfolgt nach den Regeln für die Addition inkohärenter Amplituden.
[F 4-07] Lges = L2i
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 41
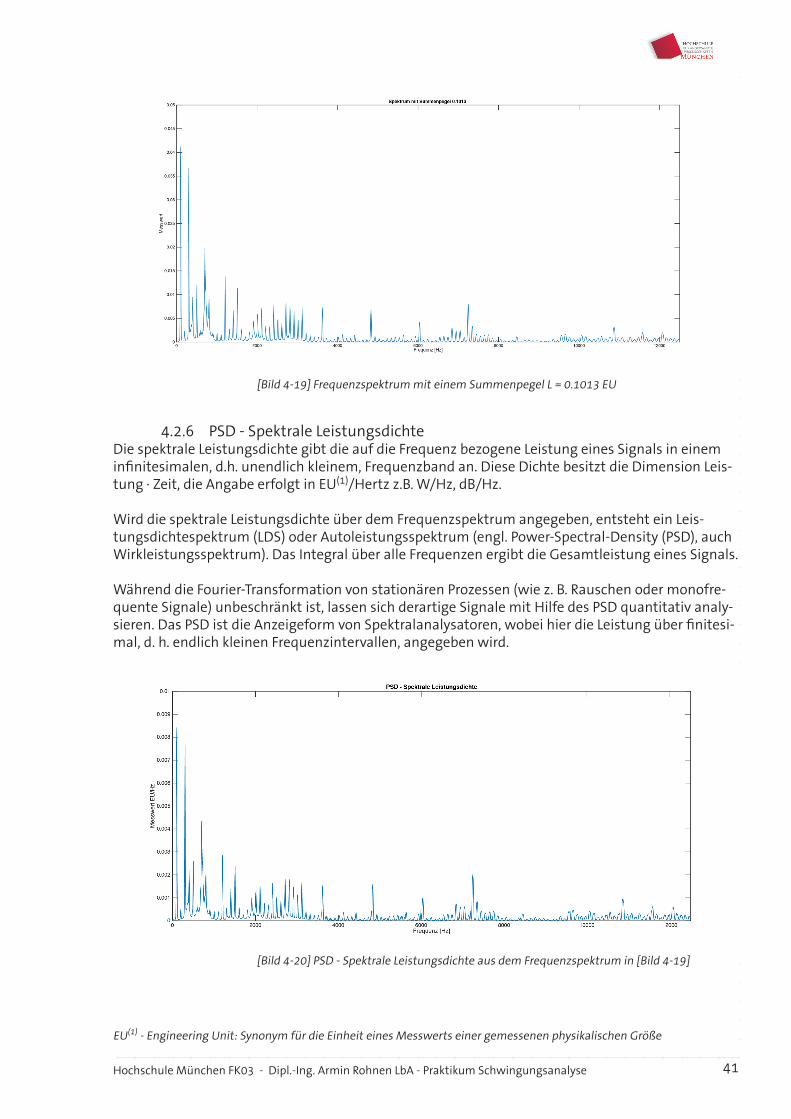
[Bild 4-19] Frequenzspektrum mit einem Summenpegel L = 0.1013 EU
4.2.6 PSD - Spektrale LeistungsdichteDie spektrale Leistungsdichte gibt die auf die Frequenz bezogene Leistung eines Signals in einem infinitesimalen, d.h. unendlich kleinem, Frequenzband an. Diese Dichte besitzt die Dimension Leis-tung · Zeit, die Angabe erfolgt in EU(1)/Hertz z.B. W/Hz, dB/Hz.
Wird die spektrale Leistungsdichte über dem Frequenzspektrum angegeben, entsteht ein Leis-tungsdichtespektrum (LDS) oder Autoleistungsspektrum (engl. Power-Spectral-Density (PSD), auch Wirkleistungsspektrum). Das Integral über alle Frequenzen ergibt die Gesamtleistung eines Signals.
Während die Fourier-Transformation von stationären Prozessen (wie z. B. Rauschen oder monofre-quente Signale) unbeschränkt ist, lassen sich derartige Signale mit Hilfe des PSD quantitativ analy-sieren. Das PSD ist die Anzeigeform von Spektralanalysatoren, wobei hier die Leistung über finitesi-mal, d. h. endlich kleinen Frequenzintervallen, angegeben wird.
[Bild 4-20] PSD - Spektrale Leistungsdichte aus dem Frequenzspektrum in [Bild 4-19]
EU(1) - Engineering Unit: Synonym für die Einheit eines Messwerts einer gemessenen physikalischen Größe

Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse42
5 Literatur
Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik an der TU München, Simulation mit Matlab/Simulink (Skript im Internet verfügbar)
Christoph Rauscher, (Volker Janssen, Roland Minihold), Grundlagen der Spektrumanalyse Rohde & Schwarz GmbH & Co. KG, Mühldorfstraße 15, 81671 München, www.rohde-schwarz.com Dieses Buch kann nur über die Rohde & Schwarz-Vertriebsstellen und das Münchner Stammhaus bezogen werden. PW 0002.6629
Thomas Kuttner, Praxiswissen Schwingungsmesstechnik, Springer Vieweg © Springer Fachmedien Wiesbaden 2015, ISBN 978-3-658-04637-8
Wolf Dieter Pietruszka, MATLAB® und Simulink® in der Ingenieurpraxis, Springer Vieweg © Springer Fachmedien Wiesbaden 2005, 2006, 2012, 2014, ISBN 978-3-658-06419-8
Martin Werner, Digitale Signalverarbeitung mit MATLAB®, © Vieweg+Teubner Verlag, Springer Fachmedien Wiesbaden GmbH 2012, ISBN 978-3-8348-1473-9
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 43
6 Schwingungsanalyse mit MATLAB
MATLAB stellt einige Funktionen für die Schwingungsanalyse bereit. So erhält man mit den Funkti-onen
ergebnis = fft(daten);
ergebnis = dft(daten);
die Fouriertransformation des Vektors „daten“.
Für die Schwingungsanalyse vorhandener Daten ist es meist unerheblich ob dabei die schnelle (fft) oder diskrete (dft) Fouriertransformation verwendet wird. Beide Funktionen stellen gleiche Ergeb-nisse zur Verfügung. Die Funktion FFT ist immer dann erforderlich, wenn die Fouriertransformation in einem zeitkritischen Prozess erforderlich ist.
Für die zeitunkritische Auswertung von Datenströmen zur Schwingungsanalyse bietet sich die Ver-wendung der mächtigen MATLAB-Funktion spectrogram an.Die Funktion ist variabel einsetzbar und liefert als Ergebnis alle für die Visualisierung benötigten Vektoren.
Erfolgt der Aufruf der Funktion als
[s,f,t,p] = spectrogram(daten, window, noverlap, blocksize, abtastrate);
dann können über die Variation der Vektoren noverlap und blocksize die Ergebnis-Vektoren entspre-chend beeinflusst werden.
Die Bedeutung der Parameter:
daten Zeitsignal (Vektor) zur Fouriertransformation abtastrate Abtastrate mit der der Vektor daten digitalisiert wurde blocksize Länge des einzelnen Datenblocks (oft auch nfft genannt, ganzzahliger Wert!) für die Fouriertransformation. Ist daten/blocksize > 1 wird das Zeitsignal in mehrere Datenblöcke der Länge blocksize aufgeteilt und jeweils einzeln Fouriertranformiert. Im Ergebnisvektor t wird der, dem jeweiligen Daten- block zugehörige Zeitstempel abgelegt. noverlap Anzahl der Messwerte mit der sich die einzelnen Datenblöcke überlappen. (ganzzahliger Wert!) window Vektor mit der WINDOW-Funktion für die „Gewichtung“ des jeweiligen Datenblocks. Die Länge des Vektors muss mit der blocksize übereinstimmen.
s Ergebnismatrix der Fouriertransformation (komplex). f Frequenzvektor t Zeitvektor p Ergebnismatrix der spektralen Leistungsdichte (Optional)
Anhand des Demosignals 15cw soll im Folgenden die Anwendung der MATLAB-Funktion spectrogram erleutert werden.
Der zugehörige MATLAB-Programmcode steht unter http://schwingungsanalyse.com im Bereich Praktika - Schwingungsanalyse zum Download zur Verfügung.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse44
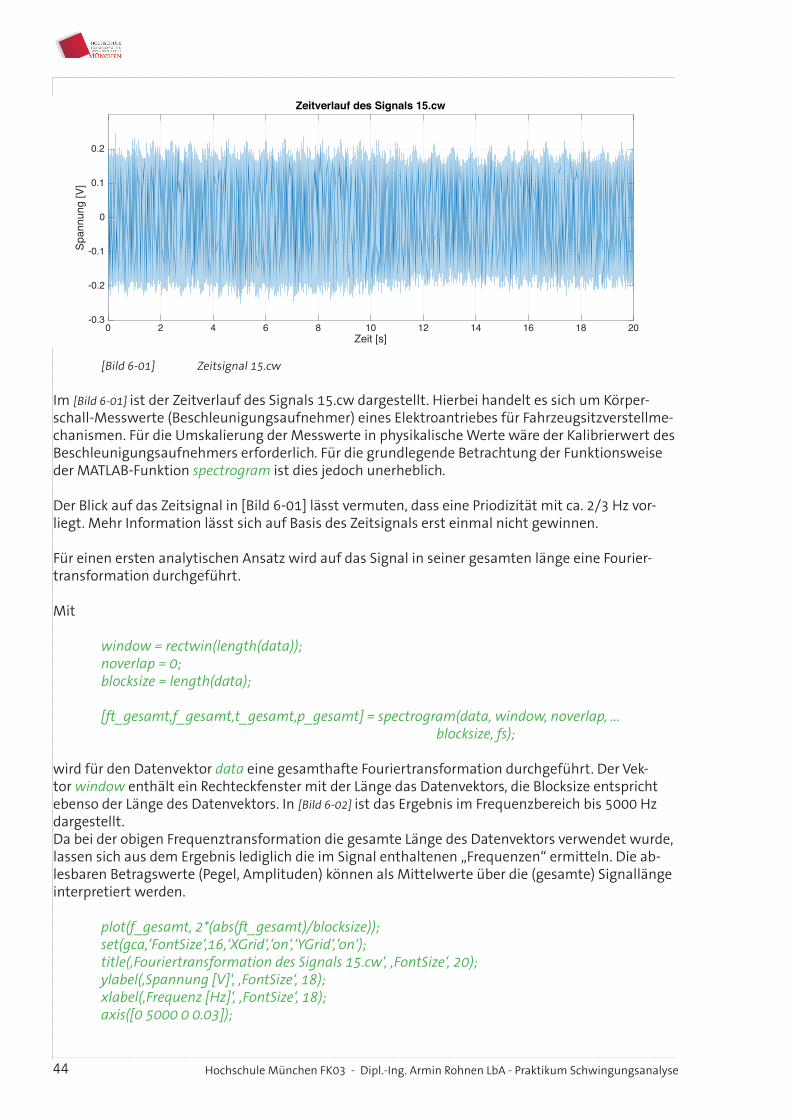
[Bild 6-01] Zeitsignal 15.cw
Im [Bild 6-01] ist der Zeitverlauf des Signals 15.cw dargestellt. Hierbei handelt es sich um Körper-schall-Messwerte (Beschleunigungsaufnehmer) eines Elektroantriebes für Fahrzeugsitzverstellme-chanismen. Für die Umskalierung der Messwerte in physikalische Werte wäre der Kalibrierwert des Beschleunigungsaufnehmers erforderlich. Für die grundlegende Betrachtung der Funktionsweise der MATLAB-Funktion spectrogram ist dies jedoch unerheblich.
Der Blick auf das Zeitsignal in [Bild 6-01] lässt vermuten, dass eine Priodizität mit ca. 2/3 Hz vor-liegt. Mehr Information lässt sich auf Basis des Zeitsignals erst einmal nicht gewinnen.
Für einen ersten analytischen Ansatz wird auf das Signal in seiner gesamten länge eine Fourier-transformation durchgeführt.
Mit
window = rectwin(length(data)); noverlap = 0; blocksize = length(data);
[ft_gesamt,f_gesamt,t_gesamt,p_gesamt] = spectrogram(data, window, noverlap, ... blocksize, fs);
wird für den Datenvektor data eine gesamthafte Fouriertransformation durchgeführt. Der Vek-tor window enthält ein Rechteckfenster mit der Länge das Datenvektors, die Blocksize entspricht ebenso der Länge des Datenvektors. In [Bild 6-02] ist das Ergebnis im Frequenzbereich bis 5000 Hz dargestellt.Da bei der obigen Frequenztransformation die gesamte Länge des Datenvektors verwendet wurde, lassen sich aus dem Ergebnis lediglich die im Signal enthaltenen „Frequenzen“ ermitteln. Die ab-lesbaren Betragswerte (Pegel, Amplituden) können als Mittelwerte über die (gesamte) Signallänge interpretiert werden.
plot(f_gesamt, 2*(abs(ft_gesamt)/blocksize)); set(gca,‘FontSize‘,16,‘XGrid‘,‘on‘,‘YGrid‘,‘on‘); title(‚Fouriertransformation des Signals 15.cw‘, ‚FontSize‘, 20); ylabel(‚Spannung [V]‘, ‚FontSize‘, 18); xlabel(‚Frequenz [Hz]‘, ‚FontSize‘, 18); axis([0 5000 0 0.03]);
0 2 4 6 8 10 12 14 16 18 20Zeit [s]
-0.3
-0.2
-0.1
0
0.1
0.2
Span
nung
[V]
Zeitverlauf des Signals 15.cw
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 45
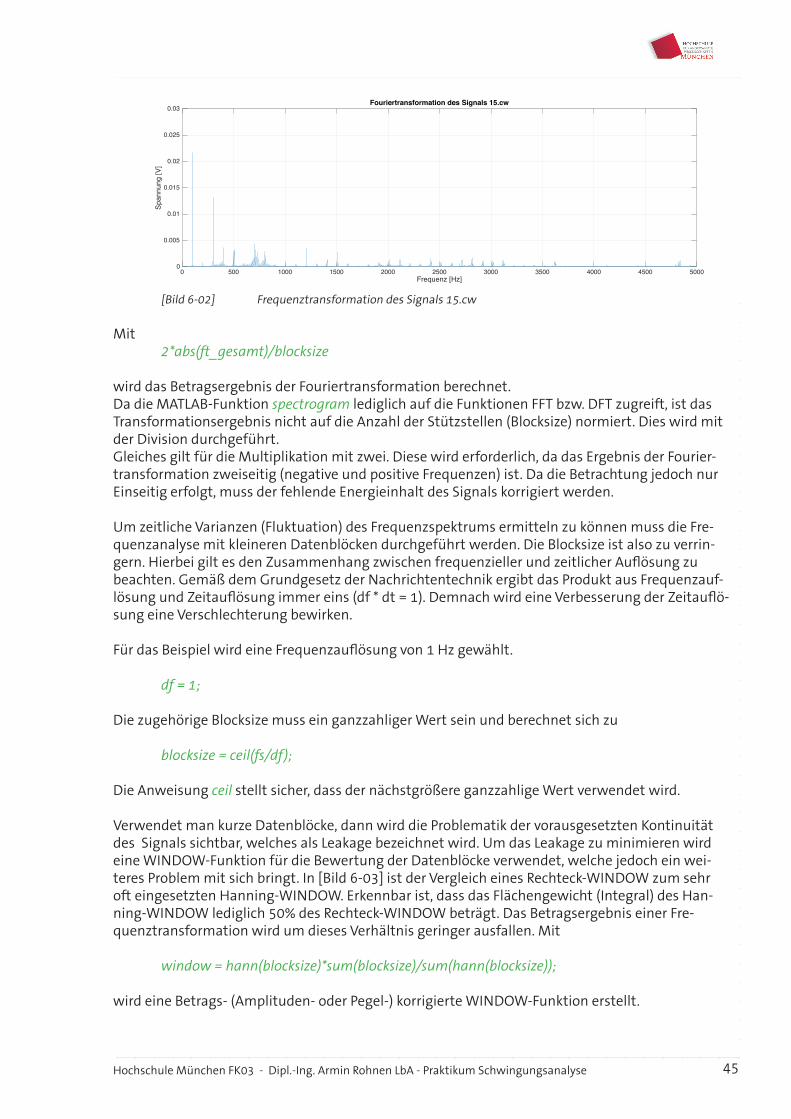
[Bild 6-02] Frequenztransformation des Signals 15.cw
Mit 2*abs(ft_gesamt)/blocksize
wird das Betragsergebnis der Fouriertransformation berechnet. Da die MATLAB-Funktion spectrogram lediglich auf die Funktionen FFT bzw. DFT zugreift, ist das Transformationsergebnis nicht auf die Anzahl der Stützstellen (Blocksize) normiert. Dies wird mit der Division durchgeführt.Gleiches gilt für die Multiplikation mit zwei. Diese wird erforderlich, da das Ergebnis der Fourier-transformation zweiseitig (negative und positive Frequenzen) ist. Da die Betrachtung jedoch nur Einseitig erfolgt, muss der fehlende Energieinhalt des Signals korrigiert werden.
Um zeitliche Varianzen (Fluktuation) des Frequenzspektrums ermitteln zu können muss die Fre-quenzanalyse mit kleineren Datenblöcken durchgeführt werden. Die Blocksize ist also zu verrin-gern. Hierbei gilt es den Zusammenhang zwischen frequenzieller und zeitlicher Auflösung zu beachten. Gemäß dem Grundgesetz der Nachrichtentechnik ergibt das Produkt aus Frequenzauf-lösung und Zeitauflösung immer eins (df * dt = 1). Demnach wird eine Verbesserung der Zeitauflö-sung eine Verschlechterung bewirken.
Für das Beispiel wird eine Frequenzauflösung von 1 Hz gewählt.
df = 1;
Die zugehörige Blocksize muss ein ganzzahliger Wert sein und berechnet sich zu
blocksize = ceil(fs/df);
Die Anweisung ceil stellt sicher, dass der nächstgrößere ganzzahlige Wert verwendet wird.
Verwendet man kurze Datenblöcke, dann wird die Problematik der vorausgesetzten Kontinuität des Signals sichtbar, welches als Leakage bezeichnet wird. Um das Leakage zu minimieren wird eine WINDOW-Funktion für die Bewertung der Datenblöcke verwendet, welche jedoch ein wei-teres Problem mit sich bringt. In [Bild 6-03] ist der Vergleich eines Rechteck-WINDOW zum sehr oft eingesetzten Hanning-WINDOW. Erkennbar ist, dass das Flächengewicht (Integral) des Han-ning-WINDOW lediglich 50% des Rechteck-WINDOW beträgt. Das Betragsergebnis einer Fre-quenztransformation wird um dieses Verhältnis geringer ausfallen. Mit
window = hann(blocksize)*sum(blocksize)/sum(hann(blocksize));
wird eine Betrags- (Amplituden- oder Pegel-) korrigierte WINDOW-Funktion erstellt.
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000Frequenz [Hz]
0
0.005
0.01
0.015
0.02
0.025
0.03
Span
nung
[V]
Fouriertransformation des Signals 15.cw
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse46
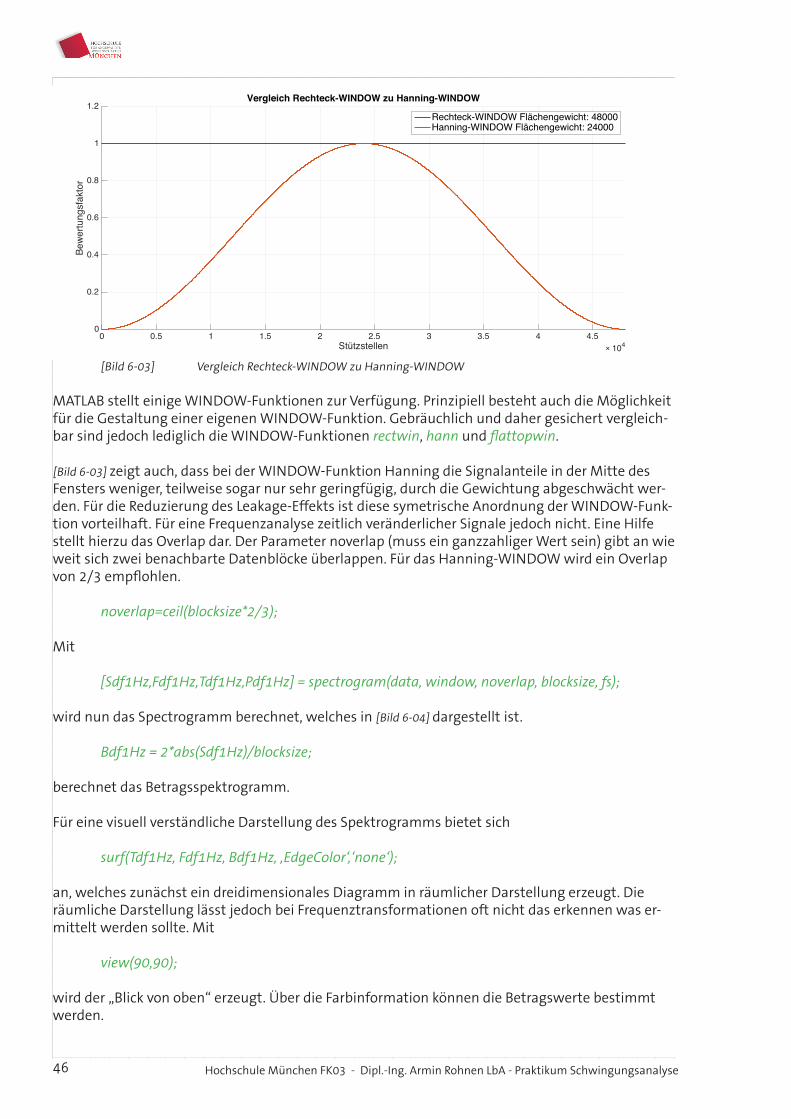
[Bild 6-03] Vergleich Rechteck-WINDOW zu Hanning-WINDOW
MATLAB stellt einige WINDOW-Funktionen zur Verfügung. Prinzipiell besteht auch die Möglichkeit für die Gestaltung einer eigenen WINDOW-Funktion. Gebräuchlich und daher gesichert vergleich-bar sind jedoch lediglich die WINDOW-Funktionen rectwin, hann und flattopwin.
[Bild 6-03] zeigt auch, dass bei der WINDOW-Funktion Hanning die Signalanteile in der Mitte des Fensters weniger, teilweise sogar nur sehr geringfügig, durch die Gewichtung abgeschwächt wer-den. Für die Reduzierung des Leakage-Effekts ist diese symetrische Anordnung der WINDOW-Funk-tion vorteilhaft. Für eine Frequenzanalyse zeitlich veränderlicher Signale jedoch nicht. Eine Hilfe stellt hierzu das Overlap dar. Der Parameter noverlap (muss ein ganzzahliger Wert sein) gibt an wie weit sich zwei benachbarte Datenblöcke überlappen. Für das Hanning-WINDOW wird ein Overlap von 2/3 empflohlen.
noverlap=ceil(blocksize*2/3);
Mit
[Sdf1Hz,Fdf1Hz,Tdf1Hz,Pdf1Hz] = spectrogram(data, window, noverlap, blocksize, fs);
wird nun das Spectrogramm berechnet, welches in [Bild 6-04] dargestellt ist.
Bdf1Hz = 2*abs(Sdf1Hz)/blocksize;
berechnet das Betragsspektrogramm.
Für eine visuell verständliche Darstellung des Spektrogramms bietet sich surf(Tdf1Hz, Fdf1Hz, Bdf1Hz, ‚EdgeColor‘,‘none‘);
an, welches zunächst ein dreidimensionales Diagramm in räumlicher Darstellung erzeugt. Die räumliche Darstellung lässt jedoch bei Frequenztransformationen oft nicht das erkennen was er-mittelt werden sollte. Mit
view(90,90);
wird der „Blick von oben“ erzeugt. Über die Farbinformation können die Betragswerte bestimmt werden.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5Stützstellen × 104
0
0.2
0.4
0.6
0.8
1
1.2
Bew
ertu
ngsf
akto
r
Vergleich Rechteck-WINDOW zu Hanning-WINDOW
Rechteck-WINDOW Flächengewicht: 48000Hanning-WINDOW Flächengewicht: 24000
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 47
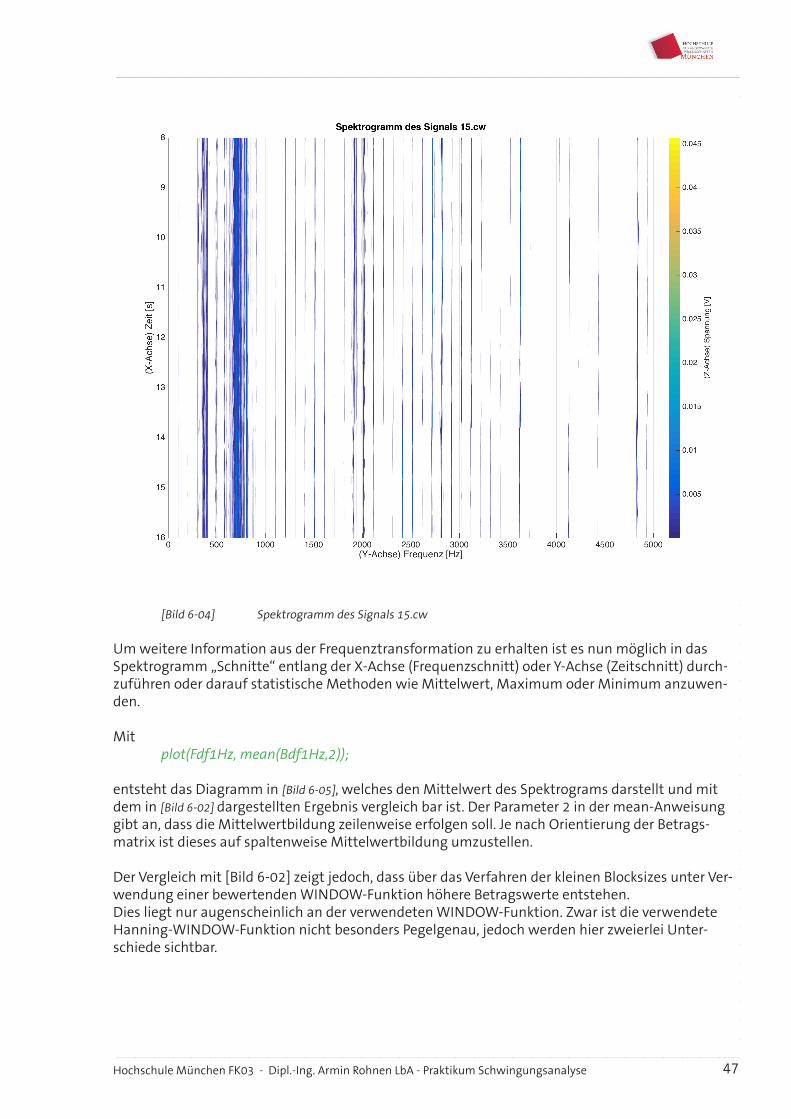
[Bild 6-04] Spektrogramm des Signals 15.cw
Um weitere Information aus der Frequenztransformation zu erhalten ist es nun möglich in das Spektrogramm „Schnitte“ entlang der X-Achse (Frequenzschnitt) oder Y-Achse (Zeitschnitt) durch-zuführen oder darauf statistische Methoden wie Mittelwert, Maximum oder Minimum anzuwen-den.
Mit plot(Fdf1Hz, mean(Bdf1Hz,2));
entsteht das Diagramm in [Bild 6-05], welches den Mittelwert des Spektrograms darstellt und mit dem in [Bild 6-02] dargestellten Ergebnis vergleich bar ist. Der Parameter 2 in der mean-Anweisung gibt an, dass die Mittelwertbildung zeilenweise erfolgen soll. Je nach Orientierung der Betrags-matrix ist dieses auf spaltenweise Mittelwertbildung umzustellen.
Der Vergleich mit [Bild 6-02] zeigt jedoch, dass über das Verfahren der kleinen Blocksizes unter Ver-wendung einer bewertenden WINDOW-Funktion höhere Betragswerte entstehen.Dies liegt nur augenscheinlich an der verwendeten WINDOW-Funktion. Zwar ist die verwendete Hanning-WINDOW-Funktion nicht besonders Pegelgenau, jedoch werden hier zweierlei Unter-schiede sichtbar.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse48
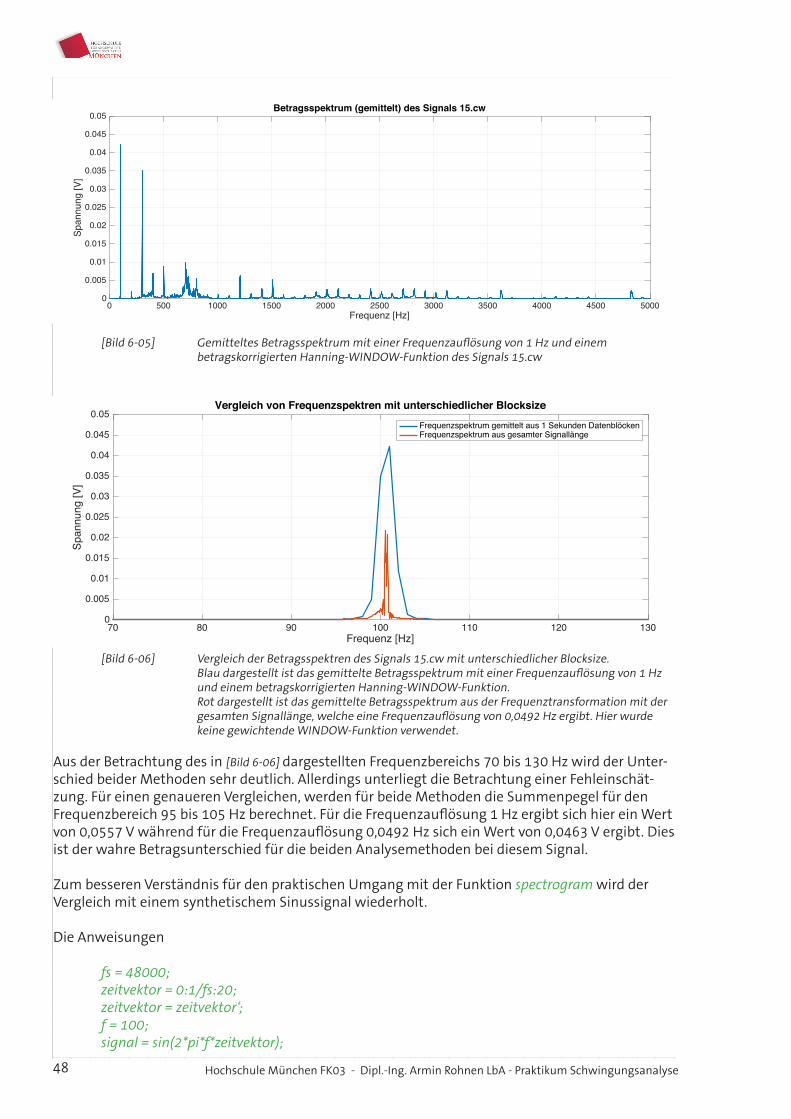
[Bild 6-05] Gemitteltes Betragsspektrum mit einer Frequenzauflösung von 1 Hz und einem betragskorrigierten Hanning-WINDOW-Funktion des Signals 15.cw
[Bild 6-06] Vergleich der Betragsspektren des Signals 15.cw mit unterschiedlicher Blocksize. Blau dargestellt ist das gemittelte Betragsspektrum mit einer Frequenzauflösung von 1 Hz und einem betragskorrigierten Hanning-WINDOW-Funktion. Rot dargestellt ist das gemittelte Betragsspektrum aus der Frequenztransformation mit der gesamten Signallänge, welche eine Frequenzauflösung von 0,0492 Hz ergibt. Hier wurde keine gewichtende WINDOW-Funktion verwendet.
Aus der Betrachtung des in [Bild 6-06] dargestellten Frequenzbereichs 70 bis 130 Hz wird der Unter-schied beider Methoden sehr deutlich. Allerdings unterliegt die Betrachtung einer Fehleinschät-zung. Für einen genaueren Vergleichen, werden für beide Methoden die Summenpegel für den Frequenzbereich 95 bis 105 Hz berechnet. Für die Frequenzauflösung 1 Hz ergibt sich hier ein Wert von 0,0557 V während für die Frequenzauflösung 0,0492 Hz sich ein Wert von 0,0463 V ergibt. Dies ist der wahre Betragsunterschied für die beiden Analysemethoden bei diesem Signal.
Zum besseren Verständnis für den praktischen Umgang mit der Funktion spectrogram wird der Vergleich mit einem synthetischem Sinussignal wiederholt.
Die Anweisungen
fs = 48000; zeitvektor = 0:1/fs:20; zeitvektor = zeitvektor‘; f = 100; signal = sin(2*pi*f*zeitvektor);
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000Frequenz [Hz]
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0.05
Span
nung
[V]
Betragsspektrum (gemittelt) des Signals 15.cw
70 80 90 100 110 120 130Frequenz [Hz]
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0.05
Span
nung
[V]
Vergleich von Frequenzspektren mit unterschiedlicher BlocksizeFrequenzspektrum gemittelt aus 1 Sekunden DatenblöckenFrequenzspektrum aus gesamter Signallänge
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 49
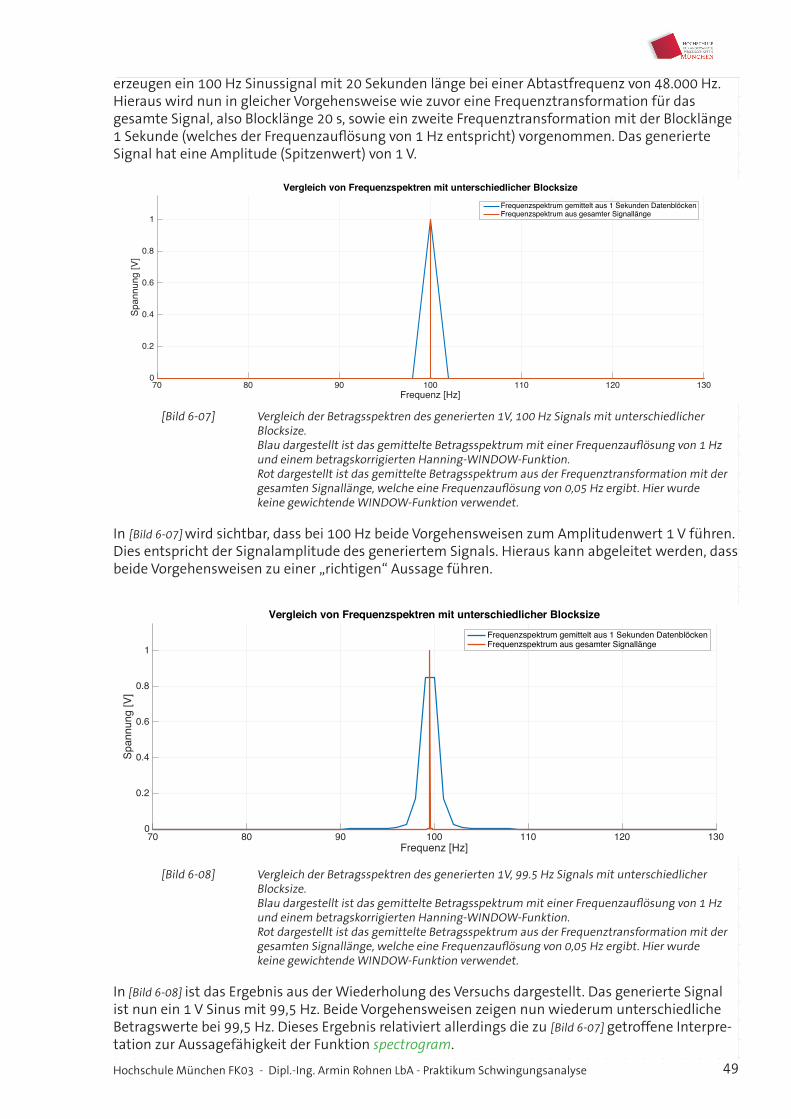
erzeugen ein 100 Hz Sinussignal mit 20 Sekunden länge bei einer Abtastfrequenz von 48.000 Hz.Hieraus wird nun in gleicher Vorgehensweise wie zuvor eine Frequenztransformation für das gesamte Signal, also Blocklänge 20 s, sowie ein zweite Frequenztransformation mit der Blocklänge 1 Sekunde (welches der Frequenzauflösung von 1 Hz entspricht) vorgenommen. Das generierte Signal hat eine Amplitude (Spitzenwert) von 1 V.
[Bild 6-07] Vergleich der Betragsspektren des generierten 1V, 100 Hz Signals mit unterschiedlicher Blocksize. Blau dargestellt ist das gemittelte Betragsspektrum mit einer Frequenzauflösung von 1 Hz und einem betragskorrigierten Hanning-WINDOW-Funktion. Rot dargestellt ist das gemittelte Betragsspektrum aus der Frequenztransformation mit der gesamten Signallänge, welche eine Frequenzauflösung von 0,05 Hz ergibt. Hier wurde keine gewichtende WINDOW-Funktion verwendet.
In [Bild 6-07] wird sichtbar, dass bei 100 Hz beide Vorgehensweisen zum Amplitudenwert 1 V führen. Dies entspricht der Signalamplitude des generiertem Signals. Hieraus kann abgeleitet werden, dass beide Vorgehensweisen zu einer „richtigen“ Aussage führen.
[Bild 6-08] Vergleich der Betragsspektren des generierten 1V, 99.5 Hz Signals mit unterschiedlicher Blocksize. Blau dargestellt ist das gemittelte Betragsspektrum mit einer Frequenzauflösung von 1 Hz und einem betragskorrigierten Hanning-WINDOW-Funktion. Rot dargestellt ist das gemittelte Betragsspektrum aus der Frequenztransformation mit der gesamten Signallänge, welche eine Frequenzauflösung von 0,05 Hz ergibt. Hier wurde keine gewichtende WINDOW-Funktion verwendet.
In [Bild 6-08] ist das Ergebnis aus der Wiederholung des Versuchs dargestellt. Das generierte Signal ist nun ein 1 V Sinus mit 99,5 Hz. Beide Vorgehensweisen zeigen nun wiederum unterschiedliche Betragswerte bei 99,5 Hz. Dieses Ergebnis relativiert allerdings die zu [Bild 6-07] getroffene Interpre-tation zur Aussagefähigkeit der Funktion spectrogram.
70 80 90 100 110 120 130Frequenz [Hz]
0
0.2
0.4
0.6
0.8
1
Span
nung
[V]
Vergleich von Frequenzspektren mit unterschiedlicher Blocksize
Frequenzspektrum gemittelt aus 1 Sekunden DatenblöckenFrequenzspektrum aus gesamter Signallänge
70 80 90 100 110 120 130Frequenz [Hz]
0
0.2
0.4
0.6
0.8
1
Span
nung
[V]
Vergleich von Frequenzspektren mit unterschiedlicher Blocksize
Frequenzspektrum gemittelt aus 1 Sekunden DatenblöckenFrequenzspektrum aus gesamter Signallänge
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse50
Wie können die Ergebnisse der Funktion spectrogram interpretiert werden?
Die Ergebnisse der Funktion spectrogram sind gleichwertig zu den Ergebnissen vergleichbarer MATLAB-Funktionen wie fft oder dft.
Das Ergebnis einer Fouriertransformation ist von mehreren Parametern abhängig. Um vergleich-bare Ergebnisse zu erhalten ist Konsens über die Parametrierung der Fouriertransformation sowie über den Messprozess zwingend erforderlich. Abweichungen im Messprozess und/oder in der Para-metrierung der Fouriertransformation führen zwangsläufig zu unterschiedlichen Ergebnissen.
Anzustreben ist, möglichst nahe an das „wahre“ Ergebnis heran zu kommen.
Das zu analysierende Signal selbst sowie die Abtastrate, die Blocklänge und die verwendete WINDOW-Funktion beeinflussen das numerische Ergebnis der Fouriertransformation.
Die ermittelten Werte eines Betragsspektrums sind immer als Mittelwert über die Blocklänge zu in-terpretieren. Hieraus ergibt sich, dass für kontinuierliche Signale - wie zum Beispiel das generierte Sinussignal - große Blocklängen mit kleinen Delta-f für die genaue Ermittlung von Betragswerten von Vorteil sind. Im Umkehrschluss benötigt man für fluktuierende Signale oder Kurzzeitereignisse möglichst kurze Datenblöcke, welches zu großem Delta-f führt.
Ermittelte Werte stellen das Ergebnis für den Frequenzbereich Delta-f dar, denn die Fouriertrans-formation erfolgt für Frequenzbereiche. Sie geht dabei von dem Vorhandensein sinusförmiger Signalverläufe aus. Je kürzer die Blocklänge, desto breiter der Frequenzbereich. Desto weniger gilt die Annahme, der abgelesene Betragswert sei die Amplitude einer Sinusschwingung.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 51
7 Datenerfassung mit MATLAB
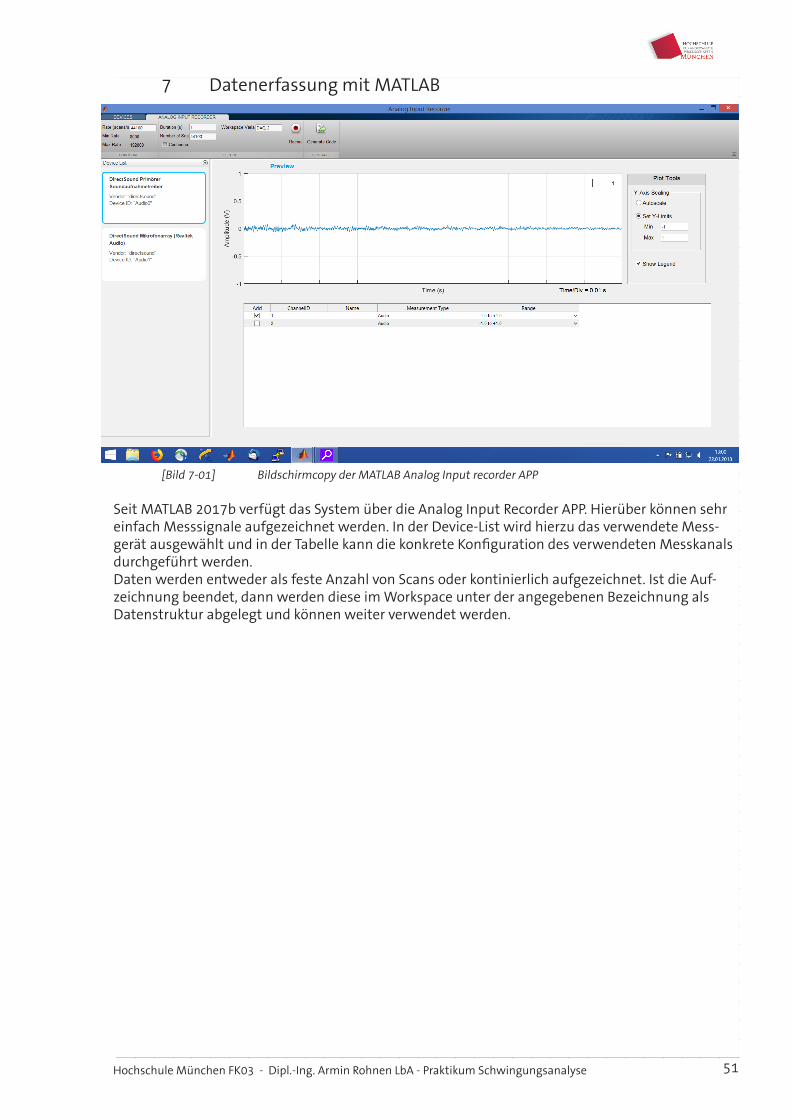
[Bild 7-01] Bildschirmcopy der MATLAB Analog Input recorder APP
Seit MATLAB 2017b verfügt das System über die Analog Input Recorder APP. Hierüber können sehr einfach Messsignale aufgezeichnet werden. In der Device-List wird hierzu das verwendete Mess-gerät ausgewählt und in der Tabelle kann die konkrete Konfiguration des verwendeten Messkanals durchgeführt werden.Daten werden entweder als feste Anzahl von Scans oder kontinierlich aufgezeichnet. Ist die Auf-zeichnung beendet, dann werden diese im Workspace unter der angegebenen Bezeichnung als Datenstruktur abgelegt und können weiter verwendet werden.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse52
8 Anwendungsbeispiel - Spieluhren
Es stehen vier verschiedene Spieluhren für eine vergleichende Analyse zur Verfügung. Der me-chanische Aufbau der Spieluhren ist jeweils gleich. Durch die Gestaltung der Melodie-Walze wird erreicht, dass jede Spieluhr ihre eigene Musik abspielt. Die Melodien weisen eine Spielzeit von ca. 15 Sekunden auf.
Aufgabe 1 – Signale mit einem Mikrofon erfassen
Für die Datenerfassung steht eine externe Soundkarte und ein XLR-Messmikrofon zur Verfügung.Über die MATLAB Analog Input Recorder App werden die Daten erfasst.
Um aus den Messwerten Schalldruckpegel berechnen zu können ist eine Messung des Referenzpe-gels mit 94 dB (RMS) bzw. 1 Pa (RMS) Schalldruck erforderlich.
Aufgabe 2 – Bestimmung der Töne (Frequenzen) der Spieluhren
Die Frequenzanalyse erfolgt auf Basis der Fouriertransformation. Für die Berechnung der Fourier-transformation als einzelne oder des Spektrogramms als gesamte Signalanalyse ist die Festlegung einiger Parameter erforderlich. Näheres hierzu im Kapitel Schwingungsanalyse mit MATLAB.
Aufgabe 3 – Erstellung eines Versuchsberichts
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 53
9 Anwendungsbeispiel - Kennwerte Beschleunigungsaufnehmer
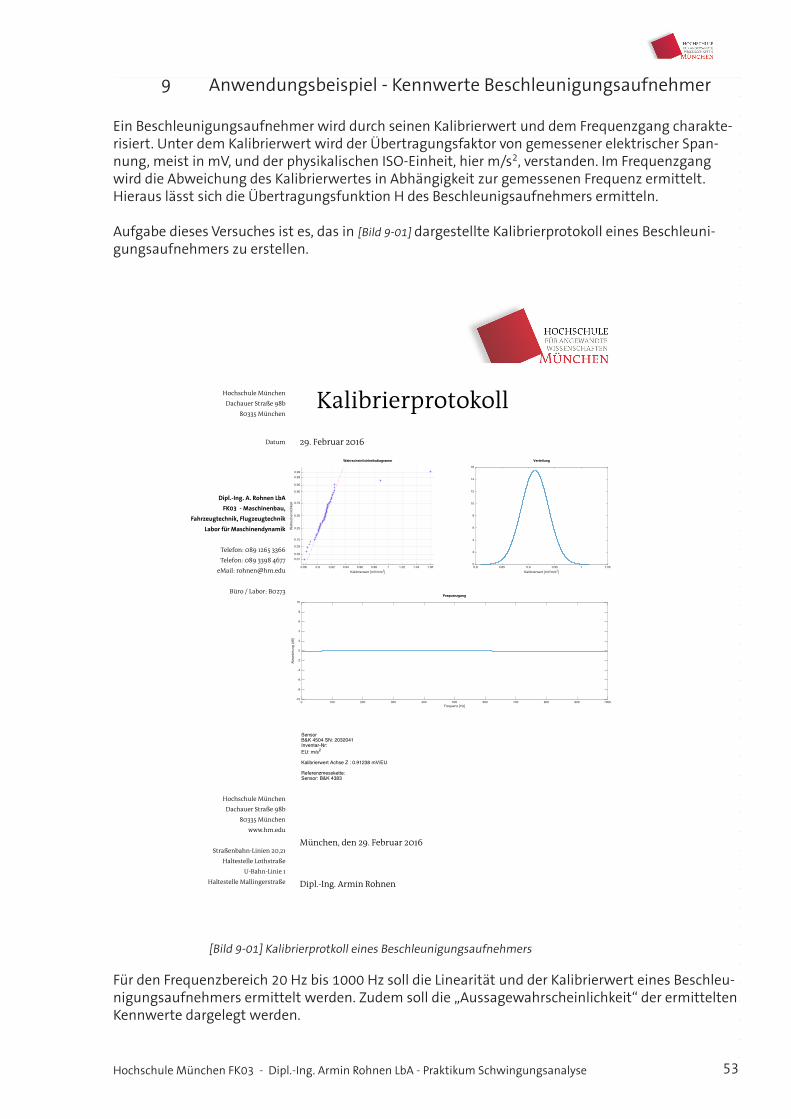
Ein Beschleunigungsaufnehmer wird durch seinen Kalibrierwert und dem Frequenzgang charakte-risiert. Unter dem Kalibrierwert wird der Übertragungsfaktor von gemessener elektrischer Span-nung, meist in mV, und der physikalischen ISO-Einheit, hier m/s2, verstanden. Im Frequenzgang wird die Abweichung des Kalibrierwertes in Abhängigkeit zur gemessenen Frequenz ermittelt. Hieraus lässt sich die Übertragungsfunktion H des Beschleunigsaufnehmers ermitteln.
Aufgabe dieses Versuches ist es, das in [Bild 9-01] dargestellte Kalibrierprotokoll eines Beschleuni-gungsaufnehmers zu erstellen.
[Bild 9-01] Kalibrierprotkoll eines Beschleunigungsaufnehmers
Für den Frequenzbereich 20 Hz bis 1000 Hz soll die Linearität und der Kalibrierwert eines Beschleu-nigungsaufnehmers ermittelt werden. Zudem soll die „Aussagewahrscheinlichkeit“ der ermittelten Kennwerte dargelegt werden.
0.88 0.9 0.92 0.94 0.96 0.98 1 1.02 1.04 1.06Kalibrierwert [mV/m/s2]
0.010.02
0.05
0.10
0.25
0.50
0.75
0.90
0.95
0.980.99
Wah
rsch
einl
ichk
eit
Wahrscheinlichkeitsdiagramm
0.8 0.85 0.9 0.95 1 1.05Kalibrierwert [mV/m/s2]
0
2
4
6
8
10
12
14
16
Verteilung
0 100 200 300 400 500 600 700 800 900 1000Frequenz [Hz]
-10
-8
-6
-4
-2
0
2
4
6
8
10
Abw
eich
ung
[dB]
Frequenzgang
Sensor B&K 4504 SN: 2032041Inventar-Nr: EU: m/s2
Kalibrierwert Achse Z : 0.91238 mV/EU
Referenzmesskette:Sensor: B&K 4383
Hochschule München
Dachauer Straße 98b
80335 München
Datum
Dipl.-Ing. A. Rohnen LbA
FK03 - Maschinenbau,
Fahrzeugtechnik, Flugzeugtechnik
Labor für Maschinendynamik
Telefon: 089 1265 3366
Telefon: 089 3398 4677
eMail: [email protected]
Büro / Labor: B0273
Hochschule München
Dachauer Straße 98b
80335 München
www.hm.edu
Straßenbahn-Linien 20,21
Haltestelle Lothstraße
U-Bahn-Linie 1
Haltestelle Mallingerstraße
Kalibrierprotokoll
29. Februar 2016
München, den 29. Februar 2016
Dipl.-Ing. Armin Rohnen
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse54
Für die Durchführung des Versuchs steht ein Shaker nebst Leistungsverstärker, ein Signalgenerator sowie ein Referenzbeschleunigungssensor zur Verfügung.
Über eine MATLAB-Funktion werden die für die jeweilige Prüffrequenz erforderlichen Sollwerte in Frequenz und Amplitude durch den HP 8904A Synthesizer generiert. Der B&K Power Amplifier verstärkt das elektrische Soll-Signal, so dass der Shaker, in den Grenzen seiner Leistungsfähigkeit, eine mechanische Schwingung erzeugen kann. Eine mechanische Überlastung des Shakers, zum Beispiel durch eine auf dem Hubkolben angebrachte zu hohe Gesamtmasse, führt zu einem unsau-beren Signalverlauf und kann dauerhaft den Shaker beschädigen.
Die auf dem Hubkolben angebrachten Referenzsensoren dienen dazu, dass die MATLAB-Funktion die jeweilige Prüffrequenz und Prüfamplitude einregeln kann, sowie als Vergleichs bzw. Referenz-werte für den zu kalibrierenden Sensor. Letztlich wird bei der Kalibrierung ein Vergleich zwischen Referenzsensoren und Prüfsensoren durchgeführt.
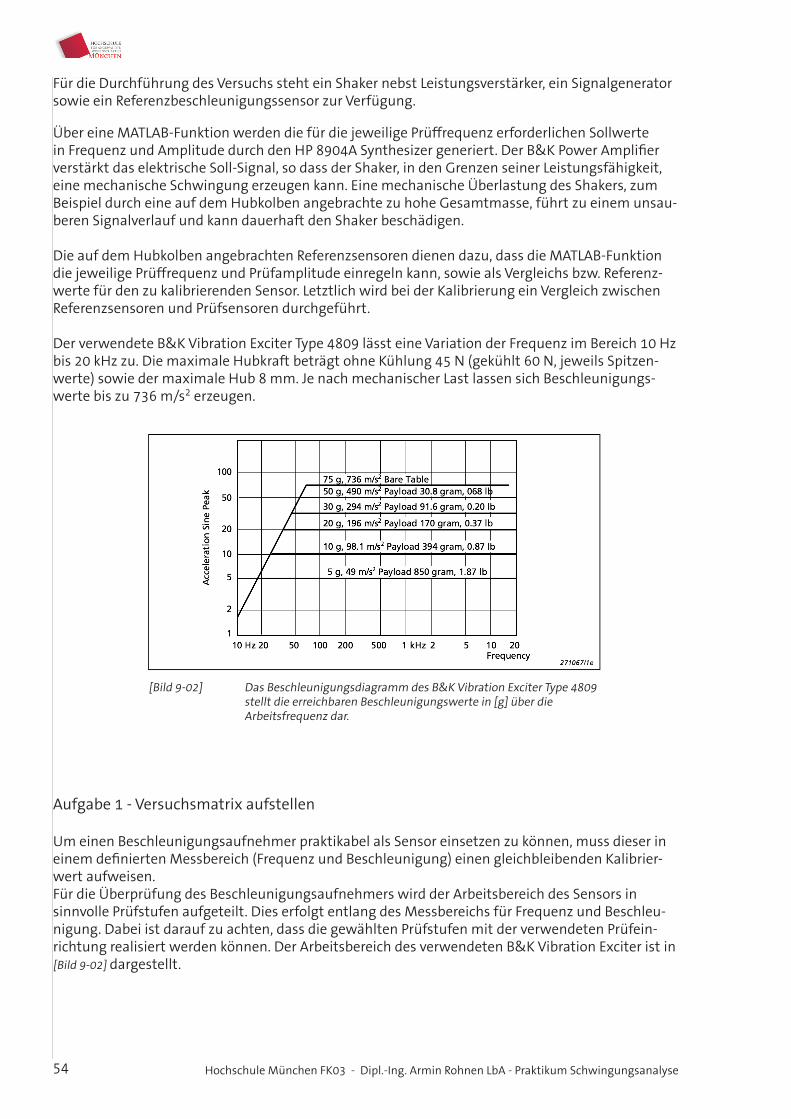
Der verwendete B&K Vibration Exciter Type 4809 lässt eine Variation der Frequenz im Bereich 10 Hz bis 20 kHz zu. Die maximale Hubkraft beträgt ohne Kühlung 45 N (gekühlt 60 N, jeweils Spitzen-werte) sowie der maximale Hub 8 mm. Je nach mechanischer Last lassen sich Beschleunigungs-werte bis zu 736 m/s2 erzeugen.
[Bild 9-02] Das Beschleunigungsdiagramm des B&K Vibration Exciter Type 4809 stellt die erreichbaren Beschleunigungswerte in [g] über die Arbeitsfrequenz dar.
Aufgabe 1 - Versuchsmatrix aufstellen
Um einen Beschleunigungsaufnehmer praktikabel als Sensor einsetzen zu können, muss dieser in einem definierten Messbereich (Frequenz und Beschleunigung) einen gleichbleibenden Kalibrier-wert aufweisen.Für die Überprüfung des Beschleunigungsaufnehmers wird der Arbeitsbereich des Sensors in sinnvolle Prüfstufen aufgeteilt. Dies erfolgt entlang des Messbereichs für Frequenz und Beschleu-nigung. Dabei ist darauf zu achten, dass die gewählten Prüfstufen mit der verwendeten Prüfein-richtung realisiert werden können. Der Arbeitsbereich des verwendeten B&K Vibration Exciter ist in [Bild 9-02] dargestellt.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 55
Aufgabe 2 - Durchführung der Kalibriermessungen
Für die Durchführung der Kalibriermessungen ist einmalig ein SETUP der Prüfeinrichtung erforder-lich. Jede der einzelnen Prüfstufen wird über eine Regelschleife in Frequenz und Beschleunigungs-amplitude eingestellt. In der Frequenz folgt der Shaker dem Soll-Signal ohne Einschränkungen. In der Beschleunigungsamplitude muss ein Regelkreis den gewünschten Sollwert einregeln. Da der Messwert des Prüflings mit dem Messwert des Referenzsensors verglichen wird, bestehen keine besonders großen Anforderungen an die Pegelgenauigkeit der Beschleunigungsamplitude. Eine Pegelgenauigkeit von 10% ist ausreichend. Diese Rahmenbedingung reduziert den Zeitaufwand für die Messungen erheblich.
function [messgeraet, hpib, fs, kalibrierwert] = setup()
Die MATLAB-Funktion setup(), welche sich im Zugriff befinden muss, führt das Mess-Setup durch. Diese Funktion ist bei anderweitiger Verwendung entsprechend der Konfiguration des Messauf-baus anzupassen. Es ist ratsam, diese Funktion in das gerade aktuelle MATLAB-Arbeitsverzeichnis zu kopieren.
Mit
[messgeraet, hpib, fs, kalibrierwert] = setup;
erfolgt der Aufruf der Funktion und das Setup der Kalibriermessung. Diese liefert insgesamt vier Parameter als Antwort zurück.
Damit sind die Vorbereitungen für die Kalibriermessung abgeschlossen.
Das Einregeln der Prüfstufe erfolgt durch die MATLAB-Funktion pegelschleife.
Mit der Codesequenz
stufe = 9; % Nr der aktuellen Prüfstufe fsoll = 1000; % Sollwert für die Frequenz soll =50; % Sollwert in m/s^2 tol =0.1; % Toleranz für den Beschleunigungswert verstaerkung = 0.4; % Startwert für den Verstärkungsfaktor Generator zu Beschleunigung chan_ref = 3; % Messkanal Nr für den Referenzsensor chan_synth = 2; % Messkanal Nr für den Signalgenerator chan_mess=1; %MesskanalNrfürdenPrüfling
disp(‚Messung startet‘);
[y, Daten, Zeit] = pegelschleife(soll, tol, fsoll, verstaerkung, fs, kalibrierwert, synth, messgeraet, chan_ref, chan_synth, chan_mess);
kann nun für jede Kalibrierstufe ein Regelungs- und Messdurchlauf durchgeführt werden. Die Funktion liefert in y und Data das Messergebnis.
y enthält die Werte aus den durchgeführten Regelungsschleifen. Der darin abgelegten werte sind lediglich zur Überprüfung des Regelungsverhatens der Shakersteuerung erforderlich.
Data enthält den Datenstrom der letzten Schleife der Pegelregelung. Hierin befinden sich demnach die Daten, welche für diese Kalibrierstufe gültig sind.
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse56
Mit
ergebnis(stufe).Daten = Daten; ergebnis(stufe).Zeit = Zeit; ergebnis(stufe).y = y; ergebnis(stufe).soll = soll; ergebnis(stufe).fsoll = fsoll; ergebnis(stufe).chan_generator = chan_synth; ergebnis(stufe).chan_referenz = chan_ref; ergebnis(stufe).chan_pruefling=chan_mess; ergebnis(stufe).kalibrierwerte = kalibrierwert;
werden die Messwerte der einzelnen Kalibrierstufen in einem MATLAB-Struct abgelegt.
Nach Beendigung der letzten Kalibrierstufe sollte mit
fprintf(hpib,[‚APA‘ num2str(0) ‚MV‘]);
der Shaker abgeschaltet werden.
Aufgabe 3 - Auswertung der Messdaten
Für die Auswertung der Messdaten werden FT-Spektren aus dem Datenstrom des Referenzsignals und des Prüflings benötigt. Der Kalibrierwert des Prüflings berechnet sich aus der Division des ermittelten Spannungswerts des Prüflings in Millivolt mit dem ermittelten Beschleunigungswerts des Referenzsensors in m/s2.
Der Mittelwert des Kalibrierwertes, berechnet über alle Kalibrierstufen, repräsentiert den Kalibrier-wert des Sensors. Zu prüfen ist, ob es sich bei der Ermittlung des Kalibrierwertes um Messwerte mit Normalverteilung handelt, oder ob es zu einzelnen Messwertausreißern gekommen ist.
Mit der Anweisung normplot( ... ) wird ein Diagramm erstellt, welches zur Darstellung bzw. Begut-achtung der Normalverteilung von (streuenden) Werten dient.
Nachdem die Normalverteilung festgestellt wurde, kann mit der MATLAB-Anweisung plot(xachse,normpdf(xachse, kalibrierwert, abweichung),‘LineWidth‘,2)
die Glockenkurve der Normalverteilung dargestellt werden.
Aufgabe 4 - Erstellung eines Berichtes
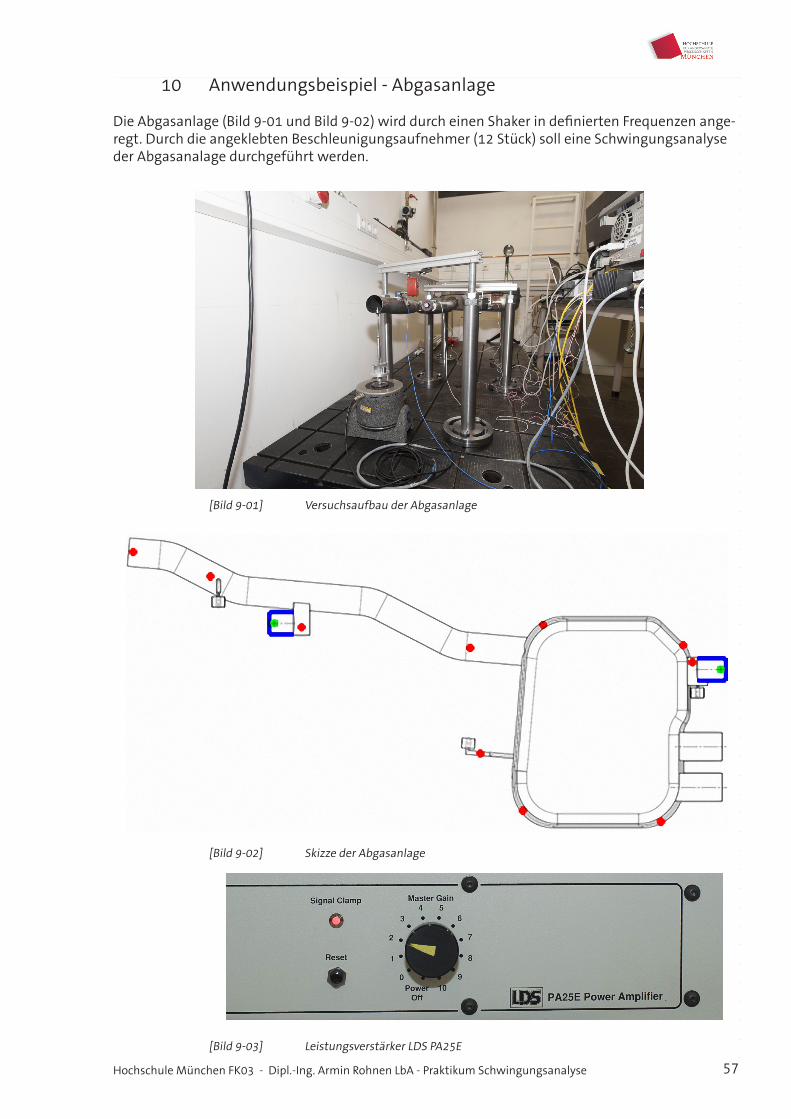
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 57
10 Anwendungsbeispiel - Abgasanlage
Die Abgasanlage (Bild 9-01 und Bild 9-02) wird durch einen Shaker in definierten Frequenzen ange-regt. Durch die angeklebten Beschleunigungsaufnehmer (12 Stück) soll eine Schwingungsanalyse der Abgasanalage durchgeführt werden.
[Bild 9-01] Versuchsaufbau der Abgasanlage
[Bild 9-02] Skizze der Abgasanlage
[Bild 9-03] Leistungsverstärker LDS PA25E
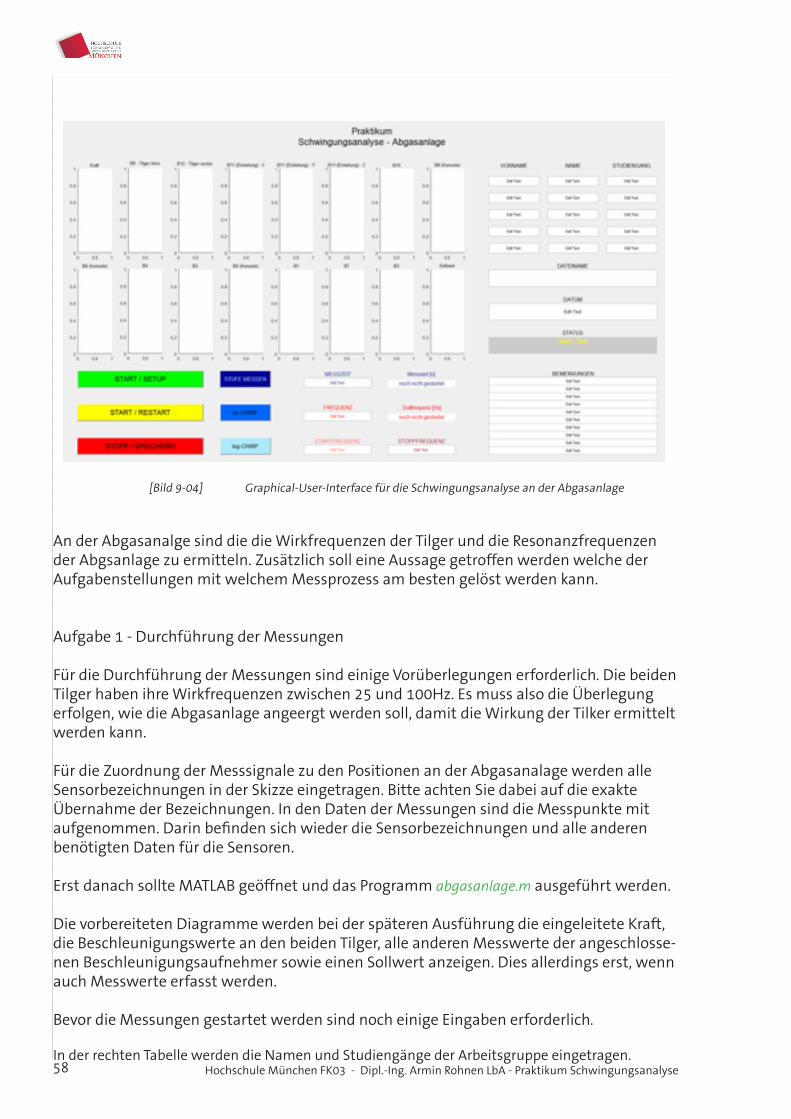
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse58
[Bild 9-04] Graphical-User-Interface für die Schwingungsanalyse an der Abgasanlage
An der Abgasanalge sind die die Wirkfrequenzen der Tilger und die Resonanzfrequenzen der Abgsanlage zu ermitteln. Zusätzlich soll eine Aussage getroffen werden welche der Aufgabenstellungen mit welchem Messprozess am besten gelöst werden kann.
Aufgabe 1 - Durchführung der Messungen
Für die Durchführung der Messungen sind einige Vorüberlegungen erforderlich. Die beiden Tilger haben ihre Wirkfrequenzen zwischen 25 und 100Hz. Es muss also die Überlegung erfolgen, wie die Abgasanlage angeergt werden soll, damit die Wirkung der Tilker ermittelt werden kann.
Für die Zuordnung der Messsignale zu den Positionen an der Abgasanalage werden alle Sensorbezeichnungen in der Skizze eingetragen. Bitte achten Sie dabei auf die exakte Übernahme der Bezeichnungen. In den Daten der Messungen sind die Messpunkte mit aufgenommen. Darin befinden sich wieder die Sensorbezeichnungen und alle anderen benötigten Daten für die Sensoren.
Erst danach sollte MATLAB geöffnet und das Programm abgasanlage.m ausgeführt werden.
Die vorbereiteten Diagramme werden bei der späteren Ausführung die eingeleitete Kraft, die Beschleunigungswerte an den beiden Tilger, alle anderen Messwerte der angeschlosse-nen Beschleunigungsaufnehmer sowie einen Sollwert anzeigen. Dies allerdings erst, wenn auch Messwerte erfasst werden.
Bevor die Messungen gestartet werden sind noch einige Eingaben erforderlich.
In der rechten Tabelle werden die Namen und Studiengänge der Arbeitsgruppe eingetragen.
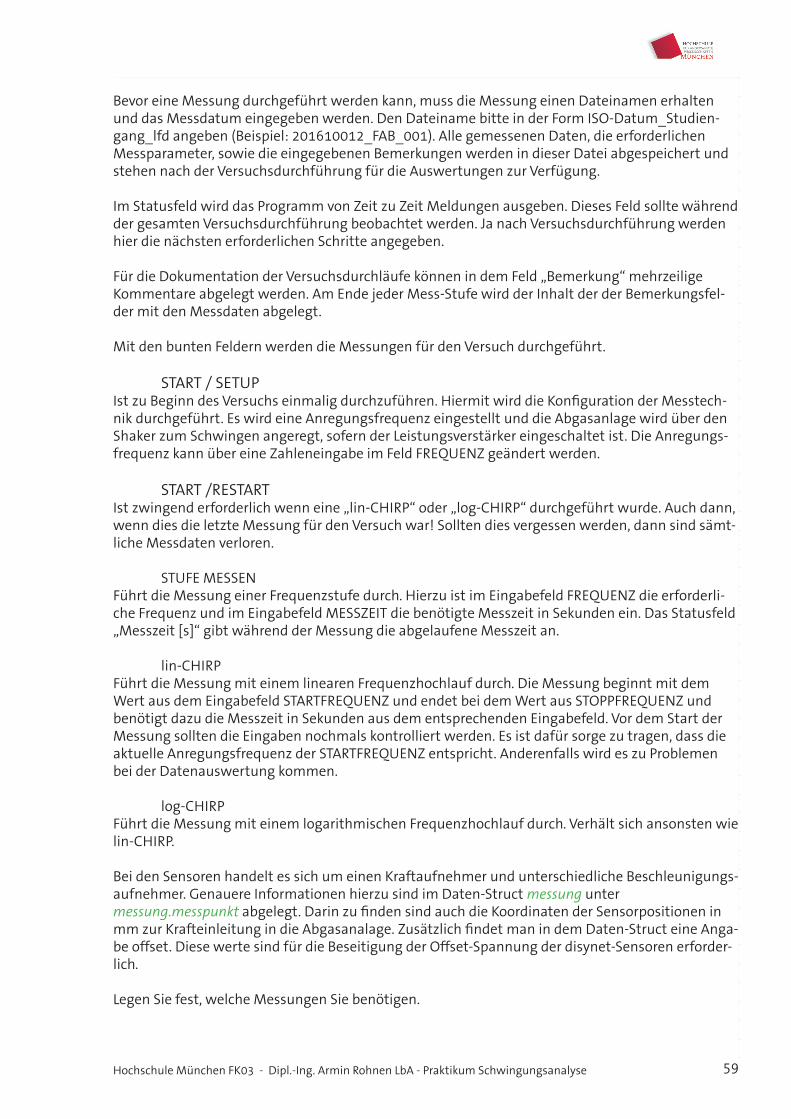
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 59
Bevor eine Messung durchgeführt werden kann, muss die Messung einen Dateinamen erhalten und das Messdatum eingegeben werden. Den Dateiname bitte in der Form ISO-Datum_Studien-gang_lfd angeben (Beispiel: 201610012_FAB_001). Alle gemessenen Daten, die erforderlichen Messparameter, sowie die eingegebenen Bemerkungen werden in dieser Datei abgespeichert und stehen nach der Versuchsdurchführung für die Auswertungen zur Verfügung.
Im Statusfeld wird das Programm von Zeit zu Zeit Meldungen ausgeben. Dieses Feld sollte während der gesamten Versuchsdurchführung beobachtet werden. Ja nach Versuchsdurchführung werden hier die nächsten erforderlichen Schritte angegeben.
Für die Dokumentation der Versuchsdurchläufe können in dem Feld „Bemerkung“ mehrzeilige Kommentare abgelegt werden. Am Ende jeder Mess-Stufe wird der Inhalt der der Bemerkungsfel-der mit den Messdaten abgelegt.
Mit den bunten Feldern werden die Messungen für den Versuch durchgeführt.
START / SETUPIst zu Beginn des Versuchs einmalig durchzuführen. Hiermit wird die Konfiguration der Messtech-nik durchgeführt. Es wird eine Anregungsfrequenz eingestellt und die Abgasanlage wird über den Shaker zum Schwingen angeregt, sofern der Leistungsverstärker eingeschaltet ist. Die Anregungs-frequenz kann über eine Zahleneingabe im Feld FREQUENZ geändert werden.
START /RESTARTIst zwingend erforderlich wenn eine „lin-CHIRP“ oder „log-CHIRP“ durchgeführt wurde. Auch dann, wenn dies die letzte Messung für den Versuch war! Sollten dies vergessen werden, dann sind sämt-liche Messdaten verloren.
STUFE MESSENFührt die Messung einer Frequenzstufe durch. Hierzu ist im Eingabefeld FREQUENZ die erforderli-che Frequenz und im Eingabefeld MESSZEIT die benötigte Messzeit in Sekunden ein. Das Statusfeld „Messzeit [s]“ gibt während der Messung die abgelaufene Messzeit an.
lin-CHIRPFührt die Messung mit einem linearen Frequenzhochlauf durch. Die Messung beginnt mit dem Wert aus dem Eingabefeld STARTFREQUENZ und endet bei dem Wert aus STOPPFREQUENZ und benötigt dazu die Messzeit in Sekunden aus dem entsprechenden Eingabefeld. Vor dem Start der Messung sollten die Eingaben nochmals kontrolliert werden. Es ist dafür sorge zu tragen, dass die aktuelle Anregungsfrequenz der STARTFREQUENZ entspricht. Anderenfalls wird es zu Problemen bei der Datenauswertung kommen.
log-CHIRPFührt die Messung mit einem logarithmischen Frequenzhochlauf durch. Verhält sich ansonsten wie lin-CHIRP.
Bei den Sensoren handelt es sich um einen Kraftaufnehmer und unterschiedliche Beschleunigungs-aufnehmer. Genauere Informationen hierzu sind im Daten-Struct messung unter messung.messpunkt abgelegt. Darin zu finden sind auch die Koordinaten der Sensorpositionen in mm zur Krafteinleitung in die Abgasanalage. Zusätzlich findet man in dem Daten-Struct eine Anga-be offset. Diese werte sind für die Beseitigung der Offset-Spannung der disynet-Sensoren erforder-lich.
Legen Sie fest, welche Messungen Sie benötigen.

Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse60
Aufgabe 2 - Auswertungen der Messungen
Aufgebe des Praktikumsversuchs ist die Bestimmung
- der Resonanzfrequenzen der Abgasanalge. - der Wirkfrequenzen der beiden Tilger.
Hierbei muss nicht zwingend auf eine mögliche Varianz des Schwinungsverhaltens der Abgas-anlage auf die dynamische Anregung geachtet werden. Wichtig ist lediglich, dass der gesamte Frequenzbereich basierend auf dem Anregungsmuster der tatsächlichen Nutzung während des Messprozesses auch tatsächlich angeregt wird.
Aufgabe 3 - Erstellung eines Berichtes
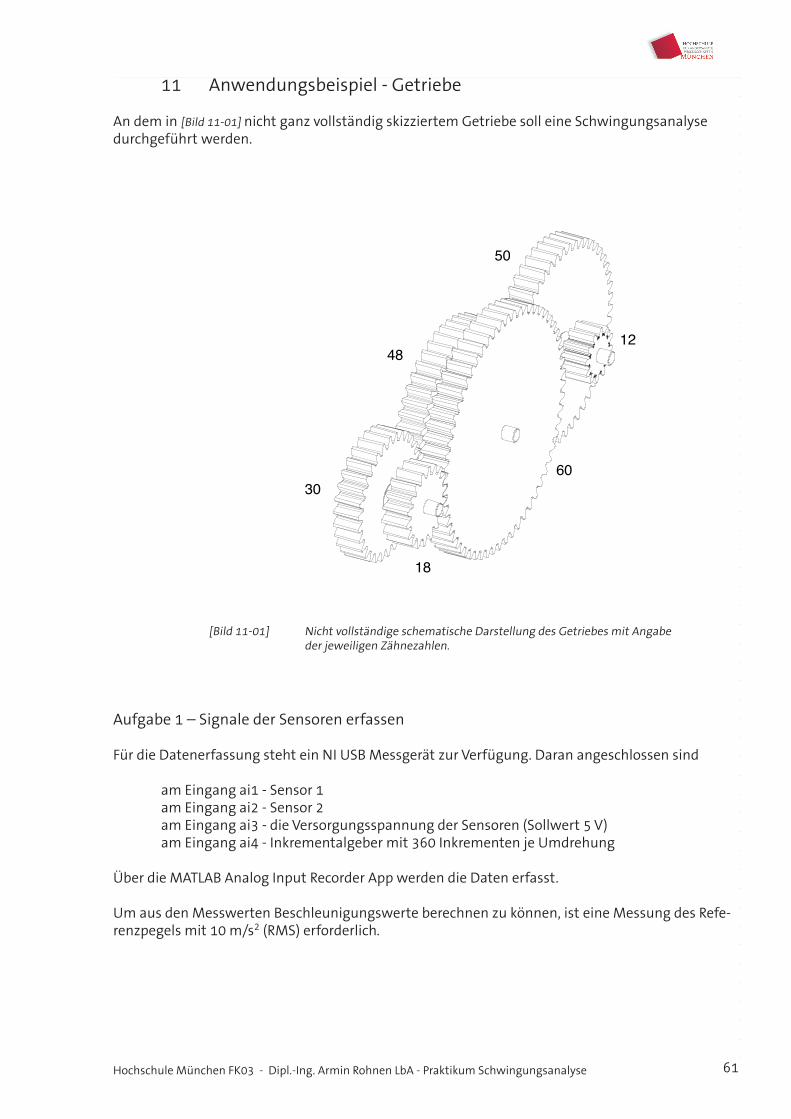
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 61
11 Anwendungsbeispiel - Getriebe
An dem in [Bild 11-01] nicht ganz vollständig skizziertem Getriebe soll eine Schwingungsanalyse durchgeführt werden.
[Bild 11-01] Nicht vollständige schematische Darstellung des Getriebes mit Angabe der jeweiligen Zähnezahlen.
Aufgabe 1 – Signale der Sensoren erfassen
Für die Datenerfassung steht ein NI USB Messgerät zur Verfügung. Daran angeschlossen sind
am Eingang ai1 - Sensor 1 am Eingang ai2 - Sensor 2 am Eingang ai3 - die Versorgungsspannung der Sensoren (Sollwert 5 V) am Eingang ai4 - Inkrementalgeber mit 360 Inkrementen je Umdrehung
Über die MATLAB Analog Input Recorder App werden die Daten erfasst.
Um aus den Messwerten Beschleunigungswerte berechnen zu können, ist eine Messung des Refe-renzpegels mit 10 m/s2 (RMS) erforderlich.
Isometrische AnsichtMaßstab: 3:1
12
50
60
48
18
30
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse62
Aufgabe 2 – Bestimmung der Zahneingriffsfrequenzen
Es soll überprüft werden, ob die Zahneigriffsfrequenzen über die Beschleunigungssensoren erkannt werden können.
Die Frequenzanalyse erfolgt auf Basis der Fouriertransformation. Für die Berechnung der Fourier-transformation als einzelne oder des Spektrogramms als gesamte Signalanalyse ist die Festlegung einiger Parameter erforderlich. Näheres hierzu im Kapitel Schwingungsanalyse mit MATLAB.
Aufgabe 3 – Erstellung eines Versuchsberichts
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse 63
Hochschule München FK03 - Dipl.-Ing. Armin Rohnen LbA - Praktikum Schwingungsanalyse64